Embed Size (px)
Citation preview

Produto interno, externo e misto
Definicao: Chama-se norma (ou comprimento) do vector u ao comprimento do segmentode recta [OP ] e representa-se por ||u||.
Definicao: Sejam a =−→OA e b =
−−→OB dois vectores nao nulos. Dizemos que θ e o angulo
formado pelos vectores a e b, e denotamos θ = ](a, b) se θ for o menor dos angulosdefinido pela semi-recta com origem em O que passa pelo ponto A e pela semi-rectacom origem em O que passa pelo ponto B.
Convencao: Se algum dos vectores e o vector nulo convenciona-se que o angulo e zero.
Definicao: Sejam u =−−→OX e a =
−→OA dois vectores com u 6= −→
0 .Seja U o ponto deinterseccao da recta que passa por A e e perpendicular a u com a recta OX. Aprojeccao ortogonal do vector a sobre o vector u e, por definicao, o numero real projuadefinido por:
||−−→OU || , se u pertence a semi-recta de origem no ponto O e que passa pelo ponto X.
−||−−→OU || ,caso contrario.
1

Propriedades:
• A projeccao ortogonal de um vector a sobre um vector u nao nulo nao depende danorma de u, ou seja, para qualquer λ > 0 tem-se:
projua = projλua
• Dados tres vectores a, b, e u tais que u 6= −→0 ,
proju(a + b) = projua + projub
PRODUTO INTERNO
Definicao:
Sejam a e b dois quaisquer vectores de R3 e seja θ o angulo formado por a e b . Chamamosproduto interno dos vectores a e b ao numero real
a|b = ||a|| ||b|| cosθ
2

Observacoes:
||a|| =√
a |a|Em particular a|a = 0 ⇔ a =
−→0 e
a|a > 0, se a 6= −→0
Reparemos ainda quea|b = ||a||projab, se a 6= −→
0 ea|b = ||b||projba, se b 6= −→
0projab = ||b||cosθ, θ = ](a, b) se a 6= −→
0
Propriedades:
1. a|b = b|a2.λ(a|b) = (λa)|b = a|(λb), λ ∈ R
3. (a + b)|c = a|c + b|c4. a|(b + c) = a|b + a|c
Definicao:
Sejam v1, v2, . . . , vk vectores de R3
Dizemos que (v1, v2, . . . , vk) e uma sequencia ortogonal de vectores se os vectores v1, v2, . . . , vk
sao ortogonais dois a dois, isto e,vi|vj = 0 se i 6= j
Dizemos que uma base (e1, e2, e3)de R3 e uma base ortogonal se e uma sequencia ortog-onal de vectores.
Dizemos que e uma base ortonormada se e uma base ortogonal constituıda por vectoresde norma 1.
Observacoes:
1. Se (v1, v2, . . . , vk) e uma sequencia ortogonal de vectores nao nulos de R3 entao e umasequencia de vectores linearmente independentes e, portanto k ≤ 3.
2. Sejam (e1, e2, e3) uma base ortonormada de R3 e x um vector de R3 . Entao existemx1, x2, x3 ∈ R tais que x = x1e1 + x2e2 + x3e3.
Os co-senos directores do vector x relativamente a (e1, e2, e3) sao dados por
x1
||x1|| ,x2
||x2|| ,x3
||x3||
Teorema:
Sejam (e1, e2, e3) uma base de R3 . Entao, dados dois vectores u = u1e1 + u2e2 + u3e3
e v = v1e1 + v2e2 + v3e3, temos:
u|v =3∑
i,j=1
(uivj)(ei|ej)
Alem disso, se a base (e1, e2, e3) e ortonormada,
u|v = u1v1 + u2v2 + u3v3
3

Corolario:
Seja (e1, e2, e3) uma base ortonormada de R3 . Entao para um vector u = u1e1 + u2e2 +u3e3 de R3 , tem-se:
||u|| =√
u21 + u2
2 + u23
O produto externo e o produto misto
Definicao:
Seja (e1, e2, e3) uma base de R3 eP = M(idR3 ; (e1, e2, e3); ((1, 0, 0), (0, 1, 0), (0, 0, 1))).Dizemos que (e1, e2, e3) e uma base directa de R3 se |P | > 0. Se|P | < 0 dizemos que a
base e inversa.
Observacao: A base canonica de R3 e directa.
Definicao: Sejam u e v dois vectores de R3 . Chamamos produto externo ou produto vectorial dovector u pelo vector v, ao vector de R3 , que denotamos por u×v ou por u∧v definidodo seguinte modo:
1. Se ue v sao linearmente dependentes entao u× v =−→0 .
2. Se u e v sao linearmente independentes, u× v e o vector perpendicular aos vectores ue v de norma igual a
||u||||v||sen(θ)
tal que(u, v, u×v) e uma base directa de R3, sendo θ o angulo formado pelos vectores ue v.
Observacoes:
• O produto externo nao e comutativo.• O produto externo nao e associativo.
Definicao:
Sejam u , v e w tres vectores de R3 . Ao numero real (u × v)|w chamamos produtomisto dos vectores u , v e w (por esta ordem).
Propriedades do produto misto:
Sejam u , v e w tres vectores de R3 . Entao:
1. (u× v)|w = 0 se, e so se, os vectores u ,v e w sao linearmente dependentes;
2. (u× v)|w > 0 se, e so se, (u, v, w) e uma base directa de R3 ;
3. (u× v)|w < 0 se, e so se, (u, v, w) e uma base inversa de R3
4. (u× v)|w = (w × u)|v = (v × w)|u;
5. (u× v)|w = −(v × u)|w = −(w × v)|u = −(u× w)|v;
6. (u× v)|w = u|(v × w).
4

