Embed Size (px)
DESCRIPTION
Proyecciones
Citation preview

UNIVERSIDAD TECNOLÓGICA NACIONAL
FACULTAD REGIONAL ROSARIO
Proyecciones
GABINETE SISTEMAS DE REPRESENTACION
AUTOR: Ing. Carlos A. Carranza [email protected]
Facultad Regional Rosario
Zeballos 1341 (2000) Rosario Tel. (0341) 4480102 / 4480148 / 4482404
Web Home: www.frro.utn.edu.ar E-mail Dpto. Ciencias Básicas: [email protected]
Septiembre de 2007 – Rosario, Pcia. de Santa Fe – Argentina -

PROYECCIONES
Introducción
El Dibujo Técnico es el medio de comunicación que utilizan los ingenieros, arquitectos y técnicos
para transmitir una información a otras personas. Esta información consiste en el diseño y proyecto
de objetos, máquinas, edificios, etc, que se encuentran solo en la mente creativa del proyectista,
siendo necesario entonces que el mismo realice dibujos (planos) para la interpretación y
construcción de esos objetos. Estos planos, ejecutados a mano o por medio de sistemas Cad,
conforman una representación precisa, exacta hasta en el detalle mínimo de un aparato, herramienta
o una construcción, con cotas, signos y símbolos, ejecutados de acuerdo con normas y leyes
preestablecidas, basados en las premisas básicas de la Geometría Descriptiva, contrariamente a lo
que es una reproducción o bosquejo mas o menos artístico, y que constituye una representación
subjetiva de un objeto de acuerdo con el modo de verlo y entenderlo el dibujante.
Está claro entonces que el Dibujo Técnico es el idioma de los profesionales, y como tal debe ser
estudiado y practicado por los futuros profesionales desde el comienzo de sus estudios. La
Geometría Descriptiva tiene que ser considerada como factor esencial para ejercitar a ver en el
espacio y para construir con exactitud.
Definición de Proyección
Dado el plano π, una dirección r, y un punto A
del espacio, proyectar a dicho punto sobre el
plano π para la dirección r, significa hacer pasar
por A, una paralela a r, y donde ésta corta al
plano π, se obtiene la proyección Aπ. (Fig. 1-1)
Fig. 1-1
Proyección del punto A sobre el plano π
Clasificación de los Sistemas de Proyección
El punto en el espacio, la dirección del rayo
proyectante y el plano de proyección, consti_
tuyen un sistema de proyección.
Cuando la dirección r es oblicua al plano π, el
sistema recibe el nombre de proyección
paralela oblicua. (Fig. 1-2)
Fig. 1-2 Proyección paralela oblicua
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 1

PROYECCIONES
Si la dirección del rayo proyectante r es
perpendicular al plano de proyección π, el
sistema recibe el nombre de proyección
paralela ortogonal. (Fig. 1-3)
Todos los puntos, rectas, etc, que se encuentran
en el espacio, se proyectan con rayos paralelos a
la dirección del rayo dado.
En el caso de que haya un centro de proyección,Fig. 1-3
Proyección paralela ortogonal
todos los rayos proyectantes parten de ese centro.
Este sistema recibe el nombre de proyección
central. (Fig. 1-4)
Como aplicación de la proyección paralela
oblicua, tenemos la Proyección Oblicua
Caballera (o perspectiva caballera) y la
Proyección oblicua Militar (o perspectiva
militar), los cuales se tratarán en profundidad
mas adelante. Como aplicación de la proyección Fig. 1-4
Proyección central
paralela ortogonal, podemos citar las Proyecciones Acotadas, las Proyecciones diédricas y la
Proyección Axonométrica ortogonal. Como ejemplo de la proyección central tenemos la
Perspectiva Real.
A los efectos del estudio de las proyecciones, debemos comenzar con la Proyección Paralela
Ortogonal.
Proyección Paralela Ortogonal
Habíamos visto que, dado un punto A del
espacio, se puede hallar la proyección sobre el
plano π, trazando por el punto A, una paralela a
la dirección del rayo proyectante. Dicho de otra
forma, dado el objeto en el espacio, se puede
determinar su proyección sobre el plano π.
Pero a la inversa no se cumple, es decir, dada la
proyección Mπ , el punto M del espacio, no se Fig. 1-5 puede determinar porque todos los puntos pertenecientes al rayo proyectante que pasa por Mπ,
tienen su proyección ortogonal sobre dicho punto. (Fig. 1-5)
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 2

