Embed Size (px)
Citation preview
Traian BOLFA
REPROGRAFIA UNIVERSITĂŢII “TRANSILVANIA” DIN BRAŞOV

- 1 -
Introducere
Cursul intitulat Rezistenţa materialelor, parte componentă a mecanicii corpului solid
deformabil, este una dintre disciplinele de baza în formarea viitorului inginer proiectant de
structuri. Studiile teoretice şi cercetările experimentale de rezistenţa materialelor, contribuie la
stabilirea formei constructive optime a produselor şi la garantarea siguranţei în exploatare.
Folosirea tehnicii moderne de calcul permite rezolvarea problemelor cu un mare volum
de calcule, într-un timp scurt şi precizie ridicată, dar pentru aceasta problemele de verificare,
dimensionare, sau calcul a sarcinilor capabile trebuiesc puse corect din punctul de vedere al
rezistenţei materialelor.
Îmbinarea informaţiei constructive sau fenomenologice cu partea de proiectare
concretă, diagrame, recomandări, programe de calcul, dar şi cu analize critice ale
posibilităţilor de sporire a fiabilităţii şi capacităţii portante a structurilor sporeşte utilitatea, dar
şi accesibilitatea cursului.
Cursul intitulat Rezistenţa materialelor, face o incursiune privitoare la proiectarea
structurilor care este indisolubil legată de cerinţele de rezistenţă, performantă, dar şi de
economicitate, aceste criterii aparent contradictorii găsindu-se într-o corelaţie firească.
Obiectivele cursului
Multe discipline de specialitate se bazează pe metodele de calcul ale cursului de
Rezistenţa materialelor, rezultând importanţa ce trebuie acordata însuşirii
cunoştintelor la aceasta disciplină.
Cursul intitulat Rezistenta materialelor, are ca obiectiv principal introducerea in
calcule a proprietatilor de deformabilitate si rezistenta ale corpurilor solide.Asadar
Rezistenta materialelor, studiaza comportarea corpurilor solide sub actiunea
fortelor si determina materialul si dimensiunile structurii astfel incat aceasta sa
reziste, la un consum de material minim, lucru care conduce la îmbogăţirea
cunoştinţelor din sfera disciplinelor cu caracter economic, ale studenţilor
Programului de studii Inginerie Economică Industrială, forma de învăţământ ID. În
acest sens, la sfârşitul acestui curs, studenţii vor fi capabili să:
opereze cu noţiuni precum economia de material, dupa care orice structura
proiectata trebuie realizata cu solutia cea mai economica posibila, in privinta
consumului de material si de manopera;
identifice solutiile referitoare la buna functionare, ceea ce se obtine daca
structura proiectata respecta conditiile de rezistenta, rigiditate si stabilitate, impuse.
Conditiile de rezistenta au in vedere valorile tensiunilor din structura solicitata,
conditiile de rigiditate se refera la valorile deformatiilor produse, iar conditiile de
stabilitate statica si dinamica, considera posibilitatea mentinerii formei de
echilibru pentru o anumita stare de incarcare.
- 2 -
Pe baza interpretarii rezultatelor experimentale, Rezistenta materialelor admite
ipoteze simplificatoare, stabilind relatii de calcul care exprima destul de fidel
marimea solicitarilor, gradul de rigiditate si de stabilitate al organelor de masini si
al elementelor de constructii aflate sub actiunea fortelor.
Cerinţe preliminare
Deducerea relatiilor de calcul ale Rezistentei materialelor, necesita utilizarea unor
cunostinte de matematica superioara. Pentru rezolvarea completa si corecta a
problemelor, calculul numeric are o importanta majora.
Resurse
Parcurgerea unităţilor de învăţare necesită utilizarea unui calculator având instalat
pachetul software SPSS for Windows pentru rezolvarea problemelor cu un mare
volum de calcule, intr-un timp scurt si cu o precizie dorita din punct de vedere
practic.
Structura cursului
Cursul de Rezistenta materialelor, este structurat în opt module, cuprinzand mai
multe unităţi de învăţare. La rândul său, fiecare unitate de învăţare cuprinde:
obiective, aspecte teoretice privind tematica unităţii de învăţare respective,
exemple, teste de autoevaluare precum şi probleme propuse spre discuţie şi
rezolvare.
Durata medie de studiu individual
Parcurgerea de către studenţi a unităţilor de învăţare ale cursului de Rezistenta
materialelor (atât aspectele teoretice cât şi rezolvarea testelor de autoevaluare şi
rezolvarea problemelor propuse) se poate face în 3-4 ore pentru fiecare unitate.
Evaluarea
La sfârşitul semestrului, fiecare student va primi o notă, care va
cuprinde:raspunsuri la un numar de intrebari teoretice din materia prezentată în
cadrul acestui material, ce va deţine o pondere de 40% în nota finală şi notele
aferente celor două probleme practice de rezolvat cu o pondere fiecare de 30%.
Spor la treaba !
Modulul 1. Noţiuni de baza in Rezistenta materialelor
- 3 -
Cuprins
U1.1 Obiectul si problemele Rezistentei materialelor........................ ......................... ...3
U1.2 Tensiuni, deformatii si deplasari................................................ ........................ ....7
U1.3 Ipoteze de baza ale Rezistentei materialelor............................. ............................1 0
Introducere
U1.1 Obiectul si problemele Rezistentei materialelor.
Pentru actualitate şi mai ales pentru perspectivă construcţia de maşini în mod direct
şi prin intervenţiile şi implicaţiile în toate sectoarele vieţii economice, are o importanţă
deosebită. Deci proiectarea raţională, cu o fiabilitate complexă cât mai ridicată, constituie o
preocupare centrală, nu numai pentru cei care învaţă să proiecteze, dar şi pentru toţi cei
care participă într-un fel sau altul la realizarea modernizărilor tehnice.
Rezistenţa materialelor este o disciplină de cultură tehnică generală, care face
trecerea dintre Mecanica teoretică şi Organe de maşini, propunându-şi să determine sau să
verifice pe bază de calcul, dimensiunile pieselor componente ale unui ansamblu pe baza a
două criterii aparent contradictorii; - economie de material; - siguranţă în funcţionare sub
acţiunea încărcării exterioare.
Uneori, în proiectare, se dovedeşte economică o subdimensionare a unor repere şi
chiar ansambluri finite, acest lucru însă trebuie corelat cu înlocuirea lor periodică, după un
anumit interval de timp, în acest caz realizându-se o construcţie cât mai uşoară (de exemplu
în aviaţie). Importantă pentru proiectare şi, în general, pentru practică a fost depăşirea
conceptului de siguranţă absolută în funcţionare, garantată firesc de un coeficient de
siguranţă supraunitar (uneori fără semnificaţie fizică adecvată).
Construcţiile mecanice cu durată infinită, aşa cum rezultă din vechea reprezentare a
coeficientului de siguranţă, de multe ori în domeniile de vârf (industria aerospaţială) nu mai
sunt de actualitate în principal datorită supradimensionării, cu consum exagerat de
materiale şi energie, cu uzură morală din ce în ce mai rapidă. Din acest motiv proiectarea
prin calcul a organelor de maşini, a maşinilor pe baze probabilistice capătă o argumentare
şi obligă la cercetări specifice pe un front larg. Calculul clasic se va corela cu noile cerinţe,
astfel încât să conducă treptat la introducerea unor metale care să evidenţieze garantarea
funcţionării fără defecte o durată cuprinsă în timp sau un număr de cicluri, cu o anumită
probabilitate.
Cele două probleme majore ale Rezistenţei materialelor sunt:
- stabilirea relaţiilor de calcul pentru determinarea dimensiunilor transversale
minime ale elementelor de rezistenţă care să le asigure satisfacerea condiţiei de rezistenţă.
- stabilirea relaţiilor de calcul ale deplasărilor elementelor de rezistenţă, produse de
forţele aplicate. Cu ajutorul relaţiilor deduse se verifică dacă dimensiunile stabilite din
prima condiţie, satisfac condiţia a doua, deci cea de rigiditate; în caz contrar dimensiunile
se vor determina cu relaţiile de calcul ale deplasărilor. Uneori pe lângă rezolvarea celor
două probleme, este necesară şi îndeplinirea condiţiei de stabilitate, deci determinarea
relaţiilor de calcul la stabilirea acelor elemente de rezistenţă la care forţele aplicate ar putea
- 4 -
provoca fenomenul de pierdere a stabilităţii formei iniţiale de echilibru.
Rezistenţa materialelor rezolvă, stabilind relaţii proprii tipurilor de solicitare, trei
categorii de probleme:
- probleme de dimensionare, stabilind dimensiunile optime ale pieselor proiectate;
- probleme de verificare, stabilind dacă piesele de diferite dimensiuni respectă sau nu,
sub acţiunea încărcării, condiţiile de rezistenţă, rigiditate şi stabilitate;
- probleme de calcul a sarcinii admisibile, cunoscându-se în acest caz materialul,
dimensiunile şi modul de solicitare.
Rezistenţa materialelor este o ştiinţă inginerească bazată pe experienţe şi încercări. În
cadrul ei se fac o serie de ipoteze simplificatoare, cu scopul reducerii volumului de calcule.
Astfel corpurile (piesele) studiate de rezistenţa materialelor se împart în trei categorii:
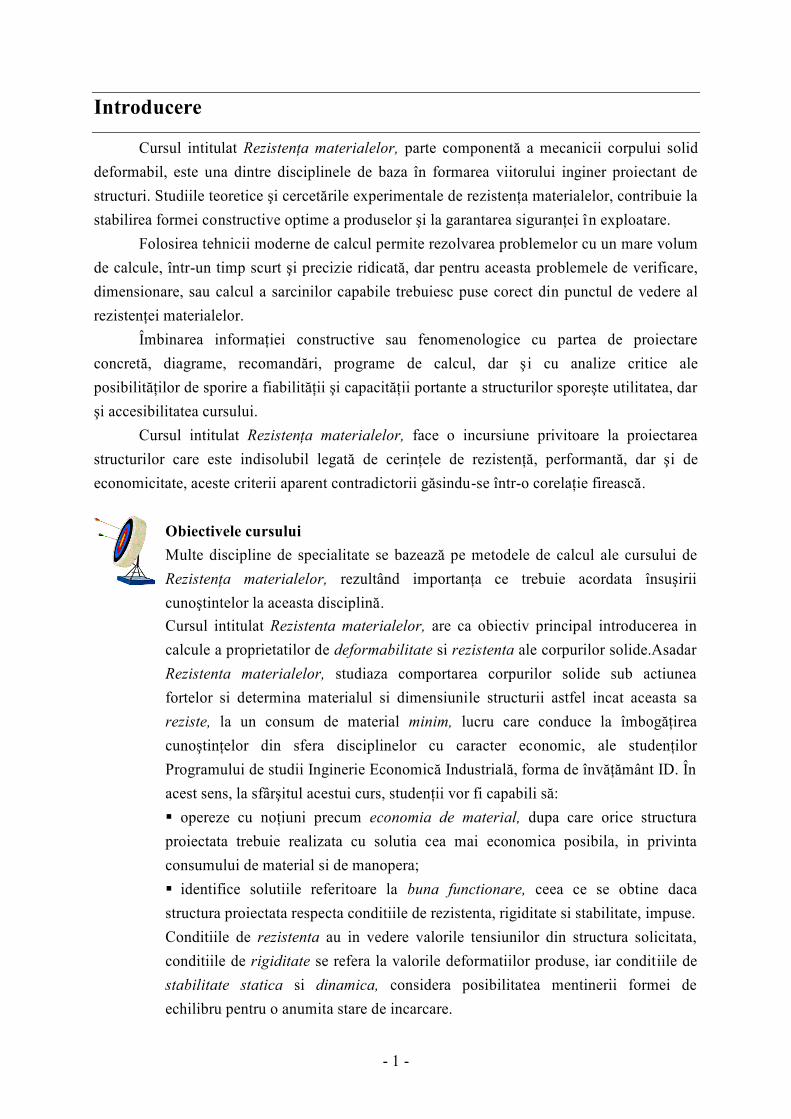
A. Elemente de rezistenţă care au dimensiunile transversale mici în raport cu
lungimea lor. Din această categorie fac parte:
- fibrele, cablurile, funiile şi benzile subţiri, acestea putând suporta numai forţe de
întindere, fiind flexibile.
- barele, care pot suporta atât forţe de întindere, cât şi forţe de compresiune, precum
şi forţe transversale.
Barele pot fi drepte sau curbe, purtând diferite denumiri în funcţie de solicitarea la care sunt
supuse: fire, tije, tiranţi care rezistă la tracţiune; stâlpi care rezistă la compresiune, grinzi
supuse la încovoiere, arbori care preiau răsucirea. (fig.1.1)
Fig. 1.1
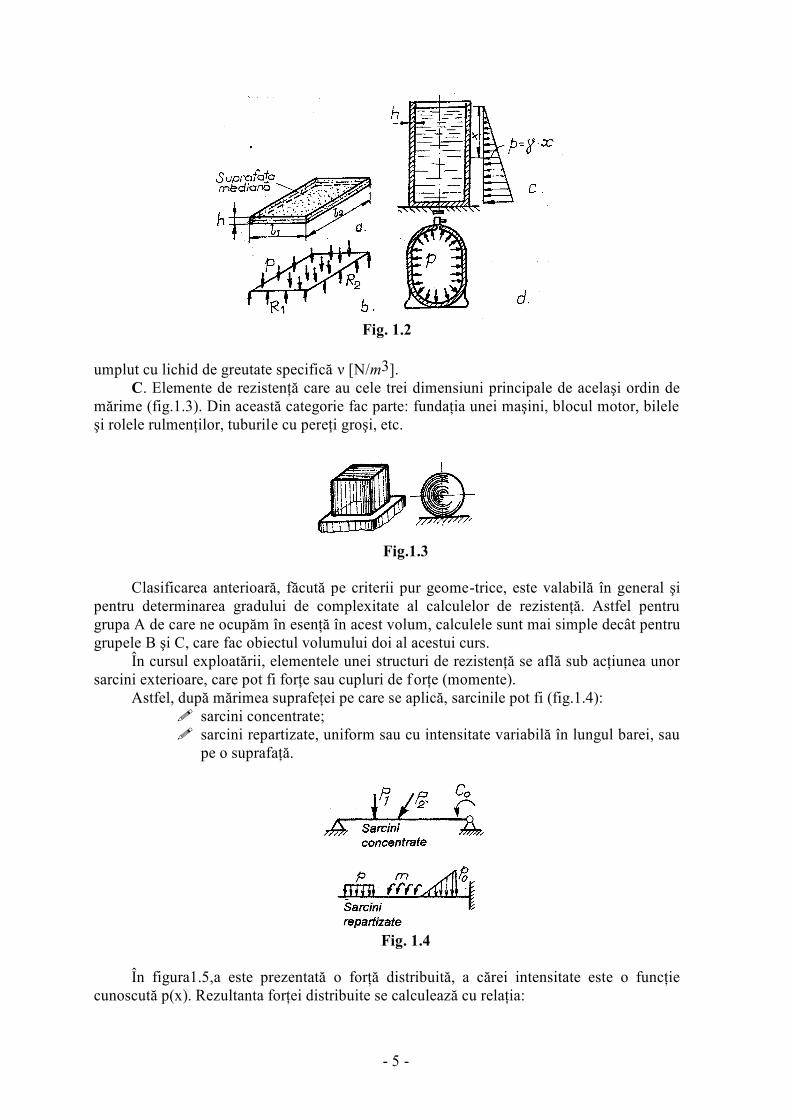
B. Elemente de rezistenţă care au două dimensiuni mari în raport cu a treia
(grosimea) (fig.1.2). Din această categorie fac parte:
- membranele, care au grosime foarte mică, neglijabilă, putând suporta numai forţe de
întindere distribuite, tangente la suprafaţa mediană.
- plăcile, care au grosimea mică în com-paraţie cu suprafaţa me-diană, dar neneglijabilă
deci pot prelua atât forţe tangente la suprafaţa mediană, cât şi forţe normale pe aceasta. În
figura 1.2 se prezintă exemple de plăci ca, de exemplu, un rezervor
- 5 -
Fig. 1.2
umplut cu lichid de greutate specifică ν [N/m3].
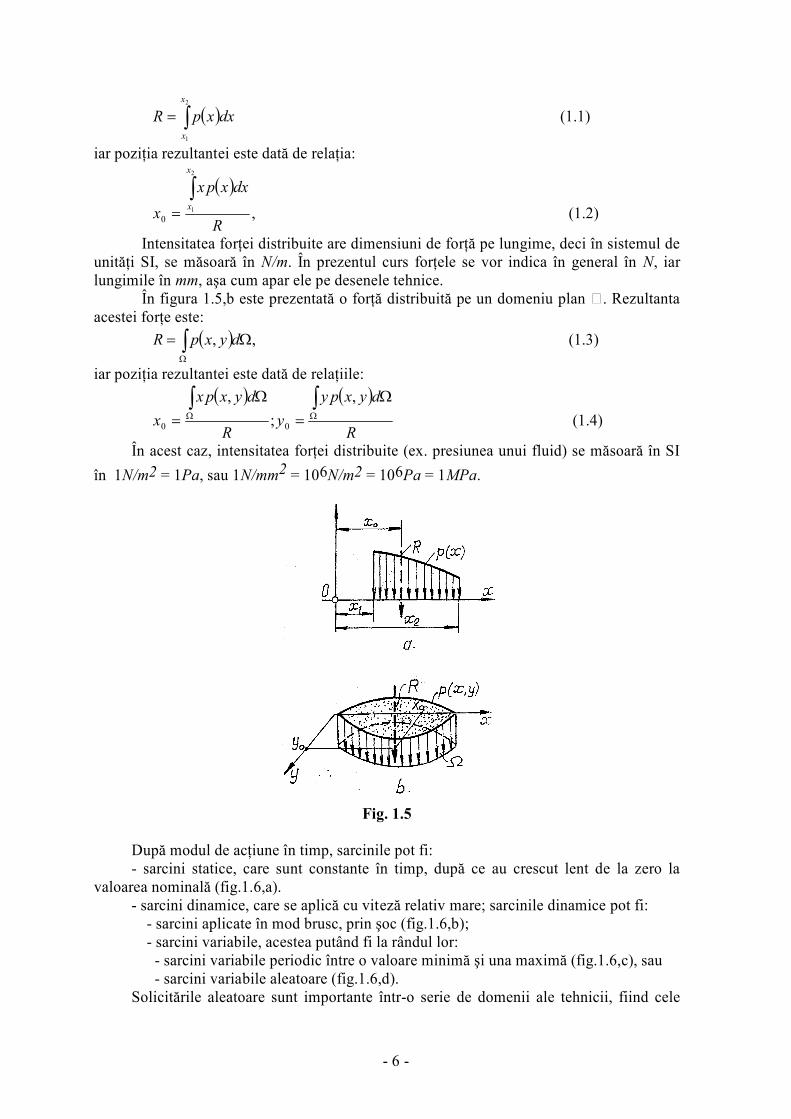
C. Elemente de rezistenţă care au cele trei dimensiuni principale de acelaşi ordin de
mărime (fig.1.3). Din această categorie fac parte: fundaţia unei maşini, blocul motor, bilele
şi rolele rulmenţilor, tuburile cu pereţi groşi, etc.
Fig.1.3
Clasificarea anterioară, făcută pe criterii pur geome-trice, este valabilă în general şi
pentru determinarea gradului de complexitate al calculelor de rezistenţă. Astfel pentru
grupa A de care ne ocupăm în esenţă în acest volum, calculele sunt mai simple decât pentru
grupele B şi C, care fac obiectul volumului doi al acestui curs.
În cursul exploatării, elementele unei structuri de rezistenţă se află sub acţiunea unor
sarcini exterioare, care pot fi forţe sau cupluri de f orţe (momente).
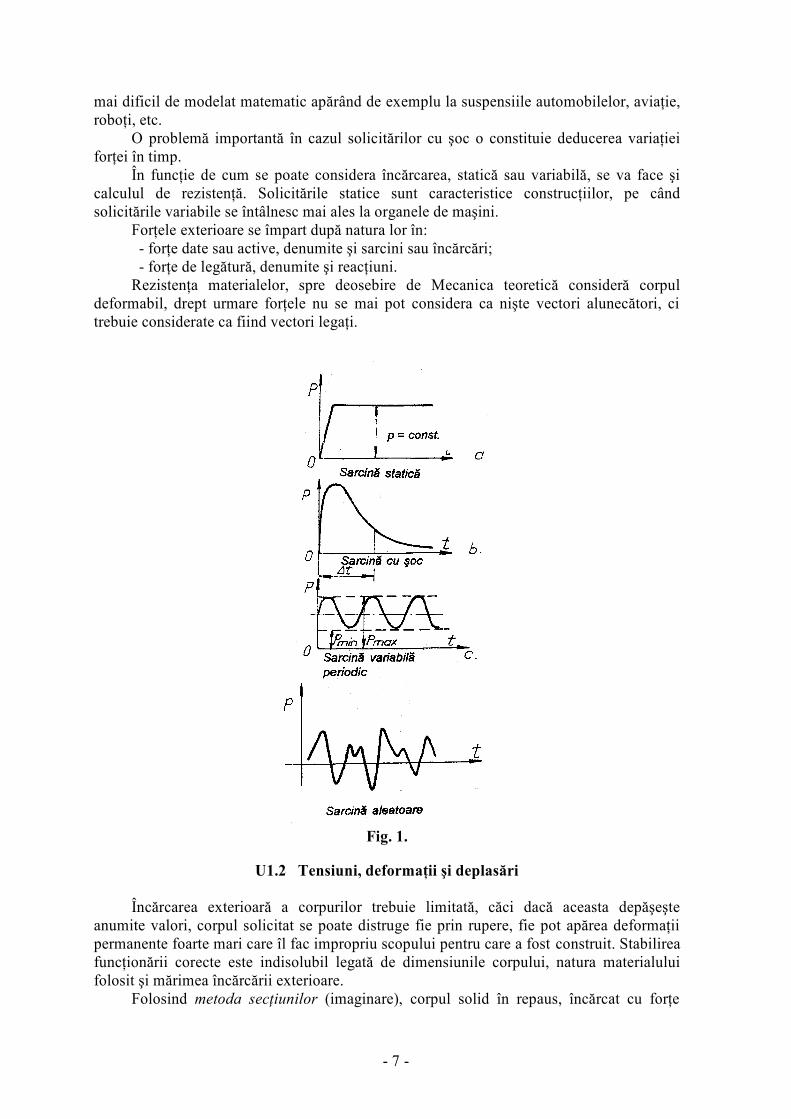
Astfel, după mărimea suprafeţei pe care se aplică, sarcinile pot fi (fig.1.4):
sarcini concentrate;
sarcini repartizate, uniform sau cu intensitate variabilă în lungul barei, sau
pe o suprafaţă.
Fig. 1.4
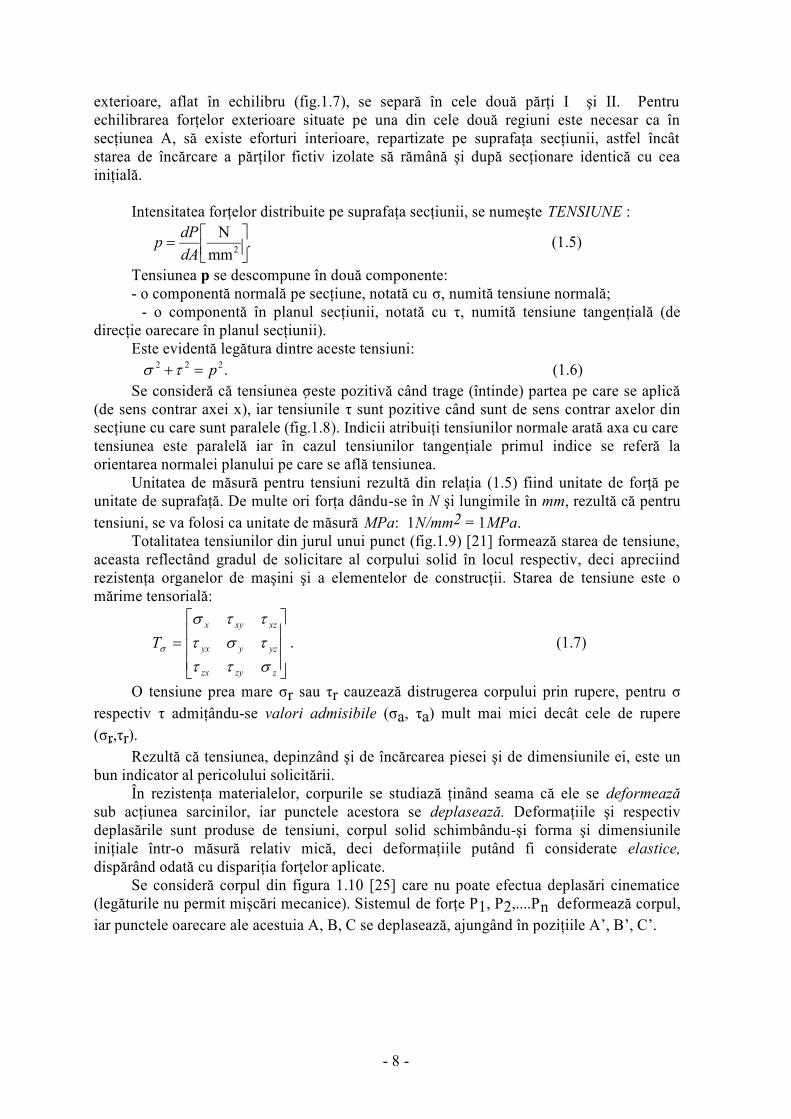
În figura1.5,a este prezentată o forţă distribuită, a cărei intensitate este o funcţie
cunoscută p(x). Rezultanta forţei distribuite se calculează cu relaţia:
- 6 -
xxpR
x
x
2
1
(1.1)
iar poziţia rezultantei este dată de relaţia:
,
2
1
0R
xxpx
x
x
x
(1.2)
Intensitatea forţei distribuite are dimensiuni de forţă pe lungime, deci în sistemul de
unităţi SI, se măsoară în N/m. În prezentul curs forţele se vor indica în general în N, iar
lungimile în mm, aşa cum apar ele pe desenele tehnice.
În figura 1.5,b este prezentată o forţă distribuită pe un domeniu plan . Rezultanta
acestei forţe este:
,,
yxpR (1.3)
iar poziţia rezultantei este dată de relaţiile:
R
yxpy
yR
yxpx
x
,
;
,
00 (1.4)
În acest caz, intensitatea forţei distribuite (ex. presiunea unui fluid) se măsoară în SI
în 1N/m2 = 1Pa, sau 1N/mm2 = 106N/m2 = 106Pa = 1MPa.
Fig. 1.5
După modul de acţiune în timp, sarcinile pot fi:
- sarcini statice, care sunt constante în timp, după ce au crescut lent de la zero la
valoarea nominală (fig.1.6,a).
- sarcini dinamice, care se aplică cu viteză relativ mare; sarcinile dinamice pot fi:
- sarcini aplicate în mod brusc, prin şoc (fig.1.6,b);
- sarcini variabile, acestea putând fi la rândul lor:
- sarcini variabile periodic între o valoare minimă şi una maximă (fig.1.6,c), sau
- sarcini variabile aleatoare (fig.1.6,d).
Solicitările aleatoare sunt importante într-o serie de domenii ale tehnicii, fiind cele
- 7 -
mai dificil de modelat matematic apărând de exemplu la suspensiile automobilelor, aviaţie,
roboţi, etc.
O problemă importantă în cazul solicitărilor cu şoc o constituie deducerea variaţiei
forţei în timp.
În funcţie de cum se poate considera încărcarea, statică sau variabilă, se va face şi
calculul de rezistenţă. Solicitările statice sunt caracteristice construcţiilor, pe când
solicitările variabile se întâlnesc mai ales la organele de maşini.
Forţele exterioare se împart după natura lor în:
- forţe date sau active, denumite şi sarcini sau încărcări;
- forţe de legătură, denumite şi reacţiuni.
Rezistenţa materialelor, spre deosebire de Mecanica teoretică consideră corpul
deformabil, drept urmare forţele nu se mai pot considera ca nişte vectori alunecători, ci
trebuie considerate ca fiind vectori legaţi.
Fig. 1.
U1.2 Tensiuni, deformaţii şi deplasări
Încărcarea exterioară a corpurilor trebuie limitată, căci dacă aceasta depăşeşte
anumite valori, corpul solicitat se poate distruge fie prin rupere, fie pot apărea deformaţii
permanente foarte mari care îl fac impropriu scopului pentru care a fost construit. Stabilirea
funcţionării corecte este indisolubil legată de dimensiunile corpului, natura materialului
folosit şi mărimea încărcării exterioare.
Folosind metoda secţiunilor (imaginare), corpul solid în repaus, încărcat cu forţe
- 8 -
exterioare, aflat în echilibru (fig.1.7), se separă în cele două părţi I şi II. Pentru
echilibrarea forţelor exterioare situate pe una din cele două regiuni este necesar ca în
secţiunea A, să existe eforturi interioare, repartizate pe suprafaţa secţiunii, astfel încât
starea de încărcare a părţilor fictiv izolate să rămână şi după secţionare identică cu cea
iniţială.
Intensitatea forţelor distribuite pe suprafaţa secţiunii, se numeşte TENSIUNE :
.mm
N2
Ad
Pdp (1.5)
Tensiunea p se descompune în două componente:
- o componentă normală pe secţiune, notată cu σ, numită tensiune normală;
- o componentă în planul secţiunii, notată cu τ, numită tensiune tangenţială (de
direcţie oarecare în planul secţiunii).
Este evidentă legătura dintre aceste tensiuni:
.222 p (1.6)
Se consideră că tensiunea σeste pozitivă când trage (întinde) partea pe care se aplică
(de sens contrar axei x), iar tensiunile τ sunt pozitive când sunt de sens contrar axelor din
secţiune cu care sunt paralele (fig.1.8). Indicii atribuiţi tensiunilor normale arată axa cu care
tensiunea este paralelă iar în cazul tensiunilor tangenţiale primul indice se referă la
orientarea normalei planului pe care se află tensiunea.
Unitatea de măsură pentru tensiuni rezultă din relaţia (1.5) fiind unitate de forţă pe
unitate de suprafaţă. De multe ori forţa dându-se în N şi lungimile în mm, rezultă că pentru
tensiuni, se va folosi ca unitate de măsură MPa: 1N/mm2 = 1MPa.
Totalitatea tensiunilor din jurul unui punct (fig.1.9) [21] formează starea de tensiune,
aceasta reflectând gradul de solicitare al corpului solid în locul respectiv, deci apreciind
rezistenţa organelor de maşini şi a elementelor de construcţii. Starea de tensiune este o
mărime tensorială:
zzyzx
yzyyx
xzxyx
T
. (1.7)
O tensiune prea mare σr sau τr cauzează distrugerea corpului prin rupere, pentru σ
respectiv τ admiţându-se valori admisibile (σa, τa) mult mai mici decât cele de rupere
(σr,τr).
Rezultă că tensiunea, depinzând şi de încărcarea piesei şi de dimensiunile ei, este un
bun indicator al pericolului solicitării.
În rezistenţa materialelor, corpurile se studiază ţinând seama că ele se deformează
sub acţiunea sarcinilor, iar punctele acestora se deplasează. Deformaţiile şi respectiv
deplasările sunt produse de tensiuni, corpul solid schimbându-şi forma şi dimensiunile
iniţiale într-o măsură relativ mică, deci deformaţiile putând fi considerate elastice,
dispărând odată cu dispariţia forţelor aplicate.
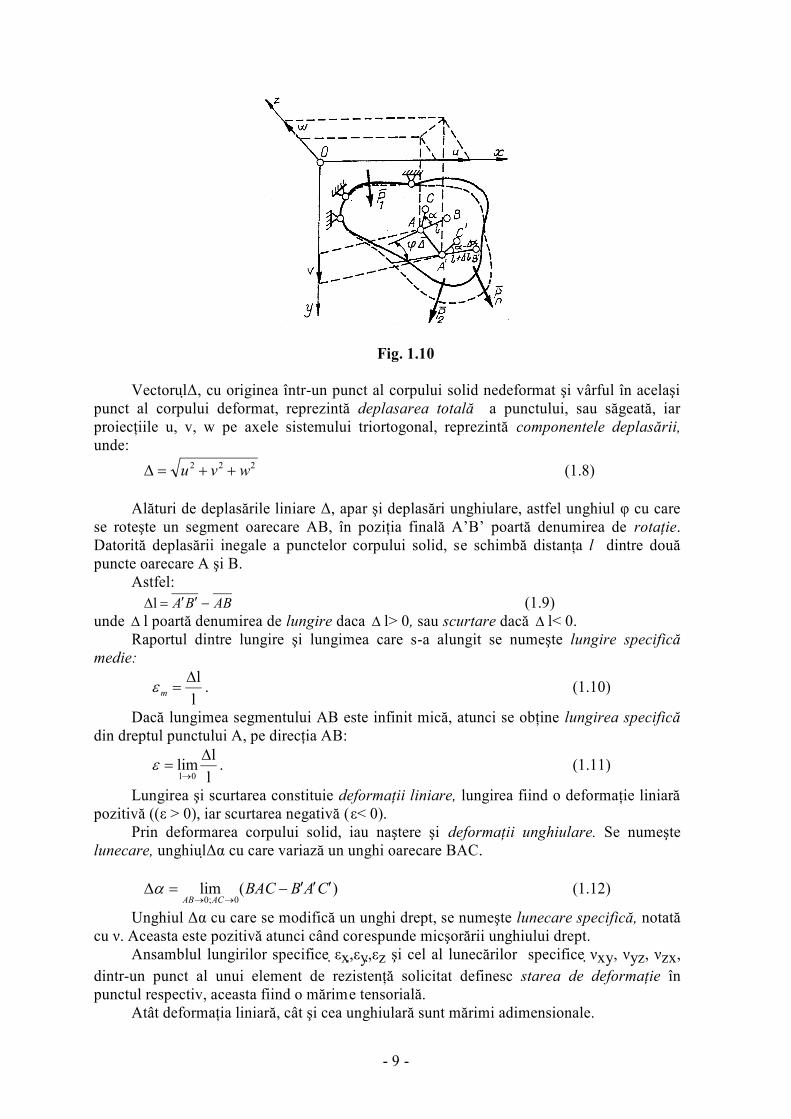
Se consideră corpul din figura 1.10 [25] care nu poate efectua deplasări cinematice
(legăturile nu permit mişcări mecanice). Sistemul de forţe P1, P2,....Pn deformează corpul,
iar punctele oarecare ale acestuia A, B, C se deplasează, ajungând în poziţiile A’, B’, C’.
- 9 -
Fig. 1.10
VectorulΔ, cu originea într-un punct al corpului solid nedeformat şi vârful în acelaşi
punct al corpului deformat, reprezintă deplasarea totală a punctului, sau săgeată, iar
proiecţiile u, v, w pe axele sistemului triortogonal, reprezintă componentele deplasării,
unde:
222 wvu (1.8)
Alături de deplasările liniare Δ, apar şi deplasări unghiulare, astfel unghiul φ cu care
se roteşte un segment oarecare AB, în poziţia finală A’B’ poartă denumirea de rotaţie.
Datorită deplasării inegale a punctelor corpului solid, se schimbă distanţa l dintre două
puncte oarecare A şi B.
Astfel:
ABBA l (1.9)
unde l poartă denumirea de lungire daca l> 0, sau scurtare dacă l< 0.
Raportul dintre lungire şi lungimea care s-a alungit se numeşte lungire specifică
medie:
l
lm . (1.10)
Dacă lungimea segmentului AB este infinit mică, atunci se obţine lungirea specifică
din dreptul punctului A, pe direcţia AB:
l
llim
0l
. (1.11)
Lungirea şi scurtarea constituie deformaţii liniare, lungirea fiind o deformaţie liniară
pozitivă ((ε > 0), iar scurtarea negativă (ε< 0).
Prin deformarea corpului solid, iau naştere şi deformaţii unghiulare. Se numeşte
lunecare, unghiulΔα cu care variază un unghi oarecare BAC.
)(lim0;0
CABBACACAB
(1.12)
Unghiul Δα cu care se modifică un unghi drept, se numeşte lunecare specifică, notată
cu ν. Aceasta este pozitivă atunci când corespunde micşorării unghiului drept.
Ansamblul lungirilor specifice εx,εy,εz şi cel al lunecărilor specifice νxy, νyz, νzx,
dintr-un punct al unui element de rezistenţă solicitat definesc starea de deformaţie în
punctul respectiv, aceasta fiind o mărime tensorială.
Atât deformaţia liniară, cât şi cea unghiulară sunt mărimi adimensionale.
- 10 -
Pentru majoritatea materialelor utilizate în tehnică, între tensiuni şi deformaţii există
relaţii liniare, valabile atâta timp cât tensiunile sunt relativ mici. Astfel:
GE ; (1.13)
unde: E este o caracteristică de material, numită modul de elasticitate longitudinal,
iar
G - modul de elasticitate transversal.
Proporţionalitatea dintre deplasările elastice ale corpurilor solide şi forţele aplicate,
exprimă legea lui Robert Hooke.
După cum rezultă din relaţiile (1.13), modulele de elasticitate se măsoară în pascali în
sistemul SI ca şi tensiunile. În tabelul 1.1 se dau valorile modulelor de elasticitate pentru
câteva materiale mai des utilizate.
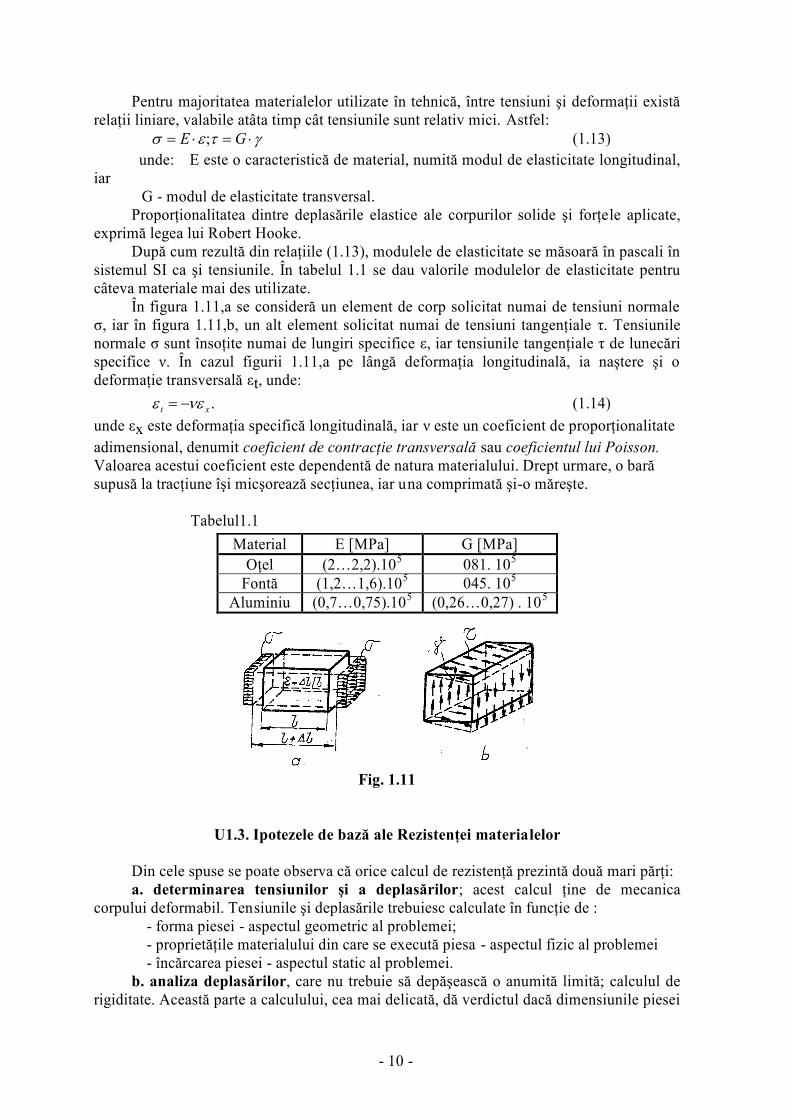
În figura 1.11,a se consideră un element de corp solicitat numai de tensiuni normale
σ, iar în figura 1.11,b, un alt element solicitat numai de tensiuni tangenţiale τ. Tensiunile
normale σ sunt însoţite numai de lungiri specifice ε, iar tensiunile tangenţiale τ de lunecări
specifice ν. În cazul figurii 1.11,a pe lângă deformaţia longitudinală, ia naştere şi o
deformaţie transversală εt, unde:
.xt (1.14)
unde εx este deformaţia specifică longitudinală, iar ν este un coeficient de proporţionalitate
adimensional, denumit coeficient de contracţie transversală sau coeficientul lui Poisson.
Valoarea acestui coeficient este dependentă de natura materialului. Drept urmare, o bară
supusă la tracţiune îşi micşorează secţiunea, iar una comprimată şi-o măreşte.
Tabelul1.1
Fig. 1.11
U1.3. Ipotezele de bază ale Rezistenţei materialelor
Din cele spuse se poate observa că orice calcul de rezistenţă prezintă două mari părţi:
a. determinarea tensiunilor şi a deplasărilor; acest calcul ţine de mecanica
corpului deformabil. Tensiunile şi deplasările trebuiesc calculate în funcţie de :
- forma piesei - aspectul geometric al problemei;
- proprietăţile materialului din care se execută piesa - aspectul fizic al problemei
- încărcarea piesei - aspectul static al problemei.
b. analiza deplasărilor, care nu trebuie să depăşească o anumită limită; calculul de
rigiditate. Această parte a calculului, cea mai delicată, dă verdictul dacă dimensiunile piesei
Material E [MPa] G [MPa]
Oţel (2…2,2).105
081. 105
Fontă (1,2…1,6).105 045. 10
5
Aluminiu (0,7…0,75).105 (0,26…0,27) . 10
5
- 11 -
sunt sau nu corespunzătoare.
Primul volum al cursului se axează pe determinarea tensiunilor şi a deplasărilor, iar
volumul doi al cursului, pe calculele de rigiditate.
În rezistenţa materialelor, pentru stabilirea unor relaţii şi rezolvarea expeditivă a
problemelor concrete, se fac mai multe ipoteze, atât asupra comportării materialului
corpului studiat, cât şi asupra solicitării acestuia. Aceste ipoteze reflectă cu aproximaţie
bună realitatea, trebuiesc verificate de experienţă, introducând erori de calcul admisibile în
practica inginerească.
Principalele ipoteze sunt următoarele:
A) Ipoteza mediului continuu - materialul corpului este continuu şi umple tot
spaţiul definit de volumul teoretic al corpului.
B) Ipoteza omogenităţii şi izotropiei - materialele au aceleaşi proprietăţi în toate
punctele şi pe toate direcţiile. Oţelul, fonta, aluminiul, sticla etc. sunt exemple de materiale
care pot fi considerate omogene şi izotrope. Exemple de materiale anizotrope sunt: lemnul,
masele plastice etc.
C) Ipoteza elasticităţii perfecte - consideră că dacă nu se depăşesc anumite limite,
după descărcarea corpului de forţele ce îl solicită, el revine complet la forma iniţială.
D) Ipoteza identităţii proprietăţilor mecanice ale elementului infinit mic cu
cele ale corpului solid întreg - permite discretizări suficient de fine, iar rezultatele analizei
de pe aceste elemente vor putea fi generalizate pe întregul corp.
E) Ipoteza proporţionalităţii dintre tensiuni şi deformaţii - admite că materialele
utilizate satisfac legea lui Hooke, dacă tensiunile nu depăşesc o anumită valoare, adică
tensiunile sunt proporţionale cu deformaţiile. Această simplificare dată de ipoteză, face ca
ea să fie aplicată chiar şi pentru unele materiale neliniare de tip fontă sau duraluminiu.
F) Ipoteza micilor deplasări - deplasările cauzate de încărcarea corpului sunt mult
mai mici decât dimensiunile corpului. Se poate neglija modificarea formei corpului ca
urmare a încărcării şi deci ecuaţiile de echilibru se pot scrie pentru corpul nedeformat.
Calculele bazate pe această ipoteză se numesc de ordinul I. În urma acestei ipoteze
deplasările vor fi tratate ca nişte infiniţi mici.
G) Ipoteza micilor deformaţii - corpul îşi modifică în mică măsură configuraţia
iniţială. Pentru piese metalice se poate considera că deformaţiile sunt mult mai mici decât
unitatea, ε << 1, ν << 1, în calcule putând fi neglijate comparativ cu unitatea.
Ca o consecinţă a celor arătate anterior este posibilă aplicarea principiului
suprapunerii efectelor.
În general, se poate scrie că deplasările (ca de altfel şi tensiunile) privite ca funcţii de
încărcare, satisfac relaţiile:
,
;2121
PvPv
PvPvPPv
(1.15)
unde α este un număr.
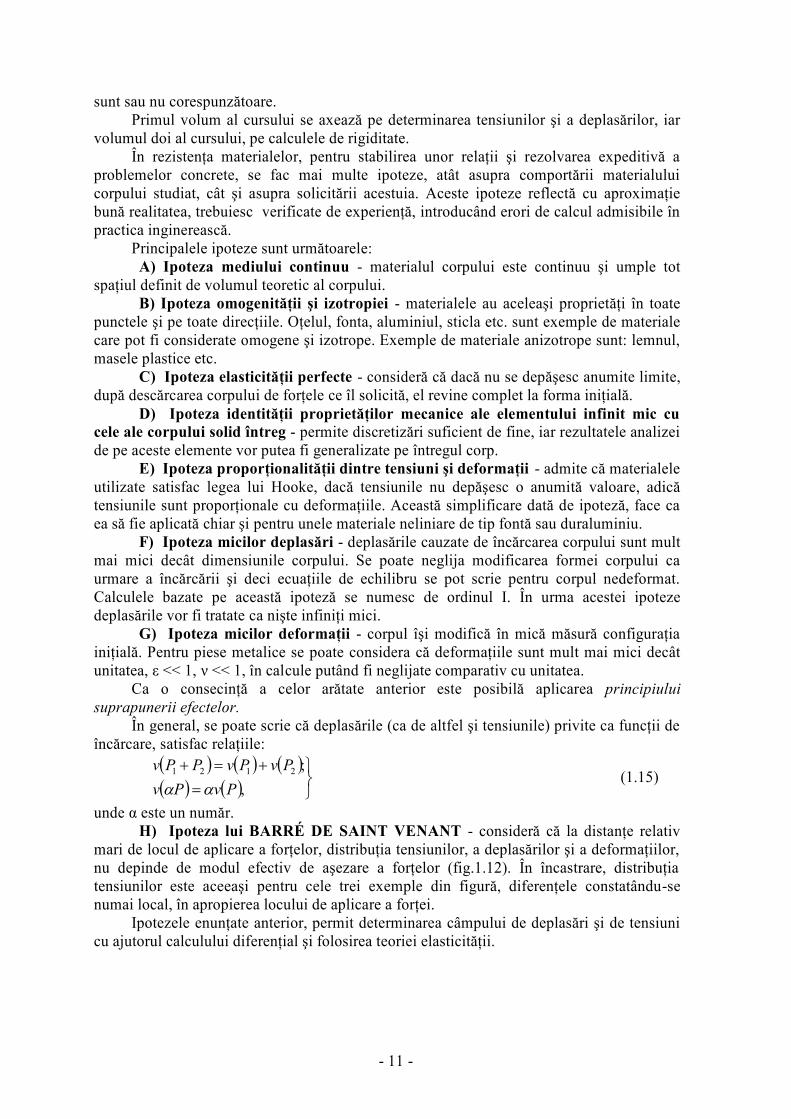
H) Ipoteza lui BARRÉ DE SAINT VENANT - consideră că la distanţe relativ
mari de locul de aplicare a forţelor, distribuţia tensiunilor, a deplasărilor şi a deformaţiilor,
nu depinde de modul efectiv de aşezare a forţelor (fig.1.12). În încastrare, distribuţia
tensiunilor este aceeaşi pentru cele trei exemple din figură, diferenţele constatându-se
numai local, în apropierea locului de aplicare a forţei.
Ipotezele enunţate anterior, permit determinarea câmpului de deplasări şi de tensiuni
cu ajutorul calculului diferenţial şi folosirea teoriei elasticităţii.
- 12 -
Fig.1.12
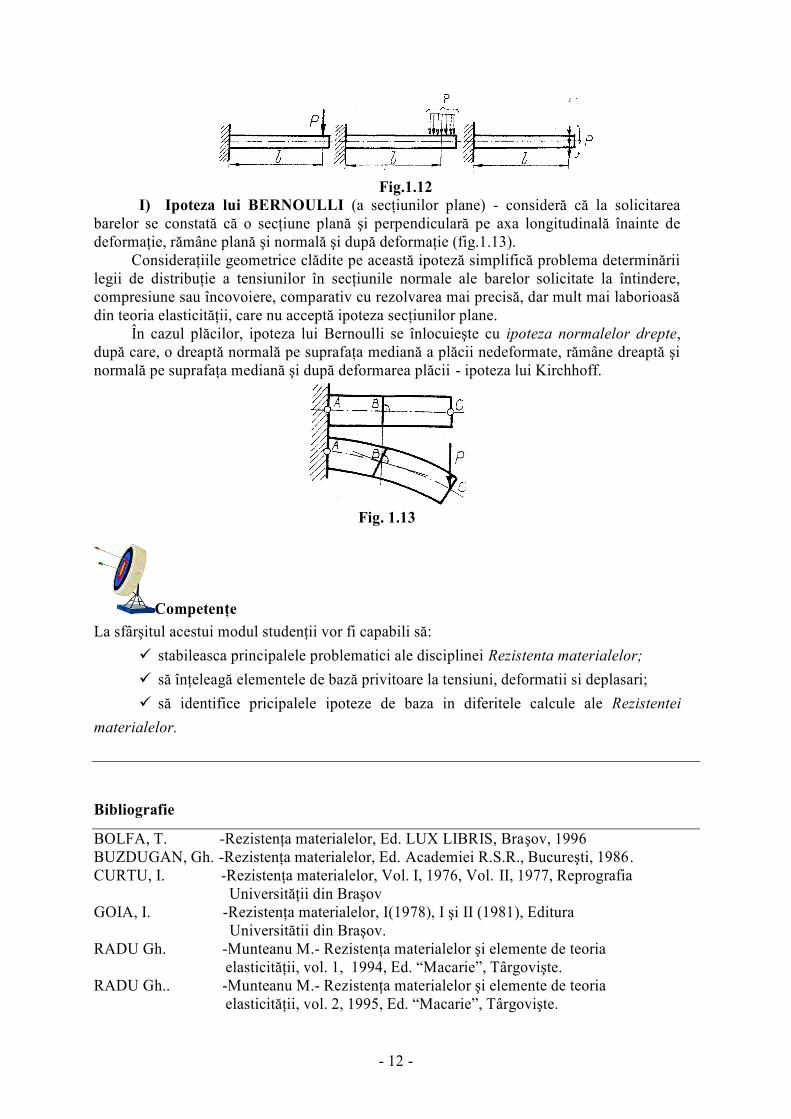
I) Ipoteza lui BERNOULLI (a secţiunilor plane) - consideră că la solicitarea
barelor se constată că o secţiune plană şi perpendiculară pe axa longitudinală înainte de
deformaţie, rămâne plană şi normală şi după deformaţie (fig.1.13).
Consideraţiile geometrice clădite pe această ipoteză simplifică problema determinării
legii de distribuţie a tensiunilor în secţiunile normale ale barelor solicitate la întindere,
compresiune sau încovoiere, comparativ cu rezolvarea mai precisă, dar mult mai laborioasă
din teoria elasticităţii, care nu acceptă ipoteza secţiunilor plane.
În cazul plăcilor, ipoteza lui Bernoulli se înlocuieşte cu ipoteza normalelor drepte,
după care, o dreaptă normală pe suprafaţa mediană a plăcii nedeformate, rămâne dreaptă şi
normală pe suprafaţa mediană şi după deformarea plăcii - ipoteza lui Kirchhoff.
Fig. 1.13
Competenţe
La sfârşitul acestui modul studenţii vor fi capabili să:
stabileasca principalele problematici ale disciplinei Rezistenta materialelor;
să înţeleagă elementele de bază privitoare la tensiuni, deformatii si deplasari;
să identifice pricipalele ipoteze de baza in diferitele calcule ale Rezistentei
materialelor.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte.
- 13 -
Modulul 2. Eforturi sectionale in bare si sisteme de bare static
determinate
Cuprins
U2.1 Determinarea eforturilor sectionale ............................. .............................. .........13
U2.2 Relatii diferentiale dintre sarcini si eforturi.................... ............................... .....16
U2.3 Constructia diagramelor de eforturi sectionale.................. ......................... .........18
U2.4 Diagrame ale fortelor axiale............................................... ............................. .....19
U2.5 Diagrame ale momentului de torsiune................................ ............................ .....20
U2.6 Diagrame ale fortelor taietoare si ale momentelor incovoietoare.................... ....21
U2.7 Sisteme de bare static determinate....................................... ............................ ....39
U2.8 Forte concentrate mobile............... ..................................... ............................. .....35
U2.9 Diagrame de eforturi la bare curbe plane............................... ............................ ..36
U2.10. Test de evaluare a cunoştinţelor............................................. ........................... 39
U2.1 Determinarea eforturilor sectionale
Problemele de bază ale rezistenţei materialelor, respectiv calculele de rezistenţă,
rigiditate şi stabilitate presupun cunoaşterea eforturilor interioare care se dezvoltă în
secţiunile transversale ale fiecărei bare. Se consideră bara ca fiind static determinată deci
ecuaţiile de echilibru static (3 în plan şi 6 în spaţiu) din mecanica corpului rigid sunt
suficiente pentru aflarea reacţiunilor. Deoarece corpul este în stare de echilibru atunci şi
părţile detaşate I, respectiv II vor fi în stare de echilibru sub acţiunea forţelor (cuplurilor)
exterioare şi a forţelor de legătură (fig.2.1). Secţionând bara cu un plan perpen-dicular pe
axa longitudinală, se obţin cele două tronsoane I şi II.

- 14 -
Fig. 2.1
Condiţia de echilibru a forţelor de pe bară presupune scrierea următoarelor două
ecuaţii vectoriale:
,0 ;0,,,
i
III
i
III
i
III
i PrCP (2.1)
unde rk este vectorul de poziţie al unei forţe oarecare faţă de centrul de greutate al secţiunii
A considerate.
Dacă bara se taie în două părţi ca în figura 2.1. atât pe un tronson cât şi pe celălalt
apar eforturile interioare care menţin echilibrul forţelor de pe tronsoane.
.0 ;0
;0 ;0
K
II
kII
II
KII
K
I
kI
I
KI
PrCPR
PrCPR
(2.2)
Întrucât forţele aplicate pe cele două tronsoane ale barei se află în echilibru, conform
relaţiilor (2.1), din aceste ecuaţii vectoriale se obţine:
.
;
I
Kk
II
kkIII
I
K
II
KIII
PrPrCC
PPRR
(2.3 )
Deci eforturile , care se dezvoltă prin încărcare pe cele două suprafeţe A, sunt egale şi
de sens contrar (metoda secţionării). Torsorul II CR , reprezintă acţiunea părţii de bară II
care a fost detaşată prin secţionare, asupra părţii I; torsorul IIII CR , reprezintă acţiunea
părţii I asupra părţii II.
De asemenea relaţiile vectoriale (2.3) arată că eforturile secţionale CRº se obţin prin
reducerea în centrul de greutate al secţiunii transversale a sistemului de forţe existent fie pe
tronsonul I, fie pe tronsonul II.

- 15 -
Fig. 2.2
Dacă raportăm tronsonul II la sistemul de referinţă triortogonal Cxyz localizat în
centrul de greutate al secţiunii (fig.2.2), eforturile secţionale CRº se pot descompune
pentru cazul general de solicitare în câte trei componente fiecare, rezultând conform relaţiei
(2.3):
- o forţă axială N, egală cu suma proiecţiilor pe axa longitudinală Cx a barei a
tuturor forţelor situate la stânga sau la dreapta, cu semn schimbat, secţiunii considerate.
; II
i
I
ix XXRN (2.4)
- două forţe tăietoare Ty şi Tz, egale cu suma proiecţiilor pe axa Cy, respectiv Cz,
din planul secţiunii, a tuturor forţelor situate la stânga sau la dreapta, cu semn schimbat,
secţiunii considerate.
.
;
II
i
I
izz
II
i
I
iyy
ZZRT
YYRT
(2.5)
- un moment de torsiune Mt, egal cu suma momentelor în raport cu axa
longitudinală Cx a barei, a tuturor forţelor şi cuplurilor de forţe situate la stânga sau
dreapta, cu semn schimbat, secţiunii considerate:
; II
x
I
xxt MMCM (2.6)
- două momente încovoietoare Miy şi Miz egale cu suma momentelor în raport cu
axa Cy, respectiv Cz, din planul secţiunii a tuturor forţelor şi cuplurilor de forţe situate la
stânga sau la dreapta, cu semn schimbat, secţiunii considerate:
.
;=
IIiz
M
Iiz
Mz
Ciz
M
IIiy
M
Iiy
My
Ciy
M
(2.7)
Eforturile din secţiune RCR iº se dezvoltă pe suprafaţa secţiunii prin tensiuni de direcţie
oarecare (fig. 2.1) care se pot descompune în componente rezultând:
- o tensiune normală σx paralelă cu axa Cx ;
- o tensiune tangenţială τxy paralelă cu axa Cy ;
- o tensiune tangenţială τxz paralelă cu axa Cz.
Componentele torsorului de reducere RCR iº se pot exprima şi în funcţie de
tensiunile generate pe suprafaţa secţiunii transversale, folosind relaţiile de echivalenţă
statică dintre eforturi şi tensiuni, respectiv:
- 16 -
A Ayiz
Axiyxzxyt
Axzz
Axyy
Ax
dAyMdAzMdAyzM
dATdATdAN
.;;)(
.;;
(2.8)
Frecvent se întâlneşte cazul particular al grinzilor solicitate numai de forţe coplanare
(fig. 2.3) [21], la care numărul componentelor torsorului de reducer e este de trei:
- forţa axială: ;
IIi
X
Ii
Xx
N
- forţa tăietoare: ;
IIi
Y
Ii
Yy
T
- momentul încovoietor: .
IIiz
M
Iiz
Miz
M
Pentru aceste eforturi se admite, convenţional, pentru calcule următoarea convenţie
de semne:
- Forţa axială N este considerată pozitivă dacă vectorul N este dinspre interiorul
către exteriorul torsorului, în acest caz ea poartă denumirea de forţă axială de tracţiune
(întindere), în caz contrar numindu-se forţă axială de compresiune, deci privind spre stânga,
forţa axială N pozitivă are sens opus axei Cy (fig.2.4);
- Forţa tăietoare T este considerată pozitivă atunci când suma proiecţiilor tuturor
forţelor situate în stânga secţiunii considerate este indreptată în sus (deci are sens opus axei
Cy), sau când cea din dreapta este orientată în jos (fig. 2.4).
- Momentul încovoietor Mi este considerat pozitiv atunci când suma momentelor
forţelor şi cuplurilor din partea stângă a secţiunii are sensul orar (vectorul moment este de
acelaşi sens cu axa Cz), sau când cea din dreapta are sensul antiorar.
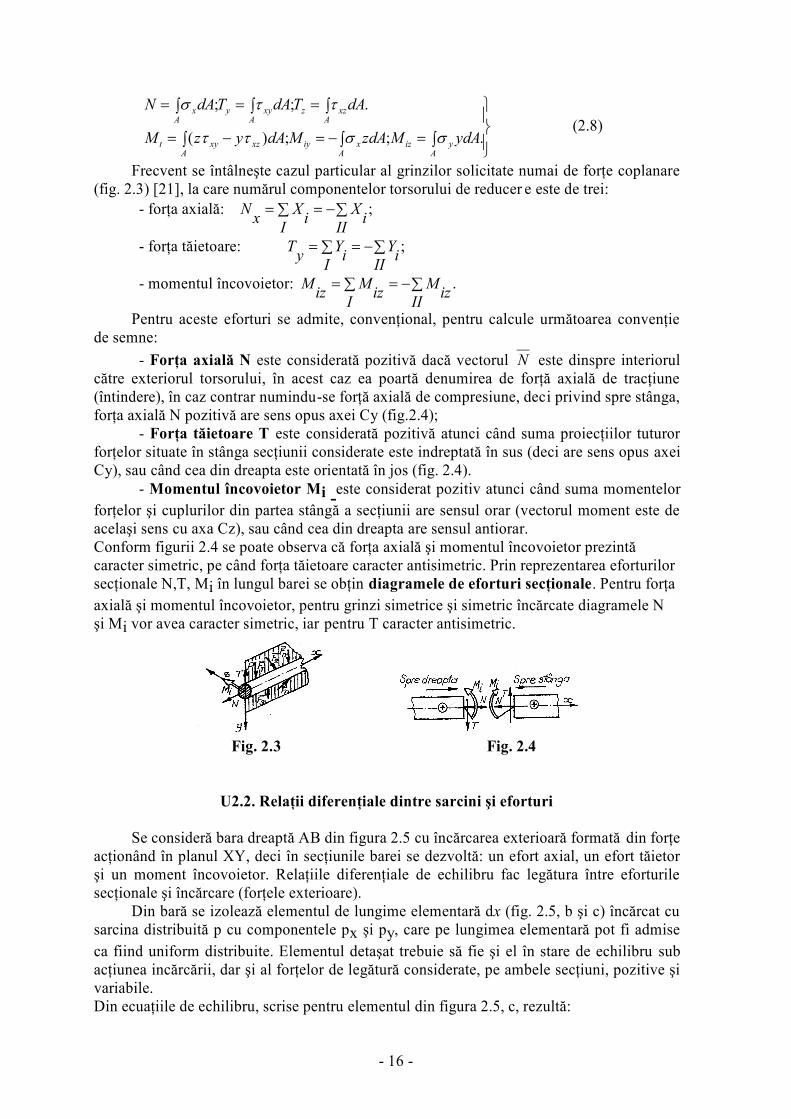
Conform figurii 2.4 se poate observa că forţa axială şi momentul încovoietor prezintă
caracter simetric, pe când forţa tăietoare caracter antisimetric. Prin reprezentarea eforturilor
secţionale N,T, Mi în lungul barei se obţin diagramele de eforturi secţionale. Pentru forţa
axială şi momentul încovoietor, pentru grinzi simetrice şi simetric încărcate diagramele N
şi Mi vor avea caracter simetric, iar pentru T caracter antisimetric.
Fig. 2.3 Fig. 2.4
U2.2. Relaţii diferenţiale dintre sarcini şi eforturi
Se consideră bara dreaptă AB din figura 2.5 cu încărcarea exterioară formată din forţe
acţionând în planul XY, deci în secţiunile barei se dezvoltă: un efort axial, un efort tăietor
şi un moment încovoietor. Relaţiile diferenţiale de echilibru fac legătura între eforturile
secţionale şi încărcare (forţele exterioare).
Din bară se izolează elementul de lungime elementară dx (fig. 2.5, b şi c) încărcat cu
sarcina distribuită p cu componentele px şi py, care pe lungimea elementară pot fi admise
ca fiind uniform distribuite. Elementul detaşat trebuie să fie şi el în stare de echilibru sub
acţiunea incărcării, dar şi al forţelor de legătură considerate, pe ambele secţiuni, pozitive şi
variabile.
Din ecuaţiile de echilibru, scrise pentru elementul din figura 2.5, c, rezultă:
- 17 -
.0=)(2
;0
;0)(;0
;0)(;0
iiyiiz
yi
xi
dMMdx
dxpMTdxM
dTTdxpTY
dNNdxpNX
Dacă neglijăm termenul
2
2dx
py care este un infinit mic de ordin superior şi
reducem termenii asemenea, rezultă:
.;;dx
idM
Tdx
dT
yp
dx
dN
xp (2.9)
Relaţiile ( 2.9 ) sunt generale la barele drepte şi sunt valabile şi pentru orice structură
formată din bare drepte.
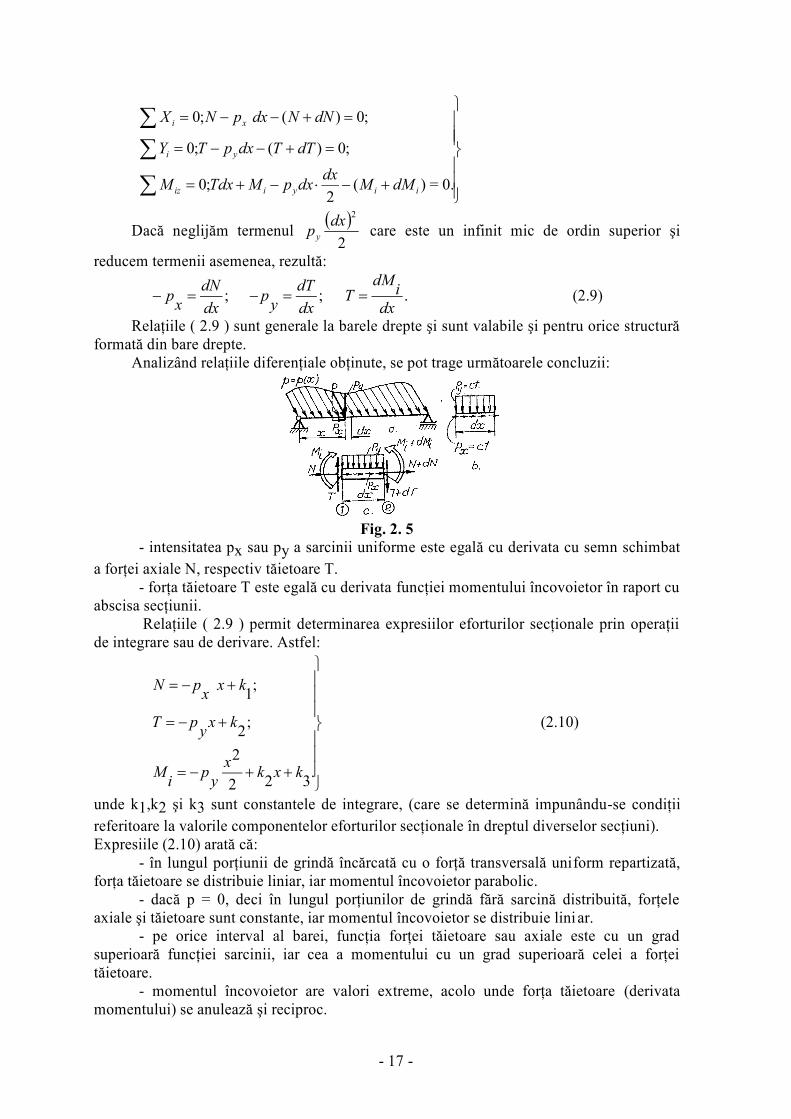
Analizând relaţiile diferenţiale obţinute, se pot trage următoarele concluzii:
Fig. 2. 5
- intensitatea px sau py a sarcinii uniforme este egală cu derivata cu semn schimbat
a forţei axiale N, respectiv tăietoare T.
- forţa tăietoare T este egală cu derivata funcţiei momentului încovoietor în raport cu
abscisa secţiunii.
Relaţiile ( 2.9 ) permit determinarea expresiilor eforturilor secţionale prin operaţii
de integrare sau de derivare. Astfel:
.322
2
;2
;1
kxkx
yp
iM
kxy
pT
kxx
pN
(2.10)
unde k1,k2 şi k3 sunt constantele de integrare, (care se determină impunându-se condiţii
referitoare la valorile componentelor eforturilor secţionale în dreptul diverselor secţiuni).
Expresiile (2.10) arată că:
- în lungul porţiunii de grindă încărcată cu o forţă transversală uniform repartizată,
forţa tăietoare se distribuie liniar, iar momentul încovoietor parabolic.
- dacă p = 0, deci în lungul porţiunilor de grindă fără sarcină distribuită, forţele
axiale şi tăietoare sunt constante, iar momentul încovoietor se distribuie lini ar.
- pe orice interval al barei, funcţia forţei tăietoare sau axiale este cu un grad
superioară funcţiei sarcinii, iar cea a momentului cu un grad superioară celei a forţei
tăietoare.
- momentul încovoietor are valori extreme, acolo unde forţa tăietoare (derivata
momentului) se anulează şi reciproc.

- 18 -
- dacă forţa tăietoare este pozitivă, atunci momentul încovoietor este crescător, iar
pentru forţa tăietoare negativă momentul încovoietor este descrescător şi reciproc.
U2.3. Construcţia diagramelor de eforturi secţionale
Având în vedere faptul că în general eforturile sunt variabile pe deschiderea barei, la
efectuarea calculelor de rezistenţă şi rigiditate, prezintă interes determinarea variaţiei
eforturilor precum şi stabilirea valorilor maxime ale acestora (determinarea secţiunii
periculoase).
Construcţia diagramelor arată reprezentarea funcţiilor de variaţie ale forţei axiale,
tăietoare sau a momentelor de încovoiere, torsiune pe deschiderea barei.
Trasarea diagramelor este precedată de obicei de calculul reacţiunilor, iar ca linie de
referinţă pentru reprezentarea valorilor eforturilor secţionale se folosesc linii de forma axei
barei. De obicei forţele axiale şi forţele tăietoare pozitive se reprezintă deasupra liniei de
referinţă, iar momentele încovoietoare pozitive sub linia de referinţă (diagrama de momente
încovoietoare devine asemănătoare cu grinda deformată sub acţiunea forţelor aplicate).
Uneori, diagramele de variaţie se trasează fără a calcula reacţiunile, pornind de la relaţiile
diferenţiale şi stabilind relaţiile de recurenţă pentru determinarea mărimii efective a valorii
eforturilor din diversele secţiuni (vezi aplicaţia 2.1).
Aplicaţia 2.1 Cu ajutorul relaţiilor diferenţiale dintre eforturi, se cere să se afle
expresia forţei tăietoare şi a momentului încovoietor pentru grinda din figura 2.6:
Fig. 2.6
Rezolvare: Intensitatea forţei distribuite la o distanţă oarecare x, se exprimă în funcţie
de intensitatea maximă p0, rezultând:
.l
0 xp
xp
Conform relaţiilor (2.9) se obţine:
.+6l
+=
;2l
+-=
32
3
03
2
2
02
kxkxp
kTdxM
kxp
kpdxT
i
Cu ajutorul a două condiţii referitoare la valoarea momentului încovoietor, se pot
determina constantele de integrare, observându-se că momentul încovoietor este nul în
punctele A şi B, adică Mi=0 pentru x=0 şi x=l. Din expresia momentului încovoietor
rezultă:
.0 6
l3
02 k
pk
Astfel, expresiile forţei tăietoare şi momentului încovoietor devin:

- 19 -
.6
l
l6 ;
6
l
l2
0
3
00
2
0 xpxp
Mpxp
T i
Funcţie de aceste expresii se pot calcula eforturile produse în oricare secţiune
transversală.
U2.4. Diagrame ale forţelor axiale
Diagramele forţelor axiale arată în ce măsură secţiunile transversale ale barei sunt
solicitate la intindere sau la compresiune, precum şi mărimea forţelor din diferitele secţiuni.
Aplicaţia 2.2 Se cere să se reprezinte diagrama forţelor axiale pentru bara din fig . 2.7.
Fig. 2.7
Rezolvare: Se determină reacţiunea XA şi valoarea forţei axiale pe fiecare tronson al
barei.
.45 ;35
;2 ;
; ,045 ;0
4332
211
PPPPXNPPPXN
PPXNPXN
PXPPPPXX
AA
AAA
AAi
Prin reprezentarea acestor valori se obţine diagrama forţelor axiale (fig. 2.7).
Aplicaţia 2.3 Pentru bara verticală, având lungimea 4l, de secţiune constantă A şi
greutate specifică ν din figura 2.8 [21], solicitată de forţele concentrate P şi 3P, se cere să
se traseze diagrama de forţe axiale, ţinând cont şi de greutatea proprie a barei.
Rezolvare: Din suma de proiecţii pe verticală, se determină reacţiunea XA.
.l44 ;0l43 ;0 APXAPPXX AAi
Forţa axială din secţiunea curentă va fi:
.AgPNx
AgPNxxAgAgPN
AgPNx
PNxxAgPN
A
Apentru
pentru
pentru
pentru
l44l3
l;4''0 l4
l;'l
;0
2
2
2
1
21
Observaţii: Datorită greutăţii proprii, care este o sarcină uniform distribuită, pe cele
două zone 1-2, respectiv 2-A, forţa axială variază liniar, iar în punctele 1 şi 2 unde există
forţele concentrate P şi 3P, se produc salturi în diagrama N (fig. 2.8).
- 20 -
Fig. 2.8
U2.5. Diagrame ale momentului de torsiune
Valoarea momentelor de torsiune dintr-o secţiune a barei se calculează, fie în funcţie
de forţele aplicate şi braţele lor de pârghie faţă de axa longitudinală a barei, fie în funcţie de
puterea pe care o transmite bara în mişcarea ei de rotaţie în jurul axei longitudinale la o
anumită turaţie.
Dacă bara transmite o putere P în kW la turaţia n în rot/min, atunci momentul de
torsiune va fi:
].[ 55,9
30mkN
nntMPPP
(2.11)
Dacă puterea este măsurată în C.P., iar turaţia în rot/min:
].[02,7 mkNntMP
(2.12)
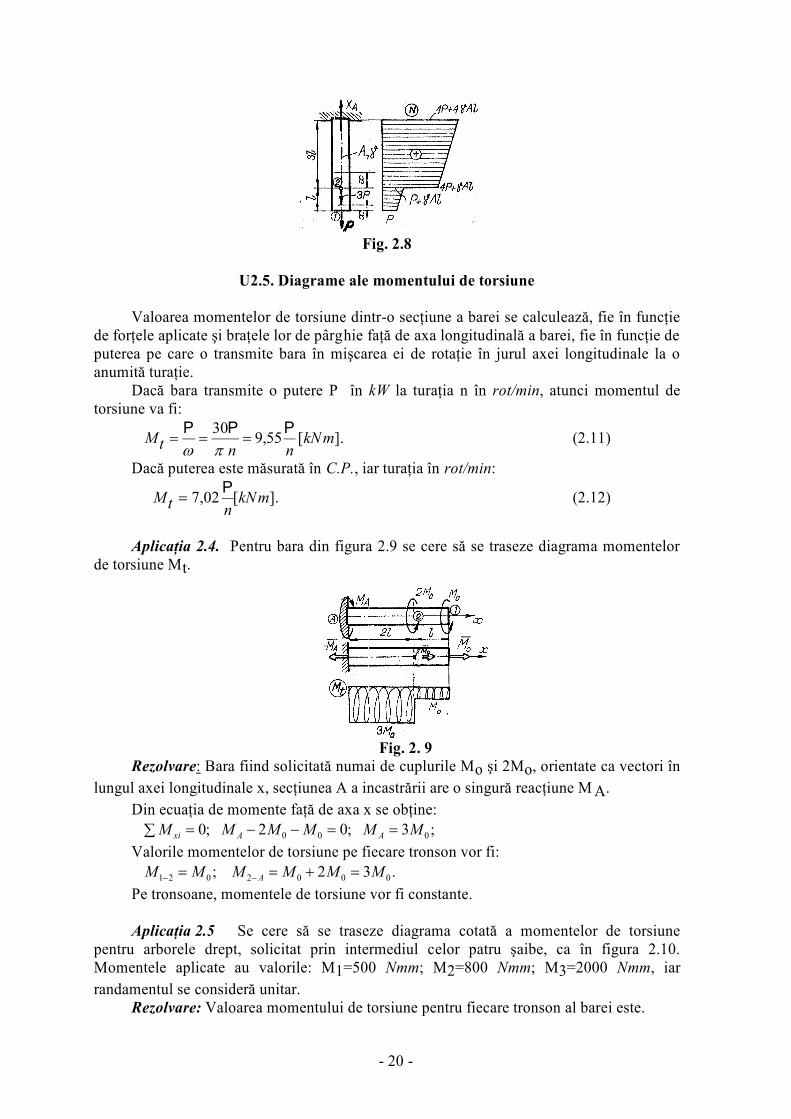
Aplicaţia 2.4. Pentru bara din figura 2.9 se cere să se traseze diagrama momentelor
de torsiune Mt.
Fig. 2. 9
Rezolvare: Bara fiind solicitată numai de cuplurile Mo şi 2Mo, orientate ca vectori în
lungul axei longitudinale x, secţiunea A a incastrării are o singură reacţiune M A.
Din ecuaţia de momente faţă de axa x se obţine:
;3 ;02 ;0 000 MMMMMM AAxi
Valorile momentelor de torsiune pe fiecare tronson vor fi:
.32 ; 0002021 MMMMMM A
Pe tronsoane, momentele de torsiune vor fi constante.
Aplicaţia 2.5 Se cere să se traseze diagrama cotată a momentelor de torsiune
pentru arborele drept, solicitat prin intermediul celor patru şaibe, ca în figura 2.10.
Momentele aplicate au valorile: M1=500 Nmm; M2=800 Nmm; M3=2000 Nmm, iar
randamentul se consideră unitar.
Rezolvare: Valoarea momentului de torsiune pentru fiecare tronson al barei este.
- 21 -
. 7002000800500
;1300800500
;500 ;0
43
32
2110
mmNM
mmNM
mmNMM
t
t
tt
Fig. 2. 10
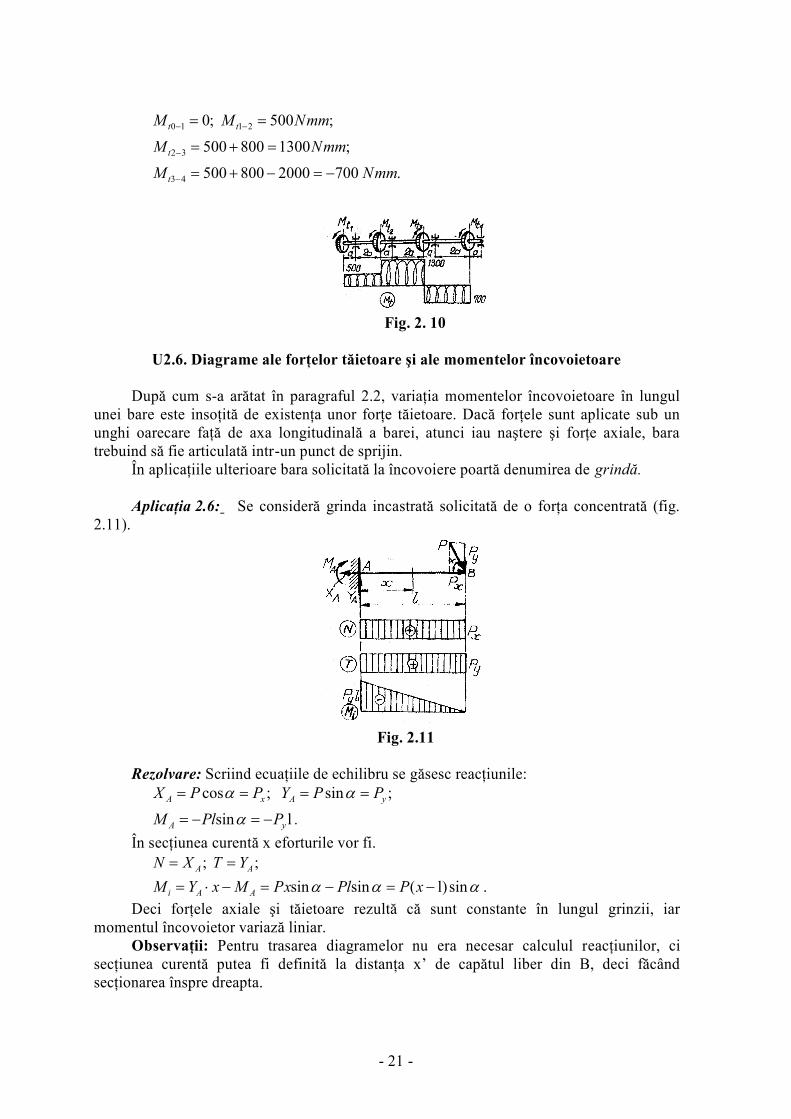
U2.6. Diagrame ale forţelor tăietoare şi ale momentelor încovoietoare
După cum s-a arătat în paragraful 2.2, variaţia momentelor încovoietoare în lungul
unei bare este insoţită de existenţa unor forţe tăietoare. Dacă forţele sunt aplicate sub un
unghi oarecare faţă de axa longitudinală a barei, atunci iau naştere şi forţe axiale, bara
trebuind să fie articulată intr-un punct de sprijin.
În aplicaţiile ulterioare bara solicitată la încovoiere poartă denumirea de grindă.
Aplicaţia 2.6: Se consideră grinda incastrată solicitată de o forţa concentrată (fig.
2.11).
Fig. 2.11
Rezolvare: Scriind ecuaţiile de echilibru se găsesc reacţiunile:
. PlPM
PPYPPX
yA
yAxA
lsin
;sin ;cos
În secţiunea curentă x eforturile vor fi.
. sin)l(sinsin
; ;
xPlPxPMxYM
YTXN
AAi
AA
Deci forţele axiale şi tăietoare rezultă că sunt constante în lungul grinzii, iar
momentul încovoietor variază liniar.
Observaţii: Pentru trasarea diagramelor nu era necesar calculul reacţiunilor, ci
secţiunea curentă putea fi definită la distanţa x’ de capătul liber din B, deci făcând
secţionarea înspre dreapta.

- 22 -
Aplicaţia 2.7 Grinda rezemată la capete, solicitată de o forţă concentrată transversală
(fig. 2.12).
Fig. 2.12
Rezolvare: Scriind ecuaţiile de momente faţă de cele două reazeme, obţinem
reacţiunile.
.ll
PaY
PbY BA º
Definind secţiunile curente pe fiecare dintre cele două tronsoane, respectiv A-1 şi 1-
B, observăm că forţele tăietoare sunt constante în lungul fiecărei regiuni, astfel:
.ll
;l
11
aPP
bPPYT
bPYT ABAA
Observaţii: Mai uşor era de definit pe cel de al doilea tronson secţiunea curentă
pornind de la B către punctul 1 deci secţiunea x’.
Într-o secţiune curentă momentul încovoietor este.
. l
;l
11 xaP
xYMxbP
xYM BBAA
Deci momentul încovoietor este repartizat liniar în lungul porţiunilor din grindă.
Dacă a = b = l /2, 4
lmax
PM i
Observaţii: - În dreptul sarcinilor concentrate în diagrama T se produce un salt pe direcţia forţei
şi cu valoarea acesteia.
- Forţa tăietoare este constantă în intervalul dintre două forţe normale pe axa barei.
- În dreptul sarcinilor concentrate diagrama Mi îşi schimbă panta.
- Momentul încovoietor este maxim în secţiunea unde forţa tăietoare trece prin zero.
- Pe intervalul A-1 forţa tăietoare este pozitivă, deci momentul încovoietor este
crescător, iar pe intervalul 1-B, forţa tăietoare este negativă, deci momentul încovoietor
este descrescător.
Aplicaţia 2.8 Grinda rezemată la capete şi solicitată de un sistem de forţe
concentrate transversale (fig. 2.13).

