Embed Size (px)
Citation preview

Robotics for AI
Dr. Cynthia Matuszek
Paula Matuszek Fall 2015

Cynthia Matuszek, Fall 2015
2
General Topics
◆ Hardware Design◆ Sensing
◆ Environment Models
◆ Actuation◆ Mobility
◆ Mapping◆ Localization
◆ Manipulation
◆ Motors
◆ Control◆ (Inverse) Kinematics◆ Dynamics◆ Motion planning
◆ Cognition◆ Machine learning◆ Classic AI◆ Others
◆ Human-robot interaction

Cynthia Matuszek, Fall 2015
3
Wall•E: 2008
Data. Star Trek: TNG: 1987
Sentinel. X-Men, Days of Future Past: 2014
Fictional Robots
Robby. Forbidden Planet: 1956
Eva. Ex Machina, 2015

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !4 3
Some21stcenturyrobots
http://www.pleoworld.com/pleo_rb/eng/lifeform.php
Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt

Cynthia Matuszek, Fall 2015
5
◆ Autonomous?◆ Physical?◆ Human-friendly?
What is a Robot?
“A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks.” (Robot Institute of America)
◆ Humanoid?◆ Sensory?◆ Intelligent?
◆ Mobile?◆ Manipulative?◆ What else?
CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !6 5
• What is hard for humans is easy for robots.– Repetitive tasks. – Continuous operation. – Complicated calculations. – Refer to huge databases.
• What is easy for a human is hard for robots. – Reasoning. – Adapting to new situations. – Flexible to changing requirements. – Integrating multiple sensors. – Resolving conflicting data. – Synthesizing unrelated information. – Creativity.
Whatarerobotsgoodat?

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7 6
• Dangerous– space exploration – chemical spill cleanup – disarming bombs – disaster cleanup
• Boring and/or repetitive– welding car frames – part pick and place – manufacturing parts.
• High precision or high speed– electronics testing – surgery – precision machining.
Whattaskswouldyougiverobots?

Cynthia Matuszek, Fall 2015
8
Robots Up to Now
◆ Robots now:◆ Expensive◆ Complex◆ Special-purpose
◆ Environments◆ Dedicated◆ Constrained
◆ Use and Management◆ Controlled by trained experts◆ Slow and expensive to reconfigure/repurpose

Cynthia Matuszek, Fall 2015
9
Robots Now
◆ As technology improves:◆ Smaller◆ Cheaper◆ More broadly capable
◆ Can consider deploying in human-centric environments◆ Homes◆ Schools◆ Care facilities
◆ Requires: flexibility and human-robot interaction (HRI).

Cynthia Matuszek, Fall 2015
10
What Should They Do?
◆ Robots are moving away from factory floors to…◆ Entertainment, toys ◆ Homes (personal robotics) ◆ Medical, surgery ◆ Industrial automation (mining, harvesting, warehouses, …) ◆ Hazardous environments (space, underwater, battlefields, …) ◆ Roads
◆ Research Trends◆ Manipulation of everyday objects◆ Complex household tasks◆ Object recognition, mapping, interaction◆ Human robot interaction

Cynthia Matuszek, Fall 2015
11
What Subsystems Are There?
◆ Or: what does a robot need to know?◆ Where am I?◆ What’s around me?◆ How am I posed?
◆ How do I change it?◆ What do I want to do?
◆ With respect to the environment?◆ Where do I go, and how?◆ What do I want to change?
◆ How do I do that?◆ Who needs to be involved?
◆ People? Other robots?

Cynthia Matuszek, Fall 2015
12
What Subsystems Are There?
◆ Sensing◆ Perceiving the world◆ Creating a world model
◆ Actuation◆ Doing something in the (physical) world◆ Mobility, manipulation, …
◆ Control◆ Navigation, motion planning, kinematics, dynamics
◆ Cognition and Learning◆ Interfaces

Cynthia Matuszek, Fall 2015
13
Sensor data
Actions
High Level View
World Model

Cynthia Matuszek, Fall 2015
14
Sensors◆ Perceive the world
◆ Passive sensors capture signals generated by environment. ◆ Background, lower power. E.G.: cameras.
◆ Active sensors probe the environment. Explicitly triggered, ◆ More info, higher power consumption. Example: lidar
◆ What are they sensing?◆ The environment: e.g. range finders, obstacle detection◆ The robot's location: e.g., gps, wireless stations◆ Robot's internals: joint encoders
◆ Proprioception◆ Close your eyes - where's your hand?

