Embed Size (px)
Citation preview

Professore: Luciano Teresi
Studente: Bruno Assumma
RELAZIONE DI FINE TIROCINIO
CORSO DI LAUREA MAGISTRALE IN INGEGNERIA
CIVILE PER LA PROTEZIONE DEL TERRITORIO DAI
RISCHI NATURALI

PAGINA 1
Indice
INTRODUZIONE ....................................................................................................................... 2
Teoria dell'Elasticità Lineare ....................................................................................................... 3
Materiali isotropi ......................................................................................................................... 5
Cenni sui materiali isotropi ...................................................................................................... 5
Simulazioni su Comsol Muliphysic ......................................................................................... 6
Prova di trazione su provino incastrato. .............................................................................. 6
Provino doppiamente incastrato con carico uniformemente distribuito. ........................... 20
Provino sottoposto a distorsione sferiche. .......................................................................... 24
Modellazione di una piastra sottile .................................................................................... 29
Materiali compositi FRP (materiali anisotropi) ......................................................................... 42
Cenni sui materiali compositi ................................................................................................. 42
Simulazioni su Comsol Muliphysic ....................................................................................... 43
PAGINA 2
INTRODUZIONE
Il tirocinio è stato basato sull’apprendimento del programma COMSOL Multiphysics.
Si tratta di un software scientifico di modellazione e simulazione di sistemi fisici complessi per
uso generale, basato su metodi numerici avanzati, finalizzata alla modellazione e alla
simulazione di problemi basati sulla fisica. Con COMSOL Multiphysics sarà possibile tener
conto dei cosiddetti fenomeni multifisici o accoppiati. Le simulazioni di COMSOL
Multiphysics possono essere associate a programmi di calcolo tecnico, CAD ed ECAD.
Nella fattispecie, durante il tirocinio, sono state affrontate simulazioni di prove di carico su
materiali isotropi e anisotropi come i materiali compositi fibrorinforzati, nell’ambito
dell’elasticità lineare.
In particolare durante il tirocinio, svolto con il Prof. Luciano Teresi, si è cercato non soltanto di
studiare queste tipologie di materiali compositi ma anche di effettuare prove implementate sul
Software riuscendo così ad apprezzare i benefici che le fibre hanno rispetto a determinate
condizioni di carico.
Tutto quanto svolto in ambito del tirocinio mi ha permesso innanzitutto di studiare a livello
teorico quel che sono i materiali compositi e i laminati, ma anche conoscenre le funzionalità e
le potenzialità del software Comsol Multyphisic per poter procedere poi all’implementazione di
modelli più complessi per la simulazione del debonding di un composito laminato, di cui
l’argomento di tesi.

PAGINA 3
Teoria dell'Elasticità Lineare
Il problema fondamentale della Teoria dell'Elasticità è quello di determinare il moto e la
deformazione che un dato corpo elastico subisce sotto l'azione di assegnate forze esterne, nel
rispetto delle relazioni di bilancio (equilibrio), congruenza cinematica e del legame costitutivo.
La teoria fa riferimento al modello continuo di Cauchy, nell'ipotesi di piccoli spostamenti (tale
da poter confondere ai fini dell'equilibrio configurazione deformata e configurazione iniziale
indeformata) e piccole deformazioni assumendo un legame elastico lineare. Nel dominio B
occupato dalla configurazione iniziale del corpo, tale problema è espresso da un sistema di
equazioni differenziali alle derivate parziali, rappresentate nella notazione tensoriale classica
della "Meccanica del Continuo" da:
BILANCIO: usate per trovare la tensione S (si hanno 3 equazioni in 6 incognite):
CONGRUENZA: usate per trovare lo spostamento U (si hanno 6 equazioni in 3 incognite):
LEGAME COSTITUTIVO: lega la deformazione alla tensione (si hanno 3 equazioni in 3
incognite):
Si anticipa che:
PAGINA 4
Quindi il comportamento meccanico di un corpo continuo, oggetto della Meccanica del
Continuo, è descritto in termini di posizione, velocità e in alcuni casi orientazione di alcuni dei
suoi punti materiali nello spazio, e come queste cambiano sotto l'azione delle forze. Per un corpo
continuo, in accordo con l'assunzione di continuità, tali quantità sono assegnate ad ogni punto
della regione dello spazio occupata dal corpo e sono definiti matematicamente attraverso l'uso
di funzioni continue (campi continui).
Lo studio si basa sulla caratterizzazione cinematica del corpo continuo (configurazione,
deformazione, moto), e lega tali nozioni del corpo alla massa assegnata su di esso e alle forze
ad esso applicate.
Fondamentale è anche la distinzione dei materiali, che possono essere:
- Omogenei: le loro proprietà sono le stesse in ogni punto e non si possono suddividere in
materiali più elementari.
- Isotropi: le loro proprietà sono indipendenti da qualsiasi direzione.
- Anisotropi: le loro proprietà presentano delle direzioni preferenziali.
PAGINA 5
Materiali isotropi
Cenni sui materiali isotropi
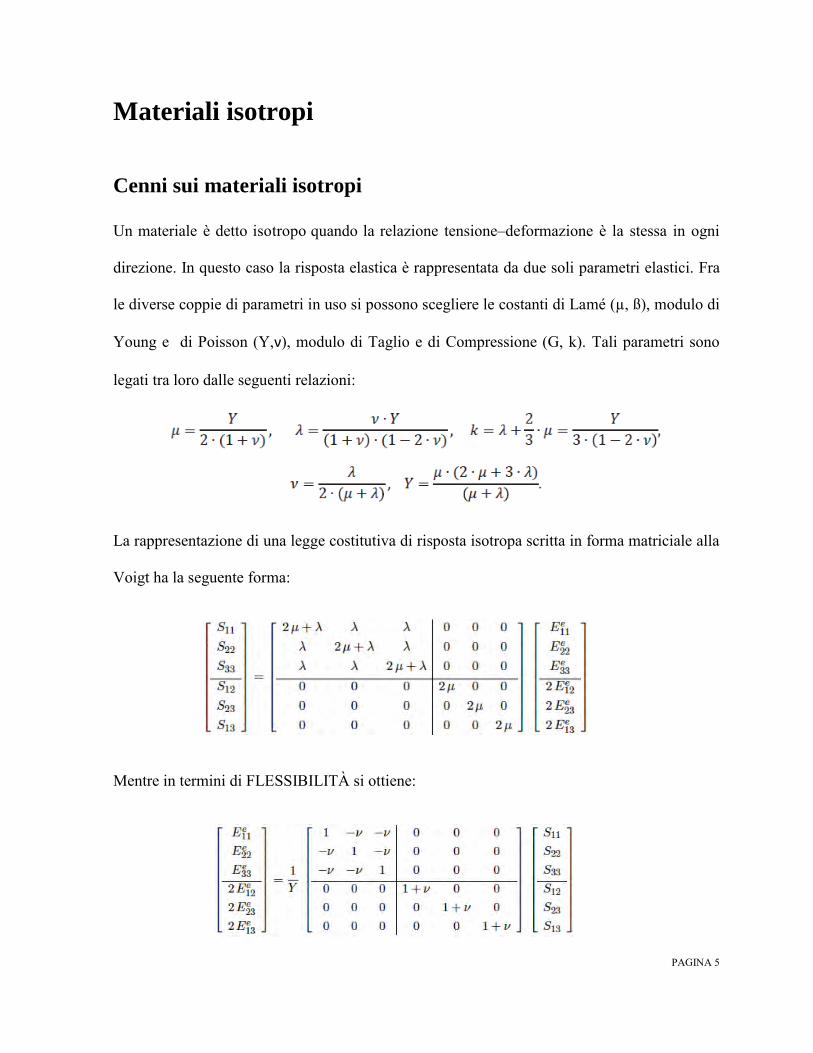
Un materiale è detto isotropo quando la relazione tensione–deformazione è la stessa in ogni
direzione. In questo caso la risposta elastica è rappresentata da due soli parametri elastici. Fra
le diverse coppie di parametri in uso si possono scegliere le costanti di Lamé (µ, ß), modulo di
Young e di Poisson (Y,ν), modulo di Taglio e di Compressione (G, k). Tali parametri sono
legati tra loro dalle seguenti relazioni:
La rappresentazione di una legge costitutiva di risposta isotropa scritta in forma matriciale alla
Voigt ha la seguente forma:
Mentre in termini di FLESSIBILITÀ si ottiene:
PAGINA 6
Simulazioni su Comsol Muliphysic
Prova di trazione.
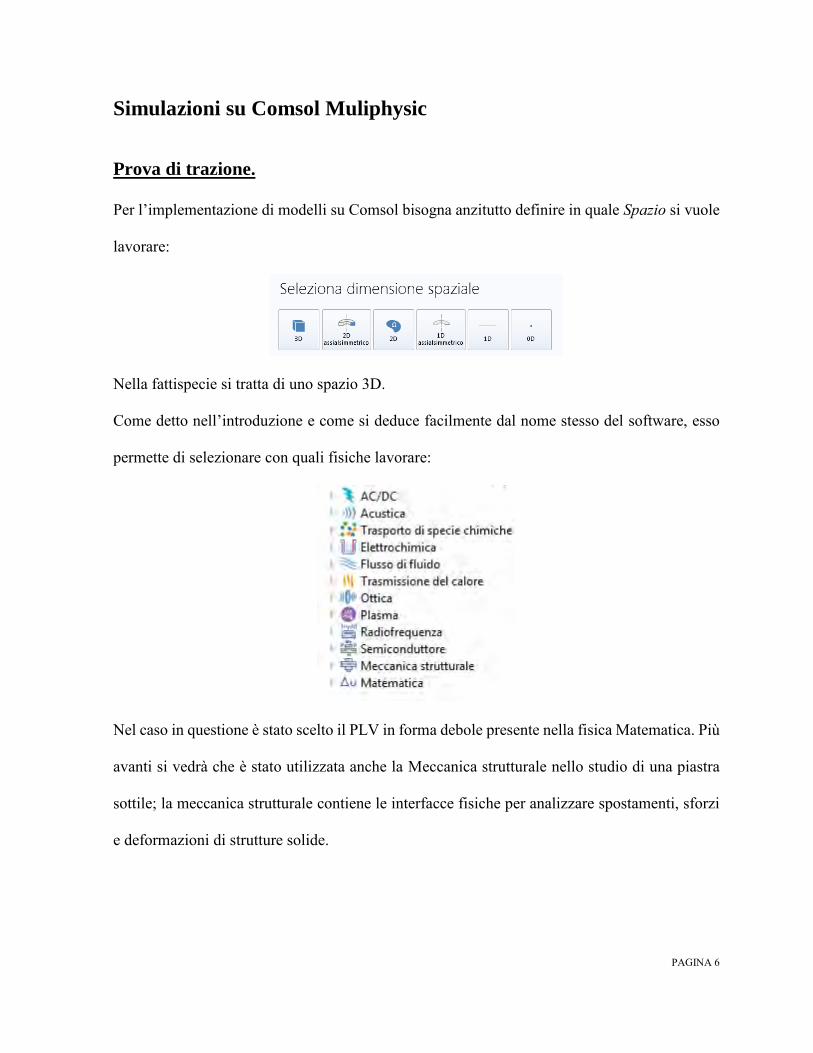
Per l’implementazione di modelli su Comsol bisogna anzitutto definire in quale Spazio si vuole
lavorare:
Nella fattispecie si tratta di uno spazio 3D.
Come detto nell’introduzione e come si deduce facilmente dal nome stesso del software, esso
permette di selezionare con quali fisiche lavorare:
Nel caso in questione è stato scelto il PLV in forma debole presente nella fisica Matematica. Più
avanti si vedrà che è stato utilizzata anche la Meccanica strutturale nello studio di una piastra
sottile; la meccanica strutturale contiene le interfacce fisiche per analizzare spostamenti, sforzi
e deformazioni di strutture solide.
PAGINA 7
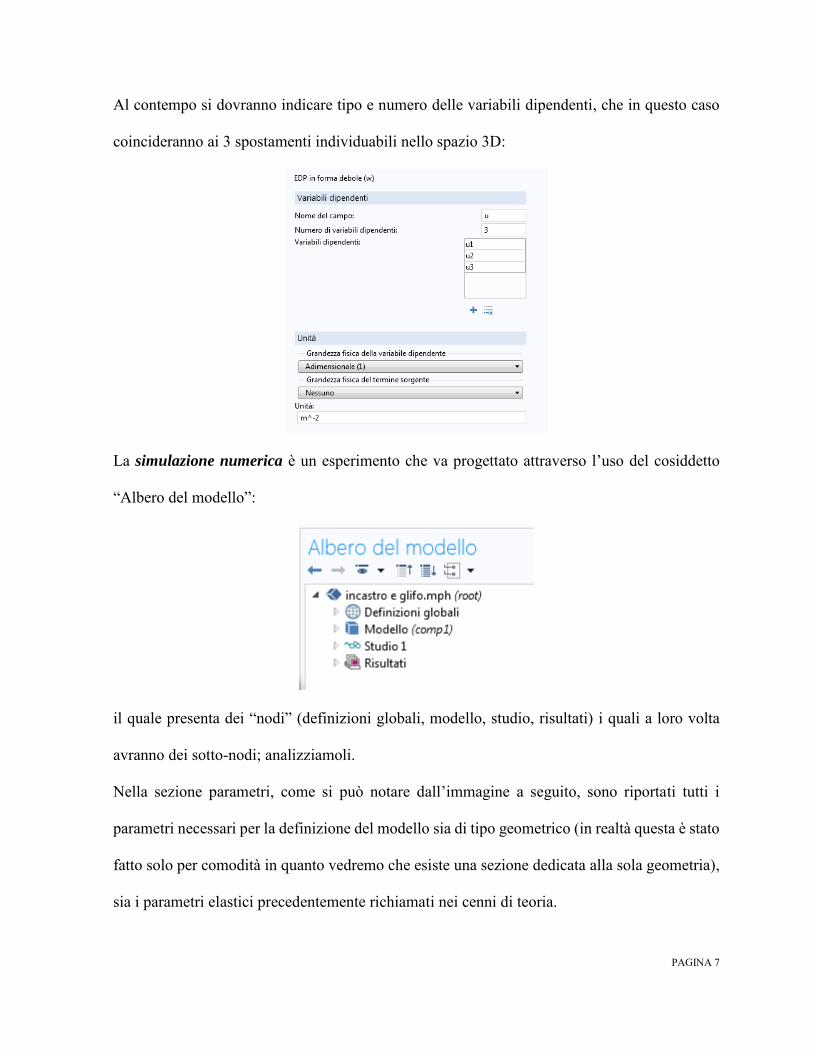
Al contempo si dovranno indicare tipo e numero delle variabili dipendenti, che in questo caso
coincideranno ai 3 spostamenti individuabili nello spazio 3D:
La simulazione numerica è un esperimento che va progettato attraverso l’uso del cosiddetto
“Albero del modello”:
il quale presenta dei “nodi” (definizioni globali, modello, studio, risultati) i quali a loro volta
avranno dei sotto-nodi; analizziamoli.
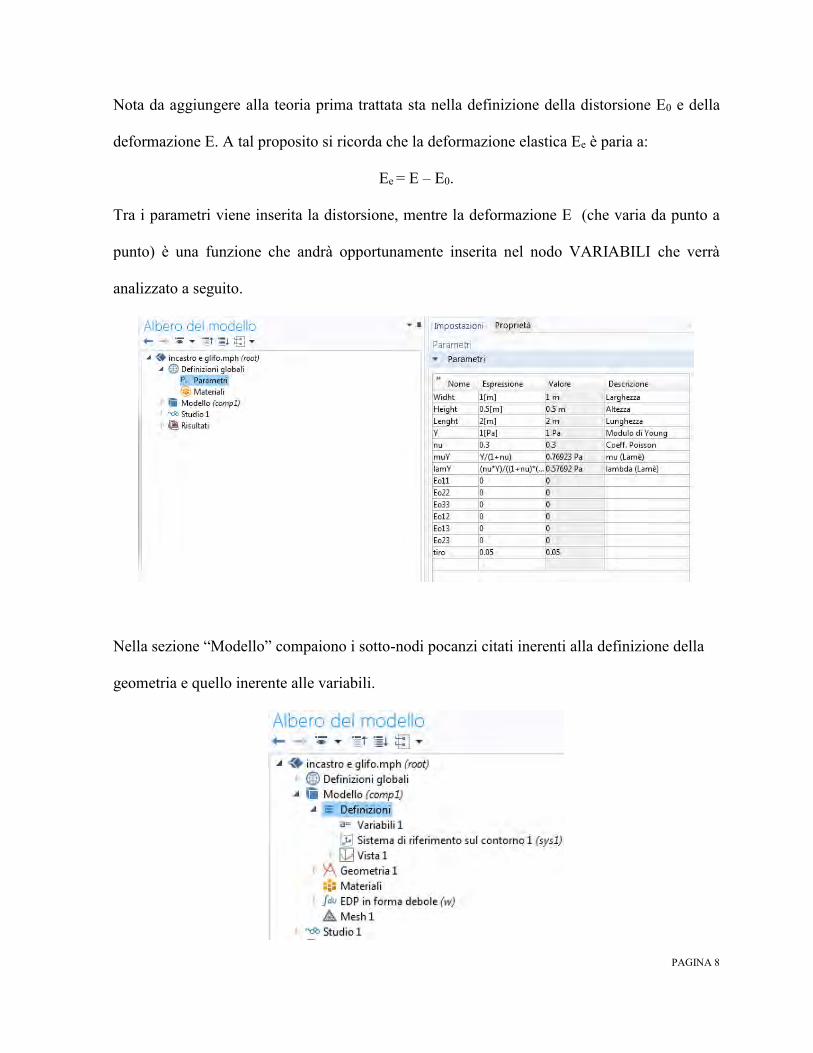
Nella sezione parametri, come si può notare dall’immagine a seguito, sono riportati tutti i
parametri necessari per la definizione del modello sia di tipo geometrico (in realtà questa è stato
fatto solo per comodità in quanto vedremo che esiste una sezione dedicata alla sola geometria),
sia i parametri elastici precedentemente richiamati nei cenni di teoria.
PAGINA 8
Nota da aggiungere alla teoria prima trattata sta nella definizione della distorsione E0 e della
deformazione E. A tal proposito si ricorda che la deformazione elastica Ee è paria a:
Ee = E – E0.
Tra i parametri viene inserita la distorsione, mentre la deformazione E (che varia da punto a
punto) è una funzione che andrà opportunamente inserita nel nodo VARIABILI che verrà
analizzato a seguito.
Nella sezione “Modello” compaiono i sotto-nodi pocanzi citati inerenti alla definizione della
geometria e quello inerente alle variabili.
