-
Corso di Modelli di Computazione Affettiva
Prof. Giuseppe Boccignone
Dipartimento di Informatica
Università di Milano
[email protected]
[email protected]
http://boccignone.di.unimi.it/CompAff2016.html
Processi stocastici: richiami generali
Dove siamo arrivati // Modelli
• Teorie: Basi psicologiche e neurobiologiche delle emozioni
• Modelli: Modelli probabilistici per la computazione
affettiva:
• Apprendimento
• Inferenza
• Applicazioni: Esempi di sistemi di computazione
affettiva
-
• Modello
stato mentale
(nascosto)
comportamento non verbale (visibile)
generazione inferenza
Dove siamo arrivati // Modelli
Teoria computazionale
Rappresentazione e algoritmo
Implementazione hardware
Modelli nelle scienze cognitive //livelli di spiegazione
stato mentale
(nascosto)
comportamento non verbale (visibile)
generazione inferenza
-
Modelli probabilistici
Algoritmi di inferenza e learning
Implementazione hardware
Modelli nelle scienze cognitive //livelli di spiegazione
X
Y
I modelli considerano processi che evolvono nel tempo...
t
t
evento emotigeno
emozionesegnali non verbali
misurabili nel tempo
-
I modelli considerano processi che evolvono nel tempo...
Processi stocastici // Definizione
We assume here that coins and dice are fair and have no memory,
i.e., eachoutcome is equally likely on each toss, regardless of the
results of previous tosses.
It is helpful to give a geometric representation of events using
a Venn diagram.This is a diagram in which sample space is presented
using a closed-plane figureand sample points using the
corresponding dots. The sample spaces (1.1) and (1.3)are shown in
Fig. 1.1a, b, respectively.
The sample sets (1.1) and (1.3) are discrete and finite. The
sample set can also bediscrete and infinite. If the elements of the
sample set are continuous (i.e., notcountable) thus the sample set
S is continuous. For example, in an experimentwhich measures
voltage over time T, the sample set (Fig. 1.2) is:
S ¼ fsjV1 < s < V2g: (1.4)
In most situations, we are not interested in the occurrence of
specific outcomes,but rather in certain characteristics of the
outcomes. For example, in the voltagemeasurement experiment we
might be interested if the voltage is positive or lessthan some
desired value V. To handle such situations it is useful to
introduce theconcept of an event.
Fig. 1.1 Sample spaces for coin tossing and die rolling. (a)
Coin tossing. (b) Die rolling
V1 V2
S
Fig. 1.2 Example of continuous space
2 1 Introduction to Sample Space and Probability
Sample space
Chapter 1Introduction to Sample Space and Probability
1.1 Sample Space and Events
Probability theory is the mathematical analysis of random
experiments [KLI86,p. 11]. An experiment is a procedure we perform
that produces some result oroutcome [MIL04, p. 8].
An experiment is considered random if the result of the
experiment cannot bedetermined exactly. Although the particular
outcome of the experiment is notknown in advance, let us suppose
that all possible outcomes are known.
The mathematical description of the random experiment is given
in terms of:
• Sample space• Events• Probability
The set of all possible outcomes is called sample space and it
is given the symbolS. For example, in the experiment of a
coin-tossing we cannot predict exactly if“head,” or “tail” will
appear; but we know that all possible outcomes are the“heads,” or
“tails,” shortly abbreviated as H and T, respectively. Thus, the
samplespace for this random experiment is:
S ¼ fH;Tg: (1.1)
Each element in S is called a sample point, si. Each outcome is
represented by acorresponding sample point. For example, the sample
points in (1.1) are:
s1 ¼ H; s2 ¼ T: (1.2)
When rolling a die, the outcomes correspond to the numbers of
dots (1–6).Consequently, the sample set in this experiment is:
S ¼ f1; 2; 3; 4; 5; 6g: (1.3)
G.J. Dolecek, Random Signals and Processes Primer with
MATLAB,DOI 10.1007/978-1-4614-2386-7_1, # Springer Science+Business
Media New York 2013
1
s1= s2=
-
Processi stocastici // Definizione
We assume here that coins and dice are fair and have no memory,
i.e., eachoutcome is equally likely on each toss, regardless of the
results of previous tosses.
It is helpful to give a geometric representation of events using
a Venn diagram.This is a diagram in which sample space is presented
using a closed-plane figureand sample points using the
corresponding dots. The sample spaces (1.1) and (1.3)are shown in
Fig. 1.1a, b, respectively.
The sample sets (1.1) and (1.3) are discrete and finite. The
sample set can also bediscrete and infinite. If the elements of the
sample set are continuous (i.e., notcountable) thus the sample set
S is continuous. For example, in an experimentwhich measures
voltage over time T, the sample set (Fig. 1.2) is:
S ¼ fsjV1 < s < V2g: (1.4)
In most situations, we are not interested in the occurrence of
specific outcomes,but rather in certain characteristics of the
outcomes. For example, in the voltagemeasurement experiment we
might be interested if the voltage is positive or lessthan some
desired value V. To handle such situations it is useful to
introduce theconcept of an event.
Fig. 1.1 Sample spaces for coin tossing and die rolling. (a)
Coin tossing. (b) Die rolling
V1 V2
S
Fig. 1.2 Example of continuous space
2 1 Introduction to Sample Space and Probability
Sample space
Chapter 1Introduction to Sample Space and Probability
1.1 Sample Space and Events
Probability theory is the mathematical analysis of random
experiments [KLI86,p. 11]. An experiment is a procedure we perform
that produces some result oroutcome [MIL04, p. 8].
An experiment is considered random if the result of the
experiment cannot bedetermined exactly. Although the particular
outcome of the experiment is notknown in advance, let us suppose
that all possible outcomes are known.