- 23 -
Fig. 2.13
Rezolvare: Din ecuaţiile de echilibru, rezultă reacţiunile:
.l
1;)l(
l
1
11
n
iiB
n
iiA aPYaPY
Diagrama forţelor tăietoare constă din porţiuni de linii orizontale, întrerupte prin
salturi în dreptul forţelor concentrate, iar curba momentelor încovoietoare din linii drepte
care îsi schimbă panta în dreptul forţelor concentrate.
Expresiile forţelor tăietoare şi momentelor încovoietoare pe diversele tronsoane ale
grinzii vor fi:
i
iiiiAi
AAA
B
n
iABnAAA
aaPaYM
aaPaYMaYMM
YPYTPYTYT
111
1212211
11211
).(
);( ; ;0
; ;...;;
Observaţii. Momentul încovoietor este maxim în secţiunea unde forţa tăietoare trece
prin zero.
Aplicaţia 2.9: Grinda rezemată, solicitată de o forţă concentrată transversală situată
pe consolă (fig. 2.14).
Fig. 2.14
.l
0l ;0
;l
l)(l)(l ;0
)(
)(
aPYaPYM
aPYaPYM
AAB
BBA
Forţele tăietoare sunt constante pe regiuni, iar momentul încovoietor variază liniar, nul în
capătul liber şi punctul A, fiind maxim unde forţa tăietoare trece prin zero, deci în punctul
B, unde Mmax= -Pa.

- 24 -
Aplicaţia 2.10 Grinda incastrată, solicitată de o forţă transversală uniform repartizată
p (fig. 2.15).
Fig. 2.15
Rezolvare: În secţiunea curentă x faţă de capătul liber 1 eforturile sunt.
.2
;2
11
pxMxpT AA
Observaţii. - În cazul sarcinilor uniform repartizate diagrama forţelor tăietoare T variază liniar,
iar diagrama momentelor încovoietoare Mi variază parabolic.
- Derivata de ordinul doi a momentului încovoietor este negativă deci curba
momentului încovoietor este concavă (ţine apa) (axa pozitivă y pentru Mi este indreptată în
jos).
Aplicaţia 2.11 Grinda rezemată la capete, solicitată de o forţă uniform repartizată p
(fig. 2.16).
Fig. 2.16
Rezolvare: Din condiţii de simetrie, reacţiunile din cele două reazeme sunt egale
între ele şi egale cu: .2
lpYY BA
Într-o secţiune curentă x, expresiile forţei tăietoare şi ale momentului încovoietor vor fi:
.8
l
2
ll
2
l
2,
2
l 0
,l222
l
2 ;
2
l
2
max
22
pp
Ml
xT
xxpxp
xpxp
xYMxpxpYT ABAABA
Observaţii: - În punctele A şi B se produc salturi cu valoarea reacţiunilor în diagrama forţelor
tăietoare, iar între reazeme forţa tăietoare scade (mergând de la A către B, conform
convenţiei de semne) cu valoarea rezultantei forţei uniform distribuite care este p l.
- La simetrie constructivă şi simetrie de încărcare, diagrama T este antisimetrică iar
diagrama Mi este simetrică; în axa de simetrie T=0 şi

- 25 -
Aplicaţia 2.12 Grinda incastrată solicitată de un cuplu concentrat (fig. 2.17).
Fig. 2.17
Rezolvare: În secţiunile barei, atât forţa axială cât şi forţele tăietoare sunt nule, iar
momentul încovoietor este constant în lungul grinzii egal cu Co, grinda aflându-se într-o
stare de încovoiere pură.
Aplicaţia 2.13 Grinda rezemată la capete solicitată de un cuplu concentrat aplicat pe
deschiderea acesteia (fig. 2.18).
Fig. 2.18
Rezolvare:
.l
0l ;0
;l
0l ;0
00)(
00)(
CYCYM
CYCYM
BBA
AAB
Deci reacţiunile sunt egale şi de sens contrar, implicit forţa tăietoare este constantă în
lungul grinzii şi egală cu.
. l
0-
CYT ABA
Pe cele două porţiuni ale grinzii momentul încovoietor este repartizat liniar având
expresiile.
. l
;l
01
01 x
CxYMx
CxYM BBAA
Observaţii: În dreptul cuplului în diagrama de momente încovoietoare se produce un
salt egal cu valoarea cuplului.
Aplicaţia 2.14 Grinda rezemată solicitată de o forţă repartizată liniar (fig. 2.19).

- 26 -
Fig. 2.19
Rezolvare: Rezultanta sarcinilor repartizate (indiferent de forma repartiţiei) este dată
de aria suprafeţei de încărcare şi acţionează în centrul de greutate al acestei suprafeţe.
. 3
l 0l
3
2
2
ll ;0
; 6
l 0l
3
1
2
ll ;0
00
00
pY
pYM
pY
pYM
BBA
AAB
Intensitatea forţei distribuite, la distanţa x de reazemul A, este:
.l
;l
0
0
xpp
x
p
px
x
Expresia forţei tăietoare în secţiunea curentă x, este:
.l
316
l
2
1
6
l2
2
00
xpxp
pT xBA
Se observă că forţa tăietoare variază parabolic şi seanulează la o distanţă egală cu:
l577,03
l0 x
Momentul încovoietor, în secţiunea curentă, are expresia:
.l
-16
l
l66
l
32
12
2
0
3
00
xxpxpx
pxxpxYM xABA
Momentul încovoietor variază după o parabolă cubică, a cărei maxim, pentru
30
lx este:
. 39
l
l3
l1
3
l
6
l 2
0
2
2
0max
ppM
Aplicaţia 2.15 Grinda rezemată solicitată de o forţă repartizată parabolic (fig. 2.20):

- 27 -
Fig. 2.20
2
2
0l
xppx .
Rezolvare:
.12
l 0ll ;0
;4
l
l 0l ;0
0)(
0)(
pYxRYM
pxRYxRYM
AGAB
GBGBA
unde
l
0
l
0
0
2
2
0 .3
l
l
pdx
xpdxpR x iar
l4
3
3
l4
l
0
2
0
l
0
l
0
p
p
dxp
dxpx
x
x
x
G .
Utilizând relaţiile diferenţiale dintre eforturi, se obţine:
2
2
0l
xp
dx
Td x şi respectiv 2
2
0l
xp
dx
Td x .
Prin integrare se obţine: . .l12
;l3
212
4
012
3
0 KxKx
pMKx
pT ixx
Cele două constante de integrare se obţin din condiţiile de legătură, scrise pentru
reazemul din A pentru x=0 ; AA YT şi 0iAM ; deci 12
l01
pK şi .02 K
Expresiile forţei tăietoare şi momentului încovoietor, devin:
.l
112
l
12
l
l12;
l41
12
l
12
l
l3 3
3
00
2
4
0
3
3
00
2
3
0
xxpxpxpM
xppxpT ixx
Deci forţa tăietoare variază după o parabolă cubică, iar momentul încovoietor după o
parabolă de gradul patru.
.l 04,0416
l
l4
l1
4
l
12
l
l, 63,04
l0
2
03
2
0
3
3
3
0max
30
ppp
M
xT
i
x
- 28 -
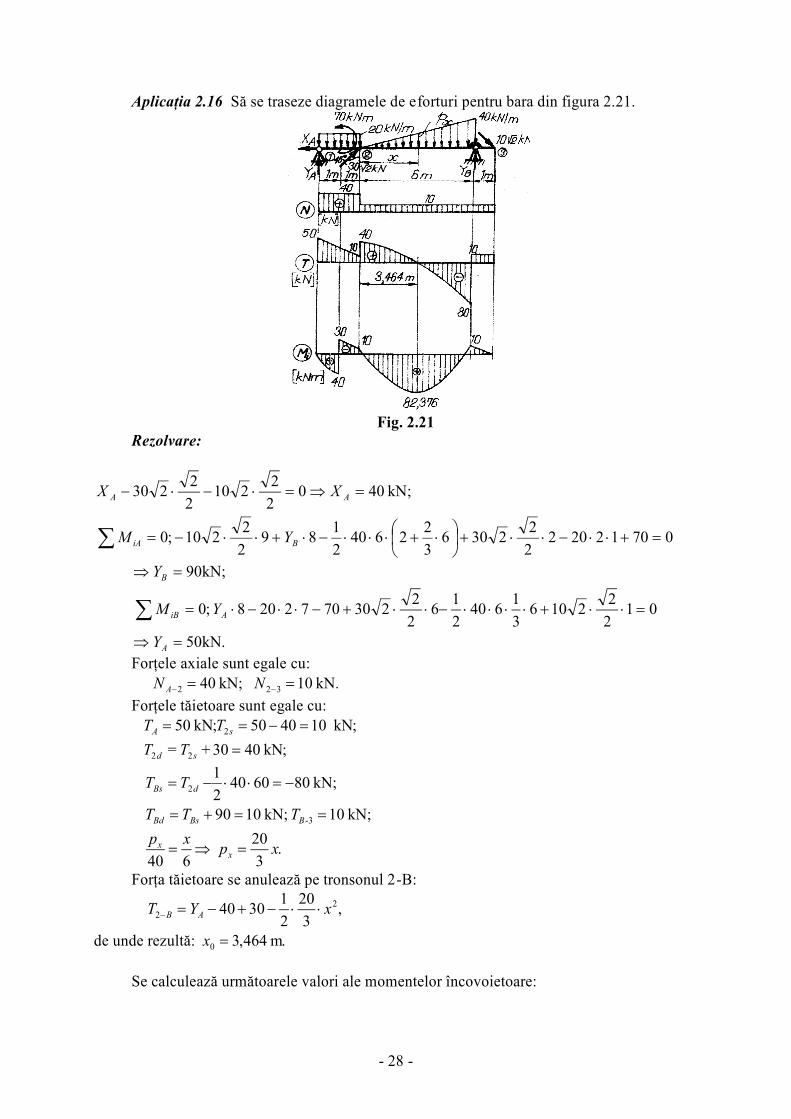
Aplicaţia 2.16 Să se traseze diagramele de eforturi pentru bara din figura 2.21.
Fig. 2.21
Rezolvare:
070122022
22306
3
22640
2
189
2
2210 ;0
;kN 4002
2210
2
2230
BiA
AA
YM
XX
kN.50
012
22106
3
1640
2
16
2
22307072208 ;0
kN;90
A
AiB
B
Y
YM
Y
Forţele axiale sunt egale cu:
.N N A kN 10 kN;40 322
Forţele tăietoare sunt egale cu:
;kN 4030+=
;kN 104050;kN 50
22
2
sd
sA
TT
TT
kN; 8060402
12 dBs TT
.
3
20
640
kN; 10 kN; 1090 3-
xpxp
TTT
xx
BBsBd
Forţa tăietoare se anulează pe tronsonul 2-B:
,3
20
2
13040 2
2 xYT AB
de unde rezultă: .m 464,30 x
Se calculează următoarele valori ale momentelor încovoietoare:
- 29 -
m.kN 376,82464,33
1
3
20464,3
2
1464,33070464,4220464,5
m;kN 10;kNm 107012202; 3070
m;kN 402
11201
2
max
211
1
A
BAsd
As
YM
MYMkNmMM
YM
Observaţii: - Scopul diagramelor de eforturi este acela de a prezenta o imagine de ansamblu a
solicitării grinzilor (în majoritate prezintă interes secţiunile cu solicitare maximă, unde
urmează să se facă calculele de dimensionare sau verificare).
- Arcele de parabolă de pe porţiunile situate la stânga, respectiv dreapta, secţiunii
din punctul 2 nu se racordează, deoarece în acest punct efortul tăietor face un salt.
U2.7. Sisteme de bare static determinate
Sistemele de bare static determinate sunt formate din bare drepte sau curbe îmbinate
rigid prin articulaţii sau alte legături. Un sistem este static determinat dacă i se pot calcula
atât reacţiunile cât şi eforturile din fiecare bară cu ajutorul metodelor de calcul ale staticii.
Grinzile cu articulaţii interioare sunt cunoscute sub denumirea de grinzi Gerber.
Sistemele de bare pot fi: închise, deschise sau mixte (fig. 2.22) [21] după cum barele
sistemului sunt astfel legate între ele încât formează contururi închise, deschise sau mixte.
Astfel de sisteme de bare închise întâlnim la grinzile cu zăbrele, diferite cadre, inele cu
articulaţii, etc. Sisteme de bare deschise întâlnim sub forma de grinzi cotite, cadre deschise,
arbori cotiţi etc.
Toate aceste sisteme de bare le întâlnim în construcţiile de masini, implicit în
construcţiile roboţilor industriali, etc.
Liniile de referinţă, ce se utilizează la trasarea diagramelor de eforturi, au forma sistemului
de bare.
Fig. 2.22
Aplicatia 2.17 Se consideră grinda dreaptă cu articulaţii din figura 2.23.
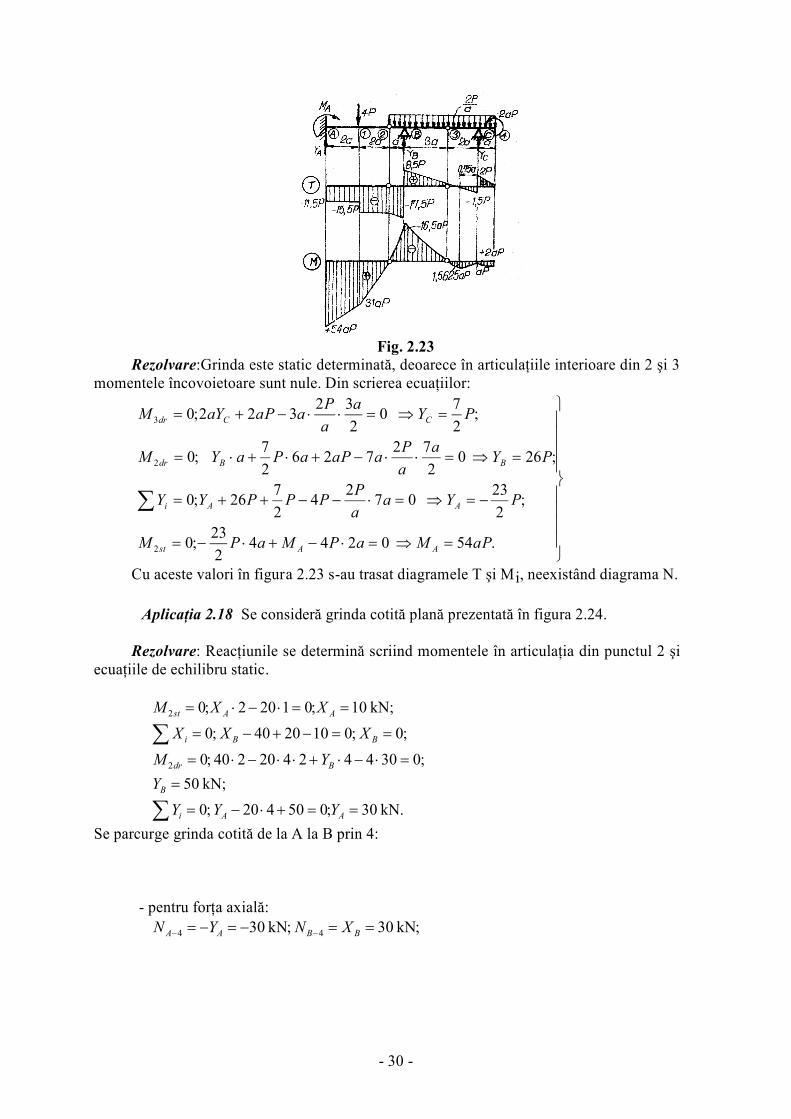
- 30 -
Fig. 2.23
Rezolvare:Grinda este static determinată, deoarece în articulaţiile interioare din 2 şi 3
momentele încovoietoare sunt nule. Din scrierea ecuaţiilor:
.54 02442
23;0
;2
23 07
24
2
726;0
;26 02
72726
2
7 ;0
;2
7 0
2
32322;0
2
2
3
PaMaPMaPM
PYaa
PPPPYY
PYa
a
PaPaaPaYM
PYa
a
PaPaYaM
AAst
AAi
BBdr
CCdr
Cu aceste valori în figura 2.23 s-au trasat diagramele T şi Mi, neexistând diagrama N.
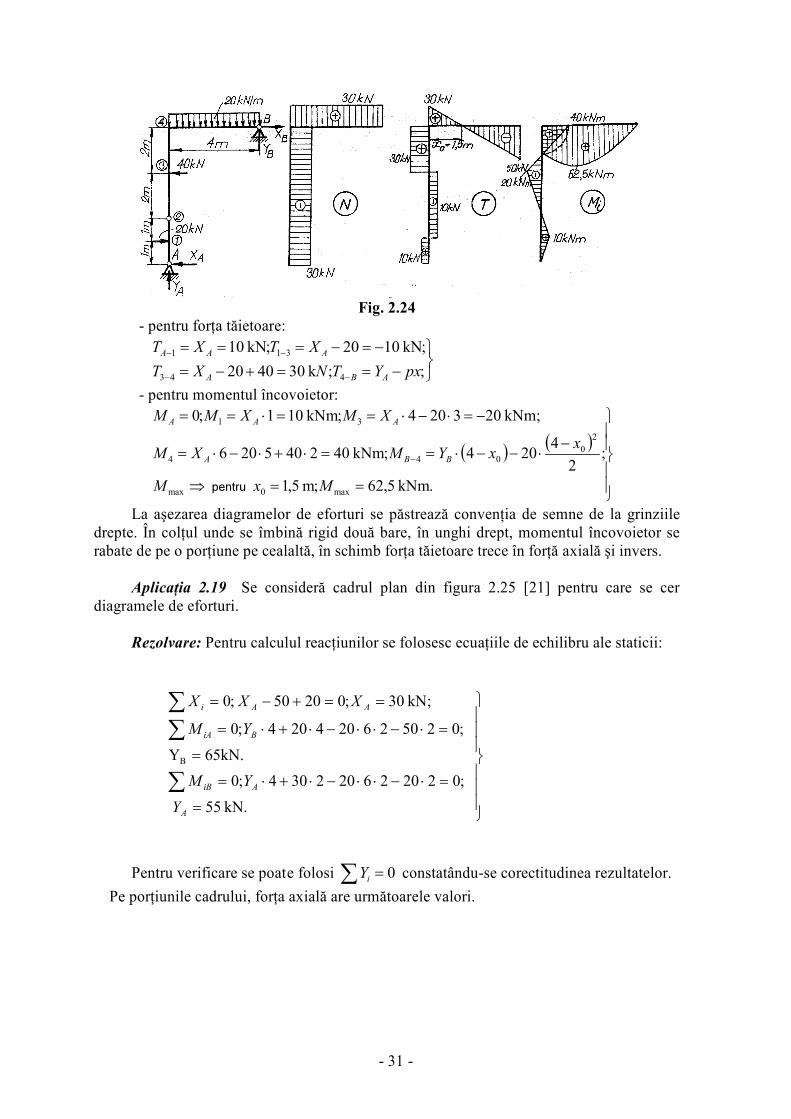
Aplicaţia 2.18 Se consideră grinda cotită plană prezentată în figura 2.24.
Rezolvare: Reacţiunile se determină scriind momentele în articulaţia din punctul 2 şi
ecuaţiile de echilibru static.
kN. 30;050420 ;0
kN; 50
;030442420240 ;0
;0 ;0102040 ;0
kN; 10;01202;0
2
2
AAi
B
Bdr
BBi
AAst
YYY
Y
YM
XXX
XXM
Se parcurge grinda cotită de la A la B prin 4:
- pentru forţa axială:
;kN 30 ;kN 30 44 BBAA XNYN
- 31 -
Fig. 2.24
- pentru forţa tăietoare:
;;k 304020
;kN 1020;kN 10
443
311
pxYTNXT
XTXT
ABA
AAA
- pentru momentul încovoietor:
.mkN 5,62;m 5,1
;2
4204;kNm 402405206
m;kN 203204;mkN 101;0
max0max
2
0044
31
MxM
xxYMXM
XMXMM
BBA
AAA
La aşezarea diagramelor de eforturi se păstrează convenţia de semne de la grinziile
drepte. În colţul unde se îmbină rigid două bare, în unghi drept, momentul încovoietor se
rabate de pe o porţiune pe cealaltă, în schimb forţa tăietoare trece în forţă axială şi invers.
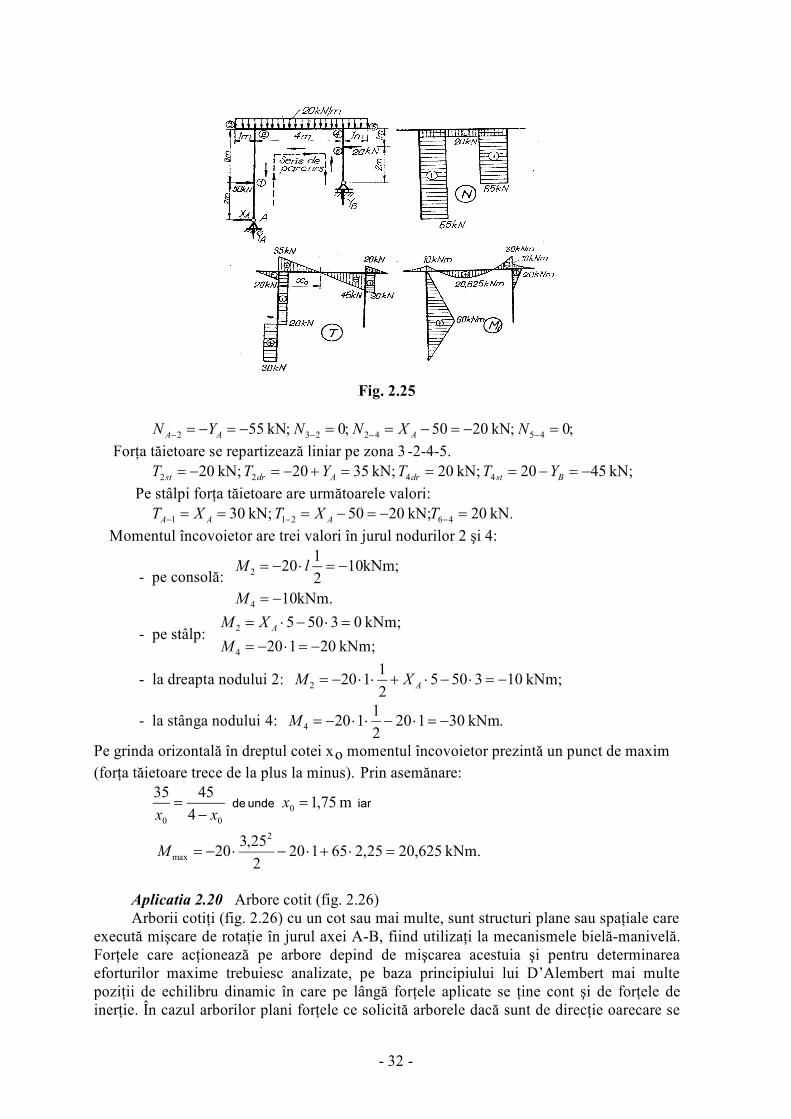
Aplicaţia 2.19 Se consideră cadrul plan din figura 2.25 [21] pentru care se cer
diagramele de eforturi.
Rezolvare: Pentru calculul reacţiunilor se folosesc ecuaţiile de echilibru ale staticii:
kN. 55
;022026202304;0
kN.65Y
;025026204204;0
;kN 30;02050 ;0
B
A
AiB
BiA
AAi
Y
YM
YM
XXX
Pentru verificare se poate folosi 0 iY constatându-se corectitudinea rezultatelor.
Pe porţiunile cadrului, forţa axială are următoarele valori.
- 32 -
Fig. 2.25
;0 ;kN 2050 ;0 ;kN 55 4542232 NXNNYN AAA
Forţa tăietoare se repartizează liniar pe zona 3 -2-4-5.
kN; 4520 kN; 20 kN; 3520 kN; 20 4422 BstdrAdrst YTTYTT
Pe stâlpi forţa tăietoare are următoarele valori:
.TXTXT AAA kN 20kN; 2050 kN; 30 46211
Momentul încovoietor are trei valori în jurul nodurilor 2 şi 4:
- pe consolă: m.kN10
;mkN102
120
4
2
M
lM
- pe stâlp: m;kN 20120
m;kN 03505
4
2
M
XM A
- la dreapta nodului 2: m;kN 1035052
11202 AXM
- la stânga nodului 4: .mkN 301202
11204 M
Pe grinda orizontală în dreptul cotei xo momentul încovoietor prezintă un punct de maxim
(forţa tăietoare trece de la plus la minus). Prin asemănare:
m.kN 625,2025,2651202
25,320
m 75,1 4
4535
2
max
0
00
M
xxx
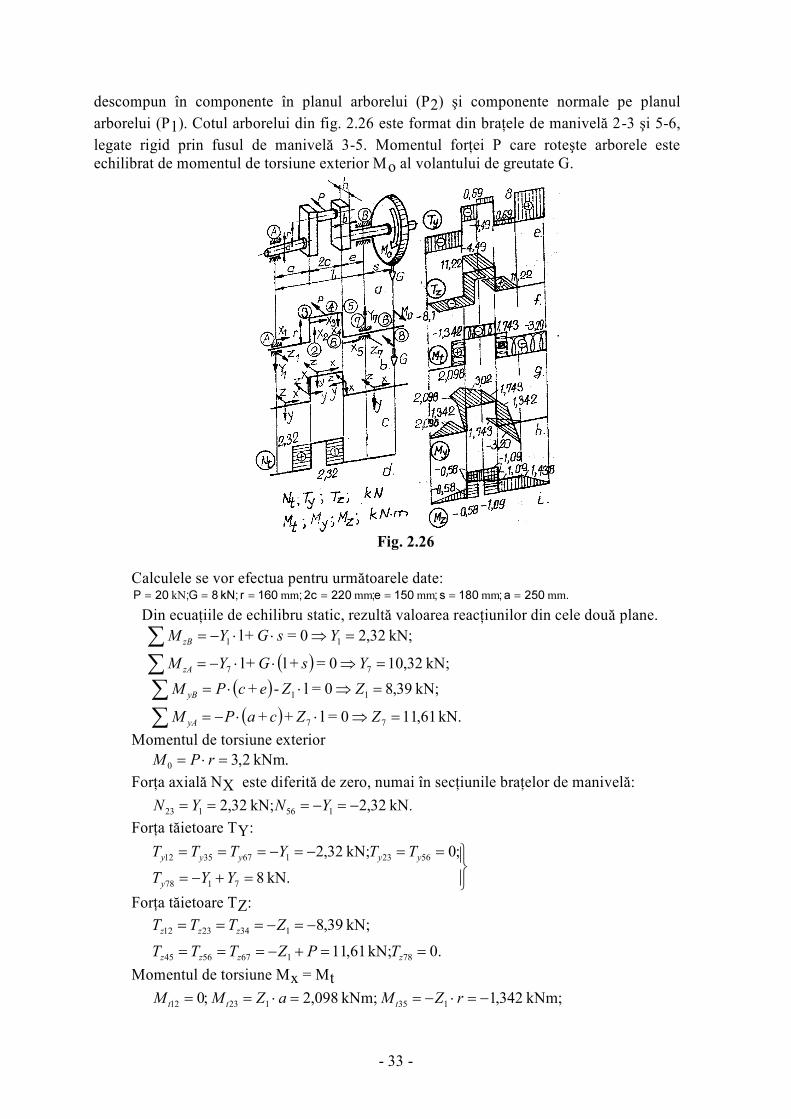
Aplicatia 2.20 Arbore cotit (fig. 2.26)
Arborii cotiţi (fig. 2.26) cu un cot sau mai multe, sunt structuri plane sau spaţiale care
execută mişcare de rotaţie în jurul axei A-B, fiind utilizaţi la mecanismele bielă-manivelă.
Forţele care acţionează pe arbore depind de mişcarea acestuia şi pentru determinarea
eforturilor maxime trebuiesc analizate, pe baza principiului lui D’Alembert mai multe
poziţii de echilibru dinamic în care pe lângă forţele aplicate se ţine cont şi de forţele de
inerţie. În cazul arborilor plani forţele ce solicită arborele dacă sunt de direcţie oarecare se
- 33 -
descompun în componente în planul arborelui (P2) şi componente normale pe planul
arborelui (P1). Cotul arborelui din fig. 2.26 este format din braţele de manivelă 2-3 şi 5-6,
legate rigid prin fusul de manivelă 3-5. Momentul forţei P care roteşte arborele este
echilibrat de momentul de torsiune exterior Mo al volantului de greutate G.
Fig. 2.26
Calculele se vor efectua pentru următoarele date: mmmmmmmmmmkN
Din ecuaţiile de echilibru static, rezultă valoarea reacţiunilor din cele două plane.
;kN 32,100=+ll
kN; 32,20=l
77
11
YsG+YM
YsG+YM
zA
zB
kN. 61,110=l++
kN; 39,80=l-+
77
11
ZZcaPM
ZZecPM
yA
yB
Momentul de torsiune exterior .mkN 2,30 rPM
Forţa axială NX este diferită de zero, numai în secţiunile braţelor de manivelă:
.YNYN kN 32,2kN; 32,2 156123
Forţa tăietoare TY:
kN. 8
;0kN; 32,2
7178
56231673512
YYT
TTYTTT
y
yyyyy
Forţa tăietoare TZ:
.0kN; 61,11
kN;39,8
781675645
1342312
zzzz
zzz
TPZTTT
ZTTT
Momentul de torsiune Mx = Mt
m;kN 342,1 m;kN 098,2 ;0 13512312 rZMaZMM ttt
- 34 -
m.kN 2,3 ;mkN 743,12 68156 rPMcPcaZM tt
Momentul încovoietor MY este nul pe porţiunea 7-8.
m;kN02,3= ;
;mkN342,1 ;0 ;;
m;kN 098,2 ;0
143134
13211122123
121
caZMxaZM
rZMMxZMxZM
aZMM
yy
yyyy
yy
;-
m;kN743,1=2);(
44156
1533145
xPxrZM
cPcaZMcxPxaZM
y
yy
.0
m;kN743,12;2
m;kN2,3 m;kN342,1
7
1655167
615
y
yy
yy
M
PccaZMxcPxcaZM
rPMrZM
Momentul încovoietor Mz.
Nm.k438,1 ;2
; m;kN09,12 ;
m;kN58,0 m;kN58,0;
75167
556153135
123121112
zz
zzzz
zzz
MxcaYM
MMcaYMxaYM
aYMaYMxYM
Diagramele cotate ale eforturilor sunt reprezentate în figura 2.26 d...i
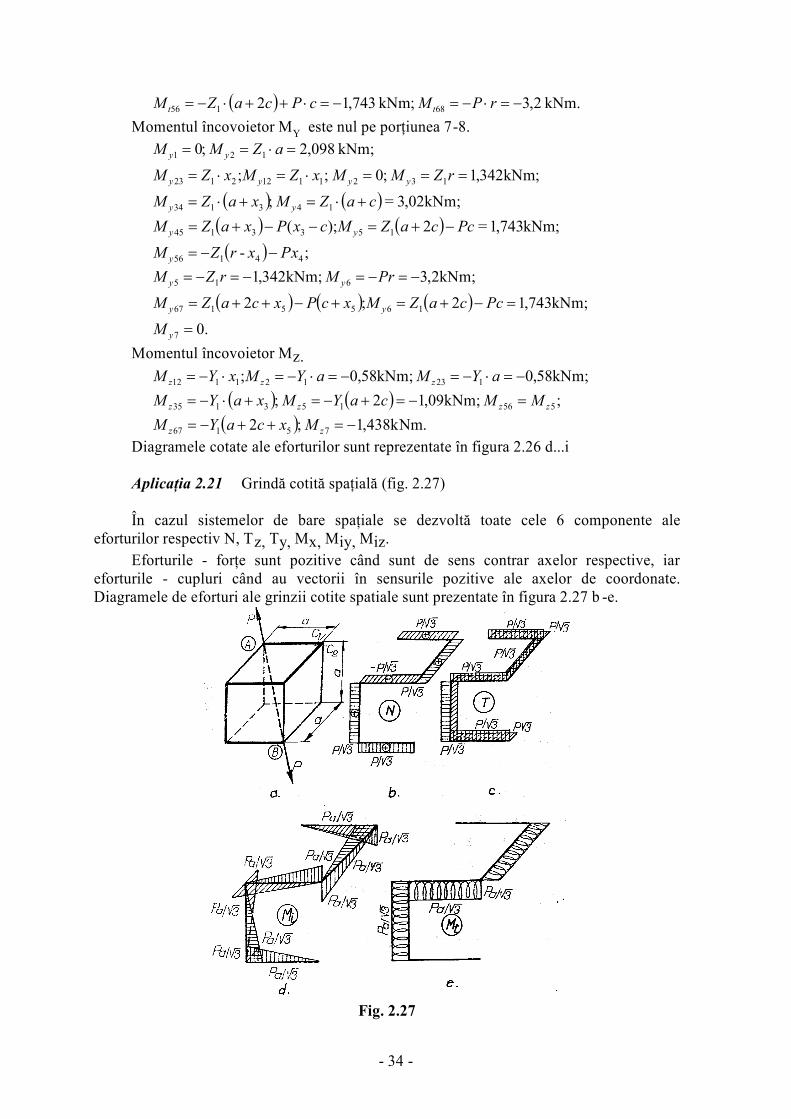
Aplicaţia 2.21 Grindă cotită spaţială (fig. 2.27)
În cazul sistemelor de bare spaţiale se dezvoltă toate cele 6 componente ale
eforturilor respectiv N, Tz, Ty, Mx, Miy, Miz.
Eforturile - forţe sunt pozitive când sunt de sens contrar axelor respective, iar
eforturile - cupluri când au vectorii în sensurile pozitive ale axelor de coordonate.
Diagramele de eforturi ale grinzii cotite spatiale sunt prezentate în figura 2.27 b -e.
Fig. 2.27

- 35 -
U2.8. Forţe concentrate mobile
În numeroase cazuri întâlnite în practica inginerească, sarcinile nu au puncte fixe de
aplicaţie pe grinzi, ci se deplasează în lungul acestora (de exemplu sarcinile transmise de
roţile vehiculelor pe un pod, roţile unui pod rulant la grinda de rulare, etc.). O succesiune
de forţe concentrate sau repartizate de mărime constantă, care se deplasează pe o grindă
menţinând distanţa dintre ele constantă, se numeşte convoi de forţe mobile.
Atunci când forţele se deplasează, eforturile secţionale şi reacţiunile grinzii îşi
modifică valoarea şi ca urmare secţiunile în care apar eforturi maxime se schimbă.
Un interes practic major prezintă determinarea eforturilor secţionale cele mai mari
şi în special a momentului înconvoietor maxim, numit moment maxim maximorum Mi max
max . În cele ce urmează se prezintă calculul Mi max max pentru o grindă simplu rezemată,
solicitată de un convoi de sarcini concentrate mobile (fig. 2.28). Cu ajutorul teoremei
proiecţiilor şi a teoremelor momentelor se determină valoarea şi poziţia rezult antei R a
forţelor convoiului, astfel:
. ;1
1
1=
n
in
i
i
n
i
ii
Ri
P
aP
aPR (2.13)
Fig. 2.28
Pentru fiecare poziţie a convoiului se produce o forţa tăietoare maximă egală cu
reacţiunea din A sau B iarTmax max = Ymax se produce atunci când convoiul ocupă o
poziţie apropiată de reazemele în care se dezvoltă aceasta reacţiune. Momentul încovoietor
maxim maximorum are loc pentru o anumită poziţie a convoiului, în dreptul unei forţe
concentrate, pentru grinda rezemată la capete, de obicei în dreptul forţei apropiate de
rezultantă.
Pentru o poziţie oarecare a convoiului, reacţiunea din A este:
,)l(l
xaR
Y RA (2.14)
iar expresia momentului încovoietor din dreptul forţei oarecare Pi este:
. )l(l 1=
n
i
iiRi aPxxaR
M
(2.15)
Derivând expresia 2.15 şi anulând-o obţinem valoarea maximă.
.2
l,02l
l
RR
i axxa
R
dx
Md (2.16)
Deci în dreptul forţei Pi, momentul încovoietor atinge valoarea cea mai mare atunci
când forţa Pi şi rezultanta R a convoiului de forţe de pe grindă se află la aceeaşi distanţă de
mijlocul grinzii. Prin înlocuire în relaţia (2.15), se obţine expresia momentului încovoietor
maxim maximorum.

- 36 -
.2
l
l 1
2
maxmax
i
iir
i aPaR
M (2.17)
Se face precizarea că forţa Pi este situată în dreptul mijlocului rezultantei, dacă se
construieşte poligonul forţelor ce alcătuiesc convoiul.
În cazul particular al unui convoi format din două forţe concentrate P1=8 kN; P2=2
kN, între care distanţa a=2 m, iar grinda are deschiderea l =8 m (fig. 2.29), rezultanta R=
P1+ P2=10 kN şi distanţa ei la forţa P1 este m4021
R
Paa . Forţa tăietoare cea mai mare
este egală cu reacţiunea maximă din A (căci P1 > P2) când x = 0.
.kN 5,9l
l21maxmaxmax
a
PPYTA
Momentul încovoietor maxim are loc în dreptul forţei P1 pentru l
respectiv:
.mkN 05,182
l
l
2
1maxmax
aRM
Fig. 2.29
În cazul când cele două forţe sunt egale, P1 = P2 = P, se obţine
.8
)l2(
l4
l2
l
2
42
l
4
l2,2
22
maxmax21
aPaPM
aaxaaa
Dacă pe grindă este o singură forţă P1=P şi P2=0, se obţine
.l
4
l,, maxmaxmaxmax
PMiarPT
U2.9. Diagrame de eforturi la bare curbe plane
În practică se întâlnesc frecvent bare curbe, solicitate de forţe situate în planul
acestora producând în secţiunile transversale forţe axiale, forţe tăietoare şi momente
încovoietoare care se definesc la fel ca şi în cazul barelor drepte.
În cazul barelor curbe, secţiunea curentă se raportează, fie în coordonate carteziene
(pentru barele curbe de curbură mică de forma unor arce de parabolă) fie în coordonate
polare (pentru barele curbe având axa arce de cerc).
Forţa axială N, dintr-o secţiune curentă este dată de suma proiecţiilor pe tangenta la
bară a tuturor forţelor situate de o parte sau alta a secţiunii considerate, fiind pozitivă când
iese din secţiune şi negativă când intră în secţiune.
Forţa tăietoare T într-o secţiune curentă, este suma proiecţiilor pe raza de curbură a
barei, a tuturor forţelor situate de o parte sau alta a secţiunii considerate.
Momentul încovoietor Mi dintr-o secţiune curentă este suma momentelor sarcinilor
(forţe şi cupluri) din stânga sau dreapta secţiunii considerate faţă de secţiune.
Drept linie de referinţă pentru reprezentarea eforturilor N,T şi Mi se foloseşte chiar
axa barei curbe.

- 37 -
Aplicaţia 2.22 Să se traseze diagramele cotate N, T, Mi pentru bara curbă plană din
fig. 2.31 fibra medie a barei fiind un arc de cerc.
Rezolvare: Scriind ecuaţiile de echilibru static în punctul A obţinem.
.2
5;03
2;0
;;0
;3;0
222
RpMRpRp
MM
RpYY
RpXX
AAiA
Ai
Ai
Într-o secţiune curentă, pe intervalul A-1, prin descompunerea lui XA şi YA pe
direcţia tangenţială şi normală obţinem următoarele eforturi:
.sin)cos (32
5
;sin3cos
;cos3sin
22
1
'''
1
'''
1
RpRRRpRpM
RpRpTTT
RpRpNNN
A
A
A
Secţiunea curentă pe cel de al doilea interval o definim între punctele 2 şi 1, în acest
caz singura forţă care trebuie descompusă după cele două direcţii fiind rezultanta sarcinii
uniform reparizate pR.
.2
cos ;sin ,cos 12
'''
12
'''
12
RRRpMRpTTRpNN
Prin reprezentarea expresiilor deduse, se obţin diagramele de eforturi. Pentru
determinarea lui Tmax, se anulează derivata expresiei lui T pe intervalul A-1.
.4371 0)cos3sin(
Rpd
Td
Valoarea lui Tmax se obţine pentru. .4371
.16,3)4371sin34371(cosmax RpRpT
.8262=
,0)sincos332
5( 0 2
1
ã RpM A
Fig. 2.31
- 38 -
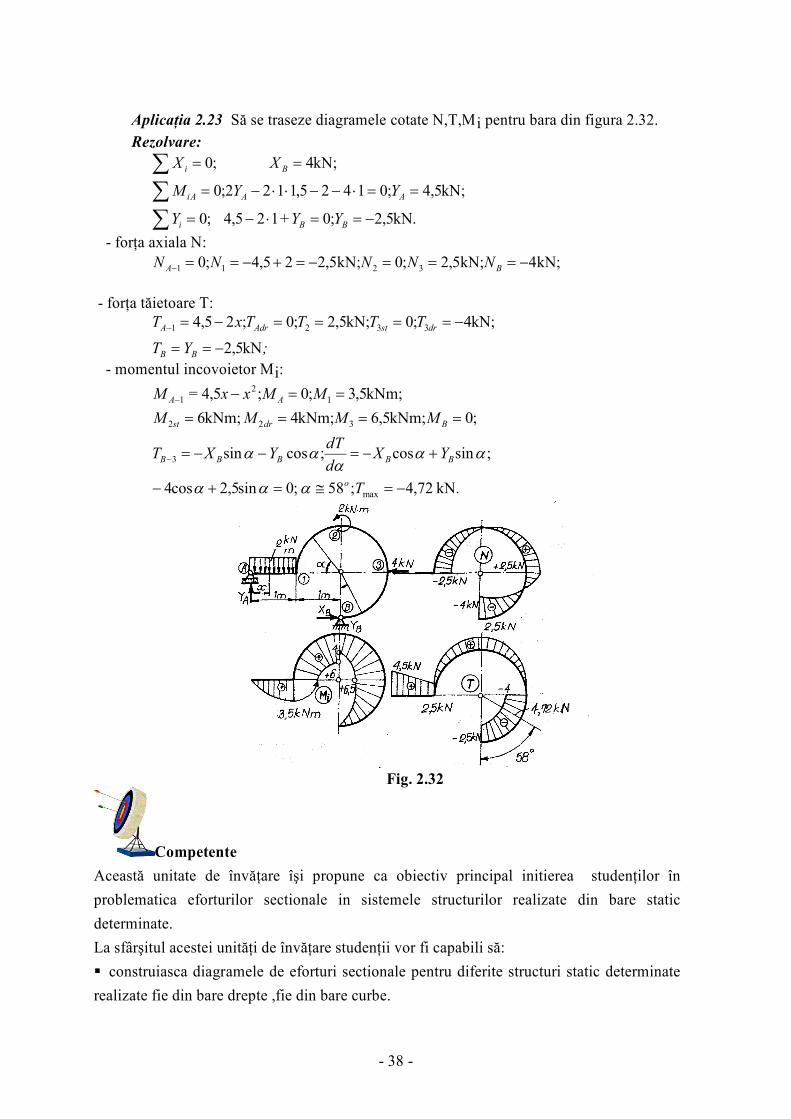
Aplicaţia 2.23 Să se traseze diagramele cotate N,T,Mi pentru bara din figura 2.32.
Rezolvare:
.kN5,2;0+125,4 ;0
;kN5,4;01425,1122;0
;kN4;0
BBi
AAAi
Bi
YYY
YYM
XX
- forţa axiala N:
kN;4kN;5,2;0kN;5,225,4;0 3211 BA NNNNN
- forţa tăietoare T:
;YT
TTTTxT
BB
drstdrAA
kN5,2
kN;4;0kN;5,2;0;25,4 3321
- momentul incovoietor Mi:
;0m;kN5,6m;kN4m;kN6
m;kN5,3;0;5,4=
322
1
2
1
Bdrst
AA
MMMM
MMxxM
.T
YXd
TdYXT
o
BBBBB
kN 72,4;58;0sin5,2cos4
;sincos;cossin
max
3
Fig. 2.32
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica eforturilor sectionale in sistemele structurilor realizate din bare static
determinate.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
construiasca diagramele de eforturi sectionale pentru diferite structuri static determinate
realizate fie din bare drepte ,fie din bare curbe.
- 39 -
realizeze programe de calcul pentru trasarea diagramelor de eforturi sectionale.
Durata medie de parcurgere a unităţii de învăţare este de 6 ore.
U2.10 Test de evaluare a cunostintelor
U2.10.1 Precizati in ce consta metoda sectiunilor.
U2.10.2 Care sunt conventiile de semne pentru eforturile sectionale?
U2.10.3 Care sunt relatiile diferentiale intre sarcina de pe grinda si eforturile
sectionale?
U2.10.4 Cum se stabilesc sectiunile in care momentul incovoietor are valori extreme?
U2.10.5 Explicati in ce consta verificarea diagramelor T si M i.
U2.10.6 Ce se intelege prin moment maxim maximorum si cum se calculeaza acesta?
Tema de control trebuie să fie alcătuita din TO DO
Exemplificaţi constructia grafica a diagramelor de eforturi sectionale pentru
diferite stari de incarcare , cu referire la bare drepte, bare curbe si sisteme de
bare.
Biblografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte.
- 40 -
Modulul 3. Caracteristici geometrice ale sectiunilor plane
Cuprins
U3.1 Generalitati.................................................................. ............................... 40
U3.2 Momente statice............................................ ........... ......................... .........40
U3.3 Momente de inertie........................................... ...................... ........... ........42
U3.4 Variatia momentelor de inertie cu translatia axelor......... ..................... .....43
U3.5 Variatia momentelor de inertie cu rotatia axelor........ ............................. ..43
U3.6 Raze de inertie, elipsa de inertie............................. .................................. .47
U3.7 Module de rezistenta.................................. ............................................... .48
U3.8. Calculul momentelor de inertie........................ ........................................ .49
U3.9 Test de evaluare a cunostintelor.................. .............................................. .54
U3.1 Generalitati
În calculul pieselor supuse la solicitări axiale (întindere sau compresiune) şi a celor de
secţiune mică solicitate la forfecare, intervine caracteristica geometrică de tip arie, forma
secţiunii nejucând nici un rol. În cazul pieselor solicitate la încovoiere şi răsucire, intervin
caracteristici geometrice de ordin superior al secţiunilor transversale ca: momente statice,
module de rezistenţă sau momente de inerţie.
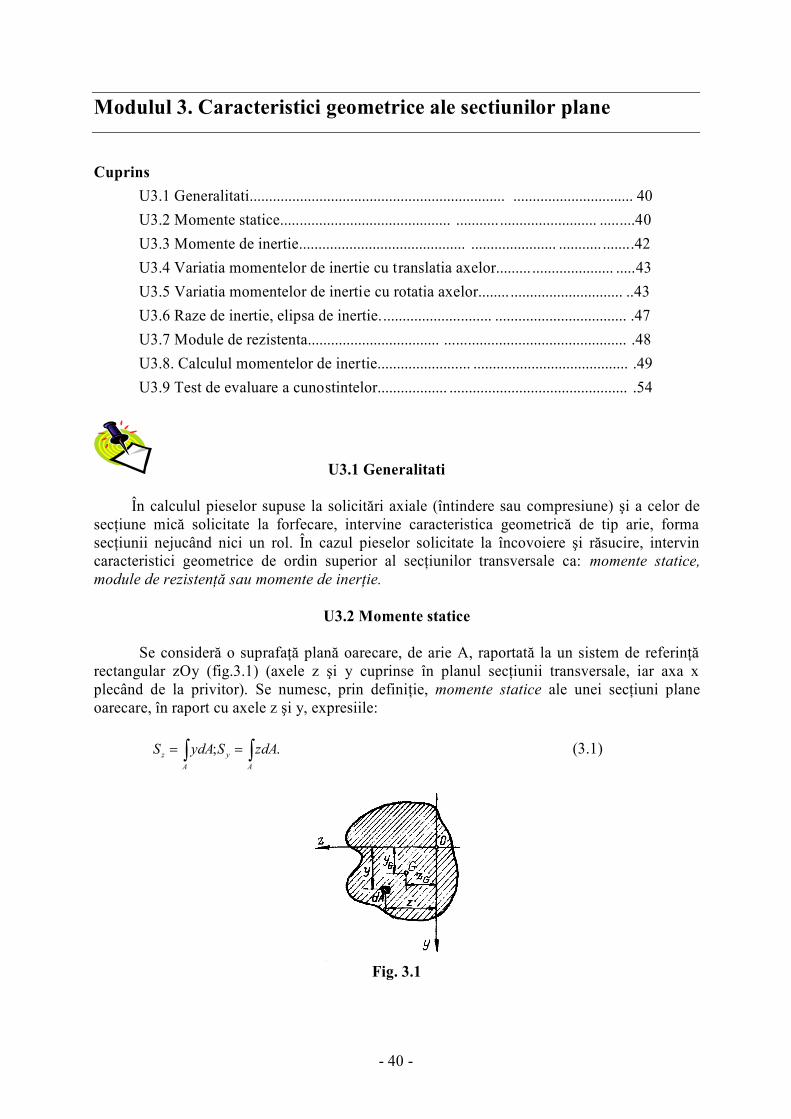
U3.2 Momente statice
Se consideră o suprafaţă plană oarecare, de arie A, raportată la un sistem de referinţă
rectangular zOy (fig.3.1) (axele z şi y cuprinse în planul secţiunii transversale, iar axa x
plecând de la privitor). Se numesc, prin definiţie, momente statice ale unei secţiuni plane
oarecare, în raport cu axele z şi y, expresiile:
.; A
y
A
zdAzSdAyS (3.1)
Fig. 3.1

- 41 -
Deci, momentele statice se definesc ca suma produselor dintre ariile dA ale elementelor
de suprafaţă şi distantele acestor elemente la axele considerate.
Momentele statice se măsoară în mm3, m3 etc. Valoarea momentelor statice depinde de
forma şi mărimea suprafeţei, precum şi de poziţia axei faţă de care se calculează.
Pentru a determina variaţia momentelor statice cu translaţia axelor, se consideră două
sisteme de referinţă ca în figura 3.2. Se presupun cunoscute Sz şi Sy şi ne propunem să
calculăm Sz1 şi Sy1 faţă de sistemul z1Oy1. Fie dA aria unei suprafeţe elementare din jurul
unui punct de coordonate z şi y, respectiv z1 şi y1, faţă de cele două sisteme de referinţă, între
care există relaţia:
.;0101
yyyzzz (3.2)
Faţă de noul sistem de referinţă momentele statice au expresiile:
.
;
001
001
1
1
AzSdAzzdAzS
AySdAyydAyS
y
AA
y
z
AA
z
(3.3)
Conform relaţiei (3.3) rezultă că variaţia momentelor statice, la trecerea de la o axă la alta
paralelă este egală cu produsul dintre aria suprafeţei şi distanţa dintre axe.
Momentele statice pot avea valori pozitive sau negative. Noile axe O1z1 şi O1y1 pot fi
astfel alese, încât faţă de ele momentul static al suprafetei să fie egal cu zero. Axele faţă de
care momentele statice sunt nule, se numesc axe centrale, iar punctul în care se intersectează,
se numeşte centru de greutate.
Dacă impunem condiţiile ca:
.011
yzSS (3.4)
din (3.3), rezultă:
A
Szz
A
Syy
y
G
z
G
00º (3.5)
sau ţinând cont de relaţia (3.1) se obţine:
;;
A
A
G
A
A
G
dA
dAz
zdA
dAy
y (3.6)
Fig. 3.2
Din relaţiile (3.5) rezultă că momentele statice ale suprafeţelor plane sunt egale şi cu
produsul dintre aria suprafeţei şi distanţa de la centrul de greutate până la axa considerată:
.;GyGz
zASyAS (3.7)
Din relaţiile (3.7) reiese că momentele statice calculate în raport cu axele centrale sunt
nule:
.0;0 GG yz
SS (3.8)
Dar axele de simetrie sunt axe centrale, deci momentul static al unei suprafeţe faţă de o

- 42 -
axă de simetrie este egal cu zero.
În cazul secţiunilor complexe, alcătuite din figuri simple de arie Ai, cu coordonatele
centrului de greutate (zi, yi), momentele statice în raport cu axele Oz şi Oy sunt:
n
i
iinny
n
i
iinnz
zAzAzAS
yAyAyAS
1
11
1
11
;
;
(3.9)
Astfel, poziţia centrului de greutate al secţiunii complexe, alcătuită din figuri simple,
pentru care se cunosc centrele de greutate, este dată de relaţiile:
;
1
1
n
i
i
n
i
ii
z
G
A
Ay
A
Sy .
1
1
n
i
i
n
i
iiy
G
A
Az
A
Sz (3.10)
U3.3 Momente de inerţie
Acestea reprezintă caracteristici geometrice ale suprafeţelor plane, la care însă distanţa
la elementul de suprafaţă apare la puterea a doua, sau apare produsul coordonatelor
elementului. Astfel, momentele de inerţie pot fi axiale, când se calculează în raport cu axa Oz,
respectiv cu axa Oy:
A
y
A
zdAzIdAyI 22 ; (3.11)
sau momentele de inerţie pot fi centrifugale, când se calculează în raport cu ambele axe Oz şi
Oy:
A
zydAzyI ; (3.12)
În cazul când una dintre axe trece prin centrul de greutate al suprafeţei, momentul de
inerţie corespunzător se numeşte central.
Integrala:
;2
0 A
pdArII (3.13)
în care r reprezintă lungimea razei vectoare (de la originea sistemului de referinţă la punctul
considerat), se numeşte moment de inerţie polar al suprafeţei date în raport cu polul O.
Dar, 222 yzr şi ca urmare:
A
yz
AA
PIIdAydAzdAyzII .2222
0 (3.14)
Momentele de inerţie ale suprafeţelor se exprimă în unităţi de lungime la puterea a patra
(mm4,m4). Momentele de inerţie axiale şi polare sunt întotdeauna mărimi pozitive, iar
momentul de inerţie centrifugal poate fi pozitiv, negativ sau nul. Valoarea acestuia este zero
dacă se calculează faţă de un sistem de referinţă în care cel puţin o axă este de simetrie. În
figura 3.3 este prezentată o secţune care are ca axă de simetrie axa y. Orice element de
suprafaţă dA are ca simetric un element similar, aparţinînd secţiunii. Aportul acestor două
elemente la calculul lui x este nul:
0 AA
dAzydAyz (3.15)
Semnul momentului de inerţie centrifugal depinde de poziţia suprafeţei faţă de sistemul
de referinţă adoptat. Astfel, elementele de suprafaţă din cadranele I şi III (fig.3.4) dau
momente de inerţie centrifugale pozitive, deoarece z şi y au acelasi semn, iar cele din

- 43 -
cadranele II şi IV dau momente centrifugale negative, deoarece z şi y au semne contrare.
Fig. 3.3 Fig.3.4
U3.4. Variaţia momentelor de inerţie cu translaţia axelor
Prezintă interes variaţia momentelor de inerţie cu translaţia axelor, respectiv cunoscând
momentele de inerţie faţă de axele sistemului de referinţă zOy, se cer să se determine, în
funcţie de ele, momentele raportate la reperul translatat z1O1y1 (fig. 3.2).
Plecând de la relaţiile de definiţie (3.11) şi ţinând cont de relaţiile (3.2), se pot calcula
momentele de inerţie faţă de axele sistemului de referinţăz1O1y1, respectiv:
.
;2
;2
00000011
2
00
2
0
2
1
2
00
2
0
2
1
11
1
1
AyzSySzIdAyyzzdAyzI
AzSzIdAzzdAzI
AySyIdAyydAyI
zyzy
AA
yz
yy
AA
y
zz
AA
z
(3.16)
Dacă originea vechiului sistem de axe zOy coincide cu centrul de greutate al suprafeţei
plane, respectiv dacă axele Oz şi Oy sunt centrale, atunci conform relaţiilor (3.8), relaţiile
(3.16) devin:
.
;
;
00
2
0
2
0
11
1
1
AyzII
AzII
AyII
zyGyz
yGy
zGz
(3.17)
unde s-a atribuit indicele G momentelor de inerţie calculate faţă de axele centrale. Aceste
relaţii sunt cunoscute sub numele de formulele lui J. Steiner. Conform relaţiilor (3.17) rezultă
că momentul de inerţie calculat faţă de o axă oarecare este egal cu momentul de inerţie
calculat în raport cu o axă paralelă, care trece prin centrul de greutate, la care se adaugă
produsul dintre aria suprafeţei şi pătratul distanţei dintre axe, iar in cazul momentului de
inerţie centrifugal se adaugă produsul distanţelor dintre axe şi aria suprafeţei.
Examinând relaţiile lui Steiner se observă că indiferent cum se translatează un reper faţă
de reperul central, momentele de inerţie axiale cresc. Deci dintre toate reperele paralele cu un
reper dat, cele mai mici momente de inerţie axiale se obţin faţă de reperul central. Se observă
de asemenea că momentul de inerţie centrifugal nu-şi schimbă valoarea în cazul translaţiei
numai a uneia dintre axele ce trec prin centrul de greutate al suprafeţei.
U3.5 Variaţia momentelor de inerţie cu rotaţia axelor
Se presupun cunoscute momentele de inerţie axiale şi momentul centrifugal al unei
suprafeţe oarecare în raport cu axele rectangulare zOy (fig.3.5), interesând ca în funcţie de
acestea să se calculeze momentele de inerţie faţă de reperul rotit cu unghiul α în sens
trigonometric, z1O1y1 respectiv:

- 44 -
A
yz
A
y
A
zdAyzIdAzIdAyI .;;
11
2
1
2
1 1111 (3.18)
Fig. 3.5
Un element de arie dA este poziţionat de coordonatele z şi y faţă de reperul vechi şi de
coordonatele z1 şi y1 faţă de reperul rotit cu unghiul α. Între ele există relaţiile de recurenţă:
.sincos
;cossin
1
1
zyy
zyz (3.19)
Cu ajutorul relaţiilor (3.19) momentele de inerţie (3.18) calculate faţă de sistemul de axe
rotit, devin:
.2sin2cos2
1
2
12sin
2
2cos1
2
2cos12sin
sincossincos 222
2
11
zyyz
yzzyyzzy
yz
A A
z
III
IIIIII
IIdAzydAyI
3.20,a)
.2sin2cos2
1
2
12sin
2
2cos1
2
2cos12sin
cossincossin 222
2
11
zyyz
yzzyyzzy
yz
A A
y
III
IIIIII
IIdAzydAzI
3.20,b)
2cos2sin2
1
cossin2sin2
2sin2
sincoscossin
22
1111
zyyz
zyzy
yz
A A
yz
III
IIII
dAzyzydAyzI
(3.20,c)
Prin adunarea primelor două relaţii din 3.20 a) şi 3.20 b) se obţine:
pyzyz
IIIII11
(invariant de ordinul I) (3.21)
Deci, suma momentelor de inerţie axiale calculate faţă de două axe ortogonale nu
depinde de unghiul α şi prin rotirea axelor ea rămâne o mărime constantă, egală cu
momentul de inerţie polar al suprafeţei respective. Din relaţiile (3.20) rezultă că prin variaţia unghiului α momentele de inerţie faţă de
axele rotite îşi schimbă valoarea, în foarte multe cazuri practice prezentând interes
cunoaşterea acelor axe, faţă de care momentele de inerţie prezintă valori extreme.
Faţă de o axă momentul de inerţie axial va fi maxim, iar faţă de axa perpendiculară
minim pentru a satisface relaţia (3.20,a,b şi c).
Axele faţă de care momentele de inerţie axiale prezintă valori maxime sau minime se
numesc axe principale de inerţie, iar momentele de inerţie axiale calculate faţă de aceste
axe momente principale de inerţie.
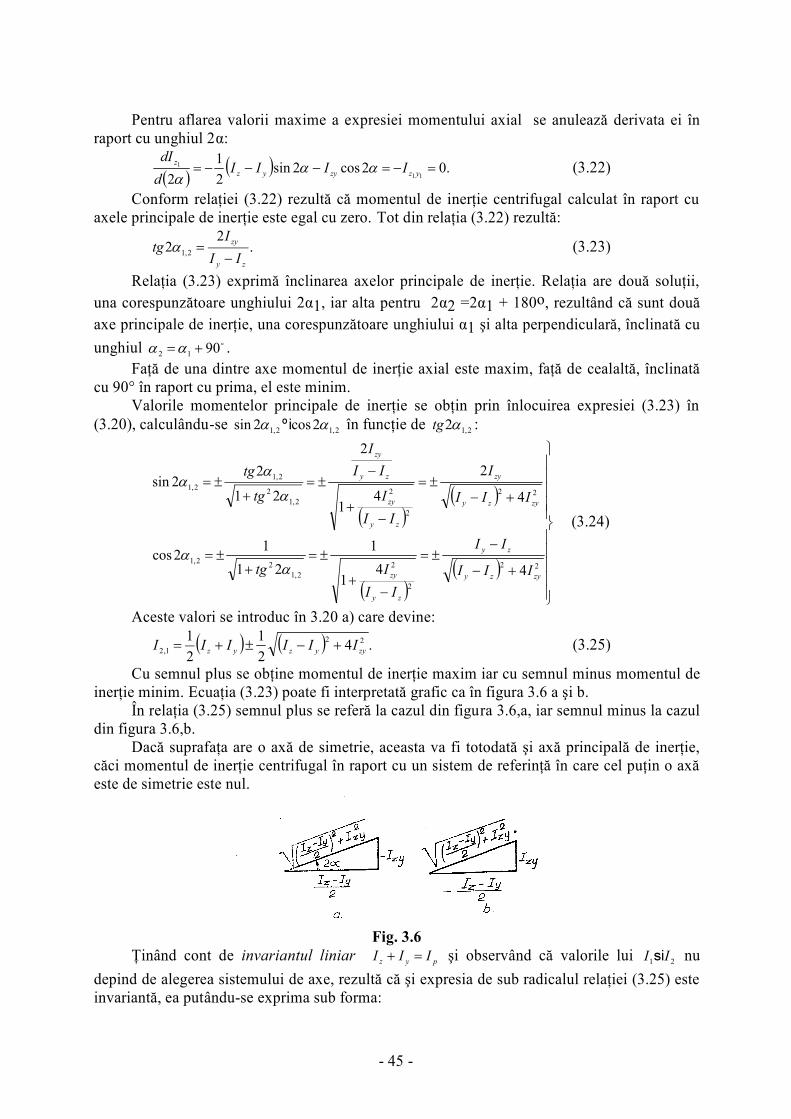
- 45 -
Pentru aflarea valorii maxime a expresiei momentului axial se anulează derivata ei în
raport cu unghiul 2α:
.02cos2sin
2
1
2 11
1 yzzyyz
zIIII
d
dI
(3.22)
Conform relaţiei (3.22) rezultă că momentul de inerţie centrifugal calculat în raport cu
axele principale de inerţie este egal cu zero. Tot din relaţia (3.22) rezultă:
.2
22,1
zy
zy
II
Itg
(3.23)
Relaţia (3.23) exprimă înclinarea axelor principale de inerţie. Relaţia are două soluţii,
una corespunzătoare unghiului 2α1, iar alta pentru 2α2 =2α1 + 180o, rezultând că sunt două
axe principale de inerţie, una corespunzătoare unghiului α1 şi alta perpendiculară, înclinată cu
unghiul 9012 .
Faţă de una dintre axe momentul de inerţie axial este maxim, faţă de cealaltă, înclinată
cu 90° în raport cu prima, el este minim.
Valorile momentelor principale de inerţie se obţin prin înlocuirea expresiei (3.23) în
(3.20), calculându-se 2,12,1
2cos2sin º în funcţie de 2,1
2tg :
22
2
2
2,1
22,1
22
2
2
2,1
2
2,1
2,1
441
1
21
12cos
4
2
41
2
21
22sin
zyzy
zy
zy
zy
zyzy
zy
zy
zy
zy
zy
III
II
II
Itg
III
I
II
I
II
I
tg
tg
(3.24)
Aceste valori se introduc în 3.20 a) care devine:
.42
1
2
1 22
1,2 zyyzyzIIIIII (3.25)
Cu semnul plus se obţine momentul de inerţie maxim iar cu semnul minus momentul de
inerţie minim. Ecuaţia (3.23) poate fi interpretată grafic ca în figura 3.6 a şi b.
În relaţia (3.25) semnul plus se referă la cazul din figura 3.6,a, iar semnul minus la cazul
din figura 3.6,b.
Dacă suprafaţa are o axă de simetrie, aceasta va fi totodată şi axă principală de inerţie,
căci momentul de inerţie centrifugal în raport cu un sistem de referinţă în care cel puţin o axă
este de simetrie este nul.
Fig. 3.6
Ţinând cont de invariantul liniar pyzIII şi observând că valorile lui
21II nu
depind de alegerea sistemului de axe, rezultă că şi expresia de sub radicalul relaţiei (3.25) este
invariantă, ea putându-se exprima sub forma:

- 46 -
.4
1
4
1
4
222
4
1 22222
22
22
zyyzpzyyzyzzy
yzyzyzyz
zyyzIIIIIIIIII
IIIIIIIIIII
Deci diferenţa 2
zyyzIII este independentă de alegerea sistemului de axe, ea constituind
invariantul pătratic al ansamblului de mărimi zyyzIII , , sau exprimând acest al doilea
invariant cu ajutorul momentelor de inerţie principale, rezultă că:
.21
2 IIIIIzyyz (3.26)
cu observaţia că: .21
IIIIyz
Pentru aflarea direcţiei faţă de care momentul de inerţie este maxim se foloseşte relaţia
(3.22):
2sin2sin
2
2cos
2sin2cos2sin2cos2
1
22
1
2
zy
zy
zy
yz
zyzyyz
z
I
tgI
I
IIIIII
d
Id
(3.27)
Pentru ca semnul derivatei a doua să depindă numai de semnul lui Izy, trebuie ca
2,0
,
interval în care sin2α este pozitiv.
Se obţine astfel:
- pentru
02
,2
,002
2
1
d
IdI
z
zy deci axa care face unghiul α cu axa z este de
minim, axa de maxim trecând prin cadranele II şi IV;
- pentru
02
,2
,002
2
1
d
IdI
z
zy deci axa care face unghiul α cu axa z este de
minim, axa de maxim trecând prin cadranele I şi III.
Totodată rezultă că se poate stabili semnul momentului de inerţie centrifugal, dacă se
cunoaşte cadranul prin care trece axa principală faţă de care momentul de inerţie prezintă o
valoare maximă (respectiv minimă). Astfel momentul de inerţie centrifugal este negativ, dacă
momentul de inerţie faţă de axa principală din primul cadran are o valoare maximă şi invers,
momentul de inerţie centrifugal este pozitiv, dacă momentul de inerţie faţă de axa principală
din primul cadran este minim.
Planele longitudinale care conţin axele principale centrale se numesc plane principale
centrale de inerţie.
Utilizând relaţia (3.20), cunoscând momentele principale de inerţie, se pot calcula
momentele de inerţie în raport cu axe înclinate cu unghiul α:
;2cos2
1
;2cos2
1
2
1
;2cos2
1
2
1
21
2121
2121
III
IIIII
IIIII
zy
z
z
(3.28)
unde α este format de axa z cu axa principală (1) măsurat în sens antiorar. Aceste relaţii se pot
reprezenta într-un sistem de referintă .zzy
IfI
Se înlocuiesc 21
22sin
II
Izy
şi
221
2412cos
II
Izy
în prima relaţie din (3.28)
obţinând:

- 47 -
.22
2
212
2
21
III
III
zyz (3.29)
adică un cerc de rază 2
21II
R
şi coordonatele centrului .02
21
zyz
III
I
Locul geometric astfel construit poartă denumirea de cerc al lui Mohr (fig.3.7) şi arată
valoarea momentelor axiale şi centrifugale de inerţie, calculate în raport cu toate axele
concurente.
22
; ;2
;; tgII
ItgDCAABADIAD
IIOCIOBICA
zy
zy
zy
yz
yz
Fig. 3.7
.42
1
2
1
;42
1
2
1
;42
1
2
22
2
22
1
222
2
zyyzyz
zyyzyz
zyzyzy
zy
IIIIIIOE
IIIIIIOF
IIIIII
CD
(3.30)
Direcţiile axelor principale de inerţie sunt DE şi DF. Orice punct de pe cercul lui Mohr
reprezintă un cuplu de axe ortogonale pentru care se pot calcula la scară .,zyyz
III
U3.6 Raze de inerţie, elipsă de inerţie
În cazul multor probleme este convenabil ca momentele de inerţie axiale să fie
exprimate printr-un produs dintre aria suprafeţei şi pătratul unei distanţe fictive, unde s-ar
putea considera concentrată suprafaţa:
.22 AiIAiIyyzz
º (3.31)
unde distanţele fictive iz şi iy, se numesc raze de inerţie sau raze de giraţie, definite:
.;A
Ii
A
Ii
y
y
z
z
Razele principale de inerţie, definite în funcţie de momentele principale de inerţie vor fi:
.; 2
2
1
1A
Ii
A
Ii
Variaţia momentelor de inerţie în raport cu axele concurente, se poate reprezenta şi cu ajutorul
razelor principale de inerţie. Se consideră o suprafaţă oarecare A (fig.3.8,c), [21]
- 48 -
Fig. 3.8
raportată la cele două axe principale de inerţie (1) şi (2), se calculează i1 şi i2 şi se
reprezintă la scară i1 perpendicular pe axa (1), iar i2 perpendicular pe axa (2).
Punctele obţinute se unesc cu ajutorul unei elipse, numită elipsă de inerţie. Elipsa de
inerţie ne arată variaţia momen-telor de inerţie în raport cu diferite axe concurente. Sensul
alungirii acesteia, corespunde cu cel al împrăştierii suprafeţei.
U3.7 Module de rezistenţă
Se consideră o suprafaţă oarecare (fig.3.9) şi axele ei centrale y şi z. Mărimea
geometrică:
Fig. 3.9
.max
y
IW z
z (3.32)
unde max
y reprezintă coordonata y a celui mai îndepărtat punct de axa Oz, este denumită
modul de rezistenţă axial faţă de axa Oz.
Când punctele cele mai depărtate de axa Oz sunt B sau C cu yB şi yC se pot calcula
modulele de rezistenţă:
.,
,
CB
z
CBzy
IW (3.33)
Modulele de rezistenţă se exprimă în L3 (deci lungimi la puterea a treia).
Faţă de axa Oy:
.max
z
IW
y
y (3.34)
Modulul de rezistenţă polar, se defineşte ca:
.max
R
IW
p
p (3.35)
unde Ip este momentul de inerţie polar, iar Rmax este raza celui mai depărtat punct de pe
conturul exterior al secţiunii faţă de pol.
Modulele de rezistenţă ale unei secţiuni compuse nu se pot calcula prin însumarea
modulelor de rezistenţă ale figurilor componente, ci momentele de inerţie se calculează prin
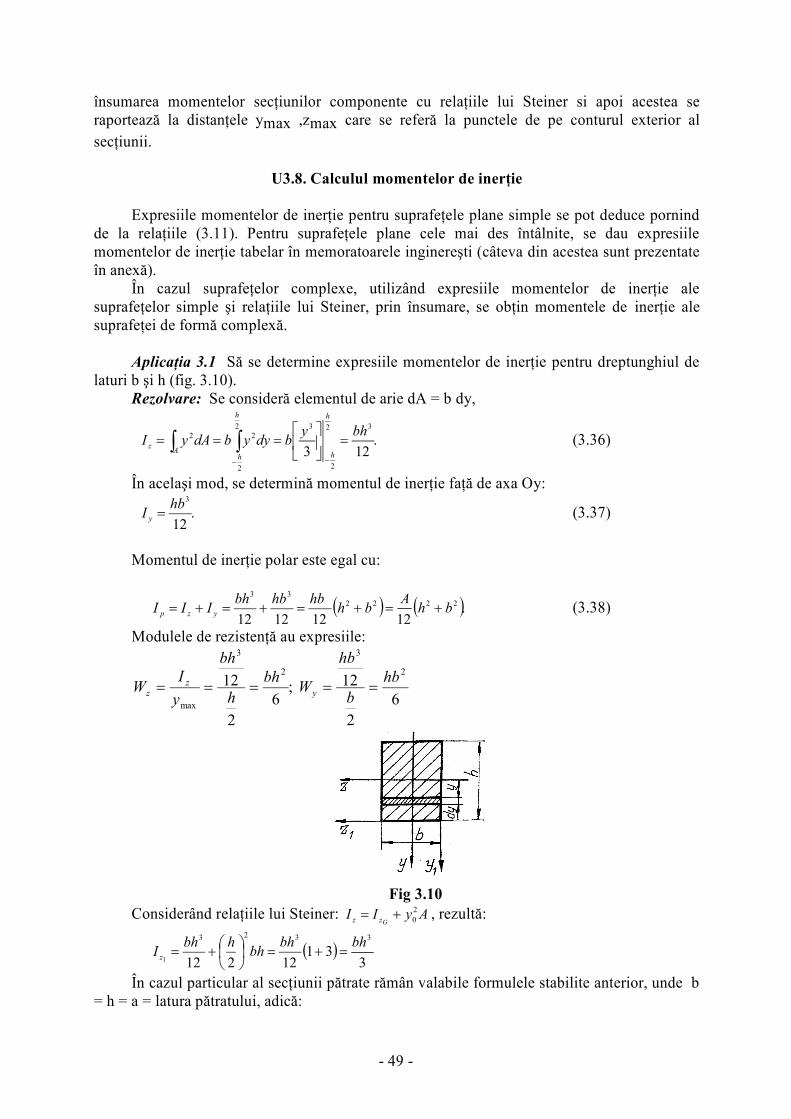
- 49 -
însumarea momentelor secţiunilor componente cu relaţiile lui Steiner si apoi acestea se
raportează la distanţele ymax ,zmax care se referă la punctele de pe conturul exterior al
secţiunii.
U3.8. Calculul momentelor de inerţie
Expresiile momentelor de inerţie pentru suprafeţele plane simple se pot deduce pornind
de la relaţiile (3.11). Pentru suprafeţele plane cele mai des întâlnite, se dau expresiile
momentelor de inerţie tabelar în memoratoarele inginereşti (câteva din acestea sunt prezentate
în anexă).
În cazul suprafeţelor complexe, utilizând expresiile momentelor de inerţie ale
suprafeţelor simple şi relaţiile lui Steiner, prin însumare, se obţin momentele de inerţie ale
suprafeţei de formă complexă.
Aplicaţia 3.1 Să se determine expresiile momentelor de inerţie pentru dreptunghiul de
laturi b şi h (fig. 3.10).
Rezolvare: Se consideră elementul de arie dA = b dy,
.123
32
2
32
2
22 bhybdyybdAyI
h
h
h
hA
z
(3.36)
În acelaşi mod, se determină momentul de inerţie faţă de axa Oy:
.12
3hbI
y (3.37)
Momentul de inerţie polar este egal cu:
.12121212
2222
33
bhA
bhhbhbbh
IIIyzp
(3.38)
Modulele de rezistenţă au expresiile:
6
2
12 ;6
2
122
3
2
3
max
hb
b
hb
Wbh
h
bh
y
IW y
zz
Fig 3.10
Considerând relaţiile lui Steiner: AyIIGzz
2
0 , rezultă:
3
3112212
3323
1
bhbhbh
hbhI
z
În cazul particular al secţiunii pătrate rămân valabile formulele stabilite anterior, unde b
= h = a = latura pătratului, adică:

- 50 -
.4
,3
,3
,6
0;12
4444
4
1111
aI
aI
aI
aI
Ia
III
yzyzp
zyyzp
Aplicaţia 3.2 Pentru triunghiul din fig.3.11 se cer să se calculeze momentele de inerţie
faţă de axele Oz şi Gz
G .
Fig. 3.11
Rezolvare: Se consideră elementul de arie dA = z dy şi raportul:
.12
.
3
0
3
0
2
0
22 bhdyydyyh
h
bdyyyh
h
bdAyI
h
yh
hhh
A
z
(3.39)
.3618
1
12
1
2312
3
3
23
2
0
bhbh
bhhbhAyII
zzG
(3.40)
Aplicaţia 3.3 Se cere să se determine expresiile momentelor de inerţie pentru suprafaţa
circulară de rază R = D/2 din figura 3.12.
Fig. 3.12
Rezolvare: Considerând y = ρsinθ şi dA = ρdθdr rezultă
.644
sin44
sinsin422
0
2
4
0
22
0
2
2
0 0
22 Drd
rdddI
rr
z
(3.41)
Datorită simetriei în raport cu orice direcţie centrală, momentele de inerţie axiale
centrale Iz şi Iy sunt egale.
.32
4DIII
yzp
(3.42)
Pentru o suprafaţă circulară cu diametrul exterior D şi diametrul interior d:
.6432
4444 dDIIdDIyzp
(3.43)
Razele de inerţie sunt:
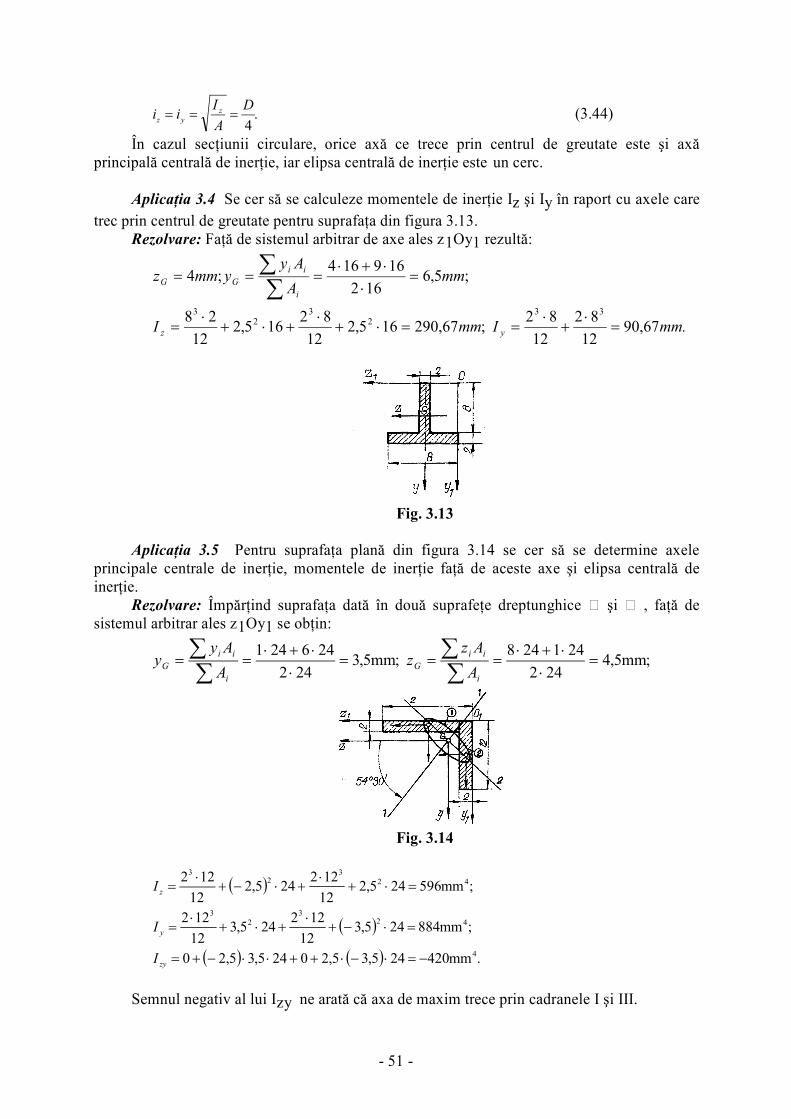
- 51 -
.4
D
A
Iii z
yz (3.44)
În cazul secţiunii circulare, orice axă ce trece prin centrul de greutate este şi axă
principală centrală de inerţie, iar elipsa centrală de inerţie este un cerc.
Aplicaţia 3.4 Se cer să se calculeze momentele de inerţie Iz şi Iy în raport cu axele care
trec prin centrul de greutate pentru suprafaţa din figura 3.13.
Rezolvare: Faţă de sistemul arbitrar de axe ales z1Oy1 rezultă:
mm.ImmI
mmA
Ayymmz
yz
i
ii
GG
67,9012
82
12
82 ;67,290165,2
12
82165,2
12
28
;5,6162
169164;4
332
32
3
Fig. 3.13
Aplicaţia 3.5 Pentru suprafaţa plană din figura 3.14 se cer să se determine axele
principale centrale de inerţie, momentele de inerţie faţă de aceste axe şi elipsa centrală de
inerţie.
Rezolvare: Împărţind suprafaţa dată în două suprafeţe dreptunghice şi , faţă de
sistemul arbitrar ales z1Oy1 se obţin:
;mm5,4242
241248 ;mm5,3
242
246241
i
ii
G
i
ii
GA
Azz
A
Ayy
Fig. 3.14
.mm420245,35,20245,35,20
;mm884245,312
122245,3
12
122
;mm596245,212
122245,2
12
122
4
423
2
3
42
32
3
zy
y
z
I
I
I
Semnul negativ al lui Izy ne arată că axa de maxim trece prin cadranele I şi III.

