Embed Size (px)
Citation preview

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
1© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008
Robotica Industriale
Lezione 1:Introduzione al corso
Prof. Riccardo Cassinis
7-01-2008Lezione 1: Introduzione al corso 2
Parliamo subito dell’orario delle lezioni
Lezioni in aula:
Lunedì 11:30 - 13:00 Aula B11
Martedì 15:30 - 17:00 Aula B15
Lezioni in laboratorio:
Lunedì 14:30 - 16:30
Squadre di esercitazione:
Le definiremo più avanti
Anche il calendario
Il corso terminerà l’ 11 marzo

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
2© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 3
Le mie disponibilità
7-01-2008Lezione 1: Introduzione al corso 4
Siete seduti nel posto giusto?
AERZTQSORKPTSQZCPRFGEBERTSZKDTVSU
ZQRPDE

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
3© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 5
Obiettivi del corso
Illustrare i concetti fondamentali della robotica
Mostrare le differenze e i punti di contatto fra la “roboticaindustriale” e la “robotica avanzata”
Illustrare i principi della costituzione dei manipolatori
Meccanica
Attuatori
Sensori
Architetture di controllo
Illustrare i principi della programmazione dei manipolatori
Linguaggi di programmazione
Sistemi di programmazione
Imparare ad usare un manipolatore
7-01-2008Lezione 1: Introduzione al corso 6
Robotica Industriale vs. Robotica Mobile
Robotica = Robotica Industriale + Robotica Mobile
Entrambi i corsi tendono a dare una visione globaledella robotica
Parte “Industriale” più concentrata su attuatori, sensorisemplici e sistemi di programmazione “tradizionali”
Parte “Mobile” si dedica ai sensori complessi, a quellitipici dei robot mobili e ai sistemi di controllo avanzati

