Embed Size (px)
Citation preview

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/~cmelchiorri
Analisi modaleAnalisi modale
CONTROLLI AUTOMATICI LSIngegneria Informatica
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
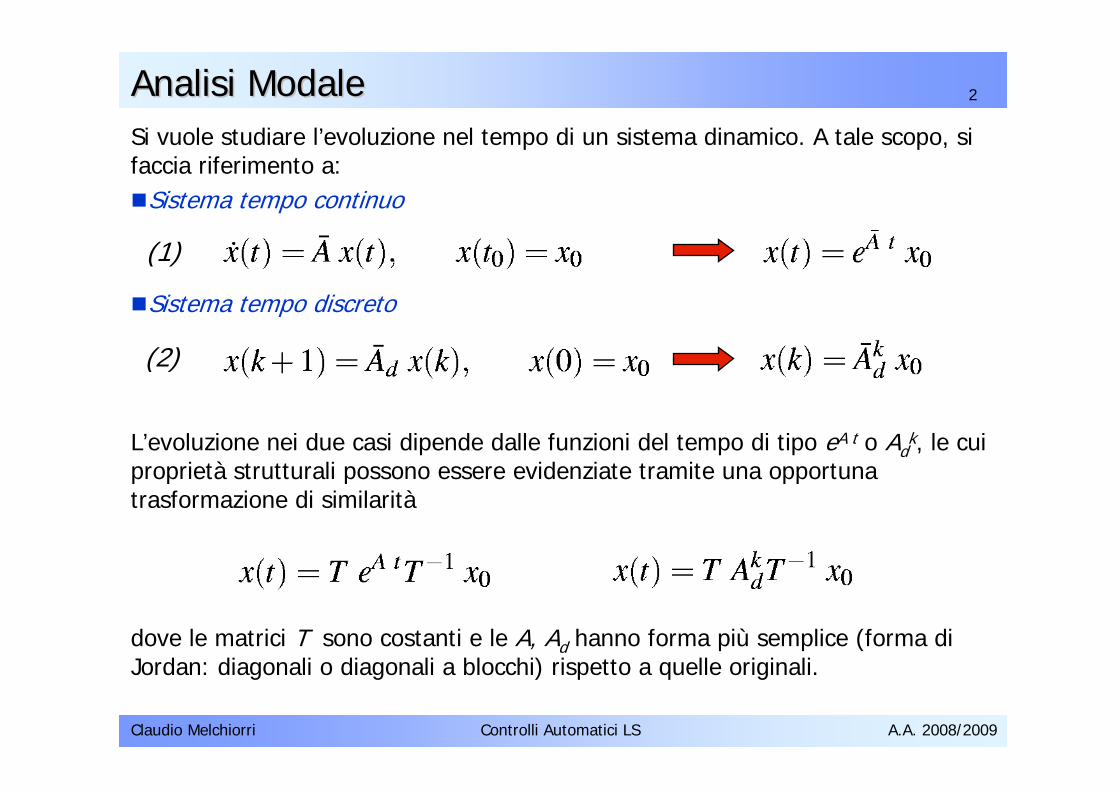
2AnalisiAnalisi ModaleModaleSi vuole studiare l’evoluzione nel tempo di un sistema dinamico. A tale scopo, sifaccia riferimento a:
Sistema tempo continuo
Sistema tempo discreto
L’evoluzione nei due casi dipende dalle funzioni del tempo di tipo eA t o Adk, le cui
proprietà strutturali possono essere evidenziate tramite una opportunatrasformazione di similarità
dove le matrici T sono costanti e le A, Ad hanno forma più semplice (forma di Jordan: diagonali o diagonali a blocchi) rispetto a quelle originali.
(1)
(2)
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
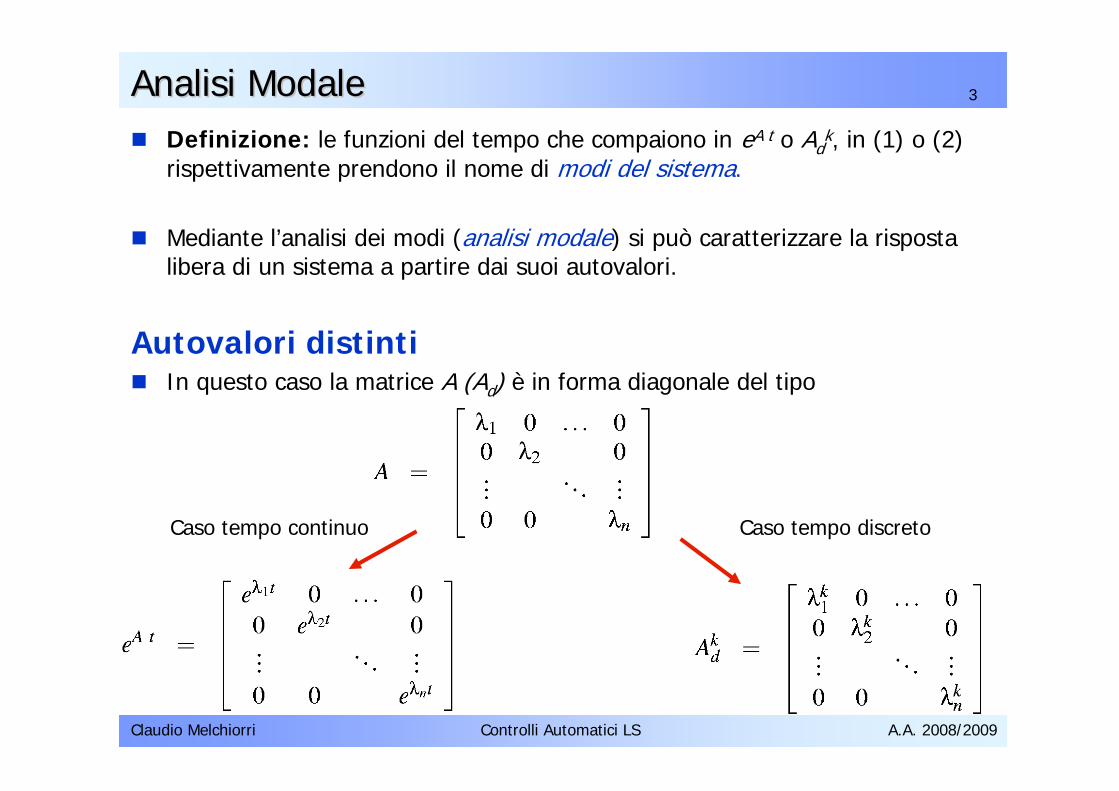
3AnalisiAnalisi ModaleModaleDefinizione: le funzioni del tempo che compaiono in eA t o Ad
k, in (1) o (2) rispettivamente prendono il nome di modi del sistema.
Mediante l’analisi dei modi (analisi modale) si può caratterizzare la risposta libera di un sistema a partire dai suoi autovalori.
Autovalori distintiIn questo caso la matrice A (Ad) è in forma diagonale del tipo
Caso tempo continuo Caso tempo discreto

