Embed Size (px)
Citation preview

Préparation aux études supérieures en
mathématique : Le transport
2016-2017
Alexandre Authelet; Aline Denis; Amaury Gilles; Antoine Borrey; Baptiste Paquet; Benjamin Hourant; Charline Honnay; Dima Lejeune; Emma Hubert; Eugénie Prévost; Louis Lejeune; Martin Lothaire; Nicolas Philippe; Nikita Doukhanin; Simon Grognard; Tom Parmentier; Vincent Van Belle
2
Sommaire
I. Introduction ..................................................................................................................................... 4
II. Déroulement du projet .................................................................................................................... 5
III. Motivations ................................................................................................................................. 6
A. Motivations personnelles ............................................................................................................ 6
B. Motivations économiques ........................................................................................................... 6
IV. Le transport ................................................................................................................................. 7
A. Le réseau ..................................................................................................................................... 7
1. Arcs et nœuds .......................................................................................................................... 7
2. Centroïdes ............................................................................................................................... 7
B. Fonction coût ............................................................................................................................... 8
C. Modèle ...................................................................................................................................... 10
1. Modèle dynamique ou statique ............................................................................................ 10
2. Modèle macroscopique ou microscopique ........................................................................... 11
3. Le modèle à 4 étapes ............................................................................................................. 11
4. L’utilisation d’un modèle ....................................................................................................... 12
D. Définition du réseau marchois .................................................................................................. 12
E. La matrice O/D .......................................................................................................................... 16
1. Définition ............................................................................................................................... 16
2. Obtention de le matrice OD .................................................................................................. 16
3. Exemple ................................................................................................................................. 16
F. Les comptages ........................................................................................................................... 18
1. Les différentes méthodes de comptage ................................................................................ 18
2. Mesurer quoi ? ...................................................................................................................... 20
3. Pourquoi effectuer des comptages ? ................................................................................... 21
4. Sources d’erreurs .................................................................................................................. 22
G. Les modèles d'équilibre ............................................................................................................. 22
1. Modèles déterministes .......................................................................................................... 23
2. Paradoxe de Braess ............................................................................................................... 26
3. Equilibre stochastique ........................................................................................................... 28
V. Un peu de théorie des graphes ..................................................................................................... 29
A. Quelques définitions ................................................................................................................. 29
1. Définition d'un graphe ........................................................................................................... 29
2. Représentation graphique ..................................................................................................... 29
3. Relations entre sommets ...................................................................................................... 30
4. Matrice d'adjacence ou d'incidence sommets - sommets .................................................... 30
5. Chaîne, chemin, longueur ..................................................................................................... 31
6. Cycles et circuits .................................................................................................................... 31
3
7. Graphe eulérien ..................................................................................................................... 32
8. Graphe hamiltonien .............................................................................................................. 32
9. Graphe planaire ..................................................................................................................... 33
10. Graphe orienté .................................................................................................................. 33
B. Application dans le transport .................................................................................................... 33
1. Flot et flux : définition ........................................................................................................... 33
2. Algorithme de Dijkstra ........................................................................................................... 34
3. Algorithme de L. Deque ......................................................................................................... 37
4. Algorithme de Frank-Ewalf .................................................................................................... 37
5. Algorithme de coloration de Welsh et Powel ....................................................................... 38
VI. ATESAME ................................................................................................................................... 40
VII. Phase illustrative ....................................................................................................................... 43
VIII. Limites et conclusion ................................................................................................................. 44
IX. Remerciements ......................................................................................................................... 44
X. Sources .......................................................................................................................................... 45
XI. Annexes ..................................................................................................................................... 46

4
I. Introduction
Chaque année, les rhétoriciens du cours de préparation aux études supérieures de
mathématiques de l'Institut Saint-Laurent ont l’honneur de créer de A à Z un projet
mathématique. Cette année c’est avec beaucoup de motivation que nous avons
choisi d'exploiter le thème du transport. Nous avons décidé de modéliser le réseau
de transport de la ville de Marche. Par manque de temps, nous avons restreint ce
dernier autour de notre école. Nous désirons observer ce qu'il se passe sur les routes
lors de la sortie des classes.
Dans ce projet, vous trouverez notre modélisation la plus précise possible du réseau
de transport marchois, ainsi que les étapes intermédiaires pour y parvenir. Nous nous
devons de préciser que cette modélisation est loin d’être parfaite. En effet, tout
d’abord nous ne sommes encore que des élèves et non des chercheurs en transport.
Ensuite, le matériel mis à notre disposition ne nous permet pas une analyse sans
erreur.
Néanmoins, nous espérons, avec notre modélisation, arriver à des résultats
concluants afin d’améliorer le réseau marchois. Nous pourrons également observer
les conséquences d'une route bloquée ou de la construction d'une nouvelle rue sur le
trafic.
5
II. Déroulement du projet
Ce projet sur le transport n’est pas né de nulle part, il a été le fruit de longues heures
de travail, pendant, et en dehors, de nos heures de cours.
La première étape fut de choisir un thème: le transport. Ensuite, nous avons analysé
la théorie individuellement, grâce au cours d’université de notre professeur de math
Mr Joachim et de certains documents provenant d’internet. Par la suite, la classe a
été divisée en groupes de 3 ou 4 auxquels on a attribué les différentes parties du
réseau à analyser. Après une mise en commun, le réseau définitif à analyser était
déterminé. Nous nous sommes donc répartis en groupes pour approfondir la
matière. Les différents points de matière à analyser étaient :
• première partie de la théorie sur le transport
• deuxième partie de la théorie sur le transport
• le programme ATESAME
• la théorie des graphes
• le projet point de vue pratique, création des cartes, comptage
Ultérieurement, nous avons entrepris des recherches sur le point de matière qui nous était attribué afin de rédiger une première version du projet. Après une première relecture par notre professeur, nous avons amélioré cette version et finalisé certaines parties. Par la suite, nous avons débuté une période de comptages, nous nous sommes donc rendus dans la ville de Marche afin de récolter les données nécessaires au programme ATESAME. Avec les résultats d’ATESAME, nous avons commencé une étape d’illustration avec l’interprétation des résultats. La dernière étape du travail fut de le critiquer afin de ne rien laisser au hasard. Après la finalisation du travail écrit, nous nous sommes concentrés sur la partie illustrative du projet. Notre professeur a divisé la classe en trois groupes, le premier s'est occupé de la présentation orale du projet et les deux autres de la création des stands. En effet, nous avons créé 2 stands différents correspondant à 2 parties du projet. La première partie concerne la théorie des graphes et celle du transport. La deuxième concerne le programme ATESAME et le choix de réseaux.
6
III. Motivations
Ce projet nous a pris un certain temps de réalisation. Malgré tout, nous étions très
motivés. Tout d’abord pour des questions personnelles. Et puis ensuite en effectuant
des recherches, nous avons remarqué que le transport, pour des raisons
économiques, est un sujet très intéressant.
A. Motivations personnelles
Le transport, pour nous, est un sujet idéal. En effet, nous sommes tous des
futurs conducteurs. Il est donc très intéressant pour nous de connaitre un peu
plus le fonctionnement d’un réseau de transport. Ensuite avec la
connaissance du réseau marchois que nous aurons acquise, il nous sera peut-
être possible d’éviter les embouteillages aux heures de pointe. De plus, ce
sujet d’actualité concerne l’ensemble de la population. Qui ne s’est jamais
retrouvé coincé dans un embouteillage ?
Derrière ce projet, pour nous, il y a aussi une autre vision des mathématiques.
Nous pouvons faire des liens avec notre cours de math, tout en ayant un
problème concret applicable à la réalité.
Pour finir, c’est un défi personnel que chaque élève se lance à lui-même.
B. Motivations économiques
En effectuant nos recherches, nous avons remarqué que le transport se
retrouve souvent dans l’actualité. Que ce soit avec les "fameux" tunnels à
Bruxelles ou encore avec les "chassés croisés" de juillet et août. Il ne se passe
pas un jour sans que l’on entende parler de ce sujet.
Nous avons aussi remarqué qu'un budget assez important est alloué à ce
domaine. En effet, si notre projet avait été réalisé par des experts, un budget
total d'environ 10 900 euros (hors TVA) aurait dû être dépensé pour former
des compteurs, effectuer les comptages, analyser les résultats et rédiger un
rapport.
Et pourquoi ne pas rêver, la concrétisation de ce projet permettra peut-être
d’éviter des dépenses publiques. Les audits concernant ce sujet étant
extrêmement chers.
Mais surtout il nous éviterait de perdre du temps en voiture, et le temps c'est
de l'argent.
IV. Le transport
A. Le réseau
Un réseau est un ensemble formé de lignes ou d’éléments qui communiquent et
qui s’entrecroisent (dixit
1. Arcs et nœuds
Un réseau est un ensemble de nœuds représentant les croisements de rues(carrefours, rondsles rues. Tout cela est modélisé parcoût à chaque arc dfonction d’un paramètre comme l’émission de COkilomètres parcourus, le nombre de feux de saussi en fonction de facteurs plus difficilement mesurables tels que la beauté du paysage ou encore l'habitude d'une personne à passer par une route bien précise. Dans le cadre de notre projet c’est prendre
2. Centroïdes
Les centroïdes sont des po
les sorties et entrées du réseau
Il est important de
Rappel : les nœuds se situent sur des
et sont reliés par des
Un réseau est un ensemble formé de lignes ou d’éléments qui communiquent et
qui s’entrecroisent (dixit Larousse 2016).
rcs et nœuds
éseau est un ensemble de nœuds représentant les croisements de ruescarrefours, ronds-points…) reliés par des arcs orientés représentant quand à eux
Tout cela est modélisé par un graphe orienté. Il faut ensuite associer un aque arc dépendant de l’objectif du projet du travail. Il peut varier en
fonction d’un paramètre comme l’émission de CO2, l’essence consommée, les kilomètres parcourus, le nombre de feux de signalisations par arc, le temps maiaussi en fonction de facteurs plus difficilement mesurables tels que la beauté du paysage ou encore l'habitude d'une personne à passer par une route bien
Dans le cadre de notre projet c’est le temps de parcours que nous allons en compte.
Centroïdes
Les centroïdes sont des points émetteurs et attracteurs de notre réseau. Ce sont
les sorties et entrées du réseau mais aussi les parkings les plus importants
l est important de ne pas confondre nœuds et centroïdes
: les nœuds se situent sur des points qui correspondent
et sont reliés par des arcs. Les centroïdes, quand à eux, sont reliés à un nœud.
7
Un réseau est un ensemble formé de lignes ou d’éléments qui communiquent et
éseau est un ensemble de nœuds représentant les croisements de rues représentant quand à eux
ensuite associer un nt de l’objectif du projet du travail. Il peut varier en
, l’essence consommée, les ignalisations par arc, le temps mais
aussi en fonction de facteurs plus difficilement mesurables tels que la beauté du paysage ou encore l'habitude d'une personne à passer par une route bien
le temps de parcours que nous allons en compte.
ints émetteurs et attracteurs de notre réseau. Ce sont
mais aussi les parkings les plus importants.
ne pas confondre nœuds et centroïdes.
ent aux croissements
Les centroïdes, quand à eux, sont reliés à un nœud.

8
B. Fonction coût
Afin de calculer la fonction coût que nous allons utiliser dans notre travail, nous avons exploité la fonction de Davidson. Il est important de préciser que la fonction de Davidson n’est qu’une approximation de la réalité et non une science exacte. Celle-ci se présente sous la forme suivante :
�� = ��� �1 + ɛ��
� − ���
� �� est le temps de trajet effectif
C’est l’inconnue que l’on recherche
� ��� est le temps de trajet à vitesse libre
Il est trouvé grâce à la formule suivante : ��� = � ������ �� �′���������� �������� ��� ���é� ��� �′���
� �� est le flux sur l’arc
Nous avons cette donnée grâce aux comptages effectués
� � est la capacité de l’axe
Il est trouvé grâce à la formule suivante � = � ������ �� �′��� ∗ � ���� �� ������� ������ � ����� �′��� � �����
Nous pouvons observer que lorsque le nombre de voitures �� tend vers la capacité de notre axe � alors, notre fonction tend vers l’infini. Ceci est logique est correspond en réalité à une circulation bloquée.
� ɛ est le paramètre de sensibilité de congestion
Afin d'estimer le paramètre de sensibilité de congestion, nous devons effectuer une petite manipulation. Imaginons que pour un arc dont la capacité est de 150 voitures, le temps prit pour parcourir celui-ci avec 20 voitures l'utilisant est de 60 secondes. La formule de Davidson devient donc :
60 = � � �1 + ɛ20
150 − 20�
Si le temps pris pour parcourir cet arc avec 40 voitures est de 70 secondes, la formule de Davidson devient :
70 = � � �1 + ɛ40
150 − 40�
9
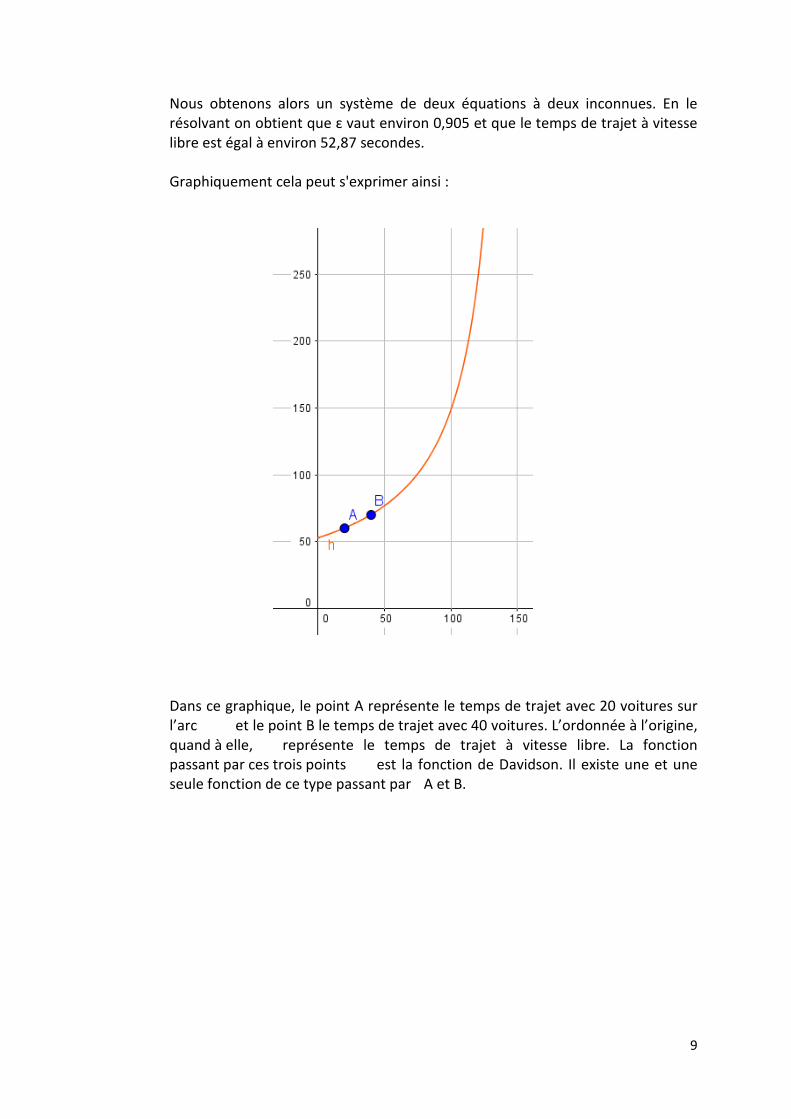
Nous obtenons alors un système de deux équations à deux inconnues. En le résolvant on obtient que ɛ vaut environ 0,905 et que le temps de trajet à vitesse libre est égal à environ 52,87 secondes. Graphiquement cela peut s'exprimer ainsi :
Dans ce graphique, le point A représente le temps de trajet avec 20 voitures sur l’arc et le point B le temps de trajet avec 40 voitures. L’ordonnée à l’origine, quand à elle, représente le temps de trajet à vitesse libre. La fonction passant par ces trois points est la fonction de Davidson. Il existe une et une seule fonction de ce type passant par A et B.
10
C. Modèle
Un modèle est une représentation simplifiée d’une réalité très complexe afin d’approcher la réalité d’un point de vue strictement mathématique (langage mathématique, représentation géométrique ou schématique, courbes ou surfaces,…).Il se base sur des hypothèses liées au cadre de travail et est ensuite construit grâce à des données bien précises. Il fait passer de la diversité à l’unité. On peut donc dire qu’un modèle repose sur des choix et que le rôle des mathématiques est important. Avant la réalisation d’un modèle, il faut tout d’abord se poser certaines questions telles que : « Quels résultats recherchons-nous ? », « Quelles données et ressources possédons-nous ? », « Quel modèle paraît le plus approprié ? ». Pour savoir quel modèle est le plus approprié à notre projet nous devons faire face à plusieurs compromis.