Cynthia Matuszek, Fall 2015
15
◆ Optical◆ Laser / radar◆ 3D◆ Color spectrum
◆ Pressure, temperature, chemical◆ Motion & Accelerometer◆ Acoustic
◆ Sonar, ultrasonic
◆ E-field Sensing
Some Typical Sensors

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !1610
• Use sensors for feedback • Closed-loop robots use sensors in
conjunction with actuators to gain higher accuracy – servo motors.
• Uses include mobile robotics, telepresence, search and rescue, pick and place with machine vision, anything involving human interaction
Whatusearesensors?

Cynthia Matuszek, Fall 2015
17
◆ Manipulators◆ Anchored somewhere: assembly lines, ISS, hospitals.◆ Common industrial robots
◆ Mobile Robots◆ Move around environment◆ UGVs, UAVs, AUVs, UUVs◆ Mars rovers, delivery bots,
ocean explorers
◆ Mobile Manipulators◆ Both move and manipulate◆ Packbot, humanoid robots
Robot Systems

Cynthia Matuszek, Fall 2015
18
◆ Take some kind of action in the world: affect it◆ Involve movement of robot or subcomponent of robot
◆ Robot actions can include◆ Pick and place: Move items between points◆ Path control: Move along a programmable path◆ Sensory: Employ sensors
for feedback (e-field sensing)◆ Manipulation: interact with
objects in the world
Actuators/Effectors

Cynthia Matuszek, Fall 2015
19
Some Typical Actuators
◆ Pneumatic◆ Hydraulic◆ Electric solenoid ◆ Motors
◆ Analog (continuous)◆ Stepping (discrete increments)◆ Gears, belts, screws, levers
◆ What’s missing?

Cynthia Matuszek, Fall 2015
20
Mobility
◆ Legs◆ Wheels◆ Tracks◆ Crawls◆ Rolls◆ Treads◆ …

Cynthia Matuszek, Fall 2015
21
Mobile Robots
◆ Space Rovers◆ Key issues: mobility in rough terrain, time delay, temperatures,
maintenance, joint infiltration
◆ Autonomous Robotic Cars◆ Key issues: dynamic environments, safety
◆ Flying Robots◆ Key issues: limited computation power and payload
◆ Personal Robots◆ Key issues: safety, human-friendliness

Cynthia Matuszek, Fall 2015
22
Mobile Robots: Space
Cynthia Matuszek, Fall 2015
23
Mobile Robots: Cars

Mobility Legs, Wheels, and Wings
Many slides adapted from slides © R. Siegwart, ETH Zürich – Autonomous Systems Laboratory

Cynthia Matuszek, Fall 2015
25
Characterizing Locomotion
◆ Locomotion:◆ Physical interaction between robot and environment.◆ Locomotion is concerned with:
◆ Interaction forces; mechanisms and actuators that generate them
◆ The most important issues in locomotion are:◆ Stability
◆ Center of gravity◆ Static/dynamic stabilization◆ Inclination of terrain
◆ Type of environment◆ Water, air, soft or hard ground
◆ Contact◆ Contact point(s)◆ Contact area◆ Angle of Contact◆ Friction
Adapted from © R. Siegwart, ETH Zürich – ASL

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !2616
• Degrees of freedom = Number of independent directions a robot or its manipulator can move
• 3 degrees of freedom: 2 translation, 1 rotation • 6 degrees of freedom: 3 translation, 3 rotation
• How many degrees of freedom does your knee have? Your elbow?
• Effective DOF vs controllable DOF: • Underwater explorer might have up or down, left or right,
rolling. 3 controllable DOF. • Position includes x,y,z coordinates, yaw, roll, pitch.
(together the pose or kinematic state). 6 effective DOF. • Holonomic: effective DOF = controllable DOF.
DegreesofFreedom(DOF)