PAGINA 9
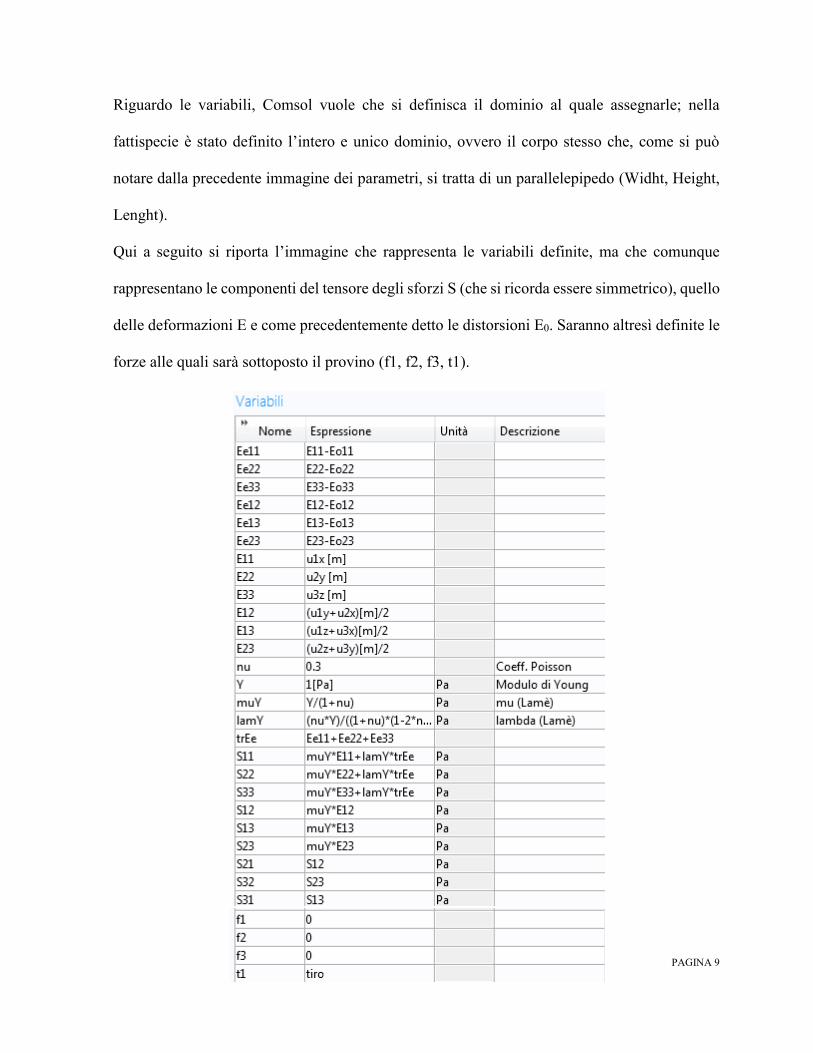
Riguardo le variabili, Comsol vuole che si definisca il dominio al quale assegnarle; nella
fattispecie è stato definito l’intero e unico dominio, ovvero il corpo stesso che, come si può
notare dalla precedente immagine dei parametri, si tratta di un parallelepipedo (Widht, Height,
Lenght).
Qui a seguito si riporta l’immagine che rappresenta le variabili definite, ma che comunque
rappresentano le componenti del tensore degli sforzi S (che si ricorda essere simmetrico), quello
delle deformazioni E e come precedentemente detto le distorsioni E0. Saranno altresì definite le
forze alle quali sarà sottoposto il provino (f1, f2, f3, t1).

PAGINA 10
Riguardo la geometria, è stato già detto che si tratta di un provino parallelepipedo di dimensioni
assegnate e fatte corrispondere alle voci presenti nella sezione dei paramentri precedentemente
definita.
Si passa ora alla compilazione più importante del modello: quella della fisica scelta. Si ricorda
essere il principio dei lavori virtuali in forma debole. Ancora una volta Comsol vuole che si
specifichi il dominio in cui dovrà essere applicato il PLV. Oltre a questo dovranno essere inserite
le 3 equazioni di bilancio descritte nei richiami di teoria dell’elasticità lineare.
Infatti, come detto nella parte introduttiva, per la corretta definizione del problema fisico occorre
anche ricavare le equazioni di bilancio che caratterizzano il dominio scelto. La prima equazione
che viene definita è proprio il bilancio ossia il PLV come segue:
dove entrambi gli integrandi rappresentano il cosiddetto “𝑊𝑒𝑎𝑘 𝐶𝑜𝑛𝑡𝑟𝑖𝑏𝑢𝑡𝑖𝑜𝑛” ossia il termine
che bisognerà fornire a Comsol, mentre per quanto riguarda gli integrali sono assunti
automaticamente nei calcoli dal programma stesso. Il primo però indica cosa c’è dentro mentre
il secondo cosa c’è al bordo.
PAGINA 11
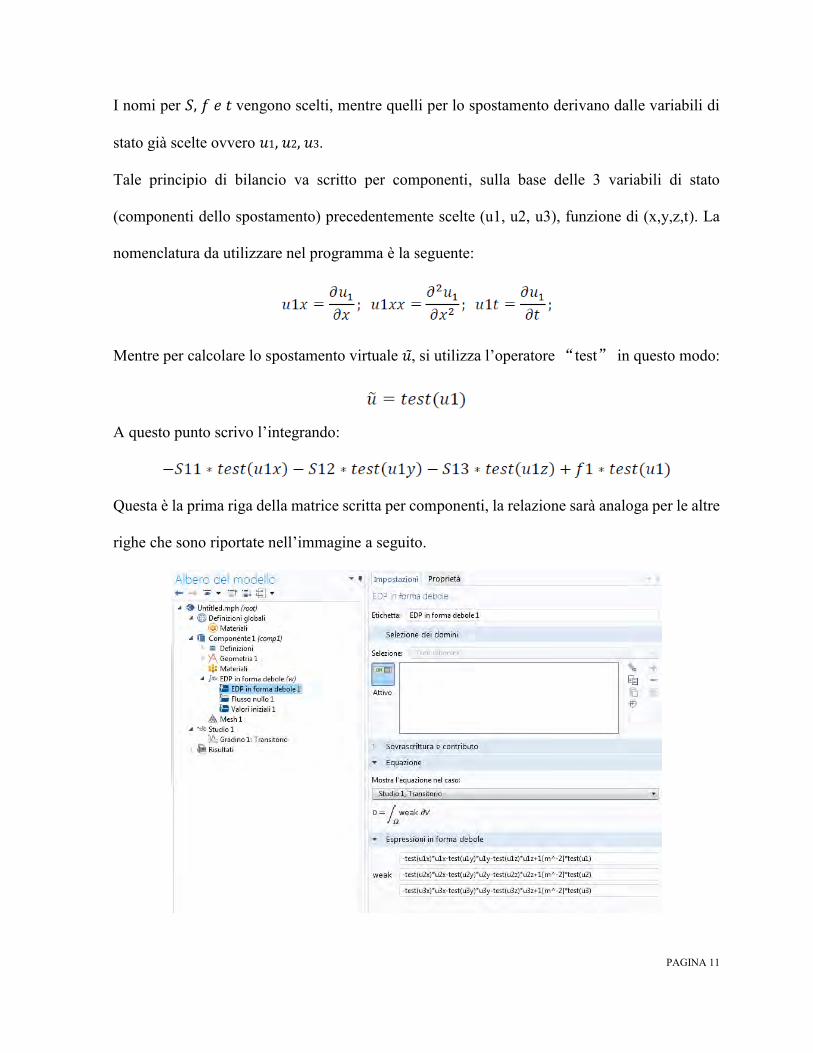
I nomi per 𝑆, 𝑓 𝑒 𝑡 vengono scelti, mentre quelli per lo spostamento derivano dalle variabili di
stato già scelte ovvero 𝑢1, 𝑢2, 𝑢3.
Tale principio di bilancio va scritto per componenti, sulla base delle 3 variabili di stato
(componenti dello spostamento) precedentemente scelte (u1, u2, u3), funzione di (x,y,z,t). La
nomenclatura da utilizzare nel programma è la seguente:
Mentre per calcolare lo spostamento virtuale 𝑢 , si utilizza l’operatore “test” in questo modo:
A questo punto scrivo l’integrando:
Questa è la prima riga della matrice scritta per componenti, la relazione sarà analoga per le altre
righe che sono riportate nell’immagine a seguito.
PAGINA 12
L’attenzione va sul fatto che le espressioni scritte dal programma sono quelle riferite al problema
più semplice ossia quello di studio del CALORE (rappresentativo del LAPLACIANO).
Infatti, il programma scrive già la seguente relazione:
−𝑡𝑒𝑠𝑡(𝑢1𝑥) ∗ 𝑢1𝑥
Dove il primo termine rappresenta proprio il gradiente dello spostamento virtuale, mentre il
secondo indica il Laplaciano ossia il termine del problema semplice di studio del calore. Allora
per riportare tutto al caso specifico si devono sostituire i termini del Laplaciano con (S11, S12,
S13, S21, S22, S23, S31, S32, S33), nel rispetto della simmetria della matrice S e tenendo conto
che S è simmetrico.
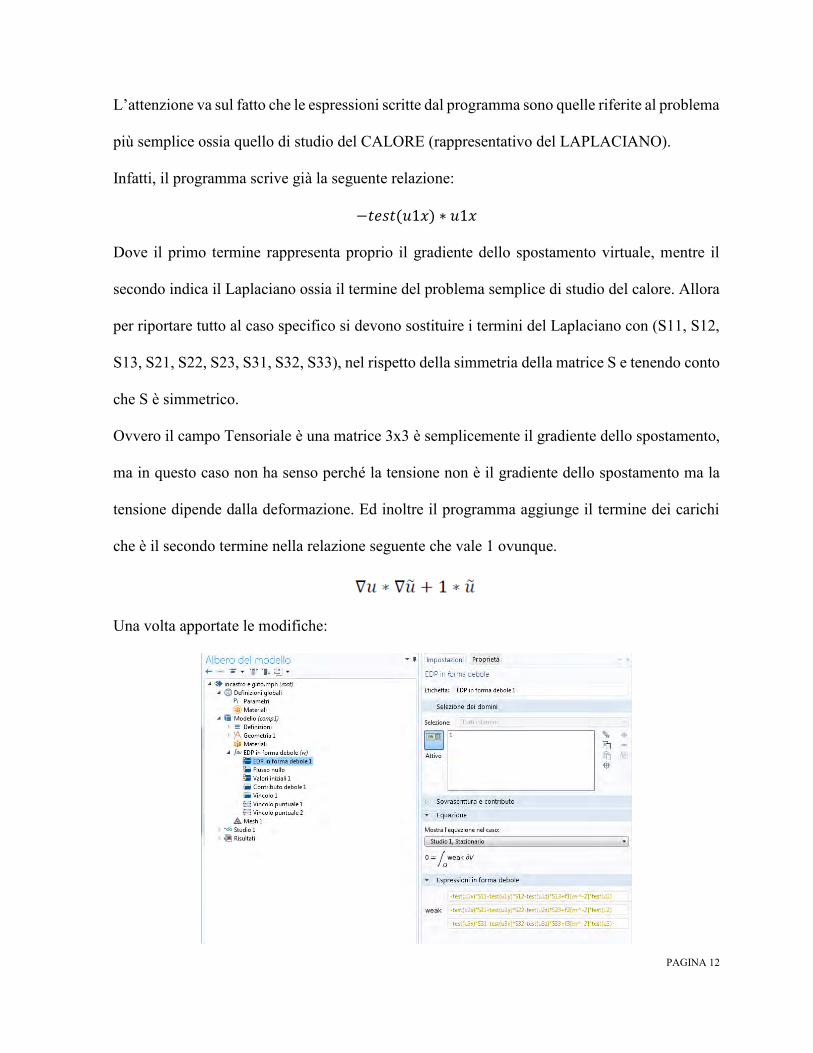
Ovvero il campo Tensoriale è una matrice 3x3 è semplicemente il gradiente dello spostamento,
ma in questo caso non ha senso perché la tensione non è il gradiente dello spostamento ma la
tensione dipende dalla deformazione. Ed inoltre il programma aggiunge il termine dei carichi
che è il secondo termine nella relazione seguente che vale 1 ovunque.
Una volta apportate le modifiche:
PAGINA 13
il programma dà la scritta in giallo semplicemente per far capire che ancora non conosce le
componenti di S. Inoltre vuole anche le dimensioni della variabile indipendente (di default posta
adimensionale) che, essendo uno spostamento saranno metri [m].
La sorgente per questi tipi di problemi prende il nome di carico “Source Term Quantity”. In
questo modo è stato definito il primo integrando, bisogna assegnare nella sezione “𝑾𝒆𝒂𝒌 𝑭𝒐𝒓𝒎
𝑷𝑫𝑬 → 𝒁𝒆𝒓𝒐 𝑭𝒍𝒖𝒙” il Flusso di carico al bordo 𝑡. Siccome si sta valutando il provino sottoposto
a trazione, la sorgente in questo caso è una forza di trazione su una delle facce del
parallelepipedo.
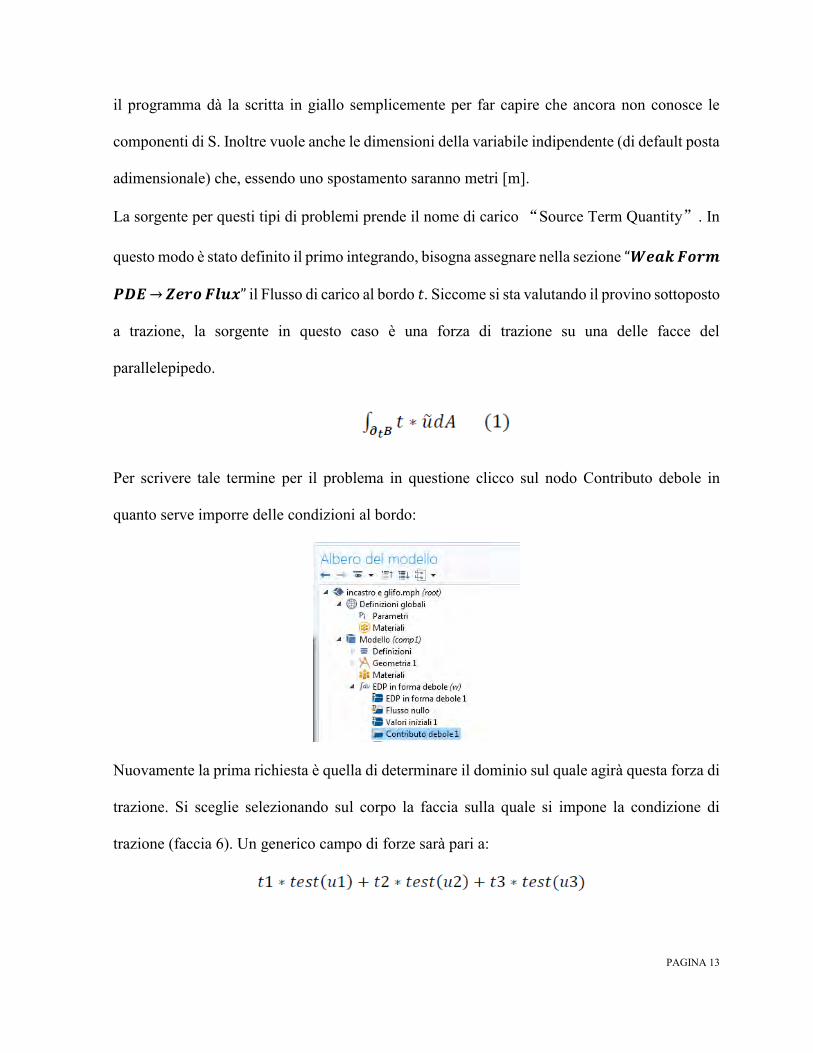
Per scrivere tale termine per il problema in questione clicco sul nodo Contributo debole in
quanto serve imporre delle condizioni al bordo:
Nuovamente la prima richiesta è quella di determinare il dominio sul quale agirà questa forza di
trazione. Si sceglie selezionando sul corpo la faccia sulla quale si impone la condizione di
trazione (faccia 6). Un generico campo di forze sarà pari a:
PAGINA 14
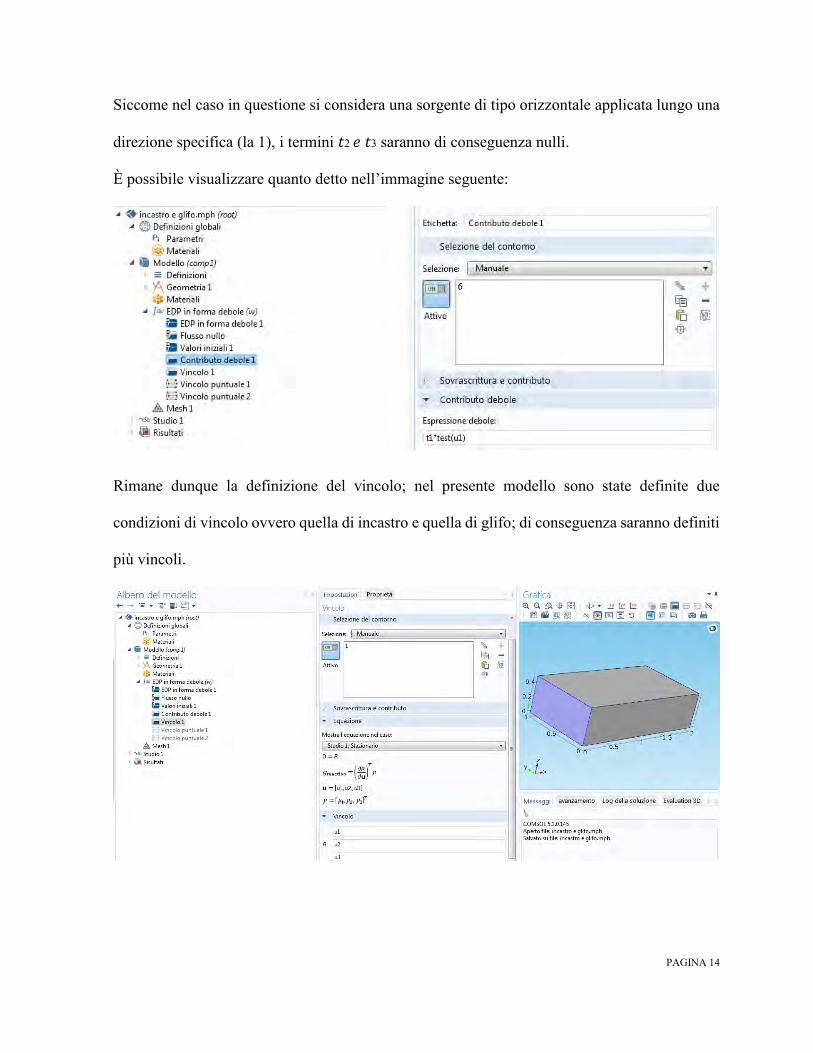
Siccome nel caso in questione si considera una sorgente di tipo orizzontale applicata lungo una
direzione specifica (la 1), i termini 𝑡2 𝑒 𝑡3 saranno di conseguenza nulli.
È possibile visualizzare quanto detto nell’immagine seguente:
Rimane dunque la definizione del vincolo; nel presente modello sono state definite due
condizioni di vincolo ovvero quella di incastro e quella di glifo; di conseguenza saranno definiti
più vincoli.
