Embed Size (px)
Citation preview
Departamento Nacional de Infraestrutura de Transportes – DNIT
Universidade Federal de Santa Catarina – UFSC
Laboratório de Transportes e Logística – LabTrans
Núcleo de Estudos de Tráfego – NET
Convênio 0056/2007 – Processo: 002829/2007-31
CGPERT/DNIT e LabTrans/UFSC
Elaborar diretrizes técnicas e parâmetros operacionais para que o DNIT execute
projetos de monitoramento de tráfego na Malha Rodoviária Federal
Produto Complementar
Restituidor de traçado as built de rodovias a partir de dados geográficos
Maio de 2009

FICHA TÉCNICA
DEPARTAMENTO NACIONAL DE INFRA-ESTRUTURA DE TRANSPORTES – DNIT
Luiz Antônio PagotDiretor Geral DNIT
Hideraldo Luiz CaronDiretor de Infraestrutura Rodoviária
Coordenação Geral de Operações Rodoviárias – CGPERT
Luiz Cláudio dos Santos VarejãoCoordenador Geral de Operações Rodoviárias
João Batista Berretta NetoCoordenador de Operações Rodoviárias
Instituto de Pesquisas Rodoviárias – IPR
Chequer Jabour ChequerGerente de Projeto
Elmar Pereira de MelloEngenheiro Responsável
Superintendência Regional/DNIT/SC
João José dos SantosSuperintendente Regional de Santa Catarina
Edemar MartinsSupervisor de Operações
Névio Antonio CarvalhoÁrea de Engenharia e Segurança de Trânsito
UNIVERSIDADE FEDERAL DE SANTA CATARINA – UFSC
Alvaro Toubes PrataReitor
Carlos Alberto Justo da SilvaVice Reitor
Edison da RosaDiretor do Centro Tecnológico
Antonio Edésio JunglesChefe do Departamento de Engenharia Civil
Laboratório de Transportes e Logística – LabTrans
Amir Mattar ValenteCoordenador Técnico do Convênio
Equipe técnica – NET
Valter Zanela TaniAlexandre Hering Coelho
Marco Túlio PimentaPaôla Tatiana Felippi Tomé
Ricardo ReibnitzRubem Queiroz

Restituidor de traçado as built de rodovias a partir de dados geográficos

Apresentação
Estando motivados com a constante melhoria e modernização da infra-estrutura do trans-
porte rodoviário brasileiro, bem como do seu sistema de gerenciamento, e tendo em vista
a importância de estudos relativos à operação das rodovias, o Departamento Nacional de
Infraestrutura de Transportes (DNIT) e a Universidade Federal de Santa Catarina (UFSC)
celebram o convênio 0056/2007 – Processo: 002829/2007-31. Este convênio conta com
a participação da Coordenação Geral de Operações (CGPERT) do DNIT para a execução
de dois diferentes projetos, contextualizados na avaliação de condições de tráfego e na
retomada do Plano Nacional de Contagem de Tráfego (PNCT).
A UFSC, por meio do Laboratório de Transportes e Logística do seu Departamento de
Engenharia Civil, se sente honrada em contribuir com a realização destes dois projetos de
tamanha influência no desenvolvimento do país. As três premissas da educação universi-
tária – o ensino, a pesquisa e a extensão – podem se beneficiar da experiência adquirida
com a realização dos projetos. A UFSC pode com isto aprimorar a mão de obra disponibili-
zada à sociedade para o desenvolvimento viário, visando melhorar a qualidade de vida dos
brasileiros.
Os dois projetos que constituem o convênio são os seguintes:
• Projeto I: Análise e Tratamento Estatístico dos Resultados de Contagens de Trá-
fego – quatro meses de duração;
• Projeto II: Projeto Trienal de Coleta de Tráfego – três anos de duração.
Adicionalmente às atividades previstas nos planos de trabalho destes projetos surgem
atividades complementares, que apoiam o seu desenvolvimento e aprimoramento. Destas
atividades resultam relatórios complementares.
i

O presente documento consiste em um relatório complementar dentro do convênio.
Está relacionado com a elaboração de um método para restituição de traçados as built de
rodovias a partir de seus dados geográficos, com a confecção de um programa para realizar
a restituição e com a apresentação de algumas aplicações.

Sumário
Apresentação i
Lista de Figuras viii
Lista de Tabelas ix
Lista de Abreviaturas x
1 Introdução 1
1.1 A relevância e a disponibilidade de dados geométricos sobre traçados de
rodovias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 O uso do GPS para o levantamento do traçado de rodovias . . . . . . . . . . 2
1.3 Os dados geográficos sobre as rodovias brasileiras . . . . . . . . . . . . . . 3
2 Objetivo 6
3 Método 7
3.1 Restituição do traçado horizontal . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.1 Modelagem das rodovias . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1.1.1 Modelos de tangentes e curvas circulares . . . . . . . . . . . 8
3.1.1.2 Relação entre pontos consecutivos . . . . . . . . . . . . . . 9
3.1.2 Segmentação de trechos e classificação entre tangentes e curvas cir-
culares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.3 Suavização do gráfico da curvatura . . . . . . . . . . . . . . . . . . . 12
3.1.4 Cálculo de raios e de ângulos internos de curvas circulares . . . . . . 12
iii

3.1.5 Cálculo de sinuosidade . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Restituição do traçado vertical . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.1 Tridimensionalização dos dados geográficos . . . . . . . . . . . . . . 15
3.2.2 Segmentação e cálculo de gradientes médios . . . . . . . . . . . . . . 16
4 Elaboração de um software para restituição as built 19
4.1 Entrada de dados e configurações . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2 Verificação da integridade dos dados . . . . . . . . . . . . . . . . . . . . . . . 22
4.3 Restituição: ajuste da segmentação . . . . . . . . . . . . . . . . . . . . . . . 22
4.4 Visualização de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4.1 Ambiente virtual para visualização em 3D . . . . . . . . . . . . . . . . 24
4.4.2 Visualização dos dados em tabelas . . . . . . . . . . . . . . . . . . . 26
5 Comparações de resultados com informações de projeto 29
5.0.3 Trecho na BR-116 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.0.4 Trecho na BR-282 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.0.5 Trecho na BR-470 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6 Exemplos de aplicações do restituidor 40
6.1 Cálculo da velocidade de operação pelo método HDM-VOC . . . . . . . . . . 40
6.2 Incorporação de informações geográficas diversas no ambiente de visualiza-
ção 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.3 Análise de segmentos críticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.4 Considerações sobre a implementação do restituidor no SGV . . . . . . . . . 47
7 Conclusões e perspectiva 49
Referências 51
A Licença do código utilizado para o ajustamento de círculos 53
B Pranchas de projetos de trechos rodoviários 55
iv

C Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ,
1994) 64
C.1 Velocidade dos veículos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
C.1.1 A velocidade em estado estável . . . . . . . . . . . . . . . . . . . . . 65
C.1.2 V DRIV Eu e V DRIV Ed . . . . . . . . . . . . . . . . . . . . . . . . . . 66
C.1.3 V BRAKEu e V BRAKEd . . . . . . . . . . . . . . . . . . . . . . . . . 69
C.1.4 V CURV E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
C.1.5 V ROUGH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
C.1.6 V DESIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
D Formulário para resolução de equações cúbicas 76
v

Lista de Figuras
3.1 Representação de pontos medidos com o GPS (na cor azul) e a relação entre
eles dada pelas distâncias d e pelos ângulos θ . . . . . . . . . . . . . . . . . 9
3.2 Exemplo de gráfico d× θ, para o trecho do PNV de código 110BBA0590 . . . 10
3.3 Exemplo de segmentação e classificação de elementos em um trecho de
rodovia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Suavização do gráfico da curvatura, para auxiliar na segmentação de trechos
com muito ruído . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.5 Dados geográficos de rodovias (linhas pretas) sobrepostos aos dados de
elevação SRTM (representação de altitude por cores). Tridimensionalização
pelo módulo v.drape do SIG GRASS. . . . . . . . . . . . . . . . . . . . . . . 17
4.1 Interface para entrada de parâmetros . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Interface para a verificação da integridade dos dados geográficos . . . . . . 23
4.3 Gráfico d × θ sendo mostrado pelo programa, auxiliando no ajuste da seg-
mentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.4 Resultado da restituição de um trecho sendo mostrado no ambiente virtual
para visualização 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.5 Interface mostrando os parâmetros resultantes da restituição em tabelas . . 28
5.1 Trecho para comparação na BR-116 . . . . . . . . . . . . . . . . . . . . . . . 31
vi

5.2 Regressão linear entre dados de projeto e obtidos com o restituidor: trecho
na BR-116 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Comparação em um trecho da BR-282 . . . . . . . . . . . . . . . . . . . . . . 34
5.4 Regressão linear entre dados de projeto e obtidos com o restituidor: trecho
na BR-282 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.5 Trecho para comparação na BR-470 . . . . . . . . . . . . . . . . . . . . . . . 37
5.6 Regressão linear entre dados de projeto e obtidos com o restituidor: trecho
na BR-470 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.7 Informações altimétricas obtidas com o restituidor para o trecho analisado na
BR-470 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.1 Interface para a configuração dos parâmetros para o cálculo da velocidade
de operação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.2 Interface mostrando o valor calculado para a velocidade de operação . . . . 43
6.3 Exemplo de mapa de velocidades por trechos do PNV, gerado para carro
pequeno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.4 Interface para seleção das informações visualizadas no ambiente 3D . . . . 45
6.5 Dados geográficos de elevação, de leitos de rios e de uso do solo inseridos
no ambiente de visualização 3D . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.6 Dados de acidentes da PRF mostrados ao longo do segmento de rodovia
analisado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
B.1 Projeto da rodovia BR-116: curvas 90 a 95 . . . . . . . . . . . . . . . . . . . 56
B.2 Projeto da rodovia BR-116: curva 96 . . . . . . . . . . . . . . . . . . . . . . . 57
B.3 Projeto da rodovia BR-282: curvas 13, 14 e 15 . . . . . . . . . . . . . . . . . 58
B.4 Projeto da rodovia BR-282: curvas 16 e 17 . . . . . . . . . . . . . . . . . . . 59
B.5 Projeto da rodovia BR-282: curvas 18, 19, 20 e 21 . . . . . . . . . . . . . . . 60
vii

B.6 Projeto da rodovia BR-282: curvas 22 e 23 . . . . . . . . . . . . . . . . . . . 61
B.7 Projeto da rodovia BR-282: curvas 24 e 25 . . . . . . . . . . . . . . . . . . . 62
B.8 Projeto da rodovia BR-470: curvas 5 a 9 . . . . . . . . . . . . . . . . . . . . . 63
viii

Lista de Tabelas
1.1 Origem dos dados geográficos disponibilizados pelo DNIT . . . . . . . . . . . 4
1.2 Densidade média dos dados geográficos disponibilizados pelo DNIT . . . . . 4
5.1 Comparação entre informações planimétricas: BR-116 . . . . . . . . . . . . . 32
5.2 Comparação entre informações altimétricas: BR-116 . . . . . . . . . . . . . . 33
5.3 Comparação entre informações planimétricas: BR-282 . . . . . . . . . . . . . 35
5.4 Comparação entre informações altimétricas: BR-282 . . . . . . . . . . . . . . 36
5.5 Comparação entre informações planimétricas: BR-470 . . . . . . . . . . . . . 38
C.1 Valores padrão de características de veículos para predição de velocidade . 75
ix

Lista de Abreviaturas
CGPERT . . . . . . . . Coordenação Geral de Operações – DNIT
DNIT . . . . . . . . . . . . Departamento Nacional de Infraestrutura de Transportes
GPS . . . . . . . . . . . . . Global Positioning System
HDM . . . . . . . . . . . . Highway Development and Management
HDM-VOC . . . . . . . HDM – Vehicle Operating Cost Model
IRI . . . . . . . . . . . . . . International Roughness Index
LabTrans . . . . . . . . Laboratório de Transportes e Logística – UFSC
MDE . . . . . . . . . . . . Modelo Digital de Elevação
NET . . . . . . . . . . . . . Núcleo de Estudos de Tráfego – LabTrans
OpenGL . . . . . . . . . Open Graphics Library
PNCT . . . . . . . . . . . Plano Nacional de Contagem de Tráfego
PNV . . . . . . . . . . . . . Plano Nacional de Viação
SGV . . . . . . . . . . . . . Sistema Georreferenciado de Informações Viárias – DNIT/UFSC-LabTrans
SRL . . . . . . . . . . . . . Sistema de Referência Linear
SRTM . . . . . . . . . . . Shuttle Radar Topography Mission
UFSC . . . . . . . . . . . Universidade Federal de Santa Catarina
x

Seção 1
Introdução
Considerando a dificuldade de serem obtidas informações geométricas sobre o traçado
das rodovias federais brasileiras de forma sistemática e considerando que se encontram
disponíveis dados geográficos sobre o seu traçado obtidos por GPS, se torna interessante
investigar a possibilidade de restituir traçados a partir dos dados geográficos.
Este documento apresenta os resultados desta investigação, realizada no LabTrans,
que resultou na produção de um software protótipo para a restituição de traçado as built de
rodovias.
1.1 A relevância e a disponibilidade de dados geométricos sobre tra-
çados de rodovias
Nas nas áreas de operação e planejamento de rodovias é muito útil que estejam disponíveis
dados geométricos sobre elas, que descrevam o seu traçado longitudinal e suas seções
transversais.
Para a realização de estudos de predição de velocidades de operação e de custos
operacionais utilizando o Highway Development and Management (HDM), por exemplo, são
necessárias informações sobre sinuosidade horizontal, gradientes verticais de rampas, lar-
gura da pista e superelevação das rodovias envolvidas. Em estudos que envolvam a homo-
geinização de trechos, o conhecimento dos dados geométricos dos traçados das rodovias
1

