Embed Size (px)
Citation preview

1
IAC-05-A3.5.A.01
HAYABUSA (MUSES-C) – RENDEZVOUS AND PROXIMITY OPERATION
Jun’ichiro Kawaguchi, Akira Fujiwara and Tono Uesugi The Institute of Space and Astronautical Science (ISAS)/ JAXA,
3-1-1 Yoshinodai, Sagamihara, Kanagawa 229-8510, Japan. Phone: +81-42-759-8219, FAX: +81-42-759-8458,
E-mail: [email protected]
Hayabusa, a world’s first sample & return attempt to/from an asteroid arrived at the target Itokawa on September 12th, 2005. It started its proximity operation including visible, near-infra-red and X-ray spectroscopy observation. This paper shows how the slow-speed rendezvous was accomplished with the optical navigation.
Introduction Hayabusa (MUSES-C) arrived at the near Earth asteroid ‘Itokawa’ in the middle of this September. It has flown one year of energy accumulation flight followed by another one year of the post Earth gravity assist flight, which has been also propelled by the ion engines aboard. So far the ion engines have been operated successfully and Hayabusa now has become the first spacecraft making a slow rendezvous with an asteroid via ion engines. Immediately after it arrived, the spacecraft started the station keeping at the Gate Position (GP) located 20 km from the surface. The laser altimeter works normally and the spacecraft autonomously keeps its position inside the GP control box. The shape of Itokawa was photographed and the surface images sent back to the Earth showed a lot of discoveries that have not been assumed before arrival. This paper presents the latest status of the spacecraft and the quasi-real time surface images sent to the operation room. And the paper will show the proximity operation schedule that is seen as of today. According to the operation plan, it makes a rehearsal touch-down at the beginning of November and will make two touches down to the surface within November. The paper in detail describes the touch down scenarios and the technology introduced for this purpose as well. Hayabusa will depart Itokawa for the Earth at the beginning of December returning the sample to the Earth in June of 2007. The paper and the presentation will open the new exploration era of returning samples back..
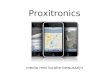
Brief Description of the Mission, Hayabusa Hayabusa is a challenge to asteroid sample and return mission. The dimensions of it are : 1.0m x 1.6m x 1.1m, whose mass is 380kg (dry) carrying chemical fuel of 70kg and Xe propellant of 60kg, having resulted in the total mass of 510 kg. (Electric Power: 2.6kW at Earth distance) What is Hayabusa? It is a world’s first round-trip interplanetary flight probe stopping over the destination. Hayabusa aims at demonstrating five new technologies. They are 1. Interplanetary Cruise via Ion Engines as
Primary Propulsion 2. Autonomous Navigation and Guidance using
Optical Measurement 3. Sample Collection from Asteroid Surface
under Micro Gravity 4. Direct Reentry for Sample Recovery from
Interplanetary Orbit 5. Combination of Low Thrust and Gravity Assist Other new technologies are also introduced:
Earth
Sun Launch by M5 Rocket in 2002
Direct Reentry in 2006
Crusing by Ion Thrusters
Asteroid
Sampling
Approach by Bi-propellant Thrusters in 2004
Departure by Bi-propellant Thrusters
Crusing by Ion Thruster
Launch May of ‘03
Low Thrust + Earth Swingby in May, ‘04(EDVEGA)
Rendezvous summer, ‘05 Touch-down +
Sampling ‘05
Asteroid Itokawa
Return Cruise Ion Engine
Reentry for Recovery ‘07
Fig. 1 Hayabusa Mission Summary
2
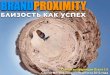
Bi-Propellant Small Thrust Reaction Control System, X-band Up/Down, Communication, Complete CCSDS Packet Telemetry, Duty Guaranteed Heater Control Electronics assuring Heater Power Constraint, Wheel Unloading via Ion Engines, PN-Code Ranging, Lithium Ion Re-chargeable Battery, Multi-Junction Solar Cell, etc. Current Status of Hayabusa Since the launch on May 9th of 2003, Hayabusa has flown toward the near Earth asteroid Itokawa, being propelled by ISAS proprietary ion engines, with the combination of Earth gravity assist.
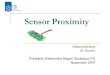
As of September 2nd in 2005 after the ion engines operation ended, Hayabusa was about 1,500 km to Itokawa with 18 km/h. Ion Engines Cruise & Earth Gravity Assist Earth swing-by occurred on May 19, ’04. The ion engines aboard Hayabusa had been driven by Aug 28th, 2005, the total operation of 26,000 hours was successfully performed. Ion Engines completed the Transfer Half of its Cruise After the solar conjunction, the microwave discharge ion engines were turned on again at the end of July and accelerated the spacecraft with their full throttling so as to approach to the target.
Launch May 9, 2003
Earth Swing-by May 19, 2004
Return July 2007
Arrival Sep 2005
Departure Dec 2005
Sun
Location on May 2005 Aphelion
on Feb 18, 2005 1.7AU from sun
Earth
Revolutaional Direction
End of August, ‘05
Launch May 9, 2003
Earth Swing-by May 19, 2004
Return July 2007
Arrival Sep 2005
Departure Dec 2005
Sun
Location on May 2005 Aphelion
on Feb 18, 2005 1.7AU from sun
Earth
Revolutaional Direction
End of August, ‘05
17 hours prior to swing-by, Earth is photographed at the distance of 300,000 km. It is seen as full moon.
After swing-by, Earth is seen as half moon.
