Embed Size (px)
Citation preview

p 1
Sciences industriellespour l’ingénieur
L ’analyse globale des mécanismes donne aux ingénieurs des informations sur la structure cinématique des
mécanismes. Ces informations constituent un élément important dans les décisions à prendre sur la validité des solutions envisagées en phase de conception. L’analyse s’effectue à partir de la théorie des mécanismes.
En s’appuyant sur les concepts de solide et de liaison, la théorie des mécanismes renseigne sur la qualité cinématique du mécanisme en regard de son organisation structurelle.
La notion de degré de liberté est à la base de la théorie des mécanisme dont l’objet est d’évaluer le nombre de degrés de liberté indépendants parmi tous les degrés de liberté. La décision de piloter ou non ces mouvements
reste le travail de l’ingénieur de conception.
L’ingénieur pourra ainsi valider le comportement cinématique du mécanisme défini par le cahier des charges. Cette validation pourra porter sur le comportement global ou externe, entre l’entrée et
la sortie, mais également sur le comportement local ou interne du mécanisme, permettant ainsi de mieux
maîtriser sa réalisation géométrique et ses performances en termes de rigidité.
La présentation complète de la théorie s’articule autour des trois parties suivantes :
• une présentation des outils, concepts et modélisation nécessaires à l’élaboration de la théorie.
• une présentation, sur un exemple, de la théorie et de sa capacité à renseigner l’ingénieur.
• une présentation complémentaire de la théorie sur le concept de liaison équivalente
Boite de vitesses
automatique
Ponceuse vibrante portative
desMÉCANISMES
MÉCANIQUEA N A L Y S E G L O B A L E
Robot àstructureparallèle
p 2 p 3
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 2 p 3
P R E M I E R E P A R T I E1 - Présentation des mécanismes.
1.1 - Contexte.
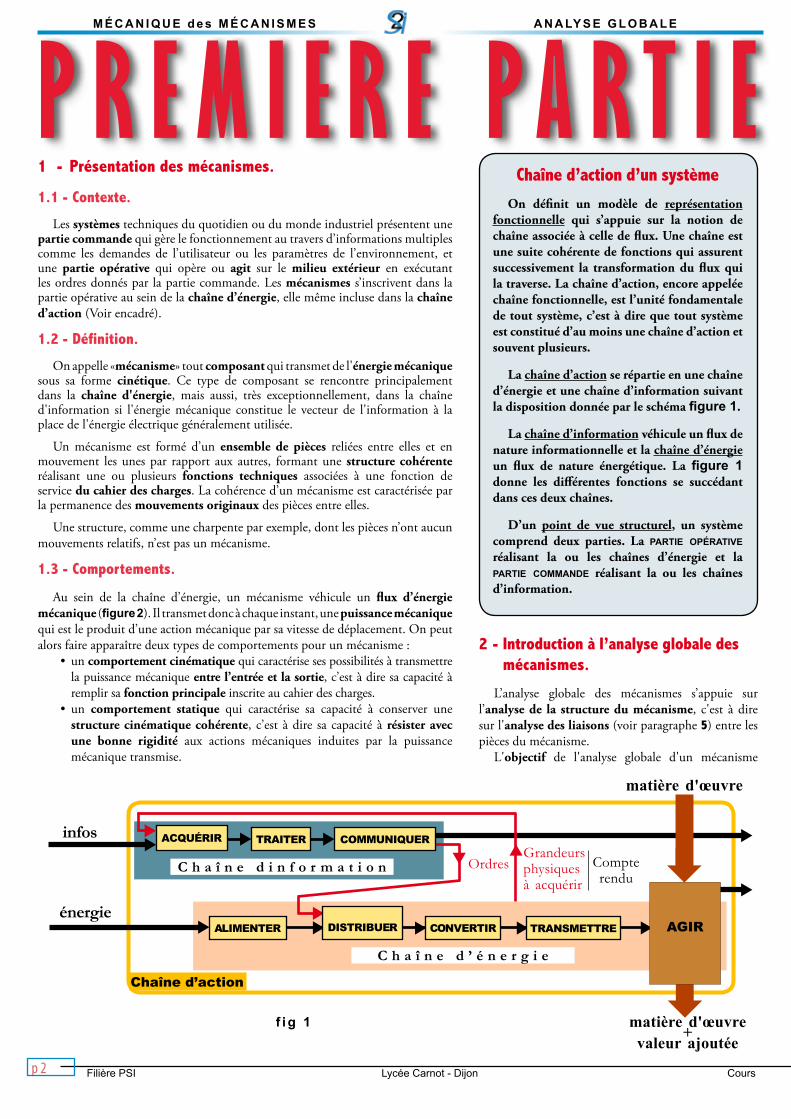
Les systèmes techniques du quotidien ou du monde industriel présentent une partie commande qui gère le fonctionnement au travers d’informations multiples comme les demandes de l’utilisateur ou les paramètres de l’environnement, et une partie opérative qui opère ou agit sur le milieu extérieur en exécutant les ordres donnés par la partie commande. Les mécanismes s’inscrivent dans la partie opérative au sein de la chaîne d’énergie, elle même incluse dans la chaîne d’action (Voir encadré).
1.2 - Définition.
On appelle «mécanisme» tout composant qui transmet de l'énergie mécanique sous sa forme cinétique. Ce type de composant se rencontre principalement dans la chaîne d'énergie, mais aussi, très exceptionnellement, dans la chaîne d'information si l'énergie mécanique constitue le vecteur de l'information à la place de l'énergie électrique généralement utilisée.
Un mécanisme est formé d’un ensemble de pièces reliées entre elles et en mouvement les unes par rapport aux autres, formant une structure cohérente réalisant une ou plusieurs fonctions techniques associées à une fonction de service du cahier des charges. La cohérence d’un mécanisme est caractérisée par la permanence des mouvements originaux des pièces entre elles.
Une structure, comme une charpente par exemple, dont les pièces n’ont aucun mouvements relatifs, n’est pas un mécanisme.
1.3 - Comportements.
Au sein de la chaîne d’énergie, un mécanisme véhicule un flux d’énergie mécanique (figure 2). Il transmet donc à chaque instant, une puissance mécanique qui est le produit d’une action mécanique par sa vitesse de déplacement. On peut alors faire apparaître deux types de comportements pour un mécanisme :
• uncomportement cinématique qui caractérise ses possibilités à transmettre la puissance mécanique entre l’entrée et la sortie, c’est à dire sa capacité à remplir sa fonction principale inscrite au cahier des charges.
• un comportement statique qui caractérise sa capacité à conserver une structure cinématique cohérente, c’est à dire sa capacité à résister avec une bonne rigidité aux actions mécaniques induites par la puissance mécanique transmise.
C h a î n e d i n f o r m a t i o n
TRAITER
C h a î n e d ’ é n e r g i e
ALIMENTER
CONVERTIR
Chaîne d’action
AGIR
DISTRIBUER TRANSMETTRE
COMMUNIQUER
ACQUÉRIR
énergie
infos
matière d'oeuvre
Grandeurs physiquesà acquérir
Ordres Compte rendu
matière d'oeuvre+
valeur ajoutéef i g 1
Chaîne d’action d’un système
On définit un modèle de représentation fonctionnelle qui s’appuie sur la notion de chaîne associée à celle de flux. Une chaîne est une suite cohérente de fonctions qui assurent successivement la transformation du flux qui la traverse. La chaîne d’action, encore appelée chaîne fonctionnelle, est l’unité fondamentale de tout système, c’est à dire que tout système est constitué d’au moins une chaîne d’action et souvent plusieurs.
La chaîne d’action se répartie en une chaîne d’énergie et une chaîne d’information suivant la disposition donnée par le schéma figure 1.
La chaîne d’information véhicule un flux de nature informationnelle et la chaîne d’énergie un flux de nature énergétique. La figure 1 donne les différentes fonctions se succédant dans ces deux chaînes.
D’un point de vue structurel, un système comprend deux parties. La partie opérative réalisant la ou les chaînes d’énergie et la partie commande réalisant la ou les chaînes d’information.
2 - Introduction à l’analyse globale des mécanismes.
L’analyse globale des mécanismes s’appuie sur l’analyse de la structure du mécanisme, c'est à dire sur l'analyse des liaisons (voir paragraphe 5) entre les pièces du mécanisme.
L'objectif de l'analyse globale d'un mécanisme
p 2 p 3p 2 p 3
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
P R E M I E R E P A R T I E énergie mécanique d’entrée
Mécanisme
flux d’énergiemécanique
énergie mécanique de sortie
Comportement statique de cohérence interne
Comportement cinématique global detransmission de puissance
est de définir des critères quantifiables permettant de statuer sur sa capacité à transmettre la puissance mécanique requise, avec ou sans transformation de mouvement. L'analyse porte sur les liaisons entre les pièces, que l'on aborde selon deux approches : L'analyse du comportement cinématique et l'analyse du comportement statique.
L'analyse du comportement cinématique s'appuie sur la théorie appelée "cinématique" dont l’outil de base est le torseur cinématique qui permet de caractériser le mouvement d’une pièce par rapport à une autre.
L'analyse du comportement statique s'appuie sur la théorie appelée "statique" dont l’outil de base est le torseur statique (ou sthénique) qui permet de caractériser les actions transmissibles entre deux pièces.
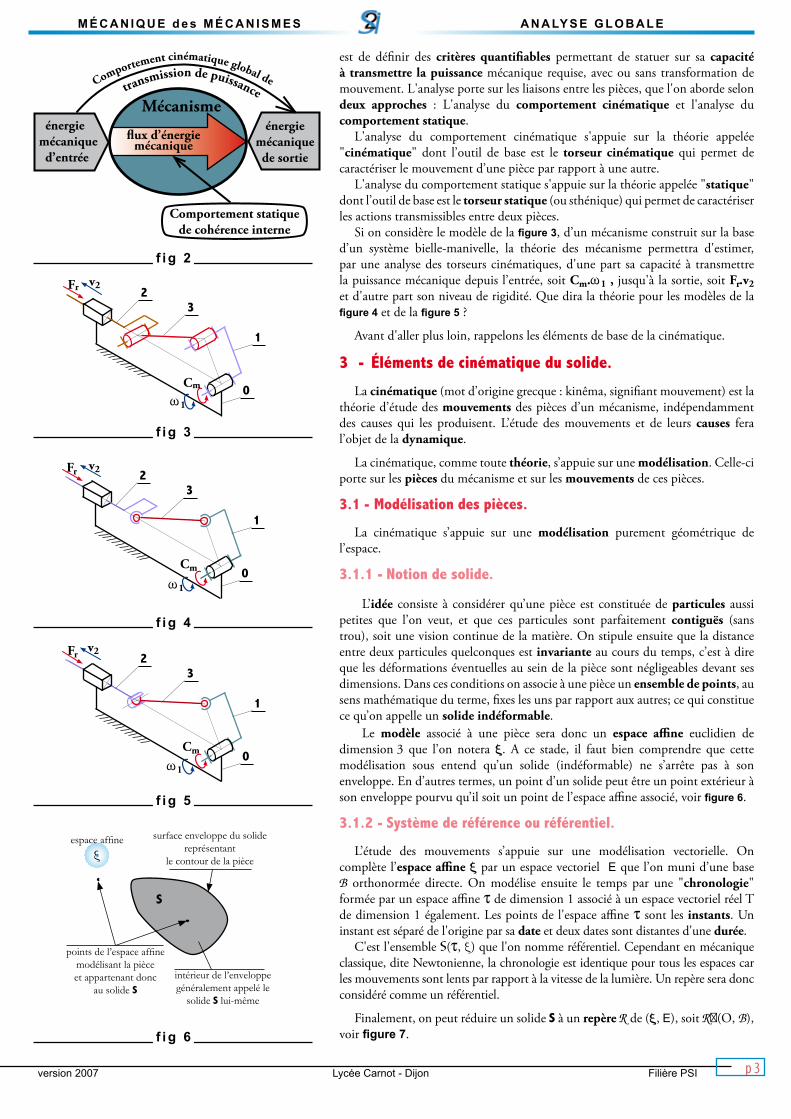
Si on considère le modèle de la figure 3, d’un mécanisme construit sur la base d’un système bielle‑manivelle, la théorie des mécanisme permettra d'estimer, par une analyse des torseurs cinématiques, d'une part sa capacité à transmettre la puissance mécanique depuis l’entrée, soit Cm.w1 , jusqu'à la sortie, soit Fr.v2 et d'autre part son niveau de rigidité. Que dira la théorie pour les modèles de la figure 4 et de la figure 5 ?
Avant d'aller plus loin, rappelons les éléments de base de la cinématique.
3 - Éléments de cinématique du solide.
La cinématique (mot d’origine grecque : kinêma, signifiant mouvement) est la théorie d’étude des mouvements des pièces d’un mécanisme, indépendamment des causes qui les produisent. L’étude des mouvements et de leurs causes fera l’objet de la dynamique.
La cinématique, comme toute théorie, s’appuie sur une modélisation. Celle‑ci porte sur les pièces du mécanisme et sur les mouvements de ces pièces.
3.1 - Modélisation des pièces.
La cinématique s’appuie sur une modélisation purement géométrique de l’espace.
3.1.1 - Notion de solide.
L’idée consiste à considérer qu’une pièce est constituée de particules aussi petites que l’on veut, et que ces particules sont parfaitement contiguës (sans trou), soit une vision continue de la matière. On stipule ensuite que la distance entre deux particules quelconques est invariante au cours du temps, c’est à dire que les déformations éventuelles au sein de la pièce sont négligeables devant ses dimensions. Dans ces conditions on associe à une pièce un ensemble de points, au sens mathématique du terme, fixes les uns par rapport aux autres; ce qui constitue ce qu’on appelle un solide indéformable.
Le modèle associé à une pièce sera donc un espace affine euclidien de dimension 3 que l’on notera x. A ce stade, il faut bien comprendre que cette modélisation sous entend qu’un solide (indéformable) ne s’arrête pas à son enveloppe. En d’autres termes, un point d’un solide peut être un point extérieur à son enveloppe pourvu qu’il soit un point de l’espace affine associé, voir figure 6.
3.1.2 - Système de référence ou référentiel.
L’étude des mouvements s’appuie sur une modélisation vectorielle. On complète l’espace affine x par un espace vectoriel E que l’on muni d’une base B orthonormée directe. On modélise ensuite le temps par une "chronologie" formée par un espace affine t de dimension 1 associé à un espace vectoriel réel T de dimension 1 également. Les points de l'espace affine t sont les instants. Un instant est séparé de l'origine par sa date et deux dates sont distantes d'une durée.
C'est l'ensemble S(t, x) que l'on nomme référentiel. Cependant en mécanique classique, dite Newtonienne, la chronologie est identique pour tous les espaces car les mouvements sont lents par rapport à la vitesse de la lumière. Un repère sera donc considéré comme un référentiel.
Finalement, on peut réduire un solide S à un repère R de (x, E), soit R≡(O, B), voir figure 7.
f i g 2
f i g 3
f i g 4
f i g 5
S
surface enveloppe du solidereprésentant
le contour de la pièce
espace affinex
points de l’espace affinemodélisant la pièceet appartenant donc
au solide Sintérieur de l’enveloppegénéralement appelé le
solide S lui-même
f i g 6
0
1
32
w1
Cm
Fr v2
0
1
32
Cm
Fr v2
w1
0
1
32
Cm
Frv2
w1

p 4 p 5
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 4 p 5
présente pas de difficulté. En effet si U =
=∑q ei ii 1
3
, avec
B = ( ) e e e1 2 3, , , alors : ddt
q ei ii
U
=
=∑
B 1
3
et il ne reste
plus qu'un "simple" produit vectoriel à calculer.Le calcul est d'autant plus simple que le nombre de
qi est faible. Ainsi si on a juste U = lu , c'est à dire un
seul qi non nul, alors ddt
u uref
U
= + ∧( )
B
B Bl l Ω / 1.
On cherchera donc, autant que possible, à choisir une base où l'expression du vecteur à dériver comporte le moins de composantes.
Remarque importante : L'option qui consiste à exprimer le vecteur
U∈ E dans la base de référence
(ici B1) est certes séduisante, mais conduit rarement à des calculs plus simples mais, le plus souvent, à des calculs plus longs et plus complexes.
Exemple : Considérons deux solides 1 et 2 en liaison pivot de centre Q1, voir figure 9.
On souhaite calculer VP
, /2 1 .On écrit Q P r x1 2
= pour un calcul simple, car alors :
VdQ P
dtr x r xP, / /2 1
12 2 1 2
1
=
= + ∧( )
B
Ω , d'où
V r z x r yP, /2 1 2 2= ∧( ) =θ θ .Pour un calcul plus complexe, on écrirait :Q P r x r y1 1 1
= +cos sinθ θ . Ce qui donnerait :V r x r yP, / sin cos2 1 1 1
= − +θ θ θ θ .
1
2
qx1Q1
x2
y1y2
P
z
3.2 - Modélisation du mouvement.
3.2.1 - Mouvement et référence.
Le mouvement est une notion relative, c’est à dire que le déplacement d’une pièce ne sera pas perçu de manière identique suivant le point de vue de l’observateur. Il est donc essentiel, avant tout étude d’un mouvement, de préciser la pièce observée et la place de l’observateur que l’on appelle généralement la référence du mouvement.
3.2.2 - Mouvement d'un point d'un solide.
On considère que le mouvement d’une pièce est parfaitement défini si on connaît à chaque instant la position de ses points.
3.2.2.1 - Position.
Une pièce étant modélisée par un solide, on définit la position d’un point P d’un solide S en mouvement par un vecteur dont l’origine est un point quelconque Q du solide de référence Sref et l’extrémité le point P dont on veut définir la position (figure 8). Ce vecteur QP
s’appelle le vecteur position du point P, sous entendu :
appartenant à S, par rapport à Sref . Ce vecteur position est une fonction du temps même si on ne note pas explicitement QP
(t). L'ensemble des points P(t)
forme une courbe appelée la trajectoire.
3.2.2.2 - Vitesse.
On caractérise ensuite la manière dont varie ce vecteur position au cours du temps. C'est ce qu'on appelle le vecteur vitesse. On utilise naturellement le concept de dérivée pour représenter cette variation. Ainsi le vecteur vitesse du
point P S/Sref, s'exprime par : VQP QP
tdQP
dtP
t
t t t
, / limS Sref =−
∆=
∆ →
+∆( ) ( )0
Bref
.
Il est à noter deux caractéristiques essentielles dans la formulation de cette relation. D'abord que la base de dérivation Bref est la base associée au solide de référence Sref, et ensuite que le point Q est un point du solide de référence Sref. Terminons en rappelant que le vecteur vitesse est tangent à la trajectoire.
3.2.2.3 - Opérateur de dérivation vectorielle
La dérivée d’un vecteur est en fait le résultat d’une opération consistant à associer à un vecteur
U∈ E , un vecteur image
V , appelé dérivée du vecteur
U
dans une base de référence Bref, obtenu en lui appliquant un opérateur vectoriel (linéaire), appelé opérateur de dérivation vectorielle dont la notation est donnée par :
U VU∈ → =
E
ddt
ddt ref
ref
B
B
Le calcul de ddt
ref
U
B
n'est pas effectué directement. On utilise une relation
traduisant un changement de base pour l'opérateur de dérivation. Étant donnés un vecteur
U∈ E de base B et deux espaces vectoriels E1 et E2 de bases respectives
B1 et B2, on montre que : ddt
ddt
U U
U
=
+ ∧
B B
B B
1 2
2 1Ω / .
Cette relation fait apparaître le vecteur Ω B B2 1/ qui caractérise le mouvement de
la base B2 par rapport à la base B1. En effet, à chaque instant, le passage de B2, de la position précédente à la position suivante, peut être caractérisé par une rotation propre dont la vitesse est donnée par la variation angulaire autour de l'axe de la rotation propre. Le vecteur
Ω B B2 1/ représente cette rotation dont l'axe et la vitesse
de variation sont différents à chaque instant. Il est ainsi appelé le vecteur rotation instantané de B2/ B1.
Cependant on a guère avancé, sauf si on utilise la relation en prenant la base B
au lieu de la base B2 : ddt
ddt
U U
U
=
+ ∧
B B
B B
1
1Ω / , où le calcul de ddt
U
B
ne
S
B
PBref
Q
Sref
f i g 7
f i g 8
f i g 9
S
RB
O

p 4 p 5p 4 p 5
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
3.2.3 - Mouvement d'un solide.
Pour caractériser le mouvement d'un solide, il suffit de caractériser le mouvement de chacun de ses points. Cette définition frappée par le bon sens, conduirait cependant à préciser le mouvement d'une infinité de points de l'espace affine si les points n'étaient pas liés. Or, le solide étant supposé indéformable, les mouvements des points de l'espace affine ne sont pas indépendants.
3.2.3.1 - Champ des vecteurs vitesse.
Pour un solide indéformable, on montre que le champ des vecteurs vitesse est un champ vectoriel équiprojectif. Le champ vectoriel des vitesses des points d'un solide 2 par rapport à un solide 1, étant défini par :
P S VVP S
S refref∈ →
, /
, /B
B , on a donc pour deux
points A, B S : V AB V ABB S A Sref ref, / , /. .B B
= .
