Embed Size (px)
Citation preview
Reglering av turbins ledskenor i vattenkraftverk
med hjälp av elektriska ställdon
Rapport för Högskoleingenjörsexamen
IDE 1210, Maj 2012
Elektroteknik
H
ög
sko
lein
ge
njö
rse
xa
me
n
S
ektio
ne
n f
ör
info
rma
tio
nsve
tenska
p, d
ata
- och
ele
ktr
ote
kn
ik
Samir Hadzic & Jakub Luszczynski

Reglering av turbins ledskenor i vattenkraftverk
med hjälp av elektriska ställdon
Högskoleingenjörsuppsats
2012 maj
Författare: Samir Hadzic, Jakub Luszczynski
Handledare: Tommy Salomonsson
Examinator: Kenneth Nilsson
Sektionen för informationsvetenskap, data- och elektroteknik Högskolan i Halmstad Box 823, 301 18 HALMSTAD

I
© Copyright Samir Hadzic, Jakub Luszczynski, 2012. All rights reserved. Högskoleingenjörsuppsats Rapport, IDE1210 Sektionen för informationsvetenskap, data- och elektroteknik Högskolan i Halmstad
II
Förord
Detta examensarbete om 15 hp har utförts åt Statkraft Sverige AB i samverkan med
sektion för informationsvetenskap, data- och elektroteknik vid Högskolan i
Halmstad som avslutning på Elektroingenjör programmet.
Vi vill börja med att ge vår djupaste uppskattning till Gabriel Waaranperä som gav
oss möjlighet att genomföra examensarbete.
Vidare vill vi ge vår uppskattning till våra handledare Tommy Salomonsson för den
obegränsade tid, stöd, idéer och vägledning under arbetets gång samt praktiska råd
vid rapport skrivning.
Tack också till våra externa handledare Åke Nilsson och Ferenc Dali från Statkraft i
Laholm för vägledning, hjälp, och trevligt bemötande.
Vi vill också tacka involverad personalen från SKF för bra samarbete och utlåning av utställningsmaterial.

III
IV
Abstract Hydropower is the largest renewable energy source available in today's society.
Operation and production is handled by high-tech electronics. This thesis is done on
behalf of Statkraft Sweden AB who wants to explore the possibility of replacing the
hydraulic cylinder with an electric actuator, generally as well as a case of a small
power station on the river Nissan. Whether it is the chaplain or francis turbine
vanes are actuated by hydraulic cylinders. Because of Gustavsberg hydropower is
inconstant operation, this report is based on power calculations, which are read and
computed according to the available hydraulic diagram. With the system operating
pressure of 100 bars determined that the hydraulic cylinder on Gustavsberg power
stations is sized for a force of 143kN. Based on this force, it has committed to fit a
suitable modular actuator from SKF.
Electric motor is determined according to actuator screw parameters which are
implemented in MATLAB to find out which torque is needed to power the actuator.
Two options are suitable for the application. One is the complete drive packages
from SKF with AC servo motor and controller to this, the other is asynchronous
motor from the appropriate manufacturer such as ABB, together with drives from
the same manufacturer.
Since the actuator will not work more than twice an hour, there will be needed
holding torque for the actuator to maintain its position. Holding torque is achieved
easiest with an inverse function of the mechanical disc brake. This can be applied
both during operation of the servo motor or asynchronous motor.
Security is key in a hydroelectric power station thereof demands on the components
involved in the closure of the turbine. In the current situation the power station is
equipped with two independent systems to shut off the turbine at degraded
situations as power failure or fire. The first system consists of the UPS device, the
other is a counterweight at 2600 kg. This thesis makes the assumption that the UPS
system has fallen away and the only thing that remains is the counterweight. The
counterweight issued to turn the vanes if the hydraulic system loses pressure.
In degraded situations problems occur with actuator when the actuator backwards
runs due to the influence of guide rails and counterweights force. To solve this
problem it has been developed three solutions suggested methods. Regenerative
braking is most appropriate when the actuator is driven by servomotor. Industrial
damper or modification of the actuator is possible to implement regardless of the
operation of the servo motor or asynchronous motor.

V
VI
Sammanfattning
Vattenkraft är en den största förnyelsebara energikällan som finns i dagens
samhälle. Drift och produktion sköts idag av högteknologiska elektroniska system.
Detta examensarbete görs på uppdrag av Statkraft Sverige AB som vill undersöka
möjligheten att byta ut hydraulcylindern till ett elektriskt ställdon, generellt samt
som ett case på ett mindre kraftverk på Nissan. Oavsett om det är kaplan eller
francis turbinen manövreras ledskovlar med hjälp av hydrauliska cylindrar. På
grund av Gustavsbergs vattenkraft är i konstant drift, bygger denna rapport på
kraftberäkningar vilka är lästa och beräknade enligt tillgänglig hydraulisk schema.
Med systemarbetstryck på 100 bar bestämmas att hydraulcylinder på Gustavsbergs
kraftverk är dimensionerad för en kraft på 143kN. Utifrån denna kraft har det
utgåtts för att anpassa en lämplig modulär aktuator från SKF.
Motorn bestäms enligt aktuatorskruvens parametrar vilka implementeras i
MATLAB för att ta fram vilket moment som behövs för att driva aktuatorn. Två olika
alternativ är lämpliga för applikationen. Den ena är ett färdigt drivpaket från SKF
med AC servomotor samt styrenhet till denna, den andra är en asynkronmaskin från
lämplig tillverkare t.ex. ABB tillsammans med frekvensomriktare från samma
fabrikat.
Eftersom ställdonet inte kommer att arbeta mer än två gånger i timman så kommer
det behövas ett hållmoment för att ställdonet skall behålla sin position. Hållmoment
åstadkoms smidigast med en inverterad funktion på mekaniskt skivbroms. Detta går
att tillämpa både vid drift med servomotor eller asynkronmotor.
Säkerheten är viktigt i en vattenkraftstation där av höga krav på komponenterna
som är involverade i stängning av turbinen. I dagsläget så är kraftstationen utrustat
med två av varandra oberoende system för att stänga turbinen vid störd drift ex.
spänningsbortfall eller brand. Det ena systemet består utav UPS enheter, den andra
är en motvikt på 2600 kilo. I detta examensarbete görs antagandet att UPS systemet
har fallit bort och det enda som återstår är motvikten. Motvikten är till för att stänga
ledskenorna ifall hydraulsystemet tappar trycket. Vid störd drift med ställdon
uppstår problem då ställdonet bakåtdriver under kraftpåverkan från ledskenorna
och motvikten. För att lösa detta problem har det tagits fram tre lösningsförslag på
metoder. Regenerativbromsning lämpar sig bäst då aktuatorn skall drivas med
servomotor. Industridämpare eller modifiering av aktuator är möjligt att
implementera oavsett vilket drift med servomotor eller asynkronmotor.

VII
VIII
Innehåll
1 Inledning ............................................................................................................................... 1 1.1 Problemformulering ........................................................................................................... 1 1.2 Syfte ........................................................................................................................................... 1 1.3 Mål ............................................................................................................................................. 1 1.4 Kravspecifikation ................................................................................................................. 2 1.5 Avgränsningar ....................................................................................................................... 2
2 Bakgrund .............................................................................................................................. 3 2.1 Vattenkraft .............................................................................................................................. 3
2.1.1 Drift & utförande ................................................................................................................ 3 2.1.2 Turbin typer ......................................................................................................................... 5 2.1.3 Löphjul och pådrag ............................................................................................................. 8
2.2 Gustavsbergs vattenkraft i Nissan .................................................................................. 9 2.2.1 Hydrauliskt system ............................................................................................................ 9 2.2.2 Elektronisk styrning ........................................................................................................ 12 2.2.3 Nuvarande säkerhetssystem .......................................................................................... 13
2.3 Elektriska maskiner ......................................................................................................... 13 2.3.1Asynkronmaskin .................................................................................................................... 13 2.3.2 Synkronmaskin- AC Servo .................................................................................................. 15 2.3.3 Newtons ekvationer ............................................................................................................. 15
2.4 Motordrivsystem .............................................................................................................. 16 2.4.1 Frekvensomriktare .............................................................................................................. 17 2.4.2 AC servons kontrollenhet ................................................................................................... 17 2.4.3 Bromsning .............................................................................................................................. 17
2.5 Rullskruv teknik ............................................................................................................................. 17 2.6 Linjära aktuatorer ............................................................................................................. 19
2.6.1 Kompakta cylindrar (CEMC) .............................................................................................. 19 2.6.2 Modulära cylindrar (SRSA) ................................................................................................ 19 2.6.3 Skruvdomkraft (RSJA) ......................................................................................................... 20
3 Metoder .............................................................................................................................. 23 3.1 Hydraulisk systemanalys ............................................................................................... 23 3.2 Förflyttning med rullskruv ............................................................................................ 23 3.3 Drivning av aktuator ........................................................................................................ 23 3.4 SimElectronics .................................................................................................................... 24 3.5 DriveSize ............................................................................................................................... 25 3.6 EasyEL .................................................................................................................................... 25
4 Resultat .............................................................................................................................. 27 4.1 Aktuator .............................................................................................................................................. 27
4.1.1 Dimensionering av aktuator .............................................................................................. 27 4.1.2 Livslängden för aktuator .................................................................................................... 28
4.2 Dimensionering av motor .............................................................................................. 29 4.2.1 Simulering av asynkronmotor med frekvernsomriktare ........................................... 31
4.3 Systemersättning ............................................................................................................... 32
5 Slutsatser ........................................................................................................................... 35
Referenser ................................................................................................................................ 37