Fig. 2 Hayabusa Swing-by and Images
Fig. 3 Ion Engines Operation History
Fig. 4 Hayabusa Trajectory Flown
3
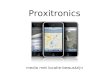
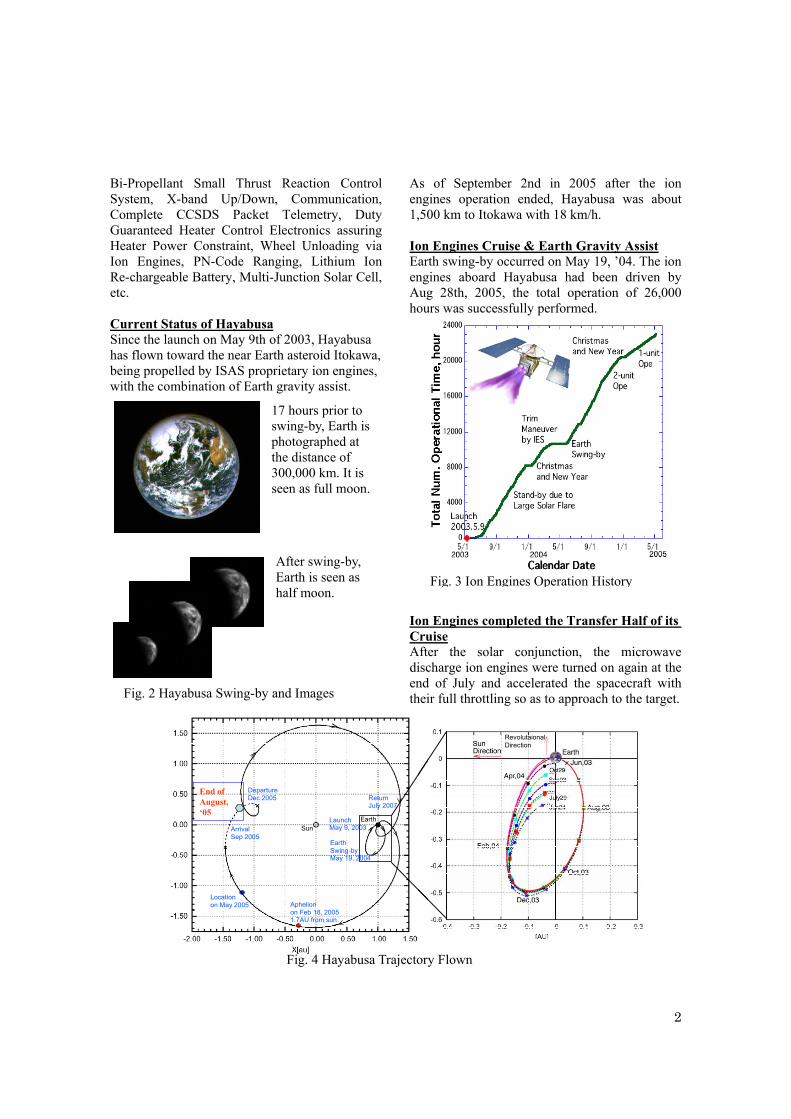
For 25,800 hours, the total numbers of space operational time, the engines were driven to generate about 1,400m/s delta-V with 22kg xenon propellant. Imaging Itokawa 2005 (Fig. 5) On July 29, 30th, August 8, 9th, August 12th in 2005, a series of Star Tracker Images were taken for the optical navigation On August 22, 23, August 29th, the narrow angle onboard Optical Navigation Camera (ONC-T) successfully exposed Itokawa also for the optical navigation. Slow speed approach navigation was taken for the first time and demonstrated successfully. Star Tracker Images of Itokawa Itokawa was taken by Hayabusa against Stars in Fig. 7. Circles show Itokawa direction taken by Star Tracker aboard. Solid lines represent the Itokawa direction predicted prior to each imagery. Solid lines show predicts and orbit updates via optical navigation. Light Curve of Itokawa and Itokawa loci Fig. 6 compares the brightness with the predict. Coincidence implies the object exposed should be the target, Itokawa. It shows that the trajectory was correctly updated. Here, solid lines show Itokawa direction predicts. Itokawa loci exposed is illustrated with optically navigated trajectory in the Fig. 7 below. Circles are Itokawa images taken by Telescopic Optical
Navigation Camera (ONC-T).
08/12 0h
08/12
08/11
08/10
08/09 08/08
08/07 08/06
08/05 08/04 08/03 08/02 08/01
07/29 07/30 07/31
07/29 5h~20h
08/08 21h
08/08 3h
Solid lines show predicts.
shows orbit updates via optical navigation.
Puppis
Carina
Canis MajorItokawa taken by Hayabusa
Fig. 5 Itokawa Tracked by Hayabusa
Fig. 6 Itokawa’s Light Curve
Fig. 7 Itokawa and Optical Navigation
4
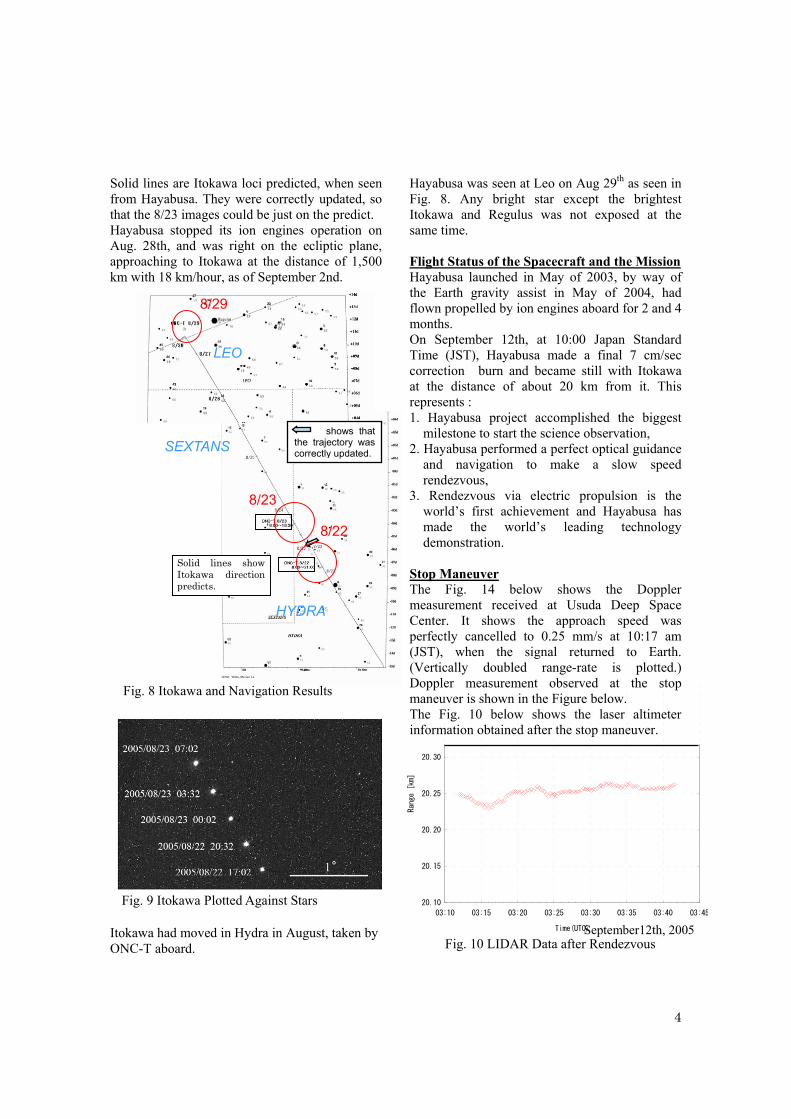
Solid lines are Itokawa loci predicted, when seen from Hayabusa. They were correctly updated, so that the 8/23 images could be just on the predict. Hayabusa stopped its ion engines operation on Aug. 28th, and was right on the ecliptic plane, approaching to Itokawa at the distance of 1,500 km with 18 km/hour, as of September 2nd. Itokawa had moved in Hydra in August, taken by ONC-T aboard.
