Embed Size (px)
Citation preview

PROGRAMAS DE ESTUDIOS PRIMER CICLO
Clave Asignaturas Total Horas Créditos
ERVA101 Matemáticas 96 6 ERVA102 Programación 96 6 ERVA103 Sistemas Embebidos 96 6

ASIGNATURA
MATEMATICAS CICLO PRIMERO
CLAVE DE LA ASIGNATURA
ERVA101
Objetivo:
Identificar y establecer la relación existente entre el álgebra, la geometría y la trigonometría como consecuencia de la asociación de ecuaciones y figuras geométricas así como también establecer las principales operaciones y propiedades matriciales.
Contenido:
UNIDAD 1: OPERACIONES ALGEBRÁICAS Y ECUACIONES 1.1 Conjuntos numéricos y casos de factorización en éstos 1.2 Ejemplos de factorización 1.3 Simplificación de fracciones con potencias y radicales 1.4 Ecuaciones lineales y cuadráticas
UNIDAD 2: LA FUNCIÓN POLINÓMICA 2.1 Definición de la función polinómica. Teoremas del residuo y del factor: División
sintética. 2.2 Teoremas de localización de las raíces positivas y negativas, de las raíces
conjugadas y teorema fundamental del álgebra 2.3 Teoremas de las raíces irracionales conjugadas y de las raíces racionales 2.4 Método de Horner para hallar raíces irracionales
UNIDAD 3: FUNCIONES TRIGONOMÈTRICAS 3.1 Ángulos, unidades, conversión de unidades. 3.2 Funciones trigonométricas
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES. 32
CREDITOS: 6

3.3 Valores de funciones trigonométricas en ángulos notables 3.4 Funciones de ángulos negativos. Gráficas de funciones. 3.5 Funciones trigonométricas inversas. 3.6 Identidades fundamentales. 3.7 Ecuaciones trigonométricas. 3.8 Solución de triángulos y otros problemas.
UNIDAD 4: NÚMEROS COMPLEJOS 4.1 Definición. Forma binomial operaciones y propiedades. 4.2 Módulo de un complejo. 4.3 Conjugado de un complejo: Otras formas de un complejo 4.4 Potenciación y radicación en los complejos
UNIDAD 5. . LINEA RECTA 5.1 Plano cartesiano y sus propiedades 5.2 Cuadrantes 5.3 Distancia euclidiana 5.4 Representación de la línea recta en el plano cartesiano
UNIDAD 6. LA CIRCUNFERENCIA 6.1 Parámetros que definen un círculo: centro y radio. 6.2 Ecuación de la circunferencia en sus diferentes formas: ordinaria, canónica y
general 6.3 Solución de ejercicios.
UNIDAD 7. OPERACIONES MATRICIALES 7.1 Definición de matriz, notación y orden 7.2 Clasificación de las matrices. 7.3 Suma y Resta 7.4 Multiplicación por un escalar 7.5 Multiplicación Matricial 7.6 Transformaciones elementales por renglón. Escalonamiento de una matriz.
Rango de una matriz. 7.7 Cálculo de la inversa de una matriz 7.8 Determinantes y su calculo
UNIDAD 8. TRANSFORMACIONES LINEALES 8.1 Definición de sistemas de ecuaciones lineales 8.2 Clasificación de los sistemas de ecuaciones lineales y tipos de solución 8.3 Núcleo e imagen de una transformación lineal. 8.4 Matriz de una transformación lineal 8.5 Transformaciones lineales: reflexión, dilatación, contracción y rotación

Actividades de aprendizaje:
En este curso se le presentan al alumno los aspectos fundamentales de las matemáticas necesarias para el técnico superior en robótica mediante exposición explicita por parte del profesor y reforzando dicha presentación con tareas, trabajos y ejercicios por parte del alumno.
Bibliografía:
Criterios y procedimientos para la acreditación:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO ÁLGEBRA Y TRIGONOMETRÍA CON GEOMETRÍA ANALÍTICA
GOODMAN, ARTHUR; HIRSCH,
LEWIS
PRENTICE HALL 2012
2 LIBRO ALGEBRA LINEAL GROSSMAN, STANLEY I. , MAC GRAW-HILL INTERAMERICANA
2014
3 LIBRO TRIGONOMETRÍA SWOKOWSKI, COLE THOMSOM 2012
02 Exámenes Departamentales o Parciales 60% 30 Tareas programadas 20% Participación, Trabajos de Investigación 20%
Total 100%

