Embed Size (px)
Citation preview

Primer Parcial. 2005-06. R-173
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Primer Examen Parcial. 20-01-2006.
(y Primera Parte de la Tercera Convocatoria)
Ejercicio 1.
(1.1) [2 puntos] Calcula la ecuacion de la parabola de eje horizontal que pasa por el punto(4, 4) y tiene como foco F = (0, 1). Determina los restantes elementos caracterısticos dela parabola y su representacion grafica.
(1.2) [3 puntos] Determina la expresion del giro de centro el punto (2, 1) y angulo θ = π/3radianes. Determina el punto que se obtiene al aplicar dicho giro al punto (3, 2). Puedestrabajar en forma vectorial o en forma compleja.
(1.3) [2 puntos] Siendo g y d la recta y la curva dadas respectivamente por
g ≡{
y = x,z = 0,
y d ≡{
x = 0,z = sen(y),
determina las ecuaciones parametricas y la ecuacion implıcita de la superficie que seobtiene al desplazar g a lo largo de d. Haz un bosquejo de dicha superficie.
(1.4) [3 puntos] Reduce a suma de cuadrados la forma cuadratica Q : R3 −→ R asociada ala matriz simetrica
A =
0 1 01 0 10 1 0
.
Expresa en forma matricial la relacion entre las variables originales y las variables finales.Determina dos puntos, en las coordenadas originales, donde la forma cuadratica alcanceel valor 7.
(1.1) Puesto que cualquier punto de una parabola equidista del foco y de la directriz, estasera una recta L tal que la distancia de A = (4, 4) a ella sea dist(A, L) = dist(A, F ) =√
16 + 9 = 5. Por otra parte, puesto que el eje de simetrıa de la parabola tiene que serhorizontal y la directriz es perpendicular al eje de simetrıa, la directriz sera una rectavertical L ≡ x = ρ. Por tanto, tiene que cumplirse que
dist(A, L) = |ρ − 4| = 5 =⇒ ρ − 4 = ±5 =⇒
ρ = 9 =⇒ L ≡ x = 9,o
ρ = −1 =⇒ L ≡ x = −1.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-174 Primer Parcial. 2005-06.
Ası, hay dos parablas que verifican las condiciones indicadas. Podemos calcular laecuacion de ambas parabolas de forma simultanea teniendo en cuenta la definicion metri-ca de la parabola como conjunto de puntos que equidistan del foco y de la directriz.Dado un punto generico P = (x, y) tenemos
dist (P, F ) = dist ((x, y), (0, 1)) =√
x2 + (y − 1)2,
dist (P, L) = dist ((x, y), x = ρ) = |x − ρ| ,
=⇒√
x2 + (y − 1)2 = |x − ρ|
=⇒ x2 + (y − 1)2 = |x − ρ|2 = x2 − 2ρx + ρ2 =⇒ (y − 1)2 = −2ρx + ρ2
=⇒ (y − 1)2 = −2ρ(
x − ρ
2
)
, ρ = 9,−1 .
Por tanto, las dos parabolas consideradas son:
Parabola con foco F = (0, 1) y directriz L ≡ x = 9,
• Ecuacion (y − 1)2 = −18
(
x − 9
2
)
,
• Eje de simetrıa, y = 1,
• Vertice V = (x − 9
2= 0, y − 1 = 0) = (
9
2, 1) (punto del eje de simetrıa que
equidista del foco y de la directriz, punto del eje de simetrıa que esta en laparabola).
Parabola con foco F = (0, 1) y directriz L ≡ x = −1,
• Ecuacion (y − 1)2 = 2
(
x +1
2
)
,
• Eje de simetrıa, y = 1,
• Vertice V = (x +1
2= 0, y − 1 = 0) = (−1
2, 1) (punto del eje de simetrıa que
equidista del foco y de la directriz, punto del eje de simetrıa que esta en laparabola).
Observacion.- La ecuacion de cualquiera de las dos parabolas se puede obtenerdeterminando en primer lugar el vertice (α, 1) (una vez elegida la directriz) yteniendo en cuenta que la ecuacion-tipo de la parabola buscada es
(y − 1)2 = 2p(x − α).
Algebra. F. Mayoral Ingenierıa Aeronautica.
Ejercicio 1. R-175
−6 −4 −2 −1 0 2 4 6 8 9−8
−6
−4
−2
0
2
4
6
8
x
y
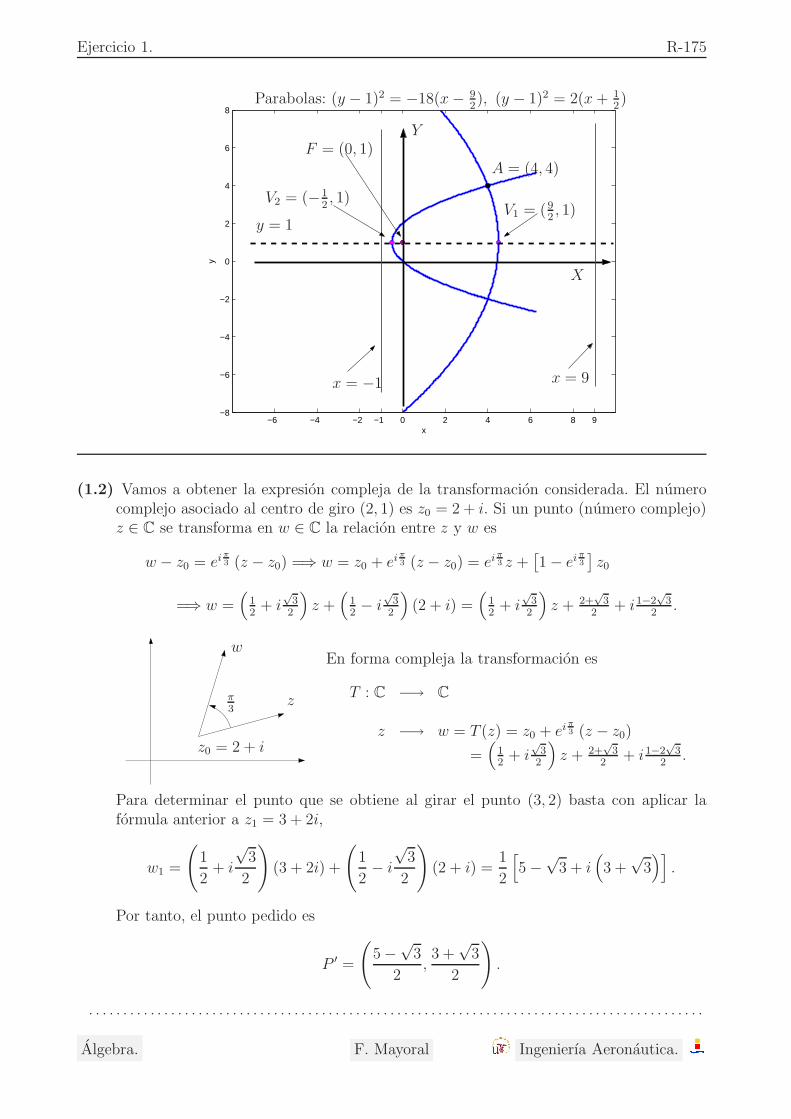
Parabolas: (y − 1)2 = −18(x − 9
2), (y − 1)2 = 2(x + 1
2)
X
Y
V1 = (9
2, 1)
V2 = (−1
2, 1)
F = (0, 1)A = (4, 4)
y = 1
x = 9x = −1
(1.2) Vamos a obtener la expresion compleja de la transformacion considerada. El numerocomplejo asociado al centro de giro (2, 1) es z0 = 2 + i. Si un punto (numero complejo)z ∈ C se transforma en w ∈ C la relacion entre z y w es
w − z0 = ei π
3 (z − z0) =⇒ w = z0 + ei π
3 (z − z0) = ei π
3 z +[
1 − ei π
3
]
z0
=⇒ w =(
1
2+ i
√3
2
)
z +(
1
2− i
√3
2
)
(2 + i) =(
1
2+ i
√3
2
)
z + 2+√
3
2+ i1−2
√3
2.
z0 = 2 + i
z
w
π3
En forma compleja la transformacion es
T : C −→ C
z −→ w = T (z) = z0 + ei π
3 (z − z0)
=(
1
2+ i
√3
2
)
z + 2+√
3
2+ i1−2
√3
2.
Para determinar el punto que se obtiene al girar el punto (3, 2) basta con aplicar laformula anterior a z1 = 3 + 2i,
w1 =
(
1
2+ i
√3
2
)
(3 + 2i) +
(
1
2− i
√3
2
)
(2 + i) =1
2
[
5 −√
3 + i(
3 +√
3)]
.
Por tanto, el punto pedido es
P ′ =
(
5 −√
3
2,3 +
√3
2
)
.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Algebra. F. Mayoral Ingenierıa Aeronautica.
R-176 Primer Parcial. 2005-06.
La expresion vectorial del giro considerado puede obtenerse de la expresion compleja sin masque obtener las partes real e imaginaria de w = x′ + iy′ en funcion de las partes real eimaginaria de z = x + iy. La transformacion viene dada por
R2- R2
[
xy
]
-
[
x′
y′
]
=
[
1/2 −√
3/2√3/2 1/2
] [
xy
]
+1
2
[
2 +√
3
1 − 2√
3
]
.
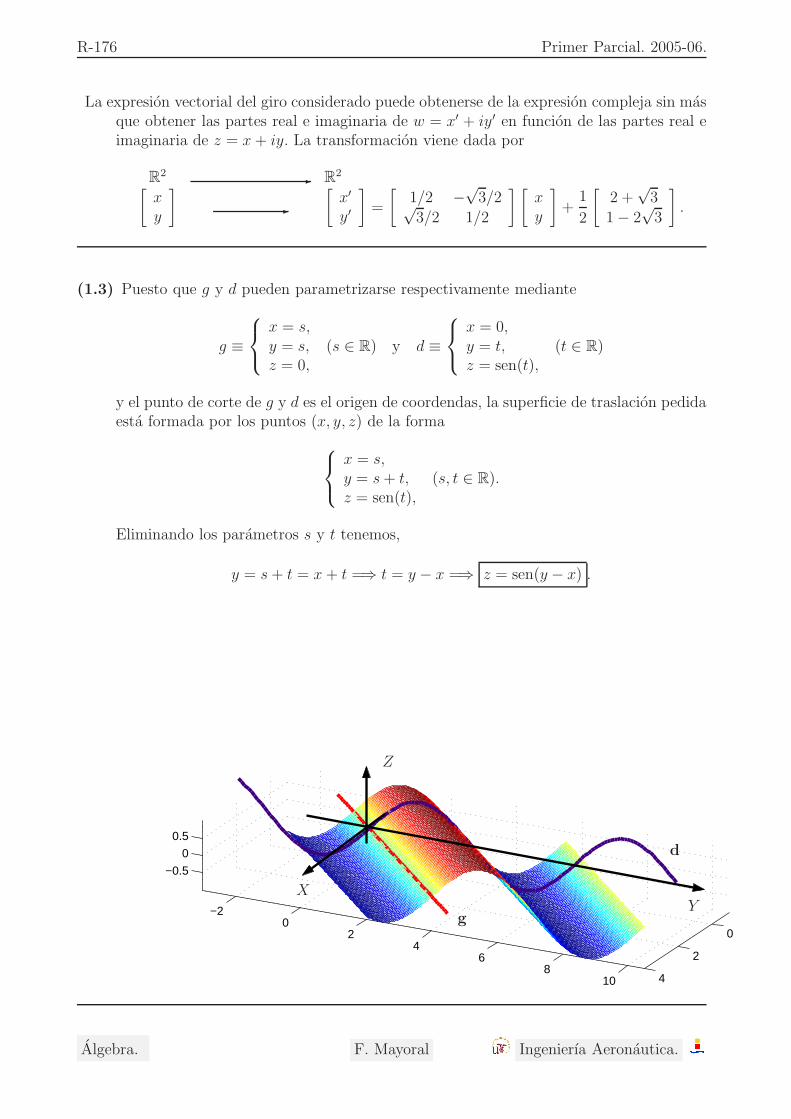
(1.3) Puesto que g y d pueden parametrizarse respectivamente mediante
g ≡
x = s,y = s,z = 0,
(s ∈ R) y d ≡
x = 0,y = t,z = sen(t),
(t ∈ R)
y el punto de corte de g y d es el origen de coordendas, la superficie de traslacion pedidaesta formada por los puntos (x, y, z) de la forma
x = s,y = s + t,z = sen(t),
(s, t ∈ R).
Eliminando los parametros s y t tenemos,
y = s + t = x + t =⇒ t = y − x =⇒ z = sen(y − x) .
0
2
4
−20
24
68
10
−0.5
0
0.5d
g
XY
Z
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 1. R-177
(1.4) La forma cuadratica Q : R3 −→ R asociada a la matriz simetrica dada es
Q(x1, x2, x3) = 2x1x2 + 2x2x3.
Puesto que en la expresion polinomica no aparece ningun cuadrado, conseguimos uncuadrado transformando un producto cruzado, por ejemplo x1x2 en una diferencia decuadrados mediante el cambio de variables
{
x1 = y1 + y2,x2 = y1 − y2,
y1 =1
2(x1 + x2) ,
y2 =1
2(x1 − x2) ,
con lo cual la forma cuadratica queda
Q = 2(y2
1 − y2
2) + 2(y1 − y2)x3 = 2y2
1 − 2y2
2 + 2y1x3 − 2y2x3
y podemos completar cuadrados en y1, por ejemplo,
Q = 2(
y1 + 1
2x3
)2 − 2(
1
2x3
)2 − 2y22 − 2y2x3 =
[
siendo z1 = y1 + 1
2x3
y completando cuadrados en y2
]
=
= 2z21 − 2
(
y2 + 1
2x3
)2+ 2
(
1
2x3
)2 − 1
2x2
3 = 2z21 − 2z2
2 .
Relacion entre las variables. De la forma en la que hemos completado cuadradostenemos:
z1 = y1 + 1
2x3 = 1
2(x1 + x2) + 1
2x3,
z2 = y2 + 1
2x3 = 1
2(x1 − x2) + 1
2x3.