Seção 1. Introdução 2
auxilia na classificação por sinuosidade horizontal e por grau de ondulação vertical. Em
estudos de segurança, o conhecimento geométrico auxilia na análise de raios de curvas
horizontais, como também na combinação entre curvas horizontais e verticais. Em estudos
sobre sinalização de rodovias, o conhecimento do traçado é importante para a avaliação de
distâncias de visibilidade, por exemplo.
Tais informações geométricas têm origem em projetos. Estando disponíveis os pro-
jetos das rodovias, a sinuosidade pode ser determinada, por exemplo, pela somatória dos
ângulos internos das curvas horizontais, enquanto que valores de gradientes verticais po-
dem ser obtidos pelas diferenças relativas entre distância percorrida e deslocamento na
vertical.
Porém, a obtenção das informações de projeto para toda a malha rodoviária federal
brasileira, de forma sistemática, é difícil. Para serem realizados estudos que envolvam a
malha como um todo, como em trabalhos de homogeinização de trechos ou priorização de
intervenções, deve estar disponível um banco de dados que possa fornecer as informações
geométricas necessárias, de todos os trechos.
Se as informações de projeto estivesse organizadas de forma sistemática, ainda res-
taria o fato de que as geometrias traçadas nos projetos podem não estar de acordo com os
traçados as built.
1.2 O uso do GPS para o levantamento do traçado de rodovias
O uso de aparelhos de GPS se tornou muito difundido e acessível. Com o uso de sistemas
GPS é possível medir com precisão a posição de pontos sobre a superfície da Terra.
Na área de infraestrutura de transportes o aparelho de GPS pode ser utilizado, por
exemplo, para medir o traçado de vias, além de pontos de interesse sobre ela ou no seu
entorno. Sendo acoplado um aparelho em um veículo que a percorre, este pode realizar a
medição do traçado da via determinando a posição de pontos com uma frequência que pode
chegar a 1Hz1. Tomando com exemplo esta frequência de 1Hz e para realizar uma medição1As frequências para determinação de pontos em aparelhos de GPS, bem como a precisão que pode ser
obtida da determinação, variam com as propriedades do aparelho e com a técnica de medição utilizada.
DNIT • LabTrans – UFSC Produto Complementar

Seção 1. Introdução 3
densa de pontos sobre a via com espaçamento médio de 10m, o veículo percorreria a via
com uma velocidade média de 36km/h.
Trazendo este exemplo para a malha rodoviária federal brasileira, que possui extensão
total de aproximadamente 120.000km o veículo a 36km/h necessitaria de aproximadamente
4,6 meses ininterruptos para realizar a medição com 10m de espaçamento.
Uma tal tarefa de medição de pontos sobre rodovias com grande densidade não só é
viável como já foi realizada pelo Departamento Nacional de Infraestrutura de Transportes
(DNIT) entre os anos de 2006 e 2008, sendo obtido um espaçamento médio de aproxima-
damente 20m entre pontos, como será visto na Seção 1.3.
Esta densidade de pontos na descrição de traçado de rodovias pode ser explorada
para algo mais do que a simples geração de mapas, ou o cruzamento com outros dados
geográficos. Pode ser imaginada a utilização de tais dados para auxiliar na obtenção de
informações geométricas da rodovia, como distinção entre retas e curvas horizontais, e até
mesmo a restituição de parâmetros geométricos de curvas, como raio e ângulo central.
1.3 Os dados geográficos sobre as rodovias brasileiras
No terceiro trimestre do ano de 2008 foram cedidos ao LabTrans pelo DNIT dados geográ-
ficos sobre o traçado horizontal da malha rodoviária federal brasileira. O conteúdo destes
dados passou no LabTrans por um processo de beneficiamento, como se encontra rela-
tado no produto complementar do Projeto Trienal de Coleta de Tráfego de março de 2009
(CGPERT/DNIT – LabTrans/UFSC, 2009), resultando em um Sistema de Referência Linear
(SRL) para o Plano Nacional de Viação (PNV).
Estes dados geográficos cedidos pelo DNIT tem origem em diferentes fontes. Entre
dados provenientes de mapas de 1998 a 2007 e traçados empíricos, se encontram dados
obtidos por GPS. Como mostra a Tabela 1.1, 77,5% das rodovias federais possuem o seu
traçado descrito por medições de GPS, que foi acoplado a uma viatura que percorreu a
malha.
Nestes dados de GPS pode ser constatada uma considerável densidade de pontos
que formam as poligonais que descrevem o traçado das rodovias, em comparação com
DNIT • LabTrans – UFSC Produto Complementar

Seção 1. Introdução 4
Tabela 1.1: Origem dos dados geográficos disponibilizados pelo DNIT
OrigemRodovias estaduais Rodovias federais
Extensão (km) Porcentagem (%) Extensão (km) Porcentagem (%)
GPS 1.834,68 0,7 64.269,00 77,5
Mapa DER 1998 10.873,50 4,4 59,37 0,1
Mapa DER 2005 31.537,60 12,7 840,98 1,0
Mapa DER 2006 69.568,20 28,1 1.748,21 2,1
Mapa DER 2007 23.724,80 9,6 551,17 0,7
Mapa DNIT 2002 77.752,20 31,4 14.048,30 16,9
Mapa DNIT 2004 26.947,00 10,9 1.342,88 1,6
Traçado empírico 0,00 0,0 54,90 0,1
Não especificada 5.153,31 2,1 0,00 0,0
TOTAL 247.391,29 100,0 82.914,80 100,0
os demais dados, como mostra a Tabela 1.2. Estando disponíveis estes dados se torna
interessante o estudo da possibilidade de serem obtidas, a partir deles, as informações
aproximadas de geometria as built das rodovias.
Tabela 1.2: Densidade média dos dados geográficos disponibilizados pelo DNIT
Fonte Pontos por km Espaçamento médio entre pontos (m)
GPS 59,41 16,83
Mapa DER 1998 1,15 873,16
Mapa DER 2005 8,84 113,07
Mapa DER 2006 18,08 55,30
Mapa DER 2007 2,55 392,31
Mapa DNIT 2002 0,48 2103,97
Mapa DNIT 2004 0,24 4249,00
Traçado empírico 28,13 35,56
Não especificada 56,74 17,62
Na sequência deste relatório consta a descrição do método utilizado para a restituição
do traçado geométrico as built de rodovias, que utiliza como dados de entrada os dados
geográficos cedidos pelo DNIT, beneficiados no LabTrans (Seção 3). A implementação
do método resultou em um software que é apresentado na Seção 4. Na Seção 5 são
DNIT • LabTrans – UFSC Produto Complementar

Seção 1. Introdução 5
comparados resultados obtidos com o uso do software com informações de projetos de
alguns trechos de rodovias. Exemplos de aplicações dos dados obtidos com o software são
apresentados na Seção 6.
DNIT • LabTrans – UFSC Produto Complementar

Seção 2
Objetivo
O objetivo deste trabalho é a definição de um método para realizar a restituição do traçado
as built de rodovias federais brasileiras a partir de dados geográficos medidos com GPS
sobre elas, e a consequente elaboração de um software para automatizar a tarefa. Também
é buscado demonstrar aplicações dos dados obtidos pela restituição.
6

Seção 3
Método
O método para restituição do traçado as built de rodovias implica no tratamento dos elemen-
tos horizontais e verticais em separado, resultando em listagens de parâmetros específicas
para cada uma das duas situações. Isto não impossibilita, porém, que sejam posterior-
mente feitas análises de traçado levando em conta as duas situações em conjunto, pois
tudo é atrelado às quilometragens constantes nas definições dos trechos do PNV.
Como consta no relatório sobre o beneficiamento dos dados geográficos fornecidos
pelo DNIT (CGPERT/DNIT – LabTrans/UFSC, 2009), as quilometragens constantes nestes
dados são as especificadas pela elação de trechos do ano de 2008.
Uma vez restituídos os traçados horizontal e vertical, tornam-se disponíveis parâme-
tros sobre as rodovias que podem auxiliar em diferentes análises, como é mostrado adiante
na Seção 6.
3.1 Restituição do traçado horizontal
Buscando na literatura maneiras de restituir a geometria as built de rodovias a partir de pon-
tos medidos com GPS sobre elas foi encontrado o trabalho de WORRAL; NEBOT (2007),
da Universidade de Sydney na Austrália. Estes autores descrevem um método automático
para a obtenção de mapas de rodovias a partir de uma grande quantidade de dados de
GPS comprimidos.
7

