Introduccin
Despus de utilizar los displays de 7 segmentos y los displays
LCD como interfaces para nuestras aplicaciones ha llegado la hora
de dar un paso ms adelante y qu mejor que la misma pantalla de un
computador.
La interface con un ordenador se puede realizar por cualquiera
de sus puertos externos ms conocidos: serie, paralelo o el USB. El
paralelo casi ni se encuentra en los ordenadores de hoy y de
momento el puerto USB nos queda fuera de alcance por la complejidad
del desarrollo del firmware (programa del microcontrolador). As nos
quedamos con el puerto serie.
Aprenderemos a volcar datos desde nuestro microcontrolador a la
pantalla del ordenador (data logging), as como a enviar datos
mediante el teclado del PC hacia el microcontrolador.
El Estndar RS-232
Toda comunicacin elaborada entre dos dispositivos requiere
conocer el protocolo que la gobierna a nivel hardware y software.
Para el puerto serie se trata del Estndar RS-232, o ms bien
EIA/TIA-232 por las siglas de Electronics Industry Association y
Telecommunications Industry Association, sus desarroladores
El RS-232 fue originariamente pensado para regir las
comunicaciones entre ordenadores y equipos de mdem de la poca (hace
ms de 40 aos). Con el tiempo han surgido otras versiones como
RS-232-C, RS-232-D, RS-232-E, etc., una ms reciente que la otra,
pero con variaciones inapreciables por ser uno de los estndares
menos estrictos. Despus de todo, es solo un Estndar Recomendado o
Recommended Standard; de ah la RS.
En la literatura tcnica se acostumbra mucho utilizar los trminos
DTE y DCE para referir a los dispositivos que se comunican segn el
Estndar RS-232. DTE (Data Terminal Equipment) suele representar al
ordenador y DCE (Data Circuit-terminating Equipment) designa a
cualquier dispositivo conectado al ordenador (un mdem se
sobrentenda antes).
Sin embargo, estos conceptos no quedan del todo claros en redes
del tipo ordenador-ordenador o microcontrolador-microcontrolador
usando el puerto serie. As que por comodidad en adelante hablaremos
de ordenador y mdem, viendo como mdem hasta donde quepa a cualquier
dispositivo conectable al puerto serie (el circuito de nuestro
microcontrolador).
Ahora pasemos a describir los principales aspectos que nos
recomienda el estndar.
Voltajes de los niveles lgicos del RS-232
En las comunicaciones seriales RS-232 los valores para
representar los 1s y 0s lgicos son muy diferentes de los que
estamos acostumbrados a usar en el mundo TTL. All no existen los 5V
(para el 1) y 0V (para el 0).
Para entenderlo ms fcilmente veamos la siguiente figura, donde
se compara la forma de onda de una seal RS-232 con la forma de onda
de una seal digital convencional.
Niveles de tensin para los 1s y 0s lgicos.Puedes notar la enorme
diferencia: los 1 lgicos se representan con voltajes negativos y
los 0 lgicos, por voltajes positivos; adems del amplio rango de los
voltajes.
Un 1 lgico se expresa por una tensin de 5V a 15V. Este estado se
llama spacing.
Un 0 lgico se da cuando la tensin en cualquiera de las lneas es
de +5V hasta +15V. Este estado se conoce como marking.
Formato de transferencia de datos
Como en toda comunicacin serial, los datos viajan en grupos de
bits. En este caso cada grupo o carcter consta de un bit de Start,
los bits de Datos (8 por lo general), un bit de Paridad (opcional)
y finaliza con uno o dos bits de Stop.
Formato de un byte de dato en el Estndar RS-232. Bit de Start.
Es la transicin de 1 a 0 e indica el inicio de una transferencia.
En la lgica RS-232 podra significar una transicin de -15V a +15V y
en lgica TTL es una transicin de 5V a 0V.
Bits de Datos. Forman los datos en s que se desean transmitir.
Cada dato puede ser de 5, 6, 7 u 8 bits. Por supuesto, siempre
preferimos trabajar con 8 bits (1 byte). El primer bit a transmitir
es el menos significativo o LSbit (Least Significant Bit).