ASIGNATURA
PROGRAMACION CICLO PRIMERO
CLAVE DE LA ASIGNATURA
ERVA102
Objetivo:
Que el alumno estructure programas utilizando el lenguaje de programación C.
Contenido:
UNIDAD 1. INTRODUCCION 1.1 Estructura básica de un programa 1.2 Palabras reservadas 1.3 Variables y constantes 1.4 Sentencias, operadores y declaraciones
UNIDAD 2. OPERADORES 2.1 Operadores aritméticos 2.2 Operadores lógicos 2.3 Operadores relacionales 2.4 Operadores asignación 2.5 Prioridad y asociación de los operadores
UNIDAD 3. ESTRUCTURAS DE CONTROL
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES. 32
CREDITOS: 6

3.1 Estructura If-Then-Else 3.2 Estructura Case 3.3 Estructura Do-while 3.4 Estructura If-Then-Else 3.5 Estructura for
UNIDAD 4. FUNCIONES Y PROGRAMACION MODULAR 4.1 Funciones 4.2 Alcance y visibilidad de datos entre funciones 4.3 Declaración 4.4 Llamada de funciones
UNIDAD 5. ARREGLOS Y CADENAS 5.1 Arreglos unidimensionales 5.2 Cadenas 5.3 Arreglos multidimensionales 5.4 Uso y programación de arreglosy cadenas
UNIDAD 6. PUNTEROS 5.1 Tipos de punteros 5.2 Asignación de punteros 5.3 Aritmética de punteros 5.4 Punteros y arreglos 5.5 Arreglos de punteros 5.6 Uso indirecto de los punteros 5.7 Asignación dinámica de memoria
Actividades de aprendizaje:
En este curso se le presentan al alumno los aspectos fundamentales de la Programación en lenguaje C mediante la exposición explicita por parte del profesor y reforzando dicha presentación con tareas, proyectos y ejercicios por parte del alumno.

Bibliografía:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO ELECTRONICO
THINKING IN C ++ BRUCE ECKEL PRENTICE HALL 2010
2 LIBRO PROGRAMACIÓN EN C BYRON S., GOTTFRIED MCGRAW HILL 2011
3 LIBRO EL LENGUAJE DE PROGRAMACIÓN C KERNIGHAN BRIAN W. Y RITCHIE DENNIS M
PRENTICE HALL 2010
Criterios y procedimientos para la acreditación:
02 Exámenes Departamentales o Parciales 60% 10 Tareas programadas 20% Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIO ASIGNATURA
Sistemas embebidos CICLO PRIMERO
CLAVE DE LA ASIGNATURA
ERV103
Objetivo:
Aprender a diseñar e implementar sistemas embebidos mediante el diseño de software y sistemas operativos para sistemas embebidos. Que el estudiante conozca y emplee las técnicas de diseño, construcción, depuración, análisis y sintonización, para la realización de software de sistemas embebidos.
Contenido:
UNIDAD 1. Introducción a los Sistemas Embebidos 1.1 Descripción general de un sistema sistemas embebidos. 1.2 Micro controladores y microprocesadores 1.3 Fundamentos de hardware para ingenieros en software. 1.4 Ejemplos de aplicaciones de sistemas embebidos 1.5 Características de un Micro controlador 1.6 PIC16F8XX UNIDAD 2. Arquitectura de un sistema embebido 2.1 ALU 2.2 Registros 2.3 Periféricos (Timer, DMA, Puerto Serie, etc.) 2.4 Puertos de Entrada/Salida 2.5 Convertidor A/D y D/A 2.6 Otros periféricos
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

