Embed Size (px)
Citation preview
Programación de Máquinas a Control Numérico

Maquina a Control Numérico moderna
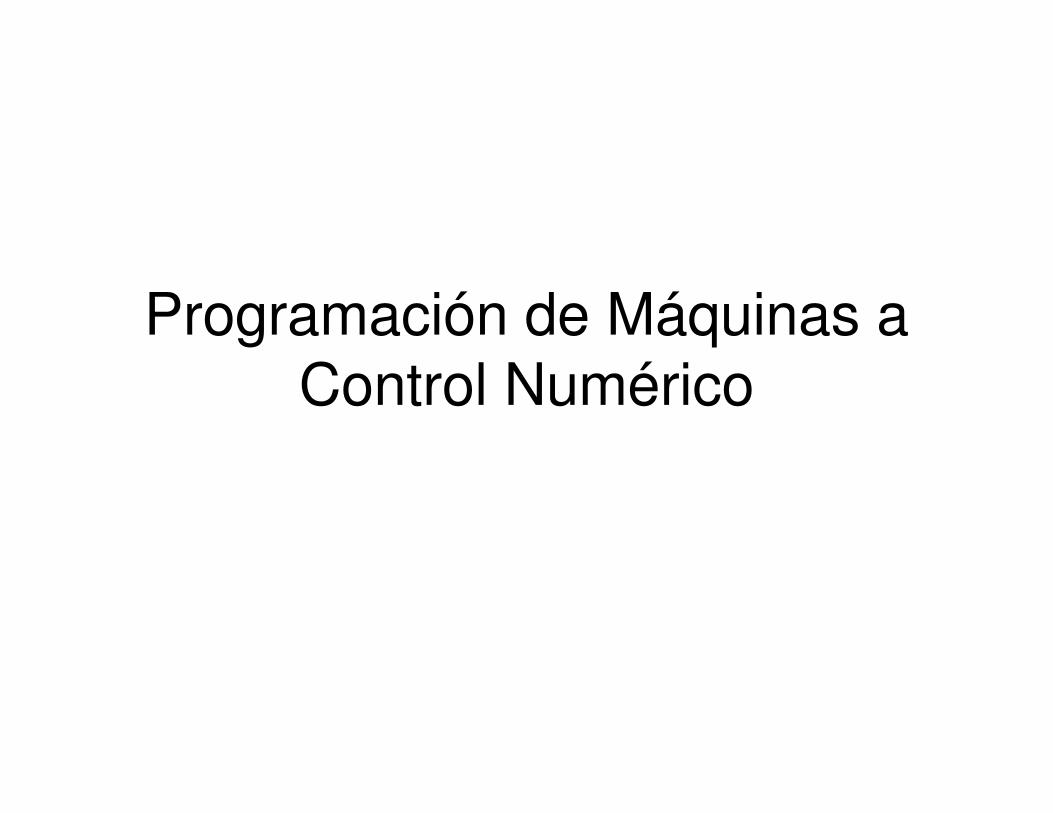
Interior

Estructuras Principales
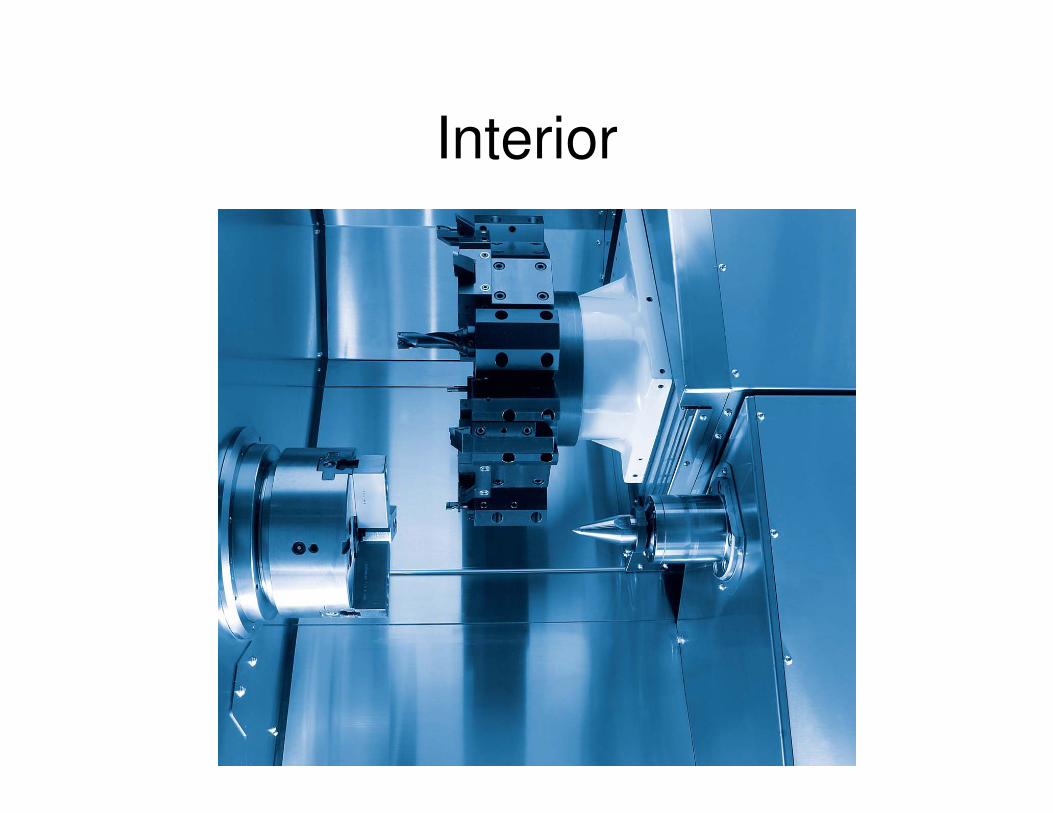
Plato
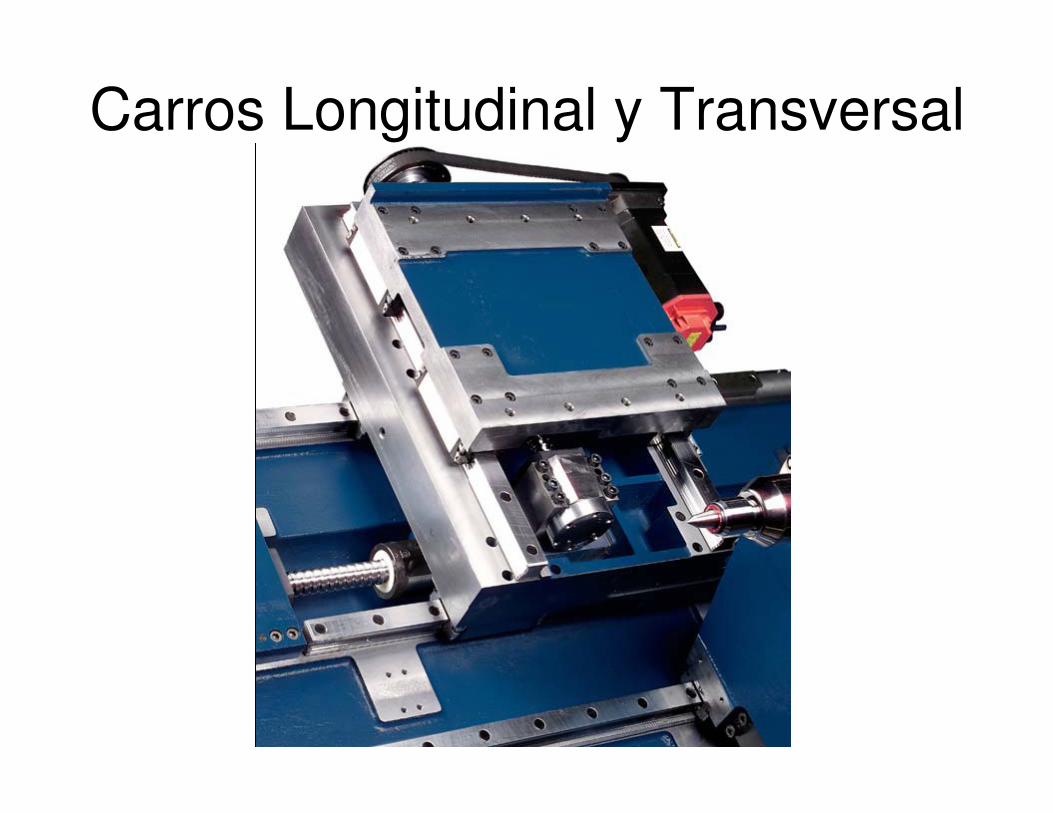
Carros Longitudinal y Transversal
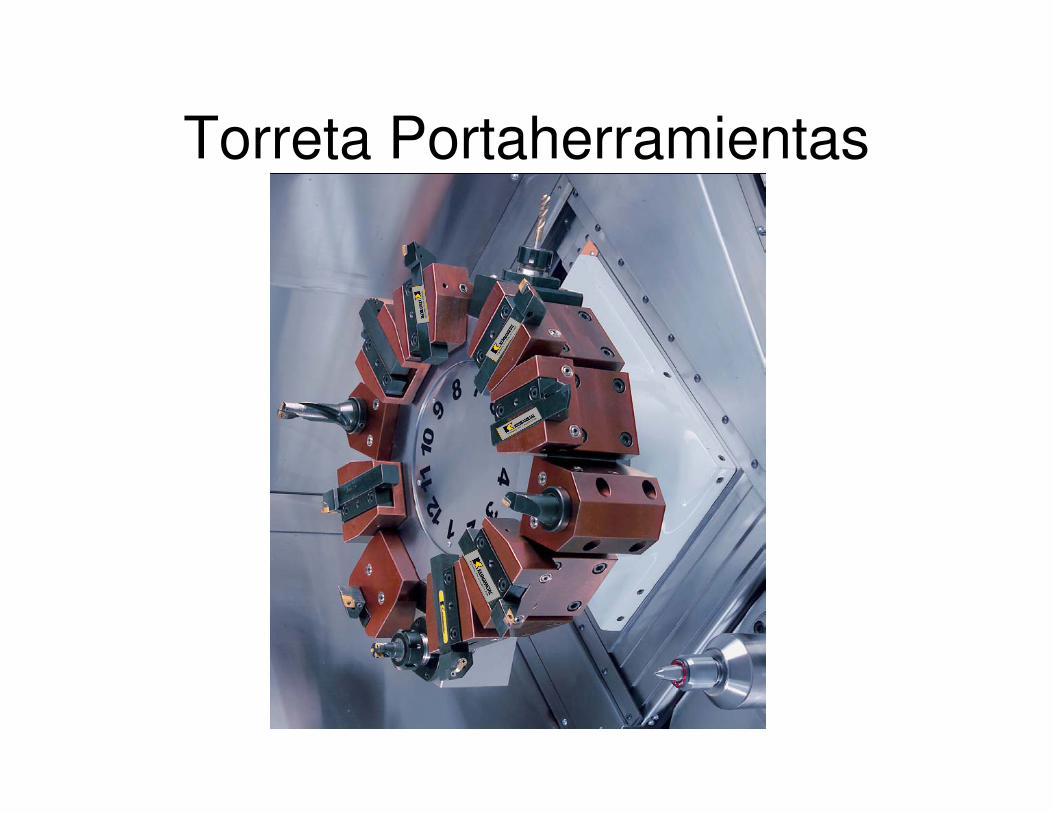
Torreta Portaherramientas
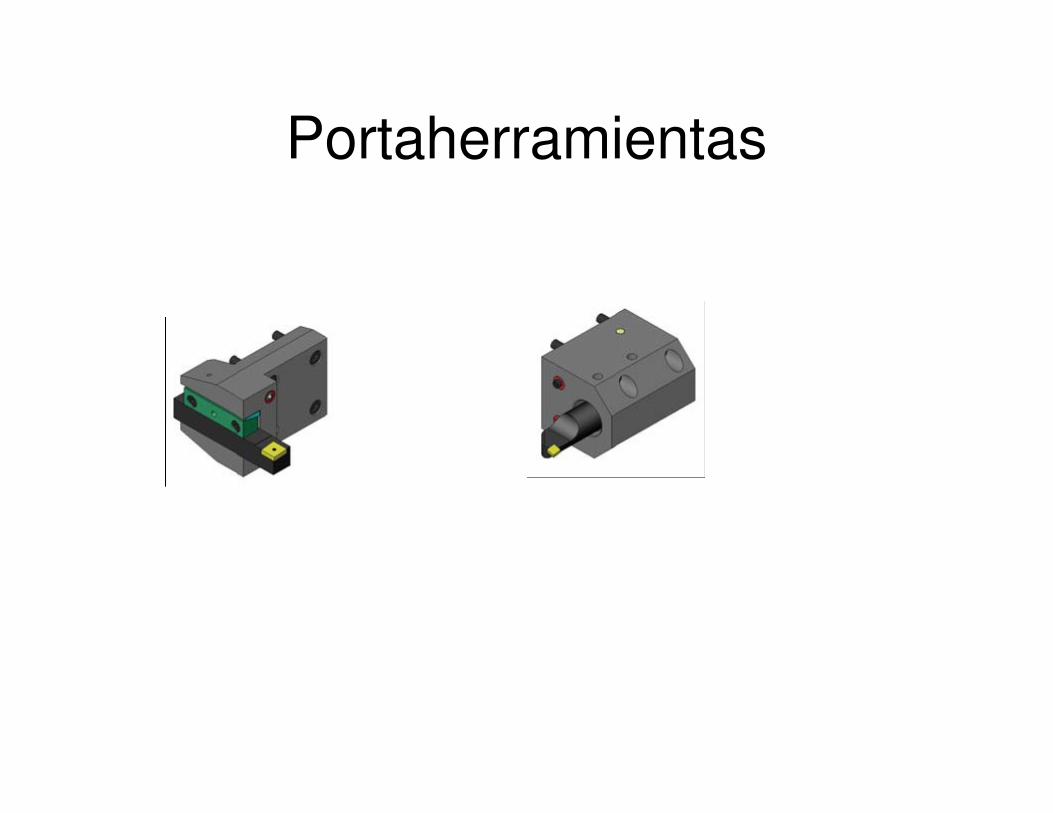
Portaherramientas
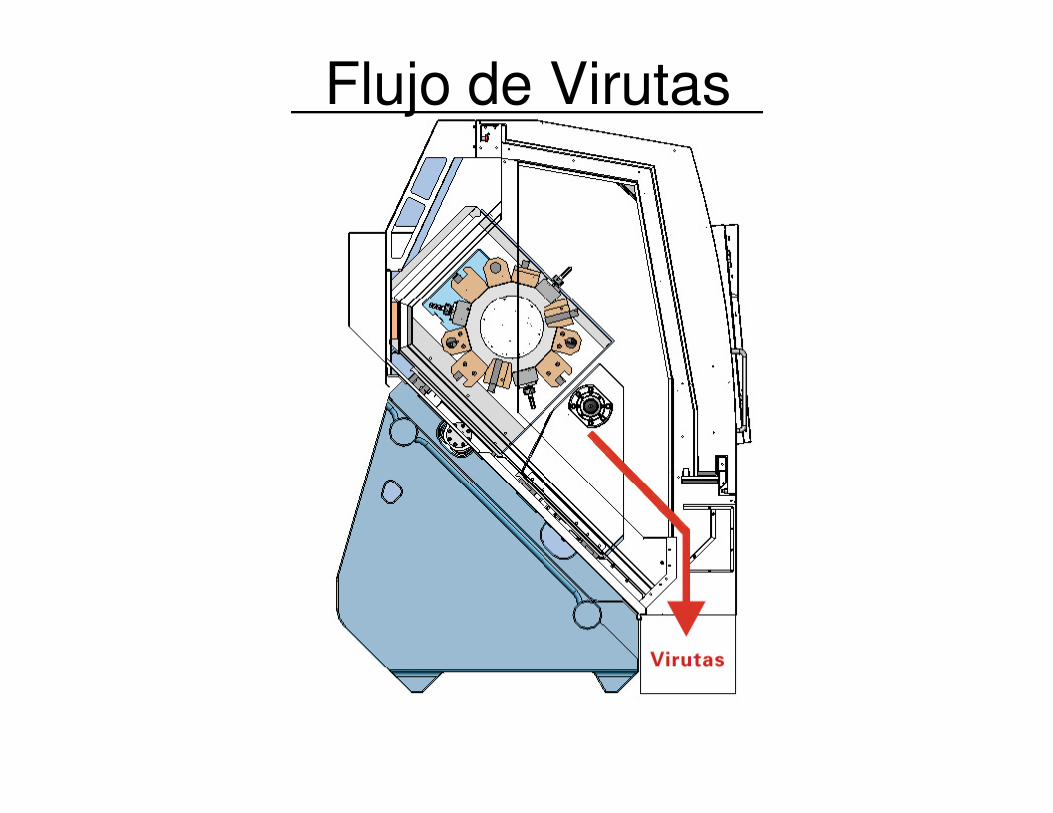
Flujo de Virutas
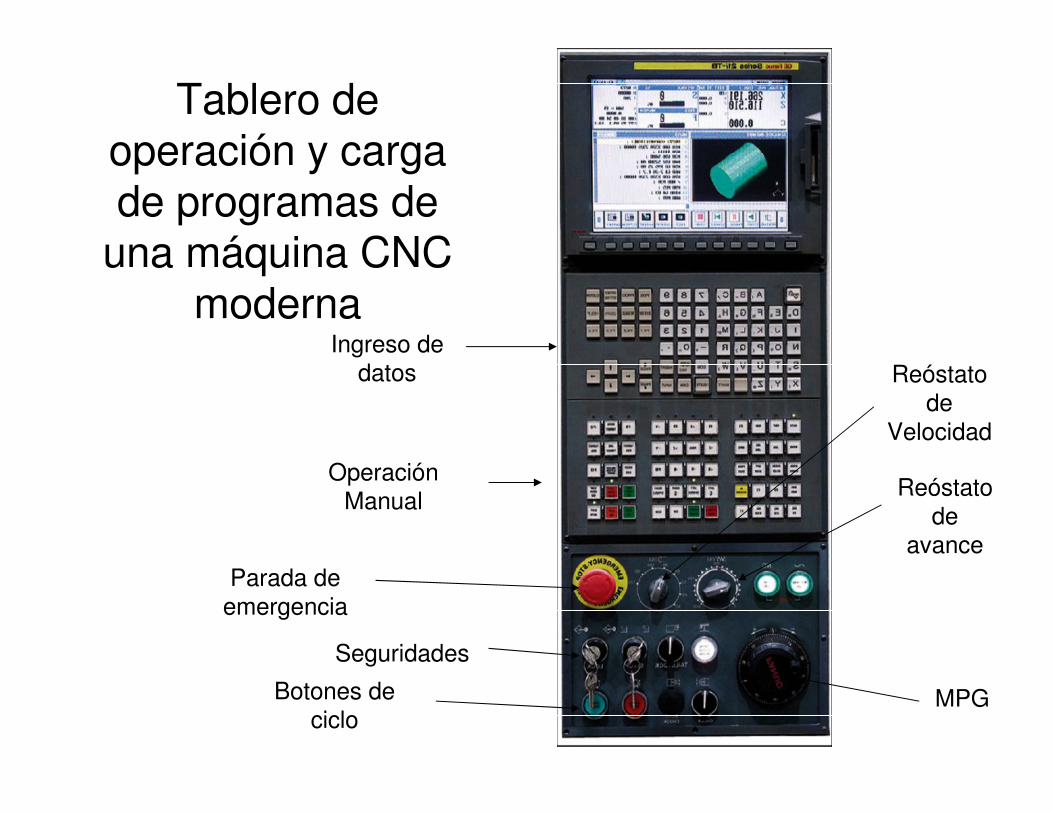
Tablero de operación y carga de programas de
una máquina CNC moderna
Ingreso de datos
Parada de emergencia
Botones de ciclo
MPG
Reóstato de
avance
Reóstato de
Velocidad
Seguridades
Operación Manual
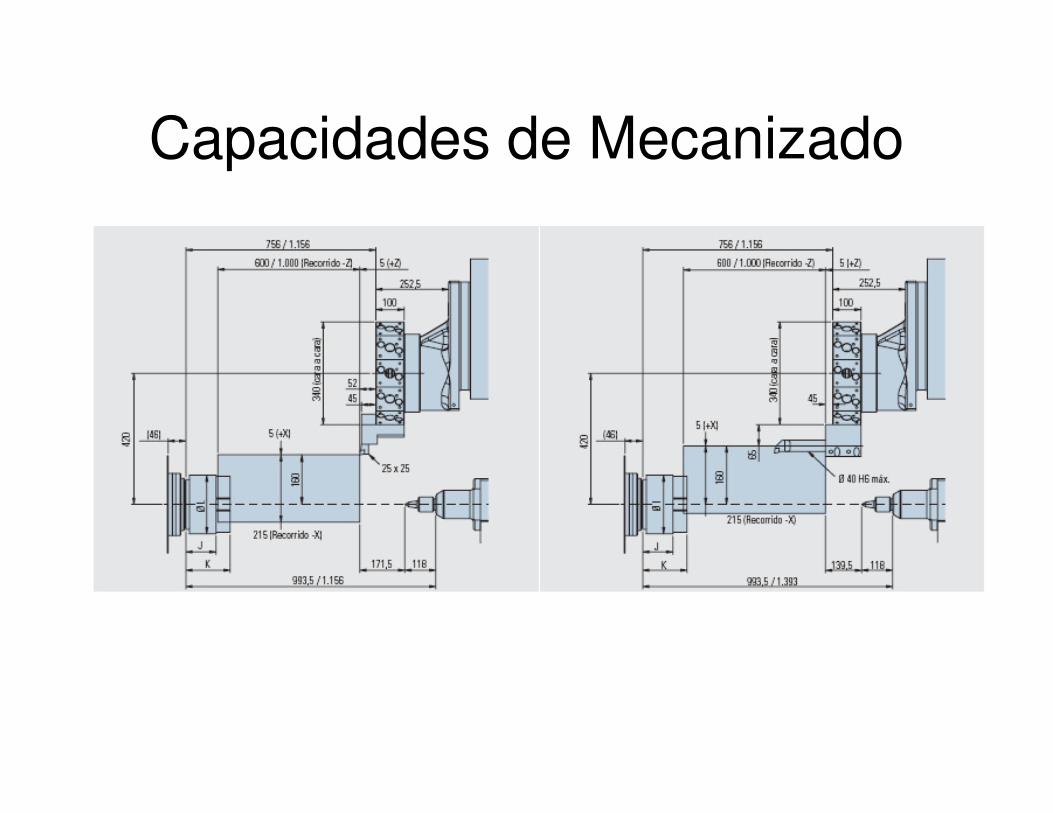
Capacidades de Mecanizado
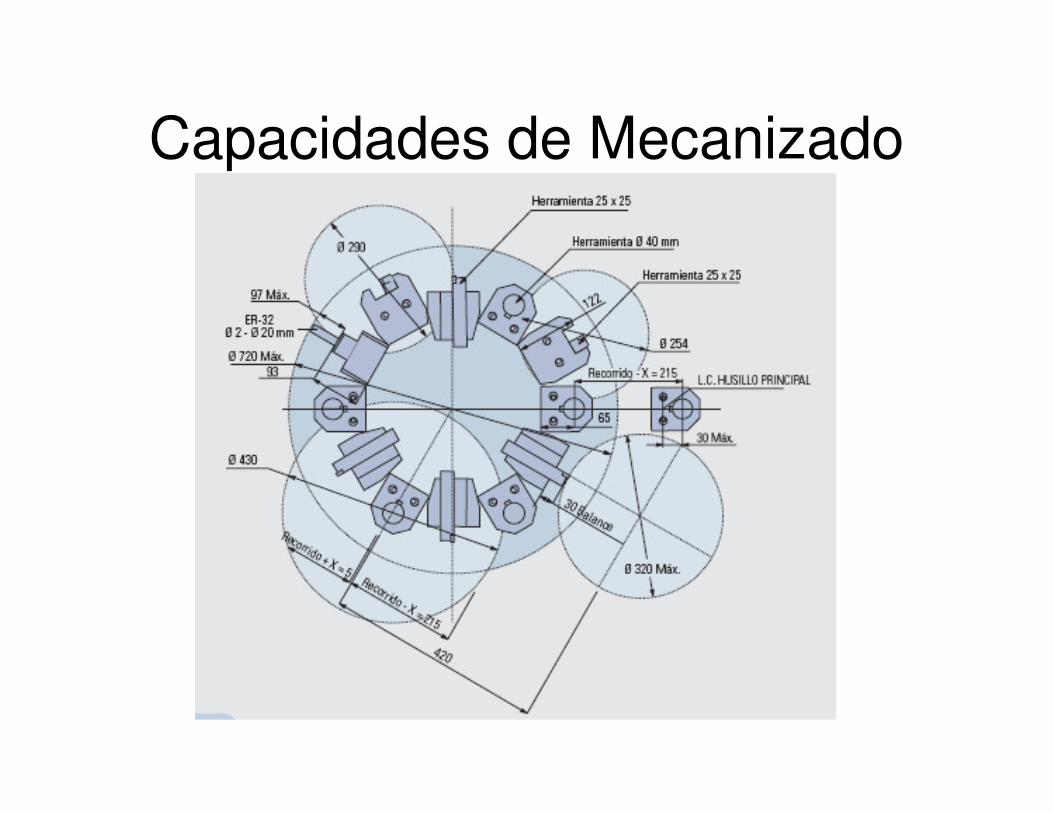
Capacidades de Mecanizado
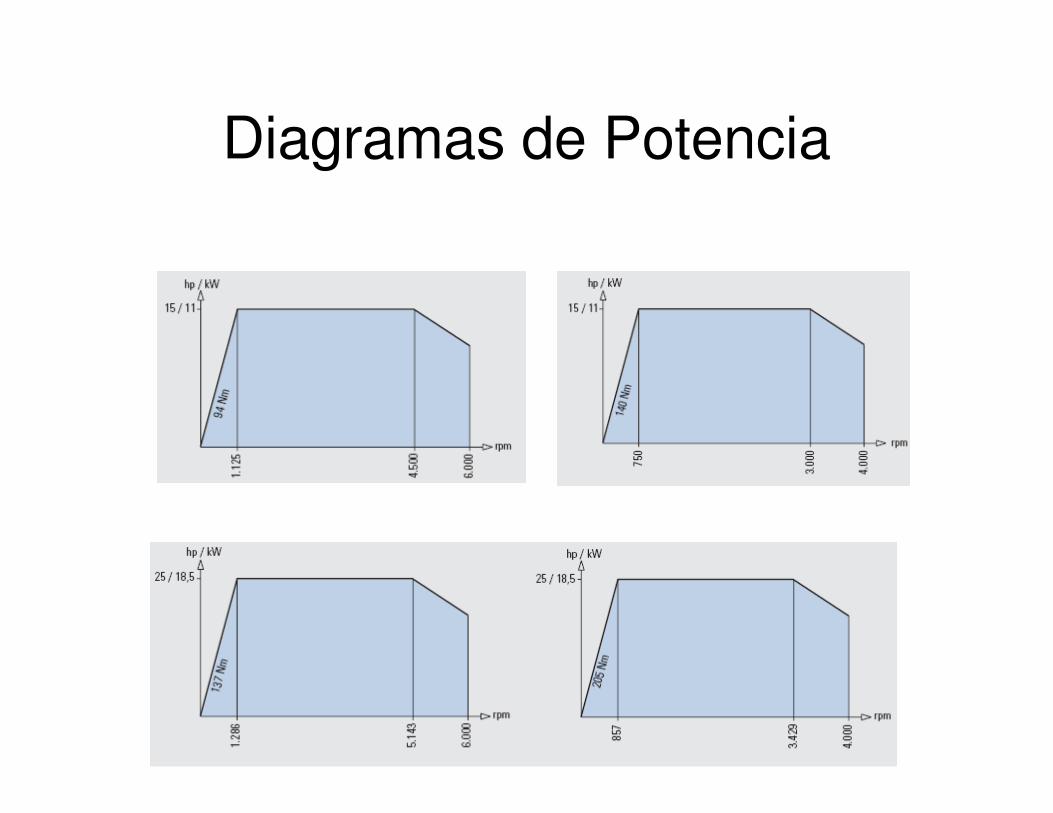
Diagramas de Potencia
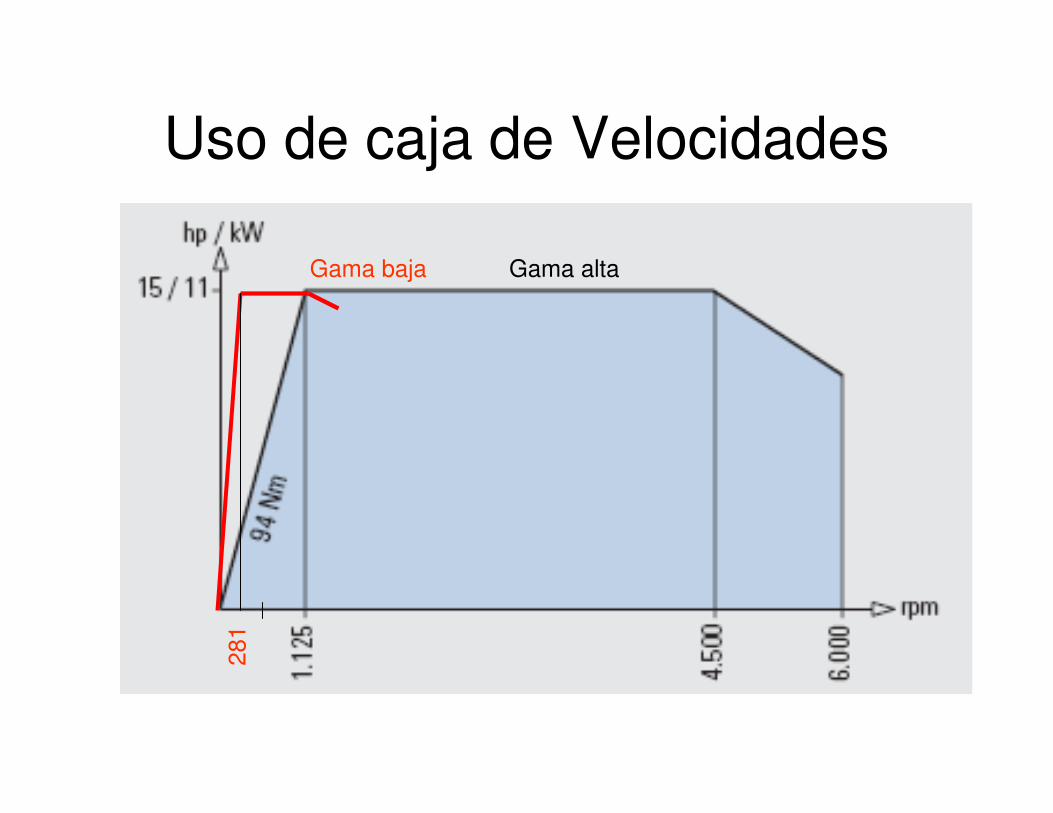
Uso de caja de Velocidades
281
Gama baja Gama alta

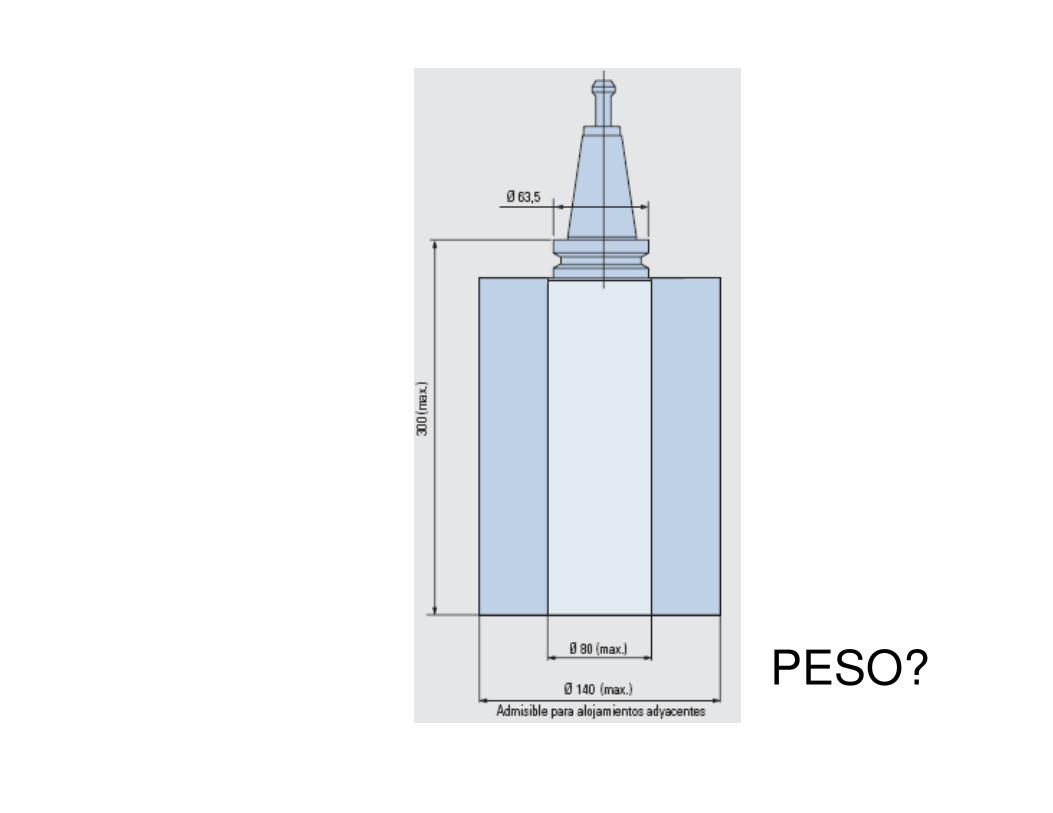
PESO?
