Embed Size (px)
Citation preview
Relatividade em Engenharia
Características e desempenho de sistemas de posicionamento global
Cláudio Miguel Raposo Gualdino
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Prof. Dr. José Manuel Biouca Dias
Orientador: Profª. Drª. Maria Hermínia Caeiro Costa Marçal
Vogal: Profª. Drª. Maria João Marques Martins
Maio/2011
i
Resumo
O GPS (Global Positioning System) tem sido, desde do seu desenvolvimento na década de 70, o
sistema GNSS (Global Navigation Satellite System) de referência. Este sistema surgiu inicialmente
com motivações meramente militares tendo sido disponibilizado a utilizadores civis apenas no final da
segunda metade da década de 90. Com início em 1998, a União Europeia assinalou a sua vontade
em interromper a dependência do sistema norte-americano GPS anunciando o desenvolvimento de
um sistema de posicionamento global com carácter inteiramente civil - GALILEO.
Os sistemas GNSS, devido à velocidade e altura a que se encontram os seus satélites sofrem
determinados efeitos, o - quais podem ser explicados pelas Teorias da Relatividade Geral e Restrita –
de Einstein. Estes efeitos relativistas provocam um desvio do ritmo dos relógios incorporados nos
satélites relativamente aos relógios localizados na superfície terrestre, ou na sua vizinhança. Caso
não fossem levados em consideração, os erros acumulados tornariam os sistemas GNSS
completamente ineficazes.
O presente trabalho faz uma comparação entre os dois sistemas (GPS - GALILEO) no que respeita
às suas características físicas e técnicas, nomeadamente os seus segmentos, serviços
disponibilizados e sinal, e analisa os erros devido aos efeitos relativistas e respectivas correcções a
efectuar em ambos sistemas.
Com base nesta análise conclui-se que a correcção a efectuar nos relógios incorporados nos satélites
são de , no caso do GPS, e de para o GALILEO.
Palavras-chave:
GPS, GALILEO, GNSS, efeitos relativista.
ii
Abstract
The GPS (Global Positioning System) has been, since its development in the 70s, the reference of
GNSS (Global Navigation Satellite System) systems. This system initially arose with military
motivation, having been made available for civilian use only later, in the second half of the 90s. Since
1998, the European Union demonstrated its willingness to break the dependence on the U.S. GPS
system and announced the development of a global positioning system with entirely civil character -
GALILEO.
The GNSS systems, due to the speed and height of their satellites, suffer relativistic effects which
cause a deviation of the beat of clocks embedded in satellites, compared to clocks located on the
Earth, or in its neighborhood. If not taken into account, those effects would make the system
completely useless. They are explained by the Theories of Relativity - General and Special – of Albert
Einstein.
The goal of this report is to compare the two systems (GPS - Galileo) and the level of their physical
skills and techniques, in particular their segments, available services and signal. An analysis of the
errors, due to relativistic effects and the corrections to be made in both systems will also be carried
out. Supported on Einstein‟s theories of Special and General relativity it was possible to determine the
corrections to be made on the clocks due to relativistic effects, obtaining a correction of 39μs/day and
41μs/day to GPS and GALILEO, respectively..
Keywords:
GPS, GALILEO, GNSS, Relativistic effects,
iii
Índice
Resumo .................................................................................................................................. i
Abstract ................................................................................................................................ ii
Índice .................................................................................................................................... iii
Lista de Figuras ................................................................................................................... vi
Lista de Tabelas ................................................................................................................. vii
Acrónimos ......................................................................................................................... viii
Constantes ........................................................................................................................... xi
Agradecimentos ................................................................................................................. xii
1 Introdução ....................................................................................................................... 13
2 Sistema GNSS ................................................................................................................ 14
2.1 Aspectos Gerais ........................................................................................................ 14
2.2 Como determinar a distância ................................................................................... 15
2.3 Aplicações do GNSS ................................................................................................. 16
2.4 Diferentes sistemas GNSS ....................................................................................... 16
2.4.1 GPS .................................................................................................................... 16
2.4.2 GLONASS ........................................................................................................... 17
2.4.3 GALILEO ............................................................................................................ 17
2.4.4 BeiDou ................................................................................................................ 18
2.4.5 QZSS................................................................................................................... 19
2.4.6 IRNSS ................................................................................................................. 20
3 Comparação entre os sistemas GPS e GALILEO ......................................................... 21
3.1 Sistema GPS ............................................................................................................. 21
3.1.1 Serviços ............................................................................................................. 21
3.1.1.1 PPS .......................................................................................................... 21
3.1.1.2 SPS .......................................................................................................... 22
3.1.2 Segmentos do sistema ..................................................................................... 22
3.1.2.1 Segmento espacial .................................................................................. 22
3.1.2.2 Segmento de controlo ............................................................................. 24
iv
3.1.2.3 Segmento do utilizador ........................................................................... 25
3.1.3 Caracterização do sinal GPS ............................................................................ 26
3.1.4 GPS Diferencial - DGPS ..................................................................................... 27
3.2 Sistema GALILEO ..................................................................................................... 28
3.2.1 Serviços ............................................................................................................. 28
3.2.1.1 Serviços satélites GALILEO ..................................................................... 29
3.2.1.2 Serviços localmente assistidos ............................................................... 31
3.2.1.3 Serviços do EGNOS ................................................................................. 32
3.2.2 Segmentos do sistema ..................................................................................... 33
3.2.2.1 Segmento espacial ................................................................................... 33
3.2.2.2 Segmento de controlo.............................................................................. 33
3.2.2.3 Segmento do utilizador ........................................................................... 34
3.2.3 Caracterização do sinal GALILEO .................................................................... 35
3.2.4 Interoperabilidade ............................................................................................. 36
3.3 Factores de degradação do sinal GNSS................................................................. 38
3.3.1 Erro de relógio .................................................................................................. 38
3.3.2 Efemérides ........................................................................................................ 39
3.3.3 Efeitos atmosféricos .......................................................................................... 39
3.3.3.1 Atraso ionosférico .................................................................................... 40
3.3.3.2 Atraso troposférico ............................................................................................ 40
3.3.4 Geometria dos satélites .................................................................................... 41
3.3.5 Multicaminho ..................................................................................................... 42
3.3.6 Efeitos relativistas ............................................................................................ 43
4 Relatividade nos sistemas GNSS .................................................................................. 44
4.1 Dilatação do tempo ................................................................................................. 46
4.2 Dilatação gravitacional do tempo ........................................................................... 48
4.3 Correcções a introduzir .......................................................................................... 49
4.3.1 Dilatação do tempo ........................................................................................... 50
4.3.2 Efeito gravitacional ........................................................................................... 51
4.3.3 Efeito Sagnac..................................................................................................... 52
v
4.3.4 Correcção da excentricidade ............................................................................ 54
4.3.5 Correcções a introduzir .................................................................................... 55
4.3.6 Futuro ................................................................................................................. 56
5 Conclusões ..................................................................................................................... 59
6 Bibliografia ..................................................................................................................... 60
Anexos ................................................................................................................................ 62
Anexo A .............................................................................................................................. 63
vi
Lista de Figuras
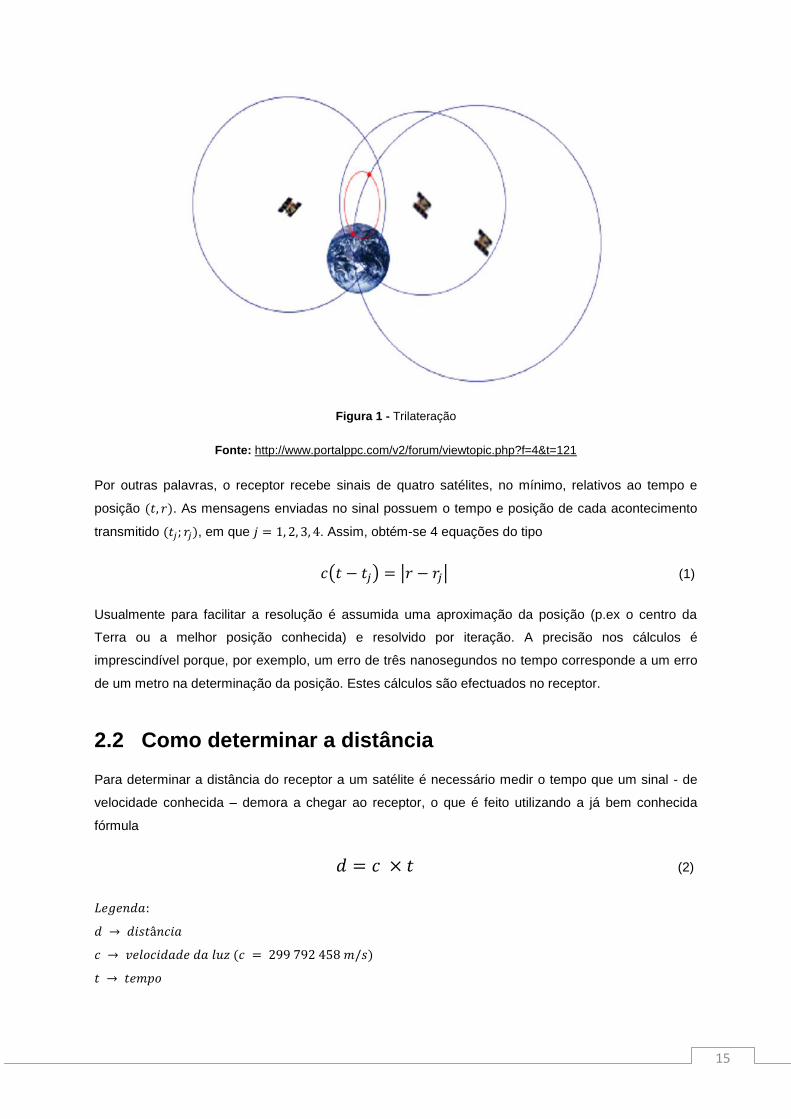
Figura 1 – Trilateração......................................................................................................... 15
Figura 2 – Órbita da constelação do sistema QZSS ............................................................ 19
Figura 3 – Constelação do sistema IRNSS .......................................................................... 20
Figura 4 – Segmentos do sistema GPS ............................................................................... 22
Figura 5 – Fluxo de Comunicação entre segmento espacial e de controlo .......................... 24
Figura 6 – Localização das estações do segmento de controlo ........................................... 25
Figura 7 – Sistema DGPS ................................................................................................... 27
Figura 8 – Área de cobertura do sistema EGNOS ............................................................... 33
Figura 9 – Arquitectura do segmento de controlo GALILEO ................................................ 34
Figura 10 – Terminal receptor - GALILEO ........................................................................... 35
Figura 11 – Diluição de precisão ......................................................................................... 41
Figura 12 – Efeito Sagnac ................................................................................................... 45
Figura 13 – Velocidade da luz constante ............................................................................. 46
Figura 14 – Relatividade da Simultaneidade ........................................................................ 47
Figura 15 – Dilatação gravitacional do tempo ..................................................................... 49
Figura 16 – Vectores de estado de um satélite GNSS ......................................................... 49
Figura 17 – Efeito Sagnac proporcional à área A ................................................................. 53
Figura 18 – Projecto SYPOR – Segmento de Controlo e Espacial coincidem ...................... 56
vii
Lista de Tabelas
Tabela 1 – Desempenho dos serviços do sistema GALILEO .............................................. 29
Tabela 2 – Desempenho do serviço SAR ............................................................................ 31
Tabela 3 – Classificação DOP ............................................................................................. 42
Tabela 4 – Erros devido a efeitos relativistas ....................................................................... 55
Tabela 5 – Parâmetros técnicos dos sistemas GNSS .......................................................... 64
viii
Acrónimos
AFB Air Force Base
AS Antispoofing
BeiDou Sistema de Posicionamento Regional Chinês
BIM Broadcast Ionosphere Model
BNTS BeiDou Navigation Test System
CS Commercial Service
C/A Coarse/Acquisition
DGPS Differential Global Navigation System
DOD United States Department of Defense
DOP Dilution of Precision
DOT United States Department of Transportation
ECEF Earth Centered Earth Fixed
ECI Earth Centered Inertial
EGNOS European Geostationary Navigation Overlay Service
ESA European Space Agency
Galileo Sistema de Posicionamento Global Europeu
GCC GALILEO Control Center
GCS GALILEO Control System
GDOP Geometric Dilution of Precision
GEO Geostationary Earth Orbit
GGTO GPS – GALILEO Time Offset
Giove Galileo In-Orbit Validation Element
Glonass GLObal NAvigation Satellite System
GMS GALILEO Mission System
GNSS Global Navigation Satellite System
GOC Galileo Operating Company
GPS Global Positioning System
GSO Geosynchronous Orbit
ix
GSS GALILEO Sensor Station
GST GALILEO System Time
GTRF GALILEO Terrestrial Reference Frame
HDOP Horizontal Dilution of Precision
HEO Highly Elliptical Orbits
ICRS International Celestial Reference System
IERS International Earth Rotation Service
IGS International GNSS Service
IRI 95 International Reference Ionosphere 1995
IRNSS India Regional Navigation Satellite System
ITRS International Terrestrial Reference System
ITRF International Terrestrial Reference Frame
JAXA Japan Aerospace Exploration Agency
JPO Joint Program Office
MEDLL Multipath Estimation Delay Lock Loop
MEO Medium Earth Orbit
MET Multipath Elimination Technique
NASA National Aeronautics and Space Administration
OCS Operational Control System
OS Open Service
PDOP Position Dilution of Precision
PPS Precise Positioning Service
PRN Pseudo Random Noise
PRS Public Regulated Service
QZSS Quasi-Zenith Satellite System
RDSS Radio Determination Satellite Service
SA Selective Availability
SAR Search and Rescue Service
SBAS Satellite-Based Augmentation System
SoL Safety of Life Service
SPS Standard Positioning Service
x
SYPOR Système de Positionnement Relativiste
TAI International Atomic Time
TCAR Three Carrier Ambiguity Resolution
TDOP Time Dilution of Precision
TOA Time of Arrival
TT&C Telemetry Tracking and Command
ULS UpLink Stations
UTC Coordinated Universal Time
VDOP Vertical Dilution of Precision
WGS 84 World Geodetic System - 1984
xi
Constantes
Velocidade da luz
Constante de Gravitação Universal
Massa da Terra
Parâmetro gravitacional da Terra
Raio da Terra
Velocidade angular da Terra
Coeficiente do momento quadrupolar
da Terra
xii
Agradecimentos
A realização deste trabalho final de mestrado consiste no encerrar de mais um ciclo da minha vida.
Este momento representa o culminar de muito esforço, dedicação, e espírito de sacrifico, que só foi
possível com a compreensão, afecto e motivação da família e amigos. Contudo, quero endereçar
um especial obrigado à Professora Doutora Maria Hermínia Costa Marçal pelo tema sugerido,
acompanhamento, compreensão e disponibilidade que sempre demonstrou no decorrer desta
dissertação; à família lá de casa que são os grandes responsáveis pelo que sou e consegui até hoje;
e finalmente mas, com certeza, não menos importante àquela pessoa que sempre esteve presente
com as suas palavras de incentivo, compreensão e apoio incondicional…obrigado Sofia.
Um Muito Obrigado a todos vós!
13
1 Introdução
Os sistemas GNSS (Global Navigation Satellite System), principalmente desde a abertura do GPS
(Global Positioning System) ao público civil, têm vindo a registar uma enorme evolução, quer a nível
técnico, precisão e fiabilidade, quer a nível de serviços disponíveis. Neste contexto, a União Europeia,
querendo libertar-se da sua dependência do GPS, está a desenvolver o seu próprio sistema –
GALILEO.
Este trabalho surge do desejo de colmatar uma ausência, na bibliografia especializada, de uma
comparação detalhada entre o actual sistema americano GPS e o primeiro sistema com motivação
inteiramente civil, desenvolvido pela União Europeia, o GALILEO. Isto será feito tendo em conta não
só a respectiva estrutura física e técnica, mas também a forma como estes dois sistemas são
afectados pelos efeitos relativistas.
Inicialmente será feita uma breve caracterização dos GNSS – capítulo dois – existentes ou em
desenvolvimento, onde se inclui o sistema russo GLONASS, o chinês BeiDou-Compass, e os dois
sistemas regionais o QZSS e o IRNSS originários do Japão e Irão, respectivamente.
Indo de encontro a um dos objectivos centrais deste trabalho, no terceiro capítulo, irá realizar-se uma
descrição dos sistemas GPS e GALILEO respectivamente. Neste ponto serão caracterizados
pormenorizadamente ambos os sistemas, em termos dos seus segmentos (Espacial, Controlo e
Utilizador), dos serviços disponibilizados e do seu sinal.
Os GNSS actuais, para que a sua utilidade seja efectiva, necessitam de correcções devido a efeitos
relativistas. Neste sentido, no quarto capítulo será realizada uma introdução aos conceitos da teoria
da Relatividade de Einstein relevantes para as correcções a integrar tanto no sistema GPS como no
sistema GALILEO. Mostrar-se-á que, caso tais correcções não fossem tidas em conta teríamos,
tomando como exemplo o caso GPS, uma acumulação de erros na ordem de . Neste ponto
irá ainda ser destacado um projecto que se encontra numa fase de desenvolvimento, tendo em visto
o futuro dos GNSS.
Por fim, no quinto capítulo serão efectuadas considerações finais relativamente às diferenças
encontradas entre o GPS e o GALILEO, tendo em conta a sua estrutura física e técnica e as
correcções a implementar devido aos efeitos relativistas.
14
2 Sistema GNSS
2.1 Aspectos gerais
Um sistema GNSS é um sistema utilizado para a determinação da posição de um objecto. O GNSS é
formado por uma constelação de satélites, com cobertura global, que envia sinais para um receptor
localizado na superfície, ou próximo, da Terra, permitindo que este possa calcular a sua localização
no espaço ( longitude, latitude e altitude) e tempo.
Inicialmente este sistema surgiu apenas devido a motivações militares. Contudo, o paradigma alterou-
se em 1996, altura em que o sistema GNSS americano, conhecido como GPS, foi disponibilizado a
utilizadores civis.
Para determinar a sua posição o receptor necessita de receber um sinal de cada um de quatro
satélites, para assim determinar as três coordenadas espaciais e uma outra respeitante ao tempo. O
método de cálculo utilizado neste sistema denomina-se por trilateração, uma vez que este processo
consiste em medir a distância entre o receptor e os diferentes satélites.
Tal como foi dito anteriormente, necessitamos de 4 satélites para determinar a posição tridimensional
de um qualquer ponto localizado no globo terrestre (ou perto dele) a qualquer instante (ver fig. 1).
Recorrer apenas a um satélite permite-nos calcular a posição de um objecto colocado numa esfera,
cujo raio é a própria distância calculada. A utilização de um segundo satélite reduz a incerteza da
posição a um círculo (intersecção de duas esferas). Um terceiro satélite intersecta o círculo anterior
em dois pontos. Por exclusão de partes, a posição está determinada uma vez que um dos pontos se
encontra, normalmente, muito distante da Terra. É ainda utilizado um último satélite como auxiliar, o
qual envia um quarto sinal ao receptor, permitindo deste modo sincronizar os relógios dos satélites e
receptor. Assim, um sistema GNSS pode determinar, de forma precisa, a posição de um dado
objecto. De salientar ainda que os satélites estão equipados com relógios atómicos, ao contrário do
que sucede com os receptores.
15
Figura 1 - Trilateração
Fonte: http://www.portalppc.com/v2/forum/viewtopic.php?f=4&t=121
Por outras palavras, o receptor recebe sinais de quatro satélites, no mínimo, relativos ao tempo e
posição . As mensagens enviadas no sinal possuem o tempo e posição de cada acontecimento
transmitido , em que . Assim, obtém-se 4 equações do tipo
(1)
Usualmente para facilitar a resolução é assumida uma aproximação da posição (p.ex o centro da
Terra ou a melhor posição conhecida) e resolvido por iteração. A precisão nos cálculos é
imprescindível porque, por exemplo, um erro de três nanosegundos no tempo corresponde a um erro
de um metro na determinação da posição. Estes cálculos são efectuados no receptor.
