Embed Size (px)
Citation preview
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Prise en compte des contraintes decommunication
Un focus sur les systemes quantifies
Sophie Tarbouriech (LAAS-CNRS, Toulouse)
Travaux communs avec F. Ferrante et F. Gouaisbaut (LAAS)
et plus largementNationalLAAS-CNRS, GIPSA-lab, LAGEP,CRAN, LSS, ONERA
InternationalBresil, Chili, Hollande, Italie,Sweden, UK, USA
5 octobre 2015
1 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Plan de la presentation
1 Thematique generale
2 Systemes a information limitee
3 Systemes quantifies
4 Prospectives
2 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
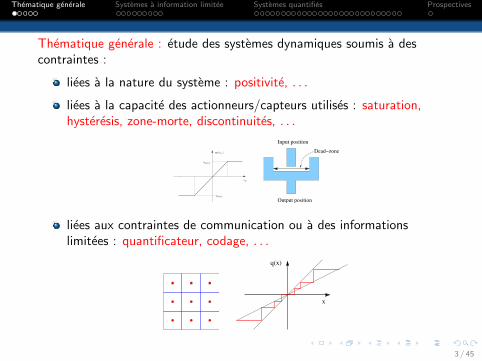
Thematique generale : etude des systemes dynamiques soumis a descontraintes :
liees a la nature du systeme : positivite, . . .
liees a la capacite des actionneurs/capteurs utilises : saturation,hysteresis, zone-morte, discontinuites, . . .
1.3 The closed-loop system 11
v(i)
sat(v(i))
−umin(i)
umax(i)
Fig. 1.1 The saturation function
ACTUATOR
PLANT
CONTROLLERv(t)
y(t)u(t)
w(t)
z(t)
Fig. 1.2 The closed-loop system
whereK ∈ℜm×n is a constant matrix.The effective control law applied to system (1.1) under Assumption 1.2 is:
u(t) = sat(Kx(t)) (1.6)
with each component,i = 1, ...,m, defined as follows
sat(K(i)x(t)) =
umax(i) if K(i)x(t)> umax(i)
K(i)x(t) if −umin(i) ≤ K(i)x(t)≤ umax(i)
−umin(i) if K(i)x(t)<−umin(i)
(1.7)
Input position
Output position
Dead−zone
liees aux contraintes de communication ou a des informationslimitees : quantificateur, codage, . . .
q(x)
x
3 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Contraintes de communication
L’etude des systemes dynamiques soumis a des contraintes decommunication ou encore a des informations limitees est un sujet ala frontiere entre theorie de la commande et theorie del’information/communication numerique.
Nous allons aborder cette problematique d’un point de vue de latheorie de la commande
4 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Motivations
Emergence de reseaux en tout genre (reseaux de capteurs,systemes controles en reseau, reseaux de communications,reseaux sociaux, reseaux de distribution d’energie intelligents,systemes biologiques, etc) qui sont batis sur des liens decommunications,
Le developpement d’une methodologie de travail a l’interfacede l’automatique et des communications n’est plus un luxemais une necessite.
Objectif/focus : donner des bases sur le probleme de laquantification d’une source d’information (en vue de satransmission) et de ses liens avec les problemes de commande.
5 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quantification
B Quantification en espace : conversion du signal (a valeurreelle) en un signal constant par morceaux prenant des valeursdans un ensemble fini.
B Quantification en temps : conversion du signal (a valeur reelle)en un signal constant par morceaux prenant des valeursdependant des instants d’echantillonnages.
6 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques references
Elia and Mitter, 2001, etudient la facon de construire lesemetteurs et receveurs dans un contexte de controle.
Nous ne voulons pas aborder ces systemes sous l’angle quantited’information finie (liee au debit)(Tatikonda and Mitter, 2004) ou sous l’angle de la naturestochastique du lien (Matveev and Savkin, 2009)
B Nous voulons considerer les emeteurs/receveurs dans un senslarge.
Voir aussi les travaux plus recents qui readaptent les schemas decommandes avancees(Liberzon, 2003), (Bullo and Liberzon, 2006),(Fu and Xie, 2005), (Gao and Chen, 2008),(Kameneva and Nesic, 2008),(Cepeda and Astolfi, 2008), (Vu and Liberzon, 2008), (Corra-dini and Orlando, 2008).