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
4AnalisiAnalisi ModaleModaleI modi del sistema sono funzioni linearmente indipendenti in quanto gli autovaloriλ1, …, λn sono distinti.
eλ1 t, …, eλn t λ1k, …, λn
k
Se lo stato iniziale x0 appartiene all’autospazio relativo ad un particolare autovalore, allora l’evoluzione libera del sistema appartiene allo stesso autospazio.
Ciascun modo può venire “eccitato” indipendemente dagli altri modi; ciascun modo complesso in generale viene eccitato assieme al suo complesso, a meno che lo stato iniziale sia a componenti complesse.
-1.5-1
-0.50
0.51
1.5
-1
0
1
-1.5
-1
-0.5
0
0.5
1
1.5
V
x0
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
5AnalisiAnalisi ModaleModale
0 2 4 6 80
10
20
30
40
50
60
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
0 2 4 6 80
0.5
1
1.5
2
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
0 2 4 6 80
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1-1
-0.5
0
0.5
1
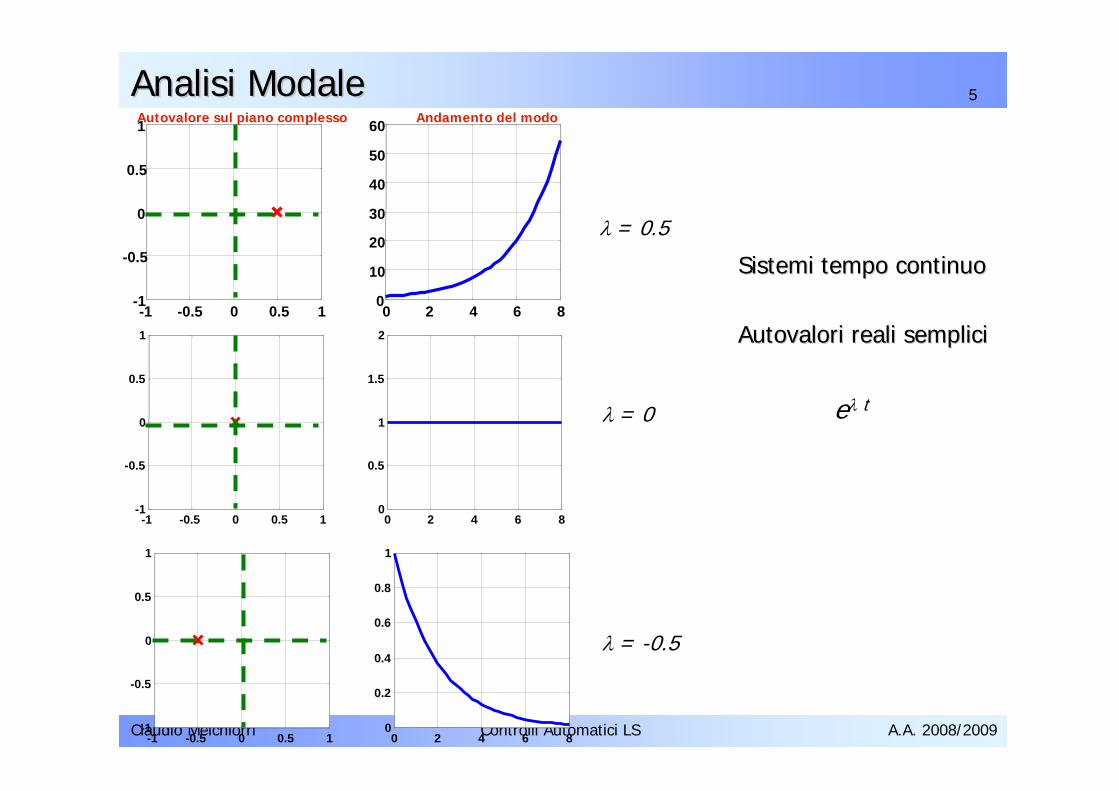
Autovalore sul piano complesso Andamento del modo
λ = 0.5
λ = 0
λ = -0.5
SistemiSistemi tempo continuotempo continuo
AutovaloriAutovalori realireali semplicisemplici
eλ t

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
6AnalisiAnalisi ModaleModaleAutovalore sul piano complesso Andamento del modo
λ = 1.5
λ = 1
λ = 0.5
SistemiSistemi tempo tempo discretodiscreto
AutovaloriAutovalori realireali semplicisemplici
λk
0 5 100
10
20
30
40
50
60
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
0.5
1
1.5
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
0.5
1
1.5
-2 -1 0 1 2-2
-1
0
1
2

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
7AnalisiAnalisi ModaleModale
0 5 100
0.2
0.4
0.6
0.8
1
-2 -1 0 1 2-2
-1
0
1
2
0 5 10-0.5
0
0.5
1
-2 -1 0 1 2-2
-1
0
1
2
0 5 10-2
-1
0
1
2
-2 -1 0 1 2-2
-1
0
1
2
Autovalore sul piano complesso Andamento del modo
λ = 0
λ = -0.5
λ = -1
SistemiSistemi tempo tempo discretodiscreto
AutovaloriAutovalori realireali semplicisemplici
λk

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
8AnalisiAnalisi ModaleModale
0 5 10-60
-40
-20
0
20
40
60
-2 0 2-3
-2
-1
0
1
2
3
0 5 10-2
-1
0
1
2
-2 0 2-3
-2
-1
0
1
2
3
0 5 10-2
-1
0
1
2
-2 0 2-3
-2
-1
0
1
2
3
λ = 0.5 ± 2j
λ = ± 2j
λ = -0.5 ± 2j
SistemiSistemi tempo continuotempo continuo
AutovAutov. . complessicomplessi semplicisemplici
eσ t cos(ω t)
Autovalore sul piano complesso Andamento del modo

