Embed Size (px)
Citation preview
Quelques développements sur le contrôle de la dynamiquede véhicule : une approche LPV du problème
Olivier Sename et Luc Dugard
Gipsa-lab, UMR CNRS 5216, Départment Automatique, France(olivier.sename,luc.dugard)@gipsa-lab.fr
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 1/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 2/62
La sécurité routière: un enjeu internationalLa perte de contrôle des véhicules est une des causes majeures d’accidents (1/3 desdécès). . .
I Dans le monde, 1.3 million de personnes décèdent chaque année sur les routes a
I En France, palier d’env. 4000 décès par an b
I Diverses causes: vitesse, alcool, drogue, interdistance, . . .I Vers plus de sécurité passive (airbags, ceinture..) et active (ABS, ESP....)
aWorld health organization (2009)bONISR
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 3/62
La sécurité routière: un enjeu internationalLa perte de contrôle des véhicules est une des causes majeures d’accidents (1/3 desdécès). . .
I Dans le monde, 1.3 million de personnes décèdent chaque année sur les routes a
I En France, palier d’env. 4000 décès par an b
I Diverses causes: vitesse, alcool, drogue, interdistance, . . .I Vers plus de sécurité passive (airbags, ceinture..) et active (ABS, ESP....)
aWorld health organization (2009)bONISR
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 3/62
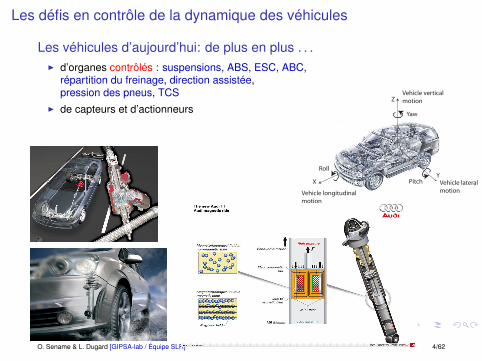
Les défis en contrôle de la dynamique des véhicules
Les véhicules d’aujourd’hui: de plus en plus . . .I d’organes contrôlés : suspensions, ABS, ESC, ABC,
répartition du freinage, direction assistée,pression des pneus, TCS
I de capteurs et d’actionneurs
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 4/62
Vehicle vertical motion
Vehicle lateral motion Vehicle longitudinal
motion
Yaw
Pitch
Roll
X Y
Z
C
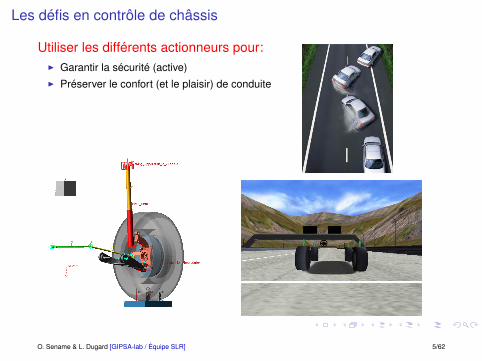
Les défis en contrôle de châssis
Utiliser les différents actionneurs pour:I Garantir la sécurité (active)I Préserver le confort (et le plaisir) de conduite
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 5/62
Contexte de la présentation
Projet
GIPSA-lab/D-Auto/SLR depuis 1994Cette présentation doit pour beaucoup aux travaux de :Ricardo Ramirez-Mendoza 94-97, Damien Sammier 98-01, Alessandro Zin 02-05,Charles Poussot-Vassal 05-08, Sébastien Aubouet 07-10, Anh-Lam Do 08-11, SoheibFergani (11-14)
Collaborations
Merci à l’ambiance studieuse du GT AA du GDR CNRS MACS
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 6/62
Une approche intégrée pour l’observation etla commande de la dynamique de véhicules2010-2014

Une longue évolution des véhicules terrestres
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 7/62
Une longue évolution des véhicules terrestres; on sort de la préhistoire!!!
Une longue évolution des véhicules terrestres; on sort de la préhistoire pour arriver àl’ère moderne!!!
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 8/62

Une longue évolution des véhicules terrestres; on sort de la préhistoire!!!
Une longue évolution des véhicules terrestres; on sort de la préhistoire pour arriver àl’ère moderne!!!O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 8/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 9/62
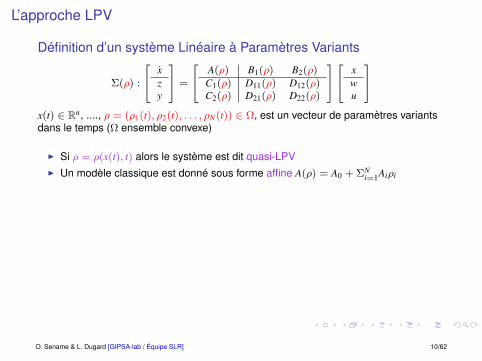
L’approche LPV
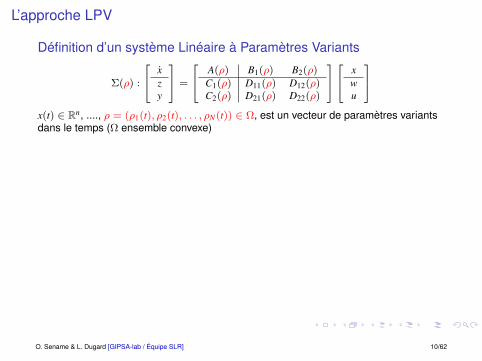
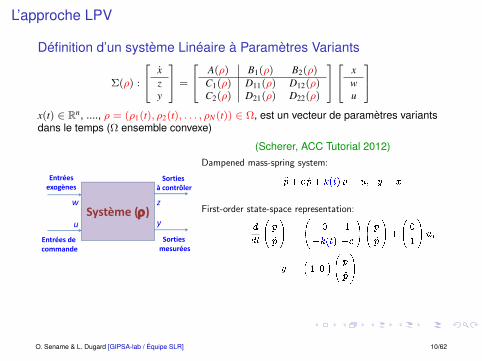
Définition d’un système Linéaire à Paramètres Variants
Σ(ρ) :
xzy
=
A(ρ) B1(ρ) B2(ρ)C1(ρ) D11(ρ) D12(ρ)C2(ρ) D21(ρ) D22(ρ)
xwu
x(t) ∈ Rn, ...., ρ = (ρ1(t), ρ2(t), . . . , ρN(t)) ∈ Ω, est un vecteur de paramètres variantsdans le temps (Ω ensemble convexe)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 10/62
L’approche LPV
Définition d’un système Linéaire à Paramètres Variants
Σ(ρ) :
xzy
=
A(ρ) B1(ρ) B2(ρ)C1(ρ) D11(ρ) D12(ρ)C2(ρ) D21(ρ) D22(ρ)
xwu
x(t) ∈ Rn, ...., ρ = (ρ1(t), ρ2(t), . . . , ρN(t)) ∈ Ω, est un vecteur de paramètres variantsdans le temps (Ω ensemble convexe)
Système (ρ)
Entréesexogènes
Sorties à contrôler
Sorties mesurées
z
Entrées de commande
w
u y
(Scherer, ACC Tutorial 2012)
10/60
Ma
them
ati
cal
Sys
tem
sT
heo
ry
Example
Dampened mass-spring system:
p+ c _p+ k(t) p = u; y = x
First-order state-space representation:
d
dt
0@ p
_p
1A =
0@ 0 1
k(t) c
1A0@ p
_p
1A+
0@ 0
1
1Au;
y =1 0
0@ p
_p
1A
Only parameter is k(t)