7 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
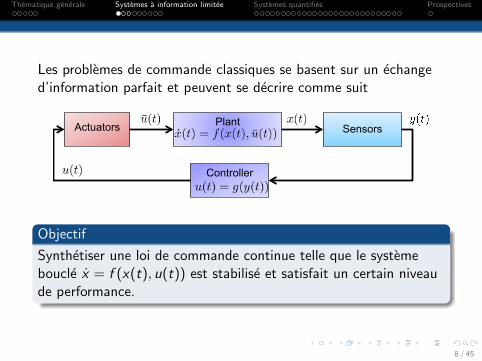
Les problemes de commande classiques se basent sur un echanged’information parfait et peuvent se decrire comme suit
Plant
Controller
Sensors
Actuators
Objectif
Synthetiser une loi de commande continue telle que le systemeboucle x = f (x(t), u(t)) est stabilise et satisfait un certain niveaude performance.
8 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
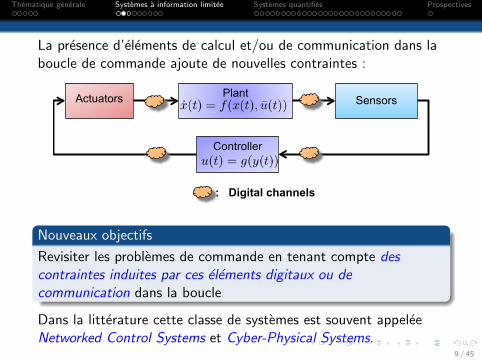
La presence d’elements de calcul et/ou de communication dans laboucle de commande ajoute de nouvelles contraintes :
Plant
Controller
Sensors
Actuators
: Digital channels
Nouveaux objectifs
Revisiter les problemes de commande en tenant compte descontraintes induites par ces elements digitaux ou decommunication dans la boucle
Dans la litterature cette classe de systemes est souvent appeleeNetworked Control Systems et Cyber-Physical Systems.
9 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
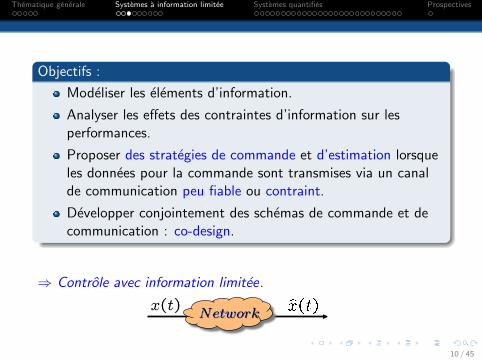
Objectifs :
Modeliser les elements d’information.
Analyser les effets des contraintes d’information sur lesperformances.
Proposer des strategies de commande et d’estimation lorsqueles donnees pour la commande sont transmises via un canalde communication peu fiable ou contraint.
Developper conjointement des schemas de commande et decommunication : co-design.
⇒ Controle avec information limitee.
10 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques elements
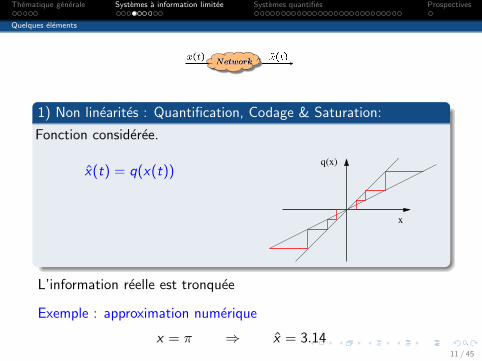
1) Non linearites : Quantification, Codage & Saturation:
Fonction consideree.
x(t) = q(x(t))q(x)
x
L’information reelle est tronquee
Exemple : approximation numerique
x = π ⇒ x = 3.1411 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques elements
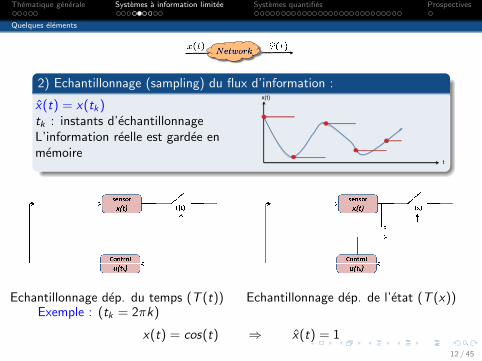
2) Echantillonnage (sampling) du flux d’information :
x(t) = x(tk)tk : instants d’echantillonnageL’information reelle est gardee enmemoire
x(t)
t
Echantillonnage dep. du temps (T (t))
Echantillonnage dep. de l’etat (T (x))Exemple : (tk = 2πk)
x(t) = cos(t) ⇒ x(t) = 1
12 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques elements
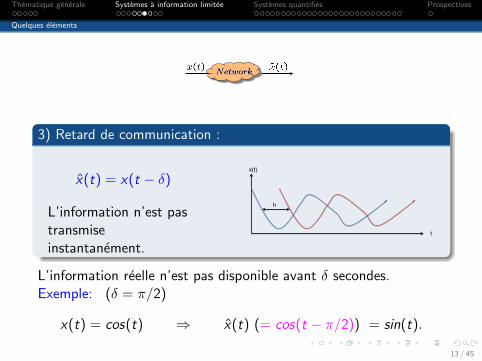
3) Retard de communication :
x(t) = x(t − δ)
L’information n’est pastransmiseinstantanement.