La relation d'équiprojectivité d'un champ vectoriel est équivalente à la relation de Varignon :
V V BAB S A S Sref ref ref, / , / /B B B
= + ∧Ω .
Cette relation montre que :Si on connaît la vitesse d'un point B S et le vecteur de rotation instantané
Ω S ref/B , alors le
vecteur vitesse de tous les autres points du solide sont parfaitement connus.
Ceci permet de calculer une vitesse sans faire le calcul d'une dérivée. A utiliser dans tous les cas, si cela est possible, bien entendu.
Le champ des vecteurs vitesse d'un solide peut se mettre sous la forme d'un torseur dit "torseur cinématique" et généralement noté :
V BS Qref/ = Ω
S Q Sref refV/ , /B B , et pour
d'autres : V BS Qref/ = ΩS
S
ref
refV/
/
B
B
Exemple : Reprenons l'exemple précédent des deux solides en liaison pivot, voir figure 9.
On connaît VQ
1 2 1 0, / = et Ω 2 1/ = θ z . Ce qui permet de calculer VP
, /2 1 en
utilisant la relation de Varignon :V V PQP Q
, / , / /2 1 2 1 1 2 11= + ∧Ω qui donne :V PQ r x z r yP , / /2 1 1 2 1 2 2= ∧ = − ∧ =Ω θ θ . Et on trouve le même résultat !
3.2.3.2 - Composition des mouvements.
La notion de composition de mouvement est essentielle dans l'analyse globale des mécanismes. En effet les deux relations vectorielles de composition de mouvements que l'on peut condenser en une relation torsorielle, soit :
V V1 11
/ /n i iQ Qi
i n
= +=
=
∑ , permettent d'obtenir les relations qui traduiront les
liens entre les solides, c'est à dire l'identité du mécanisme.Pour terminer sur ces rappels de cinématique, soulignons que les deux
relations :
V VQ Qi
i n
n i i
, / , /1 11
= +=
=
∑ et V V QPQ Pi i i i i i
, / , / /+ + += + ∧1 1 1Ω
permettent de calculer la vitesse de n'importe quel point appartenant à n'importe quel solide, par rapport à n'importe quel autre solide, et tout cela sans avoir à calculer une dérivée vectorielle (!)
Même si, avec les outils présentés, l'opération de dérivation vectorielle semble sans difficultés importantes, elle peut être délicate. En effet, suivant que le point dont on veut calculer la vitesse appartient à un solide ou à un autre, les paramètres géométriques exprimant le vecteur position doivent être considérés comme constants ou variables. Et ceci n'est pas toujours facile à voir.
Il est donc fortement déconseillé de calculer une vitesse par dérivation du vecteur position si ce n'est pas strictement nécessaire comme dans le cas d'un solide en mouvement de translation.
Exemple : Considérons pour illustrer le propos précédent le mécanisme de la figure 10, constitué de trois solides.
Si on note Q P xt1 2
= ( )l , alors V dQ Pdt
P
, /3 11
1
=
B
et V dQ Pdt
P
, /2 11
1
=
B
.
Ces deux expressions semblent identiques alors qu'elles expriment des vitesses différentes. En fait dans le deuxième cas le paramètre l(t) devra être considéré comme constant.
4 - Notion de degré de liberté.
Cette notion est très importante car à la base du concept de liaison qui permet de modéliser un mécanisme. Le torseur cinématique y joue un rôle essentiel.
4.1 - Torseur cinématique.
La théorie de la cinématique associe au mouvement relatif de deux solides un torseur cinématique dont la connaissance définit parfaitement ce mouvement. Ainsi le mouvement de S/Sref, figure 11, est parfaitement défini par le torseur
cinématique : VS/Sref Q
= Ω
S/S Q,S/Sref refV Q
.
Dans ces conditions, on peut choisir d’exprimer les deux vecteurs caractérisant le torseur, dans une base Bref liée à Sref. Ceci permet de substituer au torseur cinématique les six composantes (scalaires) des deux vecteurs exprimés dans la base Bref, qui, précisons le, est choisie arbitrairement.
En notant x y zref ref ref, ,( ) les vecteurs unitaires de la base Bref, on définit généralement les six composantes comme suit : Ω
S S ref ref refref x y z/ = + +p q r et V x y zQ S S ref ref refref
, / = + +u v w . Ce qui conduit
à écrire : VB
S/Sref Q ref,
=p uq vr w
B
Q ref,
remarque : les six composantes scalaires sont des fonctions du temps, soient : p(t), q(t), r(t), u(t), v(t), w(t).
f i g 1 0
Bref
Sref
SQ
f i g 11
1
2
qx1Q1
x2
y1y2
P
z
x3y3
3
p 6 p 7
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 6 p 7
4.2 - Degrés de liberté entre deux solides.
La notion de degré de liberté est attachée à la notion d’indépendance entre les composantes du torseur cinématique caractérisant le mouvement relatif de deux solides. Ainsi, en reprenant les notations du paragraphe précédent, le mouvement
relatif de S/Sref défini par p uq vr w
B
Q ref,
, montre que les six composantes :
(p, q, r, u, v, w) suffisent à caractériser le mouvement de S/Sref.
Si ces six composantes sont parfaitement indépendantes, alors le solide S possède 6 degrés de liberté par rapport au solide Sref. On note nc ce nombre de degrés de liberté.
Si, par contre, les six composantes sont liées par des relations du type fi (p, q, r, u, v, w)=0 avec i=(1, ... , n), alors le solide S possède nc = (6‑n) degrés de liberté. On se limitera à n ≤ 6. Le cas n > 6 ne fait pas partie de cet exposé, en effet l’analyse des mécanismes se préoccupe de l’architecture du mécanisme et pas de la réalisation particulière de chaque liaison. Finalement : 0 ≤ nc ≤ 6.
remarque : les relations fi (p, q, r, u, v, w)=0 les plus simples et les plus fréquentes sont celles qui expriment la nullité d’une de ces composantes, comme, par exemple, p = 0 ou bien v = 0.
5 - Concept de liaison.
5.1 - Présentation.
Le concept de liaison résulte de deux approches. Une approche de type réalisation, correspondant à l’analyse des contacts entre les deux pièces et une approche de type modélisation, correspondant à l’analyse des mouvements possibles entre les deux pièces.
La première approche est à l’origine du mot « liaison », car ce sont les contacts entre les deux pièces qui induisent le caractère « lié » des deux pièces. A noter que ces contacts sont les contacts de deux surfaces quelconques, c’est à dire, en général,
des contacts ponctuels. Cependant la modélisation des pièces par des solides indéformables permet de considérer les surfaces géométriquement parfaites en formes et dimensions qui peuvent ainsi conduire à des contacts surfaciques. Cette approche est utilisée pour construire (réaliser) des liaisons, ce qui n’est pas notre propos.
La deuxième approche définit une correspondance unique entre le mouvement relatif de deux solides et la liaison existant entre ces deux solides. C’est cette approche qui analyse le mouvement possible entre deux solides et permet de modéliser la cinématique d'un mécanisme. Enfin le mouvement possible entre deux solides est caractérisé et quantifié par le concept de degré de liberté.
5.2 - Définition.
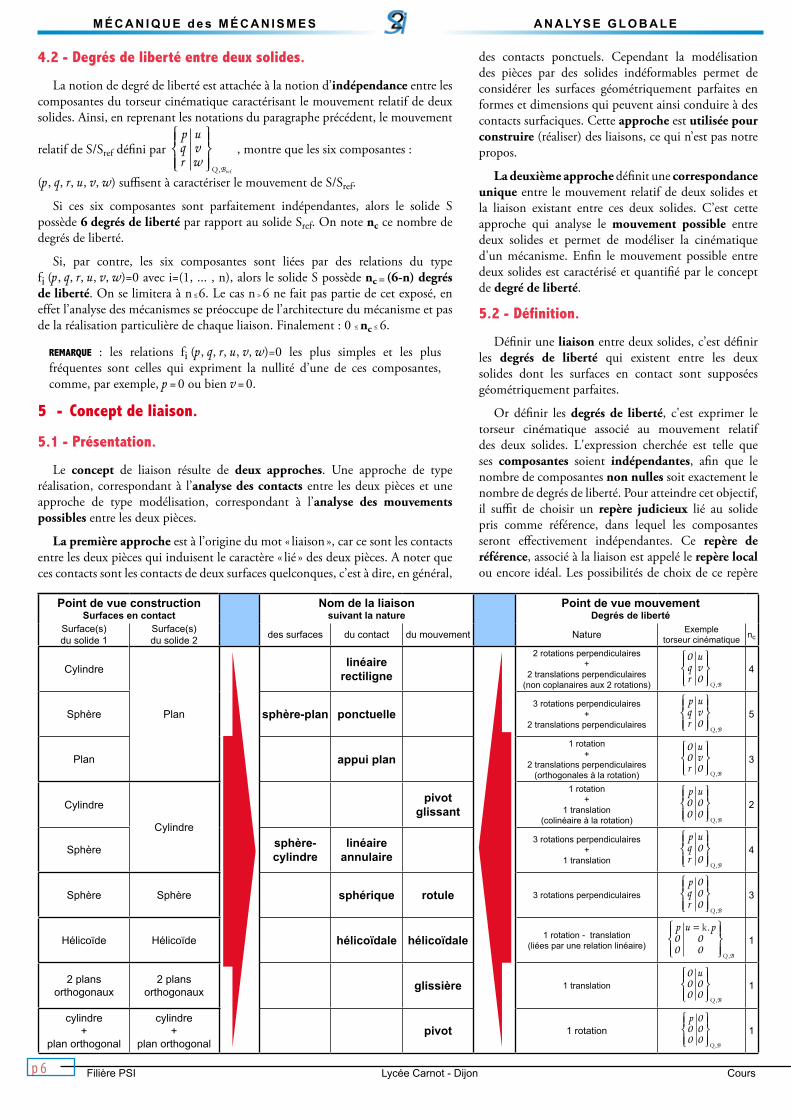
Définir une liaison entre deux solides, c’est définir les degrés de liberté qui existent entre les deux solides dont les surfaces en contact sont supposées géométriquement parfaites.
Or définir les degrés de liberté, c'est exprimer le torseur cinématique associé au mouvement relatif des deux solides. L'expression cherchée est telle que ses composantes soient indépendantes, afin que le nombre de composantes non nulles soit exactement le nombre de degrés de liberté. Pour atteindre cet objectif, il suffit de choisir un repère judicieux lié au solide pris comme référence, dans lequel les composantes seront effectivement indépendantes. Ce repère de référence, associé à la liaison est appelé le repère local ou encore idéal. Les possibilités de choix de ce repère
Point de vue construction Surfaces en contact
Nom de la liaison suivant la nature
Point de vue mouvement Degrés de liberté
Surface(s)du solide 1
Surface(s)du solide 2 des surfaces du contact du mouvement Nature Exemple
torseur cinématique nc
Cylindre
Plan
linéairerectiligne
2 rotations perpendiculaires+
2 translations perpendiculaires(non coplanaires aux 2 rotations)
0 uq vr 0
B
Q,
4
Sphère sphère-plan ponctuelle3 rotations perpendiculaires
+2 translations perpendiculaires
p uq vr 0
B
Q,
5
Plan appui plan1 rotation
+2 translations perpendiculaires
(orthogonales à la rotation)
0 u0 vr 0
B
Q,
3
Cylindre
Cylindre
pivotglissant
1 rotation +
1 translation(colinéaire à la rotation)
p u0 00 0
B
Q,
2
Sphère sphère-cylindre
linéaireannulaire
3 rotations perpendiculaires+
1 translation
p uq 0r 0
B
Q,
4
Sphère Sphère sphérique rotule 3 rotations perpendiculairesp 0q 0r 0
B
Q,
3
Hélicoïde Hélicoïde hélicoïdale hélicoïdale 1 rotation - translation(liées par une relation linéaire)
p u = p0 00 0
B
k
Q
.
,
1
2 plansorthogonaux
2 plansorthogonaux glissière 1 translation
0 u0 00 0
B
Q,
1
cylindre+
plan orthogonal
cylindre+
plan orthogonalpivot 1 rotation
p 00 00 0
B
Q,
1
p 6 p 7p 6 p 7
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
sont données dans les tableaux de liaisons fournis en première année.
5.3 - Les liaisons normalisées.
On limite la typologie des liaisons aux quelques liaisons résultant des contacts entre des surfaces particulières des enveloppes des deux solides considérés. Les surfaces particulières sont : le plan, le cylindre et la sphère. L'association de ces surfaces par couple en contact (une surface sur chacun des deux solides) permet de définir les liaisons dites normalisées. On complète cette liste en y ajoutant la surface hélicoïdale ou hélicoïde, et des combinaisons de ces surfaces (Voir tableau dans lequel sont volontairement omis les liaisons encastrement et sphérique à doigt). On remarque que la dénomination des liaisons est très largement issue de l'approche contact alors que c'est l'analyse des mouvements qui nous permettra d'identifier les liaisons d'un mécanisme.
5.4 - Caractérisation d'une liaison.
Pour caractériser une liaison, il faut d'abord préciser le repère local qui permet de la situer géométriquement et terminer en précisant une des représentations suivantes :
‑ représentation formelle : les composantes du torseur cinématique dans le repère local en indiquant seulement si elles sont nulles ou pas.
‑ représentation littérale : le nom normalisé complété par son orientation dans le repère local.
‑ représentation graphique : le symbole normalisé avec la représentation du repère local.
Chaque représentation poursuit un objectif particulier. En effet la première représentation est utilisée pour mener les calculs d'analyse du mécanisme, la deuxième pour définir le graphe de structure du mécanisme et la troisième pour tracer le schéma
S5
S1
S4
S6
L45
L15L46
S5
S1
S4
S2
S3
S6
L45
L15
L'15L24
L12
L34
L46
L23
S5
S1
S4
S2S3
L45
L15L24
L12
L34
L23
S5
S1
L'15
L15S4
S2
L24
f i g 1 2
f i g 1 3
f i g 1 4
cinématique du mécanisme.
6 - Théorie des mécanismes.
Comme dans toute démarche scientifique, la modélisation joue un rôle essentiel. C'est la modélisation introduite en première année pour l'étude mécanique des mécanismes dans laquelle s'intègre largement l'analyse globale des mécanismes. La modélisation comporte un modèle structurel et un modèle comportemental.
6.1 - Modélisation structurelle.
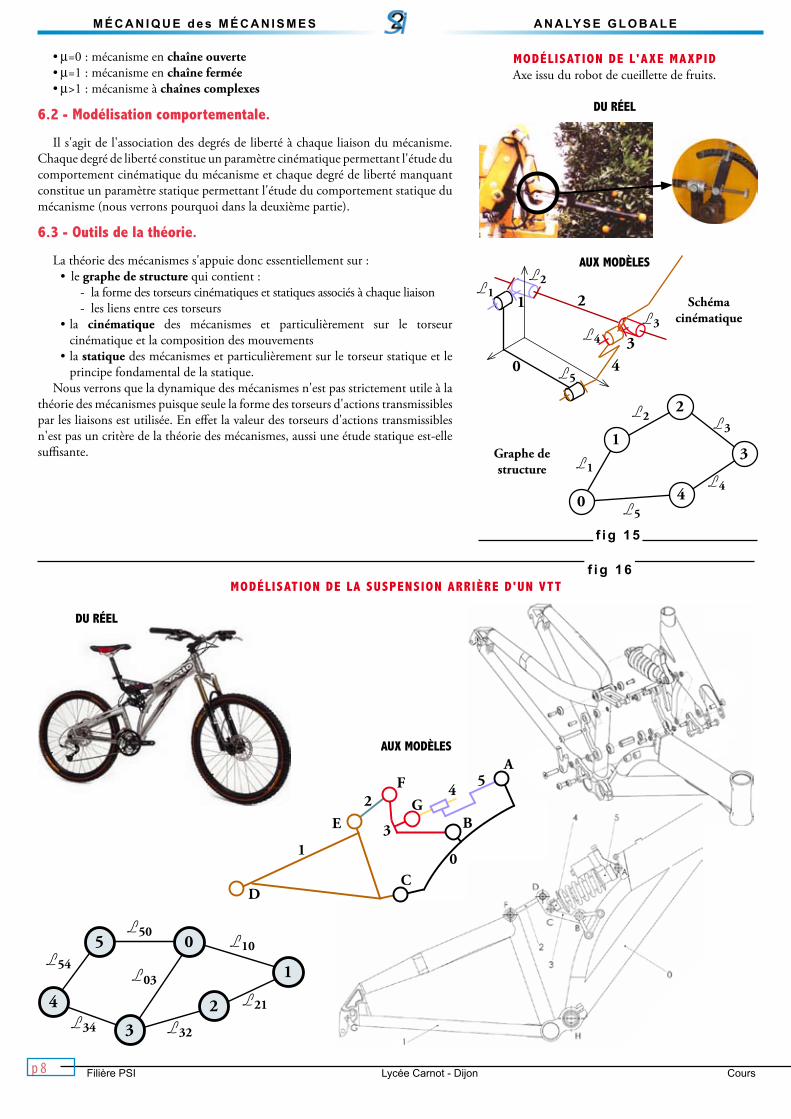
Cette modélisation (voir figure 15) apparaît sous deux formes : ‑ le graphe de structure, et ‑ le schéma cinématique.
Ces deux modèles sont issus de la théorie des graphes. Rappelons rapidement quelques éléments de cette théorie.
6.1.1 - Formalisme.
La théorie des graphes s'appuie sur un formalisme dont l'objectif est de mettre en évidence le ou les cheminements possibles entre deux objets.
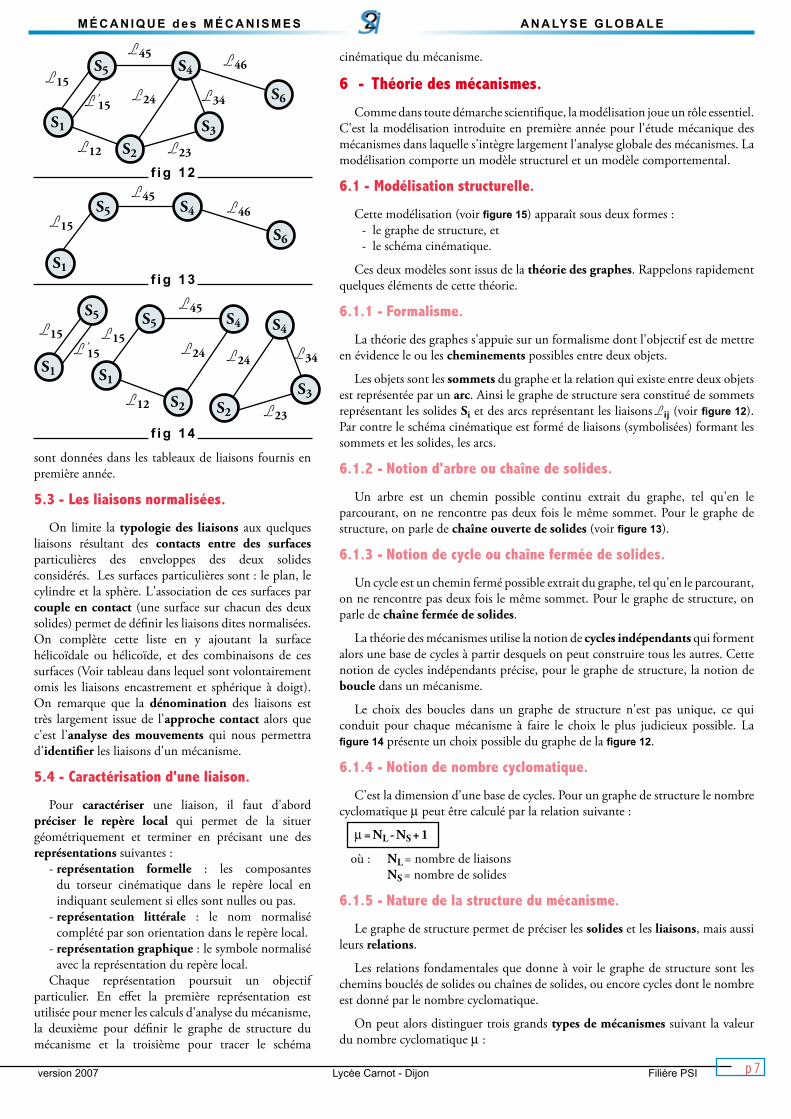
Les objets sont les sommets du graphe et la relation qui existe entre deux objets est représentée par un arc. Ainsi le graphe de structure sera constitué de sommets représentant les solides Si et des arcs représentant les liaisons Lij (voir figure 12). Par contre le schéma cinématique est formé de liaisons (symbolisées) formant les sommets et les solides, les arcs.
6.1.2 - Notion d'arbre ou chaîne de solides.
Un arbre est un chemin possible continu extrait du graphe, tel qu'en le parcourant, on ne rencontre pas deux fois le même sommet. Pour le graphe de structure, on parle de chaîne ouverte de solides (voir figure 13).