Compromis
Entre réalisme et efficacité Entre simplicité et déformation
Entre généralité et précision
Entre détails et données
1. Modèle dynamique ou statique
Nous devons identifier les caractéristiques temporelles pour faire un choix entre un modèle statique ou dynamique.
DYNAMIQUE STATIQUE
vidéo évolution temporelle ce qui est ponctuel
matrice O/D dynamique -> besoin de plus de données
régler des plans de feux
photo moyenne temporelle
ce qui est habituel matrice O/D statique
dimensionner une infrastructure
Le modèle dynamique est le plus réaliste, il comprenant tous les paramètres influençant le coût des arcs et incorpore par exemple la dimension temporelle. Ce n’est pas le modèle que nous choisirons ici car il n’est pas adapté à notre niveau.
Le modèle statique consiste à représenter de manière simplifiée les déplacements sur un secteur défini (ndlr : « ce qui correspond à notre réseau ») et durant une période donnée. Ce modèle ne prend pas en compte les fluctuations et interactions de la demande de déplacements par rapport à la distance. Ce modèle, en outre, ne prend pas en compte la dimension temporelle du problème.
11
2. Modèle macroscopique ou microscopique
Tableau de comparaison :
MACRO MICRO peu de détails zone étendue
grands flux peu de données
peu de temps de calcul niveau stratégique
beaucoup de détails zone réduite
véhicule par véhicule beaucoup de données
beaucoup de temps de calcul niveau opérationnel
Pour notre projet nous avons dû faire un compromis entre les deux, ce qui s’appelle un modèle mésoscopique.
3. Le modèle à 4 étapes
a) Génération
La génération permet de répondre à la question : Combien de déplacements sont émis et reçus par chaque zone ?
b) La distribution
La distribution est l’étape qui suit la génération. Elle consiste à prendre les volumes de déplacement émis et reçus par chaque zone issus de l’étape de génération, et à les répartir entre les différentes Origine-destination possibles. (Celles-ci seront vues plus en détail lors d'un point suivant de ce travail)
c) Le choix modal
Le choix modal est le choix du moyen de transport que nous allons analyser. Dans le cadre de ce projet nous utilisons la voiture.
d) Affectation
Pour effectuer une affectation sur un réseau routier, nous devons disposer d’une offre, le réseau routier, et d’une demande, la matrice origine destination des flux de véhicules.
12
4. L’utilisation d’un modèle
• Lors de la création d’un modèle, il faut toujours tenir compte des
hypothèses.
• Le modèle doit être calibré, c’est-à-dire ajuster les données pour que
les valeurs stimulées correspondent aux valeurs expérimentales. (Ne pas
utiliser toutes les données pour la calibration).
• Un modèle sans données est inutile.
• Un modèle ne peut pas être plus précis que les données.
• Un modèle sert à comparer des scénarios.
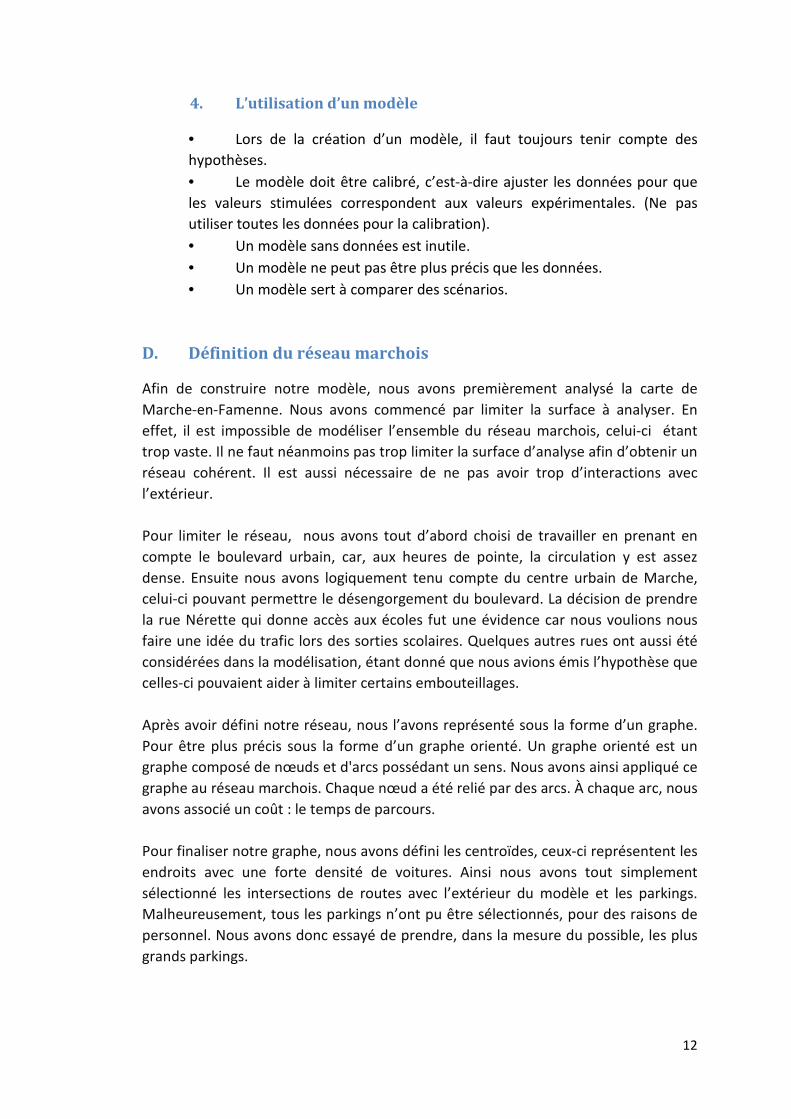
D. Définition du réseau marchois
Afin de construire notre modèle, nous avons premièrement analysé la carte de
Marche-en-Famenne. Nous avons commencé par limiter la surface à analyser. En
effet, il est impossible de modéliser l’ensemble du réseau marchois, celui-ci étant
trop vaste. Il ne faut néanmoins pas trop limiter la surface d’analyse afin d’obtenir un
réseau cohérent. Il est aussi nécessaire de ne pas avoir trop d’interactions avec
l’extérieur.
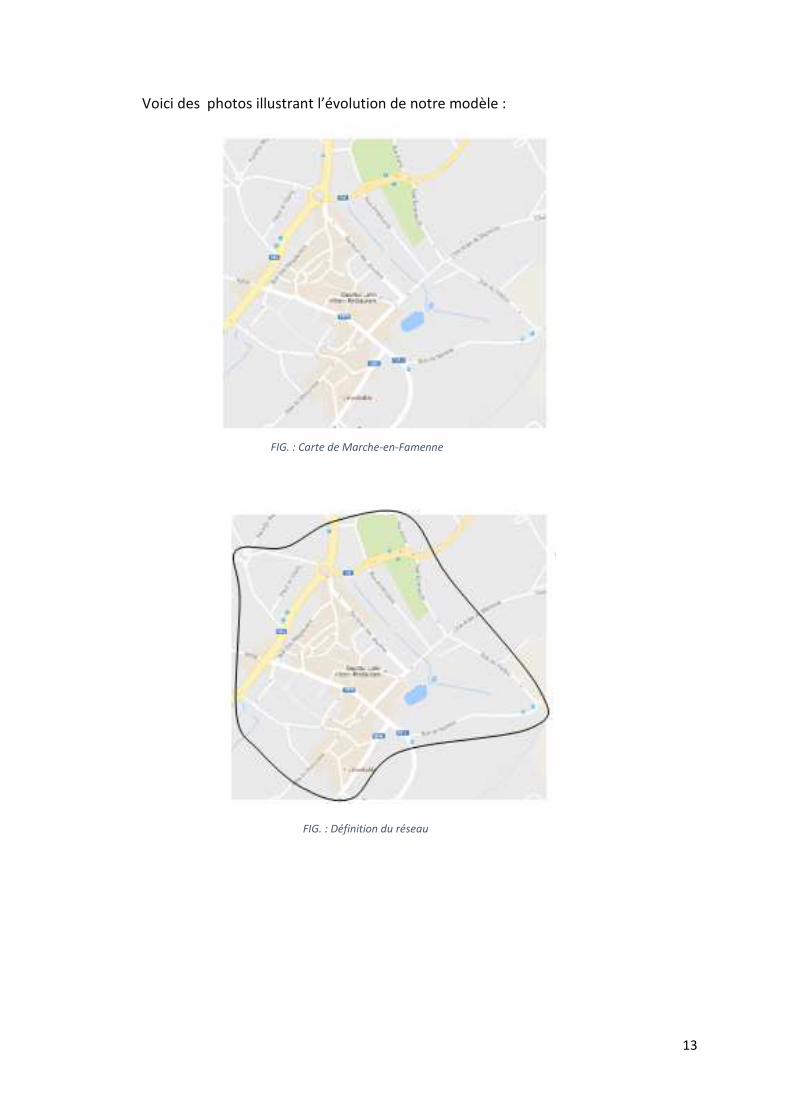
Pour limiter le réseau, nous avons tout d’abord choisi de travailler en prenant en
compte le boulevard urbain, car, aux heures de pointe, la circulation y est assez
dense. Ensuite nous avons logiquement tenu compte du centre urbain de Marche,
celui-ci pouvant permettre le désengorgement du boulevard. La décision de prendre
la rue Nérette qui donne accès aux écoles fut une évidence car nous voulions nous
faire une idée du trafic lors des sorties scolaires. Quelques autres rues ont aussi été
considérées dans la modélisation, étant donné que nous avions émis l’hypothèse que
celles-ci pouvaient aider à limiter certains embouteillages.
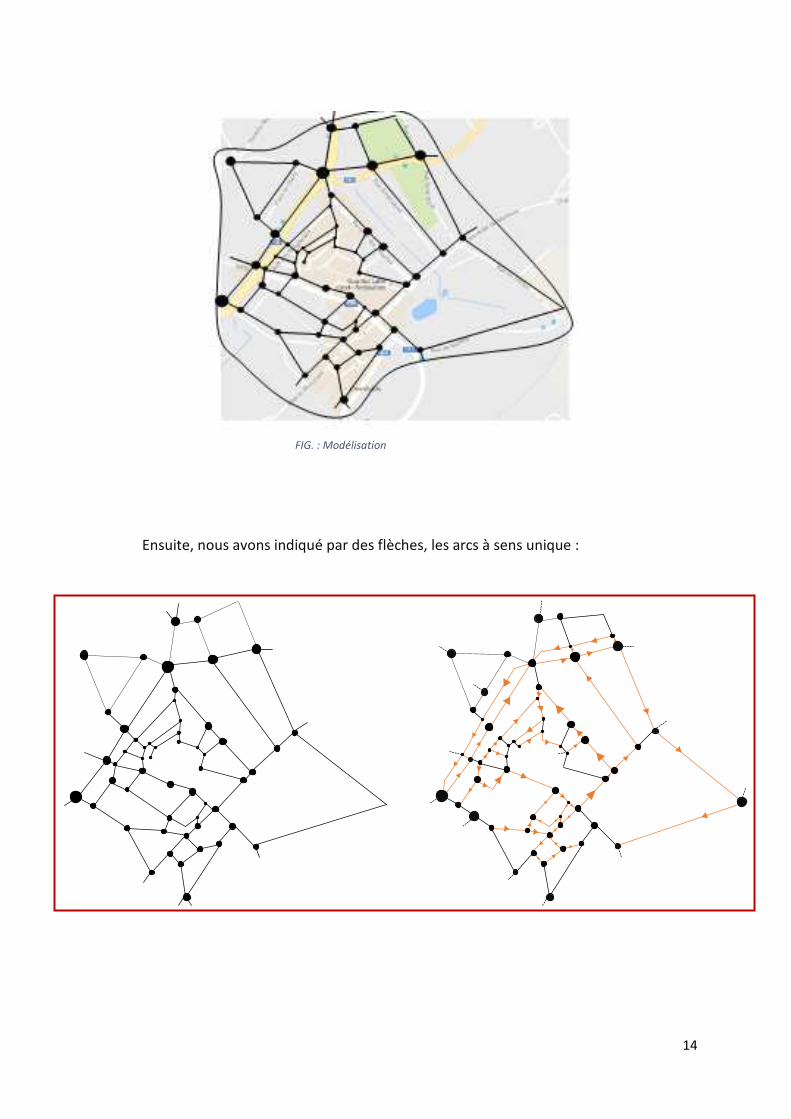
Après avoir défini notre réseau, nous l’avons représenté sous la forme d’un graphe.
Pour être plus précis sous la forme d’un graphe orienté. Un graphe orienté est un
graphe composé de nœuds et d'arcs possédant un sens. Nous avons ainsi appliqué ce
graphe au réseau marchois. Chaque nœud a été relié par des arcs. À chaque arc, nous
avons associé un coût : le temps de parcours.
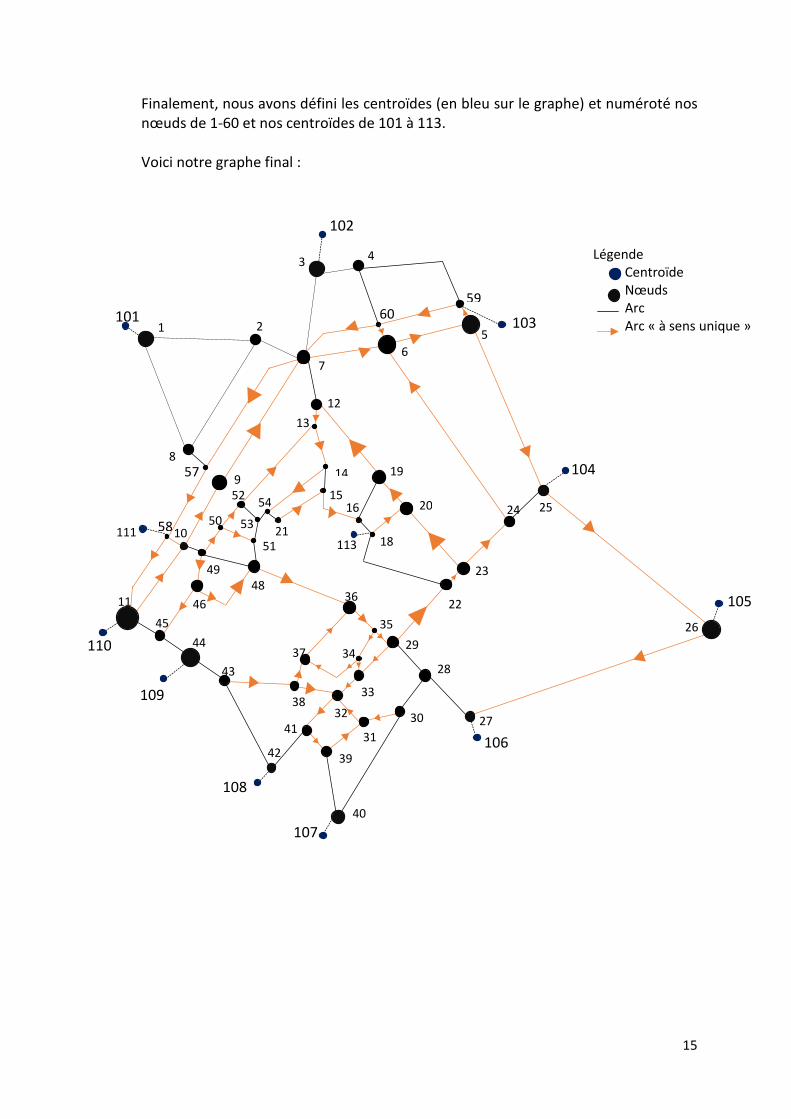
Pour finaliser notre graphe, nous avons défini les centroïdes, ceux-ci représentent les
endroits avec une forte densité de voitures. Ainsi nous avons tout simplement
sélectionné les intersections de routes avec l’extérieur du modèle et les parkings.
Malheureusement, tous les parkings n’ont pu être sélectionnés, pour des raisons de
personnel. Nous avons donc essayé de prendre, dans la mesure du possible, les plus
grands parkings.
13
Voici des photos illustrant l’évolution de notre modèle :
FIG. : Carte de Marche-en-Famenne
FIG. : Définition du réseau
14
Ensuite, nous avons indiqué par des flèches, les arcs à sens unique :
FIG. : Modélisation
15
Finalement, nous avons défini les centroïdes (en bleu sur le graphe) et numéroté nos nœuds de 1-60 et nos centroïdes de 101 à 113. Voici notre graphe final :
Légende Centroïde Nœuds Arc Arc « à sens unique »
57
58
60 1 2
3 4
5 6
7
8
9
10
11
12 13
14 15
16
113 18
19
20
22
23
24 25
26
27
28
29
30 31
32 33
34
35
36
37
38
39
40
41
42
43
44 45
46
111
48 49
50
51
52 54
53 21
101
110
109
102
103
104
105
106
107
108
59
16
E. La matrice O/D
1. Définition
Une matrice origine-destination (matrice OD) est un tableau comportant i lignes et j colonnes. Les lignes correspondant aux zones « origines » et les colonnes aux zones « destinations ». Pendant un intervalle de temps bien déterminé, le nombre de déplacements de la zone i vers la zone j est appelé l'élément Tij. La matrice se divise également en deux réseaux : l’intra-urbain qui correspond au centre de la ville et l’extra-urbain qui correspond aux périphéries. La matrices OD fait partie du système offre et demande. L’offre correspond au réseau et la demande correspond à cette matrice. Il y a plusieurs types de demande : les demandes induites (on sait où l'on va, ce que l’on va faire et à quel moment) et les demandes plus complexes qui sont variable.