Seção 3. Método 8
O trabalho desenvolvido pelos autores e o conteúdo no presente relatório diferenciam
na quantidade de dados de GPS disponíveis e no modo como eles são obtidos. Enquanto
que para eles várias viaturas coletaram pontos em cada uma das faixas da rodovia, resul-
tando em uma nuvem de pontos em cada faixa, para o presente trabalho se encontram
disponível dados coletados em somente uma faixa e por uma só viatura. Apesar disso,
o restante da modelagem para rodovias e do método para a segmentação e cálculo de
raios de curvas circulares pode ser utilizado na mesma forma e se encontram descritos na
seqüência.
3.1.1 Modelagem das rodovias
A modelagem empregada descreve as rodovias como sendo constituídas por tangentes e
curvas circulares, que são formas de descrição mais simples e podem ser reconhecidas
com mais facilidade nos dados geográficos.
Curvas de transição, que interligam normalmente trechos em tangentes com trechos
em curvas circulares são de obtenção mais difícil a partir destes dados, pois se torna ne-
cessário ajustamento de clotóides (ou espirais de Cornu1).
3.1.1.1 Modelos de tangentes e curvas circulares
Os modelos utilizados para descrever tangentes e curvas circulares são dados respecti-
vamente pelas equações 3.1 e 3.2, de acordo com o que consta em WORRAL; NEBOT
(2007).
tangente = {x1, y1, x2, y2} (3.1)
curva = {xc, yc, r, θ1, θ2} (3.2)
onde:
x1 e y1, x2 e y2: descrevem as coordenadas dos pontos de início e de fim da tangente;1Espiral criada por Marie Alfred Cornu como um nomograma para computação de difrações em ciências e
engenharia.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 9
xc e yc: descrevem o ponto do centro da curva;
r: é o raio da curva;
θ1 e θ2: descrevem o intervalo angular da curva.
Estes são os parâmetros que descrevem os elementos, a partir dos quais pode ser
reconstruído o desenho dos traçados. São de determinação possível pela restituição e são
descritos em função das suas quilometragens:
• retas: quilômetro inicial e quilômetro final;
• curvas circulares: quilômetro inicial, quilômetro final e raio, com o consequente cál-
culo do ângulo central.
3.1.1.2 Relação entre pontos consecutivos
Para analisar algebricamente os dados obtidos com o auxílio do GPS é estabelecida a
relação entre pontos consecutivos tomando como base a distância geográfica d entre eles
e os ângulos θ formados entre o alinhamento que os unem e o norte, como mostra a Figura
3.1. Partindo do ponto de início de cada registro geométrico formado por n pontos é possível
determinar desta forma d e θ de cada ponto i até o ponto n−1, com o auxílio respectivamente
das equações 3.3 e 3.4.
Figura 3.1: Representação de pontos medidos com o GPS (na cor azul) e a relação entre eles dada
pelas distâncias d e pelos ângulos θ
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 10
di =√
(xi+1 − xi)2 + (yi+1 − yi)2 (3.3)
θi = arcsen
(xi+1 − xi√
(xi+1 − xi)2 + (yi+1 − yi)2
)= arcsen
(xi+1 − xi
di
)(3.4)
De posse de d e θ de cada ponto dentro de um trecho de rodovia, é possível construir
um gráfico d × θ. Para exemplificar este gráfico tomamos como exemplo os dados geo-
gráficos sobre o trecho do PNV de código 110BBA0590, representado na Figura 3.2(a). O
gráfico correspondente está ilustrado na Figura 3.2(b), onde d aparece como a quilometra-
gem do trecho.
(a) Representação dos dados geográ-
ficos do trecho. Ponto inicial de qui-
lometragem representado em verde e
ponto final em vermelho.
(b) Gráfico d× θ correspondente para o trecho
Figura 3.2: Exemplo de gráfico d× θ, para o trecho do PNV de código 110BBA0590
Analisando a Figura 3.2 é possível perceber que os trechos em tangente no traçado
do trecho geram patamares horizontais no gráfico e que trechos em curvas geram aproxi-
madamente retas inclinadas. Maiores inclinações no gráfico indicam curvas com menores
raios no trecho.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 11
3.1.2 Segmentação de trechos e classificação entre tangentes e curvas circulares
Seguindo a idéia para a segmentação de trechos em tangente ou curvas circulares a partir
de dados de GPS apresentada em WORRAL; NEBOT (2007), a análise é feita sobre os
gráficos d× θ descritos na Seção 3.1.1.2. A segmentação consiste em identificar os pontos
de início e de fim de linhas aproximadamente retas no gráfico d × θ. Para realizar a tarefa
foi reproduzido o procedimento explicado em WORRAL; NEBOT (2007), que consiste em
duas etapas:
1. O primeiro ponto do trecho é tomado como ponto de início de uma reta e o ponto de
fim é movido iterativamente adiante. Para cada iteração é criada uma reta que une os
pontos de início e de fim e é feita a somatória do quadrado do desvio de cada ponto
para a reta. Quando o valor resultante é maior do que um valor limite grosseiro, a
iteração é interrompida sendo definido o ponto de fim da reta.
2. O ponto de fim da reta é movido de volta em direção ao ponto de início iterativamente,
sendo novamente computados valores de somatória de quadrados dos desvios, até
que o valor obtido seja inferior a um valor limite mais fino.
O resultado da segmentação por estes passos é mostrado na Figura 3.3 para o exem-
plo do trecho do PNV de código 110BBA0590. Na Figura 3.3(a) é representado novamente
o gráfico da Figura 3.2(b), porém com retas verticais que indicam os pontos limites dos
elementos encontrados (retas e curvas circulares). Ao final da segmentação, os segmentos
são classificados entre tangentes ou curvas simplesmente pela verificação da sua incli-
nação. Pode ser dado um valor limite para esta inclinação, acima do qual os pontos do
segmento descrevem uma curva.
A Figura 3.3(b) mostra o trecho agora com a sua segmentação assinalada. Os pontos
na cor laranja indicam os limites dos elementos e estão relacionados às retas verticais do
gráfico d × θ. Os elementos classificados como curvas estão assinalados na figura na cor
vermelha.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 12
(a) Gráfico d× θ com retas verticais na cor vermelha assinalando
os pontos limites dos elementos
(b) Trecho segmentado e classificado
pela análise do gráfico d× θ
Figura 3.3: Exemplo de segmentação e classificação de elementos em um trecho de rodovia
3.1.3 Suavização do gráfico da curvatura
Em alguns casos, o nível de ruído nos dados é excessivamente grande e dificulta a aplica-
ção do procedimento de segmentação. Para contornar este problema os dados podem ser
suavizados ao ser aplicado um filtro de média. Neste filtro o valor de cada ponto analisado
é comparado com o valor médio dos n pontos em sua proximidade. Na Figura 3.4 são mos-
trados os gráficos d× θ com os dados originais e com os dados suavizados, para o exemplo
do trecho do PNV de código 116BPE0470.
A sinuosidade horizontal deste trecho calculada utilizando produtos vetoriais direta-
mente sobre os dados originais é de 261,25◦/km. A restituição do trecho sem a utilização
da suavização gera uma sinuosidade horizontal de 84,94◦/km, enquanto que com a suavi-
zação a sinuosidade baixa para 21,76◦/km (ver cálculo de sinuosidade na Seção 3.1.5).
3.1.4 Cálculo de raios e de ângulos internos de curvas circulares
Ao final da segmentação, a geometria dos segmentos em tangente já se encontra descrita,
uma vez que se tem registrados os pontos de início e de fim de cada um deles e estes estão
relacionados com valores de quilometragem.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 13
Figura 3.4: Suavização do gráfico da curvatura, para auxiliar na segmentação de trechos com muito
ruído
Para a determinação dos parâmetros que descrevem os segmentos em curva circu-
lar, é necessária a aplicação de um ajustamento por mínimos quadrados não linear. De
acordo com WORRAL; NEBOT (2007) este ajustamento implica em encontrar uma função
objetiva que deve ser minimizada, indicando a qualidade do ajustamento. Na Equação 3.5
é mostrada a função objetiva J e o seu conjunto de derivadas para solução iterativa pelo
algoritmo de Levenberg-Marquardt, como consta em SHAKARJI (1998) apud WORRAL;
NEBOT (2007).
J(x, y, r) =∑(√
(xi − x)2 + (yi − y)2 − r)2
(3.5)
∂di∂x
= −(xi − x)/(di + r)
∂di∂y
= −(yi − y)/(di + r)
∂di∂r
= −1
Seguindo o que trazem WORRAL; NEBOT (2007) o algoritmo de Levenberg-Marquardt
é utilizado para minimizar a função objetiva e requer uma boa estimativa inicial dos valores
do centro e do raio do círculo. Os valores tomados para estes valores iniciais são obtidos
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 14
tomando o primeiro e o último pontos de cada segmento em curva e encontrando o ponto
aonde as suas perpendiculares se intersectam.
Para a aplicação do ajustamento utilizando o algoritmo de Levenberg-Marquardt foi
utilizada neste trabalho a implementação preparada e disponibilizada por MAISONOBE
(2007), cuja licença para uso se encontra no Anexo A.
Ao algoritmo são dadas as coordenadas geográficas dos pontos que pertencem à
curva e as coordenadas da estimativa inicial do seu centro. São retornados o valor do raio
e as coordenadas corrigidas do ponto do centro da circunferência. De posse do valor do
raio e dos valores de quilometragem dos pontos de início e de fim da curva é calculado o
ângulo central α em graus pela Equação 3.6
α =360× (kmf − kmi)
2πr(3.6)
com r em quilômetros.
3.1.5 Cálculo de sinuosidade
A sinuosidade horizontal SH de rodovias é dada em ◦/km (graus por quilômetro) e indica
a variação acumulada da direção ao ser percorrido um trecho de rodovia. Ela é calculada
dividindo a somatória dos ângulos centrais α das curvas dentro de um trecho de rodovia
pela extensão total do trecho l, como mostra a Equação 3.7.
SH =
∑αil
(3.7)
3.2 Restituição do traçado vertical
Os dados geográficos obtidos junto ao DNIT são constituídos por coordenadas planimétri-
cas. Não há informação de altitude embutida nestes dados. Porém, é possível gerar dados
sintéticos de elevação, tomados a partir de um Modelo Digital de Elevação (MDE).
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 15
A partir dos dados tridimensionalizados das rodovias, é possível segmentar trechos
em rampas ascendentes e descendentes, monitorando as variações de altitude ao longo da
sua extensão.
3.2.1 Tridimensionalização dos dados geográficos
Sendo tomados dados de altitude de um MDE como sendo dados de altitude nos eixos de
rodovias é feita uma aproximação. Os erros cometidos pelo uso desta aproximação não
são controlados neste trabalho, pois não se dispõe de dados para isto. Porém, estando
disponíveis informações altimétricas sobre os eixos das rodovias, medidos por GPS por
exemplo, é possível substituir estas informações sem alteração do método.
O Consultative Group on International Agricultural Research - Consortium for Spatial
Information (CGIAR-CSI) disponibiliza dados digitais de elevação para todo o globo terres-
tre, produzidos originalmente pela NASA no programa Shuttle Radar Topography Mission
(SRTM – http://srtm.csi.cgiar.org/). Os dados possuem resolução de 90m na su-
perfície da Terra, ou 3" (ou ainda 0.0008098384907◦) em coordenadas geográficas, e são
disponibilizados em arquivos GeoTiff (formato raster) formando um mosaico com partes que
cobrem 5◦×5◦. O sistema de referência utilizado é o WGS84.
Para cobrir todo o território brasileiro são necessários 48 destes arquivos, obtidos na
página do CGIAR-CSI, cujo conteúdo foi organizado em um SIG. Dados vetoriais com os
limites do território brasileiro organizados pelo IBGE2, foram utilizados para delimitar a área.
Os 48 arquivos são listados a seguir.
srtm_22_12.TIF
srtm_23_14.TIF
srtm_24_15.TIF
srtm_25_15.TIF
srtm_26_13.TIF
srtm_26_19.TIF
srtm_27_17.TIF
srtm_28_17.TIF
srtm_22_13.TIF
srtm_23_15.TIF
srtm_24_16.TIF
srtm_25_16.TIF
srtm_26_14.TIF
srtm_27_12.TIF
srtm_27_18.TIF
srtm_29_13.TIF
srtm_22_14.TIF
srtm_24_11.TIF
srtm_25_11.TIF
srtm_25_17.TIF
srtm_26_15.TIF
srtm_27_13.TIF
srtm_28_13.TIF
srtm_29_14.TIF
srtm_22_15.TIF
srtm_24_12.TIF
srtm_25_12.TIF
srtm_25_18.TIF
srtm_26_16.TIF
srtm_27_14.TIF
srtm_28_14.TIF
srtm_29_15.TIF
srtm_23_12.TIF
srtm_24_13.TIF
srtm_25_13.TIF
srtm_25_19.TIF
srtm_26_17.TIF
srtm_27_15.TIF
srtm_28_15.TIF
srtm_29_16.TIF
srtm_23_13.TIF
srtm_24_14.TIF
srtm_25_14.TIF
srtm_26_12.TIF
srtm_26_18.TIF
srtm_27_16.TIF
srtm_28_16.TIF
srtm_30_14.TIF
2ftp://geoftp.ibge.gov.br/mapas/malhas_digitais/municipio_2007
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 16
A tridimensionalização dos dados geográficos de rodovias é feita com o auxílio de
uma funcionalidade específica de SIG. Para cada ponto das poligonais que descrevem as
rodovias é consultado o valor de altitude no local e este é atribuído como a componente Z
da sua coordenada. Neste trabalho foi utilizado para isso o módulo v.drape do SIG GRASS
(versão 6.4, http://grass.itc.it). Este módulo permite que a altitude dos pontos seja
determinada por três métodos: vizinho mais próximo, interpolação bilinear e interpolação
por convolução cúbica. Foi utilizado o método da convolução cúbica.
A interpolação faz com que pontos que incidam no interior de um pixel nos dados de
elevação (90 metros) não tenham todos a mesma altitude atribuída. Há uma variação entre
elas, de acordo com a proximidade e com o valor dos pixels vizinhos. Este efeito suaviza as
altitudes atribuídas aos pontos.
Para aproveitar melhor este efeito de suavização e para acompanhar melhor a con-
formação da elevação foi efetuado, antes da aplicação do módulo v.drape, um processa-
mento nos dados geográficos de rodovias para que não houvesse espaçamento maior que
30 metros entre pontos que formam as poligonais. Isto é feito pela inserção automática de
novos pontos, caso a distância entre eles ultrapassasse os 30 metros. Para isso foi criada
uma rotina na linguagem Java, apoiada em funções do banco de dados espacial PostGIS
(http://postgis.refractions.net).
A Figura 3.5 mostra os dados geográficos de rodovias sobrepostos aos dados de
elevação no ambiente do SIG GRASS.
3.2.2 Segmentação e cálculo de gradientes médios
A segmentação de um trecho de rodovia ocorre na sequência da sua quilometragem. Par-
tindo do ponto de início da poligonal que o representa, são computadas as variações na
altitude dos pontos que o formam (com espaçamento máximo de 30 metros, como foi colo-
cado na Seção 3.2.1). Se a variação inicia com valor positivo, caracterizando uma rampa
ascendente no sentido da quilometragem, é feito o monitoramento desta variação até que
ela se torne negativa, caracterizando um ponto limite. Procede-se então da mesma forma
até que a variação mude novamente para o sinal positivo, caracterizando um novo ponto
limite.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 17
Figura 3.5: Dados geográficos de rodovias (linhas pretas) sobrepostos aos dados de elevação
SRTM (representação de altitude por cores). Tridimensionalização pelo módulo v.drape do SIG
GRASS.
Segmentado o trecho, para cada segmento i de extensão li é calculado o seu valor
do gradiente médio gi pela variação de altitude no segmento no sentido da quilometragem
∆hi, utilizando a Equação 3.83.
gi =∆hili
(3.8)
A rampa média gi do segmento pode assumir valores positivos e negativos, conforme
o valor de ∆hi.
O gradiente médio positivo g+, o gradiente médio negativo g− e a proporção de subidas3A determinação de valores representativos para a altimetria de trechos de rodovias pode seguir diferen-
tes formulações. A aqui apresentada é a utilizada no modelo HDM-VOC para predição de velocidades de
operação, apresentado na Seção 6.1.
DNIT • LabTrans – UFSC Produto Complementar

Seção 3. Método 18
ps do trecho restituído como um todo são calculados a partir de todos os segmentos i do
trecho, respectivamente pelas Equações 3.9, 3.10 e 3.11.
g+ =
∑∆h+
i∑l+i
(3.9)
g− =
∑∆h−i∑l−i
(3.10)
ps =
∑l+i∑
l+i +∑l−i
(3.11)
DNIT • LabTrans – UFSC Produto Complementar

Seção 4
Elaboração de um software para
restituição as built
O método apresentado na Seção 3 foi implementado no LabTrans, sendo gerado um soft-
ware: o "Restituidor as built". Foram utilizados recursos da linguagem Java, da biblioteca
gráfica OpenGL e do banco de dados PostGIS para implementar a organização dos dados,
o processo de segmentação, o cálculo dos parâmetros horizontais e verticais e a visualiza-
ção dos dados e dos resultados.
O software foi preparado para analisar trechos quaisquer de rodovias, com base nos
dados geográficos sobre as rodovias federais cedidos pelo DNIT e beneficiados no Lab-
Trans (ver Seção 1.3). O beneficiamento realizado no LabTrans (CGPERT/DNIT – Lab-
Trans/UFSC, 2009) organizou os dados como um SRL, fazendo com que os dados geográ-
ficos estejam condizentes com as características dos trechos do PNV, incluindo orientação.
Isto torna possível realizar análises em rodovias de forma contínua, sendo somente espe-
cificadas as quilometragens limites.
Os dados necessários foram armazenados no banco de dados PostgreSQL com o
módulo espacial PostGIS. São utilizadas a camada de dados geográficos das rodovias e os
dados alfanuméricos sobre os trechos do PNV de acordo com a listagem de 2008.
19

