Embed Size (px)
Citation preview

Zeszyty Naukowe 29(101) 69
Scientific Journals Zeszyty Naukowe Maritime University of Szczecin Akademia Morska w Szczecinie
2012, 29(101) pp. 69–75 2012, 29(101) s. 69–75
Problems of towing of damaged tankers
Problemy holowania uszkodzonych zbiornikowców
Lech Kobyliński
Ship Handling Research and Training Centre Fundacja Bezpieczeństwa Żeglugi i Ochrony Środowiska 14-200 Iława, ul. Chodkiewicza 12, e-mail: [email protected]
Key words: tanker casualties, system of preventing marine environment pollution
Abstract Tanker casualties that happen from time to time in the world cause serious damage to environment with
disastrous effects. In particular, casualties of tankers “Prestige”, “Erika” and “Nakhodka” where ships were
seriously damaged, broken in the middle or separated into two parts showed that salvage operations in many
cases were not effective. Such casualty in the Baltic Sea, that is closed area, may lead to the total destruction
of the environment. The paper describes a proposed system of preventing marine environment pollution from
damaged tankers. Problems related to towing of damaged tankers to the safe harbour or area, that consist an
important element of the system, are discussed in more detail with reference to model tests of towing of
damaged tanker performed at Iława Training and Research Centre for Ship Manoeuvrability.
Słowa kluczowe: katastrofy zbiornikowców, system zapobiegania zanieczyszczeniom morza
Abstrakt Katastrofy zbiornikowców, które zdarzają się co jakiś czas, powodują poważne szkody w środowisku mor-
skim. W szczególności katastrofy zbiornikowców „Prestige”, „Erika” czy „Nakhodka”, gdy statki zostały
poważnie uszkodzone, przełamane w połowie lub rozbite na dwie części, wykazały, że akcja ratownicza
w wielu przypadkach nie była efektywna. Gdyby taka katastrofa zdarzyła się na Bałtyku, które jest morzem
zamkniętym, mogłoby to spowodować całkowite zniszczenie życia w morzu. W artykule zaproponowano sys-
tem zapobiegania zanieczyszczaniu morza przez uszkodzone statki. Problemy odholowania takich statków do
bezpiecznego portu czy akwenu, stanowiące ważny element systemu, omówiono szczegółowo w powiązaniu
z badaniami holowania uszkodzonego zbiornikowca przeprowadzonymi w Badawczo-Szkoleniowym Ośrod-
ku Manewrowania Statkami w Iławie.
Introduction
From time to time the public opinion is shocked
by the information that somewhere in the world
there was serious shipping accident where damaged
large crude oil tanker caused disastrous pollution of
the sea environment. In consequence, hundreds
kilometers of the seaside were polluted and were of
no use for tourism, recreation and for fishery, sea
life was damaged for a long time and resulting cost
of recovery was counted in hundreds of millions of
US dollars. Those accidents happen in spite of en-
hanced international safety rules adopted regarding
construction of tankers during the last period,
where double hull, segregated ballasts, duplicated
rudder gear amongst other measures are required.
Avoiding disastrous consequences of such acci-
dents requires immediate localization of the casu-
alty, securing the damage ship as far possible, tow-
ing it to the safe place where oil spill could be
contained and removed. Rescue and cleaning action
has to be quick and effectively performed.
Important oil spills and their consequences
The most serious tanker casualties that happened
in years 1967–2008 are shown in the table 1 (from
[1]). In the last column amount of oil that went to
the sea is shown, and largest oil spills polluting the
coastline are marked by star. In older times when

Lech Kobyliński
70 Scientific Journals 29(101)
the size of tankers was generally rather small, casu-
alties, if they happen, did not cause large pollution
because of small amount of oil spilled. The rapid
increase of the amount of oil transport and of the
tankers size in the sixties of the last century has
changed the situation.