Hayabusa was seen at Leo on Aug 29th as seen in Fig. 8. Any bright star except the brightest Itokawa and Regulus was not exposed at the same time. Flight Status of the Spacecraft and the Mission Hayabusa launched in May of 2003, by way of the Earth gravity assist in May of 2004, had flown propelled by ion engines aboard for 2 and 4 months. On September 12th, at 10:00 Japan Standard Time (JST), Hayabusa made a final 7 cm/sec correction burn and became still with Itokawa at the distance of about 20 km from it. This represents : 1. Hayabusa project accomplished the biggest
milestone to start the science observation, 2. Hayabusa performed a perfect optical guidance
and navigation to make a slow speed rendezvous,
3. Rendezvous via electric propulsion is the world’s first achievement and Hayabusa has made the world’s leading technology demonstration.
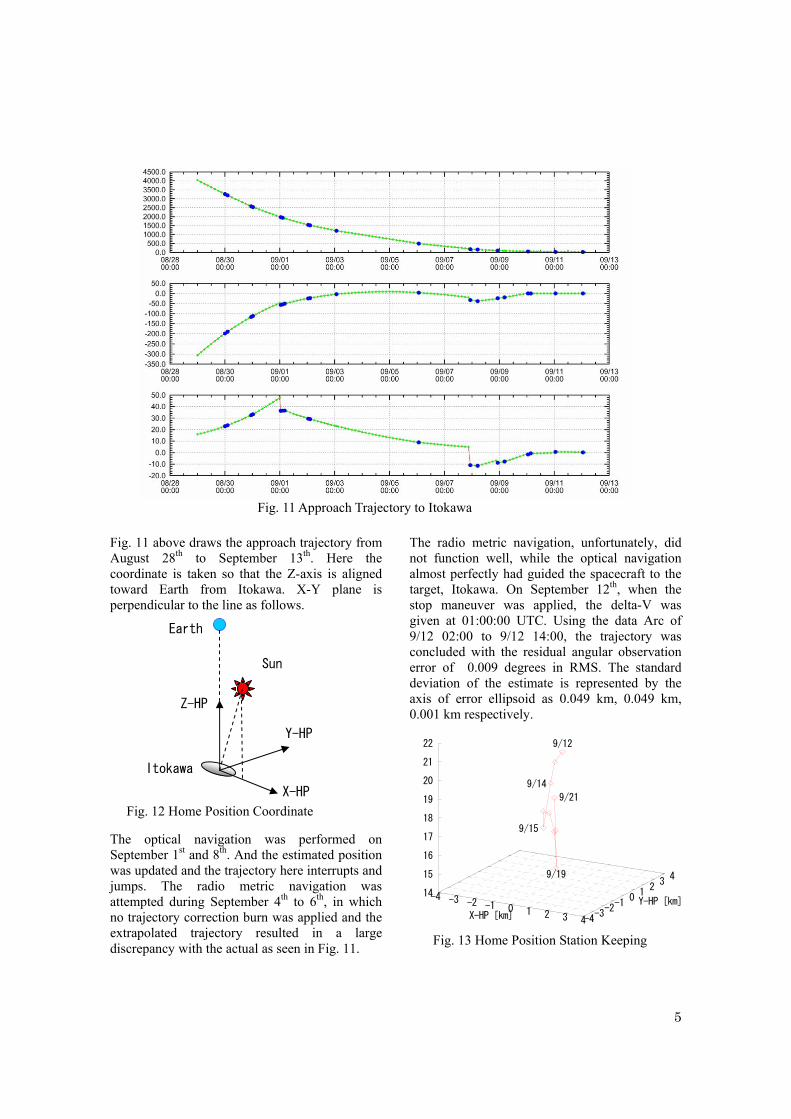
Stop Maneuver The Fig. 14 below shows the Doppler measurement received at Usuda Deep Space Center. It shows the approach speed was perfectly cancelled to 0.25 mm/s at 10:17 am (JST), when the signal returned to Earth. (Vertically doubled range-rate is plotted.) Doppler measurement observed at the stop maneuver is shown in the Figure below. The Fig. 10 below shows the laser altimeter information obtained after the stop maneuver.
8/29
LEO
shows that the trajectory was correctly updated.
Solid lines show Itokawa direction predicts.
