Embed Size (px)
Citation preview

Prévoir et vérifier les performances cinématiquesdes systèmes.
Td 5 CI-3
LYCÉE CARNOT (DIJON), 2017 - 2018
Germain Gondor
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 1 / 43

Vecteurs Figures planes de calculs ou figures géométrales
Figures planes de calculs ou figures géométrales
Soient deux bases orthonormées directes (#»
i ,#»
j ,#»
k ) et (#»u , #»v , #»w) telles
que α = (#»
i , #»u ) et #»w .#»
k = 1 et une troisième base orthonormée directe(
#»x , #»y , #»z ) telle que β = (#»u , #»x ) et #»w . #»z = 1.
Q - 1 : Représenter la figure géométrale montrant le passage de labase (
#»
i ,#»
j ,#»
k ) à la base (#»u , #»v , #»w).
Q - 2 : Déterminer les composantes de #»u et de #»v dans la base(
#»
i ,#»
j ,#»
k ) en fonction de l’angle α.
Q - 3 : Représenter la figure géométrale montrant le passage de labase (
#»u , #»v , #»w) à la base (#»x , #»y , #»z ).
Q - 4 : Déterminer les produits scalaires suivants : #»x . #»u et #»x . #»v enfonction de l’angle β .
Q - 5 : Déterminer les composantes de #»x dans la base (#»
i ,#»
j ,#»
k ).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 2 / 43

Vecteurs Produit vectoriel
Produit vectoriel
On considère les deux bases orthonormées directes suivantes :B1(
#»x1,#»y1,
#»z1) et B2(#»x2,
#»y2,#»z2). On passe de la base B1 à la base B2
par une rotation d’angle θ autour de #»z 1 ( #»z 1 =#»z 2).
Q - 1 : Tracer la figure géométrale montrant le passage de la baseB1 à la base B2.
Q - 2 : Exprimer le produit vectoriel #»x1 ∧#»x2 en fonction de l’angle θ.
Soient# »
AB = b. #»x1 et# »
BC = c. #»x2 ; b et c étant des longueurs expriméesen mètre.
Q - 3 : Exprimer le produit vectoriel# »
AB ∧# »
BC en fonction de b, c etde l’angle θ.
Q - 4 : En déduire la quantité
∥∥∥∥ # »
AB ∧# »
BC∥∥∥∥
2 . Quelle est son unité?Que représente-elle?
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 3 / 43

Vecteurs Produits vectoriels
Produits vectoriels
Soient deux bases orthonormées directes (#»
i ,#»
j ,#»
k ) et (#»u , #»v , #»w) telles
que α = (#»
i , #»u ) et #»w .#»
k = 1 et une troisième base orthonormée directe(
#»x , #»y , #»z ) telle que β = (#»v , #»y ) et #»u . #»x = 1.
Q - 1 : Représenter les figures géométrales montrant le passage dela base (
#»
i ,#»
j ,#»
k ) à la base (#»u , #»v , #»w) et de la base (
#»u , #»v , #»w)à la base (
#»x , #»y , #»z )
Q - 2 : Déterminer les produits vectoriels suivants dans la base(
#»
i ,#»
j ,#»
k ) : #»u ∧#»
i , #»u ∧#»
j , #»v ∧#»
i et #»v ∧#»
j en fonction del’angle α.
Q - 3 : Calculer les composantes de #»v ∧ #»y dans la base (#»
i ,#»
j ,#»
k ).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 4 / 43