Seção 4. Elaboração de um software para restituição as built 20
4.1 Entrada de dados e configurações
Para auxiliar na escolha dos dados, no ajuste dos parâmetros envolvidos no método foi
criada uma interface gráfica, mostrada na Figura 4.1. As configurações abrangidas são as
seguintes:
• Parâmetros da conexão: possibilita escolher o nome do computador no qual se en-
contra o banco de dados (host) e o nome do usuário.
• Escolha do trecho: possibilita a escolha pela restituição de algum trecho do PNV
como um todo ou a especificação de um trecho qualquer, sendo dados a unidade da
federação, a sigla da rodovia e os quilômetros inicial e final. É dada a opção ainda para
a realização da restituição no sentido direto da quilometragem ou no sentido inverso.
• Segmentação: permite configurar:
◦ limites para extensão mínima de um segmento e para o raio máximo de curva
circular na segmentação horizontal;
◦ valores limites grosseiro e fino para o somatório dos quadrados dos desvios na
segmentação horizontal (ver Seção 3.1.2);
◦ opção para aplicar a suavização (ver Seção 3.1.3);
◦ diferença limite entre o valor do ponto e o valor da média na suavização;
◦ número de vizinhos para o cálculo do valor da média na suavização;
• Ajuste de circunferências: possibilita a entrada de parâmetros para o algoritmo de
Levenberg-Marquardt (ver Seção 3.1.4).
• Decisão entre reta e curva: permite especificar o valor limite de inclinação no gráfico
d× θ acima do qual o segmento é classificado como curva (ver Seção 3.1.2).
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 21
Figura 4.1: Interface para entrada de parâmetros
Esta interface oferece também a barra de menu, com as seguintes opções:
• Arquivo
◦ Ler arquivo de configuração: permite que sejam lidas configurações para todos
os campos da interface a partir de um arquivo.
◦ Gravar arquivo de configuração: permite que todas as configurações da inter-
face sejam gravadas em um arquivo.
◦ Sair.
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 22
• Visualização
◦ Camadas (ver Seção 6.2)
• Ferramentas
◦ Velocidade de operação (ver Seção 6.1)
4.2 Verificação da integridade dos dados
Como foi colocado no início da Seção 3, a restituição dos trechos de rodovias é atrelada à
sua quilometragem. O beneficiamento dos dados geográficos realizados no LabTrans con-
sistiu no mapeamento dos trechos do PNV sobre dados geográficos de rodovias a partir
dos valores de quilometragem presentes na listagem de trechos de 2008. Nos casos onde
as poligonais nos dados geográficos descreviam em mais detalhes os traçados das rodo-
vias, a relação geo/alfa entre a extensão obtida nos dados geográficos e a extensão obtida
nos dados alfanuméricos se aproximou de 1. Porém, esta relação varia, de acordo com a
configuração dos dados geométricos disponíveis.
Para conhecer a relação geo/alfa dos dados escolhidos para a restituição, que reflete
a integridade dos dados geográficos, foi elaborada uma interface gráfica, mostrada na Fi-
gura 4.2. Esta interface é mostrada quando é acionado o botão "Verificar integridade", na
interface para configuração mostrada na Figura 4.1. Ela é formada por uma tabela que traz
informações a respeito dos dados, onde a relação geo/alfa é dada em termos de porcenta-
gem no campo "%map".
No caso de ser escolhida a restituição de um trecho de rodovia por valores de quilome-
tragem, a tabela é populada com as informações sobre todos os trechos do PNV envolvidos.
4.3 Restituição: ajuste da segmentação
Ao ser acionado o botão "Processar" na interface de configuração mostrada na Figura 4.1, o
programa realiza automaticamente todo o processo envolvido na restituição: gera o gráfico
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 23
Figura 4.2: Interface para a verificação da integridade dos dados geográficos
d×θ segmentando o trecho e calcula os parâmetros geométricos. O programa mostra então
o gráfico d× θ na interface ilustrada na Figura 4.3.
O usuário do programa pode verificar a segmentação realizada e, conforme a neces-
sidade, aplicar valores mais restritivos ou mais tolerantes para as configurações envolvidas.
Simultaneamente, o usuário pode verificar o resultado da restituição sobre o trecho de ro-
dovia, com o auxílio do ambiente virtual mostrado na Figura 4.4.
Figura 4.3: Gráfico d× θ sendo mostrado pelo programa, auxiliando no ajuste da segmentação
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 24
4.4 Visualização de resultados
O programa desenvolvido oferece a possibilidade de visualizar os dados e os resultados da
restituição graficamente e através de tabelas.
4.4.1 Ambiente virtual para visualização em 3D
A Figura 4.4 ilustra um exemplo de resultado de restituição, sendo mostrado no ambiente
virtual para visualização tridimensional, criado com o auxílio da biblioteca JOGL (https:
//jogl.dev.java.net). Neste ambiente são desenhados os resultados da restituição na
horizontal e na vertical, respectivamente mostrados nas Figuras 4.4(a) e 4.4(b). A opção
pelas informações a serem visualizadas é controlada na interface de configuração mostrada
na Figura 4.1.
A visualização no ambiente virtual pode ser controlada pelo usuário. Com o auxílio
do mouse é possível rotacionar o objeto livremente. A orientação do ambiente virtual pode
ser monitorada pelo marcador de direções, que mostra as direções norte (N), sul (S), leste
(L) e oeste (O) e a direção positiva da altitude (Z). Com as teclas direcionais do teclado
(↑↓→←) é acionada a funcionalidade de pan. O zoom é acionado pelas teclas "Z" e "X".
O botão "Reset zoom", presente na interface de configuração, ajusta a visualização para o
seu estado inicial, onde os dados são posicionados como em projeção horizontal.
Na visualização de informações planimétricas são desenhadas no ambiente virtual cir-
cunferências horizontais junto ao traçado das rodovias, que assinalam as curvas detectadas
e restituídas. Também são mostrados junto às curvas os valores numéricos obtidos para os
raios. Os pontos limites entre segmentos são marcados em pontos na cor laranja, enquanto
que os pontos de início e de fim, segundo a quilometragem, são marcados respectivamente
nas cores verde e vermelha. Os segmentos em reta são representados na cor preta e os
em curva na cor vermelha.
Na opção pela visualização de informações altimétricas os trechos ascendentes são
representados na cor vermelha e os descendentes na cor verde. Os valores calculados
para rampas médias são mostrados junto aos segmentos.
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 25
Em ambos os casos são também mostrados na cor cinza os trechos de rodovias ad-
jacentes ao trecho restituído.
(a) Informações planimétricas
(b) Informações altimétricas
Figura 4.4: Resultado da restituição de um trecho sendo mostrado no ambiente virtual para
visualização 3D
As opções para a visualização são controladas pelo usuário com o auxílio de uma
interface gráfica, que é mostrada adiante na Seção 6.2 (Figura 6.4).
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 26
4.4.2 Visualização dos dados em tabelas
Os parâmetros resultantes da restituição são mostrados também em forma de tabelas,
como mostra a Figura 4.5. Na parte superior da interface está disposta a tabela que contém
o resultado para a restituição do traçado horizontal (informação planimétrica). A tabela traz
os seguintes campos:
• ID: um número identificador, que também é mostrado no ambiente de visualização
tridimensional (Figura 4.4(a));
• Km inicial: quilômetro de início do segmento, de acordo com a quilometragem da
rodovia;
• Km final: quilômetro de fim do segmento, de acordo com a quilometragem da rodovia;
• Alfa (◦): valor do ângulo de inclinação da reta correspondente no gráfico d× θ;
• Reta/Curva: indica se o segmento foi classificado como reta ou como curva;
• Comprimento (km): o comprimento do segmento em quilômetros;
• No de pontos: número de pontos que formam a poligonal do segmento nos dados
geográficos;
• Raio (m): o valor do raio da curva circular em metros, caso o segmento seja classifi-
cado como curva;
• Ângulo interno (◦): o valor calculado para o ângulo interno , caso o segmento seja
classificado como curva.
Logo abaixo desta tabela é mostrado o valor da sinuosidade horizontal calculado sem
a restituição ("s.r."), ou seja, apenas pelo produto escalar, e o valor da sinuosidade hori-
zontal com a restituição ("c.r."), como apresentado na Seção 3.1.5. O valor da sinuosidade
calculado com a restituição é sempre menor do que o valor sem a restituição, pois sem a
restituição todo o ruído é mantido nos dados (ver Seção 3.1.3).
Na parte inferior está a tabela com o resultado da restituição vertical (informação alti-
métrica). A tabela traz os seguintes campos:
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 27
• ID: um número identificador, que também é mostrado no ambiente de visualização
tridimensional (Figura 4.4(b));
• Km inicial: quilômetro de início do segmento, de acordo com a quilometragem da
rodovia;
• Km final: quilômetro de fim do segmento, de acordo com a quilometragem da rodovia;
• Subida/Descida: indica respectivamente se o segmento é uma rampa ascendente ou
descendente, de acordo com o sentido de quilometragem escolhido na configuração;
• Comprimento (km): o comprimento do segmento em quilômetros;
• No de pontos: número de pontos que formam a poligonal do segmento nos dados
geográficos;
• Alt. ini. (m): valor da altitude no ponto de início do segmento em metros;
• Alt. fin. (m): valor da altitude no ponto de fim do segmento em metros;
• G. médio (m/km): valor calculado para o gradiente médio do segmento, em m/km (ver
Seção 3.2.2).
Na parte inferior da tabela são mostrados os valores calculados para o gradiente médio
positivo, para o gradiente médio negativo e o valor da proporção de subidas do trecho
restituído, no sentido escolhido de quilometragem (ver Seção 3.2.2).
DNIT • LabTrans – UFSC Produto Complementar

Seção 4. Elaboração de um software para restituição as built 28
Figura 4.5: Interface mostrando os parâmetros resultantes da restituição em tabelas
DNIT • LabTrans – UFSC Produto Complementar

Seção 5
Comparações de resultados com
informações de projeto
Resultados obtidos para os parâmetros dos traçados de alguns trechos de rodovias, obtidos
pela restituição de dados geográficos pelo método exposto, são comparados nesta seção
com dados obtidos de seus projetos. Os resultados são mostrados em forma de tabelas e
gráficos.
Para realizar a comparação entre dados resultantes de restituição e dados de pro-
jeto foram escolhidos trechos de rodovias que apresentaram restrições de segurança pela
configuração dos traçados horizontais e verticais.
Comparações foram feitas para três trechos de rodovias. Os parâmetros comparados
aqui foram os raios e os ângulos internos obtidos para as curvas circulares nas informações
planimétricas e os valores de rampas médias para as informações altimétricas.
A configuração para a segmentação no restituidor foi ajustada para cada trecho, de
forma que as curvas resultantes se aproximassem o máximo possível das curvas constantes
nos projetos (ver Seção 4.3).
Os trechos se encontram no estado de Santa Catarina, nas rodovias BR-116 (quilô-
metro 116,5 a 118), BR-282 (quilômetro 630 a 638) e BR-470 (quilômetro 192,8 a 194,5).
29