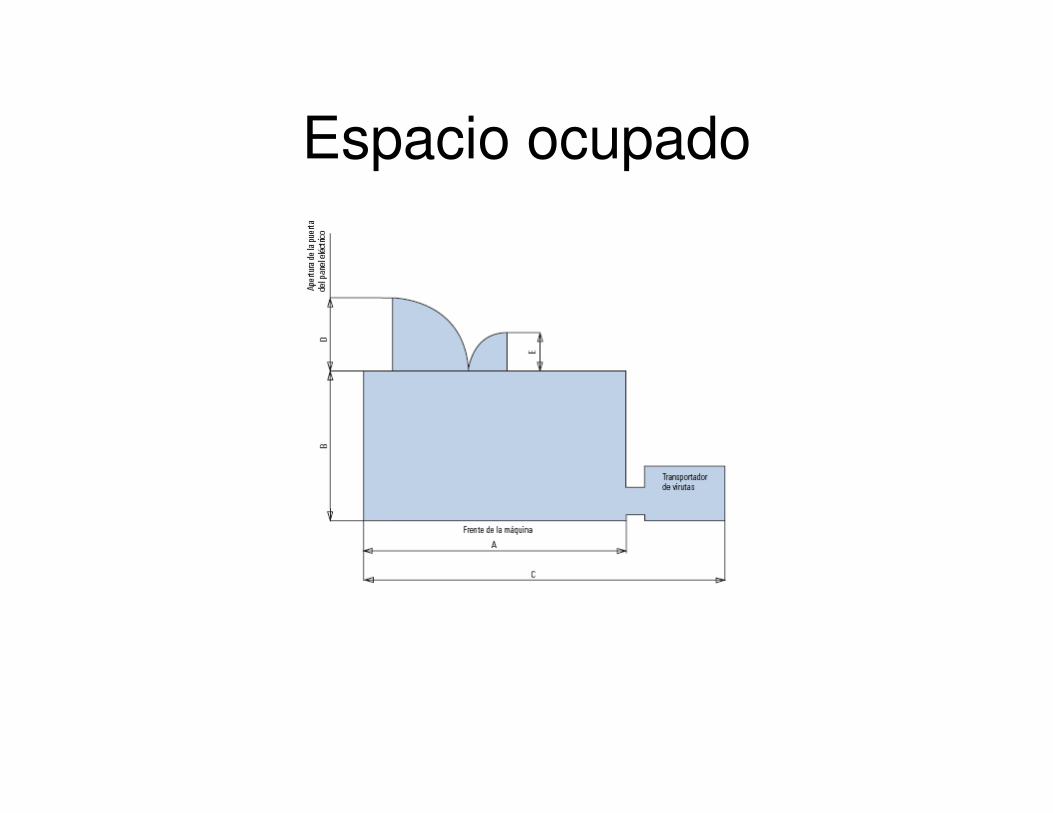
Espacio ocupado
Cuando usar una máquina CNC?
• Lotes grandes?
• Lotes pequeños?
• Producciones flexibles?
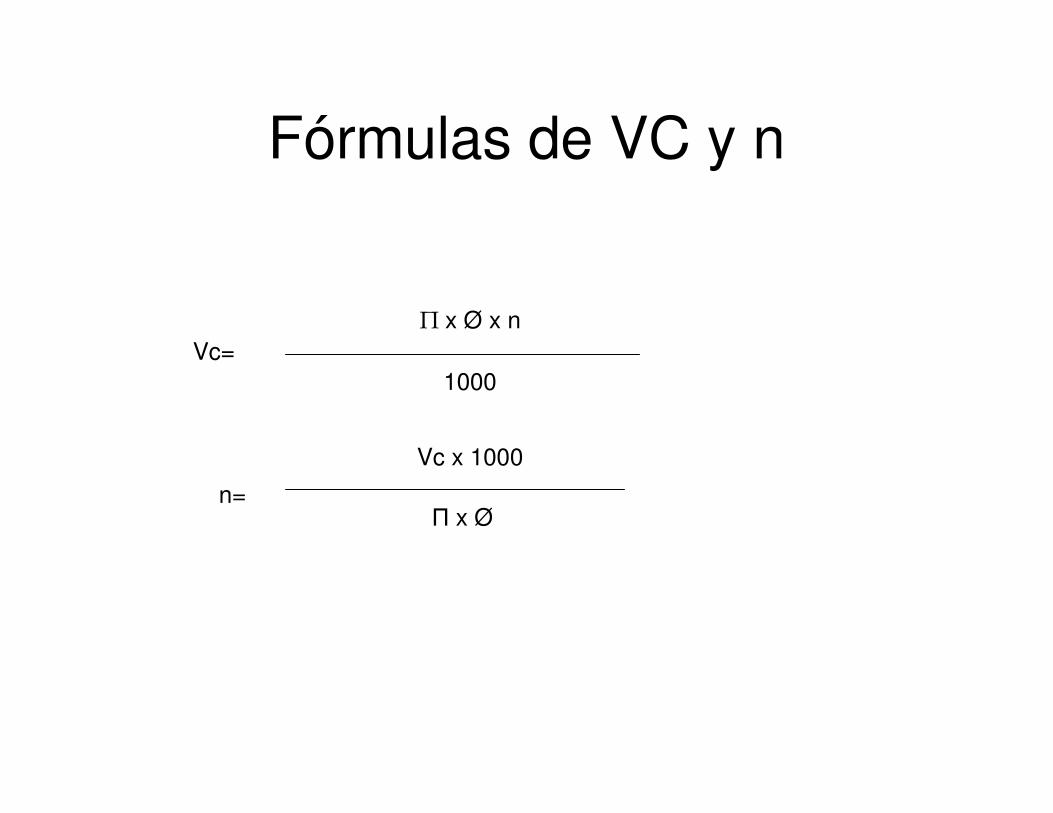
Fórmulas de VC y n
Vc=
Π x Ø x n
1000
Π x Ø n=
Vc x 1000
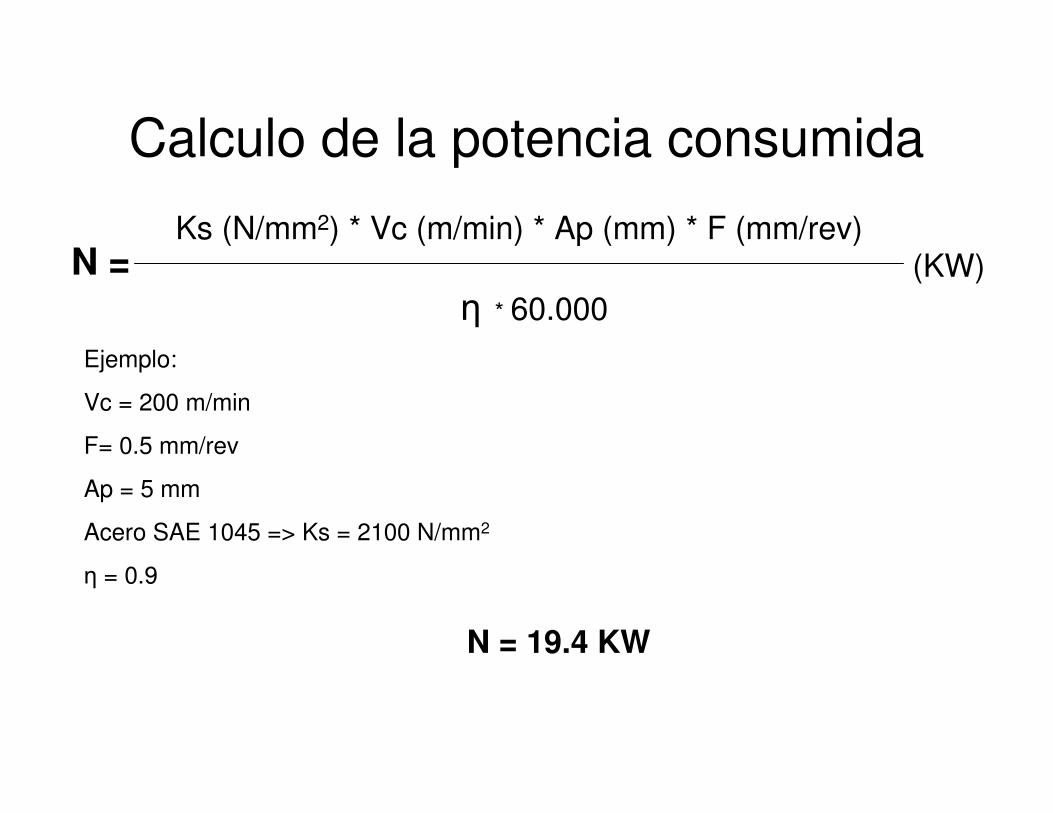
Calculo de la potencia consumida
N = Ks (N/mm2) * Vc (m/min) * Ap (mm) * F (mm/rev)
η * 60.000
(KW)
Ejemplo:
Vc = 200 m/min
F= 0.5 mm/rev
Ap = 5 mm
Acero SAE 1045 => Ks = 2100 N/mm2
η = 0.9
N = 19.4 KW
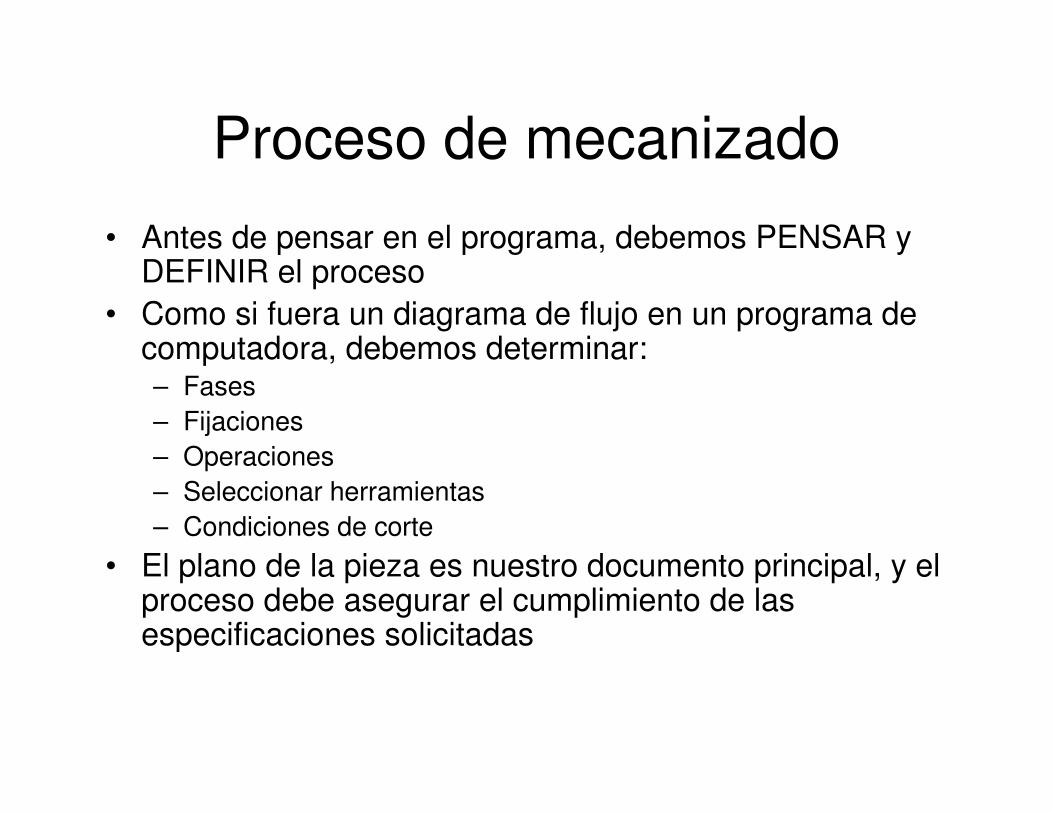
Proceso de mecanizado
• Antes de pensar en el programa, debemos PENSAR y DEFINIR el proceso
• Como si fuera un diagrama de flujo en un programa de computadora, debemos determinar:– Fases
– Fijaciones
– Operaciones
– Seleccionar herramientas
– Condiciones de corte
• El plano de la pieza es nuestro documento principal, y el proceso debe asegurar el cumplimiento de las especificaciones solicitadas
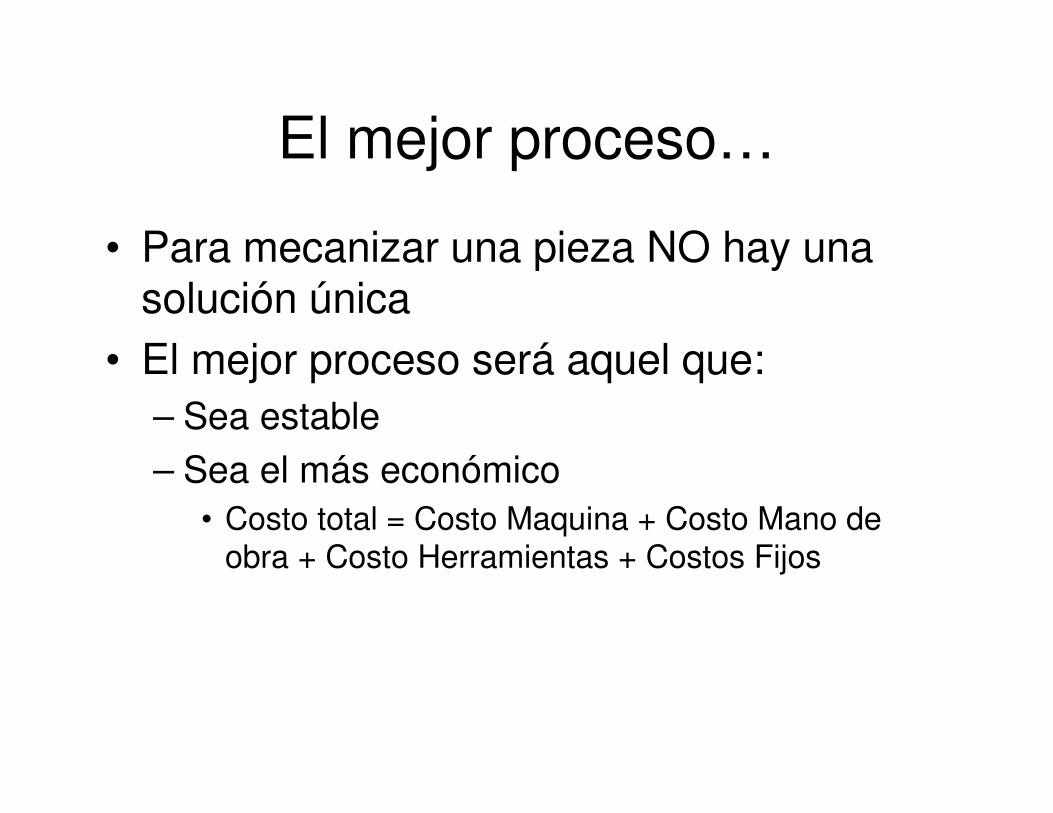
El mejor proceso…
• Para mecanizar una pieza NO hay una solución única
• El mejor proceso será aquel que:
– Sea estable
– Sea el más económico
• Costo total = Costo Maquina + Costo Mano de obra + Costo Herramientas + Costos Fijos
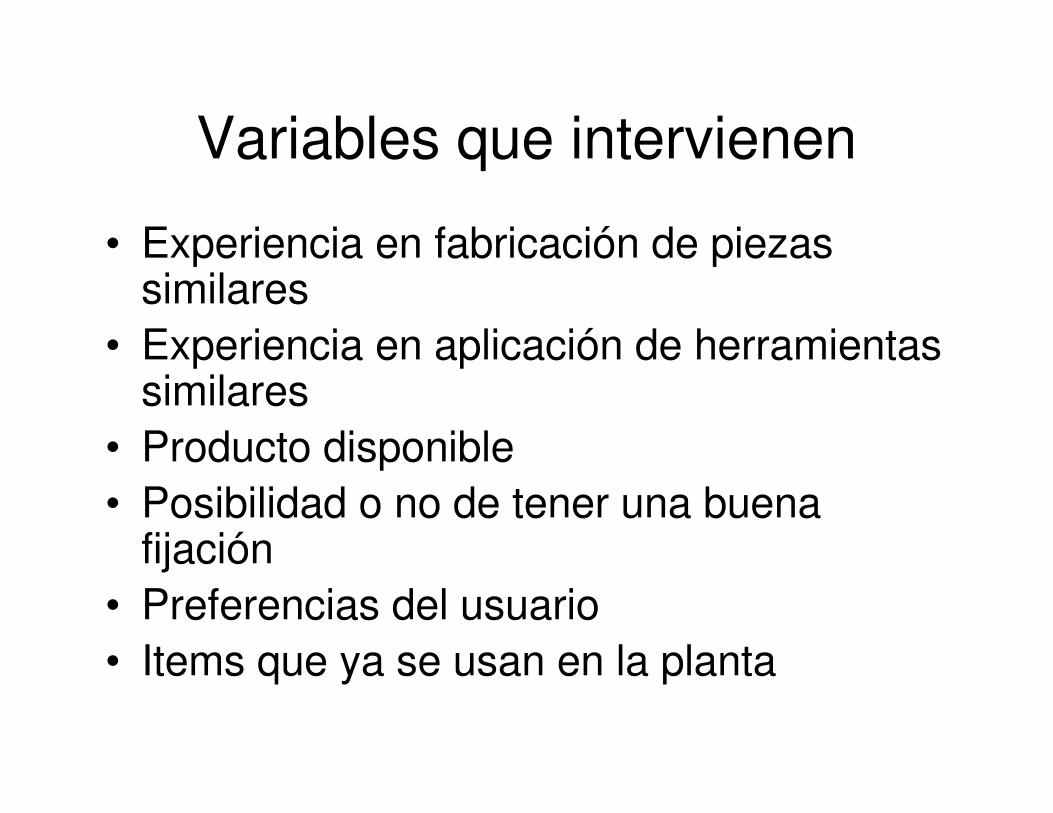
Variables que intervienen
• Experiencia en fabricación de piezas similares
• Experiencia en aplicación de herramientas similares
• Producto disponible
• Posibilidad o no de tener una buena fijación
• Preferencias del usuario
• Items que ya se usan en la planta
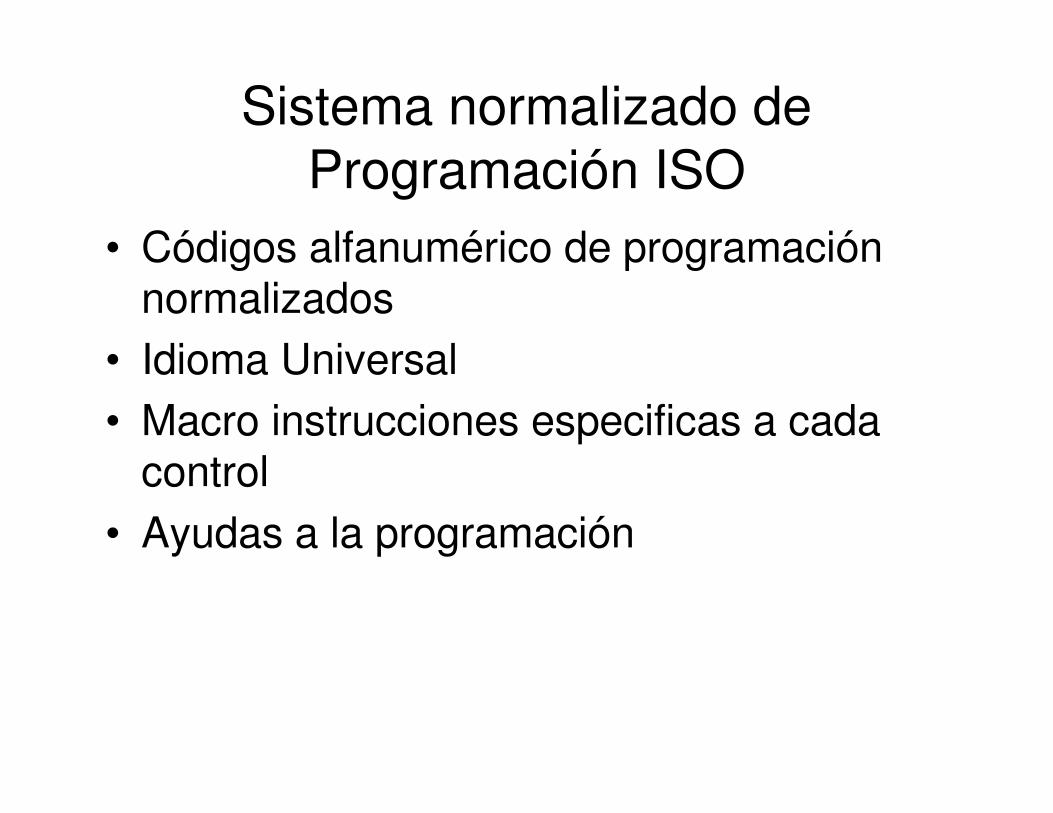
Sistema normalizado de Programación ISO
• Códigos alfanumérico de programación normalizados
• Idioma Universal
• Macro instrucciones especificas a cada control
• Ayudas a la programación
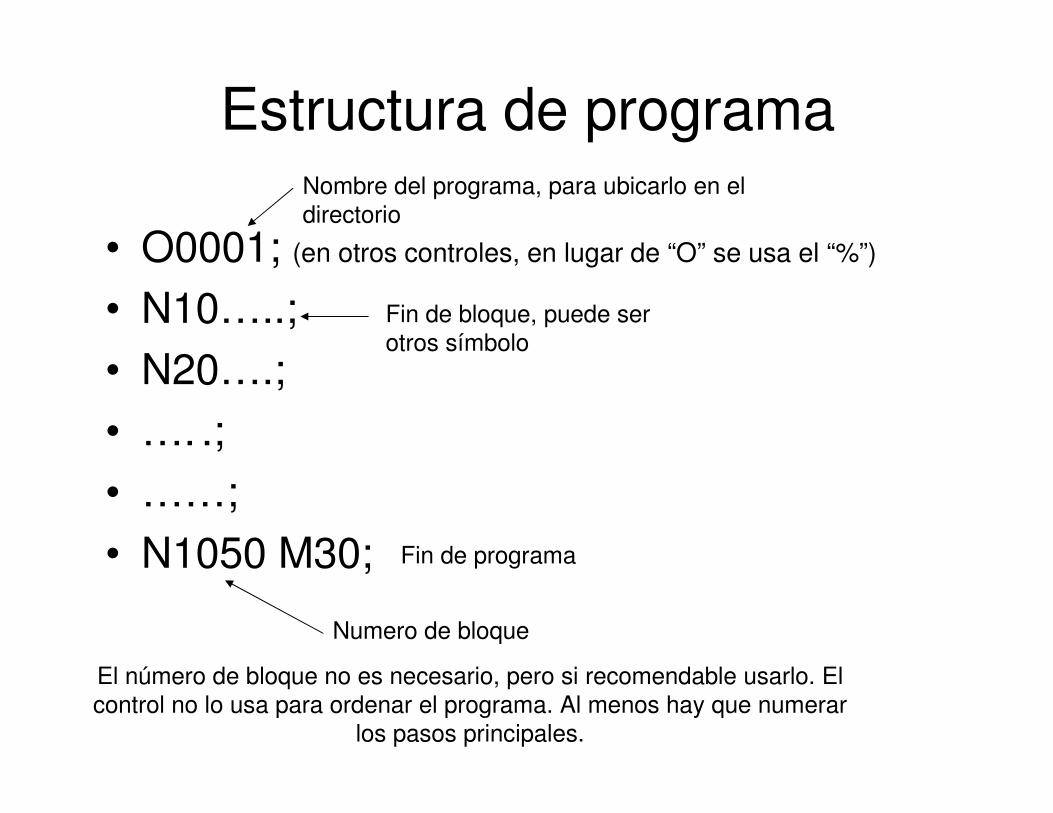
Estructura de programa
• O0001; (en otros controles, en lugar de “O” se usa el “%”)
• N10…..;
• N20….;
• …. .;
• ……;
• N1050 M30;
Nombre del programa, para ubicarlo en el directorio
Numero de bloque
Fin de programa
Fin de bloque, puede ser otros símbolo
El número de bloque no es necesario, pero si recomendable usarlo. El control no lo usa para ordenar el programa. Al menos hay que numerar
los pasos principales.