PROYECCIONES
Podemos decir por el momento, que dada la
proyección, no puedo determinar el objeto en el
espacio. Una forma de resolver este problema, se
hace colocando el valor numérico de la cota
(altura del punto respecto del plano de proyec_
ción) al lado de la proyección del punto. Este
sistema recibe el nombre de Proyecciones
Acotadas. (Fig. 1-6) Fig. 1-6
Otra forma de resolver el problema mencionado en la Fig. 1-5, se efectúa colocando otro plano de
proyección perpendicular al anterior. Este sistema de proyección es conocido con el nombre de
Proyecciones diédricas o Método Monge.
Proyecciones diédricas o Método Monge
El método debe su nombre al matemático francés
Gaspard Monge (1746-1818), quién estableció sus
fundamentos al principio del siglo XIX. Consiste en
dos planos de proyección perpendiculares entre si,
el plano horizontal H o plano I y el plano vertical
V o plano II (ver Fig. 1-7). Ambos se cortan en una
línea llamada Línea de Tierra (LT).
Un punto del espacio, tal como A, se proyecta sobre
el plano H (Horizontal) con una dirección de rayos
perpendiculares a dicho plano. Esta proyección
recibe el nombre de proyección horizontal del punto
A, y la designamos A' (A prima). De igual manera,
el punto A del espacio también se proyecta sobre el Fig. 1-7
plano V (Vertical) con una dirección de rayos perpendiculares al mismo, y esta proyección recibe el
nombre de proyección vertical del punto A, y la designamos A" (A segunda). En conclusión, a un
punto del espacio le corresponden dos proyecciones.
Vemos que, dado el punto, se puede determinar sus proyecciones o bien, dadas las dos
proyecciones, se puede determinar el punto A en el espacio, el cual se encuentra en la intersección
de los rayos proyectantes que pasan por A' y A", y son perpendiculares a los planos H y V
respectivamente.
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 3

PROYECCIONES
En la Fig. 1-7, está indicado un punto A del espacio
con sus proyecciones horizontal y vertical. Como
ambas proyecciones se encuentran en dos planos
perpendiculares, resultaría útil y necesario tenerlas en
un único plano u hoja de dibujo. Por tal motivo,
hacemos girar el plano H alrededor de la Línea de
Tierra (ver Fig. 1-7), hasta que coincida con el plano V
( Fig. 1-8 ), quedando entonces ambas proyecciones en
un único plano de dibujo. La proyección A" está por
encima de la línea de tierra y la proyección A' queda
Fig. 1-8
Plano H abatido sobre el V (visto de frente)
por debajo de dicha línea. Uniendo las dos proyecciones tenemos la línea auxiliar llamada Línea de
Enlace.
La distancia del punto A al plano H, recibe el nombre de Cota y se proyecta sobre el plano vertical
desde A" hasta la línea de tierra. La distancia del punto A al plano V, recibe el nombre de Apar_
tamiento y se proyecta sobre el plano horizontal desde A' hasta la línea de tierra. ( ver Fig. 1-8 ). Si
nos preguntamos: ¿Dónde está el punto A en la Fig. 1-8?, pues bien debemos recordar que estamos
trabajando solamente con las proyecciones de los objetos en el espacio, es decir con sus imágenes
sobre los planos de proyección. Cuando un Ingeniero desea construir una pieza, primero la imagina
en el espacio y luego dibuja las proyecciones de la misma, con lo cual preguntar donde está el punto
A sería lo mismo que preguntar donde está la pieza mientras se observa las proyecciones de la
misma.
En la Fig. 1-9 no se indica el contorno de los planos de proyección por no ser de utilidad y
solamente se dibuja la línea de tierra y las dos proyecciones del punto A con su correspondiente
Cota y Apartamiento.
Fig. 1-9 Eliminación de los contornos de los planos de proyección.
Fig. 1-10 Eliminación de la L.T.
Fig. 1-11
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 4

