Embed Size (px)
DESCRIPTION
Human Machine InterfaceWonderware in TouchPLC
Citation preview
USULAN PROGRAM KREATIVITAS MAHASISWA
JUDUL PROGRAM
EasyP-Kit : Rancang Bangun Human Machine Interface (HMI) Modul Training
Kit Pneumatik Menggunakan PLC (Programmable Logic Controler) Dan
Wonderware in Touch Sebagai Media Pembelajaran Pneumatik Yang Interaktif
pada Dunia Training Untuk Industri
BIDANG KEGIATAN :
PKM KARSA CIPTA
Diusulkan Oleh :
Ardiansyah (2211100096) Angkatan 2011
Adi Prasetiyawan (2211100006) Angkatan 2011
Firilia Filiana (2213105044) Angkatan 2013
Hendra Antomy (2211100130) Angkatan 2011
Alif Ridwan Maulana (2213100117) Angkatan 2011
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2014
ii
USULAN PROGRAM KREATIVITAS MAHASISWA
JUDUL PROGRAM
EasyP-Kit : Rancang Bangun Human Machine Interface (HMI) Modul Training
Kit Pneumatik Menggunakan PLC (Programmable Logic Controler) Dan
Wonderware In Touch Sebagai Media Pembelajaran Pneumatik Yang Interaktif
pada Dunia Training Untuk Industri
BIDANG KEGIATAN :
PKM KARSA CIPTA
Diusulkan Oleh :
Ardiansyah (2211100096) Angkatan 2011
Adi Prasetiyawan (2211100006) Angkatan 2011
Firilia Filiana (2213105044) Angkatan 2013
Hendra Antomy (2211100130) Angkatan 2011
Alif Ridwan Maulana (2213100117) Angkatan 2011
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2014
iv
DAFTAR ISI
HALAMAN SAMPUL………………………………………………………….............ii
HALAMAN PENGESAHAN…………………………………………………………..iii
DAFTAR ISI…………………………………………………………………………....iv
RINGKASAN…………………………………………………………………………...v
BAB 1. PENDAHULUAN
1.1 Latar Belakang……………………………………………………………….1
1.2 Rumusan Masalah…………………………………………………………....2
1.3 Tujuan………………………………………………………………………..2
1.4 Luaran Yang Diharapakan…………………………………………………...2
1.5 Manfaat……………………………………………………………………....2
BAB 2. TINJAUAN PUSTAKA
2.1 Pneumatik Sebagai Sistem Penggerak dalam Proses Industri……………….3
2.2 Human Machine Interface……………………………..…………………….4
2.3 Wonderware in Touch…………………………….…………………………4
2.4 PLC (Programmable Logic Contoller)………………………………………5
BAB 3. METODE PELAKSANAAN
3.1 Metodologi Pelaksanaan……………………………………………………..6
3.2 Wiring pada Modul Pneumatik.……………..…………..……………….......7
3.3 Perancangan Ladder Diagram PLC………………………………………….8
BAB 4. BIAYA DAN JADWAL KEGIATAN
4.1 Anggaran Biaya……………………………………………………………...9
4.2 Jadwal Kegiatan……………………………………………………………...9
DAFTAR PUSTAKA…………………………………..…………………………......10
LAMPIRAN

v
Rancang Bangun Human Machine Interface (HMI) Modul Pneumatik
menggunakan PLC (Programmable Logic Controler) dan Wonderware in Touch
sebagai media pembelajaran Pneumatik yang interaktif dan inovatif dunia
training untuk Industri
Ardiansyah, Hendra Antomy, Firilia Filiana, Alif Ridwan Maulana, Adi
Prasetiyawan
RINGKASAN
Industri yang terus berkembang saat ini di pengaruhi berbagai faktor. Salah satu
faktor yang paling berpengaruh ialah kemajuan teknologi. Kemajuan ini di tandai
dengan pengontrolan sistem kerja peralatan industri secara otomatis. Peralatan otomasi
yang banyak digunakan saat ini berbasis PLC dan pneumatik. Oleh karena itu banyak
pengguna peralatan otomasi tersebut menjadi lebih mudah dan cepat untuk
dikendalikan. Dengan menggunakan PLC sebagai pengontrolan maka akan
memudahkan pengguna dan HMI (Human Machine Interface) memberikan kemudahan
kepada operator untuk memonitoring sistem kerja peralatan dari jarak jauh.
Saat ini metode pembelajaran pneumatik belum terpadu dan komprehensif pada
suatu training kit. Training kit pada modul pneumatik belum memiliki HMI (Human
Machine Interface) mampu memudahkan dalam pembelajaran. Karena itulah perlu
adanya HMI yang terpadu dengan modul pembelajaran guna memudahkan siswa,
mahasiwa, atau pekerja dalam memahami sistem Pneumatik.
Sistem kerja peralatan pada modul pneumatik akan ditampilkan menggunakan
komputer. Sistem ini lebih dikenal dengan istilah HMI (Human Machine Interface).
HMI yang telah dirancang dari komputer menggunakan software Wonderware Intouch
akan mengontrol dan memonitoring tahapan-tahapan percobaan pada modul pneumatik
tersebut sehingga memudahkan untuk belajar pneumatik. Sebagai komunikasi antar
perangkat komputer dan PLC menggunakan RS - 232 sebagai penghubungnya.
Sedangkan untuk menghubungkan modul pneumatic dengan PLC menggunakan
konektor A6CON1.
Dengan adanya aplikasi HMI pada pengontrolan modul pneumatik ini, bisa
digunakan sebagai modul pembelajaran dan dapat memudahkan para siswa, mahasiswa,
dan pekerja untuk memahami dan melakukan percobaan pada modul pneumatik dengan
lebih mudah dan interaktif, sehingga kualitas Sumber Daya Manusia (SDM) yang
disiapkan untuk industri lebih berkualitas.
Kata kunci : EasyP-Kit, HMI, PLC, Pneumatik
1
BAB 1. PENDAHULUAN
1.1 Latar Belakang
Perkembangan dunia industri yang pesat memunculkan berbagai peralatan yang
memudahkan manusia untuk menyelesaikan pekerjaannya. Beberapa di antaranya ialah
pneumatik dan PLC. Sistem pneumatik ialah semua sistem yang menggunakan tenaga yang
disimpan dalam bentuk udara yang dimampatkan untuk menghasilkan suatu kerja. Karena
sistem pneumatik menggunakan udara, maka sistem ini lebih ramah lingkungan. Selain itu
sistem pneumatik juga menghasilkan tenaga yang besar (Firilia, 2012)
Sistem pneumatik banyak digunakan di industri antara lain penangan benda kerja
seperti pemposisian, pemisahan, dan peletakan. Misalnya di pengamplasan otomatis,
pneumatik digunakan untuk meletakkan kayu tepat di bawah pengamplasnya, selain itu
pneumatik juga digunakan untuk menggerakkan mesin pengamplas di atas kayu. Namun, pada
industri jika terjadi kerusakan penanganannya tidak secara real time karena tidak terintegrasi
dengan Human Machine Interface (HMI).
Kemudahan yang diberikan pneumatik dan PLC ini yang menyebabkan penggunaan
keduanya akan semakin banyak. Modul pneumatik yang kami kerjakan adalah contoh aplikasi
dari pneumatik. Modul ini menghasilkan gerakan – gerakan untuk awal pembelajaran
pneumatik dengan PLC yang terintegrasi dengan HMI.
Training kit pneumatik yang ada tidak menggunakan HMI, dan PLC yang terhubung
langsung menuju aplikasi pemrogaman ladder, karena itulah pembelajaran pneumatik
kovensional tidak mampu dipahami dengan baik. Diperlukan sebuah modul pembelajaran
yang terintegrasi dengan HMI (Human Machine Interface) untuk memudahkan proses
pembelajaran bagi yang ingin terjun di dunia industri atau mahasiswa.
