Embed Size (px)
Citation preview

27
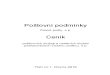
Radarski uredaj sastavljen je od tri dijela:odašiljac (predajnik)prijemnikantena.
Osim ovih (elektronskih) komponenti u sklopu radara je i motor generator.Odašiljac brodskog radara je oscilator koji generira impulse SHF (Super Hight Frequency)
valnih dužina od dva do deset centimetara (frekvencija od 3 GHz do 15 GHz) vrlo velike snage (do 100 kW). Glavni su mu djelovi: multivibrator, modulator i magnetron.
Prijemnik brodskog radara je sklop koji jeke vrlo slabe snage (do 5 mW) pojacava i na ekranu prikazuje kao videosignale od kojih se formira panoramska slika podrucja odredenog na odredenom dometu. Glavni su mu djelovi: mješac frekvencija, pojacalo, limiter i katodna cijev s pokazivacem.
Antenski sklop brodskog radara je uredaj koji omogucava ravnomjerno emitiranje u prostor impulsa super visoke frekvencije i velike snage, te prijem jeke male snage. Glavni su mu djelovi: antena, valovod i sinhromotor (servomotor ili selsin).
Shema brodskog radarskog uredaja s osnovnim elementima prikazana je na slici 23.
Blok shema s najvažnijim djelovima brodskog radara
Naziv "radar" je nastao od engleske kratice . Uporaba radara danas je mnogostruka i neizbježna u zrakoplovstvu, pomorstvu, meteorologiji.
RADAR
Kompletni radar
•••
Slika 23.
RAdio Detecting And Ranging

28
ima funkciju ukljucivanja uredaja. To je zapravo bistabilni multivibrator koji generira iglicaste impulse vrlo stabilne frekvencije. U jednoj sekundi master oscilator generira 500 do 3500 impulsa. Impulsi iz master oscilatora racvaju se na dva dijela: jedan dio vodi prema predajniku a drugi prema prijemniku i obje radarskog uredaj ukljucuje istodobno.
ima funkciju odgovarajuceg moduliranja iglicastog signala u pravokutni cije trajanje odreduje vrijeme rada predajnika. Kod desetcentimetarskih radarskih valova (S opseg - frekvencije od 2 GHz do 4 GHz) vrijeme trajanja impulsa nešto je duže, a kod trocimentarskih radarskih valova (X opseg - frekvencije izmedu 8 GHz i 12,5 GHz) nešto krace. U prosjeku vrijeme trajanja jednog pravokutnog kojeg generira modulator je izmedu 0,1 mikrosekundi i 1,25 mikrosekundi. S obzirom da svaki impuls ukljucuje predajnik ovaj se element zove i (okidac), a element modulatora koji ima funkciju generiranja impulsa po tome se zove
je (ili više njih)1 na kojeg je narinut vrlo visoki napon (do 10 kV) cime se proizvodi potrebna snaga signala (20 do 100 kW). Magnetron generira impuls vrlo visoke frekvencije (do 12,5 GHz) i velike snage (do 100 kW), a impuls se generira samo onoliko vremena koliko traje pravokutni modulirani signal iz modulatora (pravokutni impuls ukljucuje magnetron koji radi onoliko vremena koliko impuls traje). Ako modulirani signal traje jednu mikrosekundu šuplji rezonator (frekvencije 10 MHz) zatitra 10000 puta, a impuls je u tom slucaju dugacak 300 metara. Ako modulirani signal traje 0,1 mikrosekundu magnetron iste frekvencije tom vremenu zatitra 1000 puta, a generirani impuls u prostoru je dugacak 30 metara. Duljina impulsa u prostoru definira kvalitet razdvajanja objekta po udaljenosti i minimalni domet radara.
Iz magnetrona impuls ulazi u valovod. je šuplja cijev pravokutnog oblika koja se može shvatiti i kao velik broj šupljih
rezonatora spojenih u seriju. Prolaskom kroz valovod elektromagnetski val se ne rasipa i ne slabi jer su dimenzije šupljih rezonatora (valovoda) sinhronizirane s valnom dužinom impulsa (duža stranica valovoda iznosi 0,7 , a kraca 0,5 ), a stranice valovoda vrlo su glatke. Na taj nacin impuls u antenu dolazi bez gubitka energije. U valovodu impuls nailazi na dva elektronska sklopa: i ( i ).
( ) propušta impuls iz magnetrona u antenu a blokira odbijeni impuls.
( ) blokira prolaz impulsa iz magnetrona prema prijemniku, a propušta odbijeni impuls u prijemnik.
TR i TB celije zapravo su diode koje naizmjenicno propuštaju impuls iz magnetrona prema anteni odnosno vracenu jeku iz antene prema prijemniku (mješacu).
Iz valovoda impuls dolazi na antenu odakle se emitira u prostor. je kod novijih radara zapravo produžetak valovoda zaokrenutog za 90° koji može
rotirati ( ). Na anteni su prorezi širine jedne cetvrtine valne dužine ( /4) cime se postiže da se impuls direktno iz valovoda emitira u prostor, te da impuls ima vrlo
1 Šupljim rezonatorom ( ) naziva se elektronski sklop u kojem je paraleno vezano više titrajnih krugova cime se postižu vrlo visoke frekvencije.
Opis djelova radara i principi rada po blok shemi
Predajnik
Master oscilator
Modulator
Magnetron
Valovod
TB celija
TR celija
Antena
triggertrigatron.
šuplji rezonator
TB celiju TR celiju TB cell TR cellTransmiter Blocking Switch
Transmit Receive Switch
Slotted Waveguide scanner
cavity resonator
λ λ
λ

29
uski horizontalni kut emitiranja (0,5°). Paraboloidne antene su napuštene zbog velikih gubitaka energije, a najnoviji radari koriste antene s elektronskim rotiranjem.
Otklonske zavojnice katodne cijevi moraju rotirati sinhrono s antenom, tako da je motor generator sinhroniziran sa na anteni i smještenim uz katodnu cijev, a ovi djelovi nemaju direktnu vezu s elektronikom unutar radara.
Nakon što je emitiran iz antene impuls vrlo visoke frekvencije i velike snage putuje brzinom svjetlosti kroz prostor. Kad naide na neku prepreku dio emitiranog impulsa se odbije natrag prema anteni i vrlo oslabljen propušta se ponovo kroz U antenu se vraca više jeka istog impulsa, zavisno o tome na koliko je prepreka impuls naišao u prostoru.
Vrlo oslabljena jeka (snaga primljene jeke može iznositi samo 5 mW) prolazi kroz valovod. TB celija ( ) ne propušta ga prema magnetronu, a TR celija ( ) propušta ga prema prijemniku.
Jeka ima istu frekvenciju kao i emitirani signal (frekvenciju magnetrona), a signal takve frekvencije ne može se pojacavati, što je nužno da bi se, kao videosignal, mogao registrirati na zaslonu katodne cijevi. Zbog toga se frekvencija primljene jeke preoblikuje u elektronskom sklopu koji se zove mješac.
( ) je sklop u kojem se miješa frekvencija jeke s frekvencijom koju generiraju posebni elektronski elementi ( ili ) a koja je od frekvencije magnetrona manja izmedu 40 i 60 MHz. Miješanjem dvaju razlicitih frekvencija javlja se takozvani
, to jest val superponiranih amplituda s frekvencijom odgovara razlici frekvencije magnetrona i gun diode ili klistrona (na primjer ako je frekvencija magnetrona 10000 MHz a frekvencija gun diode 9940 MHz superponirani val imat ce frekvenciju 60 MHz). Posebna kristalna dioda iz mješaca propušta samo pozitivnu poluperiodu signala, a tako dobijena frekvencija zove se (slika 24).
Envelopa superheterodinskog efekta
je generator vrlo visokih frekvencija koji se koristio u prvim radarima i vec se dugo ne upotrebljava. To je bio šuplji rezonator cija se frekvencija (male snage) prilagodavala frekvenciji magnetrona na nacin da je frekvencija magnetrona kontrolirana preko ( ) i prilagodavana klistronu.
je poluvodic od galija i arsena koja je u stanju proizvoditi potrebne frekvencije. Danas se koristi u svim uredajima koji rade na vrlo visokim frekvencijama, a smještena je u
sinhrogeneratorom sinhromotorom
Transmiter Blocking SwitchTransmit Receive Switch
mixergun dioda klistron
superheterodinski efekt
medufrekvencija
Slika 24.
AFC sklopaAutomatic Frequency Control
Prijemnik
Mješac
Klistron
Gun dioda

