Embed Size (px)
Citation preview

Praktikumz elektroniky •
••
KEF
/PEL
•
Milan VůjtekPavel KrchňákMichal Dudka
Sandra Drusová20
18

A
Text pokrývá obsah předmětu KEF/PEL Praktikum z elektroniky, které probíháv elektronické laboratoři LP-4.030 na Katedře experimentální fyziky. Vždy je uvedenazkrácená teorie (předpokládá se předchozí absolvování přednášek z elektroniky), nutnápro pochopení jednotlivých úloh, a zadání měřicích úloh. Každá kapitola je věnována
jednomu bloku měření v délce tří vyučovacích hodin.
Předpokládá se, že studenti se s úlohami seznámí před měřením a provedou si přípravu(např. teoretické vyřešení některých úloh). Součástí přípravy je také navržení vhodných
měřicích zapojení, volby přístrojů atd., které nejsou v zadání úloh detailněrozpracované. To vyžaduje od studentů aktivní přístup a využití znalostí, které by již
měli mít z teoretických přednášek. Pro usnadnění návrhu je v každé kapitole oddíl„Realizace měření“ s užitečnými poznámkami a případnými omezeními dostupného
vybavení.
Tento text vznikl přepracováním původních návodů.
Elektronická verze dokumentu je dostupná na Portálu moderní fyziky http://fyzika.upol.cz
Obsah1 Měření vlastností pasivních polovodičových prvků 3
2 Studium vlastností usměrňovačů střídavého proudu 8
3 Bipolární tranzistor a jednostupňový zesilovač 14
4 Operační zesilovač a jeho statické vlastnosti 22
5 Dynamické vlastnosti operačního zesilovače 30
6 Kombinační logické obvody 38
7 Sekvenční logické obvody 47
8 Harmonická analýza 57
9 Časovač NE555 63

1 Měření vlastností pasivních polovodičových prvků
Cíle úlohy
voltampérové charakteristikypolovodičové diodylineární modeldiodový omezovač
1.1| Teorie
Polovodičová dioda je v podstatě přechod PN a její statické vlastnosti lze vystih-nout voltampérovou charakteristikou, vyjadřující závislost proudu I procházejícíhodiodou na napětí U na diodě, tedy I = f(U). Tuto závislost lze vyjádřit graficky nebopřibližně vztahem
I = I0(T )
(e
ekBT U − 1
), (1)
kde I0(T ) je nasycený proud diodou v závěrném směru při dané teplotě T , e je elemen-tární náboj (e = 1,602 ·10−19 C), kB je Boltzmannova konstanta (kB = 1,38 ·10−23 J/K)a T je absolutní teplota přechodu PN (nikoliv teplota okolí). Veličina kBT
e v exponenturovnice (1) má rozměr napětí a nazývá se proto též teplotní napětí UT , tedy
UT =kBT
e. (2)
Pro teplotu T = 300K má teplotní napětí UT hodnotu 26 mV. Rovněž proud v závěr-ném směru I0(T ), tvořený převážně tokem minoritních nosičů náboje, závisí na tep-lotě tak, že při vzrůstu teploty o každých 10 C se jeho hodnota zvětší přibližně na dvoj-násobek (neboť vzroste vlastní vodivost polovodiče).
Této teplotní závislosti lze využít pro měření teploty – polovodičová dioda můžepracovat ve funkci snímače teploty, maximálně do přibližně 150 C, pak dojde k de-strukci přechodu. Při měření V-A charakteristik může však tato teplotní závislostovlivnit přesnost měření.
Budeme-li uvažovat, že teplota T je konstantní, pak z rovnice (1) je zřejmé, žev propustném směru (U > 0) roste proud diodou přibližně exponenciálně v závislostina napětí U , kdežto v závěrném směru (U < 0) je pro dostatečně velkou absolutníhodnotu U výraz exp
(− e
kT |U |)≪ 1, takže jej můžeme zanedbat a diodou prochází
jen malý závěrný proud I ≈ I0(T ). Polovodičová dioda má tedy nesymetrickou V-Acharakteristiku a lze ji proto využít jak pro usměrňování střídavých proudů, tak i prodalší aplikace využívající této vlastnosti.
P Kapitola 1 Měření vlastností pasivních polovodičových prvků 3

Přesnost měření V-A charakteristiky může být rovněž ovlivněna vnitřními od-pory použitých měřicích přístrojů. Při měření V-A charakteristiky diody v závěrnémsměru je odpor diody velký a je proto vhodné použít zapojení jako při měření vel-kých odporů přímou metodou. Naopak při měření V-A charakteristiky v propustnémsměru použijeme zapojení jako při měření malých odporů, neboť odpor diody v pro-pustném směru je malý.
| Druhy polovodičových diod V praxi se používá celá řada druhů diod. Jedním z kri-térií třídění je materiál diody, což je nejčastěji křemík a germanium. Diody z různýchmateriálů se liší především napěťovým úbytkem v propustném směru a dynamickýmodporem, ale i dalšími parametry (frekvenční vlastnosti, průrazné napětí). Zenerovadioda nemá v závěrné oblasti vodorovný průběh, ale při určitém napětí UZ začnecharakteristika prudce klesat. V této části charakteristiky i velké změny procházejí-cího proudu vyvolávají jen malé změny napětí na diodě a Zenerova dioda je protovhodným stabilizačním prvkem. Schottkyho dioda není tvořena PN přechodem, alepřechodem kov–polovodič. Díky vysoké koncentraci elektronů v kovu a jejich vysoképohyblivosti má tato dioda nižší úbytky napětí a lepší frekvenční vlastnosti (rychlejšídobu reakce). Luminiscenční dioda je vytvořena z takových materiálů, aby energe-tická šířka jejich zakázaného pásu odpovídala oblastem viditelného záření. Běhemprůchodu proudu pak taková dioda svítí odpovídající barvou; barevné vlastnosti jsouzpravidla zvýrazněny barevným krytem diody.
Obrázek
α = arctg 1RP
β = arctg 1
RdynP
U
I
P
∆U
∆I
1 Voltampérová charakteristika nelineárního prvku a určení statického a dy-namického odporu.
| Statický a dynamický odpor V případě obyčejného rezistoru s odporem R platímezi proudem I a napětímU vztah I = U
R , a to pro všechny hodnoty napětí a proudu.V případě nelineáních součástek však vztah přestává platit a místo něj platí neline-ární rovnice I = f(U). Zvolíme-li si nějaký pracovní bod P (obr. 1), bude při napětíUP procházet prvkem proud IP . Jejich podíl pak bude představovat statický odporprvku v bodě P , tj.
RP =UP
IP, (3)
který už však není konstantou jednoznačně prvek popisující, ale mění se v závislostina poloze bodu P . Tento odpor má význam např. při řešení energetických poměrů
P Kapitola 1 Měření vlastností pasivních polovodičových prvků 4
v obvodech či při stanovení zatížení prvku. Je však nevhodný, chceme-li popisovatchování prvku při malé změně podmínek (což je typická situace např. u zesilovačů).Pro tyto aplikace je vhodné si představit, že lze prvek nahradit ještě jedním, dynamic-kým odporem, který umožňuje reakci na malé změny. Dochází-li k malým změnámnapětí okolo hodnoty UP , bude se výsledný proud měnit tak, jako by se pohybovalpo přímce, upevněné v bodě P . Hodnota směrnice této přímky (dynamického od-poru) je opět závislá na poloze boduP a určí se z nelineární závislosti prvku měřenímdiferencí nebo teoreticky výpočtem derivace
RdynP =
∆U
∆f(U)=
1df(U)dU
. (4)
V případě experimentálních dat se často tečna, užívaná k určení dynamického od-poru, nahrazuje sečnou tak, aby pracovní bod P ležel uprostřed vyznačeného inter-valu.
| Sestavování lineárních modelů Když máme v pracovním boděP určen dynamickýodpor součástky, můžeme sestavit její náhradní linearizovaný model. Linearizovanýmodel sestavujeme proto, abychom mohli při řešení elektrického obvodu aplikovatteorii lineárních obvodů, která je dobře propracovaná a mnohem jednodušší než ře-šení nelineárních obvodů. Nesmíme však zapomínat, že výsledky platí jen pro malézměny signálů. Lineární model sestává z takové seriové kombinace ideálního zdrojenapětí a rezistoru, která dává pro malé změny napětí v okolí bodu P téměř shodnézměny proudu jako původní součástka.
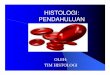
| Diodový omezovač Mnohé elektronické obvody mají omezení velikosti napětí, jakélze přivést na jejich vstupy. Přivedeme-li napětí větší, může dojít k poškození obvodu.Proto se před citlivé vstupy zařazují omezovače napětí. Když se podíváme na voltam-pérovou charakteristiku diody, uvidíme, že napětí na diodě v propustném směrunepřesáhne znatelně prahové napětí Ud. Můžeme tedy použít diodu ke konstrukcidiodového omezovače tak, že paralelně ke chráněnému vstupu připojíme propustněpolarizovanou diodu (sch. 1a). V případě vstupního napětí U1 menšího než Ud senapětí beze změny přenese na vstup chráněného obvodu, v případě U1 > Ud dio-
Schéma
a)
R
D1D2U1 U2
chraneny
obvod
b)
U2
U1
Ud
1 Diodový omezovač a) zapojení, b) ideální přenosová charakteristika ome-zovače se dvěma diodami.
dou začne protékat proud I takový, že bude platit U1 = RI + Ud. To znamená, že„přebytečná“ část napětí se srazí na ochranném rezistoru (který omezuje proud dio-dou) a na vstupu chráněného obvodu bude pouze Ud. Uvedený způsob však chrání
P Kapitola 1 Měření vlastností pasivních polovodičových prvků 5

vstup jen při jedné polaritě napětí. Chceme-li obvod chránit při obou polaritách, mu-síme zapojit antiparalelně dvě diody. Omezovač napětí je možno charakterizovat jehopřenosovou charakteristikou, tj. závislostí U2 = f(U1), která je pro případ ideálníhoomezovače znázorněna na sch. 1b).
1.2| Realizace měření
Pro měření voltampérové charakteristiky diody I = I(U) použijeme měřicí jed-notku A & D D U výukového systému µL se softwarem 2000a příslušný modul C B. Výstup A O, který během měřeníposkytuje časově proměnné napětí Unap sloužící k postupnému proměřování V-Acharakteristiky, připojte na sériovou kombinaci diody a převodníku proudu na na-pětí. Paralelně k výstupu A O připojte i vstup I A. „Proudový“ vstup IB připojte k převodníku proudu na napětí a zvolte vhodnou hodnotu S R.
| Doplnění popisu programu pro měření V-A charakteristik:
C – analýza dat pomocí kurzorů (ukazatelů) měří napětí a proudy v bodě1 a 2 a počítá „odpor“ jejich směrnice; v případě poloh těsně blízko nulového na-pětí nemusí být hodnoty zobrazeny, taktéž pro některé hodnoty napětí nemusíbýt kurzor v grafu zobrazen. Je-li jeden kurzor umístěn ve zvoleném pracovnímbodě a druhý v nule, získáme hodnotu statického odporu. Jsou-li oba kurzoryblízko sebe, získáme dynamický odpor v daném bodě.
| Určení lineárního modelu Do obvodu se zapojí nelineární prvek a v režimu S- se vykreslí jeho charakteristika ve zvoleném kvadrantu. Z ní se pak ve zvolenémpracovním bodě P určí její dynamický odpor v bodě P . Nyní prvek vypojíme a místoněj zapojíme sériovou kombinaci dekády a pomocného zdroje (použijeme modulP DC S). Na dekádě nastavíme hodnotu odpovídající dynamic-kému odporu a vykreslíme si průběh druhou barvou. Sklon vykreslené přímky byměl odpovídat sklonu V-A charakteristiky v bodě P . Pomocí změny napětí zdroje aopakovaného vykreslování charakteristiky docílíme shody obou průběhů v bodě P .Pro lepší shodu můžeme mírně upravit i odpor dekády. Výsledná hodnota odporu anapětí pak udává parametry linearizovaného modelu.
| Poznámky k měření
1. V měřicím obvodu je nutno pamatovat na proudové omezení a zařadit ochrannýrezistor, jehož hodnota se musí zvolit s ohledem na vestavěnou proudovouochranu (max. 20 mA) a velikost napájecího napětí. V případě, že proud pře-kročí uvedenou hodnotu, rozsvítí se červeně dioda F. Odstraňte příčinu pře-tížení a obnovte činnost zdroje stiskem tlačítka F.
2. Program měří najednou propustný i závěrný směr, využívá tedy vždy jen jednumetodu přímého měření. Je proto nutné předem zvážit, který směr je třeba mě-řit přesněji.
3. Dbejte na shodné zapojování měřicích sond a shodnou orientaci všech diodv průběhu měření; pro změření závěrného směru diodu nepřevracejte.
4. Při sestavování lineárního modelu se musí napětí měřit na kombinaci rezistoruse zdrojem napětí. Rovněž nezapomeňte přičíst 20 Ω k údaji na malé odporovédekádě.
P Kapitola 1 Měření vlastností pasivních polovodičových prvků 6

5. Přenosovou charakteristiku diodového omezovače změřte v režimu V-A cha-rakteristik; S R nastavte na 1 a rozdíl v jednotkách ignorujte. Při nahrazo-vání diod Zenerovými diodami pamatujte na skutečnost, že se Zenerovy diodypoužívají opačně polarizované. Použijte ochranný rezistor R = 100 kΩ.
1.3| Zadání úlohy
1. Nakreslete principiální elektrický obvod pro měření V-A charakteristiky polo-vodičové diody zapojené v propustném a závěrném směru, v zapojeních místoampérmetru použijte jednoduchý lineární převodník proudu na napětí.
2. Pomocí programu 2000 změřte V-A charakteristiky křemíkové, germaniové,luminiscenční, Zenerovy a Schottkyho diody. Pokud je k dispozici více diodstejného typu, změřte více charakteristik do jednoho grafu.
(a) Určete ve třech bodech charakteristik diod v propustném směru (I. kvad-rant) statický a dynamický odpor, a totéž pro jeden bod v závěrném směru.
(b) Určete prahové napětí diody (definované jako napětí při proudu 1 mA).(c) V případě Zenerových diod určete Zenerovo napětíUZ (při proudu−5 mA)
a posuďte strmost charakteristiky ve III. kvadrantu v závislosti na UZ.
3. Pro všechny diody vyjma Zenerových určete multimetrem závěrný proud di-ody při napětí U = −5V.
4. V případě luminiscenčních diod určete nejmenší proud, který stačí k rozsvícenídiody.
5. Ve zvoleném (pracovním) bodě charakteristiky nahraďte diodu sériovou kom-binací rezistoru (odporové dekády) a stejnosměrného zdroje napětí a nakres-lete náhradní (lineární) model diody ve zvoleném pracovním bodě. S ohledemna vlastnosti odporové dekády využijte znalostí z předchozích měření a zvoltediodu, která má diferenciální odpor v daném bodě větší než 20 Ω.
6. Zapojte diodový omezovač a změřte jeho přenosovou charakteristiku. Ověřtesi chování obvodu, pokud jednu a obě diody nahradíte Zenerovou diodou. Ur-čete, jak změnit zapojení omezovače, aby omezoval na napětí ±4V a obvodproměřte.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, C B,přesný stavitelný zdroj P DC S, sada rezistorů a propojek, odpo-rová dekáda, křemíkové diody, germaniová dioda, luminiscenční diody, Schottkyhodioda, sada vodičů
P Kapitola 1 Měření vlastností pasivních polovodičových prvků 7

2 Studium vlastností usměrňovačů střídavého proudu
Cíle úlohy
usměrňovačestabilizátoryčinitel zvlnění a stabilizaceblokové schéma napájecího zdroje
2.1| Teorie
Rozvodná síť i některé generátory poskytují střídavé napětí, které se periodickymění tak, že se mění jeho polarita. Mnoho zařízení však potřebuje napětí jen jedné po-larity, a v některých případech i s přesně udržovanou hodnotou. Usměrňovač je elek-tronický obvod, který umožňuje přeměnu střídavého napětí na stejnosměrné napětí.Jeho konstrukce závisí na požadovaném výkonu a charakteru usměrněného proudu,podle toho se volí usměrňovací prvky i způsob jejich zapojení v obvodech. Pro usměr-ňování střídavých napětí o frekvenci 50 Hz se většinou používají plošné polovodičovédiody, neboť mohou usměrňovat poměrně velké proudy a kapacita přechodu PN přitéto frekvenci nenarušuje usměrňovací proces.
Samotný usměrňovač mnohdy nesplňuje všechny naše požadavky, proto se do-plňuje dalšími prvky, např. vyhlazovacím členem a stabilizátorem napětí, a vznikánapájecí zdroj. Blokové schéma napájecího zdroje klasické konstrukce je znázorněnona sch. 2.
Schéma
1 2 3 4 5
+Rzu1 u2 Ut Ust
U0
+Uzvl
2 Blokové schéma napájecího zdroje. Velikost vstupního napětí u1(t) se měnítransformátorem 1, pak se mění na unipolární průběh usměrňovačem 2 ajeho průběh se upraví vyhlazovacím filtrem 3. Přesnou velikost konstant-ního napětí pro zátěž 5 nastavuje stabilizátor 4.
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 8

Na vstupu usměrňovače bývá obvykle zařazen síťový transformátor (blok 1), kterýmá dvě funkce:
1. transformuje střídavé vstupní napětí o efektivní hodnotě U1 na takovou hod-notu U2, jejímž usměrněním obdržíme požadovanou hodnotu stejnosměrnéhonapětí,
2. galvanicky odděluje obvod usměrňovače od síťového napětí, což zvyšuje bez-pečnost práce s usměrněným napětím nebo se zařízením, které je tímto napětímnapájeno.
Střídavé napětí ze sekundárního vinutí transformátoru o efektivní hodnotě U2 aamplitudě Um2 =
√2U2 je přiváděno do usměrňovacího členu (blok 2) obsahujícího
polovodičové diody, které způsobí jednocestné nebo dvoucestné usměrnění. Pokud ne-budou připojeny další bloky 3 a 4, dostaneme na výstupu bloku 2 sice stejnosměrné,avšak pulzující (tepavé) napětí o maximální hodnotě Utm a po připojení zátěže Rz
(blok 5) bude obvodem procházet stejnosměrný pulzující proud o maximální hod-notě Itm. Poněvadž vinutí tranformátoru i diody mají jistý odpor, jehož celkovouhodnotu můžeme označit Ri, dojde při průchodu proudu tímto odporem k úbytkunapětí RiItm na tomto odporu a usměrněné napětí Utm bude proto menší než ampli-tuda střídavého napětí Um2 (Utm < Um2), neboť podle II. Kirchhoffova zákona platírovnice
Utm = Um2 −RiItm. (5)
Odtud je zřejmé, že při zvětšování odebíraného proudu Itm (tj. při zmenšování Rz) sebude hodnota usměrněného napětí Utm zmenšovat. Připojíme-li k zátěži Rz voltmetr(resp. zařadíme-li do obvodu ampérmetr), ukáží nám tyto měřicí přístroje podle svékonstrukce buď střední, nebo efektivní hodnoty napětíUts,Ute (resp. proudu Its, Ite).Pro jednocestně usměrněné harmonické veličiny platí pro střední a efektivní hodnotyvztahy
Uts =Utm
π, Ute =
Utm
2√2, Its =
Itmπ
, Ite =Itm
2√2
(6)
a pro dvoucestně usměrněné harmonické veličiny platí
Uts = 2Utm
π, Ute =
Utm√2, Its = 2
Itmπ
, Ite =Itm√2. (7)
Hodnoty Utm a Itm můžeme stanovit výpočtem z naměřených hodnot Uts a Its neboUte a Ite, nebo je můžeme změřit pomocí osciloskopu.
Takové tepavé stejnosměrné napětí není vhodné pro napájení většiny elektronic-kých zařízení a je použitelné jen v některých speciálních případech, např. pro nabíjeníakumulátorů.
Abychom potlačili tepavý charakter usměrněného napětí, zařazujeme mezi usměr-ňovací blok 2 a zátěž 5 vyhlazovací filtr (blok 3), obsahující kondenzátory, případněrezistory nebo cívky. Vzhledem k tomu, že dnes vyráběné elektrolytické kondenzá-tory dosahují při poměrně malých rozměrech značných kapacit C, stačí pro většinuběžných aplikací použít pro vyhlazení tepavého napětí jediný kondenzátor o dosta-tečně velké kapacitě C, který se připojí paralelně k výstupním svorkám usměrňovače(blok 2). Je však třeba dbát na to, abychom elektrolytický (unipolární) kondenzátornepřepólovali, protože by došlo k jeho zničení a obvykle i ke zničení usměrňovače.Vývod elektrolytického kondenzátoru označený „+“ musí být vždy připojen na klad-nější potenciál než vývod označený „−“ (bývá spojený s vnějším pouzdrem konden-zátoru, je-li vodivé). Pokud kondenzátor nemá označené vývody, jedná se o bipolárníelektrolytický kondenzátor, u kterého přepólování nehrozí.
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 9

