Embed Size (px)
DESCRIPTION
Proiectul Meu Ciuru
Citation preview
Mod Coala
№ document. Semnat.
Data
Coala2
P R O I E C T D E C U R S
ACŢIONARE ELECTRICĂ DE CURENT CONTINUU CU REDRESOR COMANDAT DE 2 (4) CADRANE
DATE INIŢIALE CUPRINS1. ALEGEREA ŞI DESCRIEREA ELEMENTELOR DE PUTERE ALE SISTEMELOR
MODERNE DE CURENT CONTINUU 1.1 Alegerea şi descrierea motorului de curent continuu al companiei ABB 1.1.1 Date tehnice şi particularităţi principale 1.1.2 Aspecte constructive generale şi ale elementelor componente de bază 1.2 Alegerea şi descrierea convertorului de curent continuu DCS ABB 1.2.1 Date tehnice, particularităţi, funcţii şi regimuri principale 1.2.2 Scheme de conexiuni exterioare şi componenţa elementelor principale 1.2.3 Scheme de forţă ale redresoarelor indusului de 2 (4) cadrane 1.2.4 Alegerea şi descrierea convertorului de excitaţie 1.2.5 Alegerea reactoarelor de reţea 1.2.6 Panou de comandă şi programare 2. ANALIZA SISTEMEOR DE REGLARE AUTOMATĂ (SRA) ALE ACŢIONĂRILOR DE
CURENT CONTINUU 2.1 Structuri tipice şi principii de reglare 2.2 Criterii de acordare optimă ale regulatoarelor tipice 2.3 Sisteme digitale de reglare automată ale acţionărilor electrice moderne DCS 2.3.1 Analiza generală a sistemului de programare şi parametrizare 2.3.2 Scheme funcţionale ale modulelor digitale principale
3. CALCULUL PARAMETRILOR SCHEMEI STRUCTURALE ALE SRA 3.1 Calculul parametrilor principali ai convertoarelor 3.2 Calculul parametrilor principali ai motorului 3.3 Alegerea şi calculul parametrilor traductoarelor SRA 3.4 Calculul parametrilor regulatoarelor
4. MODELALAREA SISTEMULUI DE ACŢIONARE ELECTRICĂ 4.1 Modelarea sistemului de acţionare pe baza schemei structurale a SRA calculat în
MATLAB SIMULINK 4.2 Modelarea sistemului de acţionare pe baza modelului virtual SimPowerSistem
CONCLUZIIBIBLIOGRAFIE
Mod Coala
№ document. Semnat.
Data
Coala
68
1.1 Sisteme de acţionare electrică reglabilă cu redresoare comandate nereversibile
1.1.1 Redresoare monofazate semicomandate
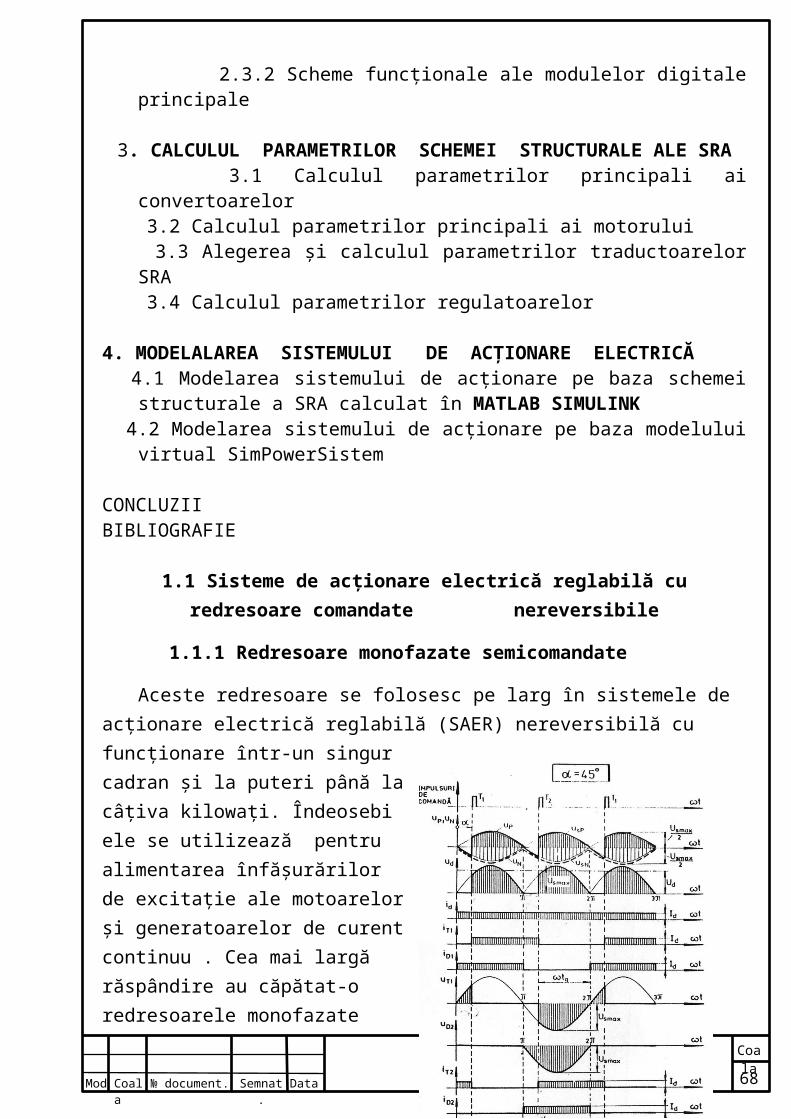
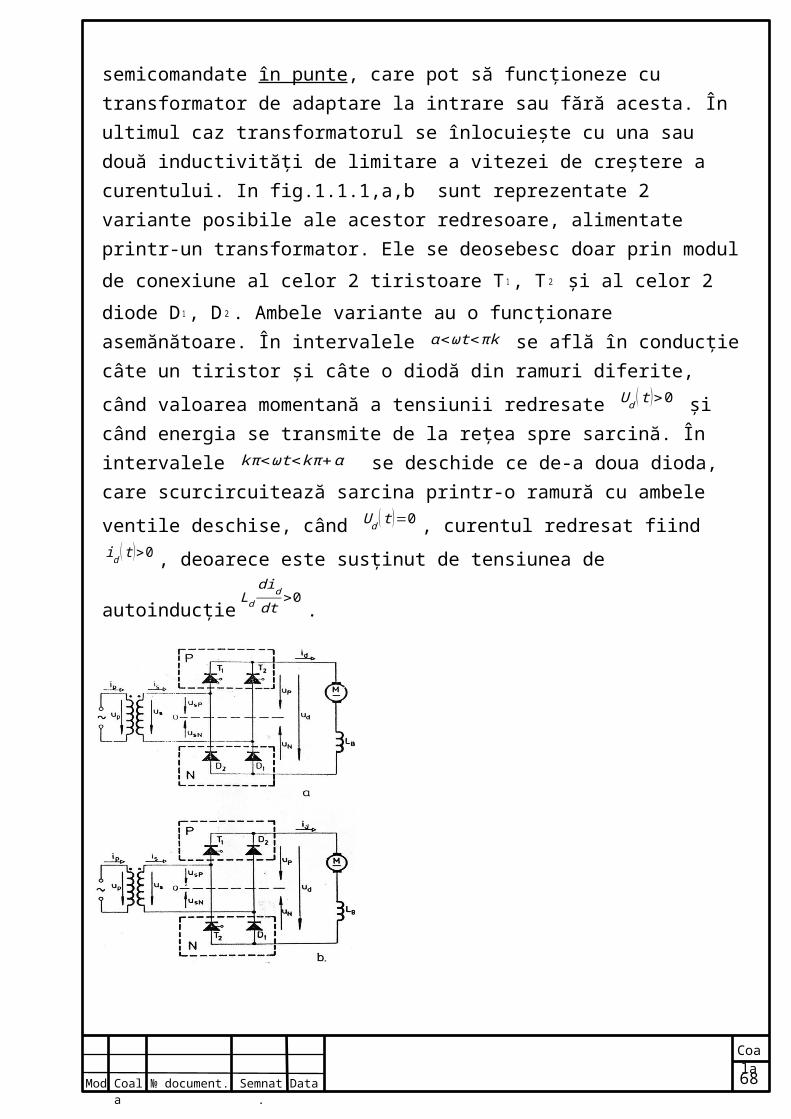
Aceste redresoare se folosesc pe larg în sistemele de acţionare electrică reglabilă (SAER) nereversibilă cu funcţionare într-un singur cadran şi la puteri până la câţiva kilowaţi. Îndeosebi ele se utilizează pentru alimentarea înfăşurărilor de excitaţie ale motoarelor şi generatoarelor de curent continuu . Cea mai largă răspândire au căpătat-o redresoarele monofazate semicomandate în punte, care pot să funcţioneze cu transformator de adaptare la intrare sau fără acesta. În ultimul caz transformatorul se înlocuieşte cu una sau două inductivităţi de limitare a vitezei de creştere a curentului. In fig.1.1.1,a,b sunt reprezentate 2 variante posibile ale acestor redresoare, alimentate printr-un transformator. Ele se deosebesc doar prin
modul de conexiune al celor 2 tiristoare T1 , T2 şi al celor 2 diode D1 , D2 . Ambele variante au o funcţionare asemănătoare. În intervalele α<ωt<πk se află în conducţie câte un tiristor şi câte o diodă din ramuri diferite, când valoarea
momentană a tensiunii redresate Ud (t )>0 şi când energia se transmite de la reţea spre sarcină. În intervalele kπ<ωt<kπ+α se deschide ce de-a doua dioda, care scurcircuitează sarcina printr-o ramură cu
ambele ventile deschise, când Ud (t )=0 ,
curentul redresat fiindid ( t )>0 , deoarece este susţinut de tensiunea de
autoinducţieLddiddt
>0.
Mod Coala
№ document. Semnat.
Data
Coala
68
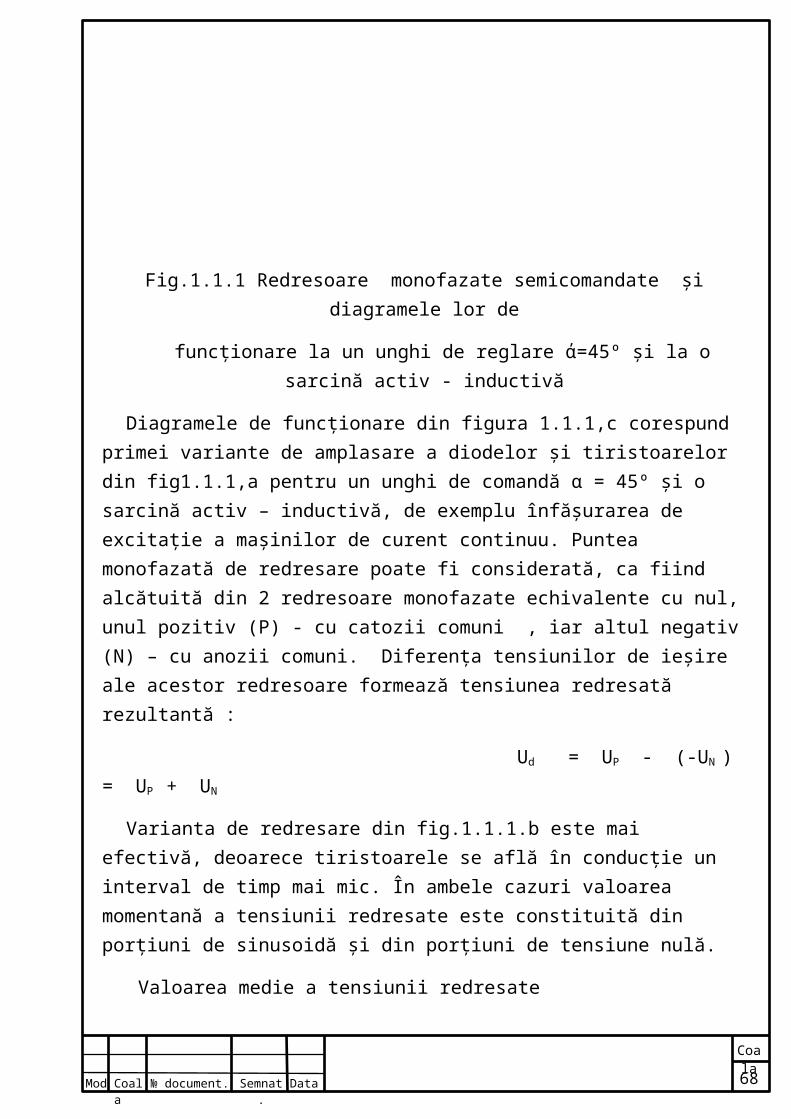
Fig.1.1.1 Redresoare monofazate semicomandate şi diagramele lor de
funcţionare la un unghi de reglare ά=45º şi la o sarcină activ - inductivă
Diagramele de funcţionare din figura 1.1.1,c corespund primei variante de amplasare a diodelor şi tiristoarelor din fig1.1.1,a pentru un unghi de comandă α = 45º şi o sarcină activ – inductivă, de exemplu înfăşurarea de excitaţie a maşinilor de curent continuu. Puntea monofazată de redresare poate fi considerată, ca fiind alcătuită din 2 redresoare monofazate echivalente cu nul, unul pozitiv (P) - cu catozii comuni , iar altul negativ (N) – cu anozii comuni. Diferenţa tensiunilor de ieşire ale acestor redresoare formează tensiunea redresată rezultantă :
Ud = UP - (-UN ) = UP + UN
Varianta de redresare din fig.1.1.1.b este mai efectivă, deoarece tiristoarele se află în conducţie un interval de timp mai mic. În ambele cazuri valoarea momentană a tensiunii redresate este constituită din porţiuni de sinusoidă şi din porţiuni de tensiune nulă.
Valoarea medie a tensiunii redresate
Ud=1π∫α
π
U 2m sinωt=2√2πU 2 (cosα+1 )/2=
Ud 0
2(cos α+1 )
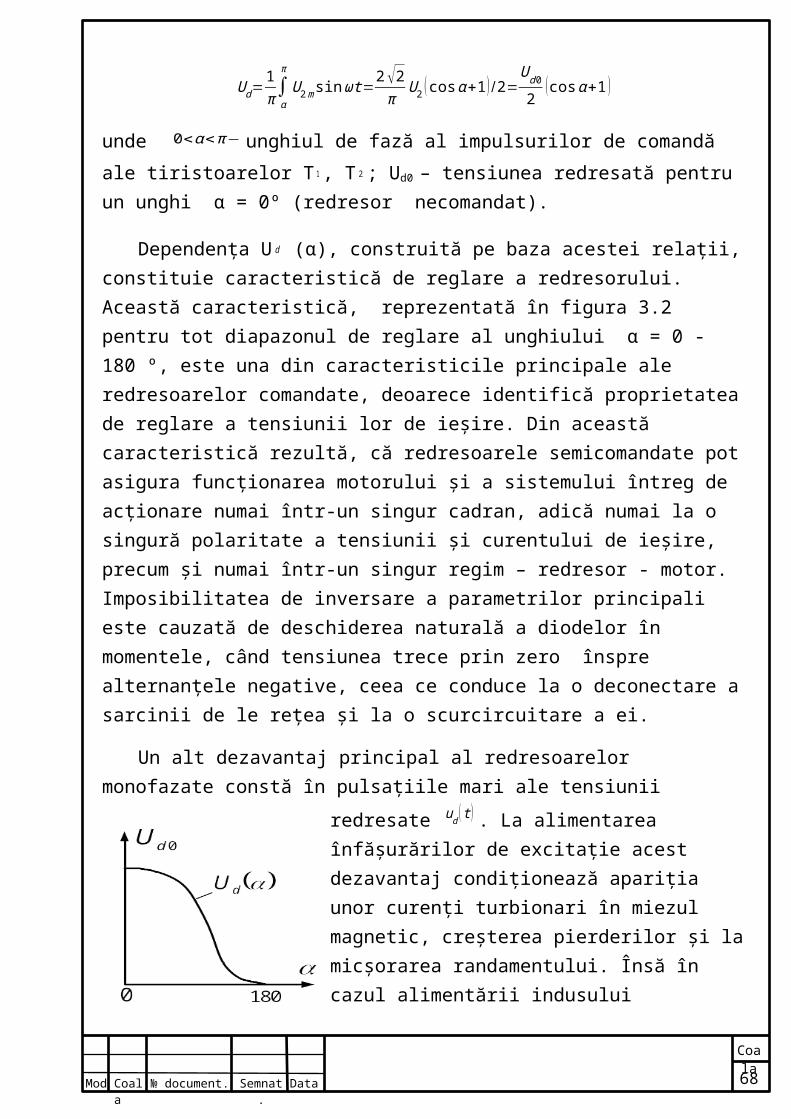
unde 0<α<π−unghiul de fază al impulsurilor de comandă ale tiristoarelor T1 , T2 ; Ud0 – tensiunea redresată pentru un unghi α = 0º (redresor necomandat).
Dependenţa Ud (α), construită pe baza acestei relaţii, constituie caracteristică de reglare a redresorului. Această caracteristică, reprezentată în figura 3.2 pentru tot diapazonul de reglare al unghiului α = 0 - 180 º, este una din caracteristicile principale ale redresoarelor comandate, deoarece identifică proprietatea de reglare a tensiunii lor de ieşire. Din această caracteristică rezultă, că redresoarele
Mod Coala
№ document. Semnat.
Data
Coala
68
semicomandate pot asigura funcţionarea motorului şi a sistemului întreg de acţionare numai într-un singur cadran, adică numai la o singură polaritate a tensiunii şi curentului de ieşire, precum şi numai într-un singur regim – redresor - motor. Imposibilitatea de inversare a parametrilor principali este cauzată de deschiderea naturală a diodelor în momentele, când tensiunea trece prin zero înspre alternanţele negative, ceea ce conduce la o deconectare a sarcinii de le reţea şi la o scurcircuitare a ei.
Un alt dezavantaj principal al redresoarelor monofazate constă în pulsaţiile mari
ale tensiunii redresate ud (t ) . La alimentarea înfăşurărilor de excitaţie acest dezavantaj condiţionează apariţia unor curenţi turbionari în miezul magnetic, creşterea pierderilor şi la micşorarea randamentului. Însă în cazul alimentării indusului motoarelor de curent continuu pulsaţiile menţionate influenţează negativ funcţionarea lor, ceea ce impune introducerea obligatorie a unei inductivităţi adăugătoare de filtrare a curentului redresat in serie
cu înfăşurarea indusului(La în fig.1.1.3,a).
Funcţionarea redresoarelor semicomandate (RSC) la
Fig.1.1.2
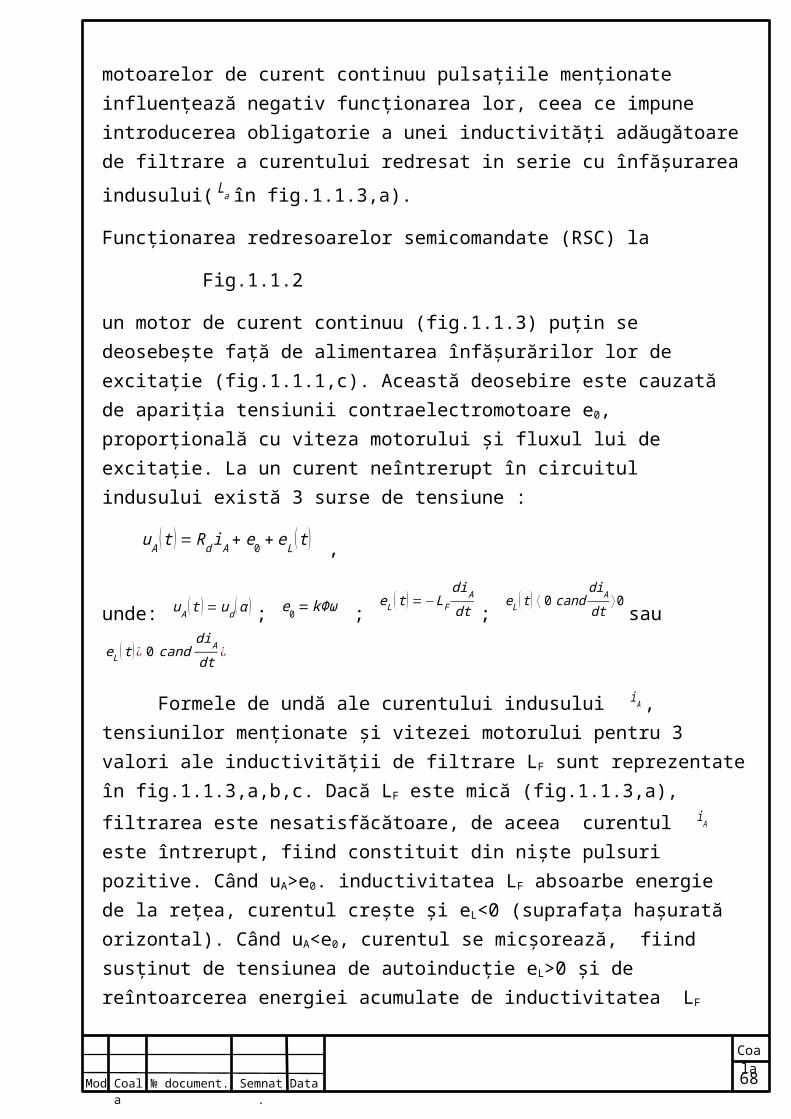
un motor de curent continuu (fig.1.1.3) puţin se deosebeşte faţă de alimentarea înfăşurărilor lor de excitaţie (fig.1.1.1,c). Această deosebire este cauzată de apariţia tensiunii contraelectromotoare e0, proporţională cu viteza motorului şi fluxul lui de excitaţie. La un curent neîntrerupt în circuitul indusului există 3 surse de tensiune :
uA ( t ) = Rd iA + e0 + eL ( t ) ,
unde: uA (t ) = ud (α ) ; e0 = kΦω ; e L (t ) =−LF
diAdt ;
e L ( t ) ⟨ 0 canddiAdt
⟩0sau
e L ( t )¿ 0 canddiAdt
¿
Formele de undă ale curentului indusului iA , tensiunilor menţionate şi vitezei motorului pentru 3 valori ale inductivităţii de filtrare LF sunt reprezentate în fig.1.1.3,a,b,c. Dacă LF este mică (fig.1.1.3,a), filtrarea este nesatisfăcătoare, de aceea
curentul iA este întrerupt, fiind constituit din nişte pulsuri pozitive. Când uA>e0. inductivitatea LF absoarbe energie de la reţea, curentul creşte şi eL<0 (suprafaţa haşurată orizontal). Când uA<e0, curentul se micşorează, fiind susţinut de tensiunea
Mod Coala
№ document. Semnat.
Data
Coala
68
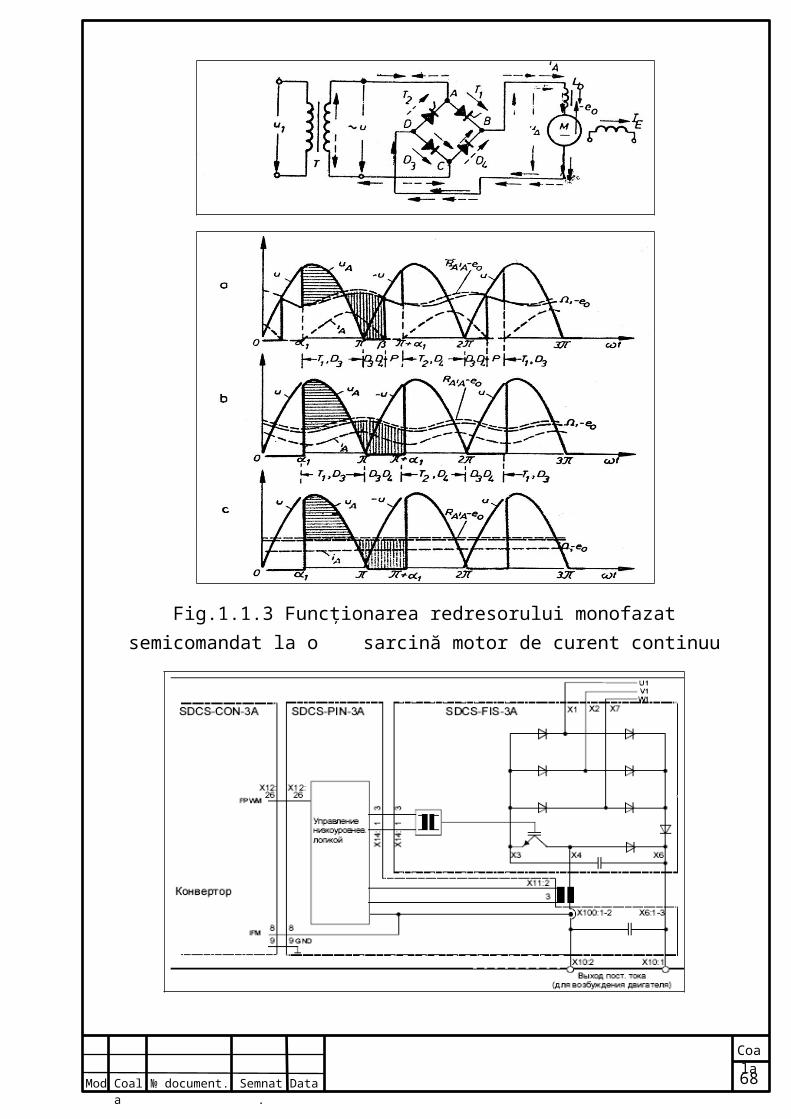
de autoinducţie eL>0 şi de reîntoarcerea energiei acumulate de inductivitatea LF ( suprafaţa haşurată vertical). În momentul ωt=β suprafeţele haşurate devin egale, curentul se întrerupe – iA=0 şi toate ventilele se blochează. În intervalul β <ωt <π + ά tensiunea redresată ud=0, iar tensiunea de la bornele motorului uA=e0. În acest interval motorul funcţionează ca generator cu curent nul.
