Embed Size (px)
Citation preview
Project 704Ψ
Design team: Sarah Steward Chad Harrington Kyle Levesque
Problem statement
Modify a miniature vehicle that will… Be able to travel through any hallway Collect paper & magazines from bins Drive to a set location and unload
material Automobile will not need human
aid, after a initial button is pressed.
Solutions
Teaching the automobile the correct path – By recording a directed path in memory of an HC12 micro controller and then playing back the path, when the playback button is activated.
Drop bins – Sliding material out of the bins, and into a dump bucket on top of the automobile.
Simple dump truck style unloading - Using a motorized lifting system to slid material into the unloading area.
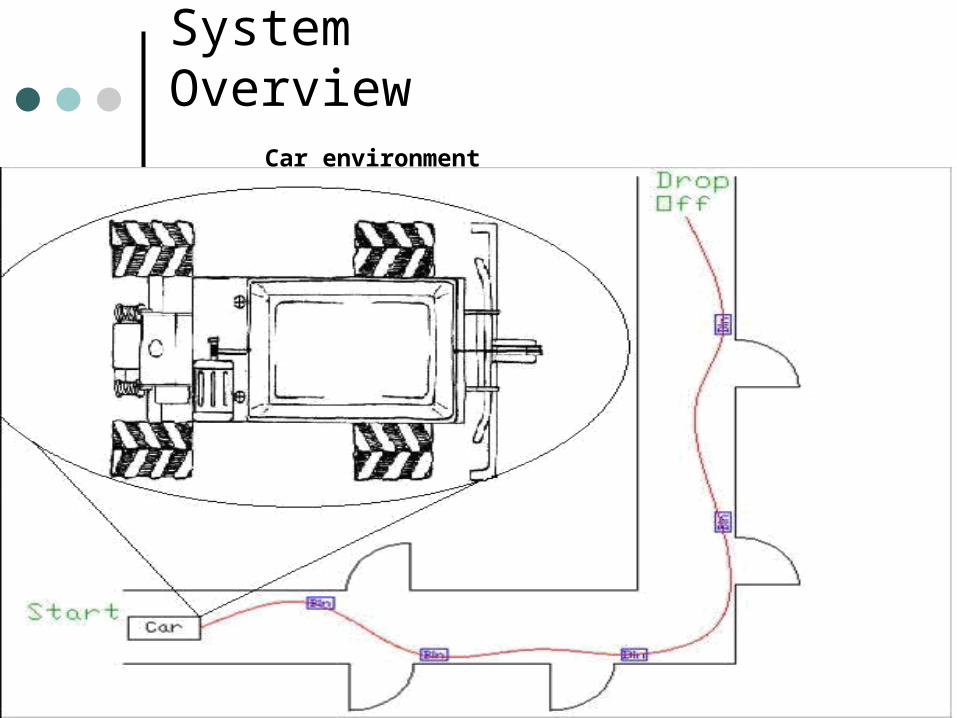
System Overview Car environment
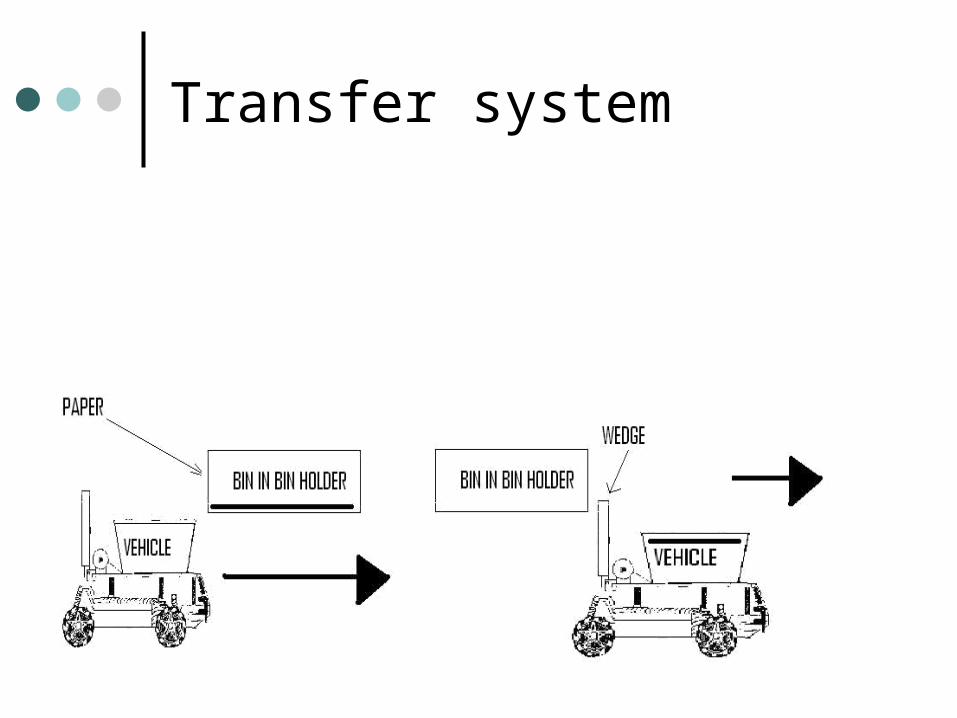
Transfer system
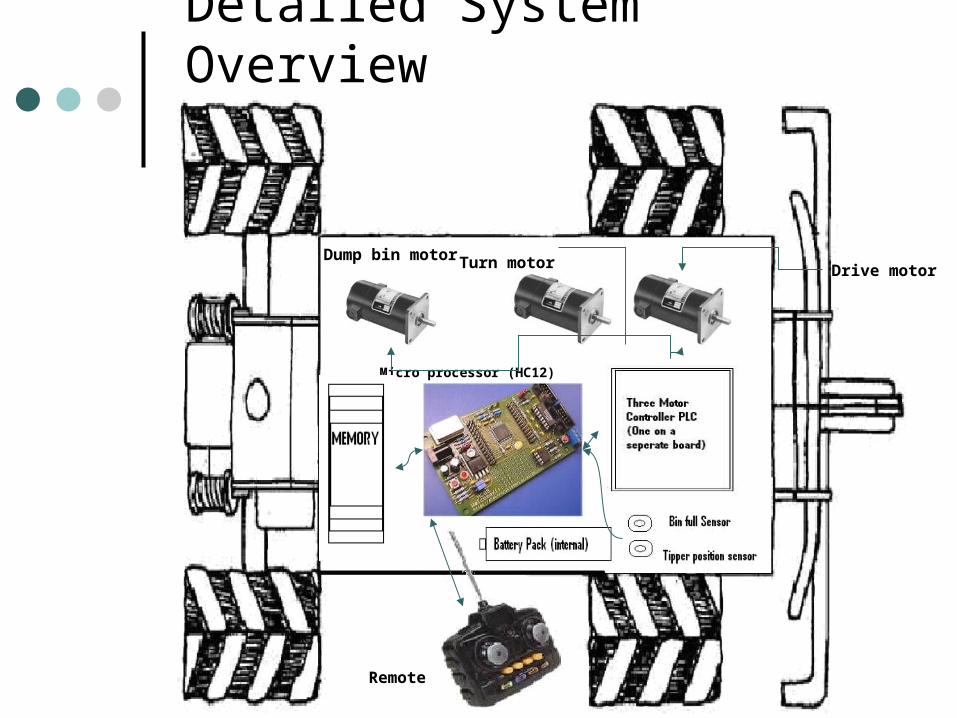
Detailed System Overview
Micro processor (HC12)
Dump bin motor
Remote
Drive motorTurn motor
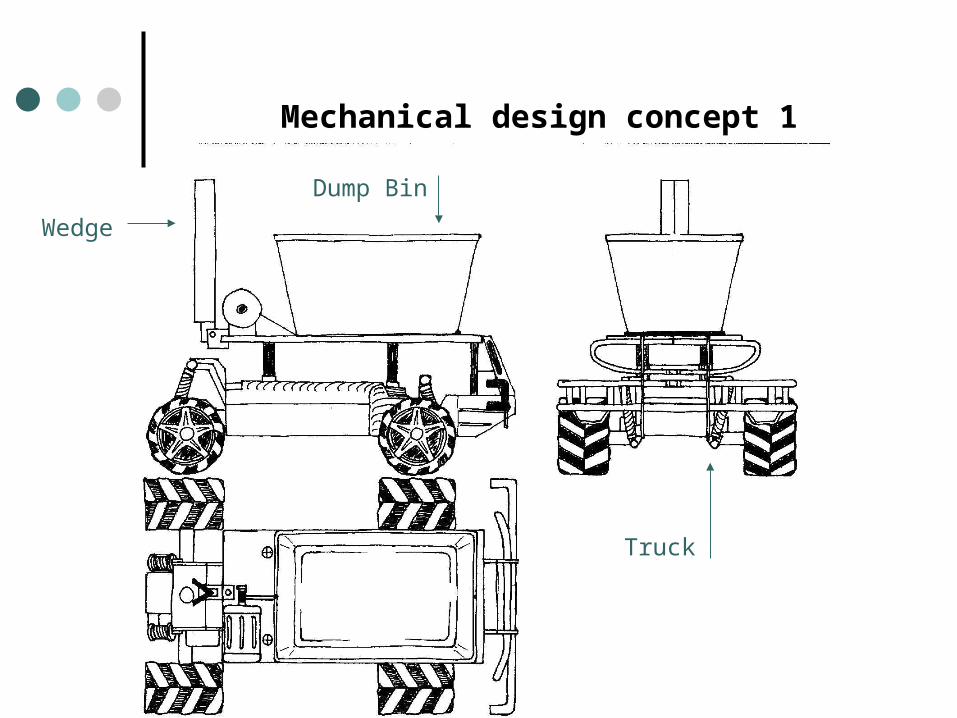
Mechanical design concept 1