IX
Bilagor ....................................................................................................................................... 39 Bilaga 9 60
Reglering av turbins ledskenor i vattenkraftverk
1
1 Inledning
1.1 Problemformulering
Ersättning av hydrauliskt servon som reglerar ledskenor i en vattenkraftturbiner,
mot elektriskt ställdon för samma uppgift. Samt att behålla samma säkerhets
funktioner vid störd drift, spänningsbortfall samt brand.
1.2 Syfte
Göra vattenkraftverket mer miljövänligare, genom att ersätta hydraulsystem och
därmed läckage utav hydrauloljan ut i vattnet, samt att öka både tekniska och
ekonomiska livslängden genom att man får fram ett system med mindre antal
rörliga komponenter.
1.3 Mål
Undersöka möjligheten att använda elektriska ställdon istället för hydraulservon.
Teoretiskt ta fram svar till frågorna som har ställts av uppdragsgivaren och kunna
redovisa en grund hur man går tillväga för att utföra en uppgradering utav systemet
för reglering av ledskenor. Frågorna som skall besvaras i detta examensarbete är:
Vilka krafter måste ställdonen kunna hantera? I förlängningen leder denna
fråga till vilka storlekar på turbiner som kan vara möjliga/lämpliga att
använda elektriska ställdon istället för traditionell hydraulik.
Hur ska dessa regleras (styras), vilken teknik skall användas?
Hur säkerställa funktionen vid störd drift? Så att turbinen skall stängas av på
ett säkert sätt vid brand, elbortfall m.m. Denna rapport skall besvara dessa
frågor generellt men även som ett case på ett mindre kraftverk på Nissan.
Reglering av turbins ledskenor i vattenkraftverk
2
1.4 Kravspecifikation
Elektrisk aktuator skall motsvara funktionsmässigt nuvarande hydraulsystem.
Behålla samma regleringsprecision.
Ta fram en lösning för att bibehålla samma säkerhet.
Nödstängning vid störd drift, t.ex. vid brand eller elbortfall skall turbinen stängas av
på maximum 8 sekunder).
1.5 Avgränsningar
Denna rapport avser endast regleringen av ledskenorna i en kaplan turbiner.
Detta examensarbete är huvudsakligen en teoretisk undersökning, p.g.a. den stora
omfattningen det skulle innebära att utföra detta praktiskt med avseende att
kraftverket är i konstant drift.
Reglering av turbins ledskenor i vattenkraftverk
3
2 Bakgrund
2.1 Vattenkraft
Vid begynnelsen av elektrisk produktion har vattenkraft alltid varit den främsta
förnybara energikällan, samtidigt som det har det minsta specifika bidraget till
växthuseffekten. Den ökande omsorgen om miljön leder till framsteg och teknisk
utveckling. Dessutom kan renovering och ersättning med ny utrustning förbättra
energieffektiviteten i befintliga vattenkraftsanläggningar.
Norge och Sverige förbrukar och producerar mest vattenkraft i världen, 119TWh
respektive 65 TWh. I Sverige finns cirka 1800 vattenkraftverk, enligt EU standard är
200 av dem större kraftverk d.v.s. att de har en effekt på 10 MW eller mer [1].
Indelningen görs efter fallhöjd för småskalig vattenkraft [2]:
– Hög fallhöjd: över 50 m
– Medelhög fallhöjd: 15-50 m
– Låg fallhöjd: 2-15 m
2.1.1 Drift & utförande
Vattenkraftens viktigaste komponent är byggnaden vilket tjänar till fördämningar.
Exempel på byggnad som används för fördämningen är damm eller dammbyggnad
vars mål är att skapa reservoarer. Dammar kan vara indelade, beroende på
utformning och byggnadsmaterial, för sten -, jordfyllnings- och betongdammar.
Det andra grundläggande elementet är vattenturbinen som kommer att beskrivas i
de följande kapitlen.
Reglering av turbins ledskenor i vattenkraftverk
4
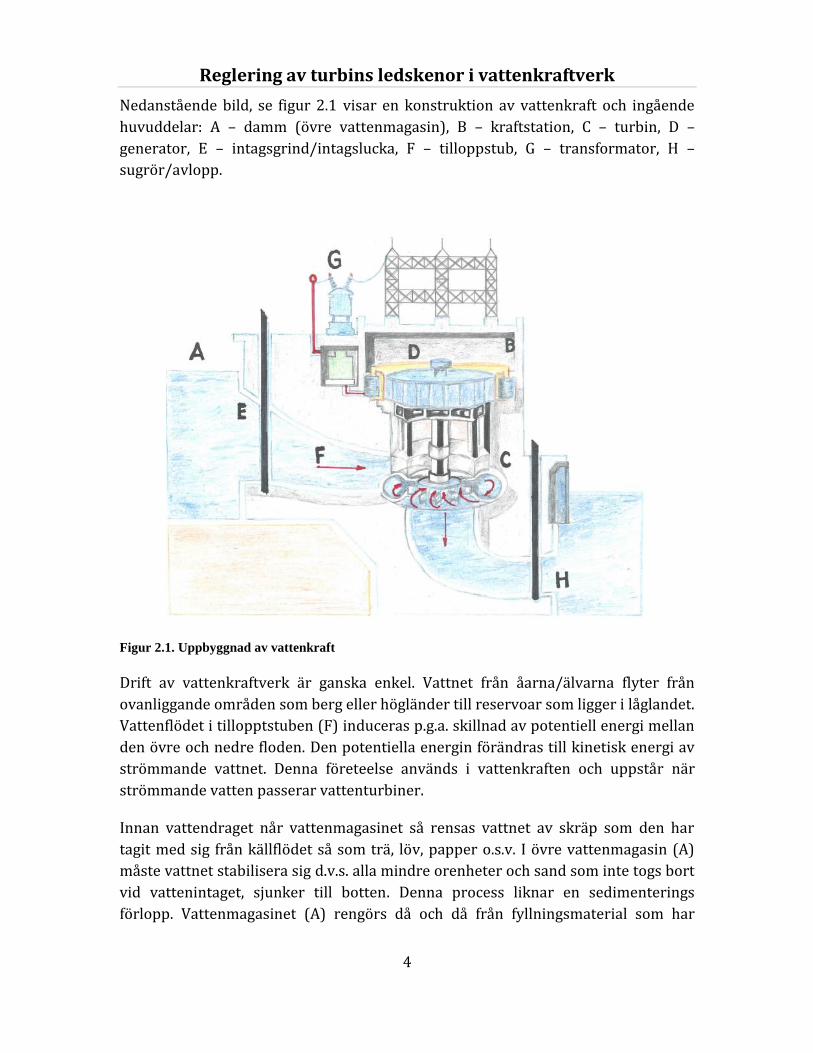
Nedanstående bild, se figur 2.1 visar en konstruktion av vattenkraft och ingående
huvuddelar: A – damm (övre vattenmagasin), B – kraftstation, C – turbin, D –
generator, E – intagsgrind/intagslucka, F – tilloppstub, G – transformator, H –
sugrör/avlopp.
Figur 2.1. Uppbyggnad av vattenkraft
Drift av vattenkraftverk är ganska enkel. Vattnet från åarna/älvarna flyter från
ovanliggande områden som berg eller högländer till reservoar som ligger i låglandet.
Vattenflödet i tillopptstuben (F) induceras p.g.a. skillnad av potentiell energi mellan
den övre och nedre floden. Den potentiella energin förändras till kinetisk energi av
strömmande vattnet. Denna företeelse används i vattenkraften och uppstår när
strömmande vatten passerar vattenturbiner.
Innan vattendraget når vattenmagasinet så rensas vattnet av skräp som den har
tagit med sig från källflödet så som trä, löv, papper o.s.v. I övre vattenmagasin (A)
måste vattnet stabilisera sig d.v.s. alla mindre orenheter och sand som inte togs bort
vid vattenintaget, sjunker till botten. Denna process liknar en sedimenterings
förlopp. Vattenmagasinet (A) rengörs då och då från fyllningsmaterial som har
Reglering av turbins ledskenor i vattenkraftverk
5
samlats på bottnen. Det övre vattenmagasinet andra uppgift är att lagra energi
genom att dämma vattnet. Detta tillåter vattenkraften att arbeta utan en ständig
vattenström under en period, vilket också är beroende av den installerade
kapaciteten och storleken på tanken.
Efter det kommer vattnet vidare via tilloppstub (F), vilken är ofta grävd under
jorden längs floden, till kraftstation (B). Turbiner och generatorer finns vanligtvis
under marknivå. Turbinen omvandlar vattnets lägesenergi och rörelseenergi till
mekanisk energi d.v.s. vattenflödet driver turbinbladet, vilket i sin tur driver en
generator som alstrar elektrisk energi [3]. Efter denna process faller vattnet till
mynning.
2.1.2 Turbin typer
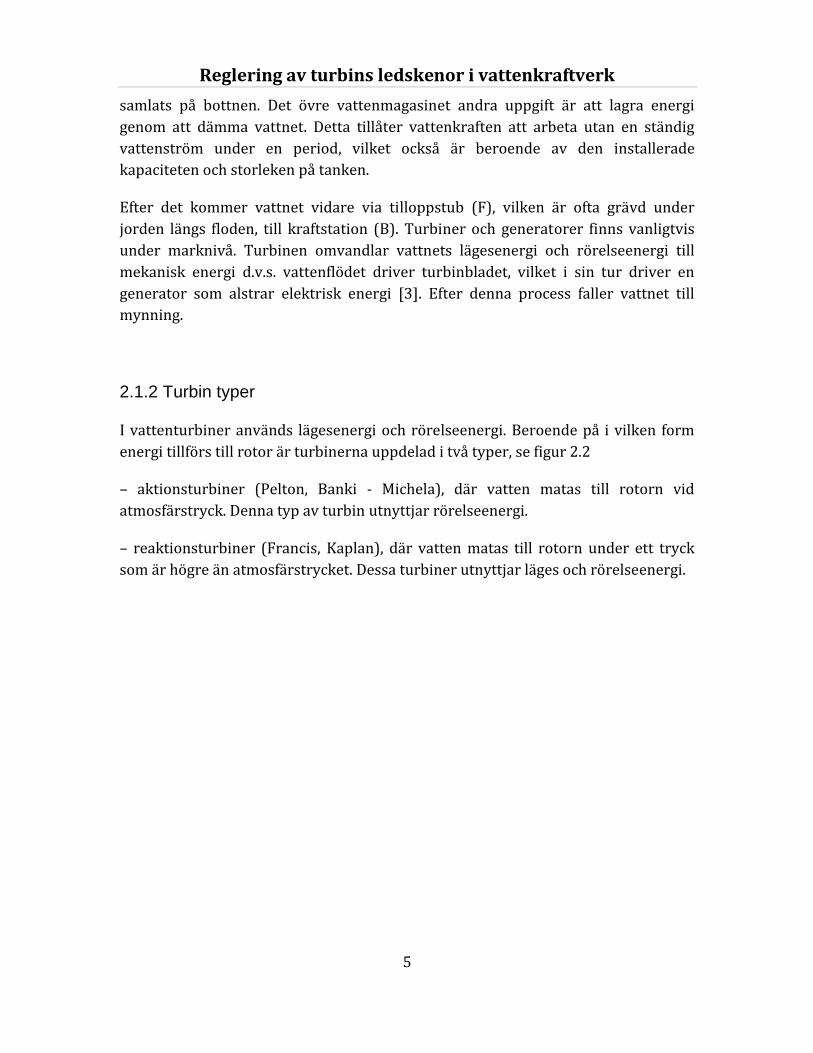
I vattenturbiner används lägesenergi och rörelseenergi. Beroende på i vilken form
energi tillförs till rotor är turbinerna uppdelad i två typer, se figur 2.2
– aktionsturbiner (Pelton, Banki - Michela), där vatten matas till rotorn vid
atmosfärstryck. Denna typ av turbin utnyttjar rörelseenergi.
– reaktionsturbiner (Francis, Kaplan), där vatten matas till rotorn under ett tryck
som är högre än atmosfärstrycket. Dessa turbiner utnyttjar läges och rörelseenergi.
Reglering av turbins ledskenor i vattenkraftverk
6
Figur 2.2 Olika typer av turbiner beroende på varvtal (eng. specific speed) a) Peltonturbin b-d)
Francisturbin ef) Kaplanturbin
Detta examensarbete tar endast upp reaktionsturbinerna och därför kommer inte
aktionsturbinerna att beskrivas.
Reglering av turbins ledskenor i vattenkraftverk
7
Francis turbin
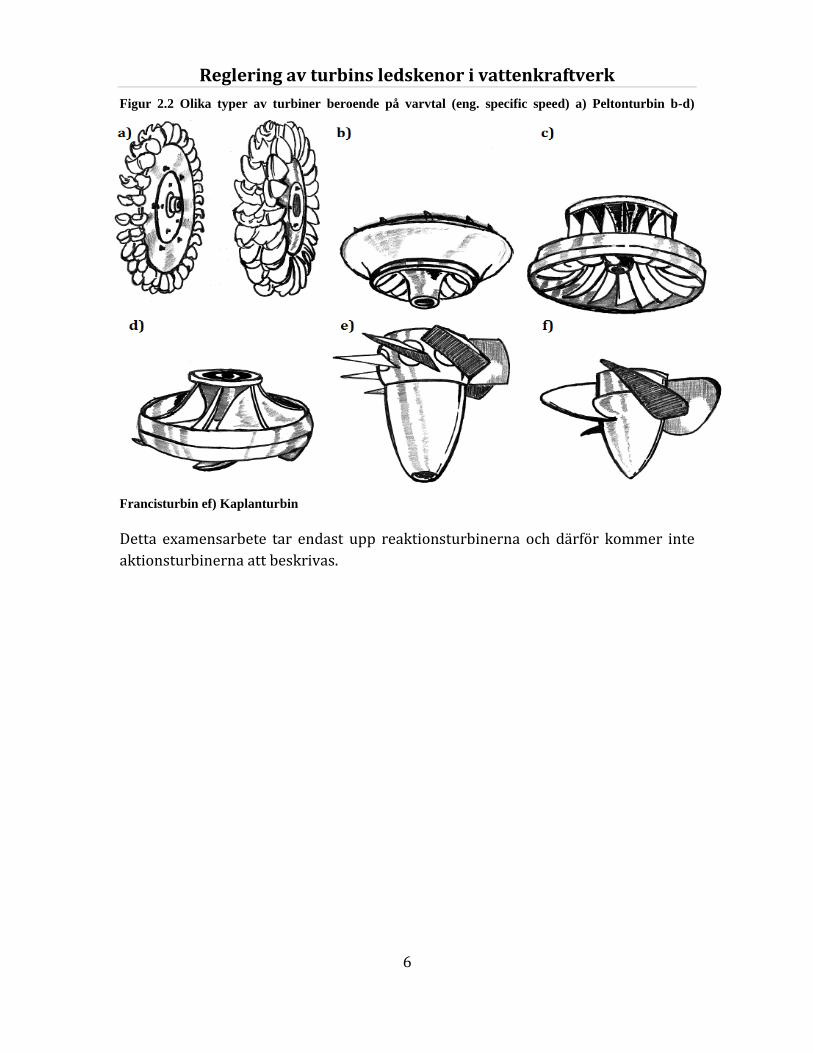
Vattenturbinen som utvecklades av James Francis har använts i nästan hundra år.
Den är mest lämplig för fallhöjder mellan cirka 30 och upp till 700 meter.
Konstruktionslösningarna är jämförbara med kaplanturbinens konstruktion, den
huvudsakliga skillnaden gäller form och byggstruktur hos rotorn, se figur 2.3. Till
skillnad från kaplanturbinen sitter rotorbladen fast hos Francis turbin, medan ledskenorna
är rörliga i båda turbinerna.
Figur 2.3 a) Rotor i Francisturbin b) Francisturbin
Kaplanturbin
Kaplanturbinen konstruerades av den österrikiska ingenjören Viktor Kaplan år
1921. Turbinen är dimensionerad för att jobba med givet flöde och fallhöjd, vanligt
mellan 2 och 80m, för att ge en maximal verkningsgrad. Därför är den konstruerade
turbinen som en propellerturbin med inställbara, vinkelreglerade rotorblad s.k.
löphjul. Bladen är monterade på lager som är inbyggda i turbinens axel, se figur
2.4b. Ledskenorna är också vinkeljusterbara för att styra vattenflödet. Den
mekanism som ansvarar för inställning av rotorbladet är kopplad med en annan
mekanism som styr ledskenorna. Kopplingen mellan mekanismerna möjliggör att
uppnå den högsta möjliga effektivitet under de rådande förhållandena.
Reglering av turbins ledskenor i vattenkraftverk
8
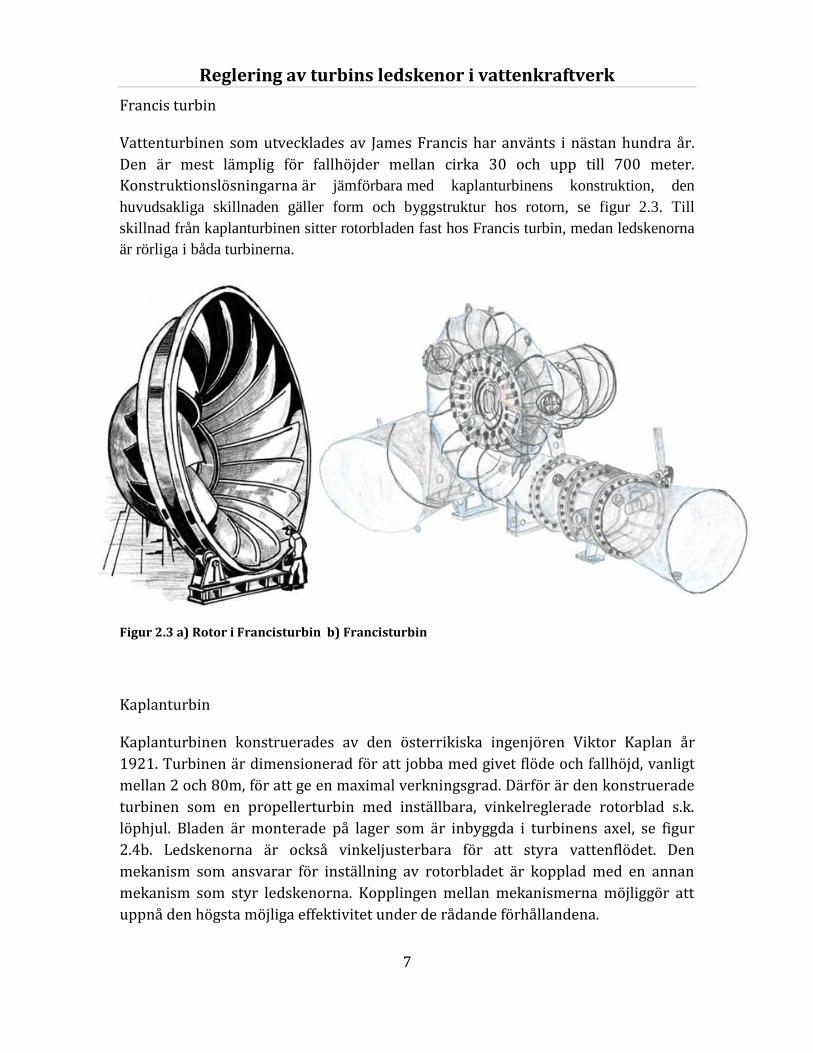
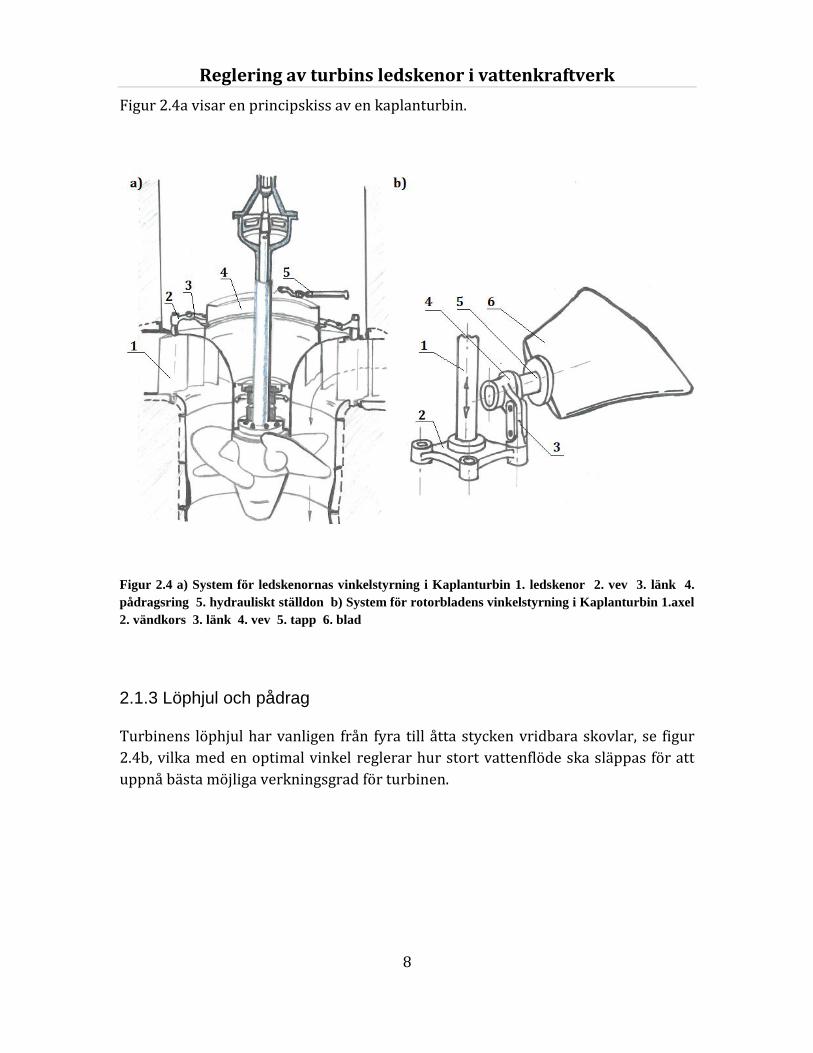
Figur 2.4a visar en principskiss av en kaplanturbin.
Figur 2.4 a) System för ledskenornas vinkelstyrning i Kaplanturbin 1. ledskenor 2. vev 3. länk 4.
pådragsring 5. hydrauliskt ställdon b) System för rotorbladens vinkelstyrning i Kaplanturbin 1.axel
2. vändkors 3. länk 4. vev 5. tapp 6. blad
2.1.3 Löphjul och pådrag
Turbinens löphjul har vanligen från fyra till åtta stycken vridbara skovlar, se figur
2.4b, vilka med en optimal vinkel reglerar hur stort vattenflöde ska släppas för att
uppnå bästa möjliga verkningsgrad för turbinen.
Reglering av turbins ledskenor i vattenkraftverk
9
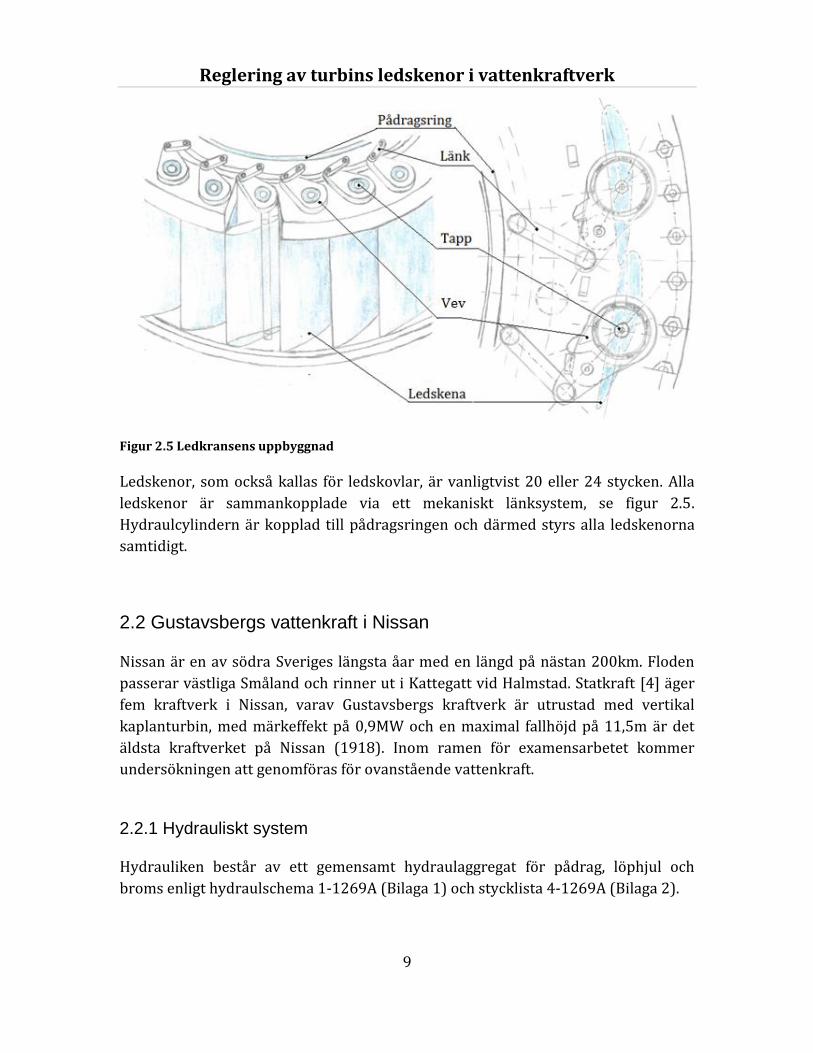
Figur 2.5 Ledkransens uppbyggnad
Ledskenor, som också kallas för ledskovlar, är vanligtvist 20 eller 24 stycken. Alla
ledskenor är sammankopplade via ett mekaniskt länksystem, se figur 2.5.
Hydraulcylindern är kopplad till pådragsringen och därmed styrs alla ledskenorna
samtidigt.
2.2 Gustavsbergs vattenkraft i Nissan
Nissan är en av södra Sveriges längsta åar med en längd på nästan 200km. Floden
passerar västliga Småland och rinner ut i Kattegatt vid Halmstad. Statkraft [4] äger
fem kraftverk i Nissan, varav Gustavsbergs kraftverk är utrustad med vertikal
kaplanturbin, med märkeffekt på 0,9MW och en maximal fallhöjd på 11,5m är det
äldsta kraftverket på Nissan (1918). Inom ramen för examensarbetet kommer
undersökningen att genomföras för ovanstående vattenkraft.
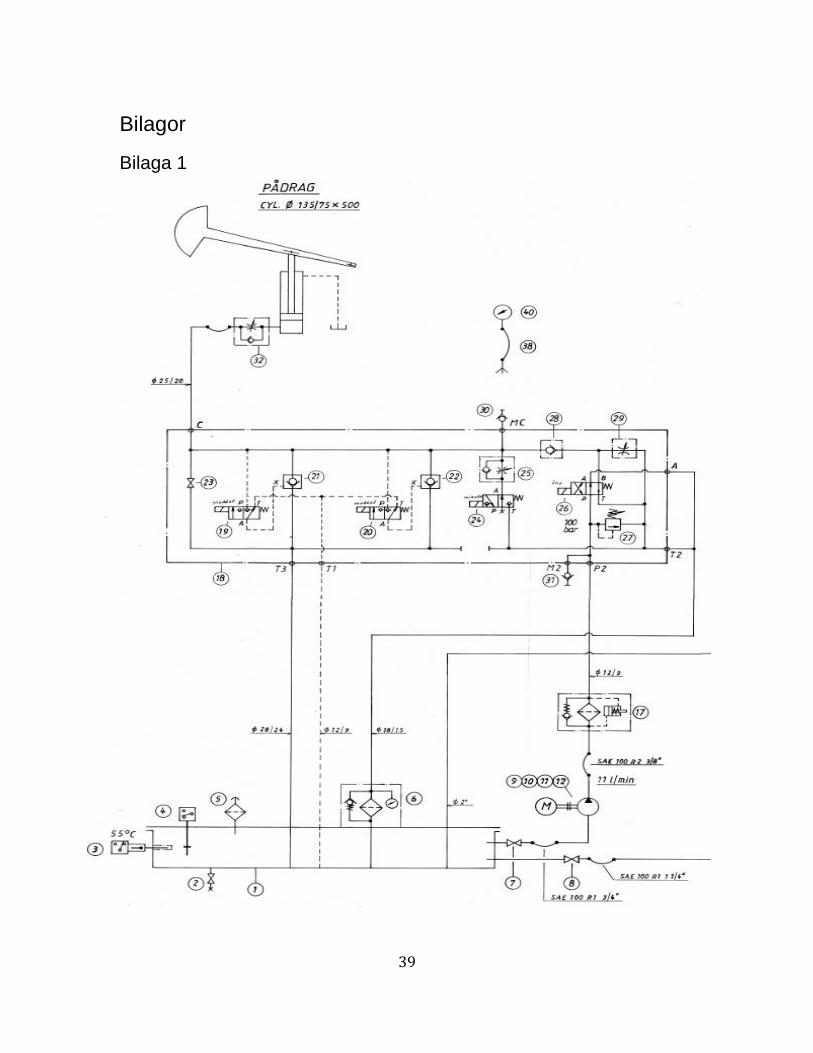
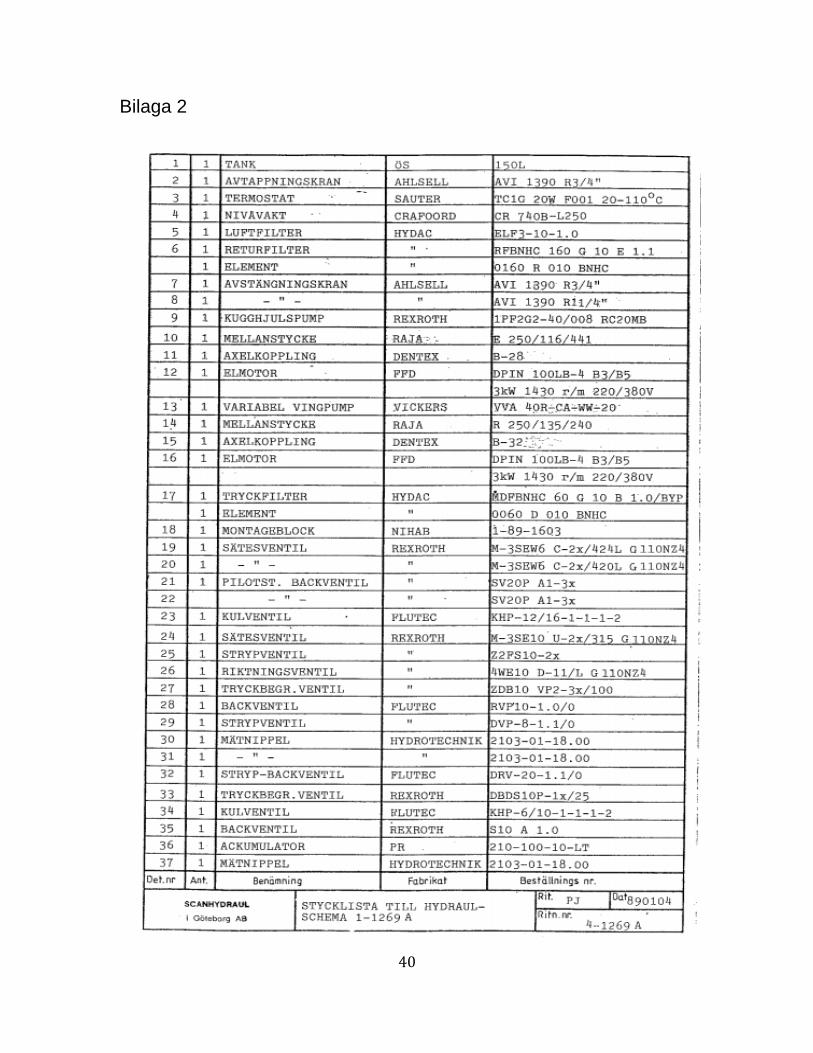
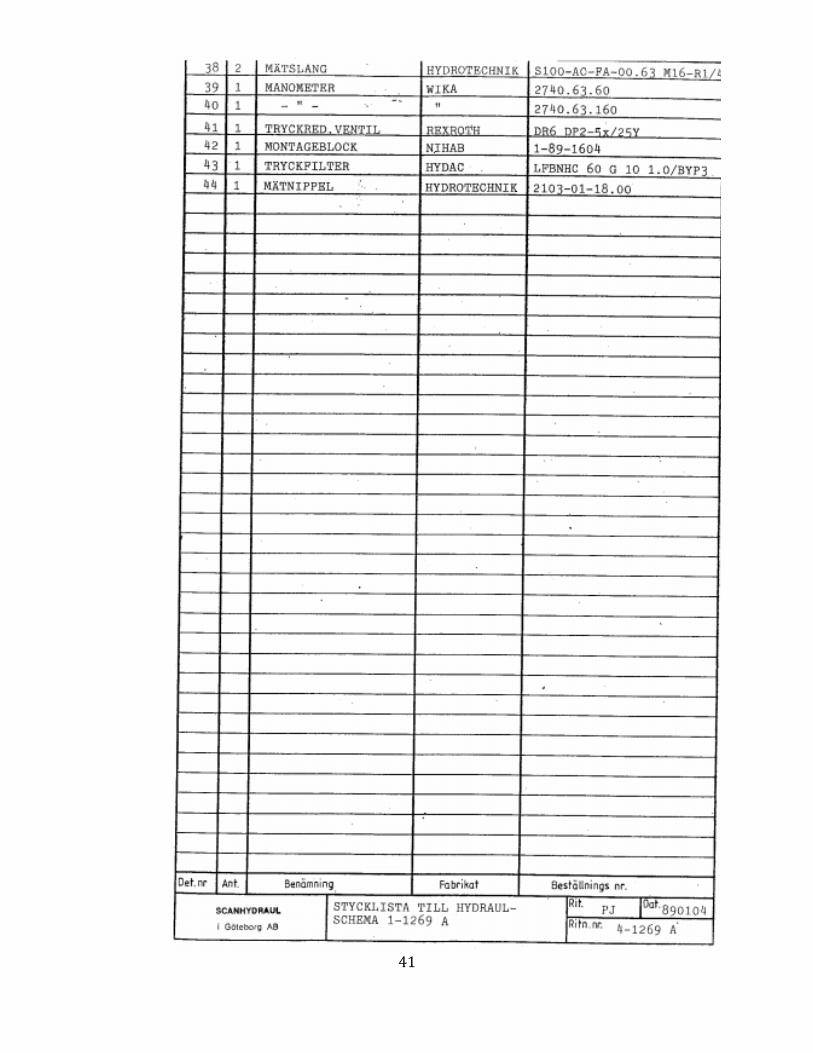
2.2.1 Hydrauliskt system
Hydrauliken består av ett gemensamt hydraulaggregat för pådrag, löphjul och
broms enligt hydraulschema 1-1269A (Bilaga 1) och stycklista 4-1269A (Bilaga 2).
Reglering av turbins ledskenor i vattenkraftverk
10
Tanken position 1 försedd med avtappningskran, termostat, nivåvakt, luftfilter och
returoljefilter pos. 2-6.
Pådrag
Pump - elmotorenheten pos. 9-12 förser pådraget med olja. Med pump – elmotor
igång och riktningsventil pos. 26 strömlös går oljan från pumpen över tryckfilter
pos. 17, P till A genom riktningsventil pos. 26 och tillbaka till tanken över
returoljefilter pos. 6.
Maximalt systemtryck 100 bar inställs med tryckbegränsningsventilen pos. 17.
Nålventilen pos. 29 stängs, riktningsventilen pos. 26 manövreras manuellt eller
med ström, så att oljan från pumpen går från P till B genom ventilen, över
backventilen pos. 28 till pådragscylindern. När cylindern maximalt har gått ut mot
mekaniskt stopp kan tryckinställningen göras på ventil pos. 27. Trycket avläses med
manometer pos. 40 som är ansluten med manometerslang pos. 38 till mättuttag pos.
31.
Pådrag reglering
För att öppna/öka och stänga/minska regleringen av pådraget används
riktningsventilerna pos. 24 och 26, då måste riktningsventilerna pos. 19 och 20 vara
strömlösa och kulventiler pos. 23 måste vara stängda.
Pådraget öppnas och ökas tack vare ström på riktningsventilen pos. 26.
Hastighetens ökning kan regleras med strypventilen pos.29 som avleder en del av
pumpflödet tillbaka till tanken (shuntreglering) beroende på hur mycket ventilen
öppnas. När ventilen pos. 26 är strömlös står pådraget kvar i inställt läge mot
stängda ventiler.
Pådraget stängs och minskas tack vare ström på riktningsventilen pos. 24 som
öppnar och släpper olja från cylindern till tank. Hastighetens minskning kan
regleras med stryp – backventilen pos 25. När ventil pos. 24 är strömlös står
pådraget kvar i inställt läge.
Snabbstängning av pådraget sker med ström på riktningsventilerna pos. 19 och 20
som leder styrolja till de pilotstyrda backventilerna pos. 21 och 22. Backventilerna
Reglering av turbins ledskenor i vattenkraftverk
11
öppnar och släpper oljan genom pådragscylindern direkt till tank.
Snabbstängningshastigheten ställs in med stryp – backventilen pos. 32. Manuell
snabbstängning kan göras genom att kulventilen pos. 23 öppnas. Stryp –
backventilen pos. 32 reglerar stängningshastigheten.
Löphjul
Pump – elmotorenheten pos. 13 och 16 förser löphjulsystemet och bromssystemet
med olja.
Broms
Pump – elmotorenheten pos. 13 och 16 förser bromssystem med olja över
tryckfiltret pos. 43 och backventilen pos. 35.
Driftsäkerhet och livslängd
Driftsäkerhet och lång livslängd är beroende av att hydrauloljan hålls fri från
föroreningar, på rätt temperatur och att anläggningen i övrigt sköts väl.
I anläggningen finns en installerad tryckfilter pos. 17 och 43. Byte av filterelement
skall göras så snart indikatorn ger signal. Dock minst 2ggr/år.
På tanken är monterad ett returoljefilter pos. 6. Byte av elementet genomförs så
snart visaren på färgskala indikatorn når det gula fältet. Dock minst 2ggr/år.
Tanken är vidare försedd med ett luftfilter pos. 5 som bör bytas minst 1 gång per år.
Underhåll
1. Filterelement byts när indikator visar, dock minst 2ggr/år.
2. Oljebyte görs ca vartannat år och även noggrann rengöring av tank utförs
3. Nivåvaktens funktion kontrolleras årligen. Fastskruvarna skall lossas i locket
och nivåvakten lyfts upp för att få signal.
Reglering av turbins ledskenor i vattenkraftverk
12
4. Termostaten kontrolleras årligen. Inställningsratten skall justera ner till
lägre värde och signal skall erhållas.
5. Oljetemperatur kontrolleras tillsammans med rumstemperatur ca 4 ggr/år.
Temperaturen bör ej överstiga 55°C.
6. Förladdningstryck i ackumulator kontrolleras 2ggr/år. Oljan tömmes via
avstängningsventilen pos. 34 därefter gastrycket mäts på ackumulatorns
ovansida med speciell mätklocka.
– Endast kvävgas N2 får användas
– Vid service på hydraulsystem skall alltid avstängningsventilen pos. 34
öppnas
7. Rutinmässigt kontrolleras
– Filterindikator
– Ljudnivå pump –motor
– Eventuellt läckage i rör och kopplingar
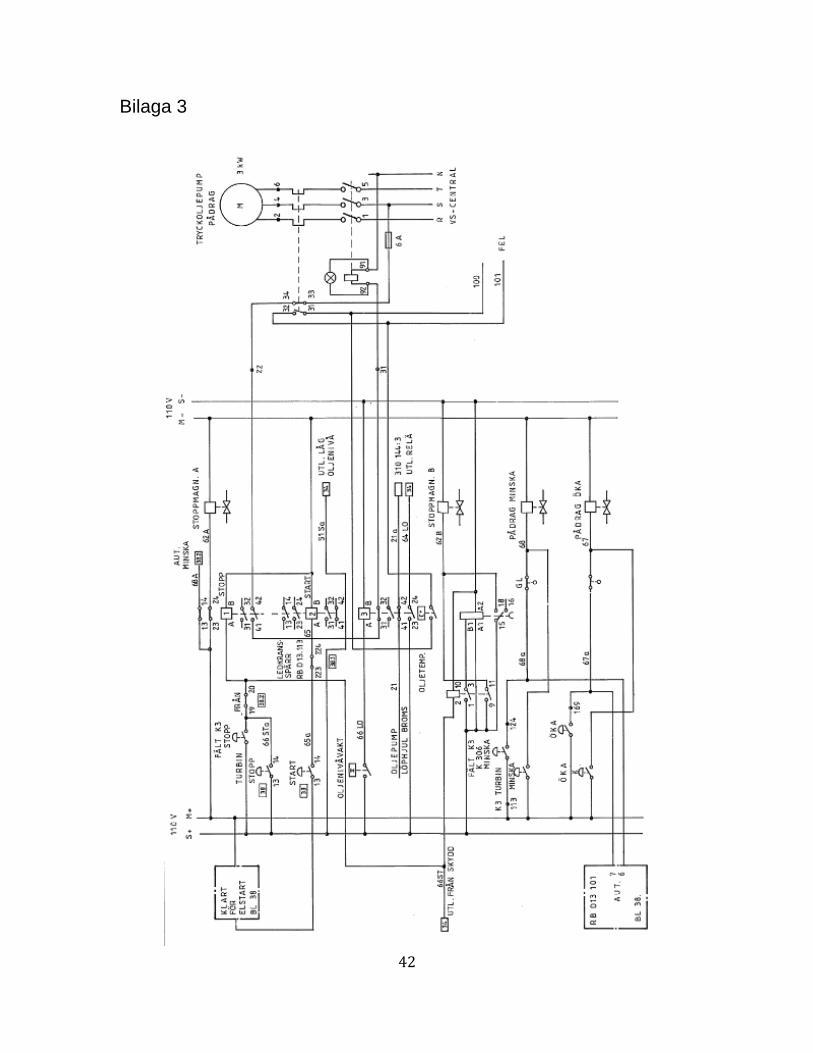
2.2.2 Elektronisk styrning
I dagsläget styrs hydraulsystemet av en trestegs regulator.
Regulatorn jobbar med tre stycken parametrar. Dessa är vattennivån i floden,
position på ledskenorna samt ett börvärde som är vattenflödet [m3/s] som passerar
genom turbinen.
Vattennivån mäts med hjälp av en trycksensor och dess utsignal konverteras i en
mätvärdesomvandlare innan den når regulatorn.
Positionens mätning utgörs av en analog potentiometer. Dess utsignal går också till
en mätvärdesomvandlare innan den når regulatorn. Mätvärdesomvandlare är av
typen spännings - ström omvandlare.
Regulatorns utsignaler är manöversignaler på 110 V likspänning som styr direkt
spolen på riktningsventilerna (Bilaga 3).
Riktningsventilerna kan också styras manuellt från tryckknappar öka/minska som
sitter på elskåpet.
Reglering av turbins ledskenor i vattenkraftverk
13
2.2.3 Nuvarande säkerhetssystem
Säkerheten på kraftverket i Gustavsberg består utav två stycken oberoende av
varandra system, ett elektriskt och ett mekaniskt.
Det elektriska systemet består utav ett avbrottsfritt kraftförsörjningssystem s.k. UPS
(Uninterruptible Power Supply).
UPS består av DC batterier och växelriktare.
Mekaniska systemet består utav en motvikt som är kopplad i serie med
hydraulcylindern som styr ledskenorna. Motviktens uppgift är att stänga av
ledskenorna vid oljetryckbortfall i hydrauliken inom max. 8 sekunder.
2.3 Elektriska maskiner
Begrepp elektriska maskiner används för att varje maskin kan användas både som
motor och generator [5]. Största indelningen görs mellan likspänningsmaskiner och
växelspänningsmaskiner. Det finns en stor variation på olika konstruktioner inom
båda maskinerna. Följande rubriker kommer att beskriva de maskiner som är
relevanta för detta examensarbete.
2.3.1 Asynkronmaskin
Asynkronmaskinen är den vanligast förekommande trefas motorn och finns i
storlekar från 0.05kW upptill flera MW. Indelningen kan göras i
lågspänningsmaskiner (<1000V) som finns både i enfas och i trefas utförande, samt
högspänningsmaskiner (>1000V) som är enbart trefasmaskiner. Maskinens
popularitet grundar sig på att den är enkel i sin konstruktion och därmed på hög
driftsäkerhet, samt att den är relativt billig jämfört med andra trefasiga maskiner.
Asynkronmaskinen [5] är uppbyggd av en fast del - stator och en roterande del -
rotor. Statorn byggs upp av laminerat plåtpaket som sätts fast i en stålkonstruktion.
Antalet grupper med lindningar i statorn ger maskinens poltal. Rotorn hos en
asynkronmaskin kan vara i två olika utförande: kortsluten rotor där rotorlindningar
inte är åtkomliga och en släpringad rotor där det är möjligt att komma åt
lindingarna utifrån. Som namnet "asynkronmaskin" tyder på så är inte
Reglering av turbins ledskenor i vattenkraftverk
14
rotorvarvtalet synkront med det elektromagnetiska fältet som avges ifrån
lindningarna i statorn. Rotorn har ingen fysisk kontakt med statorn utan det
elektromagnetiska momentet överförs induktivt mellan dem.
Eftersläpningen (s) räknas fram enligt formeln
där Ns är maskinens synkrona varvtal och n är maskinens asynkrona varvtal.
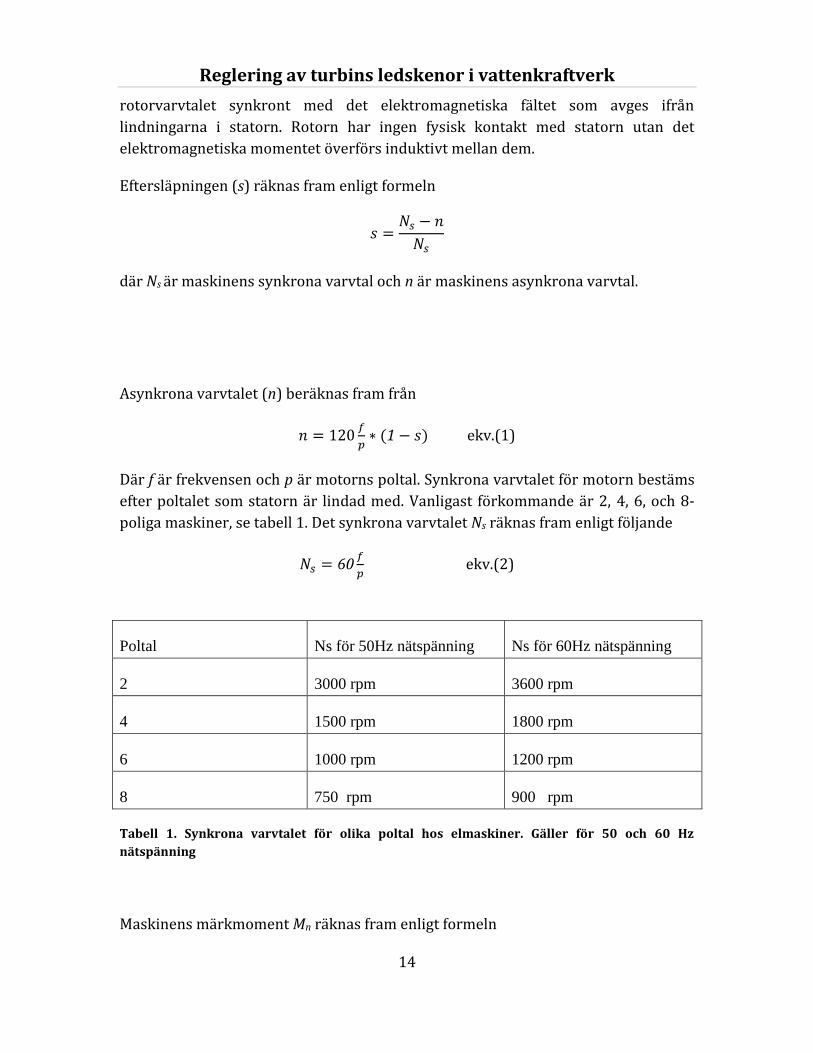
Asynkrona varvtalet (n) beräknas fram från
ekv.(1)
Där f är frekvensen och p är motorns poltal. Synkrona varvtalet för motorn bestäms
efter poltalet som statorn är lindad med. Vanligast förkommande är 2, 4, 6, och 8-
poliga maskiner, se tabell 1. Det synkrona varvtalet Ns räknas fram enligt följande
ekv.(2)
Poltal Ns för 50Hz nätspänning Ns för 60Hz nätspänning
2 3000 rpm 3600 rpm
4 1500 rpm 1800 rpm
6 1000 rpm 1200 rpm
8 750 rpm 900 rpm
Tabell 1. Synkrona varvtalet för olika poltal hos elmaskiner. Gäller för 50 och 60 Hz
nätspänning
Maskinens märkmoment Mn räknas fram enligt formeln