x(t)
t
h
L’information reelle n’est pas disponible avant δ secondes.Exemple: (δ = π/2)
x(t) = cos(t) ⇒ x(t) (= cos(t − π/2)) = sin(t).
13 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques elements
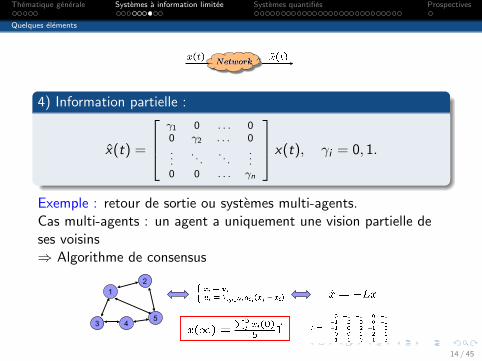
4) Information partielle :
x(t) =
γ1 0 . . . 00 γ2 . . . 0...
. . .. . .
...0 0 . . . γn
x(t), γi = 0, 1.
Exemple : retour de sortie ou systemes multi-agents.Cas multi-agents : un agent a uniquement une vision partielle deses voisins⇒ Algorithme de consensus
1 2
3 4 5
14 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quelques applications
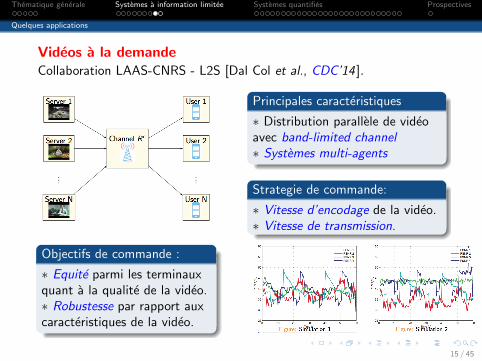
Videos a la demandeCollaboration LAAS-CNRS - L2S [Dal Col et al., CDC’14 ].
Objectifs de commande :
∗ Equite parmi les terminauxquant a la qualite de la video.∗ Robustesse par rapport auxcaracteristiques de la video.
Principales caracteristiques
∗ Distribution parallele de videoavec band-limited channel∗ Systemes multi-agents
Strategie de commande:
∗ Vitesse d’encodage de la video.∗ Vitesse de transmission.
15 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
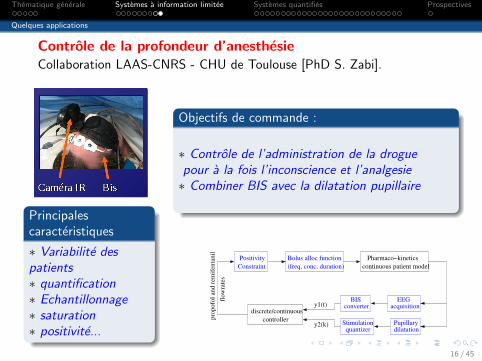
Quelques applications
Controle de la profondeur d’anesthesieCollaboration LAAS-CNRS - CHU de Toulouse [PhD S. Zabi].
Chapitre 4
Observation a l’hopital
4.1 Deroulement d’une operation
Le propofol etant de la categorie des anesthesiques, il va agir sur l’etat de consciencedu patient. L’anesthesiste commence donc generalement par induire l’anesthesie par unbolus de ce produit ou d’un assimile. Il teste ensuite les effets du produit sur le patientapres quelques minutes en touchant les cils... pour voir s’il reagit encore. Il faut attendreun temps que le produit ait theoriquement le temps d’atteindre le site effet.
Une fois le patient suffisament endormi, l’intubation est realisee. Apres hydratationde l’oeil, la camera est posee et le logiciel VideoAnalgesyGraph est parametre. Une valeurde reference de surface de la pupille est definie au repos, c’est a dire sans injection demorphinique. Elle sert de valeur de reference pour les mesures de variation qui vont etrefaites tout au long de l’operation.
Fig. 4.1 – Camera pour VAG et dispositif pour BIS
13
Principalescaracteristiques
∗ Variabilite despatients∗ quantification∗ Echantillonnage∗ saturation∗ positivite...