UNIDAD 3. Lenguaje C para embebidos 3.1 Herramientas de software para la generación de código 3.2 Secciones de memoria 3.3 Modos de direccionamiento 3.4 Instrucciones de lectura y escritura 3.5 Instrucciones aritméticas y lógicas 3.6 Instrucciones de control 3.7 Llamadas a subrutina 3.8 Manejo de interrupciones 3.9 Mescla de lenguaje ensamblador con lenguajes de alto nivel UNIDAD 4. Sistemas operativos para sistemas embebidos 4.1 Introducción al sistema operativo 4.2 Planeación de ejecución de Hilos (Tareas, idle, Interrupciones por software, Interrupciones por hardware) 4.3 Sincronización de hilos (Semáforos, Lock, Mailbox) 4.4 Manejo de memoria(Pipes, colas, cola de mensajes 4.5 Funciones periódicas UNIDAD 5. Programación de aplicaciones Middleware 5.1 Introducción a la aplicaciones Middleware 5.2 Desarrollos de aplicaciones middleware 5.3 Pruebas de diseño UNIDAD 6. Aplicaciones en tiempo real 6.1 Introducción a la aplicaciones en tiempo real 6.2 Consideraciones de las aplicaciones en tiempo real 6.3 Manejo y planeación en tiempo real
Actividades de aprendizaje:
Este curso se llevará a cabo mediante exposiciones orales, resolución de ejercicios, trabajos en equipo, trabajos de investigación, asesorías, prácticas de laboratorio en donde se programe la arquitectura de un sistema embebido. Asi la exposición explicita por parte del profesor y reforzando dicha presentación con tareas, trabajos y ejercicios por parte del alumno. Es preferente que el estudiante realice un proyecto final en donde desarrolle una aplicación de un sistema embebido. mediante

Bibliografía:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO Embedded Software: The Works. Wall Colin Newnes-Elsevier 2010
2 LIBRO Sistemas Embebidos en FPGA CAYSSIALS, Ricardo alfaomega 2014
3 LIBRO Programación de sistemas embebidos en c GALEANO, Gustavo alfaomega 2012
4 LIBRO Programación de Sistemas Embebidos con aplicaciones para el PIC16F8XX
Jose Miguel Moran Loza, Alberto de la Mora Galvez, Alicia
Garcia Arreola
PEARSON 2014
Criterios y procedimientos para la acreditación:
02 Exámenes Departamentales o Parciales 60% 30 Tareas programadas 20% Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIOS
SEGUNDO CICLO
Clave Asignaturas Total Horas Créditos
ERV201 Procesamiento digital de Imágenes 96 6
ERV202 Robótica I 96 6 ERV203 Seminario I 96 6

PROGRAMAS DE ESTUDIO ASIGNATURA
Procesamiento digital de imágenes CICLO SEGUNDO
CLAVE DE LA ASIGNATURA
ERV201
(4) OBJETIVO(S) GENERAL(ES) DE LA ASIGNATURA: Utilizar técnicas y algoritmos del procesamiento digital de imágenes, para mejorar la calidad de la imagen o bien encontrar información contenida en la misma.
(5) TEMAS Y SUBTEMAS: Módulo 1. INTRODUCCION
1.1 Fundamentos 1.2 Representación de imágenes digitales 1.3 Leyendo Imágenes de MatLAB 1.4 Despliegue de imágenes en MatLAB 1.5 Escritura de imágenes en MatLAB 1.6 Tipos de Imágenes 1.7 Conversión de Imágenes 1.8 Introducción a la programación en MatLAB para el
procesamiento de Imágenes Módulo 2. TRASFORMACIONES DE INTENSIDAD Y FILTRADO SPACIAL
2.1 Introducción 2.2 Funciones para la transformación imágenes a escala de
grises 2.3 Procesamiento a partir de Histograma 2.4 Filtrado espacial 2.5 Principales filtros espaciales
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

Módulo 3. PROCESAMIENTO DE IMÁGENES EN EL DOMINIO DE LA FRECUENCIA
3.1 Introducción 3.2 La trasformada de Fourier bidimensional 3.3 Computación y Visualización de la Trasformada de Fourier
bidimensional 3.4 Filtrado de imágenes en el dominio de la frecuencia
Módulo 4. PROCESAMIENTO DE IMÁGENES DE COLOR
4.1 Representación de imágenes en color en MatLAB 4.2 Conversión de imágenes entre distintos tipos de espacios de color 4.3 Filtrado de color en imágenes
Módulo 5. OPERADORES MORFOLOGICOS
5.1 Introducción 5.2 Dilatación 5.3 Erosión 5.4 Combinaciones de Erosión y Dilatación 5.5 Reconstrucción morfológica 5.6 Morfología a escala de grises
Módulo 7. DETECCION DE CONTORNOS
6.1 Contornos 6.2 Detectores basados den Gradientes 6.3 Filtros para la detección de Contornos 6.4 Maximización de Cantos
Módulo 6. OPERACIONES GEOMETRICAS
7.1 Transformación de Coordenadas 7.2 Re-muestreo 7.3 Interpolación de píxeles
(6) ACTIVIDADES DE APRENDIZAJE: BAJO LA CONDUCCION DEL DOCENTE -Exposiciones individuales preparadas por equipo Técnicas de comunicación -De información -Panel De motivación -Lluvia de ideas

