Embed Size (px)
Citation preview
1
L’Agriculture de Précision
en Champagne-Ardenne
Mathieu BRUYEN Angèle SORIA Jérémy VINCENT Alexandre BLIN Lionel STASZAK
Lycée Roosevelt – Reims
2
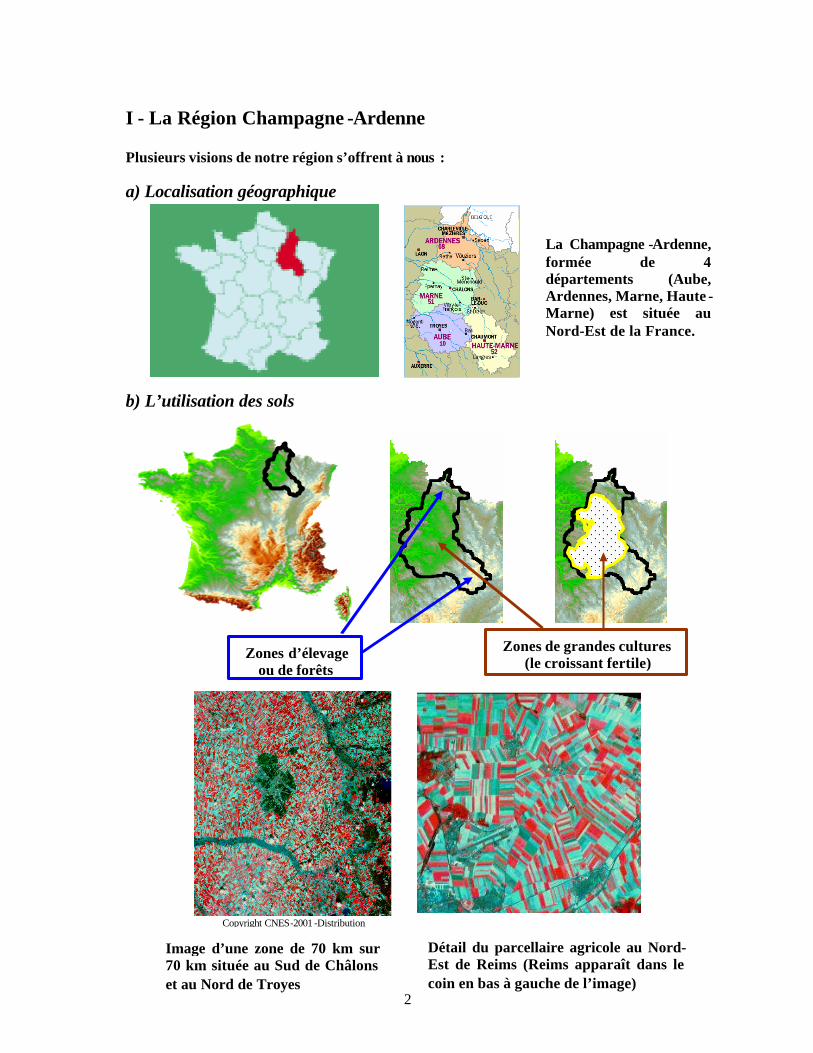
I - La Région Champagne -Ardenne Plusieurs visions de notre région s’offrent à nous : a) Localisation géographique b) L’utilisation des sols
La Champagne -Ardenne, formée de 4 départements (Aube, Ardennes, Marne, Haute -Marne) est située au Nord-Est de la France.
Zones d’élevage ou de forêts
Zones de grandes cultures (le croissant fertile)
Copyright CNES-2001 -Distribution
Image d’une zone de 70 km sur 70 km située au Sud de Châlons et au Nord de Troyes
Détail du parcellaire agricole au Nord-Est de Reims (Reims apparaît dans le coin en bas à gauche de l’image)
3
c) Données statistiques agricoles (2001) Région Champagne -Ardenne
Surfaces non agricoles : 39% Surfaces de céréales : 27% Surfaces autres que céréales : 34%
Aube Surfaces non agricoles : 36% Surfaces de céréales : 34% Surfaces autres que céréales : 30%
Ardennes Surfaces non agricoles : 50% Surfaces de céréales : 18% Surfaces autres que céréales : 32%
Marne Surfaces non agricoles : 32% Surfaces de céréales : 34% Surfaces autres que céréales : 34%
Haute-Marne Surfaces non agricoles : 40% Surfaces de céréales : 20% Surfaces autres que céréales : 40%
L’importance des grandes cultures (céréales et betteraves) transparaît dans les statistiques agricoles. d) Données économiques (2001)
Le croissant fertile
PIB Région Champagne -Ardenne : 29,3 milliards d’euros
PIB Région Champagne -Ardenne, hors agriculture :
25,577 milliards d’euros PIB Région Champagne -Ardenne, part de l’agriculture :
3,223 milliards d’euros PIB Région Champagne -Ardenne, part de la viticulture :
1,386 milliards d’euros PIB Région Champagne -Ardenne, part de l’agriculture, hors viticulture :
1,837 milliards d’euros
4
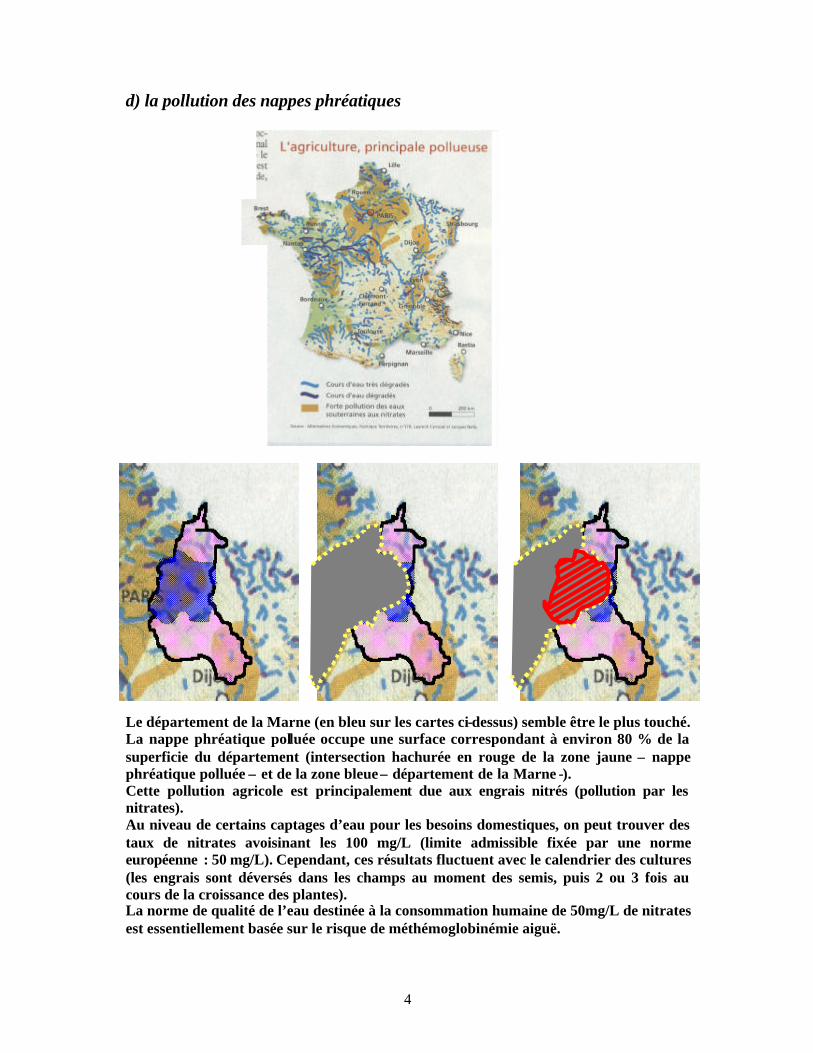
d) la pollution des nappes phréatiques Le département de la Marne (en bleu sur les cartes ci-dessus) semble être le plus touché. La nappe phréatique polluée occupe une surface correspondant à environ 80 % de la superficie du département (intersection hachurée en rouge de la zone jaune – nappe phréatique polluée – et de la zone bleue – département de la Marne -). Cette pollution agricole est principalement due aux engrais nitrés (pollution par les nitrates). Au niveau de certains captages d’eau pour les besoins domestiques, on peut trouver des taux de nitrates avoisinant les 100 mg/L (limite admissible fixée par une norme européenne : 50 mg/L). Cependant, ces résultats fluctuent avec le calendrier des cultures (les engrais sont déversés dans les champs au moment des semis, puis 2 ou 3 fois au cours de la croissance des plantes). La norme de qualité de l’eau destinée à la consommation humaine de 50mg/L de nitrates est essentiellement basée sur le risque de méthémoglobinémie aiguë.
