Embed Size (px)
Citation preview

Range Extension Control System for ElectricVehicles Based on Optimal-Deceleration Trajectoryand Front-Rear Driving-Braking Force DistributionConsidering Maximization of Energy Regeneration
Shingo Harada and Hiroshi FujimotoThe University of Tokyo
5-1-5, Kashiwanoha, Kashiwa, Chiba, 277-8561 JapanPhone: +81-4-7136-3881
Fax: +81-4-7136-3881Email: [email protected], [email protected]
Abstract— Electric vehicles (EVs) have become a world-widelyrecognized solution for future green transportation. However,the mileage per charge of EVs is short compared with that ofinternal combustion engine vehicles. In this paper, a maximizationmethod of regenerative energy is proposed. The method optimizesthe velocity trajectory and distribution ratio of front and rearbraking force using calculus of variations. The effectiveness ofthe proposed method is verified by simulations and experiments.
I. INTRODUCTION
Considering current environmental and energy problems,electric vehicles (EVs) have been proposed as an alternativesolution to internal combustion engine vehicles (ICEVs). Inaddition, EVs have the remarkable advantages compared withICEVs [1].
• Response of driving-braking force by motor is muchfaster than that of engines (100 times).
• In-wheel motors enable independent control and drive ofeach wheel.
• Motor torque is measured precisely from motor current.
Research of traction control [2], [3] and stability control [4]utilizing the above advantages were actively conducted.
One of the reasons that prevents EVs from spreading is thatmileage per charge of EVs is shorter than that of conventionalICEVs. In order to solve this problem, research on efficiencyimprovement of motors [5] and extending high efficiencyarea of motor [6] were carried out. From the view pointof motor efficiency control, research of torque and angularvelocity pattern that maximize efficiency during accelerationand deceleration [7] was carried out. Utilizing independentcharacteristic of traction motors, a torque distribution methodwas studied to decrease EV’s energy consumption [8].
On the other hand, the authors’ research group proposedrange extension control systems (RECSs) [9]–[11]. Thesesystems do not involve changes of vehicle structure such asadditional clutch [8] and motor type. RECS extends cruisingrange by motion control of vehicle.
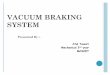
(a) FPEV–2 Kanon. (b) dSPACE AutoBox.
(c) Front motor. (d) Rear motor.
Fig. 1. Experimental vehicle.
Conventional research in RECS has been conducted underan assumption that vehicle motion is controlled by driver.However, it is needed to consider autonomous driving tech-nologies along with the development of intelligent transportsystems (ITS) [12]. If vehicle velocity can be controlled,minimizing the energy consumption by optimizing the velocitytrajectory is possible.
In this paper, for electric vehicles which are equipped withfront and rear motors, a RECS which maximizes the regener-ative energy is proposed. This method optimizes the velocitytrajectory and braking force distribution ratio. The proposedmethod can be applied to acceleration. The effectiveness of theproposed method is verified by simulations and experiments.
II. EXPERIMENTAL VEHICLE AND VEHICLE MODEL
A. Experimental VehicleIn this research, an original electric vehicle “FPEV–2
Kanon”, manufactured by the authors’ research group, is used.This vehicle has four outer-rotor type in-wheel motors. Sincethese motors are direct drive type, the reaction force from roadis directly transferred to the motor without backlash influenceof the reduction gear.

TABLE IVEHICLE SPECIFICATION.
Vehicle Mass M 854 kgWheelbase l 1.715 m
Distance from CG lf :1.013 mto front/rear axle lf , lr lr :0.702 m
Gravity height hg 0.51 mFront Wheel Inertia Jωf 1.24 Nms2
Rear Wheel Inertia Jωr 1.26 Nms2
Wheel Radius r 0.302 m
TABLE IISPECIFICATION OF IN–WHEEL MOTORS.
Front RearManufacturer TOYO DENKI SEIZO K.K.
TypeDirect Drive System
Outer Rotor TypeRated Torque 110 Nm 137 Nm
Maximum Torque 500 Nm 340 NmRated Power 6.0 kW 4.3 kW
Maximum Power 20.0 kW 10.7 kWRated Speed 382 rpm 300 rpm
Maximum Speed 1113 rpm 1500 rpm
Wheel velocity [km/h]
Torq
ue [N
m]
9085
80
757060
50
50
60
70
0 20 40 60 800
100
200
300
400
500
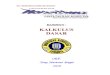
(a) Front motor.