Instrucciones necesarias para fabricar una pieza
• Accionar el husillo
• Seleccionar herramientas
• Definir parámetros de corte
• Posicionamientos
• Definir recorridos (pasadas, perfiles, etc)
• Accesorios– Refrigerante
– Plato y/o Contrapunta
– Carga y descarga
– Subrutinas
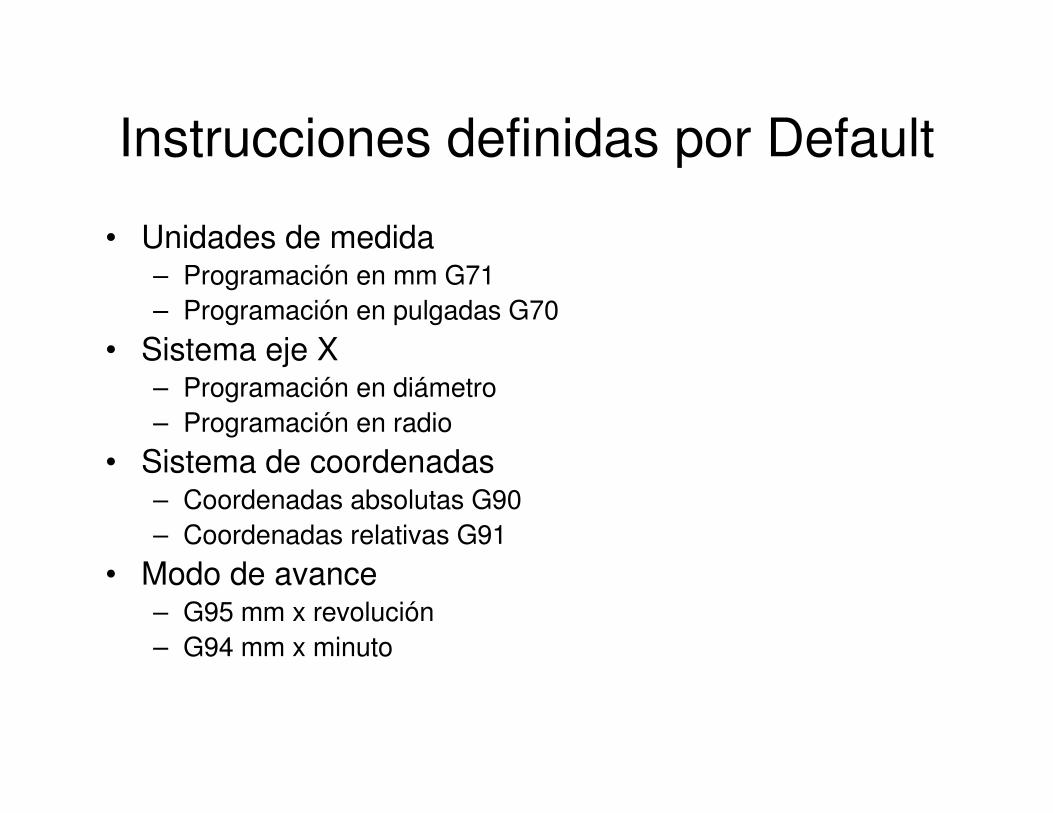
Instrucciones definidas por Default
• Unidades de medida– Programación en mm G71
– Programación en pulgadas G70
• Sistema eje X– Programación en diámetro
– Programación en radio
• Sistema de coordenadas– Coordenadas absolutas G90
– Coordenadas relativas G91
• Modo de avance– G95 mm x revolución
– G94 mm x minuto
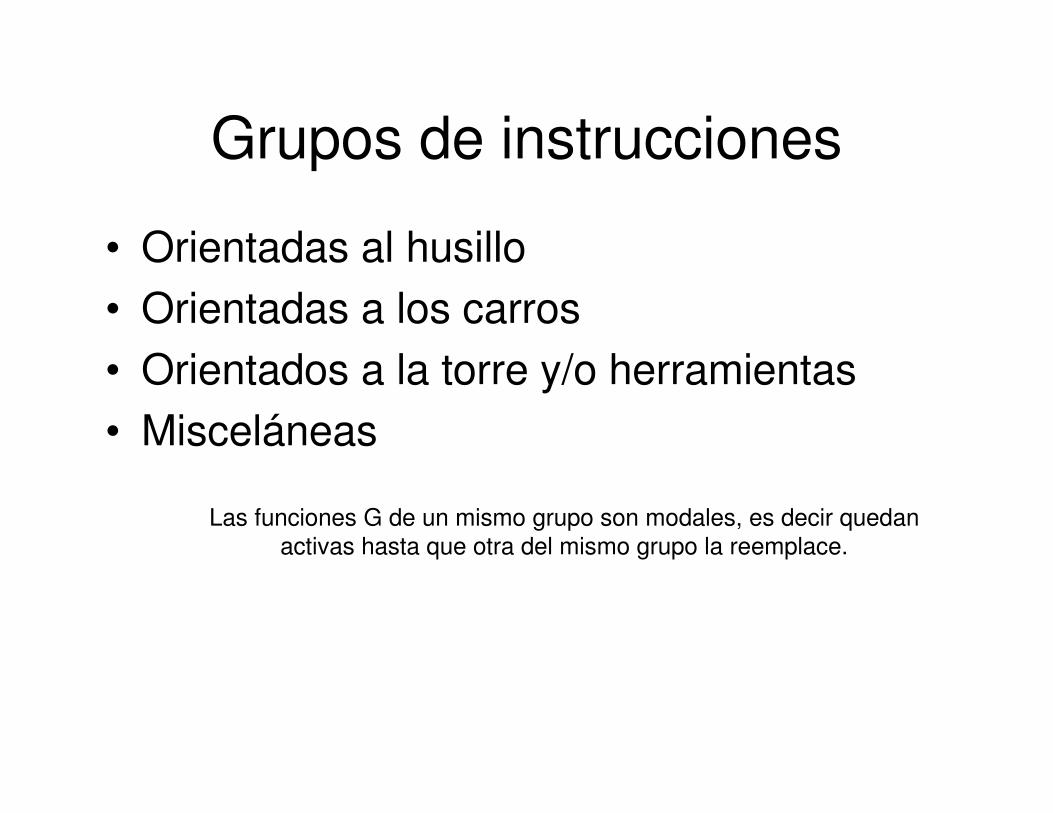
Grupos de instrucciones
• Orientadas al husillo
• Orientadas a los carros
• Orientados a la torre y/o herramientas
• Misceláneas
Las funciones G de un mismo grupo son modales, es decir quedan activas hasta que otra del mismo grupo la reemplace.

Instrucciones orientadas la husillo
• Cambio de Velocidad– Maquinas con Caja
• M41 – gama baja
• M42 – gama alta
• Sentido de Giro– M4- Sentido Horario
– M3 - Sentido Anti-horario
• Modo de Velocidad– G96 Vc = cte
– G97 n = cte
• Velocidad– S300
– S2500
• Limitador de Velocidad G50 S….
M4
M3
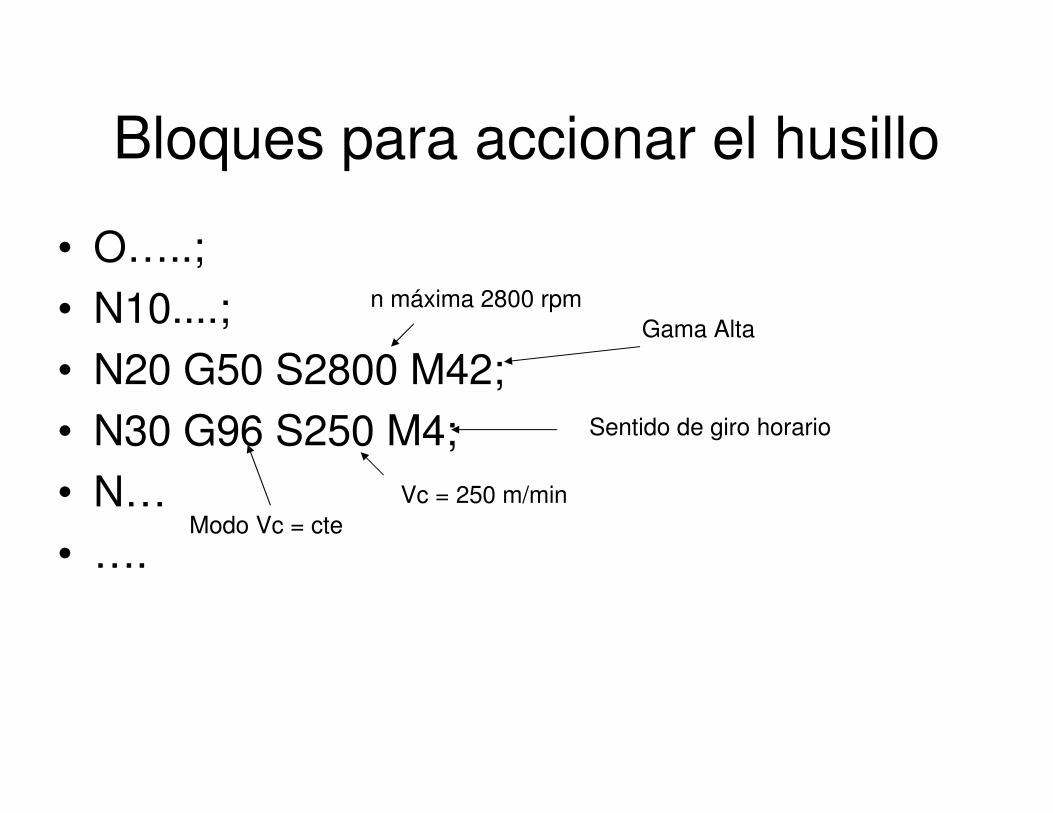
Bloques para accionar el husillo
• O…..;
• N10....;
• N20 G50 S2800 M42;
• N30 G96 S250 M4;
• N…
• ….
n máxima 2800 rpm
Gama Alta
Modo Vc = cte
Vc = 250 m/min
Sentido de giro horario
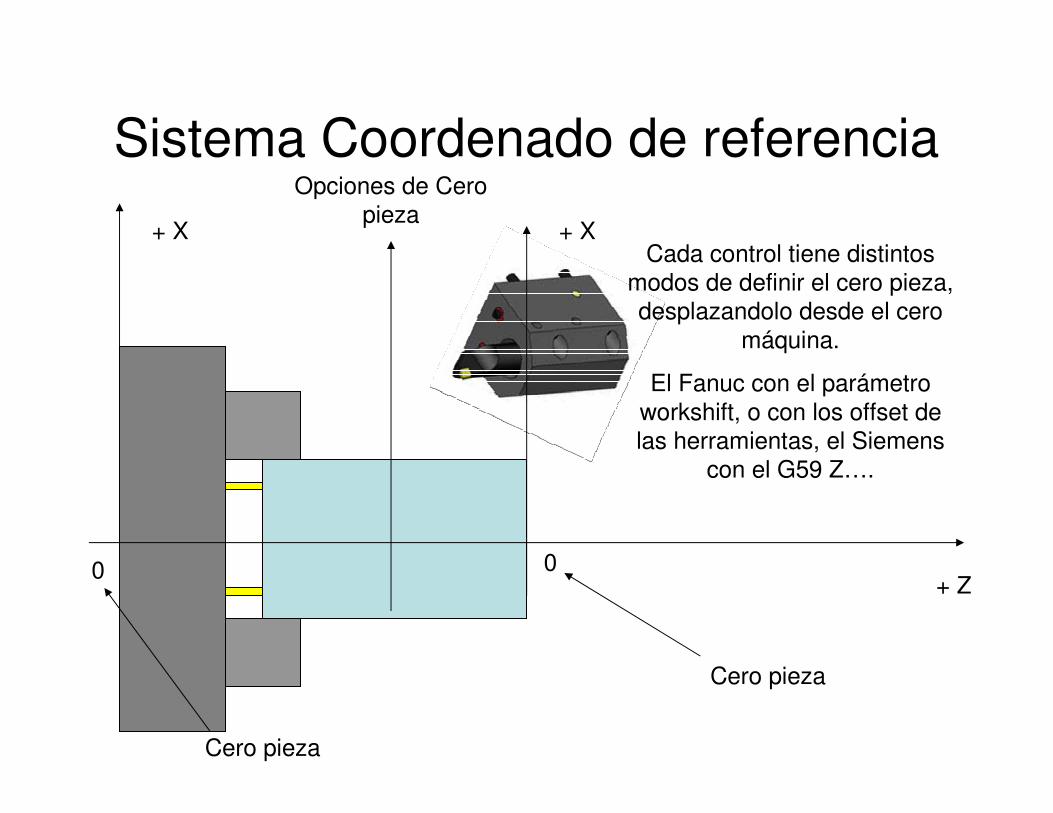
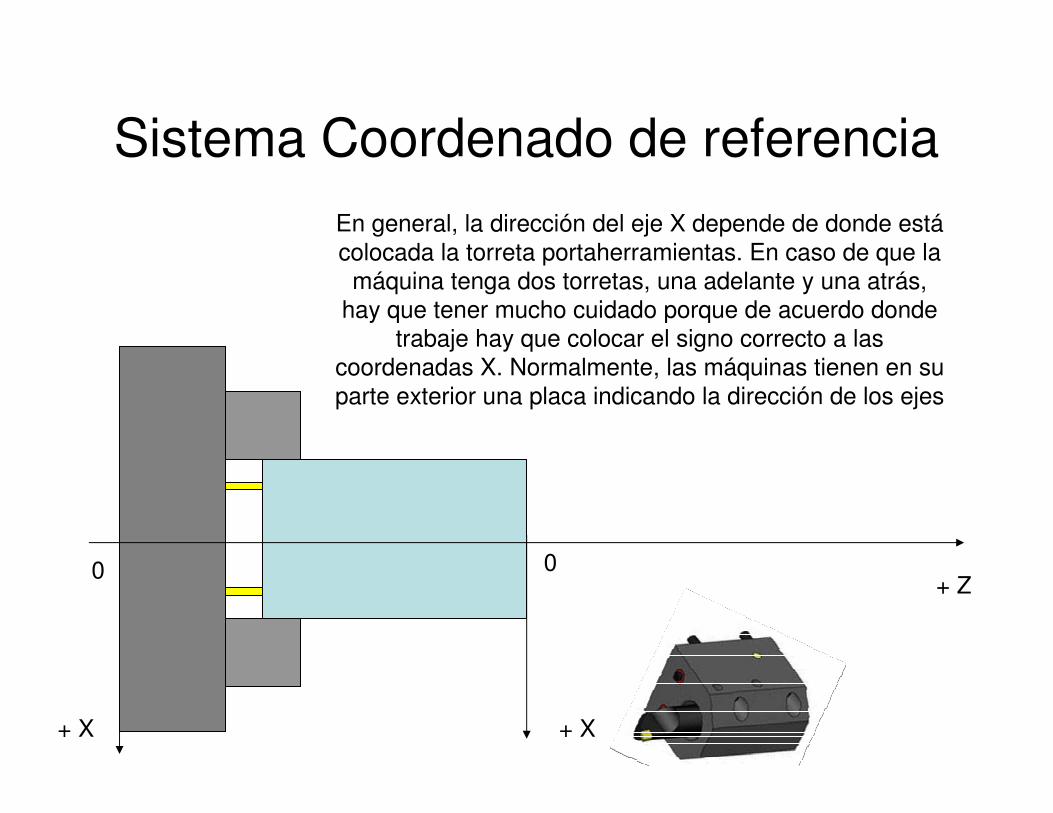
Sistema Coordenado de referencia
+ Z
+ X
0
+ X
0
Cero pieza
Cero pieza
Cada control tiene distintos modos de definir el cero pieza, desplazandolo desde el cero
máquina.
El Fanuc con el parámetro workshift, o con los offset de las herramientas, el Siemens
con el G59 Z….
Opciones de Cero pieza
Sistema Coordenado de referencia
+ Z
+ X
0 0
En general, la dirección del eje X depende de donde está colocada la torreta portaherramientas. En caso de que la
