Embed Size (px)
Citation preview
MODELAMIENTO MATEMATICO DE CONVERTIDORES DC DC‐TIPO BOOST
UNIVERSIDAD DE LAS FUERZAS ARMADAS
Arévalo EstefaníaGuamán FabricioOnofre Gabriela
Prócel Galo
INTRODUCCIÓN
En muchas aplicaciones industriales, es necesario el convertir una fuente de poder de corriente directa (CD) de voltaje fijo a una fuente de CD de voltaje variable. Un convertidor de CD, convierte directamente de CD a CD. Este convertidor se puede considerar como el equivalente a un transformador de corriente alterna (CA) con una relación de vueltas que varía en forma continua. Al igual que un transformador, puede utilizarse como una fuente de CD reductora o elevadora de voltaje.Los circuitos más frecuentemente utilizados en la conversión DC–DC son los denominados Buck, Boost y Buck-Boost,
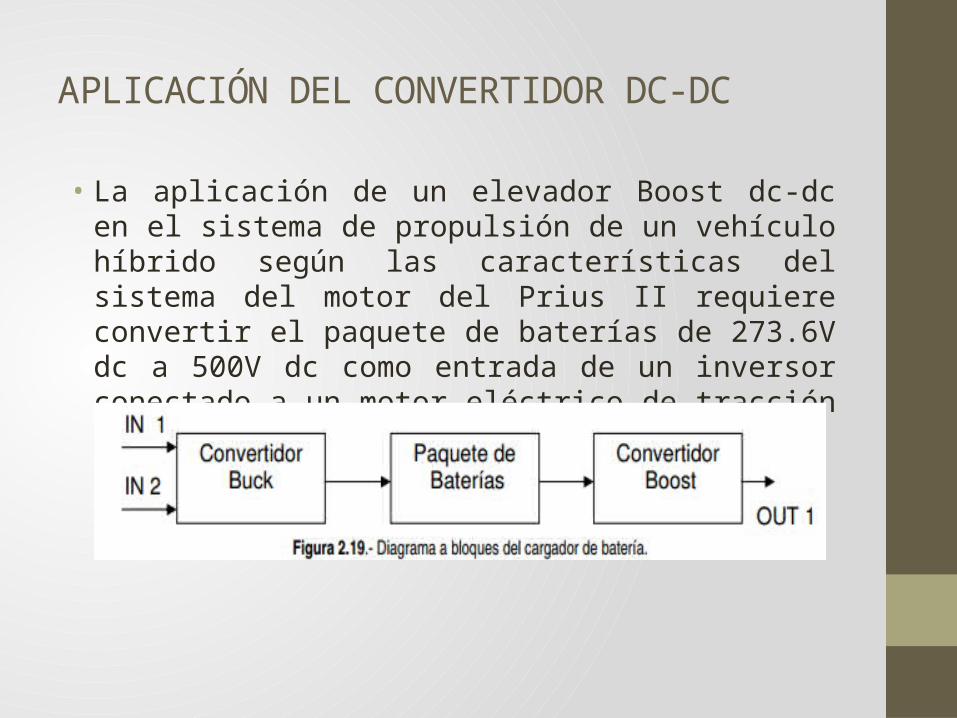
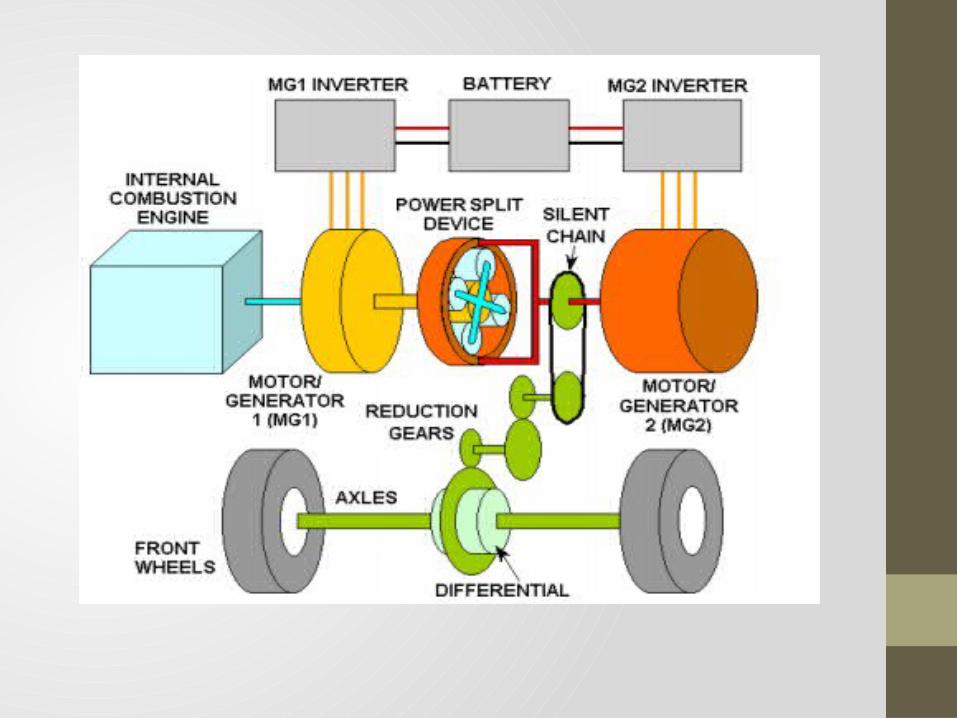
APLICACIÓN DEL CONVERTIDOR DC-DC
• La aplicación de un elevador Boost dc-dc en el sistema de propulsión de un vehículo híbrido según las características del sistema del motor del Prius II requiere convertir el paquete de baterías de 273.6V dc a 500V dc como entrada de un inversor conectado a un motor eléctrico de tracción para las ruedas.
