Embed Size (px)
Citation preview
RESUMEN INTRO
UNIDAD 2
Sistemas de Comunicaciones
Un sistema electrónico de comunicación es un sistema que tiene como objetivo primordial enviar información de un lugar a otro en forma de señales eléctricas. Todo sistema de comunicaciones consta de tres grandes bloques: 1. Transmisor (Tx) 2. Medio de transmisión 3. Receptor (Rx)
Tx: Contiene como dispositivo de entrada una fuente de información, y el objetivo del Tx es procesar la señal eléctrica proporcionada por la fuente de información, para que sea acoplada de manera eficiente al medio de transmisión. Medio de transmisión: Es el canal a través del cual viaja la información en forma de oem desde el Tx hasta el Rx Rx: Tiene como objetivo principal, captar parte de la potencia emitida por el Tx al medio de transmisión y procesarla para que el dispositivo de salida pueda reproducir la información enviada por el Tx.
Formas de los Sistemas de Comunicaciones
Sistema ideal: La información reproducida por el dispositivo de salida tiene que ser una replica perfecta de la información. Esto requiere que el sistema de comunicaciones desde la fuente hasta el dispositivo reproductor de la información se comporte como un dispositivo: 1. Lineal 2. Invariante en el tiempo 3. Con ancho de banda (AB) infinito 4. Sin ruido
Sistema real: Se comporta en forma totalmente diferente al sistema ideal. Todo sistema de comunicación: - Agrega ruido - Se comporta como no lineal - Tiene un AB finito Configuraciones de los Sistemas de Comunicaciones
Monocanal: Envían una información a la vez (telefonía convencional) Multicanal: Envían varias informaciones a la vez (enlaces entre centrales telefónicas) Unidireccional: Envían información en una dirección (sistemas de difusión AM, FM, TV) Bidireccional: Envían información en dos dirección (sistemas de telefonía alámbrica)
Modos de transmisión de los Sistemas de Comunicaciones
Simplex: Transmisión en una sola dirección Half Duplex: Transmisión en dos sentidos, pero solo un emisor transmite a la vez (t1 diferente a t2)
1
Duplex (Full Duplex): Transmisión en ambos sentidos con posible emisión simultanea (t1 = t2) Configuraciones de los Sistemas de Comunicaciones
Punto a punto: De un Tx a un Rx (enlaces fijos de sistemas de microondas terrestres) Punto a muchos puntos (difusión): De un Tx a varios Rx (sistemas de difusión AM, FM, TV) Muchos puntos a un punto: De varios Tx a un Rx (sistemas de telefonía celular) Muchos puntos a muchos puntos (redes): De varios Tx/Rx (transceptores) entre sí (redes LAN, redes WAN)
Señal Telefónica Es una representación eléctrica de la forma de onda sonora de la voz.
Características: Tensión o corriente que varía en el tiempo, al igual que la presión de la onda sonora a medida que se propaga a través del aire.
Defectos de la Transmisión Telefónica:
Ruido La respuesta del oído humano al sonido varía con la frecuencia y la potencia o intensidad del sonido. El ruido es un factor que afecta la calidad de la transmisión telefónica. El ruido esta siempre presente, tanto si resulta audible como si no. Para determinar la calidad de la transmisión de la señal, se establece una relación señal a ruido (S/N) expresada en decibeles (dB).En sentido amplio, el ruido es cualquier señal que se suma a la señal enviada. El ruido puede provenir de: 1. Ruido térmico (aleatorio), introducido en componentes electrónicos, o el ambiente visto por una antena de radio 2. Ciertos tipos de distorsión inherentes a las tecnicas de transmisión digital 3. Ruido impulsivo causado, por ejemplo, por las operaciones de equipos electromecánicos 4. Crosstalk, producido por señales que se cruzan de otro circuito
Interferencia Es cualquier proceso que altera, modifica o destruye una señal durante su trayecto en el canal existente entre el emisor y el receptor. La palabra destrucción, debe entenderse en el sentido de que las ondas cambian de forma al unirse con otras; esto es, después de la interferencia normalmente vuelven a ser las mismas ondas con la misma frecuencia. Dependiendo de la fase, la interferencia será: 1. Destructiva: Las ondas se encuentran desfasadas 180 grados o p radianes 2. Constructiva: Las ondas tienen un desfase de 0 grados/radianes
Distorsión Es la diferencia entre señal que entra a un equipo o sistema y la señal de salida del mismo. Por tanto, puede definirse como la "deformación" que sufre una señal tras su paso por un sistema. Las distorsiones que también se pueden medir son: 1. Distorsiones en la señal de video (lineales y no lineales) 2. Distorsiones ópticas (aberración cromática) 3. Distorsiones en amplificadores de audio (en frecuencia, fase, por intermodulación)
2
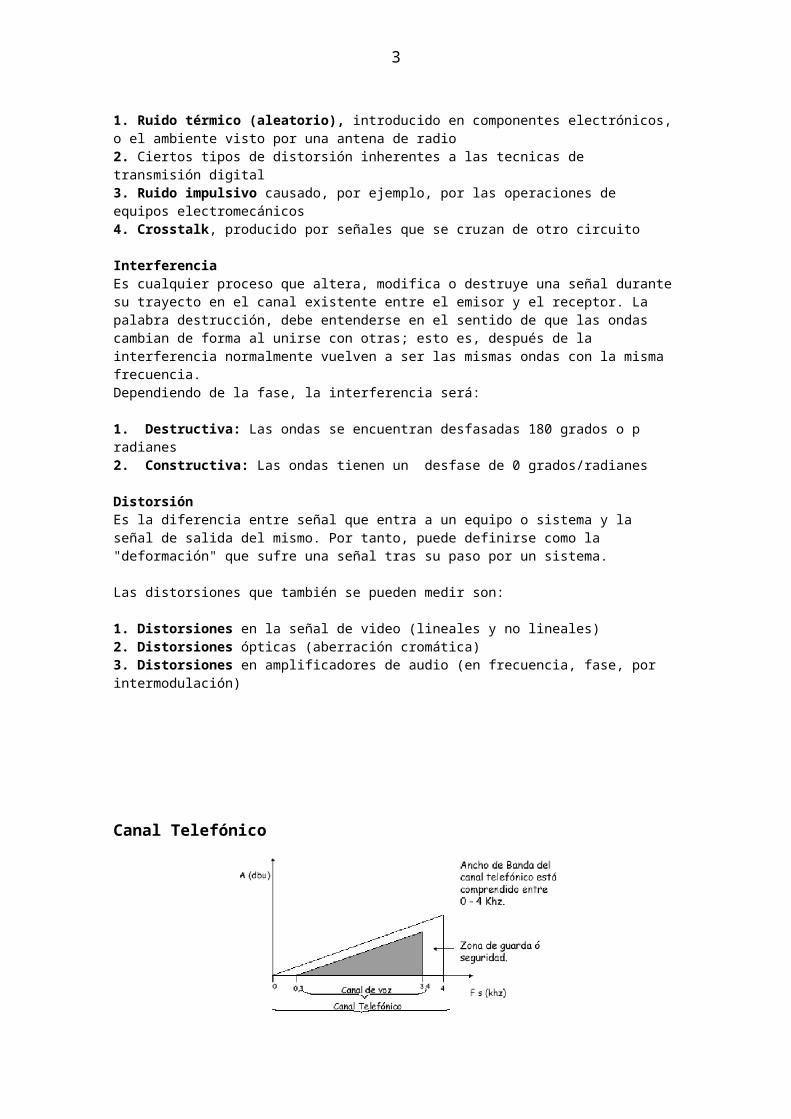
Canal Telefónico
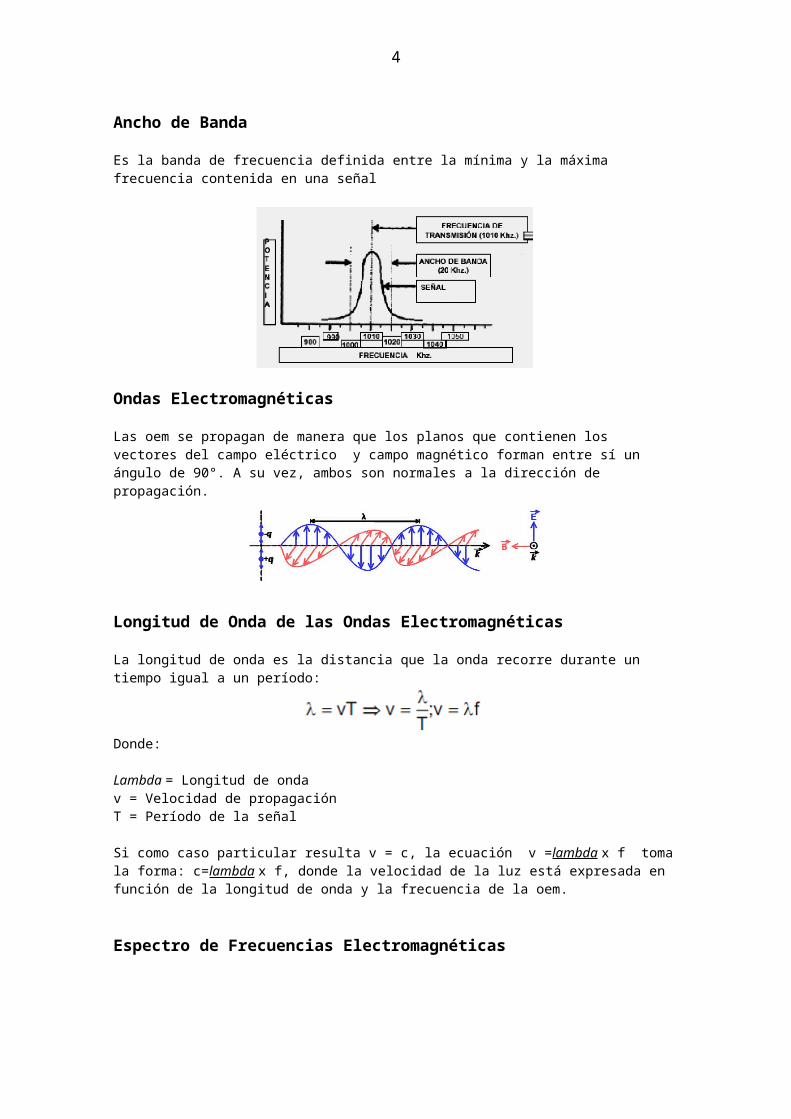
Ancho de Banda Es la banda de frecuencia definida entre la mínima y la máxima frecuencia contenida en una señal
Ondas Electromagnéticas Las oem se propagan de manera que los planos que contienen los vectores del campo eléctrico y campo magnético forman entre sí un ángulo de 90°. A su vez, ambos son normales a la dirección de propagación.
Longitud de Onda de las Ondas Electromagnéticas La longitud de onda es la distancia que la onda recorre durante un tiempo igual a un período:
Donde: Lambda = Longitud de onda v = Velocidad de propagación T = Período de la señal Si como caso particular resulta v = c, la ecuación v =lambda x f toma la forma: c=lambda x f, donde la velocidad de la luz está expresada en función de la longitud de onda y la frecuencia de la oem.
3
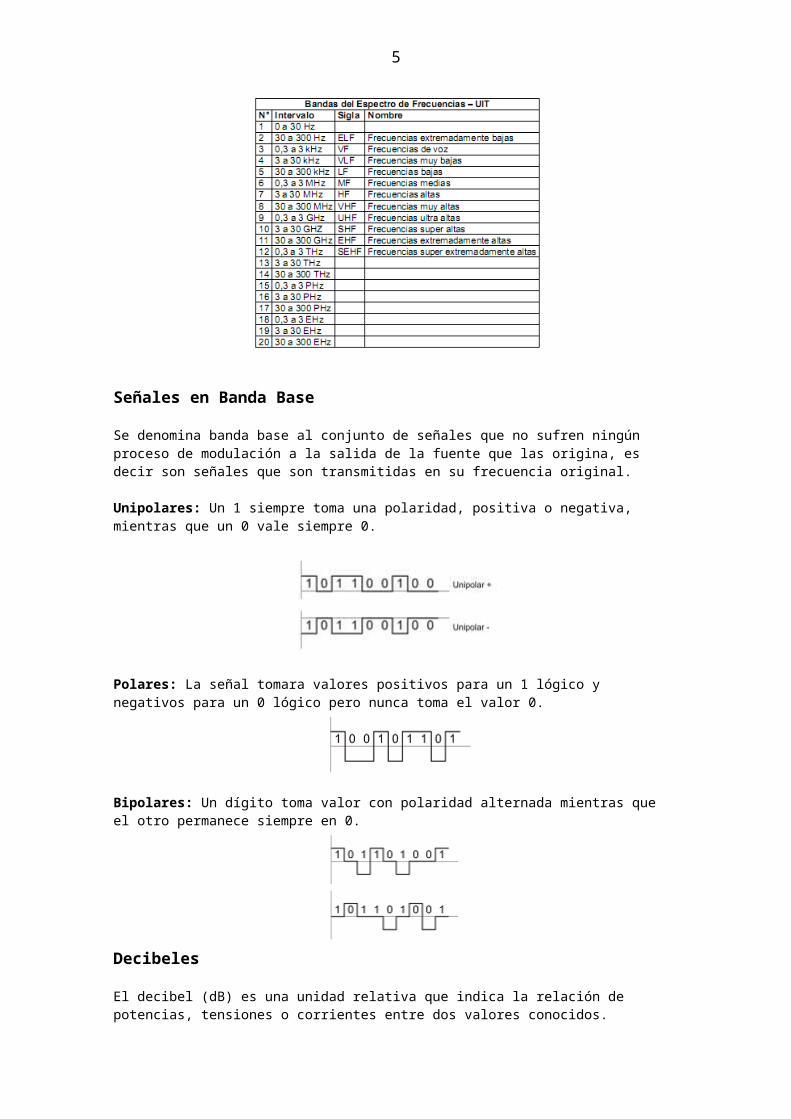
Espectro de Frecuencias Electromagnéticas
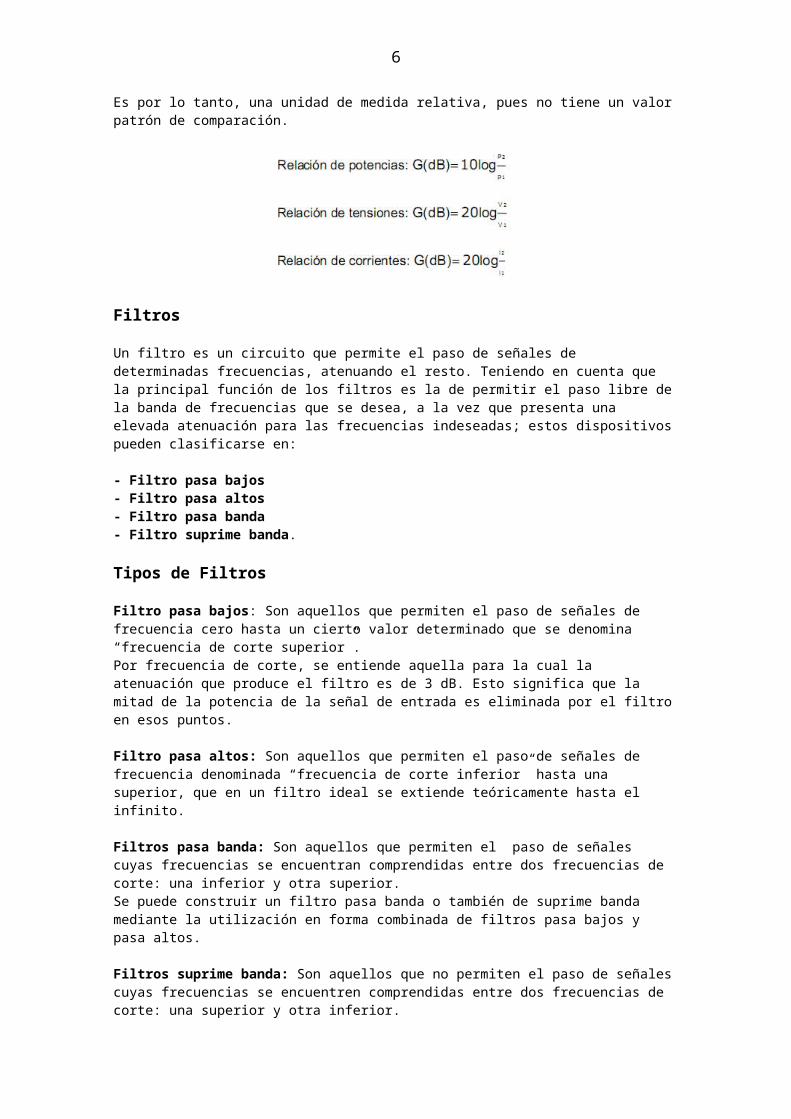
Señales en Banda Base Se denomina banda base al conjunto de señales que no sufren ningún proceso de modulación a la salida de la fuente que las origina, es decir son señales que son transmitidas en su frecuencia original. Unipolares: Un 1 siempre toma una polaridad, positiva o negativa, mientras que un 0 vale siempre 0.