La relacion entre las variables iniciales (x1, x2, x3) y las variables finales (z1, z2, z3) sera dela forma
z1
z2
z3
=
1/2 1/2 1/21/2 −1/2 1/2∗ ∗ ∗
x1
x2
x3
donde como tercera fila de la matriz que relaciona las variables (la que nos da la variablez3 que no ha aparecido en la reduccion a suma de cuadrados) podemos tomar cualquieracon la unica condicion de que la matriz tenga inversa, por ejemplo podemos tomar
z1
z2
z3
=
1/2 1/2 1/21/2 −1/2 1/20 0 1
x1
x2
x3
es decir z3 = x3.
Habitualmente, la forma mas comoda de obtener puntos donde una forma cuadraticaalcanza un determinado valor es hacerlo a partir de una expresion de la forma cuadraticacomo suma de cuadrados, sin embargo para la forma cuadraticada Q dada tambien desdela expresion en las variables dadas. Basta tomar, por ejemplo,
(x1 = 7, x2 = 1/2, x3 = 0) =⇒ Q = 7,
(x1 = 0, x2 = 1/2, x3 = 7) =⇒ Q = 7.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-178 Primer Parcial. 2005-06.
Ejercicio 2.
(2.1) [4 puntos] Calcula la matriz P de la proyeccion ortogonal, en R3, sobre un plano deecuacion x + y + az = 0 sabiendo que la proyeccion del vector w = [−1,−1, 1]T sobredicho plano es el vector nulo.
(2.2) [4 puntos] Determina el valor de la suma
(
n1
)
2 +
(
n2
)
22 +
(
n3
)
23 + · · ·+(
nn
)
2n
para n = 2, 3, . . . y calcula la matriz (I + 2P )2006 siendo I la matriz identidad de orden3 y P la matriz de la proyeccion del apartado anterior.
(2.3) [2 puntos] Resuelve (determina todas las soluciones complejas de) la ecuacion
(z − 1)2 = −4z2.
(2.1) [4 puntos] Para que la proyeccion ortogonal de un vector sobre un plano (que pasapor el origen de coordenadas) sea el vector nulo dicho vector tiene que ser ortogonal alplano. Por tanto, para que la proyeccion ortogonal del vector w dado sea el vector nulo,w tiene que ser un multiplo del vector u = [ 1 1 a ]T (de los coeficientes de la ecuaciondel plano), o viceversa, con lo cual
[−1,−1, 1]T = α [1, 1, a]T ⇐⇒ α = −1, a = −1.
Calculemos la matriz de la proyeccion ortogonal sobre π ≡ x + y − z = 0. Para ello,tomamos dos vectores linealmente independientes {v1, v2} en el plano, por ejemplo
v1 =
1−10
, v2 =
101
y un vector ortogonal al plano, por ejemplo el vector u dado por los coeficientes de laecuacion implıcita. Sobre estos tres vectores (linealmente independientes) la matriz Pde la proyeccion tiene que verificar
Pv1 = v1, P v2 = v2 y Pu = 0.
Escibiendo estas tres igualdades vectoriales en forma matricial tenemos
A
1 1 1−1 0 10 1 −1
=
1 1 0−1 0 00 1 0
=⇒ A =
1 1 0−1 0 00 1 0
1 1 1−1 0 10 1 −1
−1
=⇒
=⇒ A =
1 1 0−1 0 00 1 0
1
3
1 −2 −11 1 21 1 −1
=1
3
2 −1 1−1 2 11 1 2
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-179
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
•
1 1 1−1 0 10 1 −1
1 0 00 1 00 0 1
F2 + F1
−→
1 1 10 1 20 1 −1
1 0 01 1 00 0 1
F3 − F2
−→F1 − F2
1 0 −10 1 20 0 −3
0 −1 01 1 0−1 −1 1
F3/(−3)−→
F2 − 2F3
F1 + F3
1 0 −10 1 20 0 1
1/3 −2/3 −1/31/3 1/3 2/31/3 1/3 −1/3
=⇒
1 1 1−1 0 10 1 −1
−1
=1
3
1 −2 −11 1 21 1 −1
(2.2) Aplicando la formula del binomio de Newton
(a + b)n =
(
n0
)
anb0 +
(
n1
)
an−1b1 + · · ·(
nm
)
an−mbm + · · ·+(
nn
)
an−nbn
con a = 1 y b = 2 obtenemos
(1 + 2)n = 3n =
(
n0
)
+
(
n1
)
2 + · · ·(
nm
)
2m + · · ·+(
nn
)
2n
con lo cual el valor de la suma pedida es(
n1
)
2 + · · ·+(
nm
)
2m + · · ·+(
nn
)
2n = 3n − 1.
Puesto que la matriz identidad conmuta con cualquier otra matriz cuadrada del mismoorden, la formula del binomio de Newton es valida para el desarrollo de una potencia(I + 2P )n con lo cual
(I + 2P )n =
(
n0
)
I +
(
n1
)
(2P )1 +
(
n2
)
(2P )2 + · · · +(
nn
)
(2P )n.
Puesto que P es la matriz de una proyeccion se verifica que P 2 = P (para cualquiervector x, el vector PPx es la proyeccion de la proyeccion de x que coincide con laproyeccion Px de x) y por tanto, para cualquier exponente m = 1, 2, . . . se verifica queP m = P . Sustituyendo obtenemos
(I + 2P )n = I +
(
n1
)
(2P ) +
(
n2
)
22P + · · ·+(
nn
)
2nP =
= I +
[(
n1
)
2 +
(
n2
)
22 + · · ·+(
nn
)
2n
]
P =
= I + (3n − 1)P.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-180 Primer Parcial. 2005-06.
Para n = 2006 obtenemos
(I + 2P )2006 = I + (32006 − 1)P = (32006 − 1)(
1
32006−1I + P
)
=
= (32006 − 1)1
3
3
32006−1+ 2 −1 1
−1 3
32006−1+ 2 1
1 1 3
32006−1+ 2
.
(2.3) Puesto que z = 0 no es solucion de la ecuacion dada, esta es equivalente a la ecuacion
(
z − 1
z
)2
= −4.
Sin mas que calcular las dos raıces cuadradas complejas de −4 obtenemos
z − 1
z= ±2i
y basta con resolver cada una de las ecuaciones:
•z − 1
z= 2i ⇐⇒ z − 1 = 2iz ⇐⇒ x − 1 + iy = 2i(x − iy)
⇐⇒ x − 1 + iy = 2ix + 2y ⇐⇒{
x − 1 = 2y,y = 2x
}
=⇒ x − 1 = 4x
=⇒ x = −1
3=⇒ y = −2
3=⇒ z1 = −1
3− 2
3i.
•z − 1
z= −2i ⇐⇒ z − 1 = −2iz ⇐⇒ x − 1 + iy = −2i(x − iy)
⇐⇒ x − 1 + iy = −2ix − 2y ⇐⇒{
x − 1 = −2y,y = −2x
}
=⇒ x − 1 = 4x
=⇒ x = −1
3=⇒ y = 2
3=⇒ z2 = −1
3+
2
3i.
Por tanto, las soluciones de la ecuacion dada son
z1 = −1 + 2i
3y z2 = z1 = −1 − 2i
3.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-181
Ejercicio 3.
(3.1) [2 puntos] Siendo A una matriz 30 × 20 de rango 7, calcula las dimensiones de losespacios nulo y columna de la matriz B = [ A | A ] y de su transpuesta BT .
(3.2) [4 puntos] Determina una base del espacio nulo de la matriz
C =
1 3 −2 4 20 1 −2 1 1−1 4 −12 3 52 1 6 3 −1
.
Sin necesidad de hacer mas calculos, ¿Cual es la dimension del espacio columna dela matriz C? ¿Cual es el menor numero posible de ecuaciones implıcitas mediante lascuales se puede caracterizar dicho espacio columna?
(3.3) [2 puntos] Comprueba que el vector v = [2,−4,−1, 2, 0]T esta en el espacio nulo de lamatriz C del apartado anterior y calcula las coordenadas de dicho vector respecto a labase obtenida.
(3.4) [2 puntos] Calcula la factorizacion LU de la matriz C dada anteriormente.
(3.1) B es una matriz 30 × 40 cuyas columnas son las mismas que las de la matriz A perorepetidas. Por tanto, los subespacios columna (subespacios vectoriales de R30) de ambasmatrices coinciden, Col (B) = Col (A). Utilizando lo anterior y el teorema del rangotenemos:
dim (Col (B)) = dim (Col (A)) = 7,
dim (Nul (B)) = 40 − dim (Col (B)) = 33,
dim(
Col (BT ))
= dim (Col (B)) = 7,
puesto que BT tiene 30 columnas,
dim(
Nul (BT ))
= 30 − dim(
Col (BT ))
= 23.
Observacion.- Es inmediato comprobar que Nul (BT ) = Nul (AT ) ⊂ R30.
(3.2) (Comparar con el Ejercicio 3 (3.2) del Primer Parcial del curso 2004-05) Resolvemos elsistema Cx = 0 reduciendolo a forma escalonada (por filas)
[C|0]F3 + F1
-
F4 − 2F1
1 3 −2 4 2 0
0 1 −2 1 1 00 7 −14 7 7 00 −5 10 −5 −5 0
F3 − 7F2
-
F4 + 5F2
1 3 −2 4 2 0
0 1 −2 1 1 00 0 0 0 0 00 0 0 0 0 0
.
Por tanto: tenemos tres variables libres x3, x4, x5, las soluciones del sistema Cx = 0
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-182 Primer Parcial. 2005-06.
vienen dadas por
x2 = 2x3 − x4 − x5,x1 = −3x2 + 2x3 − 4x4 − 2x5
= −4x3 − x4 + x5,=⇒
x1
x2
x3
x4
x5
= x3
−42100
+ x4
−1−1010
+ x5
1−1001
y una base de Nul (C) es
v1 =
−42100
, v2 =
−1−1010
, v3 =
1−1001
.
¿Cual es la dimension del espacio columna de la matriz C? Puesto que
dim [Nul (C)] = 3
y C tiene 5 columnas, la dimension del espacio columna de C es (el numero depivotes que se obtienen al reducir a forma escalonada)
dim [Col (C)] = 5 − dim [Nul (C)] = 2.
De hecho, una base del espacio columna de C la forman las dos primeras columnasde dicha matriz.
¿Cual es el menor numero posible de ecuaciones implıcitas mediante lascuales se puede caracterizar dicho espacio columna?. Al reducir a formaescalonada mediante operaciones fila un sistema de ecuaciones Cx = y, siendoy ∈ R4 un vector generico, podemos hacerlo con las mismas operaciones fila quehemos utilizado para reducir a forma escalonada el sistema homogeneo Cx = 0.Por tanto Col (C) puede caracterizarse mediante 2 ecuaciones implıcitas.
(3.3) Para comprobar que el vector v dado esta en Nul (C) bastara comprobar que Cv = 0o bien que al intentar expresar v como combinacion lineal de los vectores de la baseobtenida de Nul (C) podemos conseguirlo. Los coeficientes de dicha combinacion linealseran las coordenadas de v respecto a {v1, v2, v3}. Resolvamos el sistema de ecuacionesasociado a la igualdad vectorial αv1 + βv2 + γv3 = v.
−42100
−1−1010
1−1001
2−4−120
F1 + 4F3 + F4 − F5
−→F2 − 2F3 + F4 + F5
00100
00010
00001
00−120
=⇒
Sistemacompatible
determinado
=⇒
αβγ
=
−120
.
Algebra. F. Mayoral Ingenierıa Aeronautica.
Ejercicio 3. R-183
(3.4) Puesto que al reducir a forma escalonada el sistema homogeneo Cx = 0 (su matrizampliada) en el apartado (3.2) no hemos hecho intercambio de filas y solo hemos pivo-tado hacia abajo, la matriz C admite factorizacion LU siendo la matriz U la matrizescalonada obtenida (de C) y la matriz L la asociada a las operaciones hechas al pivotar,
U =
1 3 −2 4 2
0 1 −2 1 10 0 0 0 00 0 0 0 0
y L =
1 0 0 00 1 0 0−1 7 1 02 −5 0 1
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-184 Tercera Convocatoria. 2005-06.
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Tercera Convocatoria (Segunda Parte). 11-02-2005.
Ejercicio 4. Considera los vectores
v1 =
−2102
, v2 =
1203
y v3 =
3101
.
(4.1) Calcula una base ortogonal del subespacio S generado por v1, v2 y v3.
(4.2) Calcula la matriz de la proyeccion ortogonal sobre S y la de la proyeccion ortogonalsobre S⊥.
(4.3) Definicion de matriz ortogonal. Demuestra que si Q es una matriz ortogonal de ordenn y {u1, u2, . . . , un} es una base ortonormal de R
n, entonces
{Qu1, . . . , Qun}
tambien es una base ortonormal de Rn.
(4.1) Aplicando el metodo de Gram-Schmidt a {v1, v2, v3} se obtienen los vectores
u1 = v1 =
−2102
, u2 = v2 −2
3u1 =
1
3
7405
y u3 = v3 +1
3u1 − u2 = 0.
Por ser u3 = 0 el correspondiente vector v3 es combinacion lineal de los anteriores v1 yv2; de hecho es inmediato comprobar que v3 = v2 − v1. Por tanto, una base ortogonalde S = Gen {v1, v2, v3} = Gen {v1, v2} es {u1, u2} y otra es
u1 =
−2102
, u′2 = 3u2 =
7405
.
(4.2) Puesto que
u1
||u1||=
1
3
−2102
,u′
2
||u′2||
=1
3√
10
7405
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 4. R-185
es una base ortonormal de S, la matriz de la proyeccion ortogonal sobre S es
PS =
−2/3 7/3√
10
1/3 4/3√
10
0 0
2/3 5/3√
10
−2/3 1/3 0 2/3
7/3√
10 4/3√
10 0 5/3√
10
= · · ·
y la matriz de la proyeccion ortogonal sobre S⊥ es
PS⊥ = I − PS = · · ·
(4.3) Se dice que una matriz Q es una matriz ortogonal si es una matriz cuadrada realcuya inversa coincide con su transpuesta.
Si Q es una matriz ortogonal de orden n y {u1, u2, . . . , un} es una base ortonormal deRn, para probar que
{Qu1, . . . , Qun}tambien es una base ortonormal de Rn basta comprobar que se trata de n vectores(reales) ortogonales dos a dos y unitarios. Haciendo los correspondientes productosescalares obtenemos para i, j = 1, . . . , n,
(Qui) · (Quj) = (Qui)T (Quj) = (uT
i QT )(Quj) = uTi QT Quj =
= uTi uj =
0 si i 6= j =⇒ (Qui)⊥(Quj),
1 si i = j =⇒ ||Qui|| = 1.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-186 Tercera Convocatoria. 2005-06.
