Embed Size (px)
Citation preview

Mention de Master Ingénierie des Systèmes Complexes (ISC)
de l’UPSay (Université Paris Saclay)
Parcours (M2) IN2P : Ingénierie Numérique Produit Process
Etablissements opérateurs : ENS Cachan, CS
Responsable : Christophe Tournier, ENS Cachan, PR, [email protected]
Contact secrétariat : Claudine Chabaud, [email protected]
Traduction de l'intitulé du parcours en anglais : Advanced and Smart Manufacturing
Présentation générale
Le parcours forme des étudiants par la recherche et à la recherche dans le domaine de l’ingénierie de
conception ainsi qu’en fabrication avancée (Advanced & Smart Manufacturing).
Généralités Contexte
Dans un contexte économique très concurrentiel, il est nécessaire de concevoir et de produire des
produits innovants, de haute technologie et à forte valeur ajoutée dans les industries de pointe. La
formation proposée a donc pour objectif de former les étudiants à la recherche dans le cadre de la
conception intégrée des produits et des processus de fabrication. La formation est centrée sur
l’apprentissage d’outils et de méthodes pour la modélisation, la simulation numérique et
l’expérimentation.
La formation est basée sur des problématiques scientifiques et technologiques et l’approche
pédagogique repose sur des apports formels (cours, conférences, travaux dirigés) mais aussi très
largement sur des travaux pratiques expérimentaux et des projets.
La spécialité ayant un fort ancrage industriel, la formation est développée en partenariat avec les
grandes entreprises du secteur des transports (Airbus, Snecma, Renault, etc.) et des logiciels
(Dassault Systèmes, Missler Software, Spring Technologies, etc.) pour proposer des interventions de
spécialistes et des stages de recherche.
Objectifs pédagogiques et scientifiques, en précisant les points forts de cette formation, les atouts
professionnels,... pour l'étudiant
La formation proposée dans le parcours IN2P aborde diverses problématiques scientifiques et
technologiques et vise à développer des compétences dans :
La modélisation des processus de Conception et de Fabrication Assistée par Ordinateur
(CFAO),
La modélisation géométrique des assemblages rigides ou flexibles et la spécification de leurs
variations géométriques admissibles,
L’optimisation de processus d’Usinage Grande Vitesse de formes complexes,
La modélisation des structures mécaniques articulées et leur commande,

L’acquisition et l’identification des formes par numérisation sans contact de pièces rigides ou
des grandes structures déformables,
L’ingénierie des systèmes complexes multi-physiques.
De plus, la formation a pour objectifs de faire acquérir un ensemble de compétences autour des outils
et méthodes pour la recherche et le développement :
Techniques de recherche bibliographique d’articles ou de brevets
Techniques de programmation logicielle pour faire la preuve de concept
Techniques d’optimisation discrètes et continues
Anglais scientifique.
Débouchés professionnels
En termes de débouchés professionnels, cette formation vise à la fois les carrières industrielles
(Ingénieur R&D des grands comptes ou PME) et académiques (Chercheur et Enseignant-Chercheur).
Elle permettra aux étudiants de trouver un emploi en R&D après le master ou de conduire des
recherches dans le cadre de thèses de doctorat à orientation industrielle (thèses CIFRE), et dans le
cadre de doctorats dans les laboratoires traitant de sujets plus académiques. Les secteurs d’activités
principalement concernés sont les industries des transports (aéronautique, automobile, etc.), de
l’énergie et l’industrie des logiciels XAO.
Mots clés :
Usine du futur, Advanced Manufacturing, Conception et Fabrication Assistée par Ordinateur (CFAO),
Assemblage de structures déformables, Tolérancement ISO, Numérisation sans contact, Traitement
des nuages de points, Usinage Grande Vitesse, Génération de trajectoires, Robotique industrielle,
Smart Manufacturing.
A qui s'adresse la formation ?
Population d'étudiants visée
Cette formation s’adresse aux étudiants ayant un niveau M1 ou finissant une 2ème année de l’école
d’ingénieurs qui souhaitent approfondir leurs connaissances et développer une expertise forte dans le
domaine de l’ingénierie de conception et de fabrication. La formation est adaptée aux étudiants qui
souhaitent approfondir la discipline et qui se destinent à une carrière académique, mais aussi aux
étudiants qui souhaitent se diriger vers une carrière industrielle dans les départements de R&D de
grands groupes ou de PME.
Prérequis demandés, formation antérieure, compétences,...
Les étudiants doivent avoir une formation de type scientifique ou en ingénierie du niveau M1 ou avoir
fini la 2ème année d’une école d’ingénieurs. Des compétences en programmation et un gout pour les
manipulations expérimentales sont souhaitées. Toutes les candidatures seront examinées en fonction
du dossier, mais aussi des motivations des étudiants pour la formation.
Laboratoires associés à la formation
Laboratoire Universitaire de Recherche en Production Automatisée (LURPA) de l’ENS Cachan
Laboratoire Génie Industriel (LGI) de CentraleSupélec (CS)
LISMMA de SUPMECA

Tableau synthétique de la formation
Intitulé des UE Responsable Etab. Heures ECTS
Tronc commun
Méthodologie de la Recherche J.-J. Lesage ENSC 20 2
Anglais Scientifique C. Colin ENSC 20 2
Techniques et outils pour la preuve de
concepts J.-M. Roussel ENSC 30 4
Introduction à l’optimisation G. Faraut ENSC 20 2
Ingénierie système basée sur les
modèles J.-Y. Choley SUPMECA 30 3
Stage 30
Parcours
Modélisation géométrique des
assemblages et systèmes F.Thiebaut ENS Cachan
PSUD
30 3
CAO, reconstruction 3D et réalité
virtuelle
C.Lartigue ENS Cachan
PSUD
30 3
Computer Aided Manufacturing C.Tournier ENS Cachan 30 3
Acquisition de géométrie par moyens
optiques, vision
C.Mehdi-
Souzany
ENS Cachan
PSUD
30 3
Modélisation et commande des
systèmes robotiques S.Lavernhe ENS Cachan
PSUD
20 2
Electif (1 au choix parmi 4)
Advanced Manufacturing Y.Quinsat ENS Cachan 30 3
Product Life-cycle Management P.Morenton CS 30 3
Ingénierie de la conception
B.Yannou
CS 30 3
Assemblages de structures :
traitement du contact frottant P-A.Boucard ENS Cachan 30 3
60
UE communes aux parcours CCSC et IN2P du M2 ISC
UE propres au parcours IN2P

