Embed Size (px)
Citation preview
UNIVERSIDAD TECNOLÓGICA DEL CENTRO DE VERACRUZ
TSU: MANTENIMIENTO ÁREA INDUSTRIALCUITLÁHUAC, VER.
PROYECTO INTEGRADOR:“CONTROL DE TEMPERATURA EN INVERNADERO”
PROTOTIPO 1° PARTE
CONTENIDO:“DISEÑAR UN SISTEMA DE CONTROL QUE MANTENGA LOS VALORES DE
LAS VARIABLES (TEMPERATURA, HUMEDAD Y RIEGO) EN RANGOS
DESEADOS Y/O RECOMENDADOS PARA OBTENER UN SISTEMA
ECONÓMICAMENTE SUSTENTABLE Y DE FÁCIL OPERACIÓN.”
NUMERO DE EQUIPO:#3
NOMBRE DEL ALUMNO(S):VILLAGRAN GARCÍA PEDRO DAMIÁN
MIRANDA ROMAN EDGARDOGONZALEZ MARTINEZ MONSERRAT
FERNANDEZ NAVA JOSE ALEJANDROGARCIA CALDERON IDELFONSOMIRANDA CHAVEZ JAIRO JARED
ALVAREZ ZAVALETA JAVIERSOLIS VELA OSCAR
CONTRERAS SANCHEZ JORGE ERIK
GRADRO Y/0 GRUPO:4° C DZ MAI
ASESOR:ING. BEATRIZ ROJAS DÍAS
FECHA DE ENTREGA:7 DE DICIEMBRE DEL 2013
PERIODO:MAYO 2013 – AGOSTO 2013
VO.BO. CALIFICACION
Índice
Índice..........................................................................................................................................1
1. Introducción...........................................................................................................................1
1.1 Antecedentes.......................................................................................................................2
1.2 Planteamiento......................................................................................................................5
1.3 Justificación..........................................................................................................................6
1.4 Objetivos..............................................................................................................................7
1.4.1 Objetivo General...............................................................................................................7
2. Componentes del sistema......................................................................................................8
2.1 Integrado para control de motores L293D...........................................................................8
2.2 Microcontrolador PIC16F877A...........................................................................................11
2.3 Modulo visual LCD 2x16.....................................................................................................15
2.3 Sensor de temperatura LM35.............................................................................................23
3. Diagramas electrónicos simulación......................................................................................29
3.1 Sensor indicando la temperatura ideal en la pantalla LCD.................................................29
3.2 Sensor indicando la temperatura esta elevada y por lo tanto los enfriadores, en nuestro caso los ventiladores están encendidos en la pantalla LCD.....................................................30
3.3 Sensor indicando que la temperatura esta baja y por lo tanto se encenderá las lámparas incandescentes a modo de generar calefacción......................................................................30
1. Introducción.
El presente trabajo Recepcional está encaminado a proponer soluciones de utilidad para resolver
algunas de las tantas problemáticas que presenta el sector agrícola y así impulsar el desarrollo de
dicho sector en la zona centro del Estado de Veracruz. Trabajar con esta temática implica no sólo
poseer conocimientos en ingeniería, sino que se debe contar con una visión multidisciplinaria que
implique considerar ciencias como la agronomía, biología, agrotecnología, entre otras.
En resumen, se tiene como objetivos generales controlar los sistemas que existen dentro
de un invernadero y capacitar a los y las productoras emprendedoras para que sean capaces de
optimizar y aprovechar sus recursos para maximizar la producción de sus cultivos.
Actualmente, la tecnología tiene grandes avances en sus distintos campos de aplicación,
uno de ellos es el desarrollo de paquetes tecnológicos para el cuidado de cultivos en invernaderos.
Los invernaderos son creados para simular en un espacio cerrado las condiciones ambientales que
hay en el exterior y con ello producir cultivos fuera de temporada en condiciones óptimas para su
desarrollo.
“La eficiencia y funcionalidad son las dos características principales que deben obtener los
invernaderos. Por eficiencia se entiende la idoneidad para condicionar alguno de los principales
elementos del clima, no de una manera estática o incontrolable, sino entre límites bien
determinados de acuerdo con las exigencias fisiológicas del cultivo. La funcionalidad es el conjunto
de requisitos que permiten la mejor utilización del invernadero, tanto desde el punto de vista
técnico como económico. Estas dos características requeridas a los invernaderos deberán estar
convenientemente armonizadas en orden a definir al invernadero como el sistema productivo capaz
de obtener cosechas fuera de la época normal en la que aparecen en el mercado.”
El anturio es una planta tropical originaria de América Central, que en su ambiente natural
crece bajo la sombra de los árboles y sobre la hojarasca en proceso de descomposición. En
México, el cultivo se desarrolla principalmente en los Estados de: Veracruz, Chiapas, Michoacán,
Jalisco y Colima.
Se estima que en Estados del norte de México se tiene el valor más alto de las flores en
todo el mundo, alcanzando precios de $ 45.00 por flor. Es un cultivo costoso en su inversión pero
rentable y productivo todo el año, aunque los costos pueden disminuir considerablemente si se
cultiva en zonas tropicales donde el clima no sea frio y seco.
1
En México no se tiene una fecha precisa de cuando fueron introducidos los anturios, pero
se cree que en la década de 1930 y 1940 se empezaron a cultivar como plantas de traspatio o de
interior en la región de Fortín de las Flores, Veracruz. Actualmente, en el Estado de Veracruz, esta
especie es ampliamente cultivada en los siguientes municipios: Fortín, Córdoba, Amatlan de los
Reyes, Yanga, Tepatlaxco, Ixtaczoquitlán, Atoyac, Coatepec, Emiliano Zapata, Catemaco,
Huatusco.
1.1 Antecedentes
El cultivo forzado o protegido es aquel que durante todo el ciclo productivo o en una parte del
mismo actúa como simulador del microclima que rodea a una planta. A pesar del hincapié en la
modificación del ambiente climático, el cultivo forzado también engloba todas aquellas técnicas (la
fertirrigacion, densidad, y época de siembra, sanidad vegetal, etcétera) que ayudan a incrementar
la producción, mejorar calidad, la precocidad de la cosecha y demás objetivos en torno al cultivo
protegido. El cultivo forzado obliga a una planta a adaptarse a un ambiente diferente al que
normalmente se desarrolla, y eso puede lograrse mediante la implementación de invernaderos,
aunque no es necesario, pues un cultivo forzado puede ser desarrollado a la intemperie, es decir,
así un cultivo bajo invernadero no es siempre un cultivo forzado. En este trabajo, se entenderá el
cultivo forzado como aquel que se desarrolla bajo condiciones de invernadero.
Es preciso mencionar que el uso de las protecciones o abrigos climáticos y los túneles son
herramientas que alcanzan los objetivos de producción, precocidad y calidad, pero no logran cubrir
la eficacia y funcionalidad, que sí logra un invernadero, el cual incluye la climatización artificial y la
regulación climática.
El desarrollo en la construcción de invernaderos y aparición de nuevos diseños coincidió
con la difusión y utilización de materiales plásticos en los diferentes campos de la agricultura. El
uso del polietileno de baja densidad en sus diferentes modalidades y de los materiales plásticos en
placas como cobertura en los invernaderos presentó un avance en el diseño de nuevos
invernaderos con la aparición de las formas curvas y la disminución en el peso de la estructura de
sostén con la consiguiente repercusión en el coste del invernadero.
La climatización del ambiente dentro de un invernadero se mostró como un avance
tecnológico, por la búsqueda de disminuir los gradientes térmicos, tanto en el plano vertical como
2
horizontal, incidiendo por lo tanto en la distribución más racional del calor mediante la adecuada
disposición de las tuberías de la calefacción por agua caliente (suelo + ambiente) o en la
canalización del aire caliente producido por los generadores con una manga de plástico perforada.
Sin embargo, éstas tecnologías se encontraron con un serio obstáculo para su desarrollo en los
años 70’s debido a la naciente crisis energética.
A partir de eso, los países con gran tradición hortícola bajo invernadero y consumidores de
energía como Holanda, Alemania, Dinamarca, etc., incrementaron sus investigaciones
considerando como objetivo principal el ahorro de combustible. Hoy en día los invernaderos
implementan la calefacción y/o mejora térmica considerando técnicas de ahorro energético.
Es de suma importancia regular el clima de los invernaderos durante el periodo invernal,
sin embargo, también es importante regular, durante el verano, la disminución de la temperatura,
misma que alcanza un nivel por debajo de la máxima biológica. Por lo tanto se puede decir que la
aplicación y la eficiencia de la tecnología para la ambientación son más complejas.
Hace 2500 años se registraron dos sucesos históricos que podrían ser considerados los
primeros antecedentes que aportan conocimientos para el surgimiento de la técnica de
invernadero. Por una parte, la construcción de los jardines colgantes de Babilonia (600 a.c.),
considerado una de las siete maravillas del mundo; y, por otra, la cultura griega (siglo V a.c.) que
comenzó a diseñar casas para captar la radiación solar durante el invierno.
Con el descubrimiento del vidrio plano y transparente, los romanos adoptan la técnica solar
griega, desarrollándola y adaptándola a los diferentes climas del imperio (siglo I d.c.) y aplicándola
en invernaderos y edificios públicos tales como los baños. En el siglo XVI, tras la reforma,
holandeses y flamencos, libres ya de la autoridad de la iglesia católica y de la inquisición,
comenzaron a emplear la técnica de orientación solar tanto en el trazado de huertos como en el
uso de invernaderos. En el siglo XVIII el uso del colector solar en forma de invernaderos resurgió
con fuerza en Inglaterra. El uso frecuente y popular de los invernaderos del siglo XVIII tuvo como
consecuencia que mucha gente experimentara de forma directa la capacidad del vidrio de retener
el calor solar.
En la región del Medio Oriente, antes del surgimiento del estado de Israel, la investigación
agropecuaria se remonta a finales del siglo XIX, con el establecimiento en el año de 1870 de la
escuela agrícola Mikvé Israel. La estación de investigación agropecuaria en Tel Aviv, establecida
en el año de 1921 evoluciono posteriormente hasta convertirse en la organización de investigación
agropecuaria, en la actualidad, la principal institución de investigación y desarrollo en este rubro en
todo Israel.
3
Desde la fundación del estado de Israel en 1948, el ahorro del agua y la máxima utilización
de la tierra todavía caracterizan la agricultura de la región. El país cuenta con diez grandes
compañías que producen equipos de irrigación y de filtración, todas activas en el ámbito
internacional, Israel destaca en este campo más que ningún otro de la tecnología agrícola.
Para reducir el consumo de agua en la agricultura fueron aplicadas técnicas avanzadas
para el ahorro del elemento (principalmente la irrigación por goteo), que depositan el agua
directamente en la raíz de la planta. También se emplearon sistemas computarizados de irrigación
y se expandió significativamente la agricultura de invernadero.
El éxito de la agricultura israelí ha sido posible gracias a la investigación científica y al uso
de tecnologías avanzadas que se aplicaron sobre todo en los programas de roturación y de
regadío.