Vecteurs Appartenance à un plan
Appartenance à un plan
On considère le repère R (0, #»x , #»y , #»z ) et les trois points A, B, C tels que# »
OA = 2 #»x +#»y − 3 #»z ,
# »
OB = −2 #»x +#»y − #»z et
# »
OC = −2 #»x + 4 #»y + 3 #»z .Q - 1 : Exprimer les vecteurs
# »
AB et# »
AC dans la base (#»x , #»y , #»z ).
Q - 2 : Calculer le vecteur# »
AB ∧# »
AC.
Q - 3 : Si M est un point appartenant au plan (A,B,C), que vaut leproduit mixte
# »
AM .( # »
AB.# »
AC)?
On notera pour les questions suivantes :# »
AM = X #»x + Y #»y + Z #»zQ - 4 : Déterminer la relation que doivent vérifier X , Y et Z si M est
un point appartenant au plan (A,B,C).
On notera pour les questions suivantes :# »
OM = X #»x + Y #»y + Z #»zQ - 5 : Déterminer la relation que doivent vérifier x, y et z si M est
un point appartenant au plan (A,B,C). Que définit cette re-lation?
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 5 / 43

Vecteurs Vecteur normal à un plan
On donne trois points A, B et C dans le repère orthonormé directR (O, #»x , #»y , #»z ) : A(1,2,3), B(−1,2,−1), C(0,1,2). Soit Π le plan définipar ces trois points.
Q - 6 : Déterminer le vecteur unitaire #»n orthogonal (ou normal) auplan Π.
Soit le vecteur#»
V =#»x +
#»y − 2 #»z que l’on cherche à exprimer sous laforme
#»
V = a. #»n + b.#»t avec
#»t vecteur unitaire orthogonal à #»n , a et b
scalaires algébriques.Q - 7 : Déterminer a puis b et enfin
#»t pour b choisi positif.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 6 / 43

Torseurs Axe central
Axe central
Soit E un espace vectoriel, muni d’un repère R (O; #»x , #»y , #»z ). On donne :
deux points A et B définis par leurs coordonnées respectives (0,0,3) et (6,0,0).
un torseur T défini par ses éléments de réduction en A :
T =A
#»
R#»
M(A)
avec
#»
R = #»y et#»
M(A) = 3. #»y + 3. #»z
Q - 1 : Définir les éléments de réduction de T en O et en B.
Q - 2 : Calculer et comparer#»
R .#»
M(O),#»
R .#»
M(A) et#»
R .#»
M(B).
Q - 3 : Déterminer l’axe central de T. Préciser son intersection avec le plan(O, #»x , #»z ).
Q - 4 : Représenter le repère en perspective cavalière et tracer les éléments deréduction de T en A, ainsi que l’axe central. Préciser les propriétés de l’axecentral d’un torseur.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 7 / 43

Torseurs Axe central
Q - 1 : Définir les éléments de réduction de T en O et en B.
Le vecteur Résultante est intrinsèque au champ de moments. Il nechange pas suivant le point de réduction.
En revanche, le moment en O est lié au moment en A par la relation duchamp de moments :
#»
M(O) =#»
M(A) +# »
OA ∧#»
R = 3. #»y + 3. #»z + 3. #»z ∧ #»y = 3.(− #»x +#»y +
#»z )
de même pour B#»
M(B) =#»
M(A) +# »
BA ∧#»
R= 3. #»y + 3. #»z + (−6. #»x + 3. #»z ) ∧
#»y = 3.(− #»x +#»y − #»z )
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 8 / 43

Torseurs Axe central
Q - 1 : Définir les éléments de réduction de T en O et en B.Le vecteur Résultante est intrinsèque au champ de moments. Il nechange pas suivant le point de réduction.
En revanche, le moment en O est lié au moment en A par la relation duchamp de moments :
#»
M(O) =#»
M(A) +# »
OA ∧#»
R = 3. #»y + 3. #»z + 3. #»z ∧ #»y = 3.(− #»x +#»y +
#»z )
de même pour B#»
M(B) =#»
M(A) +# »
BA ∧#»
R= 3. #»y + 3. #»z + (−6. #»x + 3. #»z ) ∧
#»y = 3.(− #»x +#»y − #»z )
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 8 / 43