PAGINA 15
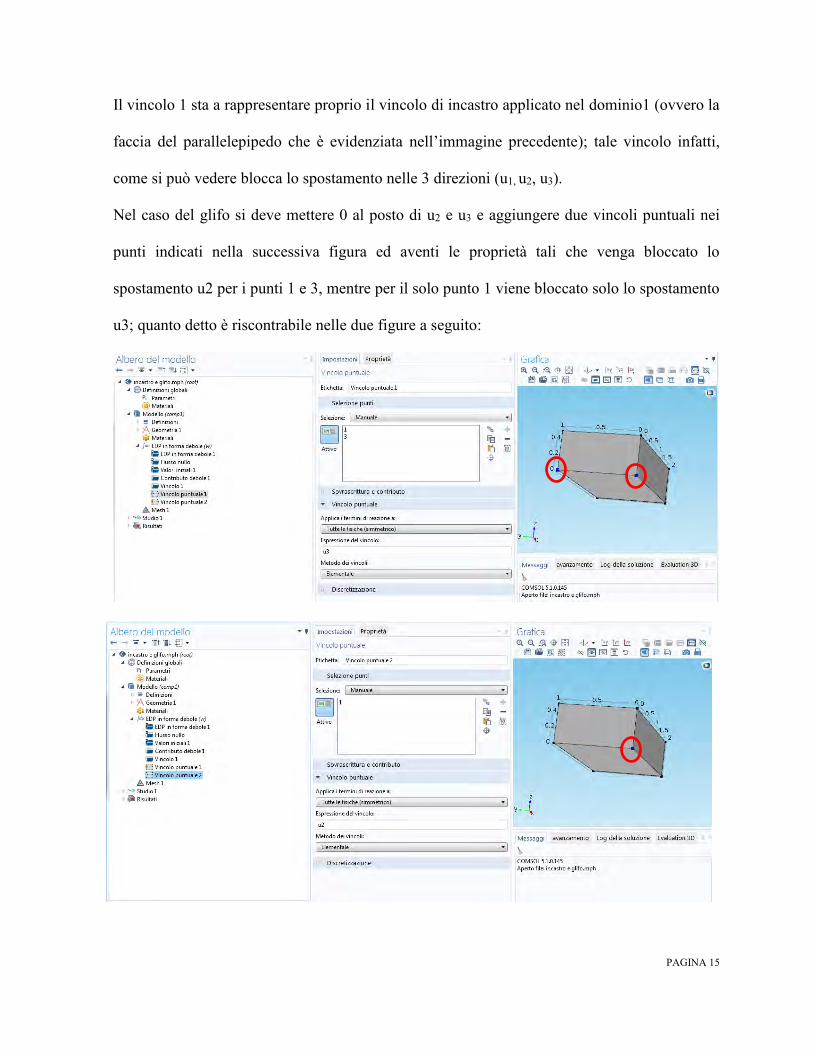
Il vincolo 1 sta a rappresentare proprio il vincolo di incastro applicato nel dominio1 (ovvero la
faccia del parallelepipedo che è evidenziata nell’immagine precedente); tale vincolo infatti,
come si può vedere blocca lo spostamento nelle 3 direzioni (u1, u2, u3).
Nel caso del glifo si deve mettere 0 al posto di u2 e u3 e aggiungere due vincoli puntuali nei
punti indicati nella successiva figura ed aventi le proprietà tali che venga bloccato lo
spostamento u2 per i punti 1 e 3, mentre per il solo punto 1 viene bloccato solo lo spostamento
u3; quanto detto è riscontrabile nelle due figure a seguito:
PAGINA 16
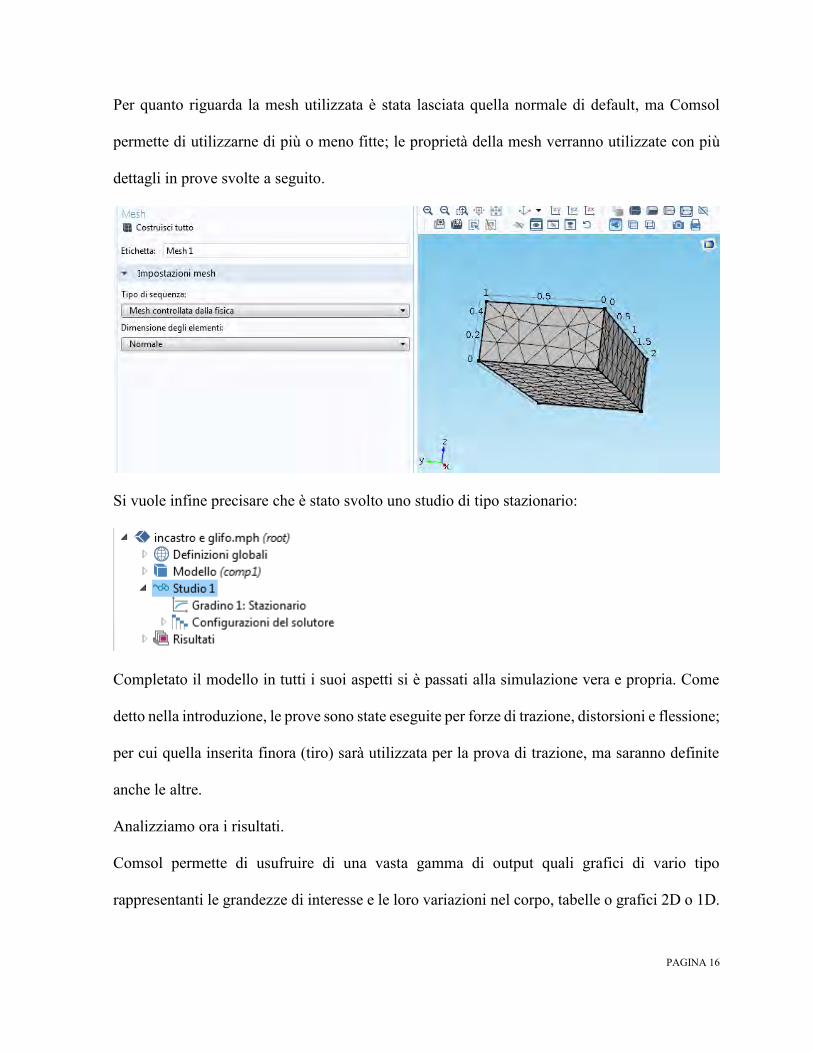
Per quanto riguarda la mesh utilizzata è stata lasciata quella normale di default, ma Comsol
permette di utilizzarne di più o meno fitte; le proprietà della mesh verranno utilizzate con più
dettagli in prove svolte a seguito.
Si vuole infine precisare che è stato svolto uno studio di tipo stazionario:
Completato il modello in tutti i suoi aspetti si è passati alla simulazione vera e propria. Come
detto nella introduzione, le prove sono state eseguite per forze di trazione, distorsioni e flessione;
per cui quella inserita finora (tiro) sarà utilizzata per la prova di trazione, ma saranno definite
anche le altre.
Analizziamo ora i risultati.
Comsol permette di usufruire di una vasta gamma di output quali grafici di vario tipo
rappresentanti le grandezze di interesse e le loro variazioni nel corpo, tabelle o grafici 2D o 1D.
PAGINA 17
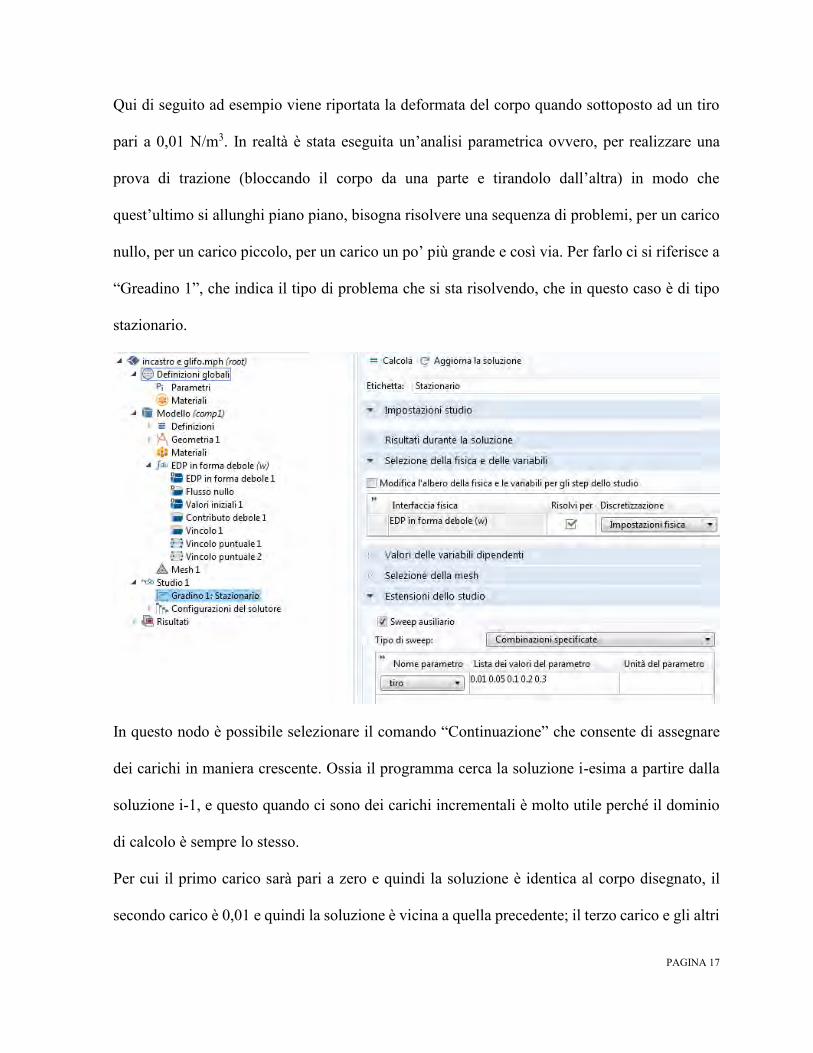
Qui di seguito ad esempio viene riportata la deformata del corpo quando sottoposto ad un tiro
pari a 0,01 N/m3. In realtà è stata eseguita un’analisi parametrica ovvero, per realizzare una
prova di trazione (bloccando il corpo da una parte e tirandolo dall’altra) in modo che
quest’ultimo si allunghi piano piano, bisogna risolvere una sequenza di problemi, per un carico
nullo, per un carico piccolo, per un carico un po’ più grande e così via. Per farlo ci si riferisce a
“Greadino 1”, che indica il tipo di problema che si sta risolvendo, che in questo caso è di tipo
stazionario.
In questo nodo è possibile selezionare il comando “Continuazione” che consente di assegnare
dei carichi in maniera crescente. Ossia il programma cerca la soluzione i-esima a partire dalla
soluzione i-1, e questo quando ci sono dei carichi incrementali è molto utile perché il dominio
di calcolo è sempre lo stesso.
Per cui il primo carico sarà pari a zero e quindi la soluzione è identica al corpo disegnato, il
secondo carico è 0,01 e quindi la soluzione è vicina a quella precedente; il terzo carico e gli altri
PAGINA 18
sono via via più grandi i cui valori sono stati inseriti e riportati nell’immagine precedente. Quindi
il programma cerca la soluzione in conformità a tutte le informazioni ottenute dalla soluzione
precedente.
Dalla lista di tutti i parametri ovviamente quello che verrà fatto variare è appunto il “TIRO”
ossia la forza di trazione orizzontale imposta.
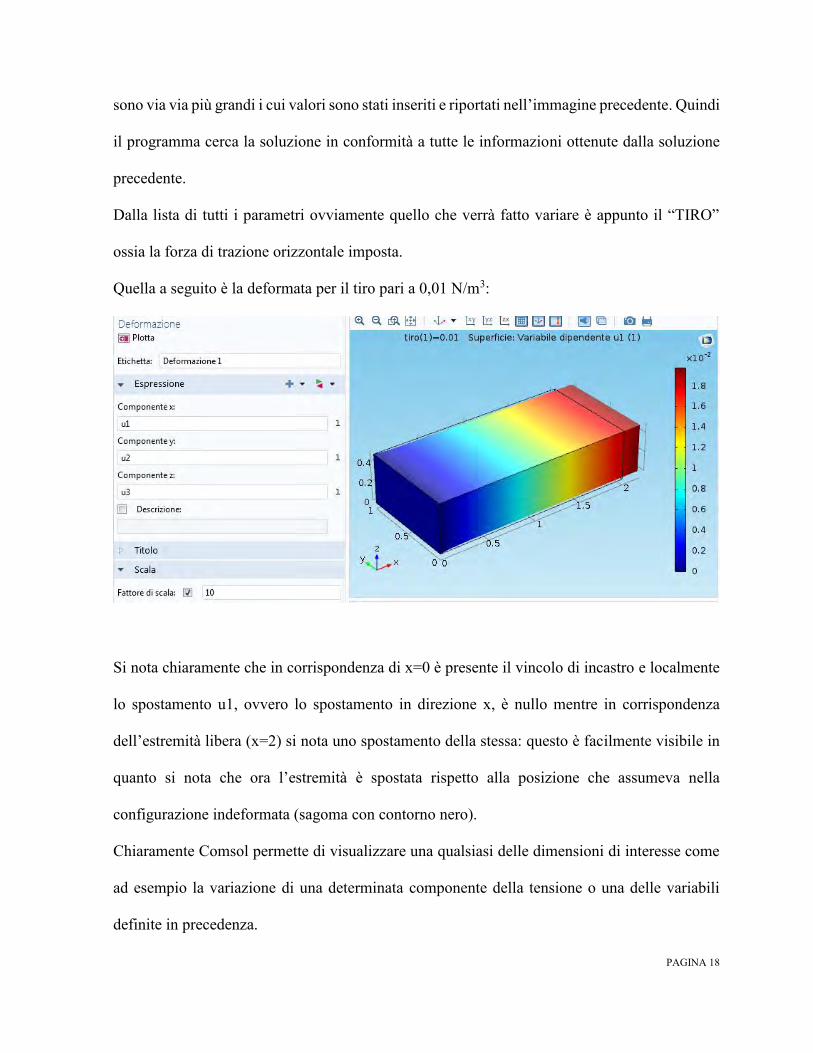
Quella a seguito è la deformata per il tiro pari a 0,01 N/m3:
Si nota chiaramente che in corrispondenza di x=0 è presente il vincolo di incastro e localmente
lo spostamento u1, ovvero lo spostamento in direzione x, è nullo mentre in corrispondenza
dell’estremità libera (x=2) si nota uno spostamento della stessa: questo è facilmente visibile in
quanto si nota che ora l’estremità è spostata rispetto alla posizione che assumeva nella
configurazione indeformata (sagoma con contorno nero).
Chiaramente Comsol permette di visualizzare una qualsiasi delle dimensioni di interesse come
ad esempio la variazione di una determinata componente della tensione o una delle variabili
definite in precedenza.
PAGINA 19
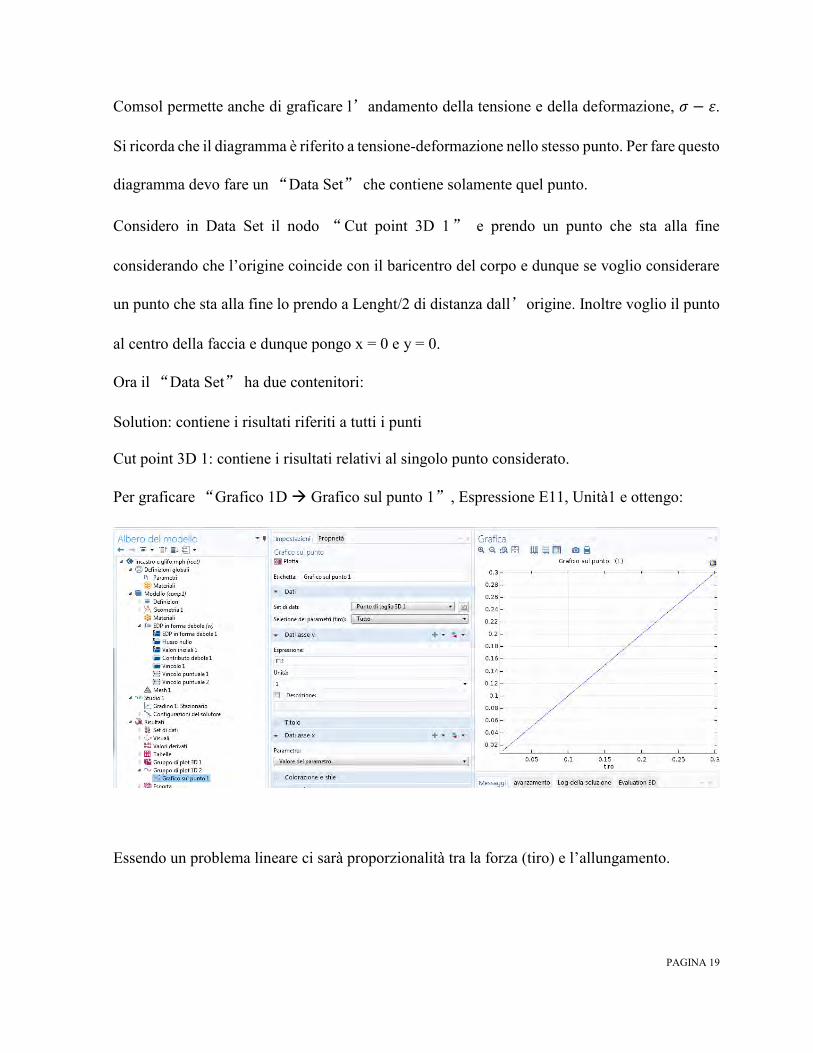
Comsol permette anche di graficare l’andamento della tensione e della deformazione, 𝜎 − 𝜀.
Si ricorda che il diagramma è riferito a tensione-deformazione nello stesso punto. Per fare questo
diagramma devo fare un “Data Set” che contiene solamente quel punto.
Considero in Data Set il nodo “Cut point 3D 1” e prendo un punto che sta alla fine
considerando che l’origine coincide con il baricentro del corpo e dunque se voglio considerare
un punto che sta alla fine lo prendo a Lenght/2 di distanza dall’origine. Inoltre voglio il punto
al centro della faccia e dunque pongo x = 0 e y = 0.
Ora il “Data Set” ha due contenitori:
Solution: contiene i risultati riferiti a tutti i punti
Cut point 3D 1: contiene i risultati relativi al singolo punto considerato.
Per graficare “Grafico 1D Grafico sul punto 1”, Espressione E11, Unità1 e ottengo:
Essendo un problema lineare ci sarà proporzionalità tra la forza (tiro) e l’allungamento.
PAGINA 20
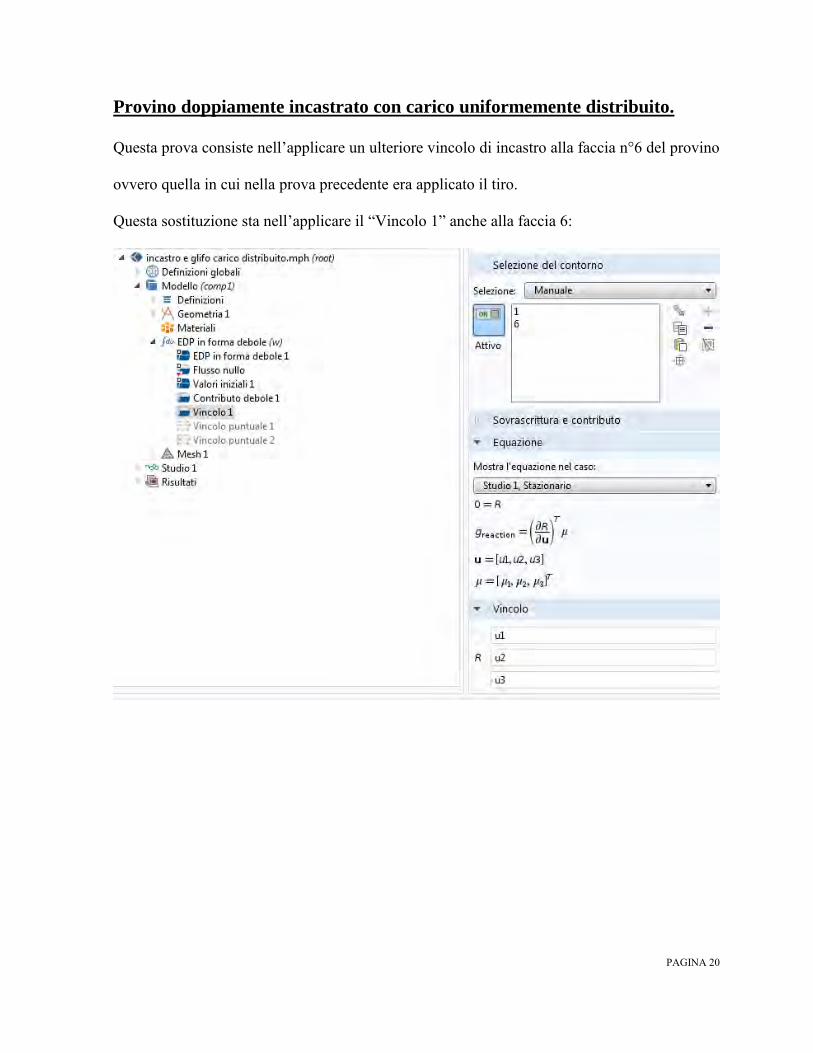
Provino doppiamente incastrato con carico uniformemente distribuito.