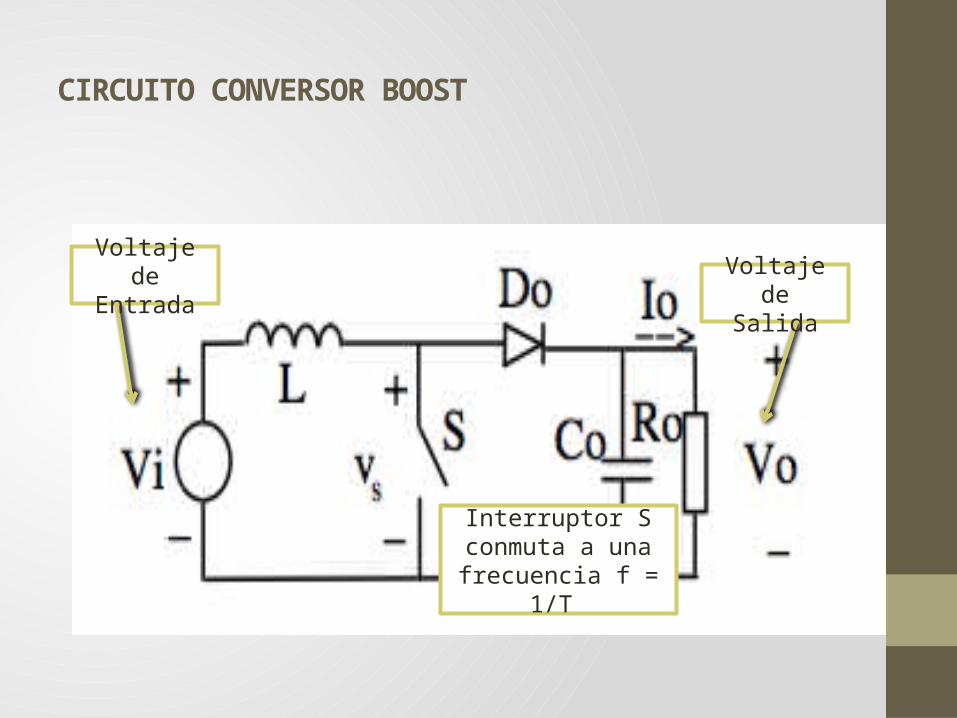
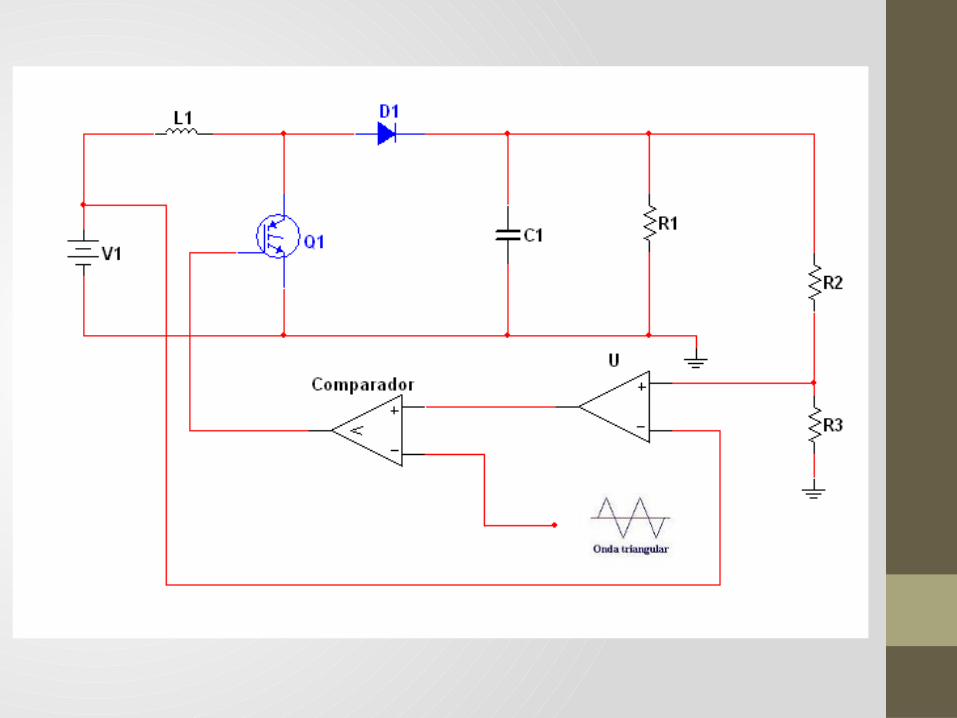
CIRCUITO CONVERSOR BOOST
Voltaje de Entrada Voltaje de
Salida
Interruptor S conmuta a una
frecuencia f = 1/T
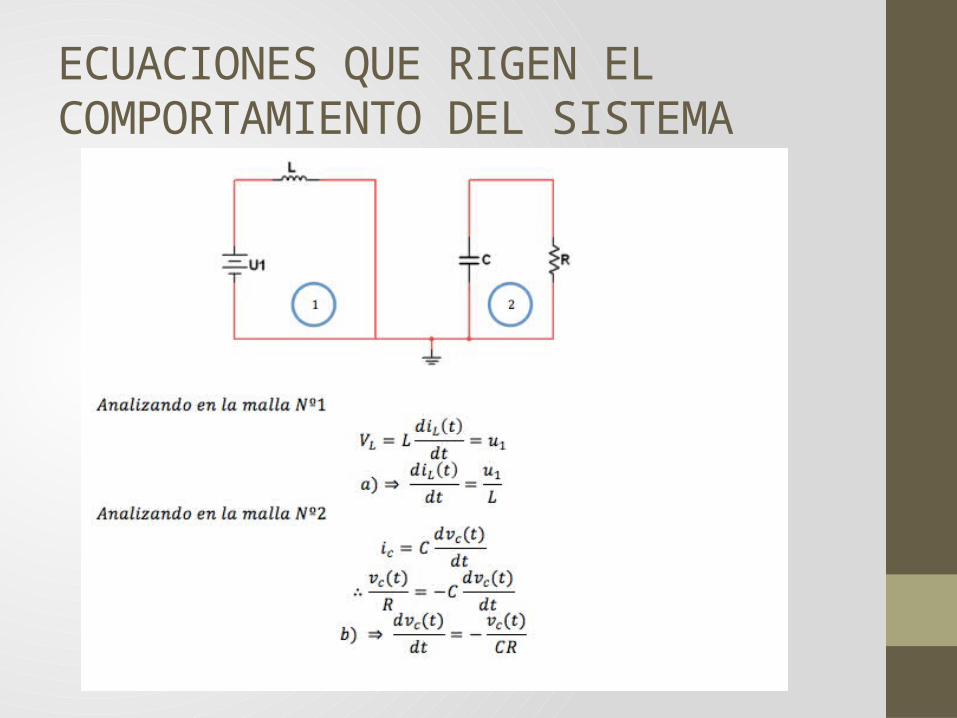
ECUACIONES QUE RIGEN EL COMPORTAMIENTO DEL SISTEMA
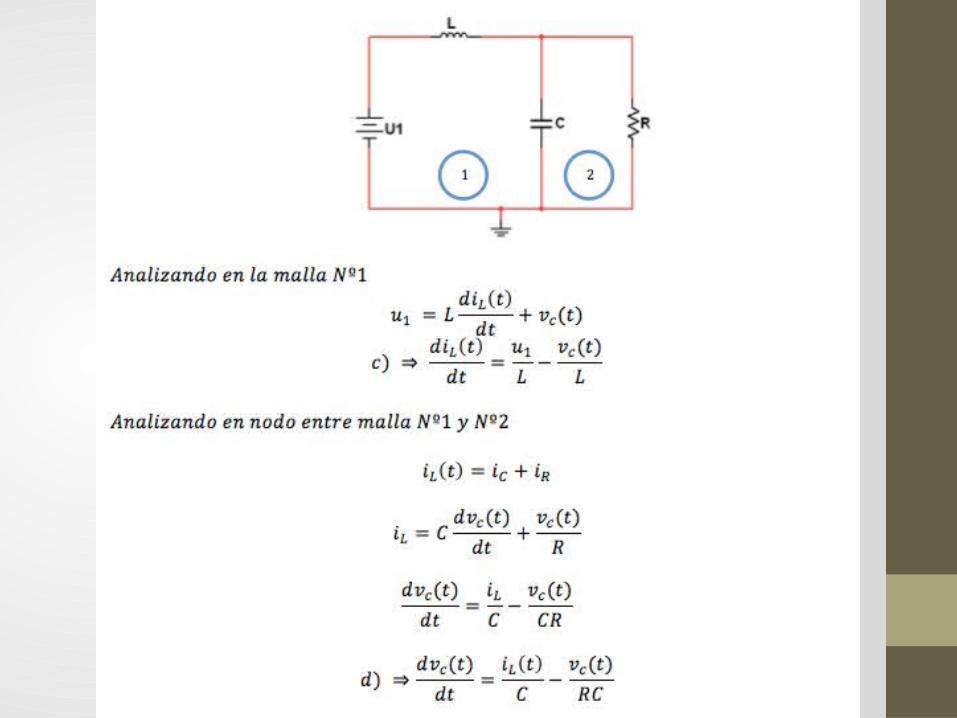
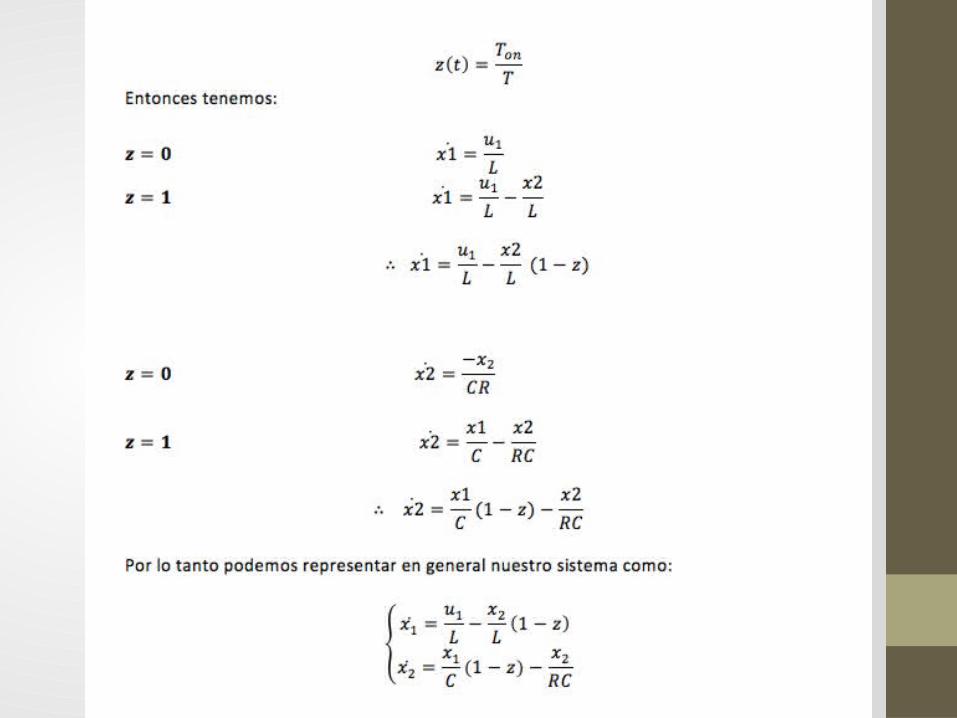
Ahora observemos las ecuaciones que representan el sistema. Cabe destacar el hecho de que difieren las mismas según el estado del interruptor, en este caso del transistor. Las ecuaciones a) y b) para un estado ON y ecuaciones c) y d) para un estado OFF. Entonces de dichas ecuaciones podemos obtener dos espacios de estados diferentes que lo modelan en ambos estados. Este comportamiento del sistema se puede asociar a un sistema bilineal.