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
9AnalisiAnalisi ModaleModale
0 5 10-1.5
-1
-0.5
0
0.5
1
1.5
-2 -1 0 1 2-2
-1
0
1
2
0 5 10-1.5
-1
-0.5
0
0.5
1
1.5
-2 -1 0 1 2-2
-1
0
1
2
0 5 10-1.5
-1
-0.5
0
0.5
1
1.5
-2 -1 0 1 2-2
-1
0
1
2
λ = e ± j π/4
λ = e ± j π/2
λ = 0.5 e ± j π/4
Autovalore sul piano complesso Andamento del modo
SistemiSistemi tempo tempo discretodiscreto
AutovAutov. . complessicomplessi semplicisemplici
eσ t cos(k ω)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
10AnalisiAnalisi ModaleModale –– AutovaloriAutovalori multiplimultipliNel caso tempo continuo si ha:
Nel caso tempo discreto si ha:
I modi del sistema sono
I modi del sistema sono
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
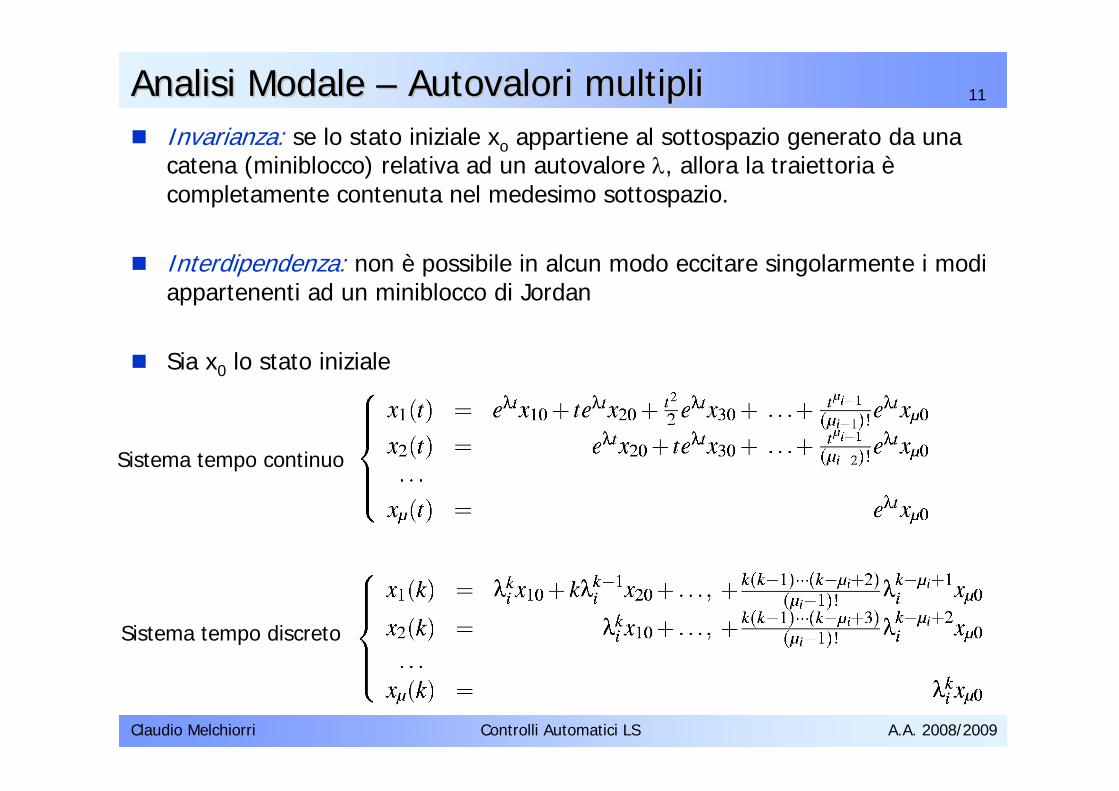
11AnalisiAnalisi ModaleModale –– AutovaloriAutovalori multiplimultipliInvarianza: se lo stato iniziale xo appartiene al sottospazio generato da una catena (miniblocco) relativa ad un autovalore λ, allora la traiettoria ècompletamente contenuta nel medesimo sottospazio.
Interdipendenza: non è possibile in alcun modo eccitare singolarmente i modi appartenenti ad un miniblocco di Jordan
Sia x0 lo stato iniziale
Sistema tempo continuo
Sistema tempo discreto
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
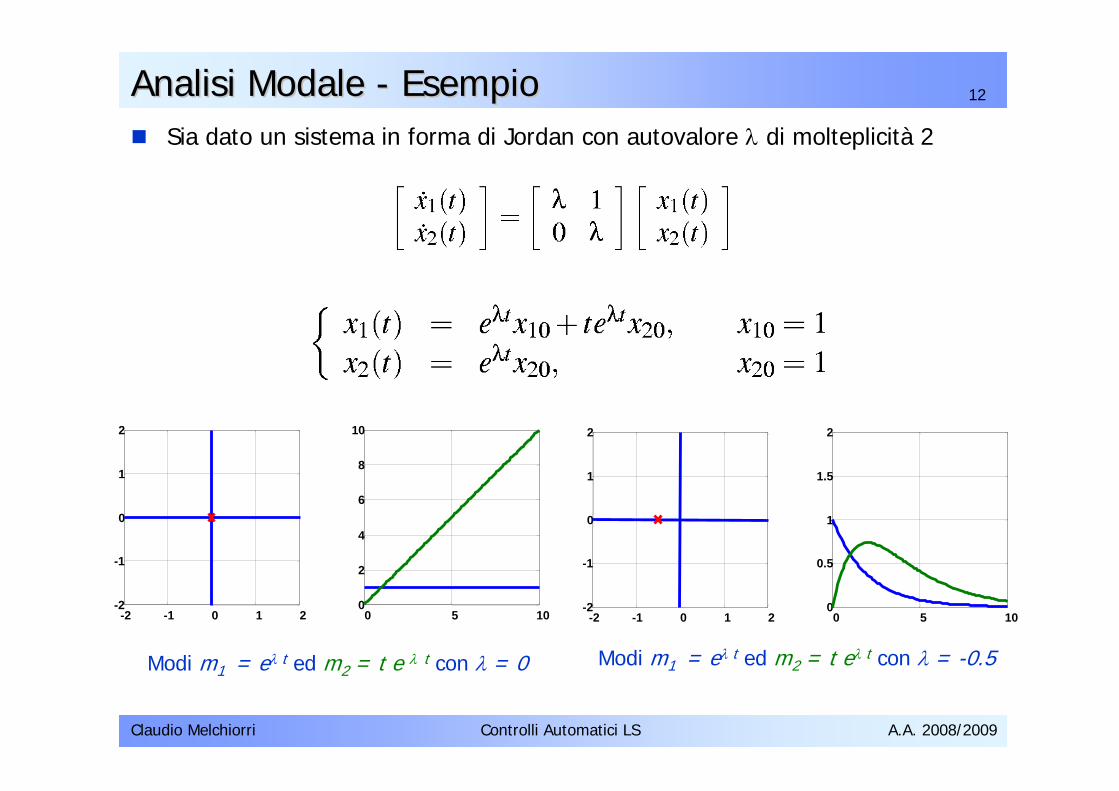
12AnalisiAnalisi ModaleModale -- EsempioEsempioSia dato un sistema in forma di Jordan con autovalore λ di molteplicità 2
Modi m1 = eλ t ed m2 = t e λ t con λ = 0 Modi m1 = eλ t ed m2 = t eλ t con λ = -0.5
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
0.5
1
1.5
2
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
2
4
6
8
10