Questa prova consiste nell’applicare un ulteriore vincolo di incastro alla faccia n°6 del provino
ovvero quella in cui nella prova precedente era applicato il tiro.
Questa sostituzione sta nell’applicare il “Vincolo 1” anche alla faccia 6:
PAGINA 21
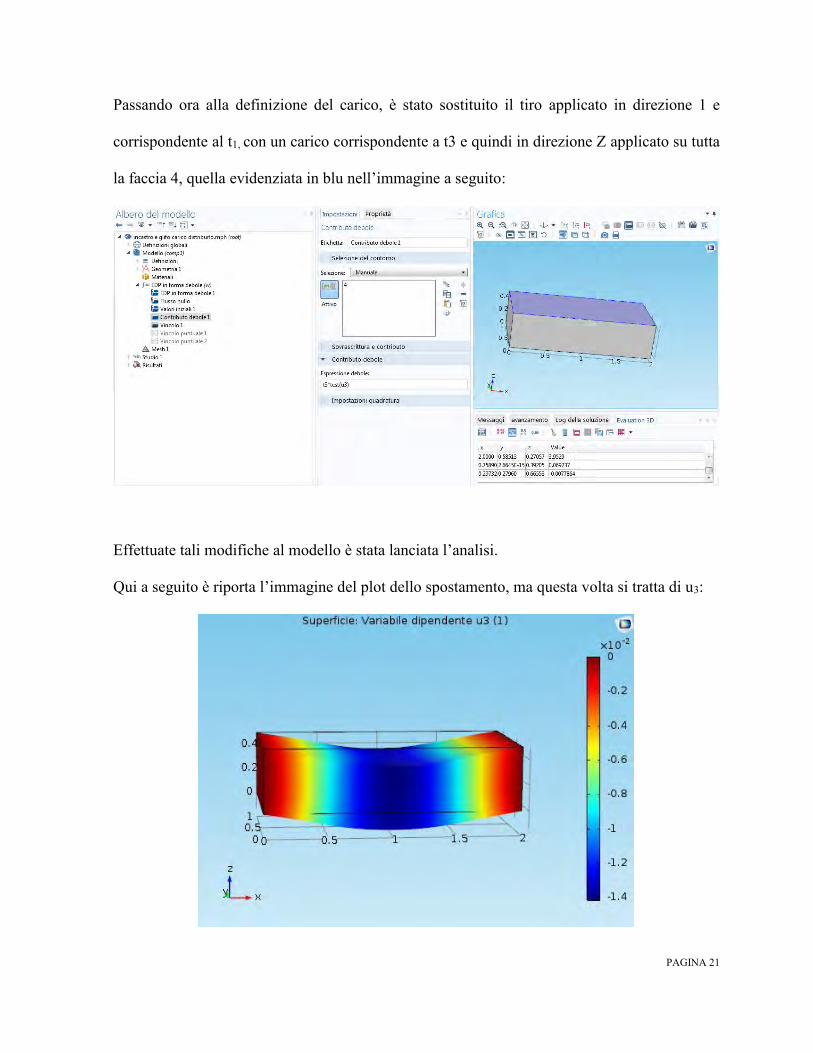
Passando ora alla definizione del carico, è stato sostituito il tiro applicato in direzione 1 e
corrispondente al t1, con un carico corrispondente a t3 e quindi in direzione Z applicato su tutta
la faccia 4, quella evidenziata in blu nell’immagine a seguito:
Effettuate tali modifiche al modello è stata lanciata l’analisi.
Qui a seguito è riporta l’immagine del plot dello spostamento, ma questa volta si tratta di u3:
PAGINA 22
Questo fa capire che può essere calcolato l’abbassamento per ogni punto di un elemento che si
voglia analizzare. Lo studio degli abbassamenti, soprattutto quelli massimi, è di nota importanza
nell’ingegneria civile, si pensi all’importanza della freccia massima delle travi in acciaio nei
ponti ferroviari o più in generale nel caso delle verifiche di deformabilità allo SLE in cui bisogna
confrontare l’abbassamento massimo con quello prescritto dalla normativa.
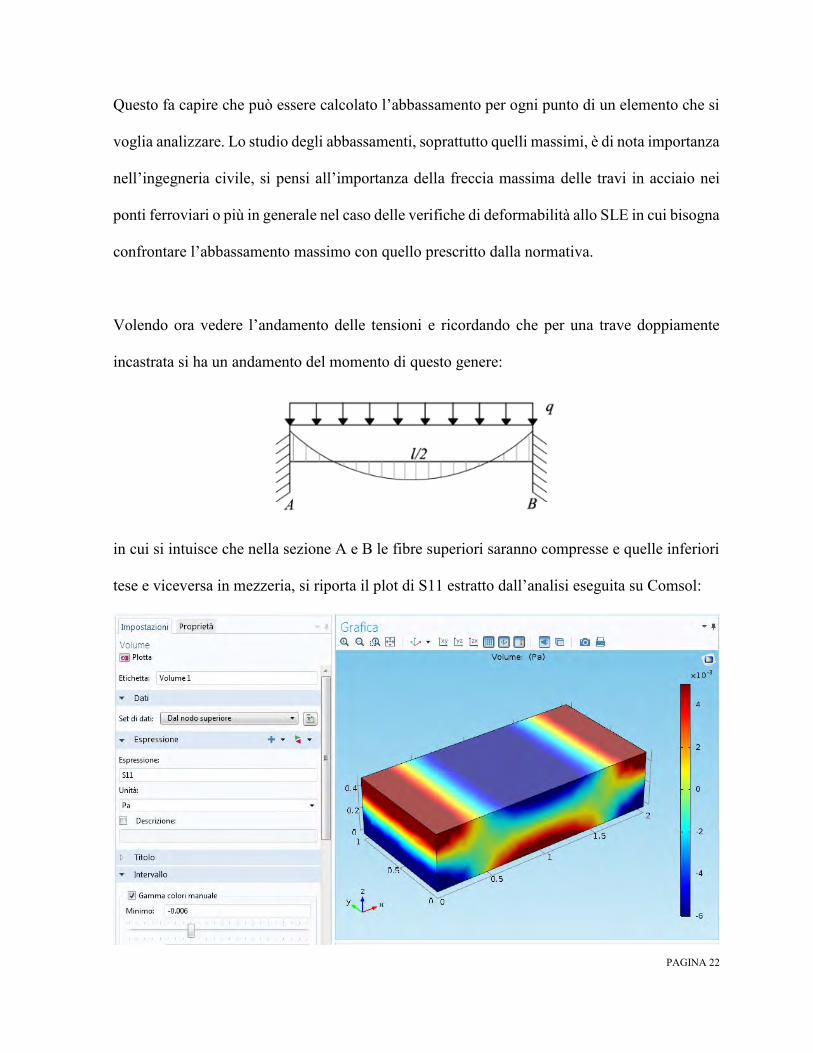
Volendo ora vedere l’andamento delle tensioni e ricordando che per una trave doppiamente
incastrata si ha un andamento del momento di questo genere:
in cui si intuisce che nella sezione A e B le fibre superiori saranno compresse e quelle inferiori
tese e viceversa in mezzeria, si riporta il plot di S11 estratto dall’analisi eseguita su Comsol:
PAGINA 23
Si può notare evidentemente l’analogia con quanto specificato pocanzi rispetto alle tensioni
presenti nelle varie sezioni, ovvero quelle agli incastri e quelle in mezzeria. Infatti, agli incastri,
si nota che superiormente le sezioni sono colorate in rosso (compressione) e inferiormente in
blu (trazione). Succede esattamente il viceversa nella sezione di mezzeria e limitrofe,
coerentemente al diagramma del momento riportato precedentemente.
A seguito viene riportato lo stesso plot dell’immagine precedente, mettendo però in evidenza
anche la deformata che subisce il corpo.
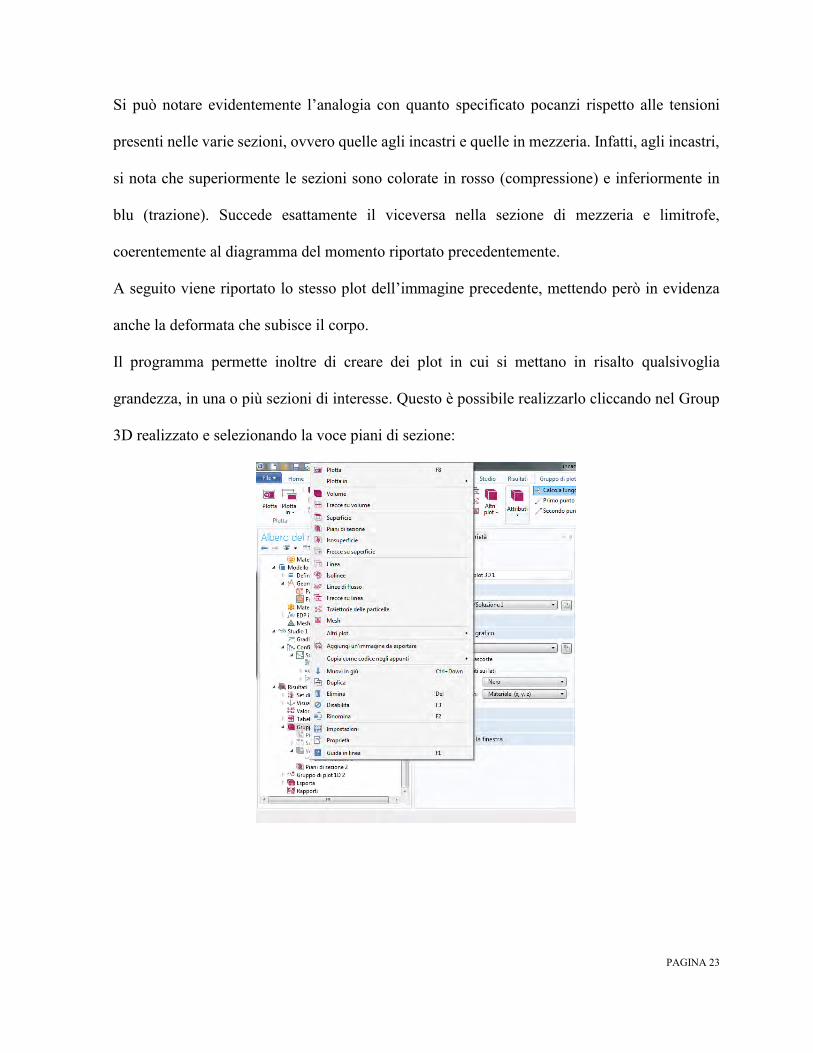
Il programma permette inoltre di creare dei plot in cui si mettano in risalto qualsivoglia
grandezza, in una o più sezioni di interesse. Questo è possibile realizzarlo cliccando nel Group
3D realizzato e selezionando la voce piani di sezione:
PAGINA 24
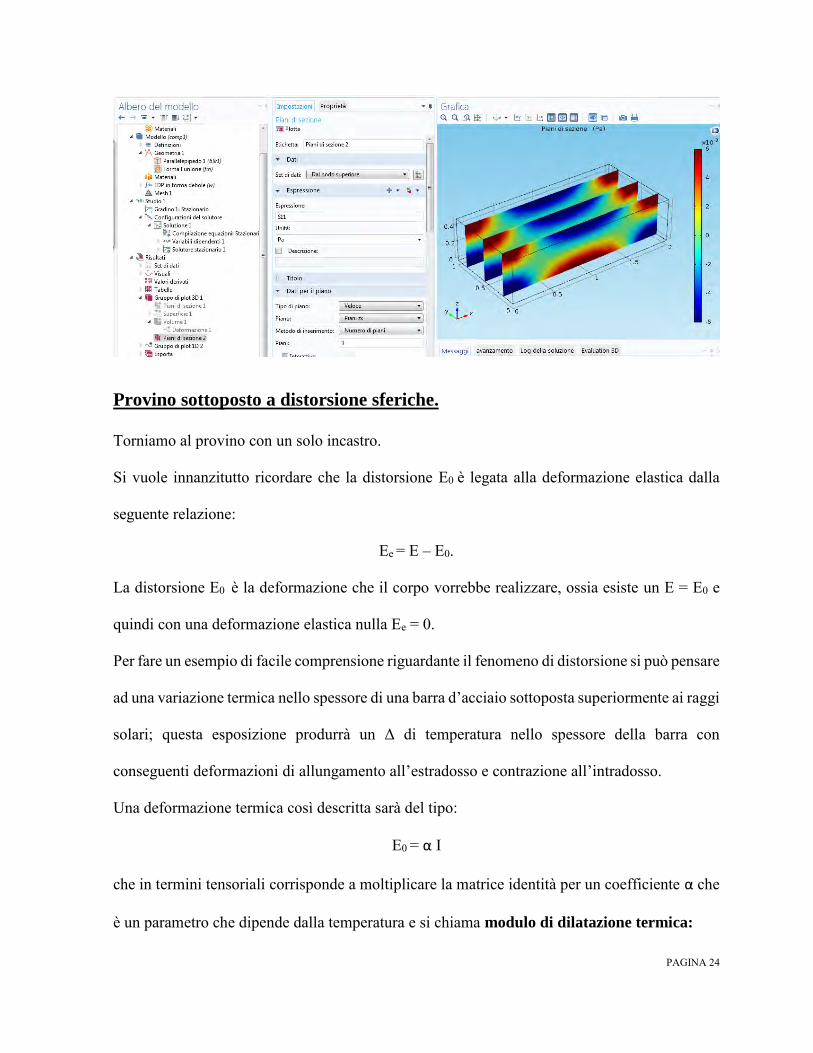
Provino sottoposto a distorsione sferiche.
Torniamo al provino con un solo incastro.
Si vuole innanzitutto ricordare che la distorsione E0 è legata alla deformazione elastica dalla
seguente relazione:
Ee = E – E0.
La distorsione E0 è la deformazione che il corpo vorrebbe realizzare, ossia esiste un E = E0 e
quindi con una deformazione elastica nulla Ee = 0.
Per fare un esempio di facile comprensione riguardante il fenomeno di distorsione si può pensare
ad una variazione termica nello spessore di una barra d’acciaio sottoposta superiormente ai raggi
solari; questa esposizione produrrà un Δ di temperatura nello spessore della barra con
conseguenti deformazioni di allungamento all’estradosso e contrazione all’intradosso.
Una deformazione termica così descritta sarà del tipo:
E0 = α I
che in termini tensoriali corrisponde a moltiplicare la matrice identità per un coefficiente α che
è un parametro che dipende dalla temperatura e si chiama modulo di dilatazione termica:
PAGINA 25
[𝐸0] = 𝛼 ∙ |1 0 00 1 00 0 1
| = |𝛼1 0 00 𝛼2 00 0 𝛼3
|.
Risulta evidente che se α1 = α2 = α3 il tensore deformerà in egual modo nelle tre direzioni.
Quelle termiche sono le distorsioni più diffuse e sono sferiche (ovvero non hanno parte
deviatorica).
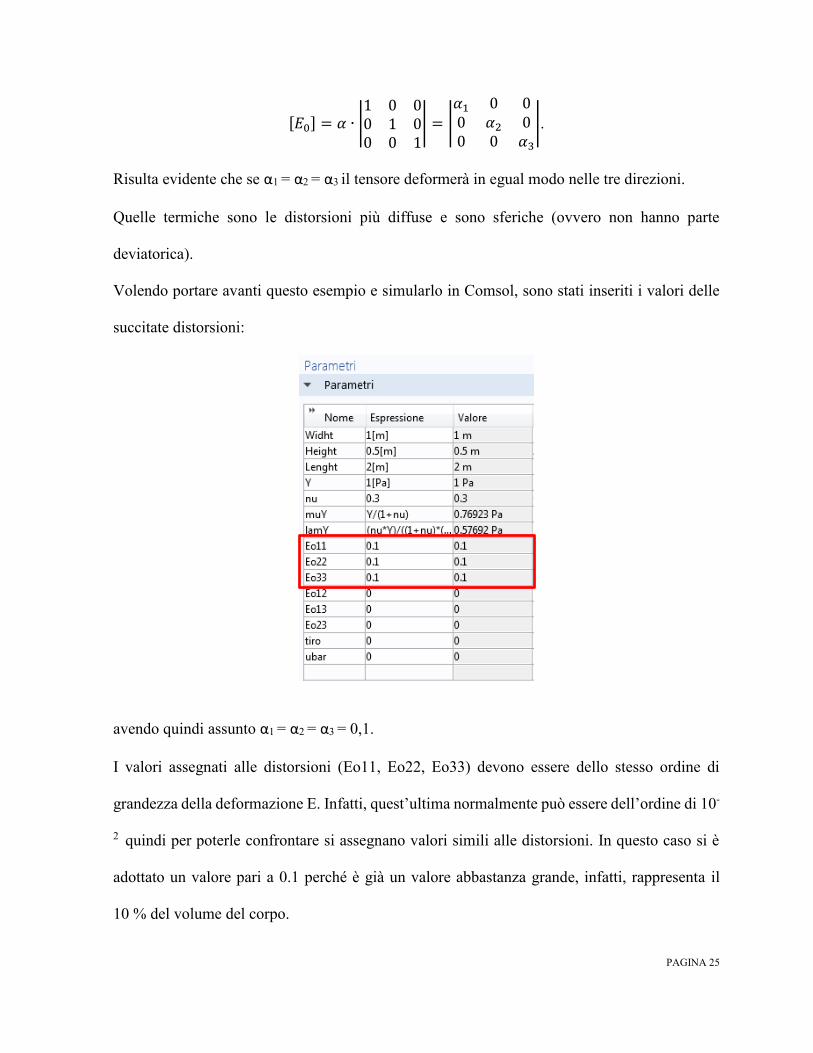
Volendo portare avanti questo esempio e simularlo in Comsol, sono stati inseriti i valori delle
succitate distorsioni:
avendo quindi assunto α1 = α2 = α3 = 0,1.
I valori assegnati alle distorsioni (Eo11, Eo22, Eo33) devono essere dello stesso ordine di
grandezza della deformazione E. Infatti, quest’ultima normalmente può essere dell’ordine di 10-
2 quindi per poterle confrontare si assegnano valori simili alle distorsioni. In questo caso si è
adottato un valore pari a 0.1 perché è già un valore abbastanza grande, infatti, rappresenta il
10 % del volume del corpo.