MODELO APROXIMADO DEL SISTEMA EN EL ESPACIO DE ESTADOS
SELECCIÓN Y DEMOSTRACIÓN DE LAS VARIABLES DE ESTADO Para seleccionar las variables de estado partiremos de los elementos almacenadores de energía como son capacitores y bobinas, los cuales no deben presentar discontinuidad en el tiempo.
iL→Corriente en el inductor
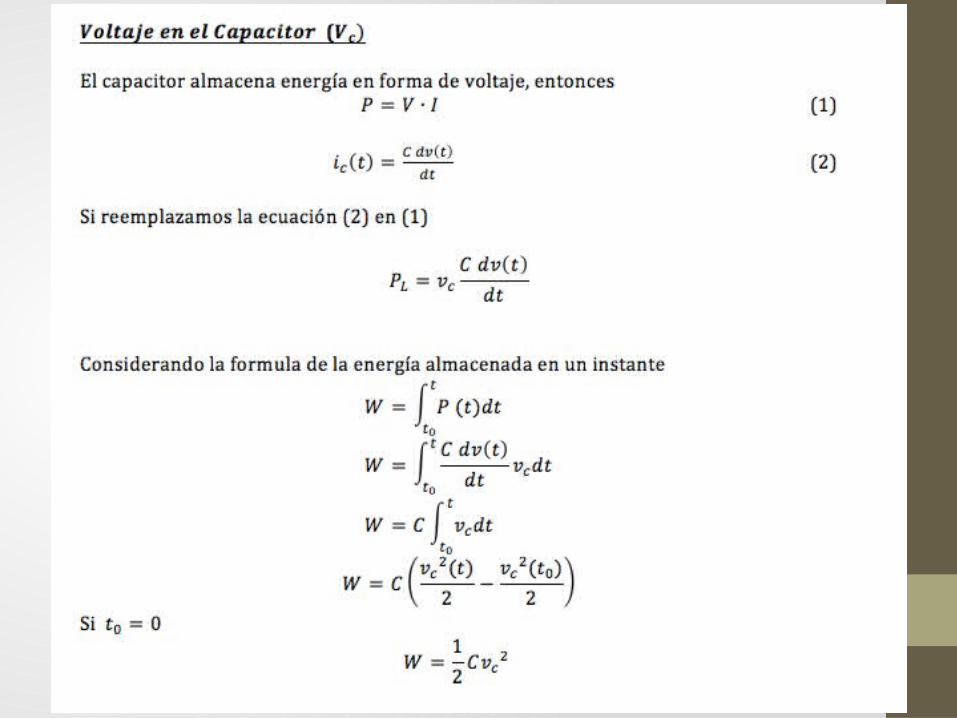
Vc→Voltaje en el capacitor
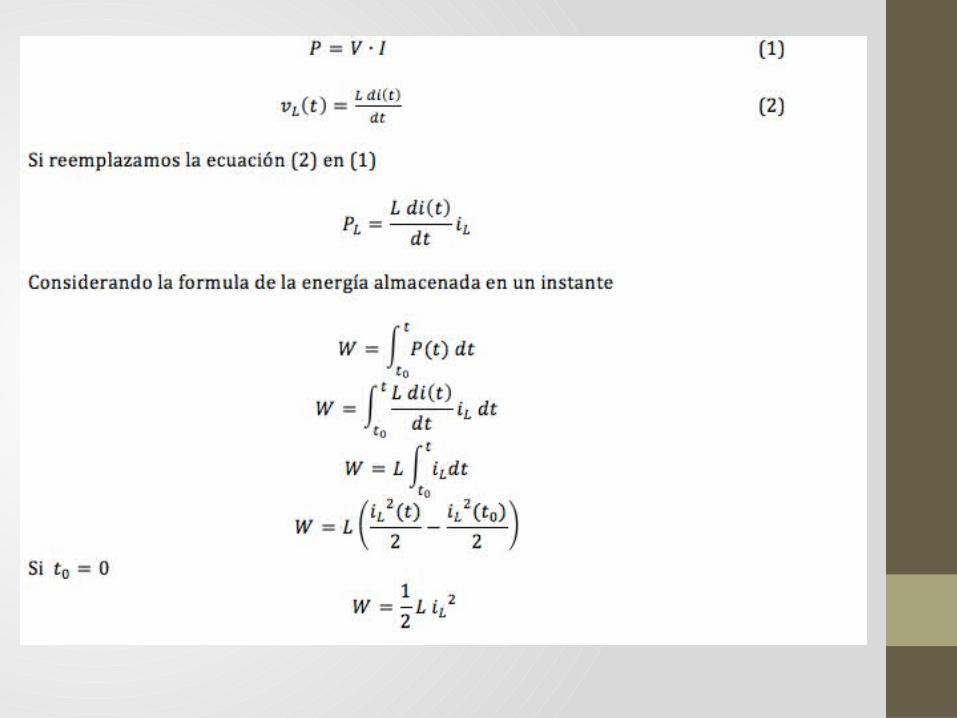
Si éstas variables nos permiten conocer la cantidad de energía almacenada en un instante de tiempo, esa variable será una variable de estado. Cor iente en el inductor𝒓 (iL) La bobina almacena energía en forma de corriente, además de que no es entrada y tampoco salida, entonces
SISTEMAS DE CONTROL BILINEAL Se conoce que muchos problemas de modelación se resuelven mediante ecuaciones diferenciales ordinarias. Una familia particular de estos son los