- 52 -
;916,2
596884
420222
zy
zy
II
Itg
.'30144º'3054;10971180271916,2221 iarctg
.mm296 mm1184
42048845962
1
2
8845964
2
1
24
21
2222
2,1
II
IIIII
I zyyz
yz
Pentru verificarea rezultatelor de până acum, folosim relaţia de control: ,2
21 zyyzIIIII
care se verifică pentru rezultatele obţinute.
mm.A
Iiiarmm
A
Ii 48,2
48
296 97,4
48
1184 22
11
Împrăştierea materialului este după axa 2, deci elipsa este alungită după această axă.
Având trasată elipsa la scară, putem măsura razele de inerţie după oricare două direcţii
perpendiculare în centrul de greutate.
Aplicaţia 3.6 Se cer să se calculeze momentele de inerţie Iz şi Iy pentru suprafaţa din
figura 3.15.
Fig. 3.15
Rezolvare: Pentru elementul detaşat de lăţime dz, conform relaţiei:
.3
1 3ydzdIz (3.38)
Deci: ;mm10197,325
643
2
3
1 46
40
0
3240
40
3
z
z
z
z
zzdz
zdzydII
.mm10092,125
642; 46
40
0
2
2
40
40
22
z
z
z
z
yyydz
zzydzzdIIdAzdI
Pentru determinarea razelor de inerţie, este necesar calculul ariei de sub curbă:
.mm341325
642 2
40
0
2
dzz
dzyA
z
z
.mm9,173413
10092,1 ;mm6,30
3413
10197,3 66
A
Ii
A
Ii
y
yz
z
Aplicaţia 3.7 Să se calculeze momentul de inerţie Gz
I pentru suprafaţa din figura 3.16.
Rezolvare: Este necesar să se determine aria triunghiului DFE cu BE = 60 mm şi unghiul
de 30o între BE şi BA.
;08,96866,0
21,83;21,83603030cos200
i
ii
GA
AyyiarmmDFmmh
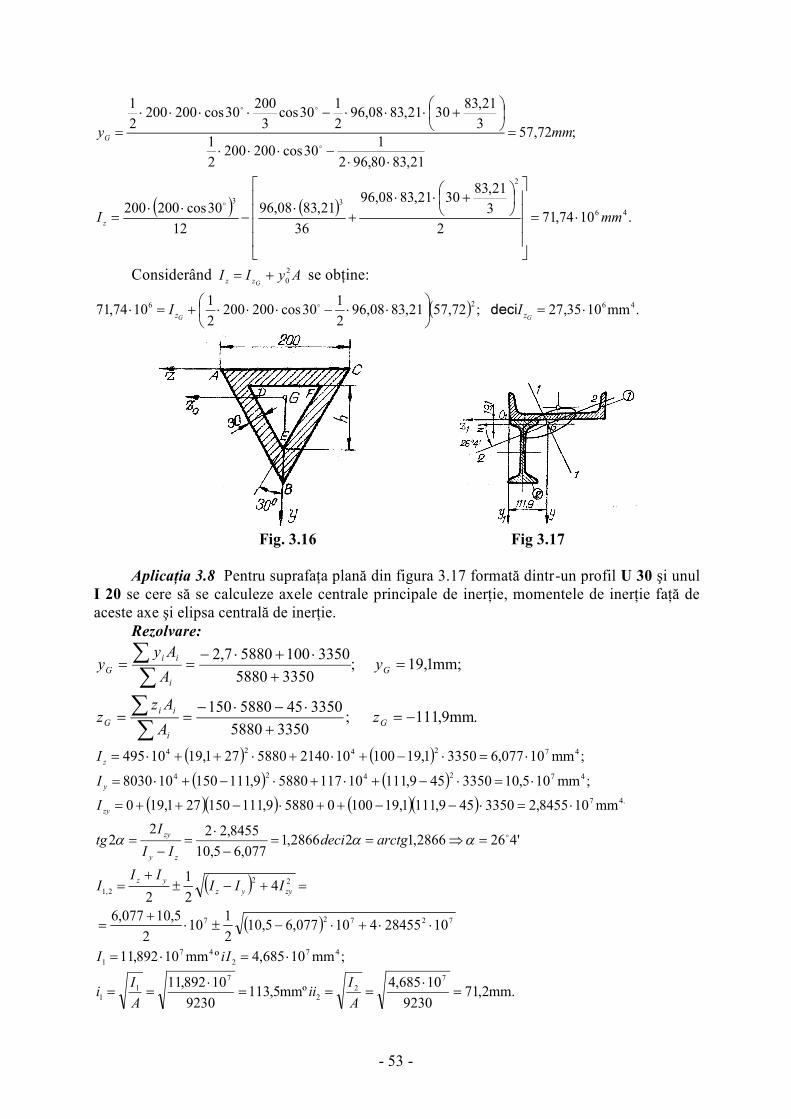
- 53 -
.1074,71
2
3
21,833021,8308,96
36
21,8308,96
12
30cos200200
;72,57
21,8380,962
130cos200200
2
1
3
21,833021,8308,96
2
130cos
3
20030cos200200
2
1
46
2
33
mmI
mmy
z
G
Considerând AyIIGzz
2
0 se obţine:
.mm1035,27 ;72,5721,8308,962
130cos200200
2
11074,71 4626
GG zzII
Fig. 3.16 Fig 3.17
Aplicaţia 3.8 Pentru suprafaţa plană din figura 3.17 formată dintr-un profil U 30 şi unul
I 20 se cere să se calculeze axele centrale principale de inerţie, momentele de inerţie faţă de
aceste axe şi elipsa centrală de inerţie.
Rezolvare:
.mm9,111 ;33505880
3350455880150
;mm1,19 ;33505880
335010058807,2
G
i
ii
G
G
i
ii
G
zA
Azz
yA
Ayy
;mm105,103350459,1111011758809,111150108030
;mm10077,633501,191001021405880271,1910495
472424
472424
y
z
I
I
.47 mm108455,23350459,1111,19100058809,111150271,190 zy
I
'4262866,122866,1077,65,10
8455,2222
arctgdeci
II
Itg
zy
zy
;mm10685,4ºmm10892,11
1028455410077,65,102
110
2
5,10077,6
42
1
2
47
2
47
1
72727
22
2,1
IiI
IIIII
Izyyz
yz
mm.2,719230
10685,4ºmm5,113
9230
10892,11 7
2
2
7
1
1
A
Iii
A
Ii
- 54 -
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii caracteristicilor geometrice de rang superior ale suprafetelor plane.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
construiasca elipsele principale centrale de inertie pentru diferite suprafete plane de forma
complexa;
realizeze programe de calcul pentru trasarea elipselor principale centrale de inertie.
Durata medie de parcurgere a unităţii de învăţare este de 6 ore.
U3.9 Test de evaluare a cunostintelor
U3.9.1 Ce se intelege prin moment de inertie axial, polar si axial central al sectiunii?
U3.9.2 Ce efect are schimbarea sistemului de referinta asupra semnului momentului
de inertie centrifugal?
U3.9.3 Care din cele doua momente de inertie ale triunghiului este mai mare:
- cel raportat la o axa ce trece prin baza?
- cel raportat la o axa ce trece prin varf si este paralela cu baza?
U3.9.4 Se modifica suma momentelor de inertie axiale la rotatia axelor?
U3.9 .5 Care este definitia axelor principale de inertie?
U3.9.6 Ce sunt razele de inertie?
U3.9.7 Cum se traseaza elipsa principala centrala de inertie?
Tema de control trebuie să fie alcătuita din TO DO
Exemplificaţi constructia grafica a elipsei principale centrale de inertie pentru
forme complexe de suprafete.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
- 55 -
Modulul 4. Tractiune- Compresiune
Cuprins
U4.1 Forta axiala, tensiuni,.deformatii.................... ................................................. ..55
U4.2 Tipuri de probleme................................... ........................................................ .58
U4.3 Contractia transversala............................................. .................................... ......59
U4.4 Bare cu variatie de sectiune................................................................... ............ .60
U4.5 Calculul barelor verticale luand in considerare greutatea proprie.................... .64.
U4.6 Probleme static nedeterminate............................................................. ............. ..69
U.4.6.1 Piese cu sectiune neomogena.................................................... ..................69
U 4.6.2 Bara articulata ( incastrata) la ambele capete................................ .............70
U 4.6.3 Sisteme de bare paralele si grinda de rigiditate foarte mare........... ............71
U 4.6.3.1 Sistem de bare paralele si grinda articulata la un capat..... ...................71
U 4.6.3.2 Sistem de bare paralele si grinda nearticulata la capete... .....................72
U 4.6.4 Sistem simetric de bare articulate concurente...................... ........................72
U 4.6.5 Sistem de bare articulate concurente...................................... ......................73
U 4.6.6 Tensiuni aparute in urma variatiilor de temperatura................. ...................74
U 4.6.7 Tensiuni aparute ca urmare a unor imperfectiuni de montaj... .....................76
U4.7 Aspecte ale calculului la compresiune............................................. ...................77
U 4.7.1 Ruperea............................................................. ..................... ......................77
U 4.7.2 Strivirea............................................................................... .........................78
U4.8 Incercari de rezistenta ale materialelor la tractiune- compresiune
Curba caracteristica............................................................................. .................81
U 4.8.1 Generalitati.................................................................................... ...............81
U 4.8.2 Incercarea de tractiune................................................................ .................83
U 4.8.2.1 Epruvete. Conditii generale de prelevare a epruvetelor....... ................83
U 4.8.2.2 Incercarea la tractiune.................. .................................... .....................83
U 4.8.2.3 Curba caracteristica............................................................. .................84
U 4.8.3 Tensiunea admisibila............................................... ...................... ............. .88
U 4.8.4 Incercarea de compresiune.............................................................. ............88
U 4.9 Test de evaluare a cunostintelor................................................................. ......94
U4.1 Forta axiala, tensiuni,.deformatii
Se consideră o bară de secţiune constantă A (dreptunghiulară, circulară sau pătrată)
având lungimea l. Asupra barei se aplică un sistem de forţe egale şi de sens contrar P,
orientate de-a lungul axei normale pe secţiune (Fig. 4.1,a şi b). În primul caz (Fig.4.1,a), când
se trage de material, se spune despre acesta că este întins, solicitarea fiind de tracţiune. În al
doilea caz (Fig.4.1,b), când materialul este apăsat cu forţa F, se spune că acesta este
comprimat, solicitarea fiind de compresiune. Tracţiunea este uşor de sesizat, aceasta având
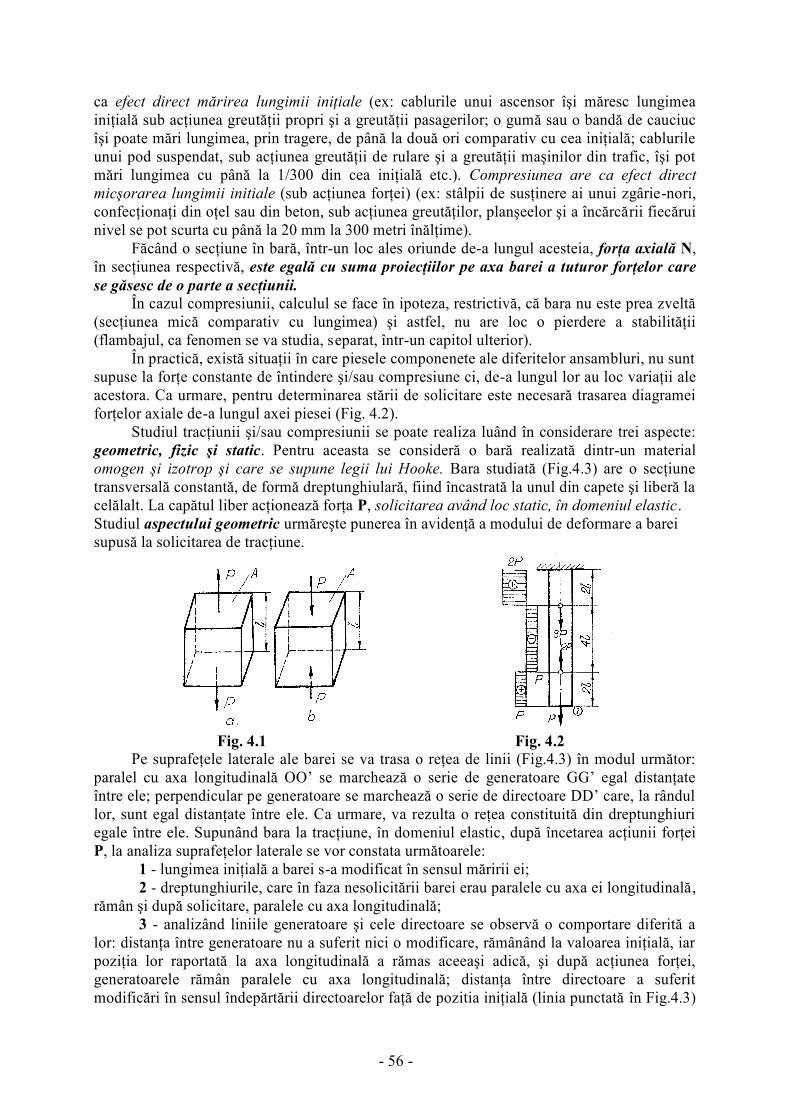
- 56 -
ca efect direct mărirea lungimii iniţiale (ex: cablurile unui ascensor îşi măresc lungimea
iniţială sub acţiunea greutăţii propri şi a greutăţii pasagerilor; o gumă sau o bandă de cauciuc
îşi poate mări lungimea, prin tragere, de până la două ori comparativ cu cea iniţială; cablurile
unui pod suspendat, sub acţiunea greutăţii de rulare şi a greutăţii maşinilor din trafic, îşi pot
mări lungimea cu până la 1/300 din cea iniţială etc.). Compresiunea are ca efect direct
micşorarea lungimii initiale (sub acţiunea forţei) (ex: stâlpii de susţinere ai unui zgârie-nori,
confecţionaţi din oţel sau din beton, sub acţiunea greutăţilor, planşeelor şi a încărcării fiecărui
nivel se pot scurta cu până la 20 mm la 300 metri înălţime).
Făcând o secţiune în bară, într-un loc ales oriunde de-a lungul acesteia, forţa axială N,
în secţiunea respectivă, este egală cu suma proiecţiilor pe axa barei a tuturor forţelor care
se găsesc de o parte a secţiunii. În cazul compresiunii, calculul se face în ipoteza, restrictivă, că bara nu este prea zveltă
(secţiunea mică comparativ cu lungimea) şi astfel, nu are loc o pierdere a stabilităţii
(flambajul, ca fenomen se va studia, separat, într-un capitol ulterior).
În practică, există situaţii în care piesele componenete ale diferitelor ansambluri, nu sunt
supuse la forţe constante de întindere şi/sau compresiune ci, de-a lungul lor au loc variaţii ale
acestora. Ca urmare, pentru determinarea stării de solicitare este necesară trasarea diagramei
forţelor axiale de-a lungul axei piesei (Fig. 4.2).
Studiul tracţiunii şi/sau compresiunii se poate realiza luând în considerare trei aspecte:
geometric, fizic şi static. Pentru aceasta se consideră o bară realizată dintr-un material
omogen şi izotrop şi care se supune legii lui Hooke. Bara studiată (Fig.4.3) are o secţiune
transversală constantă, de formă dreptunghiulară, fiind încastrată la unul din capete şi liberă la
celălalt. La capătul liber acţionează forţa P, solicitarea având loc static, în domeniul elastic.
Studiul aspectului geometric urmăreşte punerea în avidenţă a modului de deformare a barei
supusă la solicitarea de tracţiune.
Fig. 4.1 Fig. 4.2
Pe suprafeţele laterale ale barei se va trasa o reţea de linii (Fig.4.3) în modul următor:
paralel cu axa longitudinală OO’ se marchează o serie de generatoare GG’ egal distanţate
între ele; perpendicular pe generatoare se marchează o serie de directoare DD’ care, la rândul
lor, sunt egal distanţate între ele. Ca urmare, va rezulta o reţea constituită din dreptunghiuri
egale între ele. Supunând bara la tracţiune, în domeniul elastic, după încetarea acţiunii forţei
P, la analiza suprafeţelor laterale se vor constata următoarele:
1 - lungimea iniţială a barei s-a modificat în sensul măririi ei;
2 - dreptunghiurile, care în faza nesolicitării barei erau paralele cu axa ei longitudinală,
rămân şi după solicitare, paralele cu axa longitudinală;
3 - analizând liniile generatoare şi cele directoare se observă o comportare diferită a
lor: distanţa între generatoare nu a suferit nici o modificare, rămânând la valoarea iniţială, iar
poziţia lor raportată la axa longitudinală a rămas aceeaşi adică, şi după acţiunea forţei,
generatoarele rămân paralele cu axa longitudinală; distanţa între directoare a suferit
modificări în sensul îndepărtării directoarelor faţă de pozitia iniţială (linia punctată în Fig.4.3)
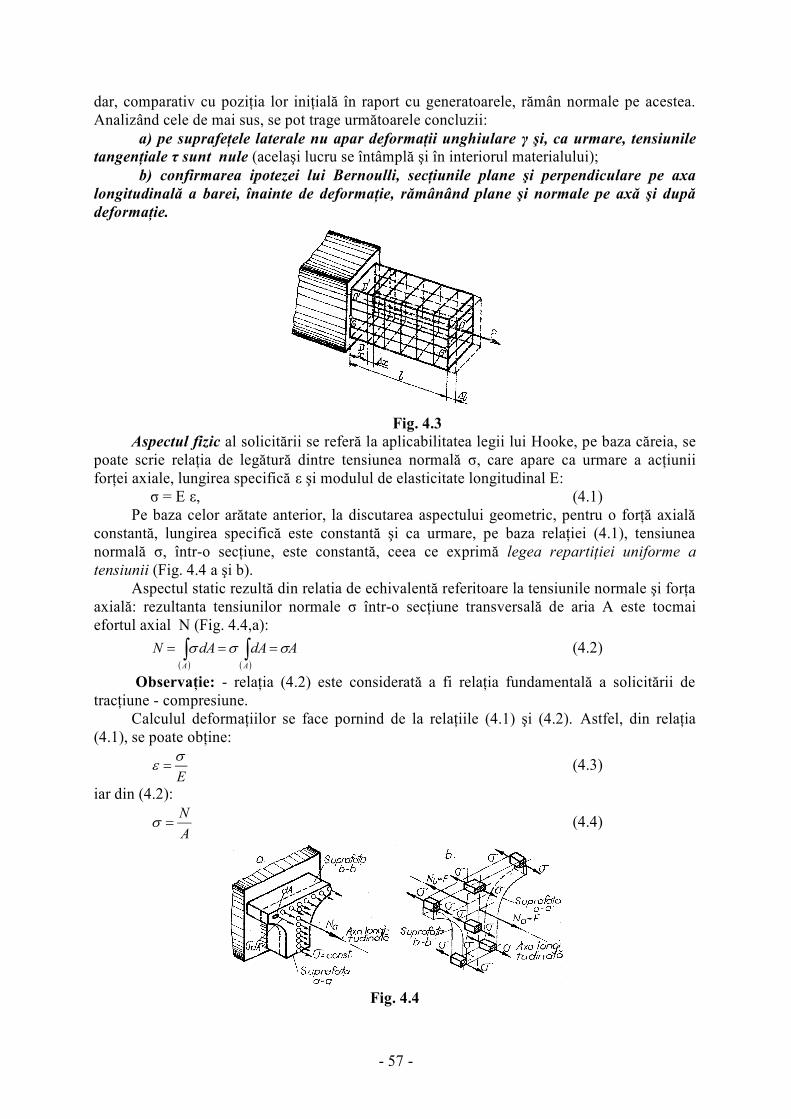
- 57 -
dar, comparativ cu poziţia lor iniţială în raport cu generatoarele, rămân normale pe acestea.
Analizând cele de mai sus, se pot trage următoarele concluzii:
a) pe suprafeţele laterale nu apar deformaţii unghiulare γ şi, ca urmare, tensiunile
tangenţiale τ sunt nule (acelaşi lucru se întâmplă şi în interiorul materialului);
b) confirmarea ipotezei lui Bernoulli, secţiunile plane şi perpendiculare pe axa
longitudinală a barei, înainte de deformaţie, rămânând plane şi normale pe axă şi după
deformaţie.
Fig. 4.3
Aspectul fizic al solicitării se referă la aplicabilitatea legii lui Hooke, pe baza căreia, se
poate scrie relaţia de legătură dintre tensiunea normală σ, care apare ca urmare a acţiunii
forţei axiale, lungirea specifică ε şi modulul de elasticitate longitudinal E:
σ = E ε, (4.1)
Pe baza celor arătate anterior, la discutarea aspectului geometric, pentru o forţă axială
constantă, lungirea specifică este constantă şi ca urmare, pe baza relaţiei (4.1), tensiunea
normală σ, într-o secţiune, este constantă, ceea ce exprimă legea repartiţiei uniforme a
tensiunii (Fig. 4.4 a şi b).
Aspectul static rezultă din relatia de echivalentă referitoare la tensiunile normale şi forţa
axială: rezultanta tensiunilor normale σ într-o secţiune transversală de aria A este tocmai
efortul axial N (Fig. 4.4,a):
AdAdANAA
(4.2)
Observaţie: - relaţia (4.2) este considerată a fi relaţia fundamentală a solicitării de
tracţiune - compresiune.
Calculul deformaţiilor se face pornind de la relaţiile (4.1) şi (4.2). Astfel, din relaţia
(4.1), se poate obţine:
E
(4.3)
iar din (4.2):
A
N (4.4)
Fig. 4.4
- 58 -
Combinând relaţiile (4.3) şi (4.4) se va obţine o nouă relaţie, de data aceasta o relaţie de
legătură între ε, N, E şi A:
AE
N (4.5)
Produsul EA poartă denumirea de modul de rigiditate la întindere-compresiune. Se
poate defini rigiditatea axială k a unei bare ca fiind forţa axială necesară pentru
producerea unei alungiri egale cu unitatea:
l
AEk (4.6)
Lungirea totală este dată de relaţia:
AE
Nll (4.7)
În cazul în care forţa axială şi secţiunea sunt variabile în lungul axei barei, un element
oarecare de bară de lungime Δx se deformează cu cantitatea:
.dxAE
Ndx
Edxdx
Prin integrare se obţine:
l
0
l
0
.1
l dxA
N
Edx
În cazul în care, separat, forţa axială N, pe o anumită porţiune, nu este constantă având
o valoare dată de o lege de variaţie oarecare N = N(x) sau secţiunea A, la rândul ei, nu este
constantă sau sunt atât forţa cât şi secţiunea variabile după două legi de variaţie diferite, în
acelaşi timp, lungirea totală se calculează prin una din relaţiile:
.l;l;llll
dxxAE
xNdx
xAE
Ndx
AE
xN (4.8)
Observaţie: - în cazul în care bara are mai multe tronsoane, deformaţia totală este dată
de: ,ll1
n
i
itot unde "n" reprezintă numărul de tronsoane.
4.2. Tipuri de probleme
În practică, în cazul pieselor solicitate la tracţiune-compresiune, pot să apară
următoarele trei tipuri de probleme:
a) Probleme de dimensionare: - sunt probleme în care este necesară determinarea
mărimii secţiunii transversale A a piesei, cunoscându-se nivelul de solicitare (valoarea forţei
axiale N în zona de interes), natura materialului (valoarea modulului de elasticitate
longitudinal E şi valoarea tensiunii admisibile σa). Pe baza relaţiei (4.4), se poate calcula aria
necesară Anec:
a
nec
NA
(4.9)
Uneori, din punct de vedere constructiv, sunt impuse restricţii legate de valoarea
limită a lungirii totale Δl, aceasta neputând să depăşească o anumită valoare admisibilă Δla.
Din relaţia (4.7) se poate calcula aria necesară sub forma:
a
necE
NA
l
l
(4.10)
b) Probleme de calcul a forţei capabile: - sunt probleme în care se determină
valoarea forţei axiale N pe care o poate suporta o piesă într-o secţiune a sa cunoscându-se
natura materialului (valoarea modulului de elasticitate longitudinal E şi valoarea tensiunii
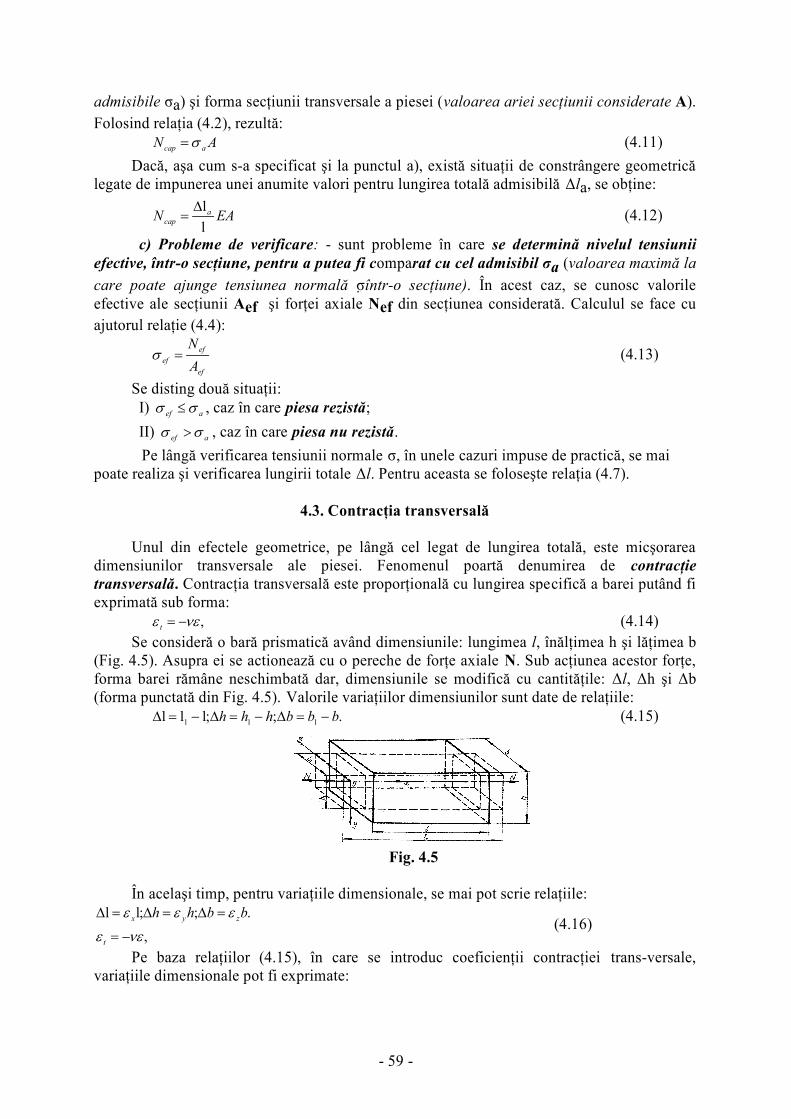
- 59 -
admisibile σa) şi forma secţiunii transversale a piesei (valoarea ariei secţiunii considerate A).
Folosind relaţia (4.2), rezultă:
ANacap
(4.11)
Dacă, aşa cum s-a specificat şi la punctul a), există situaţii de constrângere geometrică
legate de impunerea unei anumite valori pentru lungirea totală admisibilă Δla, se obţine:
EAN a
capl
l (4.12)
c) Probleme de verificare: - sunt probleme în care se determină nivelul tensiunii
efective, într-o secţiune, pentru a putea fi comparat cu cel admisibil σa (valoarea maximă la
care poate ajunge tensiunea normală σ într-o secţiune). În acest caz, se cunosc valorile
efective ale secţiunii Aef şi forţei axiale Nef din secţiunea considerată. Calculul se face cu
ajutorul relaţie (4.4):
ef
ef
efA
N (4.13)
Se disting două situaţii:
I) aef , caz în care piesa rezistă;
II) aef , caz în care piesa nu rezistă.
Pe lângă verificarea tensiunii normale σ, în unele cazuri impuse de practică, se mai
poate realiza şi verificarea lungirii totale Δl. Pentru aceasta se foloseşte relaţia (4.7).
4.3. Contracţia transversală
Unul din efectele geometrice, pe lângă cel legat de lungirea totală, este micşorarea
dimensiunilor transversale ale piesei. Fenomenul poartă denumirea de contracţie
transversală. Contracţia transversală este proporţională cu lungirea specifică a barei putând fi
exprimată sub forma:
, t
(4.14)
Se consideră o bară prismatică având dimensiunile: lungimea l, înălţimea h şi lăţimea b
(Fig. 4.5). Asupra ei se actionează cu o pereche de forţe axiale N. Sub acţiunea acestor forţe,
forma barei rămâne neschimbată dar, dimensiunile se modifică cu cantităţile: Δl, Δh şi Δb
(forma punctată din Fig. 4.5). Valorile variaţiilor dimensiunilor sunt date de relaţiile:
.;;lll111
bbbhhh (4.15)
Fig. 4.5
În acelaşi timp, pentru variaţiile dimensionale, se mai pot scrie relaţiile:
,
.;;ll
t
zyxbbhh
(4.16)
Pe baza relaţiilor (4.15), în care se introduc coeficienţii contracţiei trans-versale,
variaţiile dimensionale pot fi exprimate:

- 60 -
.
;
;ll
bbb
hhh
xz
xy
x
(4.17)
În faza iniţială, când nu acţionează forţa axială N, mărimea secţiunii transversale este
egală cu: A0 = bh. Sub acţiunea forţei axiale N, dimensiunile modificându-se, aria va avea o
nouă valoare:
.1122
11
xix
xx
Ahb
hhbbhhbbhbA
(4.18)
Prin rezolvarea parantezei şi neglijând termenii infinitezimali rezultă:
x
AA 210
(4.19)
Modificarea mărimii secţiunii transversale în acelaşi timp cu modificarea lungimii barei
considerate, fac ca şi volumul să sufere, la rândul său, o modificare. a mărimii sale. Astfel, în
faza iniţială, volumul este: . În faza finală, după acţiunea forţei N, volumul final va avea
valoarea:
ll hhbbVf (4.20)
variaţia volumului fiind: ifVVV .
Raportând variaţia volumului ΔV la valoarea sa iniţială Vi se obţine deformaţia
specifică de volum:
i
vV
V (4.21)
Introducând expresia volumului iniţial şi relaţia (4.20) în (4.21) rezultă:
l
l
h
h
b
bv (4.22)
Având în vedere relaţiile (4.8), deformaţia specifică de volum se poate scrie sub noua
formă:
zyxv (4.23)
În relaţia (4.23) dacă se înlocuiesc εy şi εz cu relaţiile (4.16) se obţine:
21xv (4.24)
Pentru oţel valoarea coeficientului lui Poisson este ν = 0,3 şi din relaţia (4.24) se obţine
o creştere a volumului dată de: xv
4,0 .
Observaţie: - din punct de vedere fizic, la solicitarea de tracţiune, modificarea
volumului este în sensul măririi sale şi ca urmare, deformarea specifică volumică este
pozitivă: εx > 0. Având în vedere că de-a lungul axei x are loc o lungire a materialului (de la
valoarea iniţială l la cea finală l1),εx > 0, şi ca urmare, din (4.24) rezultă că: 1-2ν >0. Din
această inegalitate se poate trage concluzia că valoarea coeficientului νν este limitată la 0,5 (
ν < 0,5 ).
4.4. Bare cu variaţie de secţiune
În practică, piesele folosite în diferite ansamble constructive pot avea secţiuni
transversale constante sau variabile. Variaţia secţiunii poate fi pe toată lungimea piesei după o
anumită lege (fie dată de existenţa unor găuri de uşurare, prindere etc. fig. 4.6 secţ. B - B şi D
- D) sau poate fi dată de existenţa unor elemente de prindere (nituri, buloane, scoabe, pene
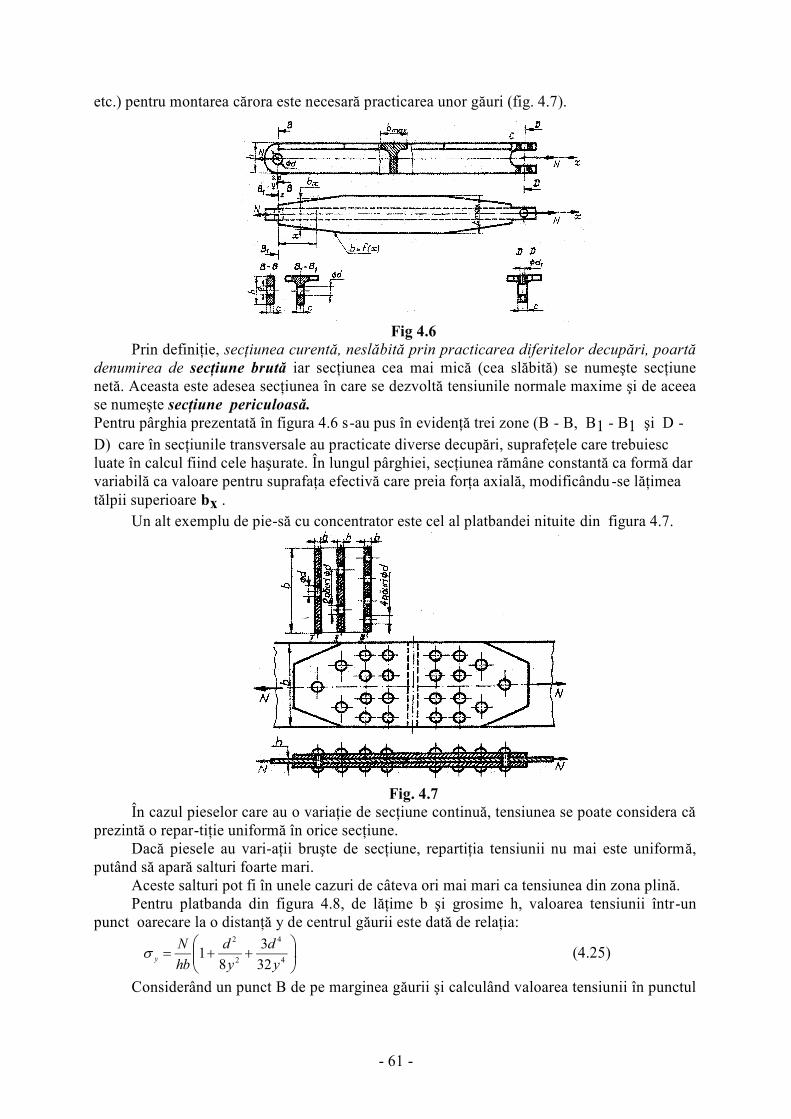
- 61 -
etc.) pentru montarea cărora este necesară practicarea unor găuri (fig. 4.7).
Fig 4.6
Prin definiţie, secţiunea curentă, neslăbită prin practicarea diferitelor decupări, poartă
denumirea de secţiune brută iar secţiunea cea mai mică (cea slăbită) se numeşte secţiune
netă. Aceasta este adesea secţiunea în care se dezvoltă tensiunile normale maxime şi de aceea
se numeşte secţiune periculoasă.
Pentru pârghia prezentată în figura 4.6 s-au pus în evidenţă trei zone (B - B, B1 - B1 şi D -
D) care în secţiunile transversale au practicate diverse decupări, suprafeţele care trebuiesc
luate în calcul fiind cele haşurate. În lungul pârghiei, secţiunea rămâne constantă ca formă dar
variabilă ca valoare pentru suprafaţa efectivă care preia forţa axială, modificându -se lăţimea
tălpii superioare bx .
Un alt exemplu de pie-să cu concentrator este cel al platbandei nituite din figura 4.7.
Fig. 4.7
În cazul pieselor care au o variaţie de secţiune continuă, tensiunea se poate considera că
prezintă o repar-tiţie uniformă în orice secţiune.
Dacă piesele au vari-aţii bruşte de secţiune, repartiţia tensiunii nu mai este uniformă,
putând să apară salturi foarte mari.
Aceste salturi pot fi în unele cazuri de câteva ori mai mari ca tensiunea din zona plină.
Pentru platbanda din figura 4.8, de lăţime b şi grosime h, valoarea tensiunii într-un
punct oarecare la o distanţă y de centrul găurii este dată de relaţia:
.32
3
81
4
4
2
2
y
d
y
d
bh
Ny
(4.25)
Considerând un punct B de pe marginea găurii şi calculând valoarea tensiunii în punctul
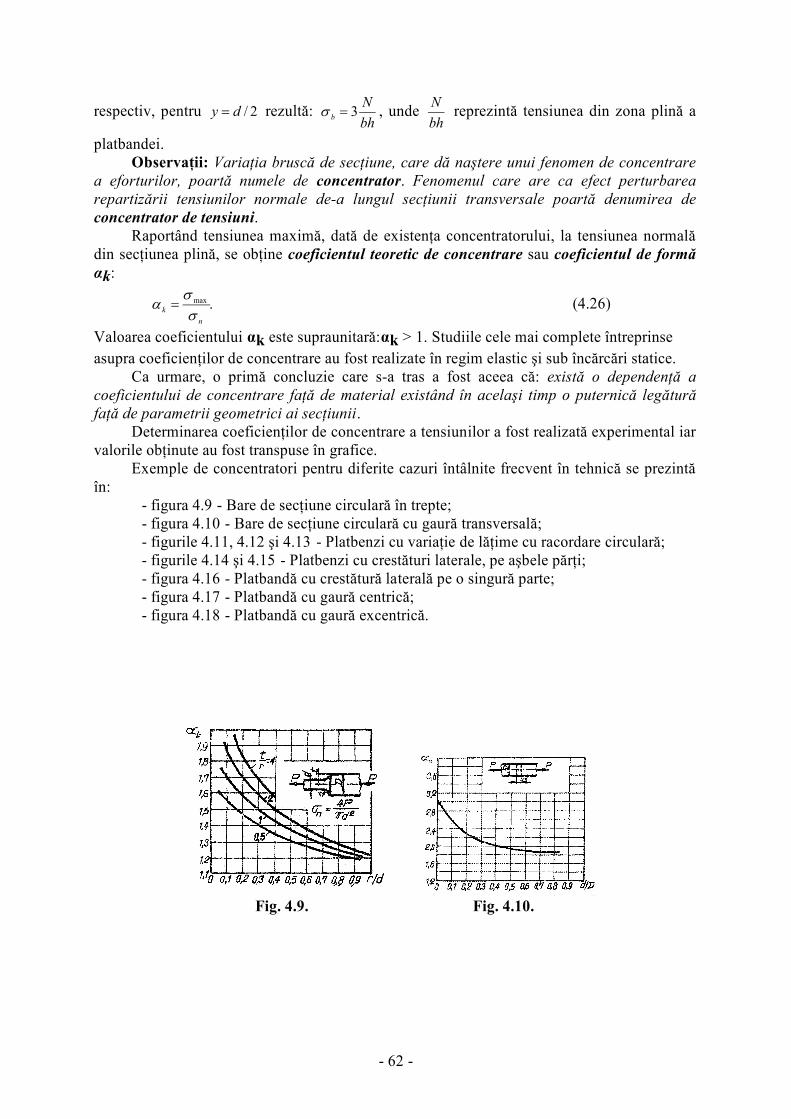
- 62 -
respectiv, pentru 2/dy rezultă: hb
Nb
3 , unde hb
N reprezintă tensiunea din zona plină a
platbandei.
Observaţii: Variaţia bruscă de secţiune, care dă naştere unui fenomen de concentrare
a eforturilor, poartă numele de concentrator. Fenomenul care are ca efect perturbarea
repartizării tensiunilor normale de-a lungul secţiunii transversale poartă denumirea de
concentrator de tensiuni.
Raportând tensiunea maximă, dată de existenţa concentratorului, la tensiunea normală
din secţiunea plină, se obţine coeficientul teoretic de concentrare sau coeficientul de formă
αk:
.max
n
k
(4.26)
Valoarea coeficientului αk este supraunitară:αk > 1. Studiile cele mai complete întreprinse
asupra coeficienţilor de concentrare au fost realizate în regim elastic şi sub încărcări statice.
Ca urmare, o primă concluzie care s-a tras a fost aceea că: există o dependenţă a
coeficientului de concentrare faţă de material existând în acelaşi timp o puternică legătură
faţă de parametrii geometrici ai secţiunii.
Determinarea coeficienţilor de concentrare a tensiunilor a fost realizată experimental iar
valorile obţinute au fost transpuse în grafice.
Exemple de concentratori pentru diferite cazuri întâlnite frecvent în tehnică se prezintă
în:
- figura 4.9 - Bare de secţiune circulară în trepte;
- figura 4.10 - Bare de secţiune circulară cu gaură transversală;
- figurile 4.11, 4.12 şi 4.13 - Platbenzi cu variaţie de lăţime cu racordare circulară;
- figurile 4.14 şi 4.15 - Platbenzi cu crestături laterale, pe aşbele părţi;
- figura 4.16 - Platbandă cu crestătură laterală pe o singură parte;
- figura 4.17 - Platbandă cu gaură centrică;
- figura 4.18 - Platbandă cu gaură excentrică.
Fig. 4.9. Fig. 4.10.
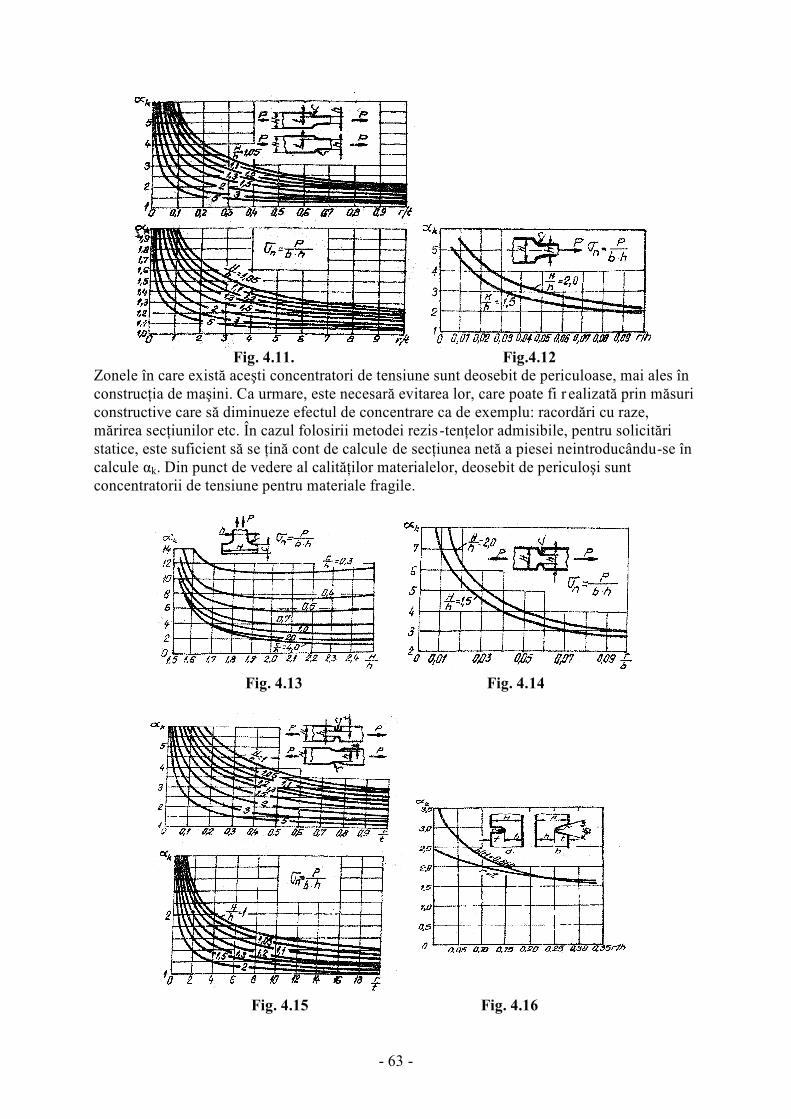
- 63 -
Fig. 4.11. Fig.4.12
Zonele în care există aceşti concentratori de tensiune sunt deosebit de periculoase, mai ales în
construcţia de maşini. Ca urmare, este necesară evitarea lor, care poate fi r ealizată prin măsuri
constructive care să diminueze efectul de concentrare ca de exemplu: racordări cu raze,
mărirea secţiunilor etc. În cazul folosirii metodei rezis -tenţelor admisibile, pentru solicitări
statice, este suficient să se ţină cont de calcule de secţiunea netă a piesei neintroducându-se în
calcule αk. Din punct de vedere al calităţilor materialelor, deosebit de periculoşi sunt
concentratorii de tensiune pentru materiale fragile.
Fig. 4.13 Fig. 4.14
Fig. 4.15 Fig. 4.16
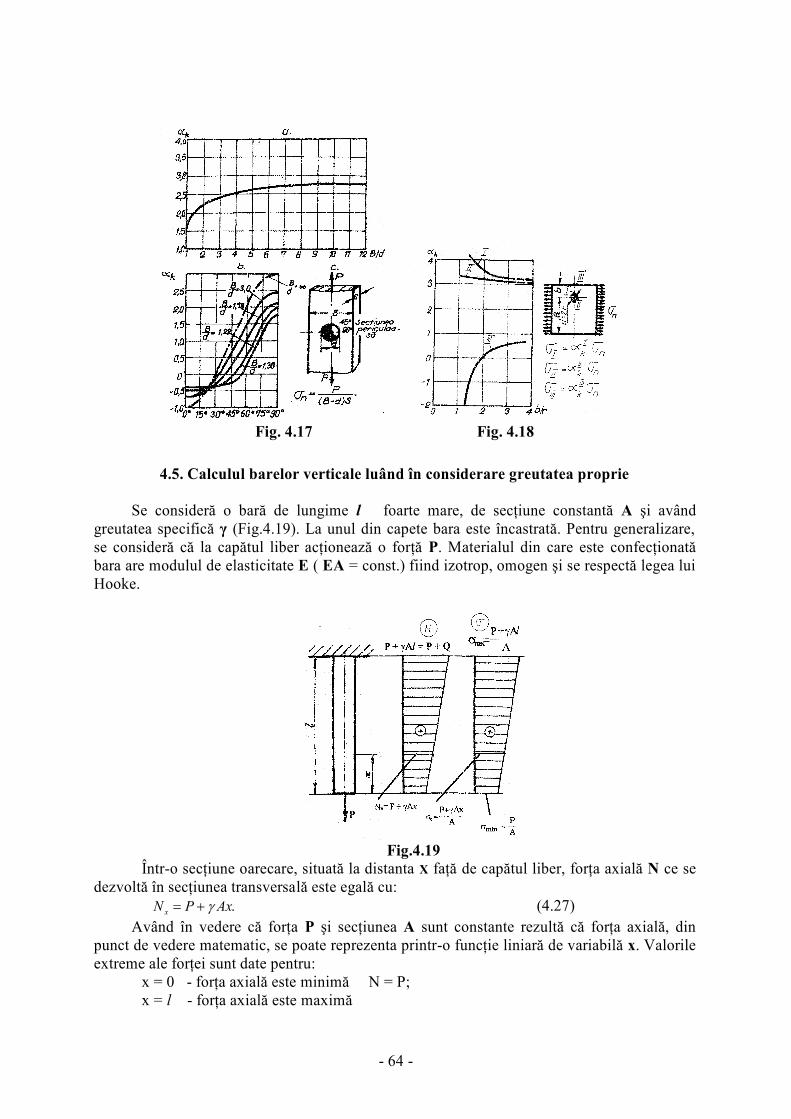
- 64 -
Fig. 4.17 Fig. 4.18
4.5. Calculul barelor verticale luând în considerare greutatea proprie
Se consideră o bară de lungime l foarte mare, de secţiune constantă A şi având
greutatea specifică γ (Fig.4.19). La unul din capete bara este încastrată. Pentru generalizare,
se consideră că la capătul liber acţionează o forţă P. Materialul din care este confecţionată
bara are modulul de elasticitate E ( EA = const.) fiind izotrop, omogen şi se respectă legea lui
Hooke.
Fig.4.19
Într-o secţiune oarecare, situată la distanta X faţă de capătul liber, forţa axială N ce se
dezvoltă în secţiunea transversală este egală cu:
.xAPNx
(4.27)
Având în vedere că forţa P şi secţiunea A sunt constante rezultă că forţa axială, din
punct de vedere matematic, se poate reprezenta printr-o funcţie liniară de variabilă x. Valorile
extreme ale forţei sunt date pentru:
x = 0 - forţa axială este minimă N = P;
x = l - forţa axială este maximă

- 65 -
N = P + γ A l = P + Q,
unde: Q este greutatea barei.
Pentru determinarea tensiunii normale x
în secţiunea considerată, la distanţa x faţă
de capătul liber, se raportează forţa din secţiune la valoarea secţiunii, conform relaţiei (4.4):
.xA
P
A
xAP
A
Nx
x
(4.28)
Ca şi în cazul forţei, se constată că tensiunea are o variaţie liniară având valorile
extreme pentru:
x = 0 - tensiunea normală minimă A
P ;
x = l - tensiunea normală maximă .l A
P
Condiţia de rezistenţă impusă este de a limita valoarea tensiunii maxime (σmax) la
valoarea tensiunii admisibile (σa), respectiv:
.lmax a
A
P (4.29)
de unde rezultă:
.l
a
PA (4.30)
Fără forţa concentrată (P = 0), deci numai sub acţiunea greutăţii proprii, tensiunea
maximă este egală cu:
,lmax
(4.31)
Relaţie cu ajutorul căreia se poate determina o caracteristică de material, numită lungimea de
rupere lr , adică acea lungime pentru care se produce ruperea barei numai sub acţiunea
greutăţii proprii:
.l
r
r (4.32)
Lungimea de rupere reprezintă un coeficient de calitate al materialului fiind cu atât mai
mare cu cât materialul este mai rezistent dar totodată şi mai uşor.
În tabelele 4.1 şi 4.2 sunt prezentate câteva valori ale lungimii de rupere pentru diferite
materiale întâlnite mai des în practica inginerească. Probleme deosebite legate de acest aspect
al solicitării se întâlnesc în industria aeronautică, în industria petrolieră (la sapele de foraj)
etc.
- 66 -
Tabelul 4.1
Tabelul 4.2
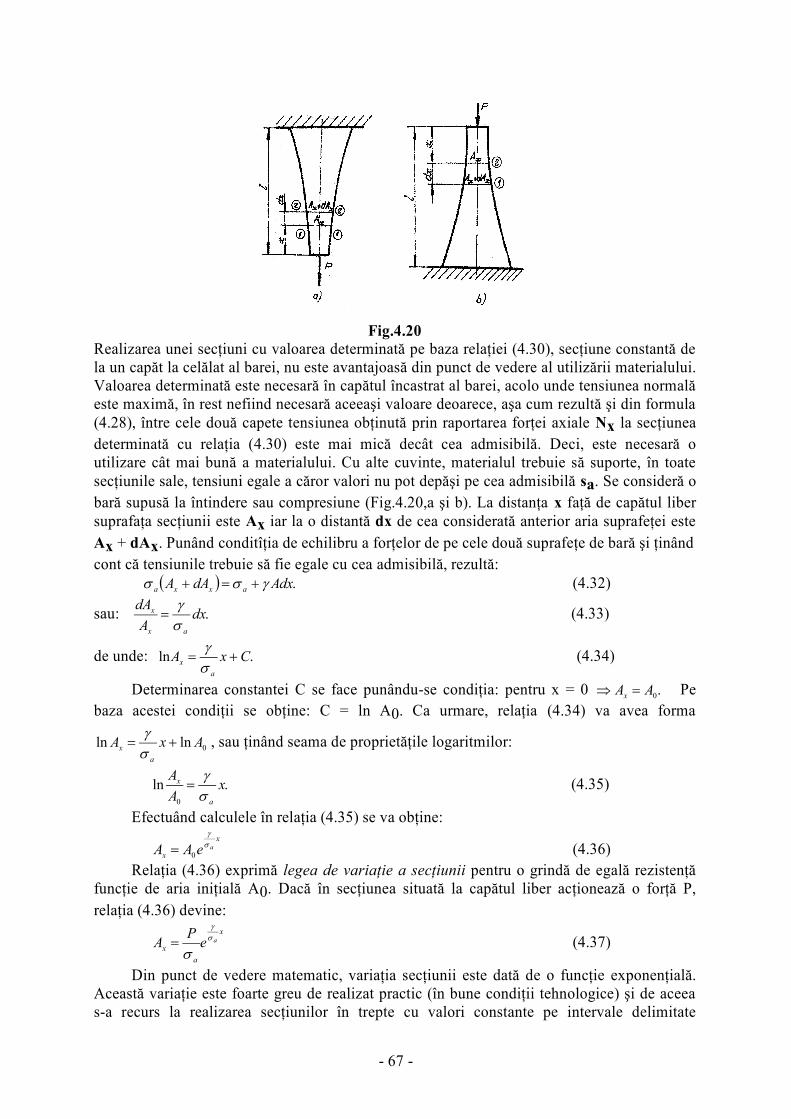
- 67 -
Fig.4.20
Realizarea unei secţiuni cu valoarea determinată pe baza relaţiei (4.30), secţiune constantă de
la un capăt la celălat al barei, nu este avantajoasă din punct de vedere al utilizării materialului.
Valoarea determinată este necesară în capătul încastrat al barei, acolo unde tensiunea normală
este maximă, în rest nefiind necesară aceeaşi valoare deoarece, aşa cum rezultă şi din formula
(4.28), între cele două capete tensiunea obţinută prin raportarea forţei axiale Nx la secţiunea
determinată cu relaţia (4.30) este mai mică decât cea admisibilă. Deci, este necesară o
utilizare cât mai bună a materialului. Cu alte cuvinte, materialul trebuie să suporte, în toate
secţiunile sale, tensiuni egale a căror valori nu pot depăşi pe cea admisibilă sa. Se consideră o
bară supusă la întindere sau compresiune (Fig.4.20,a şi b). La distanţa x faţă de capătul liber
suprafaţa secţiunii este Ax iar la o distantă dx de cea considerată anterior aria suprafeţei este
Ax + dAx. Punând conditîţia de echilibru a forţelor de pe cele două suprafeţe de bară şi ţinând
cont că tensiunile trebuie să fie egale cu cea admisibilă, rezultă:
.dxAdAAaxxa
(4.32)
sau: .dxA
dA
ax
x
(4.33)
de unde: .ln CxAa
x
(4.34)
Determinarea constantei C se face punându-se condiţia: pentru x = 0 .0
AAx Pe
baza acestei condiţii se obţine: C = ln A0. Ca urmare, relaţia (4.34) va avea forma
0lnln AxA
a
x
, sau ţinând seama de proprietăţile logaritmilor:
.ln0
xA
A
a
x
(4.35)
Efectuând calculele în relaţia (4.35) se va obţine:
x
xaeAA
0 (4.36)
Relaţia (4.36) exprimă legea de variaţie a secţiunii pentru o grindă de egală rezistenţă
funcţie de aria iniţială A0. Dacă în secţiunea situată la capătul liber acţionează o forţă P,
relaţia (4.36) devine:
x
a
xae
PA
(4.37)
Din punct de vedere matematic, variaţia secţiunii este dată de o funcţie exponenţială.
Această variaţie este foarte greu de realizat practic (în bune condiţii tehnologice) şi de aceea
s-a recurs la realizarea secţiunilor în trepte cu valori constante pe intervale delimitate
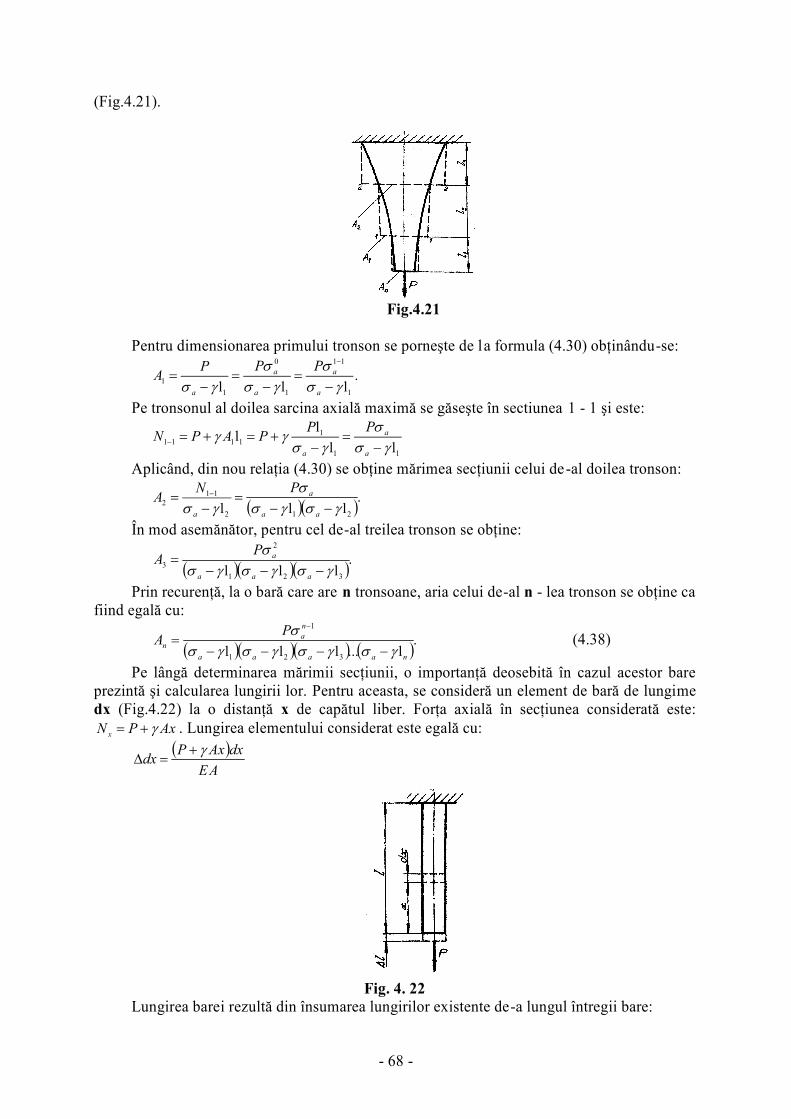
- 68 -
(Fig.4.21).
Fig.4.21
Pentru dimensionarea primului tronson se porneşte de la formula (4.30) obţinându-se:
.lll1
11
1
0
1
1
a
a
a
a
a
PPPA
Pe tronsonul al doilea sarcina axială maximă se găseşte în sectiunea 1 - 1 şi este:
11
1
1111ll
ll
a
a
a
PPPAPN
Aplicând, din nou relaţia (4.30) se obţine mărimea secţiunii celui de-al doilea tronson:
.
lll212
11
2
aa
a
a
PNA
În mod asemănător, pentru cel de-al treilea tronson se obţine:
.
lll321
2
3
aaa
aP
A
Prin recurenţă, la o bară care are n tronsoane, aria celui de-al n - lea tronson se obţine ca
fiind egală cu:
.
l...lll321
1
naaaa
n
a
n
PA
(4.38)
Pe lângă determinarea mărimii secţiunii, o importanţă deosebită în cazul acestor bare
prezintă şi calcularea lungirii lor. Pentru aceasta, se consideră un element de bară de lungime
dx (Fig.4.22) la o distanţă x de capătul liber. Forţa axială în secţiunea considerată este:
xAPNx
. Lungirea elementului considerat este egală cu:
AE
dxxAPdx
Fig. 4. 22
Lungirea barei rezultă din însumarea lungirilor existente de-a lungul întregii bare:
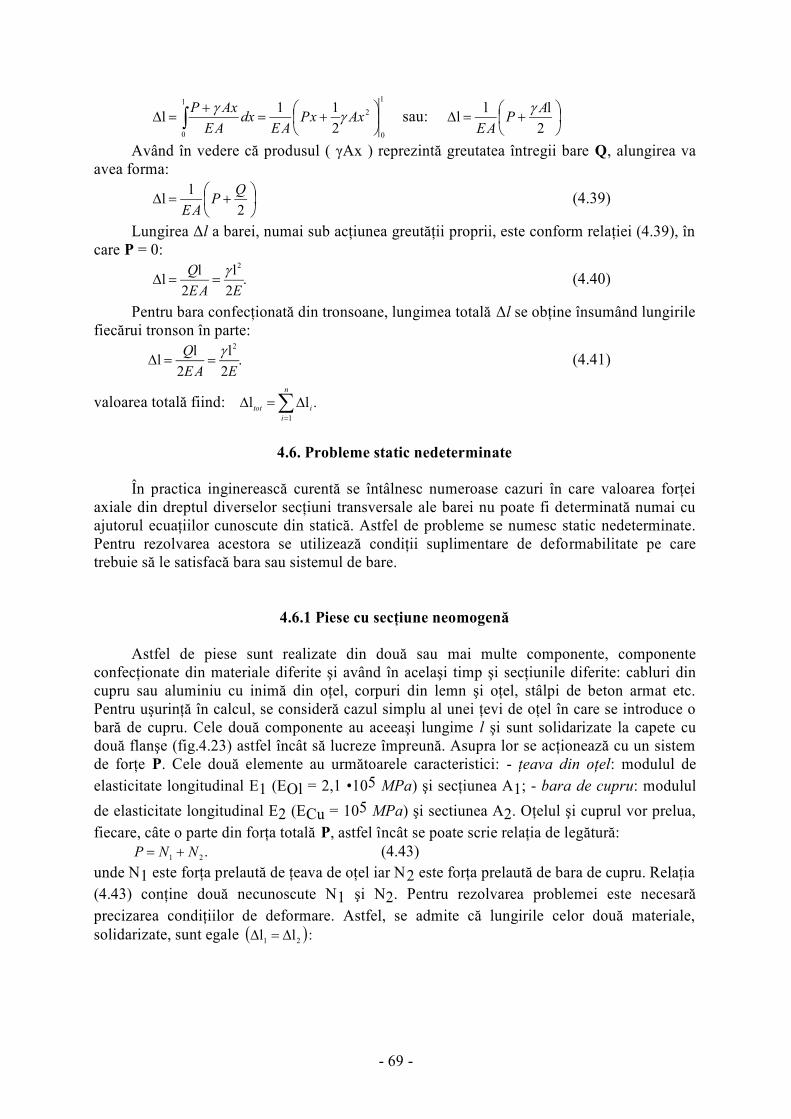
- 69 -
l
0
2
l
02
11l
xAxP
AEdx
AE
xAP
sau: .
2
lll
AP
AE
Având în vedere că produsul ( γAx ) reprezintă greutatea întregii bare Q, alungirea va
avea forma:
.2
ll
QP
AE (4.39)
Lungirea Δl a barei, numai sub acţiunea greutăţii proprii, este conform relaţiei (4.39), în
care P = 0:
.2
l
2
ll
2
EAE
Q (4.40)
Pentru bara confecţionată din tronsoane, lungimea totală Δl se obţine însumând lungirile
fiecărui tronson în parte:
.2
l
2
ll
2
EAE
Q (4.41)
valoarea totală fiind: .ll1
n
i
itot
4.6. Probleme static nedeterminate
În practica inginerească curentă se întâlnesc numeroase cazuri în care valoarea forţei
axiale din dreptul diverselor secţiuni transversale ale barei nu poate fi determinată numai cu
ajutorul ecuaţiilor cunoscute din statică. Astfel de probleme se numesc static nedeterminate.
Pentru rezolvarea acestora se utilizează condiţii suplimentare de deformabilitate pe care
trebuie să le satisfacă bara sau sistemul de bare.
4.6.1 Piese cu secţiune neomogenă
Astfel de piese sunt realizate din două sau mai multe componente, componente
confecţionate din materiale diferite şi având în acelaşi timp şi secţiunile diferite: cabluri din
cupru sau aluminiu cu inimă din oţel, corpuri din lemn şi oţel, stâlpi de beton armat etc.
Pentru uşurinţă în calcul, se consideră cazul simplu al unei ţevi de oţel în care se introduce o
bară de cupru. Cele două componente au aceeaşi lungime l şi sunt solidarizate la capete cu
două flanşe (fig.4.23) astfel încât să lucreze împreună. Asupra lor se acţionează cu un sistem
de forţe P. Cele două elemente au următoarele caracteristici: - ţeava din oţel: modulul de
elasticitate longitudinal E1 (EOl = 2,1 •105 MPa) şi secţiunea A1; - bara de cupru: modulul
de elasticitate longitudinal E2 (ECu = 105 MPa) şi sectiunea A2. Oţelul şi cuprul vor prelua,
fiecare, câte o parte din forţa totală P, astfel încât se poate scrie relaţia de legătură:
.21
NNP (4.43)
unde N1 este forţa prelaută de ţeava de oţel iar N2 este forţa prelaută de bara de cupru. Relaţia
(4.43) conţine două necunoscute N1 şi N2. Pentru rezolvarea problemei este necesară
precizarea condiţiilor de deformare. Astfel, se admite că lungirile celor două materiale,
solidarizate, sunt egale :ll21
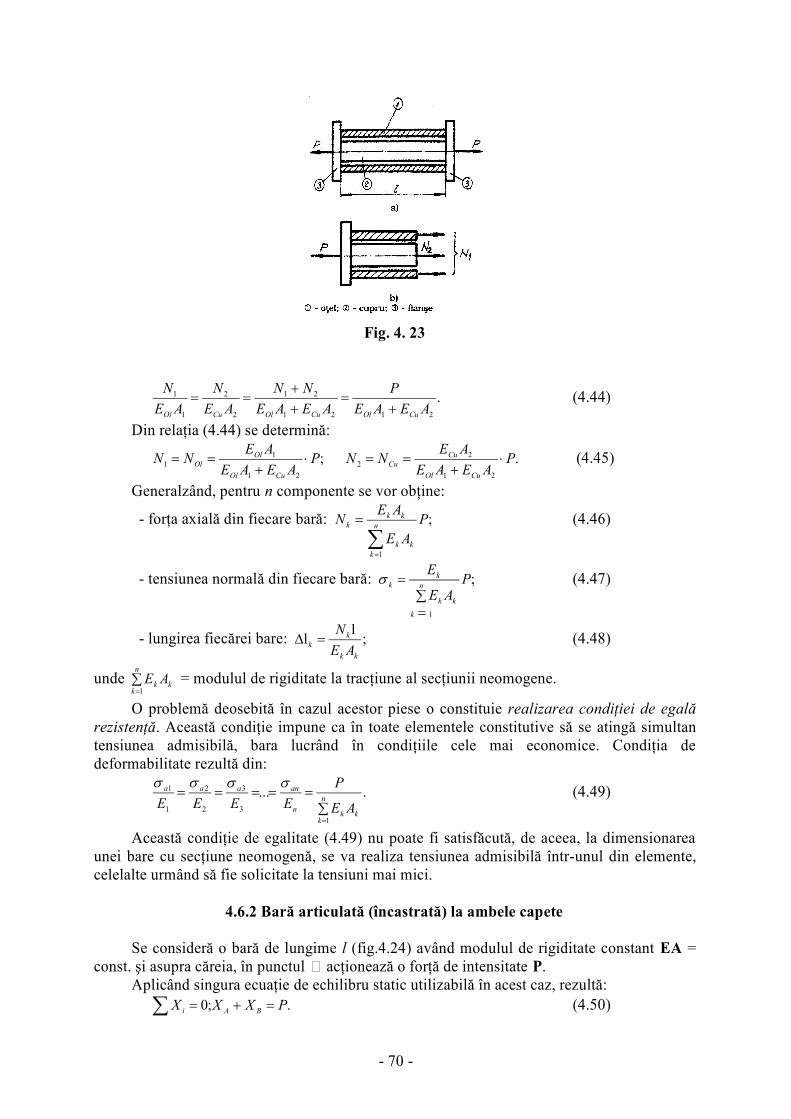
- 70 -
Fig. 4. 23
.2121
21
2
2
1
1
AEAE
P
AEAE
NN
AE
N
AE
N
CuOlCuOlCuOl
(4.44)
Din relaţia (4.44) se determină:
.;21
2
2
21
1
1P
AEAE
AENNP
AEAE
AENN
CuOl
Cu
Cu
CuOl
Ol
Ol
(4.45)
Generalzând, pentru n componente se vor obţine:
- forţa axială din fiecare bară: ;
1
P
AE
AEN
n
k
kk
kk
k
(4.46)
- tensiunea normală din fiecare bară: ;
1
PAE
En
k
kk
k
k
(4.47)
- lungirea fiecărei bare: ;l
lkk
k
kAE
N (4.48)
unde
n
kkk
AE1
= modulul de rigiditate la tracţiune al secţiunii neomogene.
O problemă deosebită în cazul acestor piese o constituie realizarea condiţiei de egală
rezistenţă. Această condiţie impune ca în toate elementele constitutive să se atingă simultan
tensiunea admisibilă, bara lucrând în condiţiile cele mai economice. Condiţia de
deformabilitate rezultă din:
....
1
3
3
2
2
1
1
n
kkk
n
anaaa
AE
P
EEEE
(4.49)
Această condiţie de egalitate (4.49) nu poate fi satisfăcută, de aceea, la dimensionarea
unei bare cu secţiune neomogenă, se va realiza tensiunea admisibilă într-unul din elemente,
celelalte urmând să fie solicitate la tensiuni mai mici.
4.6.2 Bară articulată (încastrată) la ambele capete
Se consideră o bară de lungime l (fig.4.24) având modulul de rigiditate constant EA =
const. şi asupra căreia, în punctul acţionează o forţă de intensitate P.
Aplicând singura ecuaţie de echilibru static utilizabilă în acest caz, rezultă:
.;0 PXXXBAi (4.50)
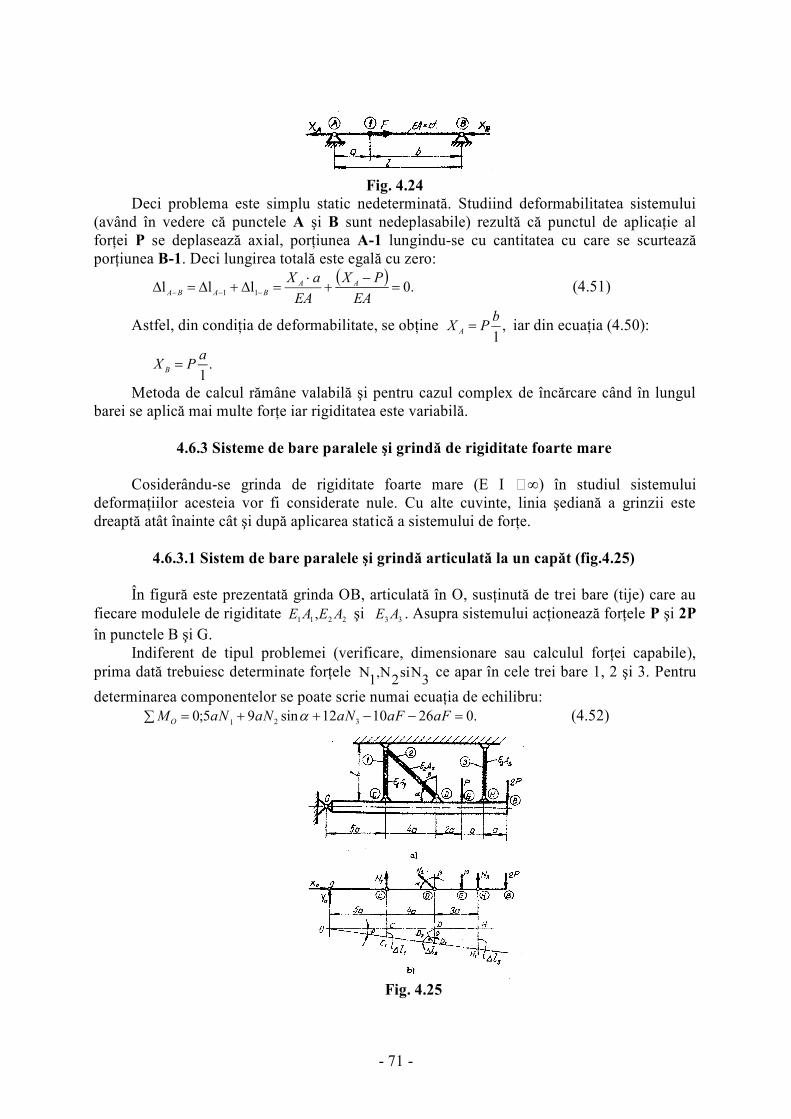
- 71 -
Fig. 4.24
Deci problema este simplu static nedeterminată. Studiind deformabilitatea sistemului
(având în vedere că punctele A şi B sunt nedeplasabile) rezultă că punctul de aplicaţie al
forţei P se deplasează axial, porţiunea A-1 lungindu-se cu cantitatea cu care se scurtează
porţiunea B-1. Deci lungirea totală este egală cu zero:
.0lll
11
EA
PX
EA
aXAA
BABA (4.51)
Astfel, din condiţia de deformabilitate, se obţine ,l
bPX
A iar din ecuaţia (4.50):
.l
aPX
B
Metoda de calcul rămâne valabilă şi pentru cazul complex de încărcare când în lungul
barei se aplică mai multe forţe iar rigiditatea este variabilă.
4.6.3 Sisteme de bare paralele şi grindă de rigiditate foarte mare
Cosiderându-se grinda de rigiditate foarte mare (E I ∞) în studiul sistemului
deformaţiilor acesteia vor fi considerate nule. Cu alte cuvinte, linia şediană a grinzii este
dreaptă atât înainte cât şi după aplicarea statică a sistemului de forţe.
4.6.3.1 Sistem de bare paralele şi grindă articulată la un capăt (fig.4.25)
În figură este prezentată grinda OB, articulată în O, susţinută de trei bare (tije) care au
fiecare modulele de rigiditate 2211
, AEAE şi 33
AE . Asupra sistemului acţionează forţele P şi 2P
în punctele B şi G.
Indiferent de tipul problemei (verificare, dimensionare sau calculul forţei capabile),
prima dată trebuiesc determinate forţele ce apar în cele trei bare 1, 2 şi 3. Pentru
determinarea componentelor se poate scrie numai ecuaţia de echilibru:
.0261012sin95;0321
FaFaNaNaNaMO
(4.52)
Fig. 4.25
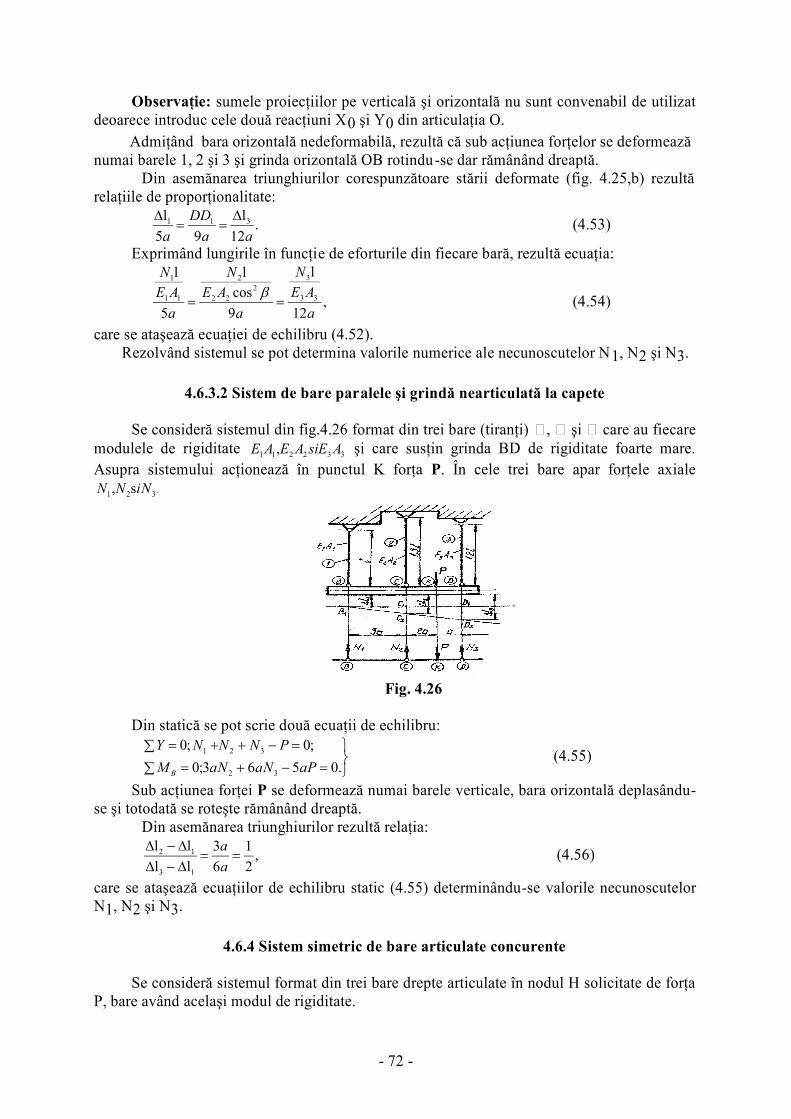
- 72 -
Observaţie: sumele proiecţiilor pe verticală şi orizontală nu sunt convenabil de utilizat
deoarece introduc cele două reacţiuni X0 şi Y0 din articulaţia O.
Admiţând bara orizontală nedeformabilă, rezultă că sub acţiunea forţelor se deformează
numai barele 1, 2 şi 3 şi grinda orizontală OB rotindu-se dar rămânând dreaptă.
Din asemănarea triunghiurilor corespunzătoare stării deformate (fig. 4.25,b) rezultă
relaţiile de proporţionalitate:
.12
l
95
l 311
aa
DD
a
(4.53)
Exprimând lungirile în funcţie de eforturile din fiecare bară, rezultă ecuaţia:
,12
l
9
cos
l
5
l
33
3
2
22
2
11
1
a
AE
N
a
AE
N
a
AE
N
(4.54)
care se ataşează ecuaţiei de echilibru (4.52).
Rezolvând sistemul se pot determina valorile numerice ale necunoscutelor N1, N2 şi N3.
4.6.3.2 Sistem de bare paralele şi grindă nearticulată la capete
Se consideră sistemul din fig.4.26 format din trei bare (tiranţi) , şi care au fiecare
modulele de rigiditate 332211
, AsiEAEAE şi care susţin grinda BD de rigiditate foarte mare.
Asupra sistemului acţionează în punctul K forţa P. În cele trei bare apar forţele axiale
.321
s, NiNN
Fig. 4.26
Din statică se pot scrie două ecuaţii de echilibru:
.0563;0
;0;0
32
321
PaNaNaM
PNNNY
B
(4.55)
Sub acţiunea forţei P se deformează numai barele verticale, bara orizontală deplasându-
se şi totodată se roteşte rămânând dreaptă.
Din asemănarea triunghiurilor rezultă relaţia:
,2
1
6
3
ll
ll
13
12
a
a (4.56)
care se ataşează ecuaţiilor de echilibru static (4.55) determinându-se valorile necunoscutelor
N1, N2 şi N3.
4.6.4 Sistem simetric de bare articulate concurente
Se consideră sistemul format din trei bare drepte articulate în nodul H solicitate de forţa
P, bare având acelaşi modul de rigiditate.
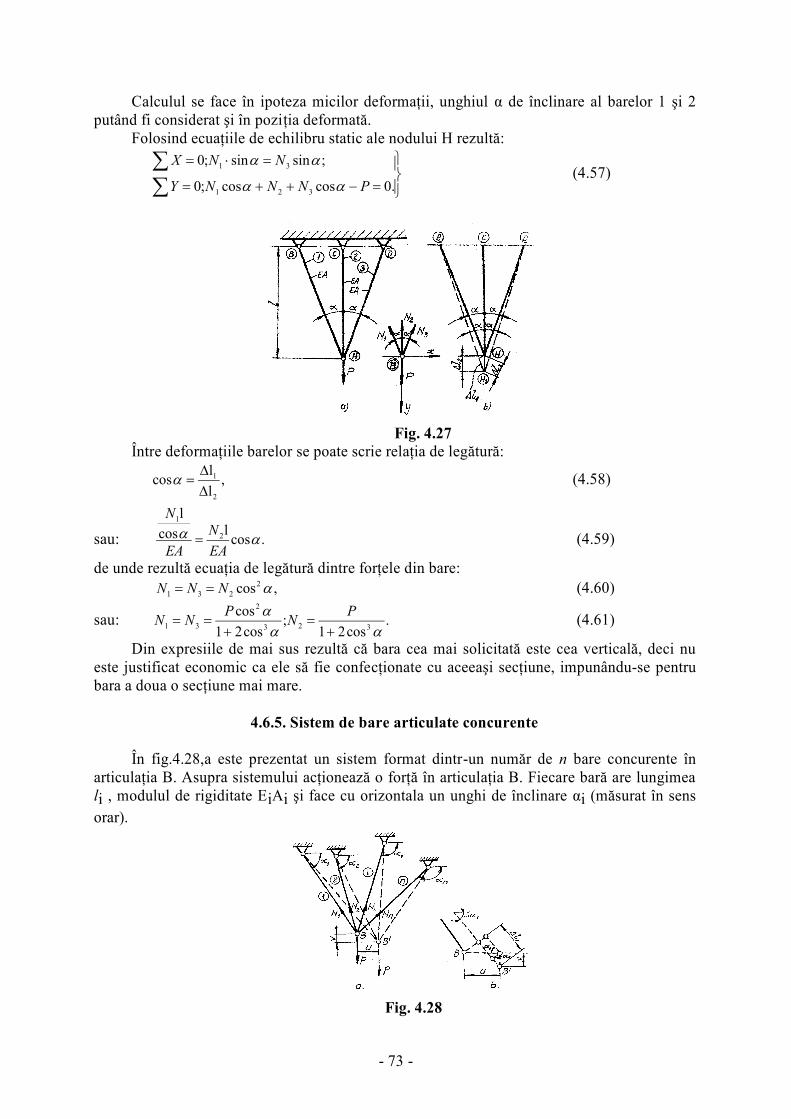
- 73 -
Calculul se face în ipoteza micilor deformaţii, unghiul α de înclinare al barelor 1 şi 2
putând fi considerat şi în poziţia deformată.
Folosind ecuaţiile de echilibru static ale nodului H rezultă:
.0coscos;0
;sinsin;0
321
31
PNNNY
NNX
(4.57)
Fig. 4.27
Între deformaţiile barelor se poate scrie relaţia de legătură:
,l
lcos
2
1
(4.58)
sau: .coslcos
l
2
1
EA
N
EA
N
(4.59)
de unde rezultă ecuaţia de legătură dintre forţele din bare:
,cos2
231NNN (4.60)
sau: .cos21
;cos21
cos323
2
31
PN
PNN (4.61)
Din expresiile de mai sus rezultă că bara cea mai solicitată este cea verticală, deci nu
este justificat economic ca ele să fie confecţionate cu aceeaşi secţiune, impunându-se pentru
bara a doua o secţiune mai mare.
4.6.5. Sistem de bare articulate concurente
În fig.4.28,a este prezentat un sistem format dintr-un număr de n bare concurente în
articulaţia B. Asupra sistemului acţionează o forţă în articulaţia B. Fiecare bară are lungimea
li , modulul de rigiditate EiAi şi face cu orizontala un unghi de înclinare αi (măsurat în sens
orar).
Fig. 4.28

- 74 -
Pe baza relaţiilor de echilibru cunoscute din mecanică se pot scrie ecuaţiile:
n
iii
n
iii
PN
N
1
1
..sin
;0cos
(4.62)
unde Ni sunt forţele care se manifestă în fiecare bară a sistemului considerat ca urmare a
acţiunii forţei P.
Rezultă că sistemul (4.62) este de (n -2) ori static nedeterminat fiind necesară examinarea
stării deformate a acestuia. Articulaţia B sub acţiunea încărcării se deplasează atât pe
orizontală cu cantitatea u cât şi pe verticală cu cantitatea v. Capătul fiecărei bare parcurge
deformaţia BB’ putându-se scrie, conform figurii 4.28 b, între lungirea barei şi deplasarea
punctului B, relaţia:
.sinvcosul111
(4.63)
În mod asemănător, pentru fiecare bară ”i” a sistemului, rezultă:
.sinvcosuliii
(4.64)
Ţinând cont de relaţia de calcul a alungirii barei rezultă:
.sinvcosul
ll
ii
i
ii
i
i
ii
i
AEAEN (4.65)
Cu această expresiile, din ecuaţiile de echilibru rezultă deplasările u şi v de forma:
.
sinl
cosl
cossinl
cosl
v
;
sinl
cosl
cossinl
cossinl
u
1
2
1
2
2
1
1
2
1
2
1
2
2
1
1
PAEAEAE
AE
PAEAEAE
AE
n
ii
i
iin
ii
i
iin
iii
i
ii
n
ii
i
ii
n
ii
i
iin
ii
i
iin
iii
i
ii
n
iii
i
ii
(4.66)
În continuare, cu valorile lui u şi v, pe baza relaţiei (4.66) se determină valorile forţelor
axiale Ni din fiecare bară.
4.6.6 Tensiuni apărute în urma variaţiilor de temperatură
Se cosideră o bară, articulată la ambele capete (fig.4.29), încălzită uniform având
modulul de elasticitate al materialului E, coeficientul de dilatare termică α, lungimea barei l
iar creşterea de temperatură Δt. Ca urmare, lungirea barei va fi egală cu:
.ll t (4.67)
Fig. 4.29
Pentru sistemul de bare static determinat această lungire se poate produce nestingherit,
dar pentru sistemul static nedeterminat dilataţia termică este împiedicată, în barele sistemului
apărând tensiuni ce pot atinge valori remarcabile. Astfel, bara din figura 4.29 devine
comprimată cu o forţă axială N (dilataţia termică fiind împiedicată).
Considerând articulaţia din 1 ca fiind mobilă, ea se alungeşte cu o cantitate dată de
(4.67). Articulaţia fiind însă fixă, se poate considera că există o forţă axială N care produce
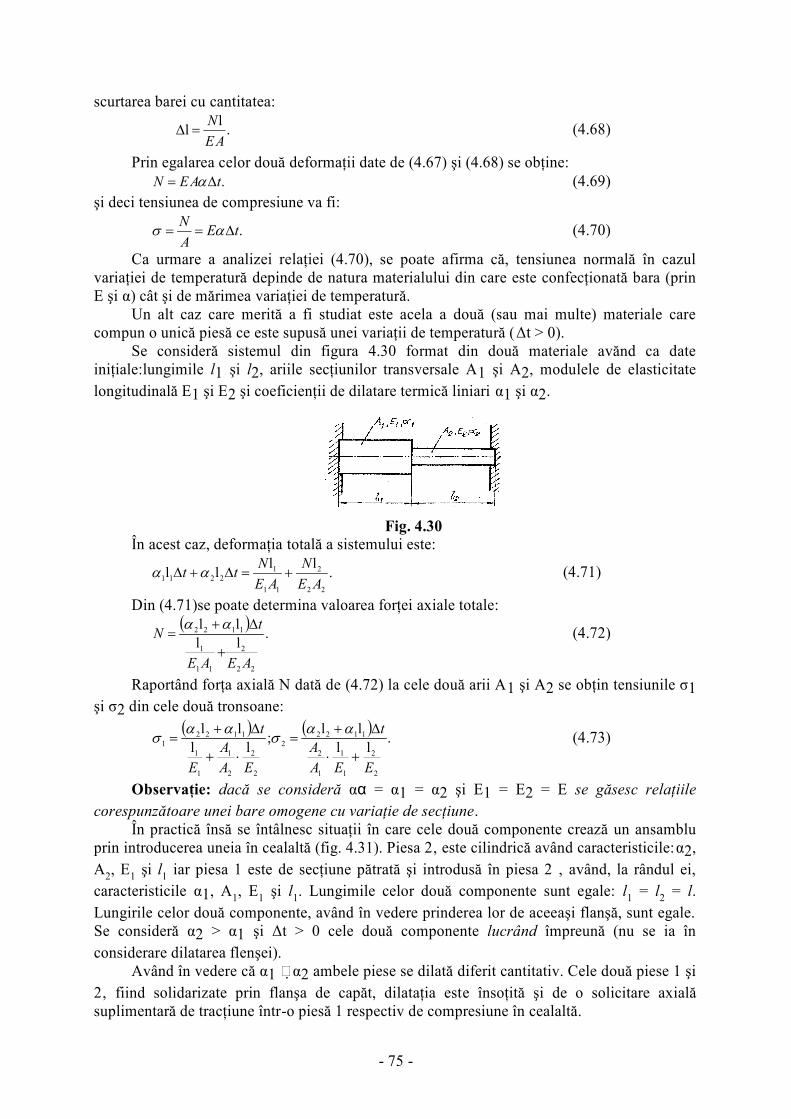
- 75 -
scurtarea barei cu cantitatea:
.l
lAE
N (4.68)
Prin egalarea celor două deformaţii date de (4.67) şi (4.68) se obţine:
.tAEN (4.69)
şi deci tensiunea de compresiune va fi:
.tEA
N (4.70)
Ca urmare a analizei relaţiei (4.70), se poate afirma că, tensiunea normală în cazul
variaţiei de temperatură depinde de natura materialului din care este confecţionată bara (prin
E şi α) cât şi de mărimea variaţiei de temperatură.
Un alt caz care merită a fi studiat este acela a două (sau mai multe) materiale care
compun o unică piesă ce este supusă unei variaţii de temperatură (Δt > 0).
Se consideră sistemul din figura 4.30 format din două materiale avănd ca date
iniţiale:lungimile l1 şi l2, ariile secţiunilor transversale A1 şi A2, modulele de elasticitate
longitudinală E1 şi E2 şi coeficienţii de dilatare termică liniari α1 şi α2.
Fig. 4.30
În acest caz, deformaţia totală a sistemului este:
.ll
ll22
2
11
1
2211AE
N
AE
Ntt (4.71)
Din (4.71)se poate determina valoarea forţei axiale totale:
.
ll
ll
22
2
11
1
1122
AEAE
tN
(4.72)
Raportând forţa axială N dată de (4.72) la cele două arii A1 şi A2 se obţin tensiunile σ1
şi σ2 din cele două tronsoane:
.
ll
ll;
ll
ll
2
2
1
1
1
2
1122
2
2
2
2
1
1
1
1122
1
EEA
A
t
EA
A
E
t
(4.73)
Observaţie: dacă se consideră αα = α1 = α2 şi E1 = E2 = E se găsesc relaţiile
corespunzătoare unei bare omogene cu variaţie de secţiune.
În practică însă se întâlnesc situaţii în care cele două componente crează un ansamblu
prin introducerea uneia în cealaltă (fig. 4.31). Piesa 2‚ este cilindrică având caracteristicile:α2,
A2, E
1 şi l
1 iar piesa 1 este de secţiune pătrată şi introdusă în piesa 2 ‚ având, la rândul ei,
caracteristicile α1, A1, E
1 şi l
1. Lungimile celor două componente sunt egale: l
1 = l
2 = l.
Lungirile celor două componente, având în vedere prinderea lor de aceeaşi flanşă, sunt egale.
Se consideră α2 > α1 şi Δt > 0 cele două componente lucrând împreună (nu se ia în
considerare dilatarea flenşei).
Având în vedere că α1 α2 ambele piese se dilată diferit cantitativ. Cele două piese 1 şi
2‚ fiind solidarizate prin flanşa de capăt, dilataţia este însoţită şi de o solicitare axială
suplimentară de tracţiune într-o piesă 1 respectiv de compresiune în cealaltă.