Torseurs Axe central
Q - 1 : Définir les éléments de réduction de T en O et en B.Le vecteur Résultante est intrinsèque au champ de moments. Il nechange pas suivant le point de réduction.
En revanche, le moment en O est lié au moment en A par la relation duchamp de moments :
#»
M(O) =#»
M(A) +# »
OA ∧#»
R = 3. #»y + 3. #»z + 3. #»z ∧ #»y = 3.(− #»x +#»y +
#»z )
de même pour B#»
M(B) =#»
M(A) +# »
BA ∧#»
R= 3. #»y + 3. #»z + (−6. #»x + 3. #»z ) ∧
#»y = 3.(− #»x +#»y − #»z )
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 8 / 43

Torseurs Axe central
Q - 1 : Définir les éléments de réduction de T en O et en B.Le vecteur Résultante est intrinsèque au champ de moments. Il nechange pas suivant le point de réduction.
En revanche, le moment en O est lié au moment en A par la relation duchamp de moments :
#»
M(O) =#»
M(A) +# »
OA ∧#»
R = 3. #»y + 3. #»z + 3. #»z ∧ #»y = 3.(− #»x +#»y +
#»z )
de même pour B#»
M(B) =#»
M(A) +# »
BA ∧#»
R= 3. #»y + 3. #»z + (−6. #»x + 3. #»z ) ∧
#»y = 3.(− #»x +#»y − #»z )
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 8 / 43

Torseurs Axe central
Q - 2 : Calculer et comparer#»
R .#»
M(O),#»
R .#»
M(A) et#»
R .#»
M(B).
#»
R .#»
M(O) = 3. #»y .(− #»x +#»y +
#»z ) = 3#»
R .#»
M(A) = 3. #»y .( #»y +#»z ) = 3
#»
R .#»
M(B) = 3. #»y .(− #»x +#»y − #»z ) = 3
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 9 / 43

Torseurs Axe central
Q - 2 : Calculer et comparer#»
R .#»
M(O),#»
R .#»
M(A) et#»
R .#»
M(B).
#»
R .#»
M(O) = 3. #»y .(− #»x +#»y +
#»z ) = 3#»
R .#»
M(A) = 3. #»y .( #»y +#»z ) = 3
#»
R .#»
M(B) = 3. #»y .(− #»x +#»y − #»z ) = 3
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 9 / 43

Torseurs Axe central
Q - 3 : Déterminer l’axe central de T. Préciser son intersection avecle plan (O, #»x , #»z ).
Nous connaissons la direction de l’axe centrale puisque#»
R est un vec-teur directeur de cet axe. Reste à trouver un point de cet axe.Or la projection H d’un point A de l’espace affine sur l’axe central estdonnée par la relation :
# »
HA =
#»
M(A) ∧#»
R∥∥∥∥−→R∥∥∥∥2
Pour obtenir directement les coordonnées qui nous intéressent, pre-nons le point O
# »
OH = −
#»
M(O) ∧#»
R∥∥∥∥−→R∥∥∥∥2= −
3.(− #»x +#»y +
#»z ) ∧#»y
12= 3. #»z + 3. #»x
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 10 / 43

Torseurs Axe central
Q - 3 : Déterminer l’axe central de T. Préciser son intersection avecle plan (O, #»x , #»z ).
Nous connaissons la direction de l’axe centrale puisque#»
R est un vec-teur directeur de cet axe. Reste à trouver un point de cet axe.
Or la projection H d’un point A de l’espace affine sur l’axe central estdonnée par la relation :
# »
HA =
#»
M(A) ∧#»
R∥∥∥∥−→R∥∥∥∥2
Pour obtenir directement les coordonnées qui nous intéressent, pre-nons le point O
# »
OH = −
#»
M(O) ∧#»
R∥∥∥∥−→R∥∥∥∥2= −
3.(− #»x +#»y +
#»z ) ∧#»y
12= 3. #»z + 3. #»x
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 10 / 43