Polares: La señal tomara valores positivos para un 1 lógico y negativos para un 0 lógico pero nunca toma el valor 0.
Bipolares: Un dígito toma valor con polaridad alternada mientras que el otro permanece siempre en 0.
Decibeles El decibel (dB) es una unidad relativa que indica la relación de potencias, tensiones o corrientes entre dos valores conocidos. Es por lo tanto, una unidad de medida relativa, pues no tiene un valor patrón de comparación.
4
Filtros Un filtro es un circuito que permite el paso de señales de determinadas frecuencias, atenuando el resto. Teniendo en cuenta que la principal función de los filtros es la de permitir el paso libre de la banda de frecuencias que se desea, a la vez que presenta una elevada atenuación para las frecuencias indeseadas; estos dispositivos pueden clasificarse en: - Filtro pasa bajos - Filtro pasa altos - Filtro pasa banda - Filtro suprime banda.
Tipos de Filtros Filtro pasa bajos: Son aquellos que permiten el paso de señales de frecuencia cero hasta un cierto valor determinado que se denomina “frecuencia de corte superior”. Por frecuencia de corte, se entiende aquella para la cual la atenuación que produce el filtro es de 3 dB. Esto significa que la mitad de la potencia de la señal de entrada es eliminada por el filtro en esos puntos. Filtro pasa altos: Son aquellos que permiten el paso de señales de frecuencia denominada “frecuencia de corte inferior” hasta una superior, que en un filtro ideal se extiende teóricamente hasta el infinito.
Filtros pasa banda: Son aquellos que permiten el paso de señales cuyas frecuencias se encuentran comprendidas entre dos frecuencias de corte: una inferior y otra superior. Se puede construir un filtro pasa banda o también de suprime banda mediante la utilización en forma combinada de filtros pasa bajos y pasa altos. Filtros suprime banda: Son aquellos que no permiten el paso de señales cuyas frecuencias se encuentren comprendidas entre dos frecuencias de corte: una superior y otra inferior.
Trabajo Práctico n° 3:
Teoria sobre Señales y Sistemas
3.2. ¿Qué es una señal? Función de una o más variables que transportan información acerca d e la naturaleza de un fenómeno físico. Cualquier cantidad física que varía con el tiempo, espacio o cualquier otra variable o variables independientes. Describen una amplia variedad de fenómenos físicos. La información de una señal está contenida en un patrón de variaciones que presenta alguna forma determinada.
5
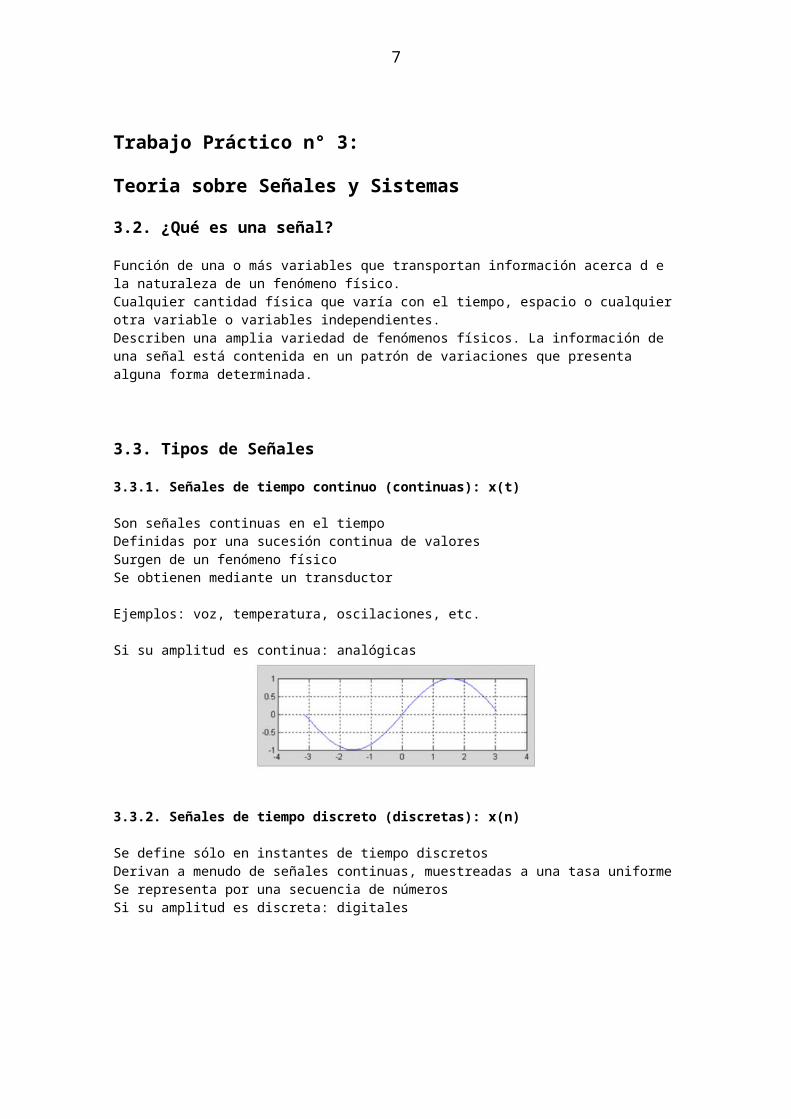
3.3. Tipos de Señales 3.3.1. Señales de tiempo continuo (continuas): x(t) Son señales continuas en el tiempo Definidas por una sucesión continua de valores Surgen de un fenómeno físico Se obtienen mediante un transductor Ejemplos: voz, temperatura, oscilaciones, etc. Si su amplitud es continua: analógicas
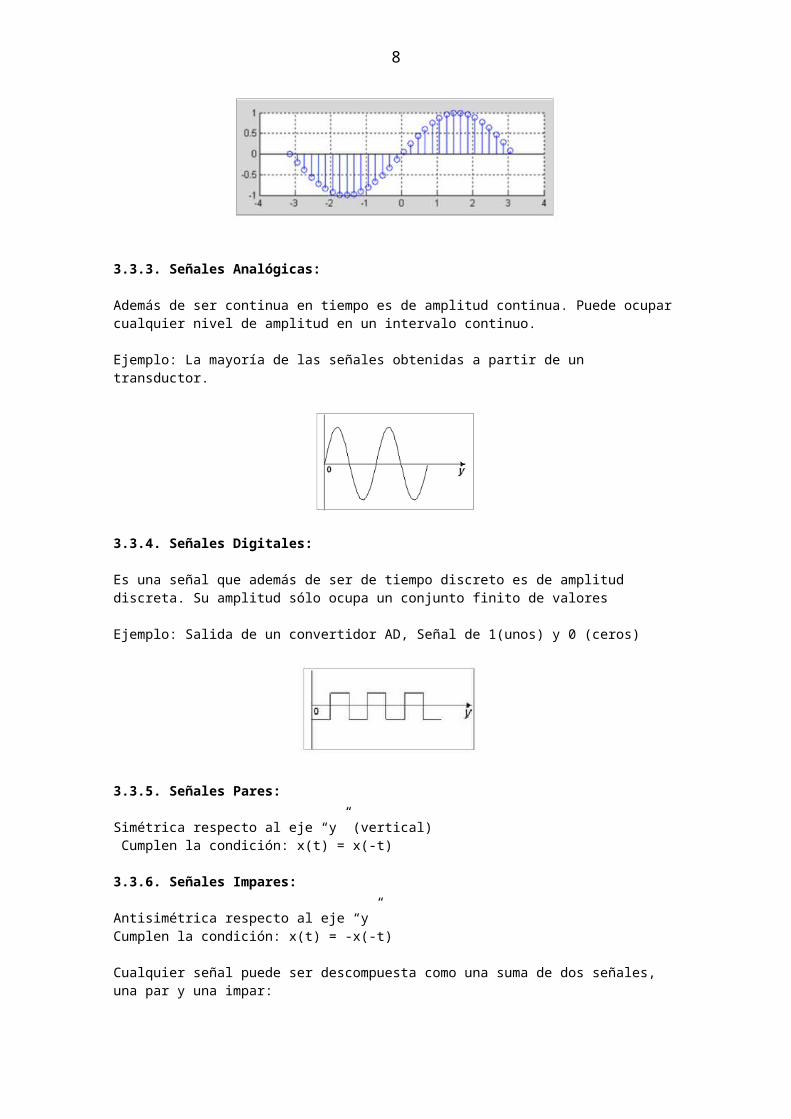
3.3.2. Señales de tiempo discreto (discretas): x(n) Se define sólo en instantes de tiempo discretos Derivan a menudo de señales continuas, muestreadas a una tasa uniforme Se representa por una secuencia de números Si su amplitud es discreta: digitales
3.3.3. Señales Analógicas: Además de ser continua en tiempo es de amplitud continua. Puede ocupar cualquier nivel de amplitud en un intervalo continuo. Ejemplo: La mayoría de las señales obtenidas a partir de un transductor.
3.3.4. Señales Digitales: Es una señal que además de ser de tiempo discreto es de amplitud discreta. Su amplitud sólo ocupa un conjunto finito de valores Ejemplo: Salida de un convertidor AD, Señal de 1(unos) y 0 (ceros)
6
3.3.5. Señales Pares: Simétrica respecto al eje “y” (vertical) Cumplen la condición: x(t) = x(-t) 3.3.6. Señales Impares: Antisimétrica respecto al eje “y” Cumplen la condición: x(t) = -x(-t) Cualquier señal puede ser descompuesta como una suma de dos señales, una par y una impar: X(t) = xp(t) + xi(t), donde : xp(t) = ½[x(t) + x(-t)] xi(t) = ½[x(t) - x(-t)]
3.3.7. Señal Periódica continua: Tiene una unidad mínima de repetición: T (período) Satisface la condición: f(t) = f(t + T), T " T en su valor más pequeño se llama periodo fundamental de f(t) F = 1/T (Hz), Frecuencia angular: w = 2pi/T (rad/s)
3.3.8. Señal Aperiódica continua: No cumple la condición de f(t) = f( t + T)
3.3.9. Señal Periódica discreta: Tiene una unidad mínima de repetición: N (período). Satisface la condición: x[n] = x[n+N], Z nŒ " . N, es un entero positivo. N en su valor más pequeño se llama periodo fundamental de x[n]. Frecuencia angular: O = 2pi/N (radianes) 3.3.10. Señal Determinística: No hay incertidumbre en cuanto a su valor en cualquier tiempo. Tiene una función de tiempo bien definida. Puede ser descrita por una ecuación matemática explícita (modelo de la señal). 3.3.11. Señal Aleatoria: Es impredecible o no se puede describir mediante una ecuación simple.