Annexe 1 : Descriptif synthétique des UEs

Description synthétique UE
Méthodologie de la recherche
Contenu Ce cours a pour objectif de former aux « bonnes pratiques » de la recherche. Sont plus particulièrement développés : les démarches, moyens et outils de recherche et d’analyse bibliographique ; les techniques de rédaction d’un article scientifique et de présentation d’une communication en conférence ; les règles et techniques de critique d’un article scientifique.
Mots clés Recherche bibliographique, publication scientifique
Responsable Jean-Jacques Lesage, PR, ENS Cachan, [email protected]
ECTS : 2 Heures : 20 Langue : Français Lieu : ENS Cachan
Description synthétique UE
Anglais scientifique
Contenu Cette UE a pour but de familiariser les étudiants avec l'anglais tel qu'il est utilisé dans le domaine de la recherche, tant à l'écrit qu'à l'oral. On insistera donc sur les spécificités de l'anglais scientifique, à travers des exemples tirés des domaines scientifiques du master. Le travail se fera à partir d’extraits de conférences et sur des articles de recherche.
Mots clés Anglais scientifique, écriture et présentation d’une conférence
Responsable Catherine Colin, PRAG, ENS Cachan, [email protected]
ECTS : 2 Heures : 20 Langue : Anglais Lieu : ENS Cachan
Description synthétique UE
Techniques et outils pour la preuve de concepts
Contenu Aujourd’hui, tout scientifique est amené à développer des maquettes logicielles lui permettant de valider les résultats de ses recherches au travers d'expérimentations numériques, d'exploiter des résultats numériques fournis par des logiciels spécifiques, d'interfacer différents logiciels dédiés ... L'objectif de ce module est d’initier les étudiants à quelques bonnes pratiques du génie logiciel afin de les rendre opérationnels pour leurs développements futurs.
Mots clés Programmation orientée objet, structuration des données, interfaçage logiciel
Responsable Jean-Marc Roussel, MCF HDR, ENS Cachan, [email protected]
ECTS : 4 Heures : 30 Langue : Français Lieu : ENS Cachan
Description synthétique UE
Introduction à l’optimisation
Contenu Ce cours propose une introduction aux différentes techniques et algorithmes d’optimisation continue et discrète, linéaire et non-linéaire, mono et multicritères. A la fin de ce cours les étudiants sont capables de reconnaître un problème d’optimisation, de le mettre sous une forme standard ou matricielle, et d’utiliser un algorithme pertinent pour sa résolution (gradient, quasi-newton, simplex, point intérieur, …).
Mots clés Optimisation linéaire, optimisation non-linéaire, Programmation Linéaire (PL), PL en Nombres Entiers, optimisation multicritères.
Responsable Gregory FARAUT, MCF, ENS Cachan, [email protected]
ECTS : 2 Heures : 20 Langue : Français Lieu : ENS Cachan

Description synthétique UE
Ingénierie système basée sur les modèles
Contenu Ce cours propose une méthode intégrée de modélisation des systèmes complexes. Il est plus spécifiquement basé sur le langage SysML et présente une approche d’ingénierie système cohérente allant de l’émergence des exigences jusqu’aux modélisations fonctionnelle, logique et physique. Les exemples traités ont comme fonction objectif l’amélioration de la sûreté de fonctionnement des systèmes mécatroniques.
Mots clés Ingénierie système, méta-modélisation, SysML, modélisation fonctionnelle, modélisation logique, modélisation physique.
Responsable Jean-Yves CHOLEY, MCF, SUPMECA, [email protected]
ECTS : 3 Heures : 30 Langue : Français Lieu : SUPMECA

Description synthétique UE
Modélisation géométrique des assemblages et systèmes
Contenu Le comportement des systèmes mécaniques est de plus en plus étudié par l’utilisation de simulations numériques. Le support de ces simulations est le modèle géométrique du système, considéré idéal. L’objectif de l’UE est de sensibiliser à l’influence des défauts géométriques sur le comportement des assemblages et des systèmes. Des approches par identification, simulation et prédiction seront utilisées. Items principaux de l’enseignement :
Normes et Langages pour la Spécification Géométrique des Produits Géométrie nominale et géométrie de substitution de composants
obtenue par prédiction, simulation, identification Détermination du comportement des assemblages et mécanismes
composés de pièces avec défauts Limitation des écarts géométriques pour atteindre des performances
fonctionnelles : tolérancement géométrique Performance des moyens de production et prédiction de la
géométrie obtenue
Mots clés Ecarts géométriques, comportement géométrique, défauts de forme, souplesse, tolérancement.
Responsable François Thiebaut, MCF, UPSud, [email protected]
ECTS : 3 Heures : 30 Langue : Français Lieu : ENS Cachan
Description synthétique UE
CAO, Reconstruction de formes et Réalité virtuelle
Contenu La maquette numérique est en général définie en CAO, et résulte soit d’une conception, soit d’une rétro-conception géométrique. Dans ce contexte, le module proposé s’articule autour de 3 points :
outils et méthodes de modélisation et de représentation des formes 3D pour la CAO
outils et méthodes de rétro-conception géométrique concept de maquette numérique pour les applications de revue de
projet, visualisation et interaction en réalité virtuelle
A la fin de l’UE, l’étudiant doit être capable de :
Comprendre le concept de maquette numérique (maîtrise)
Modéliser en CAO les produits par des surfaces, des maillages ou des solides (maîtrise)
Appliquer les techniques de reconstruction de surfaces (continues ou discrètes) en rétro-conception (maîtrise)
Faire le lien entre la maquette numérique et la réalité virtuelle (notion)
Mots clés CAO, Maquette numérique, Courbes et Surfaces, Rétro-conception
Responsable Claire Lartigue, Professeur, UPSud, [email protected]
ECTS : 3 Heures : 30 Langue : Français Lieu : ENS Cachan

Description synthétique UE
Computer Aided Manufacturing
Contenu This course aims at addressing the technics and algorithms of tool path computation used in Computer Aided Manufacturing Software. The study of tool path computation is carried out in the context of 5-axis high speed machining of free-form surfaces (molds, medical implants or parts of aero structures) or additive manufacturing, executed on 5-axis CNC machine tool. Two objectives are followed: choosing and setting up the best strategies using CAM software algorithms (TopSolid’CAM and CATIA V5) and proposing specific algorithms to deal with specific or innovative cases. Skills acquisition:
Computation of tool postures along a free-form surface
Modeling of geometrical deviation of free-form surfaces dues to sweeping strategy
Knowledge of collision avoidance techniques
Modeling of the Inverse Kinematical Transformation on 5 or 6-axis machine tools
Computational geometry for manufacture (intersections, collisions, polynomial interpolation, etc.)
Mots clés Tool path computation ; computational geometry ; 5-axis milling ; Free-form surfaces ; Collision avoidance ;
Responsable Christophe Tournier, Professeur, ENS Cachan, christophe.tournier@ens-
cachan.fr ECTS : 3 Heures : 30 Langue : Anglais Lieu : ENS Cachan
Description synthétique UE
Acquisition de géométrie par moyen optique, vision
Contenu Les processus d’acquisition de géométrie s’appuient de plus en plus sur des systèmes de numérisation par moyens optiques qui délivrent une représentation de la géométrie des pièces sous forme de données discrètes (nuages de points, maillages, images, …) en des temps relativement courts. Dans ce contexte, l’objectif de ce cours est de présenter les principes, outils et méthodes associés à l’acquisition de la géométrie des formes des pièces par moyens optiques :
Principes, Moyens et méthodes d’acquisition de géométrie des surfaces
Stratégie de numérisation et qualité Pré-Traitement des données discrètes
Mots clés Numérisation sans contact, étalonnage, qualification, sélection, trajectoire, métrologie, recalage, fusion, multi-échelle, multi-capteur.
Responsable Charyar Mehdi-Souzany, MCF, Paris 13, [email protected]
ECTS : 3 Heures : 30 Langue : Français Lieu : ENS Cachan

