Embed Size (px)
Citation preview

2 1 Risposta nel dominio del tempo
Risposta nel dominio del tempo
1
1 Concetti introduttiviLo studio della risposta nel dominio del tempo viene condotto con lo sco-po di determinare l’andamento nel tempo dell’uscita di un sistema come risposta a un ingresso specifico.
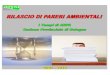
L’analisi viene affrontata eccitando il sistema con segnali di prova stan-dard (FIGURA 1) denominati rispettivamente:
• impulso unitario;
• gradino unitario;
• rampa unitaria;
• parabola unitaria.
Impulsounitario
t
(t)d
Rampaunitaria
t
t
Gradinounitario
u(t)
t
Parabolaunitaria
t
t2/2
FIGURA 1 Segnali di prova.
Si impiegano come strumenti matematici per lo studio della risposta nel dominio del tempo:
• equazioni differenziali;
• trasformate funzionali.
2 Trasformate funzionaliL’impiego delle equazioni differenziali come metodo di calcolo nello stu-dio dei sistemi si presenta alquanto complicato poiché richiede una cono-scenza non certo superficiale di argomenti di matematica piuttosto com-plessi.
Chi non possiede gli strumenti matematici adatti per lo studio di queste equazioni può aggirare l’ostacolo utilizzando le trasformate funzionali,

33 Trasformata di Laplace
strumenti matematici che consentono di ricondurre la soluzione di equa-zioni differenziali a quella di equazioni algebriche.
Per inquadrare l’argomento si consideri lo schema riprodotto in FIGURA 2.
FIGURA 2 Modi d’impiego delle trasformate funzionali.
Il metodo consente di risolvere un problema oggetto di difficile soluzione risolvendo al suo posto un problema immagine di più facile soluzione rica-vato per trasformazione diretta.
Dalla soluzione del problema immagine, definita soluzione immagine, si ricava per trasformazione inversa la soluzione oggetto.
Il punto di partenza è in questo caso un’equazione differenziale che, per trasformazione diretta, diventa un’equazione algebrica.
Dalla soluzione dell’equazione algebrica si passa, per trasformazione in-versa, alla soluzione dell’equazione differenziale.
Esistono diverse tipologie di trasformate; quella che viene di seguito trattata è la trasformata di Laplace.
3 Trasformata di LaplaceLa trasformata di Laplace stabilisce una corrispondenza biunivoca tra una funzione oggetto f (t) definita nel dominio del tempo e una funzione
immagine F(s) definita nel dominio della variabile complessa s.
Per indicare in modo sintetico l’operazione di trasformata si usa l’espres-sione seguente:
F(s) 5 L [ f (t)]
Dopo aver effettuato i calcoli, essendo il dominio s un dominio astratto, per poter ottenere dall’indagine risultati effettivamente valutabili si deve passa-re nuovamente nel dominio del tempo.
Il passaggio inverso, dalla funzione immagine alla funzione oggetto, si realizza utilizzando l’operazione di antitrasformata; per indicarla in modo sintetico si usa l’espressione seguente:
f (t) 5 L–1 [F(s)]
problemaoggetto
problemaimmagine
soluzioneimmagine
soluzioneoggetto
trasformazionediretta
trasformazioneinversa
equazionedifferenziale
equazionealgebrica
soluzioneequazionealgebrica
soluzioneequazionedifferenziale

4 1 Risposta nel dominio del tempo
Il procedimento viene sintetizzato in FIGURA 3.
FIGURA 3 Modalità d’impiego della trasformata di Laplace.
I calcoli che vengono effettuati facendo uso della trasformata di Laplace sono relativamente semplici in quanto, per effettuare le trasformazioni, non si usa direttamente la definizione di trasformata (argomento puramente matematico) ma si ricorre all’impiego di tabelle che riportano i casi di più comune impiego pratico.
4 Principali proprietà e applicazioniSi evidenziano in particolare due proprietà il cui utilizzo è ricorrente nello studio di sistemi elettrici e non elettrici.
Risultano i seguenti enunciati relativi alle trasformate del prodotto di una costante per una funzione e di una somma di funzioni.
La trasformata del prodotto di una costante per una funzione si ottiene moltiplicando la costante per la trasformata della funzione:
L[k · f (t)] 5 k · F(s)
La trasformata di una somma di funzioni è uguale alla somma delle tra-sformate delle singole funzioni:
L[ f1(t) + f
2(t)] 5 F
1(s) + F
2(s)
4.1 Applicazioni alle reti elettricheSi indichino con V(s) e I(s) tensioni e correnti espresse nel dominio s.
Estendendo la legge di Ohm valida per i resistori a condensatori e in-duttori si ottengono le relazioni che legano tensioni e correnti sostituendo al coefficiente di proporzionalità R le corrispondenti espressioni sL per le bobine e 1/sC per i condensatori.
f(t)equazione
differenziale
F(s)equazionealgebrica
F(s)soluzioneequazionealgebrica
f(t)soluzioneequazione
differenziale
L–1L
trasformazionediretta
trasformazioneinversa
dominio t dominio s dominio s dominio t

54 Principali proprietà e applicazioni
Risultano di conseguenza le seguenti relazioni:
V(s) 5 R I(s) (resistore)
(condensatore)
V(s) 5 sL I(s) (induttore)
Si richiede di rappresentare nel dominio s le equazioni relative alle maglie d’in-gresso e d’uscita del circuito riportato in FIGURA 5.
FIGURA 5 Schema elettrico del circuito.
SoluzioneAdottando le normali ipotesi semplificative tipiche dei circuiti con operazionali risulta
per la maglia d’ingresso e
Vi(s) 5 –R · I (s)
per la maglia d’uscita.
ESE
MP
IO 2
R
Vi(s) V
u(s)
–
+
I(s)
I(s)
1/sC
Vi (s )51
sC⋅ l (s )
V(s)51
sC · I(s)
Si richiede di rappresentare nel dominio s la legge di Ohm generalizzata relati-va al circuito RLC serie riportato in FIGURA 4.
SoluzioneSi indichi con V (s) il generico segnale di tensione applicato al circuito e con I (s) la corrente in esso circolante.La legge di Ohm generalizzata applicata al circuito risulta la seguente:
V (s) 5 VR(s) + V
L(s) + V
C (s) 5 R � I (s) + sL � I (s) + I (s)/sC
FIGURA 4 Applicazione della trasformata al circuito RLC serie.
ESE
MP
IO 1
V(s)
I(s)
R
sL
1/sC
+V
R(s)
VL(s)
VC(s)

6 1 Risposta nel dominio del tempo
4.2 Applicazioni a sistemi non elettriciSi estende ora la trattazione svolta per i componenti dei sistemi elettrici ai componenti dei sistemi meccanici, idraulici e termici.
Sistemi meccanici
Per lo smorzatore (equivalente a un resistore) risulta la relazione
F(s) 5 b · v(s)
essendo v la velocità, F la forza e b il coefficiente di attrito viscoso.Per la molla (equivalente a un condensatore) risulta la relazione
essendo K la costante della molla.Sempre per la molla risulta vera anche la più utilizzata relazione
essendo x la variazione di lunghezza della molla.Per la massa (equivalente a un induttore) risulta la relazione
F(s) 5 M · s · v(s)
essendo M la massa del corpo in movimento.
Sistemi idraulici
Per la condotta (equivalente a un resistore) risulta la relazione
p(s) 5 RL · Q(s)
essendo Q la portata volumetrica, p la pressione, RL la resistenza idraulica.
Per il serbatoio (equivalente a un condensatore) risulta la relazione
Q(s) 5 CL · s · p(s)
essendo CL la capacità idraulica del serbatoio.
Per la condotta (equivalente a un induttore) risulta la relazione
p(s) 5 IL · s · Q(s)
essendo IL l’inerzia idraulica della condotta.
Sistemi termici
Per lo scambiatore di calore (equivalente a un resistore) risulta la relazione
u(s) 5 RT · Q(s)
essendo Q il flusso termico, u la temperatura, RT la resistenza termica.
Per la massa (equivalente a un condensatore) risulta la relazione
Q(s) 5 CT · s · u(s)
essendo CT la capacità termica della massa.
v(s)51
K⋅ s ⋅F(s)
F(s)5K ⋅v(s)
s5K ⋅x(s)