Bit de Paridad. Este bit es opcional y se puede enviar despus de
los bits de datos. Sirve para ayudar a detectar posibles errores en
las transferencias de datos. Es muy raramente usado, primero,
porque es poco efectivo (solo podra detectar errores, no
corregirlos) y, segundo, porque hay mejores formas de tratamiento
de errores.
Bits de Stop. Los bits de Stop son estados de 1 lgico. El
Estndar dice que puede haber 1, 1.5 2 bits de Stop al final de los
datos (o del bit de paridad si lo hubiera).
Velocidad de transmisin (Baud Rate)
El Baud Rate es el nmero de bits que se transmiten por
segundo.
Debido a que estamos hablando de un tipo de transmisin asncrona,
no existe una seal de reloj que sincronice los bits de datos. Para
que los dispositivos transmisor y receptor se entiendan
correctamente tambin es necesario que operen con el mismo baud
rate. Los valores ms comunes que fija el Estndar RS-232 son: 1200,
2400, 4800, 9600, 19200, 38400, 56000, 57600, 115200, 128000,
256000. Aunque las versiones ms recientes del Estndar ponen un
lmite de 20 kbits, es comn emplear los valores altos como 115200
(siempre que sea posible).
Sabemos que no es lo mismo interfacear un ordenador con un
microcontrolador usando un cable de 2 m de longitud que conectarlo
a un PLC a 8 m de distancia: la longitud del cable y la
interferencia presente en el ambiente son factores a considerar a
la hora de escoger el baud rate.
Seales del puerto serie
Internamente el puerto serial de un ordenador es controlado por
un circuito integrado (por ejemplo el 16750, de 40 pines). De esas
lneas solo 9 salen al exterior y desembocan en un conector DB9
macho (el que nosotros vemos y donde conectamos nuestro programador
TE-20). Raras veces se ve que salen ms lneas para llegar a un
conector DB25.
El uso de las 9 seales tiene ms sentido cuando se trabaja con un
mdem. Por eso vamos a seguir hablando de mdem, pese a que bien
puede ser reemplazado por otro dispositivo.
Pines del conector DB9 (macho) del puerto serie.En la figura
mostrada las direcciones de las flechas sealan si los pines son de
entrada o de salida. Del mismo modo, los colores ayudan a asociar
los pines con funciones anlogas o complementarias, as:
TD y RD se encargan de transmitir y recibir los datos,
respectivamente.
RTS y CTS sirven para controlar el Control del flujo de datos
(Handshaking) hardware.
DTR, DSR y DCD intervienen en el establecimiento de la
comunicacin.
Adems de ellos, estn la infaltable tierra (SG) y RI, usada
exclusivamente en conexiones con un mdem.
Ahora bien, cuando vamos a conectar el ordenador a un
microcontrolador nuestro inters se puede reducir a tres lneas: TD,
RD y SG. Las dems: o pueden ignorarse, o pueden conectarse al mismo
puerto serie artificiosamente para evitar problemas de comunicacin,
o pueden usarse para implementar un Control del flujo de datos
(Handshaking) hardware, con el microcontrolador emulando algunas
funciones de mdem. En cualquiera de los tres casos, eso depender
del software de ordenador usado para controlar el puerto serie.
En el conector hembra la posicin de los pines se puede ver
diferente a fin de establecer una conexin cruzada, es decir, para
que el TD de un dispositivo se una con el RD del otro y viceversa.
Lo mismo debe pasar con los pares RTS-CTS y DTR-DSR.
Control del flujo de datos (Handshaking)
Generalmente el ordenador superar a su interlocutor (mdem u
otro) tanto en velocidad de transferencia como en los buffers de
recepcin de datos. Para que el mdem no empiece a perder los datos
llegados el Estndar contempla mecanismos de control de flujo de
datos ya sea va hardware o software.