Modul ini terdiri dari komponen utama yang ada di pneumatik yaitu Directional
Control Valve, silinder, FLR (filter, regulator, lubricator). Selain itu ada beberapa komponen
kelistrikan seperti selenoid, sensor magnetik dan limit switch. Modul pneumatik ini akan
dikendalikan melalui PLC Mitsubishi Q-Series. PLC dapat mengatur gerakkan silinder
melalui output PLC yang terhubung ke selenoid Directional Control Valve. Input PLC sendiri
berasal dari sensor yang ada di modul, yaitu sensor magnetic dan limit switch. Silinder yang
digunakan ialah silinder double acting yang berjumlah dua buah. Setiap silinder dilengkapi
dengan one way control valve di bagian depan dan belakang silider untuk mengatur kecepatan
udara yang masuk ke silinder.
Proses kerja dari pneumatik dan PLC ini akan di monitoring menggunakan HMI
Wonderware in Touch. HMI adalah tampilan interface yang memungkinkan penggunanya
2
untuk melihat dan mengatur proses yang sedang terjadi. HMI memberikan tampilan real time
yang terjadi saat itu. HMI ini sebagai sarana penghubung antara manusia dengan peralatan.
HMI nantinya akan berisi pilihan – pilihan dari materi pembelajaran pneumatik dengan PLC.
1.2 Rumusan Masalah
Berdasarkan latar belakang tersebut, maka rumusan masalah adalah:
1. Bagaimana merancang trainer kit (Easy-P) Pneumatik yang terintegrasi dengan
software Human Machine Interface?
2. Bagaimanakah membuat modul trainer kit Pneumatik?
3. Bagaimana membuat Human Machine Interface (HMI) dari trainer kit pneumatik
menggunakan Wonderware Intouch?
1.3 Tujuan
Berdasarkan rumusan masalah tersebut, maka tujuan yang ingin dicapai adalah :
1. Merancang trainer kit (Easy-P) Pneumatik yang terintegrasi dengan software Human
Machine Interface.
2. Membuat modul trainer kit Pneumatik.
3. Membuat Human Machine Interface (HMI) dari trainer kit pneumatik menggunakan
Wonderware Intouch.
1.4 Luaran yang Diharapkan
Luaran yang diharapkan dari program ini adalah :
1. Prototipe dari trainer kit, yaitu modul pembelajaran bagi pekerja baru di industri atau
mahasiswa.
2. Paten mengenai Easy-P mengenai tampilan HMI-nya.
1.5 Manfaat Program
Berdasarkan hal tersebut, maka manfaat yang ada dari program ini adalah:
1. Bagi mahasiswa, program ini dapat menjadi sarana pembelajaran untuk meningkatkan
IPTEKS dengan kompetensi yang dimiliki dan menjadi modul trainer yang dapat
digunakan untuk mempelajari Pneumatik
2. Bagi masyarakat, hasil dari program ini dapat digunakan untuk media pembelajaran
interaktif bagi masyarakat atau khalayak umum tentang Pneumatik.
3
BAB 2. TINJAUAN PUSTAKA
2.1 Pneumatik sebagai Sistem Penggerak Dalam Proses Industri
Pneumatik merupakan pengembangan teknologi dengan cara kerja memanfaatkan
udara bertekanan untuk mempengaruhi kerja suatu peralatan mekanikal agar menghasilkan
gerakan maju mundur, naik turun, berputar dan sebagainya. Pneumatik sistem secara intensif
dan luas telah banyak digunakan hampir diseluruh kehidupan yang berhubungan dengan
peralatan yang menghasilkan gerakan-gerakan dengan aplikasi yang disesuaikan dengan jenis
pneumatik serta cara kerja pneumatic (Firilia, 2012)
Sistem pneumatik memiliki banyak manfaat karena hampir semua industri sekarang
memanfaatkan sistem pneumatik. Banyak industri yang menggunakan sistem pneumatik
dalam proses produksi hingga pengepakkan barang. Beberapa bidang aplikasi di industri yang
menggunakan media pneumatik dalam hal penangan material adalah sebagai berikut :
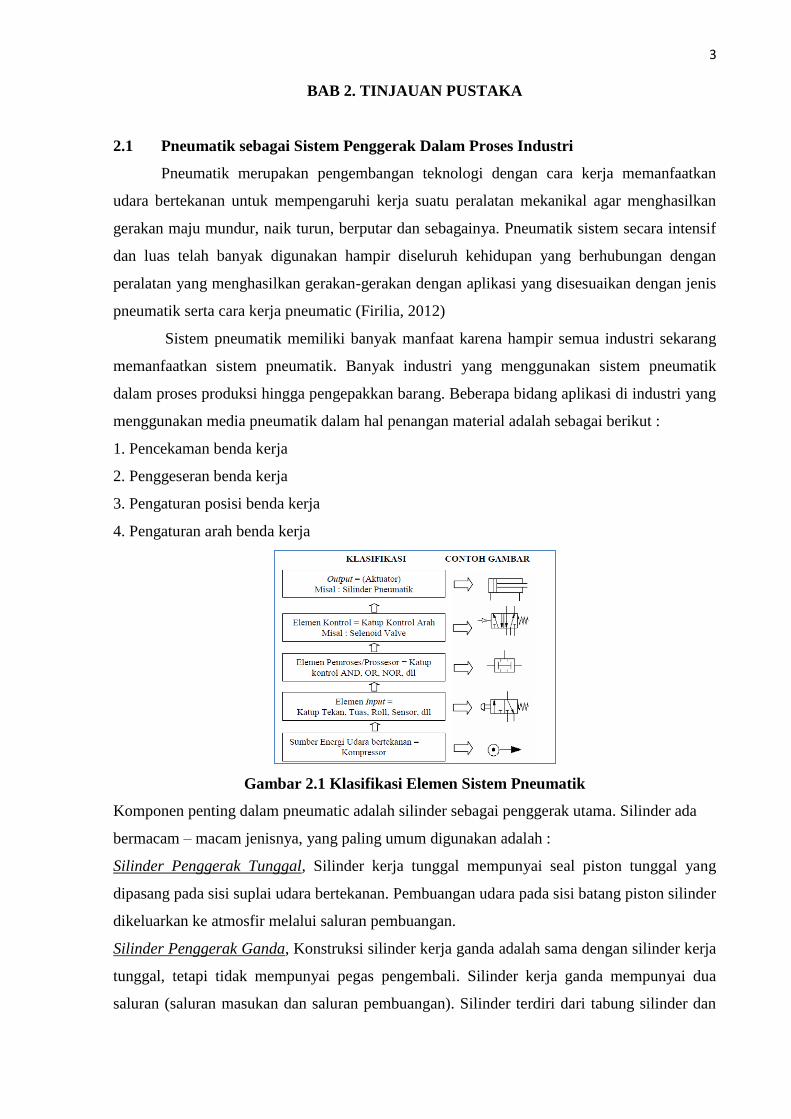
1. Pencekaman benda kerja
2. Penggeseran benda kerja
3. Pengaturan posisi benda kerja
4. Pengaturan arah benda kerja
Gambar 2.1 Klasifikasi Elemen Sistem Pneumatik
Komponen penting dalam pneumatic adalah silinder sebagai penggerak utama. Silinder ada
bermacam – macam jenisnya, yang paling umum digunakan adalah :
Silinder Penggerak Tunggal, Silinder kerja tunggal mempunyai seal piston tunggal yang
dipasang pada sisi suplai udara bertekanan. Pembuangan udara pada sisi batang piston silinder
dikeluarkan ke atmosfir melalui saluran pembuangan.