Wedge
Dump Bin
Truck
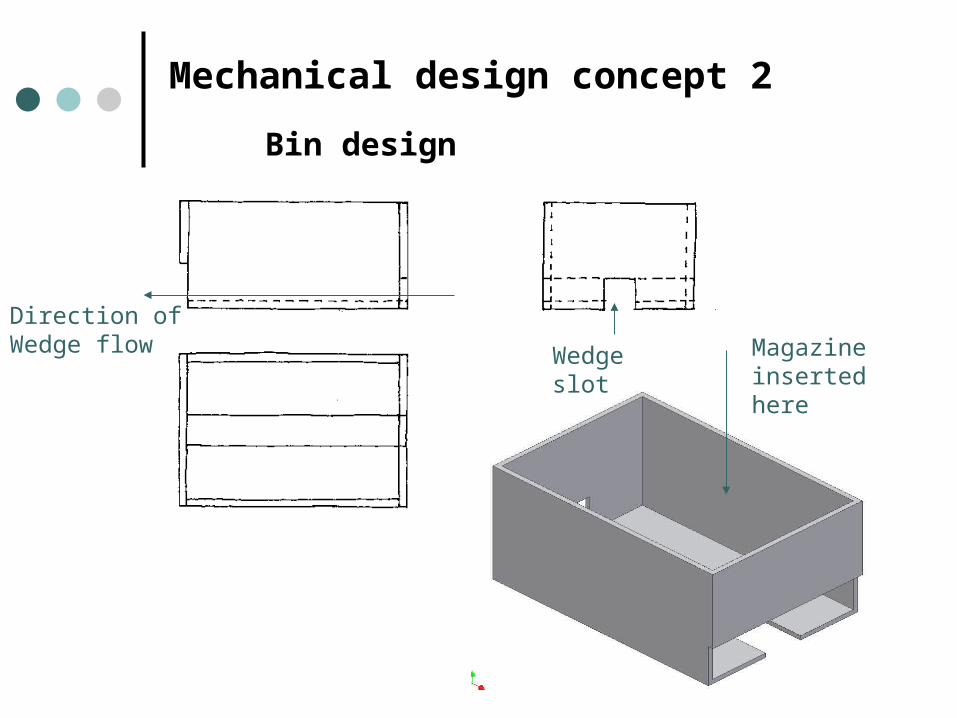
Mechanical design concept 2 Bin design
Wedge slot
Direction of Wedge flow Magazine
inserted here
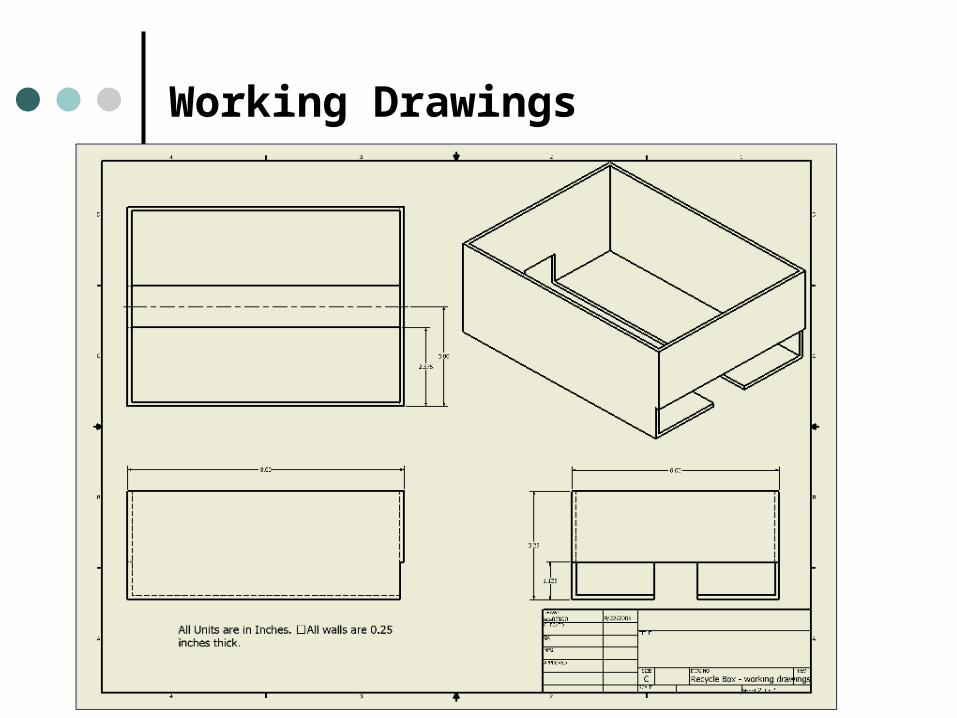
Working Drawings
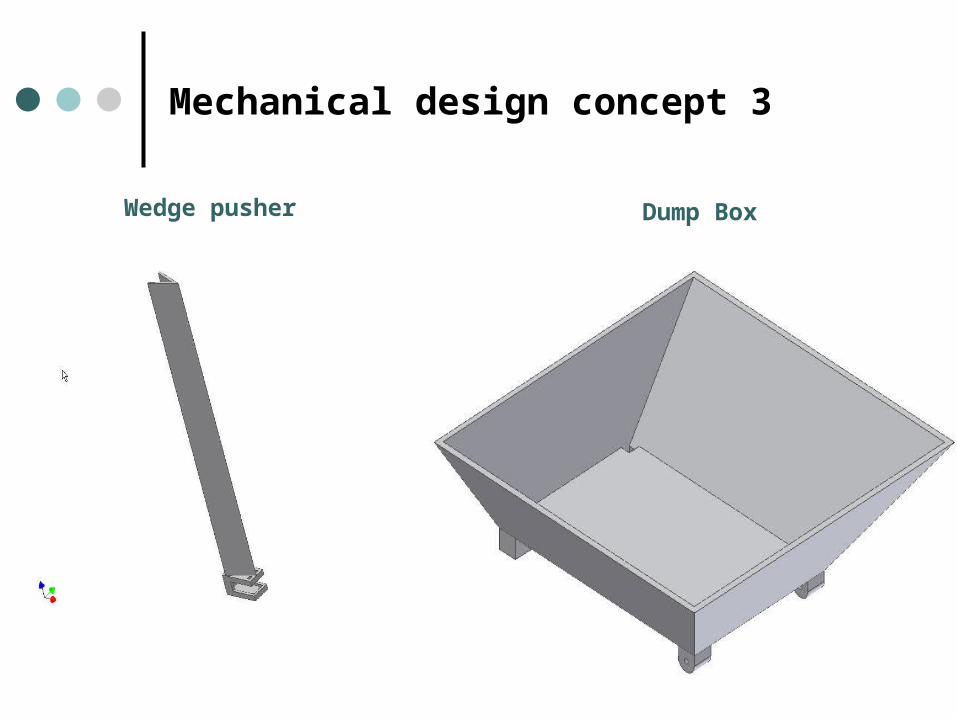
Mechanical design concept 3
Wedge pusher Dump Box
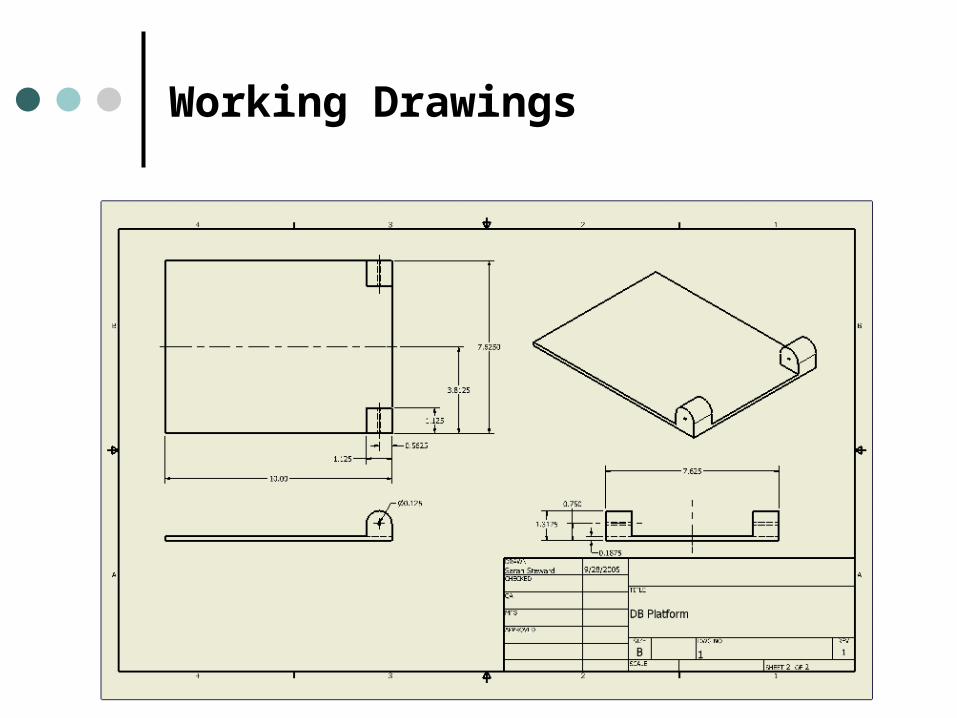
Working Drawings
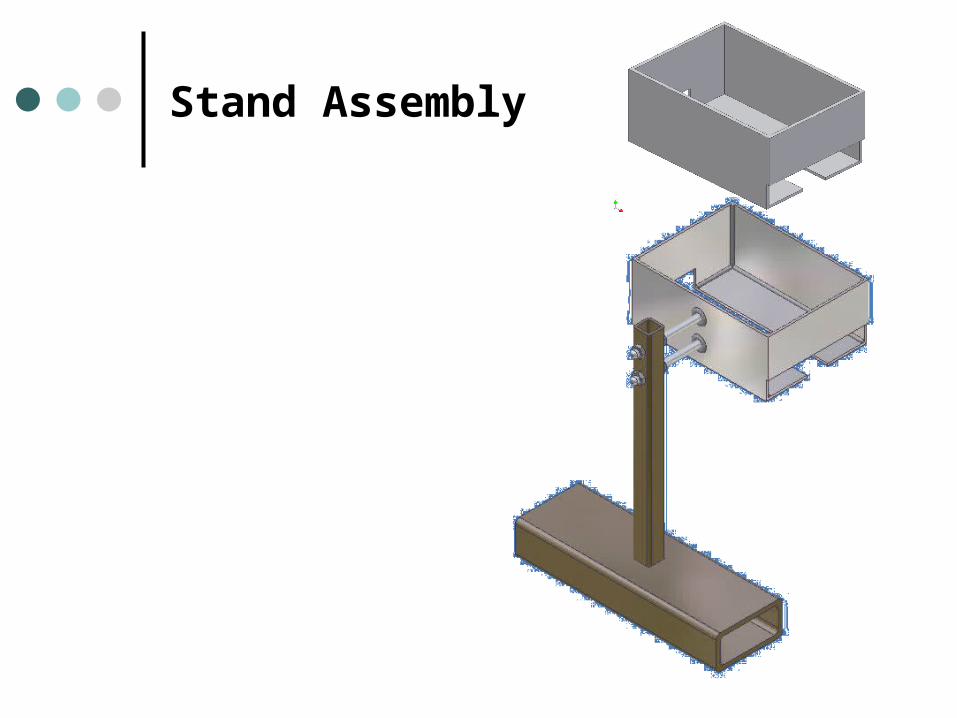
Stand Assembly
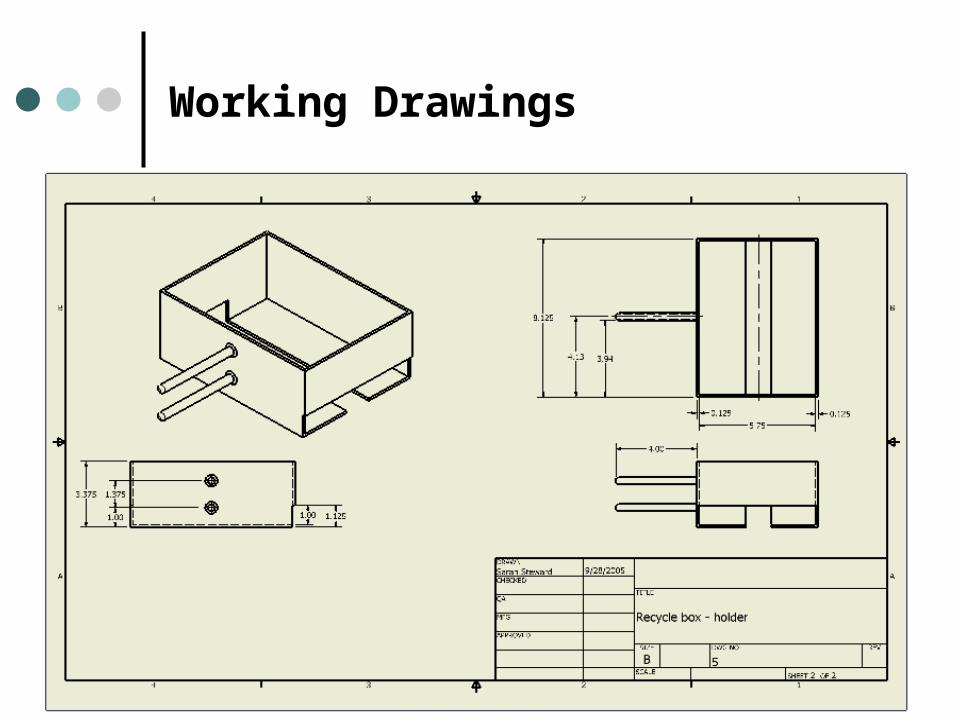
Working Drawings
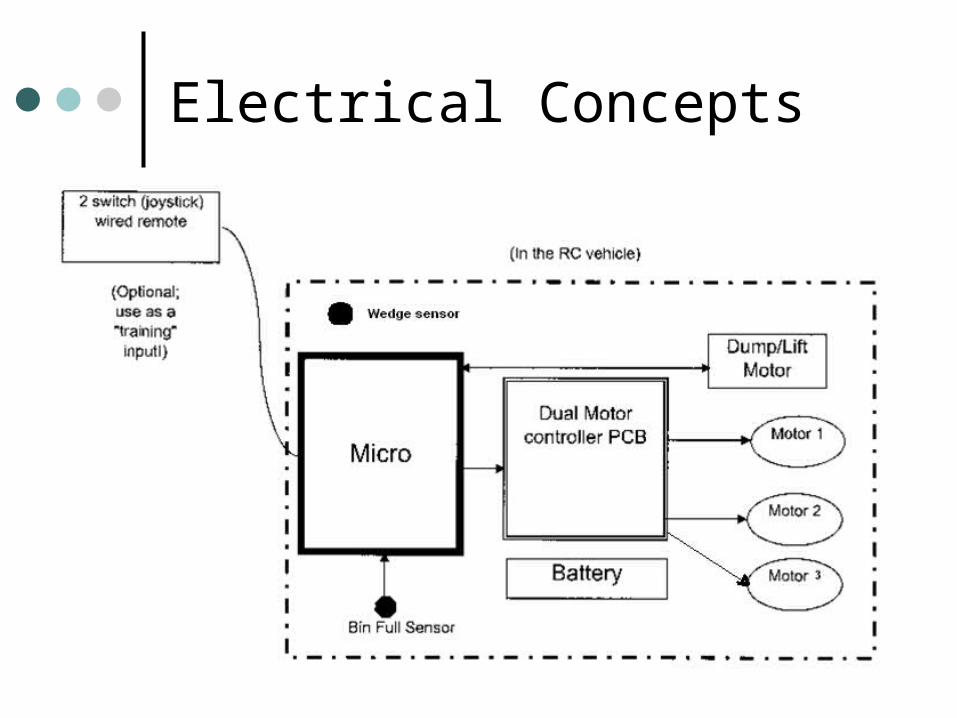