PAGINA 26
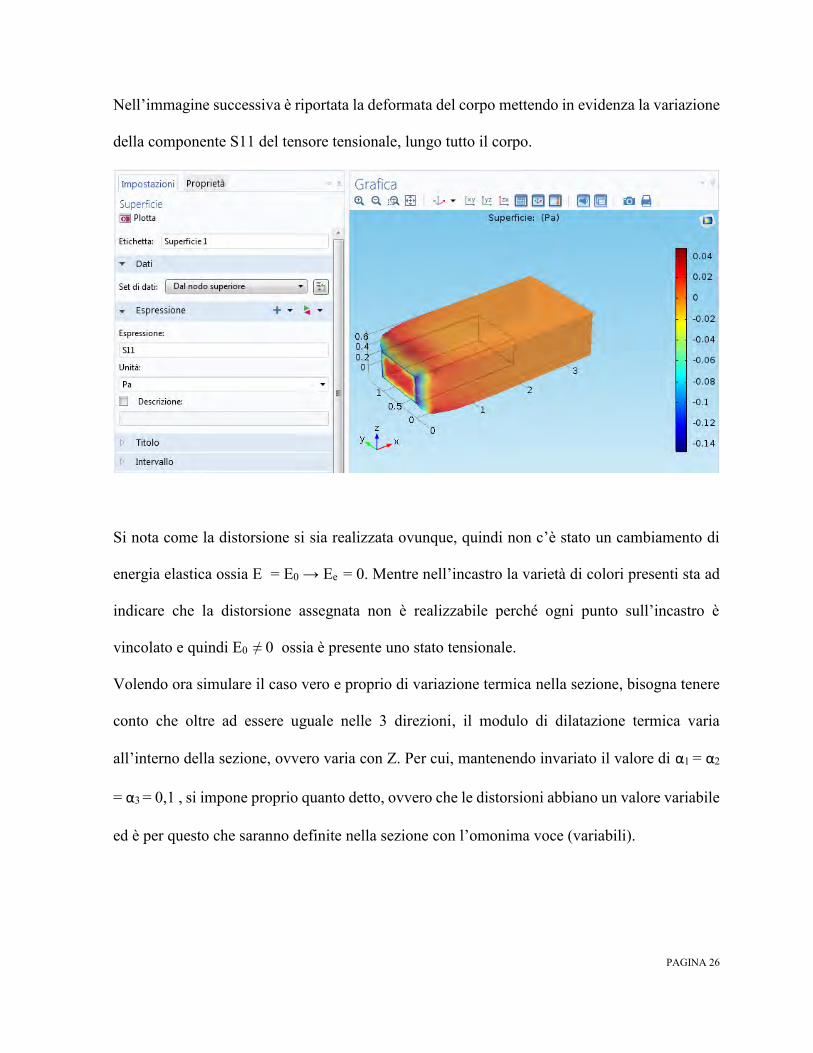
Nell’immagine successiva è riportata la deformata del corpo mettendo in evidenza la variazione
della componente S11 del tensore tensionale, lungo tutto il corpo.
Si nota come la distorsione si sia realizzata ovunque, quindi non c’è stato un cambiamento di
energia elastica ossia E = E0 → Ee = 0. Mentre nell’incastro la varietà di colori presenti sta ad
indicare che la distorsione assegnata non è realizzabile perché ogni punto sull’incastro è
vincolato e quindi E0 ≠ 0 ossia è presente uno stato tensionale.
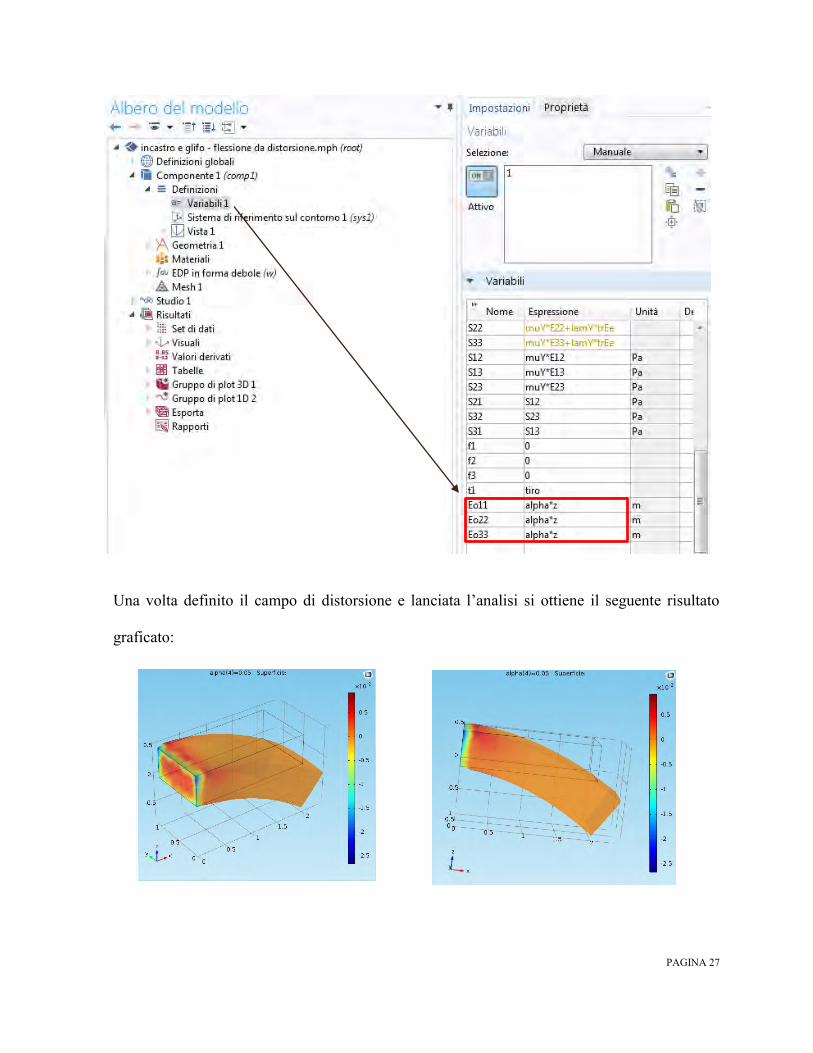
Volendo ora simulare il caso vero e proprio di variazione termica nella sezione, bisogna tenere
conto che oltre ad essere uguale nelle 3 direzioni, il modulo di dilatazione termica varia
all’interno della sezione, ovvero varia con Z. Per cui, mantenendo invariato il valore di α1 = α2
= α3 = 0,1 , si impone proprio quanto detto, ovvero che le distorsioni abbiano un valore variabile
ed è per questo che saranno definite nella sezione con l’omonima voce (variabili).
PAGINA 27
Una volta definito il campo di distorsione e lanciata l’analisi si ottiene il seguente risultato
graficato:
PAGINA 28
dal quale si capisce molto evidentemente che il campo distorsionale imposto fa sì che le fibre
superiori siano sottoposti ad un allungamento, mentre quelle inferiori ad una contrazione. Nel
complesso il provino risulterà allungato.
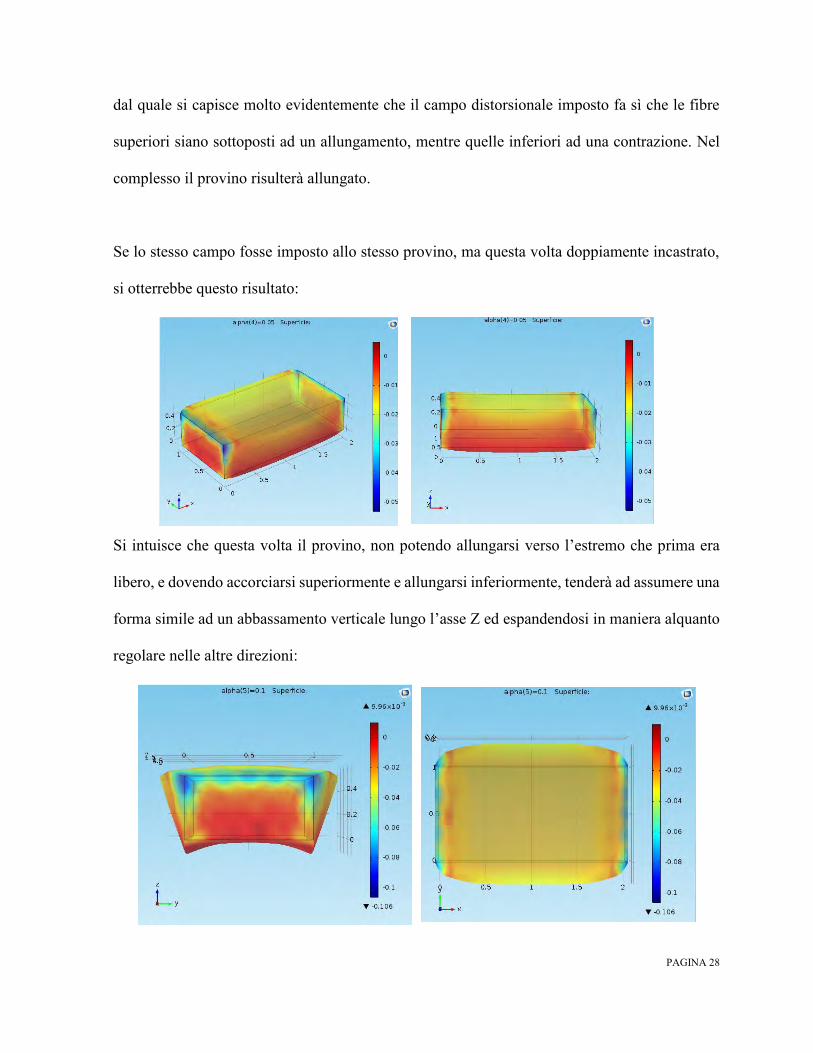
Se lo stesso campo fosse imposto allo stesso provino, ma questa volta doppiamente incastrato,
si otterrebbe questo risultato:
Si intuisce che questa volta il provino, non potendo allungarsi verso l’estremo che prima era
libero, e dovendo accorciarsi superiormente e allungarsi inferiormente, tenderà ad assumere una
forma simile ad un abbassamento verticale lungo l’asse Z ed espandendosi in maniera alquanto
regolare nelle altre direzioni:
PAGINA 29
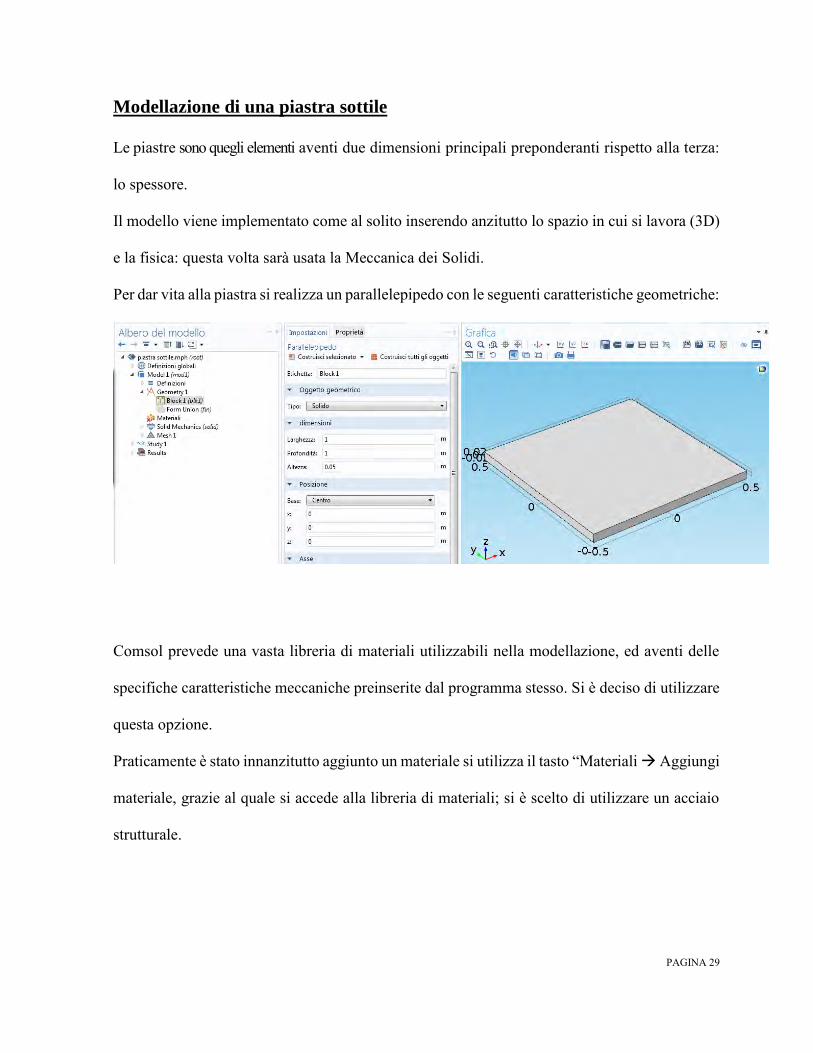
Modellazione di una piastra sottile
Le piastre sono quegli elementi aventi due dimensioni principali preponderanti rispetto alla terza:
lo spessore.
Il modello viene implementato come al solito inserendo anzitutto lo spazio in cui si lavora (3D)
e la fisica: questa volta sarà usata la Meccanica dei Solidi.
Per dar vita alla piastra si realizza un parallelepipedo con le seguenti caratteristiche geometriche:
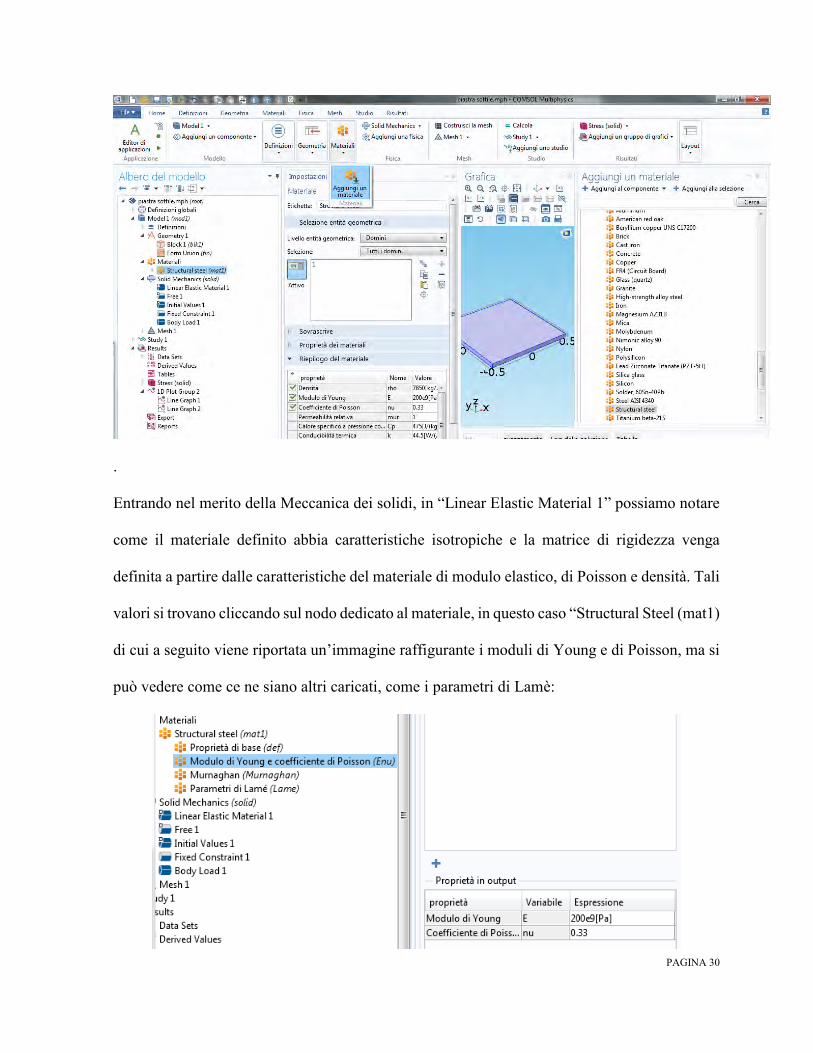
Comsol prevede una vasta libreria di materiali utilizzabili nella modellazione, ed aventi delle
specifiche caratteristiche meccaniche preinserite dal programma stesso. Si è deciso di utilizzare
questa opzione.
Praticamente è stato innanzitutto aggiunto un materiale si utilizza il tasto “Materiali Aggiungi
materiale, grazie al quale si accede alla libreria di materiali; si è scelto di utilizzare un acciaio
strutturale.
PAGINA 30
.
Entrando nel merito della Meccanica dei solidi, in “Linear Elastic Material 1” possiamo notare
come il materiale definito abbia caratteristiche isotropiche e la matrice di rigidezza venga
definita a partire dalle caratteristiche del materiale di modulo elastico, di Poisson e densità. Tali
valori si trovano cliccando sul nodo dedicato al materiale, in questo caso “Structural Steel (mat1)
di cui a seguito viene riportata un’immagine raffigurante i moduli di Young e di Poisson, ma si
può vedere come ce ne siano altri caricati, come i parametri di Lamè:
PAGINA 31
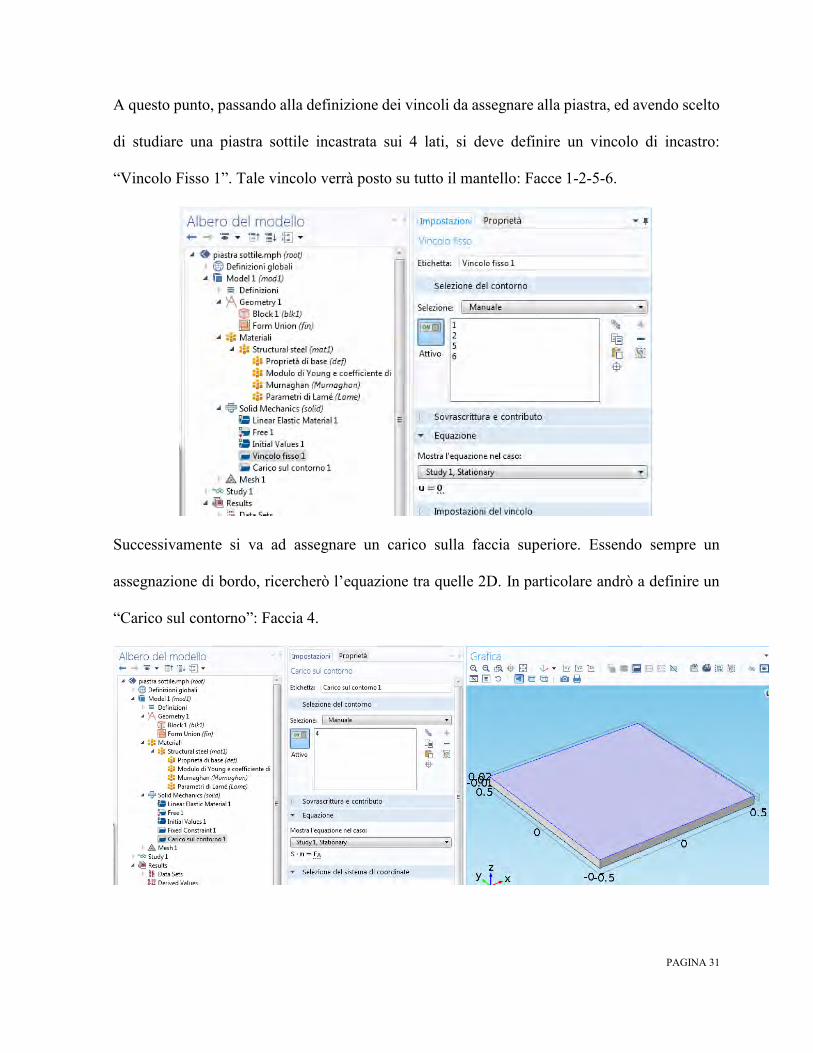
A questo punto, passando alla definizione dei vincoli da assegnare alla piastra, ed avendo scelto
di studiare una piastra sottile incastrata sui 4 lati, si deve definire un vincolo di incastro:
“Vincolo Fisso 1”. Tale vincolo verrà posto su tutto il mantello: Facce 1-2-5-6.
Successivamente si va ad assegnare un carico sulla faccia superiore. Essendo sempre un
assegnazione di bordo, ricercherò l’equazione tra quelle 2D. In particolare andrò a definire un
“Carico sul contorno”: Faccia 4.