30
šupljom rezonatoru. Proizvodi vrlo stabilne frekvencije, a u modernim radarima koristi se umjesto klistrona.
Superheterodinski signal ima frekvenciju (40 do 60 MHz) koja omogucava pojacavanje. S obzirom da je snaga signala koji izlazi iz mješaca vrlo mala signal se mora mnogostruko pojacati (ponekad do 50 kW, odnosno do milijardu puta). Zbog toga se signal pojacava dvaput: najprije u predpojacalu a zatim u pojacalu. Na izlasku iz pojacala signal ima vrlo veliku snagu i može se registrirati na zaslonu katodne cijevi kao video signal. Snaga signala mnogostruko je veca od potrebne.
( ) je sklop koji vrlo pojacani signal slabi na snagu koja je dovoljna da se propusti prema zaslonu katodne cijevi. Ovaj postupak nužan je zbog ujednacavanja intenziteta jeka razlicitih snaga. Ako bi se jednako pojacavale sve jeke, onda bi one od bližih objekata imale višestruko vecu snagu i time bi na zaslonu radara ostavljale videosignal mnogostruko veceg intenziteta. Zbog toga se svi signali mnogostruko pojacavaju, a zatim na limiteru smanjuju na jednake vrijednosti. Time je slika na radarskom ekranu ujednacena, a svi primljeni signali imaju isti intenzitet (slika 25).
Ogranicenje višestruko pojacanog signala jeke
Ukupna preobrazba impulsa od trenutka izlaza iz magnetrona do trenutka ulaza u limiter može se vidjeti na shematskom prikazu iz slike 26.
Ogranicavac limiter
Slika 25.

31
Pretvorba signala od izlaska iz magnetrona do ulaza u limiterU pojacalo dolaze signali i iz , to jest sklopa na koji se može rucno djelovati u
svrhu smanjivanja snage signala. Ovo je potrebno ukoliko se na radarskom ekranu pojavljuju smetnje nastale utjecajima valove ( ) ili kiše ( ). Podešavanjem sea clutera slabe se signali u blizini središta ekrana (odnosno u blizini broda kod thrue motion radara), a podešavanjem rain cluttera slabe se svi signali. Na takav nacin otklanjaju se neželjene jeke, ali se ponekad mogu izgubiti i korisni signali.
Iz master oscilatora (multivibratora) iglicasti impulsi upucuju se i prema prijemniku. Ti se impulsi obraduju u dva elektronska sklopa:
obraduje impulse u oblik pogodan za mjerenje udaljenosti na nacin da se rucnim djelovanjem operatora postavlja promjenjivi prsten koji se dovodi do objekta do kojeg se želi izmjeriti udaljenost.
ili ( ) ukljucuje i iskljucuje katodnu cijev. Iglicasti impulsi iz multivibratora u ovom se sklopu pretvaraju u pravokutne impulse dugod trajanja (do 1 milisekunde). Za vrijeme trajanja pravokutnog impulsa aktivira se anodna rešetka katodne cijevi tako da elektronski top katodne cijevi emitira elektrone. Zbog toga se period trajanja pravokutnog impulsa naziva , a period u kojem tog impulsa nema naziva se (katoda ne emitira elektrone, prijemnik ne radi).
Iz blok generatora impulsi se upucuju i na dva druga sklopa koji moraju raditi sinhronizirano: i .
u vremenu trajanja svjetlog perioda generira odredeni iglicastih impulsa koji se dovode na limiter i stvaraju odredenu lažnu jeku uvijek na istoj udaljenosti središta katodne cijevi. Na takav se nacin na ekranu iscrtavaju krugovi koji su pravilno rasporedeni tako da se u odnosu na njih mogu mjeriti udaljenosti od objekata u prostoru (
). Zavisno o dometu radara može biti 2, 4 ili 6 kalibracijskih prstenova. ( ) u vremenu trajanja svjetlog perioda
generira impulse ciji napon linearno raste sinhrono s dometom radara. Napon se dovodi do katodne cijevi, a one stvaraju jako elektricno polje koje povija snop elektrona iz elektronskog topa prema obodu zaslona katodne cijevi. U trenutku završetka svjetlog perioda napon naglo pada na nulu a snop elektrona se ponovo postavlja u središte ekrana. U trenutku emitiranja signala pocinje rasti napon na otklonskim zavojnicama katodne cijevi i snop elektrona pocinje se povijati prema obodu katodne cijevi. Vrijeme putovanja elektronskog snopa od središta ekrana do ruba ekrana sinhronizirano je s vremenom putovanja emitiranog signala kroz prostor i vremenom povratka jeke u antenu. Kad emitirani impuls naide na prepreku, a u antenu se vrati jeka, elektronski snop se nalazi na onom dijelu ekrana koji je proporcionalan udaljenosti objekta od kojeg se vratila jeka. Nakon obrade u mješacu, predpojacalu, pojacalu i limiteru na mjestu na kojem se našao elektronski snop ostane zabilježen videozapis koji zbog perzistencije fluorescentnog sloja svijetli. Iscrtavanjem velikog broja videozapisa na ekranu se formira slika okolnog prostora. Zbog vremenske sinhronizacije rada blok generatora i generatora pilastih impulsa s vremenom putovanja kroz prostor ova se dva elementa zajednickim imenom nazivaju . S obzirom da otklonske zavojnice rotiraju sinhrono s antenom i vremenska baza rotira sinhrono s antenom.
je elektronski sklop koji omogucava da se jeka registrira kao videosignal. To je visokovakumska cijev s elementima koji formiraju sliku okolnog prostora ( ,
). je žica koja je jako grijana i zbog toga emitira elektrone koji velikom brzinom ulijecu u vakuum. S obzirom da su negativno nabijeni privlaci
Slika 26.anticluttera
sea clutter rain clutter
blok generator Block Wave Generator
svjetli periodtamni period
kalibrator generator pilastih impulsa
Rings -kalibracijski prstenovi
sawtooth generator
otklonskih zavojnica
vremenska baza
katoda anoda, mreža, fokus, otklonske zavojnice Katoda
Variable Range Marker
Generator pravokutnih impulsa
Kalibrator
Generator pilastih impulsa
Katodna cijev

32
ih s naponom od 10.000 V, tako da dobiju vrlo veliko ubrzanje. Anoda ima otvor kroz koji dio elektrona prolazi na katodne cijevi. je povezana s blok generatorom i definira rad katodne cijevi (svjetli period). je sklop koji fokusira snop elektrona, a napaja se neovisno o elektronici radara. , kao što je vec spomenuto, služe za otklanjanje elektronskog snopa od prema rubu ekrana i mehanicki se okrecu sinhronizirano s antenom (slika 27).
Organizacija vremenske baze
Broj okretaja antene i otklonskih zavojnica standardiziran je na 20 do 25 okretaja u minuti.
Kontrole radara mogu biti i . služe za podešavanje konfiguracije radara i u nacelu se koriste samo povremeno. kontrole su i
.
ili aktiviraju motor generator i griju vakumske elektronske cijevi, ali ne i generatore visokih napona. Nakon ukljucivanja potrebno je pricekati dvije minute dok se ne ukljuci termicki prekidac.
je prekidac za ukljucivanje ili iskljucivanje antene. Kod novih uredaja antena se automatski ukljucuje ukljucivanjem predajnika ( ). Kod nekih radara položaj
omogucava da se radar ne iskljuci sasvim vec se njegovi elementi drže u stanju spremnim za rad. Ako se radar gasi krace vrijeme preporuca se postavljanje na režim.
omogucava podešavanje osvijetljenosti ekrana. Ovim dugmetom djeluje se na katodnu cijev.
omogucava pojacavanje prijemnika. Ovom se kontrolom djeluje na limiter.
anodafluorescentni ekran Mreža
FokusOtklonske zavojnice
Slika 27.
vanjske unutrašnje UnutrašnjeVanjske osnovne
sekundarneOsnovne kontrole:
transmitStand by
Stand byNajvažnije sekundarne kontrole:
Praktican rad radarskim uredajem
Kontrole
Start - stop On - Off
Scanner On - Off
Briliance
Gain