5
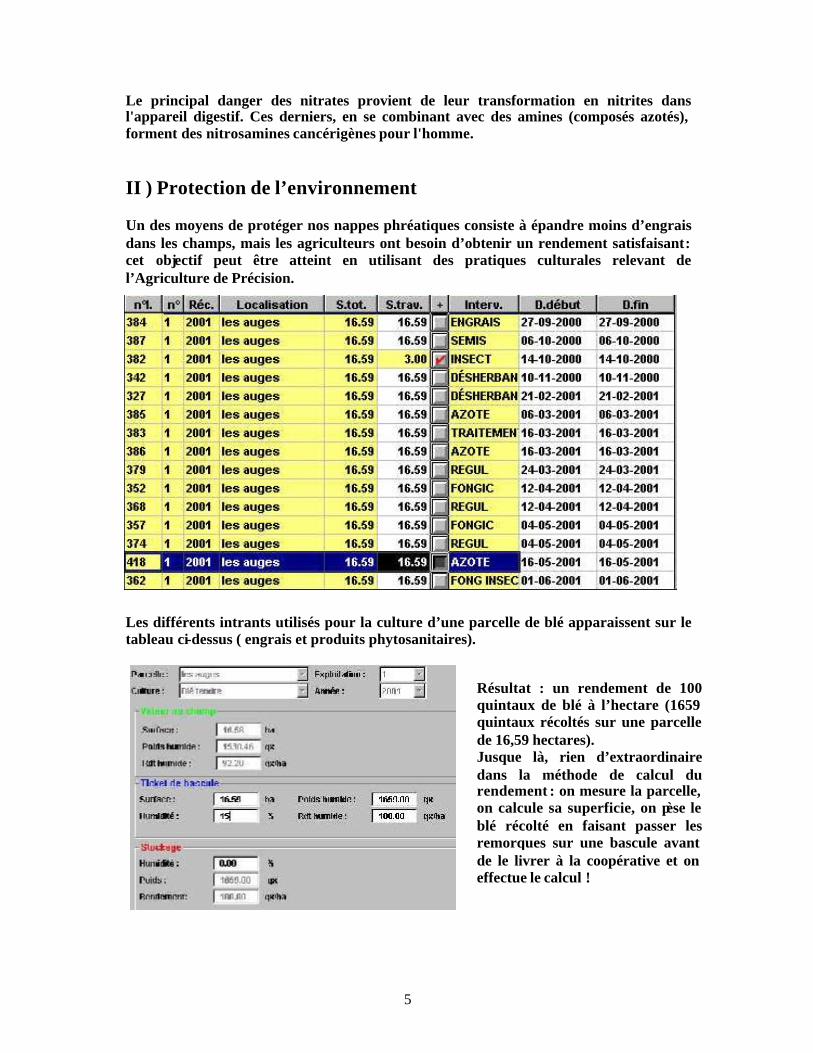
Le principal danger des nitrates provient de leur transformation en nitrites dans l'appareil digestif. Ces derniers, en se combinant avec des amines (composés azotés), forment des nitrosamines cancérigènes pour l'homme. II ) Protection de l’environnement Un des moyens de protéger nos nappes phréatiques consiste à épandre moins d’engrais dans les champs, mais les agriculteurs ont besoin d’obtenir un rendement satisfaisant : cet objectif peut être atteint en utilisant des pratiques culturales relevant de l’Agriculture de Précision. Les différents intrants utilisés pour la culture d’une parcelle de blé apparaissent sur le tableau ci-dessus ( engrais et produits phytosanitaires).
Résultat : un rendement de 100 quintaux de blé à l’hectare (1659 quintaux récoltés sur une parcelle de 16,59 hectares). Jusque là, rien d’extraordinaire dans la méthode de calcul du rendement : on mesure la parcelle, on calcule sa superficie, on pèse le blé récolté en faisant passer les remorques sur une bascule avant de le livrer à la coopérative et on effectue le calcul !
6
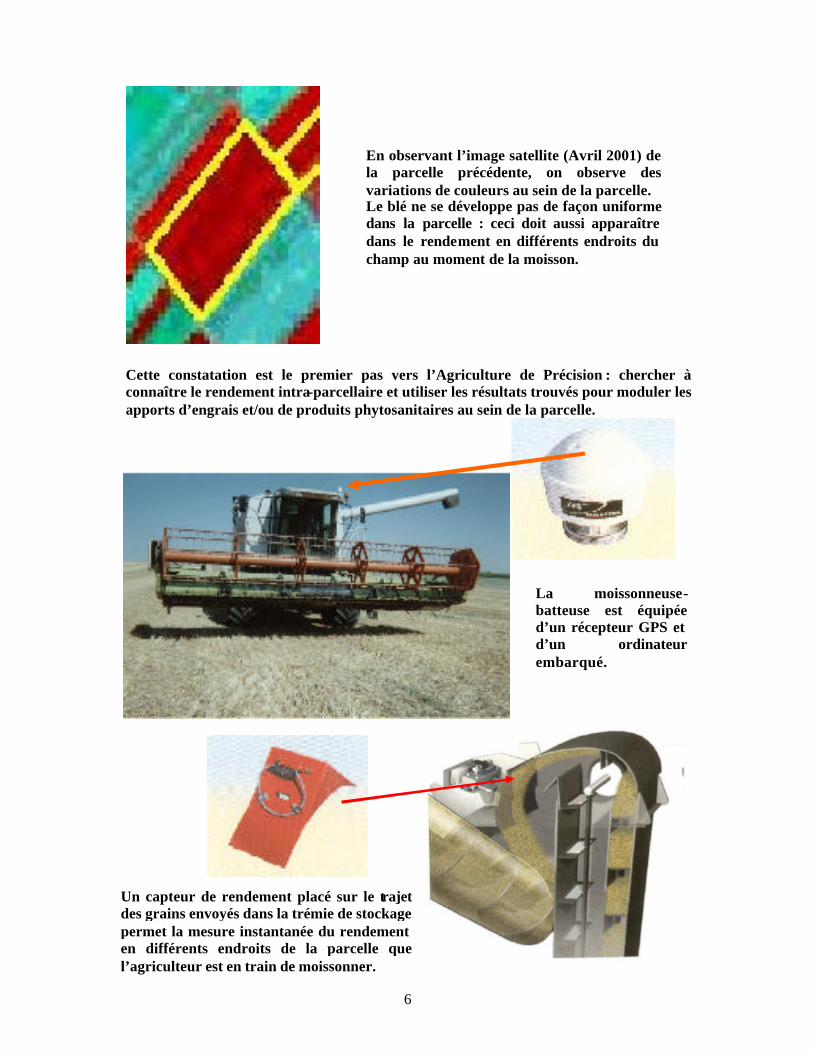
Cette constatation est le premier pas vers l’Agriculture de Précision : chercher à connaître le rendement intra-parcellaire et utiliser les résultats trouvés pour moduler les apports d’engrais et/ou de produits phytosanitaires au sein de la parcelle.
En observant l’image satellite (Avril 2001) de la parcelle précédente, on observe des variations de couleurs au sein de la parcelle. Le blé ne se développe pas de façon uniforme dans la parcelle : ceci doit aussi apparaître dans le rendement en différents endroits du champ au moment de la moisson.
La moissonneuse-batteuse est équipée d’un récepteur GPS et d’un ordinateur embarqué.
Un capteur de rendement placé sur le trajet des grains envoyés dans la trémie de stockage permet la mesure instantanée du rendement en différents endroits de la parcelle que l’agriculteur est en train de moissonner.