- 76 -
Fig. 4.31
Rezultă:
.l
ll
l22
2
11
1AE
Nt
AE
Nt (4.74)
Din relaţia (4.74) rezultă valoarea forţei axiale ce acţionează în fiecare din cele două
piese:
.
2211
122211
AEAE
tAEAEN
(4.75)
Pornind de la (4.75) se pot determina tensiune σ1 şi σ2 din fiecare componentă:
.;
2
1
12
2211
12221
1A
A
AEAE
tAEE
(4.78)
iar lungirile Δl vor fi: .lllll1
1
121E
t
(4.77)
Fenomenul de dilatare termică, în special în cazul unor structuri metalice mari, poate
avea urmări deosebit de grave prin cumularea valorilor lungirilor de pe fiecare porţiune în
parte. Ca urmare, pentru împiedicarea lor, se aplică diferite soluţii tehnice, cum ar fi:
poziţionarea (în special la poduri) a unuia din capete pe role, realizarea unor zone curbe (mai
ales la conducte prin care se transportă fluide încălzite), practicarea de elemente
compensatoare (rosturi de dilatare) etc.
4.6.7 Tensiuni apărute ca urmare a unor imperfecţiuni de montaj
În cazul sistemelor de bare static nedeterminate este posibil să apară, la montaj, tensiuni
cauzate de imprecizia dimensiunilor barelor chiar în absenţa forţelor exterioare. Aceste
tensiuni sunt dependente atât de configuraţia geometrică cât şi de proprietăţile mecanice ale
materialelor.
Pentru sistemul prezentat în figura 4.32, la care bara verticală 1 este mai mare cu
cantitatea Δl, pentru realizarea îmbinării în nodul din O este necesară comprimarea ei
simultan cu întinderea barelor 2 şi 3.
Fig. 4.32
Astfel, în bara verticală apare un efort de compresiune N1, în timp ce, în barele înclinate
apar eforturile de întindere N2 = N
3.
Pentru rezolvarea problemei static nedeterminate (găsirea forţelor N1 şi N
2 = N
3) este
necesară stabilirea unor relaţii între deformaţiile sistemului:
- 77 -
Bara 1: prin comprimarea ei, bara va rămâne cu o scurtare egală cu σ':
.
ll'
11
1
AE
N (4.78)
Barele 2 şi 3: prin tracţiune vor suferi o lungire egală cu σ1 şi σ
3 (se consideră
EEEAAA 3131
º ):
.cos
l
cos
l;
33
3
22
2
32
AE
N
AE
N (4.79)
Din analiza figurii rezultă: .cos
l
cos"
2
22
AE
N (4.80)
Scriind echilibrul nodului în punctul O2 se obţine ecuaţia:sau:
.cos2
1
2
NN (4.81)
Prin introducerea relaţiei (4.81) în (4.80) se obţine:
.cos2
l"
2
1
AE
N (4.82)
Pentru a realiza îmbinarea este necesar ca suma dintre deplasarea verticală a capătului
barei 2 şi 3 să fie egală cu abaterea Δl de la dimensiunea proiectată. Deci:
.
cos2
lll"'l
2
1
11
1
AE
N
AE
N
(4.83)
de unde se poate determina valoarea forţei axiale N1 şi apoi pe baza relaţiei (4.81) a forţelor
N2.= N
3.
4.7. Aspecte ale calculului la compresiune
Din punct de vedere al distribuţiei tensiunilor şi la compresiune, ca şi la întindere,
aceasta este uniformă pe secţiune. Secţiunile plane şi normale pe axa longitudinală, înainte de
deformamare, rămân plane şi normale pe aceeaşi axă şi după deformare (ipoteza lui
Bernoulli) astfel încât relaţiile deduse le întindere rămân valabile şi la compresiune.
Există materiale, ca de exemplu: fonta, betonul, sticla, care prezintă valori diferite ale
tensiunilor admisibile la întindere comparativ cu cele de compresiune (valorile tensiunilor
admisibile de compresiune sunt mult mai mari, aproximativ de trei ori).
Dacă la solicitarea de tracţiune se constată o contracţie transversală, la solicitarea de
compresiune se poate observa o umflare în sens transversal. În acest mod, secţiunea
transversală devine, după solicitare, mai mare decât cea iniţială A f > Ai..
Deşi există o identitate clară a relaţiilor de la compresiune cu cele de la întindere, totuşi
la compresiune, din punct de vedere al comportării materialului în ansamblul său, apar şi o
serie de aspecte distincte.
4.7.1 Ruperea
Ruperea este influenţată foarte mult de proprietăţile mecanice ale materialelor. În
funcţie de aceste proprietăţi se disting:
- materiale casante: (ex : fonta, sticla, betonul, piatra etc.) - la începutul solicitării
apar simultan scurtarea materialului şi umflarea lui, caracteristice ca valori fiecăruia în parte
(fig.4.33,a); în faza a doua se constată apariţia, la o anumită tensiune σc , pe feţele laterale ale
cubului sau pe suprafaţa generatoare a cilindrului, o serie de fisuri (fig.4.33,b). În felul acesta
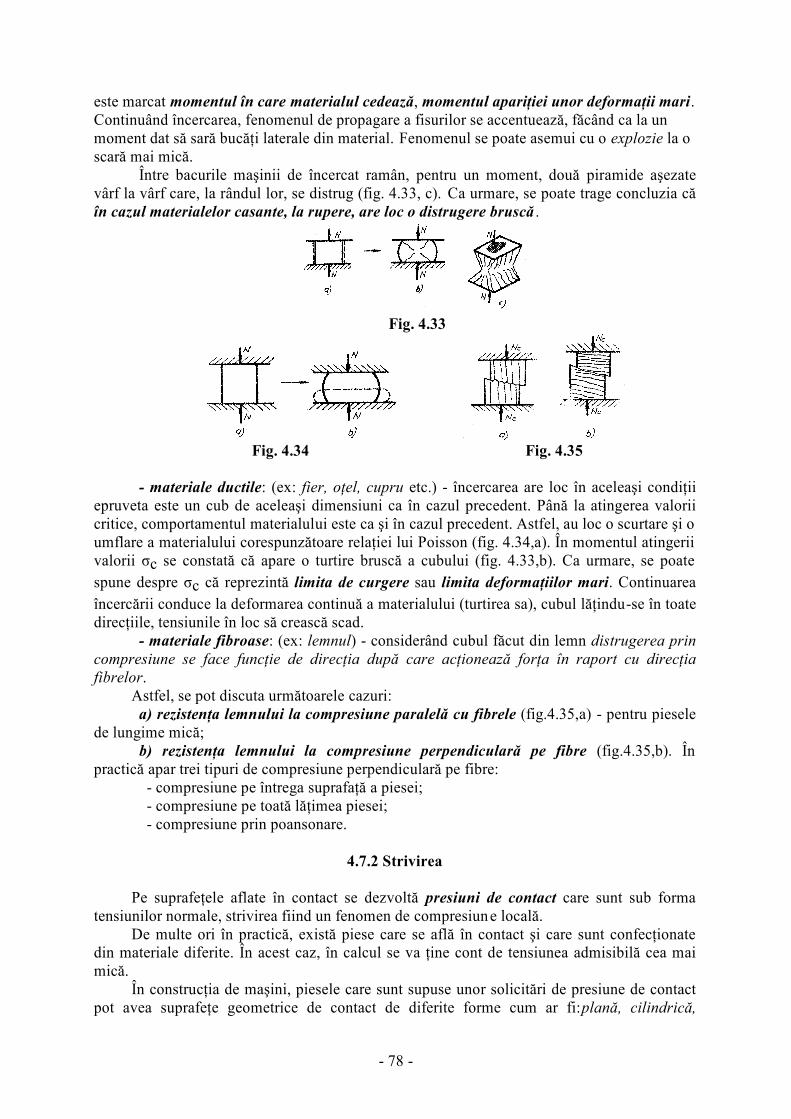
- 78 -
este marcat momentul în care materialul cedează, momentul apariţiei unor deformaţii mari.
Continuând încercarea, fenomenul de propagare a fisurilor se accentuează, făcând ca la un
moment dat să sară bucăţi laterale din material. Fenomenul se poate asemui cu o explozie la o
scară mai mică.
Între bacurile maşinii de încercat ramân, pentru un moment, două piramide aşezate
vârf la vârf care, la rândul lor, se distrug (fig. 4.33, c). Ca urmare, se poate trage concluzia că
în cazul materialelor casante, la rupere, are loc o distrugere bruscă .
Fig. 4.33
Fig. 4.34 Fig. 4.35
- materiale ductile: (ex: fier, oţel, cupru etc.) - încercarea are loc în aceleaşi condiţii
epruveta este un cub de aceleaşi dimensiuni ca în cazul precedent. Până la atingerea valorii
critice, comportamentul materialului este ca şi în cazul precedent. Astfel, au loc o scurtare şi o
umflare a materialului corespunzătoare relaţiei lui Poisson (fig. 4.34,a). În momentul atingerii
valorii σc se constată că apare o turtire bruscă a cubului (fig. 4.33,b). Ca urmare, se poate
spune despre σc că reprezintă limita de curgere sau limita deformaţiilor mari. Continuarea
încercării conduce la deformarea continuă a materialului (turtirea sa), cubul lăţindu-se în toate
direcţiile, tensiunile în loc să crească scad.
- materiale fibroase: (ex: lemnul) - considerând cubul făcut din lemn distrugerea prin
compresiune se face funcţie de direcţia după care acţionează forţa în raport cu direcţia
fibrelor.
Astfel, se pot discuta următoarele cazuri:
a) rezistenţa lemnului la compresiune paralelă cu fibrele (fig.4.35,a) - pentru piesele
de lungime mică;
b) rezistenţa lemnului la compresiune perpendiculară pe fibre (fig.4.35,b). În
practică apar trei tipuri de compresiune perpendiculară pe fibre:
- compresiune pe întrega suprafaţă a piesei;
- compresiune pe toată lăţimea piesei;
- compresiune prin poansonare.
4.7.2 Strivirea
Pe suprafeţele aflate în contact se dezvoltă presiuni de contact care sunt sub forma
tensiunilor normale, strivirea fiind un fenomen de compresiune locală.
De multe ori în practică, există piese care se află în contact şi care sunt confecţionate
din materiale diferite. În acest caz, în calcul se va ţine cont de tensiunea admisibilă cea mai
mică.
În construcţia de maşini, piesele care sunt supuse unor solicitări de presiune de contact
pot avea suprafeţe geometrice de contact de diferite forme cum ar fi:plană, cilindrică,
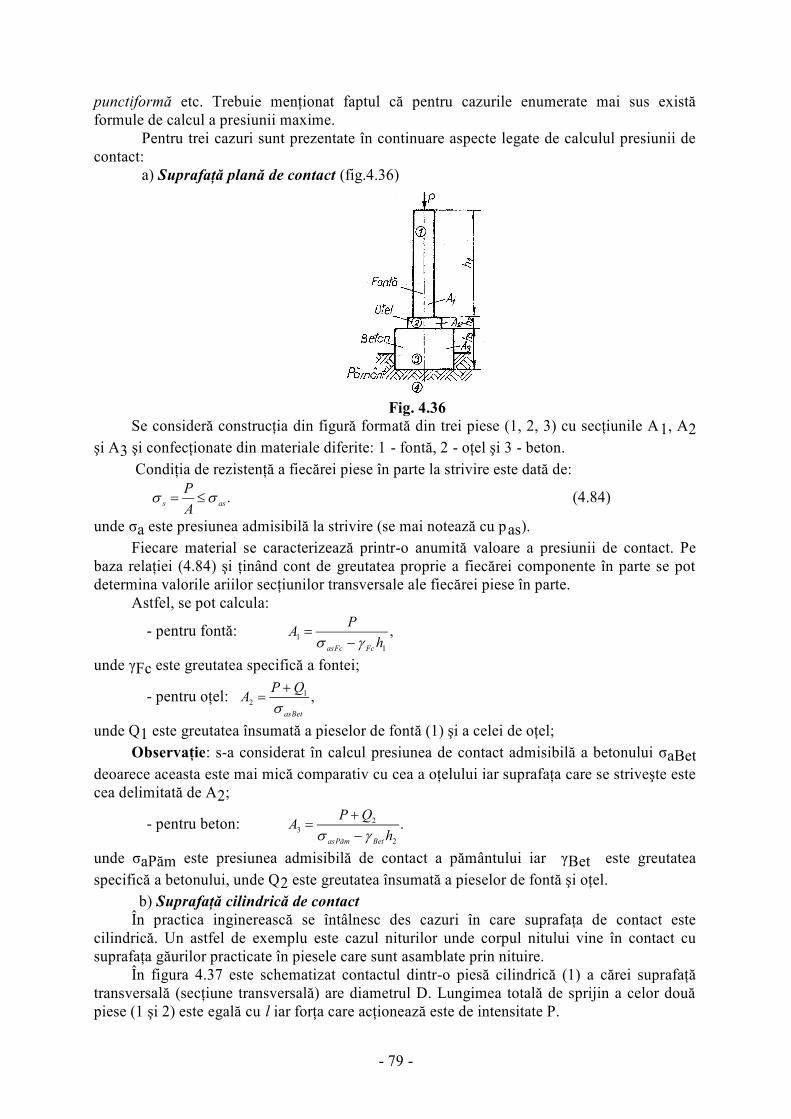
- 79 -
punctiformă etc. Trebuie menţionat faptul că pentru cazurile enumerate mai sus există
formule de calcul a presiunii maxime.
Pentru trei cazuri sunt prezentate în continuare aspecte legate de calculul presiunii de
contact:
a) Suprafaţă plană de contact (fig.4.36)
Fig. 4.36
Se consideră construcţia din figură formată din trei piese (1, 2, 3) cu secţiunile A1, A2
şi A3 şi confecţionate din materiale diferite: 1 - fontă, 2 - oţel şi 3 - beton.
Condiţia de rezistenţă a fiecărei piese în parte la strivire este dată de:
.ass
A
P (4.84)
unde σa este presiunea admisibilă la strivire (se mai notează cu pas).
Fiecare material se caracterizează printr-o anumită valoare a presiunii de contact. Pe
baza relaţiei (4.84) şi ţinând cont de greutatea proprie a fiecărei componente în parte se pot
determina valorile ariilor secţiunilor transversale ale fiecărei piese în parte.
Astfel, se pot calcula:
- pentru fontă: ,1
1h
PA
FcFcas
unde γFc este greutatea specifică a fontei;
- pentru oţel: ,1
2
Betas
QPA
unde Q1 este greutatea însumată a pieselor de fontă (1) şi a celei de oţel;
Observaţie: s-a considerat în calcul presiunea de contact admisibilă a betonului σaBet
deoarece aceasta este mai mică comparativ cu cea a oţelului iar suprafaţa care se striveşte este
cea delimitată de A2;
- pentru beton: .2
2
3h
QPA
BetPãmas
unde σaPăm este presiunea admisibilă de contact a pământului iar γBet este greutatea
specifică a betonului, unde Q2 este greutatea însumată a pieselor de fontă şi oţel.
b) Suprafaţă cilindrică de contact
În practica inginerească se întâlnesc des cazuri în care suprafaţa de contact este
cilindrică. Un astfel de exemplu este cazul niturilor unde corpul nitului vine în contact cu
suprafaţa găurilor practicate în piesele care sunt asamblate prin nituire.
În figura 4.37 este schematizat contactul dintr-o piesă cilindrică (1) a cărei suprafaţă
transversală (secţiune transversală) are diametrul D. Lungimea totală de sprijin a celor două
piese (1 şi 2) este egală cu l iar forţa care acţionează este de intensitate P.
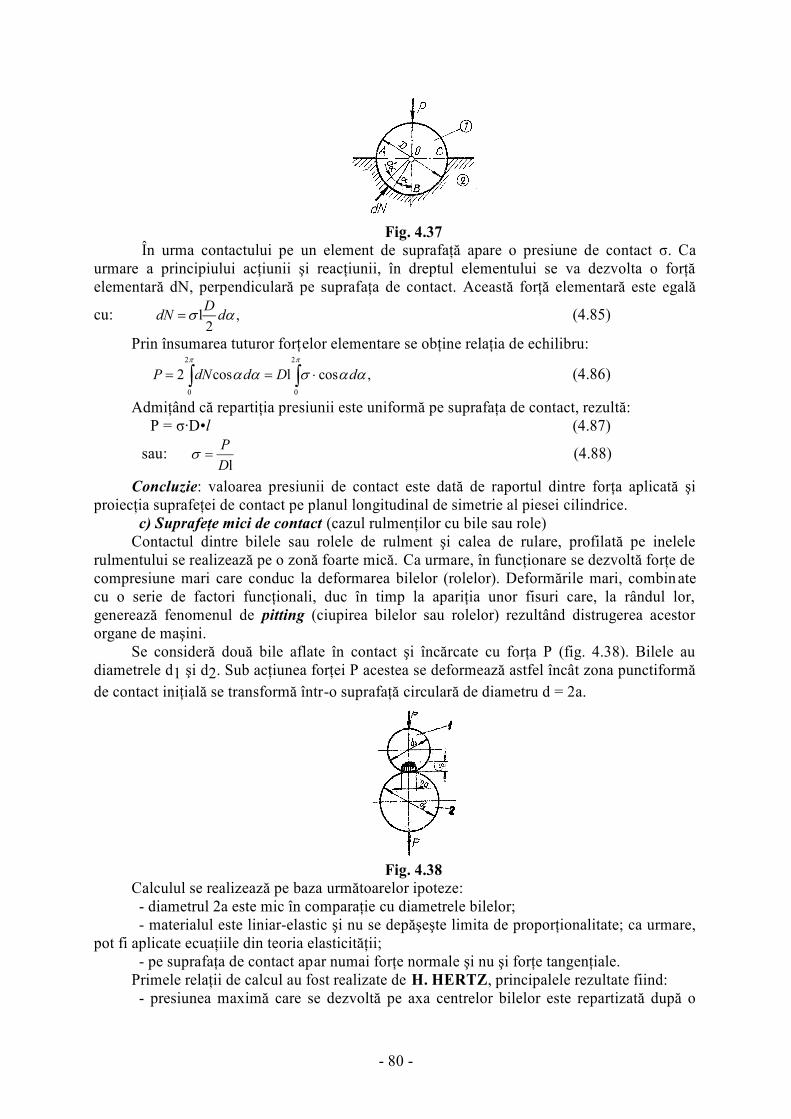
- 80 -
Fig. 4.37
În urma contactului pe un element de suprafaţă apare o presiune de contact σ. Ca
urmare a principiului acţiunii şi reacţiunii, în dreptul elementului se va dezvolta o forţă
elementară dN, perpendiculară pe suprafaţa de contact. Această forţă elementară este egală
cu: ,2
l dD
dN (4.85)
Prin însumarea tuturor forţelor elementare se obţine relaţia de echilibru:
,coslcos2
2
0
2
0
dDddNP (4.86)
Admiţând că repartiţia presiunii este uniformă pe suprafaţa de contact, rezultă:
P = σ·D•l (4.87)
sau: lD
P (4.88)
Concluzie: valoarea presiunii de contact este dată de raportul dintre forţa aplicată şi
proiecţia suprafeţei de contact pe planul longitudinal de simetrie al piesei cilindrice.
c) Suprafeţe mici de contact (cazul rulmenţilor cu bile sau role)
Contactul dintre bilele sau rolele de rulment şi calea de rulare, profilată pe inelele
rulmentului se realizează pe o zonă foarte mică. Ca urmare, în funcţionare se dezvoltă forţe de
compresiune mari care conduc la deformarea bilelor (rolelor). Deformările mari, combin ate
cu o serie de factori funcţionali, duc în timp la apariţia unor fisuri care, la rândul lor,
generează fenomenul de pitting (ciupirea bilelor sau rolelor) rezultând distrugerea acestor
organe de maşini.
Se consideră două bile aflate în contact şi încărcate cu forţa P (fig. 4.38). Bilele au
diametrele d1 şi d2. Sub acţiunea forţei P acestea se deformează astfel încât zona punctiformă
de contact iniţială se transformă într-o suprafaţă circulară de diametru d = 2a.
Fig. 4.38
Calculul se realizează pe baza următoarelor ipoteze:
- diametrul 2a este mic în comparaţie cu diametrele bilelor;
- materialul este liniar-elastic şi nu se depăşeşte limita de proporţionalitate; ca urmare,
pot fi aplicate ecuaţiile din teoria elasticităţii;
- pe suprafaţa de contact apar numai forţe normale şi nu şi forţe tangenţiale.
Primele relaţii de calcul au fost realizate de H. HERTZ, principalele rezultate fiind:
- presiunea maximă care se dezvoltă pe axa centrelor bilelor este repartizată după o
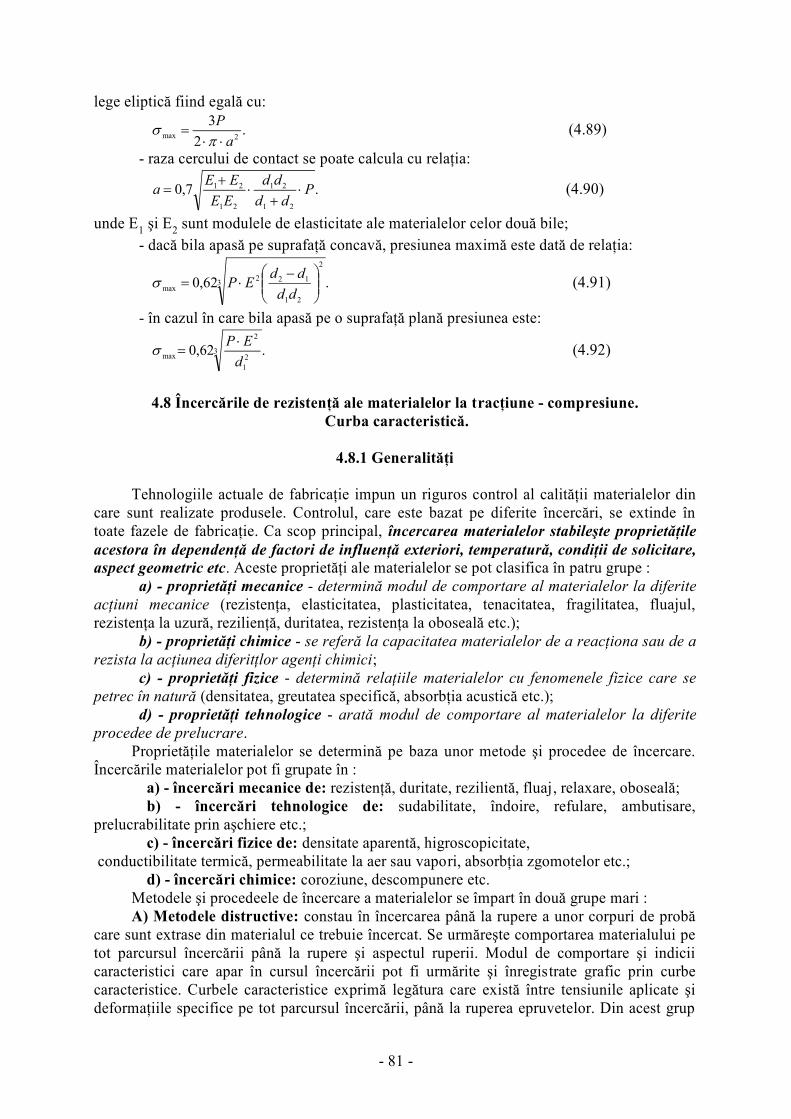
- 81 -
lege eliptică fiind egală cu:
.2
32max
a
P
(4.89)
- raza cercului de contact se poate calcula cu relaţia:
.7,021
21
21
21 Pdd
dd
EE
EEa
(4.90)
unde E1 şi E
2 sunt modulele de elasticitate ale materialelor celor două bile;
- dacă bila apasă pe suprafaţă concavă, presiunea maximă este dată de relaţia:
.62,0 3
2
21
122
max
dd
ddEP (4.91)
- în cazul în care bila apasă pe o suprafaţă plană presiunea este:
.62,0 32
1
2
maxd
EP (4.92)
4.8 Încercările de rezistenţă ale materialelor la tracţiune - compresiune.
Curba caracteristică.
4.8.1 Generalităţi
Tehnologiile actuale de fabricaţie impun un riguros control al calităţii materialelor din
care sunt realizate produsele. Controlul, care este bazat pe diferite încercări, se extinde în
toate fazele de fabricaţie. Ca scop principal, încercarea materialelor stabileşte proprietăţile
acestora în dependenţă de factori de influenţă exteriori, temperatură, condiţii de solicitare,
aspect geometric etc. Aceste proprietăţi ale materialelor se pot clasifica în patru grupe :
a) - proprietăţi mecanice - determină modul de comportare al materialelor la diferite
acţiuni mecanice (rezistenţa, elasticitatea, plasticitatea, tenacitatea, fragilitatea, fluajul,
rezistenţa la uzură, rezilienţă, duritatea, rezistenţa la oboseală etc.);
b) - proprietăţi chimice - se referă la capacitatea materialelor de a reacţiona sau de a
rezista la acţiunea diferitţlor agenţi chimici;
c) - proprietăţi fizice - determină relaţiile materialelor cu fenomenele fizice care se
petrec în natură (densitatea, greutatea specifică, absorbţia acustică etc.);
d) - proprietăţi tehnologice - arată modul de comportare al materialelor la diferite
procedee de prelucrare.
Proprietăţile materialelor se determină pe baza unor metode şi procedee de încercare.
Încercările materialelor pot fi grupate în :
a) - încercări mecanice de: rezistenţă, duritate, rezilientă, fluaj, relaxare, oboseală;
b) - încercări tehnologice de: sudabilitate, îndoire, refulare, ambutisare,
prelucrabilitate prin aşchiere etc.;
c) - încercări fizice de: densitate aparentă, higroscopicitate,
conductibilitate termică, permeabilitate la aer sau vapori, absorbţia zgomotelor etc.;
d) - încercări chimice: coroziune, descompunere etc.
Metodele şi procedeele de încercare a materialelor se împart în două grupe mari :
A) Metodele distructive: constau în încercarea până la rupere a unor corpuri de probă
care sunt extrase din materialul ce trebuie încercat. Se urmăreşte comportarea materialului pe
tot parcursul încercării până la rupere şi aspectul ruperii. Modul de comportare şi indicii
caracteristici care apar în cursul încercării pot fi urmărite şi înregistrate grafic prin curbe
caracteristice. Curbele caracteristice exprimă legătura care există între tensiunile aplicate şi
deformaţiile specifice pe tot parcursul încercării, până la ruperea epruvetelor. Din acest grup
- 82 -
fac parte, în special, încercările referitoare la comportarea materialelor din punct de vedere al
rezistenţei, deformaţiei şi mecanicii ruperii.
B) Metodele nedistructive: se bazează pe acţiunea reciprocă dintre diferitele forme de
energie şi materie servind la indicarea naturii, mărimii şi frecvenţei discontinuităţilor (defecte
interioare şi de suprafaţă) în materiale. Se aplică la semifabricate şi la componente ale
utilajelor şi construcţiilor care sunt supuse la solicitări importante în exploatare.
În vederea comparării modului de comportare a materialelor la diverse acţiuni au fost
introduse o serie de standarde. Acestea prevăd toate condiţiile care trebuiesc respectate la
încercarea şi controlul materialelor cu privire la: extragerea corpurilor de probă (epruvetele),
forma, mărimea şi modul de prelucrare al acestora, condiţii de încercare propriu-zise,
interpretarea şi prezentarea rezultatelor.
Pentru unificarea standardelor, a fost constituită Organizatia Internatională de
Standardizare (I. S. O.) care a întocmit recomandări şi proiecte de standarde. În 1948 a fost
creată Uniunea Internatională de Încercări şi Cercetări asupra Materialelor şi
Construcţiilor (R. I. L. E. M.) avându-şi sediul la Geneva.
Metodele actuale de încercare îşi au originea în Evul mediu, primul care a realizat astfel d e
activităţi a fost Leonardo de Vinci (1452 - 1510). El a conceput o maşină folosită la
determinarea rezistenţei la tracţiune a sârmelor. Mai târziu, maşina a fost dezvoltată de
Galilei (1564 - 1642). Primele observaţii de comportare mecanică a materialelor au fost
făcute, în 1678, de către Hooke (1635 - 1703). Aceste prime observaţii aveau să capete
denumirea, atât de cunoscută astăzi, de legea lui Hooke sau legea elasticităţii. Forma actuală
a prins contur în 1807 prin definirea modului de elasticitate a lui Young. Preocupări în
domeniul încercărilor epruvetelor de lemn şi metal au mai avut: R. de Reaumur (1683 -
1757),P. van Musschenbrock (1662 - 1716) iar primele studii care au avut ca scop
determinarea durităţii metalelor au fost făcute de către M. V. Lomonosov (1711 - 1765).
Primul laborator public, care avea drept scop principal determinarea calităţii
materialelelor prin încercări, a fost realizat în 1858 în Angla şi a fost o urmare firească a
primei revoluţii industriale. Astfel de laboratoare au mai fost create la München şi Stuttgart.
Primele cercetări asupra oţelurilor care sunt supuse la solicitări variabile au fost realizate de
A. Wöhler între anii 1860 şi 1870. Aceste cercetări au fost necesare ca urmare a apariţiei
ruperilor frecvente ale osiilor de la vagoanele de tren, Wöhler fiind inginer angajat al căilor
ferate germane. În anul 1884 au fost efectuate, pentru prima dată, încercări la şoc de către
Tetmajer la grinzi în T cu crestătură. Mai târziu, plecând de la aceste încercări, au fost create
încercări de rezilienţă, în ambele forme cunoscute (Charpy şi Izod).
Anul 1900 a însemnat şi Expoziţia Universală de la Paris unde Brinell a prezentat
pentru prima dată o metodă tehnică pentru determinarea durităţii. Această metodă este des
utilizată şi în zilele noastre împreună cu metodele Rockwell şi Vickers. În paralel cu
dezvoltarea metodelor de încercare au fost construite şi instalaţiile necesare.
Primele maşini au fost realizate în 1758 în Franţa de către J. Peronet (1708 - 1784)
fiind urmat de către L. Werder (1808 - 1885) şi A. Gagarin. Primele laboratoare având ca
activitate încercarea materialelor au fost construite la sfârşitul secolului trecut pe lângă marile
întreprinderi constructoare de maşini. În Europa, în anul 1904, este înfiinţat primul Institut de
încercarea materialelor de către Martens în Germania.
Metodele nedistructive au fost dezvoltate, mai ales, după descoperirea razelor Röntgen
(1895) şi a razelor gama (1896). Saxby, în anul 1868, aplică pentru prima dată câmpul
magnetic în vederea descoperirii defectelor superficiale. Alte metode nedistructive, care au
fost introduse la începutul acestui secol, au fost : procedeul cu pulbere magnetică (introdus în
1919 de Hoke); controlul magneto-inductiv (curenti turbionari - realizat de Förster);
determinarea imperfecţiunilor interioare cu ajutorul ultrasunetelor şi mai mai târziu cu laser.
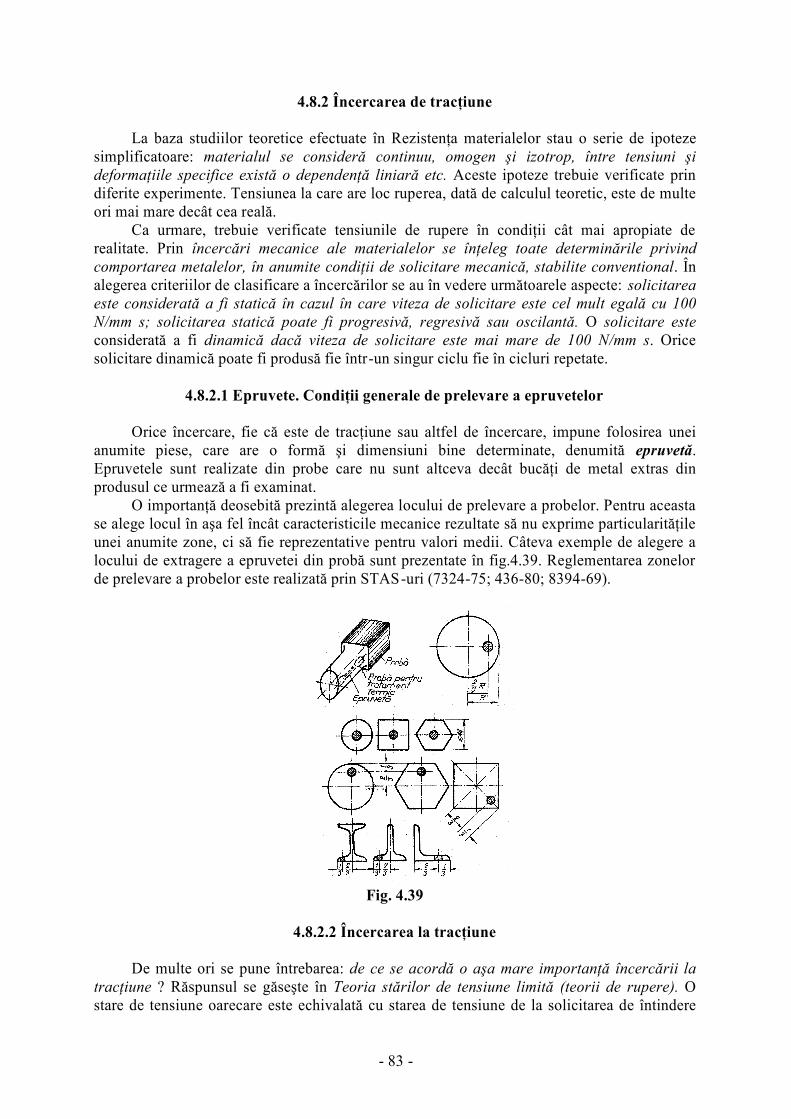
- 83 -
4.8.2 Încercarea de tracţiune
La baza studiilor teoretice efectuate în Rezistenţa materialelor stau o serie de ipoteze
simplificatoare: materialul se consideră continuu, omogen şi izotrop, între tensiuni şi
deformaţiile specifice există o dependenţă liniară etc. Aceste ipoteze trebuie verificate prin
diferite experimente. Tensiunea la care are loc ruperea, dată de calculul teoretic, este de multe
ori mai mare decât cea reală.
Ca urmare, trebuie verificate tensiunile de rupere în condiţii cât mai apropiate de
realitate. Prin încercări mecanice ale materialelor se înţeleg toate determinările privind
comportarea metalelor, în anumite condiţii de solicitare mecanică, stabilite conventional. În
alegerea criteriilor de clasificare a încercărilor se au în vedere următoarele aspecte: solicitarea
este considerată a fi statică în cazul în care viteza de solicitare este cel mult egală cu 100
N/mm s; solicitarea statică poate fi progresivă, regresivă sau oscilantă. O solicitare este
considerată a fi dinamică dacă viteza de solicitare este mai mare de 100 N/mm s. Orice
solicitare dinamică poate fi produsă fie într-un singur ciclu fie în cicluri repetate.
4.8.2.1 Epruvete. Condiţii generale de prelevare a epruvetelor
Orice încercare, fie că este de tracţiune sau altfel de încercare, impune folosirea unei
anumite piese, care are o formă şi dimensiuni bine determinate, denumită epruvetă.
Epruvetele sunt realizate din probe care nu sunt altceva decât bucăţi de metal extras din
produsul ce urmează a fi examinat.
O importanţă deosebită prezintă alegerea locului de prelevare a probelor. Pentru aceasta
se alege locul în aşa fel încât caracteristicile mecanice rezultate să nu exprime particularităţile
unei anumite zone, ci să fie reprezentative pentru valori medii. Câteva exemple de alegere a
locului de extragere a epruvetei din probă sunt prezentate în fig.4.39. Reglementarea zonelor
de prelevare a probelor este realizată prin STAS-uri (7324-75; 436-80; 8394-69).
Fig. 4.39
4.8.2.2 Încercarea la tracţiune
De multe ori se pune întrebarea: de ce se acordă o aşa mare importanţă încercării la
tracţiune ? Răspunsul se găseşte în Teoria stărilor de tensiune limită (teorii de rupere). O
stare de tensiune oarecare este echivalată cu starea de tensiune de la solicitarea de întindere
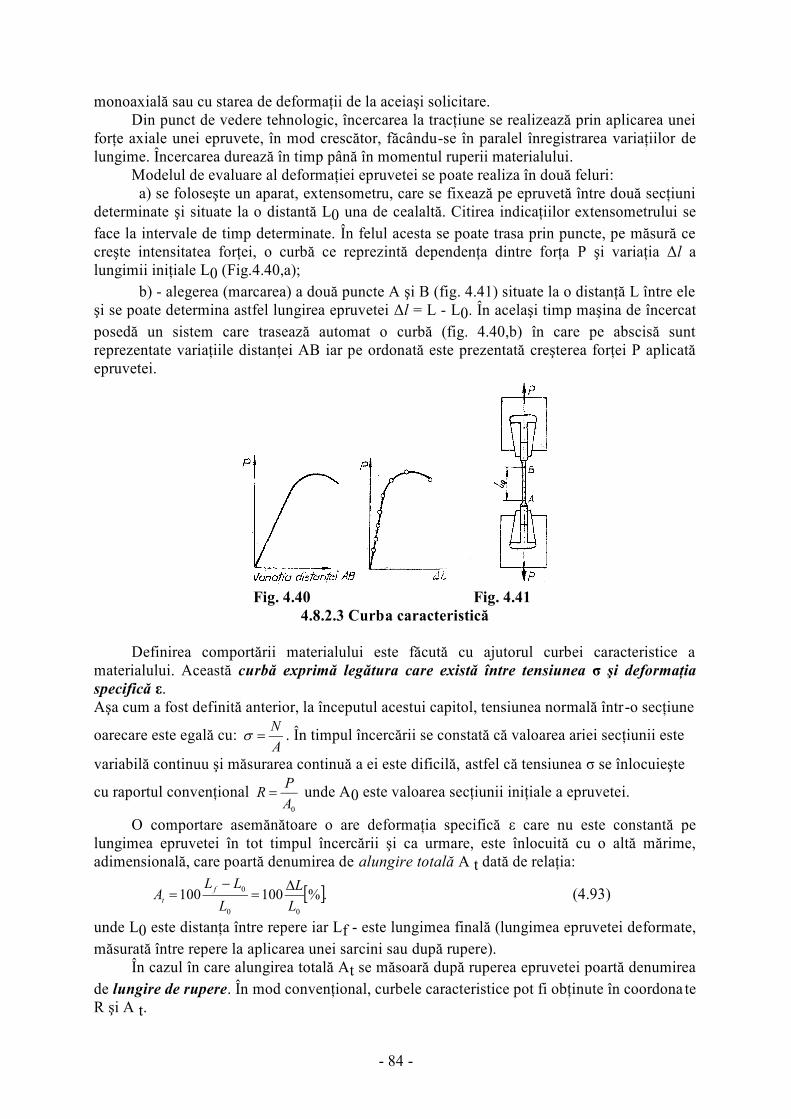
- 84 -
monoaxială sau cu starea de deformaţii de la aceiaşi solicitare.
Din punct de vedere tehnologic, încercarea la tracţiune se realizează prin aplicarea unei
forţe axiale unei epruvete, în mod crescător, făcându-se în paralel înregistrarea variaţiilor de
lungime. Încercarea durează în timp până în momentul ruperii materialului.
Modelul de evaluare al deformaţiei epruvetei se poate realiza în două feluri:
a) se foloseşte un aparat, extensometru, care se fixează pe epruvetă între două secţiuni
determinate şi situate la o distantă L0 una de cealaltă. Citirea indicaţiilor extensometrului se
face la intervale de timp determinate. În felul acesta se poate trasa prin puncte, pe măsură ce
creşte intensitatea forţei, o curbă ce reprezintă dependenţa dintre forţa P şi variaţia Δl a
lungimii iniţiale L0 (Fig.4.40,a);
b) - alegerea (marcarea) a două puncte A şi B (fig. 4.41) situate la o distanţă L între ele
şi se poate determina astfel lungirea epruvetei Δl = L - L0. În acelaşi timp maşina de încercat
posedă un sistem care trasează automat o curbă (fig. 4.40,b) în care pe abscisă sunt
reprezentate variaţiile distanţei AB iar pe ordonată este prezentată creşterea forţei P aplicată
epruvetei.
Fig. 4.40 Fig. 4.41
4.8.2.3 Curba caracteristică
Definirea comportării materialului este făcută cu ajutorul curbei caracteristice a
materialului. Această curbă exprimă legătura care există între tensiunea σ şi deformaţia
specifică ε.
Aşa cum a fost definită anterior, la începutul acestui capitol, tensiunea normală într-o secţiune
oarecare este egală cu: A
N . În timpul încercării se constată că valoarea ariei secţiunii este
variabilă continuu şi măsurarea continuă a ei este dificilă, astfel că tensiunea σ se înlocuieşte
cu raportul convenţional 0
A
PR unde A0 este valoarea secţiunii iniţiale a epruvetei.
O comportare asemănătoare o are deformaţia specifică ε care nu este constantă pe
lungimea epruvetei în tot timpul încercării şi ca urmare, este înlocuită cu o altă mărime,
adimensională, care poartă denumirea de alungire totală A t dată de relaţia:
.%10010000
0
L
L
L
LLA
f
t
(4.93)
unde L0 este distanţa între repere iar Lf - este lungimea finală (lungimea epruvetei deformate,
măsurată între repere la aplicarea unei sarcini sau după rupere).
În cazul în care alungirea totală At se măsoară după ruperea epruvetei poartă denumirea
de lungire de rupere. În mod convenţional, curbele caracteristice pot fi obţinute în coordona te
R şi A t.
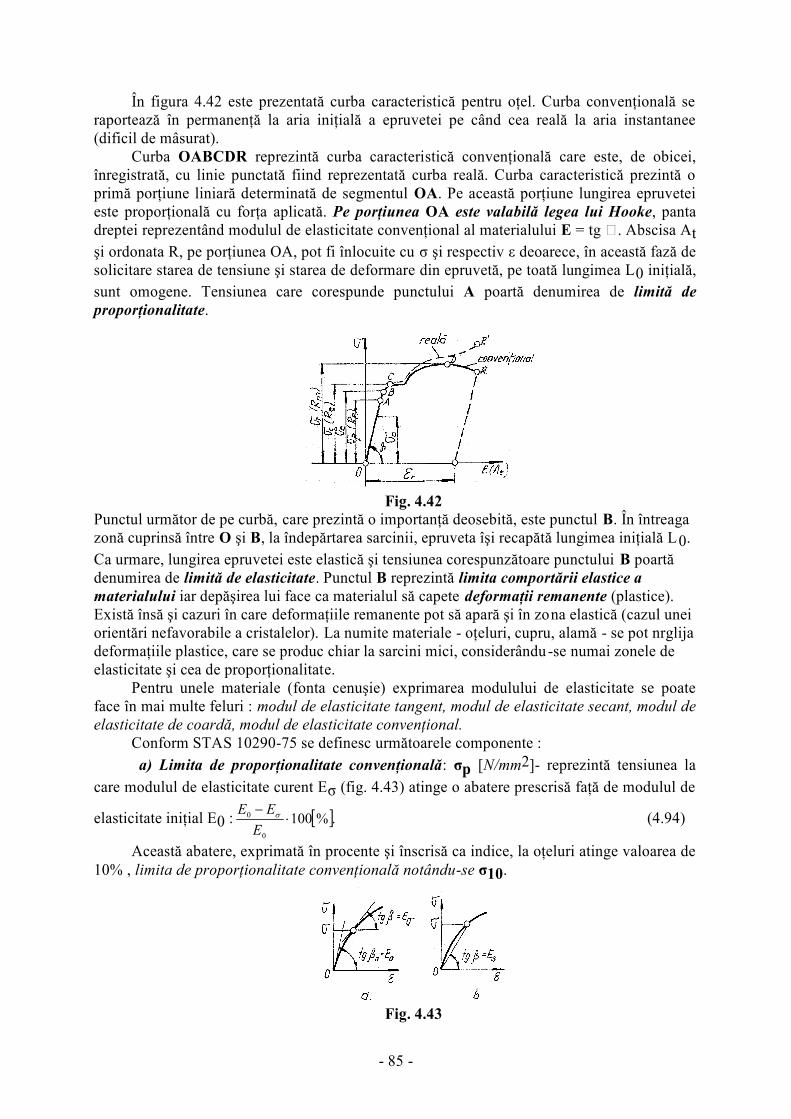
- 85 -
În figura 4.42 este prezentată curba caracteristică pentru oţel. Curba convenţională se
raportează în permanenţă la aria iniţială a epruvetei pe când cea reală la aria instantanee
(dificil de mâsurat).
Curba OABCDR reprezintă curba caracteristică convenţională care este, de obicei,
înregistrată, cu linie punctată fiind reprezentată curba reală. Curba caracteristică prezintă o
primă porţiune liniară determinată de segmentul OA. Pe această porţiune lungirea epruvetei
este proporţională cu forţa aplicată. Pe porţiunea OA este valabilă legea lui Hooke, panta
dreptei reprezentând modulul de elasticitate convenţional al materialului E = tg . Abscisa At
şi ordonata R, pe porţiunea OA, pot fi înlocuite cu σ şi respectiv ε deoarece, în această fază de
solicitare starea de tensiune şi starea de deformare din epruvetă, pe toată lungimea L0 iniţială,
sunt omogene. Tensiunea care corespunde punctului A poartă denumirea de limită de
proporţionalitate.
Fig. 4.42
Punctul următor de pe curbă, care prezintă o importanţă deosebită, este punctul B. În întreaga
zonă cuprinsă între O şi B, la îndepărtarea sarcinii, epruveta îşi recapătă lungimea iniţială L0.
Ca urmare, lungirea epruvetei este elastică şi tensiunea corespunzătoare punctului B poartă
denumirea de limită de elasticitate. Punctul B reprezintă limita comportării elastice a
materialului iar depăşirea lui face ca materialul să capete deformaţii remanente (plastice).
Există însă şi cazuri în care deformaţiile remanente pot să apară şi în zona elastică (cazul unei
orientări nefavorabile a cristalelor). La numite materiale - oţeluri, cupru, alamă - se pot nrglija
deformaţiile plastice, care se produc chiar la sarcini mici, considerându-se numai zonele de
elasticitate şi cea de proporţionalitate.
Pentru unele materiale (fonta cenuşie) exprimarea modulului de elasticitate se poate
face în mai multe feluri : modul de elasticitate tangent, modul de elasticitate secant, modul de
elasticitate de coardă, modul de elasticitate convenţional.
Conform STAS 10290-75 se definesc următoarele componente :
a) Limita de proporţionalitate convenţională: σp [N/mm2]- reprezintă tensiunea la
care modulul de elasticitate curent Eσ (fig. 4.43) atinge o abatere prescrisă faţă de modulul de
elasticitate iniţial E0 : .%1000
0
E
EE (4.94)
Această abatere, exprimată în procente şi înscrisă ca indice, la oţeluri atinge valoarea de
10% , limita de proporţionalitate convenţională notându-se σ10.
Fig. 4.43
- 86 -
b) Limita de elasticitate convenţională (pentru o lungire proporţională prescrisă) σp
[N/mm2] - reprezintă tensiunea la care abaterea de la variaţia proporţinală dintre tensiune şi
lungire atinge o valoare prescrisă care se menţionează ca indice la notaţia tensiunii. La oţeluri
este admisă o abatere de 0,01% iar limita de elasticitate convenţională se notează cu σp 0,01.
c) Limita de elasticitate tehnică (pentru o lungire remanentă prescrisă) σe [N/mm2] -
este tensiunea la care lungirea specifică remanentă atinge o valoare prescrisă care este înscrisă
ca indice. La oţeluri, în mod uzual, lungirea specifică remanentă este stabilită la valoarea de
0,01% şi ca urmare, limita de elasticitate tehnică este notată cu σe 0,01. Prin raportarea
lungirii transversale εtr la lungirea specifică longitudinală ε se obţine coeficientul de
contracţie transversală notat cu ν.
Caracteristicile definite până acum, modulul de elasticitate longitudinal, limita de
proporţionalitate convenţională, limita de elasticitate convenţională, limita de elasticitate
tehnică şi coeficientul de contracţie transversală poartă denumirea de caracteristici elastice
ale materialului şi nu sunt considerate caracteristici mecanice uzuale.
Revenind la curba caracteristică din (fig.4.42), pentru zona deformaţiilor plastice
pronunţate, zona situată după punctul B, alura curbei are aspecte diferite, funcţie de natura
materialului. Pentru oţeluri, în special pentru cele cu conţinut redus de carbon, se constată
apariţia unei zone în care deformaţiile plastice sunt foarte mari producându-se la o forţă
exterioară constantă sau chiar descrescătoare. Este vorba de zona de curbă situată după
punctul C. Acest punct se numeste limita de curgere corespunzându-i o tensiune de curgere
ce este notată cu σc. În această fază a încercării materialului curge, adică se deformează, deşi
sarcina nu mai creşte. Pe curbă, după punctul C, se constată existenţa unui palier de curgere.
Există unele materiale la care acest palier de curgere lipseşte, stabilirea limitei de curgere
fiind dificilă. A fost definită drept limita de curgere tehnică punctul de pe curba caracteristică
căruia îi corespunde după descărcarea epruvetei o lungire specifică remanentă de 0,2%. Ca
urmare, tensiunea normală se notează cu σ0, 2
.
Raportând sarcina constantă, la care are loc continuarea deformaţiei, la aria secţiunii
transversale iniţiale a epruvetei se obţine limita de curgere aparentă şi este notată cu Re.
Pentru materialele care nu au limită de curgere aparentă, stabilirea ei se face convenţional,
definindu-se conform STAS 200-75:
a) Limita de curgere convenţională (pentru o alungire neproporţională prescrisă), fiind
raportul dintre sarcina corespunzătoare unei alungiri neproporţionale prescrise şi aria secţiunii
transversale iniţiale a epruvetei fiind notată cu Rp (la oţeluri Rp O,2).
b) Limita de curgere remanentă (pentru o alungire remanentă prescrisă) - notată cu Rr şi reprezintă raportul între sarcina corespunzătoare unei alungiri remanente (la descărcarea
epruvetei) prescrise şi aria sectiunii transversale initiale a epruvetei. Alungirea remanentă
prescrisă este mentionată ca indice. La oţeluri, în mod uzual, alungirea remanentă este 0,2% şi
curgerea este notată cu Rr 0,2. Atât limita de curgere convenţională cât şi limita de curgere
remanentă se măsoară în [N/mm2].
Cu creşterea gradului de deformare plastică din zona de curgere, metalul suferă un
fenomen de ecruisare şi din această cauză este necesară mărirea forţei de deformare. Curba
prezintă o nouă zonă de creştere a cărui punct de maxim este D. Prin convenţie, tensiunea
corespunzătoare punctului D este tensiunea de rupere :
.N/mm2
0
max
A
Nr
deşi ruperea reală are loc în dreptul punctului R.
Zona de curbură dinaintea punctului D se numeşte zonă de ecruisare sau întârziere. În
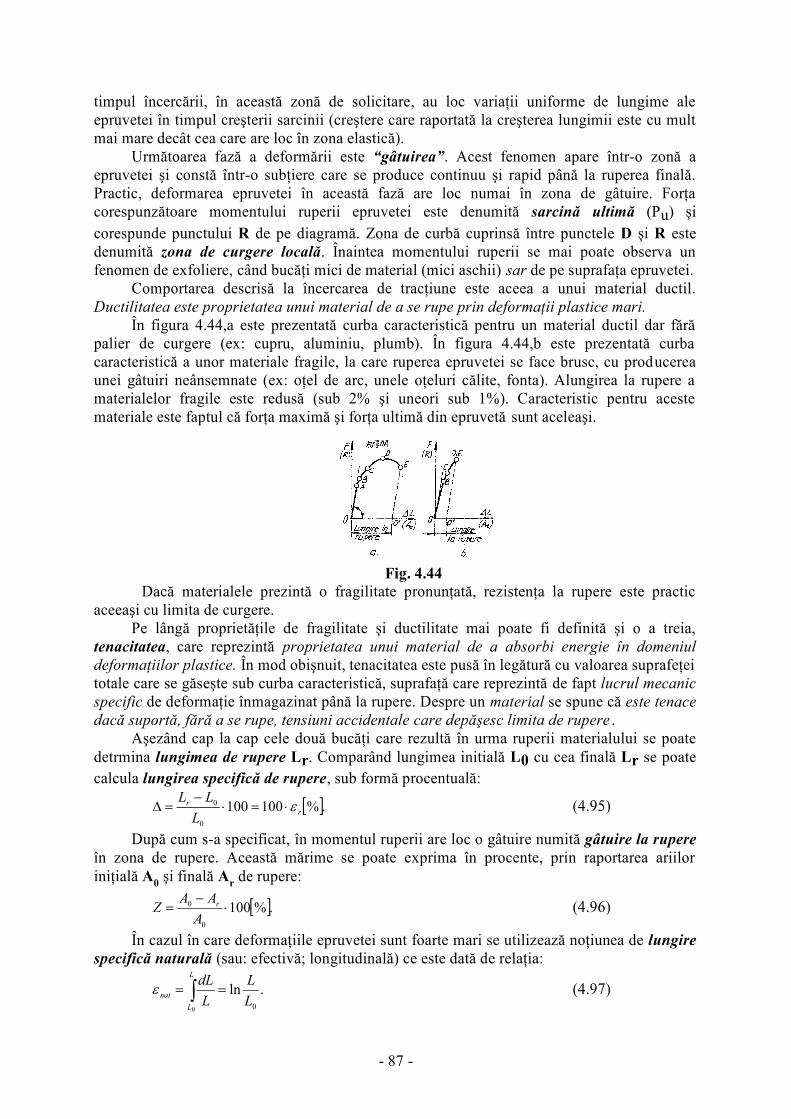
- 87 -
timpul încercării, în această zonă de solicitare, au loc variaţii uniforme de lungime ale
epruvetei în timpul creşterii sarcinii (creştere care raportată la creşterea lungimii este cu mult
mai mare decât cea care are loc în zona elastică).
Următoarea fază a deformării este “gâtuirea”. Acest fenomen apare într-o zonă a
epruvetei şi constă într-o subţiere care se produce continuu şi rapid până la ruperea finală.
Practic, deformarea epruvetei în această fază are loc numai în zona de gâtuire. Forţa
corespunzătoare momentului ruperii epruvetei este denumită sarcină ultimă (Pu) şi
corespunde punctului R de pe diagramă. Zona de curbă cuprinsă între punctele D şi R este
denumită zona de curgere locală. Înaintea momentului ruperii se mai poate observa un
fenomen de exfoliere, când bucăţi mici de material (mici aschii) sar de pe suprafaţa epruvetei.
Comportarea descrisă la încercarea de tracţiune este aceea a unui material ductil.
Ductilitatea este proprietatea unui material de a se rupe prin deformaţii plastice mari.
În figura 4.44,a este prezentată curba caracteristică pentru un material ductil dar fără
palier de curgere (ex: cupru, aluminiu, plumb). În figura 4.44,b este prezentată curba
caracteristică a unor materiale fragile, la care ruperea epruvetei se face brusc, cu producerea
unei gâtuiri neânsemnate (ex: oţel de arc, unele oţeluri călite, fonta). Alungirea la rupere a
materialelor fragile este redusă (sub 2% şi uneori sub 1%). Caracteristic pentru aceste
materiale este faptul că forţa maximă şi forţa ultimă din epruvetă sunt aceleaşi.
Fig. 4.44
Dacă materialele prezintă o fragilitate pronunţată, rezistenţa la rupere este practic
aceeaşi cu limita de curgere.
Pe lângă proprietăţile de fragilitate şi ductilitate mai poate fi definită şi o a treia,
tenacitatea, care reprezintă proprietatea unui material de a absorbi energie în domeniul
deformaţiilor plastice. În mod obişnuit, tenacitatea este pusă în legătură cu valoarea suprafeţei
totale care se găseşte sub curba caracteristică, suprafaţă care reprezintă de fapt lucrul mecanic
specific de deformaţie înmagazinat până la rupere. Despre un material se spune că este tenace
dacă suportă, fără a se rupe, tensiuni accidentale care depăşesc limita de rupere .
Aşezând cap la cap cele două bucăţi care rezultă în urma ruperii materialului se poate
detrmina lungimea de rupere Lr. Comparând lungimea initială L0 cu cea finală Lr se poate
calcula lungirea specifică de rupere, sub formă procentuală:
.%1001000
0
r
r
L
LL
(4.95)
După cum s-a specificat, în momentul ruperii are loc o gâtuire numită gâtuire la rupere
în zona de rupere. Această mărime se poate exprima în procente, prin raportarea ariilor
iniţială A0 şi finală A
r de rupere:
.%1000
0
A
AAZ r (4.96)
În cazul în care deformaţiile epruvetei sunt foarte mari se utilizează noţiunea de lungire
specifică naturală (sau: efectivă; longitudinală) ce este dată de relaţia:
.ln00
L
L
L
dLL
L
nat (4.97)

- 88 -
unde L0 este lungimea iniţială a epruvetei şi L este lungimea efectivă momentană.
4.8.3 Tensiunea admisibilă
Prin definiţie, tensiunea admisibilă sau rezistenţa admisibilă este acea valoare
convenţională aleasă în calcul, în urma rezultatelor practice, pentru tensiunea maximă din
punctul cel mai solicitat al unei piese (organ de maşină) în condiţile concrete date de
solicitare şi de material.
În activitatea de proiectare a unor piese/organe de maşini, ca dată de intrare, se găseşte
şi natura materialului ce urmează a fi folosit. Ca urmare, cunoscându -se materialul implicit
este cunoscută şi curba sa caracteristică la tracţiune, cunoscându-se de fapt valorile maxime
admisibile pe care le suportă materialul piesei. Tensiunile ce se dezvoltă în piesă, în timpul
funcţionării sale, trebuie să fie limitate la valori mai mici ca cele corespunzătoare limitelor de
elasticitate sau curgere.
Funcţionarea piesei într-un ansamblu, limita ei practică de rezistenţă, este influenţată de
o serie de factori care ţin de: omogenitatea materialului din care este confecţionată piesa,
coincidenţa între valorile reale ale forţelor în exploatare cu cele luate în calcul pentru
proiectarea piesei, schematizarea corectă a încercărilor pe baza luării în considerare a
tuturor solicitărilor ce apar în funcţionarea piesei, diferiţi factori aleatori care pot apare în
timpul funcţionării (suprasolicitări, agenţi corozivi, imperfecţiuni de execuţie şi/sau monatj
etc).
Pentru a exista o posibilitate de protecţie faţă de situaţiile limită s-a introdus un
coeficient de siguranţă. Se defineşte drept tensiune admisibilă pentru bare solicitate static la
temperatură normală:
,21
cc
r
a
c
a
(4.98)
unde prima egalitate din (4.98) este folosită în cazul în care materialul barei are o comportare
ductilă iar a doua în cazul în care acesta are o comportare fragilă.
Deci c1 este coeficientul de siguranţă în raport cu limita de curgere iar c2 este
coeficientul de siguranţă în raport cu rezistenţa la rupere statică a materialului prescris pentru
elemente de rezistenţă.
Alegerea tensiunii admisibile şi a coeficientului de siguranţă se face ţinându-se cont de:
felul materialelor, procesul tehnologic de prelucrare al piselor, natura solicitării, modul de
acţionare a sarcinilor în timp, condiţiile de lucru, modelele de calcul etc.
Valorile orientative ale coeficienţilor de siguranţă la solicitări statice, raportat la σr ,
funcţie de natura materialului piesei realizate, pot fi:
- pentru materiale tenace: c = 2 ÷ 3;
- pentru materiale fragile: c = 3 ÷ 4;
- pentru materiale foarte frragile: c = 4 ÷ 6.
4.8.4 Încercarea de compresiune
Acest gen de încercare se aplică cu precădere materialelor care funcţionează într-un
regim continuu de compresiune: beton, cărămidă, ciment, lemn, deci materiale de construcţie.
Problema importantă care apare este legată de realizarea în epruvetă a unei tensiuni omogene
în epruvetă.
În cazul folosirii unei epruvete cilindrice (fig. 4.45), ca urmare a frecărilor dintre
suprafeţele de contact dintre epruvetă şi suprafeţele de aşezare, starea de tensiune monoaxială
suferă modificări. Punctele A - A rămân, în timpul solicitării, în contact permanent cu placa
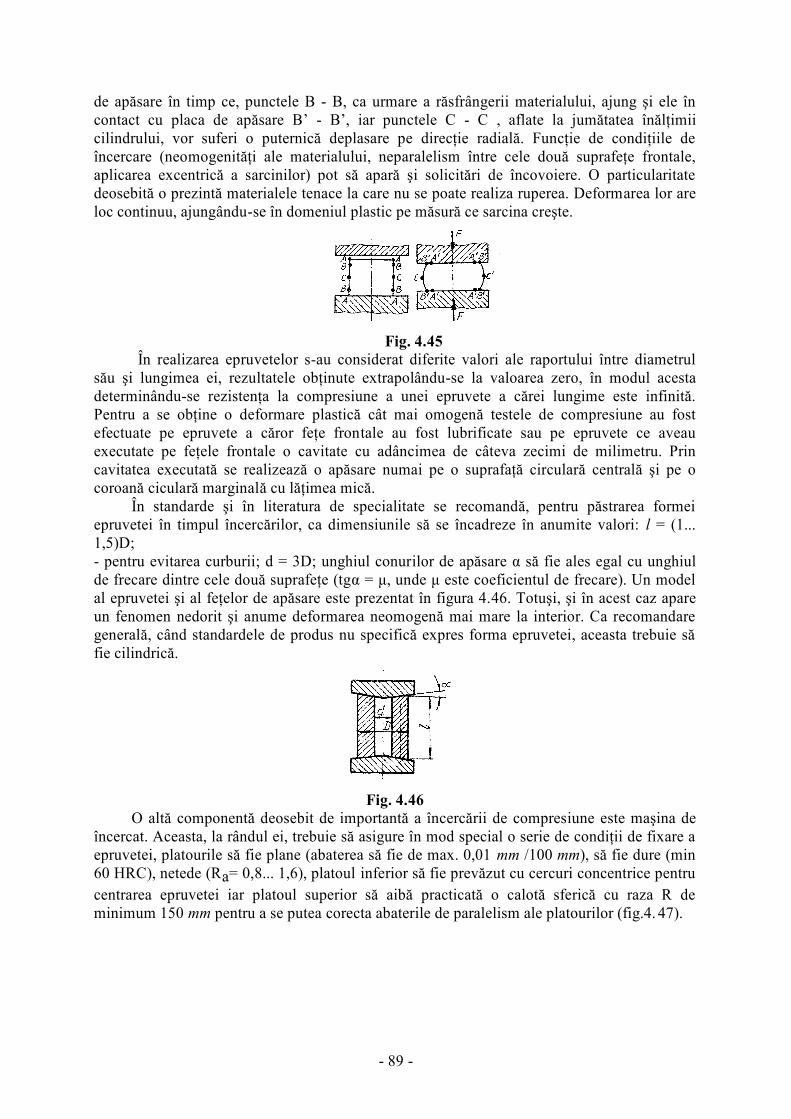
- 89 -
de apăsare în timp ce, punctele B - B, ca urmare a răsfrângerii materialului, ajung şi ele în
contact cu placa de apăsare B’ - B’, iar punctele C - C , aflate la jumătatea înălţimii
cilindrului, vor suferi o puternică deplasare pe direcţie radială. Funcţie de condiţiile de
încercare (neomogenităţi ale materialului, neparalelism între cele două suprafeţe frontale,
aplicarea excentrică a sarcinilor) pot să apară şi solicitări de încovoiere. O particularitate
deosebită o prezintă materialele tenace la care nu se poate realiza ruperea. Deformarea lor are
loc continuu, ajungându-se în domeniul plastic pe măsură ce sarcina creşte.
Fig. 4.45
În realizarea epruvetelor s-au considerat diferite valori ale raportului între diametrul
său şi lungimea ei, rezultatele obţinute extrapolându-se la valoarea zero, în modul acesta
determinându-se rezistenţa la compresiune a unei epruvete a cărei lungime este infinită.
Pentru a se obţine o deformare plastică cât mai omogenă testele de compresiune au fost
efectuate pe epruvete a căror feţe frontale au fost lubrificate sau pe epruvete ce aveau
executate pe feţele frontale o cavitate cu adâncimea de câteva zecimi de milimetru. Prin
cavitatea executată se realizează o apăsare numai pe o suprafaţă circulară centrală şi pe o
coroană ciculară marginală cu lăţimea mică.
În standarde şi în literatura de specialitate se recomandă, pentru păstrarea formei
epruvetei în timpul încercărilor, ca dimensiunile să se încadreze în anumite valori: l = (1...
1,5)D;
- pentru evitarea curburii; d = 3D; unghiul conurilor de apăsare α să fie ales egal cu unghiul
de frecare dintre cele două suprafeţe (tgα = μ, unde μ este coeficientul de frecare). Un model
al epruvetei şi al feţelor de apăsare este prezentat în figura 4.46. Totuşi, şi în acest caz apare
un fenomen nedorit şi anume deformarea neomogenă mai mare la interior. Ca recomandare
generală, când standardele de produs nu specifică expres forma epruvetei, aceasta trebuie să
fie cilindrică.
Fig. 4.46
O altă componentă deosebit de importantă a încercării de compresiune este maşina de
încercat. Aceasta, la rândul ei, trebuie să asigure în mod special o serie de condiţii de fixare a
epruvetei, platourile să fie plane (abaterea să fie de max. 0,01 mm /100 mm), să fie dure (min
60 HRC), netede (Ra= 0,8... 1,6), platoul inferior să fie prevăzut cu cercuri concentrice pentru
centrarea epruvetei iar platoul superior să aibă practicată o calotă sferică cu raza R de
minimum 150 mm pentru a se putea corecta abaterile de paralelism ale platourilor (fig.4. 47).

- 90 -
Fig.4.47
Aplicaţia 4.1: Se consideră bara formată din două sectoare de secţiuni 2A şi A (fig.
4.48). Bara este confecţionată din oţel (E = 2•105 MPa) cele două tronsoane având lungimile
indicate în figură.
Fig. 4.48
Cunoscând că
a = 300 mm, forţa P = 60 kN, iar σa = 120 MPa, se cer să se precizeze următoarele:
a) diagrama de forţe axiale;
b) mărimea ariei necesare Anec din condiţia de rezistenţă a
max
c) lungirea totală Δl.
Rezolvare: a) diagrama este prezentată în figura 4. 48,b.
b) După trasarea diagramei de forţe axiale, se poate observa că în lungul barei aceasta
este solicitată diferit. Astfel, pe porţiunea de la 1 la 3 intensitatea solicitării este egală cu P în
timp ce pe porţiunea 3 - 4 intensitatea solicitării este 4P.
Valorile tensiunilor vor fi:
- pe porţiunea 1 -2: 2
4
21max,mm500120
106
A
AA
P
-pe porţiunea 2 – 3 ;mm2501202
106
2
2
4
32max,
A
AA
P
-porţiunea 3 – 4 ;mm10001202
1024 2
4
43max,
A
AA
P
Dintre cele trei valori determinate mai sus, valoarea aleasă pentru aria necesară este
cea de 1000 mm2.
c) lungirea totală este egală cu: .mm495,02
112
2
3
2
4ll
AE
aP
AE
aP
AE
aP
AE
aPitot
Aplicaţia 4.2: Se consideră o bară de lungime l = 1 m şi de secţiune dreptunghiulară
variabilă prezentată în figura 4.49. Variaţia secţiunii este realizată numai pe înălţime (la
distanţa x faţă de încastrare aceasta are valoarea hx) de la 200 mm la 100 mm în timp ce
lăţimea ei rămâne constantă şi egală cu 50 mm (secţiunea B-B). Cunoscând P = 50 kN, se
cere: a) să se verifice bara ştiind că σa = 150 MPa;
b) să se determine lungirea barei Δl.