sistemas lineales en el plano indexados bajo un parámetro que varía sobre el conjunto de las funciones reales constantes por partes:
Estos sistemas se conocen como Sistemas Bilineales de Control y describen una familia de trayectorias en el plano.
Esto implica poseer dos matrices diferentes para A, que difieren por un parámetro u, siendo este último conocido como variable de control, el cual me permite combinar los enésimos posibles estados en un solo modelo matemático Ahora al analizar nuestro sistema adjudicaremos esta variable de control al tiempo en encendido del transistor y analizamos:
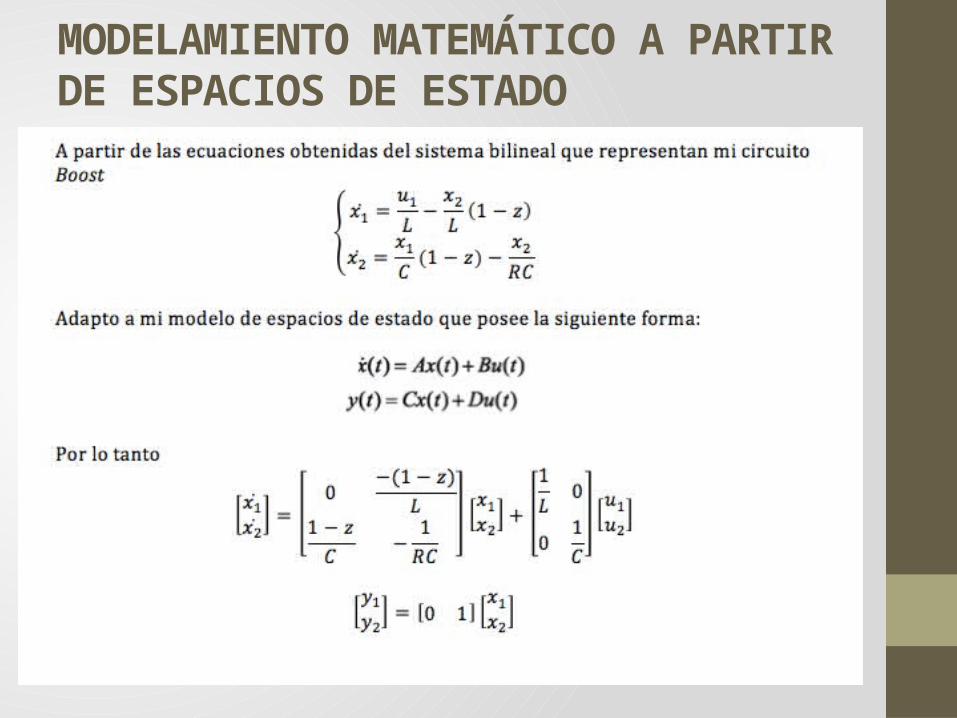
MODELAMIENTO MATEMATICO A PARTIR DE ESPACIOS DE ESTADO
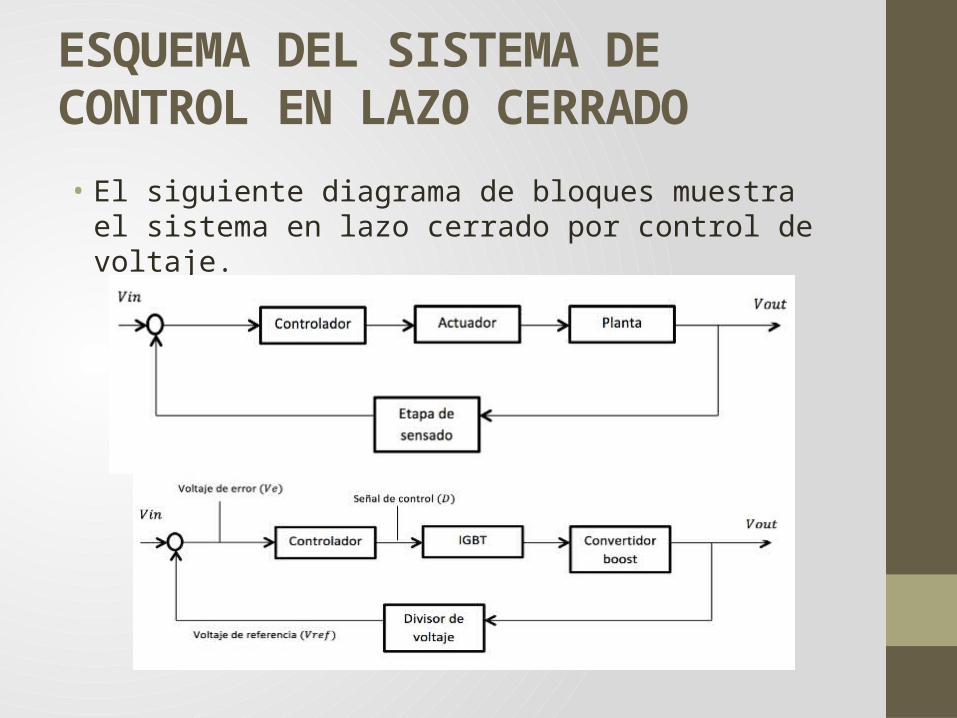
ESQUEMA DEL SISTEMA DE CONTROL EN LAZO CERRADO
• El siguiente diagrama de bloques muestra el sistema en lazo cerrado por control de voltaje.