Seção 5. Comparações de resultados com informações de projeto 30
5.0.3 Trecho na BR-116
O trecho na BR-116 tem extensão de 1,5 quilômetros, onde se encontram 7 curvas circula-
res. Neste trecho não há curvas de transição. Os projetos consultados deste trecho estão
presentes no Anexo B, nas Figuras B.1 e B.2.
A Figura 5.1(a) mostra o mosaico no trecho, composto por duas pranchas de projeto,
orientadas aproximadamente com o norte para cima. As curvas circulares estão identifica-
das de 90 a 96, seguindo a numeração do projeto. Na Figura 5.1(b) são apresentados os
dados do mesmo trecho, na interface de visualização do software restituidor, sendo mostra-
das as informações planimétricas.
A sinuosidade horizontal calculada no trecho pelo restituidor é de 111,2◦/km. Os valo-
res de gradientes médios positivo e negativo no trecho foram respectivamente 41,5m/km e
70,9m/km, com 60% de subidas no sentido da quilometragem.
Na Tabela 5.1 são comparadas as informações planimétricas de projeto com as obti-
das pela restituição. Na parte superior da tabela são comparados os valores de raios, sendo
mostradas diferenças absolutas e relativas. Em média os valores de raios obtidos com o
uso do restituidor no trecho ficaram 15,69% maiores dos que os raios de projetos, com
um desvio padrão de 25,08%. Os ângulos internos receberam valores em média 3,45%
maiores quando é usado o restituidor, com desvio padrão de 14,82%.
As curvas 93 e 94 são adjacentes e possuem valores próximos de raios (respectiva-
mente 200,00 e 196,77 metros no projeto), sendo que o restituidor não foi capaz de separá-
las. Para estas curvas foi obtida na restituição uma curva de raio 215,14, que foi atribuído
a ambas. O ângulo interno obtido foi dividido igualmente entre as curvas 93 e 94 (25,73◦
para cada).
Os gráficos da Figura 5.2 mostram as relações entre os valores de projeto e obtidos
com o restituidor. Na Figura 5.2(a) é mostrada a relação entre os valores de raios, onde
foi obtido o coeficiente de correlação r2 igual a 0,8446. Na Figura 5.2(b) consta a relação
entre ângulos internos das curvas, com a correlação r2 igual a 0,8749. A correlação para
os ângulos internos ficou ligeiramente melhor do que para os raios, porém nenhuma delas
alcançou 0,90.
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 31
(a) Mosaico das pranchas que constituem o projeto trecho
(b) Visualização dos dados planimétricos resultantes da restituição
Figura 5.1: Trecho para comparação na BR-116
A Tabela 5.2 traz a comparação de dados verticais para o trecho. No mosaico da
Figura 5.1(a) estão marcadas 3 rampas, R1 a R3, cujas altitudes dos pontos de início e de
fim são utilizadas para o cálculo de rampas médias para os dados de projeto e os obtidos na
restituição. Como mostram os números na Tabela 5.2, os valores de rampas médias obtidas
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 32
Tabela 5.1: Comparação entre informações planimétricas: BR-116
Raios
Curva Projeto (m) Restituidor (m) Ext. (km) No pontos Diferença absoluta (m) Diferença percentual (%)
90 299,97 326,75 0,17 10 -26,78 -8,93
91 313,66 263,04 0.09 6 50,62 16,14
92 210,00 214,15 0,13 9 -4,15 -1,98
93 200,00215,14 0,19 12
-15,14 -7,57
94 196,77 -18,37 -9,34
95 227,47 361,41 0,11 6 -133,94 -58,88
96 409,98 570,89 0,17 9 -160,91 -39,25
Média -15,69
Desvio padrão 25,08
Ângulos internos
Curva Projeto (◦) Restituidor (◦) Diferença absoluta (◦) Diferença percentual (%)
90 25,88 29,84 -3,96 -15,30
91 18,83 20,12 -1,29 -6,85
92 26,69 34,53 -7,84 -29,37
93 25,9625,73
0,24 0,91
94 27,06 1,34 4,93
95 18,83 16,80 2,03 10,78
96 19,36 17,28 2,08 10,74
Soma 162,61 170,02 Média -3,45
Desvio padrão 14,82
(a) Raios (b) Ângulos internos
Figura 5.2: Regressão linear entre dados de projeto e obtidos com o restituidor: trecho na BR-116
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 33
com o restituidor ficaram em média 1,1% menores do que os observados no projeto, com
um desvio padrão de 21,2%.
Tabela 5.2: Comparação entre informações altimétricas: BR-116
Rampa Projeto (m/km) Restituidor (m/km) Diferença absoluta (m/km) Diferença percentual (%)
R1 34,9 42,9 -8,0 -22,8
R2 -70,0 -64,3 -5,7 8,1
R3 56,0 46,0 10,0 17,9
Média 1,1
Desvio padrão 21,2
5.0.4 Trecho na BR-282
O trecho analisado na BR-282 possui extensão de 8,0 quilômetros. Nele se encontram 13
curvas circulares. O mosaico montado com as 5 pranchas que constituem o projeto é apre-
sentado na Figura 5.3(a). As curvas horizontais circulares estão assinaladas no mosaico
com os números 13 a 25, conforme a numeração no projeto. As 5 pranchas que formam
o projeto do trecho se encontram no Anexo B, nas Figuras B.3 a B.7. Na Figura 5.3(b) é
mostrado o trecho correspondente no ambiente virtual do restituidor, posicionado para evi-
denciar as informações planimétricas. As curvas circulares neste trecho são conectadas às
tangentes por curvas de transição, com excessão das curvas 15, 23, 24 e 25.
A sinuosidade horizontal calculada no trecho pelo restituidor é de 72,2◦/km. Os valo-
res de gradientes médios positivo e negativo no trecho foram respectivamente 57,6m/km e
39,2m/km, com 76% de subidas no sentido da quilometragem.
Na Figura 5.3(b) pode ser observado que diversos círculos são desenhados junto às
curvas do trecho. Isto ocorre devido à variação angular ao longo das curvas (efeito das
curvas de transição e/ou imperfeições no traçado as built) e implica na segmentação das
curvas em várias curvas circulares consecutivas. Porém, estas várias curvas circulares
possuem extensão reduzida e a somatória dos seus ângulos internos tende a se aproximar
da somatória dos ângulos de projeto.
A Tabela 5.3 traz numericamente a comparação entre as informações planimétricas
de projeto com as obtidas pela restituição. Em média os valores de raios obtidos com o
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 34
(a) Mosaico das pranchas que constituem o projeto trecho
(b) Visualização dos dados planimétricos resultantes da restituição
Figura 5.3: Comparação em um trecho da BR-282
uso do restituidor no trecho ficaram 15,92% maiores dos que os raios de projetos, com
um desvio padrão de 19,03%. Os ângulos internos receberam valores em média 12,84%
maiores quando é usado o restituidor, com desvio padrão de 10,91%.
Na Figura 5.4(a) é mostrada a relação entre os valores de raios para o trecho, onde
foi obtido o coeficiente de correlação r2 igual a 0,9565. Na Figura 5.4(b) consta a relação
entre ângulos internos das curvas, com a correlação r2 igual a 0,9848. Estes coeficientes
apresentam valores melhores (mais próximos de 1) do que os obtidos na comparação para
o trecho da BR-116.
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 35
Tabela 5.3: Comparação entre informações planimétricas: BR-282
Raios
Curva Projeto (m) Restituidor (m) Ext. (km) No pontos Diferença absoluta (m) Diferença percentual (%)
13 312,50 342,79 0,29 16 -30,29 -9,69
14 214,87 345,58 0,19 8 -130,71 -60,83
15 848,45 976,10 0,41 22 -127,65 -15,05
16 350,88 394,05 0,24 15 -43,17 -12,30
17 312,50 451,98 0,25 13 -139,48 -44,63
18 491,16 555,00 0,30 20 -63,84 -13,00
19 156,30 167,24 0,26 20 -10,94 -7,00
20 603,14 757,14 0,16 11 -154,00 -25,53
21 156,30 178,04 0,26 19 -21,74 -13,91
22 245,58 269,46 0,50 36 -23,88 -9,72
23 603,14 520,00 0,27 19 83,14 13,78
24 603,14 670,38 0,16 9 -67,24 -11,15
25 603,14 590,90 0,12 8 12,24 2,03
Média -15,92
Desvio padrão 19,03
Ângulos internos
Curva Projeto (◦) Restituidor (◦) Diferença absoluta (◦) Diferença percentual (%)
13 56,55 45,00 11,55 20,42
14 29,51 30,96 -1,45 -4,91
15 26,67 24,00 2,67 10,01
16 35,56 34,59 0,97 2,73
17 32,21 31,91 0,30 0,93
18 32,50 30,61 1,89 5,82
19 73,83 59,32 14,51 19,65
20 14,63 11,82 2,81 19,21
21 67,35 66,45 0,90 1,34
22 107,96 91,32 16,64 15,41
23 41,58 32,71 8,87 21,33
24 20,00 13,77 6,23 31,15
25 14,88 11,34 3,54 23,79
Soma 553,23 483,80 Média 12,84
Desvio padrão 10,91
São trazidos na Tabela 5.4 os resultados da comparação de dados altimétricos, para
as rampas R1 a R4 assinaladas na Figura 5.3(a). As diferenças relativas entre os dados
tiveram um valor médio de 62,6%, com desvio padrão de 55,1%.
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 36
(a) Raios (b) Ângulos internos
Figura 5.4: Regressão linear entre dados de projeto e obtidos com o restituidor: trecho na BR-282
Tabela 5.4: Comparação entre informações altimétricas: BR-282
Rampa Projeto (m/km) Restituidor (m/km) Diferença absoluta (m/km) Diferença percentual (%)
R1 58.8 70.2 -11.5 -19.5
R2 33.8 82.0 -48.2 -142.9
R3 65.0 88.7 -23.7 -36.5
R4 30.0 45.5 -15.5 -51.7
Média -62,6
Desvio padrão 55,1
5.0.5 Trecho na BR-470
A comparação entre dados de projeto e resultantes de restituição foi feito na BR-470 num
trecho de extensão de 1,7 quilômetros. Este trecho possui um traçado geométrico mais
complexo, com trechos em tangente curtos, curvas circulares e curvas de transição. No
trecho se encontram 5 curvas circulares, assinaladas na Figura 5.5(a). Na Figura 5.5(b) é
mostrado o resultado da restituição para os dados planimétricos. A prancha única de projeto
utilizada se encontra na Figura B.8.
A sinuosidade horizontal calculada no trecho pelo restituidor é de 329,6◦/km. Os valo-
res de gradientes médios positivo e negativo no trecho foram respectivamente 178,2m/km
e 103,4m/km, com 65% de subidas no sentido da quilometragem.
A Tabela 5.5 traz os resultados numéricos da comparação. Se observou que os dados
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 37
(a) Mosaico das pranchas que constituem o projeto trecho
(b) Visualização dos dados planimétricos resultantes da restituição
Figura 5.5: Trecho para comparação na BR-470
de raios gerados pelo restituidor possuem valores de diferença relativa em média 9,19%
maiores do que os de projeto, com desvio padrão de 8,9%. Os ângulos internos apresenta-
ram uma diminuição relativa média de 9,60%, com desvio padrão de 11,25%.
Na Figura 5.6(a) é mostrada a relação entre os valores de raios para o trecho, onde
foi obtido o coeficiente de correlação r2 igual a 0,9933. Na Figura 5.6(b) consta a relação
entre ângulos internos das curvas, com a correlação r2 igual a 0,9817.
DNIT • LabTrans – UFSC Produto Complementar

Seção 5. Comparações de resultados com informações de projeto 38
Tabela 5.5: Comparação entre informações planimétricas: BR-470
Raios
Curva Projeto (m) Restituidor (m) Ext. (km) No pontos Diferença absoluta (m) Diferença percentual (%)
5 115,00 128,92 0,09 9 -13,92 -12,10
6 67,00 63,60 0,19 16 3,40 5,07
7 82,96 99,02 0,19 15 -16,06 -19,36
8 196,00 214,01 0,16 17 -18,01 -9,19
9 98,00 108,16 0,19 15 -10,16 -10,37
Média -9,19
Desvio padrão 8,9
Ângulos internos
Curva Projeto (◦) Restituidor (◦) Diferença absoluta (◦) Diferença percentual (%)
5 44,50 38,50 6,00 13,48
6 142,90 154,23 -11,33 -7,93
7 127,00 112,37 14,63 11,52
8 57,00 43,92 13,08 22,95
9 103,50 95,25 8,26 7,98
Soma 474,90 444,26 Média 9,60
Desvio padrão 11,25
(a) Raios (b) Ângulos internos
Figura 5.6: Regressão linear entre dados de projeto e obtidos com o restituidor: trecho na BR-470
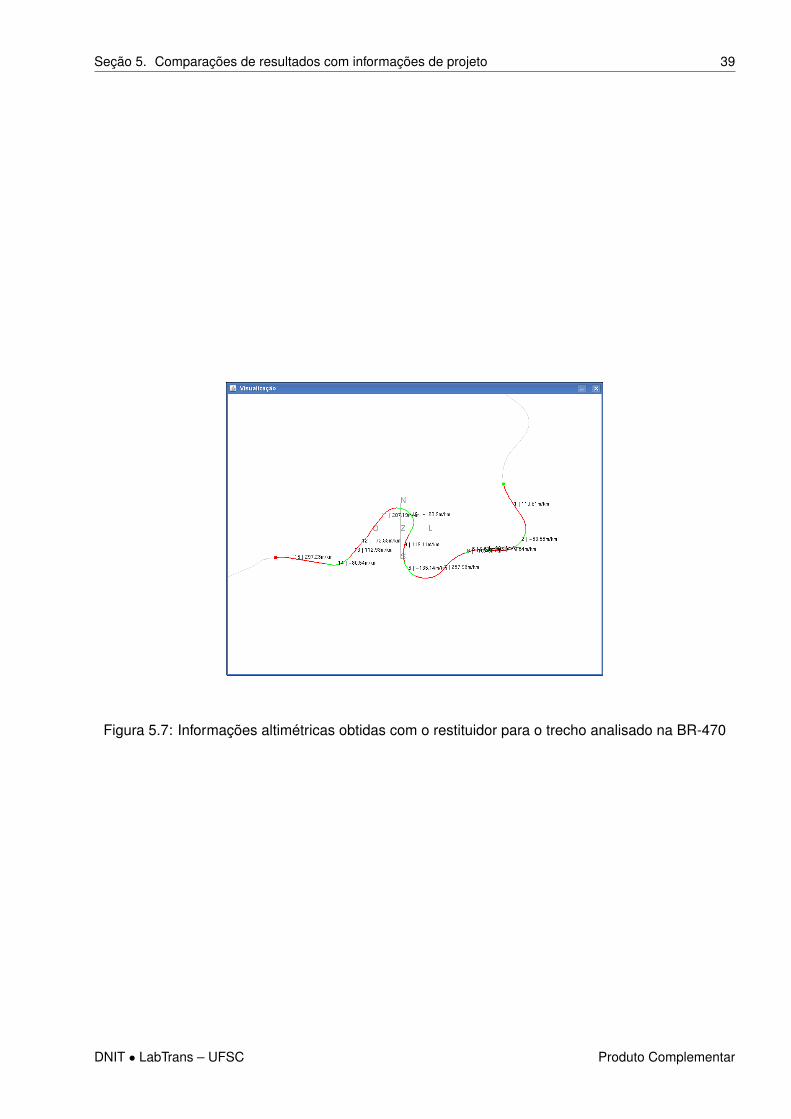
Não é feita a comparação na vertical para este trecho, pois já podem ser observadas
grandes diferenças no greide, comparando a Figura 5.7 com a prancha do projeto na Figura
B.8. No projeto todo o trecho consta como pertencente a uma única rampa, enquanto
que o resultado obtido com o restituidor mostra alternação entre rampas ascendentes e
descendentes, com grandes variações de gradiente médio.
DNIT • LabTrans – UFSC Produto Complementar
Seção 5. Comparações de resultados com informações de projeto 39
Figura 5.7: Informações altimétricas obtidas com o restituidor para o trecho analisado na BR-470
DNIT • LabTrans – UFSC Produto Complementar

Seção 6
Exemplos de aplicações do restituidor
Nesta seção são explorados alguns exemplos de aplicação do restituidor as built. Na Seção
6.1 é mostrado como os resultados gerados pela restituição podem ser empregados para
a determinação da velocidade de operação segundo o método do HDM-VOC. Na Seção
6.2 é explorado o ambiente de visualização tridimensional do restituidor sendo carregados
diferentes dados geográficos, relacionados com as rodovias. Na Seção 6.4 são dadas con-
siderações sobre a implementação do método de restituição no Sistema Georreferenciado
de Informações Viárias do LabTrans.
6.1 Cálculo da velocidade de operação pelo método HDM-VOC
A velocidade de operação é um parâmetro operacional importante para o gerenciamento
rodoviário. Relacionado com o nível de serviço da rodovia ele é um indicador da qualidade
do tráfego. Serve como dado importante, por exemplo, para estudos de custos operacionais
e análises de segmentos críticos. Ela pode ser calculada a partir de informações da rodovia
e do tipo de veículo, através do método do HDM-VOC.
40