Description synthétique UE
Modélisation et commande des systèmes robotiques
Contenu L’objectif de l’UE est de donner aux étudiants les compétences nécessaires pour appréhender le pilotage et la maîtrise des performances d’un système robotisé (robotique ou centre d’usinage multi-axes). Ces compétences opérationnelles sont atteintes au travers de l’étude scientifique du comportement géométrique et dynamique des systèmes poly-articulés. Les trois axes de formation sont donc la géométrie, la dynamique et la commande :
Description géométrique des systèmes poly-articulés et paramétrage pour des architectures sérielles (transformations homogènes, paramètres de Dénavit et Hartenberg, paramètres de rotation 3D, modèles géométriques direct et inverse)
Modélisation dynamique de systèmes multi-corps : Théorèmes généraux, principe des puissances virtuelles, formalisme de Lagrange, formalisme de Newton-Euler et méthode de la double récurrence
Techniques de commande - réglage Architectures industrielles et avancées, comparaison des solutions PID - prédictive sous forme RST, intégration de la dynamique dans la commande, commande par découplage non linéaire dans l’espace articulaire et dans l’espace opérationnel.
Mots clés Modèle géométrique, modèle dynamique, commande, robot
Responsable Sylvain Lavernhe, MCF, ENS Cachan, [email protected]
ECTS : 2 Heures : 20 Langue : Français Lieu : ENS Cachan
Description synthétique UE
Advanced Manufacturing
Contenu L’UE proposée s’appuiera sur un enseignement théorique fortement illustré par une analyse de phénomène physique mise en évidence lors d’activités pratiques. L’objectif est que les élèves puissent mener l’analyse d’un problème de coupe et de mettre en place les outils analytiques de modélisation des phénomènes macroscopiques liés à l’usinage par enlèvement de matière . Ainsi le cours s’oriente sur les points suivants :
Etude de la Formation du copeau ; Géométrie outil ; Loi d’usure Efforts de coupe (Merchant), mise en évidence du COM, Méthode
par discrétisation d’arête Vibration en usinage : lobes de stabilité Vibration en usinage : structure machine Simulation de l’état de surface en usinage
Mots clés coupe des métaux, efforts de coupe, lobes de stabilité, intégrité de surface
Responsable Yann Quinsat, MCF, ENS Cachan, [email protected]
ECTS : 3 Heures : 30 Langue : Français/Anglais
Lieu : ENS Cachan

Description synthétique UE
Assemblages de structures : traitement du contact frottant
Contenu La prise en compte des phénomènes de contact et de frottement est vitale dans la simulation du comportement des assemblages de structures. Ces phénomènes sont très fortement non linéaires et leur modélisation pose de sérieuses difficultés tant sur le plan de la formulation que sur celui de la résolution numérique. Ce module présente, dans un premier temps, la problématique générale des assemblages de structures et les méthodes pratiques de modélisation des conditions de liaison linéaires. Les formulations classiques et les méthodes numériques employées dans les codes de calcul industriels pour la prise en compte des conditions de contact et de frottement sont ensuite abordées. Le cours est illustré par des applications industrielles et une initiation à la résolution sur code de calcul par élément finis est proposée.
Mots clés assemblages, liaisons, frottement, contact
Responsable Pierre-Alain Boucard, Professeur, ENS Cachan, [email protected]
ECTS : 3 Heures : 30 Langue : Français Lieu : ENS Cachan

Annexe 2 : Descriptif détaillé des UEs

Intitulé de l’UE Méthodologie de la recherche
Mots clés Recherche bibliographique, production scientifique
Contenu de l’UE : Cette UE a comme objectif d’informer les étudiants sur le monde de la recherche et sa structuration, et de les former aux « bonnes pratiques » de la recherche bibliographique et de l’écriture scientifique. Sont successivement abordés :
Le monde de la recherche académique et industrielle,
Les démarches, moyens et outils de recherche et d’analyse bibliographique,
La rédaction d’un article scientifique,
La critique d’un article scientifique,
La présentation d’une communication en conférence.
Lieu de la formation ENS Cachan
ECTS 2
Objectifs scientifiques et pédagogiques :
Former aux techniques de recherche, d’analyse et de synthèse bibliographique.
Compétences complémentaires acquises par l’étudiant durant cette UE :
Acquisition des « bonnes pratiques » de la recherche bibliogra-phique et de l’écriture scientifique.
Coordinateur de l’UE LESAGE Jean-Jacques, Professeur, section 61, ENS Cachan
Description de l’équipe enseignante
LESAGE Jean-Jacques, Professeur, section 61, ENS Cachan
Pour chaque intervenant LESAGE Jean-Jacques : 12h CM, 8h TP
Période d’enseignement S3
Langue Français
Nbre heures CM 12
Nbre heures TP 8
Prérequis : Aucun
Modalités des contrôles des connaissances
Réalisation, rédaction et soutenance d’une synthèse bibliographique

Intitulé de l’UE Anglais scientifique
Mots clés Ecriture scientifique, présentation de conférences
Contenu de l’UE : Cette UE a pour but de familiariser les étudiants avec l'anglais tel qu'il est utilisé dans le domaine de la recherche, tant à l'écrit qu'à l'oral. On insistera donc sur les spécificités de l'anglais scientifique, à travers des exemples tirés des domaines scientifiques du parcours. Le travail se fera à partir d’extraits de conférences et d’articles de recherche.
Lieu de la formation ENS Cachan
ECTS 2
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable de :
Rédiger en anglais le résumé d’une communication,
Prendre la parole dans le contexte d’une conférence.
Coordinateur de l’UE COLIN Catherine, PRAG, ENS Cachan
Description de l’équipe enseignante
COLIN Catherine, PRAG, ENS Cachan
Pour chaque intervenant COLIN Catherine : 10h CM, 10h TD
Période d’enseignement S3
Langue Anglais
Nbre heures CM 10
Nbre heures TD 10
Bibliographie conseillée : Wallwork, A. (2013) English for Writing Research Papers, Springer.
Modalités des contrôles des connaissances
Contrôle continu (présentation orale, rédaction d’abstracts)