Silinder Penggerak Ganda, Konstruksi silinder kerja ganda adalah sama dengan silinder kerja
tunggal, tetapi tidak mempunyai pegas pengembali. Silinder kerja ganda mempunyai dua
saluran (saluran masukan dan saluran pembuangan). Silinder terdiri dari tabung silinder dan
4
penutupnya, piston dengan seal, batang piston, bantalan, ring pengikis dan bagian
penyambungan.
2.2. Human Machine Interface (HMI)
Human Machine Interface (HMI) untuk meningkatkan interaksi antara mesin dan
operator melalui tampilan layar komputer dan memenuhi kebutuhan pengguna terhadap
informasi sistem. Dengan membuat desain pada HMI yang sesuai dengan sistem kerja dapat
memberikan kemudahan untuk dapat memonitoring sistem kerja tersebut. Konsep HMI pada
industri adalah sebagai media untuk komunikasi antara bagian operator dengan perencanaan
serta perancangan sistem dengan maksimum serta sebagai sarana bagi operator untuk
mengakses sistem kerja dilapangan (Arief, 2012)
Pada umumnya HMI berupa komputer dengan tampilan dimonitor dimana pada
monitor tersebut kita bisa melihat keseluruhan sistem kerja dari layar teresbut. Adapun fungsi
dari HMI dijabarkan sebagai berikut :
1. Monitoring, kita dapat melakukan monitoring kondisi sistem kerja dilapangan secara real
time tanpa harus melihat langsung kelapangan sehingga bisa menghemat waktu dan tenaga.
2. Dapat mengendalikan sistem kerja dengan seketika melalui monitor komputer. Sehingga
dengan sistem ini dapat menghemat waktu dan tenaga kerja untuk memonitoring dan
mengendalikan setiap sistem kerja produksi.
3. Kita dapat menjalankan suatu proses atau mematikan suatu sistem hanya dengan mengatur
melalui komputer. Software untuk HMI saat ini sudah banyak yang digunakan.
2.3 Wonderware in Touch
Pada dasarnya InTouch adalah software Human Machine Interface yg dilengkapi dg
fitur dasar SCADA software. Untuk menggunakan wonderware intouch ada 3 komponen
penyusun utama yg harus diketahui yaitu :
1. Intouch application manager, berfungsi utk mengorganisasikan aplikasi yg akan
dibuat.
2. Intouch window maker, suatu development environment dari intouch, kita dapat
membuat halaman-halaman HMI dg grafik yg object-oriented utk menciptakan layar
tampilan yg dapat bergerak san dapat menerima masukan dari pengguna.
3. Intouch window viewer, suatu runtime environment yg dapat menampilkan layar
grafik yg telah dibuat pada windowmaker.
5
Gambar 2.2 Salah Satu Tampilan Wonderware in Touch
2.3 PLC (Programmable Logic Controller)
Programmable Logic Controller (PLC) didefinisikan sebagai suatu perangkat
elektronik digital dengan memori yang dapat diprogram untuk menyimpan instruksi-instruksi
yang menjalankan fungsi-fungsi spesifik seperti: logika, sekuen, timing, counting, dan
aritmatika untuk mengontrol suatu mesin industri atau proses industri sesuai dengan yang
diinginkan. PLC mampu mengerjakan suatu proses terus menerus sesuai variabel masukan
dan memberikan keputusan sesuai keinginan pemrograman sehingga nilai keluaran tetap
terkontrol.
PLC mempunyai saluran masukan (input) dan saluran keluaran (output). PLC bekerja
dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses
dan melakukan tindakan sesuai yang dibutuhkan, dapat menghidupkan atau mematikan