The mathematical description of the random experiment is given
in terms of:
• Sample space• Events• Probability
The set of all possible outcomes is called sample space and it
is given the symbolS. For example, in the experiment of a
coin-tossing we cannot predict exactly if“head,” or “tail” will
appear; but we know that all possible outcomes are the“heads,” or
“tails,” shortly abbreviated as H and T, respectively. Thus, the
samplespace for this random experiment is:
S ¼ fH;Tg: (1.1)
Each element in S is called a sample point, si. Each outcome is
represented by acorresponding sample point. For example, the sample
points in (1.1) are:
s1 ¼ H; s2 ¼ T: (1.2)
When rolling a die, the outcomes correspond to the numbers of
dots (1–6).Consequently, the sample set in this experiment is:
S ¼ f1; 2; 3; 4; 5; 6g: (1.3)
G.J. Dolecek, Random Signals and Processes Primer with
MATLAB,DOI 10.1007/978-1-4614-2386-7_1, # Springer Science+Business
Media New York 2013
1
0 1
XVariabile aleatoria
X (discreta)
x Realizzazioni x della v.a. X
s1= s2=
x1= x2=
Processi stocastici // Definizione
• Generazione di una variabile aleatoria (Bernoulliana):
X = (rand
-
• Serie temporale o sample path
X = (rand
-
Processi stocastici // Definizione
Weassumehere
that
coinsanddice
arefair
andhave
nomem
ory,
i.e.,each
outcom
eisequallylikely
oneach
toss,regardless
oftheresultsof
previous
tosses.
Itishelpfulto
give
ageom
etricrepresentation
ofeventsusingaVenndiagram.
Thisisadiagram
inwhich
samplespaceispresentedusingaclosed-plane
figure
andsamplepointsusingthecorrespondingdots. T
hesamplespaces
(1.1)and(1.3)
areshow
nin
Fig.1.1a,b,
respectively.
The
samplesets(1.1)and(1.3)arediscreteandfinite.The
sampleset can
also
be
discrete
andinfinite.
Iftheelem
ents
ofthesamplesetarecontinuous
(i.e.,not
countable)
thus
thesamplesetSis
continuous.For
exam
ple,
inan
experiment
which
measuresvoltageover
timeT,thesampleset(Fig.1.2)
is:
S¼
fsjV
1<
s<
V2g:
(1.4)
Inmostsituations,wearenotinterested
intheoccurrence
ofspecificoutcom
es,
butrather
incertaincharacteristicsof
theoutcom
es.For
exam
ple,
inthevoltage
measurementexperimentwemight
beinterested
ifthevoltageispositive
orless
than
somedesiredvalueV.Tohandle
such
situations
itisuseful
tointroducethe
conceptof
anevent.
Fig. 1.1
Sam
plespaces
forcoin
tossinganddierolling.(a)Cointossing.(b)Dierolling
V1
V2
SFig. 1.2
Exampleof
continuous
space
2
1Introduction
toSam
pleSpace
andProbability
X(t,S
)
s 1=
s 2=
X j (t)
X i (t)
Processo stocastico
…
Processi stocastici // Definizione
6.1.1 Deterministic and Nondeterministic Random Processes
A random process is said to be deterministic if all future
values of any realizationcan be determined from its past values
[PEE93, p. 166]. As an example, considersinusoidal realizations
where the amplitude varies for different realizations, asshown in
Fig. 6.2a. The future values of each realization are shown with
dottedlines and are completely known. In the opposite case, shown
in Fig. 6.2.b, theprocess is a nondeterministic. The waveforms of
realizations are irregular andcannot be described using a
mathematical expression. Consequently, futurevalues–shown with
dotted lines–cannot be precisely determined.
From the previous discussion, note that the term “random” in a
random processis not related with a wave shape of its realizations,
but with an uncertainty in whichthe time function is assigned to a
particular outcome. Similarly, as in a die rollingexperiment, one
knows with certainty that a number from 1 to 6 will appear, andthe
uncertainty is which of those numbers will appear in each roll.
6.1.2 Continuous and Discrete Random Processes
The classification of random processes may be performed
depending on whetheramplitudes and time are continuous or discrete
values. As both amplitude and timecan be either continuous or
discrete, all possible combinations are shown in Fig. 6.3.
Fig. 6.1 Mapping a space of events S to a (x, y) space
372 6 Random Processes
Processo stocastico
-
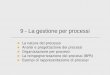
• Processo stocastico
Processi stocastici // Definizione
354 CHAPTER 10 STOCHASTIC PROCESSES
x t,s( )1
x t,s( )2
x t,s( )3
s1
s2
s3
SAMPLE SPACE SAMPLE FUNCTIONS
Figure 10.1 Conceptual representation of a random process.
Definition 10.1 Stochastic ProcessA stochastic process X (t)
consists of an experiment with a probability measure P[·] definedon
a sample space S and a function that assigns a time function x(t,
s) to each outcome sin the sample space of the experiment.
Essentially, the definition says that the outcomes of the
experiment are all functions oftime. Just as a random variable
assigns a number to each outcome s in a sample space S, astochastic
process assigns a sample function to each outcome s.
Definition 10.2 Sample FunctionA sample function x(t, s) is the
time function associated with outcome s of an experiment.
A sample function corresponds to an outcome of a stochastic
process experiment. It isone of the possible time functions that
can result from the experiment. Figure 10.1 showsthe correspondence
between the sample space of an experiment and the ensemble of
samplefunctions of a stochastic process. It also displays the
two-dimensional notation for samplefunctions x(t, s). In this
notation, X (t) is the name of the stochastic process, s indicates
theparticular outcome of the experiment, and t indicates the time
dependence. Correspondingto the sample space of an experiment and
to the range of a random variable, we define theensemble of a
stochastic process.
Definition 10.3 EnsembleThe ensemble of a stochastic process is
the set of all possible time functions that can resultfrom an
experiment.
