Embed Size (px)
Citation preview
Regrasp Planning for a 4-Fingered Regrasp Planning for a 4-Fingered Hand Manipulating a PolygonHand Manipulating a Polygon
การวางแผนการจับด้ วยมื�อที่��มื� การวางแผนการจับด้ วยมื�อที่��มื� 4 4 น��วเพื่��อที่�าการจัด้การกบวตถุ�หลายน��วเพื่��อที่�าการจัด้การกบวตถุ�หลาย
ด้ านด้ านโด้ย นายธนะธร พื่#อค้ า โด้ย นายธนะธร พื่#อค้ า 457 0343457 0343
3 213 21
อาจัารย%ที่��ปร'กษา ด้รอาจัารย%ที่��ปร'กษา ด้ร. . อรรถุว�ที่ย% อรรถุว�ที่ย% สุ�ด้แสุงสุ�ด้แสุง
OutlineOutline
IntroductionIntroductionRelated worksRelated worksBackgroundBackgroundThesisThesis
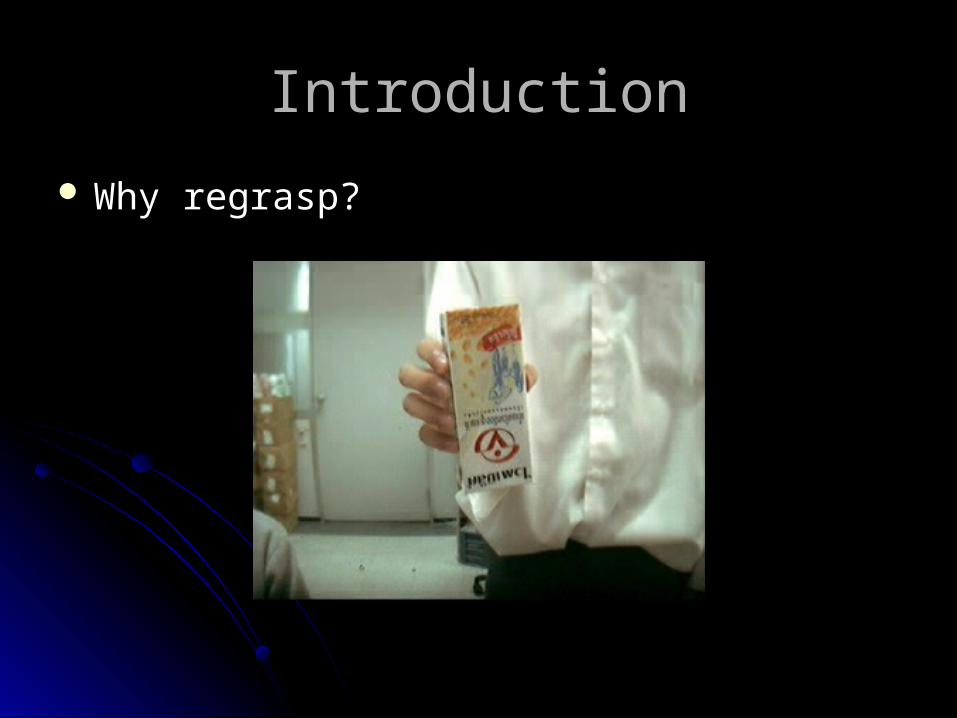
IntroductionIntroduction
Why regrasp?Why regrasp?
IntroductionIntroduction
Properties for stable graspProperties for stable grasp
EquilibriumEquilibrium
Force closureForce closure
IntroductionIntroduction
Computing a sequence of finger Computing a sequence of finger repositioningrepositioning
Problem definitionProblem definitionPolygonal objectPolygonal object4-fingered hand4-fingered hand