- 91 -
Fig. 4.49
Rezolvare: a) din modul de încărcare al barei se poate observa că de-a lungul ei solicitarea axială
este constantă având valoarea P = 5.104 N. Ca urmare, ţinând cont de faptul că secţiunea
transversală este variabilă, verificarea se va face în zona în care aria transversală este cea mai
mică:
,
4
maxMPa10
10050
105a
deci bara rezistă.
b) Pentru determinarea lungirii barei, având în vedere faptul că secţiunea este
variabilă, calculul se va face pe baza relaţiei de calcul:
l
0
.l dxAE
N
x
l
0
.l dxAE
N
x
unde Ax este aria la distanţa x.
Valoarea acestei arii este, conform secţiunii B-B egală cu: Ax = 50hx.
Determinarea înălţimii hx se poate realiza prin două moduri: prin asemănare sau
pornind de la observaţia că variaţia ei este liniară. Pe baza acestei observaţii se poate scrie:
hx = C x + D ,
unde C şi D sunt două constante care pot fi determinate din condiţiile de graniţă:
- pentru x = 0 rezultă: hx = 200 = D;
- pentru x = l rezultă: .l
100C200lC100h
x
Pe baza celor calculate mai sus, secţiunea la distanţa x va fi:
.20001,0l2l
100200
l
100xxxA
x
Ca urmare, lungirea este:
mm.732,11021,0
105693,0693,0
1,02000ln
1,0
2000
11
1,020001,0
11l
5
41000l
0
l
0
l
0
l
0
l
0
E
Px
E
P
dxxE
Pdx
xE
Pdx
AE
Pdx
EA
P
xx
Aplicaţia 4.3: O bară dreaptă foarte rigidă (fig. 4.50) este articulată la un capăt (în B) şi
susţinută cu două tije care au următoarele caracteristici:
- pentru bara 1: secţiunea A = 250 mm2, modulul de elasticitate longitudinal E = 2
•105 MPa;
- pentru bara 2: secţiunea 2A = 500 mm2, modulul de elsticitate longitudinal E = 2•105
MPa. Se cere să se determine:
a) valoarea forţei capabile P având în vedere că σa = 120 MPa iar l = 0,8 m;
b) lungirile celor două bare;
c) deplasarea pe verticală a punctului D (vD).
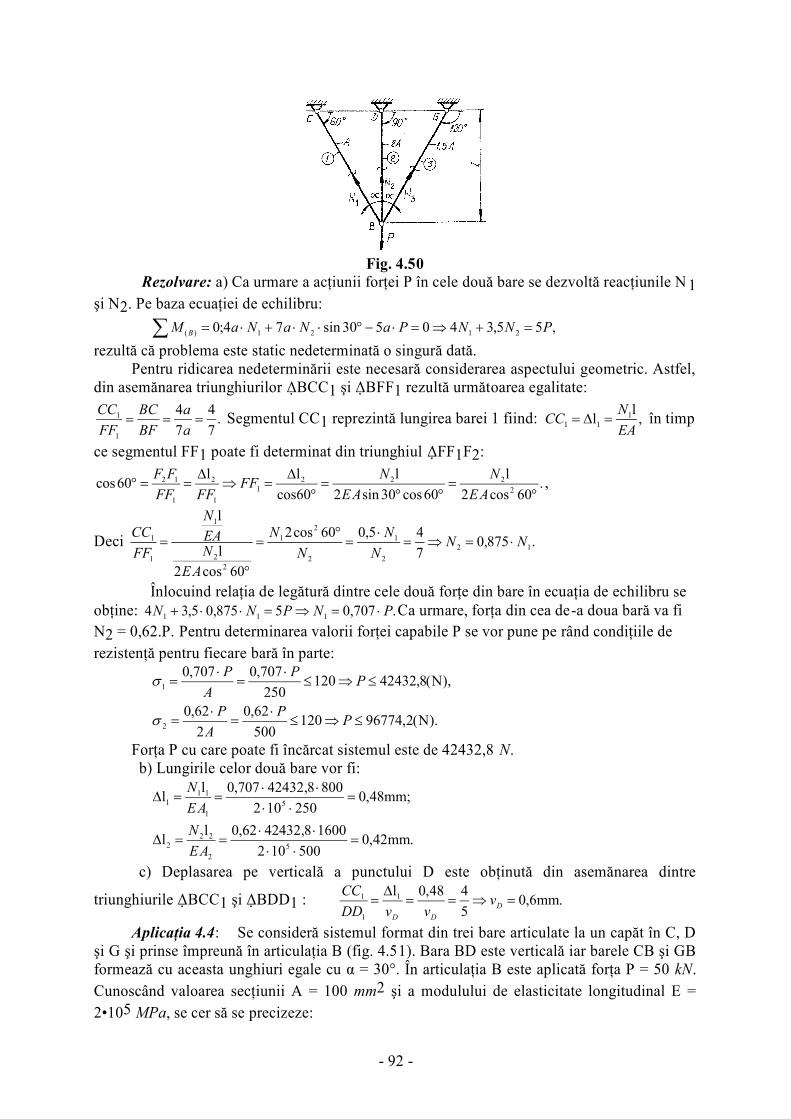
- 92 -
Fig. 4.50
Rezolvare: a) Ca urmare a acţiunii forţei P în cele două bare se dezvoltă reacţiunile N 1
şi N2. Pe baza ecuaţiei de echilibru:
,55,340530sin74;02121)(
PNNPaNaNaMB
rezultă că problema este static nedeterminată o singură dată.
Pentru ridicarea nedeterminării este necesară considerarea aspectului geometric. Astfel,
din asemănarea triunghiurilor ΔBCC1 şi ΔBFF1 rezultă următoarea egalitate:
.7
4
7
4
1
1 a
a
BF
BC
FF
CC Segmentul CC1 reprezintă lungirea barei 1 fiind: ,
ll 1
11EA
NCC în timp
ce segmentul FF1 poate fi determinat din triunghiul ΔFF1F2:
.60cos2
l
60cos30sin2
l
cos60
ll60cos
2
222
1
1
2
1
12
AE
N
AE
NFF
FFFF
FF,
Deci .875,07
45,060cos2
60cos2
l
l
12
2
1
2
2
1
2
2
1
1
1 NNN
N
N
N
AE
NEA
N
FF
CC
Înlocuind relaţia de legătură dintre cele două forţe din bare în ecuaţia de echilibru se
obţine: .707,05875,05,34111
PNPNN Ca urmare, forţa din cea de-a doua bară va fi
N2 = 0,62.P. Pentru determinarea valorii forţei capabile P se vor pune pe rând condiţiile de
rezistenţă pentru fiecare bară în parte:
).N(2,96774120500
62,0
2
62,0
),N(8,42432120250
707,0707,0
2
1
PP
A
P
PP
A
P
Forţa P cu care poate fi încărcat sistemul este de 42432,8 N.
b) Lungirile celor două bare vor fi:
.mm42,0500102
16008,4243262,0ll
;mm48,0250102
8008,42432707,0ll
5
2
22
2
5
1
11
1
AE
N
AE
N
c) Deplasarea pe verticală a punctului D este obţinută din asemănarea dintre
triunghiurile ΔBCC1 şi ΔBDD1 : .mm6,05
448,0l1
1
1
D
DD
vvvDD
CC
Aplicaţia 4.4: Se consideră sistemul format din trei bare articulate la un capăt în C, D
şi G şi prinse împreună în articulaţia B (fig. 4.51). Bara BD este verticală iar barele CB şi GB
formează cu aceasta unghiuri egale cu α = 30°. În articulaţia B este aplicată forţa P = 50 kN.
Cunoscând valoarea secţiunii A = 100 mm2 şi a modulului de elasticitate longitudinal E =
2•105 MPa, se cer să se precizeze:

- 93 -
a) eforturile secţionale şi tensiunile care se dezvoltă în cele trei bare;
b) deplasările punctului B pe orizontală (uB) şi deplasarea totală ΔB.
Fig. 4.51
Rezolvare:
a) Sub acţiunea forţei P în cele trei bare se vor dezvolta eforturile secţionale N1, N2 şi
N3. În nodul B pot fi scrise ecuaţiile de echilibru cunoscute din statică:
.coscos;0
;sinsin;0
231
3131
PNNNY
NNNNX
Sistemul de două ecuaţii conţine un număr de trei necunoscute N1, N2 şi N3. Ca
urmare, sistemul de trei bare considerat este o dată static nedeterminat. Pentru determinarea
necunoscutelor este necesară găsirea unei noi relaţii de legătură între necunoscute.
Între deplasările punctului B pe orizontală şi verticală şi alungirile fiecărei bare:
.866,05,0l
30cos5,1
,l
2 ;866,05,0
l
30cos
3
21
BB
BBB
vuAE
N
vAE
NvuAE
N
Din relaţia lui N2 rezultă:
AE
Nv
B2
l2 iar din egalitatea N
1 = N
3 se obţine:
,866,05,05,1866,05,0BBBB
vuvu de unde rezultă: uB = 0,3464 v
B.
Înlocuind expresia lui vB rezultă: .
l1732,0 2
AE
Nu
B
Cu valorile de mai sus, expresiile eforturilor secţionale din barele BC şi BG vor fi date de:
.45,0l
866,0l
1732,05,030cosl
2
22
31N
EA
N
EA
NAENN
Înlocuind valorile lui N1 şi N
3 în cea de-a doua ecuaţie de echilibru static rezultă:
,N28050561,01866,845,0222
PNPN
iar valorile celorlalte două sunt: .N12600252,021
PNN
Tensiunile care se dezvoltă în fiecare bară vor fi egale cu :
MPa84mm150
N60012
;MPa25,140mm200
N05028 ;MPa126
mm100
N60012
2
3
3
3
2
2
222
1
11
A
N
A
N
A
N
b) Deplasarea pe orizontală a punctului B este egală cu:
.mm291,0100102
1200050281732,0
l1732,0
5
2
EA
Nu
B
Deplasarea pe verticală a punctului B este dată de:
- 94 -
.mm841,01001022
120005028l5
2
EA
Nv
B
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii tipului de solicitare de tractiune- compresiune , stabilind forta
axiala, tensiunile si deformatiile care apar.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
rezolve tipurile de probleme static determinate, cat si mai ales cele static nedeterminate;
determine caracteristicile materialelor analizate prin prisma incercarilor specifice.
Durata medie de parcurgere a unităţii de învăţare este de 6 ore.
U4.9 Test de evaluare a cunostintelor
U4.9.1 Stabiliti expresia lungirii la o bara dreapta, de sectiune constanta solicitata de
o forta axiala centrica.
U4.9.2 Ce se intelege prin modul de ri giditate al sectiunii la intindere(compresiune)?
U4.9.3 Ce se intelege prin coeficientul contractiei transversale si intre ce limite
variaza valorile lui?
U4 .9.4 Explicati ce se intelege prin curba caracteristica conventionala si prin curba
caracteristica reala.
U4.9.5 Care este definitia coeficientului de siguranta si de care factori depinde
valoarea sa ?
U4.9.6 Ce masu ri se iau pentru micsorarea concentrarii tensiunilor?
U4.9.7 Precizati ce reprezinta ecuatiile de echilibru elastic?
U4.9.8 Ce tensiuni se produc datorita temperaturii si cum se determina ele?
U4.9.9 Comparati tensiunile datorate variatiei de temperatura in cazul unei bare
incastrata la capete, cu sectiunea constanta, fata de o bara cu sectiunea
variabila.
Tema de control trebuie să fie alcătuita din TO DO
Exemplificaţi tipurile de probleme static nedeterminate de tractiune- compresiune
pe diverse exemple numerice.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte
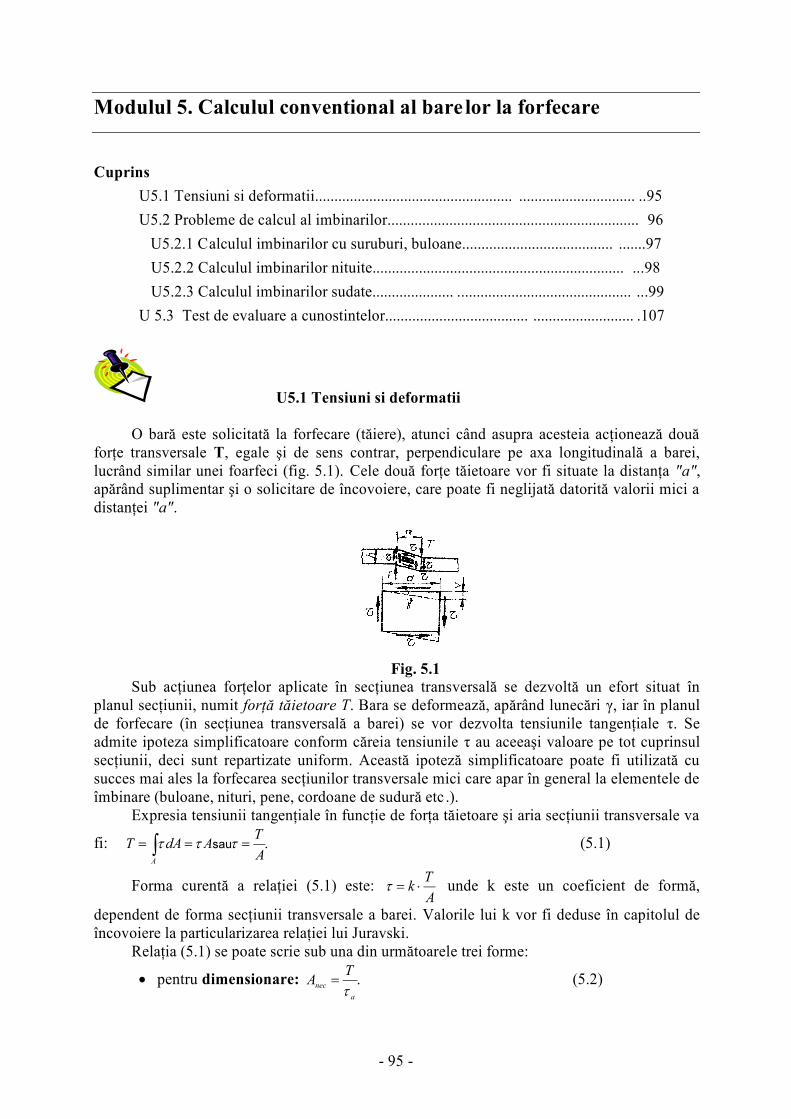
- 95 -
Modulul 5. Calculul conventional al bare lor la forfecare
Cuprins
U5.1 Tensiuni si deformatii................................................... .............................. ..95
U5.2 Probleme de calcul al imbinarilor................................................................. 96
U5.2.1 Calculul imbinarilor cu suruburi, buloane....................................... .......97
U5.2.2 Calculul imbinarilor nituite................................................................. ...98
U5.2.3 Calculul imbinarilor sudate..................... ............................................. ...99
U 5.3 Test de evaluare a cunostintelor..................................... .......................... .107
U5.1 Tensiuni si deformatii
O bară este solicitată la forfecare (tăiere), atunci când asupra acesteia acţionează două
forţe transversale T, egale şi de sens contrar, perpendiculare pe axa longitudinală a barei,
lucrând similar unei foarfeci (fig. 5.1). Cele două forţe tăietoare vor fi situate la distanţa "a",
apărând suplimentar şi o solicitare de încovoiere, care poate fi neglijată datorită valorii mici a
distanţei "a".
Fig. 5.1
Sub acţiunea forţelor aplicate în secţiunea transversală se dezvoltă un efort situat în
planul secţiunii, numit forţă tăietoare T. Bara se deformează, apărând lunecări γ, iar în planul
de forfecare (în secţiunea transversală a barei) se vor dezvolta tensiunile tangenţiale τ. Se
admite ipoteza simplificatoare conform căreia tensiunile τ au aceeaşi valoare pe tot cuprinsul
secţiunii, deci sunt repartizate uniform. Această ipoteză simplificatoare poate fi utilizată cu
succes mai ales la forfecarea secţiunilor transversale mici care apar în general la elementele de
îmbinare (buloane, nituri, pene, cordoane de sudură etc .).
Expresia tensiunii tangenţiale în funcţie de forţa tăietoare şi aria secţiunii transversale va
fi: .A
TAdAT
A
(5.1)
Forma curentă a relaţiei (5.1) este: A
Tk unde k este un coeficient de formă,
dependent de forma secţiunii transversale a barei. Valorile lui k vor fi deduse în capitolul de
încovoiere la particularizarea relaţiei lui Juravski.
Relaţia (5.1) se poate scrie sub una din următoarele trei forme:
pentru dimensionare: .a
nec
TA
(5.2)
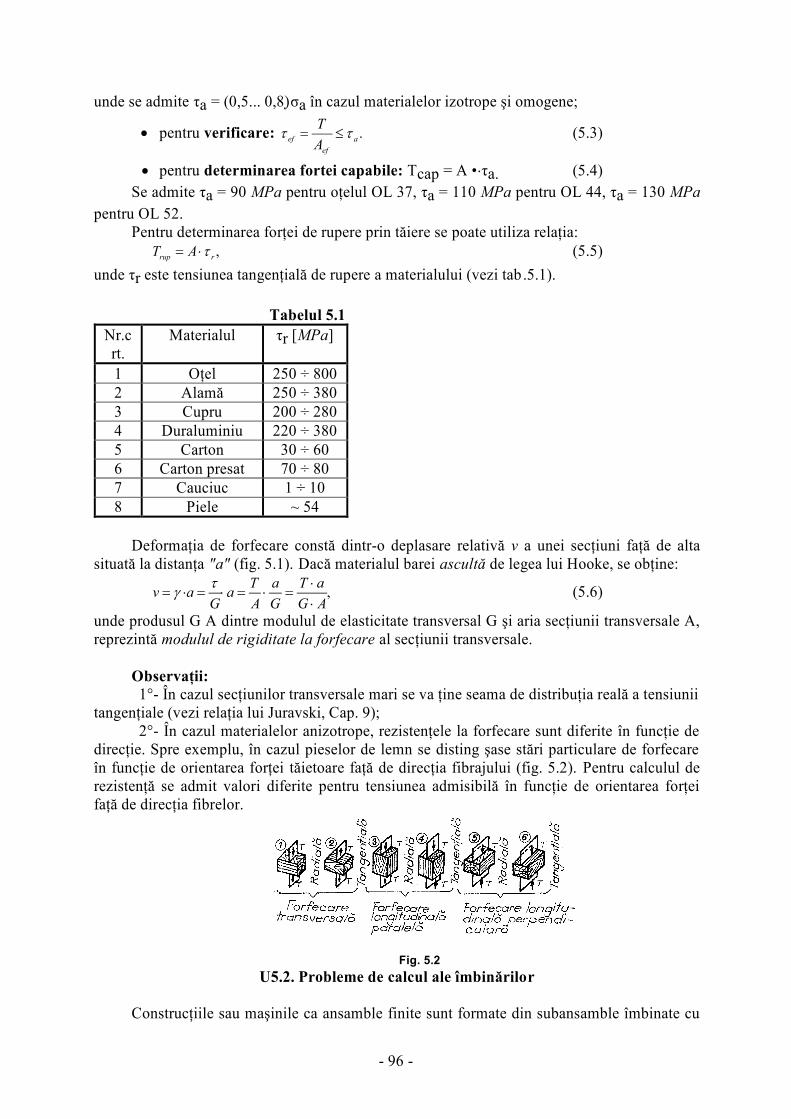
- 96 -
unde se admite τa = (0,5... 0,8) σa în cazul materialelor izotrope şi omogene;
pentru verificare: .a
ef
efA
T (5.3)
pentru determinarea fortei capabile: Tcap = A •.τa. (5.4)
Se admite τa = 90 MPa pentru oţelul OL 37, τa = 110 MPa pentru OL 44, τa = 130 MPa
pentru OL 52.
Pentru determinarea forţei de rupere prin tăiere se poate utiliza relaţia:
,rrup
AT (5.5)
unde τr este tensiunea tangenţială de rupere a materialului (vezi tab .5.1).
Tabelul 5.1
Nr.c
rt.
Materialul τr [MPa]
1 Oţel 250 ÷ 800
2 Alamă 250 ÷ 380
3 Cupru 200 ÷ 280
4 Duraluminiu 220 ÷ 380
5 Carton 30 ÷ 60
6 Carton presat 70 ÷ 80
7 Cauciuc 1 ÷ 10
8 Piele ~ 54
Deformaţia de forfecare constă dintr-o deplasare relativă v a unei secţiuni faţă de alta
situată la distanţa "a" (fig. 5.1). Dacă materialul barei ascultă de legea lui Hooke, se obţine:
,AG
aT
G
a
A
Ta
Gav
(5.6)
unde produsul G A dintre modulul de elasticitate transversal G şi aria secţiunii transversale A,
reprezintă modulul de rigiditate la forfecare al secţiunii transversale.
Observaţii: 1°- În cazul secţiunilor transversale mari se va ţine seama de distribuţia reală a tensiunii
tangenţiale (vezi relaţia lui Juravski, Cap. 9);
2°- În cazul materialelor anizotrope, rezistenţele la forfecare sunt diferite în funcţie de
direcţie. Spre exemplu, în cazul pieselor de lemn se disting şase stări particulare de forfecare
în funcţie de orientarea forţei tăietoare faţă de direcţia fibrajului (fig. 5.2). Pentru calculul de
rezistenţă se admit valori diferite pentru tensiunea admisibilă în funcţie de orientarea forţei
faţă de direcţia fibrelor.
Fig. 5.2
U5.2. Probleme de calcul ale îmbinărilor
Construcţiile sau maşinile ca ansamble finite sunt formate din subansamble îmbinate cu
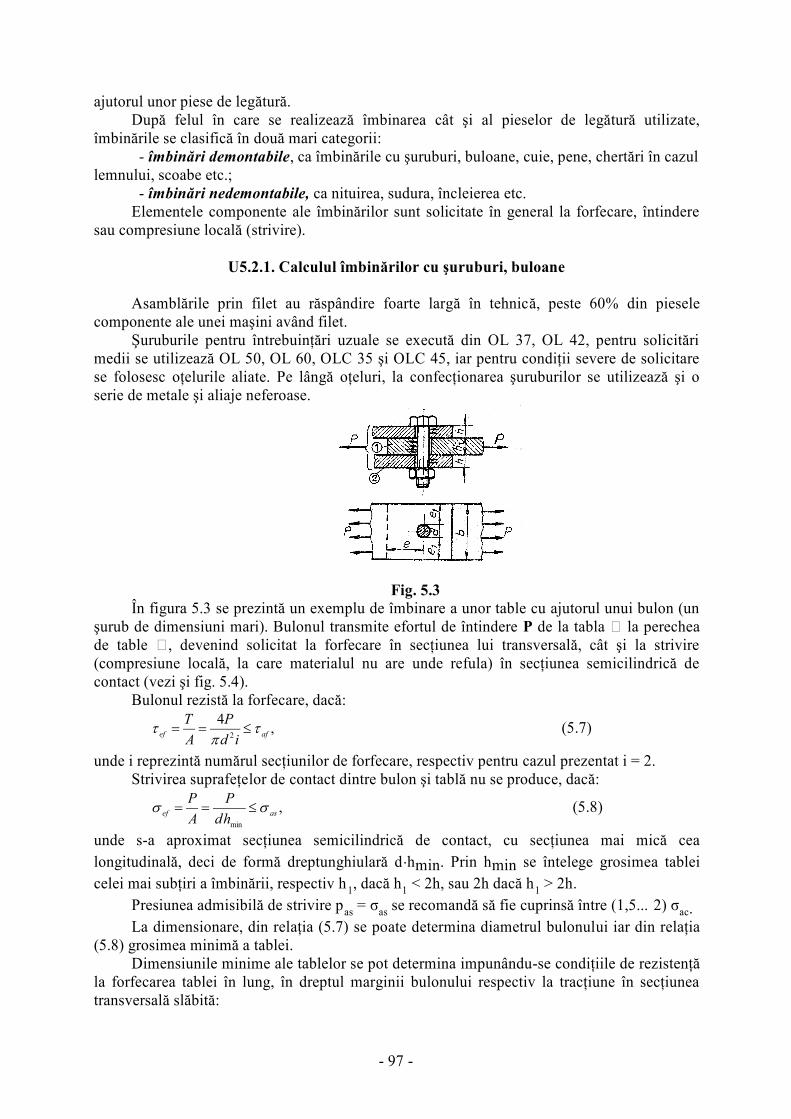
- 97 -
ajutorul unor piese de legătură.
După felul în care se realizează îmbinarea cât şi al pieselor de legătură utilizate,
îmbinările se clasifică în două mari categorii:
- îmbinări demontabile, ca îmbinările cu şuruburi, buloane, cuie, pene, chertări în cazul
lemnului, scoabe etc.;
- îmbinări nedemontabile, ca nituirea, sudura, încleierea etc.
Elementele componente ale îmbinărilor sunt solicitate în general la forfecare, întindere
sau compresiune locală (strivire).
U5.2.1. Calculul îmbinărilor cu şuruburi, buloane
Asamblările prin filet au răspândire foarte largă în tehnică, peste 60% din piesele
componente ale unei maşini având filet.
Şuruburile pentru întrebuinţări uzuale se execută din OL 37, OL 42, pentru solicitări
medii se utilizează OL 50, OL 60, OLC 35 şi OLC 45, iar pentru condiţii severe de solicitare
se folosesc oţelurile aliate. Pe lângă oţeluri, la confecţionarea şuruburilor se utilizează şi o
serie de metale şi aliaje neferoase.
Fig. 5.3
În figura 5.3 se prezintă un exemplu de îmbinare a unor table cu ajutorul unui bulon (un
şurub de dimensiuni mari). Bulonul transmite efortul de întindere P de la tabla la perechea
de table , devenind solicitat la forfecare în secţiunea lui transversală, cât şi la strivire
(compresiune locală, la care materialul nu are unde refula) în secţiunea semicilindrică de
contact (vezi şi fig. 5.4).
Bulonul rezistă la forfecare, dacă:
,4
2 afefid
P
A
T
(5.7)
unde i reprezintă numărul secţiunilor de forfecare, respectiv pentru cazul prezentat i = 2.
Strivirea suprafeţelor de contact dintre bulon şi tablă nu se produce, dacă:
,min
asefhd
P
A
P (5.8)
unde s-a aproximat secţiunea semicilindrică de contact, cu secţiunea mai mică cea
longitudinală, deci de formă dreptunghiulară d.hmin. Prin hmin se întelege grosimea tablei
celei mai subţiri a îmbinării, respectiv h1, dacă h
1 < 2h, sau 2h dacă h
1 > 2h.
Presiunea admisibilă de strivire pas
= σas
se recomandă să fie cuprinsă între (1,5... 2) σac.
La dimensionare, din relaţia (5.7) se poate determina diametrul bulonului iar din relaţia
(5.8) grosimea minimă a tablei.
Dimensiunile minime ale tablelor se pot determina impunându-se condiţiile de rezistenţă
la forfecarea tablei în lung, în dreptul marginii bulonului respectiv la tracţiune în secţiunea
transversală slăbită:
- 98 -
,2
min
afefhe
P
(5.9)
.
2min1min
aefhe
P
hdb
P
(5.10)
Din relaţiile (5.9) şi (5.10) rezultă dimensiunile e şi e 1 ale tablei.
În calculele prezentate d reprezintă diametrul minim din zona de calcul, care adeseori
reprezintă diametrul de fund al zonei filetate.
U5.2.2. Calculul îmbinărilor nituite
Atât niturile de rezistenţă, cât şi cele de rezistenţă şi etanşare sunt normalizate printr-o
serie de standarde. În stare nemontată nitul are două părţi, capul nitului şi tija nitului (fig. 5.4).
Operaţia de nituire constă din găurirea tablelor (găuri ce se execută cu 1 mm mai mari decât
diametrul nitului) şi apoi urmează nituirea şi baterea niturilor, astfel încât în stare montată se
poate considera că diametrul tijei este egal cu diametrul găurii de nit.
Fig. 5.4
La calculul unei îmbinări nituite se admit următoarele ipoteze: toate niturile îmbinării au
acelaşi diametru, forţa repartizându-se uniform pe nituri, eforturile se repartizează uniform în
secţiunile functionale. Dimensionarea unei îmbinări nituite presupune stabilirea diametrului
niturilor precum şi a numărului de nituri.
Diametrul niturilor se alege funcţie de grosimea tablelor care se îmbină, folosind relaţia:
,mm50min
ahd (5.11)
unde hmin reprezintă grosimea celei mai subţiri table din îmbinare în [mm], iar a se va
considera de 2 mm pentru îmbinările de rezistenţă, de 4 mm pentru îmbinările de rezistenţă-
etanşare şi de 6 mm pentru îmbinările de rezistenţă-etanşare realizate cu eclise. Valoarea
diametrului d, se rotunjeşte în ordine crescătoare la diametrul standardizat (tab. 5.2).
Tabelul 5.2
În tabelul 5.3 se prezintă concis diametrele maxime de nituri recomandate pentru
îmbinarea tablelor şi profilelor laminate.
Tabelul 5.3
Stabilirea numărului de nituri se face în funcţie de cele două solicitări care apar în nit
respectiv forfecarea secţiunii transversale şi strivirea secţiunii longitudinale. Se determină
forţa capabilă a unui nit la forfecare şi la strivire (fig. 5.5) [21]:
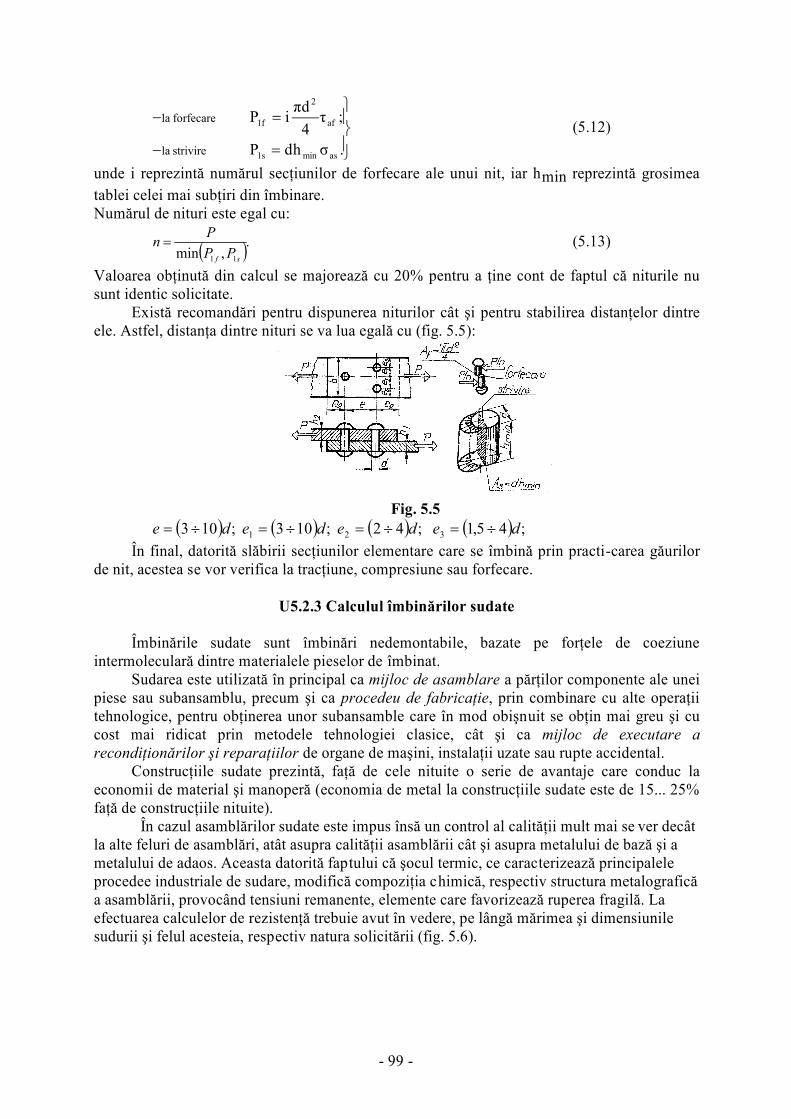
- 99 -
.σhdP
;τ4
dπiP
asmin1s
af
2
1f
strivirela
forfecarela (5.12)
unde i reprezintă numărul secţiunilor de forfecare ale unui nit, iar hmin reprezintă grosimea
tablei celei mai subţiri din îmbinare.
Numărul de nituri este egal cu:
.
,min11 sf
PP
Pn (5.13)
Valoarea obţinută din calcul se majorează cu 20% pentru a ţine cont de faptul că niturile nu
sunt identic solicitate.
Există recomandări pentru dispunerea niturilor cât şi pentru stabilirea distanţelor dintre
ele. Astfel, distanţa dintre nituri se va lua egală cu (fig. 5.5):
Fig. 5.5
;45,1 ;42 ;103 ;103 321 dededede
În final, datorită slăbirii secţiunilor elementare care se îmbină prin practi-carea găurilor
de nit, acestea se vor verifica la tracţiune, compresiune sau forfecare.
U5.2.3 Calculul îmbinărilor sudate
Îmbinările sudate sunt îmbinări nedemontabile, bazate pe forţele de coeziune
intermoleculară dintre materialele pieselor de îmbinat.
Sudarea este utilizată în principal ca mijloc de asamblare a părţilor componente ale unei
piese sau subansamblu, precum şi ca procedeu de fabricaţie, prin combinare cu alte operaţii
tehnologice, pentru obţinerea unor subansamble care în mod obişnuit se obţin mai greu şi cu
cost mai ridicat prin metodele tehnologiei clasice, cât şi ca mijloc de executare a
recondiţionărilor şi reparaţiilor de organe de maşini, instalaţii uzate sau rupte accidental.
Construcţiile sudate prezintă, faţă de cele nituite o serie de avantaje care conduc la
economii de material şi manoperă (economia de metal la construcţiile sudate este de 15... 25%
faţă de construcţiile nituite).
În cazul asamblărilor sudate este impus însă un control al calităţii mult mai se ver decât
la alte feluri de asamblări, atât asupra calităţii asamblării cât şi asupra metalului de bază şi a
metalului de adaos. Aceasta datorită faptului că şocul termic, ce caracterizează principalele
procedee industriale de sudare, modifică compoziţia chimică, respectiv structura metalografică
a asamblării, provocând tensiuni remanente, elemente care favorizează ruperea fragilă. La
efectuarea calculelor de rezistenţă trebuie avut în vedere, pe lângă mărimea şi dimensiunile
sudurii şi felul acesteia, respectiv natura solicitării (fig. 5.6).
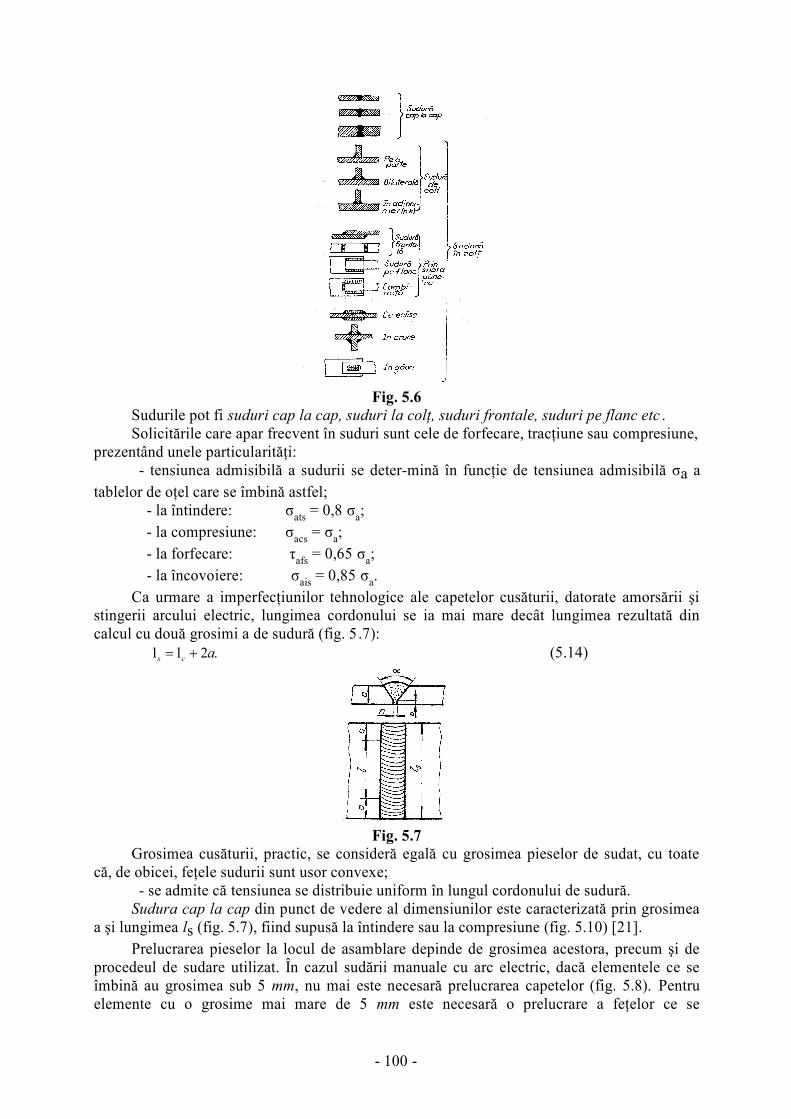
- 100 -
Fig. 5.6
Sudurile pot fi suduri cap la cap, suduri la colţ, suduri frontale, suduri pe flanc etc .
Solicitările care apar frecvent în suduri sunt cele de forfecare, tracţiune sau compresiune,
prezentând unele particularităţi:
- tensiunea admisibilă a sudurii se deter-mină în funcţie de tensiunea admisibilă σa a
tablelor de oţel care se îmbină astfel;
- la întindere: σats
= 0,8 σa;
- la compresiune: σacs
= σa;
- la forfecare: τafs
= 0,65 σa;
- la încovoiere: σais
= 0,85 σa.
Ca urmare a imperfecţiunilor tehnologice ale capetelor cusăturii, datorate amorsării şi
stingerii arcului electric, lungimea cordonului se ia mai mare decât lungimea rezultată din
calcul cu două grosimi a de sudură (fig. 5 .7):
.2ll acs (5.14)
Fig. 5.7
Grosimea cusăturii, practic, se consideră egală cu grosimea pieselor de sudat, cu toate
că, de obicei, feţele sudurii sunt usor convexe;
- se admite că tensiunea se distribuie uniform în lungul cordonului de sudură.
Sudura cap la cap din punct de vedere al dimensiunilor este caracterizată prin grosimea
a şi lungimea ls (fig. 5.7), fiind supusă la întindere sau la compresiune (fig. 5.10) [21].
Prelucrarea pieselor la locul de asamblare depinde de grosimea acestora, precum şi de
procedeul de sudare utilizat. În cazul sudării manuale cu arc electric, dacă elementele ce se
îmbină au grosimea sub 5 mm, nu mai este necesară prelucrarea capetelor (fig. 5.8). Pentru
elemente cu o grosime mai mare de 5 mm este necesară o prelucrare a feţelor ce se
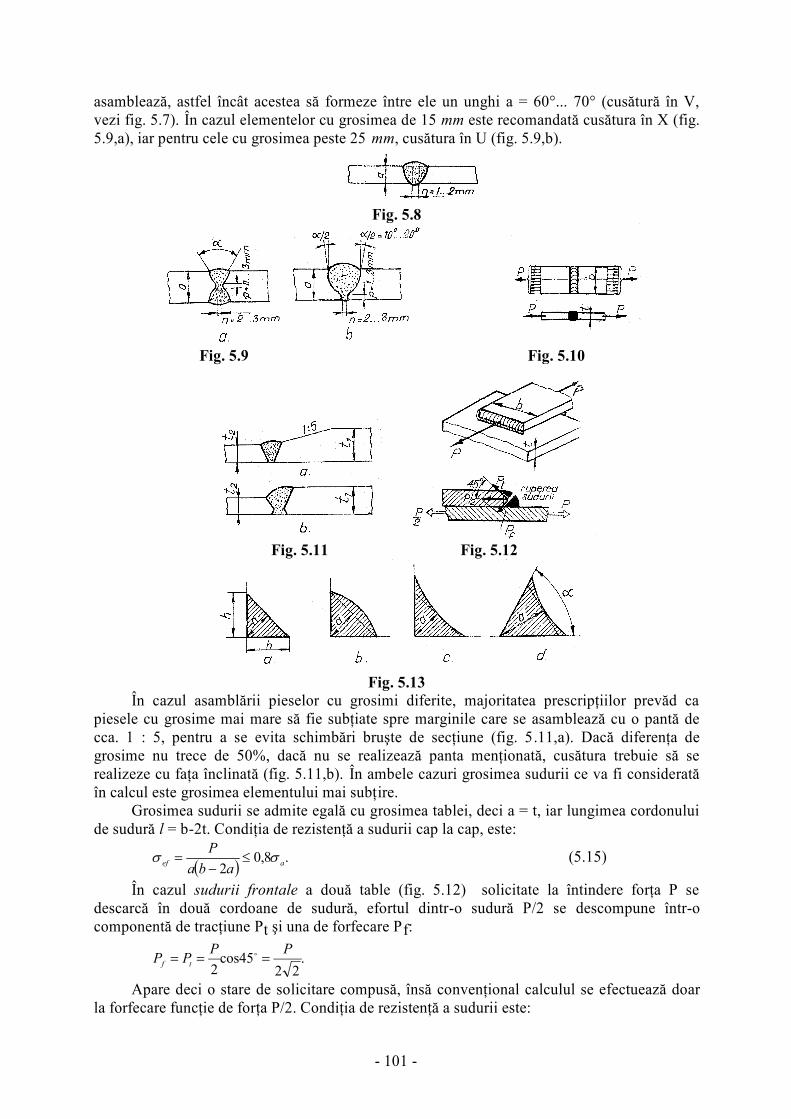
- 101 -
asamblează, astfel încât acestea să formeze între ele un unghi a = 60°... 70° (cusătură în V,
vezi fig. 5.7). În cazul elementelor cu grosimea de 15 mm este recomandată cusătura în X (fig.
5.9,a), iar pentru cele cu grosimea peste 25 mm, cusătura în U (fig. 5.9,b).
Fig. 5.8
Fig. 5.9 Fig. 5.10
Fig. 5.11 Fig. 5.12
Fig. 5.13
În cazul asamblării pieselor cu grosimi diferite, majoritatea prescripţiilor prevăd ca
piesele cu grosime mai mare să fie subţiate spre marginile care se asamblează cu o pantă de
cca. 1 : 5, pentru a se evita schimbări bruşte de secţiune (fig. 5.11,a). Dacă diferenţa de
grosime nu trece de 50%, dacă nu se realizează panta menţionată, cusătura trebuie să se
realizeze cu faţa înclinată (fig. 5.11,b). În ambele cazuri grosimea sudurii ce va fi considerată
în calcul este grosimea elementului mai subţire.
Grosimea sudurii se admite egală cu grosimea tablei, deci a = t, iar lungimea cordonului
de sudură l = b-2t. Condiţia de rezistenţă a sudurii cap la cap, este:
.8,0
2aef
aba
P
(5.15)
În cazul sudurii frontale a două table (fig. 5.12) solicitate la întindere forţa P se
descarcă în două cordoane de sudură, efortul dintr-o sudură P/2 se descompune într-o
componentă de tracţiune Pt şi una de forfecare Pf:
.22
45cos2
PPPP
tf
Apare deci o stare de solicitare compusă, însă convenţional calculul se efectuează doar
la forfecare funcţie de forţa P/2. Condiţia de rezistenţă a sudurii este:
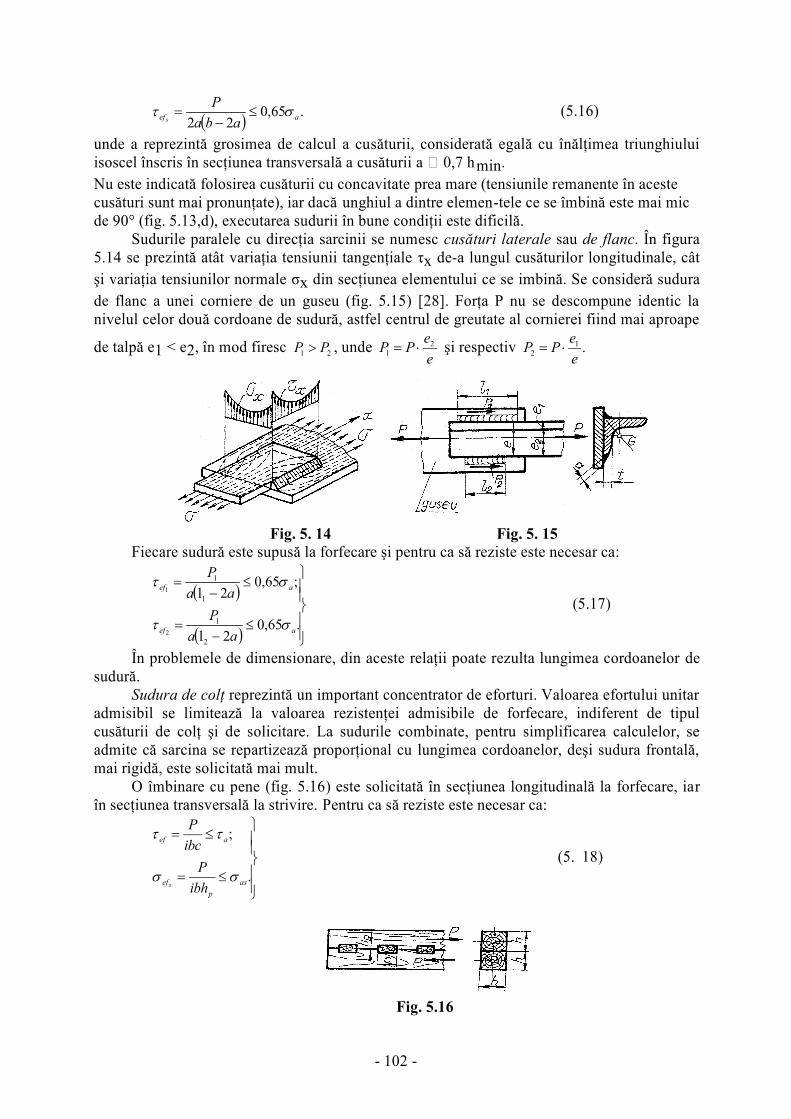
- 102 -
.65,0
22aef
aba
Ps
(5.16)
unde a reprezintă grosimea de calcul a cusăturii, considerată egală cu înălţimea triunghiului
isoscel înscris în secţiunea transversală a cusăturii a 0,7 hmin.
Nu este indicată folosirea cusăturii cu concavitate prea mare (tensiunile remanente în aceste
cusături sunt mai pronunţate), iar dacă unghiul a dintre elemen-tele ce se îmbină este mai mic
de 90° (fig. 5.13,d), executarea sudurii în bune condiţii este dificilă.
Sudurile paralele cu direcţia sarcinii se numesc cusături laterale sau de flanc. În figura
5.14 se prezintă atât variaţia tensiunii tangenţiale τx de-a lungul cusăturilor longitudinale, cât
şi variaţia tensiunilor normale σx din secţiunea elementului ce se imbină. Se consideră sudura
de flanc a unei corniere de un guseu (fig. 5.15) [28]. Forţa P nu se descompune identic la
nivelul celor două cordoane de sudură, astfel centrul de greutate al cornierei fiind mai aproape
de talpă e1 < e2, în mod firesc 21
PP , unde e
ePP 2
1 şi respectiv .1
2e
ePP
Fig. 5. 14 Fig. 5. 15
Fiecare sudură este supusă la forfecare şi pentru ca să reziste este necesar ca:
.65,02l
;65,02l
2
1
1
1
2
1
aef
aef
aa
P
aa
P
(5.17)
În problemele de dimensionare, din aceste relaţii poate rezulta lungimea cordoanelor de
sudură.
Sudura de colţ reprezintă un important concentrator de eforturi. Valoarea efortului unitar
admisibil se limitează la valoarea rezistenţei admisibile de forfecare, indiferent de tipul
cusăturii de colţ şi de solicitare. La sudurile combinate, pentru simplificarea calculelor, se
admite că sarcina se repartizează proporţional cu lungimea cordoanelor, deşi sudura frontală,
mai rigidă, este solicitată mai mult.
O îmbinare cu pene (fig. 5.16) este solicitată în secţiunea longitudinală la forfecare, iar
în secţiunea transversală la strivire. Pentru ca să reziste este necesar ca:
.
;
as
p
ef
aef
hbi
P
cbi
P
s
(5. 18)
Fig. 5.16
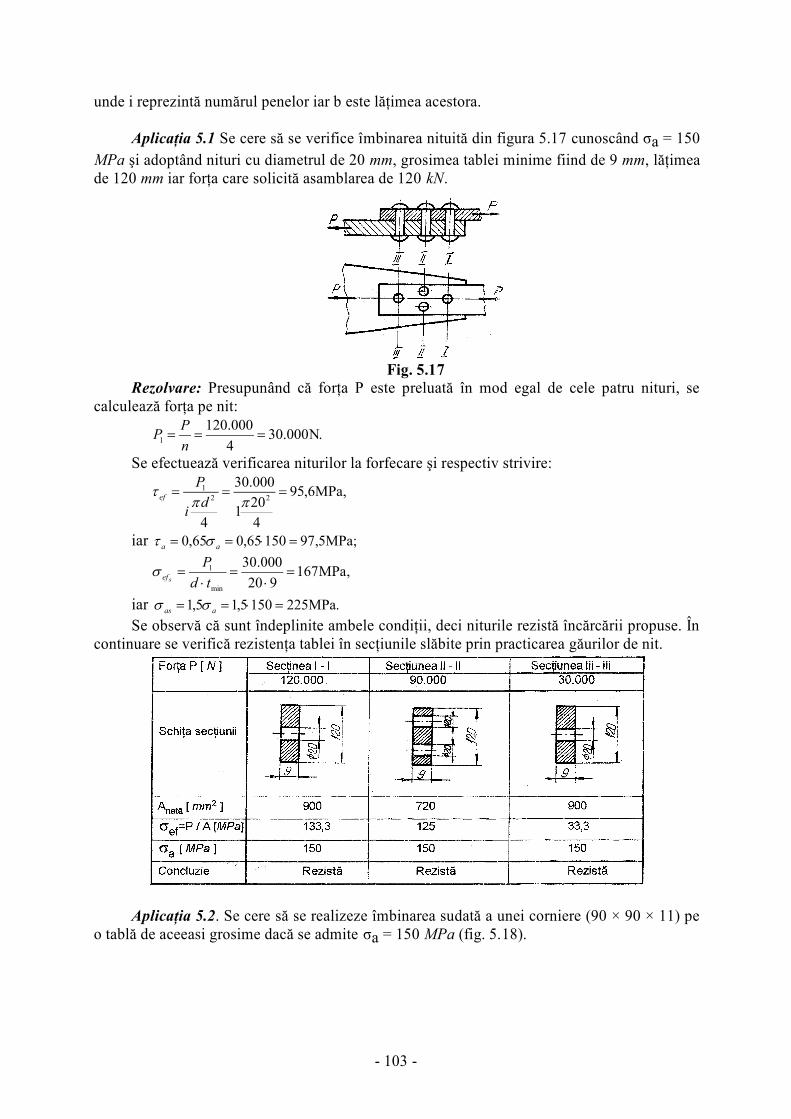
- 103 -
unde i reprezintă numărul penelor iar b este lăţimea acestora.
Aplicaţia 5.1 Se cere să se verifice îmbinarea nituită din figura 5.17 cunoscând σa = 150
MPa şi adoptând nituri cu diametrul de 20 mm, grosimea tablei minime fiind de 9 mm, lăţimea
de 120 mm iar forţa care solicită asamblarea de 120 kN.
Fig. 5.17
Rezolvare: Presupunând că forţa P este preluată în mod egal de cele patru nituri, se
calculează forţa pe nit:
.N000.304
000.1201
n
PP
Se efectuează verificarea niturilor la forfecare şi respectiv strivire:
,MPa6,95
4
201
000.30
4
22
1
d
i
Pef
iar ;MPa5,9715065,065,0 aa
,MPa167920
000.30
min
1
td
Psef
iar .MPa2251505,15,1 aas
Se observă că sunt îndeplinite ambele condiţii, deci niturile rezistă încărcării propuse. În
continuare se verifică rezistenţa tablei în secţiunile slăbite prin practicarea găurilor de nit.
Aplicaţia 5.2. Se cere să se realizeze îmbinarea sudată a unei corniere (90 × 90 × 11) pe
o tablă de aceeasi grosime dacă se admite σa = 150 MPa (fig. 5.18).

- 104 -
Fig. 5.18
Rezolvare: Se admite că forţa actionează în lungul axei longitudinale a cornierei, adică
în dreptul centrului de greutate al secţiunii transversale. Forţa capabilă se determină din
condiţia de tracţiune, impusă pentru cornieră: N500.2801870150 APacap
Sudurile solicitate la forfecare, adoptând grosimea cordonului de sudură funcţie de
grosimea h a aripii cornierei: a = 0,7 h = 0,7.11 = 7,7 mm, vor avea lungimea totală:
.mm374l15065,07,7
500.280l;l
ss
af
sa
P
Lungimea reală a cordonului de sudură va fi: .mm4057,743744ll
, a
sreals Se adoptă ls,real = 410 mm.
Cordoanele de sudură nu sunt solicitate în mod identic, ele preluând următoarele
componente ale forţei: .; 1
2
2
1P
c
cPP
c
cP
Dar lungimile cordoanelor sunt proporţionale cu forţele ce le revin, putându-se efectua
defalcarea lor. Astfel:
.44,22,26
8,63
l
l
;410ll
1
2
2
1
21
c
c
Din rezolvarea sistemului, vom avea l1 = 290 mm iar l2 = 120 mm.
Aplicaţia 5.3 Îmbinarea din figura 5.19 este solicitată de o forţă P = 175 kN. Elementele
îmbinării sunt din OL 37 cu σa= 120 MPa, σas = 150 MPa şi τa = 90 MPa. Se cere să se
verifice îmbinarea.
Rezolvare: Tija este solicitată la:
Fig. 5.19
întindere:
;MPa3,83256060
000.175aef
A
P
forfecare: ;MPa167,2960502
000.175a
f
efAi
P
strivire: ;MPa673,1166025
000.175as
s
efsA
P
Pana este solicitată la:
forfecare: ;MPa5,8740252
000.175a
f
efAi
P
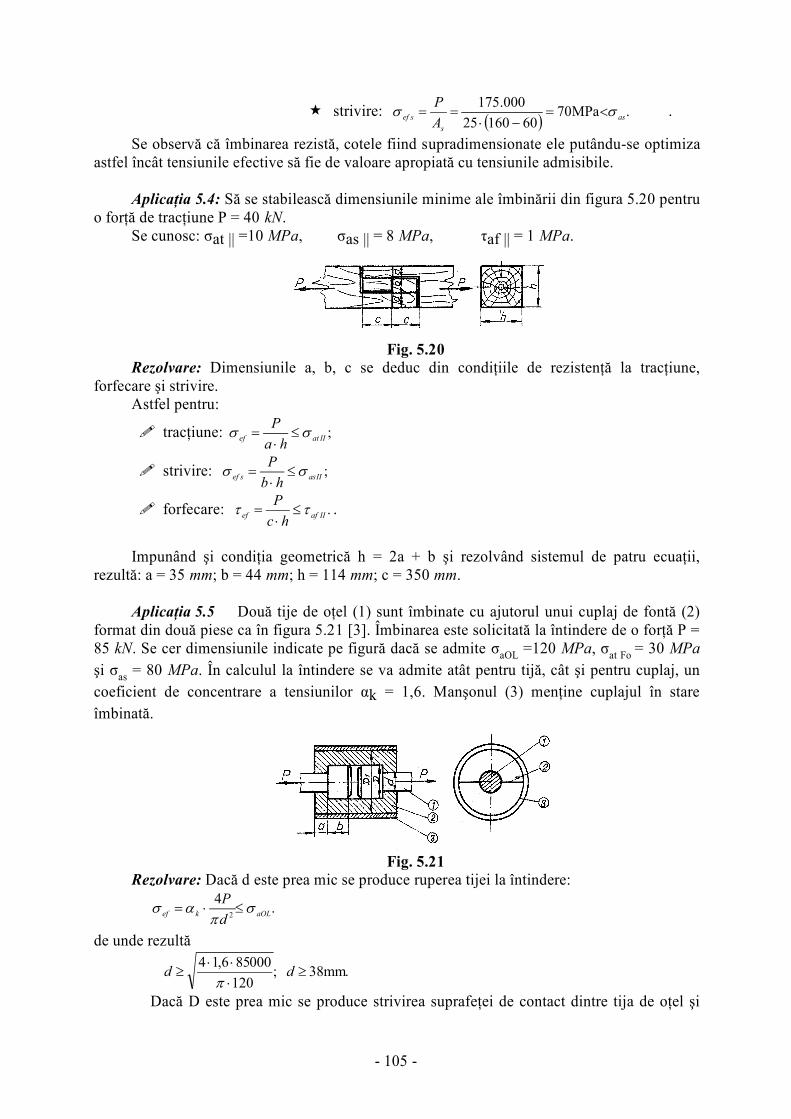
- 105 -
strivire:
.MPa706016025
000.175as
s
sefA
P
.
Se observă că îmbinarea rezistă, cotele fiind supradimensionate ele putându-se optimiza
astfel încât tensiunile efective să fie de valoare apropiată cu tensiunile admisibile.
Aplicaţia 5.4: Să se stabilească dimensiunile minime ale îmbinării din figura 5.20 pentru
o forţă de tracţiune P = 40 kN.
Se cunosc: σat || =10 MPa, σas || = 8 MPa, τaf || = 1 MPa.
Fig. 5.20
Rezolvare: Dimensiunile a, b, c se deduc din condiţiile de rezistenţă la tracţiune,
forfecare şi strivire.
Astfel pentru:
tracţiune: ;IIatef
ha
P
strivire: ;IIassef
hb
P
forfecare: .IIafef
hc
P
.
Impunând şi condiţia geometrică h = 2a + b şi rezolvând sistemul de patru ecuaţii,
rezultă: a = 35 mm; b = 44 mm; h = 114 mm; c = 350 mm.
Aplicaţia 5.5 Două tije de oţel (1) sunt îmbinate cu ajutorul unui cuplaj de fontă (2)
format din două piese ca în figura 5.21 [3]. Îmbinarea este solicitată la întindere de o forţă P =
85 kN. Se cer dimensiunile indicate pe figură dacă se admite σaOL
=120 MPa, σat Fo = 30 MPa
şi σas
= 80 MPa. În calculul la întindere se va admite atât pentru tijă, cât şi pentru cuplaj, un
coeficient de concentrare a tensiunilor αk = 1,6. Manşonul (3) menţine cuplajul în stare
îmbinată.
Fig. 5.21
Rezolvare: Dacă d este prea mic se produce ruperea tijei la întindere:
.4
2 OLakefd
P
de unde rezultă
;120
000856,14
d mm38d
Dacă D este prea mic se produce strivirea suprafeţei de contact dintre tija de oţel şi

- 106 -
cuplajul de fontă:
,4
22 asdD
P
sef
de unde rezultă:
.53;80
00085438 mm
2
DD
.
Dacă D1 este prea mic se produce ruperea cuplajului la întindere:
,
4
022
1FatDD
P
ef k
de unde rezultă:
;30
000856,14532
1
D .92mm
1D
Dacă a este prea mic se produce ruperea prin forfecare a cuplajului:
,65,00Fatef
Da
P
de unde rezultă:
.mm2,26;3065,053
00085
aa
Dacă b este prea mic se produce ruperea prin forfecare a capătului tijei:
,65,0OLaef
bd
P
de unde rezultă: .mm1,9;
12065,038
00085
bb
.
Aplicaţia 5.6: O barcă de salvare de pe o navă maritimă este fixată la fiecare capăt de un
cablu din oţel care trece peste un scripete ancorat de punte. Cablul este încărcat la capete cu
forţe de 4000 N (fig. 5.22). Scripetele se poate roti liber în jurul axei orizontale. Se cere să se
determine diametrul axului, dacă se admite τa = 50 MPa.
Fig. 5.22
Rezolvare: Datorită tensiunilor din cablu, în ax apar rezultantele RH în planul orizontal
si RV în planul vertical:
.N6000;060cos40004000
;N3464;060sin4000
VVV
HHH
RdeciRF
RdeciRF
Rezultanta lor N930600064643 22 R este orientată după unghiul θ:
.604643
0006 arctg
Dacă admitem că rezultanta este uniform distribuită pe sectiunea axului, tensiunea
tangentială τ are distribuţia din fig. 5.25, c:
- 107 -
.mm28,13,50
4
93062
ddA
R
Se adoptă d =14 mm.
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii si calcularii diverselor tipuri de elemente de imbinare folosite curent
in tehnica.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
rezolve tipurile de probleme specifice fiecarui tip de imbinare folosita tehnic;
determine caracteristicile diverselor tipuri de imbinari.
Durata medie de parcurgere a unităţii de învăţare este de 2 ore.
U5.3 Test de evaluare a cunostintelor
U5.3.1 Care este conditia de rezistenta la forfecare?
U5.3.2 Stabiliti expresia deplasarii la forfecare.
U5.3.3 Determinati relatia de calcul a unei imbinari nituite cu mai multe sectiuni de
forfecare.
U5.3.4 Stabiliti r elatia de calcul la strivire a unui nit.
U5.3.5 Cum se calculeaza numarul necesar de nituri?
U5.3.6 Care este clasificarea imbinarilor sudate?
Tema de control trebuie să fie alcătuita din TO DO
Exemplificaţi tipurile de imbinari pe diverse exemple numerice.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte.
- 108 -
Modulul 6. Torsiunea
Cuprins
U6.1 Torsiunea barelor de sectiune circulara....................... ................................109
U6.2 Deformatia la torsiune..................................................... ............................111
U6.3 Probleme static nedeterminate la torsiune..................... ..............................113
U6.4 Torsiunea barelor de sectiune dreptunghiulara.............. ..............................114
U6.5 Torsiunea barelor tubulare cu pereti subtiri............................................... ..117
U6.6 Generalizarea relatiilor de calcul...................................... ...........................119
U6.7 Test de evaluare a cunostintelor........................................................ ...........122
Torsiunea
În practica inginerească apare foarte frecvent problema transmiterii puterii de la un
punct la altul în cadrul unui sistem mecanic: de la o turbină cu aburi la un generator electric,
de la un motor electric la o sculă aşchietoare, de la un motor cu ardere internă la roţile
automobilului, etc. Acest lucru se realizează de cele mai multe ori prin intermediul unor arbori
de secţiune circulară, inelară sau de alte forme (fig. 6.1).
Fig. 6.1
Puterea se transmite de la turbina (4) la generatorul electric (1) prin intermediul
arborelui (2) şi cuplajelor (3). Dacă se “extrage” din figura 6.1 elementul (2) atunci se poate
spune că acesta este solicitat la capete de două cupluri (momente de torsiune) Mt de sens
contrar, un cuplu motor şi un cuplu rezistent (fig. 6.2).
Fig. 6.2 Fig. 6.3
Dacă se notează cu P puterea transmisă prin intermediul arborelui (exprimată în [CP]) şi
cu n turaţia arborelui [rot/min], atunci momentul de torsiune Mt va fi dat de relaţia:
.mNk02,7 n
Mt
P (6.1)
Dacă P este exprimată în [kW] şi n [rot/min] atunci momentul de torsiune Mt va fi dat
de relaţia:
.mNk55,9 n
Mt
P (6.2)
Torsiunea (răsucirea) poate fi produsă şi prin acţiunea a două forţe de sens contrar (fig. 6.3).
- 109 -
U6.1. Torsiunea barelor de secţiune circulară
Aşa după cum se va vedea în cele ce urmează, forma secţiunii transversale a elementului
supus torsiunii va influenţa în mod fundamental starea de tensiune şi de deformaţie. Pentru
început se va prezenta torsiunea barelor de secţiune circulară sau inelară. În acest scop se
consideră o bară de secţiune circulară supusă acţiunii unui moment de torsiune M t (fig. 6.4).
Fig. 6.4
Dacă Mt este variabil de-a lungul barei, pentru calculul de rezistenţă şi rigiditate în
prealabil se construieşte diagrama momentelor de torsiune. Momentul de torsiune este
orientat, în reprezentare vectorială, în lungul axei longitudinale a barei. Se consideră o bară
dreaptă, de secţiune circulară, constantă în lungul acesteia, realizată dintr-un materialul
omogen, izotrop, cu caracteristică liniară şi care satisface legea lui Hooke.
Una dintre proprietăţile importante ale barei de secţiune circulară este aceea că, în urma
răsucirii, o secţiune plană şi perpendiculară pe axa barei înainte de solicitare rămâne plană şi
perpendiculară pe axa barei şi în timpul solicitării (fig. 6.5,a) spre deosebire de o bară cu
secţiunea dreptunghiulară, de exemplu (fig. 6.5,b) la care are loc deplanarea secţiunilor în
timpul deformării.
La bara de secţiune circulară, distanţa e dintre două secţiuni perpendiculare pe axa barei
rămâne nemodificată în urma acţiunii momentului de torsiune. Ca urmare:
;0;0 xxx
E
Se consideră o bară de lungime l, de secţiune circulară cu raza R, care a fost rotită cu un
unghi φ prin acţiunea unui moment de torsiune Mt (fig. 6.6,a).
Se numeşte unghi de torsiune, unghiul cu care se roteşte o secţiune transversală faţă de
alta. Dacă distanţa între secţiuni este infinit mică unghiul de torsiune este elementar dφ, iar
dacă distanţa este egală cu unitatea unghiul de torsiune se numeşte specific θ. Unghiul cu care
se roteşte o secţiune marginală faţă de alta se numeşte unghi de torsiune total φ.
Se detaşează din această bară un cilindru de rază r pe care se consideră un element de
formă pătrată cuprins între două secţiuni adiacente (perpendiculare pe axa barei) şi două linii
drepte (paralele cu axa barei) - (fig. 6.6,b) - înainte de acţiunea momentului Mt. În urma
răsucirii însă, elementul considerat devine romb (fig. 6.6,c). Cum cele două secţiuni circulare
care mărginesc elementul rămân neschimbate în urma solicitării, deformaţia unghiulară g
pentru acest element va fi egală cu unghiul dintre liniile AB şi A’B. Pentru valori mici ale lui γ
se poate scrie: .lll
'
rrAAtg (6.3)
Dacă în locul barei de lungime l se consideră un element de bară de lungime dx, se poate
scrie: .dx
dr
(6.4)
Din legea lui Hooke: . rGrGG (6.5)
Pentru a determina orientarea acestor tensiuni se consideră o secţiune oarecare a barei
supuse răsucirii (fig. 6.7).

- 110 -
Fig. 6.7
Se presupune că într-un punct oarecare {A}, de pe conturul secţiunii circulare, apare o
tensiune tangenţială τ cu o orientare oarecare în cadrul secţiunii. Se poate descompune
tensiunea τ în două componente, una după direcţia razei (τ’) şi alta după o direcţie tangentă la
contur (τ”). Din legea dualităţii tensiunilor tangenţiale ar trebui însă ca lui τ’ să-i corespundă o
tensiune de aceeaşi valoare τ’” pe suprafaţa exterioară a barei. Cum însă suprafaţa exterioară
este neîncărcată, va rezulta că τ’” = 0 deci şi că τ’ = 0. Rezultă de aici că tensiunea τ în punctul
A este orientată perpendicular pe raza OA. Se admite aceiaşi distribuţie a tensiunii tangenţiale
şi pentru punctele din interiorul secţiunii.
,22
p
AAA
tIGdArGdArGdArM
de unde rezultă că: .p
t
IG
M
(6.6)
Înlocuind (6.6) în (6.5) se obţine: .rI
Mr
I
M
IG
MrGrG
p
t
p
t
p
t (6.7)
În relaţia (6.7), Ip reprezintă momentul de inerţie polar al secţiunii barei, Mt este
momentul de torsiune aplicat iar r este distanţa de la punctul considerat (în care apare
tensiunea τ) şi centrul secţiunii. Se poate observa că tensiunile tangenţiale τ variază liniar
(după r).
Se poate spune că tensiunile tangenţiale rezultate în urma solicitării de torsiune au pe
secţiune distribuţia din figura 6.8.
Fig. 6.8
Tensiunea tangenţială maximă apare deci în punctele de pe contur (pentru r = R).
.max
p
t
p
t
p
t
W
M
R
I
MR
I
M (6.8)
unde s-a notat:
Wp = Ip/R - modulul de rezistenţă polar, acesta reprezentând o caracteristică
dimensională măsurată în mm3.
Pentru secţiunea circulară cu diametrul d:
.16
2
323
4
d
d
R
IW
p
p (6.9)
- 111 -
Pentru secţiunea inelară :
.16
2
32 44
44
dDDD
dD
Wp
(6.10)
Tipurile de probleme care se pun şi în cadrul capitolului de torsiune sunt:
a) Probleme de dimensionare: ;a
t
necp
MW
τa - reprezintă tensiunea admisibilă la torsiune, τa OL=50...90 MPa.
b) Probleme de calcul al momentului torsional capabil: ;azefpcapt
WM
c) Probleme de verificare: .a
p
t
efW
M
Relaţia (6.8) se poate folosi şi pentru bare cu secţiune variabilă în lungul lor. Dacă însă
trecerea de la o secţiune la alta are loc brusc va apare un efect de concentrare a tensiunilor,
valoarea maximă a tensiunii corespunzând zonei A, (fig. 6.9).
Pentru un astfel de caz tensiunea tangenţială maximă va avea expresia :
.max
p
t
kW
M (6.11)
unde raportul Mt/Wp se referă la zona de diametru d a barei, iar αk este factorul de
concentrare a tensiunilor.
Valoarea factorului de concentrare a tensiunii depinde atât de raportul dintre cele două
diametre (D/d) cât şi de raportul dintre raza de racordare şi valoarea diametrului mic (r/d),
(fig. 6.10).
De notat că diagrama din figura 6.10 este valabilă atât timp cât tensiunile calculate cu
relaţia (6.8) nu depăşesc limita de proporţionalitate a materialului. În cazul în care apar şi
deformaţii plastice atunci valorile tensiunii tangenţiale maxime vor fi mai scăzute decât cele
date de relaţia (6.8).
Fig. 6.9 Fig. 6.10
U6.2. Deformaţia la torsiune
Din relaţiile anterioare s-a văzut că, sub acţiunea unui moment de torsiune, secţiunile
transversale ale barei circulare se rotesc cu anumite unghiuri. Unghiul cu care se roteşte o
secţiune faţă de altă secţiune situată la distanţa l (unghiul de torsiune φ) se calculează pornind
de la relaţia definită anterior θ = dφ/dx.
.
l
0
dxIG
M
IG
M
dx
d
IG
M
p
t
p
t
p
t
(6.12)
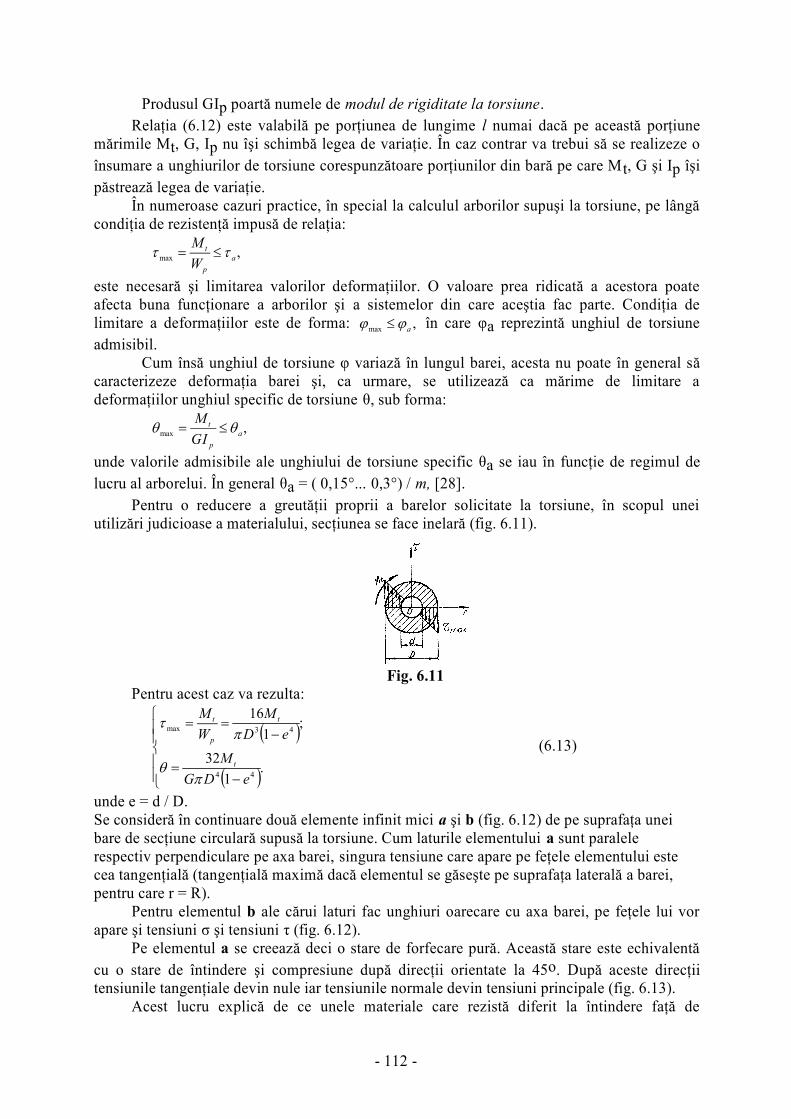
- 112 -
Produsul GIp poartă numele de modul de rigiditate la torsiune.
Relaţia (6.12) este valabilă pe porţiunea de lungime l numai dacă pe această porţiune
mărimile Mt, G, Ip nu îşi schimbă legea de variaţie. În caz contrar va trebui să se realizeze o
însumare a unghiurilor de torsiune corespunzătoare porţiunilor din bară pe care Mt, G şi Ip îşi
păstrează legea de variaţie.
În numeroase cazuri practice, în special la calculul arborilor supuşi la torsiune, pe lângă
condiţia de rezistenţă impusă de relaţia:
,max a
p
t
W
M
este necesară şi limitarea valorilor deformaţiilor. O valoare prea ridicată a acestora poate
afecta buna funcţionare a arborilor şi a sistemelor din care aceştia fac parte. Condiţia de
limitare a deformaţiilor este de forma: ,max a
în care φa reprezintă unghiul de torsiune
admisibil.
Cum însă unghiul de torsiune φ variază în lungul barei, acesta nu poate în general să
caracterizeze deformaţia barei şi, ca urmare, se utilizează ca mărime de limitare a
deformaţiilor unghiul specific de torsiune θ, sub forma:
,max a
p
t
IG
M
unde valorile admisibile ale unghiului de torsiune specific θa se iau în funcţie de regimul de
lucru al arborelui. În general θa = ( 0,15°... 0,3°) / m, [28].
Pentru o reducere a greutăţii proprii a barelor solicitate la torsiune, în scopul unei
utilizări judicioase a materialului, secţiunea se face inelară (fig. 6.11).
Fig. 6.11
Pentru acest caz va rezulta:
.1
32
;1
16
44
43max
eDG
M
eD
M
W
M
t
t
p
t
(6.13)
unde e = d / D.
Se consideră în continuare două elemente infinit mici a şi b (fig. 6.12) de pe suprafaţa unei
bare de secţiune circulară supusă la torsiune. Cum laturile elementului a sunt paralele
respectiv perpendiculare pe axa barei, singura tensiune care apare pe feţele elementului este
cea tangenţială (tangenţială maximă dacă elementul se găseşte pe suprafaţa laterală a barei,
pentru care r = R).
Pentru elementul b ale cărui laturi fac unghiuri oarecare cu axa barei, pe feţele lui vor
apare şi tensiuni σ şi tensiuni τ (fig. 6.12).
Pe elementul a se creează deci o stare de forfecare pură. Această stare este echivalentă
cu o stare de întindere şi compresiune după direcţii orientate la 45o. După aceste direcţii
tensiunile tangenţiale devin nule iar tensiunile normale devin tensiuni principale (fig. 6.13).
Acest lucru explică de ce unele materiale care rezistă diferit la întindere faţă de

- 113 -
compresiune (cum ar fi de exemplu fonta) se rup la torsiune după suprafeţe orientate la 45o
faţă de axă (după o direcţie perpendiculară pe tensiunea principală σ1 - de întindere - pentru
fontă) - (fig. 6.14).
Prezenţa tensiunilor tangenţiale într-un plan perpendicular pe axa barei implică (conform
legii dualităţii tensiunilor tangenţiale) apariţia tensiunilor tangenţiale şi în plane orientate
paralel cu axa (fig. 6.15).
Apariţia tensiunilor tangenţiale în plane orientate după axă explică unele ruperi ce au loc
în anumite materiale după direcţii paralele cu axa barei supusă la torsiune.
Fig. 6.12 Fig. 6.13
Fig. 6.14 Fig. 6.15
U6.3. Probleme static nedeterminate la torsiune
Se pot întâlni adeseori în practică bare solicitate la torsiune care să reprezinte sisteme
static nedeterminate. Se consideră spre exemplu cazul unei bare de secţiune circulară variabilă
în trepte, aflată sub acţiunea unui moment de torsiune Mo, (fig. 6.16).
Acţiunea momentului de torsiune MO conduce la apariţia reacţiunilor din încastrările A
şi B, reprezentate de momentele de torsiune MA respectiv MB. Singura ecuaţie de echilibru
static care se poate scrie este:
,00BOA
MMMM
rezultând că MA+ MB = MO.
Fig. 6.16
Se dispune în felul acesta de o singură ecuaţie, insuficientă însă pentru determinarea
necunoscutelor MA şi MB. Problema este deci simplu static nedeterminată şi pentru
rezolvarea ei va trebui să se facă apel la condiţia de deformare a barei. Încastrările din A şi B
nu vor permite rotirea relativă a secţiunilor A şi B, şi deci :

- 114 -
:00
11
p
OA
p
A
BABAIG
bMM
IG
aM
Se obţine în felul acesta un sistem de două ecuaţii cu două necunoscute, MA şi M
B:
.0
;
21
4
p
OA
p
A
OBA
IkG
bMM
IG
aM
MMM
Admiţând un raport de valoarea k între cele două diametre, , se obţine:
.3232
;32 121
4
444
pppIk
dkDI
dI
Sistemul devine:
.0
;
.0
;
44
11 k
bMMaM
MMM
IkG
bMM
IG
aM
MMM
OA
A
OBA
p
OA
p
A
OBA
.1
;
4
4
44
4
4
4
44
bka
kaM
bka
bM
bka
bMMM
bka
bM
k
bak
bMM
k
bM
k
baM
MMM
O
O
O
OB
OO
A
O
A
OBA
Cunoscând valorile momentelor de torsiune MA şi MB se poate trasa diagrama de
momente de torsiune, (fig. 6.16), şi se pot determina valorile tensiunilor tangenţiale şi ale
deformaţiilor unghiulare în orice secţiune a barei.
U6.4. Torsiunea barelor de secţiune dreptunghiulară
Ipoteza secţiunilor plane pentru barele de secţiune circulară nu mai rămâne valabilă în
cazul secţiunii de formă oarecare. Acest lucru se poate deduce uşor dacă se analizează modul
în care se deformează o bară de secţiune dreptunghiulară supusă la torsiune (fig. 6.17).
Datorită acestui fapt studiul torsiunii unei bare de secţiune dreptunghiulară este mult mai
complex.
Când deplanarea secţiunilor se poate produce neîmpiedicat în timpul torsiunii (în felul
acesta neapărând tensiuni de tip σ orientate în lungul barei) torsiunea se numeşte liberă. În caz
contrar torsiunea se numeşte împiedicată.
În cazul barei de secţiune pătratică, diagonalele pătratului şi liniile ce unesc mijloacele
laturilor într-o secţiune făcută perpendicular pe axa barei înainte de deformare, rămân tot linii
drepte după deformare (fig. 6.17).
Fig. 6.17
Totuşi, orice altă linie dreaptă trasată în secţiunea respectivă înainte de deformare nu va
mai rămâne dreaptă după deformare. Chiar întreaga secţiune îşi va pierde planeitatea.
Pentru torsiunea barelor de secţiune dreptunghiulară ar fi greşit să se presupună că
tensiunea tangenţială în secţiunea curentă variază liniar cu distanţa până la centrul secţiunii.
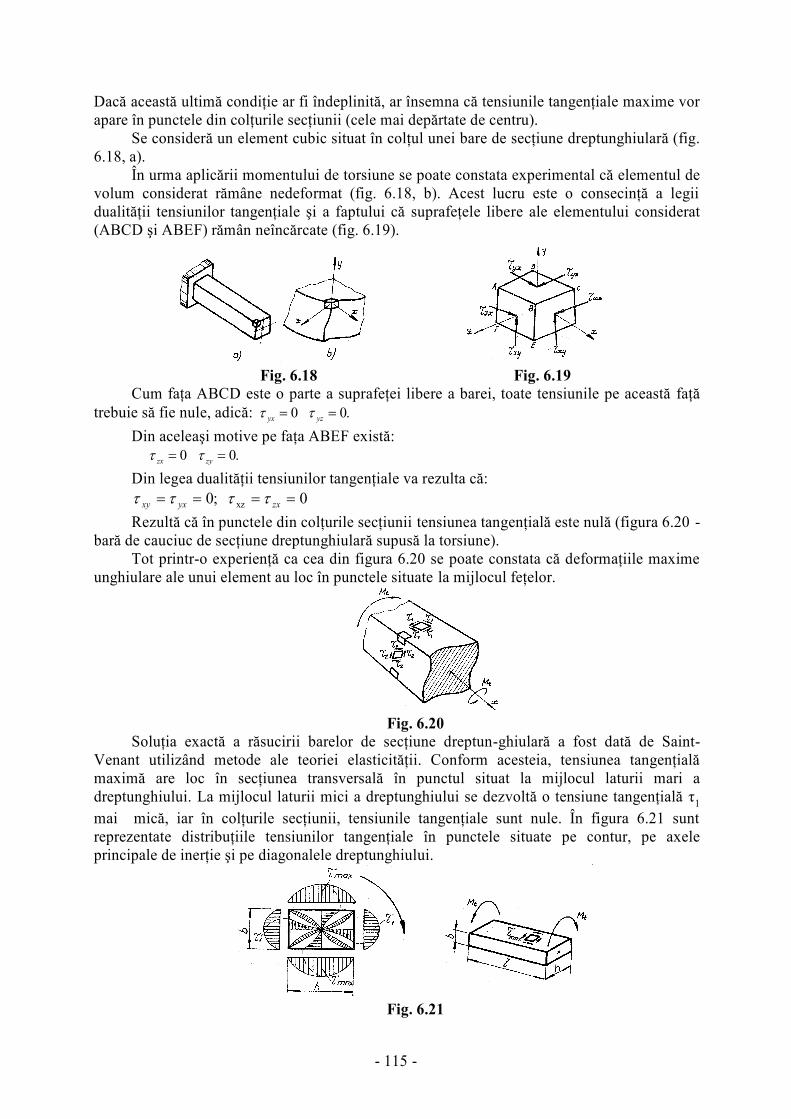
- 115 -
Dacă această ultimă condiţie ar fi îndeplinită, ar însemna că tensiunile tangenţiale maxime vor
apare în punctele din colţurile secţiunii (cele mai depărtate de centru).
Se consideră un element cubic situat în colţul unei bare de secţiune dreptunghiulară (fig.
6.18, a).
În urma aplicării momentului de torsiune se poate constata experimental că elementul de
volum considerat rămâne nedeformat (fig. 6.18, b). Acest lucru este o consecinţă a legii
dualităţii tensiunilor tangenţiale şi a faptului că suprafeţele libere ale elementului considerat
(ABCD şi ABEF) rămân neîncărcate (fig. 6.19).
Fig. 6.18 Fig. 6.19
Cum faţa ABCD este o parte a suprafeţei libere a barei, toate tensiunile pe această faţă
trebuie să fie nule, adică: .00 yzyx
Din aceleaşi motive pe faţa ABEF există:
.00 zyzx
Din legea dualităţii tensiunilor tangenţiale va rezulta că:
0 ;0 xz zxyxxy
Rezultă că în punctele din colţurile secţiunii tensiunea tangenţială este nulă (figura 6.20 -
bară de cauciuc de secţiune dreptunghiulară supusă la torsiune).
Tot printr-o experienţă ca cea din figura 6.20 se poate constata că deformaţiile maxime
unghiulare ale unui element au loc în punctele situate la mijlocul feţelor.
Fig. 6.20
Soluţia exactă a răsucirii barelor de secţiune dreptun-ghiulară a fost dată de Saint-
Venant utilizând metode ale teoriei elasticităţii. Conform acesteia, tensiunea tangenţială
maximă are loc în secţiunea transversală în punctul situat la mijlocul laturii mari a
dreptunghiului. La mijlocul laturii mici a dreptunghiului se dezvoltă o tensiune tangenţială τ1
mai mică, iar în colţurile secţiunii, tensiunile tangenţiale sunt nule. În figura 6.21 sunt
reprezentate distribuţiile tensiunilor tangenţiale în punctele situate pe contur, pe axele
principale de inerţie şi pe diagonalele dreptunghiului.
Fig. 6.21
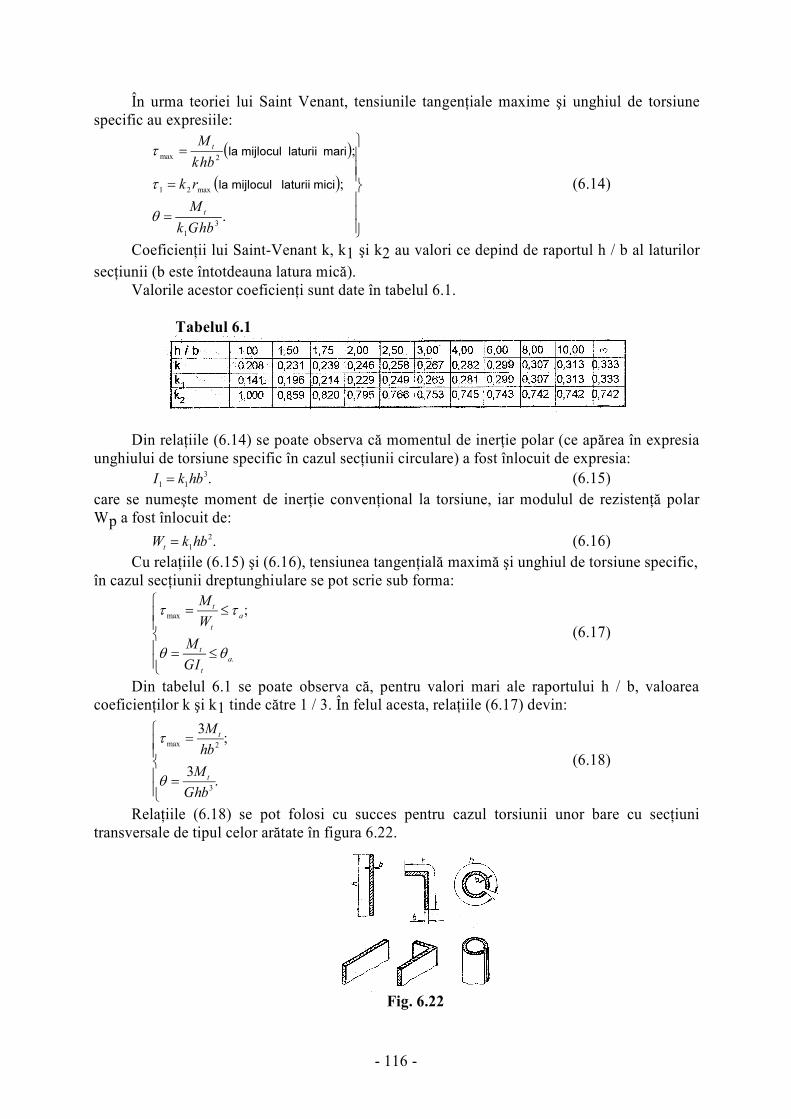
- 116 -
În urma teoriei lui Saint Venant, tensiunile tangenţiale maxime şi unghiul de torsiune
specific au expresiile:
.
;
;
3
1
max21
2max
bhGk
M
rk
bhk
M
t
t
(6.14)
Coeficienţii lui Saint-Venant k, k1 şi k2 au valori ce depind de raportul h / b al laturilor
secţiunii (b este întotdeauna latura mică).
Valorile acestor coeficienţi sunt date în tabelul 6.1.
Tabelul 6.1
Din relaţiile (6.14) se poate observa că momentul de inerţie polar (ce apărea în expresia
unghiului de torsiune specific în cazul secţiunii circulare) a fost înlocuit de expresia:
.3
11bhkI (6.15)
care se numeşte moment de inerţie convenţional la torsiune, iar modulul de rezistenţă polar
Wp a fost înlocuit de:
.2
1bhkW
t (6.16)
Cu relaţiile (6.15) şi (6.16), tensiunea tangenţială maximă şi unghiul de torsiune specific,
în cazul secţiunii dreptunghiulare se pot scrie sub forma:
.
max;
a
t
t
a
t
t
IG
M
W
M
(6.17)
Din tabelul 6.1 se poate observa că, pentru valori mari ale raportului h / b, valoarea
coeficienţilor k şi k1 tinde către 1 / 3. În felul acesta, relaţiile (6.17) devin:
.3
;3
3
2max
bhG
M
bh
M
t
t
(6.18)
Relaţiile (6.18) se pot folosi cu succes pentru cazul torsiunii unor bare cu secţiuni
transversale de tipul celor arătate în figura 6.22.
Fig. 6.22
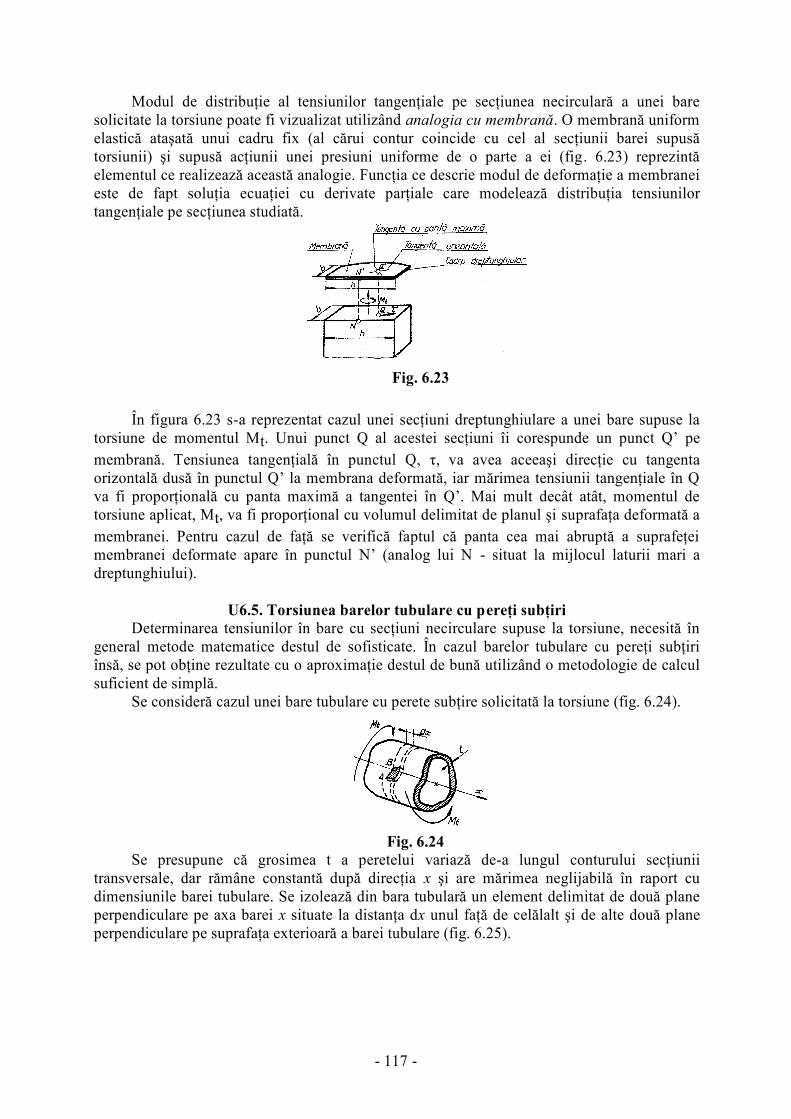
- 117 -
Modul de distribuţie al tensiunilor tangenţiale pe secţiunea necirculară a unei bare
solicitate la torsiune poate fi vizualizat utilizând analogia cu membrană. O membrană uniform
elastică ataşată unui cadru fix (al cărui contur coincide cu cel al secţiunii barei supusă
torsiunii) şi supusă acţiunii unei presiuni uniforme de o parte a ei (fig. 6.23) reprezintă
elementul ce realizează această analogie. Funcţia ce descrie modul de deformaţie a membranei
este de fapt soluţia ecuaţiei cu derivate parţiale care modelează distribuţia tensiunilor
tangenţiale pe secţiunea studiată.
Fig. 6.23
În figura 6.23 s-a reprezentat cazul unei secţiuni dreptunghiulare a unei bare supuse la
torsiune de momentul Mt. Unui punct Q al acestei secţiuni îi corespunde un punct Q’ pe
membrană. Tensiunea tangenţială în punctul Q, τ, va avea aceeaşi direcţie cu tangenta
orizontală dusă în punctul Q’ la membrana deformată, iar mărimea tensiunii tangenţiale în Q
va fi proporţională cu panta maximă a tangentei în Q’. Mai mult decât atât, momentul de
torsiune aplicat, Mt, va fi proporţional cu volumul delimitat de planul şi suprafaţa deformată a
membranei. Pentru cazul de faţă se verifică faptul că panta cea mai abruptă a suprafeţei
membranei deformate apare în punctul N’ (analog lui N - situat la mijlocul laturii mari a
dreptunghiului).
U6.5. Torsiunea barelor tubulare cu pereţi subţiri
Determinarea tensiunilor în bare cu secţiuni necirculare supuse la torsiune, necesită în
general metode matematice destul de sofisticate. În cazul barelor tubulare cu pereţi subţiri
însă, se pot obţine rezultate cu o aproximaţie destul de bună utilizând o metodologie de calcul
suficient de simplă.
Se consideră cazul unei bare tubulare cu perete subţire solicitată la torsiune (fig. 6.24).
Fig. 6.24
Se presupune că grosimea t a peretelui variază de-a lungul conturului secţiunii
transversale, dar rămâne constantă după direcţia x şi are mărimea neglijabilă în raport cu
dimensiunile barei tubulare. Se izolează din bara tubulară un element delimitat de două plane
perpendiculare pe axa barei x situate la distanţa dx unul faţă de celălalt şi de alte două plane
perpendiculare pe suprafaţa exterioară a barei tubulare (fig. 6.25).
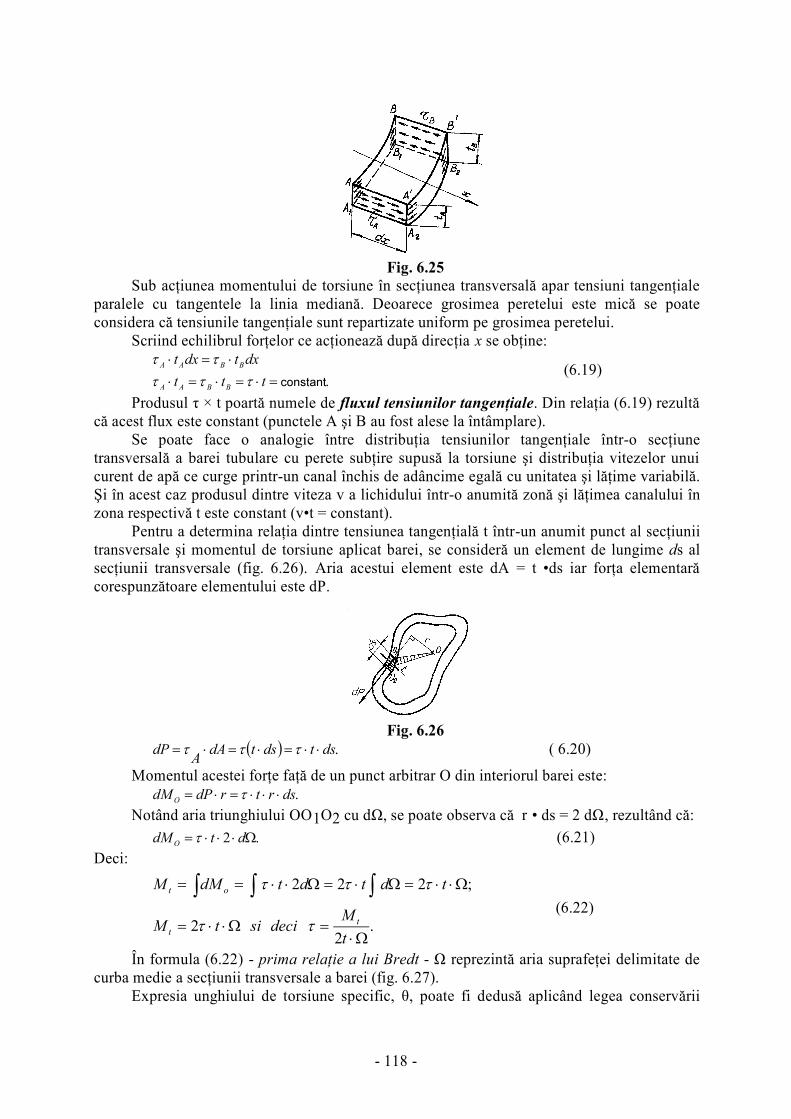
- 118 -
Fig. 6.25
Sub acţiunea momentului de torsiune în secţiunea transversală apar tensiuni tangenţiale
paralele cu tangentele la linia mediană. Deoarece grosimea peretelui este mică se poate
considera că tensiunile tangenţiale sunt repartizate uniform pe grosimea peretelui.
Scriind echilibrul forţelor ce acţionează după direcţia x se obţine:
.
ttt
dxtdxt
BBAA
BBAA
(6.19)
Produsul τ × t poartă numele de fluxul tensiunilor tangenţiale. Din relaţia (6.19) rezultă
că acest flux este constant (punctele A şi B au fost alese la întâmplare).
Se poate face o analogie între distribuţia tensiunilor tangenţiale într-o secţiune
transversală a barei tubulare cu perete subţire supusă la torsiune şi distribuţia vitezelor unui
curent de apă ce curge printr-un canal închis de adâncime egală cu unitatea şi lăţime variabilă.
Şi în acest caz produsul dintre viteza v a lichidului într-o anumită zonă şi lăţimea canalului în
zona respectivă t este constant (v•t = constant).
Pentru a determina relaţia dintre tensiunea tangenţială t într-un anumit punct al secţiunii
transversale şi momentul de torsiune aplicat barei, se consideră un element de lungime ds al
secţiunii transversale (fig. 6.26). Aria acestui element este dA = t •ds iar forţa elementară
corespunzătoare elementului este dP.
Fig. 6.26
.dstdstdAA
dP ( 6.20)
Momentul acestei forţe faţă de un punct arbitrar O din interiorul barei este:
.dsrtrdPdMO
Notând aria triunghiului OO1O2 cu dΩ, se poate observa că r • ds = 2 dΩ, rezultând că:
.2 dtdMO
(6.21)
Deci:
.2
2
;222
t
MdecisitM
tdtdtdMM
t
t
ot
(6.22)
În formula (6.22) - prima relaţie a lui Bredt - Ω reprezintă aria suprafeţei delimitate de
curba medie a secţiunii transversale a barei (fig. 6.27).
Expresia unghiului de torsiune specific, θ, poate fi dedusă aplicând legea conservării