2.2 Como determinar a distância
Para determinar a distância do receptor a um satélite é necessário medir o tempo que um sinal - de
velocidade conhecida – demora a chegar ao receptor, o que é feito utilizando a já bem conhecida
fórmula
(2)
16
A distância entre o receptor e cada um dos satélites é a incógnita que se pretende determinar. A
velocidade é a velocidade da luz, constante e conhecida. O tempo corresponde ao tempo
decorrido entre a “partida” e a “chegada” do sinal ao receptor. O satélite envia um sinal (pseudo-
código, próprio a cada satélite) com uma mensagem que contém a sua posição e instante em que a
mensagem foi enviada. Assim, o receptor que tem o seu relógio sincronizado com o relógio do satélite
pode calcular a distância a que se encontra do satélite.
2.3 Aplicações do GNSS
A capacidade de determinar a posição tridimensional, precisa, de um objecto pode ser utilizada nas
mais variadas aplicações, nomeadamente:
Navegação;
Localização;
Mapeamento;
Emergência;
Aviação;
Etc.
2.4 Diferentes sistemas GNSS
Os governos dos EUA e da Rússia desenvolveram dois sistemas, durante as décadas de 60/70, o
GPS e o GLONASS, respectivamente. No entanto a evolução destes sistemas foi distinta, como se
demonstrará mais à frente. Em fase de desenvolvimento encontram-se os sistemas de navegação
Europeu, GALILEO, o sistema Chinês, BeiDou, o Japonês QZSS e o IRNSS, um sistema de origem
Indiana.
2.4.1 GPS
Os EUA em 1964 tinham um sistema de navegação operacional conhecido por TRANSIT. Contudo, o
sistema tinha muitas limitações, nomeadamente um serviço de posicionamento a duas dimensões, e
apenas servia para plataformas de baixa dinâmica.
As organizações governamentais americanas, incluindo o DOD (Department of Defense), a NASA
(National Aeronautics and Space Administration), e o DOT (Department of Transportation), estavam
empenhadas em desenvolver um sistema de navegação por satélite que tornasse possível determinar
uma posição nas três dimensões. Os atributos exigidos do sistema seriam cobertura global,
disponibilidade, capacidade de servir plataformas de elevada dinâmica e precisão.
17
Todos os esforços realizados pelas organizações referidas resultaram no sistema GPS, que será
descrito mais à frente no capítulo 3.
2.4.2 GLONASS
A Rússia, semelhante ao que se passou com o GPS, começou a desenvolver o seu sistema no final
da década de 1960, início de 1970, inicialmente com o intuito de dar suporte às suas forças militares.
Todavia, testes iniciais do sistema demonstraram que seria possível utilizar este sistema também
para uso civil, sem comprometer a vertente militar.
O primeiro satélite da constelação foi enviado a 12 de Outubro de 1982. No início do ano de 1996 foi
declarada como operacional a constelação GLONASS. Esta constelação é constituída por 24
satélites, sendo 3 dos quais de reserva (21 + 3). Os satélites estão dispostos em três planos orbitais
espaçados entre si de 120º. Os 21 satélites asseguram, em 97% dos casos, que pelo menos 4
satélites estejam visíveis em qualquer ponto da superfície da Terra. Os satélites encontram-se em
órbita MEO (Medium Earth Orbit), a 19 100 km da superfície da Terra com uma inclinação de 64,8º. O
período orbital é de 11 horas e 15 minutos. Porém, devido a problemas económicos e de manutenção
alguns satélites deixaram de funcionar e depressa o sistema deixou de estar operacional.
Em 2001, o governo russo estabeleceu um programa para restabelecer o seu sistema entre 2002 –
2011 – GLONASS M.
O GLONASS utiliza duas bandas L ( L1 - 1602 MHz, L2 - 1246 MHz), apresentando dois níveis de
precisão. Alta precisão para serviços militares e baixa precisão para serviços civis.
Os russos estão a trabalhar com a União Europeia e os Estados Unidos de forma a alcançarem
compatibilidade entre o sistema GLONASS - GALILEO e GPS - GLONASS, respectivamente.
2.4.3 GALILEO
Em 1998 a União Europeia decidiu construir um sistema de navegação por satélite independente do
GPS e para uso civil. Surge assim o sistema conhecido por GALILEO, ainda em fase de
desenvolvimento, estando previsto a sua operacionalidade para o biénio de 2012/13.
O sistema é composto por uma constelação de 30 satélites em órbita MEO, em três planos inclinados
56º relativamente ao plano equatorial, a 23 222 km de altitude. Cada plano contém 10 satélites, sendo
um deles de reserva. Este último satélite terá a capacidade de substituir um qualquer outro satélite,
do mesmo plano, em cerca de 6 horas. O tempo de órbita é de 14 horas. Actualmente existem dois
satélites do programa GALILEO em órbita. O lançamento do primeiro, denominado Giove-A, ocorreu
a 28 de Dezembro de 2005 (Falcone et al., 2006). O segundo, Giove-B, teve lugar no dia 27 de Abril
de 2008 (ESA, 2008).

18
O sistema irá disponibilizar múltiplos níveis de serviço ao utilizador:
Open Service (OS);
Safety of Life (SoL);
Commercial Service (CS);
Public Regulated Service (PRS);
Search and Rescue Service (SAR).
No capítulo 3, o sistema será caracterizado com maior pormenor.
2.4.4 BeiDou
BeiDou é o nome atribuído ao programa Chinês de navegação por satélite multi-plataforma,
concebido para fornecer posicionamento, gestão de frotas e divulgação em tempo preciso, para uso
militar e civil. Actualmente, BeiDou está numa fase semi-operacional, com três satélites em órbita
GEO (Geostationary Earth Orbit), implantado sobre a China.
A longo prazo, o plano chinês passa por implantar uma constelação de navegação regional, ou
mundial, de 30 satélites (27 MEO + 3 GSO) no âmbito do Programa BeiDou-2 - Compass.
O programa BeiDou foi primeiramente proposto pelo académico chinês Chen Fangyun em 1983 com
o intuito de oferecer suporte à navegação de navios da marinha chinesa.
O BNTS (BeiDou Navigation Test System) fornece um serviço de RDSS (Radio Determination
Satellite System). Ao contrário do GPS, GLONASS e GALILEO, que utilizam medições TOA (Time of
Arrival) apenas num sentido, o RDSS exige medições nos dois sentidos. Ou seja, um centro de
operações envia um sinal através de um dos satélites BeiDou para um subconjunto de utilizadores.
Esses utilizadores respondem a este sinal transmitindo um sinal através de pelo menos dois dos três
satélites geoestacionários do sistema. O tempo de viagem é medido através do loop realizado pelo
sinal desde o centro de operações até ao satélite, receptor de um utilizador e caminho inverso. No
seu conjunto, estas informações sobre tempo de viagem, posições (conhecidas) dos dois satélites, e
estimativa da altitude do utilizador, permitem que o centro de operações determine a localização do
utilizador. Assim que realizado o cálculo, o centro de operações transmite a informação de
posicionamento ao utilizador.
BNTS é composto por três satélites. Os dois primeiros satélites, lançados em Outubro e Dezembro de
2000, foram colocados a 80º E e 140º E longitude na faixa geoestacionária e transportam um
transponder RDSS. Os transponders RDSS operam numa banda L (1610-1626.5 MHz) uplink e
banda S (2483.5-2500 MHz) downlink. O terceiro satélite do programa Beidou-1 foi lançado em Maio
de 2003 e colocado a 110º E de longitude. Este satélite carrega um transponder RDSS e um SBAS
19
(Satellite-Based Augmentation System). SBAS opera nas faixas de frequências do GPS L1 e L2 e é
usado para melhorar a precisão de dados obtidos através dos sistemas GPS e GLONASS.
O sistema BeiDou é caracterizado por uma dupla utilização (militar e civil). O serviço civil foi
declarado operacional após o lançamento do terceiro satélite em Junho de 2003.
Em 2007 iniciou-se o programa Compass, com o envio do primeiro satélite em órbita MEO, a 21
500km de altitude, no dia 14 de Abril de 2007 – Compass M1. Actualmente, já se encontram em
órbita seis satélites da constelação. É expectável que no decorrer de 2011 o território chinês esteja
coberto pelo Compass, no entanto apenas entre 2015 e 2020 o sistema apresentará uma cobertura
global. As bandas de frequência do sistema Compass sofreram uma alteração comparativamente ao
sistema BeiDou, passando a utilizar-se três bandas (1559.05 -1591.79 MHz; 1166.22-1217.37 MHZ;
1250.62-1286.42 MHz ), sendo a terceira banda de acesso restrito. O Compass apresenta-se com
uma precisão inferior a 10 m (95%).
2.4.5 QZSS
O QZSS (Quasi-Zenith Satellite System) é um sistema desenvolvido pelo Japão com o objectivo de
melhorar e garantir o serviço de navegação por satélite, nomeadamente o GPS, na região nipónica.
Devido às zonas montanhosas e às cidades dotadas de numerosos e grandes edifícios existem
problemas de cobertura em cerca de 80% do território, o que é francamente negativo. (Kaplan and
Hegarty, 2006)
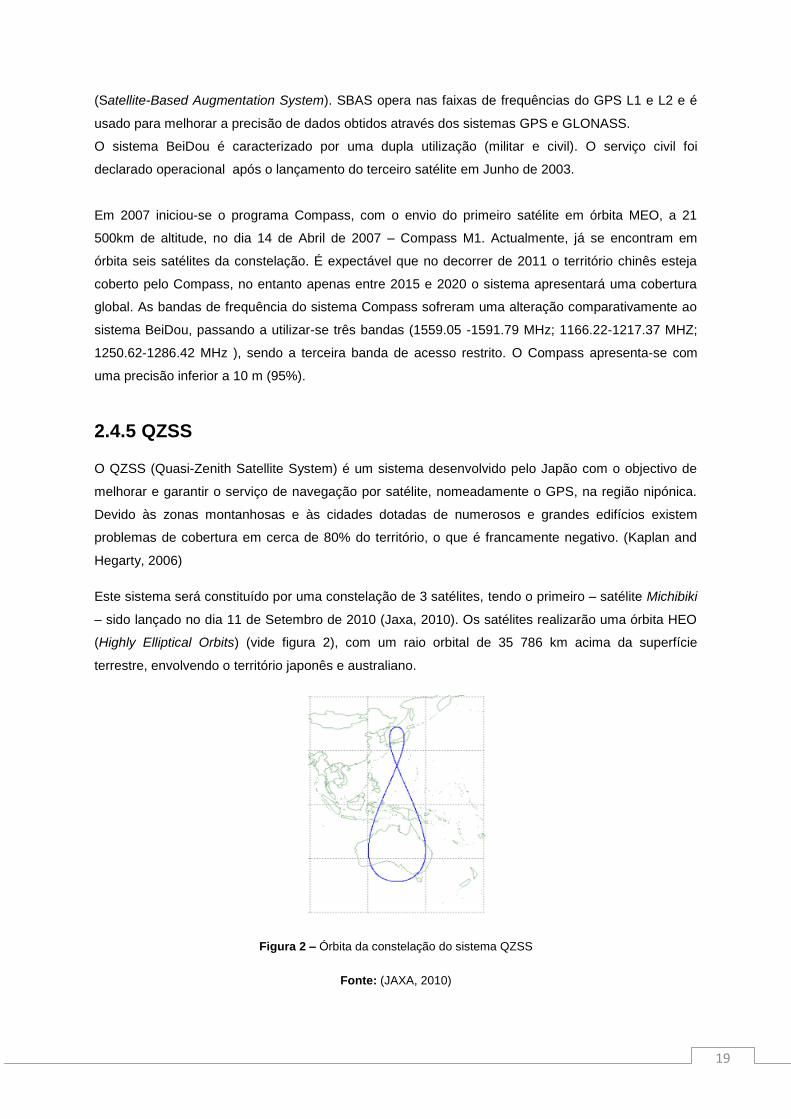
Este sistema será constituído por uma constelação de 3 satélites, tendo o primeiro – satélite Michibiki
– sido lançado no dia 11 de Setembro de 2010 (Jaxa, 2010). Os satélites realizarão uma órbita HEO
(Highly Elliptical Orbits) (vide figura 2), com um raio orbital de 35 786 km acima da superfície
terrestre, envolvendo o território japonês e australiano.
Figura 2 – Órbita da constelação do sistema QZSS
Fonte: (JAXA, 2010)
20
Este formato orbital permitirá assegurar a presença de, no mínimo, um satélite sobre o território
japonês durante as 24 horas diárias. Os sinais a utilizar encontram-se nas bandas L1, L2 e L5 de
forma a garantir a compatibilidade com o sistema GPS. Os serviços disponibilizados pelo sistema
QZSS são, para lá do objectivo principal que é o posicionamento, as aplicações móveis, no intuito de
proporcionar uma comunicação à base de serviços de vídeo, áudio e dados.
É expectável a sua operacionalidade para o ano de 2013.
2.4.6 IRNSS
No mesmo sentido o governo indiano aprovou, em 2006, um programa de desenvolvimento do seu
sistema de navegação regional por satélite, o IRNSS (India Regional Navigation Satellite System). O
sistema será utilizado com grande incidência nas áreas de vigilância, telecomunicações, transporte,
identificação de áreas criticas e segurança pública. (Kulkarni, 2007)
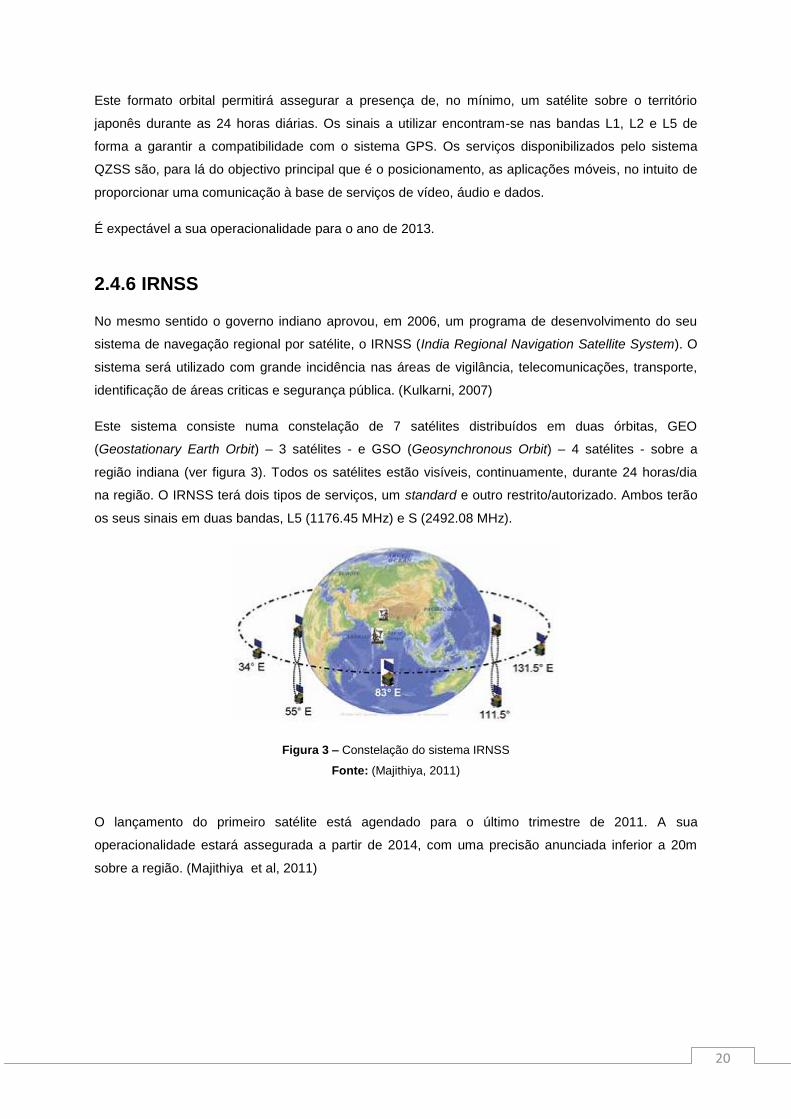
Este sistema consiste numa constelação de 7 satélites distribuídos em duas órbitas, GEO
(Geostationary Earth Orbit) – 3 satélites - e GSO (Geosynchronous Orbit) – 4 satélites - sobre a
região indiana (ver figura 3). Todos os satélites estão visíveis, continuamente, durante 24 horas/dia
na região. O IRNSS terá dois tipos de serviços, um standard e outro restrito/autorizado. Ambos terão
os seus sinais em duas bandas, L5 (1176.45 MHz) e S (2492.08 MHz).
Figura 3 – Constelação do sistema IRNSS
Fonte: (Majithiya, 2011)
O lançamento do primeiro satélite está agendado para o último trimestre de 2011. A sua
operacionalidade estará assegurada a partir de 2014, com uma precisão anunciada inferior a 20m
sobre a região. (Majithiya et al, 2011)
21
3 Comparação entre os sistemas GPS e
GALILEO
Sendo, actualmente, o GPS o sistema mais utilizado no mundo para navegação por satélite, e sendo
o GALILEO a futura grande ameaça à hegemonia do sistema americano, considera-se de grande
utilidade, e tendo em conta o objectivo deste trabalho, uma pormenorizada caracterização destes dois
sistemas.
3.1 Sistema GPS
3.1.1 Serviços
GPS é um sistema caracterizado por actuar em duas vertentes, disponibilizando serviços a
utilizadores civis e militares. Estes serviços estão agrupados em dois formatos, designados por SPS
(Standard Positioning Service) e PPS (Precise Positioning Service). O SPS está definido para a
comunidade civil, enquanto que o PPS está destacado apenas para utilizadores autorizados das
forças militares e agências governamentais dos EUA.
3.1.1.1 PPS
O PPS está desenhado para oferecer uma precisão de pelo menos 13m (95%) no plano horizontal e
22m (95%) no plano vertical.
Como dito anteriormente, o PPS está disponível para uso por parte das forças militares e algumas
agências governamentais. Para uso civil é necessária uma aprovação especial do DOD.
O acesso ao serviço PPS é controlado através de dois recursos criptográficos denominados por AS
(antispoofing) e SA (selective availability). O AS impede que os receptores GPS sejam enganados por
sinais falsos e que utilizadores não autorizados façam medições directas em L2. Esta técnica foi
activada no dia 31 de Janeiro de 1994 e permanece em operação.
O DOD implementou o SA para reduzir a precisão da informação GPS (posição, velocidade e tempo),
através de dois factores, nomeadamente, 1-introdução de erros pseudo-aleatórios no relógio do
satélite; 2-degradação das efemérides radiodifundidas.
O SA foi entretanto removido a 1 de Maio de 2000, pelo que actualmente o SPS disponibiliza uma
precisão muito semelhante à dada pelo PPS.
22
3.1.1.2 SPS
O SPS está disponível para todos os utilizadores em todo o mundo, sem qualquer custo directo. Não
há restrições sobre o uso do SPS. Este serviço está projectado para fornecer precisão superior a 22m
(95%) no plano horizontal e 27m (95%) no plano vertical (média global).