máquina tenga dos torretas, una adelante y una atrás, hay que tener mucho cuidado porque de acuerdo donde
trabaje hay que colocar el signo correcto a las coordenadas X. Normalmente, las máquinas tienen en su parte exterior una placa indicando la dirección de los ejes
+ X
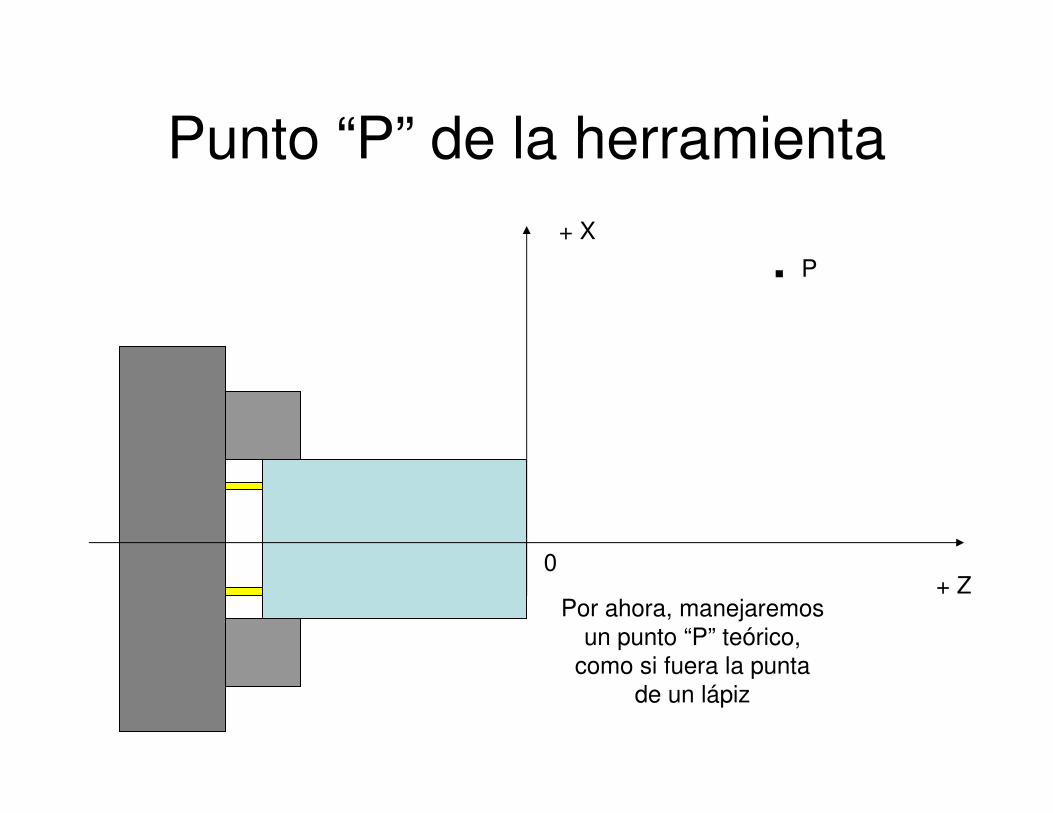
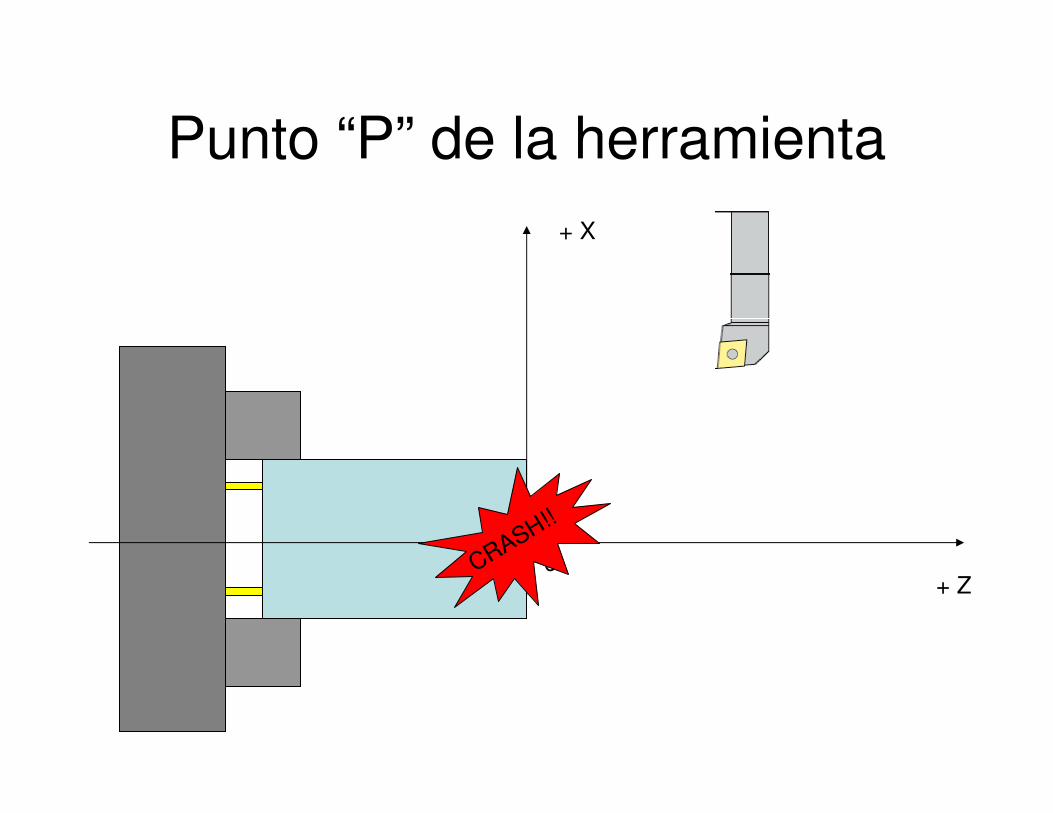
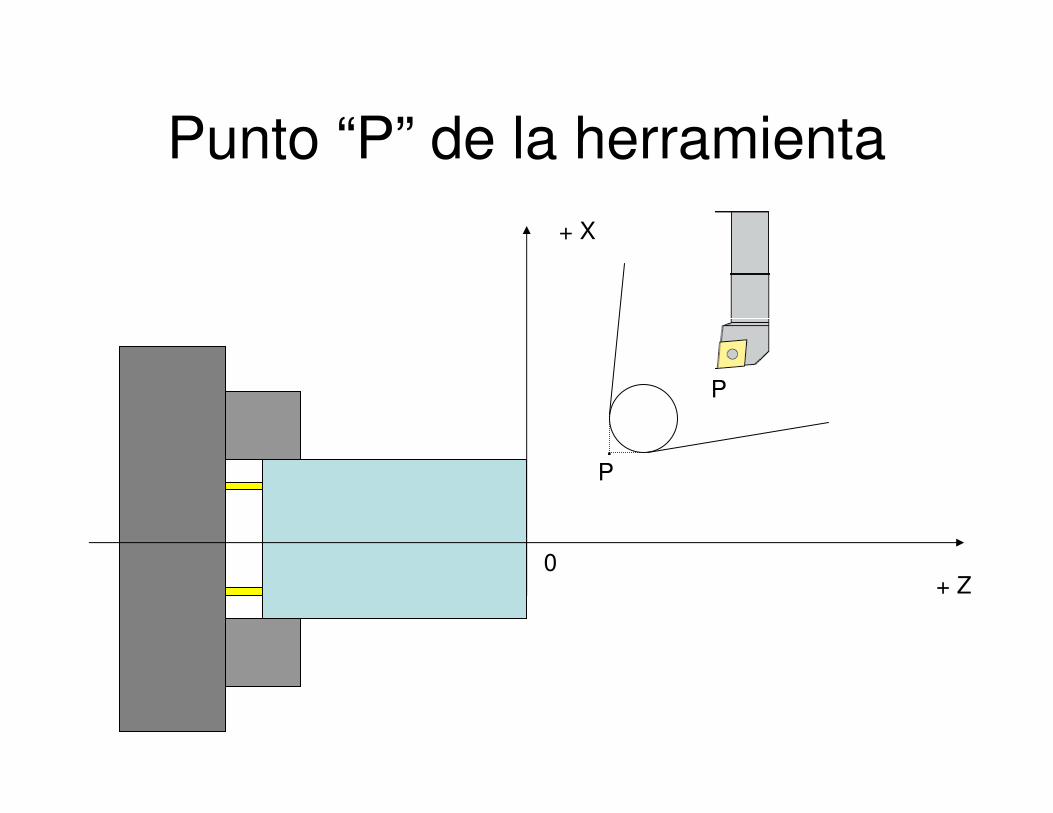
Punto “P” de la herramienta
+ Z
+ X
0
. P
Por ahora, manejaremos un punto “P” teórico,
como si fuera la punta de un lápiz
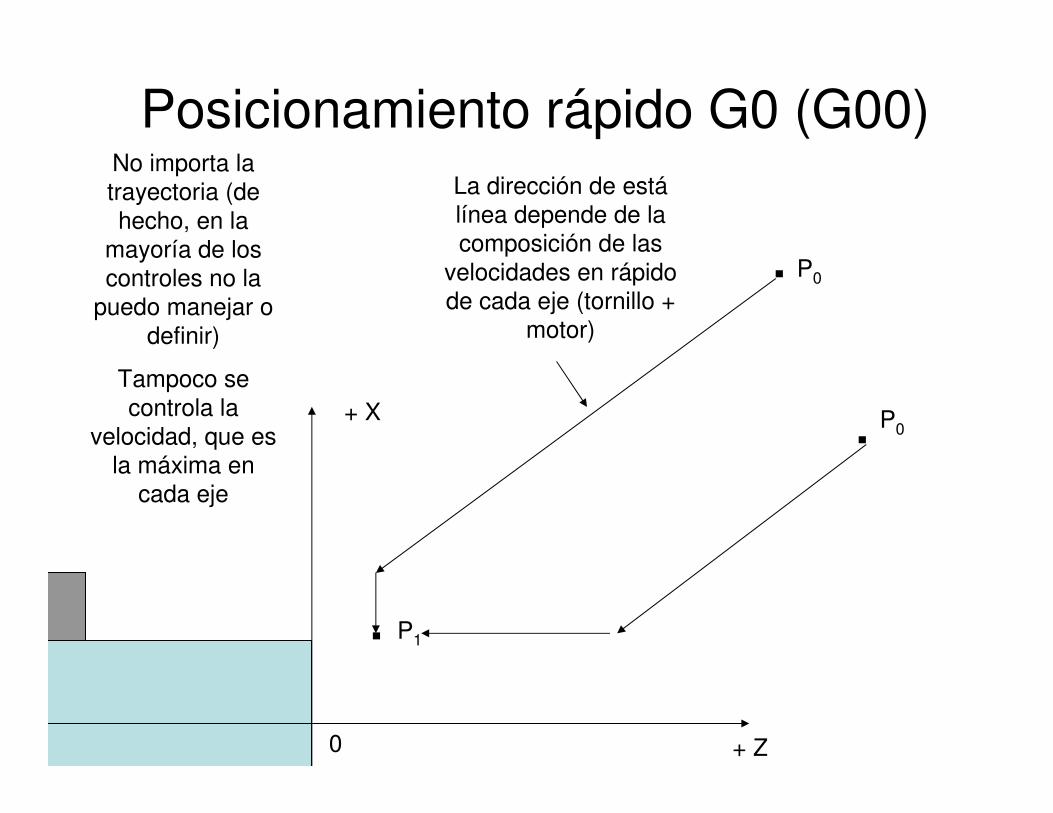
Posicionamiento rápido G0 (G00)
+ Z
+ X
0
. P0
. P1
No importa la trayectoria (de hecho, en la
mayoría de los controles no la
puedo manejar o definir)
Tampoco se controla la
velocidad, que es la máxima en
cada eje
. P0
La dirección de está línea depende de la composición de las
velocidades en rápido de cada eje (tornillo +
motor)
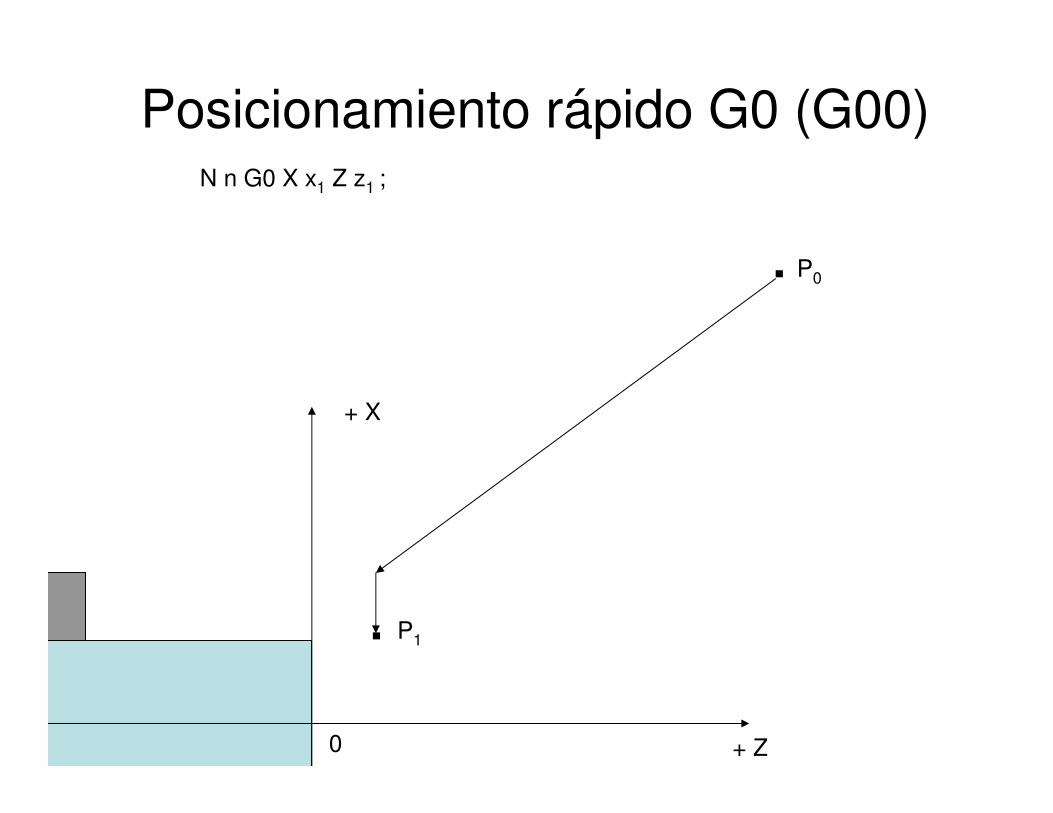
Posicionamiento rápido G0 (G00)
+ Z
+ X
0
. P0
. P1
N n G0 X x1 Z z1 ;
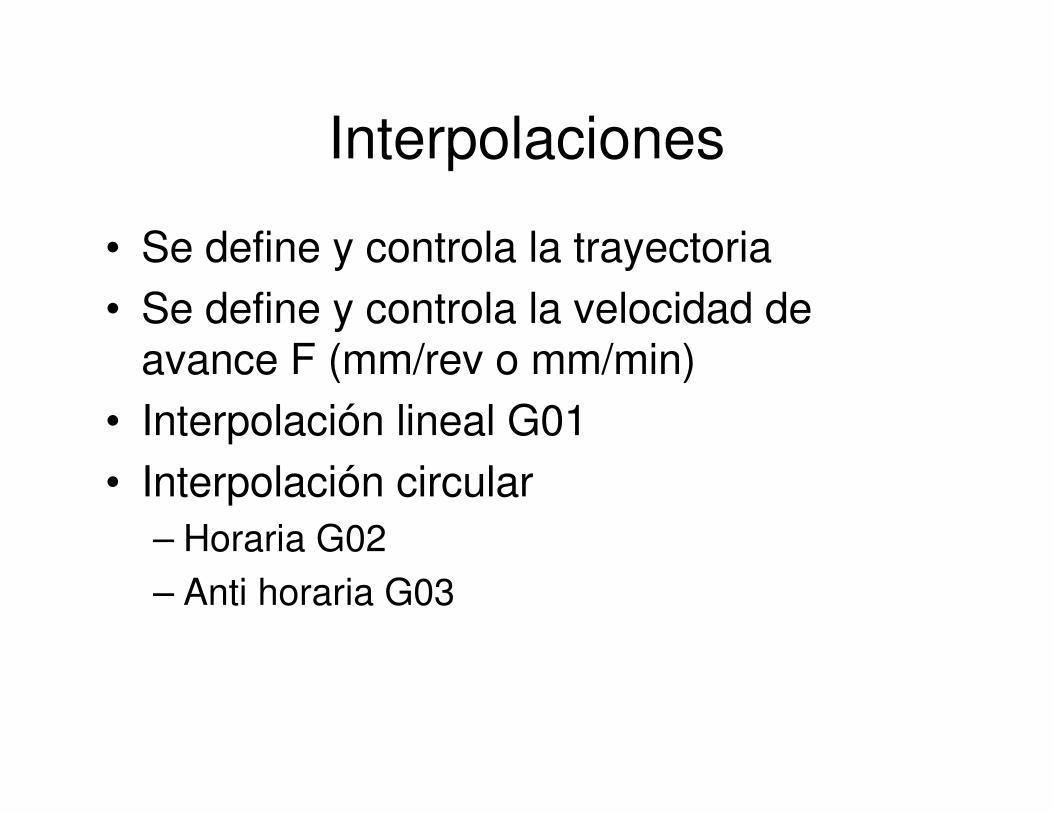
Interpolaciones
• Se define y controla la trayectoria
• Se define y controla la velocidad de avance F (mm/rev o mm/min)
• Interpolación lineal G01
• Interpolación circular
– Horaria G02
– Anti horaria G03
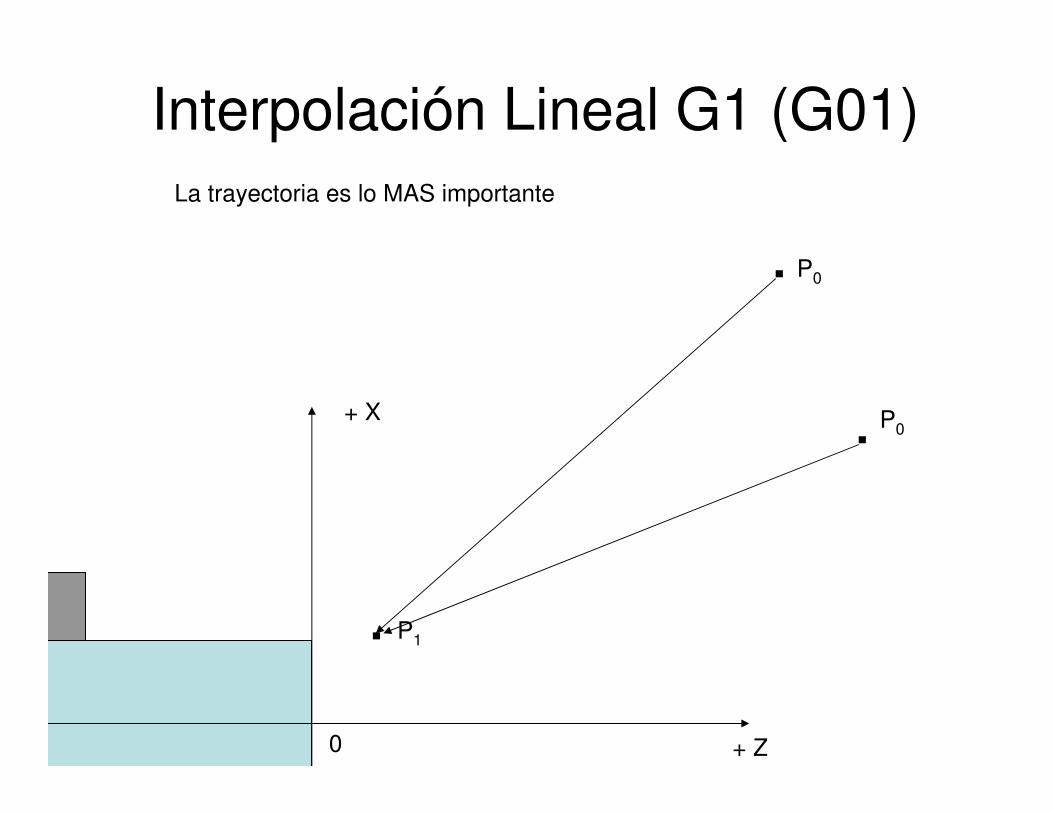
Interpolación Lineal G1 (G01)
+ Z
+ X
0
. P0
. P1
La trayectoria es lo MAS importante
. P0
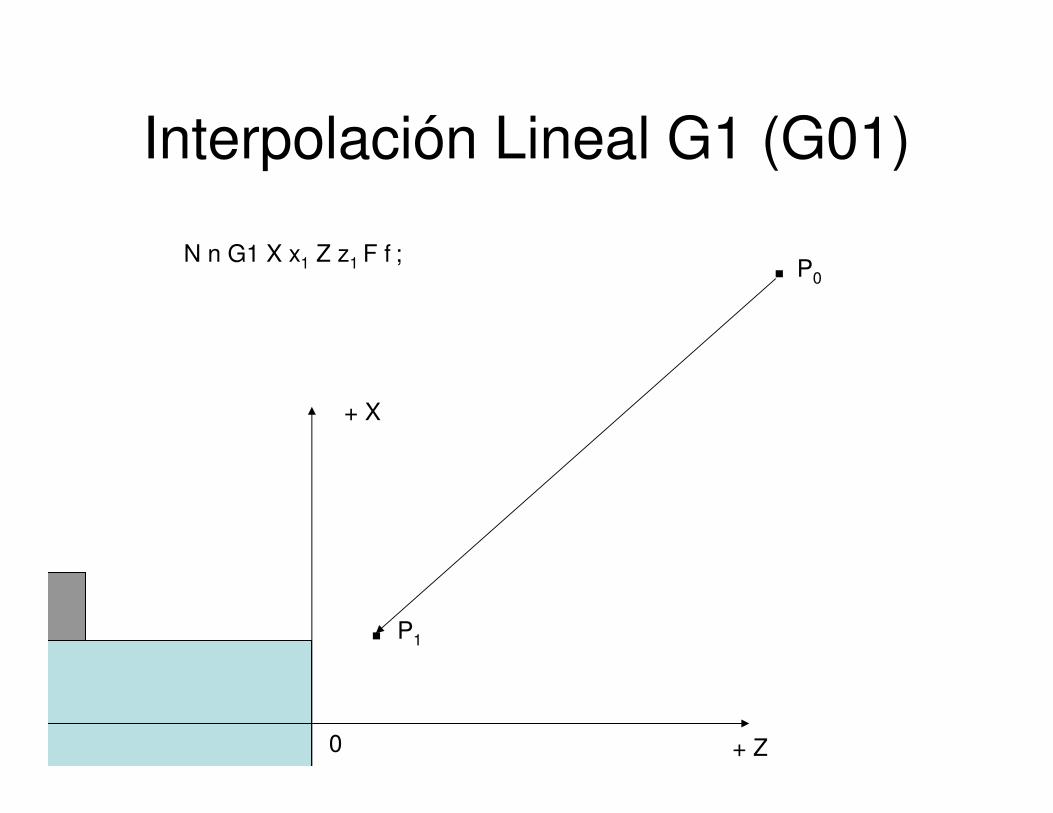
+ Z
+ X
0
. P0
. P1
N n G1 X x1 Z z1 F f ;
Interpolación Lineal G1 (G01)
+ Z
+ X
0
P0
. P1
r
.
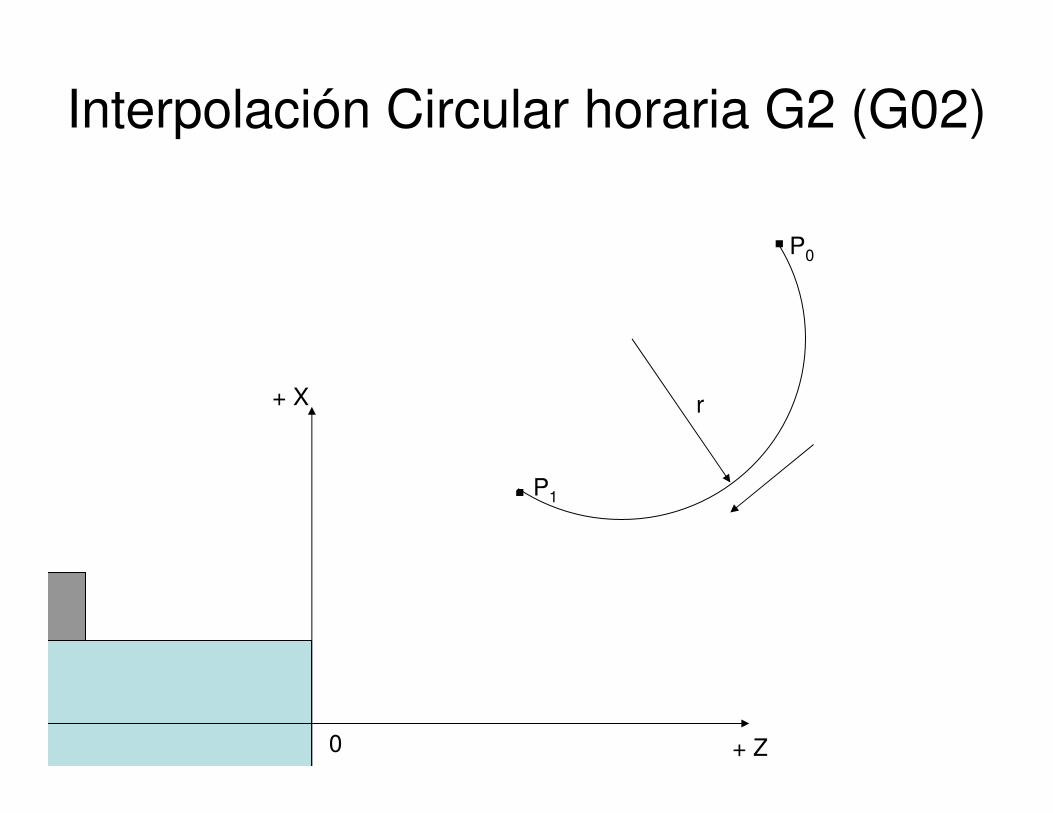
Interpolación Circular horaria G2 (G02)
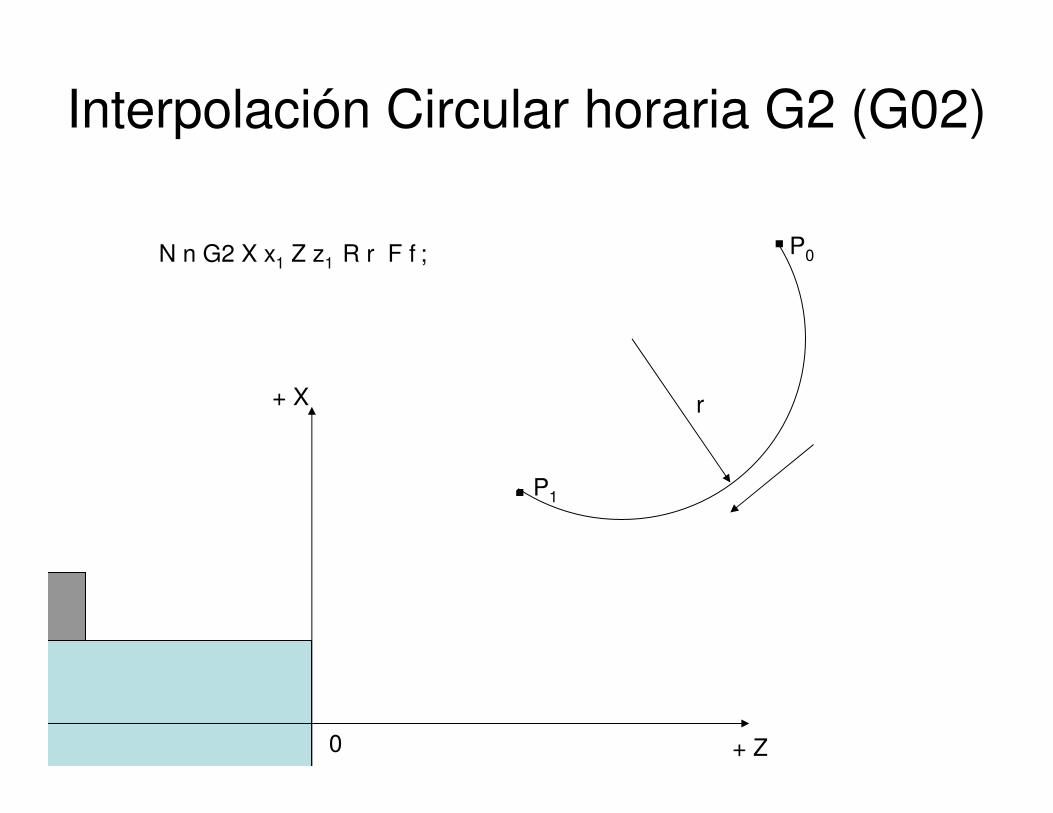
+ Z
+ X
0
P0
. P1
r
.
Interpolación Circular horaria G2 (G02)
N n G2 X x1 Z z1 R r F f ;
+ Z
+ X
0
.
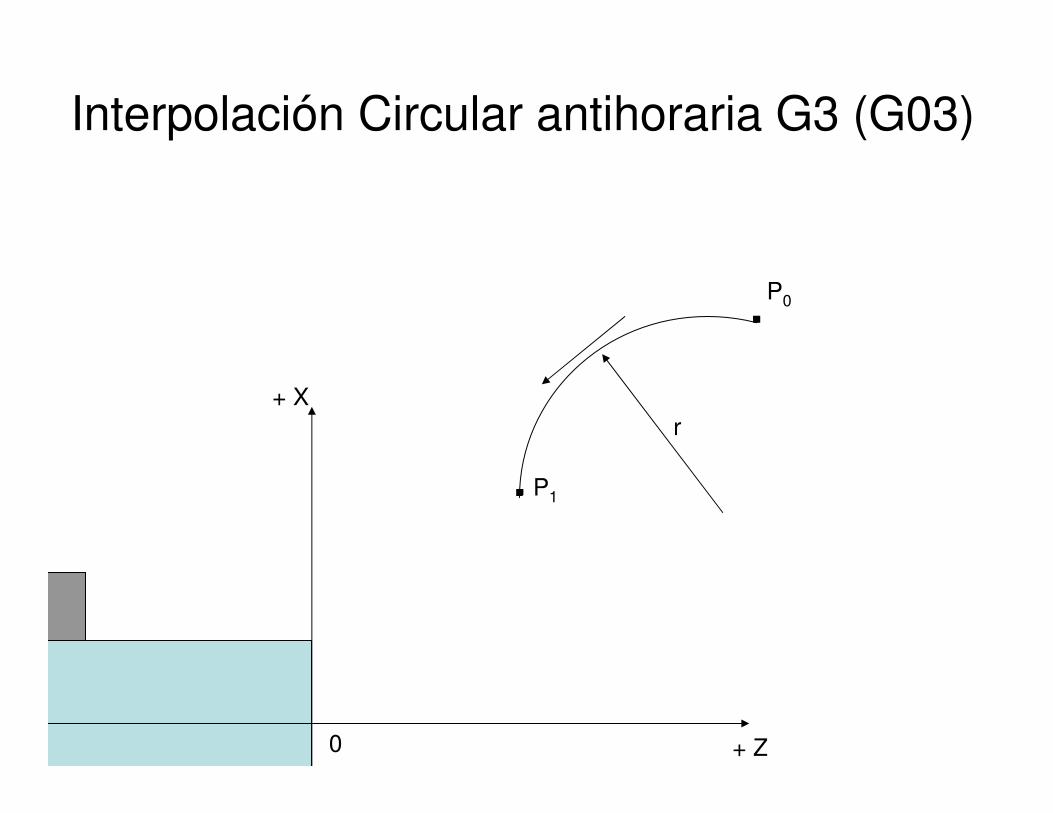
Interpolación Circular antihoraria G3 (G03)
P1
.P0
r
+ Z
+ X
0
.
Interpolación Circular antihoraria G3 (G03)
P1
.P0
r
N n G3 X x1 Z z1 R r F f ;
+ Z
+ X
0
.
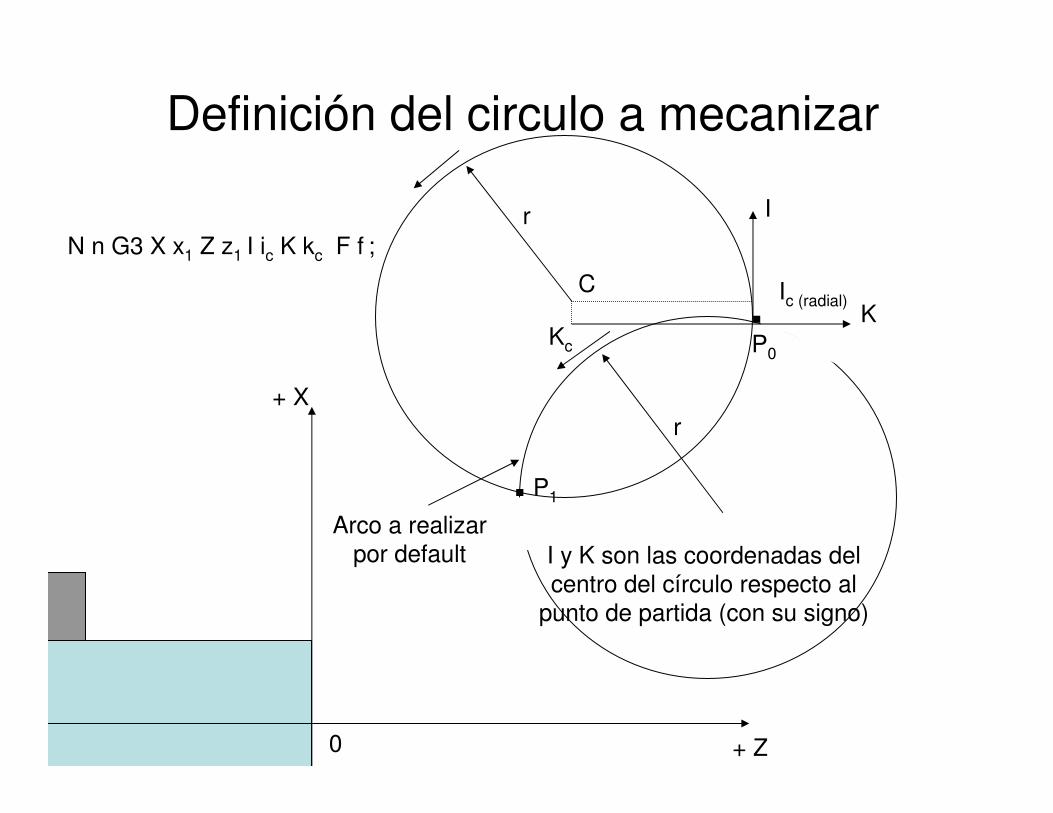
Definición del circulo a mecanizar
P1
.P0
r
r
K
I
C Ic (radial)
Kc
