Embed Size (px)
Citation preview

Robotik II
Entwicklung einer Software zur Steuerung und Visualisierung
eines Fischerroboters

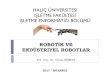
Überblick NT-Rechner DOS-Rechner Roboter
VisualisierungGraphische Oberfläche
mit SteuerfunktionenFischer-technik
Kommunikations-schnittstelle
Schnittstelle zumfischertechnik interface
Bahnplanung
Kommunikations-schnittstelle

Aufgaben
Treiber zur Ansteuerung des fischertechnik interfaces
Entwurf einer graphischen Oberfläche als Kontrollbildschirm
Einbinden einer Netzwerk-Schnittstelle unter DOS

Voraussetzungen
Beschreibung des Roboterinterfaces
Bereitstellung einer Kommunikationsschnittstelle zur Visualisierung
Datentyp für Koordinaten

fischertechnik interface
8 digitale Eingänge für Sensoren
4 Ausgänge für Motoren, Lampen usw.
2 analoge Eingänge für Widerstände 0-5kΩ
Sicherheitsfunktion für das Ausbleiben des Signals vom Steuerrechner durch timeout–Behandlung
Kommunikation über Druckerschnittstelle

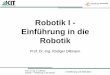
Impulsdiagramm des „fischertechnik interface“
Interface Signal LPT-Pin
LOAD-OUT 2
LOAD-IN 3
DATA-OUT 4
CLOCK 5
TRIGGERX 6
TRIGGERY 7
DATA/COUNT-IN 11

Probleme
Verarbeitungsgeschwindigkeit der Signale durch das fischertechnik interface unbekannt
Trägheit des Roboterarms
geringe Genauigkeit durch mechanisches Spiel

Treiberschnittstelle
Folgende Funktionen werden über eine Objektdatei
bereitgestellt:
Initialisierung
(Adresse LPT-Port, Maximalwerte der Robotergelenke)
Referenzfahrt
Polling oder Interruptsteuerung
Freigabe

„ast.obj“
Liste der öffentlichen Funktionen:
createRob(…) freeRob() defRob() testRob(…) readRob(…) neu in ast2.obj openRob() cntlRob(…) closeRob()
Alle Parameter sind vom Datentyp: WORD

Vereinbarungen
F0-M4/E8=li/E3=re
F1-M3/E7=li/E2=re
F2-M2/E6=li/E1=re
Greifer-M1/E5=zu/E4=auf
0..65535
M1aufM2reM2liM3reM3liM4reM4li M1zu
7 0
E2E3E4E5E6E7E8 E1
0..65535
0..65535
15Bit
Motoren Endschalter Geber M4 Geber M3 Geber M2

Abrechnung
Untersuchung des fischertechnik interfaces auf physikalisches Verhalten
20h
Programmierung der Schnittstelle und Tests35h
Änderungen und Erweiterungen
30h

ROBCOM - Software

Aufgaben
Empfang von Roboterkoordinaten für die Steuerung des Roboters
Vergleich der Soll- und Istpositionen Ansteuerung der Motoren Auswertung der Geberdaten Begrenzung der Bewegungen auf den tatsächlichen
Arbeitsraum Senden der aktuellen Position für die Visualisierung Anzeigen des Aktuellen Roboterstatus

Funktionen
Log – File Aufzeichnung Handsteuerung des Roboters Konfigurieren des Arbeitsraumes Anpassen der Gebersignale Empfang und Senden von Roboterdaten Abspielen von vorgefertigten Datendateien Einzelschrittsteuerung Einstellung der TCP/IP-Parameter Datenhaltung in Configdatei Schnellstart ohne Bedienung

Dateien
Im Programmverzeichnis müssen sich folgende Dateien befinden:
robcom.exe // Programm robcom.dat // Config-Datei robcom.log // Log-Datei ntcpdrv.exe // TCP-Treiber
Bei fehlen werden die Dateien robcom.dat und robcom.log mit Defaulteinstellungen neu erzeugt

Aufbau
robcom.pas
motor.pas
ast.obj
statsteu.pas
dek.pas
rnet.pas
trumptcp.pas
mainapp.pas
connect.pas

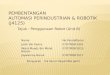
TCP-Server

TCP-Server
Start Daten ?Bereit
nein
übernehmen
Stop ?nein
Endeja ja
Roboter bewegen Status senden
Datensatz holenNoch Daten ?
Einzelschritt ?ja
nein
Taste
ja
nein

Roboter

Log-Datei

Probleme
Keine Parallelität „Dummes“ fischer interface - Pollen des Interfaces nötig Zeitkritisch Keine Bildschirm Aktualisierung Grafikobjekte ohne Funktionalität

Abrechnung
Entwicklung der Oberfläche
30h
Robotersteuerung und Gebersignale
15h
TCP-Server und Zusatzfunktionen
35h