HYDRA
SEXTANS
8/22
8/23
20.10
20.15
20.20
20.25
20.30
03:10 03:15 03:20 03:25 03:30 03:35 03:40 03:45
Range [km]
Time(UTC)September12th, 2005Fig. 10 LIDAR Data after Rendezvous
Fig. 8 Itokawa and Navigation Results
Fig. 9 Itokawa Plotted Against Stars
5
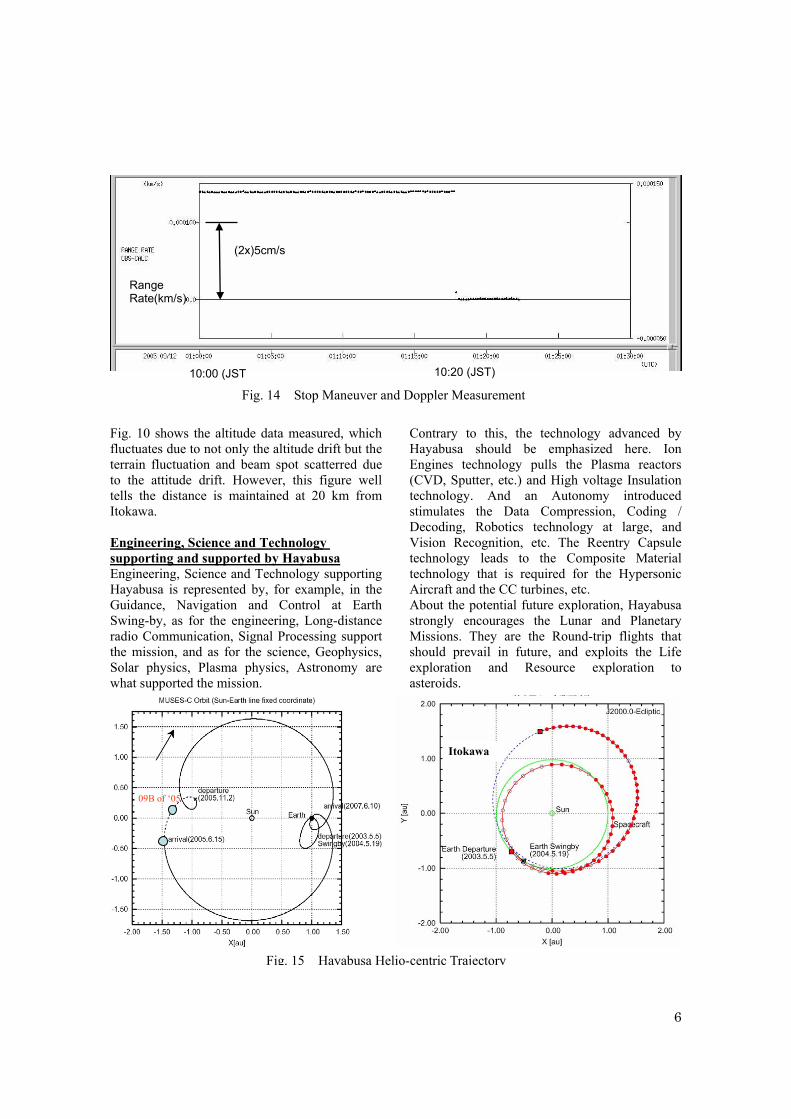
Fig. 11 above draws the approach trajectory from August 28th to September 13th. Here the coordinate is taken so that the Z-axis is aligned toward Earth from Itokawa. X-Y plane is perpendicular to the line as follows. The optical navigation was performed on September 1st and 8th. And the estimated position was updated and the trajectory here interrupts and jumps. The radio metric navigation was attempted during September 4th to 6th, in which no trajectory correction burn was applied and the extrapolated trajectory resulted in a large discrepancy with the actual as seen in Fig. 11.
The radio metric navigation, unfortunately, did not function well, while the optical navigation almost perfectly had guided the spacecraft to the target, Itokawa. On September 12th, when the stop maneuver was applied, the delta-V was given at 01:00:00 UTC. Using the data Arc of 9/12 02:00 to 9/12 14:00, the trajectory was concluded with the residual angular observation error of 0.009 degrees in RMS. The standard deviation of the estimate is represented by the axis of error ellipsoid as 0.049 km, 0.049 km, 0.001 km respectively.
X-HP
Y-HP
Z-HP
Earth
Sun
Itokawa
-4 -3 -2 -1 0 1 2 3 4-4-3-2-1 0 1 2 3 4
14
15
16
17
18
19
20
21
22 9/12
9/14
9/15
9/19
9/21
X-HP [km]
Y-HP [km]
Fig. 11 Approach Trajectory to Itokawa
Fig. 12 Home Position Coordinate
Fig. 13 Home Position Station Keeping
6
Fig. 10 shows the altitude data measured, which fluctuates due to not only the altitude drift but the terrain fluctuation and beam spot scatterred due to the attitude drift. However, this figure well tells the distance is maintained at 20 km from Itokawa. Engineering, Science and Technology supporting and supported by Hayabusa Engineering, Science and Technology supporting Hayabusa is represented by, for example, in the Guidance, Navigation and Control at Earth Swing-by, as for the engineering, Long-distance radio Communication, Signal Processing support the mission, and as for the science, Geophysics, Solar physics, Plasma physics, Astronomy are what supported the mission.
Contrary to this, the technology advanced by Hayabusa should be emphasized here. Ion Engines technology pulls the Plasma reactors (CVD, Sputter, etc.) and High voltage Insulation technology. And an Autonomy introduced stimulates the Data Compression, Coding / Decoding, Robotics technology at large, and Vision Recognition, etc. The Reentry Capsule technology leads to the Composite Material technology that is required for the Hypersonic Aircraft and the CC turbines, etc. About the potential future exploration, Hayabusa strongly encourages the Lunar and Planetary Missions. They are the Round-trip flights that should prevail in future, and exploits the Life exploration and Resource exploration to asteroids.