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
13AnalisiAnalisi ModaleModale -- EsempioEsempioSia dato un sistema in forma di Jordan con autovalore λ di molteplicità 2
Modi m1 = λk ed m2 = k λk-1 con λ = 1 Modi m1 = λk ed m2 = k λk-1 con λ = 0.5
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
5
10
15
-2 -1 0 1 2-2
-1
0
1
2
0 5 100
0.5
1
1.5
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
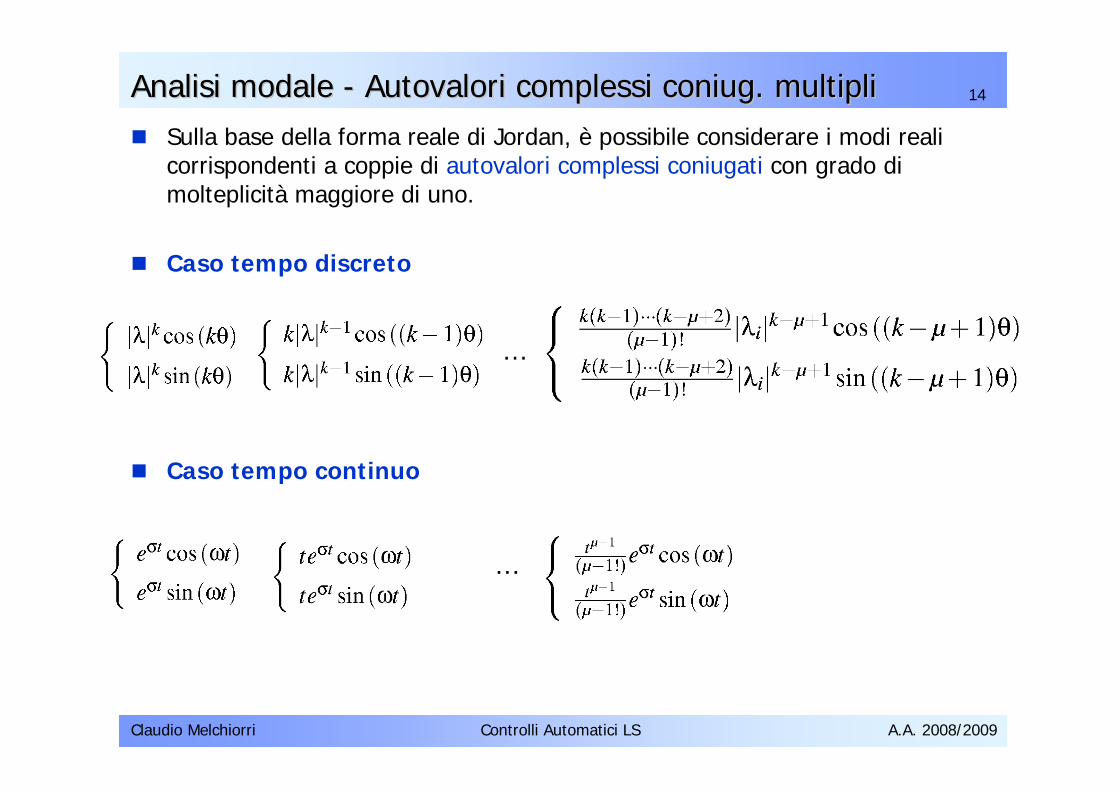
14Analisi modale Analisi modale -- AutovaloriAutovalori complessi complessi coniugconiug. multipli. multipliSulla base della forma reale di Jordan, è possibile considerare i modi reali corrispondenti a coppie di autovalori complessi coniugati con grado di molteplicità maggiore di uno.
Caso tempo discreto
Caso tempo continuo
…
…

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
15AnalisiAnalisi modalemodale –– caratterecarattere di di convergenzaconvergenza deidei modimodiDato un SL stazionario (tempo continuo o tempo discreto), il modo m(t) (realeo complesso) definito per t ≥ 0 è:
Convergente se:
Limitato ma non convergente, se ∃ un numero reale M > 0 tale che
Non limitato se ∀ M > 0, esiste t tale che
Proposizione 1: I modi del sistema sono:Convergenti sse tutti λ(A) hanno parte reale < 0Limitati sse tutti λ(A) hanno parte reale · 0 e quelli a parte reale nulla sonoassociati a miniblocchi di Jordan di dimensione unitaria (radici semplici del polinomio minimo)
Proposizione 2: I modi del sistema sono:Convergenti sse tutti λ(A) hanno modulo < 1Limitati sse tutti λ(A) hanno modulo · 1 e quelli a modulo = 1 sono associati a miniblocchi di Jordan di dimensione unitaria (radici semplici del polinomio minimo)

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
16AnalisiAnalisi modalemodale –– ModiModi dominantidominantiL’evoluzione libera del sistema lineare
a partire dallo stato iniziale x(0) = x0 è data da
al tendere di t (di k) all’infinito, i modi del sistema tendono a zero, rimangono costanti o divergono a seconda del valore degli autovalori.
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Tempo (sec)
Alcuni di essi, però, tendono a zero più rapidamente rispetto ad altri, per cui la loro influenza sul comportamento asintotico del sistema diventa trascurabile all’aumentare del tempo
Modo dominante

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
17AnalisiAnalisi modalemodale –– ModiModi dominantidominantiConsideriamo per semplicità il caso di autovalori reali distinti
Definizione: Siano λi gli autovalori della matrice A. L’autovalore λ1 è l’autovalore dominante della matrice A se vale la seguente relazione:
Caso tempo continuo
Caso tempo discreto
Proprietà. Al tendere di t (di k) all’infinito, l’evoluzione libera x(t) [x(k)] di un sistema lineare tempo continuo [tempo discreto] tende ad appiattirsi lungo il sottospazio corrispondente all’autovalore dominante, cioè l’autovalore λ1 a parte reale [modulo] maggiore.
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
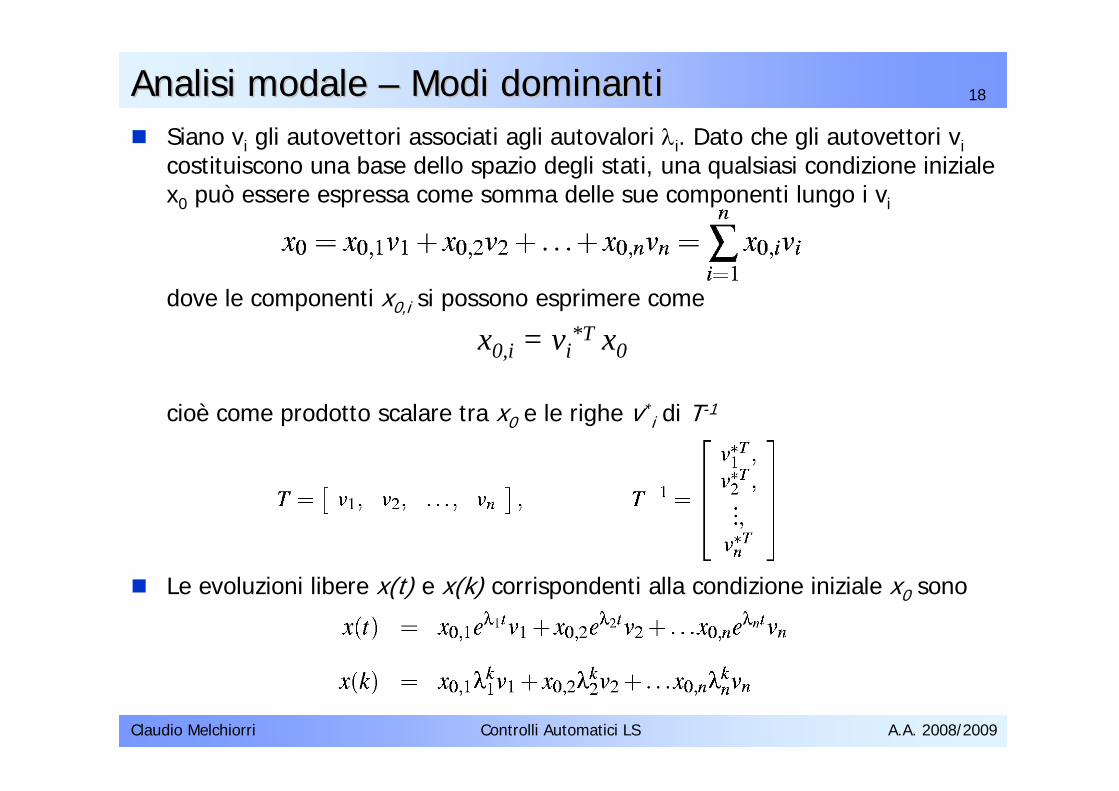
18AnalisiAnalisi modalemodale –– ModiModi dominantidominantiSiano vi gli autovettori associati agli autovalori λi. Dato che gli autovettori vicostituiscono una base dello spazio degli stati, una qualsiasi condizione inizialex0 può essere espressa come somma delle sue componenti lungo i vi
dove le componenti x0,i si possono esprimere come
x0,i = vi*T x0
cioè come prodotto scalare tra x0 e le righe v*i di T-1
Le evoluzioni libere x(t) e x(k) corrispondenti alla condizione iniziale x0 sono