Electrical Concepts
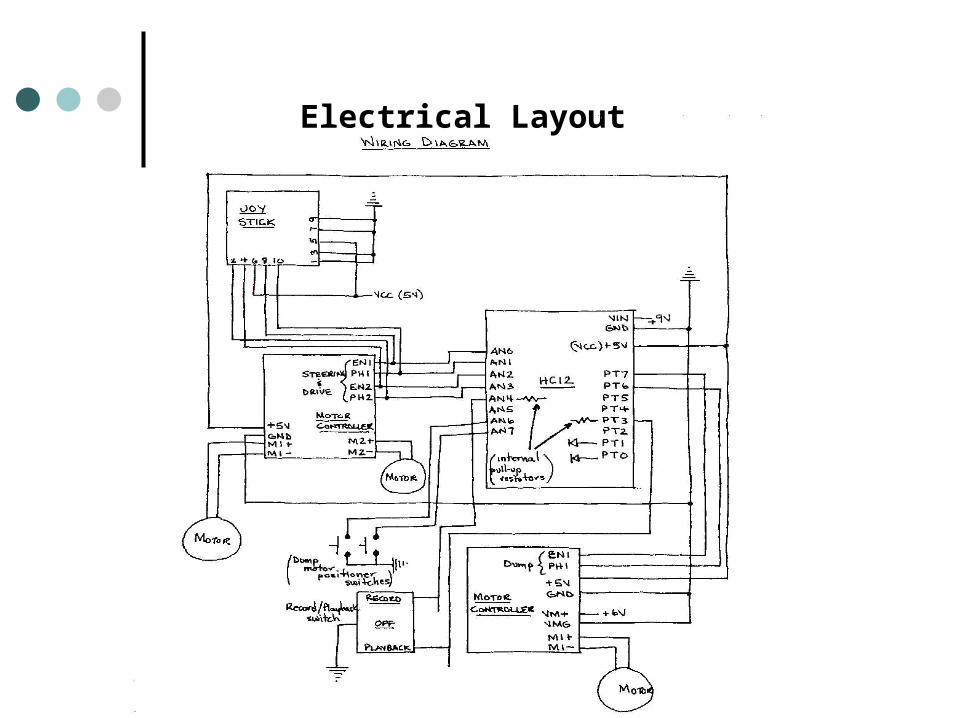
Electrical Layout
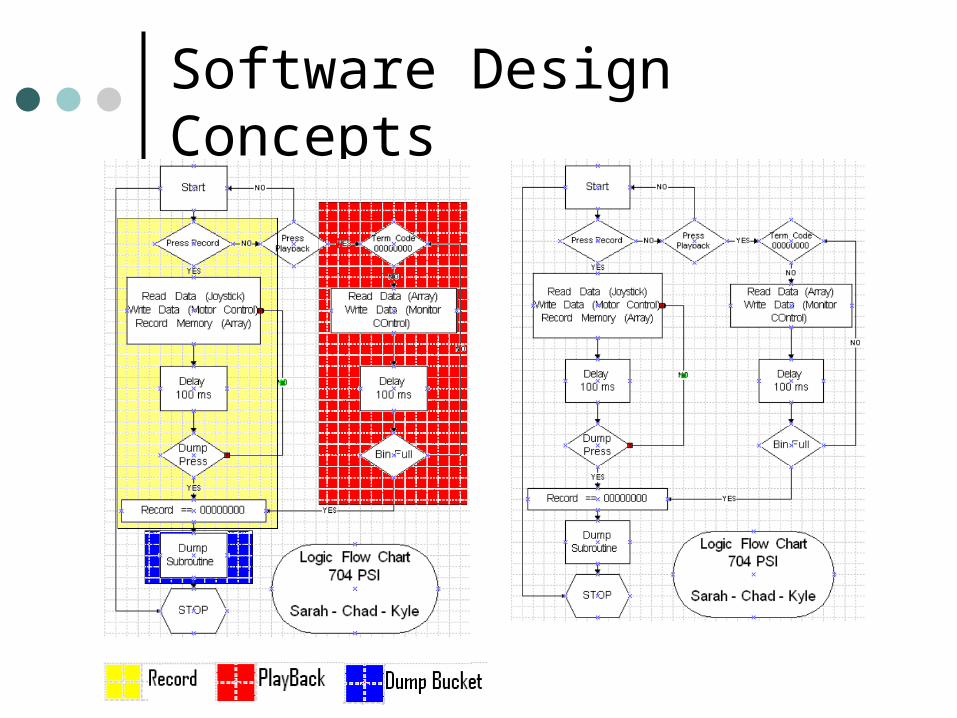
Software Design Concepts
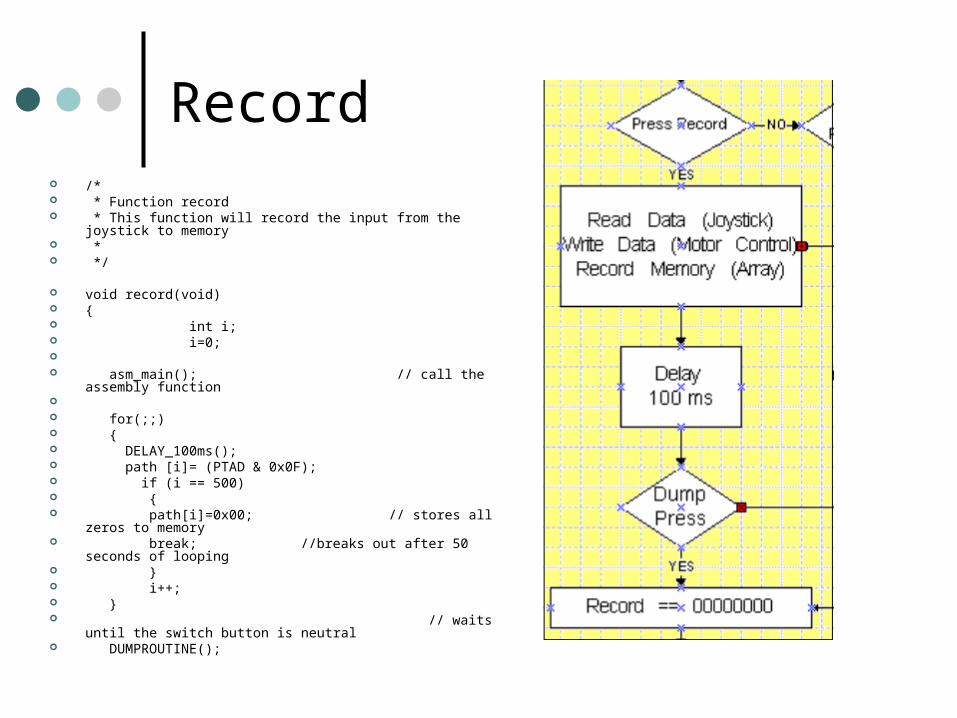
Record /* * Function record * This function will record the input from the joystick to memory * */
void record(void) { int i; i=0; asm_main(); // call the assembly function for(;;) { DELAY_100ms(); path [i]= (PTAD & 0x0F); if (i == 500) { path[i]=0x00; // stores all zeros to memory break; //breaks out after 50 seconds of looping } i++; } // waits until the switch button is neutral DUMPROUTINE();