Intitulé de l’UE Techniques et outils pour la preuve de concepts
Mots clés Programmation orientée objet, interfaçage de logiciels dédiés
Contenu de l’UE : En sciences appliquées, les outils informatiques sont omniprésents. Ils sont de plus en plus ouverts et peuvent être interfacés, à la condition de disposer d'un minimum de culture informatique. Aujourd’hui, tout scientifique est amené à développer des maquettes logicielles lui permettant de valider les résultats de ses recherches au travers d'expérimentations numériques, d'exploiter des résultats numériques fournis par des logiciels spécifiques, d'interfacer différents logiciels dédiés, … L'objectif de cette UE est d’initier les étudiants à quelques pratiques ciblées du génie logiciel, afin de les rendre opérationnels pour leurs développements futurs. Cette initiation se fera aux travers de la conduite d’un projet, consistant à développer un module logiciel en lien avec le contenu scientifique d’une des UE du parcours.
Lieu de la formation ENS Cachan
ECTS 4
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable de :
Structurer les données d’un logiciel,
Choisir l’architecture d’un module logiciel,
Evaluer l’efficacité des algorithmes mis en œuvre,
S’interfacer avec des logiciels tiers,
Spécifier et concevoir un module logiciel en utilisant la programmation orientée objet.
Coordinateur de l’UE ROUSSEL Jean-Marc, Maître de Conf. HDR, section 61, ENS Cachan
Description de l’équipe enseignante
ROUSSEL Jean-Marc, Maître de Conf. HDR, section 61, ENS Cachan LAVERNHE Sylvain, Maître de Conf., section 60, ENS Cachan
Pour chaque intervenant ROUSSEL Jean-Marc : 8h CM, 3h TD, 6h TP LAVERNHE Sylvain : 4h CM, 3h TD, 6h TP
Période d’enseignement S3
Langue Français
Nbre heure CM 12
Nbre heure TD 6
Nbre heure TP 12
Bibliographie conseillée : • Apprenez à programmer en Python, Vincent Le Goff, Openclassrooms, 382 pages
• UML 2 par la pratique: Etudes de cas et exercices corrigés, Pascal Rocques, Eyrolles, 396 pages
Prérequis : Bases de la programmation Objet
Modalités des contrôles des connaissances
Réalisation et présentation d’un mini projet
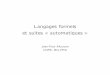
Intitulé de l’UE Introduction à l’optimisation
Mots clés Optimisation linéaire, optimisation non-linéaire, programmation linéaire, optimisation multicritères.
Contenu de l’UE : Ce cours propose une introduction aux différentes techniques d’optimisation :
Linéaire et non-linéaire pour des fonctions continues convexes (gradient, quasi-newton).
Programmation linéaire avec les algorithmes du simplex et du point intérieur.
Programmation Linéaire en Nombre Entier (PLNE).
Optimisation multicritères. La partie TD aura pour objectif de mettre en œuvre les principaux algorithmes d’optimisation : gradient, newton, simplex, point intérieur, etc. L’outil Matlab sera utilisé à cette fin.
Lieu de la formation ENS Cachan
ECTS 2
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable :
De reconnaître un problème d’optimisation,
De choisir la technique la plus appropriée et de le mettre sous une forme pertinente à sa résolution.
Coordinateur de l’UE FARAUT Gregory, MCF, section 61, ENS Cachan
Description de l’équipe enseignante
FARAUT Gregory, MCF, section 61, ENS Cachan
Pour chaque intervenant FARAUT Gregory : 10h CM, 10h TP
Période d’enseignement S3
Langue Français
Nbre heures CM 10
Nbre heures TP 10
Bibliographie conseillée : Optimisation continue, Bonnans, F. (2006), Dunod.
Convex optimization, Boyd, S.P. and Vandenberghe, L. (2004), Cambridge university press
Programmation mathématique : théorie et algorithmes, vol.1, Minoux, M (1983), Dunod Paris
Optimisation discrète, Billionnet, A. (2007), Dunod
Prérequis : Equations linéaires et différentielles linéaires, calcul matriciel
Modalités des contrôles des connaissances
Examen écrit

Intitulé de l’UE Ingénierie système basée sur les modèles
Mots clés Ingénierie système, méta-modélisation, SysML, modélisation fonct-ionnelle, logique et physique
Contenu de l’UE : Ce cours présente un langage et une méthodologie de modélisation des systèmes complexes. Pour cela, une présentation du MBSE (Model-Based Systems Engineering) et des possibilités d’intégration avec le MBSA (Model-Based Safety Assessment) sera faite pour traiter le cas des systèmes critiques. Il se décompose en 4 parties principales :
Langage orienté objet (SysML) et méta-modélisation ;
Mécanismes d’extension (profile). Exemples de la sûreté de fonctionnement et de la mécatronique ;
Méthodologie d’ingénierie système cohérente allant de l’émergence des exigences jusqu’aux modélisations fonctionnelle, logique et physique.
Possibilités d’exploitation du modèle SysML dans un processus intégré afin de générer des FMEA et FTA et de permettre le Model Checking au plus tôt dans le cycle de conception.
Le cours s’appuie sur un scénario de système critique aéronautique. Il est suivi d’un TD de modélisation d’un système critique aéronautique avec l’outil Artisan Studio (ATEGO).
Lieu de la formation SUPMECA
ECTS 3
Compétences complémentaires acquises par l’étudiant durant cette UE :
Maîtrise de la démarche de modélisation système. Notions d’extension d’un langage de modélisation pour supporter des concepts spécifiques à un domaine particulier (sûreté de fonctionnement). Prise en compte au plus tôt de la sûreté de fonctionnement en se basant sur le modèle système.
Coordinateur de l’UE CHOLEY Jean-Yves, Maître de conférences, section 60, SUPMECA
Description de l’équipe enseignante
CHOLEY Jean-Yves, Maître de conférences, section 60, SUPMECA
Période d’enseignement S3
Langue Français
Nbre heures CM 15
Nbre heures TD 15
Bibliographie conseillée : Safety Analysis Integration in a Systems Engineering Approach for Mechatronic system Design, Faïda MHENNI, phD thesis, Ecole Centrale Paris, 12/2014.
A SysML-based methodology for mechatronic systems architectural design, Faida Mhenni, Jean-Yves Choley, Olivia Penas, Regis Plateaux, and Moncef Hammadi, Advanced Engineering Informatics, 28(3):218-231, 2014.
Automatic SysML-based safety analysis, Philipp Helle, In Proc. of the 5th Int. Workshop on Model Based Architecting and Construc-tion of Embedded Systems, 2012.
Prérequis : Notions de langage orienté objet, d’analyse des systèmes et d’analyse de sûreté de fonctionnement.
Modalités des contrôles des connaissances
Mini projet