75 Impiego delle tabelle
5 Impiego delle tabelleVengono proposte nella TABELLA 1 le trasformate di uso più frequente.
f (t ) F (s ) f (t ) F (s )
d(t ), impulso unitario 11
b − a (e−at−e
−bt)
1
(s + a ) (s + b )
u (t ), gradino unitario 1/s1
ab 1 +
b
a − b e−at−
a
a − b e−bt( ) 1
s (s + a ) (s + b )
t, rampa unitaria 1/s21
a − b (ae
−at−be
−bt)
s
(s + a ) (s + b )
t 2/2, parabola unitaria 1/s3 t senvt2vt
(s2 + v2 )2
e at1
(s − a ) t cosvts
2−v
2
(s2+v
2)2
senvtv
s2 + v
2 e –at senvtv
(s +a )2+v
2
cosvts
s2 + v
2 e –at cosvts +a
(s +a )2+v
2
te – at
1
(s + a )2
vn
1− j2
eÐjv
nt
senvnt 1− j
2 v2
n
s2
+2jvns +v
2
n
1
a (1− e
−at
)1
s (s + a ) 2 a2+b
2e
ctcos(dt + arctan b/a )
(a + jb )
s + (c + jd )+
(a − jb )
s + (c − jd )
TABELLA 1 Trasformate d’impiego più comune.
Si richiede di ricavare la trasformata di un segnale che presenta le seguenti caratteristiche:
• passa per l’origine degli assi;• al tempo t 5 2 s assume il valore 4.
SoluzioneIl segnale ha le caratteristiche di una rampa evidentemente non unitaria; la sua equazione assume la seguente espressione:
f (t ) 5 2t
Utilizzando la trasformata della rampa si ottiene:
ESE
MP
IO 3
F (s ) 5 2
s2
Si richiede di ricavare la trasformata di un segnale che presenta le seguenti caratteristiche:
• nell’origine assume il valore 2;• al tempo t 5 2 s assume il valore 6.
SoluzioneDal punto di vista matematico il segnale viene rappresentato da una retta che non passa per l’origine degli assi; la sua equazione assume la seguente espressione:
f (t ) 5 2 + 2t
Il segnale è in effetti la somma tra un gradino e una rampa entrambi non uni-tari; si ottiene quindi:
F (s ) 5 2
s+
2
s2
ESE
MP
IO 4

8 1 Risposta nel dominio del tempo
Si richiede di ricavare la trasformata di un segnale che presenta le seguenti caratteristiche:
• è sinusoidale con pulsazione 10 rad/s;• ha valore massimo 2 e valore minimo 0.
SoluzioneDal punto di vista matematico il segnale viene rappresentato da una sinusoide traslata di 1 verso l’alto.Il segnale è dunque la somma tra un gradino unitario e una sinusoide; la sua equazione assume la seguente espressione:
f (t ) 5 1 + sen10tSi ottiene pertanto:
ESE
MP
IO 5
F (s ) 5 1s
+ 10
s2 + 100
Si richiede di ricavare l’antitrasformata di un segnale che, nel dominio s, assu-me la seguente espressione:
SoluzioneL’espressione risulta dalla somma di due termini.Al primo termine corrisponde un segnale a gradino unitario; al secondo ter-mine corrisponde un esponenziale con coefficiente a negativo (quindi decre-scente).Nel suo complesso l’andamento nel tempo della funzione è quello di un espo-nenziale decrescente che, essendo traslato di 1 verso l’alto (in quanto som-mato al gradino unitario), presenta le seguenti caratteristiche:
• vale 2 al tempo t 5 0;• vale 1 a transitorio esaurito.
Dal punto di vista matematico la forma d’onda viene rappresentata dall’e-spressione:
f (t ) 5 1 + e–5t
ESE
MP
IO 6
F (s ) 5 1s
+ 1
s + 5
Si richiede di ricavare la trasformata di un segnale il cui andamento nel tempo viene riprodotto in FIGURA 6.
FIGURA 6 Andamento nel tempo del segnale.
SoluzioneDalla tabella delle funzioni notevoli si ricava che:
Moltiplicando e dividendo per 10 si ottiene quindi:
ESE
MP
IO 7
1 – e–10t
t
1
L [f (t )]5L 1
a(1−e
−at)⎡
⎣⎢⎤⎦⎥5
1
s (s +a )
F (s )510 L 1
10(1−e
−10t)⎡
⎣⎢⎤⎦⎥5
10
s (s +10)

95 Impiego delle tabelle
Si richiede di ricavare l’antitrasformata di un segnale che, nel dominio s, assu-me la seguente espressione:
SoluzioneL’espressione risulta dalla somma di due termini.Al primo termine corrisponde un segnale a gradino di ampiezza 2; al secon-do termine corrisponde una cosinusoide di valore massimo 2 e pulsazione 10 rad/s.Nel suo complesso l’andamento nel tempo della funzione è quello di una cosi-nusoide di ampiezza 2 con valore massimo 4 e valore minimo 0.Dal punto di vista matematico la forma d’onda viene rappresentata dall’e-spressione:
f (t ) 5 2 + 2 cos10t
ESE
MP
IO 8
F (s ) 5 2s
+ 2s
s2 + 100
Si richiede di ricavare la trasformata di un segnale il cui andamento nel tempo viene riprodotto in FIGURA 7.
FIGURA 7 Andamento nel tempo del segnale.
SoluzioneDalla tabella delle funzioni notevoli si ricava che:
Si ottiene quindi:
ESE
MP
IO 9
e–8t sen6t
t
L [f (t )]5L e−at
senvt⎡⎣ ⎤⎦5v
(s +a )2+v
2
F (s )56
(s +8)2+36
56
s2+16s +64+36
56
s2+16s +100
Si richiede di ricavare l’antitrasformata della seguente funzione:
SoluzioneSi risolve il polinomio di secondo grado che si trova al denominatore; le solu-zioni sono reali e distinte e valgono rispettivamente –2 e –3; si utilizza per-tanto l’antitrasformata:
Sostituendo a 5 2 e b 5 3 si ottiene la seguente funzione in s
e la conseguente funzione in t :
f (t )51
a −b (ae −at
−be −bt)53e −3t
−2e −2t
ESE
MP
IO 1
0
F (s )5s
s2+5s +6
F (s )5s
(s +a )(s +b )
F (s )5s
(s +2)(s +3)

10 1 Risposta nel dominio del tempo
6 Scomposizione in fratti sempliciLe funzioni che si presentano nei casi che sono oggetto di studio sono fun-
zioni razionali fratte (funzioni esprimibili come rapporto tra due polinomi di cui quello al numeratore ha un grado non superiore a quello del deno-minatore).
Il metodo della scomposizione in fratti semplici si utilizza per antitrasfor-mare una funzione razionale fratta quando sulle tabelle non è presente la funzione richiesta.
Si richiede di ricavare l’antitrasformata della seguente funzione:
SoluzioneSi risolve il polinomio di secondo grado che si trova al denominatore; le solu-zioni, reali e coincidenti, valgono –3; si può infatti riconoscere nell’espressione al denominatore il quadrato di un binomio; si utilizza pertanto l’antitrasfor-mata:
Sostituendo a 5 3 si ottiene la funzione in s
e la conseguente funzione in t :
f (t ) 5 te –at 5 te –2t
Moltiplicando infine per il fattore 10 si ottiene l’espressione cercata:
f (t ) 5 10te –2t
ESE
MP
IO 1
1
F (s )510
s2+18s +9
F (s )51
(s +a )2
F (s )51
(s +3)2
Si richiede di ricavare l’antitrasformata della seguente funzione la cui f.d.t. as-sume la seguente espressione:
SoluzioneDal confronto con l’espressione
si deduce immediatamente il valore della pulsazione naturale che è di 3 rad/s.Per il coefficiente di smorzamento risulta
2jvn 5 3
e di conseguenza:
Affinché le due espressioni siano effettivamente confrontabili si deve far as-sumere alla funzione la forma seguente:
Utilizzando la tabella delle trasformate si ottiene:
ESE
MP
IO 1
2
F (s )518
s2+3s +9
F (s )5vn
2
s2+2jvns +vn
2
j 53
2vn
53
2⋅350,5
F (s )52⋅9
s2+3s +9
f (t )52⋅vn
1−j 2 e −jvnt
senvnt 1−j 256,9 e −1,5t
sen2,6t