Range Rate(km/s)
(2x)5cm/s
10:00 (JST 10:20 (JST)
Fig. 14 Stop Maneuver and Doppler Measurement
Itokawa
09B of ‘05
Fig. 15 Hayabusa Helio-centric Trajectory
7
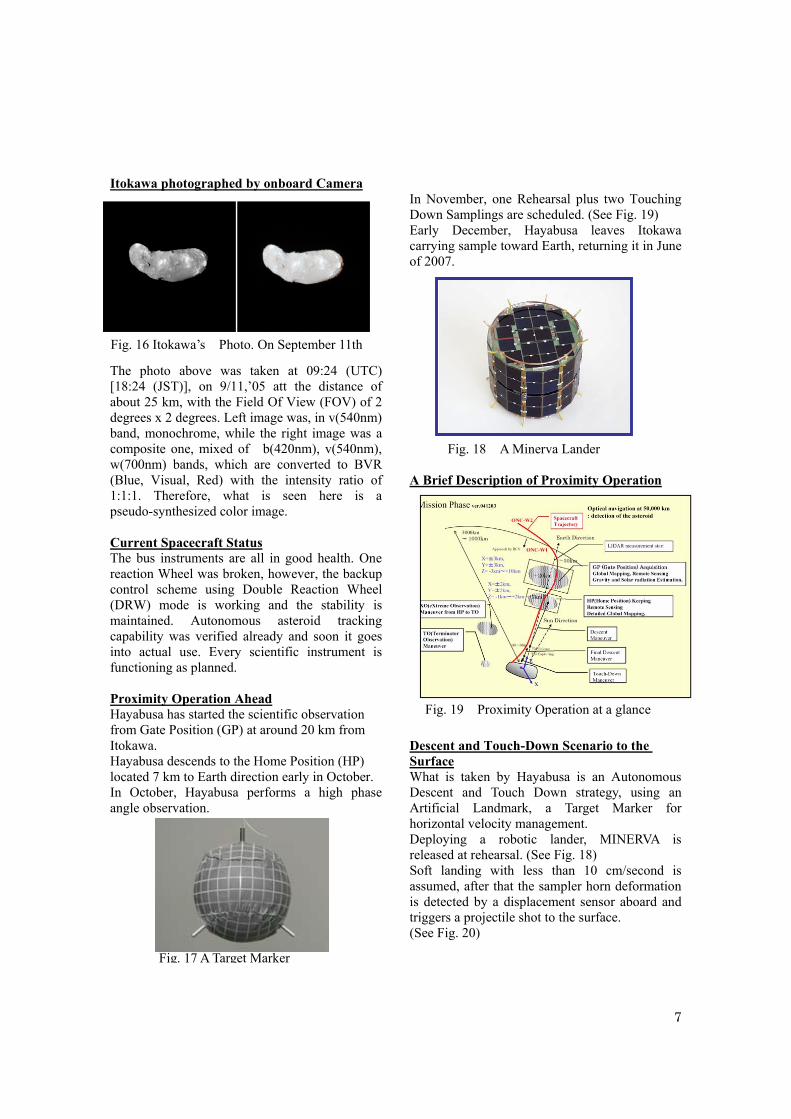
Itokawa photographed by onboard Camera The photo above was taken at 09:24 (UTC) [18:24 (JST)], on 9/11,’05 att the distance of about 25 km, with the Field Of View (FOV) of 2 degrees x 2 degrees. Left image was, in v(540nm) band, monochrome, while the right image was a composite one, mixed of b(420nm), v(540nm), w(700nm) bands, which are converted to BVR (Blue, Visual, Red) with the intensity ratio of 1:1:1. Therefore, what is seen here is a pseudo-synthesized color image. Current Spacecraft Status The bus instruments are all in good health. One reaction Wheel was broken, however, the backup control scheme using Double Reaction Wheel (DRW) mode is working and the stability is maintained. Autonomous asteroid tracking capability was verified already and soon it goes into actual use. Every scientific instrument is functioning as planned. Proximity Operation Ahead Hayabusa has started the scientific observation from Gate Position (GP) at around 20 km from Itokawa. Hayabusa descends to the Home Position (HP) located 7 km to Earth direction early in October. In October, Hayabusa performs a high phase angle observation.
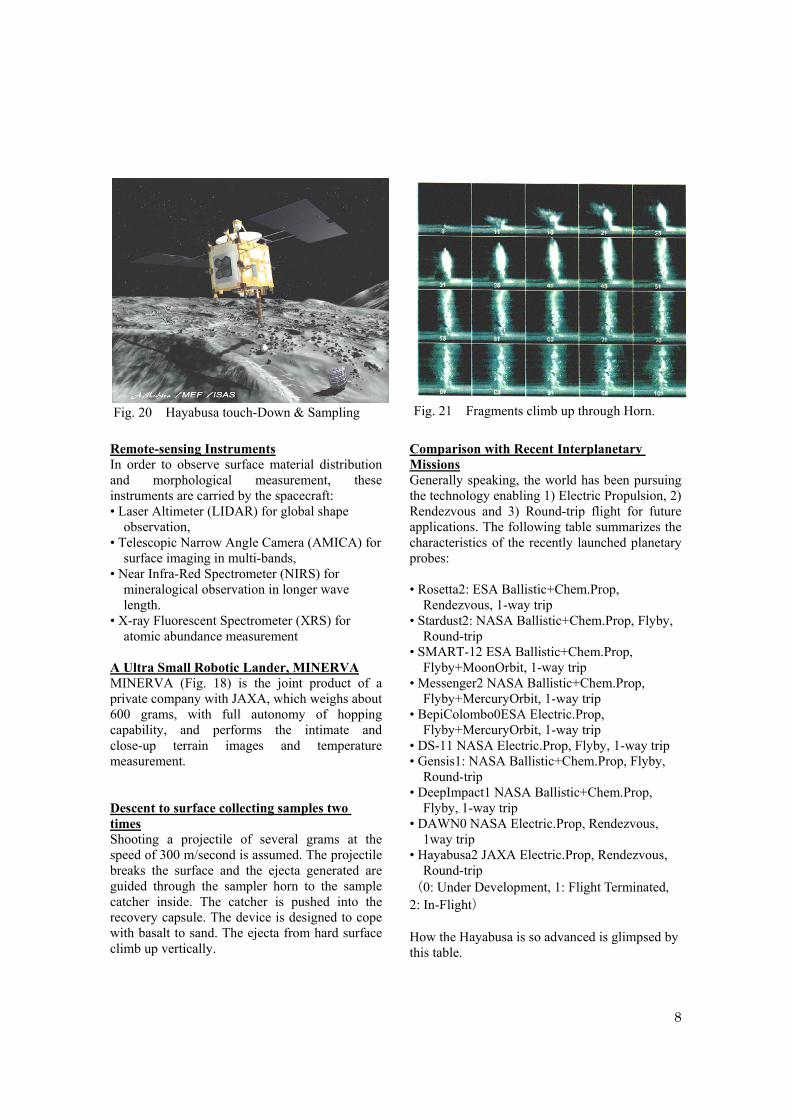
In November, one Rehearsal plus two Touching Down Samplings are scheduled. (See Fig. 19) Early December, Hayabusa leaves Itokawa carrying sample toward Earth, returning it in June of 2007. A Brief Description of Proximity Operation Descent and Touch-Down Scenario to the Surface What is taken by Hayabusa is an Autonomous Descent and Touch Down strategy, using an Artificial Landmark, a Target Marker for horizontal velocity management. Deploying a robotic lander, MINERVA is released at rehearsal. (See Fig. 18) Soft landing with less than 10 cm/second is assumed, after that the sampler horn deformation is detected by a displacement sensor aboard and triggers a projectile shot to the surface. (See Fig. 20)
Fig. 16 Itokawa’s Photo. On September 11th
Fig. 17 A Target Marker
Fig. 18 A Minerva Lander
Fig. 19 Proximity Operation at a glance
8
Remote-sensing Instruments In order to observe surface material distribution and morphological measurement, these instruments are carried by the spacecraft: • Laser Altimeter (LIDAR) for global shape
observation, • Telescopic Narrow Angle Camera (AMICA) for
surface imaging in multi-bands, • Near Infra-Red Spectrometer (NIRS) for
mineralogical observation in longer wave length.
• X-ray Fluorescent Spectrometer (XRS) for atomic abundance measurement