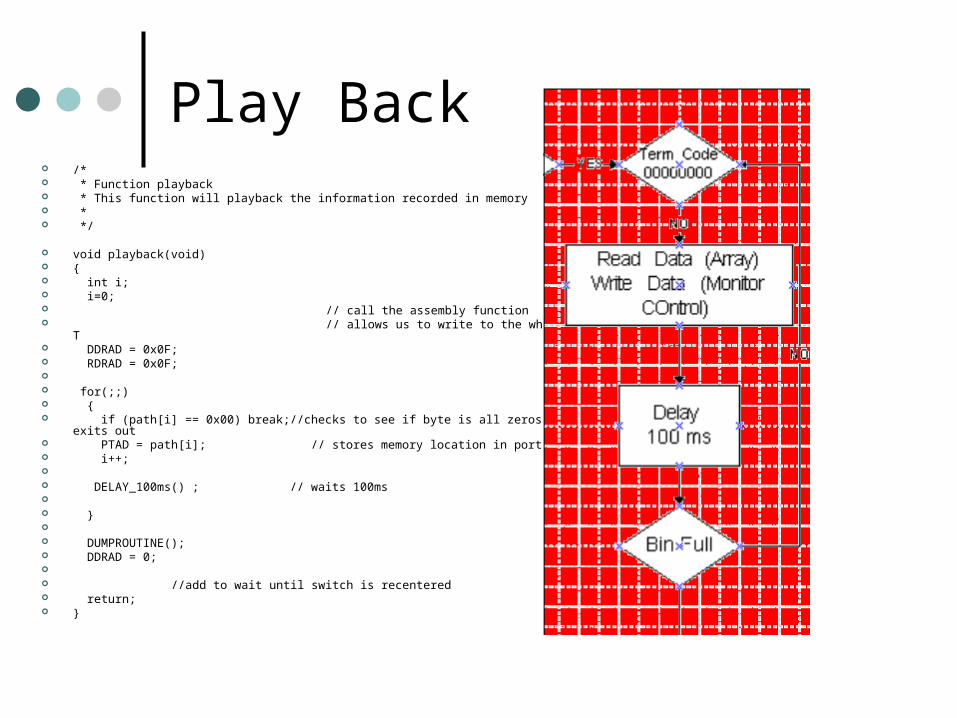
Play Back /* * Function playback * This function will playback the information recorded in memory * */
void playback(void) { int i; i=0; // call the assembly function // allows us to write to the whole port T DDRAD = 0x0F; RDRAD = 0x0F; for(;;) { if (path[i] == 0x00) break;//checks to see if byte is all zeros if so exits out PTAD = path[i]; // stores memory location in port T i++; DELAY_100ms() ; // waits 100ms } DUMPROUTINE(); DDRAD = 0; //add to wait until switch is recentered return; }