33
omogucava sinhronizaciju frekvencije mješaca. Ovom se kontrolom djeluje na gun diodu (odnosno klistron).
Domet radara ovisi o dva faktora: radarskog horizonta i konstrukcijske izvedbe uredaja.Domet radarskog horizonta funkcija je udaljenosti, s obzirom na zakrivljenost površine
Zemlje, ali i na atmosferske uvjete koji utjecu na propagaciju (slika 28).
. Geometrijska udaljenost radarskog horizonta
Radarski horizont veci je od optickog jer je valna dužina radarskog impulsa veca od valnedužine svjetlosti, pa se kroz atmosferske slojeve razlicite gustoce više lome.
Radarski horizont iznosi:
D = udaljenost radarskog horizonta (izražena u kilometrima)Hant = visina anteneHobj = visina objektaZa udaljenost radarskog horizonta izraženu u nautickim miljama formula ima oblik:
Udaljenost radarskog horizonta vrijedi za standardne atmosferske uvjete. Ako atmosferski uvjeti nisu standardni (temperatura, vlažnost, tlak) javljaju se:
subrefrakcija (zraka se povija prema gore) ako je zrak uz more topliji nego u atmosferisuperefrakcija (zraka se povija prema dolje) ako je zrak uz more hladniji nego u
atmosferi (inverzija).Domet odreden konstrukcijskom izvedbom ovisan je o frekvenciji, kvaliteti komponenti od
kojih je radar izraden ali i o vanjskim faktorima kao što su svojstva prepreke od koje se odbija emitirani impuls. Empirijska jednadžba ima oblik:
r = domet Pmax = maksimalna snaga predajnika
Tune
Domet radara
Slika 28
o b ja n t H4,06H4,06D
o b ja n t H2,2H2,2D
r = 14
PP
Amax
min
2
24
+=
+=
••
λδ µ

34
Pmin = minimalna osjetljivost prijemnikaA = površina antene
= valna dužina = površina objekta = koeficijent odbijanja
Ako se želi domet povecati dvostruko snaga impulsa (Pmax) mora se povecati na cetvrtu potenciju (16 puta) ili se osjetljivost prijemnika mora povecati 16 puta.
Površina antene utjece na domet u funkciji kvadrata, kao i (reciprocno) valna dužina. Zbog toga je za povoljan domet poželjno izabrati odgovarajuci odnos površine antene i valne dužine.
Razliciti materijali imaju razlicite koeficijente odbijanja ( Najbolji koeficijent odbijanja imaju metali, a najlošiji mocvarna zemljišta i podrucja pokrivena šumom. Kvalitet odbijanja mogu se vidjeti iz tablice .....
Osim koeficijenta odbijanja na kvalitet jeke utjece i pod kojim impuls upada na prepreku. Prepreke nepravilnih oblika i hrapave površine daju dobru jeku bez obzira na kut pod kojim impuls na njih upada dok glatke površine daju dobru jeku ako impuls upada okomito, a slabu ako impuls upada pod nekim kutom.
Vecina navigacijskih radara radi na trocentimetarskim valovima, s frekvencijama magnetrona od oko 9,4 GHz dok manji dio koristi desetcentimetarske valove i frekvencije od 3,05 GHz. Impulsna snaga radarskih odašiljaca krece se izmedu 5 i 50 kW. Trajanje impulsa manje je u manjim mjernim podrucjima a vece na duljim, a u prosjeku traje izmedu 0,06 do 1,2 mikrosekundi. Antena se ujednaceno vrti s 22 do 28 okretaja u minuti (mehanicki ili elektronski). Horizontalna širina snopa iznosi od 0,5° do 2°, a vertikalna izmedu 15° i 30°.
Situacija se na radarskom ekranu može prikazati na relativan ili apsolutan (pravi) nacin. Prema nacinu prikazivanja slike navigacijski se radari dijele na:
radari koji prikazuju samo relativnu sliku ( ),radari koji prikazuju relativnu ( ) i pravu sliku ( ),antisudarni (antikoluzijski) radari koji prikazuju sintetiziranu relativnu ili pravu sliku s dodatnim simbolima kojima se oznacavaju promatrani objekti te koji su u stanju rješavati i mnoge druge probleme u svrhu izbjegavanja sudara (u ovu grupu spada i ARPA radar).
Ekran s relativnim prikazivanjem slike ( ) imaju svi pokazivaci, bez obzira na njihove daljnje mogucnosti. Kod relativnog prikazivanja položaj vlastitog broda podrazumijeva se u središtu ekrana (kod nekih ekscentricno orijentiranih radara s relativnim pokazivanjem vlastiti položaj nalazi se izvan središta ekrana). Vlastiti brod miruje u središtu ekrana, a promatrani objekti pomicu se relativnim brzinama i relativnim kursevima. Objekti koji miruju pomicu se u protukursu brzinom broda. Relativno prikazivanje ne daje pravu sliku
λδµ
µ).
•••
Vrst materijala Koeficijent refleksijeMetali 1Kamenita obala 0,9Morska voda 0,8Led 0,3Pašnjaci 0,7 – 0,8Obraslo tlo 0,1 – 0,4Makija i šume 0,1
Vrste prikaza
relative motionrelative motion true motion
relative motion display

35
situacije vec samo sliku koja može poslužiti za orijentaciju. Iz relativnog prikaza direktno se mogu dobiti samo udaljenost i azimut. Svi ostali podaci o drugim brodovima, koji su važni zaizbjegavanje sudara, mogu se utvrditi samo grafickim rješavanjima (plotiranjem) neposredno na ekranu ili na posebnom dijagramu.
Slika s relativnim prikazivanjem može biti stabilizirana ili nestabilizirana. Nestabilizirana slika nije sinhronizirana s drugim navigacijskim uredajima a orjentirana je s nulom podjele prema pramcu ( orijentacija). Na tako orijentiranoj slici moguce je samo pramcane kurtove dok se azimuti izracunavaju pribrajanjem kursa koji se otcitava neovisno o radaru. Stabilizirana radarska slika sinhronizirana je s cerkom žirokompasa, a može biti orijentirana s nulom prema pramcu ( ), s pramcanicom na oznaci vrijednosti kursa ( ) ili s nulom u pravom meridijanu ( slika 29).
. Relative motion, stabiliziranja slika, north up orjentacija
Ekran s prikazivanjem prave (apsolutne) slike (true motion, true course, chart plan display) koristi iskljucivo stabiliziranu sliku orijentiranu prema sjeveru ( ). Kod takvog prikaza slike svi objekti koji nemaju vlastito kretanje miruju na ekranu, dok se svi pokretni objekti, ukljucujuci i vlastiti brod krecu u pravim kursevima i brinama koje su proporcionalne stvarnim brzinama. Vlastiti brod pocinje s kretanjem s jednog ruba ekrana (obicno na 2/3 njegova polumjera), krece se preko ekrana i cim prijede središte oko 1/3 polumjera ekrana automatski se vraca dijametralno na drugu stranu ekrana, ali ako situacija tako zahtijeva njegovo se kretanje može produžiti. Tehnicki se to kretanje postiže posebnim dodatnim zavojnicama oko katodne cijevi, a pomake racuna posebni procesor koristeci pritom podatke s žirokompasa i brzinomjera. Da bi se pravac kretanja brodova mogao tocnije uociti ekran ovih radara ima nešto dužu perzistenciju, tako da za bodom pokretu ostaje vidljiv svijetleci trag koji je, ipak, uocljiv samo na manjim podrucjima.
Kod relativnog prikazivanja i plotiranja radarske slike ova pogreška ne postoji s obzirom da se relativne brzine dobiju posredno, mjerenjem udaljenosti do objekta u pokretu. Medutim kod apsolutnog prikazivanja pozicija vlastitog broda na ekranu odreduje se išctavanjem podataka s brzinomjera i žirokompasa. Ukoliko ovi instrumenti ne registriraju tocnu vlastitu
Head Up
Head UpCourse Up North Up,
Slika 29
North Up
Utjecaj neispravne brzine i devijacije žirokompasa
Utjecaj pogrešaka na tocnost prikazanih podataka