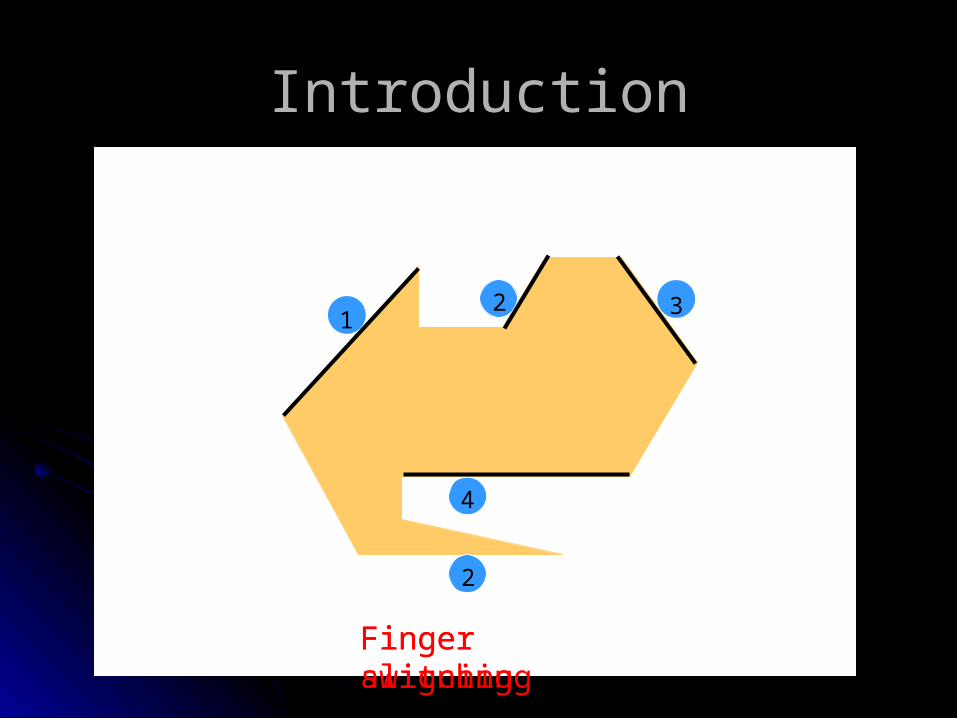
IntroductionIntroduction
1
2
3
4
2
Finger switchingFinger aligning
IntroductionIntroduction
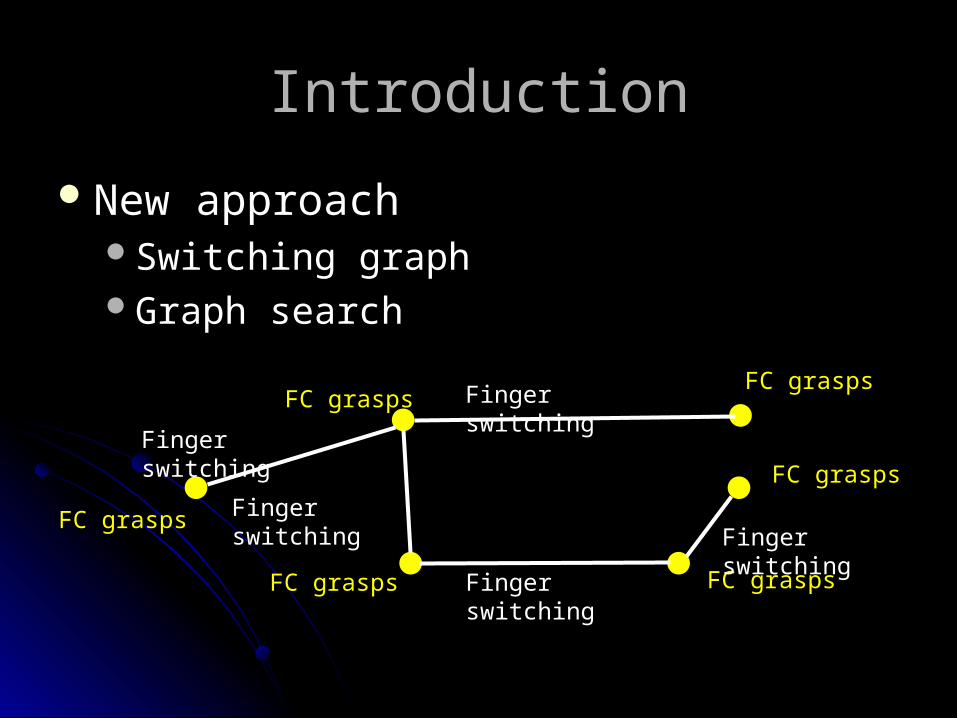
New approachNew approachSwitching graphSwitching graphGraph searchGraph search
FC grasps
FC grasps
FC grasps
FC grasps FC grasps
FC grasps
Finger switching
Finger switching
Finger switching
Finger switching
Finger switching
Related worksRelated works
Dexterous manipulationDexterous manipulationTask planningTask planningGrasp positionsGrasp positionsDynamics, kinematics, forceDynamics, kinematics, force
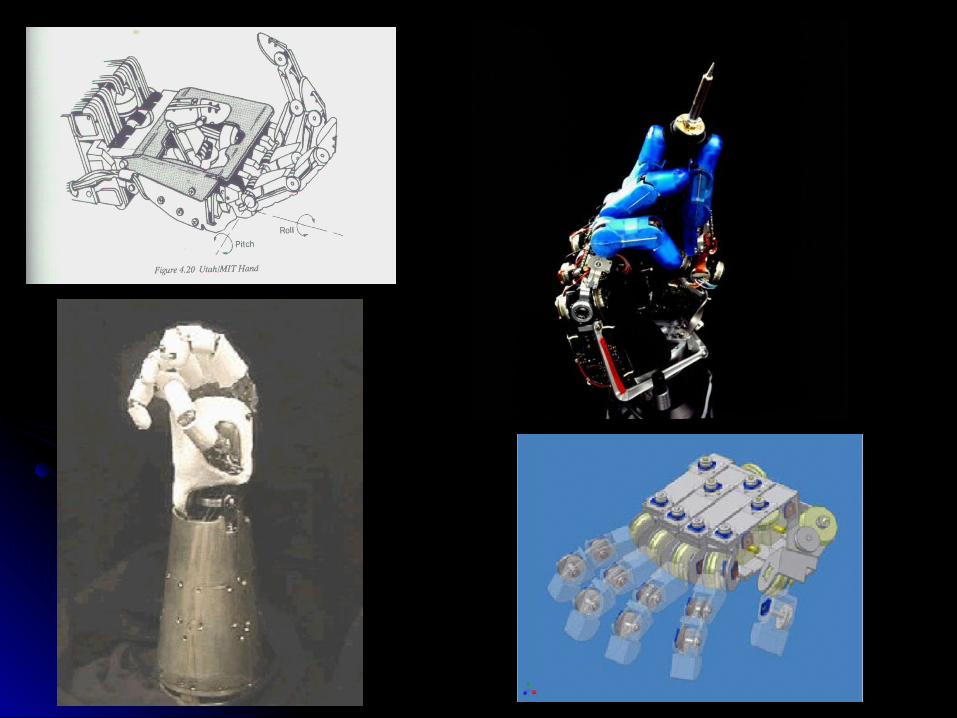
Related worksRelated works Robot handsRobot hands
S. Jacobsen, E. Iversen, D. Knutti, R. Johnson, and K. Bigger. S. Jacobsen, E. Iversen, D. Knutti, R. Johnson, and K. Bigger. Design of the Utah/MIT Dextrous Hand. Design of the Utah/MIT Dextrous Hand. IEEE Int. Conf. on IEEE Int. Conf. on Robotics and AutomationRobotics and Automation, pp. 96-102, 1986., pp. 96-102, 1986.