En Estados Unidos, entre 1925 y 1935, tomo lugar el desarrollo intensivo para modificar los
métodos de los fisiólogos vegetales para una producción de cultivos a mayor escala. Sin embargo,
la producción de alimentos en invernaderos no fue establecido totalmente hasta la introducción del
polietileno en 1948, cuando el profesor Emery Myers Emmert de la Universidad de Kentucky, usó el
material menos caro en lugar de un caro vidrio.
En MEXICO, el interés en los proyectos de invernaderos comenzó alrededor de los años
noventa y de ahí a la fecha se da un crecimiento muy claro. En 1990 había aproximadamente 50
hectáreas con algún tipo de producción de vegetales bajo invernadero, para 1999 la cifra era de
600, en 2001 se elevó a 950 y ahora suman alrededor de 2200 hectáreas con una diversificación
de cultivos. Aunque no se cuenta con una estadística oficial, las estimaciones refieren que hay
otras 500 hectáreas de invernadero en construcción, por lo que a finales de 2004 o principios de
2005 en México habrá cerca de tres mil hectáreas en total.
Sin lugar a dudas, el que más tiene participación en la producción bajo invernaderos es el
tomate, que representa 70% del total, seguido de pepino 10% y pimiento 8%, la globalización de la
economía, los tratados de libre comercio, y de la demanda de calidad fitosanitaria y de inocuidad
alimentaria que están imponiendo los consumidores de hortalizas están limitando la producción
tradicional de estos cultivos y forzando la búsqueda de nuevas formas de producción.
Entre los años 2001 y 2006 la SAGARPA apoyo 3197 proyectos de invernaderos, en todo
el país, con una inversión promedio de 293.4 miles de pesos por proyecto. Entre 2002 y 2005,
mediante el programa PAPIR se apoyaron otros 1300 proyectos con una inversión promedio de
141.3 miles de pesos para invernadero.
4
1.2 Planteamiento
Yanga es un municipio ubicado en la zona centro del Estado de Veracruz, éste municipio se
caracteriza por tener, un número importante, de pequeños productores en invernadero
pertenecientes al sector agrícola. Se ha observado que los productores de dicho municipio no
cuentan con herramientas tecnológicas y capacitación profesional para optimizar su producción, y
es por esto que surge la necesidad de trabajar en un invernadero de anturios con 350 metros
cuadrados. En la producción del cultivo del anturio se debe tener en cuenta las condiciones
ambientales dentro del invernadero, puesto que la humedad y temperatura idónea fluctúa, entre
una humedad mínima de 50% y una máxima de 80%, y una temperatura mínima de 18°C y una
máxima de 35°C, puesto que temperaturas que se ubiquen fuera del rango indicado originan
problemas en el desarrollo de la planta con la finalidad de mejorar la producción en dos sentidos:
calidad y cantidad, tomando en cuenta que existen factores externos que inciden y algunas veces
determinan la calidad, el costo, producción y manejo de operación de este tipo de invernaderos.
Actualmente, la confiabilidad del desarrollo del cultivo se basa en la experiencia y conocimientos
del productor, ya que propiamente toma sus decisiones con respecto a los ajustes necesarios a
realizar, es decir, todo es controlado manualmente por el trabajador en turno.
En esta ocasión se traza una propuesta para controlar y mejorar el funcionamiento de un
invernadero a través de sistemas de bajo costo y mantenimiento, ya que los paquetes tecnológicos
destinados a estos sectores de aplicación soy muy costosos y foráneos, y su mantenimiento es a
cargo de especialistas.
En la búsqueda de desarrollar tecnologías de calidad y de muy bajo costo, proponemos no solo la
automatización de un invernadero (Temperatura, Humedad y Riego), también, se busca el
desarrollo del campo Veracruzano, por consiguiente mejorar la producción de pequeños
productores de la zona centro del Estado de Veracruz.
5
1.3 Justificación
La agricultura es parte fundamental del desarrollo económico de la región que va encaminada a la
explotación de los recursos naturales desde dos perspectivas: de forma natural o por la
intervención del hombre.
Una de las muchas consecuencias del calentamiento global es la inestabilidad climática
que afecta y destruye de manera violenta la producción agrícola de los agricultores.
Actualmente, la agricultura como ciencia debe afrontar por una parte, el satisfacer las
demandas alimenticias y la producción de materias básicas y por la otra, buscar alternativas que
ayuden a no degradar o agotar el medio ambiente cuando se produce cualquier cultivo. Los
cambios climáticos generan periodos extremos: demasiado calor, demasiado frío, demasiadas
lluvias, etc. Debido a esto es necesario generar alternativas que logren regular el clima para que un
cultivo pueda crecer en óptimas condiciones.
Los invernaderos son una herramienta que se utiliza para lograr la producción agrícola
mediante la regulación de las condiciones climáticas, gracias a esto se logra cumplir las
expectativas de producción y comercialización de los productos. Sin embargo, los productores de
Yanga se enfrentan a un problema que entorpece la producción de sus productos: controlan
manualmente las condiciones de humedad y temperatura dentro de los invernaderos teniendo que
ir periódicamente a abrir las válvulas surtidoras de agua que modifican las condiciones
ambientales.
Por eso es importante implementar a través de la ingeniería, paquetes tecnológicos de
automatización económicamente sustentables para ahorrar energía eléctrica, agua y regular los
cambios climáticos dentro del invernadero. Un sistema de control es capaz de garantizar de
manera exacta las condiciones del cultivo automatizando y controlando mediante sensores,
actuadores y controladores los tiempos en los que se debe regar el suelo, cambiar la temperatura y
la humedad.
6
1.4 Objetivos
1.4.1 Objetivo General
Diseñar un sistema de control que mantenga los valores de las variables (temperatura, humedad y
riego) en rangos deseados y/o recomendados para obtener un sistema económicamente
sustentable y de fácil operación.
1.4.2 Objetivos específicos
- Analizar la situación actual de lo producción bajo invernadero en la zona centro del estado
de Veracruz, México.
- Realizar e implementar la programación necesaria para el correcto funcionamiento del
controlador a operar.
- Realizar pruebas en laboratorio, para que el presente proyecto no solo sea un prototipo, si
no que pueda ser implementado directamente en trabajo de campo.
- Escribir un manual de operación dirigido a cualquier persona, en especial a las personas
que trabajan en el campo.
7
2. Componentes del sistema
2.1 Integrado para control de motores L293D
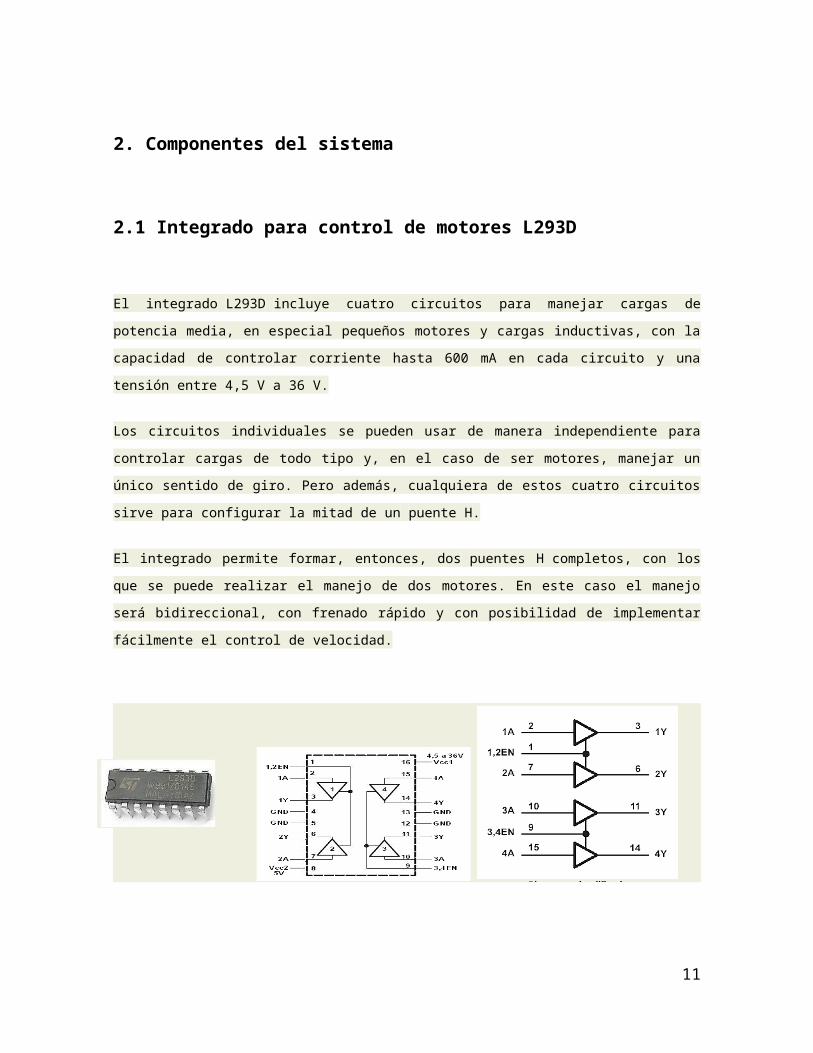
El integrado L293D incluye cuatro circuitos para manejar cargas de potencia media, en especial
pequeños motores y cargas inductivas, con la capacidad de controlar corriente hasta 600 mA en
cada circuito y una tensión entre 4,5 V a 36 V.
Los circuitos individuales se pueden usar de manera independiente para controlar cargas de todo
tipo y, en el caso de ser motores, manejar un único sentido de giro. Pero además, cualquiera de
estos cuatro circuitos sirve para configurar la mitad de un puente H.
El integrado permite formar, entonces, dos puentes H completos, con los que se puede realizar el
manejo de dos motores. En este caso el manejo será bidireccional, con frenado rápido y con
posibilidad de implementar fácilmente el control de velocidad.
Las salidas tienen un diseño que permite el manejo directo de cargas inductivas tales como relés,
solenoides, motores de corriente continua y motores por pasos, ya que incorpora internamente los
diodos de protección de contracorriente para cargas inductivas.
Las entradas son compatibles con niveles de lógica TTL. Para lograr esto, incluso cuando se
manejen motores de voltajes no compatibles con los niveles TTL, el chip tiene patas de
8
alimentación separadas para la lógica (VCC2, que debe ser de 5V) y para la alimentación de la
carga (VCC1, que puede ser entre 4,5V y 36V).