3.1.2 Segmentos do Sistema
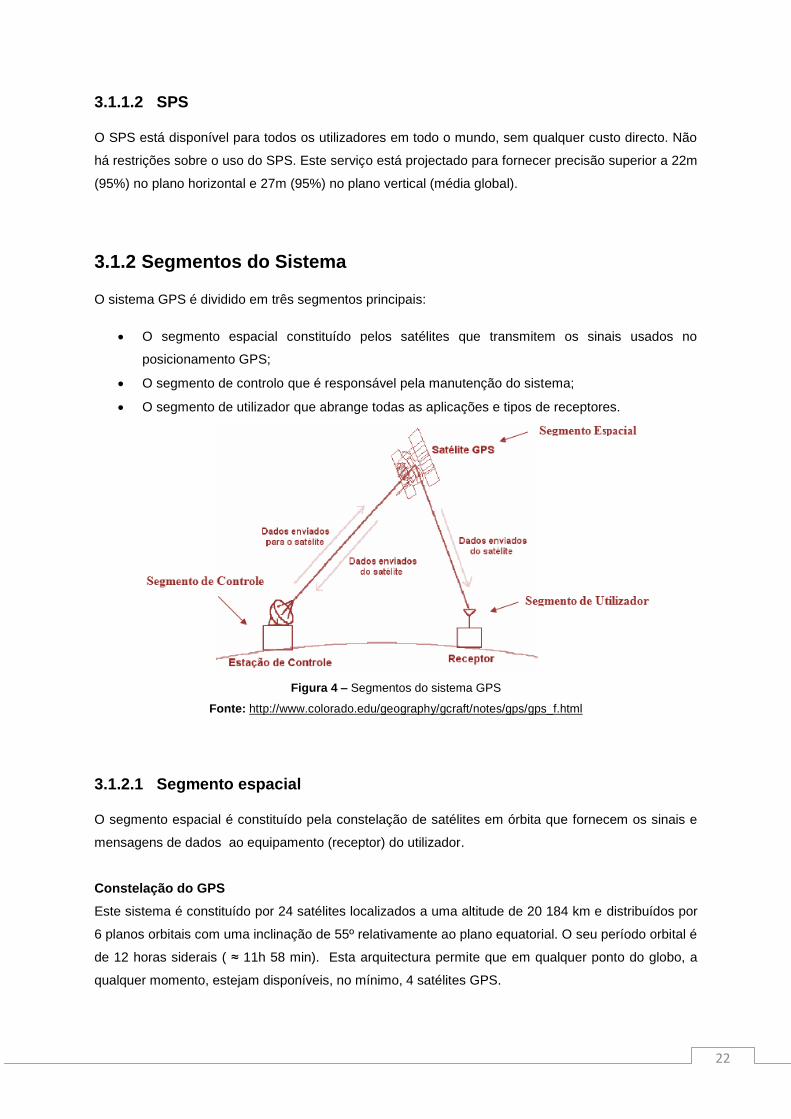
O sistema GPS é dividido em três segmentos principais:
O segmento espacial constituído pelos satélites que transmitem os sinais usados no
posicionamento GPS;
O segmento de controlo que é responsável pela manutenção do sistema;
O segmento de utilizador que abrange todas as aplicações e tipos de receptores.
Figura 4 – Segmentos do sistema GPS
Fonte: http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
3.1.2.1 Segmento espacial
O segmento espacial é constituído pela constelação de satélites em órbita que fornecem os sinais e
mensagens de dados ao equipamento (receptor) do utilizador.
Constelação do GPS
Este sistema é constituído por 24 satélites localizados a uma altitude de 20 184 km e distribuídos por
6 planos orbitais com uma inclinação de 55º relativamente ao plano equatorial. O seu período orbital é
de 12 horas siderais ( ≈ 11h 58 min). Esta arquitectura permite que em qualquer ponto do globo, a
qualquer momento, estejam disponíveis, no mínimo, 4 satélites GPS.
23
Os satélites GPS transportam no seu interior transmissores para a radiodifusão dos sinais, e 4
relógios atómicos com precisão de 10-12
, i.e., apresentam uma estabilidade de 1 em
1.000.000.000.000 segundos, o mesmo será dizer que só ao fim de 32 000 anos o relógio se atrasará
ou adiantará 1 segundo.
Configuração do GPS:
o 24 satélites;
o 6 planos orbitais, com inclinação de 55º relativamente ao equador;
o Período sideral de 11h 58min;
o Altura orbital de 20.184 km;
o Cobertura global.
Actualmente a constelação é composta por 30 satélites operacionais, 11 da classe IIA, 12 da classe
IIR e 7 da classe IIR-M. (Chidester, 2010)
Neste segmento, o GPS apresenta 5 tipos de satélites que constituem as seguintes classes:
Bloco I, Bloco II. Bloco IIA, Bloco IIR, Bloco IIR-M, e por fim Bloco IIF. (Sá, 2004)
Bloco I – Nesta classe foram lançados 11 satélites pelo JPO (Joint Program Office), entre 22 de
Fevereiro de 1978 e 9 de Outubro de 1985. Actualmente a classe está completamente extinta.
Bloco II – As duas maiores diferenças entre as classes I e II prende-se com o facto dos satélites do
Bloco II apresentarem uma inclinação orbital que passou de 63º para 55º, e a restrição de sinal ao
utilizador civil. Foram lançados 9 satélites pela AFB (Air Force Base) entre 14 de Fevereiro de 1989 e
1 de Outubro de 1990.
Bloco IIA (Advanced) – Esta classe continuou com as características anteriormente desenvolvidas e
foram acrescentadas outras por forma a assegurar a capacidade de comunicação mútua. Alguns
satélites foram equipados com reflectores que permitiam a sua detecção através de estações laser.
Um conjunto de 19 satélites foi lançado entre 26 de Novembro de 1990 e 6 de Novembro de 1997.
Bloco IIR (Replacement) - Estes satélites caracterizam-se por algumas inovações, nomeadamente
são equipados com osciladores de hidrogénio, pelo menos uma ordem de grandeza mais precisa que
os osciladores de césio dos satélites existentes, e a comunicação e predição de órbita a bordo foram
melhoradas. Entre 17 de Janeiro de 1997 e 6 de Novembro de 2004 foram lançados 13 satélites
desta classe.
Bloco IIR-M (Modernized) – Esta classe foi concebida com o intuito de modernizar a classe anterior,
tendo em vista a introdução de três novos sinais disponíveis, nomeadamente, dois novos códigos
militares na banda L1 e L2, que ficou conhecido por M – code, e um sinal de uso civil na banda L2,
24
conhecido por L2C. Esta classe é constituída por 8 satélites, enviados entre 26 de Setembro de 2005
e 17 de Agosto de 2009.
Bloco IIF (Follow-on) – Esta classe ainda está em fase de desenvolvimento, tendo sido lançado o
primeiro satélite no dia 28 de Maio de 2010. Estes satélites apresentam a introdução de um novo
sinal, L5 = 1176,45 Mhz, de uso civil e transmitido numa frequência específica para aplicações de
segurança de vida humana (safety-of-life).
Actualmente, prevê-se a estruturação de mais uma classe, denominada Bloco III – Satélites de Nova
Geração, com o objectivo de fornecer precisão sub-métrica, maior precisão de tempo e elevada
capacidade de cruzamento de dados inter-satélite. (Kaplan and Hegarty, 2006)
3.1.2.2 Segmento de controlo
O segmento de controlo é responsável por detectar e manter os satélites no espaço. Monitoriza o
estado do satélite, mantém a configuração da sua órbita, e analisa a integridade do sinal. Além disso,
actualiza as correcções do relógio do satélite e efemérides, bem como numerosos outros parâmetros
essenciais para a determinação da posição do utilizador.
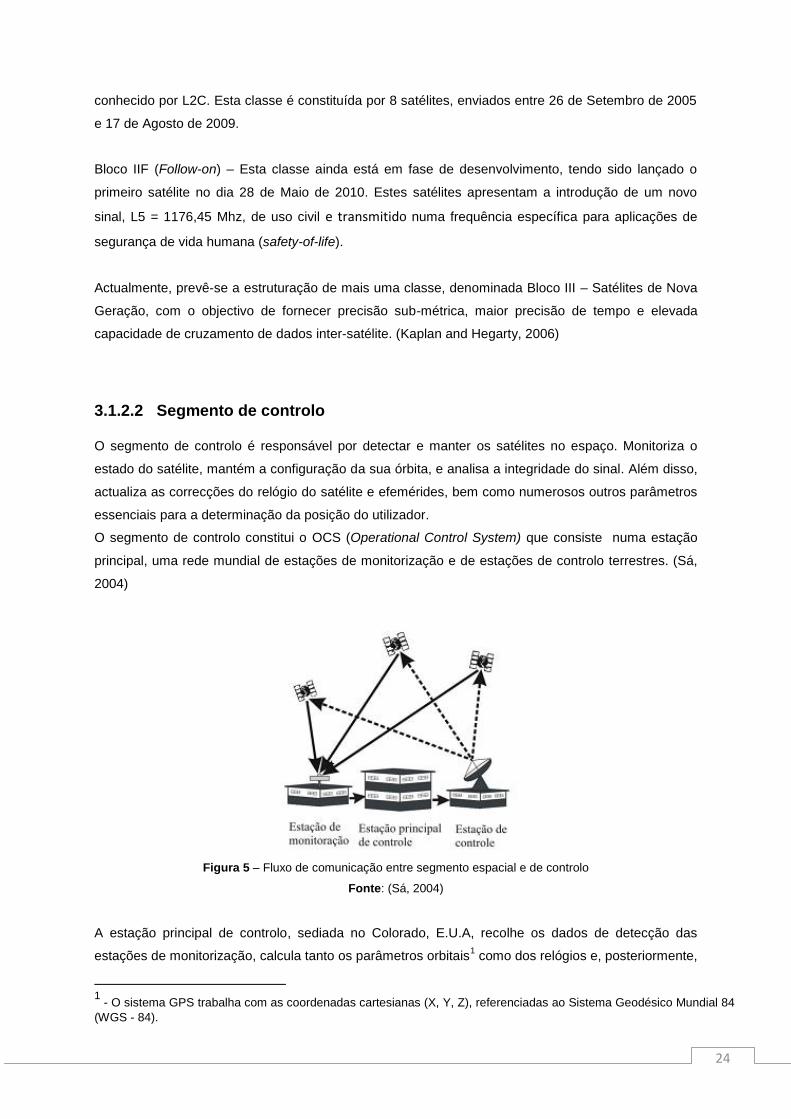
O segmento de controlo constitui o OCS (Operational Control System) que consiste numa estação
principal, uma rede mundial de estações de monitorização e de estações de controlo terrestres. (Sá,
2004)
Figura 5 – Fluxo de comunicação entre segmento espacial e de controlo
Fonte: (Sá, 2004)
A estação principal de controlo, sediada no Colorado, E.U.A, recolhe os dados de detecção das
estações de monitorização, calcula tanto os parâmetros orbitais1 como dos relógios e, posteriormente,
1 - O sistema GPS trabalha com as coordenadas cartesianas (X, Y, Z), referenciadas ao Sistema Geodésico Mundial 84
(WGS - 84).
25
reenvia-os para uma das 3 estações de controlo terrestre, para que esta possa comunicar com os
satélites. Esta estação principal é igualmente responsável pelo controlo dos satélites e do sistema de
operação.
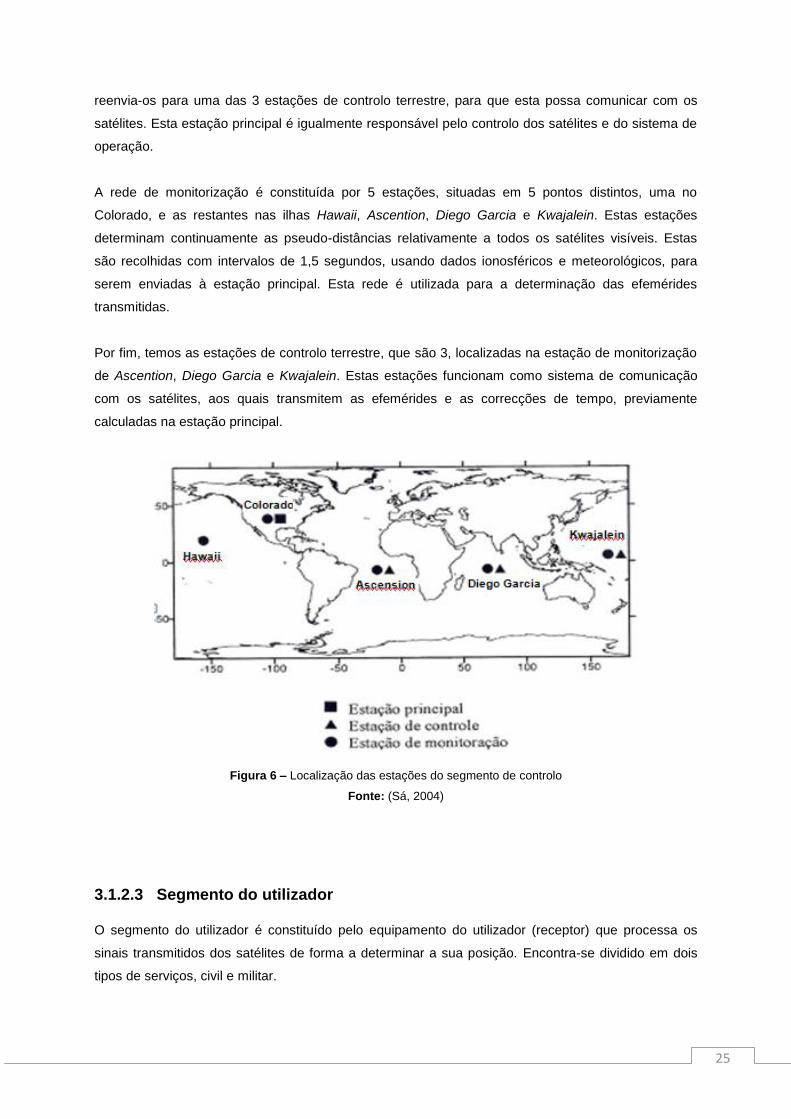
A rede de monitorização é constituída por 5 estações, situadas em 5 pontos distintos, uma no
Colorado, e as restantes nas ilhas Hawaii, Ascention, Diego Garcia e Kwajalein. Estas estações
determinam continuamente as pseudo-distâncias relativamente a todos os satélites visíveis. Estas
são recolhidas com intervalos de 1,5 segundos, usando dados ionosféricos e meteorológicos, para
serem enviadas à estação principal. Esta rede é utilizada para a determinação das efemérides
transmitidas.
Por fim, temos as estações de controlo terrestre, que são 3, localizadas na estação de monitorização
de Ascention, Diego Garcia e Kwajalein. Estas estações funcionam como sistema de comunicação
com os satélites, aos quais transmitem as efemérides e as correcções de tempo, previamente
calculadas na estação principal.
Figura 6 – Localização das estações do segmento de controlo
Fonte: (Sá, 2004)
3.1.2.3 Segmento do utilizador
O segmento do utilizador é constituído pelo equipamento do utilizador (receptor) que processa os
sinais transmitidos dos satélites de forma a determinar a sua posição. Encontra-se dividido em dois
tipos de serviços, civil e militar.

26
Os receptores GPS recolhem os dados enviados pelos satélites transformando-os em coordenadas,
(distâncias, tempo, deslocamento e velocidade) através de processamento em tempo real ou pós
processamento.
3.1.3 Caracterização do sinal GPS
Os satélites da constelação GPS transmitem sinais em duas frequências da banda L, denominadas
por L1 e L2, que são obtidas a partir da frequência fundamental (fo) de 10,23 MHz multiplicada por
154 e 120 para gerar as portadoras. Portanto as frequências (L) e os comprimentos de onda
resultantes são:
O código PRN (Pseudo Random Noise) é modulado sobre as duas portadoras. O código C/A
(Coarse/Aquisition) é modulado apenas na portadora L1 e tem comprimento de onda (λ) por volta de
300 m e frequência de 1,023 MHz. O código P (Precise ou Protected), reservado ao uso militar
americano e a utilizadores autorizados, tem comprimento de onda de aproximadamente 30 m e é
transmitido com uma frequência de 10.23 MHz, além de ser modulado nas duas portadoras (L1 e L2).
Com a modernização do sistema GPS surgiram três novos sinais, L2C, M-code e L5 (Kaplan and
Hegarty, 2006)
O sinal civil L2C,que é um sinal melhorado do L1 C/A, permite a correcção de erros ionosféricos ao
utilizador civil.
O M-code consiste na modernização do código militar, exclusivo para uso militar, nas bandas L1 e L2.
Este código irá trazer mais segurança, robustez, e fiabilidade ao sistema.
Por fim, temos o sinal L5, também um sinal civil, que opera na banda L numa frequência de 1176, 45
Mhz (115 fo ), específico para aplicações de segurança da vida humana (safety-of-life).
27
3.1.4 GPS Diferencial – DGPS
Com a necessidade de melhoria da qualidade e precisão do GPS surgem novas técnicas para cálculo
e diminuição de erros na determinação do posicionamento de um objecto. Neste contexto, foi
implementado o DGPS (Differential Global Positioning System).
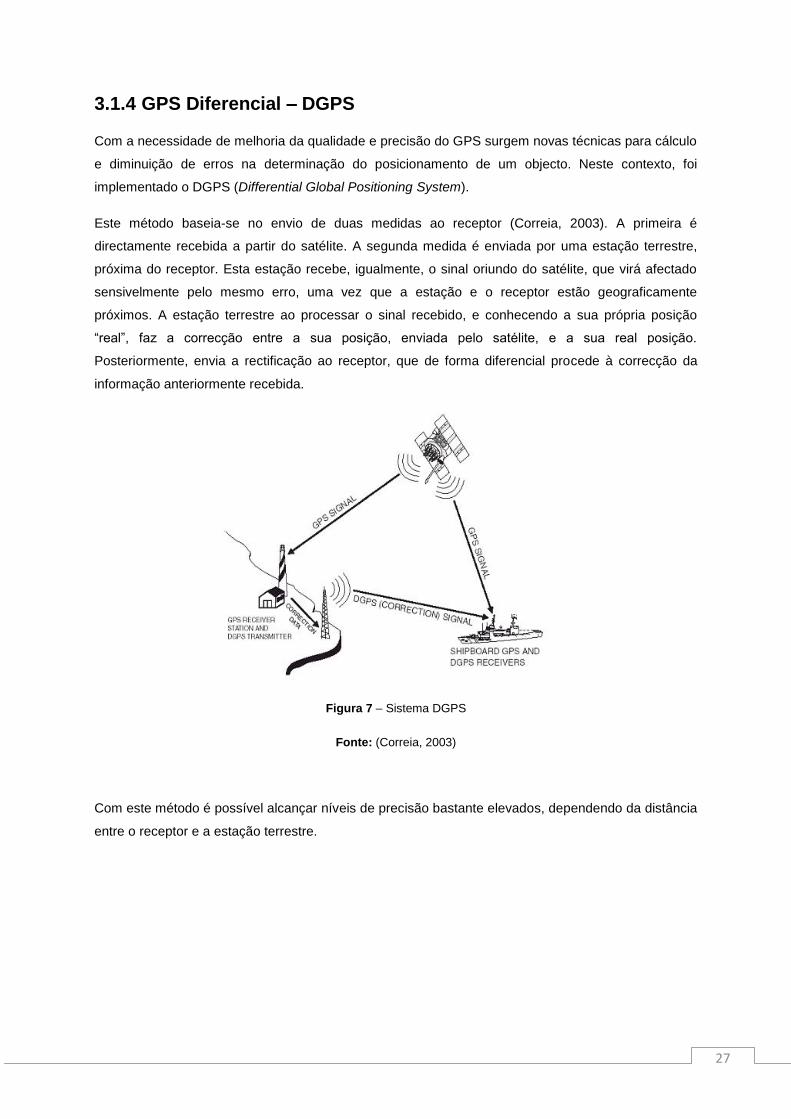
Este método baseia-se no envio de duas medidas ao receptor (Correia, 2003). A primeira é
directamente recebida a partir do satélite. A segunda medida é enviada por uma estação terrestre,
próxima do receptor. Esta estação recebe, igualmente, o sinal oriundo do satélite, que virá afectado
sensivelmente pelo mesmo erro, uma vez que a estação e o receptor estão geograficamente
próximos. A estação terrestre ao processar o sinal recebido, e conhecendo a sua própria posição
“real”, faz a correcção entre a sua posição, enviada pelo satélite, e a sua real posição.