Seção 6. Exemplos de aplicações do restituidor 41
O Vehicle Operating Costs Model do Highway Development and Management (HDM-
VOC) é um aplicativo stand-alone para estimação de custos de operação para dez tipos de
veículos em função das sua características, da sua utilização e das características da rodo-
via, baseado nos relacionamentos do HDM-III1. O software se encontra disponível gratuita-
mente na internet, na página do Banco Mundial: http://www.worldbank.org/transport/
roads/tools.htm.
Segundo ARCHONDO-CALLAO; FAIZ (1994):
"o software HDM-VOC estima os vários componentes dos custos de operação dos
veículos baseando-se em características das rodovias, dos veículos e em custos uni-
tários em um ambiente de tráfego de fluxo livre. São providos cálculos para dez tipos
de veículos desde carros de passeio até caminhões articulados e computa valores de
velocidade, consumo físico e custos operacionais totais."
A velocidade em "tráfego de fluxo livre" é a própria velocidade de operação, de acordo
com AASHTO (2001) que define a velocidade de operação como sendo "a velocidade na
qual os motoristas são observados operando os seus veículos em condições de tráfego
livre".
O cálculo da velocidade de operação pelo modelo HMD-VOC compreende várias eta-
pas. É utilizado um conjunto de velocidades limitadoras, correspondentes a diversos fatores
diferentes que tendem a limitar a velocidade. As velocidades limitadoras são funções de tais
fatores, como características dos veículos (p.ex. potência, capacidade de frenagem, carga
carregada) e da rodovia (p.ex. gradiente vertical, rugosidade, curvatura). A teoria por trás
desta computação envolve o tratamento de cada uma das velocidades limitadoras para o
segmento como uma variável aleatória e a velocidade de operação como o valor médio dos
mínimos destas variáveis aleatórias. O modelo probabilístico utilizado é a distribuição de
Weibull, que é uma das distribuições padrão para valores extremos.
O método de cálculo se encontra descrito em ARCHONDO-CALLAO; FAIZ (1994). O
original em inglês foi traduzido na íntegra para o presente trabalho e se encontra no Anexo
C.1A explanação geral sobre o modelo HDM-III pode ser encontrada no endereço eletrônico http://www.
worldbank.org/transport/roads/rd_tools/hdm3.htm (acesso em maio de 2009).
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 42
As características da rodovia envolvidas no cálculo da velocidade de operação pelo
método do HDM-VOC são a sinuosidade horizontal SH, mencionada na Seção 3.1.5, os
gradientes médios positivo e negativo g+ e g− e a proporção de subidas ps, mencionados
na Seção 3.2.2.
Além das características da rodovia, o método do HDM-VOC baseia o cálculo da ve-
locidade de operação em determinadas características gerais por tipo de veículo. Tais ca-
racterísticas são mostradas na Tabela C.1.
Na interface gráfica para configuração do restituidor, no menu "Ferramentas", foi im-
plementada a funcionalidade "Velocidade de operação". Quando acionada é mostrada a
interface gráfica para configuração dos parâmetros envolvidos, mostrada na Figura 6.1.
Nesta interface podem ser configurados:
• Veículo
◦ tipo de veículo;
◦ carga no veículo.
• Rodovia
◦ valor do índice de rugosidade internacional (IRI) da rodovia;
◦ tipo de pista entre simples e dupla;
◦ tipo de pista entre pavimentada e não pavimentada.
O valor da velocidade é sensível ao sentido no qual o trecho é percorrido, que é sele-
cionado na interface gráfica apresentada na Figura 4.1.
Na parte inferior desta interface há o botão "Ver informações de velocidade" que,
quando acionado, é mostrada uma interface com as informações relativas ao cálculo da
velocidade de operação, ilustrada na Figura 6.2.
Sendo desprezadas as diferenças que ocorrem no valor da velocidade pela aplica-
ção dos mesmos parâmetros de configuração a quaisquer trechos de rodovias, é possível
aplicar o software sobre os dados geográficos de toda a malha rodoviária federal de forma
sistemática, gerando mapas de velocidades de operação.
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 43
Figura 6.1: Interface para a configuração dos parâmetros para o cálculo da velocidade de operação
Figura 6.2: Interface mostrando o valor calculado para a velocidade de operação
A aplicação sistemática do software por toda a malha é possibilitado por um programa
auxiliar, que aciona o restituidor repetidamente, calculando a velocidade para cada trecho
do PNV individualmente e armazenando os resultados em uma tabela no banco de dados.
O software auxiliar toma valores de pista simples ou dupla, pavimentada ou não pavimen-
tada da listagem de trechos do PNV. A velocidade de operação é calculada para cada tipo
de veículo. Os dados de IRI de toda a malha rodoviária federal não estão disponíveis no
LabTrans e foi utilizado o mesmo valor para todos os trechos.
A Figura 6.3 ilustra como exemplo o mapa gerado para o tipo de veículo "Carro pe-
queno", no sentido direto da quilometragem. O processamento para a geração dos dados
de velocidade para toda a malha teve uma duração aproximada de 240 minutos.
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 44
(a) Malha rodoviária federal
(b) Detalhe no litoral catarinense
Figura 6.3: Exemplo de mapa de velocidades por trechos do PNV, gerado para carro pequeno
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 45
6.2 Incorporação de informações geográficas diversas no ambiente
de visualização 3D
O ambiente 3D criado para a visualização dos dados e dos resultados da restituição pode
ser explorado para a visualização de quaisquer outros dados geográficos relevantes sobre
a rodovia e seu entorno. Para exemplificar a visualização de dados geográficos adicionais
foram inseridos dados vetoriais sobre:
• uso de solo (IBGE, ftp://geoftp.ibge.gov.br/mapas/malhas_digitais/setor_rural/Malha_
Setorial_Rural/) e;
• hidrografia (ANA, http://www.ana.gov.br/bibliotecavirtual/solicitacaoBaseDados.asp).
A Figura 6.4 mostra a interface gráfica criada para gerenciar estas informações no
ambiente de visualização.
Figura 6.4: Interface para seleção das informações visualizadas no ambiente 3D
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 46
A Figura 6.5 mostra o ambiente de visualização contendo os dados tridimensionais
do MDE, coloridos de acordo com o uso do solo. Os dados de elevação na cor verde
representam solo rural, segundo o IBGE, e os dados na cor vermelha solo urbanizado. Na
mesma figura podem ser visualizados dados vetoriais que descrevem a malha hidrográfica,
na cor azul.
Figura 6.5: Dados geográficos de elevação, de leitos de rios e de uso do solo inseridos no ambiente
de visualização 3D
6.3 Análise de segmentos críticos
Em estudos voltados à identificação de segmentos críticos são originadas listagens de seg-
mentos de rodovias que devem receber intervenções para melhoria.
O ambiente de visualização do restituidor pode auxiliar na tarefa de identificação dos
problemas específicos que ocorrem em segmentos considerados críticos. Os raios das cur-
vas assinalados junto ao traçado do segmento de rodovia, em conjunto com a visualização
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 47
da informação altimétrica, podem auxiliar na identificação mais precisa da localização do
problema. Outras camadas de dados relevantes para a análise do ambiente de entorno da
rodovia podem ser agregadas ao ambiente de visualização, como mostrado na Seção 6.2.
A Figura 6.6 mostra como exemplo a localização de acidentes sobre o traçado da
rodovia analisada. Estas informações sobre ocorrência de acidentes são levantadas pela
Polícia Rodoviária Federal (PRF) e são localizadas sobre a malha rodoviária federal pela
especificação da unidade da federação, da sigla da rodovia e da quilometragem.
Figura 6.6: Dados de acidentes da PRF mostrados ao longo do segmento de rodovia analisado
6.4 Considerações sobre a implementação do restituidor no SGV
O Sistema Georreferenciado de Informações Viárias (SGV) consiste em uma solução in-
tegrada na Web, em desenvolvimento pelo Laboratório de Transportes e Logística (Lab-
Trans/UFSC), que disponibiliza um conjunto de ferramentas e procedimentos para acompa-
nhamento, estudo e análises de informações viárias pelo DNIT. O acesso ao SGV é reali-
zado na Internet por meio do endereço eletrônico http://www.labtrans.ufsc.br/sgv/.
Dentro do contexto do projeto, todas as informações geográficas relevantes, incluindo
DNIT • LabTrans – UFSC Produto Complementar

Seção 6. Exemplos de aplicações do restituidor 48
as relativas à malha rodoviária federal brasileira, estão sendo organizadas dentro do SGV.
Os dados geográficos sobre a malha rodoviária federal utilizados neste trabalho são os
mesmos que constam no "módulo GEO" do SGV.
Para a implementação do método apresentado neste trabalho no SGV é necessário
desenvolver interfaces gráficas específicas para a entrada de parâmetros de configuração e
as para a visualização dos resultados, similares às aqui apresentadas. Para a visualização
dos resultados de forma gráfica poderiam ser geradas figuras para vistas horizontais e
verticais dos trechos restituídos, como aparecem em projetos. A confecção de um ambiente
virtual para a visualização 3D, apesar de não ser necessária para a realização da restituição,
poderia ser implementada com o auxílio de componentes como por exemplo Java3D ou
JOGL.
DNIT • LabTrans – UFSC Produto Complementar

Seção 7
Conclusões e perspectiva
Neste trabalho foi apresentado o estudo realizado no LabTrans para a extração de informa-
ções sobre o traçado geométrico as built de rodovias a partir de seus dados geográficos,
em um procedimento de restituição. Foi delimitado um método para realizar a restituição e
este foi implementado em um software.
A aplicação do software sobre dados geográficos de trechos de rodovias mostrou ser
possível a segmentação de retas e curvas circulares, sendo obtidos para estas últimas au-
tomaticamente os valores de raio e de ângulo central. Para que o método de segmentação
possa distinguir com maior fidelidade retas de curvas circulares, bem como realizar a seg-
mentação dentro das curvas, é necessário o ajuste manual de valores limites para cada
trecho, para o qual é disponibilizada uma interface gráfica.
Foram realizados testes para comparar os resultados obtidos com o software desen-
volvido com informações obtidas em projetos de trechos de rodovias. Os testes mostraram
que os parâmetros obtidos para as curvas circulares se aproximaram dos valores obtidos
em projetos. Porém, os valores dos parâmetros encontrados pela restituição podem sofrer
variações relativamente grandes, dependendo de fatores como por exemplo:
• a proximidade entre o traçado de projeto e o traçado as built ;
• a densidade de pontos presente nos dados geográficos;
• a predominância de curvas de transição, que não são previstas no modelo e são
classificadas em parte como curvas circulares durante a restituição.
49

Seção 7. Conclusões e perspectiva 50
Embora o ajuste dos parâmetros influencie da segmentação, a influência dos parâ-
metros sobre o valor determinado para a velocidade de operação deve ser ainda avaliado
numericamente. Isto é feito sendo monitorado o valor da sinuosidade horizontal, que é
função somente da extensão do trecho e da somatória dos ângulos internos encontrados,
quando os parâmetros limites são variados.
A segmentação vertical realizada pelo restituidor é até o momento simplificada, sendo
computados somente os valores de variação de altitude nos segmentos. Esta segmentação
pode ser mais sofisticada, de forma similar à segmentação horizontal empregada neste
trabalho, sendo determinados, por exemplo, os parâmetros de curvatura K e o raios de
curvatura das parábolas.
A utilização de dados de SRTM como dados verticais de traçados de rodovias pode
ser em muitas situações uma aproximação grosseira. Em áreas densamente urbanizadas
ou de floresta densa os dados de altitude representam a superfície das edificações ou das
copas das árvores. Porém, estando disponíveis dados de altimetria obtidos por GPS sobre
o traçado das rodovias, estes podem ser diretamente utilizados no software desenvolvido
neste trabalho.
É interessante o estudo de aplicações onde os traçados horizontal e vertical de trechos
de rodovias sejam avaliados de forma simultânea. Os dados tridimensionais são capazes
de atender isto diretamente. Como exemplo podem ser citados estudos de distância de
visibilidade (ver DNER (1999), página 134), de análise das características de segurança e
conforto.
O ambiente de visualização tridimensional desenvolvido pode ter o seu uso estendido
para a análise de dados geográficos quaisquer, o que amplia as possibilidades de análises
de trechos de rodovias.
Os parâmetros resultantes da restituição horizontal podem ser estendidos para a re-
composição do desenho do traçado da rodovia. Para isso é necessário que sejam calcu-
lados todos os parâmetros presentes nas equações apresentadas na Seção 3.1.1.1. De
posse destes parâmetros é possível recompor o desenho da rodovia a partir somente dos
dados gerados pela restituição. Isto pode ser automatizado, por exemplo, com o uso da bibli-
oteca DXF Export Java (http://www.cadsofttools.com/en/products/dxf_export_java.
DNIT • LabTrans – UFSC Produto Complementar

Seção 7. Conclusões e perspectiva 51
html). O arquivo resultante com o desenho pode ser assim aberto e editado em softwares
de CAD convencionais.
Com o uso do restituidor as built é possível gerar sistematicamente informações sobre
o traçado geométrico de rodovias e sobre velocidade de operação, para qualquer rodovia
que esteja descrita por dados geográficos obtidos por GPS. A qualidade das informações
geradas dependem diretamente da qualidade dos dados geográficos disponíveis. De forma
ideal os dados devem possuir uma boa densidade, com baixo espaçamento entre pontos
medidos. O espaçamento médio de 16,8 metros, verificado nos dados utilizados neste
trabalho, já torna possível a restituição de curvas circulares de extensões até mesmo inferi-
ores a 100 metros. É de se esperar que com maiores densidades de pontos a precisão na
restituição seja também maior.
O processo de restituição de um trecho de rodovia com extensão de alguns quilôme-
tros, como os apresentados nos exemplos da Seção 5, é rápido e pode ser implementado
em um programa para operação na Web (SGV). Tecnologias para a visualização dos resul-
tados tridimensionalmente neste ambiente se encontram disponíveis e podem ser explora-
das.
Dados geográficos não são úteis somente para a geração de mapas temáticos. Este
trabalho evidencia a utilidade de tais dados na obtenção de parâmetros operacionais que
permeiam uma ampla gama de aplicações nas áreas operação, planejamento e segurança
rodoviária.
DNIT • LabTrans – UFSC Produto Complementar