Arco a realizar por default I y K son las coordenadas del
centro del círculo respecto al punto de partida (con su signo)
N n G3 X x1 Z z1 I ic K kc F f ;
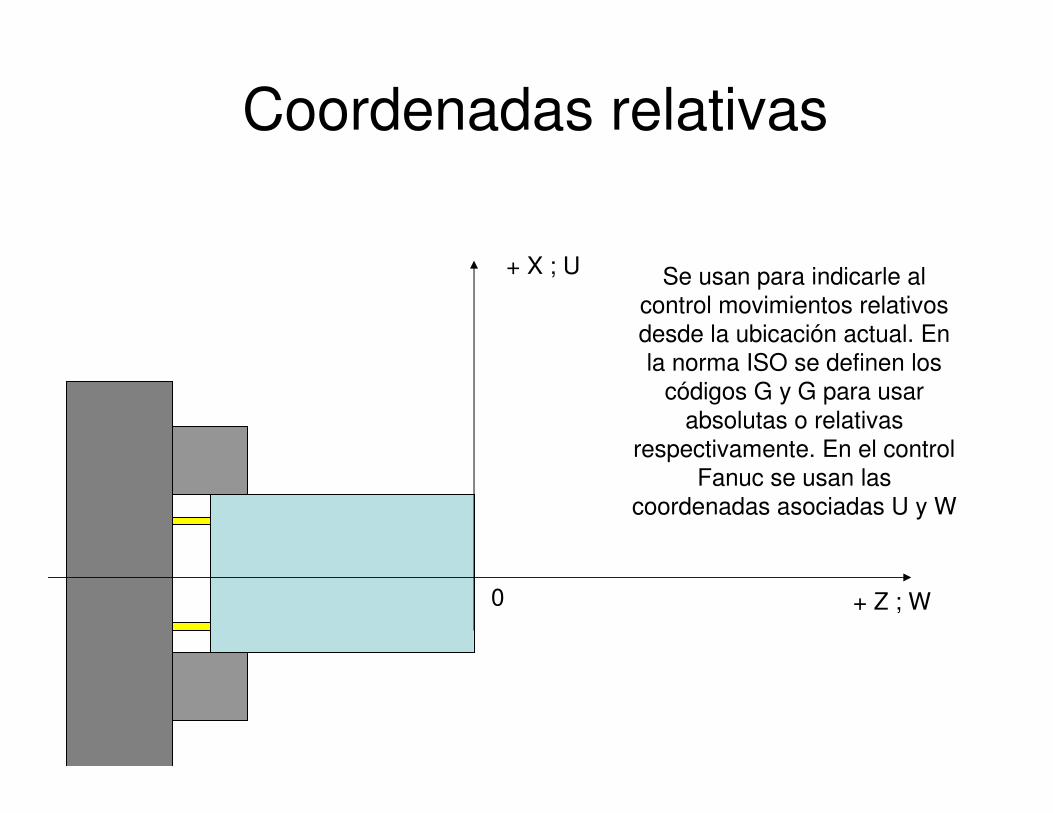
Coordenadas relativas
+ Z ; W
+ X ; U
0
Se usan para indicarle al control movimientos relativos desde la ubicación actual. En la norma ISO se definen los
códigos G y G para usar absolutas o relativas
respectivamente. En el control Fanuc se usan las
coordenadas asociadas U y W
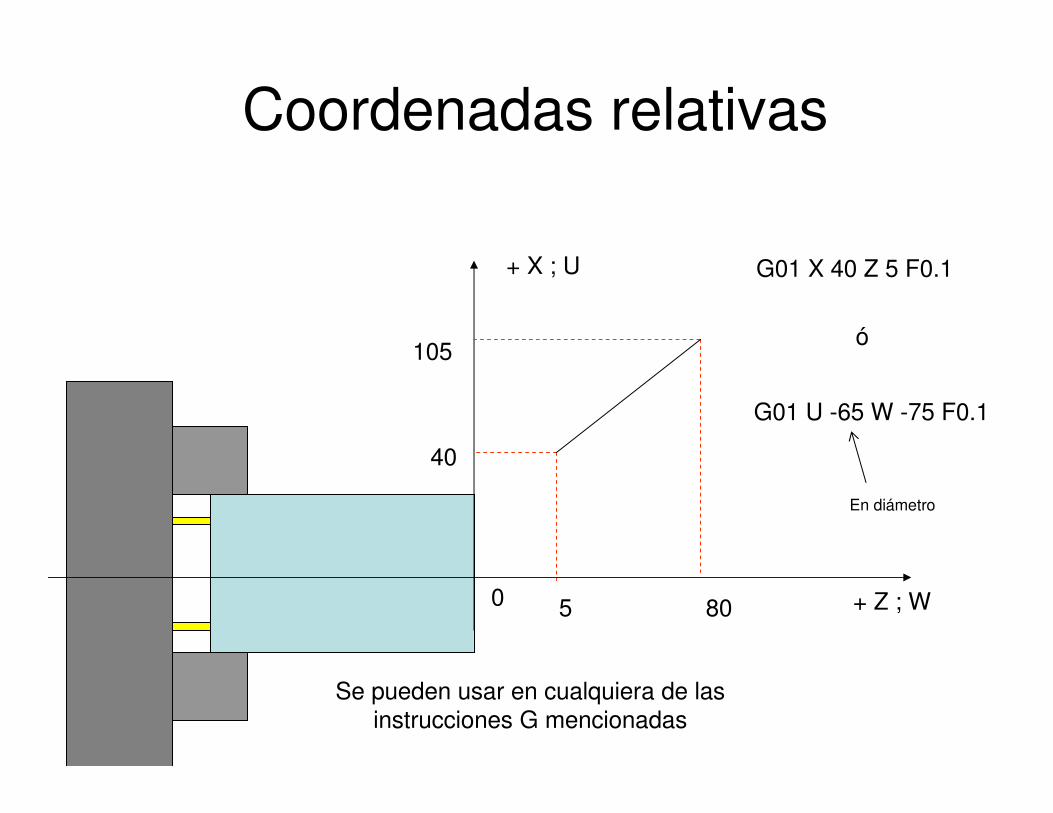
Coordenadas relativas
+ Z ; W
+ X ; U
0
Se pueden usar en cualquiera de las instrucciones G mencionadas
5
40
105
80
G01 X 40 Z 5 F0.1
ó
G01 U -65 W -75 F0.1
En diámetro
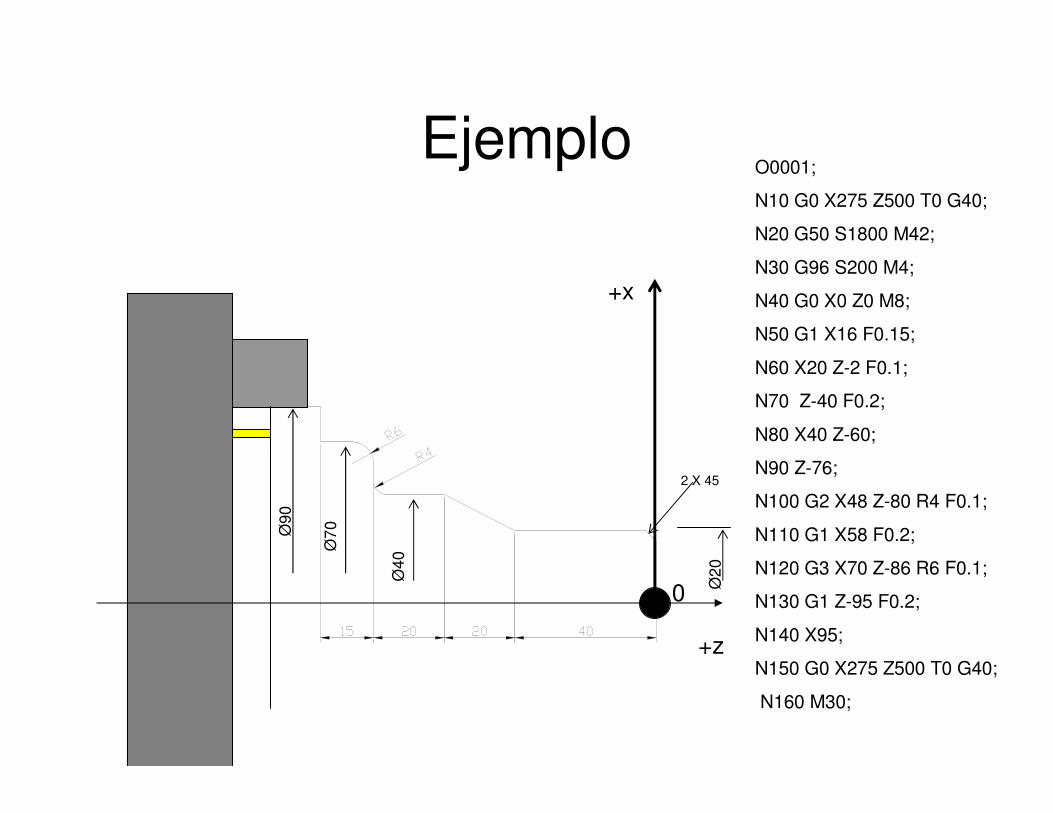
Ejemplo
Ø2
0
Ø4
0
Ø7
0Ø9
0
0
O0001;
N10 G0 X275 Z500 T0 G40;
N20 G50 S1800 M42;
N30 G96 S200 M4;
N40 G0 X0 Z0 M8;
N50 G1 X16 F0.15;
N60 X20 Z-2 F0.1;
N70 Z-40 F0.2;
N80 X40 Z-60;
N90 Z-76;
N100 G2 X48 Z-80 R4 F0.1;
N110 G1 X58 F0.2;
N120 G3 X70 Z-86 R6 F0.1;
N130 G1 Z-95 F0.2;
N140 X95;
N150 G0 X275 Z500 T0 G40;
N160 M30;
+z
+x
2 X 45
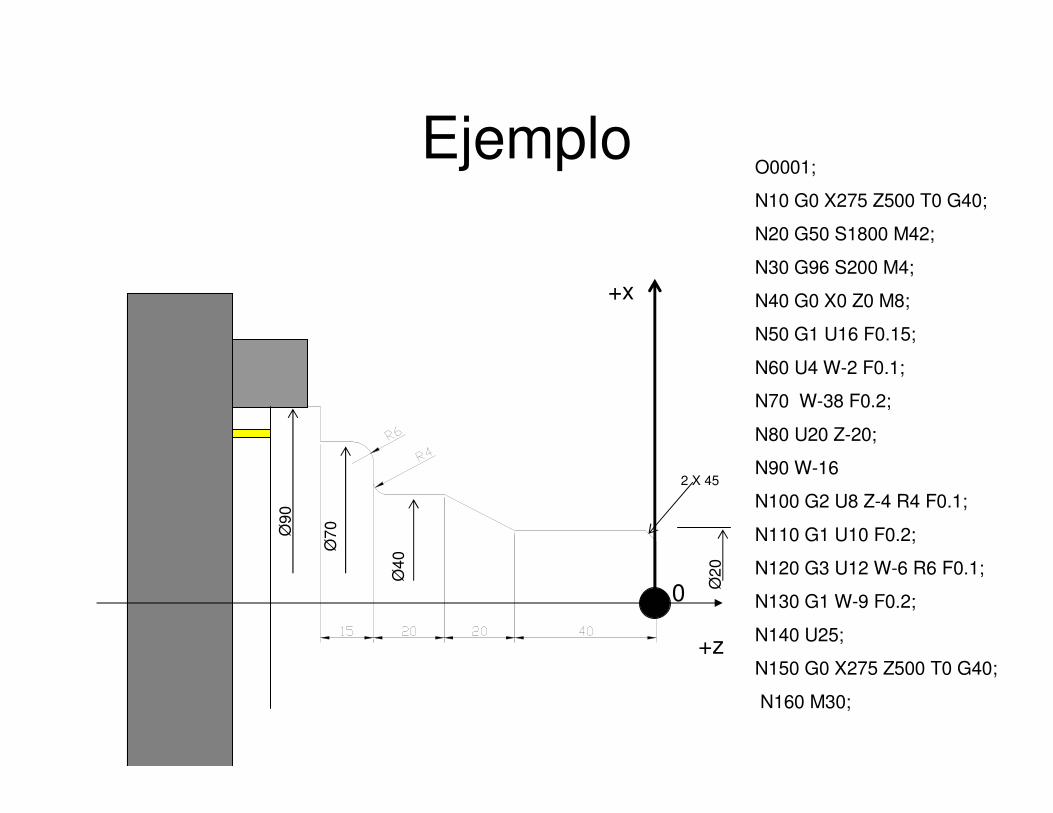
Ejemplo
Ø2
0
Ø4
0
Ø7
0Ø9
0
0
O0001;
N10 G0 X275 Z500 T0 G40;
N20 G50 S1800 M42;
N30 G96 S200 M4;
N40 G0 X0 Z0 M8;
N50 G1 U16 F0.15;
N60 U4 W-2 F0.1;
N70 W-38 F0.2;
N80 U20 Z-20;
N90 W-16
N100 G2 U8 Z-4 R4 F0.1;
N110 G1 U10 F0.2;
N120 G3 U12 W-6 R6 F0.1;
N130 G1 W-9 F0.2;
N140 U25;
N150 G0 X275 Z500 T0 G40;
N160 M30;
+z
+x
2 X 45
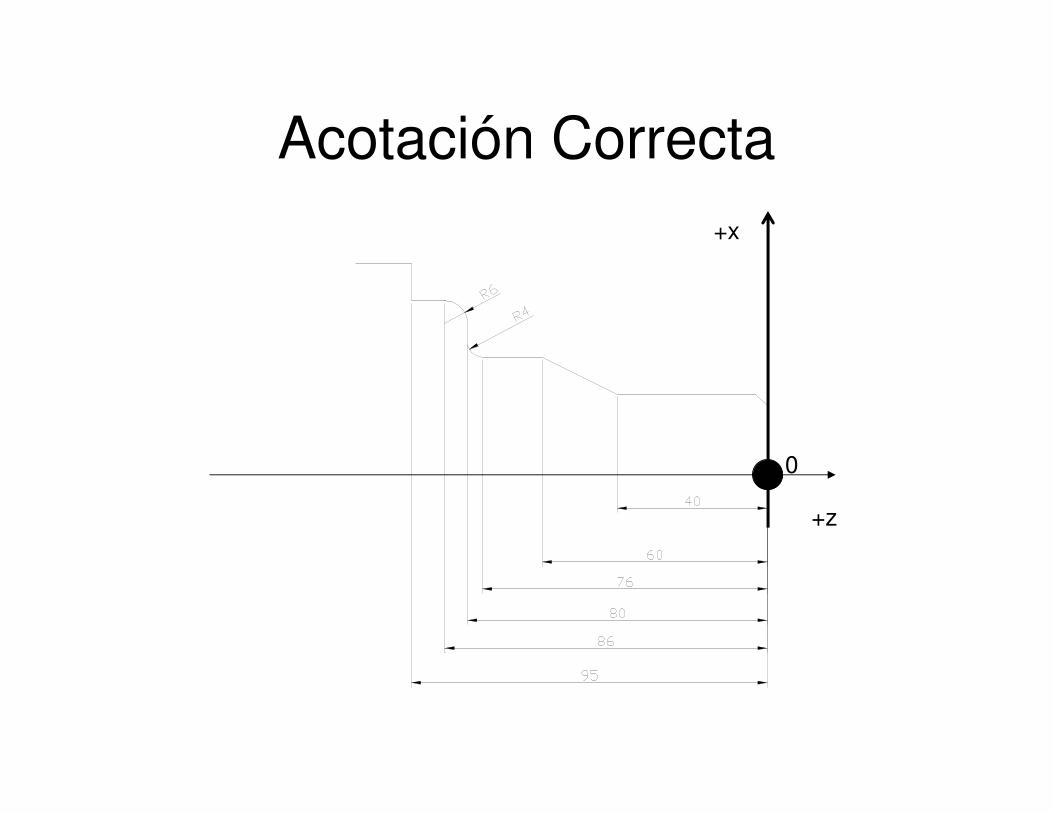
Acotación Correcta
0
+z
+x
Punto “P” de la herramienta
+ Z
+ X
0CRASH!!
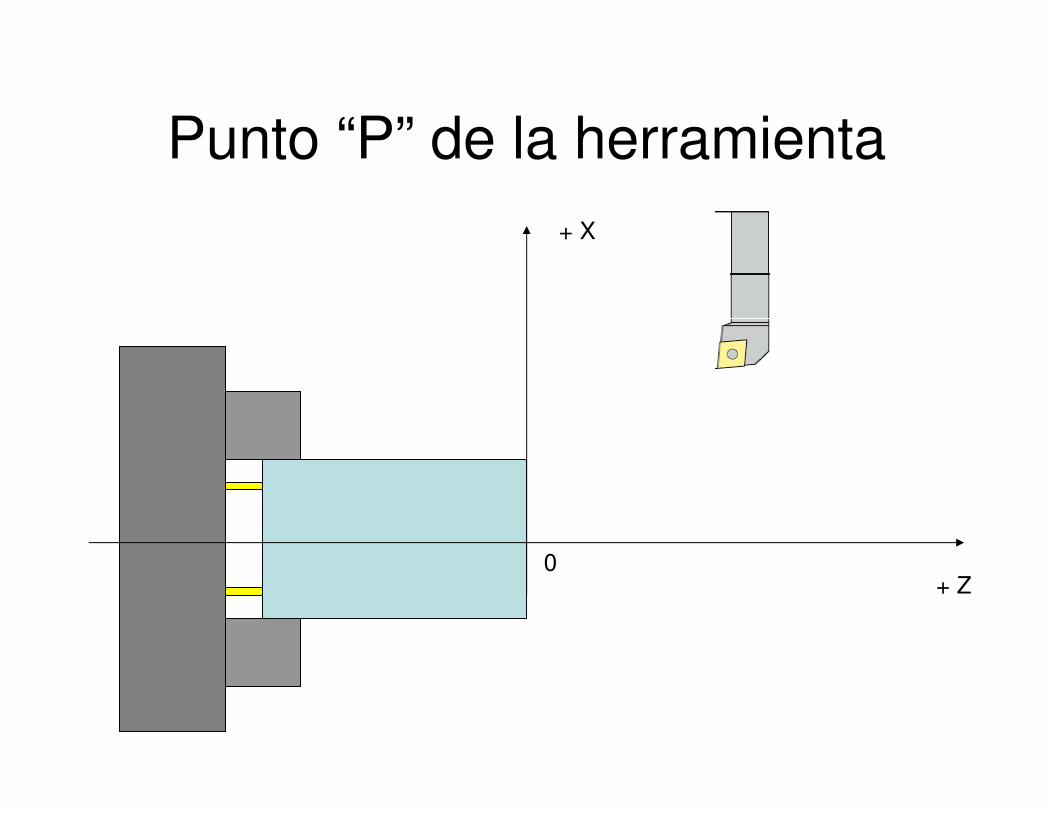
Punto “P” de la herramienta
+ Z
+ X
0
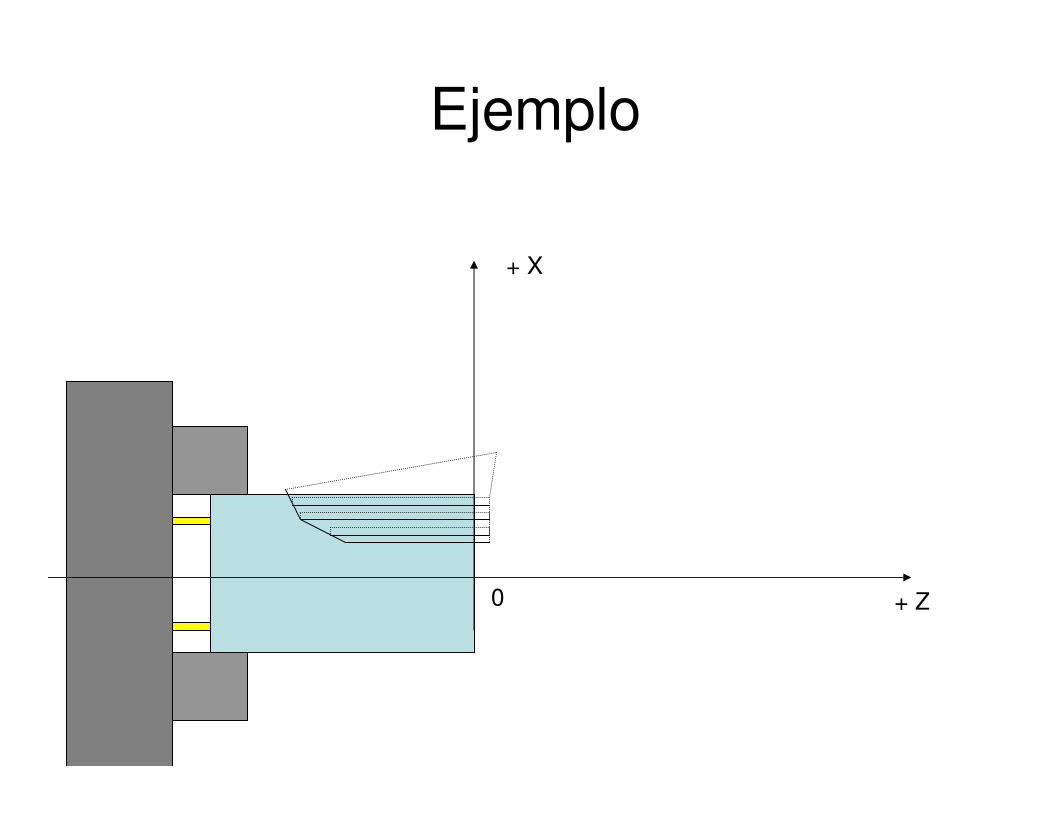
Ejemplo
+ Z
+ X
0
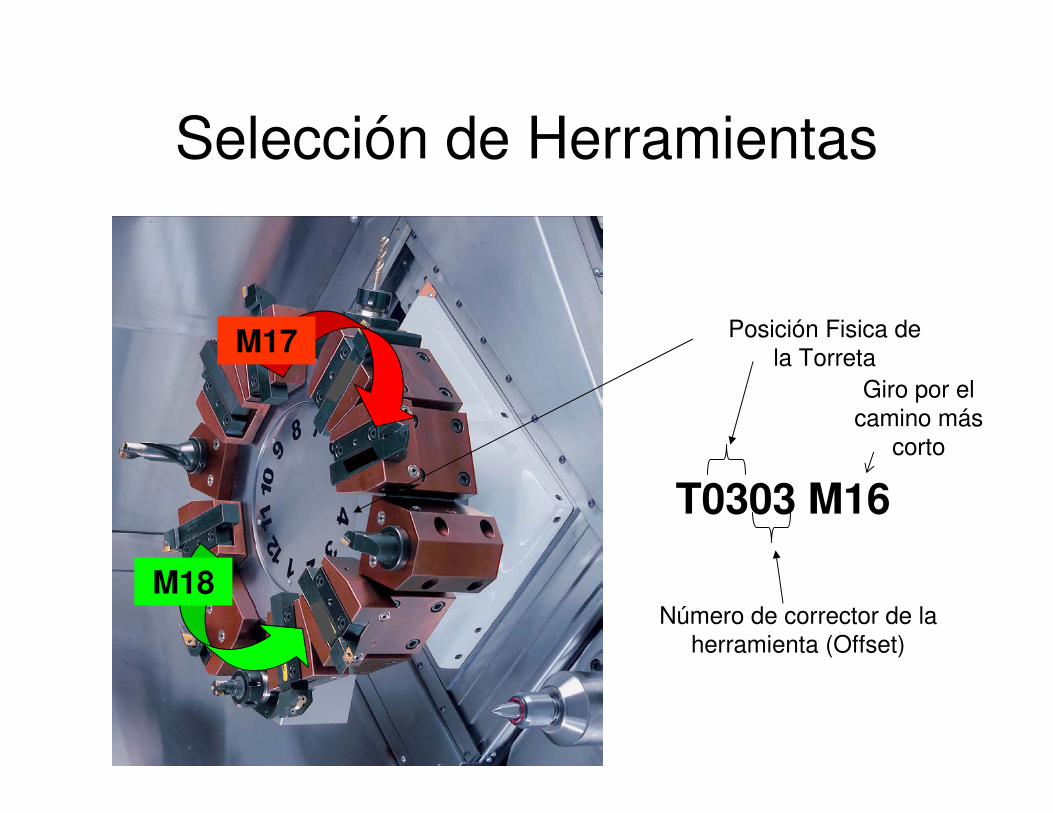
Selección de Herramientas
Posición Fisica de la Torreta
T0303 M16
Número de corrector de la herramienta (Offset)
Giro por el camino más
corto
M17
M18
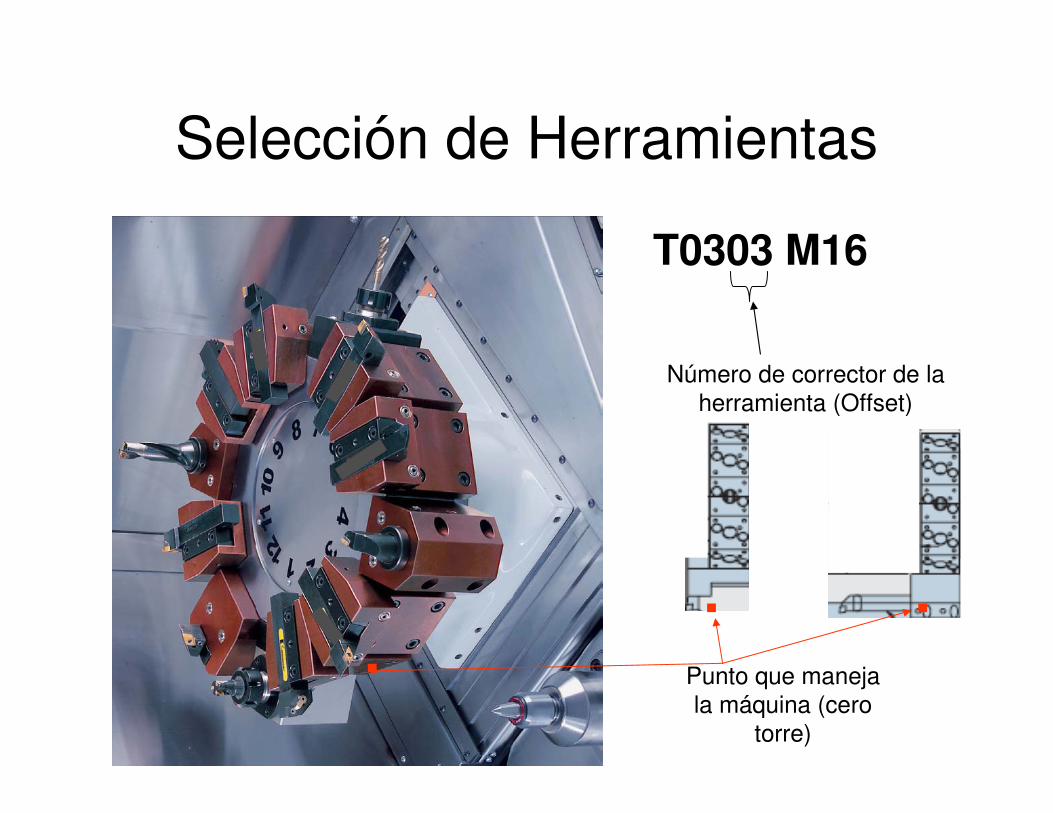
Selección de Herramientas
T0303 M16
Número de corrector de la herramienta (Offset)
.Punto que maneja la máquina (cero
torre)
. .