Reglering av turbins ledskenor i vattenkraftverk
15
ekv.(3)
där Pmekaniskt =
är maskinens verkningsgrad
och ω= 2π*f
2.3.2 Synkronmaskin- AC Servo
En borstlös elektrisk AC motorn (BLAC) [5] är en elektrisk motor driven av en
elektrisk AC-insignal, vilkens konstruktion saknar kommutatorn eller släpring.
Motorlindningen lindas till statorn och permanentmagneter är fastsatta på rotorn.
Inga borstar tillhandahåller minimalt underhåll. AC servo är utformat för
högprestation, det ger mycket hög acceleration, hög och konstant vridmoment över
ett brett utbud av hastighet, hög nominell hastighet, exakt hastighet och/eller
positionsreglering.
2.3.3 Newtons ekvationer
För att bestämma tröghetsmoment J och totalt motormomentet M används Newtons
lagar vilka framträder i nedanstående ekvationer [6]:
Där
Mmotor - motorns egenbehov vid start [Nm]
ekv.(7)
tstart – starttid [sek], Δn - varvtalsändring [rpm]
Mf – lastens momentbehov vid start, Mt – moment från en kraft F på lasten
ekv.(8)
F – tillsatskraft [N], μ – friktionskoefficient, h-stigning[mm], m - lastens massa [kg]