În cazul, când LF este relativ mare (fig.1.1.3,b), energia acumulată de inductivitate este suficiente pentru a susţine curentul până în momentul deschiderii următorului tiristor ( ωt=π +ά). De aceea curentul devine neîntrerupt, având totuşi nişte ondulaţii neînsemnate.
În cazul unei inductivităţi deosebit de mari (fig.1.1.3,c), energia reactivă acumulată este atât de mare, încât eL>>e0, ceea ce asigură o filtrare ideală şi un curent iA=IA=constant. Redresorul în acest caz reprezintă o sursă de curent continuu, de aceea poate fi numit redresor de curent.
Dacă la ieşirea redresorului se conectează un condensator cu o capacitate mare, atunci redresorul se transformă într-o sursă de tensiune continuă Această variantă se foloseşte în prezent pentru alimentarea înfăşurărilor de excitaţie ale motoarelor de curent continuu . Însă pentru o filtrare mai eficientă (ideală) redresorul se alege trifazat şi necomandat, funcţia de reglare fiind atribuită în acest caz unui chopper (tranzistor) cu o comandă PWM şi o frecvenţă de comutaţie relativ mare (fig.1.1.4).
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.1.1.3 Funcţionarea redresorului monofazat semicomandat la o sarcină motor de curent continuu
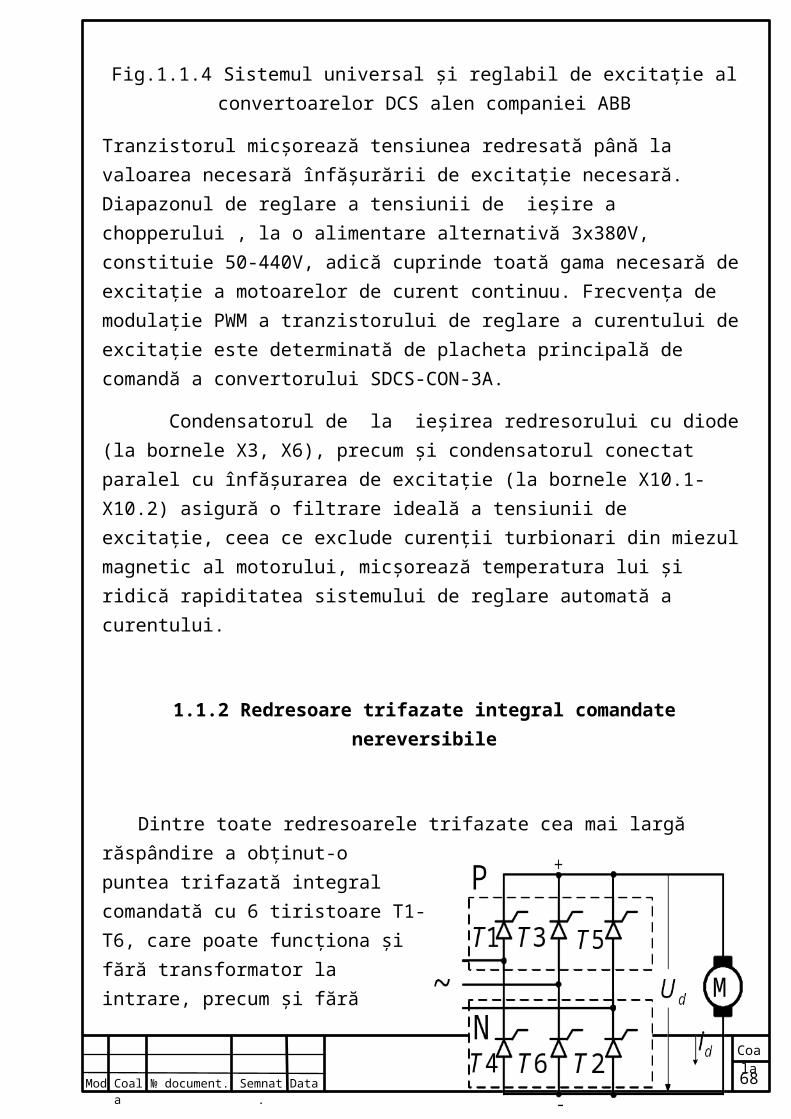
Fig.1.1.4 Sistemul universal şi reglabil de excitaţie al convertoarelor DCS alen companiei ABB
Tranzistorul micşorează tensiunea redresată până la valoarea necesară înfăşurării de excitaţie necesară. Diapazonul de reglare a tensiunii de ieşire a chopperului , la o alimentare alternativă 3x380V, constituie 50-440V, adică cuprinde toată gama necesară de excitaţie a motoarelor de curent continuu. Frecvenţa de modulaţie
Mod Coala
№ document. Semnat.
Data
Coala
68
PWM a tranzistorului de reglare a curentului de excitaţie este determinată de placheta principală de comandă a convertorului SDCS-CON-3A.
Condensatorul de la ieşirea redresorului cu diode (la bornele X3, X6), precum şi condensatorul conectat paralel cu înfăşurarea de excitaţie (la bornele X10.1-X10.2) asigură o filtrare ideală a tensiunii de excitaţie, ceea ce exclude curenţii turbionari din miezul magnetic al motorului, micşorează temperatura lui şi ridică rapiditatea sistemului de reglare automată a curentului.
1.1.2 Redresoare trifazate integral comandate nereversibile
Dintre toate redresoarele trifazate cea mai largă răspândire a obţinut-o puntea trifazată integral comandată cu 6 tiristoare T1-T6, care poate funcţiona şi fără transformator la intrare, precum şi fără inductivitate de filtrare la ieşire, deoarece
pulsaţiile tensiunii redresate Ud (t ) sunt mult mai mici. Acest lucru se datorează creşterii numărului de comutaţii ale tiristoarelor, la care sunt aplicate impulsuri de comandă de 6 ori într-o perioadă, adică peste fiecare 60º. Ordinea de aplicare a acestor impulsuri coincide cu numeraţia tiristoarelor (fig.1.1.5, 1.1.7). Fig.1.1.5
Puntea trifazată, de asemenea, poate fi reprezentată ca fiind alcătuită din 2 redresoare trifazate echivalente cu nul: unul pozitiv (P) - T1, T3, T5 cu catozii comuni şi altul negativ (N) -T2, T4, T6, cu anozii comuni. Aceste 2 redresoare sunt conectate în serie cu sarcina, de aceea ea poate fi alimentată doar dacă în fiecare moment de timp este deschis câte un tiristor din fiecare redresor, însă din ramuri diferite ale punţii. Deoarece redresorul pozitiv are catozii comuni, în fiecare moment de timp se deschide acel tiristor, care are tensiunea (potenţialul) anodului mai pozitivă, pe care o transmite la işlire. În mod analogic, în redresorul negativ se deschide acel tiristor, care are în momentul curent tensiunea catodului mai negativă.
Mod Coala
№ document. Semnat.
Data
Coala
68
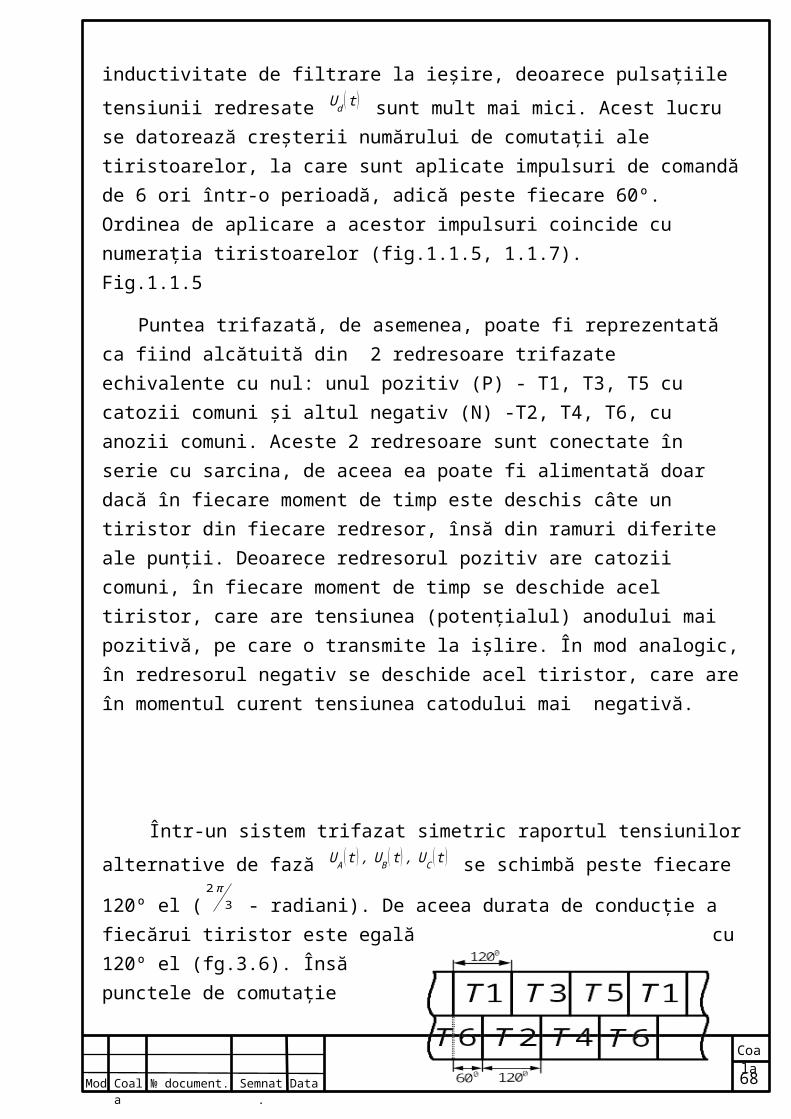
Într-un sistem trifazat simetric raportul tensiunilor alternative de fază
U A (t ) , U B (t ) , UC ( t ) se schimbă peste fiecare 120º el (2π
3 - radiani). De aceea durata de conducţie a fiecărui tiristor este egală cu 120º el (fg.3.6). Însă punctele de comutaţie naturală A, B, C ale redresorului pozitiv sunt defazate cu 60º faţă de
punctele de comutaţie naturală A' , B' , C '
ale redresorului negativ (fig.1.1.7). Ca urmare, comutaţiile tiristoarelor în ambele redresoare sunt defazate, de asemenea, cu 60º el, având o succesiune indicată în fig1.1.6. Fiecare tiristor conduce curentul 60º cu tiristorul precedent şi 60º cu tiristorul următor.
Fig.1.1.6
Deschiderea tiristoarelor are loc în momentul aplicării impulsului de comandă, dacă tensiunea anod – catod este pozitivă în acel moment. Însă blocarea lor se efectuează sub acţiunea tensiunii reţelei de alimentare, Într-adevăr, la deschiderea următorului tiristor, către cel precedent din grupa respectivă se aplică o tensiune anod–catod negativă, care condiţionează o blocare a acestuia din urmă.
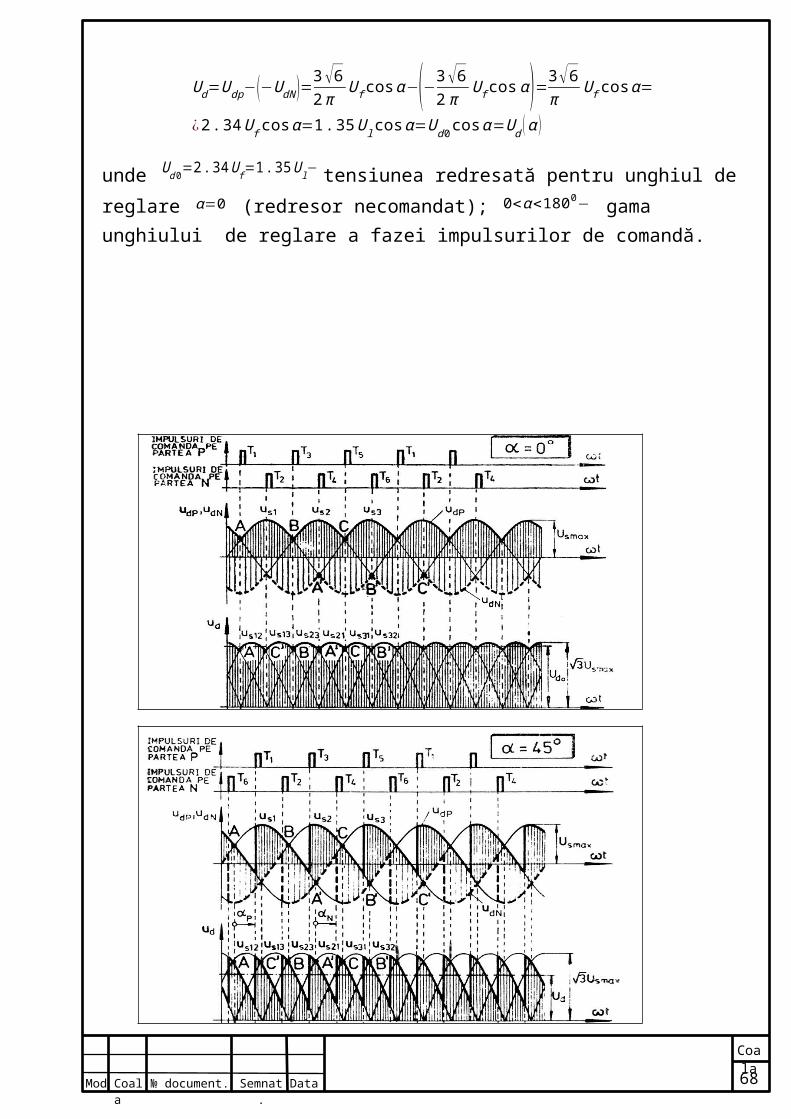
În figura 1.1.7 sunt prezentate diagramele temporale de funcţionare ale parametrilor punţii trifazate cu tiristoare la diferite unghiuri de comandă α = 0º, 45º,90º şi o sarcină activ – inductivă.
Valoarea momentană a tensiunii redresate este alcătuită din porţiuni de 60º ale tensiunilor alternative de linie, care alcătuiesc o componentă pulsatorie (alternativă) şi o componentă medie. Pulsaţiile cele mai mici se obţin pentru un unghi ά =0º, iar
cele mai mari – pentru ά=90º. Valoarea medie a tensiunii redresate Ud într-o perioadă şi pentru o sarcină activ-inductivă
Ud=Udp−(−UdN )=3 √62π
U f cos α−(−3√62π
U f cosα)=3√6π
U f cosα=
¿2 .34U f cosα=1 .35U lcos α=Ud 0 cosα=Ud (α )
unde Ud 0=2 . 34U f=1. 35U l−tensiunea redresată pentru unghiul de reglare α=0
(redresor necomandat); 0<α<1800− gama unghiului de reglare a fazei impulsurilor de comandă.
Mod Coala
№ document. Semnat.
Data
Coala
68
Mod Coala
№ document. Semnat.
Data
Coala
68
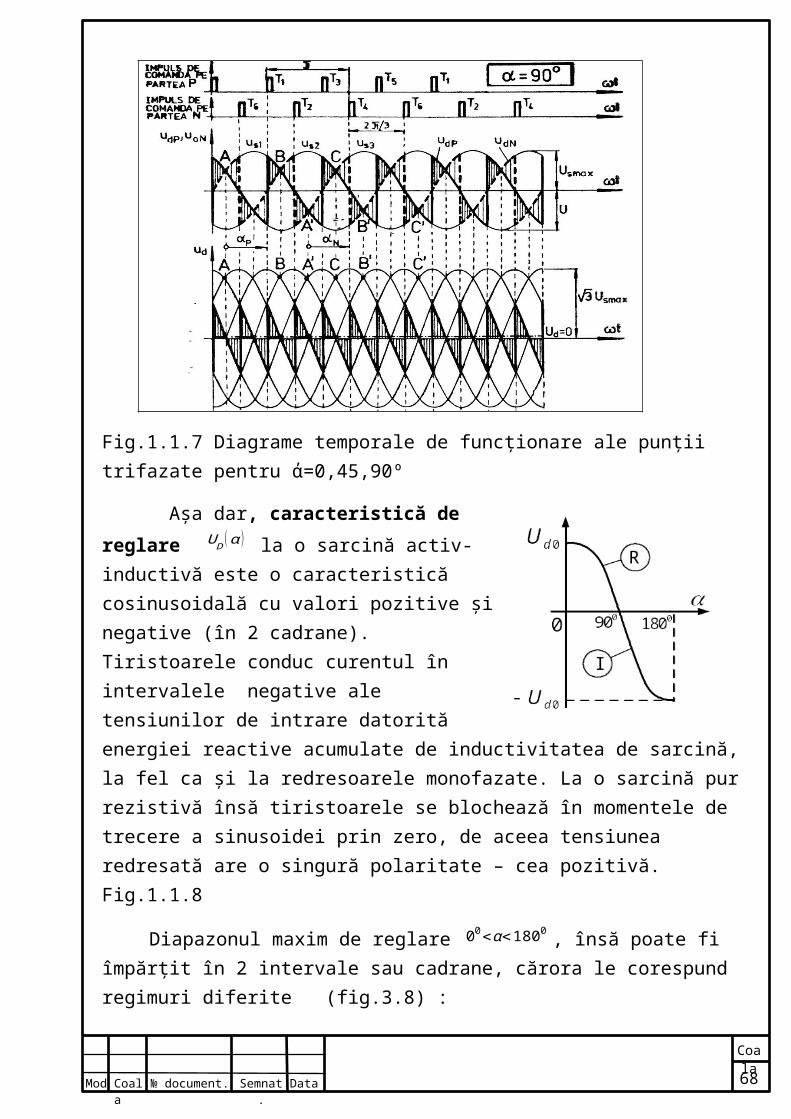
Fig.1.1.7 Diagrame temporale de funcţionare ale punţii trifazate pentru ά=0,45,90º
Aşa dar, caracteristică de reglare U D (α ) la o sarcină activ-inductivă este o caracteristică cosinusoidală cu valori pozitive şi negative (în 2 cadrane). Tiristoarele conduc curentul în intervalele negative ale tensiunilor de intrare datorită energiei reactive acumulate de inductivitatea de sarcină, la fel ca şi la redresoarele monofazate. La o sarcină pur rezistivă însă tiristoarele se blochează în momentele de trecere a sinusoidei prin zero, de aceea tensiunea redresată are o singură polaritate – cea pozitivă. Fig.1.1.8
Diapazonul maxim de reglare 00<α<1800 , însă poate fi împărţit în 2 intervale sau cadrane, cărora le corespund regimuri diferite (fig.3.8) :
- Regimul de redresor (R), pentru 00<α<900 şi Ud (α )>0 , căruia îi corespunde regimul de motor al maşinii de curent continuu, alimentate de redresor;
- Regimul de invertor (I), pentru 900<α<1800 şi Ud (α )<0 , căruia îi corespunde regimul de generator al maşinii de curent continuu, tensiunea căreea este transformată în tensiune trifazată alternativă şi reîntoarsă în reţea prin invertor;
Mod Coala
№ document. Semnat.
Data
Coala
68
Utilizarea largă a redresoarelor comandate în sistemele de acţionare electrică reglabilă cu motoare de curent continuu este datorată posibilităţii simple de reglare
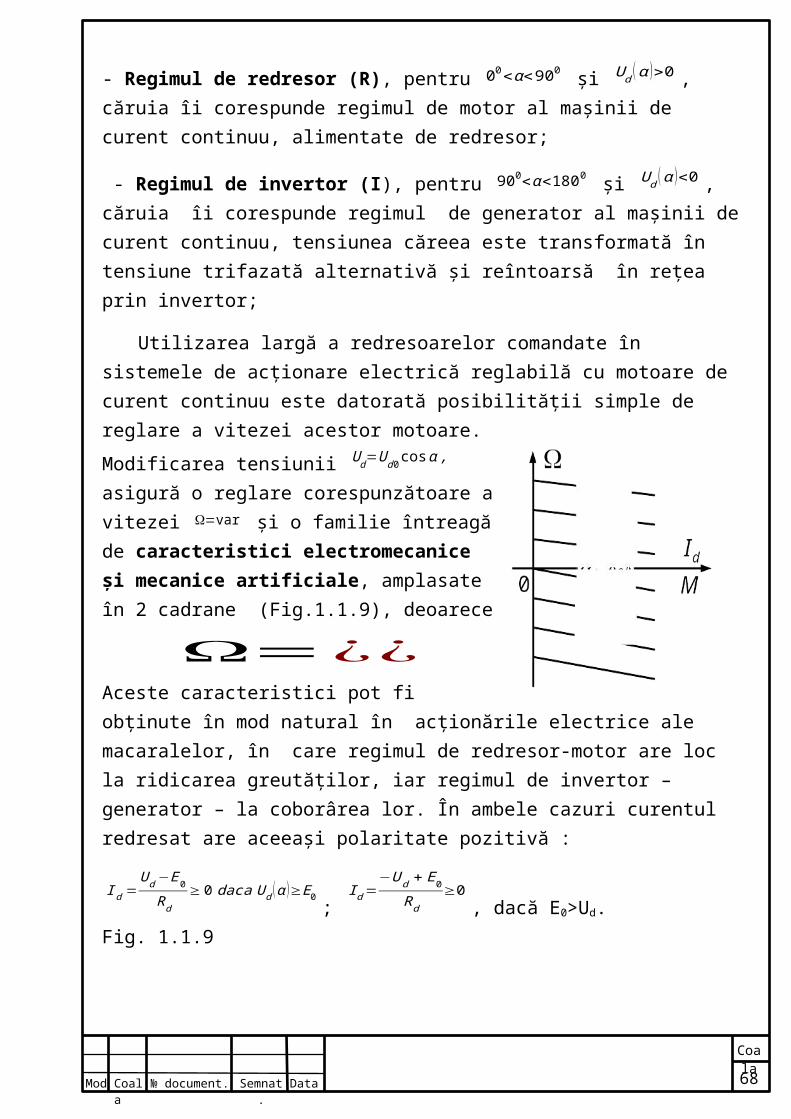
a vitezei acestor motoare. Modificarea tensiunii Ud=Ud 0 cosα , asigură o reglare corespunzătoare a vitezei Ω=var şi o familie întreagă de caracteristici electromecanice şi mecanice artificiale, amplasate în 2 cadrane (Fig.1.1.9), deoarece
Ω=¿¿Aceste caracteristici pot fi obţinute în mod natural în acţionările electrice ale macaralelor, în care regimul de redresor-motor are loc la ridicarea greutăţilor, iar regimul de invertor –generator – la coborârea lor. În ambele cazuri curentul redresat are aceeaşi polaritate pozitivă :
I d =U d −E 0
Rd≥ 0 daca Ud (α )≥E0
; I d=
−U d + E0
Rd≥0
, dacă E0>Ud. Fig. 1.1.9
1.2 Sisteme de acţionare electrică reglabilă cu redresoare reversibile
Deoarece cuplul motorului de curent continuu (MCC) depinde de 2 parametri → M=kФIA, inversarea lui şi respectiv a vitezei se poate face prin 2 variante alternative :
Prin inversarea curentului indusului IA=Id<0 la un flux de excitaţie Ф=const; Prin inversarea fluxului de excitaţie Ф<0 la un sens al curentului IA=const.Ţinând cont, că un singur redresor integral comandat poate funcţiona doar în 2
cadrane cu tensiuni redresate ± Ud în regim de redresor (R) sau invertor (I),
Mod Coala
№ document. Semnat.
Data
Coala
68
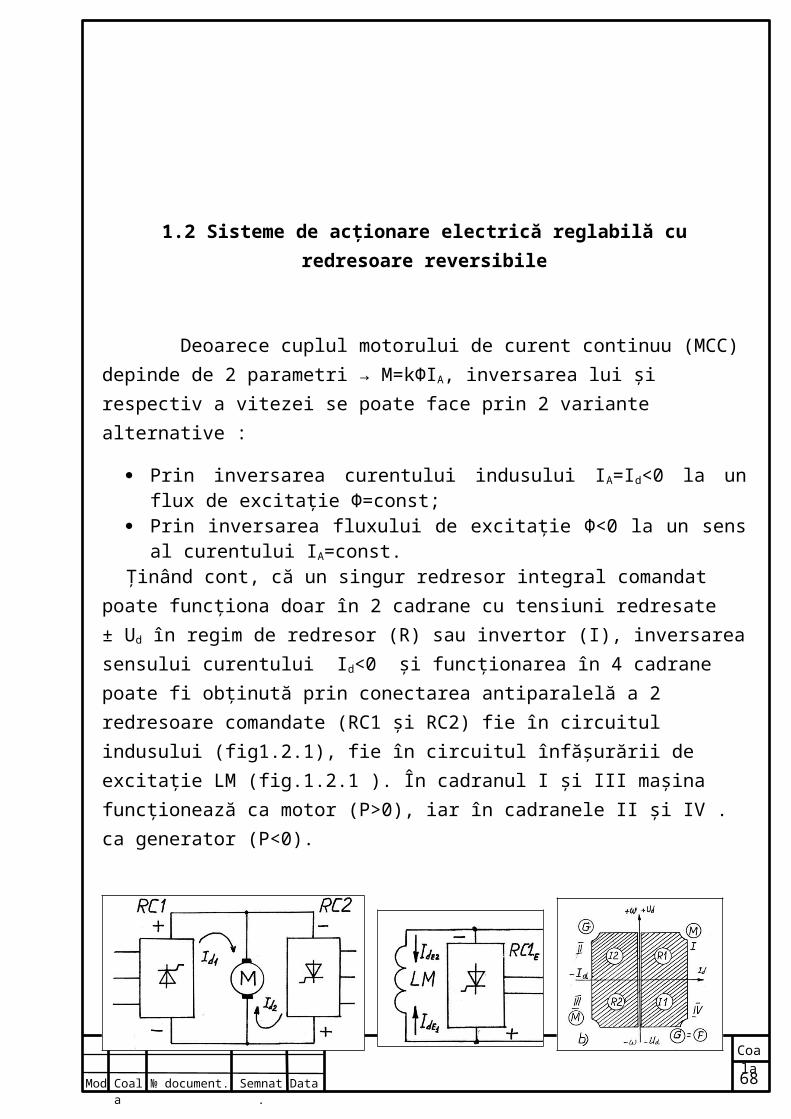
inversarea sensului curentului Id<0 şi funcţionarea în 4 cadrane poate fi obţinută prin conectarea antiparalelă a 2 redresoare comandate (RC1 şi RC2) fie în circuitul indusului (fig1.2.1), fie în circuitul înfăşurării de excitaţie LM (fig.1.2.1 ). În cadranul I şi III maşina funcţionează ca motor (P>0), iar în cadranele II şi IV . ca generator (P<0).