Wheel velocity [km/h]
Torq
ue [N
m]
8580
80
70
7060
60
50
0 20 40 60 800
100
200
300
400
500
(b) Rear motor.
Fig. 2. Efficiency maps of front and rear motors.
Fig. 1 shows the experimental vehicle. The dSPACE Au-toBox (DS1103) is used for real-time data acquisition andcontrol. Table I and Table II show the specification of vehicleand in-wheel motors. Fig. 2 expresses efficiency map of thefront/rear in-wheel motors. Since front/rear motors installedin the vehicle are different, efficiency maps of those aredifferent. Therefore, extending cruising range by exploitingthe difference of the efficiency is possible.
Fig. 3 illustrates power system of the vehicle. Lithium-ionbattery is used as power source. The voltage of the mainbattery is 160 V (ten battery modules are connected in series).The voltage is boosted to 320 V by a chopper. In this paper,the chopper loss is neglected.
B. Vehicle Model
In this section, a four wheel driven vehicle model is de-scribed. The equation of wheel rotation is expressed by (1),as shown in Fig. 4. In case of straight driving, driving-brakingforces of right and left wheels are equal. From Fig. 5, theequations of vehicle dynamics are expressed as (2) and (3)
Jωj ωj = Tj − rFj , (1)
MV = Fall − FDR, (2)Fall = 2(Ff + Fr), (3)
where ωj[rad/s] is the wheel angular velocity, V [m/s] is thevehicle velocity, Tj[Nm] is the motor torque, Fall[N] is the
Fig. 3. Electric power system of vehicle.
ωT
F r
Jω
Fig. 4. Rotational motion of wheel. Fig. 5. Vehicle model.
total driving-braking force, Fj[N] is the driving-braking forceof each wheel, M [kg] is the vehicle mass, r[m] is the wheelradius, Jωj [Nms2] is the wheel inertia, and FDR[N] is thedriving resistance. The subscript j represents f or r (f standsfor front and r represents rear).
C. Driving-Braking force distribution model
During straight driving, required total driving-braking forcecan be distributed to each wheel. In this research, since themotors of the EV can be independently controlled, a degreeof freedom of the driving-braking force distribution exists.Introducing front and rear driving-braking force distributionratio k, driving-braking forces can be formulated based on thetotal driving-braking force Fall and the distribution ratio k, asfollows [10]:
Ff =1
2(1− k)Fall, (4)
Fr =1
2kFall. (5)
Distribution ratio k varies from 0 to 1. k = 0 means the vehicleis a front driven system, and k = 1 means rear driven only.
III. OPTIMAL VELOCITY TRAJECTORY AND DISTRIBUTIONRATIO
A. Constant Deceleration (Trajectory 1)
In this paper, a case that a vehicle which has velocity V0 att0 starts to decelerate and stop at t1 is considered.

As the first trajectory, constant deceleration is employed. Inthis case, velocity trajectory and braking time t1 are given by
V1(t) = V0 −V 20
2Xt (t0 ≤ t ≤ t1), (6)
t1 =2X
V0, (7)
where V0[m/s] is initial velocity, X[m] is braking distance.
B. Modeling of Regenerative Energy
To derive optimal deceleration trajectory and braking forcedistribution ratio, regenerative energy is expressed. Neglectingthe inverter loss, iron and mechanical loss of the motors, thesum of input power of each inverter Pin is expressed as
Pin = Pout + Pc, (8)
where Pout[W] is the sum of mechanical output of eachmotor, Pc[W] is the sum of copper loss of each motor. In thispaper, the slip ratio of each wheel is neglected. Therefore, ωj
is expressed as ωj = V/r. Then, from (1) and (2), Pout isgiven by
Pout = 2(ωfTf + ωrTr)
=
M +
2
r2(Jωf
+ Jωr )
V V + FDR(V )V. (9)
In the modeling of copper loss Pc, let us suppose that magnettorque is much bigger than reluctance torque, and q-axiscurrent is much bigger than d-axis current. In this case, Pc
is expressed as
Pc = 2(Rf i2qf +Rri
2qr), (10)
where Rj[Ω] is the armature winding resistance of the motor,iqj[A] is q-axis current of the motor. Then, following relation-ship between q-axis current and torque is obtained,
iqj =Tj
Ktj, (11)
where Ktj[Nm/A] is the torque coefficient of the motor.Therefore, from (1), (2), (4) and (5), copper loss Pc is givenby
Pc = 2(Rf i2qf +Rri
2qr)
= 2
(RfT
2f
K2tf
+RrT
2r
K2tr
)
= 2
[Rf
K2tf
Jωf
rV +
r
2(1− k)
(MV + FDR(V )
)2
+Rr
K2tr
Jωr
rV +
r
2k(MV + FDR(V )
)2], (12)
In addition, driving resistance FDR[N] is determined as
FDR(V ) = µ0Mg + fDR(V ), (13)
where µ0 is rolling friction coefficient, fDR(V ) is assumed tobe propotional to V . The coefficient of fDR(V ) is determinedas b.