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
1
Stochastic processes
1.1 IntroductionThe theme of this book is Bayesian Analysis of
Stochastic Process Models. In thisfirst chapter, we shall provide
the basic concepts needed in defining and analyzingstochastic
processes. In particular, we shall review what stochastic processes
are,their most important characteristics, the important classes of
processes that shall beanalyzed in later chapters, and the main
inference and decision-making tasks that weshall be facing. We also
set up the basic notation that will be followed in the restof the
book. This treatment is necessarily brief, as we cover material
which is wellknown from, for example, the texts that we provide in
our final discussion.
1.2 Key concepts in stochastic processesStochastic processes
model systems that evolve randomly in time, space or space-time.
This evolution will be described through an index t ∈ T . Consider
a randomexperiment with sample space !, endowed with a σ -algebra F
and a base probabilitymeasure P . Associating numerical values with
the elements of that space, we maydefine a family of random
variables {Xt , t ∈ T }, which will be a stochastic process.This
idea is formalized in our first definition that covers our object
of interest inthis book.
Definition 1.1: A stochastic process {Xt , t ∈ T } is a
collection of random variablesXt, indexed by a set T, taking values
in a common measurable space S endowed withan appropriate σ
-algebra.
T could be a set of times, when we have a temporal stochastic
process; a set ofspatial coordinates, when we have a spatial
process; or a set of both time and spatialcoordinates, when we deal
with a spatio-temporal process. In this book, in general,
Bayesian Analysis of Stochastic Process Models, First Edition.
David Rios Insua, Fabrizio Ruggeri and Michael P. Wiper.© 2012 John
Wiley & Sons, Ltd. Published 2012 by John Wiley & Sons,
Ltd.
3
L’ “output” dell’esperimento è un ensemble di funzioni nel
tempo
• Processo stocastico
Processi stocastici // Definizione
354 CHAPTER 10 STOCHASTIC PROCESSES
x t,s( )1
x t,s( )2
x t,s( )3
s1
s2
s3
SAMPLE SPACE SAMPLE FUNCTIONS
Figure 10.1 Conceptual representation of a random process.
Definition 10.1 Stochastic ProcessA stochastic process X (t)
consists of an experiment with a probability measure P[·] definedon
a sample space S and a function that assigns a time function x(t,
s) to each outcome sin the sample space of the experiment.
Essentially, the definition says that the outcomes of the
experiment are all functions oftime. Just as a random variable
assigns a number to each outcome s in a sample space S, astochastic
process assigns a sample function to each outcome s.
Definition 10.2 Sample FunctionA sample function x(t, s) is the
time function associated with outcome s of an experiment.
A sample function corresponds to an outcome of a stochastic
process experiment. It isone of the possible time functions that
can result from the experiment. Figure 10.1 showsthe correspondence
between the sample space of an experiment and the ensemble of
samplefunctions of a stochastic process. It also displays the
two-dimensional notation for samplefunctions x(t, s). In this
notation, X (t) is the name of the stochastic process, s indicates
theparticular outcome of the experiment, and t indicates the time
dependence. Correspondingto the sample space of an experiment and
to the range of a random variable, we define theensemble of a
stochastic process.
Definition 10.3 EnsembleThe ensemble of a stochastic process is
the set of all possible time functions that can resultfrom an
experiment.
Variabile aleatoria
Serie temporale
-
• Processi stocastici:
Processi stocastici // Definizione
358 CHAPTER 10 STOCHASTIC PROCESSES
Continuous-Time, Continuous-Value Discrete-Time,
Continuous-Value
−1 −0.5 0 0.5 1
−2
0
2
t
Xcc
(t)
−1 −0.5 0 0.5 1
−2
0
2
t
Xdc
(t)
Continuous-Time, Discrete-Value Discrete-Time,
Discrete-Value
−1 −0.5 0 0.5 1
−2
0
2
t
Xcd
(t)
−1 −0.5 0 0.5 1
−2
0
2
t
Xdd
(t)
Figure 10.3 Sample functions of four kinds of stochastic
processes. Xcc(t) is a continuous-time,continuous-value process.
Xdc(t) is discrete-time, continuous-value process obtained by
samplingXcc) every 0.1 seconds. Rounding Xcc(t) to the nearest
integer yields Xcd (t), a continuous-time,discrete-value process.
Lastly, Xdd (t), a discrete-time, discrete-value process, can be
obtained eitherby sampling Xcd (t) or by rounding Xdc(t).
Definition 10.4 Discrete-Value and Continuous-Value ProcessesX
(t) is a discrete-value process if the set of all possible values
of X (t) at all times t is acountable set SX ; otherwise X (t) is a
continuous-value process.
Definition 10.5 Discrete-Time and Continuous-Time ProcessesThe
stochastic process X (t) is a discrete-time process if X (t) is
defined only for a set oftime instants, tn = nT , where T is a
constant and n is an integer; otherwise X (t) is acontinuous-time
process.
In Figure 10.3, we see that the combinations of
continuous/discrete time and continu-ous/discrete value result in
four categories. For a discrete-time process, the sample functionis
completely described by the ordered sequence of random variables X
n = X (nT ).
Definition 10.6 Random SequenceA random sequence X n is an
ordered sequence of random variables X 0, X1, . . ..
Quiz 10.2 For the temperature measurements of Example 10.3,
construct examples of the measurementprocess such that the process
is either(1) discrete-time, discrete-value, (2) discrete-time,
continuous-value,
358 CHAPTER 10 STOCHASTIC PROCESSES
Continuous-Time, Continuous-Value Discrete-Time,
Continuous-Value
−1 −0.5 0 0.5 1
−2
0
2
t
Xcc
(t)
−1 −0.5 0 0.5 1
−2
0
2
t
Xdc
(t)
Continuous-Time, Discrete-Value Discrete-Time,
Discrete-Value
−1 −0.5 0 0.5 1
−2
0
2
t X
cd(t)
−1 −0.5 0 0.5 1
−2
0
2
t
Xdd
(t)
Figure 10.3 Sample functions of four kinds of stochastic
processes. Xcc(t) is a continuous-time,continuous-value process.