Není-li k vyhlazovacímu členu připojena zátěž (nebo Rz → ∞), obvodem ne-protéká proud a Utm = Um2. Vyhlazovací kondenzátor se proto nabije na napětíUv = Um2. V půlperiodě, kdy polovodičová dioda v usměrňovacím obvodu je pó-lována v závěrném směru, sčítá se napětí na vyhlazovacím kondenzátoru s napětímna sekundárním vinutí transformátoru. Maximální hodnota závěrného napětí diodyUzavmax , udávaná výrobcem, musí být proto větší než 2Um2.
Připojíme-li k výstupním svorkám usměrňovače zátěž Rz, napětí Uv na vyhlazo-vacím kondenzátoru se zmenší vlivem úbytku napětí na odporu Ri, takže Uv < Um2.Toto vyhlazené napětí není zcela neproměnné s časem a lze jej rozložit na ustálenéstejnosměrné napětí velikosti U0 a malou střídavou složku nazývanou zvlnění Uzvl.Toto zvlnění je způsobeno tím, že v době, kdy usměrňovacími diodami neprocházíproud (jsou pólovány v závěrném směru), je proud do zátěže Rz dodáván z nabitéhovyhlazovacího kondenzátoru, který se přes odpor Rz vybíjí a napětí na jeho svorkáchproto klesá. Jakmile se diody otevřou (když napětí na sekundárním vinutí transfor-mátoru je u2 > Uv), kondenzátor se znovu nabije a napětí na něm vzroste na hodnotuUtm.
Velikost zvlnění Uzvl závisí jak na velikosti kapacity C, tak i na velikosti zátěže Rz,neboť pokles napětí při vybíjení kondenzátoru závisí na časové konstantě obvoduτ = RzC. Čím větší je τ , tím menší je zvlnění Uzvl. Velikost zvlnění Uzvl můžemezměřit např. pomocí osciloskopu a vyjadřujeme je obvykle v procentech ustálenéhonapětí U0, čímž dostaneme činitel zvlnění
p =Uzvl
U0. (8)
Při změnách zátěže Rz se mění velikost proudu obvodem a vlivem úbytku napětína vnitřním odporu usměrňovače Ri dochází i ke změnám ustáleného stejnosměr-ného napětí U0. Toto napětí se může rovněž měnit při změnách vstupního střídavéhonapětí U1. Často je třeba pro náročnější aplikace zcela odstranit jak zvlnění Uzvl, tak ikolísání napětí U0 při změnách zátěže Rz nebo změnách vstupního střídavého napětí.V těchto případech mezi usměrňovač a zátěž Rz zařazujeme ještě stabilizátor napětí(blok 4), na jehož výstupu dostaneme nezvlněné napětí Ust konstantní velikosti.
Nejjednodušším stabilizačním obvodem je parametrický stabilizátor, využíva-jící nelineární voltampérové charakteristiky některých elektronických prvků s malýmdynamickým odporem v pracovní oblasti (doutnavka, Zenerova dioda). Měřítkemkvality stabilizátoru je činitel stabilizace daný vztahem
s =∆U0
U0
∆Ust
Ust
=∆U0
∆Ust
Ust
U0, (9)
vyjadřujícím poměr relativních změn napětí na vstupu a výstupu stabilizátoru. Cílemčinnosti každého stabilizátoru je zachovávat konstantní hodnotu výstupní veličinypři změnách vstupní veličiny a proto by měl být poměr ∆U0/∆Ust co největší (a tedyi činitel stabilizace s co největší).
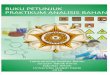
Jednoduchý stabilizátor napětí se Zenerovou diodou ZD a s připojenou zátěží Rz
je na sch. 3. Podle hodnoty požadovaného stabilizovaného napětí volíme takový typZenerovy diody, aby její Zenerovo napětí UZ bylo rovno požadované hodnotě stabili-zovaného napětí UZ ≈ Ust. Pro každý typ Zenerovy diody udává výrobce v katalogumaximální ztrátový výkon PZmax = UZIZmax . Odtud můžeme vypočítat maximálnípřípustný proud Zenerovou diodou
IZmax =PZmax
UZ. (10)
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 10
Schéma
U0
I R
Ust
IZ
Rz
IRz
ZD
3 Stabilizátor se Zenerovou diodou.
Aby stabilizátor správně pracoval, musí být napětíU0 na vstupu stabilizátoru většínež UZ. V praxi se volí U0 = (2 až 3)UZ = (2 až 3)Ust. Odpojíme-li od výstupu stabi-lizátoru zátěž, bude celý proud I protékat Zenerovou diodou, nesmí však překročithodnotu IZmax
. S ohledem na tento požadavek volíme hodnotu odporu R ve stabili-zátoru podle vztahu
R =U0 − UZ
IZmax
, (11)
neboť napětí na rezistoru R je U0−UZ = U0−Ust. Připojíme-li k výstupu stabilizátoruzátěž Rz, bude zátěží procházet proud IRz = Ust/Rz a proud Zenerovou diodou IZse zmenší, neboť podle I. Kirchhoffova zákona musí platit I = IZ + IRz . Zmenší-lise proud Zenerovou diodou IZ pod hodnotu 0,1IZmax , dostane se pracovní bod doohbí voltampérové charakteristiky Zenerovy diody a stabilizátor přestává stabilizo-vat. Proto by měl proud zátěží splňovat podmínku
IRz< 0,9IZmax
a tedy Rz >Ust
0,9IZmax
. (12)
V praxi se při konstrukci stabilizátorů s konstantní zátěží Rz často volí přísnější pod-mínka IRz ≤ 0,5IZmax .
2.2| Realizace měření
Pro měření vlastností usměrňovačů použijeme měřicí jednotku A & DD U výukového systému µL se softwarem 2000 (v režimu O)a příslušný modul C B pro zapojení usměrňovače, modul FG pro vytváření střídavého signálu a modul V DC & AC RMS proměření (pravé) efektivní hodnoty napětí. Vzhledem k použití generátoru funkcí v re-žimu sinusového signálu není potřeba na vstup zařazovat síťový transformátor. Přiměření stejnosměrných napětí je třeba pamatovat na skutečnost, že napětí má tepavýcharakter a je tedy třeba použít měřidlo, které získává skutečné střední či efektivníhodnoty výpočtem z průběhu, nikoliv jen vynásobením maximální hodnoty nějakýmkoeficientem (tento způsob je použitelný jen pro přesně definovaný průběh napětí,zpravidla harmonický). Vstupní napětí z generátoru přiveďte na vstup I A měřicíjednotky, na vstup I B přivádějte postupně vyšetřované usměrněné napětí. Nastavtespouštěcí signál (T na vstup A a vhodně zvolte úroveň). K usměrňování pou-žijte obyčejné křemíkové diody, hodnoty odporu R si zvolte sami tak, aby nedošlo
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 11

k přetížení proudové ochrany modulů (max. 20 mA). Není-li řečeno jinak, použijtevstupní napětí s co největší amplitudou (aby nespínala elektronický pojistka; v pří-padě, že umíte pracovat opatrně, můžete proud zvýšit až na 250 mA pomocí moduluB).
Při měření Ute a Ite vhodně zvolte měřicí přístroj a jeho nastavení. Nejlepší vol-bou je měřit v režimu „AC+DC“, což ovšem mnohé přístroje neumí (včetně moduluV DC & AC RMS). V tom případě měřte střední hodnotu, tj. použijte „DC“režim. Údaje, které počítá program 2000 v bloku M, odpovídají „DC“ režimu(U ) a „AC+DC“ (U ).
Nejjednodušší jednocestný usměrňovač (sch. 4a) používá jen jednu diodu a odporR (volte 1 kΩ), ze kterého se odebírá usměrněné napětí. Případný vyhlazovací kon-denzátor se připojuje paralelně k odporu R. U dvoucestných usměrňovačů je zapo-třebí nejméně dvou diod, které se zapojí tak, aby v různých půlperiodách byly různěpólovány. To je možné provést u síťového transformátoru, který má vyvedenu středníodbočku, která slouží diodám jako společný vodič. U běžného transformátoru pou-žíváme můstkové zapojení diod (sch. 4b), u nichž během jedné půlperiody procházíproud vždy dvěma diodami tak, aby prostředním (diagonálním) rezistorem R proudprocházel stále v jednom směru.
Schéma
a)
INA
INB
1
2
R C
A
Rz
b)
INA
D1
D2
D3
D4
IN B
R
4 Usměrňovač a) jednocestný, b) dvoucestný můstkový.
2.3| Zadání úlohy
1. Zapojte jednocestný usměrňovač podle sch. 4a. Jako zdroj usměrňovaného na-pětí použijte blok F G, v režimu vytváření sinusového sig-nálu s frekvencí 100 Hz a amplitudou A = 4V. Zobrazte časový průběh te-pavého usměrněného napětí na výstupních svorkách usměrňovače. Sledujtezměnu průběhu se změnou ofsetu Aof generovaného signálu a vysvětlete mě-ření při Aof > A. Vyzkoušejte činnost usměrňovače pro malou amplitudu A =300mV a nulový ofset.
2. K výstupním svorkám 1, 2 připojte zátěžRz, realizovanou odporovou dekádou.Změnou odporu Rz v rozmezí 450 Ω až 9 kΩ nastavujte různé hodnoty výstup-ního proudu Ite a měřte střední hodnoty napětí Ute. Z výsledků pak sestavtezávislost Ute = f(Ite).
3. Na výstup usměrňovače připojte vyhlazovací kondenzátorC = 10µF a připojtemodul V DC & AC RMS pro měření ustáleného stejnosměrného napětí
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 12

U0. Změnou odporu Rz regulujte proud zátěží IRza stanovte závislost ustále-
ného stejnosměrného napětí U0 na odebíraném proudu, tj. U0 = f(IRz) a takézávislost činitele zvlnění p = f(IRz
).
4. Mezi výstup jednocestného usměrňovače a zátěžRz zařaďte jednoduchý stabili-zátor napětí se Zenerovou diodou. Změnou odporu Rz (realizujte i nekonečnouhodnotu odpojením) regulujte protékající proud a pomocí měření napětí U0 aUst stanovte činitel stabilizace s.
5. Zapojte dvoucestný usměrňovač v můstkovém provedení dle sch. 4b a zopa-kujte obdobná měření jako v bodech 1–4. Vysvětlete původ plochých oblastímezi vlnami. Jaký výsledek dostanete, pokud z obvodu vytáhnete D1 a D4?
6. V předchozím zapojení nahraďte obyčejné diody luminiscenčními, snižte frek-venci na 0,4Hz a nastavte minimálně na 5 V. Sledujte průběh činnosti diod a najeho základě popište proces usměrňování.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, C B,sada rezistorů, propojek, diod a kondenzátorů, odporová dekáda, F G-, V DC & AC RMS, sada vodičů, digitální multimetr, (B)
P Kapitola 2 Studium vlastností usměrňovačů střídavého proudu 13

3 Bipolární tranzistor a jednostupňový zesilovač
Cíle úlohy
bipolární tranzistorcharakteristiky a hybridní parametry tranzistorujednostupňový zesilovačnávrh zesilovače
3.1| Teorie
Bipolární tranzistor je součástka, která mění svůj odpor mezi dvěma elektrodamiv závislosti na napájení třetí elektrody. Tranzistor je založen na principu injekce aextrakce nosičů náboje skrz PN přechod, přičemž vedení proudu v bipolárním tran-zistoru se uskutečňuje oběma typy nosičů, tj. elektrony i dírami. Struktura tranzis-toru je třívrstvá (dva PN přechody), krajní vrstvy se stejným typem vodivosti se na-zývají emitor (označení E) a kolektor (označení C), mezi nimi je tenká vrstva báze(označení B), která má opačný typ vodivosti. Z principiálního hlediska je strukturasymetrická, v praxi však jsou vlastnosti emitoru a kolektoru odlišné díky technologiivýroby. Podle uspořádání vrstev rozlišujeme tranzistory typu PNP a NPN. Princi-piálně jsou jejich činnosti stejné, liší se jen v polaritě napájecích napětí a proudů av některých vlastnostech, které jsou závislé na fyzikálních vlastnostech elektronů čiděr. V této úloze se věnujeme tranzistoru typu NPN.
Každá vrstva tranzistoru má jeden vývod, proto je tranzistor trojpólem, vlivemPN přechodů však nelineárním. V aplikacích však vždy musí být jeden vývod spo-lečný pro vstup i výstup a lze tedy tranzistor považovat za dvojbran (je to výhodnétaké proto, že teorie dvojbranů je dobře propracována, ovšem pouze pro lineárníprvky). Podle toho, který vývod je společný, rozlišujeme zapojení tranzistoru se spo-lečnou bází (SB), se společným emitorem (SE) a se společným kolektorem (SC).
Protože tranzistor je nelineární prvek, byla by jeho obecná analýza složitá. Častojej proto v daném pracovním bodě P linearizujeme, což můžeme provést několika způ-soby, v závislosti na předpokládném užití. Linearizace se provádí tak, že ve zvo-leném bodě nahradíme nelineární závislost lineární funkcí dvou proměnných, při-čemž koeficienty lineární funkce budou (teoreticky) dány první parciální derivací pů-vodní funkce podle dané proměnné. Často se užívají dva způsoby linearizace, a to ad-mitanční nebo hybridní. Admitanční parametry yij s významem vodivosti (obecněkomplexní) se zavádějí pomocí vztahů
I1 = y11U1 + y12U2, (13)I2 = y21U1 + y22U2 (14)
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 14

a jsou funkcí jak polohy pracovního bodu P, tak dalších parametrů (např. frekvence).Hybridní (smíšené) parametry hij mají různé fyzikální jednotky, jsou zpravidla re-álné a zavádějí se vztahy
U1 = h11I1 + h12U2, (15)I2 = h21I1 + h22U2. (16)
Protože parametry závisejí i na způsobu zapojení, doplňují se ještě indexem označují-cím společnou elektrodu. Například obecně definovaný proudový zesilovací činitel
h21 =
(∆I2∆I1
)U2=konst.
(17)
splňuje podmínku h21b < 1 pro zapojení SB a h21e > 1 pro zapojení SE.Porovnáme-li jednotlivá zapojení podle jejich vlastností, zjistíme, že obecně nej-
výhodnější vlastnosti má zapojení se společným emitorem SE, a proto se používánejčastěji. Jedině zde se dosahuje napěťového a zároveň proudového zesílení, a tími výkonového zesílení. Také rozdíl mezi velikostí vstupního a výstupního odporu jev zapojení SE nejmenší, což usnadňuje spojování několika zesilovacích stupňů v jed-nom zesilovači. Dvě další zapojení se používají jen ve speciálních aplikacích. V tétoúloze se budeme zabývat jen zapojením SE.
Výše uvedené čtyřpólové parametry vystihují vlastnosti tranzistoru jen v okolípracovního bodu P. Chování tranzistoru ve větším rozsahu napětí a proudu popisují(při pomalých změnách veličin) nejlépe statické charakteristiky, které se znázorňují
Obrázek
IC
UBE
IB UCE
IB
IB
UCE
vystupnı
vstupnı
prevodnı
zpetne
2 Statické charakteristiky bipolárního tranzistoru.
graficky a vyjadřují vždy závislost dvou veličin, přičemž třetí veličina se uvažuje jakoparametr. Ze čtyř veličin U1, U2, I1 a I2 lze sestavit 4! = 24 různých soustav charakte-ristik. Pro praxi jsou však důležité jen čtyři z nich, a to vždy jen v jednom kvadrantu.Proto se často všechny čtyři zakreslují do jednoho grafu (obr. 2) tak, že každá za-bírá jeden kvadrant. V takovém tvaru bývají charakteristiky uváděny také v kataloguvýrobce.
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 15

Čtveřice používaných charakteristik je:
výstupní charakteristika naprázdnoIC = f(UCE), IB = konst.
vstupní charakteristika nakrátkoIB = f(UBE), UCE = konst.
proudová převodní charakteristika nakrátkoIC = f(IB), UCE = konst.
zpětná napěťová převodní charakteristika naprázdnoUBE = f(UCE), IB = konst.
U bipolárního tranzistoru se výrazně projevuje vliv teploty na průběh charakte-ristik. Můžeme ho tedy považovat i za součástku řízenou teplotou. Zpravidla všaktuto vlastnost považujeme za parazitní, neboť se s teplotou mění i poloha nastave-ného pracovního bodu a je proto třeba při praktických aplikacích používat stabilizacipracovního bodu. Proto při měření charakteristik se snažíme udržovat stálou teplotua nenecháváme tranzistorem protékat velké proudy po dlouhou dobu.
Obrázek
fd fh
Sırka pasma
log f [Hz]
a[d
B]
0−3
20dB
/dek
−20
dB/dek
3 Amplitudová frekvenční charakteristika zesilovače.
| Zesilovač je aktivní dvojbran, který je sestaven tak, aby malý vstupní signál vytvá-řel velkou změnu napětí na výstupu zesilovače a tím vstupní signál zesiloval. Zesíleníse pak děje na úkor energie napájecího zdroje zesilovače. Pro malé signály lze zpra-vidla zesilovač uvažovat jako lineární dvojbran, jehož parametry však závisí na po-loze pracovního bodu. V případě lineárního zesilovače má smysl zavést frekvenčnězávislé zesílení napětí Au, které je obecně komplexní a vystihuje poměr komplexněvyjádřeného výstupního napětí ku komplexně vyjádřenému vstupnímu napětí. Zcelaobdobně lze zavést zesílení proudu Ai či výkonu Ap. Máme tedy definiční vztahy
Au =U2
U1
, Ai =I2
I1, Ap =
P2
P1
. (18)
Protože velikost zesílení se může měnit i v rozmezí několika řádů, používá se zpra-vidla jeho logaritmu, který se označuje jako zisk,
au = 20 log
∣∣∣∣∣ U2
U1
∣∣∣∣∣ , ai = 20 log
∣∣∣∣∣ I2I1∣∣∣∣∣ , ap = 10 log
∣∣∣∣∣ P2
P1
∣∣∣∣∣ . (19)
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 16

Takto vyjádřená veličina se udává v jednotkách decibel (dB) a nenese žádnou infor-maci o fázi zesílení. Pro posouzení vlastností zesilovačů se zpravidla kreslí frekvenčnícharakteristiky zisku (obr. 3) a fáze. Ideální zesilovač by měl mít rovnou frekvenčnícharakteristiku, reálná charakteristika však na straně nízkých i vysokých kmitočtůklesá s určitou strmostí (jednoduchá zapojení mají strmost−20dB/dek, což znamená,že při vzrůstu frekvence o jeden řád poklesne zesílení o 20 dB). Hraniční body, přikterých frekvenční charakteristika poklesne o 3 dB vzhledem ke svému maximu, seoznačují jako mezní frekvence, a to dolní fd a horní fh. Rozdíl B = fh − fd definuješířku pásma zesilovače. Ve speciálních aplikacích (např. ekvalizéry) se zesilovač do-plňuje frekvenčně závislými prvky, které rovnoměrnou charakteristiku přetvářejí dopožadovaného tvaru.
Schéma
+
+
+
u0
RiC1
R2
R1 R3
R4 C4
C2
Rz
+UCC
u1
u2
UCEUBE
IBIC
5 Jednostupňový zesilovač.
Tranzistorový zesilovací stupeň je nejjednodušší realizovatelný zesilovač, zpra-vidla je tvořen jedním tranzistorem v zapojení se společným emitorem. Obvod (sch. 5)je doplněn několika rezistory, které slouží k nastavení pracovního bodu (R1, R2) ak jeho stabilizaci (R4). KondenzátoryC1 aC2 jsou vazební kondenzátory, které sloužík odstranění stejnosměrné složky, která by ovlivňovala nastavení pracovního bodu(C1) a která je nežádoucí na výstupu (C2). Jejich hodnoty se pohybují v jednotkách aždesítkách µF. Odpor R4 se zařazuje pro kompenzaci teplotních změn UBE. Zvyšuje-li se teplota, zmenšuje se odpor přechodu báze–emitor a tím roste i proud IB, kterýnásledně zvyšuje IC a posouvá pracovní bod. Zvýšený kolektorový proud tranzistorzahřívá a efekt se lavinovitě zesiluje. Zapojíme-li R4, bude na něm s růstem IC růsti napětí UR4 = UE, což při stálém UB = UR2 působí proti teplotní změně UBE a celýobvod se tím stabilizuje, ale za cenu poklesu zesílení. Proto se zařazuje kondenzátorC4, který odpor R4 pro vyšší frekvence „zkratuje“ a v oblasti nenulových frekvencíse pak odpor R4 neprojeví.
K výpočtu zesílení daného stupně je zapotřebí nahradit tranzistor některým z jehomodelů. Protože se v zapojení vyskytují frekvenčně závislé prvky, je třeba sestavitpřibližné náhradní modely pro nízké, střední a vysoké frekvence a určit v nich zesí-lení zvlášť. Např. na středních frekvencích lze všechny kondenzátory nahradit zkratya pak odvodit zesílení ve tvaru
A0 = −h21e
h11e
(1
h22e∥ R3 ∥ Rz
), (20)
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 17

kde symbol ∥ značí paralelní kombinaci odporů. Je vidět, že zapojení SE obrací fázisignálu.
Podle způsobu nastavení pracovního bodu se zesilovače řadí do několika katego-rií. V úloze se budeme zabývat kategorií A, která má pracovní bod umístěn přibližněuprostřed prvního kvadrantu, v oblasti, kde jsou převodní charakteristiky téměř přím-kové, takže dochází k nejmenšímu zkreslení signálu.
3.2| Realizace měření
Pro měření vlastností tranzistoru použijeme měřicí jednotku A & DD U výukového systému µL se softwarem 2000 a příslušný modul T- B pro zapojení tranzistoru a modul P DC S pro přesnánastavení parametrických napětí či proudů. Měření budeme provádět podle sch. 6v režimu V-A C vždy pro několik hodnot parametru, některé parame-try budeme měřit externím multimetrem (parametr IB).
P
Tranzistor se do modulu T B zapojuje vlevo nahoře do zdířek C B E (shodně seznačením na tranzistoru – pozor, v sadě součástek je také tyristor s označením K G A). Zdířkyc, b pod ním slouží k vyřazení ochran tranzistoru před přetížením, které by ovlivňovaly měření.Postupujte tak, že nejprve nechte zdířky rozpojené a až ověříte funkčnost zapojení, tak je zkratujtea proveďte měření.
Schéma
A =
=
100 Ω(1 kΩ)
10 kΩ
IN A
IN B
IN A
IN B
IN A
IN B
1
1
1
1
1 2
2
2
2
2
3
3
3
33
4
4
4
4
4
6 Schéma pro měření vlastností tranzistoru. Čísla 1 až 4 ukazují, co je třebazapojit při měření úlohy 1 až 4, A O připojte na místo zdrojese symbolem pily.
V některých úlohách (např. 2) v případě sepnutí elektronické pojistky (F) na-hraďte odpor 100Ω odporem 1 kΩ. Napětí UCE by se správně mělo přivádět přímona svorku kolektoru, ale bezpečnější je připojení přes ochranný odpor 100Ω. Pak jenapětí udávané na displeji P DC S jen přibližně napětímUCE, přes-nou hodnotu získáte připojením digitálního multimetru nebo modulu V DC& AC RMS (na místo, kde se v úloze 1 připojí I A).
Při určování hybridních parametrů by se měly určovat hodnoty ze směrnice tečny.Abychom snížili vliv nejistot, zvláště u téměř vodorovných průběhů ve výstupních
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 18

charakteristikách, budeme je určovat ze sklonu sečen. Po změření charakteristikyv režimu S proto nastavte jeden kursor na konec průběhu a druhý co nejblížk nule tak, aby ještě stále ležel v přímkové oblasti. Nezapomeňte, že program určujepouze odpory, takže příslušné parametry budete muset přepočítat.
Program 2000 je určen jen pro měření V-A charakteristik v prvním a třetímkvadrantu, a to s pevně danými proudovými a napěťovými osami. Proto musíte ivstupní charakteristiky vykreslit do prvního kvadrantu, ačkoliv je potřeba je mít vetřetím a otočené. Překreslení musíte provést externím programem (editorem rastro-vých obrázků). Horší situace nastává v případě převodních/zpětných charakteristik,protože zde potřebujeme mít obě osy proudové/napěťové. To bohužel nelze provést,takže získané hodnoty i stupnice v grafu musíte přepočítat. V případě převodních cha-rakteristik zapojte na osu x signál z bázového odporu 10 kΩ a získané údaje přepoč-těte podle vztahu x[A] = 10−4x[V]. Proudová osa by v případě správného nastaveníS R měla být v pořádku. Pak platí h21 = 104/R, kdeR je hodnota, kterou programudává jako dynamický odpor mezi polohami 1 a 2. V případě zpětných charakteristiknastavte S R na hodnotu 1 a proudové údaje berte přímo jako napětí.
Pro měření vlastností zesilovače použijeme externí generátor (z osciloskopu DSO-X 2002A, levý vývod) pro vytváření střídavého signálu, výstup budeme měřit stejnýmosciloskopem (program 2000 zde nebudeme využívat). Vzhledem k zesílení v řádustovek a omezení napětí na ±10V musí mít vstupní napětí amplitudu cca 20 mV. Po-kud použijete přímo výstup z generátoru, může být zašuměný (patrně vlivem rušeníz napájecího zdroje). Proto nastavte větší amplitudu generátoru (cca 1 V) a na mo-dulu C B sestavte dělič napětí (např. z rezistorů 50 kΩ a 1 kΩ). Zesi-lovač napájejte (vstup +UCC na modulu T B) z pomocného zdroje,který je na modulu C B. Jeho hodnotu změřte multimetrem a pomocítlačítek F dolaďte na přesnou hodnotu. Pro spojení zesilovače s digitálním oscilo-skopem použijte tři kabely, které mají z jedné strany BNC konektory. Vlastní měřeníse provádí ve frekvenčním rozsahu 1 Hz až 1 MHz nastavením požadované frekvencea odečtením amplitudy vstupního i výstupního signálu pomocí kurzorů (výsledkůmautomatického měření není radno, při zašuměných signálech, věřit).
Při návrhu zesilovače počítejte s dispozicí pouze dvou odporových dekád, zbylédva rezistory volte dle dostupných prvků. Přesné hodnoty mění pouze velikost ze-sílení, samotná funkce zesilovače jimi příliš ovlivněna není. Zesilovač se zesílenímv řádu desítek lze realizovat (pro podmínky dané úlohou 6) s orientačními hodno-tami R1 = 50 kΩ, R2 = 11 kΩ, R3 = 1000Ω, R4 = 500Ω, C1 = 3,3µF, C2 = 1µF aC4 = 100µF. Konkrétní hodnoty však závisejí na parametrech tranzistoru. Vzhledemk vlastnostem systému µL nelze tyto parametry určit přímo v použitém pracovnímbodě, ale můžeme předpokládat, že se moc nemění. Hodnotu C2 volte tak, aby dobřeodstranila stejnosměrnou složku.
| Návrh tranzistorového zesilovače v zapojení SE při zadání napájecího napětíUCC,napětí kolektoru UCE, bázového IB a kolektorového IC proudu, známých parametrůtranzistoru (h11, h22, h21, UBE ≈ 0,65V) a zvolené frekvenční oblasti:
1. Pro napětí ve větvi kolektor–emitor platí UCC = UR3 + UCE + UR4 = ICR3 +UCE + UR4 . Z hlediska stabilizace by měl být R4 co největší, ale pak na němroste ztrátový výkon. Proto se napětí UR4 volí v rozmezí (0,1÷ 0,3)UCC, dále jejzvolíme 0,2UCC. Po zvolení můžeme určit odpor R4 =
UR4
IC+IB.
2. Ze zadaného napájecího napětíUCC aUCE určíme napětíUR3 = UCC−UCE−UR4
a z něho R3 =UR3
IC. Tímto jsou určeny odpory R3 a R4.
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 19