Ejercicio 5. Considera la matriz A y el vector w dados por
A =
2 3 20 a − 1 02 2 − a 2
, w =
123
.
(5.1) Determina los valores de a para los que A es diagonalizable.
(5.2) Diagonaliza A para a = 0 (indicando la matriz de paso, la matriz diagonal y la relacionentre dichas matrices).
(5.3) Resuelve, para a = 0, el problema de valor inicial
{
y′ = 2Ay,y(0) = w
(5.1) Calculando el polinomio caracterıstico obtenemos
p(λ) = det (A − λI) = (a − 1 − λ)λ(λ − 4)
con lo cual los autovalores son:
λ1 = 0, λ2 = 4 y λ3 = a − 1.
Por tanto, los casos en los que aparecen autovalores multiples son:
λ1 = λ3 ⇐⇒ a = 1 y λ2 = λ3 ⇐⇒ a = 5.
Estudiando cada caso tenemos:
Si a 6= 1, 5 =⇒ A es diagonalizable pues todos sus autovalores son simples.
Si a = 1 los autovalores de A son λ1 = 0 (doble) y λ2 = 4 (simple). Puesto que lamultiplicidad geometrica del unico autovalor multiple λ1 = 0 es
dim Nul (A − λ1I) = dim Nul
2 3 20 0 02 1 2
= 1
la matriz A no es diagonalizable en este caso.
Si a = 5 los autovalores de A son λ1 = 0 (simple) y λ2 = 4 (doble). Puesto que lamultiplicidad geometrica del unico autovalor multiple λ2 = 4 es
dim Nul (A − λ1I) = dim Nul
−2 3 20 0 02 −3 −2
= 2
la matriz A si es diagonalizable en este caso.
Resumiendo,A es diagonalizable ⇐⇒ a 6= 1.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 5. R-187
(5.2) Para a = 0 los autovalores de A son
λ1 = 0, λ2 = 4 y λ3 = −1.
Resolviendo los correspondientes sistemas homogeneos (A − λkI)x = 0 obtenemos loscorrespondientes autovectores
v1 =
−101
, v2 =
101
y v3 =
−110
.
Por tanto una diagonalizacion de A viene dada por AP = PD ≡ A = PDP−1 siendola matriz de paso P y la matriz diagonal D las matrices
P =
v1 v2 v3
=
−1 1 −10 0 11 1 0
y D =
λ1
λ2
λ3
=
04
1
.
(5.3) Utilizando las propiedades de los autovalores y autovectores de una matriz, los auto-valores de 2A son
µ1 = 2λ1 = 0, µ2 = 2λ2 = 8 y µ3 = 2λ3 = −2
siendo los autovectores respectivos los mismos que los de la matriz A, v1, v2 y v3. Notemosque de la diagonalizacion de A = PDP−1 tenemos 2A = P (2D)P−1.
Por tanto, la solucion general del sistema diferencial y′ = 2Ay es
y(t) = c1eµ1tv1 + c2e
µ2tv2 + c3eµ3tv3, c1, c2, c3 ∈ R.
Resolviendo el sistema que se obtiene al imponer la condicion inicial y(0) = w,
c1v1 + c2v2 + c3v3 = w ≡ P
c1
c2
c3
=
123
,
obtenemosc1 = 0, c2 = 3 y c3 = 2.
Por tanto, la solucion del problema de valor inicial planteado es
y(t) = 3e8tv2 + 2e−2tv3 = 3e8t
101
+ 2e−2t
−110
=
3e8t − 2e−2t
2e−2t
3e8t
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-188 Segundo Parcial. 2005-06.
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Segundo Examen Parcial. 05-06-2006.
Ejercicio 1.
(1.1) [2 puntos] Enuncia y demuestra las propiedades que conozcas relativas a autovaloresy autovectores complejos (no reales) de una matriz cuadrada real.
(1.2) [2 puntos] Determina los autovalores de una matriz real A de orden 4 sabiendo queverifica la igualdad A3 − 2A2 + A − 2I = 0 (I es la matriz identidad de orden 4).
(1.3) [4 puntos] Calcula la matriz de la proyeccion ortogonal sobre el subespacio vectorialS de R6 definido por las ecuaciones
{
x1 + x2 + x3 + x4 + x5 + x6 = 0,x1 − x2 + x3 − x4 + x5 − x6 = 0.
(1.4) [2 puntos] Determina los valores de α ∈ R para los que x2 − 4xy + α2y2 + α = 0 es laecuacion de una hiperbola.
(1.1) Sea A una matriz cuadrada real de orden n y sea p(λ) = det (A − λI) su polinomiocaracterıstico. Se pueden citar varias propiedades relativas a los autovalores y autovec-tores complejos (no reales) de A. Entre las mas importantes cabe citar:
(a) Si λ0 = a + bi ∈ C, a, b ∈ R, b 6= 0 es un autovalor de A y v0 = u0 + iw0 ∈Cn, u0, w0 ∈ Rn es un autovector de A asociado a λ0 se verifica que λ0 = a − ibtambien es autovalor de A y v0 = u0 − iw0 es un autovector de A asociado al
autovalor λ0 = a − ib.
(b) Los vectores parte real u0 y parte imaginaria w0 del autovector v0 son linealmente
independientes.
(c) Las multiplicidades algebraicas de λ0 y de λ0 como autovalores de A coinciden.
(d) Las multiplicidades geometricas de λ0 y de λ0 como autovalores de A coinciden.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
(a) Av0 = λ0v0 =⇒ [tomando conjugados] Av0 = λ0v0 =⇒ Av0 = λ0v0.
(b) Puesto que
u0 = Re (v0) =1
2(v0 + v0) ,
w0 = Im (v0) =1
2i(v0 − v0) ,
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 1. R-189
si tenemos una combinacion lineal
αu0 + βw0 = 0
sustituyendo obtenemos
α1
2(v0 + v0) + β
1
2i(v0 − v0) =
(
α
2+
β
2i
)
v0 +
(
α
2− β
2i
)
v0 = 0.
Puesto que v0 y v0 son linealemnte independientes, por tratarse de autovectoresasociados a autovalores distintos λ0 6= λ0, tiene que verificarse
α
2+
β
2i= 0
α
2− β
2i= 0
=⇒ · · · =⇒ α = β = 0.
Por tanto, u0 y w0 son linealemnte independientes.
(c) Si el polinomio caracterıstico p(λ)es divisible por una potencia (λ − λ0)r entonces
tambien lo es por (λ − λ0)r,
Si p(λ) = (λ − λ0)q(λ) =⇒ p(λ) = (λ − λ0)q(λ) =⇒[p es real] p(λ) = (λ − λ0)Q(λ) =⇒ p(µ) = (µ − λ0)Q(µ).
(d) Las dimensiones de los espacios nulos
Nul (A − λ0I) y Nul(
A − λ0I)
coinciden puesto que al reducir a forma escalonada las matrices A−λ0I y A−λ0I =A − λ0I coinciden el numero de pivotes (y el numero de variables libres).
(1.2) Si λ ∈ C es un autovalor de A y v 6= 0 es un atovector de A asociado a λ, se verifica queAv = λv y, por tanto, A2v = λ2v, A3v, = λ3v, . . . Teniendo esto en cuenta y aplicandola condicion dada de A obtenemos:
(A3 − 2A2 + A − 2I) v = 0 ⇐⇒ A3v − 2A2v + Av − 2v = λ3v − 2λ2v + λv − 2v = 0
⇐⇒ (λ3 − 2λ2 + λ − 2) v = 0 ⇔ λ3 − 2λ2 + λ − 2 = 0.
El polinomio λ3−2λ2 +λ−2 se anula para λ = 2. Dividiendo dicho polinomio por λ−2obtenemos
λ3 − 2λ2 + λ − 2 = (λ − 2)(
λ2 + 1)
= (λ − 2) (λ − i) (λ + i) .
Por tanto, los unicos numeros, reales o complejos, que pueden ser autovalores de Ason
λ = 2, λ = i, λ = −i.
Puesto que A es una matriz de orden 4, tiene que tener, contando multiplicidades, 4autovalores. Por ser A real, si tiene un autovalor complejo no real su conjugado tambienes autovalor y ademas con la misma multiplicidad. Por todo esto las unicas posibilidadespara los autovalores de A son:
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-190 Segundo Parcial. 2005-06.
λ1 = 2 con multiplicidad 4. La matriz A = 2I es una matriz que verifica la ecuacionmatricial dada y tiene a λ1 = 2 como autovalor cuadruple. De hecho, es la unicamatriz de orden 4 que verifica la ecuacion dada y tiene a λ1 = 2 como autovalorcuadruple, pero esa es otra historia.
λ1 = 2 (doble), λ3 = i (simple) y λ4 = −i (simple). Una matriz en dichas condi-ciones es
A =
22
−11
.
λ1 = i (doble) y λ2 = −i (doble). Una matriz en dichas condiciones es
A =
−11
−11
.
(*) Observacion.- La condicion dada sobre la matriz A no obliga a que el polinomioobtenido λ3−2λ2 +λ−2 sea el polinomio caracterıstico de A, que no puede serlopor tratarse de un polinomio de grado 3 y ser A una matriz de orden 4. Por otraparte, la condicion dada tampoco obliga a que el citado polinomio sea un divisordel polinomio caracterıstico.
(1.3) Se trata de un subespacio vectorial S de R6 que tiene, obviamente, dimension 4. Sucomplemento ortogonal S⊥ tiene, por tanto, dimension 2. A priori, calcular directamentela matriz de la proyeccion ortogonal sobre S⊥ debe conllevar menos operaciones quecalcular, directamente, la matriz de la proyeccion ortogonal sobre S. Puesto que
S⊥ = Gen
w1 =
111111
, w2 =
1−11−11−1
,
tenemos una base {w1, w2} de S⊥ que, ademas, es una base ortogonal, w1 · w2 = 0.Normalizando, obtenemos una base ortonormal de S⊥
{
w1
||w1||=
1√6w1,
w2
||w2||=
1√6w2
}
y la matriz de la proyeccion ortogonal sobre S⊥ es
PS⊥ = UUT siendo U =
1/√
6 1/√
6
1/√
6 −1/√
6
1/√
6 1/√
6
1/√
6 −1/√
6
1/√
6 1/√
6
1/√
6 −1/√
6
=1√6
1 11 −11 11 −11 11 −1
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 1. R-191
Por tanto,
PS⊥ = 1√6
1 11 −11 11 −11 11 −1
1√6
[
1 1 1 1 1 11 −1 1 −1 1 −1
]
=
=1
6
2 0 2 0 2 00 2 0 2 0 22 0 2 0 2 00 2 0 2 0 22 0 2 0 2 00 2 0 2 0 2
=1
3
1 0 1 0 1 00 1 0 1 0 11 0 1 0 1 00 1 0 1 0 11 0 1 0 1 00 1 0 1 0 1
.
Teniendo en cuenta que la suma de las matrices de la proyeccion ortogonal PS sobre Sy la de la proyeccion ortogonal PS⊥ sobre S⊥ es la matriz identidad obtenemos
PS + PS⊥ = I =⇒ PS = I − PS⊥ =1
3
2 0 −1 0 −1 00 2 0 −1 0 −1
−1 0 2 0 −1 00 −1 0 2 0 −1
−1 0 1 0 2 00 −1 0 −1 0 2
.
(1.4) Determina los valores de α ∈ R para los que x2 − 4xy + α2y2 + α = 0 es la ecuacionde una hiperbola. Para que la ecuacion dada pueda ser la ecuacion de una hiperbolalos dos autovalores λ1, λ2 de la matriz (simetrica) asociada a la parte cuadratica de laecuacion
A =
[
1 −2−2 α2
]
tienen que ser de distinto signo. De forma equivalente tiene que verificarse que
λ1λ2 = det (A) = α2 − 4 < 0 ⇐⇒ −2 < α < 2.
Siendo Q una matriz ortogonal que Al diagonalizar ortogonalmente la matriz A medianteuna matriz de paso Q y hacer el cambio de variables asociado
[
xy
]
= Q
[
x′
y′
]
en la ecuacion de la conica obtendremos
λ1x′2 + λ2y
′2 + α = 0
con lo cual, siendo λ1λ2 < 0, para que sea la ecuacion de una hiperbola tiene que serα 6= 0. Resumiendo:
La ecuacion es de una hiperbola ⇐⇒ α ∈ (−2, 0) ∪ (0, 2).
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-192 Segundo Parcial. 2005-06.
Ejercicio 2. Considera la matriz A y el vector y0 dados por
A =
0 1 00 0 1−2 0 1
, y0 =
2−11
.
(2.1) [4 puntos] Determina los autovalores y los autovectores de A y una diagonalizacionde A, si existe.
(2.2) [1 punto] Calcula An, n = 1, 2, . . .
(2.3) [3 puntos] Resuelve el problema de valor inicial
{
y′ = A2y,y(0) = y0.
(2.4) [2 puntos] Determina los valores de n = 1, 2, 3, . . . para los que la matriz An esdigonalizable mediante una matriz de paso real.
(2.1) [4 puntos] Determina los autovalores y los autovectores de A y una diagonalizacionde A, si existe.
Autovalores.
p(λ) = det (A − λI) =
∣
∣
∣
∣
∣
∣
−λ 1 00 −λ 1−2 0 1 − λ
∣
∣
∣
∣
∣
∣
= λ2 (1 − λ) − 2 = −λ3 + λ2 − 2
Una solucion de la ecuacion −λ3 + λ2 − 2 = 0 es λ1 = −1. Dividiendo p(λ) entre(λ + 1) obtenemos
p(λ) = (λ + 1)(
−λ2 + 2λ − 2)
y resolviendo la ecuacion −λ2 + 2λ − 2 = 0 obtenemos:
λ =−2 ±
√4 − 8
−2=
−2 ±√−4
−2=
−2 ± 2i
−2= 1 ± i.
Por tanto, A tiene tres autovalores simples
λ1 = −1, λ2 = 1 + i y λ3 = 1 − i,
un autovalor real y una pareja de autovalores complejos conjugados.
∗ Puesto que A tiene 3 autovalores simples, A es diagonalizable y para obtener unadiagonalizacion basta con calcular un autovector asociado a cada autovector.