Xdc(t) is discrete-time, continuous-value process obtained by
samplingXcc) every 0.1 seconds. Rounding Xcc(t) to the nearest
integer yields Xcd (t), a continuous-time,discrete-value process.
Lastly, Xdd (t), a discrete-time, discrete-value process, can be
obtained eitherby sampling Xcd (t) or by rounding Xdc(t).
Definition 10.4 Discrete-Value and Continuous-Value ProcessesX
(t) is a discrete-value process if the set of all possible values
of X (t) at all times t is acountable set SX ; otherwise X (t) is a
continuous-value process.
Definition 10.5 Discrete-Time and Continuous-Time ProcessesThe
stochastic process X (t) is a discrete-time process if X (t) is
defined only for a set oftime instants, tn = nT , where T is a
constant and n is an integer; otherwise X (t) is acontinuous-time
process.
In Figure 10.3, we see that the combinations of
continuous/discrete time and continu-ous/discrete value result in
four categories. For a discrete-time process, the sample functionis
completely described by the ordered sequence of random variables X
n = X (nT ).
Definition 10.6 Random SequenceA random sequence X n is an
ordered sequence of random variables X 0, X1, . . ..
Quiz 10.2 For the temperature measurements of Example 10.3,
construct examples of the measurementprocess such that the process
is either(1) discrete-time, discrete-value, (2) discrete-time,
continuous-value,
6.2 Statistics of Random Processes
6.2.1 Description of a Process in One Point
We have already mentioned that a random process in a specified
time t becomes arandom variable. Let us consider the time instant
t1. A random variable defined in a
Fig. 6.2 Deterministic and nondeterministic random processes
Fig. 6.3 Discrete and continuous random processes
6.2 Statistics of Random Processes 373
VALUE
Processi stocastici // Definizione
• Descrizione del processo in un punto: fissato il tempo
considero la v.a.
time instant t1 is a random variable X1. The distribution
function of the variable,denoted as FX1ðx1; t1Þ is defined as:
FX1ðx1; t1Þ ¼ PfX1 $ x1; t1g: (6.1)
Note that the definition (6.1) is the same as the definition of
distribution of arandom variable, with the only difference being
that the distribution (6.1) dependson the time instant t1.
The meaning of the distribution (6.1) is explained in Fig. 6.4.
For the specifiedtime instant t1 and value x1, the distribution
(6.1) presents the probability that in theinstant t1 all
realizations are less than or equal to a value x1. This probability
canalso be interpreted using a frequency ratio, as described
below.
Consider that a random experiment is performed n times and a
particularrealization is given to each outcome, as shown in Fig.
6.4. Let n(x1, t1) be the totalnumber of successes where the
amplitudes of realizations in the time instant t1 arenot more than
x1.
Taking n to be very large, the desired probability can be
approximated as:
FX1ðx1; t1jÞ %nðx1; t1Þ
n: (6.2)
The distribution (6.2) is called a distribution of the first
order, or a one-dimensionaldistribution of a processX(t). Note that
the one-dimensional distribution is obtained byobserving a process
in one time instant.
Fig. 6.4 Description of a process in a particular time
instant
374 6 Random Processes
time instant t1 is a random variable X1. The distribution
function of the variable,denoted as FX1ðx1; t1Þ is defined as:
FX1ðx1; t1Þ ¼ PfX1 $ x1; t1g: (6.1)
Note that the definition (6.1) is the same as the definition of
distribution of arandom variable, with the only difference being
that the distribution (6.1) dependson the time instant t1.
The meaning of the distribution (6.1) is explained in Fig. 6.4.
For the specifiedtime instant t1 and value x1, the distribution
(6.1) presents the probability that in theinstant t1 all
realizations are less than or equal to a value x1. This probability
canalso be interpreted using a frequency ratio, as described
below.
Consider that a random experiment is performed n times and a
particularrealization is given to each outcome, as shown in Fig.
6.4. Let n(x1, t1) be the totalnumber of successes where the
amplitudes of realizations in the time instant t1 arenot more than
x1.
Taking n to be very large, the desired probability can be
approximated as:
FX1ðx1; t1jÞ %nðx1; t1Þ
n: (6.2)
The distribution (6.2) is called a distribution of the first
order, or a one-dimensionaldistribution of a processX(t). Note that
the one-dimensional distribution is obtained byobserving a process
in one time instant.
Fig. 6.4 Description of a process in a particular time
instant
374 6 Random Processestime instant t1 is a random variable X1.
The distribution function of the variable,denoted as FX1ðx1; t1Þ is
defined as:
FX1ðx1; t1Þ ¼ PfX1 $ x1; t1g: (6.1)
Note that the definition (6.1) is the same as the definition of
distribution of arandom variable, with the only difference being
that the distribution (6.1) dependson the time instant t1.
The meaning of the distribution (6.1) is explained in Fig. 6.4.
For the specifiedtime instant t1 and value x1, the distribution
(6.1) presents the probability that in theinstant t1 all
realizations are less than or equal to a value x1. This probability
canalso be interpreted using a frequency ratio, as described
below.
Consider that a random experiment is performed n times and a
particularrealization is given to each outcome, as shown in Fig.
6.4. Let n(x1, t1) be the totalnumber of successes where the
amplitudes of realizations in the time instant t1 arenot more than
x1.