From (9), (12) and (13), Pin is described as
Pin(k, V, V )
= a20(k)V2 + a11(k)V V + a10(k)V
+ a2(k)V2 + a1(k)V + a0(k), (14)
where
a20(k) =2Rf
K2tf
Jωf
r + Mr2 (1− k)
2
+2Rr
K2tr
(Jωr
r + Mr2 k)2
,
a11(k) = M + 2r2 (Jωf
+ Jωr )
+2bRr
K2tr
(Jωr +
Mr2
2 k)k
+2bRf
K2tf
Jωf
+ Mr2
2 (1− k)(1− k),
a10(k) = 2µ0MgRr
K2tr
(Jωr +
Mr2
2 k)k
+2µ0MgRf
K2tf
Jωf
+ Mr2
2 (1− k)(1− k),
a2(k) = b+ b2r2
4
Rf
K2tf(1− k)2 + Rr
K2trk2,
a1(k) = µ0Mg
+µ20M
2g2br2
2
Rf
K2tf(1− k)2 + Rr
K2trk2,
a0(k) =µ20M
2g2r2
2
Rf
K2tf(1− k)2 + Rr
K2trk2.
By using Pin, regenerative energy W [Ws] is given as
W = −∫ t1
t0
Pin(k, V, V )dt. (15)
The objective of this paper is to maximize Win by optimizingk and V .
C. Derivation of Optimal Deceleration Trajectory and DrivingForce Distribution Ratio
1) Case with given braking distance and time (Trajectory2): In the case braking distance is known, a condition aboutvehicle velocity is given by∫ t1
t0
V (t)dt = X. (16)
In this section, a variational problem is solved to derive the tra-jectory of V which satisfies (16) and maximizes regenerativeenergy written by (15). The solution of variational problemwhich contains such incidental condition is given by solvingthe simultaneous equations which have Lagrange multiplier λ[13] such as
∂Pin(k, V, V )
∂k= 0, (17)
d
dt
(∂Pin(t, k, V, V )
∂V
)− ∂Pin(t, k, V, V )
∂V
+λ
d
dt
(∂V
∂V
)− ∂V
∂V
= 0. (18)
In (8) and (17), by assuming the inertia of wheels to bemuch smaller than vehicle mass, the optimal driving force

distribution ratio kopt expressed by (19) is obtained.
kopt =
Rf
K2tf
Rf
K2tf
+ Rr
K2tr
(19)
kopt is the distribution ratio which minimizes the copperloss. kopt consists of only motor parameters, therefore kopt isconstant. In addition, from (14) and (18), the below equationis given.
2a20(k)V − 2a2(k)V = a1(k) + λ (20)
In case of k is constant, (20) can be solved analytically.Therefore, the optimal velocity trajectory with given brakingdistance and time is obtained as
V2(t, k) = A1eα(k)t +B1e
−α(k)t + β1(k), (21)
where
α(k) =
√a2(k)
a20(k)(22)
β1(k) = −a1(k) + λ
2a2(k)
The integration constants A1, B1 and λ are calculated tosatisfy V2(t0, k) = V0, V2(t1, k) = 0 and (16) after decidingk.
2) Case with given braking time (Trajectory 3): In the casewith given braking time, the optimal velocity trajectory isobtained by solving the differential equation with λ = 0 in(20).