System matrix depends affinely on this parameter
Could view c as another parameter - keep it simple for now ...O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 10/62
L’approche LPV
Définition d’un système Linéaire à Paramètres Variants
Σ(ρ) :
xzy
=
A(ρ) B1(ρ) B2(ρ)C1(ρ) D11(ρ) D12(ρ)C2(ρ) D21(ρ) D22(ρ)
xwu
x(t) ∈ Rn, ...., ρ = (ρ1(t), ρ2(t), . . . , ρN(t)) ∈ Ω, est un vecteur de paramètres variantsdans le temps (Ω ensemble convexe)
I Si ρ = ρ(x(t), t) alors le système est dit quasi-LPVI Un modèle classique est donné sous forme affine A(ρ) = A0 + ΣN
i=1Aiρi
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 10/62
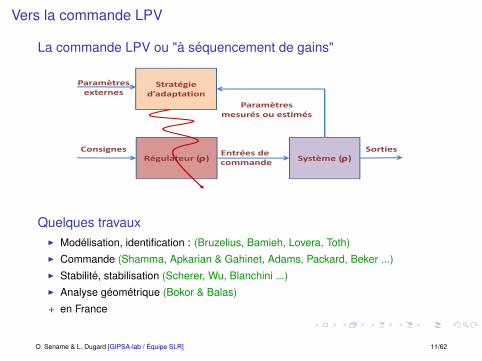
Vers la commande LPV
La commande LPV ou "à séquencement de gains"
Système (ρ)Régulateur (ρ)
Stratégied’adaptation
Paramètresmesurés ou estimés
Consignes Entrées de commande
Sorties
Paramètresexternes
Quelques travauxI Modélisation, identification : (Bruzelius, Bamieh, Lovera, Toth)I Commande (Shamma, Apkarian & Gahinet, Adams, Packard, Beker ...)I Stabilité, stabilisation (Scherer, Wu, Blanchini ...)I Analyse géométrique (Bokor & Balas)
+ en France
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 11/62
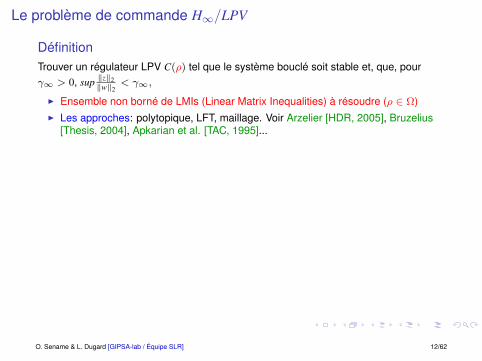
Le problème de commande H∞/LPV
DéfinitionTrouver un régulateur LPV C(ρ) tel que le système bouclé soit stable et, que, pourγ∞ > 0, sup ‖z‖2
‖w‖2< γ∞,
I Ensemble non borné de LMIs (Linear Matrix Inequalities) à résoudre (ρ ∈ Ω)I Les approches: polytopique, LFT, maillage. Voir Arzelier [HDR, 2005], Bruzelius
[Thesis, 2004], Apkarian et al. [TAC, 1995]...
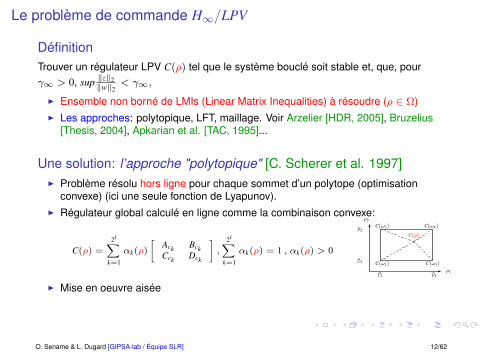
Une solution: l’approche "polytopique" [C. Scherer et al. 1997]I Problème résolu hors ligne pour chaque sommet d’un polytope (optimisation
convexe) (ici une seule fonction de Lyapunov).I Régulateur global calculé en ligne comme la combinaison convexe:
C(ρ) =
2i∑k=1
αk(ρ)
[Ack BckCck Dck
],
2i∑k=1
αk(ρ) = 1 , αk(ρ) > 0
6
-
ρ2
ρ1ρ1
ρ2
ρ2
ρ1
C(ω1)
C(ω2) C(ω4)
C(ω3)
C(ρ)
I Mise en oeuvre aisée
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 12/62
Le problème de commande H∞/LPV
DéfinitionTrouver un régulateur LPV C(ρ) tel que le système bouclé soit stable et, que, pourγ∞ > 0, sup ‖z‖2
‖w‖2< γ∞,
I Ensemble non borné de LMIs (Linear Matrix Inequalities) à résoudre (ρ ∈ Ω)I Les approches: polytopique, LFT, maillage. Voir Arzelier [HDR, 2005], Bruzelius
[Thesis, 2004], Apkarian et al. [TAC, 1995]...
Une solution: l’approche "polytopique" [C. Scherer et al. 1997]I Problème résolu hors ligne pour chaque sommet d’un polytope (optimisation
convexe) (ici une seule fonction de Lyapunov).I Régulateur global calculé en ligne comme la combinaison convexe:
C(ρ) =
2i∑k=1
αk(ρ)
[Ack BckCck Dck
],
2i∑k=1
αk(ρ) = 1 , αk(ρ) > 0
6
-
ρ2
ρ1ρ1
ρ2
ρ2
ρ1
C(ω1)
C(ω2) C(ω4)
C(ω3)
C(ρ)
I Mise en oeuvre aisée
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 12/62
Intérêts du LPVL’approche LPV : un outil clef pour traiter la commande des systèmes complexes.
Quelques exemples :
Modélisation des systèmes complexes (non linéaires)I Utilisation d’une représentation quasi-LPV pour modéliser les non linéarités d’un
modèle d’état (y compris des retards)I Transformation des contraintes (e.g. saturation) en un paramètre "externe"I Modélisation des systèmes LTV, hybrides (e.g. commande par commutation)
Attention :
Le système LPV n’est pas équivalent au système non linéaire:I stabilité: ρ = ρ(x(t), t) est supposé borné... donc les trajectoires d’état également.I commandabilité: disparition, selon la représentation LPV, des modes non
commandables du système non linéaire ...
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 13/62
Intérêts du LPVL’approche LPV : un outil clef pour traiter la commande des systèmes complexes.
Quelques exemples :
Modélisation des systèmes complexes (non linéaires)I Utilisation d’une représentation quasi-LPV pour modéliser les non linéarités d’un
modèle d’état (y compris des retards)I Transformation des contraintes (e.g. saturation) en un paramètre "externe"I Modélisation des systèmes LTV, hybrides (e.g. commande par commutation)
Attention :
Le système LPV n’est pas équivalent au système non linéaire:I stabilité: ρ = ρ(x(t), t) est supposé borné... donc les trajectoires d’état également.I commandabilité: disparition, selon la représentation LPV, des modes non
commandables du système non linéaire ...