6.1.3 - Notion de cycle ou chaîne fermée de solides.
Un cycle est un chemin fermé possible extrait du graphe, tel qu'en le parcourant, on ne rencontre pas deux fois le même sommet. Pour le graphe de structure, on parle de chaîne fermée de solides.
La théorie des mécanismes utilise la notion de cycles indépendants qui forment alors une base de cycles à partir desquels on peut construire tous les autres. Cette notion de cycles indépendants précise, pour le graphe de structure, la notion de boucle dans un mécanisme.
Le choix des boucles dans un graphe de structure n'est pas unique, ce qui conduit pour chaque mécanisme à faire le choix le plus judicieux possible. La figure 14 présente un choix possible du graphe de la figure 12.
6.1.4 - Notion de nombre cyclomatique.
C'est la dimension d'une base de cycles. Pour un graphe de structure le nombre cyclomatique m peut être calculé par la relation suivante :
m = NL ‑ NS + 1
où : NL = nombre de liaisons NS = nombre de solides
6.1.5 - Nature de la structure du mécanisme.
Le graphe de structure permet de préciser les solides et les liaisons, mais aussi leurs relations.
Les relations fondamentales que donne à voir le graphe de structure sont les chemins bouclés de solides ou chaînes de solides, ou encore cycles dont le nombre est donné par le nombre cyclomatique.
On peut alors distinguer trois grands types de mécanismes suivant la valeur du nombre cyclomatique m :
p 8 p 9
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 8 p 9
MODÉLISATION DE LA SUSPENSION ARRIÈRE D'UN VTT
DU RÉEL
AUX MODÈLES
5
4
0
32
1
L50
L54L03
L34
L21
L10
L32
•m=0 : mécanisme en chaîne ouverte•m=1 : mécanisme en chaîne fermée•m>1 : mécanisme à chaînes complexes
6.2 - Modélisation comportementale.
Il s'agit de l'association des degrés de liberté à chaque liaison du mécanisme. Chaque degré de liberté constitue un paramètre cinématique permettant l'étude du comportement cinématique du mécanisme et chaque degré de liberté manquant constitue un paramètre statique permettant l'étude du comportement statique du mécanisme (nous verrons pourquoi dans la deuxième partie).
6.3 - Outils de la théorie.
La théorie des mécanismes s'appuie donc essentiellement sur : • legraphe de structure qui contient :
‑ la forme des torseurs cinématiques et statiques associés à chaque liaison ‑ les liens entre ces torseurs
•la cinématique des mécanismes et particulièrement sur le torseur cinématique et la composition des mouvements
•lastatique des mécanismes et particulièrement sur le torseur statique et le principe fondamental de la statique.
Nous verrons que la dynamique des mécanismes n'est pas strictement utile à la théorie des mécanismes puisque seule la forme des torseurs d'actions transmissibles par les liaisons est utilisée. En effet la valeur des torseurs d'actions transmissibles n'est pas un critère de la théorie des mécanismes, aussi une étude statique est‑elle suffisante. Graphe de
structure
Schéma cinématique
MODÉLISATION DE L 'AXE MAXPIDAxe issu du robot de cueillette de fruits.
DU RÉEL
AUX MODÈLES
f i g 1 5
f i g 1 6
1
L5
L1
L2 L3
L4
2
3
40
340
1 2L1
L2
L3L4
L5
C
1
D
E
AF
GB
2
3
45
0
p 8 p 9p 8 p 9
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
D E U X I E M E P A R T I E7 - Analyse cinématique globale.
7.1 - Objectif de l'analyse.
Le but de cette analyse est la définition d'un critère permettant de valider la structure d'un mécanisme sur sa capacité à transmettre le mouvement de l'entrée à la sortie. En d'autres termes, le mouvement de sortie doit être imposé et parfaitement défini par le mouvement d'entrée.
7.2 - Principe de l'analyse.
On caractérise les différents mouvements des pièces du mécanisme par les degrés de liberté des liaisons. Parmi tous les degrés de liberté du mécanisme, l'analyse cinématique globale évalue les degrés de liberté indépendants, c'est à dire ceux que l'on doit piloter afin que tous les autres soient fixés.
Dans ces conditions, les degrés de liberté pilotés constituent le mouvement d'entrée et permettent de maîtriser l'ensemble des mouvements du mécanisme et plus particulièrement le mouvement de sortie.
7.3 - Notion de degré de mobilité.
La notion de degré de mobilité repose sur le concept de degré de liberté, or le nombre de degrés de liberté dépend directement du choix des liaisons, donc du modèle associé au mécanisme. Il est alors facile de comprendre que, même si on parle souvent du degré de mobilité d'un mécanisme, on devrait en toute rigueur, parler du degré de mobilité du modèle d'un mécanisme.
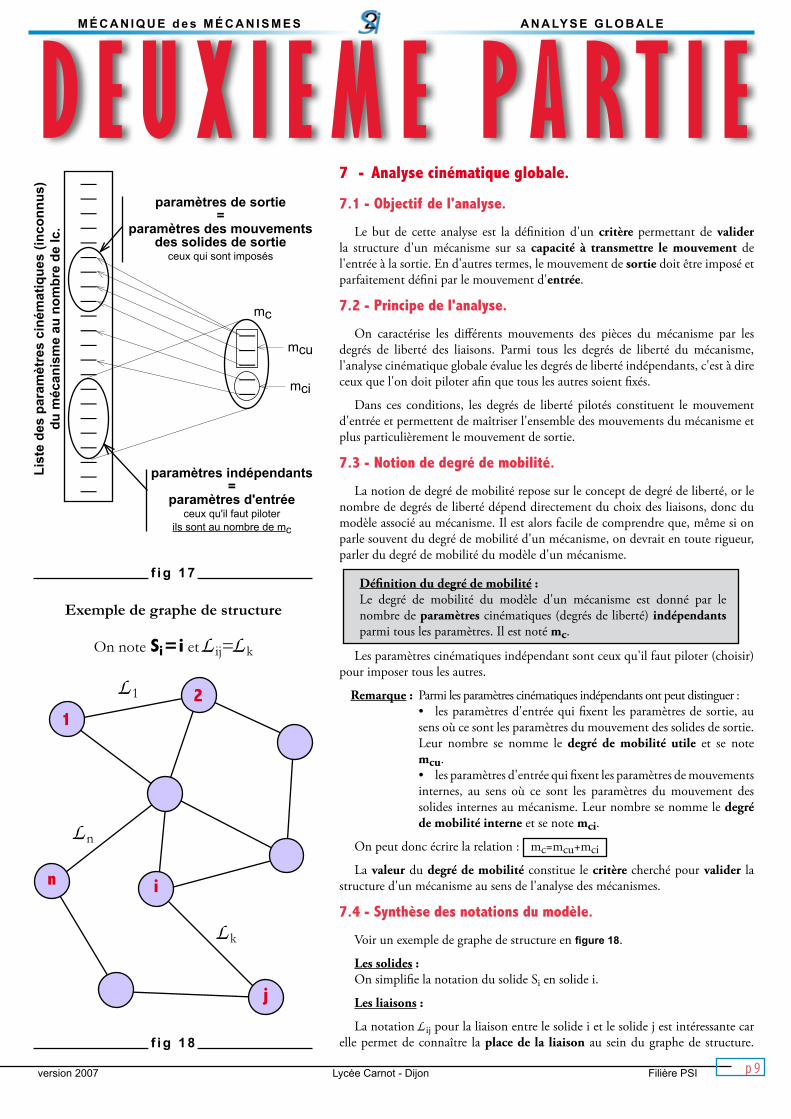
Définition du degré de mobilité :Le degré de mobilité du modèle d'un mécanisme est donné par le nombre de paramètres cinématiques (degrés de liberté) indépendants parmi tous les paramètres. Il est noté mc.
Les paramètres cinématiques indépendant sont ceux qu'il faut piloter (choisir) pour imposer tous les autres.
Remarque : Parmi les paramètres cinématiques indépendants ont peut distinguer : • lesparamètresd'entréequifixentlesparamètresdesortie,au
sens où ce sont les paramètres du mouvement des solides de sortie. Leur nombre se nomme le degré de mobilité utile et se note mcu.
• lesparamètresd'entréequifixentlesparamètresdemouvementsinternes, au sens où ce sont les paramètres du mouvement des solides internes au mécanisme. Leur nombre se nomme le degré de mobilité interne et se note mci.
On peut donc écrire la relation : mc=mcu+mci
La valeur du degré de mobilité constitue le critère cherché pour valider la structure d'un mécanisme au sens de l'analyse des mécanismes.
7.4 - Synthèse des notations du modèle.
Voir un exemple de graphe de structure en figure 18.
Les solides :On simplifie la notation du solide Si en solide i.
Les liaisons :
La notation Lij pour la liaison entre le solide i et le solide j est intéressante car elle permet de connaître la place de la liaison au sein du graphe de structure.
——————————————————————
List
e de
s pa
ram
ètre
s ci
ném
atiq
ues
(inco
nnus
)du
méc
anis
me
au n
ombr
e de
Ic.
—————
paramètres indépendants=
paramètres d'entréeceux qu'il faut piloter
ils sont au nombre de mc
paramètres de sortie=
paramètres des mouvements des solides de sortie
ceux qui sont imposés
mcu
mci
mc
f i g 1 7
f i g 1 8
Exemple de graphe de structure
On note Si = i et Lij=Lk
12
in
j
Lk
L1
Ln
p 10 p 11
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 10 p 11
Cependant on peut souvent alléger cette notation par Lk, où k est le numéro de la liaison, en perdant l'information de position qui n'est pas toujours nécessaire.
La modélisation des liaisons ne tient généralement compte que des mouvements de grande amplitude (voire infinie), mais nous verrons qu'il est possible de tenir compte des mouvements de faible amplitude introduits par les jeux existants dans la réalisation des liaisons.
Le torseur cinématique :
Le mouvement du solide i par rapport au solide j, défini par la liaison Lij, sera modélisé par le torseur cinématique exprimé dans le repère local (voir
paragraphe 5.2). On adopte la notation suivante : VB
B
p uq vr w
ij =
Q
ij ij
ij ij
ij ij Q,
,
.
C'est à dire que : Ω
i j ij ij ijx y z/ = + +p q r et que
V x y zQ i j ij ij ij
, / = + +u v w avec B =
x y z, ,( ) .
Le repère local (Q,B) permet une expression simple du torseur cinématique où n'interviennent que les degrés de liberté, représentés par les composantes non nulles qui sont indépendantes. Ces composantes constituent alors les paramètres cinématiques associés à la liaison dont le nombre est noté nc. Le nombre des paramètres cinématiques associés à la kième liaison sera noté quant à lui nck.
Les paramètres globaux du mécanisme :
NS : nombre de solidesNL : nombre de liaisonsm = NL ‑ NS + 1 : nombre cyclomatique ou nombre de chaînes fermées
indépendantes du graphe de structure.nck : nombre de paramètres cinématiques associés à la kième liaison ou nombre
de degrés de liberté de la kième liaison.
Ic = nckk=∑
1
NL
: nombre total de paramètres cinématiques associés au mécanisme, appelés également inconnues cinématiques.
Ec : nombre de relations ou équations reliant les Ic paramètres cinématiques.Ces relations proviennent du réseau de liaisons du mécanisme que l'on observe aisément sur le graphe de structure (voir figure 18).
8 - Recherche du degré de mobilité.
8.1 - Principe.
La recherche des degrés de liberté indépendants sous‑entend que parmi tous les degrés de liberté, il en existe qui sont dépendants. Or pour que certains paramètres dépendent d'autres paramètres, c'est qu'il existe des relations liant tous ces paramètres.
On en conclue que la recherche du degré de mobilité mc passe par la recherche des relations liant les paramètres cinématiques. Ces relations proviennent de l'organisation, décrite par le graphe de structure, des liaisons au sein du mécanisme. Si cette organisation présente des boucles ou chaînes fermées de solides (mailles du réseau des liaisons), les relations existent, si, par contre, l'organisation ne présente aucune boucle, c'est à dire que la chaîne de solides est ouverte, alors il n'existe aucune relation.
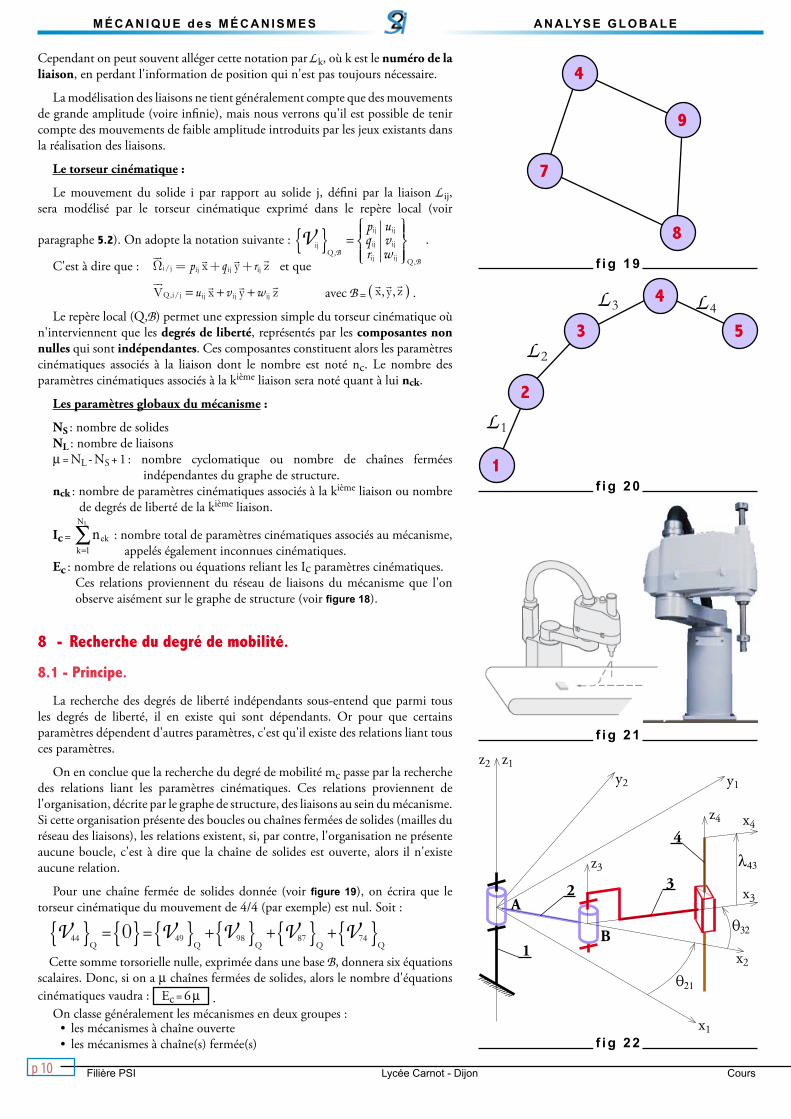
Pour une chaîne fermée de solides donnée (voir figure 19), on écrira que le torseur cinématique du mouvement de 4/4 (par exemple) est nul. Soit :
V V V V V44 49 98 87 74 = = + + + Q Q Q Q Q
0Cette somme torsorielle nulle, exprimée dans une base B, donnera six équations
scalaires. Donc, si on a m chaînes fermées de solides, alors le nombre d'équations cinématiques vaudra : Ec = 6 m .
On classe généralement les mécanismes en deux groupes : • lesmécanismesàchaîneouverte • lesmécanismesàchaîne(s)fermée(s)
4
8
9
7
f i g 1 9
f i g 2 2
f i g 2 01
2
3 5
4
L1
L2
L3 L4
f i g 2 1
A
B
q21
q32
l43
1
2 3
4
x1
x2
x3
x4
y1y2
z1
z4
z3
z2

p 10 p 11p 10 p 11
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
8.2 - Mécanismes à chaîne ouverte
8.2.1 - Présentation.
Ce type de mécanisme concerne essentiellement les robots ou bras manipulateurs. Ils sont constitués d'une suite de solides et de liaisons en série (voir figure 20).
Le graphe de structure ne présentant aucune boucle, le nombre d'équations cinématique est nul : Ec = 0. Il s'en suit que les paramètres cinématiques, n'étant liés par aucune relations, sont tous indépendants. Ce qui conduit à mc = Ic .
Ce type de mécanisme nécessite donc le pilotage de chaque paramètre cinématique. Pour des considérations de réalisation, il est délicat d'implanter plus d'un actionneur pour piloter le mouvement d'une liaison. Ceci conduit à construire ces mécanismes sur la base de liaisons à un degré de liberté (nck = 1), c'est à dire des liaisons pivots et/ou des liaisons glissières. Chaque liaison ainsi pilotée peut s'appeler un axe et on parle alors de robots trois axes, quatre axes, etc… .
8.2.2 - Étude d'un exemple : Robot SCARA.
Présentation :
Ce type de robot est très utilisé dans les chaînes d'assemblage (voir figure 21) et exécute des mouvements identiques au bras humain. D'ailleurs SCARA est l'acronyme de Selectiv Compliance Assembly Robot Arm (ce que l'on pourrait traduire par : Bras adaptatif de robot d'assemblage).
1
2
3
4
L1pivot ‑ (A,
z1 )
nc1=1 ≡ r21= θ21
L2pivot ‑ (B,
z1 )
nc2=1 ≡ r32= θ32
L3glissière ‑ (
z1 )
nc3=1 ≡ w43= λ43
f i g 2 3
f i g 2 4
q32
x2
x3
y2y3 q32
q21
x1
x2
y1y2 q21
Description du modèle :
Ce mécanisme à chaîne ouverte est composé de (voir schéma figure 22) : • unbâti1 auquel est lié un repère A x y z, , ,
1 1 1( )
• unsolide2, en liaison pivot d'axe A z,
1( ) aveclebâti1, auquel est lié le repère A x y z, , ,
2 2 2( ) tel que
x x y y1 2 1 2 21, ,( ) = ( ) = θ et z z2 1= .
• unsolide3, en liaison pivot d'axe B z,
1( ) avec le solide 2, auquel est lié le repère B x y z, , ,
3 3 3( ) tel que
x x y y2 3 2 3 32, ,( ) = ( ) = θ et
z z3 1= . La position de B est donnée par AB d x
= 2 .• unsolide4, en liaison glissière d'axe
z1 avec le solide 3, auquel est lié le
repère M x y z, , ,
4 4 4( ) tel que B4 = B3. La position de 4/3 est repérée par BM z
. 1 43= λ .
Graphe de structure : (voir figure 23)
Analyse globale du mécanisme :
Comme il a été dit précédemment, ce mécanisme présente un degré de mobilité
tel que : mc = Ic = nckk=∑
1
3
, soit : mc = 3. Ce qui permet de conclure qu'il faut installer
trois actionneurs pour piloter les mouvements du robot.
Étude complémentaire :
Le pilotage du robot a pour but de commander le mouvement du solide terminal, ici le solide 4. On est donc amené à compléter l'étude globale par un calcul du torseur cinématique du mouvement de 4/1 afin d'exprimer ses composantes, dans le repère fixe, en fonction des paramètres à piloter. Pour notre robot, les trois paramètres à piloter seront r21, r32 et w43, composantes des torseurs cinématiques suivants :
VB
Br
21 =
AA
,,
11
0 00 0
021
, VB
Br
32 =
BB
,,
11
0 00 0
032
et VB
Bw
43 =
AA
,,
11
0 00 00 43
Ensuite on obtient le torseur cinématique du mouvement de 4/1 en composant les mouvements, soit : V
B41
A, 1
= VB
43 A, 1
+ VB
32 A, 1
+ VB
21 A, 1
Il reste donc à exprimer VB
32 B, 1
au point A et dans la base B1. en utilisant les figures planes de calcul de la figure 24.
Pour cela on calcule V V BA d x zB A, / , / /3 2 3 2 3 2 2 320 = + ∧ = − ∧ΩΩ r 11 32 2= d y.r .
Or : y x y2 21 1 21 1= − +sin cosθ θ d'où V d x d yB, / . .sin . .cos3 2 32 21 1 32 21 1
= − +r rθ θ .
Et ainsi : VB
B
rr
r32 =
−
AA
dd
,,
. .sin. .cos
11
00
0
32
32
32
θθ .
Finalement la relation de composition des mouvements donne :
VB
rr
r r w41 =
−
+
AA
dd
,
. .sin. .cos
1
00
32 21
32 21
32 21 43
θθ
,,B1
Pour conclure, on constate que le mouvement de 4/1 possède quatre composantes avec trois degrés de liberté, c'est à dire les trois paramètres à piloter mis en évidence lors de l'étude globale.
8.3 - Mécanismes à chaîne fermée.
8.3.1 - Présentation.
Ces mécanismes constituent la majorité des mécanismes. On pourrait même dire que ce sont les seuls mécanismes car ils répondent à la définition. En effet si l'on veut que le mouvement de sortie dépende du mouvement d'entrée, il faut établir une relation de dépendance que seule la fermeture d'une chaîne peut établir.