Autovectores asociados a λ1 = −1, (A + I)x = 0:
1 1 0 00 1 1 0−2 0 2 0
F3 + 2F1
−→
1 1 0 00 1 1 00 2 2 0
F3 − 2F2
−→
1 1 0 00 1 1 00 0 0 0
=⇒
x1
x2
x3
= x3
1−11
=⇒ Nul (A + I) = Gen
v1 =
1−11
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-193
Autovectores asociados a λ2 = 1 + i, (A − (1 + i)I)x = 0:
−1 − i 1 0 00 −1 − i 1 0−2 0 −i 0
=⇒{
x2 = (1 + i)x1,x3 = (1 + i)x2 = (1 + i)2x1 = 2ix1
}
=⇒
x1
x2
x3
= x1
11 + i2i
=⇒ Nul (A − (1 + i)I) = Gen
v2 =
11 + i2i
.
Autovectores asociados a λ3 = λ2 = 1 − i. Teniendo en cuenta las propiedades delos autovalores complejos no reales de una matriz real
−1 + i 1 0 00 −1 + i 1 0−2 0 i 0
=⇒ Nul (A − (1 − i)I) = Gen
v3 = v2 =
11 − i−2i
.
∗ Siendo P una matriz de orden 3 cuyas columnas sean autovectores de A aso-ciados respectivamente a λ1, λ2 y λ3 y siendo la matriz diagonal cuyos elementosdiagonales son λ1, λ2 y λ3,
P =
v1 v2 v3
=
1 1 1−1 1 + i 1 − i1 2i −2i
,
D =
λ1
λ2
λ3
=
−11 + i
1 − i
se verifica AP = PD y por tanto tenemos una diagonalizacion de A, A = PDP−1.
(2.2) Utilizando la digonalizacion obtenida de A,
An = (PDP−1)n = PDnP−1 = P
(−1)n
(1 + i)n
(1 − i)n
P−1.
(2.3) La matriz del sistema homogeneo dado es la matriz A2. Los autovalores de A2 son
µ1 = λ2
1 = 1, µ2 = λ2
2 = (1 + i)2 = 2i y µ3 = λ2
3 = (1 − i)2 = −2i
y los autovectores correspondientes son los mismos que los de la matriz A asociados,respectivamente, a λ1, λ2yλ3.
La solucion general del sistema y′ = A2y es
y(t) = c1eµ1tv1 + c2Re
[
eµ2tv2
]
+ c3Im[
eµ2tv2
]
.
Obtengamos las partes real e imaginaria de eµ2tv2,
•eµ2tv2 = e2itv2 = (cos(2t) + i sen(2t))
110
+ i
012
= cos(2t)
110
− sen(2t)
012
+ i
cos(2t)
012
+ sen(2t)
110
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-194 Segundo Parcial. 2005-06.
Por tanto la parte real es
Re[
eµ2tv2
]
= cos(2t)
110
− sen(2t)
012
y la parte imaginaria es (el coeficiente real de i)
Im[
eµ2tv2
]
= cos(2t)
012
+ sen(2t)
110
.
Imponiendo la condicion inicial y(0) = y0 tenemos
c1
1−11
+c2
110
+c3
012
=
2−11
⇐⇒
1−11
110
012
c1
c2
c3
=
2−11
y resolviendo este sistema obtenemos
c1 =7
5, c2 =
3
5y c3 = −1
5.
La solucion del problema de valor inicial planteado es, por tanto,
y(t) = 7
5et
1−11
+
+3
5
cos(2t)
110
− sen(2t)
012
− 1
5
cos(2t)
012
+ sen(2t)
110
= 7
5et
1−11
+ cos(2t)
3/53/5 − 1/5−2/5
+ sen(2t)
−1/5−3/5 − 1/5
−6/5
=7
5et
1−11
+1
5cos(2t)
32−2
− 1
5sen(2t)
146
.
La curva descrita por las ecuacionesparametricas
x = y1(t),y = y2(t),z = y3(t)
cuando t recorre el intervalo [0, 1,5] es ladada en la figura adjunta
23
45
6
−8
−6
−4
−2
0
0
1
2
3
4
5
6
7
XY
Z
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-195
(2.4) Puesto que la matriz A es diagonalizable, An tambien lo es para cualquier n = 1, 2, . . .pudiendo tomarse como matriz de paso la misma que hemos considerado al diagonalizarA. Para que la matriz An sea digonalizable mediante una matriz de paso real basta conque todos sus autovalores
λn1 = (−1)n, λn
2 = (1 + i)n y λn3 = (1 − i)n,
sean reales. El autovalor λn1 es real para cualquier valor de n = 1, 2, . . . y expresando λ2
y λ3 en forma exponencial tenemos
λ2 = (1 + i) =√
2ei π
4 =⇒ λn2 = (1 + i)n =
√2ei nπ
4 ;
λ3 = (1 − i) =√
2e−i π
4 =⇒ λn3 = (1 − i)n =
√2e−i nπ
4 .
Para que estos numeros complejos (conjugados entre si) sean reales (su parte imaginariasea cero) sus argumentos
nπ
4y − nπ
4
tienen que ser multiplos enteros de π. Si lo es uno lo es el otro y viceversa,
nπ
4= kπ ⇐⇒ n = 4k.
Por tanto los valores de n pedidos son los multiplos de 4,
n = 4k =⇒ n = 4, 8, 12, · · ·
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-196 Segundo Parcial. 2005-06.
Ejercicio 3.
(3.1) [4 puntos] Diagonaliza ortogonalmente la matriz
A =
a −2a 22 −1 22 2 −1
para los valores de a ∈ R para los que sea posible.
(3.2) [4 puntos] Para los valores de a obtenidos en (2.2), determina:
el signo de la forma cuadratica ϕ asociada a la matriz 5A,
los extremos de ϕ sobre la esfera unidad x21 + x2
2 + x23 = 1 y
los puntos donde dichos extremos se alcanzan.
(3.3) [2 puntos] Para los valores de a obtenidos en (3.1), describe geometricamente como
actua la matriz1
3A sobre un vector generico de R3. ¿Cuales son los autovalores y au-
tovectores de la matriz1
3A?
(3.1) Por el Teorema Espectral para matrices simetricas reales, una matriz real es diago-nalizable mediante una matriz de paso ortogonal si, y solo si, es simetrica. Aplicandoeste resultado, la matriz real A dada es diagonalizable ortogonalmente si, y solo si, essimetrica,
AT = A ⇐⇒ −2a = 2 ⇐⇒ a = −1.
Polinomio caracterıstico.
det (A − λI) =
∣
∣
∣
∣
∣
∣
−1 − λ 2 22 −1 − λ 22 2 −1 − λ
∣
∣
∣
∣
∣
∣
=
= (−1 − λ)3 + 8 + 8 − 4(−1 − λ) − 4(−1 − λ) − 4(−1 − λ) =
= (−1 − λ) (λ2 + 2λ + 1) + 16 + 12 + 12λ =
= −λ3 − 3λ2 + 9λ + 27
Autovalores. Una solucion de la ecuacion p(λ) = −λ3−3λ2 +9λ+27 = 0 es λ1 = 3.Dividiendo p(λ) entre (λ − 3) obtenemos
p(λ) = −λ3 − 3λ2 + 9λ + 27 = (λ − 3)[
−λ2 − 6λ − 9]
= −(λ − 3) (λ + 3)2 .
Por tanto los autovalores de A (para a = −1) son
λ1 = 3 (simple) y λ2 = −3 (doble).
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-197
Autovectores asociados a λ1 = 3, (A − 3I)x = 0.
−4 2 2 02 −4 2 02 2 −4 0
F3 + F1 + F2
-
F2 + 1
2F1
−4 2 2 00 −3 3 00 0 0 0
F1/2-
F2/3
→
−2 1 1 00 −1 1 00 0 0 0
F1 + F2
-
−2 0 2 00 −1 1 00 0 0 0
=⇒ Nul (A − 3I) = Gen
v1 =
111
.
Autovectores asociados a λ2 = −3, (A + 3I)x = 0.
2 2 2 02 2 2 02 2 2 0
-
1 1 1 00 0 0 00 0 0 0
=⇒
x1
x2
x3
= x2
−110
+ x3
−101
=⇒ Nul (A + 3I) = Gen
v2 =
−110
, v3 =
−101
∗ Con lo que hemos obtenido podemos conseguir una diagonalizacion no-ortogonalde A, AP = PD, A = PDP−1 siendo P la matriz cuyas columnas son los au-tovectores (linealmente independientes) y D la matriz diagonal cuyos elementosdiagonales son los autovalores (en el mismo orden en el que hemos tomado losautovectores),
P =
111
−110
−101
, D =
−33
3
.
∗ Para obtener una diagonalizacion ortogonal de A necesitamos obtener 3 au-tovectores que sean ortonormales.
Autovalores ortogonales. El autovector v1 es ortogonal a cada uno de los au-tovectores v2 y v3 (como debe ser puesto que v1 esta asociado a un autovalor yv2 y v3 estan asociados a otro autovalor distinto de una matriz simetrica real).Los autovectores no son ortogonales entre sı pero cualquier combinacion lineal deellos tambien es autovector de A asociado al mismo autovalor λ2. Ortogonalizando{v2, v3} obtenemos
u2 = v2; u3 = v3 −v3 · u2
||u2||2u2 = v3 −
1
2u2 = −1
2
11−2
.
Por tanto,
v1, v2, w3 = −2u3 =
11−2
es una base ortogonal de R3 formada por autovectores de A.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-198 Segundo Parcial. 2005-06.
Autovalores ortonormales. Normalizando los autovectores obtenidos
v1
||v1||=
1√3
111
,v2
||v2||=
1√2
−110
,w3
||w3||=
1√6
11−2
.
• Diagonalizacion ortogonal de A, AQ = QD =⇒ A = QDQ−1 = QDQT
Q =
v1
||v1||v2
||v2||w3
||w3||
=
1√3
− 1√2
1√6
1√3
1√2
1√6
1√3
0 − 2√6
(Q−1 = QT ),
D =
λ1
λ2
λ2
=
−33
3
.
(3.2)
Puesto que la matriz 5A es real y simetrica, una reduccion a suma de cuadradosde la forma cuadratica que define tiene por coeficientes los autovalores de la matriz5A que son
µ1 = 5λ1 = 15 (simple) y µ2 = 5λ2 = −15 (doble).
Por tanto, la forma cuadratica asociada es indefinida.
Los extremos de ϕ sobre la esfera unidad x21 + x2
2 + x23 = 1 son el mayor el menor
autovalor de la matriz simetrica real asociada a la forma cuadratica, es decir
max {ϕ(x) : ||x|| = 1} = max
{
xT 5Ax
||x||2: x 6= 0
}
= µ1 = 15,
min {ϕ(x) : ||x|| = 1} = min
{
xT 5Ax
||x||2: x 6= 0
}
= µ2 = −15.
Los extremos de ϕ sobre la esfera unidad se alcanzan sobre autovectores asociadosa los correspondientes autovalores maximo y mınimo,
ϕ
(
± v1
||v1||
)
= µ1 = 15,
ϕ
(
u
||u||
)
= µ2 = −15, ∀u ∈ Nul (A − λ2I), u 6= 0.
(3.3) Para a = −1 la matriz1
3A es una matriz simetrica real que tiene como autovalores
ν1 =1
3µ1 = 1 y ν2 =
1
3µ2 = −1.
Por otra parte, los espacios propios asociados
Nul
(
1
3A − I
)
= Nul (A − 3I) y Nul
(
1
3A + I
)
= Nul (A + 3I)
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-199
son uno el complemento ortogonal del otro.
El subespacio Nul(
1
3A − I
)
= Nul (A − 3I) = Gen {v1} es una recta que pasa por elorigen de coordenadas y sobre los vectores de dicha recta se verifica
1
3Av = v.
El subespacio Nul(
1
3A + I
)
= Nul (A + 3I) = Gen {v2, v3} es el plano que pasa porel origen de coordenadas y es ortogonal a la recta anterior. Sobre los vectores de dichoplano se verifica
1
3Av = −v.
Por tanto, la matriz 1
3A es la matriz de la simetrıa respecto de la recta
Nul (A − 3I) = Gen
v1 =
111
≡ x1 = x2 = x3.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-200 Examen de Junio (Segundo Parcial). 2005-06.
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Examen Final de Junio (Segundo Parcial). 23-06-2006.
Ejercicio 1. Sean A y b la matriz y el vector dados por
A =1
2√
2006
1 1 1−1 1 10 0 11 1 1
.
(1.1) [3 puntos] Calcula una base ortogonal de S = Col (A).
(1.2) [3 puntos] Calcula la proyeccion ortogonal de b sobre S y sobre S⊥.
(1.3) [2 puntos] Resuelve, en el sentido de los mınimos cuadrados, el sistema Ax = b.
(1.4) [2 puntos] ¿Cuantas soluciones en el sentido de los mınimos cuadrados tiene cada unode los sistemas de ecuaciones
[
A A]
y = b,
[
AA
]
z =
[
bb
]
?
¿Por que?
(1.1) El subespacio S generado por las columnas de A coincide con el subespacio generadopor las columnas de la matriz 2
√2006A. Por tanto, para obtener una base ortogonal de
S basta con ortogonalizar los vectores columna de la matriz 2√
2006A,
v1 =
1−101
, v2 =
1101
y v3 =
1111
.
Aplicando el metodo de Gram-Schmidt tenemos
u1 = v1, u2 = v2 −v2 · u1
||u1||2u1 =
1101
− 1
3
1111
=2
3
1201
,
u3 = v3 −v3 · u1
||u1||2u1 −
v3 · u2
||u2||2u2 = v3 −
1
3u1 − u2 =
0110
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 1. R-201
Por tanto, una base ortogonal de Col (A) es
u1 =
1−101
, w2 =3
2u2 =
1201
, u3 =
0110
(1.2) Puesto que {u1, w2, u3} es una base ortogonal de S, la proyeccion ortogonal de unvector b sobre S es
proy S(b) =b · u1
||u1||2u1 +
b · w2
||w2||2w2 +
b · u3
||u3||2u3,
con lo cual en nuestro caso,
proy S(b) =1
3
1−101
+1
6
1201
+0
2u3 =
1
2
1001
y
proy S⊥(b) = b − proy S(b) =
1000
− 1
2
1001
=1
2
100−1
.
(1.3) Puesto que S = Col (A), las soluciones en mınimos cuadrados del sistema Ax = b sonlas soluciones del sistema
Ax = proy S(b) =1
2
1001
,
o lo que es lo mismo, las soluciones del sistema
1 1 1−1 1 10 0 11 1 1
x = 2√
20061
2
1001
=
√200600√2006
.