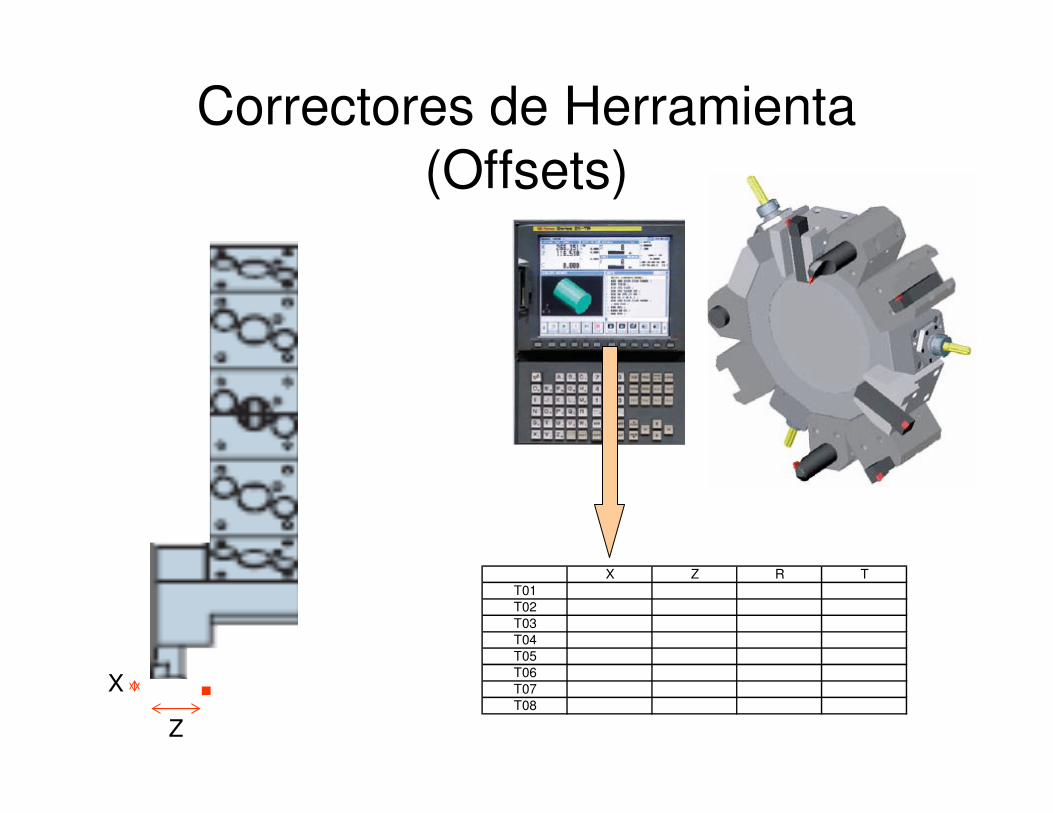
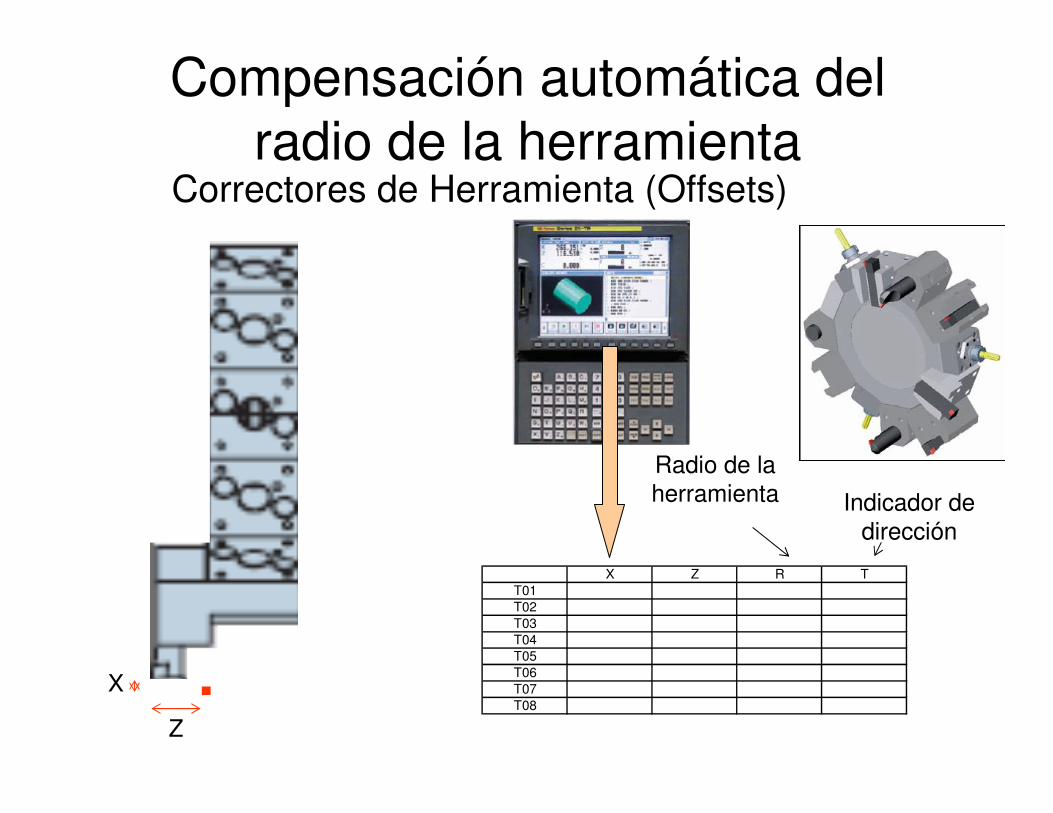
Correctores de Herramienta (Offsets)
.X
Z
X Z R T
T01
T02
T03
T04
T05
T06
T07
T08
Roscado – G32
• Coordinación electrónica entre el husillo y los ejes
• Encoder de husillo
• Velocidad de giro constante
• Sentido de giro, avance y mano del portaherramientas
• Cantidad de pasadas y escalonamiento
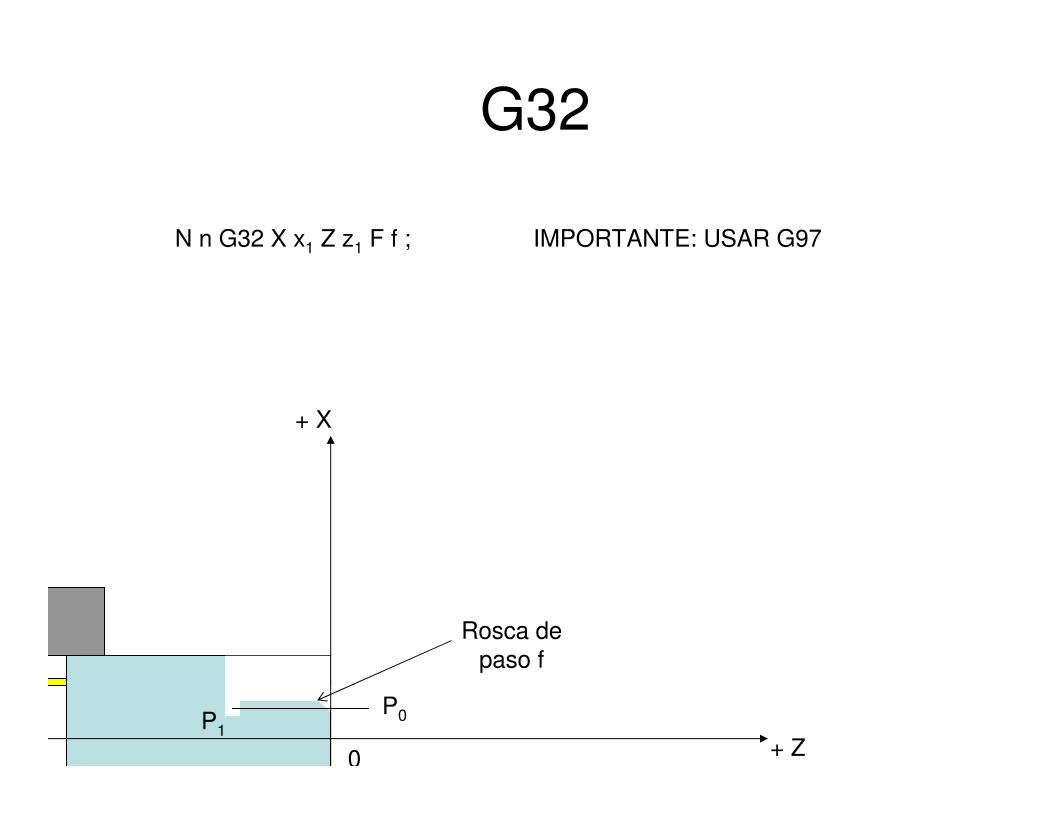
G32
+ Z
+ X
0
N n G32 X x1 Z z1 F f ;
P1
P0
Rosca de paso f
IMPORTANTE: USAR G97
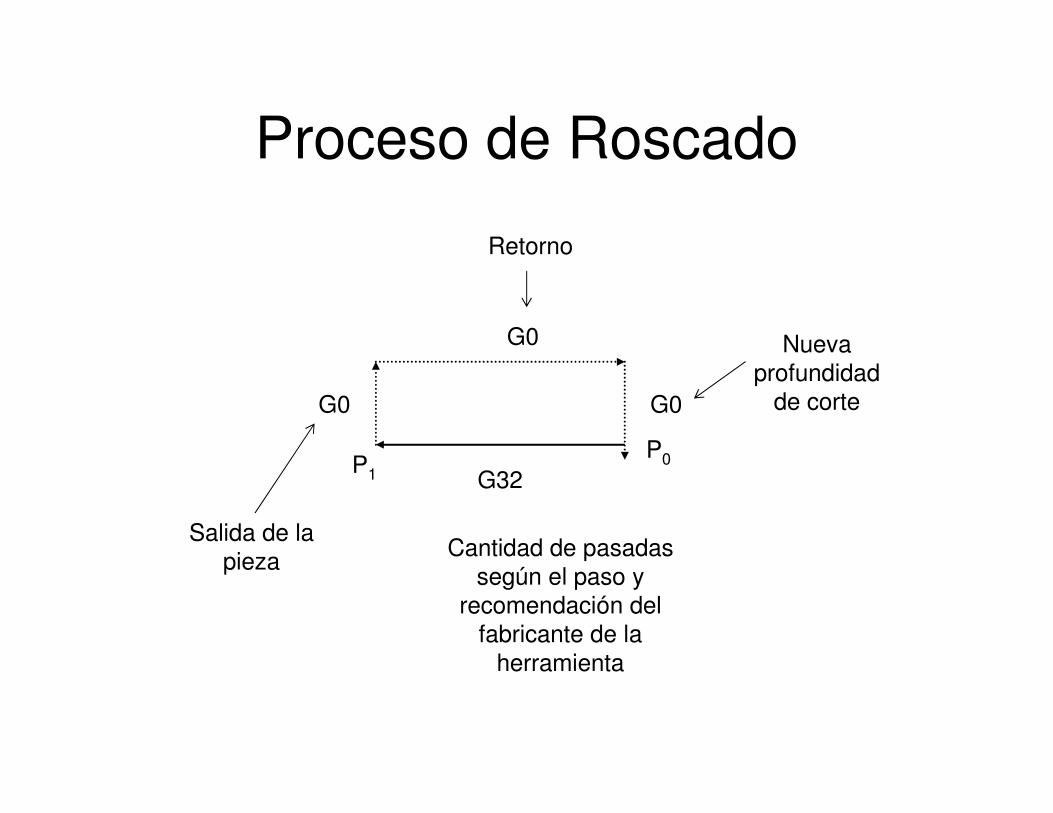
Proceso de Roscado
G32
G0
G0
G0
Salida de la pieza
Retorno
Nueva profundidad
de corte
P1
P0
Cantidad de pasadas según el paso y
recomendación del fabricante de la
herramienta
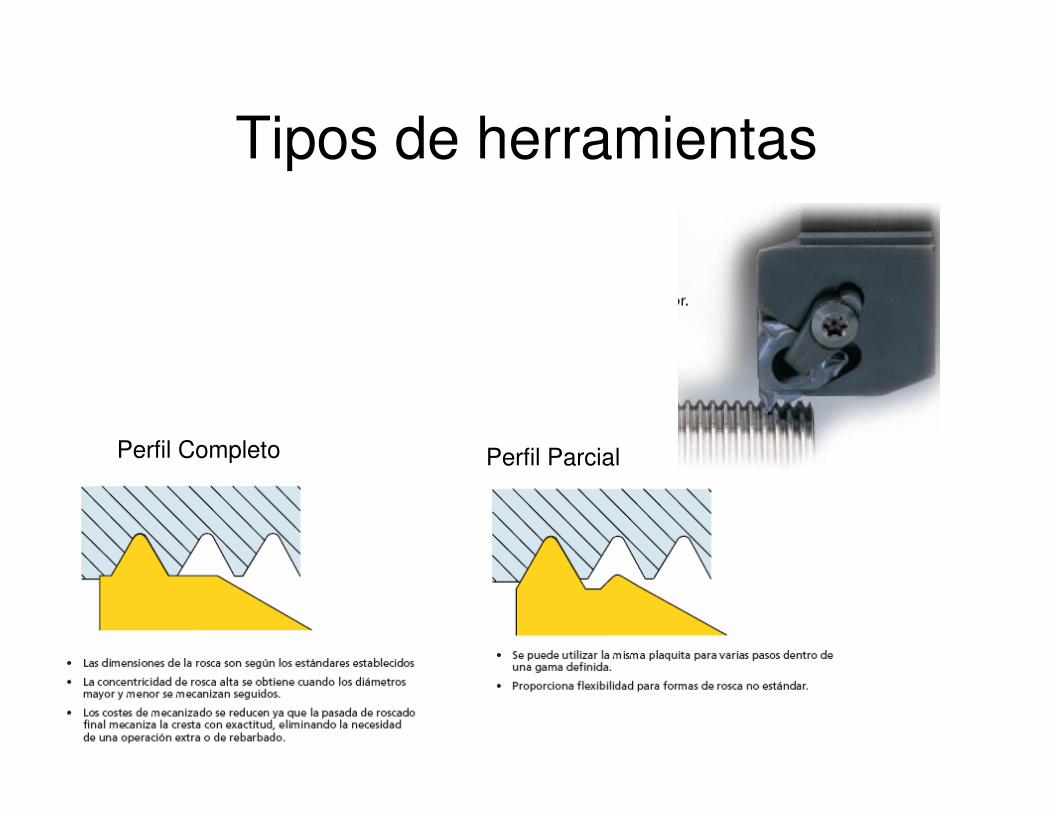
Tipos de herramientas
Perfil Completo Perfil Parcial
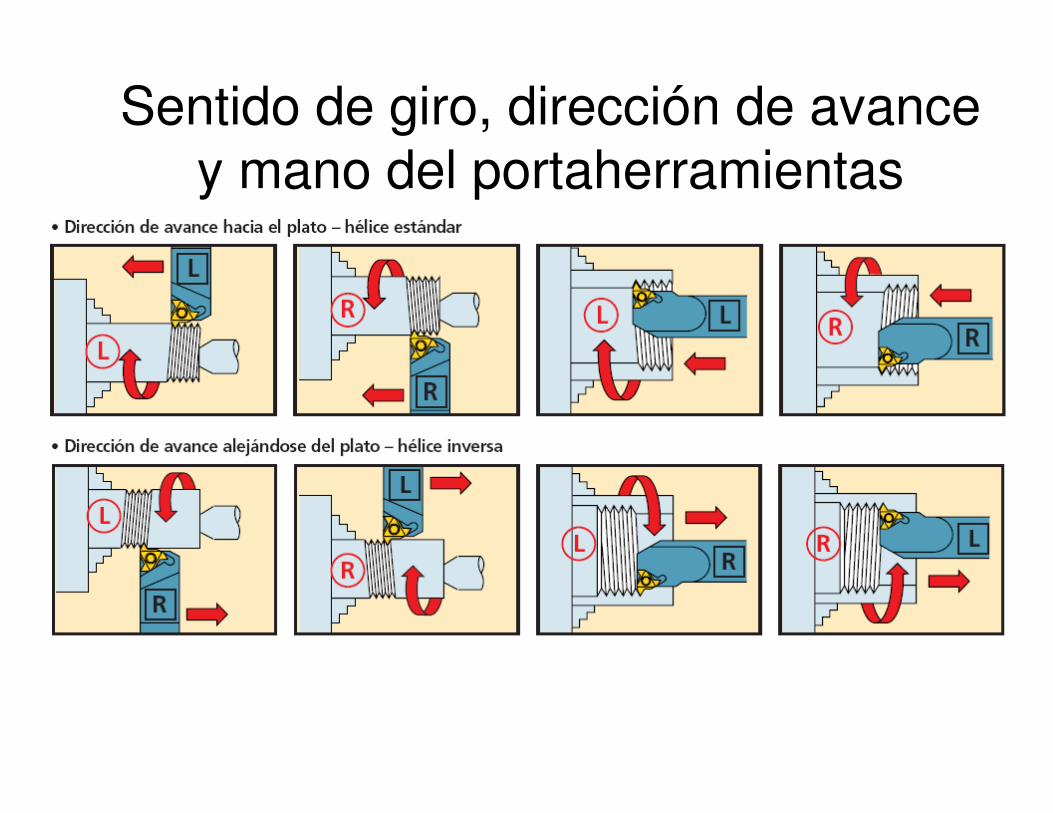
Sentido de giro, dirección de avance y mano del portaherramientas
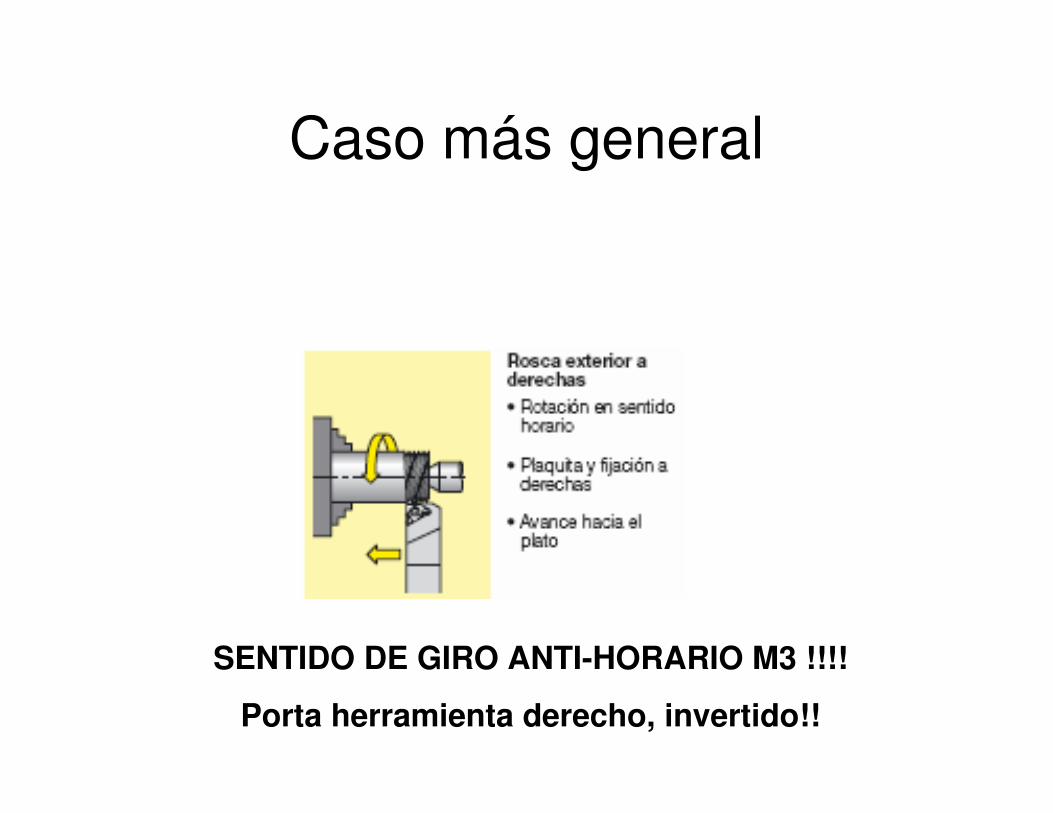
Caso más general
SENTIDO DE GIRO ANTI-HORARIO M3 !!!!
Porta herramienta derecho, invertido!!
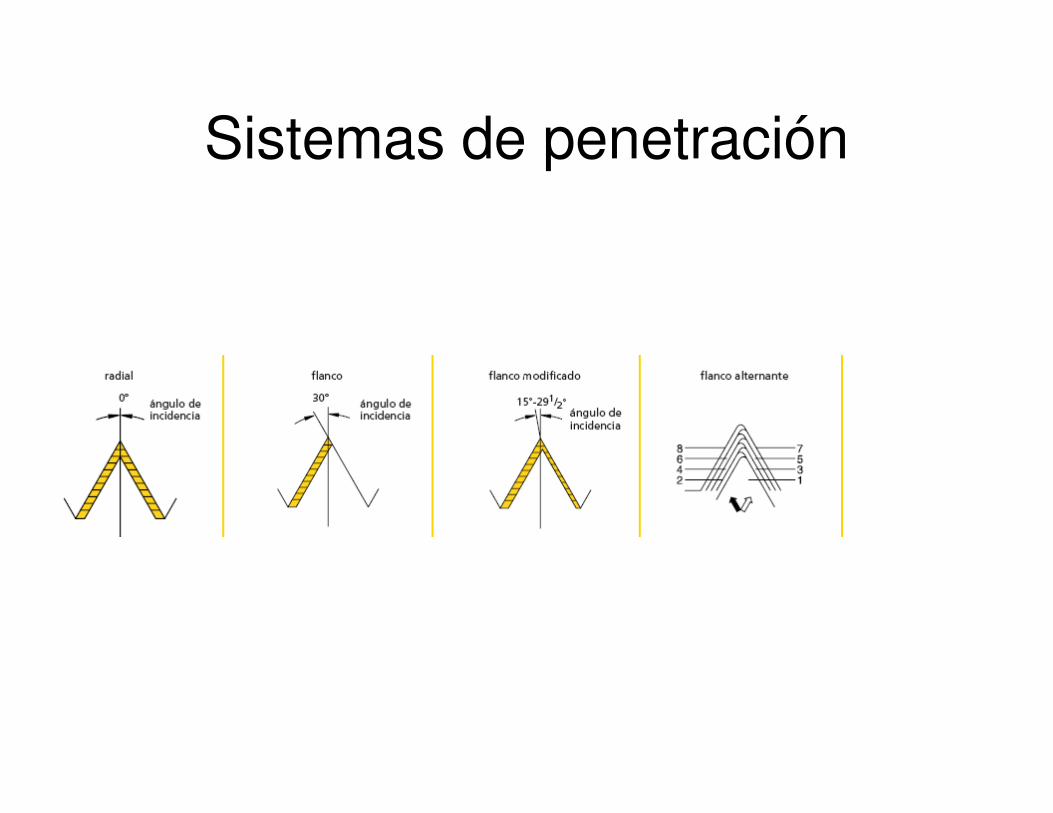
Sistemas de penetración
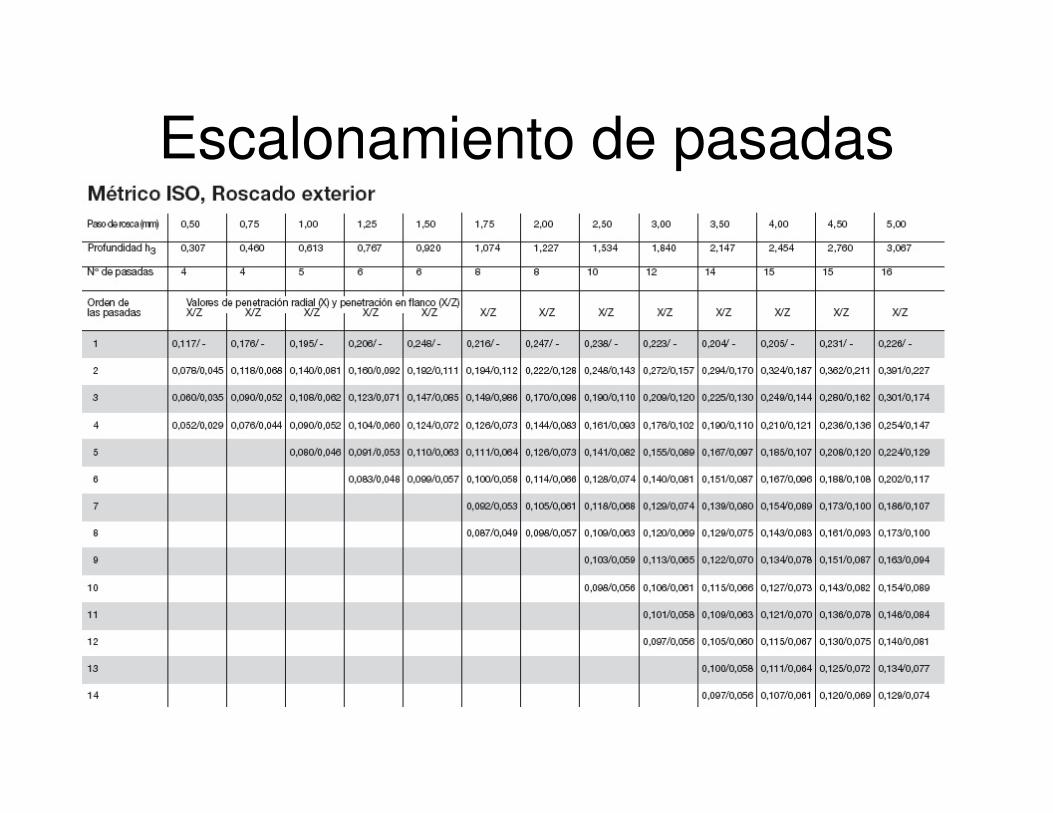
Escalonamiento de pasadas
Punto “P” de la herramienta
+ Z
+ X
0
P
.P
.
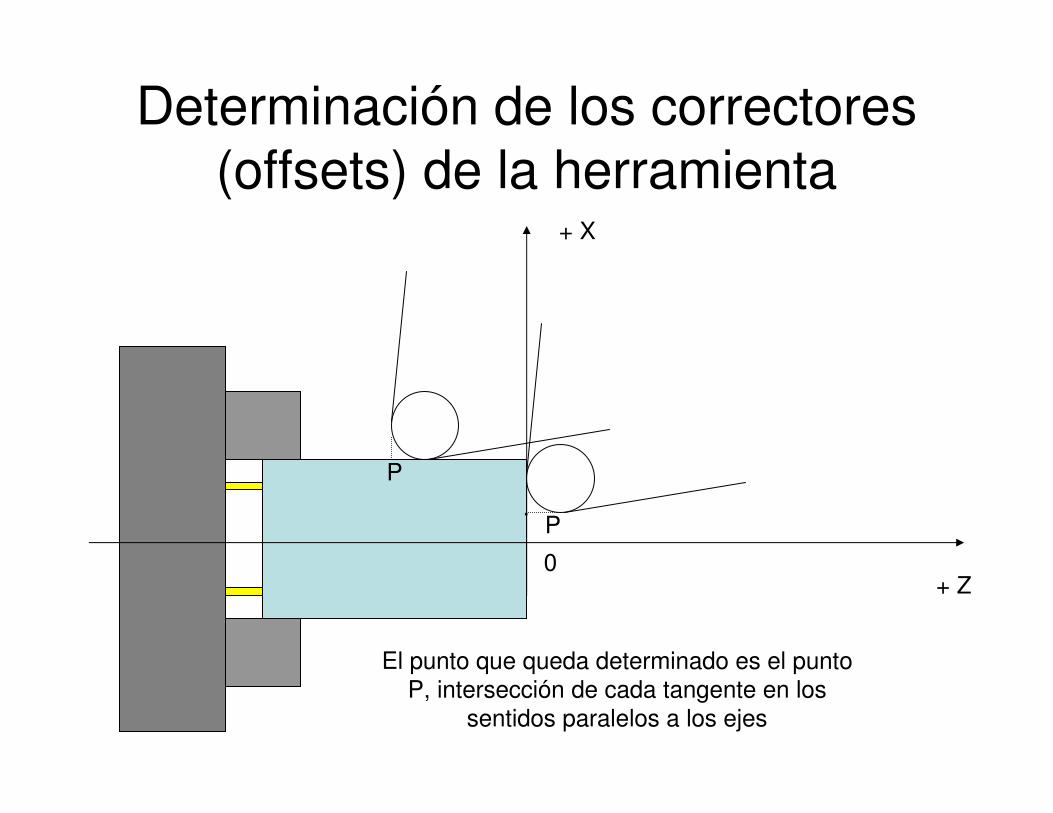
Determinación de los correctores (offsets) de la herramienta
+ Z
+ X
0
P
P.
El punto que queda determinado es el punto P, intersección de cada tangente en los
sentidos paralelos a los ejes
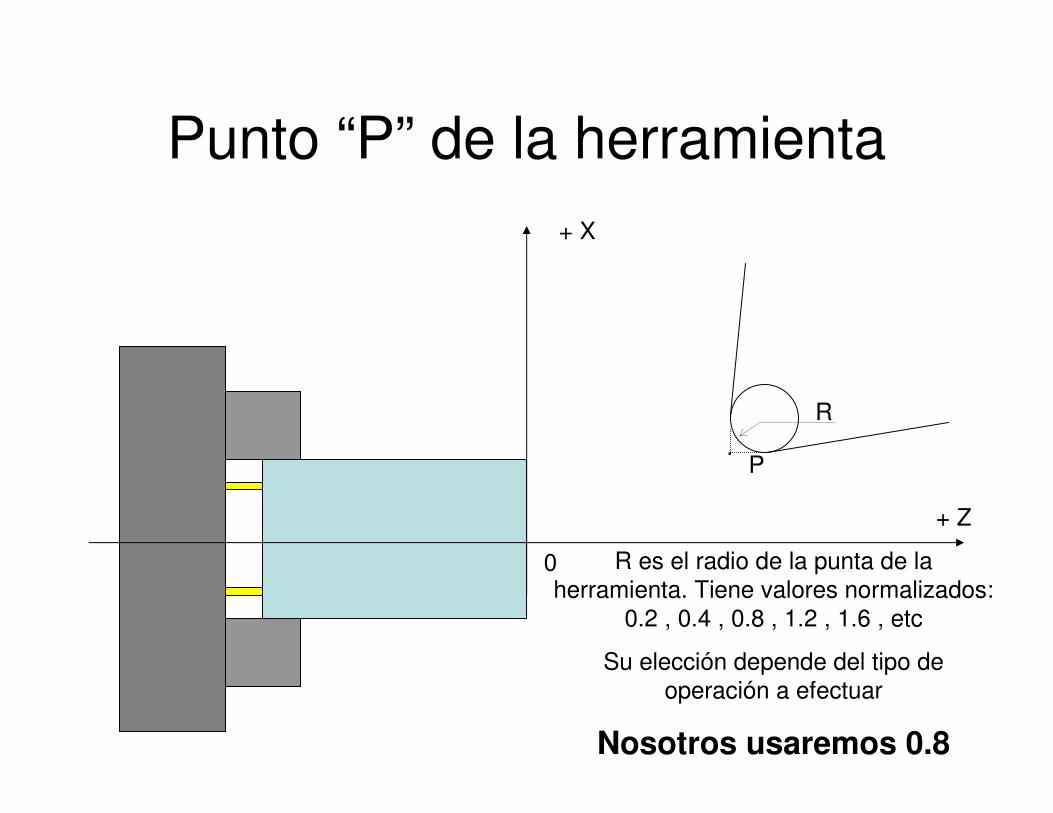
Punto “P” de la herramienta
+ Z
+ X
0
P.
R
R es el radio de la punta de la herramienta. Tiene valores normalizados:
0.2 , 0.4 , 0.8 , 1.2 , 1.6 , etc
Su elección depende del tipo de operación a efectuar
Nosotros usaremos 0.8
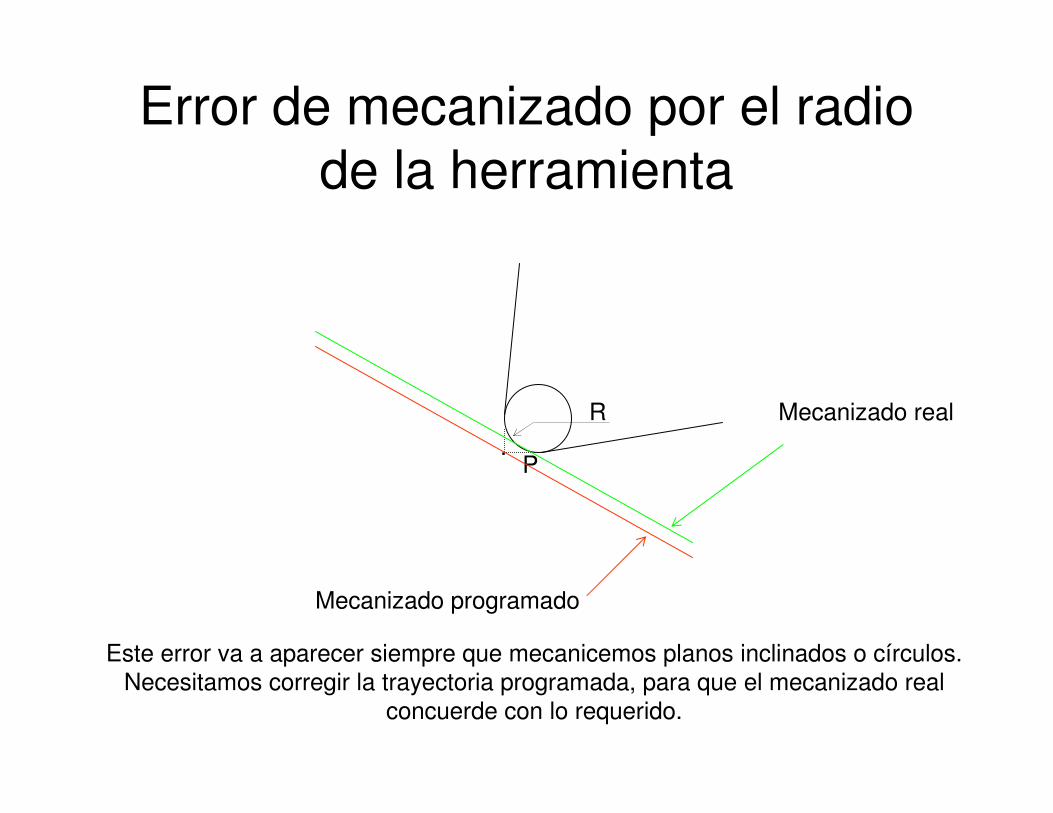
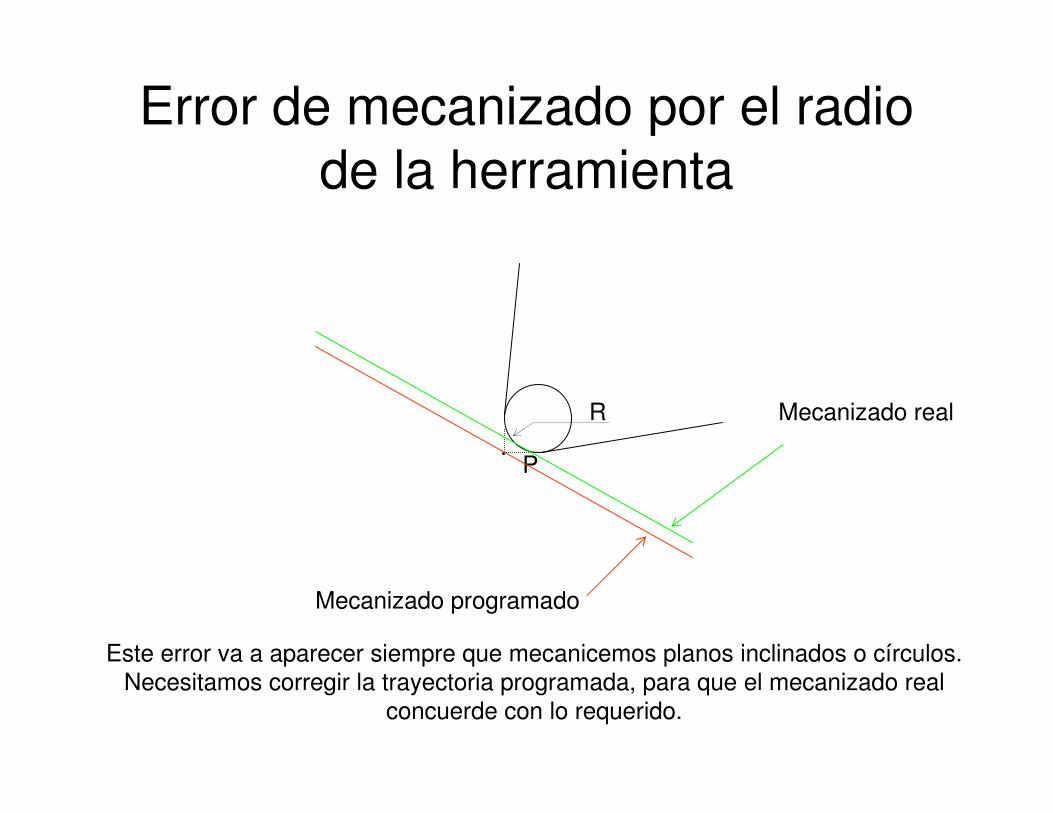
Error de mecanizado por el radio de la herramienta
P.