3. Pro obvod napěťového děliče (sloužícího k nastavení pracovního bodu) platíUCC = UR1 + UR2 = (I1 + IB)R1 + I1R2, kde I1 je proud tekoucí děličem,který musíme zvolit (z obvodových rovnic není jednoznačně určen). Zpravidlase volí I1 = (1÷5)IB, což je hodnota, která zajišťuje dostatečnou tvrdost děliče azároveň umožní, aby bylR2 dost velký (ovlivňuje totiž vstupní odpor zesilovačea tím i zatížení budicího stupně, které by mělo být co nejmenší).
4. Pro smyčku R2–báze–emitor platí UR2 = I1R2 = UBE + UR4 , z níž lze určitR2 =
UBE+UR4
I1.
5. Z podmínky UCC = UR1 + UR2 určíme UR1 a pak R1 =UCC−UBE−UR4
IB+I1. Nyní
máme určeny všechny rezistory v obvodě.
6. Vazební kondenzátory C1 a C2 musíme určit z mezí, které jsme si stanovilipro frekvenční pásmo zesilovače. Oba kondenzátory tvoří (s rezistory v ob-vodě) RC články s časovými konstantami τ = 1
f = 2πRiC, kde Ri je celkovývstupní/výstupní odpor zesilovače.
7. Pro stanovení mezní dolní frekvence určíme nejprve vstupní odpor, který jedán paralelní kombinací odporů děliče R1, R2 a vstupního odporu tranzistoruRvstT = h11. Tedy 1
Rvst= 1
R1+ 1
R2+ 1
RvstT. Tento odpor pak s kondenzátorem
tvoří hornofrekvenční propust. Pro dolní mezní frekvenci budeme požadovat,aby na ni byl pokles přenosu této propusti 3 dB. Ze vztahu pro přenos pak ur-číme fd = 1
2πC1Rvst→ C1 = 1
2πfdRvst.
8. Obdobně určíme výstupní odpor z kombinace odporů (odpor R4 je pro vysokéfrekvence zkratován kondenzátorem C4 a proto není uvažován) R3, Rz (zátěž)a výstupního odporu tranzistoru RvystT = 1
h22, tedy 1
Rvyst= h22 + 1
R3+ 1
Rz.
Pro nezatížený zesilovač (Rz → ∞) pak 1Rvyst
= h22 +1R3
. Ze vztahu pro dolnímezní frekvenci pak dostaneme C2 = 1
2πfdRvyst.
9. Posledním krokem je volba kondenzátoru C4. Ten se zpravidla volí ve tvaruC4 ≈ h21C1.
| Popis ovládání generátoru z osciloskopu DSO-X 2002A Běžně používaný systémµL je schopen pracovat jen do frekvence 10 kHz. Proto ke generaci, ale také k zob-razení signálů použijeme digitální osciloskop A. Funkční generátor se zapnestiskem tlačítka W G, které se modře rozsvítí. Totéž tlačítko použijte kdyko-liv v průběhu měření pro přístup k ovládání generátoru. Po zapnutí musíte nastavittvar signálu W na S, vhodnou amplitudu a požadovanou frekvenci (hod-noty se nastavují otáčením prostředního šedého točítka vpravo od displeje, označe-ného kruhovou šipkou). Signál může být zašuměný a mohou proto být problémy sespouštěním osciloskopu, které lze někdy odstranit stiskem tlačítka M/Ca zapnutím voleb N R a HF R.
3.3| Zadání úlohy
1. Změřte výstupní charakteristiky tranzistoru pro několik hodnot proudu IB.Rozkmit analogového výstupu nastavte minimálně na 5 V. V pracovním boděUCE = 3V a IB = 30µA z charakteristik určete výstupní odpor tranzistoru1/h22.
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 20
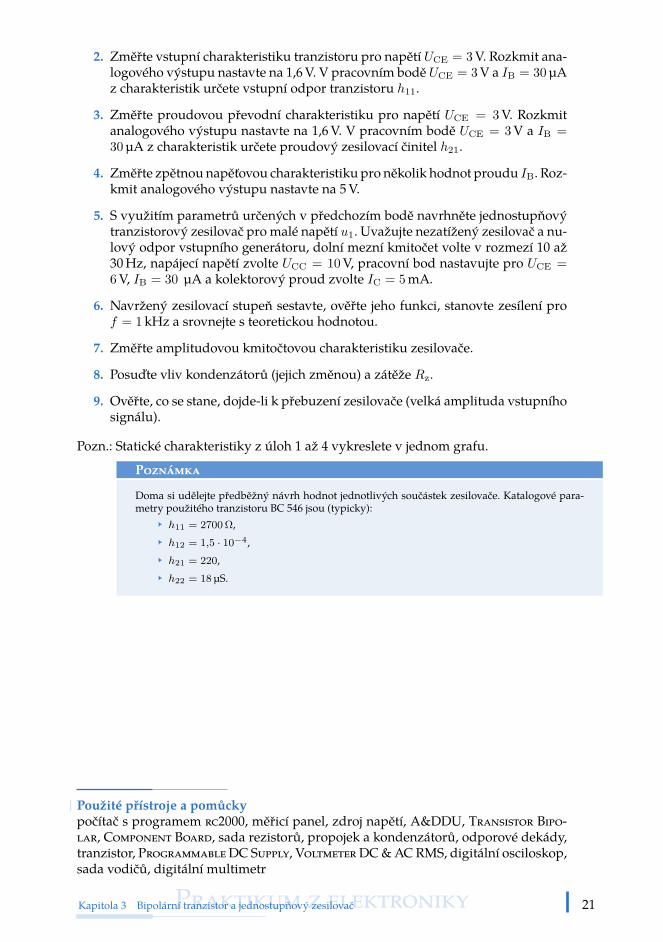
2. Změřte vstupní charakteristiku tranzistoru pro napětí UCE = 3V. Rozkmit ana-logového výstupu nastavte na 1,6 V. V pracovním bodě UCE = 3V a IB = 30µAz charakteristik určete vstupní odpor tranzistoru h11.
3. Změřte proudovou převodní charakteristiku pro napětí UCE = 3V. Rozkmitanalogového výstupu nastavte na 1,6 V. V pracovním bodě UCE = 3V a IB =30µA z charakteristik určete proudový zesilovací činitel h21.
4. Změřte zpětnou napěťovou charakteristiku pro několik hodnot proudu IB. Roz-kmit analogového výstupu nastavte na 5 V.
5. S využitím parametrů určených v předchozím bodě navrhněte jednostupňovýtranzistorový zesilovač pro malé napětí u1. Uvažujte nezatížený zesilovač a nu-lový odpor vstupního generátoru, dolní mezní kmitočet volte v rozmezí 10 až30 Hz, napájecí napětí zvolte UCC = 10V, pracovní bod nastavujte pro UCE =6V, IB = 30 µA a kolektorový proud zvolte IC = 5mA.
6. Navržený zesilovací stupeň sestavte, ověřte jeho funkci, stanovte zesílení prof = 1 kHz a srovnejte s teoretickou hodnotou.
7. Změřte amplitudovou kmitočtovou charakteristiku zesilovače.
8. Posuďte vliv kondenzátorů (jejich změnou) a zátěže Rz.
9. Ověřte, co se stane, dojde-li k přebuzení zesilovače (velká amplituda vstupníhosignálu).
Pozn.: Statické charakteristiky z úloh 1 až 4 vykreslete v jednom grafu.
P
Doma si udělejte předběžný návrh hodnot jednotlivých součástek zesilovače. Katalogové para-metry použitého tranzistoru BC 546 jsou (typicky):
h11 = 2700Ω,h12 = 1,5 · 10−4,h21 = 220,h22 = 18µS.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, T B-, C B, sada rezistorů, propojek a kondenzátorů, odporové dekády,tranzistor, P DC S, V DC & AC RMS, digitální osciloskop,sada vodičů, digitální multimetr
P Kapitola 3 Bipolární tranzistor a jednostupňový zesilovač 21

4 Operační zesilovač a jeho statické vlastnosti
Cíle úlohy
ideální operační zesilovačinvertující a neinvertující zesilovačsoučtový a rozdílový zesilovačkomparátorlogaritmický zesilovač
4.1| Teorie
Operační zesilovač (OZ) je elektronický prvek, který se vyznačuje velmi velkýmzesílením diferenciálního signálu, vysokým vstupním a nízkým výstupním odpo-rem, téměř nulovým výstupním napětím při nulovém napěťovém rozdílu na vstupua velmi malým časovým zpožděním výstupu oproti vstupu. Název „operační“ po-chází z prvních aplikací, v nichž se využíval k realizaci základních matematickýchoperací (např. součet či logaritmování). Operační zesilovač má tyto základní vstupy(sch. 7a):
kladný (neinvertující) signálový vstup s napětím U+,
záporný (invertující) signálový vstup s napětím U−,
výstup (obvykle jeden),
dva napájecí vývody pro napájení ze symetrického zdroje ±UCC, tyto se zpra-vidla ve schématech s operačním zesilovačem nezakreslují.
Dále může operační zesilovač mít další svorky, například pro napěťovou a kmitočto-vou kompenzaci.
Všechna napětí, která se v obvodech s OZ uvažují, jsou vztažena k zemnící svorcesymetrického zdroje napětí. Rozdíl ud = U+−U− se označuje jako vstupní diferenci-ální napětí a právě ono je OZ zesilováno se zesílením A0, tj. Uout = A0ud. Teoretickyvýstup OZ závisí pouze na ud bez ohledu na absolutní hodnoty U+, U−, v praxi toneplatí a dochází k nežádoucímu zesilování souhlasného napětí se zesílením Ag.
Vnitřně je OZ řešen sériovou kombinací několika zesilovacích bloků. Prvním blo-kem je vstupní rozdílový zesilovač, který napětí ud zesiluje 1000 až 10000krát. Dru-hým blokem je střední zesilovací stupeň se zesílením asi 100, tvořený tranzistoryv Darlingtonově zapojení, který zesiluje výstupní proud předchozího stupně a impe-dančně odděluje vstupní zesilovač od koncového. Koncový zesilovač má jednotkovézesílení a pouze dodává výstupní výkon.
Je-li na obou vstupech OZ stejné napětí, je výstupní napětí nulové. Pokud je jednonapětí větší, bude na výstupu napětí ∓Umax, což je napájecí napětí snížené o úbytky
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 22

Schéma
a)
−
+
=
=
ud
U−U+
Uout
+
−
+
−UCC
UCC
b)
−
+
=
=
RS
RS
D1 D2
D3
D4
R
R
D7
D8
D5
D6
P
C
C
RCM
+−
−+
UCC
UCC
U−
U+
Uout
7 Operační zesilovač. a) Značení vývodů, b) ochrana vstupu a výstupu.
na PN přechodech. Na výstupu OZ tedy můžeme dostat jen tři úrovně signálu, což jev souladu s ideálním nekonečným zesílením. V reálných aplikacích, kde potřebujemevýstup se spojitou „škálou“ výstupních úrovní, musíme OZ doplnit nějakým typemzpětné vazby. Je však zřejmé, že výstup nemůže přesáhnout velikost napájecího na-pětí, zmenšeného o úbytky na PN přechodech, a proto může u velkých vstupníchsignálů dojít k saturaci OZ.
V praxi se obvod OZ zpravidla doplňuje ochrannými prvky – diodami, které bránípřepětí. Mezi vstupy „+“ a „−“ se paralelně zapojí dvě obyčejné diody, které nedovolírozdílovému napětí přesáhnout v absolutní hodnotě asi 0,7 V (sch. 7b). Ke kladnémuvstupu se proti zemi připojí sériová kombinace opačně polarizovaných Zenerovýchdiod, které zabrání velkému napětí vůči zemi. Do větví napájení OZ se zapojují diody,které zabrání poškození při špatné polaritě napájecího napětí a slouží i jako ochranaproti rušení. Další dvě Zenerovy diody se připojují mezi výstup OZ a zem a bránípoškození OZ indukovaným napětím, pokud by byla připojena zátěž s indukčnímcharakterem. Na výstup se také zařazuje malý odpor bránící výkonovému přetížení.Ovšem takový obvod už je „přechráněný“, což zhoršuje vlastnosti zapojení. Proto ipoužitá ochrana se uzpůsobuje podle toho, jaké nebezpečí reálně hrozí.
Funkci, kterou bude v obvodu OZ vykonávat, definuje jeho zpětná vazba. Ob-vod zpětné vazby může obsahovat aktivní i pasivní prvky a propojuje přes OZ zdrojsignálu (uin, iin) se zátěží. Zpětná vazba se definuje pomocí své operační rovnice
uout = f1(uin, iin), iout = f2(uin, iin). (21)
| Analýza zapojení OZ Uvažujme, že vlastní OZ má přenos diferenciálního napětíA0 a k němu připojená zpětná vazba má přenos β. Bez zpětné vazby platí uout =A0uin. Z výstupního napětí zpětná vazba přenese zpět na vstup napětí uzv = βuout,které se sečte s uin, tj. máme uvst = uin + βuout. Po zesílení se toto napětí musí rovnatvýstupnímu, tedy A0(uin + βuout) = uout. Po úpravách získáme zesílení se zpětnou
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 23

vazbou
A =uout
uin=
A0
1− βA0, (22)
které v případě ideálního OZ (A0 → ∞) je určováno jen parametry zpětné vazby,Aid = − 1
β . V případě, že zpětná vazba obsahuje frekvenčně závislé prvky, je zesíleníobecně komplexní.
Obecné zapojení OZ s komplexními impedancemi je na sch. 8. Zpravidla se řešív aproximaci ideálního zesilovače, který má Rin → ∞, Rout → 0 a A0 → ∞. Pakmusí být diferenciální napětí nulové, protože výstupní napětí musí být konečné alimA0→∞ ud = limA0→∞
uout
A0= 0. Protože vstupní odpor je nekonečný, nemůže do
vstupů téci proud a dle prvního Kirchhoffova zákona musí platit
I− = I1 + Izv =Uin1 − Uin2
Z1
+Uout − Uin1
Zzv
= 0, (23)
z čehož plyne
Uout = Uin1
(1 +
Zzv
Z1
)− Uin2
Zzv
Z1
. (24)
Tato rovnice se pak používá k řešení jednotlivých aplikací.
Schéma
−
+=
Uin2
Uin1
Uout
ud
U+U−
I1 I−
Izv
RinRout
Zzv
Z1
8 Obecné zapojení operačního zesilovače.
V případě, že A0 je konečné, dojdeme obdobným postupem k výsledku
Uout =Uin1
(1 + Zzv
Z1
)− Uin2
Zzv
Z1
1 + 1
A0
(1 + Zzv
Z1
) . (25)
Uvedený způsob řešení operačního zesilovače budeme dále aplikovat na některéspeciální případy, a to za předpokladu ideálního zesilovače.
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 24

| Invertující zesilovač (sch. 9a) má zesílení
A =−Rzv
R1
1 + 1A0
(1 + Rzv
R1
) A0→∞= −Rzv
R1. (26)
Výstupní signál je tedy fázově posunut o 180 vzhledem ke vstupnímu signálu. Vol-bouR1 aRzv lze měnit zesílení v širokém rozsahu. OdporR1 v sobě zahrnuje i vnitřníodpor zdroje signálu. Zároveň určuje vstupní odpor invertoru, protože je virtuálněuzemněn (ud = 0).
Při volbě hodnot odporů je třeba respektovat omezující pravidla daná typem po-užitého OZ. Zpětnovazební odpor by neměl překročit 10 MΩ, protože jinak vznikajíproblémy s nestabilitou a šumem OZ. Dále je velikost odporů Rzv a R1 nutné volittak, aby zesílení invertoru bylo podstatně menší než zesílení A0 použitého OZ.
Zvláštní případ nastává pro R1 = 0, kdy je výstup přímo úměrný proudu (pod-mínka z I. Kirchhoffova zákona má tvar I1 = Uout
Rzv) a obvod pracuje jako převodník
proudu na napětí.
Schéma
a)
−
+
UinUout
R1
Rzv
b)
−
+
Uin Uout
R1
Rzv
c)
−
+
UinUout
9 Zesilovač a) invertující, b) neinvertující, c) napěťový sledovač.
| Neinvertující zesilovač (sch. 9b) má zesílení
A =1 + Rzv
R1
1 + 1A0
(1 + Rzv
R1
) A0→∞= 1 +
Rzv
R1. (27)
Výstupní signál je nyní ve fázi se vstupním a nikdy nemůže být menší. Vstupní odporneinvertujícího zesilovače bývá 109 až 1014 Ω.
V případě, že je Rzv = 0 a R1 → ∞ (tedy výstup je napojen přímo na invertu-jící vstup, který není odporem spojen se zemí), vychází zesílení A = 1 a dostávámenapěťový sledovač (sch. 9c), který na výstupu přesně kopíruje vstupní signál. Vzhle-dem k vlastnostem OZ toto zapojení může sloužit k impedančnímu přizpůsobení – velkývstupní odpor málo zatěžuje generátor signálu a malý výstupní odpor příliš neovliv-ňuje následující elektronické obvody.
| Invertující sumátor (sch. 10a) má výstupní napětí dané váženým součtem vstup-ních napětí na invertujícím vstupu,
Uout = −(Rzv
R1Uin1 +
Rzv
R2Uin2 + · · ·
)= −Rzv
N∑k=1
1
RkUink. (28)
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 25

Pokud platí R1 = R2 = · · · = RN = Rzv, je výstup roven záporně vzatému součtuvšech napětí. Je-li R1 = R2 = · · · = RN = NRzv, je výstup aritmetickým průměrem,Uout = − 1
N
∑Nk=1 Uink.
Schéma
a)
−
+
Uin1Uout
Uin2
R1
RzvR2
b)
−
+
Uin1
Uin2
Uout
R1 Rzv
R2 Rn
10 a) Invertující sumátor, b) rozdílový zesilovač.
| Rozdílový zesilovač (sch. 10b) v případě jednoho kladného a jednoho zápornéhovstupu dává výstupní napětí
Uout =Rn
R2 +Rn
(1 +
Rzv
R1
)Uin2 −
Rzv
R1Uin1, (29)
a speciálně pro Rn/Rzv = R2/R1 je výstup úměrný rozdílu obou napětí, Uout =Rzv
R1(Uin2 − Uin1).
| Funkční měniče Jde o taková zapojení, v nichž je výstupní napětí rovno předemnadefinované funkci vstupního napětí, tj. Uout = f(Uin), a realizuje se použitím neli-neární operační sítě. Příkladem může být logaritmický zesilovač (sch. 11a), kterýv obvodu zpětné vazby obsahuje diodu. Protože pro proud diody přibližně platíID ≈ I0e
eUDkT , získáváme z podmínek UD = Uout, Iin = Uin
R a Iin + ID = 0 výsle-dek
Uout = −kT
e
(ln
Uin
RI0
). (30)
Dioda však poskytuje jen malý dynamický rozsah, větší rozsah umožní zapojení tran-zistoru.
Logaritmické zesilovače se často používaly k realizaci násobení/dělení signálů,kde se využilo vztahu ln(xy) = lnx+ln y, ln x
y = lnx−ln y. Oba signály se nejprve zlo-garitmovaly, pak se sečetly/odečetly a výsledek se odlogaritmoval pomocí obvoduze sch. 11b), který se od logaritmického zesilovače liší „přehozením“ rezistoru a di-ody. Zobecněním dojde k tvrzení, že přesunutím funkční sítě, která realizuje funkciF (x), z obvodu zpětné vazby do obvodu vstupu lze získat měnič realizující inverznífunkci F−1(x).
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 26