Cynthia Matuszek, Fall 2015
27
Degrees of Freedom
https://en.wikipedia.org/wiki/Degrees_of_freedom_%28mechanics%29
◆ DoFs◆ Number of independent parameters that define the
state (not location!) of a physical system.
Cynthia Matuszek, Fall 2015
28
Passive Dynamic Walking◆ Gravity-powered walking with bipedal gait
https://www.youtube.com/watch?v=CK8IFEGmiKY

Cynthia Matuszek, Fall 2015
29
◆ Boston Dynamics BigDog
Dynamic Quadruped
https://www.youtube.com/watch?v=cNZPRsrwumQ

Cynthia Matuszek, Fall 2015
30
Basic Wheel Types
https://www.youtube.com/watch?v=8sH1a511_q4

Cynthia Matuszek, Fall 2015
31
Walking Wheels
HallucII,ChibaInst.OfTech.
Cynthia Matuszek, Fall 2015
32
◆ Passive locomotion on rough terrain
◆ 6 wheels◆ One fixed wheel in the rear◆ Two bogies on each side◆ Front wheel, spring suspension
◆ ≈ 60 cm long, 20 cm tall◆ Highly stable in rough terrain◆ Climbs obstacles up to 2x wheel diameter
Passive: the Shrimp
Adapted from © R. Siegwart, ETH Zürich – ASL

Cynthia Matuszek, Fall 2015
33
◆ JPL Lunar rover◆ Walking, rolling or
combination◆ 6 DoF legs with
1lockable 1 DoF wheels
◆ Requires a substantial planning component
◆ Under development
Active: Athlete

Cynthia Matuszek, Fall 2015
34
Flying
◆ Advantages◆ Rough terrain◆ Ground-inaccessible areas◆ Z-axis maneuverability◆ Perspective for mapping & sensing◆ Flying is cool
◆ Disadvantages◆ Control problems◆ Z-axis controllability◆ Weight & scaling laws◆ Flying is dangerous

Cynthia Matuszek, Fall 2015
35
Types of Flyers
◆ Fixed wing (sometimes with flaps)◆ Flapping wing◆ Rotors/props
◆ Axial (single)◆ Coaxial (reversed)◆ Tandem (two non-coaxial)◆ Quadcopters (+)
◆ Lighter-than-air
https://robotics.eecs.berkeley.edu/~ronf/Ornithopter/index.html

Cynthia Matuszek, Fall 2015
36
Manipulators

Cynthia Matuszek, Fall 2015
37
◆ Actuator◆ Generates motion or force; usually a motor◆ “Drive type”
◆ End Effector◆ Device at the end of an arm; interacts with environment
◆ DoFs◆ Gripper
◆ What it sounds like; a type of manipulator
◆ Actuation◆ How are the individual parts made to move?
Terminology

Cynthia Matuszek, Fall 2015
38
◆ Modeled as a chain of rigid links connected by joints
◆ Links: unjointed length of robot◆ Joints: translational or rotational movement
◆ Joints have DoFs◆ How many to describe its position and orientation in space?
◆ Sliding or jointed
◆ Manipulator / End Effectors◆ Grippers / Tools◆ Sensors
Manipulator Robot
Links
JointsEndEffector(gripper)

Cynthia Matuszek, Fall 2015
39
◆ Types◆ By drive◆ By actuation
◆ Tendons◆ Direct servoing◆ Underactuation
◆ By motion◆ Prismatic (linear)◆ Revolute (rotational)
◆ By Characteristics◆ Payload◆ Working area/radius
Characterization

Cynthia Matuszek, Fall 2015
40
◆ Prismatic: sliding / translational
◆ Revolute: rotational
Joints
CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !4118
• Joint play, compounded through N joints. • Accelerating masses produce vibration,
elastic deformations in links. • Torques, stresses transmitted depending on
end actuator loads. • Feedback loop creates instabilities.
• Delay between sensing and reaction. • Firmware and software problems
• Especially with more intelligent approaches
Whataresomeproblemswithcontrolofrobotactions?