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
19AnalisiAnalisi modalemodale –– ModiModi dominantidominantiLe evoluzioni libere x(t) e x(k) corrispondenti alla condizione iniziale x0 sono
Indipendentemente dalla condizione iniziale x0, se x0,1 ≠ 0 l’evoluzione del sistema tende verso l’autospazio corrispondente al polo (modo) dominante
00.2
0.40.6
0.81
0
0.5
10
0.2
0.4
0.6
0.8
1

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
20AnalisiAnalisi modalemodale –– ModiModi dominantidominantiNel caso di autovalori complessi coniugati, la coppia di autovalori λ1,2=σ ± j ωè detta dominante se (tempo continuo)
Se v1 è l’autovettore complesso corrispondente a λ1 e v1R, v1I le sue componenti reali ed immaginarie, si può dimostrare che
cioè l’evoluzione libera del sistema tende verso il sottospazio generato dai vettori v1R e v1I.
Considerazioni simili valgono anche nel caso di sistemi tempo-discreti con autovalori complessi coniugati dominanti.
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
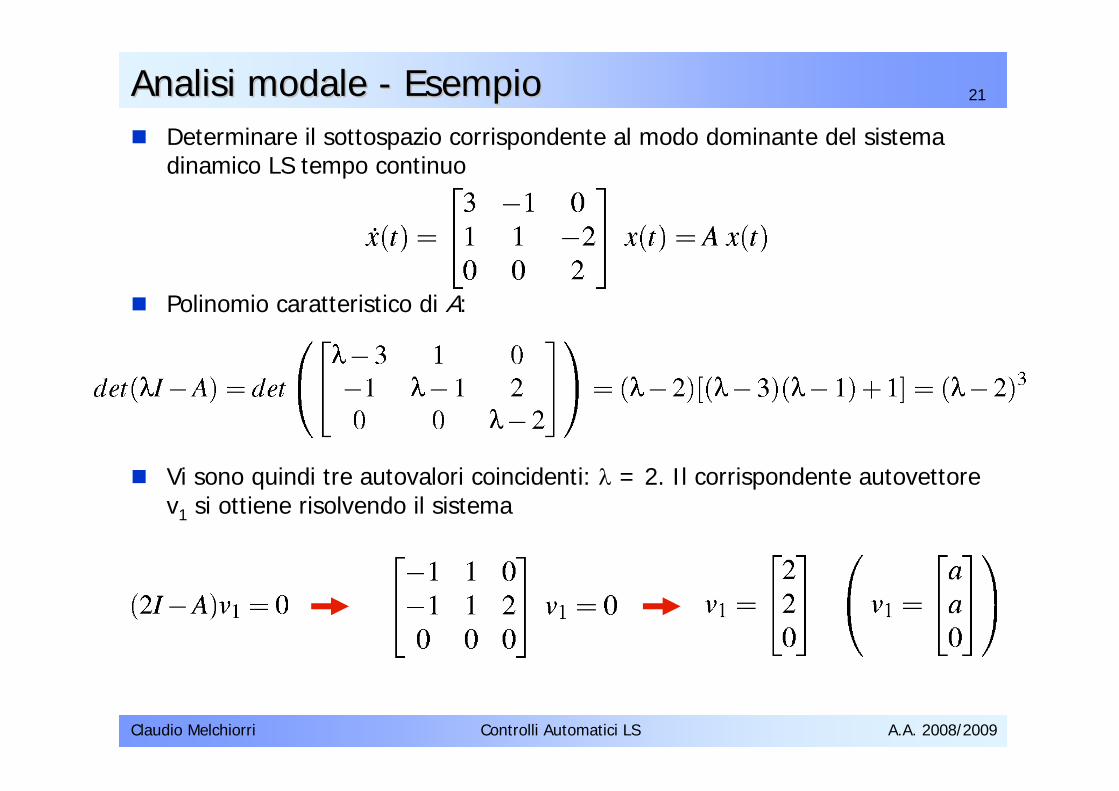
21AnalisiAnalisi modalemodale -- EsempioEsempioDeterminare il sottospazio corrispondente al modo dominante del sistema dinamico LS tempo continuo
Polinomio caratteristico di A:
Vi sono quindi tre autovalori coincidenti: λ = 2. Il corrispondente autovettorev1 si ottiene risolvendo il sistema
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
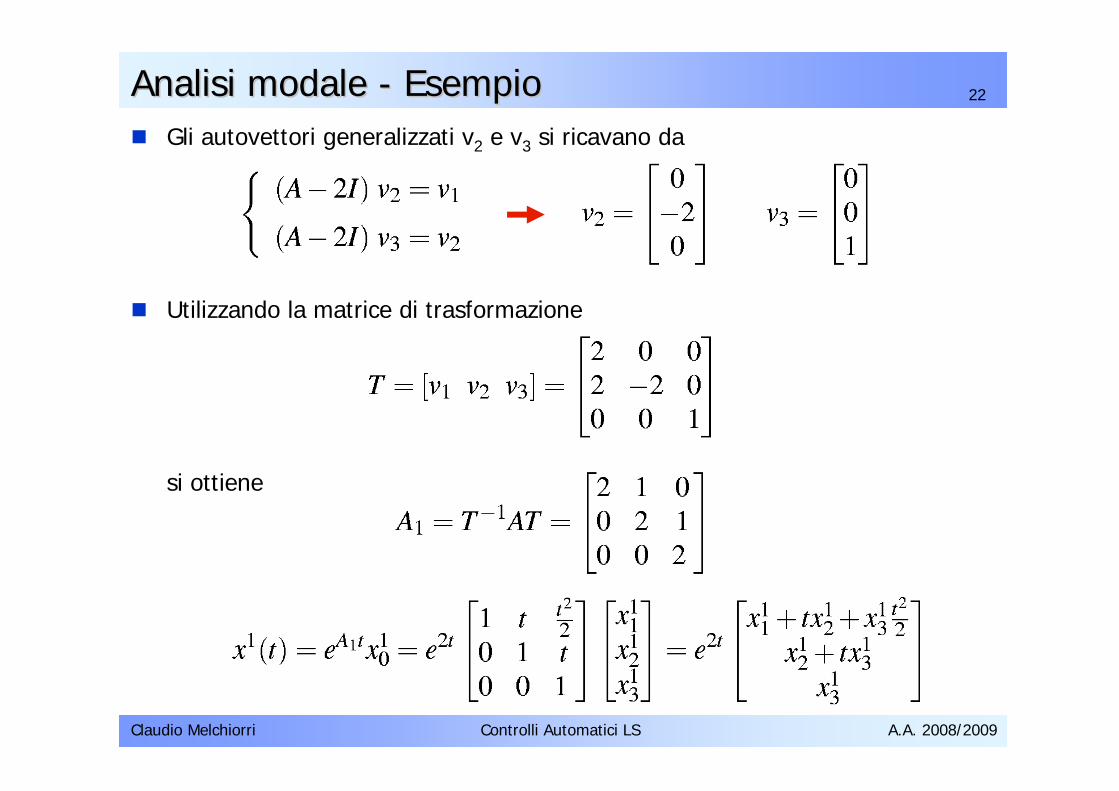
22AnalisiAnalisi modalemodale -- EsempioEsempioGli autovettori generalizzati v2 e v3 si ricavano da
Utilizzando la matrice di trasformazione
si ottiene
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
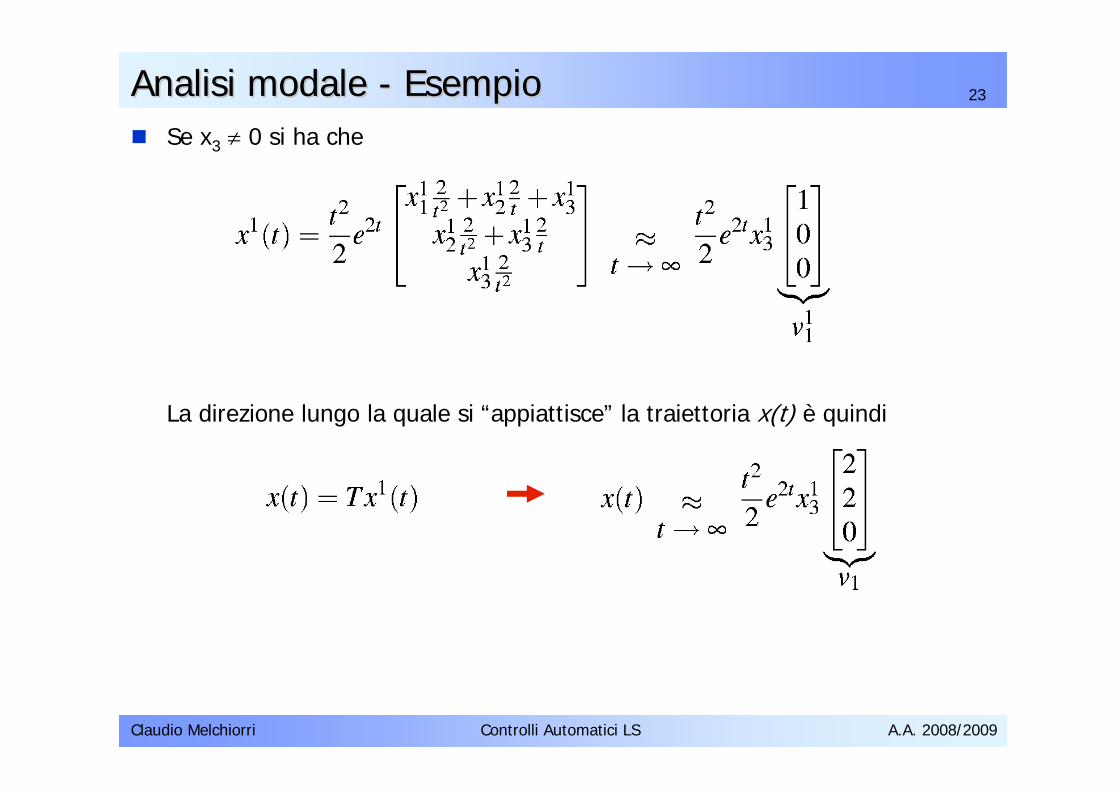
23AnalisiAnalisi modalemodale -- EsempioEsempioSe x3 ≠ 0 si ha che
La direzione lungo la quale si “appiattisce” la traiettoria x(t) è quindi