PROYECCIONES
En la Fig. 1-10 se ha eliminado la línea de tierra, quedando únicamente las dos proyecciones del
punto A, unidas por la línea de enlace.
Si las proyecciones del punto A fueran un dato a dibujar, para poder ubicar las mismas; dado que al
faltar la línea de tierra no podemos indicar la cota y el apartamiento; lo referimos a un sistema de
ejes coordenados. ( Fig. 1-11 )
Estos ejes ( normales entre si ) los ubicamos en la lámina, en forma imaginaria ( no los dibujamos )
y en la posición que creemos conveniente. ( ver Fig. 1-11 )
En el dibujo de la Fig. 1-11, las dos proyecciones de A están referidas a los ejes x e y:
Por ejemplo: A" ( 80 ; 180 ) en milímetros
A' ( 80 ; 100 ) " "
El primer número corresponde a la Abscisa (según x) y el segundo corresponde a la Ordenada
(según y). Las dos proyecciones del punto A, tienen la misma abscisa, pero distinta ordenada.
Eliminación de la Línea de Tierra
Lo que nos interesa, son las proyecciones del objeto y no la distancia del mismo a los planos de
proyección ( cota o apartamiento ) y así eliminamos en el dibujo, líneas que no son útiles, como en
este caso, la misma LT. No obstante, toda vez que se haga necesario la colocación de la LT para una
mejor comprensión del ejercicio, trabajaremos con la misma.
Una observación que corresponde
hacer es la siguiente: El plano
Vertical y el plano Horizontal de
proyección, dividen al espacio en
cuatro sectores o cuadrantes ( ver
Fig. 1-12 ). Trabajaremos sola_
mente con los objetos ubicados
en el primer cuadrante (con
cotas y apartamientos positivos).
RECORDAR ⎢ La cota de un
punto es positiva cuando el mismo
está por encima del plano hori_ Fig. 1-12
zontal y el apartamiento es positivo cuando éste está adelante del plano vertical de proyección.
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar
Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 5

PROYECCIONES
Puntos relacionados
Fig. 1-13
Fig. 1-14
Teniendo el punto A, como punto de referencia,
vemos que B, está a la derecha de A, tiene menor
cota que A, y mayor apartamiento (ver Fig. 1-13 y
14). Por lo tanto podemos decir que:
A de respecto Adelante Debajo
derecha la a está B⎪⎩
⎪⎨
⎧
Veamos un ejemplo con medidas (ver Fig. 1-15):
Siendo A el punto de referencia; la posición de B,
es la siguiente:
A de respecto apart. igualcon
arriba mm 10 izq. la a mm 20
está B⎪⎩
⎪⎨
⎧
La distancia entre las líneas de enlace, recibe el
nombre de separación lateral.
De acuerdo a lo visto, podemos hacer el siguiente
gráfico ( Fig. 1-16 ):
Tenemos las dos proyecciones de A unidas por la
línea de enlace. Trazamos por A" y A' las líneas
horizontales auxiliares que nos limitan la cota y el
apartamiento de A. En base a esto, dada la posición del punto de referencia, en este caso el punto A,
las flechas indicarán las posiciones donde deberán ir las proyecciones del nuevo punto.
Fig. 1-15 Fig. 1-16
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 6

PROYECCIONES
Nuevo Plano de Proyección
Hemos aprendido con el Método Monge que podemos determinar dos proyecciones de un punto del
espacio y viceversa, dadas las dos proyecciones podemos determinar el punto en el espacio.
Veremos a continuación que podemos representar múltiples proyecciones de un punto sobre
distintos planos de proyección.
Dado un punto A en el espacio, se proyecta sobre el
plano I y II con direcciones de rayos perpendiculares a
dichos planos. De igual manera con una dirección de
rayo perpendicular al plano III se obtiene la proyec_
ción tercera del punto A (Fig. 1-17a). El plano III es un
plano de proyección que es perpendicular al plano II y
al plano I.
RECORDAR ⎢ “Todo nuevo plano de proyección debe
ser perpendicular a uno de los planos de proyección
ya existentes, para formar así un nuevo diedro de
proyección.”
Para llevar a la hoja lo indicado en la Fig. 1-17a,
hacemos girar el plano I alrededor de la línea de tierra,
hasta que quede en el mismo plano que el II. De igual
manera, hacemos girar el plano III alrededor de la
nueva línea de tierra (entre el plano II y el III), hasta
que coincida con el plano vertical. ( Fig. 1-17b )
OBSERVACION ⎢ “Al ser el plano III perpendicular
a ambos planos II y I, se puede abatir el plano III
sobre el plano I, ya que estos dos también conforman
un diedro de proyección”. El apartamiento, que es la distancia del punto A al plano vertical, se conserva tanto en la proyección
horizontal ( distancia de A’ a la LT ) como así también en la proyección tercera (distancia de A’’’ a
la nueva LT ), lo cual vale para todo punto del espacio.
Proyecciones de rectas y/o segmentos
De acuerdo a la posición que una recta o segmento tenga con respecto a los planos de proyección,
recibe distintos nombres. Se incluye una tercera proyección sobre un plano III, el cual se abate
sobre el plano II. Lo ilustramos con un segmento que denominamos AB.
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 7