Ce sont les relations de composition de mouvement, traduisant la fermeture des chaînes de solides, qui fourniront les relations de dépendance entre les paramètres cinématiques ou équations cinématiques. Il reste alors que les équations ne sont elle même pas toutes indépendantes, mais que chaque mécanisme est un cas
p 12 p 13
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 12 p 13
particulier. Nous allons donc étudier un exemple qui permettra de comprendre la méthode d'analyse qu'il faut mettre en oeuvre.
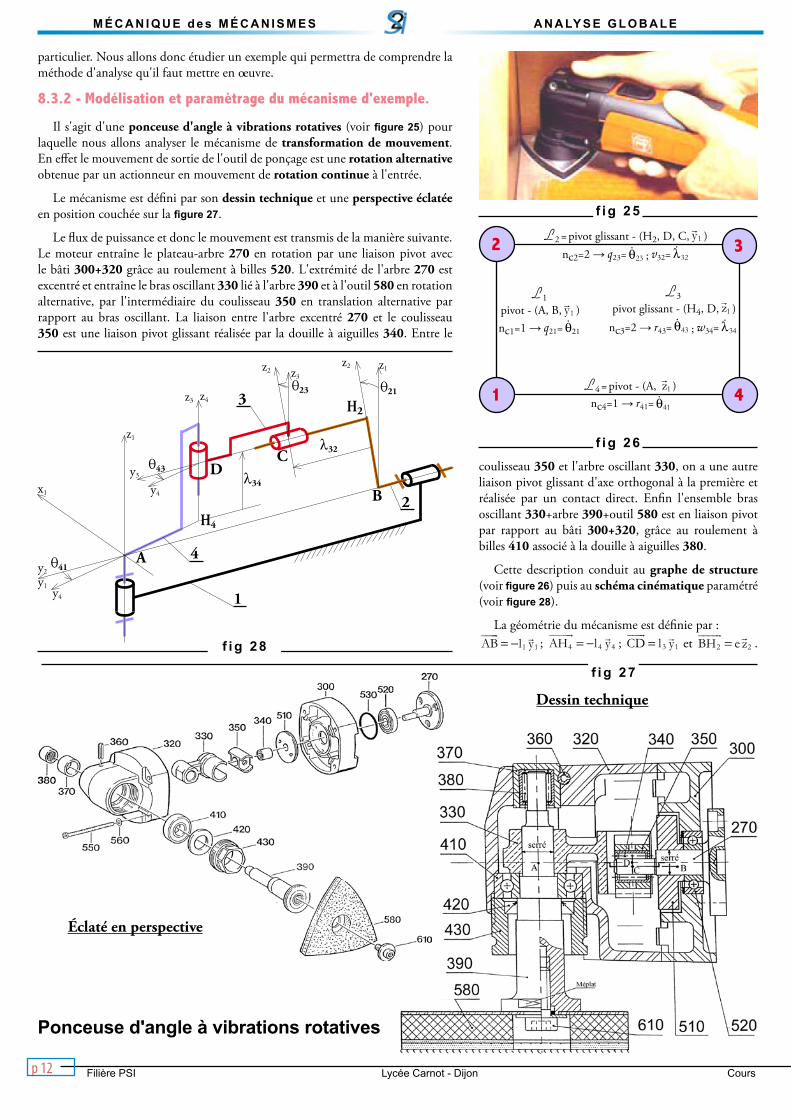
8.3.2 - Modélisation et paramètrage du mécanisme d'exemple.
Il s'agit d'une ponceuse d'angle à vibrations rotatives (voir figure 25) pour laquelle nous allons analyser le mécanisme de transformation de mouvement. En effet le mouvement de sortie de l'outil de ponçage est une rotation alternative obtenue par un actionneur en mouvement de rotation continue à l'entrée.
Le mécanisme est défini par son dessin technique et une perspective éclatée en position couchée sur la figure 27.
Le flux de puissance et donc le mouvement est transmis de la manière suivante. Le moteur entraîne le plateau‑arbre 270 en rotation par une liaison pivot avec lebâti300+320grâceauroulementàbilles520. L'extrémité de l'arbre 270 est excentré et entraîne le bras oscillant 330 lié à l'arbre 390 et à l'outil 580 en rotation alternative, par l'intermédiaire du coulisseau 350 en translation alternative par rapport au bras oscillant. La liaison entre l'arbre excentré 270 et le coulisseau 350 est une liaison pivot glissant réalisée par la douille à aiguilles 340. Entre le
f i g 2 5
f i g 2 7
f i g 2 6
f i g 2 8
Ponceuse d'angle à vibrations rotatives
Éclaté en perspective
Dessin technique
coulisseau 350 et l'arbre oscillant 330, on a une autre liaison pivot glissant d'axe orthogonal à la première et réalisée par un contact direct. Enfin l'ensemble bras oscillant 330+arbre 390+outil 580 est en liaison pivot par rapport au bâti 300+320, grâce au roulement àbilles 410 associé à la douille à aiguilles 380.
Cette description conduit au graphe de structure (voir figure 26) puis au schéma cinématique paramétré (voir figure 28).
La géométrie du mécanisme est définie par :AB l y = − 1 1 ; AH l y4 4 4
= − ; CD l y = 3 1 et BH e z2 2
= .
2
4
3
1
L1pivot ‑ (A, B, y1 )nc1=1 → q21= θ21
L2 = pivot glissant ‑ (H2, D, C,y1 )
nc2=2 → q23= θ23 ; v32= λ32
L3pivot glissant ‑ (H4, D,
z1 )nc3=2 → r43= θ43 ; w34= λ34
L4 = pivot ‑ (A, z1 )
nc4=1 → r41= θ41
1
4
2
3 H2
B
A
CD
H4
l34
l32
q21q23
q43
q41
x1
y4
z1
y1
y2
y4
y3
z4z3
z3z2
z2 z1

p 12 p 13p 12 p 13
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
Les paramètres géométriques associés aux liaisons sont les suivants :
• paramètres de position → H D z4 34 1
= λ et H C y2 32 1
= λ• paramètresd'orientation→ q21, q32, q43 et q41
(voir figure 29).
8.3.3 - Analyse cinématique.
La démarche d'analyse comprend quatre étapes : • définition des paramètres cinématiques• établissement du système d'équations
traduisant la fermeture des chaînes de solides par composition des mouvements
• détermination du nombre d'équations indépendantes parmi les équations du système précédent. C'est ce que l'on appelle le rang du système.
• évaluationdudegré de mobilité
1 Définition des paramètres cinématiques
Il s'agit d'écrire les torseurs cinématiques de chaque liaison en projection dans le repère local de celle‑ci. Pour les quatre liaisons du mécanisme, on obtient :
VB
q21 =
A, 1
0 00
0 021 ; V
Bq v32 =
H2 1
0 0
0 032 32
,;
VB r w
43 =
H4 1
0 00 043 43,
et VB r
41 =
A, 1
0 00 0
041
.
2 Fermeture cinématique
Pour le cycle 4‑3‑2‑1‑4, la relation de composition de mouvements traduisant la fermeture de la chaîne de solides, est :V V V V
B B B B43 32 21 41 + + − =
A A A A, , , ,1 1 1 1
0
Cette relation est écrite au point A puisque deux torseurs sur quatre étaient déjà exprimés au point A. Il reste donc à exprimer les torseurs cinématiques des mouvements de 3/2 et 4/3 au point A. Ce qui donne :VA, /3 2
= V AHH2 3 2 2 3 2, / /
+ ∧ΩΩ =
v q32 1 1 1 2 32 1 y l y e z y+ − +( ) ∧ = v q32 1 32 2
y e x− .or x x z2 21 1 21 1= −cos sinθ θd'où : V e x y e zA, / - . .cos . .sin3 2 32 21 1 32 1 32 21 1
= q v qθ θ+ −
D'autre part : VA, /4 3
= V AHH4 4 3 4 4 3, / /
+ ∧ΩΩ
Soit : VA, /4 3
= w r43 1 4 4 43 1
z l y z+ −( ) ∧ = w r43 1 4 43 4 z l x− .
q41
x1
x4
y1y4 q41
q21
z1
z2
x1x2 q21
q43
x3
x4
y3y4 q43
q23
z3
z2
x3x2 q23
f i g 2 9
or x x z4 41 1 41 1= −cos sinθ θd'où : V l x l y zA, / - . .cos . .sin4 3 4 43 41 1 4 43 41 1 43 1
= r r + wθ θ−
Ce qui donne finalement :
VB
qq v
q32 =
−
A
e
e,
. .cos
. .sin1
0
0
32 21
32 32
32 21
θ
θ et V
B
rr
r w43 =
−−
A
ll
,
. .cos. .sin
1
00
4 43 41
4 43 41
43 43
θθ
La relation de composition des mouvements donne le système de de 6 équations suivant :
0 = 0q32 + q21 = 0r43 – r41 = 0– l4.cos q41.r43 – e.cos q21.q32 = 0– l4.sin q41.r43 + v32 = 0w43 + e.sin q21.q32 = 0
On peut remarquer que ce système d'équations est : • linéaire (les inconnues ne sont pas les angles !) et •homogène (le second membre est nul).
On peut alors mettre ce système sous forme matricielle. Soit :
0 0 0 0 0 0
1 0 0 0 0 1
0 0 1 0 1 0
0 0 0 0
0 1 0 0 0
21 4 41
4 41
−
− −
−
e l
l
e
.cos .cos
.sin
θ θ
θ
..sin θ21
32
32
43
43
41
210 0 1 0 0
q
v
r
w
r
q
=
0
0
0
0
0
0
que l'on peut abréger en : [A] X = B et dans laquelle : • [A]estlamatricedescoefficientsetquel'onappelleramatrice cinématique • Xestlevecteurcolonnedesinconnues• Bestlevecteurcolonne2e membre (pour nous il est nul et le système est
dit homogène)
Remarque:Lamatricecinématique[A]estunematriced'ordre n x p, c'est à dire formée de n lignes et p colonnes où n = Ec = 6.m et p = Ic. Le nombre de lignes n est donc un multiple de six, alors que le nombre d'inconnues p est quelconque et dépend du type des liaisons constituant le mécanisme.
3 Détermination du rang
Il s'agit de déterminer le nombre d'équations indépendantes parmi les équations du système, c'est à dire le rang du système.
Sous forme matricielle, le rang du système devient le rang de la matrice des coefficients, c'est à dire l'ordre du déterminant non nul le plus grand que l'on peut extraire de la matrice.
La détermination du rang d'une matrice d'ordre important est long et fastidieux. On utilise donc des moyens informatiques comme le logiciel Maple. Cependant un cas simple comme le nôtre peut être traité manuellement. Notons également que les logiciels de simulation mécanique associés aux modeleurs volumiques tels que Inventor© ou Solidworks© donne le résultat à partir de la saisie de la structure cinématique du mécanisme.
On notera rc le rangde lamatricecinématique [A].Pournotreexemple, lerang de la matrice cinématique vaut visiblement 5 car la ligne de zéros annulera le déterminant d'ordre 6. On obtient donc rc = 5 .
4 Évaluation du degré de mobilité
Comme il a été dit précédemment, le degré de mobilité mc représente le nombre de paramètres cinématiques (ou inconnues cinématiques) que l'on ne peut pas exprimer en fonction des autres puisqu'ils sont indépendants. Or un paramètre est indépendant quand il n'est relié aux autres par aucune relation ou équation.
p 14 p 15
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 14 p 15
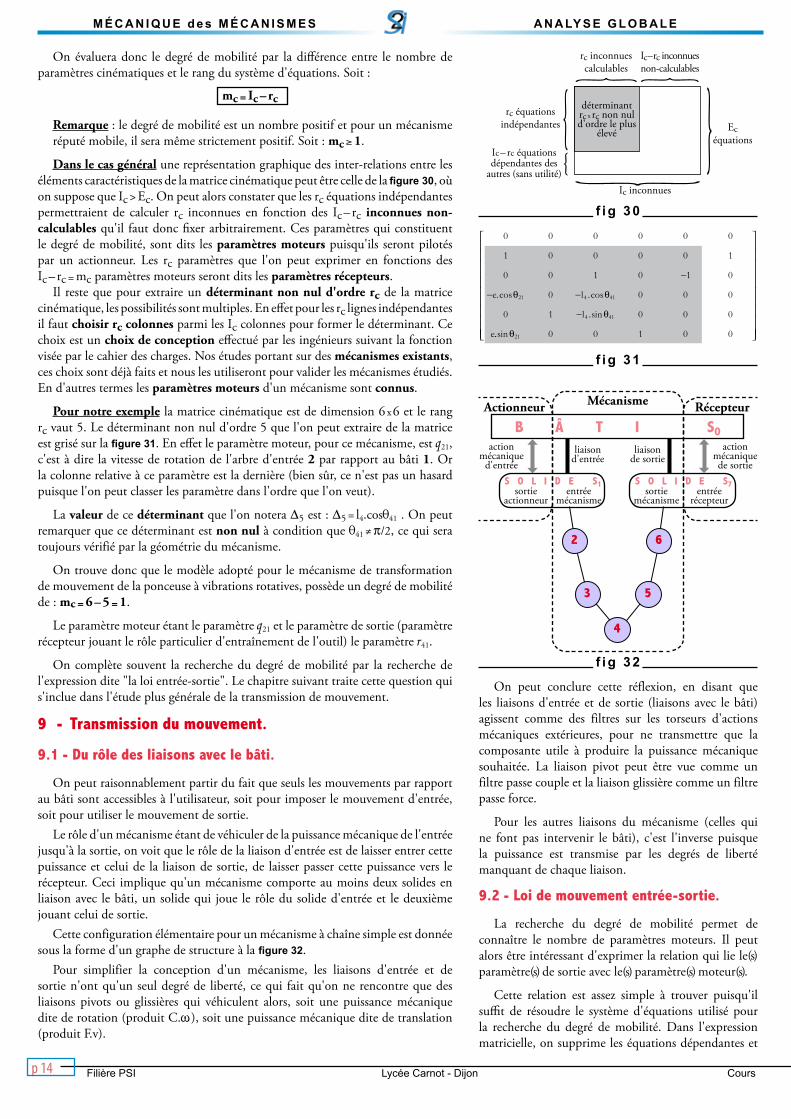
On évaluera donc le degré de mobilité par la différence entre le nombre de paramètres cinématiques et le rang du système d'équations. Soit :
mc = Ic – rc
Remarque : le degré de mobilité est un nombre positif et pour un mécanisme réputé mobile, il sera même strictement positif. Soit : mc ≥ 1.
Dans le cas général une représentation graphique des inter‑relations entre les éléments caractéristiques de la matrice cinématique peut être celle de la figure 30, où on suppose que Ic > Ec. On peut alors constater que les rc équations indépendantes permettraient de calculer rc inconnues en fonction des Ic – rc inconnues non‑calculables qu'il faut donc fixer arbitrairement. Ces paramètres qui constituent le degré de mobilité, sont dits les paramètres moteurs puisqu'ils seront pilotés par un actionneur. Les rc paramètres que l'on peut exprimer en fonctions des Ic – rc = mc paramètres moteurs seront dits les paramètres récepteurs.
Il reste que pour extraire un déterminant non nul d'ordre rc de la matrice cinématique, les possibilités sont multiples. En effet pour les rc lignes indépendantes il faut choisir rc colonnes parmi les Ic colonnes pour former le déterminant. Ce choix est un choix de conception effectué par les ingénieurs suivant la fonction visée par le cahier des charges. Nos études portant sur des mécanismes existants, ces choix sont déjà faits et nous les utiliseront pour valider les mécanismes étudiés. En d'autres termes les paramètres moteurs d'un mécanisme sont connus.
Pour notre exemple la matrice cinématique est de dimension 6 x 6 et le rang rc vaut 5. Le déterminant non nul d'ordre 5 que l'on peut extraire de la matrice est grisé sur la figure 31. En effet le paramètre moteur, pour ce mécanisme, est q21, c'est à dire la vitesse de rotation de l'arbre d'entrée 2parrapportaubâti1. Or la colonne relative à ce paramètre est la dernière (bien sûr, ce n'est pas un hasard puisque l'on peut classer les paramètre dans l'ordre que l'on veut).
La valeur de ce déterminant que l'on notera D5 est : D5 = l4.cosq41 . On peut remarquer que ce déterminant est non nul à condition que q41 ≠ p/2, ce qui sera toujours vérifié par la géométrie du mécanisme.
On trouve donc que le modèle adopté pour le mécanisme de transformation de mouvement de la ponceuse à vibrations rotatives, possède un degré de mobilité de : mc = 6 – 5 = 1.
Le paramètre moteur étant le paramètre q21 et le paramètre de sortie (paramètre récepteur jouant le rôle particulier d'entraînement de l'outil) le paramètre r41.
On complète souvent la recherche du degré de mobilité par la recherche de l'expression dite "la loi entrée‑sortie". Le chapitre suivant traite cette question qui s'inclue dans l'étude plus générale de la transmission de mouvement.
9 - Transmission du mouvement.
9.1 - Du rôle des liaisons avec le bâti.
On peut raisonnablement partir du fait que seuls les mouvements par rapport aubâtisontaccessiblesàl'utilisateur,soitpourimposerlemouvementd'entrée,soit pour utiliser le mouvement de sortie.
Le rôle d'un mécanisme étant de véhiculer de la puissance mécanique de l'entrée jusqu'à la sortie, on voit que le rôle de la liaison d'entrée est de laisser entrer cette puissance et celui de la liaison de sortie, de laisser passer cette puissance vers le récepteur. Ceci implique qu'un mécanisme comporte au moins deux solides en liaisonavec lebâti,unsolidequi joue lerôledusolided'entréeet ledeuxièmejouant celui de sortie.
Cette configuration élémentaire pour un mécanisme à chaîne simple est donnée sous la forme d'un graphe de structure à la figure 32.
Pour simplifier la conception d'un mécanisme, les liaisons d'entrée et de sortie n'ont qu'un seul degré de liberté, ce qui fait qu'on ne rencontre que des liaisons pivots ou glissières qui véhiculent alors, soit une puissance mécanique dite de rotation (produit C.w), soit une puissance mécanique dite de translation (produit F.v).
f i g 3 0
Ec
équations
Ic inconnues
rc inconnues calculables
Ic – rc inconnues non‑calculables
rc équations indépendantes
Ic – rc équations dépendantes des
autres (sans utilité)
déterminant rc x rc non nul d'ordre le plus
élevé
f i g 3 1
f i g 3 2
0 0 0 0 0 0
1 0 0 0 0 1
0 0 1 0 1 0
0 0 0 0
0 1 0 0 0
21 4 41
4 41
−
− −
−
e l
l
e
.cos .cos
.sin
θ θ
θ
..sin θ21 0 0 1 0 0
B Â T I S0action
mécanique d'entrée
S O L I D E S1sortie
actionneurentrée
mécanisme
liaisond'entrée
S O L I D E S7sortie
mécanismeentrée
récepteur
Actionneur Mécanisme Récepteur
liaisonde sortie
2
3
4
5
6
action mécanique de sortie
On peut conclure cette réflexion, en disant que les liaisonsd'entréeetde sortie (liaisonsavec lebâti)agissent comme des filtres sur les torseurs d'actions mécaniques extérieures, pour ne transmettre que la composante utile à produire la puissance mécanique souhaitée. La liaison pivot peut être vue comme un filtre passe couple et la liaison glissière comme un filtre passe force.
Pour les autres liaisons du mécanisme (celles qui ne fontpas intervenir le bâti), c'est l'inversepuisquela puissance est transmise par les degrés de liberté manquant de chaque liaison.
9.2 - Loi de mouvement entrée-sortie.
La recherche du degré de mobilité permet de connaître le nombre de paramètres moteurs. Il peut alors être intéressant d'exprimer la relation qui lie le(s) paramètre(s) de sortie avec le(s) paramètre(s) moteur(s).
Cette relation est assez simple à trouver puisqu'il suffit de résoudre le système d'équations utilisé pour la recherche du degré de mobilité. Dans l'expression matricielle, on supprime les équations dépendantes et

p 14 p 15p 14 p 15
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
onfaitpasserdanslamatricecolonneBlesparamètresmoteurs considérés comme connus.
Pour notre exemple, on obtient ceci :1 0 0 0 0
0 0 1 0 1
0 0 0
0 1 0 0
0 0 1
21 4 41
4 41
21
−
− −
−
e l
l
e
.cos .cos
.sin
.sin
θ θ
θ
θ 00
32
32
43
43
41
q
v
r
w
r
=
-q21
0
0
0
0
Le paramètre moteur ou paramètre d'entrée est q21 et le paramètre de sortie est r41. La relation cherchée consiste donc à exprimer r41 = f (q21). Ce qui donne :
r q4121
4 4121= e
l.cos.cos
θθ
On s'aperçoit que cette relation fait intervenir les angles q21 et q41 dont les dérivées respectives ne sont autres que q21 et r41. Il est donc nécessaire d'exprimer q41 = f (q21) qui est une relation géométrique. Il faut alors effectuer une étude géométrique du mécanisme.
9.3 - Étude géométrique.
