Embed Size (px)
Citation preview
srsrEMA ELEcrRoNrco DE coNTRgL DEL cRupo I^IARD-LEONARD
Y DEL GENERADOR SINCRONICO DEL LABORATORIO DE
SUB ESTACION DE LA C.U.A.O.
ALFREDO MUñOZ CORTEStl
LUIS EDUARDO MUÑOZ MOSCOSO
Trabajo de Grado preeentadocouro requieito parcial paraoptar al título de INGENIEROELECTRICISTA
142?.8¡t
qnorna tta f'(ciüilh
tte.irr Frhl"*:'a
CALI
CORP0RACION UNTVERSTTARIA AUTONOMA DE O_CCTDENTE_
TNcENTERTA ELEcrRrcA l$f ,,,,, ",SiY.ih%oLssz | ililu|ü|utl!|utuilJtl!|uil

6 ,V))tel
tl9.
qbTp,l
Aprabada ¡3ür e,¡ sor¡Jf.É detraba,ia de g:rada, encumpliaiento de la,s .reguisi úo,sexj¡fjdos Für 1a G*rjrorasicír¡Uniwersitaria Autónama deüccidente, ¡ta.r:l gptar a} tÍ.tuLade fng:enjertr E].ectrLej-.+úa-
Jurado
_:--l
dd\i
Aao\$
I
',)("oI
+-\
l\Jorz
\-/-
o4lrl<24w4
\I
4Rq¡n
Np/¿cY
otüPu
-<
?-oYu<2A
TABLA DE CONTENIDO
IHTRODLIüCION
1. GENERALIDADES SOBRE LOS SERVOMECANISMOS
1.1- INTBÜDUCCIfJN A LOS SERVOHECANISMOS
L.2. CLASES DE ACCION DE CONTROL
L-2-L- Control de bucle abierto
L-2-2- Control de bucle cerrado
l--2-2-L- Control de doe poeiciones (ON-OFF)
L-2-2-2- Aceión de eontrol proporciona.l
L-2-2-3- Accíón de control derivativoL-2-2-4- Acción de control integralL-2-2-5- Control proporcional e integnal
L-2-2-6- Control proporcional y derivatj-vo
L-2-2-7. Control proporcional, derivativo eintegratlvo -
2. DIVERSAS REGULACIONES DE UN MOTOR DE CC
2.L- ACCIONAMIENTOS
2-1-1- Accionamíento para rnotor de CC con grupo€ttüard-Leonard
2-L- 1- 1- Regulación del núnero de revolucíoneade1 motor
Páe -
1
3
3
-3
3
I11
15
L7
19
2L
23
24
27
37
4t
43
t-v
Páe-
2-L-t-Z- Estabilización de1 número de revoluciones 43
2-1-1-3- Frenado por recuperación 44
2-L-L-4- Para la inversión del giro 45
2-L-1-5- Deeventajas del grupo Ward-LeonardTradieional
2-2- GRUPOS ['¡L CON CONTROL ELECTRONICO
2-2-t- Grupo convertidor CA-CC con motorgenerador CC
2-2-2- Motor de CC
2-2-3- Convertidor CA-CC para eircuitoe dei-nducido
2.2-4- Convertidor de üA-CC para circuitoe deexcitaeión
2-2-5- Circuito dieparo de loe SCR
2-2.6- Tenaión de refereneia
2-2-7 - Anplificador de error2-2-A- Limltador de eorriente2-2-9- Solueión para eliminar el magnetigmo
remanente
2-2-9-1- Campo suicida
2-2-9-Z- Arrollamiento de excitación de altareeieteneia conectado conetantementea la fuente de excitaeión-
2:3. ACCIONAMIENTO PARA MOTORES DE CC CONCONVERTIDORES A SCR
2 -3 -I - Transformador de alimentación
2-3-2- Motor de CC
45
46
+7
47
47
48
48
48
48
49
51
51
51
54
55
56
2-3.3- 'Convertidor de CA a CC para el circuitode inducido
2-3-4- Convertidores CA/CC para circuitos deexeitación
2-3-5- Circuítoe de disparo
2.3-6. Tensiones de referencia
2-3-7 - Amplifieadoree de error2-3- 7 -L- Amplificador de error2-3-7 -2- Nudo diferenciadc¡r de entrada
2-3-7 -3- Red integradora de compengación
2-3-8- Limitador de eorriente
3. REGULACION DE LA TENSION ELECTRICA
3-1. CLASES DE REGULADORES
3-1-1- Reguladoree reootáticos de eontaetoerodantee
ts.1-Z- Regulación de la teneión eIéctrica pormedio de traneietoree
3-1-3- Regulador de teneión contra traneductores
3-L-4- Excl-tacíón y Regulaeión de voltaje de1Generador con Amplidina-
3.1-5- Excitación y Reerrlación del voltaJe de los. alternadores pbr amplidina asoeiada a un
regulador estático
3- 1-6- Regulador Eetático
4. PARAMETROS DE DISEÑO DEL CONTROL DE VEI,OCIDADDEL MOTOR C.C
4.L- ETAPA DE POTENCIA
4-2. CIRCUITO DE SINCRONIS}CO
Páe.
57
58
6s
62
68
72
72
76
77
85
85
85
111
111
119
91
96
99
142
LO5
v1

4-2,-L- CáIculo de1 umbral de dieparo
4.3. CIRCUITO DE DISPARO
4-E.1- Circuito generador de la señal dientede sierra
4-3-2- Cálculo de la frecuencia de oscilaciónbaee (portadora)
4.4. CIRCUITO DE REFERENCIA DE VELOCIDAD Y RA}IPA
4-4-L- Seña1 de referencia4-4-2- Circuito de rampa
4-5. CIRCUITO DE REALIMENTACION DE VETOCIDAD
4-5-1- Realimentación alta: 246 V
4-5-2- Realin¡entación medía: 178 V
4-5-3. Realimentación baja: L27 V
4-5-4- Calibración de potenciómetro méximo QbA K)
4.6. AMPLIFICADOR DE VELOCIDAD
4.7. CIRCUITO DE REALIMENTACION DE CORRIENTE
4.8. CIRCUITO AHPLIFICADOR DE CORRIENTE
4.9. FUENTE DE ALIMENTACION
4.LO. ESTACION DE MANDO
4.11. LISTA DE ELEMENTOS
4.L2. POSIBLES FALIAS Y SUS CAUSAS
5. PARAMETROS DE DISEÑO DEL REGULADOR DE VOLTAJE
5.1. PRINCIPIOS DE OPERACION DEL REGULADORDE VOLTAJE
5-1.1- Cireuito de eampo, eincronismo y fuentede polarización
Páe.
LZ6
LzL
L?.3
L29
134
L34
L34
137
L40
141
r42,
143
145
L5A
L54
155
158
158
161
163
164
164
v1l-

5-L.2 Circuito de realirnentación de voltaje
5-1.3 Circuito de dieparo
5.2. POSIBLES FALLAS Y SOLUCIONES
5.3. PRINCIPIO DEL CIRCUITO DE DISPARO
5.4. CALCULO DE LOS ELEMENTOS DEL PUENTE DEPOTENCIA
5.5. LISTA DE ELEMENTOS
6- FUNCIONAMIENTO DEL SISTEMA DE CONTROL
6.1. PUESTA EN MARCHA
6.2- REGULACION DE I,A VELOCIDAD Y EL VOLTAJE
7. CONCLUSIONES
BIBLIOGRAFIA
Páe-
166
r67
17A
L71
175
176
L78
178
178
LAO
181
vt_ l_r_

LISTA DE FIGURAS
Páe,
Figura 1- Control de buele abj"erto 3
Figura 2- Control discontinuo 5
Figura 3- Control diseontinuo con rango variable 6
Figura 4- Oontrol continuo IFigura 5. Control de anillo cerrado L@
Figura 6. Diagrama de bloques eontrol SI-NO 13
Figura 7. Diagrama de bloques control Sf-NO conbrecha diferencial L4
Fi€ura 8- Diagrama de bloques de un controlproporcional 15
Figrrra 9- Diagrama de bloquee de un controlL7derivativo
Figura LA- Diagrama de bloques de un controlintegral 19
Figura 11- Diagrama de bloquee de un controlproporcional e integral 21
Figura t2- Diagranna de bloques de un controlproporeional y derivativo 23
Figura 13- Diagrama de bloques de un eontrolproporcional, derivativo e integral 26
Figrrra L4- Par y potencia en función de] númerode revolucionee 28
Figura 15- Revolución Ve. Comiente 31
L)<

Figura 16- Par de arranque en funeión del numero de.revoluciones- 33
Figura L7 - Frenado con motor de excitaciónindependiente. 36
Figura 18. Diagrama eartesiano Velocidad-Par 38
'Flgura 19- Característ,ica Par-Número de revoluciones 40
Figura 2O- Grupo Ward-Leonard inicial (compueetosolamente de rráquinaa eléctríeas) 42
Figura 21- Grupo WL eon control electrónico 46
Fígpra 22- Campo Suicida para eliminar magnetismoremanente. 52
Figura 23. Arrollaml-ento de alta resletencia queelimina el magnetiemo remanente. 53
Figura 24- Aecionamiento para un motor c-c. 54
Figura 25- Puente semicontrolado para cireuitoede excitación. 59
Figura 26. Convertidor con dos alimentadores enantiparalelo- 61
Figura 27- Teneión de referencia con Lln diodo Zener 63
Figura 28- Tensión de referencia con dos diodoeZenet en cadena- 63
Figura 29. Tensión de referencia mae elaborado- 65
Figrrra 3O- Tensión de referencia con aceleracíóneontrolada- 67
Figura 31- Círcuito con anplificador e íntegrador 69'
Fieura 32 - F.uneionannient<¡ del- circuito conampllficador e integrador 7A
Figura 33. Amplificador de error 7L
Figura 34- Respuesta en amplitud de un amplifieadorde error 73
Figura 35.
Figura 36.
Figura 37-
Figura 38.
Figura 39-
Fígura 4O.
Figura 41.
FLgura 42 -
Figura 43.
Figuna 4,4 -
Figura 45.
Figura 46.
Figura 47-
FiÉura 48 -
Fieura 49-
Figura 5O-
Fieura 51-
Figura 52-
Figura 53.
Nodo diferenciador de entrada.
Salida del arnplificador
Limitador de corriente.Numero de revolucionea en función deIa eorriente.
Esquema completo de accionamíentopara motor c.c.Dispoeición esquemática del reEuladorde tensión de aeción rápida, tipoBrown Boveri.
Característicae de un reguladorautomático
Dieposición para la regulación de teneiónen los generadores sincronoa por mediode traneistoree-
Esguema del princ5-pio de funcionamientode la excitación de Ioe generadoree pordínano amplidina-
Esguema de la excitación automático delgenerador sincrono por medio de amplidina
Esguema de conexiones del reguladoreetático de la amplidina-
Etapa de potencia.
Configuración de dos SCR y doe diodoe-
Configuración de tree SCR y dos diodos-
fmpuleos de dieparo
V<¡ltaje de salida Vs alfa en radianes
Circuito equívalente.
Circuito de eincroniamo.
SeñaI diente de sierra-
.7478
79
82
83
LOO
LO3
LLO
113
L74
114
115
118
L20
L22
L24
87
89
93
xl_
Figura 54.
Fi€ura 55 -
Figura 56-
Figura 57.
Figura 58-
Figura 59-
Figura 6O-
Figura 61-
Figura 62-
Fien¡ra 63 -
Figura 64-
Figura 65.
Flgura 66-
Figura 67.
Figura 68-
Fígura 69-
F:i-gura 76 -
Figura 71-
Fígura 72.
Figura 73.
Figura 74 -
Caracteristicae de la señal de dieparo.
Características de Ia eeñaI de dieparo.
Caracterletieas de la señal de dieparo.
Circuito de dieparo
Red integradora
Cireuito de Rampa
Reali-mentación alta
Real-imentación media
Realimentación baja-
Calibración del potenciómetro máxÍmo-
A¡r¡plificador de veloeidad.
Señal de reepueeta
SeñaI de respuesta-
Ajuste de potenciómetro de límite deeorriente -
Circuito de realimentacién de corrienteCircuito amplibicador de corriente.Fuente de alimentación
Eetación de mando.
Eequema reÉulador de voltajeOscilador de relajaeión.
Formas de onda del oecilador monojuntura
L26
L27
128
131
136
138
L40
141
L42
r43
145
L47
148
t52
153
L54
L37
159
163
L7T
L74
xii
RESUMEN
el síetema electrónico de control aI que noa referimoe a
eontimración, repreÉenta una solución a 1oe problemas de
ineetabilidad del sietema de generación del laboratorio de
subeetaciones de Ia C:U:A:O: Este eistema de generación
cdneta básicamente de euatro máquinae; Un motor aaincrono,
un generador C.C, un motor C-C- y un generador eincrónieo.La inestabilidad se preerenta en Ias no deseadas variaeiones
de velocidad del rnotor C.C- gue ocasionan al mismo tiempo
v¿riacionee en la tensión entregada a la carga por eIgenerador Sincrónico. Para ewitar diehas variacionee Ee
utilizaron circuitos eleetrónicoe que perniten eI manejo de
Ia corniente de excitación de1 devanado de cannpo en elgenerador de C-C; esüa eorriente eE un factor que influyede manera proporcional en la tensión de inducido del motor
C-C- V obviamente en la velocidad de giro de1 eje de1
miernr -
Habiendo obtenido un control sobre la velocidad del motor
C-C-n el pa6o a seÉtuir es mantener eonetante Ia magnitud
Unirusiüd llutonomo de 0tcidrotr
fl4m Rhliat.ro
xl-t_1

del volt,aje generado en el generador sÍncrónico. De manera
análoga aI control de velocidad Ee hace un control de
tensión obrando directamente en eI flujo magnético en la
exeitación, este flujo eer proporcional a Ia tensión
generada- En la parle externa ee observan indieadores de
teneión y velocidad y un potenciómetro de calibraeión,
aeompañado de una eetación de mando, con }ae cualeÉ,
mediante maniobras eencillas se consigue el objetivo final:
Freeuencia y Tensión de Generación Conetante-'
x]_v

INTRODUCCION
Dado que dentro de las polf ticas, de la C.U.A.O., se 'encuentra
dotación y mejoramiento de los equipos de laboratorio con
colaboración de los estudiantes y habiendo: constatado
necesidades existentes en el laboratorio de subestaciones,
consideramos la posibilidad de reemplazar el sistena de control del
Élrupo ward-leonard (motor asincrono-generador cc-notor cc) por un
sistema más noderno y'confiable, y8 que el que se encuentra en
funcionaniento, debido a su antiguedad presenta dificultades en la
consecución de repuestos que se prevee que en el caso de fallar, el
sistema serfa difici lmente recuperable.
Por otra parte se verificó que el generador sincrónico carece de un
regulador autonático de voltaje, presentandose la variación no
deseada del voltaje gfenerado a nedida que se varf a la carga. Es
nuestro proposito, dar solución a las necesidades descritas, con el
diseño construcción y montaje de los respectivos sistemas
electrónicos de control .
El proyecto permitirá como resultado final, la optinización del
sistema de generación del laboratorio de subestaciones de la
C.U.A.O. , garantizando la estabi I idad de la tensión generada y
asegurando la continuidad del servicio.
la
la
la
Academicamente se profundizan conocimientos en áreas como Máquinas
CA y CC, control electronico
tarjetas electrónicas con los
para la elaboración
circuitos impresos.
y procesos
respect ivos
de

I. GENERALIDADES SOBRE LAS SERVOMECANISMOS
1. I. INTRODUCCION A LOS SERVOMECANISMOS
La teorfa y práctica dei control brindan medios de lograr el
funcionamienüo óptimo de sistemas dinámicos, mejoranla calidad,
abaratan los costos y expande el ritmo de producción; además de
re I evar operar ios en ruü inas comp I e jas y de f at i8ia
1,2, CLASES DE ACCION DE CONTROL
L .2 . l. Contro I de bucle abierto
ENTRADA
FIGURA 1
------)SALIDA
Se caracteriza por no tener la posibilidad de corregir la señal de
salida ante variaciones de la mÍsma, For carecer de realimentación,
lo que imposibilita al sistema la elaboración de una señal de
error. En la práctica, sólo se puede usar el control de lazo
abierto si la relación entre la entrada y la salida es conocida, y
si no hay perturbaciones internas y/o externas. Otra caracterfsticade los controles de bucle abierto es que estos sistemas de control
funcionan sobre una base de tienpos
ACCION
CONTROL------ ) PROCESO

4
Un ejemplo práctico de este tipo de acción de contfol lo constituye
la máquina de lavar; el remojo, lavado y enjuague de la máquina de
lavar se cumple sobre una base de tiempos. La máquina no mide la
señal de salida, es decir la linpieza de la ropa. Otro ejemplo, lo
constituye el conürol de tráfico por señales actuadas, €D función
de tiempos. La regulación de un sistema de anillo abierto (bucle
abierto) se puede obtener de dos maneras:
Control discontinuo
Como su nombre lo dice, se caracteriza por no tener una acción de
control continuo a través del tiempo, sobre el proceso, eü€ en
últina instancia me va a generar la salida (variable a controlar).Es el caso de la figura 2.
Con el interruptor A cerrado, la poterlcia de calentamiento del
horno es máxima, mientras quo con A abierto es nula.

c
,
¡t8fr{f ilEIn0
FT¡EI{ÍE IIE
EHEB6I f,
Flgura 2 Control dlscontinuo
c';

¡ (tEilPEB$Il¡Bf)o
le (IEilFEPAtttF.f, nilEtEHIE)
P0tEHr¡* Pfll)
t¡trllttllllI I .¡ | | |t¡llll¡ltlltltttllttltllttlltltltlrllllltll¡llllll¡rlt
f r¡¡snsol
I (I¡EIITS}
///
/t/
////// /tt///l/ll/,1///t'l///l//t//!1tiI /// l,t/ / I
¡tt
Flgura 3 Control discontlnuo con rango de varlaclon
Se
de
Ia
7
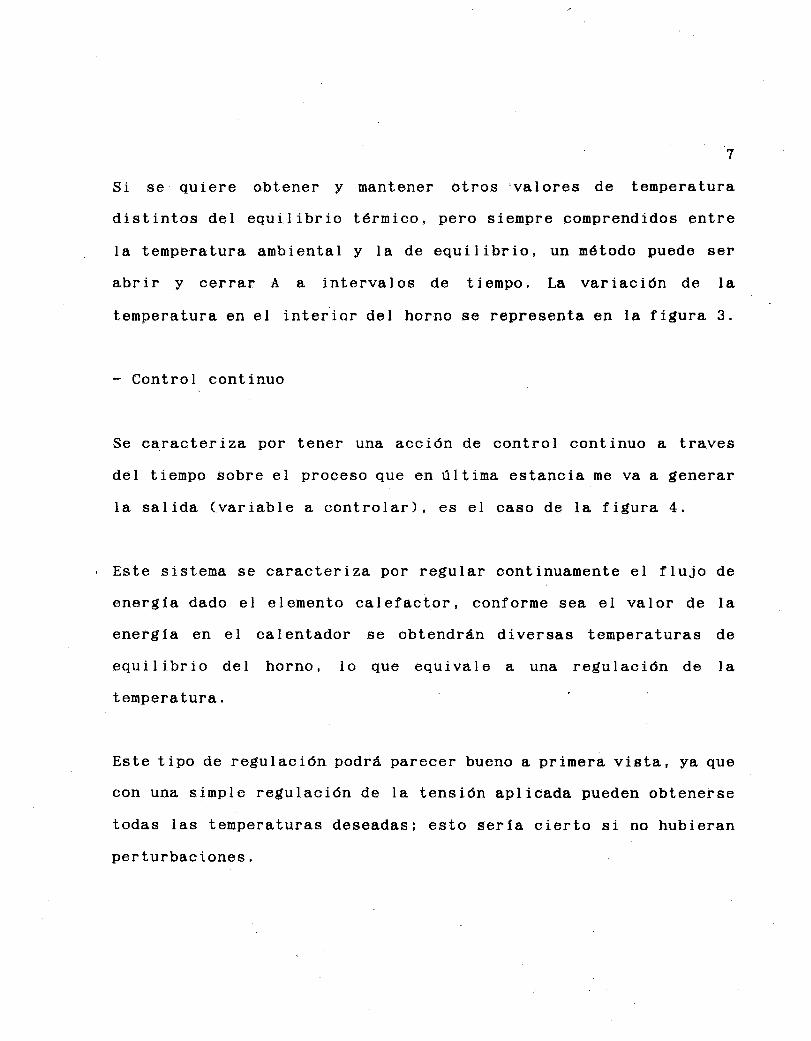
Si se quiere obtener y mantener otros 'valores de tenperatura
distintos del equilibrio térmico, pero siempre conprendidos entre
la temperatura ambiental y la de equilibrio, un método puede ser
abrir y cerrar A a j.ntervalos de tiempo. La variación de la
temperatura en el interior del horno se representa en la figura 3.
Control continuo
caracteriza por tener una acción de control continuo a traves
I tiempo sobre el proceso que en última estancia me va a generar
salida (variable a controlar), es el caso de la figura 4,
Este sistema se caracteriza por regular continuanente el flujo de
energfa dado el elemento calefactor, conforme sea el valor de laenergffa en el calentador se obtendrán diversas temperaturas de
equilibrio del horno, lo que equivale a una regulación de la
temperatura.
Este tipo de regulación podrá parecer bueno a primera vista, ya que
con una simple regulación de ia tensidn aplicada pueden obtenerse
todas las temperaturas deseadas; est,o serfa cierto si no hubieran
per turbac i ones

It8ñ0t|EtB0
t{08H0
i¡̂ñ
(IEñPERf, IUBf, NilB¡ ÉHIE)
¿o
g'
Flgura 4 ControL Contlnuo
T (TI€IIPO}
IIt.
.t.l
I¡IIII //t//
/////

I
Las perturbaciones son variables incontrolables (e.rrores), capaces
de modificar las relaciones existentes entre las magnitudes de
entrada y las magnitudes de salida, En el caso que estamos
observando, son perturbaciones las variables en la tensión de
alinentación, la variación de la lnercia térmica del horno debido
a la carEa o descarÉia del material q:" hay que
variaciones de ia temperatura ambiental, etc.
ca I entar ,
1 .2 .2. Contro I de I cuc I e cerrado
Los sistemas de control de anillo cerrado se caracterizan por el
hecho de poder hacer ajustes en el proceso controlado ante la
presencia de perturbaciones y de esta nanera obt,ener el resultado
deseado.
EI diagrama tfpico de esta acción de control la podemos observar en
la fig. 5 R(s) constituye la referencia, es decir el valor de lavariable que se pretende controlar
Este nodo sumador constituye el detector de error y es el elemento
encargado de elaborar la señal de error, resultado de la diferenciaentre la referencia (señal de entrada) y la salida (resultado
obtenido )
G(s) Constituye el amplificador de error que es el encargado de
influir directamente sobre el proceso para
[fnirrírlrl ,!rr+onomo da ftcijra¡l!.+- Rrh¡¡¡i¡rn

é
CgHFROL DE/
ñN ILLB CERRADO
Figura 5 Control de anlIIo cerrado

1t
obtener la señal deseada.
H(s) Constituye la función de transferencia del elemento de
real imentación, el cual es el encarglado de real ízar la conversión
de las unidades de ia señal de salida a las mismas unidades de la
referencia para de esta manera posibilitar la estancia de la señal
de error en el nodo sumador.
Los sistemas de control de anillo cerrado se pueden clasificar en:
| ,2,2,1 . Control de dos posiciones (ON-OFF) :
En un sistema de control de dos posiciones el elemento accionador
tiene solamente dos posiciones fijas, eu€ en muchas ocasiones son
simplemonte conectado y desconectado. El control de dos posiciones
ó de SI-NO es relativanente simple y económico; por esta razón,
ampliamente utilizado en sistemas de control, tanto industrialescomo domésticos. Sea la,señal de salida del control m(t) y la sefial
de error actuante e(t), en un control de dos posicionesi la señal
m(t) permanece en un valor máxino ó nfnino, seElún que la señal de
error actuante sea positiva (+) o neEativa (-), de modo que:
T2
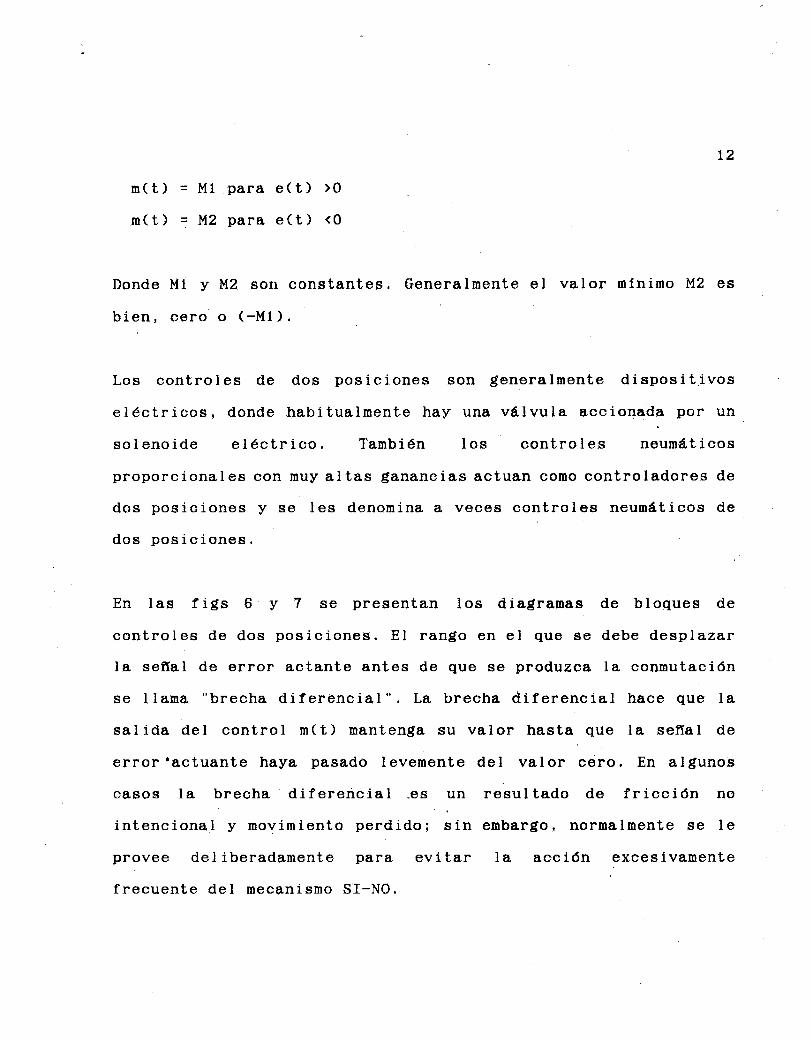
) = M1 para
) = 142 para
Donde Ml V l'12 son constantes. Generalmente el valor mfnimo 142 es
bien, cero o (-M1).
Los controles de dos posiciones son generalnente disposi.tivos
eléctricos, donde habitualmente hay una válvula accionada por un
solenoide eléctrico. Ta¡nb i én los controles neumát i cos
proporcionales con muy altas Eanancias actuan como controladores de
dos posiciones y se les denomina a veces controles neumáticos de
dos posiciones.
En las figis 6 y 7 se presentan los diagramas de bloques de
controles de dos posiciones. El ranglo en el que se debe desplazar
la señal de error actante antes de gue se produzca la conmutación
se I lama "brecha diferencial ". La brecha diferencial hace que la
salida del control m(t) manten$a su valor hasta que la señal de
error'actuante haya pasado levemente del valor cero. En algunos
casos la brecha diferencial -es un resultado de fricción no
intencional y movimiento perdido; sin embargo, normalmente se le
provee del iberadamente para evitar la acción excesivamente
frecuente del mecanisno SI-NO.
e(t) >0
e(t) <0
m(t
m(t