Localization where am I? – errors and odometry
“Position”: Global map
Perception Motion Control
Cognition
Real WorldEnvironment
Localization
PathEnvironment Model Local Map

Cynthia Matuszek, Fall 2015
43
Localization: Where am I?
◆ Given:◆ A map (which MAY be being found on the fly)◆ A set of sensor readings
◆ Where am I in that map?
◆ Things to consider :◆ Belief representation◆ Map representation◆ Types of sensor data◆ Probabilistic representations

Cynthia Matuszek, Fall 2015
44
Challenges of Localization
◆ Knowing absolute position (e.g. GPS) is not sufficient◆ Localization in human-scale as relates to environment
◆ Planning in Cognition needs >1 position as input
◆ Perception and motion plays an important role◆ Sensor noise◆ Sensor aliasing◆ Effector noise◆ Odometric position estimation◆ Probabilities and uncertainty management

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !4519
• Sensing isn’t enough: need to act on data sensed • Hard because data are noisy; environment is dynamic
and partially observable. • Must be mapped into an internal representation
• state estimation • Good representations
• contain enough information for good decisions • structured for efficient updating • natural mapping between representation and real
world. • Cognition!
RoboticPerception
46
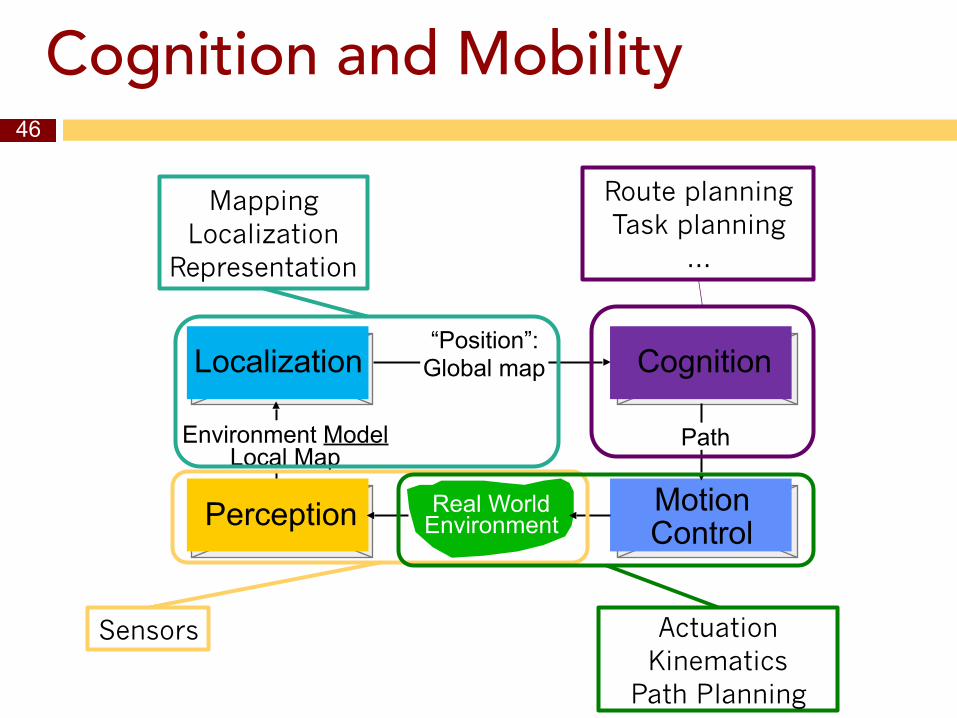
Cognition and Mobility
“Position”: Global map
Perception Motion Control
Cognition
Real WorldEnvironment
Localization
PathEnvironment Model Local Map
Sensors Actuation Kinematics
Path Planning
Mapping Localization
Representation
Route planning Task planning
…

Cynthia Matuszek, Fall 2015
47
Control: The Brain
◆ Open loop, i.e., no feedback◆ Instructions◆ Rules
◆ Closed loop, i.e., feedback◆ Adapts◆ Can learn

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !4820
• Belief state: model of the state of the environment (including the robot) • X: set of variables describing the environment • Xt: state at time t • Zt: observation received at time t • At: action taken after Zt is observed
• After At, compute new belief state Xt+1 • Probabilistic, because uncertainty in both Xt and
Zt.
BeliefState