Comme pour l'analyse cinématique, l'étude géométrique, qui recherche les relations entre les paramètres géométriques, est menée en traduisant la fermeture des chaînes de solides.
Chaque solide étant équivalent à un repère, la fermeture géométrique revêt deux aspects :
‑ un aspect position qui concerne l'origine des repères. On parle de fermeture linéaire.
‑ un aspect orientation qui concerne les bases des repères. On parle de fermeture angulaire.
D'une manière générale :
‑ la fermeture linéaire s'obtient en écrivant par une relation de Chasles que la somme des vecteurs position relative des origines des repères liés aux solides successifs de la chaîne fermée est nulle.
‑ la fermeture angulaire s'obtient en écrivant que le produit des matrices de passage successivement de base en base pour tous les solides de la chaîne fermée est égal à la matrice identité.
Ce qui donne pour notre exemple :
1 Fermeture linéaire
Elle s'écrit : AB BC CD DA
+ + + = 0 , mais les données géométriques nous obligent à écrire : BC BH H C
= +2 2 et DA DH H A
= +4 4 .Finalement l'équation de fermeture linéaire s'écrit
AB BH H C CD DH H A
+ + + + + =2 2 4 4 0 , ce qui, avec
les notations de l'énoncé, donne : − + + + − + =l y e z y l y z l y1 1 2 32 1 3 1 34 1 4 4 0 λ λ .
Cette équation vectorielle permet d'écrire 3 équations scalaires en projection sur une base. La base la mieux adaptée sera celle dont les vecteurs de base sont les plus représentés dans l'équation vectorielle. On constate ici que la base B1 sera la plus judicieuse. Pour cela il reste à écrire les formules de changement de base suivantes : z x z2 21 1 21 1= +sin cosθ θ
y x y4 41 1 41 1= − +sin cosθ θEt on obtient les trois équations scalaires suivantes :
proj/x1 :proj/y1 :proj/z1 :
e.sinq21–l4.sinq41 = 0–l1+l32+l3+l4.cosq41 = 0e.cosq21– l34 = 0
Remarque : ces trois équations n'étant pas linéaires, on ne peut pas les exprimer sous forme matricielle.
2 Fermeture angulaire
La fermeture de la chaîne de solides se traduit pour les bases liées à ces solides par la représentation graphique donnée figure 33a.
Si on note Pij la matrice de passage de la base Bi à la base Bj, alors la relation de fermeture angulaire s'écrit : P12 . P23 . P34 . P41 = I où I est la matrice identité. Les équations scalaires issues de l'égalité matricielle sont au nombre de neuf mais dont seulement trois seront indépendantes car l'orientation d'une base par rapport à une autre n'est définie que par trois paramètres angulaires comme, par exemple, les angles d'Euler.
Cette expression longue à mettre en oeuvre et très répétitive se prête bien à un calcul informatisé mais reste impropre à un calcul manuel. On limitera donc nos études aux cas simples où les mouvements sont plans et où la fermeture angulaire se réduit à sommer les angles.
Notre exemple, bien que spatial, peut se ramener à deux études planes car les bases B1 et B3 sont identiques (voir figure 33b). La fermeture angulaire se traduira alors par les deux relations suivantes : x x x x x x1 3 1 2 2 3 0, , ,( ) = ( ) + ( ) = et x x x x x x1 3 1 4 4 3 0, , ,( ) = ( ) + ( ) = .
D'où : x x x x1 2 2 3, ,( ) + ( ) = x x x x1 4 4 3, ,( ) + ( ) =
q21 – q23 = 0q41 – q43 = 0
Conclusion :On obtient au final 5 équations contenant 6 paramètres (q21, q23, l32, q43, l34,
q41). Elles permettraient en se donnant un paramètre de calculer les autres.La première équation de cette étude géométrique permet d'écrire que :
sin .sinθ θ414
21= el
Or on a trouvé la loi d'entrée‑sortie sous la forme r41 = a. q21 , avec
α θθ
= el4
21
41.coscos
. On cherche donc à exprimer a uniquement en fonction de q21.
Pour cela exprimons : 12α
=sinsin
.coscos
221
241
241
221
θθ
θθ
=sincos
.sin
sin
221
221
241
241
1θθ
θθ
−
=
sincos
. .sin
221
221
42
2 221
11
θθ θ
le
−
=
le
42
2 221
221
1.cos
tanθ
θ−
=
le
42
22
212
211. tan tan+( ) −θ θ
D'où αθ
=+ −( )
e
l l e42
42 2 2
21.tan
Le paramètre r41 est donc ainsi entièrement exprimé en fonction de q21 et de la dérivée q21. La loi entrée‑sortie est alors parfaitement définie à tout instant.
9.4 - Positions singulières et irréversibilité du mouvement.
La recherche du degré de mobilité est effectuée pour le fonctionnement "normal" du mécanisme, c'est à dire pour l'ensemble des positions parcourues
f i g 3 3
B1 B2
B4 B3
a b
B1 B2
B4 B3
B1
B3
p 16 p 17
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 16 p 17
au cours du mouvement. Cependant, il peut exister sur cet ensemble, une ou plusieurs positions dites singulières.
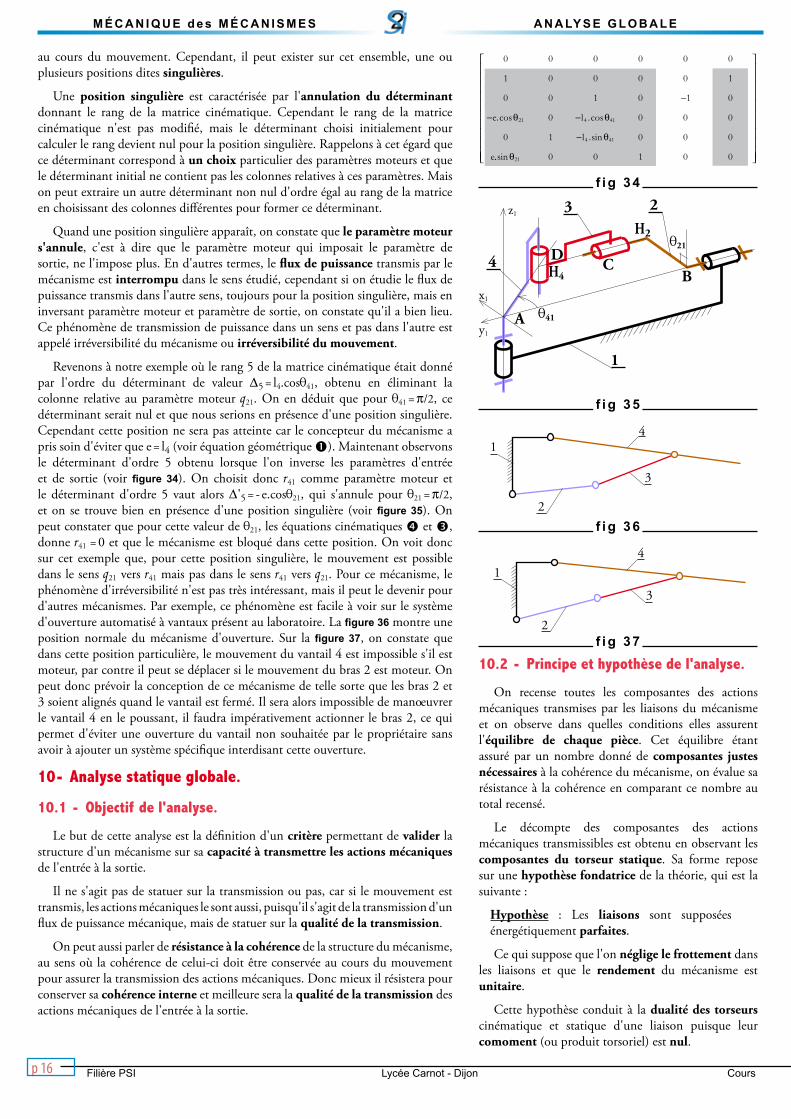
Une position singulière est caractérisée par l'annulation du déterminant donnant le rang de la matrice cinématique. Cependant le rang de la matrice cinématique n'est pas modifié, mais le déterminant choisi initialement pour calculer le rang devient nul pour la position singulière. Rappelons à cet égard que ce déterminant correspond à un choix particulier des paramètres moteurs et que le déterminant initial ne contient pas les colonnes relatives à ces paramètres. Mais on peut extraire un autre déterminant non nul d'ordre égal au rang de la matrice en choisissant des colonnes différentes pour former ce déterminant.
Quand une position singulière apparaît, on constate que le paramètre moteur s'annule, c'est à dire que le paramètre moteur qui imposait le paramètre de sortie, ne l'impose plus. En d'autres termes, le flux de puissance transmis par le mécanisme est interrompu dans le sens étudié, cependant si on étudie le flux de puissance transmis dans l'autre sens, toujours pour la position singulière, mais en inversant paramètre moteur et paramètre de sortie, on constate qu'il a bien lieu. Ce phénomène de transmission de puissance dans un sens et pas dans l'autre est appelé irréversibilité du mécanisme ou irréversibilité du mouvement.
Revenons à notre exemple où le rang 5 de la matrice cinématique était donné par l'ordre du déterminant de valeur D5 = l4.cosq41, obtenu en éliminant la colonne relative au paramètre moteur q21. On en déduit que pour q41 = p/2, ce déterminant serait nul et que nous serions en présence d'une position singulière. Cependant cette position ne sera pas atteinte car le concepteur du mécanisme a pris soin d'éviter que e = l4 (voir équation géométrique ). Maintenant observons le déterminant d'ordre 5 obtenu lorsque l'on inverse les paramètres d'entrée et de sortie (voir figure 34). On choisit donc r41 comme paramètre moteur et le déterminant d'ordre 5 vaut alors D'5 = ‑ e.cosq21, qui s'annule pour q21 = p/2, et on se trouve bien en présence d'une position singulière (voir figure 35). On peut constater que pour cette valeur de q21, les équations cinématiques et , donne r41 = 0 et que le mécanisme est bloqué dans cette position. On voit donc sur cet exemple que, pour cette position singulière, le mouvement est possible dans le sens q21 vers r41 mais pas dans le sens r41 vers q21. Pour ce mécanisme, le phénomène d'irréversibilité n'est pas très intéressant, mais il peut le devenir pour d'autres mécanismes. Par exemple, ce phénomène est facile à voir sur le système d'ouverture automatisé à vantaux présent au laboratoire. La figure 36 montre une position normale du mécanisme d'ouverture. Sur la figure 37, on constate que dans cette position particulière, le mouvement du vantail 4 est impossible s'il est moteur, par contre il peut se déplacer si le mouvement du bras 2 est moteur. On peut donc prévoir la conception de ce mécanisme de telle sorte que les bras 2 et 3 soient alignés quand le vantail est fermé. Il sera alors impossible de manoeuvrer le vantail 4 en le poussant, il faudra impérativement actionner le bras 2, ce qui permet d'éviter une ouverture du vantail non souhaitée par le propriétaire sans avoir à ajouter un système spécifique interdisant cette ouverture.
10 - Analyse statique globale.
10.1 - Objectif de l'analyse.
Le but de cette analyse est la définition d'un critère permettant de valider la structure d'un mécanisme sur sa capacité à transmettre les actions mécaniques de l'entrée à la sortie.
Il ne s'agit pas de statuer sur la transmission ou pas, car si le mouvement est transmis, les actions mécaniques le sont aussi, puisqu'il s'agit de la transmission d'un flux de puissance mécanique, mais de statuer sur la qualité de la transmission.
On peut aussi parler de résistance à la cohérence de la structure du mécanisme, au sens où la cohérence de celui‑ci doit être conservée au cours du mouvement pour assurer la transmission des actions mécaniques. Donc mieux il résistera pour conserver sa cohérence interne et meilleure sera la qualité de la transmission des actions mécaniques de l'entrée à la sortie.
1
2
3
4
1
2
3
4
f i g 3 6
f i g 3 7
f i g 3 5
f i g 3 4
0 0 0 0 0 0
1 0 0 0 0 1
0 0 1 0 1 0
0 0 0 0
0 1 0 0 0
21 4 41
4 41
−
− −
−
e l
l
e
.cos .cos
.sin
θ θ
θ
..sin θ21 0 0 1 0 0
10.2 - Principe et hypothèse de l'analyse.
On recense toutes les composantes des actions mécaniques transmises par les liaisons du mécanisme et on observe dans quelles conditions elles assurent l'équilibre de chaque pièce. Cet équilibre étant assuré par un nombre donné de composantes justes nécessaires à la cohérence du mécanisme, on évalue sa résistance à la cohérence en comparant ce nombre au total recensé.
Le décompte des composantes des actions mécaniques transmissibles est obtenu en observant les composantes du torseur statique. Sa forme repose sur une hypothèse fondatrice de la théorie, qui est la suivante :
Hypothèse : Les liaisons sont supposées énergétiquement parfaites.
Ce qui suppose que l'on néglige le frottement dans les liaisons et que le rendement du mécanisme est unitaire.
Cette hypothèse conduit à la dualité des torseurs cinématique et statique d'une liaison puisque leur comoment (ou produit torsoriel) est nul.
1
4
23H2
B
A
CDH4
q21
q41
x1
z1
y1
p 16 p 17p 16 p 17
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
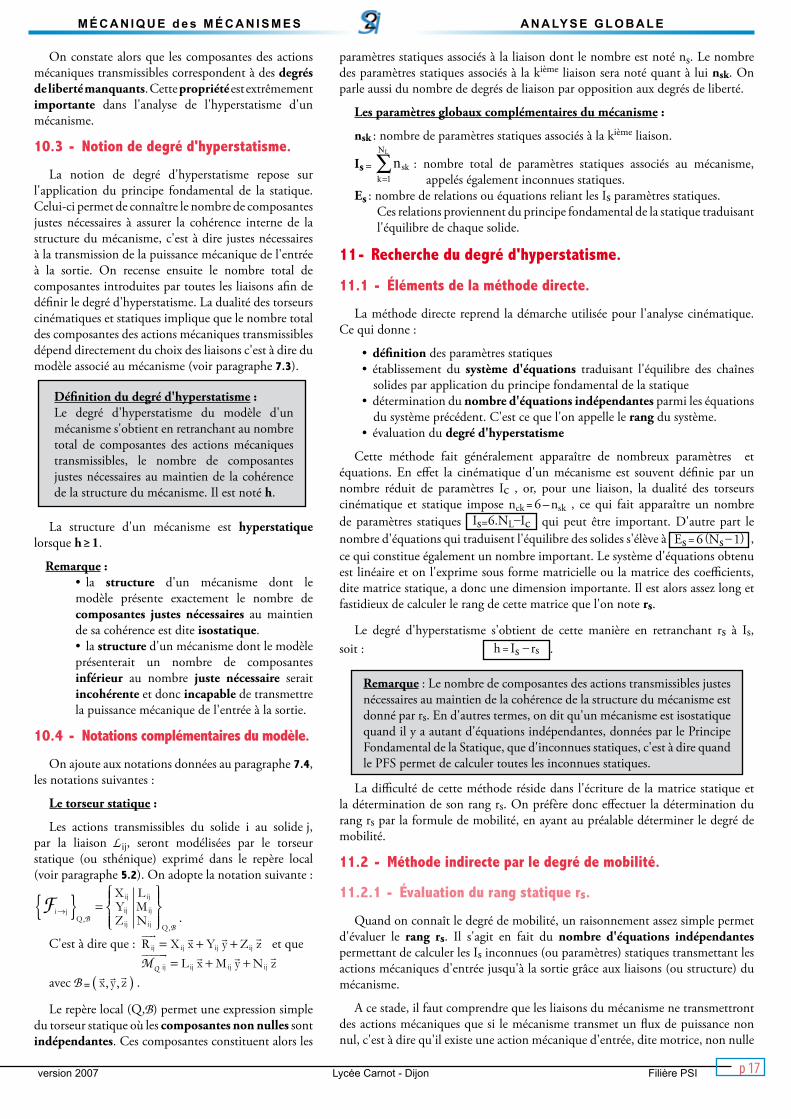
On constate alors que les composantes des actions mécaniques transmissibles correspondent à des degrés de liberté manquants. Cette propriété est extrêmement importante dans l'analyse de l'hyperstatisme d'un mécanisme.
10.3 - Notion de degré d'hyperstatisme.
La notion de degré d'hyperstatisme repose sur l'application du principe fondamental de la statique. Celui‑ci permet de connaître le nombre de composantes justes nécessaires à assurer la cohérence interne de la structure du mécanisme, c'est à dire justes nécessaires à la transmission de la puissance mécanique de l'entrée à la sortie. On recense ensuite le nombre total de composantes introduites par toutes les liaisons afin de définir le degré d'hyperstatisme. La dualité des torseurs cinématiques et statiques implique que le nombre total des composantes des actions mécaniques transmissibles dépend directement du choix des liaisons c'est à dire du modèle associé au mécanisme (voir paragraphe 7.3).
Définition du degré d'hyperstatisme :Le degré d'hyperstatisme du modèle d'un mécanisme s'obtient en retranchant au nombre total de composantes des actions mécaniques transmissibles, le nombre de composantes justes nécessaires au maintien de la cohérence de la structure du mécanisme. Il est noté h.
La structure d'un mécanisme est hyperstatique lorsque h ≥ 1.
Remarque : • la structure d'un mécanisme dont le
modèle présente exactement le nombre de composantes justes nécessaires au maintien de sa cohérence est dite isostatique.
• lastructure d'un mécanisme dont le modèle présenterait un nombre de composantes inférieur au nombre juste nécessaire serait incohérente et donc incapable de transmettre la puissance mécanique de l'entrée à la sortie.
10.4 - Notations complémentaires du modèle.
On ajoute aux notations données au paragraphe 7.4, les notations suivantes :
Le torseur statique :
Les actions transmissibles du solide i au solide j, par la liaison Lij, seront modélisées par le torseur statique (ou sthénique) exprimé dans le repère local (voir paragraphe 5.2). On adopte la notation suivante :
FB
B
i j→ =
Q
ij ij
ij ij
ij ij Q
X LY MZ N,
,.
C'est à dire que : R X x Y y Z zij ij ij ij
= + + et que M Q ij ij ij ijL x M y N z
= + +avec B =
x y z, ,( ) .
Le repère local (Q,B) permet une expression simple du torseur statique où les composantes non nulles sont indépendantes. Ces composantes constituent alors les
paramètres statiques associés à la liaison dont le nombre est noté ns. Le nombre des paramètres statiques associés à la kième liaison sera noté quant à lui nsk. On parle aussi du nombre de degrés de liaison par opposition aux degrés de liberté.
Les paramètres globaux complémentaires du mécanisme :
nsk : nombre de paramètres statiques associés à la kième liaison.
Is = nskk=∑
1
NL
: nombre total de paramètres statiques associés au mécanisme, appelés également inconnues statiques.
Es : nombre de relations ou équations reliant les Is paramètres statiques.Ces relations proviennent du principe fondamental de la statique traduisant l'équilibre de chaque solide.
11 - Recherche du degré d'hyperstatisme.
11.1 - Éléments de la méthode directe.
La méthode directe reprend la démarche utilisée pour l'analyse cinématique. Ce qui donne :
• définition des paramètres statiques• établissement du système d'équations traduisant l'équilibre des chaînes
solides par application du principe fondamental de la statique• déterminationdunombre d'équations indépendantes parmi les équations
du système précédent. C'est ce que l'on appelle le rang du système. • évaluationdudegré d'hyperstatisme
Cette méthode fait généralement apparaître de nombreux paramètres et équations. En effet la cinématique d'un mécanisme est souvent définie par un nombre réduit de paramètres Ic , or, pour une liaison, la dualité des torseurs cinématique et statique impose nck = 6 – nsk , ce qui fait apparaître un nombre de paramètres statiques Is=6.NL–Ic qui peut être important. D'autre part le nombre d'équations qui traduisent l'équilibre des solides s'élève à Es = 6 (Ns – 1) , ce qui constitue également un nombre important. Le système d'équations obtenu est linéaire et on l'exprime sous forme matricielle ou la matrice des coefficients, dite matrice statique, a donc une dimension importante. Il est alors assez long et fastidieux de calculer le rang de cette matrice que l'on note rs.
Le degré d'hyperstatisme s'obtient de cette manière en retranchant rs à Is, soit : h = Is – rs .
Remarque : Le nombre de composantes des actions transmissibles justes nécessaires au maintien de la cohérence de la structure du mécanisme est donné par rs. En d'autres termes, on dit qu'un mécanisme est isostatique quand il y a autant d'équations indépendantes, données par le Principe Fondamental de la Statique, que d'inconnues statiques, c'est à dire quand le PFS permet de calculer toutes les inconnues statiques.
La difficulté de cette méthode réside dans l'écriture de la matrice statique et la détermination de son rang rs. On préfère donc effectuer la détermination du rang rs par la formule de mobilité, en ayant au préalable déterminer le degré de mobilité.
11.2 - Méthode indirecte par le degré de mobilité.
11.2.1 - Évaluation du rang statique rs.