Table 1. Most serious tanker casualties and oil spills from
tankers in years 1967–2007
Tabela 1. Najpoważniejsze awarie zbiornikowców i wylewy
ropy naftowej w latach 1967–2007
Month /
Year Ship’s name Place
Oil spill /
sunk (t∙103)
03/1967 Torrey Canyon* Scilly Isles 119 000
03/1971 Wafra South Africa 65 000
08/1974 Metula Magellan Strait 50 000
01/1975 Jacob Maersk Oporto, Portugal 88 000
05/1976 Uruiola Galicia, Spain 101 000
01/1977 Nakhodka* Japan Sea 6 000
02/1977 Havaian Patriot Hawaii 95 000
03/1978 Amoco Cadiz* Brittany, France 223 000
11/1979 Independent* Bosphorus 95 000
07/1979 Atlantic Empress* Tobago, West
Indies 287 000
02/1980 Irenes Serenade Navarino Bay 100 000
01/1983 Assimi Oman 53 000
08/1983 Castillo de
Bellveder* South Africa 252 000
11/1988 Odyssey Nova Scotia, 132 000
03/1989 Exxcon Valdez* Alaska 37 000
12/1989 Khark 5 Morocco 80 000
04/1991 Haven Genoa, Italy 144 000
05/1991 ABT Summer Angola 260 000
04/1992 Katina Mozambique 72 000
12/1992 Aegean Sea Galicia, Spain 74 000
01/1993 Braer Shetlands 85 000
02/1996 Sea Empress* Milford Haven 72 000
12/1999 Erika* Brittany, France 20 000
11/2002 Prestige* Galicia, Spain 76 000
08/2003 Tasman Spirit Karachi 28 000
12/2007 Hebei Spirit South Korea 10 500
The first serious tanker casualty that happened
in European waters was in 1967 when the super-
tanker “Torrey Canyon”, because of the master
fault, hit the Seven Stone rocks near the Scilly
Island. The hull of the tanker was ruptured and
spilled oil caused the most serious ecological disas-
ter. Several other serious tanker casualties hap-
pened in years 1967–1977, many of them close to
the coast of America that stirred public opinion and
maritime authorities and as a result extraordinary
conference was organized by the International
Maritime Organization (IMO) in 1978 and Protocol
SOLAS and MARPOL Conventions was adopted
that included important amendments to those
conventions related to tanker safety [2]. This confe-
rence almost coincided with the most serious disas-
ter of the tanker “Amoco Cadiz” in 1978 close to
shores of Normandy that was caused by rudder gear
failure. Disabled ship drifted towards the rocks
where the hull was eventually split into two parts
and more than 200 000 tons of oil transported
spilled into the sea.
More recently, in November 2002 in Greek
owned tanker “Prestige” one of the tanks started
leaking due to hull damage in Atlantic Ocean close
to Portugal. Because all ports refuse to allow the
leaking tanker to enter, the master was forced to
sail farther from the shore. Attempts to tow, the
disabled ship failed and during the stormy weather
the ship was broken into two parts as shown in
figure 1, that ultimately separated and finally foun-
dered. The spilled oil drifting towards the Spanish
coast caused the worst disaster in the history of
Spain.The consequences of such large oil spills are
disastrous for the sea life (birds, animals and fish),
for the economy (fishery, tourism, recreation) and
cleaning operations costs usually many millions
euro.
Fig. 1. Tanker “Prestige” broken down drifting in Atlantic
Ocean
Rys 1. Zbiornikowiec „Prestige” przełamany, dryfujący na
Atlantyku
Casualties of the Russian tanker “Nakhodka” in
1997 that was broken into two parts in Japan sea, of
the tanker “Erika” in1999 that was also broken into
two parts near Brest, and in particular of the tanker
“Prestige” where attempts to tow the disabled ship
failed drew attention to the problems of towing
disabled ships.
System of preventing marine environment pollution from damaged tankers
Understanding that such disasters, in spite of
whatever prohibitive measures are taken, are un-
avoidable, people realized that it would be neces-
sary to develop a system to prevent or mitigate
consequences caused by spilled oil, if such casualty

Problems of towing of damaged tankers
Zeszyty Naukowe 29(101) 71
happens. This was done for the first time after the
“Nakhodka” disaster, where in Japan important
project of this type was installed under the leader-
ship of professor Hara. This was reported in several
places, (e.g. [3, 4]). Attempts to develop certain
tools designed to help the salvage organization to
deal with the consequences of similar disasters
were undertaken also after the “Erica” and “Pres-
tige” disasters [5].
Baltic Sea is a closed sea particularly vulnerable
to pollution. If disaster of a large tanker, such as
described above, happens in the Baltic, the results
would be catastrophic to the countries surrounding
Baltic Sea. In the extreme case, the whole life in the
Baltic might be destroyed and the beaches made
unusable for the long time. Fortunately, such disas-
ter did not happened yet, but the risk that it may
happen in future is rather high. Some indication
what may happen was shown in December 2009,
when the bunker ship “Romanka” lost manoeuvra-
bility, drifted towards the Latvian coast and
grounded. The ship was without cargo and on the
sandy beach hull was not ruptured. Fortunately,
nothing serious did happen [6].