116 Scomposizione in fratti semplici
Il metodo, che prevede l’utilizzo del principio di identità dei polinomi, con-siste nello scomporre una funzione complessa in una somma di funzioni più semplici (tante quante sono le soluzioni del polinomio al denominatore tenendo anche conto della loro molteplicità) le cui trasformate si trovano nelle tabelle.
Per spiegare il metodo si procede con alcuni esempi tipici distinguendo i casi in cui il polinomio al denominatore ha soluzioni:
• semplici;
• multiple;
• complesse coniugate.
a scuola di lavoro Si richiede di individuare l’andamento nel tempo della funzio-ne che ha come trasformata:
L’antitrasformata di questa funzione si può ricavare anche utilizzando diretta-mente le tabelle a disposizione; scopo dell’esempio è dimostrare che la scom-posizione in fratti semplici porta al medesimo risultato.
SoluzioneData la presenza di due soluzioni distinte si deve scomporre la funzione in due frazioni; si ottiene:
Si procede determinando i coefficienti A e B.Con semplici passaggi risulta:
Eguagliando i termini dello stesso ordine che si trovano al numeratore delle due frazioni si ottiene il sistema:
Risolvendo si ottiene infine A 5 2,5 e B 5 –2,5.Sostituendo si ha:
Dalle tabelle, essendo
si ottiene l’espressione cercata:
f (t ) 5 2,5 (e–t 5 e–2t )
È la stessa espressione che si otterrebbe utilizzando direttamente le ta-belle.
ESE
MP
IO 1
3
F (s )510
(s +1)(s +2)
F (s )510
(s +1)(s +2)5
A
(s +1)+
B
(s +2)
F (s )510
(s +1)(s +2)5
(A+B )s + (2A+2B )
(s +1)(s +2)
A+B 50
2A+2B 50
⎧⎨⎩
F (s )5A
(s +1)+
B
(s +2)5
2,5
(s +1)−
2,5
(s +2)
L−1 1
s +a
⎛⎝
⎞⎠5e
−at

ESE
MP
IO 5
12 1 Risposta nel dominio del tempo
a scuola di lavoro Si richiede di individuare l’andamento nel tempo di una funzio-ne che ha come trasformata:
L’antitrasformata di questa funzione non si può ricavare utilizzando diretta-mente le tabelle a disposizione; pertanto bisogna utilizzare il metodo della scomposizione in fratti semplici.
SoluzioneData la presenza di una soluzione semplice e di una con molteplicità due si deve scomporre la funzione in tre frazioni; si ottiene:
Si procede determinando i coefficienti A, B e C.Con semplici passaggi risulta:
Eguagliando i termini dello stesso ordine che si trovano al numeratore delle due frazioni si ottiene il sistema:
Risolvendo si ottiene infine A 5 5, B 5 –5 e C 5 –4.Sostituendo si ha:
Dalle tabelle, essendo
sostituendo si ottiene l’espressione cercata:
f (t ) 5 5 + 5e –t – 4te –t 5 5e –t – 4te –t
ESE
MP
IO 1
4
F (s )5s +5
s (s +1)2
F (s )5s +5
s (s +1)2
5A
s+
B
(s +1)+
C
(s +1)2
F (s )5s +5
s (s +1)2
5(A+B )s
2+ (2A+B +C )s + A
s (s +1)2
A+B 50
2A+B +C 51
A 55
⎧
⎨⎪
⎩⎪
F (s )5A
s+
B
(s +1)+
C
(s +1)2
55
s−
5
(s +1)−
4
(s +1)2
L −1 1
s
⎛⎝⎞⎠51 (t )
L −1 1
s +a
⎛⎝
⎞⎠5e
−t
L −1 1
(s +a )2
⎛⎝⎜
⎞⎠⎟
5te−kt
Si richiede di individuare l’andamento nel tempo di una funzione che ha come trasformata:
L’antitrasformata di questa funzione non si può ricavare utilizzando diretta-mente le tabelle a disposizione; pertanto bisogna utilizzare il metodo della scomposizione in fratti semplici.
SoluzioneRaccogliendo s al denominatore si ottiene:
ESE
MP
IO 1
5
F (s )510
s3+ s
2+5s
F (s )510
s (s2+ s +5)

136 Scomposizione in fratti semplici
Risolvendo l’equazione di secondo grado al denominatore si ottengono due soluzioni complesse coniugate (–1 ± j 2); si ha quindi:
Si procede determinando i coefficienti A, B e C.Con semplici passaggi risulta:
Eguagliando i termini dello stesso ordine che si trovano al numeratore delle due frazioni si ottiene il sistema:
Risolvendo si ha infine A 5 2, B 5 –1 e C 5 –1.Sostituendo risulta:
Dalle tabelle, essendo:
sostituendo si ottiene l’espressione cercata:
f (t ) 5 2 – 2e –t cos2t
F (s )5As+
Bs +1+ j2
+C
s +1− j2
10
s (s2+ s +5)
5
(A+B +C ) s2+ (A+B +C +2Bj −2Cj ) s +5A
s (s2+ s +5)
A+B +C 50
A+B +C +2Bj −2Cj 50
5A 510
⎧
⎨⎪
⎩⎪
F (s )5As+
Bs +1+ j2
+C
s +1− j25
2
s− 1
s +1+ j2+
1
s +1− j2⎛⎝⎜
⎞⎠⎟
L −1 1
s
⎛⎝⎞⎠51 (t )
L −1 1
s +1− j 2+
1
s +1+ j 2⎛⎝⎜
⎞⎠⎟
52e−t
cos2t
Si richiede di antitrasformare la seguente funzione:
SoluzioneSi risolve il polinomio di secondo grado che si trova al denominatore; le solu-zioni sono reali e distinte e valgono rispettivamente –2 e –3; si utilizza per-tanto l’antitrasformata:
Sostituendo a 5 2 e b 5 3 si ottiene la seguente funzione in s
e la conseguente funzione in t
Moltiplicando infine per il fattore 10 si ottiene l’espressione cercata:
f (t ) 5 10 (e –2t – e –3t )
ESE
MP
IO 1
6
F (s )510
s2+5s +6
F (s )51
(s +a )(s +b )
F (s )51
(s +2)(s +3)
f (t )51
b −a (e −at
−e −bt)5e −2t
−e −3t

14 1 Risposta nel dominio del tempo
7 Funzione di trasferimentoLa f.d.t. di un sistema, intesa come rapporto tra uscita Y(s) e ingresso U(s), viene di seguito rappresentata con funzioni razionali fratte, ovvero da rap-porti tra due polinomi che si trovano rispettivamente al numeratore e al denominatore della f.d.t. stessa.
Le radici del polinomio al numeratore vengono denominate zeri, quelle del polinomio al denominatore poli.
Le radici dei polinomi possono essere:
• reali (in particolare anche nulle);
• complesse coniugate (hanno la medesima parte reale e parte immagina-ria di segno opposto);
• semplici o multiple.
Zeri e poli vengono rappresentati sul piano complesso (FIGURA 8) utilizzan-do rispettivamente dei cerchi e delle crocette.
FIGURA 8 Posizione di zeri e poli sul piano complesso.
Di interesse pratico sono i casi in cui nella f.d.t. sono presenti poli nulli (si usa anche il termine equivalente poli nell’origine) siano essi semplici o multipli.
Legata alla presenza di poli nulli è la seguente classificazione dei sistemi in:
• sistemi di tipo 0 se non sono presenti poli nulli;
• sistemi di tipo 1 se è presente un polo nullo;
• sistemi di tipo 2 se sono presenti due poli nulli.
Ponendo s 5 0 in una f.d.t. priva di poli nulli si ottiene un valore costante denominato costante di guadagno.
La costante di guadagno viene valutata anche in presenza di poli nulli assu-mendo significati diversi e precisamente:
• costante di posizione se non sono presenti poli nulli;
• costante di velocità se è presente un polo nullo;
• costante di accelerazione se sono presenti due poli nulli.
Quando sono presenti poli nulli la costante di guadagno si calcola facendo riferimento alla f.d.t. priva dei poli nulli.
Re
lm