Posteriormente, envia a rectificação ao receptor, que de forma diferencial procede à correcção da
informação anteriormente recebida.
Figura 7 – Sistema DGPS
Fonte: (Correia, 2003)
Com este método é possível alcançar níveis de precisão bastante elevados, dependendo da distância
entre o receptor e a estação terrestre.
28
3.2 Sistema GALILEO
Reconhecendo a importância estratégica das aplicações dos sistemas GNSS, no inicio da década de
90 a Comissão Europeia e a ESA (European Space Agency) desenvolveram a primeira geração de
um sistema global de posicionamento, o GNSS-1, conhecido por programa EGNOS (European
Geostationary Navigation Overlay Service2).
Apesar do GNSS-1 fornecer benefícios imediatos, com evidentes melhorias na integridade e precisão
do sinal, não oferece um nível de controlo sobre o GNSS. Dada a sua dependência do GPS não pode
oferecer garantias quanto à disponibilidade e desempenho dos sinais. Perante esta conjuntura as
agências Europeias estão a desenvolver a futura geração de navegação por satélite (GNSS-2) - o
sistema GALILEO - uma constelação de satélites com cobertura mundial.
O uso combinado do GALILEO, EGNOS e GPS / GLONASS irá aumentar o desempenho global,
robustez e segurança inerentes aos serviços realizados a partir de sistemas GNSS. (Kaplan and
Hegarty, 2006)
3.2.1 Serviços
O programa GALILEO é o primeiro sistema direccionado apenas para uso civil. Assim, o seu principal
objectivo encontra-se nas necessidades do utilizador civil e do mercado global. (European
Commission, 2002)
Os serviços fornecidos pelo sistema podem agrupar-se em serviços independentes e serviços
combinados com os restantes sistemas GNSS existentes. Os serviços do programa GALILEO podem
ser classificados da seguinte forma:
Serviços satélites GALILEO;
Serviços localmente assistidos;
Serviços EGNOS;
Serviços combinados.
2 - EGNOS – Este programa consiste no aumento da funcionalidade do GPS e GLONASS, com grande ênfase
nas aplicações de transportes (terra-água-ar) no território europeu e vizinhança. Tem como base o envio, a partir
de 3 satélites geoestacionários, de sinais GPS e GLONASS com as devidas introduções diferenciais, efectuadas
a partir de 30 estações de controlo e monitorização da integridade do sinal, de 4 centros de controlo principais e
de 6 estações de emissão.
29
3.2.1.1 Serviços satélites GALILEO
Este pacote de serviços oferece uma cobertura global e independente dos outros sistemas GNSS,
recorrendo apenas à combinação de sinais transmitidos pelos satélites GALILEO.
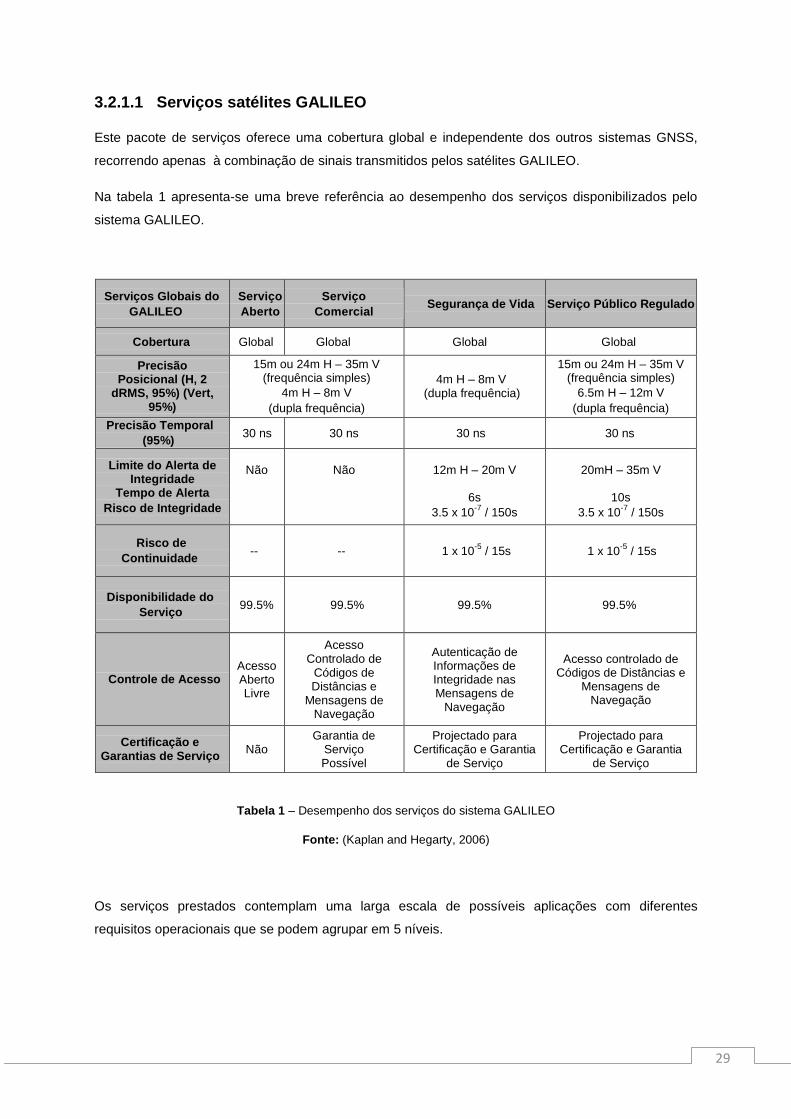
Na tabela 1 apresenta-se uma breve referência ao desempenho dos serviços disponibilizados pelo
sistema GALILEO.
Serviços Globais do
GALILEO
Serviço
Aberto
Serviço
Comercial Segurança de Vida Serviço Público Regulado
Cobertura Global Global Global Global
Precisão Posicional (H, 2
dRMS, 95%) (Vert, 95%)
15m ou 24m H – 35m V (frequência simples)
4m H – 8m V
(dupla frequência)
4m H – 8m V (dupla frequência)
15m ou 24m H – 35m V (frequência simples)
6.5m H – 12m V
(dupla frequência)
Precisão Temporal
(95%) 30 ns 30 ns 30 ns 30 ns
Limite do Alerta de Integridade
Tempo de Alerta
Risco de Integridade
Não
Não
12m H – 20m V
6s
3.5 x 10-7
/ 150s
20mH – 35m V
10s
3.5 x 10-7
/ 150s
Risco de
Continuidade -- -- 1 x 10
-5 / 15s 1 x 10
-5 / 15s
Disponibilidade do
Serviço 99.5% 99.5% 99.5% 99.5%
Controle de Acesso Acesso Aberto Livre
Acesso Controlado de
Códigos de Distâncias e
Mensagens de Navegação
Autenticação de Informações de Integridade nas Mensagens de
Navegação
Acesso controlado de Códigos de Distâncias e
Mensagens de Navegação
Certificação e Garantias de Serviço
Não Garantia de
Serviço Possível
Projectado para Certificação e Garantia
de Serviço
Projectado para Certificação e Garantia
de Serviço
Tabela 1 – Desempenho dos serviços do sistema GALILEO
Fonte: (Kaplan and Hegarty, 2006)
Os serviços prestados contemplam uma larga escala de possíveis aplicações com diferentes
requisitos operacionais que se podem agrupar em 5 níveis.
30
1. Open Service (OS)
Este serviço está concebido para o utilizador comum – aplicações do mercado de massas - que não
requer qualquer garantia. A sua precisão será equivalente ao sistema DGPS, mas sem a necessidade
de recurso a infra-estruturas no solo. Como se observa na tabela acima, o OS apresenta uma
precisão horizontal de 4 metros e vertical de 8 metros, ambas com 95% de fiabilidade. Este serviço é
gratuito e será disponibilizado a qualquer utilizador que possua um receptor.
A gama de sinais disponíveis para difusão deste serviço são, as bandas E5a+E5b (1164 – 1215 MHz)
e L1 (1559 – 1592MHz).
2. Safety of Life (SoL)
Com o intuito de garantir um serviço de alto desempenho a utilizadores de segurança crítica,
nomeadamente marinha, aviação e comboios, será criado o serviço SoL. Este serviço pretende
fornecer altos níveis de desempenho global, satisfazendo as necessidades destes utilizadores e
aumentando a sua segurança, especialmente nos locais onde as infra-estruturas tradicionais no solo
não apresentam tanta eficácia.
O SoL será cedido abertamente e o sistema terá o seu sinal autenticado (p.ex através de assinatura
digital) de forma a assegurar ao utilizador que o sinal recebido é efectivamente o sinal real do
GALILEO. O serviço será igual para qualquer utilizador, e activado através de requerimento do
próprio.
Os sinais ocupados por este serviço são, as bandas E5a+E5b (1164 – 1215 MHz) e L1 (1559 –
1592MHz).
3. Commercial Service (CS)
Este serviço possibilitará o desenvolvimento de aplicações profissionais, com um alto desempenho de
navegação e dados de valor acrescentado. Estas aplicações terão como base: a disseminação de
dados com uma velocidade de 500 bps, para serviços de valor acrescentado; a difusão de dois sinais
de forma a facilitar aplicações avançadas, tais como a integração das aplicações de posição
GALILEO com redes de comunicação sem fio; o fornecimento de alta precisão de posição e
navegação indoor.
O nível de desempenho deste serviço resulta da conjugação de três factores, nomeadamente o
serviço comercial em causa, a procura da Indústria, as necessidades do consumidor. O serviço será
regulado pela GOC (Galileo Operating Company).
Os sinais utilizados serão os mesmo que o OS, adicionando-se outros mais dois sinais encriptados
(revestimento no código e dados) na banda E6 (1260 – 1300 MHz).
4. Public Regulated Service (PRS)
O PRS apresenta-se como um serviço robusto (exibe um nível de protecção superior aos anteriores
serviços) e de acesso controlado para aplicações governamentais. O serviço deverá exibir um
funcionamento contínuo e em qualquer circunstância. O PRS é um serviço independente. Uma
característica que destaca o serviço PRS é a robustez do seu sinal, o qual está protegido contra os
efeitos das tentativas de interferências intencionais e emissão de um sinal modificado. O acesso será
31
controlado por entidades previamente definidas, através de sinais encriptados e chaves distribuídas
apropriadamente.
As frequências ocupadas serão a E6 (1260 – 1300 MHz) e L1 (1559 – 1592MHz)..
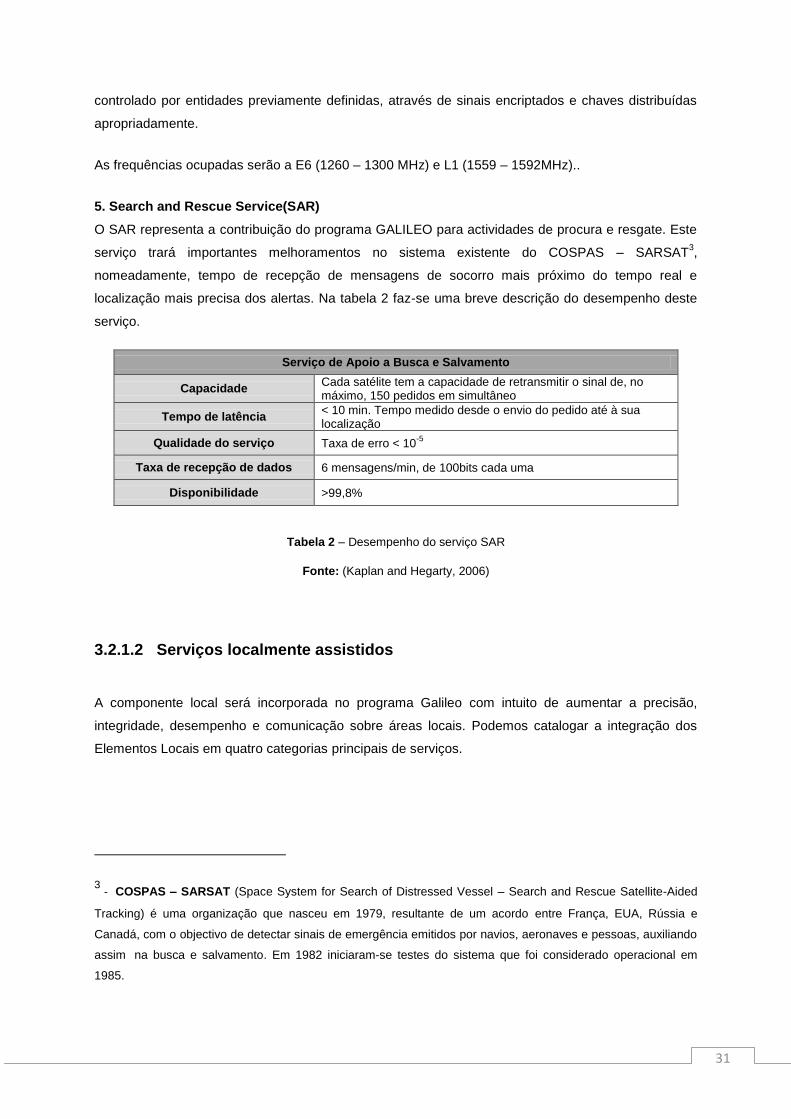
5. Search and Rescue Service(SAR)
O SAR representa a contribuição do programa GALILEO para actividades de procura e resgate. Este
serviço trará importantes melhoramentos no sistema existente do COSPAS – SARSAT3,
nomeadamente, tempo de recepção de mensagens de socorro mais próximo do tempo real e
localização mais precisa dos alertas. Na tabela 2 faz-se uma breve descrição do desempenho deste
serviço.
Serviço de Apoio a Busca e Salvamento
Capacidade Cada satélite tem a capacidade de retransmitir o sinal de, no máximo, 150 pedidos em simultâneo
Tempo de latência < 10 min. Tempo medido desde o envio do pedido até à sua localização
Qualidade do serviço Taxa de erro < 10-5
Taxa de recepção de dados 6 mensagens/min, de 100bits cada uma
Disponibilidade >99,8%
Tabela 2 – Desempenho do serviço SAR
Fonte: (Kaplan and Hegarty, 2006)
3.2.1.2 Serviços localmente assistidos
A componente local será incorporada no programa Galileo com intuito de aumentar a precisão,
integridade, desempenho e comunicação sobre áreas locais. Podemos catalogar a integração dos
Elementos Locais em quatro categorias principais de serviços.
3 - COSPAS – SARSAT (Space System for Search of Distressed Vessel – Search and Rescue Satellite-Aided
Tracking) é uma organização que nasceu em 1979, resultante de um acordo entre França, EUA, Rússia e
Canadá, com o objectivo de detectar sinais de emergência emitidos por navios, aeronaves e pessoas, auxiliando
assim na busca e salvamento. Em 1982 iniciaram-se testes do sistema que foi considerado operacional em
1985.
32
1. Serviços locais de navegação com precisão
Com o recurso a Elementos Locais é possível oferecer um código com correcções diferenciais que
poderão alcançar uma precisão inferior a 1 metro. Estes elementos têm igualmente a capacidade de
aumentar o nível de determinação do sinal de alarme de integridade do sinal, em 1 segundo.
2. Serviços locais de navegação com alta precisão
Com a exploração do método TCAR (Three Carrier Ambiguity Resolution) juntamente com os
elementos locais do sistema será possível o utilizador determinar o seu posicionamento com um erro
inferior a 10 centímetros.
3. Serviço de navegação localmente ajudado
Reduzindo a quantidade de informação a ser descodificada no utilizador final, é possível melhorar a
disponibilidade do sinal no espaço, especialmente quando consideramos aplicações que operam em
ambientes de acesso dificultado, como é o caso de zonas urbanas e aplicações em interiores.
4. Serviços locais para aumento de disponibilidade
As estações locais que transmitem sinais de satélite, pseudo-satélite4 ou pseudolite, também serão
utilizadas para aumentar a disponibilidade do serviço. Estes sinais têm a vantagem de não sofrerem o
mesmo nível de distorção do ambiente quando comparado com o sinal de satélite. Este aumento de
disponibilidade é desejável em ambientes restritos, como p.ex urbanos, e situações que requerem um
alto nível de disponibilidade, como é o caso de aterragem de aviões.
3.2.1.3 Serviços do EGNOS
Este serviço é fornecido pelo programa EGNOS já em funcionamento desde 1 de Outubro de 2009. O
EGNOS fornece um serviço a uma ampla categoria de utilizadores, público geral (mercado de
massa), especialistas e segurança crítica.
Este sistema apresenta-se como uma ferramenta de futuras aplicações para o sistema GALILEO.
O EGNOS oferece actualmente uma complementaridade aos sistemas GPS e GLONASS, com
incidência na zona Europeia (ver figura 8), proporcionando níveis superiores de precisão e
integridade de sinal. Este serviço é disponibilizado abertamente, estando no entanto condicionado à
disponibilidade dos sistemas GNSS existentes.
4 - Pseudo-satélite ou pseudolite é um equipamento, localizado no solo, receptor - transmissor que funciona
como um satélite. Este sistema tem a capacidade de enviar o sinal Galileo com mensagens de navegação.
33
Figura 8 – Área de cobertura do sistema EGNOS
Fonte: (European Commission, 2002)
3.2.2 Segmentos do sistema
Para fornecer os serviços a que se propõe o sistema GALILEO apresenta uma vasta infra-estrutura
que se pode agrupar em 3 segmentos, espacial, controlo e utilizador.
3.2.2.1 Segmento espacial
O sistema é composto por uma constelação de,
30 satélites em órbita MEO (23 222 km de altitude);
Inclinação orbital de 56º;
Três planos orbitais igualmente espaçados;
Nove satélites operacionais em cada plano;
Um satélite de reserva, igualmente operacional em cada plano.
Cada satélite está construído para transmitir sinais de tempo precisos, em simultâneo com a
sincronização do relógio, efemérides das órbitas, entre outros dados.
3.2.2.2 Segmento de controlo
Este segmento será responsável pelo controlo, comunicação e processamento da informação
transmitida pelos satélites. O sistema é composto pelo GCS (GALILEO Control System), GMS
(GALILEO Mission System) e o GCC (GALILEO Control Center). O GCS contém 5 estações de TT&C
(Telemetry Tracking and Command) que comunicam entre si através da banda S (2483 – 2500 MHz).