Quand on connaît le degré de mobilité, un raisonnement assez simple permet d'évaluer le rang rs. Il s'agit en fait du nombre d'équations indépendantes permettant de calculer les Is inconnues (ou paramètres) statiques transmettant les actionsmécaniquesd'entréejusqu'àlasortiegrâceauxliaisons(oustructure)dumécanisme.
A ce stade, il faut comprendre que les liaisons du mécanisme ne transmettront des actions mécaniques que si le mécanisme transmet un flux de puissance non nul, c'est à dire qu'il existe une action mécanique d'entrée, dite motrice, non nulle
p 18 p 19
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 18 p 19
à transmettre jusqu'à la sortie où un organe récepteur exerce, lui aussi, une action mécanique non nulle, dite réceptrice. Or il existe autant de composantes d'actions mécaniques motrices (ou réceptrices) que de degrés de liberté à piloter, puisque ce sont elles qui les pilotent. Leur nombre s'élève donc à ce qu'on a appelé le degré de mobilité.
Ceci conduit à dire que dans le système de Es équations indépendantes traduisant l'équilibre des (Ns – 1) solides, figurent les Is inconnues introduites par les liaisons mais également les mc composantes des actions mécaniques réceptrices inconnues ainsi que les motrices qui elles sont connues, ou inversement suivant le problème.
Il se trouve que ces mc inconnues supplémentaires, par rapport aux inconnues introduites par les liaisons, peuvent être déterminées en isolant l'ensemble du mécanismehorsbâti.Eneffetl'équilibredel'ensembledonne6équationsdontmc sont indépendantes et permettent de déterminer les inconnues supplémentaires. Donc les mc équations ne sont que des combinaisons linéaires des Es = 6 (Ns – 1) équations indépendantes constituant le système d'équations initiales. On peut également trouver ces mc équations en appliquant le théorème de l'énergie cinétiqueàl'ensemblegrâceàl'hypothèsedesliaisonsénergétiquementparfaites.
On conclue de cette analyse que pour déterminer les Ic inconnues statiques, il ne reste en fait que (Es – mc) équations utilisables. Le nombre d'équations indépendantes utilisables est justement ce que l'on avait appelé le rang rs de la matrice statique.
Il vient donc que, si on connaît le degré de mobilité du mécanisme, le rang rs de la matrice statique s'obtient par la relation :
rs = Es – mc
11.2.2 - Indice de mobilité.
Avant d'établir la formule de mobilité, il faut introduire un nouveau nombre, appelé indice de mobilité, qui est défini par : m = Ic – Ec. Or nous avons vu que Ec = 6.m = 6 (NL – NS + 1), ce qui peut s'écrire Ec = 6.NL – 6 (NS – 1), soit : Ec = 6.NL – Es. D'autre part, la dualité des torseurs cinématiques et statiques implique que : Ic = 6.NL – Is. On obtient ainsi que m = 6.NL – Is – 6.NL + Es.
Et finalement : m = Ic – Ec = Es – Is
11.2.3 - Formule de mobilité.
On a vu que h = Is – rs et que rs = Es – mc. Donc h = Is – Es + mc.
Ce qui donne : h = mc – m ou bien m = mc – h .
La formule de mobilité permet de déterminer le degré d'hyperstatisme h après avoir déterminé l'indice de mobilité m et le degré de mobilité mc.
11.2.4 - Conclusions.
On peut remarquer que le calcul du degré d'hyperstatisme par la méthode directe n'est pas la plus simple. On procède donc généralement en calculant d'abord le degré de mobilité du mécanisme puis en appliquant la formule de mobilité.
On peut également remarquer que le degré d'hyperstatisme peut être obtenu par une simple observation de la matrice cinématique. En effet, comme h = mc – m, alors : h = Ic – rc – Ic + Ec. Ce qui donne h = Ec – rc . Ce nombre correspond au nombre d'équations non indépendantes parmi les Ec équations dont les coefficients forment les lignes de la matrice cinématique. Il vient donc que le nombre des lignes de la matrice cinématique qui sont des combinaisons linéaires des autres lignes, ou mieux encore, des lignes de zéros (à condition de choisir judicieusement la base de projection des équations vectorielles), constituent le degré d'hyperstatisme du mécanisme. Nous verrons un peu plus loin que leur position dans la matrice cinématique nous renseignera, de surcroît, sur l'origine de l'hyperstatisme.
On peut enfin remarquer que, pour les mécanismes à chaîne ouverte, comme
le nombre d'équations Ec traduisant la fermeture de la chaîne de solides est nul, l'indice de mobilité vaut m = Ic. Or, on a vu au paragraphe 8.2.1 que, pour la même raison, le degré de mobilité valait mc = Ic. Le degréd'hyperstatismeétantdonné,grâceàlaformulede mobilité, par h = mc – m, on trouve donc que h = 0.
En conclusion et pour les mécanisme à chaînes fermées, la matrice cinématique constitue un outil d'analyse globale du mécanisme très efficace aussi bien du point de vue cinématique pour estimer le degré de mobilité que du point de vue statique pour estimer le degré d'hyperstatisme.
11.3 - Retour sur l'exemple de la ponceuse.
On applique tout simplement la relation h = mc – m. On connaît déjà mc qui vaut 1. Il reste à calculer l'indice de mobilité m qui vaut Ic – Ec. Ce qui donne : m = 6 – 6 = 0. On obtient donc : h = 1.
L'observation de la matrice cinématique pouvait également nous renseigner rapidement sur le degré d'hyperstatisme puisqu'elle contenait une ligne de zéros, ce qui conduisait à : h = 1.
Ensuite on peut se demander comment interpréter cette valeur du degré d'hyperstatisme, c'est à dire quels sont les enseignements que peut tirer de cette valeur l'ingénieur qui conçoit le mécanisme ?
12 - Réflexion sur l'hyperstatisme.
Rappelons tout d'abord que quand on parle de l'hyperstatisme d'un mécanisme, il s'agit en fait de l'hyperstatisme de son modèle et que ce modèle n'est que le fruit de la réflexion de l'ingénieur. Le modèle ne reflète donc que sa manière de "voir" le mécanisme c'est à dire d'estimer le type des liaisons existant entre les pièces en prenant en compte ou pas le jeu dans les liaisons. C'est cette estimation qui donnera au modèle sa capacité à analyser le mécanisme.
Comme il l'a été dit au paragraphe 11.2.4, l'hyperstatisme d'un mécanisme provient de l'existence de chaînes fermées puisque sinon il est parfaitement isostatique. Pratiquement, on peut "sentir" l'hyperstatisme d'un mécanisme quand, en imaginant un défaut dans la géométrie initiale des liaisons (celle qui assure un degré de mobilité non nul), on ne peut pas fermer la chaîne de solides sans forcer sur les pièces, c'est à dire en les déformant. Théoriquement ceci signifie que pour un mécanisme hyperstatique, les inconnues statiques ne peuvent pas être toutes calculées en appliquant le PFS qui suppose que les solides sont indéformables et que pour toutes les calculer il faudrait adjoindre aux équations issues du PFS, des équations dites de déformation qui seraient obtenues en prenant en compte dans le modèle, le caractère déformable des pièces réelles.
Ceci étant, on constate qu'un mécanisme hyperstatique est plus rigide qu'un mécanisme isostatique et qu'il est d'autant plus rigide qu'il est fortement hyperstatique. On peut illustrer cette
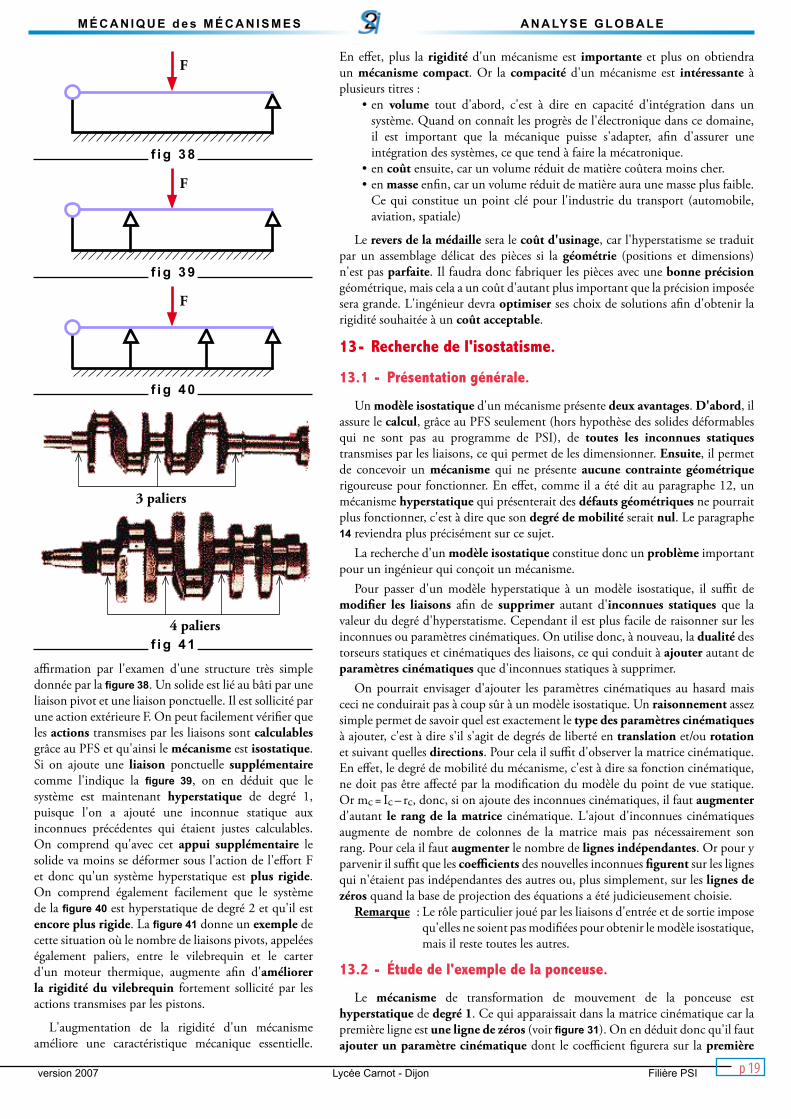
p 18 p 19p 18 p 19
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
affirmation par l'examen d'une structure très simple donnée par la figure 38.Unsolideestliéaubâtiparuneliaison pivot et une liaison ponctuelle. Il est sollicité par une action extérieure F. On peut facilement vérifier que les actions transmises par les liaisons sont calculables grâceauPFSetqu'ainsilemécanisme est isostatique. Si on ajoute une liaison ponctuelle supplémentaire comme l'indique la figure 39, on en déduit que le système est maintenant hyperstatique de degré 1, puisque l'on a ajouté une inconnue statique aux inconnues précédentes qui étaient justes calculables. On comprend qu'avec cet appui supplémentaire le solide va moins se déformer sous l'action de l'effort F et donc qu'un système hyperstatique est plus rigide. On comprend également facilement que le système de la figure 40 est hyperstatique de degré 2 et qu'il est encore plus rigide. La figure 41 donne un exemple de cette situation où le nombre de liaisons pivots, appelées également paliers, entre le vilebrequin et le carter d'un moteur thermique, augmente afin d'améliorer la rigidité du vilebrequin fortement sollicité par les actions transmises par les pistons.
L'augmentation de la rigidité d'un mécanisme améliore une caractéristique mécanique essentielle.
f i g 3 8
f i g 3 9
f i g 4 0
f i g 4 1
3 paliers
4 paliers
En effet, plus la rigidité d'un mécanisme est importante et plus on obtiendra un mécanisme compact. Or la compacité d'un mécanisme est intéressante à plusieurs titres : •en volume tout d'abord, c'est à dire en capacité d'intégration dans un
système. Quand on connaît les progrès de l'électronique dans ce domaine, il est important que la mécanique puisse s'adapter, afin d'assurer une intégration des systèmes, ce que tend à faire la mécatronique.
•encoût ensuite, car un volume réduit de matière coûtera moins cher. •enmasse enfin, car un volume réduit de matière aura une masse plus faible.
Ce qui constitue un point clé pour l'industrie du transport (automobile, aviation, spatiale)
Le revers de la médaille sera le coût d'usinage, car l'hyperstatisme se traduit par un assemblage délicat des pièces si la géométrie (positions et dimensions) n'est pas parfaite. Il faudra donc fabriquer les pièces avec une bonne précision géométrique, mais cela a un coût d'autant plus important que la précision imposée sera grande. L'ingénieur devra optimiser ses choix de solutions afin d'obtenir la rigidité souhaitée à un coût acceptable.
13 - Recherche de l'isostatisme.
13.1 - Présentation générale.
Un modèle isostatique d'un mécanisme présente deux avantages. D'abord, il assure le calcul,grâceauPFSseulement(horshypothèsedessolidesdéformablesqui ne sont pas au programme de PSI), de toutes les inconnues statiques transmises par les liaisons, ce qui permet de les dimensionner. Ensuite, il permet de concevoir un mécanisme qui ne présente aucune contrainte géométrique rigoureuse pour fonctionner. En effet, comme il a été dit au paragraphe 12, un mécanisme hyperstatique qui présenterait des défauts géométriques ne pourrait plus fonctionner, c'est à dire que son degré de mobilité serait nul. Le paragraphe 14 reviendra plus précisément sur ce sujet.
La recherche d'un modèle isostatique constitue donc un problème important pour un ingénieur qui conçoit un mécanisme.
Pour passer d'un modèle hyperstatique à un modèle isostatique, il suffit de modifier les liaisons afin de supprimer autant d'inconnues statiques que la valeur du degré d'hyperstatisme. Cependant il est plus facile de raisonner sur les inconnues ou paramètres cinématiques. On utilise donc, à nouveau, la dualité des torseurs statiques et cinématiques des liaisons, ce qui conduit à ajouter autant de paramètres cinématiques que d'inconnues statiques à supprimer.
On pourrait envisager d'ajouter les paramètres cinématiques au hasard mais ceci ne conduirait pas à coup sûr à un modèle isostatique. Un raisonnement assez simple permet de savoir quel est exactement le type des paramètres cinématiques à ajouter, c'est à dire s'il s'agit de degrés de liberté en translation et/ou rotation et suivant quelles directions. Pour cela il suffit d'observer la matrice cinématique. En effet, le degré de mobilité du mécanisme, c'est à dire sa fonction cinématique, ne doit pas être affecté par la modification du modèle du point de vue statique. Or mc = Ic – rc, donc, si on ajoute des inconnues cinématiques, il faut augmenter d'autant le rang de la matrice cinématique. L'ajout d'inconnues cinématiques augmente de nombre de colonnes de la matrice mais pas nécessairement son rang. Pour cela il faut augmenter le nombre de lignes indépendantes. Or pour y parvenir il suffit que les coefficients des nouvelles inconnues figurent sur les lignes qui n'étaient pas indépendantes des autres ou, plus simplement, sur les lignes de zéros quand la base de projection des équations a été judicieusement choisie.
Remarque : Le rôle particulier joué par les liaisons d'entrée et de sortie impose qu'elles ne soient pas modifiées pour obtenir le modèle isostatique, mais il reste toutes les autres.
13.2 - Étude de l'exemple de la ponceuse.
Le mécanisme de transformation de mouvement de la ponceuse est hyperstatique de degré 1. Ce qui apparaissait dans la matrice cinématique car la première ligne est une ligne de zéros (voir figure 31). On en déduit donc qu'il faut ajouter un paramètre cinématique dont le coefficient figurera sur la première
F
F
F
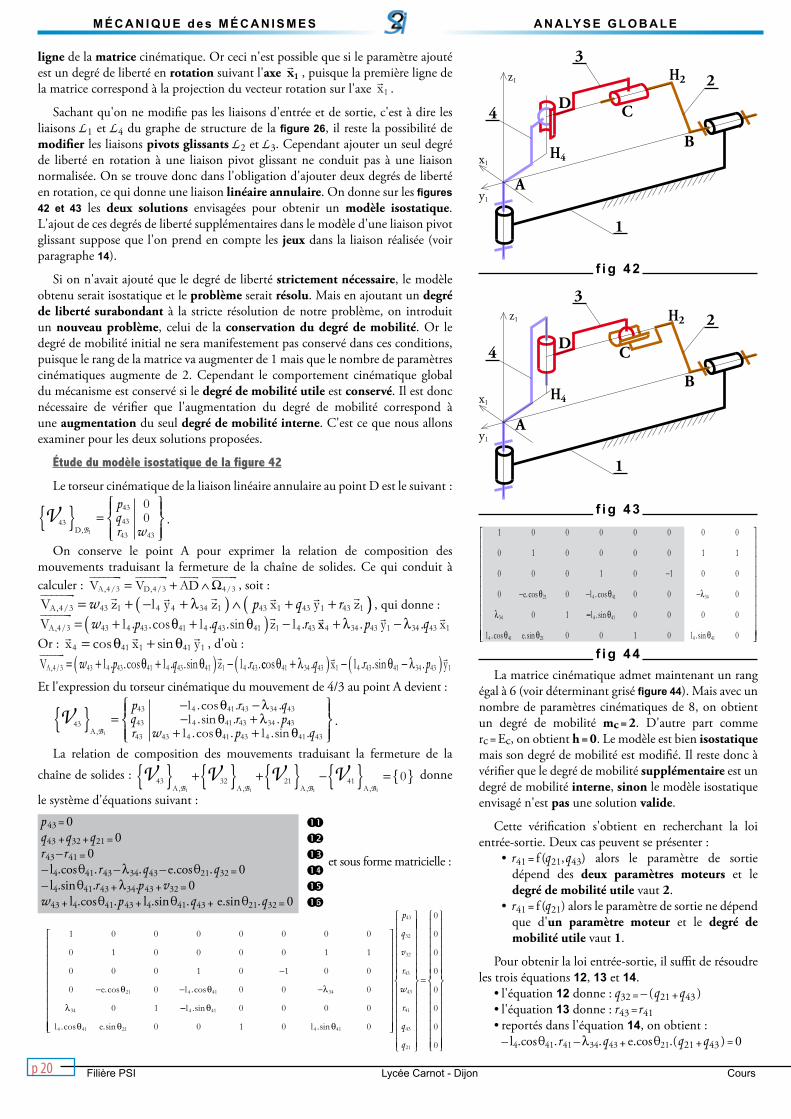
p 20 p 21
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 20 p 21
ligne de la matrice cinématique. Or ceci n'est possible que si le paramètre ajouté est un degré de liberté en rotation suivant l'axe x1 , puisque la première ligne de la matrice correspond à la projection du vecteur rotation sur l'axe x1 .
Sachant qu'on ne modifie pas les liaisons d'entrée et de sortie, c'est à dire les liaisons L1 et L4 du graphe de structure de la figure 26, il reste la possibilité de modifier les liaisons pivots glissants L2 et L3. Cependant ajouter un seul degré de liberté en rotation à une liaison pivot glissant ne conduit pas à une liaison normalisée. On se trouve donc dans l'obligation d'ajouter deux degrés de liberté en rotation, ce qui donne une liaison linéaire annulaire. On donne sur les figures 42 et 43 les deux solutions envisagées pour obtenir un modèle isostatique. L'ajout de ces degrés de liberté supplémentaires dans le modèle d'une liaison pivot glissant suppose que l'on prend en compte les jeux dans la liaison réalisée (voir paragraphe 14).
Si on n'avait ajouté que le degré de liberté strictement nécessaire, le modèle obtenu serait isostatique et le problème serait résolu. Mais en ajoutant un degré de liberté surabondant à la stricte résolution de notre problème, on introduit un nouveau problème, celui de la conservation du degré de mobilité. Or le degré de mobilité initial ne sera manifestement pas conservé dans ces conditions, puisque le rang de la matrice va augmenter de 1 mais que le nombre de paramètres cinématiques augmente de 2. Cependant le comportement cinématique global du mécanisme est conservé si le degré de mobilité utile est conservé. Il est donc nécessaire de vérifier que l'augmentation du degré de mobilité correspond à une augmentation du seul degré de mobilité interne. C'est ce que nous allons examiner pour les deux solutions proposées.
Étude du modèle isostatique de la figure 42
Le torseur cinématique de la liaison linéaire annulaire au point D est le suivant :
VB
pqr w
43 =
D, 1
43
43
43 43
00 .
On conserve le point A pour exprimer la relation de composition des mouvements traduisant la fermeture de la chaîne de solides. Ce qui conduit à calculer : V V ADA D, / , / /4 3 4 3 4 3
= + ∧ Ω , soit :
V z l y z x y zA, /4 3 43 1 4 4 34 1 43 1 43 1 43 1
= + − +( ) ∧ + +(w p q rλ )) , qui donne :V l l z lA, / .cos .sin .4 3 43 4 43 41 4 43 41 1 4 43
= + +( ) −w .p .q rθ θ xx y x4 34 43 1 34 43 1+ −λ λ. .p q
Or : x x y4 41 1 41 1= +cos sinθ θ , d'où :V l l z lA, / .cos .sin . .4 3 43 4 43 41 4 43 41 1 4 43
= + +( ) −w .p .q rθ θ ccos . . .sin .θ λ θ λ41 34 43 1 4 43 41 34 43 1+( ) − −( )q r p x l yEt l'expression du torseur cinématique du mouvement de 4/3 au point A devient :
VB
p r qq r p43 =
− −− +
A
ll
,
.cos . .
