-
8/18/2019 prova controle
1/8
Departamento de Engenharia Elétrica
Faculdade de Tecnologia Prof. Adolfo BauchspiessUniversidade de
Brasília Prof. Flavia Maria Oliveira
ENE/FT/UnB
Prova individual, sem consulta. Não é permitido usar
calculadora. 20/09/2013, 730
-1000
Nome:
_____________________________________________________________
Matrícula: _________
GABARITO
- 1a PROVA – 160032 CONTROLE
DINÂMICO - 2°/2013
mn
zeros pólos
mn
k
)12(180
K
T
T
K
K K
T T S T K
/
/
1ªQuestão : 2 Pts (Sensibilidade) Considere o seguinte
sistema de controle, em que K e a são parâmetros
ajustáveis.)(
)()(
s R
sY sT .
a) (0,5 pt) Calcule a sensibilidade
T K S da função de transferência de malha
fechada T ( s) em relação à variação do
parâmetro K .
b)
(0,5 pt) Calcule a sensibilidade T pS da função
de transferência de malha fechada T ( s) em relação à
variação do
parâmetro p.
c) Em regime permanente, se p = K :
(c.1) (0,5 pt) Determine a variação percentual em T
devido a um aumento no valor de K de 10%. (Dica:
determine primeiro o valor da sensibilidade para este novo valor
do parâmetro K );
(c.2) (0,5 pt) Determine a variação percentual em T devido a um
aumento no valor de p de 10%. (Veja dica
anterior.)
Obs.: (Variação percentual em uma grandeza X )
X
X 100
r (t ) K
)()1(
12 p s s
y(t )
-
8/18/2019 prova controle
2/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 2
Solução:
(a) K p s s
K sT
)()1()(
2
K p s s K
K
K p s s
K K p s s
T
K
K
T S T K
)()1(
)()1(
)()1( 222
2
K p s s
p s sS T K
)()1(
)()1(2
2
K p s p s p s
p s p s p sS T K
)21()2(
)21()2(23
23
(b)
K p s s
s p K p s s
K
p
K p s s
s K
T
p
p
T S T p
)()1(
)1()()1(
)()1(
)1(2
22
22
2
K p s s
s pS T p
)()1(
)1(2
2
K p s p s p s
s s pS T p
)21()2(
)12(23
2
(c)
Em regime permanente ( slim ): K p
p
S T
K e K p
p
S T p
(c.1) Aumento de 10% no valor do ganho K : 1,0
K
K .
Para este novo valor de K :1,2
1
1,1
K p
pS T K
Assim, pela expressão da sensibilidade, pode-se determinar a
variação percentual em T a partir de:
21
11,0
1,2
1
K
K S
T
T
T
K
K
T S T K T K
(c.2) Aumento de 10% no valor do pólo p: 1,0
p
p.
Para este novo valor de p:1,2
1,1
1,1
1,1
K p
pS T p
Assim, pode-se determinar a variação percentual em T a partir
de:21
1,11,0
1,2
1,1
p
pS
T
T T p
Isto é, um aumento em 10% do ganho K produz um
aumento de T em regime permanente de 0,0476
(+4,76%).
Um aumento do valor do pólo em 10% produz uma redução de
T em regime permanente de -0,0524 (-5,24%).
-
8/18/2019 prova controle
3/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 3
2ªQuestão : 3Pts (Coeficientes de Erro)Considere o sistema
abaixo, onde r é a referência, e w1 e w2 são duas entradas de
perturbação. A saída y
deve seguir a referência r e rejeitar as perturbações w1 e w2.
Como todos os blocos são lineares, vale o princípio da
superposição.
(a) (0,9 pt) Obtenha as funções de transferência)(
)()(0
s R
sY sT ,
)(
)()(
11
sW
sY sT e
)(
)()(
22
sW
sY sT
(b) (1,5 pt) Preencha, justificando, a tabela com os erros
em regime permanente
t t yt r )()( para
as entradas de referência R( s) e de perturbação
W 1( s) e W 2( s).