Code ROF
Intitulé de l’UE Modélisation géométrique des assemblages et systèmes
Mots clés Ecarts géométriques, comportement géométrique, défauts de forme, souplesse, tolérancement.
Contenu de l’UE : Le comportement des systèmes mécaniques est de plus en plus étudié par l’utilisation de simulations numériques. Le support de ces simulations est le modèle géométrique du système, considéré idéal. L’objectif de l’UE est de sensibiliser à l’influence des défauts géométriques sur le comportement des assemblages et des systèmes. Des approches par identification, simulation et prédiction seront utilisées. Items principaux de l’enseignement : Normes et Langages pour la Spécification Géométrique des Produits Géométrie nominale et géométrie de substitution de composants obtenue par prédiction, simulation, identification Détermination du comportement des assemblages et mécanismes composés de pièces avec défauts Limitation des écarts géométriques pour atteindre des performances fonctionnelles : tolérancement géométrique Performance des moyens de production et prédiction de la géométrie obtenue
Lieu de la formation ENS de Cachan
ECTS 30
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable de :
Connaître les principaux modèles de substitution à des surfaces réelles – notions
Maîtriser les modèles de substitution aux surfaces réelles par des surfaces sans défaut de forme
Simuler le comportement géométrique d’un assemblage composé de pièces rigides avec défauts géométriques – maîtrise
Simuler le comportement d’un assemblage composé de pièces flexibles avec défauts géométriques - notions
Coordinateur de l’UE ANWER Nabil, MdC, section 60, Université Paris 13 (IUT de Saint Denis) LAVERNHE Sylvain, MdC, section 60, ENS Cachan PIERRE Laurent, MdC, section 60, Université Paris Sud (IUT de Cachan) THIEBAUT François, MdC, section 60, Université Paris Sud (IUT de Cachan) FALGARONE Hugo, Ingénieur, AIRBUS GROUP
Description de l’équipe enseignante
Pour chaque intervenant, indiquer son nom, son prénom, son grade, éventuellement sa section CNU et son établissement ou organisme d’exercice.
Pour chaque intervenant ANWER Nabil, 6 hetd LAVERNHE Sylvain, 5 hetd

PIERRE Laurent, 8 hetd THIEBAUT François, 8 hetd FALGARONE Hugo, 10 ehtd
Période d’enseignement S3
Langue
Nbre heure CM 18
Nbre heure TP 4
Nbre heure TD 6
Vol horaire global de travail personnel
15
Nbre heure autres types d’enseignement (ex : tutorat)
Durée du stage en semaine
Bibliographie conseillée : Écriture formelle des « chaînes de cotes 3D, P. Bourdet, F. Thiébaut, G. Cid, ouvrage collectif, Tolérancement géométrique des produits (Traité IC2, série productique), Editeur Hermes-Lavoisier, chapitre 6, 22 p. mai 2007 Quality and cost-driven assembly technique selection and geometrical tolerance allocation for mechanical structure assembly, L. Andolfatto, C. Lartigue, F. Thiébaut, M. Douilly, Journal of Manufacturing Systems Volume 33, Issue 1, January 2014, Pages 103-115 Skin Model Shapes: A new Paradigm Shift for Geometric Variations Modelling in Mechanical Engineering B. Schleich, N. Anwer, L. Mathieu, S. Wartzack Computer-Aided Design, 50, pp. 1-15, 2014 Code d’essais des machines outils - Partie 1 : Exactitude géométrique des machines fonctionnant à vide ou dans des conditions quasi-statiques, NF ISO 230-1 (2012). Theory and simulation for the identification of the link geometric errors for a five-axis machine tool using a telescoping magnetic ball-bar, Y. Abbaszadeh-Mir, J.R.R. Mayer, G. Cloutier, C. Fortin, International Journal of Production Research 40 (18) (2002) 4781–4797.
Prérequis : Module de M1 : Assemblages (géométrie)
Modalités des contrôles des connaissances
Session 1 : [note de controle continu + 3 x note examen écrit]/4 Session 2 : [note de controle continu + 3 x note examen écrit ou oral de rattrapage]/4
Coefficients
Code ROF
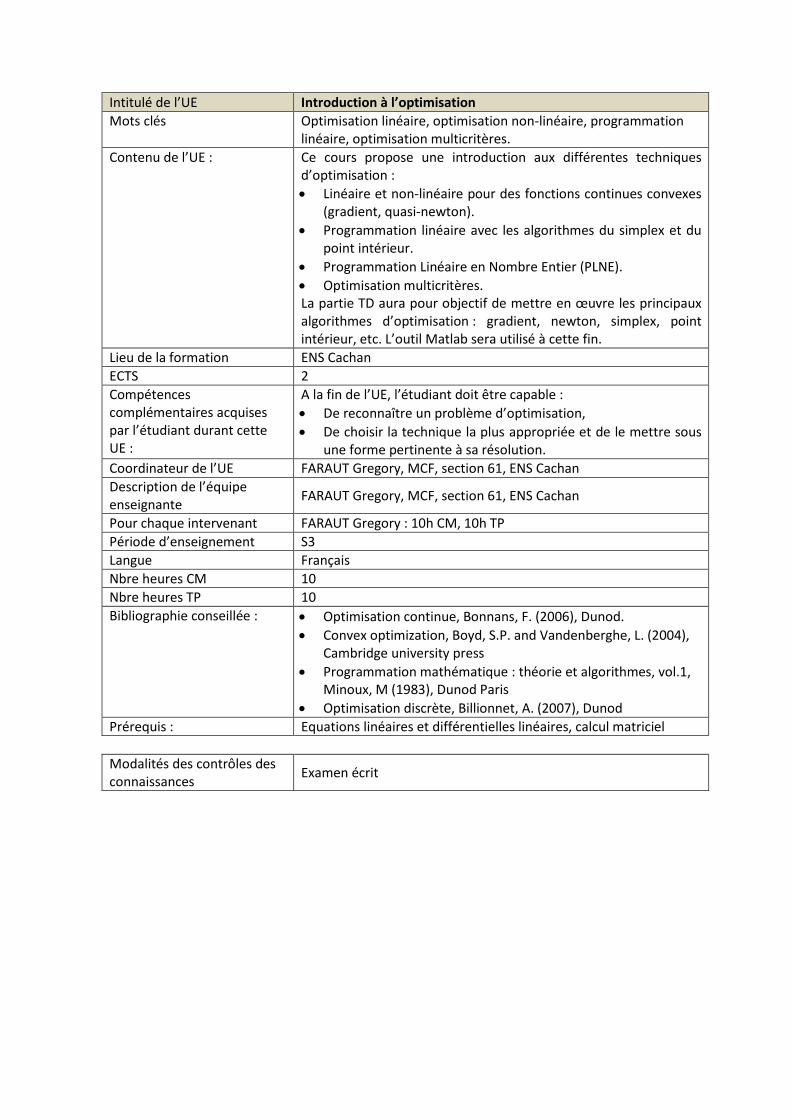
Intitulé de l’UE CAO, Reconstruction de formes et Réalité virtuelle
Mots clés CAO, Maquette numérique, Courbes et Surfaces, Rétro-conception
Contenu de l’UE : Définir en une phrase ou deux les objectifs de l’UE puis plan du cours avec les items principaux, ne pas détailler chaque séance, demi page maximum La maquette numérique est en général définie en CAO, et résulte soit d’une conception, soit d’une rétro-conception géométrique. Dans ce contexte, le module proposé s’articule autour de 3 points : • outils et méthodes de modélisation et de représentation des formes 3D pour la CAO • outils et méthodes de rétro-conception géométrique • concept de maquette numérique pour les applications de revue de projet, visualisation et interaction en réalité virtuelle
Lieu de la formation ENS Cachan
ECTS 3
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable de :
Comprendre le concept de maquette numérique (maîtrise)
Modéliser en CAO les produits par des surfaces, des maillages ou des solides (maîtrise)
Appliquer les techniques de reconstruction de surfaces (continues ou discrètes) en rétro-conception (maîtrise)
Faire le lien entre la maquette numérique et la réalité virtuelle (notion)
Coordinateur de l’UE Claire LARTIGUE
Description de l’équipe enseignante
Nabil ANWER, MCF, Université Paris Nord, section 60 Claire LARTIGUE, PR, Université Paris Sud, section 60 Sylvain LAVERNHE, MCF, ENS Cachan, section 60 Yann QUINSAT, PRAG, ENS Cachan, section 60 Un industriel non encore défini
Pour chaque intervenant Nabil ANWER – 4h CM Claire LARTIGUE – 2h CM – 4h TP Sylvain LAVERNHE – 2h CM – 4h TD Yann QUINSAT- 2h CM – 2h TD – 6h TP Un industriel non encore défini – 4h CM
Période d’enseignement S3
Langue Français, anglais
Nbre heure CM 14h (dont 4h de conférences par un industriel)
Nbre heure TP 10h
Nbre heure TD 6h
Vol horaire global de travail personnel
10h