keluarannya (logika 0 jika mati dan logika1 jika hidup). Untuk membuat program (statement
list atau ladder diagram) yang kemudian harus dijalankan oleh PLC yang bersangkutan,
Dengan kata lain, PLC menentukan aksi apa yang harus dilakukan pada instrumen keluaran
berkaitan dengan status suatu ukuran atau besaran yang diamati.
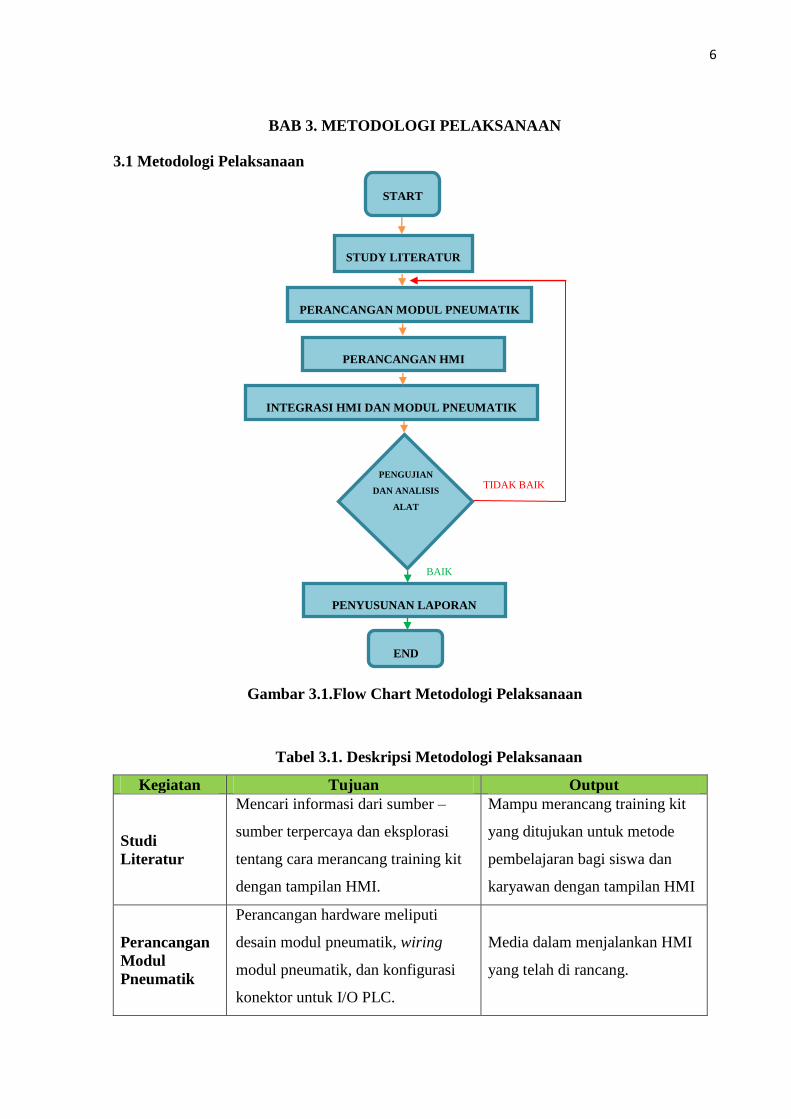
PLC Mitsubishi Q – Series adalah jenis PLC modular. Bisa dikatakan modular karena
terdiri dari modul CPU dan modul input/output yang bagian-bagiannya terpisah-pisah bentuk
PLC modular terdiri dari modul CPU dan modul input/output (merupakan bagian yang
terpisah-pisah)
Gambar 2.3 PLC Mitsubishi Q-Series
6
TIDAK BAIK
BAIK
BAB 3. METODOLOGI PELAKSANAAN
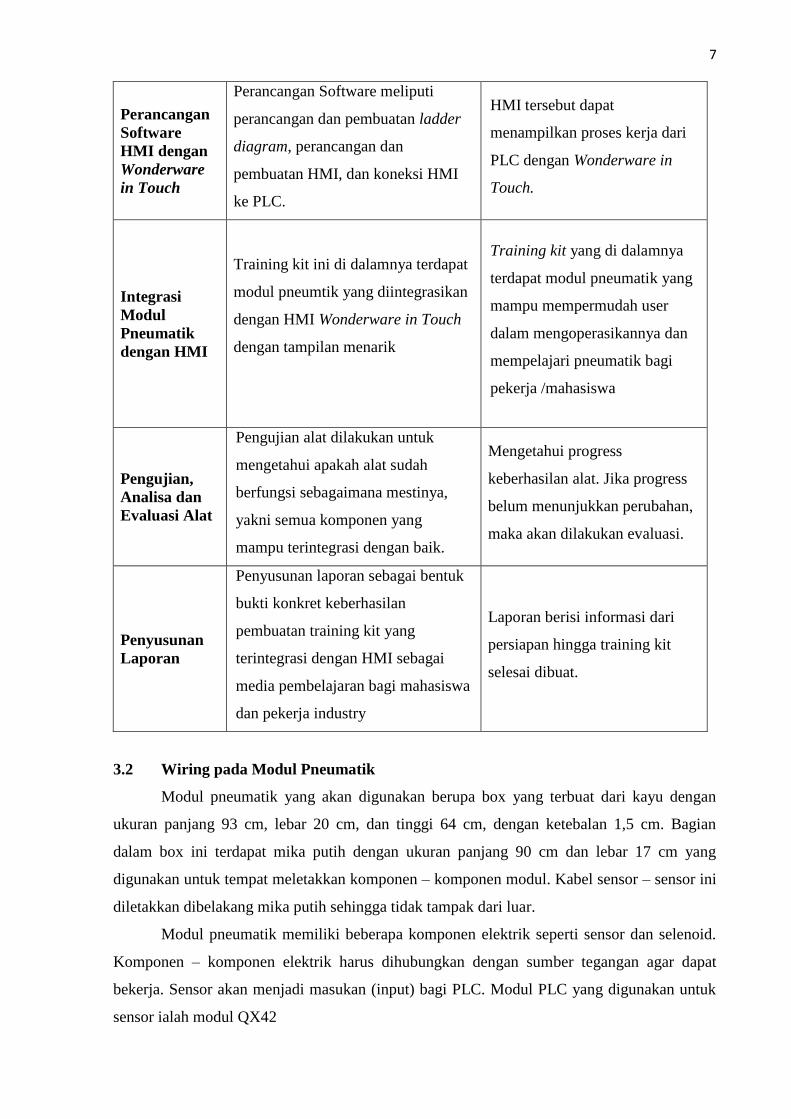
3.1 Metodologi Pelaksanaan
Gambar 3.1.Flow Chart Metodologi Pelaksanaan
Tabel 3.1. Deskripsi Metodologi Pelaksanaan
Kegiatan Tujuan Output
Studi
Literatur
Mencari informasi dari sumber –
sumber terpercaya dan eksplorasi
tentang cara merancang training kit
dengan tampilan HMI.
Mampu merancang training kit
yang ditujukan untuk metode
pembelajaran bagi siswa dan
karyawan dengan tampilan HMI
Perancangan
Modul
Pneumatik
Perancangan hardware meliputi
desain modul pneumatik, wiring
modul pneumatik, dan konfigurasi
konektor untuk I/O PLC.
Media dalam menjalankan HMI
yang telah di rancang.
STUDY LITERATUR
PERANCANGAN MODUL PNEUMATIK
START
PERANCANGAN HMI
INTEGRASI HMI DAN MODUL PNEUMATIK
PENGUJIAN
DAN ANALISIS
ALAT
PENYUSUNAN LAPORAN
END
7
Perancangan
Software
HMI dengan
Wonderware
in Touch
Perancangan Software meliputi
perancangan dan pembuatan ladder
diagram, perancangan dan
pembuatan HMI, dan koneksi HMI
ke PLC.
HMI tersebut dapat
menampilkan proses kerja dari
PLC dengan Wonderware in
Touch.
Integrasi
Modul
Pneumatik
dengan HMI
Training kit ini di dalamnya terdapat
modul pneumtik yang diintegrasikan
dengan HMI Wonderware in Touch
dengan tampilan menarik
Training kit yang di dalamnya
terdapat modul pneumatik yang
mampu mempermudah user
dalam mengoperasikannya dan
mempelajari pneumatik bagi
pekerja /mahasiswa
Pengujian,
Analisa dan
Evaluasi Alat
Pengujian alat dilakukan untuk
mengetahui apakah alat sudah
berfungsi sebagaimana mestinya,
yakni semua komponen yang
mampu terintegrasi dengan baik.
Mengetahui progress
keberhasilan alat. Jika progress
belum menunjukkan perubahan,
maka akan dilakukan evaluasi.
Penyusunan
Laporan
Penyusunan laporan sebagai bentuk
bukti konkret keberhasilan
pembuatan training kit yang
terintegrasi dengan HMI sebagai
media pembelajaran bagi mahasiswa
dan pekerja industry
Laporan berisi informasi dari
persiapan hingga training kit
selesai dibuat.
3.2 Wiring pada Modul Pneumatik
Modul pneumatik yang akan digunakan berupa box yang terbuat dari kayu dengan
ukuran panjang 93 cm, lebar 20 cm, dan tinggi 64 cm, dengan ketebalan 1,5 cm. Bagian
dalam box ini terdapat mika putih dengan ukuran panjang 90 cm dan lebar 17 cm yang
digunakan untuk tempat meletakkan komponen – komponen modul. Kabel sensor – sensor ini
diletakkan dibelakang mika putih sehingga tidak tampak dari luar.
Modul pneumatik memiliki beberapa komponen elektrik seperti sensor dan selenoid.