El control de flujo de datos por software se identifica por el
uso de los caracteres Xon (ascii 0x11) y Xoff (ascii 0x13). El
dilogo es as: cuando, por alguna razn, el mdem ya no desea recibir
ms datos del ordenador entonces le enva el carcter Xoff dicindole
que suspenda la transmisin al menos temporalmente. Cuando el mdem
est nuevamente dispuesto a aceptar ms datos le enviar el carcter
Xon y el ordenador reanudar la transferencia.
Lo bueno del mtodo es que el hardware requerido es el mnimo (ver
la siguiente figura) y lo malo es que ambos dispositivos deben
soportar las transferencias full duplex que exige el estndar RS232
para este caso.
Conexin bsica para el Handshaking software.En un tipo de
comunicacin simplex el protocolo es ste: cuando el ordenador quiere
enviar datos al mdem pone un 1 en RTS. Si el mdem est dispuesto a
recibir esos datos, le responder con un 1 por la lnea CTS y el
ordenador empezar a transmitir los datos; de otro modo, le
responder con un 0 y el ordenador tendr que posponer el envo de
datos.
Cuando la comunicacin es half duplex o full duplex el protocolo
vara, pero eso ya no lo tocaremos aqu para no seguir enredndolo.
Solo vemos lo suficiente del estndar, en este caso para entender
las conexiones alternativas entre un ordenador y un
microcontrolador que se usan en algunas ocasiones y que veremos en
la siguiente seccin.
Cableado para el handshaking hardware entre dos dispositivos.En
el diagrama se han sumado las lneas DTR, DSR y DCD (de color
marrn), por las que los dispositivos se informan el uno al otro si
estn listos o no para iniciar la comunicacin.
Interface serial microcontrolador-ordenador
Como siempre, el enfoque se divide en dos partes:
Requerimientos hardware
Nos vamos a enfocar en dos aspectos.
Primero veamos el tema del transceiver. Dado que los niveles de
tensin en el Estndar RS-232 (de 12V, 0V y +12V en el ordenador) no
son compatibles con los niveles habituales de los
microcontroladores (de 0 y 5V), se requiere de un transceiver que
convierta estas tensiones de unos niveles a otros y viceversa.
Sin duda, el MAX232 es el ms famoso de todos. Como se ve en su
esquema, mostrado abajo, el MAX232 puede trabajar con una fuente de
alimentacin de 5V y provee dos canales de transmisin y dos de
recepcin, aunque solo se suele usar un par. A su gran tamao se suma
como desventaja el uso de condensadores externos, para bombear la
carga necesaria en los circuitos doblador e inversor de
voltaje.
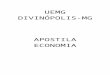
Interface entre un microcontrolador y un computador mediante el
transceiver MAX232.El mismo fabricante del MAX232, Dallas
Semiconductors, ofrece sus versiones mejoradas como el MAX203, que
no requiere de capacitores externos, o el MAX202, que brinda
proteccin contra cargas electrostticas.
Mejor aun para pequeos circuitos sera el DS275 (de 8 pines), el
cual tampoco requiere de capacitores externos y cuenta con el par
justo de drivers de transmisin y recepcin de datos. Su principal
inconveniente es que est diseado para operar solo en transferencias
half duplex.
Para conocer ms del funcionamiento interno de los transceivers
es recomendable que consultes sus respectivos datasheets.
Interface entre un microcontrolador y un computador mediante el
transceiver DS275.El segundo aspecto hardware que interesa es el
relacionado con el Control del flujo de datos (Handshaking): en los
dos esquemas presentados anteriormente las retro-conexiones en el
conector DB9 (de color violeta) son opcionales. Solo harn falta
cuando el programa terminal del ordenador est configurado para
utilizar los pines indicados, as:
RTS (7) se conecta a CTS (8) para que siempre que el ordenador
desee enviar datos al microcontrolador, se responda a s mismo con
un permiso concedido.