- 119 -
energiei respectiv lucrul mecanic exterior produs prin acţiunea momentului de torsiune M t este
egal cu energia de deformaţie elastică acumulată de bară.
Aplicând acest principiu unui element de bară obţinut prin secţionare cu două plane
perpendiculare pe axa barei şi situate la distanţa dx, (fig. 6.27), rezultă:
.22
1 2
V
tdV
GdM
(6.23)
Fig. 6.27
unde dφ este unghiul de torsiune al elementului de lungime dx; τ2 / 2G - energia specifică de
deformaţie elastică, iar dV - volumul elementului considerat.
În conformitate cu cele prezentate anterior, se poate scrie:
.44
,2
1
2
122
2
t
ttt
V
tIG
M
t
dsG
M
t
ds
G
M
dx
ddsdxt
GdM
(6.24)
Relaţia (6.24) reprezintă formula a doua a lui Bredt. S-a ajuns astfel la aceiaşi formă a
expresiei unghiului specific de torsiune, adică:
.,4
,max
2
t
t
t
t
t
W
M
t
dsI
IG
M
unde momentul de inerţie convenţional la torsiune are expresia: ,4 2
t
dsI
t
Integrala pe contur se referă la toată lungimea s a liniei medii.
Rezultatele obţinute se pot extinde la cazul unei secţiuni complexe având mai multe
contururi închise (de exemplu batiuri de maşini).
U6.6. Generalizarea relaţiilor de calcul
În concluzie, tensiunea tangenţială maximă şi unghiul specific de torsiune în cazul
barelor de secţiune oarecare acţionate de un moment de torsiune M t, au expresiile generale:
.max
t
t
t
t
IG
M
W
M (6.25)
Valorile modulului de rezistenţă convenţional la torsiune, Wt, şi ale momentului de
inerţie convenţional It, sunt prezentate în manualele inginereşti pentru secţiunile mai des
întâlnite în activitatea practică.
Pentru cazul secţiunii circulare sau inelare:
Wt devine Wp ; It devine Ip.
Secţiunea transversală are o formă raţională, economică la torsiune dacă ea prezintă Wt
cât mai mare la un consum de material cât mai mic. Astfel, pentru o secţiune circulară

- 120 -
, iar pentru o secţiune inelară cu acelaşi diametru exterior şi grosimea peretelui t =
d/6,
. Din acest punct de vedere sunt raţionale barele tubulare,
soluţia ideală reprezentând-o bara de secţiune inelară cu perete subţire, căci pentru aceasta
materialul barei se află dispus în locul unde se dezvoltă tensiunile cele mai mari la solicitarea
de torsiune.
Aplicaţia 6.1 Se consideră o bară de secţiune inelară (fig. 6.28,a) cu diametrul mediu D
şi grosimea peretelui t. Se cere să se arate de câte ori scade rezistenţa şi rigiditatea barei la
torsiune prin tăierea ei de-a lungul unei generatoare în cazul când D = 6t. (fig. 6.28,b).
Fig. 6.28
În cazul secţiunii inelare: .2
2
4
2
2tDtD
ttW
În cazul secţiunii cu tăietură: .3
22
3
1 tDtstW
Deci 92
3
2
1 t
D
W
WK
t
t
deci rezistenţa barei scade de 9 ori.
.274
3,
33,
4
442
2
1
33
2
222
1
t
D
I
IK
tDtsI
tD
D
t
t
dsI
t
t
tt
Deci bara se deformează de 27 ori mai uşor la torsiune în cazul prezentat în figura 6.28,b
Observaţie: Profilele cu contur închis prezintă rigiditate mare la torsiune comparativ cu
cele cu contur deschis. În tehnică uneori este avantajos de a avea rigiditate mare (cazul
batiurilor de maşini-unelte, care se confecţionează din contururi închise) iar alteori rigiditate
mică (cazul ramelor de şasiuri auto, acestea confecţionându-se din contururi deschise).
Aplicaţia 6.2 Să se calculeze unghiul de torsiune al secţiunii (1) faţă de încastrare,
pentru bara din figura 6.29.
Fig. 6.29
,43322141
;;;
3
3
2
21
l
0
321
43
l
0
21
32
l
0
1
21
dxIG
MMMdx
IG
MMdx
IG
M
PPP
;
lll
321
332122111
41
PPPIG
MMM
IG
MM
IG
M
de unde
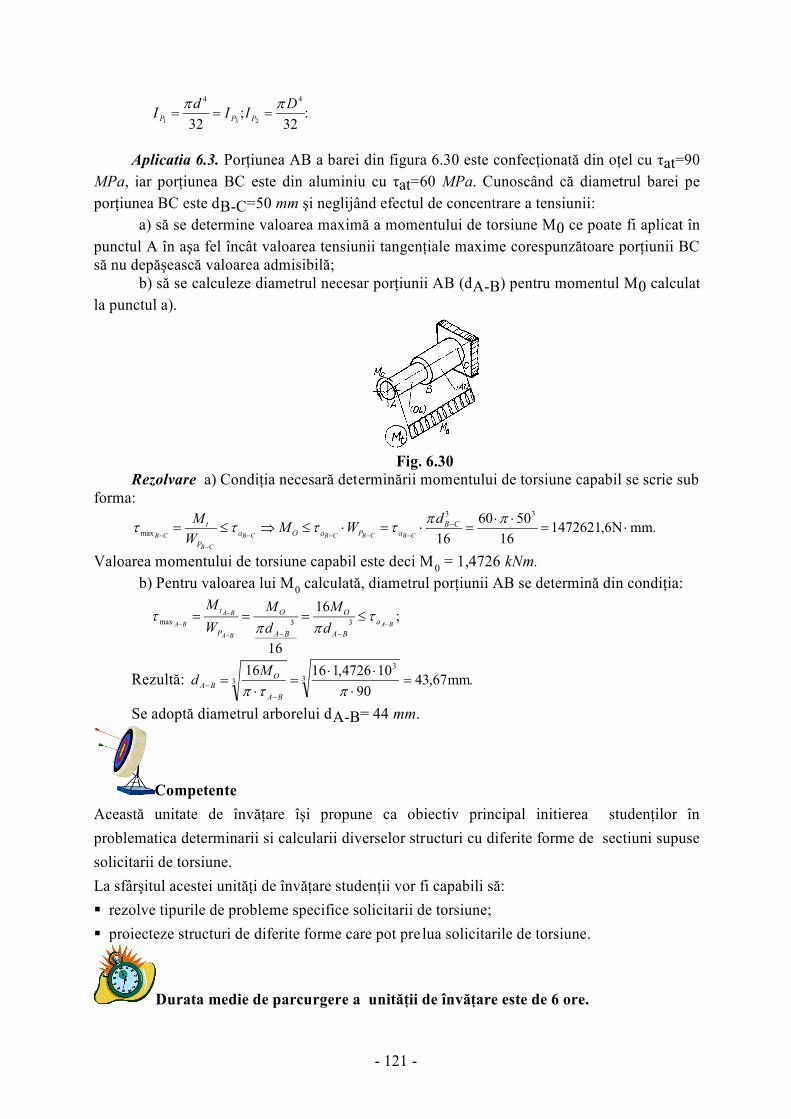
- 121 -
:32
;32
44
231
DII
dI
PPP
Aplicatia 6.3. Porţiunea AB a barei din figura 6.30 este confecţionată din oţel cu τat=90
MPa, iar porţiunea BC este din aluminiu cu τat=60 MPa. Cunoscând că diametrul barei pe
porţiunea BC este dB-C=50 mm şi neglijând efectul de concentrare a tensiunii:
a) să se determine valoarea maximă a momentului de torsiune M0 ce poate fi aplicat în
punctul A în aşa fel încât valoarea tensiunii tangenţiale maxime corespunzătoare porţiunii BC
să nu depăşească valoarea admisibilă;
b) să se calculeze diametrul necesar porţiunii AB (dA-B) pentru momentul M0 calculat
la punctul a).
Fig. 6.30
Rezolvare a) Condiţia necesară determinării momentului de torsiune capabil se scrie sub
forma:
.mmN6,147262116
5060
16
33
max
CB
aPaOa
P
td
WMW
MCBCBCBCB
CB
CB
Valoarea momentului de torsiune capabil este deci M0 = 1,4726 kNm.
b) Pentru valoarea lui M0 calculată, diametrul porţiunii AB se determină din condiţia:
;16
16
33max BA
BA
BA
BA a
BA
O
BA
O
P
t
d
M
d
M
W
M
Rezultă: .mm67,4390
104726,116163
3
3
BA
O
BA
Md
Se adoptă diametrul arborelui dA-B= 44 mm.
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii si calcularii diverselor structuri cu diferite forme de sectiuni supuse
solicitarii de torsiune.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
rezolve tipurile de probleme specifice solicitarii de torsiune;
proiecteze structuri de diferite forme care pot pre lua solicitarile de torsiune.
Durata medie de parcurgere a unităţii de învăţare este de 6 ore.
- 122 -
U6.7 Test de evaluare a cunostintelor
U6.7.1 Cum se calculeaza momentul de torsiune M t ce poate fi transmis la o putere
(P) data si un numar de rotatii pe minut(n) cunoscut?
U6.7.2 Enuntati ipotezele ce stau la baza demonstratiei relatiei tensiunii tangentiale
la torsiunea barelor de sectiune circulara.
U6.7.3 In ce puncte ale unei bare de se ctiune circulara solicitata la torsiune se
se dezvolta cele mai mari tensiuni? Care este legea de distributie a
tensiunilor tangentiale la torsiunea barelor de sectiune circulara?
U6.7.4 Cum se explica faptul ca sectiunea inelara este mai economica la solicitarea
de torsiune?
U6.7.5 Ce particularitati prezinta barele de sectiune oarecare solicitate la torsiune?
U6.7.6 Care sunt expres iile tensiunilor tangentiale maxime pentru barele de sectiune
dreptunghiulara solicitate la torsiune?
U6.7.7 Trasati diagramele tensiunilor tangentiale pentru o bara de sectiune
dreptunghiulara.
U6.7.8 Care sunt criteriile de calcul la torsiune pentru o bara de sectiune oarecare?
Tema de control trebuie să fie alcătuita din TO DO
Rezolvati exemple numerice de bare solicitate la torsiune, bare ce au diverse
forme de sectiuni.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte
- 123 -
Modulul 7. Tensiuni in grinzi drepte solicitate la incovoiere
Cuprins
U7.1 Definitii. Ipoteze........................................................... ............................... ...123
U7.2 Tensiuni la incovoierea plana pura a barelor drepte......................... ............ ..124
U7.3 Incovoierea grinzilor neomogene alcatuite din materiale diferite..................128
U7.4 Concentratori de tensiune....................... ............................. ...........................130
U7.5 Forme rationale de sectiuni pentru incovoiere.................... ........... ................131
U7.6 Incovoierea oblica........................................................ ...................................131
U7.7 Incovoierea stramba............................................................. ...........................134
U7.8 Expresia generala a tensiunii de incovoiere pura................. ........................... 135
U7.9 Incovoierea simpla plana..................................................... ....................... ...136
U7.10 Starea de tensiune a grinzilor drepte solicitate la incovoiere simpla............ .140
U7.11 Lunecarea longitudinala............... .................................... ...............................142
U7.12 Grinzi de egala rezistenta la incovoiere........................... ................................143
U7.13 Test de evaluare a cunostintelor...................................... ................................149
U7.1 Definitii. Ipoteze
O grindă dreaptă este solicitată la încovoiere dacă în secţiunile ei transversale se
dezvoltă momente încovoietoare Mi (suportul forţelor trece prin centrul de greutate pentru a
nu apărea solicitarea de torsiune). În funcţie de poziţia în spaţiu a forţelor încovoierea poate fi:
încovoiere plană, cazul în care toate sarcinile se află într-un plan
longitudinal care conţine una dintre axele principale centrale de inerţie ale
secţiunii transversale.
încovoiere oblică, dacă toate sarcinile se află într-un plan longitudinal care
însă nu conţine niciuna dintre axele principale centrale de inerţie.
încovoiere strîmbă, când suportul fiecărei forţe în parte trece prin centrul de
greutate al secţiunii dar forţele sunt situate în plane diferite.
În dependenţă de natura tensiunilor din secţiune solicitarea de încovoiere poate fi:
încovoiere pură, când în secţiunea transversală acţionează numai Mi,
momente încovoietoare ce produc tensiunile σ (fig. 7.1,a).
încovoiere simplă, când în secţiunea transversală acţionează simultan atât
momentele încovoietoare Mi cât şi forţele tăietoare T apărând atât tensiuni
σ cât şi τ (fig. 7.1,b).
Fig. 7.1
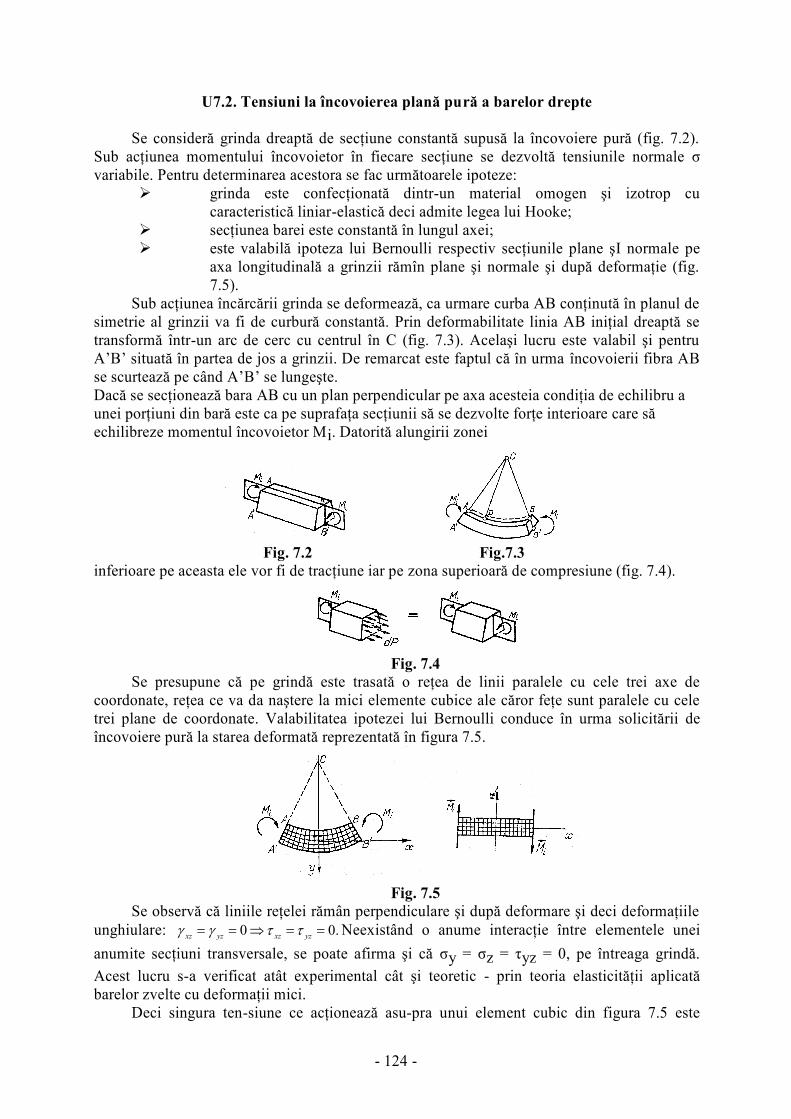
- 124 -
U7.2. Tensiuni la încovoierea plană pură a barelor drepte
Se consideră grinda dreaptă de secţiune constantă supusă la încovoiere pură (fig. 7.2).
Sub acţiunea momentului încovoietor în fiecare secţiune se dezvoltă tensiunile normale σ
variabile. Pentru determinarea acestora se fac următoarele ipoteze:
grinda este confecţionată dintr-un material omogen şi izotrop cu
caracteristică liniar-elastică deci admite legea lui Hooke;
secţiunea barei este constantă în lungul axei;
este valabilă ipoteza lui Bernoulli respectiv secţiunile plane şI normale pe
axa longitudinală a grinzii rămîn plane şi normale şi după deformaţie (fig.
7.5).
Sub acţiunea încărcării grinda se deformează, ca urmare curba AB conţinută în planul de
simetrie al grinzii va fi de curbură constantă. Prin deformabilitate linia AB iniţial dreaptă se
transformă într-un arc de cerc cu centrul în C (fig. 7.3). Acelaşi lucru este valabil şi pentru
A’B’ situată în partea de jos a grinzii. De remarcat este faptul că în urma încovoierii fibra AB
se scurtează pe când A’B’ se lungeşte.
Dacă se secţionează bara AB cu un plan perpendicular pe axa acesteia condiţia de echilibru a
unei porţiuni din bară este ca pe suprafaţa secţiunii să se dezvolte forţe interioare care să
echilibreze momentul încovoietor Mi. Datorită alungirii zonei
Fig. 7.2 Fig.7.3
inferioare pe aceasta ele vor fi de tracţiune iar pe zona superioară de compresiune (fig. 7.4).
Fig. 7.4
Se presupune că pe grindă este trasată o reţea de linii paralele cu cele trei axe de
coordonate, reţea ce va da naştere la mici elemente cubice ale căror feţe sunt paralele cu cele
trei plane de coordonate. Valabilitatea ipotezei lui Bernoulli conduce în urma solicitării de
încovoiere pură la starea deformată reprezentată în figura 7.5.
Fig. 7.5
Se observă că liniile reţelei rămân perpendiculare şi după deformare şi deci deformaţiile
unghiulare: .00 yzxzyzxz
Neexistând o anume interacţie între elementele unei
anumite secţiuni transversale, se poate afirma şi că σy = σz = τyz = 0, pe întreaga grindă.
Acest lucru s-a verificat atât experimental cât şi teoretic - prin teoria elasticităţii aplicată
barelor zvelte cu deformaţii mici.
Deci singura ten-siune ce acţionează asu-pra unui element cubic din figura 7.5 este

- 125 -
componenta normală σx. Deci în orice punct al grinzii solicitată la încovoiere pură va exista
doar o stare de tensiune uniaxială. Tot din analiza reţelei deformate din figura 7.5 se observă
că fibrele din partea superioară a grinzii se scurtează pe cănd cele din partea inferioară se
lungesc. Va exista deci şi o suprafaţă paralelă cu faţa superioară şi cea inferioară a grinzii -
numită suprafaţă neutră - în care deformaţiile după direcţia x sunt nule. Suprafaţa neutră
intersectează planul de simetrie după arcul de cerc DE (fig. 7.6).
Fig. 7.6
Se notează cu ρ raza arcului de cerc DE şi cu θ unghiul la centru corespunzător acestui
arc: L = ρ•θ, unde L este lungimea iniţială a grinzii.
Lungimea arcului JK situat la distanţa y de arcul DE va fi: L' = (ρ y)θ
Deformaţia specifică longitudinală a fibrei JK se va putea deci scrie sub forma:
;)(
yyy
L
JKDx
(7.1)
Din relaţia (7.1) se poate observa că valoarea absolută maximă a deformaţiei este:
.max
max
y
(7.2)
Se pot deci calcula deformaţiile specifice longitudinale la nivel de punct dacă se cunoaşte
distanţa de la acel punct la axa neutră. Apare deci necesară poziţionarea suprafeţei neutre. În
acest scop se utilizează legea lui Hooke şi relaţiile de echivalenţă dintre eforturi şi tensiuni.
Pentru un material omogen cu modulul de elasticitate longitudinal E se poate scrie:
;max
max
y
iary
EExx
(7.3)
unde prin σmaxam notat valoarea maximă absolută a tensiunii. Rezultă deci că tensiunea
normală variază liniar cu distanţa faţă de suprafaţa neutră (fig. 7.7).
Necunoscând nici poziţia suprafeţei neutre şi nici valoarea maximă a tensiunii normale
σmax, se va ataşa unei secţiuni curente a grinzii (fig. 7.7,a) un sistem de axe de coordonate
Oxyz la care axa Oz să fie conţinută în planul neutru. Cum în această secţiune singurul efort
prezent este momentul încovoietor M, relaţiile de echivalenţă între eforturi şi tensiuni se pot
scrie sub forma:
;00 dAydANx
(7.4)
.0 zA
SdAy (7.5)
Din relaţia (7.4) rezultă deci că momentul static al secţiunii transversale faţă de axa Oz este
nul. Ca urmare, axa Oz este axă centrală.
;00;0 AAxty
dAyzdAzM (7.6)
sistemul de axe zOy este un sistem central principal (lucru echivalent de fapt dacă axa Oy este
şi axă de simetrie).
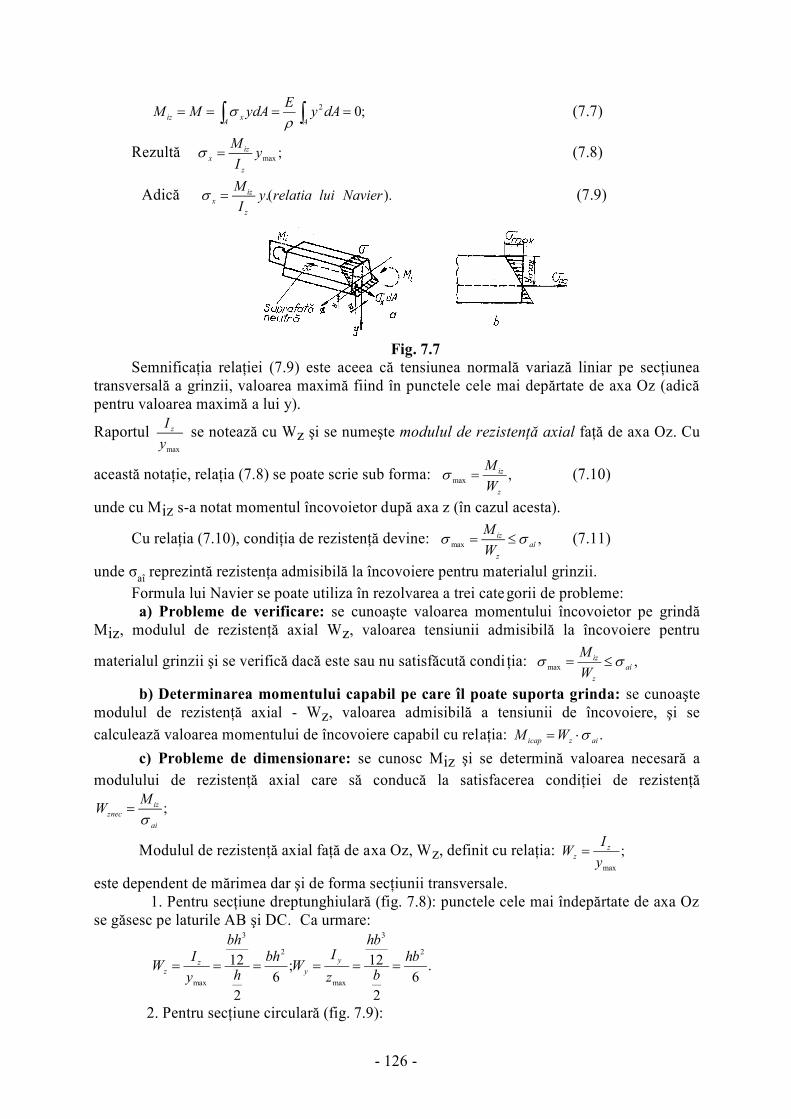
- 126 -
;02 AAxiz
dAyE
dAyMM
(7.7)
Rezultă ;max
yI
M
z
iz
x (7.8)
Adică ). (. NavierluirelatiayI
M
z
iz
x (7.9)
Fig. 7.7
Semnificaţia relaţiei (7.9) este aceea că tensiunea normală variază liniar pe secţiunea
transversală a grinzii, valoarea maximă fiind în punctele cele mai depărtate de axa Oz (adică
pentru valoarea maximă a lui y).
Raportul max
y
Iz se notează cu Wz şi se numeşte modulul de rezistenţă axial faţă de axa Oz. Cu
această notaţie, relaţia (7.8) se poate scrie sub forma: ,max
z
iz
W
M (7.10)
unde cu Miz s-a notat momentul încovoietor după axa z (în cazul acesta).
Cu relaţia (7.10), condiţia de rezistenţă devine: ,max aî
z
iz
W
M (7.11)
unde σaî
reprezintă rezistenţa admisibilă la încovoiere pentru materialul grinzii.
Formula lui Navier se poate utiliza în rezolvarea a trei cate gorii de probleme:
a) Probleme de verificare: se cunoaşte valoarea momentului încovoietor pe grindă
Miz, modulul de rezistenţă axial Wz, valoarea tensiunii admisibilă la încovoiere pentru
materialul grinzii şi se verifică dacă este sau nu satisfăcută condi ţia: ,max aî
z
iz
W
M
b) Determinarea momentului capabil pe care îl poate suporta grinda: se cunoaşte
modulul de rezistenţă axial - Wz, valoarea admisibilă a tensiunii de încovoiere, şi se
calculează valoarea momentului de încovoiere capabil cu relaţia: .aizcapi
WM
c) Probleme de dimensionare: se cunosc Miz şi se determină valoarea necesară a
modulului de rezistenţă axial care să conducă la satisfacerea condiţiei de rezistenţă
;ai
iz
necz
MW
Modulul de rezistenţă axial faţă de axa Oz, Wz, definit cu relaţia: ;max
y
IW z
z
este dependent de mărimea dar şi de forma secţiunii transversale.
1. Pentru secţiune dreptunghiulară (fig. 7.8): punctele cele mai îndepărtate de axa Oz
se găsesc pe laturile AB şi DC. Ca urmare:
.6
2
12;6
2
122
3
max
2
3
max
bh
b
bh
z
IW
hb
h
hb
y
IW
y
y
z
z
2. Pentru secţiune circulară (fig. 7.9):
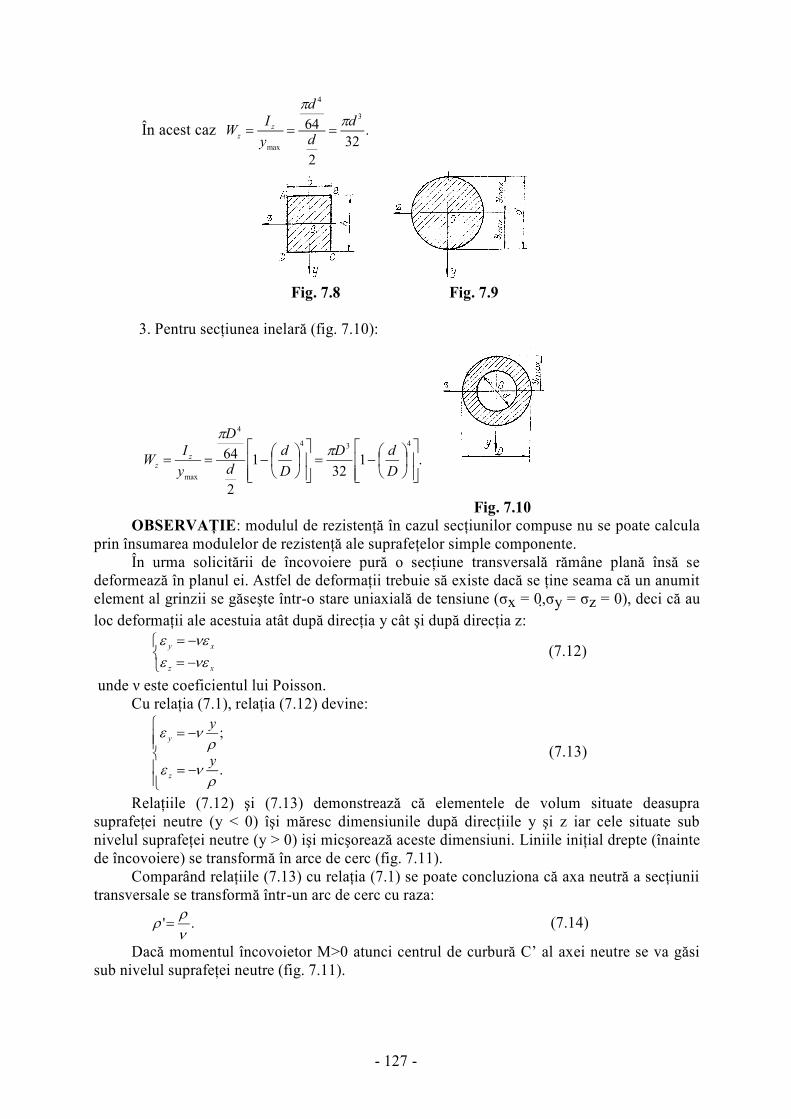
- 127 -
În acest caz .32
2
643
4
max
d
d
d
y
IW z
z
Fig. 7.8 Fig. 7.9
3. Pentru secţiunea inelară (fig. 7.10):
.132
1
2
64434
4
max
D
dD
D
d
d
D
y
IW z
z
Fig. 7.10
OBSERVAŢIE: modulul de rezistenţă în cazul secţiunilor compuse nu se poate calcula
prin însumarea modulelor de rezistenţă ale suprafeţelor simple componente.
În urma solicitării de încovoiere pură o secţiune transversală rămâne plană însă se
deformează în planul ei. Astfel de deformaţii trebuie să existe dacă se ţine seama că un anumit
element al grinzii se găseşte într-o stare uniaxială de tensiune (σx = 0,σy = σz = 0), deci că au
loc deformaţii ale acestuia atât după direcţia y cât şi după direcţia z:
xz
xy
(7.12)
unde ν este coeficientul lui Poisson.
Cu relaţia (7.1), relaţia (7.12) devine:
.
;
y
y
z
y
(7.13)
Relaţiile (7.12) şi (7.13) demonstrează că elementele de volum situate deasupra
suprafeţei neutre (y < 0) îşi măresc dimensiunile după direcţiile y şi z iar cele situate sub
nivelul suprafeţei neutre (y > 0) işi micşorează aceste dimensiuni. Liniile iniţial drepte (înainte
de încovoiere) se transformă în arce de cerc (fig. 7.11).
Comparând relaţiile (7.13) cu relaţia (7.1) se poate concluziona că axa neutră a secţiunii
transversale se transformă într-un arc de cerc cu raza:
.'
(7.14)
Dacă momentul încovoietor M>0 atunci centrul de curbură C’ al axei neutre se va găsi
sub nivelul suprafeţei neutre (fig. 7.11).
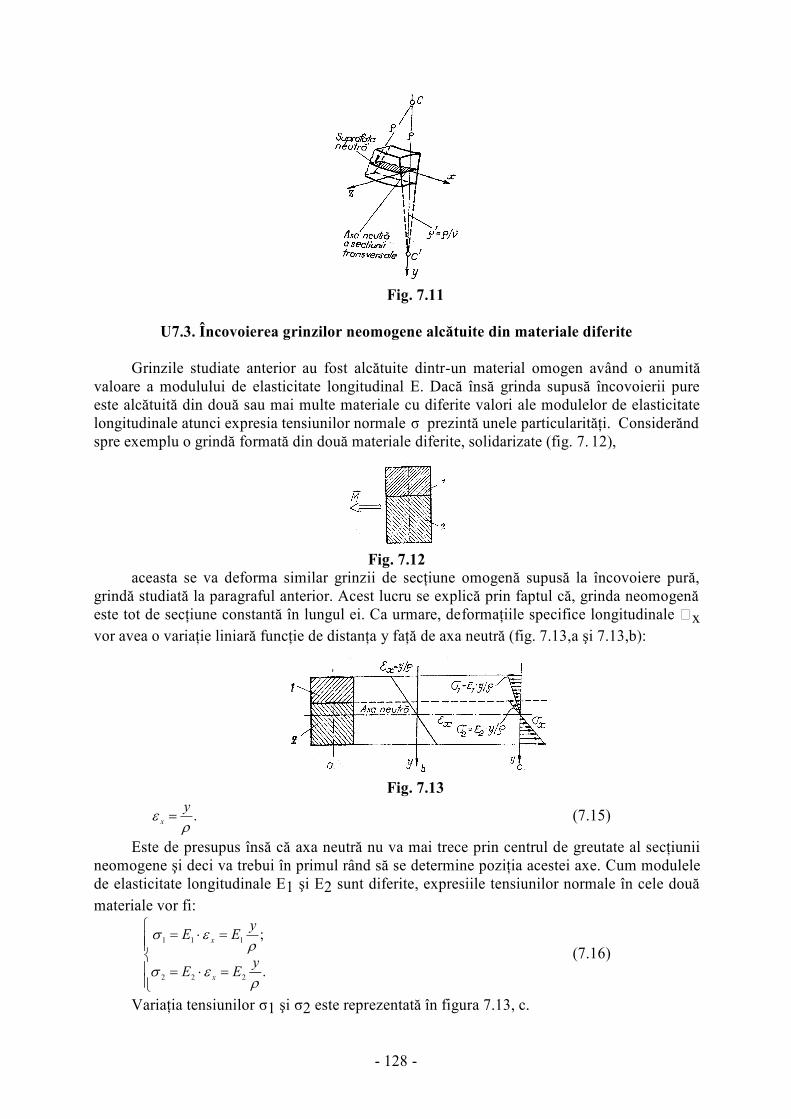
- 128 -
Fig. 7.11
U7.3. Încovoierea grinzilor neomogene alcătuite din materiale diferite
Grinzile studiate anterior au fost alcătuite dintr-un material omogen având o anumită
valoare a modulului de elasticitate longitudinal E. Dacă însă grinda supusă încovoierii pure
este alcătuită din două sau mai multe materiale cu diferite valori ale modulelor de elasticitate
longitudinale atunci expresia tensiunilor normale σ prezintă unele particularităţi. Considerănd
spre exemplu o grindă formată din două materiale diferite, solidarizate (fig. 7. 12),
Fig. 7.12
aceasta se va deforma similar grinzii de secţiune omogenă supusă la încovoiere pură,
grindă studiată la paragraful anterior. Acest lucru se explică prin faptul că, grinda neomogenă
este tot de secţiune constantă în lungul ei. Ca urmare, deformaţiile specifice longitudinale x
vor avea o variaţie liniară funcţie de distanţa y faţă de axa neutră (fig. 7.13,a şi 7.13,b):
Fig. 7.13
.
y
x (7.15)
Este de presupus însă că axa neutră nu va mai trece prin centrul de greutate al secţiunii
neomogene şi deci va trebui în primul rând să se determine poziţia acestei axe. Cum modulele
de elasticitate longitudinale E1 şi E2 sunt diferite, expresiile tensiunilor normale în cele două
materiale vor fi:
.
;
222
111
yEE
yEE
x
x
(7.16)
Variaţia tensiunilor σ1 şi σ2 este reprezentată în figura 7.13, c.
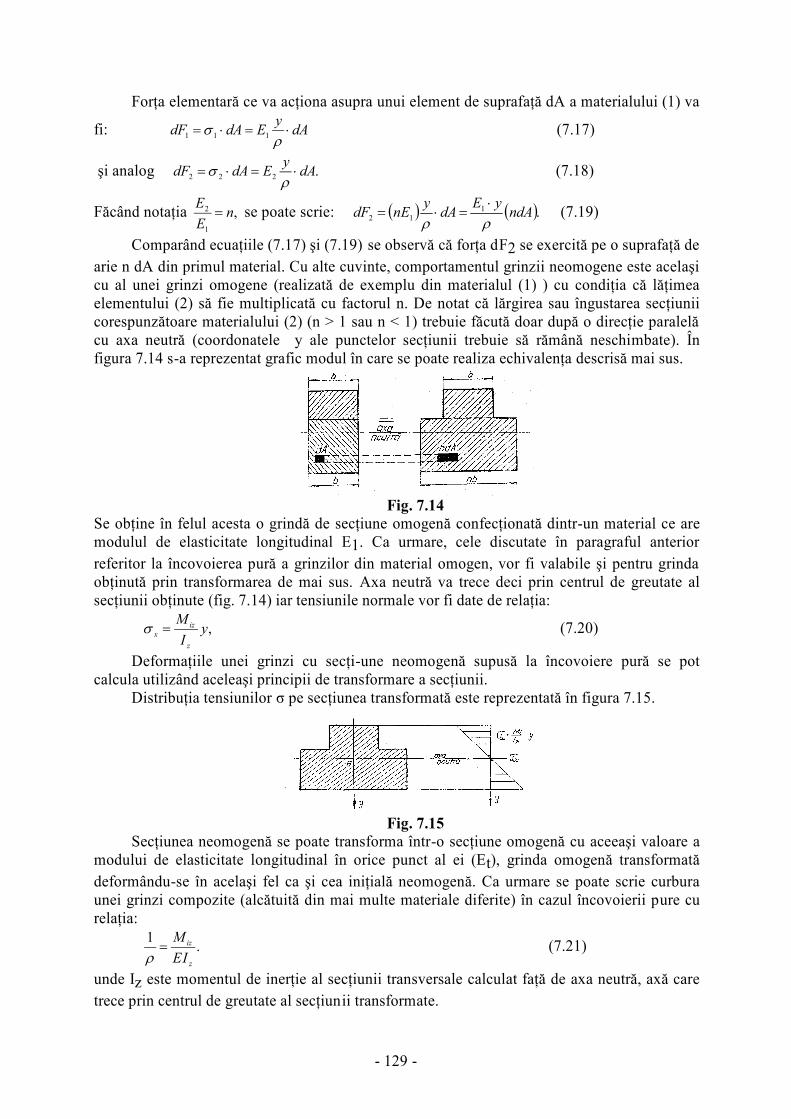
- 129 -
Forţa elementară ce va acţiona asupra unui element de suprafaţă dA a materialului (1) va
fi: dAy
EdAdF
111
(7.17)
şi analog .222
dAy
EdAdF
(7.18)
Făcând notaţia ,1
2 nE
E se poate scrie: .1
12dAn
yEdA
yEndF
(7.19)
Comparând ecuaţiile (7.17) şi (7.19) se observă că forţa dF2 se exercită pe o suprafaţă de
arie n dA din primul material. Cu alte cuvinte, comportamentul grinzii neomogene este acelaşi
cu al unei grinzi omogene (realizată de exemplu din materialul (1) ) cu condiţia că lăţimea
elementului (2) să fie multiplicată cu factorul n. De notat că lărgirea sau îngustarea secţiunii
corespunzătoare materialului (2) (n > 1 sau n < 1) trebuie făcută doar după o direcţie paralelă
cu axa neutră (coordonatele y ale punctelor secţiunii trebuie să rămână neschimbate). În
figura 7.14 s-a reprezentat grafic modul în care se poate realiza echivalenţa descrisă mai sus.
Fig. 7.14
Se obţine în felul acesta o grindă de secţiune omogenă confecţionată dintr-un material ce are
modulul de elasticitate longitudinal E1. Ca urmare, cele discutate în paragraful anterior
referitor la încovoierea pură a grinzilor din material omogen, vor fi valabile şi pentru grinda
obţinută prin transformarea de mai sus. Axa neutră va trece deci prin centrul de greutate al
secţiunii obţinute (fig. 7.14) iar tensiunile normale vor fi date de relaţia:
,yI
M
z
iz
x (7.20)
Deformaţiile unei grinzi cu secţi-une neomogenă supusă la încovoiere pură se pot
calcula utilizând aceleaşi principii de transformare a secţiunii.
Distribuţia tensiunilor σ pe secţiunea transformată este reprezentată în figura 7.15.
Fig. 7.15
Secţiunea neomogenă se poate transforma într-o secţiune omogenă cu aceeaşi valoare a
modului de elasticitate longitudinal în orice punct al ei (Et), grinda omogenă transformată
deformându-se în acelaşi fel ca şi cea iniţială neomogenă. Ca urmare se poate scrie curbura
unei grinzi compozite (alcătuită din mai multe materiale diferite) în cazul încovoierii pure cu
relaţia:
.1
z
iz
IE
M
(7.21)
unde Iz este momentul de inerţie al secţiunii transversale calculat faţă de axa neutră, axă care
trece prin centrul de greutate al secţiunii transformate.
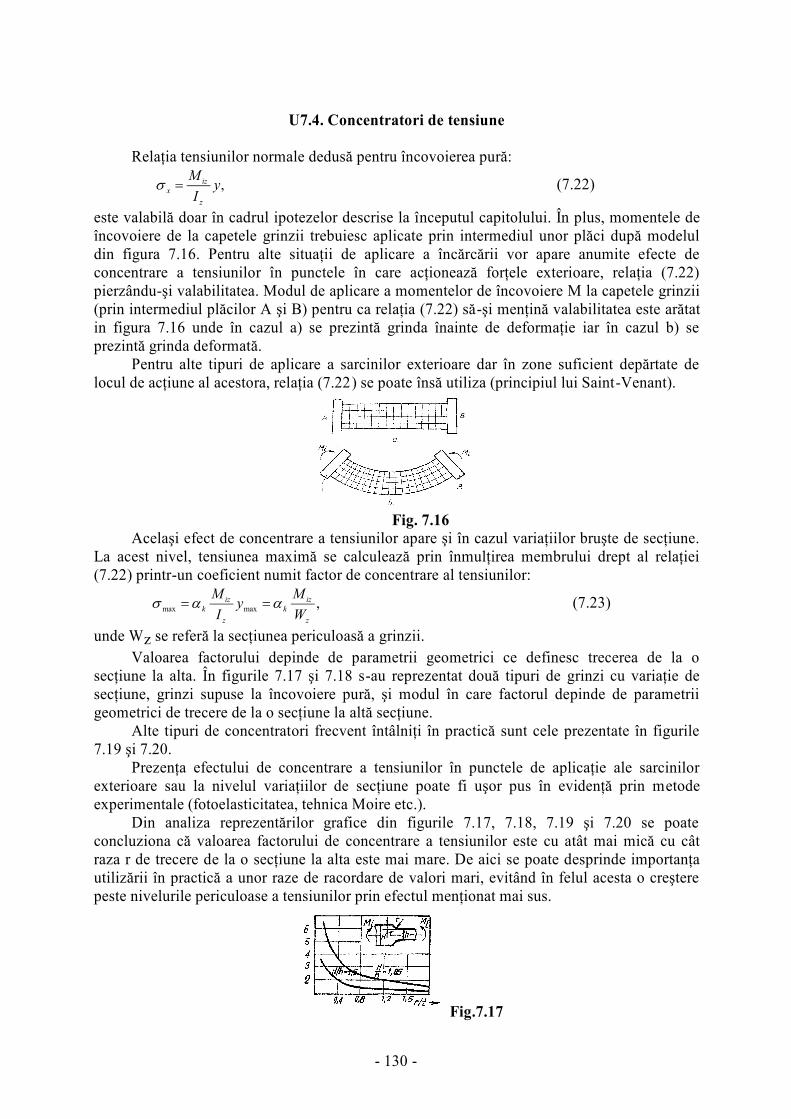
- 130 -
U7.4. Concentratori de tensiune
Relaţia tensiunilor normale dedusă pentru încovoierea pură:
,yI
M
z
iz
x (7.22)
este valabilă doar în cadrul ipotezelor descrise la începutul capitolului. În plus, momentele de
încovoiere de la capetele grinzii trebuiesc aplicate prin intermediul unor plăci după modelul
din figura 7.16. Pentru alte situaţii de aplicare a încărcării vor apare anumite efecte de
concentrare a tensiunilor în punctele în care acţionează forţele exterioare, relaţia (7.22)
pierzându-şi valabilitatea. Modul de aplicare a momentelor de încovoiere M la capetele grinzii
(prin intermediul plăcilor A şi B) pentru ca relaţia (7.22) să-şi menţină valabilitatea este arătat
in figura 7.16 unde în cazul a) se prezintă grinda înainte de deformaţie iar în cazul b) se
prezintă grinda deformată.
Pentru alte tipuri de aplicare a sarcinilor exterioare dar în zone suficient depărtate de
locul de acţiune al acestora, relaţia (7.22) se poate însă utiliza (principiul lui Saint-Venant).
Fig. 7.16
Acelaşi efect de concentrare a tensiunilor apare şi în cazul variaţiilor bruşte de secţiune.
La acest nivel, tensiunea maximă se calculează prin înmulţirea membrului drept al relaţiei
(7.22) printr-un coeficient numit factor de concentrare al tensiunilor:
,maxmax
z
iz
k
z
iz
kW
My
I
M (7.23)
unde Wz se referă la secţiunea periculoasă a grinzii.
Valoarea factorului depinde de parametrii geometrici ce definesc trecerea de la o
secţiune la alta. În figurile 7.17 şi 7.18 s-au reprezentat două tipuri de grinzi cu variaţie de
secţiune, grinzi supuse la încovoiere pură, şi modul în care factorul depinde de parametrii
geometrici de trecere de la o secţiune la altă secţiune.
Alte tipuri de concentratori frecvent întâlniţi în practică sunt cele prezentate în figurile
7.19 şi 7.20.
Prezenţa efectului de concentrare a tensiunilor în punctele de aplicaţie ale sarcinilor
exterioare sau la nivelul variaţiilor de secţiune poate fi uşor pus în evidenţă prin metode
experimentale (fotoelasticitatea, tehnica Moire etc.).
Din analiza reprezentărilor grafice din figurile 7.17, 7.18, 7.19 şi 7.20 se poate
concluziona că valoarea factorului de concentrare a tensiunilor este cu atât mai mică cu cât
raza r de trecere de la o secţiune la alta este mai mare. De aici se poate desprinde importanţa
utilizării în practică a unor raze de racordare de valori mari, evitând în felul acesta o creştere
peste nivelurile periculoase a tensiunilor prin efectul menţionat mai sus.
Fig.7.17
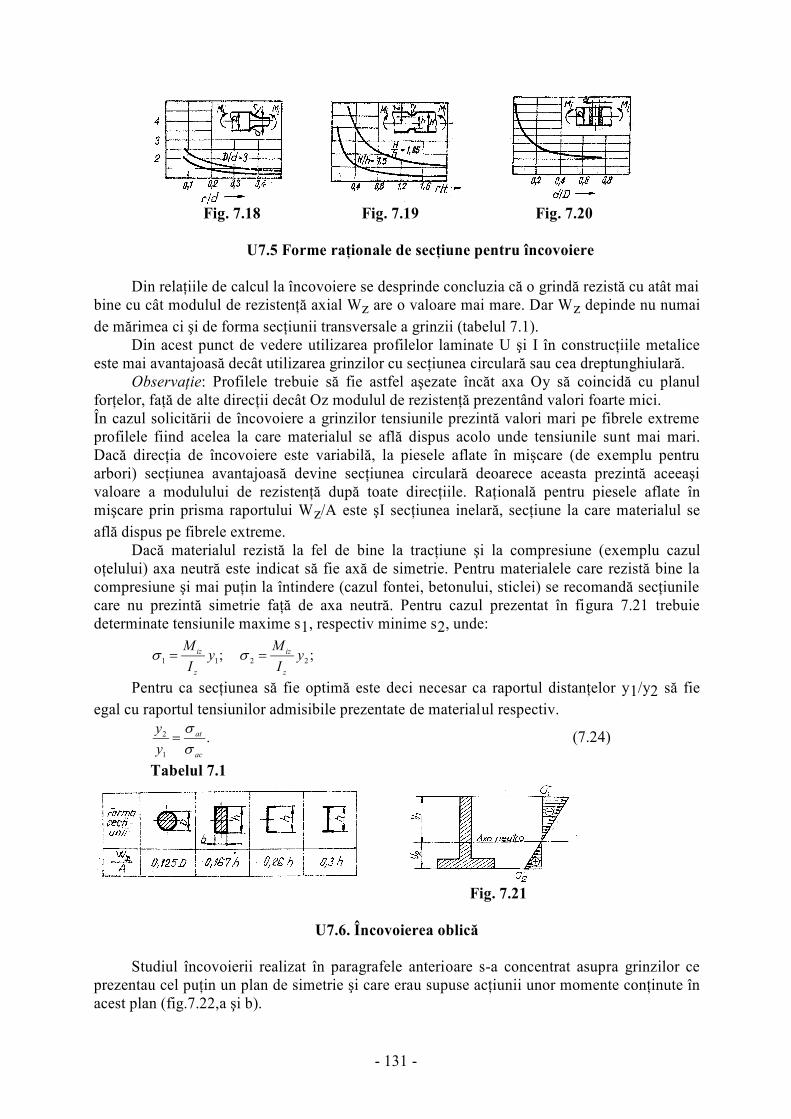
- 131 -
Fig. 7.18 Fig. 7.19 Fig. 7.20
U7.5 Forme raţionale de secţiune pentru încovoiere
Din relaţiile de calcul la încovoiere se desprinde concluzia că o grindă rezistă cu atât mai
bine cu cât modulul de rezistenţă axial Wz are o valoare mai mare. Dar Wz depinde nu numai
de mărimea ci şi de forma secţiunii transversale a grinzii (tabelul 7.1).
Din acest punct de vedere utilizarea profilelor laminate U şi I în construcţiile metalice
este mai avantajoasă decât utilizarea grinzilor cu secţiunea circulară sau cea dreptunghiulară.
Observaţie: Profilele trebuie să fie astfel aşezate încăt axa Oy să coincidă cu planul
forţelor, faţă de alte direcţii decât Oz modulul de rezistenţă prezentând valori foarte mici.
În cazul solicitării de încovoiere a grinzilor tensiunile prezintă valori mari pe fibrele extreme
profilele fiind acelea la care materialul se află dispus acolo unde tensiunile sunt mai mari.
Dacă direcţia de încovoiere este variabilă, la piesele aflate în mişcare (de exemplu pentru
arbori) secţiunea avantajoasă devine secţiunea circulară deoarece aceasta prezintă aceeaşi
valoare a modulului de rezistenţă după toate direcţiile. Raţională pentru piesele aflate în
mişcare prin prisma raportului Wz/A este şI secţiunea inelară, secţiune la care materialul se
află dispus pe fibrele extreme.
Dacă materialul rezistă la fel de bine la tracţiune şi la compresiune (exemplu cazul
oţelului) axa neutră este indicat să fie axă de simetrie. Pentru materialele care rezistă bine la
compresiune şi mai puţin la întindere (cazul fontei, betonului, sticlei) se recomandă secţiunile
care nu prezintă simetrie faţă de axa neutră. Pentru cazul prezentat în figura 7.21 trebuie
determinate tensiunile maxime s1, respectiv minime s2, unde:
; ;2211
yI
My
I
M
z
iz
z
iz
Pentru ca secţiunea să fie optimă este deci necesar ca raportul distanţelor y1/y2 să fie
egal cu raportul tensiunilor admisibile prezentate de materialul respectiv.
.1
2
ac
at
y
y
(7.24)
Tabelul 7.1
Fig. 7.21
U7.6. Încovoierea oblică
Studiul încovoierii realizat în paragrafele anterioare s-a concentrat asupra grinzilor ce
prezentau cel puţin un plan de simetrie şi care erau supuse acţiunii unor momente conţinute în
acest plan (fig.7.22,a şi b).
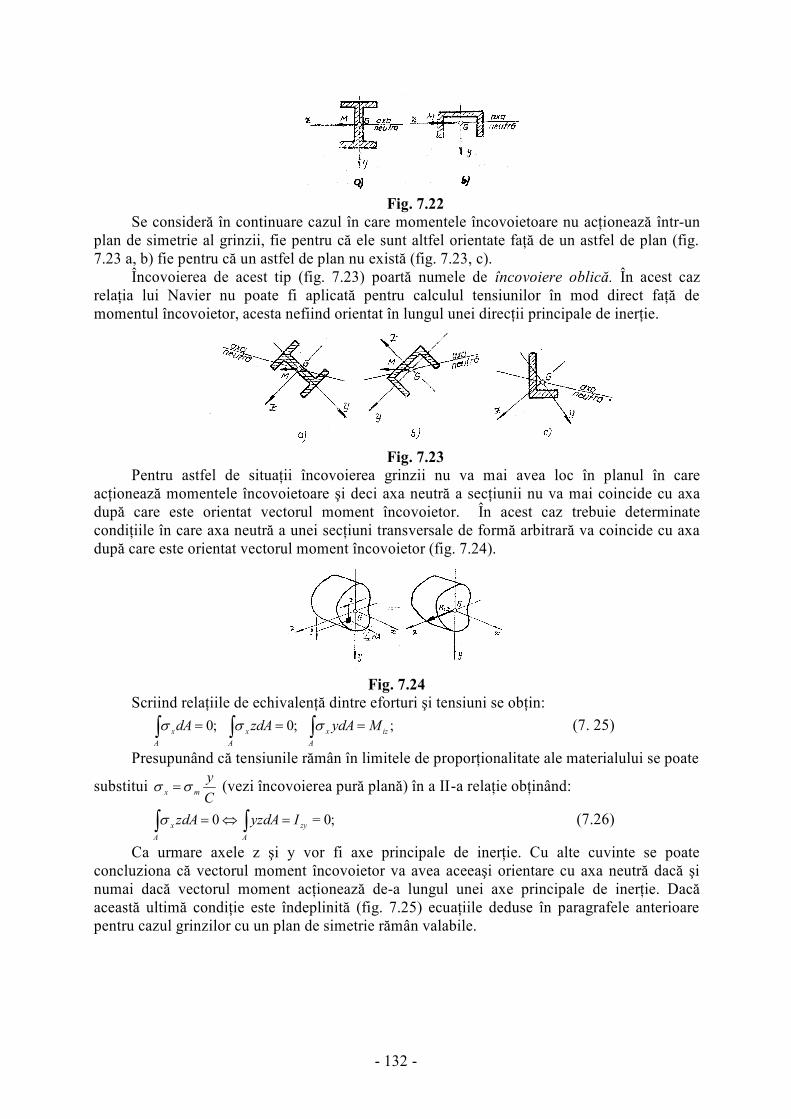
- 132 -
Fig. 7.22
Se consideră în continuare cazul în care momentele încovoietoare nu acţionează într-un
plan de simetrie al grinzii, fie pentru că ele sunt altfel orientate faţă de un astfel de plan (fig.
7.23 a, b) fie pentru că un astfel de plan nu există (fig. 7.23, c).
Încovoierea de acest tip (fig. 7.23) poartă numele de încovoiere oblică. În acest caz
relaţia lui Navier nu poate fi aplicată pentru calculul tensiunilor în mod direct faţă de
momentul încovoietor, acesta nefiind orientat în lungul unei direcţii principale de inerţie.
Fig. 7.23
Pentru astfel de situaţii încovoierea grinzii nu va mai avea loc în planul în care
acţionează momentele încovoietoare şi deci axa neutră a secţiunii nu va mai coincide cu axa
după care este orientat vectorul moment încovoietor. În acest caz trebuie determinate
condiţiile în care axa neutră a unei secţiuni transversale de formă arbitrară va coincide cu axa
după care este orientat vectorul moment încovoietor (fig. 7.24).
Fig. 7.24
Scriind relaţiile de echivalenţă dintre eforturi şi tensiuni se obţin:
; ;0 ;0iz
A
x
A
x
A
xMydAzdAdA (7. 25)
Presupunând că tensiunile rămân în limitele de proporţionalitate ale materialului se poate
substitui C
ymx
(vezi încovoierea pură plană) în a II-a relaţie obţinând:
;0= 0zy
AA
xIdAyzdAz (7.26)
Ca urmare axele z şi y vor fi axe principale de inerţie. Cu alte cuvinte se poate
concluziona că vectorul moment încovoietor va avea aceeaşi orientare cu axa neutră dacă şi
numai dacă vectorul moment acţionează de-a lungul unei axe principale de inerţie. Dacă
această ultimă condiţie este îndeplinită (fig. 7.25) ecuaţiile deduse în paragrafele anterioare
pentru cazul grinzilor cu un plan de simetrie rămân valabile.
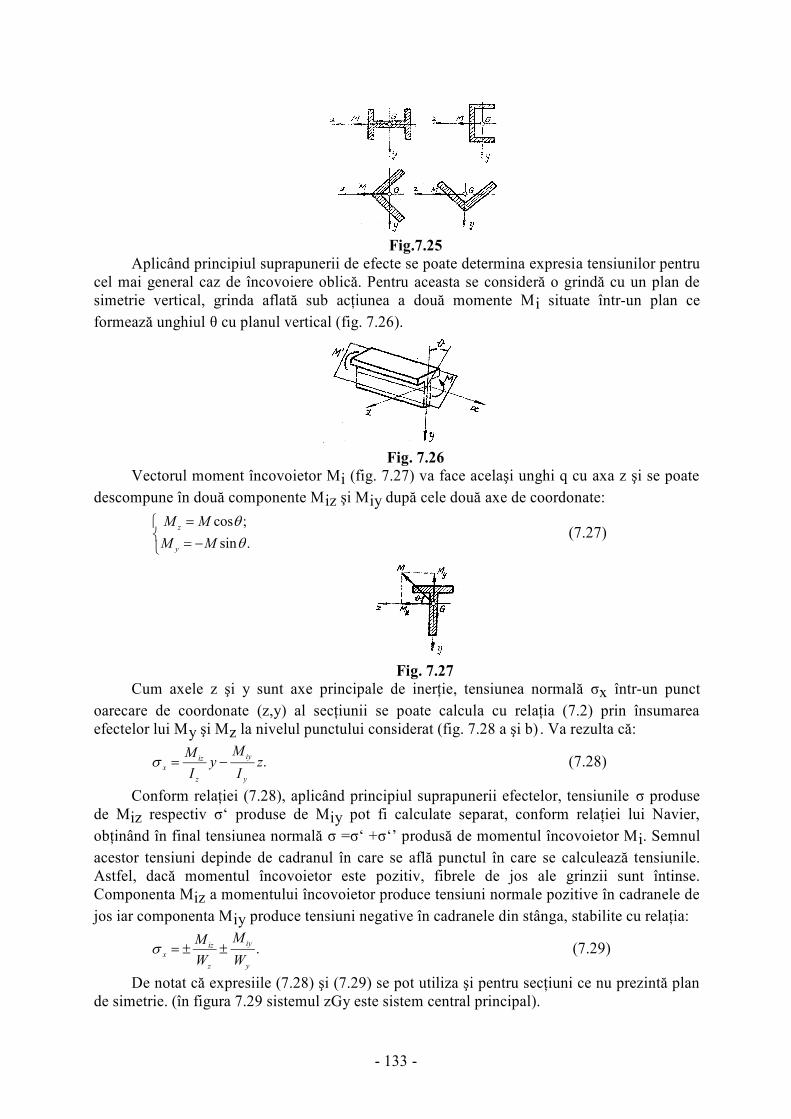
- 133 -
Fig.7.25
Aplicând principiul suprapunerii de efecte se poate determina expresia tensiunilor pentru
cel mai general caz de încovoiere oblică. Pentru aceasta se consideră o grindă cu un plan de
simetrie vertical, grinda aflată sub acţiunea a două momente Mi situate într-un plan ce
formează unghiul θ cu planul vertical (fig. 7.26).
Fig. 7.26
Vectorul moment încovoietor Mi (fig. 7.27) va face acelaşi unghi q cu axa z şi se poate
descompune în două componente Miz şi Miy după cele două axe de coordonate:
.sin
;cos
MM
MM
y
z (7.27)
Fig. 7.27
Cum axele z şi y sunt axe principale de inerţie, tensiunea normală σx într-un punct
oarecare de coordonate (z,y) al secţiunii se poate calcula cu relaţia (7.2) prin însumarea
efectelor lui My şi Mz la nivelul punctului considerat (fig. 7.28 a şi b) . Va rezulta că:
.zI
My
I
M
y
iy
z
iz
x (7.28)
Conform relaţiei (7.28), aplicând principiul suprapunerii efectelor, tensiunile σ produse
de Miz respectiv σ‘ produse de Miy pot fi calculate separat, conform relaţiei lui Navier,
obţinând în final tensiunea normală σ =σ‘ +σ‘’ produsă de momentul încovoietor Mi. Semnul
acestor tensiuni depinde de cadranul în care se află punctul în care se calculează tensiunile.
Astfel, dacă momentul încovoietor este pozitiv, fibrele de jos ale grinzii sunt întinse.
Componenta Miz a momentului încovoietor produce tensiuni normale pozitive în cadranele de
jos iar componenta Miy produce tensiuni negative în cadranele din stânga, stabilite cu relaţia:
.y
iy
z
iz
xW
M
W
M (7.29)
De notat că expresiile (7.28) şi (7.29) se pot utiliza şi pentru secţiuni ce nu prezintă plan
de simetrie. (în figura 7.29 sistemul zGy este sistem central principal).
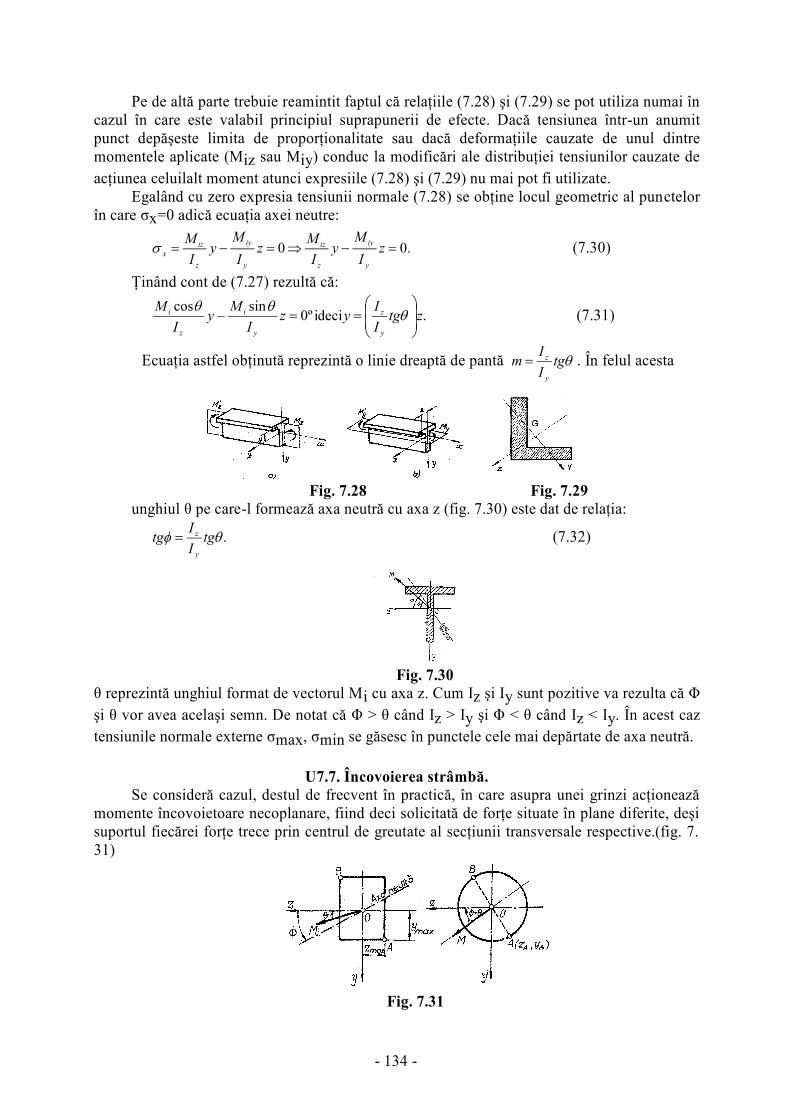
- 134 -
Pe de altă parte trebuie reamintit faptul că relaţiile (7.28) şi (7.29) se pot utiliza numai în
cazul în care este valabil principiul suprapunerii de efecte. Dacă tensiunea într-un anumit
punct depăşeste limita de proporţionalitate sau dacă deformaţiile cauzate de unul dintre
momentele aplicate (Miz sau Miy) conduc la modificări ale distribuţiei tensiunilor cauzate de
acţiunea celuilalt moment atunci expresiile (7.28) şi (7.29) nu mai pot fi utilizate.
Egalând cu zero expresia tensiunii normale (7.28) se obţine locul geometric al punctelor
în care σx=0 adică ecuaţia axei neutre:
.0 0 zI
My
I
Mz
I
My
I
M
y
iy
z
iz
y
iy
z
iz
x (7.30)
Ţinând cont de (7.27) rezultă că:
.0sincos
ztgI
Iyz
I
My
I
M
y
z
y
i
z
i
º (7.31)
Ecuaţia astfel obţinută reprezintă o linie dreaptă de pantă tgI
Im
y
z . În felul acesta
Fig. 7.28 Fig. 7.29
unghiul θ pe care-l formează axa neutră cu axa z (fig. 7.30) este dat de relaţia:
. tgI
Itg
y
z (7.32)
Fig. 7.30
θ reprezintă unghiul format de vectorul Mi cu axa z. Cum Iz şi Iy sunt pozitive va rezulta că Φ
şi θ vor avea acelaşi semn. De notat că Φ > θ când Iz > Iy şi Φ < θ când Iz < Iy. În acest caz
tensiunile normale externe σmax, σmin se găsesc în punctele cele mai depărtate de axa neutră.
U7.7. Încovoierea strâmbă. Se consideră cazul, destul de frecvent în practică, în care asupra unei grinzi acţionează
momente încovoietoare necoplanare, fiind deci solicitată de forţe situate în plane diferite, deşi
suportul fiecărei forţe trece prin centrul de greutate al secţiunii transversale respective.(fig. 7.
31)
Fig. 7.31
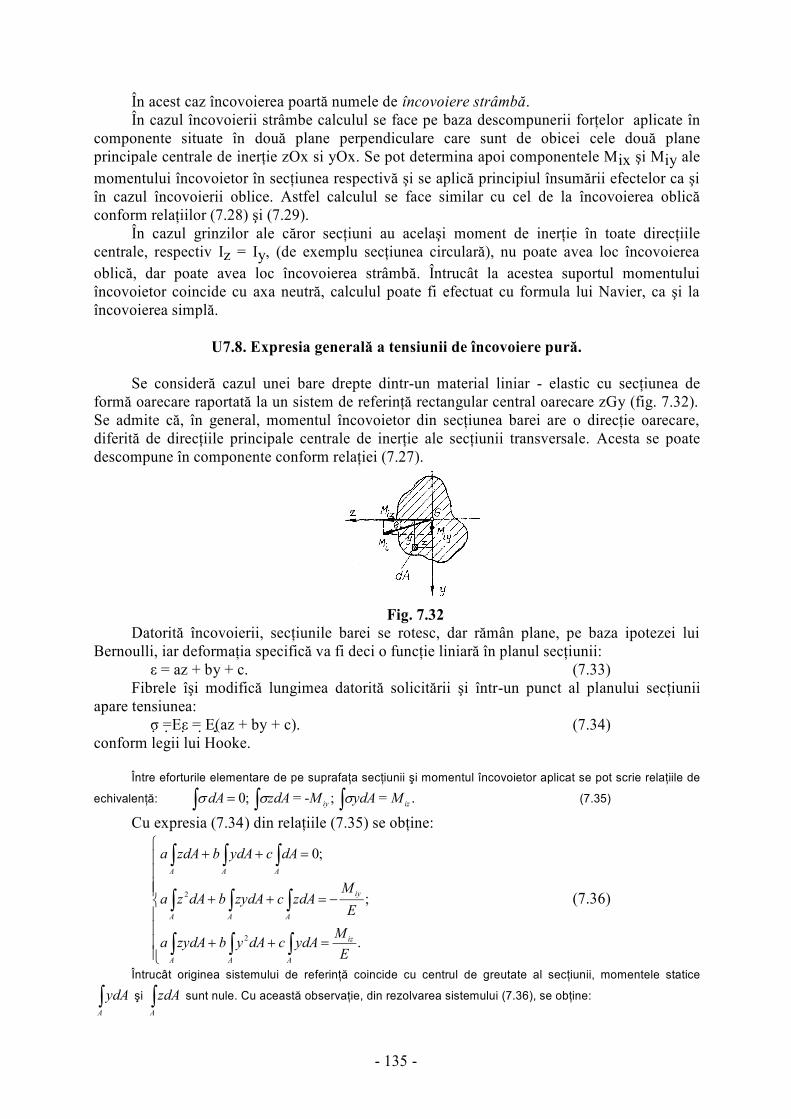
- 135 -
În acest caz încovoierea poartă numele de încovoiere strâmbă.
În cazul încovoierii strâmbe calculul se face pe baza descompunerii forţelor aplicate în
componente situate în două plane perpendiculare care sunt de obicei cele două plane
principale centrale de inerţie zOx si yOx. Se pot determina apoi componentele Mix şi Miy ale
momentului încovoietor în secţiunea respectivă şi se aplică principiul însumării efectelor ca şi
în cazul încovoierii oblice. Astfel calculul se face similar cu cel de la încovoierea oblică
conform relaţiilor (7.28) şi (7.29).
În cazul grinzilor ale căror secţiuni au acelaşi moment de inerţie în toate direcţiile
centrale, respectiv Iz = Iy, (de exemplu secţiunea circulară), nu poate avea loc încovoierea
oblică, dar poate avea loc încovoierea strâmbă. Întrucât la acestea suportul momentului
încovoietor coincide cu axa neutră, calculul poate fi efectuat cu formula lui Navier, ca şi la
încovoierea simplă.
U7.8. Expresia generală a tensiunii de încovoiere pură.
Se consideră cazul unei bare drepte dintr-un material liniar - elastic cu secţiunea de
formă oarecare raportată la un sistem de referinţă rectangular central oarecare zGy (fig. 7.32).
Se admite că, în general, momentul încovoietor din secţiunea barei are o direcţie oarecare,
diferită de direcţiile principale centrale de inerţie ale secţiunii transversale. Acesta se poate
descompune în componente conform relaţiei (7.27).
Fig. 7.32
Datorită încovoierii, secţiunile barei se rotesc, dar rămân plane, pe baza ipotezei lui
Bernoulli, iar deformaţia specifică va fi deci o funcţie liniară în planul secţiunii:
ε = az + by + c. (7.33)
Fibrele îşi modifică lungimea datorită solicitării şi într-un punct al planului secţiunii
apare tensiunea:
σ =Eε = E(az + by + c). (7.34)
conform legii lui Hooke.
Între eforturile elementare de pe suprafaţa secţiunii şi momentul încovoietor aplicat se pot scrie relaţiile de
echivalenţă: .= ;-= ;0iziy
MdAyMdAzdA (7.35)
Cu expresia (7.34) din relaţiile (7.35) se obţine:
A A A
iz
A A A
iy
A A A
E
MdAycdAybdAzya
E
MdAzcdAzybdAza
dAcdAybdAza
.
;
;0
2
2 (7.36)
Întrucât originea sistemului de referinţă coincide cu centrul de greutate al secţiunii, momentele statice
A
dAy şi A
dAz sunt nule. Cu această observaţie, din rezolvarea sistemului (7.36), se obţine:
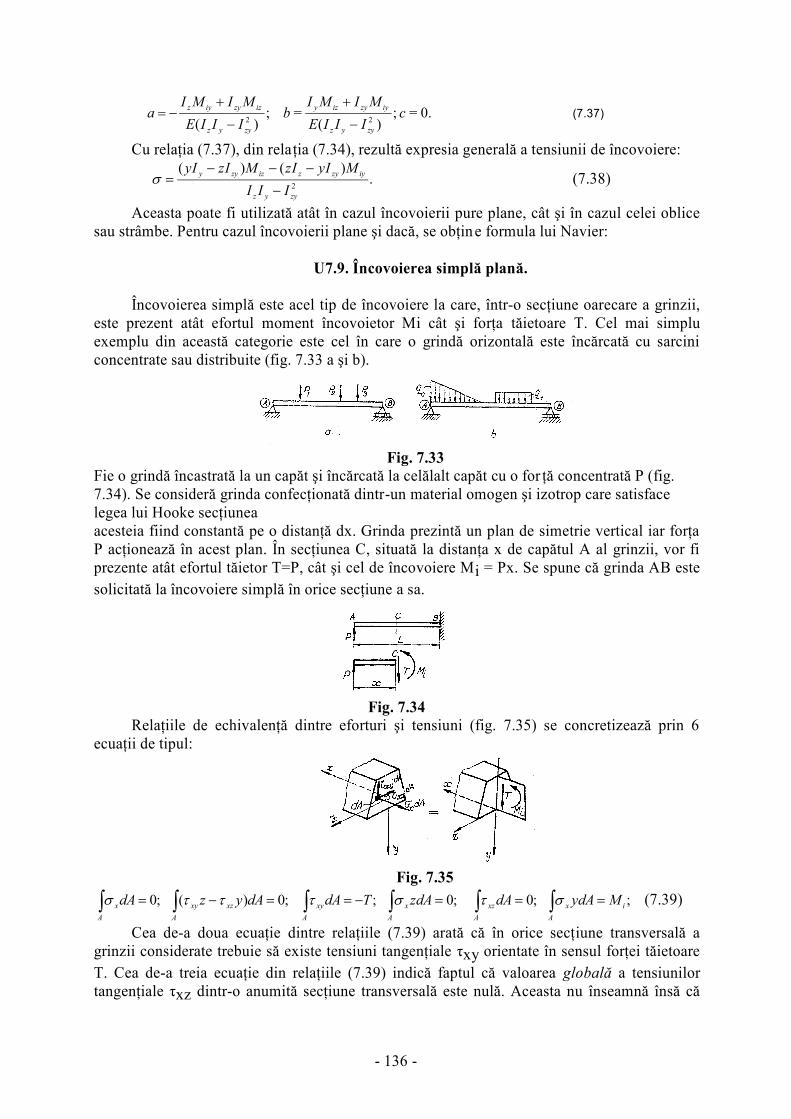
- 136 -
.0= ;)(
= ;)(
22c
IIIE
MIMIb
IIIE
MIMIa
zyyz
iyzyizy
zyyz
izzyiyz
(7.37)
Cu relaţia (7.37), din relaţia (7.34), rezultă expresia generală a tensiunii de încovoiere:
.)()(
2
zyyz
iyzyzizzyy
III
MIyIzMIzIy
(7.38)
Aceasta poate fi utilizată atât în cazul încovoierii pure plane, cât şi în cazul celei oblice
sau strâmbe. Pentru cazul încovoierii plane şi dacă, se obţine formula lui Navier:
U7.9. Încovoierea simplă plană.
Încovoierea simplă este acel tip de încovoiere la care, într-o secţiune oarecare a grinzii,
este prezent atât efortul moment încovoietor Mi cât şi forţa tăietoare T. Cel mai simplu
exemplu din această categorie este cel în care o grindă orizontală este încărcată cu sarcini
concentrate sau distribuite (fig. 7.33 a şi b).
Fig. 7.33
Fie o grindă încastrată la un capăt şi încărcată la celălalt capăt cu o for ţă concentrată P (fig.
7.34). Se consideră grinda confecţionată dintr-un material omogen şi izotrop care satisface
legea lui Hooke secţiunea
acesteia fiind constantă pe o distanţă dx. Grinda prezintă un plan de simetrie vertical iar forţa
P acţionează în acest plan. În secţiunea C, situată la distanţa x de capătul A al grinzii, vor fi
prezente atât efortul tăietor T=P, cât şi cel de încovoiere Mi = Px. Se spune că grinda AB este
solicitată la încovoiere simplă în orice secţiune a sa.
Fig. 7.34
Relaţiile de echivalenţă dintre eforturi şi tensiuni (fig. 7.35) se concretizează prin 6
ecuaţii de tipul:
Fig. 7.35
A
xzxy
A
xdAyzdA ;0)( ;0
A
x
A
xydAzTdA ;0 ;
A
ix
A
xzMdAydA ; ;0 (7.39)
Cea de-a doua ecuaţie dintre relaţiile (7.39) arată că în orice secţiune transversală a
grinzii considerate trebuie să existe tensiuni tangenţiale τxy orientate în sensul forţei tăietoare
T. Cea de-a treia ecuaţie din relaţiile (7.39) indică faptul că valoarea globală a tensiunilor
tangenţiale τxz dintr-o anumită secţiune transversală este nulă. Aceasta nu înseamnă însă că
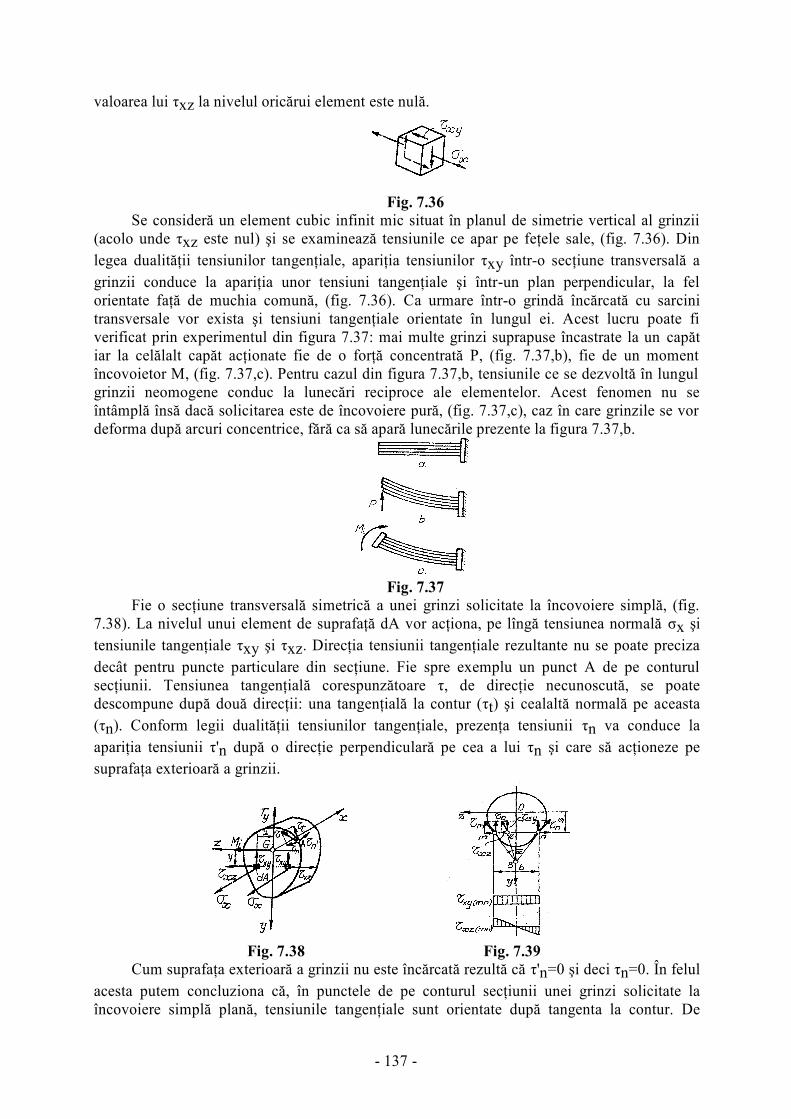
- 137 -
valoarea lui τxz la nivelul oricărui element este nulă.
Fig. 7.36
Se consideră un element cubic infinit mic situat în planul de simetrie vertical al grinzii
(acolo unde τxz este nul) şi se examinează tensiunile ce apar pe feţele sale, (fig. 7.36). Din
legea dualităţii tensiunilor tangenţiale, apariţia tensiunilor τxy într-o secţiune transversală a
grinzii conduce la apariţia unor tensiuni tangenţiale şi într-un plan perpendicular, la fel
orientate faţă de muchia comună, (fig. 7.36). Ca urmare într-o grindă încărcată cu sarcini
transversale vor exista şi tensiuni tangenţiale orientate în lungul ei. Acest lucru poate fi
verificat prin experimentul din figura 7.37: mai multe grinzi suprapuse încastrate la un capăt
iar la celălalt capăt acţionate fie de o forţă concentrată P, (fig. 7.37,b), fie de un moment
încovoietor M, (fig. 7.37,c). Pentru cazul din figura 7.37,b, tensiunile ce se dezvoltă în lungul
grinzii neomogene conduc la lunecări reciproce ale elementelor. Acest fenomen nu se
întâmplă însă dacă solicitarea este de încovoiere pură, (fig. 7.37,c), caz în care grinzile se vor
deforma după arcuri concentrice, fără ca să apară lunecările prezente la figura 7.37,b.
Fig. 7.37
Fie o secţiune transversală simetrică a unei grinzi solicitate la încovoiere simplă, (fig.
7.38). La nivelul unui element de suprafaţă dA vor acţiona, pe lîngă tensiunea normală σx şi
tensiunile tangenţiale τxy şi τxz. Direcţia tensiunii tangenţiale rezultante nu se poate preciza
decât pentru puncte particulare din secţiune. Fie spre exemplu un punct A de pe conturul
secţiunii. Tensiunea tangenţială corespunzătoare τ, de direcţie necunoscută, se poate
descompune după două direcţii: una tangenţială la contur (τt) şi cealaltă normală pe aceasta
(τn). Conform legii dualităţii tensiunilor tangenţiale, prezenţa tensiunii τn va conduce la
apariţia tensiunii τ'n după o direcţie perpendiculară pe cea a lui τn şi care să acţioneze pe
suprafaţa exterioară a grinzii.
Fig. 7.38 Fig. 7.39
Cum suprafaţa exterioară a grinzii nu este încărcată rezultă că τ'n=0 şi deci τn=0. În felul
acesta putem concluziona că, în punctele de pe conturul secţiunii unei grinzi solicitate la
încovoiere simplă plană, tensiunile tangenţiale sunt orientate după tangenta la contur. De
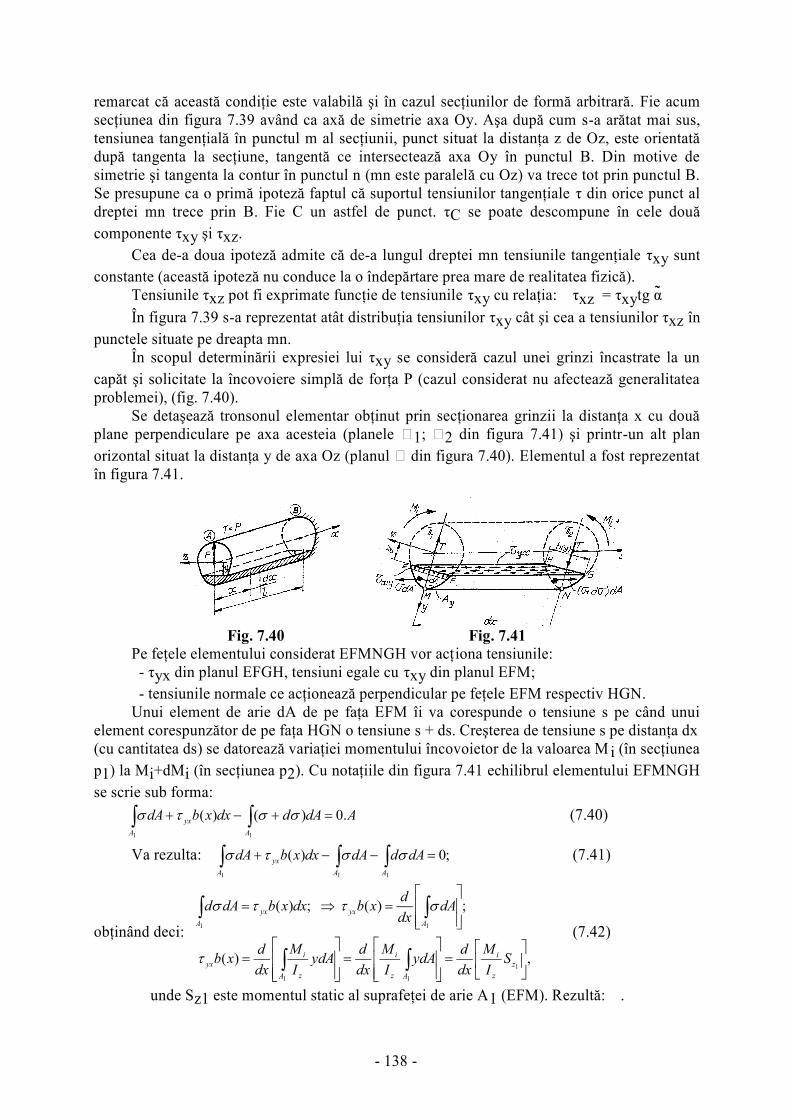
- 138 -
remarcat că această condiţie este valabilă şi în cazul secţiunilor de formă arbitrară. Fie acum
secţiunea din figura 7.39 având ca axă de simetrie axa Oy. Aşa după cum s-a arătat mai sus,
tensiunea tangenţială în punctul m al secţiunii, punct situat la distanţa z de Oz, este orientată
după tangenta la secţiune, tangentă ce intersectează axa Oy în punctul B. Din motive de
simetrie şi tangenta la contur în punctul n (mn este paralelă cu Oz) va trece tot prin punctul B.
Se presupune ca o primă ipoteză faptul că suportul tensiunilor tangenţiale τ din orice punct al
dreptei mn trece prin B. Fie C un astfel de punct. τC se poate descompune în cele două
componente τxy şi τxz.
Cea de-a doua ipoteză admite că de-a lungul dreptei mn tensiunile tangenţiale τxy sunt
constante (această ipoteză nu conduce la o îndepărtare prea mare de realitatea fizică).
Tensiunile τxz pot fi exprimate funcţie de tensiunile τxy cu relaţia: τxz = τxytg α
În figura 7.39 s-a reprezentat atât distribuţia tensiunilor τxy cât şi cea a tensiunilor τxz în
punctele situate pe dreapta mn.
În scopul determinării expresiei lui τxy se consideră cazul unei grinzi încastrate la un
capăt şi solicitate la încovoiere simplă de forţa P (cazul considerat nu afectează generalitatea
problemei), (fig. 7.40).
Se detaşează tronsonul elementar obţinut prin secţionarea grinzii la distanţa x cu două
plane perpendiculare pe axa acesteia (planele 1; 2 din figura 7.41) şi printr-un alt plan
orizontal situat la distanţa y de axa Oz (planul din figura 7.40). Elementul a fost reprezentat
în figura 7.41.
Fig. 7.40 Fig. 7.41
Pe feţele elementului considerat EFMNGH vor acţiona tensiunile:
- τyx din planul EFGH, tensiuni egale cu τxy din planul EFM;
- tensiunile normale ce acţionează perpendicular pe feţele EFM respectiv HGN.
Unui element de arie dA de pe faţa EFM îi va corespunde o tensiune s pe când unui
element corespunzător de pe faţa HGN o tensiune s + ds. Creşterea de tensiune s pe distanţa dx
(cu cantitatea ds) se datorează variaţiei momentului încovoietor de la valoarea M i (în secţiunea
p1) la Mi+dMi (în secţiunea p2). Cu notaţiile din figura 7.41 echilibrul elementului EFMNGH
se scrie sub forma:
AdAddxxbdAA
yx
A
.0)()(
11
(7.40)
Va rezulta: ;0)(
111
AA
yx
A
dAddAdxxbdA (7.41)
obţinând deci:
,)(
;)( ;)(
1
11
11
z
z
i
Az
i
A z
i
yx
A
yx
A
yx
SI
M
dx
ddAy
I
M
dx
ddAy
I
M
dx
dxb
dAdx
dxbdxxbdAd
(7.42)
unde Sz1 este momentul static al suprafeţei de arie A1 (EFM). Rezultă: .
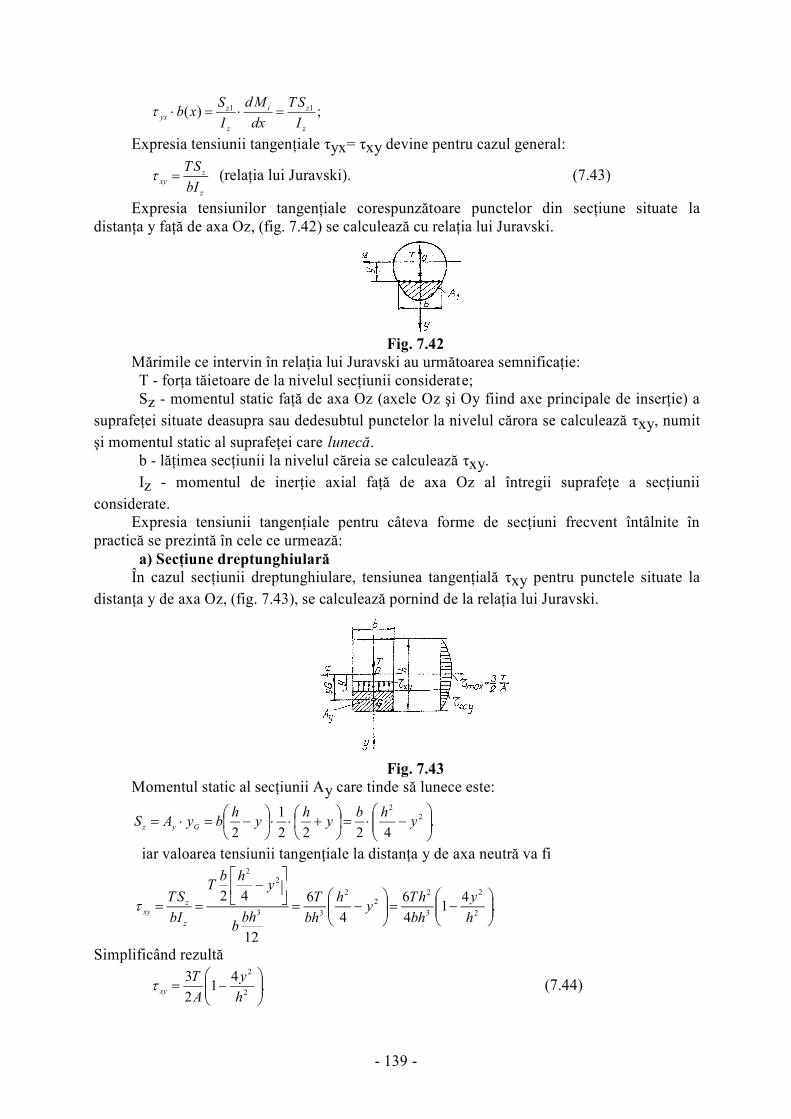
- 139 -
;)( 11
z
zi
z
z
yxI
ST
dx
Md
I
Sxb
Expresia tensiunii tangenţiale τyx= τxy devine pentru cazul general:
z
z
xyIb
ST (relaţia lui Juravski). (7.43)
Expresia tensiunilor tangenţiale corespunzătoare punctelor din secţiune situate la
distanţa y faţă de axa Oz, (fig. 7.42) se calculează cu relaţia lui Juravski.
Fig. 7.42
Mărimile ce intervin în relaţia lui Juravski au următoarea semnificaţie:
T - forţa tăietoare de la nivelul secţiunii considerate;
Sz - momentul static faţă de axa Oz (axele Oz şi Oy fiind axe principale de inserţie) a
suprafeţei situate deasupra sau dedesubtul punctelor la nivelul cărora se calculează τxy, numit
şi momentul static al suprafeţei care lunecă.
b - lăţimea secţiunii la nivelul căreia se calculează τxy.
Iz - momentul de inerţie axial faţă de axa Oz al întregii suprafeţe a secţiunii
considerate.
Expresia tensiunii tangenţiale pentru câteva forme de secţiuni frecvent întâlnite în
practică se prezintă în cele ce urmează:
a) Secţiune dreptunghiulară În cazul secţiunii dreptunghiulare, tensiunea tangenţială τxy pentru punctele situate la
distanţa y de axa Oz, (fig. 7.43), se calculează pornind de la relaţia lui Juravski.
Fig. 7.43
Momentul static al secţiunii Ay care tinde să lunece este:
.4222
1
2
2
2
y
hby
hy
hbyAS
Gyz
iar valoarea tensiunii tangenţiale la distanţa y de axa neutră va fi
.4
14
6
4
6
12
422
2
3
2
2
2
33
22
h
y
hb
hTy
h
hb
T
hbb
yhb
T
Ib
ST
z
z
xy
Simplificând rezultă
.4
12
32
2
h
y
A
Txy
(7.44)