36
brzinu ili kurs položaj i pomak vlastitog broda bit ce netocno prikazan. Položaji ostalih objekata odreduju se mjerenjem udaljenosti i smjera u odnosu na vlastiti brod, tako da ce i oni sadržavati pogrešku u tocnosti izmjerene brzine ili kursa.
ARPA radari imaju mogucnost otkrivanja pogrešaka brzinomjera i žirokompasa i to na nacin da se odabere (fiksira) odredeni nepomicni objekt na obali i izvrši dodatna stabilizacija slike (Ground Lock): rucnim odabirom i oznacavanjem poznate nepomicne tocke (dio obale, plutaca, racon) racunalo može nadzirati tocnost i pogreške senzora sustava (brzinomjer i žirokompas); to se izracunava analizom relativnog pomaka nepokretnog objekta.
Udaljenost objekata u prostoru na radaru se odreduje usporedivanjem vremena putovanja signala kroz prostor s pomakom vremenske baze u katodnoj cijevi: udaljenost je proporcionalna polovini vremena proteklog od trenutka emitiranja signala do trenutka primitka jeke. Za mjerenje udaljenosti u prostor se emitira impuls odredene dužine koja je definirana vremenom rada magnetrona. Master oscilator (multivibrator) predajnika generira jedan iglicasti impuls svakih 1000 mikrosekundi (1000 impulsa u sekundi) koji pobuduje trigatron. Modulator trigatrona generira pravokutne impulse cije (u vremenu od 0,1 mikrosekunde) ukljucuje magnetron koji u tom periodu zatitra oko 1000 puta (ako je frekvencija impulsa 10 GHz). Prema tome, ako se impuls u magnetronu generira jednu mikrosekundu njegova duljina iznosi oko 30 metara (ili 1000 valnih dužina od 3 cm). Drugim rijecima impuls koji je emiritan iz antene u prostoru dugacak oko 30 m, a to odreduje minimalni domet radara (polovinu te udaljenosti, kod modernih radara izmedu 17 i 45 metara), te razdvajanje objekata u dubinu (slika 30).
Preciznost mjerenja vremena, a time i udaljenosti, najviše je ovisna o ravnomjernosti kretanja, odnosno linearnosti vremenske baze, na što ujednacenost porasta napona u generatoru pilastih impulsa. Ako vremenska baza postane konkavna pomak prema rubu ekrana u pocetku je sporiji pa se objekti u blizini prikazuju bližima nego što stvarno jesu, a oni udaljeniji prikazuju se još udaljenijima. Osim tih pogrešaka na tocnost mjerenja udaljenosti utjece i depresija u slucaju da je antena smještena visoko, a objekt koji se opaža je prenizak.
. Razdvajanje objekta po udaljenosti
Smjer u navigaciji odreduje vrijednost azimuta. Mjerenja pramcanih kutova i azimuta manje je tocno od mjerenja udaljenosti, a za to postoji nekoliko razloga.
Prvi je razlog horizontalna širina radarskog snopa. Apsolutni iznos izoblicenja izazvanog horizontalnom širinom radarskog snopa. Tako ce širina od 2° izazvati razvlacenje
Otkrivanje pogrešne podešenosti uredaja
Udaljenost i smjer
Slika 30

37
objekata u vrijednosti od 3° (ako radarski snop u potpunosti obuhvaca opažani objekt), a radarski snop širine 1° izazvat ce razvlacenje od 1,5° (slika 31).
. Razdvajanje objekta po azimutu
Na tocnost mjerenja azimuta ili pramcanog kuta utjece nepravilno postavljena pramcanica.
Kod radara kojima je magnetron u odredenoj mjeri istrošen (na primjer zbog starenja) može se promijeniti izlazna frekvencija koja uzrokuje da smjer emitiranja impulsa nije okomit na ravninu antene, a to uzrokuje pomak impulsa u horizontalnoj ravnini i pogrešno otcitavanje azimuta ili pramcanog kuta.
Decentralizirana slika (kod radara s relativnim prikazivanjem) takoder utjece na pogrešno otcitavanje smjera. To se dogada ako se položaj vlastitog broda ne poklapa s geometrijskim središtem radarskog ekrana.
Razdvajanje objekata po kutu takoder je zavisno o horizontalnoj širini snopa: ako se dva objekta razdvojena u prostoru nadu unutar istog radarskog snopa oni ce na ekranu biti prikazani kao jedan objekt.
Za mjerenje udaljenost na svakom su radaru postavljene stvarne daljinarske kružnice () koje se satoje od nekoliko koncentricnih elektronickih svjetlecih kružnica.
Ekvidistanca izmedu njih je jednaka a zavisna je o dometu radara i iznosi izmedu 0,25 i 8 M. Za one objekte koji leže medu kružnicama udaljenost se procjenjuje (interpolira). Daljinarske kružnice slijede vlastiti brod i pri ekscentricnoj i pri pravoj radarskoj slici. Osim tih kružnica na radarima se primjenjuje i 1 do 3 promjenjive daljinarske kružnice ( ) koje se promjenom promjera dovode do motrenog objekta. Izmjerena udaljenost cita se na posebnoj skali. Ako postoji više takvih kružnica druga i treca su obicno crtkane. Tocnost izmjerene daljine za stalne kružnice je oko 1% a za pomicne kružnice za oko 1,5% najvece udaljenosti mjernog podrucja. Sve kružnice po potrebi mogu se ukljuciti ili iskljuciti.
Za mjerenje smjerova u navigaciji (smjer azimuta ili smjer pramcanog kuta) koristi se mehanicko smjeralo i azimutni prsten kod radara s relativnim pokazivanjem. Smjeralo se sastoji od prozirne ploce koja se okrece rucno, s ugraviranim paralelnim crtama. Pramcani se kutovi (nestabilizirana slika) ili azimuti (stabilizirana slika) otcitavaju na azimutnom prstenu.
Za mjerenje smjerova pri ekscentricnom i pravom prikazivanju slike služi elektronicko smjeralo ( ). To je svjetleca crta koja se proteže od ishodišta vremenske baze do ruba ekrana. Rucno se može postaviti u željeni smjer, a azimut se otcita na posebnoj skali. Ako nema posebne skale azimut se može procitati mehanickim smjeralom i to tako da se
Slika 31
Nacin mjerenja udaljenosti i smjerafixed
range rings
variable range marker
electronic cursor

38
najbliža paralelna crta postavi paralelno s elektronickim smjeralom, a na onoj crti koja prolazi sredinom ekrana otcita se vrijednost azimuta. Neki true motion radari imaju posebnu sklopku ( ) kojom se slika postavi u središte dok se ne izmjeri azimut.
Prema propisima pogreška u mjerenjima udaljenosti kalibracijskim prstenovima ne smije biti veca od 1,5 % dometa na kojem tog trenutka radi radar. Pogreška za kalibracijske prstenove može iznositi najviše 68 metara (75 yardi), pogreška za promjenjive daljinarske kružnice do 115 metara (125 yardi) ili 2,5 % dometa. U praksi se za mjerenje udaljenosti koriste promjenjive kružnice jer nije potrebna interpolacija u mjerenjima udaljenosti.
Provjera tocnog mjerenja udaljenosti radarom obavlja se za vrijeme dok brod boravi uz obalu usporedbom udaljenosti otcitanih na radaru s onima koje se mogu otcitati na planu.
Tocnost pokazivanja smjerova (azimuta i pramcanih kutova može se provjeriti na isti nacin: za vrijeme boravka u luci usporeduju se vrijednosti izmjerene radarom s vrijednostima dobivenim iz plana ili karte krupnog mjerila. Pogreška nepravilno podešene pramcanice otkrije se tijekom plovidbe opažanjem nekog uocljivog objekta se nalazi ravno prema pramcu: ako se taj objekt na radaru pokaže izvan pramcanice to je znak da postoji pogreška nepravilno podešene pramcanice. Otklanja se podešavanjem odgovarajuceg mikroprekidaca.
Danas svi brodovi posjeduju dva radarska predajnika (Transceiver) sa antenama, monitorima (PM), preklopnim uredajem (Interswitch Unit) i displejima. Jedan predajnik emitira na X-band frekventnom podrucju (frekvencija 10 GHz i valna dužina 3 cm), a drugi na S-band frekventnom podrucju (frekvencija 3 GHz i valna dužina 10 cm). Videosignal oba frekventna podrucja može se registrirati na istom displeju (što je kod novih radara redovit slucaj) ili se impulsi jednog frekventnog podrucja registriraju na jednom displeyu (Master) a drugog frekventnog podrucja na drugom displeju (Slave). Interswitch Unit omogucava rad na jednom ili drugom frekventnom podrucju. Svaka od dvije valne dužine ima svojih prednosti i nedostataka, pa je uporabom jedne i druge ooguceno optimalno korištenje radara.
EBL - Electronic Bearing Line
Provjera tocnosti izmjerene daljine i smjera