Torseurs Axe central
Q - 3 : Déterminer l’axe central de T. Préciser son intersection avecle plan (O, #»x , #»z ).
Nous connaissons la direction de l’axe centrale puisque#»
R est un vec-teur directeur de cet axe. Reste à trouver un point de cet axe.Or la projection H d’un point A de l’espace affine sur l’axe central estdonnée par la relation :
# »
HA =
#»
M(A) ∧#»
R∥∥∥∥−→R∥∥∥∥2
Pour obtenir directement les coordonnées qui nous intéressent, pre-nons le point O
# »
OH = −
#»
M(O) ∧#»
R∥∥∥∥−→R∥∥∥∥2= −
3.(− #»x +#»y +
#»z ) ∧#»y
12= 3. #»z + 3. #»x
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 10 / 43

Torseurs Axe central
Q - 3 : Déterminer l’axe central de T. Préciser son intersection avecle plan (O, #»x , #»z ).
Nous connaissons la direction de l’axe centrale puisque#»
R est un vec-teur directeur de cet axe. Reste à trouver un point de cet axe.Or la projection H d’un point A de l’espace affine sur l’axe central estdonnée par la relation :
# »
HA =
#»
M(A) ∧#»
R∥∥∥∥−→R∥∥∥∥2
Pour obtenir directement les coordonnées qui nous intéressent, pre-nons le point O
# »
OH = −
#»
M(O) ∧#»
R∥∥∥∥−→R∥∥∥∥2= −
3.(− #»x +#»y +
#»z ) ∧#»y
12= 3. #»z + 3. #»x
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 10 / 43

Torseurs Axe central
Autre méthodeQ - 3 : Déterminer l’axe central de T. Préciser son intersection avec
le plan (O, #»x , #»z ).
l’axe central =I ∈ ε/
#»
R ∧#»
M(I) =#»
0
:
I =
∣∣∣∣∣∣∣∣∣∣xyz
⇒#»
M(I) =#»
M(A) +#»
IA ∧#»
R
= 3. #»y + 3. #»z + (−x . #»x + (3 − y). #»y + (3 − z). #»z ) ∧ #»y
= (z − 3). #»x + 3. #»y + (3 − x). #»z
#»
R ∧#»
M(I) = #»y ∧ [(z − 3). #»x + 3. #»y + (3 − x). #»z ]
=
∣∣∣∣∣∣∣∣∣∣3 − x
03 − z
=#»
0
⇒ l’axe central =(3, y ,3)/y ∈ R
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 11 / 43

Torseurs Axe central
Q - 4 : Représenter le repère en perspective cavalière et tracer leséléments de réduction de T en A, ainsi que l’axe central. Pré-ciser les propriétés de l’axe central d’un torseur.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 12 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH
#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH
#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Torseurs Axe central
#»x#»y
#»z
xO
xA
xB
xH#»
R
#»
M(A)
#»
M(O)
#»
M(B)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 13 / 43

Robot SIRTES
Robot SIRTES
On se propose d’étudier le mouvement d’un robot piloté par ordinateur.On se limitera à la cinématique des pièces. Le mécanisme interne estreprésenté. Un schéma cinématique dans le plan (O, #»y1,
#»z0) estdonné. Le robot repose sur un socle 0 et comporte 5 bras : 1, 2, 3, 4 et5 en rotation les uns par rapport aux autres.
Vue du robot Mécanisme interne Schéma cinématique
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 14 / 43

Robot SIRTES
On supposera dans cette partie que 5 est immobile par rapport à 4.
• 1 est en rotation par rapport à 0 autour de l’axe (O, #»z0), paramétrée parα1.
• 2 est en rotation par rapport à 1 autour de l’axe (O1,#»y1), paramétrée
paα2.
• 3 est en rotation par rapport à 2 autour de l’axe (O2,#»y1), paramétrée
paα3.
• 4 est en rotation par rapport à 3 autour de l’axe (O3,#»y1), paramétrée
paα4.
Le paramétrage est dessiné sur les figures 2 et 3. Attention, les angles nesont pas tous positifs sur le dessin ; veillez à l’orientation des axes.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 15 / 43