In the Baltic Sea 55 000 ships pass the Danish
Strait every year, and about 6000 of them are large
or medium size tankers carrying dangerous goods;
more than 50 ferry routes cross the Baltic Sea.
Collision and grounding may easily happen. There-
fore, it is extremely important to assess risk of such
a situation and appropriate salvage action has to be
prepared.
The attempt to mitigate consequences of such
disaster materialized in the proposal to develop
a system for preventing disastrous consequences in
case of tanker casualty in the Baltic Sea [7]. Such
system developed in Japan was the result of 5 years
project installed after “Nakhodka” disaster and was
named Optimum Towing Support System (OTSS)
[4]. Unfortunately, only short publications that in-
clude description of the system and some results of
the model test of damaged tankers are available,
and access to the system that is owned by Japanese
authorities is not possible (see references above).
Moreover, the system is geared to the local condi-
tions in Japan and model tests comprise damage
cases that do not include cases that happened in
“Prestge” or “Erika” casualties.
The system proposed (EPM System) should be
for use in the Baltic, therefore should be tailored to
local conditions. The system should made use of
the Japanese experience, but will not necessarily be
modeled in the same way. The block diagram of the
proposed system is shown in figure 2. In order to
Containment and cleaning
oil spilled
Information about ship’s type,
cargo, dimensions extent
of damage and other relevant
information
Information on hydro-
-meteorological conditions
and weather forecast
Approx. estimation ship
parameters required for
further calculations
Prediction of the path
of drifting damaged ship
Planning of optimum towing
operations to safe place
Information on availability
of tugs, on availability of safe
harbor etc.
Towing operation,
supervised and corrected
Information on the true
position of damaged ship
under way and weather
conditions
Information on the amount
and location of spilled oil etc.
Information on availability
of equipment
CASUALTY
Fig. 2. Block diagram of the EPS system
Rys. 2. Schemat blokowy systemu EPS

Lech Kobyliński
72 Scientific Journals 29(101)
accomplish aims of the EPM system, the following
tasks have to be undertaken:
Task 1: Identification of the condition and impor-
tant parameters of the disabled ship.
Task 2: Identification and prediction of the hydro-
-meteorological condition in the area of
casualty.
Task 3: Prediction of the path of drifting damaged
vessel.
Task 4: Developing of the optimum towing system
of the damaged vessel to the safe place.
Task 5: Developing optimum system of contain-
ment of the pollution and removal spilled
oil.
Task 6: Developing user friendly fast computer
code for the use of salvage organization.
Research project on prevention of oil pollution from damaged tankers
Bearing in mind the possibility of a large tanker
being damaged because of grounding or collision
in the Baltic Sea, the programme of research was
installed in the Foundation for Safety of Navigation
and Environment Protection with the aim to de-
velop the system mentioned above aimed at preven-
tion of oil pollution from damaged tankers. Part of
this programme constituting important element of
the system was already completed. The aim of this
part was prediction of drift of a damaged tanker
under the influence of wind, waves and current
allowing fast intervention of the salvage ships. The
results of this part were already reported [8].
The other part of the project, now under consid-
eration, is aimed at estimation of forces required to
tow the damaged tanker to the safe place where the
oil spill may be contained and ultimately remove-
dand to recommend optimum towing arrangement.
It is necessary to estimate forces required for tow-
ing which in turn affect the choice of tugs (neces-
sary to do this work) and provide recommendations
regarding the technique of towing. This part is
almost completed and is based on model tests of
towing of the model of disabled tanker in different
conditions of damage. Large model of damaged
ship was used for this purpose.
Towing tests of the disabled tanker
Within the scope of the project model tests using
large model of a tanker in different damage condi-
tions were arranged on the lake in the Research and
Training Centre for Ship Manoeuvrability in Iława
in order to study the behaviour of damaged tanker
when towed and to develop computer code for pre-
dicting forces required for towing. Those tests are
unique, because no such tests were performed any-
where yet. As a sample ship for model tests tanker
of the common size met in the Baltic Sea was
chosen. This was the same tanker as used for tests
within the first part of the programme of research
[8]. The dimensions of the chosen ship are shown
in the table 2, together with dimensions of the large
model used in experiments on the lake. Figure 3
shows conditions of the damage tanker that were
used in model tests.