39
Ugradnjom racunala u klasicne radarske sustave dobivene su bitno nove kvalitete u korištenju radara u navigaciji. U navigacijsku upotrebu ušli su CAS i ARPA radari te radari koji obraduju primljeni signal racunalnom tehnikom, ali nemaju mogucnost automatskog ucrtavanja kretanja objekata, odnosno izbjegavanja sudara.
ARPA ( ) je kompjutorizirani radarski sustav za automatsko ucrtavanje i izbjegavanje sudara.
CAS ( ) je kompjutorizirani radarski sustav koji je po svojim konstrukcijskim karakteristikama slican sustavu ARPA.
Osnovne komponente sustava ARPA
Osnovna razlika izmedu klasicnih i ARPA/CAS radara sadržana je u kompjutorskoj analizi primljenog signala i njegovom obradom u svrhu pracenja kretanja objekta ciji se odraz dobio na zaslonu katodne cijevi. Kod klasicnog radara nakon prijema na anteni signal putuje valovodom do mješaca u kojem mu se superheterodinskim (mješanjem odraženog visokofrekventnog signala male snage sa signalom cija je frekvencija niža izmedu 40 i 60 MHz, a koju generira gun dioda - ranije klistron) snižava frekvencija na vrijednost razlike frekvencije magnetrona (npr. 10 GHz) i gun diode ili klistrona (npr. 9,94 do 9,96 GHz). Snagu signala tako snižene frekvencije moguce je višestruko pojacavati, a taj se proces dogada u predpojacalu i pojacalu. Pojacan signal dolazi na ogranicavac ( ) i odatle na katodnu cijev gdje se, tehnikom katodne cijevi, pretvara u video signal na zaslonu ekrana. Podatak o tom signalu ostaje krace vrijeme zabilježen na ekranu zahvaljujuci perzistenciji fluorescentnog sloja radarskog ekrana.
ARPA
Temelj rada ARPA uredaja
Automatic Radar Plotting Aid
Collision Avoidance System
Slika 32.
limiter

40
U prvom dijelu prijenosa signal kod ARPA uredaja slijedi istovjetan put i istovjetne transformacije kao i kod klasicnog radara, ali nakon izlaska iz demodulatora i pojacala ulazi u racunalo te u memoriji ostaje zabilježen kao podatak, ali ga racunalo ne propušta na ekran. Signal se na ekran propušta tek kad se analizira nekoliko uzastopnih odraza. Na taj nacin se analizom takvih zapisa iz racunala generiraju impulsi na radarskom ekranu tvore sliku okolnog prostora s potpunim podacima o stanju objekata prikazanih na ekranu. Takva je slika stvorena sintetski generiranim impulsima, pa se cijela radarska slika zove sintetska slika ( ). Slika klasicnog radara može se, dakle, nazvati neobradenom likom (
), s obzirom da signali koji je tvore prenose neanalizirane informacije.
Temelj prednosti ARPA radara u odnosu prema klasicnom je u obradi podataka o otkrivenim objektima. Prednosti su višestruke, a sve se mogu klasificirati u dvije vrste:
prednosti vezane za kvalitet slikeprednosti vezane za ARPA sustav kao izvor navigacijskih podataka.
Bolji kvalitet slike postiže se efikasnijim brisanjem smetnji, svjetlijom slikom, jednakim termickim i optickim opterecenjem ekrana, mogucnosti prikaza reljefa, odnosno generiranjem slike u boji, a posebno mogucnošcu distribuiranja slike na više mjesta na brodu (ponavljaci radarske slike). Te su prednosti posljedica kompjutorske obrade signala.
Tehnicki je sintetiziranje slike omoguceno podjelom radarskog ekrana na veliki broj malih površina koji su definirani kutom i udaljenošcu od središta ekrana. Te površine nazivaju se pikseli ( ), a jedan piksel je najmanja površina ekrana koja može biti osvijetljena ili zatamnjena. Broj takvih površina po osi x i osi y definira ekrana. Na primjer, radar
firme ima ekran koji je podijeljen u 210 x 210 tocaka. U memoriji racunala svakom je pikselu dodijeljena jedna celija, tako da je u racunalu pohranjena matrica memorijskih celija u koju se upisuju podaci o radarskim odrazima. Svakoj elementarnoj površini ekrana ( ) odgovara jedna memorijska celija ( ), odnosno svakom sektoru ekrana i njemu pripadajuceg prostora po jedan red ( ) celija.
Nakon ukljucivanja radara impul se uzpucuje u odredenom smjeru u prostoru. Emitira se jedan impuls uskog snopa i velike snage, a vraca se više odjeka, zavisno o tome na koliko je prepreka naišao impuls. Jeke se propuštaju kroz mješac i pojacalo te pohranjuju u matrici memorijskih celija, tako da svakom pikselu odgovara odredena adresa u jednom registru. Nakon toga antena radara zarotira za odredeni kut te se emitira drugi impuls a jeke se pohranjuju na odredenim adresama matrice u drugom registru. Okretanjem antene popunjavaju se i ostali registri, a nakon punog okreta antene radar ponovo analizira prvi sektor te usporedi broj odraza s podacima u prvom registru. Nakon nekoliko osmatranja istog sektora racunalo odreduje koji se odrazi mogu smatrati kao odrazi od objekata, a koji kao smetnje. Broj osmatranja i pojavnost odraza na ekranu zavisi o racunala. Na takav nacin racunalo je statistickom provjerom broja pojavljivanja odredenog odraza pojedine eliminirao kao smetnje, a pojedine propustio kao odraze od objekata u prostoru.
Brisanje smetnji kod ARPA radara razlikuje se, dakle, brisanja smetnji kod klasicnog radara ( ). Kod obicnog radara smetnje se otklanjaju smanjivanjem snage slabijih signala, dok se kod ARPA uredaja smetnje otklanjaju bez smanjivanja snage primljenog signala.
Rad kompletnog sklopa temeljen je na obradi signala ( ), odnosno sklopu za memoriranje i komparatorima za usporedbu signala. Nakon prvog
synthetic picture raw picture
pixelsrezoluciju
CONCEPT Kelwin Hughes
pikselu adresaregistar
clutter
SPU - Signal Procesor Unit
Prednosti ARPA radara
••