Resolvamos dicho sistema
1 1 1√
2006−1 1 1 00 0 1 0
1 1 1√
2006
F2 + F1
−→F4 − F1
1 1 1√
2006
0 2 2√
20060 0 1 00 0 0 0
=⇒
x3 = 0,
x2 =
√2006
2,
x1 =√
2006 − x2 − x3 =
=
√2006
2.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-202 Examen de Junio (Segundo Parcial). 2005-06.
(1.4) Puesto que las columnas de la matriz[
A A]
son linealmente dependientes,
• el sistema homogeneo[
A A]
y = 0
tiene infinitas soluciones,
• cualquier sistema[
A A]
y = c.
que sea compatible tiene infinitas soluciones.
• Por tanto, cualquier sistema asociado a dicha matriz tiene infinitas solucionesen el sentido de los mınimos cuadrados pues dichas soluciones en mınimos sonlas soluciones de un sistema compatible asociado a dicha matriz.
Puesto que las columnas de la matriz
[
AA
]
son linealmente independientes,
• el sistema homogeneo[
AA
]
z = 0
asociado tiene solucion unica.
• Por tanto, cualquier sistema
[
AA
]
z = d
que sea compatible tiene una unica solucion.
• Por tanto, cualquier sistema asociado a dicha matriz tiene una unica solucionen el sentido de los mınimos cuadrados pues las soluciones en mınimos cuadra-dos de dicho sistema son las soluciones de un sistema compatible asociado adicha matriz.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-203
Ejercicio 2. Consideremos una matriz A de orden 4 cuyo polinomio caracterıstico es
p(λ) = (λ2 − λ − 6)(λ2 − 2λ + 4).
(2.1) [1 punto] Calcula los autovalores de A y demuestra que A es diagonalizable.
(2.2) [2 puntos] Calcula los autovalores de las matrices(
A − 1
2I)2
, A−1 + I, siendo I lamatriz identidad de orden 4.
(2.3) [1 punto] Aplicando el Teorema de Cayley-Hamilton, expresa A−1 como combinacionlineal de: I, A, A2 y A3.
(2.4) [1 punto] Determina los valores (reales o complejos) de ρ para los que la matriz A+ρIno tiene inversa.
(2.5) [2 puntos] Determina todos los valores de n = 1, 2, . . . para los que todos los autova-lores de An son numeros reales positivos.
(2.6) [3 puntos] Diagonaliza la matriz
1 3 0 02 0 0 00 0 1 30 0 −1 1
.
(2.1) Las soluciones de la ecuacion p(λ) = (λ2 − λ − 6)(λ2 − 2λ + 4) = 0 son las solucionesde las ecuaciones de segundo grado
λ2 − λ − 6 = 0 y λ2 − 2λ + 4 = 0.
Resolviendo cada una de las ecuaciones obtenemos
λ =1 ±
√1 + 24
2=
1 ± 5
2, λ =
2 ±√
4 − 16
2=
2 ±√−12
2=
2 ± 2√
3i
2.
Por tanto, las soluciones de p(λ) = 0 son
λ1 = 3, λ2 = −2, λ3 = 1 +√
3i, λ4 = 1 −√
3i.
Puesto que todos los autovalores de A son simples, A es diagonalizable.
(2.2) [2 puntos] Calcula los autovalores de las matrices(
A − 1
2I)2
, A−1 + I, siendo I lamatriz identidad de orden 4.
Autovalores de A Autovalores de(
A − 1
2I)2
Autovalores de A−1 + I
λ1 = 3 µ1 =(
λ1 − 1
2I)2
= 25
4ν1 = 1
λ1+ 1 = 4
3
λ2 = −2 µ2 =(
λ2 − 1
2I)2
= 25
4ν2 = 1
λ2+ 1 = 1
2
λ3 = 1 +√
3i µ3 =(
λ1 − 1
2I)2
= −11
4+ i
√3 ν3 == 1
λ3+ 1 = 5−i
√3
4
λ4 = 1 −√
3i µ4 =(
λ1 − 1
2I)2
= −11
4− i
√3 ν4 == 1
λ4+ 1 = 5+i
√3
4
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-204 Examen de Junio (Segundo Parcial). 2005-06.
Observacion.- Las matrices(
A − 1
2I)2
y A−1+I son diagonalizables por serlo la matrizA. Si tenemos una diagonalizacion de A, A = P−1DP , entonces(
A − 1
2I
)2
=
(
P−1DP − 1
2P−1P
)2
=
[
P−1
(
D − 1
2I
)
P
]2
= P−1
(
D − 1
2I
)2
P
yA−1 + I = P−1D−1P + P−1P = P−1
(
D−1 + I)
P
(2.3) Puesto que el polinomio caracterıstico de A es
p(λ) = λ4 − 3λ3 + 8λ − 24
el Teorema de Cayley-Hamilton gaantiza que la matriz A verifica
p(A) = A4 − 3A3 + 8A − 24I = 0 ⇐⇒ A(A3 − 3A2 + 8I) = 24I
⇐⇒ A−1 =1
24
(
A3 − 3A2 + 8I)
.
(2.4) Recodemos que una matriz M no tiene inversa (el sistema homogeneo Mx = 0 tiene(infinitas) soluciones no nulas) si y solo si η = 0 es un autovalor de M . Por otra parte,los autovalores de la matriz M = A + ρI son λ + ρ para los autovalores λ de A, es decir
3 + ρ,−2 + ρ, 1 +√
3i + ρ, 1 −√
3i + ρ.
Recordemos que el determinante de una matriz es igual al producto de sus autovalores,
det (A + ρI) = (3 + ρ) (−2 + ρ)(
1 + i√
3 + ρ)(
1 − i√
3 + ρ)
.
Por tanto, A + ρI no tiene inversa para
3 + ρ = 0 ⇔ ρ = −3; −2 + ρ = 0 ⇔ ρ = 2;
1 + i√
3 + ρ = 0 ⇔ ρ = −1 − i√
3; 1 − i√
3 + ρ = 0 ⇔ ρ = −1 + i√
3
(2.5) Los autovalores de An son
λn1 = 3n, λn
2 = (−2)n, λn3 =
(
1 +√
3i)n
, λn4 =
(
1 −√
3i)n
.
El autovalor λn1 = 3n es real positivo para cualquier valor de n = 1, 2, . . .
El autovalor λn2 = (−2)n es real positivo para cualquier valor par de n = 2, 4, . . .
Para la pareja de autovalores complejos conjugados
λn4 = λn
3
cuando uno sea real positivo lo sera el otro (y viceversa)
Puesto que λ3 = 2ei π
3 (numero complejo de argumento π3), el argumento de las
sucesivas potencias
λ2
3 = 22ei2π
3 , λ3
3, . . . , λn3 = 2nein π
3 , · · ·de λ3 es, respectivamente,
2π
3, 3
π
3, 4
π
3, · · · , n
π
3, · · ·
con lo cual para que λn3 sea un numero real positivo su argumento nπ
3tiene que
ser un multiplo entero k2π de 2π, es decir n tiene que ser un multiplo de 6,n = 6k, k = 1, 2, . . .
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-205
Por tanto, An tiene todos sus autovalores reales positivos si y solo si n es un multiplode 6.
(2.6)
det (A − λI) =
∣
∣
∣
∣
∣
∣
∣
∣
1 − λ 3 0 02 −λ 0 00 0 1 − λ 30 0 −1 1 − λ
∣
∣
∣
∣
∣
∣
∣
∣
=
∣
∣
∣
∣
1 − λ 32 −λ
∣
∣
∣
∣
∣
∣
∣
∣
1 − λ 3−1 1 − λ
∣
∣
∣
∣
=
= (λ2 − λ − 6)(λ2 − 2λ + 4).
Por tanto los autovalores de A son
λ1 = 3, λ2 = −2, λ3 = 1 +√
3i, λ4 = 1 −√
3i.
Autovectores de A asociados a λ1 = 3, Nul (A − 3I), (A − 3I)x = 0.
−2 3 0 0 02 −3 0 0 00 0 −2 3 00 0 −1 −4 0
F2 + F1
−→F3 − 2F4
−2 3 0 0 00 0 0 0 00 0 0 11 00 0 −1 −4 0
=⇒
x3 = 0,x4 = 0,x1 = 3
2x2,
=⇒ Nul (A − 3I) = Gen
v1 =
3200
.
Autovectores de A asociados a λ1 = −2, Nul (A + 2I), (A + 2I)x = 0.
3 3 0 0 02 2 0 0 00 0 3 3 00 0 −1 3 0
F2 − 2
3F1
−→F3 + 3F4
3 3 0 0 00 0 0 0 00 0 0 12 00 0 −1 3 0
=⇒
x3 = 0,x4 = 0,x1 = −x2,
=⇒ Nul (A + 2I) = Gen
v2 =
−1100
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-206 Examen de Junio (Segundo Parcial). 2005-06.
Autovectores de A asociados a λ1 = 1 +√
3i,(
A − (1 + i√
3)I)
x = 0.
−i√
3 3 0 0 0
2 −1 − i√
3 0 0 0
0 0 −i√
3 3 0
0 0 −1 −i√
3 0
−→
F2 + 2
i√
3F1
-
F3 − i√
3F4
−i√
3 3 0 0 0
0 −1 − 3i√
3 0 0 00 0 0 0 0
0 0 −1 −i√
3 0
=⇒
x2 = 0,x1 = 0,
x3 = −i√
3x4,
=⇒ Nul(
A − (1 + i√
3)I)
= Gen
v3 =
00
−i√
31
.
Autovectores de A asociados a λ4 = λ3 = 1 − i√
3,(
A − (1 − i√
3)I)
x = 0. Apli-cando las proiedades de los autovalores/autovectores de una matriz real, tenemosque
Nul(
A − (1 − i√
3)I)
= Gen
v4 = v3 =
00
+i√
31
.
Por tanto, una diagonalizacion de A es A = PDP−1 siendo
P =
v1 v2 v3 v4
=
3 −1 0 02 1 0 0
0 0 −i√
3 i√
30 0 1 1
y
D =
λ1
λ2
λ3
λ4
=
3−2
1 + i√
3
1 − i√
3
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-207
Ejercicio 3. Considera la matriz A dada por
A =
[
1 + α α + α2
1 + α 1 + α
]
.
(3.1) [4 puntos] Diagonaliza ortogonalmente la matriz A para los valores de α ∈ R para losque sea posible (matriz de paso Q ortogonal, matriz diagonal D y relacion entre dichasmatrices y la matriz A).
(3.2) [1 punto] Para los valores de α ∈ R considerados en el apartado anterior y teniendoen cuenta lo obtenido, diagonaliza ortogonalmente la matriz
B =
[
A 00 A
]
.
(3.3) [3 puntos] Para α = 0,
Calcula An, n = 1, 2, . . .
Resuelve el sistema y′ = −Ay.
(3.4) [2 puntos] Demuestra que si B es una matriz real cuadrada de orden n (par), que notiene ningun autovalor real, entonces para cualquier vector no nulo v ∈ Rn, los vectoresv y Bv son linealmente independientes.
(3.1) Segun el Teorema Espectral (para matrices simetricas reales), una matriz real es diago-nalizable ortogonalmente si y solo si es simetrica. Por tanto, tenemos que determinarlos valores de α ∈ R para los que la matriz dada coincide con su traspuesta,
AT = A ⇐⇒ a12 = a21 ⇐⇒ α + α2 = 1 + α ⇐⇒ α2 = 1 ⇐⇒ α = ±1.
Por tanto, tenemos que diagonalizar ortogonalmente las matrices
α = 1 −→[
2 22 2
]
y , α = −1 −→[
0 00 0
]
Para α = −1 se obtiene la matriz nula, y cualquier matriz ortogonal P de ordendos (como por ejemplo la matriz identidad) nos da una diagonalizacion ortogonalde A,
A =
[
0 00 0
]
= P
[
0 00 0
]
P T , P = I,−I,
[
1 00 −1
]
,1√2
[
1 1−1 1
]
, · · ·
Para α = 1 se obtiene la matriz[
2 22 2
]
cuyos autovalores son λ1 = 0 y λ2 = 4. Calculando autovectores obtenemos
Nul (A − λ1I) = Gen
{
v1 =
[
1−1
]}
, Nul (A − λ2I) = Gen
{
v2 =
[
11
]}
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-208 Examen de Junio (Segundo Parcial). 2005-06.
Por tanto, normalizando los autovectores (son ortogonales),{
q1 =v1
||v1||=
1√2v1, q2 =
v2
||v2||=
1√2v2
}
es una base ortonormal de R2 formada por autovectores y la matriz
Q =
1√2
1√2
− 1√2
1√2
es una matriz ortogonal (Q−1 = QT ) que diagonaliza a la matriz A,
AQ = QD, A = QDQT , D =
[
0 00 4
]
.
(3.2) Si tenemos una diagonalizacion ortogonal de una matriz A, A = QDQT , Q−1 = QT
para la matriz B asociada a dicha matriz A tenemos
B =
[
A 00 A
]
=
[
QDQT 00 QDQT
]
=
[
Q 00 Q
] [
D 00 D
] [
QT 00 QT
]
=
[
Q 00 Q
] [
D 00 D
] [
Q 00 Q
]T
.
lo que nos da una diagonalizacion ortogonal de B puesto que la matriz[
Q 00 Q
]
es ortogonal si lo es Q (los vectores columna son ortogonales dos a dos y son unitarios).
(3.3) Para α = 0 tenemos la matriz
A =
[
1 01 1
]
que tiene a λ1 = 1 como unico autovalor (doble) y es no diagonalizable. El calculo deautovectores y autovectores generalizados de A nos proporciona
Nul (A − λ1I) = Nul (A − I) = Nul
[
1 01 1
]
= Gen
{
v1 =
[
01
]}
Nul [(A − λ1I)2] = Nul [(A − I)2] = Nul
[
1 01 1
]
= R2 = Gen
{
v1, u2 =
[
10
]}
.
Podemos obtener An, n = 1, 2, . . . teniendo en cuenta que (A − I)2 = (A − I)3 =· · · = 0. Aplicando la formula del binomio de Newton tenemos
An = [I + (A − I)]n = In +
(
n1
)
In−1(A − I) +
(
n2
)
In−2(A − I)2 + · · ·
= I + n(A − I) = I + n
[
0 01 0
]
=
[
1 0n 1
]
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-209
La matriz del sistema y′ = −Ay es −A que no es diagonalizable, por no serlola matriz A. La matriz −A tiene como unico autovalor µ1 = −λ1 = −1 y comoespacio propio asociado
Nul (−A − µ1I) = Nul (−A + I) = Nul (A − I) = Gen
{
v1 =
[
01
]}
.