F'igura 6 Dlagrama de bloques controL SI-NO

Flgura 7
R( t>
Dlagrana dedlferenciaL
bloques cont.rol S.I-NO
r.r(t) e(t)
con brecha
o
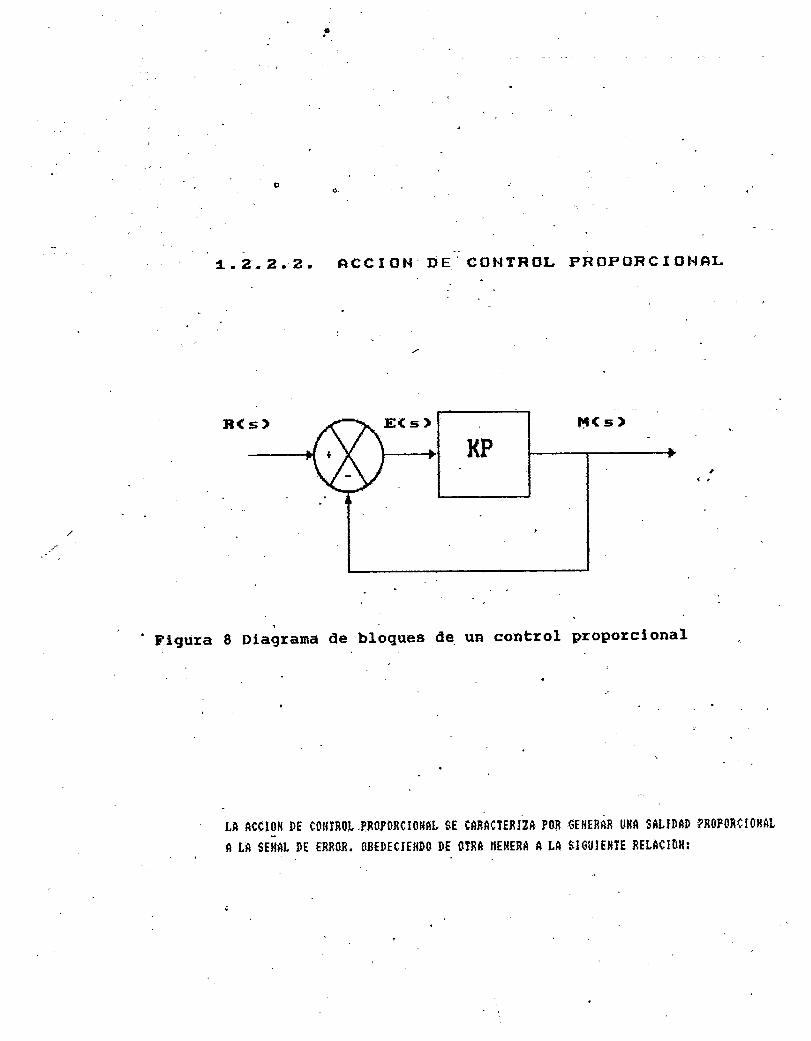
t.2.2.2.
Dlagrana
ts Accl0l{
R tR SEII*L
fiCC I OH. DE
r'
de bloques
s0HIB0t .PR0P0BC I 0llf,t
EBBOB, (IBEOECIEIIDO
COT.ITROL FROFBRC I OI.IñL
control proporclonalde uRFlgura I
SE
DE
I}E
IIE
cñnf,ctERIzf, P0n
llIBN TEilEBf A tN
6EHEnfiR Ut{R S0LtDñIf Pfi0P0nt¡oil4t
S¡GUltltfE BEL*CI0ll¡

16
M (t) - Kp e(t), o en magnitudes de transformadas de
Laplace M (s)=Kp
E (s)
donde Kp se denomina sensibilidad proporcional o gianancia.
Cualquiera que sea el mecanisno en sf, y sea cual fuere la potencia
que lo al imenta, €l control proporcional esencialrnente es un
ampl if icador de ganancia ajustable.
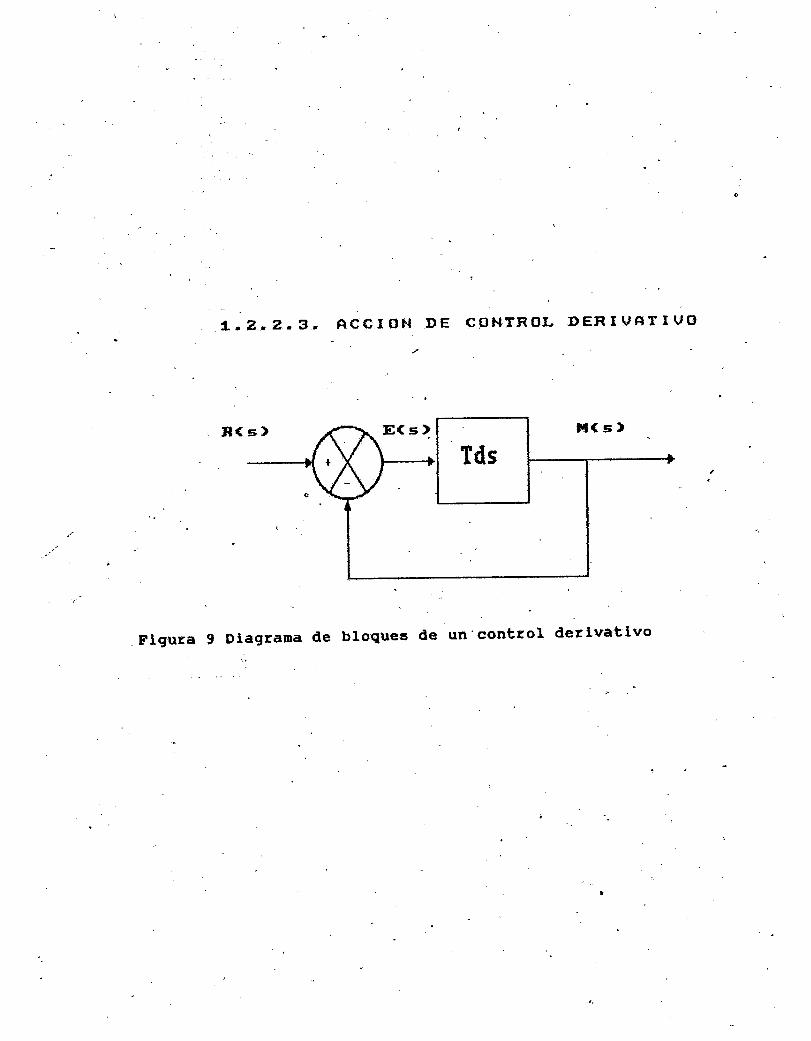
6ñLoü¿útJe ACCIOH DE CgHTROL DERIUATIVO
n{
, Flgura 9 Dlagrana de bloques de un'conttol derlvatlvo

La acción de control derivativo queda
ecuac i ón :
definida por
18
la siguiente
m (t) = Td e(t)
llevando la ecuación
transferencia queda:
a transfornadas de Laplace la función de
M(s)= Tds
e(s)
Donde Td es el tiempo derivativo. La acción de sontrol derivativoa veces denominada control de velocidad es cuando el valor de
sal ida del control es proporcional a la velocidad de variación de
la señal de erro"."t.ru.nte. El tiempo derivativo Td es el intervalode tiempo en el que la acción de velocidad se adelanta a Ios otros
tipos de acción de control.
Este tipo de acción de control es importante debido a que entra acompensar las perturbaciones que se pudier¿n producir.
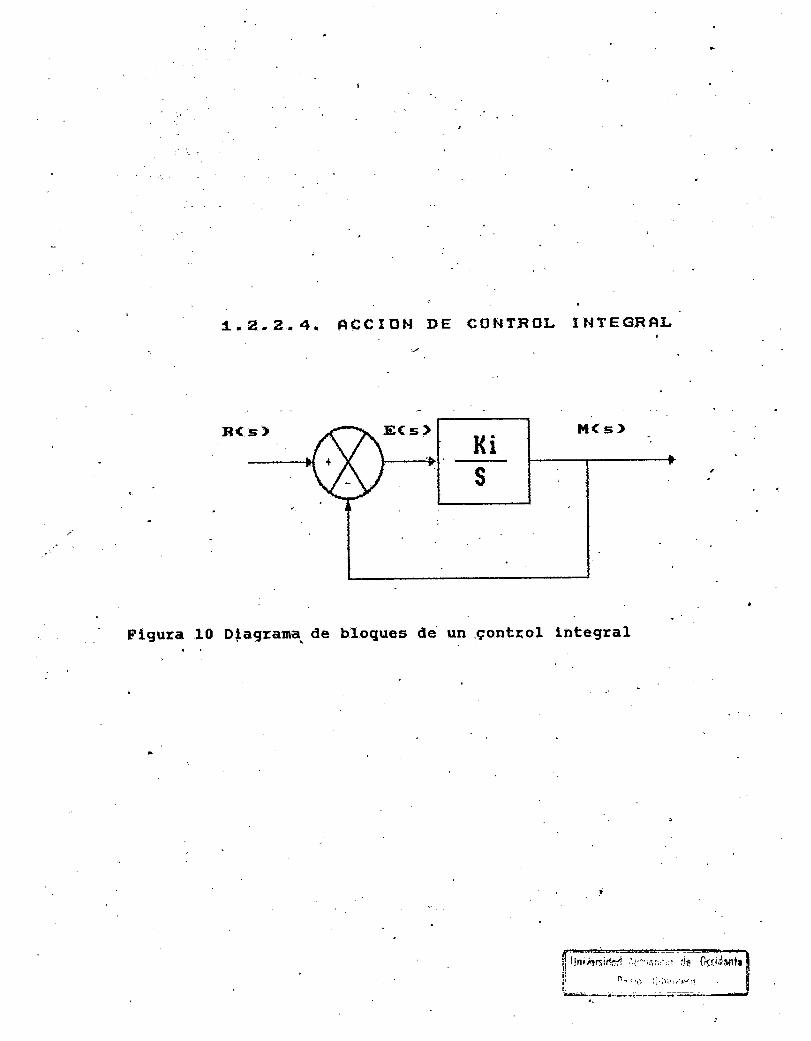
3-.2.2. 4. ACC r BH DE CONTROL I I.ITEGRRL
Flgura 10 Diagrana de bloques de un .qontrol Integral

La acción
ecuac i ón :
de control integral queda definida por
20
la si9uiente
m(t)=Ki e(t)dt
llevando la ecuación a transformadas de Laplace tenenos
M (s)
e (s)
Donde Ki es la constante de inteÉlración, que es regulable.
La principal caracterfstica de este tipo de acción de control
radica en el hecho de integrar el error a través del tiempo; es
decir, que cuando el error se mantiene constante¡ la acción de
corrección se incrementará a través del tiempo, hasta lograr
minimizarlo. Debido a esta caracterfstica este tipo de control se
denomina control de reppsición,
Paralelamente a este tipo de acciones de control se presenta la
combinación de estos dando origen a los modulos que se expl ican a
cont i nuac i ón .
Ki
S

L.2-2.5'. COHTRgL
at 5)
PRT}PBRCIOI.IAL E IHTEGRAL
Hp{l+tis}Tis
Flgura 11 Diagrama dee lntegral
{o
control ptoporcionalbloques de uri

22
La acción control proporcional e integlral queda definida por la
siguiente ecuación:
l
m{t)=w$)-*¡n*
Llevando la ecuación a transformadas de Laplace la función de
transferencia es:
M(s) 1
= Kp(1+ )TisE(s)
Donde Kp representa la sensibilidad proporcional ó Efanancia y Ti el
tiempo integral, tanto Kp como Ti son regulables,
Como su nombre Io indica estos conüroladores combinan la acción de
control proporcional y la acción de control inte€lral.
Su principal caracterfstica es la de inicialnente real izar la
corrección proporcionalmente a la señal de error, más si este error
se mantÍene a través del tiempo la acsión de control se incrementa
debido al control integral.
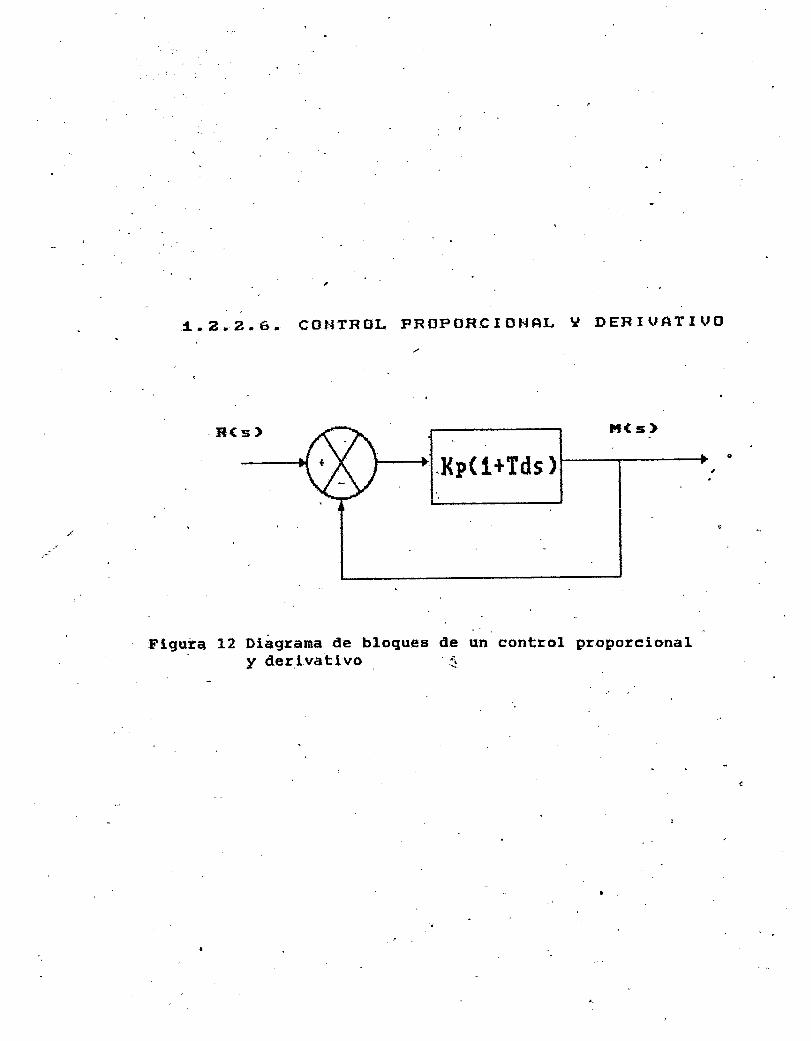
L.2.2.6- C0tdTRBL PRT}PBRCIOI.IAL Y DERIVATIVO
Flgura 12 Dlágrarna de bloquesy derlvatlvo
control proporcionalde un
l(p( t+Tds )

24
La acción de conürol proporcional y derivativo queda definida por
la sigiuiente ecuación:
tn(t)=gr4t+brdl+A,
0
Llevando la ecuación a transformadas de Laplace tenemos
M(s)= Kp (1 + Tds)
E(s)
donde Kp es la sensibi I idad proporcional y Td es el tiempo
derivatlvo, tanto kp como Td son regiulables.
Como su nombre lo indica estos controladores combinan la acción de
control proporcional y la acción de control derivativo.
Su principal c¿racterfstica es la de inicialmente realizar la
acción de corrección proporcionalmente a la seffal de error, más sise presentara a través del tiempo un incremeDto brusco en la señal
de error, la acción de corrección se incrementará debido al control
der ivat ivo.
1.2,2,7. Control proporcional, derivativo e integrativo
La acción de este contro I queda def inida por I a s iglui ente

25
LI
13
ecuac ión:
n{t) = Kpc(t . Wrafica. # ¡or*
evando la ecuación a transformadas de Laplace veanos la f iSiura
Como su nombre lo indica estos controladores combinan los tres
tipos de aceión. fnicialmente real izatá, la corrección
proporcionalmente a la señal de error, más si la señal de error *:
mantiene a través del tiempo, l& acción de correccidn se
increnentará debido al control inte8ral, má,s si ocurriera un
incre¡nento brusco en la señal de error, la acción de corrección se
incrementará debido al control derivativo.

a
Itl( s )E{s)
J.\Tis/
ITP[ t-+T11s+t\
Si"qut* t5 Diagrama deder lvatlvo
=If
blogues de un controle lntegral
proporcional
Hp( 1+T i s+T i Tds')

27
2, DIVERSAS REGULACIONES EN UN MOTOR DE CC
Los controles. electrónicos tienen como ffn, nejorar las
caracteristicas naturales acercándolas lo nás posible a las
ideales,
Las re8lulaciones que se pueden ejecutar en un motor de CC son:
Reglulación del número de revoluciones
- Regulación del par suministrado
Limitación de la corriente máxima en el arranque
Inversión del sentido de giro,
Frenado
- Regiulación del núnero de revoluciones
Es una de las principales regulaciones ya que permite elininarcostosos y engorrosos cambios mecáni"gs. Permite tanbién gran
adaptabi I idad del motor a las dif erentes exiglencias de la
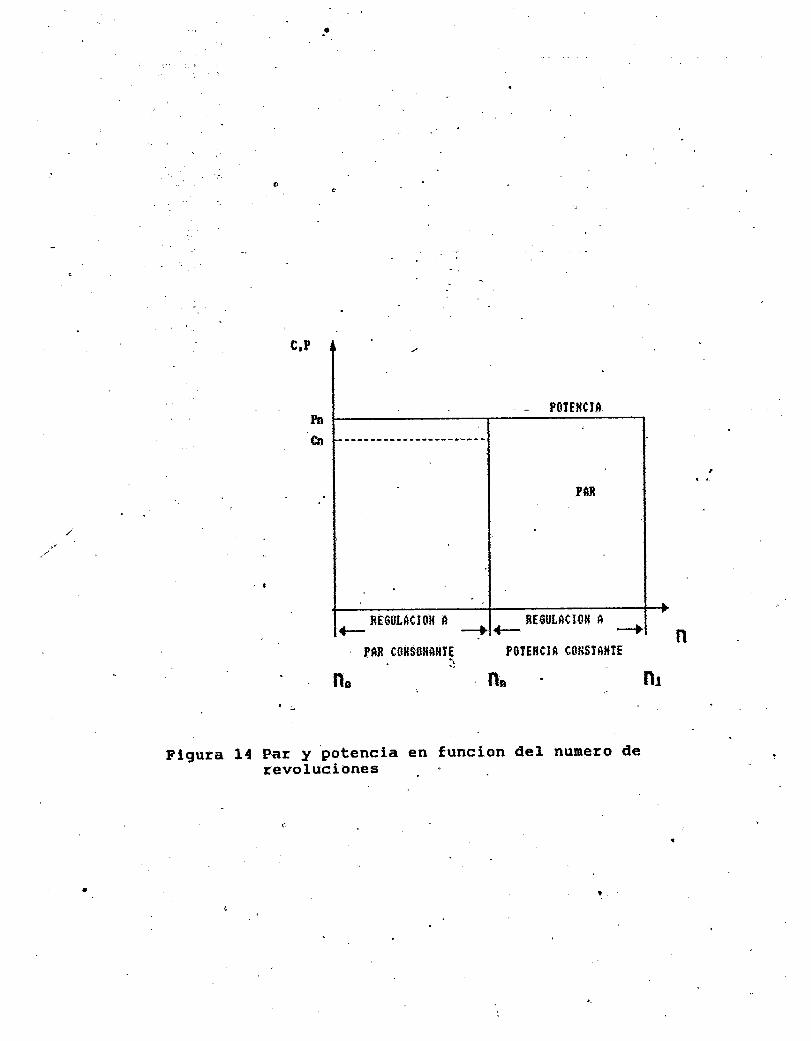
máquina. Esta regulación puede hacerse.a par constante (regulando
la tensión de inducido) o bien,
ürP
fnf,¡l
Flgura 1'l
.!l . llc
Par y potencla enrevoluciones
c
P0tEfic¡A e0H$I*fflE
Iln [|r
funcion del. nunero de
ntGuLA{I0il n+.-. PSA C0|ISSH*HIE

2g
a potencia constante (reÉiulando la corriente de excitación).
En la figiura 14 se presentan el par y la potencia en función del
número de revoluciones n.
Con Nn se indica la velocidad nominal fijada por el constructor
para la regulación a par constante, con Nl se indica eI
lfmite de velocidad, también fijado por el constructor, para la
regulacidn a potencia constante con No se indica la velocidad
mfnima permitida en el campo de
la reEulación. El valor de No decide el tipo de enfriamiento del
motor. En algunos controles no es una velocidad es una velocidád
nula, o sea, el motor debe producir un par a velocidad nula, Brr
otras palabras., a velocidad nula el rotor está recorrido por una
corriente cuyo llmite es la corriente nominal náxima. Todo el
calor producido debe ser eliminado con una ventilación externa.
La relación No,/Nn representa la relacidn de regulación a par
constante y cuanto mayor €s, mayores son las posibilidades de
control. La relación Nl/Nn representa la relación de regulación
potencia constante.
Nn = Vel. nominal; No Vel.
No---) Re$ulación par
Nn par cte
mfnimai N1=lfnite de velocidad
-Y ) Regutación aNn potencia constante
Otra caracterfstica. del control
en la inercÍa al variar la carga
de revolucionos (error) al pasar
(o estatismo) se expresa como un
de velocidad en los motores de CC,
y precisamente la variación del #
de vacio a plena carEa. La inercia
error entre vacio y plena carUninrsidod di,ilricnnc ós 0ctiüalr
lr,tin Fjrblr+¡r::

30
se da en porcentaje (%) de la velocidad náxima. Los er.rores de
estatismo más corrientes están comBrendidas entre 0,1 3%. Los
valores más bajos se obtienen en Ios controles con DT (Djnamo
Tacométrica) mientras los más altos se obtienen tonando como
referencia de velocidad la tensión de inducido, este segundo
sistema se usa en casos que no requieren una. Sfran precisión y se
requiere ahorrar el costo de la DT.
Regulación del par
Este control consiste en Ia regulación de la corriente absorbida
por el motor, lo que permite la regulación del par en el eie, ya
que el par es función directa de la corriente Ta del motor. Se
utiliza en máquinas que requieren una fuerza de tracción como
bobinadoras, tref i ladoras para metal es, etc.

I-la4
Flgura 15 Revoluclones Vs corrlente
I .3
-la -¡3 tan.24 2l ¡n
ES LR Fl6tlnfi 15 SE BEPBEStllltl
Lf, IIIIITf,CIBII DE LA C(IBBIEI{TE
Et t{UllEB0 SE BEU0LUC¡0|{E$ n Ef{ Fllllc¡0tl $E
Ia.

32
Se puede. observar que el número de revoluciones se mantiene
constante al variar la corriente fa (y por tanto al variar la
carga) hasta el valor fijado como limitación. Se observa el, punto
Zfan en el que interviene el eircuito que limita la corriente en el
arranque, en el caso que no se requiera otra limitación.
Linitación de la corriente náxina en el arranque
Esta linitación sustituye el reóstato de arranque. Es sabido que la
corriente en el arranque tiende al valor de cotocircuito, valor que
no puede soportar el motor. Las sobrecargas permitidas están
comprendidas entre el 50 y eI 100% de la corriente para un tiempo
máxino de aproximadamente 12O segundos, en el monénto del arranque,

tj.l
-:
Par en el arranque ende revoluciones
\\\\\
funclori del numero deF lgura 16
T't Lfi F¡(UXf, 16 $E,8EPBE$EI{TS Et Pf,B EII EL AB*íIISIIE EII FUTICIOII DEI IITIñEBO DE
BEU(}LUC I t|I{E S
q-

34
Inversión del sentido de giro
En el motor de CC con excitación independiente la manera de
invertir el sentido de Eliro consiste en eambiar el sentido de la
corrienüe ó en las arrol lamientos de excitación ó en los
arrollanientos del inducido. La inversión puede hacerse a mano ó
autonat i cament e .
- A nano: primero hay que cortar la alinentación.y comprobar que
e I motor está parado, luego se podrá suministrar al i.mentación
con la polaridad invertida. Antes de hacerlo Sirar en sentido
contrario hay que cerciorarse que el notor está parado. Para
evitar falsas maniobras, el circuito de inversión puede estar
provisto de sistemas de bloqueo (relé o retardador) que no
permitan el arranque del motor con velocidad invertida hasta que
no esté completamente parado. Estos sistemas presentan el
inconveniente de la lentitud de operación y la imposibilidad de
progiramar la inversión. La lentitud de la operación de inversión
está relacionada con el tiempo que enplea el motor, unido con la
inercia de la máquina a éI conectado para detenerse. Este tiempo
se puede disninuir frenando el motor -como se colocó- a mano.
Automáticamente: se le suministra el sistema de control la
información necesaria para efectuar la inversión, con las
operaciones de moderar, parar arrancar en sentido inverso,
alcanzar la velocidad que requiere el motor y la máquina
35
conectada a él
Frenado del motor
Para frenar el motor y por consiEiuiente la máquina a
conectado, el sistema nás simple es transformar toda
cinética de la máquina en energfa eléctrica y disiparla
calor sobre una resistencia.
la
la
en
que está
energ f a
forma de
Esto se obtiene con un motor de excitación independiente como lo
muestra la f iÉlura t7.
Este sistema presenta alEiunos inconvenientes ya que el frenado
eficaz solo inicialmente, mientras reduce, a medida que el rotorva parando, ya que la fuerza electromotriz del generador depende
la velocidad
Para que el frenado sea más eficaz serfa necesario variar la
resi.stencia a medida que el motor desacelera. Otro inconveniente es
que este tipo de frenado sólo es posible en el caso que el motor
deba ser parado.. En el caso de necesitarse rlnicanente una
disminución de velocidad. el sistema es ineficaz,
es
se
de

PABS FSEIIAfi EI IfgI{}N
Et SI6IEII* }I*S sIilTLE
EII EHEBSIS ELETIBIC*
v pt|B e0ilsl6ttlEil'E tÍ flsou¡fl$ f, tñ QtlE E$ts t{lfltct*D(|,
Es l*lrsFoxíen tsl* ir meReln cIHEIIcfi IrE t0 rsQ$ttfrt,J D¡sIP*rlE Eil FOBIIf, DE CAI{}B S{}BI{T UIIS BES¡'EIICIR.
utxc
Figura L7 Frenado con motor de excltaclon lndependlente
nUa

37
Para solucionar algunos de estos inconvenientes se ,recurre aI
frenado de recuperación. Este frenado consiste en hacer pasar el
notor de f-uncionamiento cono uti I izador (corriente absorbida de la
red) a funcionar como Éienerador (corriente suministrada por el
motor a la red) a funcionar como generador (corriente suninistrada.
por el motor a la red). Este sistena elimina el problema de la
disipacióndel calor y de la inconstancia en el frenado. Para hacer
pasar el motor de utilizador a generador es suficiente con cambiar
el sentido de la corriente de inducido. De esta ¡[anera se obtienen
desaceleraciones e inversiones de marcha c@etamernf,e automáticas
y con tÍempos muy breves.
2.1, ACCIONAMIENTOS
Los accionamientos es un conjunto de elenentos c¿.paz de arrancar,
regular, mantener constante, frenar y parar un motor de CC. Un
accionaniento es "reversible" cuando además dé las funciones
indicadas'es capaz de obtener el frenado por recuperación..
-c
FU|{CI0lf0nIEflto cBí0
GE|{EB*D0B {6lng A IZQUIEB}nS)
Ft H{t(ufAílEHl0 c0fl0
tfo!0B {st30 f, l?Qu¡EnDss)
FüffcIsBeillEf{10 c0lt0
fr8tos (srs0 s ItEnEcH*s)
FUHCloISilIEfttB
GEIIEBSDBB (6IT{}
IU
f, tz0ulEBsss)
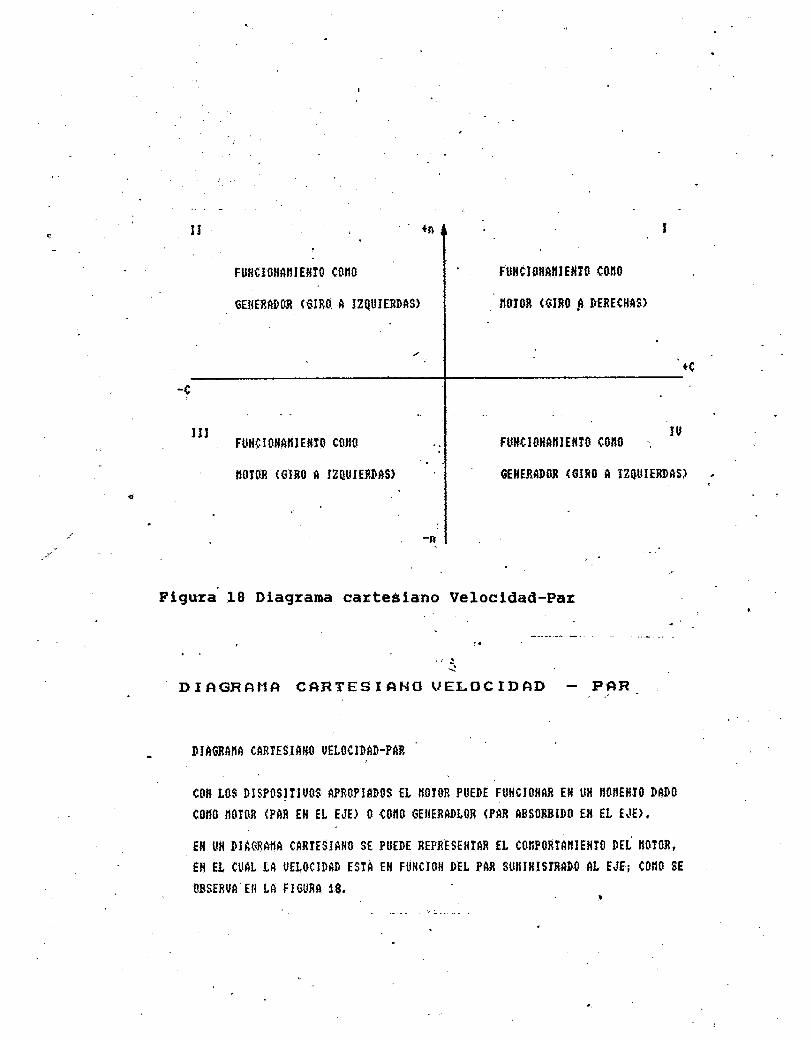
Figura 18 Diagrana carteslano Velocldad-Par
:.', t
DIRGRA}14 CAFTESIAHO TTELOCIDñD PAR
DTAGNñilS CfiBTES¡f,I{{¡ I'ELO{IDAI-PAB
c0tf t0s DtspfistItuos RFR0Ptf,I)0s EL tfot0B pttElE FüilcIoilAB Eil rtil il0ftEHto DAD0
C{¡IIO TI{}IOB (PAR EH €t EJE} {} .CI|II|} GEIIFBSDIOB {PAR ABSOBSII¡(} EII EL E.I[).
EII IIII DIAGBAI1A CRR¡ESIAIIO SE PUEDE BEFIESE't!f,B Et {t|NPOBTSIIIEIITO DEL II(|T(]B,
EH tl CUAI lf, UEL0CtDtlD ESr$ Erl tUltCI0H DEt PSR Stl]lltllslR$D0 f,L EJE; C0fi0 SE
oEsEnuA Erl LA ilGtl[f, 18,

39
Sobre el eje de abcisas se representan los valores + C, que
corresponde a un par producido en el eie del motor, y -C, para un
par absorbido (acción de frenado).
Con este diagrama es posibl e mostra'r todas las condiciones posibl es
del funcionamiento del motor
Se pueden tener éntonces:
- Accionamientos en un solo cuadrante, ea-todos aquellos casos en
los cuales el motor solo pude suministrar un par notor en el eje en
un solo sentido del giro (Cuadrante I);Acciona¡niento en 2 cuadrantes, en todos aquellos casos en los
cuales el motor pueda suministrar un par motriz en un sentido de
rotación y un par de frenado en sentido opuesto (Cuadrantes I y
III)
Sobre el eje de ordenadas
correspondientes al giro a
i zqu i erda .
Accionamiento en
suministrar par notr
se repr-esenta'n los valores de +N
la derecha y con -n el Efiro a la
4 cuadrantes, cuando el notor puede
par de freno en ambos sentidos de giro.
Univr¡rsirleC .{¡!toni;$o ds fkcido¡trr.3-'.! ljl!11¡,rj,::,,
los
izy

((360
Figura
' '' :
19 Caracteristlca
' i:¡ .r
Par-Nunero
{}g6D
de revoluclones

41
Las caracterfsticas con lfnea continua (Cuadrantes I y M son las
que representan un accionamiento con un puente enteramente
controlado, €l cual manteniendo inalterable el sentido de la
corriente, puede invertir la polaridad.de VM, lo mismo vale para
las caracterfsticas representadas con I fnea a trazos (Cuadrantes fIy III) un accionamiento en los cuatro cuadrantes solo es posible
con 2 puentes enteramente controlados y conectados en oposición.
2.L.1. Accionamiento para motor de CC con Erupos I{ARD-LEONARD
El primer accionamiento para motor de CC que ha tenido éxito ha
sido el grupo Ward-Leonard. El Erupo inicial estaba. compuesto
solamente de máquinas eléctrieas y fué má tarde cuando algún
componente se sustituyó por circuitos electrónicos. Nació asf el
grupo Ward-Leonard con control electrónico.
El girupo tradicional se componf a por las sigluientes náquinas:
Grupo convertidor CA(CC compuesto por un motor de CA y un
gienerador CC de excitación independiente

E lgura 20 Grupo ltard-Leonard - lntcial ( conBuests solanente
' de maquinas electricas )
GRUPE I.IAFD-LEC}.IARD I I.I I
}IATIU I HAS ELECTR I CAS)
CIAt( CTIfTFUESTO SBLAHET.ITE DE

43
' El notor de CC ó de trabajo
La dfnamo taquimétrica
- Una excitatriz para alimentar los circuitos de excitación y su
reós tato
Los controles que el Erupo l{ord-Leonard tradicional podfa ejercer
eran los siEiuientes: '-
2.L.1.1. Regulación del Nrlmero de Revoluciones del Motor
El motor trifásico mantiene en movimiento constante a el Éienerador
CC. La tensión de sal ida de el Élenerador CC depende, sin enbarg¡o,
del valor de la corriente de excitación.
A una variación de la corriente de excitación corresponde una
variación de la tensión de sal ida del generador CC y por
consiguiente una variación de la velocidad del motor (Regulación o
per constante).
2.1.L.2, Estabi lización del núnero de revoluciones
El circuito de excitación de la excitatriz está recorrido por una
corriente de excitación que es función de la tensión elegida conel
potencionetro P y por la contratensión desarrol lado por la DT.