Objectifs de commande :
∗ Controle de l’administration de la droguepour a la fois l’inconscience et l’analgesie∗ Combiner BIS avec la dilatation pupillaire
Bolus alloc functionPositivity
Constraint continuous patient model
Pharmaco−kinetics
pro
pofo
l an
d r
emif
enta
nil
discrete/continuous
controllerStimulation quantizer
Pupillarydilatation
flow
rate
s
y1(t)
y2(k)
acquisitionconverterBIS EEG
(freq, conc, duration)
16 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Nous allons nous focaliser sur un des cas de contraintes decommunication :
Systeme lineaire soumis a un quantificateur en entree et/ousur l’etat
Definissons la notion de quantification
Definition
Un quantificateur q est une fonction qui convertit un signal de Rn
en un signal qui appartient a un ensemble discret.
q :
{Rn 7→ F
x(t)→ q(x(t))avec F un ensemble fini.
17 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
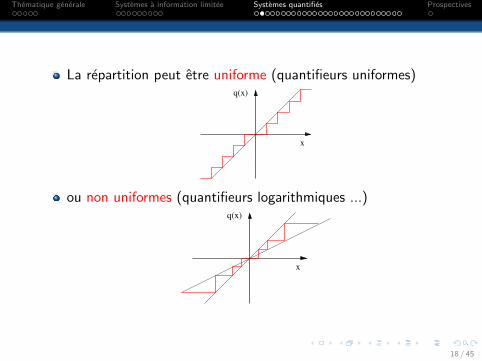
La repartition peut etre uniforme (quantifieurs uniformes)q(x)
x
ou non uniformes (quantifieurs logarithmiques ...)q(x)
x
18 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Quantification
C’est un processus
irreversible,
source de perte d’information,
tres utilise en traitement du signal audio, video : c’est une etapecritique pour les algorithmes de compression (image et video),
impact significatif sur la distorsion du signal reconstruit (videoou image)impact signification sur la vitesse de codage (bit rate)
etudie depuis peu par la communaute de la commande
Interet pour la commande : quelle est l’information utile pour la
commande ?
19 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Rapide historique
Kalman et al, (56), Delchamps (90) etudient l’apparition de cycleslimites /trajectoires chaotiques lorsque un quantifieur est ajoutedans la boucle de commande.
Elia-Mitter (01), Brockett-Liberzon (00-03) etudient la stabilisationdes systemes lineaires puis non lineaires soumis a des entrees/sortiesquantifiees.
Mitter,Tatikonda (01-04) etudient le lien entre la theorie del’information et theorie de la commande. Quelle est la quantited’information minimale a transmettre pour stabiliser un systemedynamique?
Liberzon (07-09), commande hybride des systemes quantifies,Fridman et al (09) quantification et retards, Astolfi (09),Tarbouriech(12), Ferrante (14,15) quantification et saturation ...
20 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
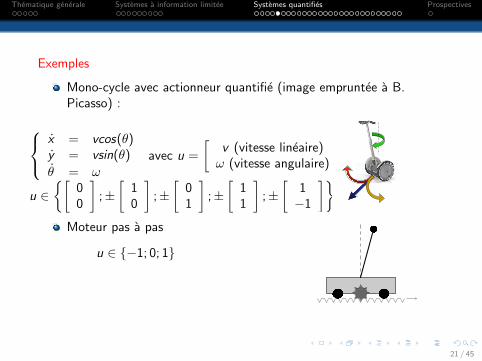
Exemples
Mono-cycle avec actionneur quantifie (image empruntee a B.Picasso) :
x = vcos(θ)y = vsin(θ)
θ = ωavec u =
[v (vitesse lineaire)ω (vitesse angulaire)
]
u ∈{[
00
];±[
10
];±[
01
];±[
11
];±[
1−1
]}
Why Quantized Control Systems
The actuator is inherently quantized (e.g., a stepper motor)
Moteur pas a pas
u ∈ {−1; 0; 1}
Why Quantized Control Systems
The actuator is inherently quantized (e.g., a stepper motor) 21 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
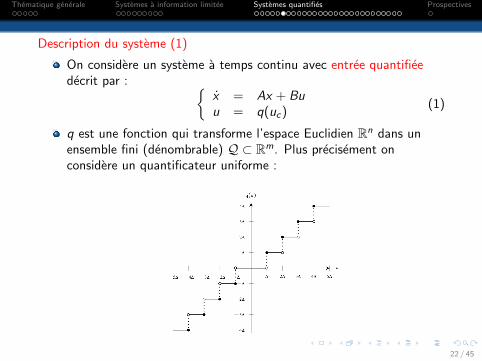
Description du systeme (1)
On considere un systeme a temps continu avec entree quantifieedecrit par : {
x = Ax + Buu = q(uc)
(1)
q est une fonction qui transforme l’espace Euclidien Rn dans unensemble fini (denombrable) Q ⊂ Rm. Plus precisement onconsidere un quantificateur uniforme :
22 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Description du systeme (2)
Pas d’hypothese de stabilite pour la matrice A.