DE MANERA INDEPENDIENTE Investigación bibliográfica y ejercicios de laboratorio.
BIBLIOGRAFIA:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO PROCESAMIENTO DIGITAL DE IMAGENES CON MATLAB Y SIMULINK
ERIK CUEVAS, DANIEL ZALDIVAR, MARCO
PEREZ
ALFAOMEGA & RA-MA
2012
2 LIBRO ELECTRONICO
Intelligent active vision systems for robots ERIK CUEVAS DANIEL ZALDIVAR RAUL ROJAS
CUVILLIER VERLAG 2011
3 LIBRO LECTRONICO
Computer Vision and Applications
Bernd Jähne Academic Press 2010
4 LIBRO LECTRONICO
Digital Image Processing Rafael C. Gonzalez Richard E. Woods
Prentice Hall 2011
CRITERIOS Y PROCEDIMIENTOS PARA LA ACREDITACIÓN:
3 Exámenes Departamentales o Parciales 60% 12 Tareas programadas 20%
Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIO
ASIGNATURA
Robótica I CICLO SEGUNDO
CLAVE DE LA ASIGNATURA
ERV202
Objetivo:
El alumno conocerá e identificará los elementos principales de los robots, tipos de bases robotizadas y sus aplicaciones.
Contenido:
Unidad 1. Introducción
1.1 Organización de un sistema robótico 1.2. Posición y orientación de cuerpo rígido 1.3 vector de traslación 1.4 matriz de rotación 1.5 la transformada homogénea 1.6 composición entre matrices homogéneas 1.7 descripción de cuerpo rígido 1.8 transformaciones de similitud 1.9 operadores de rotación 1.10 otros descriptores de posición y orientación en el espacio 1.11 grados de libertad 1.12 cuerpo rígido: expandiendo su definición 1.13 tipos de articulaciones 1.14 cadena cinemática 1.15 cinemática directa 1.16 ejemplos del cálculo de la cinemática directa para diferentes robots
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