3.3.14. Señal Real: Señal que sólo contiene una parte “real” (La parte imaginaria es cero): x(t) = x(1)(t)
7
3.3.15. Señal Compleja: Señal que tienen partes real e imaginaria: X(t) = x(1)(t) + jx(2)(t)
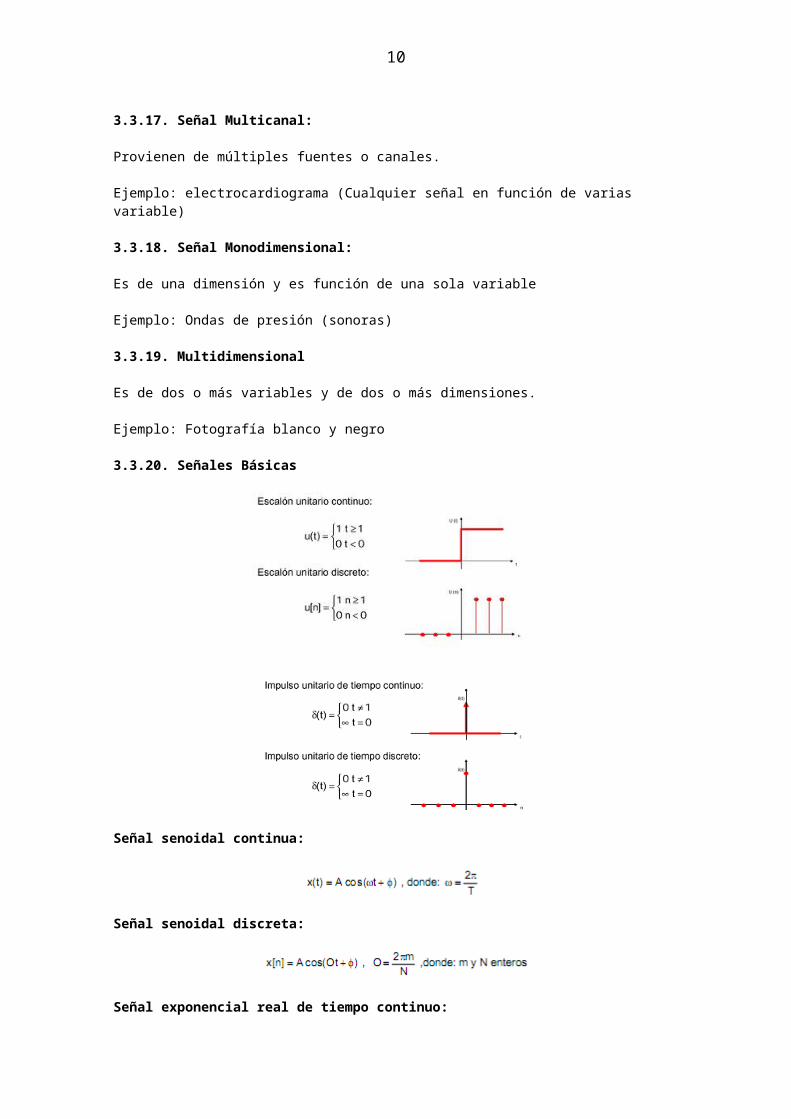
3.3.16. Señal Monocanal: Provienen de una sola fuente o canal. Ejemplo: Oscilación sinusoidal (Cualquier señal en función de una variable) 3.3.17. Señal Multicanal: Provienen de múltiples fuentes o canales. Ejemplo: electrocardiograma (Cualquier señal en función de varias variable) 3.3.18. Señal Monodimensional: Es de una dimensión y es función de una sola variable Ejemplo: Ondas de presión (sonoras) 3.3.19. Multidimensional Es de dos o más variables y de dos o más dimensiones. Ejemplo: Fotografía blanco y negro 3.3.20. Señales Básicas
Señal senoidal continua:
Señal senoidal discreta:
8
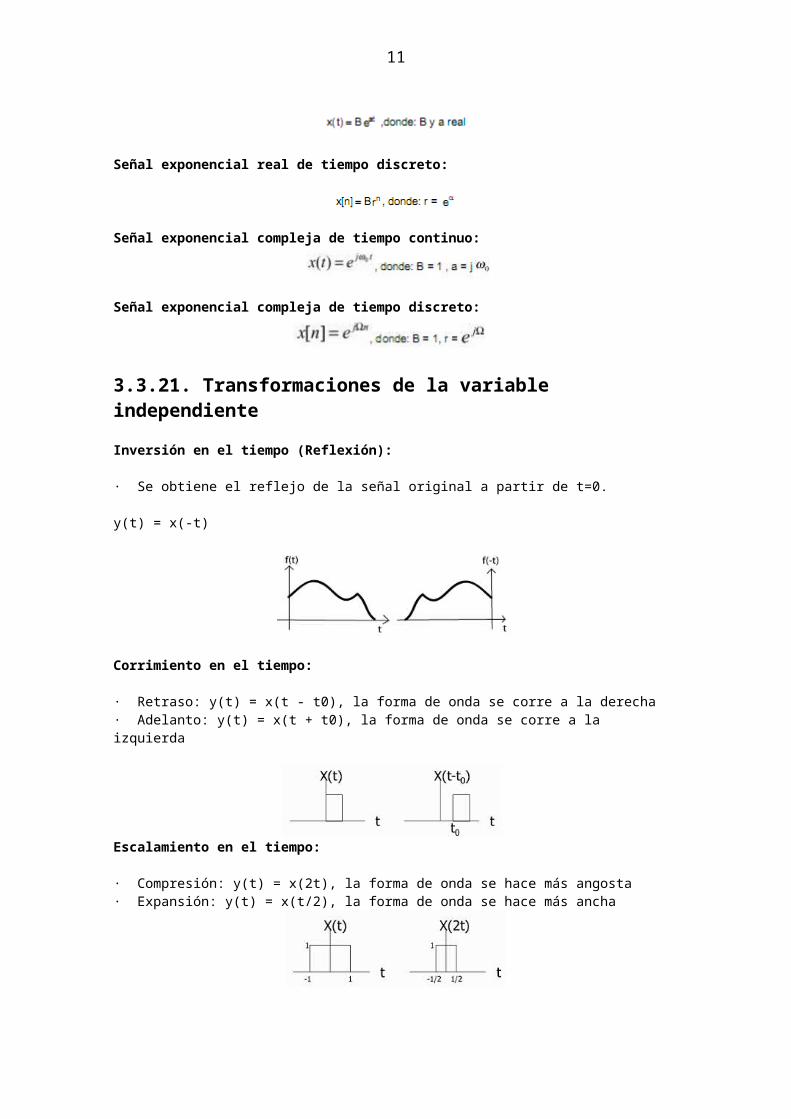
Señal exponencial real de tiempo continuo:
Señal exponencial real de tiempo discreto:
Señal exponencial compleja de tiempo continuo:
Señal exponencial compleja de tiempo discreto:
3.3.21. Transformaciones de la variable independiente Inversión en el tiempo (Reflexión): · Se obtiene el reflejo de la señal original a partir de t=0. y(t) = x(-t)
Corrimiento en el tiempo: · Retraso: y(t) = x(t - t0), la forma de onda se corre a la derecha · Adelanto: y(t) = x(t + t0), la forma de onda se corre a la izquierda
Escalamiento en el tiempo: · Compresión: y(t) = x(2t), la forma de onda se hace más angosta · Expansión: y(t) = x(t/2), la forma de onda se hace más ancha
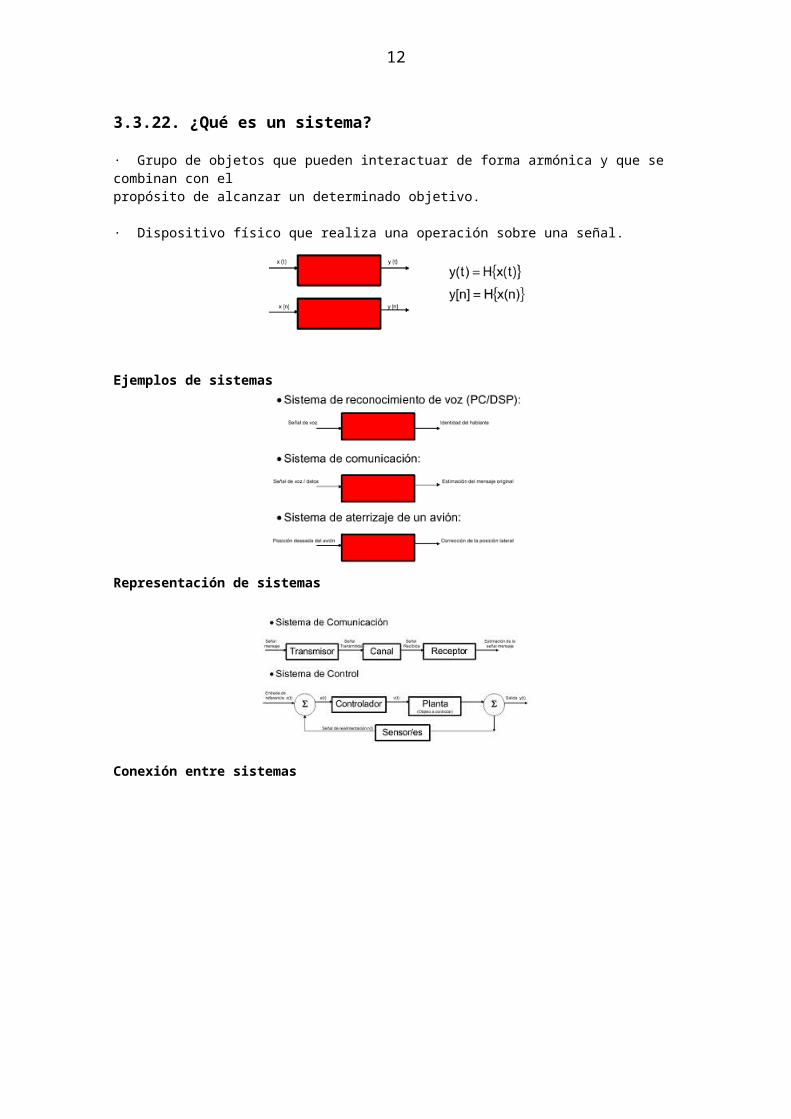
3.3.22. ¿Qué es un sistema? · Grupo de objetos que pueden interactuar de forma armónica y que se combinan con el propósito de alcanzar un determinado objetivo.
9
· Dispositivo físico que realiza una operación sobre una señal.
Ejemplos de sistemas
Representación de sistemas
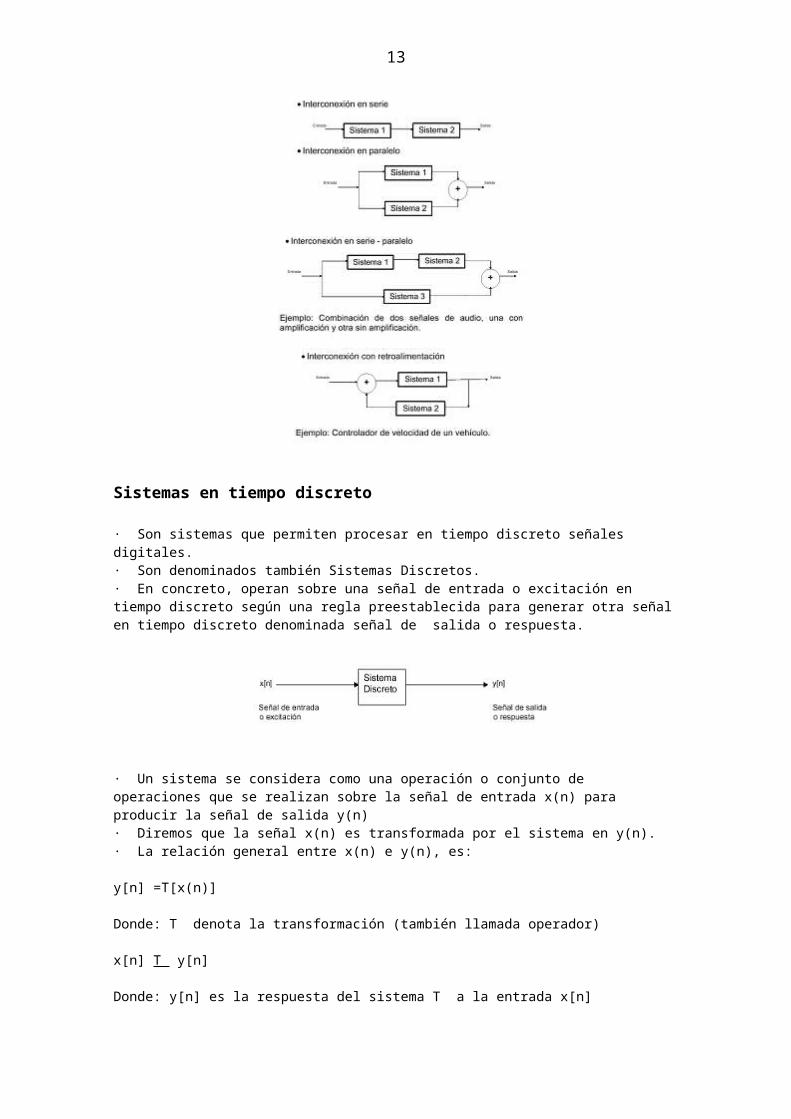
Conexión entre sistemas
10
Sistemas en tiempo discreto · Son sistemas que permiten procesar en tiempo discreto señales digitales. · Son denominados también Sistemas Discretos. · En concreto, operan sobre una señal de entrada o excitación en tiempo discreto según una regla preestablecida para generar otra señal en tiempo discreto denominada señal de salida o respuesta.
· Un sistema se considera como una operación o conjunto de operaciones que se realizan sobre la señal de entrada x(n) para producir la señal de salida y(n) · Diremos que la señal x(n) es transformada por el sistema en y(n). · La relación general entre x(n) e y(n), es: y[n] =T[x(n)] Donde: T denota la transformación (también llamada operador) x[n] T y[n] Donde: y[n] es la respuesta del sistema T a la entrada x[n]
3.3.23. Propiedades de los Sistemas Memoria · Sistemas con memoria: Si la salida depende de entradas pasadas (y futuras). Ejemplo: Capacitor, bobina · Sistemas sin memoria: Si solo depende de la entrada presente. Ejemplo: Resistor
Causalidad · Sistema Causal: Si la salida presente depende de los valores presente y/o pasado de la señal de entrada. · Sistema No Causal: si la salida presente depende de los valores futuros de la señal de entrada. Invariancia en el tiempo · Las características de entrada y salida del sistema no cambian con el tiempo · Al aplicar una entrada desplazada en el tiempo (retraso o adelanto) al sistema, se produce una salida con el mismo desplazamiento · Cuando no se cumple el comportamiento anterior, el sistema es variante en el tiempo
11
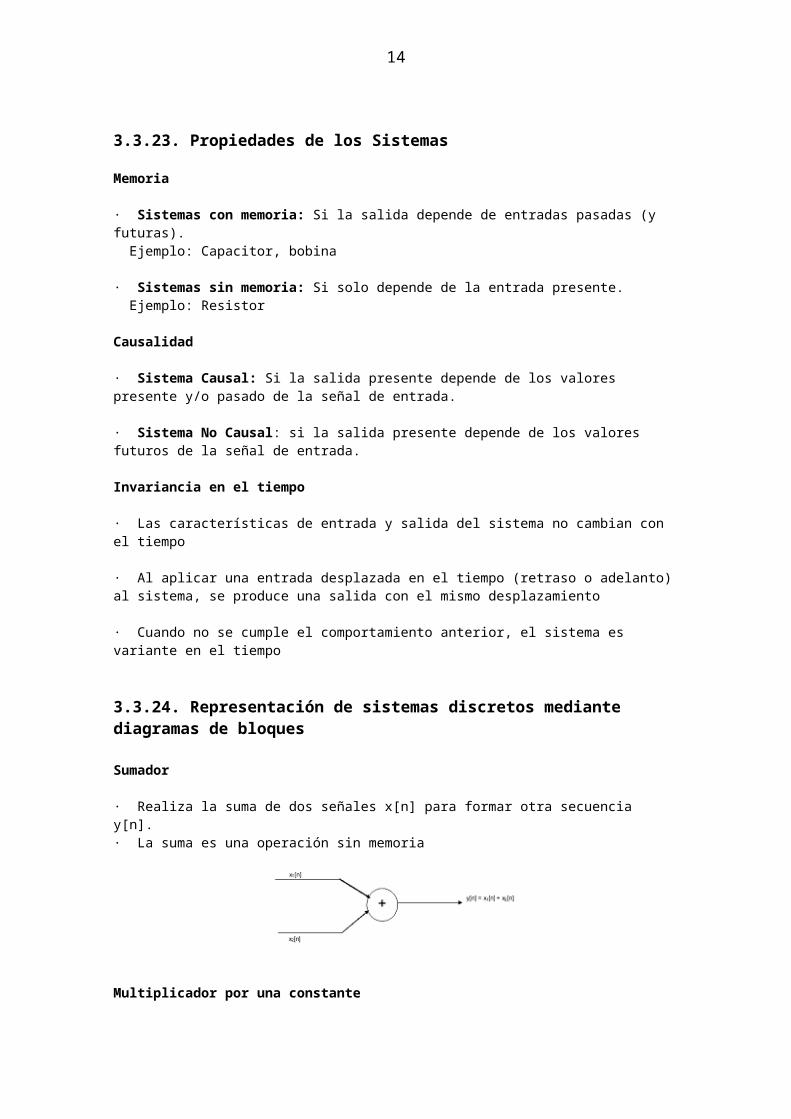
3.3.24. Representación de sistemas discretos mediante diagramas de bloques Sumador · Realiza la suma de dos señales x[n] para formar otra secuencia y[n]. · La suma es una operación sin memoria
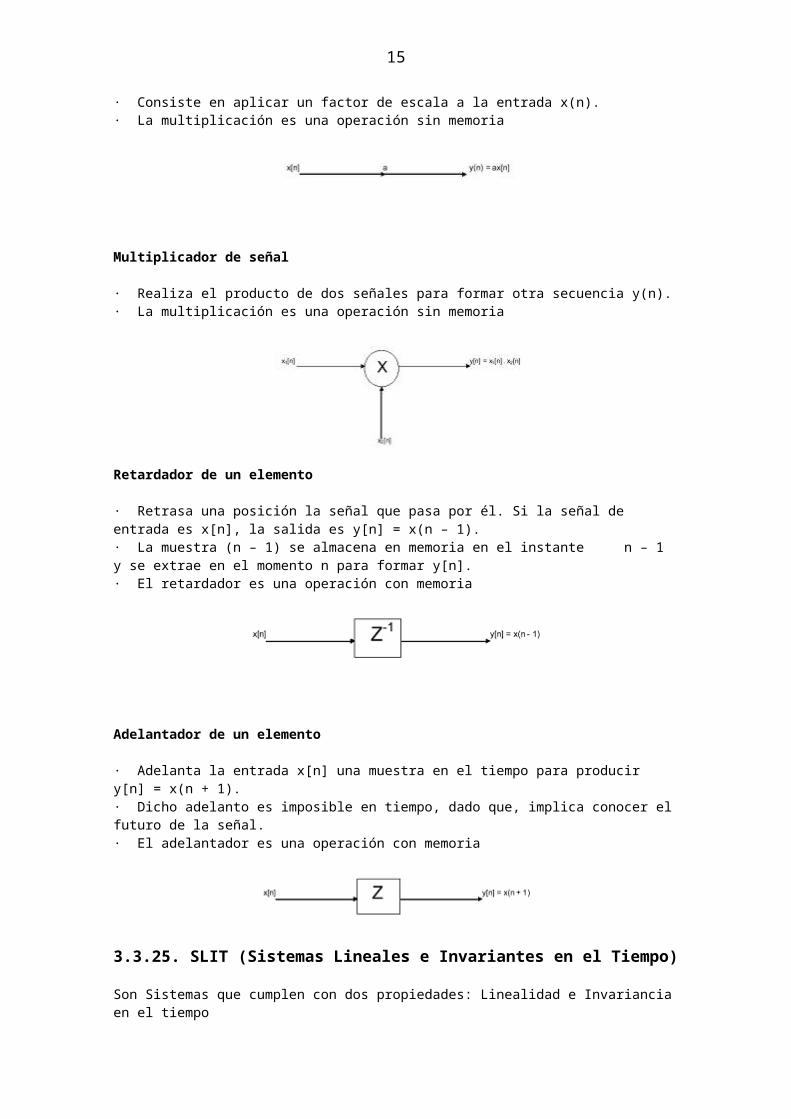
Multiplicador por una constante · Consiste en aplicar un factor de escala a la entrada x(n). · La multiplicación es una operación sin memoria
Multiplicador de señal · Realiza el producto de dos señales para formar otra secuencia y(n). · La multiplicación es una operación sin memoria
Retardador de un elemento · Retrasa una posición la señal que pasa por él. Si la señal de entrada es x[n], la salida es y[n] = x(n – 1). · La muestra (n – 1) se almacena en memoria en el instante n – 1 y se extrae en el momento n para formar y[n]. · El retardador es una operación con memoria
Adelantador de un elemento · Adelanta la entrada x[n] una muestra en el tiempo para producir y[n] = x(n + 1). · Dicho adelanto es imposible en tiempo, dado que, implica conocer el futuro de la señal. · El adelantador es una operación con memoria