2a20(k)V − 2a2(k)V = a1(k) (23)
Similarly, solving the differential equation, the optimal veloc-ity trajectory with only braking time is expressed as
V3(t, k) = A2eα(k)t +B2e
−α(k)t + β2(k), (24)
where
β2(k) = − a1(k)
2a2(k). (25)
The integration constants A2 and B2 are also calculated tosatisfy V3(t0, k) = V0, V3(t1, k) = 0 after deciding k.
IV. SIMULATION
In this section, to demonstrate the effectiveness of theproposed method, simulation is conducted. To represent therelationship between road and tire, Magic Formula [14] isused. µ0 and b which is the coefficient of fDR(V ) are setas 8.36× 10−3 and 10.7 Ns/m, respectively. These values areobtained by experiments. The initial condition is determinedto V0 = 30 km/h, t0 = 0 s. In this paper, 6 cases areconsidered. The distribution ratio is k = 0.5, kopt. Three typesof trajectories are calculated under each distribution ratio. Tocompare all cases under same braking distance, braking timeof each case is decided as Table III. In this paper, case (A) istreated as conventional method. Case (E) and (F) are proposed
TABLE IIIBRAKING TIME [S](V0 = 30 KM/H, X = 27.38 M).
k Trajectory 1 Trajectory 2 Trajectory 30.5 6.57 (A) 6.57 (B) 7.87 (C)
(Conventional)kopt 6.57 (D) 6.57 (E) 10.0 (F)
(Proposed 1) (Proposed 2)
Fig. 6. Vehicle speed control system.
method 1 and 2, respectively. The braking distance is set to27.38 m.
In this paper, automatic control of vehicle velocity is as-sumed to be possible as described in section 1. Fig. 6 showsvehicle velocity control system to control the vehicle auto-matically. This system is composed of a feedforward controllerand feedback controller. The input is vehicle velocity referenceV ∗, and these controllers generate total driving-braking forcereference F ∗
all. And then, F ∗all is distributed to the front and
rear driving-braking force reference F ∗j based on (4) and (5).
Represented by the slip ratio, front and rear torque referenceT ∗j is given as
T ∗j = rF ∗
j +Jωja
∗x
r(1 + λ∗
j ), (26)
where the second term of right hand side means compensationof inertia of the wheels. In this research, considering stabilityof vehicle velocity control system, reference of the acceler-ation a∗x is used. λ∗
j is nominal slip ratio of front and rearwheels that is 0.05, 0 and -0.05 during acceleration, cruisingand deceleration, respectively.
Vehicle velocity controller CPI(s) is a PI controller, and itis designed by pole placement method. The plant of vehiclevelocity controller is expressed as
V
Fall=
1
Ms. (27)
In the simulation and experiment, the pole of vehicle velocitycontroller is set to -5 rad/s.
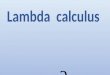
Fig. 7 shows simulation results. Fig. 7(a), Fig. 7(b) andFig. 7(c) show vehicle velocity of case (A), (E) and (F),respectively. From these figures, case (E) and (A) are almostequivalent. On the other hand, in case (F), the initial decel-eration is large. Therefore, as shown Fig. 7(d) and Fig. 7(e),the braking force at start in case (F) is larger than that of case(A). From a standpoint of velocity trajectory, the differencebetween case (E) and (A) is slight. However front and rearbraking force of each case is different because of the differentdistribution ratio. Fig. 7(f) shows inverter input power. In case(F), the regenerative energy is larger than that of other cases

0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Conventional)
V (Conventional)
(a) Velocity (conventional (A)).
0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Proposed 1)
V (Proposed 1)
(b) Velocity (proposed 1 (E)).
0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Proposed 2)
V (Proposed 2)
(c) Velocity (proposed 2 (F)).
0 2 4 6 8 10 12−600
−500
−400
−300
−200
−100
0
100
time t [s]
Fro
nt D
rivin
g F
orc
e F
f [N
]
Conventional
Proposed1
Proposed2
(d) Front driving force.
0 2 4 6 8 10 12−300
−250
−200
−150
−100
−50
0
50
time t [s]
Rear
Drivin
g F
orc
e F
r [N
]
Conventional
Proposed1
Proposed2
(e) Rear driving force.
0 2 4 6 8 10 12−12
−10
−8
−6
−4
−2
0
2
4
time t [s]
Invert
er
input pow
er
Pin
[kW
]
ConventionalProposed1Proposed2
(f) Inverter input power.
Fig. 7. Simulation result (conventional (A), proposed 1 (E), proposed 2 (F)).
