Embed Size (px)
DESCRIPTION
MRAR – Radioloka ční a radionaviga ční systémy. PŘEDNÁŠKA 8. 19 . 11 .20 13. Jiří Šebesta Ústav radioelektroniky FEKT VUT v Brně. MRAR : PŘEDNÁŠKA 8. TÉMA: RADIONAVIGAČNÍ SYSTÉMY. Směrová navigace Kruhová navigace Kruhově – směrová navigace Hyperbolická navigace FM výškoměry - PowerPoint PPT Presentation
Citation preview

PŘEDNÁŠKA 8
MRAR – Radiolokační a radionavigační systémy
Jiří Šebesta
Ústav radioelektroniky FEKT VUT v Brně
6.11.2017

strana 2
MRAR: PŘEDNÁŠKA 8.
Radary se syntetickou aperturou

strana 3
MRAR-P8: Syntetická apertura (1/13)
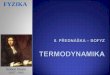
Obecný princip SAR = Synthetic Aperture Radar
Podstatné zvětšení rozlišení radaro-vého zobrazení
Instalace:
- letadla (airborne SAR)
- družice (space- borne SAR)

strana 4
MRAR-P8: Syntetická apertura (2/13)
Vytváří se umělá anténní řada ve směru pohybu radaru (na letadle nebo družici)

strana 5
MRAR-P8: Syntetická apertura (3/13)
Jednotlivá měření (odezvy na pulzní signál vysílače) se uloží do pa-měti a při vyhodnocení se aplikuje součet signálů s váhováním (fázo-vé) k vytvoření umělého úzkého svazku

strana 6
MRAR-P8: Syntetická apertura (4/13)
Doba apertury (Aperture Time) definuje čas pro získání sady záznamů pro postprocessingový beamforming

strana 7
MRAR-P8: Syntetická apertura (5/13)
Vzdálenost k měřenému bodu od jednotlivých pozic antén:
sin dnRRn
sin
2ndR
ctj
n eAtr
cd
cdM
M
Rj
tj
M
Mn
ndRc
tjM
Mnn
ee
eAtrtr
sinsin
sin12sin
12
14
sin2
Signál na n-té pozici antény
Celkový signál ze všech pozic a pro svazek ve směru měřeného bodu:

strana 8
MRAR-P8: Syntetická apertura (6/13)
VV L
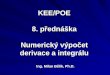
Systém SLAR (Side Looking Airborne Radar) Hlavní svazek anténa pulsního
SAR radaru míří do boku pod úhlem (look angle) .
Šířka bočního svazku V (pro pokles o 3 dB v radiánech) je svázána s rozměrem apertury LV:
Šířka pásu stopy (swath width) pro radiální vzdálenost R0 do středu stopy:
cos0
V
V L
RW

strana 9
MRAR-P8: Syntetická apertura (7/13)
HH L
sin2
pV
c
Rozlišení v příčném (bočním) směru je dáno šířkou pulsu (V<<WV):
Šířka svazku v podélném smě-ru je dáno podélným rozměrem apertury (radiány):
Rozlišení v podélném směru je dáno jen podélným rozměrem apertury a radiální vzdáleností:
HHH L
RR
0
0

strana 10
MRAR-P8: Syntetická apertura (8/13)
20
20
20 htvyxR
vLTA
2/;2/ AA TTt
Uvažujme SAR měření na délce L, pak interval přeletu pro konstantní rychlost v (odpovídá aperture time) bude:
Radiální vzdálenost k bodu P na zemi lze vyjádřit:
kde:
20
20
200 hyxR RL
0
00cos
R
x

strana 11
MRAR-P8: Syntetická apertura (9/13)
0
220
22
00
0 sin2
cos1 R
tv
R
vtRR
02
0
22
00 sincos
22 cR
tv
c
vt
c
Rttt TXTXTX
TXTX
Po úpravě a aplikaci Taylorova rozvoje:
Argument přijatého signálu je závislý na tomto zpoždění:
se zpožděním impulsu na trase tam i zpět :
TX
c
2
02
0
22
00 sincos
222 cR
tv
c
vt
c
R
c
R
02
0
22
00 sin
2cos
44
R
tvvtRtt TX
Se zavedením vlnové délky:
zjednodušíme na:

strana 12
MRAR-P8: Syntetická apertura (10/13)
dt
tdfi
2
10
2
0
2
0 sin2
cos2
R
tvvff TXiRX
0cos2 v
fdP
Okamžitá frekvence přijatého signálu je:
a rozdíl mezi Doppler. posuvy mezi P a P’ je :
vDt
2sin 0
Vyjádříme–li Doppler. posuvy pro cíl v bodě P a P’:
za t jsme dosadili :
00
0' sincos2
R
DvvfdP
00
sinR
Dvfd

strana 13
MRAR-P8: Syntetická apertura (11/13)
dA f
T
1
Pro rozlišení dvou cílů musí být SAR data ukládána (doba apertury):
a délka L pak musí být:
odtud pro rozlišení platí v podélném směru platí:
0
0
sin
D
RTvL A
0
0
sin22
L
RDSARH
Příklad 14:----------------------------------------------------------------------------------------------------------SAR instalovaný na stratosférickém průzkumném letadle s výškou letu 25 km pracuje na kmitočtu 1,5 GHz. Rozměry apertury antény v obou souřadnicích (příčná i podélná) jsou 2 m. Úhel snímání je 45°, délka pulsu 1 s a rychlost letadla je 800 km/h. Určete šířku snímaného pásu a rozlišení na povrchu, je-li doba apertury SAR 0,2 s.----------------------------------------------------------------------------------------------------------

strana 14
MRAR-P8: Syntetická apertura (12/13)
m11345sin4,442
2,0104,35
sin2
3
0
0
L
RSARH
m/s2226,3/800km/h800 v Vlnová délka:
m4,442,0222 ATvL
Rychlost pohybu:
Radiální dálka:
m2,0105,1
1039
8
TXf
c
km4,3545sin
1025
sin
3
0
00
hR
Šířka pásu: km545cos2
104,352,0
cos
30
VV L
RW
Příčné rozlišení: m21245sin2
101103
sin2
68
pV
c
Podélné rozlišení bez SAR: km54,32
2,0104,35 30
HH L
R
Podélná délka syntetické apertury:
Podélné rozlišení se SAR:
HL

strana 15
MRAR-P8: Syntetická apertura (13/13)
SAR systémy (komprese LFM, 1-30 GHz)
Průzkum Země (oceánografie, monitoring ledu a sněhu, měření znečištení, těžařství, klasifikace terénu, mapování) s rozlišením i pod 10 m
AIRBORNE – (první 1953, Godyear research, na DC-3, 930 MHz), AIRSAR (NASA JPL), YSAR
SPACEBORNE
RADARSAT (Kanada)
ERS (ESA – European Remote Sensing)
ENVISAT (ESA 2002 - studium změn v životním prostředí, včetně globálního oteplování a tání ledovců)

strana 16
Děkuji za vaši pozornost
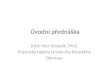
SAR obrázek plujících ledových kerVlevo: ERS-1 image, 06th Nov. 1995, 04:51:30 UT, Vpravo: ERS-2 image, 7th Nov. 1995, 04:51:31 UT