J. Butterfass, M. Grebenstein, H. Liu, and G. Hirzinger. DLR-J. Butterfass, M. Grebenstein, H. Liu, and G. Hirzinger. DLR-Hand II: Next Generation of a Dextrous Robot Hand.Hand II: Next Generation of a Dextrous Robot Hand. IEEE Int. IEEE Int. Conf. on Robotics and AutomationConf. on Robotics and Automation, , SeoulSeoul, 2001. , 2001.
C.S. Lovchik and M.A. Diftler. 1999. The Robonaut hand: a dextC.S. Lovchik and M.A. Diftler. 1999. The Robonaut hand: a dexterous robot hand for space.erous robot hand for space. IEEE Int. Conf. on Robotics and AutIEEE Int. Conf. on Robotics and Automationomation, pp. 907-912, 1999., pp. 907-912, 1999.
I. Yamano, K. Takemura, and T. Maeno. Development of a I. Yamano, K. Takemura, and T. Maeno. Development of a Robot Finger for Five-fingered Hand using Ultrasonic Motors. Robot Finger for Five-fingered Hand using Ultrasonic Motors. IEEE/RSJ Int. Conf. on Intelligent Robots and SystemsIEEE/RSJ Int. Conf. on Intelligent Robots and Systems,, 2003.2003.
Related worksRelated works
GraspingGraspingV-D. Nguyen. Construction force-closure grasV-D. Nguyen. Construction force-closure gras
ps, ps, 1988.1988.2-fingered force closure grasp2-fingered force closure graspIndependent contact regionIndependent contact region
J. Ponce and B. Faverjon. On computing threJ. Ponce and B. Faverjon. On computing three-finger force-closure grasps of polygonal obje-finger force-closure grasps of polygonal objects, ects, 1995.1995.2 and 3-fingered force closure grasp2 and 3-fingered force closure graspIndependent contact regionIndependent contact region
Related worksRelated works
Dexterous manipulation & regraspingDexterous manipulation & regraspingJ.W. Hong, G. Lafferriere, B. Mishra, and X.L. TJ.W. Hong, G. Lafferriere, B. Mishra, and X.L. T