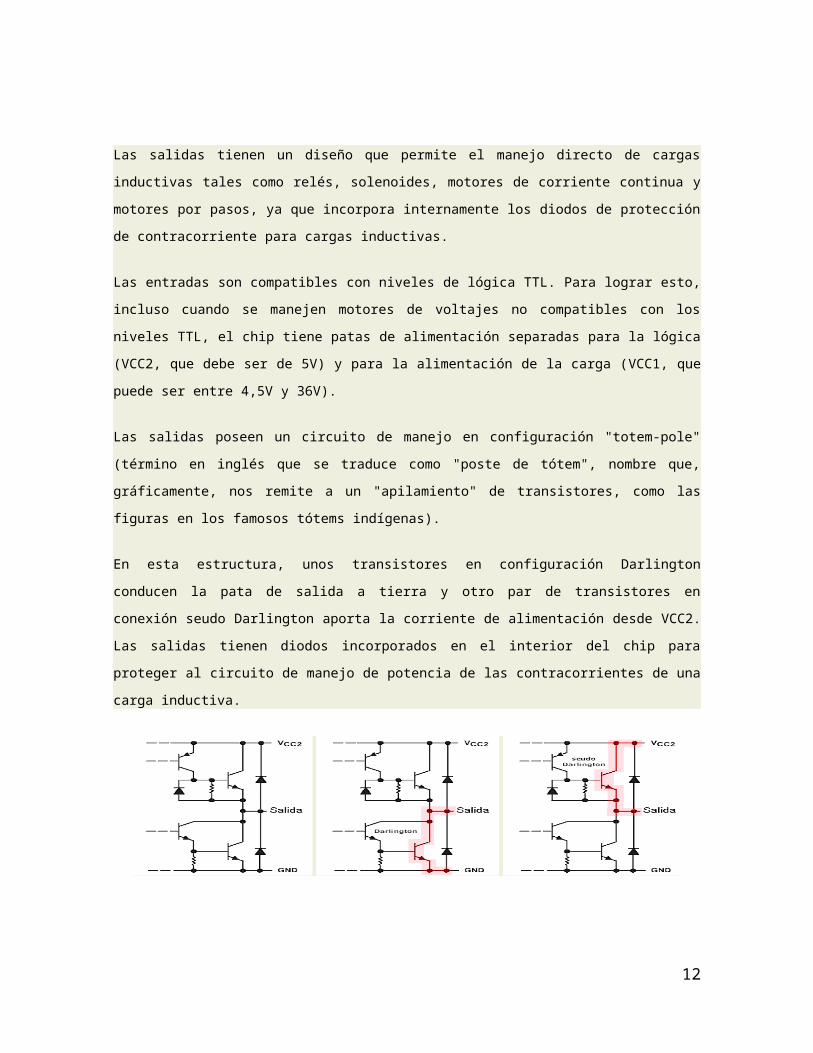
Las salidas poseen un circuito de manejo en configuración "totem-pole" (término en inglés que se
traduce como "poste de tótem", nombre que, gráficamente, nos remite a un "apilamiento" de
transistores, como las figuras en los famosos tótems indígenas).
En esta estructura, unos transistores en configuración Darlington conducen la pata de salida a
tierra y otro par de transistores en conexión seudo Darlington aporta la corriente de alimentación
desde VCC2. Las salidas tienen diodos incorporados en el interior del chip para proteger al circuito
de manejo de potencia de las contracorrientes de una carga inductiva.
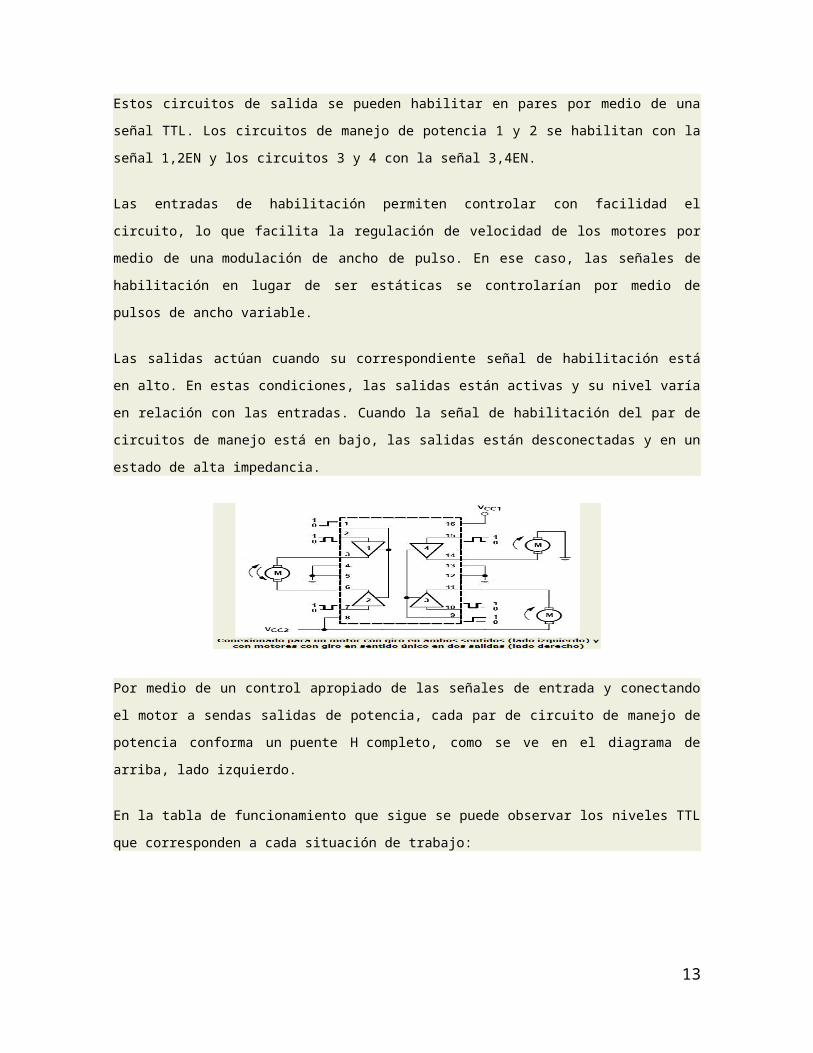
Estos circuitos de salida se pueden habilitar en pares por medio de una señal TTL. Los circuitos de
manejo de potencia 1 y 2 se habilitan con la señal 1,2EN y los circuitos 3 y 4 con la señal 3,4EN.
Las entradas de habilitación permiten controlar con facilidad el circuito, lo que facilita la regulación
de velocidad de los motores por medio de una modulación de ancho de pulso. En ese caso, las
señales de habilitación en lugar de ser estáticas se controlarían por medio de pulsos de ancho
variable.
Las salidas actúan cuando su correspondiente señal de habilitación está en alto. En estas
condiciones, las salidas están activas y su nivel varía en relación con las entradas. Cuando la señal
de habilitación del par de circuitos de manejo está en bajo, las salidas están desconectadas y en
un estado de alta impedancia.
9
Por medio de un control apropiado de las señales de entrada y conectando el motor a sendas
salidas de potencia, cada par de circuito de manejo de potencia conforma un puente H completo,
como se ve en el diagrama de arriba, lado izquierdo.
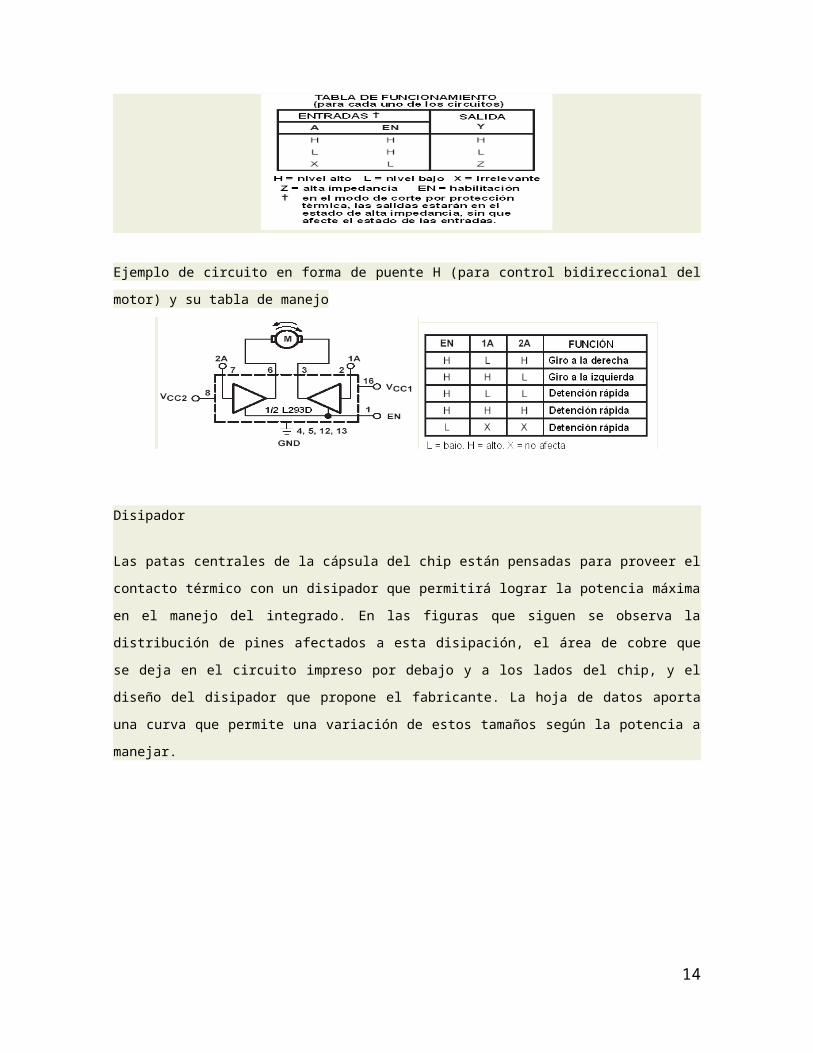
En la tabla de funcionamiento que sigue se puede observar los niveles TTL que corresponden a
cada situación de trabajo:
Ejemplo de circuito en forma de puente H (para control bidireccional del motor) y su tabla de
manejo
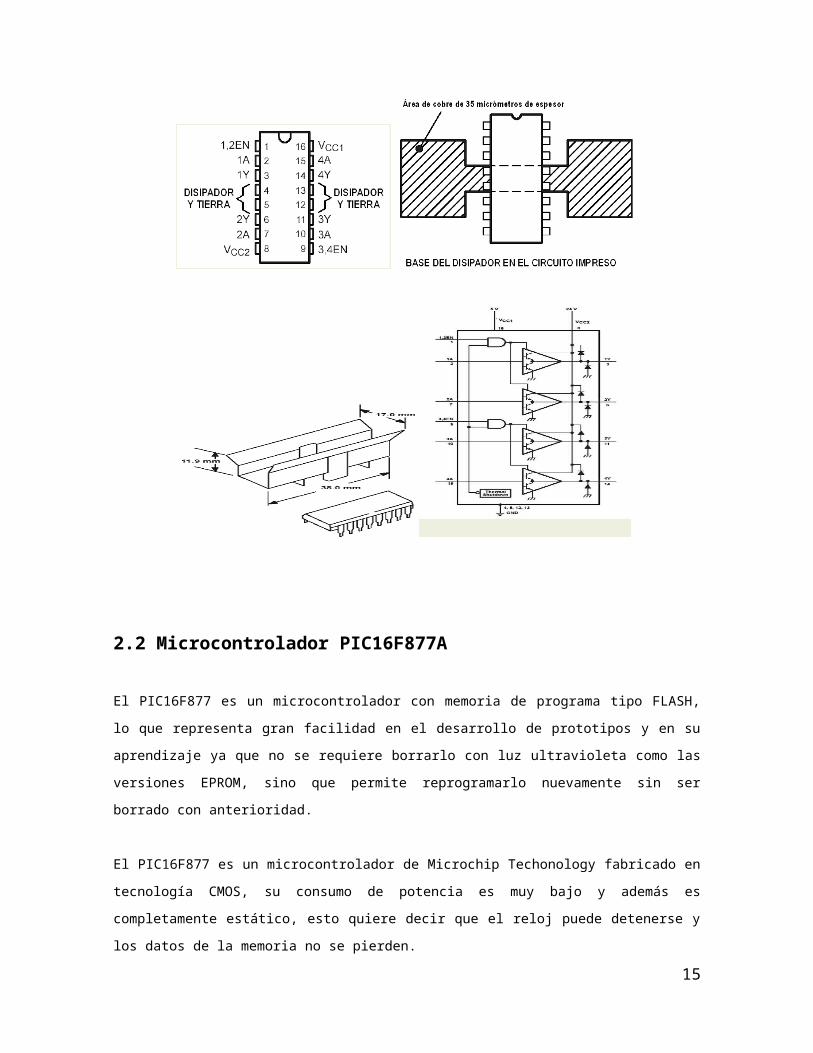
Disipador
Las patas centrales de la cápsula del chip están pensadas para proveer el contacto térmico con un
disipador que permitirá lograr la potencia máxima en el manejo del integrado. En las figuras que
siguen se observa la distribución de pines afectados a esta disipación, el área de cobre que se deja
en el circuito impreso por debajo y a los lados del chip, y el diseño del disipador que propone el
fabricante. La hoja de datos aporta una curva que permite una variación de estos tamaños según la
potencia a manejar.