La paire (A,B) est supposee controlable.
On suppose que le systeme est controle via un retour d’etat :uc = Kx .
Le systeme boucle etudie est donc :
x = Ax + Bq(Kx) (2)
23 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Ingredients cles
Pour etudier le systeme, nous devons considerer deux points :
l’existence de solutions,
le type de stabilite attaignable.
24 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Existence de solutions (1)
La presence du quantificateur (et sa definition) implique la presenced’une discontinuite.
B le quantificateur est une fonction qui transforme l’espaceEuclidien en un ensemble denombrable.
B Par consequent le systeme boucle (2) est decrit par uneequation a membre droit discontinu.
B Aucune garantie quant a l’existence de solutions classiquespour le systeme en boucle fermee, i.e., des fonctionsdifferentiables partout qui satisfont la dynamique du systemeen boucle fermee a chaque point dans leur domaine (Filippov,1988).
25 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Existence de solutions (2)
Notion de solutions plus generales a considerer. Solutions du typeCaratheodory (Ceragioli et al., 2011, Cortes, 2008) et Krasovskii(Krasovskii, 1963, Cortes, 2008).
Solutions du type Caratheodory. Soit un
intervalle I ⊂ R≥. Une fonction ϕ : I→ Rn
est une solution de Caratheodory pour
x = X (x) si elle est absolument continue
sur I, et ϕ = X (ϕ), pour presque tout t ∈ I.
Solutions du type Krasovskii.Soit un intervalle I ⊂ R≥. Une
fonction ϕ : I→ Rn est une solution
de Caratheodory pour x = X (x) si
elle est absolument continue sur I,et ϕ ∈ K[X ](ϕ), pour presque tout
t ∈ I.
K[X ](x) =⋂δ>0 coX (x + δB), B boule de rayon 1, est une fonction
multi-valuee
26 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Existence de solutions (3)
Interet des solutions de Krasovskii :
B Quand elles existent, les solutions de Caratheodory sont dessolutions de Krasovskii
B Les solutions de Krasovskii fournissent des indications sur lecomportement du systeme considere
B L’utilisation des solutions de Krasovskii garantit que lesproprietes etablies pour le systeme en boucle fermee sontrobustes par rapport aux petites perturbations
L’outil de base pour s’interesser aux solutions de Krasovskii sont lesinclusions differentielles
27 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Existence de solutions (4)
Exemple : x = q(−x) = −sign(x). q transforme R en {−1, 1}.Pas de solutions de Caratheodory mais existence de solutions deKrasovskii
28 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Etude de la stabilite
Probleme 1.
B Analyse de la stabilite du systeme (2).B On se base sur les solutions de KrasovskiiB Cela implique d’utiliser une description du systeme boucle via
les inclusions differentielles :
x ∈ K(x)
29 / 45

Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Proprietes preliminaires
Le quantificateur q(Kx) est defini comme :
q(Kx) = ∆ sign(Kx)
⌊ |Kx |∆
⌋
ou ∆ est la borne sur l’erreur de quantification.
On a les proprietes suivantes :
B On peut verifier que chaque composante de Kx :
|q(Kix)− Kix | ≤ ∆, i = 1, . . . ,m
B q(0) = 0
Le systeme sans quantificateur est lineaire : x = (A + BK )x
B Si A + BK est Hurwitz alors x = 0 est un point d’equilibreglobalement asymptotiquement stable pour ce systeme
30 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Question preliminaire
x = 0 est-il un point d’equilibre globalement asymptotiquementstable pour le systeme boucle (2) ?
B La reponse est en generale negative.B Demander que l’origine soit asymptotiquement stable pour le
systeme quantifie est en general impossible a satisfaire.
Ceci nous amene a reposer plus precisement le probleme a traiter.