41
primanja impuls je prošao kroz jedan komparator, a u drugom primanju usporeduje se s prvim signalom u drugom komparatoru. Usporedbom se propuštaju signali koji su stalno primani i otklanjaju oni koji se primaju samo povremeno. Tako se sasvim sigurno otklanjaju interferencijski signali i signali kontaminirani smetnjama, ali se mogu eliminirati i korisni signali ako se primaju samo povremeno, na primjer signal plutace koja se njiše na nemirnom moru. Zapisi radarskih odraza koji su nakon digitalnog filtriranja i komparacija ostali zapisani u memorijskoj matrici racunala pretvaraju se u ujednacene pravokutne impulse koji se šalju na ekran na kojem tvore sintetiziranu sliku okolnog prostora.
S obzirom da racunalo može analizirati i snagu odraza, na ekran je moguce poslati signal razlicitog intenziteta ili razlicite boje. Tako se dobije reljefna slika okolnog prostora, ili se signalima razlicite snage dodjeljuju odredene boje pa može dobiti sintetizirana slika u boji. Na takvoj radarskoj slici obala i metalni djelovi u blizini radara koji daju jak odraz na ekranu biti prikazani crvenom bojom, odrazi slabije snage bojama od žute do zelene, dok je morska površina i ostali prostor bez jeke prikazan plavom bojom.
. Sinhronizacija elektronske vektorske karte i radarske slike
Ovakvim nacinom rada ARPA radar otklanjao bi, osim lažnih odraza, i sve one objekte koji se u prostoru pomicu. Da se to ne bi dogadalo algoritam za pracenje objekata mora biti proširen tako da racunalo analizira objekt ako se on nalazi u odredenom prostoru ( ) cija je površina definirana programom racunala ili racunskom procjenom srednjeg pomaka pojedinog objekta korištenjem regresijske analize njegovih trenutnih položaja. Analiza procjenom položaja u racunalu se odvija tako da se u prvom promatranju odredi položaj pojedinog objekta, u drugom odredi njegov pravac i brzina kretanja te procijeni položaj za trece opažanje. Ako je procjena pogrešna (u trecem opažanju objekt se ne nalazi u predvidenom položaju) ta ce se pogreška iskoristiti u definiranja promjera kruga u kojem se ocekuje pojava objekta. U svakom slijedecem opažanju racunalo ce smanjivati površinu kruga u kojem se ocekuje pojava pokretnog objekta, te ce poceti vrlo precizno procijenjivati njegov naredni položaj i nakon desetak antene situaciju ce prikazivati vrlo sigurno. Takva analiza omogucuje ucrtavanje regresijskih pravaca na pokretnim objektima, a u njihovom produžetku ucrtavanje i vektora pomaka objekata. Nagib regresijskih
Slika 33
gate

42
pravaca izracunava se metodom najmanjih kvadrata tako je suma kvadrata odstupanja od zadanih tocaka jednaka nuli.
Kod izracuna regresijskih pravaca i vektora kao i pomaka pokretnih objekata koristi se pravokutni koordinatni sustav s osima x (apscisa) i y koji je primjenjen u ravnini horizonta (apscisa prestavlja pravac istok - zapad, a ordinata pravac sjever - jug), a to je omogucilo zamjenu klasicnog okruglog ekrana s polarnim koordinatama s ekranom u obliku pravokutnika.
Jasna i svijetla slika ARPA radara koja je jednako kvalitetna u svim dometima posljedica je organizacije vremenske baze. U klasicnom radaru svakom emisijskom impulsu pripada jedna vremenska baza, dok izmedu pojedinih vremenskih baza elektronski snop iz elektronskog topa katodne cijevi udara u središte ekrana i grije ga dok slika postupno blijedi kako vremenska baza nastavlja kretanje. Osim toga nagib vremenske baze (a time i osvijetljenost slike) ovisna je o dometu radara. Kod ARPA radara sadržaj slike pohranjen je u memorijskoj matrici pa se ona može višestruko upisivati generiranjem niza sekundarnih vremenskih baza. Višestrukim ispisivanjem slike ona postaje mnogo jasnija dok je središte ekrana termicki znatno manje optereceno, a perzistencija ekrana može biti mnogo kraca, tako da kod promjene dometa nova slika se postavlja mnogo brže. Osim toga nagib vremenske baze, odnosno njezino trajnje, neovisno je o dometu radara, a to znaci da je slika jednako svijetla na svim dometima.
ARPA radar je izvor navigacijskih podataka koji omogucavaju svrsishodnu akciju u svrhu izbjegavanja pogibeljnih situacija. Broj i vrst podataka koje uredaj pruža ovise o tipu i proizvodacu opreme. Navigacijski podaci koji se mogu dobiti korištenjem ARPA sustava ipak mogu biti podložni pogreškama u prikazu ili interpretaciji, a moguca je i pojavnost sustavnih pogrešaka samog uredaja. Nakon upisa ulaznih vrijednosti i aktiviranja objekata sustav pruža velik broj navigacijskih podataka koji su prikazani na ekranu ili ih je moguce otcitati na posebnim alfanumerickim pokazivacima ( ). Najcešci podaci koje ARPA radar može osigurati su:
1. Podaci o vlastitom brodukurs i brzina broda dobijeni su od žirokompasa odnosno brzinomjera; pogreške u prikazu ovisne su o pogreškama ovih instrumenata,zaokret broda dobije se deriviranjem kursa po vremenu a izražen je u stupnjevima po jedinici vremena,broj okretaja motora i smjer vožnje.
2. Podaci o odabranom objektu ( ):kurs i brzina izracunavaju se regresijskom analizom koja je vec objašnjena, a prikazani su na ekranu radara u obliku vektora odnosno na digitalnom pokazivacu,prethodni položaj objekta ( ) oznacen je nizom kružnica koje predstavljaju nekoliko ranijih položaja promatranog objekta, a taj podatak može poslužiti za sigurniju prognozu slijedeceg položaja, te za iscrtavanje traga plovidbe, stanje objekta prikazano je simbolima: vektorom brzine racunalo oznacava pokretne objekte a ostalim simbolima nepokretne; promatranjem relativnog pomaka objekta ( ) može se uociti opasnost od sudara, a pravi prikaz ( ili
) olakšava izbor potrebnog manevra,kut i udaljenost objekta prikazani su s obzirom na vlastiti brod ili na neki izabrani ( ) objekt pri cemu su izabrani i referentni objekt spojeni isprekidanom crtom,
Obrada podataka
display
select target
history
relative vectors thrue picturethrue vectors
referentni
•
•
•
•
•
•
•

43
minimalna udaljenost mimoilaženja ( ) i vrijeme plovidbe do minimalne udaljenosti mimoilaženja ( ) prikazani su uz uvijet da brodovi ne mijenjaju ni kurs ni brzinu unutar intervala plotiranja, a ako neki objek mijenja kurs ili brzinu racunalo ponavlja postupak s novim podacima,poruka o nestalom objektu ( ) javlja se ako neki praceni objekt izide izvan dometa radara ili ga zakloni neki drugi (veci) objekt; u oba slucaja racunalo reagira porukom o nestalom objektu, a ista poruka dobije se i ako objekt ostane na ekranu ali se, iz nekih razloga, izbriše iz memorijske matrice racunala.
3. Podaci o navigacijskoj situacijizone nadzora: ovisno o navigacijskoj situaciji osmatrac može ucrtati zonu automatskog aktiviranja te definirati CPA i TCPA, a oblik zone nadzora prilagoden je stvarnoj situaciji; na otvorenom moru najcešce je oznacena kao sektor ispred pramca dok je u kanalima citava širina kanala zapravo zona automatskog nadzora svakom slucaju kao zonu nadzora potrebno je iskljuciti kopno zbog velikog opterecenja memorije)alarmiranje opasne blizine: ako neki od objekata prijede prostornu ili vremensku granicu zone nadzora ( , ) racunalo aktivira alarm upozorenja (
),nadzor plovnog puta: osim zone nadzora omogucen je i nadzor plovnog puta, pri cemu racunalo vodi racuna da vlastiti brod ne prijede ucrtanu granicu plovnog puta,potencijalne tocke sudara ( ): prateci odabraneobjekte racunalo izracunava kurseve vlastitog broda koji bi doveli do sudara, a operator (navigacijski casnik) mora te kurseve izbjegavati,zone moguce opasnosti ( ); racunalo definira sigurnosne zone u okolini tocaka moguceg sudara, a velicina tih zona ovisi o nepreciznostima ulaznih podataka sustava, velicini brodova i prihvatljivog CPA,simulacija (simulation): na zahtjev operatora racunalo može simulirati narednu navigacijsku situaciju, zavisno o kursevima i brzinama brodova i odabranom vremenskom pomaku; staticka simulacija podrazumijeva prikaz situacije kakva ce biti nakon protoka odabranog vremena, a dinamicka simulacija podrazumijeva ubrzano kretanje svih objekata u narednom odabranom periodu,dodatna stabilizacija slike ( ): rucnim odabirom i oznacavanjem poznate nepomicne tocke (dio obale, plutaca, racon) racunalo može nadzirati tocnost i pogreške senzora sustava (brzinomjer i žirokompas); to se izracunava analizom relativnog pomaka nepokretnog objekta.
Osim opcih pogrešaka radara specificne pogreške ARPA sustava mogu se podijeliti u tri skupine:
1. pogreške radarskog dijela sustava ARPA2. pogreške u prikazu podataka3. pogreške u interpretaciji podatakaPogreške radarskog dijela sustava su:
zbog valjanja i posrtanja broda centar radarske jeke pomice se preko cijele dužine broda; udaljenost središta jeke od sredine broda slucajna je sa standardnom devijacijom vrijednosti jedne šestine dužine broda,
•
•
•
•
•
•
•
•
•
•
CPA - Closest Point to AproachTCPA - Time to Closest Point to Aproach
target lost
CPA limit TCPA limit collision warning
PPC - Potential Points of Collision
PAD - Predicted Area of Danger
Ground Lock
Pogreške i opasnosti od prekomjernog pouzdavanja u ARPA sustav