PAGINA 32
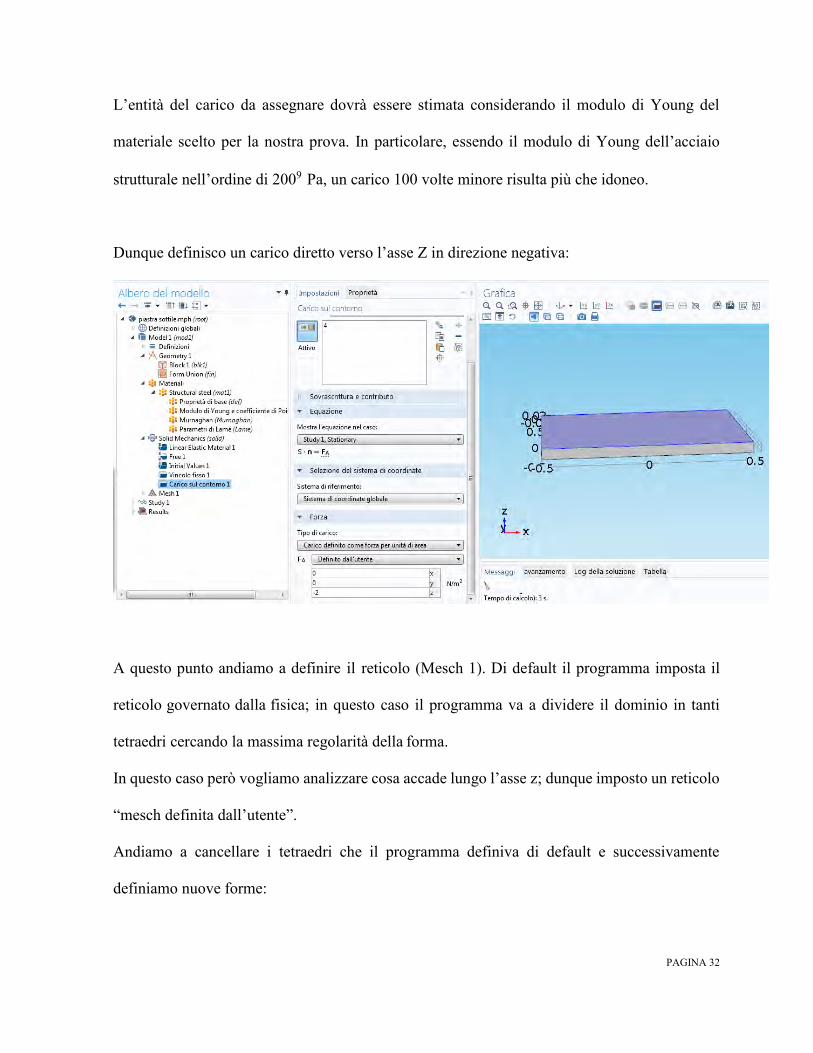
L’entità del carico da assegnare dovrà essere stimata considerando il modulo di Young del
materiale scelto per la nostra prova. In particolare, essendo il modulo di Young dell’acciaio
strutturale nell’ordine di 2009 Pa, un carico 100 volte minore risulta più che idoneo.
Dunque definisco un carico diretto verso l’asse Z in direzione negativa:
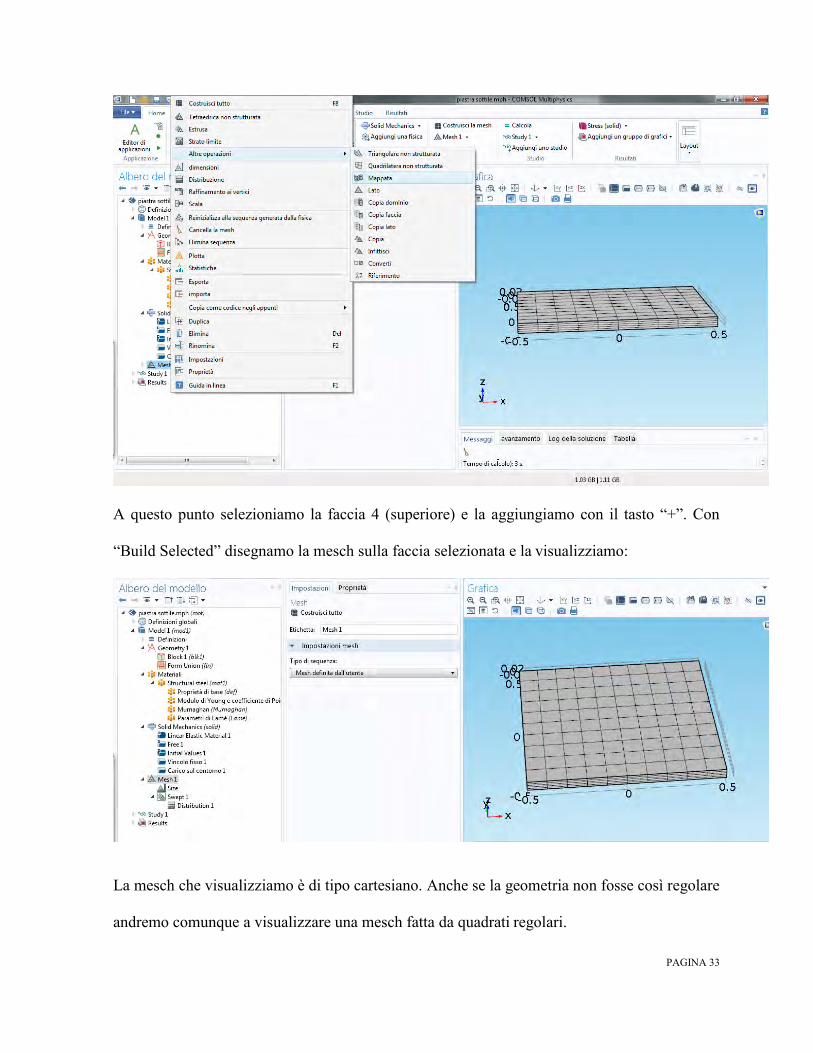
A questo punto andiamo a definire il reticolo (Mesch 1). Di default il programma imposta il
reticolo governato dalla fisica; in questo caso il programma va a dividere il dominio in tanti
tetraedri cercando la massima regolarità della forma.
In questo caso però vogliamo analizzare cosa accade lungo l’asse z; dunque imposto un reticolo
“mesch definita dall’utente”.
Andiamo a cancellare i tetraedri che il programma definiva di default e successivamente
definiamo nuove forme:
PAGINA 33
A questo punto selezioniamo la faccia 4 (superiore) e la aggiungiamo con il tasto “+”. Con
“Build Selected” disegnamo la mesch sulla faccia selezionata e la visualizziamo:
La mesch che visualizziamo è di tipo cartesiano. Anche se la geometria non fosse così regolare
andremo comunque a visualizzare una mesch fatta da quadrati regolari.
PAGINA 34
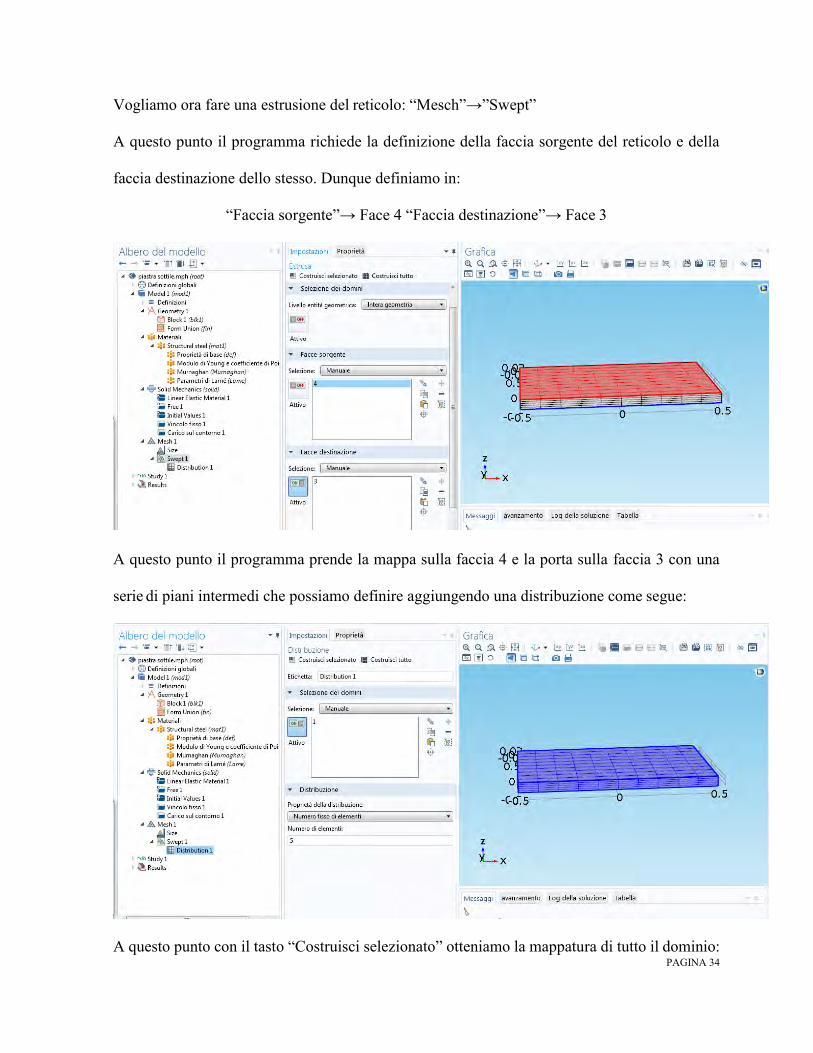
Vogliamo ora fare una estrusione del reticolo: “Mesch”→”Swept”
A questo punto il programma richiede la definizione della faccia sorgente del reticolo e della
faccia destinazione dello stesso. Dunque definiamo in:
“Faccia sorgente”→ Face 4 “Faccia destinazione”→ Face 3
A questo punto il programma prende la mappa sulla faccia 4 e la porta sulla faccia 3 con una
serie di piani intermedi che possiamo definire aggiungendo una distribuzione come segue:
A questo punto con il tasto “Costruisci selezionato” otteniamo la mappatura di tutto il dominio:
PAGINA 35
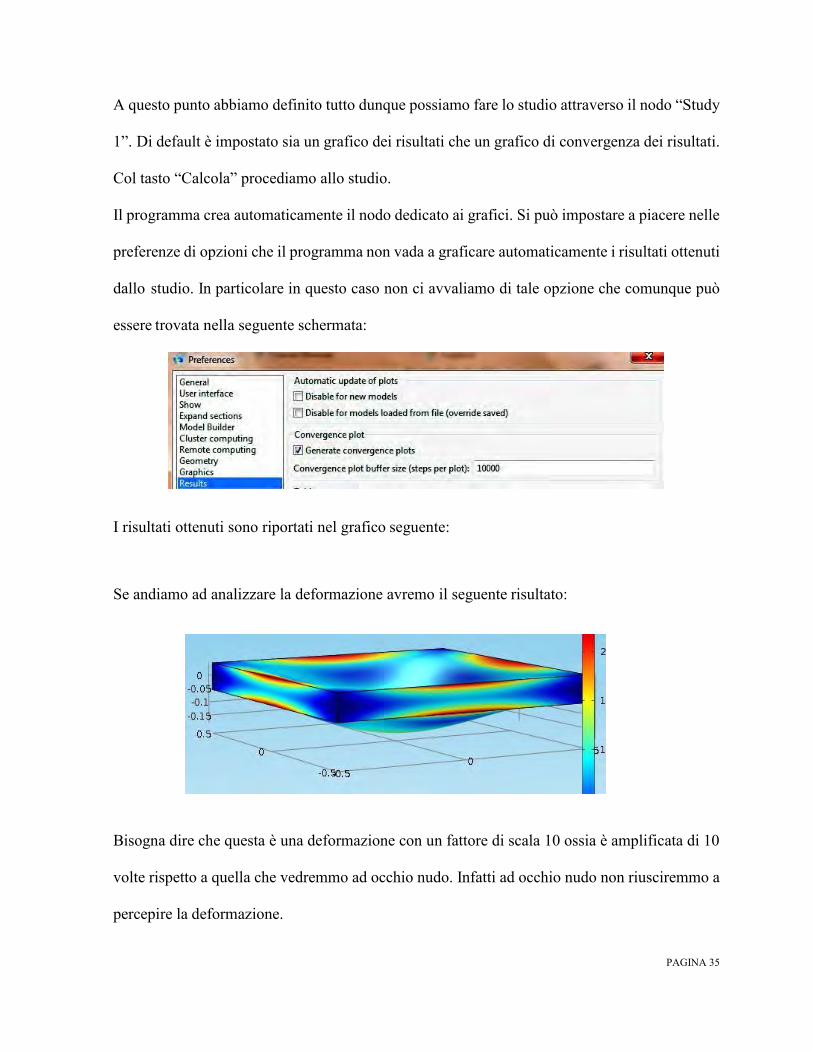
A questo punto abbiamo definito tutto dunque possiamo fare lo studio attraverso il nodo “Study
1”. Di default è impostato sia un grafico dei risultati che un grafico di convergenza dei risultati.
Col tasto “Calcola” procediamo allo studio.
Il programma crea automaticamente il nodo dedicato ai grafici. Si può impostare a piacere nelle
preferenze di opzioni che il programma non vada a graficare automaticamente i risultati ottenuti
dallo studio. In particolare in questo caso non ci avvaliamo di tale opzione che comunque può
essere trovata nella seguente schermata:
I risultati ottenuti sono riportati nel grafico seguente:
Se andiamo ad analizzare la deformazione avremo il seguente risultato:
Bisogna dire che questa è una deformazione con un fattore di scala 10 ossia è amplificata di 10
volte rispetto a quella che vedremmo ad occhio nudo. Infatti ad occhio nudo non riusciremmo a
percepire la deformazione.
PAGINA 36
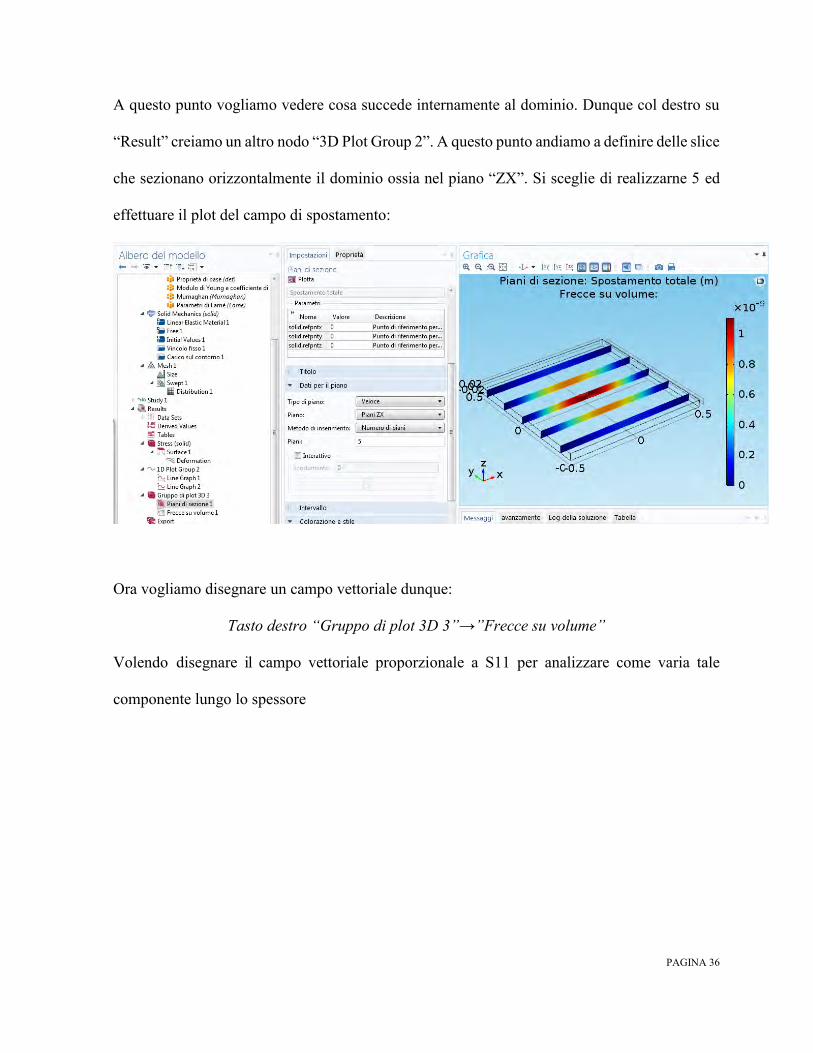
A questo punto vogliamo vedere cosa succede internamente al dominio. Dunque col destro su
“Result” creiamo un altro nodo “3D Plot Group 2”. A questo punto andiamo a definire delle slice
che sezionano orizzontalmente il dominio ossia nel piano “ZX”. Si sceglie di realizzarne 5 ed
effettuare il plot del campo di spostamento:
Ora vogliamo disegnare un campo vettoriale dunque:
Tasto destro “Gruppo di plot 3D 3”→”Frecce su volume”
Volendo disegnare il campo vettoriale proporzionale a S11 per analizzare come varia tale
componente lungo lo spessore
PAGINA 37
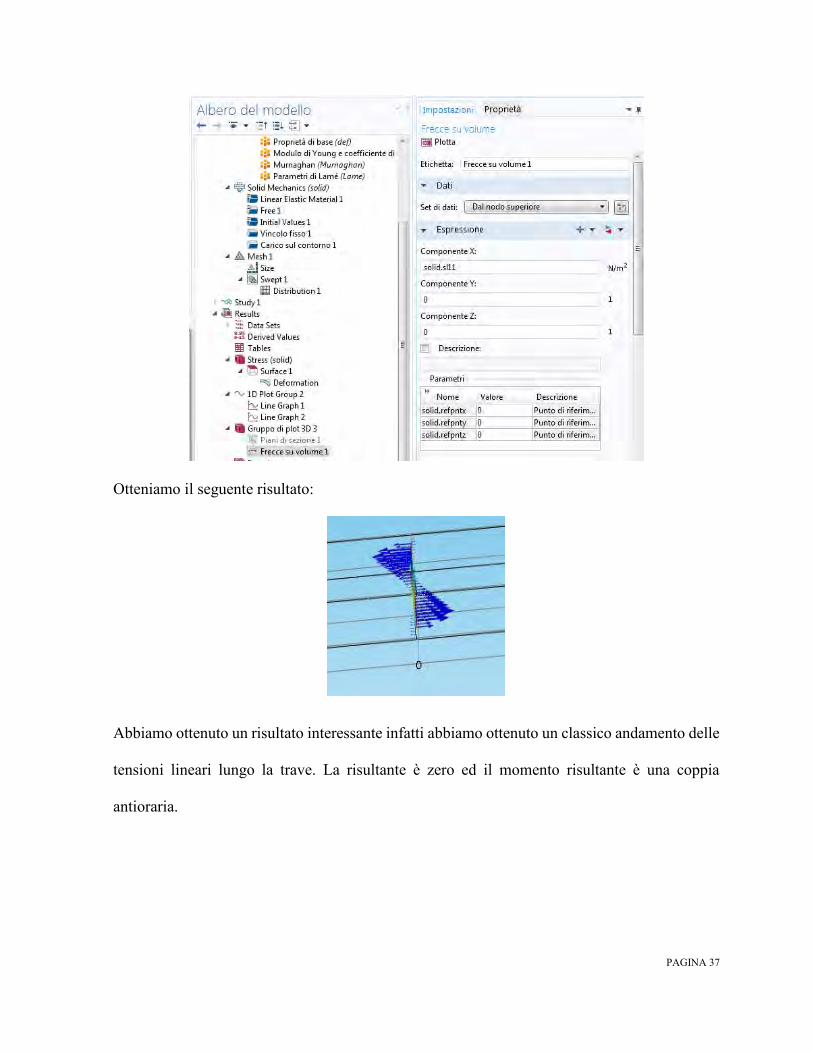
Otteniamo il seguente risultato:
Abbiamo ottenuto un risultato interessante infatti abbiamo ottenuto un classico andamento delle
tensioni lineari lungo la trave. La risultante è zero ed il momento risultante è una coppia
antioraria.