Anlogamente, DTR (4) se une a DSR (6) para que cuando el
ordenador informe un estoy listo para la comunicacin, su eco
(hacindose pasar por el microcontrolador) le responda con un yo
tambin lo estoy. A veces DTR tambin se dirige a DCD (1).El MAX232
(Maxim) es un circuito integrado utilizado para adaptar los niveles
requeridos en una conexin donde interviene un dispositivo que
maneja niveles de tensin TTL (nuestro microcontrolador, por
ejemplo) y otro capaz de trabajar bajo los parmetros de la norma
EIA/TIA-232E y las V.28/V.24. Expresado en lenguaje de tensiones,
los niveles TTL operan entre los 0 y 5Volts y la otra norma,
conocida en el mundo tcnico como RS-232 (Recommended Standard-232),
utiliza tensiones que van desde los -12Volts a los +12Volts. Este
circuito integrado (el MAX232) est especialmente diseado para
trabajar en equipos que utilicen bajos niveles de tensin (5Volts) y
requiere de muy pocos componentes externos para lograr un
funcionamiento ptimo.
En su arquitectura interna, el MAX232 posee los accesorios
necesarios para obtener las tensiones que se requieren a ambos
lados de los circuitos que enlaza y cuenta con cuatro
adaptadores-inversores de tensin: dos son utilizados para la
conversin TTL RS-232 y los otros dos para la operacin inversa. En
la mayora de las aplicaciones con microcontroladores se utilizan
slo dos (uno de cada tipo), pero cuando se lo emplea en
aplicaciones especiales, como puede ser el caso de redes RS-485, se
agrega una conexin extra para controlar la prioridad de uso del bus
(RS-485). Es decir, la seal RTS (Request To Send = Peticin de envo)
que proviene desde el ordenador pasa por una unidad de recepcin del
MAX 232 y se entrega al controlador de bus RS-485 en niveles de
tensin TTL.
Requerimientos software
Por un lado necesitamos unas rutinas para el microcontrolador
que gestionen las funciones del Estndar RS-232. stas pueden
implementarse tranquilamente a nivel software debido a su
simplicidad o mediante el mdulo USART, el cual por supuesto ofrecer
mucha ms eficiencia y flexibilidad.
Por otro lado, necesitaremos un programa de ordenador que se
encargue de controlar su puerto serie. A su vez, este programa
puede ser uno desarrollado por nosotros mismos, que nos permitira
tener el control total del puerto serie y podramos transmitir y
recibir todo tipo de datos (binarios o de texto). Tambin podramos
implementar tcnicas alternativas de control de flujo de datos
(aparte de los descritos arriba), o sofisticados mecanismos para el
control de errores en la transferencias de datos. Como ves, se ve
muy atractivo, pero tambin requiere de conocimientos a mediano
nivel sobre programacin en lenguajes como Visual C++, Delphi o
Visual Basic.
Como alternativa prctica, podemos usar softwares como el
Hyperterminal de Windows, Serial Port Monitor o Smart Term. Estos
son programas de tipo consola que nos permiten visualizar los datos
que se transfieren hacia/desde el puerto serie. Por no ofrecer
tanta flexibilidad nos limitaremos a trabajar con datos de texto.
Conforme vamos escribiendo los caracteres en la consola, se irn
enviando hacia nuestro microcontrolador. As mismo, los caracteres
enviados desde el microcontrolador se irn mostrando en la consola,
todo en tiempo real.
El USART de los PICs
USART es la sigla de Universal Synchronous Asynchronous Receiver
Transmitter. Es el mdulo perifrico que incorporan muchos
microcontroladores para comunicarse con dispositivos que soportan
el estndar RS-232. En su nombre se aprecia que puede trabajar en
modo Sncrono o Asncrono. En este presentacin nos enfocaremos
exclusivamente al modo asncrono.
En los PICs las principales caractersticas del USART son:
Asncronamente el USART puede trabajar en modo full-duplex, esto
es transmitir y recibir datos, al mismo tiempo inclusive.
El USART puede generar interrupciones al recibir datos o despus
de enviarlos.
El USART opera detrs del escenario para que las transferencias
de datos se lleven a cabo mientras el CPU realiza otras tareas.
El baud rate es configurable por el usuario.
Los datos pueden ser de 8 9 bits, solo habr 1 bit de stop y sin
bit de paridad.