7
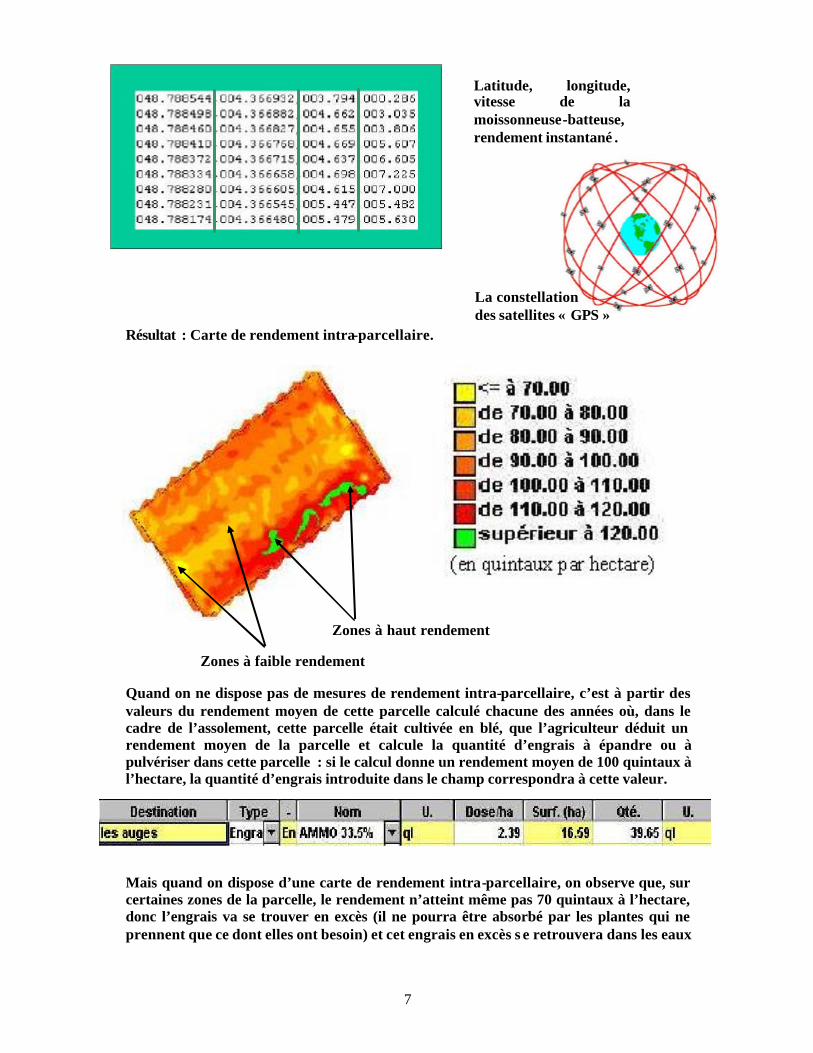
Résultat : Carte de rendement intra-parcellaire. Quand on ne dispose pas de mesures de rendement intra-parcellaire, c’est à partir des valeurs du rendement moyen de cette parcelle calculé chacune des années où, dans le cadre de l’assolement, cette parcelle était cultivée en blé, que l’agriculteur déduit un rendement moyen de la parcelle et calcule la quantité d’engrais à épandre ou à pulvériser dans cette parcelle : si le calcul donne un rendement moyen de 100 quintaux à l’hectare, la quantité d’engrais introduite dans le champ correspondra à cette valeur. Mais quand on dispose d’une carte de rendement intra-parcellaire, on observe que, sur certaines zones de la parcelle, le rendement n’atteint même pas 70 quintaux à l’hectare, donc l’engrais va se trouver en excès (il ne pourra être absorbé par les plantes qui ne prennent que ce dont elles ont besoin) et cet engrais en excès s e retrouvera dans les eaux
Latitude, longitude, vitesse de la moissonneuse-batteuse, rendement instantané .
Zones à haut rendement
Zones à faible rendement
La constellation des satellites « GPS »
8
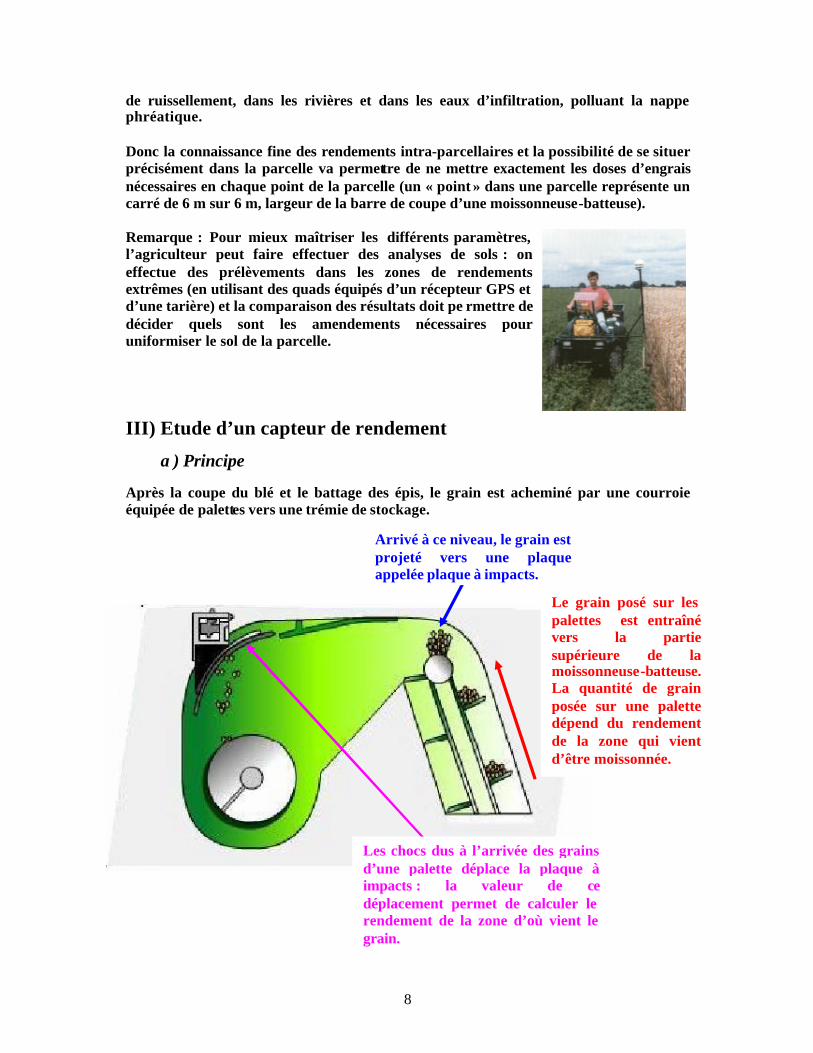
Le grain posé sur les palettes est entraîné vers la partie supérieure de la moissonneuse-batteuse. La quantité de grain posée sur une palette dépend du rendement de la zone qui vient d’être moissonnée.
Arrivé à ce niveau, le grain est projeté vers une plaque appelée plaque à impacts.
Les chocs dus à l’arrivée des grains d’une palette déplace la plaque à impacts : la valeur de ce déplacement permet de calculer le rendement de la zone d’où vient le grain.
de ruissellement, dans les rivières et dans les eaux d’infiltration, polluant la nappe phréatique. Donc la connaissance fine des rendements intra-parcellaires et la possibilité de se situer précisément dans la parcelle va permettre de ne mettre exactement les doses d’engrais nécessaires en chaque point de la parcelle (un « point » dans une parcelle représente un carré de 6 m sur 6 m, largeur de la barre de coupe d’une moissonneuse-batteuse). Remarque : Pour mieux maîtriser les différents paramètres, l’agriculteur peut faire effectuer des analyses de sols : on effectue des prélèvements dans les zones de rendements extrêmes (en utilisant des quads équipés d’un récepteur GPS et d’une tarière) et la comparaison des résultats doit pe rmettre de décider quels sont les amendements nécessaires pour uniformiser le sol de la parcelle. III) Etude d’un capteur de rendement
a ) Principe
Après la coupe du blé et le battage des épis, le grain est acheminé par une courroie équipée de palettes vers une trémie de stockage.