34
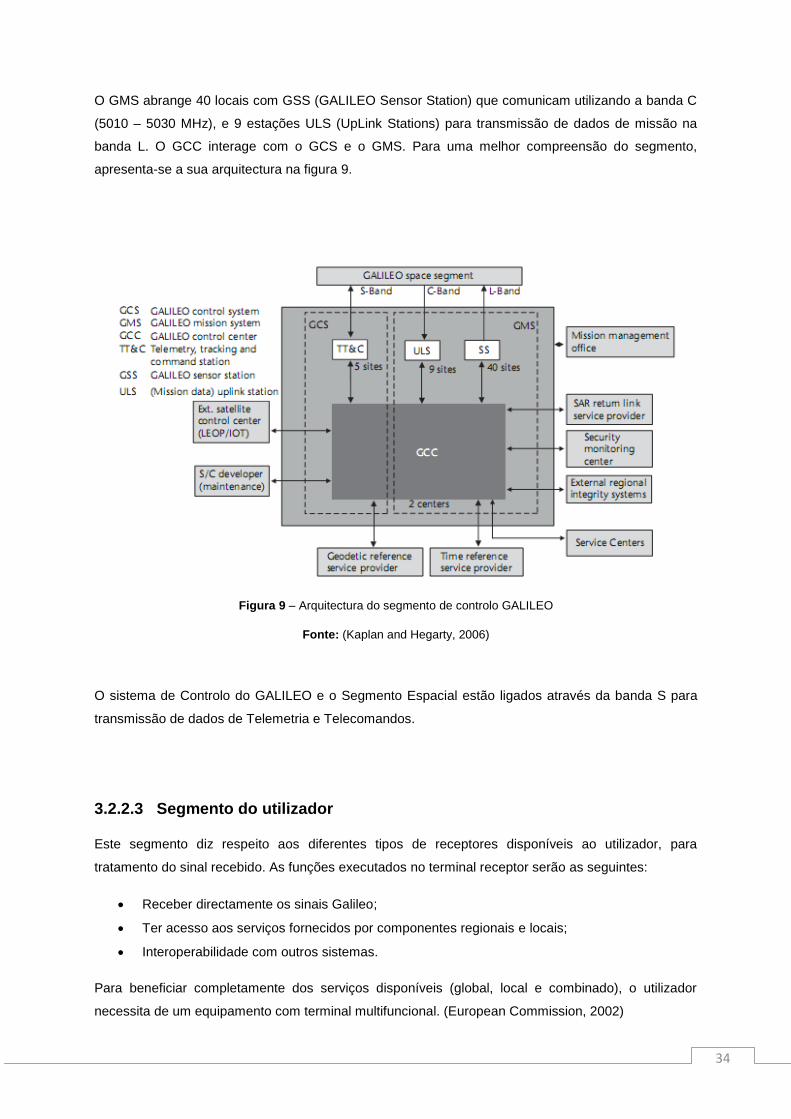
O GMS abrange 40 locais com GSS (GALILEO Sensor Station) que comunicam utilizando a banda C
(5010 – 5030 MHz), e 9 estações ULS (UpLink Stations) para transmissão de dados de missão na
banda L. O GCC interage com o GCS e o GMS. Para uma melhor compreensão do segmento,
apresenta-se a sua arquitectura na figura 9.
Figura 9 – Arquitectura do segmento de controlo GALILEO
Fonte: (Kaplan and Hegarty, 2006)
O sistema de Controlo do GALILEO e o Segmento Espacial estão ligados através da banda S para
transmissão de dados de Telemetria e Telecomandos.
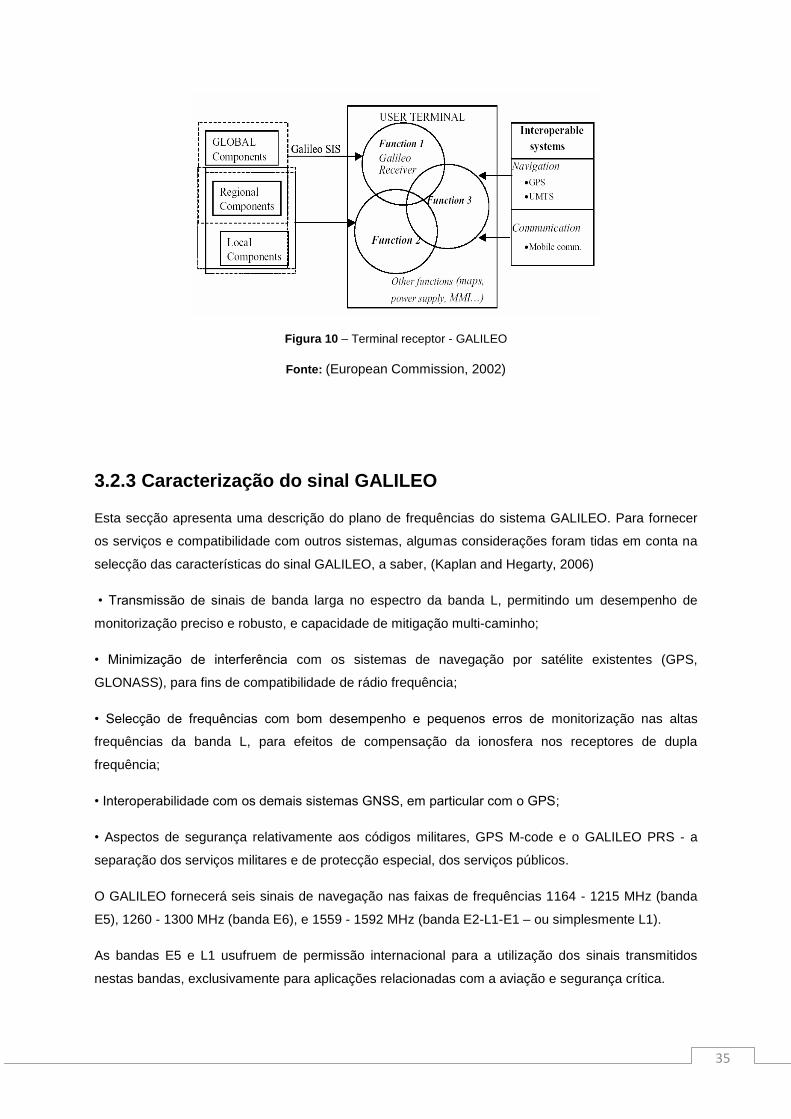
3.2.2.3 Segmento do utilizador
Este segmento diz respeito aos diferentes tipos de receptores disponíveis ao utilizador, para
tratamento do sinal recebido. As funções executados no terminal receptor serão as seguintes:
Receber directamente os sinais Galileo;
Ter acesso aos serviços fornecidos por componentes regionais e locais;
Interoperabilidade com outros sistemas.
Para beneficiar completamente dos serviços disponíveis (global, local e combinado), o utilizador
necessita de um equipamento com terminal multifuncional. (European Commission, 2002)
35
Figura 10 – Terminal receptor - GALILEO
Fonte: (European Commission, 2002)
3.2.3 Caracterização do sinal GALILEO
Esta secção apresenta uma descrição do plano de frequências do sistema GALILEO. Para fornecer
os serviços e compatibilidade com outros sistemas, algumas considerações foram tidas em conta na
selecção das características do sinal GALILEO, a saber, (Kaplan and Hegarty, 2006)
• Transmissão de sinais de banda larga no espectro da banda L, permitindo um desempenho de
monitorização preciso e robusto, e capacidade de mitigação multi-caminho;
• Minimização de interferência com os sistemas de navegação por satélite existentes (GPS,
GLONASS), para fins de compatibilidade de rádio frequência;
• Selecção de frequências com bom desempenho e pequenos erros de monitorização nas altas
frequências da banda L, para efeitos de compensação da ionosfera nos receptores de dupla
frequência;
• Interoperabilidade com os demais sistemas GNSS, em particular com o GPS;
• Aspectos de segurança relativamente aos códigos militares, GPS M-code e o GALILEO PRS - a
separação dos serviços militares e de protecção especial, dos serviços públicos.
O GALILEO fornecerá seis sinais de navegação nas faixas de frequências 1164 - 1215 MHz (banda
E5), 1260 - 1300 MHz (banda E6), e 1559 - 1592 MHz (banda E2-L1-E1 – ou simplesmente L1).
As bandas E5 e L1 usufruem de permissão internacional para a utilização dos sinais transmitidos
nestas bandas, exclusivamente para aplicações relacionadas com a aviação e segurança crítica.
36
Cada satélite irá transmitir seis sinais de navegação, denominados por L1F, L1P, E6C, E6P, E5a e
sinais E5b.
L1F - é um sinal de acesso aberto transmitido na banda L1. Estará acessível a todos os
utilizadores. O fluxo de dados L1F também contém mensagens de integridade e dados
comerciais encriptados. A taxa de dados L1F é de 125 bps. Este sinal suportará o OS, CS e
SoL.
L1P - é um sinal de acesso restrito transmitidos na banda L1. Possui códigos e dados
encriptados, utilizando um algoritmo de encriptação governamental. O sinal L1P suportará o
PRS.
E6C - é um sinal de acesso comercial, transmitido na banda E6. Tem os códigos e dados
encriptados utilizando um algoritmo comercial. A taxa de dados de 500 bps permitirá a
transmissão de serviços de valor acrescentado. O sinal E6C é um sinal específico para apoiar
o CS.
E6P - é um sinal de acesso restrito transmitido na banda E6. Os códigos e dados são
encriptados através de um algoritmo governamental. O sinal E6P apoiará o PRS.
E5a - é um sinal de acesso aberto transmitido na banda E5. Possui um sinal não encriptado,
acessível a todos os utilizadores. Ele transmite os dados básicos de suporte às
funcionalidades de navegação e tempo. O sinal E5a apoiará o OS.
E5b - é um sinal de acesso aberto transmitido na banda E5, acessível a todos os utilizadores.
O fluxo de dados E5b também contém mensagens de integridade e de dados comerciais
encriptados. A taxa de dados é de 125 bps. O sinal E5b apoiará o OS, CS e SoL.
3.2.4 Interoperabilidade
A interoperabilidade pode ser definida como a combinação de informação (p. ex, dados de
navegação), de dois sistemas de navegação (p.ex, GPS e GALILEO) no receptor do utilizador, de
forma a obter um melhor desempenho do que empregar qualquer um dos sistemas individualmente.
(Kaplan and Hegarty, 2006)
O nível de interoperabilidade resulta de um processo de optimização. Alguns factores revestem-se de
grande importância neste processo de compatibilidade, nomeadamente, frequência de rádio,
complexidade do equipamento do utilizador, perspectivas de mercado, independência dos sistemas e
problemas de compatibilidade de segurança nacional.
Nesta temática de interoperabilidade, destacam-se três temas de importância primordial:
37
Sinal no espaço
De forma a minimizar a complexidade e custo de implementação do receptor, os sinais GALILEO -
E5a e E2-L1-E1, serão transmitidos usando frequências idênticas aos sinais GPS L5 e L1,
respectivamente.
Sistema de referências geodésicas
O programa GALILEO irá adoptar o sistema de coordenadas de referência internacional. O sistema
de referência de coordenadas e tempo do programa GALILEO será baseado em estações e relógios
diferentes do GPS.
O GTRF (GALILEO Terrestrial Reference Frame) será uma adaptação independente do ITRS
(International Terrestrial Reference System). O ITRS é definido e monitorizado pelo Serviço IERS
(International Earth Rotation Service).
O sistema GPS utiliza o sistema de referência WGS-84 (World Geodetic System - 1984), que se
apresenta também como uma adaptação do ITRS. As diferenças entre o WGS-84 e o GTRF serão,
no máximo, de 2 cm, o que não afectará a maioria dos utilizadores (Miller, 2004). Isto implicará que o
sistema WGS-84 e GTRF serão idênticos (as coordenadas de referência são compatíveis).
Sistemas de referência de tempo
Tal como o Sistema de Tempo GPS , que coordena o seu tempo através do UTC (Coordinated
Universal Time), o GALILEO terá a sua própria escala de tempo de referência, o GST (GALILEO
System Time). O GST será coordenado pelo TAI (International Atomic Time). O GST está definido
com um offset de tempo relativo ao TAI de 50 nanossegundos para 95% do tempo num intervalo
de tempo de 1 ano. A principal função do GST é a manutenção do tempo para navegação, cujo
principal objectivo consiste na determinação de órbitas dos satélites e a sincronização do tempo.
Haverá um desvio entre estas duas escalas de tempo, conhecido por GGTO (GPS – GALILEO Time
Offset), que é necessário ter em conta quando combinados dados provenientes dos dois sistemas.
Este offset será calculado e enviado para os utilizadores, em tempo real, na mensagem de
navegação do GALILEO. (Forrest, 2004)
38
3.3 Factores de degradação do sinal GNSS
A precisão com que um utilizador (receptor) pode determinar a sua posição, velocidade, ou
sincronização com o tempo de um sistema GNSS, depende de uma complexa interacção de vários
factores. A precisão de um sistema GNSS depende da qualidade das medições das pseudo-
distâncias e da fase da portadora, bem como da transmissão dos dados de navegação.
3.3.1 Erro de relógio
Como dito anteriormente, os receptores para determinar a sua posição tridimensional necessitam das
medidas de tempo dos sinais enviados de, no mínimo, quatro satélites. Assim, é fundamental
conhecer, de forma precisa, a data de transmissão e recepção dos dados. Idealmente, os satélites
transmitiriam o seu posicionamento com o tempo exactamente sincronizado com o tempo GNSS, no
entanto existe sempre um erro de sincronização entre o relógio do satélite e o relógio do sistema.
A estação de controlo em solo determina e transmite os parâmetros de correcção do relógio para os
satélites, que posteriormente transmitem na sua mensagem de navegação. A diferença de tempos
pode ser determinada através da seguinte expressão (Kaplan and Hegarty, 2006)
(3)
em que é o desvio do oscilador do satélite, é a deriva do oscilador, a velocidade da
deriva, o instante de referência, o instante de transmissão e a correcção devido a efeitos
relativistas - o quarto capítulo ocupa-se, com maior pormenor, das correcções que devem ser
aplicadas para corrigir a estes efeitos.
No entanto, existirá sempre um erro residual. Este erro, , pode variar entre 0.3 - 4m, dependendo do
tipo de satélite e do tempo em que são transmitidos os dados. Esta gama de erros residuais são,
geralmente, menores logo após um upload efectuado pelo segmento de controlo para o satélite, e
degradar-se-á lentamente ao longo do tempo, até ao próximo upload (normalmente diário).
Dois receptores distintos, observando os mesmos satélites sofrem exactamente os mesmos erros dos
relógios. Desta forma, é possível eliminar esta fonte de erro residual, recorrendo a métodos
diferenciais, p. ex., GPS diferencial. Os erros nos relógios incorporados no satélite são independentes
da distância entre a estação de referência e o utilizador (Horváth, 2002).
39
Os relógios dos receptores são osciladores de quartzo, mais baratos que os relógios atómicos
utilizados nos satélites, e consequentemente menos precisos. Estes relógios, assim como acontece
nos relógios incorporados nos satélites, também não estão sincronizados com o tempo do sistema.
Deste modo, as correcções podem variar das dezenas de nanosegundos até milisegundos, ou mais,
dependendo da sincronização e das técnicas de navegação usadas.
3.3.2 Efemérides
Os erros que advêm das órbitas dos satélites são causados por uma imperfeita modelação da
dinâmica dos satélites, i. e., o erro das efemérides dos satélites resulta da divergência entre o valor
real da posição de um satélite e o respectivo valor indicado nas efemérides. O actual erro das
efemérides é de cerca de 1m (IGS, 2009).
Pode-se abordar de duas formas a minimização deste erro. Se duas estações efectuarem,
simultaneamente, o mesmo tipo de observações relativamente ao mesmo satélite, é possível obter a
diferença simples entre receptores. Contudo, permanece um erro residual que está intimamente
ligado com a distância existente entre os dois receptores, ou seja, à medida que esta distância
aumenta, o erro residual também aumenta (Horváth, 2002).
Outra forma de minimizar os erros orbitais passa pela utilização de efemérides mais precisas
resultantes de observações de um grupo de estações de monitorização. Algumas instituições
internacionais disponibilizam órbitas pós-processadas, como por exemplo, a IGS (International GNSS
Service). Esta instituição oferece quatro tipos de órbitas – órbitas previstas ultra-rápidas, disponíveis
em tempo real e com uma precisão aproximada de 5cm, órbitas observadas ultra-rápidas, disponíveis
entre 3 - 9 horas, com uma precisão aproximada de 3cm, e por fim, órbitas rápidas e finais,
disponíveis de 17 - 41 horas e 12 – 18 dias, respectivamente, ambas com uma precisão aproximada
de 2,5cm (IGS, 2009).
3.3.3 Efeitos atmosféricos
O sinal transmitido pelos satélites antes de atingir o receptor tem que atravessar a atmosfera
terrestre, o que implica uma alteração na sua velocidade e direcção de propagação. As duas
camadas com interferência na forma de propagação do sinal são, a ionosfera – composta por átomos
ionizados pela radiação solar – e a troposfera – com alto teor de humidade. Este efeito aumenta à
medida que o satélite se aproxima do horizonte.
40
3.3.3.1 Atraso ionosférico
A ionosfera é a camada da atmosfera compreendida entre 50 e 1 000 km acima da superfície da
Terra. Dentro desta região, os raios ultravioleta ionizam uma parte das moléculas de gás e libertam
electrões livres, que vão influenciar a propagação das ondas electromagnéticas (Langley, 1996).
Sendo a ionosfera um meio dispersivo a velocidade de propagação do sinal electromagnético vai ser
afectada, o que implicará uma alteração da distância medida. A ionosfera causa um atraso na
medida da fase e um avanço na medida da pseudo-distância, isto é, a pseudo-distância obtida é
superior à distância geométrica entre o satélite e o receptor, e a distância calculada com a fase é
inferior a essa distância geométrica (Rizos, 1999).
Existem duas abordagens possíveis no sentido de minimizar os erros nomeadamente, medir ou
modelar o atraso ionosférico. Estamos perante um meio dispersivo para as ondas de rádio, o seu
índice de refracção é uma função da frequência (Langley, 1996). Assim, utilizando receptores de
dupla frequência é possível medir e remover, quase na sua totalidade, o atraso ionosférico. Com
receptores de frequência singular é possível recorrer a modelos ionosféricos, tais como os modelos
BIM (Broadcast Ionosphere Model), transmitidos na mensagem de navegação, que permitem
minimizar em cerca de 50 – 80% o atraso ionosférico. Bent, IRI 95 (International Reference
Ionosphere 1995), entre outros. Estes modelos mostram-se eficazes em regiões compreendidas nas
latitudes de ±20 a ±60, ao contrário do verificado nas regiões equatorial e polar (Horváth, 2002).
3.3.3.2 Atraso troposférico
A troposfera é a região mais baixa da atmosfera na qual a temperatura decresce com o aumento da
altitude. A espessura desta camada não é a igual ao longo da mesma, variando aproximadamente,
entre os 9 km, nos pólos, e os 16 km, no equador. A troposfera caracteriza-se por uma presença de
átomos e moléculas neutros que afecta a propagação dos sinais electomagnéticos. Estamos perante
um meio neutro, não dispersivo, para as ondas de rádio com frequências até 30 GHz (Langley, 1996).
Assim, a propagação dos sinais GNSS são independentes da frequência. As características
determinantes para o atraso troposférico são a pressão atmosférica, a temperatura e a humidade ao
longo da trajectória do sinal, assim como o ângulo de elevação do satélite e a altura do receptor.
Quando este ângulo é pequeno (tipicamente inferior a 15º) o atraso troposférico é superior e estimado
com menor grau de precisão. Especificamente, tem-se para a grandeza do efeito troposférico, para
uma estação ao nível do mar, cerca de 2,3 m para satélites no zénite5 e entre 20 - 30 m para satélites
próximos do horizonte (Rizos, 1999).
Da mesma forma que no atraso ionosférico teremos duas formas possíveis para minimizar o atraso
troposférico. Quando a distância entre duas estações não é elevada, e a diferença de altura entre
elas não é significativa, as condições atmosféricas estão suficientemente correlacionadas entre as
5 - O Zénite é o ponto no céu que se observa quando, na superfície terrestre, se olha “exactamente para cima”.
Mais precisamente, é o ponto no céu com uma Altitude de +90º
41
duas estações, o que possibilita a utilização como observação da diferença existente nas duas
estações e consequentemente minimização do erro (Seeber, 2003).
Caso a correlação entre estações esteja comprometida é possível recorrer a um modelo de
troposfera. Os modelos dividem o atraso troposférico, , em duas componentes, a componente
seca, ou hidrostática, e a componente húmida, (Rizos, 1999)
(4)
A componente seca é responsável por cerca de 90% do atraso troposférico total, é gerada pela
influência da atmosfera hidrostática, principalmente pela influência do nitrogénio e do oxigénio. Esta
componente pode ser determinada com bastante precisão – erro de, aproximadamente, 1% para
satélites no zénite. Quanto à componente húmida é gerada pela influência do vapor de água
atmosférico, e representa 10% do atraso total. Sendo a componente húmida variável no tempo e no
espaço é possível obter erros de 10 – 20% na sua estimativa (Rizos, 1999).