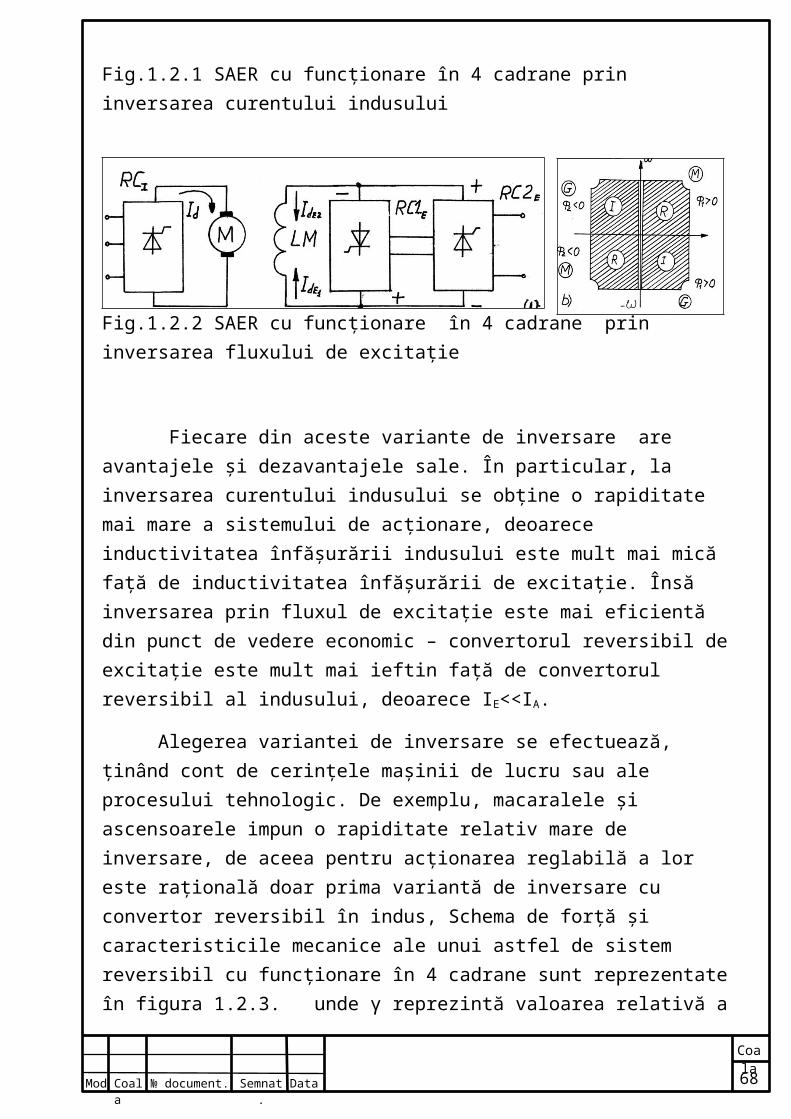
Fig.1.2.1 SAER cu funcţionare în 4 cadrane prin inversarea curentului indusului
Fig.1.2.2 SAER cu funcţionare în 4 cadrane prin inversarea fluxului de excitaţie
Fiecare din aceste variante de inversare are avantajele şi dezavantajele sale. În particular, la inversarea curentului indusului se obţine o rapiditate mai mare a sistemului de acţionare, deoarece inductivitatea înfăşurării indusului este mult mai mică faţă de inductivitatea înfăşurării de excitaţie. Însă inversarea prin fluxul de excitaţie este mai eficientă din punct de vedere economic – convertorul reversibil de excitaţie este mult mai ieftin faţă de convertorul reversibil al indusului, deoarece IE<<IA.
Alegerea variantei de inversare se efectuează, ţinând cont de cerinţele maşinii de lucru sau ale procesului tehnologic. De exemplu, macaralele şi ascensoarele impun o rapiditate relativ mare de inversare, de aceea pentru acţionarea reglabilă a lor este raţională doar prima variantă de inversare cu convertor reversibil în indus, Schema de forţă şi caracteristicile mecanice ale unui astfel de sistem reversibil cu funcţionare
Mod Coala
№ document. Semnat.
Data
Coala
68
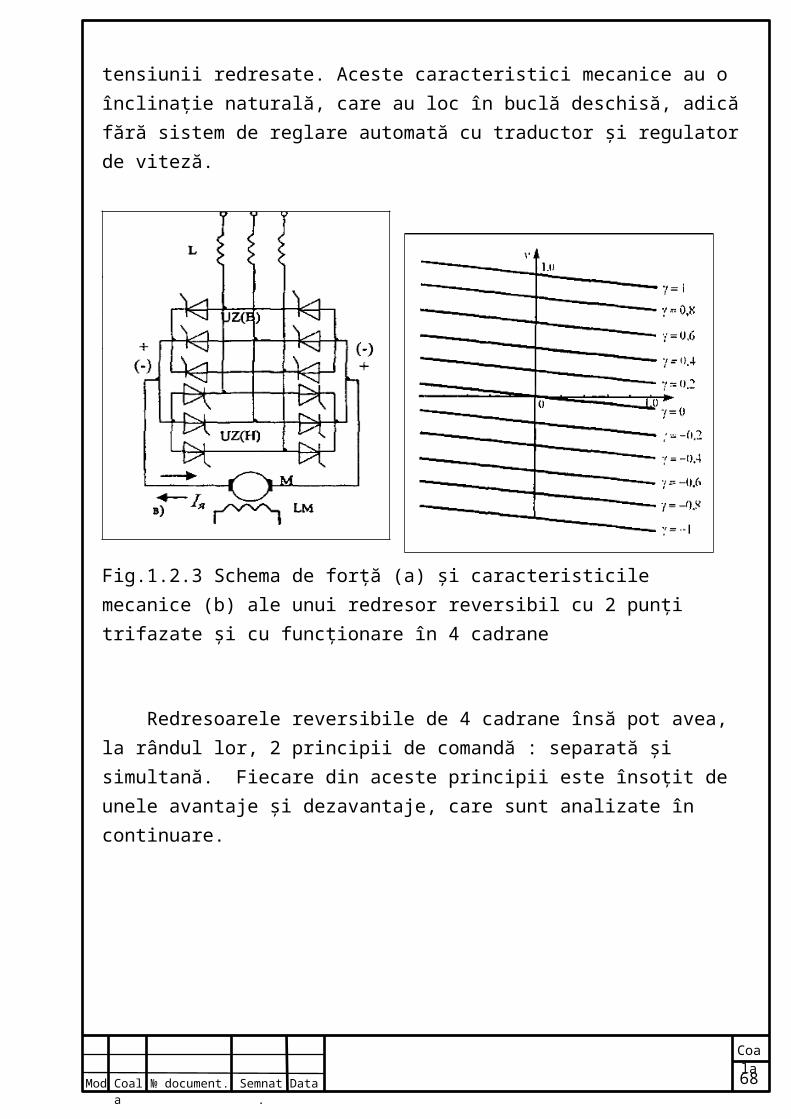
în 4 cadrane sunt reprezentate în figura 1.2.3. unde γ reprezintă valoarea relativă a tensiunii redresate. Aceste caracteristici mecanice au o înclinaţie naturală, care au loc în buclă deschisă, adică fără sistem de reglare automată cu traductor şi regulator de viteză.
Fig.1.2.3 Schema de forţă (a) şi caracteristicile mecanice (b) ale unui redresor reversibil cu 2 punţi trifazate şi cu funcţionare în 4 cadrane
Redresoarele reversibile de 4 cadrane însă pot avea, la rândul lor, 2 principii de comandă : separată şi simultană. Fiecare din aceste principii este însoţit de unele avantaje şi dezavantaje, care sunt analizate în continuare.
Mod Coala
№ document. Semnat.
Data
Coala
68
1.2.1 Convertoare reversibile cu comandă separată
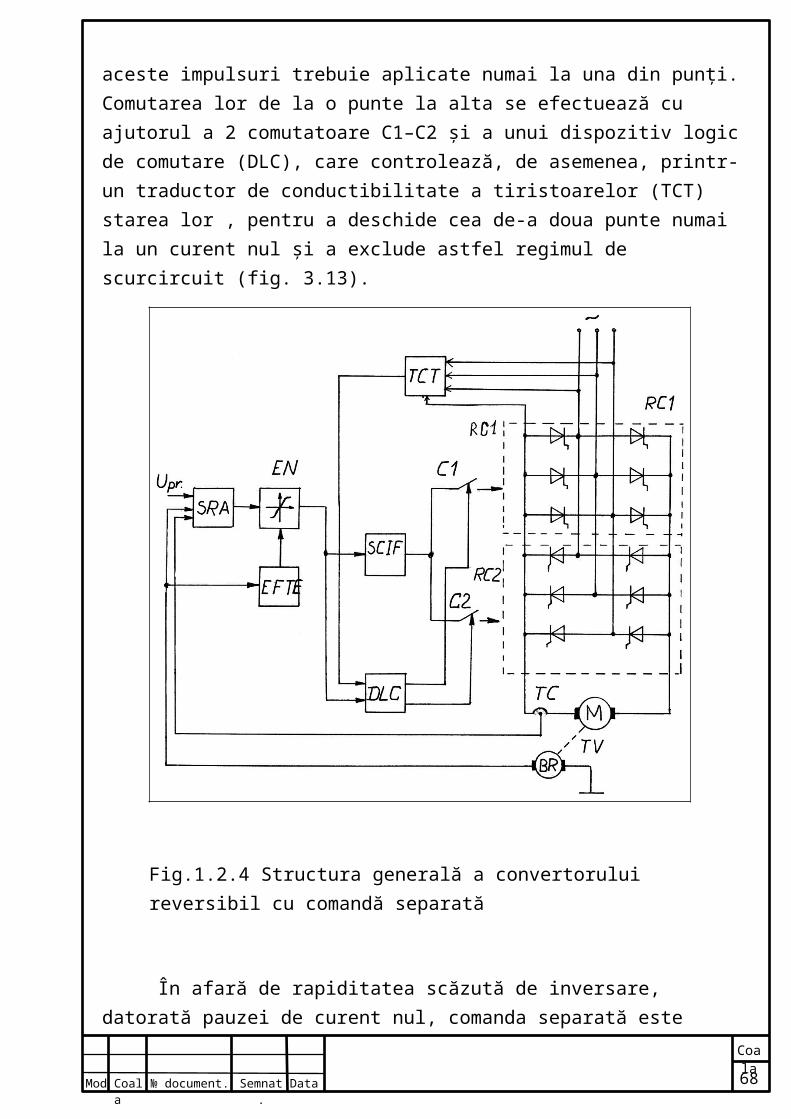
La o comandă separată în fiecare moment de timp funcţionează doar o singură punte - cealaltă este blocată prin blocarea impulsurilor ei de comandă. Pentru inversarea curentului, el se micşorează lin mai întâi până la 0, unde puntea aflată în conducţie se blochează. După o mică pauză fără curent (5-10ms), când sunt blocate ambele punţi, se deschide cea de-a doua punte, care asigură mai departe conducţia curentului de sens invers. Pauza de curent nul este necesară pentru a exclude funcţionarea ambelor punţi, însoţită de un regim de scurtcircuit între redresoare sau între fazele lor de intrare. În acest caz convertorul are un singur sistem de comandă impuls – fază (SCIF) pentru generarea impulsurilor de deschidere a tiristoarelor, deoarece aceste impulsuri trebuie aplicate numai la una din punţi. Comutarea lor de la o punte la alta se efectuează cu ajutorul a 2 comutatoare C1–C2 şi a unui dispozitiv logic de comutare (DLC), care controlează, de asemenea, printr-un traductor de conductibilitate a tiristoarelor (TCT) starea lor , pentru a deschide cea de-a doua punte numai la un curent nul şi a exclude astfel regimul de scurcircuit (fig. 3.13).
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.1.2.4 Structura generală a convertorului reversibil cu comandă separată
În afară de rapiditatea scăzută de inversare, datorată pauzei de curent nul, comanda separată este confruntată încă cu o problemă – conducţia întreruptă a curentului motorului la viteze şi sarcini mici, când inductivitatea de filtrare adăugătoare a curentului redresat din circuitul indusului lipseşte. În regim de curent întrerupt, când acesta are forma unor pulsuri cu pauze nule între ele, caracteristica de reglare a redresoarelor nu mai este cosinusoidală, ci transcendentă şi neliniară. Aceasta condiţionează o instabilitate a sistemului de reglare automată (SRA) a curentului şi vitezei în regim de curent întrerupt. Liniarizarea SRA în acest caz se efectuează, de obicei, pe cale indirectă, adăugând nişte elemente cu funcţii neliniare inverse. În fig.1.2.4 ca astfel de elemente servesc elementul neliniar (EN) şi elementul funcţional de tensiune electromotoare (t.e.m.) (EFTE), care corectează prescrierea curentului cu un circuit de reacţie a t.e.m. E0 . Acest semnal nu este afectat la un curent întrerupt, deoarece depinde de viteză.
Mod Coala
№ document. Semnat.
Data
Coala
68
Necătând la aceste dezavantaje, sistemele reversibile de acţionare cu comandă separată se folosesc pe larg în practică. În fig.1.2.5 este reprezentată schema funcţională a unui astfel de sistem clasic cu inversare prin indus şi SRA desfăşurat.
Mod Coala
№ document. Semnat.
Data
Coala
68
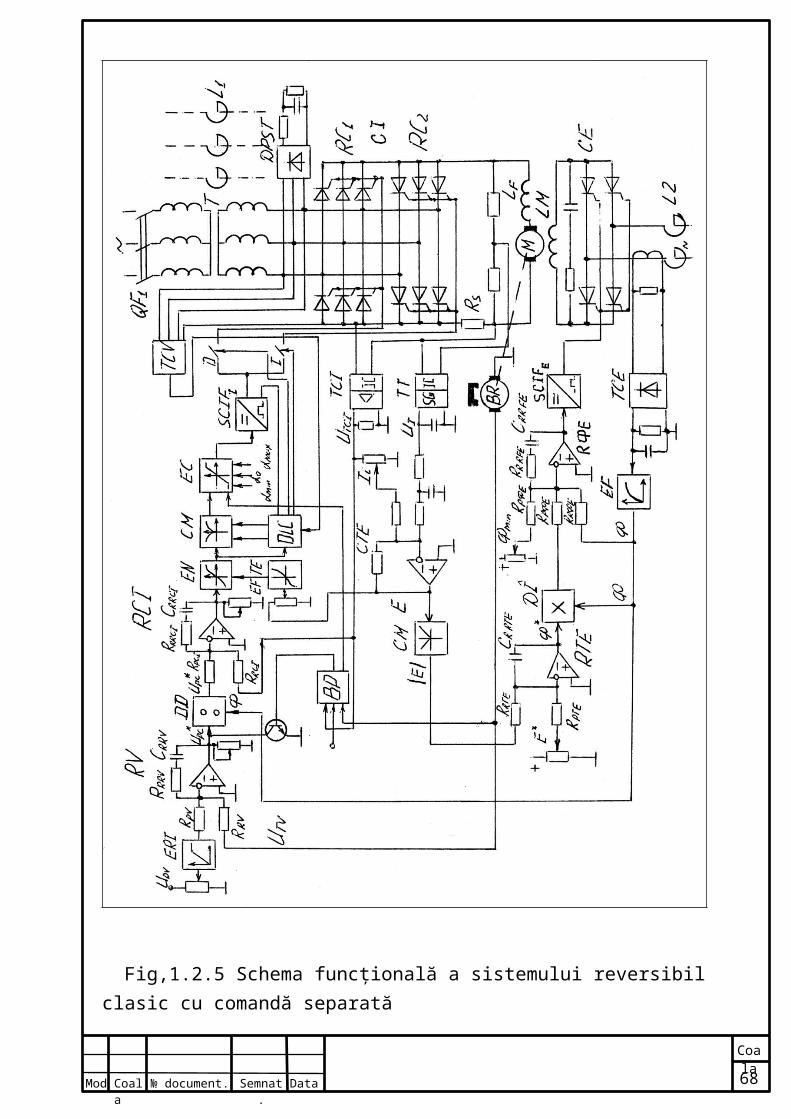
Fig,1.2.5 Schema funcţională a sistemului reversibil clasic cu comandă separată
Sistemul lui de reglare automată continuă (analogică) conţine 2 canale interdependente, prevăzute pentru fiecare convertor de putere – cel reversibil trifazat al indusului (CI) şi cel nereversibil monofazat de excitaţie (CE).
Fiecare canal conţine , la rândul său, câte 2 bucle închise de reglare automată, dintre care cea exterioară – de viteză sau tensiune electromotoare - este principală, iar cea interioară – a curentului indusului sau curentului de excitaţie este subordonată primei. Un astfel de sistem asigură 2 zone de reglare a vitezei motorului de acţionare : subnominală - 0<ω<ωN ş supranominală – ωN <ω< 2ωN. Reglajul în prima zonă se efectuează cu variaţia tensiunii indusului în intervalul (0-1)UN la un flux de excitaţie Ф=constant, iar reglajul în zona a doua – prin variaţia curintului (fluxului( de excitaţie în intervalul (o,5-1,0) IEN la o tensiune a indusului UA= UAN= constantă.
Bucla principală în canalul indusului este bucla de viteză, care conţine următoarele elemente componente :
Elementul de reglare a intensităţii (ERI) de variaţie a semnalului de prescriere a vitezei;
Regulatorul proporţional – integral de viteză (RV); Traductorul de viteză în varianta unui tahogenerator de curent continuu BR; Dispozitivul de divizare (DD) de la ieşirea RV, destinat pentru liniarizarea SRA în
zona a doua de reglare;Bucla interioară a curentului indusului conţine o grupă mai mare de elemente :
Regulatorul proporţional – integral al curentului indusului (RCI); Traductorul curentului indusului (TCI); Traductorul tensiunii (TT) redresate a indusului; Calculatorul de tensiune electromotoare (CTE) ; Elementul funcţional de tensiune electromotoare (RFTE); Elementul neliniar (EN); Sistemul de comandă impuls – fază al convertorului indusului (SCIF) I cu elementul
de comandă (EC), calculatorul de modul al semnalului de comandă (CM), dispozitivul logic de comutare (DLC), traductorul de conductibilitate a ventilelor (tiristoarelor) (TCV) şi comutatoarele impulsurilor de comandă ale redresoarelor comandate de sens direct (D) şi invers (I) ;
Bucla exterioară de tensiune electromotoare a canalului de excitaţie include :
regulatorul integral de tensiune electromotoare (RTE), calculatorul de tensiune electromotoare (CTE) ,
Mod Coala
№ document. Semnat.
Data
Coala
68
calculatorul de modul (CM) al semnalului de reacţie t.e.m.; dispozitivul de înmulţire (DÎ) şi de liniarizare a acestei bucle în zona a doua de
reglare. Bucla interioară a fluxului de excitaţie conţine :
regulatorul proporţional – integral de flux (RФE), elementului funcţional (EF) de aproximare a curbei d magnetizare şi obţinere a
semnalului fluxului de excitaţie, traductorul curentului de excitaţie (TCE), sistemul de comandă impuls – fază a convertorului de excitaţie (SCIF)E. Principiul general de funcţionare al acestui sistem în prima zonă de reglare, când semnalul exterior de prescriere a vitezei UPV = (0-5) V, este următorul. În momentul iniţial de pornire viteza motorului şi tensiunea redresată a indusului sunt nule. De aceea regulatorul de viteză RV şi de tensiune electromotoare RTE, având semnale de prescriere mult mai mari, intră repede în saturaţie, adică URV=URV.max = UPC..N şi URTE=URTE.max=UPФ.N, ceea ce asigură procesul de pornire cu un curent constant şi nominal în indus şi un curent şi flux nominal de excitaţie. Când viteza motorului atinge valoarea prescrisă din prima zonă, regulatorul de viteză iese din saturaţie şi prescrie buclei de curent un astfel de semnal, care să asigure o stabilizare a vitezei ω=const şi un cuplu, egal cu cuplul de sarcină curent de la arborele motorului.
Dacă se aplică apoi un semnal exterior de prescriere a vitezei supranominale UPV=(5-10)V, regulatorul de viteză începe să ridice viteza rin tensiunea redresată. Când aceasta din urmă atinge valoarea nominală a ei şi a tensiunii electromotoare E0=E0N , regulatorul RTE iese din saturaţie şi începe să micşoreze semnalul de prescrie a fluxului şi curentului de excitaţie şi să stabilizeze tensiunea electromotoare la nivel nominal E0=E0N=const. Ca urmare, viteza motorului în acest caz creşte peste valoarea nominală ω>ωN prin micşorarea fluxului şi curentului de excitaţie, deoarece ω0=UA/kФ .
Însă în zona a doua de reglare sistemul devine neliniar, atât canalul indusului, cât şi canalul de excitaţie. Bucla de viteză este neliniară datorită faptului că cuplul motorului în acest caz constituie produsul a două mărimi variabile M= KФ().II(MS), iar bucla de t.e.m. devine neliniară din cauza produsului E= KФ().(UPV). Din cauza acestor neliniarităţi acordarea regulatoarelor în zona a doua devine optimă numai pentru o singură valoare a vitezei şi fluxului magnetic. Pentru ca acordarea regulatoarelor să fie optimă în tot diapazonul de reglare, iar coeficienţii de transfer ai elementelor respective să se menţină constanţi, în bucla de viteză se introduce dispozitivul de divizare (DD), iar în bucla de tensiune electromotoare – dispozitivul de
Mod Coala
№ document. Semnat.
Data
Coala
68
înmulţire (DÎ). Aceste dispozitive compensează variaţia fluxului de excitaţie la reglajul vitezei şi invers – variaţia vitezei la reglajul fluxului.
Blocul de protecţie (BP) al regimurilor de avarie este comun pentru ambele canale şi convertoare, însă el nu este desfăşurat.
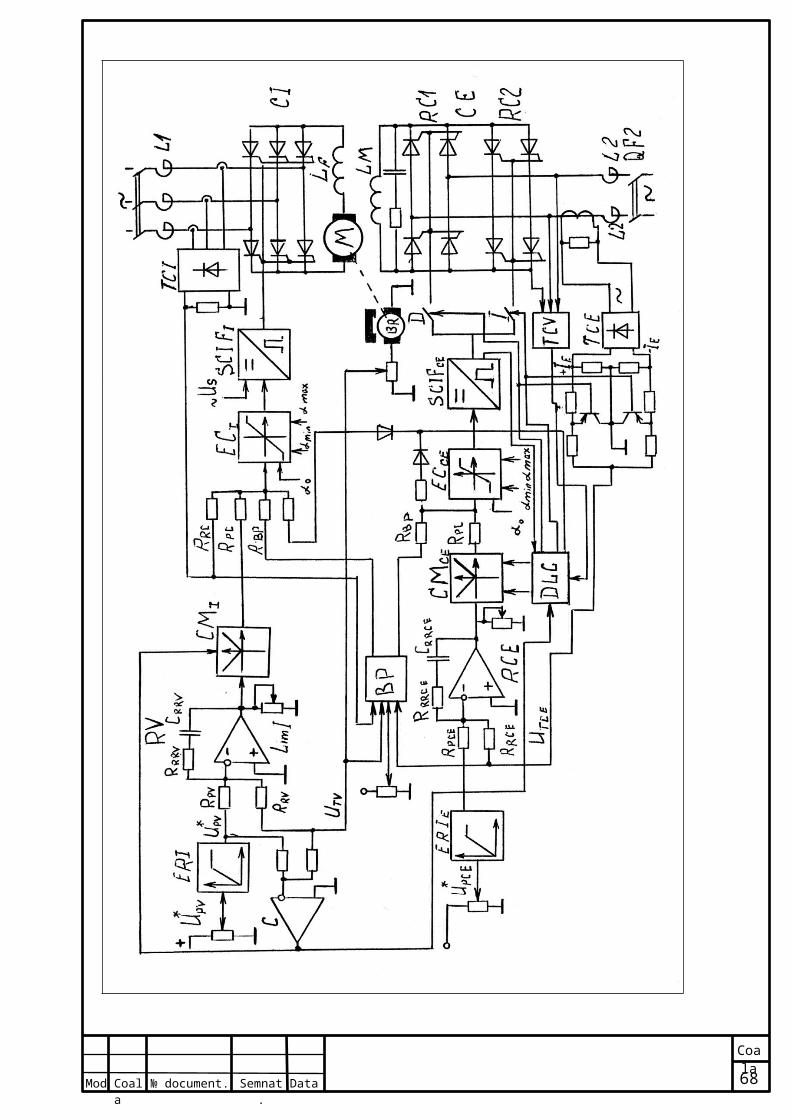
Sistemele reversibile de acţionare cu inversarea curentului (fluxului) de excitaţie au o structură şi principii asemănătoare. În fig.1.2.6 este arătată schema funcţională a unui astfel de sistem cu un redresor trifazat nereversibil în indus şi 2 redresoare comandate monofazate în circuitul înfăşurării de excitaţie LM. Această variantă este raţională în acţionările de putere mare, care nu impun o inversare rapidă a vitezei de rotaţie a motorului.