Schéma
a)
−
+
UinUout
R
D
b)
−
+
UinUout
D
R
11 Zesilovač a) logaritmický, b) antilogaritmický.
| Přesný usměrňovač Všechny usměrňovače, které se studovaly v úloze 2, nebylyschopny usměrnit napětí menší než je prahové napětí diody. Pokud taková napětípotřebujeme usměrňovat, můžeme využít zapojení s OZ (sch. 12a). Je-li napětí Uin
kladné, je dioda polarizována v propustném směru, OZ vyrovnává napětí mezi in-vertujícím a neinvertujícím vstupem a musí pro U− = RID platit U− = Uin. Proto jei výstupní napětí Uout = Uin. Je-li napětí záporné, je obvod zpětné vazby přerušen aodporem R neprotéká proud (vstup OZ má nekonečný odpor), a proto je Uout = 0.
| Komparátor (sch. 12b) slouží ke srovnání velikostí dvou signálů – výstup OZ rozli-šuje tři stavy: první signál je menší, první signál je větší a signály jsou shodné. Jak užbylo psáno dříve, toto chování odpovídá samotnému OZ bez zpětné vazby. Často jejeden ze signálů pevně nastaven na určitou hodnotu Uref a sleduje se překročení tétoúrovně, při kterém dojde k obrácení polarity výstupu.
Schéma
a)
−
+
UinUoutR
D
b)
−
+
=
Uin Uout
Uref
c)
−
+
=
Uin Uout
Uref
Upos
R1
R2
12 a) Usměrňovač, b) komparátor c) s hysterezí.
Uvedené zapojení mění polaritu výstupu okamžitě po dosažení zvolené úrovně.Mnohdy je žádoucí, aby překlápění vykazovalo hysterezi, tj. přechod mezi polari-tami nastával při jiných napětích při vzrůstu a poklesu signálu. Toho lze docílit za-řazením odporového děliče R1, R2 mezi výstup a zem (sch. 12c), jehož napětí Uref =±Umax
R2
R1+R2slouží jako referenční napětí a přivádí se na neinvertující vstup. Tím
vzniká kladná zpětná vazba, která způsobí na výstupu maximální velikost napětí.
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 27

K překlopení nedojde při nulové hodnotě, ale až přiUin = Uref , a vzhledem k tomu, žeUref je odvozeno z výstupního napětí, které při překlopení změní znaménko, vznikáhystereze o velikosti 2Uref . Pokud nechceme, aby k hysterezi docházelo v okolí nuly,musíme napětí děliče posunout přídavným zdrojem Upos.
4.2| Realizace měření
Pro měření zapojení operačního zesilovače použijeme měřicí jednotku A& D D U výukového systému L se softwarem 2000 v režimu O- a O & G a příslušný modul O A. Jakozdroj signálu budeme používat buď výstup z F G v případě sinuso-vých a obdélníkových průběhů, nebo A O v případě „ručně“ vytvářenýchprůběhů. Pomocné napětí do 10 V budeme získávat ze zdroje integrovaného v mo-dulu C B pomocí odporového děliče.
K výstupu OZ připojíme vstup I B a případně V DC & AC RMS, vstup IA budeme připojovat na vhodný vstup OZ, v případě sumátoru a rozdílového zesilo-vače bohužel druhý vstupní signál nelze sledovat. Průběhy sledujte v časovém rozvi-nutí V YT. Pro odpory R1 a R2, jejichž hodnoty se budou měnit, používejte před-nostně odporové dekády. Při měření komparátoru nepoužívejte výstup OZ přímo,ale připojte k němu odporový dělič napětí, zapojený na modulu C B.Pro snažší srovnání průběhu můžete připojit svorky I B s opačnou polaritou.
4.3| Zadání úlohy
1. Vytvořte si v editoru libovolný průběh signálu Uin∗(t) a uložte jej.
2. Zapojte invertující zesilovač a ověřte graficky jeho funkci pro vstupní napětísinusové, obdélníkové a Uin∗(t). Připojte na vstup P DC S,na výstup V DC & AC RMS a změnou odporů R1 a Rzv ověřte vzorec(26) pro zesílení invertoru, i pro případ A < 1. Připojte na vstup digitální mul-timetr ve funkci ampérmetru, nastavte R1 = 100Ω, Rzv = 1Ω a ověřte funkcipřevodníku proudu na napětí.
3. Zapojte neinvertující zesilovač a ověřte graficky jeho funkci pro vstupní napětísinusové, obdélníkové a Uin∗(t). Připojte na vstup P DC S,na výstup V DC & AC RMS a změnou odporů R1 a Rzv ověřte vzorec(27) pro zesílení invertoru. Ověřte funkci napěťového sledovače.
4. Zapojte invertující sumátor a přiveďte na oba jeho vstupy stejný signál. Ověřtegraficky funkci sumátoru pro R1 = R2 a R1 = 2Rzv. Pak na jeden ze vstupůpřiveďte napětí z P DC S a sledujte reakci výstupu při změnějeho napětí. Na první vstup přiveďte napětí z modulu C B a při-pojte k němu digitální multimetr v režimu voltmetru. Na druhý vstup přiveďtenapětí z P DC S, k výstupu sumátoru připojte V DC& AC RMS. Ověřte číselně funkci sumátoru pro různá napětí obou vstupů arůzné hodnoty R1, R2 a Rzv. Ověřte funkci pro velká zesílení.
5. Zapojte rozdílový zesilovač a přiveďte na oba jeho vstupy stejný signál. Ověřtegraficky funkci rozdílového zesilovače pro různé kombinace odporů a speci-álně pro Rn
Rzv= R2
R1. Obdobně jako v předchozí úloze zapojte zdroj 10 V, digi-
tální multimetr, P DC S a V DC & AC RMS a ověřtečíselně funkci pro různé hodnoty R1, R2, Rn a Rzv.
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 28

6. Vytvořte si napěťový průběh ve tvaru pily (tj. pozvolný lineární nárůst násle-dovaný strmým lineárním poklesem) s amplitudou 5 V. Zapojte logaritmickýzesilovač s R = 2kΩ a přiveďte na jeho vstup vytvořený signál. Ověřte grafickylogaritmický průběh.
7. Zapojte přesný usměrňovač a přiveďte postupně na jeho vstup sinusové napětís amplitudou 2 a 0,3 V. Srovnejte získané průběhy s výsledky úlohy 2 (Studiumvlastností usměrňovačů střídavého proudu).
8. Vytvořte si napěťový průběh ve tvaru impulsů (tenkých obdélníků) s různouamplitudou. Zapojte komparátor a nastavte Uref = 0V pomocí PDC S. Sledujte průběh na osciloskopu a postupně zvyšujte Uref .
9. Ověřte chování komparátoru s hysterezí pomocí připojení P DCS a V DC & AC RMS. Totéž ověřte graficky pro trojúhelníkovýbipolární signál. Zjistěte, na čem závisí napětí překlopení.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, O A-, C B, sada rezistorů, propojek, kondenzátorů a diod, odporovédekády, F G, P DC S, V DC & AC RMS,sada vodičů, digitální multimetr
P Kapitola 4 Operační zesilovač a jeho statické vlastnosti 29

5 Dynamické vlastnosti operačního zesilovače
Cíle úlohy
integrátor a derivátoraktivní filtrysyntetická indukčnost
5.1| Teorie
Ideální operační zesilovač má zesílení nezávislé na frekvenci. Reálný zesilovačzesiluje rovnoměrně až do mezní frekvence fOZ, dále jeho frekvenční charakteristikaklesá se strmostí asi 20 dB/dek a protíná osu 0 dB při frekvenci fT. Mezní frekvenceje však u běžných operačních zesilovačů relativně vysoká, v řádu stovek kHz a v níz-kofrekvenčních aplikacích se tedy neprojevuje. Pro vysokofrekvenční aplikace je dů-ležité si uvědomit, že frekvenční charakteristika zapojení OZ závisí i na operační síti,a může být i širší než u samotného OZ. Například invertující zesilovač má oblast rov-noměrného zesílení větší, finv = fT
A > fOZ, protože zesílení má menší hodnotu aspadá tedy do rozšiřující se části frekvenční charakteristiky OZ (obr. 4).
Obrázek
operacnı zesilovacinvertujıcı zesilovac
fTfinvfOZ log f
A
4 Amplitudová frekvenční charakteristika OZ a invertujícího zesilovače.
| Integrátor Nahradíme-li v zapojení invertujícího zesilovače zpětnovazebný rezistorRzv kondenzátorem C (sch. 13a), získáme integrátor. Pro jeho analýzu předpoklá-dejme, že kondenzátor je v čase t = 0 vybitý. Po přivedení napětí uin začne procházetodporem R proud iin = uin
R (vstup „−“ je totiž virtuálně uzemněn), který musí býtkompenzován nabíjecím proudem zpětnovazebního kondenzátoru iC = C duout
dt , aby
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 30

proud tekoucí do vstupu „−“ byl nulový. Z rovnosti obou proudů dostaneme zá-kladní rovnici
uin
R+ C
duout
dt= 0, (31)
jejíž řešení je
uout(t) = −1
τ
∫ t
0
uin(t′) dt′, (32)
kde τ = RC je časová konstanta integrátoru. V případě, že by byl v počátku konden-zátor nabit na napětí U0, bude výstupní průběh o toto napětí posunut.
Schéma
a)
−
+
uinuout
R
C
b)
charakteristikaOZ
idealnı integrator
log ffi
A
13 Invertující integrátor s operačním zesilovačem a jeho amplitudová frek-venční charakteristika.
Vlastnosti reálného integrátoru jsou určeny zejména konečným zesílením A0, ko-nečnou šířkou pásma přenosu OZ a konečným napájecím napětím. Dojde-li ke sko-kové změně napětí uin z nuly na hodnotuUin, mělo by teoreticky napětí lineárně stou-pat až do nekonečna rychlostí 1
τ . U reálného zesilovače však musí být napětí konečné,a proto bude (v absolutní hodnotě) stoupat podle vztahu
uout(t) = −(1− e−
tA0τ
)A0Uin. (33)
Při dlouhých dobách integrace tak vzniká chyba ε = 100t2A0τ
[%]. Proto se obvykle pou-žívá jen krátká doba integrace, aby chyba byla zanedbatelná. V případě rychlých in-tegrátorů je nutno uvážit ještě časové zpoždění τp odezvy na skokovou změnu vstup-ního napětí.
Abychom vyjádřili komplexní přenos integrátoru, přivedeme na jeho vstup har-monické napětí uin(t) = U cosωt, které vytvoří výstupní napětí
uout(t) = − 1
RC
∫ t
0
U cosωt′ dt′ = − 1
ωRCU sinωt. (34)
Přenos pak obdržíme ve tvaru
A =Uout
Uin
= − 1
jωRC,∣∣∣A∣∣∣ = 1
ωRC=
1
ωτ. (35)
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 31

Amplitudová charakteristika ideálního integrátoru (sch. 13b) má jediný pól v počátkua je znázorněna přímkou se strmostí −20dB/dek, která protíná osu 0 dB v bodě od-povídajícím charakteristické frekvenci
fi =1
2πRC=
1
2πτ. (36)
| Derivátor Jestliže prohodíme ve schématu integrátoru kondenzátor a rezistor, do-staneme v souladu s poučkou o inverzních funkcích zapojení derivátoru (sch. 14a).Opět můžeme sestavit rovnici popisující proudovou rovnováhu u invertujícího vstupu
Cduin
dt+
uout
R= 0 (37)
a obdržíme její řešení
uout = −RCduin(t)
dt, (38)
v níž opět zavedeme časovou konstantu derivátoru τ = RC. U derivátoru se uplatňujístejné zdroje chyb jako u integrátoru a skutečná odezva je derivaci rovna jen přibližně:
uout = −(1− e−
A0τ t)τduin(t)
dt. (39)
U reálného derivátoru je možný rozsah časových konstant omezen podmínkou τ ≤|Uoutmax |∣∣∣ duin
dt
∣∣∣max
.
Schéma
a)
−
+
uinuout
C
R
b)
40 dB/dek.
charakteristika OZ idealnı derivator
realny derivator
log ffd
A
14 Invertující derivátor s operačním zesilovačem a jeho amplitudová frek-venční charakteristika.
Pro stanovení zesílení derivátoru využijeme stejný postup jako u integrátoru aobdržíme
A = −jωRC,∣∣∣A∣∣∣ = ωRC = ωτ. (40)
Amplitudová frekvenční charakteristika (sch. 14b) derivátoru je znázorněna přím-kou se strmostí +20 dB/dek, která protíná osu 0 dB v bodě fd = 1
2πRC = 12πτ . Od
frekvence fp je však ovlivněna klesající frekvenční charakteristikou samotného OZ ave výsledku má strmost o 40 dB/dek menší než odpovídá ideálnímu derivátoru. Toje příčinou značné nestability zapojení (zpětná vazba způsobuje posuv fáze 90, ke
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 32

kterému se přidává posuv samotným OZ, který také může být 90, a výsledný fázovýposuv je 0). Nestabilitu rovněž ovlivňuje citlivost na vysokofrekvenční složky šumu,protože amplituda napětí závisí přímo úměrně na ω.
Prakticky se proto realizuje složitější derivátor, který obsahuje minimálně odporR1, často i kondenzátor C1 (sch. 15). Zařazením R1 se omezí zesílení při vyšších frek-vencích než f1 = 1
2πR1Ca obdobně C1 omezí zesílení od f2 = 1
2πRC1. Při vhodné
volbě R1 a C1 téměř nedojde k ovlivnění pracovních kmitočtů derivátoru. Zpravidlase volí R1C = C1R = τc =
1fc
a fc <√fTfd. Pak pro zesílení platí∣∣∣A∣∣∣ = τω
1 + τ2ω2. (41)
Schéma
−
+
uinuout
C
R
R1
C1
Rp = R1
15 Reálné zapojení derivátoru.
Derivátor a integrátor také můžeme vytvořit pomocí RC členu, ke kterému připo-jíme OZ v zapojení napěťového sledovače. Pak integraci či derivaci vytváří RC člen aOZ jen zajišťuje nízké zatížení členu, aby pracoval (téměř) naprázdno.
| Aktivní filtry Frekvenční filtry slouží ke třídění signálů z hlediska jejich frekvenč-ních spekter. Pokud na vstup přivedeme signál obsahující frekvence f ∈ ⟨0,∞), navýstupu dostaneme signál obsahující pouze frekvence z intervalu ⟨fd, fh⟩, který nazý-váme pásmem propustnosti. Doplňkové intervaly ⟨0, fd) a (fh,∞) se nazývají pásmatlumení. Činnost filtru se samozřejmě projeví i v energetické bilanci: část energievstupního signálu se od vstupu filtru odrazí, část energie se rozptýlí na reálných od-porech filtru a zbylá část energie, která odpovídá pásmu propustnosti filtru, procházína výstup filtru.
Filtry lze dělit podle stavebních prvků na pasivní a aktivní. Pasivní filtr se skládáz odporů, cívek a kondenzátorů a při filtraci na něm dochází i k utlumení propuště-ného signálu. Připojení zátěže k výstupu pak značně ovlivňuje filtrační funkci. Ak-tivní filtr obsahuje (polovodičové) prvky, které dokáží kompenzovat útlum signálupasivními prvky a zároveň impedančně oddělit vstup od výstupu tak, aby zátěž ne-měla vliv na filtraci. Použití aktivních prvků také umožní konstrukci filtrů bez použitíindukčností, které bývají objemné a technologicky náročné.
Obdobně jako u zesilovačů se filtr jakožto čtyřpól charakterizuje napěťovým pře-nosem
F (jω) =Uout
Uin
. (42)
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 33

Narozdíl od zesilovače však ideální přenos filtru není konstantní pro všechny frek-vence, ale jen v pásmu propustnosti a nulový v pásmech tlumení. Graf ideálního pře-nosu (v logaritmickém vyjádření) tedy obsahuje strmé přechody, čehož není možnév praxi dosáhnout. Reálný filtr má určitou přechodnou oblast s pozvolným přecho-dem, který lze v oblasti nepropustnosti asymptoticky aproximovat přímkou s koneč-nou strmostí, podle které se rozlišuje řád filtru. Filtry 1. řádu mají strmost 20 dB/dek,filtry obecně n-tého řádu mají strmost 20ndB/dek.
Podle tvaru přenosové charakteristiky rozeznáváme dolní propust, horní propust,pásmovou propust a pásmovou zádrž. První dva typy lze považovat za základní,druhé dva získáme (alespoň teoreticky) jejich sériovou (propust) a paralelní (zádrž)kombinací při vhodně zvolených horních a dolních frekvencích. Filtry se charakteri-zují svou šířkou pásma ∆f = fh − fd, relativní šířkou pásma ∆fR = ∆f
fRa normo-
vanou šířkou pásma ∆fn = ∆f2fR
, kde fR =√fhfd je střední frekvence filtru. Podle
normované šířky pásma se filtry dělí na širokopásmové (∆fn > 1 a fh/fd > 6) aúzkopásmové (∆fn < 1 a fh/fd < 6). Převrácená hodnota relativní šířky pásma senazývá činitel jakosti
Q =1
∆fR=
fRfh − fd
. (43)
Při návrhu aktivního filtru se typicky snažíme zajistit
1. frekvenčně nezávislou hodnotu napěťového přenosu F (jω) v oblasti propust-nosti,
2. strmý přechod mezi oblastí propustnosti a nepropustnosti,
3. rychlou odezvu výstupního napětí na skokovou změnu vstupu bez překývnutí.Reálný filtr těchto vlastností nikdy nedosáhne, může se jim pouze přibližovat. Podlepoužité aproximační metody se reálné filtry dělí na Butterworthovy, Čebyševovy aBesselovy.
Nejjednodušší pasivní dolnofrekvenční propustí je RC článek, u něhož se výstupnínapětí odebírá z kondenzátoru. Pro jeho přenos platí
F (jω) =1
1 + jωRC(44)
a dosahuje strmosti 20 dB/dek. Potřebujeme-li strmost vyšší, lze zařadit několik stej-ných filtrů sériově (jejich popis je ale složitější, nemůžeme jejich dílčí přenosy Fi(jω)jen vynásobit). Zaměníme-li vzájemně polohu kondenzátoru a rezistoru, obdržímepasivní vysokofrekvenční propust.
Aktivní filtr z pasivního filtru uděláme nejjednodušeji tak, že výstup pasivníhofiltru impedančně oddělíme pomocí OZ (neinvertující zesilovač). Takový zesilovačvšak musí mít dobré frekvenční vlastnosti, protože se sám chová jako dolní propust.
| Dvojitý T–článek Dalším způsobem vytváření aktivních filtrů je využití frekvenčnězávislých prvků přímo v operační síti OZ, nejčastěji v obvodu zpětné vazby. Pro vy-tváření propusti se často používá dvojitý T–článek (sch. 16a), který s výjimkou úzkéhopásma kolem své střední frekvence f0 = 1
2πRC zajišťuje silnou zápornou zpětnouvazbu. Minimální přenos článku je dán vztahem F (f0) =
2n2−n
1+n+2n2. V případě symet-
rického T–článku (n = 12 ) platí F (f0) = 0 a přenos pro všechny frekvence lze vyjádřit
vztahem
F (jω) =ωRC − 1
ωRC
ωRC − 1ωRC − j4
. (45)
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 34

Schéma
a)
−
+
R R
nR
C C
1nC
uinuout
b)
−
+
uinuout
R2 R2
R1C
C
R
16 Aktivní filtr s a) dvojitým T–článkem, b) dolní propustí 2. řádu.
| Dolní propust 2. řádu je příkladem složitějšího filtru, který v oblasti nepropustnostidosahuje poklesu 40 dB/dek (sch. 16b). Tento filtr už nemá jednoznačně oddělenouvstupní a zpětnovazební větev a jeho přenos je dán vztahem
F (jω) =1
R1
R1+R (1− ω2R22C
2) + jωCR22R1−RR1+R
. (46)
| Syntetická indukčnost Když použijeme OZ se zpětnou vazbou, můžeme dosáh-nout nejen zesílení či filtrace signálu, ale i vytvoření „prvku“ se zadanou hodnotoureaktance. Uvážíme-li, že klasické cívky jsou technologicky náročné na výrobu a bý-vají hmotné, zatímco kondenzátory mohou být malé i při velkých kapacitách, nabízíse možnost realizovat indukční chování synteticky. Uvažujme zapojení na sch. 17.Protože se rozdílové vstupní napětí ud vyrovnává na nulu, musí být výstupní na-pětí rovno vstupnímu. Pak dostaneme pro příslušné proudy kombinací Ohmova aKirchhoffových zákonů vztahy
IR =Uin − U1
R, IC =
Uin − U11
jωC
. (47)
Protože platí RIR = 1jωC IC , získáme vztah IC = jωRCIR. Spodním odporem pak
protéká jejich součet, tedy I2 = IR+IC = IR(1+jωRC). Pro tento proud zároveň platípodmínka I2 = U1
R = Uin−RIRR a po srovnání obou vztahů dostaneme rovnici Uin =
IR(2R+jωR2C). Z ní vyplývá, že uvedené zapojení se chová jako cívka s indukčnostíL = CR2 a odporem vinutí RL = 2R, a to vzhledem ke vstupním svorkám (výstupnísvorka s napětím Uout se v aplikaci vůbec nevyužívá).
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 35

Schéma
−
+
Uin Uout
R
R
C
IR
ICI2
U1
17 Syntetická indukčnost.
5.2| Realizace měření
Pro měření dynamických aplikací operačního zesilovače použijeme měřicí jed-notku A & D D U výukového systému L se softwarem 2000v režimech O a F C a příslušný modul O- A pro zapojení OZ. Vstupní signály získávejte z modulu F G- a přivádějte je zároveň na I A. Výstup zapojte na I B. Při měření frekvenčníchcharakteristik zapojte na vstup A O.
V zapojení integrátoru a derivátoru si vhodně zvolte hodnoty odporu a konden-zátoru (např. 100 kΩ a 3,3 nF). Zvláště u integrátoru může výstup přesahovat meze±10V, proto vhodně zvolte velikost vstupní amplitudy. Obsahuje-li výstupní signálstejnosměrnou složku, připojte k výstupu OZ sériově kondenzátor 1 až 3,3 µF a chvílivyčkejte, než se výstup ustálí. V zapojení reálného derivátoru musíte vhodně zvolithodnoty C1 a R1 (např. 1 µF, 100 Ω). Při měření frekvenčních charakteristik se můžestát, že charakteristika bude přerušovaná. Pokud při měření integrátoru nedostanetežádnou křivku, opět připojte filtrační kondenzátor.
Při měření T–článku s různou hodnotou n měňte vždy jen jeden kondenzátor ajeden rezistor, použijte odporovou a kapacitní dekádu. T–článek zapojte na moduluC B a použijte R = 100 kΩ, C = 10nF. Uvedený modul využijte ipři realizaci RLC obvodu (nezapomeňte propojit zemnící svorky obou modulů) avhodně zvolte velikosti součástek (např. R1=200 Ω, C1 = 3,3µF).
5.3| Zadání úlohy
1. Sestavte integrátor a ověřte jeho funkci pro sinusové i obdélníkové vstupní na-pětí, a to pro několik časových konstant. Změřte jeho frekvenční charakteris-tiku.
2. Sestavte derivátor a ověřte jeho funkci pro sinusové i obdélníkové vstupní na-pětí, a to pro několik časových konstant. Změřte jeho frekvenční charakteris-tiku. Totéž ověřte pro „reálné“ zapojení derivátoru.
3. Ověřte, že integrace a derivace lze dosáhnout i kombinací RC článku a neinver-tujícího zesilovače.
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 36