ang. Fine manipulation with multifinger handang. Fine manipulation with multifinger hand,, 11990990..Regrasping with 3 and 4 fingersRegrasping with 3 and 4 fingersFinger gaitingFinger gaitingCurved objectCurved object
L. Han and J.C. Trinkle. Dextrous manipulation L. Han and J.C. Trinkle. Dextrous manipulation by rolling and finger gaiting, by rolling and finger gaiting, 1998.1998.General framework for dexterous manipulationGeneral framework for dexterous manipulationFinger rolling and gaitingFinger rolling and gaitingSpherical objectSpherical object
Related worksRelated works
Dexterous manipulation & regraspingDexterous manipulation & regraspingT. Omata and K. Nagata. Planning T. Omata and K. Nagata. Planning
reorientation of an object with a multifingered reorientation of an object with a multifingered handhand, 1994., 1994.4-fingered hand4-fingered handPolygonal objectPolygonal objectSearch treeSearch treeLinear and non-linear programmingLinear and non-linear programming
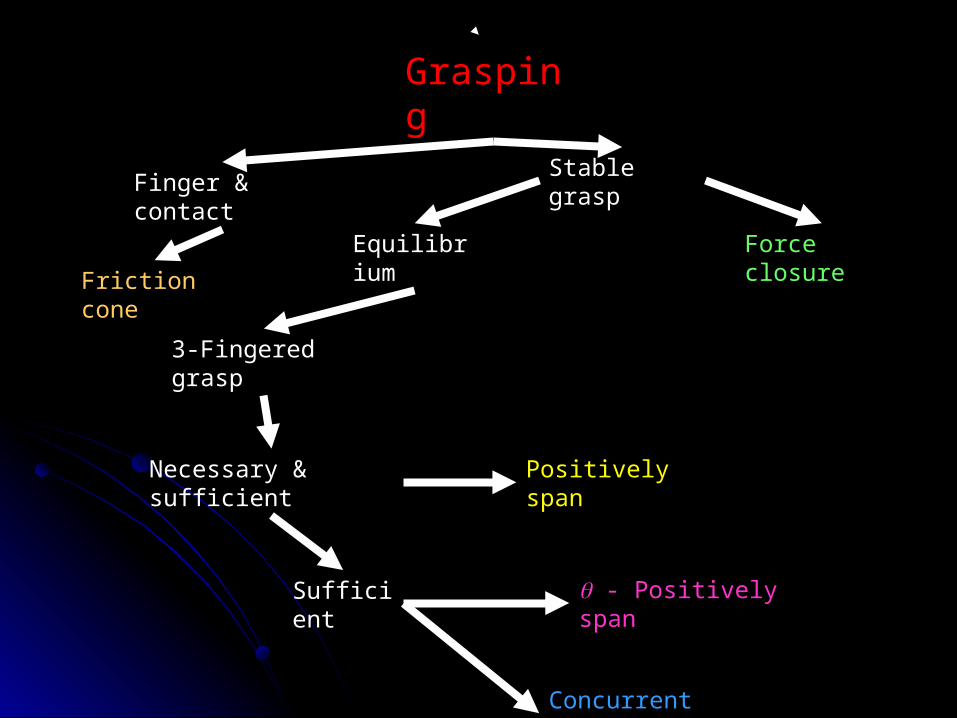
Grasping
Finger & contact
Friction cone
Equilibrium Force closure
3-Fingered grasp
Necessary & sufficient
Sufficient
Positively span
- Positively span
Concurrent grasp
Stable grasp
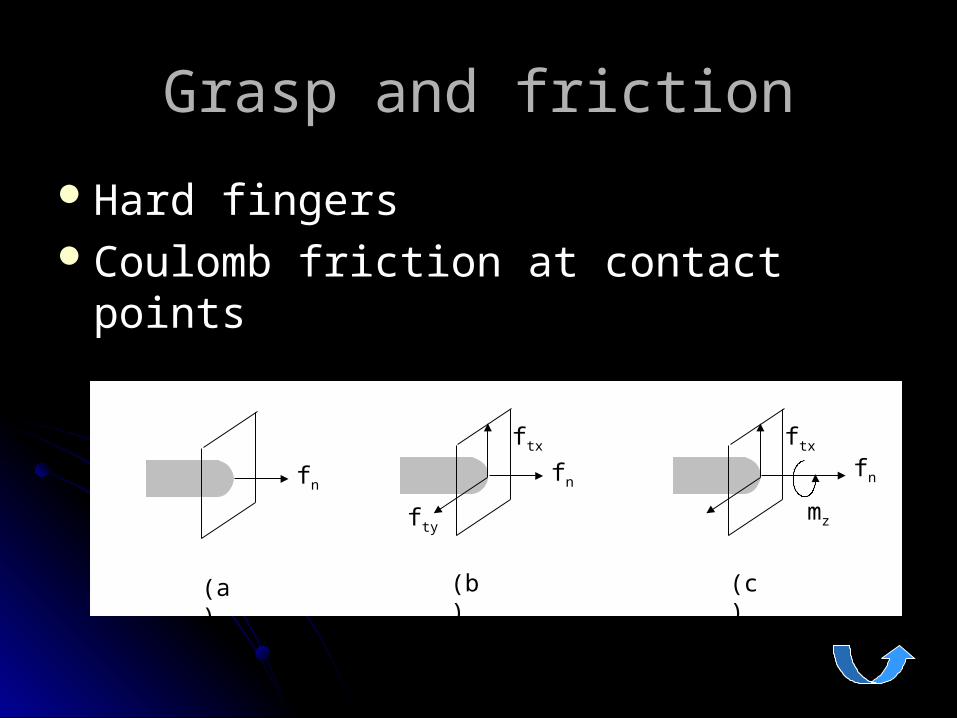
Grasp and frictionGrasp and friction
Hard fingersHard fingersCoulomb friction at contact pointsCoulomb friction at contact points
fnfn
ftx
fty
ftx
mz
fn
(a) (b) (c)
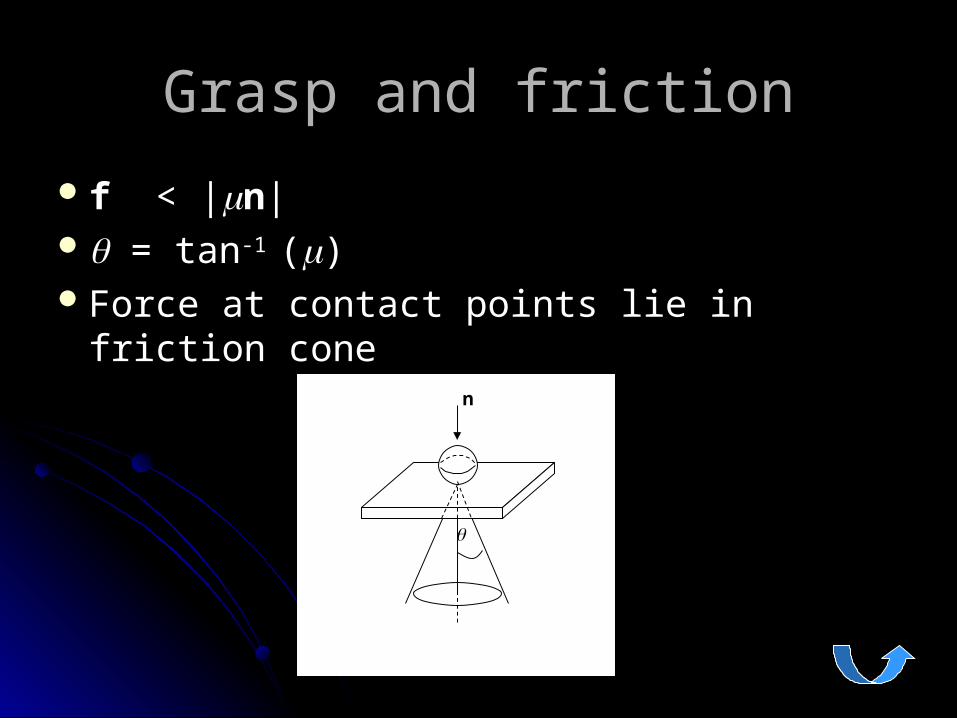
Grasp and frictionGrasp and friction
f f < |< |nn|| = tan= tan-1 -1 (())Force at contact points lie in friction coneForce at contact points lie in friction cone
f
n
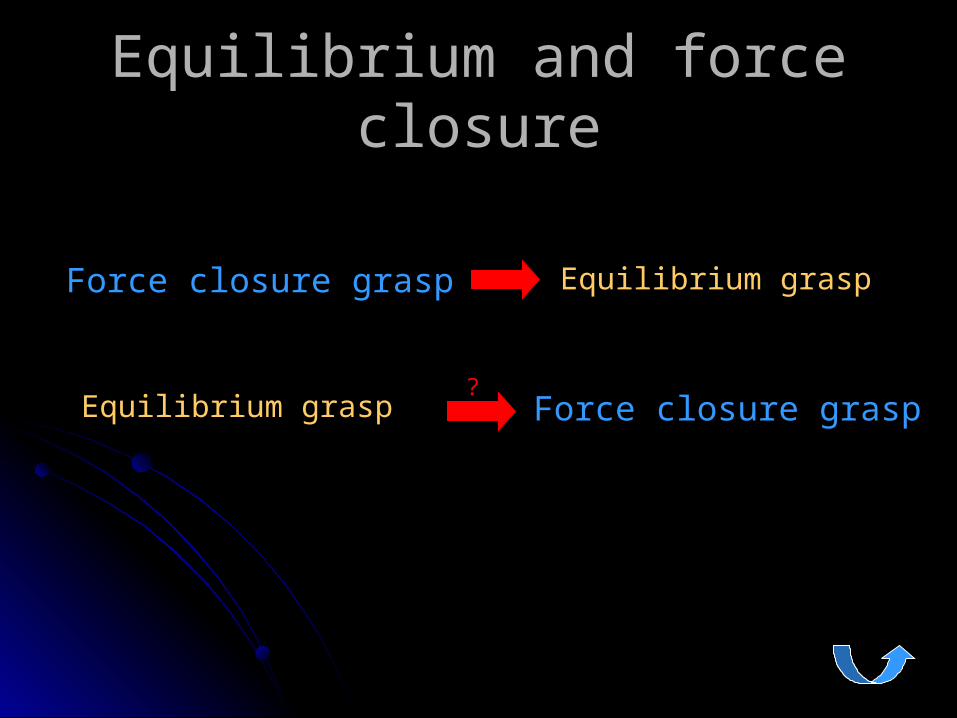
Equilibrium and force closureEquilibrium and force closure
Equilibrium graspEquilibrium graspForce closure graspForce closure grasp
Force closure graspForce closure graspEquilibrium graspEquilibrium grasp?