A Ultra Small Robotic Lander, MINERVA MINERVA (Fig. 18) is the joint product of a private company with JAXA, which weighs about 600 grams, with full autonomy of hopping capability, and performs the intimate and close-up terrain images and temperature measurement. Descent to surface collecting samples two times Shooting a projectile of several grams at the speed of 300 m/second is assumed. The projectile breaks the surface and the ejecta generated are guided through the sampler horn to the sample catcher inside. The catcher is pushed into the recovery capsule. The device is designed to cope with basalt to sand. The ejecta from hard surface climb up vertically.
Comparison with Recent Interplanetary Missions Generally speaking, the world has been pursuing the technology enabling 1) Electric Propulsion, 2) Rendezvous and 3) Round-trip flight for future applications. The following table summarizes the characteristics of the recently launched planetary probes: • Rosetta2: ESA Ballistic+Chem.Prop,
Rendezvous, 1-way trip • Stardust2: NASA Ballistic+Chem.Prop, Flyby,
Round-trip • SMART-12 ESA Ballistic+Chem.Prop,
Flyby+MoonOrbit, 1-way trip • Messenger2 NASA Ballistic+Chem.Prop,
Flyby+MercuryOrbit, 1-way trip • BepiColombo0ESA Electric.Prop,
Flyby+MercuryOrbit, 1-way trip • DS-11 NASA Electric.Prop, Flyby, 1-way trip • Gensis1: NASA Ballistic+Chem.Prop, Flyby,
Round-trip • DeepImpact1 NASA Ballistic+Chem.Prop,
Flyby, 1-way trip • DAWN0 NASA Electric.Prop, Rendezvous,
1way trip • Hayabusa2 JAXA Electric.Prop, Rendezvous,
Round-trip (0: Under Development, 1: Flight Terminated, 2: In-Flight) How the Hayabusa is so advanced is glimpsed by this table.
Fig. 20 Hayabusa touch-Down & Sampling Fig. 21 Fragments climb up through Horn.
9
Comparison with Other Types of Sample Return Missions The world is, again generally speaking, pursuing 1) Rendezvous Sampling and 2) Bulk Sampling. Here are listed the comparison with the other missions : • Stardust2: NASA Flyby
(Non-stop&High-Speed) Sampling, Particles • Gensis1: NASA Flyby (Non-stop&High-Speed)
Sampling, Ion+Proton • Hayabusa2 JAXA Rendezvous(Stop-over)
Sampling, Bulk Samples (1: Flight Terminated, 2: In-Flight) These mean how challenging the Hayabusa is, too. Collaboration with NASA (MOU) 1) Heat Shield Development for test hours at the Ames Research Center that has the world’s largest facility, 2) Ground observation of 1998SF36 (Itokawa) for ephemeris and shape information including radar observation 3) Supporting in terms of Planetary Protection for the COSPAR/UN resolution 4) Tracking including data receiving at DSN stations with the navigation support Summary Hayabusa now achieved one of the biggest milestones, ‘Arrival at the Target Body’. Both the bus and scientific instruments are in good condition for the detailed study of the object.