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 8

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 9

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 10

PROYECCIONES
Conclusiones:
1.- Todo segmento se proyecta como un segmento o como un punto.
2.- Cuando la proyección es un segmento, dicha proyección puede estar en VM (verdadera magni_
tud) o con una magnitud menor que la real, nunca mayor.
3.- Cuando una de las proyecciones es un punto, la otra necesariamente está en VM.
4.- Cuando un segmento es paralelo a un plano de proyección, la proyección sobre dicho plano está
en VM y la otra es un segmento paralelo a la LT. (Si no tenemos LT decimos que es
perpendicular a la línea de enlace)
RECORDAR ⎢ El apartamiento de un punto se conserva en la proy. tercera (Es decir, la distancia
de la proy. prima a la línea de tierra I-II es igual a la distancia de la proyección tercera a la línea
de tierra II-III).
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 11
PROYECCIONES
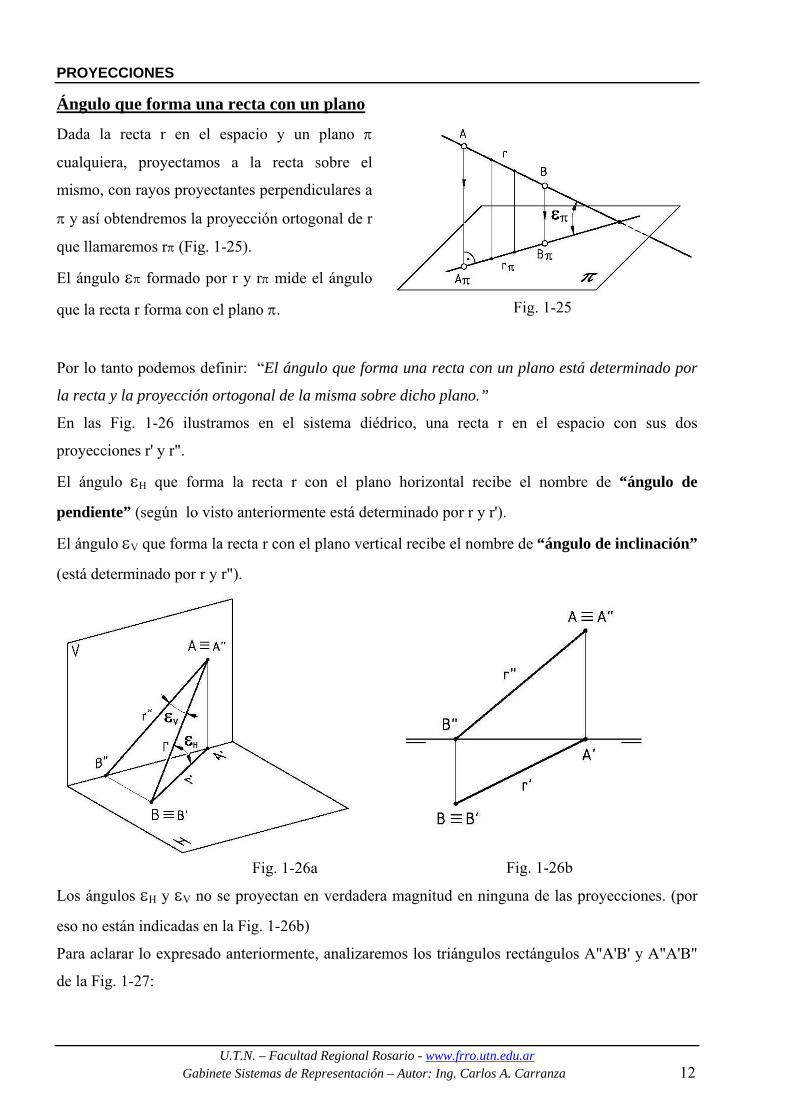
Ángulo que forma una recta con un plano
Dada la recta r en el espacio y un plano π
cualquiera, proyectamos a la recta sobre el
mismo, con rayos proyectantes perpendiculares a
π y así obtendremos la proyección ortogonal de r
que llamaremos rπ (Fig. 1-25).
El ángulo επ formado por r y rπ mide el ángulo
que la recta r forma con el plano π. Fig. 1-25
Por lo tanto podemos definir: “El ángulo que forma una recta con un plano está determinado por
la recta y la proyección ortogonal de la misma sobre dicho plano.”
En las Fig. 1-26 ilustramos en el sistema diédrico, una recta r en el espacio con sus dos
proyecciones r' y r".
El ángulo εH que forma la recta r con el plano horizontal recibe el nombre de “ángulo de
pendiente” (según lo visto anteriormente está determinado por r y r').
El ángulo εV que forma la recta r con el plano vertical recibe el nombre de “ángulo de inclinación”
(está determinado por r y r").
Fig. 1-26a
Fig. 1-26b
Los ángulos εH y εV no se proyectan en verdadera magnitud en ninguna de las proyecciones. (por
eso no están indicadas en la Fig. 1-26b)
Para aclarar lo expresado anteriormente, analizaremos los triángulos rectángulos A"A'B' y A"A'B"
de la Fig. 1-27:
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 12