44
pogreška u mjerenjima kutova zbog širine radarskog snopa (od 0,5° do 1,5°) uzrokuju lošu procjenu CPA i TCPA,valjanje i posrtanje broda uzrokuju pomak osi rotacije radarske antene, a pogreška (paralaksa) je ovisna o visini antene, kutu nagiba broda i azimutu objekta kojeg se opaža, pogreška kvantizacije kuta (pretvorbe analognih velicina u digitalne) mala je ali ipak iznosi do 0,01 M.
Pogreške u prikazu podataka mogu biti:zamjena objekata ( ) može nastati ako ako se u blizini pracenog objekta pojavi objekt koji nije pracen; ako je jeka objekta koji nije pracen jaca od jeke objekta kojeg se prati racunalo ce nastaviti pratiti objekt jaceg signala,promjena kursa objekta kojeg se prati ili nestabilnost kursa vlastitog broda može biti uzrokom nestabilnosti u pracenju ponašanja objekta, a se pogreška objašnjava pogreškama kvantizacije kuta i udaljenosti (kod binarne pretvorbe, unošenjem tih podataka u memorijsku matricu),pogreške u prikazu vektora kretanja ovisna je o tome da li racunalo pamti relativne ili stvarne pomake i položaje objekata; ako se pamte relativni položaji korektno ce biti prikazani relativni pomaci objekata jer relativni pomaci ne ovise o pogreškama žirokompasa i azimuta; ako se pamte stvarni položaji prava ce slika biti pouzdanija od relativne.
Pogreške u interpretaciji podataka posljedica su pogrešnog tumacenja podataka, neiskustva ili nemarnog pracenja situacije. Najcešca pogreška ovog tipa je korištenje vektora jedne vrsti (relativni ili pravi), a slika se tumaci kao da su prikazani vektori druge vrsti. Zbog toga neki ARPA radari imaju stalno ukljucenu jednu vrst vektora se druga vrst dobije pridržavanjem sklopke s oprugom.
Takoder kod korištenja ( - zone moguce opasnosti) cestose mogu zanemariti slijedece cinjenice:
crta koja spaja objekt i tocku sudara nije vektor i ne pokazuje brzinu broda,tocka sudara ne daje podatke o CPA,podrucje opasnosti ne pomice se simetricno s minimalnom udaljenošcu prolaska brodova,tocka sudara nije u središtu podrucja opasnosti.
Svijetli trag iz objekta (prethodni položaji - ) može zbuniti neiskusnog operatora. Kod prave slike svijetli trag i vektor nisu korelirani.
Objekti koji se prate biraju se automatski ili rucno, o tipu ARPE. Prihvacanju objekata ( ) potrebno je posvetiti posebnu pažnju. Kod rucnog odabira operator mora dovesti marker na svaki objekt cije pracenje želi te pritiskom na odredeni taster (ili na odredenu sklopku miša kod simulatora) ukljuciti izabrani objekt u sustav pracenja. Postupak može biti dugotrajan, uz opasnost da se previdi objekt koji može ugrožavati sigurnost, na primjer vrlo brzi brod koji se u trenutku odabira nalazi daleko od vlasitiog broda. Brodovi koji se oznacavaju moraju se izabrati po odredenim kriterijima. Prioriteti izbora temeljeni su na podacima o promjenama pramcanih kutova, procjenama minimalnih udaljenosti mimoilaženja (CPA) i procjenama vremena minimalne udaljenosti mimoilaženja (TCPA). U nacelu prate se slijedeci objekti:
•
•
•
•
•
•
•••
•
target swop
PAD Predicted Area of Danger
afterglow
acquire target
Uvjeti izbora ciljeva pri rucnom izboru, automatsko i rucno prihvacanje

45
svi objekti u neposrednoj blizini vlastitog broda (položaj opasne blizine ovisan je o vlastitoj brzini i gustoci prometa),objekti ciji se pramcani kutovi ne mijenjaju ili se mijenjaju sporo, objekti za koje se primjeti da brzo mijenjaju vlastiti položaj ili relativnu brzinu,pokretni objekti ciji je odraz izražajniji.
Automatskim postupkom aktiviranja sustav sam prihvaca 20 objekata, a prioritet privcanja isti je kao i kod rucnog odabira. Ipak, najcešce se koristi odabir pracenja svih objekata na odredenoj udaljenosti od vlastitog broda.
Neovisno o tome kojim je kriterijem praceni objekt izabran, pracenje se prekida u trenutku kao objekt išcezne s ekrana.
U memoriji racunala svakoj elementarnoj površini ekrana ( ) dodijeljena je jedna adresa.2 Primljeni impuls pohranjuje se u memoriji te se propušta na ekran ukoliko je imao dovoljan broj pojavljivanja, cime se eliminiraju lažne jeke. Zapis radarskih jeka koji su, nakon digitalnog filtriranja i usporedbi, ostali u memoriji kao odjeci stvarnih objekata, pretvaraju se u napon pravokutnog oblika i šalju na radarski ekran na kojem se ocituju kao videosignal objekta u prostoru. Da li se radi o nepomicnom objektu ili objektu u pokretu izracunava racunalo analizom nekoliko uzastopnih položaja. Ako se jeka objekta pojavljuje uvijek na istoj memorijskoj adresi to je znak da se radi o nepokretnom objektu. Ako se jeka pojavljuje unutar odredene površine (koja je definirana u memoriji racunala) znak je da se radi o objektu u pokretu. Racunalo takav objekt nastavlja pratiti i iz više uzastopnih položaja odreduje parametre kretanja te ih, ako je neki objekt za pracenje, prikazuje u obliku vektora i digitalnih zapisa.
Da bi se definirali parametri objekta u pokretu racunalo analizira dva položaja i prognozira naredni položaj. U svakom slijedecem koraku površina na kojoj se ocekuje pojava jeke se smanjuje, a da bi uredaj prihvatio pracenje potrebno je desetak okretaja antene.
Ako se jeka pracenog objekta izgubi vektor koji definira parametre kretanja nestaje. Za ponovu uspostavu nadzora potreban je novi izbor cilja i nova analiza.
Gubitak jeke pracenog objekta ispisuje se na ekranu u obliku alarma.
Zamjena objekta ( ) nastaje ako se u blizini pracenog objekta pojavi objekt koji nije pracen. Kod preklapanja ciljeva racunalo ce reagirati zavisno o situaciji:
ako je jeka objekta koji se ne prati jaca od jeke objekta koji se prati racunalo ce nastaviti pratiti jacu jeku,ako su jacine odraza jednake racunalo ce nastaviti pratiti jeku koja ima veci prioritet pracenja (po spomenutim kriterijima).
Kad je izabran veci broj objekata za pracenje ili ako se objekti odabiru automatski na odredenoj udaljenosti od vlastitog broda, za svaki je potrebna analiza njegovog kretanja. Da bi se pogrešni prikazi sveli na najmanju mogucu mjeru racunalo unaprijed procjenjuje pojavljivanje, pri cemu se koriste odredene matematicke metode (na primjer metoda
2 Broj pixela na koji je podijeljen radaski ekran definira rezoluciju. Radari razlicitih proizvodaca imaju razlicite rezolucije, na primjer radar CONCEPTfirme Kelvin Hughes ima 1024 x 1024 pixela.
•
•••
•
•
Utjecaj gubitka cilja na pracenje
Preklapanje ciljeva, kašnjenje podataka i vrste kašnjenja
pixel
target swop