Unidad 2. Mindstorms nxt (nxt-g) 2.1 Plataforma mindstorms nxt de lego 2.2 Proyecto almacenador de datos (data logger) 2.3 Proyecto robot a control inalámbrico 2.4 Proyecto robot sigue-líneas 2.5 Proyecto nxt alarma Unidad 3. Nxc 3.1 Primer proyecto robot de avance 3.2 Segundo proyecto robot explorador 3.3 Tercer proyecto explorador mejorado 3.4 Cuarto proyecto robot sigue líneas 3.5 Quinto proyecto robot sigue líneas mejorado 3.6 Sexto proyecto robot medidor de distancia 3.7 Séptimo proyecto robot comandado por sonido 3.8 Octavo proyecto robot seguidor de objetos 3.9 Noveno proyecto robot bípedo 3.10 Decimo proyecto control remoto robot bípedo Unidad 4. Robotc 4.1 Primer proyecto robot rotador 4.2 Segundo proyecto robot dibuja circulo 4.3 Tercer proyecto robot medidor de rotaciones 4.4 Cuarto proyecto robot busca salida 4.5 Quinto proyecto robot brújula 4.6 Sexto proyecto robot brújula en rvw 4.7 Séptimo proyecto robot orientado con lógica difusa 4.9 Noveno proyecto robot seguidor de luz
Actividades de aprendizaje:
En este curso se le presentan al alumno los aspectos fundamentales de la robótica, como lo son los elementos de un sistema robótico, tipos de robots, sensores etc. Mediante exposición explícita por parte del profesor, así como videos y bases robóticas comerciales reforzando dicha presentación con tareas, talleres y ejercicios por parte del alumno.
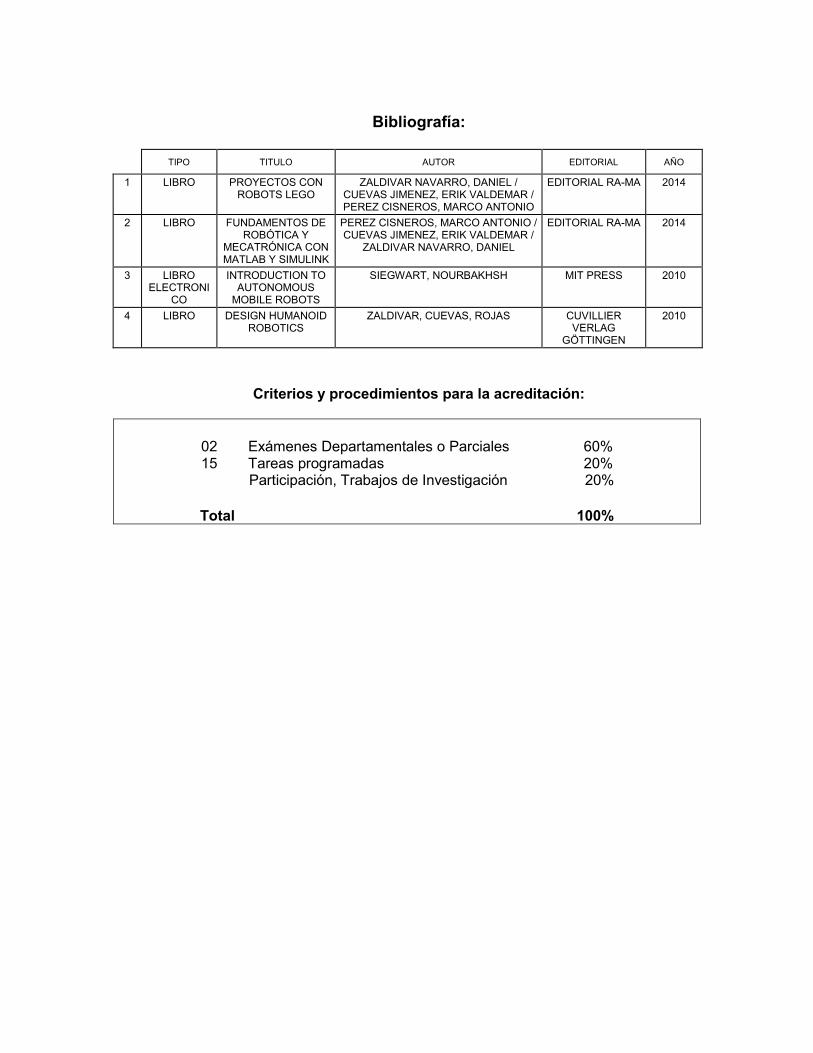
Bibliografía:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO PROYECTOS CON ROBOTS LEGO
ZALDIVAR NAVARRO, DANIEL / CUEVAS JIMENEZ, ERIK VALDEMAR / PEREZ CISNEROS, MARCO ANTONIO
EDITORIAL RA-MA 2014
2 LIBRO FUNDAMENTOS DE ROBÓTICA Y
MECATRÓNICA CON MATLAB Y SIMULINK
PEREZ CISNEROS, MARCO ANTONIO / CUEVAS JIMENEZ, ERIK VALDEMAR /
ZALDIVAR NAVARRO, DANIEL
EDITORIAL RA-MA 2014
3 LIBRO ELECTRONI
CO
INTRODUCTION TO AUTONOMOUS
MOBILE ROBOTS
SIEGWART, NOURBAKHSH MIT PRESS 2010
4 LIBRO DESIGN HUMANOID ROBOTICS
ZALDIVAR, CUEVAS, ROJAS CUVILLIER VERLAG
GÖTTINGEN
2010
Criterios y procedimientos para la acreditación:
02 Exámenes Departamentales o Parciales 60% 15 Tareas programadas 20% Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMA DE ESTUDIOS
ASIGNATURA
SEMINARIO I CICLO SEGUNDO
CLAVE DE LA ASIGNATURA
ERV203
Objetivo:
Proporcionar las bases metodológicas que sustentan la investigación y desarrollo de un proyecto con el objetivo de aplicarlas en el trabajo final que acredite el término de la especialidad.
Contenido:
TEMAS Y SUBTEMAS: Módulo 1. CIENCIA Y MEDIDA
1.1 Ciencia y tecnología 1.2 Conocimiento científico 1.3 Medición de una variable 1.4 Incertidumbre y error 1.5 Teoría y experimento
Módulo 2. METODO CIENTIFICO
2.1 Definición 2.2 Postulados del método científico 2.3 Método de casos 2.4 Método estadístico 2.5 Método inductivo
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