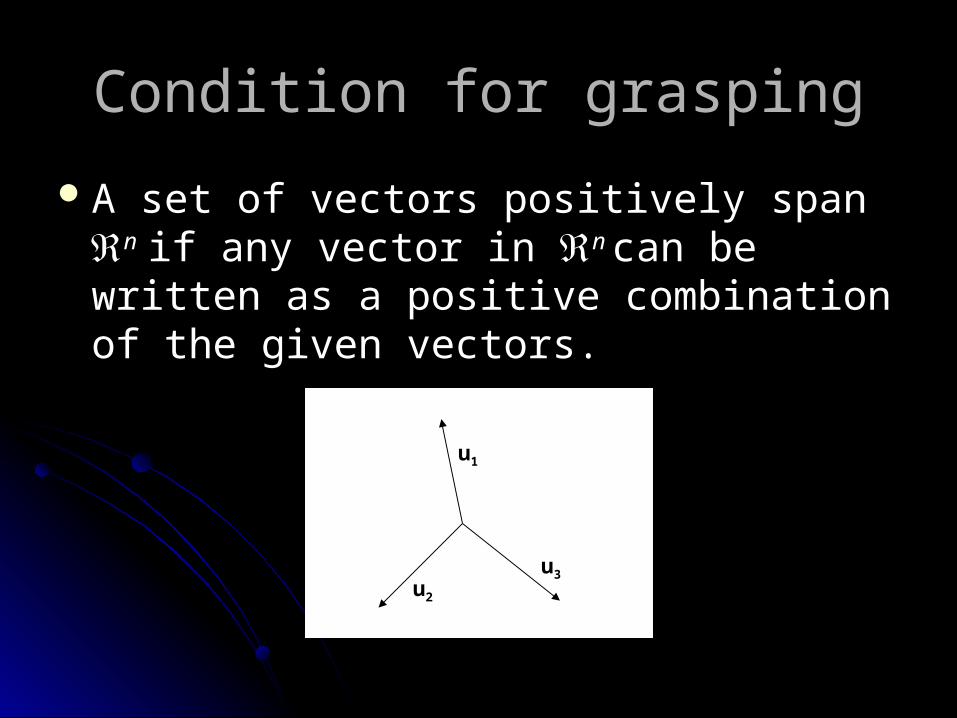
Condition for graspingCondition for grasping
A set of vectors positively span A set of vectors positively span nn if any if any vector in vector in n n can be written as a positive can be written as a positive combination of the given vectors.combination of the given vectors.