ESE
MP
IO 5
157 Funzione di trasferimento
Si richiede di individuare la f.d.t. di un circuito RLC serie riportato in FIGURA 10 assumendo per ipotesi:
• come ingresso X (s ) la tensione imposta dal generatore;• come uscita Y (s ) la tensione prelevata ai capi del resistore (caso a), del con-
densatore (caso b) e dell’induttore (caso c).
Si considerino nulle tensioni e correnti nel momento in cui il sistema viene sollecitato.
SoluzionePer la corrente risulta:
Si richiede di individuare la f.d.t. del circuito RC serie riportato in FIGURA 9 as-sumendo per ipotesi:
• come ingresso X (s ) la tensione imposta dal generatore;• come uscita Y (s ) la tensione prelevata ai capi del condensatore (caso a) e
del resistore (caso b).
Si consideri nulla la tensione ai capi del condensatore nel momento in cui il sistema viene sollecitato (condizioni iniziali nulle).
FIGURA 9 Circuito RC con grandezze espresse nel dominio s.
SoluzionePer la corrente si ha:
• caso a
La tensione ai capi del condensatore vale:
Y (s ) 5 I (s )/sC
Sostituendo l’espressione della corrente e con opportuni passaggi si ottiene quanto richiesto:
La f.d.t. è caratterizzata dalla presenza di un polo reale semplice di valore ne-gativo.
• caso b
Se la tensione venisse prelevata ai capi del resistore si otterrebbe:
La f.d.t. è caratterizzata dalla presenza di un polo reale semplice di valore ne-gativo e di uno zero nell’origine.
ESE
MP
IO 1
7
X(s)
R
+
Y(s)1/sC
I(s)
l (s )5X (s )
R +1
sC
G (s )5Y (s )
X (s )5
1
1+ sRC
G (s )5Y (s )
X (s )5
sRC
1+ sRC
ESE
MP
IO 1
8
l (s )5X (s )
R +1
sC+ sL

ESE
MP
IO 5
16 1 Risposta nel dominio del tempo
FIGURA 10 Circuito RLC con grandezze espresse nel dominio s.
• caso a
La tensione ai capi del resistore vale:
X (s ) 5 R · I (s )
Sostituendo l’espressione della corrente e con opportuni passaggi si ottiene quanto richiesto:
La f.d.t. è caratterizzata dalla presenza di due poli (la cui natura è legata ai valori di resistenza, capacità e induttanza dei tre componenti) e di uno zero nell’origine.
• caso b
Se la tensione viene prelevata ai capi del condensatore si ottiene:
In questo caso la f.d.t. è caratterizzata dalla sola presenza dei due poli.
• caso c
Se la tensione viene prelevata ai capi dell’induttore si ottiene:
La f.d.t. è caratterizzata, oltre che dalla presenza dei soliti due poli, anche da quella di uno zero nell’origine con molteplicità due.
Si richiede di individuare le f.d.t. di un sistema elettrico costituito dal circuito RL serie riportato in FIGURA 11 assumendo:
• come ingresso V (s ) la tensione imposta dal generatore e come uscita la tensione prelevata ai capi dell’induttore V
L(s ) (caso a);
• come ingresso V (s ) la tensione imposta dal generatore e come uscita la tensione prelevata ai capi del resistore V
R (s ) (caso b).
FIGURA 11 Circuito RL.
X(s)
R
+
Y(s)
1/sC
sL
I(s)
G (s )5Y (s )
X (s )5
sRC
1+ sRC + s2LC
G (s )5Y (s )
X (s )5
1
1+ sRC + s2LC
G (s )5Y (s )
X (s )5
(sL )2
1+ sRC + s2LC
ESE
MP
IO 1
9
V(s)
I(s)sL
R
+
VR(s)
VL(s)

178 Forme fattorizzate della f.d.t.
SoluzionePer la corrente si ha:
• caso a
La tensione ai capi della bobina vale:
VL(s ) 5 s · L · I (s )
Sostituendo l’espressione della corrente e con opportuni passaggi si ottiene quanto richiesto:
La f.d.t. è caratterizzata dalla presenza di un polo a parte reale negativa e di uno zero nell’origine.
• caso b
Se la tensione viene prelevata ai capi della resistenza si ottiene:
La f.d.t. è caratterizzata dalla presenza di un solo polo a parte reale negativa.
8 Forme fattorizzate della f.d.t.La f.d.t. può essere espressa tramite due forme fattorizzate con lo scopo di mettere in evidenza rispettivamente zeri e poli o costanti di tempo e co-stante di guadagno.
La prima forma fattorizzata consente di rendere direttamente ricono-scibili i valori degli zeri e dei poli.
l (s )5V (s )
R + sL
VL (s )
V (s )5
sL
R + sL
VR (s )
V (s )5
R
R + sL
Si richiede di individuare la f.d.t. del sistema elettrico costituito dal circuito ri-portato in FIGURA 12 assumendo come uscita e come ingresso quelli eviden-ziati nella figura stessa.
FIGURA 12 Schema elettrico del circuito.
SoluzioneAdottando le normali ipotesi semplificative tipiche dei circuiti con operazionali risulta
per la maglia d’uscita eV
i (s ) 5 R · I (s )
per la maglia d’ingresso.La f.d.t. del sistema assume pertanto la seguente espressione:
ESE
MP
IO 2
0
Vi(s) V
u(s)
I(s)
R
I(s)
1/sC
–
+
Vu (s )5−1
sC l (s )
G (s )5Vu (s )
Vi (s )52
1
sCl (s )
R ⋅I (s )5
1
sC
R5
1
sRC

ESE
MP
IO 5
18 1 Risposta nel dominio del tempo
La sua espressione generale in forma semplificata è la seguente:
Con m viene indicato il numero degli zeri, con n il numero dei poli, k è una costante di proporzionalità.
Per semplicità di trattazione non si evidenzia esplicitamente l’eventuale presenza di zeri e poli nulli o complessi coniugati; non si tiene conto nep-pure della possibile molteplicità di zeri e poli.
La seconda forma fattorizzata consente di rendere direttamente rico-noscibili i valori delle costanti di tempo corrispondenti a zeri e poli e della costante di guadagno.
La sua espressione generale in forma semplificata è la seguente:
Con il simbolo tz viene rappresentata la costante di tempo corrispondente
a uno zero, con il simbolo tp la costante di tempo corrispondente a un polo,
G0 è il guadagno statico.Poiché zeri e poli sono il reciproco cambiato di segno di una costante di
tempo, sostituendo le relazioni
si ottiene l’espressione equivalente
che esplicita zeri, poli e costante di guadagno.Il coefficiente k, presente nella prima forma, rappresenta un semplice
fattore moltiplicativo; ponendo s 5 0 e moltiplicando per k si ottiene la costante di guadagno G
0 che compare nella seconda forma.
Risulta di conseguenza la seguente relazione:
Si richiede di rappresentare le due forme fattorizzate corrispondenti a una f.d.t. che ha:
• una costante di guadagno pari a 2;• uno zero reale (z1 5 –1);• due poli reali semplici (p1 5 –2 e p2 5 –5).
SoluzioneLa prima forma fattorizzata, sostituendo i valori di poli e zeri, assume la se-guente espressione:
G(s)5k ⋅(s − z1)(s − z2 ) ........ (s − zm )(s − p1)(s − p2 ) ........ (s − pn )
G(s)5G0 ⋅
(1+ st z1)(1+ st z2 ) ........ (1+ st zm )
(1+ st p1)(1+ st p2 ) ........ (1+ st pn )
z5−1
t z
p5−1
t p
G(s)=G0 ⋅
1−sz1
⎛⎝
⎞⎠ 1−
sz2
⎛⎝
⎞⎠ ........ 1−
szm
⎛⎝
⎞⎠
1−sp1
⎛⎝⎜
⎞⎠⎟1−
sp2
⎛⎝⎜
⎞⎠⎟
........ 1− spn
⎛⎝⎜
⎞⎠⎟
G0 = k ⋅(−z1)(−z2 ) ........ (−zm )(−p1)(−p2 ) ........ (−pn )
ESE
MP
IO 2
1
G (s )5k (s +1)
(s +2)(s +5)