46
najmanjih kvadrata). Kod izbora jednog cilja kašnjenje pojave vektora uzrokovano je prognoziranjem narednog položaja i potvrdom ispravnosti analize i, kao što je receno, traje onoliko vremena koliko je potrebno da antena izvrši desetak okretaja. Kod izbora više ciljeva vektori ce se pojavljivati uzastopno.
Svaka situacija koja može dovesti do opasnosti sudara se alarmom. Pojava
alarmnih stanja definirana je granicom minimalnih udaljenosti mimoilaženja (CPA) i vremenom minimalne udaljenosti mimoilaženja (TCPA). Alarm koji upucuje na opasnu blizinu ispisuje se na radarskom ekranu u obliku upozorenja, dok se istovremeno vektor broda koji dolazi u opasnu blizinu naizmjenicno gasi i pali. Vektorski prikaz može biti pravi ili relativni. Ako je prikazan relativni vektor opasnost od sudara postoji ukoliko je vektor usmjeren prema položaju vlastitog broda. Ako je prikazan pravi vektor opasnost od sudara postoji ako se vrhovi vektora vlastitog broda i broda koji se prati podudaraju.
Osim alrma koji upucuje na opasnost sudara ispisuje se i alarm koji upucuje na gubitak pracenog objekta.
Parametri kretanja broda koji se prati prikazani su u obliku vektora koji mogu biti relativni ili pravi. Izbor vrste vektora doreduje sam operator. relativnog vektora prikazuje relativni pravac kretanja broda kojeg se prati (u odnosu na kretanje vlastitog broda), a dužina relativnog vektora proporcionalna je relativnoj brzini pracenog broda u odnosu prema brzini vlastitog broda. Opasnost od sudara postoji ukoliko je smjer relativnog vektora usmjeren prema položaju vlastitog broda. Vektor nepokretnog objekta imat ce smjer suprotan smjeru kretanja vlastitog broda, a dužina vektora nepokretnog objekta bit ce proporcionalna brzini vlastitog broda. Pravi vektori prikazuju stvarna kretanja pracenih objekata. Smjer pravih vektora odgovara kursu pracenog broda, a dužina je proporcionalna brzini pracenog broda. Opasnost od sudara postoji ukoliko se vrhovi pravih vektora vlastitog broda i broda koji se prati podudaraju.
Relativni vektori nastaju pracenjem uzastopnih položaja broda koji se prati i na njega ne utjecu pogreške perifernih uredaja (gurokompasa i brzinomjera), kao ni vanjski utjecaji (struja i vjetar), tako da je, u smislu procjene mogucnosti sudara, relativni vektor pouzdaniji.
Pravi vektori nastaju analizom medusobnih položaja vlastitog broda i broda koji se prati, pri cemu se potrebni podaci vlastitog broda citaju s perifernih uredaja (gyrokompasa, brzinomjera, GPS-a). Na tocnost pravog vektora utjecu pogreške tih perifernih uredaja. Ako postoje i vanjski utjecaji koji se ne mogu registrirati perifernim uredajima (na primjer struja ili vjetar) oni ne mogu biti prikazani u velicini i smjeru pravog vektora, ali ako su ti utjecaji poznati oni se mogu unijeti u memoriju racunala kao podaci. Ako su podaci o struji i utjecajima vjetra uneseni (unosi se posebno smjer, a posebno brzina struje) smjer pravog vektora vlastitog broda pokazivat ce put preko dna. S obzirom da je pramcanica postavljena na vrijednost kursa (kod orjentacije) to se pravi vektor i pramcanica nece poklapati.
Korištenje alarmnih stanja
Nacin izvoda i korištenje pravih i relativnih vektora, procjena opasnosti
Utjecaj promjene brzine i kursa vlastitog ili drugog broda
North Up

47
Promjena kursa ili brzine vlastitog broda uzrokuju primjenu novonastalih okolnosti u procjenama, tako da i to može uzrokovati kašnjenje prikaza.
Promjene kurseva ili brzina objekata koji se prate zahtijevaju nove analize i time uzrokuju kašnjenja prikaza i skokovite promjene vrijednosti. Za stabilizicaiju prikaza potrebno je da prode odredeno vrijeme.
Pogreške u prikazu vektora kretanja ovise o tome da li racunalo pamti relativne ili prave položaje objekata. Ako pamti relativne položaje korektno ce biti prikazan relativan pomak. Kao što je receno takav prikaz je pouzdaniji jer na prikaz situacije ne utjecu pogreške perifernih uredaja ni vanjskih utjecaja.
Uz pohranjivanje pravih položaja prava je slika pouzdanija, ali na prikaz utjecu pogreške perifernih uredaja i vanjski utjecaji. Iz tog razloga je usporedivati relativne vektore s pravima.
Posebno gruba može biti pogreška ako se zamijene vektori, to jest ako je prikazana jedna vrst vektora a slika se tumaci kao da su prikazani vektori druge vrsti. Zbog toga neki tipovi ARPA uredaja imaju stalno ukljucenu jednu vrstu vektora dok se druga vrst vektora dobije pridržavanjem sklopke s oprugom.
Perzistencija ekrana ARPA uredaja mnogo je kraca nego obicnih radara jer se ujednacavanje slike postiže matematickim konstrukcijama sekundarnih vremenskih baza. Iz tog razloga brodovi u pokretu na ekranu ne ostavljaju trag kretanja. Ipak, ARPA uredaj ima mogucnost prikazivanja podataka o prošlim položajima. kretanja ( ) koristi se iz prethodno zapamcenih položaja objekta u pokretu ( ). Kod nekih vrsta ARPA uredaja trag može biti prikazan u drugacijoj boji, a prethodni položaji uglavnom su prikazani u obliku kružica.
Opcija se koristi ako se iz nekog razloga (na primjer kvara) ne mogu prikazati vektori kretanja. Trag kretanja usmjeren je u suprotnom pravcu od pravca vektora.
Zbog pojacanja radarske jeke plutace su opskrbljene metalnim plocama trokutastog oblika koje su tako razmještene da se neke od njih uvijek odbijeni impuls vracaju u istom smjeru odakle je impuls došao. Te metalne konstrukcije imaju dimenzije izmedu 40 i 50 cm, a videosignal koji ih registrira na ekranu radara ekvivalentan je signalu kojeg izaziva metalna konstrukcija broda ukupne nosivosti 1000 tona. Zovu se pasivni radarski reflektori.
Aktivni radarski reflektori javljaju se u dva oblika: kao Radar Beacon ( ) ili kao Radar Marker ( ). RACON izvedbe ponekad se zovu i .
RACON je aktivni radarski reflektor koji emitira vlastiti impuls nakon što ga aktivira impuls radara. Uglavnom se mogu identificirati po nekim karakteristikama. Najviše je u uporabi Search and Rescue Transponder (SART) koji se koristi u operacijama traganja i spašavanja. Radi na 9,2 GHz, a na radarskom zaslonu registrira se niz tocaka od kojih je ona najbliža središtu položaj SART-a. Približavanjem, tocke se pretvaraju u lukove, a u neposrednoj blizini SART-a u kružnicu.
Utjecaj netocnih vektora, korištenje izmjene pravog i relativnog prikaza
Korištenje podataka o prošlim položajima
Radarski reflektori
TrailsHistory
RACONRAMARK Secondary Radar

48
RAMARK je aktivni radarski reflektor koji se sam ukljucuje u vremenskim intervalima koji predstavljaju njegovu karakteristiku. Na radarskom ekranu identificira se nizom dugih i kratkih signala koji formiraju neki simbol Morzeove abecede (na primjer crta i tri tocke što odgovara slovu B Morseove abecede). Ovi se reflektori uglavnom montiraju na obalne stanice ili plutace koje oznacavaju kanale.