31 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
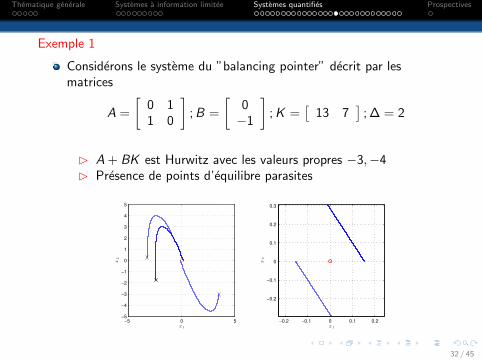
Exemple 1
Considerons le systeme du ”balancing pointer” decrit par lesmatrices
A =
[0 11 0
];B =
[0−1
];K =
[13 7
]; ∆ = 2
B A + BK est Hurwitz avec les valeurs propres −3,−4B Presence de points d’equilibre parasites
−5 0 5
−5
−4
−3
−2
−1
0
1
2
3
4
5
x 1
x2
(a) Closed-loop trajectories
−0.2 −0.1 0 0.1 0.2
−0.2
−0.1
0
0.1
0.2
0.3
x 1
x2
(b) A close-up showing the trajectories converge towardthe two equilibria
Figure 1.5: Closed-loop trajectories
In Figure 1.6, some closed-loop trajectories are shown. Simulations show that the closed-loop systemtrajectories approach a limit cycle, implying that the origin is not globally asymptotically stable.
The above two examples show that, in general, the asymptotic stability properties of the quantizationfree closed-loop system are destroyed by quantization. This phenomenon is well established in the liter-ature; see, e.g., [55, 70, 15]. The reason behind this phenomenon directly follows from the definition ofthe uniform quantizer in (1.17). Indeed, due to the deadzone effect induced by the quantizer, there exists,for both systems (1.15) and (1.16), a region of the state space wherein the control system runs in openloop. This implies that if the origin of the open-loop plant is unstable, then the origin of the closed-loopsystem is unstable as well. For instance, consider system (1.16), and suppose that the open-loop plant inunstable. Let qu and qy defined as in (1.17), with respectively ∆u and ∆y. Pick xc = 0, and x0 such that|Cx0| ≺ ∆y. Now, let ϕ be a maximal solution to x = Ax, with ϕ(0) = x0. Due to linearity, there existsa strictly positive T , such that |Cϕ(t)| ≺ ∆y for each t ∈ [0, T ]. Thus, (ϕ(t), 0) is a solution to (1.16)on the interval [0, T ]. Since this construction can be repeated for any x0 such that |Cx0| ≺ ∆y, and theopen loop-plant is unstable by hypothesis, it can be shown that the origin is unstable for system (1.16).These arguments exploited the fact that sensor quantization induces a lack of the feedback action in apolyhedral region containing the origin. On the other hand, via similar arguments, it can be shown thatactuator quantization induces the same issue. Analogous considerations hold also for the simpler case ofthe static state feedback control system (1.15).
19
32 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Remarques (1)
La propriete de stabilite du systeme sans quantification est doncperdue lorsque l’on rajoute le quantificateur
B Ce phenomene est bien etabli dans la litterature (voir parexemple Ceragioli et al., 2011, D. Liberzon, 2003, S.Tarbouriech & F. Gouaisbaut, 2012).
B La raison de ce phenomene decoule directement de ladefinition du quantificateur uniforme
B La presence de la deadzone
q(Kx) = 0 pour |Kix | ≤ ∆, i = 1, . . .m
implique qu’il existe une region de l’espace d’etat|Kix | ≤ ∆, i = 1, . . .m ou le systeme boucle evolue avec ladynamique du systeme en boucle ouverte
Le systeme boucle peut donc presenter des comportementscomplexes autour de l’origine (point d’equilibre, cycle limite, ...) quis’averent non triviaux a etudier
33 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Remarques (2)
On peut cependant, sous reserve que certaines conditions soientsatisfaites (D. Liberzon, 2003, S. Tarbouriech & F. Gouaisbaut,2012), montrer que les trajectoires du systemes boucle sont borneeset convergent vers un ensemble compact et invariant A qui contientl’origine.
B Un tel ensemble contiendra les points d’equilibre parasites, lescycles limites, . . .
B Cet ensemble represente une approximation par l’exterieure ducomportement du systeme autour de l’origine.
L’ensemble A possede 2 proprietes importantes :
B Les trajectoires initialisees dans cet ensemble restentdefinitivement confinees dedans (invariance) ;
B Les trajectoires initialisees en dehors de cet ensembleconvergent vers lui (attractivite).
34 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Probleme d’analyse
Probleme 2. Supposons les matrices A, B, K donnees, telles queA + BK est Hurwitz, determiner un ensemble compact A ⊂ Rn
contenant l’origine et UGAS pour le systeme (2).
Uniformite : convergence independante de la condition initiale.