Robot SIRTES
Q - 1 : Exprimer le vecteur# »
OP
Q - 2 : Calculer la vitesse#»
V(P,5/0) =
ddt
( # »
OP)
R0
en fonction des
vitesses de rotation de chacun des bras et des paramètresde géométrie
Q - 3 : Calculer la composante verticale de l’accélération#»
A(P,5/0).#»z0 =
#»z0.
ddt
( #»
V(P,5/0))
R0
en fonction des vitesses
et accélérations de chacun des bras et des paramètres degéométrie
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 16 / 43

Centrifugeuse de laboratoire de Chimie
Centrifugeuse de laboratoire de Chimie
On considère une centrifugeuse composée d’un bâti (S0), d’un bras(S1) et d’une éprouvette (S2) qui peut contenir deux liquides demasses volumiques différentes.
Sous l’effet centrifuge dû à la rotation du bras (S1), l’éprouvette (S2)s’incline pour se mettre pratiquement dans l’axe du bras et le liquidedont la masse volumique est la plus élevée va au fond de l’éprouvette.Ainsi la séparation des deux liquides est réalisée.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 17 / 43

Centrifugeuse de laboratoire de Chimie
Soit R (0, #»x , #»y , #»z ) un repère lié à (S0) (fixe). Les solide (S1) admetune rotation par rapport au solide (S0) d’axe (O, #»x ). R1(A, #»x1,
#»y1,#»z1)
un repère lié à (S1). Posons α = (#»y , #»y1) avec α = ω.t et ω étant
une constante positive exprimée en radians par seconde. On pose# »
OA = a. #»y1.
Le solide (S2) admet une rotation par rapport à (S1) d’axe (A, #»z1) telleque R2(A, #»x2,
#»y2,#»z1) soit lié à (S2). On pose β = (
#»x1,#»x2), β étant une
fonction du temps inconnue.
Soit B le centre d’inertie de (S2) tel que# »
AB = b. #»x2 ( b constante posi-tive exprimée en mètre).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 18 / 43

Centrifugeuse de laboratoire de Chimie
#»y2
#»z1
#»z2
#»y1
#»x2#»x1#»x0
#»x1
−→y0
−→z0
−→x1−→x0
−→y1
−→z1
α
−→x1
−→y1
−→z2−→z1
−→x2
−→y2
β
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 19 / 43

Centrifugeuse de laboratoire de Chimie
Q - 1 : Déterminer les vecteur taux de rotation du solide (S1) parrapport au solide (S0) (
#»
Ω(S2/S1)), de S2/S1 et de S2/S0.
Q - 2 : Donner la vitesse en O du solide S1 par rapport au solide S0.
Q - 3 : Déterminer la vitesse en A du solide S1 par rapport au solideS0.
Q - 4 : Donner la vitesse en A du solide S2 par rapport au solide S1.En déduire
#»
V(A,S2/S0).
Q - 5 : Déterminer la vitesse en B du solide S2 par rapport au solideS1.
Q - 6 : Déterminer la vitesse en B du solide S1 par rapport au solideS0.
Q - 7 : En déduire la vitesse en B du solide S2 par rapport au solideS0.
Q - 8 : Déterminer finalement le vecteur accélération du point B dusolide S2 par rapport à S0.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 20 / 43
Manège de l’extrême !
Manège de l’extrême !
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 21 / 43

Manège de l’extrême !
Manège de l’extrême !
1 2
3
4
56
5
1
x
21y
22y
3
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 22 / 43