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
24InvariantiInvarianti
In termini matematici, un invariante è un aspetto, una proprietà, o una caratteristica che non cambia se soggetta ad una trasformazione.
Esempi:Parte reale e valore assoluto di un numero complesso con la operazione di coniugazione;Il grado di un polinomio con una trasformazione lineari delle variabili;Gli autovalori o i valori singolari di una matrice con una trasformazione di similitudine;La norma Euclidea (lunghezza di vettori) con una trasformazione ortonormale (rotazione);L’angolo tra due vettori con una trasformazione ortonormale (rotazione);
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
25InvariantiInvarianti
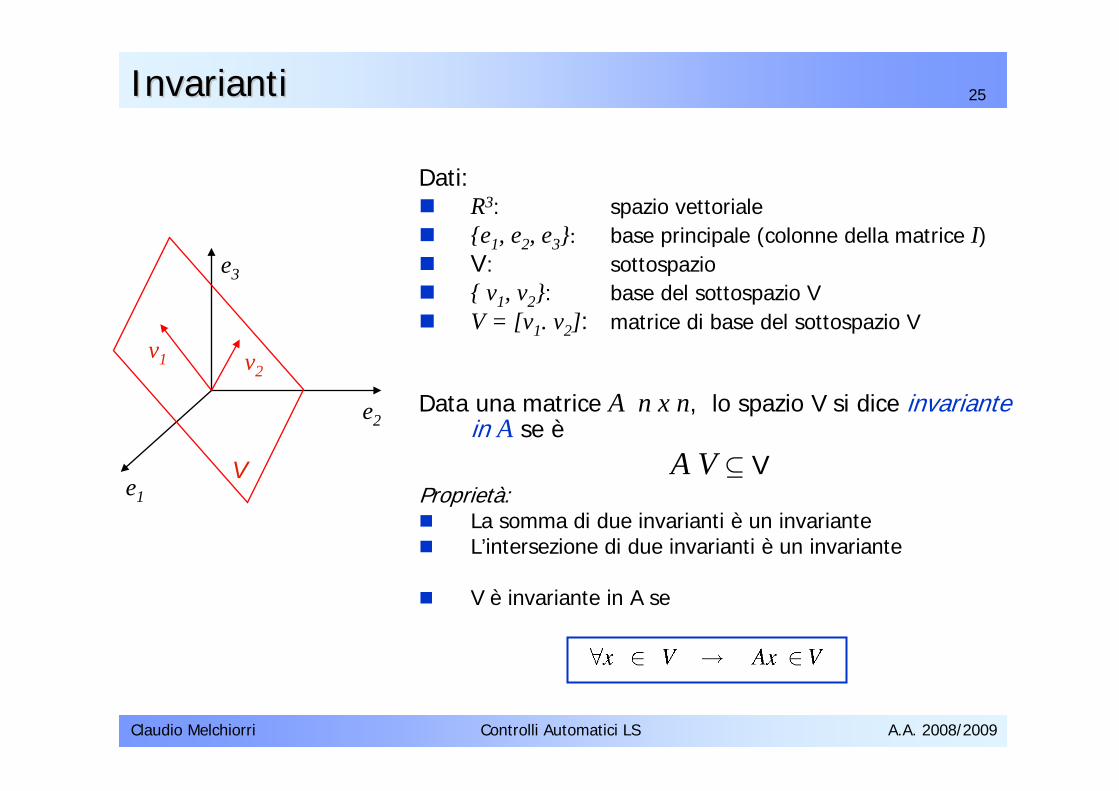
Dati:R3: spazio vettoriale {e1, e2, e3}: base principale (colonne della matrice I)V: sottospazio { v1, v2}: base del sottospazio VV = [v1. v2]: matrice di base del sottospazio V
Data una matrice A n x n, lo spazio V si dice invariantein A se è
A V ⊆ VProprietà:
La somma di due invarianti è un invarianteL’intersezione di due invarianti è un invariante
V è invariante in A se
e1
e3
e2
v1 v2
V
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