Propriedades do produto externo:
Sejam u , v e w tres vectores de R3 e λ um numero real. Entao:
1. u× v = −v × u;
2. λ(u× v) = (λu)× v = u× (λv);
3. (u + v)× w = (u× w) + (v × w);
4. u× (v + w) = (u× v) + (u× w).
Teorema:
Seja (e1, e2, e3) uma base ortonormada directa de R3 . Entao
u× v = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
para quaisquer vectores de R3
u = α1e1 + α2e2 + α3e3 e v = β1e1 + β2e2 + β3e3.
Observacao: Nas condicoes do teorema anterior e usual escrevermos simbolicamente:
u× v =
∣∣∣∣∣∣
e1 e2 e3
α1 α2 α3
β1 β2 β3
∣∣∣∣∣∣
5

Teorema:
Seja (e1, e2, e3) uma base ortonormada directa de R3 . Entao dados tres vectores
u = u1e1 + u2e2 + u3e3, v = v1e1 + v2e2 + v3e3, e w = w1e1 + w2 e2 + w3e3 temos:
(u× v)|w =
∣∣∣∣∣∣
u1 u2 u3
v1 v2 v3
w1 w2 w3
∣∣∣∣∣∣
Aplicacoes
1. Considere-se o seguinte paralelogramo
A area do paralelogramo e dada por
||−−→OC ×−→OA||
6

2. Sejam u =−→OA, v =
−−→OB e w =
−−→OC tres vectores nao complanares de R3 . Entao os
vectores u , v, e w definem um paralelipıpedo de volume nao nulo :
O volume deste paralelipıpedo e dado por
∣∣∣(−→OA×−−→OB
)|−−→OC
∣∣∣
7

RECTA E PLANO
Representacao cartesiana da recta
Definicao:
Designa-se por representacao cartesiana de uma recta a uma equacao ou sistema de equacoescujas solucoes sao as coordenadas dos seus pontos em relacao a um certo referencial.
Dado um ponto P = (a, b, c) duma recta e um vector u = (u1, u2, u3) com a direccaodessa mesma recta, um ponto qualquer (x, y, z) da recta e dado por:
(x, y, z) = (a, b, c) + λ(u1, u2, u3), λ ∈ REQUACAO VECTORIAL DA RECTA
x = a + λu1
y = b + λu2
z = c + λu3
, λ ∈ R
EQUACOES PARAMETRICAS DA RECTA
Para u1 6= 0, u2 6= 0 e u3 6= 0,
x− a
u1=
y − b
u2=
z − c
u3EQUACOES NORMAIS DA RECTA
Estas equacoes vem:
Para u1 = 0, u2 6= 0 e u3 6= 0,
x = a ey − b
u2=
z − c
u3
Para u1 6= 0, u2 = 0 e u3 6= 0,
y = b ex− a
u1=
z − c
u3
Para u1 6= 0, u2 6= 0 e u3 = 0,
z = c ex− a
u1=
y − b
u2
Se u1 = 0, u2 = 0 e u3 6= 0,
X ∈ R ⇔ x = a e y = b
Se u1 = 0, u2 6= 0 e u3 = 0,
X ∈ R ⇔ x = a e z = c
Se u1 6= 0, u2 = 0 e u3 = 0,
X ∈ R ⇔ y = b e z = c
8

Para u3 6= 0 temos ainda que se:
m =u1
u3, n =
u2
u3, p = a− cu1
u3e q = b− cu2
u3,
Entao
{x = mz + py = nz + q
EQUACOES REDUZIDAS DA RECTA
Representacao cartesiana do plano
Dado um ponto P = (p1, p2, p3) dum plano e dois vectores u = ( u1, u2, u3) e v = (v1, v2, v3)linearmente independentes, um ponto qualquer (x, y, z) do plano definido pelo ponto P epelos vectores u e v e dado por:
(x, y, z) = (p1, p2, p3) + λ( u1, u2, u3) + µ(v1, v2, v3), λ, µ ∈ REQUACAO VECTORIAL DO PLANO
x = a + λu1 + µv1
y = b + λu2 + µv2
z = c + λu3 + µv3
, λ, µ ∈ R
EQUACOES PARAMETRICAS DO PLANO
9