Canalul de excitaţie în acest caz are o singură buclă – a curentului de excitaţie, deoarece sistemul este prevăzut pentru o singură zonă de reglare – subnominală. Ca element de legătură între canalul nereversibil al indusului şi canalul reversibil de excitaţie serveşte comparatorul C, care compară semnalul de prescriere cu cel de reacţie al vitezei şi care comandă funcţionarea dispozitivului logic de comutare (DLC) a redresoarelor convertorului de excitaţie CE.
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.1.2.6 Schema funcţională a sistemului de 4 cadrane cu inversarea excitaţiei
Mod Coala
№ document. Semnat.
Data
Coala
68
1.2.2 Convertoare reversibile cu comandă simultană
La o comandă simultană a redresoarelor comandate conectate antiparalel în fiecare moment de timp funcţionează ambele redresoare, ceea ce este posibil numai dacă ele aceeaşi polaritate şi aceeaşi amplitudine a tensiunilor redresate. Însă aceste condiţii sunt posibile, la rândul lor, în cazul, când o punte funcţionează în regim de redresor cu un unghi ά1 , iar cealaltă – în regim de invertor cu un unghi α2 = 180º - α1
. Într-adevăr, în acest caz, datorită conectării antiparalele a punţilor,
Ud 1 =U d 0 cos α1 = −Ud 0 cos (180 −α 1) =−(−Ud 0 cosα1) =U d 2
Însă tensiunile redresate nu sunt tensiuni ideale de curent continuu, ci conţin anumite pulsaţii sau componente alternative, care nu coincid după fază. Ca urmare,
valorile momentane ale acestor tensiuni nu sunt absolut egale : ud 1 (t ) ≠ ud 2 (t ) .
Diferenţa acestor tensiuni Δu (t ) = ud 1 ( t ) −ud 2 ( t ) cauzează , la rândul său, apariţia
unui curent adăugător, numit curent de circulaţie interioară ic (t ) . Acest curent nu trece prin motor, ci numai prin tiristoare, deoarece ele au o rezistenţă relativ mică, de aceea amplitudinea lui poate atinge valori mari. Pentru a micşora aceste valori
până la limitele admisibile ic (t ) = (0,1−0 ,25 ) I d , între redresoare se introduc nişte inductivităţi, numite inductivităţi de egalizare a tensiunilor redresate.
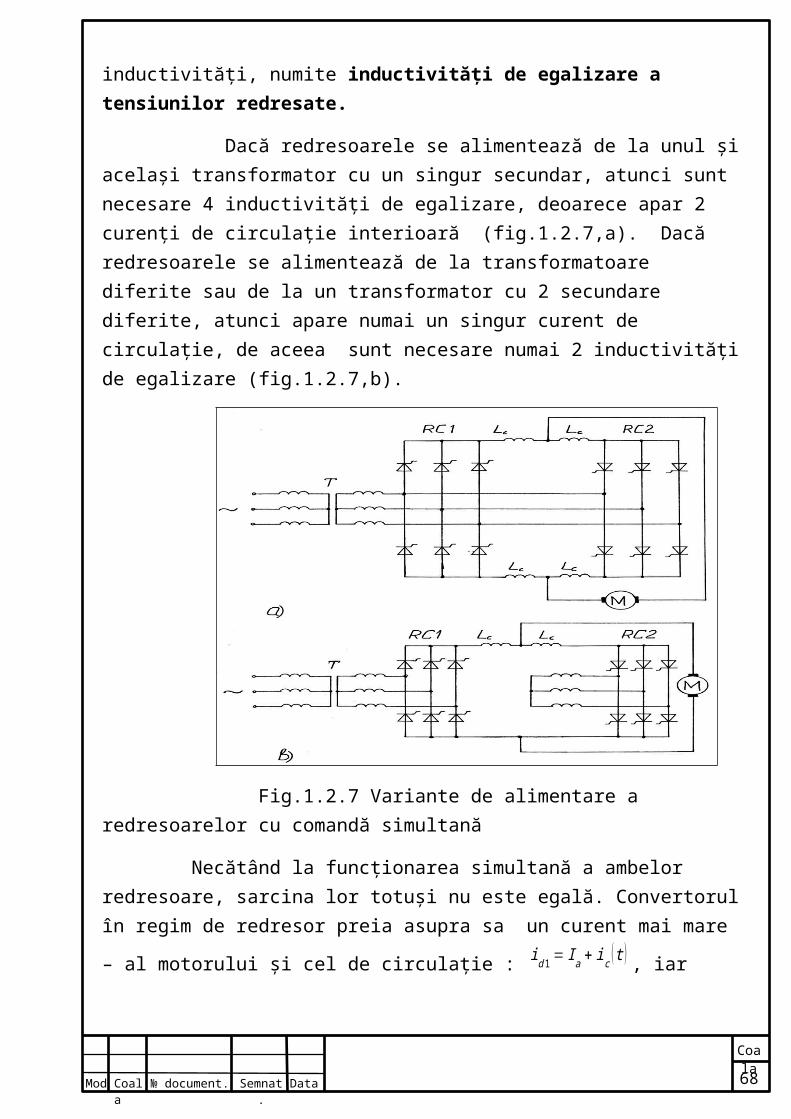
Dacă redresoarele se alimentează de la unul şi acelaşi transformator cu un singur secundar, atunci sunt necesare 4 inductivităţi de egalizare, deoarece apar 2 curenţi de circulaţie interioară (fig.1.2.7,a). Dacă redresoarele se alimentează de la transformatoare diferite sau de la un transformator cu 2 secundare diferite, atunci apare numai un singur curent de circulaţie, de aceea sunt necesare numai 2 inductivităţi de egalizare (fig.1.2.7,b).
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.1.2.7 Variante de alimentare a redresoarelor cu comandă simultană
Necătând la funcţionarea simultană a ambelor redresoare, sarcina lor totuşi nu este egală. Convertorul în regim de redresor preia asupra sa un curent mai mare – al
motorului şi cel de circulaţie : id 1 = I a + ic (t ) , iar convertorul în regim de invertor
preia asupra sa doar curentul de circulaţie : id 2 = ic ( t ) .
Aşa dar, curentul de circulaţie la o comandă simultană constituie o necesitate inertă, constituind un dezavantaj principal, deoarece impune utilizarea inductivităţilor de egalizare, ceea ce condiţionează o creştere a masei şi gabaritelor sistemului de acţionare. Însă acest curent joacă totuşi şi un rol pozitiv - exclude regimul de curenţi întrerupţi, iar ca urmare şi instabilitatea sistemului de reglare automată. Principalul avantaj al principiului de comandă simultană îl constituie rapiditatea maximă la inversarea curentului motorului, deoarece în acest caz pauza de curent nul nu mai este necesară.
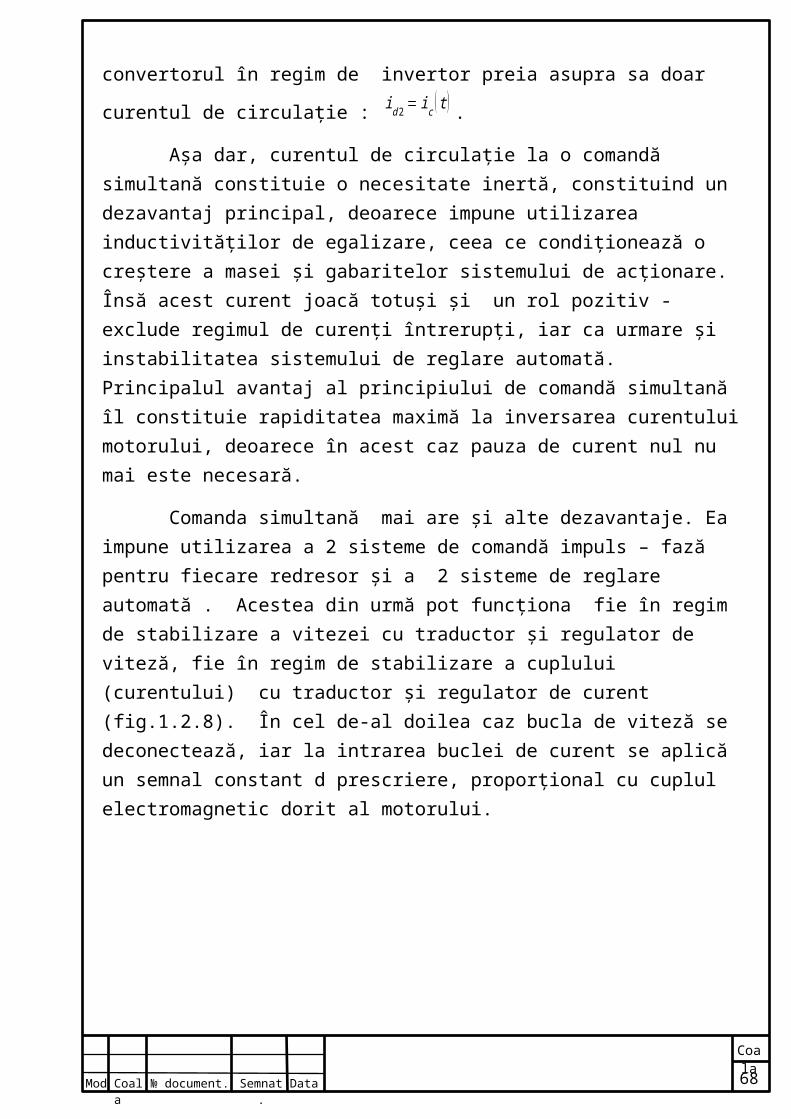
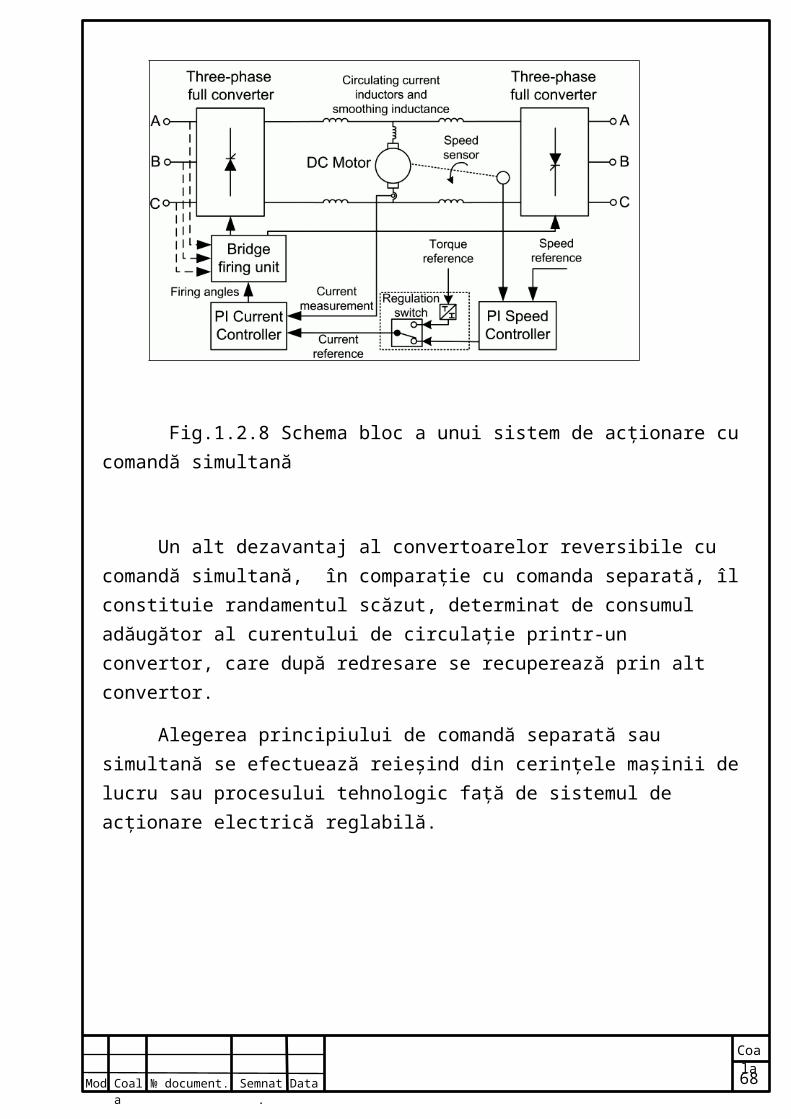
Comanda simultană mai are şi alte dezavantaje. Ea impune utilizarea a 2 sisteme de comandă impuls – fază pentru fiecare redresor şi a 2 sisteme de reglare automată . Acestea din urmă pot funcţiona fie în regim de stabilizare a vitezei cu traductor şi regulator de viteză, fie în regim de stabilizare a cuplului (curentului) cu traductor şi regulator de curent (fig.1.2.8). În cel de-al doilea caz bucla de viteză se deconectează, iar la intrarea buclei de curent se aplică un semnal constant d prescriere, proporţional cu cuplul electromagnetic dorit al motorului.
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.1.2.8 Schema bloc a unui sistem de acţionare cu comandă simultană
Un alt dezavantaj al convertoarelor reversibile cu comandă simultană, în comparaţie cu comanda separată, îl constituie randamentul scăzut, determinat de consumul adăugător al curentului de circulaţie printr-un convertor, care după redresare se recuperează prin alt convertor.
Alegerea principiului de comandă separată sau simultană se efectuează reieşind din cerinţele maşinii de lucru sau procesului tehnologic faţă de sistemul de acţionare electrică reglabilă.
Mod Coala
№ document. Semnat.
Data
Coala
68
1.1 Alegerea şi descrierea motorului de curent continuu al companiei ABB
Gama motoarelor standart ABB cuprinde oserie de puteri de la 1kW pina la 2 MW, avind o inaltime de la 180mm la 400mm, cu o putere nominala cuprinsa intre limitele: 25-1300kWsi un moment cuprins intre: 265-22000NmMotoarele de tip ABB pot sa se roteasca intro directie cit si in cealalt
Codificarea motoarelor DMI: DMI 180B-CBA;
Unde: DM- Motor de curent continuu(DC);
I – tipul motorului;
180 – inaltimea axei (mm)’
B – lungimea de baza;
CB - numarul de bobinare;
A – diapazonul de viteze;
Motoarele seriei DMI corespund normelor internationale CEI Publ. 60034 -1.Seria motoarelor DMI este acceptata conform CSA pentru tensiuni pina la 750V.Seria DMI are ca scop de a nu afecta mediul ambient si viata utilizatorului.Firma ABB da garantie la toate produsele ie timp de 24 luni de la data achizitiei sau 12 luni de la data darii in exploatare a utilajului.Un exemplu de motor de la firma ABB cu marca firmei este prezentat in figura de mai jos:
Mod Coala
№ document. Semnat.
Data
Coala
68
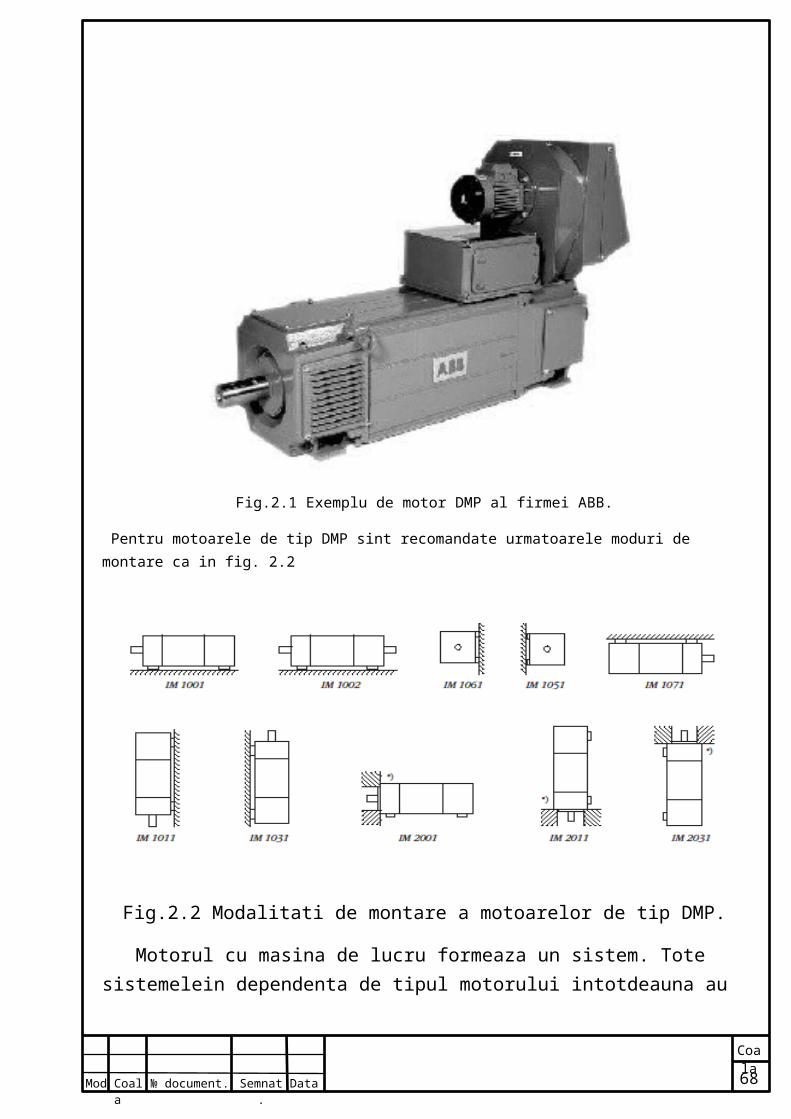
Fig.2.1 Exemplu de motor DMP al firmei ABB.
Pentru motoarele de tip DMP sint recomandate urmatoarele moduri de montare ca in fig. 2.2
Fig.2.2 Modalitati de montare a motoarelor de tip DMP.
Motorul cu masina de lucru formeaza un sistem. Tote sistemelein dependenta de tipul motorului intotdeauna au o careva viteza critica la care apar niste vibratii puternice chiar dac centrarea este perfecta.
Intro aplicatie la montarea motorului pe piceoare pe o fondatie rigida vitaza critica este intotdeauna mai mare decit viteza maximala si din aceasta cauza nu apare problema de vibratiei. Problema vibratiei se rezolva in cazul cind masa fondatiei este de 5 ori mai mare ca masa motorului. Pentru cazul cind fondatia este mai putin
Mod Coala
№ document. Semnat.
Data
Coala
68
rigida, adica motorul este amplasat pe perete ca consecinta avem ca viteza critica a motorului se gaseste la mijlocul vitezei maisnii de lucru ceia ce reduce randamentul. Utilizarea motorului un timp indelungat la viteza critica duce la distrugerea lui. Viteza critica a motorului poate fi marita prin adaugarea unui suport rigid perechii de piceoaree care se afla cel mai departe de perete.
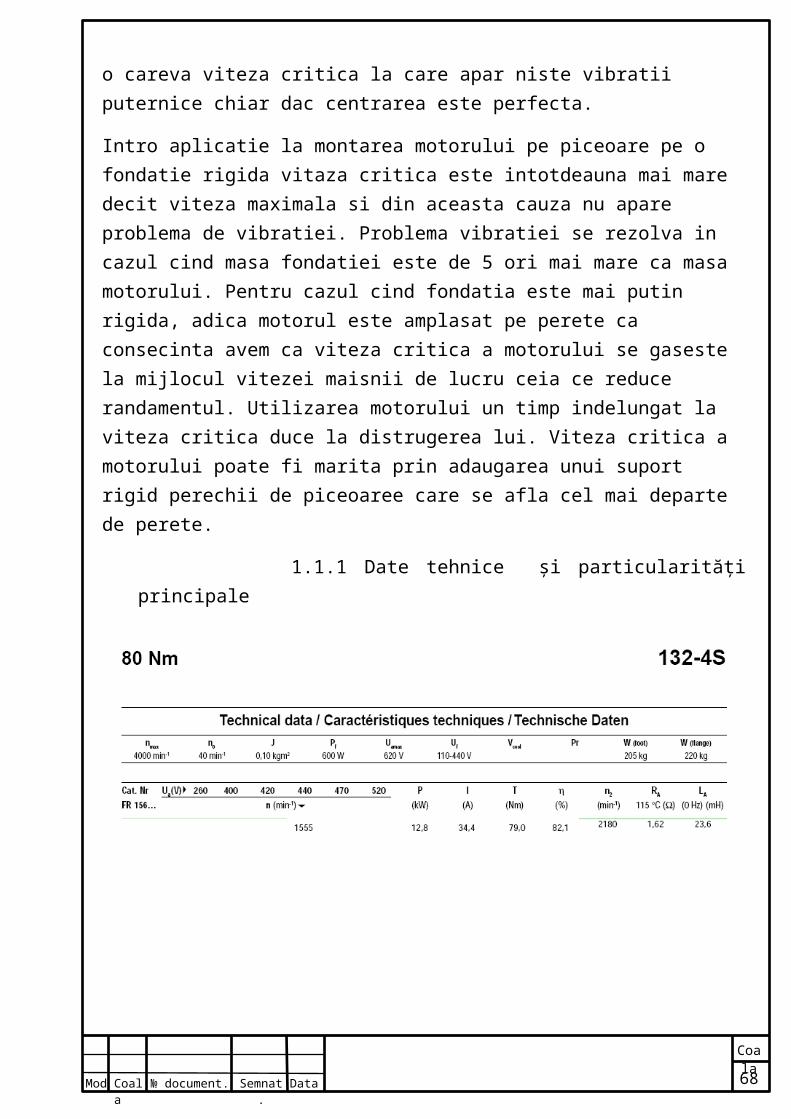
1.1.1 Date tehnice şi particularităţi principale
Mod Coala
№ document. Semnat.
Data
Coala
68
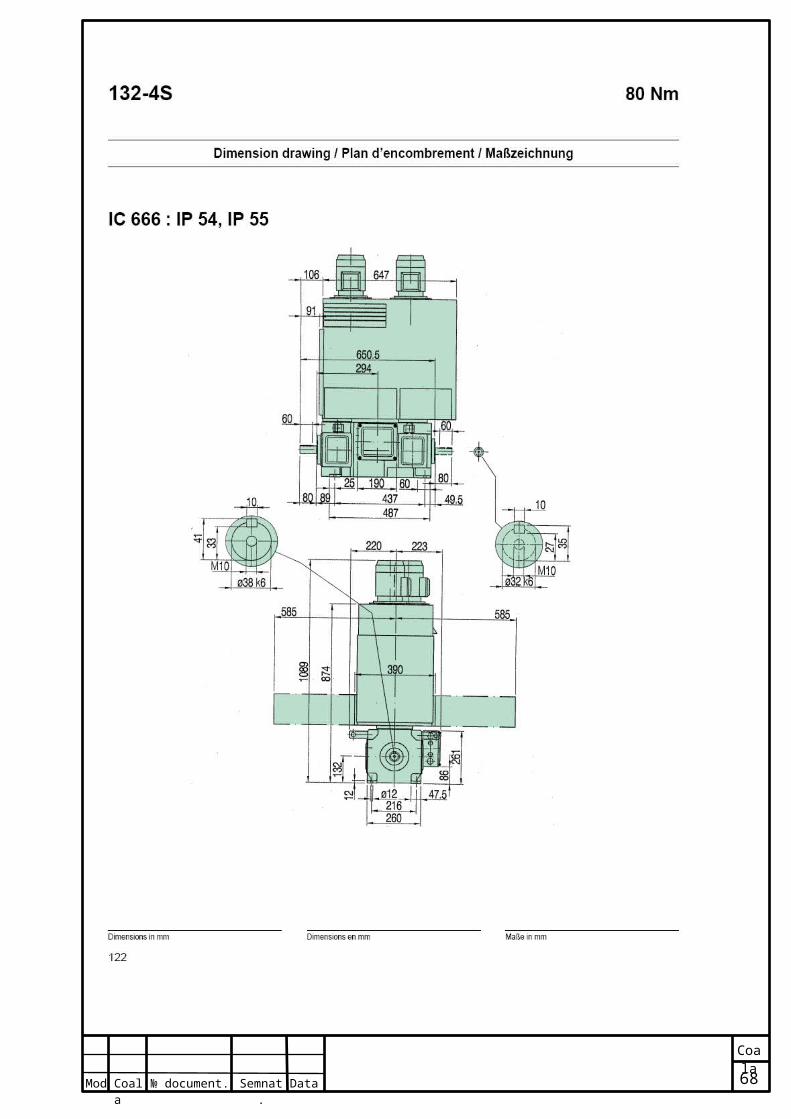
1.1.2 Aspecte constructive generale şi ale elementelor componente de bază
Mod Coala
№ document. Semnat.