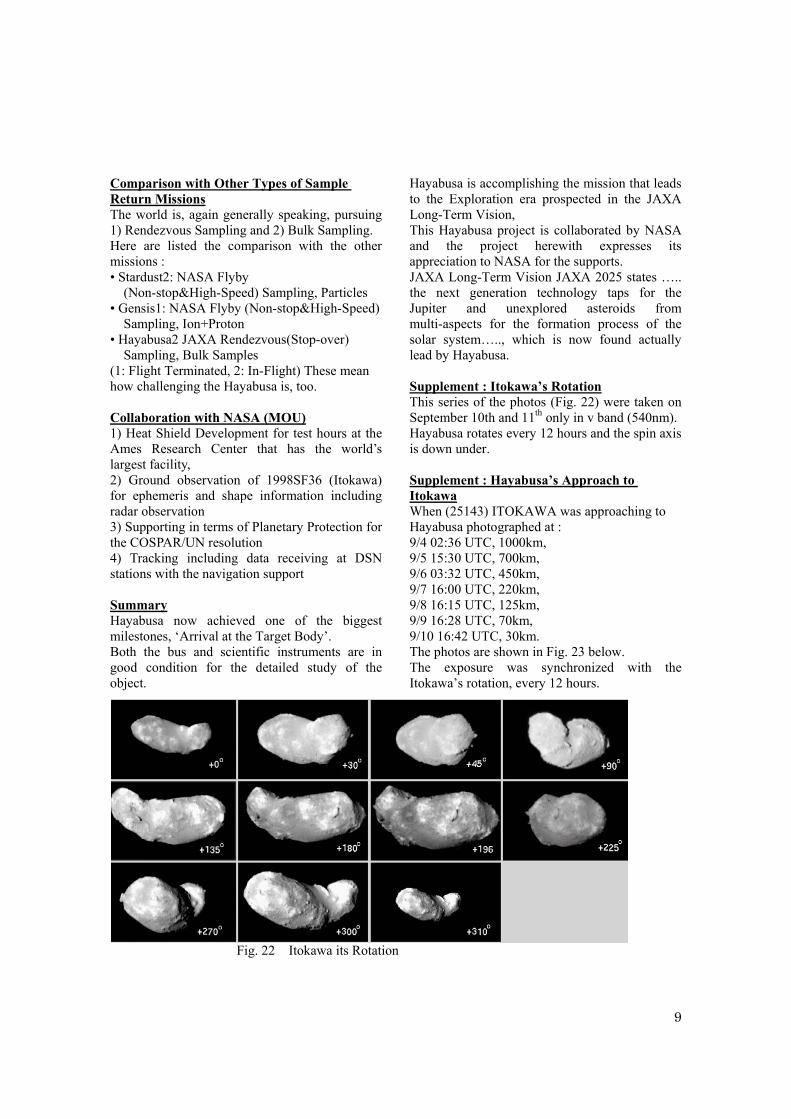
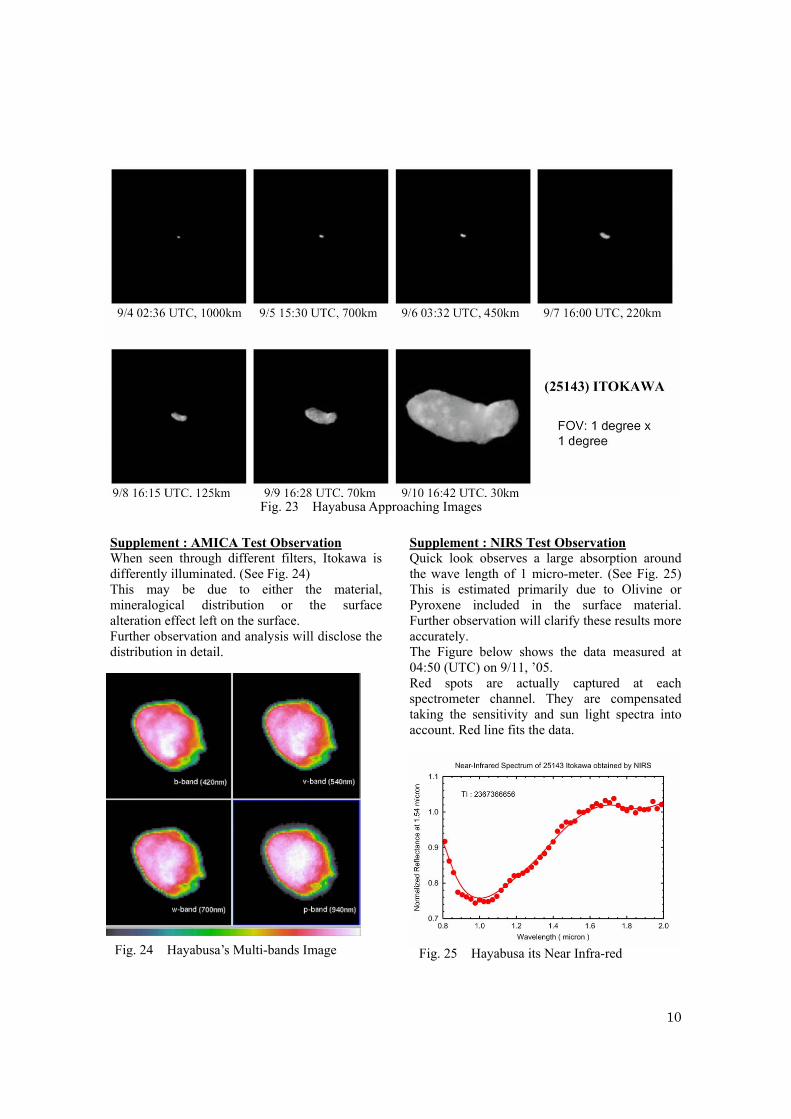
Hayabusa is accomplishing the mission that leads to the Exploration era prospected in the JAXA Long-Term Vision, This Hayabusa project is collaborated by NASA and the project herewith expresses its appreciation to NASA for the supports. JAXA Long-Term Vision JAXA 2025 states ….. the next generation technology taps for the Jupiter and unexplored asteroids from multi-aspects for the formation process of the solar system….., which is now found actually lead by Hayabusa. Supplement : Itokawa’s Rotation This series of the photos (Fig. 22) were taken on September 10th and 11th only in v band (540nm). Hayabusa rotates every 12 hours and the spin axis is down under. Supplement : Hayabusa’s Approach to Itokawa When (25143) ITOKAWA was approaching to Hayabusa photographed at : 9/4 02:36 UTC, 1000km, 9/5 15:30 UTC, 700km, 9/6 03:32 UTC, 450km, 9/7 16:00 UTC, 220km, 9/8 16:15 UTC, 125km, 9/9 16:28 UTC, 70km, 9/10 16:42 UTC, 30km. The photos are shown in Fig. 23 below. The exposure was synchronized with the Itokawa’s rotation, every 12 hours.
Fig. 22 Itokawa its Rotation
10
Supplement : AMICA Test Observation When seen through different filters, Itokawa is differently illuminated. (See Fig. 24) This may be due to either the material, mineralogical distribution or the surface alteration effect left on the surface. Further observation and analysis will disclose the distribution in detail.