2.6 Método experimental 2.7 Análisis grafico
Módulo 3. METDO CIENTIFICO EXPERIMENTAL
3.1 Experimento 3.2 Pasos del método experimental 3.3 Análisis de resultados 3.4 Estudios de casos
Módulo 4. MEDIDAS Y SU INTERPRETACION
4.1 Conceptos cualitativos y cuantitativos 4.2 Medidas e incertidumbre 4.3 Estimación del error experimental 4.4 Clasificación de errores 4.5 Combinación de incertidumbre 4.6 Análisis grafico
Módulo 5. APLICACIONES
5.1 Energía solar 5.2 Concentración de plomo 5.3 Separabilidad
Actividades de aprendizaje:
En este curso se le presentan al alumno los aspectos fundamentales para la elaboración de su trabajo final que acredite el final de la especialidad. Para ellos se utilizara la exposición explicita por parte del profesor y reforzando dicha presentación con el seguimiento continuo del trabajo final del alumno.
BIBLIOGRAFIA:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO METODOLOGIA PARA LA ELABORACION DE TESIS
MARCELA CHAVARRIA OLARTE, MARVEYA VILLALOBOS PEREZ
CORTEZ
TRILLAS 2012
2 LIBRO METODOLOGÍA DE LA INVESTIGACIÓN MARIO TAMAYO LIMUSA 2012
3 LIBRO ELECTRONICO ADMINISTRACION DE PROYECTOS
GUIA PARA EL APRENDIZAJE
Rivera Martinez F Pearson 2011

4 LIBRO EL METODO CIENTIFICO APLICADO A LAS CIENCIAS EXPERIMENTALES
Hector G. Riveros Lucia Rosas
Trillas 2014
CRITERIOS Y PROCEDIMIENTOS PARA LA ACREDITACIÓN:
3 Exámenes Departamentales o Parciales 60% 12 Tareas programadas 20%
Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIOS TERCER CICLO
Clave Asignaturas Total Horas Créditos
ERV301 Visión Artificial 96 6 ERV302 Robótica II 96 6 ERV303 Seminario II 96 6

PROGRAMAS DE ESTUDIO ASIGNATURA
Visión Artificial CICLO TERCERO
CLAVE DE LA ASIGNATURA
ERV301
(4) OBJETIVO(S) GENERAL(ES) DE LA ASIGNATURA: Aplicar los algoritmos básicos utilizados en visión por computadora, para mejora y extracción de información en imágenes.
(5) TEMAS Y SUBTEMAS: Módulo 1. DETECCION DE CONTORNOS
1.1 Contornos 1.2 Detectores basados den Gradientes 1.3 Filtros para la detección de Contornos 1.4 Maximización de Cantos
Módulo 2. DETECCION DE ESQUINAS
2.1 Esquinas en una imagen 2.2 Algoritmo de Harris 2.3 Matriz de estructuras y valores propios 2.4 Función de esquinas 2.5 Otros detectores de esquinas
Módulo 3. DETECCION DE LINEAS Y CURVAS
3.1 Estructuras en la imagen 3.2 Transformada de Hough 3.3 Espacio de parámetros 3.4 Detección de líneas
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