2. Obtention de le matrice OD
Nous avons obtenu la matrice grâce aux comptages que nous avons effectués les mardi 7, 14 et 21 février 2017 de 15h30 à 17h00. Nous avons compté le nombre de voitures partant et arrivant à chaque centroïde. Ensuite, nous avons créé notre matrice OD et l'avons inséré dans un programme informatique nommé ATESAME dont nous vous parlerons plus en détail plus loin dans ce travail. Ce programme nous a réparti les voitures sur notre réseau. Nous avons comparé ces résultats avec les comptages que nous avions réalisés sur les différents arcs afin de modifier notre matrice OD. Nous avons répété ces étapes jusqu'à ce que la matrice OD soit la plus proche de la réalité. Il existe d’autres moyens pour obtenir la matrice. On peut faire des enquêtes ou interroger les gens en arrêtant les voitures mais ces deux moyens sont très couteux en temps et les gens ne prennent pas toujours la peine de répondre aux questions posées ni même de s’arrêter.
3. Exemple
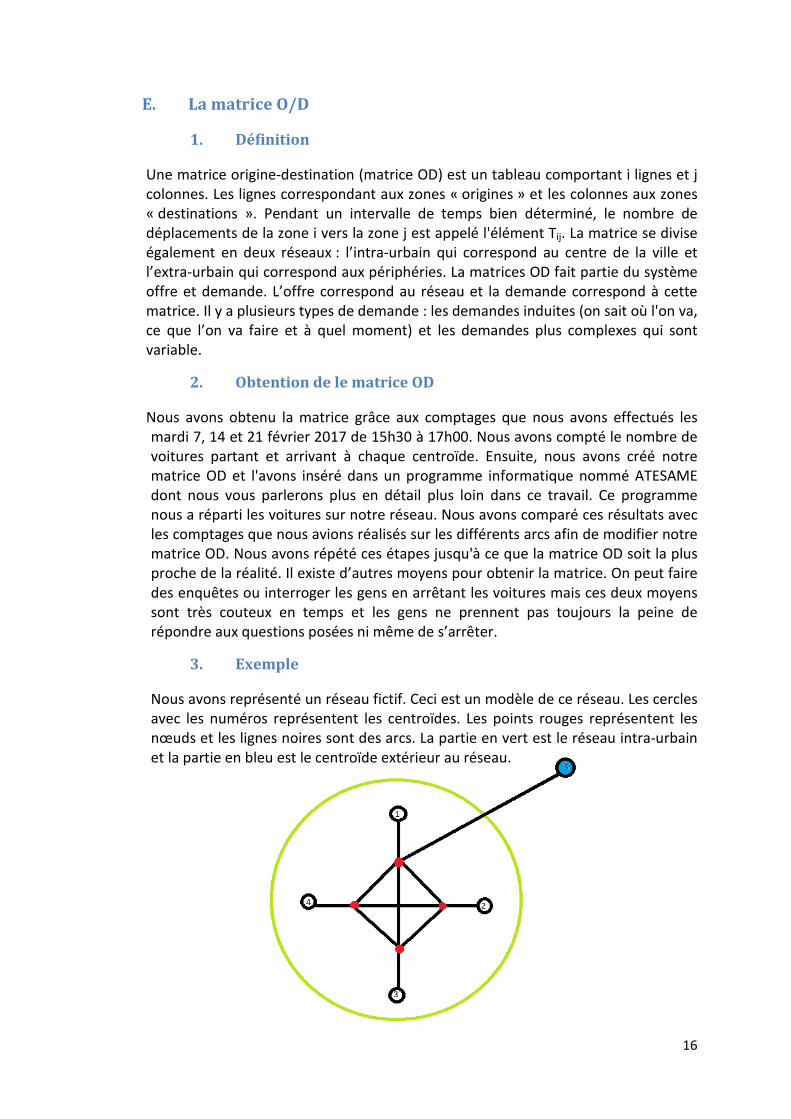
Nous avons représenté un réseau fictif. Ceci est un modèle de ce réseau. Les cercles avec les numéros représentent les centroïdes. Les points rouges représentent les nœuds et les lignes noires sont des arcs. La partie en vert est le réseau intra-urbain et la partie en bleu est le centroïde extérieur au réseau.
17
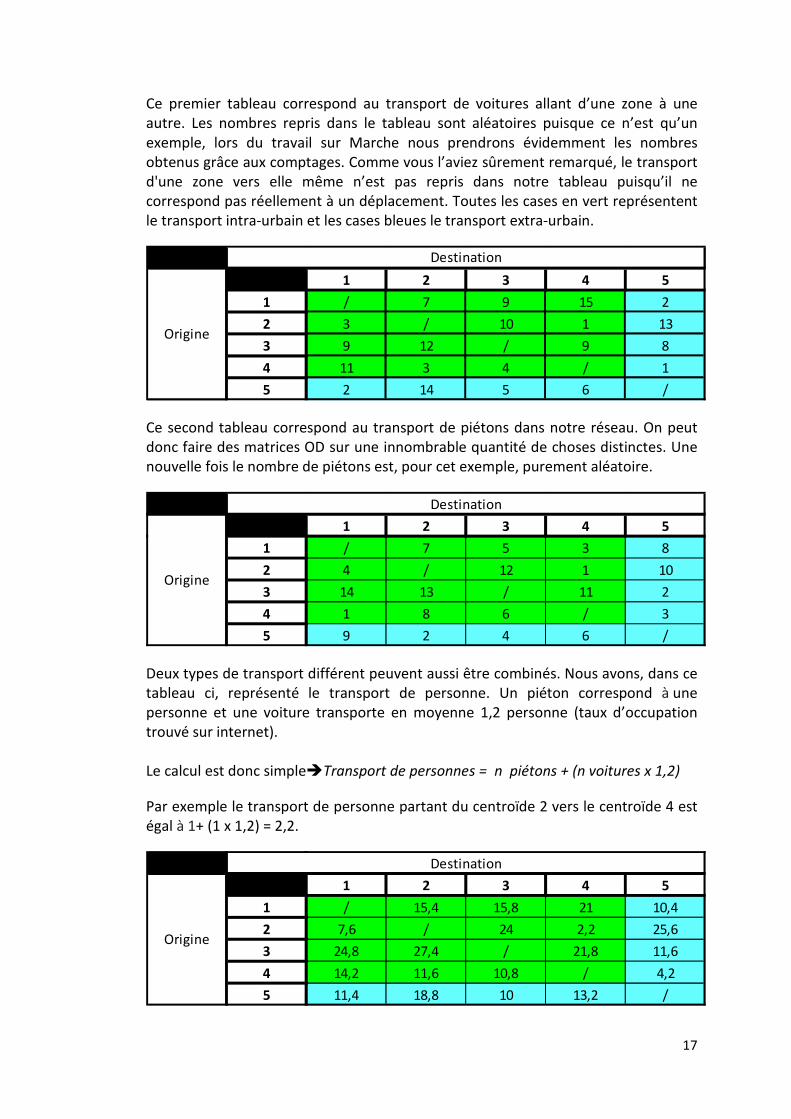
Ce premier tableau correspond au transport de voitures allant d’une zone à une autre. Les nombres repris dans le tableau sont aléatoires puisque ce n’est qu’un exemple, lors du travail sur Marche nous prendrons évidemment les nombres obtenus grâce aux comptages. Comme vous l’aviez sûrement remarqué, le transport d'une zone vers elle même n’est pas repris dans notre tableau puisqu’il ne correspond pas réellement à un déplacement. Toutes les cases en vert représentent le transport intra-urbain et les cases bleues le transport extra-urbain.
Ce second tableau correspond au transport de piétons dans notre réseau. On peut donc faire des matrices OD sur une innombrable quantité de choses distinctes. Une nouvelle fois le nombre de piétons est, pour cet exemple, purement aléatoire.
Deux types de transport différent peuvent aussi être combinés. Nous avons, dans ce tableau ci, représenté le transport de personne. Un piéton correspond à une personne et une voiture transporte en moyenne 1,2 personne (taux d’occupation trouvé sur internet). Le calcul est donc simple�Transport de personnes = n piétons + (n voitures x 1,2)
Par exemple le transport de personne partant du centroïde 2 vers le centroïde 4 est égal à 1+ (1 x 1,2) = 2,2.
1 2 3 4 5
1 / 7 9 15 2
2 3 / 10 1 13
3 9 12 / 9 8
4 11 3 4 / 1
5 2 14 5 6 /
Destination
Origine
1 2 3 4 5
1 / 7 5 3 8
2 4 / 12 1 10
3 14 13 / 11 2
4 1 8 6 / 3
5 9 2 4 6 /
Destination
Origine
1 2 3 4 5
1 / 15,4 15,8 21 10,4
2 7,6 / 24 2,2 25,6
3 24,8 27,4 / 21,8 11,6
4 14,2 11,6 10,8 / 4,2
5 11,4 18,8 10 13,2 /
Destination
Origine
18
Dans notre travail nous avons considéré les bus, les camions, les motos et les scooters comme des voitures car il y en avait très peu qui passaient sur notre réseau durant les heures où nous avons réalisé nos comptages.
F. Les comptages
Le comptage est une étape obligatoire à la mise en place de notre projet car il est
nécessaire à la constitution de données. C'est un outil indispensable pour gérer la
mobilité à l'échelon régional.
Nous allons, pour notre projet, nous concentrer uniquement sur le comptage des
véhicules automobiles.
1. Les différentes méthodes de comptage
a) Le comptage manuel
Il ne demande pas d’investissement matériel mais un grand investissement de
personnel. Plus la zone du réseau est grande, plus le nombre de personnes
nécessaires pour la couvrir augmente. Il faut donc faire appel à de nombreux
bénévoles. Dans ce type de comptages, il faut bien briefer les personnes
« envoyées sur le terrain ». Il est avantageux pour les données telles qu’un
comptage « origine-destination ». Il s’effectue sur une durée de temps
limitée.
b) Les compteurs électromagnétiques
C’est un fil de cuivre inséré dans la route qui forme une boucle de 2m de long
sur 1,5m de large et lorsqu’une voiture passe dessus, cela modifie le champ
magnétique de la boucle. Cela provoque un signal électrique sur le détecteur
associé à la boucle. La boucle permet d’avoir des données sur la vitesse de la
voiture (grâce au temps qu’elle est restée sur la boucle) mais lorsqu’on a deux
boucles qui se suivent ces données sont plus précises. L’inconvénient est qu’il
faut régulièrement réinstaller les boucles car la profondeur de leur
implantation joue sur la détection des données.
c) Les compteurs pneumatiques
Ce sont des tubes en caoutchouc placés perpendiculairement au sens de la
route. Lorsqu’une voiture passe dessus, une variation de pression d’air a lieu
dans les tubes et est envoyée jusqu’aux extrémités de ce tube c'est-à-dire
jusqu’aux détecteurs. Ils mesurent le sens de la circulation, la vitesse et
différencient les différents types de véhicules. Pour mesurer la vitesse, on
19
place deux tubes parallèles à une distance connue. Les détecteurs
déterminent la vitesse grâce au temps mis par le véhicule pour passer du tube
1 au tube 2, ainsi qu'à la distance entre ces deux tubes.
d) Les radars
Il y a un effet Doppler entre le radar et le véhicule en mouvement, ce qui
permet de calculer : la vitesse, la direction de mouvement et la longueur du
véhicule.
Un effet Doppler désigne le décalage de fréquence d’une onde observée
entre les mesures à l'émission et à la réception, lorsque la distance entre
l'émetteur et le récepteur varie au cours du temps.
e) Les lasers
Ils utilisent le même principe que les radars (l’effet Doppler). La différence de
fréquences entre l’onde émise et l’onde réfléchie permet de déterminer la
vitesse du véhicule. L’avantage est qu’ils permettent de calculer la vitesse à
grande distance du véhicule. L’inconvénient est que la surface de réflexion
doit être perpendiculaire au faisceau.
f) Les vidéos
Elles permettent de traiter un important volume de données. Le principe est
de définir deux capteurs virtuels sur l’image de la chaussée et aussi de définir
la distance entre ces deux capteurs afin de mesurer les données qui nous sont
nécessaires. Le problème est que certains facteurs comme des ombres ou du
brouillard peuvent venir endommager la précision des comptages.
Nous avons décidé de privilégier le comptage manuel pour diverses raisons. La
première est un souci d'économie. En effet nous ne disposons pas de fonds pour
acheter divers matériaux afin d'effectuer nos comptages. De plus, même si cette
méthode nécessite un bon nombre de bénévoles, elle nous est avantageuse afin de
connaitre les données « origine-destination ». Enfin, ce type de comptage nous
convient très bien vu que nous allons analyser le réseau sur une durée de temps
limitée. Pour rappel, nous avons limité nos comptages entre 15h30 à 17h00, c'est-à-
dire à la sortie des classes.
20
2. Mesurer quoi ?
a) Origine-destination
Ce comptage permet de mesurer les trafics entrant et sortant, et de
distinguer ainsi le trafic de « transit » du trafic local. Ce comptage peut être
effectué selon 3 différentes techniques. En fonction des techniques utilisées,
les données seront plus ou moins précises
• Interview : Afin d’obtenir des informations comme le lieu de départ,
d’arrivée, la fréquence du trajet, il faut interroger les automobilistes.
• Évaluation du nombre de véhicules et de leur itinéraire pour obtenir
leur point d’entrée et de sortie d’un réseau déterminé: Soit par la
lecture automatisée des plaques minéralogiques, cette méthode
utilise une technique de reconnaissance pour lire les plaques
d’immatriculation de véhicules. Soit par la pose de « papillon » au
point de couleurs différentes d’entrée dont la couleur sera relevée à
chaque poste de sortie.
• Évaluation du trafic de transit en connaissant les trafics au cordon et le
trafic d’échange. Le trafic au cordon est le trafic situé au bord de la
zone d’étude. Celui-ci doit être donné. Par contre le trafic de transit
peut être déterminé par des données socio-économiques (nombre
d'habitants, …) ou de stationnement (nombre de places,…). En
connaissant ces 2 « trafics », on peut définir le trafic de transit avec
une formule :
�%&'( �%&)*(� = �%&'( &+ ,%-,) − �%&'( -′éℎ&)/02
Dans notre projet, nous avons tenté d'utilisé la technique de l’interview. En
effet celle-ci semblait la plus aisée à utiliser tout en nous donnant malgré tout
des informations assez précises. Malheureusement, les voitures en voulaient
pas s'arrêter et nous avons dû approximer notre matrice OD à l'aide des
comptages comme expliqué précédemment dans ce travail.
b) Le débit
Un comptage doit être effectué pour connaître le nombre de voitures par
unité de temps ; c’est-à-dire le débit. Pour effectuer ce comptage, il est
nécessaire de connaître le lieu et le sens de circulation du flux.
21
c) La vitesse
Le but n’est pas de connaitre la vitesse de chaque voiture, en effet nous
n’avons pas les moyens de posséder des appareils nous le permettant. Mais
nous pouvons néanmoins, à l’aide des panneaux de signalisation par exemple,
connaitre la vitesse maximale autorisée.
d) La longueur arc
Durant nos heures de cours, nous sommes partis mesurer
précisément les routes à l'aide d'odomètres prêtés par la
commune de Marche.
e) La capacité d’un arc et la sensibilité de congestion
Les étapes pour les calculer ont déjà été abordées précédemment dans ce
travail.
Toutes ces données vont être utilisées pour la modélisation de notre réseau.
Elles seront encodées dans le logiciel ATESAME qui nous permettra travailler
sur différents scénarios possibles.
3. Pourquoi effectuer des comptages ?
Les comptages sont réalisés très régulièrement à l’occasion de campagnes sur
le réseau routier régional. Une fois les comptages réalisés, les données sont
récoltées. Par la suite, on effectue une étude de mobilité spécifique sur le
dossier qui nous est adressé.
Les résultats de ces études figurent souvent dans des brochures ou des cartes.
Les compteurs placés à des postes spécifiques, sur les autoroutes et les routes
régionales fort fréquentées, permettent entre autre, de déterminer le trafic
journalier moyen, d’avoir un aperçu de la circulation plus ou moins dense.