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
4© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 7
Prerequisiti
Conoscere i concetti fondamentali dell’elettrotecnica edell’elettronica (in particolare di quella digitale): V èuguale a R•I anche in pratica, non solo in teoria!
Essere molto curiosi; provare gusto nello smontare lecose e nel cercare di capire come funzionano
Sapere l’inglese, perché tutta la documentazione èscritta in tale lingua
7-01-2008Lezione 1: Introduzione al corso 8
Metodologie di apprendimento
Sporcarsi le mani (di polvere, grasso e olio)
Porsi dei problemi e risolverli
Confrontare e studiare le diverse soluzioni
Provare, provare e provare ancora
Smitizzare il robot: non morde! (affermazione falsa)
Cercare di capire a fondo le cose: non trascurare mai idettagli
E ricordare: alla base di ogni robot ci sono deicalcolatori, con tutti i loro pregi ma anche e soprattuttocon tutti i loro difetti
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
5© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 9
Materiale di studio 1
Le trasparenze delle lezioni saranno rese disponibili sulsito internethttp://www.ing.unibs.it/~cassinis/Dida/current/roba/index.html
il giorno dopo ogni lezione.
Formato usato: PDF (Adobe Acrobat reader)
Altro materiale sarà pubblicato sullo stesso sito secondonecessità
Formati usati: diversi
Non tutto il materiale sarà pubblicato!
7-01-2008Lezione 1: Introduzione al corso 10
Materiale di studio 2
La parte sperimentale (in laboratorio e anche a casa) èessenziale per il superamento dell’esame
Saranno forniti link a siti internet da cui è possibilescaricare software gratuito utile per il corso
Saranno indicati altri siti per il reperimento di materialeaggiuntivo
Esistono utili gruppi di discussione su internet
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
6© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 11
Materiale di studio: i libri
In libreria ci sono infiniti libri sulla robotica e sui suoidiversi aspetti.
Quelli in italiano (tradotti) in genere sono pessimi
Il nostro libro “ufficiale” (che però non copre tutti gliargomenti):
Giuseppina Gini, Vincenzo CagliotiROBOTICAZanichelli ( 22.00)
NON comprate le enciclopedie a dispense che sivendono in edicola!
Chi vuole costruirsi un robot può farlo benissimospendendo molto meno
7-01-2008Lezione 1: Introduzione al corso 12
Interazione con il docente
Interazione il più stretta possibile. Chi si presentaall’esame senza essersi mai fatto vedere prima ha benpoche possibilità di superarlo rapidamente!
Mezzi di contatto:
Diretto (solo nell’orario di ricevimento o subito dopo lalezione, oppure per appuntamento)
Telefono (030-3715.453): la segreteria telefonica non vienemai ascoltata, ma fornisce informazioni utili
Email ([email protected]) letta più volte al giorno,spesso anche quando sono in viaggio, ma occorre rispettare leregole che seguono
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
7© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 13
I messaggi di posta elettronica
Vengono instradati automaticamente in appositi folder
Subject: [robotica <nome e cognome>]altrimenti finisce dritto nel tritarifiuti
Costruiamo una mailing list per comunicazioni, ecc.:
Ho già inserito tutti gli indirizzi degli iscritti al corso
Si usano solo gli indirizzi email “istituzionali”
7-01-2008Lezione 1: Introduzione al corso 14
LDRA (Laboratorio Didattico diRobotica Avanzata)
Accesso: vicino alla rampa dalla parte di V.le Europa
Finanziato con i contributi degli studenti
Da quando è stato creato (nel 1998) non ha avuto piùuna lira per il funzionamento
Non è vero, quattro anni fa ha avuto 10.000 euro…
E quattro anni fa un bellissimo regalo!
Occorre averne la massima cura!
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
8© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 15
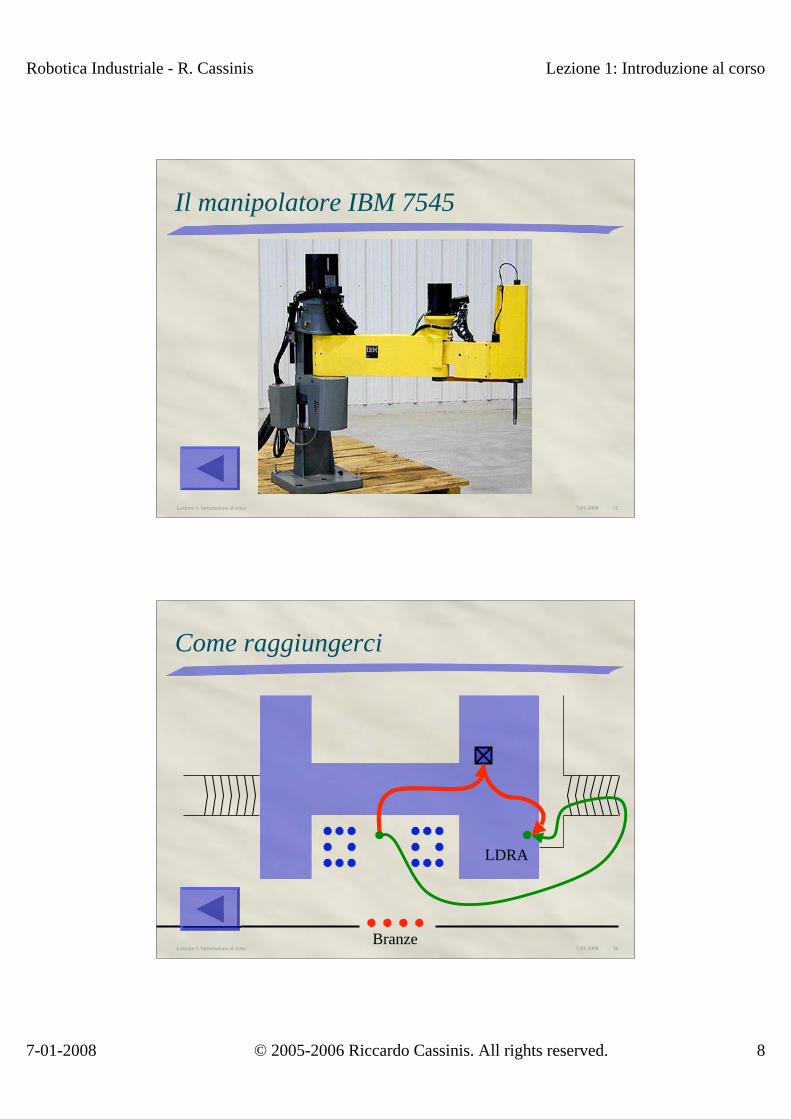
Il manipolatore IBM 7545
7-01-2008Lezione 1: Introduzione al corso 16
Come raggiungerci
Branze
LDRA