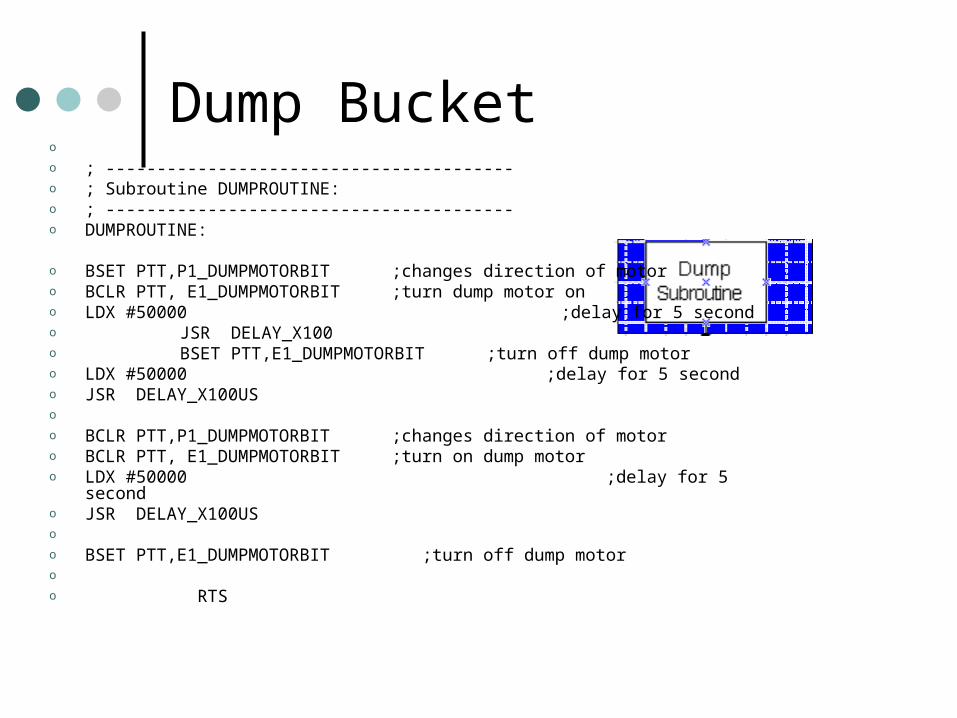
Dump Bucketo o ; ----------------------------------------o ; Subroutine DUMPROUTINE:o ; ----------------------------------------
o DUMPROUTINE:
o BSET PTT,P1_DUMPMOTORBIT ;changes direction of motoro BCLR PTT, E1_DUMPMOTORBIT ;turn dump motor ono LDX #50000 ;delay for 5 secondo JSR DELAY_X100o BSET PTT,E1_DUMPMOTORBIT ;turn off dump motor o LDX #50000 ;delay for 5 secondo JSR DELAY_X100USo o BCLR PTT,P1_DUMPMOTORBIT ;changes direction