Komponen – komponen elektrik harus dihubungkan dengan sumber tegangan agar dapat
bekerja. Sensor akan menjadi masukan (input) bagi PLC. Modul PLC yang digunakan untuk
sensor ialah modul QX42
8
Gambar 3.2 Konfigurasi Modul QX42 dan Modul QY42P
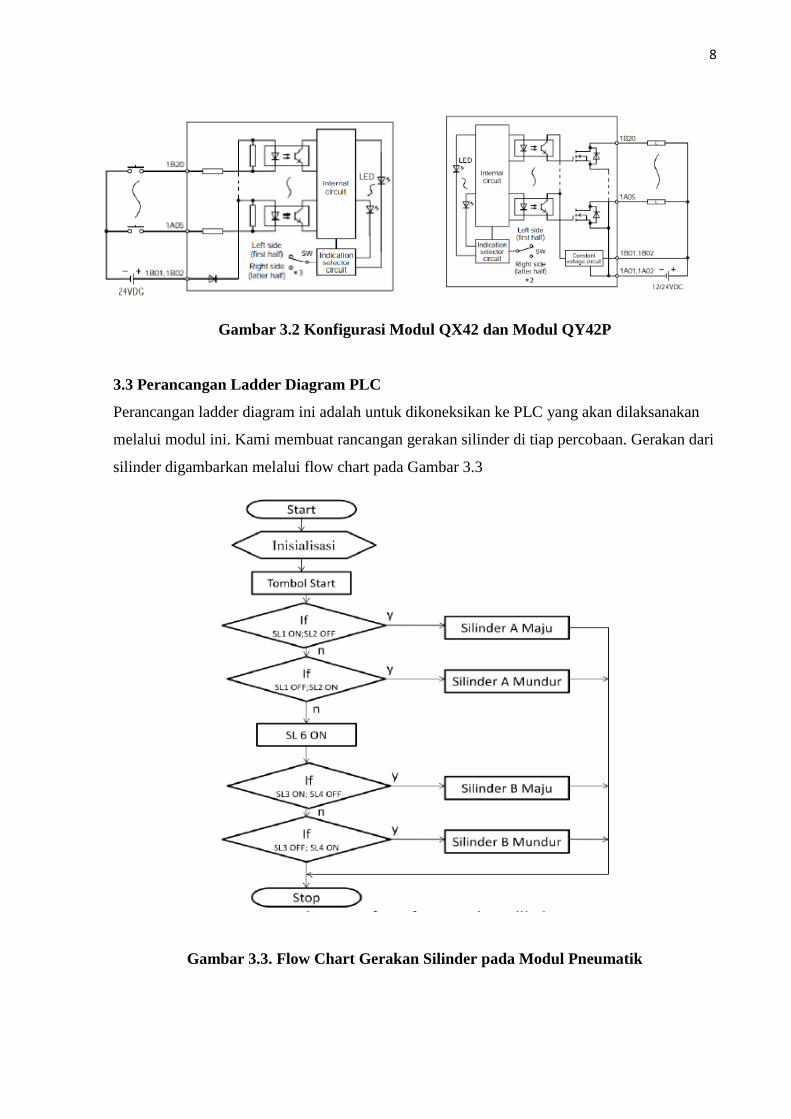
3.3 Perancangan Ladder Diagram PLC
Perancangan ladder diagram ini adalah untuk dikoneksikan ke PLC yang akan dilaksanakan
melalui modul ini. Kami membuat rancangan gerakan silinder di tiap percobaan. Gerakan dari
silinder digambarkan melalui flow chart pada Gambar 3.3
Gambar 3.3. Flow Chart Gerakan Silinder pada Modul Pneumatik
9
BAB 4. BIAYA DAN JADWAL KEGIATAN
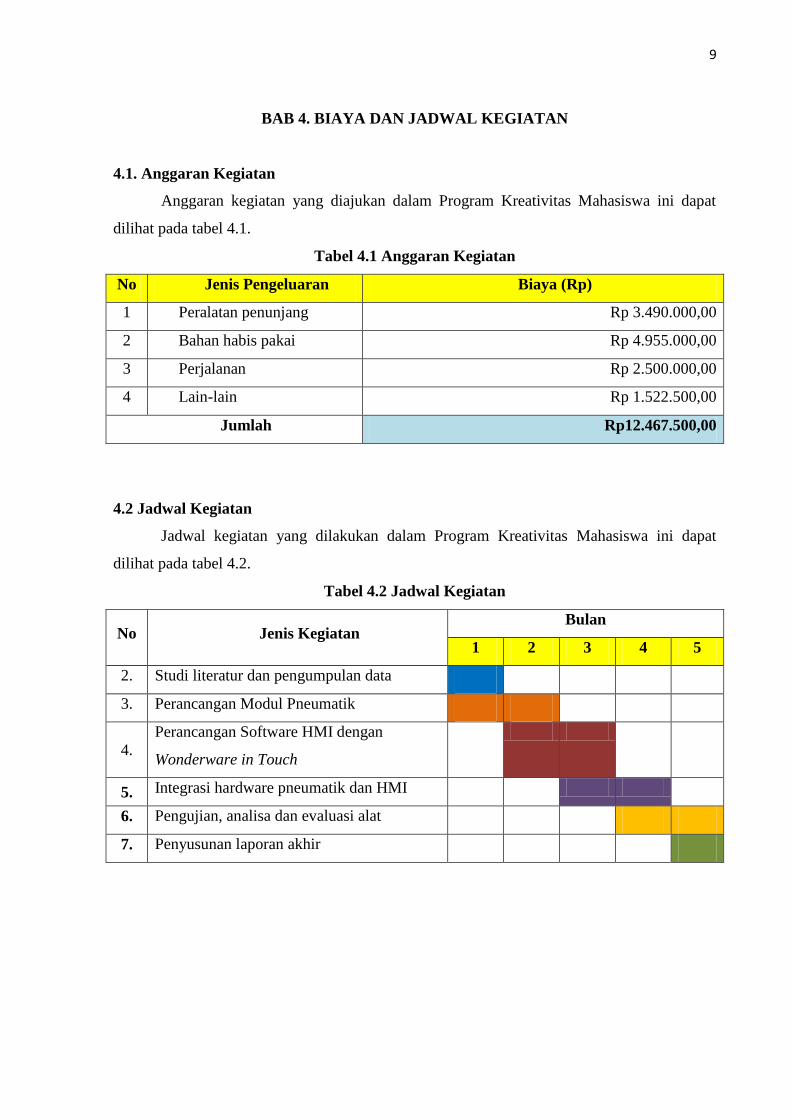
4.1. Anggaran Kegiatan
Anggaran kegiatan yang diajukan dalam Program Kreativitas Mahasiswa ini dapat
dilihat pada tabel 4.1.
Tabel 4.1 Anggaran Kegiatan
No Jenis Pengeluaran Biaya (Rp)
1 Peralatan penunjang Rp 3.490.000,00
2 Bahan habis pakai Rp 4.955.000,00
3 Perjalanan Rp 2.500.000,00
4 Lain-lain Rp 1.522.500,00
Jumlah Rp12.467.500,00
4.2 Jadwal Kegiatan
Jadwal kegiatan yang dilakukan dalam Program Kreativitas Mahasiswa ini dapat
dilihat pada tabel 4.2.
Tabel 4.2 Jadwal Kegiatan
No Jenis Kegiatan Bulan
1 2 3 4 5
2. Studi literatur dan pengumpulan data
3. Perancangan Modul Pneumatik
4.