44
fnicialnente con el motor de trabajo parado, la corriente de
excitación de la excitatriz dependerá de la tensión recogida sobre
el potenciómetro P; Et Generador CC dará tensión y el notor se
pondrá a funcionar. Con el motor en moviniento, gira también la DT
que producirá una tensión de sentido contrario a la del
potenciónetro P. La excitación resultante en la excitatriz quedará
reducida y también disminuirá la tensión de s¿l ida del gfenerador
CC. El motor alcanzará una velocidad tal que la.tensión recogida
por el potenciónetro P, menos la tensión suministrada por la dfnano
taquimétrica, puede mantener una corriente suficiente en la
exciLatriz y, por consigluienüe una cierta tensión de sal ida en el
Generador CC. Es importante que esta velocidad se mantenÉla aunque
varie la cargla en el motor. Si debido a un par resistente disminuye
la velocidad del motor, disminuirátambién la contratensión de la DT
con lo cual aumentará la corriente de excitación de la excitatrizy aumentará, también la tensión Va en los bornes del motor. El
aumento de la Va dejará la velocidad del notor en un valor, tanto
más próximo al anterior, cuanto mayor sea la ganancia de la
excitatriz. Sucede igual para la disminución de la carga.
2.1.1.3. Frenado por recuperación. Cuando la tensión del generador
CC se reduce o anula, el motor, debido a la inercia continrla
Slirando y a causa del flujo de su excitación trabaja
como un generador que al imenta al Elenerador principal haciéndolo
funcionar como motor. Puesto que el generador principal, arrastradopor el notor CA, esta'girando casi a la velocidad de sincronismo,

45
basta un pequeño aumento de la velocidad de el generador principal,
que ahora se comporta como motor, para poner al notor de CA a la
velocidad de sincronismo, y por tanto, €D condiciones de
suministrar energfa a la red. La operación de frenado por
recuperación se produce sea cual sea el sentido de Éliro del motor,
y por tanto, puede clasificarse como un accionamiento a cuatro
cuadrantes en el diagrama velocidad-par.
2.1.1 .4, Para la inversión de Éiiro, so-lo se requiere la inversión
de la corriente en los arrol lanientos de excitación del generador
principal, corriente que es muy pequeña comparada con la corriente
de inducido del motor
Desventajas del grupo Ward-Leonard Tradicional2.1.1.5
Notables variaciones -de velocidad al variarespecialmente para bajas velocidades de trabajo.
la carga,
- Imposibilidad de proglramar las diferentes velocidades de trabajo
Dif icultad de accionamiento.
2 .2.G
GRUPCIS LIL COH COI.ITROL ELECTROHICON
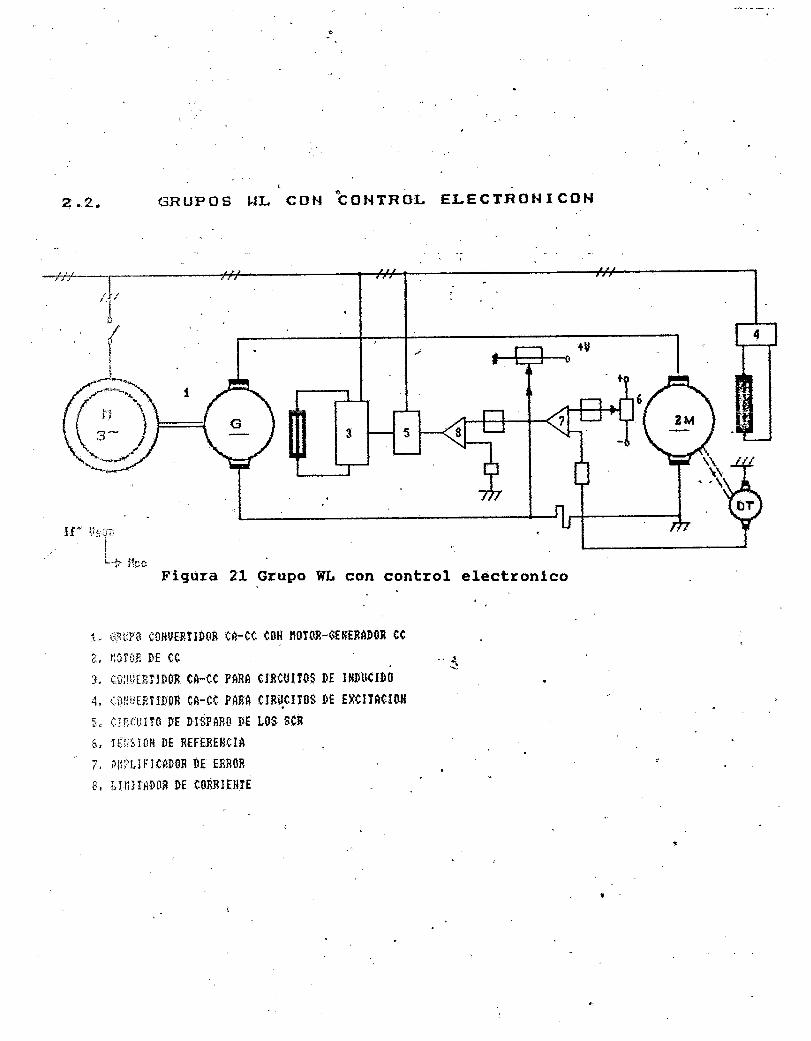
Flgura 21 Grupo lfL con control electronico
i. ,l!ilift t0lt'JEStl$08 tf,-*C C0l{ tl0I0g-8Ef{É8*D{}B eG
?, ti0?itf; $E (C ,i3. f;¡r;tÉÉTlnoB c*-{e Pf|ÍA cI*Ctlltss I}E llfsucls0
,i. ';ü;jitiÉiII)08 CA-CC PAfiA CIBü,CII0S Dt EHCIfSCI0fI
t. t:lr,rrri r0 DE DISPABI I]E L0S $CB
i, rátiriüf'r DE nEFERil{il4
?, PIIIL¡FiTAD(IE DE EBE(|E
,1. ttllllrii'¡8 DE C0RBItlffE
4T
Se ha conservado el grupo convertidor CA-CC conpuesto por el motor
trf iásico y el EÍenerador CC, por su sinpl icidad y la ventaja del
f renado de recuperación. Los d.emás Élrupos cono la excitatriz, los
reóstatos , se han sust i tu ido por e I ementos e l.ectrónicos . El ef ecto
amplificador de la excita|"riz se ha sustituido por un verdadero
anplificador de error. La DT ya no suninistra la corriente para laexcitatriz, sino una señal de error para el amplificador.
2,2,1. Grupo convertidor CA-CC con motor generador CC
Este grupo permite la conversión de CA a CC con el fin de al imentar
el voltaje de armadura en el motor de CC, al cual se le va a
controlar la velocidad
2.2.2. Motor de CC
motor CC alimentado por el generador CC; y es al cual se leregular Ia velocidad
2.2.3. Convertidor CA-CC para circuitos de inducido
Generalmente está constituido por un puente rectificador nonofásico
semicontrolado, dada la baja corriente del campo del glenerador CC.
Es el
vaa

48
2.2.4. Convertidor CA-CC para circuitos de excitación
Este converüidor, como el anterior, dada la baja corriente de campo
del motor se utiliza un puente rectificador monofásico.
2,2,5. Circuito disparo de los SCR
Como su nombre lo dice es el circuito resporisable del disparo de
los SCR, que a su vez va a producir la regulación del voltajeentregfado.
2.2,6. Tensión de ref erencia
Con un potenciómet.ro P, se impone un voltaje de referencia, que se
constituye en referencia de la velocidad a alcanz&r o regular.
2.2,7. Ampl ificador de error
Es el circuito responsable de elaborar la sefial de error en lavelocidad, os decir, la diferencia entre la tensión de referenciay la tensión de realinentación de la velocidad (entregada por una
DT acoplada al eje del motor a controlar).
4.9
2.2.8. I-imitaCor de C<.¡rrierrte
ljs el circuito responsatrle de I imit.ar la corriente de campo del
gener:acior CC, cieI grr¡po {:onvertidor CA-CC con motor-generador CC.
Con un circuito má.s completo, se ha rluerido sustituir el.
conver t Ídor mot or-gerrrerador CC por un dob I e puentg de SCR
r:nteramente controlado -v que puedei, r,:onseguir t.anto ld inversión de
m¿rrclta cofno r-l i f renar-io por recu¡rerac ión, exactamente como e l
(::onverliclo: motor-generador. Con ello se ha logrado el llamado
grupcr WI- entera.mente eir-rc'rrónieo o "a.ccionamiento revefsible para,
nro.tor rle CC" ouyc, e$(lrifinü Ír. bioqtres se representa en 1a figura No.
fq
Ilt¡chos de lcs el ementcs rlrir' ()omponen el grupo WL -conlas mismas del
accionarnir¡nto r€rversible. El rlnir:o elemento qr¡e en el glrupo WL er.i
rliferenter del accionamienLo rev(:rsilrle es el número 1, que
crJmprerncle c l nir¡ i r¡r rlr-, riA -v e l gieneradclr CC.
ijl motor de CA t.rifásjc-,t l)liF(lr, ser asfnr:rono o sfncrono. Se escoge
rl rnoLor sf nr:rcritr¡ r'uairrl,o le corresponcla además del arraste del
generaclc¡r la. fuit¡:ió¡r clr: ref as¿clor'. Pa-ra elegir la potencia que debe
.surninistrar e I ,' j¡ ttaS' rlue Lener p:esente el nendimiento riel
¡ienera.rlor y clel moti,i ,le C(1.
Univrnidd 4¡rtnnano dn ftcilufrñ.¡'n lrhlir¡.'r¡
50
Par¿r los motores asÍncroiros, se escogerá el rotor en cortocircuito,
nás robusto y er:onóiniuo, sirlmpi'e:J cuAnclc¡ no ¡re presenten problemas
en el ai"ranque,
!ll generador cletre ¡rodcr ¿rlimenta; ei motor de CC. A1 proyecüar el
,'i.rtuitr; hay <¡rie fene¡ en ()usrrta el rendimiento del generador y del
r¡rotor 11e CC. La ten:itin Cr: induc:ido del generador ha de ser igual
a, ia rlel. jndu<;ido riei motr,¡i. I-a excitación para el generador ha de
:1er de tipo inde¡rerrilicrte.
.Í,ln los generarlores peclr-reñor-, €Xisten a.rrol IamienLos para Ia
riuirresión rlel ma.gnetjsrnc¡ l*emanente, esl.e rlltimo es clebiclc a la
f r¡erza. coerc l t iva cl¡ 1c"¡s ma.t.r-r ia l es magnét. i cos de que están
i'(filstrr¡ irl¿r,:.. il rna,sirlr-l l , sntrr remanent e se evidencia cuandoe exiStc
irna tensjóti eri lr;s hr:rnr)s (l ¡'il gent:rarl or sienrlo cero la corrienLe cle
,.:-'.ir-:lIac:i.ón, Del"¡id,: a tsl.e rn;tginÉ-tisinr¡ se ¡lresentan prolrlemas com¡f :
'' El mot i-rr cle CC c(,ll€,',-rta{lr; a I Ef r:ne-adc¡r altnque tenga que pararsr},
r.s;.,r;:¡io"lmcn';e r-'ün (:í¿iEiari {r¿isi r:t;1as, tiende a seguir $irando.

- El magne{isnc¡ re[ianenle i¿leva r:l Ifmite inferior. de
i-educir-,n,lo así la i eiaeióll cie rcgiulacirJn.
- Elt má.r¡u il;as i..r,iüt, ñ¿t'-. ¡'I Í.a.'¿ine l i srnrl rFjrnanenl,e es ml¡y
51
I a ve I oc idarl
fuer t e
2,2.9. Solitr;iones pitl.r) eri.lir i:i¿r r:rl mrlgne:Llsmo remanente
¿
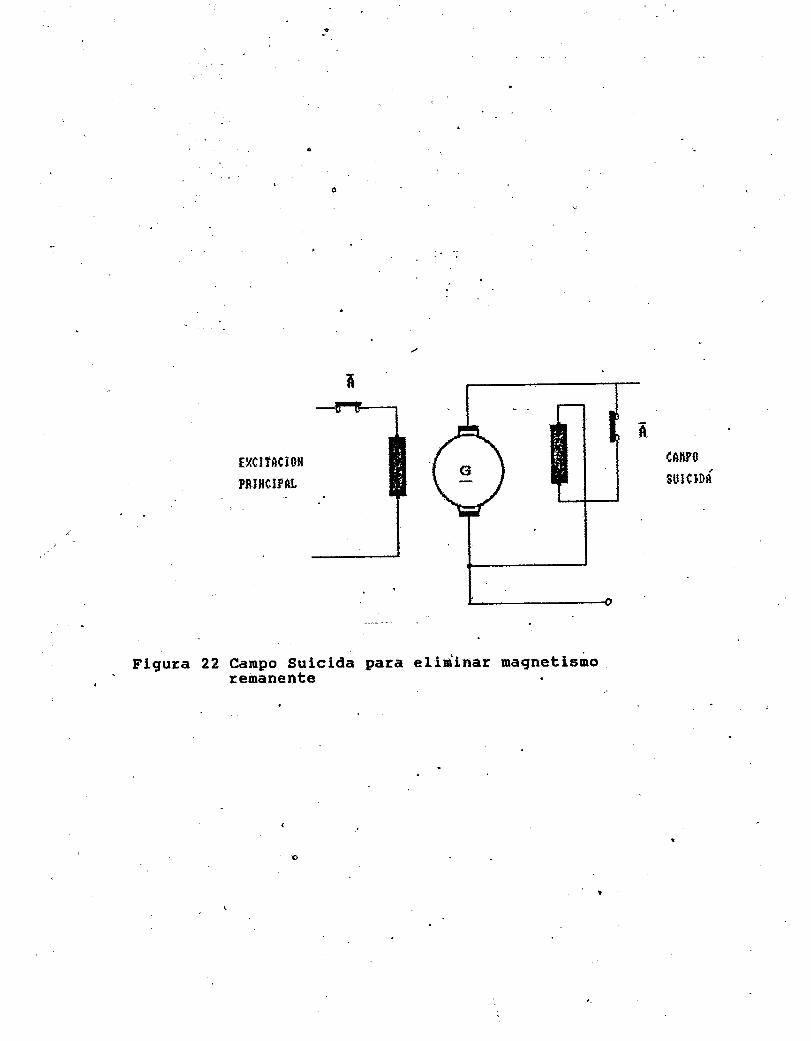
2.2,.q, I . Cainpo sr-it' irla.
l:$ un arrol la-nl .'ernt.o ili': tra ja resi stenr'ia. (lu€)! en el moment.o cle Ia.
j,rti:rr:i:¡.,ción de';F. {:oi'rjr:nte r.le r;xcitacitjn del generador, s(1
<;clnecta a la sai ida tlerl rni smo $enerarclor. A causa clel magnel.isrnc¡
ie¡nanente el e:'í'ollarie;llo estará re(:orriclo por una corriente,
l,ero Ia.s ccrl]exiones'erté¡r r-1is¡rrie¡tas de manera que crean un f lujo
rle r.x i iac ión {tr-}iltrar i t¡ ¡¡ I i'r:fnaltei)l,e (Ver Figiu ra 22) ,
?,,2.9,2. A,^rol l¿imient.r) tIo ,'tc itar ión rlr¡ a. l t.a. resistencia cone(:LarIo
r '.lI:5t¡rltt.i:ilierttr: a ia f r,¡ltl.e rir. r\r., i la,C iri;f
i)e esta ¡l¿rllr,,'ra. se pt'aldü(::(i urra ex(: i t.¿rc i c'¡n opuesta ¿l l a principal -v,
;,r-,.'(:orlsi$uiente, ta.ml:ié,r ¿rr:Lria c'iiarirlr"r ia excitac'idn queda cortada,¡:Fto es. cuanilo querrla r:rl rnaEfn(it isrno rr:riralrente. Si el arrol iamientcr
ri.:'r,sit, ii¡ro es'r;ielr r:iir:r.iari o :;e ¡rrorlrtr:e un f lrijo i$ual y opuesto
:'l reme.nent.e,. (\'Ior Fi6iiila 23).'
E'{Ctrf,c¡l}H
PBIIIC¡Pf,L
Flgura 22 Canpo Sulcidarenanente
para eliminar magnetismo

AAR$LISlllil{¡S ItE
aHA nE-RIS¡ÉXCIf,
Flgura 23 Arrollamientoel nagnetismo
'lde alta reslstenclaremanente'
que ellmina
o.
2.3. ACC r OHAfl l EHTOSt
ó
DE CC COH COIIUERT
PARA }IOTORES
I DORE€ R SCR
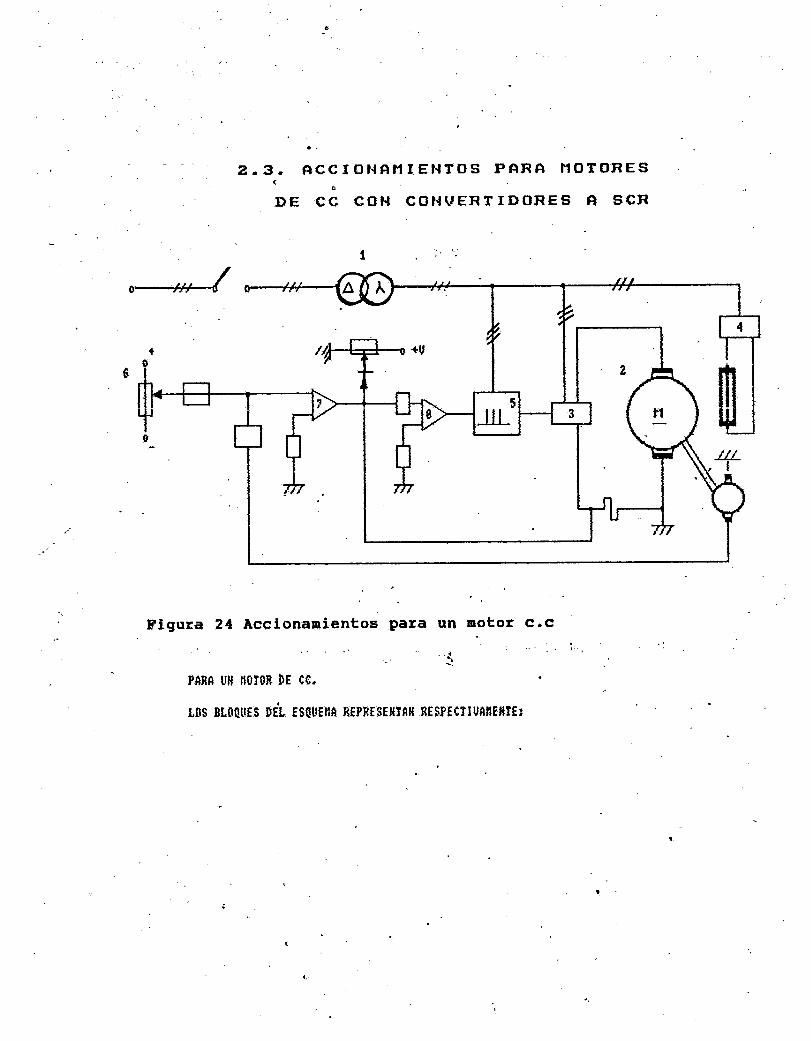
Flgura 2{ Accionanientos pala un motor c.c
iPABS lill rf0lsB bE ct,
r0$ Bt(|Qu€s osi esQtr¡nl BgPBEsElllRtl BESPECIIUsI{EllIÉr
A [)c)Jlt:iii:ar'ióir sÉr ii¡r:'¡i Li;r ¡:riili';is r]e cada bloctrue proponienrlo las
:r,,li.i'. ir.r r),J ! ;ná: v.i¿J"ilrr-.
l,irs f il¡rr.: ii)rres rit I I i'¿;r:sf r.'¡r'r¿:rJ clr ic,f'):
'Ado¡r!.ar l;r terrriió.¡'i r.l is¡roltii¡lr,: 13n la red, a las erigencias del
il:,i l. rJI .
Aislai ¡ri CjrOtlii.(.j rrlt'roi.rí¡nit:t¡ rle la. red, por mOtivcts drl
i:¿jlilr i ¡l¡'j.
Fittrar sr:b¡'ctensiriil¡:3 e\,'(:-;i1 ilt¡lr+'; Sienera.das en la. red.
- Linti t.a¡ rloll s,-: re¿]{:t¡t.rrt,ia li: rá¡iirla variar:ión de la corrienti:
rlt,/Cif 6,r) I¿tS SCR ri,j:'.¡r:-ltr.¡ ia (:r'¡liirt¡l¿Ción.
56
l'irt elr-:r:' irin tl¡rl¡c' r'l¡rt'e-stl i irrr 'i¡¿ts€ ell la potencia que ha cle
r- t¡l- j.i i;|.. l;-r-i' ) .!: l¡i.. (ai'¿ir'1-i'r'f '-;l.ir:a:; rlel converticlor que lt'
¡: I imenta.
Stl 1,en',lt;iIr l., I'iisr:'tt.{:'i. las '-i-"rii,,¡r1.r,r inrjic;aciones:
Telts i;.',ri ,lÉ, ,: I irtc¡itiii,, itit; l ]ta ilt- I p¡,,¡¡¡1i¡,, en ci¡e¡tt ¿r. e I prohl ema r-ie:
il .i'I'('ll¡ln i'.'lli,t', ejil)e'r'ialilr,rri,t' sOltl.r: r:l r:r.llí!(;tOr y- el pfOblenta de la,
:.rr(;(:jfir: ;le Ir-r\ ( ,Jl,1.'..''i!:.t.:-.
l\iúmr:r,i l¡láx,¡i:¡.¡ r.lFr t.tj!r'jlL¡r':ir.r¡tes: t'rl .joilstrt¡c1,or fija, f)ara c:arla
iii-)L¡)i. É'l llútttrit¡ iitát ii:rr, ilr,r ¡',:;\,r')lit() ji)Jjea ilue !)uede dar a par
í r)nstAtlit,, '"' üi 11 l:iilla,i-ll í¡¡iX i,¡rit rl¡, ^eV()lt¡CioneS qlle ptterle daf A
, i.'-;i.t-ttr: iil r-'i)!)lil.Ajj'Lt . I íf ij r,", r,.ijrr íir.t rlel'¡,-.i_r Se j- siUI)ef adOS,
l'ara l¿r ;'Érgir,il¿t¡-;itin ¿i i::li'i,.ri)nriAi, 1,,. el lfmite es delticlo a la máxiin¡l
:','i''i-t'i;.r ir!l;tr ',-:-r ri,i! rr,,r"rt¡-¡ rlisil¿;'erl inctÜr. Pa¡.a. la regiulación ¿.¡.
irotenc'to i.'(,tfiStA,le ,I I i;1,:ifi p1i ,it,i,¡ir-ic, a. la (:afA.Ctef lStiCa

;r:+¡:i_1.ir.'¿jI .i,.: Ii,s af l-(.)II:lii: ir-:ti IíiS ilgI
:: * r'
- Cara r''f i',¡'l s 1, i r:.:¿i ir:(.r'¡irt j f il : r,: -'
,'¡:,--.l'. ¡l, i)¿:.i'I i c¡LI a"t';liÉr!l l r" (rrj¿tllrio
57
inil¡¡i.:.i(io, a los cojinetes,
l.r {liüi.ilt,) rle inercia T, es de tenef en
:re I'e(lu : eraf¡ aCcionamientos veloces.
CA ;r Cl i)e ;'a ', i r: i rr;rr i to rle i nduc: ído
t ,.ri;,J,' (.j(lrt\"/t)r1. irJr;r
I t,,';ir:ri irl't ll (:l¡¿rrlf'ante
¡ia'l-l¡,; i'.
es frtndamental para el
rlesr-raclo, según'el rliagrama
Crln\-t,i'i. i,iL¡I'+rs p¿i.¿. i- J r L:c i nirarii i en f.o eil lln cua.clrante
(-r.,i los IIU'j,ilt,:ri iilclrlt!^:ir.'r't.s ¡, l.ri.^ásir:r;ii semiCtinl.rolAdo.s que por sti
ii:-l ttll'a \tr. ¿.?^ tl(-, ¡.¡i^e(lí't; irt.r,r'i i,' ci :=i¡i iro {l erl .,'al(,r medi(r rle la
i ::i.,''-: clc ,.-'"1:r-l¿. i'rr ,:(rtrs ij,,rettl.r. Ii¡. únicla posit¡il iclad rlt-,
iltnf:ir..r.i l::'i, tr::i'-r ,:'S r. .);liar if!i.rI r-¡l
At!"r.¡ + dos r:uadrantets
ilr¡nsLit..¡ i',it, :, !rc;r ¡rl iriir':,r1.á¿lr'¡l'r'q trifásilrr'rsi cll¡r:lr tnil.ltLeniendo ei mismo
r.'i.i'.irJ,: r-ll ii, i.i-!lf'li'r,lr,:, ;)rrt-rJen i¡t'',,t't i¡ Él valof medic¡ de l¿f.
tensió¡' rlr :-li i,1".,,..41:...t'ri s: p¡:É:rje lrl¡tr,.r' (ll .iutrr:it¡na.mienLo c:omo ,t|oLor
¡{