EVALUACIÓN DEL SISTEMA MODELADO
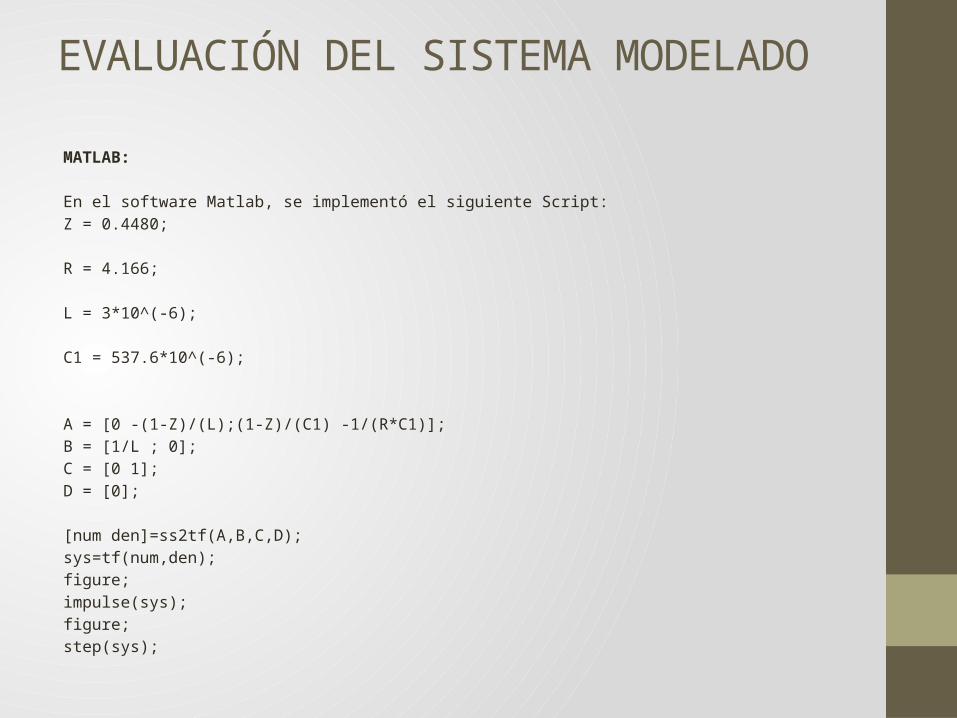
MATLAB: En el software Matlab, se implementó el siguiente Script:Z = 0.4480; R = 4.166; L = 3*10^(-6); C1 = 537.6*10^(-6); A = [0 -(1-Z)/(L);(1-Z)/(C1) -1/(R*C1)];B = [1/L ; 0];C = [0 1];D = [0]; [num den]=ss2tf(A,B,C,D);sys=tf(num,den);figure;impulse(sys);figure;step(sys);
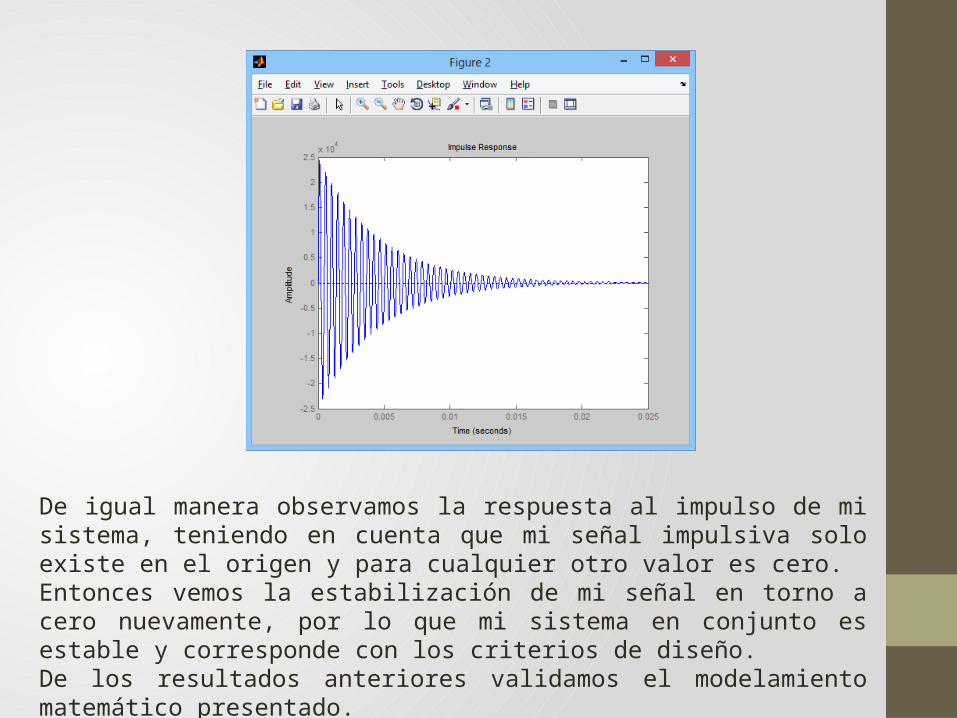
De igual manera observamos la respuesta al impulso de mi sistema, teniendo en cuenta que mi señal impulsiva solo existe en el origen y para cualquier otro valor es cero. Entonces vemos la estabilización de mi señal en torno a cero nuevamente, por lo que mi sistema en conjunto es estable y corresponde con los criterios de diseño.De los resultados anteriores validamos el modelamiento matemático presentado.