3.3.4 Geometria dos satélites
O erro que advém da geometria dos satélites conhecido como DOP (Dilution of Precision) ou GDOP
(Geometric Dilution of Precision), descreve a importância que a configuração da constelação dos
satélites do sistema tem na precisão das medidas obtidas
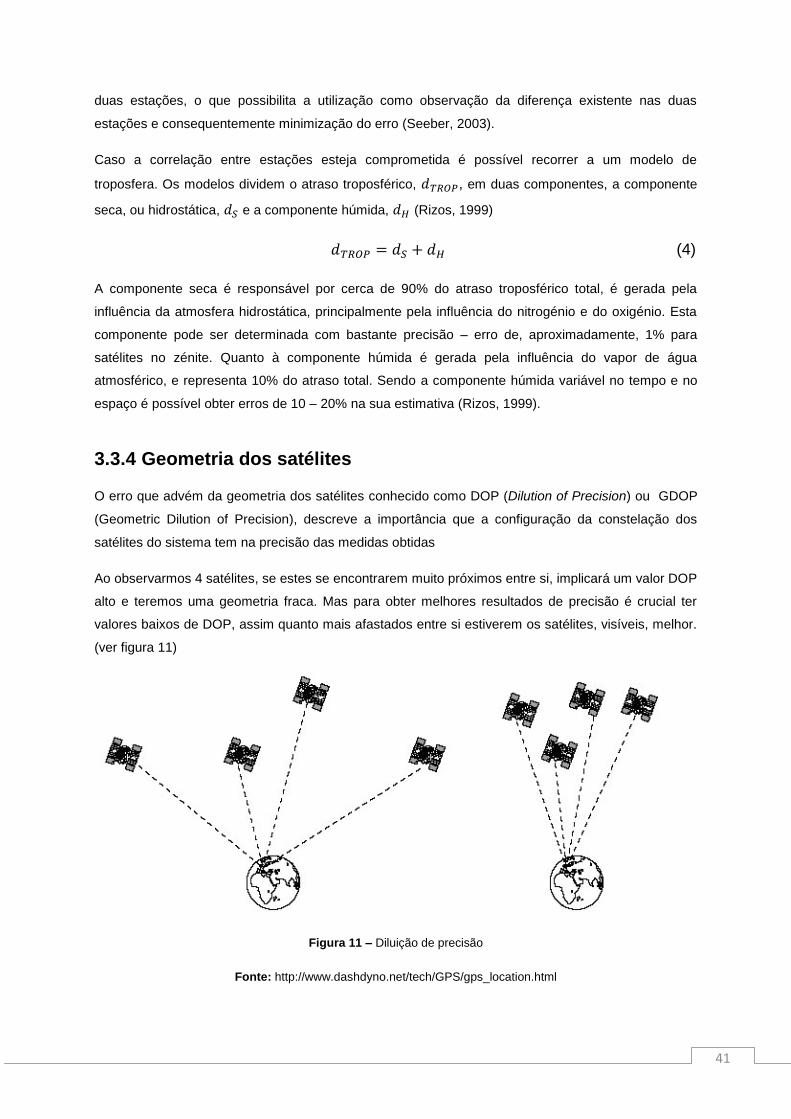
Ao observarmos 4 satélites, se estes se encontrarem muito próximos entre si, implicará um valor DOP
alto e teremos uma geometria fraca. Mas para obter melhores resultados de precisão é crucial ter
valores baixos de DOP, assim quanto mais afastados entre si estiverem os satélites, visíveis, melhor.
(ver figura 11)
Figura 11 – Diluição de precisão
Fonte: http://www.dashdyno.net/tech/GPS/gps_location.html
42
O volume formado pelos sinais vindos dos satélites é inversamente proporcional ao DOP, ou seja,
quanto mais dispersos estiverem os satélites visíveis maior será o volume e consequentemente o erro
causado pela geometria dos satélites será menor.
Contudo, não é apenas a configuração da constelação que afecta o DOP, também o local onde está
inserido o receptor, que executa o pedido, é influenciador uma vez que se tivermos numa região com
muitos obstáculos, esta irá afectar os satélites que se encontram visíveis para aquela localização.
Esta situação ocorre com frequência em grandes cidades e terrenos montanhosos.
Na tabela 3 podemos ver as diferentes classificações atribuídas ao factor DOP
Valor DOP Classificação
1 Ideal
2-4 Excelente
4-6 Bom
6-8 Moderado
8-20 Suficiente
20-50 Fraco
Tabela 3 - Classificação DOP
Fonte: (Dutt et al., 2009)
Para examinar a diluição de precisão o GDOP é discretizado em várias formas, a saber:
PDOP (Position Dilution of Precision) – representa a incerteza na medida da posição
tridimensional;
HDOP (Horizontal Dilution of Precision) – incerteza na medida da posição horizontal (latitude
e longitude);
VDOP (Vertical Dilution of Precision) – incerteza na medida da posição vertical (altitude);
TDOP (Time Dilution of Precision) – incerteza na medida no relógio do receptor.
3.3.5 Multicaminho
Multicaminho é o fenómeno em que o sinal chega ao receptor através de dois ou mais caminhos,
distintos do caminho directo. Este fenómeno sucede devido à existência de superfícies reflectoras nas
proximidades do receptor, por exemplo, em ambientes urbanos (edifícios) (Langley, 1996). O
multicaminho é inevitável, particularmente nas aplicações dinâmicas.
Os erros de multicaminho variam significativamente dependendo do ambiente no qual o receptor está
localizado, o ângulo de elevação do satélite, o processamento de sinal do receptor, o ganho da
antena e as características do sinal (Kaplan and Hegarty, 2006).
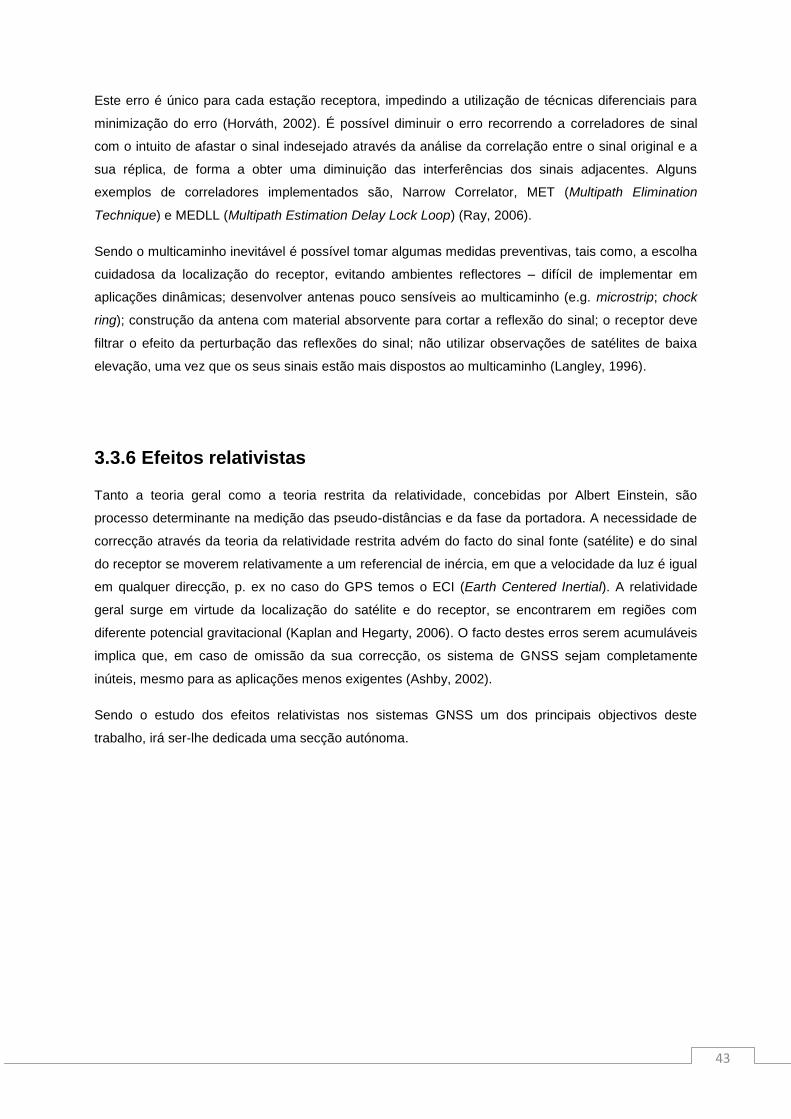
43
Este erro é único para cada estação receptora, impedindo a utilização de técnicas diferenciais para
minimização do erro (Horváth, 2002). É possível diminuir o erro recorrendo a correladores de sinal
com o intuito de afastar o sinal indesejado através da análise da correlação entre o sinal original e a
sua réplica, de forma a obter uma diminuição das interferências dos sinais adjacentes. Alguns
exemplos de correladores implementados são, Narrow Correlator, MET (Multipath Elimination
Technique) e MEDLL (Multipath Estimation Delay Lock Loop) (Ray, 2006).
Sendo o multicaminho inevitável é possível tomar algumas medidas preventivas, tais como, a escolha
cuidadosa da localização do receptor, evitando ambientes reflectores – difícil de implementar em
aplicações dinâmicas; desenvolver antenas pouco sensíveis ao multicaminho (e.g. microstrip; chock
ring); construção da antena com material absorvente para cortar a reflexão do sinal; o receptor deve
filtrar o efeito da perturbação das reflexões do sinal; não utilizar observações de satélites de baixa
elevação, uma vez que os seus sinais estão mais dispostos ao multicaminho (Langley, 1996).
3.3.6 Efeitos relativistas
Tanto a teoria geral como a teoria restrita da relatividade, concebidas por Albert Einstein, são
processo determinante na medição das pseudo-distâncias e da fase da portadora. A necessidade de
correcção através da teoria da relatividade restrita advém do facto do sinal fonte (satélite) e do sinal
do receptor se moverem relativamente a um referencial de inércia, em que a velocidade da luz é igual
em qualquer direcção, p. ex no caso do GPS temos o ECI (Earth Centered Inertial). A relatividade
geral surge em virtude da localização do satélite e do receptor, se encontrarem em regiões com
diferente potencial gravitacional (Kaplan and Hegarty, 2006). O facto destes erros serem acumuláveis
implica que, em caso de omissão da sua correcção, os sistema de GNSS sejam completamente
inúteis, mesmo para as aplicações menos exigentes (Ashby, 2002).
Sendo o estudo dos efeitos relativistas nos sistemas GNSS um dos principais objectivos deste
trabalho, irá ser-lhe dedicada uma secção autónoma.
44
4 Relatividade nos sistemas GNSS
Presentemente, os sistemas GNSS para cumprirem eficientemente a sua função precisam ter em
conta os efeitos relativistas. Estes sistemas são baseados num modelo Newtoniano, isto é, um
modelo que usa um sistema de referência não inercial, que tem um movimento de rotação em
conjunto com a Terra e origem no centro da mesma, ECEF (Earth Centered Earth Fixed), e um
sistema de referência de tempo inercial centrado na Terra, ECI.
Os satélites são afectados pela relatividade de três maneiras diferentes, a saber: nas equações do
movimento, na propagação do sinal e no ritmo dos relógios dos satélites. Nos presentes sistemas
GNSS apenas os efeitos nos relógios são mensuráveis (Pascual-Sánchez, 2007). Se estes efeitos
não fossem tidos em conta ocorreria um erro na determinação da posição de por dia, ou seja
uma desfasagem temporal, acumulada, de por dia (Haustein, 2009).
Os efeitos relativistas que afectam os relógios de um satélite de forma mais perceptível são, o desvio
da frequência do relógio do satélite devido ao potencial gravítico (Relatividade Geral) e a dilatação do
tempo, devido ao movimento do satélite (Relatividade Restrita). (Pascual-Sánchez, 2007)
A. Desvio gravitacional da frequência do relógio do satélite
O ritmo de um relógio é tanto maior, quanto maior for a sua distância a um centro de atracção
gravitacional. No caso dos sistemas de GNSS o centro de gravitação coincide com o centro
da Terra, o que implica um desvio de frequência para o azul dos sinais enviados pelo satélite
para Terra.
B. Dilatação do tempo
Os relógios incorporados num satélite estão em movimento relativamente a um relógio
colocado em Terra, originando um fenómeno conhecido por dilatação do tempo que se traduz
por um atraso do relógio do satélite comparativamente ao relógio em Terra.
Consequentemente, temos um desvio de frequência para o vermelho do sinal enviado pelo
satélite.
C. Efeito Sagnac
Sendo a escala de tempo GPS definida num sistema inercial, a passagem para outro sistema
rotacional, no caso a Terra, origina o aparecimento de um efeito relativista conhecido por
efeito Sagnac. Durante a propagação do sinal vindo do satélite, o relógio (receptor) na
superfície terrestre sofre uma rotação finita, devido ao movimento de rotação da Terra
relativamente ao sistema de coordenadas ECI. (figura 12)
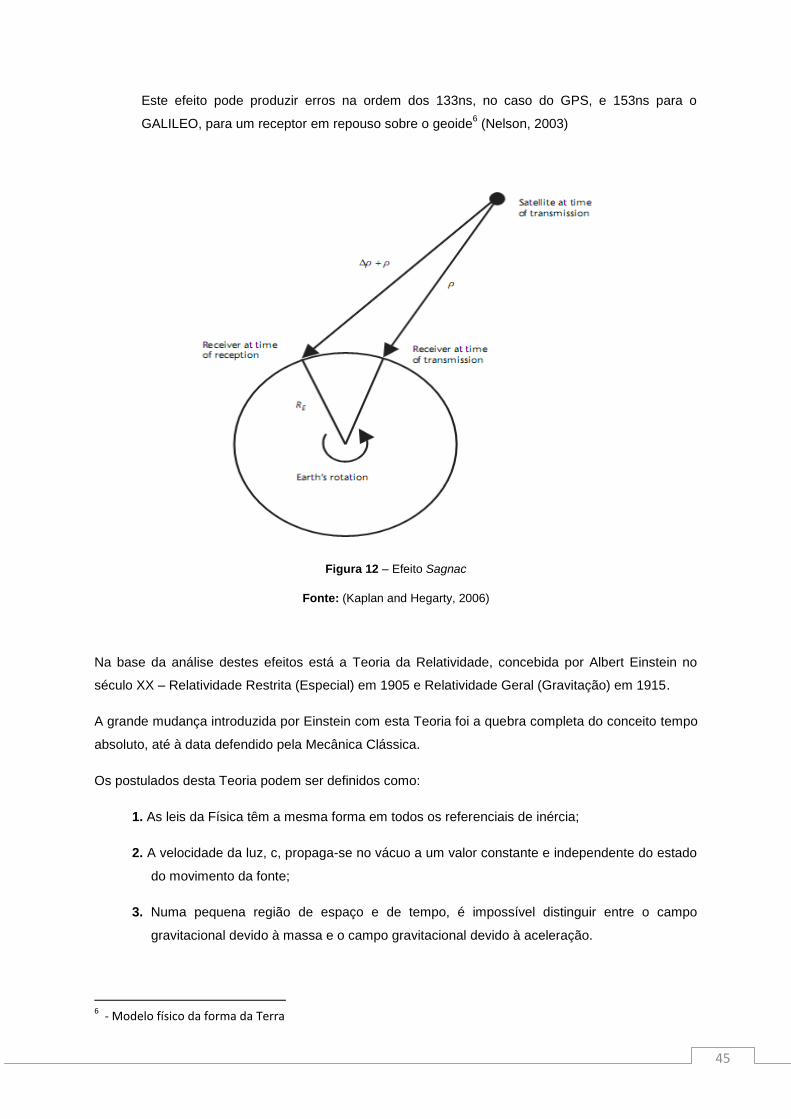
45
Este efeito pode produzir erros na ordem dos 133ns, no caso do GPS, e 153ns para o
GALILEO, para um receptor em repouso sobre o geoide6 (Nelson, 2003)
Figura 12 – Efeito Sagnac
Fonte: (Kaplan and Hegarty, 2006)
Na base da análise destes efeitos está a Teoria da Relatividade, concebida por Albert Einstein no
século XX – Relatividade Restrita (Especial) em 1905 e Relatividade Geral (Gravitação) em 1915.
A grande mudança introduzida por Einstein com esta Teoria foi a quebra completa do conceito tempo
absoluto, até à data defendido pela Mecânica Clássica.
Os postulados desta Teoria podem ser definidos como:
1. As leis da Física têm a mesma forma em todos os referenciais de inércia;
2. A velocidade da luz, c, propaga-se no vácuo a um valor constante e independente do estado
do movimento da fonte;
3. Numa pequena região de espaço e de tempo, é impossível distinguir entre o campo
gravitacional devido à massa e o campo gravitacional devido à aceleração.
6 - Modelo físico da forma da Terra
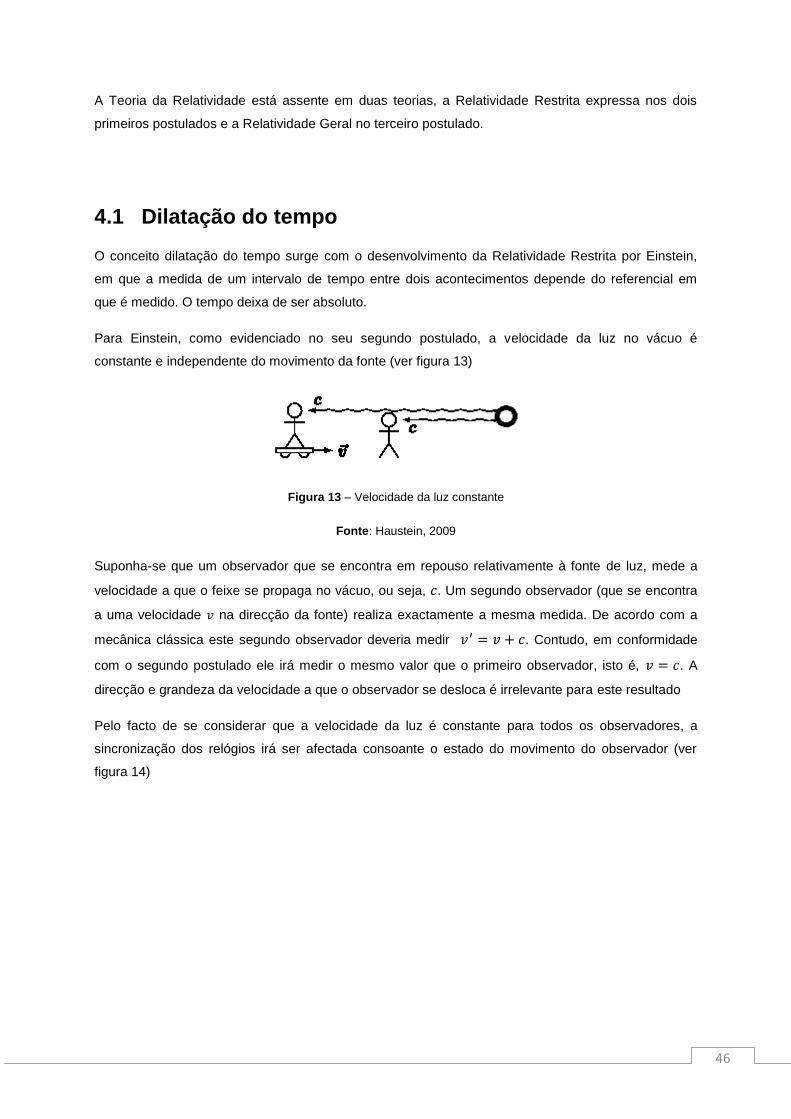
46
A Teoria da Relatividade está assente em duas teorias, a Relatividade Restrita expressa nos dois
primeiros postulados e a Relatividade Geral no terceiro postulado.
4.1 Dilatação do tempo
O conceito dilatação do tempo surge com o desenvolvimento da Relatividade Restrita por Einstein,
em que a medida de um intervalo de tempo entre dois acontecimentos depende do referencial em
que é medido. O tempo deixa de ser absoluto.