Data
Coala
68
Gradul de protectie IP 54Protejate împotriva prafului, stropirii cu apa din orice direcţie şi în contact cu părţi vii. Pentru utilizare în praf şi / sau medii umede. Daca este folosita in aer liber, potrivit protecţia împotriva precipitatiilor (ploaie, ninsoare, furtuna) ar trebui să fie furnizate
Metoda de racireForme de răcire în conformitate cu IEC Publ. 34-6. Metoda recomandată de răcire este determinată de mediul înconjurător şi amplasarea motorului. Formularul de răcire selectat ar trebui să furnizeze o răcire a aerului pentru d. c. motoare la temperaturi cuprinse între -5 şi + 40 Motors pentru funcţionarea la alte temperaturi pot fi furnizate la cerere. Standard DMP-machi-nespecificate în altă parte au priza de aer de răcire de la D-end. Versiunile modificate cu priza de aer de la N-end (sfârşitul comutator) pot fi furnizate. Admisia aerului de răcire de mai jos este disponibil ca o modificare la un cost suplimentar pentru utilizare în atmosfere agresive care conţin clor, sulf, potasiu, etc. Un sistem închis de răcire, în care d. c. motorul este răcit cu aer la peste presiune dintr-o sursă curată, se recomandă. Pentru maşinile cu schimbătoare de căldură, până filtrul de aer-murături este înlocuit cu o conexiune la alimentarea cu aer curat. Mediu de aer agresiv, de asemenea, ar trebui să fie împiedicată să intre cu motor în timpul perioadelor de non-operaţionale.
Motor montat aer / schimbător de căldură aer
IC 666
Motor montat aer / schimbător de căldură aer
Proiectare MecanicaStator:Cadru, stalpi principali sunt pe deplin laminate. Acest lucru asigură comutarea bună chiar şi în timpul actual schimbări rapide de la convertizoare cu tiristoare. Componentele statorului sunt sudate împreună într-un dispozitiv, pe care ambele aliniază de plăci împreună pentru a forma o unitate solidă. Forma patrata a DMP-
Mod Coala
№ document. Semnat.
Data
Coala
68
motor permite o instalare simplă a accesoriilor şi conductelor de aer si deschideri mari pentru inspecţie.
Înfăşurărilor statoriceÎnfăşurărilor statorice sunt izolate de sarma de cupru-lac. Statorului este impregnat pentru o robuste şi rezistenta la umiditate. La cerere înfăşurărilor statorice pot fi impregnate pentru a da un grad foarte ridicat de protecţie împotriva medii dure (substanţe chimice, săruri, climatul tropical). Conexiunile sunt brazate sau sertizată să reziste la suprasarcini.
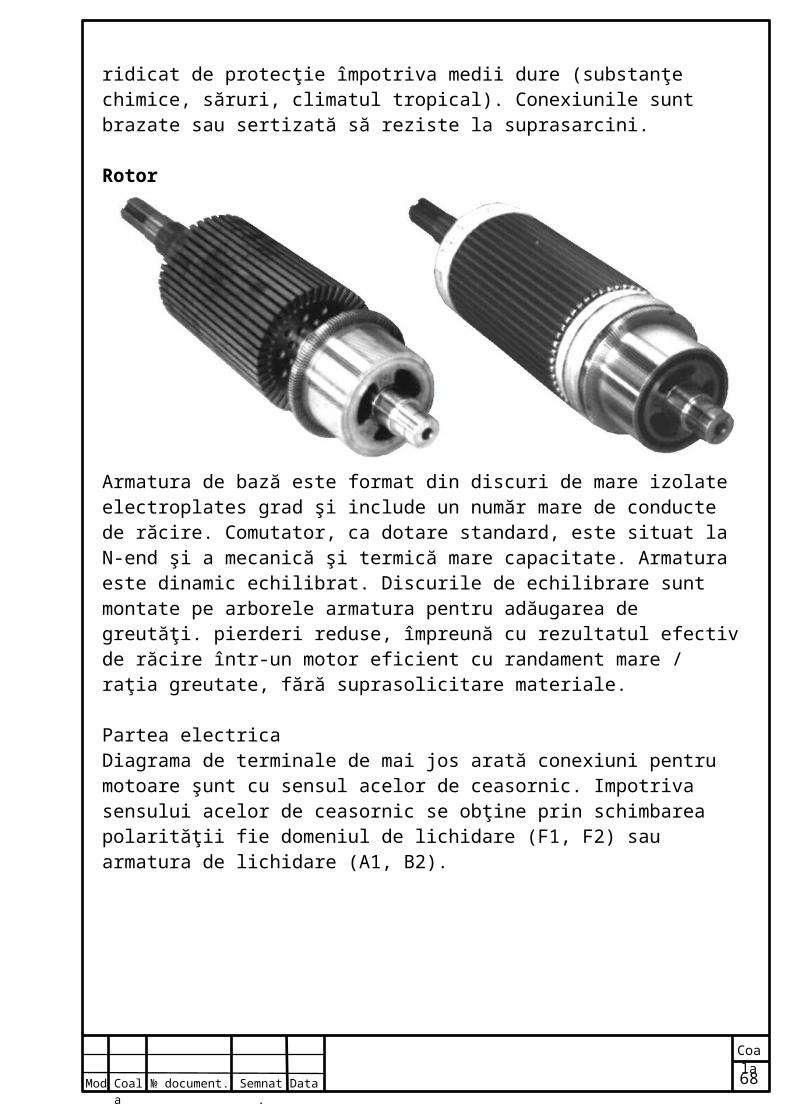
Rotor
Armatura de bază este format din discuri de mare izolate electroplates grad şi include un număr mare de conducte de răcire. Comutator, ca dotare standard, este situat la N-end şi a mecanică şi termică mare capacitate. Armatura este dinamic echilibrat. Discurile de echilibrare sunt montate pe arborele armatura pentru
Mod Coala
№ document. Semnat.
Data
Coala
68
adăugarea de greutăţi. pierderi reduse, împreună cu rezultatul efectiv de răcire într-un motor eficient cu randament mare / raţia greutate, fără suprasolicitare materiale.
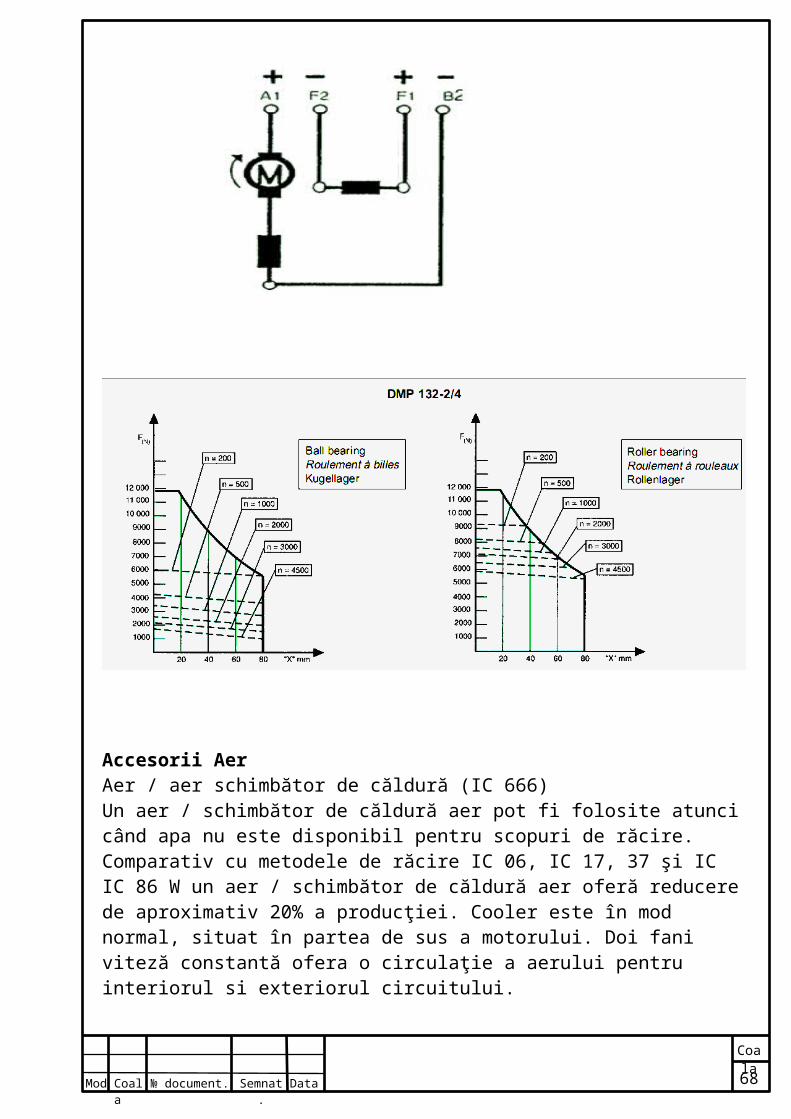
Partea electricaDiagrama de terminale de mai jos arată conexiuni pentru motoare şunt cu sensul acelor de ceasornic. Impotriva sensului acelor de ceasornic se obţine prin schimbarea polarităţii fie domeniul de lichidare (F1, F2) sau armatura de lichidare (A1, B2).
Accesorii AerAer / aer schimbător de căldură (IC 666)Un aer / schimbător de căldură aer pot fi folosite atunci când apa nu este disponibil pentru scopuri de răcire. Comparativ cu metodele de răcire IC 06, IC 17, 37 şi IC IC 86 W un aer / schimbător de căldură aer oferă reducere de aproximativ 20% a
Mod Coala
№ document. Semnat.
Data
Coala
68
producţiei. Cooler este în mod normal, situat în partea de sus a motorului. Doi fani viteză constantă ofera o circulaţie a aerului pentru interiorul si exteriorul circuitului.
1.2 Alegerea şi descrierea convertorului de curent continuu DCS ABB2.2 Sisteme digitale de acţionare electrică DCS 400(500) ale companiei ABB
2.2.1 Particularităţi, funcţii şi regimuri principale.
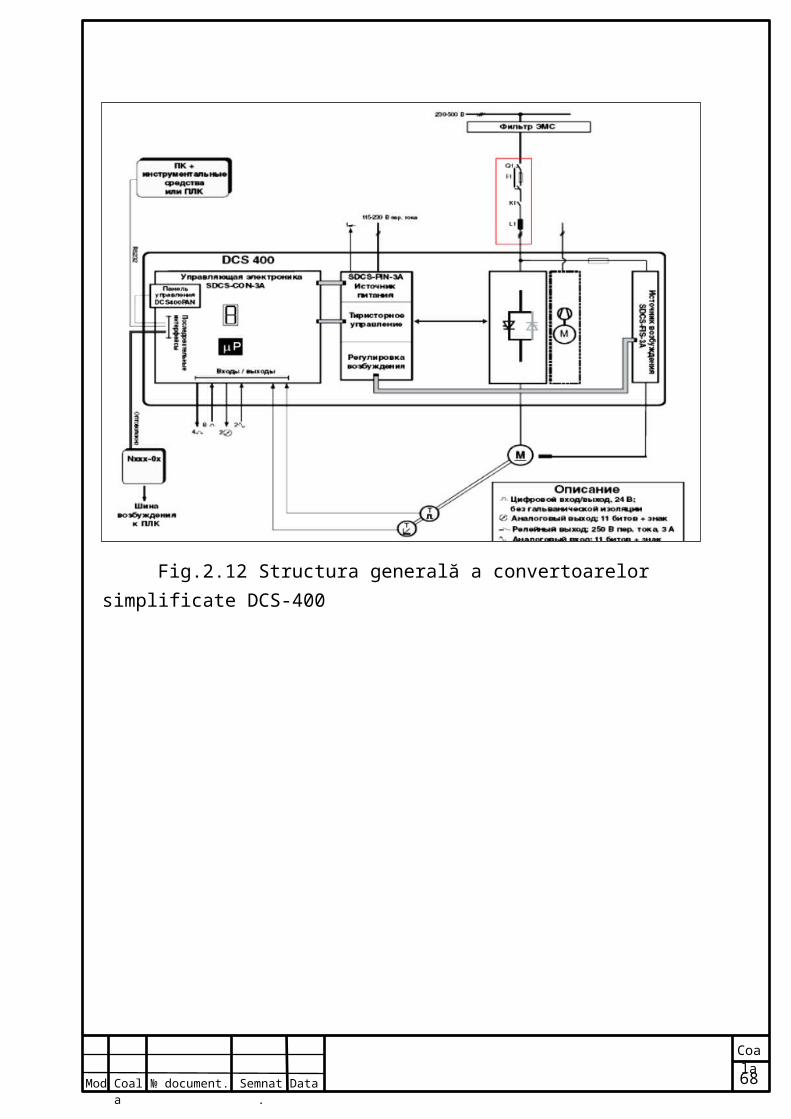
Unele dintre cele mai performante convertoare industriale moderne sunt convertoarele DCS ale corporaţiei internaţionale ABB. Aceste convertoare au avut mai multe generaţii – DCS-400 (anii 1990), DCS-500 (programabilă de utilizator) şi DCS-600 (fig,3.43), ultima fiind generaţia sau familia DCS-800 (fig.3.44). Ele sunt elaborate pentru tot diapazonul de curenţi şi tensiuni ale motoarelor de curent continuu , precum şi cu execuţii constructive diferite (IP):
curentul redresat – 20 -20000 A; tensiunea redresată 0-1500V; tensiunea alternativă de alimentare - 230 – 1200V;
Fiecare generaţie include mai multe modificaţii funcţionale, parametrice şi constructive modulare. Convertoarele de putere mică şi mijlocie au la bază schema tipică în punte trifazată cu 6 tiristoare şi funcţionare în 2 cadrane, sau schema cu 2 punţi trifazate conectate antiparalel şi cu funcţionare în 4 cadrane. Ele sunt alimentate, de regulă, prin reactoare inductive de reţea (fig.3.46). Convertoarele de putere mare se alimentează prin transformatoare cu 2 înfăşurări în secundar, defazate cu 30 º şi cu 2 module trifazate, conectate în paralel sau în serie. Comanda, reglarea şi protecţia tuturor convertoarelor este realizată cu μP (fig.3.42)
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.2.12 Structura generală a convertoarelor simplificate DCS-400
Mod Coala
№ document. Semnat.
Data
Coala
68
Mod Coala
№ document. Semnat.
Data
Coala
68
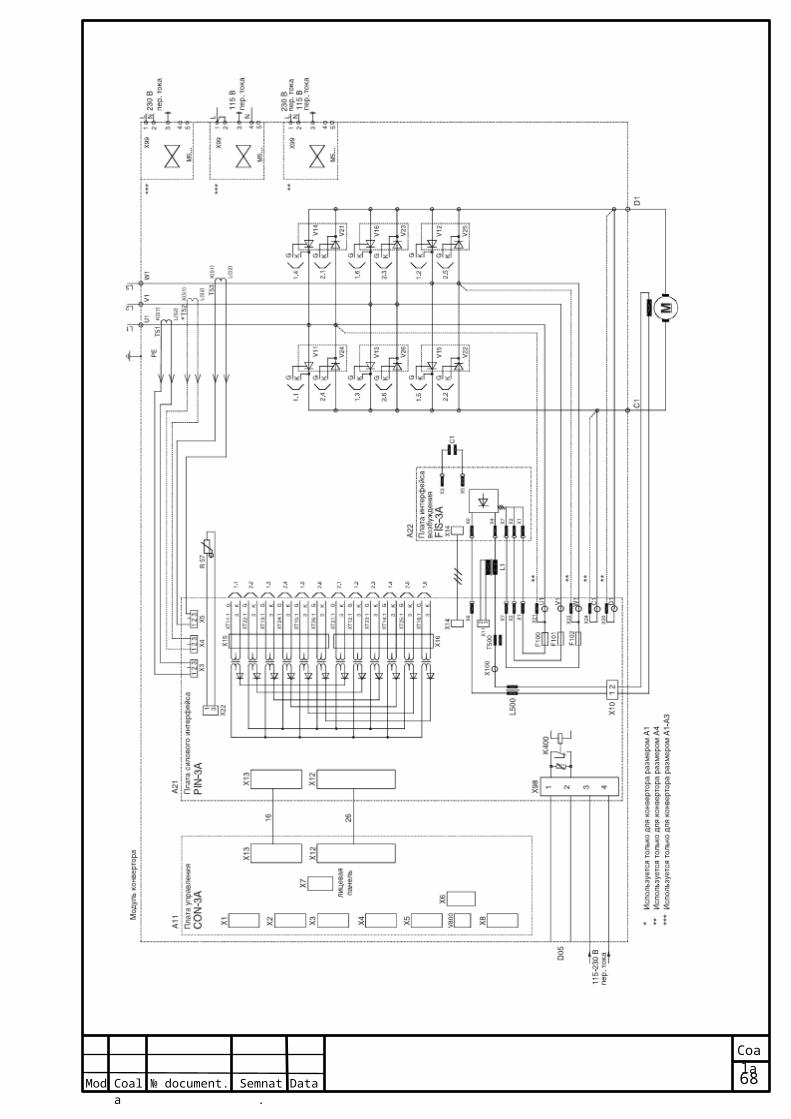
Fig.2.13 Schema generală a convertoarelor DCS-400
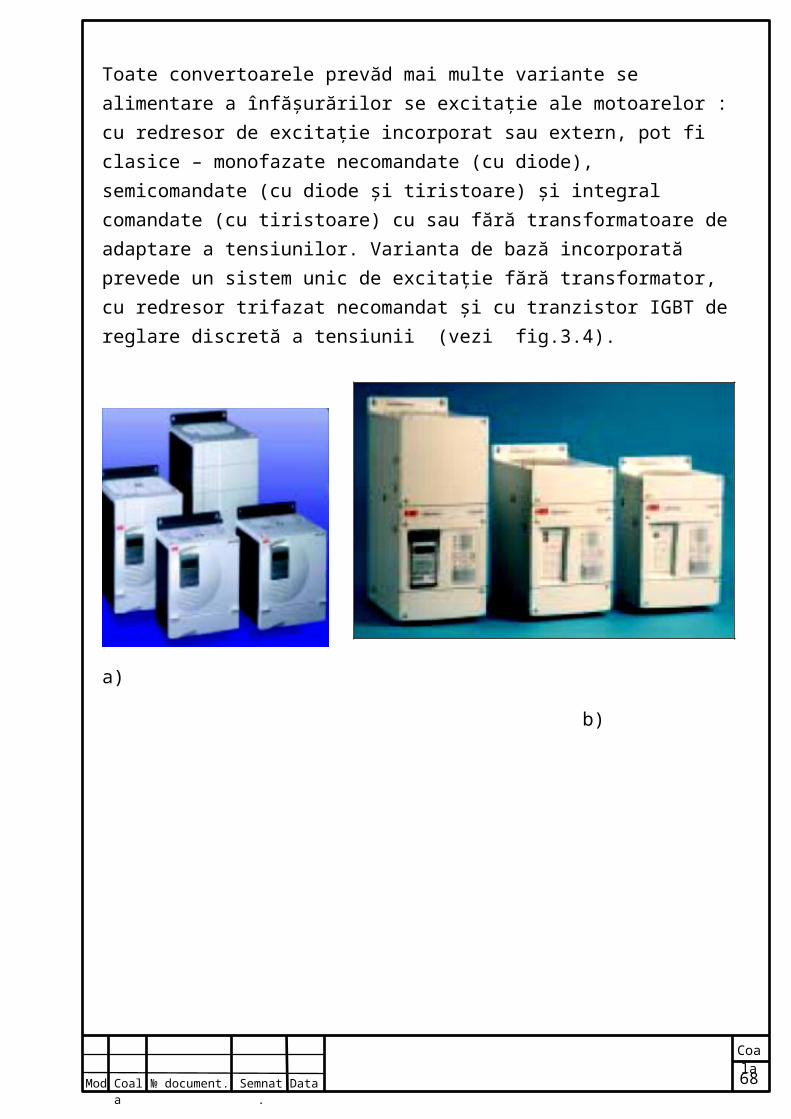
Toate convertoarele prevăd mai multe variante se alimentare a înfăşurărilor se excitaţie ale motoarelor : cu redresor de excitaţie incorporat sau extern, pot fi clasice – monofazate necomandate (cu diode), semicomandate (cu diode şi tiristoare) şi integral comandate (cu tiristoare) cu sau fără transformatoare de adaptare a tensiunilor. Varianta de bază incorporată prevede un sistem unic de
Mod Coala
№ document. Semnat.
Data
Coala
68
excitaţie fără transformator, cu redresor trifazat necomandat şi cu tranzistor IGBT de reglare discretă a tensiunii (vezi fig.3.4).
a)
b)
c)
Fig.2.14 Convertoare de curent DCS-400(a), DCS-500(b) şi DCS-600(c)
Mod Coala
№ document. Semnat.
Data
Coala
68
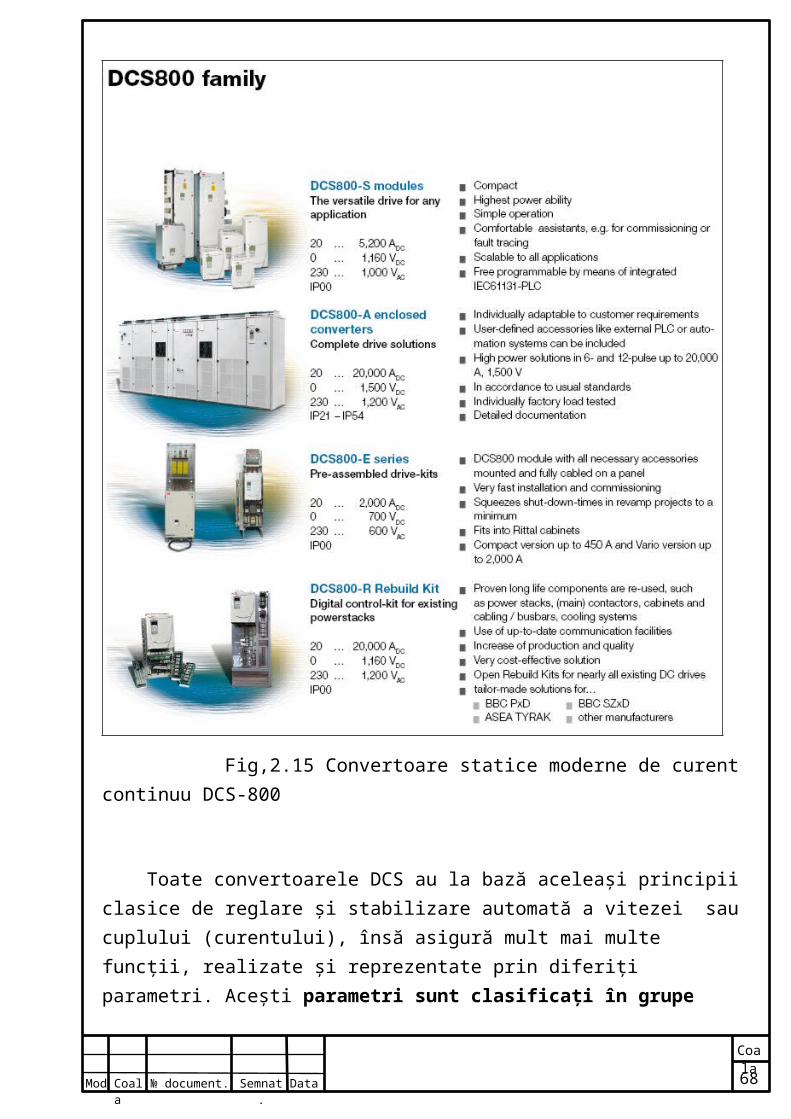
Fig,2.15 Convertoare statice moderne de curent continuu DCS-800
Toate convertoarele DCS au la bază aceleaşi principii clasice de reglare şi stabilizare automată a vitezei sau cuplului (curentului), însă asigură mult mai multe funcţii, realizate şi reprezentate prin diferiţi parametri. Aceşti parametri sunt clasificaţi în grupe funcţionale, numerotate prin 2 cifre, urmate de un index tot din 2 cifre, care identifică numărul parametrului din grupă, toate fiind luate în paranteze, de exemplu (04.22). Convertoarele mai vechi DCS-400 conţineau 9 grupe funcţionale (a motorului , sistemului de excitaţie, regulatoarelor PID etc), iar DCS-600–36 de
Mod Coala
№ document. Semnat.
Data
Coala
68
grupe parametrice. Deoarece numărul parametrilor este foarte mare, ei sunt grupaţi, de asemenea, în seturi de utilizare, numite macrosuri ( setul standard de reglare a vitezei, a cuplului etc). Un astfel de concept a favorizat o utilizare universală a convertoarelor DCS, inclusiv ca surse de excitaţie.
Seria de convertoare DCS-500 este reprezentat printrun larg diapazon de actionari de curent continuu cu caracteristici si fiabilitate inalta destinate pentru alimenarea si comanda rotoarelor masinilor de curent continuu. DCS-500 este o actionare programabila libera satisfacind cerintele oricaror utilizari. DCS-500 in calitate de modul de putere a convertorului, reprezinta un spectru larg de instalatii care satisface urmatorul diapazon de curenti de la 25A la 5200A, cappabili de a fi utilizati in toate sistemele trifazate.
Spectrul de utilizare in industrie este destul de larg si este prezentat mai jos:
Metalurgie; Industria cartonului; Prelucrarea materialelor; Incercare instalatiilor; Industria alimentara; Poligrafie; Fabricare produselor din masa plestica si cauciuc; Platforme de foraj; Industria magnetilor; Electroliza; Instalatii de incalcare a acumulatoarelor.
2.2.2 Scheme de conexiuni exterioare şi componenţa elementelor principale
Funcţionarea convertoarelor DCS este determinată de opţiunile parametrilor menţionaţi, precum şi de semnalele de prescriere (referinţă) şi de reacţie de la traductoarele de viteză, curent, tensiune. Toţi parametrii şi semnalele se reprezintă în unităţi diferite : în procente faţă de valorile nominale sau maximale, în cod binar de 16 biţi, în care funcţionează microcontrolerul, iar parametrii principali se indică pe panoul de comandă şi vizualizare în unităţi absolute (fig.2.13). Fiecare parametru şi semnal de măsurare are subprogramul său propriu, în care calibrarea constituie una din funcţiile obligatorii. Măsurarea vitezei, de exemplu, poate avea 3 variante de traductoare în circuitul de reacţie (fig.2.14), care asigură precizii diferite :
Mod Coala
№ document. Semnat.