10
2.2 Microcontrolador PIC16F877A
El PIC16F877 es un microcontrolador con memoria de programa tipo FLASH, lo que representa
gran facilidad en el desarrollo de prototipos y en su aprendizaje ya que no se requiere borrarlo con
luz ultravioleta como las versiones EPROM, sino que permite reprogramarlo nuevamente sin ser
borrado con anterioridad.
El PIC16F877 es un microcontrolador de Microchip Techonology fabricado en tecnología CMOS, su
consumo de potencia es muy bajo y además es completamente estático, esto quiere decir que el
reloj puede detenerse y los datos de la memoria no se pierden.
El encapsulado más común para este microcontrolador es el DIP (Dual In-line Pin) de
40 pines, propio para usarlo en experimentación. La referencia completa es PIC16F877-04 para el
dispositivo que utiliza cristal oscilador de hasta 4 MHz,
PIC16F877-20 para el dispositivo que utiliza cristal oscilador de hasta 20 MHz o
11
PIC16F877A-I para el dispositivo tipo industrial que puede trabajar hasta a 20 MHz. Sin embargo,
hay otros tipos de encapsulado que se pueden utilizar según el diseño y la aplicación que se quiere
realizar. Por ejemplo, el encapsulado tipo surface mount (montaje superficial) tiene un reducido
tamaño y bajo costo, que lo hace propio para producciones en serie o para utilizarlo en lugares de
espacio muy reducido.
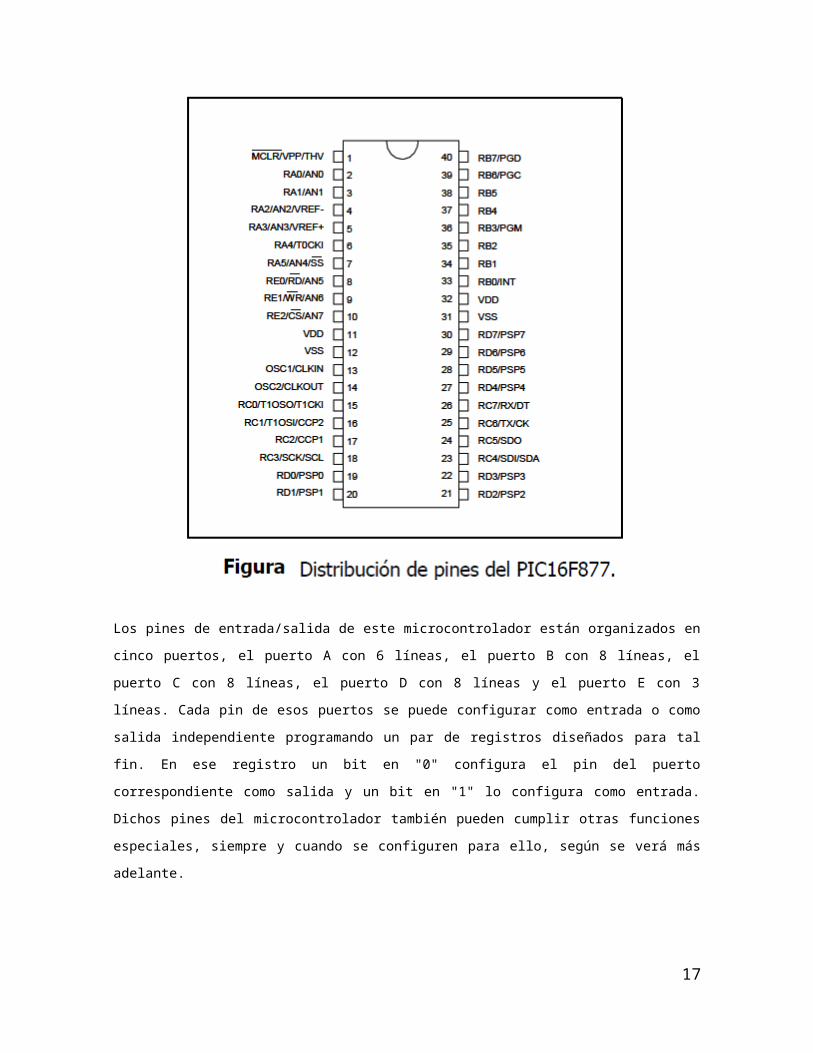
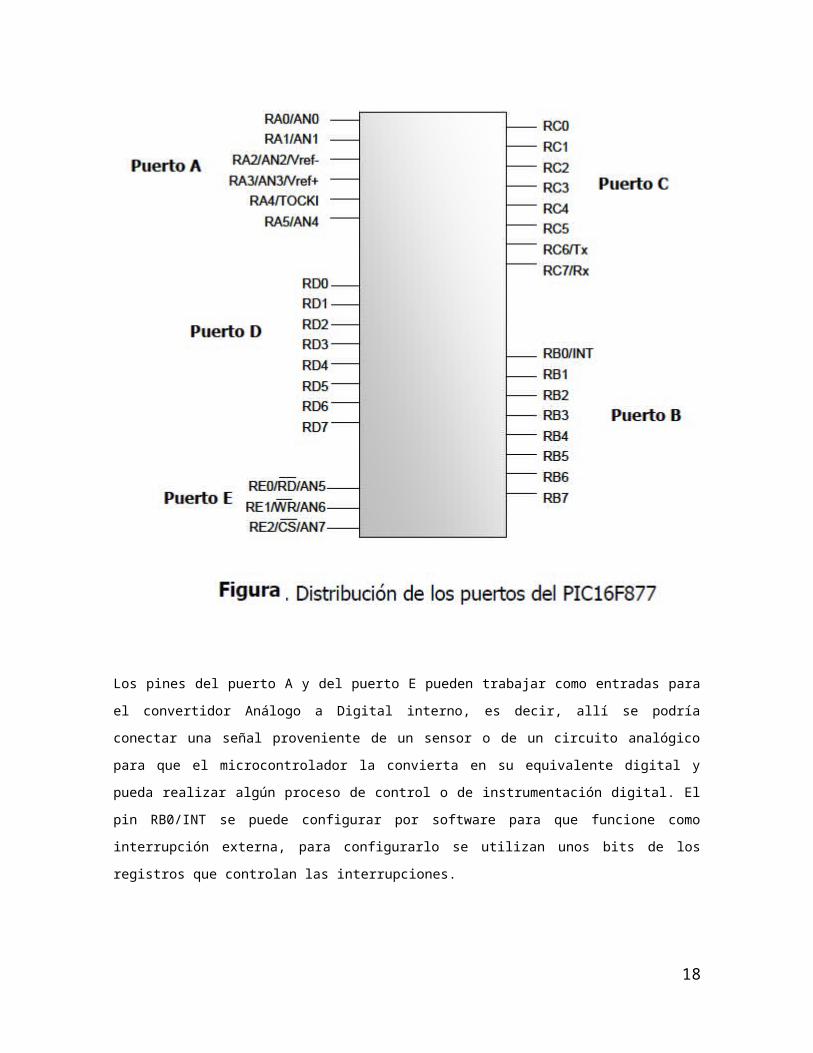
Los pines de entrada/salida de este microcontrolador están organizados en cinco puertos, el puerto
A con 6 líneas, el puerto B con 8 líneas, el puerto C con 8 líneas, el puerto D con 8 líneas y el
puerto E con 3 líneas. Cada pin de esos puertos se puede configurar como entrada o como salida
independiente programando un par de registros diseñados para tal fin. En ese registro un bit en "0"
configura el pin del puerto correspondiente como salida y un bit en "1" lo configura como entrada.
Dichos pines del microcontrolador también pueden cumplir otras funciones especiales, siempre y
cuando se configuren para ello, según se verá más adelante.
12
Los pines del puerto A y del puerto E pueden trabajar como entradas para el convertidor Análogo a
Digital interno, es decir, allí se podría conectar una señal proveniente de un sensor o de un circuito
analógico para que el microcontrolador la convierta en su equivalente digital y pueda realizar algún
proceso de control o de instrumentación digital. El pin RB0/INT se puede configurar por software
para que funcione como interrupción externa, para configurarlo se utilizan unos bits de los registros
que controlan las interrupciones.
El pin RA4/TOCKI del puerto A puede ser configurado como un pin de entrada/salida o como
entrada del temporizador/contador. Cuando este pin se programa como entrada digital, funciona
como un disparador de Schmitt (Schmitt trigger), puede reconocer señales un poco distorsionadas
y llevarlas a niveles lógicos (cero y cinco voltios). Cuando se usa como salida digital se comporta
como colector abierto (open collector), por lo tanto, se debe poner una resistencia de pull-up
(resistencia externa conectada a un nivel de cinco voltios). Como salida, la lógica es inversa: un "0"
13
escrito al pin del puerto entrega en el pin un "1" lógico. Además, como salida no puede manejar
cargas como fuente, sólo en el modo sumidero.
El puerto E puede controlar la conexión en modo microprocesador con otros dispositivos utilizando
las líneas RD (read), WR (write) y CS (chip select). En este modo el puerto D funciona como un
bus de datos de 8 bits (pines PSP).