12
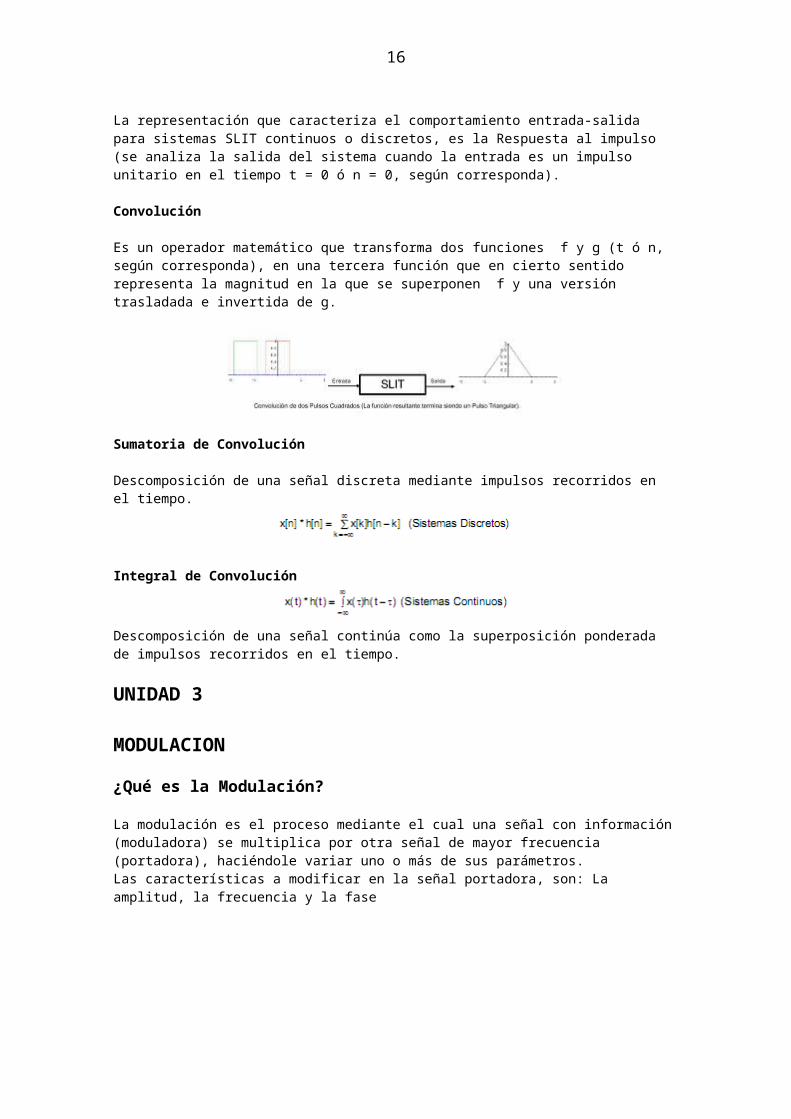
3.3.25. SLIT (Sistemas Lineales e Invariantes en el Tiempo) Son Sistemas que cumplen con dos propiedades: Linealidad e Invariancia en el tiempo La representación que caracteriza el comportamiento entrada-salida para sistemas SLIT continuos o discretos, es la Respuesta al impulso (se analiza la salida del sistema cuando la entrada es un impulso unitario en el tiempo t = 0 ó n = 0, según corresponda). Convolución Es un operador matemático que transforma dos funciones f y g (t ó n, según corresponda), en una tercera función que en cierto sentido representa la magnitud en la que se superponen f y una versión trasladada e invertida de g.
Sumatoria de Convolución Descomposición de una señal discreta mediante impulsos recorridos en el tiempo.
Integral de Convolución
Descomposición de una señal continúa como la superposición ponderada de impulsos recorridos en el tiempo.
UNIDAD 3
MODULACION
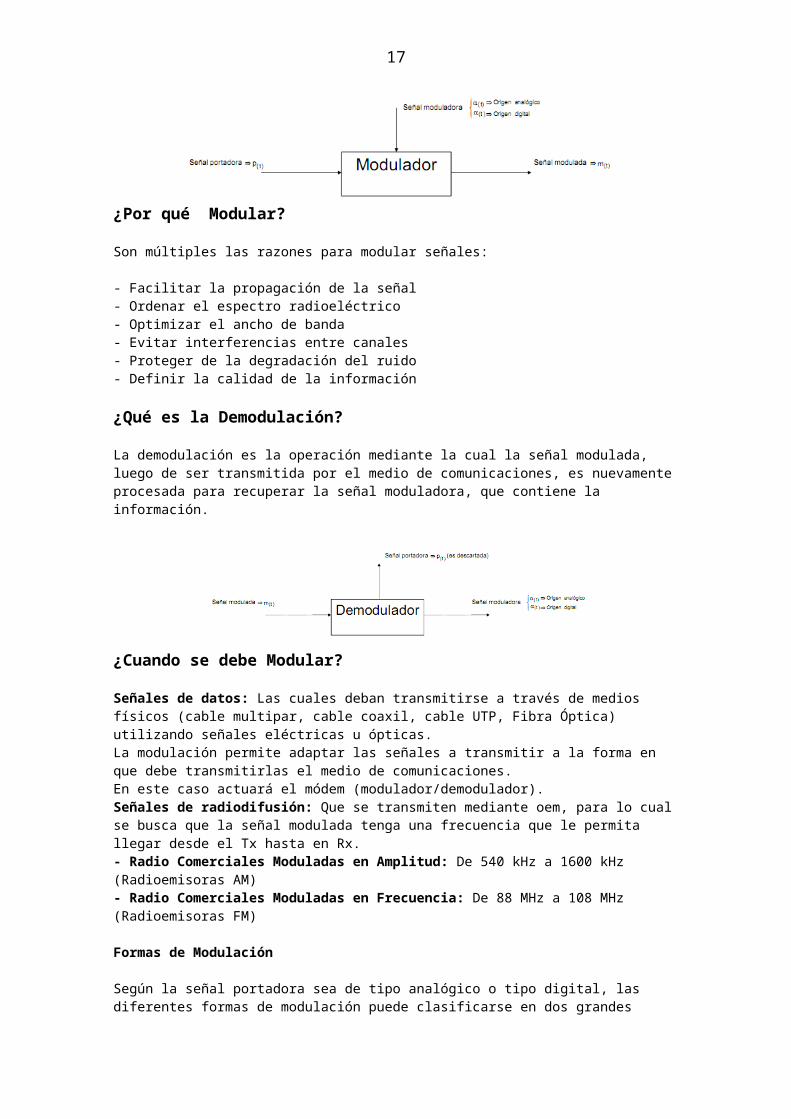
¿Qué es la Modulación? La modulación es el proceso mediante el cual una señal con información (moduladora) se multiplica por otra señal de mayor frecuencia (portadora), haciéndole variar uno o más de sus parámetros. Las características a modificar en la señal portadora, son: La amplitud, la frecuencia y la fase
¿Por qué Modular?
13
Son múltiples las razones para modular señales: - Facilitar la propagación de la señal - Ordenar el espectro radioeléctrico - Optimizar el ancho de banda - Evitar interferencias entre canales - Proteger de la degradación del ruido - Definir la calidad de la información
¿Qué es la Demodulación? La demodulación es la operación mediante la cual la señal modulada, luego de ser transmitida por el medio de comunicaciones, es nuevamente procesada para recuperar la señal moduladora, que contiene la información.
¿Cuando se debe Modular? Señales de datos: Las cuales deban transmitirse a través de medios físicos (cable multipar, cable coaxil, cable UTP, Fibra Óptica) utilizando señales eléctricas u ópticas. La modulación permite adaptar las señales a transmitir a la forma en que debe transmitirlas el medio de comunicaciones. En este caso actuará el módem (modulador/demodulador).Señales de radiodifusión: Que se transmiten mediante oem, para lo cual se busca que la señal modulada tenga una frecuencia que le permita llegar desde el Tx hasta en Rx. - Radio Comerciales Moduladas en Amplitud: De 540 kHz a 1600 kHz (Radioemisoras AM) - Radio Comerciales Moduladas en Frecuencia: De 88 MHz a 108 MHz (Radioemisoras FM)
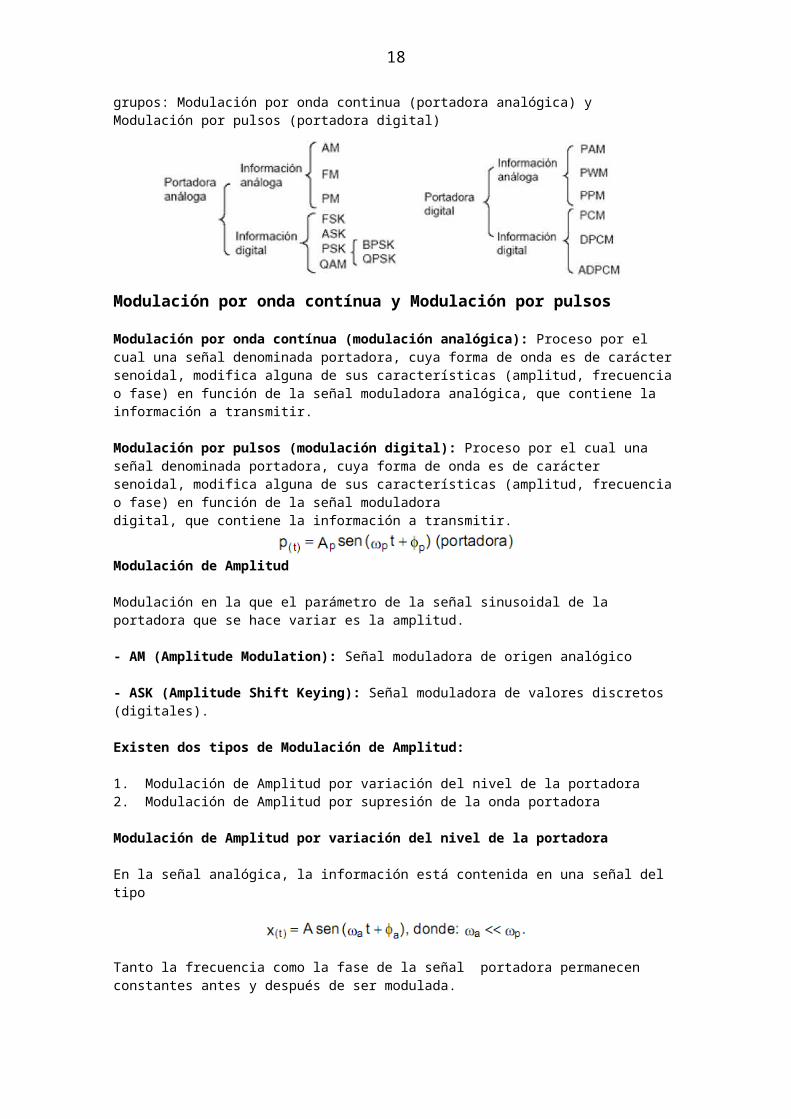
Formas de Modulación Según la señal portadora sea de tipo analógico o tipo digital, las diferentes formas de modulación puede clasificarse en dos grandes grupos: Modulación por onda continua (portadora analógica) y Modulación por pulsos (portadora digital)
Modulación por onda contínua y Modulación por pulsos Modulación por onda contínua (modulación analógica): Proceso por el cual una señal denominada portadora, cuya forma de onda es de carácter senoidal, modifica alguna de sus características (amplitud, frecuencia o fase) en función de la señal moduladora analógica, que contiene la información a transmitir. Modulación por pulsos (modulación digital): Proceso por el cual una señal denominada portadora, cuya forma de onda es de carácter senoidal, modifica alguna de sus características (amplitud, frecuencia o fase) en función de la señal moduladora
14
digital, que contiene la información a transmitir.
Modulación de Amplitud Modulación en la que el parámetro de la señal sinusoidal de la portadora que se hace variar es la amplitud. - AM (Amplitude Modulation): Señal moduladora de origen analógico - ASK (Amplitude Shift Keying): Señal moduladora de valores discretos (digitales). Existen dos tipos de Modulación de Amplitud: 1. Modulación de Amplitud por variación del nivel de la portadora 2. Modulación de Amplitud por supresión de la onda portadora
Modulación de Amplitud por variación del nivel de la portadora En la señal analógica, la información está contenida en una señal del tipo
Tanto la frecuencia como la fase de la señal portadora permanecen constantes antes y después de ser modulada.
Modulación de Amplitud por supresión de la onda portadora Los valores de la señal modulada varían entre un valor de amplitud A para la transmisión del dígito 1 y la supresión total de la portadora para la transmisión del dígito 0. Se utilizaba en los antiguos sistemas telegráficos.