Data
Coala
68
- cu tahogenerator analogic clasic de curent continuu în calitate de tahometru;
- cu traductor discret (fotoelectronic) de viteză cu frecvenţă înaltă a impulsurilor;
- cu calculare după tensiunea electromotoare măsurată la un flux constant .
În ultimul caz tensiunea electromotoare se calculează pe baza măsurării tensiunii ţi şi curentului redresat, ţinând cont de căderile active şi inductive de tensiune :
e0 = u A − R A iA − LA
diAdt .
Pentru simplificare, prin 3 transformatoare de curent se măsoară curentul alternativ din fiecare fază de intrare a convertorului, care apoi se redresează şi se calibrează. În plus la aceşti parametri, se mai măsoară curentul de excitaţie şi tensiunea alternativă de alimentare, care se controlează permanent şi, în caz de dispariţie, este prevăzută o reconectare automată temporizată după restabilirea ei. Dacă motorul include un traductor de temperatură, atunci se asigură o monitorizare permanentă a temperaturii şi o protecţie directă a lui la supraîncălzire.
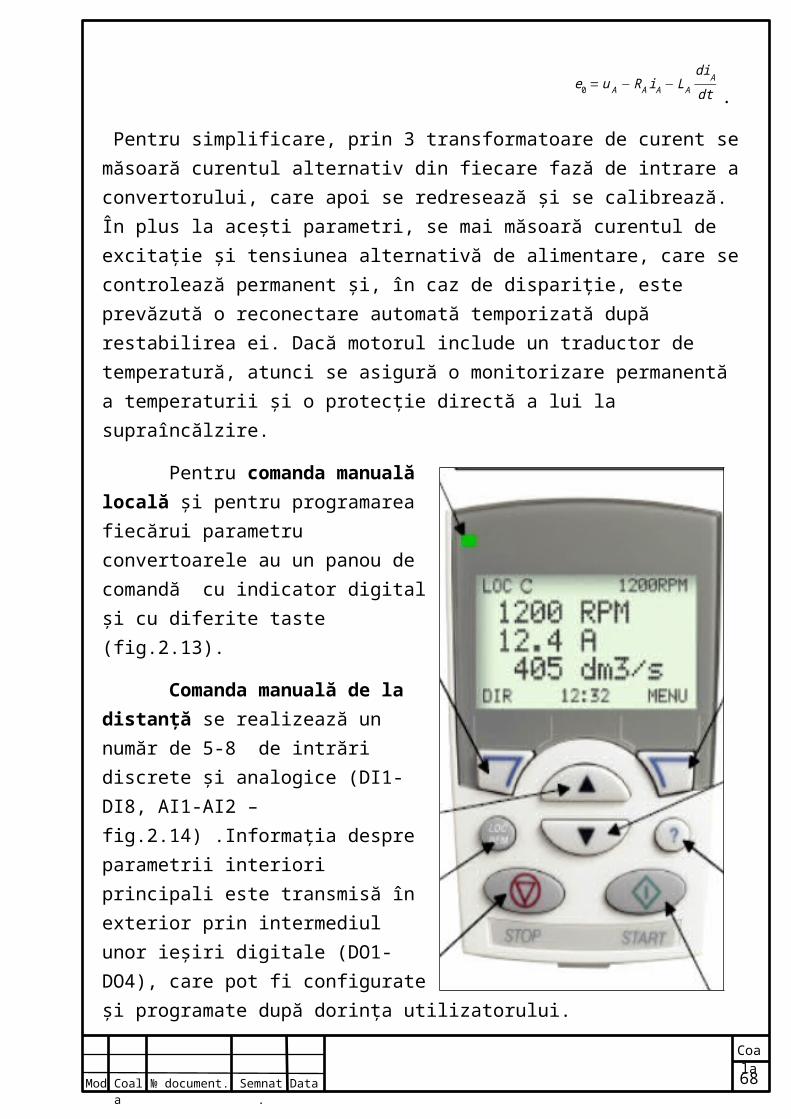
Pentru comanda manuală locală şi pentru programarea fiecărui parametru convertoarele au un panou de comandă cu indicator digital şi cu diferite taste (fig.2.13).
Comanda manuală de la distanţă se realizează un număr de 5-8 de intrări discrete şi analogice (DI1-DI8, AI1-AI2 – fig.2.14) .Informaţia despre parametrii interiori principali este transmisă în exterior prin intermediul unor ieşiri digitale (DO1-DO4), care pot fi configurate şi programate după dorinţa utilizatorului.
Comanda automatizată a convertoarelor DCS poate fi făcută, de asemenea, din exterior printr-un controler programabil de automatizare (PLC) sau printr-un computator cu soft special de
Mod Coala
№ document. Semnat.
Data
Coala
68
programare computerizată Drives Windown, utilizând o interfaţă standardizată cu un cablu RS232 .
În caz de avarii convertorul este deconectat automat de la reţea prin intermediul contactorului de intrare K1 (fig.2.14).
Fig.2.16 Panou de comandă DCS-800
Mod Coala
№ document. Semnat.
Data
Coala
68
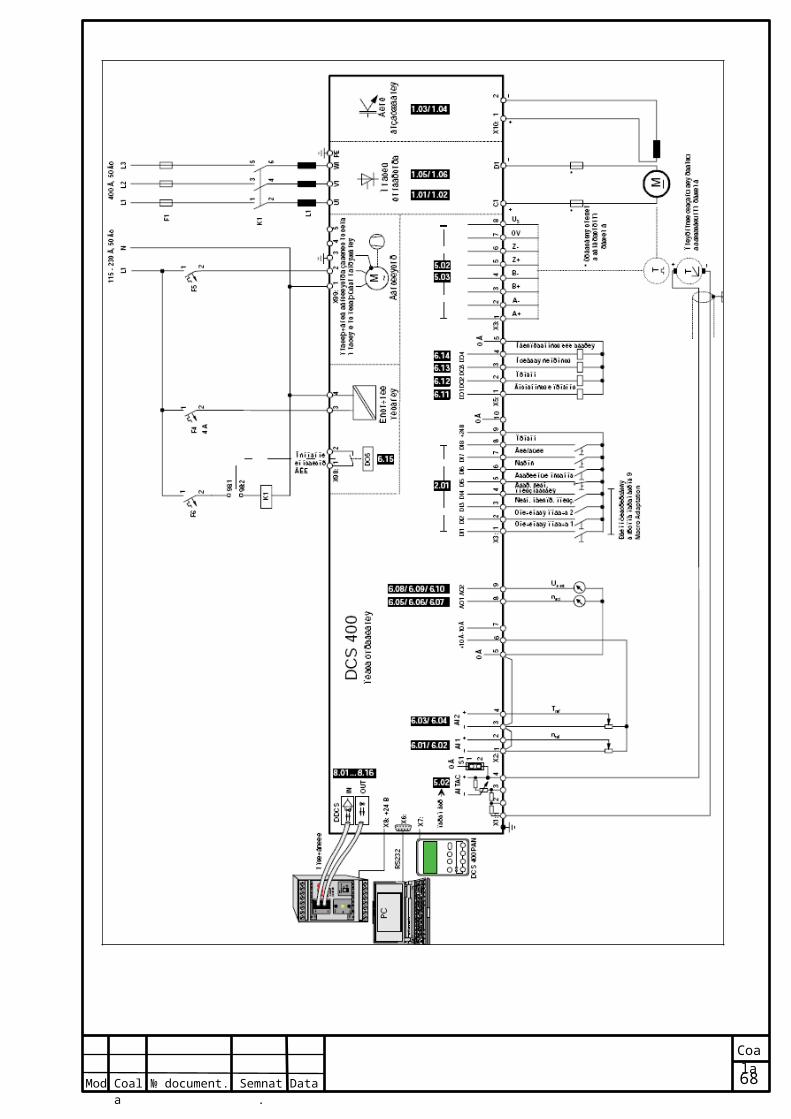
Fig.2.17 Schema de conexiuni exterioare ale convertoarelor DCS-400
Mod Coala
№ document. Semnat.
Data
Coala
68
Comanda digitală a microcontrolerului de 16 biţi se efectuează prin semnale digitale în forma unor cuvinte (coduri) binare de comandă de 16 biţi. Fiecare bit din aceste cuvinte are funcţia şi semnificaţia sa , de exemplu comanda discretă a contactorului de alimentare a convertorului indusului sau de excitaţie, comanda locală sau la distanţă etc. Codurile digitale de comandă se clasifică în codul principal (MAIN CONTROL WORD–MCW), în coduri auxiliare (ACW) şi în coduri de stare (MAIN STATUS WORD –MSW) a convertorului. Bitul 0 al codului principal prevede, de exemplu, comanda de conectare ON sau deconectare OFF1 cu pornire şi oprire lină; bitul 1 - deconectarea avariată şi oprirea naturală a motorului OFF2; bitul 2–frânarea dinamică OFF3; bitul 3–comanda de funcţionare RUN cu semnalul prescris; bitul 4 – comanda RAMP OUT ZERO de resetare a elementului de accelerare /decelerare temporizată etc. În mod analogic sunt programate şi codurile auxiliare şi de stare (Status).
Semnalele analogice şi discrete variabile sunt supuse unei transformări duble. În cazul utilizării unor traductoare digitale (encodere incrementale) de viteză, frecvenţa maximă a impulsurilor lor, proporţională cu viteza motorului, nu depăşeşte 15-20kHz. Pentru a transforma aceste impulsuri discrete în semnal numeric de 16 biţi poate fi utilizat un numărător de 16 biţi cu intrare serială, frecvenţa maximă de lucru a căruia constituie 32kHz (215=32768). Pentru a avea o anumită rezervă, frecvenţa maximă se limitează la o valoare de 20kHz=20000Hz, căreea trebuie să-i corespundă o viteză maximă a motorului. Frecvenţa curentă a traductorului de viteză se raportează la această valoare maximă, fiind transformată astfel în procente, sau rot/min, deoarece mărimile principale pe panoul de comandă al operatorului se reprezintă în unităţile lor reale. Evident, că şi semnalul tahogeneratorului analogic trebuie mai întâi calibrat la tensiunea maximă de 10V, iar apoi transformat în procente împreună cu semnalul analogic sumar de prescriere (referinţă) a vitezei . Aceste semnale se transformă apoi din procente în coduri binare de 16 sau 12 biţi pentru a putea fi aplicate la intrarea regulatorului digital de viteză . Pentru această transformare se foloseşte o anumită scară, care trebuie să asigure o precizie necesară, Pentru semnalele procentuale este suficientă o precizie de 0,1% la fiecare semnal de tact, adică la 1Hz. Ca urmare, scara de codificare a acestor semnale trebuie să fie 1(Hz) : 0,1%.
Semnalele analogice variabile de curenţi şi tensiuni sunt calibrate şi codificate ca şi semnalul analogic de viteză, utilizând convertoare analogo – numerice de 12 biţi
Mod Coala
№ document. Semnat.
Data
Coala
68
cu o precizie mai mică şi o frecvenţă maximă 4096 Hz (212=4096), precum şi scări diferite, în particular o scară digitală 4096=100% pentru regulatoare, sau o scară absolută 1:1A; 1:1V; 1:1Nm;; 1:1 rot/min – pentru panoul de comandă şi programare.
Constantele de timp se calibrează şi se codifică cu o scară, aleasă, de asemenea, în funcţie de precizia necesară. De exemplu, cea mai mică valoare a constantelor filtrelor nu este mai mică de 0,001s, de aceea scara de codificare a acestor constante de timp poate fi aleasă 1 : 0,001s . Valoarea minimă a constantelor regulatoarelor şi elementului de prescriere a acceleraţie /deceleraţiei constituie 0,01s, de aceea scara lor se alege în mod corespunzător – 1 : 0,01s. În mod analogic se alege scara de transformare a celorlalţi parametri.
2.2.3 Scheme de forţă ale redresoarelor indusului de 2 sau 4 cadrane
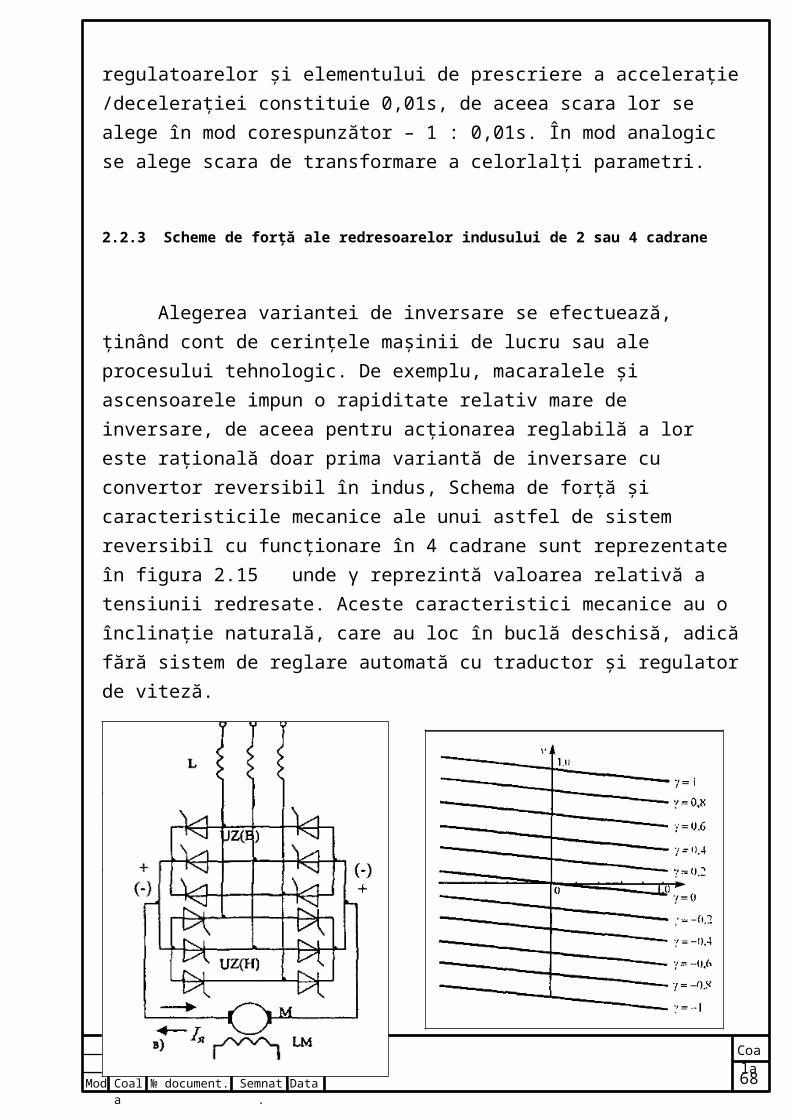
Alegerea variantei de inversare se efectuează, ţinând cont de cerinţele maşinii de lucru sau ale procesului tehnologic. De exemplu, macaralele şi ascensoarele impun o rapiditate relativ mare de inversare, de aceea pentru acţionarea reglabilă a lor este raţională doar prima variantă de inversare cu convertor reversibil în indus, Schema de forţă şi caracteristicile mecanice ale unui astfel de sistem reversibil cu funcţionare în 4 cadrane sunt reprezentate în figura 2.15 unde γ reprezintă valoarea relativă a tensiunii redresate. Aceste caracteristici mecanice au o înclinaţie naturală, care au loc în buclă deschisă, adică fără sistem de reglare automată cu traductor şi regulator de viteză.
Mod Coala
№ document. Semnat.
Data
Coala
68
b)
Fig.2.18 Schema de forţă (a) şi caracteristicile mecanice (b) ale unui redresor reversibil cu 2 punţi trifazate şi cu funcţionare în 4 cadrane
Redresoarele reversibile de 4 cadrane însă pot avea, la rândul lor, 2 principii de comandă : separată şi simultană. Fiecare din aceste principii este însoţit de unele avantaje şi dezavantaje, care sunt analizate în continuare.
2.2.4 Convertoare de excitaţie
Avem doua tipuri de convertoare pentru excitatia motorului: necomandate si semicomandate. In proiectul nostru am ales convertor semicomandat pentru excitatia motorului de tipul SDCS-FEX-2A cu urmatorii parametric:
Punte semiicomandata de un cadran; Comanda cu microprocesor cu ajutorul unui sistem electronic alimentat de
convertorul circuitului indusului; Constructia si componentele sint calculate la tensiune de 600V curent
alternativ;
Mod Coala
№ document. Semnat.
Data
Coala
68
Excitatia cu o constatta mica de timp este posibila cu o rezerva corespunzatoare de tensiune;
Tensiunea de iesire Uie = (0.5 – 1.1) Uint; Recomandari: tensiunea de excitatie (0.6 – 0.8)Uret.
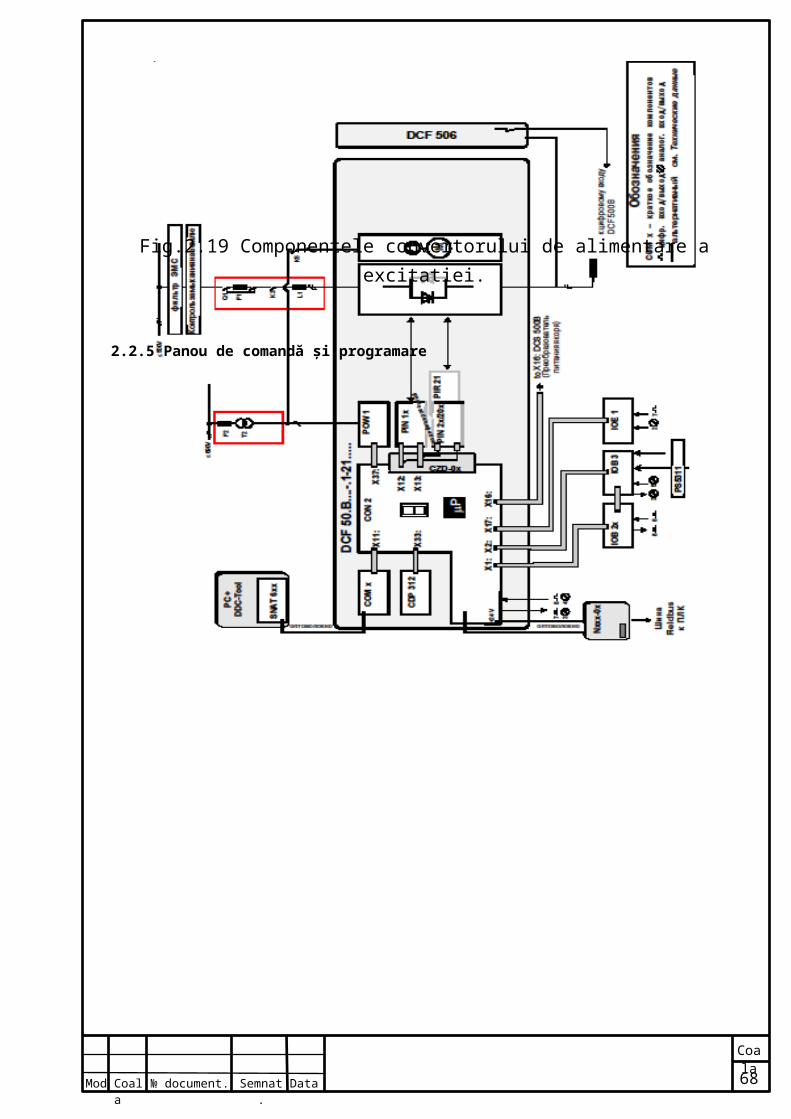
In fig.2.16 sint reprezentate componentele convertorului de alimentare a excitatiei.
Fig.2.19 Componentele convertorului de alimentare a excitatiei.
2.2.5 Panou de comandă şi programare
Mod Coala
№ document. Semnat.
Data
Coala
68
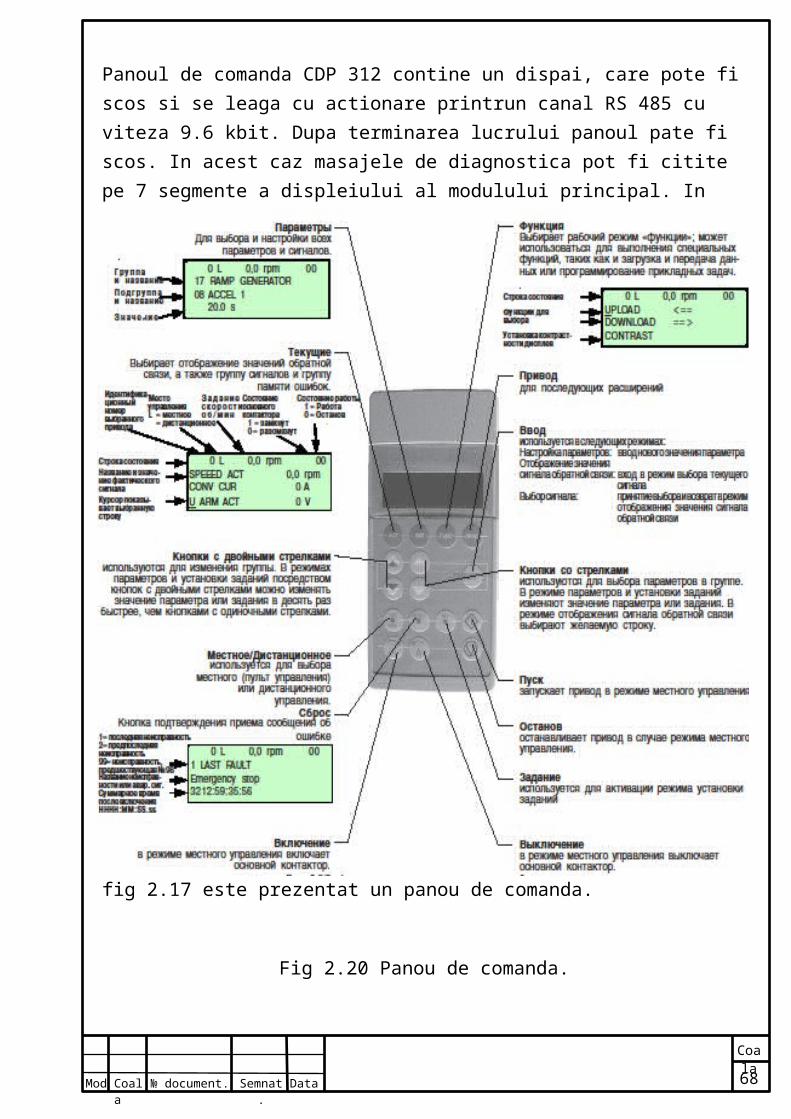
Panoul de comanda CDP 312 contine un dispai, care pote fi scos si se leaga cu actionare printrun canal RS 485 cu viteza 9.6 kbit. Dupa terminarea lucrului panoul pate fi scos. In acest caz masajele de diagnostica pot fi citite pe 7 segmente a displeiului al modulului principal. In fig 2.17 este prezentat un panou de comanda.
Fig 2.20 Panou de comanda.
Panou de comanda este alcatuit din: 16 butoane in 3 grupe functionale; JC ecran care contine 4 rinduri cite 20 simboluri; limbi: germana,engleza,franceza,italiana; componente adaugatoare pentru CDP 312- cablu 3m pentru a utiliza pulitu la
Mod Coala
№ document. Semnat.
Data
Coala
68
distanta fata de panoul principal; set de montaare a panoului in usa dulapului de distributie.
2.2.6 Dispozitive auxiliare
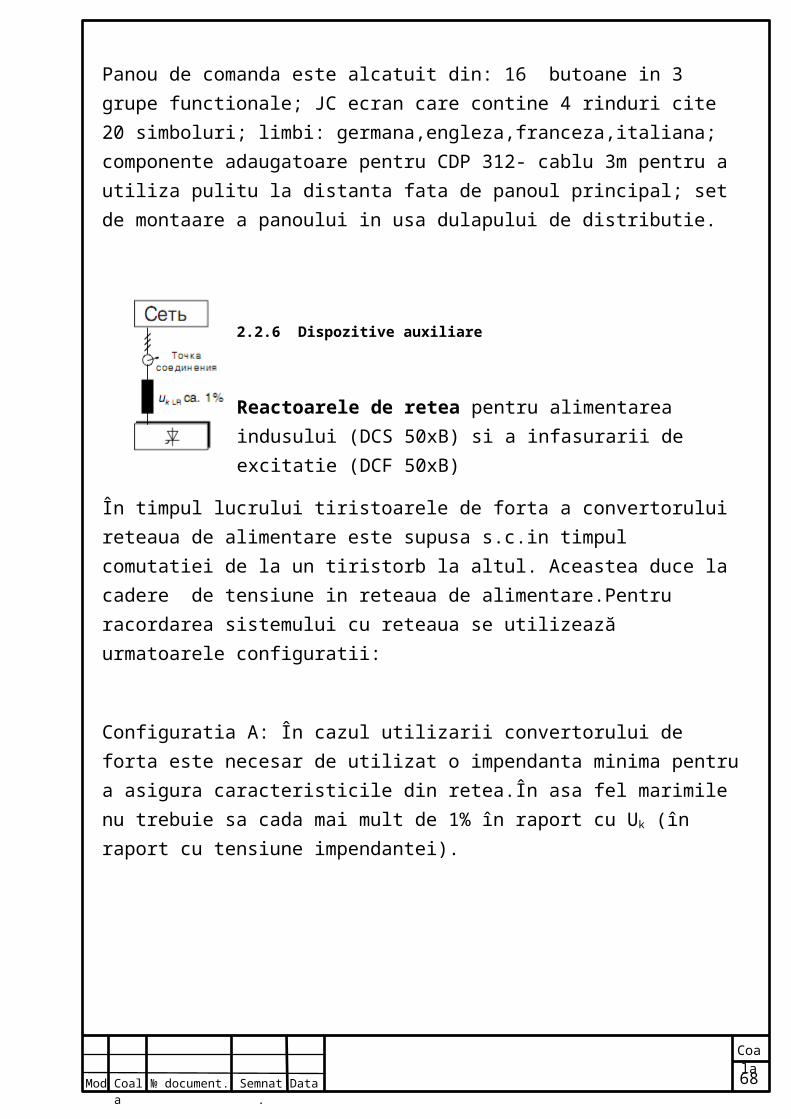
Reactoarele de retea pentru alimentarea indusului (DCS 50xB) si a infasurarii de excitatie (DCF 50xB)
În timpul lucrului tiristoarele de forta a convertorului reteaua de alimentare este supusa s.c.in timpul comutatiei de la un tiristorb la altul. Aceastea duce la cadere de tensiune in reteaua de alimentare.Pentru racordarea sistemului cu reteaua se utilizează urmatoarele configuratii:
Configuratia A: În cazul utilizarii convertorului de forta este necesar de utilizat o impendanta minima pentru a asigura caracteristicile din retea.În asa fel marimile nu trebuie sa cada mai mult de 1% în raport cu Uk (în raport cu tensiune impendantei).