u1
u3
u2
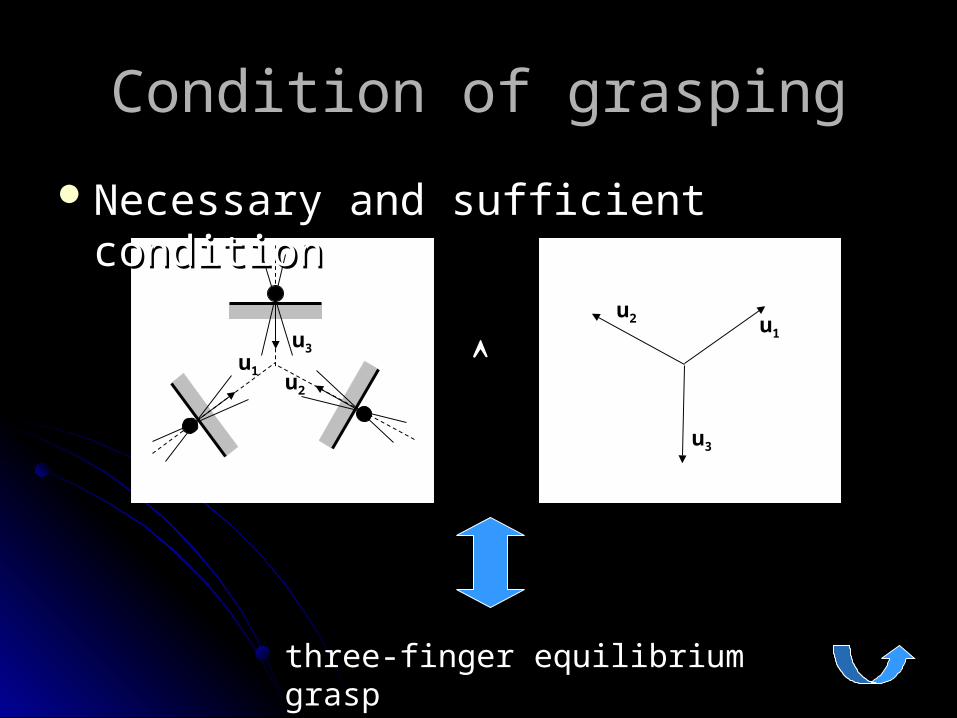
Condition of graspingCondition of grasping
u1
u3
u2
u1
u3
u2
three-finger equilibrium grasp
Necessary and sufficient conditionNecessary and sufficient condition
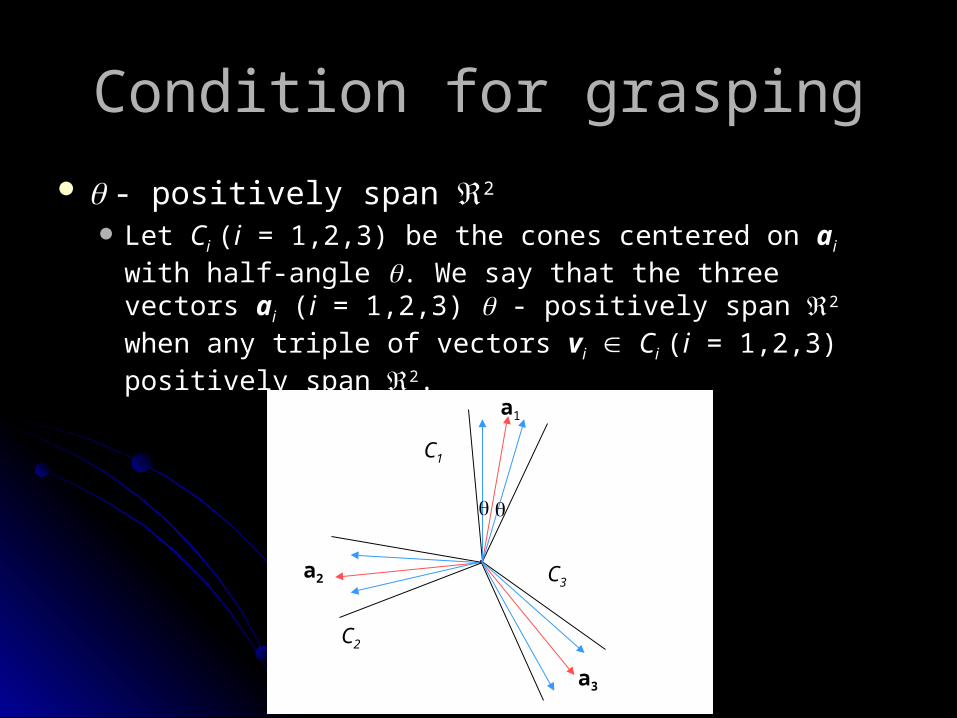
Condition for graspingCondition for grasping
- positively span - positively span 2 2
LetLet CCii ((ii = 1,2,3) = 1,2,3) be the cones centered onbe the cones centered on aaii with half-with half-
angleangle . We say that the three vectors . We say that the three vectors aaii ( (ii = 1,2,3) = 1,2,3) - -
positively span positively span 22 when any triple of vectorswhen any triple of vectors vvii CCii ((ii
= 1,2,3) = 1,2,3) positively spanpositively span 22..
a2
a3
a1
C1
C2
C3
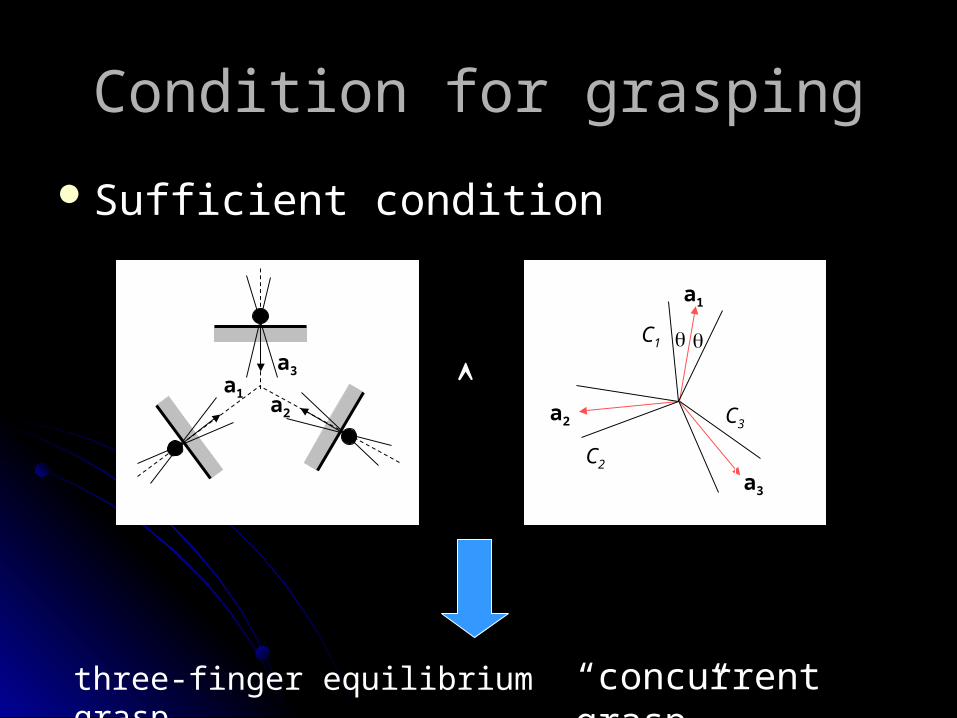
Condition for graspingCondition for grasping
Sufficient conditionSufficient condition
a1
a3
a2
three-finger equilibrium grasp
a2
C1
C2
C3
a1
a3
“concurrent grasp”
ThesisThesis