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 13/62
Intérêts du LPV
Commande à gains séquencésI Prise en compte des diverses conditions opératoires en utilisant un "point
d’équilibre variable": (Gauthier 2007)I Commande avec adaptation de performances en temps-réel avec des fonctions
de pondération dépendant de paramètres exogènes ou endogènes (Briat 2008,Poussot 2008, Do 2011)
I Commande sous contraintes temps-réel (Robert 2007, Roche 2011))
Coordination de divers actionneurs dans les procédés MIMOI Structure LPV pour la répartition des commandes Poussot et al. (CEP 2011)I Choix d’un paramètre pour l’activation des commandes Poussot et al. (VSD 2011)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 14/62
Dans cette présentation
Sur différents types de paramètresI Non linéarités: exemple de l’amortisseur MR (Do, Lozoya, Aubouet)I Paramètres endogènes fonction de caractéristiques physiques du système:
contraintes, mesure du comportement dynamique (Do, Poussot, Doumiati,Fergani)
Sur la formulation LPVI Définir un modèle LPV (Zin, Do, Lozoya, Aubouet)I Fixer la structure d’un régulateur LPV (Poussot)I Choisir des fonctions de pondération (approche H∞) dépendant de paramètres
(Poussot, Do, Doumiati)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 15/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 16/62
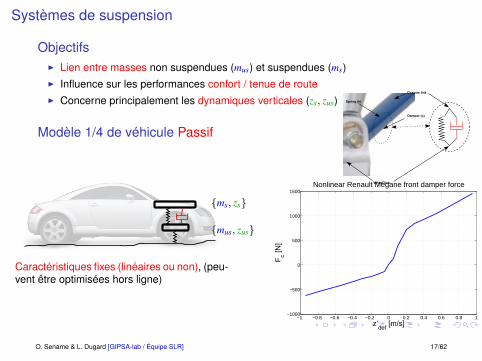
Systèmes de suspension
ObjectifsI Lien entre masses non suspendues (mus) et suspendues (ms)I Influence sur les performances confort / tenue de routeI Concerne principalement les dynamiques verticales (zs, zus)
Modèle 1/4 de véhicule Passif
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 17/62
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1000
−500
0
500
1000
1500
z’def
[m/s]
Fc [N
]
Nonlinear Renault Mégane front damper force
Caractéristiques fixes (linéaires ou non), (peu-vent être optimisées hors ligne)
mus, zus
ms, zs
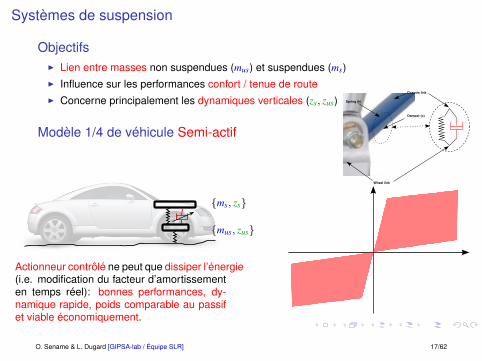
Systèmes de suspension
ObjectifsI Lien entre masses non suspendues (mus) et suspendues (ms)I Influence sur les performances confort / tenue de routeI Concerne principalement les dynamiques verticales (zs, zus)
Modèle 1/4 de véhicule Semi-actif
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 17/62
Actionneur contrôlé ne peut que dissiper l’énergie(i.e. modification du facteur d’amortissementen temps réel): bonnes performances, dy-namique rapide, poids comparable au passifet viable économiquement.
mus, zus
ms, zs
Le paradigme de la commande semi-active
I "Clipped control" (synthèse sans contrainte puis saturation) : conduit à descomportements imprévisibles (et non optimaux), ne garantit ni la stabilité interneni les performances
I Objectifs : traiter les contraintes semi-actives spécifiques en modifiant en ligne lecoefficient d’amortissement ou en synthétisant une action de commandeadéquate
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 18/62
Recherches en commande de suspensions semi-actives
Nombreuses approches∗ Approche CRONE: plutôt orientée confort, lien avec les organes
hydropneumatiques (Oustaloup, Moreau, 91 ....)
Méthodes "clipped":- "Skyhook clipped" : (Karnopp et al. 1974), (Emura et al. 1994)
- "LQ clipped": complexe, mesure des états Tseng et al. [VSD, 1994]
- "H∞ & skyhook clipped" : Sammier et al. [VSD, 2003]
Pilotage du coefficient d’amortissement:• "Skyhook 2-états" : Nombreux travaux pour améliorer le confort (Simon 2001),
(Ahmadian et al. 2004).
• ADD, Mixed SH-ADD : Savaresi et al.[2005/2009]
Synthèse avec prise en compte de la contrainte (dissipativité)I basée sur le MPC : optimisation, mesure des états, robustesse? Canale et al.
[TCST, 2006], Giorgetti et al. [IJRNLC, 2006]I LPV ...
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 19/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 20/62
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 21/62
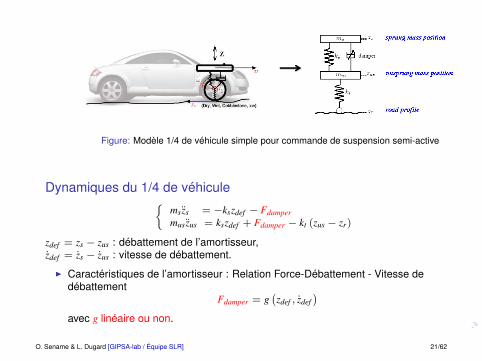
Dynamiques du 1/4 de véhiculems zs = −kszdef − Fdampermus zus = kszdef + Fdamper − kt (zus − zr)
zdef = zs − zus : débattement de l’amortisseur,zdef = zs − zus : vitesse de débattement.
I Caractéristiques de l’amortisseur : Relation Force-Débattement - Vitesse dedébattement
Fdamper = g(zdef , zdef
)avec g linéaire ou non.
Figure: Modèle 1/4 de véhicule simple pour commande de suspension semi-active
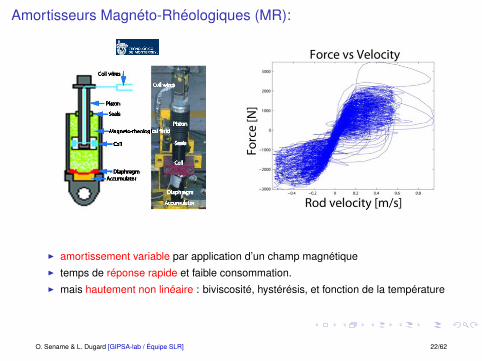
Amortisseurs Magnéto-Rhéologiques (MR):
I amortissement variable par application d’un champ magnétiqueI temps de réponse rapide et faible consommation.I mais hautement non linéaire : biviscosité, hystérésis, et fonction de la température
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 22/62
Modèles orientés commande
Modèle d’amortisseur linéaire semi-actif (Modèle 1)
Fdamper = c0 zdef + u, c0 = (cmax + cmin)/2
utilisé dans de nombreuses approches (optimal, MPC, H∞, H2...), avec Fdamper bornée.
Modèle d’amortisseur non linéaire semi-actif (Modèle 2) [Gu et al.,2006, Nino-Juarez et al., 2008]
Fdamper = c0 zdef + k0zdef + fI tanh(c1 zdef + k1zdef
)I tanh : permet de modéliser le comportement bivisqueux.I fI : force contrôlable fonction du courant d’entrée I.