Nbre heure autres types d’enseignement (ex : tutorat)
néant
Durée du stage en semaine néant
Bibliographie conseillée : 1/ The Nurbs book – Les Piegl & Wayne Tiller – Springer-Verlag, (London, UK), 1997 2/A Method For Registration of 3D Shape- P. J. Besl & N. D. M. Kay. -IEEE Transactions on Pattern Analysis and Machine Intelligence 14(5), 1992 3/Multi sensor integration and discrete geometry processing for coordinate metrology, Haibin Zhao, Thèse de doctorat de l’ENS Cachan, 18 janvier 2010 4/ 3D Imaging, Analysis and Applications - Pears, N., Liu, Y., Bunting, P., Springer-Verlag (London, UK), 2012 5/ Solid Modelling and CAD Systems - Stroud, I., Nagy, H. - Springer-Verlag, (London, UK), 2011
Prérequis : Maîtrise des courbes et surfaces polynomiales ; Notions de CAO ; Notions de mesure et incertitudes associées ; Notions d’identification (critères des moindres carrés) Pour le M1 IN2P : Conseillée : « Ingénierie numérique et collaborative » ; « Mesure 3D Muli-capteurs » Indispensable : « Modélisation des courbes et des Surfaces »
Modalités des contrôles des connaissances
Session 1 : note examen écrit Session 2 : note examen écrit ou oral de rattrapage
Coefficients 100%

Code ROF
Intitulé de l’UE Computer Aided Manufacturing
Mots clés Tool path computation ; computational geometry ; 5-axis milling ; Free-form surfaces ; Collision avoidance ;
Contenu de l’UE : Tool path generation in 3-axis milling of free-form surfaces
Algorithms for tool path computation, scallop height and chordal deviation issues
Optimal machining strategies to minimize production time
Polynomial interpolation Tool path generation in 5-axis milling of free-form surfaces
Algorithms for tool path computation in point milling and flank milling
Local and global collisions avoidance methods
Interactive tool path computation with CAM software (Catia V5, TopSolid’CAM)
Inverse Kinematical Transformation on 5-axis machining center, singularity issues, post-processing.
Lieu de la formation Ecole Normale Supérieure de Cachan
ECTS 3
Objectifs scientifiques et pédagogiques :
This course aims at addressing the technics and algorithms of tool path computation used in Computer Aided Manufacturing Software. The study of tool path computation is carried out in the context of 5-axis high speed machining of free-form surfaces (molds, medical implants or parts of aero structures) or additive manufacturing, executed on 5-axis CNC machine tool. Two objectives are followed: choosing and setting up the best strategies using CAM software algorithms (TopSolid’CAM and CATIA V5) and proposing specific algorithms to deal with specific or innovative cases.
Compétences complémentaires acquises par l’étudiant durant cette UE :
Computation of tool postures along a free-form surface
Modeling of geometrical deviation of free-form surfaces dues to sweeping strategy
Knowledge of collision avoidance techniques
Modeling of the Inverse Kinematical Transformation on 5 or 6-axis machine tools
Computational geometry for manufacture (intersections, collisions, polynomial interpolation, etc.)

Coordinateur de l’UE Christophe Tournier
Description de l’équipe enseignante
Christophe Tournier (PR, 60, ENS Cachan)
Période d’enseignement S3
Langue Français / Anglais
Nbre heure CM 12
Nbre heure TP 18
Nbre heure TD
Vol horaire global de travail personnel
12
Nbre heure autres types d’enseignement (ex : tutorat)
néant
Durée du stage en semaine néant
Bibliographie conseillée : Sculptured surface machining theory and applications, B.K.Choi, R.B.Jerard, Kluwer academic 1998 Computational Geometry for Design and Manufacture, I. D. Faux, M. J. Pratt, Ellis Horwood 1980
Prérequis : Basics in differential geometry of curves and surfaces Knowledges in machining process
Modalités des contrôles des connaissances
Session 1 : [note de controle continu + 3 x note examen écrit]/4 Session 2 : [note de controle continu + 3 x note examen écrit ou oral de rattrapage]/4

Code ROF
Intitulé de l’UE Acquisition de géométrie par moyen optique, vision
Mots clés Numérisation sans contact, étalonnage, qualification, sélection, trajectoire, métrologie, recalage, fusion, multi-échelle, multi-capteur.
Contenu de l’UE : Les processus d’acquisition de géométrie s’appuient de plus en plus sur des systèmes de numérisation par moyens optiques qui délivrent une représentation de la géométrie des pièces sous forme de données discrètes (nuages de points, maillages, images, …) en des temps relativement courts. Dans ce contexte, l’objectif de ce cours est de présenter les principes, outils et méthodes associés à l’acquisition de la géométrie des formes des pièces par moyens optiques. Partie 1 – Principes, Moyens et méthodes d’acquisition de géométrie des surfaces
CM – TD :
La chaîne de numérisation 3D, notion de système de mesure multi-capteurs
Les technologies de capteurs : laser-plan, projection de franges, stéréovision, tomographie, …
Modélisation des caméras et méthodes de calibration
Notion d’incertitude de mesure et caractéristiques des données acquises
Calibration et raccordement métrologique TP :
Mise en œuvre de systèmes de numérisation : laser-plan, stéréovision sur pièces souples
Partie 2 –Stratégie de numérisation et qualité: CM - TP :
Qualification des systèmes de numérisation
Stratégie de numérisation trajectographie
Partie 3 –Pré-Traitement des données discrètes CM– TD :
Modèles de structuration topologique à partir de données discrètes : Surfel, voxel, octree, maillages …
Mise en cohérence des données : filtrage, fusion, recalage (rigide et non rigide) et segmentation
Qualification des données en terme de qualité TP :
Les outils logiciels CAO pour la manipulation de données de numérisation
Manipulation d’algorithmes de recalage et partitionnement des données
Lieu de la formation ENS Cachan
ECTS 3