Para obtener dos soluciones linealmente independientes del sistema y′ = −Aynecesitaremos recurrir a los autovectores generalizados. Puesto que −A es unamatriz de orden 2 cualquier vector de R2 es autovector generalizado de −A asociadoal unico autovalor µ = −1. Podemos tomar por ejemplo
u2 =
[
10
]
.
Por tanto, la solucion general del sistema y′ = −Ay es
y = c1eµ1tv1 + c2e
µ1t [I + t(−A − µ1I)] u2
= c1e−tv1 + c2e
−t [I + t(−A + I)] u2 = c1e−tv1 + c2e
−t
[
u2 + t
[
0 0−1 0
]
u2
]
=
= c1e−t
[
01
]
+ c2e−t
([
10
]
+ t
[
0−1
])
= c1e−t
[
01
]
+ c2e−t
[
1−t
]
=⇒ y(t) = e−t
[
c2
c1 − c2t
]
, c1, c2 ∈ R.
(3.4) Puesto que λ = 0 no es un autovalor de B, el vector Bv ∈ Rn no es el vector nulo. Sitenemos una combinacion lineal (real o compleja) de los vectores v y Bv igual al vectornulo
αv + βBv = 0
comprobemos que necesariamente los coeficientes α y β tienen que ser nulos.
No puede ser α 6= 0 y β = 0 pues en tal caso serıa que ser αv = 0 cosa que esimposible por ser v 6= 0.
Por una razon similar (Bv 6= 0) no puede ser α = 0 y β 6= 0.
No puede ser α 6= 0 y β 6= 0 pues en tal caso tendrıamos que
Bv = −α
βv
con lo cual −αβ
serıa un autovalor (real) de B y v serıa un vector asociado, encontradiccion con las condiciones dadas en el enunciado.
Por tanto, la unica opcion posible es α = β = 0 y esto significa que v y Bv sonlinealmente independientes.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-210 Examen de Junio (Segundo Parcial). 2005-06.
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Examen Final de Junio (Primer Parcial). 23-06-2006.
Ejercicio 4.
(4.1) [3 puntos] Determina la ecuacion de la superficie de revolucion que se genera al girar
la parabola dada por
{
x = 0y = 1 + z2 alrededor del eje OZ. ¿Se trata de una cuadrica?
¿Por que? Haz un esbozo de dicha superficie.
(4.2) [2 puntos] Resuelve la ecuacion (compleja) z5 − z4 + z − 1 = 0.
(4.3) [2 puntos] Reduce a suma de cuadrados la forma cuadratica dada por
Q1(x1, x2, x3) = αx1x2 + x2x3 + x1x3.
(4.4) [3 puntos] Determina la ecuacion del giro de centro el punto A = (3, 2) y anguloθ = π/3 radianes. Determina el punto que se obtiene al aplicar dicho giro al puntoP = (−1, 3).
(4.1) Cuando giramos un punto (0, y, z) del plano OY Z obtenemos los puntos de coordenadas(X, Y, Z) dadas por
X = |y| sen(t),Y = |y| cos(t),Z = z
cuando el angulo trecorre el intervalo0 ≤ t ≤ 2π
Si consideramos los puntos (x = 0, y = 1 + z2, z = z) de la parabola dada tenemos
X = (1 + z2) sen(t),Y = (1 + z2) cos(t),Z = z
cuando t y z recorren0 ≤ t ≤ 2π,
−∞ < z < +∞=⇒ X2+Y 2 = (1+z2)2 = (1+Z2)2.
Por tanto la ecuacion implıcita de la superficie dada es
X2 + Y 2 = (1 + Z2)2.
Obviamente, la superficie de revolucion obtenida no es una cuadrica pues su ecuaciones una ecuacion polinomica de cuarto grado, aunque se parece a un hiperboloide de unahoja.
Algebra. F. Mayoral Ingenierıa Aeronautica.
Ejercicio 4. R-211
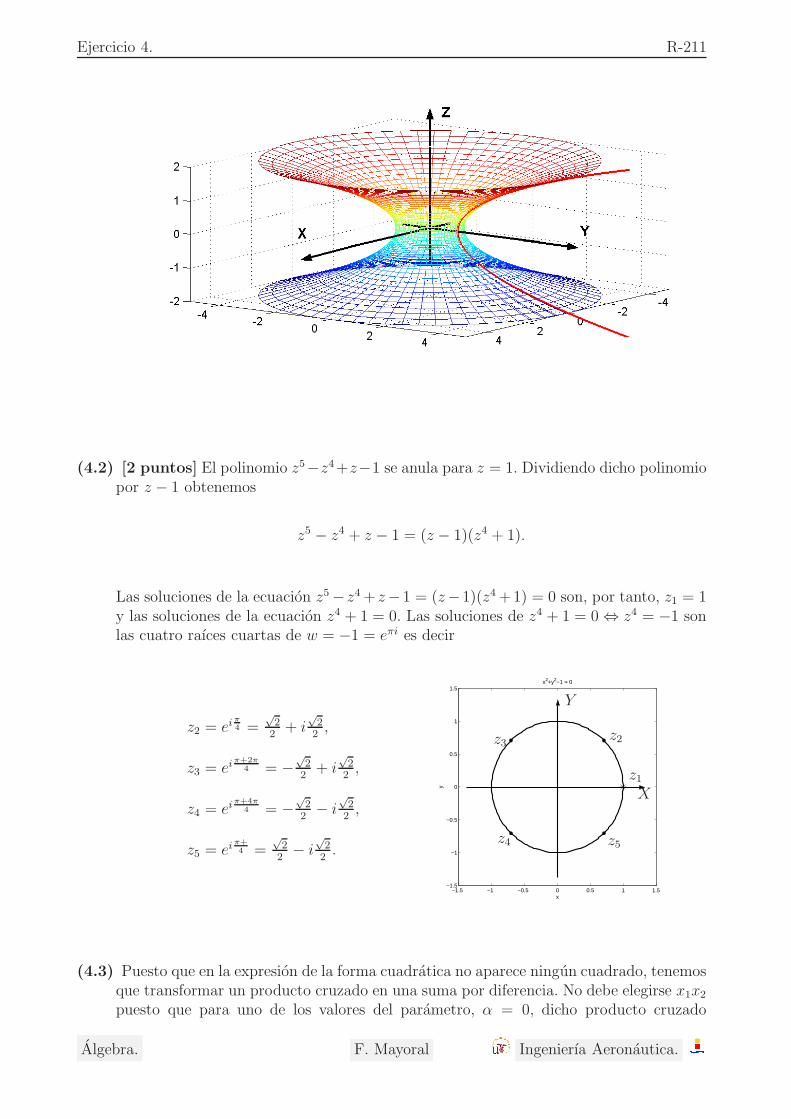
(4.2) [2 puntos] El polinomio z5−z4+z−1 se anula para z = 1. Dividiendo dicho polinomiopor z − 1 obtenemos
z5 − z4 + z − 1 = (z − 1)(z4 + 1).
Las soluciones de la ecuacion z5 −z4 + z−1 = (z−1)(z4 +1) = 0 son, por tanto, z1 = 1y las soluciones de la ecuacion z4 + 1 = 0. Las soluciones de z4 + 1 = 0 ⇔ z4 = −1 sonlas cuatro raıces cuartas de w = −1 = eπi es decir
z2 = ei π
4 =√
2
2+ i
√2
2,
z3 = ei π+2π
4 = −√
2
2+ i
√2
2,
z4 = ei π+4π
4 = −√
2
2− i
√2
2,
z5 = ei π+
4 =√
2
2− i
√2
2.
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x
y
x2+y2−1 = 0
z1
z2z3
z4 z5
X
Y
(4.3) Puesto que en la expresion de la forma cuadratica no aparece ningun cuadrado, tenemosque transformar un producto cruzado en una suma por diferencia. No debe elegirse x1x2
puesto que para uno de los valores del parametro, α = 0, dicho producto cruzado
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-212 Examen de Junio (Segundo Parcial). 2005-06.
tampoco aparece. Asi que transformamos x2x3 en una suma por diferencia.
Q1(x1, x2, x3) = αx1x2 + x2x3 + x1x3 =
x1 = y1
x2 = y2 + y3
x3 = y2 − y3
=
= αy1(y2 + y3) + (y2 + y3)(y2 − y3) + y1(y2 − y3) =
= (α + 1)y1y2 + (α − 1)y1y3 + y22 − y2
3 =
=[
y2 + α+1
2y1
]2 −(
α+1
2y1
)2+ (α − 1)y1y3 − y2
3 =
= z22 −
[
y3 + α−1
2y1
]2+(
α−1
2y1
)2 −(
α+1
2y1
)2=
= z22 − z2
3 − αy21.
(4.4) Dada un punto generico z del plano complejo el punto w que se obtiene al realizar elgiro considerado verifica, siendo z0 = 3 + 2i el centro de giro,
z ∈ C −→ w ∈ C : w − z0 = ei π
3 (z − z0) =⇒ w = ei π
3 (z − z0) + z0.
Para obtener la expresion vectorial (real) de la transformacion considerada basta conobtener las partes real e imaginaria de w = x′ + iy′ en funcion de las partes real eimaginaria de z = x + iy.
(x′ + iy′) − (3 + 2i) = eiπ/3 ((x + iy) − (3 + 2i))
(x′ − 3) + i(y′ − 2) =(
1
2+ i
√3
2
)
((x − 3) + i(y − 2))
x′ − 3 = 1
2(x − 3) −
√3
2(y − 2) = 1
2x −
√3
2y − 3
2+√
3
y′ − 2 =√
3
2(x − 3) + 1
2(y − 2) =
√3
2x + 1
2y − 3
√3
2− 1
x′ = 1
2x −
√3
2y + 3
2+√
3
y′ =√
3
2x + 1
2y − 3
√3
2+ 1
=⇒[
x′
y′
]
= 1
2
[
1 −√
3√3 1
] [
xy
]
+ 1
2
[
3 + 2√
3
2 − 3√
3
]
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 4. R-213
−2 −1 0 1 2 3 4 5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
z0
z
w
O
X
Y
π/3
Para el punto P = (−1, 3) dado tenemos
z = −1 + 3i =⇒ w = ei π
3 (−1 + 3i − 3 − 2i) + 3 + 2i
=⇒ w =(
1
2+ i
√3
2
)
(−4 + i) + 3 + 2i = −2 + i1
2− i2
√3 −
√3
2+ 3 + 2i =
= 1 −√
3
2+ i(
5
2− 2
√3)
=⇒ P ′ =(
2−√
3
2, 5−4
√3
2
)
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-214 Examen de Junio (Segundo Parcial). 2005-06.
Ejercicio 5. Considera la matriz A dada por
A =
1 2 −1 0 1−1 −3 2 1 −2α α 0 2 0
−2α −3α 0 4 −α
.
(5.1) [2 puntos] Reduce la matriz A a forma escalonada segun los valores de α.
(5.2) [2 puntos] Calcula, en funcion de α ∈ R, la dimension y una base de Col (A).
(5.3) [2 puntos] Para α = 0, determina unas ecuaciones implıcitas y tres bases distintas deCol (A).
(5.4) [2 puntos] Determina, para α = 0, las dimensiones de los subespacios Nul (A) yNul ([A|A]).
(5.5) [2 puntos] Calcula la inversa de la siguiente matriz de orden n ≥ 3
B =
1 1. .
.
1 −1
bij =
1 si i + j = n + 1,1 si i = j = 1,
−1 si i = j = n,0 en los restantes casos.
(5.1)
A =
1 2 −1 0 1−1 −3 2 1 −2α α 0 2 0
−2α −3α 0 4 −α
F2 + F1
F3 − αF1
−→F4 + 2αF1
1 2 −1 0 1
0 -1 1 1 −10 −α α 2 −α0 α −2α 4 α
F3 − αF2
−→F4 + αF2
1 2 −1 0 1
0 -1 1 1 −10 0 0 2 − α 00 0 −α 4 + α 0
.
Ahora podemos tener dos casos distintos:
Si α 6= 0, haciendo F3 ↔ F4,
F3 ↔ F4
−→
1 2 −1 0 1
0 -1 1 1 −10 0 −α 4 + α 00 0 0 2 − α 0
.
Siendo α 6= 0 la ultima matriz obtenida esta en forma escalonada (por filas) tantosi 2 − α es igual a cero como si es distinto de cero.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 5. R-215
Si α = 0, tenemos
1 2 −1 0 1
0 -1 1 1 −10 0 0 2 00 0 0 4 0
F4 − 2F3
−→
1 2 −1 0 1
0 -1 1 1 −1
0 0 0 2 00 0 0 0 0
.
(5.2) Segun los resultados obtenidos en el apartado (5.1), tenemos los siguientes casos
Si α 6= 0 y 2 − α 6= 0, es decir, si α 6= 0, 2 se obtienen 4 pivotes con lo cualdim (Col (A)) = 4 y las correspondientes columnas-pivote de A (las 4 primeras)forman una base de Col (A). Notemos que en este caso, puesto que Col (A) ⊂ R4,tiene que ser Col (A) = R
4 y cualquier base de R4 servirıa, como por ejemplo la
base canonica.
Si α 6= 0 y 2 − α = 0, es decir, si α = 2, se obtienen 3 pivotes siendo columnas-pivote las columnas 1, 2 y 3 de A. Por tanto,
dim (Col (A)) = 3 y una base es
v1 =
−112−4
, v2 =
2−32−6
, v3 =
−1200
.
Si α = 0, se obtienen 3 pivotes siendo columnas-pivote las columnas 1, 2 y 4 deA. Por tanto,
dim (Col (A)) = 3 y una base es
v1 =
−1100
, v2 =
2−300
, v4 =
0124
.
(5.3) [2 puntos] Aunque podrıamos aprovechar las operaciones que hemos hecho para re-ducir A a forma escalonada, obtengamos directamente, para α = 0, las ecuacionesimplıcitas de
Col (A) = {x ∈ R4 : x es combinacion lineal de las columnas de A}
= {x ∈ R4 : Az = x es un sistema compatible (incognita z)} .