Contrainte : 0 ≤ fImin ≤ fI ≤ fImax - contrainte de passivité.
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 23/62
Modèles orientés commande
Modèle d’amortisseur linéaire semi-actif (Modèle 1)
Fdamper = c0 zdef + u, c0 = (cmax + cmin)/2
utilisé dans de nombreuses approches (optimal, MPC, H∞, H2...), avec Fdamper bornée.
Modèle d’amortisseur non linéaire semi-actif (Modèle 2) [Gu et al.,2006, Nino-Juarez et al., 2008]
Fdamper = c0 zdef + k0zdef + fI tanh(c1 zdef + k1zdef
)I tanh : permet de modéliser le comportement bivisqueux.I fI : force contrôlable fonction du courant d’entrée I.
Contrainte : 0 ≤ fImin ≤ fI ≤ fImax - contrainte de passivité.
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 23/62
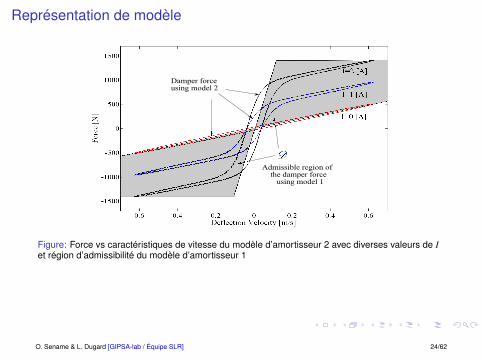
Représentation de modèle
Figure: Force vs caractéristiques de vitesse du modèle d’amortisseur 2 avec diverses valeurs de Iet région d’admissibilité du modèle d’amortisseur 1
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 24/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 25/62
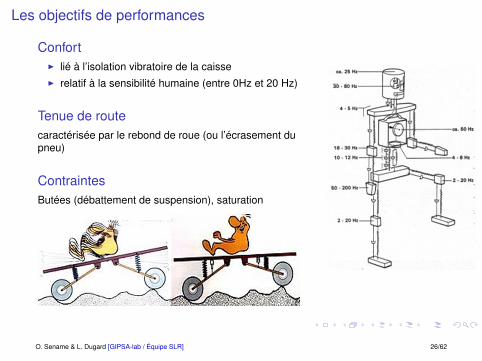
Les objectifs de performances
ConfortI lié à l’isolation vibratoire de la caisseI relatif à la sensibilité humaine (entre 0Hz et 20 Hz)
Tenue de routecaractérisée par le rebond de roue (ou l’écrasement dupneu)
ContraintesButées (débattement de suspension), saturation
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 26/62
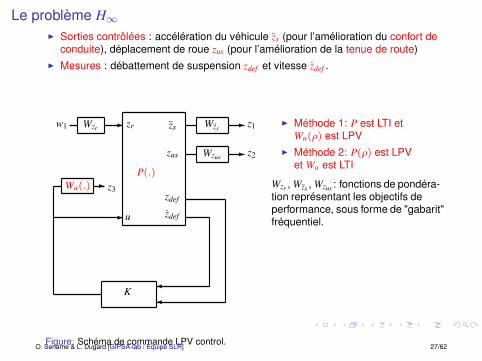
Le problème H∞I Sorties contrôlées : accélération du véhicule zs (pour l’amélioration du confort de
conduite), déplacement de roue zus (pour l’amélioration de la tenue de route)I Mesures : débattement de suspension zdef et vitesse zdef .
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 27/62
I Méthode 1: P est LTI etWu(ρ) est LPV
I Méthode 2: P(ρ) est LPVet Wu est LTI
Wzr , Wzs , Wzus : fonctions de pondéra-tion représentant les objectifs deperformance, sous forme de "gabarit"fréquentiel.
zs
zus
Wzs
Wzus
zr
u
zdef
zdef
K
P(.)
z1
z2
-
-
-
Wzr-w1
-Wu(.) z3
Figure: Schéma de commande LPV control.
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 28/62
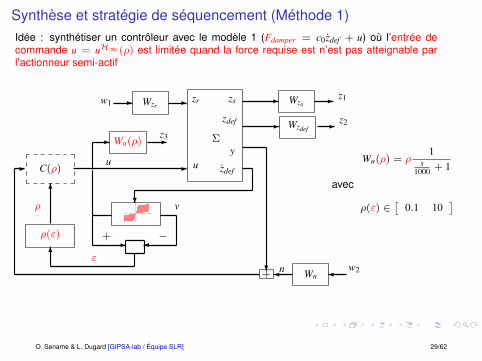
Synthèse et stratégie de séquencement (Méthode 1)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 29/62
Wu(ρ) = ρ1
s1000 + 1
avec
ρ(ε) ∈[
0.1 10]
Σ
zdef
zdef
u
zr zs
y
- - z1Wzs
- Wzdefz2-
Wzr--w1
Wu(ρ)z3
u
Wn w2n?
-
+
--
-C(ρ)
−+
? v
ε
-
6
6
ρ
ρ(ε)
Idée : synthétiser un contrôleur avec le modèle 1 (Fdamper = c0 zdef + u) où l’entrée decommande u = uH∞ (ρ) est limitée quand la force requise est n’est pas atteignable parl’actionneur semi-actif
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 30/62
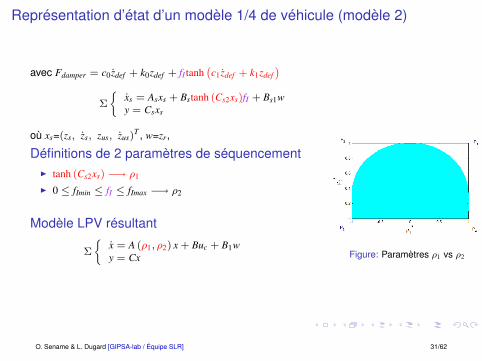
Représentation d’état d’un modèle 1/4 de véhicule (modèle 2)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 31/62
Figure: Paramètres ρ1 vs ρ2
Définitions de 2 paramètres de séquencementI tanh (Cs2xs) −→ ρ1
I 0 ≤ fImin ≤ fI ≤ fImax −→ ρ2
Modèle LPV résultant
Σ
x = A (ρ1, ρ2) x + Buc + B1wy = Cx
avec Fdamper = c0 zdef + k0zdef + fI tanh(c1 zdef + k1zdef
)Σ
xs = Asxs + Bstanh (Cs2xs)fI + Bs1wy = Csxs
où xs=(zs, zs, zus, zus)T , w=zr,
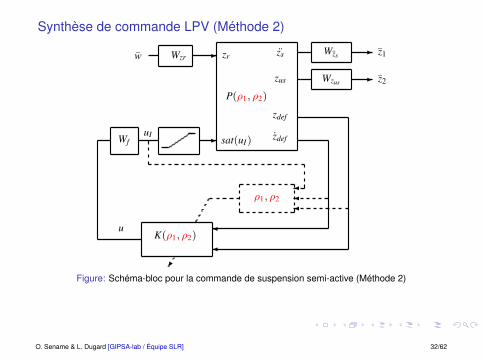
Synthèse de commande LPV (Méthode 2)
zs
zus
Wzs
Wzus
zr
sat(uI)
zdef
zdef
ρ1, ρ2
K(ρ1, ρ2)
P(ρ1, ρ2)
Wf
z1
z2
Wzrw
uI
u
-
-
-
-
Figure: Schéma-bloc pour la commande de suspension semi-active (Méthode 2)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 32/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 33/62
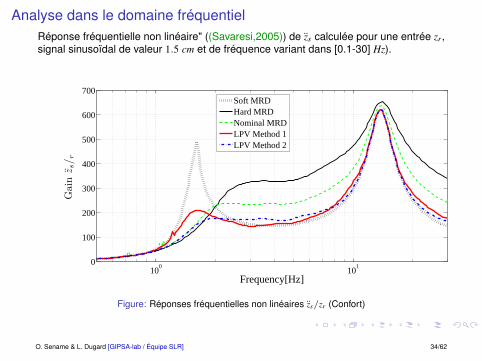
Analyse dans le domaine fréquentielRéponse fréquentielle non linéaire" ((Savaresi,2005)) de zs calculée pour une entrée zr,signal sinusoïdal de valeur 1.5 cm et de fréquence variant dans [0.1-30] Hz).