Taking n to be very large, the desired probability can be
approximated as:
FX1ðx1; t1jÞ %nðx1; t1Þ
n: (6.2)
The distribution (6.2) is called a distribution of the first
order, or a one-dimensionaldistribution of a processX(t). Note that
the one-dimensional distribution is obtained byobserving a process
in one time instant.
Fig. 6.4 Description of a process in a particular time
instant
374 6 Random Processes
time instant t1 is a random variable X1. The distribution
function of the variable,denoted as FX1ðx1; t1Þ is defined as:
FX1ðx1; t1Þ ¼ PfX1 $ x1; t1g: (6.1)
Note that the definition (6.1) is the same as the definition of
distribution of arandom variable, with the only difference being
that the distribution (6.1) dependson the time instant t1.
The meaning of the distribution (6.1) is explained in Fig. 6.4.
For the specifiedtime instant t1 and value x1, the distribution
(6.1) presents the probability that in theinstant t1 all
realizations are less than or equal to a value x1. This probability
canalso be interpreted using a frequency ratio, as described
below.
Consider that a random experiment is performed n times and a
particularrealization is given to each outcome, as shown in Fig.
6.4. Let n(x1, t1) be the totalnumber of successes where the
amplitudes of realizations in the time instant t1 arenot more than
x1.
Taking n to be very large, the desired probability can be
approximated as:
FX1ðx1; t1jÞ %nðx1; t1Þ
n: (6.2)
The distribution (6.2) is called a distribution of the first
order, or a one-dimensionaldistribution of a processX(t). Note that
the one-dimensional distribution is obtained byobserving a process
in one time instant.
Fig. 6.4 Description of a process in a particular time
instant
374 6 Random Processes
time instant t1 is a random variable X1. The distribution
function of the variable,denoted as FX1ðx1; t1Þ is defined as:
FX1ðx1; t1Þ ¼ PfX1 $ x1; t1g: (6.1)
Note that the definition (6.1) is the same as the definition of
distribution of arandom variable, with the only difference being
that the distribution (6.1) dependson the time instant t1.
The meaning of the distribution (6.1) is explained in Fig. 6.4.
For the specifiedtime instant t1 and value x1, the distribution
(6.1) presents the probability that in theinstant t1 all
realizations are less than or equal to a value x1. This probability
canalso be interpreted using a frequency ratio, as described
below.
Consider that a random experiment is performed n times and a
particularrealization is given to each outcome, as shown in Fig.
6.4. Let n(x1, t1) be the totalnumber of successes where the
amplitudes of realizations in the time instant t1 arenot more than
x1.
Taking n to be very large, the desired probability can be
approximated as:
FX1ðx1; t1jÞ %nðx1; t1Þ
n: (6.2)
The distribution (6.2) is called a distribution of the first
order, or a one-dimensionaldistribution of a processX(t). Note that
the one-dimensional distribution is obtained byobserving a process
in one time instant.
Fig. 6.4 Description of a process in a particular time
instant
374 6 Random Processes
Funzione di distribuzione
A density function is obtained as the derivation of the
corresponding distributionfunction,
fX1ðx1; t1Þ ¼@FX1ðx1; t1Þ
@x1¼ Pfx1
-
Processi stocastici // Definizione
• Descrizione del processo in due punti:
Funzione di distribuzione
Funzione di densità
6.2.3 Description of Process in n Points
The previous discussion can be generalized by observing a
process in n points.Obviously, in this way we can obtain a more
detailed description of a process.However, the resulting
description will be highly complex.
By observing a process in n points, t1, . . ., tn, we get n
random variables:
X1 ¼ Xðt1Þ;X2 ¼ Xðt2Þ; . . . ;Xn ¼ XðtnÞ: (6.7)
We define a joint distribution function of nth order, as:
FX1X2:::Xnðx1; x2; . . . ; xn; t1; t2; . . . ; tnÞ¼ P Xðt1Þ $
x1;Xðt2Þ $ x2; . . . ;XðtnÞ $ xnf g¼ PfX1 $ x1;X2 $ x2; . . . ;Xn $
xn; t1; t2; . . . ; tng:
(6.8)
The corresponding joint density function of nth order is given
as:
fX1X2;...;Xnðx1; x2; . . . ; xn; t1; t2; : . . . tnÞ
¼@nFX1X2ðx1; x2; . . . ; xn; t1; t2; . . . ; tnÞ
@x1@x2:::@xn
¼ P x1
-
Processi stocastici // Definizione
• Attenzione!: con qualche abuso di notazione, ma per
semplificare, indicheremo nel seguito la densità congiunta (pdf)
come nel caso discreto
Funzione di densità
6.2.3 Description of Process in n Points
The previous discussion can be generalized by observing a
process in n points.Obviously, in this way we can obtain a more
detailed description of a process.However, the resulting
description will be highly complex.
By observing a process in n points, t1, . . ., tn, we get n
random variables:
X1 ¼ Xðt1Þ;X2 ¼ Xðt2Þ; . . . ;Xn ¼ XðtnÞ: (6.7)
We define a joint distribution function of nth order, as:
FX1X2:::Xnðx1; x2; . . . ; xn; t1; t2; . . . ; tnÞ¼ P Xðt1Þ $
x1;Xðt2Þ $ x2; . . . ;XðtnÞ $ xnf g¼ PfX1 $ x1;X2 $ x2; . . . ;Xn $
xn; t1; t2; . . . ; tng:
(6.8)
The corresponding joint density function of nth order is given
as:
fX1X2;...;Xnðx1; x2; . . . ; xn; t1; t2; : . . . tnÞ
¼@nFX1X2ðx1; x2; . . . ; xn; t1; t2; . . . ; tnÞ
@x1@x2:::@xn
¼ P x1
-
Processi stocastici // Dinamica
• Evoluzione del processo: Per caratterizzare la dinamica del
processo, ovvero nel caso temporale le probabilità di
transizione
• Queste sono specificate come probabilità condizionata
Table of content 23
where P(1, · · · ,n)dxk+1dxk+2 · · · dxn stands for the joint
probability of finding thatx has a certain value
xk+1 < x ≤ xk+1 + dxk+1 at time tk+1xk+2 < x ≤ xk+2 +
dxk+2 at time tk+2
· · ·For instance, referring to Figure 13, we can calculate the
joint probability
P(1,2)dx1dx2 by following the vertical line at t1 and t2 and
find the fraction ofpaths for which x(t1) = x1 within tolerance dx1
and x(t2) = x2 within tolerancedx2, respectively3
Summing up, the joint probability density function, written
explicitly as
P(x1, t1; x2, t2; · · · ; xn , tn),
is all we need to fully characterise the statistical properties
of a stochastic processand to calculate the quantities of interest
characterising the process (see Table 6).