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
9© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 17
Modalità di esame
Obiettivi:
Dimostrare conoscenza e padronanza degli argomenti delcorso
Mostrare dimestichezza con i robot del laboratorio
Dimostrare la capacità di inventare algoritmi risolutivi diproblemi di programmazione dei robot
Metodi:
Molte esercitazioni pratiche
Esecuzione di un piccolo elaborato
Discussione dell’elaborato e domande orali
7-01-2008Lezione 1: Introduzione al corso 18
E per finire… Ci sono domande?
Per riuscire bene, questo corso deve essere MOLTOinterattivo.
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
10© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 19
Allora possiamo cominciare con ledefinizioni
Potete non crederci, ma non esiste una definizione“ufficiale” di robot.
mechanical device designed to perform the work generallydone by a human being
1. A mechanical device that sometimes resembles a humanand is capable of performing a variety of often complexhuman tasks on command or by being programmed inadvance.2. A machine or device that operates automatically or byremote control.3. A person who works mechanically without original thought,especially one who responds automatically to the commandsof others.
7-01-2008Lezione 1: Introduzione al corso 20
Altre definizioni
1. any machine that can be programmed to carry outinstructions and perform particular duties, especially one thatcan take over tasks normally done by people. - See alsoautomaton2. a machine that resembles a human in appearance and canfunction like a human, especially in science fiction. - See alsoandroid3. somebody who works or behaves mechanically, showinglittle or no emotion and often responding to orders withoutquestion

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
11© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 21
L’unica “vera” definizione:
“Non so dire cosa sia un robot, macertamente so dire quando ne vedo uno”
Joseph F. Engelberger,
President,
Unimation Inc.
7-01-2008Lezione 1: Introduzione al corso 22
Cosa vorreste che un robot facesse?
Interagire con l’utente econ l’ambiente
Fare lavori pericolosi perl’uomo
Fare qualcosa chel’uomo non può fare
Fare i lavori al postodell’uomo
Farvi fare bella figura
…
R2D2C3PO

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
12© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 23
Il robot attraverso i secoli
La robotica, intesa come il desiderio di riprodurre sestesso con mezzi non naturali, è il secondo più anticosogno dell’uomo
La letteratura e la storia riportano innumerevoli esempi,molti dei quali hanno grande importanza filosofica, senon scientifica
7-01-2008Lezione 1: Introduzione al corso 24
Le motivazioni:
Desiderio di stupire
Erone Alessandrino (10?-200? d.C.)
Automa di Von Kempelen (1800)
Automi dei Droz e dei Maillardet (foto)(1750-1800)
Desiderio di riprodursiartificialmente
Dr. Faust - Goethe - Homunculus (1800)
Frankenstein - NON E’ UNROMANZO DEL TERRORE!
• E non si intitola neanche così!
– Frankenstein, or The ModernPrometheus
– Chi lo ha scritto? Quando?
– Mary Wollstonecraft Shelley, 1818
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
13© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 25
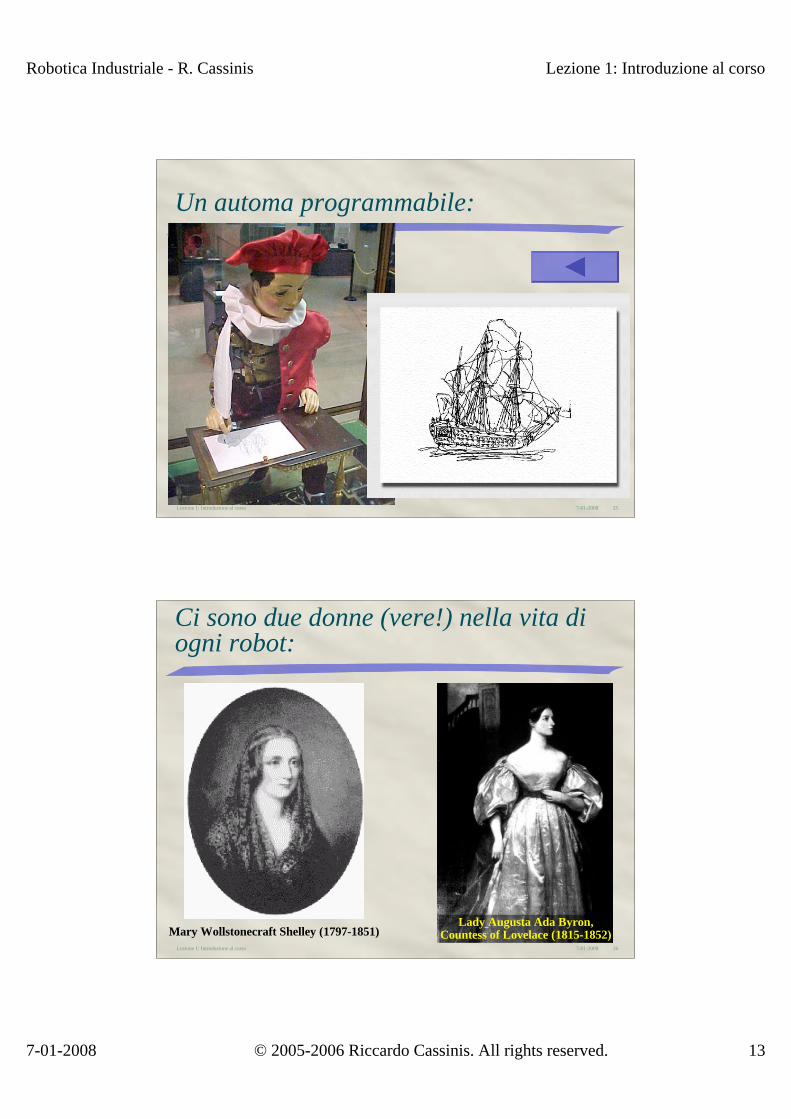
Un automa programmabile:
7-01-2008Lezione 1: Introduzione al corso 26
Ci sono due donne (vere!) nella vita diogni robot:
Mary Wollstonecraft Shelley (1797-1851) Lady Augusta Ada Byron,
Countess of Lovelace (1815-1852)
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
14© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 27
Altre motivazioni:
Fantascienza
Azimov, Zelazny
Philip K. Dick - Do Androids dream of ElectricSheep? (1968)
• Ridley Scott - Blade Runner (1969)
Desiderio di schiavi meccanici
Golem (leggende medievali)
R.U.R. - Capeç - 1925
Joseph Engelberger - Anni ‘50 - Unimate
Richard “Lou” Paul - Anni ‘60
Sostituti dell’uomo in situazioni impossibili
Rodney Brooks (M.I.T.)
Takeo Kanade (Carnegie Mellon University)
7-01-2008Lezione 1: Introduzione al corso 28
I protagonisti:
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
15© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 29
Il primo robot in una università italiana:
7-01-2008Lezione 1: Introduzione al corso 30
Personaggi italiani:
Prof. Marco Somalvico
(1941-2002)
“La robotica
è una
disciplina
onnivora”