Compétences complémentaires acquises par l’étudiant durant cette UE :
Mettre en place une numérisation à qualité donnée (maitrise)
Qualifier des données numérisées (maitrise)
Définir de nouveaux critères de qualification ou/et de sélection fonction de nouvelles applications (notion)
Réaliser des opérations de recalage, fusion et partitionnement du nuage de points (maitrise)
Coordinateur de l’UE Charyar MEHDI-SOUZANI
Description de l’équipe enseignante
Nabil ANWER, MCF, Université Paris Nord, section 60 Claire LARTIGUE, PR, Université Paris Sud, section 60 Charyar MEHDI-SOUZANI, MCF, Université Paris Nord, section 60 Yann QUINSAT, PRAG, ENS Cachan, section 60 Hichem NOURIA, ingénieur, LNE
Pour chaque intervenant Claire LARTIGUE, 9h (2C, 6 TD) Nabil ANWER, 7 (2C, 4TD) Charyar MEHDI-SOUZANI, 10h (4C, 4TD) Yann QUINSAT, 6h (6TD) Hichem NOURIA, 3h (2C)
Période d’enseignement S3
Langue Anglais, Français
Nbre heure CM 12
Nbre heure TP 13
Nbre heure TD 5
Vol horaire global de travail personnel
15
Nbre heure autres types d’enseignement (ex : tutorat)
0
Durée du stage en semaine Non concerné
Bibliographie conseillée : D.Whitehouse, livre: "Surfaces and their measurement", Elsevier, 2004.
N.Audfray, thèse de doctorat, "Une approche globale pour la métrologie 3D automatique multi-systèmes", LURPA ENS de Cachan, 2012
Prérequis : Maîtrise des transformations spatiales, d’algèbre linéaire et de géométrie affine. Notions de CAO ; Notions de mesure et incertitudes associées ; Notions d’identification (critères des moindres carrés).
Modalités des contrôles des connaissances
Session 1 : note examen écrit Session 2 : note examen écrit ou oral de rattrapage
Coefficients 100%
Code ROF
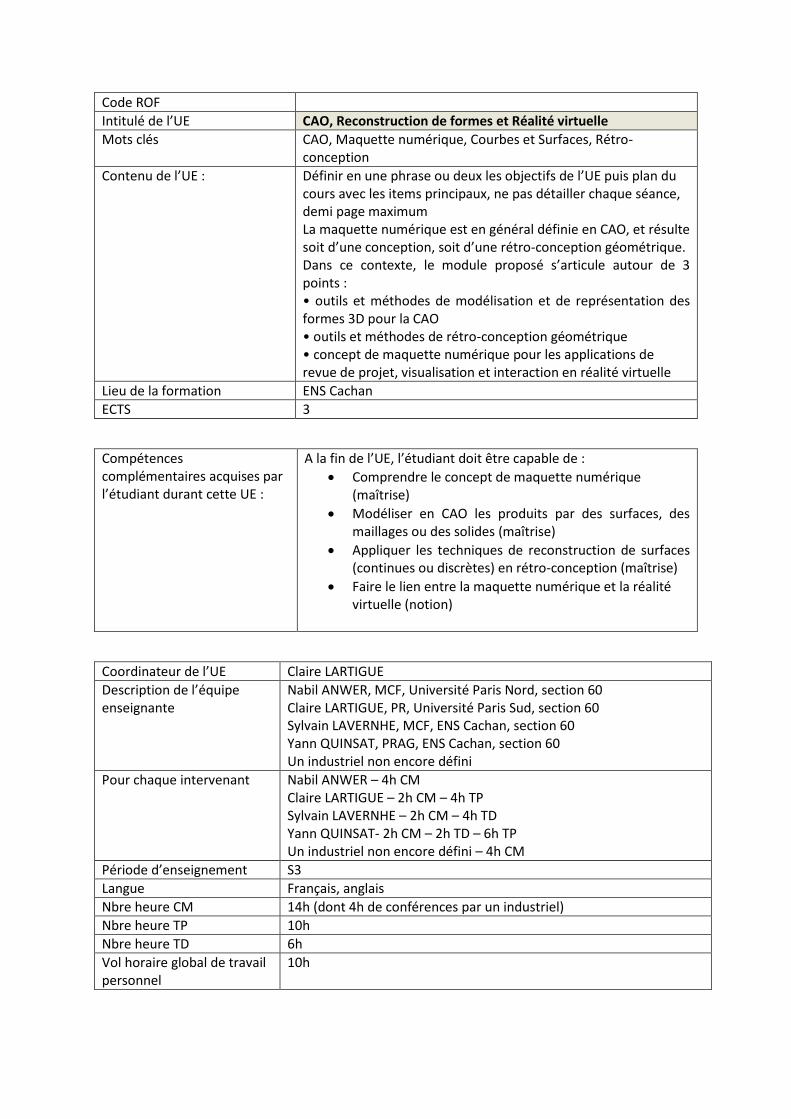
Intitulé de l’UE Modélisation et commande des systèmes robotiques
Mots clés Modèle géométrique, modèle dynamique, commande, robot
Contenu de l’UE : L’objectif de l’UE est de donner aux étudiants les compétences nécessaires pour appréhender le pilotage et la maîtrise des performances d’un système robotisé (robotique ou centre d’usinage multi-axes). Ces compétences opérationnelles sont atteintes au travers de l’étude scientifique du comportement géométrique et dynamique des systèmes poly-articulés. Les trois axes de formation sont donc la géométrie, la dynamique et la commande :
Description géométrique des systèmes poly-articulés et paramétrage pour des architectures sérielles (transformations homogènes, paramètres de Dénavit et Hartenberg, paramètres de rotation 3D, modèles géométriques direct et inverse)
Modélisation dynamique de systèmes multi-corps : Théorèmes généraux, principe des puissances virtuelles, formalisme de Lagrange, formalisme de Newton-Euler et méthode de la double récurrence
Techniques de commande - réglage Architectures industrielles et avancées, comparaison des solutions PID - prédictive sous forme RST, intégration de la dynamique dans la commande, commande par découplage non linéaire dans l’espace articulaire et dans l’espace opérationnel.
Lieu de la formation ENS Cachan
ECTS 2
Compétences complémentaires acquises par l’étudiant durant cette UE :
A la fin de l’UE, l’étudiant doit être capable de :
Savoir les principaux effets géométriques et dynamiques du comportement réel des systèmes polyarticulés lors de l’exécution de tâches (maitrise).
Modéliser un système d’un point de vue géométrique et dynamique en mettant en œuvre les paramétrages et théorèmes généraux afin de simuler le comportement du système (maitrise).
Mettre en pratique des outils industriels pour le pilotage de robots anthropomorphes (notions)
Régler les paramètres opératoires du système (notions)
Spécifier la génération de trajectoire articulaire ou cartésienne à partir des modèles et simulations, (notions)