Por fortuna, el USART y su control es compatible en todos los
PICs que lo tienen, desde los PIC16F hasta los PIC18F, incluso hay
un gran parecido con los de otros microcontroladores. As que creo
que valdr la pena demorarnos un poco en esta teora.
Los registros del USART
Adems de estos registros todava faltan por citar los que
controlan las interrupciones del USART. Aunque ya los conocemos
basante bien los veremos por separado.
SPBRG. Registro Generador de Baud Rate del USART. Pone la
velocidad de transmisin.
TXREG. Registro de Transmisin del USART. Aqu se cargan los datos
a transmitir.
RCREG. Registro de Recepcin del USART. Aqu se almacenan los
datos recibidos.
TXSTA. Registro de Control y Estado de Transmisiones.
RCSTA. Registro de Control y Estado de Recepciones.
Todos estos registros son de 8 bits. Los tres primeros no tienen
formatos preestablecidos y podran aceptar cualesquiera valores. Los
dos ltimos tienen los siguientes mapas de bits:
TXSTA: CSRC TX9 TXEN SYNC--- BRGH TRMT TX9D
RCSTA: SPEN RX9 SREN CREN ADDEN FERR OERR RX9DEn lo sucesivo
iremos describiendo las funciones de estos dos registros y de cada
uno de sus bits. Algunos bits estn relacionados con la operacin del
USART en modo sncrono, tema que de momento no nos compete, y sern
ignorados.
Ahora que si no quieres seguir esperando para ver tu PIC
conectado al puerto serie del ordenador, ya puedes pasar a las
prcticas.
Inicializacin del USART
Lo primero que se debe hacer con un mdulo es configurar su
operacin. Los bits de los registros TXSTA y RCSTA relacionados con
esta tarea son:
SYNC. Establece si el USART trabajar en modo sncrono (si vale 1)
o asncrono (si vale 0).
SPEN (Serial Port Enable). Con 1 se habilita el USART, con 0 se
le inhabilita. Una vez habilitado, el USART asumir el control de
los pines TX y RX. los cuales en los PIC16F87xA son RC6 y RC7.
TXEN (Transmit Enable). Con 1 se habilita la parte del USART que
transmite los datos. Con 0 la inhabilitamos.
CREN (Continue Receive Enable). Lo mismo que TXEN pero para las
recepciones.
TX9 (9-bit Transmit). Si vale 1, los datos que se transmitan
sern de 9 bits. Si vale 0 los datos sern de 8 bits.
RX9 (9-bit Receive). Lo mismo que TX9 pero para las
recepciones.
Con todo esto ya podemos implementar la siguiente funcin de
inicializacin del USART. Las dos primeras lneas establecen el Baud
rate. Ese tema lo tratamos ms adelante por ser tan extenso como
importante. De hecho, si hubiera que cambiar algo en esta funcin,
seran esas dos lneas. El resto del cdigo ser casi siempre el
mismo.
//****************************************************************************
// Inicializa el USART a 9600-8N1.
// Si BRGH = 1 => BaudRate = Fosc/(16*(SPBRG+1))
// Si BRGH = 0 => BaudRate = Fosc/(64*(SPBRG+1))
//****************************************************************************
void usart_init(void){ // Establecer el Baud rate a 9600.
TXSTA.BRGH = 1; // Set high speed => ...
SPBRG = 25; // SPBRG = Fosc/(BaudRate*16) -1
// Establecer modo asncrono, habilitar transferencias de
datos,
// configurar pines de E/S respectivos.
TXSTA.SYNC = 0; // Seleccionar modo asncrono
RCSTA.SPEN = 1; // Habilitar el puerto serial
TXSTA.TXEN = 1; // Habilitar las transmisiones
RCSTA.CREN = 1; // Habiiitar las recepciones
TXSTA.TX9 = 0; // Transmisiones de 8 bits
RCSTA.RX9 = 0; // Recepciones de 8 bits
}Lo curioso es que las cosas ms importantes de esta funcin se
pueden resumir con la notacin 9600 8N1. Significa Baud rate = 9600,
formato de datos = 8 bits, No (sin) bit de paridad y 1 bit de Stop.