PROYECCIONES
Fig. 1-27
Considerando que a mayor lado corresponde
mayor ángulo γ > γ" por ser 'AB' > 'AB" y por
lo tanto εH” > εH. (el mismo razonamiento lo
podemos hacer para εV)
El segmento horizontal (ver Fig. 1-21): Tiene ángulo de inclinación εV.
No tiene ángulo de pendiente porque el segmento es
paralelo al plano horizontal.
εV se proyecta sobre el plano horizontal en VM.
El segmento frontal (ver Fig. 1-22): Tiene ángulo de pendiente εH.
No tiene ángulo de inclinación porque es paralelo al
plano vertical.
εH se proyecta sobre el plano vertical en VM.
El segmento de perfil (ver Fig. 1-24): Tiene ángulo de inclinación y ángulo de pendiente.
Ninguno de los dos se proyectan en VM sobre los
planos de proyección.
El segmento oblicuo (ver Fig. 1-23): Tiene ángulo de inclinación y ángulo de pendiente.
Ninguno de los dos se proyectan en VM sobre los
planos de proyección.
Posición relativa de dos rectas
Dadas dos rectas en el espacio, se pueden presentar las siguien_
tes situaciones:
A) Que las dos rectas se corten en un punto: Reciben el nombre
de rectas concurrentes o secantes (son coplanares porque
determinan un plano). En la Fig. 1-28, la recta a está en posi_
ción frontal y la recta b está en posición oblicua. Ambas tienen en común el punto O. Fig. 1-28
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 13

PROYECCIONES
B) Que las dos rectas sean paralelas:
b' // a'
β // α b de eproyectant plano β a de eproyectant plano α
b // a
⇒
⎪⎪⎭
⎪⎪⎬
⎫
Si dos rectas son paralelas en el espacio, sus proyecciones homónimas también son paralelas (las
proyecciones verticales son paralelas entre sí y las proyecciones horizontales también son paralelas
entre sí).
Las rectas paralelas también son coplanares (Fig. 1-29).
Fig. 1-29
C) Que las dos rectas sean alabeadas: Son dos rectas que no se cortan en el espacio, y no son
coplanares, porque no hay un plano que contenga a las dos rectas simultáneamente.
Si observamos la Fig. 1-30 vemos que el punto donde se cortan las proyecciones verticales no está
sobre la misma línea de enlace con el punto donde se cortan las proyec_ ciones horizontales. Por
esto podemos afirmar que las rectas no se cortan, tampoco son paralelas; reciben el nombre de
rectas alabeadas.
Fig. 1-30
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 14