58
puente debe estar completanente controlado.
Circuitos para accionamientos en los cuatro cuadrantes
Son muchos más compl ejos, constituidos por al imentadores
trfifásicos. Varios circuitos perniten real izar tan funcionamiento,
entre los cuales se hal lan:
Inversión en el campo
fnversión en el inducido
2.3.4, Convertidores CA/CC para circuiüos de excitación
Se deben distinguir 3 casos:
- El motor ha de regularse a par constante. El flujo de excitacióndebe ser constante. Para este ffn sirve un circuito rectÍficador en
puente nornal, tanto monofásico (pequefios motores) cono trifásico(grandes motores).
- El motor ha de reglularse a par constante y a potencia constante. ,
El convertidor será un puente senicontrolado, como se ilustra en lafigura 25.
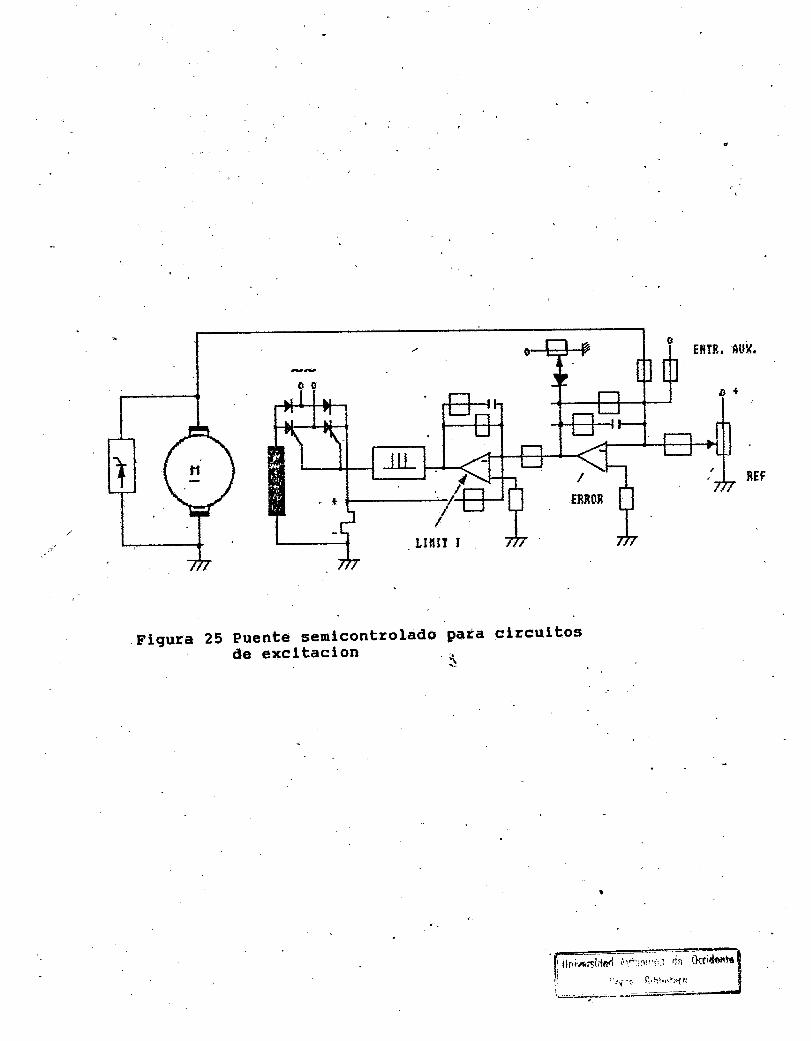
Flgura 25 Puente senlcontroladode excltaclon
para clrcultos
ffr"*+tfa¡,1r'+ri:¡r'rr:: rir {kridontr

Terminada la regulación a par constante y con
inducido en su valor nomin¿1, se puede obtener
aumento de velocidad desexcitando el motor.
BO
la tensión de
un subsigluiente
Apenas la tensión de inducido supera el nivel de referencia
impuesto por el potenciómetro Pl, se reduce el ángulo de disparo
del convertidor y, por consiguiente, la desexcitación del motor.
- En el motor además de la regulación a par constante; Fe requiere
tambÍén la inversión de la corriente de oxcitación. El convertidor
deberá ser del tipo semicontrolado con dos al imentadores en
antiparelelo y funcionando alternativamente, como lo muestra la
figura 26.
Cuando funcione el convertidor AV, fND,ha de estar bloqueado y el
motor gira a derecha. Cuando funeiona el convertidor fND, AV debe
estar bloqueado y el notor gira a izquierda.
2.3.5. Circuitos de Disparo
Representan
reÉlu I ac i ón .
asegurará s
una de las partes más del icadas en un sistema de
Donde un correcto funcionaniento del sistema de disparo
iempre un buen

Flgura 26
tff,tll)ll P*3f,
l,s IffuEBStf¡ll
Convertidor conantiparalelo
dos . al lmentadoreE:.
-t ¡
en

62
defuncionaniento de los convertidores de CA a CC. Estos circuitos
d.isparo están constituidos por:
Circuitos de sincronizacíón
Circuitos formadores de inpulsos
Circuitos de sincronización: Como su nombre lo indica es el
encar¡lado de sincronizar el circuito formador de impulsos respecto
a la alternancia de la red de alimentación.
Circuitos f ormadores de impul sos: El circuito f o.rmador de
impulsos sea del tipo que sea, tiene el fin de producir un impulso
de una cierta duración que ocupe sienpre la misna posición respecto
a la alternancia de la red de alimentación, produciendo una mayor
o menor reglulación de la potencia entregada por los convertidores
de CA o CC dependiendo del punto en que se dispare.
2.3.6. Tensiones de. referencia
En el control de los motores de CC la tensión de la DT o la tensión
de inducido debe ser constantemente comparada con una tensión
llamada de referencia. la cual debe ser:
'Muy bien nivelada, y por tantot con un factor de rizado muy bajo.

Flgura
Ffgura
27 Tension de t"f"t"..f"
470t¿
. ?e {,cc Z
tulsts
::
28 Tenslon de ref,erenclaen cadena
un dlodo Zgner
con dos diodos Zener
con

- Muy estable, y esto se obtiene con diversos
que se observarán a continuación:
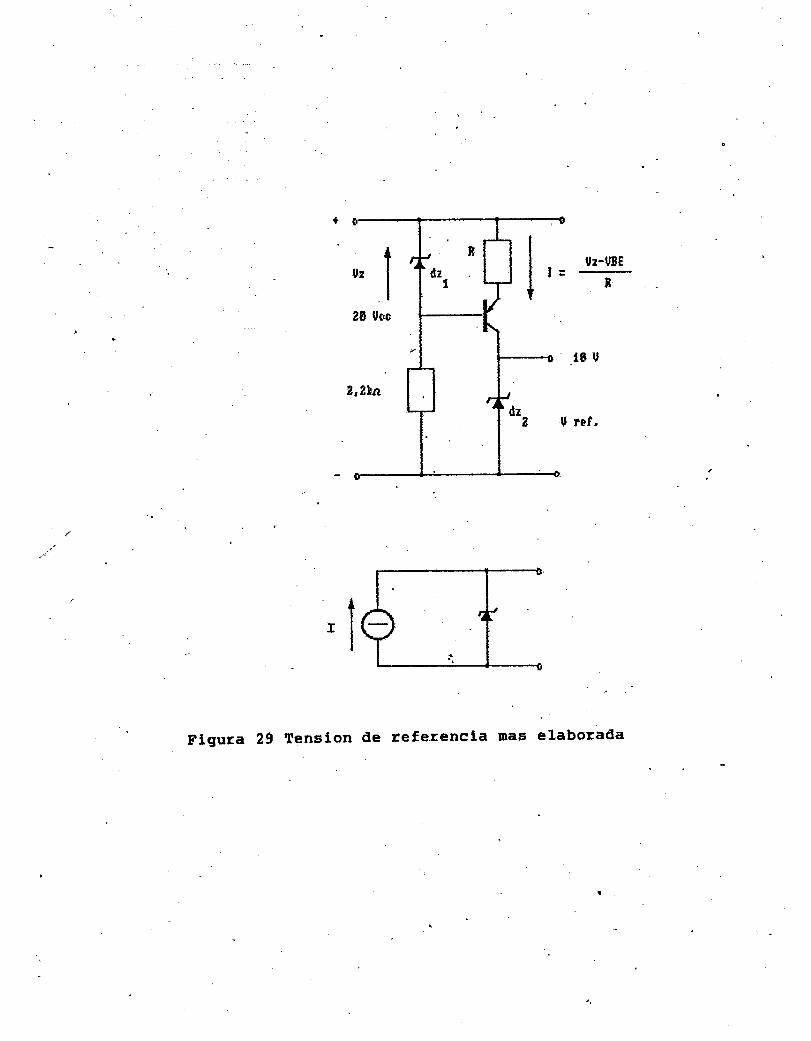
También aqul ha de compensarse el segundo diodo zener
circuito nás elaborado se presenta en la figura 29,
Con el circuito a) la tensión de referencia se estabiliza con un
solo diodo zener, El diodo'en serie con el zener sirve para
compensar Ia deriva térmica del zener. El coeficiente de
temperatura del diodo debe ser iÉiual y de si$no contrario a la del
zener, que vale aproximadanente de 2 a 3 mv/oC.
Si un solo diodo no basta se ponen vario.s en serie. Los zener para
tensiones de zener por debajo de svtienen un coeficiente de
temperatura negiativo y, por tanto, la compensación con diodos no es
posible. En el comercio existen algiunos ya compensados, pero de
mayor costo.
En el circuito b) se mejora la. estabilización poniendo los diodos
zener en cadena.
64
circuitos, como los
Un
El circuito equivalente es un Eenerador de corriente constanto y,
por tanto, con una resistencia interna muy
ü¡-tBE
tJ ref.
eLaborada
18|J
2,?la
Figura 29 Tenslon de referencia mas
66
alta. Las perturbaciones provenientes de la alimentación se
reparten entre la alta resistencia lnterna del Slenerador
equivalente y la baja impedancia del zener dz? y, For
consiguiente, no se aprecian en la salida.
Cuando la tensión de error de velocidad del motor no ostá tomada
de la dinamo taquimétrica sino de la tensión del inducido del
motor, la tensión de referencia no debe estar estabilizada, sinó
tan solo bien nivelada
Como se vé se obtiene una conpensación parcial de las variac'iones
de la velocidad del motor pol efecto de'las variaciones de la
tensión de la red. Si la tensión de la red aumenta, aumentará
también la excitación del motor con lo cual disminuirá la
velocidad. La disminución de velocidad estará compensada por el
aumento, también provocado por la red, de la tensión de
roferencia.
Serán necesar ias dos tens iones , una pos i t iva y una .ne8iat iva, y&
que para una tensión positiva el motor girará en un sentido y
para una t,ensión negativa girará en sentido contrario.
Para evitar aceleraciones o desaceleraciones bruscas se utiliza
un método de aceleración controlada repreaentado en la Figura 30.

30 Tenslon de referencla con
ref,
aceleraclon controlada .Flgura

68
El contacto (a) forma parte del contactor que gobierna la marcha
o parada del motor. En el momento del arranque el contacto se
cierra y la tensión V aumenta con una cierta constante de tiempo
dada por R la cual, por otra parte, puede ser también variable
para parado.
Si también interesa que la parada suceda eon. una cierta
desaceleración. el contacto no debe conectarse al contactor
principal sinó a un relé secundario que provoca la parada lenta
de la máquina.
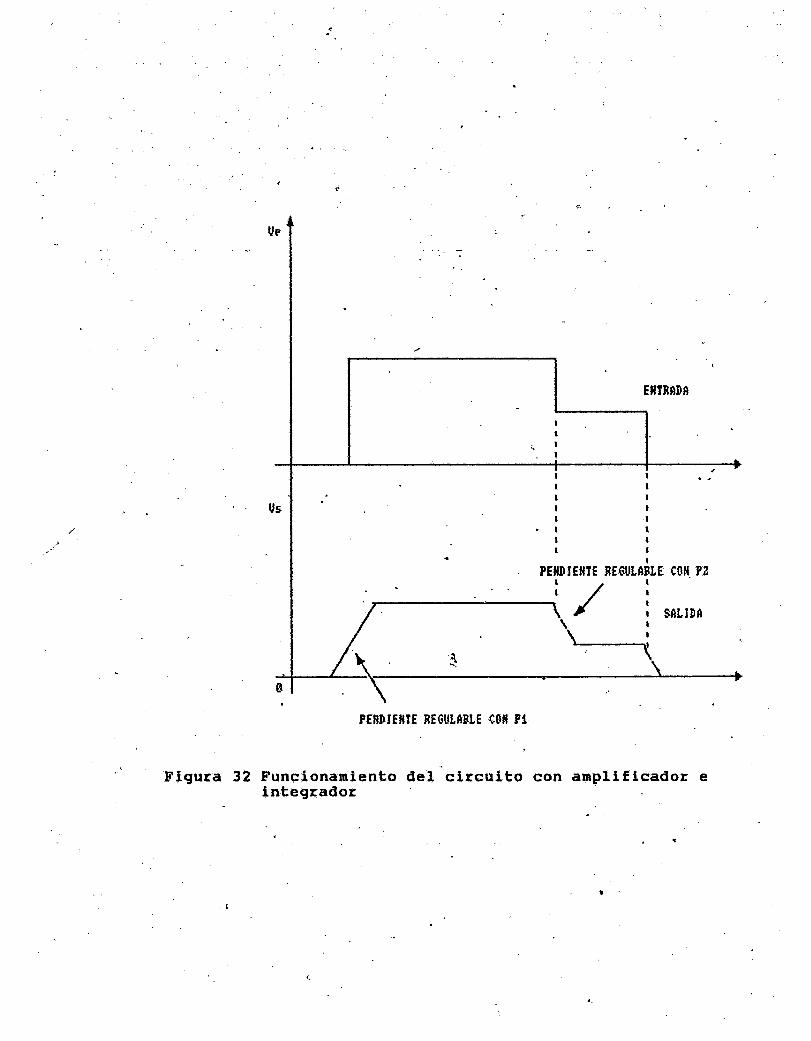
Un sistema más conpleto se nuestra en la Figiura 31.
El circuito consta de un amplificador, eü6 invierte la señal, y
un integrador. Dando a la entrada una señal de escalón, Ia sal.ida
será una señal en rampa de pendiente reÉlulable por medio de Pl y
P2 que se detiene cuando la salida ha alsanzado la entrada. El
funcionaniento se representa en la figura 32.
2.3.7 . Ampl if icadores de Error
(Ver Figura 33).
Se dividen en tres partes:

PI
Fl.gura 31 Clrcutto eon anplif lsador e lntegrador.:)
Uniwrsidad :l;:lrr:¡r.rrn d¡ &cid¡¡m. i;,'¡1.,r i:t).iiif,.¡.{:l!.i
ll¡l
I
PEIIDIEIIIE fiESULEBTE Et}fl P?tIt
' SEL¡D$II
PETDTEII'E BEGUTRBLE CI}II F1
Flgura 3? Funcionamiento deI circulto con ampllflcador e
- lntegrador

B4
.:,
:.
Flgura 33 Anpllf i.cador de "error

72
- Amplificadores de error propiamente dichos
- Nudo diferenciador de entrada
Red de compensación
2.3,7,1, Amplificador de error
Hasta el presente estaba constituf do por u.n ampl if icador integrado
I ineal . Sin embargfo puede fabricarse con componenües discretos,
transistores y resistencias. Lo importante es que su caracterfstica
soa lineal y simétrica y que por su naturaleza no tienda a oscilar,
La respuesta en amplitud de un amplificador de error, invierta o no
la señal de salida se representa en la figura No. 34,
2.3,7 .2. Nudo dif erenciador de entrada
(Ver Figura 35)
Suministra instante por instante la diferenei¿ entre la tensión de
referencia y la señal proveniente de la DT.
Para el cálculo de las resist,encias Rl ,.R2, R3 y R4, se fija en
primer luElar el valor de la corriente que las atraviesa

us. ltAl{, f,ilrttF!c$IlsB
fir|g lr0
I'ITITEBTE
Ftrgura 34 ResPuesta
(U) E|TBf,fA
en anplltud de un anpllflcador de error
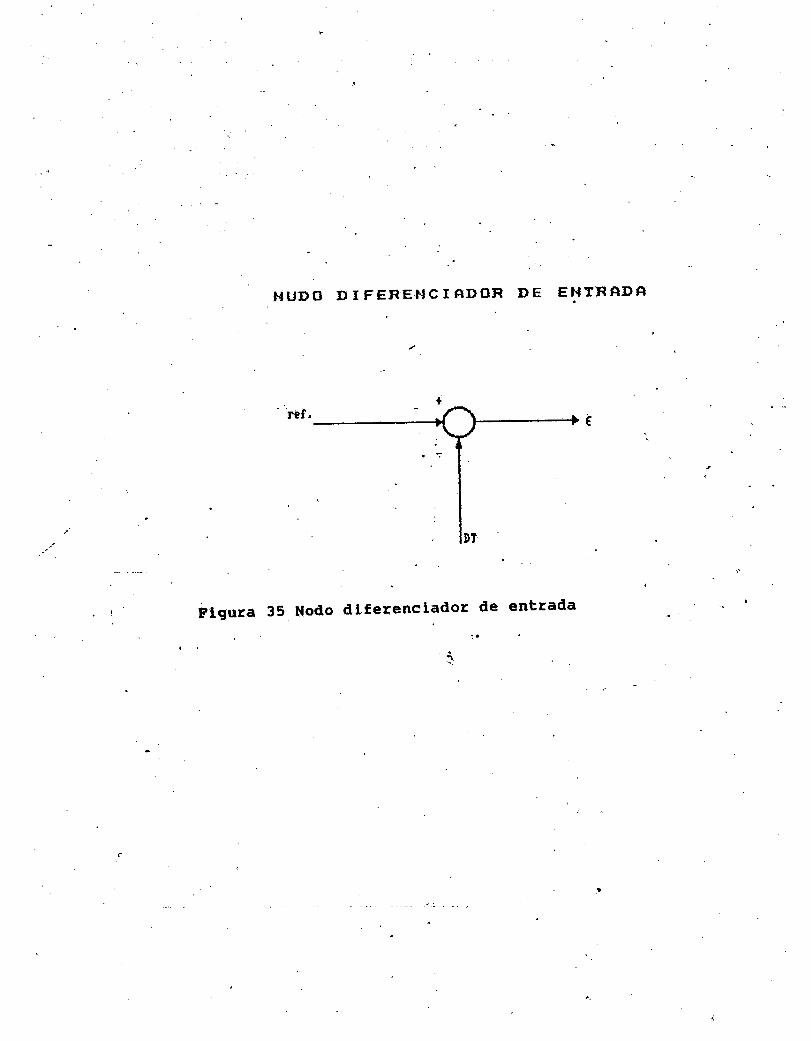
Flgura 35
a¡
HUDB DIFEREHCIADOR DE ENTRRDA
Nodo dlferenclador de entrada
75
Normalmente se fija una corriente de 1 mA o fracción.
Sabiendo la tensión máxima suministrada por la referencia es
posible deterninar Rl y R2.
V ref max(R1+R2)=-------l----1
Para R3 y R4., conocido ol número de revoluciones náximo que puede
dar el motor y la constante de la dfnamo taquimétrica, se tendrá
KDT max(R3 + R4)
Con un filtro en T en las dos entradas se impide que a través de lareferencia y de la DT lleguen a la entrada del amplificador las
perturbaciones. La constante de tiempo de estos filtros está entre
2 y 5 ms. La frecuencia de corte de esta red est.á "orp""rOida entre
30 y 80 Hz, v&lor superior a la frecueneia de corte de los motores
a los que se hace referencia.
78
r'd
2.3.7.3. Red fnte8iradora de Compensación
Su valor depende de muchos factores por lo que se prefiere
determinarla experimentalmente en la puesta a punto del notor con
su carga. Para orientarse en el cálculo se fiia atenuación
máxima que la red puede producir y a qué valor de frecuencia
(determinación del cero).
P
Recordando que la atenuación corresponde az
R7
R6+R7
se encuentra el valor de R7
El valor de la capacidad se puede obtener de la expresión del
cero.
Z=R7C
Para la puesta a punto de la red se procede como si$ue: con un
generador de funciones se manda a la entrada de un amplifieador
un escalón de tensión relativamente pequeño, de modo que no sature
el anplificador. La salida del anplificador presentará uno de los
tres casos siEfuientes, como se i lustra en l¿ f iEura 36.

Corrigiendo el valor de
buscará la respuesta de
velocidad de respuesta,
Se desarrol la
como se ve en
la resistencia y
la figura 338 que
7T
el de la capacidad, sO
corresponde a la nejor
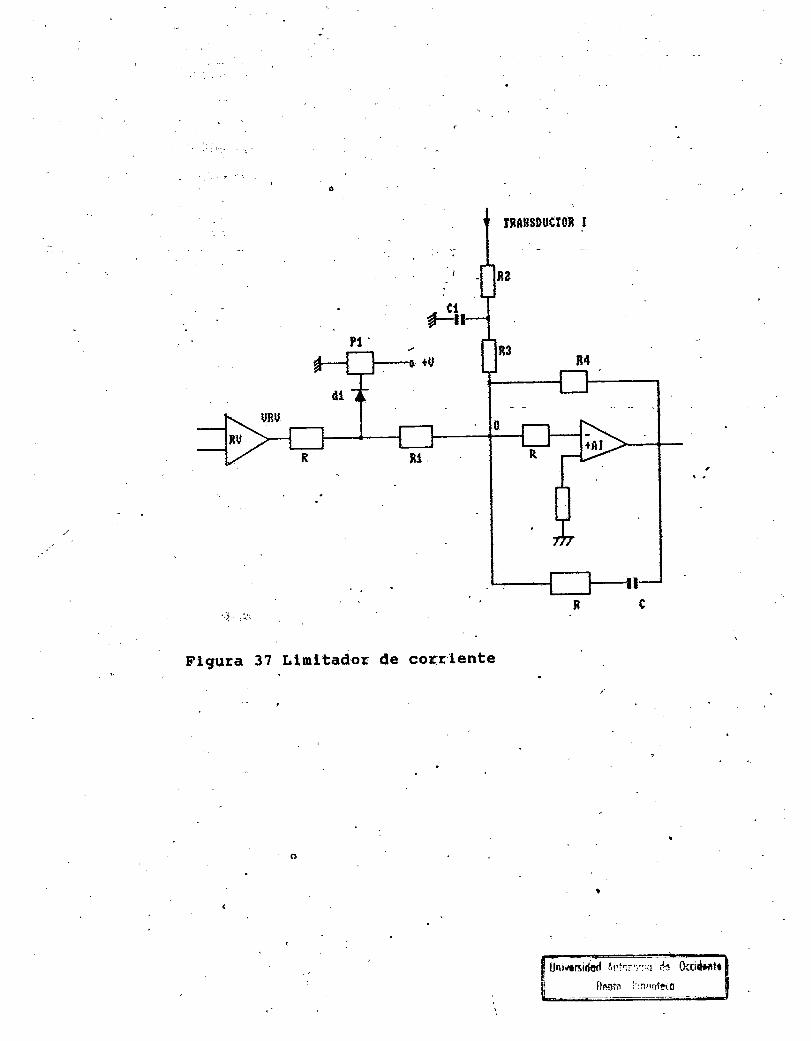
2.3.8. Limitador de Corriente
por medio de una etapa.amplificadora realimentada,
la figura 37.
El circuito desarrolla dos funciones:
Limitador de la corriente máxima en el arranque. Una señal
proporcional al valor de la corriente absorbida por el notor I leEla
al üransductor de corriente. En el nudo aditivo O, la señal debe
ser nula cuando el amplificador RV está saturado
(-12V) y dé señal náxima en el transductor de corriente. El
amplificador RV se satura en el momento del arranque del notor
porque en ese instante el error de velocidad es máximo. Pero en ese
momento la corriente en el motor es máxima y por consiguiente,
también es máxima la tensión proveniente del transductor de
corriente. Se podrá, por tanto, escribir la expresión

R) eilBBll{trf;lltEt{t0 B) AtfoBl¡GuslflEfll0
. BSJ0 BrrEll0
36 SFIida del auplificador
c) IfEttñslAIr0
sfr0BI I Guf,I)0
Figura
Flgura 37 Llnltador de corr'lente
A¡.i1¡.;r':r¡'t 0tC¡drntr
¡¡r¡lio í,:nirDte(0

80
que.pernite calcular el valor de Rl y R2 + R3 asf :
VRV VTrsd=' --------- = lmA
R1 R2+R3
donde VRV
VTrsd
tens
tens
ión
ión
máx i¡na de I amp I i f i cador de error
suministrada por el transductor
El filtro Cl se escoge con el mismo criterio de los filtros de
referencia y de la taquimétrica. La resistencia R4 se c¿lcula para
una ganancia estática del. ampl if icador de alElunas unidades. La red
inte€lradora se busca experimentalnente mandando a la entrada del
amplificador Af un escalón de tensión ¡nuy pequeño. Actuando sobre
R y C se hará de nodo que la salida del amplÍficador sea nuevamente
un escalón ni sobreamortiEluado ni subamortiguado
- En algunas apl icaciones se puede I imitar el par suministrado por
el motor con una reEulación manual ó automática, El circuÍto consta
del potenciómetro P2 y el diodo dl. Con este circuito la tensión de
salida del amplificador de error puede linitarse a placer. Apenas
la VRv supera el valor de Vei impuesto por el potenciómetro P2, el
diodo D1 entra en conducción bloqueando un uIüerior aunento de laVRv. Ahora valores más reducidos de la corriente en el motor hacen
intervenir la acción I initadora del AI
B1
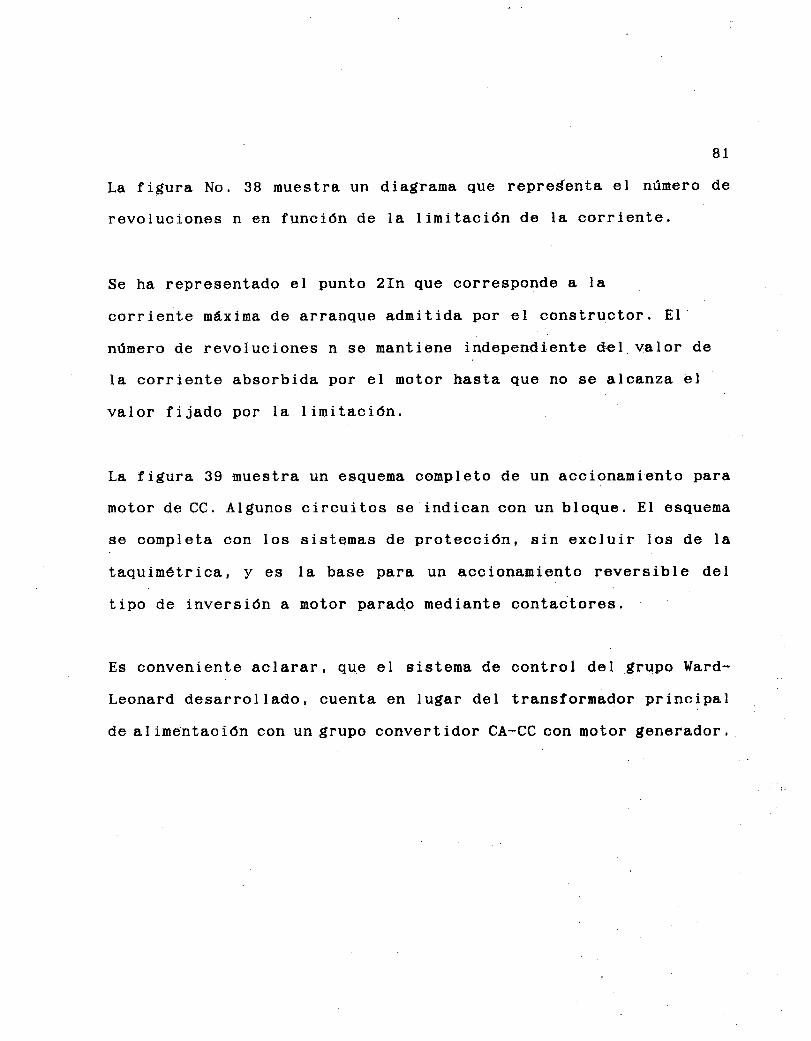
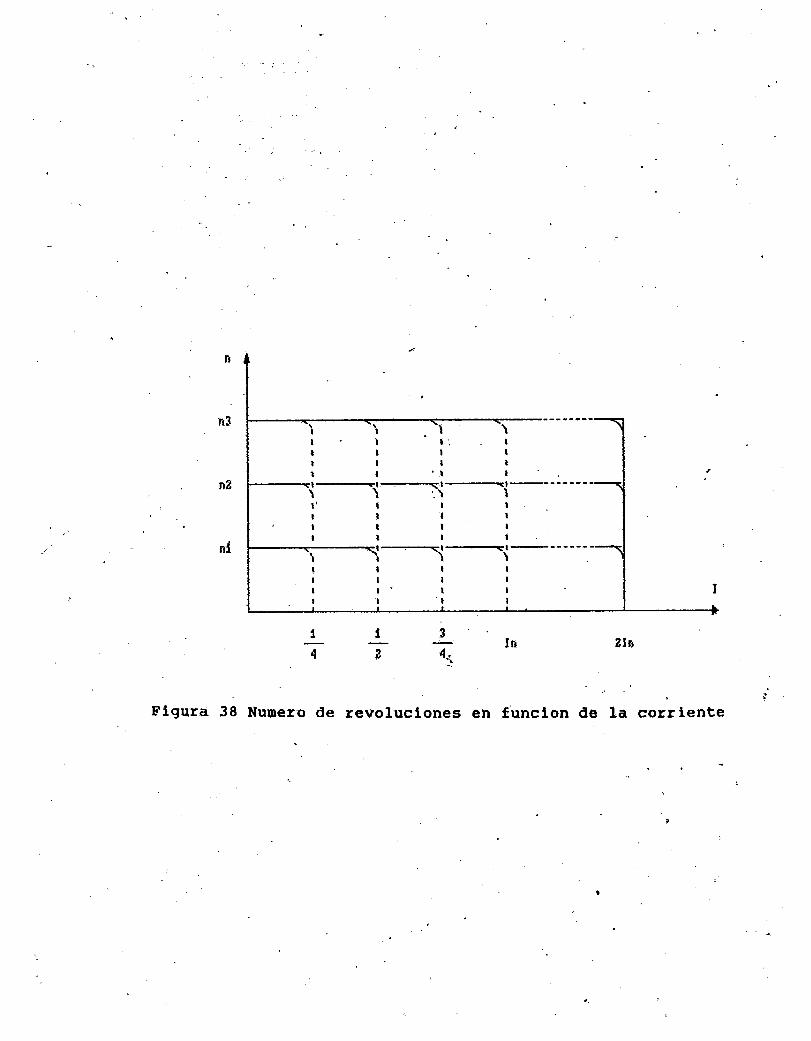
La f igiura No. 38 muestra un dia$rama que repregenta el nrlmero de
revoluciones n en función de la limitación de la corriente,
Se ha representado el punto ZIn que corresponde a la
corriente máxima de arranque admitida por el constructor. El-
número de revoluciones n se nantiene independiente del valor de
la corriente absorbida por el motor hasta que no se alcanza el
valor fijado por la linitación.
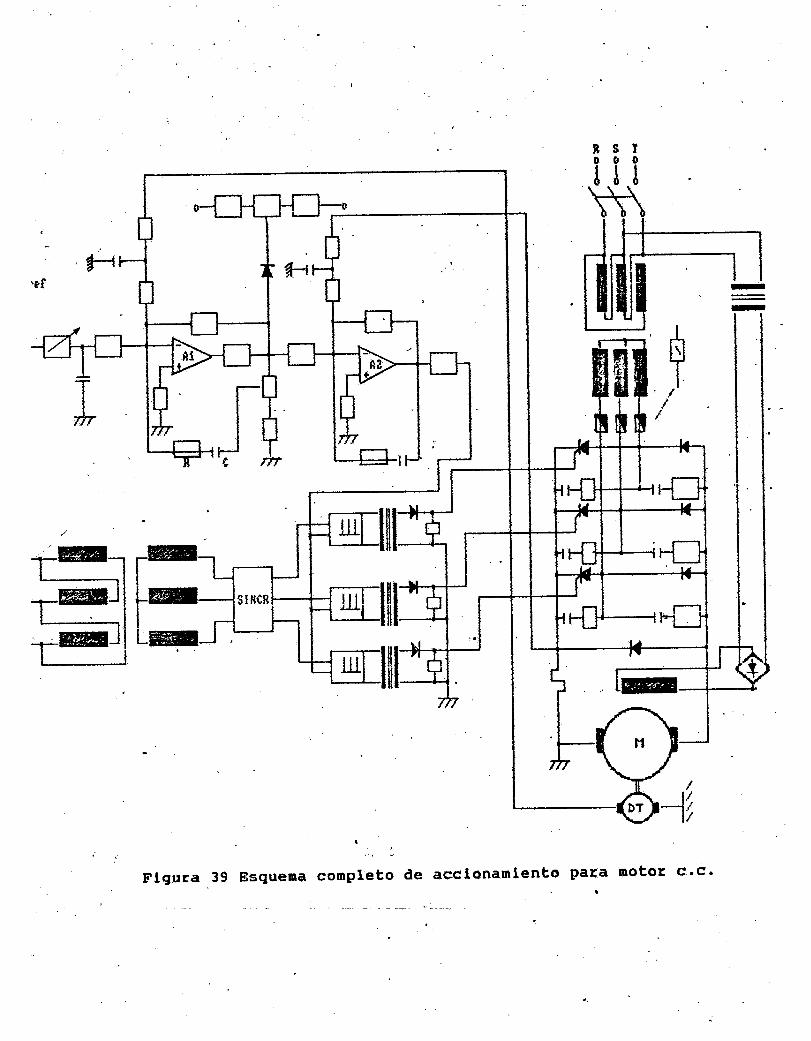
La figura 39 muestra un esquema completo de un accionaniento para
motor de CC. Algunos circuitos se indican con un bloque. El esquema
se completa con Ios sistemas de protección, sin excluir los de la
taquinétrica, y es la base para un accionamiento reversible del
tipo de inversión a motor parado mediante contactores.
Es conveniente aclarar, que el sistema de control del Élrupo Uard-
Leonard desarrollado, cuenta en lugar del transfornador principal
de alimentación con un grupo convertidor CA-CC con notor generador.
?lntnI I .3424..
Figura 38 Nunero de revoluciones en funclon de Ia corrlente
üI
J
t .., :
Flgura 39 Esguena corapleto de acclOnanlento para notor C'c'-.t
Todos los
detal le en
como parte
de control
84
Élrupos anteriormente descritos, serán explicados con
cuanto a sus componentes, funcionaniento individual y
del sistema en el numeral relativo al diseño del sistena