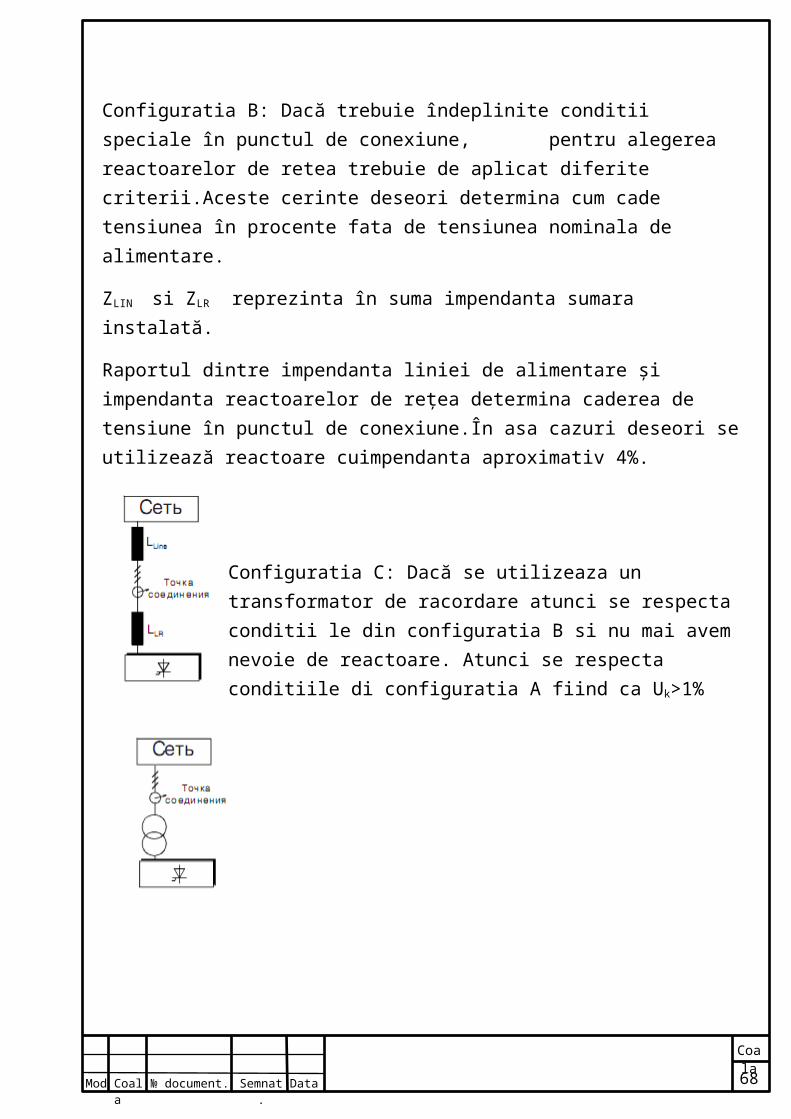
Configuratia B: Dacă trebuie îndeplinite conditii speciale în punctul de conexiune, pentru alegerea reactoarelor de retea trebuie de aplicat diferite criterii.Aceste cerinte deseori determina cum cade tensiunea în procente fata de tensiunea nominala de alimentare.
ZLIN si ZLR reprezinta în suma impendanta sumara instalată.
Raportul dintre impendanta liniei de alimentare şi impendanta reactoarelor de reţea determina caderea de tensiune în punctul de conexiune.În asa cazuri deseori se utilizează reactoare cuimpendanta aproximativ 4%.
Mod Coala
№ document. Semnat.
Data
Coala
68
Configuratia C: Dacă se utilizeaza un transformator de racordare atunci se respecta conditii le din configuratia B si nu mai avem nevoie de reactoare. Atunci se respecta conditiile di configuratia A fiind ca Uk>1%
Fig.2.21 Reactoare de retea
Sigurante fuzibile pentru pentru sursa de alimentare a indusului şi a înfasurarii de excitatie actionarii de curent continuu.
Generalitati
Schema structurala
Elementele de protectie asa cum sunt sigurantele fuzibile sau instslatii de declansare la supracurent, se utilizeaza atunci cînd supracurentul nu poate fi redus de tot.
Fig.2.22 Amplasarea elementelor de protectie in convertorul ce alimenteaza indusul.
Recomandari de ABB
Mod Coala
№ document. Semnat.
Data
Coala
68
O protectie buna la scurt circuit , cum este specificat în standartul EN50178 este posibila numai cu sigurante semiconductoare.
Fig. 2.23 Aplasarea elementelor de protectie in cadrul convertorului
3. SISTEME DE REGLARE AUTOMATĂ (SRA) ALE ACŢIONĂRILOR DE CURENT CONTINUU
3.1 Structura generală şi principii de reglare
Scopul principal al sistemelor de reglare automată (SRA) cu funcţionare în buclă închisă constă în reglarea coordonată şi într-un diapazon larg, optimizarea proceselor dinamice, limitarea valorilor maxime şi stabilizarea parametrilor principali ai motorului de acţionare electrică reglabilă în conformitate cu cerinţele impuse. Aceste sisteme lichidează de fapt unele dezavantaje ale motoarelor de curent continuu (MCC) la o funcţionare naturală a lor şi le atribuie proprietăţi şi caracteristici noi. În particular, caracteristicile mecanice înclinate şi dependente de cuplul de sarcină de la arborele motorului SRA le transformă în caracteristici absolut orizontale şi invariante (independente) de cuplul de sarcină. Un alt dezavantaj lichidat de aceste sisteme constă în pornirea şi frânarea lină cu cuplu (curent) constant, însă flexibil (ales după dorinţă şi necesitate). SRA mai asigură, de asemenea, o optimizare a acestor şi altor procese dinamice în raport cu creşterea
Mod Coala
№ document. Semnat.
Data
Coala
68
preciziei şi rapidităţii lor fără o depăşire substanţială a parametrilor nominali şi fără oscilaţii sau alte regimuri nedorite.
Structura generală a unui sistem de reglare automată, care permite obţinerea acestor proprietăţi şi caracteristici noi ale MCC este reprezentată în figura 3.22. El conţine un redresor comandat (Управляемый Преобразователь) şi un SRA, constituit din 2 bucle închise : bucla interioară cu traductor de curent (датчик тока ДТ) şi regulator de curent (регулятор тока РТ) şi bucla exterioară cu traductor de viteză (Тахогенератор TГ), regulator de viteză (Pегулятор Cкорости РС) şi dispozitiv de prescriere a vitezei (задающее устройство ЗУ).
Fig.3.1 Structura generală a unui sistem tipic de reglare automată a MCC
Un astfel de SRA, cu 2 bucle legate în cascadă (serie), asigură, pe de o parte, caracteristici mecanice orizontale, adică o stabilizare a vitezei motorului Ω = const la un cuplu de sarcină MS = var, iar pe de altă parte – o limitare foarte simplă a parametrului maxim de ieşire buclei interioare – curentului maxim al indusului motorului. Stabilizarea aceasta se obţine datorită principiului de funcţionare în buclă închisă cu reacţie negativă, prin care regulatorul PC controlează permanent abaterea vitezei reale sau a semnalului ei proporţional de reacţie UO.C.(обратной связи) faţă de mărimea prescrisă constantă a vitezei de la intrare U3.C.=const (задание скорости), iar semnul acestei abateri signUέ=sign(U3.C-UO.C.) condiţionează o modificare opusă a tensiunii redresate, care readuce viteza reală din nou la valoarea ei prescrisă.
Mod Coala
№ document. Semnat.
Data
Coala
68
Limitarea curentului maxim este realizată cu ajutorul dispozitivului БО (Блок ограничения), care limitează tensiunea de ieşire a regulatorului de viteză (PC), la o valoare, care determină valoarea necesară a curentului maxim, deoarece el serveşte ca dispozitiv de prescriere a curentului pentru bucla interioară. Limitarea valorii maxime a curentului este impusă de colectorul şi periile motorului.
Analiza, calculul şi modelarea SRA pot fi efectuate cel mai simplu pe baza schemelor structurale, fiecare element principal al cărora este reprezentat prin funcţia sa de transfer. Însă la început, când funcţiile de transfer nu se cunosc, SRA se reprezintă printr-o schemă – bloc, care scoate în evidenţă elementele principale şi modul de interacţiune al lor. Această schemă se ia deseori ca bază în procesul de elaborare a schemei structurale. O astfel de schemă bloc pentru SAER, analizat mai sus şi constituit dintr-un motor (M) şi convertor (C), un traductor (TC) şi regulator de curent (RC), un traductor (TV) şi regulator de viteză (RV), este arătată în fig. 3.2.
Ώ UPV
Fig.3.2 Schema bloc a sistemului de reglare automată a MCC O astfel de structură tipică este realizată şi în schema funcţională a unui convertor reversibil de 4 cadrane din figura 3.14. Principiul ei de funcţionare este descris în paragraful 3.2, de aceea în continuare vor fi date unele aspecte, legate de principiile de acordare, modelare şi de calcul ale ei, care să asigure o stabilitate bună şi o funcţionare optimă. Stabilitatea şi funcţionarea optimă este absolut necesară în fiecare caz de implementare a unui SRA cu traductor şi regulator în buclă închisă, deoarece din teoria sistemelor se ştie, că fără calcule şi acordare optimă un astfel de
Mod Coala
№ document. Semnat.
Data
Coala
68
sistem poate să aibă o funcţionare neoptimală, sau poate chiar să fie instabil şi să nu poată funcţiona de loc.
3.1.1 Principii generale de cercetare a regimurilor dinamice şi acordare optimă a SRA
Acordarea optimă a unui sistem de reglare automată subînţelege acordarea sau alegerea optimă a tipului şi a parametrilor regulatoarelor, care să asigure o comportare bună (cu rapiditate mare şi fără oscilaţii sau suprareglaje) atât în regimuri statice, cât şi în regimuri dinamice. Însă proprietăţile unui sistem închis de reglare depind nu numai de tipul şi parametrii regulatoarelor, ci şi de tipul şi parametrii elementelor obiectului de reglare (OR), precum şi de corectitudinea de alegere interdependentă a parametrilor regulatoarelor în raport cu parametrii OR. Numai o astfel de alegere interdependentă, reciprocă şi compensatoare poate asigura o comportare optimă a SRA în regimuri statice şi dinamice. Într-adevăr, dacă OR conţine, de exemplu, nişte elemente inerţiale cu constante de timp TOR aperiodice mari sau cu coeficienţi de transfer (amplificare) subunitari (k OR<1) , atunci se poate obţine o rapiditate maximă a SRA numai dacă parametrii regulatoarelor vor fi aleşi opuşi, adică cu constante de anticipare (derivative) de timp TR şi cu coeficienţi de amplificare supraunitari kR=1/kOR >1. Această alegere univocă (de la obiect spre regulator) este determinată de faptul, că parametrii OR nu pot fi schimbaţi, întrucât ei depind de principiul de funcţionare şi construcţia lor, iar parametri regulatorului pot fi modificaţi uşor, deoarece regulatorul reprezintă un element electronic realizat cu un amplificator operaţional universal .
Aşa dar, pentru o optimizare a SRA este necesar de ştiut, sau de calculat în caz dacă nu se cunosc, atât parametrii regimului static (coeficienţii de transfer), cât şi parametrii regimurilor dinamice (constantele de timp) ale obiectului de reglare. Acest obiect, de regulă, este alcătuit din mai multe elemente, care pot fi analizate separat sau împreună ca un singur element sumar şi echivalent. De exemplu, în cazul SAER, analizat mai sus, OR include convertorul (redresorul comandat), motorul şi traductoarele lor. Pentru o analiză mai simplă şi mai eficientă, motorul se împarte , la rândul său, în 3 elemente componente de natură diferită şi cu parametri diferiţi – partea electromecanică (circuitul indusului), partea mecanică cu momentul sumar de inerţie şi partea electromagnetică a înfăşurării de excitaţie .
Mod Coala
№ document. Semnat.
Data
Coala
68
Cea mai simplă metodă de analiză şi cercetare a regimurilor dinamice ale unui SRA şi a stabilităţii lui se bazează pe schema structurală totală, elementele căreea sunt reprezentate prin funcţii de transfer sau prin funcţii grafice tipice. Aceste funcţii se alcătuiesc pe baza ecuaţiilor funcţionale diferenţiale sau algebrice ale fiecărui element, sau a unui model matematic în cazul unui element mai complex. Pentru aceasta ecuaţiile diferenţiale se transformă în ecuaţii algebrice simple, înlocuind parametrii reali şi variaţiile lor în timp prin imaginile lor cu variaţii în funcţie de un alt parametru – parametrul complex şi variabil al Transformatei continue Laplace s=d/dt . Această metodă este cunoscută în teoria sistemelor automate şi în electrotehnică ca metodă operaţională.
O funcţie de transfer (f.d.t.), notată de exemplu prin H(s), se defineşte ca raportul dintre imaginea mărimii de ieşire a unui element sau a unei bucle, (ca o funcţie de parametrul s) către imaginea mărimii de intrare pentru condiţii iniţiale nule, adică reprezintă coeficientul complex ( dinamic) de amplificare sau transfer al unui element sau al unei bucle închise.
H ( s )=
U E( s )U I( s ) .
Cunoscând această funcţie, adică cunoscând valorile constantelor de timp şi coeficientului de transfer, se poate determina variaţia dinamică a mărimii de ieşire:
U E (s ) = H ( s) U I ( s) .
Funcţia de transfer descrie, de asemenea, şi regimul static al elementului respectiv - ca un caz particular al regimului dinamic pentru s=0. Reprezentând astfel fiecare element şi conectând unul câte unul conform ordinii de transmitere a semnalelor din schema funcţională sau din schema bloc, se obţine schema structurală a buclei sau a SRA, alcătuit din mai multe bucle. Această schemă permite cercetarea simplificată şi o modelare a regimurilor dinamice principale, precum şi a regimului static ca un caz particular.
În cazul sistemul de acţionare menţionat mai sus elementul principal al obiectului de reglare este motorul de curent continuu, care poate fi reprezentat prin câteva funcţii de transfer, deoarece are mai multe părţi componente, care în regim dinamic se descrie prin mai multe ecuaţii algebrice şi diferenţiale, descrise mai jos
Mod Coala
№ document. Semnat.
Data
Coala
68
3.2 Regulatoare analogice tipice
Fiecare regulator al SRA are 2 semnale de intrare – unul de prescriere UP şi altul de reacţie negativă UR, proporţională cu mărimea principală de ieşire a buclei, însă datorită semnelor lor opuse, regulatorul calculează diferenţa sau abaterea lor Uέ=UP-UR. Această abatere este apoi prelucrată de regulator conform funcţiei sale de transfer, care depinde de tipul regulatorului. Există mai multe tipuri de regulatoare tipice, des utilizate în practică, cu diferite funcţii tipice de transfer, iar ca urmare şi cu diferite proprietăţi statice şi dinamice. O răspândire mai largă au căpătat-o regulatoarele : proporţionale (P), integrale (I), proporţional – integrale (PI) şi proporţional – integral - diferenţiale (PID). Acestor denumiri sau tipuri le corespund funcţiile de transfer, pe care regulatoarele le realizează în transmiterea semnalului de la intrare spre ieşire şi care pot fi scrise, ca funcţii continue, în felul următor .
F.d.t. a regulatorului proporţional H P(s )=
U μ( s )U ε (s )
=KP ,
unde Kp- coeficientul de amplificare proporţională ; U μ( s ) - imaginea mărimii de
ieşire; ¿U ε( s )- imaginea mărimii de intrare (abatere) ;
F.d.t. a regulatorului integral H I( s )=
Uμ (s )U ε( s )
= 1T I⋅s
=K Is ,
unde TI – constanta integrală de timp, egală cu intervalul de timp, în decursul căruia mărimea de regulatorului ieşire atinge valoarea mărimii de intrare ; KI=1/TI
F.d.t. a regulatorului PI H PI (S )=HP( S )+H I (S )=KP+
1T I S
=1+T IZ sT I s ,
undeT IZ=KP⋅T I - constanta izodromă de timp, egală cu intervalul de timp în decursul căruia mărimea de ieşire atinge valoarea dublă a mărimii de intrare ;
F.d.t a regulatorului PIDH PID(S )=HP( S )+H I (S )+H D( S )=K P+
1T I S
+TD S
unde: TD – constanta de derivare, TA= TD/KP – constanta de anticipare, care acţionează numai în regimuri dinamice, când s≠0 . Realizarea practică a acestor funcţii se efectuează, de regulă, cu ajutorul amplificatoarelor operaţionale universale. În figura 3.29,a sunt reprezentate tipurile
Mod Coala
№ document. Semnat.
Data
Coala
68
principale de regulatoare : a) - PI, realizat cu 3 amplificatoare, dintre care A1 constituie un regulator proporţional, A2- un regulator integral, A3 – însumează ambele componente pentru obţinerea regulatorului PI; b) – regulatorul PI cu un singur amplificator, care realizează concomitent toate funcţiile necesare ; c) – regulatorul PID, realizat cu un singur amplificator. Aşa dar, fiecare regulator poate fi realizat cu un singur amplificator cu funcţii complexe, sau cu mai multe amplificatoare operaţionale cu funcţii individuale . Ultima variantă permite o reglare autonomă a fiecărei funcţii sau parametru de acord, pe când în prima variantă variaţia unui parametru conduce la o variaţie interdependentă a altui parametru, ceea ce condiţionează unele probleme în procesul de acordare al SRA.
a)
b) c) Fig.3.3 Scheme de realizare a regulatoarelor tipice PI (a,b) şi PID (c) Parametrii de acord ai acestor regulatoare se exprimă prin rezistenţele şi condensatoarele lor de realizare conform relaţiilor următoare :
K P =
R RRRR ; T I =RRCRR ;
T IZ = RRRCRR ; TD = RRRCR ; T A = RRCR Regulatorul proporţional, la fel cât şi cel integral, posedă unele avantaje şi dezavantaje. De exemplu, regulatorul pur proporţional P are proprietăţi dinamice bune, asigură o stabilitate suficientă, însă proprietăţile statice (precizia statică) sunt scăzute. În figura
Mod Coala
№ document. Semnat.
Data
Coala
68
3.30 este arătată influenţa generală a 3 valori ale coeficientului KP al regulatorului proporţional asupra semnalului de ieşire la un semnal treaptă unitară a semnalului de prescriere de la intrare UP(t) =1(t). Din aceste procese se observă, că cu cît coeficientul KP este mai mare, cu atât şi precizia şi rapiditatea SRA este mai mare (timpul de reglare se micşorează), însă stabilitatea se
Fig.3.4
înrăutăţeşte (apar oscilaţii şi suprareglări mari). Pentru o excludere definitivă a oscilaţiilor, dimpotrivă, KP trebuie sa aibă o valoare relativ mică, însă în acest caz timpul de derulare a proceselor dinamice dimpotrivă creşte. Deoarece aceste cerinţe sunt contradictorii, apare necesitatea alegerii, unei valori de compromis sau optime KP=KP.OPT. Valoarea optimă KP.OPT, asigură un suprareglaj şi oscilaţii minime, la o valoare medie a timpului de reglare. Regulatorul pur integral, dimpotrivă, are proprietăţi dinamice scăzute, asigură o stabilitate redusă, însă proprietăţile statice sunt foarte bune – coeficientul static de amplificare este infinit de mare (când s→0, HI(s) = 1/TIs →∞ ). Un astfel de coeficient asigură, la rândul său, o eroare staţionară nulă în procesul static de stabilizare a mărimii de ieşire şa o variaţie a mărimii de perturbaţie. În legătură cu aceasta în practică o mai largă răspândire au căpătat-o regulatoarele combinate – PI şi PID, care îmbină în mod armonios avantajele şi exclud dezavantajele fiecărei componente în parte. Având în aceste cazuri mai mulţi parametri cu influenţe diferite, se poate obţine, în primul rând, o optimizare a desfăşurării proceselor dinamice . De exemplu, în figura 3.31 este prezentată reacţia unui element aperiodic la un semnal de intrare în formă de treaptă unitară în circuit deschis şi reacţia aceluiaşi element în buclă închisă cu regulator proporţional – integral, iar în figura 3.32 – o modelare asemănătoare, însă pentru un element oscilatoriu de gradul II în circuit deschis şi în buclă închisă cu regulator PID. În ambele cazuri bucla închisă cu regulator PI sau PID asigură o rapiditate mult mai mare, precum şi o desfăşurare mai favorabilă a procesului de pornire ( cu oscilaţii mai mici şi fără suprareglaj).
Fig.3.5 Schema se modelare a unui element aperiodic în circuit deschis şi în buclă închisă cu regulator proporţional – integral PI
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.3.6 Schema de modelare a unui element oscilatoriu în circuit deschis şi în buclă închisă cu regulator PID
3.3 Criterii de acordare optimă ale regulatoarelor tipice
În cazul SRA cu mai multe bucle şi regulatoare PI sau PID sunt necesare însă nişte criterii speciale de alegere a tipului regulatorului şi de calcul a parametrilor lor, deoarece numărul variabilelor şi combinaţiilor lor este mai mare. Pentru aceste scopuri au fost propuse mai multe metode analitice şi experimentale, care au fost numite şi criterii de acordare optimă a regulatoarelor. Dintre cele mai simple şi mai eficiente criterii analitice de acordare optimă fac parte criteriul modulului şi criteriul simetriei (în limba rusă– оптимум по модулю sau технический оптимум şi симметричный оптимум). Conform acestor criterii, alegerea tipului regulatorului, (după cum a fost deja menţionat la început), trebuie făcută în primul rând în dependenţă de funcţia de transfer a obiectului de reglare şi de cerinţele tehnologice impuse. De exemplu, dacă OR are o funcţie de transfer cu un element integrator HOR(s)=1/TORs, atunci conform criteriului modulului trebuie ales un regulator pur proporţional – HR(s)=KP. Dacă OR are o funcţie de transfer aperiodică, sau 2 elemente aperiodice cu constante diferite de timp – una mare TOR şi alta mică Tμ , precum şi un coeficient static de transfer KOR,
HOR ( s ) =
KOR
(1 +TOR s) (1 +T μs ) ,atunci conform criteriului modulului poate fi obţinută o acordare şi comportare bună a sistemului, dacă se alege un regulator PI cu funcţia de transfer :
H R(s )=
1+T R . IZ s
T R . I s ,
Mod Coala
№ document. Semnat.
Data
Coala
68
unde : (1+TR.IZ·s) – reprezintă f.d.t. a unui element proporţional – derivativ (PD) (deoarece este la numărător) cu coeficient unitar al componentei proporţionale, care rezultă din însumarea regulatorului pur proporţional şi integral, din care rezultă, de asemenea, şi o altă constantă de timp – cea izodromă TR.IZ ; TR.I - constanta integrală a regulatorului. Dacă obiectul de reglare are funcţia de transfer menţionată mai sus, atunci conform criteriului modulului SRA poate avea o comportare optimă, bacă parametri regulatorului PI sunt aleşi conform condiţiilor : TR.IZ = TOR ; TR.I = 2 KORTμ ;În acest caz constanta derivativă sau izodromă a regulatorului compensează constanta aperiodică mare a obiectului de reglare ( cu cât ultima micşorează viteza de transmitere a semnalelor, cu atât prima anticipează sau ridică această viteză). Procesul de compensare este confirmat şi din punct de vedere matematic – la o conectare în serie a regulatorului şi OR şi la o înmulţire a funcţiilor lor de transfer, componentele (1+TR.IZ·s) şi (1+TORs) de la numărător şi numitor se reduc, iar F.d.t. a buclei deschise şi închise
H D (s ) = H R (s ) H OR (s ) = 1
2T μ s (1 +T μ s) ,
H ¿ ( s ) =
HD ( s )1 +HD ( s)
= 12T μ
2 s2 +2T μ s +1≈ 1
1 +2T μ s Constanta mică Tμ însă nu se compensează, deoarece efectul ei este amortizat de constanta mare. După acest criteriu se acordează, de regulă, bucla interioară şi regulatorul de curent din structura tipică a SAER (fig.3.23), deoarece obiectul ei de reglare are o funcţie de transfer cu 2 elemente aperiodice cu o constantă mare de timp (a indusului) şi o constantă mică – cea a redresorului comandat. Bucla exterioară de viteză însă are o f.d.t. cu un element integrator – 1/Tms , determinat de ecuaţia fundamentală a mişcării mecanice. De aceea pentru acordarea ei, conform criteriului modulului, este necesar un regulator proporţional de viteză cu un coeficient de amplificare KP=Tm/2Tμ . Acordarea buclei de viteză după acest criteriu însă nu asigură o eroare staţionară nulă ( o stabilizare absolută a vitezei motorului) în raport cu semnalul de perturbaţie (cuplul de sarcină de la arbore). În majoritatea cazurilor practice, de la SAER, se cer caracteristici mecanice absolut orizontale, adică o eroare staţionară nulă a vitezei la variaţia cuplului de sarcină. De aceea în astfel de cazuri se recomandă o acordare a regulatorului de viteză după criteriul simetriei, care garantează această condiţie. Conform criteriului simetriei, este necesar de ales un regulator proporţional – integral de viteză cu următoarele valori ale constantelor sale de timp : TR.IZ = 4Tμ ; TR.I = 8 (Tμ)2 F.d.t. ale buclei deschise şi închise de viteză în acest caz se exprimă :
H D (s ) = H R (s ) H OR (s ) =
1 +4 T μs
8T μ2 s2 (1 +T μs )
H ¿ ( s ) =
HD ( s )1 +HD ( s)
=1 +4T μ s
8T μ3 s3 +8T μ
2 s2 +4T μ s +1≈
1 +T μ s
8T μ2 s2 +4T μ s +1
Mod Coala
№ document. Semnat.