35 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Resultats d’analyse (1)
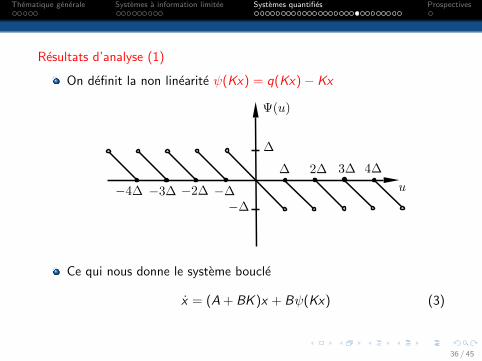
On definit la non linearite ψ(Kx) = q(Kx)− Kx
u
Ψ(u)
∆
−∆
∆ 2∆ 3∆ 4∆
−∆−2∆−3∆−4∆
Ce qui nous donne le systeme boucle
x = (A + BK )x + Bψ(Kx) (3)
36 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Resultats d’analyse (2)
Theoreme 1. Supposons les matrices A, B, K donnees, telles queA + BK est Hurwitz, alors il existe un ensemble compact A ⊂ Rn
contenant l’origine et UGAS pour le systeme (3).
C’est un resultat general dont la preuve est tres technique (Thesede F. Ferrante) qui ne nous aide pas pour caracteriser l’ensemble A.
Utilisation des proprietes de ψ :
B Lemme 1. Soient S1 et S2 deux matrices diagonales definiespositives de Rm×m. Pour z ∈ Rm, v ∈ K[ψ](v), les deuxconditions suivantes sont satisfaites :
ψ(v)′S1ψ(v)− trace(S1)∆2 ≤ 0ψ(v)′S2(ψ(v) + z) ≤ 0
(4)
37 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
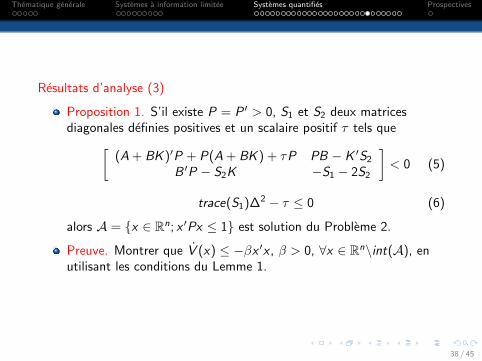
Resultats d’analyse (3)
Proposition 1. S’il existe P = P ′ > 0, S1 et S2 deux matricesdiagonales definies positives et un scalaire positif τ tels que
[(A + BK )′P + P(A + BK ) + τP PB − K ′S2
B ′P − S2K −S1 − 2S2
]< 0 (5)
trace(S1)∆2 − τ ≤ 0 (6)
alors A = {x ∈ Rn; x ′Px ≤ 1} est solution du Probleme 2.
Preuve. Montrer que V (x) ≤ −βx ′x , β > 0, ∀x ∈ Rn\int(A), enutilisant les conditions du Lemme 1.
38 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
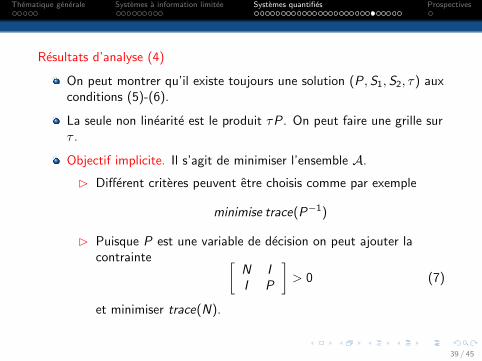
Resultats d’analyse (4)
On peut montrer qu’il existe toujours une solution (P,S1,S2, τ) auxconditions (5)-(6).
La seule non linearite est le produit τP. On peut faire une grille surτ .
Objectif implicite. Il s’agit de minimiser l’ensemble A.
B Different criteres peuvent etre choisis comme par exemple
minimise trace(P−1)
B Puisque P est une variable de decision on peut ajouter lacontrainte [
N II P
]> 0 (7)
et minimiser trace(N).
39 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Simulation.
Une fois que l’on a des conditions pour verifier la stabilite dusysteme, une question naturelle peut-etre posee : commentsimule-ton le systeme (3) en tenant compte du type de solutionretenu ?
B Comment integrer numeriquement les solutions du systemex = Ax + Bq(Kx) ?
B On utilise la notion de solutions d’Euler qui sont des solutionsde Krasovskii (Bressan, 1998) et la notion d’approximationpolygonale : xk+1 = xk + (tk+1 − tk)X (tk), k = 0, . . . ,N − 1(tN = T = temps de simulation)
B L’idee est d’approcher le mieux possible les solutions deKrasovskii numeriquement.