- 140 -
Relaţia (7.44) arată că secţiunea tangenţială este repartizată pe înălţimea grinzii
dreptunghiulare după o funcţie parabolică prezentând valoarea maximă în punctele axei neutre
deci pentru y=0.
.2
3max
A
Txy
(7.45)
b) Secţiune circulară În cazul secţiunii circulare se consideră linia BC la distanţă oarecare y de axa neutră (fig.
7.44). Pentru această secţiune pe suprafaţa ei apar atât tensiunile tangenţiale τxy cât şi τxz.
Lungimea liniei BC este egală cu .2 22 yrBC
Fig. 7.44
Momentul static Sz al suprafeţei Ay este egal cu:
.3
2
2
322
2
322
2
32
1
2
2
1
2'2
1
2
1
2
1
2
11
2
1
2
1
yr
yrdyyryrdyyrydyyrydAyS
r
y
r
y
r
yAA
z
yy
Deci .13
42
2
r
y
A
T
Ib
ST
z
z
xy (7.46)
Se observă că şi în cazul secţiunii circulare componenta τxy variază după o lege
parabolică pe înălţimea secţiunii prezentând valoare maximă în axa neutră pentru y =0.
.3
4max
A
Txy
(7.47)
În cazul în care se admite o variaţie liniară de-a lungul liniei BC a componentei τxz :
;22
xy
xz
yr
ytg
.
3
4
3
42222
22
r
zy
A
T
yr
y
r
yr
A
Ttg
xyxz
Se poate concluziona că tensiunile τxz <τxy.
U7.10 Starea de tensiune a grinzilor drepte solicitate la încovoiere simplă.
Dimensionarea secţiunii transversale a unei grinzi se face astfel încât în nici un punct al
acesteia, tensiunile normale cât şi cele tangenţiale să nu depăşească valorile admisibile.
În zone suficient de îndepărtate de locul de aplicare al forţelor, tensiunile normale σx şi
cele tangenţiale τxy se determină cu relaţiile stabilite anterior, relaţia lui Navier, respectiv
relaţia lui Juravski.
Un element D situat între extremitatea grinzii şi axa neutră este solicitat de tensiunile
normale ce scad pe măsura apropierii de axa neutră, dar şi de tensiunile tangenţiale
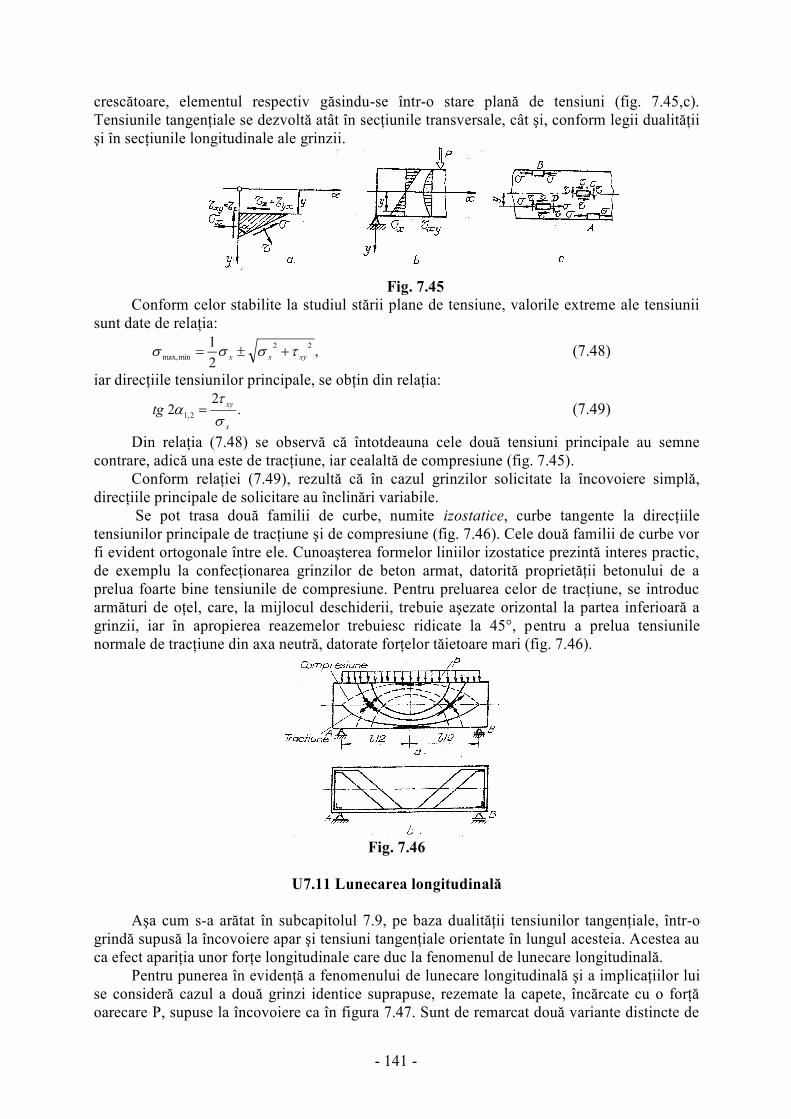
- 141 -
crescătoare, elementul respectiv găsindu-se într-o stare plană de tensiuni (fig. 7.45,c).
Tensiunile tangenţiale se dezvoltă atât în secţiunile transversale, cât şi, conform legii dualităţii
şi în secţiunile longitudinale ale grinzii.
Fig. 7.45
Conform celor stabilite la studiul stării plane de tensiune, valorile extreme ale tensiunii
sunt date de relaţia:
,2
1 22
minmax, xyxx (7.48)
iar direcţiile tensiunilor principale, se obţin din relaţia:
.2
2 2,1
x
xytg
(7.49)
Din relaţia (7.48) se observă că întotdeauna cele două tensiuni principale au semne
contrare, adică una este de tracţiune, iar cealaltă de compresiune (fig. 7.45).
Conform relaţiei (7.49), rezultă că în cazul grinzilor solicitate la încovoiere simplă,
direcţiile principale de solicitare au înclinări variabile.
Se pot trasa două familii de curbe, numite izostatice, curbe tangente la direcţiile
tensiunilor principale de tracţiune şi de compresiune (fig. 7.46). Cele două familii de curbe vor
fi evident ortogonale între ele. Cunoaşterea formelor liniilor izostatice prezintă interes practic,
de exemplu la confecţionarea grinzilor de beton armat, datorită proprietăţii betonului de a
prelua foarte bine tensiunile de compresiune. Pentru preluarea celor de tracţiune, se introduc
armături de oţel, care, la mijlocul deschiderii, trebuie aşezate orizontal la partea inferioară a
grinzii, iar în apropierea reazemelor trebuiesc ridicate la 45°, pentru a prelua tensiunile
normale de tracţiune din axa neutră, datorate forţelor tăietoare mari (fig. 7.46).
Fig. 7.46
U7.11 Lunecarea longitudinală
Aşa cum s-a arătat în subcapitolul 7.9, pe baza dualităţii tensiunilor tangenţiale, într-o
grindă supusă la încovoiere apar şi tensiuni tangenţiale orientate în lungul acesteia. Acestea au
ca efect apariţia unor forţe longitudinale care duc la fenomenul de lunecare longitudinală.
Pentru punerea în evidenţă a fenomenului de lunecare longitudinală şi a implicaţiilor lui
se consideră cazul a două grinzi identice suprapuse, rezemate la capete, încărcate cu o forţă
oarecare P, supuse la încovoiere ca în figura 7.47. Sunt de remarcat două variante distincte de
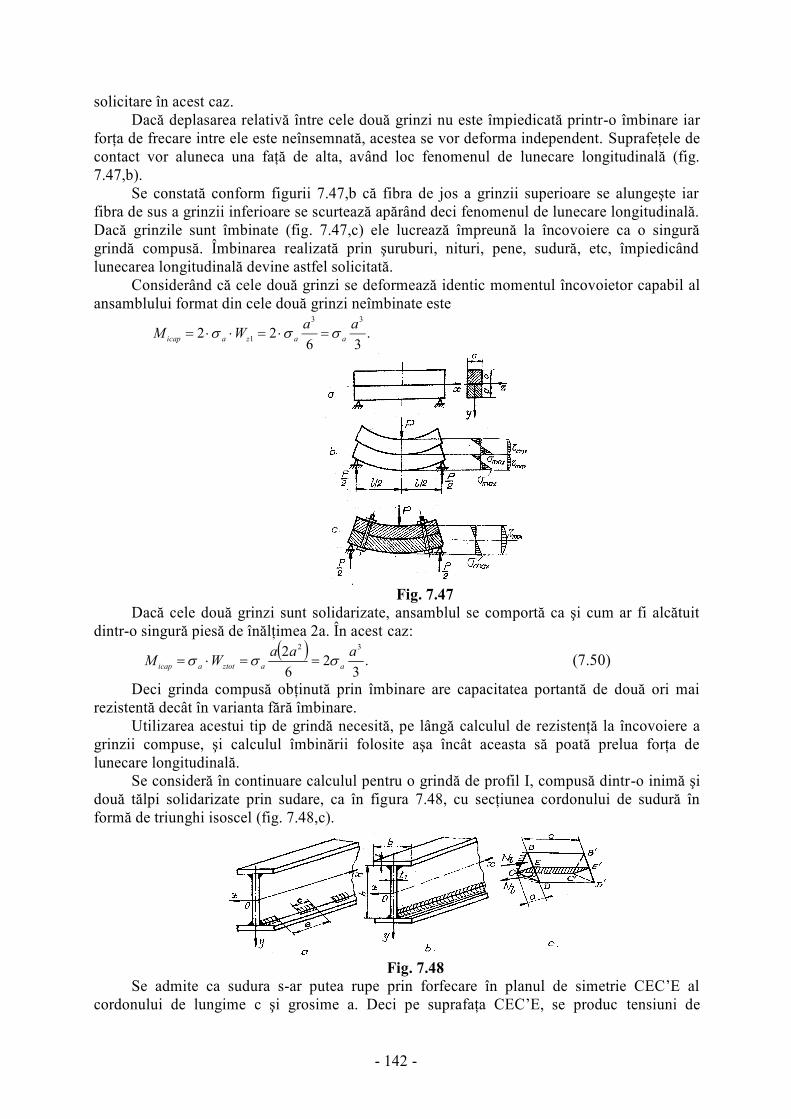
- 142 -
solicitare în acest caz.
Dacă deplasarea relativă între cele două grinzi nu este împiedicată printr-o îmbinare iar
forţa de frecare intre ele este neînsemnată, acestea se vor deforma independent. Suprafeţele de
contact vor aluneca una faţă de alta, având loc fenomenul de lunecare longitudinală (fig.
7.47,b).
Se constată conform figurii 7.47,b că fibra de jos a grinzii superioare se alungeşte iar
fibra de sus a grinzii inferioare se scurtează apărând deci fenomenul de lunecare longitudinală.
Dacă grinzile sunt îmbinate (fig. 7.47,c) ele lucrează împreună la încovoiere ca o singură
grindă compusă. Îmbinarea realizată prin şuruburi, nituri, pene, sudură, etc, împiedicând
lunecarea longitudinală devine astfel solicitată.
Considerând că cele două grinzi se deformează identic momentul încovoietor capabil al
ansamblului format din cele două grinzi neîmbinate este
.36
2233
1
aaWM
aazacapi
Fig. 7.47
Dacă cele două grinzi sunt solidarizate, ansamblul se comportă ca şi cum ar fi alcătuit
dintr-o singură piesă de înălţimea 2a. În acest caz:
.3
26
2 32 aaaWM
aatotzacapi (7.50)
Deci grinda compusă obţinută prin îmbinare are capacitatea portantă de două ori mai
rezistentă decât în varianta fără îmbinare.
Utilizarea acestui tip de grindă necesită, pe lângă calculul de rezistenţă la încovoiere a
grinzii compuse, şi calculul îmbinării folosite aşa încât aceasta să poată prelua forţa de
lunecare longitudinală.
Se consideră în continuare calculul pentru o grindă de profil I, compusă dintr-o inimă şi
două tălpi solidarizate prin sudare, ca în figura 7.48, cu secţiunea cordonului de sudură în
formă de triunghi isoscel (fig. 7.48,c).
Fig. 7.48
Se admite ca sudura s-ar putea rupe prin forfecare în planul de simetrie CEC’E al
cordonului de lungime c şi grosime a. Deci pe suprafaţa CEC’E, se produc tensiuni de

- 143 -
forfecare τf, considerate uniform distribuite: ,l
ca
Nf
(7.51)
unde Nl este forţa de lunecare longitudinală.
Considerând pe lungimea c a cordonului forţa tăietoare T=ct, pe baza celor arătate în
subcapitolul anterior (vezi relaţiile (7.40...7.43) şi figurile 7.40 şi 7.41) rezultă
,dxbIb
STdxbdN
z
z
xy
l (7.52)
respectiv, .l
cI
STxTd
I
SN
z
z
cx
xz
z
(7.53)
Sudura se aplică pe două cordoane situate de o parte şi de alta a inimii, care pot fi
continue (fig. 7.48,a) sau intermitente (fig. 7.48,b).
În cazul sudurii continue calculul se face pentru o lungime egală cu unitatea
determinându-se grosimea a a sudurii. Pentru ca sudura de pe un cordon cu lungimea egală cu
unitatea să reziste este necesar ca: ,2
afs
z
z
efsT
Ia
S (7.54)
rezultă grosimea sudurii: .2
zafs
z
I
TSa
(7.55)
unde Sz este momentul static al secţiunii tălpii, calculat faţă de axa neutră, T- este forţa
tăietoare considerată constantă pe lungimea c şi τafs - tensiunea admisibilă la forfecare a
cordonului de sudură.
Dacă sudura continuă nu este necesară aceasta se poate înlocui cu sudura discontinuă.
Forţa de lunecare ce revine unei perechi de suduri ce leagă talpa de inimă este egală cu:
.l
z
z
I
eSTN
Considerând distanţa e între două cordoane succesive rezultă condiţia de rezistenţă:
,2 caeTI
Safs
z
z (7.56) din care
.2
TS
Ia
c
e
z
zafs
(7.57)
Deci se poate alege e şi calcula c, sau invers.
U7.12. Grinzi de egală rezistenţă la încovoiere
Grinda având secţiune constantă pe toată lungimea nu este o soluţie economică, din
punct de vedere al solicitării la încovoiere simplă, deoarece materialul este folosit în mod
economic doar în secţiunea periculoasă, unde din proiectare tensiunea maximă va putea fi cel
mult egală cu cea admisibilă. În celelalte secţiuni tensiunea maximă efectivă va fi sensibil mai
mică. Din acest motiv în practică se caută soluţii economice de grinzi cu secţiune variabilă.
Cea mai potrivită soluţie este grinda de egală rezistenţă, în lungul căreia tensiunea normală
σmax are aceeaşi valoare în orice secţiune. Considerând σmax= σa, ecuaţia generală a
grinziilor de egală rezistenţă este:
.max
ctW
Ma
z
sau
,a
z
xMxW
(7.58)
adică modulul de rezistenţă variază după aceeaşi lege ca şi momentul încovoietor. În relaţia
(7.58) s-a notat cu Wz(x) şi M(x) valorile lui Wz şi M într-o secţiune oarecare x, iar prin σa
valoarea tensiunii admisibile.

- 144 -
Ecuaţia (7.58) permite stabilirea formei grinzii de egală rezistenţă în funcţie de modul de
rezemare, de modul de aplicare a sarcinii şi de forma secţiunii.
În continuare se vor analiza două cazuri privind grinda încastrată la un capăt, cu sarcina
P concentrată la capătul liber, de secţiune dreptunghiulară.
- Cazul grinzii cu lăţimea b = const. (fig. 7.49).
In acest caz trebuie să varieze înălţimea y, y [o,h]. Într-o secţiune x
.6
2maxconst
yb
xP
W
Ma
z
(7.59)
de unde rezultă ,6
ab
xPy
(7.60)
deci înălţimea grinzii prezintă pe lungimea acesteia o variaţie parabolică.
Bara se poate realiza fie nesimetric ca în figura 7.49,a sau simetric ca în figura 7.49,b. În
încastrare înălţimea maximă ymax= h, va avea valoarea :
.l6
ab
Ph
(7.61)
Fig. 7.49
Conform relaţiei 7.60 rezultă că în capătul liber, deci pentru x = 0, înălţimea y = 0.
Pentru a putea prelua sarcina P în această zonă dimensionarea se face din condiţia de
forfecare, astfel:
,2
3
0
max ayb
P
A
T deci
.8
3
6 x
2
3=y
2
2
00
a
aa
a b
P
P
yb
b
P
- Cazul grinzii cu înălţimea h = const. (fig. 7.50).
Fig. 7.50
În acest caz, variabilă va fi lăţimea z,, aşa încât ecuaţia (7.58) devine
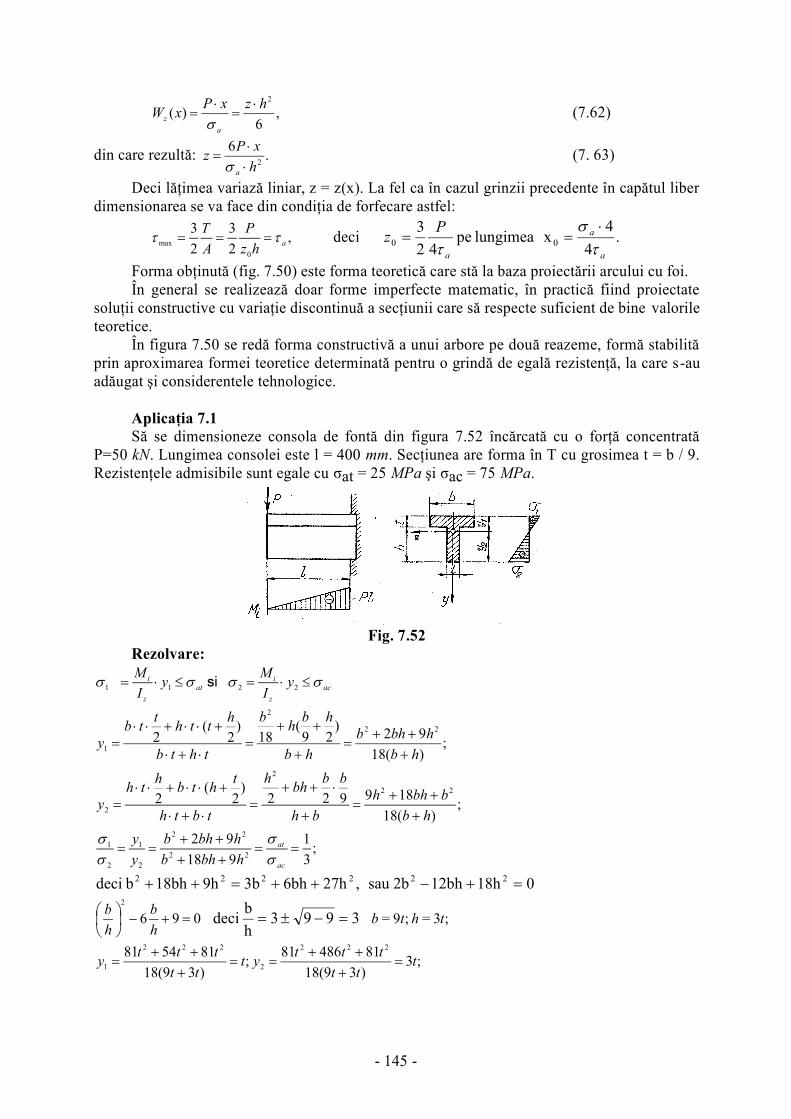
- 145 -
,6
)(2hzxP
xWa
z
(7.62)
din care rezultă: .6
2h
xPz
a
(7. 63)
Deci lăţimea variază liniar, z = z(x). La fel ca în cazul grinzii precedente în capătul liber
dimensionarea se va face din condiţia de forfecare astfel:
,2
3
2
3
0
max ahz
P
A
T deci .
4
4x lungimea pe
42
300
a
a
a
Pz
Forma obţinută (fig. 7.50) este forma teoretică care stă la baza proiectării arcului cu foi.
În general se realizează doar forme imperfecte matematic, în practică fiind proiectate
soluţii constructive cu variaţie discontinuă a secţiunii care să respecte suficient de bine valorile
teoretice.
În figura 7.50 se redă forma constructivă a unui arbore pe două reazeme, formă stabilită
prin aproximarea formei teoretice determinată pentru o grindă de egală rezistenţă, la care s-au
adăugat şi considerentele tehnologice.
Aplicaţia 7.1 Să se dimensioneze consola de fontă din figura 7.52 încărcată cu o forţă concentrată
P=50 kN. Lungimea consolei este l = 400 mm. Secţiunea are forma în T cu grosimea t = b / 9.
Rezistenţele admisibile sunt egale cu σat = 25 MPa şi σac = 75 MPa.
Fig. 7.52
Rezolvare:
ac
z
i
at
z
i yI
My
I
M
221 1
;)(18
92)
29(
18)
2(
222
2
1hb
hhbb
hb
hbh
b
thtb
htth
ttb
y
;)(18
189922)
2(
222
2
2hb
bbhh
bh
bbbh
h
tbth
thtb
hth
y
;3
1
918
9222
22
2
1
2
1
ac
at
hhbb
hhbb
y
y
,27h6bh3b9h18bhb deci 2222 018h12bh2bsau 22
096
2
h
b
h
b 3993
h
b deci ;3= ;9= thtb
;3)39(18
8148681 ;
)39(18
815481 222
2
222
1t
tt
tttyt
tt
ttty
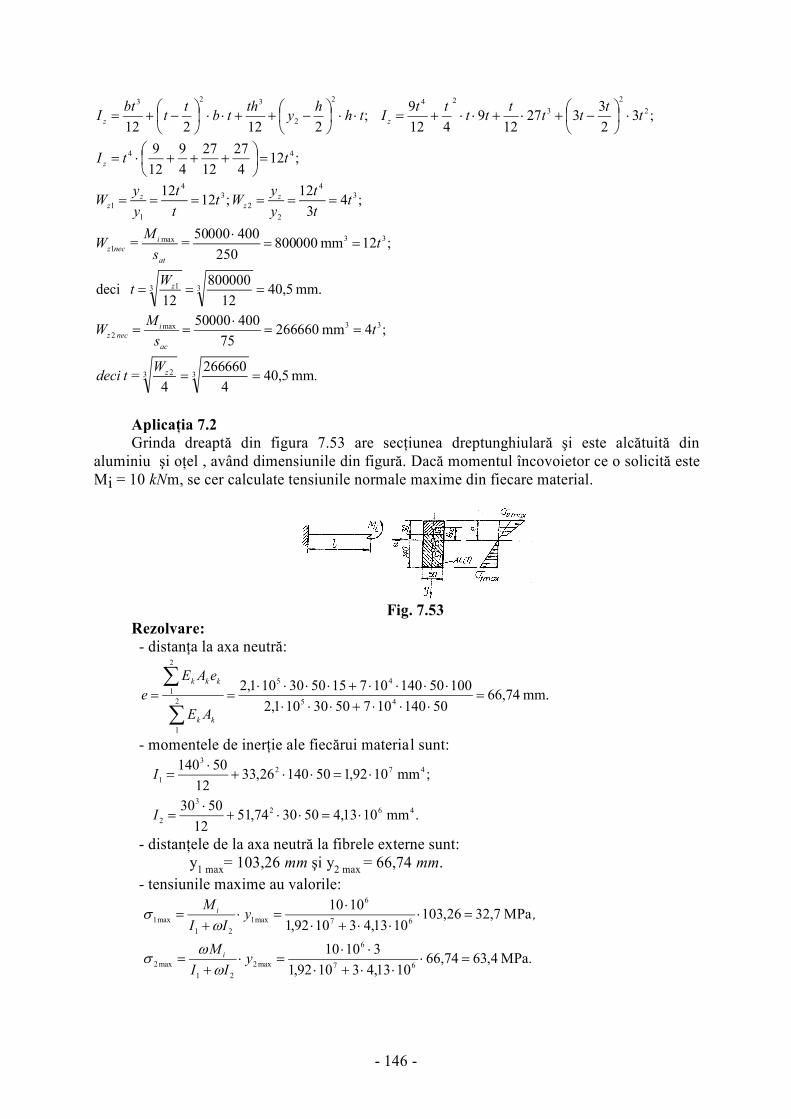
- 146 -
;212212
2
2
323
thh
yth
tbt
tbt
Iz
;3
2
3327
129
412
9 2
2
3
24
tt
ttt
tttt
Iz
;124
27
12
27
4
9
12
9 44 ttIz
;12mm 000800250
40000050==
;43
12 ;12
12
33max
1
3
4
2
2
3
4
1
1
ts
MW
tt
t
y
yWt
t
t
y
yW
at
i
necz
z
z
z
z
.W
tdeci
ts
MW
Wt
z
ac
i
necz
z
mm 5,404
660266
4=
;4mm 66026675
40000050
mm. 5,4012
000800
12 deci
33 2
33max
2
33 1
Aplicaţia 7.2 Grinda dreaptă din figura 7.53 are secţiunea dreptunghiulară şi este alcătuită din
aluminiu şi oţel , având dimensiunile din figură. Dacă momentul încovoietor ce o solicită este
Mi = 10 kNm, se cer calculate tensiunile normale maxime din fiecare material.
Fig. 7.53
Rezolvare: - distanţa la axa neutră:
mm. 74,66501401075030101,2
10050140107155030101,245
45
2
1
2
1
kk
kkk
AE
eAE
e
- momentele de inerţie ale fiecărui material sunt:
.mm 1013,4503074,5112
5030
;mm 1092,15014026,3312
50140
462
3
2
472
3
1
I
I
- distanţele de la axa neutră la fibrele externe sunt:
y1 max
= 103,26 mm şi y2 max = 66,74 mm.
- tensiunile maxime au valorile:
MPa. 4,6374,661013,431092,1
31010
MPa 7,3226,1031013,431092,1
1010
67
6
max2
21
max2
67
6
max1
21
max1
yII
M
,yII
M
i
i
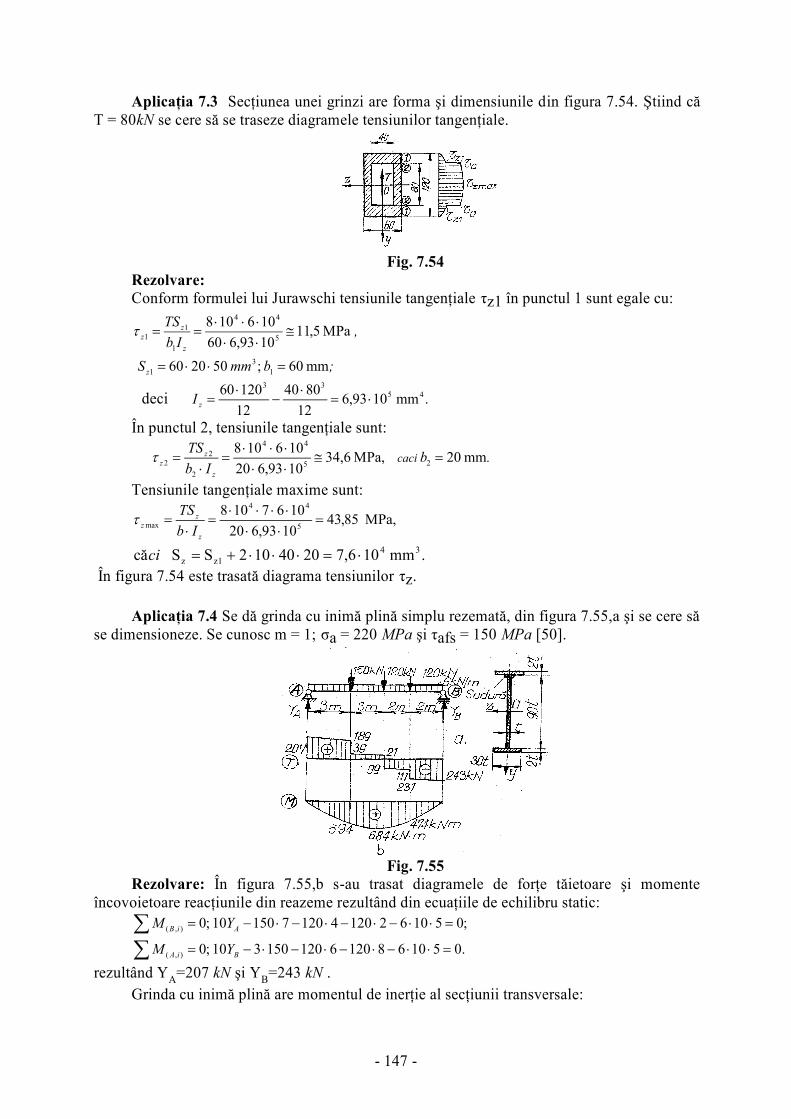
- 147 -
Aplicaţia 7.3 Secţiunea unei grinzi are forma şi dimensiunile din figura 7.54. Ştiind că
T = 80kN se cere să se traseze diagramele tensiunilor tangenţiale.
Fig. 7.54
Rezolvare: Conform formulei lui Jurawschi tensiunile tangenţiale τz1 în punctul 1 sunt egale cu:
;bmmS
,Ib
TS
z
z
z
z
mm 60 ; 502060
MPa 5,111093,660
106108
1
3
1
5
44
1
1
1
deci .mm 1093,612
8040
12
12060 45
33
z
I
În punctul 2, tensiunile tangenţiale sunt:
MPa, 6,341093,620
1061085
44
2
2
2
z
z
zIb
TS .bcaci mm 20
2
Tensiunile tangenţiale maxime sunt:
MPa, 85,431093,620
10671085
44
max
z
z
zIb
TS
.mm107,62040102SS că 3 4
z1z ci
În figura 7.54 este trasată diagrama tensiunilor τz.
Aplicaţia 7.4 Se dă grinda cu inimă plină simplu rezemată, din figura 7.55,a şi se cere să
se dimensioneze. Se cunosc m = 1; σa = 220 MPa şi τafs = 150 MPa [50].
Fig. 7.55
Rezolvare: În figura 7.55,b s-au trasat diagramele de forţe tăietoare şi momente
încovoietoare reacţiunile din reazeme rezultând din ecuaţiile de echilibru static:
.0510681206120150310 ;0
;0510621204120715010 ;0
),(
),(
BiA
AiB
YM
YM
rezultând YA=207 kN şi Y
B=243 kN .
Grinda cu inimă plină are momentul de inerţie al secţiunii transversale:

- 148 -
,71031460)46(12
)2(302
12
)90( 422
33
ttttttt
Ig
iar modulul de rezistenţă . 6696 47
710314 3
4
max
tt
t
y
IW z
z
Dimensiunile secţiunii se determină din condiţia de rezistenţă: ,max
max a
zW
M
rezultând: . M
ta
mm7,72206696
10684
66963
6
3max
Se adoptă t = 8 mm.
În ipoteza sudării tălpilor de inimă prin cordoane de sudură continuă, grosimea
cordoanelor de sudură este dată de relaţia: ,I
STa
afsz
z
necmm 89,0
150183147102
1041110243
2 4
63
max
.mm 101,413 t276060t46tSunde 3632
z
Deoarece în varianta sudurii continue rezultă un cordon de dimensiuni prea mici în
comparaţie cu grosimea minimă indicată, se adoptă soluţia sudurii discontinue alegând o
grosime a = 4 mm. Raportul între lungimea cordonului de sudură şi zona aferentă acestuia va
fi: .2225,0831471022042
10413110243
2 4
63
max
zafs
z
Ima
ST
e
c
Alegând c = 80 mm, rezultă e = 360 mm.
Aplicaţia 7.5 O consolă confecţionată prin sudură dintr-o grindă cu inimă plină este
solicitată de P=33 kN. Cunoscând sa =150 MPa, se cere să se verifice grinda (fig. 7.56).
Fig. 7.56
Rezolvare:
Momentul de inerţie al secţiunii este: .mm 103138,212009512
101202
12
1803 472
33
zI
Tensiunea normală maximă are valoarea:
MPa 4,128103138,2
901033
MPa 6,142103138,2
1001033
7
6
max
7
6
max
z
B
B
z
A
A
I
yM
I
yM
< 150
MPa;iar tensiunea tangenţială: MPa. 2,54103138,23
12009510337
3
z
zB
zBIb
ST
Tensiunile principale sunt:
MPa. 8,192,5444,1282
1
2
4,1284
2
1
2
;0MPa 150MPa 2,1482,5444,1282
1
2
4,1284
2
1
2
2222
3
2
2222
1
zBBB
B
BzBBB
B ;<
Se constată că solicitarea din B este mai mare decât cea din A.
- 149 -
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii si calcularii diverselor structuri cu diferite forme de sectiuni supuse
solicitarii de incovoiere plana cat si simpla.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
rezolve tipurile de probleme specifice solicitarii de incovoiere plana, oblica sau stramba;
proiecteze structuri de diferite forme care pot prelua solicitarile de incovoiere.
Durata medie de parcurgere a unităţii de învăţare este de 8 ore.
U7.13 Test de evaluare a cunostintelor
U7.13.1 Enuntati ipotezele ce stau la baza demonstratiei relatiei tensiunilor normale
la incovoierea pura plana.
U7.13.2 La ce este folosita relatia lui Navier?
U7.13.3 Ce particularitati prezinta calculul la incovoiere pentru o grinda
confectionata din fonta? Exemplu.
U7.13.4 Care este metodologia de calcul a tensiunii la incovoierea oblica?
U7.13.5 Enuntati ipotezele lui Juravski.
U7.1 3.6 Demonstrati relatia lui Juravski.
U7.13.7 Explicati termenii din relatia lui Juravski.
U7.1 3.8 Care este distributia tensiunii tangentiale pe inaltimea unei sectiuni
dreptunghiulare? Dar a uneia circulare?
U7.1 3.9 Trasati diagrama tensiunilor tangentiale pe inaltimea unui profil I.
Tema de control trebuie să fie alcătuita din TO DO
Rezolvati exemple numerice de grinzi solicitate la incovoiere pura cat si simpla,
grinzi ce au diverse forme de sectiuni complexe.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte.
- 150 -
Modulul 8. Solicitari compuse
Cuprins
U8.1 Generalitati.................................................... ........................ ...................... ... .150
U8.2 Solicitarea compusa de tip σ-σ, ( intindere sau compresiune cu incovoiere). ..151
U8.2.1 Grinda dreapta solicitata de o forta inclinata aplicata intr -un plan principal
ce ntral de inertie................................................................. ..................... . ..151
U8.2.2 Fir sau banda infasurate pe un disc si solicitate la tractiu ne................... ....151
U8.2.3 Compresiunea excentrica a barelor de inaltime mica......... .................... ....152
U8.3 Solicitarea compusa de tip τ-τ, ( forfecare cu torsiune)........... ....................... . .157
U8.4 Solicitarea compusa de tip σ-τ ( intindere, compresiune cu forfecare, incovoiere
cu torsiune)....................................................................... .................... ..............159
U8.4.1 Solicitari compuse cu tensiuni normale si tangentiale la arbori de sectiune
circulara............ ................................................................ ........................... ..159
U8.4.2 Solicitari compuse cu tensiuni normale si tangentiale la bare cu sectiune
dreptunghiulara.................................... ......................................................... .162
U8.5 Test de evaluare a cunostintelor...................................... ...................................169
U8.1 Generalitati
În practică de cele mai multe ori în secţiunea unei bare apar simultan mai multe
componente ale eforturilor secţionale (fig. 8.1).
Astfel dacă efortul din secţiunea transversală a unei bare, are o singură componentă,
orientată în lungul axei longitudinale a barei sau a uneia dintre axele principale centrale de
inerţie ale secţiunii transversale, atunci bara se află într-o stare de solicitare simplă. Dacă
efortul din secţiunea transversală are mai multe componente, rezultă o stare compusă de
solicitare.
Componentele eforturilor secţionale: forţa axială N, forţele tăietoare Ty şi Tz ,
momentele încovoietoare Miy şi Miz , momentul torsional Mt , dezvoltă tensiuni de tip σ
sau τ , repartizate pe suprafaţa secţiunii în conformitate cu legile de distribuţie stabilite în
cadrul solicitărilor simple.
În funcţie de tipul tensiunilor dezvoltate, solicitările compuse se grupează în
următoarele categorii:
a)- solicitări ce produc în secţiunile transversale ale barelor numai tensiuni normale σ (N şi Mi);
b)- solicitări ce produc în secţiunile transversale ale barelor numai tensiuni
tangenţiale τ (T şi Mt);
c)- solicitări ce produc în secţiunile transversale ale barelor atât tensiuni normale σ
cât şi tensiuni tangenţiale τ (N şi T şi mai ales Mi şi Mt prin prisma valorilor mari ale
tensiunilor).
Solicitările de tipul a şi b produc deci tensiuni de acelaşi tip, pe când solicitările de tipul
c, produc tensiuni diferite.
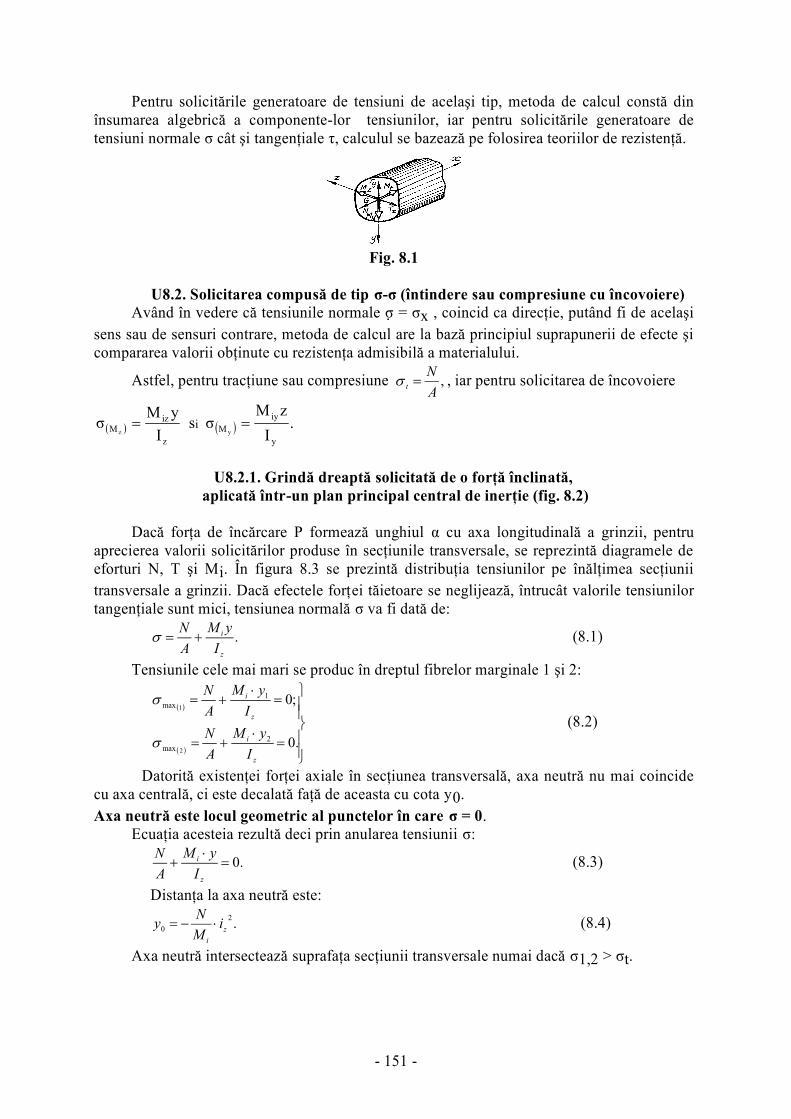
- 151 -
Pentru solicitările generatoare de tensiuni de acelaşi tip, metoda de calcul constă din
însumarea algebrică a componente-lor tensiunilor, iar pentru solicitările generatoare de
tensiuni normale σ cât şi tangenţiale τ, calculul se bazează pe folosirea teoriilor de rezistenţă.
Fig. 8.1
U8.2. Solicitarea compusă de tip σ-σ (întindere sau compresiune cu încovoiere)
Având în vedere că tensiunile normale σ = σx , coincid ca direcţie, putând fi de acelaşi
sens sau de sensuri contrare, metoda de calcul are la bază principiul suprapunerii de efecte şi
compararea valorii obţinute cu rezistenţa admisibilă a materialului.
Astfel, pentru tracţiune sau compresiune ,A
Nt , iar pentru solicitarea de încovoiere
.I
zMσs
I
yMσ
y
iy
M
z
izM yz
i
U8.2.1. Grindă dreaptă solicitată de o forţă înclinată,
aplicată într-un plan principal central de inerţie (fig. 8.2)
Dacă forţa de încărcare P formează unghiul α cu axa longitudinală a grinzii, pentru
aprecierea valorii solicitărilor produse în secţiunile transversale, se reprezintă diagramele de
eforturi N, T şi Mi. În figura 8.3 se prezintă distribuţia tensiunilor pe înălţimea secţiunii
transversale a grinzii. Dacă efectele forţei tăietoare se neglijează, întrucât valorile tensiunilor
tangenţiale sunt mici, tensiunea normală σ va fi dată de:
.z
i
I
yM
A
N (8.1)
Tensiunile cele mai mari se produc în dreptul fibrelor marginale 1 şi 2:
.0
;0
2
max
1
max
2
1
z
i
z
i
I
yM
A
N
I
yM
A
N
(8.2)
Datorită existenţei forţei axiale în secţiunea transversală, axa neutră nu mai coincide
cu axa centrală, ci este decalată faţă de aceasta cu cota y0.
Axa neutră este locul geometric al punctelor în care σ = 0.
Ecuaţia acesteia rezultă deci prin anularea tensiunii σ:
.0
z
i
I
yM
A
N (8.3)
Distanţa la axa neutră este:
.2
0 z
i
iM
Ny (8.4)
Axa neutră intersectează suprafaţa secţiunii transversale numai dacă σ1,2 > σt.
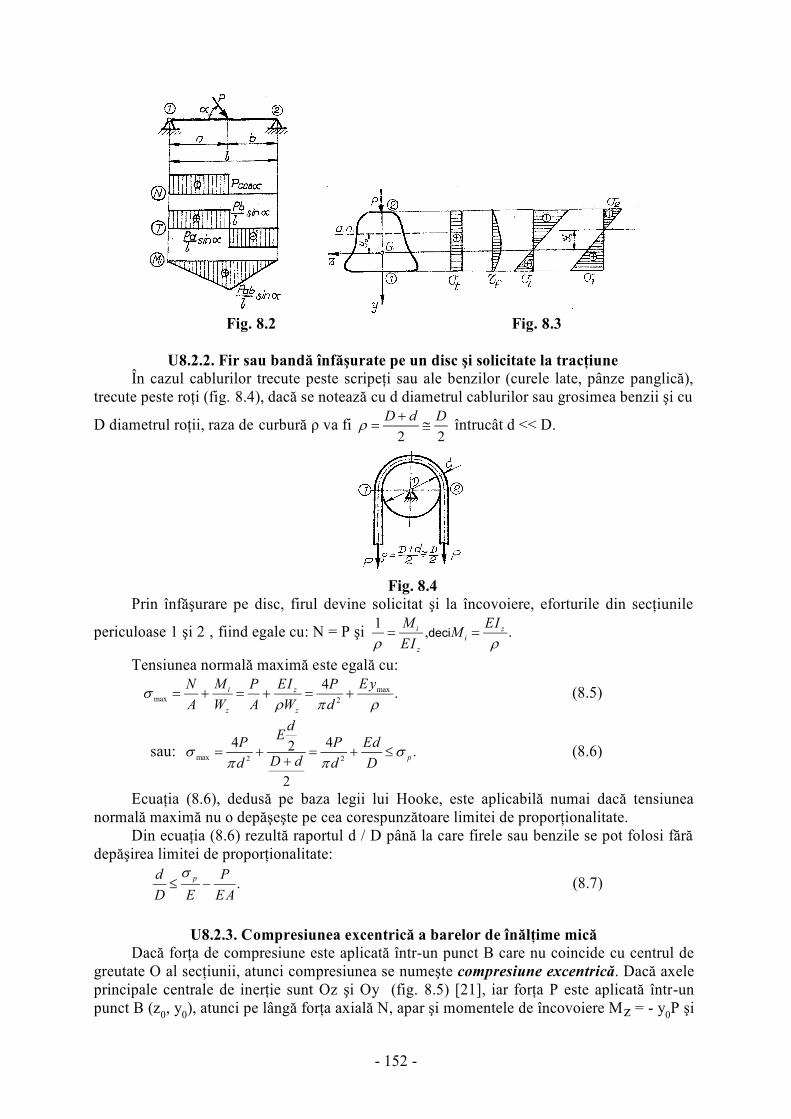
- 152 -
Fig. 8.2 Fig. 8.3
U8.2.2. Fir sau bandă înfăşurate pe un disc şi solicitate la tracţiune
În cazul cablurilor trecute peste scripeţi sau ale benzilor (curele late, pânze panglică),
trecute peste roţi (fig. 8.4), dacă se notează cu d diametrul cablurilor sau grosimea benzii şi cu
D diametrul roţii, raza de curbură ρ va fi 22
DdD
întrucât d << D.
Fig. 8.4
Prin înfăşurare pe disc, firul devine solicitat şi la încovoiere, eforturile din secţiunile
periculoase 1 şi 2 ‚ fiind egale cu: N = P şi .,1
z
i
z
i IEM
IE
M
Tensiunea normală maximă este egală cu:
.4 max
2max
yE
d
P
W
IE
A
P
W
M
A
N
z
z
z
i (8.5)
sau: .4
2
2422max p
D
dE
d
P
dD
dE
d
P
(8.6)
Ecuaţia (8.6), dedusă pe baza legii lui Hooke, este aplicabilă numai dacă tensiunea
normală maximă nu o depăşeşte pe cea corespunzătoare limitei de proporţionalitate.
Din ecuaţia (8.6) rezultă raportul d / D până la care firele sau benzile se pot folosi fără
depăşirea limitei de proporţionalitate:
.AE
P
ED
d p
(8.7)
U8.2.3. Compresiunea excentrică a barelor de înălţime mică
Dacă forţa de compresiune este aplicată într-un punct B care nu coincide cu centrul de
greutate O al secţiunii, atunci compresiunea se numeşte compresiune excentrică. Dacă axele
principale centrale de inerţie sunt Oz şi Oy (fig. 8.5) [21], iar forţa P este aplicată într-un
punct B (z0, y
0), atunci pe lângă forţa axială N, apar şi momentele de încovoiere Mz = - y
0P şi
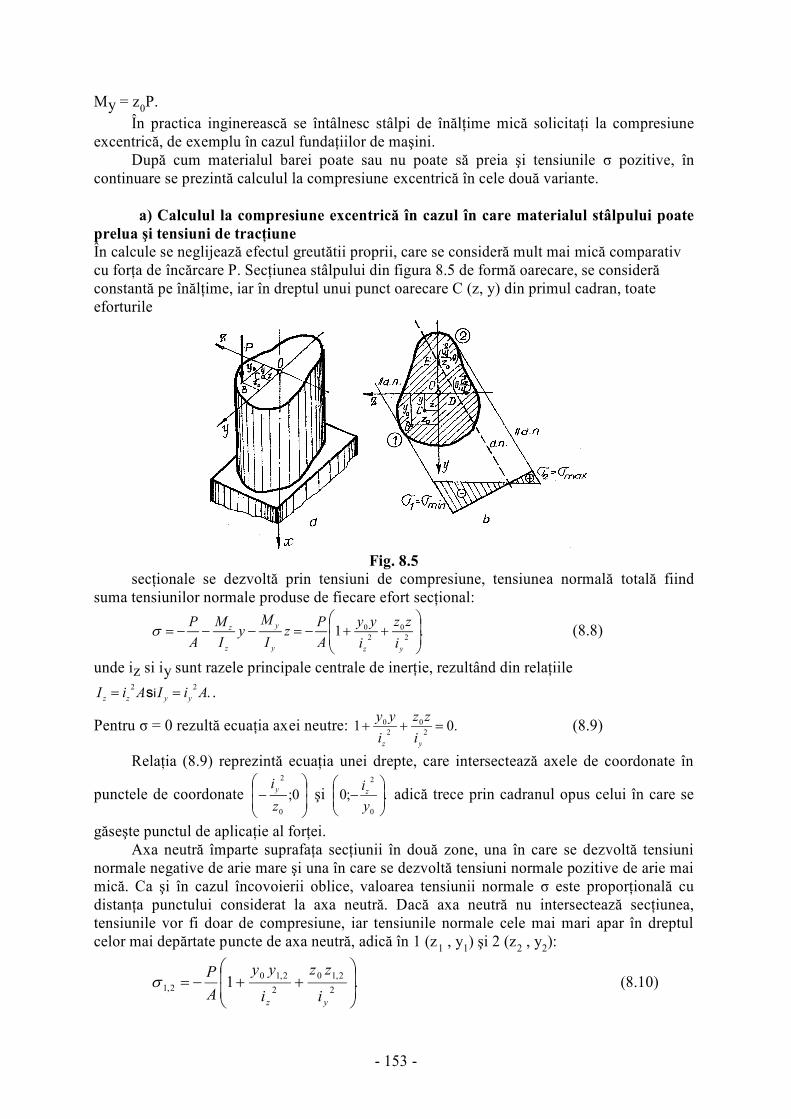
- 153 -
My = z0P.
În practica inginerească se întâlnesc stâlpi de înălţime mică solicitaţi la compresiune
excentrică, de exemplu în cazul fundaţiilor de maşini.
După cum materialul barei poate sau nu poate să preia şi tensiunile σ pozitive, în
continuare se prezintă calculul la compresiune excentrică în cele două variante.
a) Calculul la compresiune excentrică în cazul în care materialul stâlpului poate
prelua şi tensiuni de tracţiune În calcule se neglijează efectul greutătii proprii, care se consideră mult mai mică comparativ
cu forţa de încărcare P. Secţiunea stâlpului din figura 8.5 de formă oarecare, se consideră
constantă pe înălţime, iar în dreptul unui punct oarecare C (z, y) din primul cadran, toate
eforturile
Fig. 8.5
secţionale se dezvoltă prin tensiuni de compresiune, tensiunea normală totală fiind
suma tensiunilor normale produse de fiecare efort secţional:
.12
0
2
0
yzy
y
z
z
i
zz
i
yy
A
Pz
I
My
I
M
A
P (8.8)
unde iz si iy sunt razele principale centrale de inerţie, rezultând din relaţiile
.22AiIAiI
yyzz .
Pentru σ = 0 rezultă ecuaţia axei neutre: .012
0
2
0 yz
i
zz
i
yy (8.9)
Relaţia (8.9) reprezintă ecuaţia unei drepte, care intersectează axele de coordonate în
punctele de coordonate
0;
0
2
z
iy
şi .;00
2
y
iz adică trece prin cadranul opus celui în care se
găseşte punctul de aplicaţie al forţei.
Axa neutră împarte suprafaţa secţiunii în două zone, una în care se dezvoltă tensiuni
normale negative de arie mare şi una în care se dezvoltă tensiuni normale pozitive de arie mai
mică. Ca şi în cazul încovoierii oblice, valoarea tensiunii normale σ este proporţională cu
distanţa punctului considerat la axa neutră. Dacă axa neutră nu intersectează secţiunea,
tensiunile vor fi doar de compresiune, iar tensiunile normale cele mai mari apar în dreptul
celor mai depărtate puncte de axa neutră, adică în 1 (z1 , y
1) şi 2 (z
2 , y
2):
.12
2,10
2
2,10
2,1
yz i
zz
i
yy
A
P (8.10)

- 154 -
Examinând relaţiile 8.8 - 8.10 se desprind următoarele proprietăţi ale axei neutre:
1) - Axa neutră trece prin cadranul opus celui în care se află aplicată forţa de
compresiune.
2) - Dacă se neglijează greutatea proprie a stâlpului, poziţia axei neutre nu depinde de
mărimea ci doar de locul de aplicare a forţei.
3) - Axa neutră se îndepărtează de centrul de greutate al secţiunii (zD şi y
E cresc),
atunci forţa se apropie (z0 şi y
0 scad) şi invers.
4) - Dacă punctul de aplicaţie al forţei se deplasează pe o axă principală centrală de
inerţie atunci axa neutră se deplasează paralel cu cealaltă axă. Dacă y0 = 0 (forţa se află pe
axa Oz), expresia axei neutre devine: ,012
0 y
i
zz deci devine o dreaptă paralelă cu Oy.
5) - Dacă punctul de aplicaţie al forţei se deplasează pe o dreaptă Δ1 (fig. 8.6) care
trece prin origine, atunci axa neutră (dreapta Δ2) se deplasează paralel cu ea însăşi.
Fig. 8.6
Pentru demonstraţie se exprimă coeficientul unghiular al axei neutre prin derivarea
expresiei axei neutre:
. 02
2
0
0
22
0
2
0
y
z
yzi
i
y
z
dz
dym
i
z
dz
dy
i
y (8,11)
unde m2 reprezintă coeficientul unghiular al axei neutre. Dacă forţa P se deplasează pe
dreapta Δ1, atunci:
. 1
2
1
21
0
0
y
z
i
i
mmm
z
y
6) - Tensiunea într-un punct C (z , y) produsă de către o forţă de compresiune aplicată
într-un punct B (z0,y
0) este egală cu tensiunea în punctul B (z
0, y
0) produsă de aceeaşi forţă
aplicată în C (z, y); din observarea relaţiei (8.10) reiese că, coordonatele punctelor B şi C se
pot înlocui reciproc, fără ca tensiunea normală σ să se modifice.
7) - Dacă punctul de aplicaţie al forţei se deplasează pe o dreaptă ce nu trece prin
centrul de greutate al secţiunii, tensiunea într-un punct din secţiune rămâne nulă, adică axa
neutră se roteşte în jurul unui punct.
Astfel, conform proprietăţii exprimate la punctul anterior, dacă punctul de aplicaţie al
forţei se deplasează pe dreapta care reprezintă axa neutră când forţa era aplicată în punctul B
(z0, y0), atunci, în punctul B, tensiunea va fi nulă, adică axa neutră se roteşte în jurul acestui
punct.
Totalitatea poziţiilor pe care le poate ocupa punctul de aplicaţie al forţei de compre-
siune, astfel încât în întreaga secţiune să se dezvolte numai tensiuni de compresiune,
formează o figură închisă în jurul centrului de greutate al secţiunii numită sâmbure central.
Conturul acestuia este locul geometric al punctelor de aplicaţie ale forţei atunci când axa
neutră rămâne mereu tangentă la conturul secţiunii.
Se exemplifică modul de determinare al conturului sâmburelui central cu referire la un
stâlp de secţiune dreptunghiulară (fig. 8.7). Pentru ca axa neutră să coincidă cu dreapta (1) -
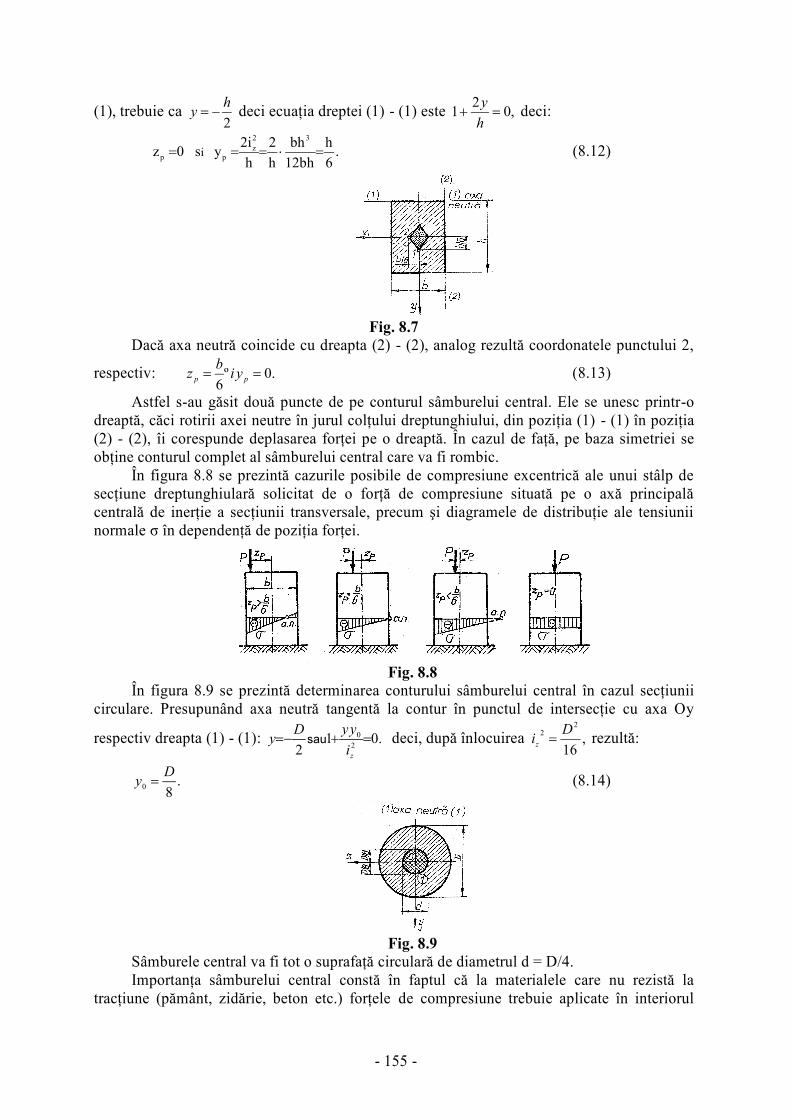
- 155 -
(1), trebuie ca 2
hy deci ecuaţia dreptei (1) - (1) este ,0
21
h
y deci:
.6
h
h12b
hb
h
2
h
2iys 0z
32
z
pp i (8.12)
Fig. 8.7
Dacă axa neutră coincide cu dreapta (2) - (2), analog rezultă coordonatele punctului 2,
respectiv: .0º6
pp
yib
z (8.13)
Astfel s-au găsit două puncte de pe conturul sâmburelui central. Ele se unesc printr-o
dreaptă, căci rotirii axei neutre în jurul colţului dreptunghiului, din poziţia (1) - (1) în poziţia
(2) - (2), îi corespunde deplasarea forţei pe o dreaptă. În cazul de faţă, pe baza simetriei se
obţine conturul complet al sâmburelui central care va fi rombic.
În figura 8.8 se prezintă cazurile posibile de compresiune excentrică ale unui stâlp de
secţiune dreptunghiulară solicitat de o forţă de compresiune situată pe o axă principală
centrală de inerţie a secţiunii transversale, precum şi diagramele de distribuţie ale tensiunii
normale σ în dependenţă de poziţia forţei.
Fig. 8.8
În figura 8.9 se prezintă determinarea conturului sâmburelui central în cazul secţiunii
circulare. Presupunând axa neutră tangentă la contur în punctul de intersecţie cu axa Oy
respectiv dreapta (1) - (1): .012 2
0 z
i
yyDy deci, după înlocuirea ,
16
22 D
iz rezultă:
.8
0
Dy (8.14)
Fig. 8.9
Sâmburele central va fi tot o suprafaţă circulară de diametrul d = D/4.
Importanţa sâmburelui central constă în faptul că la materialele care nu rezistă la
tracţiune (pământ, zidărie, beton etc.) forţele de compresiune trebuie aplicate în interiorul