Perancangan Software HMI dengan
Wonderware in Touch
5. Integrasi hardware pneumatik dan HMI
6. Pengujian, analisa dan evaluasi alat
7. Penyusunan laporan akhir

10
DAFTAR PUSTAKA
Yulianto, Arief Budi (2012). Rancang Bangun HMI Untuk Modul Pneumatik Silinder Single
Action. Surabaya : Institut Teknologi Sepuluh Nopember
Filiana, Filiria (2012). Aplikasi HMI untuk Pembelajaran Modul Pneumatik. Surabaya :
Institut Teknologi Sepuluh Nopember
Mead (2011). Pneumatik Handbook and Reference. Chicago : Manufacturing Facility
Hackworth, John. R (2011). Programmable Logic Controllers: Programming Methods and
Applications. California : University of California
Training Manual Woderware in Touch. Foxboro : Invensys Systems
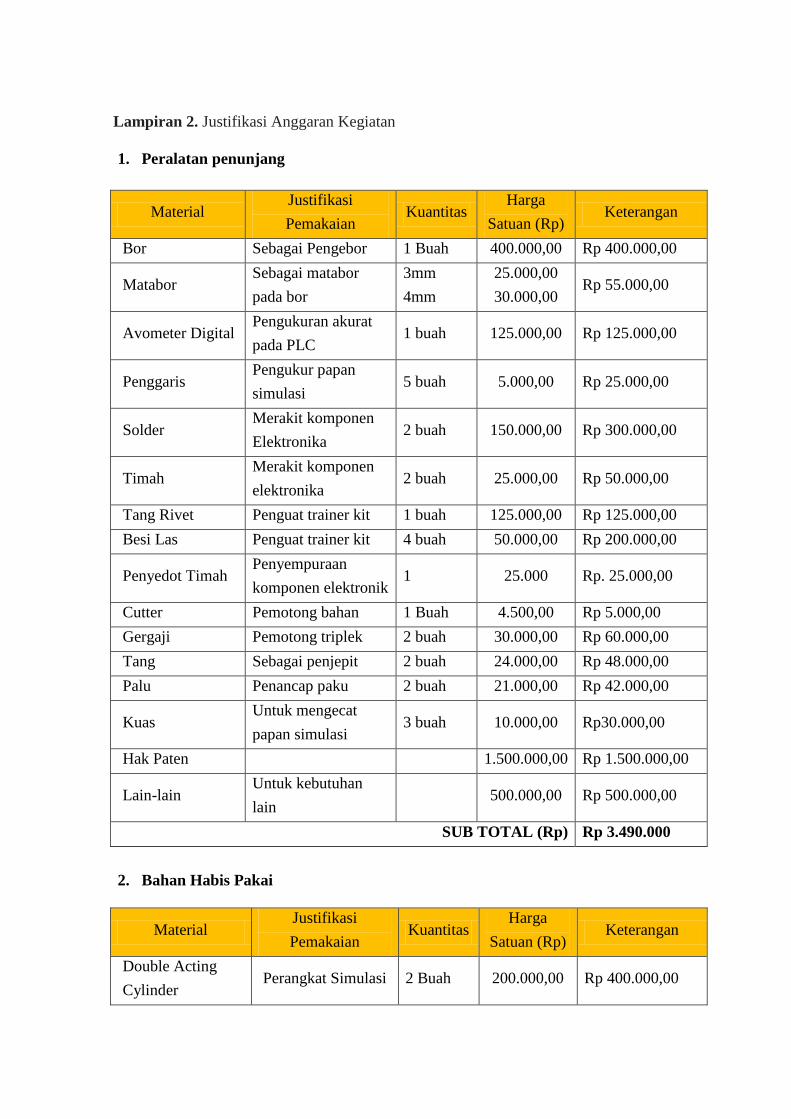
Lampiran 2. Justifikasi Anggaran Kegiatan
1. Peralatan penunjang
Material Justifikasi
Pemakaian Kuantitas
Harga
Satuan (Rp) Keterangan
Bor Sebagai Pengebor 1 Buah 400.000,00 Rp 400.000,00
Matabor Sebagai matabor
pada bor
3mm
4mm
25.000,00
30.000,00 Rp 55.000,00
Avometer Digital Pengukuran akurat
pada PLC 1 buah 125.000,00 Rp 125.000,00
Penggaris Pengukur papan
simulasi 5 buah 5.000,00 Rp 25.000,00
Solder Merakit komponen
Elektronika 2 buah 150.000,00 Rp 300.000,00
Timah Merakit komponen
elektronika 2 buah 25.000,00 Rp 50.000,00
Tang Rivet Penguat trainer kit 1 buah 125.000,00 Rp 125.000,00
Besi Las Penguat trainer kit 4 buah 50.000,00 Rp 200.000,00
Penyedot Timah Penyempuraan
komponen elektronik 1 25.000 Rp. 25.000,00
Cutter Pemotong bahan 1 Buah 4.500,00 Rp 5.000,00
Gergaji Pemotong triplek 2 buah 30.000,00 Rp 60.000,00
Tang Sebagai penjepit 2 buah 24.000,00 Rp 48.000,00
Palu Penancap paku 2 buah 21.000,00 Rp 42.000,00
Kuas Untuk mengecat
papan simulasi 3 buah 10.000,00 Rp30.000,00
Hak Paten 1.500.000,00 Rp 1.500.000,00
Lain-lain Untuk kebutuhan
lain 500.000,00 Rp 500.000,00
SUB TOTAL (Rp) Rp 3.490.000
2. Bahan Habis Pakai
Material Justifikasi
Pemakaian Kuantitas
Harga
Satuan (Rp) Keterangan
Double Acting
Cylinder Perangkat Simulasi 2 Buah 200.000,00 Rp 400.000,00
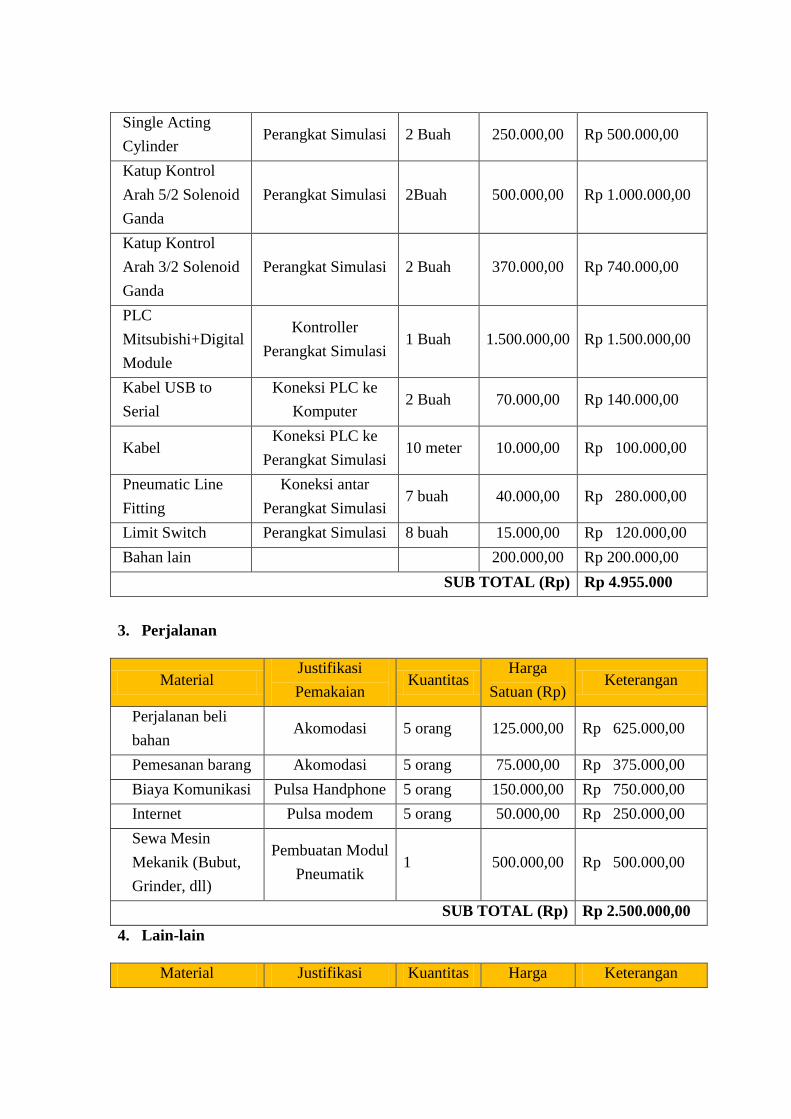
Single Acting
Cylinder Perangkat Simulasi 2 Buah 250.000,00 Rp 500.000,00
Katup Kontrol
Arah 5/2 Solenoid
Ganda
Perangkat Simulasi 2Buah 500.000,00 Rp 1.000.000,00
Katup Kontrol
Arah 3/2 Solenoid
Ganda
Perangkat Simulasi 2 Buah 370.000,00 Rp 740.000,00
PLC
Mitsubishi+Digital
Module
Kontroller
Perangkat Simulasi 1 Buah 1.500.000,00 Rp 1.500.000,00
Kabel USB to
Serial
Koneksi PLC ke
Komputer 2 Buah 70.000,00 Rp 140.000,00
Kabel Koneksi PLC ke
Perangkat Simulasi 10 meter 10.000,00 Rp 100.000,00
Pneumatic Line