Manège de l’extrême !
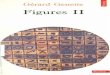
Le bras principal 1, associé au repère R1(O, ~x1, ~y1, ~z0) supporte l’ensembledu manège. Il est en liaison pivot d’axe (O, ~z0) avec le sol 0. Sa rotationest paramétrée par l’angle α = (~x0, ~x1). Un vérin de corps 5 et de tige 6commande la rotation du bras 1. L’angle α varie entre π/4 et π/2.
La rotation du vérin est paramétrée par l’angle θ = (~x0, ~x5) et sa longueur estparamétrée par λ tel que ~AB = λ.~x5.
Le bras secondaire 2, associé au repère R21(C, ~x1, ~y21, ~z21) est en liaisonpivot d’axe (C, ~x1). La rotation est paramétrée par l’angle γ = (~y1, ~y21). Unsecond repère R22(D, ~x22, ~y22, ~z21) est associé au solide 2, tourné d’un angleβ = (~x1, ~x22) = −45o constant, autour de l’axe ~z21 (attention cet angle estnégatif). Ce repère permet de définir la rotation de la tourelle 3.
La tourelle 3, associé au repère R3(E , ~x3, ~y22, ~z3) est en liaison pivot d’axe(D, ~y22). La rotation est paramétrée par l’angle δ = (~x22, ~x3).
Le banc 4, associé au repère R4(E , ~x3, ~y4, ~z4) est en liaison pivot d’axe (E , ~x3).La rotation est paramétrée par l’angle ϕ = (~y22, ~y4).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 23 / 43

Manège de l’extrême !
# »
OA = a.~x0 avec a = 1.5 m.# »
OB = b.~x1 avec b = 1.5 m.# »
OC = c.~x1 avec c = 4 m.# »
CD = −d .~y21 avec d = 4 m.# »
DE = −e.~y22 avec e = 1 m.# »
EF = f .~x3 avec f = 3 m.# »
FM = h.~y4 avec h = 0.5 m.# »
AB = λ.~x5.
α = (#»x0,
#»x1) = (#»y0,
#»y1)
β = (#»x21,
#»x22) = (#»y21,
#»y22)
γ = (#»y1,
#»y21) = (#»z1,
#»z21)
δ = (#»x22,
#»x3) = (#»z22,
#»z23)
φ = (#»y3,
#»y4) = (#»z3,
#»z4)
θ = (#»x0,
#»x5) = (#»y0,
#»y5)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 24 / 43

Manège de l’extrême !
Sol 0 associé au repère R0 (O, #»x0,#»y0,
#»z0)
Bras principal 1 associé au repère R1 (O, #»x1,#»y1,
#»z1)
Bras secondaire 2 associé au repère R21 (C, #»x21,#»y21,
#»z21)
- associé au repère R22 (D, #»x22,#»y22,
#»z22)
Tourelle 3 associé au repère R3 (E , #»x3,#»y3,
#»z3)
Banc 4 associé au repère R4 (E , #»x4,#»y4,
#»z4)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 25 / 43

Manège de l’extrême !
−→x0−→y0−→z1−→z0
−→x1−→y1αα−→y1−→z1−−→x21−→x1
−−→y21−−→z21γγ−−→x21−−→y21−−→z22−−→z21
−−→x22−−→y22ββ
−−→z22−−→x22−→y3−−→y22
−→z3−→x3δδ−→y3−→z3−→x4−→x3
−→y4−→z4φφ−→x0−→y0−→z5−→z0
−→x5−→y5θθ
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 26 / 43

Manège de l’extrême !
1 2
3
4
56
5
1
x
21y
22y
3
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 27 / 43

Etude d’un coupe câble
Etude d’un coupe câble
Le système étudié permet de couper des câbles électriques.
Le bâti est la pièce 7. Le mouvement de la vis 8 vient déplacer en trans-lation la pièce 6 par rapport à 7. L’objectif est de déterminer la vitessede coupe en K de la lame 3 par rapport à 7 :
#»
V(K ,3/2). On donne#»
V(B,6/7).
Le mouvement de 6 est transmis aux pièces 4 et 5 en contact ponctuelavec 6 respectivement en C et D. Les pièces 4 et 5 sont en liaisonspivots avec 7 en E et F . Le mouvement est ensuite transmis aux lamesde coupes 2 et 3. 2 est en liaison pivot avec 4 en H et 5 est en liaisonpivot avec 3 en I. 2 et 3 sont en liaison pivot en I.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 28 / 43

Etude d’un coupe câble
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 29 / 43