Reglering av turbins ledskenor i vattenkraftverk
16
Mskruv – skruvens egenbehov vid start [Nm]
ekv.(9)
där
ekv.(10)
Jskruv – skruvens tröghetsmoment [kgm2], l – skruvlängden [m], d – skruvdiameter
[m], ρ – densitet [kg/m3]
Ms – lastens startmoment [Nm]
ekv.(11)
där
ekv.(12)
Jlast - lastens tröghetsmoment [kgm2], η – skruvens verkningsgrad
För att förenkla beräkningen har tröghetsmomentet undantagits och motorns egen
friktion mellan skruv och motor. Vanlig värdet för rullskruvars verkningsgrad η är
0.2 för.
För små laster gäller kort starttid och motor med litet tröghetsmoment Jmotor vilken
vid rätt anpassad stigning skulle ge bäst tröghetsförhållande så att Jyttre/Jmotor <5-8.
Där ekv.(13)
Det optimala förhållandet är ca 1:1, men för stor last, stor stigning och måttlig
starttid kan en motor med förhöjt Jmotor vara en lämplig lösning.
2.4 Motordrivsystem
Reglering av turbins ledskenor i vattenkraftverk
17
2.4.1 Frekvensomriktare
Frekvensomriktare [5] omvandlar en växelspänning från en frekvens till en annan.
Huvudsyfte är att använda dessa för varvtalreglering av AC motorer.
DTC (Direct Torque Control) gör en skattning av motorns magnetiska flöde och
moment baserat på U och I hos motorn. Metoden karakteriserar mycket låga
övertoner och snabbhet.
2.4.2 AC servons kontrollenhet
Styrning för AC servo [5] är integrerad i en kompakt kontrollenhet och utrustad med
varvtalsregulator, manöverkontroll, PLC samt kraftfulla CANopen eller numerisk
kontroll Profibus.
2.4.3 Bromsning
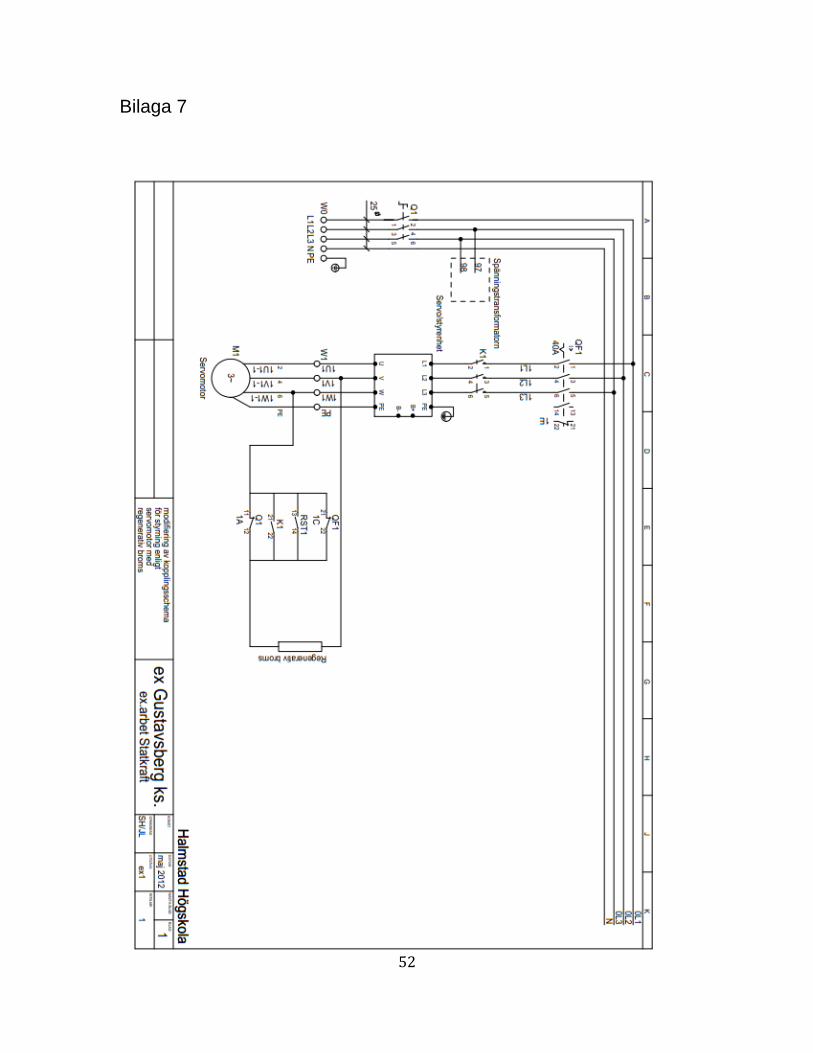
Elmaskiner används både för drivning samt för generering av elektrisk energi. I detta fall skall maskinen användas för en högdynamisk drift och då genererar maskinen elektrisk energi så att den kan utnyttjas för reostatisk (regenerativ) bromsning [5]. Vid bromsning är vridmoment och rotationsriktning motriktade. Användning av en bromschopper vid alternativet med en servomotor skulle leda till att den stora kraften som uppstår i slutskedet vid en spänningslös stängning skall kunna bromsas ned med rätt dimensionerad bromsmotstånd s.k. bromschopper (Bilaga 7).
2.5 Rullskruv teknik
Uppdragsgivarens önskemål är att undersöka om det är möjligt att implementera en
lösning med en aktuator från SKF [7]. Företaget har i sitt utbud tre olika slags
ställdon, dess konstruktion är baserad på rullskruv teknik (eng.”roller screw”), se
figur 2.6.
Reglering av turbins ledskenor i vattenkraftverk
18
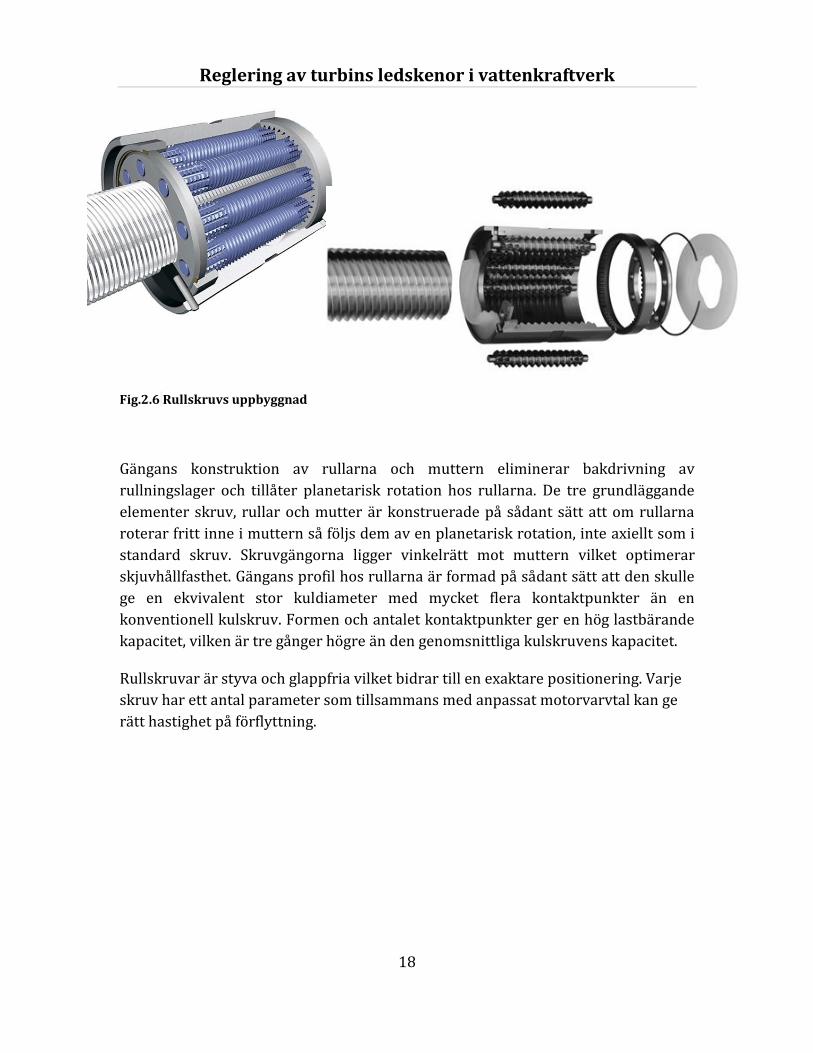
Fig.2.6 Rullskruvs uppbyggnad
Gängans konstruktion av rullarna och muttern eliminerar bakdrivning av
rullningslager och tillåter planetarisk rotation hos rullarna. De tre grundläggande
elementer skruv, rullar och mutter är konstruerade på sådant sätt att om rullarna
roterar fritt inne i muttern så följs dem av en planetarisk rotation, inte axiellt som i
standard skruv. Skruvgängorna ligger vinkelrätt mot muttern vilket optimerar
skjuvhållfasthet. Gängans profil hos rullarna är formad på sådant sätt att den skulle
ge en ekvivalent stor kuldiameter med mycket flera kontaktpunkter än en
konventionell kulskruv. Formen och antalet kontaktpunkter ger en hög lastbärande
kapacitet, vilken är tre gånger högre än den genomsnittliga kulskruvens kapacitet.
Rullskruvar är styva och glappfria vilket bidrar till en exaktare positionering. Varje
skruv har ett antal parameter som tillsammans med anpassat motorvarvtal kan ge
rätt hastighet på förflyttning.
Reglering av turbins ledskenor i vattenkraftverk
19
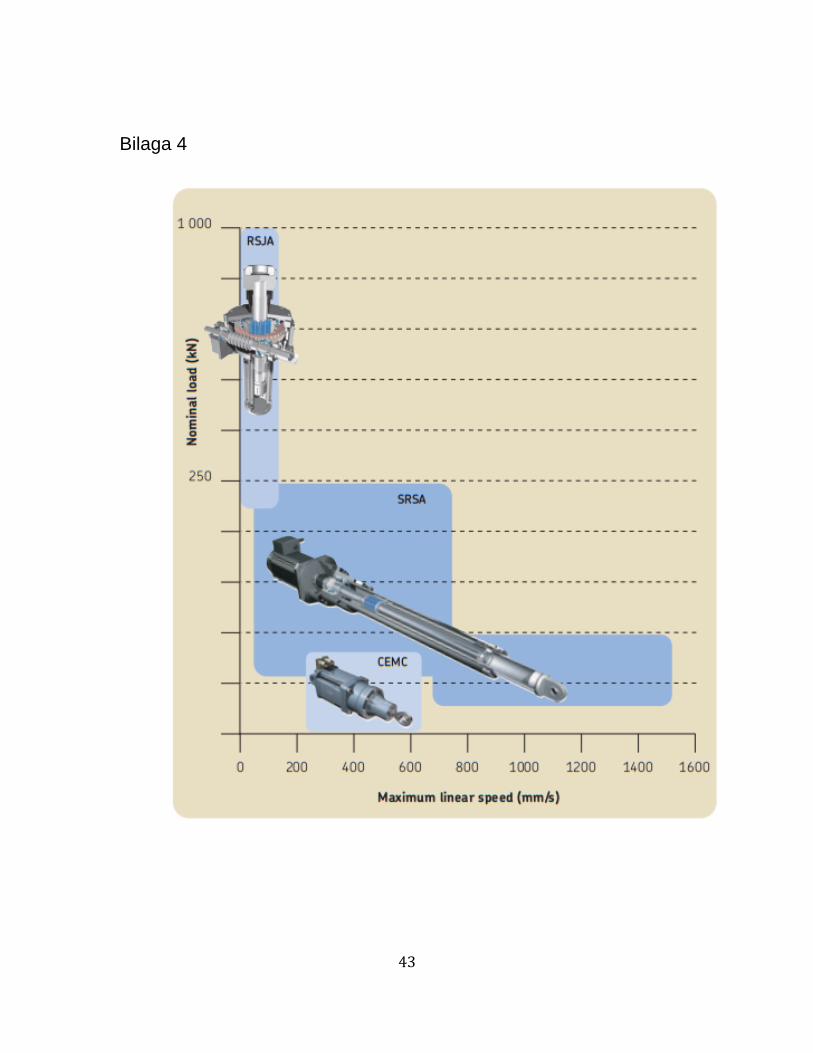
2.6 Linjära aktuatorer
2.6.1 Kompakta cylindrar (CEMC)
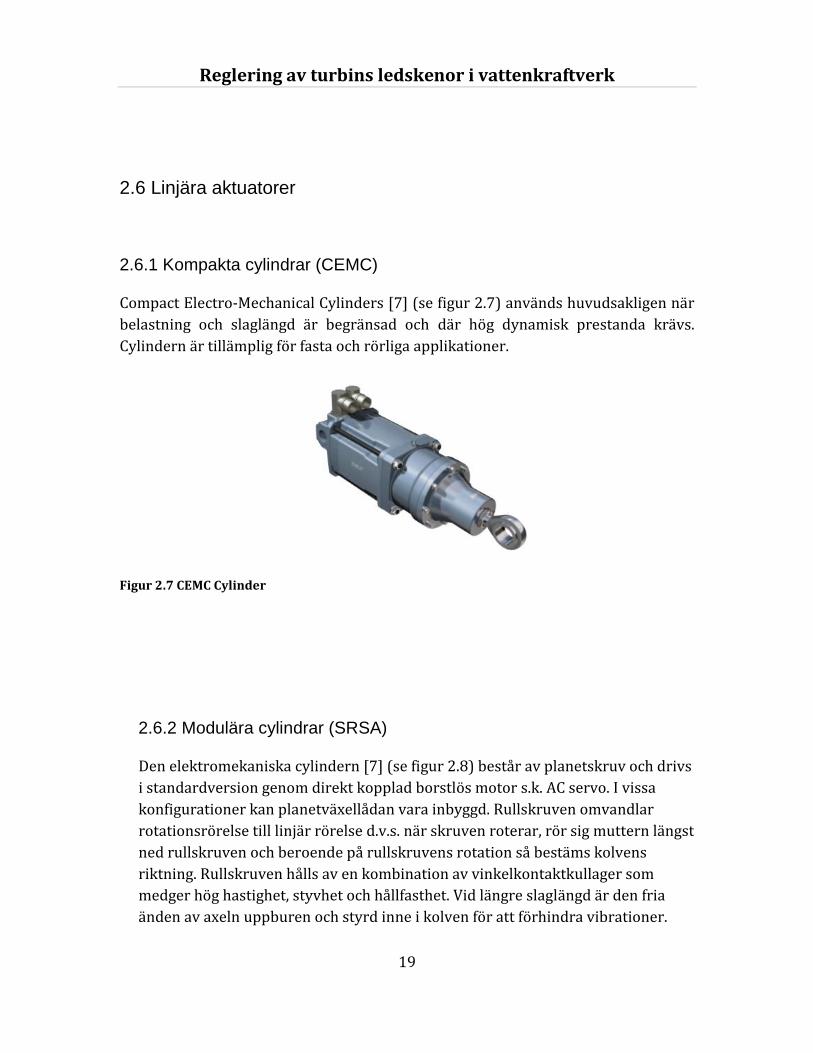
Compact Electro-Mechanical Cylinders [7] (se figur 2.7) används huvudsakligen när
belastning och slaglängd är begränsad och där hög dynamisk prestanda krävs.
Cylindern är tillämplig för fasta och rörliga applikationer.
Figur 2.7 CEMC Cylinder
2.6.2 Modulära cylindrar (SRSA)
Den elektromekaniska cylindern [7] (se figur 2.8) består av planetskruv och drivs
i standardversion genom direkt kopplad borstlös motor s.k. AC servo. I vissa
konfigurationer kan planetväxellådan vara inbyggd. Rullskruven omvandlar
rotationsrörelse till linjär rörelse d.v.s. när skruven roterar, rör sig muttern längst
ned rullskruven och beroende på rullskruvens rotation så bestäms kolvens
riktning. Rullskruven hålls av en kombination av vinkelkontaktkullager som
medger hög hastighet, styvhet och hållfasthet. Vid längre slaglängd är den fria
änden av axeln uppburen och styrd inne i kolven för att förhindra vibrationer.