Les statistiques réalisées permettent d’effectuer un suivi systématique de l’évolution des charges de trafic sur le réseau routier. En règle générale, il s'agit de toutes les catégories de véhicules confondues. Nous, nous allons nous concentrer plus spécifiquement sur les voitures. Ici les résultats trouvés seront aussi utilisés pour permettre d'observer l'utilité d'une route ou les impacts d'une rue bloquée sur le réseau. En conclusion les comptages nous permettent de récolter un ensemble de données qui peuvent nous servir dans certains cas d’études, comme ici, l'envie de rendre la circulation plus fluide.
22
4. Sources d’erreurs
Notre comptage étant réalisé par des bénévoles et nous-mêmes, nous ne
pouvons pas dire que celui-ci sera parfaitement correct. En effet, nous ne
travaillons pas avec des machines et l’erreur est humaine. Nous nous
accordons donc une marge d’erreur. De plus, rien ne nous assure qu’il n’y
aura pas un trafic plus faible ou plus élevé que d’habitude lorsque nous
effectuerons les comptages. Enfin, l’encodage des données recueillies est un
travail long et pénible. Une erreur de frappe est vite arrivée !
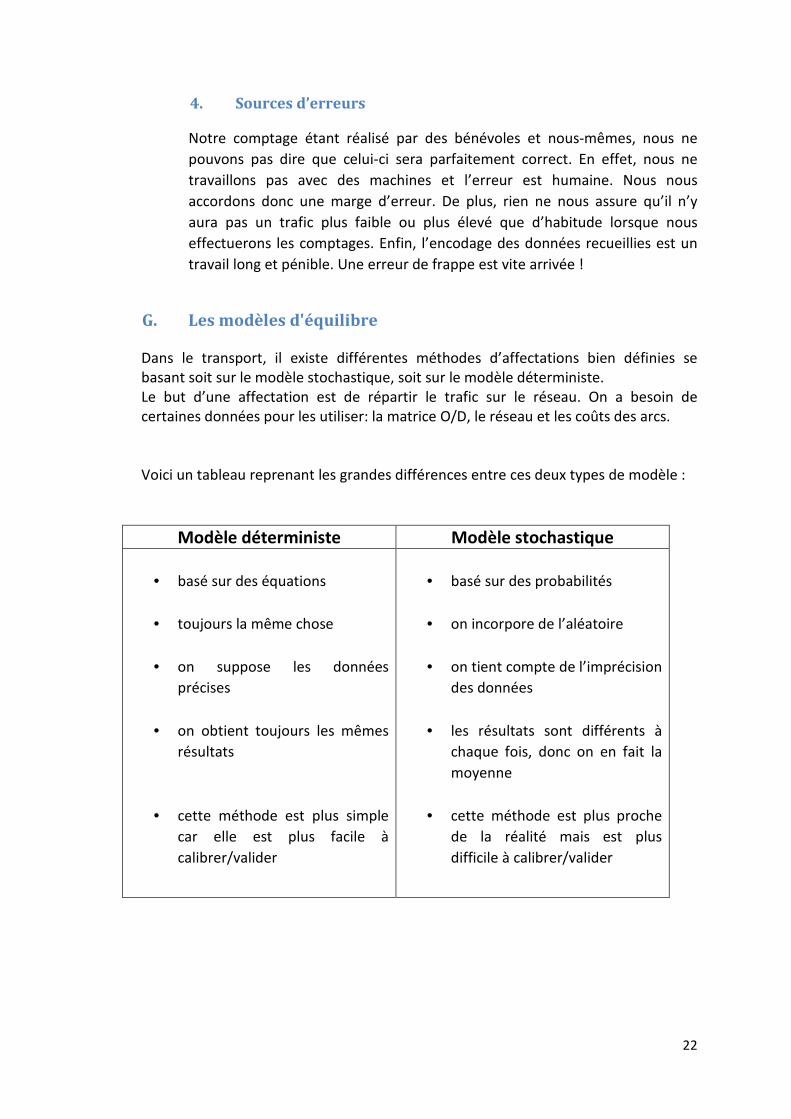
G. Les modèles d'équilibre
Dans le transport, il existe différentes méthodes d’affectations bien définies se basant soit sur le modèle stochastique, soit sur le modèle déterministe. Le but d’une affectation est de répartir le trafic sur le réseau. On a besoin de certaines données pour les utiliser: la matrice O/D, le réseau et les coûts des arcs. Voici un tableau reprenant les grandes différences entre ces deux types de modèle :
Modèle déterministe Modèle stochastique
• basé sur des équations
• toujours la même chose
• on suppose les données
précises
• on obtient toujours les mêmes
résultats
• cette méthode est plus simple
car elle est plus facile à
calibrer/valider
• basé sur des probabilités
• on incorpore de l’aléatoire
• on tient compte de l’imprécision
des données
• les résultats sont différents à
chaque fois, donc on en fait la
moyenne
• cette méthode est plus proche
de la réalité mais est plus
difficile à calibrer/valider
23
1. Modèles déterministes
Ces modèles sont basés sur deux hypothèses : 1) Chaque conducteur a une connaissance parfaite du réseau.
2) Tous les conducteurs ont le même comportement dans les mêmes situations.
a) Equilibre utilisateur
L’équilibre utilisateur est une situation dans laquelle aucun utilisateur ne peut minimiser son temps de trajet en décidant (unilatéralement) de modifier son itinéraire, chaque utilisateur a trouvé son itinéraire optimal. Dans ce cas, les souhaits et les choix de l'utilisateur ne sont pas pris en compte. On peut caractériser cet équilibre de descriptif et d’égoïste. Cette méthode utilise l’algorithme de Franck-Ewalf pour calculer les plus courts chemins et applique la méthode tout ou rien plusieurs fois d’affilée en recalculant les plus courts chemins par résolution d’un problème d’optimisation (minimisation).
Principe de Wardrop :
Les coûts de parcours pour tous les itinéraires réellement utilisés dans le réseau sont plus faibles ou égaux à ceux qui seraient encourus par un véhicule unique empruntant un itinéraire non utilisé. En effet, dans le cas d’un équilibre utilisateur, chaque utilisateur a trouvé son itinéraire optimal et il ne peut pas améliorer son temps de parcours en changeant son itinéraire. Dans ce cas, on parle aussi d'équilibre Wardropien.
Nous pouvons déduire que pour chaque paire origine-destination : - le temps de trajet (t) est égal sur chacun des chemins utilisés (t=t')
- le temps de trajet (t) est plus grand sur tous les chemins inutilisés (t ≥ t’)
Notre équilibre utilisateur peut donc se réécrire en termes de programmation mathématique. Trouver un équilibre est équivalent à résoudre un problème de minimisation. Pour le réécrire, nous utiliserons la transformation de Beckmann. Comme expliqué précédemment, il sera résolu à l'aide de l'algorithme de Franck-Ewalf. Nous allons à présent énoncer ce problème de minimisation sans rentrer dans sa résolution.

24
Pour cela, commençons par définir quelques notations utiles :
( , )q i j = flux entre i et j
ax = flux sur l'arc a
at = temps de parcours sur l'arc a ( , )i j
kf = flux sur le chemin k entre i et j ( , )i jkc = temps de parcours sur le chemin k entre i et j ( , ),i j
a kδ = indicatrice (=1 si a k∈ , =0 sinon)
Définissons ensuite deux fonctions, la fonction temps et la fonction flux.
Fonction temps :
( , ) ( , ),.i j i j
k a a ka
c t δ=∑ (temps total = somme des temps sur les arcs empruntés)
Exemple : supposons que l'utilisateur emprunte l’arc &1, &2 puis &3. On dira que ces 3 arcs appartiennent au chemin k. Pour &1, &2 et &3 , 4 vaut 1 car a ∈ k mais pour & , 4 vaut 0 car a ∉ k. Pour trouver le temps du chemin k, nous allons additionner le temps des arcs &1, &2 et &3 sans utiliser le temps de l'arc & .
Fonction flux : ( , ) ( , ),
( , )
.i j i ja k a k
i j k
x f δ=∑∑
C'est-à-dire que le flux sur un arc est égal à la somme des flux sur les chemins reliant chacune des paires OD passant par cet arc.
Notre problème de minimisation revient à :
Contrairement aux contraintes, la fonction objectif n'est pas "explicable" en termes concret. La première contrainte est la conservation du flux. La deuxième vient du fait qu'un flux doit toujours être positif. La dernière indique que le flux sur un arc est formé des flux des chemins passant par là.
25
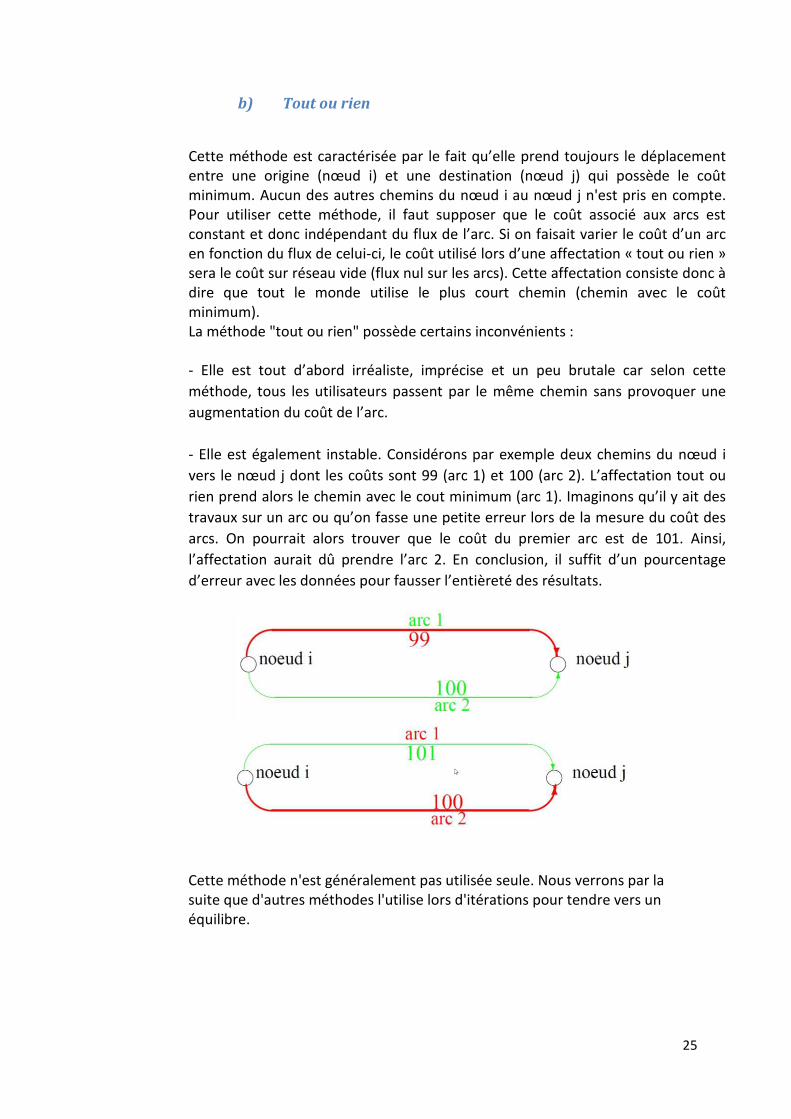
b) Tout ou rien
Cette méthode est caractérisée par le fait qu’elle prend toujours le déplacement entre une origine (nœud i) et une destination (nœud j) qui possède le coût minimum. Aucun des autres chemins du nœud i au nœud j n'est pris en compte. Pour utiliser cette méthode, il faut supposer que le coût associé aux arcs est constant et donc indépendant du flux de l’arc. Si on faisait varier le coût d’un arc en fonction du flux de celui-ci, le coût utilisé lors d’une affectation « tout ou rien » sera le coût sur réseau vide (flux nul sur les arcs). Cette affectation consiste donc à dire que tout le monde utilise le plus court chemin (chemin avec le coût minimum). La méthode "tout ou rien" possède certains inconvénients : - Elle est tout d’abord irréaliste, imprécise et un peu brutale car selon cette
méthode, tous les utilisateurs passent par le même chemin sans provoquer une
augmentation du coût de l’arc.
- Elle est également instable. Considérons par exemple deux chemins du nœud i
vers le nœud j dont les coûts sont 99 (arc 1) et 100 (arc 2). L’affectation tout ou
rien prend alors le chemin avec le cout minimum (arc 1). Imaginons qu’il y ait des
travaux sur un arc ou qu’on fasse une petite erreur lors de la mesure du coût des
arcs. On pourrait alors trouver que le coût du premier arc est de 101. Ainsi,
l’affectation aurait dû prendre l’arc 2. En conclusion, il suffit d’un pourcentage
d’erreur avec les données pour fausser l’entièreté des résultats.
Cette méthode n'est généralement pas utilisée seule. Nous verrons par la suite que d'autres méthodes l'utilise lors d'itérations pour tendre vers un équilibre.
26
c) Equilibre système
L’équilibre système est une situation de base par rapport à laquelle on peut comparer différents scénarios, une situation dans laquelle le temps total des déplacements ne peut être diminué par un quelconque changement d’itinéraire. Cet équilibre représente un équilibre normatif (suivant des règles, des normes) et admet que les conducteurs sur le réseau ont une vision altruiste. L’équilibre système est une situation utopique car les différents usagers du réseau vont privilégier le temps de parcours total par rapport à leur propre temps de parcours, ce qui n’est pas le cas sur nos routes. En effet, chaque utilisateur tente de minimiser son temps de parcours sur la route même si il le fait au détriment des autres utilisateurs du réseau. Tout comme l’équilibre utilisateur, l’équilibre système utilise l’algorithme de Franck-Ewalf pour calculer les plus courts chemins. Dans la réalité, on tente de faire tendre l’équilibre utilisateur vers l’équilibre système qui est la situation idéale sur le réseau car le temps de parcours global de tous les utilisateurs est minimisé. La différence entre ces deux équilibres peut s’illustrer par le paradoxe de Braess.
2. Paradoxe de Braess
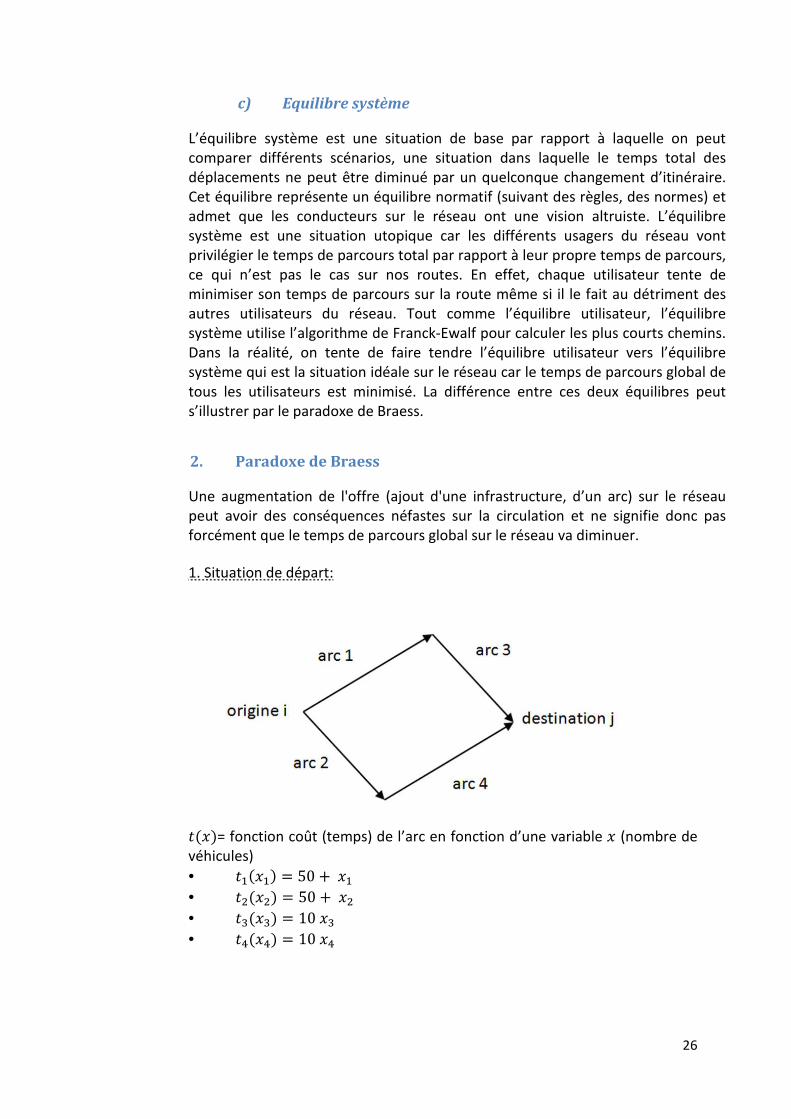
Une augmentation de l'offre (ajout d'une infrastructure, d’un arc) sur le réseau peut avoir des conséquences néfastes sur la circulation et ne signifie donc pas forcément que le temps de parcours global sur le réseau va diminuer.