Modulación de Amplitud por supresión de la onda portadora
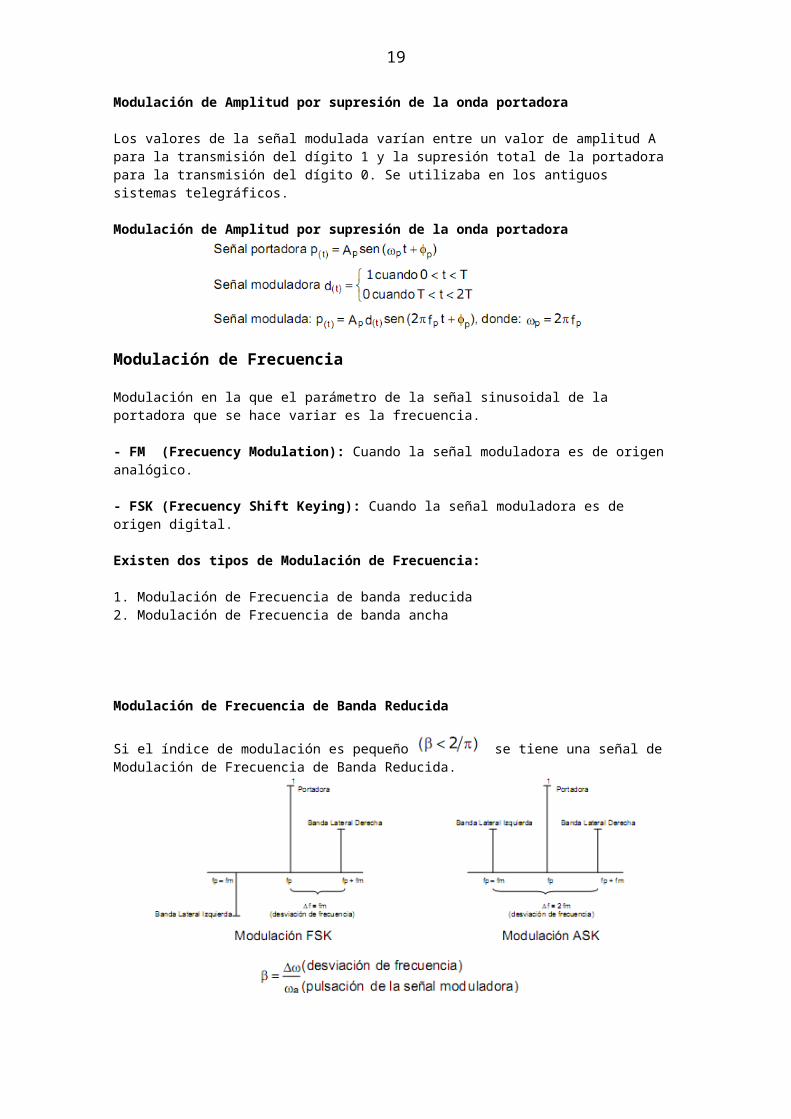
Modulación de Frecuencia Modulación en la que el parámetro de la señal sinusoidal de la portadora que se hace variar es la frecuencia. - FM (Frecuency Modulation): Cuando la señal moduladora es de origen analógico. - FSK (Frecuency Shift Keying): Cuando la señal moduladora es de origen digital. Existen dos tipos de Modulación de Frecuencia: 1. Modulación de Frecuencia de banda reducida 2. Modulación de Frecuencia de banda ancha
Modulación de Frecuencia de Banda Reducida
15
Si el índice de modulación es pequeño se tiene una señal de Modulación de Frecuencia de Banda Reducida.
Modulación de Frecuencia de Banda Ancha
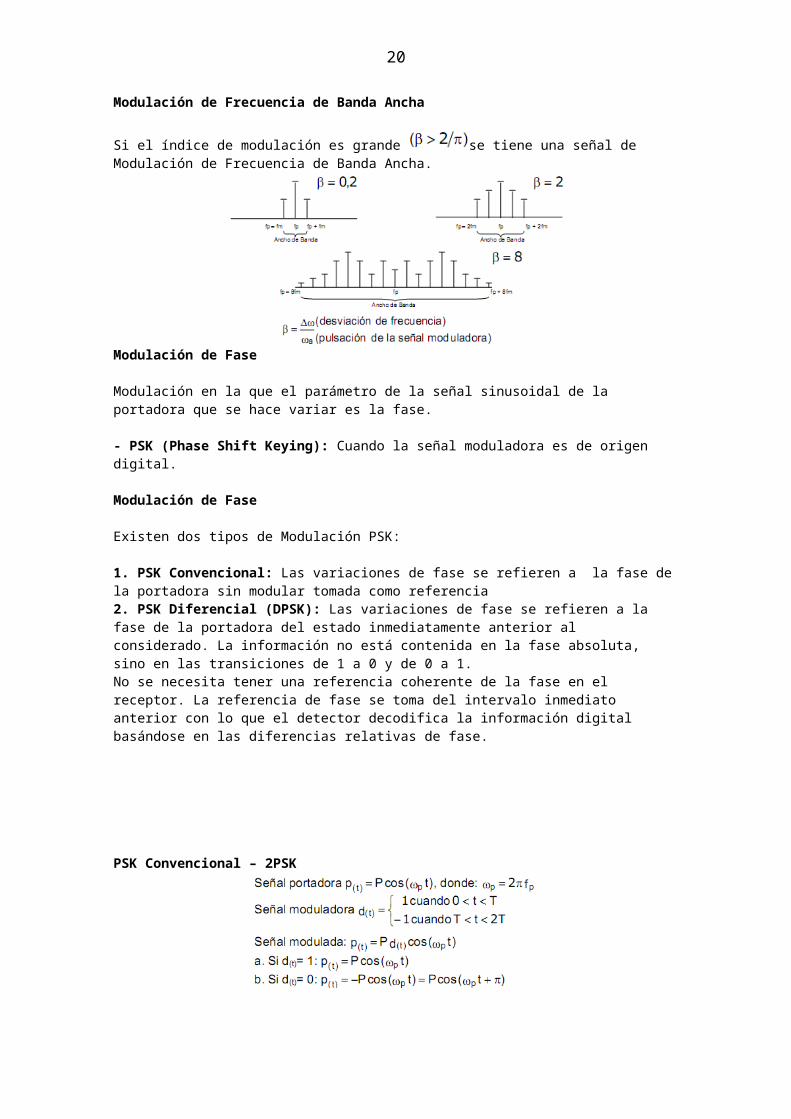
Si el índice de modulación es grande se tiene una señal de Modulación de Frecuencia de Banda Ancha.
Modulación de Fase Modulación en la que el parámetro de la señal sinusoidal de la portadora que se hace variar es la fase. - PSK (Phase Shift Keying): Cuando la señal moduladora es de origen digital.
Modulación de Fase Existen dos tipos de Modulación PSK: 1. PSK Convencional: Las variaciones de fase se refieren a la fase de la portadora sin modular tomada como referencia 2. PSK Diferencial (DPSK): Las variaciones de fase se refieren a la fase de la portadora del estado inmediatamente anterior al considerado. La información no está contenida en la fase absoluta, sino en las transiciones de 1 a 0 y de 0 a 1. No se necesita tener una referencia coherente de la fase en el receptor. La referencia de fase se toma del intervalo inmediato anterior con lo que el detector decodifica la información digital basándose en las diferencias relativas de fase.
PSK Convencional – 2PSK
16
Modulación Multifase - MPSK La fase de la onda portadora puede tomar secuencialmente M valores posibles separados entre sí por un ángulo:
Modulación Multifase - MPSK La fase de la onda portadora puede tomar secuencialmente M valores posibles separados entre sí por un ángulo:
Modulación Multinivel - MQAM Se basa en la modulación en amplitud de dos señales portadoras desfasadas en cuadratura entre sí:
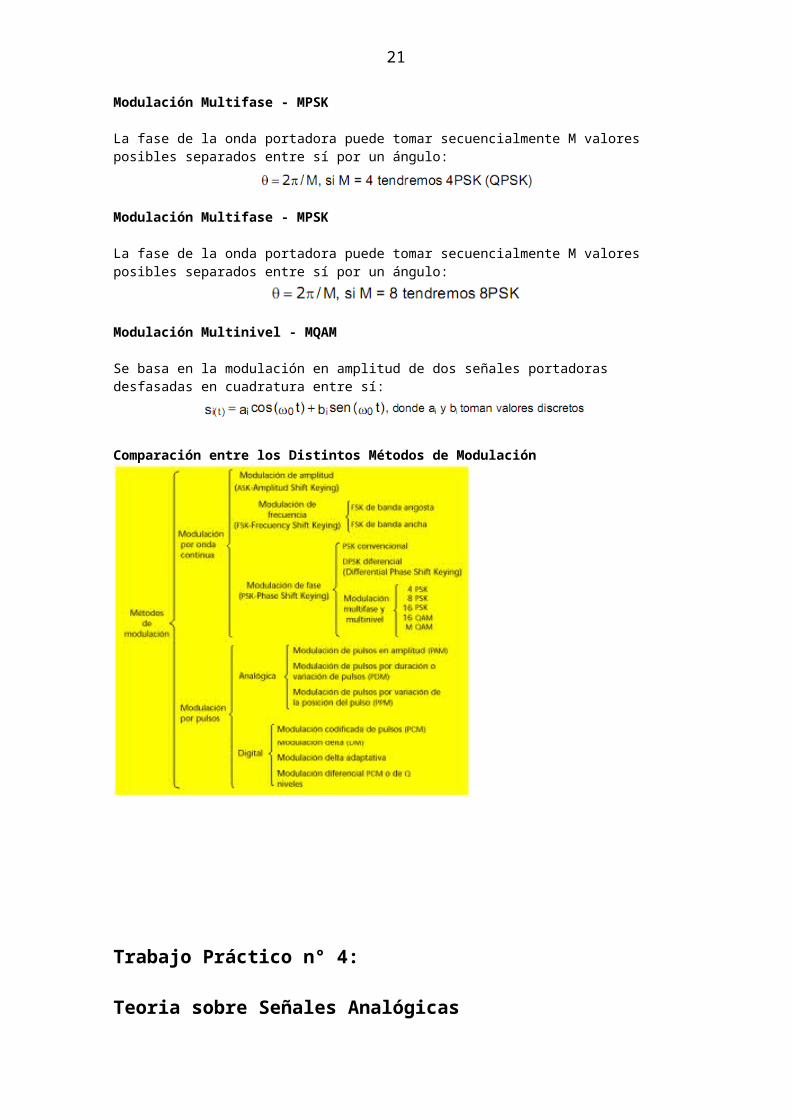
Comparación entre los Distintos Métodos de Modulación
17
Trabajo Práctico n° 4:
Teoria sobre Señales Analógicas
3.1. Señales analógicas Las señales analógicas se pueden clasificar en simples y compuestas. Una señal analógica simple o una onda seno, no puede ser descompuesta en señales más simples. Una señal analógica compuesta está formada por múltiples ondas seno.
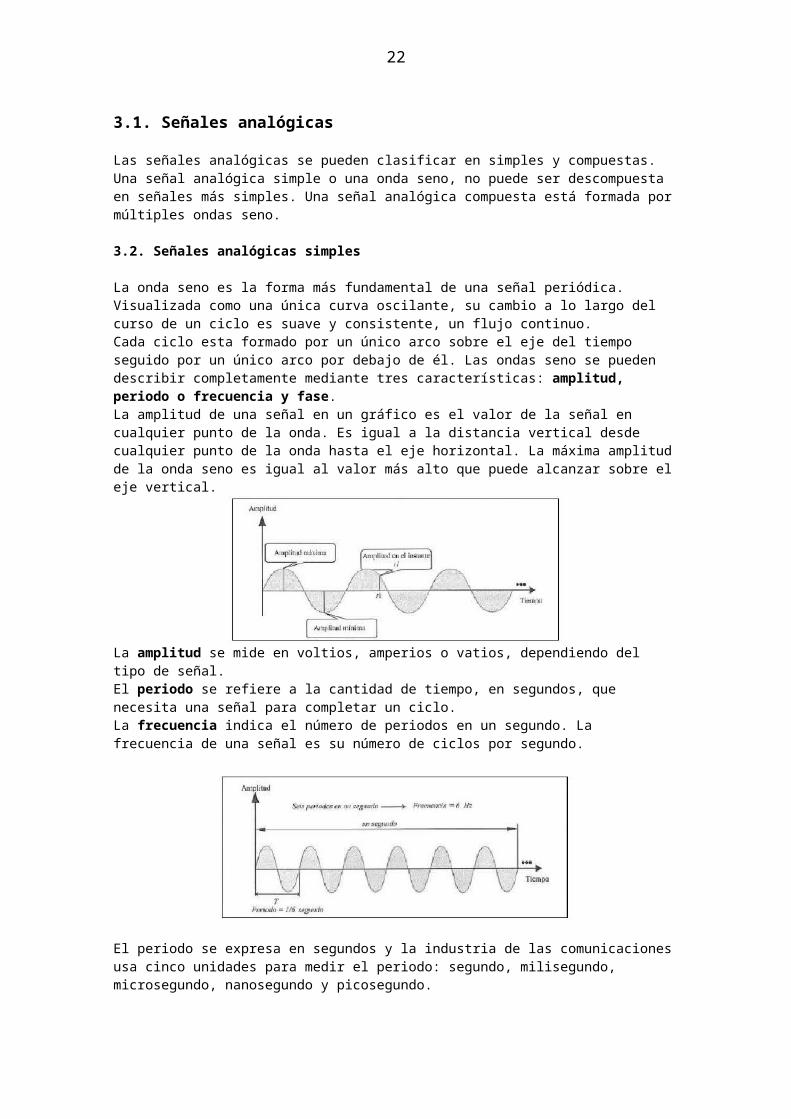
3.2. Señales analógicas simples La onda seno es la forma más fundamental de una señal periódica. Visualizada como una única curva oscilante, su cambio a lo largo del curso de un ciclo es suave y consistente, un flujo continuo. Cada ciclo esta formado por un único arco sobre el eje del tiempo seguido por un único arco por debajo de él. Las ondas seno se pueden describir completamente mediante tres características: amplitud, periodo o frecuencia y fase. La amplitud de una señal en un gráfico es el valor de la señal en cualquier punto de la onda. Es igual a la distancia vertical desde cualquier punto de la onda hasta el eje horizontal. La máxima amplitud de la onda seno es igual al valor más alto que puede alcanzar sobre el eje vertical.
La amplitud se mide en voltios, amperios o vatios, dependiendo del tipo de señal. El periodo se refiere a la cantidad de tiempo, en segundos, que necesita una señal para completar un ciclo. La frecuencia indica el número de periodos en un segundo. La frecuencia de una señal es su número de ciclos por segundo.
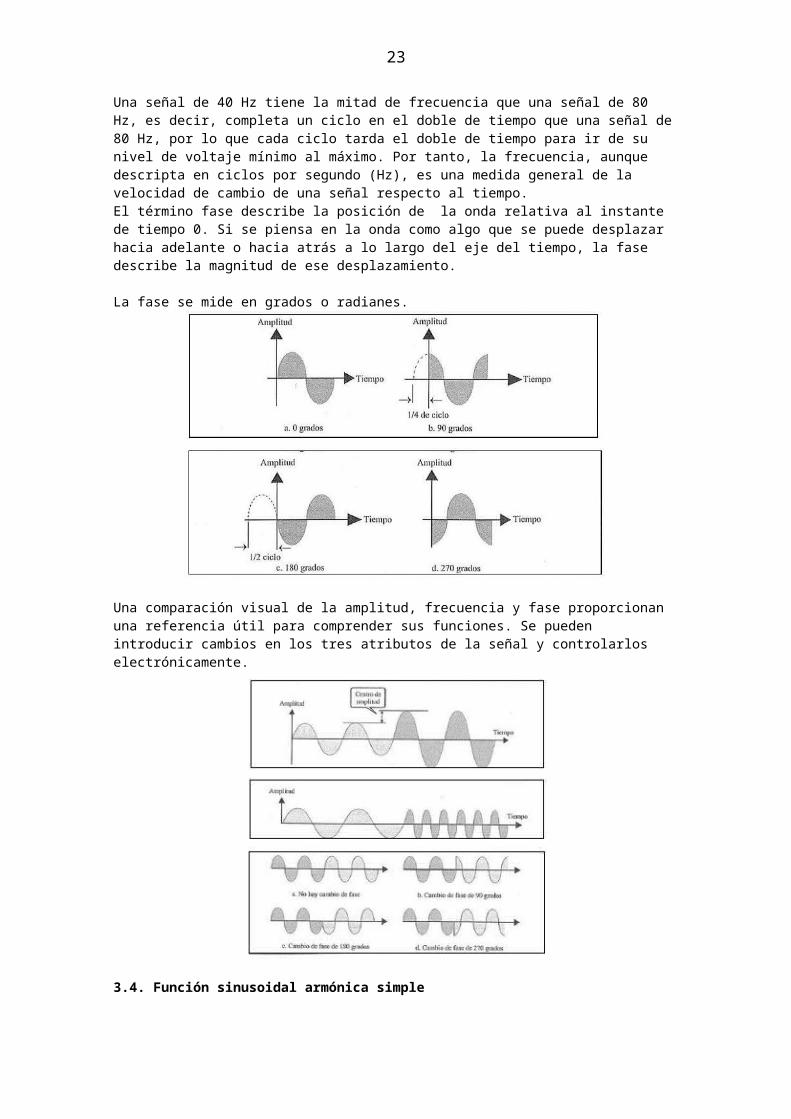
El periodo se expresa en segundos y la industria de las comunicaciones usa cinco unidades para medir el periodo: segundo, milisegundo, microsegundo, nanosegundo y picosegundo.Una señal de 40 Hz tiene la mitad de frecuencia que una señal de 80 Hz, es decir, completa un ciclo en el doble de tiempo que una señal de 80 Hz, por lo que cada ciclo tarda el doble de tiempo para ir de su nivel de voltaje mínimo al máximo. Por tanto, la frecuencia, aunque descripta en ciclos por segundo (Hz), es una medida general de la velocidad de cambio de una señal respecto al tiempo.El término fase describe la posición de la onda relativa al instante de tiempo 0. Si se piensa en la onda como algo que se puede desplazar hacia adelante o hacia atrás a lo largo del eje del tiempo, la fase describe la magnitud de ese desplazamiento.