PAGINA 38
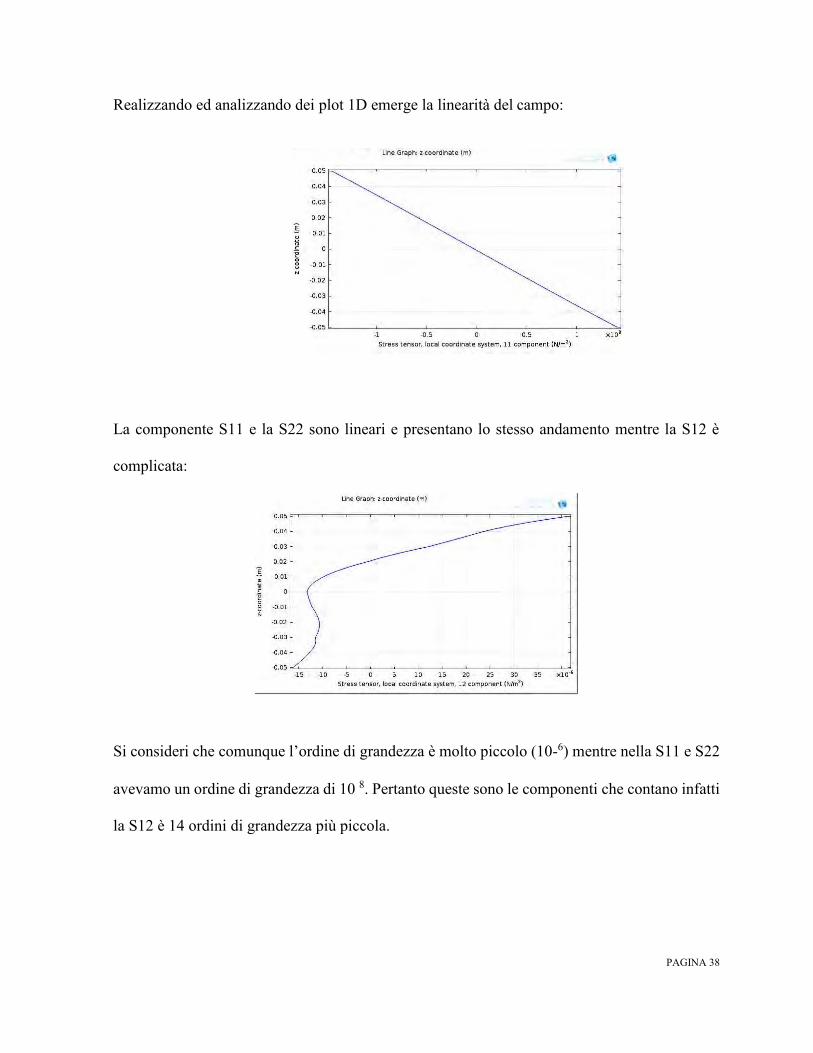
Realizzando ed analizzando dei plot 1D emerge la linearità del campo:
La componente S11 e la S22 sono lineari e presentano lo stesso andamento mentre la S12 è
complicata:
Si consideri che comunque l’ordine di grandezza è molto piccolo (10-6) mentre nella S11 e S22
avevamo un ordine di grandezza di 10 8. Pertanto queste sono le componenti che contano infatti
la S12 è 14 ordini di grandezza più piccola.
PAGINA 39
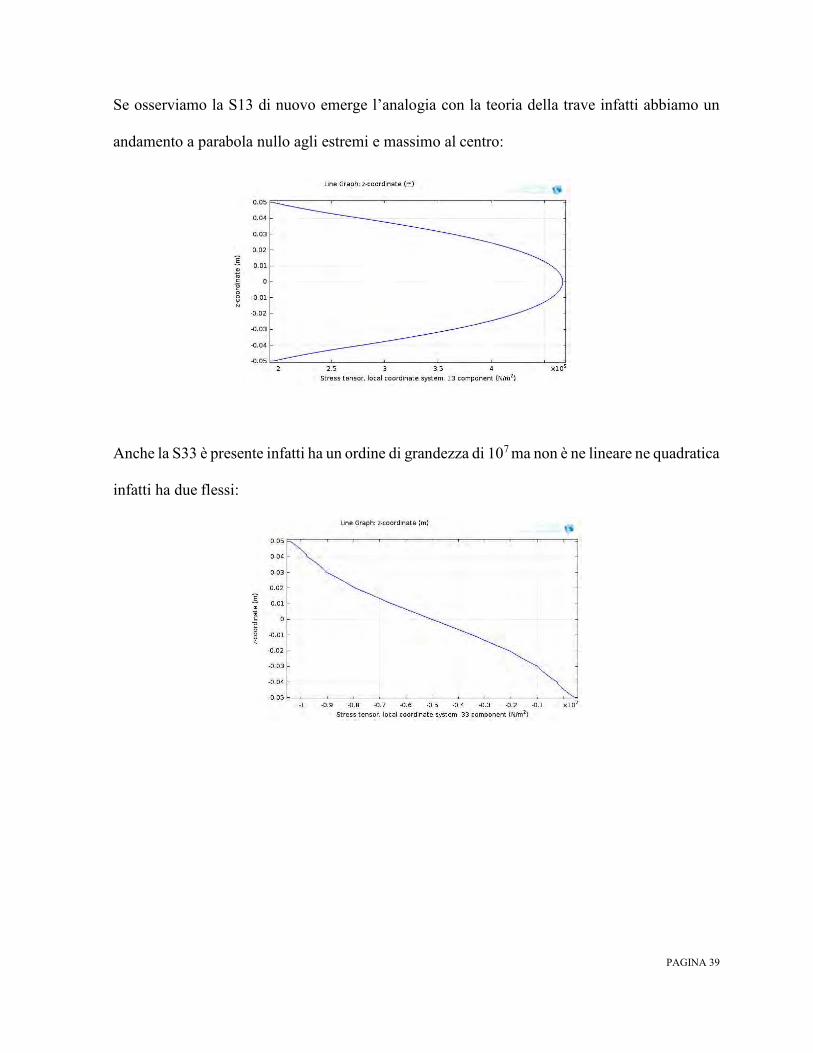
Se osserviamo la S13 di nuovo emerge l’analogia con la teoria della trave infatti abbiamo un
andamento a parabola nullo agli estremi e massimo al centro:
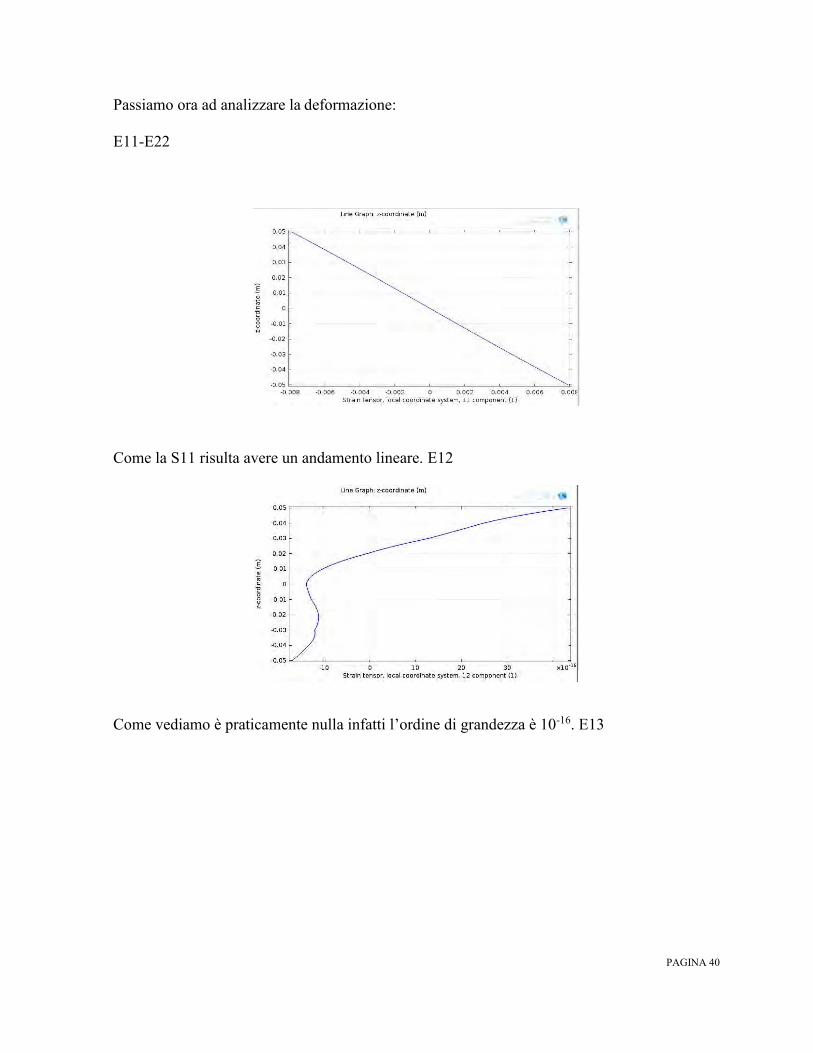
Anche la S33 è presente infatti ha un ordine di grandezza di 107 ma non è ne lineare ne quadratica
infatti ha due flessi:
PAGINA 40
Passiamo ora ad analizzare la deformazione:
E11-E22
Come la S11 risulta avere un andamento lineare. E12
Come vediamo è praticamente nulla infatti l’ordine di grandezza è 10-16. E13
PAGINA 41
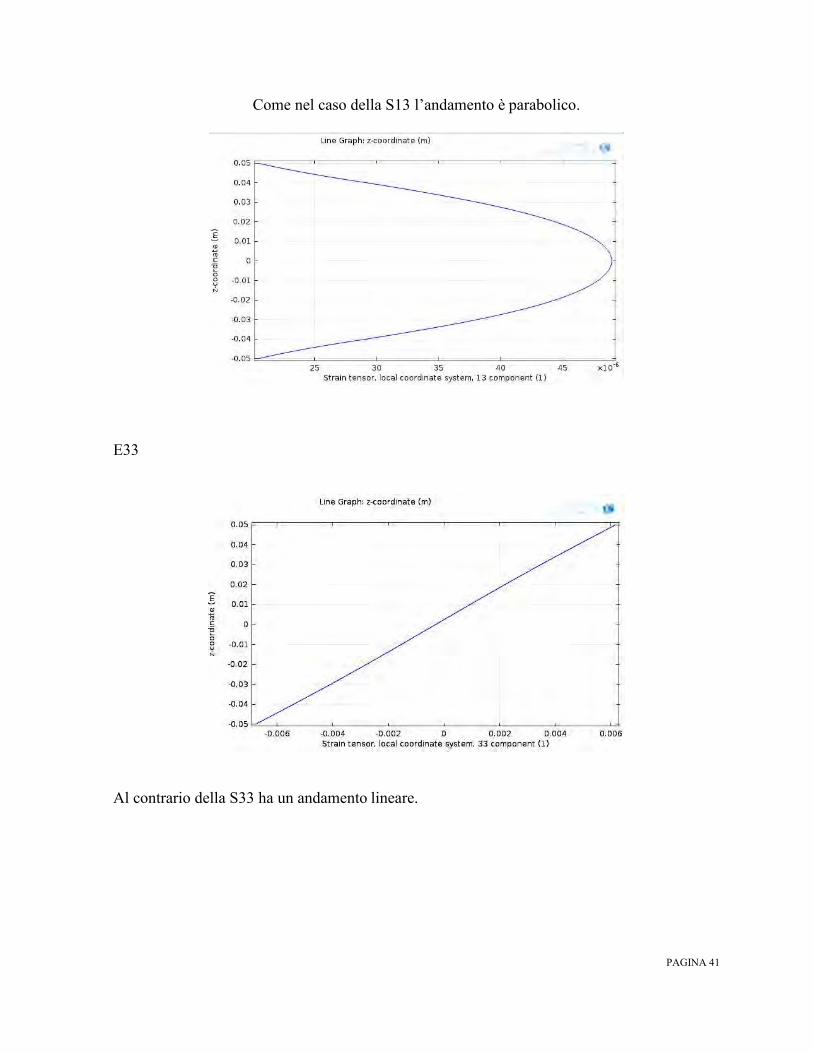
Come nel caso della S13 l’andamento è parabolico.
E33
Al contrario della S33 ha un andamento lineare.
PAGINA 42
Materiali compositi FRP (materiali anisotropi)
Cenni sui materiali compositi
Per materiale composito si intende una combinazione di due o più componenti che
contribuiscono mutuamente a fornire proprietà meccaniche e fisiche complessivamente
superiori, o comunque più idonee all'uso che ci si prefigge, rispetto a quelle dei suoi singoli
costituenti.
Un materiale composito è costituito da:
1. la matrice che, bloccando le fibre, trasferisce loro il carico esterno e le protegge dai fattori
ambientali, dall’usura e da eventuali azioni meccaniche di taglio;
2. il materiale di rinforzo (o carica) che viene aggiunto sotto forma di fibre lunghe, fibre corte o
particelle (Figura 1);
3. l'interfaccia tra il materiale di rinforzo e la matrice (Figura 2).
PAGINA 43
Nel caso che le fibre siano disposte parallelamente tra loro nella matrice, si parla di compositi
unidirezionali e si ottengono proprietà meccaniche del materiale spiccatamente anisotrope:
questa è la caratteristica peculiare dei compositi in quanto offre la possibilità di progettare e
costruire un materiale in funzione delle esigenze strutturali.
Materiali con desiderate proprietà meccaniche possono essere infatti costruiti formando strati
ognuno costituito da fibre parallele tra loro e sovrapponendo gli strati stessi con le relative fibre
disposte secondo orientazioni diverse. In tal caso i singoli strati si definiscono lamine e l'insieme
delle lamine è detto laminato:
I compositi laminati unidirezionali saranno poi oggetto della mia tesi di cui si studieranno i
meccanismi di frattura e nello specifico il meccanismo di debonding.
Simulazioni su Comsol Muliphysic
Durante il tirocinio, ho dunque indagato su come si modellassero questi elementi compositi
(matrice + fibre) su Comsol prestando attenzione su come l’inserimento di materiali (le fibre)
all’interno della matrice, potessero offrire dei benefici rispetto alle capacità meccaniche di un
corpo sottoposto a sforzi di trazione. Vediamo dunque come è stata realizzata la modellazione
di tali materiali.
Come già spiegato nel primo modello della presente relazione, si è inserito lo spazio 3D in cui
si lavora e la fisica. Chiaramente, a differenza dei modelli trattati finora in cui il provino era
composto da un unico materiale ed in più omogeneo ed isotropo, adesso si presenta la
PAGINA 44
compresenza di due materiali che interagiscono tra di loro; questo implica la definizione di due
domini e l’obbligo di definire due corpi aventi ognuno la sua geometria e le proprie
caratteristiche meccaniche e proprietà elastiche.
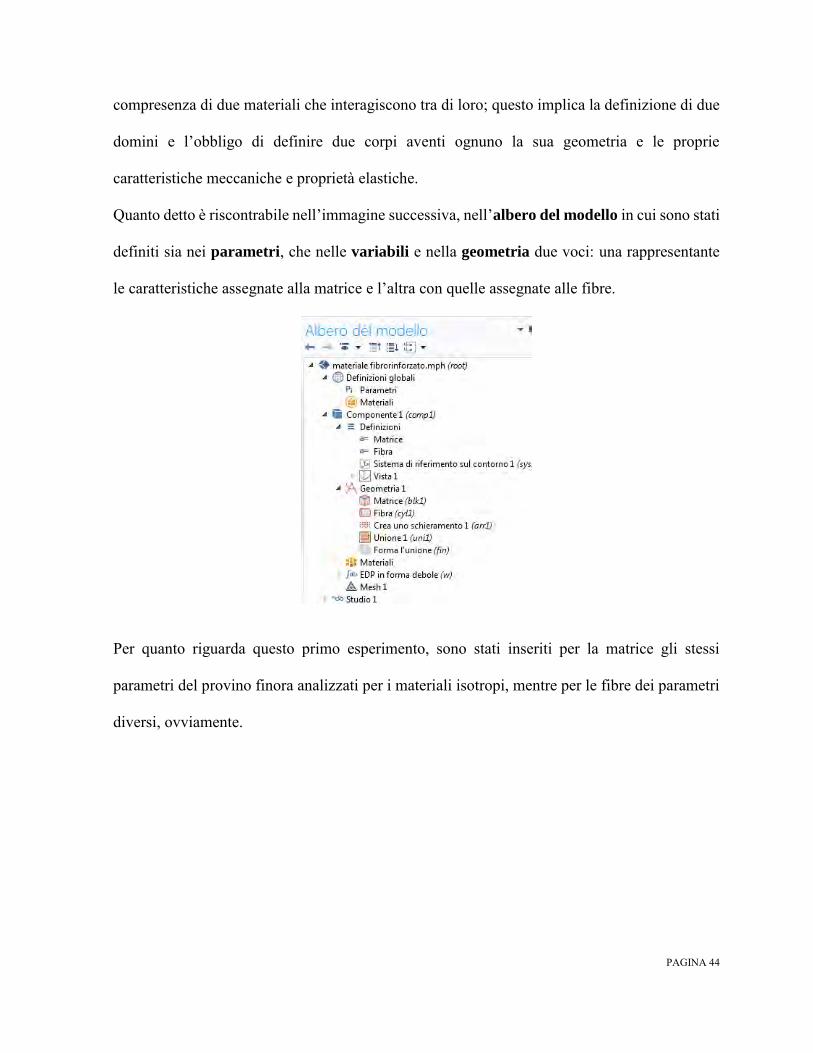
Quanto detto è riscontrabile nell’immagine successiva, nell’albero del modello in cui sono stati
definiti sia nei parametri, che nelle variabili e nella geometria due voci: una rappresentante
le caratteristiche assegnate alla matrice e l’altra con quelle assegnate alle fibre.
Per quanto riguarda questo primo esperimento, sono stati inseriti per la matrice gli stessi
parametri del provino finora analizzati per i materiali isotropi, mentre per le fibre dei parametri
diversi, ovviamente.
PAGINA 45
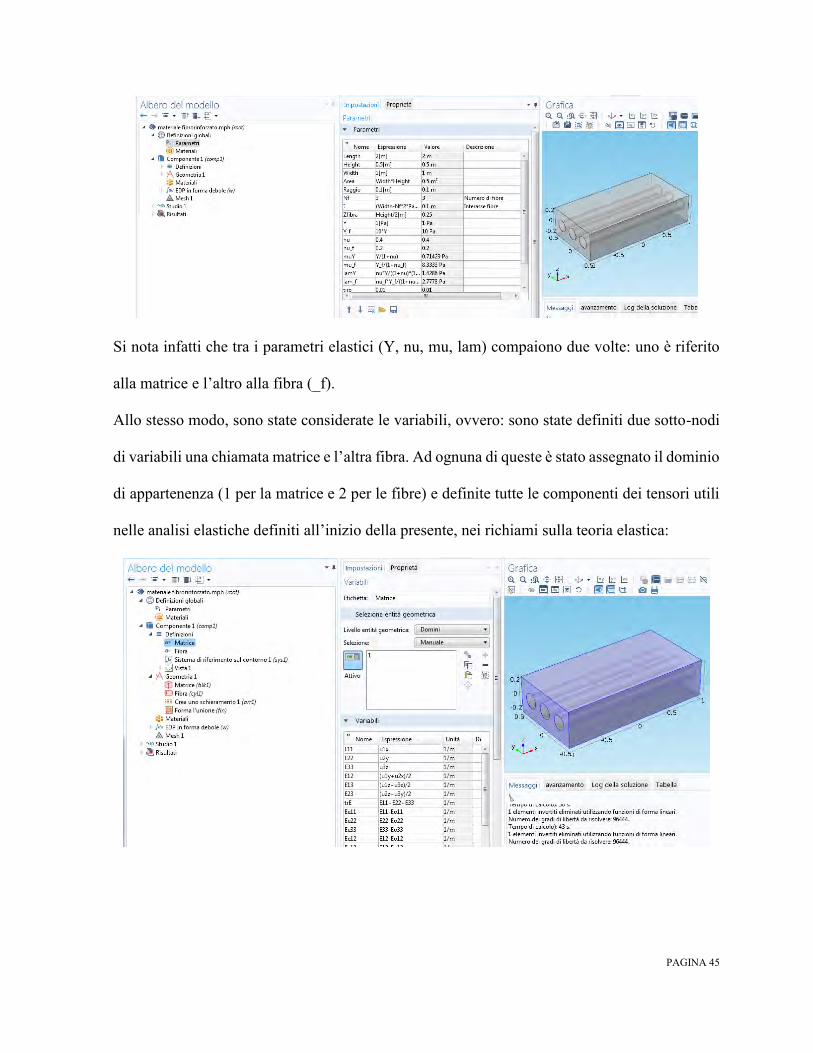
Si nota infatti che tra i parametri elastici (Y, nu, mu, lam) compaiono due volte: uno è riferito
alla matrice e l’altro alla fibra (_f).