85
3. REGULACION DE LA TENSION ELECTNICA
La función de un buen regiulador automático de voltaje consiste en
mantener la tensión constante en los terminales del glenerador, para
cualquier variación de la corriente de cargia. Este voltaje
pernanece constante dentro de cierto rango prefiiado y puede
logr4rse básicamente de dos fornas:
Variando la resistencia en serie en el campo de excitación.
Variando la magnitud de la corriente de excitación por medio de
elementos de estado sólido (SCR) en circuitos electrónicos.
3.1. CLASES DE REGULADORES
3.1.1. Reguladores Roostáticos de Contactos Rodantes
Un regulador de este tipo es de construcción Brown Boveri y ha sido
adoptado universalmente por las grandes

86
Suventajas que reporta. Se denomina reEulador de acción rápida
funcionamiento se representa en la fi$ura 40.
Una bobina T ejerce sobre su arnadura un esfuerzo de tracción que
depende de la fuerza aplicada en sus extremos,.y opuesto a esta
acción existe el esfuerzo de un contrapeso G. El movimiento de la
armadura hace funcionar el cursor (sector) del reóstato W. Se
admite que el esfuerzo de tracción en el canpo utilizado, de la
bobina T, eS independiente del canino recorrido, .eg decir, que el
esfuerzo de la bobina T y el contrapeso G se equi I ibranen cualquier
posición cuando la tensión alcanza su valor de consi$na. Desde que
una u otra fuerza arrastra el núcleo, el sector:e mueve hacia
arriba o hacia abaio. Si por ejemplo, la tensión de alternador
aumenta, Ia punta del sector se desplaza hacia arriba y provoca la
inserción de resistencia en el circuito Shunt de la excitatriz para
hacer volver la tensión del alternadOr al valor necesario.
Hay que observar que un regulador consüituldo por los elernentos
reseñados no serfa estable. Debido a la inercia nagnética de los
circuitos considerados, la variación de la tensión del alternador
siglue con un cierto retarde de la tensión excitadora. Cuando la
tensión del alternador haya alcanzado su valor prefiiado, la
variación de la

\\\\\\\\\\\i\t\l\t\
t\
Figura 40 DtsPosicion esqueuraticaáe-áccron raPldat tlPo
del. reEuladorBroun Boverl
de tenslon-

88
tensión de excitación habrá sido demasiado importante, por lo que
la tensión del alternador sobrepasará la tensión de consigna, y
el lo ilará origfen al movi¡niento del regulador en sentido opuesto y
a la repetición del proceso en sentido contrario, es decir, se
establecerá el penduleo.
Para obtener una regulación estable, o lo que es lo misno, para
llevar el regulador por una oscilación anortiguada, a la posición
correspondiente al nuevo estado de equilibrio, se le provee de un
dispositivo de retorno elástico que produce un estatismo temporal,
cuyo disposiüivo de retorno el6stico que produce un estatismo
temporal, cuyo dispositivo comprende un amorti$uador D y un resorte
de retorno F, En estado estacionario, el resorte F está aflojado y
la palanca H se encuentra en su posición media con relación al
sector. La caracterfstica de un reEulador muestra la relación,
entre las posiciones del sistena movil y el valor L*tt"ionario
correspondiente de la nagnitud reglulada; por eiemplo, entre la
posición del regulador y la tensión regulada. Se denomina astática
cuando el valor de consiÉlna, queda constante sobre todo el dominio
utilizado. Los reguladores en los cuales el par anta$onista es
producido por un resorte, puede tanbién constituirse con
caracterfstica estática: el valor
reEulada disminuye
de cons iÉlna de I a magini tud
U;
IlEü
trn
{3ZtB$
Flgura {1 Caracterlstlcas de un regulador autonatlco
cAnAc¡EBlsil{ss DE uil nEGutf,DoB *lltslltl¡c0, [* f,lfclluns
DE TN Z{}fiS I}E IIISETISIB¡tIDAD ES EIMGES*DA Pf,BS C(IIIPREIIDEB
tfEJ0B, f,fiBlBt csBf,cltBlstlcs Esls?ltA, ABf,Jo cfEAClSBISll{$
ASIAI I CA.
llniwnidmd ¡'rr:irrirÍrrir t: krldc*io[]nr:rn Rri,linlrtn

entonces cuando el regulador se
(y la tensión reÉlulada aumenta
90
mueve en el sentido de "apertura"
si la excitación también aumenta).
Se trata entonces de estatismo permanente de los regluladores, €rl
oposición al estatismo temporal mencionado, Es necesario recurrir
a la caracterfstica astática cuando se trata de la marcha en
paralelo de varias máquinas provistas de reguladores individuales,
independientes los unos de los otros, para obtener una buena
repartición de la carga sobre las diversas mdquinas¡ como eJemplo
tfpico se cita el reglaje de la tensión de los alternadores que
marchan en paralelo y aseguran una repartición correcta de la
energfa reactiva, o la reglulación de la frecuencia de sus máquinas
de accionamiento en las que se reparte igualnente la potencia
activa. Se hace observar, finalmente, euo el estatisno. de la
caracterfstica'de los reÉluladores de tensión puede ser enteramente
suprimido por medio de transformadores de intensidad, de
oompensación ó de estabilización.
Por lo que afecta la insensibilidad, es preciso hacer constar eü€,
en el sistema del regulador mejor oonstrufdo, se deben vencer
ciertos pares de esfuerzos debido al frotamiento,
El re8lulador no se pone en movimienüo nás que cuando la separación
de la magnitud regulada con relación a su valor de consiglna alcanza
cierto valor mf nimo.

91
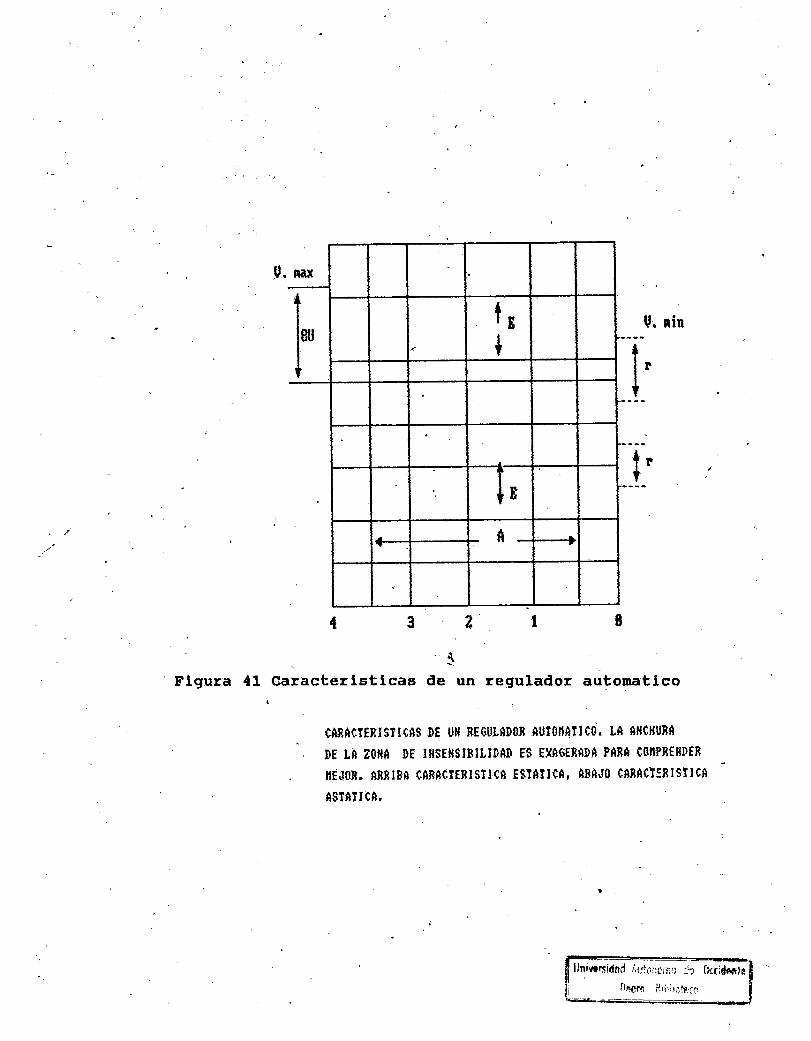
La caracterfst,ica efectiva del regulador sobre eI diagrana no €s,
pues, una recta, sinó una banda nás o menos estrecha en la que la
anchura, para un buen regulador, no difiere como máximo en +O.5%
del valor de.consiÉlna, en la forma que muestra la fi¡lura 41 y en la
que son:
E = fnsensibilidad expresada en + lí
Y = fnexactitud total expresada en + lí
Su= Estatisno, os decir (Vmax-Vmin)/Vmax
A = Dominio de funcionamiento deI regulador
O,.,4 = Posiciones del regulador
3,1,2. Regulación de la tensión eléctrica por modio de transistores
El transistor es en electrónica un elemento irremplazable de los
circuÍtos. Su empleo en diversas aplicaciones (como la construcción
de los ampl if icadores, dispositivos de mando y regluladores)
comprueba las muchisimas ventajas que ofrecen. La rlltima o sea, la
relativa a la construcción de los regluladores de la tensión en los
alternadores de Élran potencia, es de la que ahor¿ nos ecuparemos.
92
Desde el punto de vista dinámico, una desaparición de la car$a en
la extremidad de una larÉia I f nea de transmisión impone severas
exiÉencias aI regulador de tensión. Este caso, especialmente, exigie
una desexcitación tan rápida como sea posible del alternador lo
cual solo puede loglrarse (dada la Eran constante de tiempo de la
rueda polar) por una fuerte excitación negativa obligada y nandada
por el regulador. La salida positiva y ia salida negativa del
escalón de potencia del regulador se han de prever para la misma
potencia.
La f igiura 42 muestra el esquema del principis del dispositivo de la
regulación de voltaje segfún el sistema Brown-Boveri. Se trata de la
regulación de las náquinas de 11SMVA de Grosio (Milán), eeüipadas
con reguladores de tensidn de transistores,
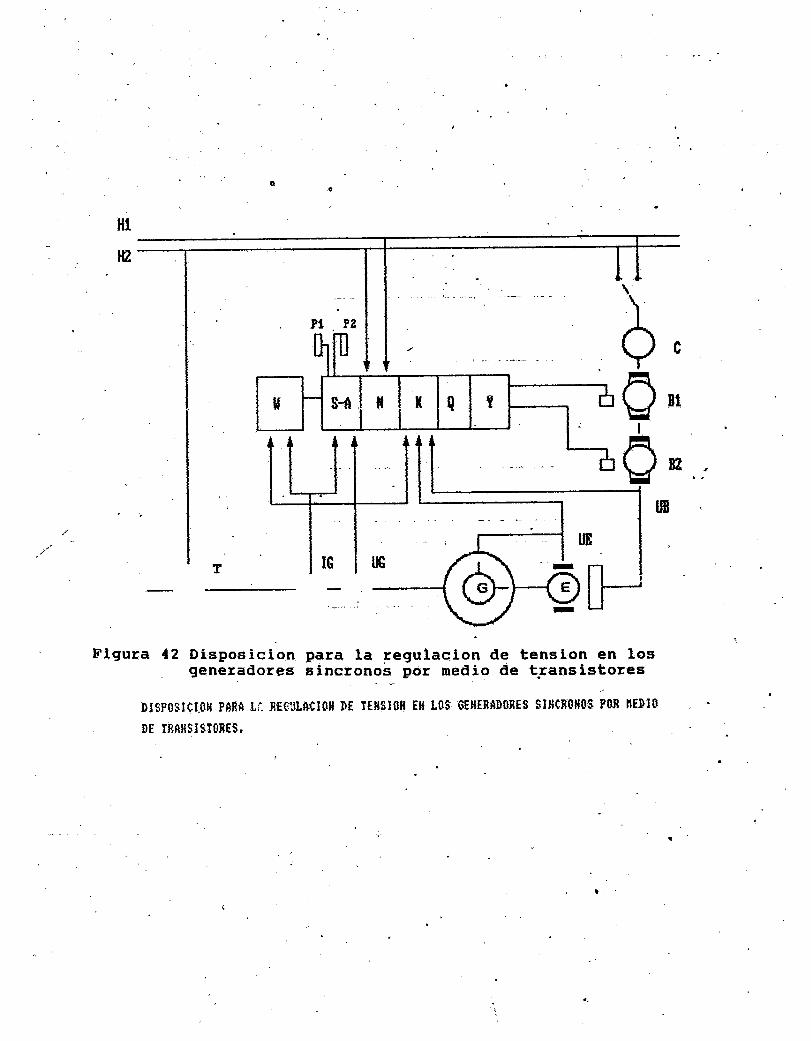
Flgura 12 Dlsposicion para la regulaclon de tenslon en losgeneradores sincronos- por ¡¡edio de t¡ansistores
DISp0SrCI.SB pf,BR Li. Bgcxtscr(¡lt DE fEn$Ioil Eft L0s sEfltB*D0BEs sllfcBoll0s PoB ñtDl0
DE TBf,fiS¡STO8ES.
g4
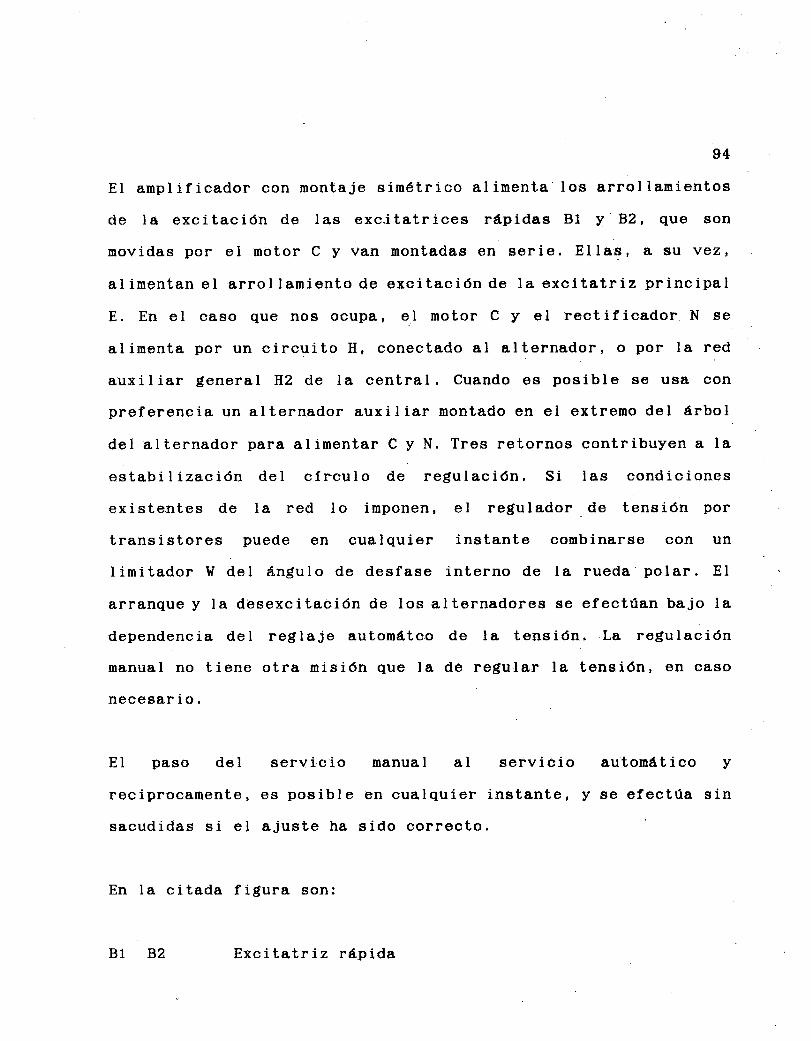
El amplificador con nontaje simétrico alimenta los arrollamientos
de la excitación de las excitatrices rápidas 81 y B2, que son
novidas por el motor C y van montadas en serie. Ellas, a su vez,
al imentan el arrol lamiento de excitación de la excitatriz principal
E. En el caso que nos ocupa, 9l motor C y el rectificador N se
alimenta por un circuito H, conectado al alternador, o por la red
auxiliar Éleneral H2 de la central. Cuando es posible se usa con
preferencia un alternador auxiliar montado en el extreno del árbol
del alternador para alimentar C y N. Tres retornos contribuyen a la
estabi I ización del cfrculo de regulación. Si las condiciones
existentes de la red Io imponen, €l regulador de tensión por
transistores puede en cualquier instante conbinarse con un
I imitador 1{ del ángulo de desf ase interno de la rueda polar. El
arranque y la desexcitación de los alternadores se efectúan bajo la
dependencia del re€ilaje automátco de la tensión, La reEulación
manual no tiene otra misión que la de regular la tensión, en caso
necesar io.
El paso del servicio manual al servicio automático y
reciprocamente, es posible en cualquier instante, V s6 efectúa sin
sacudidas si el ajuste ha sido correcto.
En la citada figlura son:
B1 B2 Excitatriz rápida

g5
C Motor de accionamiento
E Excitatriz principal
G Alüernador
T Transformador que al imenta la red El
H1 Red auxiliar a la tensión del alternador G
HZ Red aux i I iar gleneral
S-A Comparador de los valores: prescrito yrealN Rectificador de alimentaciónK Dispositivo de estabilizaciónA Váscula e inversoY AmpIifÍcador simétrico de transistoresPl Potenciómetro de arranqueP2 " de ajusteW Linitador del ángulo de desfase interno
de la rueda polar
UI Tensión y corriente del alternador G G
Los reguladores con transistores han denostrado en la práctica su
importancia, no tan sólo por sus caracterlsticas dinámicas de
regulación, sino porque procuran una Elran seg¡uridad en el servicio
encomendado y por su sencíllez. Cumplen pués, todas las exiglencias
que se inponen en la explotación moderna de las centrales.
96
3.1.3. Regulador de tensión con transductores
Por ampl if icador maÉlnético se desi$na un piso completo de
ampl if icación que cornprende transducto.res los cuales son elementos
activos compuestos de uno o varios circuitos ferromagnéticos,
cerrados, provistos de arrollamientos y de endurecedores. Se€lún su
uti I ización o su estructura constituyen regiuladores de
ampl if icadores internedios, o de órElanos de regulac-ión.
Debido a que los amplificadores nagnéticos pueden construirse para
potencias muy importantes, el regulador de tensión co.n
transductores se emplea ventajosamente cuando las ex.citatrices
auxiliares se consideran inadecuadas y entonces el regulador debe
actuar directamente sobre la exciLat,riz del alternador. En este
caso se utiliza una cascada de amplificadores, que permite, a pesar
de la Eran potencia de sal ida, ef ectuar .la c'omparación entre el
valor prescrito y el valor real a un bajo,.nivel de potencia; asf
mismo procura un tiempo corto de respuesta. El escalón de salidapuede buscarse en una serie de amplificadores rnagnéticos de
potencia y de el lo permite una fácil adapt,ación a cualquier
exc i LaLr iz .
La excitación de la excitatriz se realiza por un arrollaniento en
serie, pero lleva además dos arrollanientos separados .para laexcitación, los cuales actúan en sentido contrario e intervienen

g7
solamente para dar a la tensión el valor requerido.
El regulador comprende una cascada de tres ampl ificadores en
montaje simétrico, cuyas sal idas van a los ' dos arrol lamienüos
c i tados .
En la entrada del primer escalón anpl ificador se introduce la
diferencia de tensión correspondiente a la separación entre el
valor prescrito y el valor real, también los ofectos de tres
retornos diferentes para la estabilízación del regulador
Como resumen de lo expuesto y relativo a los tres métodos de
excitación reseñados, a continuación se indican los resultados
obtenidos en los ensayos comparativos de dichos re$uladores-
aplicados a la excitación de alternadores de $ran potencia. El
estado que si¡lue muestra la duración de la regulación en segun{os,
en d i st intos s i stemas de reglu I adores

9B
DURACION DE LA REGULACION EN SEGUNDOS
SISTEMA DEREGULADOR
CORTE DE UNA CARGAINDUCTIVA DE sOX
CORTE DE UNA CARGACAPACITIVA DE sOX
ReÉlu I ador portransductores
0.31 0.37
Reguladores portransistores conexcitaLríz rápida
o ,44 a .44
Regulador mecánicocon órgfano queactrla porder ivac ión
0.58 0 ,60
Como se aprecia, el sistema de regulación más rápido es el de
transductores y el de mayor duración el regfulador electro-mecánico.
Las diferencias son, sinenbarglo, muy pequefias y en la práctica no
pesarán en la elección, más que en raros casos. Por ojemplo, con el
regulador mecánico se ha conseEuiAo, en ensayos reatizados hacer
narchar un alternadáf en reglimen permanente con un retrazo interno
de 1179 y se nejora su comportamiento ainenico aglreElándose el
dispositivo I lanado "de ¿cción por derivación".
De todos modos, cuando se exi jan unas condicione.s particulares
dificiles, de rapidez en la reÉulación se emplearán reguladores de
transistores o transductores; el regulador electromecánico podrá
emplearse en condiciones nornales y si fuese necesario cumplir
exigencias extraordinarias en la reElulación, habrfa que recurrir a
la al inentación de circuito de excitación por medio de

99
convert idores (mutadores )
3.1.4. Excitación y Regulación de Voltaje del Generador con
Ampl idina
Este sistema de excitacidn utiliza una dfnamo de construcción
especial conocida con el nombre de anplidina. El principio de
funcionamiento de la amplidina es el si$uiente: La dinamo en
cuestión funciona como amplificador de corriente. El colector del
inducido va provisto de dos gfrupos de escobillas l,l' y 2, 2' (Ver
Figura 43), colocados en planos perpendiculares entre sf; las
escobillas 2 y 2' están adenás en cortocircuito.
En los polos inductores va montado el arrollamiento inducto-r A, al
que atraviesa una débil corriento, la cual crea un flujo en
dirección horizontal (Ver Figlura 40), es decir de Norte a Sur, eü€
corta a los conductores del inducido y da origen a una fuerza
electromotriz cuyo valor máxino se capta por medio de las
escobillas 2, 2' puestas en cortocircuito.

lz2lJJ
flI
ItEr(cl tAlBl?1is+ 1,1'
Figura 43 esquema aetexcltacion
prlnciplo de funclonamlento de lad; Ios generadores por dinamo anplidina.
t
101
A esta circunstancia se debe que la corriente de 2 a 2' sea muy
inportante y por ello con una intensidad de algunos miliamperios,
que circule por el inductor, pueden producir centenas de amperios
en el circuito 2, 2'.'Esta corriente tan elevada es com-parable y
produce el efecto de una sola espira cuyo plano fuese horizontal
(Ver figura 43) el cual da origen a un flujo OA que circula en el
núcleo del inducido en dirección vertical y que corta a su vez a
los conductores de este.
El lo crea en los mismos una fuerza electromotriz recoÉlida por las
escobillas I, 1' a las cuales se conecta el circuito de excitación
de la exciLatriz del Élenerador. Sin embargior para evitar que el
flujo de reacción del circuito 1, 1' (que tiene la misna direccidn,
pero de sentido contrario'al que produce el arrollaniento A)
desmagfnetice el nrlcleo de hierro del inducido, se coloca en el
inductor en arrol lamiento de corto número de espiras B que crea el
flujo 0B y que compensa la reacción del inducido.
La disposición de los elementos de la figura 4O muestra la forna de
regular el voltaje del generador. Consiste en eu€, cuando 'el
alternador tiene la tensión normal, ninguna tensión provien€ del
puente de Wheatstone 3, en el cual el arrollamiento A es una
dia$onal; cuando la tensión del alternador se sep¿ra un poco del
valor nornal (nenos del I%), una pequeff* corriente circulai ns tantaneament e por A, corr i ente que se amplifica

eons iderab
de excitac
generador
I emente
ión de I
a su val
o resta
vo I ver
L02
a la corriente
la-,tensión del
por la Ampl idina y se suma
a excitatriz, loElrando asf
or normal.
Las variaciones del voltaje
transfornador de tensión 4.
En el tipo de Ampl idina que
detalles completos de los
aquellas.
3. 1 .5. Excitac
Ampl idina Asoc
se hacen en el punte 3 por el
se reseñarán a cont
elementos para el
inuación se dan
func ionan i ento
los
de
ión y Reglulación del Vol taje de los Alternadores por
iada a un Regulador Estático (Alsthom).
La excitación de la excitatriz principal se efectúa por una
amplidina movida con un motor de corriente continua. Este pequeño
grupo convertidor se alimenta directamente por la excit-a.triz-
piloto, del conjunto de excitación, lo cual la hace independiente
de otro manantial y se pone en narcha al mis¡to tiempo que el
a I ternador .

r'l
rfrSgBf
--4esnagneti zante.l--¡
-JIDesnagnet i z ante
¡utanati co
Flgura 141
Esquema de la excltaclon' automaticaslncrono Por nedio de anPlidina
de I generador
I

104
La amplidina va nontada como anplificatriz y es solicitada (tanto
en marcha automática como con actuación a nano) por dos
arrol lanientos en oposición: uno magnetfzante y otro
desmagnetizante. El primero de ellos se alinenta por la excitatriz-piloto (Ver Figura 44) ó por la baterfa bajo tensión constante (de
puesta en marcha automática), y bajo tensión variable por
intermedio de un reóstato poüenciómetrico y con= inversor de
accionamiento nanual.
El arrollamiento desmagnetizante está desdoblado; une sirve para la
marcha automática y se alinenta por un regulador estático, el otro
sirve en marcha manual y se al imenta por la tensión de la
excitatriz principal. La diferencia entre los amperios-vuelta de
los arrollamientos magnetízanLe y desnagnetizante crea eI flujoprimario de'control de ia amplidina: una pequeña variación de este
flujo basta para obtener en Ios bornes de Ia amplidina l¿s
variaciones de tensión necesaria al gobierno de la excitación de la
excitatriz principal.
En caso de no poder utilizar el reEulador, la tensión de la
exciLaLriz principal (y por consiguiente la del alternador) puede
regularse por el reóstato potenciómetrico.
Las Or*Oo"iciones indicadas
fáci lmente de la marcha manual
a figura 45 permiten pasar
automática y viceversa.
enla la
105
Para pasar de la primera a la seglunda, y después de haber colocado
el reóstato de regulación automática Rht en posición conveniente,
será necesario maniobrar sobre eI conmutador de cambio de marcha.
Para la operación inversa bastará, y a fin de no modificar la
tensión en los bornes de al ternador, I levar al reostato
potencionetrico Rhp a la posición que corresponde a la tensión
entre los bornes de la excitatriz principal en
considerado y después actuar sobre el conmutador.
el instante
3. 1.6. ReEiulador Estático
Este regfulador, euo gobierna el arrol laniento desmatlnetizado de la
amplidina, abarca dos partes principales (Ver fi$ura 45).
- Una combinación de circuito que permite detectar la separación y
el sentido de la variación de voltaje del alternador, con relación
al valor normal que debe permanecer constante.
- Un amplificador de lámparas que, rectificando y amplificando este
cambio de tensión, suministra a la anplidina la corriente de
excitación necesaria para que pueda I levar a cabo una óorrección de
la corriente excitadora de la excitaLriz principal, retornando la
tensión del alternador a su valor norm¿l con estatismo próximo al
propio del amplificador.