18
La fase se mide en grados o radianes.
Una comparación visual de la amplitud, frecuencia y fase proporcionan una referencia útil para comprender sus funciones. Se pueden introducir cambios en los tres atributos de la señal y controlarlos electrónicamente.
3.4. Función sinusoidal armónica simple Una de las formas más comunes de las señales analógicas es la función sinusoidal simple.
3.5. Onda senoidal La forma de onda del voltaje se llama onda senoidal.
19
El valor instantáneo del voltaje en cualquier punto de la onda senoidal se expresa por la ecuación:
El número de ciclos por segundo se llama frecuencia, se indica con la letra f y se expresa en Hz. Un ciclo por segundo es igual a un Hertz (Hz). El tiempo que se requiere para completar un ciclo se llama período, se indica con la letra T y se expresa en segundos (s). La frecuencia y el período son recíprocos:
La longitud de onda l es la longitud de una onda completa o ciclo completo. Depende de la frecuencia de la variación periódica y de la velocidad de propagación o transmisión.
Para las oem, la velocidad en el aire o en el vacío es
3.6. Relaciones de fase El ángulo de fase entre dos formas de onda de la misma frecuencia es la diferencia angular en cualquier instante.
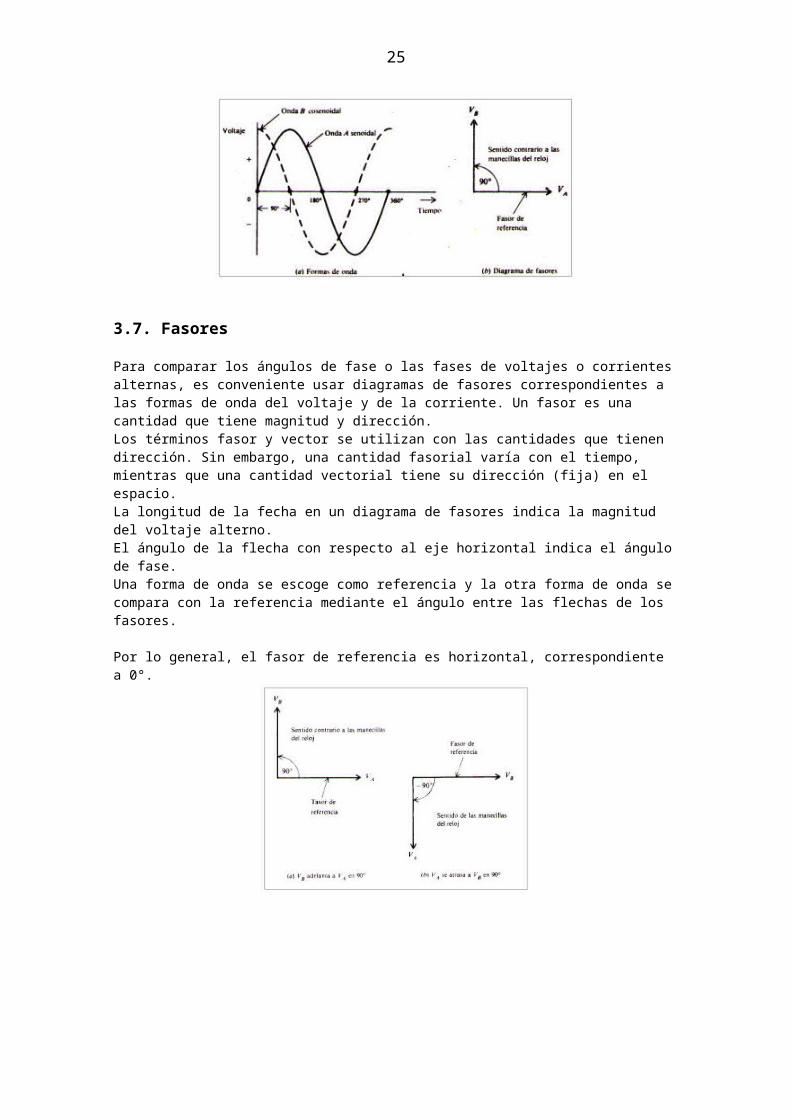
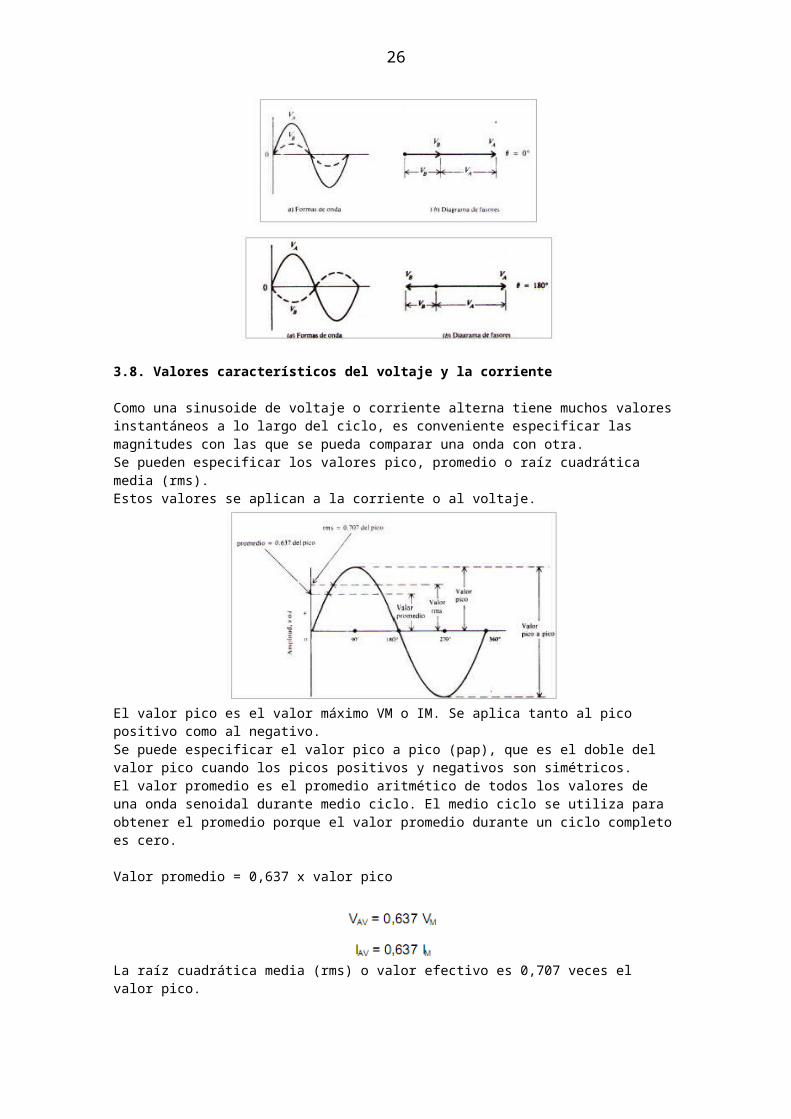
3.7. Fasores Para comparar los ángulos de fase o las fases de voltajes o corrientes alternas, es conveniente usar diagramas de fasores correspondientes a las formas de onda del voltaje y de la corriente. Un fasor es una cantidad que tiene magnitud y dirección. Los términos fasor y vector se utilizan con las cantidades que tienen dirección. Sin embargo, una cantidad fasorial varía con el tiempo, mientras que una cantidad vectorial tiene su dirección (fija) en el espacio. La longitud de la fecha en un diagrama de fasores indica la magnitud del voltaje alterno. El ángulo de la flecha con respecto al eje horizontal indica el ángulo de fase. Una forma de onda se escoge como referencia y la otra forma de onda se compara con la referencia mediante el ángulo entre las flechas de los fasores.
20
Por lo general, el fasor de referencia es horizontal, correspondiente a 0°.
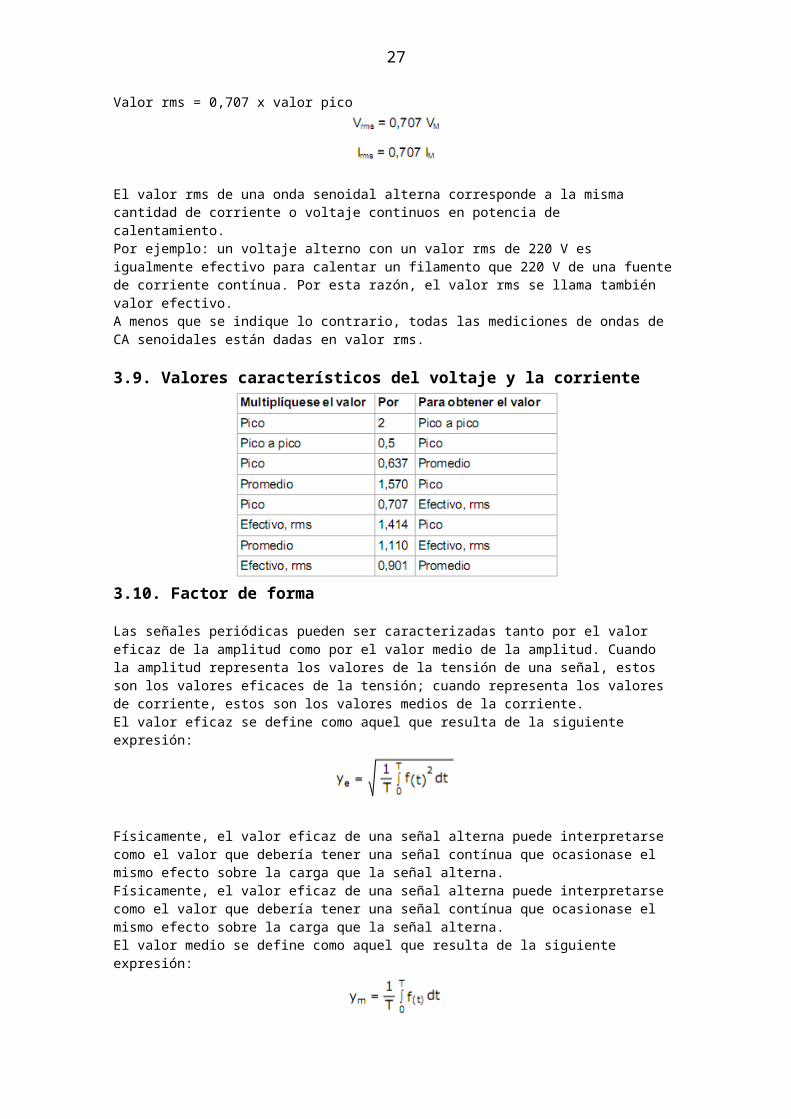
3.8. Valores característicos del voltaje y la corriente Como una sinusoide de voltaje o corriente alterna tiene muchos valores instantáneos a lo largo del ciclo, es conveniente especificar las magnitudes con las que se pueda comparar una onda con otra. Se pueden especificar los valores pico, promedio o raíz cuadrática media (rms). Estos valores se aplican a la corriente o al voltaje.
El valor pico es el valor máximo VM o IM. Se aplica tanto al pico positivo como al negativo. Se puede especificar el valor pico a pico (pap), que es el doble del valor pico cuando los picos positivos y negativos son simétricos. El valor promedio es el promedio aritmético de todos los valores de una onda senoidal durante medio ciclo. El medio ciclo se utiliza para obtener el promedio porque el valor promedio durante un ciclo completo es cero.
21
Valor promedio = 0,637 x valor pico
La raíz cuadrática media (rms) o valor efectivo es 0,707 veces el valor pico.
Valor rms = 0,707 x valor pico
El valor rms de una onda senoidal alterna corresponde a la misma cantidad de corriente o voltaje continuos en potencia de calentamiento. Por ejemplo: un voltaje alterno con un valor rms de 220 V es igualmente efectivo para calentar un filamento que 220 V de una fuente de corriente contínua. Por esta razón, el valor rms se llama también valor efectivo. A menos que se indique lo contrario, todas las mediciones de ondas de CA senoidales están dadas en valor rms.
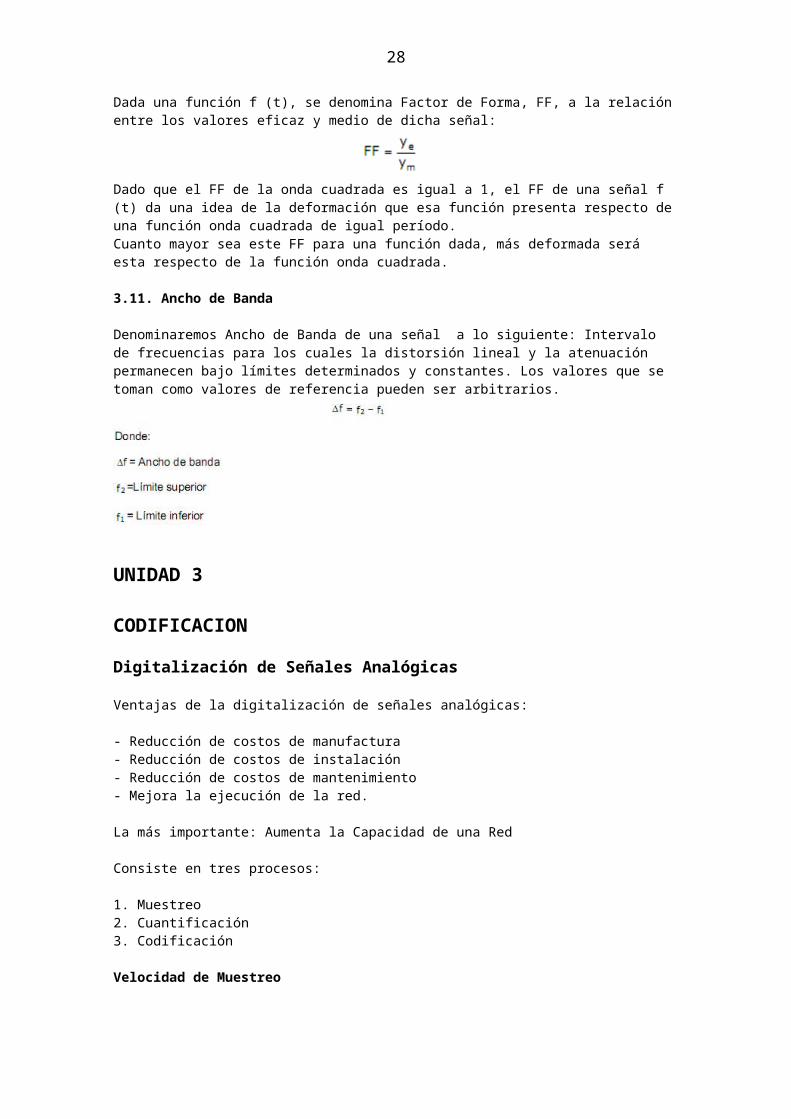
3.9. Valores característicos del voltaje y la corriente
3.10. Factor de forma Las señales periódicas pueden ser caracterizadas tanto por el valor eficaz de la amplitud como por el valor medio de la amplitud. Cuando la amplitud representa los valores de la tensión de una señal, estos son los valores eficaces de la tensión; cuando representa los valores de corriente, estos son los valores medios de la corriente. El valor eficaz se define como aquel que resulta de la siguiente expresión:
Físicamente, el valor eficaz de una señal alterna puede interpretarse como el valor que debería tener una señal contínua que ocasionase el mismo efecto sobre la carga que la señal alterna. Físicamente, el valor eficaz de una señal alterna puede interpretarse como el valor que debería tener una señal contínua que ocasionase el mismo efecto sobre la carga que la señal alterna. El valor medio se define como aquel que resulta de la siguiente expresión:
Dada una función f (t), se denomina Factor de Forma, FF, a la relación entre los valores eficaz y medio de dicha señal:
22
Dado que el FF de la onda cuadrada es igual a 1, el FF de una señal f (t) da una idea de la deformación que esa función presenta respecto de una función onda cuadrada de igual período. Cuanto mayor sea este FF para una función dada, más deformada será esta respecto de la función onda cuadrada. 3.11. Ancho de Banda Denominaremos Ancho de Banda de una señal a lo siguiente: Intervalo de frecuencias para los cuales la distorsión lineal y la atenuación permanecen bajo límites determinados y constantes. Los valores que se toman como valores de referencia pueden ser arbitrarios.