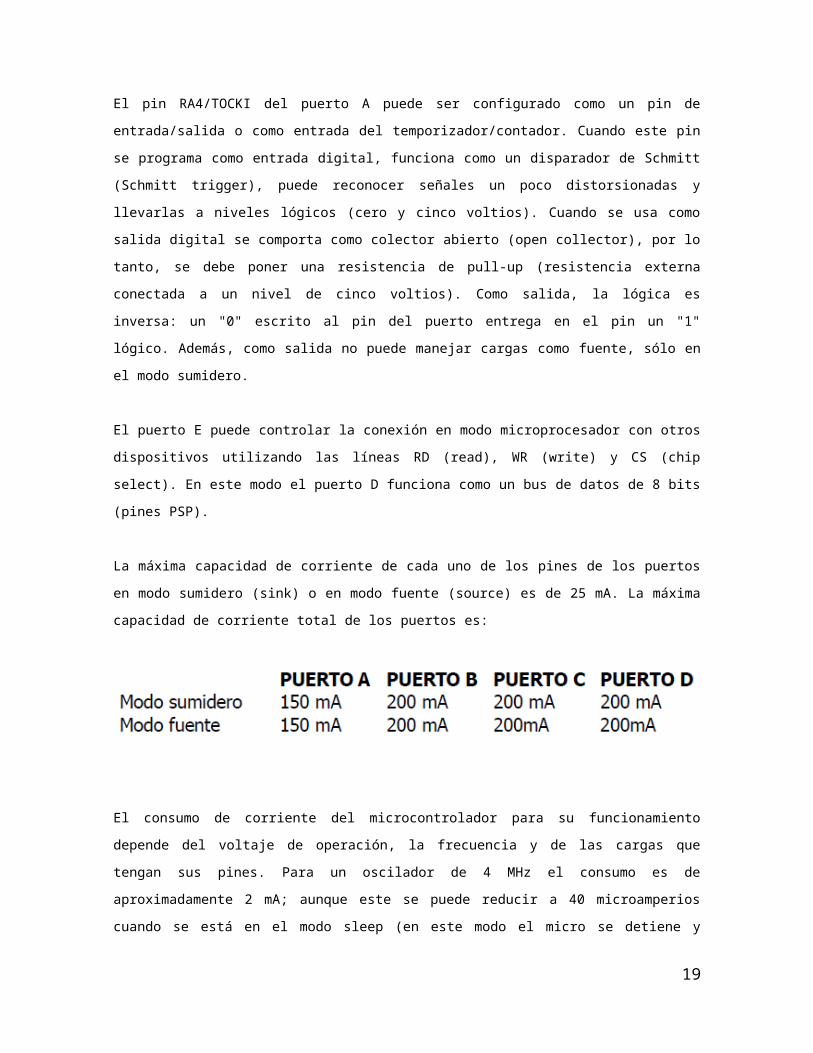
La máxima capacidad de corriente de cada uno de los pines de los puertos en modo sumidero
(sink) o en modo fuente (source) es de 25 mA. La máxima capacidad de corriente total de los
puertos es:
El consumo de corriente del microcontrolador para su funcionamiento depende del voltaje de
operación, la frecuencia y de las cargas que tengan sus pines. Para un oscilador de 4 MHz el
consumo es de aproximadamente 2 mA; aunque este se puede reducir a 40 microamperios cuando
se está en el modo sleep (en este modo el micro se detiene y disminuye el consumo de potencia).
Se sale de ese estado cuando se produce alguna condición especial que veremos más adelante.
14
2.3 Modulo visual LCD 2x16
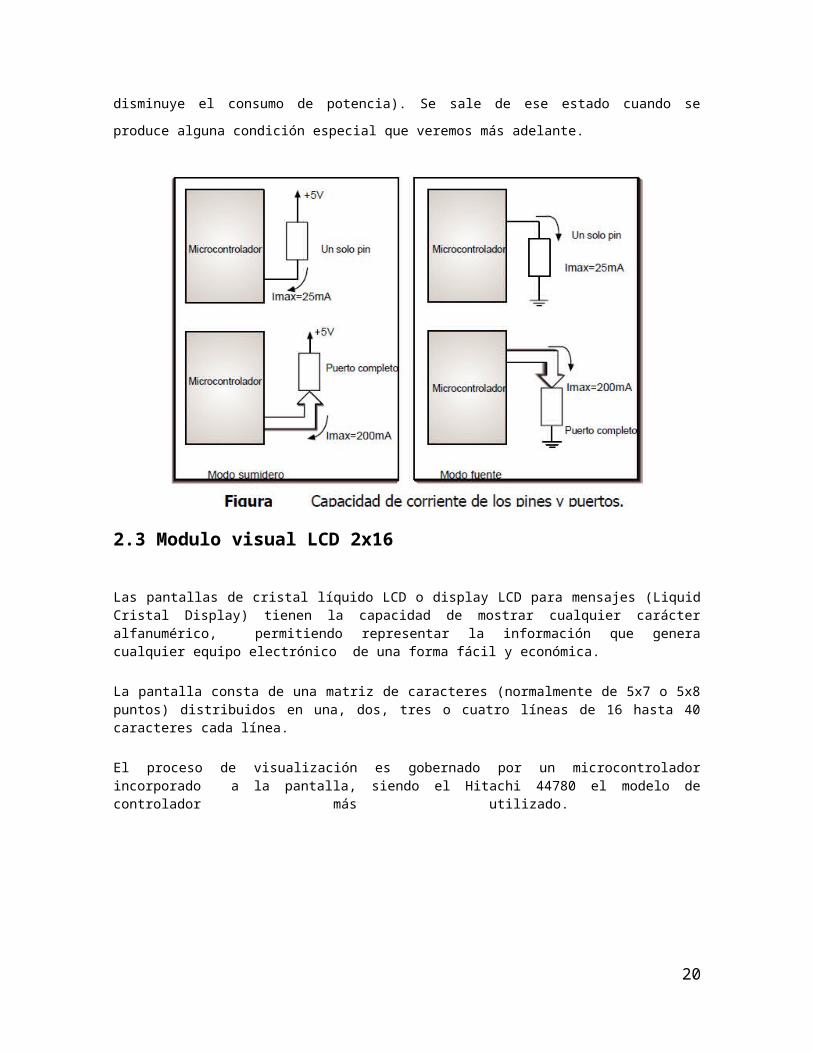
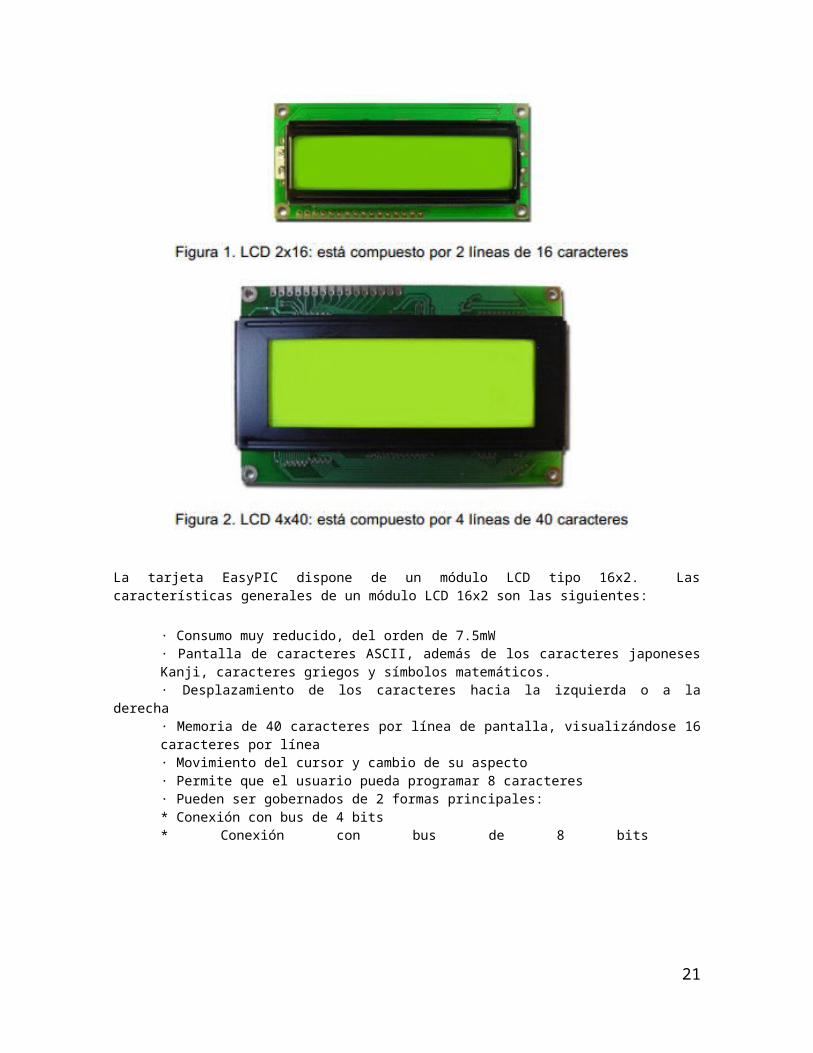
Las pantallas de cristal líquido LCD o display LCD para mensajes (Liquid Cristal Display) tienen la capacidad de mostrar cualquier carácter alfanumérico, permitiendo representar la información que genera cualquier equipo electrónico de una forma fácil y económica. La pantalla consta de una matriz de caracteres (normalmente de 5x7 o 5x8 puntos) distribuidos en una, dos, tres o cuatro líneas de 16 hasta 40 caracteres cada línea. El proceso de visualización es gobernado por un microcontrolador incorporado a la pantalla, siendo el Hitachi 44780 el modelo de controlador más utilizado.
La tarjeta EasyPIC dispone de un módulo LCD tipo 16x2. Las características generales de un módulo LCD 16x2 son las siguientes:
· Consumo muy reducido, del orden de 7.5mW · Pantalla de caracteres ASCII, además de los caracteres japoneses Kanji, caracteres griegos y símbolos matemáticos. · Desplazamiento de los caracteres hacia la izquierda o a la derecha · Memoria de 40 caracteres por línea de pantalla, visualizándose 16 caracteres por línea · Movimiento del cursor y cambio de su aspecto · Permite que el usuario pueda programar 8 caracteres · Pueden ser gobernados de 2 formas principales:
15
* Conexión con bus de 4 bits * Conexión con bus de 8 bits
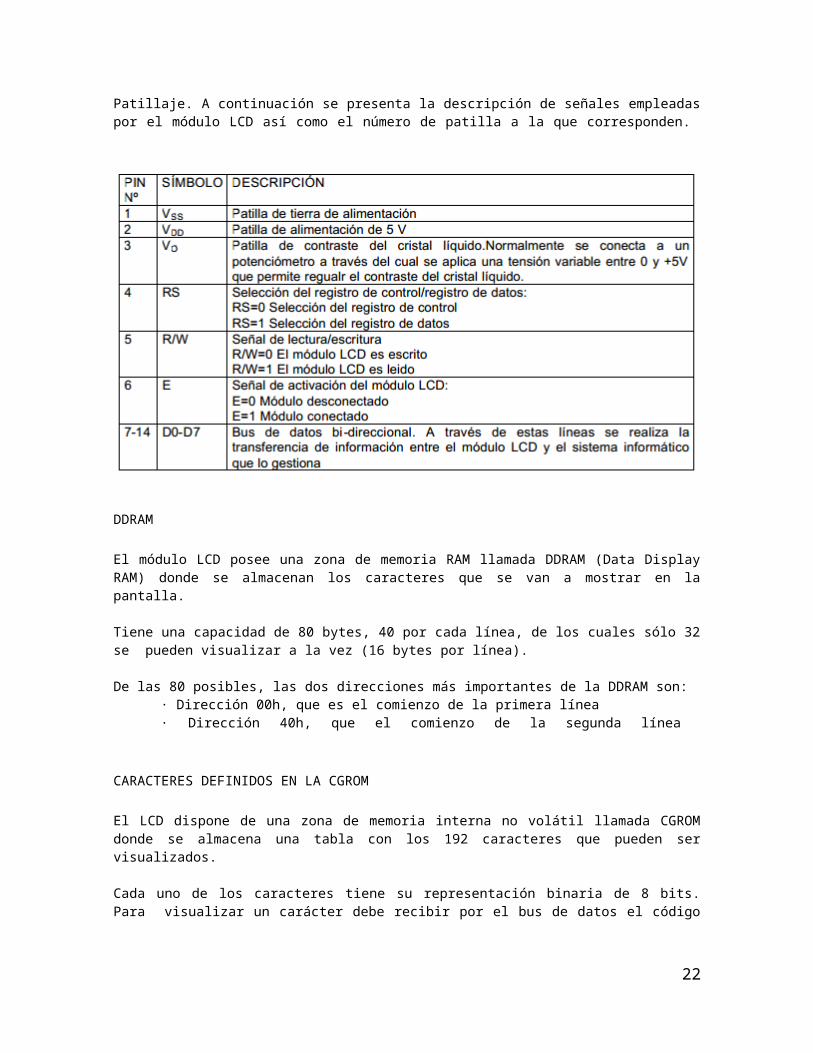
Patillaje. A continuación se presenta la descripción de señales empleadas por el módulo LCD así como el número de patilla a la que corresponden.