106
El ¡nontaje que permite detectar el cambio y el sentido de la
variacidn del voltaje del alternador, con respecto al valor que se
trata de re8lul.ar, está formada por un puente I'Iheatstone cuyas dos
ramas están constituidas por resistencias lineales y las otras dos
por resistencias cuyo valor óhmico crece con la tensión aplicada a
sus bornes (resistencias no lineales). Estas resistencias son dos
lánparas de alumbrado L, de tipo corriente, alimentadas por una
tensión igual al 30% aproximadanente de su tensión de servicio
normal y cuya d.uración con tan baio voltaje de trabajo es
práct icamente i I imi tada.
Una diagional de dicho puente se alimenta por el secundarib de un
transformador T1 cuyo primario está sometido a la tensión que debe
gobernarse. Cuando esta tensión es normal , la tensión existente, .en
los bornes de la otra d'iagional del puente, tiene por valor cero
(aproxinadamente). Cuando la t,ensión del alternador se separa de su
valor normal, en los bornes de la diagonal considerada existe una
üensión variable que se rectifica y amplifica por el amplificador
de válvulas electrónicas. La tensión de.los bornes de salida de
dicho ampl ificador es la que al imenta el arrol laniento regulador de
la anpl idina.
Una variación muy débil de la tensión del alternador se traduce
finalmente por'una gran variación de tensión en los bornes de la
Ampl idina y, por consiEluiente de la corriente de excitación de la

L07
excitatriz principal, lo eual asegura una respuesta muy rápida.
El amplificador está constituido por cuatro válvulas electrdnicas:
Vl, V2, V3, V4. Todos los cátodos están en paralelo, de los demás
elementos (placas, pantallas y rejillas de mando) dos a dos en
paralelo: V1 con V3 y V2 con V4.
La al imentación de las placas tiene lu8lar con corriente alterna
mediante el transformador T1; las válvulas trabajan a la vez cono
rectif icadores y ampl if icadores.
Las rejillas de Élobierno se alimentan por el secundario de
transformador T2, cuyo primario es asf mismo alimentado por
diferencia de tensión detectada por el puénte de lfheatstone.
La potencia necesarÍa al arrollaniento regulador de. la amplidina,
que es del orden de un vatio, podrá fácilmente obtenerse por un
solo juegio de lámparas que rectif iquen las dos al ternativas (Vl y
VZ) I imitando además las corrientes dadas por las válvulas a
valores normales de uti I ización. Sinembargio, y para aumentar
todavfa nás la seguridad de funcionamiento, se ha doblado el rÍúmero
de válvulas, de suerte que la ruptura de un filamento de caldeo no
repercuta sobre la narcha del regiulador. La puesta fuera de
servicio de una válvula es señalada por la lámpara de ¡lobierno Ls,
que está supeditada por el funcionamiento del relé Rs de la figura
45.
un
la
' 108
debé hacerse sin tener porLa
el
sustitución de la
lo que suspender e
lámpara defectuosa
I servicio.
Un potenciómetro Pl permite equilibrar de una vez para siempre las
corrinües suministradas por cada par de placas.
Por.medio de los transformadores T3 y T4, con el juego de los
reóstatos R3 y R4, y por reacción de sus secundarios de los
circuitos de rejilla, se puede hacer variar a voluntad el estatismo
del regulador. Finalnente con el reóstato del transfornador Tl se
log.re variar Ia tensión del alternador Élobernado en un + 2O%. -T.a potencia absorbida del manantial de Siobierno por este regulador,
es del orden de 20 vatios. Su consumo por el caldeo del conjunto de
las cuatro válvulas es de 0,8 anperios a 115 voltios.
El regulador es insensible de la frecuencia. Su retardo a la acción
y su constante de tiempo de respuesta son muy cortos (de al$unas
centesfmas de segundo.).
Esta rapidez de acción unida a la rapidez propia de las amplidinas,
procura a su vez una rapidez de regulación de la tensión del
alternador más elevada que la que puede obtenerse con regluladoros

que hacen interven
resistencias de campo
perm i ten aprox i¡narse
109
ir órganos móvi les y que modifican las
; las Elrandes f aci I idades de ajuste de retorno
muchisimo a una regulación aperiódica ideal.

^ll-r n--l-- | trl
i..#,,u4 t --F/v\
t
t---lt--
t-f--
l:l
ci
c3
I
I
I
I
ü
I-- t-- I r,?
\B
Flgura 45 Esguema de conexlones della anplidlna
regulador estatlco de
t
nt
II
{
t--t--I4
I
{, 1
* ) t-,:) I -:r¡r\u{ I --F_-r
'j

111
4, PARAMETROS DE DISEÑO DE CONTROL DE VELOCIDAD
DEL MOTOR C.C.
Para la tarjeta electrónica de control de velocidad en el grupo
l{ard-Leonard se tomaron 3 parámetros básicos.
-Voltaje de excitación del devanado de campo en eI generador de
C,C.: 12O V,
-Corriente de excitación del devanado de campo en el generador de
C.C.: 1,8 A.
-Valor de la constante en la dinamo tacométrica acoplada al eje del
motor de C.C.: K= O,Og V/RPM.
4.1: ETAPA DE POTENCTA
Siendo los numerales II y fII parámetros de diseño, €l puente
rectificador a usar en la etapa de potencia es un puente
semieontrolado monofásico al imentado a 120 V,C.A. que entreEla un
voltaje entre "0" y 108 V.C.D. (l2O r,0,9). Este voltaje de lOB
V.C.D. cubre en un 90lí el rango del voltaje nominal de canpo en el
gienerador de C.C., valor óptimo dadas nuestras condiciones de
earga.
Sabiendo que el voltaje pronedio inverso y
edt¿n sometidos los diodos y los SCR son
0,9 A (1,8 *0,5) se seleccionaron:
t12
l'a corriente nedia a que
respectivanente 1,2O V y
scR 56025 L
DIODOS D6O2OL
(scR B00v, 25a)
(Diodo 600V, 12A)
Los elementos
confiabi I idad
siglnificativa
seleccionados están
en el circuito y
sobred inensÍ onados
se incidencia en
para brindar
costos no es
Para la protección en las I fneas de potencia se colocaron 2
fusibles (F) cada uno en serie, cuyo valor queda determinado por el
paránetro II (1..8A). Se colocaron fusibles de doble elemento
fusitron FNM 2 I/2 A el valor más próximo encontrado
comercialmente
Para la selección de los fusibles de doble elenrento no es necesario
sobredimensionarlos para prevenir aperturar innecesarias. Esüos
fusibles a diferencia de los senci I los se pueden someter a
sobrecargas temporales, y corrientes de arranque en motores y
garantizan protección tanto de'corto circuito como de sobrecar$a.

ITAPR DE PÍ}TEIICIñ
6
sl
s?
.Nl
nts¡slglli!s IIE
nE$Ll l'lEHf Atl sll
DE COBBIEIIIE
e
r||€BrE. BECr I F ICSII(tR SEll I C0llrB0L*Ds
.n0rfsFssle0
Flgura. {5 EtaPa de Potencla
+
cfirl?s DEI S€ilEnAIlBB

e0Í0 Er{ tll Et0p0 f}E p0TEr{rIA sE UI¡u¡* Ur PUETIE tf0ilBrAstc0 SEllIC0lllB{}Llt|{l
I tfil i /iillii.,i tiii lri ilil lÍI il lt l,'[lua
+I
USII?
Figura 41
:
Conffguracion deSCR y dos diodos
dos FIgura. {8 Conftguracion de tresSCR y dos dlodos
Io

n PtsñB 0E IE'{EB - ttH ttE}tEllIo tl*s t* c0f{tlGtlBAeloil 0E
RE9PTIESTS DE DISPf,B{l
L* F0RttA 0E tfi IEHst0ll DE SSLltrf, ESr
DOS SCB Y IBES OIODOS BBIIID$ ITIIEJOB
', "
Figura 49 XmPulsos de dlsParo

116
A pesar de tener un elemento más la confiEluración de dos SCR y tres
diodos brinda mejor respuesta de disparo (Fig. 48).
Donde la VC de sal ida en funcÍón del angulo de disparo
viene dada por la si8luiente expresión:
vr = II,t vadn(wt')4wt)=f2l911 +e6sa¡
Va = VRMS
Para = Q Vco = 2 fJ?Zff lVa = 0,9 Va;d que es la misna
expresión para el circuito rectificador monofásico en puente con
diodos nor¡nales. (Vco = Voltaje C.D rectif icador onda conpleta).
En todos los denás casos:
VcoVc = ( 1 + cos"<)
2
.VazV.c = (l + cos<), como Vco = O,9 Va
rT
Despejando:
VCo
0,9= Va y reemplazando tenemos:

117
Vco 2(1 + cos o< )
0,9 m
VcoY obtenenos: ( I + cos<)
2
La gráfica dé Vc en función de (fig. 50) es collto si$ue:
Al al imentar nuestro puente con un VA = 120 V. RMS podemos tener un
barrido del.< entre O0 y 1800 para obtener un voltaje de salÍda
entre 108 V CD y -0'; v.
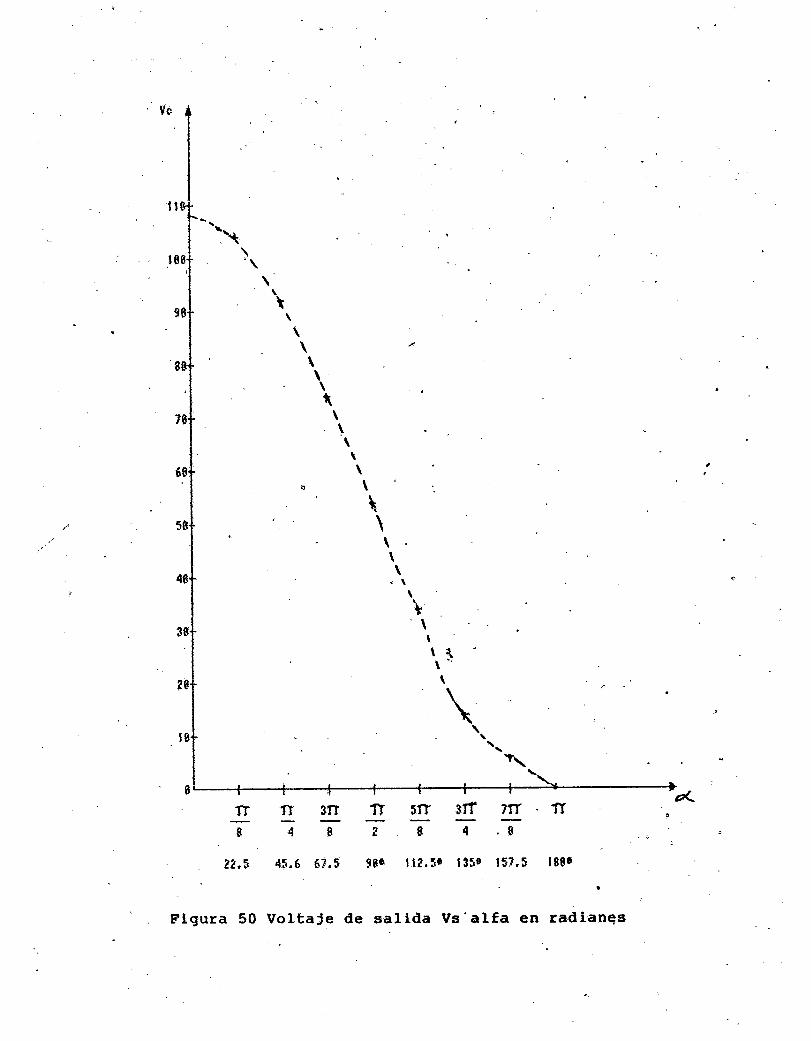
\\t\\\
\\.\
tr{I'\
TT
I
?2,3
Flsura s0 v:ltaJe de
7fl.8
t53, fI
sallda Vs'alfa en radlanes
| 88c
g 3n q ff} 3tf48?94
4f,6 6?,$ 36G I le.5t l3f0

119
4,2. CIRCUITO DE SINCRONISMO
Permite la
potencia),
vo I taje.
s incroni zaci6n
con la señal de
de Ia señal de
dÍsparo para
al imentación (fuénte
reÉlu I ar adecuadamente
de
el
Está constituido por un circuito detector de paso por cero (Ver
figura 52), formado por R20, DL4, RZ4, C16 y Ql
Este circuito funciona de la sigfuiente manera:
La resÍstencia R20 (3.3K) es alinentada por un voltaje (-V), de
señal rectificada onda completa negativa no filtrada que permitirá,
cadavez que cruce por cero (180G, 8,3ns) la saturación de Ql como
consecuencia de la aparición de un voltaje positivo Base-emisor
(+O,6V). D14 es un diodo de protección que aseEura un voltaje
negativo en la polarización base-enisor de Ql menor o iÉual A-0,6V,
C16 es un filtro que elimina señales de "ruido" que se puedan
producir en el circuito por acople electro-nagnético.
Después de completarse un ciclo en la señal de sincronismo (1800,
8,3 ms), hay un periodo de saüuración del transist,or
correspondiente a 4,50 de los 1800, tiempo que transcurre hasta que
la señal de sincronismo alcanza un voltaje instant6neo de -2,25 V,
momento en el cual Ql entra en corte. Este angulo se reflejará en
ll¡,rnnidfi lflt¡n(.r¡i: ¡-. ftlidrrhr'!¿¡t:¡ \irtira*¡n

4.2 - | . Calculo del
I
_J_=
'3,3K A?K
51 Clrculto equlvalente
VP-VB
YP
{{¡LIA'IE DE
-{
G}
It.
II
Flgura
[P+{=3,3 l( ?¡K
-{o
. 3,31( ?3K
-tÍ * 3,3 -g:----t.?3 12?
-{ : t,?f v
PñBS DETEBHT}IAB C¡SE Hf,CE
u :rflYsns * sEH c¿
z.,ls = rlf * ?8 * Sfil Q(
8.f 59 : SEt{ D¿
sc = 4,3s q¡¡$ltlf! ItE tllsPARo Dl tos scp.)
u¡nbnal de disPaFt¡
l-_t_
{P -- B {esilo¡il8ll 0E cgBIE 0E Ql.)
l!{cD
tzr
el cireuito gienérador de la rampa, €rI el circuito de disparo y
finalnente en el de potencia, como un perfodo de no conducción,
aseÉlurando de que en caso de carglas inductivas, la corriente se
haya extinguido una vez el.voltaje sea cero, esto como consecuencia
del desfase voltaje-corriente.
4,3, CIRCUITO DE DISPARO
Los impulsos de disparo de los SCR se obtienen a través de trenes
de pulsos generados por un CI 555 confi$urado como oscilador
astable, a una frecuencia base de 1328 KHZ, los cuales serán
modulados a través áe una "ventana" originada por el ar¡pl ificador
de bucle abierto 2L2, obtenida de una sefral ranpa-pedestal,
proveniente de la superposición de la señal entregada por el
amplificador de corriente L LZ ("Pedestal) y la generada por un
circuito generador de señal "Diente de sierra" Ilamada rampa.
pedestal que es la componente CD ori$inada por el anplificador
corriente variará en el tiempo entre "O" y +15 VCD.
EI
de
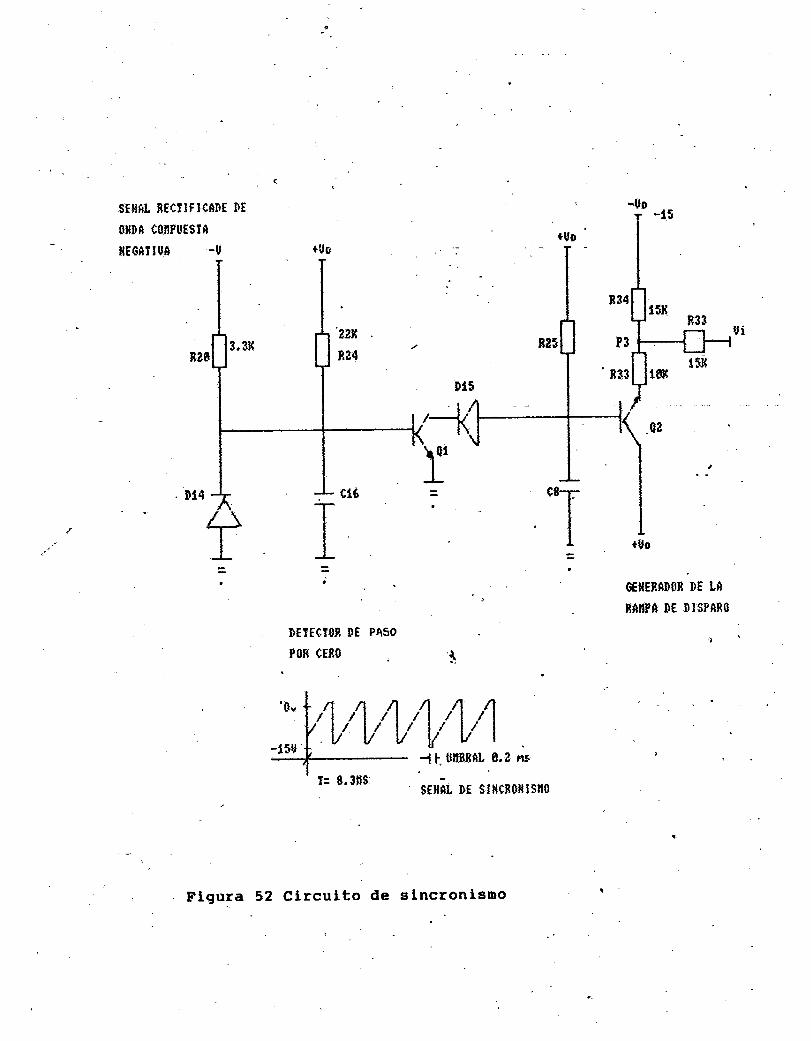
SEI{AL fiECIIFIE$I}f DE
0tflrf, c0nPt Ésf$
ilE6SrIUA -U
"T
BE'IEF,ATIS* DE Lf,
B*I{P* DE IISPRNS
TIE'E(IOg DE PASO
?0s cEno '{
'0,
-ffu
I: 8,3llS
Flgura.52 Circulto de slncronlsmo
I:
J l-. llffBR*t.0,3 ¡ts
smfu rr stilcBontstto

r23
4.3.L. Circuito Eienerador de la sefial diente de sierre
Se configura a través de q2, R25 y CB y D15 (fig 52) asociado al
circuito detector de cruce por cero.
Durante el perfodo de corte de Ql, corréspondiente a 175,50 glrados
(de los 1800) de cada semiciclo, se establece el tiempo de carÉla
del condensador C8 a través de R25; ese tienpo de carga en su parte
lineal correspondiente al 650 de la car$a total está dado por:
Tienpo total de semiciclo (1800 8,3 ms nenos el tiempo de corte
de Ql.
El tiempo de corte de Ql se calcula como si$ue:
4- = zfIfl- 4.50 ---> X
0.078 = 2n- x 60 X tO,O78 rad
0 ,078=t
2Tr *60
O.2 ms = t
4,5 * Ilrad [ =
180
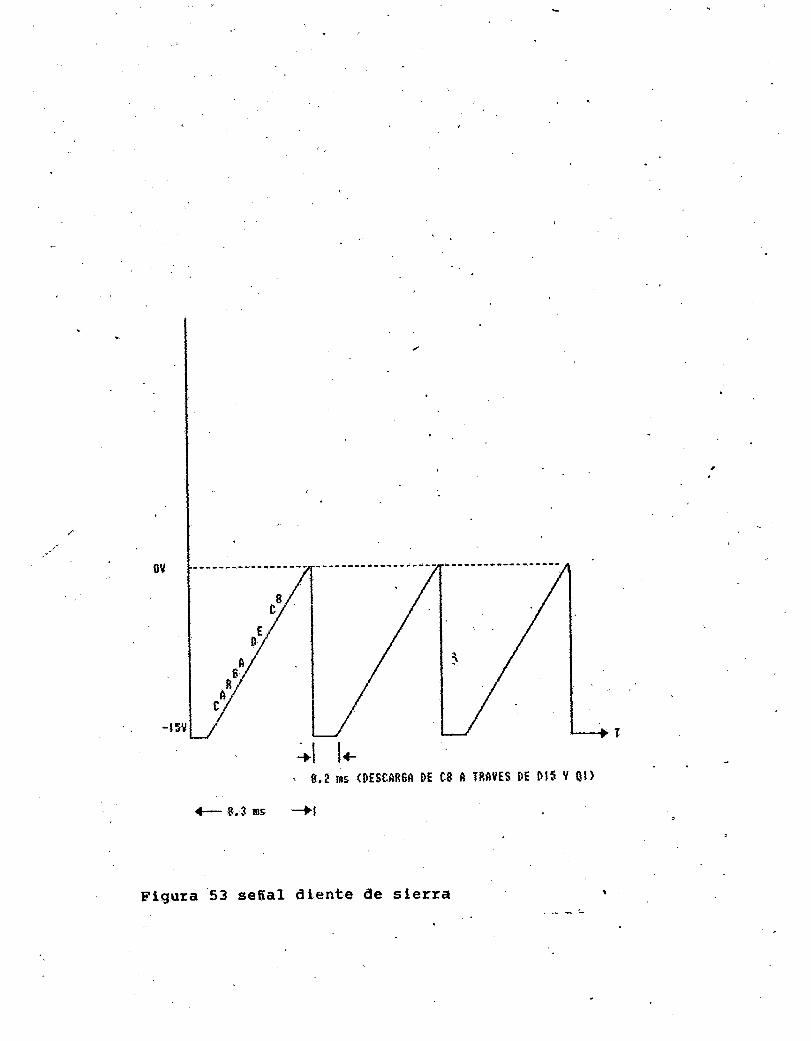
-+l l*' 8,2 ms (0ESCSR6* DE C8
t- 8.3 ns -ll
Ftgura 53 señal dlente de sierra
* IBfiYES t'E DfÍ v tl)

\25
El per'fodo de la señal diente de sierra será: 8.3 ns 0.2 ms =
B.I ms. tn Ql la señal vista en el emisor seguirá a la sefial de
base para gleirerar una señal de sÍerra con las caracterfsticas de
la figura 53.
La descarga de CB se produce a través de D15 y Ql, una ve4 este
rlltimo se haya'saturado, D15 actua como limitador de'corriente
para evitar la destrucción de Ql.
En el nodo P3 de la figura Plano de Reá. de Velocidad, so realiz.a
la suma vectorial de la sefial de rampa de disparo con la señal de
pedestal para generar una señal de disparo con las
caracterf sticas que se observan en la f iÉlura 54.