100
101
0
100
200
300
400
500
600
700
Frequency[Hz]
Gai
nz s
/ r
Soft MRDHard MRDNominal MRDLPV Method 1LPV Method 2
Figure: Réponses fréquentielles non linéaires zs/zr (Confort)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 34/62
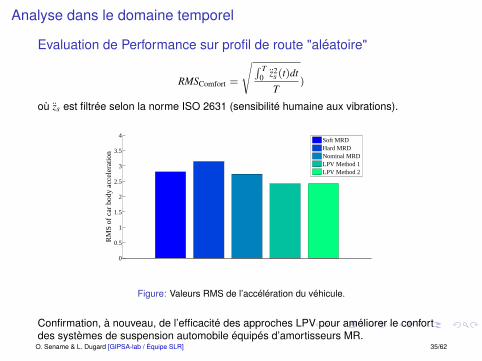
Analyse dans le domaine temporel
Evaluation de Performance sur profil de route "aléatoire"
RMSComfort =
√∫ T0 z2
s (t)dt
T)
où zs est filtrée selon la norme ISO 2631 (sensibilité humaine aux vibrations).
10
0.5
1
1.5
2
2.5
3
3.5
4
RM
S o
f ca
r bo
dy a
ccel
erat
ion
Soft MRDHard MRD Nominal MRDLPV Method 1LPV Method 2
Figure: Valeurs RMS de l’accélération du véhicule.
Confirmation, à nouveau, de l’efficacité des approches LPV pour améliorer le confortdes systèmes de suspension automobile équipés d’amortisseurs MR.
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 35/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 36/62
Vers des approches de commande globale de châssis (GCC)
Approche usuelleLes sous-systèmes de commande de la dynamique véhicule (commande desuspension, de direction, de stabilité, de traction .... ) sont traditionnellementdéveloppés et mis en œuvre en tant que systèmes indépendants (ou faiblementinteragissant).
Travaux actuels sur la dynamique véhicule (sans GCC)I système de freinage, par ex. avec différentiel actif [Canale et al., 2007]I braquage actif à l’avant [Guvenc et al., 2004, 2009; Falcone et al., 2007], à
l’arrière [Burgio et al., 2010] ou sur les 4 roues du véhicule [Horiuchi et al., 1996].I système de suspension semi-active [Oustaloup & Moreau, 96], [Savaresi et al,
2005], [Dugard & Sename, 2003])
Une des pistes d’améliorationLa collaboration entre ces systèmes est réalisée avec des règles empiriques et peutmener à des objectifs de commande conflictuels.
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 37/62
Vers des approches de commande globale de châssis
Qu’est-ce que la Commande Globale de Châssis ?I combine plusieurs (au moins 2) sous-systèmes du véhicule de façon à améliorer
son comportement globalI tend à faire collaborer entre eux les sous-systèmes vers les mêmes objectifs,
selon la situation (contraintes, environnement, ...)I est développée pour améliorer le confort et la sécurité, selon la situation du
véhicule, en tenant compte des contraintes des actionneurs et de la connaissance(éventuelle) de l’environnement du véhicule.
Quelques exemplesI freinage/suspension : approche non linéaire (Chou et d’Andréa Novel, 2005), LPV
pour les poids-lourds (Gaspar, Szabo & Bokor, 2008), et pour les voitures(Poussot et al., CEP 2011)
I freinage / braquage : commandes optimale [Yang et al., 2009], prédictive [DiCairano and Tseng, 2010 ou par allocation de la commande [Tjonnas andJohansen, 2010]
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 38/62

Petite illustration
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 39/62
Intérêts de l’approche LPV pour le contrôle global
Adapter en ligne les performances du véhiculeGrâce à l’utilisation de fonctions de pondération LPV, on peut réagir:
I aux types/conditions de route (mesurés, estimés)I aux solicitations du conducteurI aux dangers identifiés par des mesures du comportement dynamique du véhicule
(sur-virage, sous-virage...)
Dans ce qui suitDéfinir une structure spécifique de commande LPV multivariable pour coordonner lesactionneurs de freinage et de braquage: (Poussot et al., VSD 2011) et (Doumiati et al,2010)
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 40/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 41/62
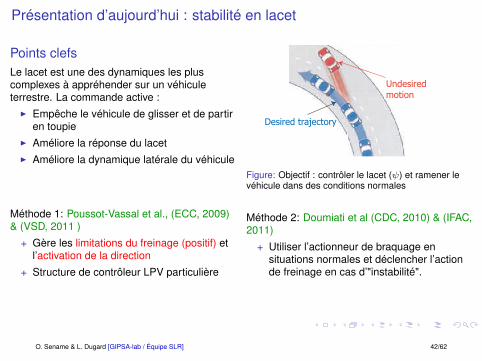
Présentation d’aujourd’hui : stabilité en lacet
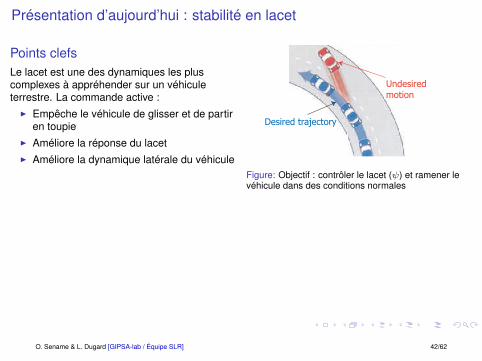
Points clefsLe lacet est une des dynamiques les pluscomplexes à appréhender sur un véhiculeterrestre. La commande active :
I Empêche le véhicule de glisser et de partiren toupie
I Améliore la réponse du lacetI Améliore la dynamique latérale du véhicule
Desired trajectory
Undesired motion
Figure: Objectif : contrôler le lacet (ψ) et ramener levéhicule dans des conditions normales
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 42/62
Présentation d’aujourd’hui : stabilité en lacet
Points clefsLe lacet est une des dynamiques les pluscomplexes à appréhender sur un véhiculeterrestre. La commande active :
I Empêche le véhicule de glisser et de partiren toupie
I Améliore la réponse du lacetI Améliore la dynamique latérale du véhicule
Méthode 1: Poussot-Vassal et al., (ECC, 2009)& (VSD, 2011 )
+ Gère les limitations du freinage (positif) etl’activation de la direction
+ Structure de contrôleur LPV particulière
Desired trajectory
Undesired motion
Figure: Objectif : contrôler le lacet (ψ) et ramener levéhicule dans des conditions normales
Méthode 2: Doumiati et al (CDC, 2010) & (IFAC,2011)
+ Utiliser l’actionneur de braquage ensituations normales et déclencher l’actionde freinage en cas d’"instabilité".