1
2
3
4
Fig. 3. Conditions of the damaged tanker tested
Rys. 3. Badane stany uszkodzonego zbiornikowca

Problems of towing of damaged tankers
Zeszyty Naukowe 29(101) 73
Table 2. Dimensions of the sample ship and its models
Tabela 2. Wymiary statku przykładowego i jego modelu
SHIP [m] MODEL 1 [m]
Scale 1 1:41.06
LOA 324.0 7.89
B 54.9 1.34
H 32.25 0.785
T1 15.50 0.377
T2 21.50 0.523
As the towing ship model of the large tanker
“Blue Lady”, normally used for training sea pilot
sand ship masters was used. Large displacement
of this model caused that effect of the towing ship
(or tug) on the behavior of the towed ship was neg-
ligible. During tests towing force was measured, as
well as velocities and paths of both ships. Also
wind velocity was measured, although all tests were
performed in calm weather with almost no wind in
order to exclude the wind and waves effects on
towing force. Those effects will be added to calm
weather towing force by calculation.
Fig. 4. Towing of the model of damaged tanker (condition 3)
Rys. 4. Holowanie modelu uszkodzonego zbiornikowca
(stan 3)
Fig. 5. Towing of the model of damaged tanker (condition 4)
Rys. 5. Holowanie modelu uszkodzonego zbiornikowca
(stan 4)
During tests three lengths of towing line were
used, corresponding to 500, 750 and 860 m. Tests
were performed at different towing speeds
Programme of tests of towing disabled tanker
in four different conditions of damage has been
already completed. Figures 4 and 5 show examples
of towing arrangement.
Ocean rescuetowing
In rescue towing as rule damaged ship is not
controlled and there usually are no crew members.
This is usually posing serious problems in bringing
the towing hawser that is rather heavy (2–3 tons)
onboard and fixing it. These problems are, how-
ever, not discussed here.
When the non controlled ship is towed, usually
yawing motion around the straight course occurs.
Yawing motion is connected with dynamic instabil-
ity of the towed ship and is difficult to avoid.
An example of the trajectory of the towed vessel is
shown in figure 6.
Fig. 6. Recorded trajectories of towed ship and tug [9]
Rys. 6. Zapisane trajektorie statku oraz holownika [9]
Yawing causes reduction of speed of towing,
increases the danger of breaking of towing line
because of overloading and possible lost of tow.
Yawing phenomenon was studied by several
authors (e.g [10, 11]) and in general, it was con-
cluded that this phenomenon is very difficult to
avoid when towing conventional ships or towing
objects unless special additional arrangement in
form of fitting fins or skegs or drag anchors are
fitted, which cannot be done with rescue towing.
Yawing, in general, depends on the inherent dy-
namic stability of the tow and on the length of the
towing line. Generally, the longer towing line, the
smaller amplitude of yawing. This relation is shown
in figure 7 derived from calculations (after [11]).
This, however, was calculated taking as an example
of towed ship a naval ship that was inherently
stable on straight course when towed. Most ships
when towed, reveal larger or smaller amplitude
of yawing. Tests with towed gas carrier model
confirmed this effect [12].
Wind 195 deg.
8.8 m/s
Wave 150 deg.
1.5 m
Current
1 knot
Tow ship
Towed ship
[m]
[m]

Lech Kobyliński
74 Scientific Journals 29(101)
Fig. 7. Relation between course stability and length of the
towing line [11]
Rys. 7. Zależność pomiędzy statecznością kursową a długością
holu [11]
The negative result of yawing motion of the tow
is jerking of the tow line. When the tug is pulling
even at constant speed, yawing of the tow is caus-
ing that the pulling force is not constant, but is
changing in time. When the yaw angle of the tow is
at its extreme, then the tow accelerates the towing
line became slack and the jerking occurs when
the tow rope is again taut. Therefore, on the steady
or quasi-static pulling force jerking force is over-
lapping as shown in figure 8 (after [13]). In this
diagram, additional time varying components of
tension caused by waves are also shown.
The extreme time varying tensions are compen-
sated by the construction of the towing hawser that,
when wire rope is used, always include highly elas-
tic part, as well as by the towing winch that auto-
matically releases rope when the tension increases
Fig. 8 Time relation of extreme tensions in towing hawser [13]
Rys. 8. Maksymalne naprężenia holu w zależności od czasu [13]
Extreme Tension (Te)
Wave-Induced (Twave)
Yawing and
Surging (Tyaw)
Steady or
Static (T)
Time (Minutes)
Ten
sio
n,
Kip
s
0
5 000
10 000
15 000
20 000
25 000
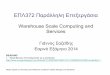
2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0 6.5
Rs [kN]
Vs [knots] l = 500 m l = 750 m l = 860 m
Fig. 9.Comparison of towing forces for different hawser lengths. Condition 3
Rys. 9. Porównanie siły holowania dla różnych długości holu. Stan 3

Problems of towing of damaged tankers
Zeszyty Naukowe 29(101) 75
over certain value, but even so, the towing hawser
diameter should be calculated taking into account
additional jerking tensions. The behaviour of the
towing hawser is very complex and several authors
attempted to investigate it and to develop computer
codes able to calculate extreme tensions (e.g. [14,
15]), but this subject it out of the scope of this
paper. On rough recommendation as used by the
U.S. Navy is to use safety factor 1.5 [13].