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !4922
• Low-level, reactive control • bottom-up, sensor results directly trigger
actions • Model-based, deliberative planning
• top-down, actions are triggered based on planning around a state model
SoftwareArchitectures

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !5023
• Augmented finite state machines • Sensed inputs and a clock determine next state • Build bottom up, from individual motions • Subsumption architecture synchronizes AFSMs,
combines values from separate AFSMs. • Advantages: simple to develop, fast • Disadvantages: Fragile for bad sensor data, don’t
support integration of complex data over time. • Typically used for simple tasks, like following a
wall or moving a leg.
Low-Level,ReactiveControl

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !5124
• Belief State model • Current State, Goal State • Any of planning techniques • Typically use probabilistic methods
• Advantages: can handle uncertain measurements and complex integrations, can be responsive to change or problems.
• Disadvantages: slow; current algorithms can take minutes. Developing models for the number of actions involved in driving a complex robot too cumbersome.
• Typically used for high-level actions such as whether to move and in which direction.
Model-BasedDeliberativePlanning

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !5225
• Usually, actually doing anything requires both reactive and deliberative processing.
• Typical architecture is three-layer: • Reactive Layer: low-level control, tight senso-
action loop, decision cycle of milliseconds • Deliberative layer: global solutions to complex
tasks, model-based planning, decision cycle of minutes
• Executive layer: glue. Accepts directions from deliberative layer, sequences actions for reactive layer, decision cycle of a second
HybridArchitectures

53
◆ Autonomous robots…◆ Perform their tasks in the world by themselves◆ Do not require human control / intervention◆ Learn about their environment and tasks◆ Avoid damage (to themselves, people, property)◆ Adapt to changing situations◆ Make and execute decisions◆ Possess some degree of self-sufficiency
◆ Intelligently and safely perform tasks◆ Without direct human control
What Is Autonomy?
All of these?

54
◆ Key types◆ Strong AI: mental/thought capabilities
equal to (or better than) human◆ Weak (bounded) AI: intelligent actions or
reasoning in some limited situations
◆ These are problematic◆ How do we measure it?◆ What’s an ‘intelligent action’?
◆ In practice, ‘previously human only’◆ Is there something ineffable missing?
◆ How does it change when it’s a robot?◆ Focus is on Autonomy
Artificial Intelligence

55
◆ Many subtasks◆ Understanding and modeling of the mechanism
◆ Kinematics, dynamics, odometry◆ Reliable control of actuators
◆ Understanding and modeling the environment◆ Integration of sensors
◆ Understanding and modeling the task◆ Generation of task-specific motions◆ Creation of flexible control policies, new situations
◆ Coping with noise and uncertainty◆ Probably physical tasks!
Autonomous Task Performance
56
◆ Knowledge Representation◆ Search◆ Planning◆ Learning◆ Inference
Intelligent Action Needs…

57
DARPA Grand Challenge 1

58
DGC 1 Challenges
◆ Localization◆ But not mapping
◆ Sensor management◆ What sensors?◆ Where’s the road?
◆ Narrow pass◆ Switchbacks, turns◆ Tunnels
◆ Actuator management
✓ Knowledge Representation
✓ Search ✓ Planning✗ Learning ✗ Inference
59
DARPA Grand Challenge 2

60
DGC 2 Challenges
◆ All of the above, plus…◆ Visual parsing of traffic elements
◆ Sensing + Knowledge
◆ Awareness of other cars◆ Sensing + Planning
◆ Non-3D-guided tasks◆ Faster speeds◆ Safety
✓ Knowledge Representation
✓ Search ✓ Planning✗ Learning ✓ Inference

61
Google Self-Driving Car
https://www.youtube.com/watch?v=uCezICQNgJU

62
Google Challenges
◆ All of the above, plus…◆ Sublimely oblivious drivers◆ Full-speed actuator management◆ Legal management◆ Ethical management
✓ Knowledge Representation
✓ Search ✓ Planning? Learning ✓ Inference