Referências
AASHTO. A Policy on Geometric Design of Highways and Streets. 4. ed. [S.l.]: American
Association of State Highway & Transport, 2001. 905 p.
ARCHONDO-CALLAO, R.; FAIZ, A. Estimating vehicle operating costs. Washington, USA,
1994. The International Bank for Reconstruction and Development – The World Bank.
CGPERT/DNIT – LabTrans/UFSC. Elaboração de um Sistema de Referência Linear para
o Plano Nacional de Viação baseado em dados geográficos – SRL-PNV. [S.l.], março
2009. Departamento Nacional de Infra-estrutura de Transportes / Coordenação Geral
de Operações Rodoviárias – Universidade Federal de Santa Catarina / Laboratório de
Transportes.
DNER. Manual de projeto geométrico de rodovias rurais. Rio de Janeiro, 1999.
Departamento Nacional de Estradas de Rodagem, Diretoria de Desenvolvimento
Tecnológico, Divisão de Capacitação Tecnológica.
MAISONOBE, L. Finding the circle that best fits a set of points. october 2007. Disponível
em: <http://www.spaceroots.org/documents/circle/circle-fitting.pdf>.
SHAKARJI, C. M. Least-squares fitting algorithms of the NIST algorithm testing system.
Journal of Research of the National Institute of Standards and Technology, v. 103, n. 6,
november-december 1998.
WORRAL, S.; NEBOT, E. Automated process for generating digitised maps through GPS
data compression. In: Proceedings of the 2007 Australasian Conference on Robotics &
Automation. Brisbane, Australia: [s.n.], 2007.
52

Apêndice A
Licença do código utilizado para o
ajustamento de círculos
Copyright (c) 2005-2007, Luc Maisonobe
All rights reserved.
Redistribution and use in source and binary forms, with
or without modification, are permitted provided that
the following conditions are met:
Redistributions of source code must retain the
above copyright notice, this list of conditions and
the following disclaimer.
Redistributions in binary form must reproduce the
above copyright notice, this list of conditions and
the following disclaimer in the documentation
and/or other materials provided with the
distribution.
Neither the names of spaceroots.org, spaceroots.com
nor the names of their contributors may be used to
endorse or promote products derived from this
software without specific prior written permission.
53

Apêndice A. Licença do código utilizado para o ajustamento de círculos 54
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND
CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED
WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A
PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL
THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF
USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER
IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE
USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B
Pranchas de projetos de trechos
rodoviários
55

Apêndice B. Pranchas de projetos de trechos rodoviários 56
Figu
raB
.1:
Pro
jeto
daro
dovi
aB
R-1
16:
curv
as90
a95
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 57
Figu
raB
.2:
Pro
jeto
daro
dovi
aB
R-1
16:
curv
a96
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 58
Figu
raB
.3:
Pro
jeto
daro
dovi
aB
R-2
82:
curv
as13
,14
e15
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 59
Figu
raB
.4:
Pro
jeto
daro
dovi
aB
R-2
82:
curv
as16
e17
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 60
Figu
raB
.5:
Pro
jeto
daro
dovi
aB
R-2
82:
curv
as18
,19,
20e
21
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 61
Figu
raB
.6:
Pro
jeto
daro
dovi
aB
R-2
82:
curv
as22
e23
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 62
Figu
raB
.7:
Pro
jeto
daro
dovi
aB
R-2
82:
curv
as24
e25
DNIT • LabTrans – UFSC Produto Complementar

Apêndice B. Pranchas de projetos de trechos rodoviários 63
Figu
raB
.8:
Pro
jeto
daro
dovi
aB
R-4
70:
curv
as5
a9
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C
Modelo do HDM-VOC para predição de
velocidade (ARCHONDO-CALLAO; FAIZ,
1994)
C.1 Velocidade dos veículos
A predição da velocidade dos veículos é uma aproximação agregada probabilistica limita-
dora para estado estável. Note o seguinte:
1.Agregada implica que o método de predição funciona com descritores agregados da
geometria da rodovia e condições da superfície ao invés de descrição detalhada sobre
arodovia.
2.Estado estável implica que o modelo não considera efeitos transitórios, ou seja, mu-
danças de velocidade dos veículos na rodovia.
3.Aproximação probabilistica limitadora da velocidade pois a velocidade predita é um
mínimo probabilístico dentre diversas velocidades limitadoras.
64