Fitting
Koneksi antar
Perangkat Simulasi 7 buah 40.000,00 Rp 280.000,00
Limit Switch Perangkat Simulasi 8 buah 15.000,00 Rp 120.000,00
Bahan lain 200.000,00 Rp 200.000,00
SUB TOTAL (Rp) Rp 4.955.000
3. Perjalanan
Material Justifikasi
Pemakaian Kuantitas
Harga
Satuan (Rp) Keterangan
Perjalanan beli
bahan Akomodasi 5 orang 125.000,00 Rp 625.000,00
Pemesanan barang Akomodasi 5 orang 75.000,00 Rp 375.000,00
Biaya Komunikasi Pulsa Handphone 5 orang 150.000,00 Rp 750.000,00
Internet Pulsa modem 5 orang 50.000,00 Rp 250.000,00
Sewa Mesin
Mekanik (Bubut,
Grinder, dll)
Pembuatan Modul
Pneumatik 1 500.000,00 Rp 500.000,00
SUB TOTAL (Rp) Rp 2.500.000,00
4. Lain-lain
Material Justifikasi Kuantitas Harga Keterangan
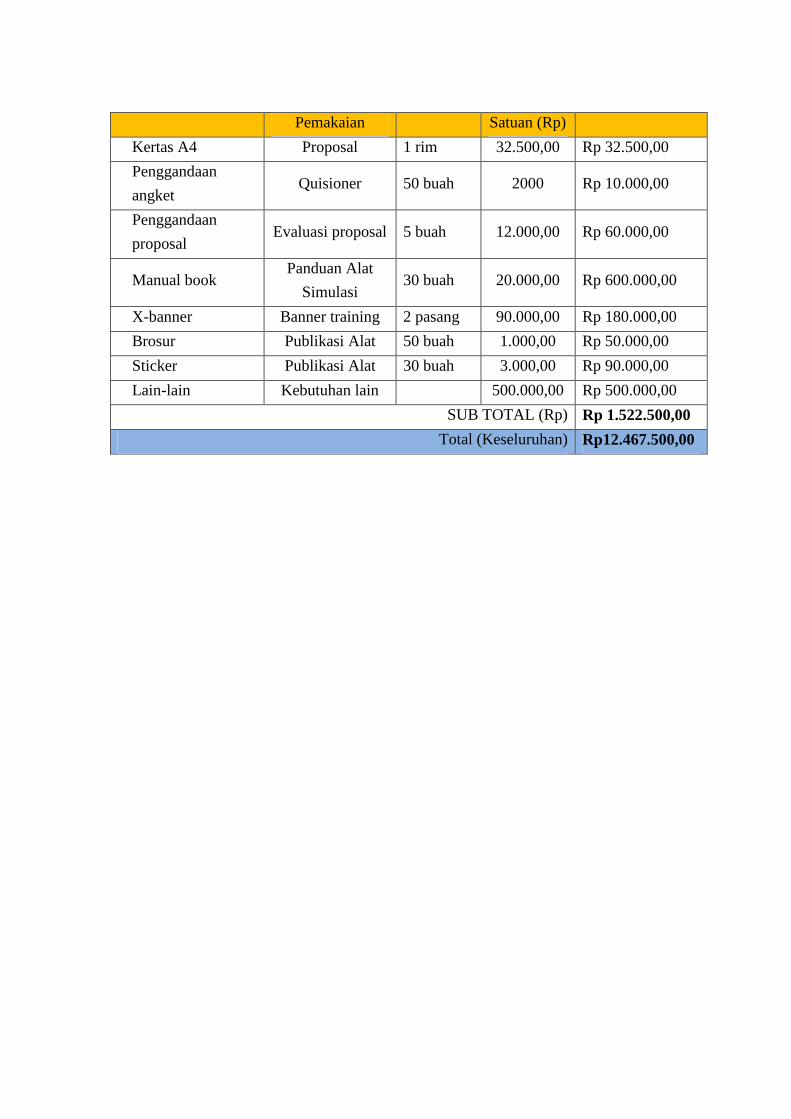
Pemakaian Satuan (Rp)
Kertas A4 Proposal 1 rim 32.500,00 Rp 32.500,00
Penggandaan
angket Quisioner 50 buah 2000 Rp 10.000,00
Penggandaan
proposal Evaluasi proposal 5 buah 12.000,00 Rp 60.000,00
Manual book Panduan Alat
Simulasi 30 buah 20.000,00 Rp 600.000,00
X-banner Banner training 2 pasang 90.000,00 Rp 180.000,00
Brosur Publikasi Alat 50 buah 1.000,00 Rp 50.000,00
Sticker Publikasi Alat 30 buah 3.000,00 Rp 90.000,00
Lain-lain Kebutuhan lain 500.000,00 Rp 500.000,00
SUB TOTAL (Rp) Rp 1.522.500,00
Total (Keseluruhan) Rp12.467.500,00
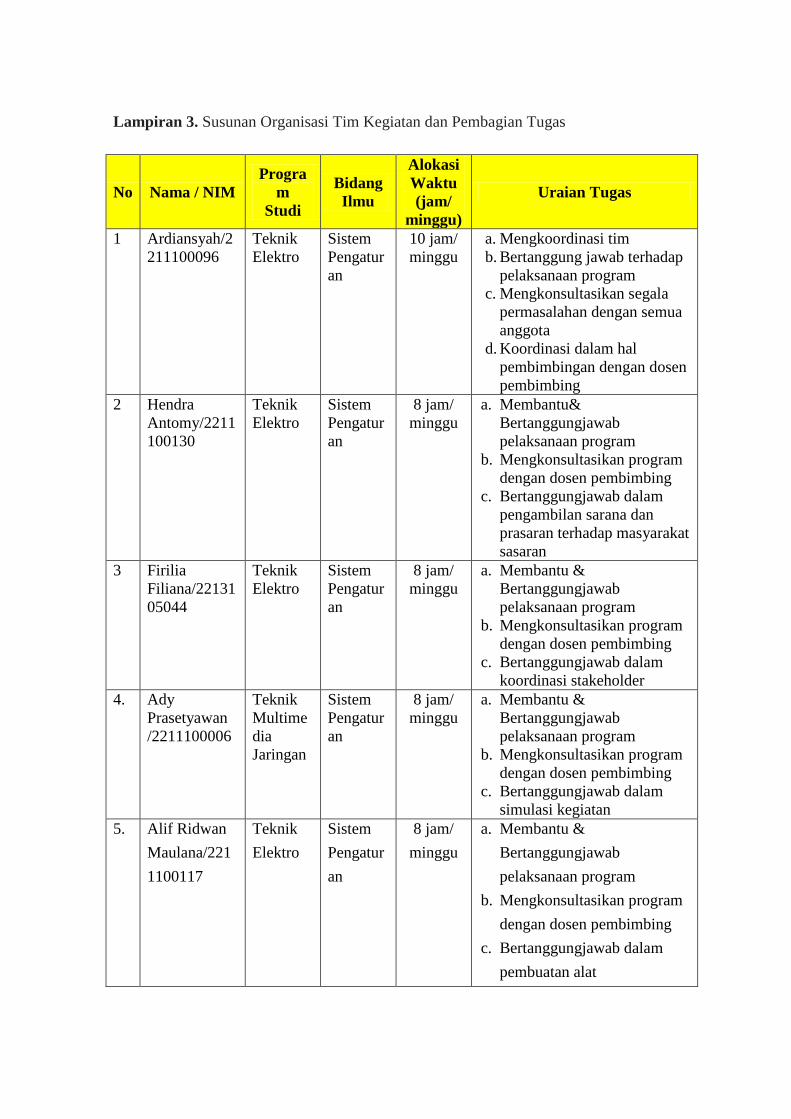
Lampiran 3. Susunan Organisasi Tim Kegiatan dan Pembagian Tugas
No Nama / NIM
Progra
m
Studi
Bidang
Ilmu
Alokasi
Waktu
(jam/
minggu)
Uraian Tugas
1 Ardiansyah/2
211100096
Teknik
Elektro
Sistem
Pengatur
an
10 jam/
minggu
a. Mengkoordinasi tim
b. Bertanggung jawab terhadap
pelaksanaan program
c. Mengkonsultasikan segala
permasalahan dengan semua
anggota
d. Koordinasi dalam hal
pembimbingan dengan dosen
pembimbing
2 Hendra
Antomy/2211
100130
Teknik
Elektro
Sistem
Pengatur
an
8 jam/
minggu
a. Membantu&
Bertanggungjawab
pelaksanaan program
b. Mengkonsultasikan program
dengan dosen pembimbing
c. Bertanggungjawab dalam
pengambilan sarana dan
prasaran terhadap masyarakat
sasaran
3 Firilia
Filiana/22131
05044
Teknik
Elektro
Sistem
Pengatur
an
8 jam/
minggu
a. Membantu &
Bertanggungjawab
pelaksanaan program
b. Mengkonsultasikan program
dengan dosen pembimbing
c. Bertanggungjawab dalam
koordinasi stakeholder
4. Ady
Prasetyawan
/2211100006
Teknik
Multime
dia
Jaringan
Sistem
Pengatur
an
8 jam/
minggu
a. Membantu &
Bertanggungjawab
pelaksanaan program
b. Mengkonsultasikan program
dengan dosen pembimbing
c. Bertanggungjawab dalam
simulasi kegiatan
5. Alif Ridwan
Maulana/221
1100117
Teknik
Elektro
Sistem
Pengatur
an
8 jam/
minggu
a. Membantu &
Bertanggungjawab