1. Situation de départ:
�(�)= fonction coût (temps) de l’arc en fonction d’une variable � (nombre de véhicules)
• � (� ) = 50 + �
• �1(�1) = 50 + �1
• �2(�2) = 10 �2
• �3(�3) = 10 �3
27
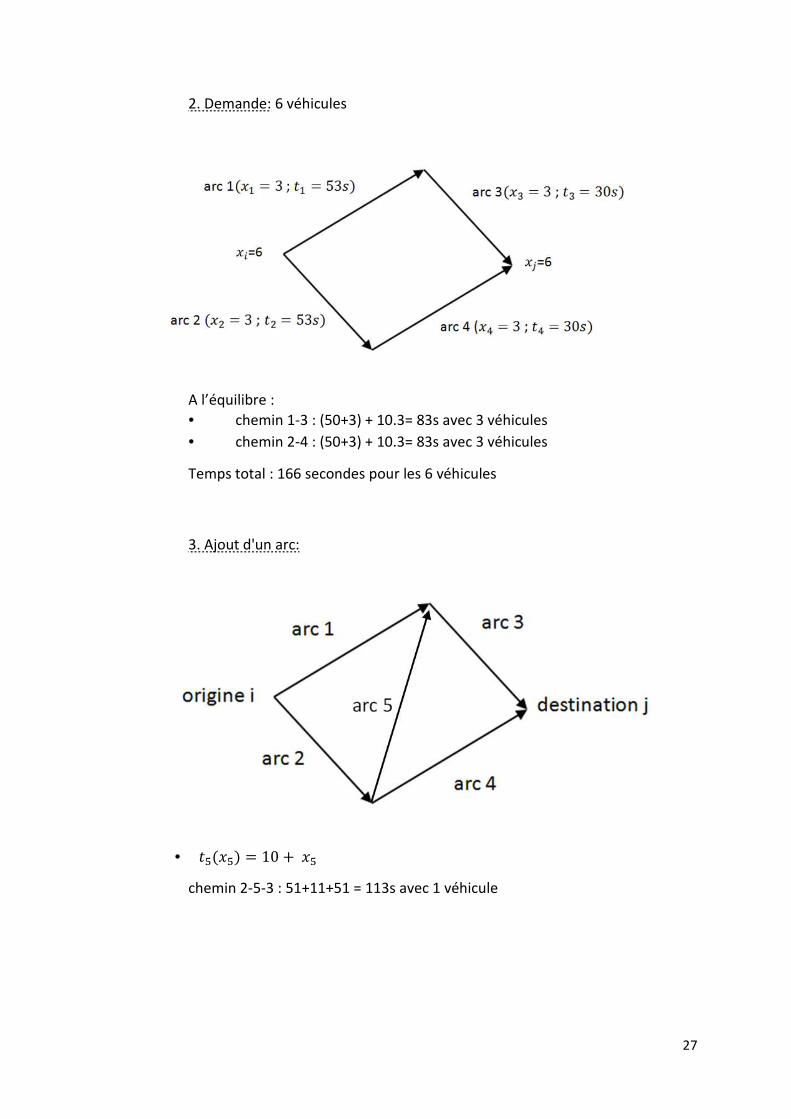
2. Demande: 6 véhicules
A l’équilibre :
• chemin 1-3 : (50+3) + 10.3= 83s avec 3 véhicules
• chemin 2-4 : (50+3) + 10.3= 83s avec 3 véhicules
Temps total : 166 secondes pour les 6 véhicules
3. Ajout d'un arc:
• �9(�9) = 10 + �9
chemin 2-5-3 : 51+11+51 = 113s avec 1 véhicule
4. Conclusion :
Pour une demande de 6 véhiculesa. Si aucun utilisateur n’utilise le chemin 2
b. Si un utilisateur utilise le chemin
Nb véhicules
Temps
Le temps total du trajet est de 177s et est supérieur au temps de parcours
initial malgré l’ajout d’un arc.
c. Si deux utilisateurs
Nb véhicules
Temps
Le temps total du trajet est de 178s et est supérieur au temps de parcours initial malgré l’ajout d’un arc.
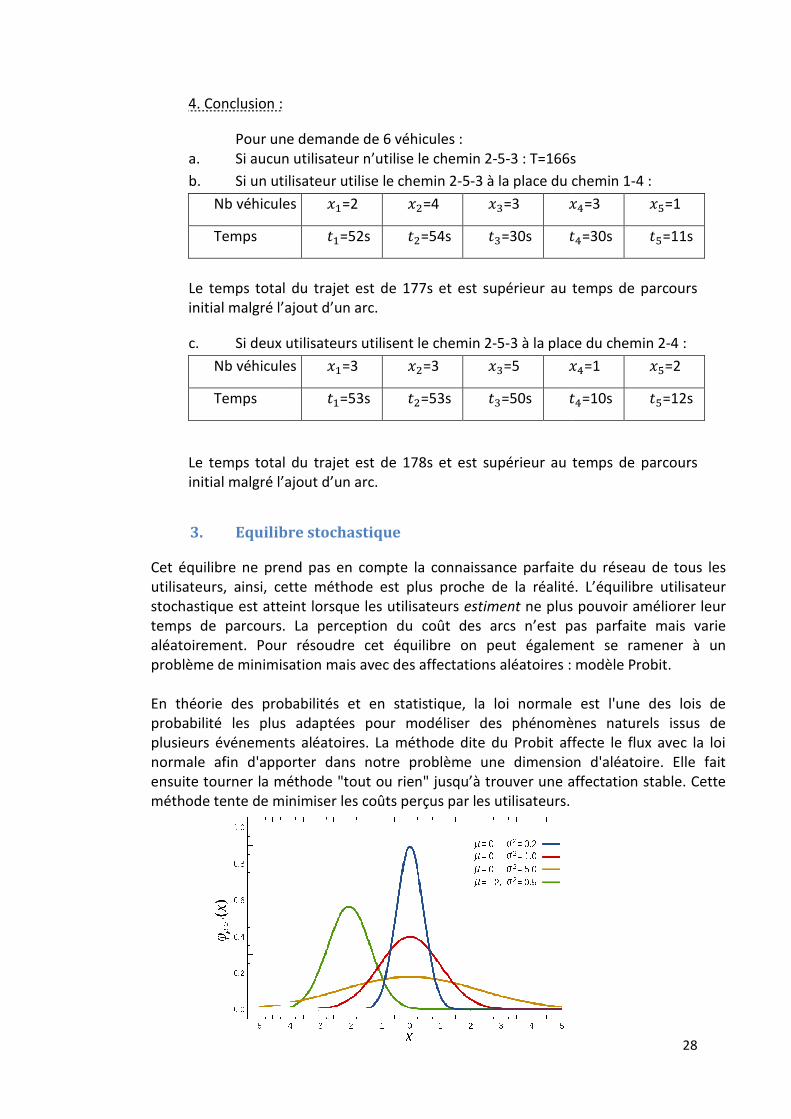
3. Equilibre stochastique
Cet équilibre ne prend pas en compte la connaissance parfaite du réseau de tous les utilisateurs, ainsi, cette méthode est plus proche de la réalité. L’équilibre utilisateur stochastique est atteint lorsque les utilisateurs temps de parcours. aléatoirement. Pour résoudre cet équilibre on peut également se ramener à un problème de minimisation mais a En théorie des probabilités et en statistique, la probabilité les plus adaptées pour modéliser des phénomènes naturels issus de plusieurs événements aléatoires.normale afin d'apporter dans notre problème une dimension d'aléatoireensuite tourner la méthode "tout ou rien" jusqu’à trouver une affectation stable. Cette méthode tente de minimiser les coûts perçus par les utilis
Pour une demande de 6 véhicules : Si aucun utilisateur n’utilise le chemin 2-5-3 : T=166s
Si un utilisateur utilise le chemin 2-5-3 à la place du chemin 1
cules � =2 �1=4 �2=3 �� =52s �1=54s �2=30s �
Le temps total du trajet est de 177s et est supérieur au temps de parcours initial malgré l’ajout d’un arc.
Si deux utilisateurs utilisent le chemin 2-5-3 à la place du chemin 2
véhicules � =3 �1=3 �2=5 �� =53s �1=53s �2=50s �
Le temps total du trajet est de 178s et est supérieur au temps de parcours initial malgré l’ajout d’un arc.
Equilibre stochastique
Cet équilibre ne prend pas en compte la connaissance parfaite du réseau de tous les , ainsi, cette méthode est plus proche de la réalité. L’équilibre utilisateur
stochastique est atteint lorsque les utilisateurs estiment ne plus pouvoir améliorer leur temps de parcours. La perception du coût des arcs n’est pas parfaite mais varie aléatoirement. Pour résoudre cet équilibre on peut également se ramener à un problème de minimisation mais avec des affectations aléatoires : mod
En théorie des probabilités et en statistique, la loi normale probabilité les plus adaptées pour modéliser des phénomènes naturels issus de plusieurs événements aléatoires. La méthode dite du Probit affecte le flux avec la loi
afin d'apporter dans notre problème une dimension d'aléatoireensuite tourner la méthode "tout ou rien" jusqu’à trouver une affectation stable. Cette méthode tente de minimiser les coûts perçus par les utilisateurs.
28
: T=166s
3 à la place du chemin 1-4 :
�3=3 �9=1
�3=30s �9=11s
Le temps total du trajet est de 177s et est supérieur au temps de parcours
3 à la place du chemin 2-4 :
�3=1 �9=2
�3=10s �9=12s
Le temps total du trajet est de 178s et est supérieur au temps de parcours
Cet équilibre ne prend pas en compte la connaissance parfaite du réseau de tous les , ainsi, cette méthode est plus proche de la réalité. L’équilibre utilisateur
ne plus pouvoir améliorer leur n’est pas parfaite mais varie
aléatoirement. Pour résoudre cet équilibre on peut également se ramener à un : modèle Probit.
est l'une des lois de probabilité les plus adaptées pour modéliser des phénomènes naturels issus de
affecte le flux avec la loi afin d'apporter dans notre problème une dimension d'aléatoire. Elle fait
ensuite tourner la méthode "tout ou rien" jusqu’à trouver une affectation stable. Cette
V. Un peu de théorie des graphes
Dans ce travail, nous avons souvent utilisé des notations et des concepts tirés de la théorie des graphes. C'est pour cela que nous allons reprendre dans cette partie quelques définitions et certains algor
A. Quelques définitions
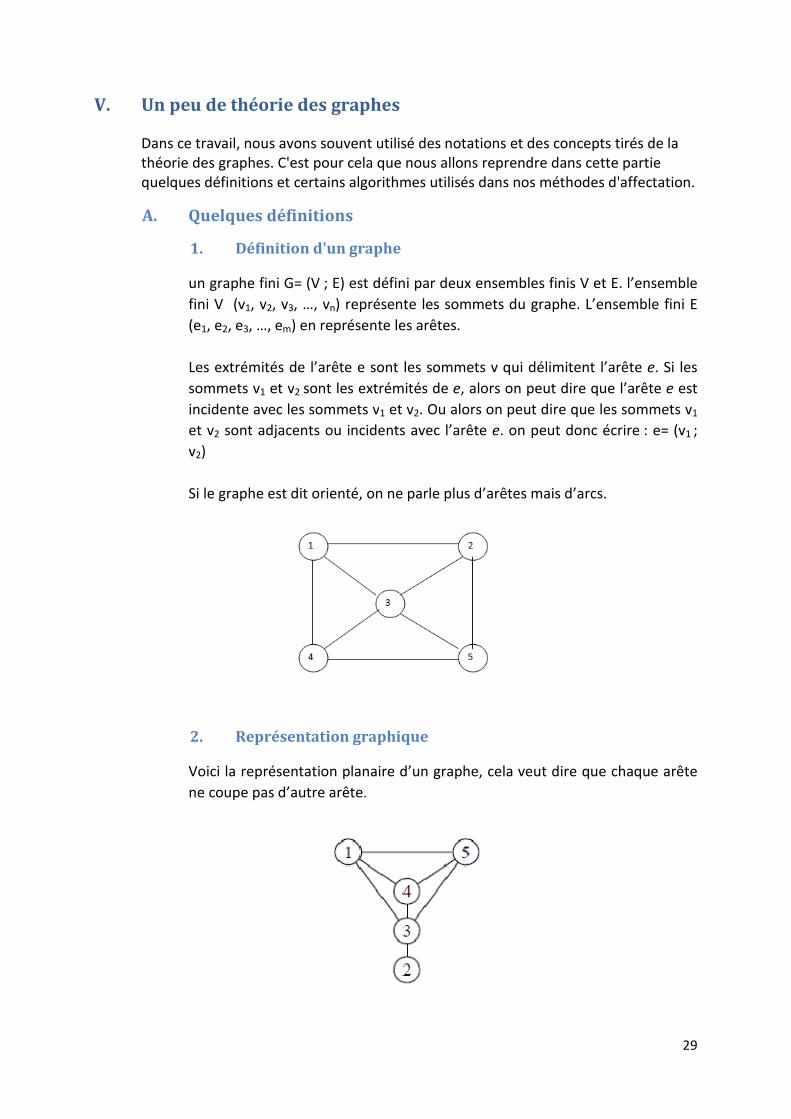
1. Définition d'un graphe
un graphe fini G= (V
fini V (v1, v2, v
(e1, e2, e3, …, em
Les extrémités de l’arête e sont les sommets v qui délimitent l’arête
sommets v1 et v
incidente avec les sommets v
et v2 sont adjacent
v2)
Si le graphe est dit orienté, on ne parle plus d’arêtes mais d’arc
2. Représentation graphique
Voici la représentation planaire
ne coupe pas d’autre
Un peu de théorie des graphes
Dans ce travail, nous avons souvent utilisé des notations et des concepts tirés de la C'est pour cela que nous allons reprendre dans cette partie
quelques définitions et certains algorithmes utilisés dans nos méthodes d'affectation.
Quelques définitions
Définition d'un graphe
un graphe fini G= (V ; E) est défini par deux ensembles finis V et E. l’ensemble
, v3, …, vn) représente les sommets du graphe. L’ensemble fini E
m) en représente les arêtes.
Les extrémités de l’arête e sont les sommets v qui délimitent l’arête
et v2 sont les extrémités de e, alors on peut dire que l’arête
incidente avec les sommets v1 et v2. Ou alors on peut dire que les sommets v
sont adjacents ou incidents avec l’arête e. on peut donc écrire
Si le graphe est dit orienté, on ne parle plus d’arêtes mais d’arc
Représentation graphique
Voici la représentation planaire d’un graphe, cela veut dire que ch
ne coupe pas d’autre arête.
29
Dans ce travail, nous avons souvent utilisé des notations et des concepts tirés de la C'est pour cela que nous allons reprendre dans cette partie
ithmes utilisés dans nos méthodes d'affectation.
; E) est défini par deux ensembles finis V et E. l’ensemble
) représente les sommets du graphe. L’ensemble fini E
Les extrémités de l’arête e sont les sommets v qui délimitent l’arête e. Si les
, alors on peut dire que l’arête e est
peut dire que les sommets v1
. on peut donc écrire : e= (v1 ;
Si le graphe est dit orienté, on ne parle plus d’arêtes mais d’arcs.
d’un graphe, cela veut dire que chaque arête
30
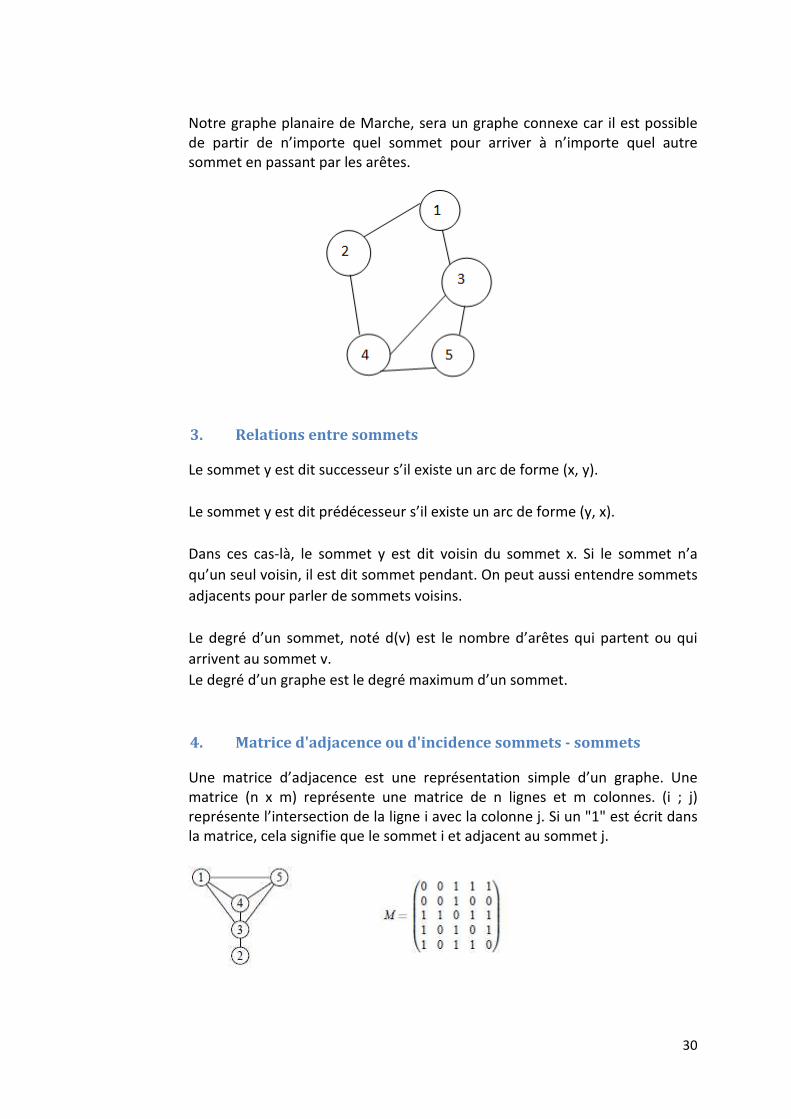
Notre graphe planaire de Marche, sera un graphe connexe car il est possible de partir de n’importe quel sommet pour arriver à n’importe quel autre sommet en passant par les arêtes.