DDRAM El módulo LCD posee una zona de memoria RAM llamada DDRAM (Data Display RAM) donde se almacenan los caracteres que se van a mostrar en la pantalla.
Tiene una capacidad de 80 bytes, 40 por cada línea, de los cuales sólo 32 se pueden visualizar a la vez (16 bytes por línea).
De las 80 posibles, las dos direcciones más importantes de la DDRAM son: · Dirección 00h, que es el comienzo de la primera línea · Dirección 40h, que el comienzo de la segunda línea
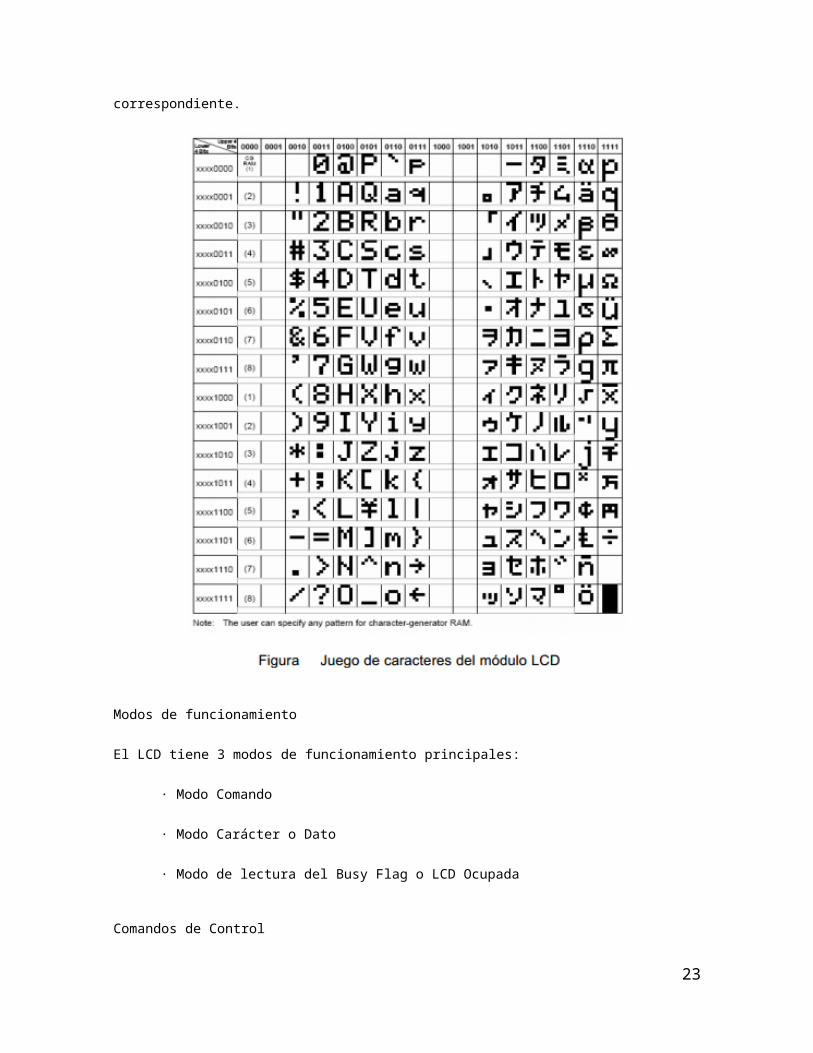
CARACTERES DEFINIDOS EN LA CGROM El LCD dispone de una zona de memoria interna no volátil llamada CGROM donde se almacena una tabla con los 192 caracteres que pueden ser visualizados.
Cada uno de los caracteres tiene su representación binaria de 8 bits. Para visualizar un carácter debe recibir por el bus de datos el código correspondiente.
16
Modos de funcionamiento El LCD tiene 3 modos de funcionamiento principales:
· Modo Comando
· Modo Carácter o Dato
· Modo de lectura del Busy Flag o LCD Ocupada
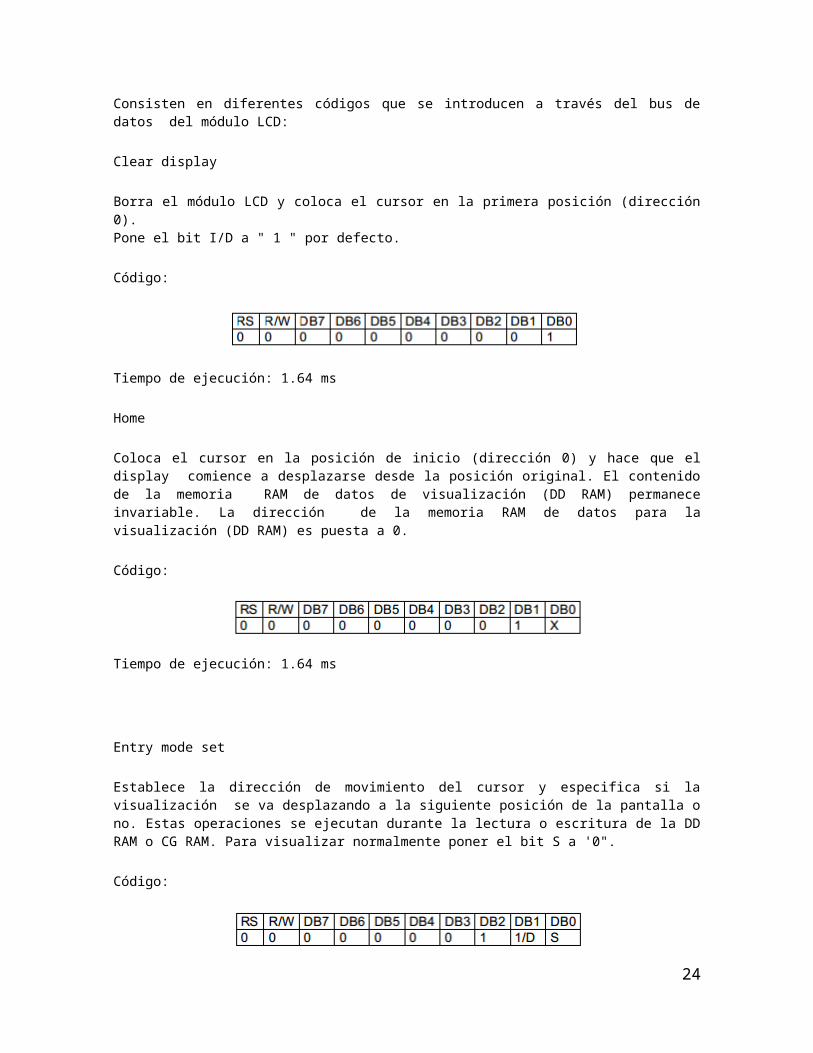
Comandos de Control Consisten en diferentes códigos que se introducen a través del bus de datos del módulo LCD: Clear display Borra el módulo LCD y coloca el cursor en la primera posición (dirección 0). Pone el bit I/D a " 1 " por defecto.