PROYECCIONES
Visibilidad de los segmentos alabeados
Estudio de la visibilidad:
En la Fig. 1-31b tenemos representadas las proyecciones
diédricas de los segmentos alabeados AB y CD . En la Fig.
1-31a están ilustrados los segmentos en el espacio con las
dos proyecciones. Observando la Fig. 1-31b, vemos que las
proyecciones verticales de los segmentos se cortan en un
punto, pero en dicho punto se encuentra la proyección
vertical de un punto del segmento AB y la de otro punto del
segmento CD .Las dos proyecciones coinciden en un único
punto que han sido designados con las letras R y S. Poste_
riormente hallamos las proyecciones horizontales de dichos puntos: R Є AB y S Є CD . Vemos
que S tiene mayor apartamiento que R y por lo tanto S es visible en proyección vertical, mientras
que R queda oculto por S.
Por lo tanto, todos los puntos del segmento CD son visibles en proyección vertical, mientras que el
segmento AB tiene el punto R que no es visible en dicha proyección.
Para estudiar la visibilidad en proyección horizontal, analizamos los puntos X e Y, cuyas
proyecciones horizontales coinciden: X Є AB; Y Є CD . Determinadas las proyecciones verticales,
vemos que X tiene mayor cota que Y, y por lo tanto X será visible en proyección horizontal. Como
X Є AB, todos los puntos de dicho segmento son visibles en proyección horizontal; y con respecto U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar
Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 15
PROYECCIONES
a los puntos de CD , son visibles todos menos el punto Y. ( el cual queda oculto por X )
En este caso particular todos los puntos de CD son visibles en proyección vertical, y todos los
puntos de AB son visibles en proyección horizontal. Analizar lo expuesto observando las
Fig. 1-31 a y b.
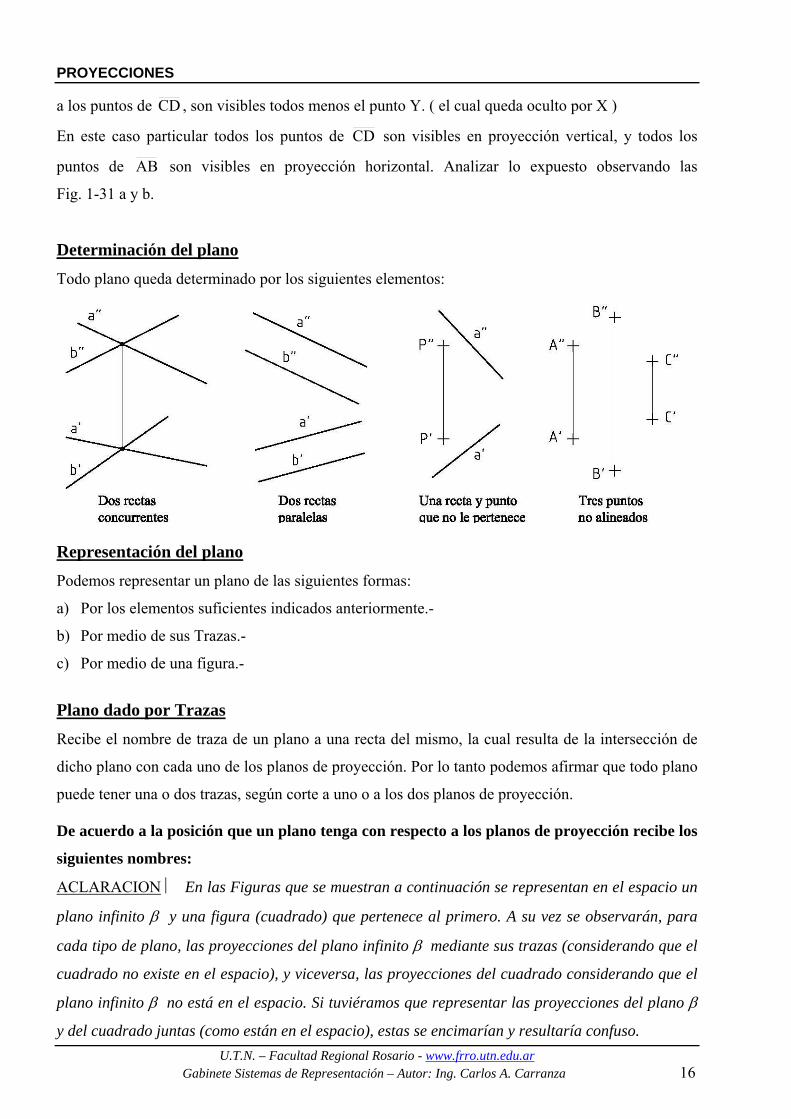
Determinación del plano
Todo plano queda determinado por los siguientes elementos:
Representación del plano
Podemos representar un plano de las siguientes formas:
a) Por los elementos suficientes indicados anteriormente.-
b) Por medio de sus Trazas.-
c) Por medio de una figura.-
Plano dado por Trazas
Recibe el nombre de traza de un plano a una recta del mismo, la cual resulta de la intersección de
dicho plano con cada uno de los planos de proyección. Por lo tanto podemos afirmar que todo plano
puede tener una o dos trazas, según corte a uno o a los dos planos de proyección.
De acuerdo a la posición que un plano tenga con respecto a los planos de proyección recibe los
siguientes nombres:
ACLARACION ⎢ En las Figuras que se muestran a continuación se representan en el espacio un
plano infinito β y una figura (cuadrado) que pertenece al primero. A su vez se observarán, para
cada tipo de plano, las proyecciones del plano infinito β mediante sus trazas (considerando que el
cuadrado no existe en el espacio), y viceversa, las proyecciones del cuadrado considerando que el
plano infinito β no está en el espacio. Si tuviéramos que representar las proyecciones del plano β
y del cuadrado juntas (como están en el espacio), estas se encimarían y resultaría confuso. U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar
Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 16