Para Einstein, como evidenciado no seu segundo postulado, a velocidade da luz no vácuo é
constante e independente do movimento da fonte (ver figura 13)
Figura 13 – Velocidade da luz constante
Fonte: Haustein, 2009
Suponha-se que um observador que se encontra em repouso relativamente à fonte de luz, mede a
velocidade a que o feixe se propaga no vácuo, ou seja, . Um segundo observador (que se encontra
a uma velocidade na direcção da fonte) realiza exactamente a mesma medida. De acordo com a
mecânica clássica este segundo observador deveria medir . Contudo, em conformidade
com o segundo postulado ele irá medir o mesmo valor que o primeiro observador, isto é, . A
direcção e grandeza da velocidade a que o observador se desloca é irrelevante para este resultado
Pelo facto de se considerar que a velocidade da luz é constante para todos os observadores, a
sincronização dos relógios irá ser afectada consoante o estado do movimento do observador (ver
figura 14)
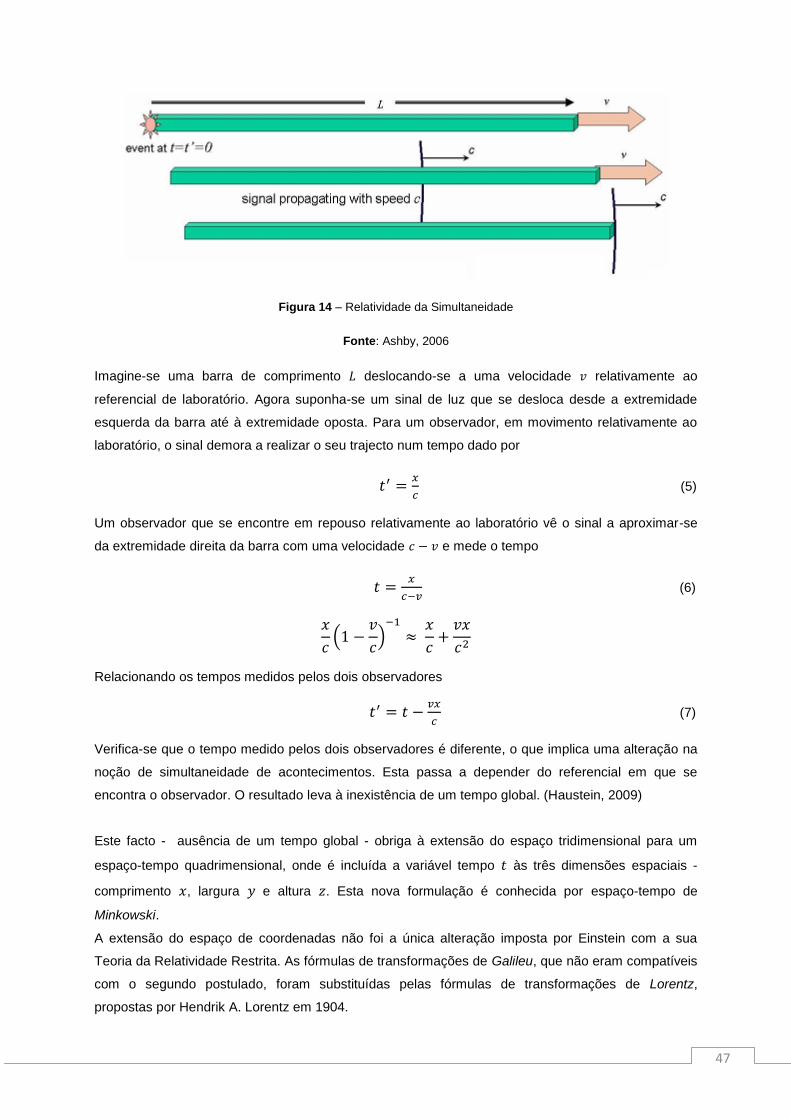
47
Figura 14 – Relatividade da Simultaneidade
Fonte: Ashby, 2006
Imagine-se uma barra de comprimento deslocando-se a uma velocidade relativamente ao
referencial de laboratório. Agora suponha-se um sinal de luz que se desloca desde a extremidade
esquerda da barra até à extremidade oposta. Para um observador, em movimento relativamente ao
laboratório, o sinal demora a realizar o seu trajecto num tempo dado por
(5)
Um observador que se encontre em repouso relativamente ao laboratório vê o sinal a aproximar-se
da extremidade direita da barra com uma velocidade e mede o tempo
(6)
Relacionando os tempos medidos pelos dois observadores
(7)
Verifica-se que o tempo medido pelos dois observadores é diferente, o que implica uma alteração na
noção de simultaneidade de acontecimentos. Esta passa a depender do referencial em que se
encontra o observador. O resultado leva à inexistência de um tempo global. (Haustein, 2009)
Este facto - ausência de um tempo global - obriga à extensão do espaço tridimensional para um
espaço-tempo quadrimensional, onde é incluída a variável tempo às três dimensões espaciais -
comprimento , largura e altura . Esta nova formulação é conhecida por espaço-tempo de
Minkowski.
A extensão do espaço de coordenadas não foi a única alteração imposta por Einstein com a sua
Teoria da Relatividade Restrita. As fórmulas de transformações de Galileu, que não eram compatíveis
com o segundo postulado, foram substituídas pelas fórmulas de transformações de Lorentz,
propostas por Hendrik A. Lorentz em 1904.

48
Suponhamos que se tem as coordenadas espaço-tempo de um evento medido em dois referenciais,
e . Assumindo que os eixos de e coincidem em , e a origem de move-se com
velocidade ao longo do eixo do referencial . A partir da transformação de Lorentz, um
observador em repouso no referencial pode transpor as suas coordenadas para o referencial
tendo em conta que
(8)
com
(9)
conhecido por factor de Lorentz.
Considerando um relógio em repouso em ( ), então um observador no referencial obterá
(10)
tendo em conta que , verifica-se que os tempos medidos nos dois referenciais são diferentes.
Este resultado mostra que o tempo deixa de ser um elemento absoluto, o que, para o objectivo deste
trabalho, implica uma alteração no ritmo dos relógios que se encontram no satélite relativamente aos
relógios sobre a superfície terrestre.
Relógios em movimento apresentam um ritmo mais lento do que um relógio idêntico em repouso.
4.2 Dilatação gravitacional do tempo
Para os sistemas de GNSS a Relatividade Geral tem um efeito relevante, conhecido por dilatação
gravitacional do tempo.
Um raio de luz emitido na direcção de um corpo, colocado num potencial gravitacional forte, ganhará
energia e deslocar-se-á para as altas frequências (azul). Em contraste, se o raio de luz for emitido no
sentido de um potencial gravitacional fraco, irá perder energia e deslocar-se para as baixas
frequências (vermelho).
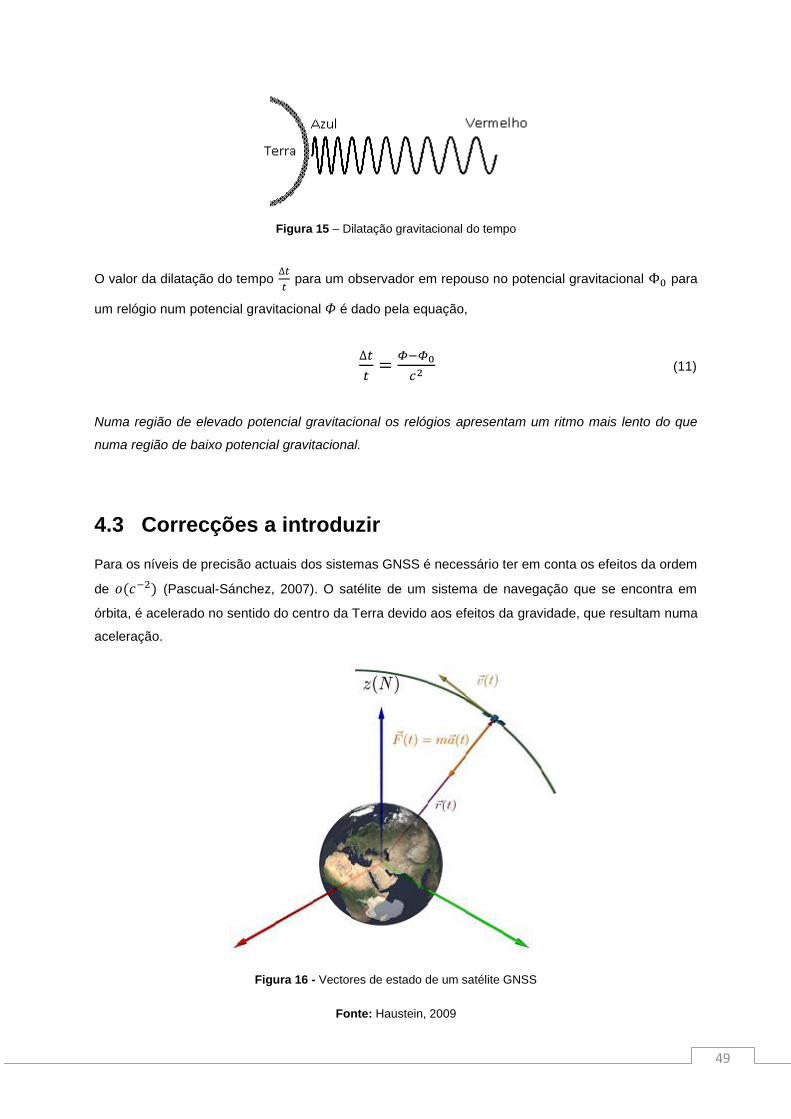
49
Figura 15 – Dilatação gravitacional do tempo
O valor da dilatação do tempo
para um observador em repouso no potencial gravitacional para
um relógio num potencial gravitacional é dado pela equação,
(11)
Numa região de elevado potencial gravitacional os relógios apresentam um ritmo mais lento do que
numa região de baixo potencial gravitacional.
4.3 Correcções a introduzir
Para os níveis de precisão actuais dos sistemas GNSS é necessário ter em conta os efeitos da ordem
de (Pascual-Sánchez, 2007). O satélite de um sistema de navegação que se encontra em
órbita, é acelerado no sentido do centro da Terra devido aos efeitos da gravidade, que resultam numa
aceleração.
Figura 16 - Vectores de estado de um satélite GNSS
Fonte: Haustein, 2009

50
A grandeza de (velocidade do satélite) é , constante, e pode ser obtida pela seguinte
equação
(12)
a grandeza do vector também é constante e igual a
tendo em consideração que o raio equatorial da Terra e a altura orbital dos satélites,
no caso do GPS, é de 20 184 km.
Se nos referirmos aos satélites GALILEO , uma vez que o seu plano orbital é
superior (23 222 km).
O parâmetro gravitacional da Terra é definido como (European Union, 2010) (GPSWing, 2010)
sendo a constante de gravitação universal e a massa da Terra.
Conclui-se que para o sistema GPS, e para o sistema Galileo.
4.3.1 Dilatação do tempo
Um dos efeitos relevantes da relatividade nos sistemas GNSS, como visto na secção 4.1, é o
abrandamento do ritmo do relógio que se encontra em movimento relativo à Terra.
Como visto acima, a velocidade de um satélite (e.g. no GPS) é de relativamente ao
ECI. Um observador em repouso no ECI verá o relógio do satélite apresentar um ritmo inferior, pelo
factor
(13)
Um relógio de referência que se encontre no geóide terrestre está, igualmente, em movimento
relativamente a ECI, devido à rotação da Terra (Ashby, 2006). Contudo, tem uma velocidade inferior à
dos satélites. No plano equatorial a Terra roda a uma velocidade de , sendo
a velocidade angular média da Terra. Para obtermos a diferença

51
entre um relógio que se encontra em repouso no referencial ECEF e o relógio em repouso no
referencial ECI é necessário recorrer à seguinte equação
(14)
Portanto, o valor da dilatação do tempo entre o relógio em órbita e outro na superfície terrestre é dado
por
(15)
Pode realizar-se idêntica análise para o sistema GALILEO. Tendo em conta que a velocidade do
satélite neste caso será , apenas o factor
sofrerá alterações, uma vez que as
variáveis de que depende o factor
mantêm-se para ambos os sistemas. Desta forma, irá obter-se
uma dilatação temporal de
4.3.2 Efeito gravitacional
Outro dos efeitos relativistas destacados anteriormente prende-se com a influência do campo
gravitacional no ritmo dos relógios.
O potencial gravitacional num ponto especifico da superfície terrestre é dado por
(16)
em que corresponde ao raio de um relógio que se encontra em repouso (equador), o raio de um
satélite e o coeficiente do momento quadrupolar da Terra e igual a (Ashby, 2006)
O potencial gravítico medido no equador, ou seja para , é obtido a partir da seguinte equação

52
(17)
Para o cálculo do potencial gravítico de um relógio em órbita é possível utilizar a equação
(18)
em que corresponde ao raio da órbita do satélite
Com o recurso às equações (17) e (18) descobrimos o erro temporal provocado pelo campo
gravitacional
(19)
Idêntica análise agora para o GALILEO obter-se-á
4.3.3 Efeito Sagnac
Como foi dito no inicio deste capítulo, existe um terceiro efeito a considerar nos sistemas de
navegação. Um receptor que se encontre em repouso na superfície terrestre irá sofrer um
deslocamento na sua posição durante o período em que o sinal, vindo do satélite, se propaga. Este
fenómeno, que advém do movimento de rotação da Terra, é conhecido por efeito Sagnac.
A correcção para este erro é dada pela equação
(20)
com
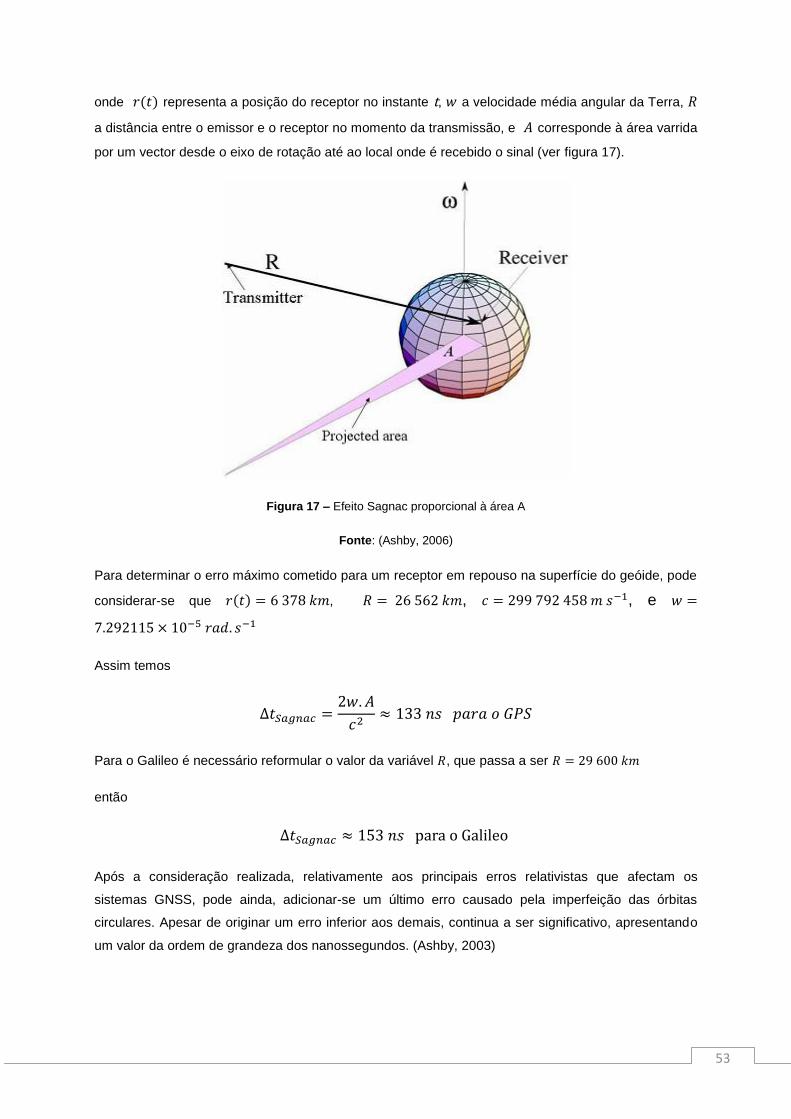
53
onde representa a posição do receptor no instante t, a velocidade média angular da Terra,
a distância entre o emissor e o receptor no momento da transmissão, e corresponde à área varrida
por um vector desde o eixo de rotação até ao local onde é recebido o sinal (ver figura 17).
Figura 17 – Efeito Sagnac proporcional à área A
Fonte: (Ashby, 2006)
Para determinar o erro máximo cometido para um receptor em repouso na superfície do geóide, pode
considerar-se que , , , e
Assim temos
Para o Galileo é necessário reformular o valor da variável , que passa a ser
então
Após a consideração realizada, relativamente aos principais erros relativistas que afectam os
sistemas GNSS, pode ainda, adicionar-se um último erro causado pela imperfeição das órbitas
circulares. Apesar de originar um erro inferior aos demais, continua a ser significativo, apresentando
um valor da ordem de grandeza dos nanossegundos. (Ashby, 2003)

54
4.3.4 Correcção da excentricidade
As órbitas dos satélites, consideradas até ao momento como circulares perfeitas ( ), sofrem
perturbações que originam uma excentricidade orbital. Este facto leva a que o satélite atinja
diferentes alturas e velocidades ao longo da sua órbita, o que, como vimos nas secções anteriores,
causa mudanças no padrão rítmico dos relógios atómicos. A velocidade e o potencial gravítico
irão sofrer alterações periódicas devido às mudanças do raio orbital dos satélites .
A correcção para o erro devido à excentricidade orbital pode ser expresso através da seguinte
equação
(21)
em que e correspondem à posição e velocidade, respectivamente, no instante de transmissão.
(Ashby, 2003)
Esta equação pode ser aproximada por
(22)
( ) correspondem aos parâmetros orbitais, excentricidade da órbita do satélite, semi-eixo
maior e anomalia excêntrica da órbita do satélite, respectivamente.
A órbita realizada por um satélite apresenta uma excentricidade (Haustein, 2009).
Considerando o valor máximo de excentricidade ( ) o erro máximo causado pela
excentricidade é de .