Por outro lado sabemos que
X ∈ P ⇔ X ∈ P + 〈 u, v〉 ⇔⇔ −−→
PX ∈ 〈 u, v〉 ⇔ −−→PX | (u× v) = 0 ⇔
⇔∣∣∣∣∣∣
x− p1 y − p2 z − p3
u1 u2 u3
v1 v2 v3
∣∣∣∣∣∣= 0
Assim os pontos do plano P sao os pontos de R3 que sao solucao da equacao linear nasvariaveis x, y e z:
ax + by + cz + d = 0EQUACAO GERAL DO PLANO
Sabemos que (a, b, c) sao as coordenadas dum vector perpendicular ao plano P.
INCIDENCIA E PARALELISMO
• Sejam P1e P2 dois planos, P1e P2 verificam uma e uma so das condicoes:
a) P1 = P2
10

b) P1e P2 sao estritamente paralelos
c) A interseccao de P1 com P2 e uma recta
11

• Seja P1 um plano eR1 uma recta, P1 eR1 verificam uma e uma so das condicoes:a) R1 ⊆ P1
b) R1 e estritamente paralela a P1
c) A interseccao de R1 com P1 e um ponto, ou seja, a recta R1 e o plano P1 saoconcorrentes.
12
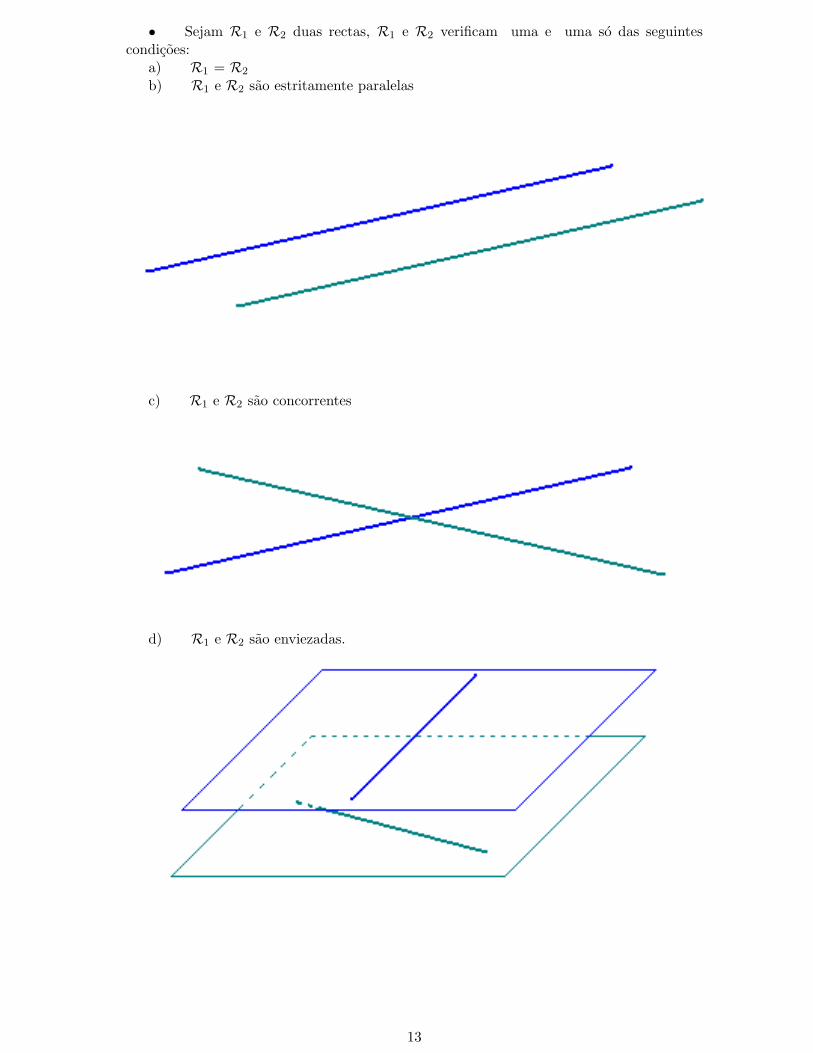
• Sejam R1 e R2 duas rectas, R1 e R2 verificam uma e uma so das seguintescondicoes:
a) R1 = R2
b) R1 e R2 sao estritamente paralelas
c) R1 e R2 sao concorrentes
d) R1 e R2 sao enviezadas.
13