4. Sestavte aktivní filtr s dvojitým T–článkem a změřte jeho frekvenční charakte-ristiku. U nesymetrického T–článku změřte charakteristiky pro několik hodnotparametru n (při téměř stejné f0). HodnotyR aC volte tak, aby rezonanční frek-vence byla v rozmezí 100–1000 Hz a bylo možno hodnoty měnit pomocí dekády(např. R = 100 kΩ, C = 10nF).
5. Sestavte aktivní filtr s dolní propustí druhého řádu s parametry R1 = 1 kΩ,R2 = 20kΩ, C = 100nF. Změřte jeho frekvenční charakteristiky a ověřte jehofunkci v časové oblasti, měření proveďte pro několik hodnot R (v rozmezí 0 až1 kΩ včetně 0 Ω).
6. Sestavte sériový RLC obvod, v němž bude místo cívky použita syntetická in-dukčnost. Ověřte „indukčnostní charakter“ napětí na cívce srovnáním s napě-tím na kondenzátoru C1. Místo syntetické indukčnosti zapojte do obvodu reál-nou cívku s indukčností 1 H a rezistor s takovým odporem, jaký má syntetickáindukčnost. Srovnejte napětí na syntetické indukčnosti s napětím na kombinacireálné cívky a rezistoru a s napětím přímo na reálné cívce. Kvůli srovnání volteR = 1 kΩ a C = 1µF. Vyhodnoťte rezonanční frekvenci z průběhu proudu az průběhů UC1(f), UL(f). Srovnejte výsledek s Thomsonovým vztahem.
Schéma
L−
+
Uin UL
R
R
C
R1 C1
18 RLC obvod se syntetickou indukčností.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, O A-, C B, sada rezistorů, propojek a kondenzátorů, odporové de-kády, kapacitní dekáda, sada vodičů
P Kapitola 5 Dynamické vlastnosti operačního zesilovače 37

6 Kombinační logické obvody
Cíle úlohy
logické obvody a Boolova algebrazákladní hradlajednoduché kombinanční logické obvody
6.1| Teorie
Logická funkce je dvouhodnotová funkce závislá na proměnných, které také mo-hou nabývat pouze dvou (diskrétních) hodnot, označovaných nejčastěji „0“ a „1“.Ukazuje se, že jakoukoliv logickou funkci libovolného počtu proměnných lze zapsatpomocí tří základních operátorů: operátoru logického součtu OR, logického součinuAND a negace NOT.
Logická funkce se vyjadřuje buď pravdivostní tabulkou nebo v algebraické formě.Pravdivostní tabulka funkce F obsahuje „vstupní sloupce“, jejichž počet odpovídápočtu n proměnných funkce F , a výstupní sloupec, který obsahuje hodnotu funkcepro příslušnou kombinaci hodnot proměnných. Celkem tabulka obsahuje 2n řádků.Pravdivostní tabulky lze sestavit i pro výše zmíněné základní operátory.
AND OR XOR NOTX Y XY X + Y X ⊕ Y X0 0 0 0 00 1 0 1 1 1
1 0 0 1 11 1 1 1 0 0
Algebraická forma vystihuje funkci F pomocí kombinace základních operátorů (pří-padně vhodně ozávorkovaných), např. F = XY + XY + X(Y + XY ). V ní náso-bení odpovídá logickému součinu AND, znaménko plus logickému součtu OR a čáranad symbolem značí negaci. Algebra, která vystihuje chování logických obvodů, všaknení totožná s algebrou známou z „běžné“ matematiky. Jedná se o tzv. Boolovu al-gebru, ve které platí následující zákony:
1. komutativní zákony: X + Y = Y +X , XY = Y X
2. asociativní zákony: X + (Y + Z) = (X + Y ) + Z, X(Y Z) = (XY )Z
3. distributivní zákony: X + (Y Z) = (X + Y )(X + Z), X(Y + Z) = XY + XZ(první zákon v běžné algebře neplatí, tj. nelze v ní psát x+ yz = (x+ y)(x+ z))
4. de Morganovy zákony: X + Y = X Y , XY = X + Y
5. další zákony: X +X = 1, XX = 0, X +X = X , X +0 = X , X + 1 = 1, X = X
P Kapitola 6 Kombinační logické obvody 38

Protože skupina tří operátorů AND, OR a NOT dovoluje vyjádřit libovolnou lo-gickou funkci, tvoří úplný systém logických funkcí. Význam této skutečnosti tkvív tom, že v praxi nám stačí vyrábět pouze tři typy elektronických prvků – hradel, avšechny ostatní logické funkce z nich dokážeme vytvořit (máme-li n logických pro-měnných, můžeme z nich vytvořit celkem 22
n různých logických funkcí).
Obrázek
&AND
1OR
1
NOT&
NAND1
NOR=1
XOR
5 Schématické značky základních hradel, jejich negovaných protějšků ahradla XOR.
Schématické značky jednotlivých hradel jsou na obr. 5. Značky hradel NOR aNOT se liší pouze počtem vstupů. Pokud je na výstupu či vstupu hradla zakreslenkroužek, znamená to, že vstup/výstup je negovaný (např. rozdíl AND–NAND). Po-čet tří základních hradel, ze kterých je možno sestavit realizaci logické funkce, nenínejmenší možný. Z technologických a ekonomických důvodů je vhodné vyrábět conejmenší počet rozdílných prvků. Pokud se omezíme jen na hradla z předchozí sku-piny, můžeme snížit počet nutných prvků na dva. Jestliže se rozhodneme používat ijiná hradla, vystačíme pouze s jedním prvkem, což bylo zvláště výhodné v dobách,kdy se obvody realizovaly z diskrétních prvků, tedy před používáním integrovanýchobvodů. Volbou „základních“ hradel můžeme získat různé minimální úplné sys-témy logických funkcí.
Schéma
a)
1
1
& 1
X
Y
X + Y
b)
1
1
1 1
X
Y
XY
19 Realizace hradla a) OR v systému AND–NOT, b) AND v systému OR–NOT.
Systém logický součin – negace je založen na použití hradel AND a NOT. Dle zapo-jení na sch. 19a) lze ověřit, že z těchto dvou hradel lze sestavit obvod, který realizujefunkci hradla OR, a proto dokáže realizovat i libovolnou další logickou funkci. Sys-tém logický součet – negace využívá hradla OR a NOT. Pomocí těchto dvou hradel lzeopět realizovat funkci hradla AND (sch. 19b) a libovolnou funkci. Systém NAND vyu-žívá jediné hradlo, které vytváří negaci hradla AND. Jeho kombinacemi lze realizovatfunkce hradel AND, OR a NOT (sch. 20). Systém NOR využívá jediné hradlo, kterévytváří negaci hradla OR. Jeho kombinacemi lze opět realizovat funkce hradel AND,OR a NOT (sch. 21).
V praxi se nyní používají nejčastěji hradla NOT, NAND, NOR. Často se pou-žívá i hradlo XOR (nonekvivalence – má hodnotu „1“, jsou-li vstupní proměnné roz-
P Kapitola 6 Kombinační logické obvody 39

Schéma
a)
&X X
b)
& &XY
XY
c)
&
&
&X
Y
X + Y
20 Pomocí hradla NAND realizujeme hradlo a) NOT, b) AND a c) OR.
Schéma
a)
1X X
b)
1
1
1X
Y
XY
c)
1 1XY
X + Y
21 Pomocí hradla NOR realizujeme hradlo a) NOT, b) AND a c) OR.
dílné). Fyzicky bývají hradla dostupná ve formě integrovaného obvodu, který obsa-huje zpravidla více hradel téhož typu. Počet hradel v jednom obvodě závisí na typuhradla i na počtu jeho vstupů (např. hradla NAND mají běžně 2, 4 a 8 vstupů). Přikreslení schémat logických obvodů bývá zvykem vynechávat napájecí vodiče a kres-lit vstupy na levé straně a výstupy na pravé. Negovaný charakter vstupu může veschematické značce naznačovat i lomítko před symbolem (např. /S).
| Logická konvence Abychom mohli operátory realizovat pomocí fyzikální struk-tury, je nutné zavést reprezentaci logických stavů. Tedy u fyzikálního prvku, kterýmá definovány dva stavy S1 a S2, musíme určit, který stav reprezentuje hodnotu 0 akterý hodnotu 1. Protože v elektronice je stav představován dvěma úrovněmi napětíU1, U2, říkáme, že logická konvence je kladná, pokud je vyššímu napětí přiřazena lo-gická hodnota 1. Pokud máme vytvořeny fyzikální struktury, které realizují v kladnélog. konvenci operátory NOT, AND, OR, NOR a NAND, pak po změně logické kon-vence budou struktury postupně reprezentovat operátory NOT, OR, AND, NAND aNOR.
| Realizace logických funkcí pomocí hradel NAND Funkci, kterou chceme realizo-vat, máme zpravidla zadánu slovním popisem nebo pravdivostní tabulkou. V prvnímpřípadě musíme z popisu určit nezbytný počet vstupních proměnných, zavést jejichoznačení a smysl (který stav odpovídá které logické úrovni, např. stisknuté tlačítkoodpovídá úrovni „1“) a sestavit pravdivostní tabulku. Abychom mohli hradla zapo-jit tak, aby realizovala danou funkci, musíme z tabulky získat algebraickou formu.Pro případ realizace hradly NAND ji vytvoříme takto: V tabulce vyznačíme všechnyřádky, které mají výstupní hodnoty ve stavu „1“. Z každého takového řádku sesta-víme jeden součin obsahující všechny vstupní proměnné, a to buď přímo, nabývá-li
P Kapitola 6 Kombinační logické obvody 40

daná proměnná na příslušném řádku hodnoty „1“, nebo její negaci, nabývá-li hod-noty „0“. Všechny součiny pak sečteme a získáme vyjádření funkce F . Takto za-psanou funkci bychom mohli přímo sestavit z příslušných hradel, ale potřebovalibychom jich velmi mnoho. Proto se snažíme provést minimalizaci, tj. snížení počtuoperací (a tím i použitých hradel). Toho docílíme postupnou aplikací základních pra-videl Booleovy algebry, až získáme co nejjednodušší tvar.
Minimalizovaný tvar funkce F se snažíme dostat ve tvaru, který obsahuje pouzeoperace dosažitelné zvolenými základními hradly, v případě hradel NAND jde pře-devším o odstranění součtů. Pokud obsahuje minimalizovaný tvar „nedosažitelné“operace, musíme tvar převést na jiný, byť trochu složitější. Uvažujme např. funkci
F = (ab+ ab)cd︸ ︷︷ ︸A
+(ab+ abd)c︸ ︷︷ ︸B
+ abcd︸︷︷︸C
. (48)
Tato funkci obsahuje součty členů A, B, C, které potřebujeme převést do tvaru sou-činů. Použijeme-li základní pravidla Booleovy algebry, můžeme psát F = ABC, kde
A = (ab+ ab)cd = ababcd (49)
B = (ab+ abd)c = ababdc (50)C = abcd. (51)
Nyní je vše vyjádřeno ve tvaru součinu a můžeme postupně zapojovat hradla NAND.
| Druhy logických obvodů Logické obvody se z hlediska funkce dělí na dvě sku-piny. Kombinační logické obvody odvozují svůj výstup pouze z okamžitých hodnotvstupních signálů (po vymizení krátkého přechodného děje). Mezi kombinanční ob-vody patří základní hradla AND, OR, NOT, NAND, NOR a jejich kombinace, kteréneobsahují „zpětnou vazbu“, paměťový prvek či zpožďovací obvod. Výstupní hod-nota sekvenčního logického obvodu naopak může záviset i na historii stavů, kterébyly na vstupu před současností. Mezi sekvenční obvody patří např. klopné obvody,registry, paměti či mikroprocesory.
| Vyjádření čísel v různých soustavách V běžném životě počítáme v desítkové sou-stavě, tj. používáme deset číslic 0, 1, …, 9. Kdybychom chtěli totéž vyjádřit v elektro-nice, potřebovali bychom všech deset cifer rozlišit jako deset různých stavů, což bykladlo velké nároky na přesnost. Proto je technicky výhodnější pracovat ve dvojkové(binární) soustavě, která pracuje pouze se dvěma číslicemi 0, 1. Základní princip vy-jádření čísla v jiné soustavě je následující: uvažujme číslo 183 v desítkové soustavě.Pak můžeme psát 183 = 1 ·100+8 ·10+3 ·1 = 1 ·102+8 ·101+3 ·100, tj. libovolné číslovyjádříme jako lineární kombinaci různých mocnin základu deset. Protože víme, jakýzáklad používáme, můžeme vynechat součty a součiny a číslo vyjádřit pouze pomocíuspořádání koeficientů u příslušných mocnin, tj. psát řetězec „183“. Pokud budemečíslo vyjadřovat v binární soustavě, vezmeme jako základ mocniny čísla 2 a pokusímese číslo vyjádřit pomocí kombinace · · ·+a7·27+a6·26+a5·25+a4·24+a3·23+a2 cdot2
2+a1 ·21+a0 ·20. Protože platí 183 = 1 ·128+0 ·64+1 ·32+1 ·16+0 ·8+1 ·4+1 ·2+1 ·1 =1·27+0·26+1·25+1·24+0·23+1·22+1·21+1·20, můžeme psát 18310 = 101101112, kdeindexem jsme označili příslušný základ soustavy. Tímto způsobem můžeme jakéko-liv (nezáporné celé) číslo vyjádřit ve dvojkové soustavě a provádět s čísly aritmetickéoperace. Například pro součet platí 0+0 = 0, 0+1 = 1+0 = 1, 1+1 = 102 (v posled-ním čísle jsme museli zdůraznit, že se jedná o binární číslo, výraz 102 čteme [jedna
P Kapitola 6 Kombinační logické obvody 41

nula], nikoliv [deset]) a ručně provádíme sčítání po jednotlivých číslicích „odzadu“,přičemž musíme zohledňovat jedničky, které se přenáší do vyšších řádů.
Výraz 101101112 je velmi dlouhý a mnohdy nepřehledný, jeho desítkové vyjá-dření zase nevhodné pro digitální zpracování. Proto se používá ještě šestnáctková(hexadecimální) soustava, která pracuje s šestnácti „číslicemi“ 0, 1, 2, 3, 4, 5, 6, 7, 8,9, A, B, C, D, E, F. Rozdělíme-li binární vyjádření do skupin po čtveřicích (10112 a01112) a jednotlivé čtveřice vyjádříme desítkově (jako by se jednalo o nezávislá čísla),dostaneme čísla 1110 a 710. Jejich hexadecimální vyjádření získáme z výše uvedenéřady číslic tak, že postupně zleva odpočítáme odpovídající počet, tedy první číslo 11nahradíme dvanáctou číslicí, což je „B“ a číslo 7 nahradíme osmou číslicí „7“. Hexa-decimální vyjádření celého čísla pak dostaneme jejich sepsáním v příslušném pořadí,takže máme 18310 = 101101112 = B716.
| Technologie hradel Logické obvody lze z fyzikálního hlediska realizovat různýmitechnologiemi (mimo jiné lze používat i hradla mechanická, pneumatická či hydrau-lická). Jedna z prvních technologií byla RDT technologie (logika), které využívaladiskrétní součástky – diody, rezistory a tranzistory. Tato technologie je sice velminázorná, ale není moc kvalitní. Jejím nástupcem byla technologie TTL, která vyu-žívá polovodičové integrované obvody, vnitřně založené na bipolárních tranzisto-rech. Pracuje s fyzickými úrovněmi +5 V („1“) a 0 V („0“), má dobré dynamické vlast-nosti, dobře definované parametry, součástky jsou značně odolné a mají nízkou cenu.Vyrábí se v značné šíři funkcí (řada 74 …).
Modernější technologií je CMOS (nebo MOS) technologie, která je založena naunipolárních tranzistorech. Díky tomu mají CMOS obvody velice nízkou spotřebu anízké napájecí napětí. Bývají však náchylnější na zacházení. Tato technologie se pou-žívá častěji pro složitější obvody než pro stavebnice hradel.
Obě základní technologické řady mají své nástupce, kteří vylepšují některé jejichvlastnosti. Například řada HC je rychlejší variantou CMOS. Při zapojování obvodůje nutno si uvědomit, že různé technologie mohou používat různé definice logickýchstavů a proto mohou být kombinace více technologií v jednom zapojení problema-tické. Pro tyto účely se vyrábí např. řada HCT, což je řada HC kompatibilní s TTLřadou.
| Charakteristiky hradel Výstup jednoho hradla je schopen dodávat jen určitou ve-likost proudu (maximální odběr). Proto je omezen počet vstupů, na které může býtvýstup přiveden. Tento počet je udán výstupním větvením. Je-li zapotřebí signál vět-vit do více vstupů, je třeba do jedné větve zařadit sledovač (což je dle schematickéznačky něco jako „jednovstupé hradlo OR“) a „nadpočetné“ vstupy připojit k jehovýstupu.
Pro spolehlivou funkci obvodů není vhodné, aby za stav „1“ či „0“ byla pova-žována jen jedna hodnota napětí, ale je lepší zvolit minimální a maximální úrovněsignálů, které odpovídají jednotlivým stavům, samozřejmě tak, aby se nepřekrývaly.Tyto úrovně se volí různé pro vstup i výstup, aby docházelo k bezpečnému pře-krytí. Zpravidla nedochází k pokrytí celého rozsahu napětí, ale uprostřed je neurčitépásmo, které neodpovídá žádnému stavu a vstup by se v této hranici nikdy nemělpohybovat. Pro logiku TTL platí následující hodnoty:
„1“ „0“vstup U ≥ 2,0V U ≤ 0,8V
výstup U ≥ 2,4V U ≤ 0,4VDynamické vlastnosti hradel popisuje doba zpoždění signálu, která udává čas,
který hradlo potřebuje, aby jeho výstup zareagoval na vstupní přechod mezi logic-
P Kapitola 6 Kombinační logické obvody 42

kými úrovněmi. Zpravidla se liší doby pro přechod „1“→„0“ a „0“→„1“. Dalším dy-namickým parametrem je doba náběhu t1 a doba doběhu t2 signálu při přechodu„0“→„1“, resp. „1“→„0“. Obě doby se měří mezi hladinami 10 % a 90 % signálu.
Z praktických hledisek je důležitá ještě spotřeba (záleží na technologii a kmitočtu),napájecí napětí a odolnost proti rušení. Logické obvody zpravidla nejsou chráněnyproti přepólování napájecího napětí.
| Obvody vyšší integrace V aplikacích logických obvodů se často vyskytuje poža-davek na vykonání stejné funkce, k jejíž realizaci je třeba velkého počtu hradel. Abyse snížila pracnost při vytváření zapojení, vyrábí se kromě základních hradel i slo-žitější integrované obvody, které realizují nějakou speciální funkci. Pak stačí použítjen jeden fyzický prvek. Vzhledem k široké škále vyráběných integrovaných obvodůse ve schématech používá jednotná schematická značka ve tvaru obdélníku, která jedoplněna typovým označením (zpravidla číslem). V obdélníku jsou vlevo vyznačenysymboly vstupů obvodu, vpravo pak jsou symboly výstupů. Vstupy i výstupy jsouzpravidla vertikálně odděleny do logicky organizovaných skupin (oddělují se buďlinkou nebo mezerou).
Mezi takové obvody patří např. čtyřbitová sčítačka s označením 7483. Ta má dvěčtveřice datových vstupů (označených A1–A4, B1–B4) a vstup C0 pro tzv. přenos.Dále má jeden datový výstup S1–S4 a výstup přenosu C1. Funkce pak je následující:vstupy A1 až A4 se berou jako binární vyjádření prvního sčítance, vstupy B1 až B4
reprezentují druhého sčítance. Tato dvě čísla se sečtou a ještě se přičte C0, binárníreprezentace výsledku A+ B + C0 se objeví na výstupech S1 až S4. Pokud je součetvětší než 15 (rozsah čtyřbitové sčítačky), nastaví se příznak přenosu C1 a výsledekse sníží o číslo 16 (tj. výsledek se vyjádří jako A+B + C0 mod16). Pokud propojímeněkolik sčítaček včetně přenosových vstupů/výstupů za sebou (kaskádně), můžemesčítat i čísla větší než 15.
Dalším důležitým druhem obvodu je multiplexor, který slouží jako přepínač sig-nálů. Takový obvod obsahuje pouze jeden výstup Y a dva druhy vstupů: datovévstupy S0–Sn a sadu výběrových vstupů A, B, C, D, …Nechť výběrové vstupy jsoubinární reprezentací nějakého čísla m. Pak bude platit Y = Sm, tedy na výstup budepřenesen jen jeden zvolený vstup. Multiplexor se využívá v případech, kdy mámev obvodu několik paralelních větví (signálů), ale některé funkční bloky máme jenjednou (například zobrazovač). Pak nemůžeme využít všech větví najednou, ale mu-síme si z nich jednu vybrat pomocí multiplexoru (případně mechanickým přepína-čem). Multiplexory se vyrábí v různých typech. Obvod s označením 74151 obsahujeosm datových vstupů S0–S7 a tři výběrové vstupy A, B, C, výstup Y je ještě doplněnsvou negací Y . Obvod 74153 sdružuje v sobě dva čtyřbitové multiplexory se vstupyS10–S13 a S20–S23 a výstupy 1Y a 2Y . Oba multiplexory se současně přepínají pomocívstupů A, B. Konečně obvod 74157 obsahuje čtyři dvojice vstupů a čtyři výstupy,mezi kterými se vybírá jediným vstupem A. Tento obvod lze použít k přepínání mezidvěma čtyřbitovými čísly.
P Kapitola 6 Kombinační logické obvody 43

6.2| Realizace měření
Hodnoty vstupních signálů získávejte z modulu L S a výstupní hod-noty určujte pomocí svítivých diod v modulu L P (sedmisegmentový displejse rozsvítí jen tehdy, jsou-li připojeny všechny čtyři vstupy). Modul s hradly je vždynutno připojit k napájení +5V a G. Jeden modul může obsahovat několik hradel,které jsou stejného druhu, ale vzájemně nezávislé. Pokud má hradlo více vstupů nežje pro realizaci zvolené funkce třeba, je nutné nevyužitý vstup připojit na „neutrální“hodnotu (závisí na typu hradla).
V případě sčítačky 7483 připojte výstupy vrchní části modulu L S navstupy A1–A4 a výstupy dolní části na B1–B4, vždy v příslušném pořadí vodičů.Vstup přenosu C0 připojte nejprve na svorku G, pak na napájecí napětí. VýstupyS1–S4 přiveďte na vstupy jednoho zobrazovače v modulu L P, přenosový vý-stup C4 přiveďte na jeden ze vstupů druhého zobrazovače.
Pro testování multiplexoru 74157 využijte L S, vrchní část přiveďte navstupy multiplexoru Sn0, spodní část na vstupy Sn1. Na obou selektorech nastavterůzná čísla. Výstupy 1Y až 4Y připojte na vstupy jednoho zobrazovače modulu LP. Vstup A připojte střídavě na svorky +5V nebo G na panelu. Vstup S při-pojte na svorku G.
6.3| Zadání úlohy
1. Určete pravdivostní tabulku hradel NAND a NOR.
2. Realizujte operace AND, OR a NOT pomocí hradel a) NAND, b) NOR a ověřtejejich pravdivostní tabulky.
3. Ověřte distributivní i asociativní zákony Booleovy algebry (vzhledem k oběmaoperacím), tj. sestavte zapojení podle levé strany příslušného zákona (např. sch.22 vlevo) a určete jeho pravdivostní tabulku, pak sestavte zapojení odpovída-jící pravé straně téhož zákona (např. sch. 22 vpravo), opět určete pravdivostnítabulku a obě tabulky srovnejte.
Schéma
1&
X
YZ
X + (Y Z)
1
1
&
XY
Z
(X + Y )(X + Z)⇔
22 Ověření distributivního zákona vzhledem k logickému součtu: realizacelevé a pravé strany.
4. Uvažujte obvod dle sch. 23. Určete funkci F , kterou obvod realizuje, a sestavtejeho pravdivostní tabulku. Pak funkci minimalizujte, sestavte obvod odpovída-jící minimalizované funkci a ověřte ekvivalenci obou zapojení.
5. Sestavte a minimalizujte logickou funkci pro ovládání motoru výtahu. Motorse rozběhne, je-li současně stlačeno tlačítko volby patra, není stlačeno nouzové
P Kapitola 6 Kombinační logické obvody 44