9
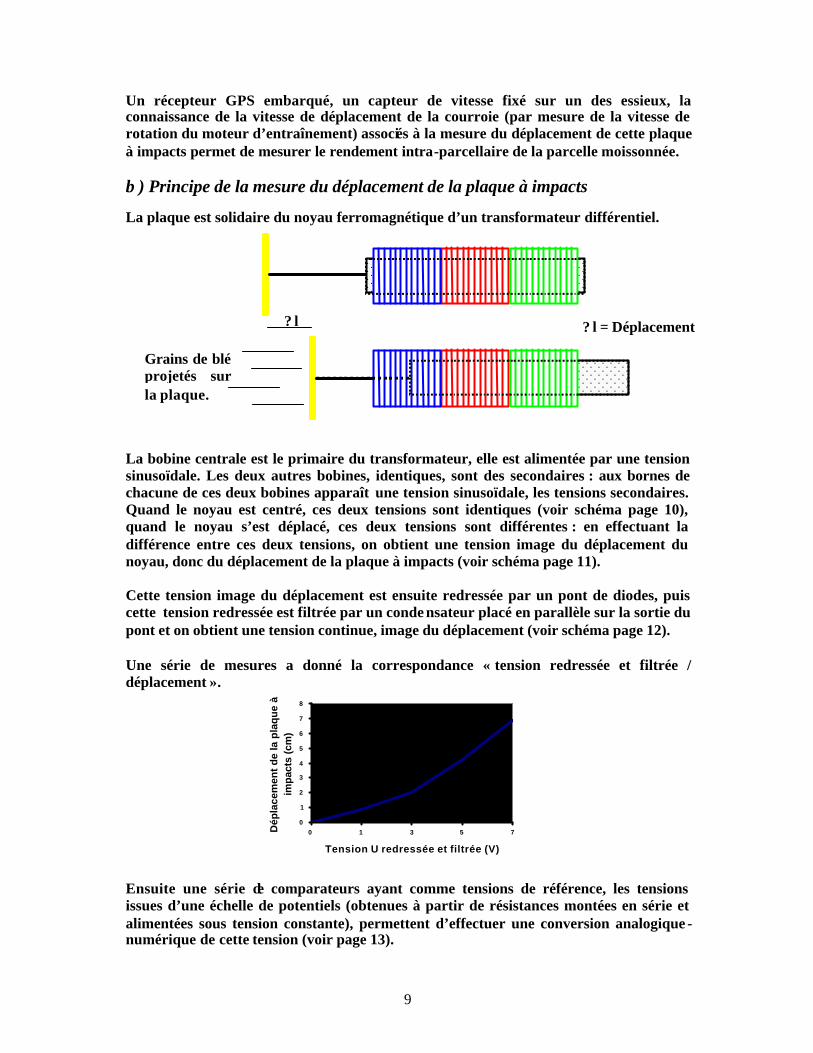
Un récepteur GPS embarqué, un capteur de vitesse fixé sur un des essieux, la connaissance de la vitesse de déplacement de la courroie (par mesure de la vitesse de rotation du moteur d’entraînement) associés à la mesure du déplacement de cette plaque à impacts permet de mesurer le rendement intra-parcellaire de la parcelle moissonnée. b ) Principe de la mesure du déplacement de la plaque à impacts
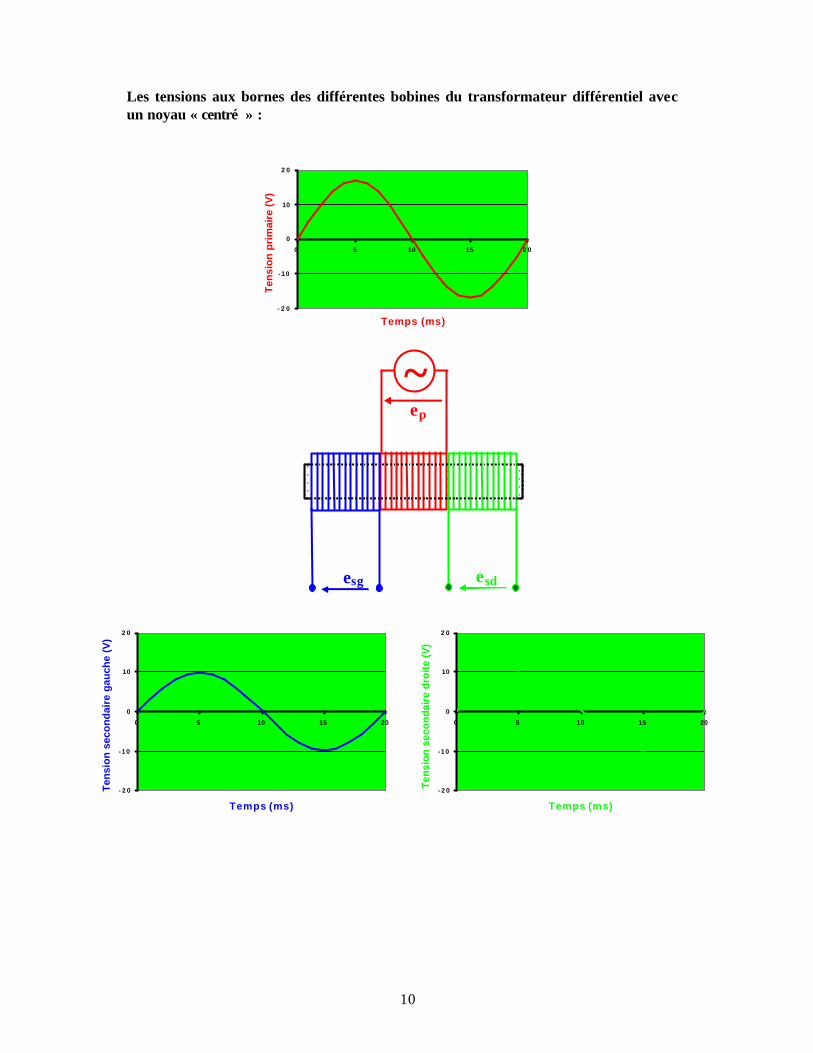
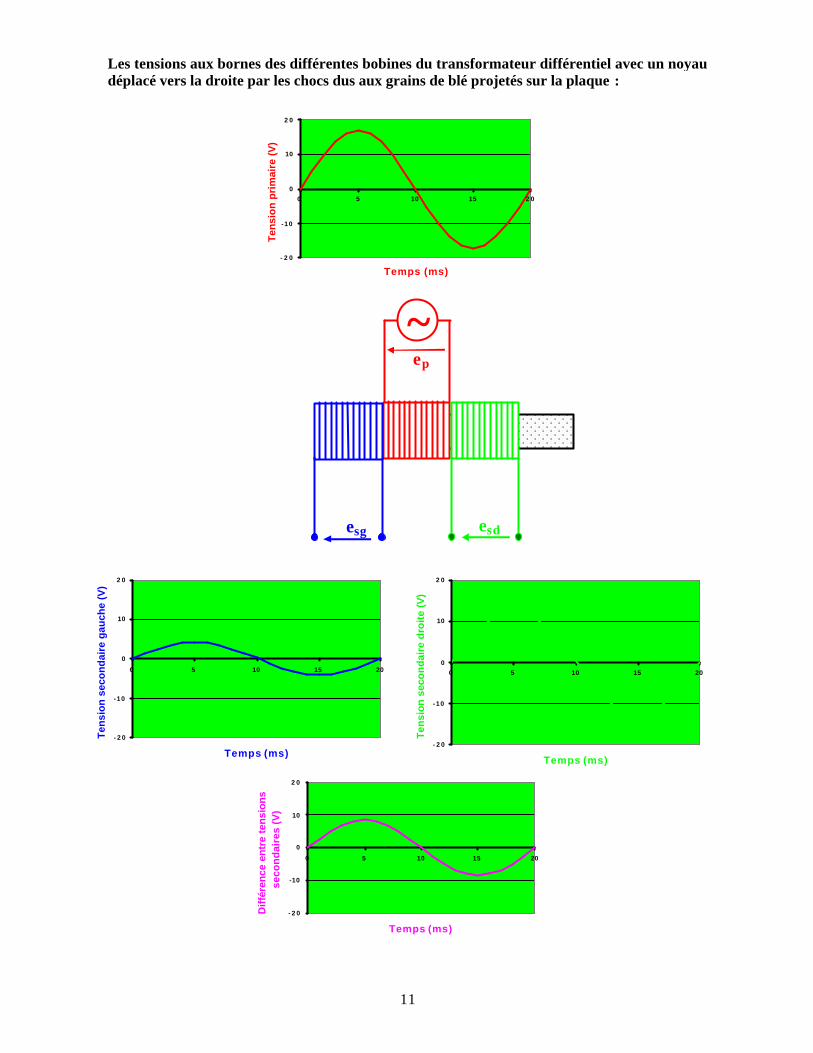
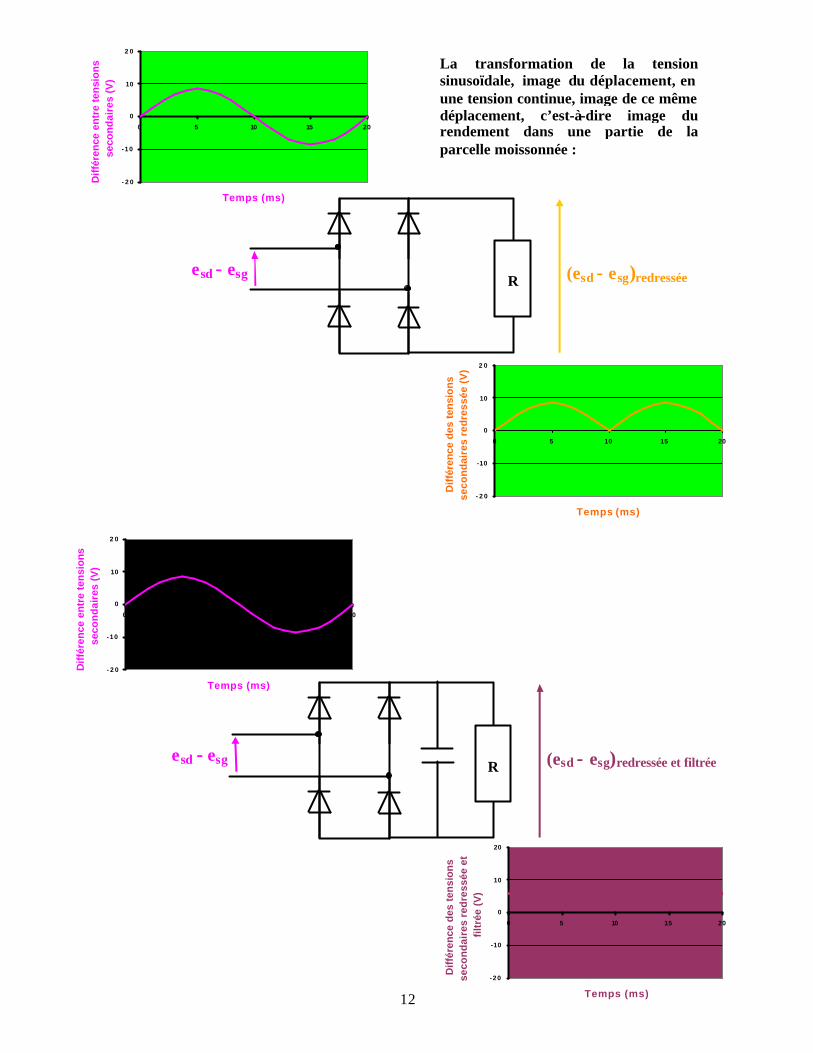
La plaque est solidaire du noyau ferromagnétique d’un transformateur différentiel. La bobine centrale est le primaire du transformateur, elle est alimentée par une tension sinusoïdale. Les deux autres bobines, identiques, sont des secondaires : aux bornes de chacune de ces deux bobines apparaît une tension sinusoïdale, les tensions secondaires. Quand le noyau est centré, ces deux tensions sont identiques (voir schéma page 10), quand le noyau s’est déplacé, ces deux tensions sont différentes : en effectuant la différence entre ces deux tensions, on obtient une tension image du déplacement du noyau, donc du déplacement de la plaque à impacts (voir schéma page 11). Cette tension image du déplacement est ensuite redressée par un pont de diodes, puis cette tension redressée est filtrée par un conde nsateur placé en parallèle sur la sortie du pont et on obtient une tension continue, image du déplacement (voir schéma page 12). Une série de mesures a donné la correspondance « tension redressée et filtrée / déplacement ». Ensuite une série de comparateurs ayant comme tensions de référence, les tensions issues d’une échelle de potentiels (obtenues à partir de résistances montées en série et alimentées sous tension constante), permettent d’effectuer une conversion analogique -numérique de cette tension (voir page 13).
? l = Déplacement ? l
0
1
2
3
4
5
6
7
8
0 1 3 5 7
Tension U redressée et filtrée (V)
Dép
lace
men
t d
e la
pla
qu
e à
impa
cts
(cm
)
Grains de blé projetés sur la plaque.
10
~ ep
esg esd
- 2 0
-10
0
10
2 0
0 5 10 15 2 0
Temps (ms)
Ten
sio
n p
rim
aire
(V
)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Ten
sio
n s
eco
nd
aire
dro
ite
(V)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Ten