+{
v
t
/,/---j\
n7--- ---- --).|'-/ -- -- -- -/ )./ t--/-t---t--)r t- -
t t- t trI ir''Z/---//)r:*-{ -,r - -.-.-{-\ -_ _ ___+tlt.ltltl¡-ttl¡lrltl
llliilli
IIIIItIItI
IIII
ll
li
J
I
I
I
I
I
IIIIIIII
ililti
irItIrillllrIr-lrItlr s
stI
II
II
LJI
.¡IIIIIII
l!
tlt t{III¡It
.lI
PO
PI
f¡frE
. sEilir
P¡II 5
fl¡
OY
tI¡II
^lCt r+-ItItI
+-UIIBBRT
()É: 4,50
v*
- il 5trc.0)
SEIIAT OE P{¡TEHCIfl
vlsls Et ts cf,R6A
Et{*l- t)E 0tsP$80 tlE t6s
CB VISI$ EII €L PIII 3 FEI
I 5i5 "uEfrTnn*" errtRínr
0B tte, scHst 'JISIA ffl Ét
tft ? oEr 0r
STR EH Et
2L2
I
Y{}TIAJE DE PEDESIAI
+ I l{Co
'0t
_:1
I
c¡(
13 {8,3 ¡¡ss)
Flgura 54 CaractertstlcaE de Ia geñal de dtsparo
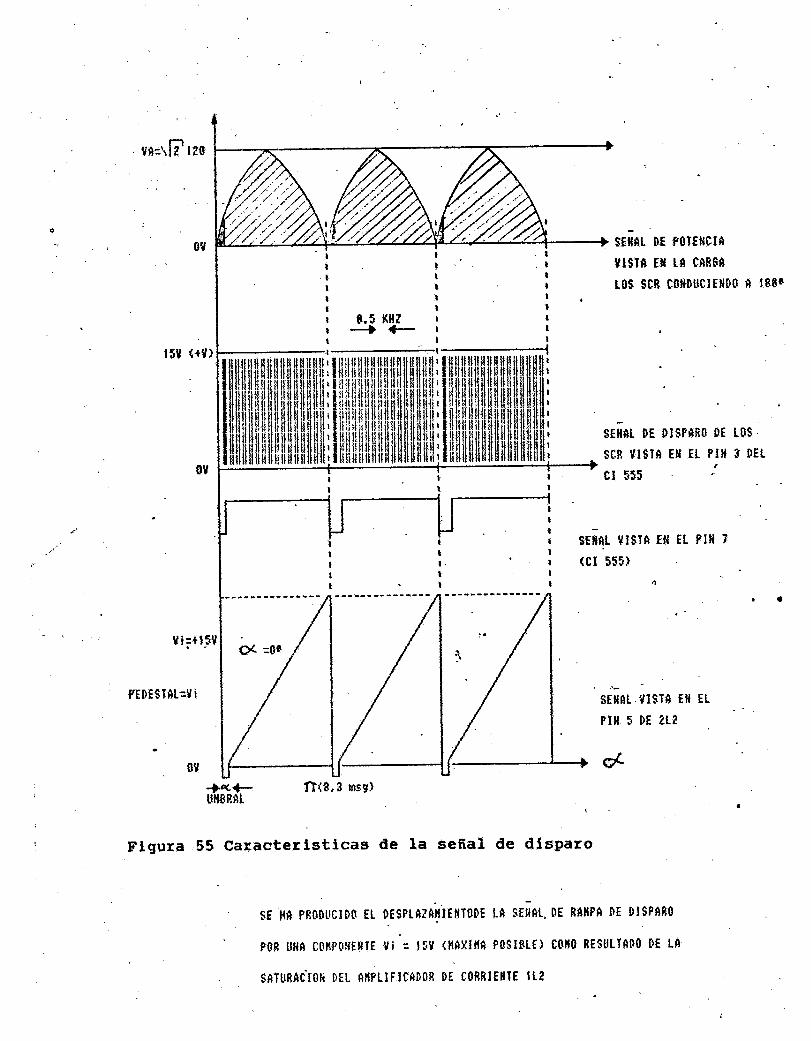
0
SEilNT t|E POIET{CIT
{lsls Efl tf, csB$s
L(tS SCB C0tlDttclEtl{t{} fl 1888
sri*r o¡ orsP*Rtl oE tos
scn {tsTf, El{ Et Plll 3 0Eta
cr 335
I.t
I
&.Í Kflz1{-l3l {+{}
Q( ={ic
PE0E$f*L=l i
+ác{-ttr{BfisI
fl{3.3 r¡-e.g)
F1gura 55 Caracterlstlcas de la 5eña1 de dlsparo
I
I
It¡
I
II
f¡I
ililililr]illilllllr!lillilillilillllllfi iil| fl !l llll llilll
itililiiltililiiilil|lilillillllllllllllt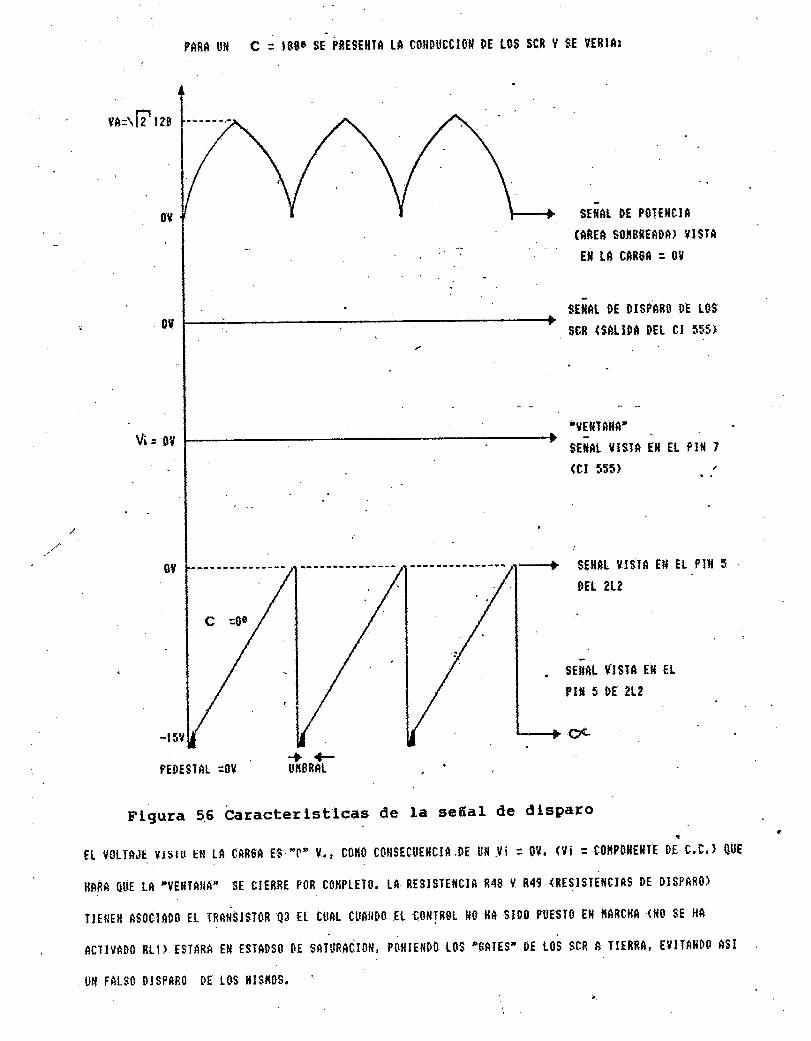
PARfi UII c = tSsc sE iREsEllIf, [A C0Ht}tlCCI0]l 0E [0s scn Y st tltf,lfir
vs:rfl I as
sr[* or PoIEtfctf,
($RES SültBRES0S) SISTS
tll tg eRneR : Ot
sEftnt 0E 0ISF*BB 0E ttrs
$cB (sfLt0l 0EL cl 5ff)
"f EflIsfl0'
sEils! t¡$I$ Ell Et PIfi ?
(ct 535) . .,
-15'd
sEltsL {Islf, Él{ EL.Pltl 5
0Er ?te
sErff,L {lslf Efl ttPIft 3 0E ?L?
e'c. + {-
PEDE$T$L :fIY IIItBBf,[
Figura 56 baracterlstlcas de la geñaI de dlsparo
Et fl|tIAJt írsttt ttl tf, CS86* [S 'f' t., C0ll0 C0]tSECUEtlCle .DE U]t .Vi = l]'J. ({i : CotlP0tlEtlTE 0E C'C') qUE
Hfi8A qtlE Lf, "SEfiTfiH*" 8E CIEBBE poR C0}¡P|,EIB, t* fiESlSfEflcIA B4s v R49 (BESISTEIiGIf,S DE DISP*R0)
TtEHEfr *s0crg00 EL rgsistslgg q3 EL ctrf,L cunnoo Et cofiIBst H0 tts st00 PuEsIo EH l{snctlfi {lls sE Hs
ecllg*oo R¡).ESIARA Elt ESISSS0 0E S*ItrRÉCI0lt, P0f{¡E[D0 105 "SAIES'0E LOS SCR * IIERRA, E',JITAllt]0 ssl
un Ff,Ls0 0lSPAB0 tlE tos fllsflos.

129
Se uti|izó en el circuito de disparo un CI 555, porque a través
de la conf iguración obtenida, se ef ectrla el disparo de los SCR
mediante un tren de pulsos. (Si no se produce el disparo con el
anterior se producirá con el siguiente), adenás de disipará bajo
potencia en el gate de los SCR.
La ventana glenerada por 2L2, cono respuesta a la seflal de disparo
de rampa y pedestal apli'cada a la entrada del nismo (Pin 5),
modulará en el tiempo la sefial $enerada por el CI 555,
configurado cono oscilador astable a una frecuencia de oscilación
base (portadora) de 1.328 KHZ,
4.3.2. Cá,lculo de la frecuencia de oscilación base (portadora)
Lt = 0,6 (R41 + R42)* C1l = 0,6 (4. 7K)*0. O12 uf = O. O33 ns
-f.Z = 0,6 (R41 + R42)* Cll = 0,6 (100K)*0.012 uf = 0,72 ns
f = Tl*fZ = (0.033 + O.TZ) ms = 0.753 ms
a, está def inido por el tiempo de cargfa de Cll (fi$ 57) a través de
R41 .
Unirrsidtd l¡ltonomn do &ri4¡a¡¡flltar. ¡.hl¡ta.ñ

130
T2 es el tiempo de descarga de C1l a través de R42.
Definiéndose asf de la suma de estos dos perfodos Ia frecuencia de
osci lación base (portadora).
C10 es un condensador de 47 uf que filtra la señal recortada
entregada por el Zener DZS (+15V) como fuente de al imentación al CI
55b.
PIN | = Tierra
PIN 2 = Disparo
PIN 4 = Reset
FIN 7 = Descarga
pINg= Vccl+V)

61r------*62rlllr--l--l-t
Flgura 57 .CircuIto de dísparo
DZF
r138 i
rUo
I\l
?)-
L-Uo
?,u
5+
876s3 Cl si5

En el caso concreto de las
en el circuito de disparo
observan 2 señales:
Para ea = 0 el disparo de los
conducción posible y se verfa asf
de disparo es 4,50.
tiristores es todo
: (en la práctica el
dos condiciones
como son: 4 =
fmite que
v
132
se presentan
o{ = 18o0, se
I
o0
el perfodo de
mfnimo angulo

-Nl-:99
t-lf- :-1i
UJ-
?{-? <l-
I¡i'É5
-r"Lf-l-H*1t-lffió 3. g
t t-17
oi j.+i
E
€ r--,i
*ul
=l#-*.rJ
€.--€
Ia
¡s

134
4,4. CIRCUTTO DE REFERENCIA DE VELOCIDAD Y RAMPA
4,4,1. Señal de Ref eirencia. La señal de ref erencia se establece a
través del potenciometro de referencia y el potenciómetro de mfnima
referencia cuyo ajuste entrega una sefial entre "O" y 9,6 V. al
circuito de rampa.
El circuito de rampa $enera una sefial de rampa que sirve como
referencia de velocidad y atenrla la señal de entrada en el tiempo,
con el fin de no producir un incremento brusco en la potencia
entregada.
4.4.2. Circuito de Rampa.
ampl ificador operacional 741
el cual entrega la señal a
para finalmente real imentar
priner ampl ificador operac
determina con el aiuste del
de aceleración).
Está const i tufda por un pr imer
con gianancia inf inita (bucle abierto),
otro 74I que trabaja como inte$rador,
la salida del circuito de rampa en el
ional. El tiempo de interación se
potencionetro de 25O K (potenciometro
El voltaje visto en la salida (Pin 7 de 2L4) "si$ue" al voltaje de
entrada (dial de potenciómetro de referencia).
La señal de sal ida siglue a la señal de entrada con un retraso de
tiempo dado por la red de integración 2L4
=
I
vi
It
sc
_I:_Vi
nio de
r(I;;l
un vo
vit
o
i
s
I
JWC
pejand
el dom
(t) =
oVie
t) =
Des
En
Vo
Com
Vo(
135
En la red inte€lradora el tiempo de retardo es "7* que equivale al
producto RC (I=RC), y se tiene que para una señal de entrada
instantanea de +lOV la sal ida en el tiempo es de +10V, donde la
pendiente de dicha rampa depende del valor de RC de lA red
integJradora (fig. 56).
XC = t = 1 : donde S=JIJ es la notación de la place
RC
La ecuación de rampa de aceleración con potenciómetro de
aceleración en su mayor valor (250 K) es:
ft= 250K + 27K Q= 1O0 uf
ft= 277 K
l= =o,036
RC'-0277* 1O"* 100* 10
Vo (t) = 0,036 t I= RC 63% carÉla de C
f= Z7,T sg.
-1
sRc
tiempo queda:
(ü) dt
aje C.C. se tiene:

Vo
'(Flgura 58 Red
I
lntegradora

137
La ecuación de rampa de aceleración con potenciónetro de
aceleración en su menor valor (OK) es:
ft= OK + 27K Q= 100 uf
ft=27K
l= =0,37
RC 27*tO3*tOO*tO-E
Vo(t) = 0,37 t
T=RC 63X de carga de C
'f.=2,7 sgi.
El circuito asociado a Q4 y Q5 se constiüuye en eI circuito de
"Reset" de la rampa, €l cual una vez apagado el equÍpo va a
producir la descar¡la del condensador Cl4 I levando la sal ida de la
rampa a "cero" voltios.
4,5 CIRCUITO DE REALIMENTACION DE VELOCIDAD
Se establece a través de una dinamo tacometrica, que entrega una
sefial de voltaje proporcional a la velocidad, señal qüe es atenuada
y rectificada a través de una red constitufda por D22, D23, D24,
D25, R39 y R54, potenciómetro de 25OK, R1g, C24, R16 para ser
entregada en el punto Pl y restarla a la señal de referencia,

Et¡
r0rtfftIoftEIf{0
f{tf EfrEHC¡e
scc
2ÍSfi
POTEHTIOTTTF{I
I{IHIl{f, Í{EFTFHCIñ
Circulto
-Uo sAcc
de59Flgura Rampa
f{4?

139
elaborando asf una señal de error de velocidad. R17 y
R18 son resistencias que se colocan en paralelo con Rl9 dependiendo
del nivel de realimenüación que se utilice.
La constante de la dinamo tacometrica (DT) -se determina
experimentalmente tal que : A 1800 R.P.M. 163,6 V C.C.
K = 163,6 V = 0,09 V/R,P.M.
lBOO R.P.M
La Red de realimentación tiene que cumplir la condición de que a
maxima referencia (9.6 V) y con el mayor voltaje de realimentación
de velocidad (163,6V) en el nodo Pl el voltaje respecto a tierra
sera" aproximadamente "o" voltios, De acuerdo a este criterio se
debe real izar el ajuste del potenciometro de real imentación (Max).
Se tiene la opción a través de la elección del puente JPZ para
una realimentación baia, media o alta.
Uninrniffi drinnnmc *n Ckcidrnfr
|¡crn f,rhl,,*ffn

4,5. t. Rea I irnentac i dn a I ta: 746 V
DEHOSTRAC I ONo
TI tz
..
60 Reallnentaclon alta
| 8G$+2561(+4]gK+2úK
grl - 3,6
33K
D0llDE TPI : I
-3,6
33K
846*9,6= 246t
$46K
Y:
'J_
Flgura
YTI .T

'l-:
Flgura 61 Reallmentacton medta
{PI-V
media; t78v4.3.2. Flea I i ¡nentac'i on
-r 9.tUIII
: ,
-9.'6
t G&K+ ? tisl(+ ¿ 3'rK+ ? É.K
fPI=0
:e,L33
6ll ri 19,6
?t
'1
-v :6t tK
t:

4,
J_r*
33K
'l-
Flgura 62 Reallnentaclon baJa
vf,I - | -9,6
436, I
U : l??l
flfiD0 0ttt ilufslftR f,LltfEl{lf,Cl0lt sS HeStfl 1f"3,É.Y R l$8S ftPl{ QUr SEBA l{tlESIBñ
t{*limo vst"nctDl}n, rgstc¡t¡t{fifitros Jr2 EN [A t:tñl.lfftl{If}clfN l{Í.DIA (178',J} I
fiJU$IS[rH0S tt f'0ItHCl0lltI$i(} tfrlÍI]10
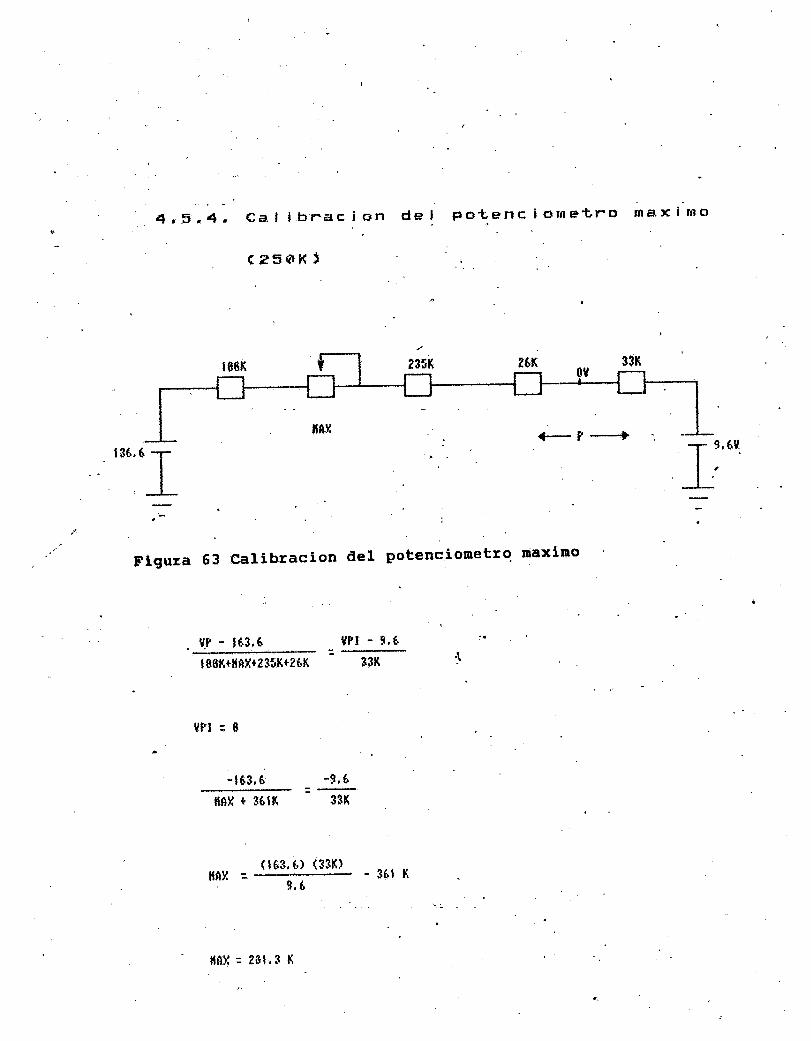
4.3,4. Ca. I i hrac i sn de I FBtenc i o¡oetre rnax i rno
( e5{,K J
Flgura 63 Calibracion del potenciometro. naxlmo
Y.r - lÉ.3,6
I t0r,+fi*'i+23fK+eú.K
Vfl:8
-t63,6=
fiAli + t6tK
( | f)?.. É.) ( 33fi)ilsli :
ttAli: ?01.3 K
ÍFr - 3.6
33K
-9.6
33K
9,6- 3É.1 l(

r44
En la red de realinentación de velocidad la seffal que entrega
nunca sera mayor que la señal de referencia.
Adicionalmente se utiliza una red de compensación (IR) de
utilidad cuando se presente Ia realimentación del voltaie de
armadura del motor (cuando se carece de dinamo tacomterica), para
eliminar la inestabilidad que se pudiera producir debido a
fluctuaciones en la corriente de campo.
En nuestro caso estamos realimentando con DT y el eursor del
potencionetro de IR se Ileva al extr.emo de cero voltios (Tierra).

4 . É, AI'tfJL I FI CF¡D{fT{ TTF I/EL(IC I DAD
Ampl i f icador
+ls {rt5}
-lo(-l 5)
Flgura 6{ de veloeldad

146
para bajas frecuencias el condensador C es un circuito abierto y
por tanto, la ganancia es: ABF = - R2
R1
Para altas freeuencias la capacidad C es un corto circuito (en la
practica X
AAF = Rz//Rg
R1
Y será sin duda menor que ABF. La relación AAF/ABF.vale:
R3+R2
Graficanente tendremos (Figi. 65)
La respuesta obtenida es exactamente la de una red inte$radora que
tiene los si$uientes Polos Y ceros:
Fdt = RZ (R3 + l/sc) = R2 (1+scR3)
RZ +R3 +l/sc l+sc (R2+r3)
cuyo cero vale Z = -1
.R3C
y el polo P = 1
(R2+R3 ) C
y la relación PlZ = R3
R3
R2+R3
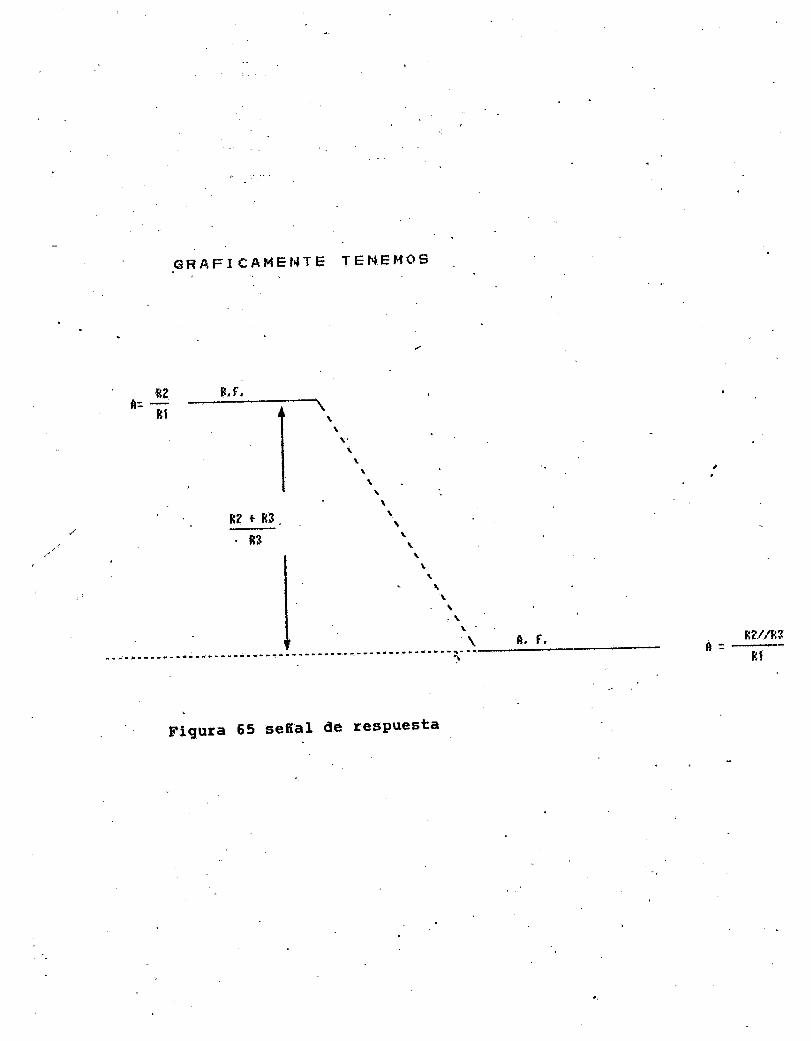
€RAF I CAHEI'lT E T Et'lEt4(lS
fizS:-
BI
S. f.€-Ta'It\| \'t\t\l't\ \
B2+83
ffgot" 65 señal' de resPuesta
.s3
T, F, Bzl/F,3fi=
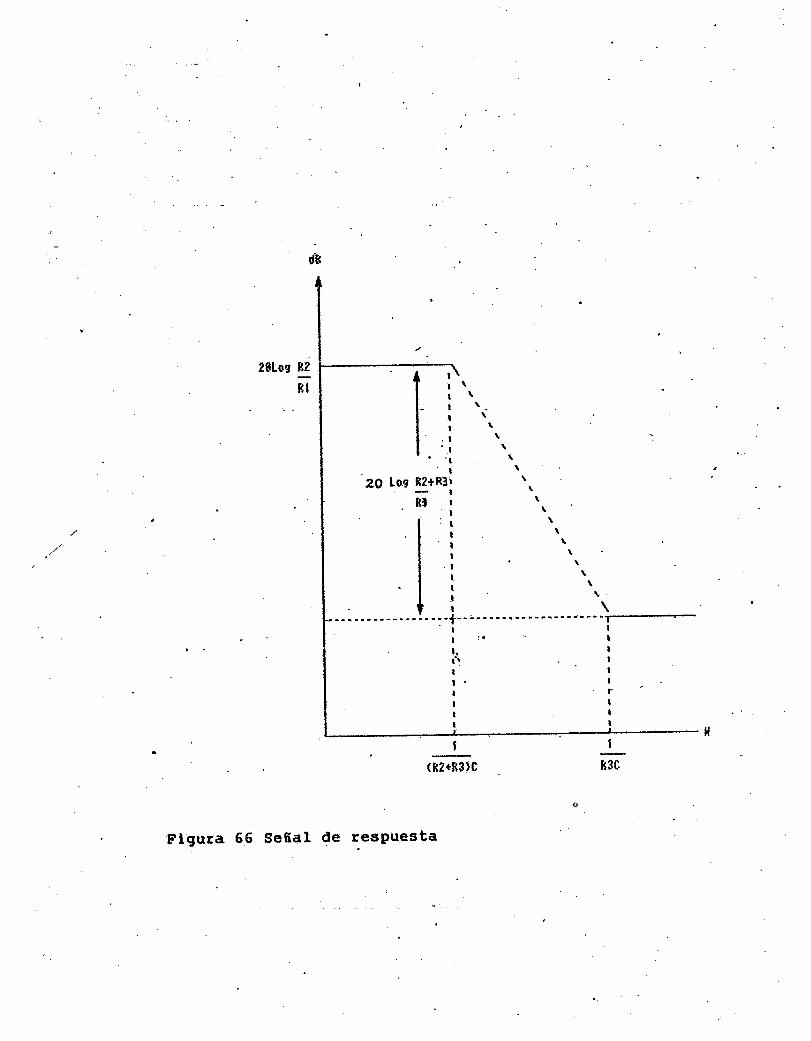
dk
t r'.l¡l¡\l- | \-liilr\I .t \| 'r \
't \'t\
g Lal B2+R3t \¡\
fi'r\.t \| 'r \lr\lr\lr\I .r ' \lr\.lr\lr\ll----f"'t
| :.. t¡
l'r
fl(82+f3)C B3C
de r-espuestaFlgura 66 SeñaI

149
laLa red integlradora
posición de polo I
efecto del cero (1
a glanancia estatica (Rz/Rl) hasta
que despueés queda reducida Por
mantiene I
/ (RL+Rz )C
/R3C)
Para el cálculo de la red se fija numéricamente la atenuación
náxima que la red debe producir y a que valor de frecuencia el
valor de la atenuación es PlZ que vale:
PlZ =
itz +Rg
De esta expresión se obtiene R3, mientras el valor de la capacidad
se obtiene de la expresión, o del polo, o del'cero. Con base en
este modelo descrito .se calcula el valor de los elementos que
constituyen el circuito del amplificador de velooidad.
Sin embarglo, éD nuesüro caso los valores de dichos elenentos se
fijaron en la practica a través de pruebas diná¡nicas efectuadas
durante el proceso de prueb.a del equipo. Habiendo part,ido de unos
valores tfpicos que se usn en estas redes.
Alglunos elementos adicionales a la "Red Tf pica" como D6, D7 , D8,
DZ6, DZI se definirán a continuación:
R3
Univraidrd ,il4rq¡¡r¡r¡ do ftdüafr0a1¡¡, f,,htirrr1¡
ID6: Diodo de
polaridad no
amplificador
segur idad,
sea la
(cero),
ol cual ante
correcta (+)
la entrada
anu I ará
r50
una señal cuya
ganancia del
de
la
D7 y D8: Diodos que linitan el voltaje diferencial
entrada A+0,6V.
DZ6¡ Diodo Zener de tZV, eI cual va a romper (deiar circular
corriente) una vez se obtenga este voltaie a la salida. del
operacional; voltaje muy próxino al voltaie de saturación del AM-
OP. Al drenar corriente se encenderá el diodo lea de "Lfmite de
Corr i ente "
Diodo Led de Lfnite de Corriente: Indica que el amplificador de
velocidad esta saturado y por tanto ha lleglado el sistena al lfmite
de corriente ajustado.
de'
DZt: Dioso Zener de 5.6V,
ampl ificador de velocidad
cual I irnita la sal ida de la etapa del
este voltaje.el
a
4 ,7 , CIRCUITO DE REALII'{ENTACION DE CORRIENTE.
Entrega una sefial de voltaje en el nodo P2 proporcional la

151',
corriente de cargla, eü€-dependiendo de su ma$niüud atenuará nás o
menos la sefial proveniente del amplificador de velocidad, atenuando
tanbién la señal de disparo, limitando asl la corriente de cargfa de
la máquina. La señal de realinentación de corriente es obtenida a
través de la resistencia RI (0,05 ), esta rlltina entre$a.una señal
continua positiva al amplificador 2L!, que la amplifica e invierte
para finalmente a través de RZT sumar esta señal en el nodo P2,
EI potenciometro de 5K de I fnite de corriente establece la
proporción entre la sefial prgveniente del amplificador de velocidad
y la señal proveniente de la red de realinentación de corriente.
Siendo un parámetro la corriente de campo del generador de. C.C.
(l.BA) se procede a ajustar la red de lfmiüe de corriente en 1,44
(77 ,T% DE LA INOMINAL). La resistencia de tom¿ de muestra de I es
O,Oslz(en serie con la car$a).
Vin = 0,051¿ *2A = 0,1 V
Para un ajuste del potenciometro de l fmite de corriente del 72%
(4V),
El circuito equivalente de lo anterior es cono se ve en la figl. 67.
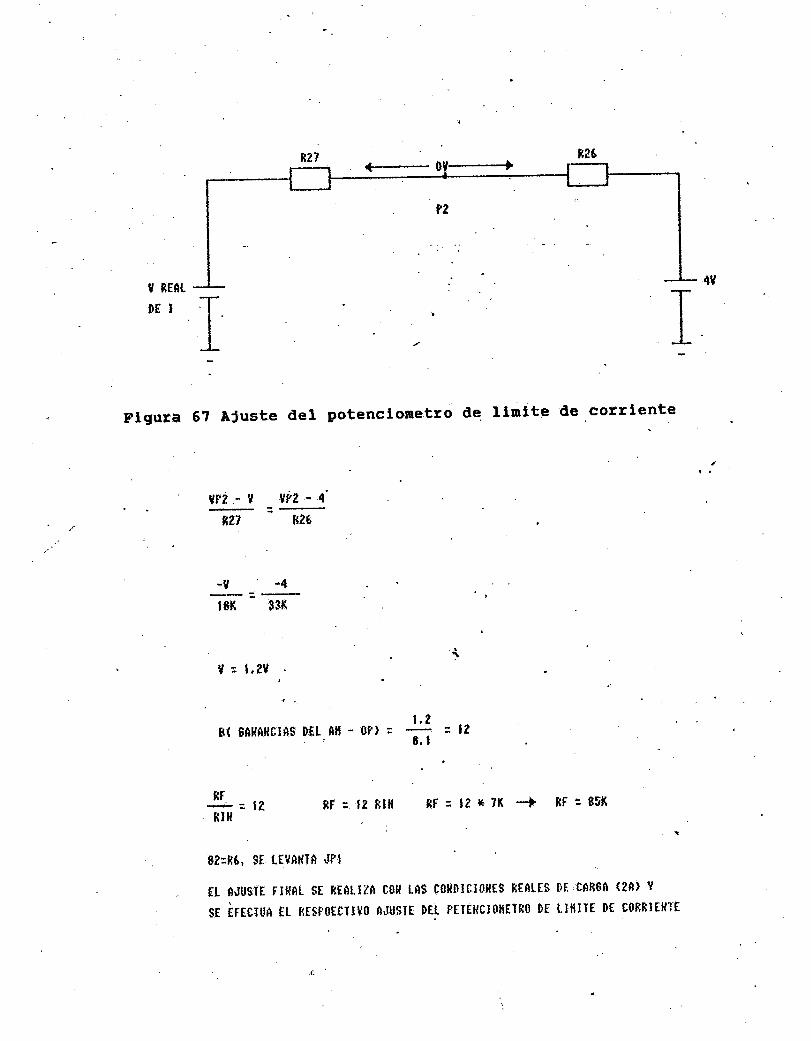
I:
F1gura 67 AJuste del potenclometro
u srstDTI
de llnlte de .corrlente
' uF?,- u
n?"l
sr?-4f{¿6
33Kt8l:
{: 1,2Í ,.
B{ SRHSHCI¡|S Dtt. Slt t2
le * ?l --| BF : 8ÍK
82:fr6, St LEVSI{TS Jf'l
ÉL áJu$It FII{f,l St f{tfitlzfi c0¡{ tf,s c0H0lcltlltts rrtntEs 0E c0fiGfi (?s) Y
s¡ irsc.luR tr. fr$rotcTtv0 nJUsIt Dt[ PHItHc¡o]lElt:0 0t H]llIt Dt c0HFIEllTt
ltr-¿=lzI{IH
1,2- 0F) : :E,I
=f2BIH BF:
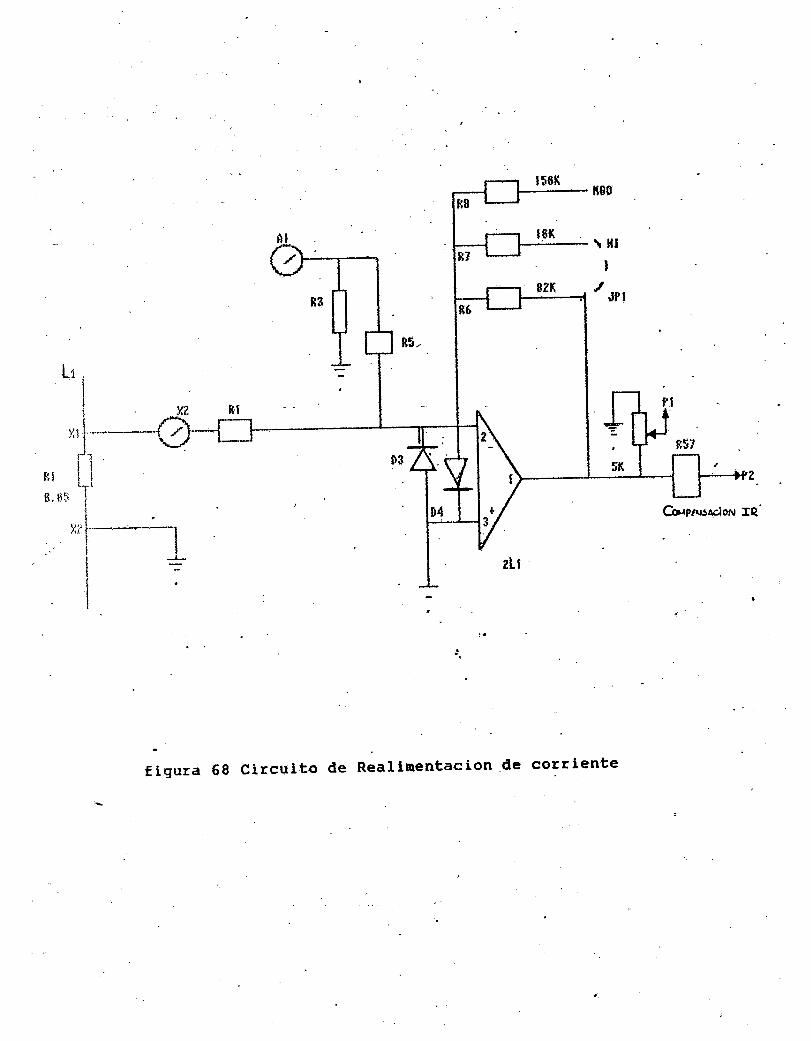
t8K
8?K
Its0
\ lllI
t ,r,
IIII
'I.tt
fJ "l
llL'.-t
i
t,L.1
il
$:l
It. {iÍi
figuraSsCircultodeReallnentaclondecorrlenEe