B Attention avec les solutions d’Euler, on peut ne pas voir toutesles solutions.
40 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
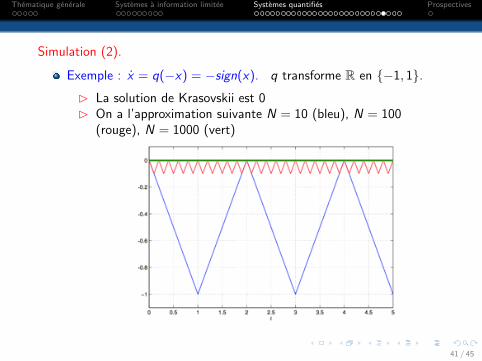
Simulation (2).
Exemple : x = q(−x) = −sign(x). q transforme R en {−1, 1}.B La solution de Krasovskii est 0B On a l’approximation suivante N = 10 (bleu), N = 100
(rouge), N = 1000 (vert)
41 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
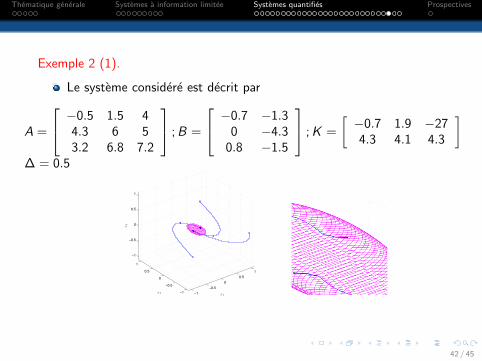
Exemple 2 (1).
Le systeme considere est decrit par
A =
−0.5 1.5 44.3 6 53.2 6.8 7.2
;B =
−0.7 −1.3
0 −4.30.8 −1.5
;K =
[−0.7 1.9 −274.3 4.1 4.3
]
∆ = 0.5
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
x 1
x 2
x3
Figure 2.5: Some closed-loop solutions. The solutions are obtained by integrating the closed-loop modelvia an Euler method with time step 10−4.
By defining κ(x) = Kx, the determination of x needs to be carried out by searching for a point x ∈ R3,such that
0 ∈ {Ax+BK[q ◦κ](x)}.
On the other hand, for every x ∈ R3, thanks to [57, Theorem 2], since rankK = 2, one has
K[q ◦κ](x) = K[q](Kx).
Moreover, due to the decentralized structure of the function u 7→ q(u), from Proposition 1.3 it follows
K[q ◦κ](x) =2×i=1
K[q](K(i)x).
51
42 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Exemple 2 (2).
L’origine est un point instable
Les trajectoires convergent vers 2 points d’equilibre quiappartiennent aux surfaces
Kx =
[∆−∆
]et Kx =
[−∆∆
]
Ces points d’equilibre sont des equilibres de Krasovskii. Le calcul dece type de points peut s’averer tres complexe :
Ax + B
[δ1
δ2
]∆ = 0 et Kx =
[∆−∆
]
pour (δ1, δ2) ∈ [0, 1]× [−1, 0]
43 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Conclusion.
Les conditions LMIs obtenues sont les memes que l’on considere dessolution de type Caratheodory ou de Krasovskii.
Considerer les solutions de Krasovskii et le cadre mathematiqueassocie permet de calculer les points d’equilibre
Un autre point clef dans l’utilisation de solutions de Krasovskiireside dans la simulation.
B Integration numerique via Euler ((xk+1 − xk)/τ)B Euler correspond a Krasovskii pour τ → 0
44 / 45
Thematique generale Systemes a information limitee Systemes quantifies Prospectives
Etendre la classe des quantificateurs (precision finie de typelogarithmique par exemple)
B suppression du chattering par exemple en ajoutant unphenomene d’hysteresis
B quantificateur dynamique
Classe de systemes non-lineaires (par exemple polynomiaux)
B Generaliser le type de fonction de Lyapunov
Co-design : synthetiser le quantificateur (en fonction des proprietessouhaitees)
45 / 45








![Janvier 2010 Contraintes de déformation par stéréoscopie Contraintes de déformation par Shape From Shading Dans le deuxième procédé [3], le jeu de contraintes](https://img.pdfslide.tips/doc/110x75/551d9dc5497959293b8e248c/janvier-2010-contraintes-de-deformation-par-stereoscopie-contraintes-de-deformation-par-shape-from-shading-dans-le-deuxieme-procede-3-le-jeu-de-contraintes.jpg)




