198 Forme fattorizzate della f.d.t.
Ponendo s 5 0 si ottiene:
G0 5 k/10
Per ottenere come costante di guadagno 2 si deve imporre k 5 20; risulta quindi:
Per rappresentare la seconda forma fattorizzata si devono calcolare le costanti di tempo corrispondenti a poli e zeri che valgono rispettivamente:
• 1 s (corrispondente allo zero);• 0,5 s (corrispondente al primo polo);• 0,2 s (corrispondente al secondo polo).
Sostituendo anche il valore della costante di guadagno risulta in conclusione la seguente espressione:
Per esplicitare zeri, poli e costante di guadagno bisogna far assumere alla f.d.t. la forma:
G (s )520(s +1)
(s +2)(s +5)
G (s )52(1+ s )
(1+ s ⋅0,5)(1+ s ⋅0,2)
G (s )52(1− s )
1+s
2( ) 1+s
5( )
Per il sistema avente f.d.t.
si richiede di individuare:
• tipo di sistema;• tipo di forma fattorizzata;• costante di guadagno, zeri e poli.
SoluzioneNon essendo presenti poli nulli il sistema viene definito di tipo 0; essendo esplicitati poli e zeri, la forma fattorizzata che esprime la f.d.t. è la prima.Ponendo s 5 0 si ottiene la costante di guadagno (guadagno di posizione) che vale 1.Non ci sono zeri; i poli sono due e valgono rispettivamente –1 e –2.
ESE
MP
IO 2
2
G (s )52
(s +1)(s +2)
Per il sistema avente f.d.t.
si richiede di individuare:
• tipo di sistema;• tipo di forma fattorizzata;• costante di guadagno, zeri e poli.
SoluzioneEssendo presente un polo nullo il sistema viene definito di tipo 1.Poiché vengono esplicitate le costanti di tempo la forma fattorizzata che esprime la f.d.t. è la seconda.La costante di guadagno (guadagno di velocità) vale 300.Non si evidenzia la presenza di zeri.I poli sono tre di cui uno nullo.Gli altri due poli sono reali e distinti; poiché le costanti di tempo valgono 50 s e 2 s, i poli valgono rispettivamente 0,02 e 0,5.
ESE
MP
IO 2
3
G (s )5300
s (1+ s ⋅50) (1+ s ⋅2)

20 1 Risposta nel dominio del tempo
9 Risposta di un sistema alle sollecitazioni
Nota la f.d.t. di un sistema G(s) e la trasformata del segnale d’ingresso X(s), si può ricavare la trasformata del segnale d’uscita Y(s) e di conseguenza il suo andamento nel tempo; risulta infatti:
Particolarmente importanti sono le seguenti tipologie di risposta:
• risposta al gradino unitario;
• risposta all’impulso unitario.
9.1 Risposta al gradino unitarioPer la risposta al gradino unitario si ha:
Si richiede di individuare tipo di sistema, tipo di forma fattorizzata, costante di guadagno, zeri e poli per il sistema che ha la f.d.t. seguente:
SoluzioneNon essendo presenti poli nulli il sistema può essere definito di tipo 0.Essendo esplicitati poli e zeri la forma fattorizzata che esprime la f.d.t. è la prima.Ponendo s 5 0 si ottiene la costante di guadagno (guadagno di posizione):
Risultano infine presenti:
• uno zero che vale –0,1;• due poli reali e distinti che valgono rispettivamente –1 e –0,05.
ESE
MP
IO 2
4
G (s )5(s +0,1)
(s +1) (s +0,05)
G0 50,1
1⋅0,0552
Si richiede di individuare tipo di sistema, tipo di forma fattorizzata, costante di guadagno, zeri e poli per il sistema che ha la f.d.t. seguente:
SoluzioneNon essendo presenti poli nulli il sistema può essere definito di tipo 0.Essendo esplicitate le costanti di tempo la forma fattorizzata che esprime la f.d.t. è la seconda.La funzione evidenzia direttamente il guadagno statico che vale 10.Poiché le costanti di tempo valgono 0,01 s e 0,1 s, i due poli reali e distinti assumono rispettivamente i valori –10 e –100.
ESE
MP
IO 2
5
G (s )510
(1+ s ⋅0,01) (1+ s ⋅0,1)
Y(s)5G(s)X(s)
Y(s)5G(s)⋅X(s)
y(t)5L −1 G(s)⋅X(s)[ ]
y(t)5L
−1 G(s)⋅X(s)[ ]5L
−1 G(s)⋅
1
s⎡⎣⎢
⎤⎦⎥

219 Risposta di un sistema alle sollecitazioni
9.2 Risposta all’impulso unitarioPer la risposta all’impulso unitario si ha:
y(t) 5 L–1[G(s) · X(s)] 5 L–1[G(s) · 1] 5 L–1[G(s)]
Consegue che la risposta, in questo caso, coincide proprio con la f.d.t. del sistema.
Si consideri un circuito RCL serie con l’uscita prelevata dal resistore (FIGURA 13).Per i componenti si hanno i valori R 5 10 V, C 5 1 mF ed L 5 0,1 H.Si richiede di individuare l’andamento nel tempo del segnale d’uscita in rispo-sta al gradino unitario (in questo caso un gradino di tensione di ampiezza 1 V).
SoluzioneLa f.d.t. del sistema assume la forma seguente:
FIGURA 13 Circuito RLC rappresentato nel dominio s.
Essendo Y (s ) 5 VR (s ) e X (s ) 5 E, la tensione ai capi del resistore vale pertanto:
Semplificando l’espressione si ottiene:
Dividendo numeratore e denominatore per 0,0001 si ottiene:
Essendo il discriminante negativo si hanno due poli complessi coniugati; la funzione corrispondente della tabella di trasformate è pertanto la seguente:
Per confronto tra le due espressioni si ricavano la pulsazione naturale (100 rad/s) e il coefficiente di smorzamento (0,5).Sostituendo tali valori nella funzione antitrasformata risulta infine:
ESE
MP
IO 2
6
G (s )5Y (s )
X (s )5
sRC
1+ sRC + s2LC
X(s)
R
1/sC
sL
I(s)Y(s)
E
VR (s )5sRC
s2LC + sRC +1
⋅E 5s
0,0001s2+0,01s +1
⋅
1
s
VR (s )51
0,0001s2+0,01s +1
VR (s )510 000
s2+100s +10 000
F (s )5vn
2
s2+2jvns +vn
2
vR (t )5vn
1−j 2
e−jvnt
sen vnt 1−j 25115,5e
− 50tsen 86,6t

22 1 Risposta nel dominio del tempo
10 Teoremi del valore iniziale e del valore finale
I teoremi del valore iniziale e del valore finale vengono utilizzati per analiz-zare il comportamento di un generico segnale d’uscita di un sistema in due momenti particolari:
• nel momento in cui esso viene sollecitato (istante iniziale 0+);
• a regime (t ➝ + ), quando gli effetti della sollecitazione si sono esauriti.
10.1 Teorema del valore inizialeSia y (t) il generico segnale d’uscita del sistema.
Il teorema del valore iniziale si esprime attraverso la relazione seguente:
Il vantaggio derivante dall’impiego di questo teorema si ha quando si vuole conoscere il solo comportamento di un segnale d’uscita nell’istante in cui viene applicata la sollecitazione senza antitrasformare la funzione.
Si consideri un sistema la cui f.d.t. ha la seguente espressione:
Si richiede di individuare l’andamento nel tempo del segnale d’uscita in rispo-sta all’impulso unitario.
SoluzioneLa f.d.t. si può porre nella seguente forma:
In risposta al segnale impulsivo si ha:
Essendo il discriminante negativo si hanno due poli complessi coniugati; la funzione corrispondente della tabella di trasformate è pertanto la seguente:
Per confronto tra le due espressioni si ricavano la pulsazione naturale (8 rad/s) e il coefficiente di smorzamento (0,5).Sostituendo tali valori nella funzione antitrasformata risulta infine:
ESE
MP
IO 2
7
G (s )5160
s2+8s +64
G (s )564 ⋅2,5
s2+8s +64
y (t )52,5⋅L −1 [G (s )]52,5⋅L −1 64
s 2+8s +64
⎡⎣⎢
⎤⎦⎥
F (s )5vn
2
s2+2jvns +vn
2
y (t )52,5 vn
1−j 2
e−jvnt
sen vnt 1−j 2523e
− 4tsen 6,9t
y(0+)5 lim
s➝∞ sY(s)