sio
n s
eco
nd
aire
gau
che
(V)
Les tensions aux bornes des différentes bobines du transformateur différentiel avec un noyau « centré » :
11
~ ep
esg esd
- 2 0
-10
0
10
2 0
0 5 10 15 2 0
Temps (ms)T
ensi
on
pri
mai
re (
V)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Ten
sio
n s
eco
nd
aire
gau
che
(V)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Ten
sio
n s
eco
nd
aire
dro
ite
(V)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Diff
éren
ce e
ntr
e te
nsi
on
s se
con
dai
res
(V)
Les tensions aux bornes des différentes bobines du transformateur différentiel avec un noyau déplacé vers la droite par les chocs dus aux grains de blé projetés sur la plaque :
12
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Diff
éren
ce e
ntr
e te
nsi
on
s se
con
dai
res
(V)
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Dif
fére
nce
des
ten
sio
ns
seco
nd
aire
s re
dre
ssée
(V
)
R esd - esg (esd - esg)redressée
- 2 0
-10
0
10
2 0
0 5 10 15 20
Temps (ms)
Diff
éren
ce e
ntr
e te
nsi
on
s se
con
dai
res
(V)
R esd - esg (esd - esg)redressée et filtrée
-20
-10
0
10
20
0 5 10 15 20
Temps (ms)
Dif
fére
nce
des
ten
sio
ns
seco
nd
aire
s re
dre
ssée
et
filt
rée
(V)
La transformation de la tension sinusoïdale, image du déplacement, en une tension continue, image de ce même déplacement, c’est-à-dire image du rendement dans une partie de la parcelle moissonnée :
13
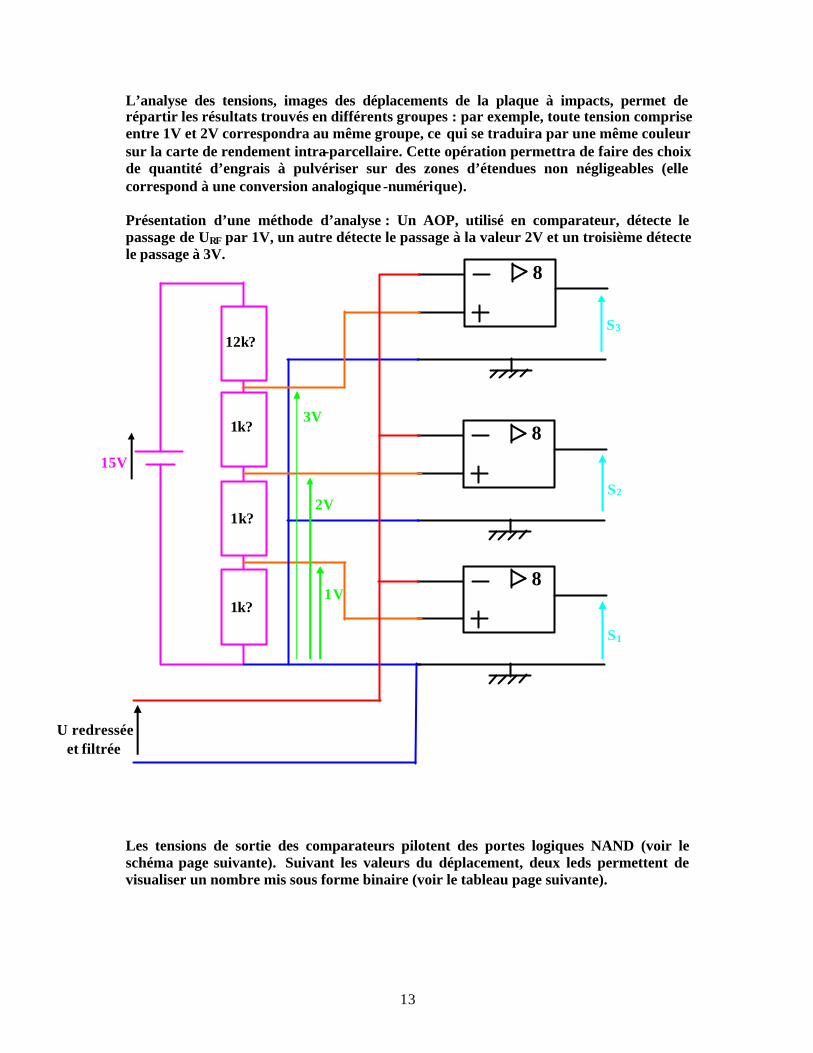
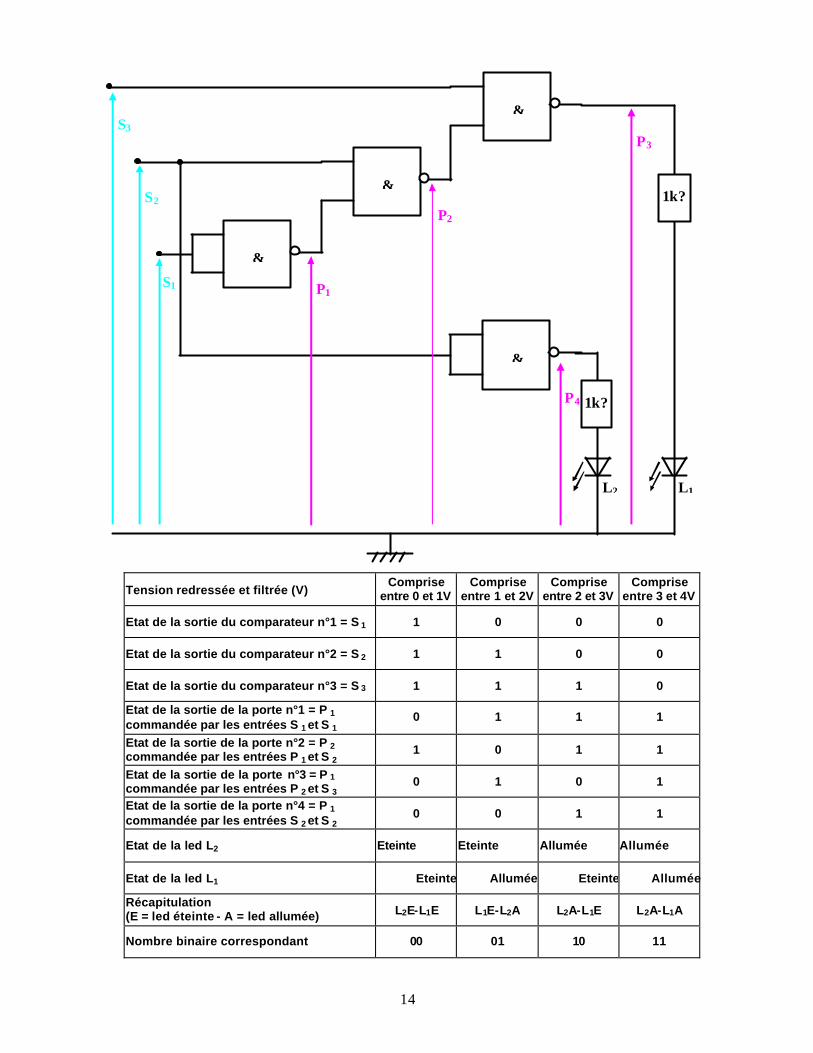
L’analyse des tensions, images des déplacements de la plaque à impacts, permet de répartir les résultats trouvés en différents groupes : par exemple, toute tension comprise entre 1V et 2V correspondra au même groupe, ce qui se traduira par une même couleur sur la carte de rendement intra-parcellaire. Cette opération permettra de faire des choix de quantité d’engrais à pulvériser sur des zones d’étendues non négligeables (elle correspond à une conversion analogique -numérique). Présentation d’une méthode d’analyse : Un AOP, utilisé en comparateur, détecte le passage de URF par 1V, un autre détecte le passage à la valeur 2V et un troisième détecte le passage à 3V. Les tensions de sortie des comparateurs pilotent des portes logiques NAND (voir le schéma page suivante). Suivant les valeurs du déplacement, deux leds permettent de visualiser un nombre mis sous forme binaire (voir le tableau page suivante).