R W 1 W 2
a) degrau e ss =
b) rampa e ss =
c) parábola e ss =
(c) (0,6 pt) Classifique o sistema (tipo) em relação aos
sinais r , w1 e w2.
--Solução:
(a) )2()1(
)2(
)1(
)2(1
)1(
)2(
)(
)()(
2
2
2
0
s s s
s
s s
s
s s
s
s R
sY sT
)2()1(
)1(
1)2(1
)1(
1
)(
)()(
2
2
2
11
s s s
s
s s
s
s
sW
sY sT
)2()1(
)1(
)1(
1)2(1
)1(
1
)(
)()(
2
22
2
s s s
s s
s s
s
s
sW
sY sT
(b)
)2()1(
)2()2()1()()(1)()()()( :)(entrada
2
2
0 s s s
s s s s s R sT s R sY s R s E s R
02
0
)2()1(
)2()2()1(1lim)(lim)(
1)(
2
2
00
s s s
s s s s
s s s sE t ee
s s R
s s ss (0,1 pt)
Ou: 01
1
)1(
)2(lim)()(lim
200
p
ss s s
p K
e s s
s s H sG K
R( s) E ( s)
W 1( s) W 2( s)
s
s 2 s
1 1
1
s
Y ( s)
-
8/18/2019 prova controle
4/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 4
2
1
)2()1(
)2()2()1(1lim)(lim)(
1)(
2
2
2002
s s s
s s s s
s s s sE t ee
s s R
s s ss (0,3 pt)
Ou:2
112
)1(
)2(lim)()(lim
200
v ss
s sv
K e
s s
s s s H s sG K
)2()1(
)2()2()1(1
lim)(lim
1
)( 2
2
3003 s s s
s s s s
s s s sE e s s R
s s ss (0,1 pt)
Ou:
a ss
s sa
K e
s s
s s s H sG s K
1
0)1(
)2(lim)()(lim
2
2
0
2
0
)2()1()()()()()(0)()()( :)(Wsinal
2111111 s s s
s sW sT sW sT sW sY s R s E s
02
0
)2()1(
1lim)(lim)(
1)(
2001
s s s
s
s s s sE t ee
s sW
s s ss (0,1 pt)
2
1
)2()1(
1lim)(lim)(
1)( 220021
s s s
s
s s s sE t ee
s sW
s s ss (0,3 pt)
)2()1(
1lim)(lim
1)(
230031
s s s
s
s s s sE e
s sW
s s ss (0,1 pt)
)2()1(
)1()()()()()(0)()()( :)(Wsinal
2222222 s s s
s s sW sT sW sT sW sY s R s E s
0
2
0
)2()1(
)1(1lim)(lim
1)(
2002
s s s
s s
s s s sE e
s sW
s s ss (0,1 pt)
2
1
)2()1(
)1(1
lim)(lim
1
)( 220022
s s s
s s
s s s sE e s sW
s s ss (0,3 pt)
)2()1(
)1(1lim)(lim
1)(
230032
s s s
s s
s s s sE e
s sW
s s ss (0,1 pt)
R W 1 W 2
a) degrau e ss = 0 0 0
b) rampa e ss = 0,5 -0,5 -0,5
c) parábola e ss = ∞ -∞ -∞
(c) R: tipo 1 (integrador na malha direta),
W 1: tipo 1 (integrador na malha de realimentação), W 2:
tipo 1
(integrador na malha de realimentação)
-
8/18/2019 prova controle
5/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 5
3ªQuestão : 5,0 Pts (LGR) Considere o controle de um
processo que é instável em malha aberta. Neste sistema osensor mede
a variável controlada, Y , introduzindo, no entanto, um
atraso. O controlador PI acrescenta um zero
próximo à origem permitindo estabilizar o processo (ramos
do LGR vem para o semi-plano esquerdo). O pólo na
origem permite seguir referências em degrau e rejeitar
perturbações constantes. O foco desta questão é encontrarum valor
adequado para o ganho K para a operação em malha fechada
(estabilização e tempo de resposta).