R Mecanizado real
Mecanizado programado
Este error va a aparecer siempre que mecanicemos planos inclinados o círculos. Necesitamos corregir la trayectoria programada, para que el mecanizado real
concuerde con lo requerido.
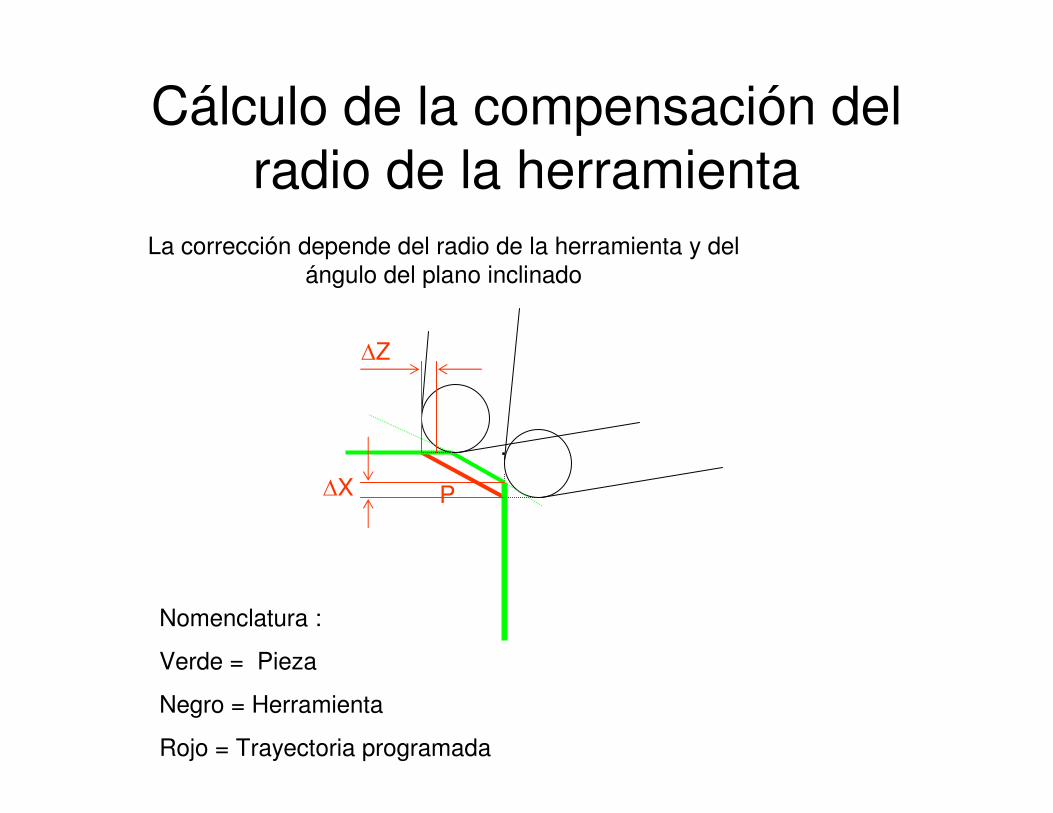
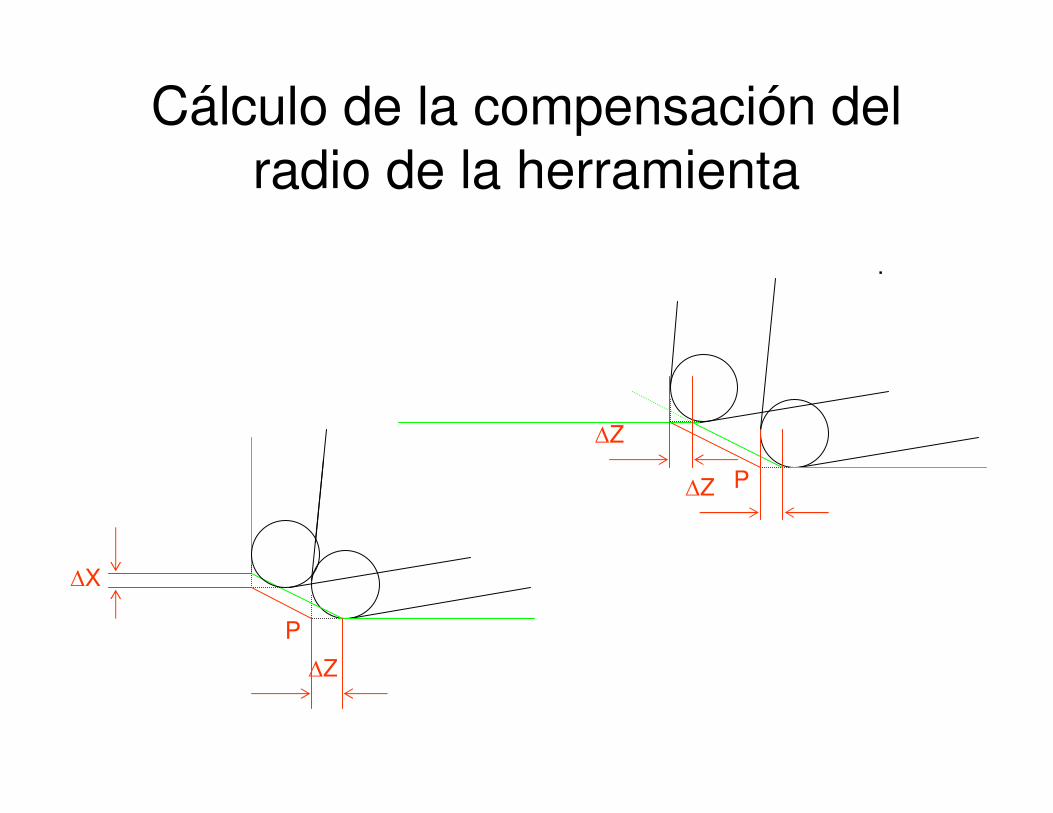
Cálculo de la compensación del radio de la herramienta
La corrección depende del radio de la herramienta y del ángulo del plano inclinado
P
.
∆X
∆Z
Nomenclatura :
Verde = Pieza
Negro = Herramienta
Rojo = Trayectoria programada
Cálculo de la compensación del radio de la herramienta
P
∆X
∆Z
P
.
∆Z
∆Z
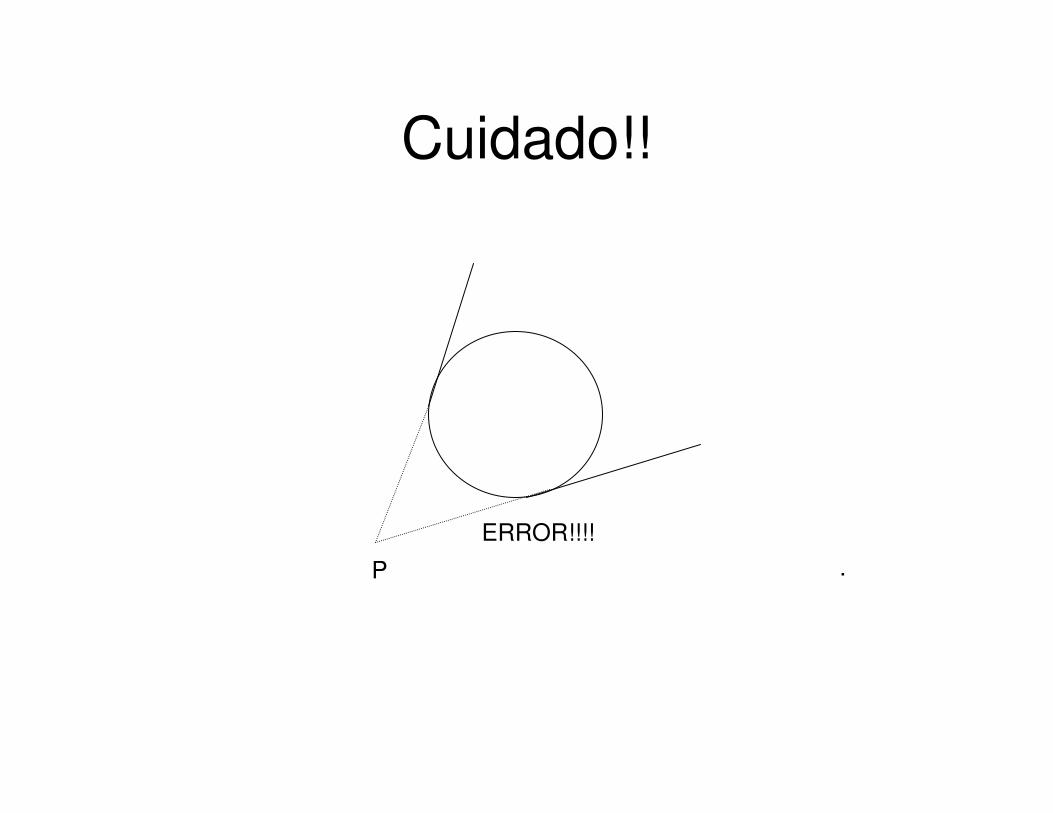
Cuidado!!
P .
ERROR!!!!
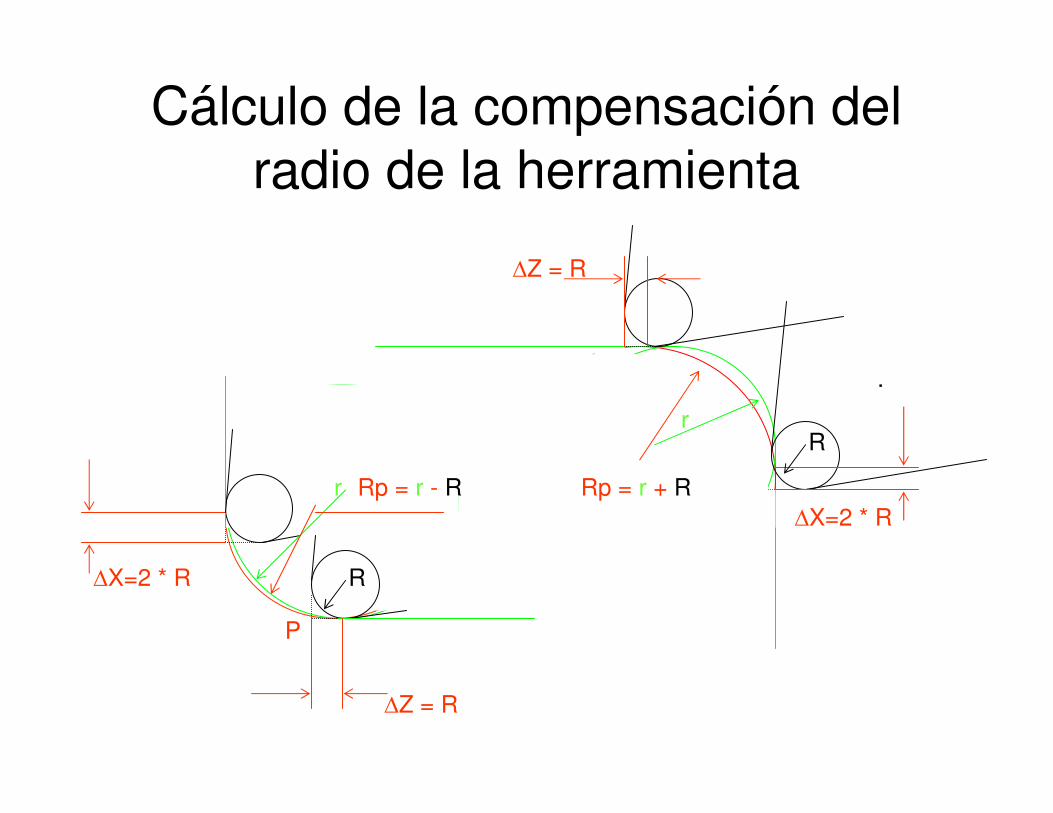
Cálculo de la compensación del radio de la herramienta
P
∆X=2 * R
∆Z = R
.
R
r
r
∆Z = R
∆X=2 * R
R
Rp = r + RRp = r - R
Ciclos Fijos
• Ayudas de programación
• Específicos para cada control
• Rígidos
• Rápidos para programar pero lentos para mecanizar
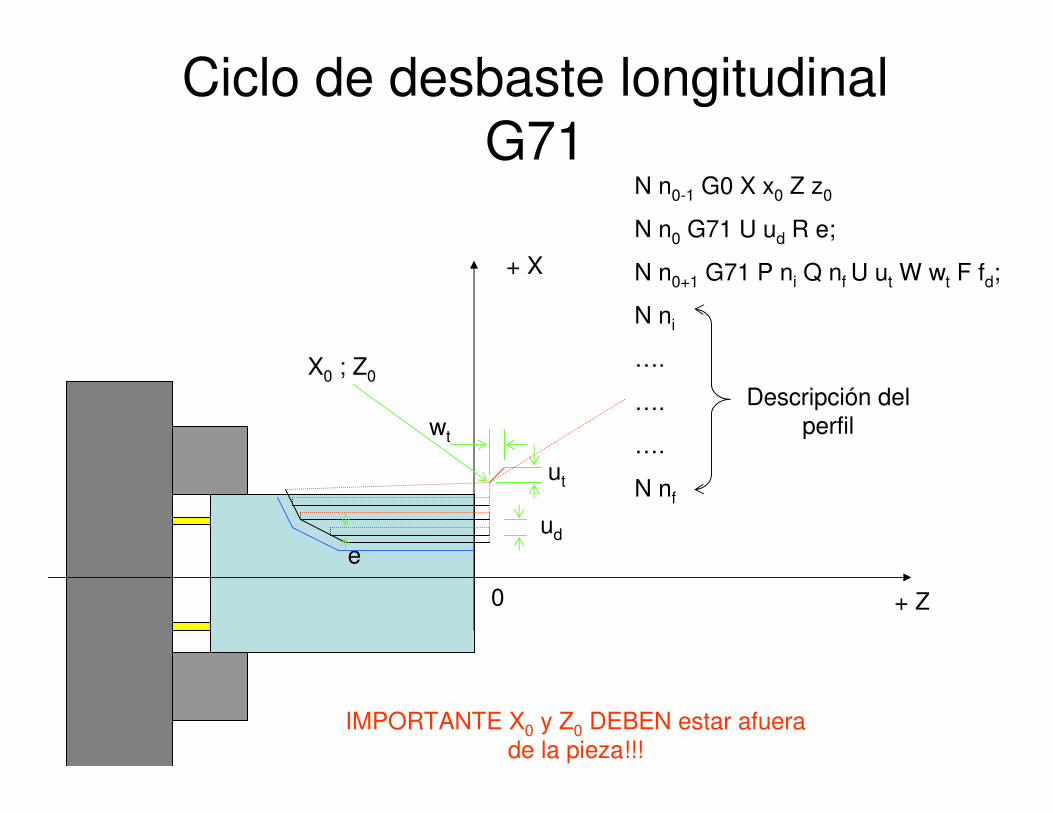
Ciclo de desbaste longitudinalG71
+ Z
+ X
0
N n0-1 G0 X x0 Z z0
N n0 G71 U ud R e;
N n0+1 G71 P ni Q nf U ut W wt F fd;
N ni
….
….
….
N nf
ud
e
Descripción del perfil
ut
wt
X0 ; Z0
IMPORTANTE X0 y Z0 DEBEN estar afuera de la pieza!!!
Ejemplo G71
+ Z
+ X
0
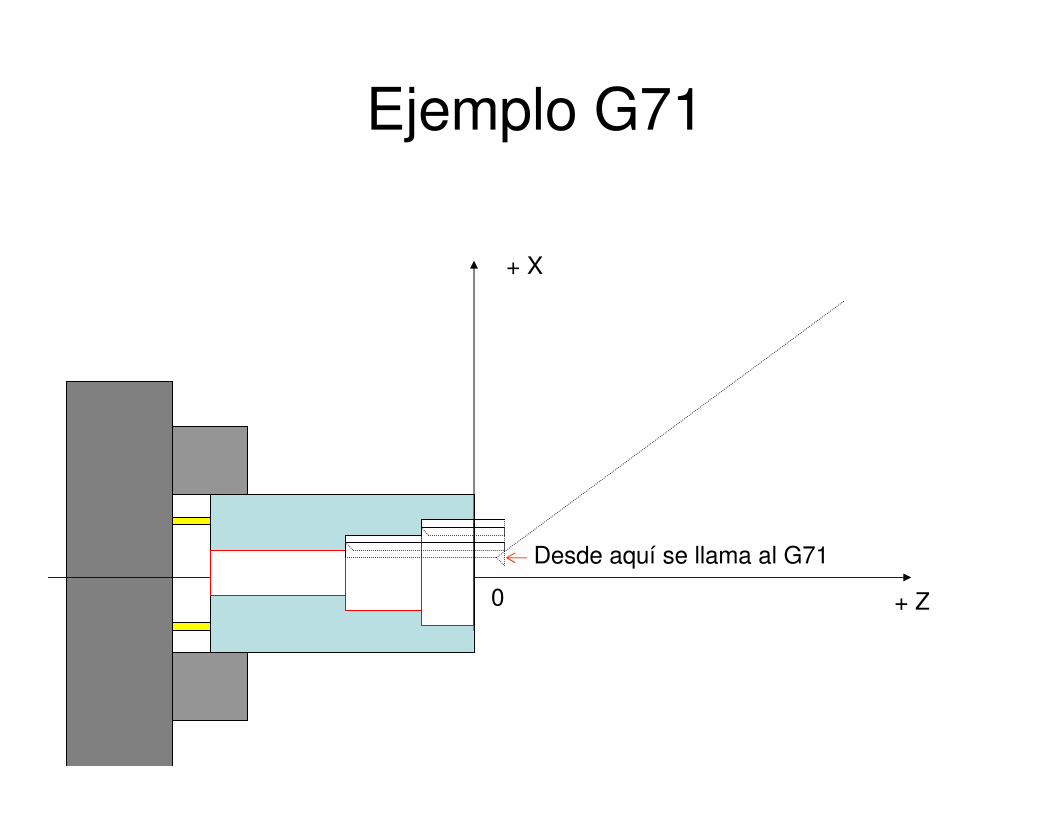
Ejemplo G71
+ Z
+ X
0
Desde aquí se llama al G71
Error de mecanizado por el radio de la herramienta
P.
R Mecanizado real
Mecanizado programado
Este error va a aparecer siempre que mecanicemos planos inclinados o círculos. Necesitamos corregir la trayectoria programada, para que el mecanizado real
concuerde con lo requerido.
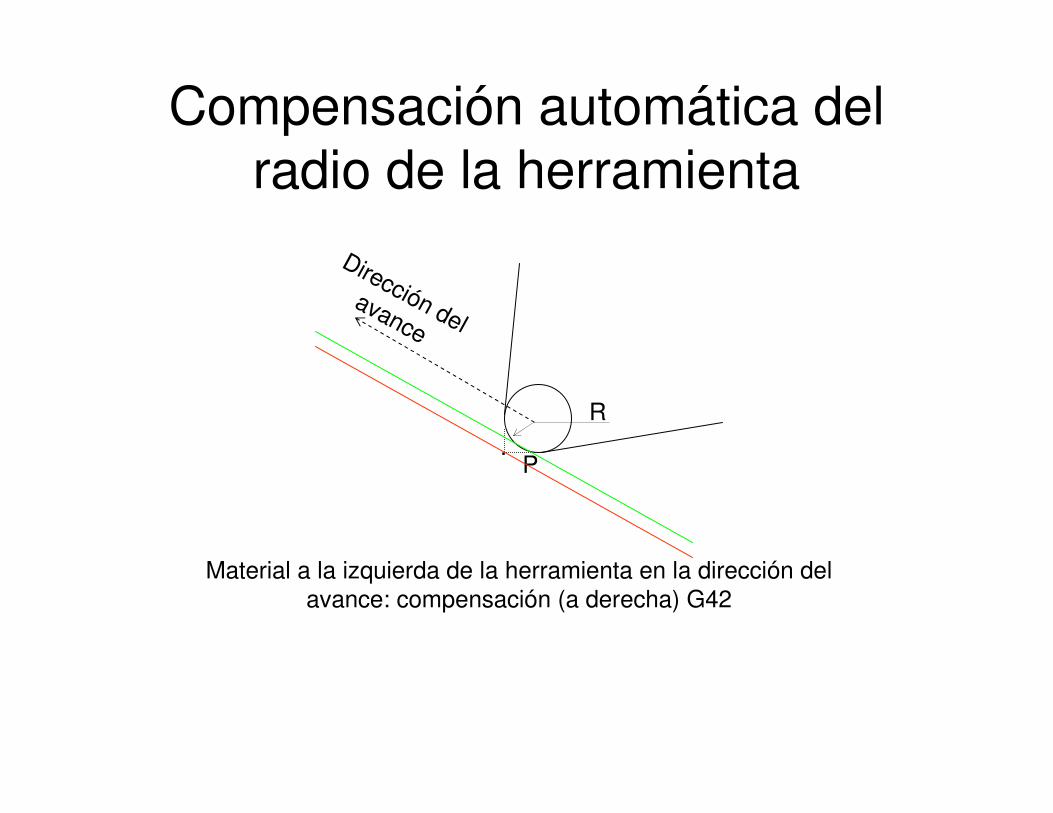
Compensación automática del radio de la herramienta
P.
R
Dirección del avance
Material a la izquierda de la herramienta en la dirección del avance: compensación (a derecha) G42
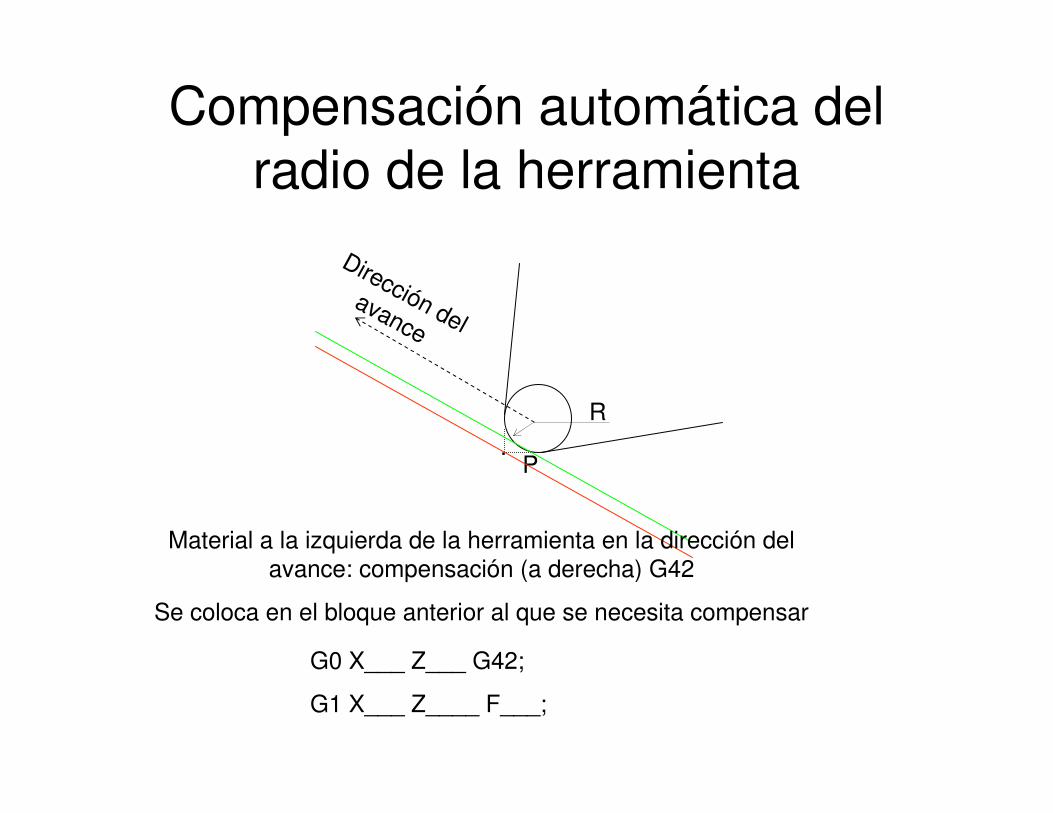
Compensación automática del radio de la herramienta
P.
R
Dirección del avance
Material a la izquierda de la herramienta en la dirección del avance: compensación (a derecha) G42
Se coloca en el bloque anterior al que se necesita compensar
G0 X___ Z___ G42;
G1 X___ Z____ F___;
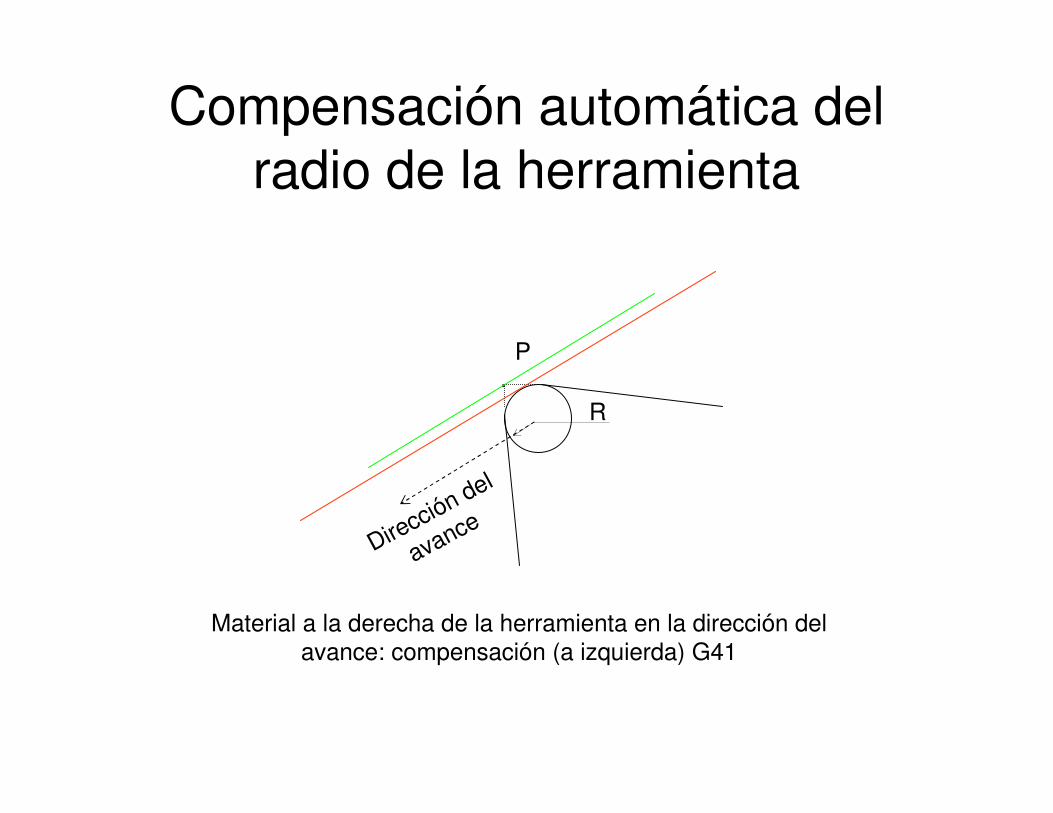
Compensación automática del radio de la herramienta
P.