Etude d’un coupe câble
Q - 1 : Justifier qu’une étude de cinématique plane peut être envi-sagée.
Q - 2 : Faire un graphe des liaisons
Q - 3 : Donner la valeur numérique de#»
V(K ,3/7) dans la configurationdu dessin. Vous expliciterez votre démarche et tous les tra-cés effectués. Vous pourrez dans un premier temps indiquerles différents centres instantanés de rotation.
Q - 4 : En déduire la vitesse de coupe en K :#»
V(K ,3/2)#»
V(B,6/7) = −10 mm/s #»y
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 30 / 43

Toit escamotable de 206 CC
Toit escamotable de 206 CCPrésentation
En 2001, Peugeot commercialise une version coupé-cabriolet d’un deses modèles . Grâce à son toit rigide escamotable à commande électro-hydraulique, la 206 CC permet d’apprécier le confort d’un coupé tant aupoint de vue acoustique que de l’étanchéité tout en offrant la possibilitéde se découvrir rapidement en cabriolet. Ce système permet d’offrir, deplus, une lunette arrière chauffante en verre.Le mécanisme de toit escamotable met en jeu cinq éléments : les vitres,le pavillon, la lunette arrière, le coffre et une tablette. Le cycle d’ouver-ture du toit est piloté par le calculateur :• A : les vitres de porte et de custode descendent en position basse,• B : la malle se déverrouille et s’ouvre,• C : le toit se soulève et vient se replier dans le coffre,• D : la tablette sort et la malle se ferme et se verrouille.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 31 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 32 / 43

Toit escamotable de 206 CC
Les vitres ne remontent pas mais leur commande est de nouveau pos-sible. Le mouvement du toit escamotable est imposé par un mécanismearticulé , actionné par deux vérins hydrauliques. La partie inférieuredu mécanisme est fixée au châssis du véhicule et la partie supérieureporte le pavillon.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 33 / 43

Toit escamotable de 206 CC
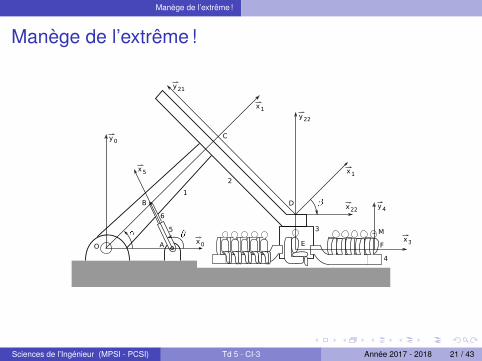
Toit escamotable de 206 CCAnalyse du mouvement
Q - 1 : A partir de l’étude de la nature des mouvements des pièces(10) et (20), dessinez la position de la pièce (30) en traçantle segment (EF ) dans les positions intermédiaires du méca-nisme repérées (1) et (2) sur le document.
Q - 2 : Précisez alors la nature du mouvement entre la pièce (30) etl’ensemble S.
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 34 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 35 / 43

Toit escamotable de 206 CC
Toit escamotable de 206 CCDétermination de la vitesse de sortie du vérin
On cherche ici à déterminer la valeur de la vitesse de sortie de la tigedu vérin, par une étude graphique sur la . Les deux configurationsextrêmes du mécanisme, la position " coupé " et la position " cabriolet "sont données sur la . Le point (A) passe de la position (A) (" coupé ") àla position (AF ) (" cabriolet ").
Q - 3 : Déterminez alors la course du vérin (la course est la distancedont s’est déplacée la tige du vérin).
Q - 4 : Sachant que les vérins se déplacent à vitesse constante, ladurée de la phase d’ouverture est de 10 secondes et quele diamètre du vérin vaut 20 mm, calculez le débit que doitfournir la pompe pour alimenter les deux vérins (coté droit etcoté gauche du toit).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 36 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 37 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 38 / 43
Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 39 / 43