Coordinateur de l’UE LAVERNHE Sylvain
Description de l’équipe enseignante
BRUNEAU Olivier, PR, section 60, Université Paris Sud. DUMUR Didier, PR, Supélec. LAVERNHE Sylvain, MCF, section 60, Ecole Normale Supérieure de Cachan.
Pour chaque intervenant BRUNEAU, Olivier, 8h eq TD DUMUR, Didier, 5h eq TD LAVERNHE, Sylvain, 13h eq TD
Période d’enseignement S3
Langue Français
Nbre heure CM 12h
Nbre heure TP 4h
Nbre heure TD 4h
Vol horaire global de travail personnel
10h
Nbre heure autres types d’enseignement (ex : tutorat)
-
Durée du stage en semaine -
Bibliographie conseillée : Modélisation Identification Et Commande Des Robots. 2ème édition revue et augmentée; Wisama Khalil, Etienne Dombre; Hermes Science Publications; ISBN : 2-7462-0003-1
Fundamentals of Robotic Mechanical Systems: Theory, Methods, and Algorithms. Third Edition; Jorge Angeles; Springer; ISBN: 0-387-29412-0
Robot Manipulator Control: Theory and Practice. Second Edition, Revised and Expanded; Frank L.Lewis, Darren M.Dawson, Chaouki T.Abdallah; Marcel Dekker, INC.; ISBN: 0-8247-4072-6
Prérequis : Notions élémentaires sur les trois thèmes : Algèbre linéaire Mécanique du solide Automatique linéaire et asservissement Pour la formation en master 1 : Indispensables : Systèmes polyarticulés Conseillées : Assemblages (géométrie) Libres : Optimisation avancée, Optimisation numérique et applications
Modalités des contrôles des connaissances
Session 1 : note examen écrit Session 2 : note examen écrit ou oral de rattrapage
Coefficients

Code ROF
Intitulé de l’UE Advanced Manufacturing
Mots clés coupe des métaux, efforts de coupe, lobes de stabilité, intégrité de surface
Contenu de l’UE : L’UE proposée s’appuiera sur un enseignement théorique fortement illustré par une analyse de phénomène physique mise en évidence lors d’activités pratiques. L’objectif est que les élèves puissent mener l’analyse d’un problème de coupe et de mettre en place les outils analytiques de modélisation des phénomènes macroscopiques liés à l’usinage par enlèvement de matière . Ainsi le cours s’oriente sur les points suivants :
1. Etude de la Formation du copeau ; Géométrie outil ; Loi d’usure
2. Efforts de coupe (Merchant), mise en évidence du COM, Méthode par discrétisation d’arête
3. Vibration en usinage : lobes de stabilité 4. Vibration en usinage : structure machine 5. Simulation de l’état de surface en usinage
Il s’accompagnera d’un BE sur la modélisation numérique de la coupe et compléter par 4 séances de travaux pratiques :
1. Effort en tournage 2. Effort en fraisage 3. Intégrité de surface par analyse de micro dureté 4. Vibration en usinage
Lieu de la formation ENS Cachan
ECTS 3
Compétences complémentaires acquises par l’étudiant durant cette UE :
A l’issu de l’UE les élèves sont capables de :
Définir les modes de déformation (maîtrise)
Modéliser les actions mécaniques par discrétisation d’arête (maîtrise)
Lier la topographie de la surface usinée aux paramètres opératoires (notion)
Etudier la dynamique du système usinant (notion)

Coordinateur de l’UE Yann Quinsat
Description de l’équipe enseignante
Yann Quinsat Prag-Dr ENS Cachan – 60ième section Sylvain Lavernhe Mcf – ENS Cachan– 60ième section
Pour chaque intervenant YQ – 8hCM 16hTP = 24h eq TD; SL- 2hCM 16hTP = 19h eq TD sur la base de 2 groupes de TP
Période d’enseignement S3
Langue
Nbre heure CM 10
Nbre heure TP 4
Nbre heure TD 16
Vol horaire global de travail personnel
20
Nbre heure autres types d’enseignement (ex : tutorat)
0
Durée du stage en semaine
Bibliographie conseillée : Y. Altintas, Dynamics of cutting Cambridge Uinversity Press. J.P. Cordebois et coll., Fabrication par usinage, Dunod 2008 C.Tournier et coll., Usinage grande Vitesse, Dunod 2010
Prérequis : Matériaux : notion de plasticité Mécanique des milieux continus
Modalités des contrôles des connaissances
Session 1 : [ 2 x Moyenne des notes de compte rendu de TP + 3 x note examen final écrit ] / 5 Session 2 : [ 2 x Moyenne des notes de compte rendu de TP + 3 x note examen final écrit ou oral de rattrapage] / 5

Code ROF
Intitulé de l’UE Assemblages de structures : traitement du contact frottant
Mots clés assemblages, liaisons, frottement, contact
Contenu de l’UE : La prise en compte des phénomènes de contact et de frottement est vitale dans la simulation du comportement des assemblages de structures. Ces phénomènes sont très fortement non linéaires et leur modélisation pose de sérieuses difficultés tant sur le plan de la formulation que sur celui de la résolution numérique. Ce module présente, dans un premier temps, la problématique générale des assemblages de structures et les méthodes pratiques de modélisation des conditions de liaison linéaires. Les formulations classiques et les méthodes numériques employées dans les codes de calcul industriels pour la prise en compte des conditions de contact et de frottement sont ensuite abordées. Le cours est illustré par des applications industrielles et une initiation à la résolution sur code de calcul par élément finis est proposée. Contenu :
Introduction : problématique générale des assemblages, non-linéarités de contact et de frottement.
Prise en compte de conditions linéaires sur les degrés de liberté
Contact unilatéral sans frottement : problème local, formulation variationnelle, théorèmes énergétiques, prise en compte des jeux.
Résolution des problèmes de contact : discrétisation, méthodes de projection, méthode des statuts, pénalisation, …
Frottement : lois de frottement, loi de Coulomb en quasi-statique, pb de point fixe, forme incrémentale, méthode des statuts.
Problèmes d'existence et d'unicité des solutions. Maillages incompatibles.
Lieu de la formation ENS Cachan
ECTS 3
Compétences complémentaires acquises par l’étudiant durant cette UE :
Compétences : Formulation des problèmes de contact-frottant Méthode de résolutions numériques associée
Compétences complémentaires : Outils numériques : programmation sous Matlab, et
utilisation du code de calcul CAST3M durant les TP.

Coordinateur de l’UE Boucard, Pierre-Alain, Professeur, CNU 60, ENS Cachan
Description de l’équipe enseignante
Oumaziz, Paul, Doctorant avec mission d’enseignement, ENS Cachan
Pour chaque intervenant
Période d’enseignement S3
Langue
Nbre heure CM 18
Nbre heure TP
Nbre heure TD 12
Vol horaire global de travail personnel
Nbre heure autres types d’enseignement (ex : tutorat)
Durée du stage en semaine
Bibliographie conseillée : Wriggers, P., Computational Contact Mechanics, New York, J. Wiley & Sons, 2002. Jean, M., Moreau, J.J., Raous, M., Contact Mechanics, Springer-Verlag New York Inc, 1995. Johnson, K.L., Contact Mechanics, Cambridge University Press, 1985.
Prérequis : Mécanique des milieux continus (formulation variationnelle, théorèmes de l’énergie) Éléments-Finis
Modalités des contrôles des connaissances
Session 1 : note examen écrit final Session 2 : note examen écrit final
Coefficients 100%