A =
1 2 −1 0 1 x1
−1 −3 2 1 −2 x2
0 0 0 2 0 x3
0 0 0 4 0 x4
F2 + F1
−→
1 2 −1 0 1 x1
0 -1 1 1 −1 x2 + x1
0 0 0 2 0 x3
0 0 0 4 0 x4
F4 − 2F3
−→
1 2 −1 0 1 x1
0 -1 1 1 −1 x2 + x1
0 0 0 2 0 x3
0 0 0 0 0 x4 − 2x3
.
Por tanto el subespacio vectorial Col (A) esta caracterizado por la ecuacion implıcita−2x3 + x4 = 0 (la unica condicion de compatibilidad del sistema Az = x).
Podemos obtener 3 bases distintas de Col (A) de varias formas:
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-216 Examen de Junio (Segundo Parcial). 2005-06.
Teniendo en cuenta la forma escalonada obtenida
1 2 −1 0 1
0 -1 1 1 −1
0 0 0 2 00 0 0 0 0
tenemos que
• las columnas 1, 2 y 4 son Linealmente Independientes y las columnas 3 y 5 soncombinacion lineal de las columnas 1 y 2;
• las columnas 1, 3 y 4 son Linealmente Independientes y las columnas 2 y 5 soncombinacion lineal de las columnas 1 y 3;
• las columnas 1, 5 y 4 son Linealmente Independientes y las columnas 2 y 3 soncombinacion lineal de las columnas 1 y 5.
Por tanto, lo mismo se verifica para las correspondientes columnas de A con lo cualsiendo {v1, v2, v3, v4, v5} las columnas de A tenemos las 3 bases siguientes
{v1, v2, v4} , {v1, v3, v4} , {v1, v5, v4} .
Obteniendo conjuntos de 3 vectores linealmente independientes que verifiquen laecuacion x4 = 2x3,
u1 = e1 =
1000
, u2 = e2 =
0100
, u3 =
0012
,
u1 = e1, w2 = e1 + e2 =
1100
, u3 =
0012
,
u1 = e1, u2 = e2, w3 =
1012
.
Una vez que tenemos una base de Col (A), por ejemplo {v1, v2, v4}, una formatramposa de obtener otras bases distintas es considerar multiplos (no nulos) de losvectores de dicha base,
{2v1, 2v2, 2v4} , {v1, 3v2,−v4} , {−2v1, 3v2, 4v4} , . . .
(5.4) Puesto que A es una matriz 4 × 5, [A|A] es una matriz 4 × 10, Col (A) = Col (A|A) ypara α = 0 sabemos que dim (Col (A)) = 3,
dim (Nul (A)) = 5 − dim (Col (A)) = 2 (Nul (A) ⊂ R5)
dim (Nul (A|A)) = 10 − dim (Col (A)) = 7 (Nul (A|A) ⊂ R10).
Algebra. F. Mayoral Ingenierıa Aeronautica.
Ejercicio 5. R-217
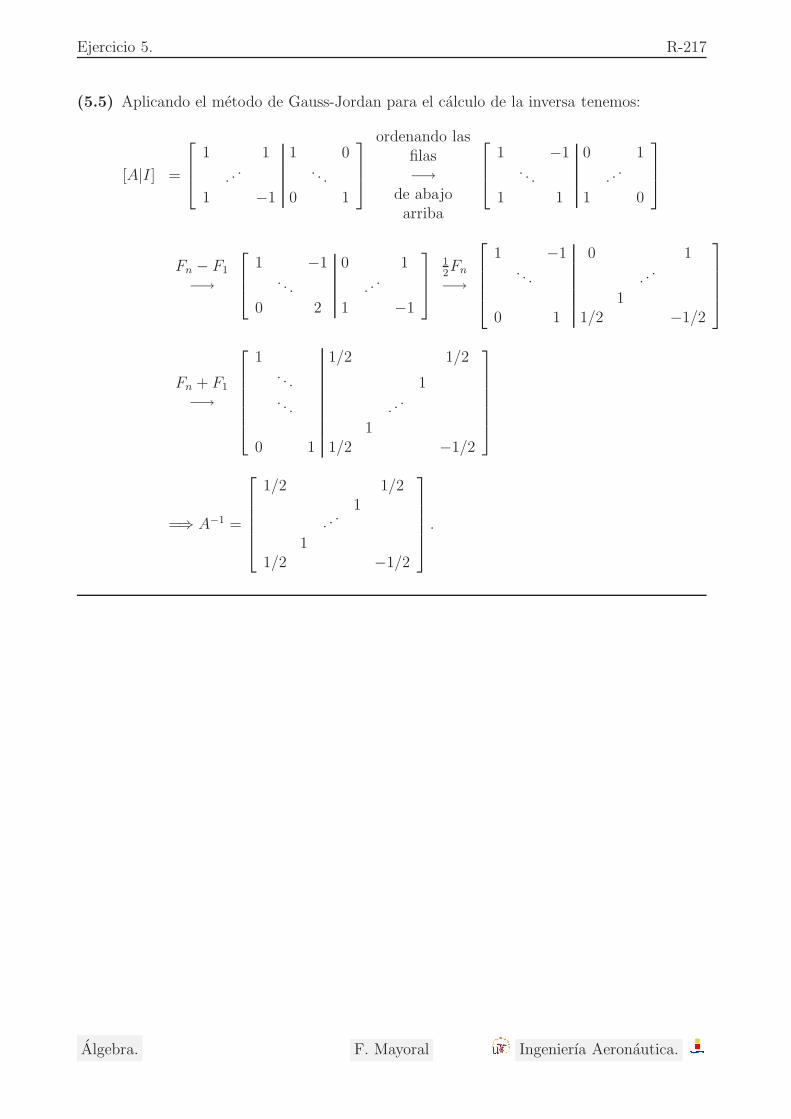
(5.5) Aplicando el metodo de Gauss-Jordan para el calculo de la inversa tenemos:
[A|I] =
1 1 1 0
. .. . . .
1 −1 0 1
ordenando lasfilas−→
de abajoarriba
1 −1 0 1. . . . .
.
1 1 1 0
Fn − F1
−→
1 −1 0 1. . . . .
.
0 2 1 −1
1
2Fn
−→
1 −1 0 1. . . . .
.
10 1 1/2 −1/2
Fn + F1
−→
1 1/2 1/2. . . 1. . . . .
.
10 1 1/2 −1/2
=⇒ A−1 =
1/2 1/21
. ..
11/2 −1/2
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-218 Examen de Septiembre. 2005-06.
Algebra. 2005-2006. Ingenierıa Aeronautica.
Departamento de Matematica Aplicada II.
Escuela Superior de Ingenieros. Universidad de Sevilla.
Examen Final de Septiembre. 04-09-2006.
Ejercicio 1. Sea S la matriz
S =1
5
[
3 44 −3
]
(1.1) [2 puntos] Teniendo en cuenta que S es la matriz de la simetrıa respecto de una recta(del plano R2) que pasa por el origen de coordenadas, determina dicha recta.
(1.2) [3 puntos] Utilizando las propiedades de la matriz de una simetrıa, expresa
(I + S)2, (I + S)3, ...
como combinacion lineal de I y de S y conjetura la expresion correspondiente para unapotencia generica (I + S)n. Determina
(I + S)2006
[
3−1
]
.
(1.3) [1 punto] Determina la ecuacion de la parabola de eje horizontal que tiene como verticeV = (2, 1) y pasa por el punto P = (0, 5).
(1.4) [2 puntos] Comprueba que la ecuacion compleja
(
z +1
z
)2
= 1
no tiene ninguna solucion (compleja).
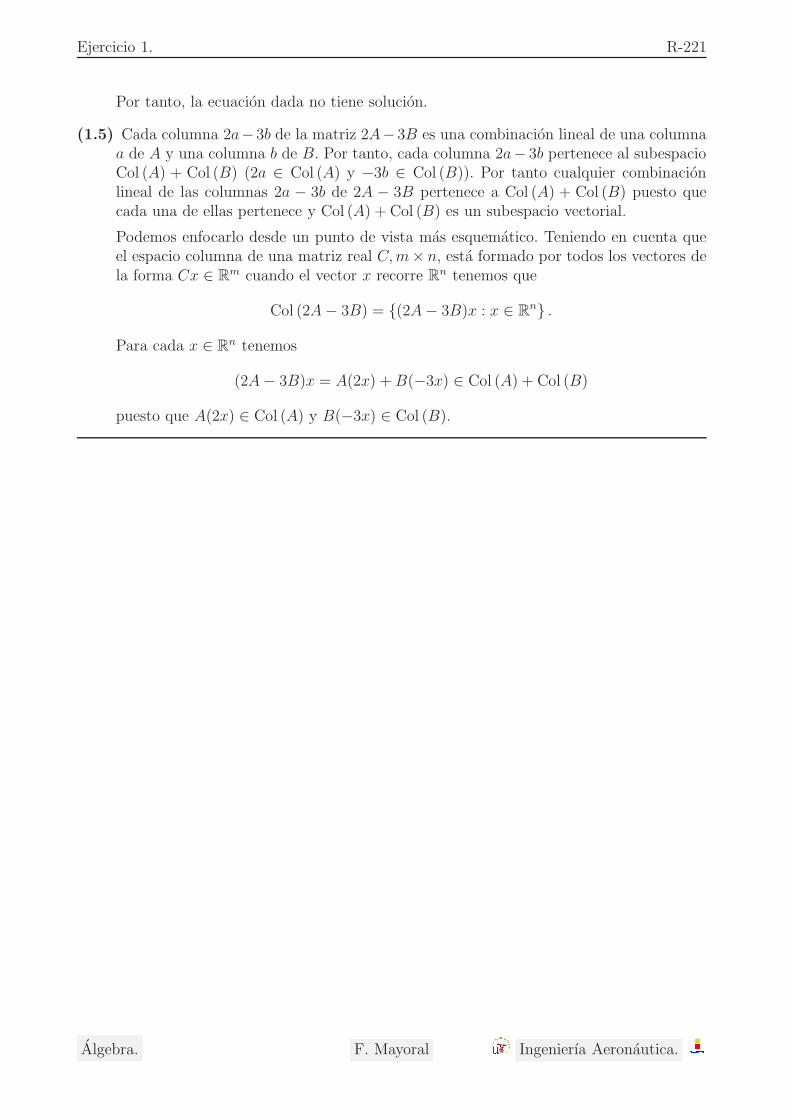
(1.5) [2 puntos] Demuestra que si A y B son dos matrices (reales) arbitrarias m×n se verificala siguiente relacion entre los subespacios vectoriales Col (A), Col (B) y Col (2A − 3B),
Col (2A − 3B) ⊂ Col (A) + Col (B).
(1.1) El eje de la simetrıa definida por la matriz S estara formado por los puntos/vectoresinvariantes por dicha matriz, es decir
{
x ∈ R2 : Sx = x
}
.
Resolvamos el correspondiente sistema de ecuaciones,
1
5
[
3 44 −3
] [
x1
x2
]
=
[
x1
x2
]
≡[
3 44 −3
] [
x1
x2
]
= 5
[
x1
x2
]
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 1. R-219
Agrupando terminos tenemos
[
−2 44 −8
] [
x1
x2
]
=
[
00
]
≡[
−2 4 04 −8 0
]
−→[
−1 2 00 0 0
]
⇔ x1 = 2x2.
Por tanto, el eje de simetrıa es
{
x ∈ R2 : x1 = 2x2
}
=
{
x ∈ R2 :
[
x1
x2
]
= α
[
21
]}
,
es decir la recta x1−2x2 = 0, que pasa por el origen de coordenadas y tiene como vectordireccion v = [2, 1]T .
(1.2) Puesto que S2 = I (el simetrico del simetrico de x es x) se verifica:
(I + S)2 = (I + S)(I + S) = I + S2 + 2S = 2I + 2S = 2(I + S),(I + S)3 = (I + S)(I + S)2 = 2(I + S)2 = 22(I + S),(I + S)4 = (I + S)(I + S)3 = 23(I + S),...(I + S)n = 2n−1(I + S).
(I + S)2006
[
3−1
]
= 22005(I + S)
[
3−1
]
= 22005 1
5
[
8 44 2
] [
3−1
]
=
=22005
5
[
2010
]
= 22005
[
42
]
.
(1.3) Tratandose de una parabola de eje horizontal, su ecuacion tıpica es de la forma
(y − β)2 = 2p(x − α)
donde V = (α, β) es el vertice de la parabola. Por tanto, la ecuacion buscada es de laforma
(y − 1)2 = 2p(x − 2)
y para que sea la ecuacion de una parabola que pasa por el punto P = (0, 5) tiene queverficarse que
(5 − 1)2 = 2p(0 − 2) =⇒ 16 = −4p.
En resumen, la ecuacion pedida es
(y − 1)2 = −8(x − 2).
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-220 Examen de Septiembre. 2005-06.
−10 −8 −6 −4 −2 0 2 4 6
−6
−4
−2
0
1
2
4
6
x
y
8 (x−2)+(y−1)2 = 0
P
V
O X
Y
F
d
Para esta parabola la distancia entre el foco y la directriz es |p| = 4 y por tanto el focoy la directriz son, respectivamente
F = (2 +p
2, 1) = (2 − 2, 1) = (0, 1), d ≡ x = 2 − p
2≡ x = 4.
(1.4) Operando podemos escribir la ecuacion dada de la forma
(zz + 1)2 = z2 ⇐⇒(
|z|2 + 1)2
= z2.
Expresando z en forma binomica z = x + iy, x, y ∈ R obtenemos la ecuacion en (x, y)(
x2 + y2 + 1)2
= x2 − y2 + 2xy i
y separando parte real y parte imaginaria de cada uno de los miembros de la ecuaciontenemos el sistema
(x2 + y2 + 1)2
= x2 − y2
2xy = 0
}
Por la segunda ecuacion, 2xy = 0, tiene que ser x = 0 o y = 0. Veamos que sucede encada uno de los casos:
Si x = 0, sustituyendo en la primera ecuacion, (x2 + y2 + 1)2
= x2 − y2, tiene queverificarse
(
y2 + 1)2
= −y2
imposible puesto que y ∈ R.
Si y = 0, sustituyendo en la primera ecuacion (x2 + y2 + 1)2
= x2 − y2 tiene queverificarse
(
x2 + 1)2
= x2 ⇐⇒ x4 + x2 + 1 = 0
imposible puesto que x ∈ R.
Algebra. F. Mayoral Ingenierıa Aeronautica.