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 17

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 18

PROYECCIONES
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 19

PROYECCIONES
Conclusiones:
1.- Toda figura se proyecta como una figura o como un segmento.
2.- Cuando se proyecta como una figura la misma puede estar en verdadera magnitud (VM) o no. Si
no está en VM se proyecta como una figura de similar configuración (la proyección de la figura
conserva algunas propiedades de la VM, como por ejemplo, número de lados, paralelismo, etc.).
3.- Si una figura está perpendicular a un plano de proyección, se proyecta sobre el mismo como un
segmento.
4.- Si la figura está paralela a un plano de proyección, la proyección sobre dicho plano está en VM
y la otra es un segmento paralelo a la L.T. (o perpendicular a las líneas de enlace).
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 20
PROYECCIONES
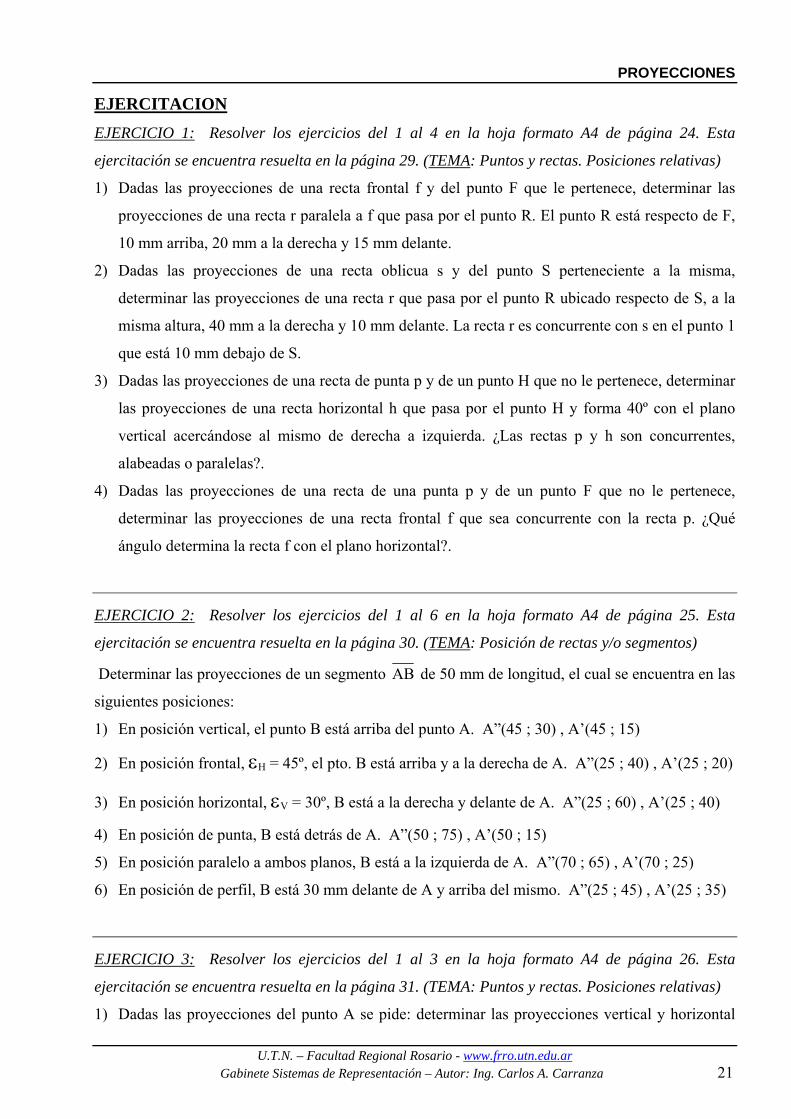
EJERCITACION
EJERCICIO 1: Resolver los ejercicios del 1 al 4 en la hoja formato A4 de página 24. Esta
ejercitación se encuentra resuelta en la página 29. (TEMA: Puntos y rectas. Posiciones relativas)
1) Dadas las proyecciones de una recta frontal f y del punto F que le pertenece, determinar las
proyecciones de una recta r paralela a f que pasa por el punto R. El punto R está respecto de F,
10 mm arriba, 20 mm a la derecha y 15 mm delante.
2) Dadas las proyecciones de una recta oblicua s y del punto S perteneciente a la misma,
determinar las proyecciones de una recta r que pasa por el punto R ubicado respecto de S, a la
misma altura, 40 mm a la derecha y 10 mm delante. La recta r es concurrente con s en el punto 1
que está 10 mm debajo de S.
3) Dadas las proyecciones de una recta de punta p y de un punto H que no le pertenece, determinar
las proyecciones de una recta horizontal h que pasa por el punto H y forma 40º con el plano
vertical acercándose al mismo de derecha a izquierda. ¿Las rectas p y h son concurrentes,
alabeadas o paralelas?.
4) Dadas las proyecciones de una recta de una punta p y de un punto F que no le pertenece,
determinar las proyecciones de una recta frontal f que sea concurrente con la recta p. ¿Qué
ángulo determina la recta f con el plano horizontal?.
EJERCICIO 2: Resolver los ejercicios del 1 al 6 en la hoja formato A4 de página 25. Esta
ejercitación se encuentra resuelta en la página 30. (TEMA: Posición de rectas y/o segmentos)
Determinar las proyecciones de un segmento AB de 50 mm de longitud, el cual se encuentra en las
siguientes posiciones:
1) En posición vertical, el punto B está arriba del punto A. A”(45 ; 30) , A’(45 ; 15)
2) En posición frontal, εH = 45º, el pto. B está arriba y a la derecha de A. A”(25 ; 40) , A’(25 ; 20)
3) En posición horizontal, εV = 30º, B está a la derecha y delante de A. A”(25 ; 60) , A’(25 ; 40)
4) En posición de punta, B está detrás de A. A”(50 ; 75) , A’(50 ; 15)
5) En posición paralelo a ambos planos, B está a la izquierda de A. A”(70 ; 65) , A’(70 ; 25)
6) En posición de perfil, B está 30 mm delante de A y arriba del mismo. A”(25 ; 45) , A’(25 ; 35)
EJERCICIO 3: Resolver los ejercicios del 1 al 3 en la hoja formato A4 de página 26. Esta
ejercitación se encuentra resuelta en la página 31. (TEMA: Puntos y rectas. Posiciones relativas)
1) Dadas las proyecciones del punto A se pide: determinar las proyecciones vertical y horizontal
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 21