2310 Teoremi del valore iniziale e del valore finale
10.2 Teorema del valore finaleSia y (t) il generico segnale d’uscita del sistema.
Il teorema del valore finale si esprime attraverso la relazione seguente:
Il vantaggio derivante dall’impiego di questo teorema si ha quando si vuole conoscere il solo comportamento del sistema a regime senza antitrasfor-mare la funzione.
Si consideri un sistema la cui f.d.t. viene rappresentata dalla seguente espres-sione:
Si richiede di individuare il valore che il segnale d’uscita del sistema assume nell’istante in cui il sistema stesso viene sollecitato in risposta a un segnale d’ingresso costituito da un gradino unitario.
SoluzionePer l’uscita risulta:
Per il teorema del valore iniziale si ha:
Il risultato al quale si perviene è evidente in quanto il grado del denominatore è maggiore di quello del numeratore.
ESE
MP
IO 2
8
G (s )520 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)
Y (s )5G (s ) ⋅X (s )520 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)⋅
1
s
y (0+
)5 lims➝∞
sY (s )5 lims➝∞
s 20 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)⋅
1
s50
limt➝+∞
y(t)= lims➝0
sY(s)
Si consideri un sistema la cui f.d.t. viene rappresentata dalla seguente espres-sione:
Si richiede di individuare il valore che il segnale d’uscita del sistema assume in condizioni di regime in risposta a una sollecitazione d’ingresso costituita da un gradino unitario.
SoluzionePer l’uscita risulta:
Per il teorema del valore finale si ha:
Il risultato al quale si perviene era atteso in quanto, visto che la f.d.t. è espres-sa nella forma fattorizzata che evidenzia la costante di guadagno, il valore della risposta a regime doveva coincidere con la costante di guadagno.
ESE
MP
IO 2
9
G (s )520 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)
Y (s )5G (s ) ⋅X (s )520 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)⋅
1
s
limt➝+∞
y (t )5 lims➝0
sY (s )5 lims➝0
s 20 (1+ s ⋅0,1)
(1+ s ) (1+ s ⋅0,05)⋅
1
s520

24 1 Risposta nel dominio del tempo
11 Considerazioni sulla stabilitàLa stabilità di un sistema lineare tempo invariante a costanti concentrate dipende dalla posizione dei poli della f.d.t. nel piano complesso.
Per la coincidenza della f.d.t. con l’uscita del sistema è evidente come dalla risposta all’impulso si possano ottenere informazioni sulla stabilità del si-stema stesso.
Si consideri in proposito la FIGURA 14 nella quale vengono rappresentate le principali tipologie di risposta di un sistema al segnale impulsivo.
FIGURA 14 Tipologie di risposta allÕimpulso.
Il sistema viene definito:
• asintoticamente stabile (se l’uscita converge al valore iniziale supposto nullo);
• semplicemente stabile (se l’uscita tende a un valore finito diverso dal valore iniziale);
• instabile (se l’uscita diverge ossia tende a infinito).
È evidente che:
• la condizione asintoticamente stabile è più restrittiva della condizione semplicemente stabile;
• un sistema asintoticamente stabile è anche semplicemente stabile.
Tra posizione dei poli del sistema sul piano complesso e stabilità sussistono le seguenti importanti relazioni:
• affinché un sistema risulti semplicemente stabile è necessario e sufficien-te che la f.d.t. non presenti alcun polo a parte reale positiva e che gli eventuali poli a parte reale nulla siano semplici;
• affinché un sistema risulti asintoticamente stabile è necessario e suffi-ciente che tutti i poli abbiano parte reale negativa.
y
t
instabile
semplicementestabile
asintoticamentestabile

2511 Considerazioni sulla stabilità
11.1 Modi di rispostaStrettamente correlate alle considerazioni relative alla posizione dei poli sul piano complesso sono le diverse tipologie di risposta che derivano dall’ap-plicazione di un segnale impulsivo ovvero i modi di risposta.
Si distinguono i seguenti casi:
• poli semplici di molteplicità uno;
• poli semplici di molteplicità due;
• poli complessi coniugati di molteplicità uno;
• poli complessi coniugati di molteplicità due.
In FIGURA 15 vengono riportati alcuni esempi significativi di disposizione di poli sul piano complesso.
FIGURA 15 Stabilità di un sistema in relazione alla posizione dei poli sul piano complesso.
Analizzando la figura si traggono le seguenti conclusioni:
• sistema 1_è asintoticamente stabile perché tutti i suoi poli hanno parte reale negativa;• sistema 2_ è semplicemente stabile perché, oltre al polo con parte reale negativa, è presente un polo
nell’origine;• sistema 3_è instabile per la presenza di due poli nulli coincidenti;• sistema 4_è instabile per la presenza di un polo con parte reale positiva;• sistema 5_è asintoticamente stabile perché tutti i poli hanno parte reale negativa;• sistema 6_ è semplicemente stabile perché, oltre al polo con parte reale negativa, è presente una coppia di
poli complessi coniugati a parte reale nulla;• sistema 7_ è instabile per la presenza di una coppia di poli complessi coniugati a parte reale nulla con
molteplicità due;• sistema 8_ è instabile per la presenza di una coppia di poli complessi coniugati con parte reale positiva.
ESE
MP
IO 3
0
Re
lm
Re
lm
Re
lm
Re
lm
asintoticamentestabile
semplicementestabile
instabile instabile
Re
lm
Re
lm
ReRe
lm lm
asintoticamentestabile
semplicementestabile
instabile instabile
(2)
(2)
1 2 3 4
5 6 7 8

26 1 Risposta nel dominio del tempo
Poli semplici di molteplicità uno
Come evidenziato in FIGURA 16, si verifica che la risposta:
• tende a zero se il polo è reale negativo (a);
• rimane limitata se il polo è nell’origine (b);
• diverge se il polo è reale positivo (c).
FIGURA 16 Modi di risposta in caso di poli semplici di molteplicità uno.
Poli semplici di molteplicità due
Come evidenziato in FIGURA 17, si verifica che la risposta:
• tende a zero se i poli sono reali negativi (a);
• diverge se i poli sono nell’origine (b);
• diverge se i poli sono reali positivi (c).
FIGURA 17 Modi di risposta in caso di poli semplici di molteplicità due.
Poli complessi coniugati di molteplicità uno
Come evidenziato in FIGURA 18, si verifica che la risposta:
• tende a zero se i poli sono a parte reale negativa (a);
• rimane limitata se i poli sono a parte reale nulla (b);
• diverge se i poli sono a parte reale positiva (c).
Re
lm
t
y
t
y
t
y
(a)
(b)(c)
(a) (b) (c)
Re
lm
t
y
t
y
t
y
(a)(b)
(c)
(a) (b) (c)

2711 Considerazioni sulla stabilità
FIGURA 18 Modi di risposta in caso di poli complessi coniugati di molteplicità uno.
Poli complessi coniugati di molteplicità due
Come evidenziato in FIGURA 19, si verifica che la risposta:
• tende a zero se i poli sono a parte reale negativa (a);
• diverge se i poli sono a parte reale nulla (b);
• diverge se i poli sono a parte reale positiva (c).
FIGURA 19 Modi di risposta in caso di poli complessi coniugati di molteplicità due.
Re
lm
t
y
t
y
t
y
(a)
(a)
(b)
(c)
(c)
(c)
(a)
(b)(b)
Re
lm
t
y
t
y
t
y
(b)
(b)
(c)
(c) (c)
(a)
(a)
(a)
(b)

28 1 Risposta nel dominio del tempo
11.2 Poli complessi coniugatiLe funzioni che hanno poli complessi coniugati hanno un andamento di tipo oscillatorio caratterizzato da due parametri fondamentali che sono la pulsazione naturale e il coefficiente di smorzamento.
In FIGURA 20 vengono rappresentati sul piano complesso due poli com-plessi coniugati con parte reale a e parte immaginaria b.
FIGURA 20 Poli complessi coniugati sul piano immaginario.
Pulsazione naturale e coefficiente di smorzamento sono legati alla parte reale e alla parte immaginaria dalle seguenti relazioni:
Risultano utili anche le seguenti relazioni che esplicitano la parte reale e la parte immaginaria dei poli:
Re
Im
p1
p2
n�
�
a
b
vn 5 a2+b
2
j 5cosw 5a
a2+b
2
a5−vnj
b5± vn 1−j 2
Si richiede di analizzare la stabilità del sistema la cui f.d.t. assume l’espressio-ne seguente:
SoluzioneRisolvendo il polinomio che si trova al denominatore si individuano due poli complessi coniugati; essi valgono rispettivamente:
• p1 5 –1 + j;• p2 5 –1– j.
Avendo i due poli parte reale negativa il sistema risulta asintoticamente sta-bile.
ESE
MP
IO 3
1
G (s )510
s2+2s +2