The dynamics, or evolution of a stochastic process can be
represented throughthe specification of transition
probabilities:
P(2 | 1) : probability of finding 2, when 1 is given;P(3 | 1,2)
: probability of finding 3, when 1 and 2 are given;
P(4 | 1,2,3) : probability of finding 4, when 1,2 and 3 are
given;· · ·
Transition probabilities for a stochastic process are nothing
but the conditionalprobabilities suitable to predict the future
values of X(t) (i.e., xk+1,xk+2, · · · xk+l ,at tk+1, tk+2, · · ·
tk+l ), given the knowledge of the past (x1,x2, · · · xk , at t1,
t2, · · · tk ).The conditional pdf explicitly defined in terms of
the joint pdf can be written:
P(future︷!!!!!!!!!!!!!!!!!!!!!!!!!!!!︸︸!!!!!!!!!!!!!!!!!!!!!!!!!!!!︷
xk+1, tk+1; · · · ; xk+l , tk+l | x1, t1; · · · ; xk ,
tk︸!!!!!!!!!!!!!!︷︷!!!!!!!!!!!!!!︸past
) =P(x1, t1; · · · ; xk+l , tk+l )
P(x1, t1; · · · ; xk , tk ).
(25)assuming the time ordering t1 < t2 < · · · < tk
< tk+1 < · · · < tk+l .
By using transition probabilities and the product rule, the
following update equa-tions can be written:
P(1,2) = P(2 | 1)P(1) (26)P(1,2,3) = P(3 | 1,2)P(1,2)
P(1,2,3,4) = P(4 | 1,2,3)P(1,2,3)· · ·
The transition probabilities must satisfy the normalisation
condition∫
P(2 |1)dx2 = 1. Since P(2) =
∫P(1,2)dx1 and by using the update eqs. (27), the
following evolution (integral) equation holds
3 This gives an intuitive insight into the notion of P(1, 2) as
a density.
Abbiamo usato la notazione abbreviata di Kerson Huang
22 Table of content
Fig. 13 An ensemble of paths representing a stochastic process.
Each path represents the sequencein time of raw x coordinates from
different scanpaths recorded on the same picture (cfr. Fig. 12).We
can conceive the trajectories of such ensemble as realisations of a
stochastic process.
at times t1, t2, t3, · · ·. The setS whose elements are the
values of the process is calledstate space.
Thus, we can conceive the stochastic process X(t) as an ensemble
of paths asshown in Figure 3 or, more simply, as illustrated in
Figure 13: here, for concreteness,we show four series of only the
raw x coordinates of different eye-tracked subjectsgazing at
picture shown in Figure 3. Note that if we fix the time, e.g., t =
t1,then X(t1) boils down to a RV (vertical values); the same holds
if we choose onepath x and we (horizontally) consider the set of
values x1, x2, x3, · · · , at timest1, t2, t3, · · ·.
Use Huang’s abbreviation [50]
k ↔ {xk , tk }
To describe the process completely we need to know the
correlations in time, thatis the hierarchy of pdfs (but see Table
6, for a discussion of correlation):
P(1) : the 1 point pdf (17)P(1,2) : the 2 points pdf
P(1,2,3) : the 3 points pdf· · ·
up to the n point joint pdf. The n point joint pdf must imply
all the lower k pointpdfs, k < n:
P(1, · · · , k) =∫
P(1, · · · ,n)dxk+1dxk+2 · · · dxn (18)
Table of content 23
where P(1, · · · ,n)dxk+1dxk+2 · · · dxn stands for the joint
probability of finding thatx has a certain value
xk+1 < x ≤ xk+1 + dxk+1 at time tk+1xk+2 < x ≤ xk+2 +
dxk+2 at time tk+2
· · ·For instance, referring to Figure 13, we can calculate the
joint probability
P(1,2)dx1dx2 by following the vertical line at t1 and t2 and
find the fraction ofpaths for which x(t1) = x1 within tolerance dx1
and x(t2) = x2 within tolerancedx2, respectively3
Summing up, the joint probability density function, written
explicitly as
P(x1, t1; x2, t2; · · · ; xn , tn),
is all we need to fully characterise the statistical properties
of a stochastic processand to calculate the quantities of interest
characterising the process (see Table 6).
The dynamics, or evolution of a stochastic process can be
represented throughthe specification of transition
probabilities:
P(2 | 1) : probability of finding 2, when 1 is given;P(3 | 1,2)
: probability of finding 3, when 1 and 2 are given;
P(4 | 1,2,3) : probability of finding 4, when 1,2 and 3 are
given;· · ·
Transition probabilities for a stochastic process are nothing
but the conditionalprobabilities suitable to predict the future
values of X(t) (i.e., xk+1,xk+2, · · · xk+l ,at tk+1, tk+2, · · ·
tk+l ), given the knowledge of the past (x1,x2, · · · xk , at t1,
t2, · · · tk ).The conditional pdf explicitly defined in terms of
the joint pdf can be written:
P(future︷!!!!!!!!!!!!!!!!!!!!!!!!!!!!︸︸!!!!!!!!!!!!!!!!!!!!!!!!!!!!︷
xk+1, tk+1; · · · ; xk+l , tk+l | x1, t1; · · · ; xk ,
tk︸!!!!!!!!!!!!!!︷︷!!!!!!!!!!!!!!︸past
) =P(x1, t1; · · · ; xk+l , tk+l )
P(x1, t1; · · · ; xk , tk ).