Deberemos recordar esos parmetros a la hora de configurar el
software terminal del lado del ordenador.
Transmisin de datos del USART
El dato que el USART transmitir debe ser previamente cargado en
el registro TXREG. Con esa accin la transmisin comienza de
inmediato. Mientras el registro TXREG contenga algn dato, el bit
TXIF (del regitro PIR1) valdr 0. Cuando TXREG est nuevamente
dispuesto para acoger otro dato, TXIF se setear automticamente por
hardware.
Hay otros detalles de consideracin que podran ser tiles para
implementar una funcin de transmisin de datos, como hablar del
registro oculto TSR o del bit TMRT, que indica si dicho registro
est vaco o no. Con lo expuesto ya se puede codificar la siguiente
funcin putch:
//****************************************************************************
// Transmite el byte 'data' por el USART
//****************************************************************************
void putch(char data){ while(PIR1.TXIF == 0) // Esperar a que
RXREG est vaco
continue; //
TXREG = data; // Poner dato a enviar
}Dije que no detallara sobre el registro oculto TST pero tampoco
nos vamos a perder de su utilidad. Con l se puede implementar la
siguiente funcin de transmisin alternativa, que, en general, ser
algo ms lenta que la anterior, aunque acaso tambin un poco ms
segura.
//****************************************************************************
// Transmite el byte 'data' por el USART
//****************************************************************************
void putch(char data){ while(TXSTA.TMRT == 0) // Esperar a que
TSR est vaco
continue; //
TXREG = data; // Poner dato a enviar
}
Recepcin de datos del USART
Los datos (de 8 9 bits) que llegan al USART se almacenan en el
registro RCREG, que en realidad es un buffer de dos niveles, es
decir, puede contener hasta dos datos. Apenas haya un dato en
RCREG, se activar el flag RCIF (del registro PIR1).
El bit RCIF es de solo lectura y se limpiar automticamente
cuando hayamos terminado de leer todos los datos del buffer
RCREG.
Es recomendable que los datos que lleguen al USART se lean de
inmediato. De no ser as, el buffer de RCREG se podra llenar y el
USART podra atorarse o quedarse colgado. No debemos olvidar esto
porque el procedimiento para desbloquear el USART es algo engorroso
como para describirlo aqu y porque personalmente he visto que no
siempre funciona.
Asumiendo que seguiremos la recomendacin mencionada la funcin de
recepcin de datos sera as:
//****************************************************************************
// Recibe un byte de dato del USART
//****************************************************************************
char getch(void){ while(PIR1.RCIF == 1) // Esperar a que haya
algn dato en buffer RCREG
continue; //
return RCREG; // Retornar dato recibido
}Clculo del Baud Rate
Como habamos estudiado, el baud rate es la velocidad de
transferencias de datos, se mide en bits/segundo y hay valores
estndar que debemos respetar (4800, 9600, 19200, 115200, etc.).
En el USART del PIC el baud rate depende de Fosc (frecuencia del
XTAL en los PIC16F), del registro SPBRG y del bit BRGH segn alguna
de las siguientes frmulas:
BRGH = 1 (Alta velocidad)BRGH = 0 (Baja velocidad)
La pregunta es cundo usar una u otra frmula, cundo debemos poner
BRGH a 1 a 0? Lamentablemente tendremos que probar las dos frmulas
y ver con cul conseguimos mejores resultados. Por ejemplo,
calculemos con el valor de 9600 para descubrir por qu es uno de los
ms recurrentes y populares.
Primero evaluemos la frmula poniendo BRGH = 1: (Se considera
XTAL de 4MHz.)
Resolvindola tenemos SPBRG = 25.04. Obviamente debemos truncar
la parte decimal y quedamos con 25. Para saber el valor real de
Baud rate que esto nos dar, volvemos a evaluar la frmula ahora con
SPBRG = 25.