17
Código:
Tiempo de ejecución: 1.64 ms Home Coloca el cursor en la posición de inicio (dirección 0) y hace que el display comience a desplazarse desde la posición original. El contenido de la memoria RAM de datos de visualización (DD RAM) permanece invariable. La dirección de la memoria RAM de datos para la visualización (DD RAM) es puesta a 0. Código:
Tiempo de ejecución: 1.64 ms Entry mode set Establece la dirección de movimiento del cursor y especifica si la visualización se va desplazando a la siguiente posición de la pantalla o no. Estas operaciones se ejecutan durante la lectura o escritura de la DD RAM o CG RAM. Para visualizar normalmente poner el bit S a '0". Código:
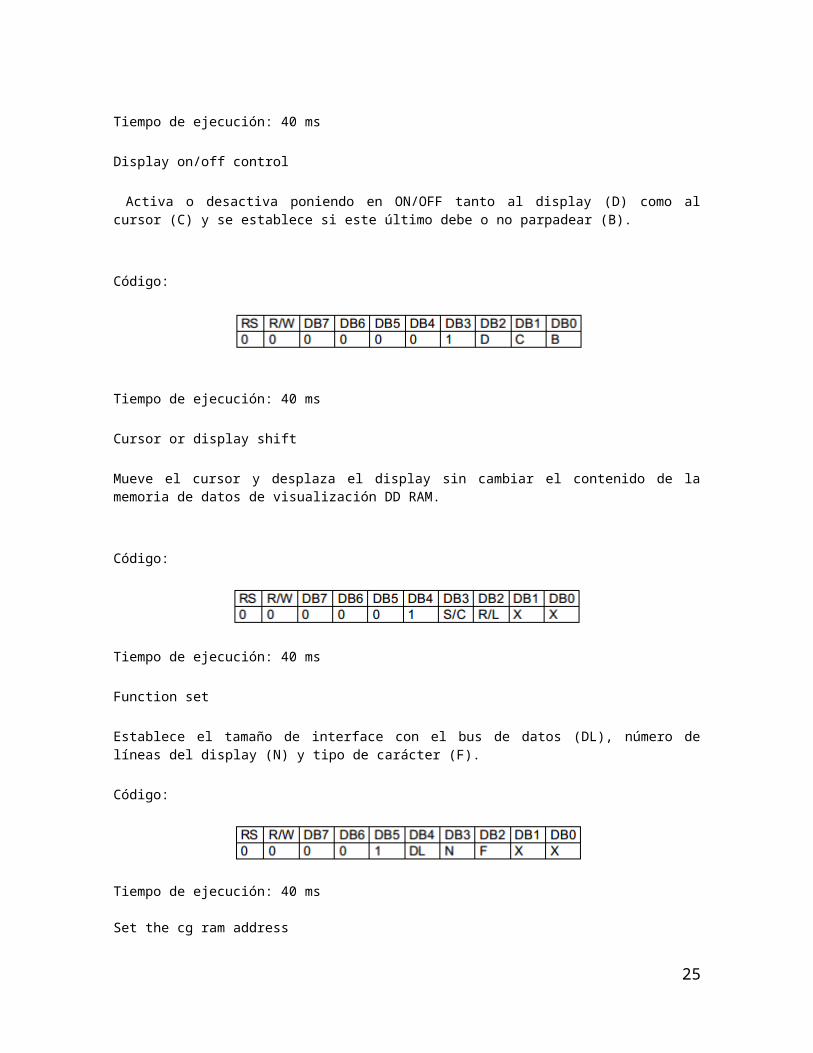
Tiempo de ejecución: 40 ms Display on/off control Activa o desactiva poniendo en ON/OFF tanto al display (D) como al cursor (C) y se establece si este último debe o no parpadear (B). Código:
Tiempo de ejecución: 40 ms Cursor or display shift
18
Mueve el cursor y desplaza el display sin cambiar el contenido de la memoria de datos de visualización DD RAM. Código:
Tiempo de ejecución: 40 ms Function set Establece el tamaño de interface con el bus de datos (DL), número de líneas del display (N) y tipo de carácter (F). Código:
Tiempo de ejecución: 40 ms
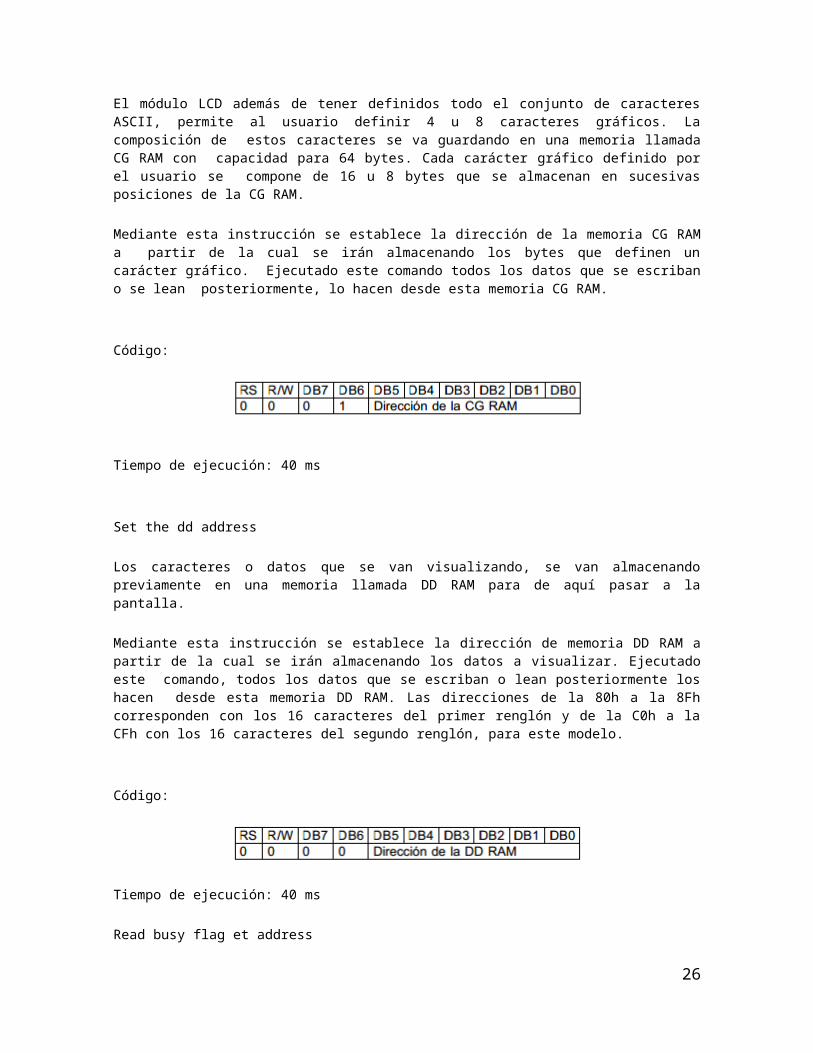
Set the cg ram address El módulo LCD además de tener definidos todo el conjunto de caracteres ASCII, permite al usuario definir 4 u 8 caracteres gráficos. La composición de estos caracteres se va guardando en una memoria llamada CG RAM con capacidad para 64 bytes. Cada carácter gráfico definido por el usuario se compone de 16 u 8 bytes que se almacenan en sucesivas posiciones de la CG RAM. Mediante esta instrucción se establece la dirección de la memoria CG RAM a partir de la cual se irán almacenando los bytes que definen un carácter gráfico. Ejecutado este comando todos los datos que se escriban o se lean posteriormente, lo hacen desde esta memoria CG RAM. Código:
Tiempo de ejecución: 40 ms Set the dd address Los caracteres o datos que se van visualizando, se van almacenando previamente en una memoria llamada DD RAM para de aquí pasar a la pantalla. Mediante esta instrucción se establece la dirección de memoria DD RAM a partir de la cual se irán almacenando los datos a visualizar. Ejecutado este comando, todos los datos que se escriban o lean posteriormente los hacen desde esta memoria DD RAM. Las direcciones de la 80h a la 8Fh corresponden con los 16 caracteres del primer renglón y de la C0h a la CFh con los 16 caracteres del segundo renglón, para este modelo.
19
Código:
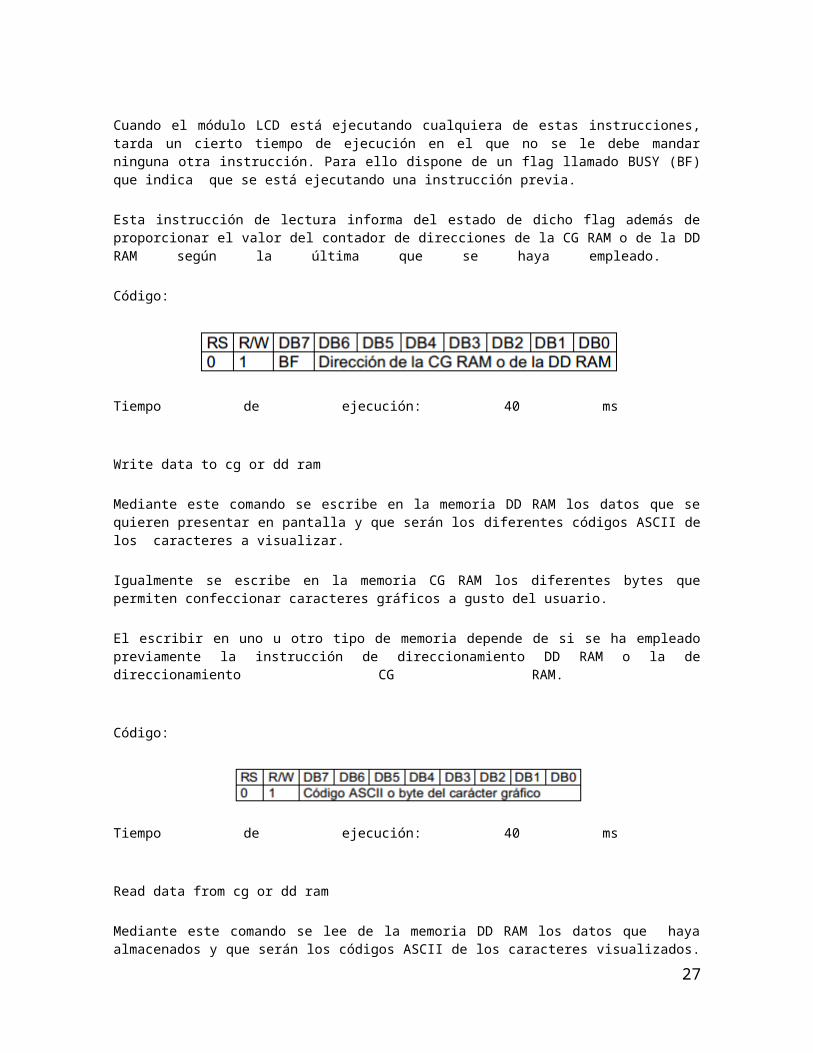
Tiempo de ejecución: 40 ms Read busy flag et address Cuando el módulo LCD está ejecutando cualquiera de estas instrucciones, tarda un cierto tiempo de ejecución en el que no se le debe mandar ninguna otra instrucción. Para ello dispone de un flag llamado BUSY (BF) que indica que se está ejecutando una instrucción previa. Esta instrucción de lectura informa del estado de dicho flag además de proporcionar el valor del contador de direcciones de la CG RAM o de la DD RAM según la última que se haya empleado.
Código:
Tiempo de ejecución: 40 ms
Write data to cg or dd ram Mediante este comando se escribe en la memoria DD RAM los datos que se quieren presentar en pantalla y que serán los diferentes códigos ASCII de los caracteres a visualizar. Igualmente se escribe en la memoria CG RAM los diferentes bytes que permiten confeccionar caracteres gráficos a gusto del usuario. El escribir en uno u otro tipo de memoria depende de si se ha empleado previamente la instrucción de direccionamiento DD RAM o la de direccionamiento CG RAM.