.sin . .1
43 4 41 43 34 43
43 4 41 43 34
θ λθ λ 443
43 43 4 41 43 4 41 43r w p q+ +
l l.cos . .sin .θ θ.
La relation de composition des mouvements traduisant la fermeture de la chaîne de solides : V V V V
B B B B43 32 21 41 + + − =
A A A A, , , ,1 1 1 1
0 donne
le système d'équations suivant :
p43 = 0q43 + q32 + q21 = 0r43 – r41 = 0– l4.cos q41. r43 – l34. q43 – e.cos q21. q32 = 0– l4.sin q41.r43 + l34.p43 + v32 = 0w43 + l4.cos q41. p43 + l4.sin q41. q43 + e.sin q21. q32 = 0
et sous forme matricielle :
1 0 0 0 0 0 0 0
0 1 0 0 0 0 1 1
0 0 0 1 0 1 0 0
0 0 0 0 0
0 1
21 4 41 34
34
−
− − −e l.cos .cosθ θ λ
λ −−
l
l e l
4 41
4 41 21 4 41
0 0 0 0
0 0 1 0 0
.sin
.cos .sin .sin
θ
θ θ θ
p
q
v
r
w
r
q
q
43
32
32
43
43
41
43
21
=
0
0
0
0
0
0
0
0
f i g 4 2
f i g 4 31 0 0 0 0 0 0 0
0 1 0 0 0 0 1 1
0 0 0 1 0 1 0 0
0 0 0 0 0
0 1
21 4 41 34
34
−
− − −e l. cos . cosθ θ λ
λ −−
l
l e l
4 41
4 41 21 4 41
0 0 0 0
0 0 1 0 0
.sin
. cos .sin .sin
θ
θ θ θ
f i g 4 4La matrice cinématique admet maintenant un rang
égal à 6 (voir déterminant grisé figure 44). Mais avec un nombre de paramètres cinématiques de 8, on obtient un degré de mobilité mc = 2. D'autre part comme rc = Ec, on obtient h = 0. Le modèle est bien isostatique mais son degré de mobilité est modifié. Il reste donc à vérifier que le degré de mobilité supplémentaire est un degré de mobilité interne, sinon le modèle isostatique envisagé n'est pas une solution valide.
Cette vérification s'obtient en recherchant la loi entrée‑sortie. Deux cas peuvent se présenter :
• r41 = f (q21, q43) alors le paramètre de sortie dépend des deux paramètres moteurs et le degré de mobilité utile vaut 2.
• r41 = f (q21) alors le paramètre de sortie ne dépend que d'un paramètre moteur et le degré de mobilité utile vaut 1.
Pour obtenir la loi entrée‑sortie, il suffit de résoudre les trois équations 12, 13 et 14.
•l'équation12 donne : q32 = – ( q21 + q43 )•l'équation13 donne : r43 = r41•reportésdansl'équation14, on obtient :
– l4.cos q41. r41 – l34. q43 + e.cos q21.( q21 + q43 ) = 0
1
4
2
3H2
B
A
CD
H4x1
z1
y1
1
4
3H2
B
A
CD
H4x1
z1
y1
2

p 20 p 21p 20 p 21
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
•quel'onpeutmettresouslaforme:– l4.cos q41. r41 + e.cos q21. q21 +(e.cos q21 – l34 ). q43 = 0•or l'équation 3 de l'étude géométrique page 15
donne : e.cos q21 – l34 = 0.
Ce qui montre que r41 = f (q21) q23, c'est à dire que mcu = 1 et mci = 1.
Remarque : Cette recherche analytique des degrés de mobilité utile et interne est le plus souvent menée par une simple observation du schéma cinématique où on aurait pu "voir" que le solide 3 peut effectivement tourner autour de l'axe (C,
y1 ) par rapport à 2 ( q23 ), car le point D est sur cet axe, sans que ce mouvement est une influence sur le mouvement de sortie.
On conclut donc de cette étude que le modèle isostatique proposé est valide.
Examinons maintenant la deuxième solution proposée.
Étude du modèle isostatique de la figure 43
Le torseur cinématique de la liaison linéaire annulaire
au point C est le suivant : VB
pq vr
32 =
C, 1
32
32 32
32
0
0.
On conserve le point A pour exprimer la relation de composition des mouvements traduisant la fermeture de la chaîne de solides. Ce qui conduit à calculer : V V ACA C, / , / /3 2 3 2 3 2
= + ∧ Ω , soit :
V y l y e z x yA, /3 2 32 1 32 1 1 2 32 1 32 1 3
= + −( ) + ∧ + +v p q rλ 22 1z( )
qui donne : V l x
e eA, / .
.cos . .sin .3 2 1 32 32 1
32 21 32 21
= − −( )+ + −
λ
θ θ
r
v p r332 1
1 32 32 1 32 2
( )+ −( ) −
y
l z e xλ . .p q
Or : x x z2 21 1 21 1= −cos sinθ θ , d'où :V l e x
e
A, / . .cos .
.cos
3 2 1 32 32 21 32 1
32
= − −( ) − + +
λ θ
θ
r q
v 221 32 21 32 1
21 32 1 32 32 1
. .sin .
.sin . .
p r
q p
−( )+ + −( )
e y
e l z
θ
θ λ
Et l'expression du torseur cinématique du mouvement de 4/3 au point A devient :
VB
p r qq v p32 =
− −( ) −+
A
l ee
,
. .cos ..cos .
1
32 1 32 32 21 32
32 32 21 32
λ θθ −−
−( ) +
e
l e.sin .
. .sin .θ
λ θ21 32
32 1 32 32 21 32
rr p q
.
La relation de composition des mouvements traduisant la fermeture de la chaîne de solides :
V V V VB B B B
43 32 21 41 + + − = A A A A, , , ,1 1 1 1
0 donne le système d'équations suivant :
p32 = 0q32 + q21 = 0r32 + r43 – r41 = 0– l4.cos q41. r43 – ( l1 ‑ l32). r32 – e.cos q21. q32 = 0– l4.sin q41.r43 + e.cos q21. p32 – e.sin q21. r32+ v32 = 0w43 + ( l1 ‑ l32). p32 + e.sin q21. q32 = 0
et sous forme matricielle :
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 1
0 0 0 1 0 1 1 0
0 0 0 0 021 4 41 1 32
−
−( )e l l
e
.cos .cos
.c
θ θ λ
oos .sin .sin
.sin
θ θ θ
λ θ
21 4 41 21
1 32 21
0 1 0 0 0
0 0 1 0 0 0
− −
−( )
l e
l e
p
q
v
r
w
r
r
q
32
32
32
43
43
41
32
21
=
0
0
0
0
0
0
0
0
La matrice cinématique admet maintenant un rang égal à 6 (voir déterminant grisé figure 45). Mais avec un nombre de paramètres cinématiques de 8, on obtient un degré de mobilité mc = 2. D'autre part comme rc = Ec, on obtient h = 0. Le modèle est bien isostatique mais son degré de mobilité est modifié. Il reste donc à vérifier que le degré de mobilité supplémentaire est un degré de mobilité interne, sinon le modèle isostatique envisagé n'est pas une solution valide.
On procède de manière identique à la recherche précédente, et pour obtenir la loi entrée‑sortie, il suffit de résoudre les trois équations 22, 23 et 24.
•l'équation22 donne : q32 = – q21•l'équation23 donne : r43 = – ( r32 – r41 )•reportésdansl'équation24, on obtient :
l4.cos q41. ( r32 – r41 ) – ( l1 ‑ l32). r32 + e.cos q21. q21 = 0•quel'onpeutmettresouslaforme:
– l4.cos q41. r41 + e.cos q21. q21 +(– l1+ l32+ l4.cos q41 ). r32 = 0•orl'équation3 de l'étude géométrique page 15 donne : – l1+ l32+ l4.cos q41 = – l3 .
Ce qui montre que r41 = f (q21, q43) , c'est à dire que mcu = 2 et mci = 0.
On conclut donc de cette étude que le modèle isostatique proposé n'est pas valide puisque le degré de mobilité utile est modifié.
14 - Écarts d'agencement.
14.1 - Présentation du problème.
Il est question ici, de l'étude des mécanismes réels qui peuvent présenter des écarts d'agencement des liaisons ou défauts géométriques de la structure. En effet rappelons que l'analyse globale des mécanismes repose sur trois hypothèses :
1 ‑ Les liaisons sont énergétiquement parfaites, c'est à dire que l'on néglige les pertes par frottement dans les liaisons. Cette hypothèse assure la dualité des torseurs cinématiques et statiques et constitue un point important de la théorie.
2 ‑ Les liaisons sont géométriquement parfaites, c'est à dire que l'on néglige les jeux dans les liaisons. Cette hypothèse permet de limiter le nombre de paramètres cinématiques et d'apprécier le degré de mobilité du mécanisme. En effet on ne prend en compte que les mouvements d'amplitude importante, voire infinie, qui sont les seuls paramètres significatifs pour l'étude de la transmission de puissance.
D'ailleurs les liaisons modélisent des mouvements et considèrent l'amplitude de ceux‑ci toujours infinie.
Il n'en reste pas moins que la recherche d'un modèle isostatique, met à mal cette hypothèse puisqu'on ajoute des mouvements issus des jeux dans les liaisons pour obtenir l'isostatisme. Mais il faut alors garder à
f i g 4 5
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 1
0 0 0 1 0 1 1 0
0 0 0 0 021 4 41 1 32
−
−( )e l l
e
. cos . cos
. c
θ θ λ
oos .sin .sin
.sin
θ θ θ
λ θ
21 4 41 21
1 32 21
0 1 0 0 0
0 0 1 0 0 0
− −
−( )
l e
l e
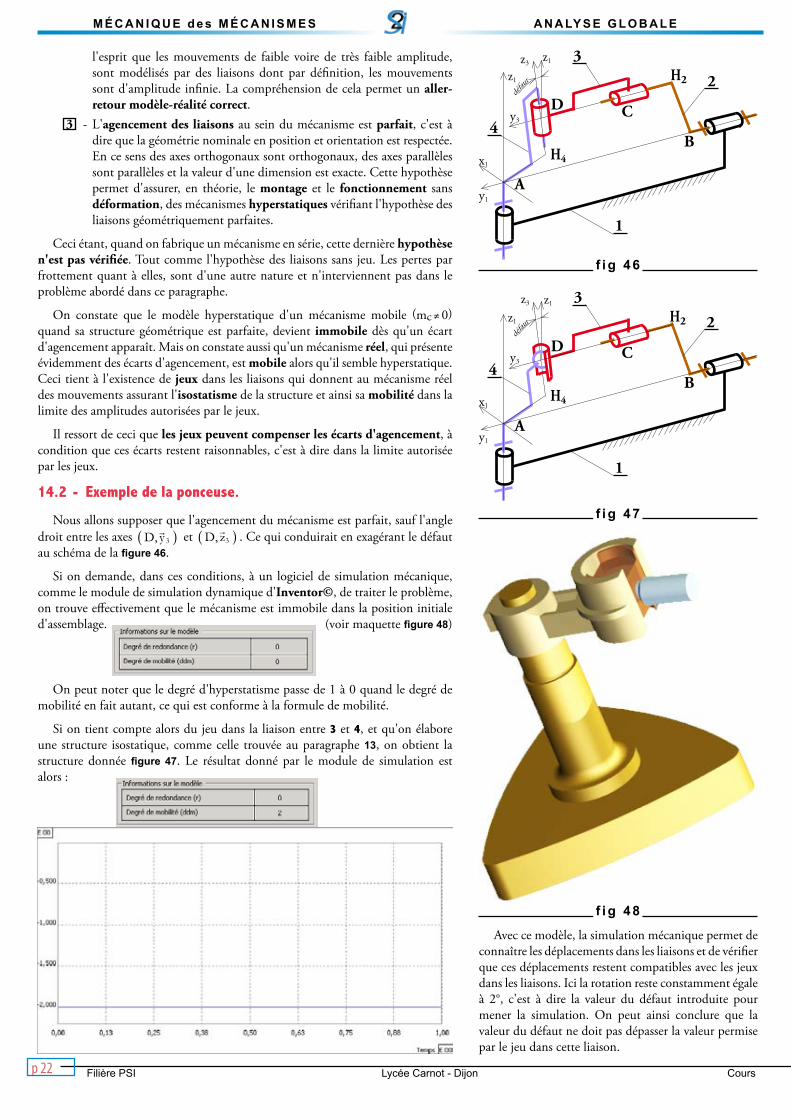
p 22 p 23
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 22 p 23
l'esprit que les mouvements de faible voire de très faible amplitude, sont modélisés par des liaisons dont par définition, les mouvements sont d'amplitude infinie. La compréhension de cela permet un aller‑retour modèle‑réalité correct.
3 ‑ L'agencement des liaisons au sein du mécanisme est parfait, c'est à dire que la géométrie nominale en position et orientation est respectée. En ce sens des axes orthogonaux sont orthogonaux, des axes parallèles sont parallèles et la valeur d'une dimension est exacte. Cette hypothèse permet d'assurer, en théorie, le montage et le fonctionnement sans déformation, des mécanismes hyperstatiques vérifiant l'hypothèse des liaisons géométriquement parfaites.
Ceci étant, quand on fabrique un mécanisme en série, cette dernière hypothèse n'est pas vérifiée. Tout comme l'hypothèse des liaisons sans jeu. Les pertes par frottement quant à elles, sont d'une autre nature et n'interviennent pas dans le problème abordé dans ce paragraphe.
On constate que le modèle hyperstatique d'un mécanisme mobile (mc ≠ 0) quand sa structure géométrique est parfaite, devient immobile dès qu'un écart d'agencement apparaît. Mais on constate aussi qu'un mécanisme réel, qui présente évidemment des écarts d'agencement, est mobile alors qu'il semble hyperstatique. Ceci tient à l'existence de jeux dans les liaisons qui donnent au mécanisme réel des mouvements assurant l'isostatisme de la structure et ainsi sa mobilité dans la limite des amplitudes autorisées par le jeux.
Il ressort de ceci que les jeux peuvent compenser les écarts d'agencement, à condition que ces écarts restent raisonnables, c'est à dire dans la limite autorisée par les jeux.
14.2 - Exemple de la ponceuse.
Nous allons supposer que l'agencement du mécanisme est parfait, sauf l'angle droit entre les axes D y, 3( ) et D z, 3( ) . Ce qui conduirait en exagérant le défaut au schéma de la figure 46.
Si on demande, dans ces conditions, à un logiciel de simulation mécanique, comme le module de simulation dynamique d'Inventor©, de traiter le problème, on trouve effectivement que le mécanisme est immobile dans la position initiale d'assemblage. (voir maquette figure 48)
On peut noter que le degré d'hyperstatisme passe de 1 à 0 quand le degré de
mobilité en fait autant, ce qui est conforme à la formule de mobilité.
Si on tient compte alors du jeu dans la liaison entre 3 et 4, et qu'on élabore une structure isostatique, comme celle trouvée au paragraphe 13, on obtient la structure donnée figure 47. Le résultat donné par le module de simulation est alors :
f i g 4 6
f i g 4 7
f i g 4 8
Avec ce modèle, la simulation mécanique permet de connaître les déplacements dans les liaisons et de vérifier que ces déplacements restent compatibles avec les jeux dans les liaisons. Ici la rotation reste constamment égale à 2°, c'est à dire la valeur du défaut introduite pour mener la simulation. On peut ainsi conclure que la valeur du défaut ne doit pas dépasser la valeur permise par le jeu dans cette liaison.
1
4
2
3H2
B
A
CD
H4x1
z1
y1
y3
défau
t
z1z3
1
4
2
3H2
B
A
CD
H4x1
z1
y1
y3
défau
t
z1z3
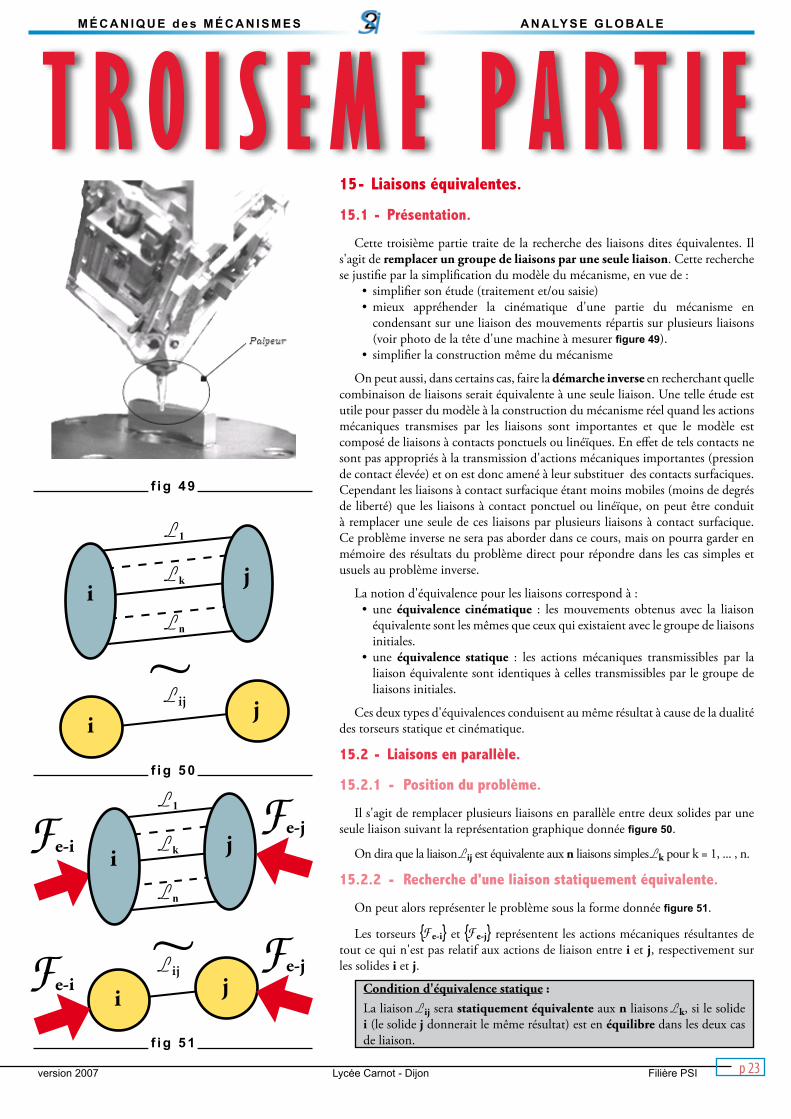
p 22 p 23p 22 p 23
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
T R O I S E M E P A R T I E15 - Liaisons équivalentes.
15.1 - Présentation.
Cette troisième partie traite de la recherche des liaisons dites équivalentes. Il s'agit de remplacer un groupe de liaisons par une seule liaison. Cette recherche se justifie par la simplification du modèle du mécanisme, en vue de :
• simplifiersonétude(traitementet/ousaisie)•mieux appréhender la cinématique d'une partie du mécanisme en
condensant sur une liaison des mouvements répartis sur plusieurs liaisons (voir photo de la tête d'une machine à mesurer figure 49).
• simplifierlaconstructionmêmedumécanisme
On peut aussi, dans certains cas, faire la démarche inverse en recherchant quelle combinaison de liaisons serait équivalente à une seule liaison. Une telle étude est utile pour passer du modèle à la construction du mécanisme réel quand les actions mécaniques transmises par les liaisons sont importantes et que le modèle est composé de liaisons à contacts ponctuels ou linéïques. En effet de tels contacts ne sont pas appropriés à la transmission d'actions mécaniques importantes (pression de contact élevée) et on est donc amené à leur substituer des contacts surfaciques. Cependant les liaisons à contact surfacique étant moins mobiles (moins de degrés de liberté) que les liaisons à contact ponctuel ou linéïque, on peut être conduit à remplacer une seule de ces liaisons par plusieurs liaisons à contact surfacique. Ce problème inverse ne sera pas aborder dans ce cours, mais on pourra garder en mémoire des résultats du problème direct pour répondre dans les cas simples et usuels au problème inverse.
La notion d'équivalence pour les liaisons correspond à :• une équivalence cinématique : les mouvements obtenus avec la liaison
équivalente sont les mêmes que ceux qui existaient avec le groupe de liaisons initiales.
• une équivalence statique : les actions mécaniques transmissibles par la liaison équivalente sont identiques à celles transmissibles par le groupe de liaisons initiales.
Ces deux types d'équivalences conduisent au même résultat à cause de la dualité des torseurs statique et cinématique.
15.2 - Liaisons en parallèle.
15.2.1 - Position du problème.
Il s'agit de remplacer plusieurs liaisons en parallèle entre deux solides par une seule liaison suivant la représentation graphique donnée figure 50.
On dira que la liaison Lij est équivalente aux n liaisons simples Lk pour k = 1, ... , n.
15.2.2 - Recherche d'une liaison statiquement équivalente.