R
Dirección del
avance
Material a la derecha de la herramienta en la dirección del avance: compensación (a izquierda) G41
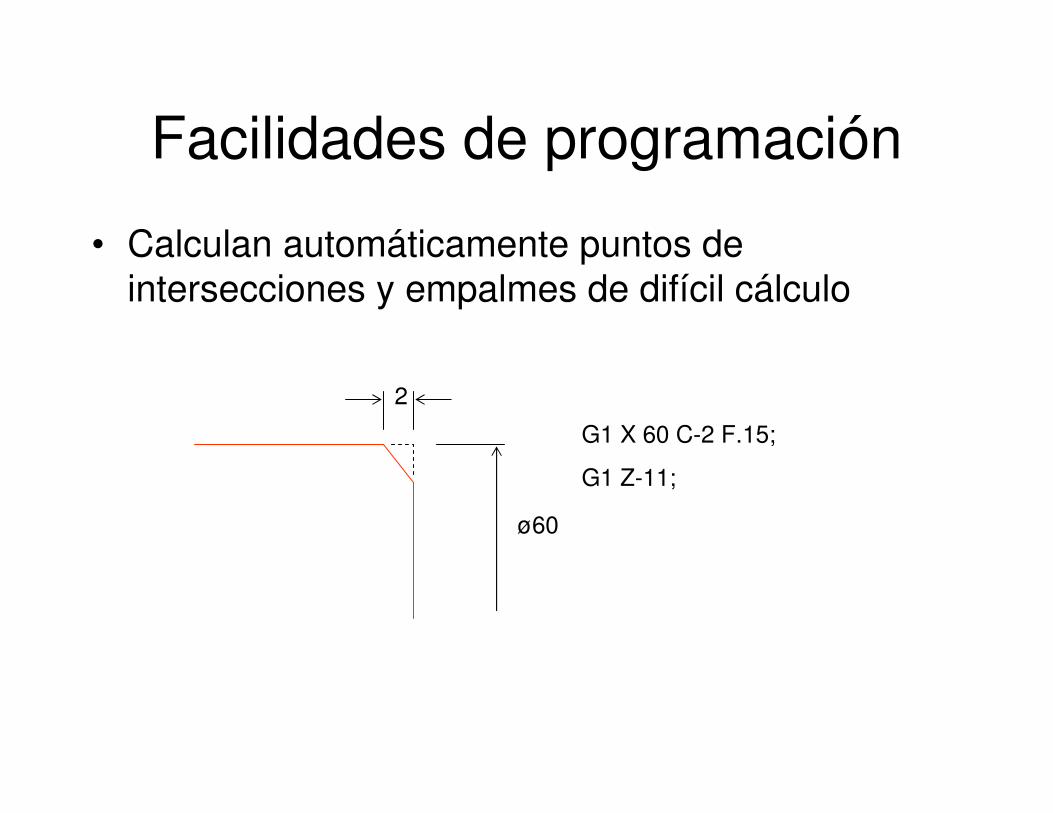
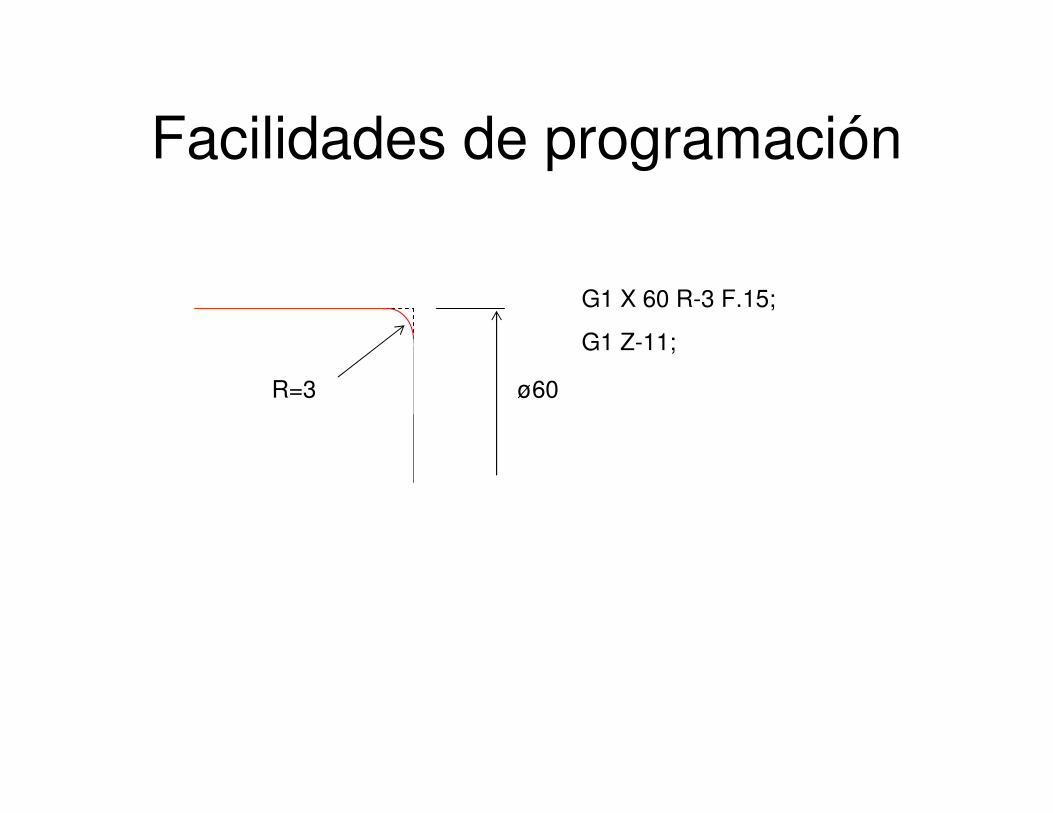
Facilidades de programación
• Calculan automáticamente puntos de intersecciones y empalmes de difícil cálculo
ø60
2
G1 X 60 C-2 F.15;
G1 Z-11;
Correctores de Herramienta (Offsets)
.X
Z
X Z R T
T01
T02
T03
T04
T05
T06
T07
T08
Radio de la herramienta Indicador de
dirección
Compensación automática del radio de la herramienta
P.
R
P.
R
Compensación automática del radio de la herramienta
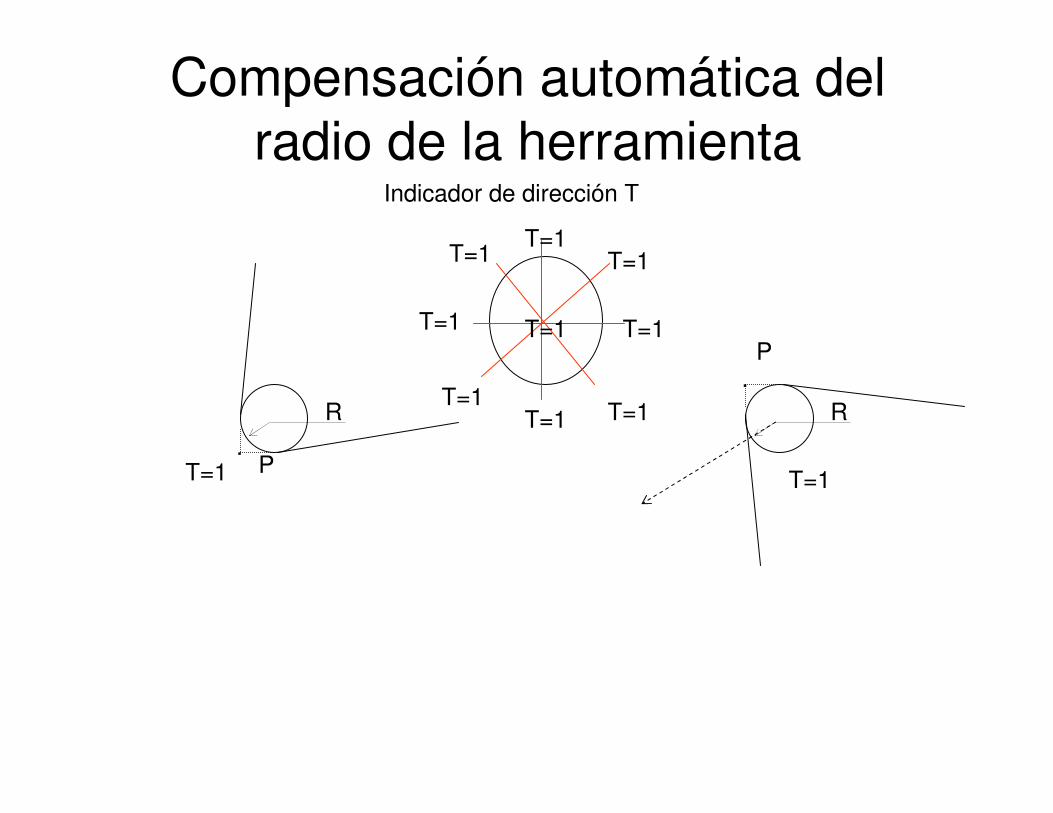
Indicador de dirección T
T=1T=1
T=1
T=1
T=1T=1
T=1
T=1
T=1
T=1T=1
ø60R=3
G1 X 60 R-3 F.15;
G1 Z-11;
Facilidades de programación
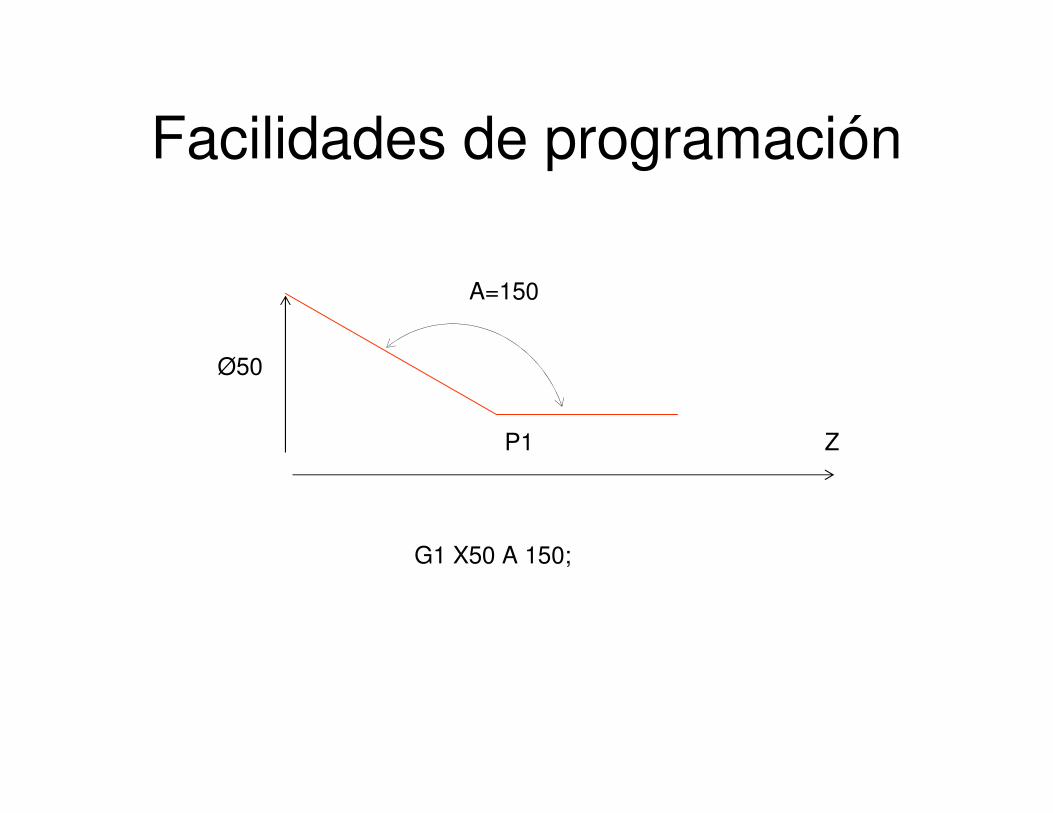
Facilidades de programación
A=150
ZP1
Ø50
G1 X50 A 150;
Facilidades de programación
A=150
ZP1
Z=75
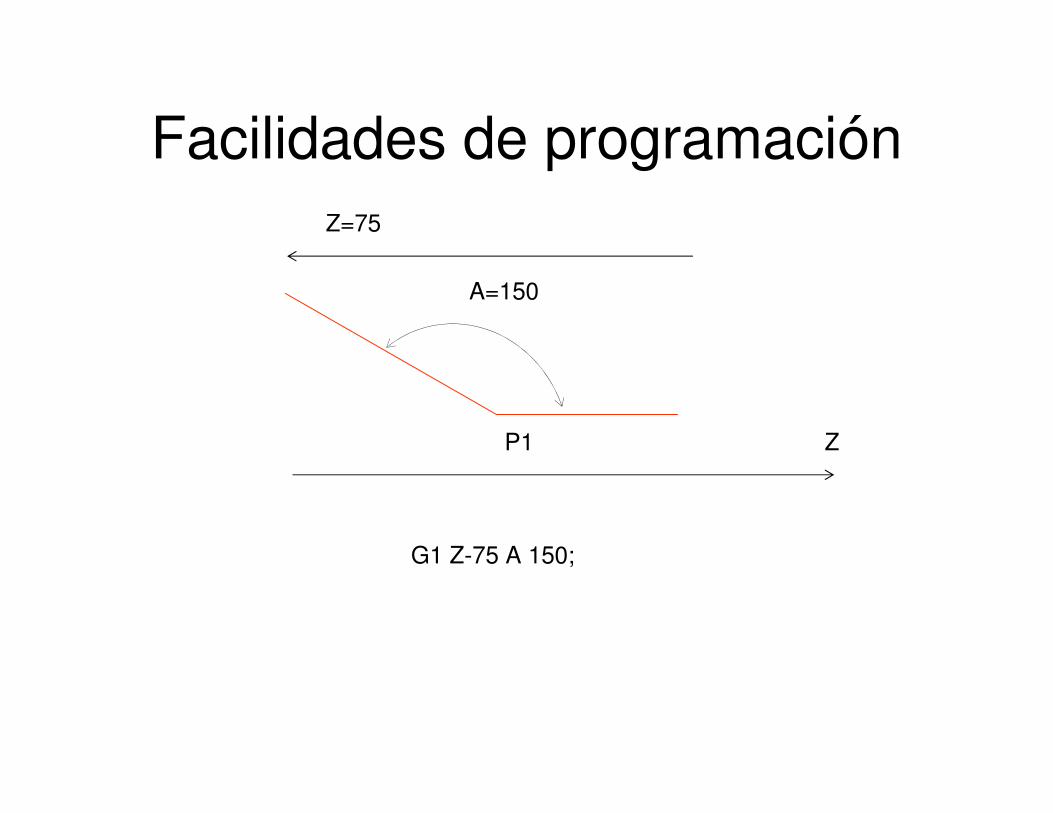
G1 Z-75 A 150;
Facilidades de programación
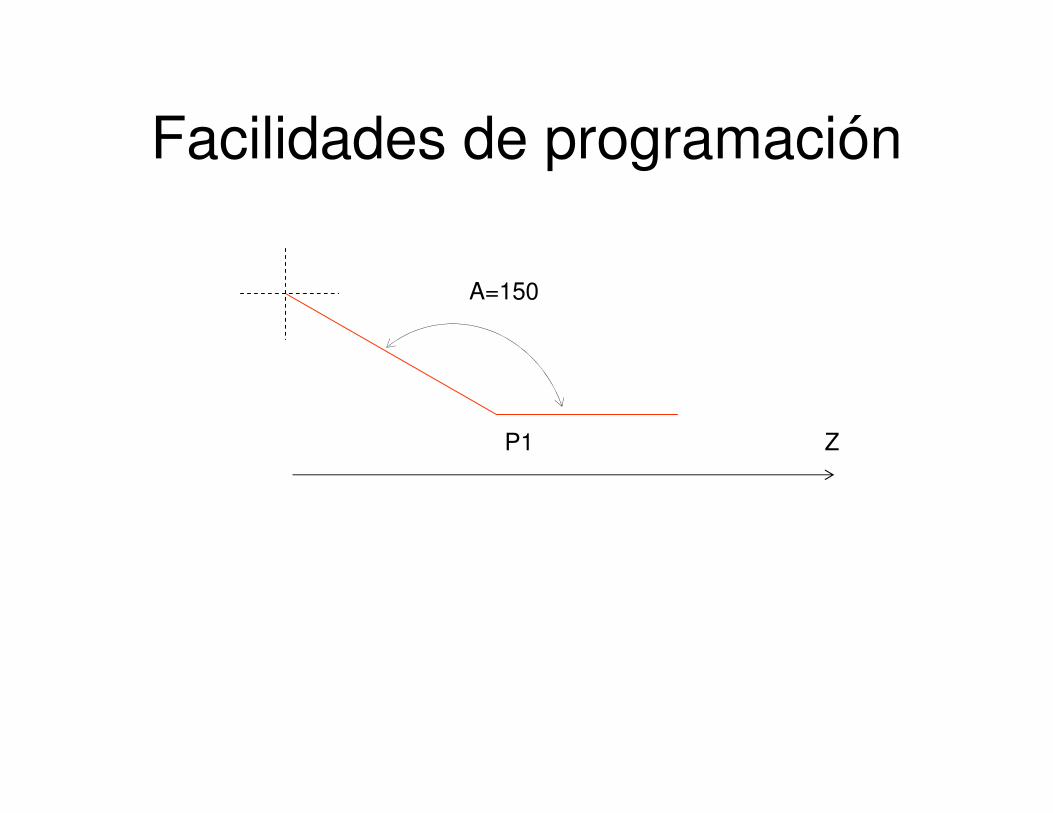
A=150
P1 Z
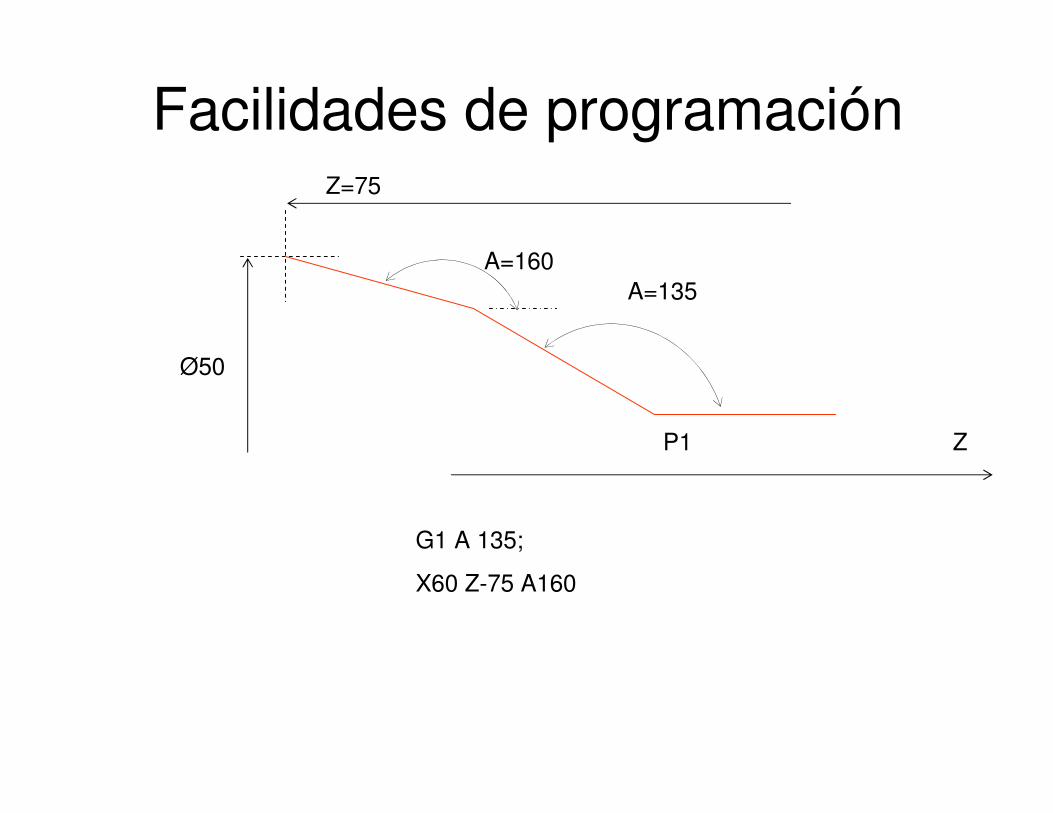
Facilidades de programación
A=135
P1 Z
A=160
Z=75
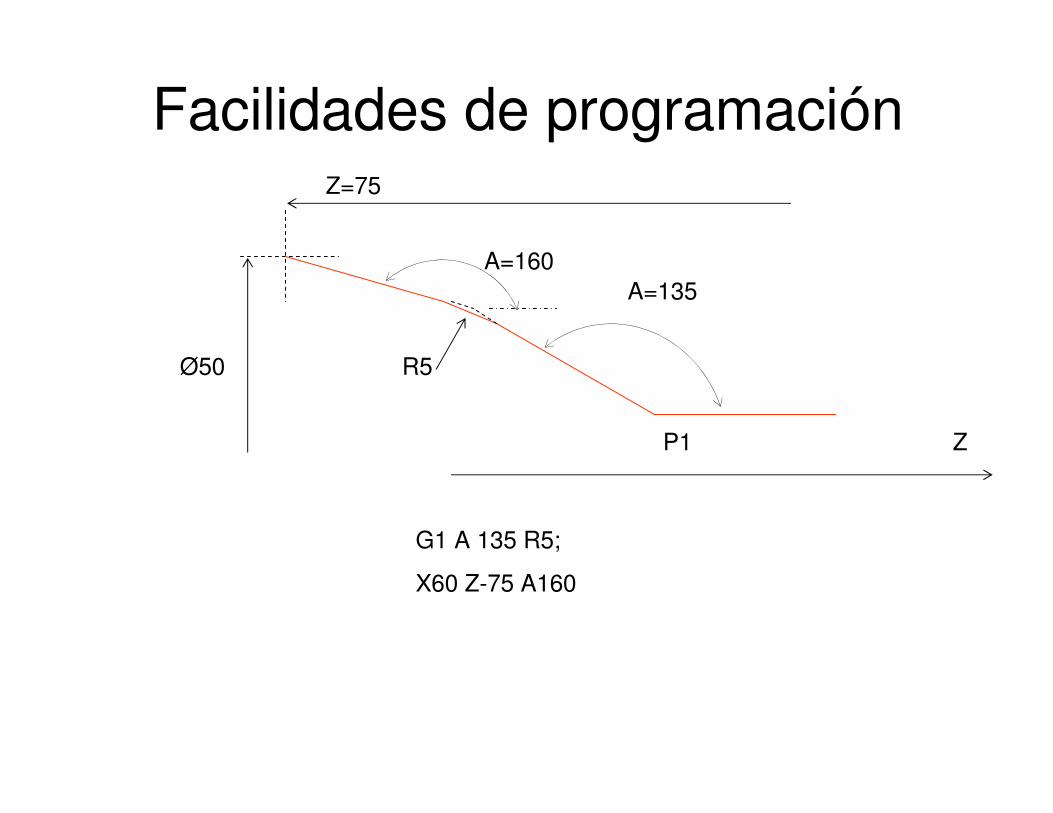
G1 A 135;
X60 Z-75 A160
Ø50
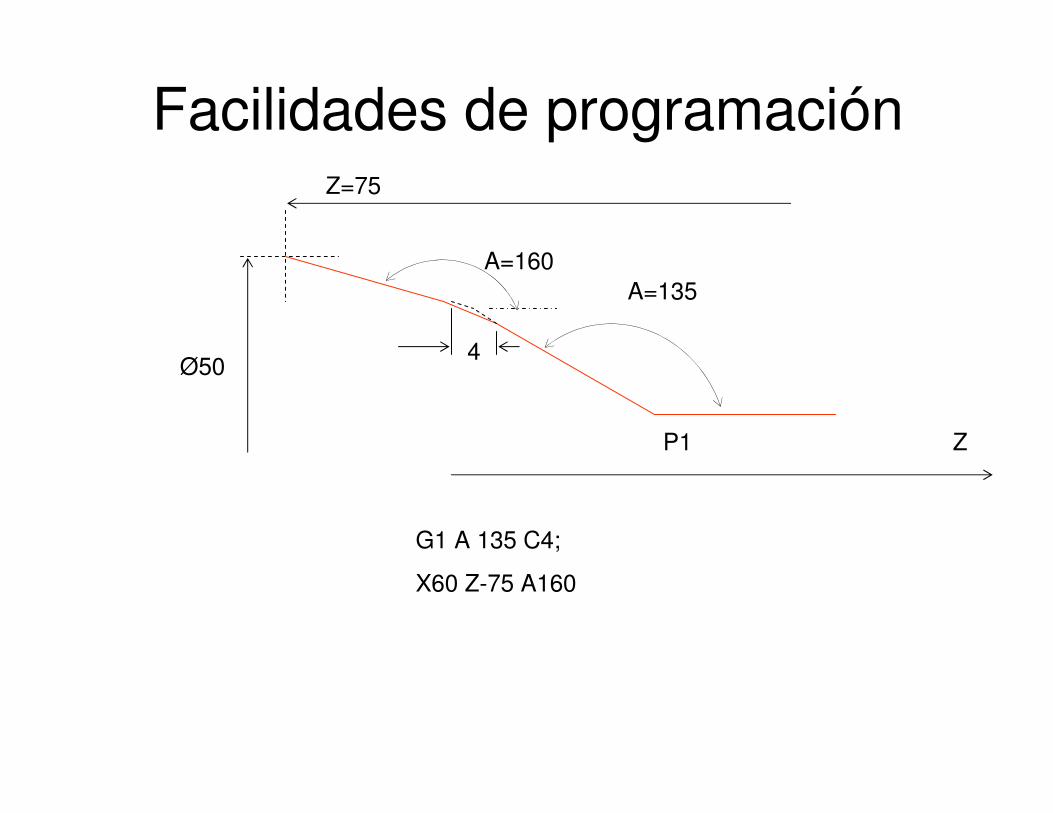
Facilidades de programación
A=135
P1 Z
A=160
Z=75
G1 A 135 C4;
X60 Z-75 A160
Ø504
Facilidades de programación
A=135
P1 Z
A=160
Z=75
G1 A 135 R5;
X60 Z-75 A160
Ø50 R5
Facilidades de programación
A=135
P1 Z
A=160
Z=75
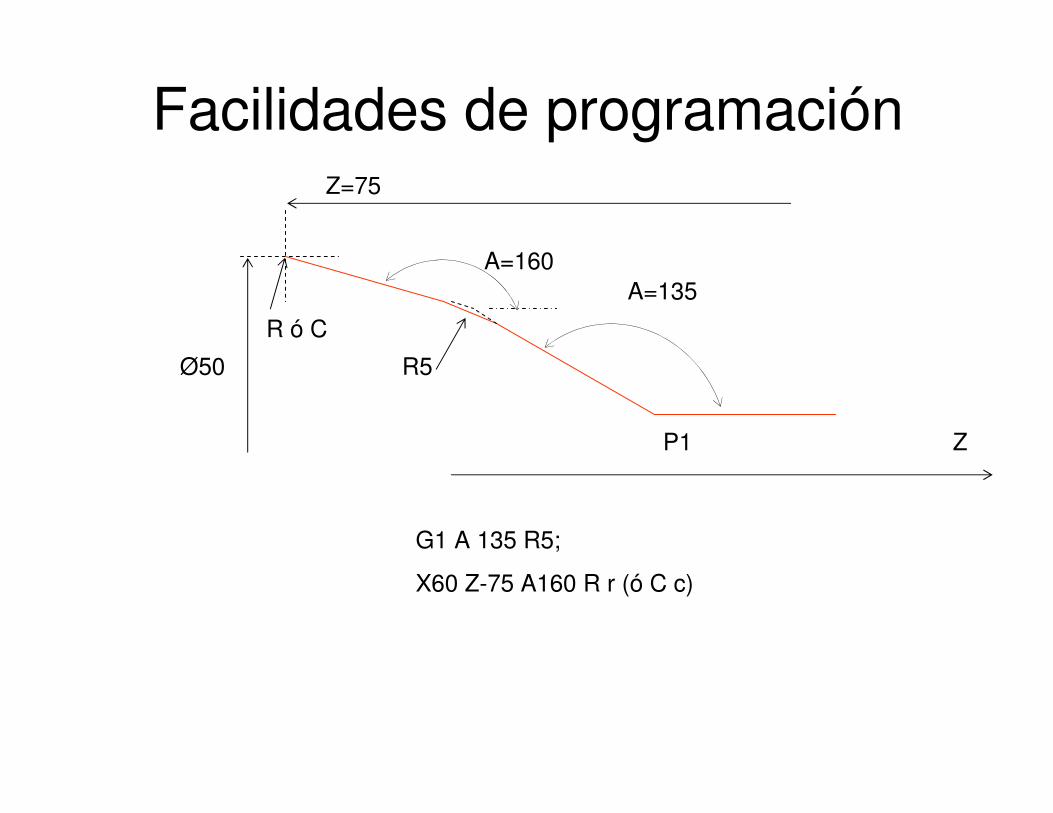
G1 A 135 R5;
X60 Z-75 A160 R r (ó C c)
Ø50 R5
R ó C