26InvariantiInvarianti
e1
e3
e2
v1 v2
V
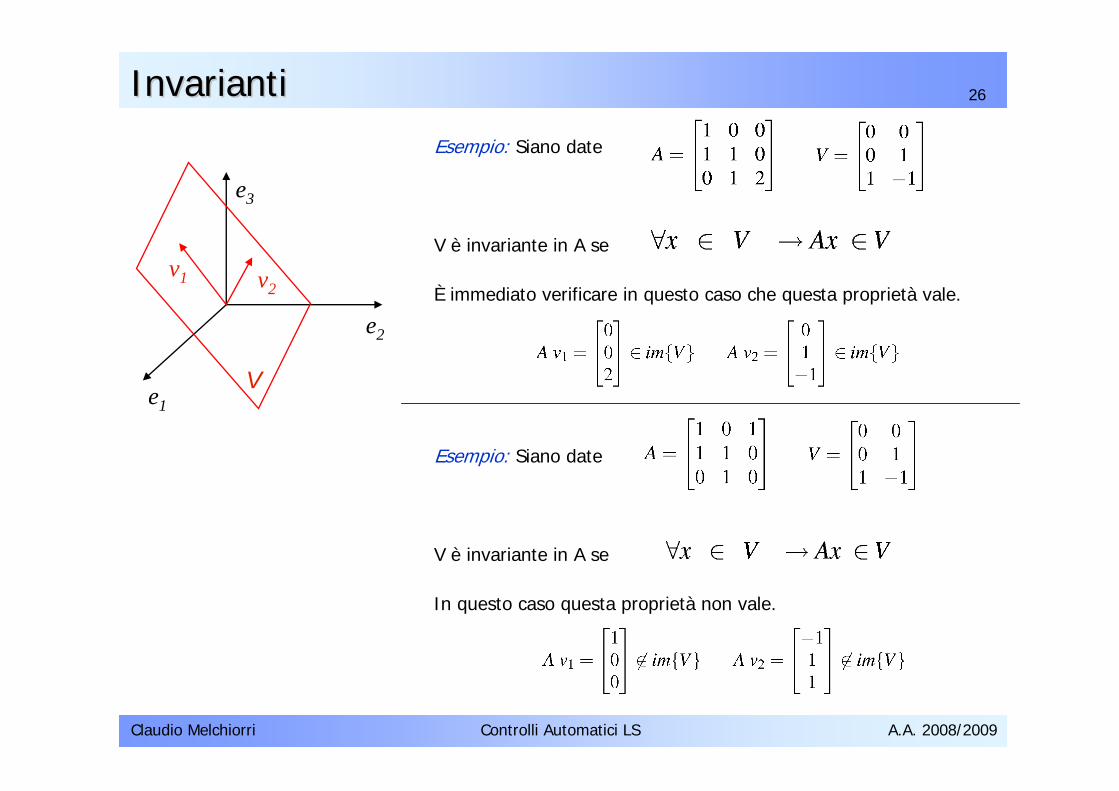
Esempio: Siano date
V è invariante in A se
È immediato verificare in questo caso che questa proprietà vale.
Esempio: Siano date
V è invariante in A se
In questo caso questa proprietà non vale.
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
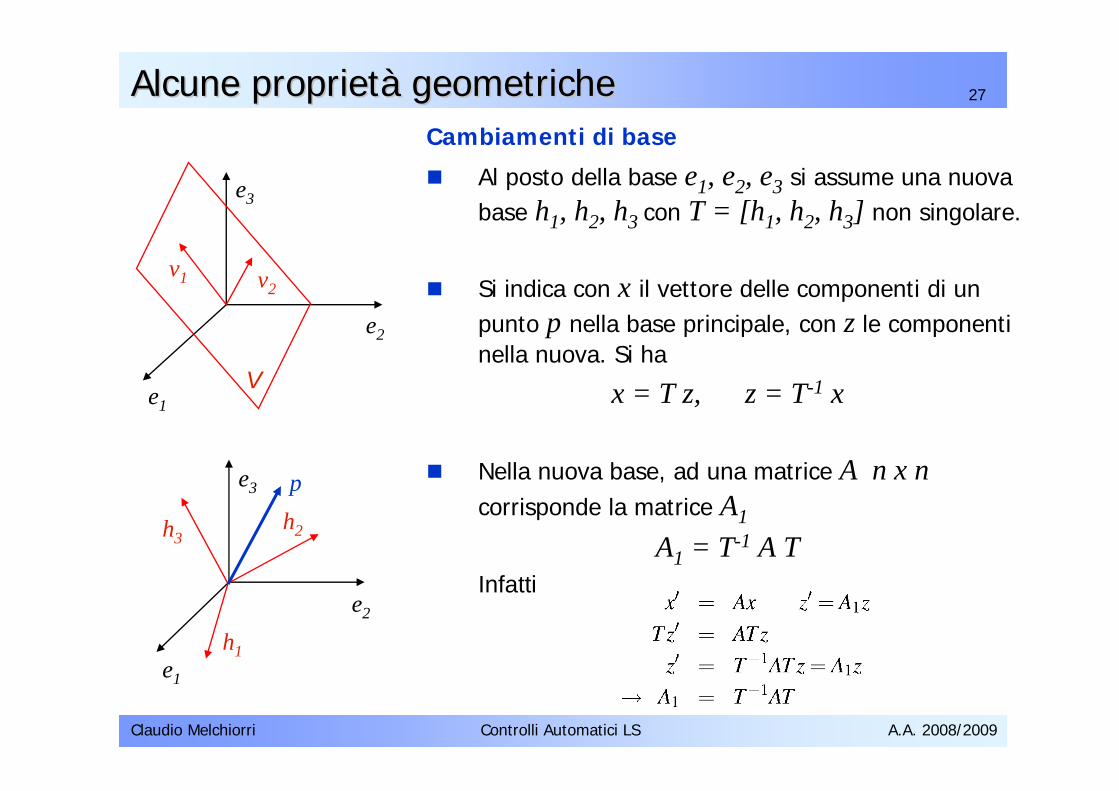
27AlcuneAlcune proprietproprietàà geometrichegeometricheCambiamenti di base
Al posto della base e1, e2, e3 si assume una nuova base h1, h2, h3 con T = [h1, h2, h3] non singolare.
Si indica con x il vettore delle componenti di un punto p nella base principale, con z le componenti nella nuova. Si ha
x = T z, z = T-1 x
Nella nuova base, ad una matrice A n x ncorrisponde la matrice A1
A1 = T-1 A TInfatti
e1
e3
e2
v1 v2
V
e1
e3
e2
h1
h3h2
p
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
28AlcuneAlcune proprietproprietàà geometrichegeometriche
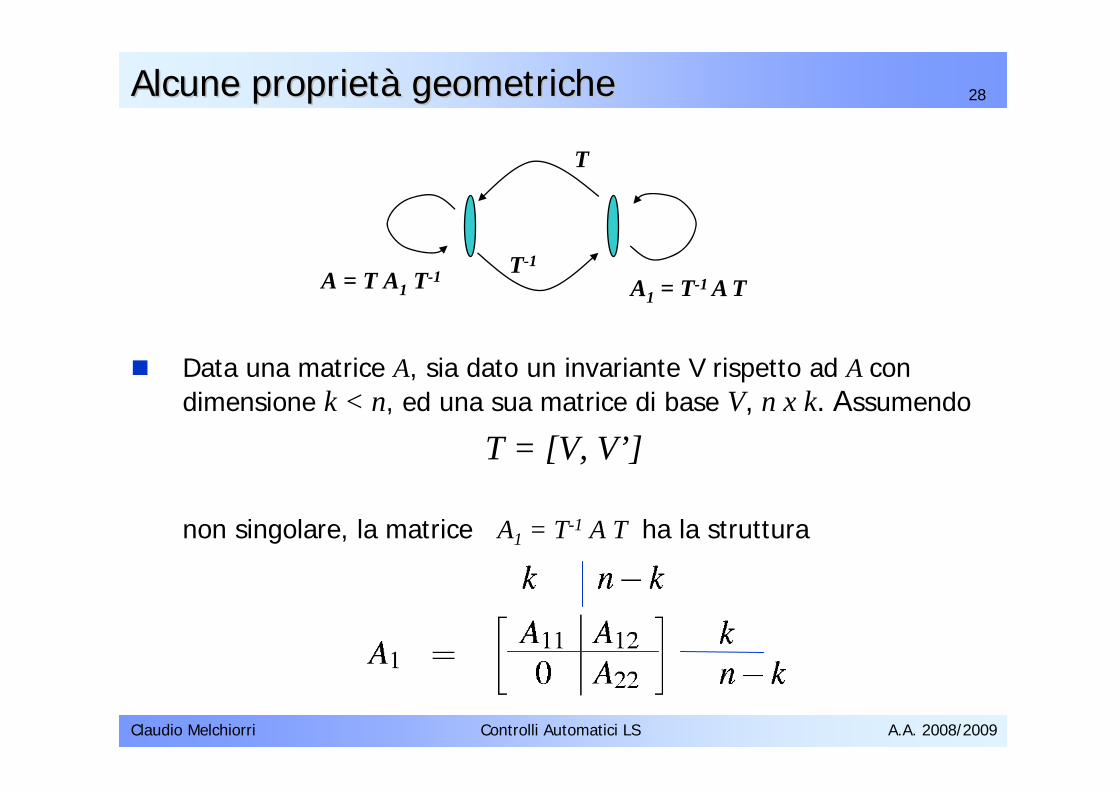
Data una matrice A, sia dato un invariante V rispetto ad A con dimensione k < n, ed una sua matrice di base V, n x k. Assumendo
T = [V, V’]
non singolare, la matrice A1 = T-1 A T ha la struttura
T
T-1A = T A1 T-1 A1 = T-1 A T