DISTANCIAS
• Distancia entre dois pontosSejam P = (a, b, c) e Q = (x, y, z) dois pontos de R3 .
Entao:
d(P,Q) = ||−−→PQ|| =√
(x− a)2 + (y − b)2 + (z − c)2
• Distancia de um ponto a um planoP = (x0, y0, z0) ∈ R3 P um planoSeja R a recta perpendicular ao plano P que passa pelo ponto P . Se Q e o ponto de
interseccao desta recta com o plano P .
d(P,P) = d(P, Q) = ||−−→PQ||
M ∈ P, w⊥P
d(P,P) =∣∣∣projw
−−→MP
∣∣∣ =
∣∣∣w|−−→MP∣∣∣
‖w‖
14

Se o plano P esta representado pela equacao vectorial:
X = M + λ u + µv, λ, µ ∈ R
Dado que o vector u× v e perpendicular ao plano P, da equacao anterior vem:
d(P,P) =∣∣∣proju×v
−−→MP
∣∣∣ =
∣∣∣u× v|−−→MP∣∣∣
‖u× v‖
Se o plano P e representado pela equacao geral
ax + by + cz + d = 0
d(P,P) =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2
15

• Distancia dum ponto a uma recta
Sejam P um ponto de R3 e R uma recta. Dado um ponto M da recta R sabemos que:
d(P,R) =∥∥∥−−→MP
∥∥∥ senθ
Se u e um vector director da recta entao:
d(P,R) =
∥∥∥u×−−→MP∥∥∥
‖u‖
Se S e a recta que passa pelo ponto P e e perpendicular e concorrente no ponto Q coma recta R, entao :
d(P,R) = d(P, Q) = ||−−→PQ||
16

• Distancia entre dois planos
Sejam P e P’ dois planos
1. Se os planos sao coincidentes
d(P,P ′) = 0
2. Se os planos P e P’ se intersectam segundo uma recta entao:
d(P,P ′) = 0
3. Se os planos P e P’ sao estritamente paralelos a distancia entre P e P’ e igual adistancia de um ponto qualquer de P ao plano P ′.
d(P,P ′) = d(P,P ′)com P ∈ P
17

• Distancia de uma recta a um plano
1. Se a recta e o plano sao concorrentes:
d(R,P) = 0
2. Se a recta R e paralela ao plano P
d(P,R) = d(P,P), P ∈ R
18

• Distancia entre duas rectas
1. Se as rectas sao concorrentes:d(R,R′) = 0
2. Se as rectas sao paralelas:
d(R,R′) = d(P,R′), P ∈ R
3. Se a recta R e paralela ao plano P que contem a recta R′, i. e., R e R′ sao enviezadas,e u e v sao os vectores directores de R e R′ respectivamente
d(R,R′) =
∣∣∣u× v|−−→QP∣∣∣
‖u× v‖ , P ∈ R, Q ∈ R′
19

ANGULOS
• Angulo de duas rectas
Sejam R1 e R2 duas rectas cujos vectores directores sao u e v respectivamente
](R1,R2) = Arc cos|u|v|‖u‖ ‖v‖
20

• Angulo de uma recta com um plano
Seja P um plano, R uma recta e R′ uma recta perpendicular a P
](R,P) =π
2− ](R,R′)
Se w e um vector director da recta e u e v sao os vectores directores do plano entaok = u× v e um vector director de R′ e:
](R,P) = Arc sen|w| k|‖w‖ ‖k‖
Se o plano P e representado pela equacao geral ax + by + cz + d = 0
vem que k = (a, b, c) e sendo w = ( w1, w2, w3)
](R,P) = Arc sen|aw1 + bw2 + cw3|√
a2 + b2 + c2√
w21 + w2
2 + w23
21

• Angulo de dois planosSejam P1e P2 dois planos e k1 e k2 dois vectores perpendiculares a P1e P2 respectiva-
mente
](P1,P2) = Arc cos|k1|k2|‖k1‖ ‖k2‖
Suponhamos que a1x + b1y + c1z + d1 = 0 e a2x + b2y + c2z + d2 = 0 sao as equacoesgerais de
P1e P2 respectivamente,
](P1,P2) = Arc cos|a1a2 + b1b2 + c1c2|√
a21 + b2
1 + c21
√a2
2 + b22 + c2
2
22









![AMAX2-P1E Behatolásj. készl. en/pl/tr/hu, Ethernetresource.boschsecurity.com/documents/AMAX_2100_Kit_Data_sheet_huHU... · Transzformátor AC teljesítménye [VA] 20 Transzformátorbiztosíték](https://img.pdfslide.tips/doc/110x75/5c8ec0ea09d3f216698c9015/amax2-p1e-behatolasj-keszl-enpltrhu-transzformator-ac-teljesitmenye.jpg)



