Allo stesso modo, sono state considerate le variabili, ovvero: sono state definiti due sotto-nodi
di variabili una chiamata matrice e l’altra fibra. Ad ognuna di queste è stato assegnato il dominio
di appartenenza (1 per la matrice e 2 per le fibre) e definite tutte le componenti dei tensori utili
nelle analisi elastiche definiti all’inizio della presente, nei richiami sulla teoria elastica:
PAGINA 46
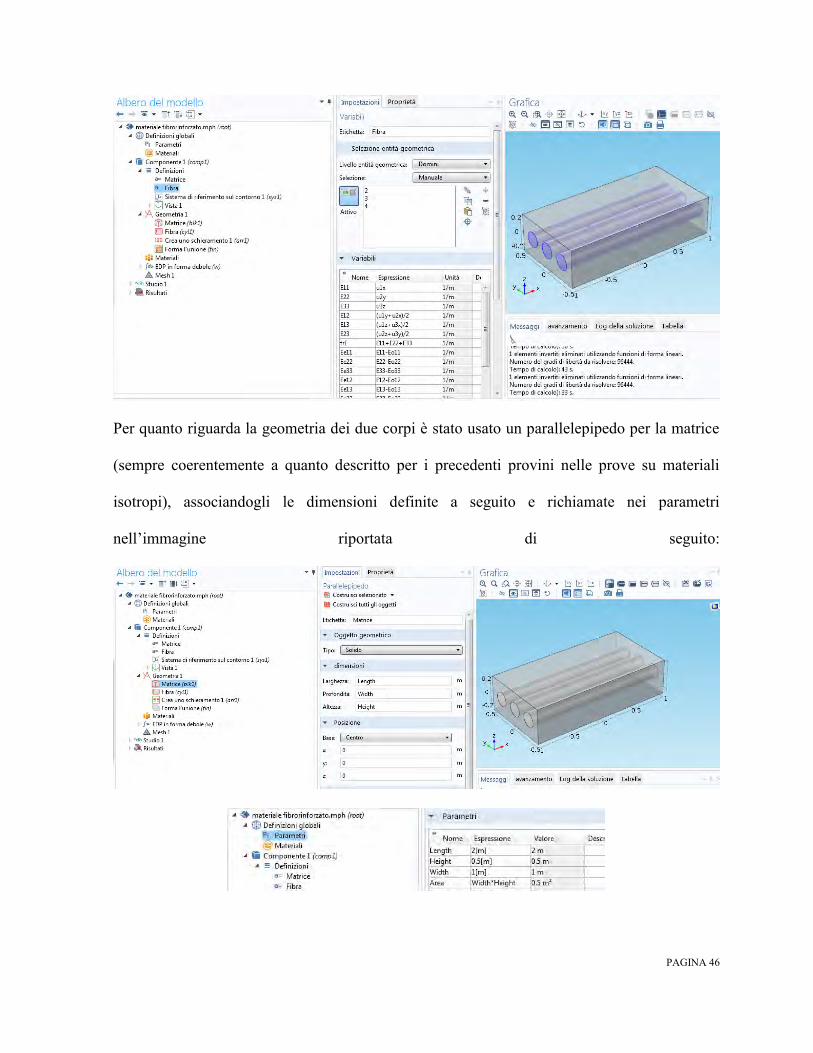
Per quanto riguarda la geometria dei due corpi è stato usato un parallelepipedo per la matrice
(sempre coerentemente a quanto descritto per i precedenti provini nelle prove su materiali
isotropi), associandogli le dimensioni definite a seguito e richiamate nei parametri
nell’immagine riportata di seguito:
PAGINA 47
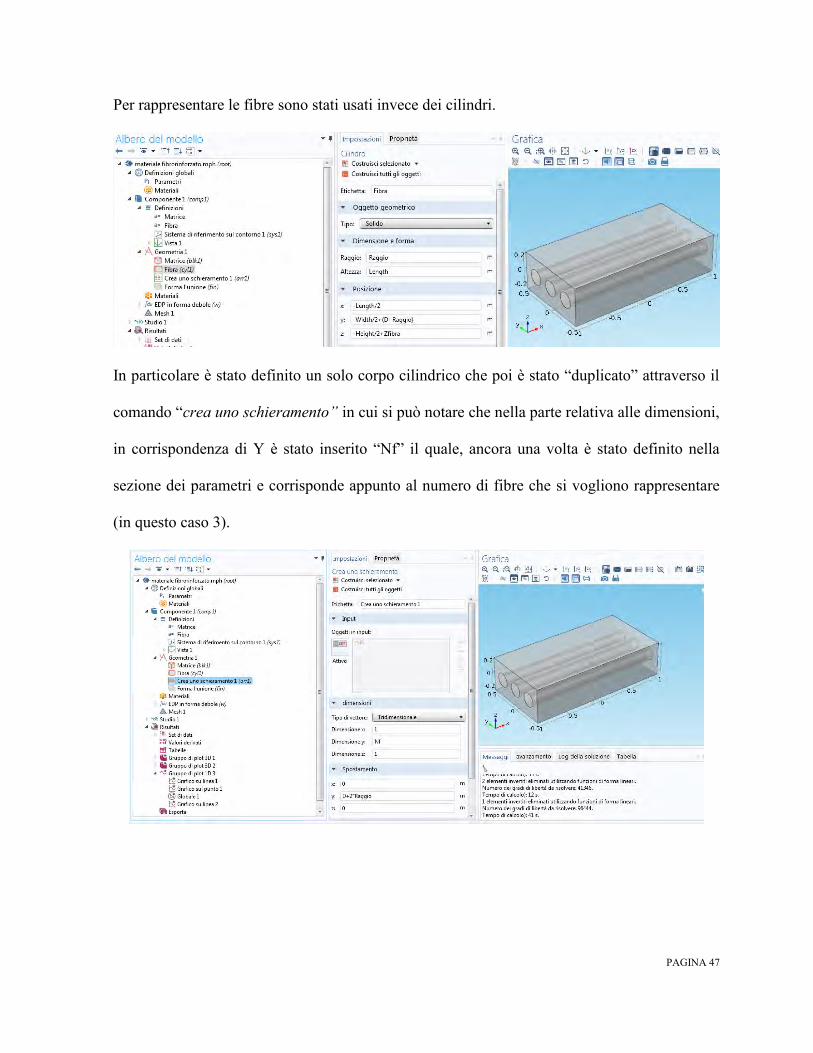
Per rappresentare le fibre sono stati usati invece dei cilindri.
In particolare è stato definito un solo corpo cilindrico che poi è stato “duplicato” attraverso il
comando “crea uno schieramento” in cui si può notare che nella parte relativa alle dimensioni,
in corrispondenza di Y è stato inserito “Nf” il quale, ancora una volta è stato definito nella
sezione dei parametri e corrisponde appunto al numero di fibre che si vogliono rappresentare
(in questo caso 3).
PAGINA 48
È chiaro che il fatto di inserire un parametro è solo una questione di metodo; alternativamente
si potrebbe inserire direttamente il numero, ma in questo caso è stato utile inserire un parametro
Nf dal quale dipende l’interasse tra le fibre anch’esso presente tra i parametri.
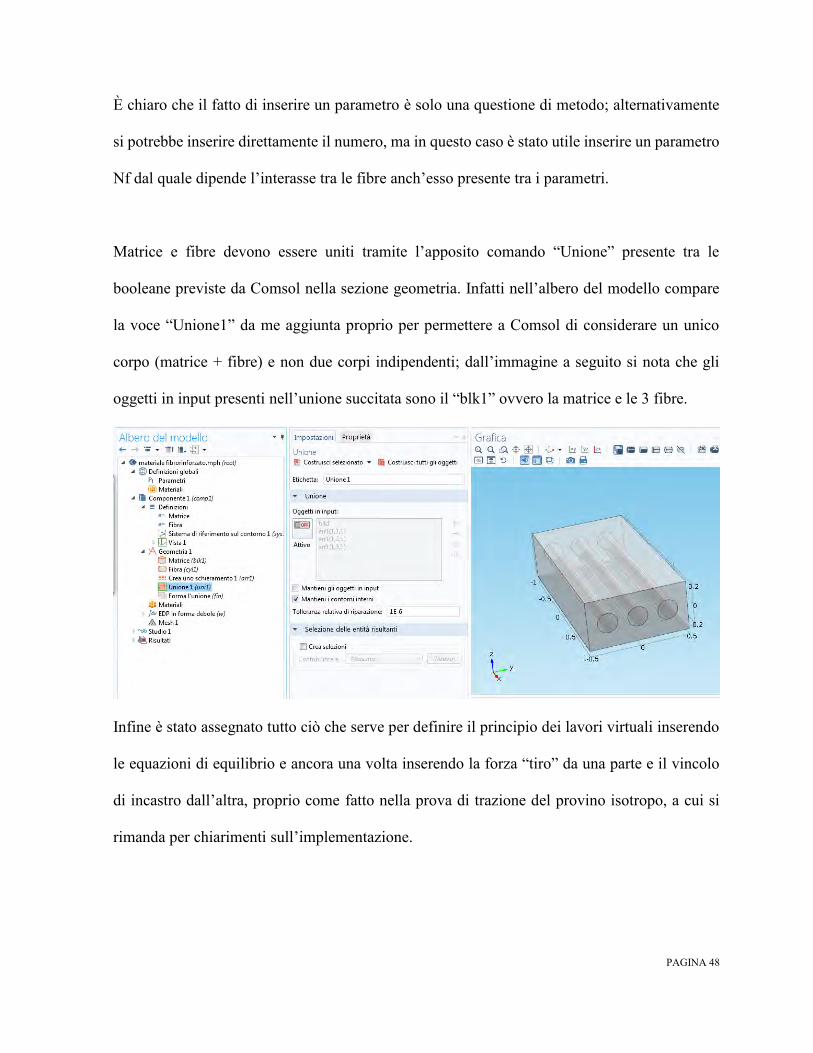
Matrice e fibre devono essere uniti tramite l’apposito comando “Unione” presente tra le
booleane previste da Comsol nella sezione geometria. Infatti nell’albero del modello compare
la voce “Unione1” da me aggiunta proprio per permettere a Comsol di considerare un unico
corpo (matrice + fibre) e non due corpi indipendenti; dall’immagine a seguito si nota che gli
oggetti in input presenti nell’unione succitata sono il “blk1” ovvero la matrice e le 3 fibre.
Infine è stato assegnato tutto ciò che serve per definire il principio dei lavori virtuali inserendo
le equazioni di equilibrio e ancora una volta inserendo la forza “tiro” da una parte e il vincolo
di incastro dall’altra, proprio come fatto nella prova di trazione del provino isotropo, a cui si
rimanda per chiarimenti sull’implementazione.
PAGINA 49
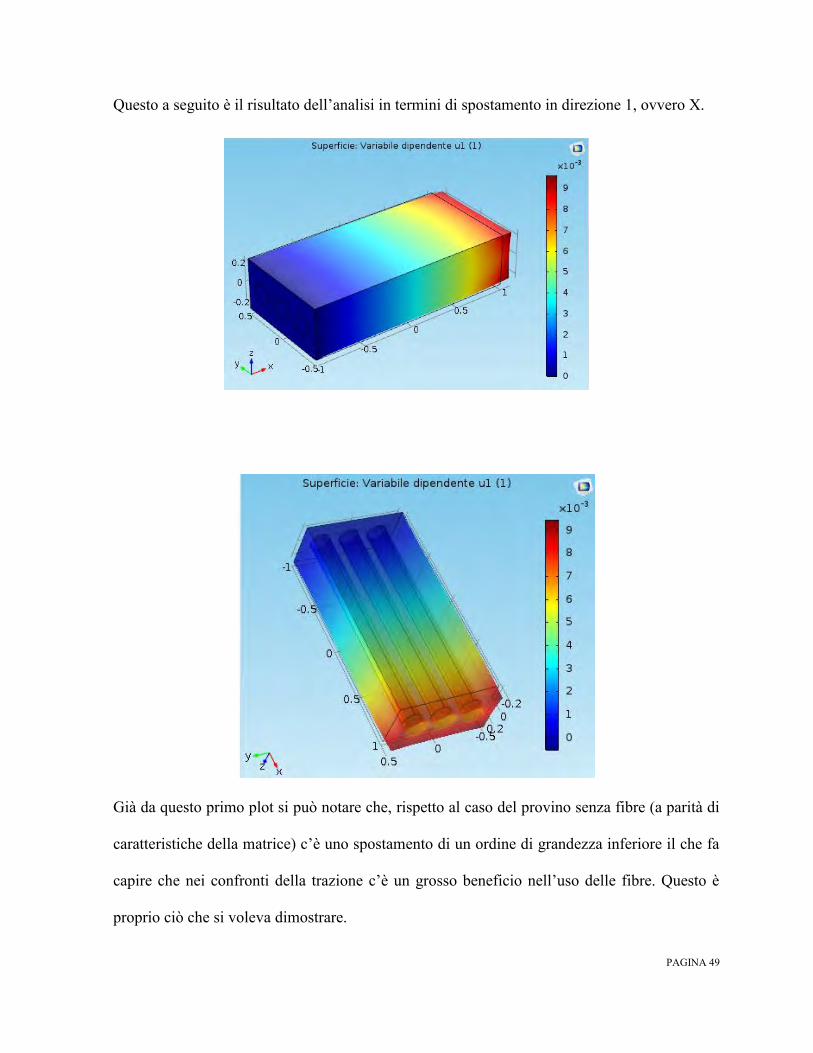
Questo a seguito è il risultato dell’analisi in termini di spostamento in direzione 1, ovvero X.
Già da questo primo plot si può notare che, rispetto al caso del provino senza fibre (a parità di
caratteristiche della matrice) c’è uno spostamento di un ordine di grandezza inferiore il che fa
capire che nei confronti della trazione c’è un grosso beneficio nell’uso delle fibre. Questo è
proprio ciò che si voleva dimostrare.
PAGINA 50
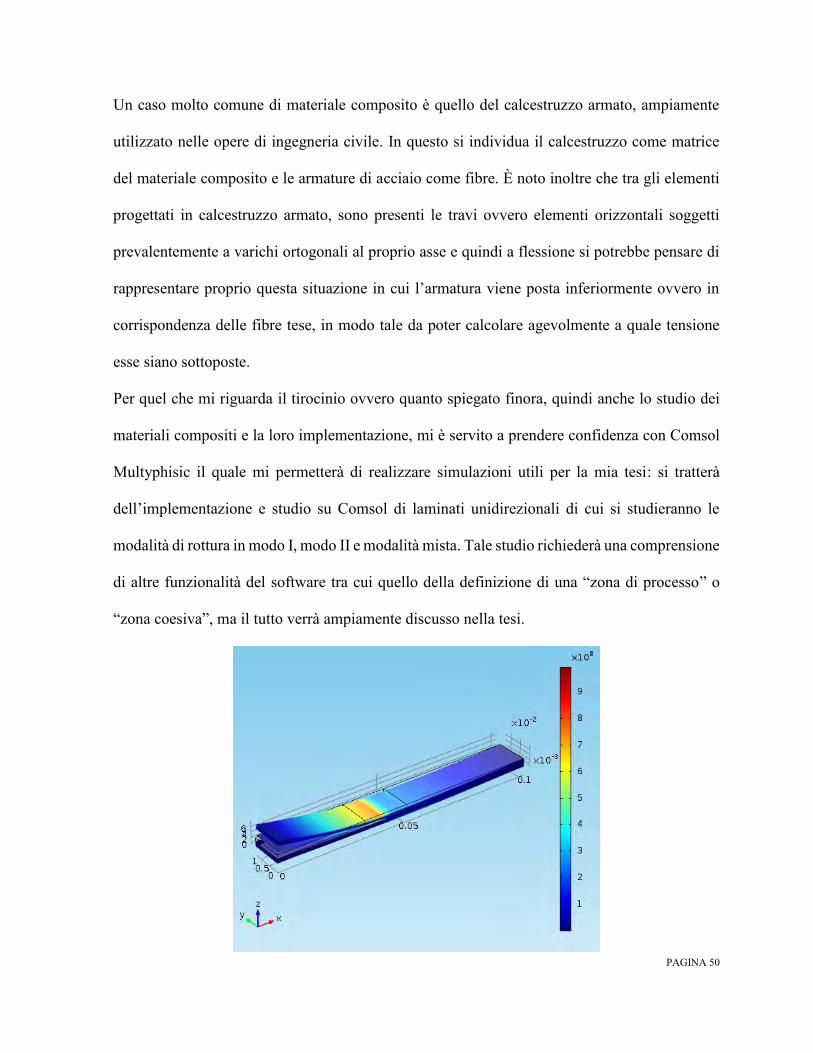
Un caso molto comune di materiale composito è quello del calcestruzzo armato, ampiamente
utilizzato nelle opere di ingegneria civile. In questo si individua il calcestruzzo come matrice
del materiale composito e le armature di acciaio come fibre. È noto inoltre che tra gli elementi
progettati in calcestruzzo armato, sono presenti le travi ovvero elementi orizzontali soggetti
prevalentemente a varichi ortogonali al proprio asse e quindi a flessione si potrebbe pensare di
rappresentare proprio questa situazione in cui l’armatura viene posta inferiormente ovvero in
corrispondenza delle fibre tese, in modo tale da poter calcolare agevolmente a quale tensione
esse siano sottoposte.
Per quel che mi riguarda il tirocinio ovvero quanto spiegato finora, quindi anche lo studio dei
materiali compositi e la loro implementazione, mi è servito a prendere confidenza con Comsol
Multyphisic il quale mi permetterà di realizzare simulazioni utili per la mia tesi: si tratterà
dell’implementazione e studio su Comsol di laminati unidirezionali di cui si studieranno le
modalità di rottura in modo I, modo II e modalità mista. Tale studio richiederà una comprensione
di altre funzionalità del software tra cui quello della definizione di una “zona di processo” o
“zona coesiva”, ma il tutto verrà ampiamente discusso nella tesi.











![Relazione sul tirocinio pratico Master, pubblicazione[1]..… sul tirocinio pratico Master... · 5 Il 23/11/2004 ho svolto il tirocinio pratico presso il complesso operatorio dalle](https://img.pdfslide.tips/doc/110x75/5c65d16a09d3f2d0218b5407/relazione-sul-tirocinio-pratico-master-pubblicazione1-sul-tirocinio-pratico.jpg)