Schéma
&
&
1
1 F
X
Y
23 Realizace logické funkce F .
tlačítko STOP a dveře výtahu jsou zavřeny. Výslednou funkci realizujte a ověřtejejí pravdivostní tabulku.
6. Sestavte jednobitovou sčítačku/odčítačku (sch. 24), sestavte její pravdivostní ta-bulku a ověřte její funkci. Je-li vstup ± ve stavu „0“, zapojení pracuje jako sčí-tačka, v opačném případě jako odčítačka.
Schéma
=1
=1&
&
=1
&
X
Y
C0
C1
±
X ± Y
24 Zapojení sčítačky/odčítačky.
Upravte zapojení tak, aby dolní displej ukazoval nižší řád součtu a horní displejzobrazoval nulu nebo jedničku v závislosti na hodnotě C1
7. Sestavte čtyřbitovou sčítačku s využitím obvodu 7483 a ověřte funkci sčítání asledujte vliv přenosu C0.
8. Ověřte funkci multiplexoru 74157 pomocí dvou čtyřbitových vstupů. Ověřte, žeobvod reaguje pouze na změnu vybraného vstupu, druhý se ignoruje.
9. Podle dříve uvedeného vztahu můžeme pro dvě proměnné realizovat 222 = 16různých funkcí. Lze navrhnout logickou jednotku (sch. 25), která v závislosti navstupech A0–A3 bude realizovat příslušnou funkci proměnných X a Y (tabulkana sch. 25). Ověřte funkci této jednotky.
P Kapitola 6 Kombinační logické obvody 45

Schéma
A0 A1 A2 A3 Logická funkce
0 0 0 0 Z = 0
0 0 0 1 Z = XY0 0 1 0 Z = XY0 0 1 1 Z = X
0 1 0 0 Z = X Y
0 1 0 1 Z = Y
0 1 1 0 Z = X Y +XY
0 1 1 1 Z = X + Y
1 0 0 0 Z = XY
1 0 0 1 Z = XY +XY1 0 1 0 Z = Y1 0 1 1 Z = X + Y
1 1 0 0 Z = X
1 1 0 1 Z = X + Y
1 1 1 0 Z = X + Y1 1 1 1 Z = 1
& & & &
&
&
1
1
1
A0A1A2A3
X
Y
Z
25 Univerzální dvouvstupá logická jednotka. Vůči logickým vstupům X a Yrealizuje obvod jednu logickou funkci Z, jejíž tvar závisí na selektorech A0
až A3 podle tabulky vlevo.
| Použité přístroje a pomůckyměřicí panel, zdroj napětí, L P, L S, sada vodičů, moduly s TTLhradly – NAND (7400, 7410), NOR (7402), NOT (7404), XOR (7486), AND (7408) aOR (7432), sčítačka 7483, multiplexor 74157
P Kapitola 6 Kombinační logické obvody 46

7 Sekvenční logické obvody
Cíle úlohy
sekvenční logické obvodysynchronní a asynchronní obvodyRS klopný obvod, D klopný obvodmonostabilní a astabilní klopný obvodposuvný a kruhový registrčítače
7.1| Teorie
Sekvenční logické obvody jsou takové obvody, jejichž výstupy nezávisí pouze nasoučasných vstupech, ale také na předchozích hodnotách (sekvencích). Sekvenční ob-vody se dají sestavit z kombinančních použitím „zpětné vazby“, příp. paměťovéhonebo časově závislého prvku. K popisu jejich funkce už většinou nepostačuje pouzepravdivostní tabulka (ve tvaru uvedeném v předchozí úloze), ale je třeba ji doplnitještě popisem vnitřních stavů obvodu. Někdy se do tabulky zapisují hodnoty výstupuQn+1 „v současném čase“ v závislosti na předchozím stavu Qn.
Protože výstup sekvenčních obvodů závisí na časové posloupnosti, je většinoutřeba jednotlivé obvody synchronizovat, tj. zajistit aby přechod z jednoho stavu dodruhého nastával u všech obvodů současně. Synchronizaci pomáhá udržovat perio-dický obdélníkový průběh zvolené frekvence – hodinový signál, který je jednotný vcelém obvodě a jeho přechody přesně definují okamžiky přechodů dalších obvodů.Zapojení se sekvenčními obvody je také nutno doplnit obvodem inicializace, kterýzajistí počáteční stav po zapnutí obvodu.
Narozdíl od kombinančních obvodů, které závisejí jen na úrovních signálu, mo-hou být sekvenční obvody citlivé na náběžnou či sestupnou hranu signálu (tato sku-tečnost se ve schématické značce vyznačuje malým trojúhelníkem u daného vstupu),během níž mění svůj stav. Při praktické realizaci je nutno pamatovat na rozdílnou cit-livost kombinačních a sekvenčních obvodů na kvalitu vstupního signálu. Zadáváme-li vstupní hodnoty pomocí mechanického spínače (tlačítka, přepínače), nedostanemepo jeho změně ustálený signál, ale objeví se několik „zákmitů“ – přechodů mezi logic-kými úrovněmi a až pak se signál ustálí. V případě kombinančního obvodu na tomtochování nezáleží, jeho výstup se ustálí na stejné hodnotě, jakou by měl v případě ide-álního přepnutí. Sekvenční obvod však zaregistruje několik vstupních přechodů aprávě tolik změn provede ve svém stavu. Ustálený výstup se tedy bude lišit od vý-stupu při ideálním chování. Proto se spínače ošetřují, např. pomocí kondenzátorů.
P Kapitola 7 Sekvenční logické obvody 47

| Klopný obvod Základním sekvenčním prvkem je klopný obvod, což je prvek sesta-vený z hradel tak, že má dva různé stavy výstupu Q (obvod má zpravidla vyveden inegovaný výstup Q). Bistabilní klopný obvod je schopen setrvat v obou stavech li-bovolně dlouho a je tedy schopen si zapamatovat jeden bit informace, tj. přenést hod-notu vstupu na svůj výstup a tam ji podržet. Rozlišujeme obvod asynchronní, kterýsi informaci zapamatuje kdykoliv, a obvod synchronní, který si informaci zapamatujepouze tehdy, přijde-li na jeho hodinový vstup (označený C, CL nebo CLK) odpoví-dající implus. Monostabilní klopný obvod je schopen být v jednom stavu jen krátkoudobu, poté se samovolně vrací do základního stavu a v něm setrvá, tj. obvod je scho-pen si zapamatovat informaci jen po krátkou (definovanou) dobu. Výstupní impulsmá obecně jinou délku než impuls vstupní a obvod se může využít jako zpožďovacíčlen. Astabilní klopný obvod nemá stabilní stav, ale střídavě samovolně přecházímezi dvěma stavy. Vytváří tedy generátor pravoúhlého periodického signálu, kterýse často používá k synchronizaci dějů v synchronních klopných obvodech (hodinovýsignál).
| Asynchronní klopný obvod RS Je tvořen dvěma hradly NAND a dvěma invertory(sch. 26), které jsou zapojeny jednak do vstupu R (reset), který slouží k nastavení vý-stupu do stavu Q = 0, jednak do vstupu S (set), který slouží k nastavení výstupu dostavuQ = 1. Jsou-li oba vstupy nulové, platíQn+1 = Qn, tedy výstup se nijak nemění.Je-li R = 1 a S = 0, dojde k nastavení Q = 0. Budou-li však oba vstupy v úrovni „1“,není výstup obvodu přesně definován a výstup bude záviset na fyzikálních vlastnos-tech obvodu (podle uvedeného schématu by v této situaci mělo zároveň platit Q = 1a Q = 1; integrovaný RS klopný obvod však může mít i jinou konstrukci a tím i jinévýstupy).
Schéma
a)
&
&
1
1
S
R
Q
Q
b)
&
&
&
&
S
R
Q
Q
C
26 RS klopný obvod a) asynchronní, b) synchronní.
Nahradíme-li vstupní invertory hradly NAND, na jejichž druhé vstupy přive-deme hodinový signál C, obdržíme synchronní klopný obvod RS. Ten mění svůj stavstejným způsobem jako asynchronní obvod, ovšem pouze v případě, že je v okamžikuimpulsu na vstupu R nebo S také C = 1. Dochází tedy k synchronizaci změny stavuobvodu s hodinovým signálem.
| Klopný obvod D (sch. 27) má dva hlavní vstupy – datovýD a hodinovýCL. Při pře-chodu hodinového vstupu z úrovně „0“ na „1“ (náběžná hrana signálu) se na výstupQ přenese hodnota ze vstupu D, jedná se tedy o synchronní obvod (případ obvodu7474). Tato hodnota pak setrvá až do okamžiku další náběžné hrany signálu CL. Ob-vod bývá často doplněn ještě dvěma nastavovacími asynchronními vstupy R a S (sestejným významem jako u obvodu RS), které slouží zpravidla k inicializaci zapojení.
P Kapitola 7 Sekvenční logické obvody 48

Schéma
a)
&
&
&
&
D
CL
Q
Q
b)
DCL
SR
Q
Q
27 D klopný obvod a) vnitřní zapojení obvodu reagujícího na úroveň hodino-vého signálu, b) schematická značka.
| Klopný obvod JK lze uvažovat jako rozšířenou kombinaci dvou obvodů typu D.Obvod reaguje na vstup nastavení (označen J) a nulování (K), ovšem pouze při pří-chodu hodinového vstupu CL, což jej odlišuje od RS obvodu. Obvod bývá zpravidlavybaven i asynchronními vstupy R, S.
| Monostabilní klopný obvod má za úkol vytvořit ze vstupního pulzu libovolnédélky impuls s přesně definovanou délkou. Základem zapojení (sch. 28a) jsou dva in-vertory v sérii. Pokud budou zapojeny přímo na sebe, bude výstup roven vstupnímusignálu. Zařadíme-li mezi ně analogový RC obvod, zavedeme mezi vstup a výstup ča-sové zpoždění definované délky, které vytvaruje impuls. Je-li na vstupu úroveň „1“,je za invertorem hodnota nulová, kondenzátor se nenabíjí a druhý invertor úroveň„0“ převede na „1“. Přijde-li nyní na vstup úroveň „0“, bude za invertorem hodnota„1“ s nenulovým napětím. Proto se začne nabíjet kondenzátor a nabíjecí proud vy-tvoří na odporu R hodnotu nutnou pro úroveň „1“, kterou druhý invertor přenese navýstup jako úroveň „0“. Po nabití kondenzátoru vymizí nabíjecí proud, úbytek napětína odporu R bude nulový a po inverzi přejde výstup do stavu „1“, tj. výstup přejdesamovolně do stabilního stavu. Délka výstupního impulsu τ bude přibližně τ ∼ aRC,kde konstanta a závisí na konkrétním obvodu. Když skončí vstupní impuls, začne sekondenzátor vybíjet se stejnou časovou konstantou a v této době nemůže obvod plněpracovat. Proto je omezena maximální frekvence vstupních impulsů, příp. lze k od-poru R paralelně připojit vhodně pólovanou diodu, která kondenzátor rychle vybije.
Schéma
a)
1 1
C
RT τ
b)
1 1 1 Q
c)
1
1
R
R
C
CQ
28 a) Monostabilní klopný obvod, b) astabilní klopný obvod c) s RC členy.
P Kapitola 7 Sekvenční logické obvody 49

| Astabilní klopný obvod Velmi jednoduchý astabilní klopný obvod lze sestavit zesérie tří invertorů, přičemž spojíme výstup posledního se vstupem prvního (sch. 28b).Představme si, že na vstupu prvního hradla je „0“. Pak na jeho výstupu je „1“, za dru-hým invertorem je „0“ a na výstupu třetího je „1“. Tato hodnota se však přenáší navstup prvního hradla, kde je úroveň „0“. Je tedy zřejmé, že obvod nemůže být sta-bilní, protože jeden vstup by měl být zároveň ve stavu „0“ i „1“. Proto dojde k dyna-mickému překlápění z jednoho stavu do druhého, a perioda kmitání bude záviset navlastnostech hradel, především zpoždění signálu. Kvalita uvedeného zapojení všaknení dobrá a hlavně není možno regulovat frekvenci kmitání (bývá okolo 10 MHz).Proto se používá jiných zapojení, např. se dvěma invertory v zapojení se „zpětnouvazbou“ (sch. 28c), která obsahuje pasivní součástky. Volba součástek umožní zvolitfrekvenci dle vztahu f ≈ 1
aRC , kde konstanta a opět závisí na konkrétním zapojení.Princip je opět založen na periodické změně úbytků napětí na odporechR, které vzni-kají střídavým nabíjením kondenzátorů C. Uvedené zapojení má střídu 1:1, tj. délkystavů „0“ a „1“ jsou stejné. V případě, že se budou hodnoty odporů (kapacit) lišit,bude i střída nesymetrická.
| Registry V aplikacích často potřebujeme v obvodu uchovat stav některých vstupů.Potřebujeme-li paměť pouze pro jeden vstup, můžeme použít klopný obvod typu D.Na jeho vstup D přivedeme signál, který chceme zapamatovat a ve vhodném oka-mžiku přivedeme impuls na vstup CL, čímž se vstupní signál D zapamatuje (do dal-šího hodinového impulsu). Potřebujeme-li paměť pro více signálů, použijeme registr,což je paralelní kombinace klopných obvodů D, které jsou řízeny stejným signálemCL. Počet obvodů pak určuje počet zapamatovatelných signálů (počet bitů informace,které je registr schopen uchovat).
Uvažujme teď, že chceme zapamatovanou informaci přenést do vzdáleného místa.Můžeme zvolit dvě varianty, a to sice paralelní přenos, při kterém povedeme tolikdrátů, kolik signálů přenášíme, nebo sériový přenos, při němž všechny signály po-stupně přeneseme po jednom vodiči. V závislosti na aplikaci se rozhodujeme provhodný typ přenosu: paralelní je velmi rychlý, ale potřebuje mnoho vodičů, sériovýje pomalejší, ale vystačí s jedním (datovým) vodičem. Dále uvažujme jenom blok propříjem informace sériovým přenosem. Potřebujeme sestavit obvod, který si jednak za-pamatuje stav přenosového vodiče, ale zároveň bude schopen „posunout“ dále infor-maci o předchozím stavu (v minulém okamžiku). Takový obvod se nazývá posuvný
Schéma
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
SR
CL
D
Q0 Q1 Q2 Q3
29 Posuvný čtyřbitový registr.
P Kapitola 7 Sekvenční logické obvody 50

registr a lze jej vytvořit kombinací obvodů typu D (sch. 29). Požadujeme-li přenosčtyř bitů informace, použijeme čtyři obvody D. U všech obvodů propojíme příslušnévstupy R, S a CL. Vstup D prvního obvodu připojíme k přenosovému vodiči, vstupD každého dalšího obvodu připojíme k výstupu Q předchozího obvodu a všechnyvýstupy Q vyvedeme jako výstupy Q0–Q3 posuvného registru. Princip obvodu je ná-sledující: když se na přenosovém vodiči objeví stav odpovídající prvnímu přenáše-nému signálu, vytvoříme signál CL, který tuto hodnotu přenese na výstup prvníhoklopného obvodu Q = Q0 (stavy dalších výstupů Q1–Q3 jsou náhodné). Když seobjeví stav odpovídající druhému přenášenému signálu, vytvoříme opět signál CL,kterým se přenese na výstupQ = Q0 daná hodnota. Protože však jsou signályCL při-váděny na všechny klopné obvody, a ty jsou vzájemně spojeny (Q0—D1), přenese sev témže okamžiku původního hodnota z Q0 naQ1 – informace odpovídající prvnímupřenášenému signálu bude nyní držena na výstupu Q1 druhého klopného obvodu.Provedeme-li uvedený cyklus čtyřikrát, budou na výstupech Q0–Q3 hodnoty odpo-vídající přenášeným signálům a přenos dat bude tedy dokončen.Obdobným způsobem by pracovala vysílající strana. Při praktické realizaci sériového přenosuje důležitá přesná synchronizace hodinových signálů CL na přijímací i vysílací straně. Do při-jetí všech čtyř bitů jsou bity vpravo náhodné.
Schéma
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
SR
CL
Q0 Q1 Q2 Q3
30 Kruhový čtyřbitový registr.
Kruhový registr vznikne z posuvného tím, že vstup prvního klopného obvodupřipojíme na výstup posledního obvodu. Pak se bude poslední výstup přenášet zpátkyna vstup a výsledkem činnosti bude periodicky se opakující posloupnost signálů. Po-kud na začátku neaktivujeme vstupy R a S, bude nastavení obvodů náhodné. Kdyžjeden z nich aktivujeme, nastaví se všechny výstupy do stejného stavu a kruhová ro-tace nebude patrná. Proto je třeba zapojit alespoň u jednoho obvodu vstupy R a Sobráceně. Pak např. aktivace signálu R způsobí vynulování všech klopných obvodů,vyjma jednoho, který se nastaví do stavu „1“. Tato jednička pak bude registrem „pu-tovat“.
| Čítače Základním úkolem čítače je uchování informace o počtu impulsů, které bylypřivedeny na jeho vstup. Tato informace je na výstupu čítače zobrazena binárnímkódem příslušného počtu. Protože každý čítač obsahuje konečný počet paměťovýchprvků (které si udržují informaci o počtu impulsů), mají všechny čítače jen omezenoukapacitu a dokáží počítat jen do N (pracují tedy v aritmetice modulo N ). Přijde-li ve
P Kapitola 7 Sekvenční logické obvody 51

stavu N − 1 další impuls, dojde k přetečení rozsahu čítače a ten přejde do stavu 0.Abychom mohli zaregistrovat, že k přetečení došlo, objeví se úroveň „1“ na speciál-ním výstupu C0 (příznak přenosu).
Nejjednodušším čítačem je dělič dvěma (sch. 31a), což je klopný obvod D, jehožvýstup Q je přiveden na vstup D. Vstupní signál je pak přiveden na hodinový vstupCL. Tento čítač počítá pouze do dvou a v podstatě nese informaci o sudém či lichémpočtu impulsů. Jeho název plyne ze skutečnosti, že v případě vstupu ve tvaru im-pulsů s frekvencí f bude mít výstup frekvenci f/2 (klopný obvod D reaguje jen nanáběžnou hranu hodinového signálu a proto je každý druhý puls „ignorován“).
Schéma
a)
DCL
SR
Q
Q
C
RS
Q
b)
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
SR
CL
A B C D
31 a) Dělič dvěma, b) šestnáctkový čítač.
Chceme-li sestavit čítač pro větší počet impulsů, stačí zařadit několik klopnýchobvodů za sebe (kaskádně) tak, že výstup Q1 prvního obvodu přivedeme na hodi-nový vstup druhého obvodu apod. (výstupy se pak zpravidla značí A, B, C, D, …).Uvedeným způsobem jsme ovšem schopni realizovat jen čítače pro N , které je moc-ninou dvou (sch. 31b). Je-li zapotřebí volit N jiné (např. pro desítkový čítač N = 10),musíme zapojit nulovací obvod – ze základních hradel sestavíme obvod, který bude mítna výstupu úroveň „1“ právě tehdy, když se výstup čítače rovná požadované maxi-mální hodnotě N . Na vstup nulovacího obvodu připojíme výstupy z čítače a výstupnulovacího obvodu připojíme na všechny vstupy R klopných obvodů. Například proN = 1010 = 10102 musí být výstup nulovacího obvodu roven jedné pro B = D = 1,A = C = 0. Z toho získáme podmínku 1 = ABCD. Ovšem když si uvědomíme,že hodnota 1010 je první, při které jsou vstupy B a D zároveň ve stavu „1“ a ostatnístavy, ve kterých je B = D = 1 nemohou nastat (protože čítač vynulujeme), můžemepodmínku ještě zjednodušit na BD.
Pokročilejší konstrukce čítačů umožňují nejen impulsy přičítat, ale i odečítat. Ta-kový čítač pak má dva vstupy, každý vyhrazený pro jeden směr čítání, a navíc výstupB0 pro signalizaci podtečení čítače, tj. dosažení menší než nulové hodnoty (čítač pakpřechází do maximální hodnoty).
Čítače se realizují přímo jako integrované obvody. Nejjednodušší z nich je šest-náctkový čítač s označením 7493. Ten má dva vstupy A a BD a výstupy A, B, C, D.Vnitřně je tento čítač rozdělen na dvě části, vstup A a výstup A tvoří dělič dvěma,vstup BD a ostatní výstupy pak dělič osmi. Pokud chceme, aby obvod pracoval jakočítač, musíme propojit výstup A se vstupem BD. Pro realizaci čítače modulo N máobvod dva ekvivalentní vstupy R0 (vnitřně spojené součinovým hradlem). Pokud anijeden z nich není v úrovni „0“, čítač se nastaví na nulovou hodnotu a čítač nečítá, do-kud se úroveň nevrátí zpět na nulu. Čítač s označením 7490 pracuje obdobně, ale čítá
P Kapitola 7 Sekvenční logické obvody 52