Some results ot the towing experiments
Figure 9 (from [16]) shows partial results of
the experiments of towing damaged ship. Towing
forces measured are shown for three different
lengths of towing line for the model in condition 3
(model broken in the middle). It may be noticed,
that the forces re-calculated for full scale ship are
extremely large, therefore, towing speed should be
rather small, perhaps no more than 3–3.5 knots.
Large scatter of measured points is due to jerking
forces caused by yawing motion.
Conclusions
The tests with towing of damaged tanker in
different conditions of damage did show that this
operation may be very difficult and the forces re-
quired to tow such a ship might in certain situations
be extremely large. This will require employment
of powerful tugs having very large bollard pull.
Usually there will be also difficulties with bringing
heavy towing hawser onboard of the damaged ves-
sel. In order to avoid disastrous pollution of the sea,
a system of preventing marine environment from
spilling oil from damaged tankers should be devel-
oped as proposed. This is especially important for
the Baltic Sea.
Acknowledgement
The project described was supported by the
Polish National Committee for Scientific Research.
References
1. MOYANO H.: The Prestige case: four years after. TSDT 07
Conference, Newcastle on Tyne, 2007.
2. IMO: Protocol 1978 relating to the SOLAS Convention
and to the MARPOL Convention. International Conference
on tanker safety and pollution prevention London 1978.
3. HARA S.: Towing support tool and objects drift at sea.
From Nakhodka to Erika. Exchange of experience in at sea
response to offshore oil spills by passing ships. Proceed-
ings of the seminar between Cedre in France and SRI.
Brest 2000, France. Presentation.
4. HARA S., YAMAKAWA K., HOSHINO K., YUKAWA K.,
HASEGAWA J., TANIZAWA K., UENO M.: Development of
towing support tool named Optimum Towing Support Sys-
tem (OTSS). Proceedings of the Fourteenth International
Offshore and Polar Engineering Conference. Toulon 2004,
France.
5. CRANEGUY PH.: A simple operational model for the analy-
sis and forecast of pollutant and object drift. Sea-Tech
Week – Brest, 2000, 18–20.
6. Anonym: Lekcja bunkierki. Polityka, Nr 49, 05.12.2009.
7. KOBYLINSKI L., NOWICKI J., BURCIU Z.: System for prevent-
ing Marine environment pollution from damaged tankers.
Konferencja Transport XXI wieku. Białowieża 2010.
8. KOBYLIŃSKI L. and al: Drift path prediction of damaged
tankers. Proc. 18th HYDRONAV International Conference,
Gdańsk 2010.
9. KURODA T., HARA S.: Application of optimum towing sup-
port system in emergency towing operation. International
Conference on Towing and Salvage of Disabled Tankers,
Glasgow 2007.
10. JIANG T.: On the dynamic instabilities in towing process
and the possibilities of stabilization. JSTG, Vol. 90, 1996.
11. STRANDHAGEN A.G., SCHOENHERR K.E., KOBAYASHI F.M.:
The dynamic stability on course of towed ships. Transac-
tions SNAME, 1950.
12. KOBYLIŃSKI L.: Holowanie morskie statków uszkodzonych.
Azipilot Project Foundation for Safety of Navigaton and
Environment Protection. RAPORT No: 12G/2011.
13. Naval ships’ technical manual. Chapter 582. Mooring and
Towing, 2001.
14. MILGRAM J.H., TRIANTAFYLLOU M.S., FRIMM F.C., ANA-
GNOSTOU G.: Seakeeping and extreme tensions in offshore
towing. Transactions SNAME, 1988.
15. PELTZER T.J.: Computer Aided Decision Making for Ocean
Towing. Massachusetts Institute of Technology. 1979.
16. OLEKSY J.: Analiza wyników badań modelowych holo-
wania. Fundacja BŻiOŚ. Raport 7G/2011/2012.
Other
17. U.S. Coast Guard Research and Development Center.
Modelling of leeward drift. Final Report, September,
Report No. CG-D-06-99, 1998.