UNIDAD 3
CODIFICACION
Digitalización de Señales Analógicas Ventajas de la digitalización de señales analógicas: - Reducción de costos de manufactura - Reducción de costos de instalación - Reducción de costos de mantenimiento - Mejora la ejecución de la red. La más importante: Aumenta la Capacidad de una Red Consiste en tres procesos: 1. Muestreo 2. Cuantificación 3. Codificación
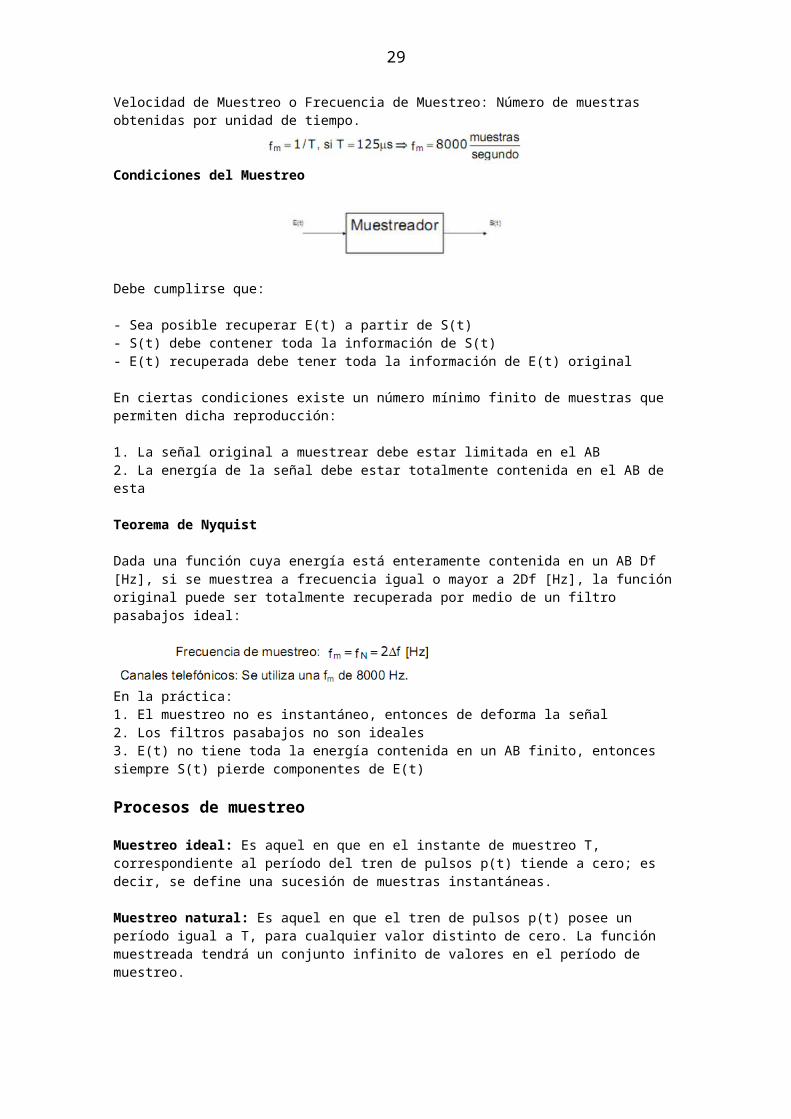
Velocidad de Muestreo Velocidad de Muestreo o Frecuencia de Muestreo: Número de muestras obtenidas por unidad de tiempo.
Condiciones del Muestreo
Debe cumplirse que: - Sea posible recuperar E(t) a partir de S(t)
23

- S(t) debe contener toda la información de S(t) - E(t) recuperada debe tener toda la información de E(t) original En ciertas condiciones existe un número mínimo finito de muestras que permiten dicha reproducción: 1. La señal original a muestrear debe estar limitada en el AB 2. La energía de la señal debe estar totalmente contenida en el AB de esta Teorema de Nyquist Dada una función cuya energía está enteramente contenida en un AB Df [Hz], si se muestrea a frecuencia igual o mayor a 2Df [Hz], la función original puede ser totalmente recuperada por medio de un filtro pasabajos ideal:
En la práctica: 1. El muestreo no es instantáneo, entonces de deforma la señal 2. Los filtros pasabajos no son ideales 3. E(t) no tiene toda la energía contenida en un AB finito, entonces siempre S(t) pierde componentes de E(t)
Procesos de muestreo Muestreo ideal: Es aquel en que en el instante de muestreo T, correspondiente al período del tren de pulsos p(t) tiende a cero; es decir, se define una sucesión de muestras instantáneas. Muestreo natural: Es aquel en que el tren de pulsos p(t) posee un período igual a T, para cualquier valor distinto de cero. La función muestreada tendrá un conjunto infinito de valores en el período de muestreo. Muestreo con retención (sample and hold): Consiste en tomar la muestra y retener el valor un cierto tiempo hasta que comience el próximo período de muestreo.
Cuantificación Proceso que consiste en transformar los niveles de amplitud continuos de la señal de entrada previamente muestreada, en un conjunto de niveles discretos previamente establecidos (por ejemplo, como potencias de 2n.
Error de Cuantificación A diferencia del muestreo, el proceso implica una perdida irremediable de información, dado que resulta imposible reconstruir la señal analógica original a/p de la señal cuantificada. La diferencia entre la señal de entrada y su versión cuantificada se denomina Error de Cuantificación:
También se suele denominar Ruido de Cuantificación o Distorsión por Cuantificación.
Tipos de Cuantificación Cuantificación Uniforme: Es aquella en la que los distintos niveles cuánticos tienen la misma medida. Presenta un error de cuantificación constante e independiente de la señal de entrada. Cuantificación no uniforme: Es aquella en la que los distintos niveles cuánticos se comprimen en proximidades al valor cero y se expanden hacia los extremos.
24
Presenta un error de cuantificación pequeño en los valores bajos y aumenta en los valores altos, posibilitando mantener una relación S/N constante.
Leyes de Cuantificación Función que define los distintos valores de los intervalos de cuantificación, para cada uno de los valores de amplitud de la señal a ser cuantificada. Es posible calcular de ley de cuantificación óptima para un canal telefónico, la cual resulta una función representada por una curva con simetría impar pero que impide la cuantificación. Por ello se han buscado soluciones lo más cercanas a la óptima, con simetría impar que permita la cuantificación. Se usan dos leyes de características logarítmicas: 1. Ley µ 2. Ley A
Ley µ (EEUU y Japón)
Usada fundamentalmente en EEUU y Japón con valores de
Donde: x´= Valor de la señal de entrada V = Valor pico de la señal de entrada x = Valor de la señal normalizada (valor x´/ V) El valor µ puede variarse para obtener distintos grados de compresión.
Ley A (Europa y Argentina) Usada fundamentalmente en Europa y América del Sur con valores de A cercanos a 100:
Donde: x´= Valor de la señal de entrada V = Valor pico de la señal de entrada x = Valor de la señal normalizada (valor x´/ V)
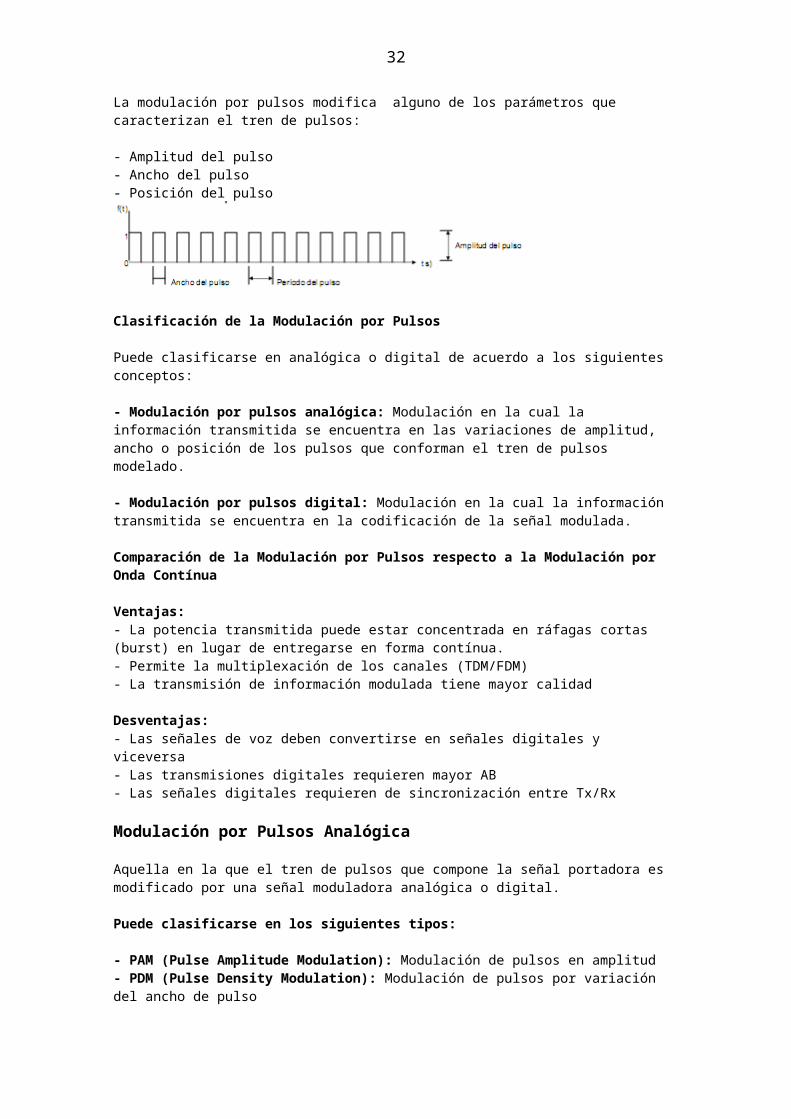
Codificación Proceso que consiste en convertir los pulsos cuantificados en un grupo equivalente de pulsos binarios de amplitud constante.
Debe reducirse el ancho de los pulsos con lo que aumenta el AB necesario para la transmisión de la señal.
25
En la práctica se utilizan sistemas de codificación de 8 bits/muestra (norma europea) y 7 bits/muestra (norma norteamericana)
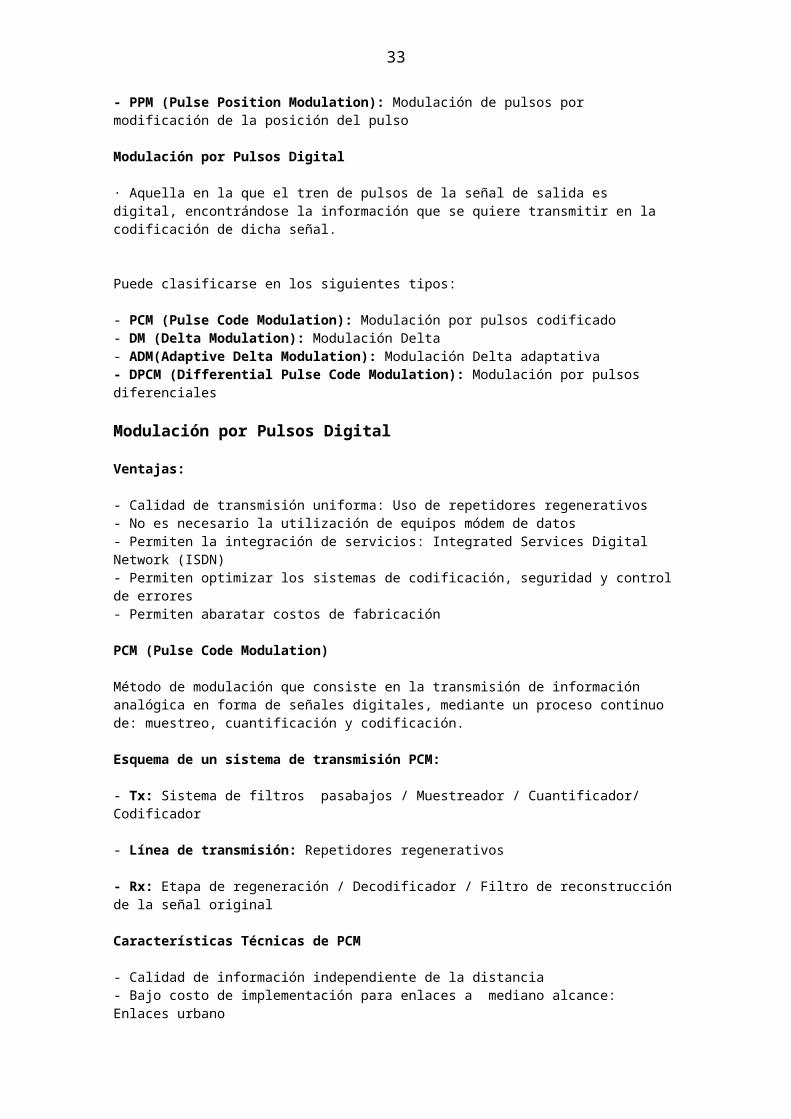
Modulación por Pulsos (Portadora Digital) Modulación de una señal portadora constituida por un tren de pulsos mediante una señal moduladora que puede ser de origen analógico o digital. La modulación por pulsos modifica alguno de los parámetros que caracterizan el tren de pulsos: - Amplitud del pulso - Ancho del pulso - Posición del pulso
Clasificación de la Modulación por Pulsos Puede clasificarse en analógica o digital de acuerdo a los siguientes conceptos: - Modulación por pulsos analógica: Modulación en la cual la información transmitida se encuentra en las variaciones de amplitud, ancho o posición de los pulsos que conforman el tren de pulsos modelado. - Modulación por pulsos digital: Modulación en la cual la información transmitida se encuentra en la codificación de la señal modulada.
Comparación de la Modulación por Pulsos respecto a la Modulación por Onda Contínua Ventajas: - La potencia transmitida puede estar concentrada en ráfagas cortas (burst) en lugar de entregarse en forma contínua. - Permite la multiplexación de los canales (TDM/FDM) - La transmisión de información modulada tiene mayor calidad Desventajas: - Las señales de voz deben convertirse en señales digitales y viceversa - Las transmisiones digitales requieren mayor AB - Las señales digitales requieren de sincronización entre Tx/Rx
Modulación por Pulsos Analógica Aquella en la que el tren de pulsos que compone la señal portadora es modificado por una señal moduladora analógica o digital. Puede clasificarse en los siguientes tipos: - PAM (Pulse Amplitude Modulation): Modulación de pulsos en amplitud - PDM (Pulse Density Modulation): Modulación de pulsos por variación del ancho de pulso - PPM (Pulse Position Modulation): Modulación de pulsos por modificación de la posición del pulso
Modulación por Pulsos Digital · Aquella en la que el tren de pulsos de la señal de salida es digital, encontrándose la información que se quiere transmitir en la codificación de dicha señal.