of motoro BCLR PTT, E1_DUMPMOTORBIT ;turn on dump motor o LDX #50000 ;delay for 5 secondo JSR DELAY_X100USo o BSET PTT,E1_DUMPMOTORBIT ;turn off dump motoro o RTS
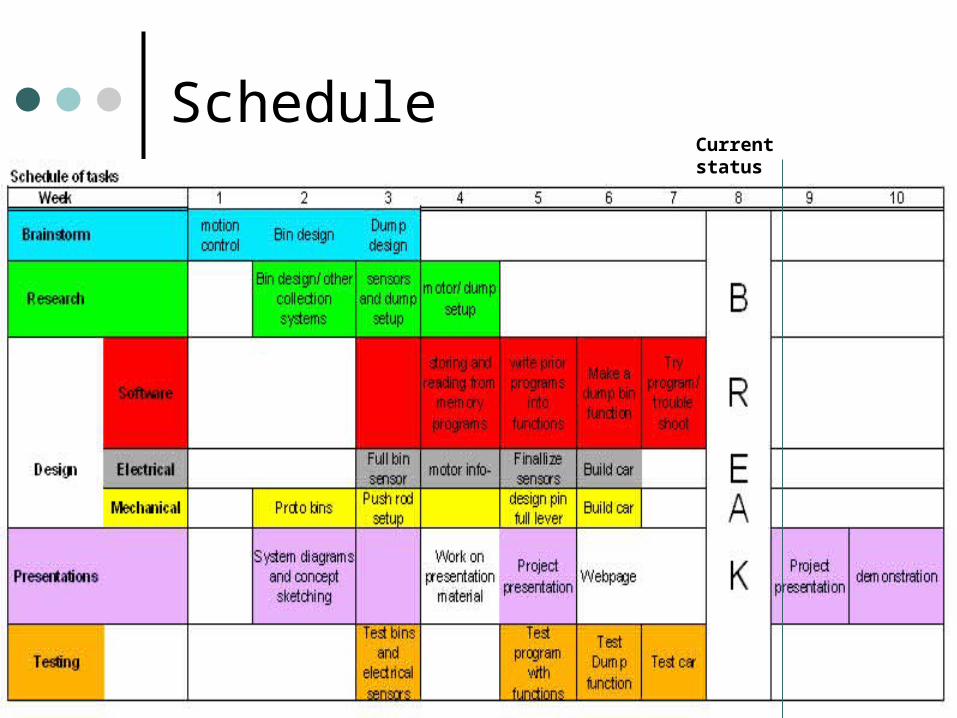
Schedule Current status
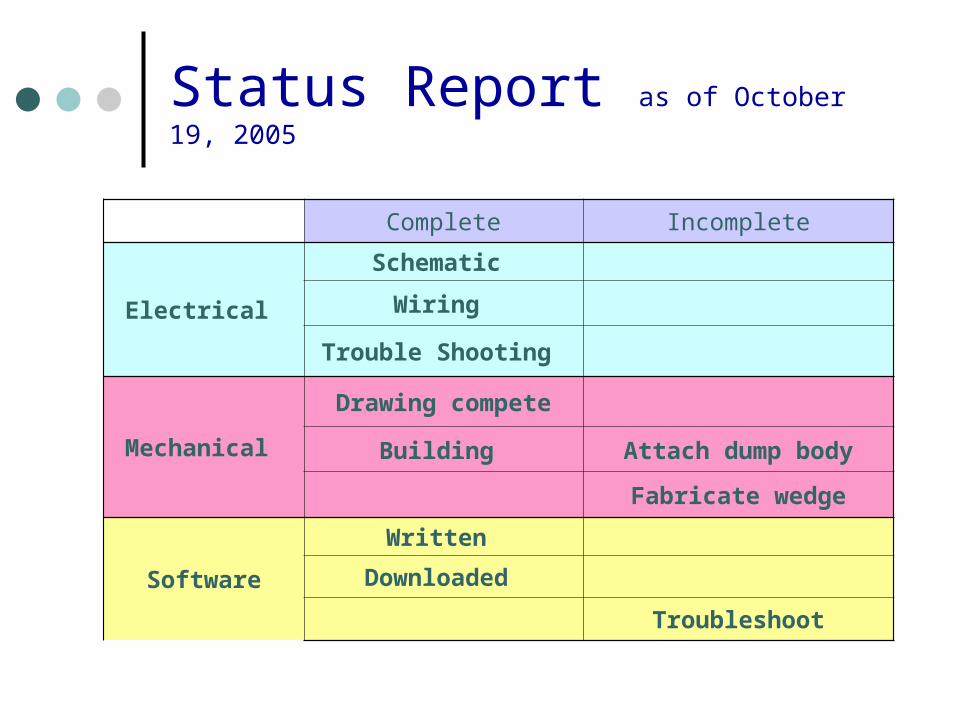
Status Report as of October 19, 2005
Complete Incomplete
Electrical
Schematic
Wiring
Trouble Shooting
Mechanical
Drawing compete
Building Attach dump body
Fabricate wedge
Software
Written
Downloaded
Troubleshoot
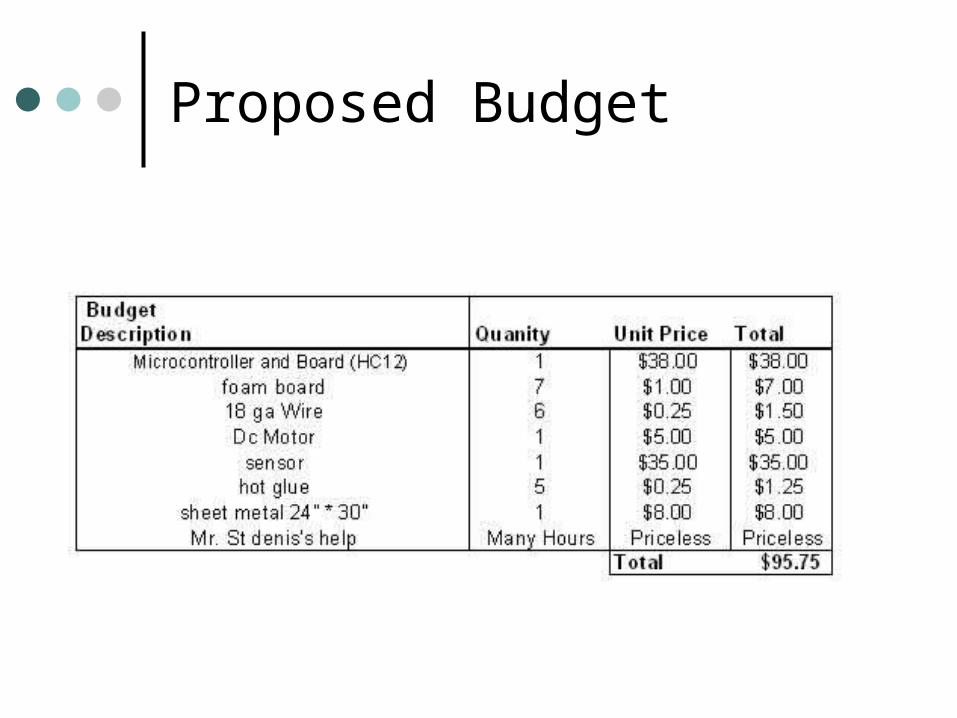
Proposed Budget
Project 704Ψ
At this time we will be willing to entertain any brief Questions.
Other implemented automated systems
www.dailycardinal.com/news/2005/09/13/News/New-Automated.Trash.Collection.Program.Facilitates.Recycling-982894.shtml
Automated trash collection systems for city use.
http://www.warwickri.gov/recycsanit/auto.htm City of Warwick, Automated trash system
http://www.madison.com/wsj/home/opinion/index.php?ntid=53867 Wisconsin, Madison automated recycling system.
Acknowledgements
Andre St. Denis
John Kidder
Roger Howes