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 42/62
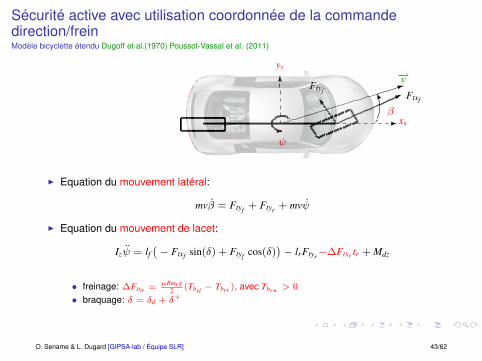
Sécurité active avec utilisation coordonnée de la commandedirection/freinModèle bicyclette étendu Dugoff et al.(1970) Poussot-Vassal et al. (2011)
I Equation du mouvement latéral:
mvβ = Ftyf + Ftyr + mvψ
I Equation du mouvement de lacet:
Izψ = lf(− Ftxf sin(δ) + Ftyf cos(δ)
)− lrFtyr−∆Ftxr tr + Mdz
• freinage: ∆Ftxr = µRmrg2 (Tbrl − Tbrr ), avec Tbr? > 0
• braquage: δ = δd + δ+
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 43/62
]*
Ftyf Ftxf
-ψ
-
6
xs
ys
1−→v
βK
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 44/62
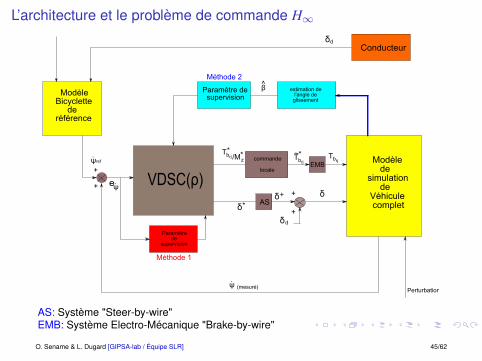
L’architecture et le problème de commande H∞
Modèle Bicyclette de référence
Paramétre de supervision
estimation de l'angle de glissement
commande locale
VDSC(ρ)
Paramétre de supervision
AS
EMB Modèle de simulation de Véhicule complet
Méthode 1
Méthode 2
Conducteur
Perturbation
ψref.
ψ.
(mesuré)
eψ.
δ*
δd
δd
δ+ δ
β
Tbrj*
/Mz* TbrjTbrj
*~
+
+
+
+
AS: Système "Steer-by-wire"EMB: Système Electro-Mécanique "Brake-by-wire"
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 45/62
L’architecture et le problème de commande H∞
ψref (v)+
−--
ψ
K1(ρ1, ρ2)
ou K2(ρ)
-Σ
-T+
brj/M+
z
6
Mdz
-δ+
-
-
EMB
ASeψ
- Wu - z2
- Wδ-
z3
Σg
- Weψ
-z1
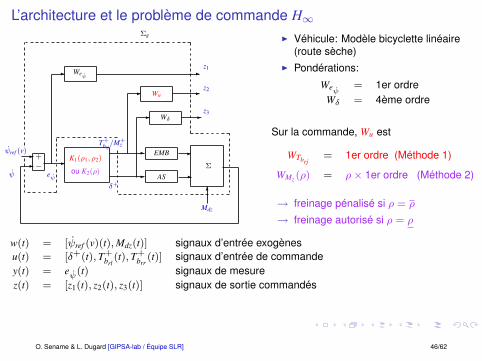
w(t) = [ψref (v)(t),Mdz(t)] signaux d’entrée exogènesu(t) = [δ+(t), T+
brl(t), T+
brr(t)] signaux d’entrée de commande
y(t) = eψ(t) signaux de mesurez(t) = [z1(t), z2(t), z3(t)] signaux de sortie commandés
I Véhicule: Modèle bicyclette linéaire(route sèche)
I Pondérations:
Weψ
= 1er ordreWδ = 4ème ordre
Sur la commande, Wu est
WTbrj= 1er ordre (Méthode 1)
WMz (ρ) = ρ× 1er ordre (Méthode 2)
→ freinage pénalisé si ρ = ρ
→ freinage autorisé si ρ = ρ
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 46/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 47/62
Structure des contrôleursLPV/H∞: Méthode 1
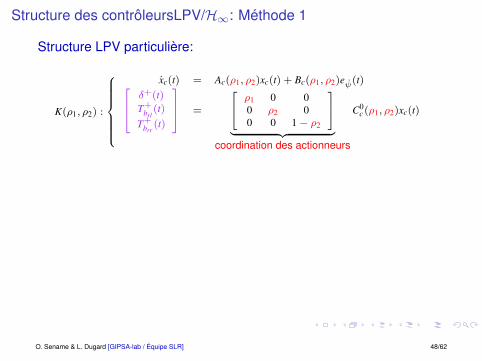
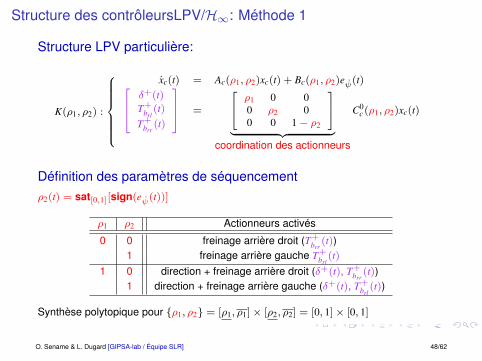
Structure LPV particulière:
K(ρ1, ρ2) :
xc(t) = Ac(ρ1, ρ2)xc(t) + Bc(ρ1, ρ2)eψ(t) δ+(t)T+
brl(t)
T+brr
(t)
=
ρ1 0 00 ρ2 00 0 1− ρ2
︸ ︷︷ ︸
coordination des actionneurs
C0c (ρ1, ρ2)xc(t)
Définition des paramètres de séquencementρ2(t) = sat[0,1][sign(eψ(t))]
ρ1 ρ2 Actionneurs activés
0 0 freinage arrière droit (T+brr
(t))1 freinage arrière gauche T+
brl(t)
1 0 direction + freinage arrière droit (δ+(t), T+brr
(t))1 direction + freinage arrière gauche (δ+(t), T+
brl(t))
Synthèse polytopique pour ρ1, ρ2 = [ρ1, ρ1]× [ρ2, ρ2] = [0, 1]× [0, 1]
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 48/62
Structure des contrôleursLPV/H∞: Méthode 1
Structure LPV particulière:
K(ρ1, ρ2) :
xc(t) = Ac(ρ1, ρ2)xc(t) + Bc(ρ1, ρ2)eψ(t) δ+(t)T+
brl(t)
T+brr
(t)
=
ρ1 0 00 ρ2 00 0 1− ρ2
︸ ︷︷ ︸
coordination des actionneurs
C0c (ρ1, ρ2)xc(t)
Définition des paramètres de séquencementρ2(t) = sat[0,1][sign(eψ(t))]
ρ1 ρ2 Actionneurs activés
0 0 freinage arrière droit (T+brr
(t))1 freinage arrière gauche T+
brl(t)
1 0 direction + freinage arrière droit (δ+(t), T+brr
(t))1 direction + freinage arrière gauche (δ+(t), T+
brl(t))
Synthèse polytopique pour ρ1, ρ2 = [ρ1, ρ1]× [ρ2, ρ2] = [0, 1]× [0, 1]
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 48/62
Structure des contrôleurs LPV/H∞: Méthode 2
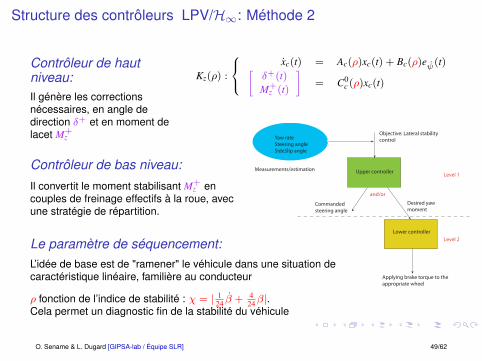
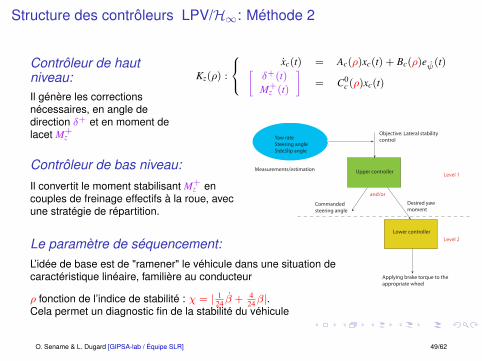
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 49/62