Código:
Tiempo de ejecución: 40 ms
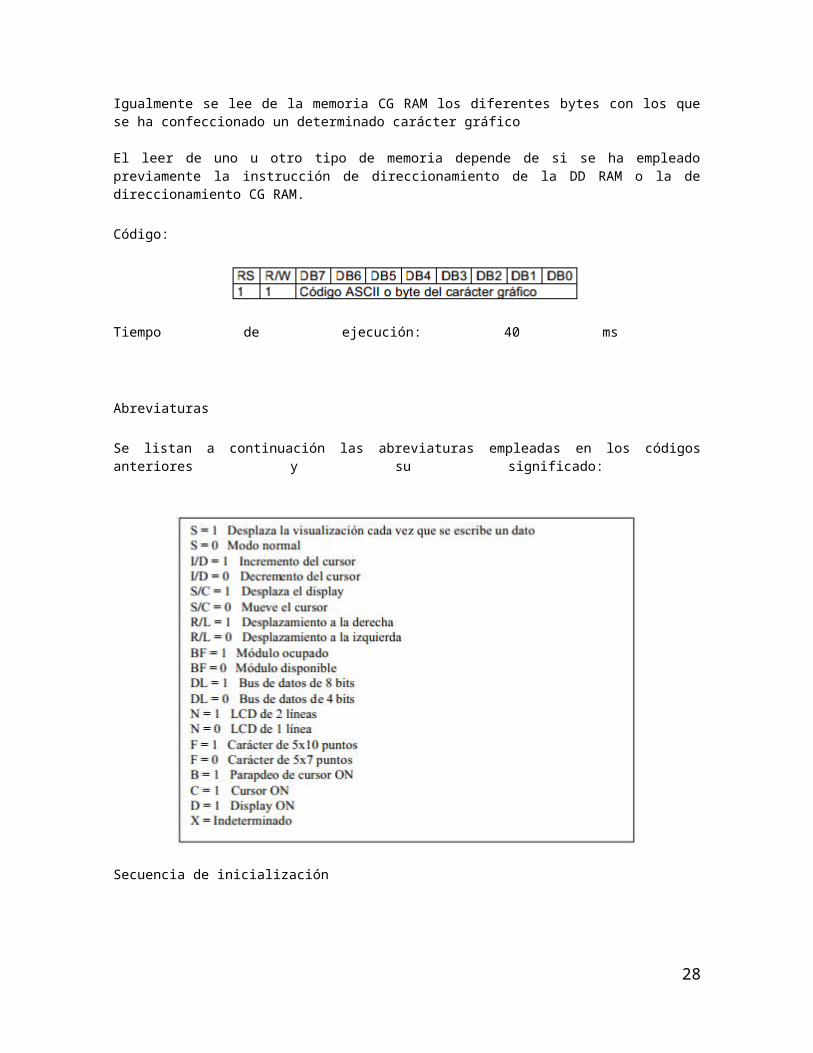
Read data from cg or dd ram Mediante este comando se lee de la memoria DD RAM los datos que haya almacenados y que serán los códigos ASCII de los caracteres visualizados. Igualmente se lee de la memoria CG RAM los diferentes bytes con los que se ha confeccionado un determinado carácter gráfico
20
El leer de uno u otro tipo de memoria depende de si se ha empleado previamente la instrucción de direccionamiento de la DD RAM o la de direccionamiento CG RAM. Código:
Tiempo de ejecución: 40 ms
Abreviaturas Se listan a continuación las abreviaturas empleadas en los códigos anteriores y su significado:
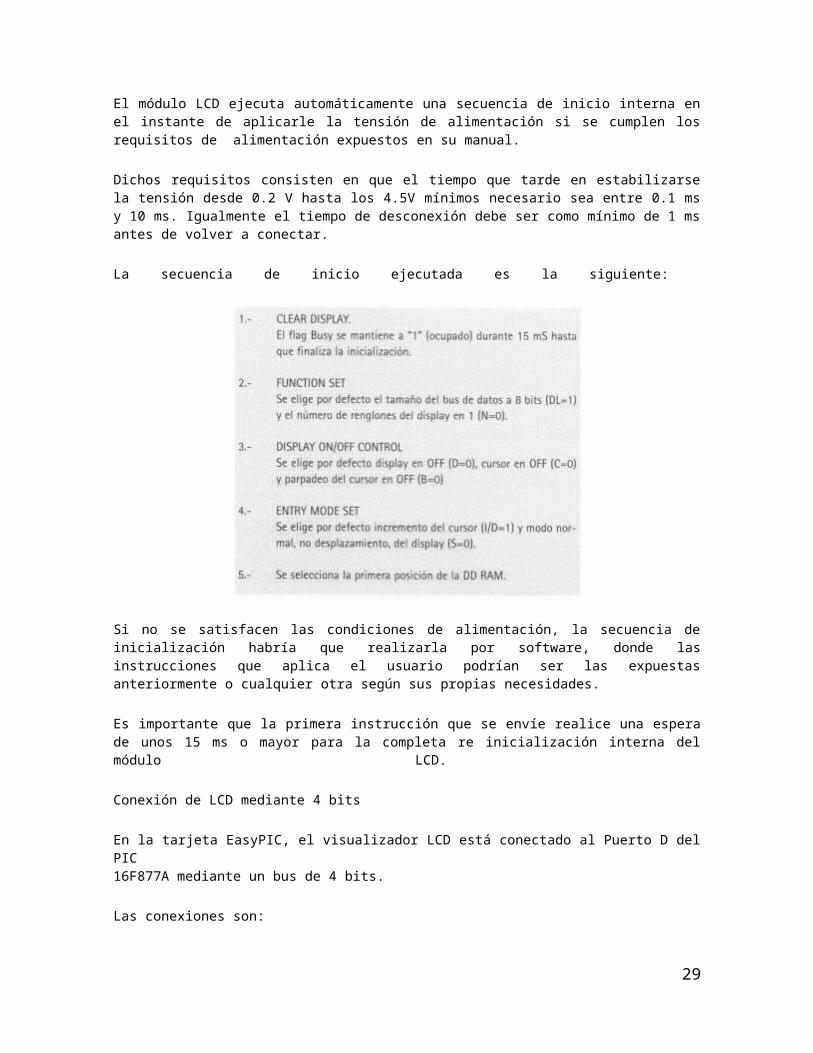
Secuencia de inicialización El módulo LCD ejecuta automáticamente una secuencia de inicio interna en el instante de aplicarle la tensión de alimentación si se cumplen los requisitos de alimentación expuestos en su manual. Dichos requisitos consisten en que el tiempo que tarde en estabilizarse la tensión desde 0.2 V hasta los 4.5V mínimos necesario sea entre 0.1 ms y 10 ms. Igualmente el tiempo de desconexión debe ser como mínimo de 1 ms antes de volver a conectar. La secuencia de inicio ejecutada es la siguiente:
21
Si no se satisfacen las condiciones de alimentación, la secuencia de inicialización habría que realizarla por software, donde las instrucciones que aplica el usuario podrían ser las expuestas anteriormente o cualquier otra según sus propias necesidades. Es importante que la primera instrucción que se envíe realice una espera de unos 15 ms o mayor para la completa re inicialización interna del módulo LCD.
Conexión de LCD mediante 4 bits En la tarjeta EasyPIC, el visualizador LCD está conectado al Puerto D del PIC 16F877A mediante un bus de 4 bits. Las conexiones son:
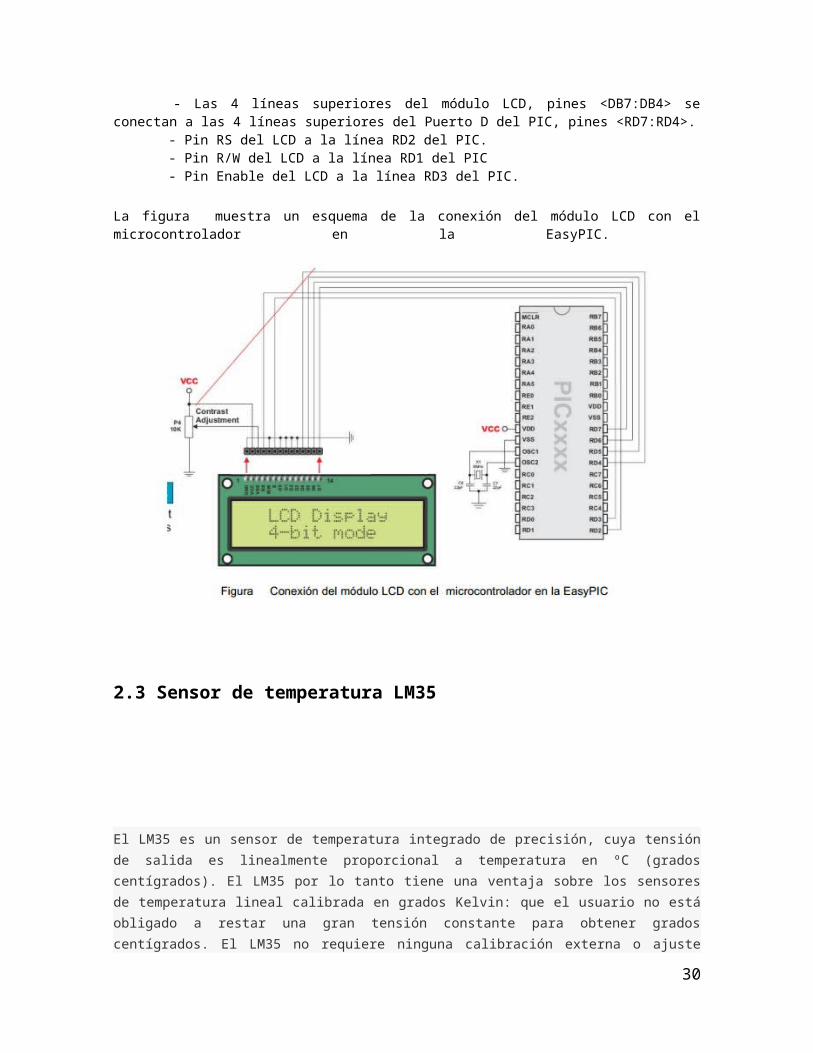
- Las 4 líneas superiores del módulo LCD, pines <DB7:DB4> se conectan a las 4 líneas superiores del Puerto D del PIC, pines <RD7:RD4>.
- Pin RS del LCD a la línea RD2 del PIC. - Pin R/W del LCD a la línea RD1 del PIC - Pin Enable del LCD a la línea RD3 del PIC.
La figura muestra un esquema de la conexión del módulo LCD con el microcontrolador en la EasyPIC.
22
2.3 Sensor de temperatura LM35
El LM35 es un sensor de temperatura integrado de precisión, cuya tensión de salida es linealmente
proporcional a temperatura en ºC (grados centígrados). El LM35 por lo tanto tiene una ventaja
sobre los sensores de temperatura lineal calibrada en grados Kelvin: que el usuario no está
obligado a restar una gran tensión constante para obtener grados centígrados. El LM35 no requiere
ninguna calibración externa o ajuste para proporcionar una precisión típica de ± 1.4 ºC a
temperatura ambiente y ± 3.4 ºC a lo largo de su rango de temperatura (de -55 a 150 ºC). El
dispositivo se ajusta y calibra durante el proceso de producción. La baja impedancia de salida, la
salida lineal y la precisa calibración inherente, permiten la creación de circuitos de lectura o control
especialmente sencillos. El LM35 puede funcionar con alimentación simple o alimentación doble (+
y -)
Requiere sólo 60 µA para alimentarse, y bajo factor de auto-calentamiento, menos de 0,1 ºC en
aire estático. El LM35 está preparado para trabajar en una gama de temperaturas que abarca
desde los- 55 ºC bajo cero a 150 ºC, mientras que el LM35C está preparado para trabajar entre -40
ºC y 110 ºC (con mayor precisión).
23
Características
Calibrado directamente en grados Celsius (Centígrados)
Factor de escala lineal de +10 mV / ºC
0,5ºC de precisión a +25 ºC
Rango de trabajo: -55 ºC a +150 ºC
Apropiado para aplicaciones remotas
Bajo coste
Funciona con alimentaciones entre 4V y 30V
Menos de 60 µA de consumo
Bajo auto-calentamiento (0,08 ºC en aire estático)
Baja impedancia de salida, 0,1W para cargas de 1mA
Diagrama de conexión
24
Aplicaciones típicas
1. Sensor de temperatura básico (+2 ºC a 150 ºC):
25
2. Sensor de temperatura con rango completo:
3. Sensor de temperatura con alimntación simple y rango completo (-55 ºC a +150 ºC):
26
4. Termómetro Fahrenheit:
5. Convertidor de temperatura digital (Salida serie) (hasta +128 ºC)
27
28
3. Diagramas electrónicos simulación.
3.1 Sensor indicando la temperatura ideal en la pantalla LCD
29
3.2 Sensor indicando la temperatura esta elevada y por lo tanto los enfriadores, en nuestro caso los ventiladores están encendidos en la pantalla LCD.
3.3 Sensor indicando que la temperatura esta baja y por lo tanto se encenderá las lámparas incandescentes a modo de generar calefacción.
30