Esta correcção é realizada pelo segmento de utilizador do sistema de navegação. Contudo, a sua
introdução faria mais sentido no sinal transmitido pelo satélite, uma vez que estes estão mais
próximos do tempo coordenado do próprio sistema (e.g. sistema de tempo GPS). (Ashby, 2003)
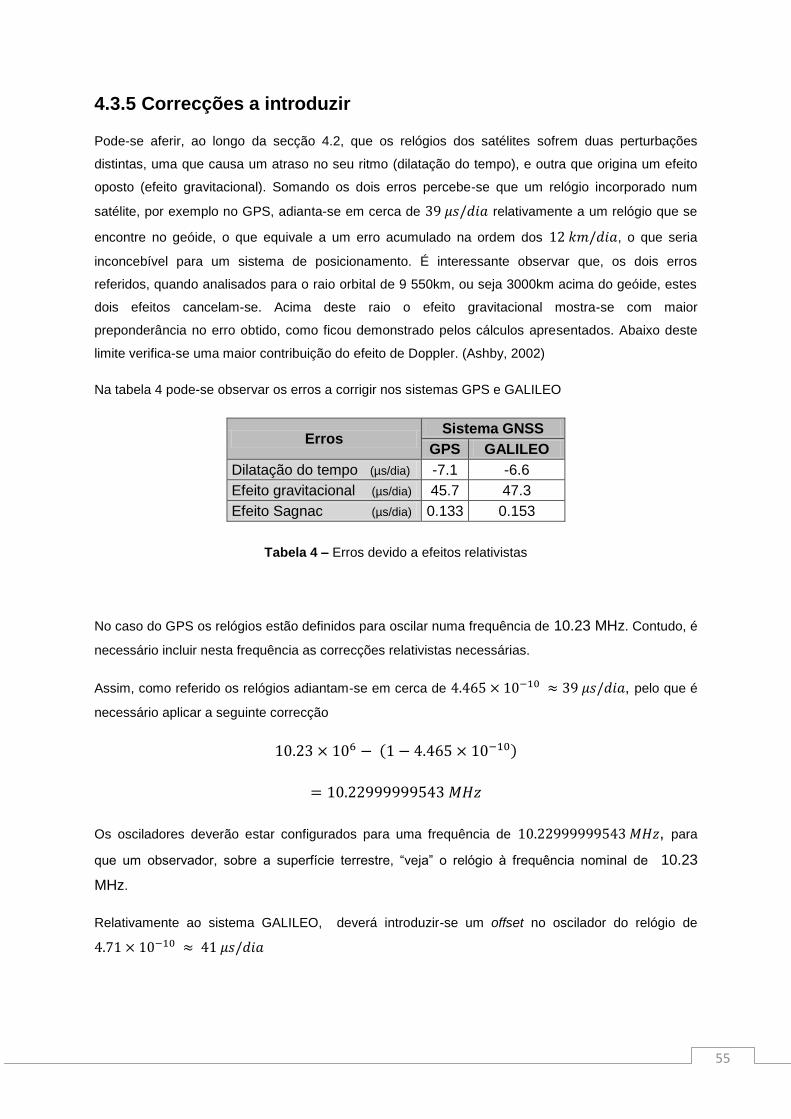
55
4.3.5 Correcções a introduzir
Pode-se aferir, ao longo da secção 4.2, que os relógios dos satélites sofrem duas perturbações
distintas, uma que causa um atraso no seu ritmo (dilatação do tempo), e outra que origina um efeito
oposto (efeito gravitacional). Somando os dois erros percebe-se que um relógio incorporado num
satélite, por exemplo no GPS, adianta-se em cerca de relativamente a um relógio que se
encontre no geóide, o que equivale a um erro acumulado na ordem dos , o que seria
inconcebível para um sistema de posicionamento. É interessante observar que, os dois erros
referidos, quando analisados para o raio orbital de 9 550km, ou seja 3000km acima do geóide, estes
dois efeitos cancelam-se. Acima deste raio o efeito gravitacional mostra-se com maior
preponderância no erro obtido, como ficou demonstrado pelos cálculos apresentados. Abaixo deste
limite verifica-se uma maior contribuição do efeito de Doppler. (Ashby, 2002)
Na tabela 4 pode-se observar os erros a corrigir nos sistemas GPS e GALILEO
Erros Sistema GNSS
GPS GALILEO
Dilatação do tempo (µs/dia) -7.1 -6.6
Efeito gravitacional (µs/dia) 45.7 47.3
Efeito Sagnac (µs/dia) 0.133 0.153
Tabela 4 – Erros devido a efeitos relativistas
No caso do GPS os relógios estão definidos para oscilar numa frequência de 10.23 MHz. Contudo, é
necessário incluir nesta frequência as correcções relativistas necessárias.
Assim, como referido os relógios adiantam-se em cerca de , pelo que é
necessário aplicar a seguinte correcção
Os osciladores deverão estar configurados para uma frequência de , para
que um observador, sobre a superfície terrestre, “veja” o relógio à frequência nominal de 10.23
MHz.
Relativamente ao sistema GALILEO, deverá introduzir-se um offset no oscilador do relógio de
56
4.3.6 Futuro
Os sistemas GNSS, até aos dias de hoje, são baseados num modelo Newtoniano que necessita de
correcções relativistas (importantes!) para manter a sua eficácia e precisão enquanto sistema de
determinação de posição e tempo. Este modelo utiliza dois sistemas de referência, ECI e ECEF para
o tempo e posição, respectivamente.
Todavia, basear um sistema num modelo que necessita de correcções não é a fórmula ideal. Neste
sentido, Bartolomé Coll ao longo da primeira década do século XXI tem-se ocupado do
desenvolvimento de um sistema completamente relativista, isto é um sistema que não necessita de
correcções. Surge assim o conceito SYPOR (Système de Positionnement Relativiste) pensado para,
possivelmente, integrar o novo sistema europeu – GALILEO. O SYPOR é um projecto que ainda se
encontra num quadro de construção teórica. (Pascual-Sánchez, 2007)
O projecto tem como objectivo construir um sistema onde coexistam apenas conceitos relativistas,
melhorando a eficácia e precisão de um sistema GNSS. (Coll, 2006) Uma das grandes inovações
avançadas por este projecto consiste em coincidir o segmento de Controlo com o segmento Espacial
(ver figura 18), ao contrário do que sucede com os actuais sistemas de posicionamento, em que o
segmento de Controlo encontra-se na superfície terrestre. Esta nova configuração, do segmento de
Controlo, permite determinar as coordenadas de um receptor relativamente à constelação. A base
deste modelo encontra-se nos relógios dos satélites que trocam os seus tempos (próprios) entre si e
com os receptores na Terra. (Pascual-Sánchez, 2007)
Figura 18 – Projecto SYPOR - Segmento de Controlo e Espacial coincidem
Fonte: (Pascual-Sánchez, 2007)
57
O SYPOR pretende dividir o sistema GNSS em dois sistemas hierárquicos, a saber (Coll, 2006):
1. Um sistema primário, independente da superfície terrestre, constituído pela constelação de
satélites - sistema primário de posicionamento a quatro dimensões
2. Um sistema secundário, dependente da superfície terrestre, ligando o sistema de referência
terrestre (WGS 84 ou ITRF) ao sistema primário.
Tecnicamente este modelo apresenta algumas características de destaque necessário,
nomeadamente (Pascual-Sánchez, 2007) :
a. O controlo externo de todo o sistema é conseguido através da introdução de um dispositivo
em pelo menos quatro satélites apontando para o ICRS (International Celestial Reference
System);
b. A instalação de um dispositivo em cada satélite para enviarem os seus tempos próprios para
outros satélites, permite assegurar o controlo interno do sistema.
c. O controlo feito pelo segmento do utilizador é conseguido através da inclusão de um
dispositivo em cada satélite que envia tanto o seu tempo próprio assim como o tempo próprio
dos seus vizinhos para Terra, através de sinais electromagnéticos.
Uma das grandes diferenças impostas por este modelo é não se socorrer de sistemas de referência,
visto não se determinar a posição dos satélites relativamente a coordenadas terrestres, mas sim
determinar estas em relação à constelação.
Os sistemas de referência são sistemas quadrimensionais que permitem um observador, considerado
na origem, obter quatro coordenadas através de transmissão de informação. No entanto, devido à
velocidade da luz ser finita este processo acarreta um atraso temporal na transmissão de informação.
Por outro lado, existem os sistemas de posicionamento, igualmente quadrimensionais, que
possibilitam qualquer evento conhecer as suas próprias coordenadas instantaneamente - são estes
os sistemas utilizados no SYPOR. É possível construir um sistema de referência a partir de um
sistema de posicionamento, basta que cada evento envie as suas coordenadas para um observador
na origem (pretendido com o sistema secundário). Contudo, o caminho inverso não é possível.
Este modelo, SYPOR, pode ser considerado autónomo, uma vez que qualquer receptor pode
determinar a sua trajectória espaço-tempo assim como a trajectória de quatro satélites, apenas com
base na informação recebida durante um tempo de intervalo próprio.
Tendo quatro satélites emitindo o seu tempo próprio , sem necessidade de sincronização, assim
como o tempo próprio de três satélites vizinhos recebidos pelo satélite em , no total
, constitui um sistema autónomo. Visto que, juntando o tempo
próprio do relógio do satélite com os três tempos recebidos a partir de outros satélites estabelece a
sua emissão de coordenadas próprias. Com a nova geração de satélites em operação no GPS, este
procedimento pode ser tecnicamente implementado. (Pascual-Sánchez, 2007)
58
Outro ponto a destacar prende-se com a ausência da utilização de equações de navegação, ao
contrário do que sucede com os sistemas contemporâneos, porque a emissão de coordenadas está
definida sem recurso a sistemas de coordenadas terrestres. Este sistema de posicionamento
autónomo não permite que um observador se situe relativamente ao geóide, mas possibilita que cada
utilizador se localize relativamente à constelação de satélites ou em relação a um sistema de
referência convencional que seja deduzido a partir do sistema autónomo, e permite ainda que dois ou
mais utilizadores possam saber as suas posições relativas.
Para possibilitar aplicações na superfície terrestre, como dito anteriormente, é necessário relacionar a
emissão de coordenadas primárias com um sistema de coordenadas quadrimensional terrestre, como
por exemplo o ITRF e o TAI.
Esta aplicação permitirá obter um sistema GNSS totalmente autónomo e relativista, sem necessidade
de corrigir erros que, actualmente, surgem devido aos efeitos relativistas, aumentando deste modo a
precisão e eficácia do sistema de posicionamento
59
5 Conclusão
O aumento da utilização dos sistemas GNSS no panorama mundial, que se deve a uma crescente
panóplia de serviços disponibilizados nas mais variadas áreas, torna a constante melhoria, em termos
de eficácia e fiabilidade, destes sistemas um assunto de extrema importância.
Ao longo do trabalho pôde-se verificar as diferenças existentes entre o sistema GPS e GALILEO
desde da sua ideia base e motivação, até ao modelo de construção dos seus segmentos. Ao
contrário do GPS, o GALILEO surge como um sistema inteiramente civil e com o intuito de dotar a
União Europeia de um sistema de posicionamento independente do sistema americano. Porém, estes
dois sistemas não serão completamente independentes uma vez que, estão a ser implementados
também numa perspectiva de interoperabilidade, possibilitando dessa forma que um receptor receba
sinais vindos dos dois sistemas.
Tanto o GPS como o GALILEO possuem o seu segmento espacial na órbita MEO e a velocidade dos
seus satélites na ordem dos km/s, o que implica o aparecimento de erros devido a efeitos relativistas.
Como visto no capítulo quatro, os erros que afectam ambos os sistemas são semelhantes assim
como a forma de efectuar as suas correcções. Estes erros surgem, fundamentalmente, do facto de os
satélites se encontrarem num campo gravitacional mais fraco, o que implica um avanço do relógio
que se encontra no satélite, comparativamente a um relógio no geóide. Por outro lado a velocidade
dos satélites origina um atraso no relógio do satélite relativamente a outro na Terra.
A correcção a efectuar nos relógios devido a efeitos relativistas é de , no caso do GPS, e
de para o GALILEO. Esta discrepância é explicada pela diferença existente entre o raio
orbital da constelação de cada um destes dois sistemas - para o GPS e para o
GALILEO . A dissemelhança verificada no raio orbital implica uma velocidade dos
satélites inferior para o GALILEO, , e para o GPS. Agregando
estes dois factores observamos uma dilatação temporal superior para o GPS, devido à velocidade
superior da sua constelação e, em oposição um efeito gravitacional superior no GALILEO derivado do
seu maior raio orbital. Se não fossem tidos em conta estes erros, o serviço de posicionamento teria
uma imprecisão acumulada na ordem dos , para ambos os sistemas, mais precisamente
no GPS e no GALILEO.
O futuro dos sistemas GNSS passa pela mudança de um modelo, actual, Newtoniano para um
inteiramente Relativista, possibilitando uma contínua melhoria na precisão, fiabilidade e integridade
do sistema, sem necessidade de efectuar correcções tal como sucede nos sistemas contemporâneos.
Este sistema está a ser estudado e desenvolvido pelo projecto SYPOR, desde o inicio do século XXI.
60
6 Bibliografia
Ashby, N., 2002, “Relativity and the Global Positioning System”, Physics Today;
______, 2003, “Relativity in the Global Positioning System”, Living Reviews Relativity, 6;
______, 2006, “Relativistic effects in the Global Positioning System”, Department of Physics,
University of Colorado;
Chidester, Maj Wesley, 2010, “GPS status and modernization”, GEOSpatial Information
Systems for Transportation Symposium, Charleston, WV, 12-14 April;
Coll, Bartolomé, 2006, “Relativistic Positioning Systems”, Systèmes de reference relativists,
SYRTE-CNRS, Observatoire de Paris, France;
Correia, Carlos, 2003, Sistema GPS – Introdução, Sistemas de Telecomunicações II, FEUP,
Porto;
Dutt, V.B. et al, 2009, “Investigation of GDOP for Precise user Position Computation with all
Satellites in view and Optimum four Satellite Configurations”, J. Ind. Geophysics Union,
Vol.13, No.3, pp.139-148;
ESA, 2008, Lançamento do Satélite Giove – B, Consult. 12 Novembro 2010, disponível em
http://www.esa.int/esaCP/SEMIKG2QGFF_Portugal_0.html;
European Commission, 2002, “Galileo: Mission High Level Definition”;
European Union, 2010, “European GNSS (Galileo) Open Service”, Signal in Space Interface
Control Document;
Falcone, Marco et al., 2006, “Giove‟s Track”, GPS World;
Forrest, W. M., 2004, ”Interoperability of the GPS and Galileo Timescales for Positioning and
Metrology”, IEEE, Thales, UK;
Global Positioning System Wing, 2010, “Navstar GPS Space Segment/Navigation User
Interfaces”, Interface Specification IS-GPS-200 Revision E;
Haustein, Mario, 2009, “Effects of the Theory of Relativity in the GPS”, Chemnitz University of
Technology;
Horváth, Tamás, 2002, “”Performance Comparison of Wide Area differential GPS Systems”,
Department of Geodesy and Geomatics Engineering, University of New Brunswick, Canada;
IGS, 2009, “IGS Products”, International GNSS Service, 17 de Novembro 2010, disponível
em http://igscb.jpl.nasa.gov/components/prods.html;
JAXA (Japan Aerospace Exploration Agency), 2010, “Launch Result of the First Quasi-Zenith
Satellite „Michibiki‟”, consulta a 5 de Fevereiro de 2011, disponível em
http://www.jaxa.jp/press/2010/09/20100911_h2af18_e.html;
______, 2010, “Quasi-Zenith Satellite System Navigation Service”,Interface Specification for
QZSS, ver.1.42;
Kaplan, Elliot D., Hegarty, Christopher J., 2006, “Understanding GPS: Principles and
Applications”, Artech House, Boston;
61
Kulkarni, Sagar, 2007, “India to develop its own version of GPS”, Hyderabad, consulta a 2 de
Fevereiro de 2011, disponível em http://www.rediff.com/news/2007/sep/27gps.htm
Langley, R. B., 1996, “Propagation of the GPS signals”, GPS for Geodesy, Springer, Berlin,
pp. 103 - 140;
Majithiya, P., et al.,2011,“Indian Regional Navigation Satellite System”, Inside GNSS,
January/February;
Miller, J., 2004, “GPS and GALILEO: Evolution towards GNSS””, Proceedings of ION 2004
National Technical Meeting, 26-28 January, California, pp. 73 – 91;
Nelson, Robert A., 2003, “Practical Relativistic Timing Effects in GPS and Galileo”, CGSIC
Timing Subcommittee Meeting;
Pascual-Sánchez, J. F., 2007, “Introducing relativity in global navigation satellite systems”,
Annual Physics (Leipzig) 16, No. 4, 258 - 273
Ray, J. K., (2006), “What receiver technologies exist for mitigating GNSS pseudo-range and
carrier phase multipath?”, Inside GNSS, pp. 25 – 27;
Rizos, C., (1999), “Principles and Practice of GPS Surveying”, School of Geomatic
Engineering, The University of New South Wales, Australia;
Sá, N. C., 2004, “GPS: Fundamentos e aplicações”, IAG/USP, Departamento de Geofísica;
SEEBER, G.,2003, “Satellite Geodesy: Foundations, methods and applications”. Walter de
Gruyter, New York;
62
ANEXOS
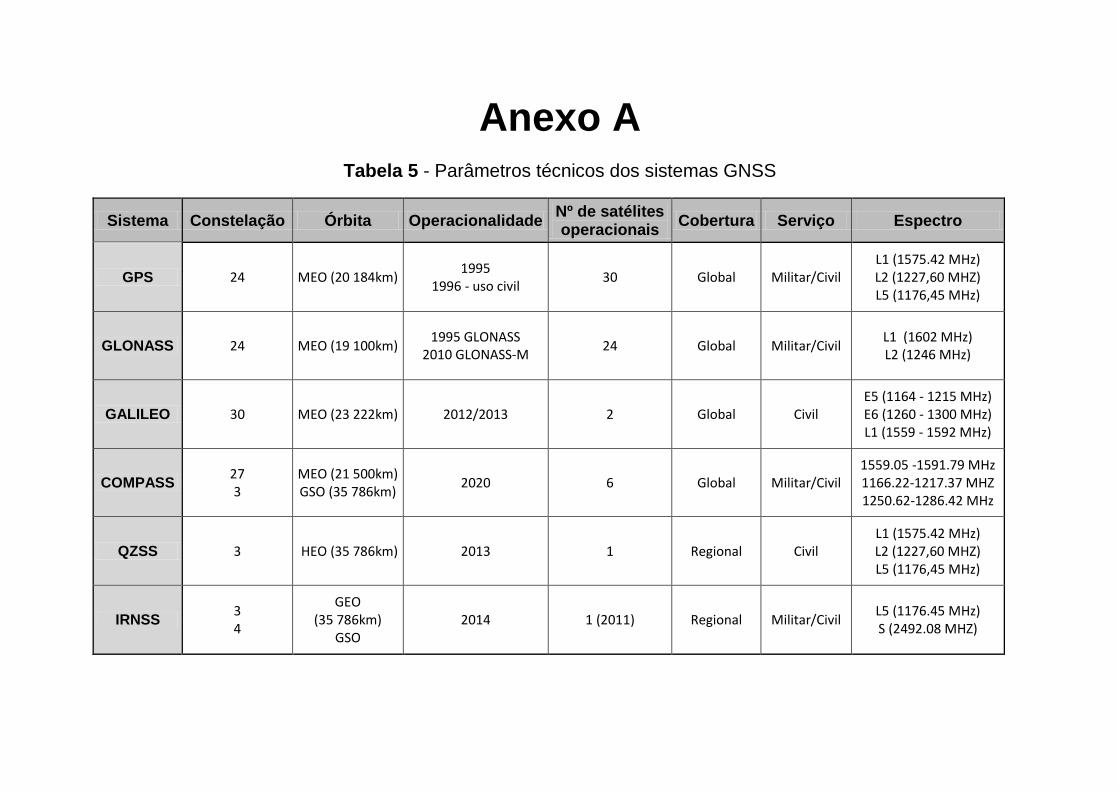
Anexo A Tabela 5 - Parâmetros técnicos dos sistemas GNSS
Sistema Constelação Órbita Operacionalidade Nº de satélites operacionais
Cobertura Serviço Espectro
GPS 24 MEO (20 184km) 1995
1996 - uso civil 30 Global Militar/Civil
L1 (1575.42 MHz) L2 (1227,60 MHZ) L5 (1176,45 MHz)
GLONASS 24 MEO (19 100km) 1995 GLONASS
2010 GLONASS-M 24 Global Militar/Civil
L1 (1602 MHz) L2 (1246 MHz)
GALILEO 30 MEO (23 222km) 2012/2013 2 Global Civil E5 (1164 - 1215 MHz) E6 (1260 - 1300 MHz) L1 (1559 - 1592 MHz)
COMPASS 27 3
MEO (21 500km) GSO (35 786km)
2020 6 Global Militar/Civil 1559.05 -1591.79 MHz 1166.22-1217.37 MHZ 1250.62-1286.42 MHz
QZSS 3 HEO (35 786km) 2013 1 Regional Civil L1 (1575.42 MHz) L2 (1227,60 MHZ) L5 (1176,45 MHz)
IRNSS 3 4
GEO (35 786km)
GSO 2014 1 (2011) Regional Militar/Civil
L5 (1176.45 MHz) S (2492.08 MHZ)





