3.5 Detección de círculos 3.6 Detección paramétrica
Módulo 4. PROCESAMIENTO DE IMÁGENES BINARIAS
4.1 Etiquetado de objetos 4.2 Contornos binarios 4.3 Características de los objetos binarios 4.4 Cancroide y momentos 4.5 Momentos invariantes
Módulo 5. TRANSFORMADA DISCRETA DEL COSENO (TDC)
5.1 La transformada discreta del coseno en dos dimensiones (TDC)
5.2 Uso de la TDC 5.3 Separabilidad 5.4 Ejemplos de la TDC
Sección 6. COMPARACION Y RECONOCIMIENTO DE OBJETOS
6.1 Medidas de similaridad. 6.2 Correlación 6.3 Coeficiente de correlación 6.4 Transformación de distancia 6.5 El algoritmo de chamfer
(6) ACTIVIDADES DE APRENDIZAJE: BAJO LA CONDUCCION DEL DOCENTE -Exposiciones individuales preparadas por equipo Técnicas de comunicación -De información -Panel De motivación -Lluvia de ideas DE MANERA INDEPENDIENTE Investigación bibliográfica y ejercicios de laboratorio.
BIBLIOGRAFIA:

TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO PROCESAMIENTO DIGITAL DE IMAGENES CON MATLAB Y SIMULINK
ERIK CUEVAS, DANIEL ZALDIVAR, MARCO
PEREZ
ALFAOMEGA & RA-MA
2012
2 LIBRO ELECTRONICO
Intelligent active vision systems for robots ERIK CUEVAS DANIEL ZALDIVAR RAUL ROJAS
CUVILLIER VERLAG 2011
3 LIBRO LECTRONICO
Computer Vision and Applications
Bernd Jähne Academic Press 2010
4 LIBRO LECTRONICO
Digital Image Processing Rafael C. Gonzalez Richard E. Woods
Prentice Hall 2011
CRITERIOS Y PROCEDIMIENTOS PARA LA ACREDITACIÓN:
3 Exámenes Departamentales o Parciales 60% 12 Tareas programadas 20%
Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIO ASIGNATURA
Robótica II CICLO TERCERO
CLAVE DE LA ASIGNATURA
ERV302 (4) OBJETIVO(S) GENERAL(ES) DE LA ASIGNATURA: Estudiar los módulos principales que constituyen la base de robótica móvil: navegación, planeación, construcción de mapas y localización, para su aplicación en la solución de problemas en las áreas industriales, de investigación, educación, etc.
Unidad 1 cinemática inversa 1.1 métodos analíticos e iterativos. 1.2 Solución iterativa del problema de cinemática inversa
Unidad 2 velocidad lineal y rotacional 2.1 vector de velocidad 2.2 matriz de velocidad 2.3 matriz de velocidad en matlab© 2.4 vector de velocidad en matlab© Unidad 3 la matriz jacobiana 3.1 cálculo de la matriz jacobiana 3.2 redundancia 3.3 análisis de singularidad 3.4 manipulabilidad 3.5 la matriz jacobiana analítica Unidad 4 métodos para el análisis del movimiento
1.1 Derivación de ecuaciones de movimiento 1.2 Construcción de la ecuación de movimiento de euler-lagrange 1.3 Ecuaciónes euler-lagrange: método de asada-spong 1.4 Simulación del robot planar de dos grados de libertad en matlab©
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

Unidad 5 definición de espacios en la planificación 5.1 conceptos básicos de trayectorias 5.2 diseño de trayectorias con polinomios 5.3trayectorias en el espacio cartesiano 5.4 trayectorias e interpolación de hermite 5.5 campos potenciales (6) ACTIVIDADES DE APRENDIZAJE: BAJO LA CONDUCCION DEL DOCENTE -Exposiciones individuales preparadas por equipo Técnicas de comunicación -De información -Panel -Corrillos De motivación -Lluvia de ideas DE MANERA INDEPENDIENTE Investigación bibliográfica y ejercicios de laboratorio
BIBLIOGRAFIA:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO PROYECTOS CON ROBOTS LEGO
ZALDIVAR NAVARRO, DANIEL / CUEVAS JIMENEZ, ERIK
VALDEMAR / PEREZ CISNEROS, MARCO ANTONIO
EDITORIAL RA-MA 2014
2 LIBRO FUNDAMENTOS DE ROBÓTICA Y
MECATRÓNICA CON MATLAB Y SIMULINK
PEREZ CISNEROS, MARCO ANTONIO / CUEVAS JIMENEZ, ERIK VALDEMAR / ZALDIVAR
NAVARRO, DANIEL
EDITORIAL RA-MA 2014
3 LIBRO ELECTRONICO
INTRODUCTION TO AUTONOMOUS MOBILE
ROBOTS
SIEGWART, NOURBAKHSH MIT PRESS 2010
4 LIBRO DESIGN HUMANOID ROBOTICS
ZALDIVAR, CUEVAS, ROJAS CUVILLIER VERLAG GÖTTINGEN
2010
CRITERIOS Y PROCEDIMIENTOS PARA LA ACREDITACIÓN:
3 Exámenes Departamentales o Parciales 60% 12 Tareas programadas 20%
Participación, Trabajos de Investigación 20%
Total 100%