Reglering av turbins ledskenor i vattenkraftverk
20
Kolven och muttern styrs i cylindern, vilket ger ett axiellt och radiellt styvt
system. Denna konstruktion ger en mycket hög vridstyvhet och hållbarhet. Två
interna stötdämpare säkrar mekanismen under justerings fasen.
Figur 2.8 SRSA cylinder
2.6.3 Skruvdomkraft (RSJA)
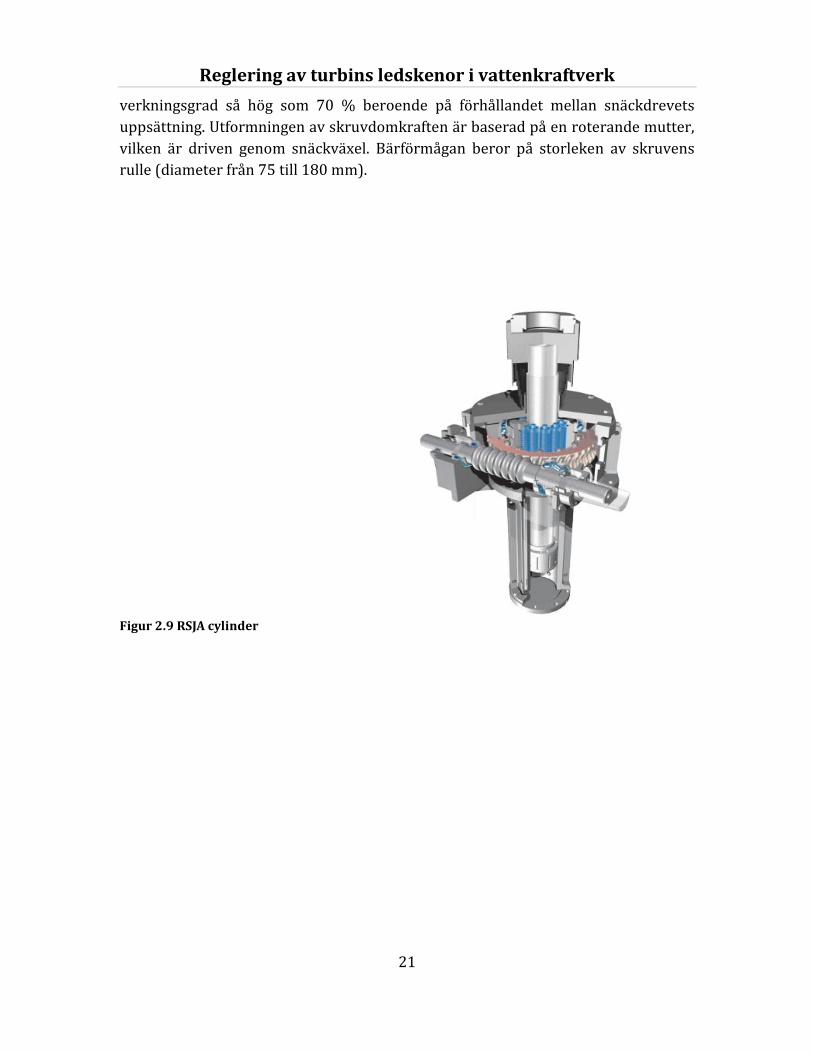
RSJA cylindern [7] (se figur 2.9) använder ett sfärisk rullager som stödjer rullskruvs
mutter. Rullar som rullelementen skapar ett system vilket tillåter sänkning och
höjning av tunga laster med hög effektivitet och hög tillförlitlighet. Det ger en total
Reglering av turbins ledskenor i vattenkraftverk
21
verkningsgrad så hög som 70 % beroende på förhållandet mellan snäckdrevets
uppsättning. Utformningen av skruvdomkraften är baserad på en roterande mutter,
vilken är driven genom snäckväxel. Bärförmågan beror på storleken av skruvens
rulle (diameter från 75 till 180 mm).
Figur 2.9 RSJA cylinder