)10)(1(
1,0
s s
R Y
W
E
s
s K )1(
10
10
s
Controlador Processo
Sensor
a) (2,5 Pontos) Esboce o LGR + (para 0
K < ):
(0,2) Assinale no plano s pólos (x) e zeros (o),
(0,2) Marque o LGR + sobre o eixo real,(0,6) Calcule
as assíntotas, centroide (α) e o ângulo (ϕ) com o eixo real,
(0,3) Obtenha os pontos de ramificação (d K /ds=0) do
LGR +.
(1,0) Calcule via Routh-Hurwitz os pontos de interseção com o
eixo jω,
(0,2) Indique no LGR + o sentido
de K crescente.
b) (1,0 Ponto) Esboce o LGR (para
- < K < 0):
(0,2) Marque o LGR sobre o eixo real,(0,3) Calcule (se
necessário) as assíntotas, centroide (α) e ângulo (ϕ) com o eixo
real,
(0,3) Obtenha os pontos de ramificação no LGR .(0,2)
Calcule (se necessário) via Routh-Hurwitz os pontos de interseção
com o eixo jω.
c)
(0,5) Para quais valores
de K (para - < K <
) este sistema de controle é estável?
d) (0,5) O ponto sx = 1,12 + 3,6i faz parte do
LGR. Indique os cálculos para obter o ganho K x
correspondente.
e) (0,5) Considerando K x do item anterior
e a posição correspondente de todos os pólos em malha fechada,
qual a estimativa para o tempo de acomodação (t s (2%)=4/σ)
para um degrau unitário de referência?
Obs.:
roots([1 19 80 -100 0] - conv([1 1],[4 57 160 -100])) = -10.0;
-2.2190 ± 1.6391i; 0.4380;roots(conv([-1 -1],[1 19 80 -100]) -
conv([1 -1],[4 57 160 -100])) = 0; -10.0; -5.6; 1.0
roots([-1 1259 -152000]) = 1123,7; 135;
roots([-1 1359 162000]) = 1227; 132;
-
8/18/2019 prova controle
6/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 6
Solução:
(0,2) Assinale no plano s polos (x) e zeros (o),
(0,2) Marque o LGR + sobre o eixo real,
(0,6) Calcule as assíntotas, centroide (α) e o ângulo (ϕ) com o
eixo real,
º180;º603
º360º180;63
111010 l
(0,3) Obtenha os pontos de ramificação (d K /ds=0) do
LGR +.
01008019
110
)(
)(10)(1
234
s s s s
s K
sa
sb K s KG
)100160574)(1(1008019'' 23234
s s s s s s sbaab
>>roots(.) = -10.0; -2.2190 ± 1.6391i; 0.4380; → Pontos de
ramificação: -10 e 0,438.
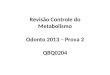
(1,0) Calcule via Routh-Hurwitz os pontos de interseção com o
eixo jω, ( K cr1 ,
ωcr1, K cr2 ,e ωcr2)
K s
X K
K K K
s
K K
s
K s
K s
0
2
3
4
19
1620
19)100(19
1620
19
1620
10019
801
-10 -8 -6 -4 -2 0 2
-10
-5
0
5
10
Root Locus
Real Axis (seconds -1)
I m a g i n a r y A x i s ( s e c o n d s -
1 )
-
8/18/2019 prova controle
7/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 7
0 200 400 600 800 1000 1200 1400-3
-2
-1
0
1
2
3x 10
5 -k.2+1359*k-162000
K
K K
K
K K K X
1620
1620001359
1620
361)100)(1620( 2
X : Raízes do numerador 1227; 132; (para estes
valores o denominador é positivo)
Condição para a estabilidade: não haver mudança no sinal da 1ª
coluna do arranjo de Routh-Hurwitz. Todos os
sinais devem ser positivos.
0
12271321620
162000359
162019
1620
0
2
2
3
4
K K s
K K
K K s
K K
s
s
s
O sistema só estável para 1227
-
8/18/2019 prova controle
8/8
Gabarito - 1ª Prova - 2° Sem. 2013 -
160032 – CONTROLE
DINÂMICO – ENE/UnB 8
(0,5) Para quais valores
de K (para - < K <
) este sistema de controle é estável?
1227