3. Relations entre sommets
Le sommet y est dit successeur s’il existe un arc de forme (x, y).
Le sommet y est dit prédécesseur s’il existe un arc de forme (y, x).
Dans ces cas-là, le sommet y est dit voisin du sommet x. Si le sommet n’a
qu’un seul voisin, il est dit sommet pendant. On peut aussi entendre sommets
adjacents pour parler de sommets voisins.
Le degré d’un sommet, noté d(v) est le nombre d’arêtes qui partent ou qui
arrivent au sommet v.
Le degré d’un graphe est le degré maximum d’un sommet.
4. Matrice d'adjacence ou d'incidence sommets - sommets
Une matrice d’adjacence est une représentation simple d’un graphe. Une matrice (n x m) représente une matrice de n lignes et m colonnes. (i ; j) représente l’intersection de la ligne i avec la colonne j. Si un "1" est écrit dans la matrice, cela signifie que le sommet i et adjacent au sommet j.

31
Une matrice peut posséder différentes caractéristiques. Par exemple, la matrice ci-dessus est carrée car elle contient le même nombre de lignes que de colonnes. Elle ne contient pas de boucle car il n’y a que des zéros sur la diagonale Lorsque qu’on fixe l’ordre d’un graphe, c'est-à-dire que l'on associe une valeur à chaque sommet, il existe alors une matrice d’adjacence unique pour chaque graphe. On peut aussi représenter un graphe par une liste d’adjacence. On donne alors à chacun des sommets la liste des sommets auxquels ils sont adjacents.
5. Chaîne, chemin, longueur
Une chaîne est une suite d’éléments alternant sommets et arêtes. La chaîne
commence par un sommet et se termine également par un sommet. Chaque
arête est encadrée par ses extrémités.
La distance entre deux sommets est la chaîne la plus courte entre ces deux
sommets. Le diamètre est l’inverse de la distance, c’est la chaîne la plus
longue entre deux sommets.
Une chaîne est élémentaire si chaque sommet apparaît au maximum une fois
Une chaîne est simple si chaque arête apparaît au maximum une fois.
Une chaîne est dite fermée quand les sommets de départ et de fin sont les
mêmes. Cette chaîne peut être aussi appelée circuit.
Quand on calcule la chaîne, on calcule le chemin.
6. Cycles et circuits
Un cycle est une chaîne simple et fermée, c'est-à-dire que chaque arête n’apparaît qu’une fois et que le sommet initial coïncide avec le sommet final. Un cycle élémentaire est un cycle dans lequel chaque sommet n’apparaît qu’une seule fois excepté le sommet initial et final qui correspondent.
32
7. Graphe eulérien
Un cycle eulérien est un cycle passant une et une seule fois par chaque arête du graphe Un graphe est dit eulérien s’il comporte un cycle eulérien. Une chaîne eulérienne est une chaîne passant une et une seule fois par chaque arête du graphe. Un graphe ne possédant que des chaînes eulériennes est appelé graphe semi-eulérien. Le graphe est dit eulérien ou semi-eulérien si on sait le dessiner d'un trait, sans lever la main.
8. Graphe hamiltonien
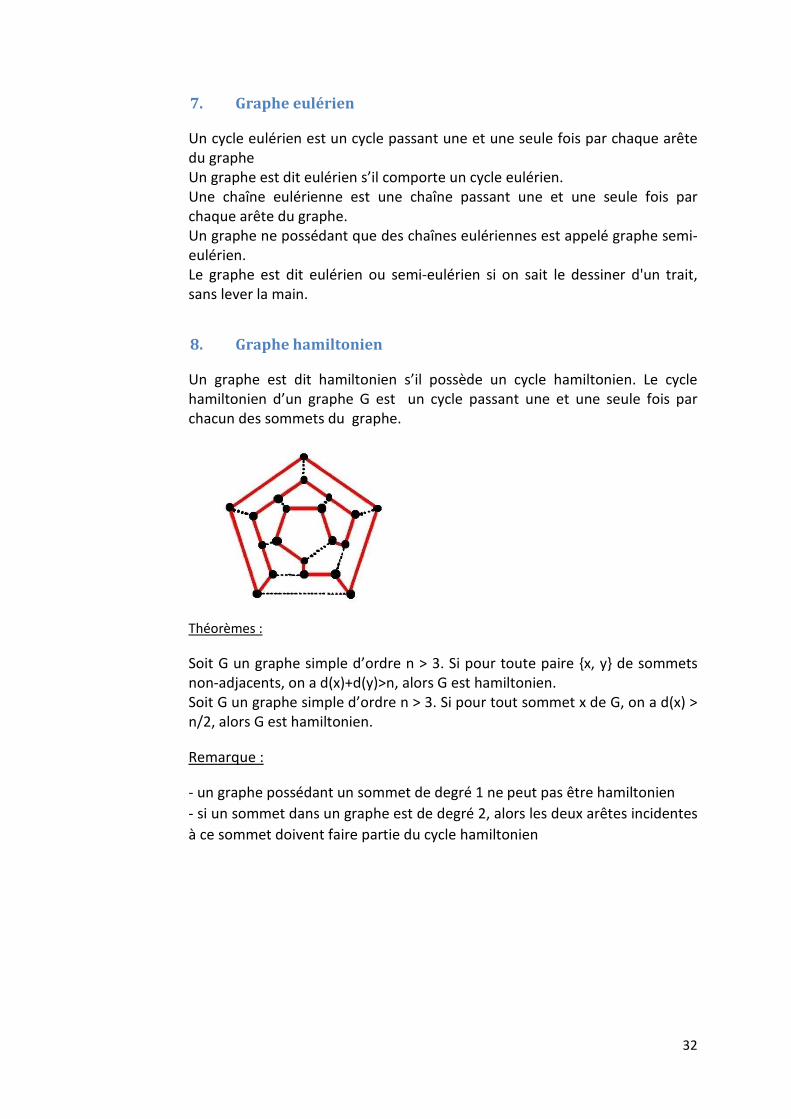
Un graphe est dit hamiltonien s’il possède un cycle hamiltonien. Le cycle hamiltonien d’un graphe G est un cycle passant une et une seule fois par chacun des sommets du graphe.
Théorèmes :
Soit G un graphe simple d’ordre n > 3. Si pour toute paire {x, y} de sommets non-adjacents, on a d(x)+d(y)>n, alors G est hamiltonien. Soit G un graphe simple d’ordre n > 3. Si pour tout sommet x de G, on a d(x) > n/2, alors G est hamiltonien.
Remarque :
- un graphe possédant un sommet de degré 1 ne peut pas être hamiltonien
- si un sommet dans un graphe est de degré 2, alors les deux arêtes incidentes
à ce sommet doivent faire partie du cycle hamiltonien

9. Graphe p
Un graphe planaire est un graphe que l'sorte que ses arêtes ne se croisent pas. Les arêtes ne sont pas obligatoirement rectilignes.
10. Graphe orienté
En donnant ungraphe orienté). Un digraphe {v1,v2,...,vn} dont les éléments sont appelés sommets, et par l’ensemble {e1,e2,...,em} dont les éléments sont appdéfini par une paire ordonnée de sommets. Lorsque va de u à v. On dit aussi que u est l’extrémité initiale et v l’extrémité e.
B. Application dans le transport
1. Flot et flux
Soit un graphe dont les arcs sont numérotés de 1 à m. Un flot dans est un
vecteur à composantes réelles :
:;< = (: , :1, …∑ :� �5@A7�8 �
dire, "ce qui rente égal ce qui sort")La composante peut-être assimilée, par exemple La capacité de l'arc u est la borne supérieure du flux admissible sur l’arc. Si on
munit chaque arc d'un intervalle
B + 5 C , D� E
On appelle réseau de transport un grapnumérotés de 1 à m- D� � 0 - � F 0 pour +- l’arc 1 � 7D,
l’entrée a telles En règle générale, un réseau de transport est un graphe antisymétrique.
Graphe planaire
raphe planaire est un graphe que l'on peut dessiner dans le plan de telle sorte que ses arêtes ne se croisent pas. Les arêtes ne sont pas obligatoirement
Graphe orienté
En donnant un sens aux arêtes d’un graphe, on obtient un digraphe (ou graphe orienté). Un digraphe fini G = (V, E) est défini par l’ensemble fini V =
} dont les éléments sont appelés sommets, et par l’ensemble } dont les éléments sont appelés arcs. Un arc e de l’ensemble E est
fini par une paire ordonnée de sommets. Lorsque e= (u, v), on dit que l’arc va de u à v. On dit aussi que u est l’extrémité initiale et v l’extrémité
Application dans le transport
et flux : définition
Soit un graphe dont les arcs sont numérotés de 1 à m. Un flot dans est un
vecteur à composantes réelles : :;< � 7: , :1, … , :�8G, tel qu'en tout sommet
… , :�8G du graphe, la loi de Kirchhoff soit vé
� ∑ :��5@H7�8 . (Le flot entrant est égal au flot sortant, c'est
dire, "ce qui rente égal ce qui sort") La composante est appelée la quantité de flux (ou le flux du vecteur) et
être assimilée, par exemple à la quantité de véhicules La capacité de l'arc u est la borne supérieure du flux admissible sur l’arc. Si on
munit chaque arc d'un intervalleID�, �J, un flot :;< � 7: , :
E :� E � est un flot compatible.
On appelle réseau de transport un graphe G(X, U) dont les arcs sont otés de 1 à m et où chaque arc est muni d'un intervalle
+ 5 C &K0 � �∞ 7 , &8 &K0 & M D est appelé arc de retour entre la sortie b et
l’entrée a telles que : NO;;;;;;<7&8 � 71,0, … ,08 et NP;;;;;;<7D8 � 71,0
En règle générale, un réseau de transport est un graphe antisymétrique.
33
on peut dessiner dans le plan de telle sorte que ses arêtes ne se croisent pas. Les arêtes ne sont pas obligatoirement
sens aux arêtes d’un graphe, on obtient un digraphe (ou fini G = (V, E) est défini par l’ensemble fini V =
} dont les éléments sont appelés sommets, et par l’ensemble fini E = de l’ensemble E est
= (u, v), on dit que l’arc e va de u à v. On dit aussi que u est l’extrémité initiale et v l’extrémité finale de
Soit un graphe dont les arcs sont numérotés de 1 à m. Un flot dans est un
tel qu'en tout sommet
hoff soit vérifiee :
(Le flot entrant est égal au flot sortant, c'est-à-
est appelée la quantité de flux (ou le flux du vecteur) et parcourant l'arc u.
La capacité de l'arc u est la borne supérieure du flux admissible sur l’arc. Si on
:1, … . , :�8G tel que
he G(X, U) dont les arcs sont et où chaque arc est muni d'un intervalleID�, �Jtel que,
est appelé arc de retour entre la sortie b et
0, … ,08.
En règle générale, un réseau de transport est un graphe antisymétrique.

34
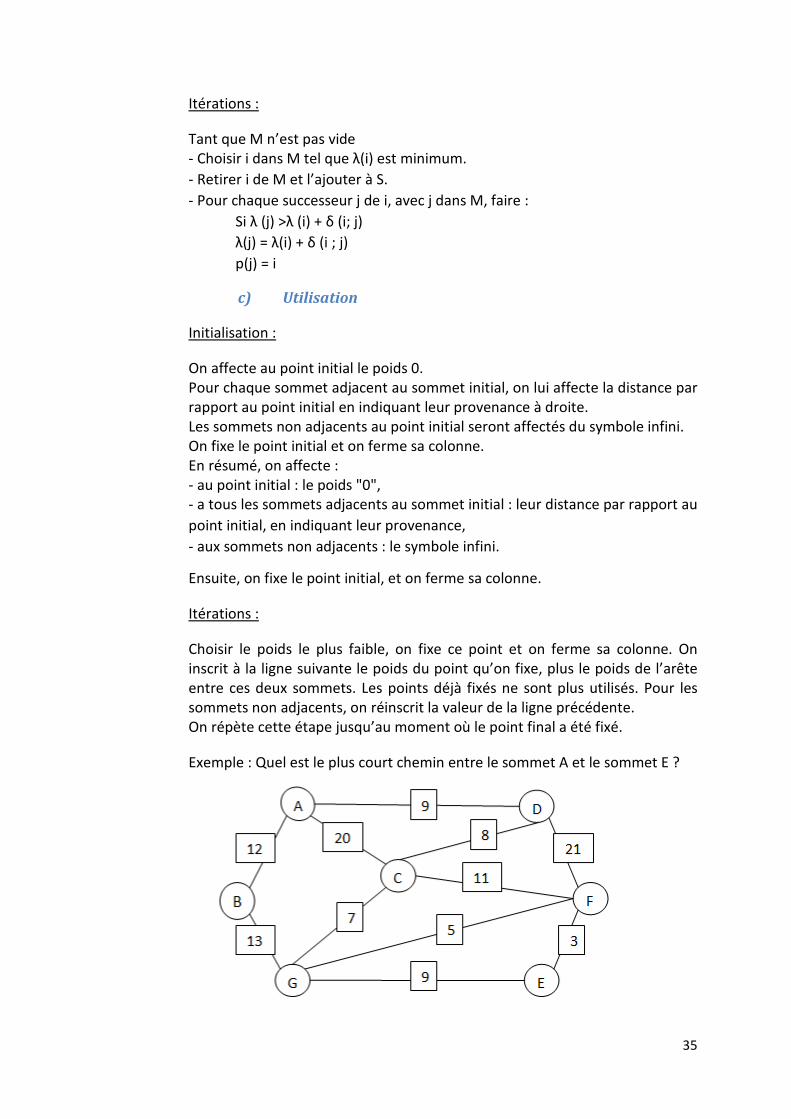
2. Algorithme de Dijkstra
a) Définition
L’algorithme de Dijkstra a été inventé en 1959 par Edgser Wybe Dijkstra. Cet algorithme est utilisé pour calculer le plus court chemin entre deux sommets d’un graphe. Dans notre cas, il nous servira à calculer le chemin plus court entre deux centroïdes dans notre réseau routier.
b) Notations
Soit le graphe noté G = (V ; E) et ses sommets notés de 1 à n. Nous commençons notre chemin en partant du sommet 1. On crée un vecteur λ = (λ(1) ; λ(2) ; … ; λ(n)) possédant n composantes tel que λ(j) soit égal à la longueur du plus court chemin entre le sommet 1 et le sommet j. On initialise ce vecteur c1j qui est la première ligne de la matrice des coûts du graphe. Il est défini comme : 0 si i = j cij = ∞ si i≠ j et (i ; j) ∉ E δ (i ; j) si i ≠ j et (i ; j) ∈ E Où δ (i ; j) > 0 est le poids de l’arc (i ; j).
On crée un deuxième vecteur q pour mémoriser le chemin du sommet 1 au sommet voulu, p(i) est le sommet qui précède i dans le chemin.
Ensuite, on considère deux ensembles de sommets : - S initialisé à {1}
- M initialisé à {2,3,…, n}.
A chaque étape de l’algorithme, on ajoute à l’ensemble S un sommet jusqu’à ce que S = V, pour qu’à chaque étape, le vecteur λ donne la longueur minimale des chemins du sommet 1 aux sommets de l’ensemble S. On suppose que le sommet de départ est le sommet 1.
Initialisations :
λ (j) = c1j et p(j) = NIL, pour 1 ≤ j ≤ n (où NIL désigne un pointeur qui n'a pas de cible, pointant dans le vide) Pour 2 ≤ j ≤ ∞ alors p(j) = 1 Si c1j<∞ alors p(j) = 1 S = 1 ; M = {2,3,…, n}
35
Itérations :
Tant que M n’est pas vide - Choisir i dans M tel que λ(i) est minimum.