- 156 -
sâmburelui central, pentru ca în toată secţiunea să se dezvolte numai tensiuni de compresiune.
b) Calculul la compresiune excentrică în cazul în care materialul stâlpului nu
poate prelua tensiuni de tracţiune Zidăria, betonul, pământul etc. rezistă numai la tensiuni de compresiune, neputând
prelua tensiuni de tracţiune. Ca urmare, dacă punctul de aplicaţie al forţei se află în afara
sâmburelui central, se admite că secţiunea transversală este împărţită într-o zonă activă (fig.
8.10) de arie A1 în care se dezvoltă tensiuni de compresiune şi o zonă pasivă de arie A2, care
s-ar fisura, pe care tensiunile de tracţiune nu se pot dezvolta [25].
Fig. 8.10
Se consideră un stâlp dintr-un astfel de material, asupra căruia forţa acţionează în afara
sâmburelui central, la distanţa c de marginea secţiunii, admiţându-se că în zona activă
tensiunile normale de compresiune sunt proporţionale cu distanţa la axa neutră, iar în zona
pasivă tensiunile sunt nule (fig. 8.10).
În ipoteza că se neglijează greutatea proprie a stâlpului se cere să se găsească expresia
tensiunii maxime: .0º2max1
i
ce
z (8.15)
Scriindu-se ecuaţiile de echivalenţă:
.1
maxmax
1
11
Sce
dAzce
dAPAA
(8.16)
.1
max2max
1
11
Ice
dAzce
dAzePAA
(8.17)
unde S1 şi I1 reprezintă momentul static, respectiv de inerţie al suprafeţei zonei active faţă de
axa neutră a secţiunii transversale.
Din relaţiile (8.16 şi 8.17), rezultă poziţia axei neutre, respectiv valoarea tensiunii
maxime:
.º1
max
1
1
S
cePi
S
Ie
(8.18)
În cazul particular al sectiunii dreptunghiulare:
.2,
3
2
2
32
3
cececeh
ceh
e
(8.19)
.3
22
2
2maxch
P
ceh
P
ceh
ceP
(8.20)
Relaţia (8.20) se foloseşte la calculul presiunilor de contact dintre stâlp şi teren, stâlpul
neputînd prelua tensiuni de tracţiune.
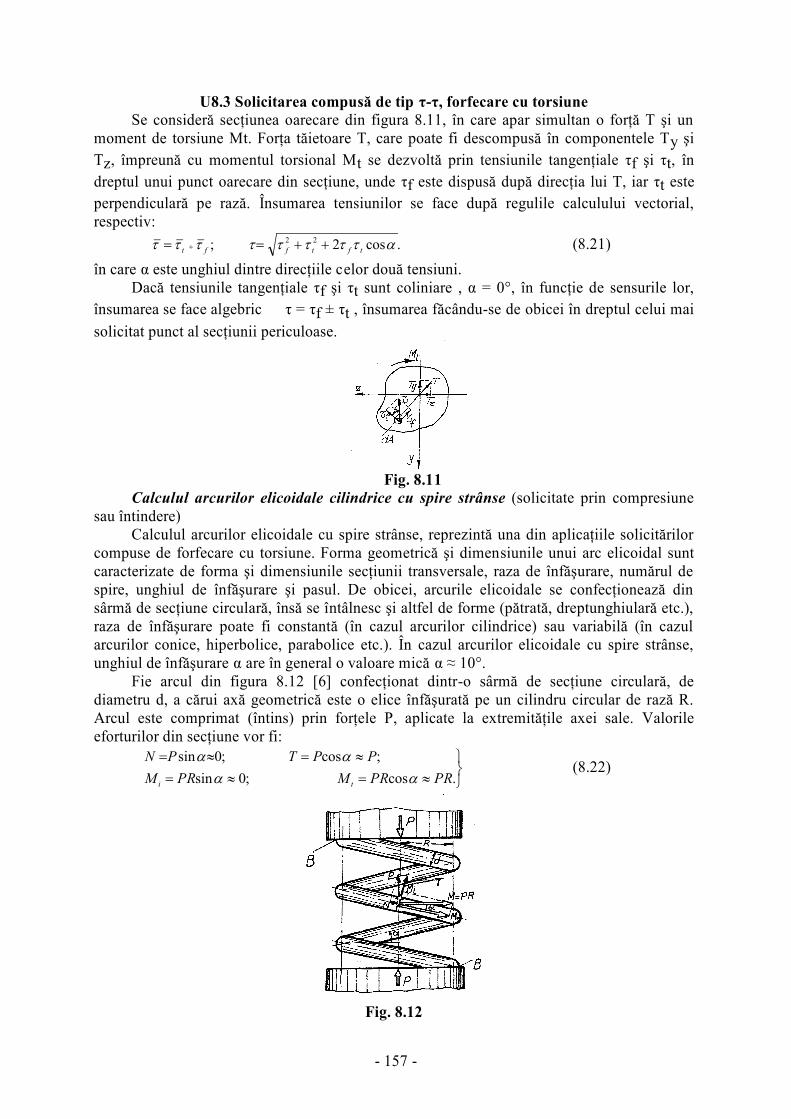
- 157 -
U8.3 Solicitarea compusă de tip τ-τ, forfecare cu torsiune
Se consideră secţiunea oarecare din figura 8.11, în care apar simultan o forţă T şi un
moment de torsiune Mt. Forţa tăietoare T, care poate fi descompusă în componentele Ty şi
Tz, împreună cu momentul torsional Mt se dezvoltă prin tensiunile tangenţiale τf şi τt, în
dreptul unui punct oarecare din secţiune, unde τf este dispusă după direcţia lui T, iar τt este
perpendiculară pe rază. Însumarea tensiunilor se face după regulile calculului vectorial,
respectiv:
.cos2; 22 tftfft
(8.21)
în care α este unghiul dintre direcţiile celor două tensiuni.
Dacă tensiunile tangenţiale τf şi τt sunt coliniare , α = 0°, în funcţie de sensurile lor,
însumarea se face algebric τ = τf ± τt , însumarea făcându-se de obicei în dreptul celui mai
solicitat punct al secţiunii periculoase.
Fig. 8.11
Calculul arcurilor elicoidale cilindrice cu spire strânse (solicitate prin compresiune
sau întindere)
Calculul arcurilor elicoidale cu spire strânse, reprezintă una din aplicaţiile solicitărilor
compuse de forfecare cu torsiune. Forma geometrică şi dimensiunile unui arc elicoidal sunt
caracterizate de forma şi dimensiunile secţiunii transversale, raza de înfăşurare, numărul de
spire, unghiul de înfăşurare şi pasul. De obicei, arcurile elicoidale se confecţionează din
sârmă de secţiune circulară, însă se întâlnesc şi altfel de forme (pătrată, dreptunghiulară etc.),
raza de înfăşurare poate fi constantă (în cazul arcurilor cilindrice) sau variabilă (în cazul
arcurilor conice, hiperbolice, parabolice etc.). În cazul arcurilor elicoidale cu spire strânse,
unghiul de înfăşurare α are în general o valoare mică α ≈ 10°.
Fie arcul din figura 8.12 [6] confecţionat dintr-o sârmă de secţiune circulară, de
diametru d, a cărui axă geometrică este o elice înfăşurată pe un cilindru circular de rază R.
Arcul este comprimat (întins) prin forţele P, aplicate la extremităţile axei sale. Valorile
eforturilor din secţiune vor fi:
.cos;0sin
;cos;0sin
RPRPMRPM
PPTPN
ti
(8.22)
Fig. 8.12
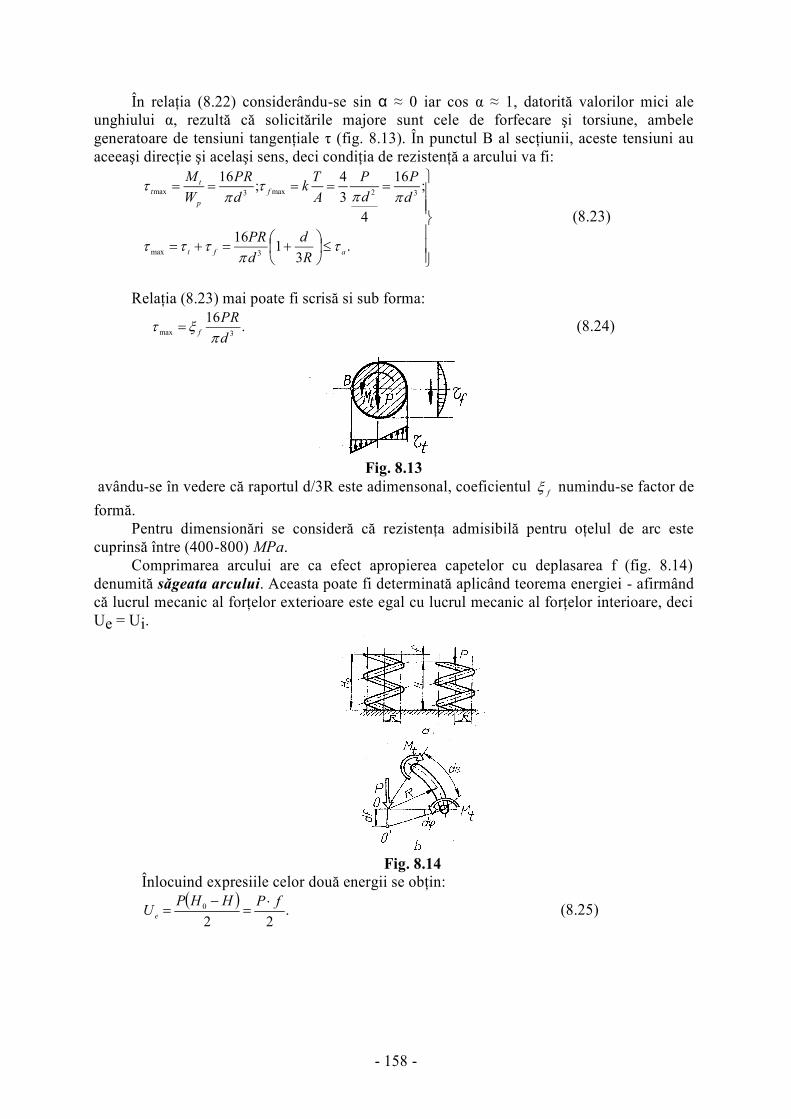
- 158 -
În relaţia (8.22) considerându-se sin α ≈ 0 iar cos α ≈ 1, datorită valorilor mici ale
unghiului α, rezultă că solicitările majore sunt cele de forfecare şi torsiune, ambele
generatoare de tensiuni tangenţiale τ (fig. 8.13). În punctul B al secţiunii, aceste tensiuni au
aceeaşi direcţie şi acelaşi sens, deci condiţia de rezistenţă a arcului va fi:
.3
116
;16
4
3
4;
16
3max
32max3max
aft
f
p
t
t
R
d
d
PR
d
P
d
P
A
Tk
d
RP
W
M
(8.23)
Relaţia (8.23) mai poate fi scrisă si sub forma:
.16
3maxd
RPf
(8.24)
Fig. 8.13
avându-se în vedere că raportul d/3R este adimensonal, coeficientul f numindu-se factor de
formă.
Pentru dimensionări se consideră că rezistenţa admisibilă pentru oţelul de arc este
cuprinsă între (400-800) MPa.
Comprimarea arcului are ca efect apropierea capetelor cu deplasarea f (fig. 8.14)
denumită săgeata arcului. Aceasta poate fi determinată aplicând teorema energiei - afirmând
că lucrul mecanic al forţelor exterioare este egal cu lucrul mecanic al forţelor interioare, deci
Ue = Ui.
Fig. 8.14
Înlocuind expresiile celor două energii se obţin:
.22
0 fPHHPU
e
(8.25)
- 159 -
.2
2
2
;2
1
2
1
322
0
22
2
2
2
2
p
Rn
p
i
p
t
V
i
IG
nRPds
IG
RPU
dsdArI
M
GdV
GU
(8.26)
deci: .64
322
2
2 4
3
4
32
dG
nRPf
dG
nRPfP
(8.27)
Din relaţia (8.27) se observă că săgeata este proporţională cu sarcina aplicată,
proprietate care stă la baza costrucţiei dinamometrelor. Se poate scrie:
.64 3
4
nRP
dGkfkP unde (8.28)
k reprezentând constanta elastică a arcului.
Pentru aflarea numărului de spire active ale arcului trebuie să se adopte sau deplasarea
sub o forţă dată, sau diferenţa dintre săgeata la o forţă maximă şi săgeata la forţa minimă, cu
care se poate calcula constanta elastică.
U8.4 Solicitarea compusă de tip σ-τ
(întindere, compresiune cu forfecare, încovoiere cu torsiune)
Solicitarea compusă de tip στ, este solicitarea cea mai răspândită la calculul pieselor din
construcţia de maşini. În această categorie de piese intră arborii drepţi (piese de secţiune
circulară solicitate la încovoiere strâmbă şi torsiune), arbori cotiţi (piese de secţiune circulară
cotită în spaţiu sau plan şi care conţin porţiuni de secţiune dreptunghiulară, eliptică etc.), sau
barele cotite spaţiale (pârghiile unor dispozitive) cu altă secţiune decât cea circulară (de
obicei de secţiune dreptunghiulară).
Într-un element dintr-o astfel de piesă apare o stare de tensiuni, cu tensiuni normale pe
direcţia axei barei (σx) şi tensiuni tangenţiale în planul secţiunii (τxy şi τxz), datorate primele
forţelor axiale şi momentelor încovoietoare, respectiv secundele forţelor tăietoare şi
momentului torsional.
Calculul de rezistenţă, în acest caz, se rezumă la compararea unor tensiuni de tip σ cu
unele de tip τ, lucru posibil de realizat dacă se utilizează una dintre cele cinci ipoteze (teorii)
de rezistenţă. În practică, se lucrează curent fie cu ipoteza tensiunilor tangenţiale maxime
(ipoteza a-III-ia) conform căreia ,4 22 ech
fie cu ipoteza energiei de deformaţie
modificatoare de formă (ipoteza a-V-a), conform căreia .3 22 ech
U8.4.1 Solicitări compuse cu tensiuni normale şi tangenţiale
la arbori de secţiune circulară
Dacă în secţiunea arborelui presupunem că se cunosc toate cele şase componente ale
eforturilor secţionale N, Ty, Tz, Miz, Miy şi Mt (fig. 8.15) [6], putem considera că efectul
forţelor tăietoare se poate neglija, datorită valorilor mici ale tensiunilor tangenţiale de
forfecare. Întrucât orice diametru este şi axă principală de inerţie se calculează momentul
încovoietor rezultant ,22
iyiziMMM acesta făcând cu axa Oz unghiul α = arctg My/Mz
(fig. 8.15 b). Tensiunile normale maximă şi minimă din solicitarea de încovoiere apar în
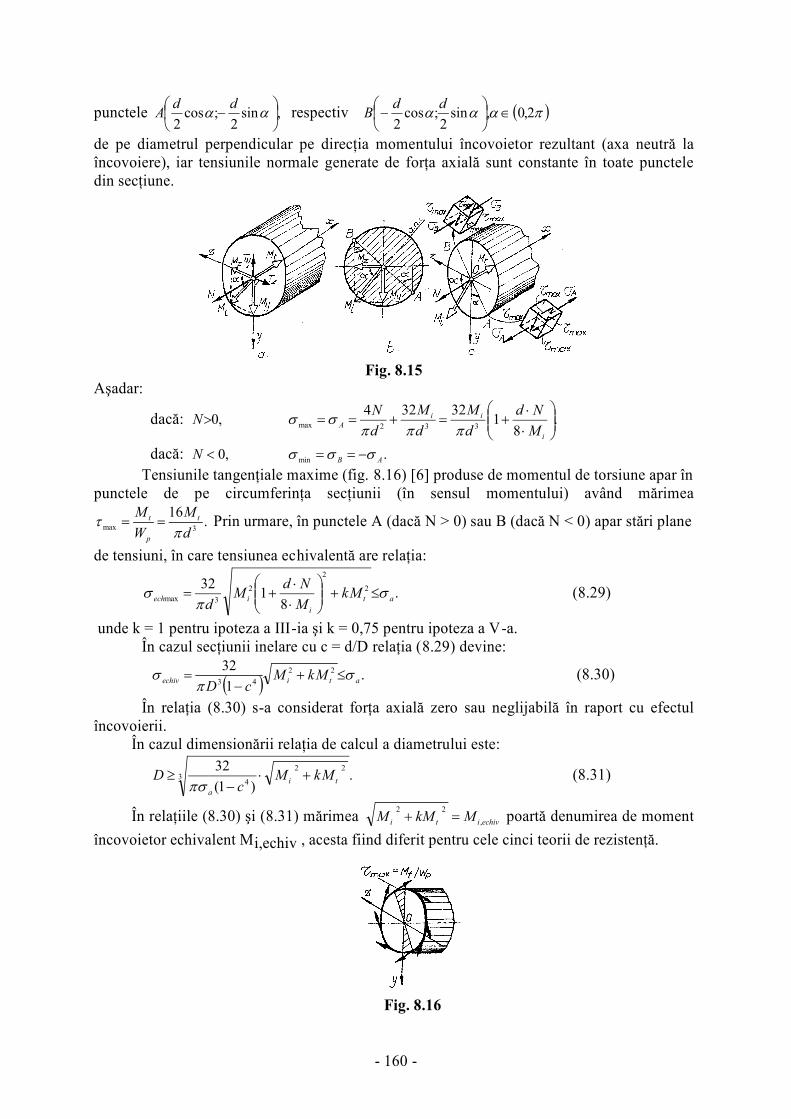
- 160 -
punctele ,sin2
;cos2
ddA respectiv 2,0,sin
2;cos
2
ddB
de pe diametrul perpendicular pe direcţia momentului încovoietor rezultant (axa neutră la
încovoiere), iar tensiunile normale generate de forţa axială sunt constante în toate punctele
din secţiune.
Fig. 8.15
Aşadar:
dacă: .8
132324
,0332max
i
ii
AM
Nd
d
M
d
M
d
NN
dacă: .,0min AB
N
Tensiunile tangenţiale maxime (fig. 8.16) [6] produse de momentul de torsiune apar în
punctele de pe circumferinţa secţiunii (în sensul momentului) având mărimea
.16
3maxd
M
W
Mt
p
t
Prin urmare, în punctele A (dacă N > 0) sau B (dacă N < 0) apar stări plane
de tensiuni, în care tensiunea echivalentă are relaţia:
.8
132 2
2
2
3max at
i
iechMk
M
NdM
d
(8.29)
unde k = 1 pentru ipoteza a III-ia şi k = 0,75 pentru ipoteza a V-a.
În cazul secţiunii inelare cu c = d/D relaţia (8.29) devine:
.
1
32 22
43 atiechivMkM
cD
(8.30)
În relaţia (8.30) s-a considerat forţa axială zero sau neglijabilă în raport cu efectul
încovoierii.
În cazul dimensionării relaţia de calcul a diametrului este:
.)1(
323
22
4 ti
a
MkMc
D
(8.31)
În relaţiile (8.30) şi (8.31) mărimea echivitiMkMM
,
22
poartă denumirea de moment
încovoietor echivalent Mi,echiv , acesta fiind diferit pentru cele cinci teorii de rezistenţă.
Fig. 8.16
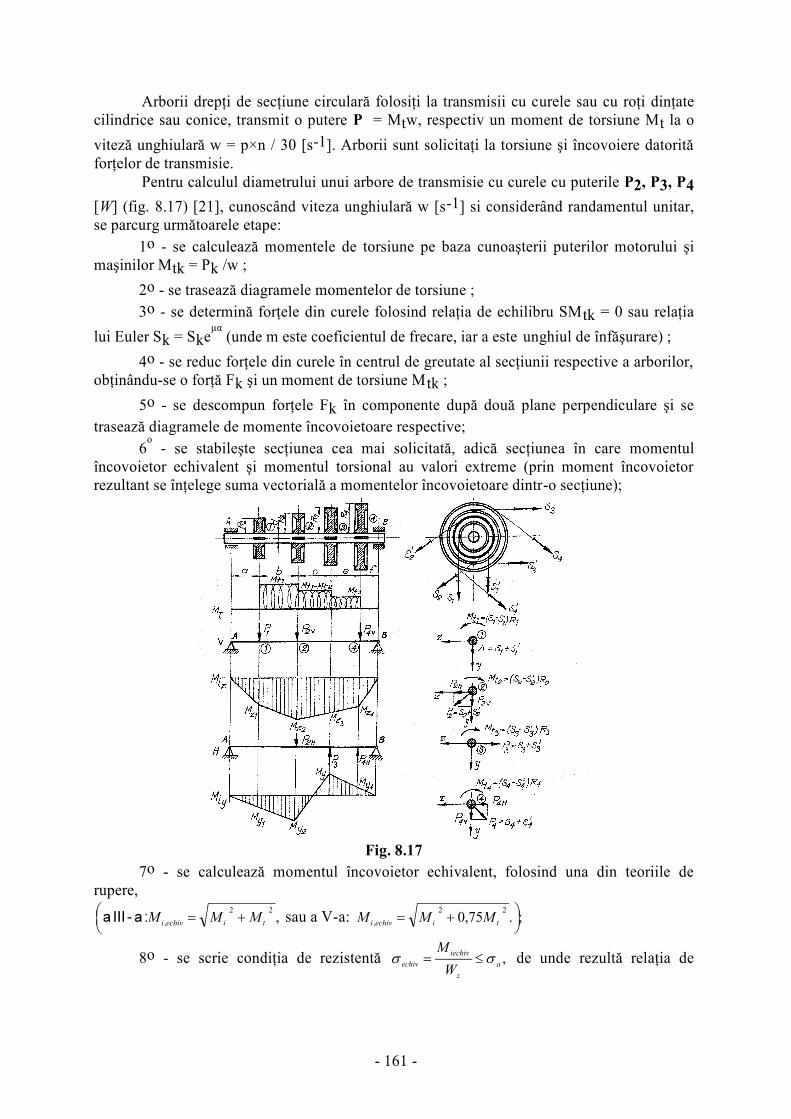
- 161 -
Arborii drepţi de secţiune circulară folosiţi la transmisii cu curele sau cu roţi dinţate
cilindrice sau conice, transmit o putere P = Mtw, respectiv un moment de torsiune Mt la o
viteză unghiulară w = p×n / 30 [s-1]. Arborii sunt solicitaţi la torsiune şi încovoiere datorită
forţelor de transmisie.
Pentru calculul diametrului unui arbore de transmisie cu curele cu puterile P2, P3, P4
[W] (fig. 8.17) [21], cunoscând viteza unghiulară w [s-1] si considerând randamentul unitar,
se parcurg următoarele etape:
1o - se calculează momentele de torsiune pe baza cunoaşterii puterilor motorului şi
maşinilor Mtk = Pk /w ;
2o - se trasează diagramele momentelor de torsiune ;
3o - se determină forţele din curele folosind relaţia de echilibru SMtk = 0 sau relaţia
lui Euler Sk = Skeμα
(unde m este coeficientul de frecare, iar a este unghiul de înfăşurare) ;
4o - se reduc forţele din curele în centrul de greutate al secţiunii respective a arborilor,
obţinându-se o forţă Fk şi un moment de torsiune Mtk ;
5o - se descompun forţele Fk în componente după două plane perpendiculare şi se
trasează diagramele de momente încovoietoare respective;
6o - se stabileşte secţiunea cea mai solicitată, adică secţiunea în care momentul
încovoietor echivalent şi momentul torsional au valori extreme (prin moment încovoietor
rezultant se înţelege suma vectorială a momentelor încovoietoare dintr-o secţiune);
Fig. 8.17
7o - se calculează momentul încovoietor echivalent, folosind una din teoriile de
rupere,
,22
, tiechiviMMM sau a V-a: ;.75,0
22
,
tiechivi
MMM
8o - se scrie condiţia de rezistentă ,a
z
echivi
echivW
M de unde rezultă relaţia de
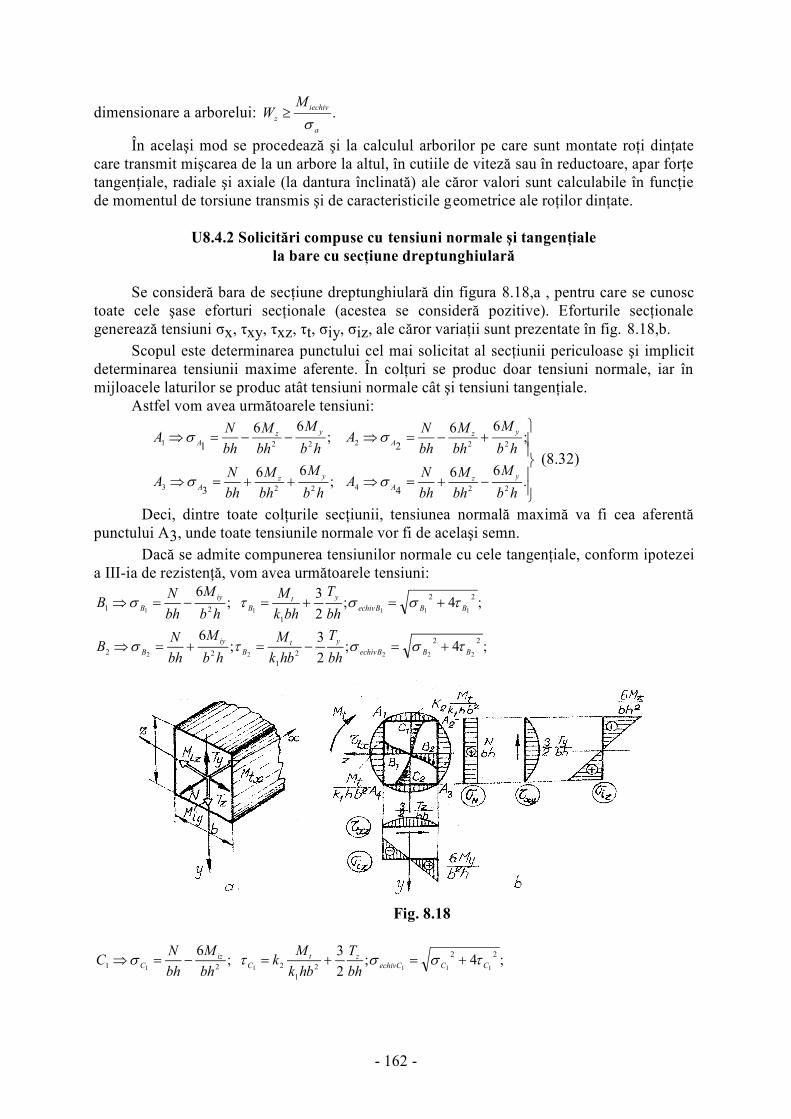
- 162 -
dimensionare a arborelui: .a
echivi
z
MW
În acelaşi mod se procedează şi la calculul arborilor pe care sunt montate roţi dinţate
care transmit mişcarea de la un arbore la altul, în cutiile de viteză sau în reductoare, apar forţe
tangenţiale, radiale şi axiale (la dantura înclinată) ale căror valori sunt calculabile în funcţie
de momentul de torsiune transmis şi de caracteristicile geometrice ale roţilor dinţate.
U8.4.2 Solicitări compuse cu tensiuni normale şi tangenţiale
la bare cu secţiune dreptunghiulară
Se consideră bara de secţiune dreptunghiulară din figura 8.18,a , pentru care se cunosc
toate cele şase eforturi secţionale (acestea se consideră pozitive). Eforturile secţionale
generează tensiuni σx, τxy, τxz, τt, σiy, σiz, ale căror variaţii sunt prezentate în fig. 8.18,b.
Scopul este determinarea punctului cel mai solicitat al secţiunii periculoase şi implicit
determinarea tensiunii maxime aferente. În colţuri se produc doar tensiuni normale, iar în
mijloacele laturilor se produc atât tensiuni normale cât şi tensiuni tangenţiale.
Astfel vom avea următoarele tensiuni:
.66
;66
;66
;66
224223
222221
43
21
hb
M
hb
M
hb
NA
hb
M
hb
M
hb
NA
hb
M
hb
M
hb
NA
hb
M
hb
M
hb
NA
yz
A
yz
A
yz
A
yz
A
(8.32)
Deci, dintre toate colţurile secţiunii, tensiunea normală maximă va fi cea aferentă
punctului A3, unde toate tensiunile normale vor fi de acelaşi semn.
Dacă se admite compunerea tensiunilor normale cu cele tangenţiale, conform ipotezei
a III-ia de rezistenţă, vom avea următoarele tensiuni:
;4;2
3;
6 22
1
21 11111 BBBechiv
yt
B
iy
Bhb
T
hbk
M
hb
M
hb
NB
;4;2
3;
6 22
2
1
22 22222 BBBechiv
yt
B
iy
Bhb
T
bhk
M
hb
M
hb
NB
Fig. 8.18
;4;2
3;
6 22
2
1
221 11111 CCCechiv
zt
C
iz
Chb
T
bhk
Mk
hb
M
hb
NC
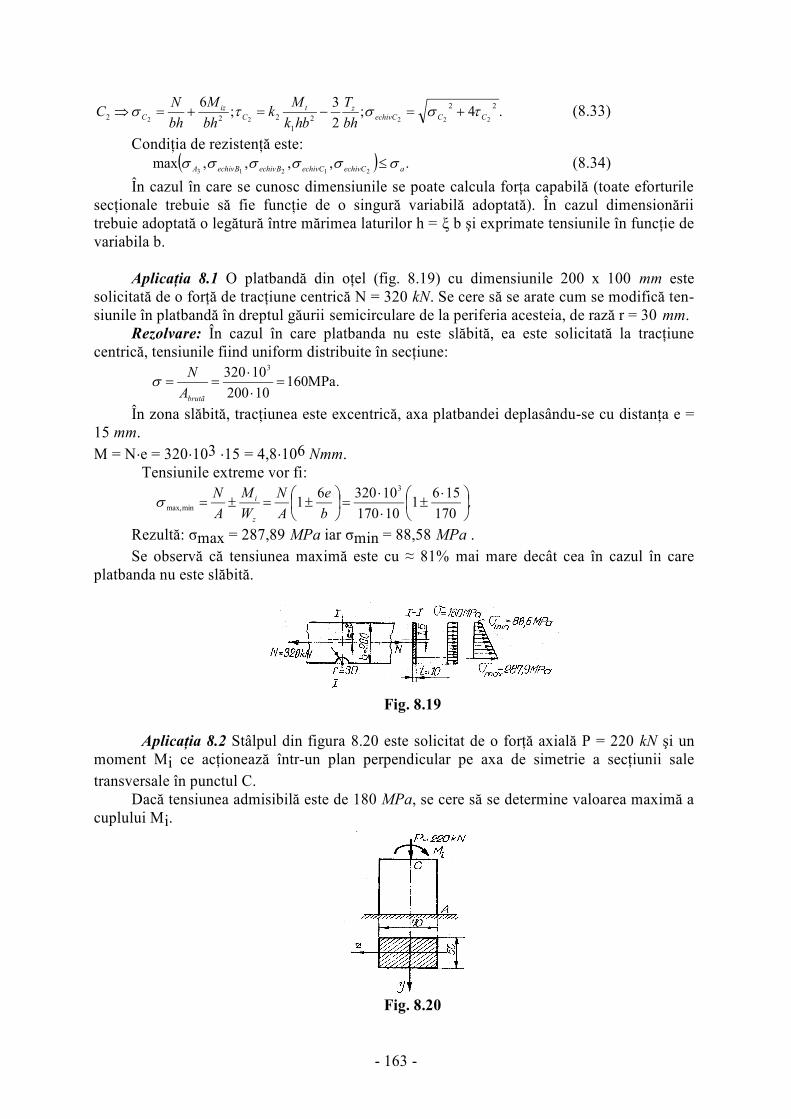
- 163 -
.4;2
3;
6 22
2
1
222 22222 CCCechiv
zt
C
iz
Chb
T
bhk
Mk
hb
M
hb
NC (8.33)
Condiţia de rezistenţă este:
.,,,,max21213 aCechivCechivBechivBechivA
(8.34)
În cazul în care se cunosc dimensiunile se poate calcula forţa capabilă (toate eforturile
secţionale trebuie să fie funcţie de o singură variabilă adoptată). În cazul dimensionării
trebuie adoptată o legătură între mărimea laturilor h = ξ b şi exprimate tensiunile în funcţie de
variabila b.
Aplicaţia 8.1 O platbandă din oţel (fig. 8.19) cu dimensiunile 200 x 100 mm este
solicitată de o forţă de tracţiune centrică N = 320 kN. Se cere să se arate cum se modifică ten-
siunile în platbandă în dreptul găurii semicirculare de la periferia acesteia, de rază r = 30 mm.
Rezolvare: În cazul în care platbanda nu este slăbită, ea este solicitată la tracţiune
centrică, tensiunile fiind uniform distribuite în secţiune:
.MPa16010200
10320 3
brutãA
N
În zona slăbită, tracţiunea este excentrică, axa platbandei deplasându-se cu distanţa e =
15 mm.
M = N.e = 320.103 .15 = 4,8.106 Nmm.
Tensiunile extreme vor fi:
.170
1561
10170
1032061
3
minmax,
b
e
A
N
W
M
A
N
z
i
Rezultă: σmax = 287,89 MPa iar σmin = 88,58 MPa .
Se observă că tensiunea maximă este cu ≈ 81% mai mare decât cea în cazul în care
platbanda nu este slăbită.
Fig. 8.19
Aplicaţia 8.2 Stâlpul din figura 8.20 este solicitat de o forţă axială P = 220 kN şi un
moment Mi ce acţionează într-un plan perpendicular pe axa de simetrie a secţiunii sale
transversale în punctul C.
Dacă tensiunea admisibilă este de 180 MPa, se cere să se determine valoarea maximă a
cuplului Mi.
Fig. 8.20
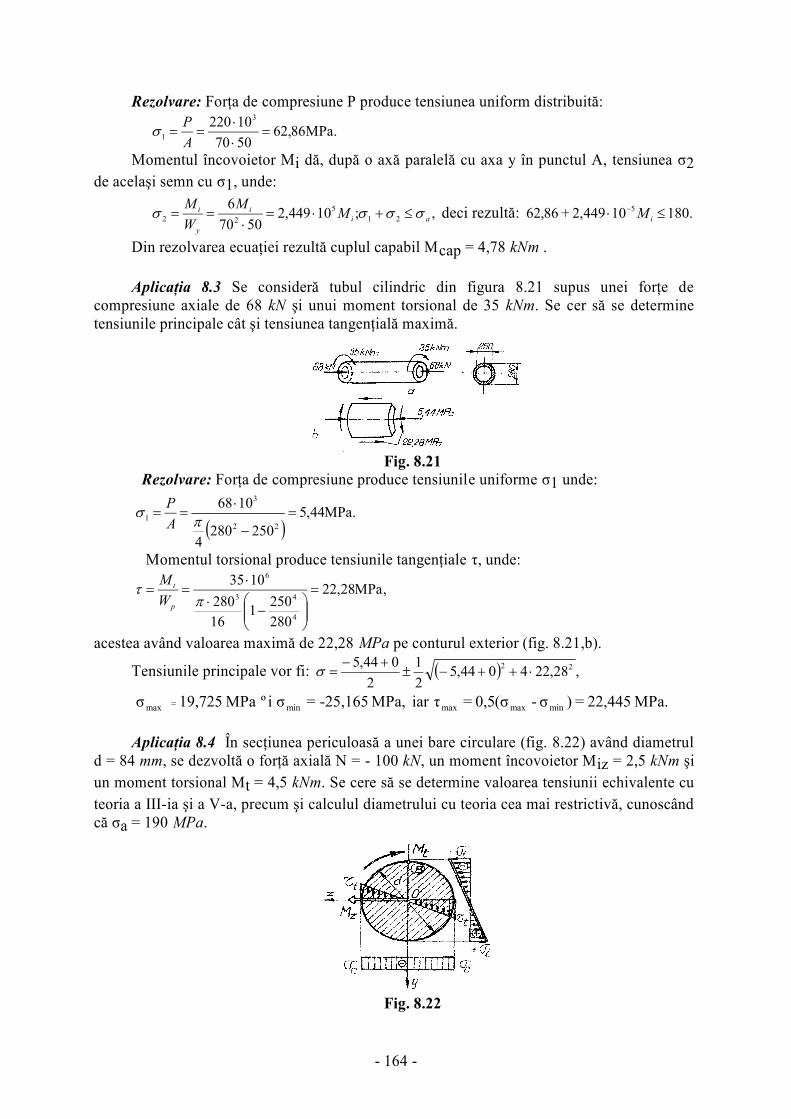
- 164 -
Rezolvare: Forţa de compresiune P produce tensiunea uniform distribuită:
.MPa86,625070
10220 3
1
A
P
Momentul încovoietor Mi dă, după o axă paralelă cu axa y în punctul A, tensiunea σ2
de acelaşi semn cu σ1, unde:
,;10449,25070
621
5
22 ai
i
y
i MM
W
M
deci rezultă: .18010449,2 + 86,62 5
iM
Din rezolvarea ecuaţiei rezultă cuplul capabil Mcap = 4,78 kNm .
Aplicaţia 8.3 Se consideră tubul cilindric din figura 8.21 supus unei forţe de
compresiune axiale de 68 kN şi unui moment torsional de 35 kNm. Se cer să se determine
tensiunile principale cât şi tensiunea tangenţială maximă.
Fig. 8.21
Rezolvare: Forţa de compresiune produce tensiunile uniforme σ1 unde:
.MPa44,5
2502804
1068
22
3
1
A
P
Momentul torsional produce tensiunile tangenţiale τ, unde:
,MPa28,22
280
2501
16
280
1035
4
43
6
p
t
W
M
acestea având valoarea maximă de 22,28 MPa pe conturul exterior (fig. 8.21,b).
Tensiunile principale vor fi: ,28,224044,52
1
2
044,5 22
MPa. 22,445 = )σ - (σ0,5 = τiar MPa, -25,165= σ iº MPa 19,725σ minmaxmaxmin=max
Aplicaţia 8.4 În secţiunea periculoasă a unei bare circulare (fig. 8.22) având diametrul
d = 84 mm, se dezvoltă o forţă axială N = - 100 kN, un moment încovoietor Miz = 2,5 kNm şi
un moment torsional Mt = 4,5 kNm. Se cere să se determine valoarea tensiunii echivalente cu
teoria a III-ia şi a V-a, precum şi calculul diametrului cu teoria cea mai restrictivă, cunoscând
că σa = 190 MPa.
Fig. 8.22

- 165 -
Rezolvare: Din distribuţia tensiunilor generate de cele trei solicitări, rezultă că punctul
B este cel mai solicitat (fig. 8.22):
;MPa43
32
384
6105,2
încov B
zW
zM
.MPa18
4
284
310100compr B
A
N
Deci în punctul B: σB = -43 - 18 = - 61 MPa ; τ
B = 38,67 MPa.
După teoria tensiunii tangenţiale maxime (ipoteza a III-ia)
.MPa5,9867,384614 2222
zx
III
echiv
După teoria energiei specifice modificatoare de formă (ipoteza a V-a):
.MPa6,9067,383613 2222 zx
V
echiv
Se observă că ipoteza cea mai restrictivă este ipoteza a III-a.
a
p
t
z
iIII
echivW
M
W
M
A
N
22
4 sau: ,16
4324 2
2
3
2
32 a
ti
d
M
d
M
d
N
respectiv: ;102432426222
atzdMMdN
din rezolvarea ecuatiei rezultă d 67 mm .
Aplicaţia 8.5 Un resort elicoidal cilindric cu raza de înfăşurare R = 80 mm, diametrul
sârmei d = 16 mm, numărul de spire active n = 9, este încastrat la capete şi încărcat cu forţa P
= 3600 N aplicată la şase spire de capătul superior.
Materialul din care este confectionat resortul este un oţel de arc cu G = 0,85.105 MPa
şi τa = 400 MPa.[3].
Se cer să se determine reacţiunile din resort, deformaţiile celor două porţiuni precum
şi tensiunea maximă.
Fig. 8.23
Rezolvare: Săgeţile în cele două porţiuni trebuie să fie egale în modul, deci 21
ff ,
unde: 4
1
3
1
1
64
dG
nRPf iar ;
644
2
3
2
2dG
nRPf rezultă:
22
11
2
1 1nP
nP
f
f iar .2
2
1
22
1P
n
PnP
Scriind ecuaţia de echilibru static, avem: P1 + P2 = P , rezultă: 3P2 = P sau:
,N12003
3600
32
P
P iar P1 = 2400 N . .mm35,42161085,0
3802400646445
3
4
1
3
1
21
dG
nRPff
Resortul este solicitat la torsiune şi forfecare, deci:
,3
116
3
43max
R
d
d
RP
A
T
W
M
p
t
ft
sau .MPa65,254803
161
16
802400163max a

- 166 -
Rezultă că resortul poate fi încărcat cu forţa P = 3600 N deoarece amax
.
Aplicaţia 8.6 Un arbore de oţel de secţiune circulară, rezemat în două lagăre A şi B,
este antrenat într-o mişcare de rotaţie prin intermediul roţii 1, a cărei curea de transmisie are
ramurile orizontale şi pune în mişcare o maşină unealtă prin intermediul roţii 2, a cărei curea
are ramurile verticale (fig. 8.24).
Dacă se consideră diametrele celor două roţi egale D = 1500 mm, S1 = 7 kN, S2 = 2 kN,
S3 = 7 kN, S4 = 2 kN, σa = 80 MPa, se cere să se dimensioneze arborele (în calcule se va
utiliza ipoteza a III-ia de rupere şi nu se ţine cont de greutatea proprie a arborelui).
Fig. 8.24
Rezolvare: Reducând forţele S1 şi S2 (S3 şi S4) la axa arborelui rezultă:
'.0009
mmN00075032
150020007000
2
21
21
1
PNSSP
DSSMM
tt
Diagramele momentelor de torsiune şi încovoiere sunt redate în figura 8.24. Pentru a
observa secţiunea periculoasă trebuie să calculăm:
.Nmm000250200080010003501 2222
ViHizrezi
MMM
Deci secţiunea periculoasă este în punctul A unde Mi = 2,7 kNm iar Mt= 3,75 kNm.
Aplicând teoria a III-a , vom avea:
ati
zp
t
z
i
echivMM
WW
M
W
M 22
2
2
2
2
22 144
deci: ,1
32
22
3
ti
a
zMM
dW
sau: .00075030007002
323
22 a
d
Calculând rezultă pentru diametru o valoare d ≥ 83,8 mm. În continuare, diametrul se
standardizează în ordine crescătoare.
Aplicaţia 8.7 Se cere să se verifice pârghia unui dispozitiv (fig. 8.25), încărcată cu
forţele P1 = 1600 N, P2 = 1400 N şi P3 = 1000 N, ştiind că este de secţiune pătrată cu latura a
= 60 mm, are lungimea bratelor l1 = 400 mm, l2 = 800 mm, l3 = 300 mm, iar σa = 120 MPa.
(În calcule se va folosi ipoteza a III-ia de rupere).
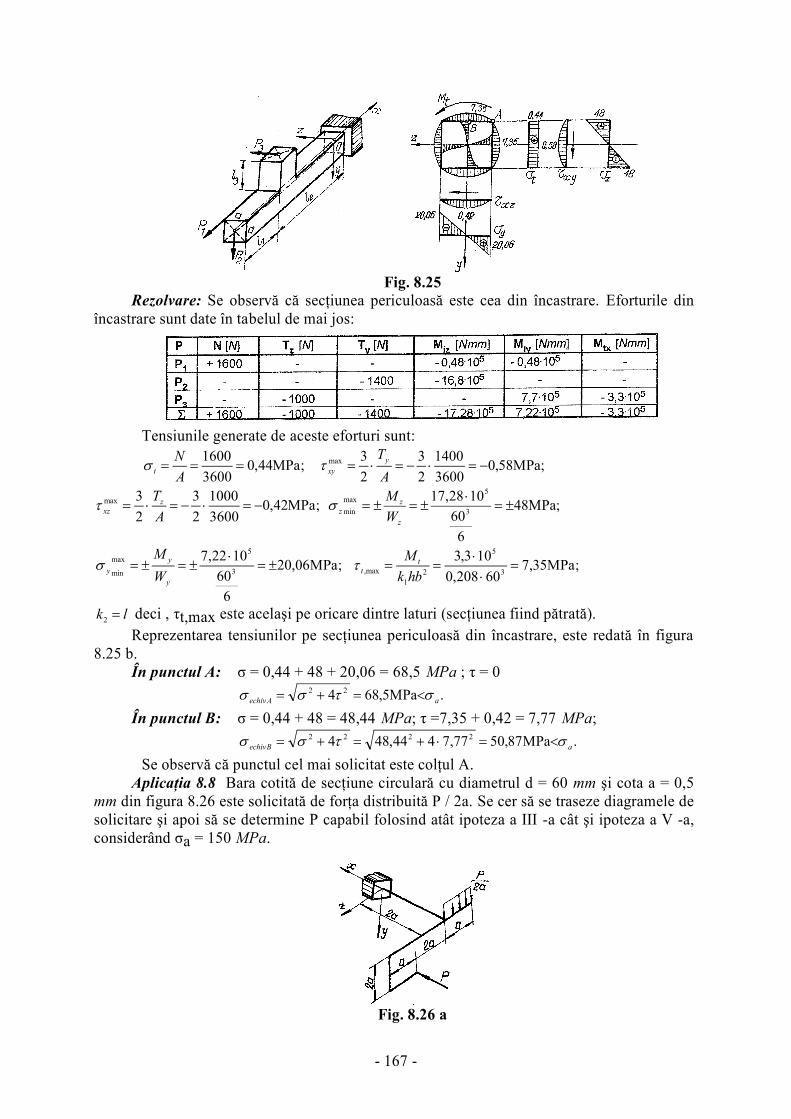
- 167 -
Fig. 8.25
Rezolvare: Se observă că secţiunea periculoasă este cea din încastrare. Eforturile din
încastrare sunt date în tabelul de mai jos:
Tensiunile generate de aceste eforturi sunt:
;MPa44,03600
1600
A
Nt
MPa;58,03600
1400
2
3
2
3max A
Ty
xy
;MPa42,03600
1000
2
3
2
3max A
Tz
xz MPa;48
6
60
1028,173
5max
min
z
z
zW
M
;MPa06,20
6
60
1022,73
5max
min
y
y
yW
M ;MPa35,7
60208,0
103,33
5
2
1
max,
bhk
Mt
t
lk 2
deci , τt,max este acelaşi pe oricare dintre laturi (secţiunea fiind pătrată).
Reprezentarea tensiunilor pe secţiunea periculoasă din încastrare, este redată în figura
8.25 b.
În punctul A: σ = 0,44 + 48 + 20,06 = 68,5 MPa ; τ = 0
.MPa5,684 22
aAechiv
În punctul B: σ = 0,44 + 48 = 48,44 MPa; τ =7,35 + 0,42 = 7,77 MPa;
.MPa87,5077,7444,484 2222
aBechiv
Se observă că punctul cel mai solicitat este colţul A.
Aplicaţia 8.8 Bara cotită de secţiune circulară cu diametrul d = 60 mm şi cota a = 0,5
mm din figura 8.26 este solicitată de forţa distribuită P / 2a. Se cer să se traseze diagramele de
solicitare şi apoi să se determine P capabil folosind atât ipoteza a III -a cât şi ipoteza a V -a,
considerând σa = 150 MPa.
Fig. 8.26 a
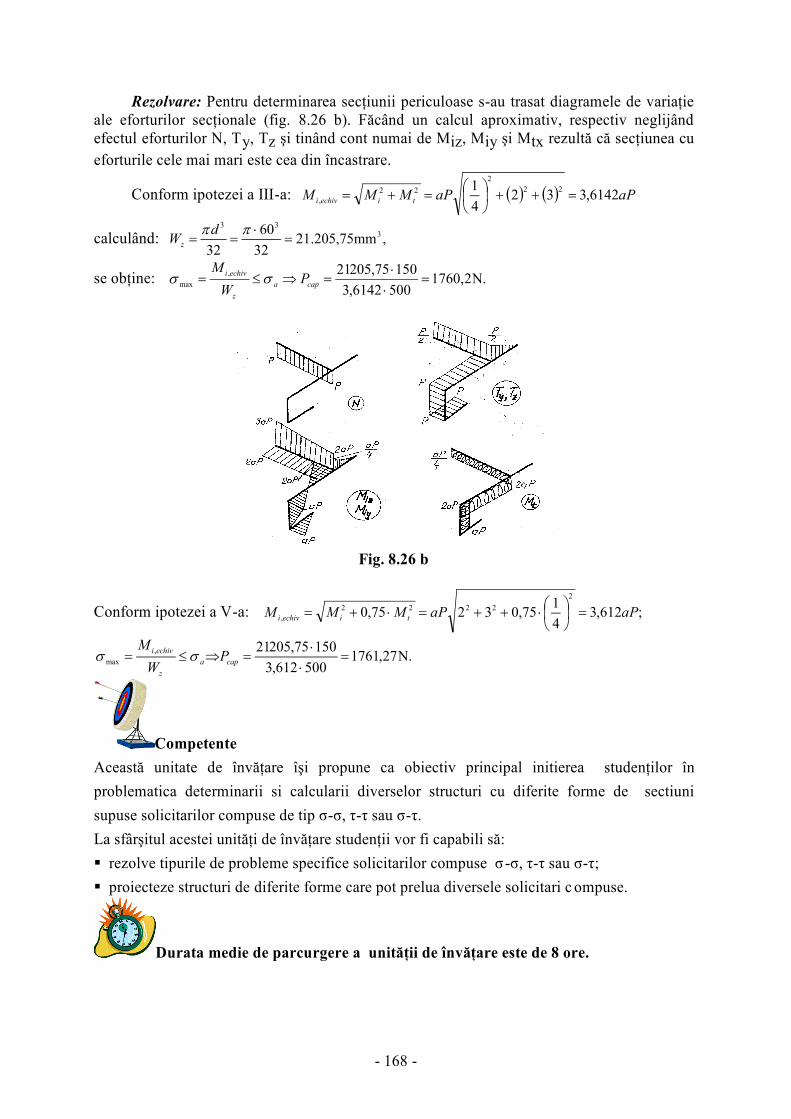
- 168 -
Rezolvare: Pentru determinarea secţiunii periculoase s-au trasat diagramele de variaţie
ale eforturilor secţionale (fig. 8.26 b). Făcând un calcul aproximativ, respectiv neglijând
efectul eforturilor N, Ty, Tz şi tinând cont numai de Miz, Miy şi Mtx rezultă că secţiunea cu
eforturile cele mai mari este cea din încastrare.
Conform ipotezei a III-a: PaPaMMMtiechivi
6142,3324
1 22
2
22
,
calculând: ,mm75,205.2132
60
32
3
33
d
Wz
se obţine: N.2,17605006142,3
15075,20521,
max
capa
z
echiviP
W
M
Fig. 8.26 b
Conform ipotezei a V-a: ;612,34
175,03275,0
2
2222
,PaPaMMM
tiechivi
N.27,1761500612,3
15075,20521,
max
capa
z
echiviP
W
M
Competente
Această unitate de învăţare îşi propune ca obiectiv principal initierea studenţilor în
problematica determinarii si calcularii diverselor structuri cu diferite forme de sectiuni
supuse solicitarilor compuse de tip σ-σ, τ-τ sau σ-τ.
La sfârşitul acestei unităţi de învăţare studenţii vor fi capabili să:
rezolve tipurile de probleme specifice solicitarilor compuse σ-σ, τ-τ sau σ-τ;
proiecteze structuri de diferite forme care pot prelua diversele solicitari c ompuse.
Durata medie de parcurgere a unităţii de învăţare este de 8 ore.
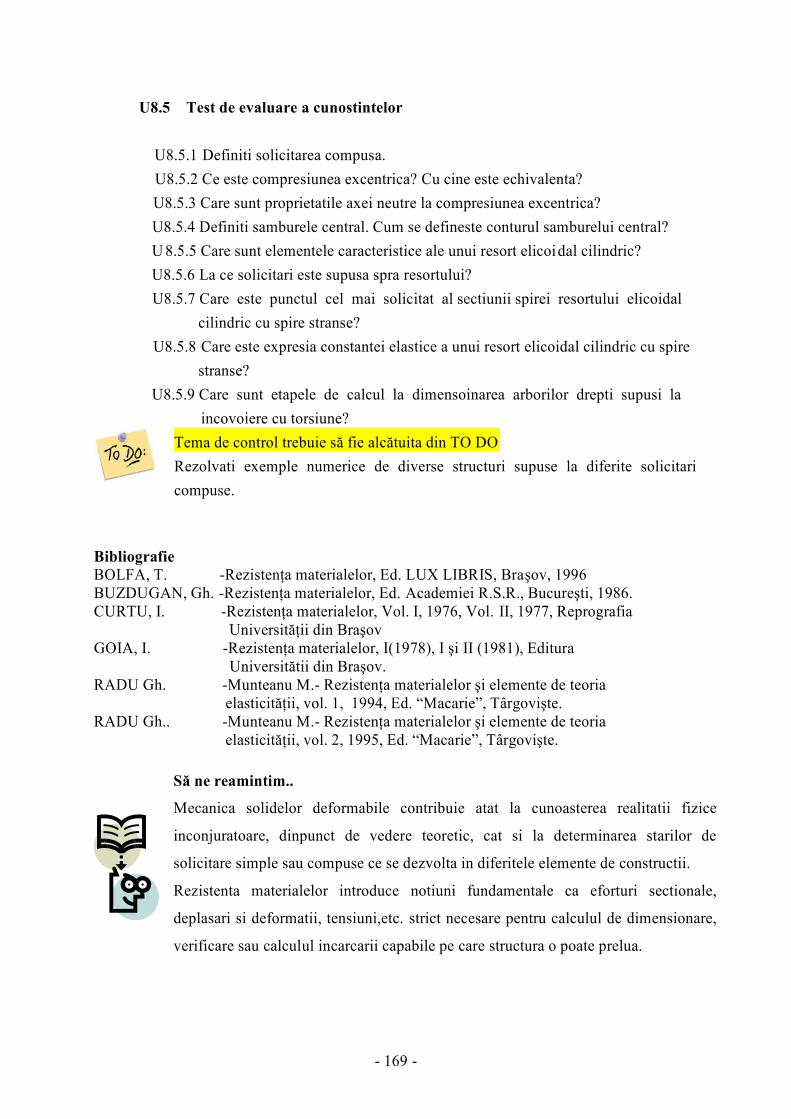
- 169 -
U8.5 Test de evaluare a cunostintelor
U8.5.1 Definiti solicitarea compusa.
U8.5.2 Ce este compresiunea excentrica? Cu cine este echivalenta?
U8.5.3 Care sunt proprietatile axei neutre la compresiunea excentrica?
U8.5.4 Definiti samburele central. Cum se defineste conturul samburelui central?
U 8.5.5 Care sunt elementele caracteristice ale unui resort elicoidal cilindric?
U8.5.6 La ce solicitari este supusa spra resortului?
U8.5.7 Care este punctul cel mai solicitat al sectiunii spirei resortului elicoidal
cilindric cu spire stranse?
U8.5.8 Care este expresia constantei elastice a unui resort elicoidal cilindric cu spire
stranse?
U8.5.9 Care sunt etapele de calcul la dimensoinarea arborilor drepti supusi la
incovoiere cu torsiune?
Tema de control trebuie să fie alcătuita din TO DO
Rezolvati exemple numerice de diverse structuri supuse la diferite solicitari
compuse.
Bibliografie
BOLFA, T. -Rezistenţa materialelor, Ed. LUX LIBRIS, Braşov, 1996
BUZDUGAN, Gh. -Rezistenţa materialelor, Ed. Academiei R.S.R., Bucureşti, 1986.
CURTU, I. -Rezistenţa materialelor, Vol. I, 1976, Vol. II, 1977, Reprografia
Universităţii din Braşov
GOIA, I. -Rezistenţa materialelor, I(1978), I şi II (1981), Editura
Universitătii din Braşov.
RADU Gh. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 1, 1994, Ed. “Macarie”, Târgovişte.
RADU Gh.. -Munteanu M.- Rezistenţa materialelor şi elemente de teoria
elasticităţii, vol. 2, 1995, Ed. “Macarie”, Târgovişte.
Să ne reamintim..
Mecanica solidelor deformabile contribuie atat la cunoasterea realitatii fizice
inconjuratoare, dinpunct de vedere teoretic, cat si la determinarea starilor de
solicitare simple sau compuse ce se dezvolta in diferitele elemente de constructii.
Rezistenta materialelor introduce notiuni fundamentale ca eforturi sectionale,
deplasari si deformatii, tensiuni,etc. strict necesare pentru calculul de dimensionare,
verificare sau calculul incarcarii capabile pe care structura o poate prelua.
- 170 -
Rezumat
Calculele de rezistenta a structurilor mecanice sunt bazate pe o serie de cunostinte
privind proprietatile fizico-mecanice ale materialelor, de mecanica teoretica si de
elasticitate.
Elementele de bază ca ecuatiile de echilibru ale sarcinilor date si ale celor din
legaturile structurilor, deformatiile specifice liniare si unghiulare, tensiunile si
eforturile sectionale specifice solicitarilor simple sau compuse sunt prezentate
gradual cu interdependenta acestora.
Pe parcursul lucrarii plecand de la ipotezele simplificatoare, se stabilesc relatii de
calcul care exprima cat mai fidel marimea solicitarilor, gradul de rigiditate si de
stabilitate al organelor de masini si al elementelor de constructii aflate sub actiunea
fortelor.
In rezolvarea problemelor, disciplina Rezistenta materialelor are in vedere doua
criterii fundamentale, respectiv: economia de material,dupa care orice structura
proiectata trebuie realizata cu solutia cea mai economica posibila,in privinta
consumului de material si de manopera; buna functionare,ceea ce se obtine daca
structura proiectata respecta conditiile de rezistenta, rigiditate si stabilitate,
contribuind astfel la asigurarea functionarii ansamblului din care face parte.
Temă de control
Trasarea diagramelor de solicitare pentru niste incarcari propuse pentru bare
drepte, bare curbe si sisteme de bare.
Rezolvarea unor probleme propuse static determinate si static nedeterminate
pentru niste bare solicitate axial cu diverse incarcari.
Rezolvarea unor probleme propuse pentru structuri solicitate la torsiune si
incovoiere.
Rezolvarea unor probleme de solicitari compuse cu aplicabilitate la arborii
drepti si parghile de dispozitive.
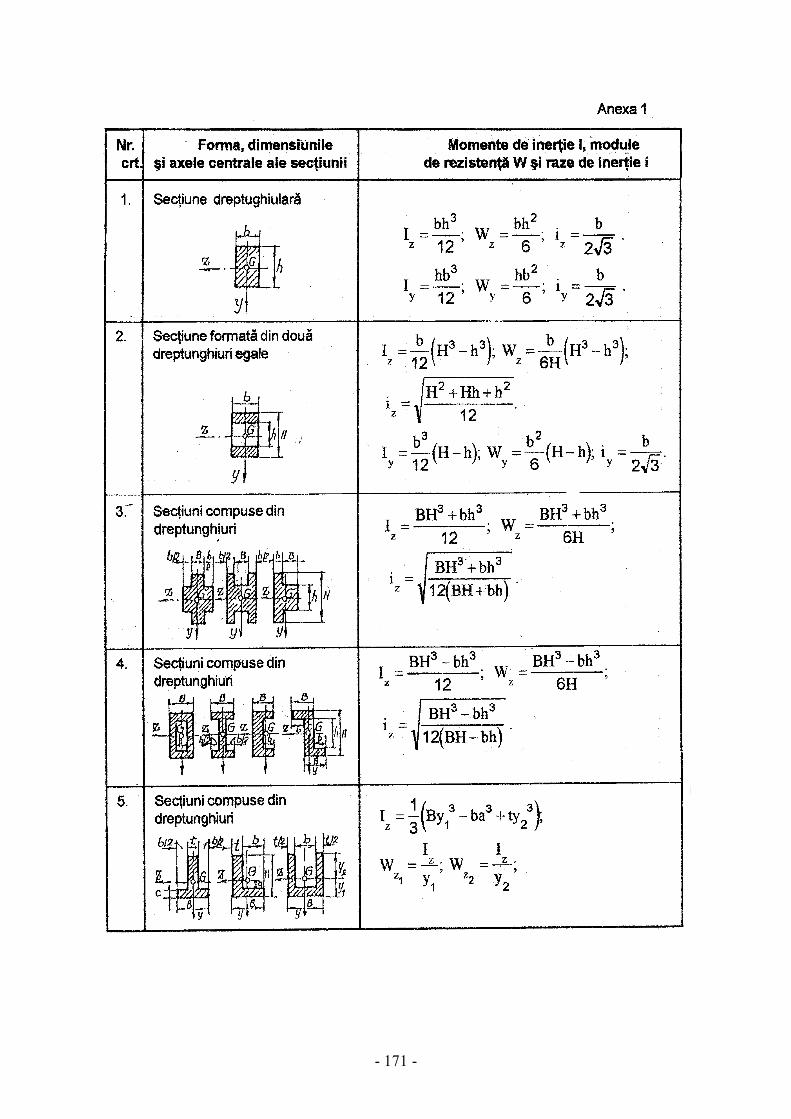
- 171 -
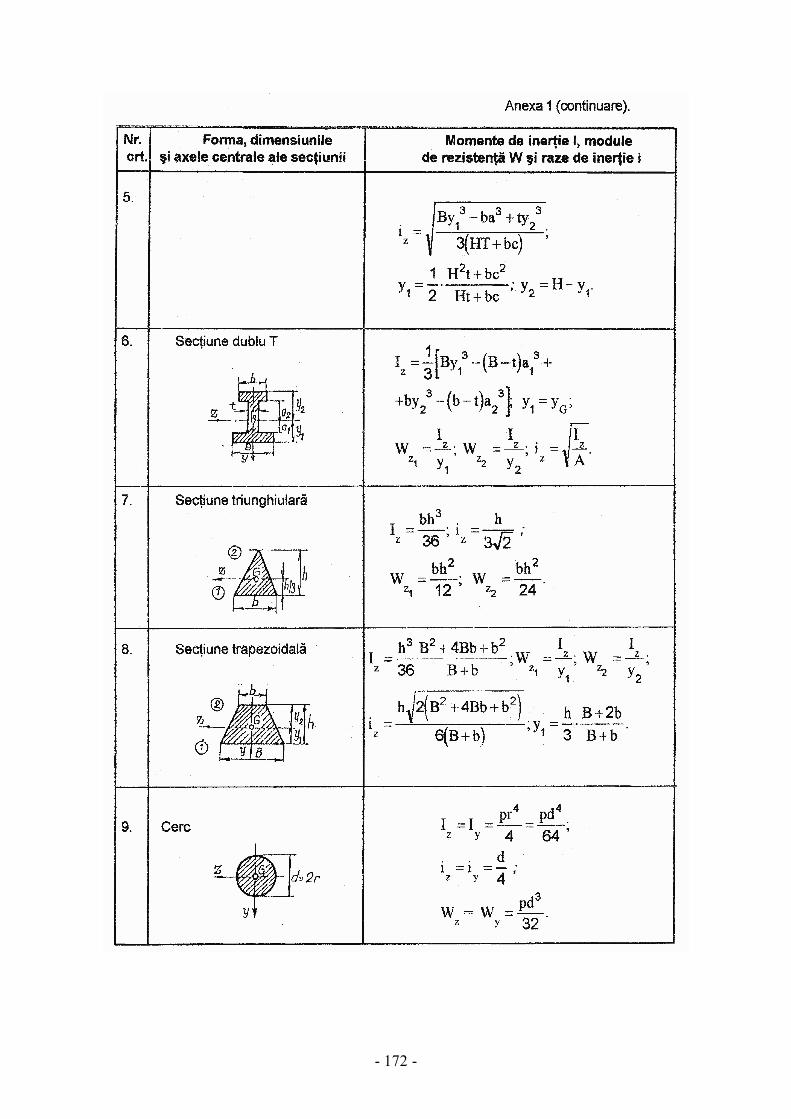
- 172 -
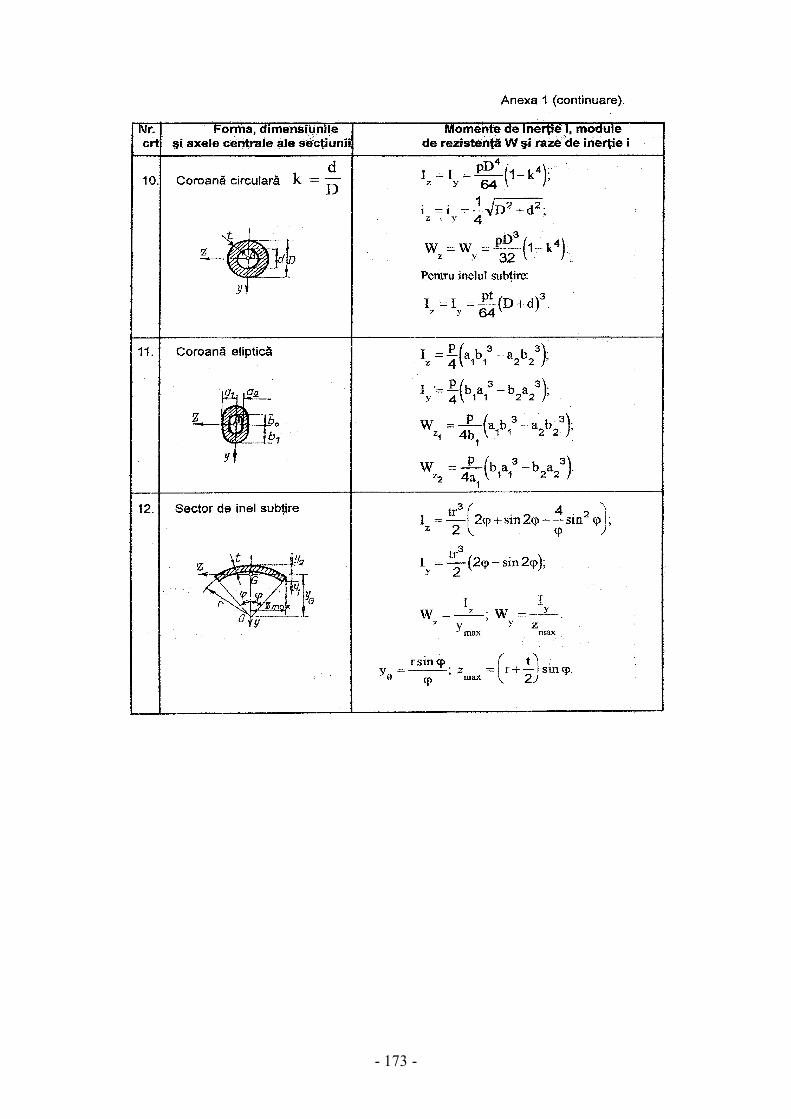
- 173 -
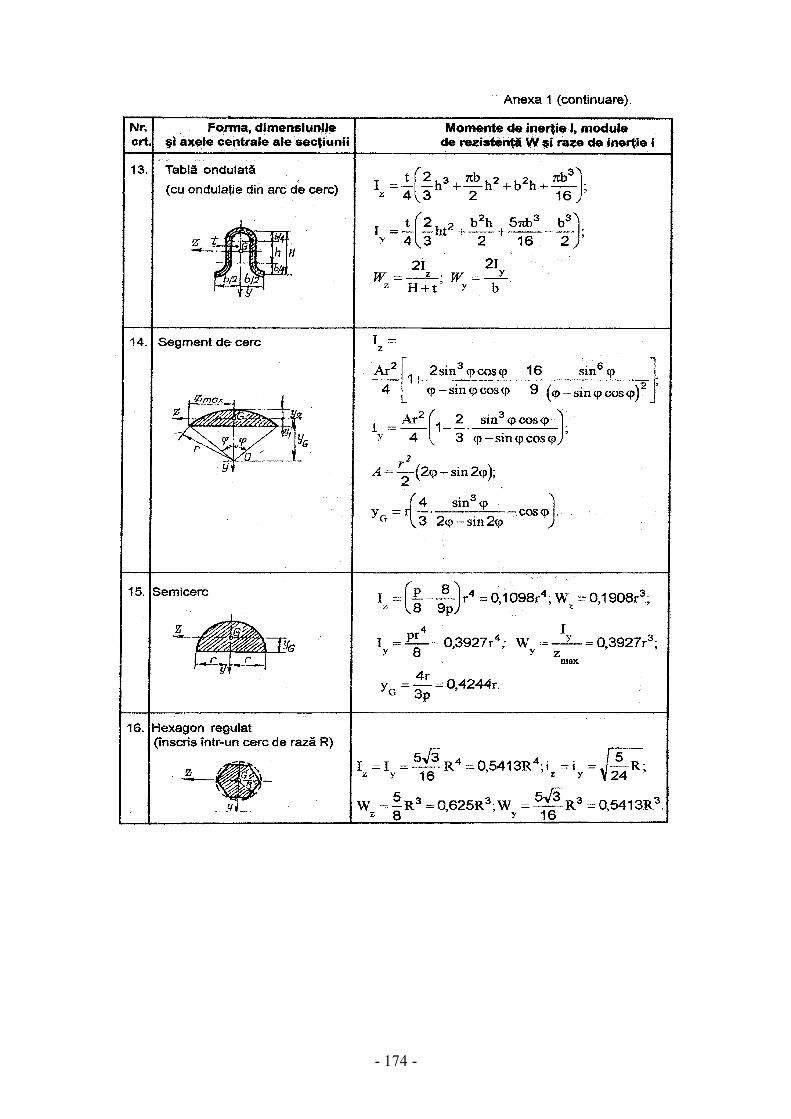
- 174 -
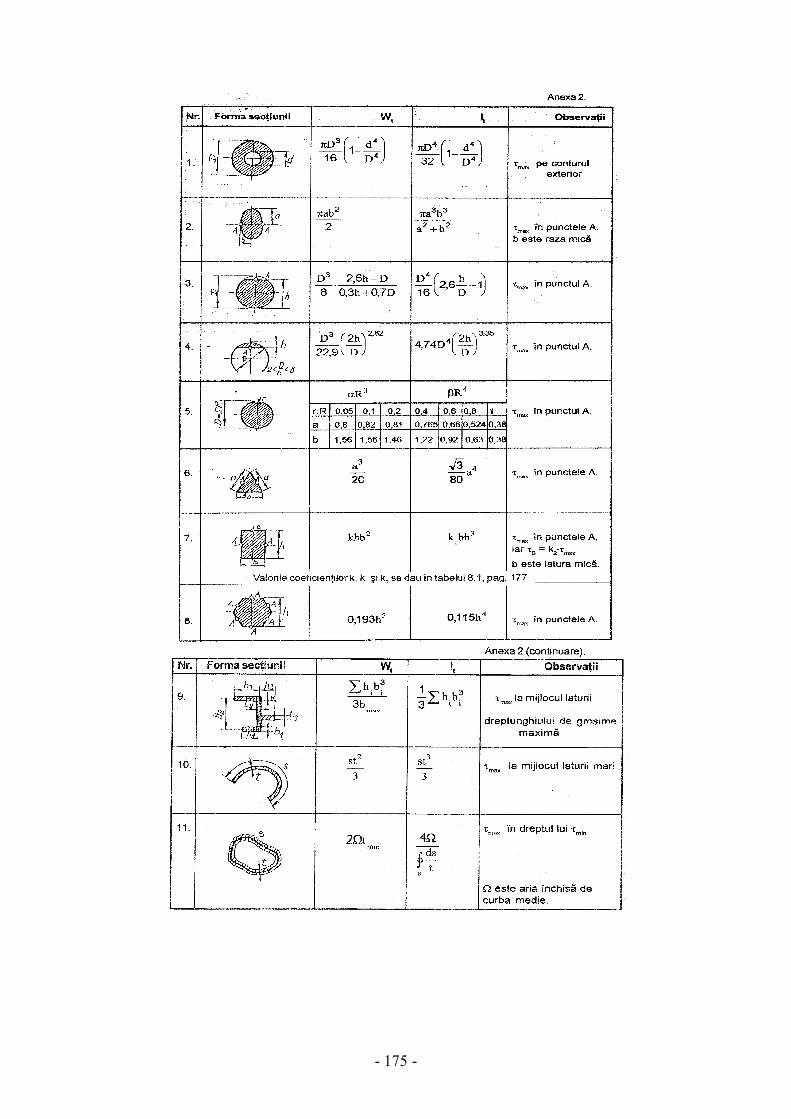
- 175 -
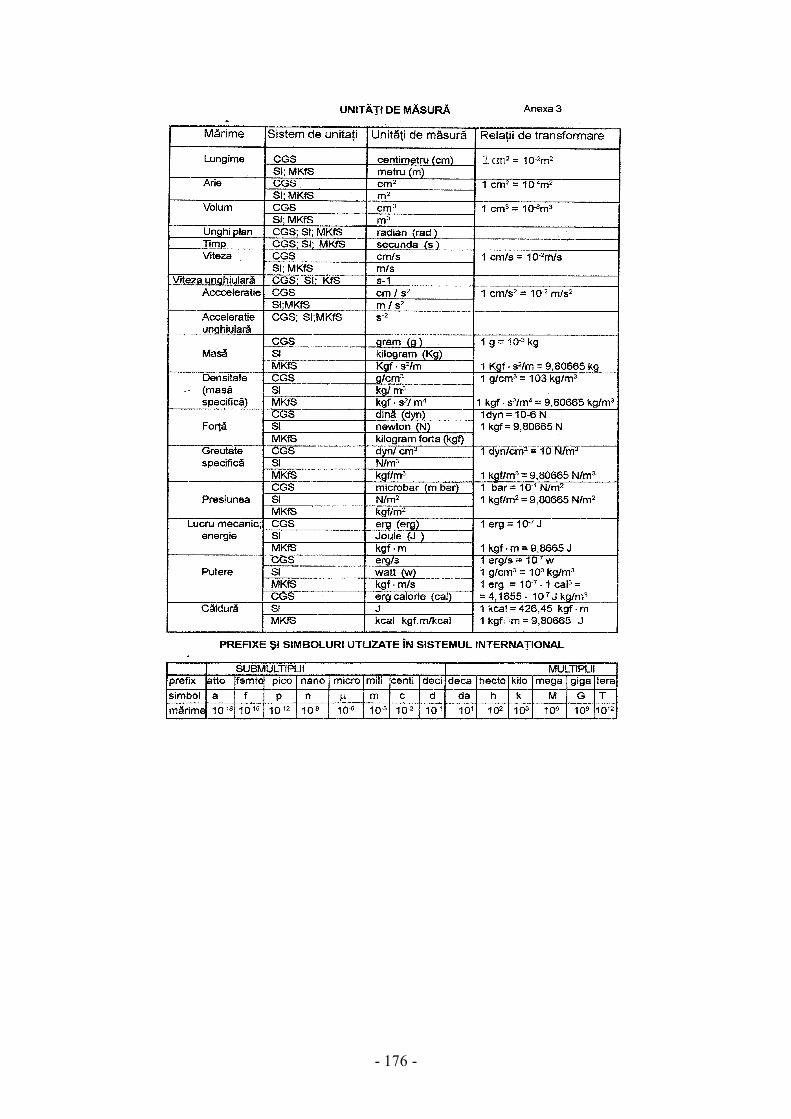
- 176 -
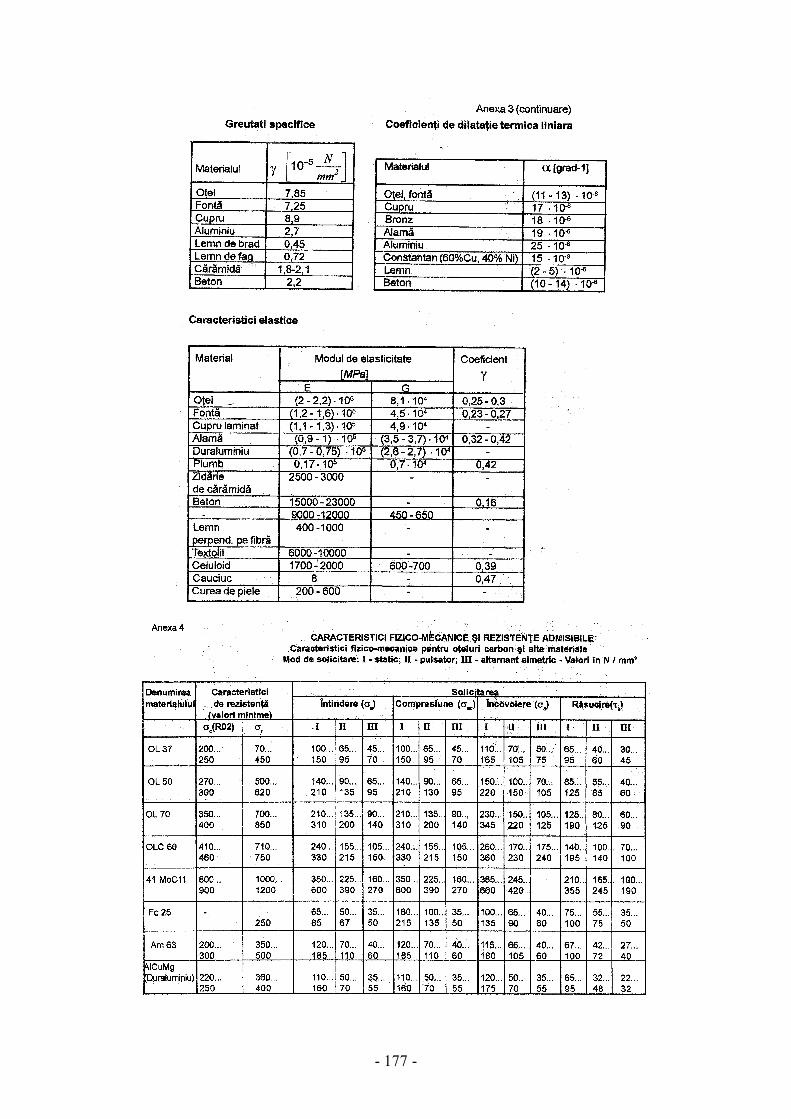
- 177 -
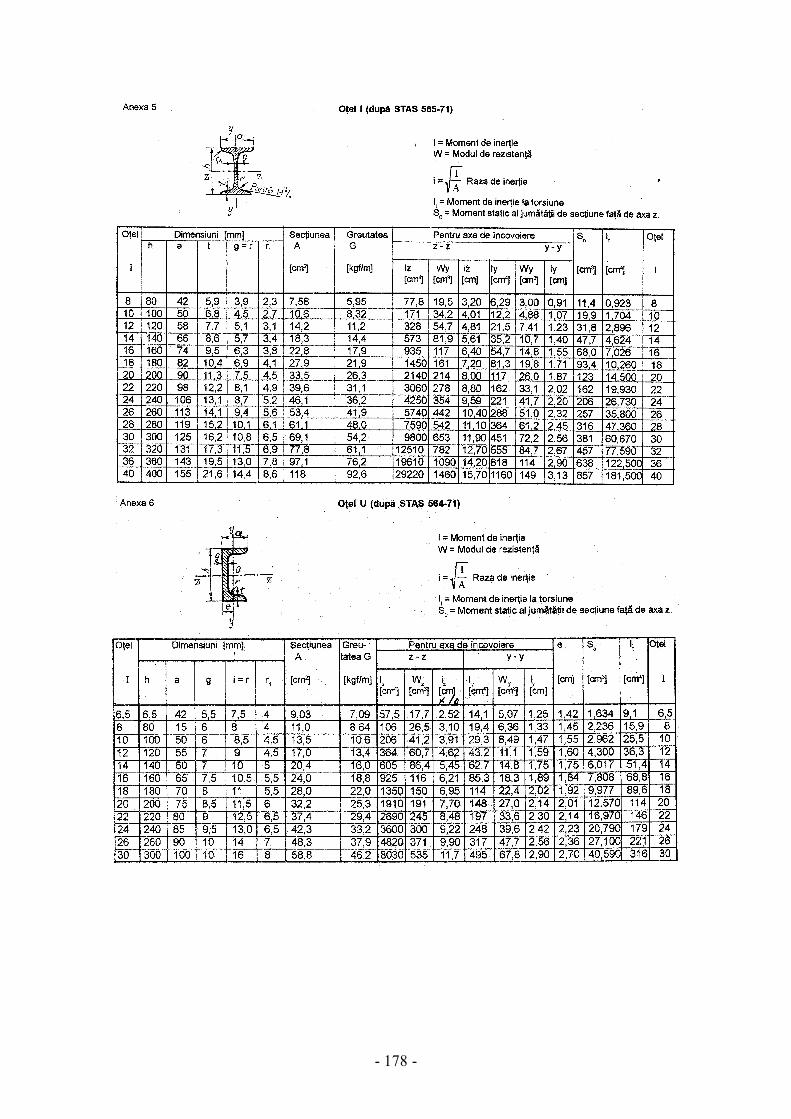
- 178 -
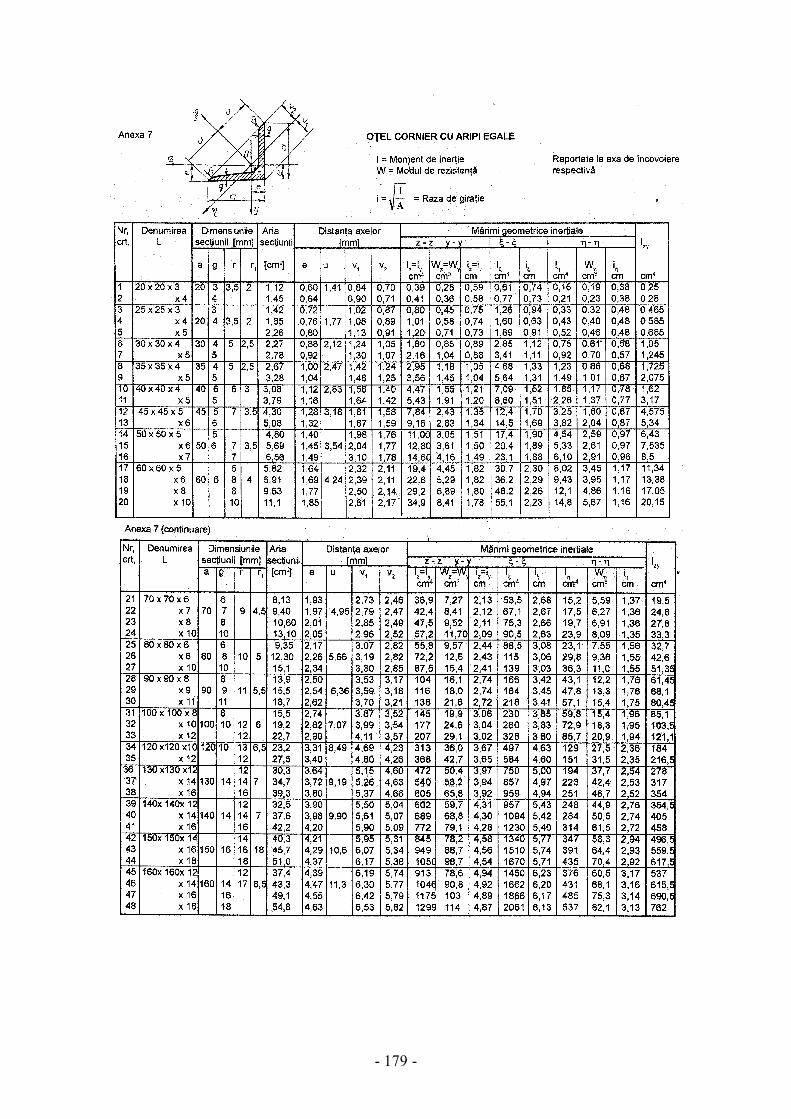
- 179 -
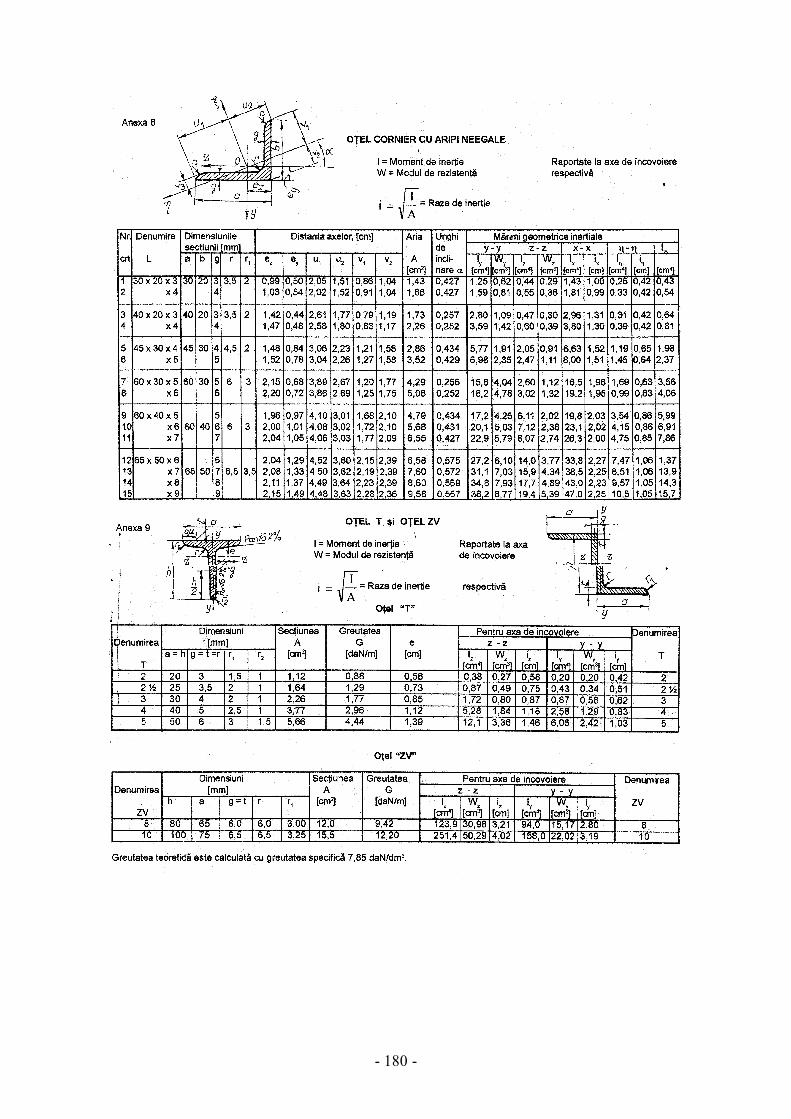
- 180 -