12k?
1k?
1k?
1k?
15V
8
8
8
U redressée et filtrée
3V
2V
1V
S3
S2
S1
14
Tension redressée et filtrée (V) Comprise
entre 0 et 1V Comprise
entre 1 et 2V Comprise
entre 2 et 3V Comprise
entre 3 et 4V
Etat de la sortie du comparateur n°1 = S 1 1 0 0 0
Etat de la sortie du comparateur n°2 = S 2 1 1 0 0
Etat de la sortie du comparateur n°3 = S 3 1 1 1 0
Etat de la sortie de la porte n°1 = P 1
commandée par les entrées S 1 et S 1 0 1 1 1
Etat de la sortie de la porte n°2 = P 2 commandée par les entrées P 1 et S 2
1 0 1 1
Etat de la sortie de la porte n°3 = P 1
commandée par les entrées P 2 et S 3 0 1 0 1
Etat de la sortie de la porte n°4 = P 1
commandée par les entrées S 2 et S 2 0 0 1 1
Etat de la led L2 Eteinte Eteinte Allumée Allumée
Etat de la led L1 Eteinte Allumée Eteinte Allumée
Récapitulation (E = led éteinte - A = led allumée) L2E-L1E L1E-L2A L2A-L1E L2A-L1A
Nombre binaire correspondant 00 01 10 11
&
&
&
&
S3
S2
S1 P1
P4
P3
P2
1k?
1k?
L2 L1

15
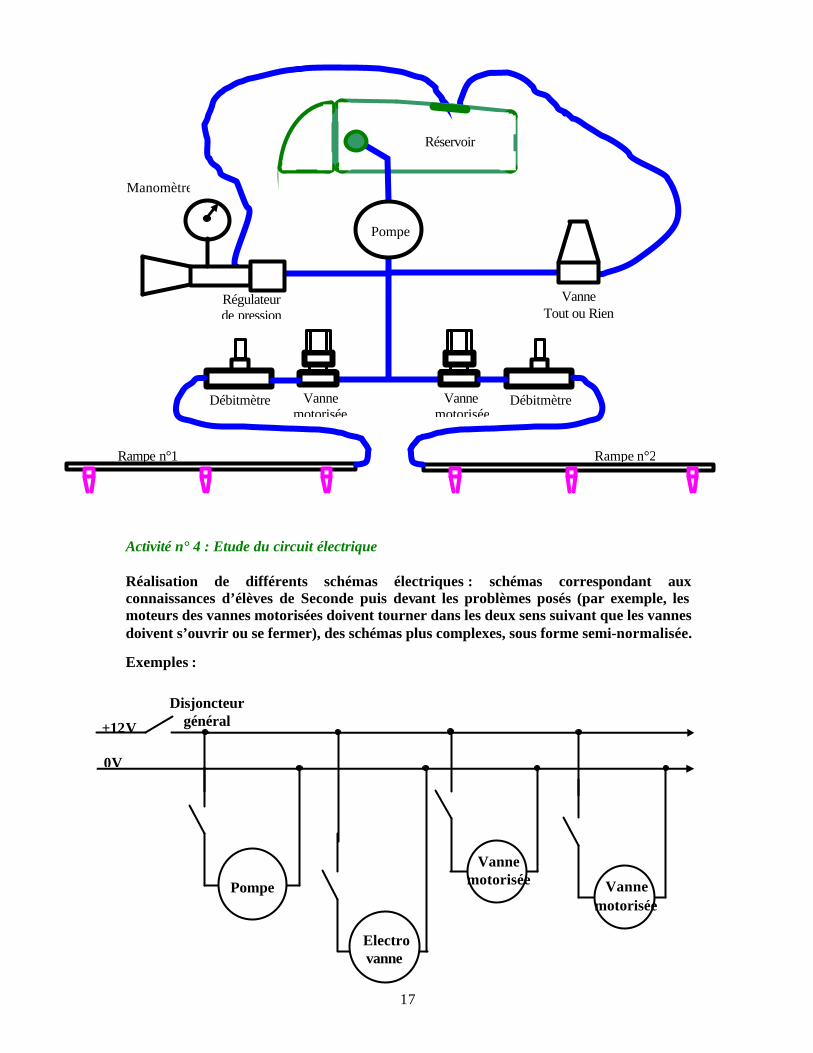
IV) Réalisation d’un prototype de pulvérisateur automatisé Le pulvérisateur automatisé repère sa position dans une parcelle et module les quantités de liquide pulvérisé en fonction de sa position et d’un cahier des charges défini par l’agriculteur et introduit dans le programme de l’automate embarqué. La position de la maquette ne sera pas repérée par GPS car ceci nécessiterait des déplacements importants du pulvérisateur pour ne pas avoir des déterminations de position entachées d’erreur. Activité n° 1 : Détermination des ensembles fonctionnels de la maquette de pulvérisateur et acquisition du vocabulaire spécifique aux différents éléments. - Le circuit hydraulique : une pompe, deux vannes motorisées, un réservoir, deux rampes équipées de trois buses chacune, un régulateur de pression, une électrovanne, des tuyaux et différents raccords. - Le système de mesure et de commande : un capteur de position, deux débitmètres, un manomètre équipé d’un cadran et deux automates . - Le circuit électrique : une batterie 12 V, une armoire électrique, des contacteurs, des disjoncteurs, un bouton-poussoir, un voyant lumineux, un répartiteur et toute la connectique.