Le paramètre de séquencement:L’idée de base est de "ramener" le véhicule dans une situation decaractéristique linéaire, familière au conducteur
ρ fonction de l’indice de stabilité : χ = | 124 β + 4
24β|.Cela permet un diagnostic fin de la stabilité du véhicule
Upper controller
Lower controller
Commanded steering angle
Desired yaw moment
Applying brake torque to the appropriate wheel
Objective: Lateral stability control
Yaw rate Steering angle SideSlip angle
and/or
Measurements/estimation Level 1
Level 2
Contrôleur de bas niveau:Il convertit le moment stabilisant M+
z encouples de freinage effectifs à la roue, avecune stratégie de répartition.
Kz(ρ) :
xc(t) = Ac(ρ)xc(t) + Bc(ρ)eψ(t)[
δ+(t)M+
z (t)
]= C0
c (ρ)xc(t)
Contrôleur de hautniveau:Il génère les correctionsnécessaires, en angle dedirection δ+ et en moment delacet M+
z
Structure des contrôleurs LPV/H∞: Méthode 2
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 49/62
Le paramètre de séquencement:L’idée de base est de "ramener" le véhicule dans une situation decaractéristique linéaire, familière au conducteur
ρ fonction de l’indice de stabilité : χ = | 124 β + 4
24β|.Cela permet un diagnostic fin de la stabilité du véhicule
Upper controller
Lower controller
Commanded steering angle
Desired yaw moment
Applying brake torque to the appropriate wheel
Objective: Lateral stability control
Yaw rate Steering angle SideSlip angle
and/or
Measurements/estimation Level 1
Level 2
Contrôleur de bas niveau:Il convertit le moment stabilisant M+
z encouples de freinage effectifs à la roue, avecune stratégie de répartition.
Kz(ρ) :
xc(t) = Ac(ρ)xc(t) + Bc(ρ)eψ(t)[
δ+(t)M+
z (t)
]= C0
c (ρ)xc(t)
Contrôleur de hautniveau:Il génère les correctionsnécessaires, en angle dedirection δ+ et en moment delacet M+
z
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 50/62
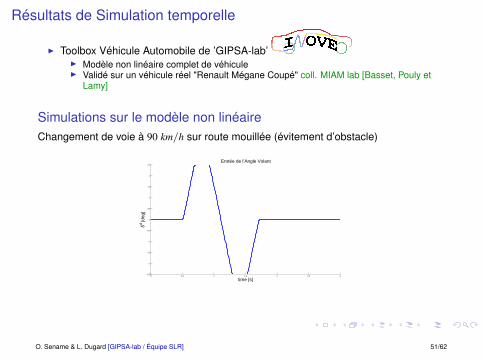
Résultats de Simulation temporelle
I Toolbox Véhicule Automobile de ’GIPSA-lab’I Modèle non linéaire complet de véhiculeI Validé sur un véhicule réel "Renault Mégane Coupé" coll. MIAM lab [Basset, Pouly et
Lamy]
Simulations sur le modèle non linéaireChangement de voie à 90 km/h sur route mouillée (évitement d’obstacle)
0 0.5 1 1.5 2 2.5 3−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Entrée de l’Angle Volant
time [s]
δd [deg
]
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 51/62
Méthode 1
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 52/62
0 10 20 30 40 50 60 70 80-2
-1
0
1
2
3
4
5
6
x-Distance [m]
y-D
ista
nce
[m]
Trajectoire du véhicule
Véhicule non controlé
LPV
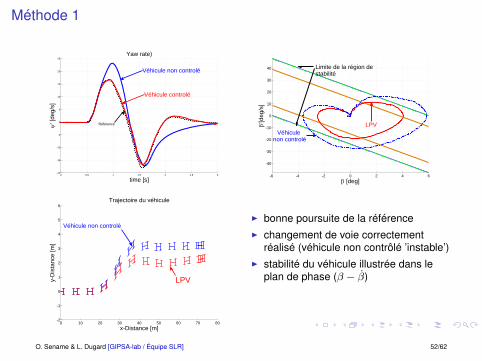
I bonne poursuite de la référenceI changement de voie correctement
réalisé (véhicule non contrôlé ’instable’)I stabilité du véhicule illustrée dans le
plan de phase (β − β)
-6 -4 -2 0 2 4 6
-40
-30
-20
-10
0
10
20
30
40
β [deg]
β'[d
eg/s
]
LPVVéhicule
non controlé
Limite de la région destabilité
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
15
20
25Yaw rate)
time [s]
ψ' [
deg/
s]
Véhicule controlé
Véhicule non controlé
Référence
Méthode 1
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 53/62
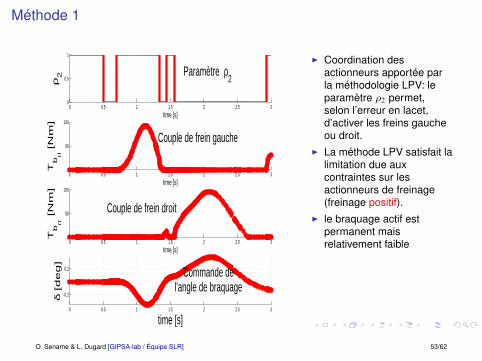
I Coordination desactionneurs apportée parla méthodologie LPV: leparamètre ρ2 permet,selon l’erreur en lacet,d’activer les freins gaucheou droit.
I La méthode LPV satisfait lalimitation due auxcontraintes sur lesactionneurs de freinage(freinage positif).