New approachNew approachSwitching graphSwitching graphFinger switchingFinger switchingFinger aligningFinger aligning
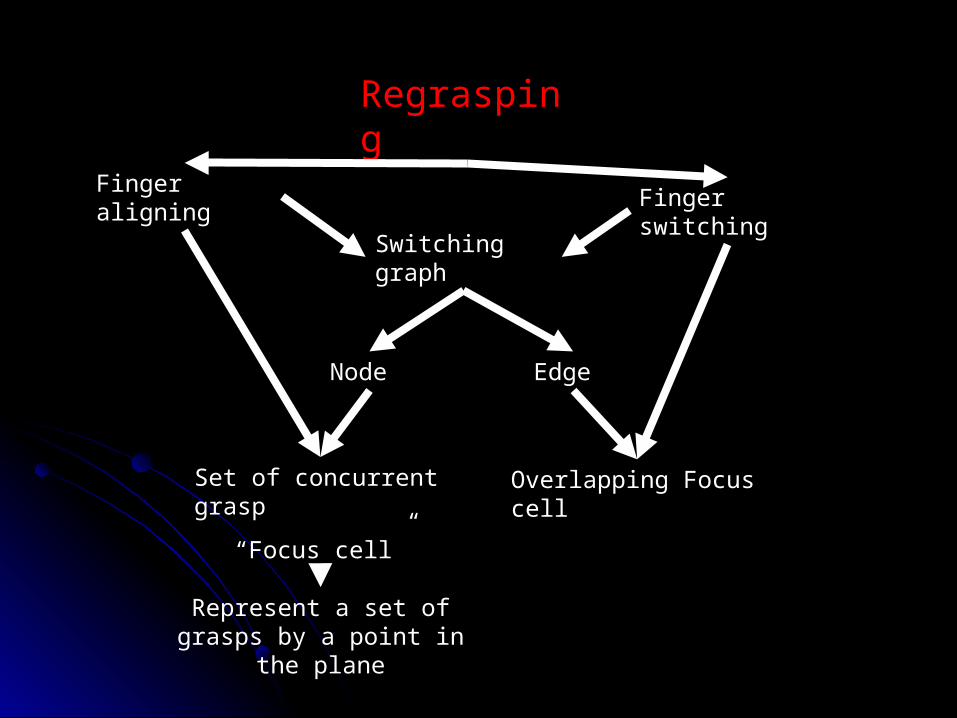
Regrasping
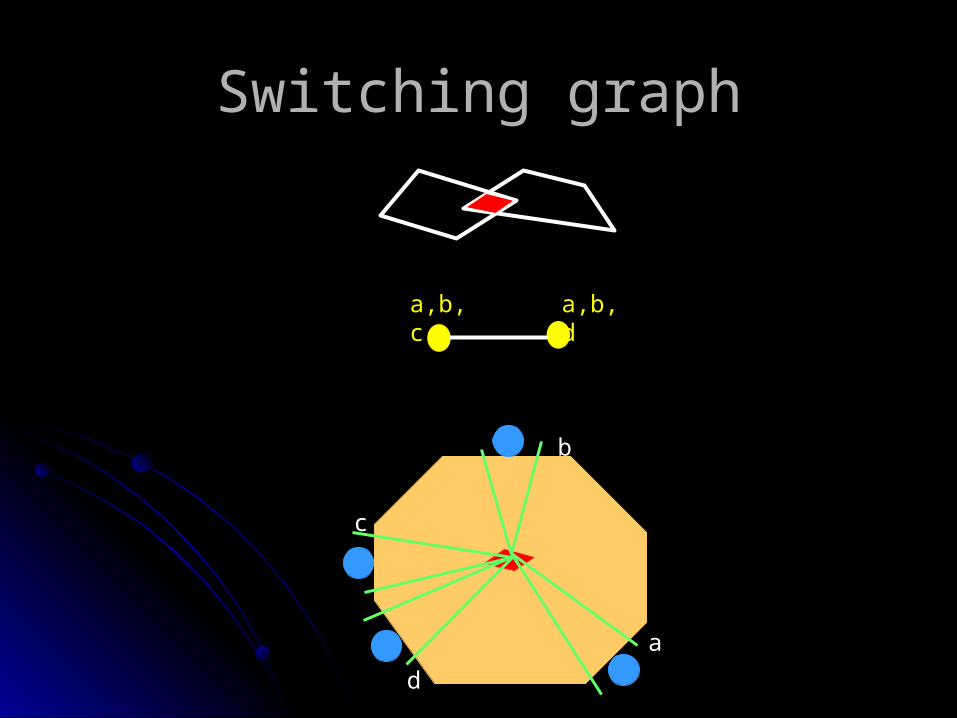
Switching graph
Finger switchingFinger aligning
Node Edge
Set of concurrent grasp
“Focus cell”
Overlapping Focus cell
Represent a set of grasps by a point in the plane
Switching graphSwitching graph
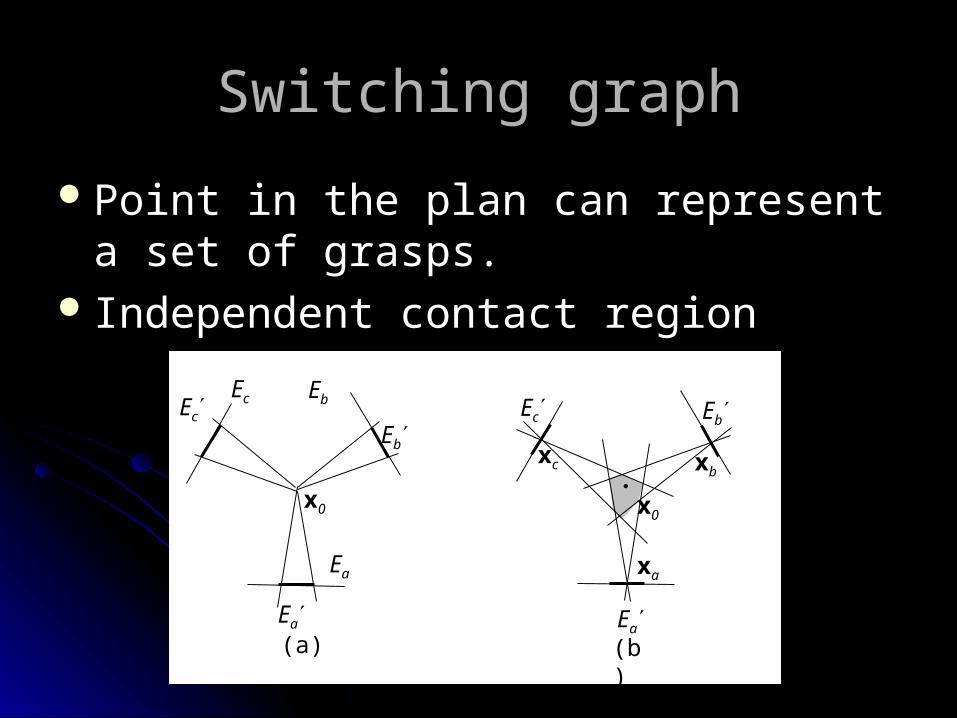
Point in the plan can represent a set of Point in the plan can represent a set of grasps.grasps.
Independent contact regionIndependent contact region
Ea Ea(a) (b)
.
EbEc
Ea
Eb
x0 x0
xc
xa
xb
EbEcEc
Switching graphSwitching graph
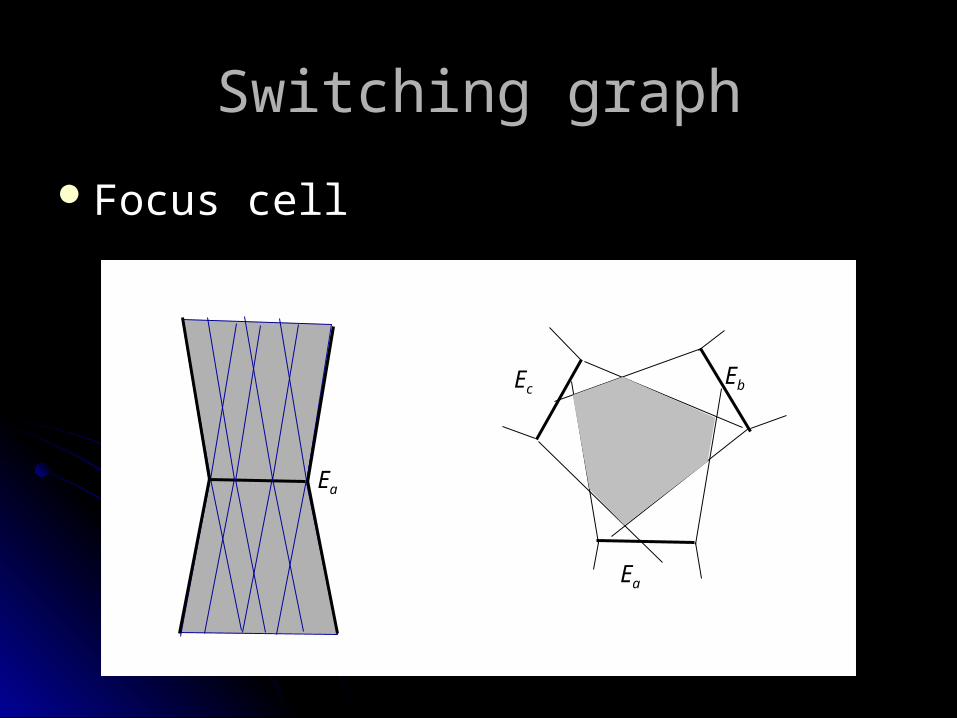
Focus cellFocus cell
Ea
EbEc
Ea
a
b
c
d
Switching graphSwitching graph
a,b,c a,b,d
ScopeScope
Regrasp Planning for a 4-Fingered Hand Manipulating Regrasp Planning for a 4-Fingered Hand Manipulating a Polygona Polygon Concurrent graspConcurrent grasp Switching graphSwitching graph
Optional scopeOptional scope Two-finger force closure graspTwo-finger force closure grasp Parallel graspParallel grasp
Completed worksCompleted works
Study works in grasping and regrasping.Switching graph for concurrent grasp. Implement in C++ with LEDA.
Completed worksCompleted works
Publication A. Sudsang and T. Phoka. Regrasp planning for a 4-fi
ngered hand manipulating a polygon. IEEE Int. Conf. on Robotics and Automation, pp. 2671 – 2676. Taipei, 2003.
T. Phoka and A. Sudsang. Regrasp planning for a 5-fingered hand manipulating a polyhedron. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3674 – 3679. Las Vegas, 2003.
Ongoing worksOngoing works
Design the switching grasp Design the switching grasp Two-finger force closure graspTwo-finger force closure grasp Parallel graspParallel grasp
ExperimentExperiment Writing a thesisWriting a thesis
BenefitBenefit
New approach for regraspingNew approach for regrasping
Thank youThank you