PROGRAMAS DE ESTUDIO
ASIGNATURA
SEMINARIO II CICLO TERCERO
CLAVE DE LA ASIGNATURA
ERV303
Objetivo:
Proporcionar ayuda, razonada y concreta que permita una ordenada elaboración y presentación del trabajo final que acredite el término de la especialidad.
Contenido:
MODULO 1. ELECCIÓN DEL ÁREA Y TEMA DE INVESTIGACIÓN
1.1 Investigación 1.2 Carácter teórico-practico 1.3 Requisitos 1.4 Legislación y características de una tesis en el contexto de la
especialidad. 1.5 Elementos que componen una tesis
MODULO 2. ELECCION DEL TEMA DE TESIS
2.1 Delimitación del trabajo de tesis 2.2 Definición del título de tesis 2.3 Naturaleza del proyecto de tesis 2.4 Como estructurar la fundamentación teórica de una
tesis 2.5 Que diferencia existe entre marco teórico y marco de
referencia
TOTAL DE HORAS:
96
HORAS CONDUCIDAS POR UN DOCENTE: 64
HORAS INDEPENDIENTES 32
CREDITOS: 6

MODULO 3. INVESTIGACION DOCUMENTAL Y EXPRIMENTAL
3.1 Naturaleza de la investigación experimental 3.2 Metodología para realizar trabajos de investigación documental 3.3 Método científico e investigación experimental 3.4 Metodología para realizar trabajos de investigación experimental
MODULO 4. ELABORACION DE LA INTRODUCCION Y CONCLUSIONES DE UNA TESIS
4.1 Trabajo previo 4.2 Análisis de trabajos similares 4.3 Referencias actuales y no actualizadas 4.4 Estructura de las conclusiones 4.5 Trabajo futuro
MODULO 5. NORMATIVIDAD DE UN TESIS PARA EL PROGRAMA DE ESPECIALIDAD
5.1 Título de la tesis 5.2 Caratula 5.3 Índice 5.4 Tablas y figuras 5.5 Capítulos 5.6 Conclusiones 5.7 Referencias
MODULO 6. PRESENTACION Y EXAMEN DE GRADO
5.1 Que es un examen de grado 5.2 Objetivo de un examen profesional 5.3 Preparación del examen 5.4 Documentos y requisitos para el examen de Grado.
Actividades de aprendizaje:
En este curso se le presentan al alumno los aspectos fundamentales para la elaboración de su trabajo final que acredite el final de la especialidad. Para ellos se utilizara la exposición explicita por parte del profesor y reforzando dicha presentación con el seguimiento continuo del trabajo final del alumno.

Bibliografía:
TIPO TITULO AUTOR EDITORIAL AÑO
1 LIBRO METODOLOGIA PARA LA ELABORACION DE TESIS
MARCELA CHAVARRIA OLARTE, MARVEYA VILLALOBOS PEREZ
CORTEZ
TRILLAS 2012
2 LIBRO METODOLOGÍA DE LA INVESTIGACIÓN MARIO TAMAYO LIMUSA 2012
3 LIBRO ELECTRONICO ADMINISTRACION DE PROYECTOS
GUIA PARA EL APRENDIZAJE
Rivera Martinez F Pearson 2011
4 LIBRO EL METODO CIENTIFICO APLICADO A LAS CIENCIAS EXPERIMENTALES
Hector G. Riveros Lucia Rosas
Trillas 2014
Criterios y procedimientos para la acreditación:
Trabajos de Investigación 100%
Total 100%