Reglering av turbins ledskenor i vattenkraftverk
22

Reglering av turbins ledskenor i vattenkraftverk
23
3 Metoder
3.1 Hydraulisk systemanalys
Baserat på Hydraulik 1 [8] genomfördes det en analys av det befintliga hydrauliska
systemet. Den nuvarande hydrauliska cylinder har en diameter på 135mm och
systemarbetstryck är på maximalt 100bar vilket är lika med 10N/mm² (Bilaga 1).
Från dessa uppgifter bestäms att hydraulcylindern på Gustavsbergs kraftverk är
dimensionerad för en kraft på 143kN. Nedanstående uträkning bevisar den
verkande kraften
ekv.(14)
3.2 Förflyttning med rullskruv
Vid kort förflyttning och hög positioneringsnoggrannhet används rullskruven för att
utföra en linjär rörelse. Skruvar finns i olika längder, stigningar och diametrar
medan motorer finns med olika kombinationer av drivmoment och hastighet. För
matematiska och tekniska uträkningar används ett verktyg och
programmeringsmiljö – MATLAB. Genom användning av skript kan beräkningarna
utföras enklare (Bilaga 5).
3.3 Drivning av aktuator
För att driva ställdonet finns det olika möjligheter. En av dem är permanent
magnetiserad Ac motor (AC-servo), med kontrollenhet från SKF (Siemens). Denna
kombination ger dubbla positionsåterkopplingar, en digital från encodern som är
monterad på motorn samt en analog från de inbyggda givarna på ställdonet.
Ställdonets position är bibehållen med hjälp av kontrollenheten. Den digitala
återkopplingen från encodern i en AC servomotor ger en positionsåterkoppling. Vid
ett spänningsbortfall blir encodern nollställd och därmed tappas den momentana
Reglering av turbins ledskenor i vattenkraftverk
24
positionen. För att åstadkomma ett högt hållmoment, vilket kan krävas i denna
applikation, så lämpar sig en mekanisk hållbroms i inverterad funktion som det
bästa alternativet. Dessutom kan servomotorer skapa sitt eget hållmoment med
hjälp av dess styrenhet som skickar ut likspänning till två av statorlidningar med
likström. Detta moment i servomotorer kan uppskattas till maximalt 110 % av
motorns märkmoment.
Alternativet är asynkronmotor med frekvensomriktare och mekanisk hållbroms
monterad på elmotorns axel. Drivningen av denna typ är enkel och beprövad, men
digital återkoppling förloras vid ovanstående alternativ. Frekvensomriktare
möjliggör att förskjuta motorns momentkarakteristik så att det blir högt
startmoment och då dimensioneras den mekaniska bromsens hållkraft efter motorn.
I driftalternativet med frekvensomriktare och asynkronmotor krävs kondensatorer
(att åstadkomma magnetiseringsström i rotorn) vilka kopplas in samtidigt med
bromsmotstånd för att åstadkomma samma funktion som vid servodrift.
Bromsmotstånd i drift med frekvensomriktare bidrar till finare reglering av
positionering vilket leder till att för slitning på mekaniska kopplingar och maskinens
komponenter skulle då undvikas.
3.4 SimElectronics
SimElectronics [10] är en toolbox till Simulink och innehåller ett bibliotek med
elkraftkomponenter som olika slags motorer, frekvensomriktare, transformatorer,
drivenheter och m.m. För att ange realistiska parametervärden används olika
parametriserings metoder för många komponenter. Parametervärdena är avlästa
direkt från komponents datablad och sätts i den skapade modellen.
För att simulera ett steg i frekvensomriktare med funktionen DTC (Direct torque
control) användes demonstrations modell ac4_example. Spänningskällan,
asynkronmotor, rotor hastighet och vridmoment parametrar sätt till enligt Bilaga 8.
Reglering av turbins ledskenor i vattenkraftverk
25
3.5 DriveSize
DriveSize [9] innehåller aktuella versioner av ABB motorer och frekvensomriktare.
Med hjälp av detta verktyg kan de optimala komponenterna för applikationen väljas
och simuleras.
3.6 EasyEL
EasyEL är svenskt el-cad program som innehåller symbolbibliotek för
enlinjeschema, elmotorer, huvudledningsschema, larm och brand och m.m. [11]
Reglering av turbins ledskenor i vattenkraftverk
26

Reglering av turbins ledskenor i vattenkraftverk
27
4 Resultat
Här klargörs en undersökning för att ersätta hydraulcylindern mot en elektrisk aktuator, samt system för drivning. Första steget är att räkna fram momentet som behövs tillföras till aktuatorn. I nästa steg skall en lämplig motor och drivenhet i form av frekvensomriktre väljas vilket görs med programvaran DriveSize [9]. Insättningen av beräkningarna av momentbehovet gav resultatet att mest lämpade komponenterna blir en sexpolig 22kW asynkronmotor samt en frekvensomriktare av typen ACS550 från ABB [9]. Asynkronmotorns parametrar, önskade varvtalet samt momentbelastningen som aktuatorn utgör under full belastning sätts in i en simulering av systemet där frekvensomriktaren parametrar skall motsvara inställningen för DTC (direkt moment kontroll) mode. Simuleringen i SimElectronics är till för att påvisa förhållanden i varvtal/momentet mot tiden. Valet av denna typ av drivnig till aktuatorn görs efter de följande beräkningar vilket påvisar det momentbehov som behövs för att åstadkomma den önskade kapaciteten på 143 kN vilket aktuatorn skall uppnå.
4.1 Aktuator
Aktuatorn har undersökts efter de kravspecifikationer som ställs på den vid utbyte
av hydraulcylindern. Ett av kriterierna för att implementeras är att den har en god
livslängd vilket påvisas i underrubriken 4.1.2 livslängd för aktuator. Valet föll på
typen SRSA ställdon eftersom den har låg friktion både vid tryck och vid drag.
Dessutom ger det möjligheten att kunna använda motvikten och dess nuvarande
funktion, d.v.s. att ledskenorna skall kunna stängas vid spänningsbortfall och bortfall
från UPS – systemet.
4.1.1 Dimensionering av aktuator
Vid dimensionering av aktuatorn utgås det ifrån att nuvarande hydraulsystem
arbetar med maxtrycket på 100 bar. Enligt ritningen för den nuvarande hydrauliska
cylindern med en diameter på 135mm och ett systemarbetstryck är på maximalt
100bar (Bilaga 1). Från dessa uppgifter bestäms det att hydraulcylindern på
Gustavsbergs kraftverk är dimensionerad för en kraft på 143kN. Nedanstående
uträkning visar den verkande kraften.
Reglering av turbins ledskenor i vattenkraftverk
28
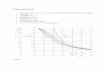
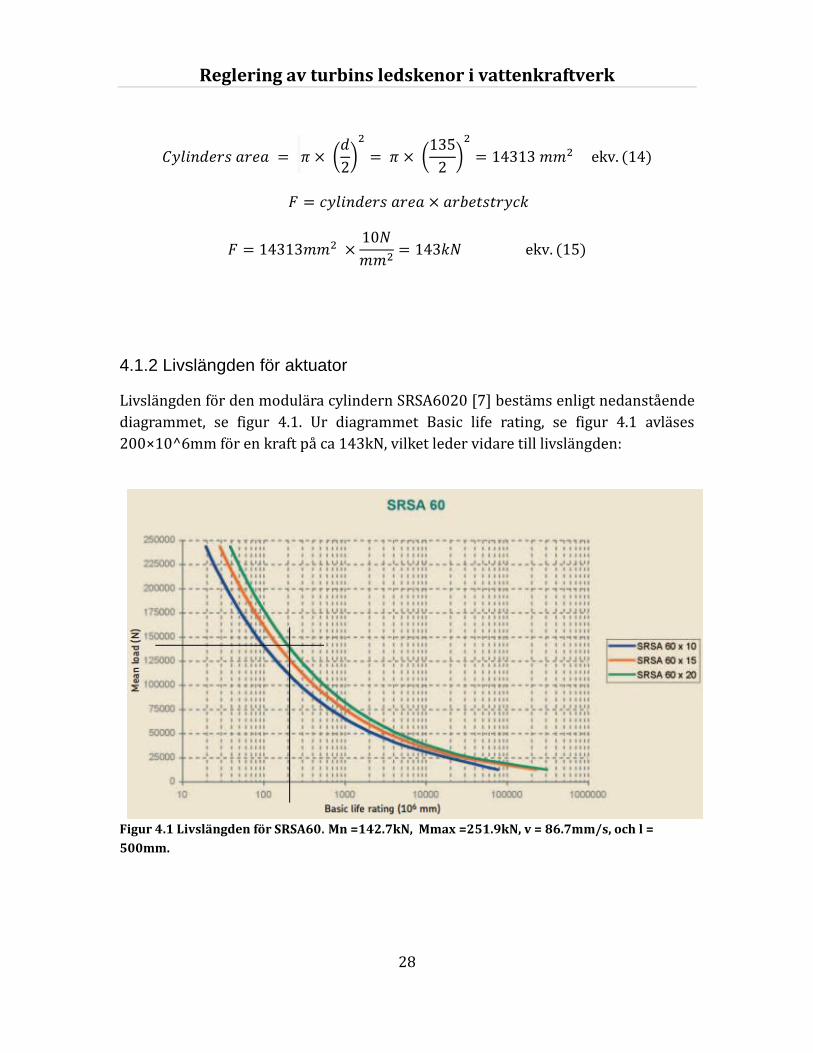
4.1.2 Livslängden för aktuator
Livslängden för den modulära cylindern SRSA6020 [7] bestäms enligt nedanstående
diagrammet, se figur 4.1. Ur diagrammet Basic life rating, se figur 4.1 avläses
200×10^6mm för en kraft på ca 143kN, vilket leder vidare till livslängden:
Figur 4.1 Livslängden för SRSA60. Mn =142.7kN, Mmax =251.9kN, v = 86.7mm/s, och l =
500mm.

Reglering av turbins ledskenor i vattenkraftverk
29
Cylindern skall arbeta 2 gånger i timme
Vilket ger
Ur diagrammet Basic life rating, se figur 4.1 avläses 200× mm för en kraft på ca
143kN, vilket leder vidare till livslängden:
Beräkningen utfördes under antagandet för maximal belastning under ständigt 24
timmars drift.
4.2 Dimensionering av motor
Den aktuella längden l= 500mm för den hydrauliska cylindern måste bevaras för att
hålla verkande krafter i systemet på 143kN, samma gäller för stängning av turbinen
vid störd drift (ex. brand, elbortfall) vilken skulle genomföras i en tidsram mellan 6-
8 sekunder. Från dessa data är det känt att motvikt som väger 2600kg skall
förflyttas med en hastighet v = 62mm/s som enligt beräkning:
Skruvens varvtal Δn omvandlas till rpm:

Reglering av turbins ledskenor i vattenkraftverk
30
Därefter bestäms Mf + Mt, d.v.s. lastens momentbehov p.g.a. friktion respektive
moment från en kraft F på lasten, i detta fall vatten trycket på ledskenorna. När
ställdonet är stängt skulle motviktens massa m, vattentrycket på ledskenornas yttre
sida samt friktionen vara resterande F = 11,4kN. Dessa ger slutligen, enligt ekvation
(8):
Från ekvation (5) och (7) skruvens egenbehov beräknas vid start Mskruv och lastens
startmoment Ms.
ekv.(17)
EMC datablad [7] ger skruvens parametrar: diameter d=60mm, stigning
h=20mm/varv, verkningsgrad η= ,2. Friktionskoefficient μ uppskattar till 0,05. Stål
densitet ρ = 78 kg/m3 vilket leder till skruvens tröghetsmoment Jskruv kan
beräknas ut från ekvation (10)
Sedan från ekvation (11)
där lastens tröghetsmoment Jlast beräknas från ekvation (12)
Från ekvation (6) beräknas Mlast
Reglering av turbins ledskenor i vattenkraftverk
31
AC servo motor CN H160 IP54 från ABB [9] med momentet 367 Nm, märkvarvtal
4000 rpm och tröghetsmoment 0.4 kgm2.
Startmoment Mmotor och totala moment M beräknas från ekvationer (7) och (5)
Och slutligen tröghetsförhållandet enligt ekvation (13)
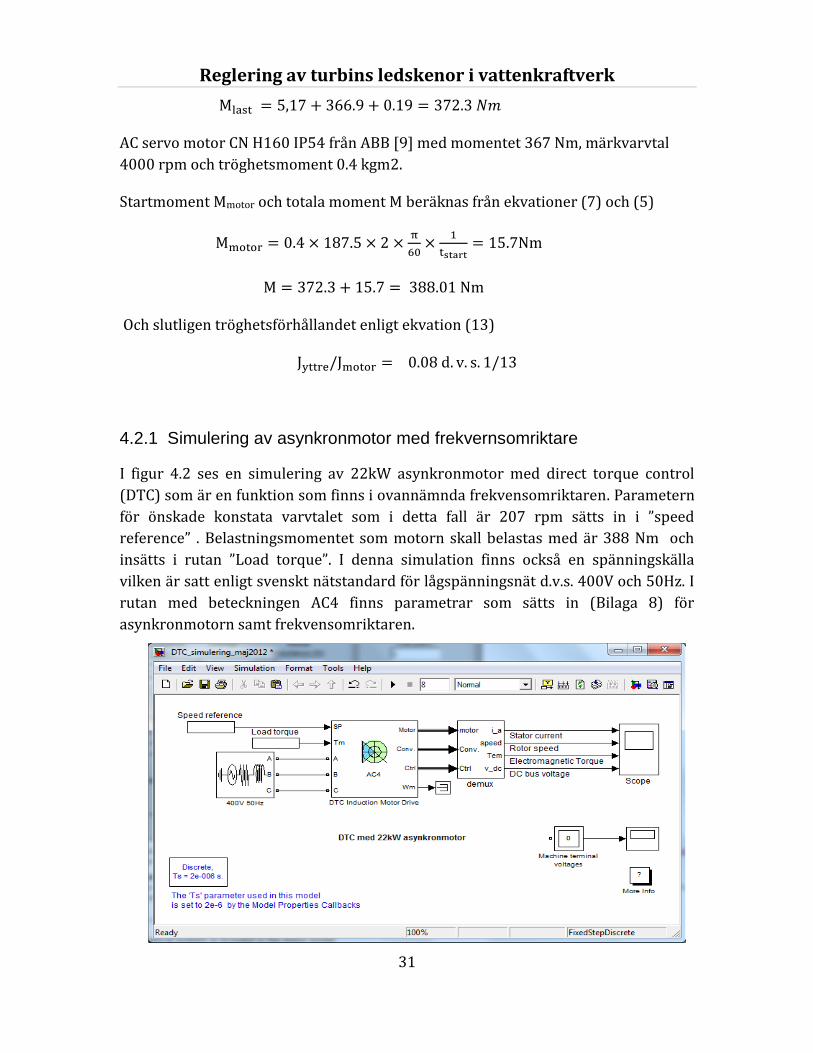
4.2.1 Simulering av asynkronmotor med frekvernsomriktare
I figur 4.2 ses en simulering av 22kW asynkronmotor med direct torque control
(DTC) som är en funktion som finns i ovannämnda frekvensomriktaren. Parametern
för önskade konstata varvtalet som i detta fall är 207 rpm sätts in i ”speed
reference” . Belastningsmomentet som motorn skall belastas med är 388 Nm och
insätts i rutan ”Load torque”. I denna simulation finns också en spänningskälla
vilken är satt enligt svenskt nätstandard för lågspänningsnät d.v.s. 400V och 50Hz. I
rutan med beteckningen AC4 finns parametrar som sätts in (Bilaga 8) för
asynkronmotorn samt frekvensomriktaren.
Reglering av turbins ledskenor i vattenkraftverk
32
Figur 4.2 Simulering av asynkronmotor samt frekvensomriktare DTC funktion i SimElectronic
miljö
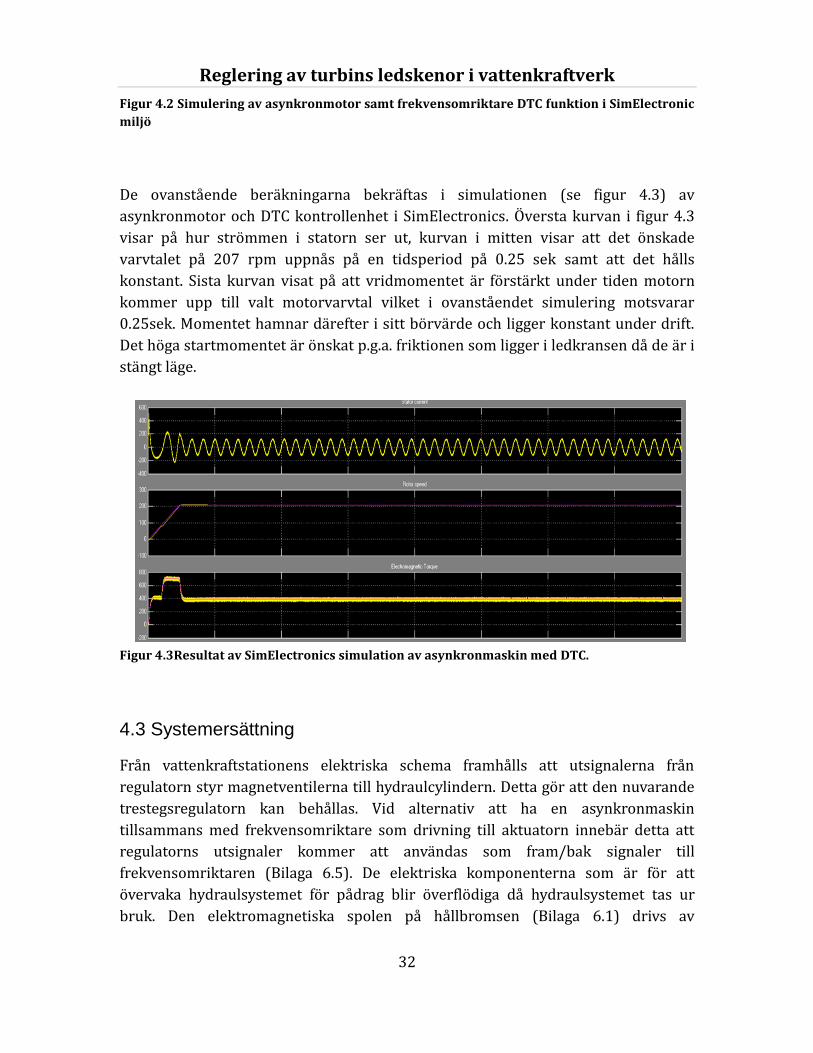
De ovanstående beräkningarna bekräftas i simulationen (se figur 4.3) av
asynkronmotor och DTC kontrollenhet i SimElectronics. Översta kurvan i figur 4.3
visar på hur strömmen i statorn ser ut, kurvan i mitten visar att det önskade
varvtalet på 207 rpm uppnås på en tidsperiod på 0.25 sek samt att det hålls
konstant. Sista kurvan visat på att vridmomentet är förstärkt under tiden motorn
kommer upp till valt motorvarvtal vilket i ovanståendet simulering motsvarar
0.25sek. Momentet hamnar därefter i sitt börvärde och ligger konstant under drift.
Det höga startmomentet är önskat p.g.a. friktionen som ligger i ledkransen då de är i
stängt läge.
Figur 4.3Resultat av SimElectronics simulation av asynkronmaskin med DTC.
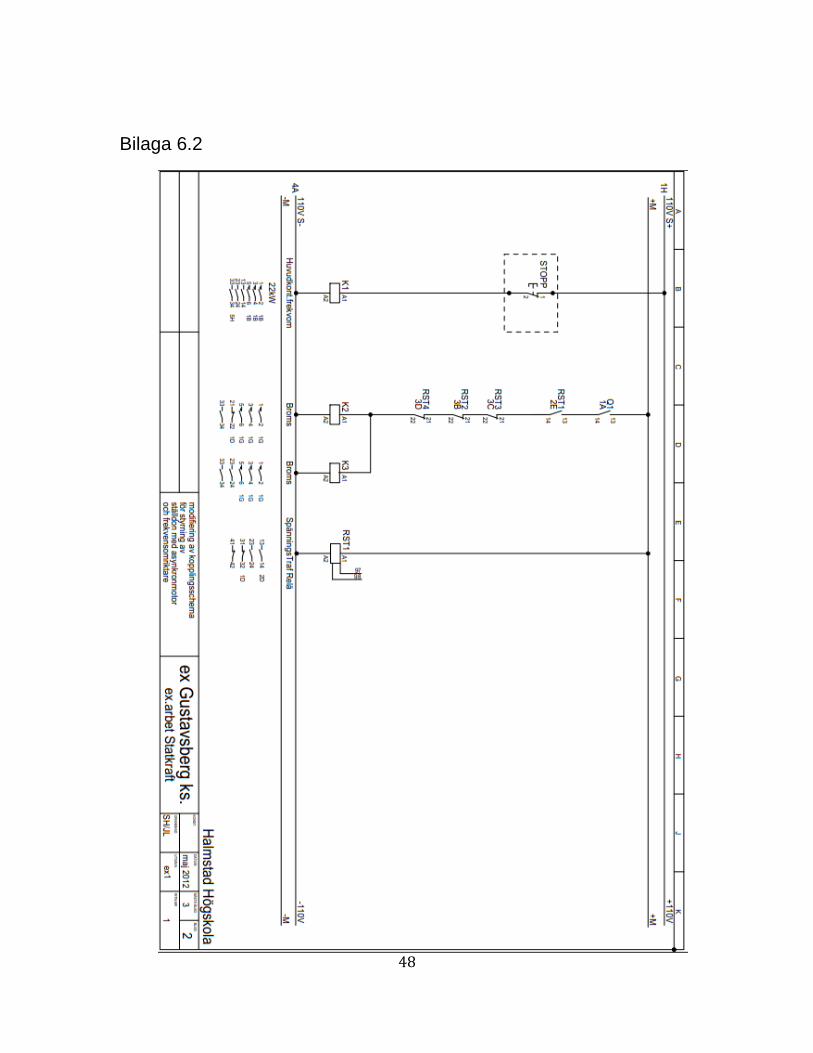
4.3 Systemersättning
Från vattenkraftstationens elektriska schema framhålls att utsignalerna från
regulatorn styr magnetventilerna till hydraulcylindern. Detta gör att den nuvarande
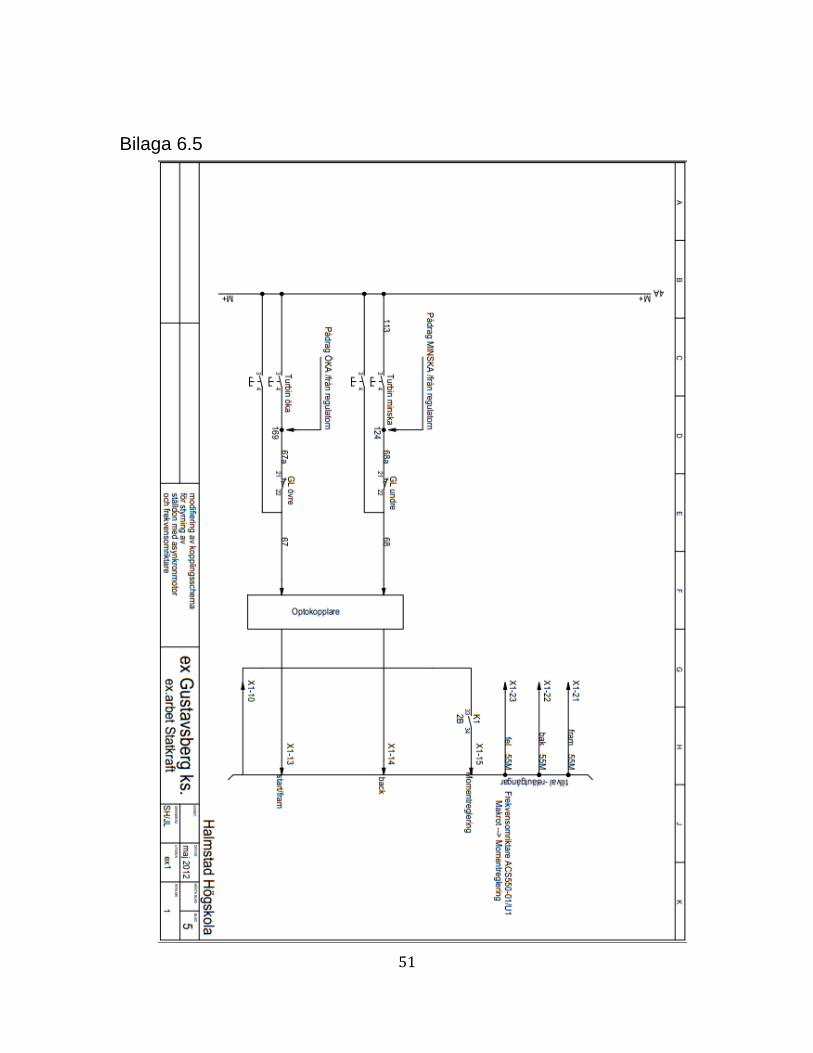
trestegsregulatorn kan behållas. Vid alternativ att ha en asynkronmaskin
tillsammans med frekvensomriktare som drivning till aktuatorn innebär detta att
regulatorns utsignaler kommer att användas som fram/bak signaler till
frekvensomriktaren (Bilaga 6.5). De elektriska komponenterna som är för att
övervaka hydraulsystemet för pådrag blir överflödiga då hydraulsystemet tas ur
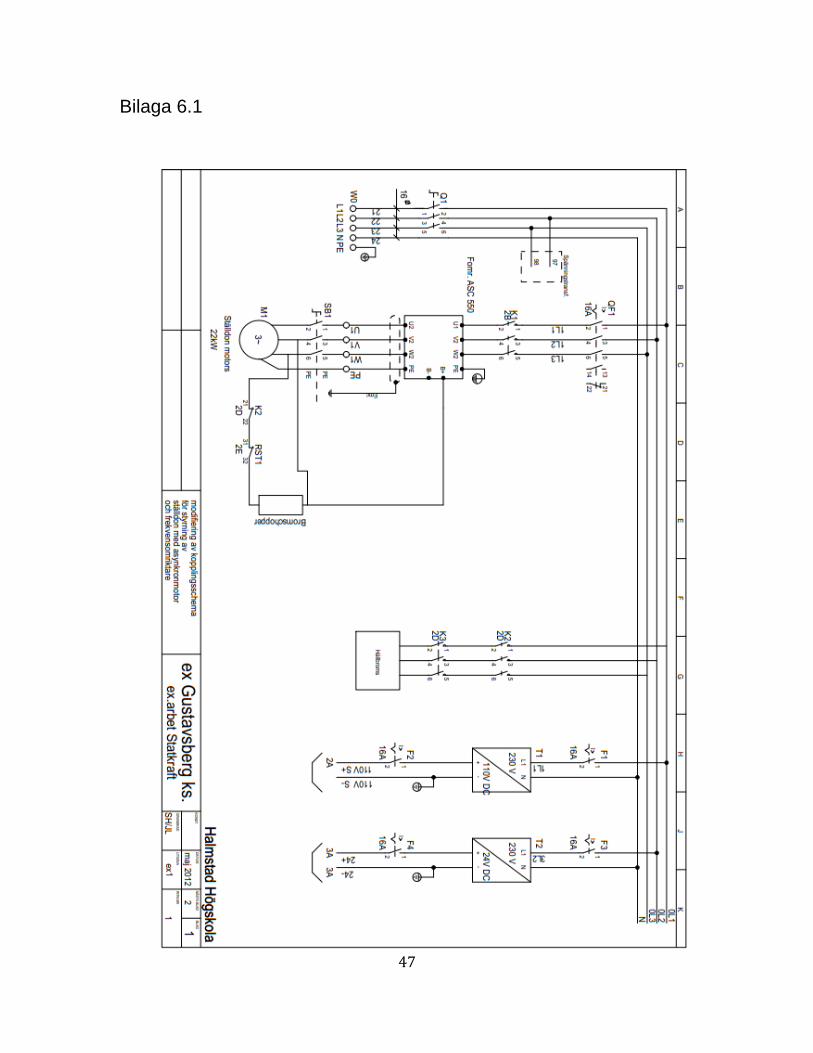
bruk. Den elektromagnetiska spolen på hållbromsen (Bilaga 6.1) drivs av
Reglering av turbins ledskenor i vattenkraftverk
33
växelström. Kontaktorer till mekaniska hållbromsen sätts efter villkor för inverterad
bromsfunktion (Bilaga 6.2), detta krävs i denna applikation för att bromsen skall
vara frisläppt då matningsspänningen försvinner. För att uppnå bästa prestanda
från driften av asynkronmotorn och frekvensomriktaren skall kopplingen och
inställningarna i omriktaren göras med inställningen ”momentreglering”.
De relevanta utgångarna (Bilaga 6.5) på frekvensomriktaren gäller endast för
ovannämnda moder.
En ersättning med elektriskt aktuator leder till att övervakningen av
hydraulsystemet blir överflödigt. Det innebär att det som är relaterat med
hydraulsystemets övervakning t.ex. hydrauloljans temperatur, nivå i oljetanken och
oljetrycket i systemet kan tas bort från kraftverkets elektriska schema för styrning
och reglering av pådraget/ledskenorna. I fallet med en drivning av en servo motor så
är det lämpligast att använda leverantörens egen styrenhet. Drift med servomotor
och regenerativ broms som kortslutningsmotstånd utav två faser (Bilaga 7) leder till
att ett tröghetsmoment skapas då motorn utsätts för rotation i spänningslöst
tillstånd. Detta är önskvärt för att minska hastigheten då ställdonet bakåtdriver i ett
spänningslöst tillstånd. Innan regenerativa bromsen kopplas in så är det några
villkor som skall uppfyllas d.v.s. huvudströmbrytaren till, spänningstrafo relä till,
samt frekvensomriktaren får inte skicka fram, bak eller fel signal (Bilaga 6.2).

Reglering av turbins ledskenor i vattenkraftverk
34
Reglering av turbins ledskenor i vattenkraftverk
35
5 Slutsatser
Det är ostridigt att utbytet av hydraulsystemet eliminerar oljans påverkan på miljö.
Kostnader för underhåll och service bör vara lägre eftersom antalet komponenter
reduceras.
I detta examensarbete är alla beräkningar gjorda efter antagandet att nuvarande
cylinder i Gustavsberg kraftstation arbetar med ett tryck på 100 bar vilket är det
maximala trycket. Första steget vid övervägande att byta ut hydraulsystemet bör
vara att mäta det verkliga trycket som hydraulcylindern arbetar med.
Linjär aktuator SRSA 6020 från SKF har kapacitet att hantera driv- och dragkrafter
som nuvarande hydraulcylinder i Gustavbergs vattenkraft är maximalt
dimensionerad för d.v.s. 143kN. Problemet i denna applikation uppstår när
ställdonet skall bakdrivas i ett spänningslöst tillstånd vid exempelvis nödstängning.
Rullskruven i aktuatorn kan komma upp i höga hastigheter i slutskedet av
stängningen då kraftpåverkan på donet är störst. I detta examensarbete föreslås
olika metoder för att lösa problemet. En metod som inte har tagits med men som är
värt att nämna är lösning med hjälp av s.k. industridämpare. Anledningen till att
industridämpare inte tags med i förstahandsval är förekommandet av olja i dess
konstruktion. Vid drift med asynkronmotor då regenerativ bromsning vid
kortslutning inte går att tillämpa så återstår alternativet att modifiera ställdonet
med regleringsventil för lufttrycket inne i ställdonet (Bilaga 9) eller att tillämpa
industridämpare.
I standardutförande finns linjära aktuatorer som klarar driva krafter upp till 250kN
som skulle kunna användas istället för traditionell hydraulik i
vattenkraftanläggningar upp till ca 2MW. Uppskattning av storlekar på
vattenkraftverken bör behandlas separat för varje fall beroende på turbintyp,
krafter i hydrauliksystem m.m.
Att ta ett kraftverk ur drift innebär att servicearbeten och ombyggnationer bör
planeras utförligt innan något påbörjas. Vid gamla kraftverk, sådana som
Gustavsberg, där det var brist eller ett dåligt skick på dokument p.g.a. ålder, kan det
uppstå svårigheter vid planering om ersättning av regulatorn. Det som efterstävas
är att återskapning av en effekt/vattenflöde kurvan för turbinen skall vara minst
lika bra som nuvarande. Det är efter dessa parametrar, återkopplingssignaler från
positionsgivarna och vattennivågivaren som regulatorn arbetar med. I detta
examensarbete har vi utgått ifrån att stationens befintliga regulator behålls.