- Retirer i de M et l’ajouter à S.
- Pour chaque successeur j de i, avec j dans M, faire :
Si λ (j) >λ (i) + δ (i; j)
λ(j) = λ(i) + δ (i ; j)
p(j) = i
c) Utilisation
Initialisation :
On affecte au point initial le poids 0. Pour chaque sommet adjacent au sommet initial, on lui affecte la distance par rapport au point initial en indiquant leur provenance à droite. Les sommets non adjacents au point initial seront affectés du symbole infini. On fixe le point initial et on ferme sa colonne. En résumé, on affecte : - au point initial : le poids "0", - a tous les sommets adjacents au sommet initial : leur distance par rapport au
point initial, en indiquant leur provenance,
- aux sommets non adjacents : le symbole infini.
Ensuite, on fixe le point initial, et on ferme sa colonne.
Itérations :
Choisir le poids le plus faible, on fixe ce point et on ferme sa colonne. On inscrit à la ligne suivante le poids du point qu’on fixe, plus le poids de l’arête entre ces deux sommets. Les points déjà fixés ne sont plus utilisés. Pour les sommets non adjacents, on réinscrit la valeur de la ligne précédente. On répète cette étape jusqu’au moment où le point final a été fixé.
Exemple : Quel est le plus court chemin entre le sommet A et le sommet E ?
36
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/
/
/
/
/
V
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ /
/ /
/ /
/ /
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ / 17D / ∞ 30D 25B B
/ / /
/ / /
/ / /
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ / 17D / ∞ 30D 25B B
/ / / / ∞ 28C 24C C
/ / / /
/ / / /
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ / 17D / ∞ 30D 25B B
/ / / / ∞ 28C 24C C
/ / / / 33G 28C / G
/ / / / /
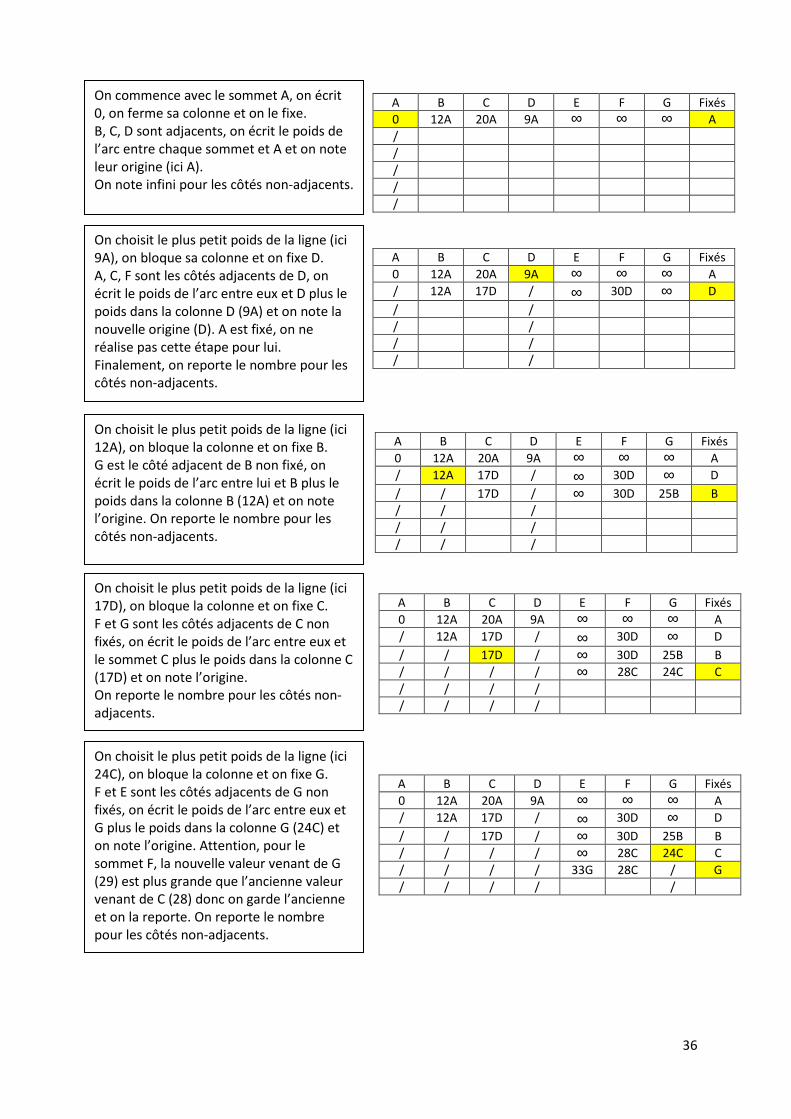
On commence avec le sommet A, on écrit 0, on ferme sa colonne et on le fixe. B, C, D sont adjacents, on écrit le poids de l’arc entre chaque sommet et A et on note leur origine (ici A). On note infini pour les côtés non-adjacents.
On choisit le plus petit poids de la ligne (ici 9A), on bloque sa colonne et on fixe D. A, C, F sont les côtés adjacents de D, on écrit le poids de l’arc entre eux et D plus le poids dans la colonne D (9A) et on note la nouvelle origine (D). A est fixé, on ne réalise pas cette étape pour lui. Finalement, on reporte le nombre pour les côtés non-adjacents.
On choisit le plus petit poids de la ligne (ici 12A), on bloque la colonne et on fixe B. G est le côté adjacent de B non fixé, on écrit le poids de l’arc entre lui et B plus le poids dans la colonne B (12A) et on note l’origine. On reporte le nombre pour les côtés non-adjacents.
On choisit le plus petit poids de la ligne (ici 17D), on bloque la colonne et on fixe C. F et G sont les côtés adjacents de C non fixés, on écrit le poids de l’arc entre eux et le sommet C plus le poids dans la colonne C (17D) et on note l’origine. On reporte le nombre pour les côtés non-adjacents.
On choisit le plus petit poids de la ligne (ici 24C), on bloque la colonne et on fixe G. F et E sont les côtés adjacents de G non fixés, on écrit le poids de l’arc entre eux et G plus le poids dans la colonne G (24C) et on note l’origine. Attention, pour le sommet F, la nouvelle valeur venant de G (29) est plus grande que l’ancienne valeur venant de C (28) donc on garde l’ancienne et on la reporte. On reporte le nombre pour les côtés non-adjacents.
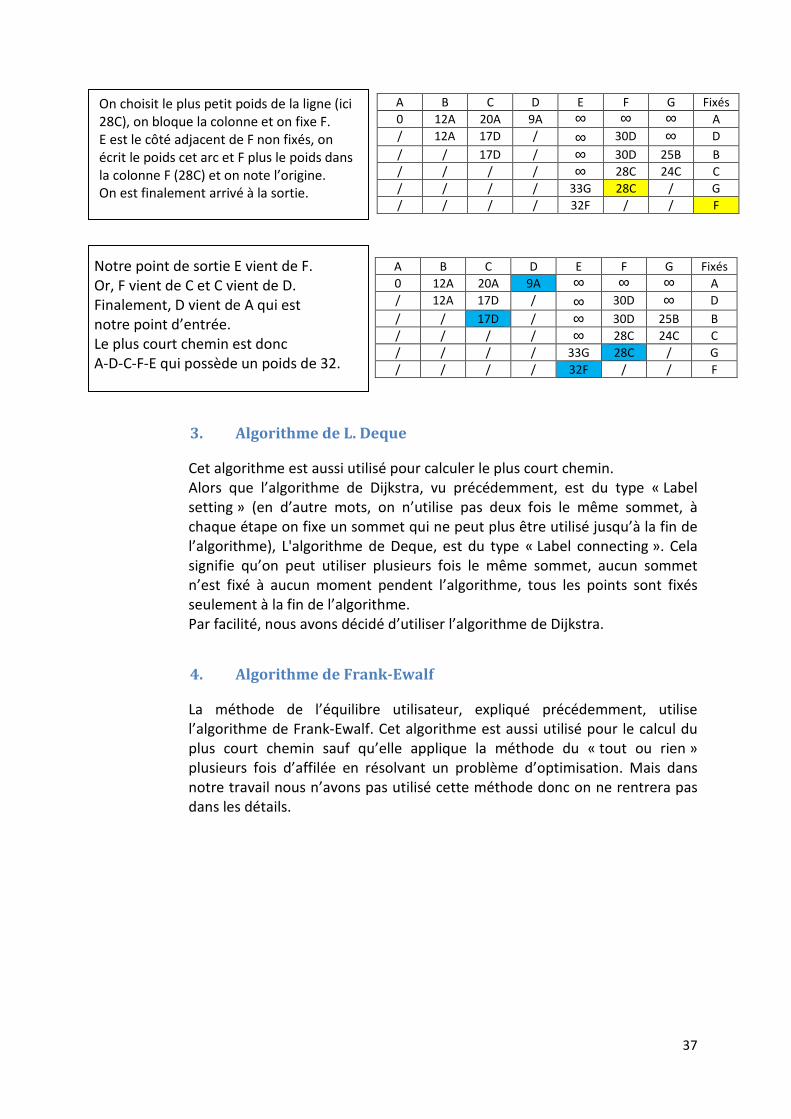
37
Notre point de sortie E vient de F. Or, F vient de C et C vient de D. Finalement, D vient de A qui est notre point d’entrée. Le plus court chemin est donc A-D-C-F-E qui possède un poids de 32.
3. Algorithme de L. Deque
Cet algorithme est aussi utilisé pour calculer le plus court chemin. Alors que l’algorithme de Dijkstra, vu précédemment, est du type « Label setting » (en d’autre mots, on n’utilise pas deux fois le même sommet, à chaque étape on fixe un sommet qui ne peut plus être utilisé jusqu’à la fin de l’algorithme), L'algorithme de Deque, est du type « Label connecting ». Cela signifie qu’on peut utiliser plusieurs fois le même sommet, aucun sommet n’est fixé à aucun moment pendent l’algorithme, tous les points sont fixés seulement à la fin de l’algorithme. Par facilité, nous avons décidé d’utiliser l’algorithme de Dijkstra.
4. Algorithme de Frank-Ewalf
La méthode de l’équilibre utilisateur, expliqué précédemment, utilise l’algorithme de Frank-Ewalf. Cet algorithme est aussi utilisé pour le calcul du plus court chemin sauf qu’elle applique la méthode du « tout ou rien » plusieurs fois d’affilée en résolvant un problème d’optimisation. Mais dans notre travail nous n’avons pas utilisé cette méthode donc on ne rentrera pas dans les détails.
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ / 17D / ∞ 30D 25B B
/ / / / ∞ 28C 24C C
/ / / / 33G 28C / G
/ / / / 32F / / F
A B C D E F G Fixés
0 12A 20A 9A ∞ ∞ ∞ A
/ 12A 17D / ∞ 30D ∞ D
/ / 17D / ∞ 30D 25B B
/ / / / ∞ 28C 24C C
/ / / / 33G 28C / G
/ / / / 32F / / F
On choisit le plus petit poids de la ligne (ici 28C), on bloque la colonne et on fixe F. E est le côté adjacent de F non fixés, on écrit le poids cet arc et F plus le poids dans la colonne F (28C) et on note l’origine. On est finalement arrivé à la sortie.
38
5. Algorithme de coloration de Welsh et Powel
a) Définition
L’algorithme de coloration est utilisé en théorie des graphes pour colorer un graphe en utilisant le moins de couleur possible. L’algorithme attribue à chaque sommet une couleur pour que deux sommets reliés par une arête soient de couleurs différentes.
b) Utilisation
1) Classer les sommets du graphe dans l’ordre décroissant de leur degré et
donner aux sommets un numéro en fonction de leur ordre dans la liste.
2) Attribuer une couleur au premier sommet de la liste encore incolore.
3) Attribuer cette couleur aux sommets non adjacents et non colorés.
4) S'il reste des sommets non colorés dans le graphe, il faut revenir à l’étape
deux jusqu’à ce que tous les points du graphe soient colorés.
c) Exemple
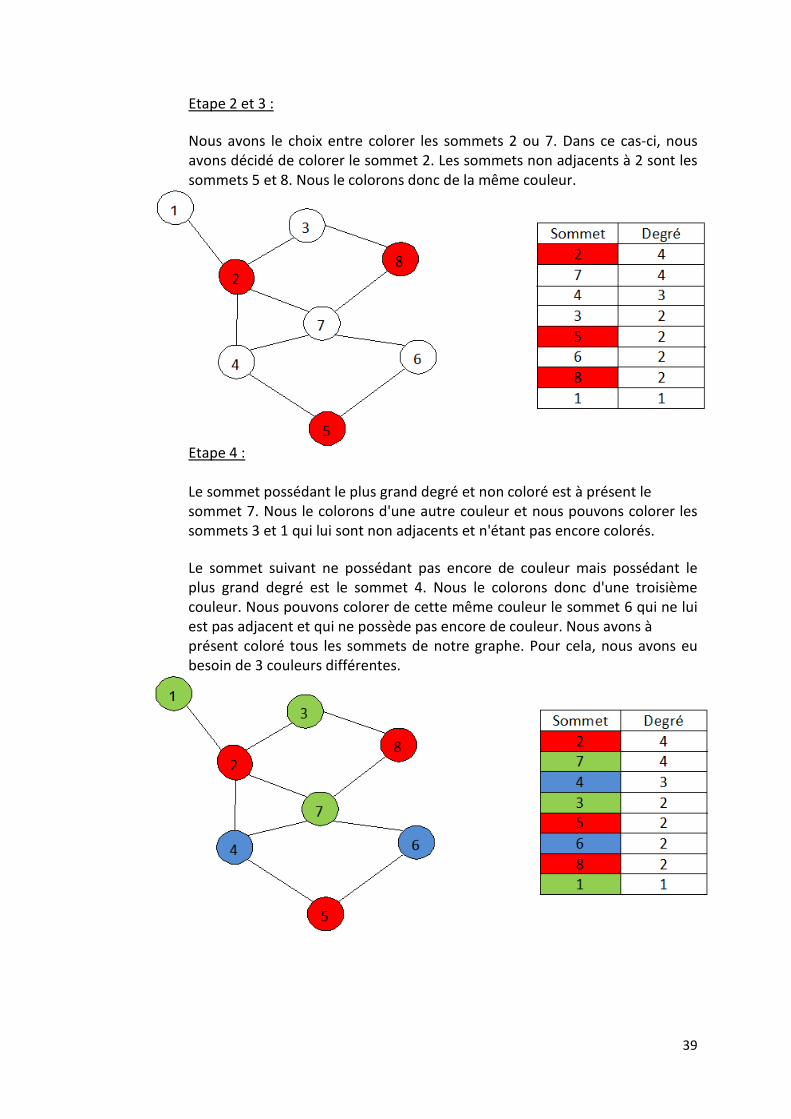
Etape 1 :
Pour chaque sommet (de 1 à 7), nous calculons son degré. Ensuite, nous ordonnons les sommets dans un tableau. Dans notre exemple, nous pouvons observer que le sommet 2 et le sommet 7 possèdent chacun 4 sommets adjacents, leur degré est donc égal à 4. Par contre le sommet 1, quand à lui, ne possède que le sommet 2 comme sommet adjacent, son degré est donc de 1.
39
Etape 2 et 3 :
Nous avons le choix entre colorer les sommets 2 ou 7. Dans ce cas-ci, nous avons décidé de colorer le sommet 2. Les sommets non adjacents à 2 sont les sommets 5 et 8. Nous le colorons donc de la même couleur.
Etape 4 : Le sommet possédant le plus grand degré et non coloré est à présent le sommet 7. Nous le colorons d'une autre couleur et nous pouvons colorer les sommets 3 et 1 qui lui sont non adjacents et n'étant pas encore colorés.
Le sommet suivant ne possédant pas encore de couleur mais possédant le plus grand degré est le sommet 4. Nous le colorons donc d'une troisième couleur. Nous pouvons colorer de cette même couleur le sommet 6 qui ne lui est pas adjacent et qui ne possède pas encore de couleur. Nous avons à présent coloré tous les sommets de notre graphe. Pour cela, nous avons eu besoin de 3 couleurs différentes.

40
VI. ATESAME
ATESAME est un programme mathématique permettant de calculer le trafic pour un réseau donné (Marche dans notre cas) sur base de données que nous fournissons au programme. Il a été créé à l'UNamur par le département de mathématiques et plus spécifiquement par le GRT (groupe de recherche en transport). L’exécutable d’ATESAME compile les informations venant des fichiers ".dat" et nous donne un fichier "out.dat" avec le résultat de son travail. Voici tous les fichiers primordiaux du programme. Cela peut paraître compliqué à première vue mais nous allons analyser chacun d’eux individuellement.