TABLE IVREGENERATIVE ENERGY [KWS] (SIMULATION RESULT).
k Trajectory 1 Trajectory 2 Trajectory 30.5 18.99 (A) 19.01 (B) 19.96 (C)
(Conventional)kopt 21.18 (D) 21.20 (E) 22.08 (F)
(Proposed 1) (Proposed 2)
immediately after starting brake. In addition, in case (F), thevehicle does not consume the energy just before stop, althoughthe case (A) and (E) consume energy.
Table IV shows the regenerative energy in the simulation.From comparisons between (A) and (B) and between (D)and (E), the effectiveness of optimization of trajectory underthe same braking time and distance as conventional methodis slight. However, from comparisons between (A) and (C)and between (D) and (F), the regenerative energy of optimaltrajectory with the same braking distance improved about 4or 5 %. On the other hand, the effectiveness of changing kfrom 0.5 to kopt is great. The regenerative energy improvedabout 10 %, respectively. As a result, proposed method 1 (E)and 2 (F) improved about 12 % and 16 % compared withconventional method (A), respectively.
V. EXPERIMENT
Experiments are conducted under the same condition assimulation. In the experiments, the average of all the wheelvelocities is treated as vehicle velocity V . Inverter input powerPin is calculated as
Pin = Vdc(Idcf + Idcr), (28)
where Vdc[V] is the inverter input voltage, Idcf [A] is the frontinverter input current, and Idcr[A] is rear inverter input current.Pin includes inverter loss and motor iron loss.
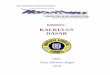
Fig. 8 shows experimental results. From Fig. 8(d) and Fig.8(e), the absolute value of front and rear braking force differfrom simulation results because of modeling error of drivingresistance. Although, from Fig. 8(f), the results of inverterinput power show the same tendency as simulation results.
Table V shows the regenerative energy in the experiments.The average values and standard deviations of 7 times exper-iments are shown. Similar to simulation, the effectiveness ofvelocity trajectory optimization with the same braking timeand distance as proposed method is slight. On the other hand,the regenerative energy improved about 4 % with only thesame braking distance, and improved about 11 % due tooptimization of velocity trajectory and distribution ratio. Asa result, proposed method 1 (E) and 2 (F) improved about11 % and 16 % compared with conventional method (A),respectively.
VI. CONCLUSION
In this paper, as a range extension control system for ac-celeration process, an optimization method of vehicle velocitytrajectory and front and rear driving-braking force distributionratio is proposed. The proposed optimization method was ap-plied to two deceleration trajectories: 1) given braking distanceand time and 2) given braking time. In the experimental results,proposed method 1 and 2 increase regenerative energy about11 % and 16 %, respectively.
The future work is to introduce load transfer, slip ratio andmotor iron loss into the loss model.

0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Conventional)
V (Conventional)
(a) Velocity (conventional (A)).
0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Proposed 1)
V (Proposed 1)
(b) Velocity (proposed 1 (E)).
0 2 4 6 8 10 12−5
0
5
10
15
20
25
30
35
time t [s]
Velo
city V
[km
/h]
V* (Proposed 2)
V (Proposed 2)
(c) Velocity (proposed 2 (F)).
0 2 4 6 8 10 12−500
−400
−300
−200
−100
0
100
200
time t [s]
Fro
nt D
rivin
g F
orc
e F
f [N
]
Conventional
Proposed1
Proposed2
(d) Front driving force.
0 2 4 6 8 10 12−250
−200
−150
−100
−50
0
50
100
time t [s]
Rear
Drivin
g F
orc
e F
r [N
]
Conventional
Proposed1
Proposed2
(e) Rear driving force.
0 2 4 6 8 10 12−10
−5
0
5
time t [s]
Invert
er
input pow
er
Pin
[kW
]
ConventionalProposed1Proposed2
(f) Inverter input power.
Fig. 8. Experimental result (conventional (A), proposed 1 (E), proposed 2 (F)).