pouze do desíti a je vybaven ještě dvěma nastavovacími vstupy R9, které nastavujíčítač do stavu „9“ (stejným způsobem jako se nuluje).
7.2| Realizace měření
Pro měření sekvenčních logických obvodů použijeme měřicí jednotku A &D D U výukového systému µL se softwarem 2000 (v režimu LA nebo L A + G) a příslušné moduly s logickými ob-vody. Budeme používat vstupy v sekci D I a výstupy v sekci D O-. Ověřování funkce v úlohách 1, 3 a 4 je lepší provádět pomocí modulů L Pa L S bez využití počítače. Nezapomeňte, že obvod typu D reaguje jen nanáběžnou hranu hodinového signálu, tlačítko z modulu L S je proto nutnovždy vrátit do základního stavu. Také dbejte na správné připojení vstupů R a S.
Při provádění úlohy 2 využijte počítač, kterým budete sledovat výstupní signály.Pro analýzu monostabilního klopného obvodu je nutno vytvořit v generátoru vstupnísignál, který obsahuje krátký nulový úsek, jinak je ve stavu „1“. Délku nulovéhoúseku volte tak, aby byla větší než hodnota τ . Vhodná kombinace parametrů je C =10nF a R = 10 až 100 kΩ. Pasivní součástky zapojujte na modulu C B-, který ale nepřipojujte na napájecí svorky. Zemnící bod spojte se svorkou Gněkterého logického obvodu.
Při ověřování posuvného registru používejte „ruční“ řízení hodinového signálu.Nejprve registr uveďte do nulového stavu, pak pomocí selektoru nastavte první bitpřenášené informace, a stiskněte dvakrát „hodinové tlačítko“ a zaznamenejte výsle-dek. Totéž opakujte několikrát pro různé kombinace vstupních úrovní a sledujte po-stup signálu. V případě kruhového registru připojte na vstup CL signál 1 Hz z mo-dulu T B, výstupy připojte na vstupy L P a sledujte změny na svítivýchdiodách.
Funkci děliče dvěma sledujte na počítači, hodinový signál používejte z moduluT B. Funkci čítačů ověřujte jak na počítači, tak na zobrazovači. Využijte režim sgenerátorem, ve kterém si vytvoříte hodinový signál s periodou 1,5 ms (zobrazí právě16 změn na šířku okna), případně použijte modul T B.
Modul T B je generátor periodického obdélníkového průběhu vhodnéhopro práci s TTL obvody. Vrchní oddíl O obsahuje několik výstupů pro frek-vence 1 Hz až 100 kHz (dekadicky stupňované) a tlačítko R pro spuštění a zastavenígenerátoru. Spodní část D slouží jako dělič signálu (tj. snižuje jeho frekvenci)přivedeného na vstup I. Výstupní signál může byt odebírán z výstupů D 2, D 5a D 10 s příslušným dělicím poměrem.
V poslední úloze je třeba použít dvou vstupních signálů. Nejprve použijte dva sig-nály z modulu T B, které jsou vzájemně synchronní. Použijte buď přímo blízkéfrekvence (např. 1 a 10 kHz), nebo využijte děličku (signál 10 kHz vyveďte přes dě-ličku pěti, výsledných 2 kHz použijte společně s 1 kHz). Poté vyzkoušejte vzájemněnesynchronní signály. První z nich získáte z modulu T B, druhý pak z moduluF G, u kterého však musíte nastavit obdélníkový průběh se správ-nou amplitudou a ofsetem (aby výstup odpovídal TTL, tedy dva stavy +5V a 0 V,tj. nastavte amplitudu i ofset na 2,5 V). Signál odebírejte z horní signálové svorky,spodní svorku připojte na svorku G některého logického obvodu. Výsledek zob-razujte osciloskopem. Neočekávajte, že průběh bude pravidelný. Obvod pracuje tak,že výstupní signál má „průměrnou frekvenci“ rovnou podílu vstupních frekvencí.Frekvenci můžete změřit multimetrem.
P Kapitola 7 Sekvenční logické obvody 53

| Popis okna programu v režimu logického analyzátoru: V přehledu jsou popsányovládací prvky, které jsou využívány v režimu L A.
T – slouží k výběru signálu, který bude použit jako spouštěč osciloskopu,je-li zvoleno tlačítko I. Stiskem tlačítka s číslem příslušného kanálu přepí-náme mezi reakcí na úroveň „0“, „1“ nebo ignorování příslušného kanálu. Sou-časný stav je indikován v poli vedle tlačítka, v případě ignorování je zde křížek.Ke spuštění dojde, jsou-li splněny podmínky na všech vstupech současně. Je-li zvoleno tlačítko E, bude použito externí spuštění, v případě O nebudevýstup synchronizován.
C – slouží k zobrazení stavu vstupu, je-li stisknuto tlačítko O. Pak sezobrazí dvě polohy kurzorů a jim odpovídající úrovně vstupu ve vyjádření bi-nárním, dekadickém a hexadecimálním.
V režimu L A + G jsou zobrazeny dva průběhy – generovanývýstupní průběh a vstupní signál. Oproti režimu L A jsou k dispozicityto prvky:
O – umožní načtení dříve uloženého výstupního průběhu.
S – uloží současný výstupní průběh do souboru.
E – otevře editor výstupních průběhů W E.
V editoru W E editujeme výstupní signál tak, že v okně s průběhem ta-žením myši se stisknutým levým tlačítkem označíme časovou oblast, která se nastavína zadanou hodnotu, v závislosti na použitém režimu. K dispozici jsou následujícíprvky:
M – přepíná mezi způsoby editace signálu. V režimu 1 jednotlivé vý-stupy nastavujeme na „0“ nebo „1“ nezávisle, v režimu 8 nastavujeme všechosm vstupů najednou, v režimu C vytvoříme v jednom vstupu hodinovýsignál.
8- – slouží k zadání hodnoty, která se bude nastavovat v režimu 8 .Jednotlivé bity se nastavují pomocí příslušných tlačítek, nad nimi je zobrazenaodpovídající desítková a šestnáctková hodnota.
C – slouží k nastavení periody hodinového signálu v režimu C. Dvo-jice tlačítek S 0 1 slouží k určení, v jakém stavu bude hodinový signál v nu-lovém čase.
L – opustí editor a současný průběh se bude používat jako výstupníprůběh.
7.3| Zadání úlohy
1. Ověřte funkci asynchronního RS klopného obvodu.
2. Ověřte funkci monostabilního a astabilního klopného obvodu (obě zapojení).Ověřte vztah pro délku trvání impulsu τ a frekvenci kmitání f pro několik kom-binací R a C. U astabilního obvodu ověřte vliv nestejných hodnot odporů. Přiurčování periody kmitů použijte průměr z různého počtu impulsů a sledujtevliv na přesnost výsledku.
P Kapitola 7 Sekvenční logické obvody 54
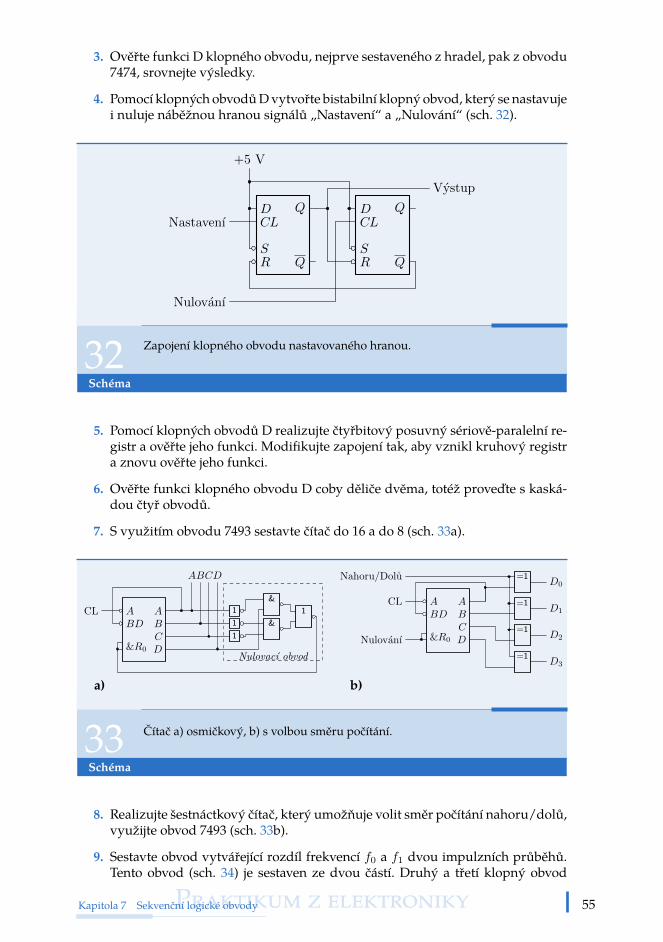
3. Ověřte funkci D klopného obvodu, nejprve sestaveného z hradel, pak z obvodu7474, srovnejte výsledky.
4. Pomocí klopných obvodů D vytvořte bistabilní klopný obvod, který se nastavujei nuluje náběžnou hranou signálů „Nastavení“ a „Nulování“ (sch. 32).
Schéma
DCL
SR
Q
Q
DCL
SR
Q
Q
Nastavenı
Nulovanı
Vystup
+5 V
32 Zapojení klopného obvodu nastavovaného hranou.
5. Pomocí klopných obvodů D realizujte čtyřbitový posuvný sériově-paralelní re-gistr a ověřte jeho funkci. Modifikujte zapojení tak, aby vznikl kruhový registra znovu ověřte jeho funkci.
6. Ověřte funkci klopného obvodu D coby děliče dvěma, totéž proveďte s kaská-dou čtyř obvodů.
7. S využitím obvodu 7493 sestavte čítač do 16 a do 8 (sch. 33a).
Schéma
a)
ABCD
ABD
&R0
ABCD
1
1
1
&
&
1CL
Nulovacı obvod
b)
ABCD
ABD
&R0
=1
=1
=1
=1
D0
D1
D2
D3
CL
Nulovanı
Nahoru/Dolu
33 Čítač a) osmičkový, b) s volbou směru počítání.
8. Realizujte šestnáctkový čítač, který umožňuje volit směr počítání nahoru/dolů,využijte obvod 7493 (sch. 33b).
9. Sestavte obvod vytvářející rozdíl frekvencí f0 a f1 dvou impulzních průběhů.Tento obvod (sch. 34) je sestaven ze dvou částí. Druhý a třetí klopný obvod
P Kapitola 7 Sekvenční logické obvody 55
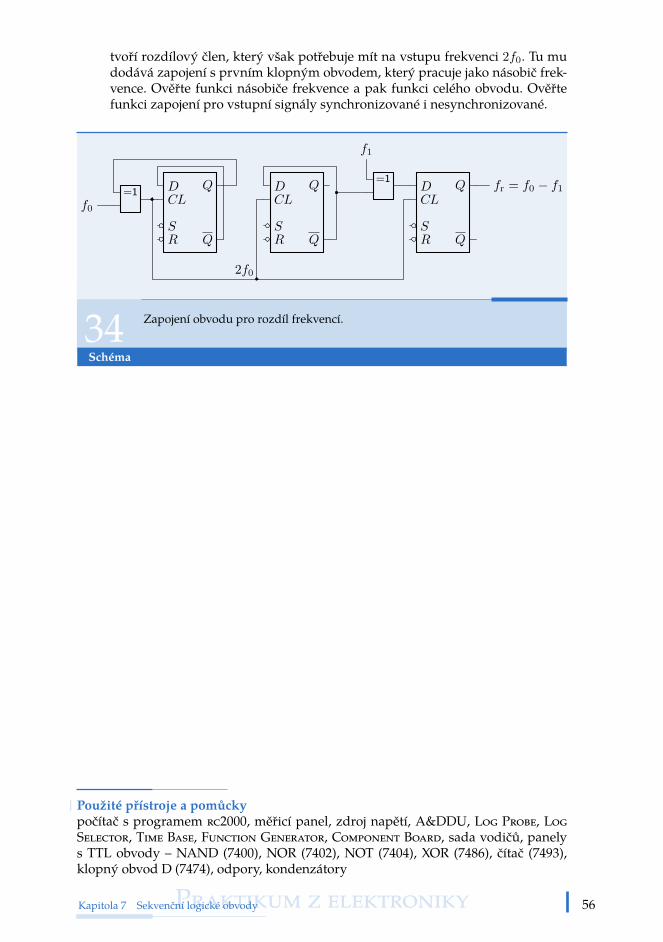
tvoří rozdílový člen, který však potřebuje mít na vstupu frekvenci 2f0. Tu mudodává zapojení s prvním klopným obvodem, který pracuje jako násobič frek-vence. Ověřte funkci násobiče frekvence a pak funkci celého obvodu. Ověřtefunkci zapojení pro vstupní signály synchronizované i nesynchronizované.
Schéma
DCL
SR
Q
Q
DCL
SR
Q
Q
DCL
SR
Q
Q
=1=1
f0
f1
fr = f0 − f1
2f0
34 Zapojení obvodu pro rozdíl frekvencí.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, L P, LS, T B, F G, C B, sada vodičů, panelys TTL obvody – NAND (7400), NOR (7402), NOT (7404), XOR (7486), čítač (7493),klopný obvod D (7474), odpory, kondenzátory
P Kapitola 7 Sekvenční logické obvody 56

8 Harmonická analýza
Cíle úlohy
Fourierova analýzaspektrum signálůnelineární obvody
8.1| Teorie
V aplikacích elektroniky se setkáváme s celou řadou signálů f(t), které mají různéprůběhy a tedy i různé „vlastnosti“. Při teoretickém vyšetřování elektronických ob-vodů není možno analyzovat odezvu obvodu na všechny myslitelné vstupní prů-běhy, a bylo by proto vhodné zavést omezené množství základních (bázových) sig-nálů, které použijeme k popisu vlastností elektronického obvodu.
V praxi se často setkáváme se signály, které mají jednu význačnou vlastnost –v čase se opakují. Takové signály označujeme jako periodické a čas T , pro který platíf(t + nT ) = f(t), kde n je celé číslo, nazýváme periodou. Může se jednat napříklado hodinový signál v logických obvodech nebo sinusový výstup RC generátoru. Ob-zvláště uvedený sinusový signál f(t) = sin(ωt) s úhlovou frekvencí ω je velice snadnorealizovatelný a má i zajímavé matematické vlastnosti. Proto je výhodné zvolit sinu-sový signál jako základ pro vyjádření dalších signálů.
Zvolme si dva signály s jednotkovou amplitudou, přičemž jeden má (úhlovou)frekvenci ω1 = 2π
T1(tj. platí f(t) = sinω1t) a druhý frekvenci ω2 (tj. g(t) = sinω2t) a
sestavme součet těchto signálů. Pokud budou frekvence ω1 a ω2 zcela libovolné, ne-bude součtový signál periodický (obr. 6a), protože oba průběhy obecně mají stejnoufázi (součin frekvence a času) jen v čase t = 0. Aby se i součtový signál v čase opa-koval s periodou T0, musí být tato perioda T0 společná pro oba signály. Tedy musízároveň platit sinω1(t + T0) = sinω1t a sinω2(t + T0) = sinω2t. Protože funkce si-nus je periodická s periodou 2π, budou obě podmínky splněny, pokud bude platitω1T0 = 2πn a ω2T0 = 2πm, kde m, n jsou celá čísla. Vyjádříme-li úhlové frekvenceω1,2 pomocí příslušných period T1,2, získáme podmínky T0 = nT1 a T0 = mT2, ajejich vydělením pak T1/T2 = m/n. Tyto podmínky lze interpretovat tak, že frekvencedílčích signálů musí být celočíselným násobkem základní frekvence f0 = 1
T0= ω0
2π ,má-li být jejich součet periodický s periodou T0 (obr. 6b). Druhá podmínka vyjadřujesouměřitelnost frekvencí.
Obdobné podmínky platí i pro součet více než dvou dílčích harmonických sig-nálů, obecně i pro nekonečný počet. Výše uvedené podmínky nikterak nezávisí naamplitudě signálů, můžeme proto připustit, aby dílčí signály měly amplitudu jinounež jednotkovou. Bude-li mít dílčí funkce nenulový fázový posuv ϕ1, tj. bude mít
P Kapitola 8 Harmonická analýza 57

Obrázek
a)
t
b)
t
6 Součet sinusových průběhů s frekvencemi a) nesouměřitelnými, b) soumě-řitelnými.
tvar f(t) = sin(ω1t+ ϕ1), uvedená podmínka se opět nezmění. Proto můžeme sesta-vit nějakou funkci u(t) s periodou T a frekvencí f = 1
T pomocí součtu (Fourierovyřady)
u(t) =
∞∑n=0
An sin(2πnf1t+ ϕn), (52)
kde An a ϕn mohou být i nulové pro některé n. Použitím f1 jsme vyjádřili skutečnost,že pro n = 1 platí f1 = 1f .
Ukazuje se, že pomocí vhodné volby koeficientů An a ϕn jsme schopni vyjádřitjakýkoliv periodický signál s periodou T = 1
f1. Uvedená skutečnost nám umožní pro-
vádět syntézu libovolného periodického signálu pomocí sinusových funkcí, jejichžfrekvence jsou násobkem f1. Tyto funkce se pak nazývají harmonické složky peri-odického signálu a množina hodnot An, ϕn tvoří amplitudové a fázové spektrumperiodického signálu.
Uvedeným způsobem můžeme periodické signály vytvářet. Často však máme pe-riodický signál zadán a potřebujeme jej rozložit do součtu harmonických funkcí, tj.potřebujeme k danému periodickému signálu nalézt hodnoty koeficientů An a ϕn.Tímto způsobem v podstatě přecházíme od časové reprezentace signálu (jako funkceu(t)) k frekvenční reprezentaci (jako posloupnost amplitud a fází). Abychom určilimatematický vztah mezi funkcí u a jejím spektrem, vyjádříme (52) pomocí vzorcesin(α+ β) = sinα cosβ + cosα sinβ, čímž získáme
u(t) =∞∑
n=0
A′n sin(2πnf1t) +
∞∑n=0
A′′n cos(2πnf1t), (53)
kde A′n = An cosϕn a A′′
n = An sinϕn. Vynásobme teď obě strany rovnice členemsin(2πkf1t) a integrujme obě strany přes jednu periodu. Protože platí
∫ T
0sin(nt)×
× sin(mt) dt = 0 pro n = m a∫ T
0sin(nt) cos(mt) dt = 0 pro všechna n = m, zbyde
nám na pravé straně jen jeden nenulový člen a můžeme tedy psát
A′k =
2
T
∫ T
0
u(t) sin(2πkf1t) dt. (54)
P Kapitola 8 Harmonická analýza 58

Když rovnici (53) vynásobíme funkcí cos(2πkf1t), získáme obdobně
A′′k =
2
T
∫ T
0
u(t) cos(2πkf1t) dt. (55)
Amplitudové a fázové spektrum pak určíme ze vztahů
An =√
A′n +A′′
n, tg ϕn =A′′
n
A′n
. (56)
Vzhledem k tomu, že amplitudy An se určují integrací, může se stát, že některé am-plitudy budou nulové. To znamená, že signál nemusí obsahovat všechny násobkyzákladní harmonické. Hodnoty relativních amplitud pro některé často užívané sig-nály jsou uvedeny v tab. 1. Z ní je vidět, že tyto signály mají vždy největší prvníharmonickou a ostatní složky jsou zastoupeny mnohem slaběji.
Tabulka
n Obdélníkový Jednocestně usměrněný Dvojcestně usměrněný1 1,000 1,000 1,0002 0,000 0,424 0,2003 0,333 0,000 0,0864 0,000 0,085 0,0485 0,200 0,000 0,0316 0,000 0,037 0,0217 0,143 0,000 0,0168 0,000 0,021 0,0129 0,111 0,000 0,00910 0,000 0,035 0,008
1 Teoretické hodnoty normovaných spektrálních koeficientů vybraných prů-běhů. Sinusový signál by měl nenulový pouze první řádek.
V uvedené sumaci vystupuje i nultý násobek s periodou T = 0T0 = 0, což od-povídá konstantní funkci. Hodnota A0 pak udává velikost střední hodnoty periodic-kého signálu (hodnota ϕ0 nemá smysl) a nazývá se stejnosměrná složka signálu.
V experimentech se harmonická analýza provádí dvěma způsoby. První spočíváve využití selektivního voltmetru, tedy přístroje, který měří napětí jen ve velmi ma-lém intervalu frekvencí. Zpravidla je tvořen sériovou kombinací laditelného frek-venčního obvodu, který propouští jen úzké frekvenční pásmo, a voltmetrem, kterýje schopen měřit frekvenčně nezávisle. Při analýze se laditelný obvod postupně pře-laďuje od nejnižší do nejvyšší frekvence a zaznamenává se poloha a velikost maximvýchylek na stupnici voltmetru. Je-li vstupní signál periodický, měla by se maximanacházet pouze u frekvencí, které jsou násobky základní frekvence f1. Výšky maximpak představují koeficienty An. Tímto způsobem jsme však schopni určit jen ampli-tudové spektrum, informace o fázi se ztrácí. Proto nebudeme schopni ze získanýchdat periodický signál znovu sestavit.
Druhý způsob spočívá v numerickém počítání spekter – pomocí logických ob-vodů se do paměti uloží informace ui = u(i∆t), kde ∆t je vzorkovací interval, oamplitudě signálu v různých časových okamžicích (signál se navzorkuje) a z těchtohodnot se pak numericky spočítají An a ϕn. Výpočet se provádí tak, že se integrály (54)
P Kapitola 8 Harmonická analýza 59

a (55) nahradí součtem podle některého pravidla o výpočtu integrálů, např. A′k =
2∆tT
∑ui sin(2πkf1i∆t).
| Využití harmonické analýzy Harmonickou analýzu nyní využijeme k popisu elek-tronických obvodů. Nemůže však rozumně popsat jakýkoliv obvod, ale jen lineárníobvod, tj. takový, pro který platí F [au(t) + bv(t)] = aF [u(t)] + bF [v(t)], kde u(t),v(t) jsou dva libovolné signály na vstupu obvodu, a, b libovolné reálné koeficienty afunkce F je charakteristická pro daný obvod, ale nemusí být vyjádřitelná analyticky(v uzavřeném tvaru). Právě tuto funkci chceme nějakým způsobem vyjádřit.
Uvažujme nyní na vstupu periodický signál u(t), který rozepíšeme ve tvaru u(t) =∑An sin(nω1t). Využijeme-li linearity obvodu, můžeme psát
F [u(t)] = F[∑
An sin(nω1t)]=∑
F [An sin(nω1t)] =∑
AnF [sin(nω1t)] . (57)
Člen F [sin(nω1t)] popisuje chování elektronického obvodu, je-li na jeho vstup přive-den signál s přesně definovaným – sinusovým – průběhem. Přivedeme-li na vstup li-neárního obvodu takovýto signál, bude na výstupu sinusový signál Fn sin(nω1t+φn)stejné frekvence, ale obecně s jinou amplitudou a jinou fází. To můžeme zapsat po-mocí komplexního koeficientu přenosu Fn = Fne
jφn . Budeme-li na vstup postupněpřivádět sinusové průběhy s frekvencí nω1, získáme posloupnost F1, F2, . . . Uvedenáposloupnost nám pak umožní popsat jakýkoliv výstupní periodický signál, protožepo dosazení do (57) lze psát
F [u(t)] =∑
AnFn sin(nω1t). (58)
Lze tedy říci, že znalost odezvy lineárního obvodu na harmonické signály nám po-stačuje k charakterizaci odezvy na libovolný periodický signál.
| Zobecnění pro neperiodické signály Uvedený postup lze zobecnit i na neperio-dické signály. Neperiodický signál můžeme uvažovat jako periodický signál, kterýmá nekonečnou periodu. Tomu pak odpovídá nekonečně malá hodnota frekvenceω1, která po dosazení do řady (52) a provedení limitního procesu T → ∞ způsobípřechod sumace v integraci. Protože odpovídající hodnoty F1, F2, . . . budou přiřa-zeny vzájemně blízkým frekvencím, můžeme posloupnost nahradit funkcí frekvenceF (ω). Tato funkce pak má význam přenosové funkce, se kterou jsme se setkali např.u filtrů.
| Nelineární obvody Analýza nelineárních obvodů je značně komplikovanější a protoje není možno popsat nějakou funkcí F (ω) jako v předchozím textu. Není totiž spl-něna podmínka, že po přivedení sinusového signálu bude na výstupu sinusový sig-nál stejné frekvence. Uvažujme například „kvadratický“ obvod popsatelný funkcíF [u(t)] = u2(t). Dosadíme-li u(t) = sinωt, dostaneme pro výstupní signál
F [u(t)] = sin2 ωt =1
2(1− cos 2ωt) .
Na výstupu se nám tedy objeví jednak stejnosměrná složka, ale také složka s dvojná-sobnou frekvencí. Kdybychom na vstup přivedli signál u(t) = sinω1t+sinω2t, objevilyby se na výstupu i křížové frekvence ω1 ± ω2.
P Kapitola 8 Harmonická analýza 60