I le braquage actif estpermanent maisrelativement faible
0 0.5 1 1.5 2 2.5 30
0.5
1
Paramètre ρ2
time [s]
ρ2
0 0.5 1 1.5 2 2.5 30
50
100
Couple de frein gauche
time [s]
Tb
rl
[N
m]
0 0.5 1 1.5 2 2.5 30
50
100
Couple de frein droit
time [s]
Tb
rr
[N
m]
0 0.5 1 1.5 2 2.5 3
-0.2
0
0.2 Commande del'angle de braquage
time [s]
δ [
deg]
Méthode 2
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 54/62
0 10 20 30 40 50 60 70 80-2
-1
0
1
2
3
4
5
6
x-Distance [m]
y-D
ista
nce
[m]
Trajectoire du véhicule
Véhicule contrôlé
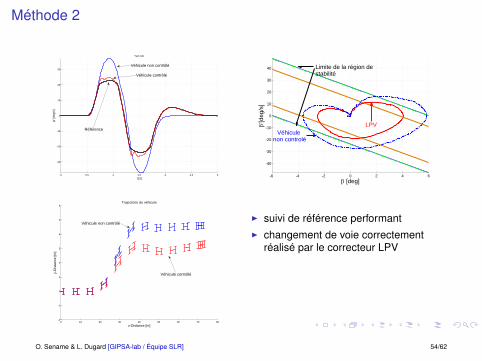
Véhicule non contrôléI suivi de référence performantI changement de voie correctement
réalisé par le correcteur LPV
-6 -4 -2 0 2 4 6
-40
-30
-20
-10
0
10
20
30
40
β [deg]
β'[d
eg/s
]
LPVVéhicule
non controlé
Limite de la région destabilité
0 0.5 1 1.5 2 2.5 3
-30
-20
-10
0
10
20
30
t [s]
ψ' [
deg/
s]Yaw rate
Référence
Véhicule contrôlé
Véhicule non contrôlé
Méthode 2
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 55/62
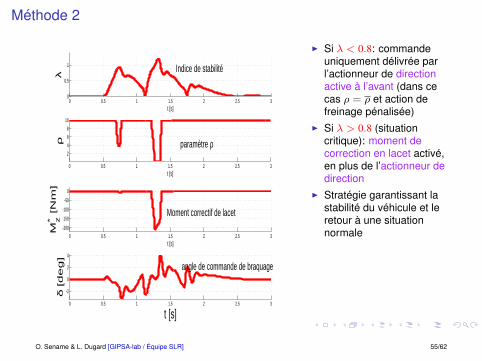
I Si λ < 0.8: commandeuniquement délivrée parl’actionneur de directionactive à l’avant (dans cecas ρ = ρ et action defreinage pénalisée)
I Si λ > 0.8 (situationcritique): moment decorrection en lacet activé,en plus de l’actionneur dedirection
I Stratégie garantissant lastabilité du véhicule et leretour à une situationnormale
0 0.5 1 1.5 2 2.5 30
0.5
1
t [s]
λIndice de stabilité
0 0.5 1 1.5 2 2.5 3
-200
-150
-100
-50
0
t [s]
M* z [
Nm
]
Moment correctif de lacet
0 0.5 1 1.5 2 2.5 3
2
4
6
8
10
t [s]
ρ
paramètre ρ
0 0.5 1 1.5 2 2.5 3
-2
0
2
4
t [s]
δ [
deg]
angle de commande de braquage
Méthode 2
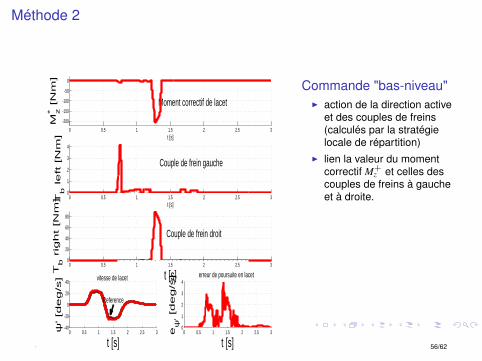
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 56/62
Commande "bas-niveau"I action de la direction active
et des couples de freins(calculés par la stratégielocale de répartition)
I lien la valeur du momentcorrectif M+
z et celles descouples de freins à gaucheet à droite.0 0.5 1 1.5 2 2.5 3
0
1
2
3
4
t [s]
Tb left
[N
m]
Couple de frein gauche
0 0.5 1 1.5 2 2.5 30
20
40
60
80
t [s]Tb r
ight
[Nm
]
Couple de frein droit
0 0.5 1 1.5 2 2.5 3
-200
-150
-100
-50
0
t [s]
M* z [
Nm
]
Moment correctif de lacet
0 0.5 1 1.5 2 2.5 3-40
-20
0
20
40
t [s]
ψ' [d
eg/s
] vitesse de lacet
0 0.5 1 1.5 2 2.5 30
1
2
3
4erreur de poursuite en lacet
t [s]
eψ
' [d
eg/s
]
Reference
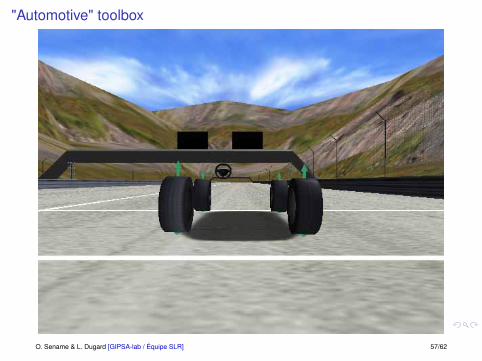
"Automotive" toolbox
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 57/62
Plan de la présentationIntroduction
ContexteProjet sur la commande de châssis
Sur l’approche LPVGénéralitésIntérêts du LPV
Sur les systèmes de suspensionGénéralitésModèles 1 et 2 pour la commande semi-activeLe problème de commande de suspensionUne stratégie de commande de suspension LPV semi-active (Méthode 1)Une stratégie de commande basée sur un modèle LPV (Méthode 2)Résultats de simulation
Contrôle de la dynamique de véhiculePrésentation du contexteSécurité active avec utilisation coordonnée de la commande direction/freinL’architecture et le problème de commande H∞Structure des contrôleursSimulations
Conclusions
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 58/62
Conclusions / Intérêt du LPV
Les intérêts de la synthèse LPV sont multiples
+ Permet de modéliser plus de dynamiques, i.e. plus dephénomènes réels que l’approche LTI
- Moins cependant que la formulation non linéaire ... MAIS+ Permet d’utiliser le linéaire pour l’analyse et pour la synthèse de
commande (H∞, H2 avec les outils d’optimisation)+ Permet de synthétiser des contrôleurs avec des performances
variables tout en garantissant la stabilité interne et lesperformances robustes
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 59/62
La suite dans
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 60/62

Et maintenant ?
Quelques challenges...pour l’automatiqueCommande distribuée pour le CGC (X-by-wire), réduire l’empreinte, le poids etl’énergie, interaction conducteur/véhicule (aussi au sens énergétique)
Mais aussi:I les poids-lourds (anti-renversement actif...), les motos (ABS...)I les nouveaux véhicules légers (électriques ou thermiques), à 2 places, pour
lesquels de mauvaises performances du châssis dues la légèreté et simplicité dela structure pourraient être compensées par la boucle fermée !!
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 61/62
Sans oublier ...les nouveaux moyens de propulsion....
Merci pour votre attention !
O. Sename & L. Dugard [GIPSA-lab / Équipe SLR] 62/62