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
16© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 31
Disciplina onnivora:
MeccanicaCinematismi, articolazioni,trasmissioni
Equazioni cinematiche edinamiche
ElettromeccanicaMotori e attuatori
SensoristicaSensori
Elettronica analogicaCircuiti dei sensori
Azionamenti
Elettronica digitaleCalcolatori grandi e piccoli
Controllistica
Sistemi di controllo delmovimento
Informatica
Sistemi di controllo
Sistemi di programmazione
Medicina e biologia
Emulazione dei sistemi animali
Psicologia
Sistemi ad autoapprendimento
Eccetera, eccetera, eccetera…
7-01-2008Lezione 1: Introduzione al corso 32
Il primo sistema multirobot in Italia:
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
17© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 33
Museo paleografico della roboticaindustriale…
Supersigma
Pragma
PUMA
Articolato grande
Staübli
SCARA
Catena chiusa
7-01-2008Lezione 1: Introduzione al corso 34
Il Supersigma
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
18© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 35
Il Puma
7-01-2008Lezione 1: Introduzione al corso 36
Pragma
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
19© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 37
Articolato grande
7-01-2008Lezione 1: Introduzione al corso 38
Stäubli
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
20© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 39
SCARA
7-01-2008Lezione 1: Introduzione al corso 40
Robot a catena cinematica chiusa
Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
21© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 41
Per capire i problemi…
Diamo un’occhiata a cosa si fa con i robot industriali
Cerchiamo di capire quali siano le esigenze del lavoroche devono compiere
7-01-2008Lezione 1: Introduzione al corso 42
Esempi di applicazioni…
Manipolazione
Saldatura ad arco
Saldatura a punti
Sbavatura
Assemblaggio
Montaggio ruote Verniciatura

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
22© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 43
Manipolazione
7-01-2008Lezione 1: Introduzione al corso 44
Saldatura ad arco

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
23© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 45
Il principio della saldatura ad arco:
+
-
Elettrodo
(consumabile)
Cianfrino
7-01-2008Lezione 1: Introduzione al corso 46
Saldatura a punti

Robotica Industriale - R. Cassinis
7-01-2008
Lezione 1: Introduzione al corso
24© 2005-2006 Riccardo Cassinis. All rights reserved.
7-01-2008Lezione 1: Introduzione al corso 47
Il principio della saldatura a punti:
+
-
Elettrodo
Elettrodo