(25)assuming the time ordering t1 < t2 < · · · < tk
< tk+1 < · · · < tk+l .
By using transition probabilities and the product rule, the
following update equa-tions can be written:
P(1,2) = P(2 | 1)P(1) (26)P(1,2,3) = P(3 | 1,2)P(1,2)
P(1,2,3,4) = P(4 | 1,2,3)P(1,2,3)· · ·
The transition probabilities must satisfy the normalisation
condition∫
P(2 |1)dx2 = 1. Since P(2) =
∫P(1,2)dx1 and by using the update eqs. (27), the
following evolution (integral) equation holds
3 This gives an intuitive insight into the notion of P(1, 2) as
a density.
Table of content 23
where P(1, · · · ,n)dxk+1dxk+2 · · · dxn stands for the joint
probability of finding thatx has a certain value
xk+1 < x ≤ xk+1 + dxk+1 at time tk+1xk+2 < x ≤ xk+2 +
dxk+2 at time tk+2
· · ·For instance, referring to Figure 13, we can calculate the
joint probability
P(1,2)dx1dx2 by following the vertical line at t1 and t2 and
find the fraction ofpaths for which x(t1) = x1 within tolerance dx1
and x(t2) = x2 within tolerancedx2, respectively3
Summing up, the joint probability density function, written
explicitly as
P(x1, t1; x2, t2; · · · ; xn , tn),
is all we need to fully characterise the statistical properties
of a stochastic processand to calculate the quantities of interest
characterising the process (see Table 6).
The dynamics, or evolution of a stochastic process can be
represented throughthe specification of transition
probabilities:
P(2 | 1) : probability of finding 2, when 1 is given;P(3 | 1,2)
: probability of finding 3, when 1 and 2 are given;
P(4 | 1,2,3) : probability of finding 4, when 1,2 and 3 are
given;· · ·
Transition probabilities for a stochastic process are nothing
but the conditionalprobabilities suitable to predict the future
values of X(t) (i.e., xk+1,xk+2, · · · xk+l ,at tk+1, tk+2, · · ·
tk+l ), given the knowledge of the past (x1,x2, · · · xk , at t1,
t2, · · · tk ).The conditional pdf explicitly defined in terms of
the joint pdf can be written:
P(future︷!!!!!!!!!!!!!!!!!!!!!!!!!!!!︸︸!!!!!!!!!!!!!!!!!!!!!!!!!!!!︷
xk+1, tk+1; · · · ; xk+l , tk+l | x1, t1; · · · ; xk ,
tk︸!!!!!!!!!!!!!!︷︷!!!!!!!!!!!!!!︸past
) =P(x1, t1; · · · ; xk+l , tk+l )
P(x1, t1; · · · ; xk , tk ).
(25)assuming the time ordering t1 < t2 < · · · < tk
< tk+1 < · · · < tk+l .
By using transition probabilities and the product rule, the
following update equa-tions can be written:
P(1,2) = P(2 | 1)P(1) (26)P(1,2,3) = P(3 | 1,2)P(1,2)
P(1,2,3,4) = P(4 | 1,2,3)P(1,2,3)· · ·
The transition probabilities must satisfy the normalisation
condition∫
P(2 |1)dx2 = 1. Since P(2) =
∫P(1,2)dx1 and by using the update eqs. (27), the
following evolution (integral) equation holds
3 This gives an intuitive insight into the notion of P(1, 2) as
a density.
Processi stocastici // Descrizione di sintesi di un processo
• Funzioni descrittive: non lo caratterizzano ma ne forniscono
una rappresentazione sintetica
• Dato il processo definiamo le funzioni
• media
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
-
Processi stocastici // Descrizione di sintesi di un processo
• Funzioni descrittive: media al tempo t1
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
In many practical situations, it is necessary to consider only
the first orsecond-order stationary processes. This can be further
simplified by introducing aterm of a wide-sense stationary process,
considering a single process, or jointlywide-sense stationary
processes. Wide-sense and jointly wide-sense processes aredefined
in Sect. 6.5.
6.4 Mean Value
A mean value considered in Chap. 2 for a single variable can
also be introduced fora process observed in a particular time
instant, as shown in Fig. 6.6. The process in atime instant t1 is a
random variable X1(t1) ¼ X1. Let the continuous range ofvariable X1
be divided into k elements Dx, such that they are so small that if
the
Fig. 6.6 Explanation ofmean value of process
6.4 Mean Value 379
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
realizzazioni nell’intervallo
realizzazioni nell’intervallo
realizzazioni nell’intervallo
realizzazioni nell’intervallo
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
Media empirica
Processi stocastici // Descrizione di sintesi di un processo
• Funzioni descrittive: media al tempo t1
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
In many practical situations, it is necessary to consider only
the first orsecond-order stationary processes. This can be further
simplified by introducing aterm of a wide-sense stationary process,
considering a single process, or jointlywide-sense stationary
processes. Wide-sense and jointly wide-sense processes aredefined
in Sect. 6.5.