63
DARPA Robot Challenge 1
64
DRC 1 Challenges
◆ All of the above, plus…◆ Non-designed environment
◆ Balancing◆ (Much) harder actuation◆ Bipedal motion
◆ Yet more sensor hassles◆ Weight, power◆ Manipulation
◆ !!!
✓ Knowledge Representation
✓ Search ✓ Planning ✓ Learning ✓ Inference ✗ Autonomy

65
DRC 1

66
Robocup

67
Robocup
◆ All of the above, plus…◆ Object interaction
◆ Balls, walls, ...
◆ Deliberately difficult goal task◆ Streets designed for easy driving◆ S&R not designed
◆ Enormous robot design space◆ Antagonistic agents
✓ Knowledge Representation
✓ Search ✓ Planning ✓ Learning ✓ Inference ✓ Autonomy

68
Other Robot Tasks

69
◆ Knowledge Representation◆ Search◆ Planning◆ Learning◆ Inference
Intelligent Action Needs…

70
◆ Background Knowledge◆ Task-Specific Knowledge◆ Explicit vs. Implicit◆ Representation Choices
◆ Probabilistic?◆ Human-understandable?
Knowledge Representation

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !71
• Social robots • In care contexts • In home contexts • In industrial contexts
• Comprehension • Natural language • Grounded knowledge acquisition • Roomba: “Uh-oh”
Human-RobotInteraction
CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !72
• Robots are getting smaller, cheaper, and more ubiquitous
• Humans need to interact with and instruct them, naturally
• Language, gesture, demonstration, …
• Key requirements: • Language understanding
learned from data • Follow instructions in a
previously unseen world • Learn to parse natural
language into robot-usable commands
Motivations
CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7335
• Social robots • Safety/security
• Ubiquitous Robotics • Small, special-purpose robots
Human-RobotInteraction

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7436
• How do humans handle it? • Assumptions about retention and understanding • Anthropomorphization
• How do robots make it easier? • Apologize vs. back off • Convey intent • Cultural context (implicit
vs. explicit communication)
MoreHuman-RobotInteraction
http://www.tweenbots.com/

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7528
• Healthcare and personal care • surgical aids, intelligent walkers, eldercare
• Personal services • Roomba! Information kiosks, lawn mowers,
golf caddies, museum guides • Entertainment
• sports (robotic soccer) • Human augmentation
• walking machines, exoskeletons, robotic hands, etc.
Wherearerobotsworkingnow?

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7629
• Industry and Agriculture assembly, welding, painting, harvesting, mining, pick-and-place, packaging, inspection, ...
• Transportation Autonomous helicopters, pilot assistance, materials movement
• Cars (DARPA Grand Challenge, Urban Challenge)
Antilock brakes, lane following, collision detection
Andmore...Exploration and Hazardous environments
Mars rovers, search and rescue, underwater and mine exploration, mine detection
MilitaryReconnaissance, sentry, S&R, combat, EOD
HouseholdCleaning, mopping, ironing, tending bar, entertainment, telepresence/surveillance

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7731
• Medical robotics • Autonomous surgery • Eldercare
• Biological Robots • Biomimetic robots • Neurobotics
• Navigation • Collision avoidance • SLAM/Exploration
Andmore...

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !78
• Robots that can learn. • Robots that interact smoothly with people. • Robots with artificial intelligence. • Robots that make other robots • Swarms
• ..?
TheFutureofRobotics
62

CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !7930
• Mechanisms • Morphology: What should robots look like? • Novel actuators/sensors
• Estimation and Learning • Reinforcement Learning • Graphical Models • Learning by Demonstration
• Manipulation (grasping) • What does the far side of an object look like? How
heavy is it? How hard should it be gripped? How can it rotate? Regrasping?
Tomorrow’sproblems
CSC 8520 Fall 2015. Paula Matuszek Slides based in part on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt !8064
• Which decisions can the machine make without human supervision?
• May machine-intelligent systems make mistakes (at the same level as humans)?
• May intelligent systems gamble when uncertain (as humans do)?
• Can intelligent systems exhibit personality? Should they?
• Can intelligent systems express emotion? Should they?
• How much information should the machine display to the human operator?
Willrobotstakeovertheworld?
HAL - 2001 Space Odyssey