pelaksanaan program
b. Mengkonsultasikan program
dengan dosen pembimbing
c. Bertanggungjawab dalam
pembuatan alat
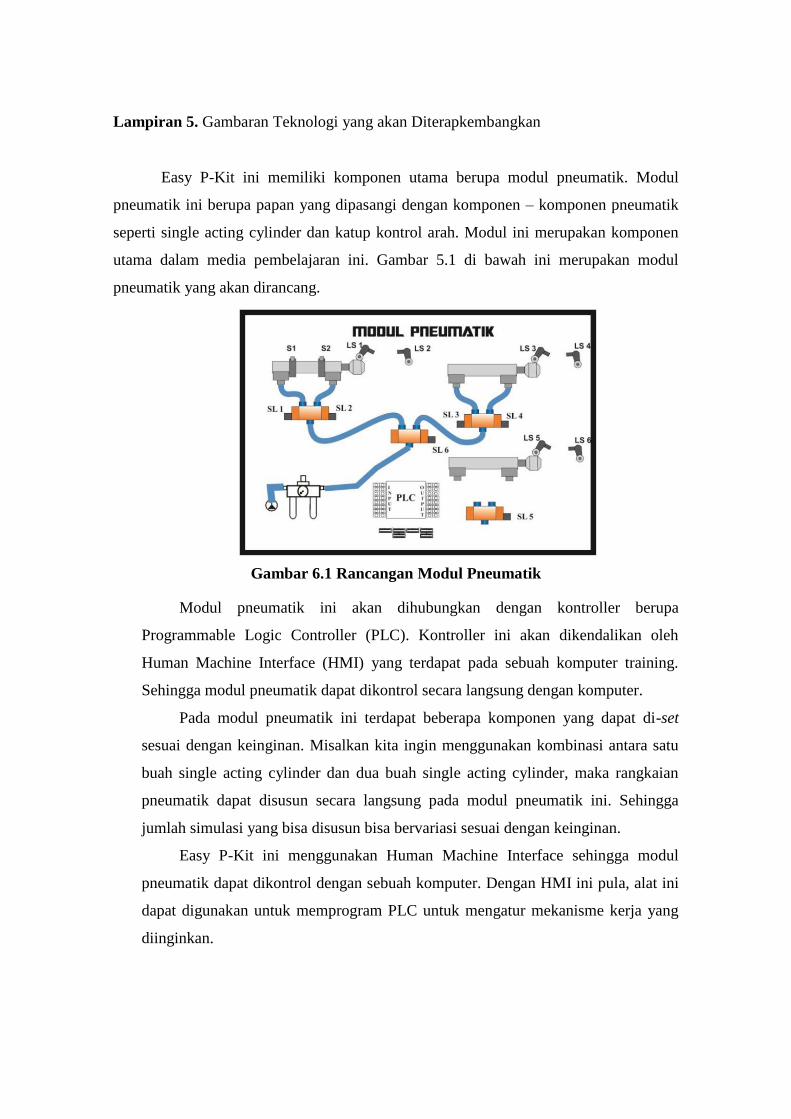
Lampiran 5. Gambaran Teknologi yang akan Diterapkembangkan
Easy P-Kit ini memiliki komponen utama berupa modul pneumatik. Modul
pneumatik ini berupa papan yang dipasangi dengan komponen – komponen pneumatik
seperti single acting cylinder dan katup kontrol arah. Modul ini merupakan komponen
utama dalam media pembelajaran ini. Gambar 5.1 di bawah ini merupakan modul
pneumatik yang akan dirancang.
Gambar 6.1 Rancangan Modul Pneumatik
Modul pneumatik ini akan dihubungkan dengan kontroller berupa
Programmable Logic Controller (PLC). Kontroller ini akan dikendalikan oleh
Human Machine Interface (HMI) yang terdapat pada sebuah komputer training.
Sehingga modul pneumatik dapat dikontrol secara langsung dengan komputer.
Pada modul pneumatik ini terdapat beberapa komponen yang dapat di-set
sesuai dengan keinginan. Misalkan kita ingin menggunakan kombinasi antara satu
buah single acting cylinder dan dua buah single acting cylinder, maka rangkaian
pneumatik dapat disusun secara langsung pada modul pneumatik ini. Sehingga
jumlah simulasi yang bisa disusun bisa bervariasi sesuai dengan keinginan.
Easy P-Kit ini menggunakan Human Machine Interface sehingga modul
pneumatik dapat dikontrol dengan sebuah komputer. Dengan HMI ini pula, alat ini
dapat digunakan untuk memprogram PLC untuk mengatur mekanisme kerja yang
diinginkan.

Gambar 6.2 Gambaran Tampilan pada Aplikasi HMI
Penggunaan HMI ini akan memudahkan peserta trainer dalam menggunakan
modul pneumatik karena pengguna atau peserta trainer dapat secara interaktif
memberikan perintah dengan tombol – tombol yang tersedia sekaligus mengamati
kejadian yang terjadi pada modul pneumatik secara langsung.
Gambar 6.3 Gambaran HMI menggunakan Wonderware in Touch
Gambar 6.3 di atas mewakili tampilan dari modul pneumatik. Gambar dua
silinder di atas mewakili silinder yang ada di modul. Gambar valve dan filter juga
mewakili valve dan filter yang ada di modul. Untuk sensor limit switch kami
menggunakan simbol LS dalam lingkaran biru. Di sebelah kiri terdapat kotak
„panel kontrol‟ yang berfungsi untuk menjalankan percobaan. Di kotak ini
terdapat tombol start untuk memulai percobaan dan lampu indikator di atasnya
menandakan proses sedang berlangsung.
Tombol Stop digunakan untuk mengakhiri percobaan, dan back untuk
kembali ke menu utama. Setiap gambar dari tampilan HMI ini memiliki alamat
yang digunakan untuk membuat ladder yang akan menggerakkan gambar





