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 65
C.1.1 A velocidade em estado estável
A predição da velocidde dos veículos em estado estável em um dado segmento de rodovia
utiliza um conjunto de velocidades limitadoras, correspondentes a diversos fatores diferen-
tes que tendem a limitar a velocidade. As velocidades limitadoras são funções de tais
fatores, como caracretísticas dos veículos (p.ex. potência, capacidade de frenagem, carga
carregada) e da rodovia (p.ex. gradiente vertical, rugosidade, curvatura). As velocidades
limitadoras são:
•V DRIV E, a velocidade limitadora baseada no gradiente vertical e potência do motor.
•V BRAKE, a velocidade limitadora baseada no gradiente vertical e capacidade de
frenagem.
•V CURV E, a velocidade limitadora determinada pela curvatura da rodovia.
•V ROUGH, a velocidade limitadora baseada na rugosidade da rodovia e na severidade
de viagem associada.
•V DESIR, a velocidade desejada sem limitações, baseada em considerações psico-
lógicas, econômicas, de segurança e outras.
Por exemplo: para um carro grande percorrendo um segmento pavimentado de rodo-
via com curvatura igual a 200◦/km e rugosidade igual a 4,5IRI, as velocidades limitadoras
poderiam ser:
V DRIV E = 148km/h;
V BRAKE =∞;
V CURV E = 103km/h;
V ROUGH = 181km/h;
V DESIR = 98km/h
resutando em uma velocidade predita em estado estável de V = 80km/h.
O modelo computa a velocidade em estado estável V para cada segmento usando os
valores respectivos das 5 velocidades limitadoras para cada segmento. A teoria por trás
desta computação envolve o tratamento de cada uma das velocidades limitadoras para o
DNIT • LabTrans – UFSC Produto Complementar
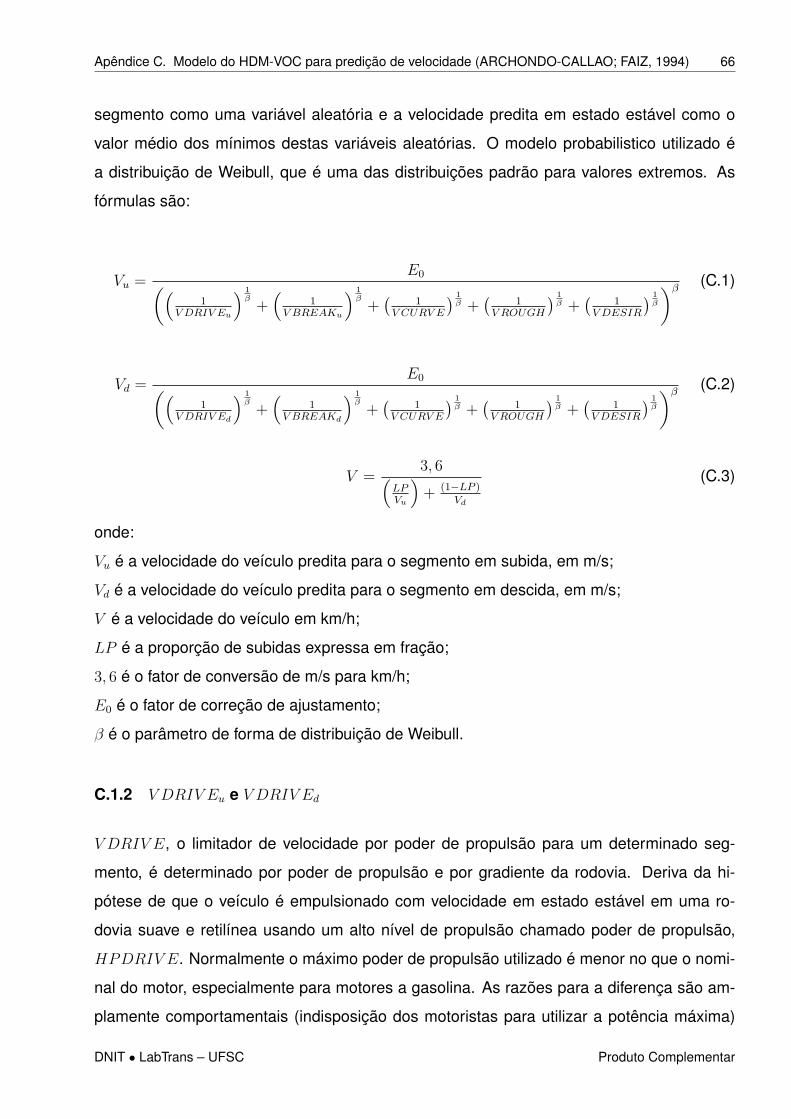
Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 66
segmento como uma variável aleatória e a velocidade predita em estado estável como o
valor médio dos mínimos destas variáveis aleatórias. O modelo probabilistico utilizado é
a distribuição de Weibull, que é uma das distribuições padrão para valores extremos. As
fórmulas são:
Vu =E0((
1V DRIV Eu
) 1β
+(
1V BREAKu
) 1β
+(
1V CURV E
) 1β +
(1
V ROUGH
) 1β +
(1
V DESIR
) 1β
)β (C.1)
Vd =E0((
1V DRIV Ed
) 1β
+(
1V BREAKd
) 1β
+(
1V CURV E
) 1β +
(1
V ROUGH
) 1β +
(1
V DESIR
) 1β
)β (C.2)
V =3, 6(
LPVu
)+ (1−LP )
Vd
(C.3)
onde:
Vu é a velocidade do veículo predita para o segmento em subida, em m/s;
Vd é a velocidade do veículo predita para o segmento em descida, em m/s;
V é a velocidade do veículo em km/h;
LP é a proporção de subidas expressa em fração;
3, 6 é o fator de conversão de m/s para km/h;
E0 é o fator de correção de ajustamento;
β é o parâmetro de forma de distribuição de Weibull.
C.1.2 V DRIV Eu e V DRIV Ed
V DRIV E, o limitador de velocidade por poder de propulsão para um determinado seg-
mento, é determinado por poder de propulsão e por gradiente da rodovia. Deriva da hi-
pótese de que o veículo é empulsionado com velocidade em estado estável em uma ro-
dovia suave e retilínea usando um alto nível de propulsão chamado poder de propulsão,
HPDRIV E. Normalmente o máximo poder de propulsão utilizado é menor no que o nomi-
nal do motor, especialmente para motores a gasolina. As razões para a diferença são am-
plamente comportamentais (indisposição dos motoristas para utilizar a potência máxima)
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 67
e talvez em parte mecânica (operação a uma rotação menor do motor, perda de potência
pela transmissão e uso de acessórios).
V DRIV E está relacionada com HPDRIV E e o gradiente através do balanço de for-
ças sem aceleração:
[Poder de propulsão] = [Resistência ao rolamento] + [Resistência pelo gradiente] +
[Resistência pelo ar]
onde os termos, todos expressos em Newtons, são dados pelas seguintes expressões:
[Poder de propulsão] = 736× HPDRIV EV DRIV E
[Resistência ao rolamento] = g ×GVW × CR
[Resistência pelo gradiente] = g ×GVW ×GR
[Resistência pelo ar] = 0, 5×RHO × CD × AR× V DRIV E2
onde:
736 é o número de Watts em um HP métrico;
GVW é o peso bruto do veículo, em kg;
g é a constante gravitacional, igual a 9,81m/s2;
CR é o coeficiente adimensional de resistência ao rolamento;
GR é o gradiente vertical expresso como fração;
RHO é a densidade do ar, em kg/m3;
CD é o coeficiente adimensional de arrasto aerodinâmico;
AR é a área frontal projetada, em m2.
Substituindo estes valores na equação resulta em uma equação cúbica para V DRIV E
que tem sempre uma única raiz positiva. Deste modo. dado o valor de HPDRIV E e os
outros listados, o modelo computa um único valor de V DRIV E. Resolvendo a equação
cúbica com GR positivo tem-se o valor de V DRIV Eu e resolvendo com GR negativo tem-
se o V DRIV Ed.
Os passos são:
1.Computar o coeficiente de restistência ao rolamento CR:
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 68
O coeficiente de resistêncoa ao rolamento CR é empiricamente dado como função da
rugosidade da rodovia.
Se o veículo é um carro ou utilitário:
CR = 0, 0218 + 0, 0006071×RI (C.4)
Se o veículo é um caminhão:
CR = 0, 0139 + 0, 0002574×RI (C.5)
onde RI é a rugosidade da rodovia expressa na unidade do Índice Internacional de
Rugosidade (IRI, m/km).
2.Computar a densidade do ar RHO, em km/m3:
RHO = 1, 225×(
1− 2, 26× ALT100.000
)4,255
(C.6)
onde ALT é a altitude da rodovia, definida como a elevação da rodovia sobre o nível
médio dos mares, em metros.
3.Computar o peso bruto do veículo GVW , em kg:
GVW = TARE + LOAD (C.7)
onde:
TARE é o peso próprio do veículo, em kg
LOAD é a carga do veículo, em kg.
4.Computar a velocidade limitada pelo poder de propulsão para subidas V DRIV Eu, em
m/s, pela equação cúbica:
0, 5×RHO × CD × AR× V DRIV Eu3 +
GVW × g × (CR + PG)× V DRIV Eu −
736×HPDRIV E = 0 (C.8)
onde PG é o gradiente positivo expresso como fração. Note que o programa recebe o
gradiente positivo como porcentagem.
No Anexo D é apresentado o formulário para a resolução de equações cúbicas.
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 69
5.Computar a velocidade limitada pelo poder de propulsão para descidas V DRIV Ed,
em m/s, pela equação cúbica:
0, 5×RHO × CD × AR× V DRIV Ed3 +
GVW × g × (CR−NG)× V DRIV Ed −
736×HPDRIV E = 0 (C.9)
onde NG é o gradiente negativo expresso como fração. Note que o programa recebe
o gradiente negativo como porcentagem.
Para resolver a equação pode ser utilizado o formulário do Anexo D. Nos casos onde
a equação possui mais de uma raiz real, o valor de V DRIV Ed é dado pela maior
delas.
C.1.3 V BRAKEu e V BRAKEd
V BRAKE, a velocidade limitada para um dado segmento de rodovia pela capacidade de
frenagem e pelo gradiente, deriva do conceito de "uso de poder de frenagem", que é um
valor positivo, representado por HPBRAKE, em cavalos de potência métricos. No conceito
de poder de frenagem, HPBRAKE, que depende do tipo do veículo, limita a velocidade
em estado estável adquirida em uma longa, reta e suave descida.
Em um segmento em subida, a limitação de velocidade por poder de frenagem não se
aplica. Conceitualmente, quando os freios não são usados o valor de V BRAKE é infinito
e 1V BRAKE
é igual a zero. De forma mais geral, a limitação não é aplicável sempre quando
o veículo necessita poder de propulsão positivo para se mover. Este seria o caso em um
segmento em descida se a resistência ao rolamento for maior, em valor absoluto, do que a
resistência pelo gradiente, ou seja, se CR ≥ NG.
Quando a limitação se aplica, V BRAKE está relacionado com HPBRAKE como
anteriormente, pela equação de balanço de forças:
[Poder de propulsão] = [Resistência ao rolamento] + [Resistência pelo gradiente] +
[Resistência pelo ar]
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 70
Contudo, uma vez que a limitação pela capacidade de frenagem é somente empre-
gada em casos de descidas íngremes (grades negativos) com velocidades em estado es-
tável, o modelo ignora a resistência pelo ar, sem erro significativo. Assim, V BRAKE é
computada com uma equação de primeiro grau:
V BRAKEu =∞ (C.10)
Se CR ≥ NG:
V BRAKEd =∞ (C.11)
Se CR < NG:
V BRAKEd = −(
736×HPBRAKEg ×GVW × (CR−NG)
)(C.12)
C.1.4 V CURV E
V CURV E, a velocidade limitada pela curvatura, é derivada do postulado de que quando a
curvatura é significante, a velocidade é limitada pela tendência dos pneus a derrapar. Um
bom indicador da tendência a derrapagem é a relação entre as forças lateral e normal do
veículo: FRATIO.
Para o veículo percorrendo a rodovia com velocidade em estado estável V , a força
lateral sobre o veículo na direção paralela à superfície da rodovia, LF , em Newtons, é dada
pela seguinte relação cinemática:
LF = [Força centrífuga] + [Força gravitacional]
LF =
(GVW × V 2
RC
)cos(sp)−GVW × g × sin(sp) (C.13)
onde:
sp é o ângulo de superelevação;
RC é o raio da curva, em metros.
A força sobre o veículo na direção perpendicular à rodovia, a força normal represen-
tada por NF , em Newtons, é dada por:
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 71
NF = GVW × g × cos(sp) +
(GVW × V 2
RC
)sin(sp) (C.14)
Uma vez que a superelevação da rodovia normalmente não excede 20%, as seguintes
aproximações podem ser utilizadas:
cos(sp) ∼= 1 (C.15)
sin(sp) ∼= SP (C.16)
onde SP é a superelevação expressa como fração. Consequentemente as equações são
simplificadas para:
LF =
(GVW × V 2
RC
)−GVW × g × SP (C.17)
NF = GVW × g +
(GVW × V 2
RC
)SP (C.18)
FRATIO, a "relação de fricção utilizada percebida", é dada pela relação entre as
forças lateral e normal:
FRATIO =LF
NF(C.19)
Substituindo as equaçãos para LF e NF e simplificando pela negligência do termoV 2
gRCSP , a seguinte equação é produzida:
FRATIO =V 2
gRC
− SP (C.20)
Resolvendo para V , temos o limitador de velocidade pela curvatura, V CURV E, ex-
presso como:
V CURV E =√
(FRATIO + SP )× g ×RC (C.21)
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 72
O valor permissível para FRATIO foi derivado como uma função da carga útil do
veículo:
FRATIO = max(0, 02;FRATIO0 − FRATIO1 × LOAD) (C.22)
onde FRATIO0 e FRATIO1 são parâmetros que dependem do tipo do veículo e do tipo da
superfície da rodovia. A Tabela C.1 lista valores estimados para o Brasil.
O raio da curva, RC é uma função simples da curvatura horizontal média:
RC =180.000
π ×max(18π
;C)(C.23)
onde C é a curvatura horizontal, em ◦/km. Note que para uso prático o modelo considera a
velocidade limitada pela curvatura somente quando o raio de curvatura RC é menor do que
10.000 metros.
Se não estiverem disponíveis os valores de superelevação SP , o modelo estima a
superelevação com as seguintes fórmulas:
SP = 0, 012C para rodovias pavimentadas e
SP = 0, 017C para rodovias não pavimentadas.
Estas fórmulas são aproximações sujeridas por padrões de projeto para velocidades
típicas nestas superfícies, e podem ser não realísticas para condições em casos particula-
res. Por isso devem ser empregados valores de superelevação reais sempre que possível.
C.1.5 V ROUGH
V ROUGH, o limitador de velociddade pela rugosidade, deriva da medida da "velocidade
média retificada" ARV , que é recomendada como uma adequada medição do desconforto
no movimento do veículo, ou severidade. ARV é definida de forma geral para um dado
veículo com eixo traseiro rígido como a relação média ou movimento de suspensão do eixo
traseiro, mais especificamente como a relação do deslocamento absoluto acumulado do
eixo traseiro relativo ao corpo do veículo, em mm/s. ARV é relacionada com a velocidade
do veículo V por meio de:
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 73
ARV = V ARS (C.24)
onde ARS é o "ângulo médio retificado" medido, definido como a quantidade de movimento
na suspensão do eixo traseiro por unidade de distância, em mm/m ou m/km. Para propósito
de modelagem, medições de ARV e ARS são aquelas do padrão "calibrado" de um carro
de passageiros (Maysmeter-equiped Opala) usado em estudos no Brasil.
A medição de ARS está relacionada com o IRI, i índice de rugosidade internacional,
pela seguinte relação:
ARS = 1, 1466RI (C.25)
onde:
RI é a rugosidade da rodovia expressa em unidade de índici internacional de rugosidade
IRI, em m/km;
1, 1466 é uma constante de conversão.
A limitação da velocidade pela severidade, V ROUGH, é governada pela máxima ARV
prática, chamada ARVMAX, como segue:
V ROUGH =ARVMAX
1,1466RI
(C.26)
onde ARVMAX é um parâmetro estimado. A Tabela C.1 lista os valores de ARVMAX
estimados para o Brasil.
C.1.6 V DESIR
V DESIR é o limitador da velocidade desejado, isto é, a velocidade na qual um veículo é
assumido como operando sem restrições quanto ao gradiente, curvatura ou rugosidade. A
velocidade desejada resulta da resposta do condutor do veículo a considerações psicológi-
cas, de segurança, de economia, dentre outras.
O estudo no Brasil considera, para cada tipo de superfície (pavimentada ou não pa-
vimentada), V DESIR como sendo uma constante para cada tipo de veículo. Porém, para
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 74
rodovia estreitas (isto é, aquelas com número de pistas efetivo igual a um, ou pista simples),
o modelo assume que V DESIR seja mais baixo. As seguintes fórmulas são adotadas, ba-
seadas em um estudo realizado na Índia:
V DESIR = V DESIR0 ×BW (C.27)
onde:
V DESIR0 é o valor da velocidade desejada não modificada especificada pelo usuário, em
km/h;
BW é o parâmetro do efeito da largura aplicável para rodovias de pista simples.
A Tabela C.1 lista os valores originalmente estimados para V DESIR0, estimados para
o Brasil, e também os valores para BW .
DNIT • LabTrans – UFSC Produto Complementar

Apêndice C. Modelo do HDM-VOC para predição de velocidade (ARCHONDO-CALLAO; FAIZ, 1994) 75
Tabela C.1: Valores padrão de características de veículos para predição de velocidade
Carro pe-
queno
Carro mé-
dio
Carro
grandeUtilitário Ônibus
Caminhão
leve a
gaolina
Caminhão
leve a
diesel
Caminhão
médio
Caminhão
pesado
Caminhão
articulado
Modelo representa-
tivo do veículo
Volkswagen
1300
Chevrolet
Opala
Chrysler
Dodge
Dart
Volkswagen
Kombi
Mercedes
Benz
O-362
Ford
F-400
Ford
F-4000
Mercedez
Benz 1113
c/ 2 eixos
Mercedez
Benz 1113
c/ 3 eixos
Scania
110/39
Peso do veículo em
kg (TARE)960 1200 1650 1320 8100 3120 3270 5400 6600 14730
Capacidade de carga
em kg (LOAD), va-
lores sujeridos
400 400 400 900 4000
Coeficiente de ar-
rasto aerodinâmico
(CD)
0,45 0,5 0,45 0,46 0,65 0,7 0,7 0,85 0,85 0,63
Área frontal em m2
(AR)1,8 2,08 2,2 2,72 6,3 3,25 3,25 5,2 5,2 5,75
HPDRIV E em hp
métricos30 70 85 40 100 80 60 100 100 210
HPBRAKE em
hp métricos17 21 27 30 160 100 100 250 250 500
FRATIO0 para
rodovias pavimenta-
das
0,268 0,268 0,268 0,221 0,233 0,253 0,253 0,292 0,292 0,179
FRATIO0 para
rodovias não pavi-
mentadas
0,124 0,124 0,124 0,117 0,095 0,099 0,099 0,087 0,087 0,040
FRATIO1 para
rodovias pavimenta-
das (10E-4)
0 0 0 0 0 0,128 0,128 0,094 0,094 0,023
FRATIO1 para
rodovias não pavi-
mentadas
0 0 0 0 0 0 0 0 0 0
ARVMAX para
rodovias pavimenta-
das em mm/s
259,7 259,7 259,7 239,7 212,8 194,0 194,0 177,7 177,7 130,9
ARVMAX para
rodovias não pavi-
mentadas em mm/s
259,7 259,7 259,7 239,7 212,8 194,0 194,0 177,7 177,7 130,9
VDESIR0 para
rodovias pavimenta-
das em km/h
98,3 98,3 98,3 94,9 93,4 81,6 81,6 88,8 88,8 84,1
VDESIR0 para
rodovias não pavi-
mentadas em km/h
82,2 82,2 82,2 76,3 69,4 71,9 71,9 72,1 72,1 49,6
BW para pista sim-
ples0,74 0,74 0,74 0,74 0,78 0,73 0,73 0,73 0,73 0,73
BW para mais que
uma pista1 1 1 1 1 1 1 1 1 1
β 0,274 0,274 0,274 0,308 0,273 0,304 0,304 0,310 0,310 0,244
E0 1,003 1,003 1,003 1,004 1,012 1,008 1,008 1,013 1,013 1,018
DNIT • LabTrans – UFSC Produto Complementar

Apêndice D
Formulário para resolução de equações
cúbicas
O seguinte formulário para a resolução de equações cúbicas foi obtido na internet no site
http://www.1728.com/cubic2.htm e foi testado numericamente no LabTrans.
A equação cúbica possui a forma geral:
ax3 + bx2 + cx+ d = 0 (D.1)
Primeiramente são calculados os valores auxiliares f , g e h:
f =3 ca− b2
a2
3(D.2)
g =2 b
3
a3 − 9 bca2 + 27d
a
27(D.3)
h =g2
4+f 3
27(D.4)
Se h > 0 existe somente uma raiz real e esta é obtida pelas seguintes equações:
R = −g2
+√h (D.5)
76

Apêndice D. Formulário para resolução de equações cúbicas 77
S = R13 (D.6)
T = −g2−√h (D.7)
U = T13 (D.8)
x1 = S + U − b
3a(D.9)
Se f = 0, g = 0 g h = 0, as três raízes são reais e iguais, e são obtidas com:
x1 = x2 = x3 = −(d
a
) 13
(D.10)
Finalmente, se h ≤ 0, existem três raízes reais, que são calculadas por:
I =
√g2
4− h (D.11)
J = I13 (D.12)
K = arccos(− g
2I
)(D.13)
L = −J (D.14)
M = cos
(K
3
)(D.15)
N =√
3 · sin(K
3
)(D.16)
DNIT • LabTrans – UFSC Produto Complementar

Apêndice D. Formulário para resolução de equações cúbicas 78
P = − b
3a(D.17)
x1 = 2JM + P (D.18)
x2 = L(M +N) + P (D.19)
x3 = L(M −N) + P (D.20)
DNIT • LabTrans – UFSC Produto Complementar





