Image 1 : Avant cela, il serait tout de même utile d’expliquer les “règles” de ces fichiers. La première ligne de chaque fichier ".dat" indique à ATESAME quelles sont les fonctions de ce fichier. Chaque fichier commence par cette ligne et se finit obligatoirement par "END" (dans l’image 2, la première ligne est SPECIFICATIONS). En plus de ces lignes -ci, il y a bien évidemment le contenu même du fichier. De plus, il est possible d’insérer des commentaires dans un fichier ".dat" (voir image 5). Un commentaire est une ligne de texte commençant par un “#”, dont le but est d’être ignoré par ATESAME. Cela peut être pratique pour faire passer un message à vos collègues par rapport à une ligne spécifique ou de “trier” les informations dans un fichier (voir image 4). Un commentaire permet également d'écrire toutes les lignes de codes utiles lors du lancement du programme et d'en ignorer une partie par la suite afin d'utiliser uniquement celle nécessaire (voir image 2). Voici pour commencer le fichier “cerveau” qui donne les ordres à l'exécutable : "ates.spc". Image 2 :
41
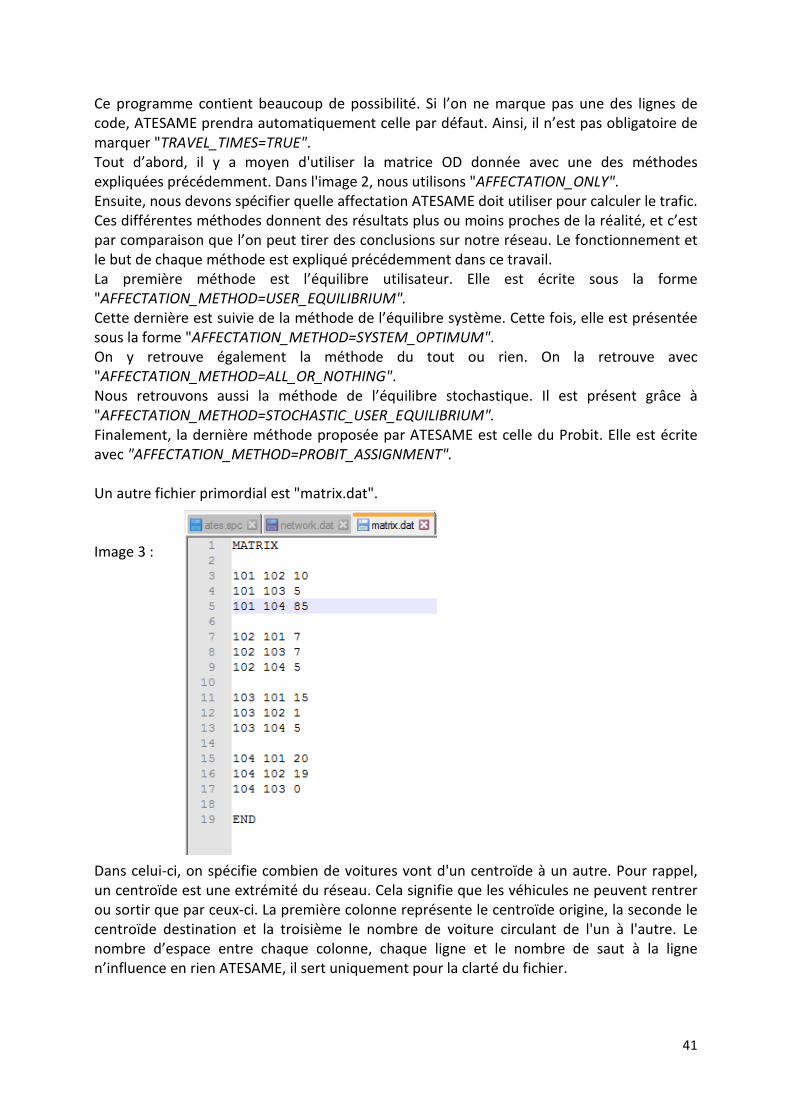
Ce programme contient beaucoup de possibilité. Si l’on ne marque pas une des lignes de code, ATESAME prendra automatiquement celle par défaut. Ainsi, il n’est pas obligatoire de marquer "TRAVEL_TIMES=TRUE". Tout d’abord, il y a moyen d'utiliser la matrice OD donnée avec une des méthodes expliquées précédemment. Dans l'image 2, nous utilisons "AFFECTATION_ONLY". Ensuite, nous devons spécifier quelle affectation ATESAME doit utiliser pour calculer le trafic. Ces différentes méthodes donnent des résultats plus ou moins proches de la réalité, et c’est par comparaison que l’on peut tirer des conclusions sur notre réseau. Le fonctionnement et le but de chaque méthode est expliqué précédemment dans ce travail. La première méthode est l’équilibre utilisateur. Elle est écrite sous la forme "AFFECTATION_METHOD=USER_EQUILIBRIUM". Cette dernière est suivie de la méthode de l’équilibre système. Cette fois, elle est présentée sous la forme "AFFECTATION_METHOD=SYSTEM_OPTIMUM". On y retrouve également la méthode du tout ou rien. On la retrouve avec "AFFECTATION_METHOD=ALL_OR_NOTHING". Nous retrouvons aussi la méthode de l’équilibre stochastique. Il est présent grâce à "AFFECTATION_METHOD=STOCHASTIC_USER_EQUILIBRIUM". Finalement, la dernière méthode proposée par ATESAME est celle du Probit. Elle est écrite avec "AFFECTATION_METHOD=PROBIT_ASSIGNMENT". Un autre fichier primordial est "matrix.dat". Image 3 :
Dans celui-ci, on spécifie combien de voitures vont d'un centroïde à un autre. Pour rappel, un centroïde est une extrémité du réseau. Cela signifie que les véhicules ne peuvent rentrer ou sortir que par ceux-ci. La première colonne représente le centroïde origine, la seconde le centroïde destination et la troisième le nombre de voiture circulant de l'un à l'autre. Le nombre d’espace entre chaque colonne, chaque ligne et le nombre de saut à la ligne n’influence en rien ATESAME, il sert uniquement pour la clarté du fichier.
42
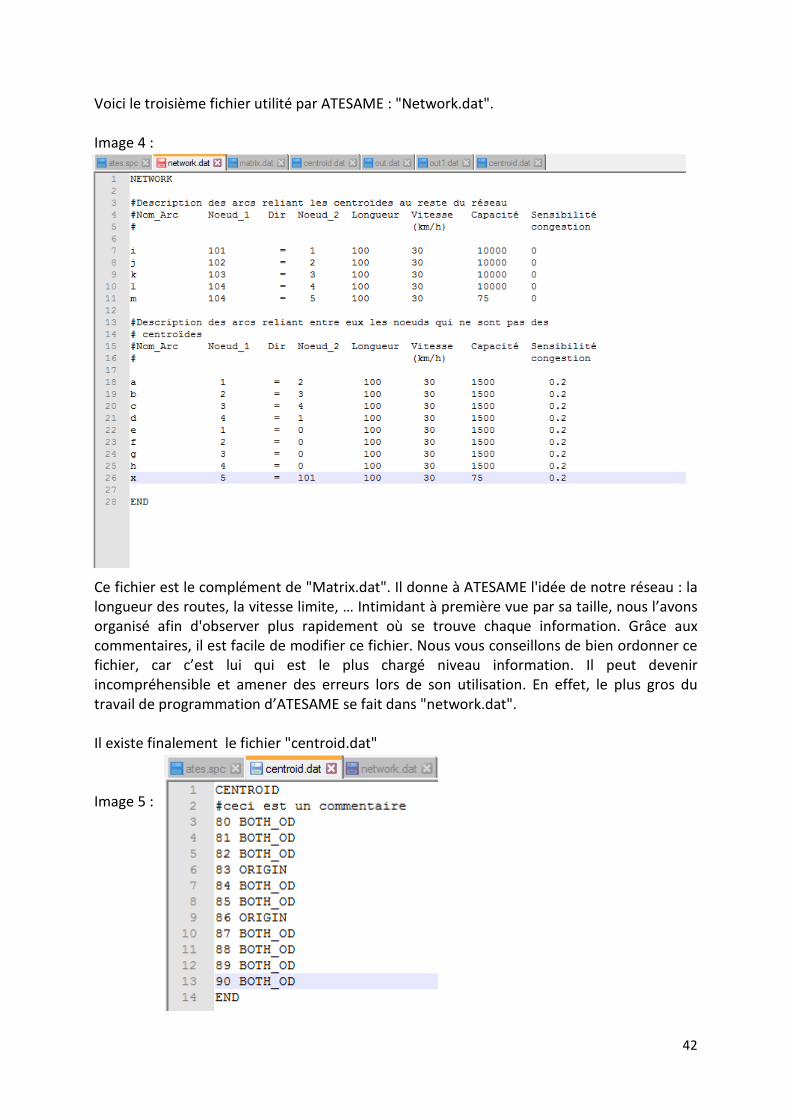
Voici le troisième fichier utilité par ATESAME : "Network.dat". Image 4 :
Ce fichier est le complément de "Matrix.dat". Il donne à ATESAME l'idée de notre réseau : la longueur des routes, la vitesse limite, … Intimidant à première vue par sa taille, nous l’avons organisé afin d'observer plus rapidement où se trouve chaque information. Grâce aux commentaires, il est facile de modifier ce fichier. Nous vous conseillons de bien ordonner ce fichier, car c’est lui qui est le plus chargé niveau information. Il peut devenir incompréhensible et amener des erreurs lors de son utilisation. En effet, le plus gros du travail de programmation d’ATESAME se fait dans "network.dat". Il existe finalement le fichier "centroid.dat" Image 5 :

43
Ce fichier permet à ATESAME de spécifier le type de chaque centroïde de notre réseau. La première colonne (celle avec des nombres) représente les centroïdes et la seconde le sens des centroïdes. "ORIGIN" : le centroïde est uniquement considéré comme une entrée du réseau. "DESTINATION" : le centroïde est uniquement considéré comme une sortie du réseau. "BOTH_OD" : le centroïde est à la fois une entrée et une sortie du réseau.
VII. Phase illustrative
Après avoir analysé notre réseau marchois et après avoir réalisé les comptages, nous avons
réfléchi en vue d’amener quelques améliorations.
Tout d’abord, nous pensons que les axes 59-4-3 et 60-4-3 pourraient être améliorés afin que
plus de voitures passent par cet endroit ce qui aurait pour conséquence de dégorger les axes
5-6-7 et surtout 7-3.
Ensuite, au point 6, nous avons remarqué que les voitures qui devaient aller au point 25
devaient faire tout le tour du long rond-point causant des embouteillages. Nous avons donc
pensé qu’au lieu de mettre un long rond-point, il serait mieux de mettre un petit rond-point
au point 5 et au point 6.
Nous avons également constaté qu'environ 1300 voitures empruntaient le boulevard urbain
entre 15h30 et 17h00. Il est donc logique que des bouchons puissent se créer à cet endroit.
Afin de gagner du temps, les gens peuvent utiliser des routes parallèles au boulevard qui
elles, sont beaucoup moins utilisées. Dans le centre de la ville, il y a de quart d'heure en
quart d'heure un nombre constant de voitures utilisant les routes entre 15h30 et 16h00 et
entre 16h30 et 17h00. Par contre entre 16h00 et 16h30, le nombre de voiture est divisé par
trois. Les voitures sont donc bloquées à des endroits précis de Marche.
Finalement, nous avons observé qu'il n'y avait qu'environ 450 voitures circulant dans la rue
de notre école entre 15h30 et 17h00. Beaucoup d'élèves partent donc rejoindre leurs
parents à d'autres endroits afin de ne par rester bloqué dans un bouchon à la sortie scolaire.
Nous aurions voulu voir l'effet de la construction d'une nouvelle route ou le fait que l'une
d'entre elle soit bloquée sur notre réseau mais les résultats donnés par ATESAME avec nos
résultats n'étaient pas assez concluants. Nous nous sommes donc limités à des observations
constatées lors des comptages.
44
VIII. Limites et conclusion
Lors du déroulement de ce projet, nous avons rencontré quelques difficultés. Nous avons
tout d’abord manqué de bénévoles durant les comptages et les enquêtes malgré les
nombreuses demandes effectuées. Ensuite, lors des comptages, le temps n’était pas
toujours avec nous. Deux fois sur trois, nous avons dû, avec les bénévoles, compter les
voitures dans de mauvaises circonstances, sous un temps pluvieux. De plus, certains d’entre
nous ont été malades les jours de comptages ce qui n’a pas facilité les choses en sachant que
nous étions déjà trop peu. Enfin, nous avons rencontré des problèmes au niveau de
l’organisation de Marche. En effet, certaines routes étaient bloquées par des travaux en
cours, ou par l'organisation du carnaval qui s'est déroulé le week-end suivant nos derniers
comptages.
Nous avons aussi rencontré des soucis avec ATESAME. Il nous indiquait qu'il y avait une
erreur dans "Network.dat" mais nous ne la trouvions pas. Nous avons finalement sû l'utiliser
sur la toute fin du travail.
Ce projet nous a demandé à tous un énorme investissement mais grâce à beaucoup de
motivation et à l’entraide de chacun, nous avons mené ce projet à bien.
IX. Remerciements
Nous tenons tout d'abord à remercier les bénévoles qui sont venus nous aider lors des comptages. Malgré le mauvais temps du temps du premier comptage, ils sont revenus nous aider pour le suivant. Sans eux, nous n'aurions jamais pû obtenir de résultat. Nous remercions également le docteur Eric Cornelis de l'UNamur pour les documents qu'il nous a envoyés mais aussi pour la conférence qu'il a donné durant l'un de nos cours. Nous le remercions également pour nous avoir aidé à trouver nos erreurs dans le programme ATESAME. Nous remercions finalement Adeline Schoep pour ses nombreuses relectures et pour l'aide lors de la mise en page et Cécile Joachim pour les dernières corrections orthographiques. N’oublions pas enfin de remercier chaleureusement Mr Joachim, notre professeur de mathématique, pour son engagement et sa motivation tout au long de ce projet, sans lui rien n’aurait été possible.
45
X. Sources
http://appli.mobilite.wallonie.be/opencms/export/sites/be.wallonie.mobilite/fr/formation_in
formation_sensibilisation/cem/cematheque/cematheque/cematheque23_200805.pdf
Travail de modélisation mathématique des Transports ; Rapport : modélisation du réseau des
FUNDP ; Sébastien Joachim
Modélisation Mathématique des Transports ; Modèle de demande ; Dr. Eric Cornelis ;
FUNDP ; GRT
https://educnet.enpc.fr/pluginfile.php/37543/mod_resource/content/1/Masyt%20-%20Partie%203%20-%20Transports%20Routiers.pdf Slide Dr. Eric CORNELIS http://l.facebook.com/l.php?u=http%3A%2F%2Fwww.unige.ch%2Fses%2Fgeo%2Foum%2Fdoc%2FRapport_test_taux_occupation.pdf&h=qAQF9ee4Q http://www.sormea.fr/fr/sig/methodologie.html http://l.facebook.com/l.php?u=http%3A%2F%2Fmdpdanech.free.fr%2Fstage%2Fsatge_arfaoui.pdf&h=qAQF9ee4Q « Cours de Modélisation des transports » du Dr Cornelis (université de Namur) Introduction à la théorie des graphes de Didier Müller GEOMATIQUE LA THÉORIE DES GRAPHES de Stéphane Pelle GASTON LAGRAF arrive, faites graphe à vous de l’institut St LAURENT http://gilco.inpg.fr/~rapine/Graphe/ https://fr.wikipedia.org/wiki/Th%C3%A9orie_des_graphes http://serge.mehl.free.fr/anx/algo_dij.html http://pageperso.lif.univ-mrs.fr/~denis.lugiez/Enseignement/Master1/RO/Cours/cours7.pdf Fichiers ATESAME du Dr Eric Cornélis https://docs.google.com/a/elmarche.be/viewer?a=v&pid=sites&srcid=ZWxtYXJjaGUuYmV8YXRlc2FtZXxneDo3MTljYTAzMWQyNzhjN2Q5
46
XI. Annexes
Annexe 1 : Exemple de feuille de comptage donnée aux bénévoles (complétée et encodée sur l'ordinateur) Annexe 2 : Exemple de feuille de comptage donnée aux bénévoles (complétée mais pas encore traitée) Annexe 3 : Fichier "ates.spc" du programme ATESAME utilisé pour notre travail
Annexe 4 : Fichier "matrix.dat" du programme ATESAME utilisé pour notre travail
Annexe 5 : Fichier "centroid.dat" du programme ATESAME utilisé pour notre travail
Annexe 6 : Fichier "network.dat" du programme ATESAME utilisé pour notre travail
Annexe 7 : Fichier "out.dat" du programme ATESAME utilisé pour notre travail avec la spécification "AFFECTATION_METHOD=USER_EQUILIBRIUM"
Annexe 8 : Fichier "out.dat" du programme ATESAME utilisé pour notre travail avec la spécification " AFFECTATION_METHOD=PROBIT_ASSIGNMENT"





