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
29AlcuneAlcune proprietproprietàà geometrichegeometricheEsempi: il vettore p nella base principale {e1, e2, e3} ha componenti
p = [3, 2, 5]T;
Sia
la matrice che definisce la nuova base. Allora:p’ = T-1 p = [-0.6548, 3.7892, 4.8180]T
con
e1
e3
e2
h1
h3h2
p
e1
e3
e2
h1
h3
h2
p
2 3
1

Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
30AlcuneAlcune proprietproprietàà geometrichegeometricheEsempio: data la matrice A e l’invariante descritto da V
Si ottiene
k = 2
n - k = 1
Claudio Melchiorri Controlli Automatici LS A.A. 2008/2009
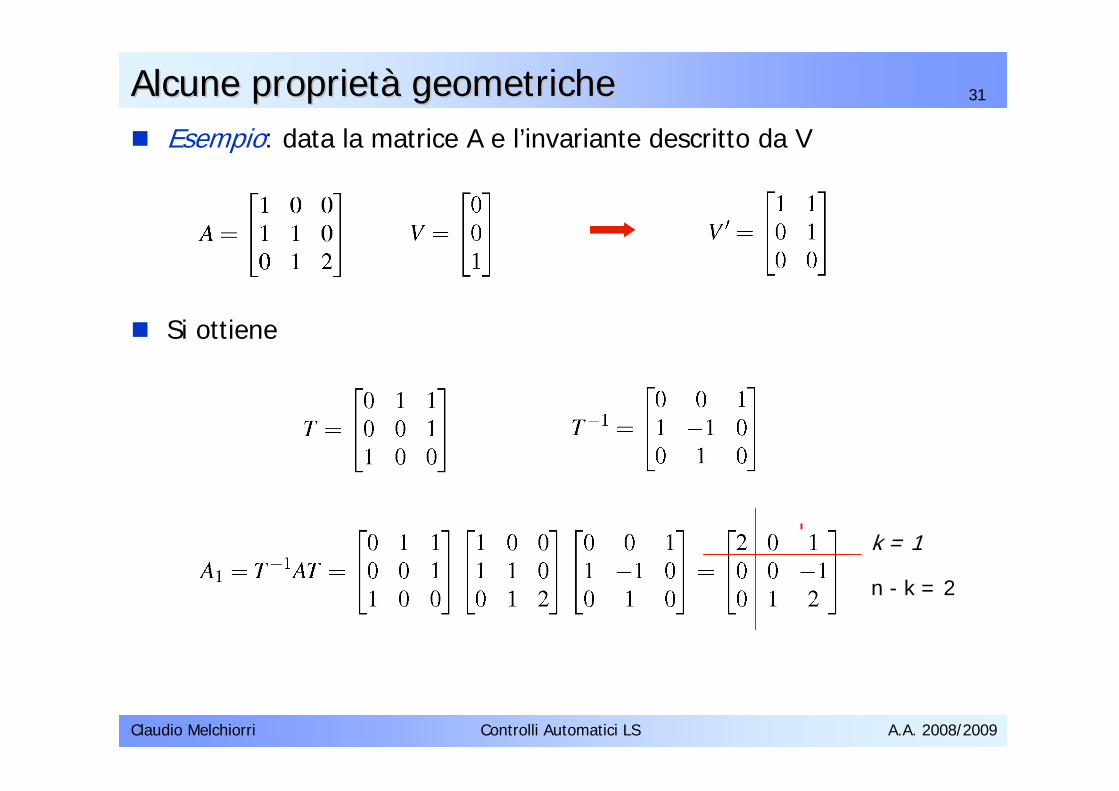
31AlcuneAlcune proprietproprietàà geometrichegeometricheEsempio: data la matrice A e l’invariante descritto da V
Si ottiene
k = 1
n - k = 2

Prof. Claudio Melchiorri
DEIS-Università di Bologna
Tel. 051 2093034
e-mail: [email protected]
http://www-lar.deis.unibo.it/~cmelchiorri
Analisi modaleAnalisi modaleFINEFINE
CONTROLLI AUTOMATICI LS





