6.4 Mean Value
A mean value considered in Chap. 2 for a single variable can
also be introduced fora process observed in a particular time
instant, as shown in Fig. 6.6. The process in atime instant t1 is a
random variable X1(t1) ¼ X1. Let the continuous range ofvariable X1
be divided into k elements Dx, such that they are so small that if
the
Fig. 6.6 Explanation ofmean value of process
6.4 Mean Value 379
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
Media empirica
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large and Dx very small, an empirical mean
value becomesindependent of an experiment and it approaches the
mean value of a process:
Xemp:av: ! Xðt1Þ ¼ mðt1Þ ¼ð1
&1
xfXðx; t1Þdx; as N ! 1; Dx ! dx; iDx ! x
(6.22)
In another time instant t2, it is possible for us to obtain a
different mean value:
mðt2Þ ¼ð1
&1
xfXðx; t2Þdx: (6.23)
In general, a mean value of the process depends on time:
mðtÞ ¼ XðtÞ ¼ E XðtÞf g ¼ð1
&1
xfXðx; tÞdx: (6.24)
380 6 Random Processes
-
Processi stocastici // Descrizione di sintesi di un processo
• Funzioni descrittive: in generale la media al tempo t è
P1: TIX/XYZ P2: ABCJWST172-c01 JWST172-Ruggeri March 3, 2012
15:53
4 BAYESIAN ANALYSIS OF STOCHASTIC PROCESS MODELS
we shall focus on stochastic processes indexed by time, and will
call T the spaceof times. When T is discrete, we shall say that the
process is in discrete time andwill denote time through n and
represent the process through {Xn, n = 0, 1, 2, . . .} .When T is
continuous, we shall say that the process is in continuous time. We
shallusually assume that T = [0,∞) in this case. The values adopted
by the process willbe called the states of the process and will
belong to the state space S. Again, S maybe either discrete or
continuous.
At least two visions of a stochastic process can be given.
First, for each ω ∈ ",we may rewrite Xt (ω) = gω(t) and we have a
function of t which is a realization ora sample function of the
stochastic process and describes a possible evolution of theprocess
through time. Second, for any given t, Xt is a random variable. To
completelydescribe the stochastic process, we need a joint
description of the family of randomvariables {Xt , t ∈ T }, not
just the individual random variables. To do this, we mayprovide a
description based on the joint distribution of the random variables
at anydiscrete subset of times, that is, for any {t1, . . . , tn}
with t1 < · · · < tn , and for any{x1, . . . , xn}, we
provide
P(Xt1 ≤ x1, . . . , Xtn ≤ xn
).
Appropriate consistency conditions over these finite-dimensional
families of dis-tributions will ensure the definition of the
stochastic process, via the Kolmogorovextension theorem, as in, for
example, Øksendal (2003).
Theorem 1.1: Let T ⊆ [0,∞). Suppose that, for any {t1, . . . ,
tn} with t1 < · · · < tn,the random variables Xt1 , . . . ,
Xtn satisfy the following consistency conditions:
1. For all permutations π of 1, . . . , n and x1, . . . , xn we
have that P(Xt1 ≤x1, . . . , Xtn ≤ xn) = P(Xtπ(1) ≤ xπ(1), . . . ,
Xtπ(n) ≤ xπ(n)).
2. For all x1, . . . , xn and tn+1, . . . , tn+m, we have P(Xt1
≤ x1, . . . , Xtn ≤ xn) =P(Xt1 ≤ x1, . . . , Xtn ≤ xn, Xtn+1 <
∞, . . . , Xtn+m < ∞).
Then, there exists a probability space (",F, P) and a stochastic
process Xt : T ×" → Rn having the families Xt1 , . . . , Xtn as
finite-dimensional distributions.
Clearly, the simplest case will hold when these random variables
are inde-pendent, but this is the territory of standard inference
and decision analysis.Stochastic processes adopt their special
characteristics when these variables aredependent.
Much as with moments for standard distributions, we shall use
some tools tosummarize a stochastic process. The most relevant are,
assuming all the involvedmoments exist:
Definition 1.2: For a given stochastic process {Xt , t ∈ T } the
mean function is
µX (t) = E[Xt ].
In many practical situations, it is necessary to consider only
the first orsecond-order stationary processes. This can be further
simplified by introducing aterm of a wide-sense stationary process,
considering a single process, or jointlywide-sense stationary
processes. Wide-sense and jointly wide-sense processes aredefined
in Sect. 6.5.
6.4 Mean Value
A mean value considered in Chap. 2 for a single variable can
also be introduced fora process observed in a particular time
instant, as shown in Fig. 6.6. The process in atime instant t1 is a
random variable X1(t1) ¼ X1. Let the continuous range ofvariable X1
be divided into k elements Dx, such that they are so small that if
the
Fig. 6.6 Explanation ofmean value of process
6.4 Mean Value 379
Media o valore atteso del processo
al tempo t
variable is in the interval Dxwe say that it is equal to Dx.
Similarly, if the variable isin the ith interval iDx we say that it
is equal to iDx.
Similarly, as in the case of a single variable, we first find an
empirical meanvalue, as a result of a performed experiment.
The experiment is repeated N times under the same conditions.
Process X(t) isobtained by assigning N realizations x(t) to each
experiment’s outcome. Considerall realizations in the time instant
t1, and suppose that we know the following:
N1 realizations are in the interval ½0;Dx"ðlike realization
xnþ1ðtÞ in Fig:6:6Þ;N2 realizations are in the interval ½Dx;
2Dx"ðlike realization xn&1ðtÞ in Fig:6:6Þ;. . .
Ni realizations are in the interval ½ði& 1ÞDx; iDx" ðlike
realization xnðtÞ in Fig:6:6Þ;. . .
Nk realizations are in the last interval [ðk & 1Dx;
kDxÞ":
An empirical mean value of the process in the time instant t1 is
equal to:
Xemp:avðt1Þ ¼N1Dxþ N22Dxþ ( ( ( þ NiiDxþ ( ( ( þ NkkDx
N
¼Xk
i¼1
NiNiDx ¼
Xk
i¼1
NiN
1
Dx
! "iDxDx: (6.21)
Because N is very large