8.2| Realizace měření
Pro měření spektrálních složek použijeme měřicí jednotku A & D DU výukového systému L se softwarem 2000 v režimu O, modulF G pro vytváření sinusových a obdélníkových signálů, modulyC B a T B pro zapojení pasivních součástek. Hodnotyodporů volte tak, aby nedošlo k překročení proudové ochrany. Při měření nezapo-meňte vhodně nastavit spouštěcí úroveň osciloskopu. Při sestavování usměrňovačůa zesilovače se řiďte pokyny z předchozích úloh (číslo 2 a 3).
V úlohách 1 a 2 připojte vstup I A přímo na výstup F G. V úlo-hách 3 a 4 připojte oba kanály pro porovnání průběhu signálů i jejich spekter. Zapo-jení úlohy 6 je shodné s úlohou 3 bez kondenzátoru.
| Popis okna programu v režimu spektrálního analyzátoru: Spektrální analyzátorzískáme stisknutím tlačítka S v režimu O. Pomocí tlačítek v blokuC můžeme určovat intenzity jednotlivých frekvenčních složek, které jsou ozna-čeny pouze pořadovým číslem harmonické. První harmonická odpovídá vždy peri-odě vstupního signálu, hodnota ji příslušné frekvence se proto mění se signálem.
8.3| Zadání úlohy
1. Změřte spektrum sinusového signálu. Zhodnoťte vliv změny ofsetu signálu.
2. Změřte spektrum symetrického obdélníkového signálu a posuďte vliv ofsetu.Srovnejte výsledek s teoretickými hodnotami.
3. Změřte spektrum jednocestně usměrněného sinusového signálu (sch. 35a) a ur-čete f1. Srovnejte výsledek s teoretickými hodnotami. Změřte spektrum signálupo vyhlazení kondenzátorem C = 1; 3,3 a 10 µF.
Schéma
a)
INA
INB
R C
b)
INA
D1
D2
D3
D4
IN B
R
35 Usměrňovací obvod a) jednocestný, b) dvojcestný.
4. Změřte spektrum dvojcestně usměrněného sinusového signálu (sch. 35b) a totéžpo vyhlazení kondenzátorem. Srovnejte výsledky s předchozí úlohou i s teorií.
5. Zapojte astabilní klopný obvod (sch. 36) a změřte spektrum výstupního signálupro různou hodnotu střídy. Zjistěte, jaká je funkce posledního hradla.
P Kapitola 8 Harmonická analýza 61

Schéma
1
1
R1
R2
C
C1 Q
36 Astabilní obvod – generátor obdélníkového průběhu s nastavitelnou stří-dou.
6. Zapojte zdroj sinusového napětí s malou amplitudou 300 mV a ofsetem 3 V azměřte spektrum signálu po průchodu diodou. Pak snižujte hodnotu ofsetu asledujte změny spektra.
7. Zapojte tranzistorový zesilovač (sch. 37) a nastavte amplitudu vstupního sinu-sového signálu tak, aby nedošlo k saturaci. Pak postupně zvyšujte amplituduaž do saturace a sledujte změny spektra. Hodnoty součástek volte přibližněR1 = 50 kΩ, R2 = 11 kΩ, R3 = 1000Ω, R4 = 500Ω, C1 = 3,3µF, C2 = 1µFa C4 = 100µF.
Schéma
+
+
+
u0
RiC1
R2
R1 R3
R4 C4
C2
+UCC
u1
u2
37 Tranzistorový zesilovač.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, F G-, C B, T B, sada vodičů, hradla NOT (7404), od-pory, kondenzátory, dioda
P Kapitola 8 Harmonická analýza 62

9 Časovač NE555
Cíle úlohy
časovací obvod 555analogový astabilní klopný obvodanalogový monostabilní klopný obvod
9.1| Teorie
NE555 je monolitický časovací obvod, schopný generovat přesné časové impulzynebo oscilace s minimem externích součástek. Je možné ho použít k různým účelům,mimo jiné například ke generování pulzně šířkové modulace (PWM). Před samotnýmměřením laboratorní úlohy si pročtěte přiložený datasheet a seznamte s mezními pa-rametry obvodu (maximální provozní napětí atd.). Dále si přečtěte následující popisfunkce obvodu. Všechna napětí v textu budou vztahována vůči zápornému napá-jecímu pinu integrovaného obvodu (pin 1 – GND), pokud nebude uvedeno jinak.Vnitřní schéma obvodu je na sch. 38.
| Popis jednotlivých bloků
Napěťový dělič je sestaven ze tří stejných rezistorů o hodnotách 5 kΩ (obr. 38levá strana) a jeho účelem je rozdělit napájecí napětí na třetiny, které pak slouží jakoreference pro komparátory. Je-li tedy napájecí napětí UCC, bude na kladném vstupukomparátoru KB 1
3UCC a na záporném vstupu komparátoru KA budou 23UCC.
Komparátor zjednodušeně řečeno porovnává dvě vstupní napětí. V našem pří-padě bude platit, že výstupní napětí komparátoru má hodnotu UCC, pokud je nakladném vstupu napětí větší, než na záporném. V opačném případě, tedy pokud jena záporném vstupu větší napětí než na kladném, pak je výstupní napětí kompará-toru nulové. Pro naše účely můžeme nadále výstupní napětí komparátorů nazývatlogickými hodnotami, nulové napětí bude logická 0 a napětí UCC bude logická 1.Chování lze popsat i stručněji následujícím vztahem
Uout =
UCC když U+ > U−,0 V když U+ < U−.
(59)
Pokud někoho znervózňuje, že v popisu funkce chybí situace, kdy budou oběvstupní napětí stejná, nemusí mít strach. Malá nesymetrie vstupů komparátoru i v ta-kové situaci překlopí komparátor do jednoho ze dvou výstupních stavů.
P Kapitola 9 Časovač NE555 63

Schéma38 Blokové schéma obvodu NE555.
R-S klopný obvod uvnitř 555 ovládá výstup celého obvodu a vybíjecí tranzistor.Činnost tohoto obvodu byla popsána v úloze Sekvenční logické obvody. V našempřípadě je výstup klopného obvodu negován, takže pro analýzu chování časovače,budeme potřebovat výstup Q. Navíc má časovač další resetovací vstup (pin 4, /R1).Vzhledem k tomu, že je tento vstup negovaný, probíhá resetování log. 0. V případěmonostabilního i astabilního režimu práce časovače nás ale nemusí zajímat, takže hoklidně můžete pustit z hlavy.
Vybíjecí tranzistor Vybíjecí tranzistor slouží u našeho časovače k vybíjení, pří-padně nabíjení časovacího kondenzátoru (což neznamená, že ho nemůžete použítk něčemu jinému). Zjednodušeně řečeno funguje tak, že pokud je na jeho bázi při-vedena log. 1, je otevřen a umožňuje tok proudu z pinu 7 (DISH) na pin 1 (GND),čímž v našem zapojení, vybíjí časovací kondenzátor. Maximální proud tranzistoremje omezen podle datasheetu a verze obvodu. Je třeba na něj dávat pozor. V příkladunaznačím rizikovou situaci:
Pin DISH je z nějakého důvodu připojen například na UCC. Dojde k otevření tran-zistoru a ten „zkratuje“ napájení, tedy zjednodušeně řečeno pokusí se spojit UCC
a GND. Řekněme, že je vnitřním zapojením integrovaného obvodu omezen proudtranzistorem, dejme tomu například na 200 mA. Jestliže bude napájecí napětí 15 V,bude pak na vybíjecím tranzistoru výkonová ztráta 3 W. Což se po jistém čase poznátím, že se obvod spálí a vy budete muset jít do obchodu pro nový. (Nevěšte hlavu,v systému µL budete časovač napájet pouze 5 V a navíc má zabudované ochrany,aby nedošlo ke zničení časovače).
Nyní, když máme všechny bloky časovače popsané, můžeme se podívat na to, jakpracuje časovač jako celek. Začneme astabilním režimem, tedy generátorem obdélní-kového signálu.
P Kapitola 9 Časovač NE555 64

| Astabilní režim časovače Funkce časovače v astabilním režimu jde popsat v ně-kolika krocích. Pro názornost slouží blokové schéma na obr. 39. V grafech jsou vy-značeny průběhy napětí na časovacím kondenzátoru (obr. 7a) a na výstupu časovače(obr. 7b).
Schéma39 Zapojení časovače v astabilním režimu.
Fáze 1 Rozběh obvodu. Kondenzátor C je vybitý (je na něm nulové napětí). Na vý-stupu dolního komparátoru (KB) je log. 1, na výstupu horního komparátoru(KA) je log. 0. Klopný obvod má tedy na výstupu log. 0. Vybíjecí tranzistor jetedy uzavřen a na pinu 3, tedy na výstupu časovače je log. 1. Kondenzátor senabíjí skrze rezistory Ra a Rb proudem I1(t).
Obrázek
a) b)
7 Průběh a) napětí na kondenzátoru C v astabilním režimu, vyznačeny jsoufáze průběhu, b) výstupního napětí časovače v astabilním režimu.
Fáze 2 Napětí na kondenzátoru přesáhlo 13UCC, komparátor KB překlopil a má tedy
na výstupu log. 0, komparátor KA má na výstupu stále log. 0. Klopný obvod
P Kapitola 9 Časovač NE555 65

má oba vstupy v log. 0, tedy nechává na výstupu předchozí stav, to jest log. 0.Vybíjecí tranzistor tedy stále zůstává uzavřen, časovací kodenzátor C se dálenabíjí a výstup je stále v log. 1.
Fáze 3 Napětí na kondenzátoru přesáhlo 23UCC, komparátor KB má na výstupu log.
0, komparátor KA překlopil a má na výstupu log. 1, klopný obvod má tedy navstupu R log. 1 a je resetován, výstup klopného obvodu se nastaví na log. 1, cožotevře vybíjecí tranzistor a kondenzátor se začne přes rezistor Rb vybíjet (poudI2b). Nesmíme zapomenout na to, že rezistorem Ra poteče proud I2a. Celkovětedy tranzistorem poteče proud I2a + I2b. Výstup časovače bude mít log. 0.
Fáze 4 Kondenzátor se vybil těsně pod hodnotu 23UCC, komparátor KB zůstává stále
na log. 0, kdežto komparátor KA překlopil zpět na log. 0. Klopný obvod mávstupy v log. 0 a výstup tedy zůstává v předchozím stavu a vybíjení kondenzá-toru pokračuje.
Fáze 5 Kondenzátor se vybil pod 13UCC, komparátor KB překlopil svůj výstup do
log. 1, komparátor KA má na výstupu log. 0, vstup S klopného obvodu je tedyv log. 1 a klopný obvod má na výstupu log. 0. Vybíjecí tranzistor je tedy uzavřen,vybíjení kondenzátoru je ukončeno a kondenzátor se opět nabíjí proudem I1.Výstup časovače je v log. 1.
Dále přichází opět fáze 2 a proces se zacyklí. Krom prvního rozběhu tedy napětí nakondenzátoru probíhá mezi 1
3UCC a 23UCC. Volbou rezistorů Ra a Rb a volbou ka-
pacity časovacího kondenzátoru C je možné nastavit doby nabíjení a vybíjení, tedy ifrekvenci a periodu. Je třeba dbát na to, abychom volbou rezistorů nepřekročili proudvybíjecího tranzistoru (tedy nevolit rezistory příliš malé). Volbou rezistorů Ra a Rb setaké nastavuje střída signálu (střída je poměr doby výstupu ve stavu log. 1 k celkovéperiodě) a v tomto uspořádání nemůže být menší než 50 %, neboť doba nabíjení jevždy větší než doba vybíjení (nabíjení probíhá přes rezistory Ra a Rb, kdežto vybí-jení pouze přes Rb). Nabíjecí a vybíjecí doba je nezávislá na napájecím napětí časo-vače. Při vyšším napájecím napětí UCC dochází sice k nabíjení kondenzátoru většímnabíjecím proudem, ale kondenzátor se zase nabíjí na vyšší napětí.
Doba nabíjení je přibližně dána vztahem
t1 = ln(2)(Ra +Rb)C. (60)
Doba vybíjení je přibližně dána vztahem
t2 = ln(2)RbC. (61)
Perioda a frekvence je tedy
T = t1 + t2 = ln(2)(Ra + 2Rb)C, (62)f = 1/T. (63)
Stejně tak lze odvodit střídu a ta je dána
D =Ra +Rb
Ra + 2Rb. (64)
Teorie nabíjení kondenzátoru Pro úplnost je nutno ještě zmínit malou vsuvkuo nabíjení kondenzátoru a odvodit vztahy pro dobu nabíjení a vybíjení. Z popisufunkce víme, že se kondenzátor nabíjí a vybíjí mezi 1
3 a 23 napájecího napětí (UCC).
P Kapitola 9 Časovač NE555 66

Vyjdeme z rovnice nabíjení kondenzátoru skrze rezistor R (její odvození je už mimorámec tohoto praktika, nicméně na požádání vám jej vedoucí praktika jistě objasní)
UC = UCmax
[1− exp
(− t
τ
)], (65)
kde τ = RC, UCmax je nabíjecí napětí a UC je napětí na kondenzátoru.V obvodu nabíjíme kondenzátor napětím UCC. Označíme-li tedy čas, kdy je nabit
na 13UCC, jako t1 a čas, kdy dosáhne 2
3UCC, jako t2, bude doba nabíjení rozdíl těchtočasů. Dosadíme-li do rovnic pro nabíjení požadované napětí kondenzátoru, dosta-neme
13 = 1− exp
(− t1
τ
)(66)
23 = 1− exp
(− t2
τ
). (67)
Z rovnic vyjádříme časy t1 a t2
t1 = −τ ln( 23 ), (68)t2 = −τ ln( 13 ), (69)
spočítáme rozdíl časů t2 − t1 a dostáváme
t2 − t1 = tnab = ln(2)τ = ln(2)RC. (70)
Všimněte si, že výsledek je nezávislý na nabíjecím napětí.Pro vybíjení kondenzátoru bychom mohli postupovat analogicky a vyjít z rovnice
pro vybíjení
UC = UCmax · exp(− t
τ
)(71)
| Monostabilní režim časovače Tento režim slouží ke generování časových impulzůo dané délce, impulz proběhne pouze jednou. Časovač je spouštěn přivedením star-tovacího impulzu na vstup TRIG.
Rozběh obvodu probíhá následovně. Předpokládejme, že na počátku je konden-zátor vybit. Komparátor KA má na výstupu tedy log. 0 a komparátor KB také log. 0(startovací impulz zatím nepřišel). Výstup klopného obvodu je tedy neznámý.
V případě, že je na výstupu log. 1 a vybíjecí tranzistor je otevřen, udržuje se kon-denzátor vybitý a obvodem protéká proud I2a. Časovač je v této chvíli připraven kespuštění a čeká na startovací impulz (situace 1).
V případě, že na výstupu klopného obvodu byla log. 0, proběhne následující sledudálostí. Log. 0 na výstupu klopného obvodu uzavírá vybíjecí tranzistor a časovacíkondenzátor se nabíjí. Jakmile překročí napětí 2
3UCC, komparátor KA překlopí dolog. 1 a nastaví tím výstup klopného obvodu do log. 1. Otevře se vybíjecí tranzistor akondenzátor se vybije (proud I2b). Napětí na kondenzátoru klesne pod 2
3UCC, kom-parátor KA překlopí svůj výstup zpět do log. 0 a obvod se dostane do stavu, kterýjsme popsali výše (situace 1).
V této chvíli stačí abychom na vstup TRIG přivedli krátký impulz o napětí nižšímnež 1
3UCC, v té chvíli totiž komparátor KB nastaví na svém výstupu log. 1. Klopnýobvod následně nastaví výstup z log. 1 do log. 0, čímž uzavře vybíjecí tranzistor akondenzátor se začne nabíjet proudem I1. Nabíjet se bude do té doby, než jeho na-pětí dosáhne 2
3UCC, pak dojde k překlopení komparátoru KA, resetování klopnéhoobvodu a následnému otevření vybíjecího tranzistoru. Obvod se tak zase vrátí dosituace 1 a čeká na startovací impulz.
P Kapitola 9 Časovač NE555 67
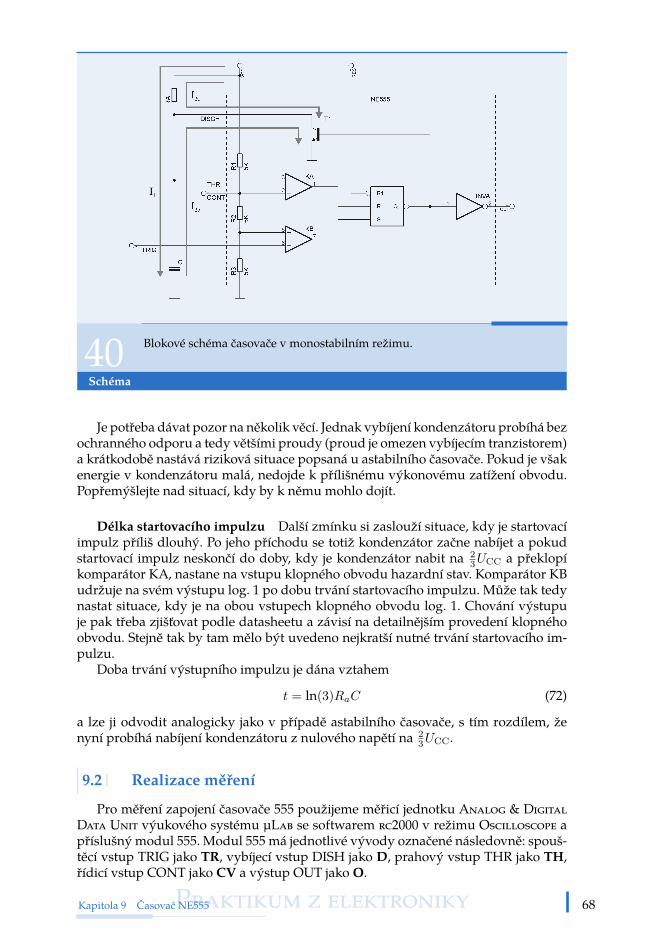
Schéma40 Blokové schéma časovače v monostabilním režimu.
Je potřeba dávat pozor na několik věcí. Jednak vybíjení kondenzátoru probíhá bezochranného odporu a tedy většími proudy (proud je omezen vybíjecím tranzistorem)a krátkodobě nastává riziková situace popsaná u astabilního časovače. Pokud je všakenergie v kondenzátoru malá, nedojde k přílišnému výkonovému zatížení obvodu.Popřemýšlejte nad situací, kdy by k němu mohlo dojít.
Délka startovacího impulzu Další zmínku si zaslouží situace, kdy je startovacíimpulz příliš dlouhý. Po jeho příchodu se totiž kondenzátor začne nabíjet a pokudstartovací impulz neskončí do doby, kdy je kondenzátor nabit na 2
3UCC a překlopíkomparátor KA, nastane na vstupu klopného obvodu hazardní stav. Komparátor KBudržuje na svém výstupu log. 1 po dobu trvání startovacího impulzu. Může tak tedynastat situace, kdy je na obou vstupech klopného obvodu log. 1. Chování výstupuje pak třeba zjišťovat podle datasheetu a závisí na detailnějším provedení klopnéhoobvodu. Stejně tak by tam mělo být uvedeno nejkratší nutné trvání startovacího im-pulzu.
Doba trvání výstupního impulzu je dána vztahem
t = ln(3)RaC (72)
a lze ji odvodit analogicky jako v případě astabilního časovače, s tím rozdílem, ženyní probíhá nabíjení kondenzátoru z nulového napětí na 2
3UCC.
9.2| Realizace měření
Pro měření zapojení časovače 555 použijeme měřicí jednotku A & DD U výukového systému µL se softwarem 2000 v režimu O apříslušný modul 555. Modul 555 má jednotlivé vývody označené následovně: spouš-těcí vstup TRIG jako TR, vybíjecí vstup DISH jako D, prahový vstup THR jako TH,řídicí vstup CONT jako CV a výstup OUT jako O.
P Kapitola 9 Časovač NE555 68

Vzhledem k omezenému rozsahu hodnot rezistorů a kondenzátorů volte kompo-nenty tak, abyste se k dané hodnotě co nejvíce přiblížili. Vybrané rezistory změřteohmmetrem, nespoléhejte se na hodnotu napsanou na součástce (výrobní toleranceje 5 %). Pokud potřebujete přesnou hodnotu odporu nebo kapacity, použijte dekádu.Zdůvodněte volbu komponent.
Ke generování startovacích impulzů v monostabilním režimu můžete použít
modul časové základny T B: použijte jeden z výstupů v bloku O-, oscilátor se spouští a zastavuje tlačítkem R. Tento způsob neumožňujenastavit jinou střídu signálu než 50 %;
výstup A O z měřicí jednotky A&DDU: v tomto případě použijtesoftware 2000 v režimu O + G a v jeho editoru průběhů si vy-tvořte signál, který je většinu času na úrovni 5 V a po krátký okamžik na úrovninižší.
9.3| Zadání
1. Sestavte generátor obdélníkového signálu o dané frekvenci (respektivě periodě)a střídě. Zapojení můžete najít v přiloženém datasheetu.Spočtěte teoretickou hodnotu periody, frekvence, doby nabíjení a doby vybíjení.Změřte RC systémem průběh napětí na časovacím kondenzátoru a na výstupučasovače.Porovnejte změřené hodnoty s vypočítanými, odchylky se pokuste zdůvodnit.Zvažte, jak volba Ra, Rb a C ovlivní odběr generátoru, případně se jej pokusteodhadnout.
2. Sestavte časovač v monostabilním režimu generující pulz o stanovené délce.Zapojení můžete najít v přiloženém datasheetu.Spočtěte teoretickou dobu trvání pulzu.Změřte RC systémem průběh napětí na časovacím kondenzátoru a na výstupučasovače.Porovnejte změřené hodnoty s vypočítanými, odchylky se pokuste zdůvodnit.Ověřte chování obvodu pro různé střídy spouštěcího signálu a také pro různétvary.
| Použité přístroje a pomůckypočítač s programem 2000, měřicí panel, zdroj napětí, A&DDU, C B,sada rezistorů, propojek a kondenzátorů, odporové a kapacitní dekády, modul 555,sada vodičů, T B
P Kapitola 9 Časovač NE555 69