Supplement : NIRS Test Observation Quick look observes a large absorption around the wave length of 1 micro-meter. (See Fig. 25) This is estimated primarily due to Olivine or Pyroxene included in the surface material. Further observation will clarify these results more accurately. The Figure below shows the data measured at 04:50 (UTC) on 9/11, ’05. Red spots are actually captured at each spectrometer channel. They are compensated taking the sensitivity and sun light spectra into account. Red line fits the data.
Fig. 23 Hayabusa Approaching Images
Fig. 24 Hayabusa’s Multi-bands Image Fig. 25 Hayabusa its Near Infra-red
11
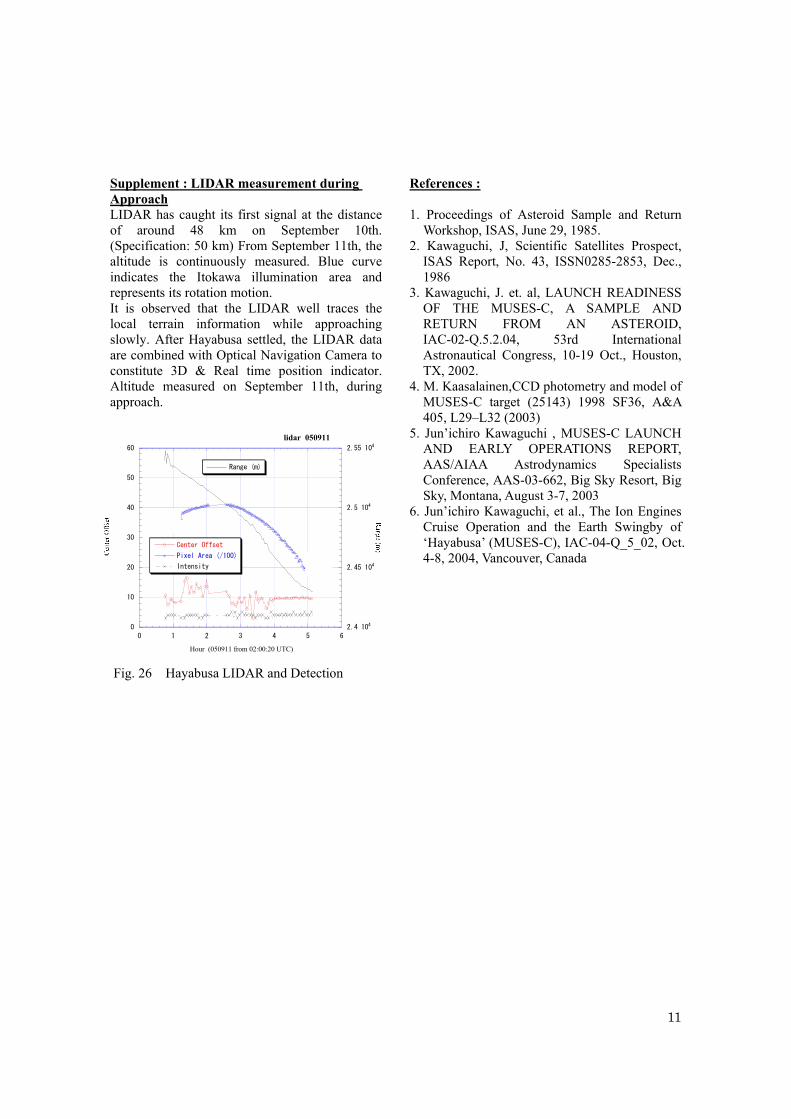
Supplement : LIDAR measurement during Approach LIDAR has caught its first signal at the distance of around 48 km on September 10th. (Specification: 50 km) From September 11th, the altitude is continuously measured. Blue curve indicates the Itokawa illumination area and represents its rotation motion. It is observed that the LIDAR well traces the local terrain information while approaching slowly. After Hayabusa settled, the LIDAR data are combined with Optical Navigation Camera to constitute 3D & Real time position indicator. Altitude measured on September 11th, during approach.
References : 1. Proceedings of Asteroid Sample and Return
Workshop, ISAS, June 29, 1985. 2. Kawaguchi, J, Scientific Satellites Prospect,
ISAS Report, No. 43, ISSN0285-2853, Dec., 1986
3. Kawaguchi, J. et. al, LAUNCH READINESS OF THE MUSES-C, A SAMPLE AND RETURN FROM AN ASTEROID, IAC-02-Q.5.2.04, 53rd International Astronautical Congress, 10-19 Oct., Houston, TX, 2002.
4. M. Kaasalainen,CCD photometry and model of MUSES-C target (25143) 1998 SF36, A&A 405, L29–L32 (2003)
5. Jun’ichiro Kawaguchi , MUSES-C LAUNCH AND EARLY OPERATIONS REPORT, AAS/AIAA Astrodynamics Specialists Conference, AAS-03-662, Big Sky Resort, Big Sky, Montana, August 3-7, 2003
6. Jun’ichiro Kawaguchi, et al., The Ion Engines Cruise Operation and the Earth Swingby of ‘Hayabusa’ (MUSES-C), IAC-04-Q_5_02, Oct. 4-8, 2004, Vancouver, Canada
0
10
20
30
40
50
60
2.4 104
2.45 104
2.5 104
2.55 104
0 1 2 3 4 5 6
lidar 050911
Center Offset
Pixel Area (/100)
Intensity
Range (m)
Hour (050911 from 02:00:20 UTC)
Fig. 26 Hayabusa LIDAR and Detection
![UN COPUOS Hayabusa okada [互換モード] · PDF fileNew Scientific Discovery by Hayabusa Future Plan of NEO Missions Summary ... Remote Sensing from Rendezvous HPiii What is Hayabusa?](https://img.pdfslide.tips/doc/110x75/5aa3355c7f8b9a46238e10e3/un-copuos-hayabusa-okada-scientific-discovery-by-hayabusa-future.jpg)