16
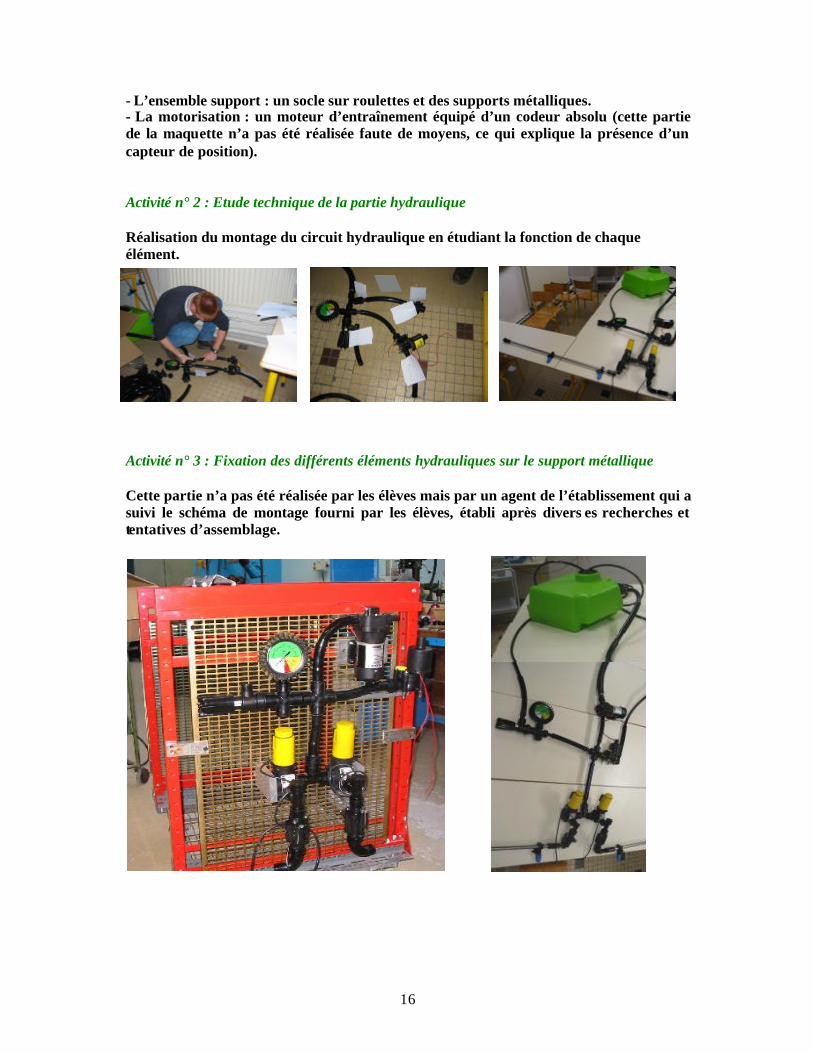
- L’ensemble support : un socle sur roulettes et des supports métalliques. - La motorisation : un moteur d’entraînement équipé d’un codeur absolu (cette partie de la maquette n’a pas été réalisée faute de moyens, ce qui explique la présence d’un capteur de position). Activité n° 2 : Etude technique de la partie hydraulique Réalisation du montage du circuit hydraulique en étudiant la fonction de chaque élément. Activité n° 3 : Fixation des différents éléments hydrauliques sur le support métallique Cette partie n’a pas été réalisée par les élèves mais par un agent de l’établissement qui a suivi le schéma de montage fourni par les élèves, établi après divers es recherches et tentatives d’assemblage.
17
Activité n° 4 : Etude du circuit électrique Réalisation de différents schémas électriques : schémas correspondant aux connaissances d’élèves de Seconde puis devant les problèmes posés (par exemple, les moteurs des vannes motorisées doivent tourner dans les deux sens suivant que les vannes doivent s’ouvrir ou se fermer), des schémas plus complexes, sous forme semi-normalisée.
Exemples :
Réservoir
Vanne motorisée
Débitmètre Vanne motorisée
Débitmètre
Pompe
Vanne Tout ou Rien
Rampe n°1 Rampe n°2
Régulateur de pression
Manomètre
Disjoncteur général
Pompe
Vanne motorisée Vanne
motorisée
+12
0V
Electro vanne
V
18
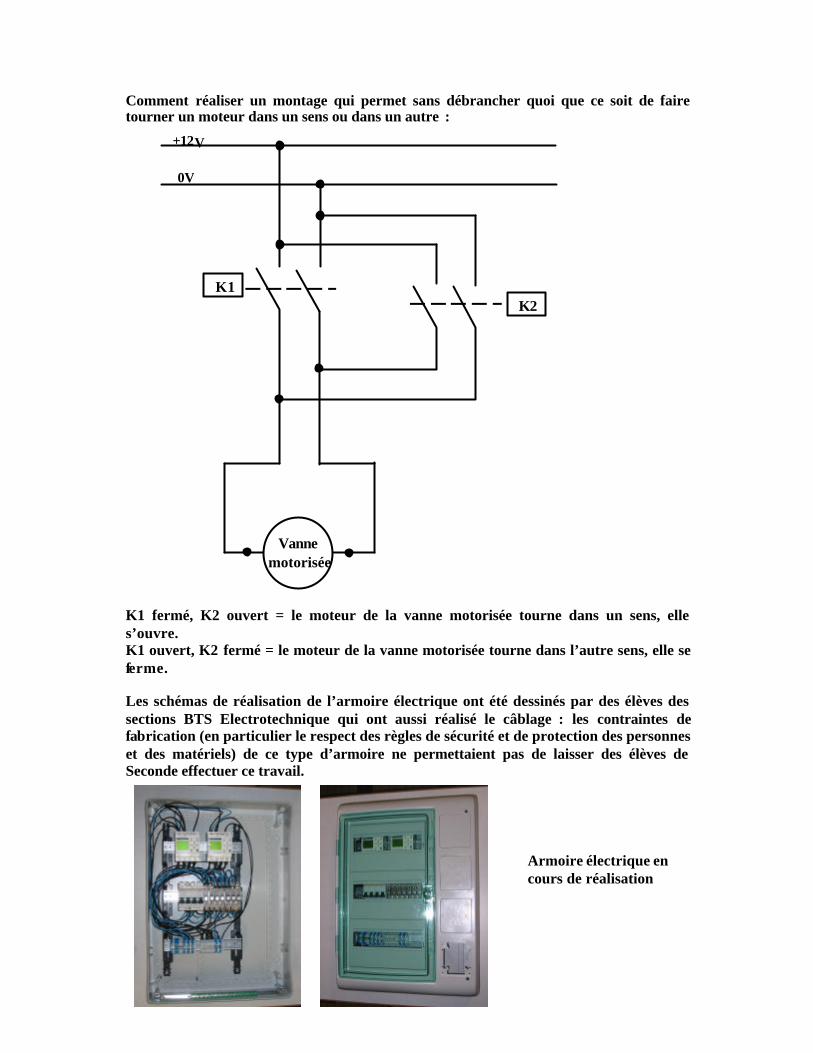
Comment réaliser un montage qui permet sans débrancher quoi que ce soit de faire tourner un moteur dans un sens ou dans un autre : K1 fermé, K2 ouvert = le moteur de la vanne motorisée tourne dans un sens, elle s’ouvre. K1 ouvert, K2 fermé = le moteur de la vanne motorisée tourne dans l’autre sens, elle se ferme. Les schémas de réalisation de l’armoire électrique ont été dessinés par des élèves des sections BTS Electrotechnique qui ont aussi réalisé le câblage : les contraintes de fabrication (en particulier le respect des règles de sécurité et de protection des personnes et des matériels) de ce type d’armoire ne permettaient pas de laisser des élèves de Seconde effectuer ce travail.