Reglering av turbins ledskenor i vattenkraftverk
36
För att uppnå hög driftsäkerhet som är ekonomiskt försvarbar i ett system och som
kräver precision i reglering bör första valet falla på asynkron maskin med
frekvensomriktare med avseende på att dessa komponenter är vanligt
förekommande. Hög regleringsprecision ställer höga krav på frekvensomriktare,
vilket innebär att den bör väljas med omsorg till applikationen. En bra
frekvensomriktare bör ha DTC utrustning, automatiskt lastreglering, PID - regulator
samt ett antal olika makron för lämpad applikation. Det som ger driftsäkerheten är
antalet komponenter som är i serie med varandra samt hur de enkla
komponenterna är i sin konstruktion.
Med en servomotor kan det vara ganska lätt att göra små regelförändringar till en
steglängd uppskattningsvis upp till 0.5mm i ställdonet. Resten är beroende på hur
hela kopplingen är styv ända fram till ledskenorna. När det gäller hållmoment så är
det smidigast och även ekonomisk att använda sig utav en mekanisk skivbroms även
i en applikation med servomotor, för att undvika att dimensionera upp motorn.
Ett riktpris för ställdon i aktuell storlek hamnar på ca hundra till tvåhundra tusen
svenska kronor beroende på utrustningsnivå. I en applikation där det ställs höga
krav på driftsäkerhet och precisions skall aktuatorn vara utrustat med elektroniskt
övervaknig av kullager samt analoga positionsgivare. SKF kan vid önskemål utrusta
aktuatorn med automatisk smörjning av kullager.
Ett java skript med manual som underlättar dimensionering av motor enligt (Bilaga
5) kommer att levereras till uppdragsgivaren.
37
Referenser
[1] http://www.svenskenergi.se 2012.04.12
[2] Små vattenkraftverk – En handbok Svensk utgåva av Guide on how to develop a small hydro site Celso Penche et al, Översatt och anpassad av Jonas Rundqvist, Christer Söderberg och Bo Bergander. ESHA (2004)
[3] De svenska vattenkraftverken – Teknik under hundra år. Spade, Bengt (1999),
Publishers, Boca Raton, 1994
[4] http://www.statkraft.se
[5] Elmaskiner Liber 2012
[6] För planering av servodrift www.crm-systems.se
[7] http://www.skf.com/portal/skf_mec/home?lang=en&site=MEC
[8] Hydraulik 1 Haugnes, Steinar Stockholm (1995), Liber
[9] www.abb.com
[10] http://www.mathworks.se/products/simulink/
[11] http://www.pkdata.se 2012-05-06

38
39
Bilagor
Bilaga 1
40
Bilaga 2
41
42
Bilaga 3
43
Bilaga 4
44
Bilaga 5
% Lasten 2 600 kg skall förflyttas med en hastighet v 0.0625 m/s
(62.5mm/s) % med startid Tst 0.5s Friktionskoefficetet u uppskattar till 0.05. % Tillsatskraft Mt=11,4kN clear clc
v = 0.0625; % [m/s] frikt = 0.05; % friktionskoefficetet m = 2600; % m-lastensmass, motvikt 2600kg Mt = 0:2000:114000; % moment från F en kraft F på lasten
d.v.s..vatten g = 9.82; % gravitaion [m/s^2] Tst = .5; % Starttid 0.5s
% skruvens data l = 0.500; % längden [m](500mm) d = 0.060; % diameter [m](60mm) h = 0.020; % stigning [m/varv](20mm) verk = 0.2; % verkningsgrad för rullskruv p = 7800; % densitet på stål [kg/m^2]
% skruvens varvtal n_skruv = v/h [rpm] n_skruv = (v/h)*60;
% lastens momentbehov Mf [Nm] pga friktion lng = length(Mt); k = 1; while lng > 0 Mf(k) = (m*g*frikt+Mt(lng))*(h/(2*pi)); lng = lng - 1; MtMt(k) = Mt(lng+1); k = k +1; end
% skruvens troghetsmoment Jskruv [kgm^2] Jskruv = (1/32)*pi*l*p*d^4;
% skruvens egenbehov vid start Mskruv [Nm] Mskruv = Jskruv * n_skruv*((2*pi)/60)*(1/Tst);
% lastens troghetsmoment Jlast [kgm^2] Jlast = m*((h/(2*pi))^2)*((v*60)/n_skruv)^2;
% Lastens startmoment Ms [Nm] Ms = Jlast *n_skruv *((2*pi)/(60)) *(1/Tst) *(1/verk);
45
% Lastens moment [Nm] Mlast = Ms+Mf+Mskruv;
format ShortG disp('------------------------------------------------------------------
------'); fprintf('| skruv.troghmom\t skruv egen behov vid start \n'); fprintf('| Jskruv[kgm^2]\t Mskruv[kgm^2]\n'); disp('------------------------------------------------------------------
------'); disp([Jskruv',Mskruv']) disp(' '); disp('------------------------------------------------------------------
------');
disp('------------------------------------------------------------------
------'); fprintf('| mass\t last.momentbehov last.moment \n'); fprintf('| m[kg]\t Mf[Nm] Mlast[Nm] \n'); disp('------------------------------------------------------------------
------'); disp([MtMt', Mf', Mlast']) disp(' '); disp('------------------------------------------------------------------
------');
% Väljer en motor från katolof med momentet Mm [Nm], varvtal n [rpm] och
tröghetsmomentet Jmotor Jmotor=input('Välj en motor med läpmlig moment för ovanstående moment,
och slå in motors tröghetsmomentet\n');
% Motor start moment Mmotor [Nm] Mmotor = Jmotor *n_skruv *((2*pi)/(60)) *(1/Tst); fprintf('Motor start moment\n'); disp (Mmotor)
% Totala moment M [Nm] M = Mlast + Mmotor;
%forhallandet= Jyttre/Jmotor= (Jskruv+Jlast)/Jmotor forhallandet =(Jskruv+Jlast)/Jmotor; fprintf('Förhållandet Jyttre/Jmotor \n'); disp(forhallandet)
%dynamiska moment Dyn_mom = Mmotor + Ms + Mskruv
disp('------------------------------------------------------------------
------'); fprintf('| mass\t last.momentbehov last.moment total moment \n'); fprintf('| m[kg]\t Mf[Nm] Mlast[Nm] M\n'); disp('------------------------------------------------------------------
------'); disp([MtMt', Mf', Mlast',M'])
46
disp(' '); disp('------------------------------------------------------------------
------');
47
Bilaga 6.1
48
Bilaga 6.2
49
Bilaga 6.3
50
Bilaga 6.4
51
Bilaga 6.5
52
Bilaga 7
53
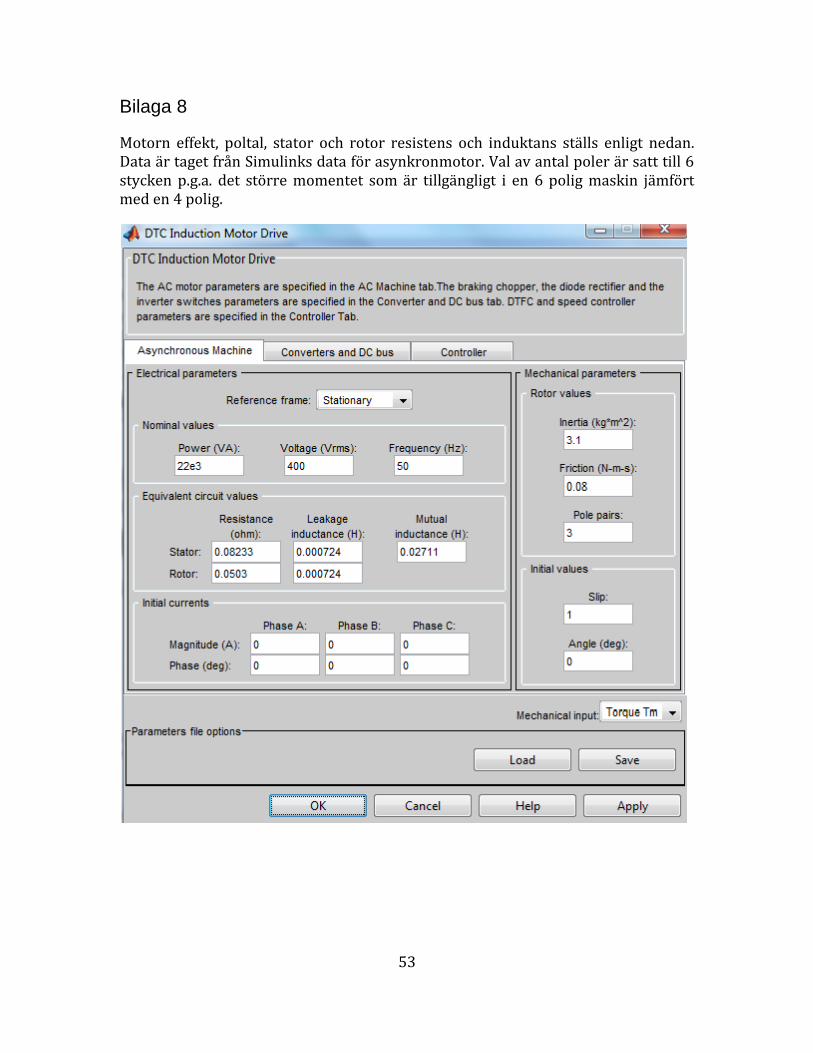
Bilaga 8
Motorn effekt, poltal, stator och rotor resistens och induktans ställs enligt nedan. Data är taget från Simulinks data för asynkronmotor. Val av antal poler är satt till 6 stycken p.g.a. det större momentet som är tillgängligt i en 6 polig maskin jämfört med en 4 polig.
54
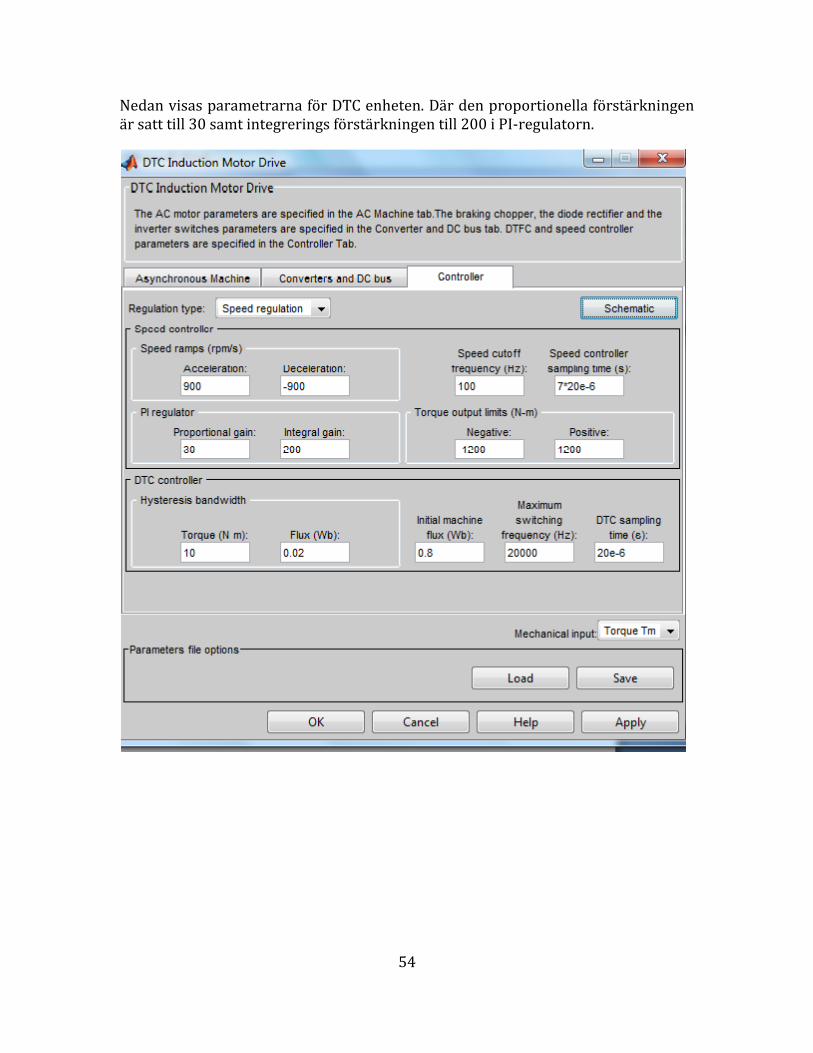
Nedan visas parametrarna för DTC enheten. Där den proportionella förstärkningen är satt till 30 samt integrerings förstärkningen till 200 i PI-regulatorn.
55
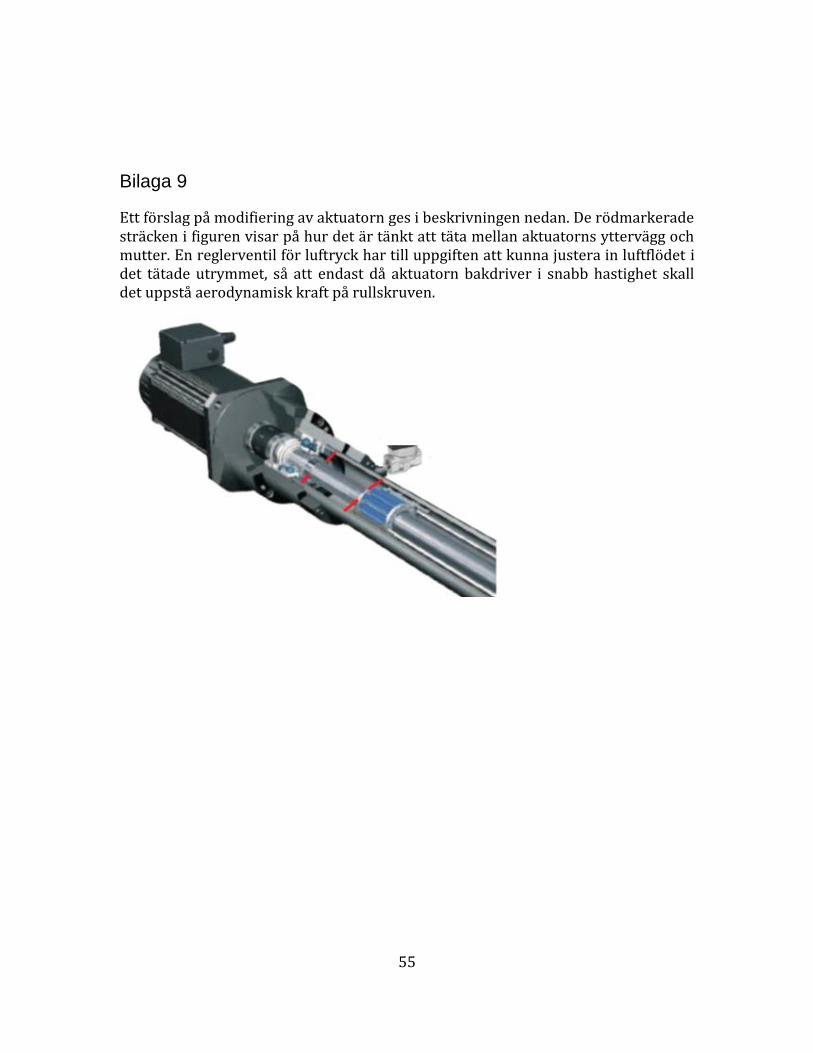
Bilaga 9
Ett förslag på modifiering av aktuatorn ges i beskrivningen nedan. De rödmarkerade sträcken i figuren visar på hur det är tänkt att täta mellan aktuatorns yttervägg och mutter. En reglerventil för luftryck har till uppgiften att kunna justera in luftflödet i det tätade utrymmet, så att endast då aktuatorn bakdriver i snabb hastighet skall det uppstå aerodynamisk kraft på rullskruven.