TABLE VREGENERATIVE ENERGY [KWS] (EXPERIMENTAL RESULT:
AVERAGE±STANDARD DEVIATION).
k Trajectory 1 Trajectory 2 Trajectory 30.5 17.94±0.14 (A) 17.96±0.08 (B) 18.73±0.14 (C)
(Conventional)kopt 19.95±0.24 (D) 19.97±0.19 (E) 20.80±0.25 (F)
(Proposed 1) (Proposed 2)
ACKNOWLEDGEMENT
This research was partly supported by Industrial Tech-nology Research Grant Program from New Energy and In-dustrial Technology Development Organization(NEDO) ofJapan (number 05A48701d), and by the Ministry of Educa-tion, Culture, Sports, Science and Technology grant (number22246057).
REFERENCES
[1] Y. Hori: “Future Vehicle Driven by Electricity and Control–Research onFour–Wheel–Motored:“UOT Electric March II””, IEEE Trans. IE, Vol.51, No. 5, pp. 954–962 (2004)
[2] R. Shirato, T. Akiba, T. Fujita and S. Shimodaira: “A Study of NovelTraction Control Method for Electric Propulsuon Vehicle”, Journal ofthe Society of Instrument and Control Engineers, Vol. 50, No. 3, pp.195–200 (2011) (in Japanese)
[3] K. Maeda, H. Fujimoto, Y. Hori: “Four–wheel Driving–force Distribu-tion Method Based on Driving Stiffness and Slip Ratio Estimation forElectric Vehicle with In–wheel Motors”, the 8th IEEE Vehicle Powerand Propulsion Conference, pp. 1286–1291 (2012)
[4] N. Ando, H. Fujimoto: “Yaw–rate control for electric vehicle with activefront/rear steering and driving/braking force distribution of rear wheels”,in Proc. the 11th IEEE International Workshop on Advanced MotionControl, pp. 726–731 (2010)
[5] H. Toda, Y. Oda, M. Kohno, M. Ishida, and Y. Zaizen: “A NewHigh Flux Density Non–Oriented Electrical Steel Sheet and its MotorPerformance”, IEEE Trans. MAGNETICS, Vol. 48, No. 11, pp. 3060–3063 (2012)
[6] H. Hijikata, T. Shigeta, N. Kariya, K. Akatsu, and T. Kato: “A Studyof Dual Winding Method for Compound Magnetomotive Force Motor”,IEEJ Trans. IA, Vol. 133, No. 10, pp. 986–994 (2013) (in Japanese)
[7] K. Inoue, K. Kotera, Y. Asano, and T. Kato: “Optimal Torque andRotating Speed Trajectories Minimizing Energy Loss of Induction MotorUnder Both Torque and Speed Limits”, in Proc. Power Electronics andDrive Systems, 2013 IEEE 10th International Conference, pp. 1127–1132 (2013)
[8] X. Yuan and J. Wang: “Torque Distribution Strategy for a Front– andRear–Wheel–Driven Electric Vehicle”, IEEE Trans. Veh. Technol., Vol.61, No. 8, pp. 3365–3374 (2012)
[9] H. Fujimoto and H. Sumiya: “Range Extension Control System ofElectric Vehicle Based on Optimal Torque Distribution and CorneringResistance Minimization”, in Proc. 37th Annual Conference of the IEEEIndustrial Electronics Society, pp. 3727–3732 (2011)
[10] H. Fujimoto, S. Egami, J. Saito, and K. Handa: “Range ExtensionControl System for Electric Vehicle Based on Searching Algorithmof Optimal Front and Rear Driving Force Distribution”, in Proc. 38thAnnual Conference of the IEEE Industrial Electronics Society, pp. 4244–4249 (2012)
[11] S. Harada, H. Fujimoto: “Range Extension Control System for ElectricVehicles during Acceleration and Deceleration Based on Front andRear Driving-Braking Force Distribution Considering Slip Ratio andMotor Loss”, in Proc. 39th Annual Conference of the IEEE IndustrialElectronics Society, pp. 6624–6629 (2013)
[12] S. E. Shladover: “Cooperative (rather than autonomous) Vehicle-Highway Automation Systems”, Intelligent Transportation SystemsMagazine, IEEE, Vol. 1, No. 1, pp. 10–19 (2009)
[13] I. M. Gelfand and S. V. Fomin: “Calculus of Variations”, trans. R. A.Silverman, DOVER PUBLICATIONS, INC. (2000)
[14] H. B. Pacejka and E. Bakker: “The Magic Formula Tyre Model”,Vehicle System Dynamics: International Journal of Vehicle Mechanicsand Mobility, Vol. 21, No. 1, pp. 1–18 (1992)