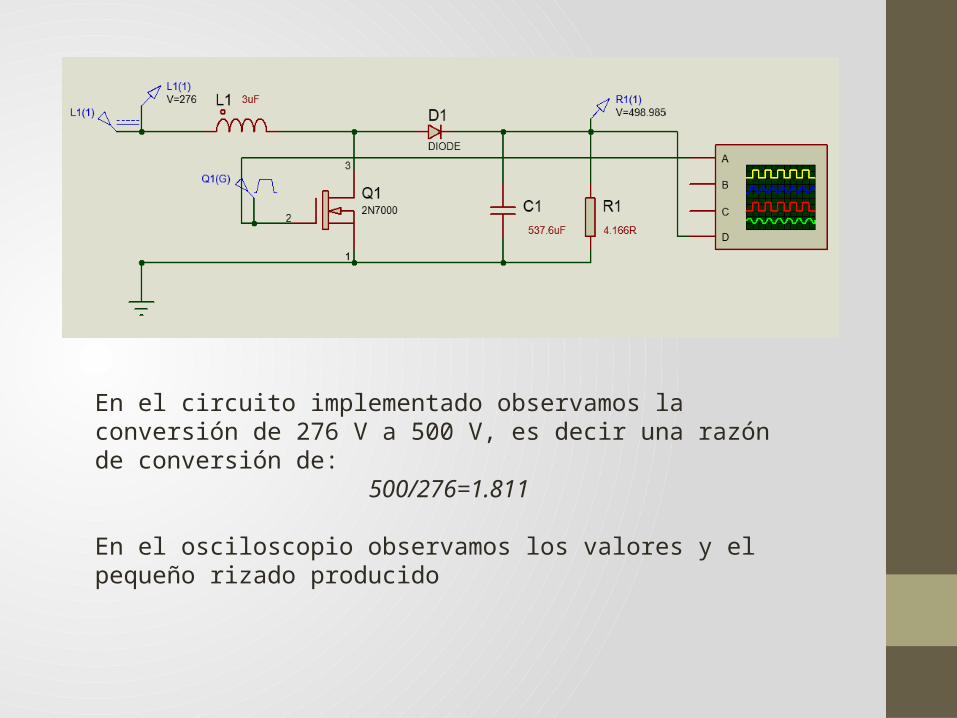
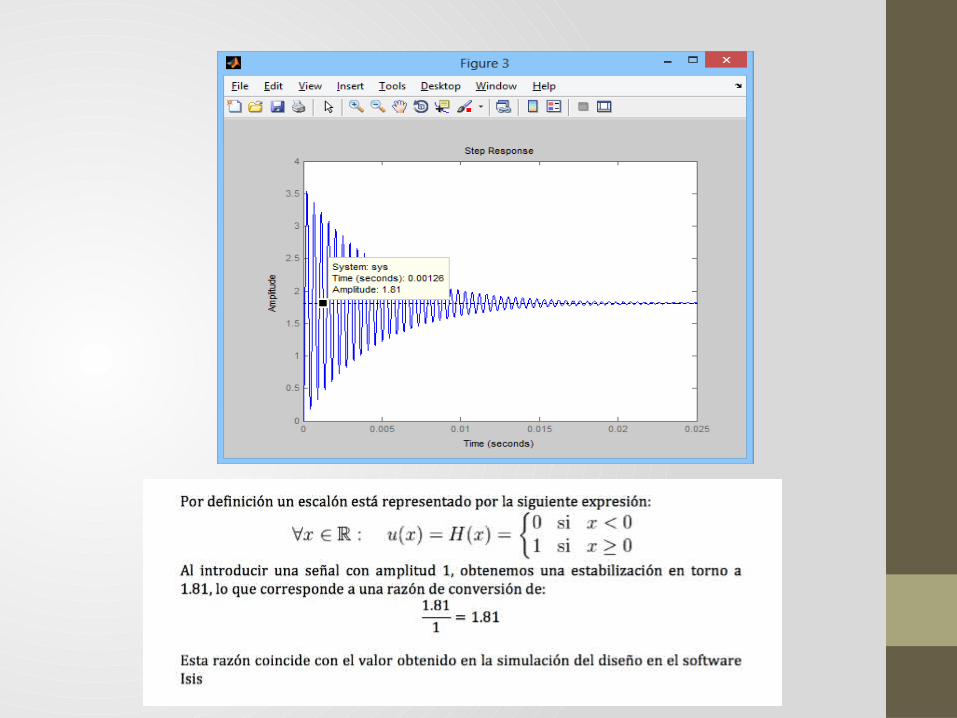
En el circuito implementado observamos la conversión de 276 V a 500 V, es decir una razón de conversión de:
500/276=1.811 En el osciloscopio observamos los valores y el pequeño rizado producido
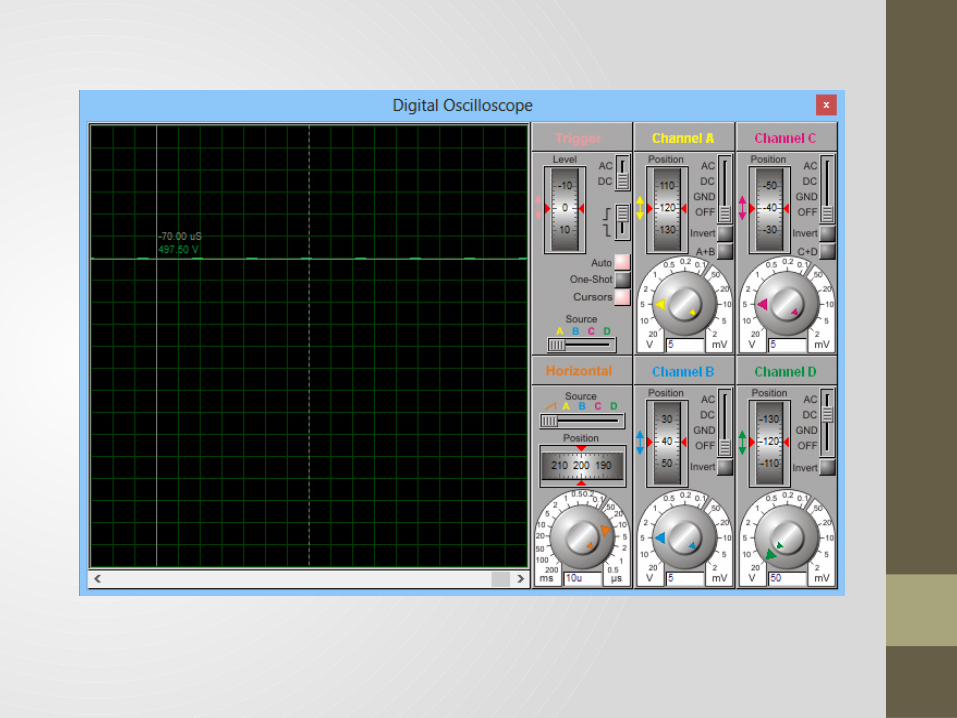
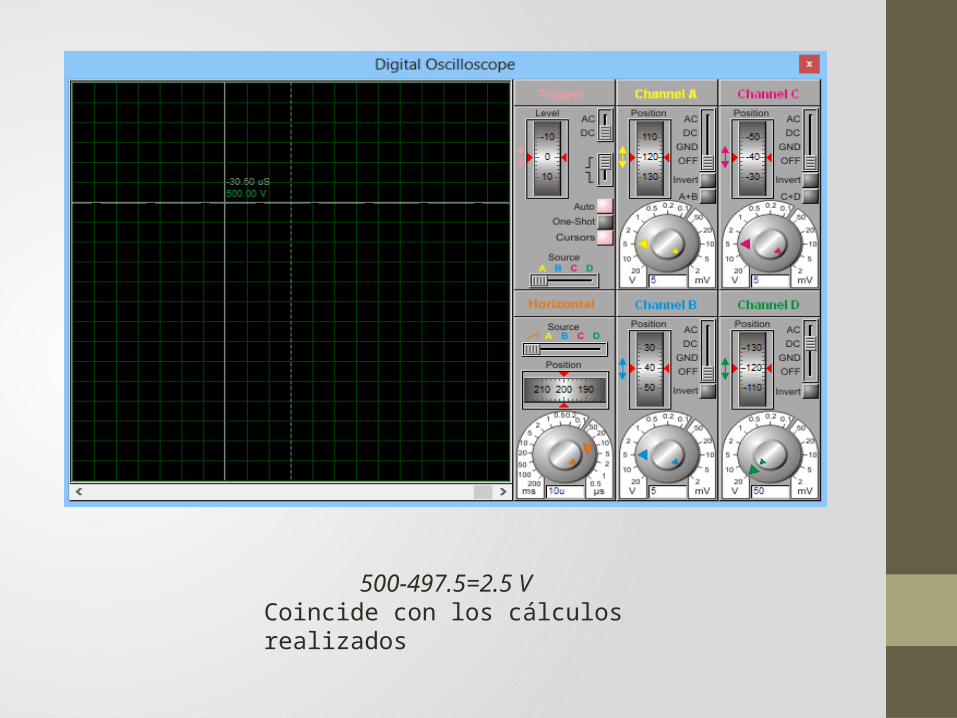
500-497.5=2.5 VCoincide con los cálculos realizados





