Ejercicio 1. R-221
Por tanto, la ecuacion dada no tiene solucion.
(1.5) Cada columna 2a−3b de la matriz 2A−3B es una combinacion lineal de una columnaa de A y una columna b de B. Por tanto, cada columna 2a− 3b pertenece al subespacioCol (A) + Col (B) (2a ∈ Col (A) y −3b ∈ Col (B)). Por tanto cualquier combinacionlineal de las columnas 2a − 3b de 2A − 3B pertenece a Col (A) + Col (B) puesto quecada una de ellas pertenece y Col (A) + Col (B) es un subespacio vectorial.
Podemos enfocarlo desde un punto de vista mas esquematico. Teniendo en cuenta queel espacio columna de una matriz real C, m× n, esta formado por todos los vectores dela forma Cx ∈ Rm cuando el vector x recorre Rn tenemos que
Col (2A − 3B) = {(2A − 3B)x : x ∈ Rn} .
Para cada x ∈ Rn tenemos
(2A − 3B)x = A(2x) + B(−3x) ∈ Col (A) + Col (B)
puesto que A(2x) ∈ Col (A) y B(−3x) ∈ Col (B).
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-222 Examen de Septiembre. 2005-06.
Ejercicio 2. Considera la matriz A dada por
A =
0 1 11 0 11 1 0
.
(2.1) [4 puntos] Diagonaliza ortogonalmente A (matriz de paso ortogonal, matriz diagonal,relacion con la matriz A).
(2.2) [2 puntos] Determina los valores de ρ ∈ R para los que la forma cuadratica asociadaa la matriz A + ρI es Indefinida.
(2.3) [2 puntos] Calcula la matriz de la proyeccion ortogonal sobre el espacio nulo de lamatriz A + I.
(2.4) [2 puntos] Sea A una matriz real m × n y sea b ∈ Rm. Enuncia (la definicion y) laspropiedades equivalentes para que un vector x ∈ Rn sea solucion en el sentido de losmınimos cuadrados del sistema Ax = b.
(2.1) Puesto que la matriz A es una matriz real y simetrica puede ser diagonalizada medianteuna matriz de paso, Q, ortogonal, es decir A = QDQ−1 siendo Q ortogonal (Q real,cuadrada y Q−1 = QT ) y D diagonal.
Autovalores de A:
det (A − λI) =
∣
∣
∣
∣
∣
∣
−λ 1 11 −λ 11 1 −λ
∣
∣
∣
∣
∣
∣
= (−λ)3 + 1 + 1 + λ + λ + λ = −λ3 + 3λ + 2
= (λ + 1) (−λ2 − λ − 2) = −(λ + 1)(λ + 1)(λ − 2).
Por tanto los autovalores de A son
λ1 = 2 (simple) y λ2 = −1 (doble).
Autovectores de A asociados a λ1 = 2, (A − 2I)x = 0 :
−2 1 1 01 −2 1 01 1 −2 0
F3 + F2 + F1
−→F2 + 1
2F1
−2 1 1 00 −3/2 3/2 00 0 0 0
⇒{
x2 = x3
x1 = x3
}
=⇒
x1
x2
x3
= γ
111
, ∀γ ∈ R =⇒
=⇒ Nul (A − 2I) = Gen
v1 =
111
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 2. R-223
Autovectores de A asociados a λ1 = −1, (A + I)x = 0 :
1 1 1 01 1 1 01 1 1 0
F3 − F1
−→F2 − F1
1 1 1 00 0 0 00 0 0 0
≡ x1 + x2 + x3 = 0
=⇒
x1
x2
x3
=
−x2 − x3
x2
x3
= x2
−110
+ x3
−101
=⇒ Nul (A + I) = Gen
v2 =
−110
, v3 =
−101
.
Para obtener una matriz ortogonal que diagonalice A necesitamos obtener una baseortonormal de R3 formada por autovectores de A y para ello necesitamos obtener unabase ortonormal de cada uno de los espacios propios asociados a A, los subespacios
Nul (A − 2I) y Nul (A + I).
Para el subespacio asociado al autovalor simple λ1 = 2 esto es inmediato,
q1 =v1
||v1||=
1√3
111
es una base ortonormal de Nul (A − 2I).
Para el subespacio Nul (A + I) asociado al autovalor doble, λ2 = −1, tenemos unabase {v1, v2} que no es una base ortogonal. Para obtener una base ortonormal podemosortogonalizar la base anterior y a continuacion normalizar la base ortogonal obtenida.Ortogonalizamos {v2, v3},
u2 = v2 =
−110
, u3 = v3 −v3 · u2
||u2||2u2 = v3 −
1
2u2 =
−1/2−1/2
1
.
Normalizando obtenemos una base ortonormal de Nul (A + I),
q2 =u2
||u2||=
1√2
−110
, q3 =u3
||u3||=
1√6
−1−12
(que esta formada por autovectores de A asociados a λ2).
Resumiendo, siendo
Q =
q1 q2 q3
=
1/√
3 −1/√
2 −1/√
6
1/√
3 1/√
2 −1/√
6
1/√
3 0 2/√
6
, D =
λ1
λ2
λ3
=
21
1
se verifica que AQ = QD (las columnas de Q son autovectores de A) siendo Q unamatriz ortogonal (matriz cuadrada con columnas ortonormales). Es decir, tenemos ladiagonalizacion ortogonal de
A = QDQT , Q−1 = QT .
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-224 Examen de Septiembre. 2005-06.
(2.2) Los autovalores de la matriz (real y simetrica) A + ρI (ρ ∈ R) son
µ1 = λ1 + ρ = −1 + ρ (doble) y µ2 = λ2 + ρ = 2 + ρ (simple).
Puesto que solo hay dos autovalores distintos, para que la forma cuadratica asociada aA + ρI sea indefinida uno de ellos tiene que ser negativo (µ1 = −1 + ρ puesto que es elmenor) y el otro tiene que ser positivo (µ2 = 2 + ρ puesto que es el mayor). Por tanto,la forma cuadratica es indefinida si y solo si
−1 + ρ < 0 y 2 + ρ > 0 ⇐⇒ ρ < 1 y ρ > −2 ⇐⇒ −2 < ρ < 1.
(2.3) Ya hemos obtenido el espacio nulo de la matriz A + I al calcular los autovectores de Aasociados al autovalor λ1 = −1,
Nul (A + I) ={
x ∈ R3 : x1 + x2 + x3 = 0
}
= Gen {v2, v3} .
Para obtener la matriz de la proyeccion ortogonal sobre Nul (A + I) podemos usar unabase ortonormal de este subespacio como la obtenida en el apartado (2.1)
{q2, q3} .
La matriz de la proyeccion ortogonal sobre Nul (A + I) es, por tanto,
P =
q1 q2
q1 q2
T
=
−1/√
2 −1/√
6
1/√
2 −1/√
6
0 2/√
6
[
−1/√
2 1/√
2 0
−1/√
6 −1/√
6 2/√
6
]
=
=
2/3 −1/3 −1/3−1/3 2/3 −1/3−1/3 −1/3 2/3
=1
3
2 −1 −1−1 2 −1−1 −1 2
.
(2.4) Teorema. Consideremos un sistema de ecuaciones Ax = b, A matriz real m × n,b ∈ Rm, S = Col (A) y sea x ∈ Rn. Son equivalentes:
(a) x es solucion en mınimos cuadrados del sistema Ax = b, es decir,
||Ax − b|| ≤ ||Ax − b|| , ∀x ∈ Rn.
(b) x verifica Ax = proy S(b).
(c) x verifica las ecuaciones normales de Gauss AT Ax = AT b.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-225
Ejercicio 3. Sea A la matriz
A =
1 0 02 α α − 33 0 3
, α ∈ R.
(3.1) [3 puntos] Determina los valores de α para los que A es diagonalizable.
(3.2) [2 puntos] Diagonaliza A para α = 0 (matriz de paso, matriz diagonal, relacion conA).
(3.3) [1 punto] Determina, para α = 0, la solucion general del sistema lineal de ecuacionesdiferenciales
y′ = A2y.
(3.4) [2 puntos] Determina, para α = 0, la factorizacion LU de A.
(3.5) [2 puntos] Determina, para α = 0, la dimension del espacio columna de la matriz[A|A] y una base del espacio nulo de dicha matriz.
(3.1) [3 puntos] Determina los valores de α para los que A es diagonalizable.
det (A − λI) =
∣
∣
∣
∣
∣
∣
1 − λ 0 02 α − λ α − 33 0 3 − λ
∣
∣
∣
∣
∣
∣
= (1 − λ)
∣
∣
∣
∣
α − λ α − 30 3 − λ
∣
∣
∣
∣
=
= (1 − λ)(α − λ)(3 − λ).
En funcion de los valores de α tenemos los siguientes casos:
Si α 6= 1, 3, la matriz A tiene tres autovalores simples λ1 = 1, λ2 = 3 y λ3 = α ypor tanto es diagonalizable.
Para α = 1 la matriz A tiene un autovalor doble λ1 = 1 y un autovalor simple λ2 =3. Para determinar si A es diagonalizable o no tenemos que obtener la multiplicidadgeometrica del autovalor doble.
• Autovectores de A (α = 1) asociados a λ1 = 1, (A−I)x = 0. Solo tenemos queobtener la dimension del espacio nulo Nul (A − I), no necesitamos resolver elsistema.
0 0 02 0 −23 0 2
operaciones−→fila
2 0 −2
0 0 50 0 0
=⇒ dim Nul (A − I) = 1.
Por tanto, en este caso α = 1, siendo el autovalor λ1 doble no pueden obtenersedos autovectores linealmente independientes asociados a el con lo cual la matrizA no es diagonalizable.
Para α = 3 la matriz A tiene un autovalor simple λ1 = 1 y un autovalor doble λ2 =3. Para determinar si A es diagonalizable o no tenemos que obtener la multiplicidadgeometrica del autovalor doble.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-226 Examen de Septiembre. 2005-06.
• Solo tenemos que obtener la dimension del espacio nulo Nul (A − 3I) (conα = 3).
−2 0 02 0 03 0 0
operaciones−→fila
-2 0 00 0 00 0 0
=⇒ dim Nul (A − 3I) = 2.
Por tanto, en este caso α = 3, la matriz A si es diagonalizable.
Resumiendo
A es diagonalizable ⇐⇒ α 6= 1.
(3.2) Tal y como hemos obtenido en el apartado anterior, para α = 0 la matriz A es diagona-lizable y sus autovalores son
λ1 = 1, λ2 = 3 y λ3 = α = 0.
Calculemos los autovectores:
Autovevtores de A asociados a λ1 = 1, (A − I)x = 0:
0 0 0 02 −1 −3 03 0 2 0
operaciones−→fila
2 −1 −3 00 3 13 00 0 0 0
⇒
x2 = −13
3x3
x1 = 1
2(x2 + 3x3) = −2
3x3
=⇒
x1
x2
x3
= x3
3
−2−133
=⇒ Nul (A − I) = Gen
v1 =
−2−133
.
Autovevtores de A asociados a λ2 = 3, (A − 3I)x = 0:
−2 0 0 02 −3 −3 03 0 0 0
operaciones−→fila
1 0 0 00 −3 −3 00 0 0 0
=⇒
x1 = 0
x2 = −x3
=⇒
x1
x2
x3
= x3
0−11
=⇒ Nul(A − 3I) = Gen
v2 =
0−11
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

Ejercicio 3. R-227
Autovevtores de A asociados a λ3 = 0, (A)x = 0:
1 0 0 02 0 −3 03 0 2 0
operaciones−→fila
1 0 0 00 0 1 00 0 0 0
⇒{
x1 = 0x3 = 0
=⇒
x1
x2
x3
= x2
010
=⇒ Nul (A) = Gen
v3 =
010
.
Siendo
P =
v1 v2 v3
=
−2 0 0−13 −1 13 1 0
y D =
λ1
λ2
λ3
=
13
0
se verifica que AP = PD =⇒ A = PDP−1(⇐⇒ P−1AP = D).
(3.3) Los autovalores de la matriz A2 son
µ1 = λ2
1 = 1, µ2 = λ2
2 = 9 y µ3 = λ2
3 = 0
y los autovectores son los correspondientes de la matriz A,
A2v1 = λ2
1v1, . . .
Por tanto, tenemos un sistema y′ = A2y en el que la matriz es diagonalizable y lasolucion general del sistema es
y(t) = c1eµ1tv1 + c2e
µ2tv2 + c3eµ3tv3
= c1et
−13−23
+ c2e9t
0−11
+ c3
010
=
−13c1et
−2c1et − c2e
9t + c3
3c1et + c2e
9t
,
c1, c2, c3 ∈ R.
(3.4)
A =
1 0 02 0 −33 0 3
F2 − 2F1
−→F3 − 3F1
1 0 0
2 0 -33 0 3
F3 + F2
−→
1 0 0
2 0 -33 0 −1
=⇒ U =
1 0 00 0 −30 0 0
, L =
1 0 02 1 03 −1 1
.
Algebra. F. Mayoral Ingenierıa Aeronautica.

R-228 Examen de Septiembre. 2005-06.
(3.5) Obviamente el espacio columna de la matriz [A|A] coincide con el espacio columna deA y por tanto
dim Col [A|A] = dim Col (A) = rango(A) = 2.
El espacio nulo de [A|A] es{
x ∈ R6 : [A|A]x = 0
}
Haciendo sobre la matriz [A|A] las mismas operaciones que hemos hecho en el apartadoanterior sobre A para obtener la forma escalonada U de A tenemos
[A|A|0] =
1 0 0 1 0 0 02 0 −3 2 0 −3 03 0 3 3 0 −3 0
−→
1 0 0 1 0 0 0
0 0 -3 0 0 −3 00 0 3 0 0 3 0
−→
1 0 0 1 0 0 0
0 0 -3 0 0 −3 00 0 0 0 0 0 0
=⇒ Nul [A|A] ≡{
x1 + x4 = 0x3 + x6 = 0
=⇒
x1
x2
x3
x4
x5
x6
=
−x4
x2
−x6
x4
x5
x6
, x2, x4, x5, x6 variables libres.
Por tanto, dim Nul [A|A] = 4 y una base es
u1 =
010000
, u2 =
−100100
, u3 =
000010
, u4 =
00−1001
.
Algebra. F. Mayoral Ingenierıa Aeronautica.





