2911 Considerazioni sulla stabilità
Si richiede di analizzare la stabilità del sistema la cui f.d.t. assume l’espressio-ne seguente:
SoluzioneScomponendo il polinomio che si trova al denominatore si ottiene:
Risolvendo l’equazione di secondo grado si individuano quindi:
• due poli reali e distinti che valgono rispettivamente p1 5 –1 e p2 5 –3;• un polo nell’origine.
Avendo i due poli parte reale negativa ed essendo semplice il polo nell’origine il sistema risulta semplicemente stabile.
ESE
MP
IO 3
2
G (s )55
s3+4s
2+3s
G (s )55
s (s2+4s +3)
Si richiede di analizzare la stabilità del sistema la cui f.d.t. assume l’espressio-ne seguente:
SoluzioneRisolvendo il polinomio che si trova al denominatore si individuano:
• un polo a parte reale negativa che vale p1 5 –1;• un polo a parte reale positiva che vale p2 5 +1.
La presenza di un polo a parte reale positiva conferisce instabilità al sistema.
ESE
MP
IO 3
3
G (s )510
s2−1
Si richiede di analizzare la stabilità del sistema la cui f.d.t. assume l’espressio-ne seguente:
SoluzioneScomponendo il polinomio che si trova al denominatore si ottiene:
Risolvendo l’equazione di secondo grado si individuano quindi:
• due poli immaginari coniugati a parte reale negativa che valgono rispettiva-mente p1 5 –1 + j e p2 5 –1 – j ;
• un polo nell’origine con molteplicità due.
Il sistema risulta instabile proprio per la presenza di un polo nell’origine con molteplicità due.
ESE
MP
IO 3
4
G (s )55
s4+2s
3+2s
2
G (s )55
s2(s
2+2s +2)
Si richiede di analizzare la stabilità del sistema la cui f.d.t. assume l’espressio-ne seguente:
SoluzioneRisolvendo il polinomio che si trova al denominatore si individuano due poli reali e distinti che valgono rispettivamente p1 5 –1 e p2 5 –3.Essendo presenti soltanto poli con parte reale negativa il sistema risulta asin-toticamente stabile.
ESE
MP
IO 3
5
G (s )55
s2+4s +3

30 1 Risposta nel dominio del tempo
1 Si richiede di rappresentare nel dominio della variabile s la legge di Ohm generalizzata relativa al circuito riprodotto in FIGURA 21 al quale viene applicato un generico segnale di tensione.
FIGURA 21
2 Si richiede di rappresentare nel dominio della variabile s la legge di Ohm generalizzata relativa al circuito riprodotto in FIGURA 22 al quale viene applicato un generico segnale di tensione.
FIGURA 22
3 Si richiede di rappresentare nel dominio della variabile s la relazione che lega la tensione d’u-scita e la tensione d’ingresso del circuito ripro-dotto in FIGURA 23.
FIGURA 23
4 Si richiede di individuare la trasformata della se-guente funzione:
f (t ) 5 0,2(1 – e – 2t)
Considerando poi la f (t ) come uscita di un siste-ma si calcoli f (o ) utilizzando il teorema del valo-re iniziale.
V(s)
I(s)sL
R
+
VR(s)
VL(s)
V(s)
I(s)
R
+
VR(s)
1/sCV
C(s)
Vi(s) V
u(s)
I(s)
R
I(s)
1/sC
–
+
R
5 Si richiede di individuare la trasformata della se-guente funzione:
f (t ) 5 e –3t – e –t
Considerando poi la f (t ) come uscita di un siste-ma si calcoli f (o ) utilizzando il teorema del valo-re iniziale.
6 Si richiede di individuare la trasformata della se-guente funzione:
f (t ) 5 2 (1 + 2e –3t – 3e –2t )
Considerando poi la f (t ) come uscita di un siste-ma si calcoli f (o ) utilizzando il teorema del valo-re iniziale.
7 La forma d’onda d’uscita di un sistema viene rappresentata dall’espressione:
y (t ) 5 2 (2e –2t – 3e –3t )
Si richiede di utilizzare il teorema del valore ini-ziale per determinare il valore che l’uscita assu-me al tempo t 5 0 e il teorema del valore finale per calcolare il valore di regime.
8 La forma d’onda d’uscita di un sistema viene rappresentata dall’espressione:
y (t ) 5 10 + sen628t
Si richiede di utilizzare il teorema del valore ini-ziale per determinare il valore che l’uscita assu-me a transitorio esaurito e il teorema del valore finale per calcolare il valore di regime.
9 Si richiede di individuare l’antitrasformata della seguente funzione:
10 Si richiede di individuare l’antitrasformata della seguente funzione:
11 Si richiede di individuare l’antitrasformata della seguente funzione:
F (s )55
s (2s +5)
F (s )51
(2s +1)(3s +2)
F (s )51
s2
+ 8s + 8
ESERCIZI

31
12 La forma d’onda d’uscita di un sistema viene rappresentata dall’espressione:
Si richiede di utilizzare il teorema del valore ini-ziale per determinare il valore che l’uscita assu-me al tempo t 5 0.
13 La forma d’onda d’uscita di un sistema viene rappresentata dall’espressione:
Si richiede di utilizzare il teorema del valore fina-le per determinare il valore che l’uscita assume a transitorio esaurito.
14 Si richiede di rappresentare sul piano comples-so poli e zeri relativi a un sistema rappresentato dalla f.d.t. che ha la seguente espressione:
15 Si richiede di rappresentare sul piano comples-so poli e zeri relativi a un sistema rappresentato dalla f.d.t. che ha la seguente espressione:
16 Si richiede di rappresentare sul piano comples-so poli e zeri relativi a un sistema rappresentato dalla f.d.t. che ha la seguente espressione:
17 Si richiede di rappresentare sul piano comples-so poli e zeri relativi a un sistema rappresentato dalla f.d.t. che ha la seguente espressione:
18 Si richiede di rappresentare sul piano comples-so poli e zeri relativi a un sistema rappresentato dalla f.d.t. che ha la seguente espressione:
F (s )55
s+
5
s2
+2s +1
F (s )510
s+
50
s2
+100
F (s )55
s (2s +10)
F (s )5s +1
(2s +4)(3s −6)
F (s )5s +1
s2
+2s +1
F (s )5s +1
s2
+2s
F (s )5s +1
s3
+2s2
+ s
1 Completare lo schema riportato in FIGURA 24 in-serendo in modo opportuno gli elementi man-canti (i nomi dei segnali abbinati ai grafici e i grafici abbinati ai nomi dei segnali).
d(t)
t
Rampaunitaria
Gradinounitario
t2/2
FIGURA 24
2 Completare lo schema riportato in FIGURA 25 in-serendo in modo opportuno all’interno del bloc-co gli elementi mancanti (il tipo di problema e di soluzione corrispondente).
FIGURA 25
3 Completare lo schema riportato in FIGURA 26 in-serendo in modo opportuno all’interno del bloc-co gli elementi mancanti (il tipo di dominio cor-rispondente).
FIGURA 26
QUESITI A RISPOSTA APERTA
trasformazionediretta
trasformazioneinversa
equazionedifferenziale
equazionealgebrica
soluzioneequazionealgebrica
soluzioneequazionedifferenziale
trasformazionediretta
trasformazioneinversa
f(t)equazionedifferenziale
F(s)equazionealgebrica
F(s)soluzioneequazionealgebrica
f(t)soluzioneequazionedifferenziale
LÐ1L
Esercizi

32 1 Risposta nel dominio del tempo
4 Stabilire se l’andamento nel tempo della rispo-sta di un sistema riprodotto in FIGURA 27 è tipico di un sistema semplicemente stabile, asintoti-camente stabile o instabile.
FIGURA 27
5 Stabilire se l’andamento nel tempo della rispo-sta di un sistema riprodotto in FIGURA 28 è tipico di un sistema semplicemente stabile, asintoti-camente stabile o instabile.
FIGURA 28
6 Individuare il componente al quale far corri-spondere la seguente relazione:
7 Individuare il componente al quale far corri-spondere la seguente relazione:
p (s ) 5 IL · s · Q (s )
8 Individuare il componente al quale far corri-spondere la seguente relazione:
Q(s ) 5 CT · s · u (s )
9 Individuare le caratteristiche delle seguenti espressioni:
y
t
y
t
v (s )51
K⋅sF (s )
G (s )5k ⋅(s – z1)(s – z 2 ) ........ (s – z m )
(s – p1)(s – p2 ) ........ (s – pn )
G (s )5G 0 ⋅(1+ st z 1)(1+ st z 2 ) ........ (1+ st zm )
(1+ st p 1)(1+ st p 2 ) ........ (1+ st pn )
10 Spiegare l’utilizzo pratico dei teoremi del valore iniziale e finale.
11 Analizzare la stabilità del sistema i cui poli sono disposti sul piano complesso come nella rappre-sentazione di FIGURA 29.
FIGURA 29
12 Analizzare la stabilità del sistema i cui poli sono disposti sul piano complesso come nella rappre-sentazione di FIGURA 30.
FIGURA 30
13 Analizzare la stabilità del sistema i cui poli sono disposti sul piano complesso come nella rappre-sentazione di FIGURA 31.
FIGURA 31
14 Analizzare la stabilità del sistema i cui poli sono disposti sul piano complesso come nella rappre-sentazione di FIGURA 32.
FIGURA 32
Re
lm
Re
lm
Re
lm
Re
lm
(2)