Toit escamotable de 206 CC
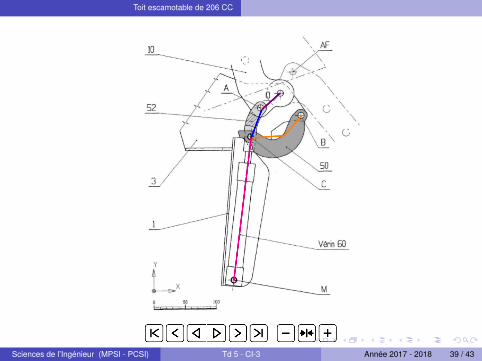
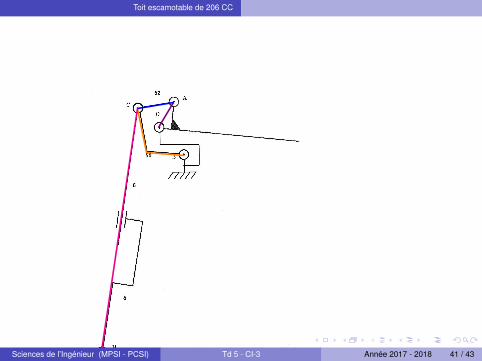
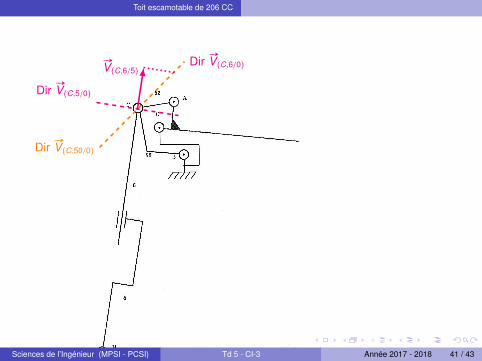
Toit escamotable de 206 CCDétermination de la vitesse d’accostage en K
Les premières constructions se feront sur la, échelle : 10mm/s ⇔ 30mm sur le graphique. Echelle : 10mm/s⇔ 5 mm sur le graphique.
Q - 5 : En justifiant votre démarche, déterminer à partir de la vitessede sortie du vérin la vitesse d’impact :
#»
V(K ,10/S).
Q - 6 : Déterminez enfin#»
V(G,30/S).
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 40 / 43
Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43
Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
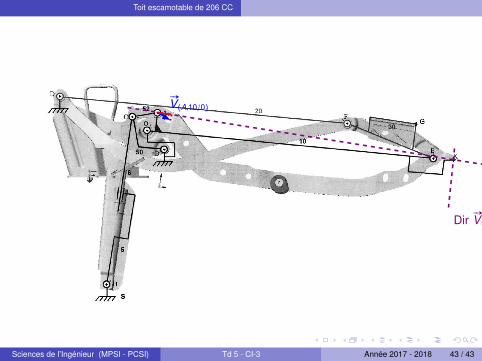
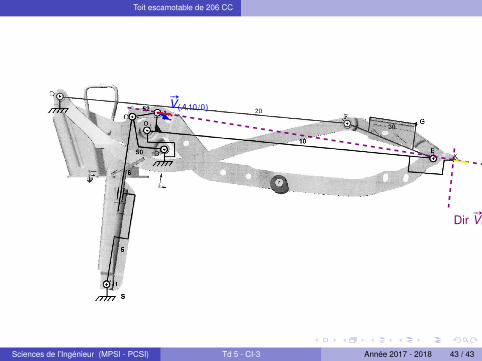
#»
V(C,52/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 41 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)
Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)#»
V(C,6/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(C,52/0)
Dir#»
V(A,10/0)
#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 42 / 43

Toit escamotable de 206 CC
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)#»
V(C,6/0)#»
V(C,52/0)
Dir#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(C,6/5)Dir#»
V(C,5/0)
Dir#»
V(C,50/0)
Dir#»
V(C,6/0)#»
V(C,6/0)#»
V(C,52/0)
Dir#»
V(A,10/0)
#»
V(A,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43
Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43
Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(A,10/0)
Dir#»
V(K ,10/0)
#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43

Toit escamotable de 206 CC
#»
V(K ,10/0)
Sciences de l’Ingénieur (MPSI - PCSI) Td 5 - CI-3 Année 2017 - 2018 43 / 43