Vemos que no da los 9600 que buscbamos. La diferencia generar un
error de (9615.38 - 9600)/9600 = 0.16%. Nada mal, verdad?
Ahora veamos qu tenemos si ponemos BRGH = 0:
Al resolver la ecuacin tenemos SPBRG = 5.51 = 5. Para saber el
valor real de Baud rate que esto nos dar, volvemos a evaluar la
frmula ahora con SPBRG = 5.
sta es una gran diferencia y origina un error de (10416.67
9600)/9600 = 8.51%.
Dado que la segunda desviacin es intolerable, concluimos en que
deberemos quedarnos con los datos del primer clculo, con BRGH = 1,
SPBRG = 25 y el error de 0.16%.
Aunque algunos compiladores pueden calcular automticamente el
valor de los registros para generar el baud rate que le indiquemos,
no avisan error producido. Por lo tanto, siempre ser recomendable
ver por nosotros mismos si el error es aceptable para nuestras
aplicaciones. Si es una cuestin crucial, a veces tambin se puede
optar por cambiar de XTAL; por ejemplo, uno de 3.6884 MHz (o sus
mltiplos) deriva en errores de 0.00% para casi todos los baud
rates.
Los registros TXSTA y RCSTA en detalle.
Transmit Status Register y Receive Status Register. No te dejes
llevar del todo por sus nombres. Hay algunos bits de un mdulo que
afectan al otro.
ste es el registro TXSTA:
CSRCTX9TXENSYNC---BRGHTRMTTX9D
Bit 7Bit 0
CSRC:Clock Source Select bit
Vlido solo en modo Sncrono:1 = Modo maestro (reloj generado
internamente desde BRG)
0 = Modo esclavo (reloj proveniente de fuente externa)
TX9:9-bit Transmit Enable bit
1 = Selecciona transmisin de 9 bits
0 = Selecciona transmisin de 8 bits
TXEN:TMR0 Clock Source Select bit
1 = Transmisiones habilitadas
0 = Transmisines inhabilitadas
SYNC:USART Mode Select bit
1 = Modo Sncrono
0 = Modo Asncrono
BRGH:High Baud Rate Select bit
Vlido solo en modo Asncrono:1 = Baud rate de Alta velocidad
0 = Baud rate de Baja velocidad
TRMT:Transmit Shift Register Status
1 = Registro TSR vaco
0 = Registro TSR lleno
TX9D:9th bit of Transmit Data. Can be Parity bit
ste es el registro RCSTA:
SPENRX9SRENCRENADDENFERROERRRX9D
Bit 7Bit 0
SPEN:Serial Port Enable bit
1 = Puerto serial habilitado (configura los pines TX y RX para
el puerto serial)
0 = Puerto serial inhabilitado
RX9:9-bit Receive Enable bit
1 = Selecciona recepciones de 9 bits
0 = Selecciona recepciones de 8 bits
SREN:Single Receive Enable bit
Vlido solo en modo Sncrono - maestro:1 = Habilita recepcin
nica
0 = Inhabilita recepcin nica
CREN:Continues Receive Enable bit
En modo Asncrono:1 = Habilita recepcin continua
0 = Inhabilita recepcin continua
En modo Sncrono:1 = Habilita recepcin continua hasta que el bit
CREN se limpie.(CREN se sobrepone a SREN)
0 = Inhabilita recepcin continua
ADDEN:Address Detect Enable bit
Vlido solo en modo Asncrono de 9 bits (RX9 = 1):1 = Habilita
deteccin de direccin
0 = Inhabilita deteccin de direccin
FERR:Framing Error bit
1 = Ocurri un error de frame
0 = No ocurri un error de frame
OERR:Overrrun Error
1 = Ocurri un error de overrun (Se puede limpiar limpiando
CREN)
0 = No ocurri un error de overrun
RX9D:9th bit of Receive Data. Can be Parity bit
_1376387175.bin
_1376388305.bin
_1376388306.bin
_1376388304.bin
_1376388303.bin
_1376386701.bin
_1376387174.bin
_1376386693.bin
_1376386700.bin
_1376386692.bin