4,8, CIRCUITC}
Flgura
AMFL I FI CAD(IR bE CC'RRIENTq
Clrcuito anPlificador
f0lEflcl 0lltTrt (esrnriül r o)
de69 corr lente
155
Presenta las mismas caracterlsticas del ampl if icado.r de velocidad,
como tener ganancia infinita amortiÉluada y el calculo de los
valores de dicha red se determinan con la puesta en marcha del
control después de haber partido de valores tfpicos.. La
resistencia R3? es un potenciometro variable y es el punto de
ajuste para la estabilidad del sistema (no oscila la corriente de
carga ); D17 es un diodo de segluridad que hace "cero" la $anancia
del sistema si la señal de entrada no'tiene la polaridad correct¿
(polaridad negativa); D16 es un diodo asociado al contacto
normalnente abierüo RLI (RLl es el rele de "puesta en narcha"), el
cual envfa la señal de entrad¿ a tierra para aseglurar que el
circuito de disp¿ro no produzca un "falso disparo".
Este AM-OP con su respectiva red, es el encar$ado de amplificar la
señal db "error de corriente" ontregando una sefial que sumada con
la sefial de sincronismo, permite la regulación .de la potencia
entregada por la etapa de potencia. Esta salida va a variar entre
0y+15voltios.
4.9 FUENTE DE ALIMENTACION
Constituida por una entrada de A.C. con opción para alimentar a 22O
V ó a llOV (doble tap). El caso nuestro utiliza el TAP de llov.
Se cuenta con un varistor entre I fneas para suprinir los picos de
156
voltaje y con un circuito RC para eliminar el ruido eléctrico.
El transformador tiene
fuente es del tipo dual
secundario con un
de cero flotnte
TAB central (20V AC).
(+15, -15) 40 Ma.
La
Además tiene salida de +V G24) para
marcha, y salida de -V (-17V) sin
señal de sincronismo en el circuito
nanejar el rele de puesta en
filtrar para utilizarla como
de disparo de los SCR.

, +u0 +15 tnc
Flgura ?0 'Fuente de AIl¡nentaclon

158
4.10. ESTACION DE MANDO
Se configura un circuito star-stop a través del rele RLl: una vez
se pulsa el start de enerEliza RL1, reteniéndose mediante su
contacto normalnente abierto. Cuando se pulsa el stop RLl se
desener$íza y se abre el contacto (ver fig' 7I).
4,11. LISTA DE ELEMENTOS
D26 = 1N47424
Dzl = 1N47344
D23 = 1N47444
D24 = 9,6V
D25 =1N4744A=15V
Ql = QZ = Q3 = Q4 = (414 PN221 9A)
Q5 = (10KM8335) VNIOKM (POSIBLE FET)
LI=L2=L4=LM358P
L3 = NE555P
D1-D2 Diodos de potencia 600 V/3A
D3, D4, D7, D8, D14, D15, D16, D17, D18, D19, DzO, D}l = 1N4748

t¡
, .¡
q
SISBIIII't t:I12 -r-
', :: ;"i.'lEstacíon de nando,''
:.
Flgura'71
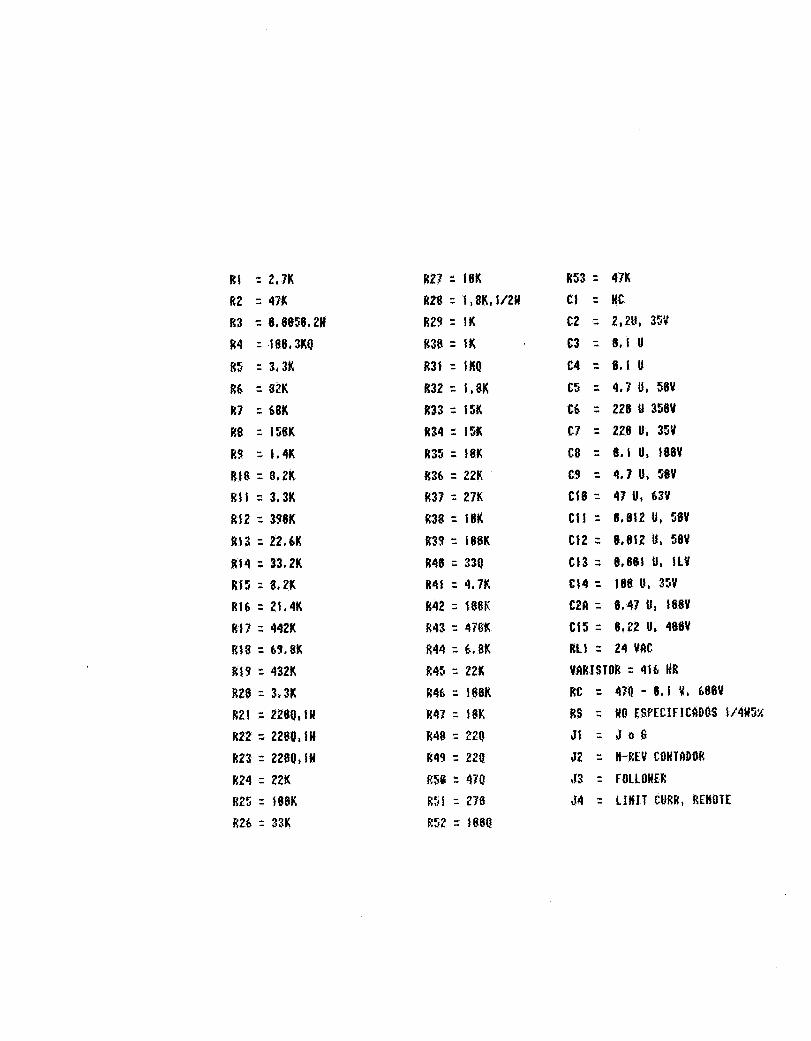
Bl : ¿. Tl(
lt? : 47Í
83 : E,88f6.211
84 : l8B.3X0
BS : 3. 3f(
86 : BZK
B? : 68K
B8 : tfBK
Bg : l, 4l(
il8 : 8,21(
Bl | : 3.3K
Bt? : 39SK
*13 : ?2,6K
814 : 33,?K
SlÍ:8.?K816 : ?1.4K
*17 : 442Í
El0 : 63.8K
¡¡lg : 4321(
BIB : 3,31
B2l : 2280, tll
tt?? -- ¿as[,tn
ft23 = 2280,ljl
H?4 -- Z.ZK
gtt : fBBK
826 : 331(
82? : f0K
ft?8 : l,8¡K,VZI
929 : lÍ¡¡35 : lX
Btf : tü{l
83? : l ,8K
833 : lfK*34 : lS[
f,3f = ltf(B3É : 2?K
83? : 27X
ft38 = 16l(
f,39 : I S$l(
fi40 : 330
B4l : 4, ?[
f42 : l8S[.
fi43 : ¡ll$fi
f,tl{ : 6, $K
¡¡{l : 2?K
¡¡it( : | 06K
841 : | 8l(
f{48 : 1?0
843 : ??0
95¡ : 4t0
Eft : 3?t
F;fA : t880
*53 : 4?f
Cl:ilCC? : 2,21f, 3ffl
C3 : E.l lf
C4 : 8,1 U
Cf : 4,? U, f0U
C6 = 228 U3t0U
C7 = 2?g U, 3ÍV
C8 : 6. | 1,, l88t
Cg : 4. ? 1,, 58t
Cl8 : 4t lf , 631
Cll : 8,81¿ U, f6U
Cl? : 8,81¡ ll, 588
Cl3 : 8,881 U, lL{
Cl4 = f06 U, 3SV
C2e : 0,4? ll' lSEt
tlf : 6,¿2 U, 48BU
BLI = ¿4 VSC
|SBISI0B : 416 RB
BC : 4?ll - 0. I U, 608U
BS : lt0 ESPICIFICS00S l/4n7x
Jl : Jo6..Ie : il-fi[V t0lflf,D0tr
.13 : F0[[0lltfi
J4 : LlllII CUBR, Btll0lt

161
D5, D9, D1O, Dl1, D12, D13 = 1N4003
D22, D23, D24, D25 = 1N4OO5
4.12. POSIBLES FALLAS Y SUS CAUSAS
EL EQUIPO NO DA VOLTAJE DE SALTDA:
-Verificar Voltaie de al imentación
-Verificar fusibles
-Verificar que haya "entrado" RLl (Rele de marcha)
-Verificar que haya señal de referencia (cursos del rele de
Referencia. ) .
EL EQUIPO DA LA MITAD DEL VOLTAJE DE SALIDA A MAXIMO SEÑAL DE
REFERENCIA (9.6v):
-Chequear puente de potencia pues probablemente se ha abierto uno
de sus "brazos" (diodo o SCR abiertos).
EL EQUIPO DA TODA SU TENSION DE SALTDA SIN RESPONDER AL
pQTENCTOMETRO DE REFERENCIA (EIIBOLAMIENTO DE LA MAQUINA):
-Verificar señal de real inentación
-Puente semiconductor en corto
-Verificar si el amplificador de velocidad esta saturado;
-Verificar ampl ificador de corriente saturado
182
EL CIRCUITO NO DA ESTABILIDAD (OSCILACION DE LA CORRIENTE DE
CARGA):
-Verificar circuito amplificador de sorriente
-Recalibrar potencionetro de estabil idad (R32)
-Chequear Cg (que esté en corto o abierto)

i,, pARAtf ETROS DE DI.SEÑO DEL RECULADOR DE VOLTAJE
BEOULf,I}OR I}E UflTTAJ E
f,JIISIE
OE
VOITSJE
.Btú
PoTfltcl ñ uolt*'lE
Eilrnsos sEllsAs0
I t8{, 6i I l0v
F|}IETGIR
OE
cnilP0
6e , 6i{
I ? 3 4
+F -t
{\Gtlf
38
BC*nP(|
Figura ?2 Esquema regulador de voltaJe
.sE l0ft* t0}|0 rAfifllllt(u tll 0¡sttlu t,lt $ttit¡L*our ft ltrtlaJt ttls 0sl0s D.E
Pt*Cf, DtL 6Et{EBt100S SIHCBt|illeü¡
I. 'JOLIAJÉ GETERf,t){] Y ¿S8
t ¡ llflxlltñ c0RF.lEtllE rrE CAB6S ú¿f,
i I L C0fiBI Elllt 0E cfltlPt| 6l
IT, ItlLIf,JE.DE Ei:ITACIi|II 65I
LI
L?
L3

164
5.1. PRTNCIPIO DE OPERACION DEL REGULADOR DE VOLTAJE
El reEulador de voltaie consta básicamente de 3 etapas:
1. Circuito de campo, sincronisno y fuente de polarización.
2. Circuito de real imentación de voltaje
3. Circuito de disparo.
5.1.1. Circuito de campo, sincronismo y fuente de
polarización.
La alimentación de este circuito se real iza a través de lo's
puntos de bornera 1 y 2 que van a estar conectados al voltaie
I fnea-neutro del generador sincrónico al cual se le va a re$ular
el voltaje de salida (110V C.A).
Una vez es,té rodando la máquina motriz (notor CC de asociado al
control de velocidad W.!) a 1800 RPM se tendrá un voltaie de
remanencia lfnea-neutro de 5 V, voltaje suficiente para producir
un Elolpe inicial de corriente a través del diodo D que entrará a
reforzar el canpo de remanencia hasta alcanzar un 30% (4OV) del
voltaje nominal lfnea neutro del generador sincrónico (110 V)
momento en el cual el puente constituido por CRl, CRz, Dg y Dll
entrará a trabajar.
A través de los diodos D3 y D4 se obtiene una señal de voltaje de
165
onda completa (V0) que se utiliza como sefial de sincronismo para
el circuito de disparo de los SCR, posteriornente esta sefial es
filtrada y regulada, a través de ZZ y CZ para suministrar un
vol taje de polar izaci6¡ +Vl (l?V) .
V0 = LTO * 0.9 = 108 V.C.D.
La corriente de la fuente de polarización viene,dada por:
v0 v1 108 12 96=
RI2 5K= ---- = 2O nA
5k
El ánÉlulo de disparo para el puente de alinentación de oampo está
dado por:
VCOVC= (1 + Cos "( ) VCO = .108 V.C.D.
2
65 V = 54 (1 + COS < )
I,2 = 1 + COS.(
O ,2 = COS.¿
166
5.L2. Circuito de real i¡nentación de voltaje
Está constituido por .el transf ormador de real inentación de voltaje
TR, el puente rectificador y la red R18, R13 y R26.
Para tz} V I fnea-neutro habrá que cal ibrar R26 tal que VP = YZL =
6,2 V.
O,9 factor conversión rectificador onda conpleta
(R26 + tZK)19.3 * ------ = 6,2
100K+R26+12K
R26 = 3T ,2 K(| = 50K
El voltaje de 6,2 como señal de referencia se tomó con el
criterÍo de que está dentro del márgen de tensión que trabaja el
CI 74I (ilOlJ ya que el voltaie de alimentación de dicho CI es de
+IZV; además que a partir de este paránetro se determinó el valor
de los componentes de la red de realimentación; donde con una
realimentación linea-neutro debe producir un Vp=$21=6, 2v,
generando asf una señal de error igfual a cero voltios. Si se
I legara a variar YZI en principio se tendrfa que variar la red de
real imentación para que se cumpl iera la condición que con 12OV de
realimentación el C.I. viera una sefral de error i$ual a cero (Vp
= Yzr) .

En
de
167
consecuencia con lo anterior se escogió en R26 un potenciómetro
SOKll y se reajustó en la puesta en marcha del equipo.
5.1 .3. Circuito de Disparo
Se tiene un formador de impulsos con transistor uniunión (UJT), que
se comporta como el üriglÉler; en efecto en estado de bloqueo está
asegurado hasta que la tensión de su emisor no alcance la I lamada
relación intrfnseca .Este coeficiente fo' suministra el
constructor y para muchos elementos vale 0.7 la relación intrfnseca
representa la relación entre la t,ensión que eI eBisor debe alcanzar
(Vp) para provocar Ia conducción del transistor y la tensión
aplicada entre las bases 81 y B2.
Vp= NVBB+Vo
Donde VO = es la cafda de tensión directa en los extremos del
diodo emison, cada vez que la tensión del emisor del UJT al.canza
la relación intrfnseca el transistor entra en conducción
produciendo asl la descar8la del condensador CT, Sobre la
resistencia de la base B/(R2B) se producirá un inpulso que en
muchos casos, especialmente para pequeños SCR, puede producir su
d i sparo .
La sincronizaciÓn dp los inpülsos con la frecuencia de la red de
al imentación se asegura al imentando al circuito con un +VO

168
rectificada y recortada (+12V). Pasando por cero la tensión
apl icada entre las bases Bl y 82 se tendrá siempre la descar$a del
condensador, ya que al crecer la tensión entre las bases 81 y 82 se
alcanza siempre la tensión Vp que hace conducir al UJT. La recarga
del condensador C7 comenzará con el inicio de una nueva
alternancia. La resistencia variable sirve para variar la constante
de tiempo RC con el fin de obtener la variación del ángulo de
encendido &
La resistencia en los controles autonáticos no puede ser regulada
manualmente y por tanto, se sustituye por un transistor (Ql), donde
una tensión variable entre cero y +12 V., provocará una variación
del .ángulo de encendido entre cero y 1800. Esta sefial de control
viene del ampl ificador de error que está constituido por una red
inteÉlradora (C3, R2 y LM741 ). Los valores de dicha red se
determinaron en la puesta en narcha del equipo.
El ángulo de disparo deseado ¿ = 78,
ajuste del . potenciómetro R26 durante
regu I ador .
se obtiene a través del
"puesta en marcha" del
50
la

como protección de corriente se colocó un fusible F en
I lnea que al imenta el circuito de campo del Elenerador y
un 4O9( por encina de la I noninal del campo (6A),
aperturas innecesarias del fusible.
Se colocó por tanto un fusible de 10A, 250 V.
169
serie con la
se rateó en
para evitar
Uniwnidcd l¡rtn¡¡¡¡¡¡r¡ r" fttidrnh' fh¡i" Brhrintrr¡

5.7. POSIBLES FALLAs V SOLUCIONES
5IilTIHfi PffWTE OflFfi
EL UOLIA.IE EETEBRI}O
tfo f,Lcf,fi¿f, tt t*toB
rrf0lcA00 (ll9v.L-t)
,',OLINJE RLTll
I ftc0ftTR0tsEtE
cot{ P0IEftct0llETB0
t|E f,JUSIE BE6
ITIESI$BTtIOSD EH EL
{{1LIS.IE SEIIEf,f,OO
fr0 H$Y f{tlEilctf Erl
t03lfBitffAtEsfvt
ff8 c0ilEcls08s fF Y -F
Bñ.ICI TOIIf,JE
BEflsll€tIE {+5'l)
Sf,tIOE DE 6EIIEBflD|}B
POB CSBIO O S{}BRECf,BSf,
OEFECT{| EII EEilENRD{IR
0 Extrsct0tl
II Eil EOBIÍ¡
0f sglEBIo
8E AEIERI{l
II|l SEII$S IíILTñJE DE
PESt IfrEtIeC I0tl
¿EIIER ZI TSIEBIO
D*fr0 ?¡tl
Ql Éfi c0BI0
FAI.If, EtI Lf, RED
IIITEEERD(lBS
DESCf,LTEB$CI{}II DE
LS BES ITITE8RTO{INS
Í)EFÉCIO E'iI L* fiEO
DE C0ltPEilSRCl0lf
Ff,Ttf, EH Lf, E}IIlf,CTflII
O E}I Et SEHERROOB
s0üHlrl
UERTTI EAB
c0r0tjsI0BE5
flEtIF¡C$Í Corsü[IofiES
tmsnEn ceilPB
ceilEtRB tustBtE v/{l
REn0tEs c0RI0 0 CIBB*
TERIFICf,B OPEf;RCI{lII OE
EXtrscl{lfi v/0 6EnER$0BB
REEIIPI.A?SB ZI
BETItPtflZflB QI
ntEiPtszrB 0t
UERIFIESN CIBCUII{} I}E
BEtL I ilE'f 1f,C Iolt
BEEffPtf,¿f,R tlBEEilPTSZSB Qt t{lBEtflPr0¿f,R 0l
{ERtFtCf,B C3 v B?
RECf,L¡BBSB R¿
uEBtFlcfiR Dlo' cll'B??,818, C3,89,
ftBtFtc$B EHl*el0¡l
Y./f} OPEBOEIBil DTL
6EIIEP*D(|R

5.3. PRINCIPIO DEL CIRCUI TO DE D I SPARO
'/
!-igura 73 Oscilador de relaÍaclon

172
El transistor monojuntura puede utilizarse en un circuito oscilador
de una sola etapa para proporcionar una señal de pulso adecuada
para aplicaciones diEitales. Puede utilizarse en lo que se denomina
oscilador de relajación como se nuestra en la fisura 73.
La resistencia RT y el condensador CT son los componentes del
tiempo que fijan la tasa de oscilación del circuito.
La f recuencia de osci lación puede calcularse con la siÉluiente la
ecuac i ón :
RT cT logn Í(1/ (1-1 )lFo
que incluye
sabiendo que
tenemos:
la
N
tazón intrfnseca N del
se encuentre entre 0,4 y
transistor monoiuntura r
0,6yutilizandoN=0,5
FoRT CT l8n [1/(=O,5)]
| 1.44=
RTctlnZ RTCT
1.5
RT CT

173
El condensador CT se carga a través de la resistencia RT hacia el
voltaje de suninistro VBB siempre Y cuando que el voltaje del
condensador VE este Oo" debajo de VP, determinado: 'por el voltaie
através de 81- 82 y que la relación N del transistor esté dada por
la ecuación:
Vp = lVBl VB2 - Vo
y el emisor del transistor monoiuntura aparece como un cir'cuito
abierto. Cuando el voltaje del emisor a través del condensador CT
excede este (Vp), el circuito monoiuntura se dispara, car8lando el
condensador, después de lo cual comierrza un nuevo ciclo de carga.
Cuando eI transistor monojuntura se dispara, sg desarrolla un
aumento de voltaje a través de Rl y la cafda de voltaje a través de
R2 como se ve en la f igura. La señal err ¿'l emieor tiene la forma de
un voltaje de sierra, que'en la base 1 es un pulso posltivo, V €D
la base 2 es un pqlso neÉlativo

''l
{E:lP
t tEtP0
TI EITPO
F iqura ?{ Formas de onda del oscllador nonoJuntura
o
5,4 CALCULO DE LOS ELEI'ÍENTOS DEL PUENTE DE POTENCIA
175
Tomando como base de I a I nom-i'na I de canpo de I $enerador
sincrónico.
IF=64
por cada brazo circulará seÉlrln Ia tabla de datss para calculo
anexa:
El 50% de IN 6 x 0,5 3A
Dg y Dl1 = IN5404 (3A, 400 V)
scR s4003L51 (10A, 400 V)

5.5. LISTA DE ELE}lEHTBS
Rl = 33t{0 ./1/41¡
8? = ZZEXA /t/4!lB3 : 33glt0 /1/41¡
84 = 3.31h ,/1,/4¡¡
B(5,9): 1n0 /t/49810 : l00l{O .¡1l4ll
B{11' 1?)= Stlo /10/¡lll
f,13 = 1?l{0 /1/4ll
Bl4:l0e,A/1/4nl(15,1?)= 33H0 /1/4ll
f,16 = 8,?l{0 .,{/4ll
813: ?tllü/t/4Ul??=&?80/f/ll¡¡¿4:18a/U?ll327 = 4?fi /t/4ll8¿6 : Stsxo /1'l?l¡gz7 -- z,?Nfi /114|¡
838 : 1000 /1/2lf
Íeg = 181{0 11./4ll
ü1 = ?58uF/16U
C{?,4,9}:0,47 uf /166U
C(3,7) -- A,Z? uf/460U
C(5,1,13) = 8,1 ufl208U
C8=1uf¡'?06U
Cl8 = E.47uF/406V
01 = 2t3053
Q? = ?tf?646
t1: U138Lf,?08
Itl= U1741
SCn(l,3) = i6627
D( I,16, f 1) : 11f5404
l((1,?,3,4,5,6) = 1lf4887
D$,DP: 1t40C7
CP = ELEtIEIC0 10uf/3BU
I¡i?,8) = 1f1400?
Z1: 6.3U
?2= 12t)
23= l?U
1
III2
I?
tI?,
II1
III1
II1
3
7,
3
IIIII1
z
3
b
z
1
Ia

{\0
t*l;l
ct
"i(D
+ü.
It.
t.
:
j
i.'1
I
I
io)iJ- r -'rlili : '1 -f--,-JA
. g* t
.r'tal¡
;
rü --.r|.i i,ii
cil a
ilIII¡I It
J
;t[l 'ifi
Ct .;
t31
rfl9rl
Eir
!
rñ,
¡¡1
't.q'tñ
l-{r"
'--í:
cJt-l-: irovrt oütr\
J|'r-',
178
8. FUNCIONAMIENTO DEL SISTEMA. DE CONTROL
6. 1 . PUESTA EN MARCIIA
fnicialmente se pondrá en marcha Ia máquina prinotor del sisüema
(motor asfncrono), luego se habilitará el control electrónioo del
grupo ward-leonard a través del selector 51, momento en el cual se
iluminará la lánpara piloto, posteriormente se pondrá en marcha el
motor de CC pulsando el Start, V se procederá a ajustar el
potenciómetro de referencia de velocidad hasta hacer que el voltaie
Élenerado por el glenerador sincrónico ten$a una frecuencia de 6O hz
(1800 RPM). La magnitud del voltaje $enerado se fiia a través de la
tar jeta reÉluladora del vol taje (2OBV) . -
6.2, REGULACION DE LA VELOCIDAD Y EL VOLTAJE
Básicanente lo que se busca es mantener el voltaie constante ante
la variación de carÉia conectada al generador sincrónico.
Cuando se carga el $enerador sincrónico va a aparecer un par
resistente, como consecuencia de la reacción d.e armadura que va a

179
atender a frenar el motor CC de excitaciOn independiente, de nodo
tal que su velocidad de rotación al i$ual que la frecuencia del
voltaje Élenerado tiende a disminuir. La magnitud del voltaie
glenerado se regula a través de la variación del fluio magnético de
campo y obviarnente a través de su corriente de canpo. La velocidad
del rotor es un parámetro que debe pernanecer constante (6O hz).
Para que esta velocidad permanezca constante es necesario el
reglulador de velocidad, €l cual para su reglulación . tiene una
ref erenc ia de ve I oc idad para e I motor CC; s.e real imenta la
veloci.dad de dicho motor mediante una dfnamo tacométrica acoplada
aI eje; el sistema electrónico de control de velocidad regula la
corriente de canpo del generador CC y consecuentemente el voltaje
generado, que a su vez va a alimentar la alnadura del motor CC,
regulándose asf la velocidad de este úItimo.

7. CONCLUSIONES
1- La regulación de velocidad realizada €)n Ia corriente de
exeitación de1 generador CC permite utilizar elementos de
bajo amperaie Y menores coatos-
Z- Las tarjetas reguladoraa de velocidad y voltaje
Elarantizan Ia eetabilidad del sietema-
3- El mantenimiento del eistema de control eE muy económico
ya. que las piezas o elementoe gue , preeentaran daños o
deterioro Ee consigUen a bajoe costoe y fáeil acceeo en el
rnercado -
4- Se evita la regulación eobre los parámetroe del motor
de CC que trabaia con muy altos a-urperaies-
5. El sietema diseñado evita Prescindir del motor
asincrono y eI generador CC-
6- La variación de comiente de excitación y f luio
magnético me permite regUlar parámetros de velocidad y
voltaje -

1Bl
BIBLIOGRAFIA
CEAPMAN, Stephen J. Máqu inas El éctr ic¿s , Ed . itfc. Graw Hi I I ,
1 gB7
OGATA, Karsuhiko. Ingenierfa de Control Moderna. EditorialPrentica- Hall,'1970.
PLZZIOLA, Antonio. Electrónica y Servonecanismos. Ediciones DonBosco, BarceIona, 1974.





