Armoire électrique en cours de réalisation
Vanne motorisée
+12
0V
K2 K1
V
19
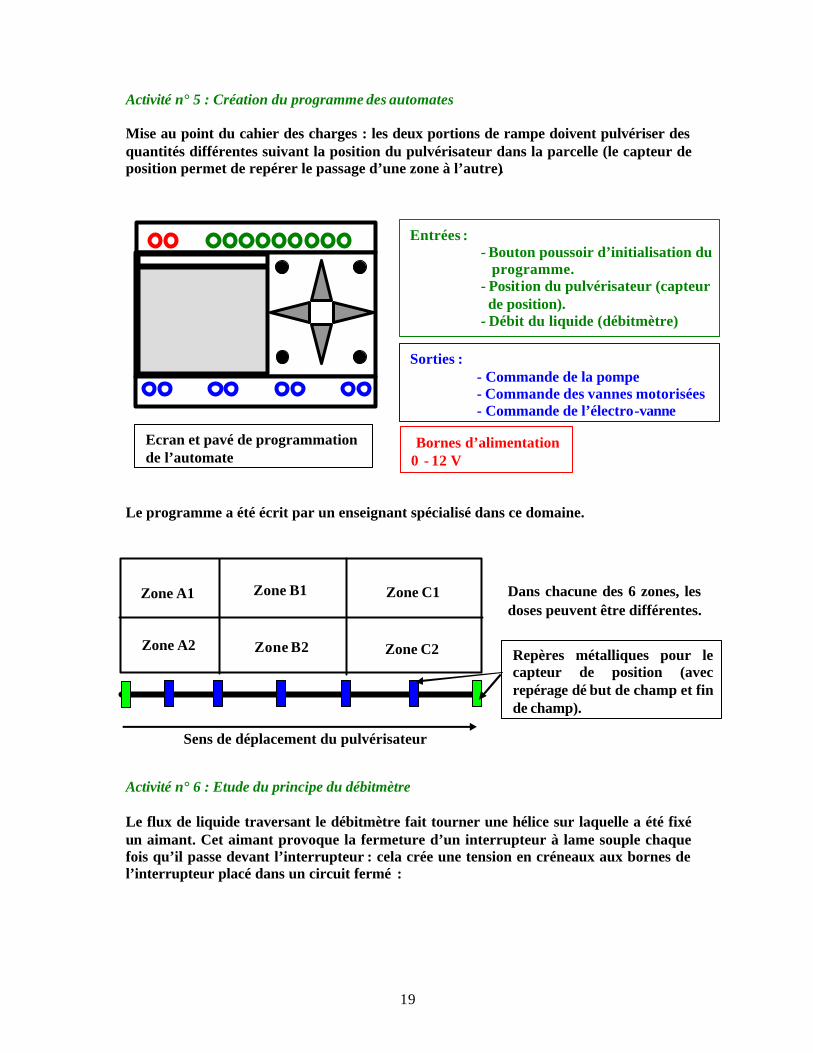
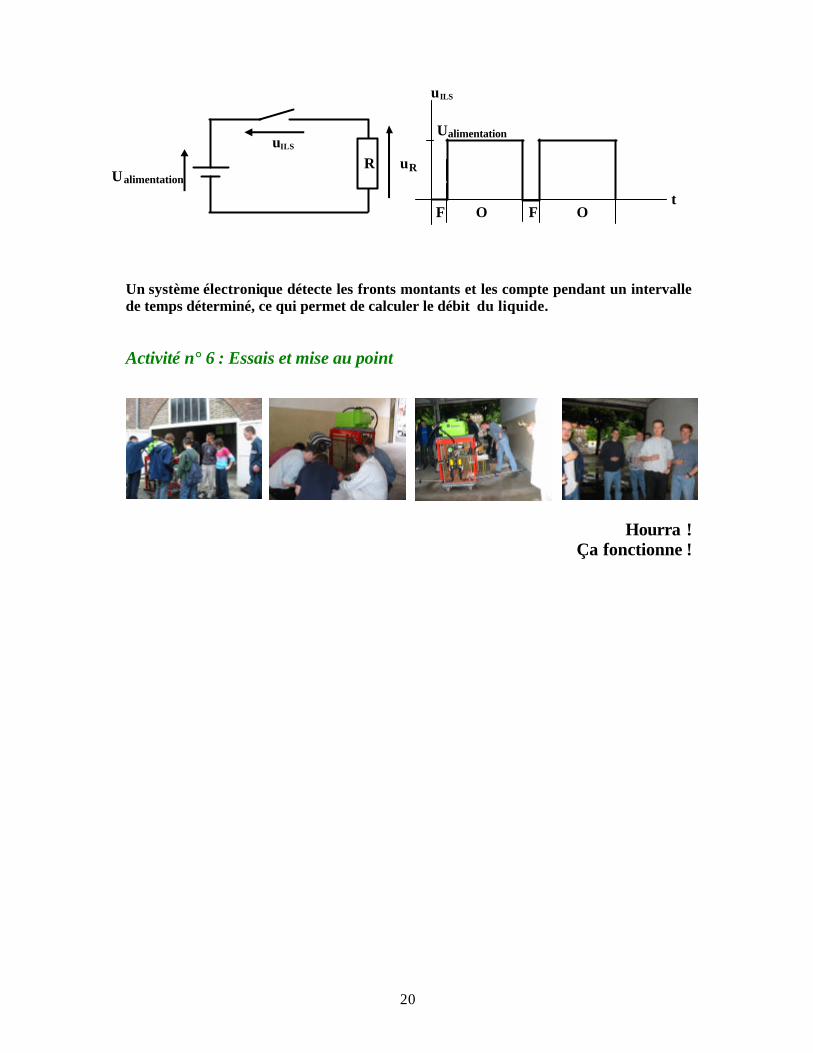
Activité n° 5 : Création du programme des automates Mise au point du cahier des charges : les deux portions de rampe doivent pulvériser des quantités différentes suivant la position du pulvérisateur dans la parcelle (le capteur de position permet de repérer le passage d’une zone à l’autre). Le programme a été écrit par un enseignant spécialisé dans ce domaine. Activité n° 6 : Etude du principe du débitmètre Le flux de liquide traversant le débitmètre fait tourner une hélice sur laquelle a été fixé un aimant. Cet aimant provoque la fermeture d’un interrupteur à lame souple chaque fois qu’il passe devant l’interrupteur : cela crée une tension en créneaux aux bornes de l’interrupteur placé dans un circuit fermé :
Sens de déplacement du pulvérisateur
Zone A1
Zone A2 Zone B2
Zone B1
Zone C2
Zone C1
Repères métalliques pour le capteur de position (avec repérage dé but de champ et fin de champ).
Dans chacune des 6 zones, les doses peuvent être différentes.
Tél
Q Q Q Q
D I
E S
Entrées : - Bouton poussoir d’initialisation du programme. - Position du pulvérisateur (capteur de position). - Débit du liquide (débitmètre)
Bornes d’alimentation 0 - 12 V
Ecran et pavé de programmation de l’automate
Sorties : - Commande de la pompe - Commande des vannes motorisées - Commande de l’électro-vanne
20
Un système électronique détecte les fronts montants et les compte pendant un intervalle de temps déterminé, ce qui permet de calculer le débit du liquide. Activité n° 6 : Essais et mise au point
Hourra ! Ça fonctionne !
Ualimentation
uILS uR
t
uILS
Ualimentation
F F O O
R





