Data
Coala
68
În figura 3.33 este reprezentată schema structurală şi reacţia semnalului de ieşire la o treaptă unitară de prescriere a unei bucle de viteză cu regulator proporţional de viteză , acordat după criteriul modulului, şi cu regulator proporţional – integral de viteză, acordat după criteriul simetriei. În primul caz suprareglajul constituie 4.3 % , iar în cel de-al doilea caz - 43% .
3.4 Scheme structurale tipice
Fig.3.7 Schema structurală a buclei de viteză cu regulator de viteză P şi PI, acordat corespunzător după criteriul modulului şi criteriul simetriei
Însă condiţiile criteriilor modulului şi al simetriei pot fi aplicate pentru o buclă de reglare închisă cu un coeficient unitar în circuitul de reacţie negativă, adică cu un coeficient unitar al traductorului de măsurare a mărimii principale de ieşire. În practică însă acest coeficient, de regulă, nu este egal cu 1. Rezolvarea acestei condiţii poate avea mai multe variante. Una din cele mai simple variante de obţinere a reacţiilor unitare este trecerea la unităţile relative pentru toate elementele SRA, aşa cum s-a procedat sus în cazul modelării motorului de curent continuu. În acest caz toţi coeficienţii regimului staţionar nominal sunt unitari, inclusiv traductoarele şi circuitele de reacţie ale regulatoarelor. Modelarea unui astfel de SRA , de asemenea, se simplifică. Schema structurală a SRA tipic cu 2 bucle de reglare - a curentului indusului şi vitezei motorului de curent continuu cu excitaţie independentă, descrise la începutul acestui paragraf, însă reprezentată în unităţi relative, este indicată în figura 3.34. Motorul în acest caz are aceiaşi parametri şi schemă structurală ca în figura 3.28.Regulatorul de viteză în acest caz este proporţional, iar de curent – PI.
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.3.8 Schema structurală a SAER de curent continuu cu 2 bucle de reglare în unităţi relative
Procesele dinamice ale vitezei şi curentului acestui sistem pentru un regulator PI de curent cu coeficient de amplificare proporţională KP.C=7 şi de integrare KI.C=1/TI= 300, pentru un regulator P de viteză cu un coeficient KP.V= 50, acordat după criteriul modulului sunt prezentate în figura 3 35,a, iar după criteriul simetriei – în figura 3.35,b. În primul caz se observă o cădere substanţială a vitezei la acţionarea cuplului de sarcină a motorului, deoarece coeficientul static al regulatorului de viteză este limitat (50). În cazul regulatorului PI de viteză coeficientul static de amplificare, datorat componentei integrale, tinde la infinit, de aceea viteza variază puţin numai în regim dinamic, rămânând practic constantă în regim static după încetarea variaţiei cuplului de sarcină.
a) b)Fig.3.9 Procese tranzitorii ale vitezei si curentului SRA la o acordare a regulatorului
de viteză după criteriul modulului (a) şi după criteriul simetriei (b)
Mod Coala
№ document. Semnat.
Data
Coala
68
În figura 3.36 este reprezentată o schemă structurală a SRA cu 2 bucle tipice de reglare şi în unităţi absolute. MCC în acest caz este prevăzut cu flux de excitaţie constant, de aceea schema structurală a circuitului de excitaţie este separată.
Fig. 3.10 Schema structurală a SRA în unităţi absolute cu o singură zonă de reglare şi cu flux constant al motorului de curent continuu
Pentru acordarea buclelor conform criteriilor modulului şi al simetriei, este necesar de raportat circuitele de reacţie negativă la un coeficient de amplificare unitar. Pentru aceasta bucla reală se aduce la o buclă echivalentă cu un coeficient unitar în circuitul de reacţie prin transferarea traductorului real în circuitul principal al obiectului de reglare (OR), precum şi în circuitul de prescriere cu o funcţie de transfer inversă – 1/HT = 1/KT (fig.3.37) .
Fig.3.11 Schema simplificată a unei bucle de reglare cu circuit unitar de reacţie
În ultima schemă blocul EP reprezintă elementul de prescriere a mărimii de intrare a regulatorului, iar mărimea Uf(s) reprezintă mărimea de perturbaţie, care acţionează, de obicei , asupra obiectului de reglare.
Mod Coala
№ document. Semnat.
Data
Coala
68
3.5 SRA digitale ale acţionărilor electrice moderne
3.5.1 Analiza generală a sistemului de programare şi parametrizare
Programul de proectare GAD este destinat pentru programarea convertoarelor DCS 500. Programul GAD (Graphical Applcation Designer) este construita din blocuri care sunt de doua tipuri : Blocuri standarte functionale şi Blocuri adăugătoare
Ca blocuri adaugatoare sunt:
ABS-(valoarea absolută); ADD-(sumator cu 2 şi 4 intrări); COMP-(comparator); CONV-(blocurile convertorului);COUNT-( contor);DIV-(divide);FILT-(filtru); FUNG-(Generator funcţiei x-y);MUL-(inmulţitor);OR-(blocul SAU);PAR-(bloc parametric funcţional);PI-(controler PI);SR-(memorie);XOR-(schema exclude SAU),şi altele.
Ambele tipuri sînt salvate în memoria convertorului şi se află în fiecare convertor produs.Blocurile adiţionale şi cele funcţionale sînt şi în forma de bibliotecă în formă de failuri.Această bibliotecă reprezintă baza la modificaţiile pe care trebuie să le facem.
Compania ABB propune un instrument pentru crearea programelor mariîn formă de scheme grafice şi dă informaţia care este destinată pentru a fi transmisă în secţia de comanda a acţionării cu ajutorul instrumentului CMT Tool.Acest instrument este GAD. Programul GAD este destinat numai pentru lucru în regim autonom şi pentru a transmite în actionare schimbările în program care se face cu ajutorul programei CMT Tool.
Programul de proectare GAD are următoarele funcţii:
Crearea sistemelor şi programare Construirea şi modificarea diagramelor Comnda utilizatorului formarea documentelor Compilarea failurilor care apoi se încarcă în convertor cu ajutorul
programei CMT Tool. Compilarea failurilor diagramei pentru a le încarca în fereastra programului
CMT Tool co scopul de a vedea în regim interactiv valorile precedente.
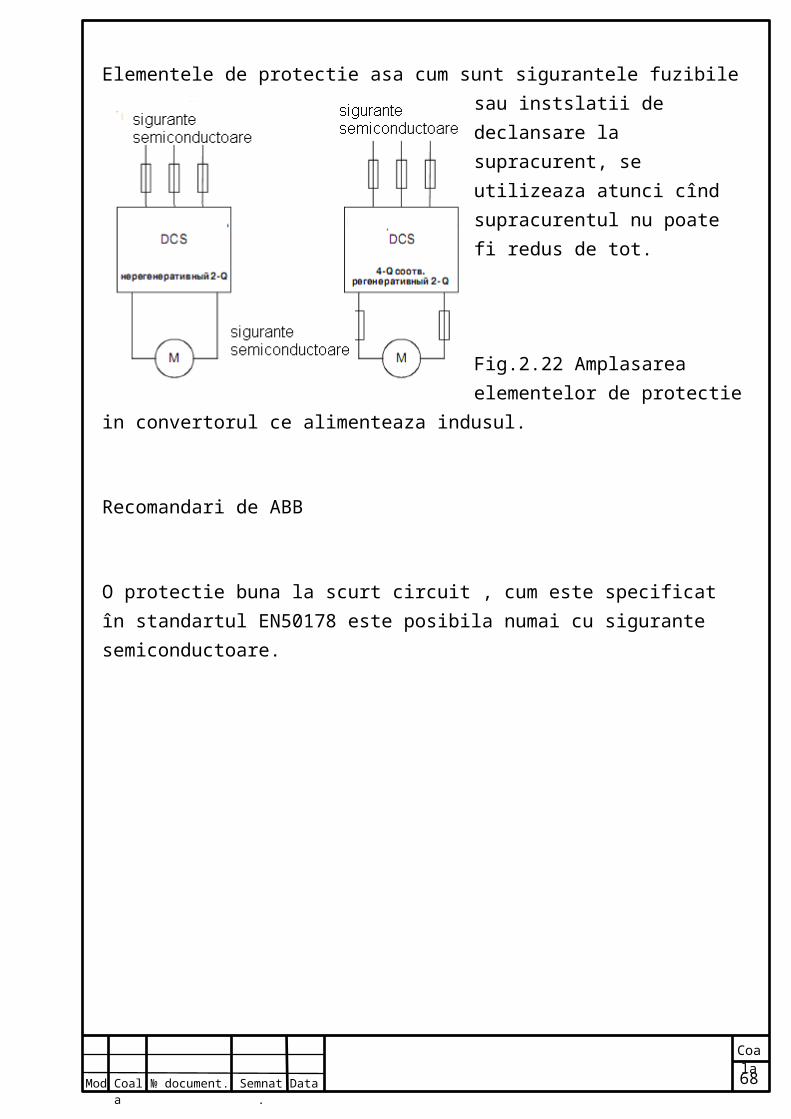
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig.3.12. Interfaţa programului GAD
În general programul elaborat constă din blocuri funcţionale interconectate. Fiecare din aceste blocuri aparte îndeplineşte o subfuncţie a funcţiei generale .
Blocurile funcţionale pot fi despîrţite în două categorii:
Blocuri permanent active , ele practic permanent se utilizează; descrise mai jos.
Blocurile funcţionale care cu toate că sînt accesibile numai în program, dar trebuie să fie activate special, cîn trebuie pentru careva scopuri speciale .
Fiecare blocuri funcţionale se caracterizează prin linii de intrare şi eşire care sunt numerotate.
Intrările şi eşirile pot fi grupate în două categorii:
Intrări pentru însemnarea conectărilor
Dacă dorim să schimbăm conexiunile întăi alegem intrarea apoi eşirea.
Parametri pentru întroducerea valorilor (aşa ca timpul de accelerare /timpul de decelerare,coeficientul de amplificare a controlerului e.c.t.)
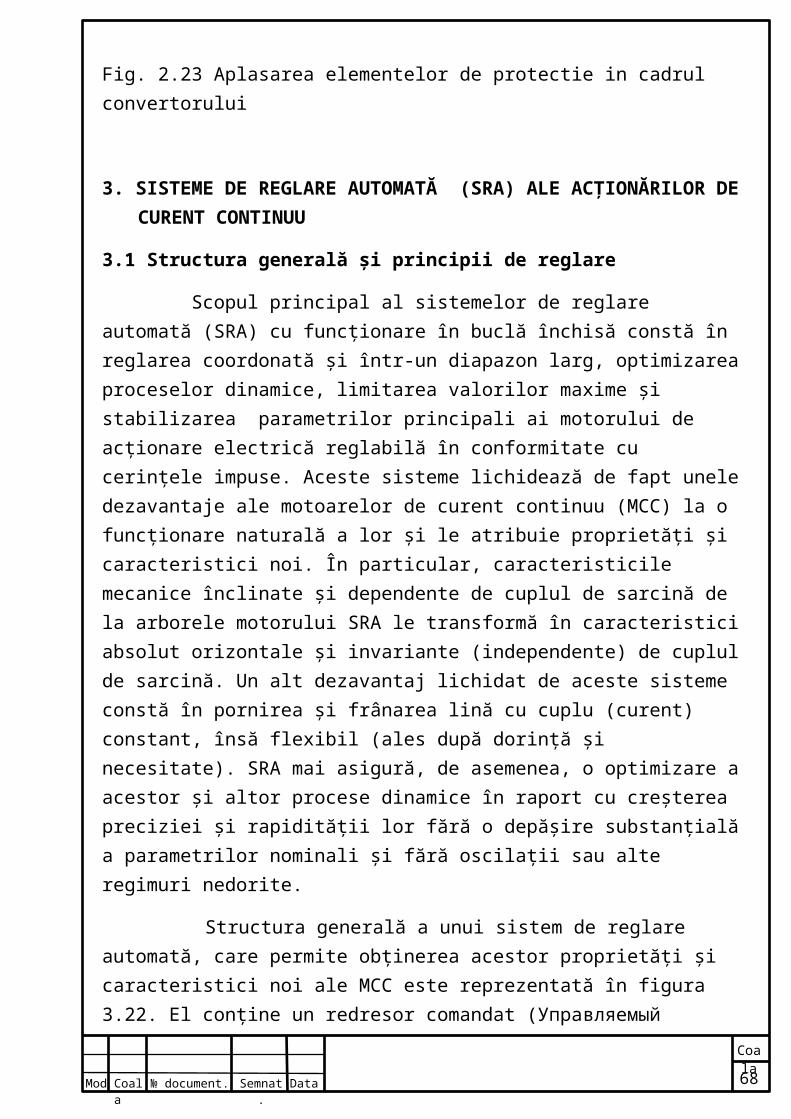
Mod Coala
№ document. Semnat.
Data
Coala
68
3.5.2 Scheme funcţionale ale modulelor digitale principale
Fig.3.13 Schema funcţională a modululuii de prescriere a vitezei.
Prelucrarea semnalului de prescriere a vitezei
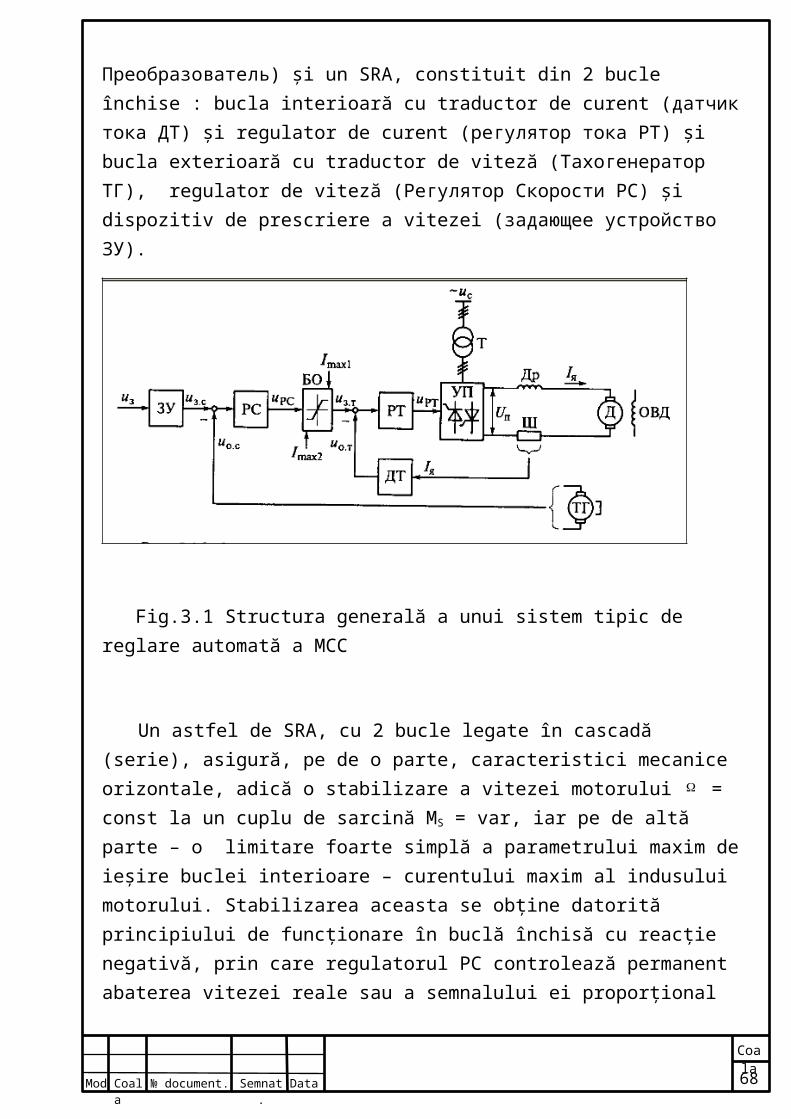
Mod Coala
№ document. Semnat.
Data
Coala
68
Comanda vitezei pentru generator , functia după care se schimbă viteza se formează cu blocurile REF SEL (alegerea comenzii), care pot fi folosite pentru alegerea valorii necesare, blocul CONSTREF formeaza tot timpul patru comenzi, blocul SOFTPOT(potentiometru din programă) care formează funcţia unui potenţiometru digital în legatură cu blocul RAMP GENERATOR (generator de schimbare a vitezei), sau blocul AI1 (intrare analogică). Urmărirea comenzii vitezei , urmarirea buclei de viteză . Blocul REFSUM (comanda sumară ) permite sumarea ieşirilor generatorului care arata modificarea vitezei ,care este prescris de utilizator.
Fig.3.14 Schema functională a modulului ce calculă bucla de viteză
Calculul buclei de viteza
Mod Coala
№ document. Semnat.
Data
Coala
68
În fig.3.14 este aratată procedura cu are loc compararea semnalului de reactie a buclei cu marimea prescrisă.Blocul AITAC se utilizeată pentru citirea semnalelor de reactie de la tahometrul analogic.Blocul SPEEDMEASUREMENT prelucreaza trii semnale posibile ale buclei de reactie : semnalul tahogeneratorului analogic, semnalul generatorului de impulsuri sau tensiunea de esire a convertorului(SPED-ACT-EMF).Blocul SPEED MONITOR(controlul vitezei) ,contine o functie de control cind motorul este frinat si veteza de turatie a lui si cu valoarea semnalului de la bucla de reactie cu pragul ce determina supracresterea de viteza.
Fig. 3.15 Schema functională a controlerului de viteza
Controlerul de viteza:Rezultatul blocului SPEED ERROR se compara cu semnalul buclei de reactie de la blocul SPEED MEASUREMENT si apoi se transmite la controlerul de viteza.Daca valoarea semnalului buclei de reactie a vitezei nu se gaseste in limitile prescrise , se porneste controlerl de viteza care aduce valoarea prescrisaa vitezei.Blocul SPEED CONTROL (comanda cu viteza) conţine controlerul de viteza care mai contine P,I si DT elemente.
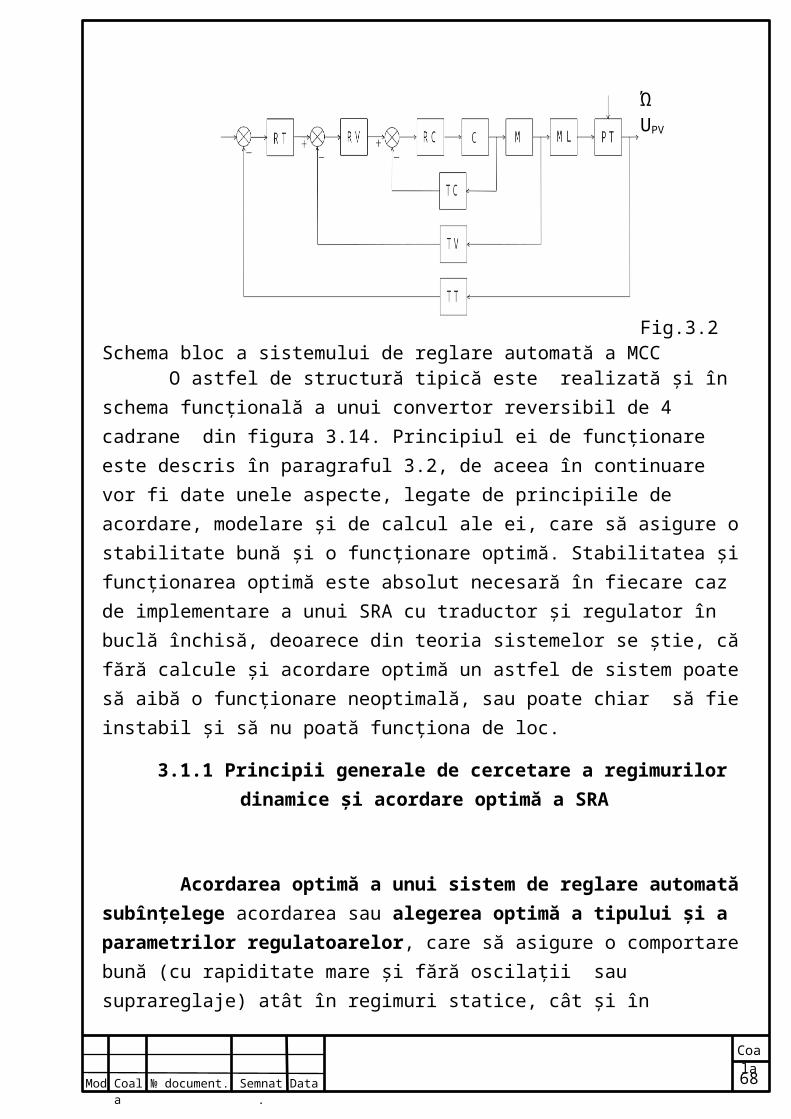
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig. 3.16 Schema functională a controlerului tensiunii motorului
Controlerul tensiunii motorului
Blocul EMFCONTROL (comanda cu TEM) conţine controlerul de tensiune a rotorului (regulator TEM).În
componenţa lui se află paralel o structura care contine: PI-controler.
Mod Coala
№ document. Semnat.
Data
Coala
68
Fig. 3.17 Schema funcţională a controlerului curentului indusului.
Controlerul curentului indusului
Blocul CURENT CONTROL (comanda cu curentul) conţine controlerul curentului cu P si I elemente si acordarea diapazonului de curenti întrerupti.Acest bloc mai contine si functia care limiteaza marirea tempului de modificare a curentului.Regimul DCF poate fi conectat cu ajutorul blocului DCFFIELDMODE.
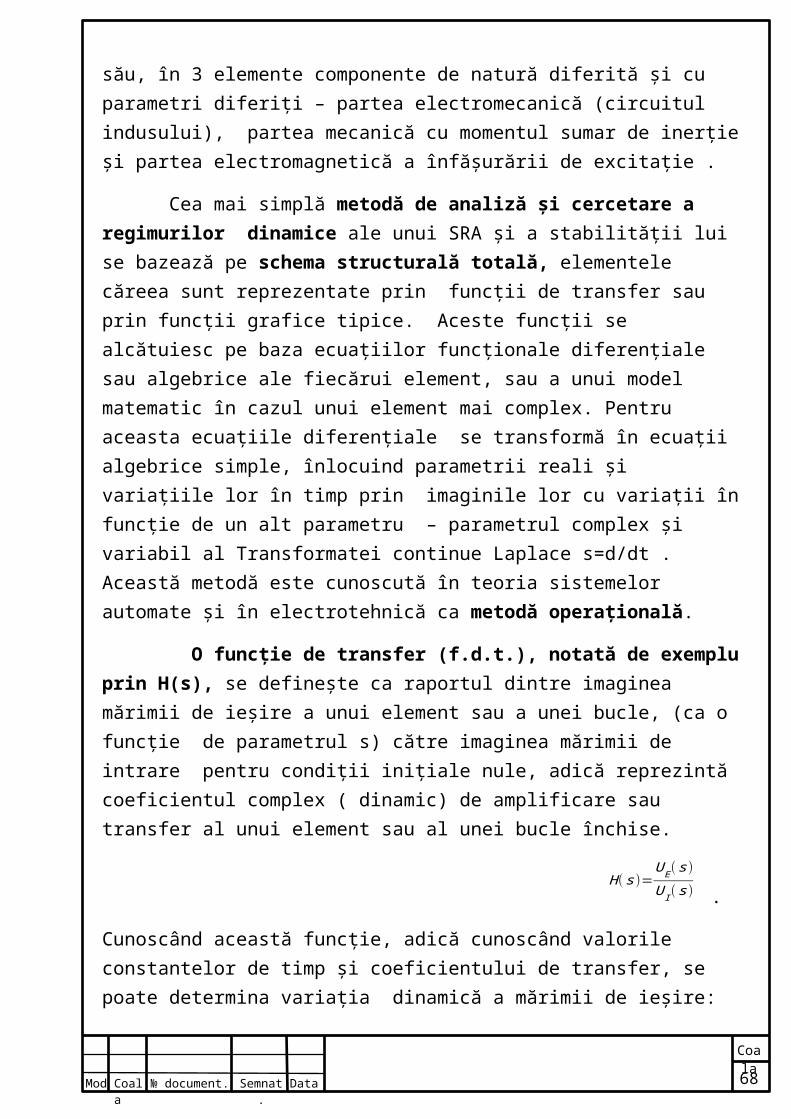
Mod Coala
№ document. Semnat.
Data
Coala
68





