26
Puede clasificarse en los siguientes tipos: - PCM (Pulse Code Modulation): Modulación por pulsos codificado - DM (Delta Modulation): Modulación Delta - ADM(Adaptive Delta Modulation): Modulación Delta adaptativa - DPCM (Differential Pulse Code Modulation): Modulación por pulsos diferenciales
Modulación por Pulsos Digital Ventajas: - Calidad de transmisión uniforma: Uso de repetidores regenerativos - No es necesario la utilización de equipos módem de datos - Permiten la integración de servicios: Integrated Services Digital Network (ISDN) - Permiten optimizar los sistemas de codificación, seguridad y control de errores - Permiten abaratar costos de fabricación
PCM (Pulse Code Modulation) Método de modulación que consiste en la transmisión de información analógica en forma de señales digitales, mediante un proceso continuo de: muestreo, cuantificación y codificación. Esquema de un sistema de transmisión PCM: - Tx: Sistema de filtros pasabajos / Muestreador / Cuantificador/ Codificador - Línea de transmisión: Repetidores regenerativos - Rx: Etapa de regeneración / Decodificador / Filtro de reconstrucción de la señal original
Características Técnicas de PCM - Calidad de información independiente de la distancia - Bajo costo de implementación para enlaces a mediano alcance: Enlaces urbano - Economía en combinación con la conmutación digital: No es necesaria la conversión A/D - Integración de los servicios: voz / datos / imágenes a 64 kbps - Nuevos medios de transmisión: microondas o fibra óptica
Trabajo Práctico n° 5:
Teoria sobre Señales Digitales
5.1. Señales digitales La señal digital es un tipo de señal generada por algún tipo de fenómeno electromagnético en que cada signo que codifica el contenido de la misma puede ser analizado en término de algunas magnitudes que representan valores discretos, en lugar de valores dentro de un cierto rango. Por ejemplo, el interruptor de la luz sólo puede tomar dos valores o estados: abierto o cerrado, o la misma lámpara: encendida o apagada.
5.2. Señal onda cuadrada
27
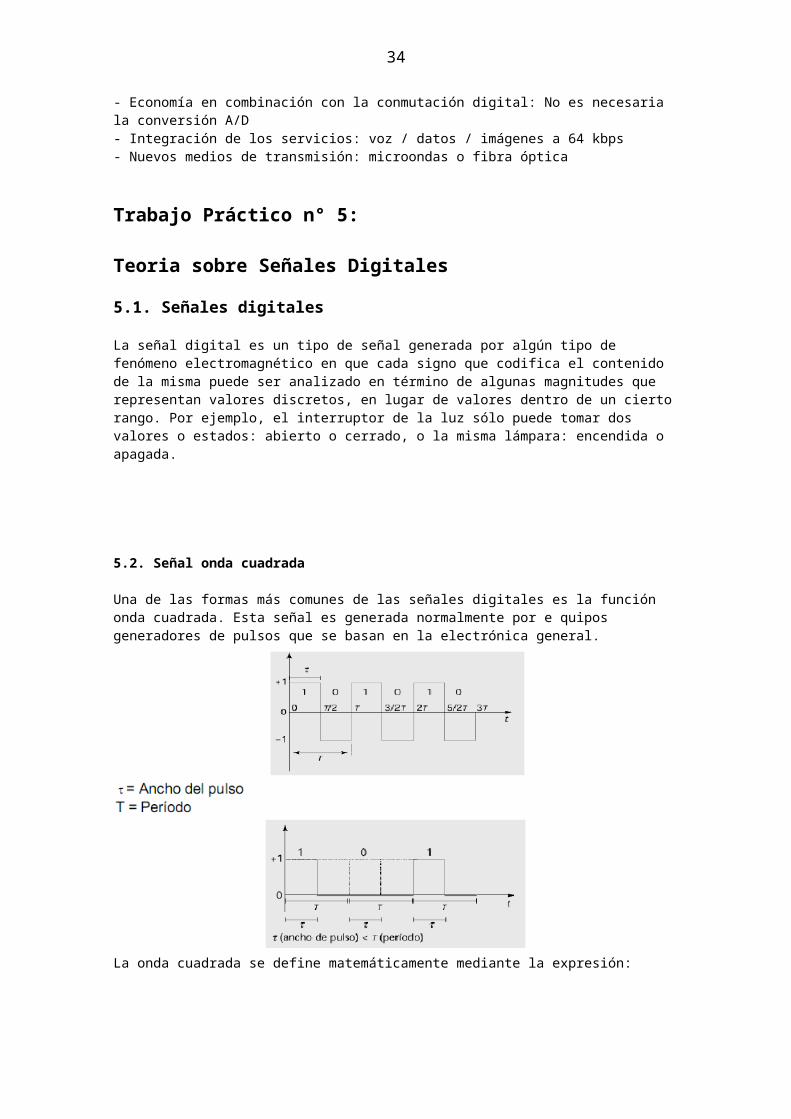
Una de las formas más comunes de las señales digitales es la función onda cuadrada. Esta señal es generada normalmente por e quipos generadores de pulsos que se basan en la electrónica general.
La onda cuadrada se define matemáticamente mediante la expresión:
En esta función, los conceptos de frecuencia, período y amplitud tienen el mismo significado. Sin embargo, en este caso la frecuencia también se denomina frecuencia de repetición de pulsos (FRP), la cual es igual a:
5.3. Definición de byte Dado que muchos sistemas de codificación utilizan 8 bits para codificar un carácter, el concepto inicial que se tiene sobre el byte es que siempre se necesita un conjunto de 8 bits para configurarlo. Definimos al byte como: Número de bits utilizados para representar un carácter en un sistema de codificación dado.
5.4. Definición de palabra Definimos la palabra como: Número de caracteres fijos que un equipo trata como unidad cuando los transfiere entre sus distintas unidades o los somete a distintos procesos, tales como lectura, escritura en memoria, operaciones aritméticas, etc. 5.5. Definición de bloque Definimos el bloque como: Conjunto de bits que a los efectos de la protección y corrección de errores, es considerado como una sola unidad.
5.6. Modos de Transmisión
28
5.6.1. Transmisión en modo serie: Es aquella en que los bits que componen cada carácter se transmiten en n ciclos de 1 bit cada uno.
5.6.2. Transmisión en modo paralelo: Es aquella en que los n bits que componen cada byte o carácter se transmiten en un solo ciclo de reloj.
5.6.3. Transmisión sincrónica: Definimos al sincronismo como: Procedimiento mediante el cual tanto la fuente como el colector de los datos adoptan una base de tiempo común, de forma que reconozcan inequívocamente la Tx de un 1 o de un 0. La sincronización entre Tx y Rx se puede realizar en tres niveles denominados: sincronismo de bit, de byte o de carácter. Se define como sincronismo de bit al procedimiento que se usa para determinar exactamente el momento en que se debe empezar a contar un bit. Se define como sincronismo de byte al procedimiento que se usa para determinar cuando comienza el byte (carácter) y cuando termina. Se define como sincronismo de bloque al procedimiento que se usa para determinar el conjunto de caracteres que se considerará a los efectos del tratamiento de los errores. 5.6.4. Transmisión asincrónica: La transmisión asíncrona se da lugar cuando el proceso de sincronización entre emisor y receptor se realiza en cada palabra de código transmitido. Esta sincronización se lleva a cabo a través de unos bits especiales que definen el entorno de cada código.
5.7. Intervalo de bit y tasa de bit
Definimos al Intervalo de bit, como: Tiempo necesario para enviar un único bit. Definimos la tasa de bit, como: Número de intervalos de bit por segundo. Es decir, es el número de bit enviado en un segundo, habitualmente expresado en bit por segundo (bps).
5.8. Velocidad de modulación Definimos la velocidad de modulación, como: Inversa de la medida del intervalo de tiempo nominal más corto entre dos instantes significativos sucesivos de la señal modulada.La velocidad de modulación se mide en baudios, tal que:
Donde: T = Duración del pulso (ancho del pulso) Con pulsos de igual duración, la velocidad de modulación medida en baudios es el número de dichos pulsos por segundo o el máximo número de transiciones de estados del canal por segundo.
5.9. Velocidad binaria o velocidad de transmisión
Definimos la velocidad binaria, como: Velocidad global de transmisión expresada en bps. Definimos la velocidad de transmisión, como: Numero de dígitos binarios transmitidos en un canal de datos, en la unidad de tiempo, independientemente de que los mismos lleven o no información.
29
Para un solo canal que transmita en el modo serie:
En el caso que la modulación sea binaria:
Expresión que coincide con la correspondiente a la Vm, único caso particular en que ambas velocidades poseen la misma expresión. En el caso de modulaciones de cuatro estados:
En el caso de modulaciones de ocho estados:
En el caso de modulaciones de dieciséis estados:
Podemos establecer una relación entre la velocidad de transmisión y la velocidad de modulación: Vt = 2Vm; Vt = 3Vm; Vt = 4Vm Se deduce que al aumentar el número de estados significativos de la señal, es posible aumentar la velocidad binaria o velocidad de transmisión, sin aumentar la velocidad de modulación.
5.10. Velocidad de transferencia de datos Definimos la velocidad de transferencia de datos (throughput), como: Número medio de bits por unidad de tiempo que se transmite entre equipos correspondientes a un sistema de transmisión de datos, concepto que se relaciona con el enlace de datos:
5.11. Velocidad real de transferencia de datos Definimos la velocidad real de transferencia de datos, como: Número medio de bits por unidad de tiempo que se transmiten entre los equipos de un sistema de transmisión de datos, a condición de que el receptor los acepte como válidos.
5.12. Eficiencia del sistema de comunicaciones
5.13. Tasa de errores Definimos la tasa de errores, como: Relación entre los bits recibidos de manera errónea respecto a la cantidad total de bits transmitidos:
5.14. Transmisión multinivel Definimos la trasmisión multinivel, como: Aquella en la que el número de niveles que puede tomar la señal es mayor que dos. En el caso en que el número de niveles es dos, la transmisión se denomina binaria. Al poder aumentar la velocidad de transmisión sin que aumente la
30
velocidad de modulación, se podrá transmitir una mayor cantidad de bits por baudio, aumentando así la eficiencia del canal de comunicaciones. Este tipo de transmisión resuelve de forma parcial, pero efectiva, el problema de enviar información a mayor velocidad por un canal de comunicaciones sin tener que aumentar el ancho de banda necesario. Como resultad final se obtiene una relacion de bits transmitidos por baudio superior a uno:
5.14.1. Dibits: Dado que la cadencia de una transmisión de datos binaria es el numero de veces que una señal cambia de nivel, podremos enviar dos unidades de información (bits) mediante un solo cambio de nivel (baudio).
5.14.2. Tribits y cuatribits: Si quisiéramos mejorar los niveles necesarios para enviar más bits en un solo pulso, aplicamos la expresión:
Donde: N = Número de niveles a transmitir n = Número de bits por pulso transmitido Para n = 3, se necesitarán 8 niveles y se obtendrán tribits Para n = 4, se necesitan 16 niveles y se obtendrán cuatribits La mayoría de los modem que transmiten a velocidades de más de 2400 bps, emplean este método para aumentar las velocidades de transmisión al tiempo que mantienen la velocidad de modulación en 2400 baudios.
5.15. Señales en banda base Definimos las señales en banda base, como: Señales que no sufren ningún proceso de modulación, a su salida de la fuente que las originó. Estas señales se pueden codificar en distintas formas, de ahí el nacimiento de los denominados códigos en banda base o códigos de línea.5.15.1. Señal unipolar: Se dice que una señal es unipolar cuando el valor que representa a un determinado dígito binario, toma siempre la misma polaridad (positiva o negativa), mientras que el otro dígito toma el valor cero.5.15.2. Señal polar: Se dice que una señal es polar cuando los valores que representan a los dígitos binarios, se originan como consecuencia de la conmutación de la línea entre un valor positivo de tensión V1 y el valor negativo de tensión – V1. La señal de línea nunca toma el valor 0. 5.15.3. Señal bipolar: Se dice que una señal es bipolar cuando un determinado dígito toma valor de polaridad alternados, mientras que el restante dígito siempre adopta el valor cero.La utilización de códigos de línea, tienen como misión fundamental solucionar los siguientes aspectos técnicos inherentes a las transmisiones en banda base: · Eliminar o disminuir la componente continua de la señal · Transmitir una señal de sincronismo desde el Tx hacia el Rx · Permitir detectar la presencia de señales en la línea Las señales en banda base pueden ser clasificadas en diferentes formas:
5.15.4. Según el ancho del pulso: NRZ: Cuando los bits están representados por pulsos que ocupan la totalidad del intervalo significativo (ancho del pulso).
31
RZ: Cuando los bits se representan por pulsos que ocupan una parte del intervalo significativo.
5.15.5. Según la polaridad: Unipolares: Son códigos cuyas señales tienen dos niveles (uno de ellos es 0).
Polares: Son códigos cuyas señales tiene dos niveles de diferente polaridad (+ y -).
Bipolares: Son códigos cuyas señales tienen tres niveles (+, 0 y -).
5.16. Códigos usados para señales en banda base Los códigos más usuales, son:
Sin retorno a cero (NRZ): Se debe efectuar un muestreo de la señal a efectos de determinar el valor de cada bit de información, observando la presencia o ausencia de corriente. Para la transmisión de un 1 se suele denominar nivel de marca. Para la transmisión de un 0 se suele denominar nivel de espacio.
Polar sin retorno a cero (NRZ): En este tipo de señales, si bien se pierde el sincronismo, se tiene la ventaja de que resulta necesario menor ancho de banda, dado que los pulsos son más anchos que los correspondientes a señales polares con retorno a cero.
32
Polar con retorno a cero (RZ): Este tipo de señales se de ominan autosincronizantes debido a que la base de tiempo queda unívocamente sincronizada en el receptor por la cadencia de los pulsos que llegan desde el receptor.
Bipolar sin retorno a cero: También denominado AMI, presenta la ventaja de utilizar pulsos de mayor duración que los bipolares con retorno a cero, por lo que el requerimiento de ancho de banda es menor.
Bipolar con retorno a cero: En este tipo de señales, la bipolaridad se utiliza solamente en forma alternada y cuando se transmiten unos.
Codificación diferencial En este tipo de codificación tienen lugar dos etapas: La primera para formar una señal diferencial que será transmitida a través del medio físico y la segunda para recuperar la señal original en el receptor: Código Manchester: El bit 1 se representa por una transición positiva en la mitad del intervalo significativo y un bit 0 con una transición negativa en la misma posición.
33
Código Manchester diferencial bifase: Se caracteriza porque para la transmisión de un 0 se efectúa una transición negativa en la mitad del intervalo significativo, mientras que para el envío de un 1 no se efectúa ninguna transición en la mitad del intervalo; pero si al comienzo del mismo. Por otro lado, no se altera la polaridad con la cual, se lo representa si el siguiente bit en un 0.
Código Miller: Emplea para la transición de un 1, una transición en lamitad del intervalo significativo. En el caso de un 0, existe una transición al final del intervalo si el bit siguiente es 0, caso contrario no habrá transición alguna.
Código HDB-3: Se basa en el Código AMI, que es un código bipolar sin retorno a cero que utiliza tres niveles (+, - y 0) para representar la información. El 0 se representa siempre con polaridad cero, el 1 con polaridad alternada (+ y -).
34





