33 Esercizi
15 Relativamente alla tipologia di risposta all’im-pulso di un sistema correggere gli errori che si riscontrano nella FIGURA 33.
FIGURA 33
16 Completare la tabella riportata in FIGURA 34 in-serendo la trasformata corrispondente alla fun-zione.
f (t ) F (s )
d (t ), impulso unitario
u (t ), gradino unitario
t, rampa unitaria
t2/2, parabola unitaria
FIGURA 34
17 Completare la tabella riportata in FIGURA 35 in-serendo la funzione corrispondente alla trasfor-mata.
f (t ) F (s )
1
(s − a )
v
s2− v
2
s
s2+ v
2
FIGURA 35
18 In relazione ai modi di risposta all’impulso ri-prodotti in FIGURA 36 individuare la posizione dei poli sul piano complesso e la loro molteplicità.
FIGURA 36
y
t
asintoticamente
instabile
semplicementestabile
instabile
t
y
t
y
t
y
1 Il grafico della funzione di prova riprodotto in FIGURA 37 rappresenta:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
FIGURA 37
2 Il grafico della funzione di prova riprodotto in FIGURA 38 rappresenta:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
FIGURA 38
3 Il grafico della funzione di prova riprodotto in FIGURA 39 rappresenta:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
FIGURA 39
TEST A RISPOSTA MULTIPLA
t
y
t
y
t
y

34 1 Risposta nel dominio del tempo
9 Il modo di risposta all’impulso riprodotto in FIGURA 41 è tipico di un sistema caratterizzato dalla presenza di:
A poli complessi coniugati nell’origine di molte-plicità uno.
B poli complessi coniugati nell’origine di molte-plicità due.
C poli semplici nell’origine di molteplicità uno.
D poli semplici nell’origine di molteplicità due.
FIGURA 41
10 Il modo di risposta all’impulso riprodotto in FIGURA 42 è tipico di un sistema caratterizzato dalla presenza di:
A poli complessi coniugati a parte reale nulla di molteplicità uno.
B poli complessi coniugati a parte reale nulla di molteplicità due.
C poli semplici nell’origine di molteplicità uno.
D poli semplici nell’origine di molteplicità due.
FIGURA 42
11 Per rappresentare analiticamente un impulso unitario si utilizza l’espressione:
A y 5 d (t).
B y 5 t.
C y 5 u (t ).
D y 5 t 2/2.
12 Per rappresentare analiticamente un gradino unitario si utilizza l’espressione:
A y 5 d (t).
B y 5 t.
C y 5 t 2/2.
D y 5 u (t ).
t
y
t
y
4 Il grafico della funzione di prova riprodotto in FIGURA 40 rappresenta:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
FIGURA 40
5 La funzione F (s ) 5 1/s rappresenta la trasfor-mata di Laplace di:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
6 La funzione F (s ) 5 1/s2 rappresenta la trasfor-mata di Laplace di:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
7 La funzione F (s ) 5 1 rappresenta la trasformata di Laplace di:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
8 La funzione F (s ) 5 1/s3 rappresenta la trasfor-mata di Laplace di:
A una parabola unitaria.
B un impulso unitario.
C un gradino unitario.
D una rampa unitaria.
t
y

35 Verso l’Esame di Stato
Passaggio da anello aperto ad anello chiusoSi consideri un sistema retroazionato con un blocco del secondo ordine A(s) sulla linea di andata e un blocco semplicemente proporzionale B(s) sulla linea di ritorno.
Per la linea di andata si ha la f.d.t.
essendo K la costante di proporzionalità di un blocco regolatore che può assumere valori compresi tra 1 e 50.
Il trasduttore, posto sulla linea di ritorno, ha costante di proporzionalità 10.
Il sistema ad anello aperto è evidentemente stabile in quanto i due poli semplici sono entrambi situati nella parte negativa del piano complesso; la costante del regolatore non ha infatti alcuna influenza sulla posizione dei poli.
La posizione dei poli sul piano complesso e la stabilità del sistema retro-azionato sono da verificare in quanto la costante del regolatore influenza in questo caso la posizione dei poli sul piano complesso.
Per il sistema retroazionato la f.d.t. è infatti la seguente:
Con semplici passaggi si ottiene l’espressione:
Per il determinante dell’equazione di secondo grado si ha
D 5 1102 2 4(100K + 1000)
che risulta negativo per 20,25 K 50, situazione in cui la modalità di risposta cambia in quanto i poli diventano complessi coniugati.
Per 1 K 20,25 la modalità di risposta non cambia rispetto a quella che si ha ad anello aperto per la presenza di due poli semplici situati nel semipiano negativo.
All’interno del campo di regolazione non si verificano situazioni in cui i poli sono situati nel semipiano positivo.
A(s)510K
(s +10) (s +100)
G(s)5A(s)
1+ A(s)⋅B(s)5
10K
(s +10) (s +100)
1+100K
(s +10) (s +100)
G(s)5
10K
(s +10)(s +100)
(s +10)(s +100)+100K
(s +10)(s +100)
G(s)510K
(s +10)(s +100)+100K
G(s)510K
s2+110s + (100K +1000)
VERSO L’ESAME DI STATO

36 1 Risposta nel dominio del tempo
control system designerprogettista di sistemi
di controllo
design parametersparametri di progetto
differential equationsequazioni differenziali
dynamic responserisposta dinamica
external disturbancedisturbi esterni
initial conditions set to zerocondizioni iniziali nulle
inverse Laplace transformantitrasformata di Laplace
Laplace transformtrasformata di Laplace
linear time invariant systemsistema lineare tempo
invariante
polespoli
roots of the polynomialradici del polinomio
transfer functionfunzione di trasferimento
unit impulseimpulso unitario
unit impulse responserisposta all’impulso unitario
zeroszeri
Transfer functionsThe Laplace transform is a valuable tool that can be used to solve differential equations
and obtain the dynamic response of a system.Additionally the Laplace transform makes it possible to obtain information relating
to the qualitative behaviour of the system response without actually solving for the dynamic response.
This is very useful because it allows a control system designer to understand how the parameters can be manipulated to obtain acceptable response characteristics.
A transfer function G(s) is defined as the following relation between the output of the system Y(s) and the input to the system U(s):
If the transfer function of a system is known then the response of the system Y(s) can be found by taking the inverse Laplace transform of G(s) ∙ U(s).
It is also important to note that a transfer function is only defined for linear time
invariant systems with all initial conditions set to zero.If the input to the system is a unit impulse (U(s)), then:
G(s) 5 Y(s)
Therefore the inverse Laplace transform of the transfer function of a system is the unit
impulse response of the system.This can be thought of as the response to a brief external disturbance.
Poles and zeros
Zeros are defined as the roots of the polynomial of the numerator of a transfer function.
Poles are defined as the roots of the polynomial of the denominator of a transfer function.
For the generalized transfer function
the zeros are z1, z
2, ..., z
m and the poles are p
1, p
2, ..., p
n.
The poles and zeros of a system provide information on the characteristic terms that the response will be comprised of.
Identifying the poles and zeros of a transfer function aids in understanding the behaviour of the system.
G(s)5
Y (s)
U(s)
G(s)5
(s − z1 ) (s − z2 ) ... (s − zm )
(s − p1 ) (s − p2 ) ... (s − pn )
AUTOMATIC SYSTEMS: HIGHLIGHTS
1 Explain the usefulness of the Laplace transformation.2 Define the significance of the transfer function.3 Write the generalised expression of a transfer function.4 Explain the meaning of the zeros and poles of a transfer
function
5 Explain the relationship between the inverse Laplace transformation and the response of a system
6 Clearly explain the significance that the inverse Laplace transformation has when the input of a system is a unit impulse.
QUESTIONS
Complete the following exercises after carefully analysing the above diagrams and text.