PROYECCIONES
del punto B el cual se encuentra respecto del punto A, 40 mm a la derecha, 35 mm arriba y con
igual apartamiento. Las mismas proyecciones de un punto C el cual se encuentra respecto del
punto A, 60 mm a la derecha, a igual altura y 30 mm adelante. ¿Qué tipo de segmentos son el
AB y el AC, de acuerdo a la posición que tiene cada uno en el espacio?. Indicar si algunos de
los segmentos se proyecta en verdadera magnitud. Datos: A” (15 ; 85) ; A’ (15 ; 45)
2) Determinar las proyecciones vertical y horizontal, de una cañería de tres tramos PQ, QR y RS,
según los siguientes datos:
TRAMO PQ: en posición vertical, ( PQ )=35 mm, Q está debajo de P.
TRAMO QR: posición horizontal, ( QR )=50 mm, εv=40°, R está a la derecha y delante de Q.
TRAMO RS: el punto S está 30 mm a la derecha, 35 mm arriba y 20 mm detrás, del punto R.
Indicar, si es posible, verdaderas magnitudes y ángulos de pendiente e inclinación de cada
tramo. Aclarar que tipo de segmento es el RS. (Representar cada cañería por un segmento)
3) Resolver el ejercicio 1, trabajando con los tres planos de proyección, plano I, II y el plano III
perpendicular a los dos primeros (de perfil). Datos: A” (15 ; 85) ; A’ (15 ; 45). Ubicar la línea de
tierra entre el plano I y el II donde se prefiera.
EJERCICIO 4: Resolver los ejercicios del 1 al 6 en la hoja formato A4 de página 27. Esta
ejercitación se encuentra resuelta en la página 32. (TEMA: Posición de planos y/o figuras)
Determinar las proyecciones de un triángulo isósceles, cuya base AB=30 mm
y la altura h=30 mm, en las siguientes posiciones:
1) En posición frontal, la base AB está paralela a ambos planos. A B
C
h
2) En posición horizontal, AB está de punta.
3) En posición proyectante vertical, forma 45º con el plano I y AB está frontal.
4) En posición proyectante horizontal, forma 30º con el plano vertical y AB está en posición
vertical.
5) En posición paralelo a la línea de tierra formando 50º con el H. La base AB está de perfil.
6) En posición de perfil, AB está vertical y C está delante de A.
EJERCICIO 5: Resolver los ejercicios del 1 al 4 en la hoja formato A4 de página 28. Esta
ejercitación se encuentra resuelta en la página 33. (TEMA: Puntos y rectas pertenecientes a un
plano)
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar
Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 22

PROYECCIONES
1) Dadas las proyecciones de una figura ABC, determinar las proyecciones de una recta horizontal
h que pertenezca al plano definido por dicha figura y que esté 20 mm debajo del punto B.
2) Dadas las proyecciones de una figura PQR y la proyección horizontal de un punto P que
pertenece a dicha figura, determinar la proyección vertical del mismo utilizando una recta
frontal f que pertenezca a la figura y que contenga al punto P. Verificar utilizando una recta r
cualquiera que pertenezca a la figura y que contenga al punto P.
3) Dadas las proyecciones de una figura LMN y la proyección horizontal de un punto P que
pertenece al lado LM, determinar la proyección vertical del mismo. Ayuda: Utilizar una recta r
que pertenezca a la figura, que sea paralela a uno de los lados de ésta y que obviamente
contenga al punto P.
4) Completar la proyección vertical de la superficie plana ABCD, dada su proyección horizontal.
U.T.N. – Facultad Regional Rosario - www.frro.utn.edu.ar Gabinete Sistemas de Representación – Autor: Ing. Carlos A. Carranza 23







