On peut alors représenter le problème sous la forme donnée figure 51.
Les torseurs Fe‑i et Fe‑j représentent les actions mécaniques résultantes de tout ce qui n'est pas relatif aux actions de liaison entre i et j, respectivement sur les solides i et j.
Condition d'équivalence statique :La liaison Lij sera statiquement équivalente aux n liaisons Lk, si le solide i (le solide j donnerait le même résultat) est en équilibre dans les deux cas de liaison.
f i g 5 0
j
L1
iLij
Lk
Ln
~i
j
f i g 5 1
f i g 4 9
j
i
~i
jFe‑iFe‑j
Fe‑iFe‑j
L1
Lij
Lk
Ln

p 24 p 25
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 24 p 25
Or, dans le premier cas, l'équilibre du solide i se traduit par l'équation :
F FB Be i P ki P
k
k n
−=
=
+ = ∑, ,1
0 où (P, B) est un repère quelconque, mais de
préférence, le repère local, supposé ou donné, de la liaison équivalente.
Dans le deuxième, l'équilibre du solide i se traduit par l'équation :F F
B Be i P ji P− + = , ,0 . Ces deux résultats montrent de manière évidente
que : F FB Bji P ki P
k
k n
= =
=
∑, ,1
.
A ce stade de l'étude, il est bon de se souvenir que la recherche porte sur la liaison équivalente c'est à dire le torseur Fji. Or ce torseur inconnu comporte à priori 6 composantes qui constituent les 6 inconnues du problème. Les composantes des torseurs Fki sont, quant à elles, parfaitement connues (en tout
cas la forme canonique du torseur). On peut noter CS = nskk
k n
=
=
∑1
le nombre des composantes
"statiques" connues non nulles où nsk est le nombre de composantes statiques de la liaison Lk. On a bien sûr CS = IS, mais la notation IS pourrait laisser penser que ces composantes sont inconnues alors que pour cette étude il n'en est rien.
La relation donne en général un système de 6 équations à 6 inconnues que l'on peut mettre sous forme matricielle car le système est linéaire.
Soit : X A BS S S = [ ] .
Si on pose : FB
ji =
P
X LY MZ N,
, alors : X
XYZLMN
S =
Et si : FB
ki =
P
ki ki
ki ki
ki ki
X LY MZ N,
, alors : B
XX
XY
Y
N
S
i
i
ni
i
ki
ni
=
1
2
1
Lamatrice[AS]est,quantàelle,dedimension6xCS.Le rang rsq de cette matrice permet de connaître le nombre d'équations
indépendantes, c'est à dire le nombre d'inconnues de Fji qui sont non nulles, les (6 ‑ rsq) inconnues restantes étant nulles si on a judicieusement choisi le repère (P, B) ), sinon ce sont des combinaisons linéaires des rsq inconnues non nulles.
Ceci permet de conclure sur le type de la liaison statiquement équivalente :• sirsq = 6 → Lij = liaison encastrement.• sirsq < 6 → Lij = liaison ayant rsq inconnues non nulles (ou indépendantes) parmilesX,Y,Z,L,M,N.Lanotationnsij pour le degré de liaison de la liaison Lij, donne nsij = rsq. Comme ncij = 6 ‑ nsij alors ncij = 6 ‑ rsq, et le degré de liberté de la liaison vaut donc ncij = (6 ‑ rsq).
On peut également conclure sur la nature du groupe de liaisons initial :• siCs > rsq → les liaisons Lk sont surabondantes, car elles introduisent
plus de composantes statiques que celles qui sont nécessaires à la liaison équivalente. Il existe (Cs ‑ rsq) composantes statiques surabondantes.
On dit que le groupe de liaisons initial est hyperstatique de degré hq = Cs ‑ rsq.• siCs = rsq → les liaisons Lk sont justes suffisantes, car elles introduisent
autant de composantes statiques que celles qui sont nécessaires à la liaison équivalente.
On dit que le groupe de liaisons initial est isostatique (hq = 0).
La recherche de la nature hyperstatique ou isostatique du groupe de liaisons étudié permet d'être renseigné sur le caractère statiquement surabondant de la réalisation du groupe de liaisons. On l'aura compris, dans ce cas la recherche de la liaison équivalente n'est pas l'objectif en soi, mais un moyen d'étudier le groupe de liaisons lui même. On pourra d'ailleurs chercher à rendre isostatique, si on le souhaite, le modèle décrit par le groupe de liaisons en modifiant une ou plusieurs liaisons du groupe.
Remarque : Une des applications classique de cette recherche concerne la liaison encastrement qu'il faut réaliser entre une pièce à usiner et la table de la machine outil. Cette liaison est réalisée par plusieurs liaisons en parallèle, mais cette réalisation doit être isostatique pour obtenir une bonne répétabilité de mise en position des pièces à usiner sur la table de la machine outil.
Exemple : considérons un cas très simple composé de deux solides suivant la disposition donnée figure 52. Le graphe de structure est donné figure 53.
Pour déterminer la liaison statiquement équivalente L12 aux deux liaisons L1 et L2, on isole le solide 2. Les actions mécaniques transmissibles par les deux liaisons L1 et L2, sont représentées par les torseurs :
FB
1 A, 1
=0 0
1 1
1 1
Y MZ N
et F
B2
A, 1
=XYZ
2
2
2
000
.
La notation générale Fki est abandonnée au profit de la notation Fk afin d'éviter une confusion possible avec Fji.
Les actions mécaniques transmissibles par la liaison équivalente L12 sont représentées par le torseur :
FB
12 A, 1
=X LY MZ N
.
Ce qui donne : FB
12 A, 1
= FB
1 A, 1
+ FB
2 A, 1
.
Cette égalité donne dans la base B1 les 6 équations suivantes :
2
1
x1
y1
A
1 L2 = sphérique (A)2L1 = pivot glissant A x, 1( )
f i g 5 2
f i g 5 3
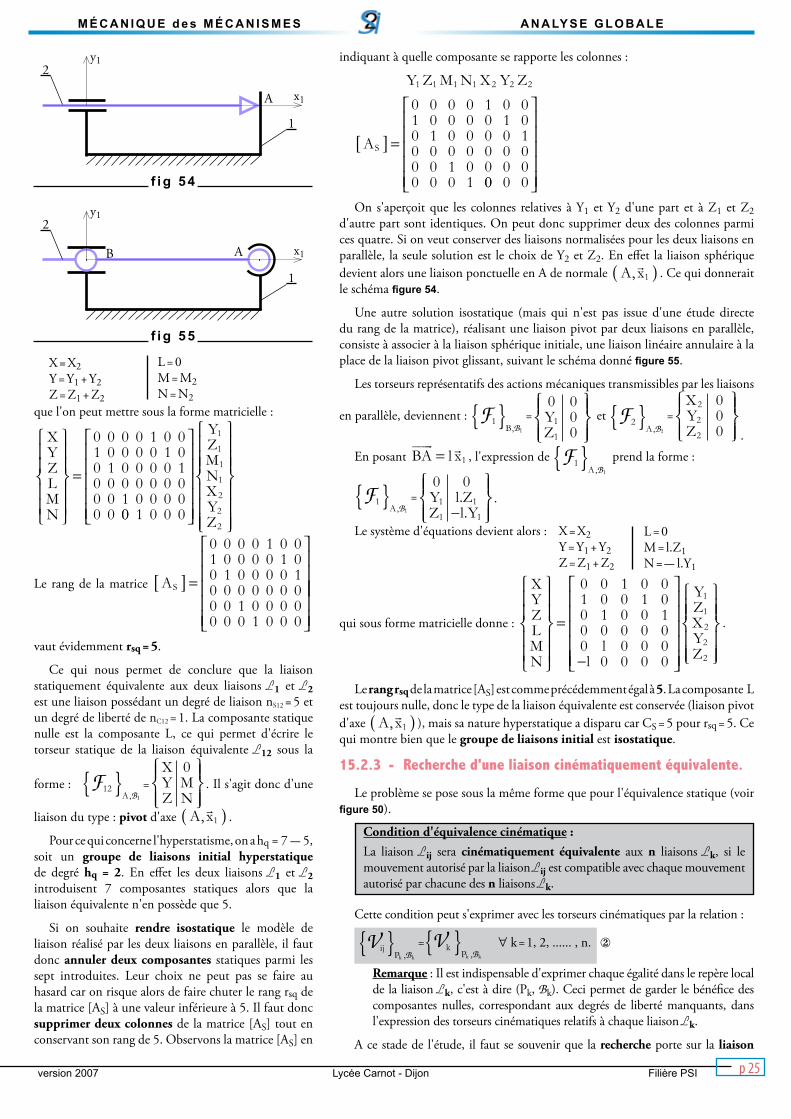
p 24 p 25p 24 p 25
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
X=X2Y=Y1+Y2Z=Z1+Z2
L = 0M = M2N = N2
que l'on peut mettre sous la forme matricielle :
XYZLMN
=
0 0 0 0 1 0 01 0 0 0 0 1 00 1 0 0 0 0 10 0 0 0 0 0 00 0 1 0 0 0 00 0 00 1 0 0 0
1
1
1
1
2
2
2
YZMNXYZ
Le rang de la matrice AS[ ] =
0 0 0 0 1 0 01 0 0 0 0 1 00 1 0 0 0 0 10 0 0 0 0 0 00 0 1 0 0 0 00 0 0 1 0 0 0
vaut évidemment rsq = 5.
Ce qui nous permet de conclure que la liaison statiquement équivalente aux deux liaisons L1 et L2 est une liaison possédant un degré de liaison nS12 = 5 et un degré de liberté de nC12 = 1. La composante statique nulle est la composante L, ce qui permet d'écrire le torseur statique de la liaison équivalente L12 sous la
forme : FB
12 A, 1
=XY MZ N
0
. Il s'agit donc d'une
liaison du type : pivot d'axe A x, 1( ) .
Pour ce qui concerne l'hyperstatisme, on a hq = 7 - 5, soit un groupe de liaisons initial hyperstatique de degré hq = 2. En effet les deux liaisons L1 et L2 introduisent 7 composantes statiques alors que la liaison équivalente n'en possède que 5.
Si on souhaite rendre isostatique le modèle de liaison réalisé par les deux liaisons en parallèle, il faut donc annuler deux composantes statiques parmi les sept introduites. Leur choix ne peut pas se faire au hasard car on risque alors de faire chuter le rang rsq de lamatrice[AS]àunevaleurinférieureà5.Ilfautdoncsupprimer deux colonnesdelamatrice[AS]toutenconservantsonrangde5.Observonslamatrice[AS]en
indiquant à quelle composante se rapporte les colonnes :
Y Z M N X Y Z
AS
1 1 1 1 2 2 2
[ ] =
0 0 0 0 1 0 01 0 0 0 0 1 00 1 0 0 0 0 10 0 0 0 0 0 00 0 1 0 0 0 00 0 0 1 00 0 0
Ons'aperçoitque les colonnes relatives àY1 etY2d'unepart et àZ1 etZ2 d'autre part sont identiques. On peut donc supprimer deux des colonnes parmi ces quatre. Si on veut conserver des liaisons normalisées pour les deux liaisons en parallèle,laseulesolutionestlechoixdeY2etZ2. En effet la liaison sphérique devient alors une liaison ponctuelle en A de normale A x, 1( ) . Ce qui donnerait le schéma figure 54.
Une autre solution isostatique (mais qui n'est pas issue d'une étude directe du rang de la matrice), réalisant une liaison pivot par deux liaisons en parallèle, consiste à associer à la liaison sphérique initiale, une liaison linéaire annulaire à la place de la liaison pivot glissant, suivant le schéma donné figure 55.
Les torseurs représentatifs des actions mécaniques transmissibles par les liaisons
en parallèle, deviennent : FB
1 B, 1
=0 0
00
1
1
YZ
et F
B2
A, 1
=XYZ
2
2
2
000
.En posant BA l x
= 1 , l'expression de FB
1 A, 1
prend la forme :
FB
1 A, 1
=0 0
1 1
1 1
Y l ZZ l Y
..−
.
Le système d'équations devient alors : X=X2Y=Y1+Y2Z=Z1+Z2
L = 0M=l.Z1N=-l.Y1
qui sous forme matricielle donne :
XYZLMN
ll
=
−
0 0 1 0 01 0 0 1 00 1 0 0 10 0 0 0 00 0 0 0
0 0 0 0
YZXYZ
1
1
2
2
2
.
Le rang rsqdelamatrice[AS]estcommeprécédemmentégalà5. La composante L est toujours nulle, donc le type de la liaison équivalente est conservée (liaison pivot d'axe A x, 1( ) ), mais sa nature hyperstatique a disparu car CS = 5 pour rsq = 5. Ce qui montre bien que le groupe de liaisons initial est isostatique.
15.2.3 - Recherche d'une liaison cinématiquement équivalente.
Le problème se pose sous la même forme que pour l'équivalence statique (voir figure 50).
Condition d'équivalence cinématique :La liaison Lij sera cinématiquement équivalente aux n liaisons Lk, si le mouvement autorisé par la liaison Lij est compatible avec chaque mouvement autorisé par chacune des n liaisons Lk.
Cette condition peut s'exprimer avec les torseurs cinématiques par la relation :
VB
ij Pk k,
= VB
k Pk k,
k = 1, 2, ...... , n.
Remarque : Il est indispensable d'exprimer chaque égalité dans le repère local de la liaison Lk, c'est à dire (Pk, Bk). Ceci permet de garder le bénéfice des composantes nulles, correspondant aux degrés de liberté manquants, dans l'expression des torseurs cinématiques relatifs à chaque liaison Lk.
A ce stade de l'étude, il faut se souvenir que la recherche porte sur la liaison
f i g 5 4
f i g 5 5
2
1
x1
y1
A
2
1
x1
y1
AB
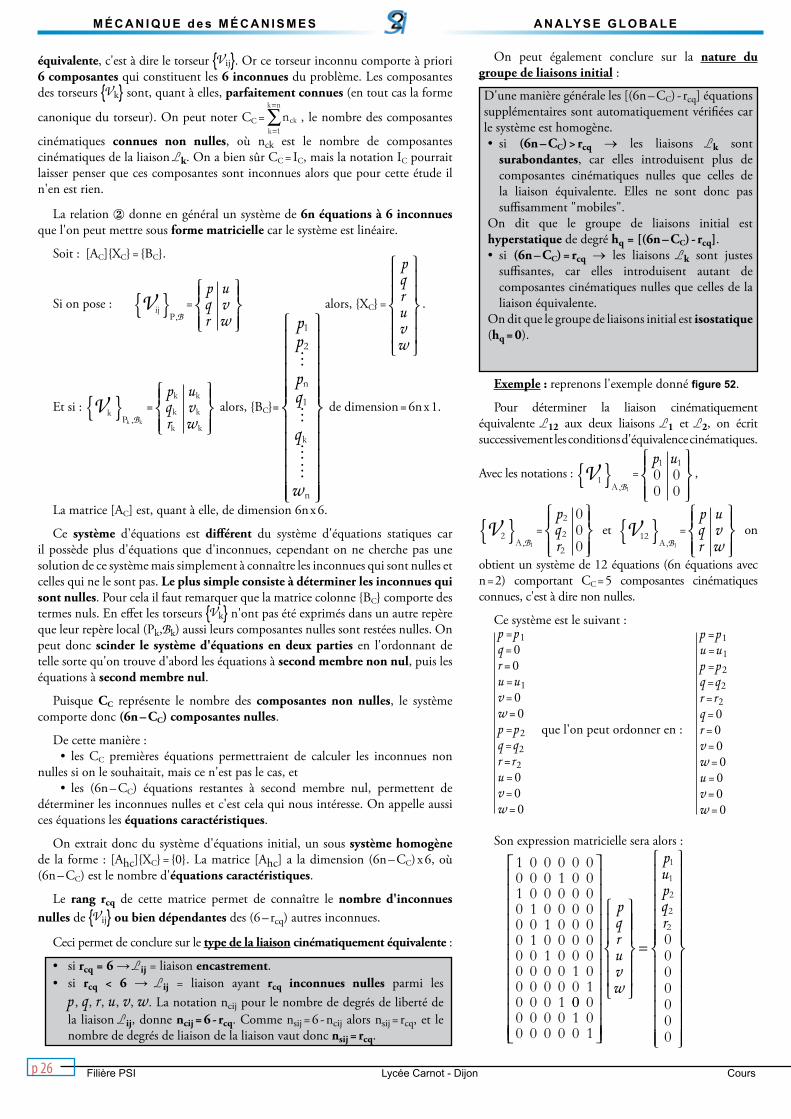
p 26 p 27
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon Coursp 26 p 27
équivalente, c'est à dire le torseur Vij. Or ce torseur inconnu comporte à priori 6 composantes qui constituent les 6 inconnues du problème. Les composantes des torseurs Vk sont, quant à elles, parfaitement connues (en tout cas la forme
canonique du torseur). On peut noter CC = nckk
k n
=
=
∑1
, le nombre des composantes cinématiques connues non nulles, où nck est le nombre de composantes cinématiques de la liaison Lk. On a bien sûr CC = IC, mais la notation IC pourrait laisser penser que ces composantes sont inconnues alors que pour cette étude il n'en est rien.
La relation donne en général un système de 6n équations à 6 inconnues que l'on peut mettre sous forme matricielle car le système est linéaire.
Soit : [AC]XC= BC.
Si on pose : VB
ij P,
=p uq vr w
alors,XC=
pqruvw
.
Et si : VB
k Pk k,
=p uq vr w
k k
k k
k k
alors,BC=
pp
pq
q
w
1
2
1
n
k
n
de dimension = 6n x 1.
Lamatrice[AC]est,quantàelle,dedimension6n
x
6.
Ce système d'équations est différent du système d'équations statiques car il possède plus d'équations que d'inconnues, cependant on ne cherche pas une solution de ce système mais simplement à connaître les inconnues qui sont nulles et celles qui ne le sont pas. Le plus simple consiste à déterminer les inconnues qui sont nulles.PourcelailfautremarquerquelamatricecolonneBCcomportedestermes nuls. En effet les torseurs Vk n'ont pas été exprimés dans un autre repère que leur repère local (Pk,Bk) aussi leurs composantes nulles sont restées nulles. On peut donc scinder le système d'équations en deux parties en l'ordonnant de telle sorte qu'on trouve d'abord les équations à second membre non nul, puis les équations à second membre nul.
Puisque CC représente le nombre des composantes non nulles, le système comporte donc (6n – CC) composantes nulles.
De cette manière : • les CC premières équations permettraient de calculer les inconnues non
nulles si on le souhaitait, mais ce n'est pas le cas, et • les (6n – CC) équations restantes à second membre nul, permettent de
déterminer les inconnues nulles et c'est cela qui nous intéresse. On appelle aussi ces équations les équations caractéristiques.
On extrait donc du système d'équations initial, un sous système homogène de la forme : [Ahc]XC= 0.Lamatrice [Ahc]a ladimension(6n–CC) x 6, où (6n – CC) est le nombre d'équations caractéristiques.
Le rang rcq de cette matrice permet de connaître le nombre d'inconnues nulles de Vij ou bien dépendantes des (6 – rcq) autres inconnues.
Ceci permet de conclure sur le type de la liaison cinématiquement équivalente :
• sircq = 6 → Lij = liaison encastrement.• si rcq < 6 → Lij = liaison ayant rcq inconnues nulles parmi les
p, q, r, u, v, w. La notation ncij pour le nombre de degrés de liberté de la liaison Lij, donne ncij = 6 ‑ rcq. Comme nsij = 6 ‑ ncij alors nsij = rcq, et le nombre de degrés de liaison de la liaison vaut donc nsij = rcq.
On peut également conclure sur la nature du groupe de liaisons initial :
D'unemanièregénéraleles[(6n – CC) ‑ rcq]équationssupplémentaires sont automatiquement vérifiées car le système est homogène.• si (6n – CC) > rcq → les liaisons Lk sont
surabondantes, car elles introduisent plus de composantes cinématiques nulles que celles de la liaison équivalente. Elles ne sont donc pas suffisamment "mobiles".
On dit que le groupe de liaisons initial est hyperstatique de degré hq = [(6n – CC) ‑ rcq].• si (6n – CC) = rcq → les liaisons Lk sont justes
suffisantes, car elles introduisent autant de composantes cinématiques nulles que celles de la liaison équivalente.
On dit que le groupe de liaisons initial est isostatique (hq = 0).
Exemple : reprenons l'exemple donné figure 52.
Pour déterminer la liaison cinématiquement équivalente L12 aux deux liaisons L1 et L2, on écrit successivement les conditions d'équivalence cinématiques.
Avec les notations : VB
1 A, 1
=p u1 10 00 0
,
VB
2 A, 1
=pqr
2
2
2
000
et V
B12
A, 1
=p uq vr w
on
obtient un système de 12 équations (6n équations avec n = 2) comportant CC = 5 composantes cinématiques connues, c'est à dire non nulles.
Ce système est le suivant :p = p1q = 0r = 0u = u1v = 0w = 0p = p2q = q2r = r2u = 0v = 0w = 0
que l'on peut ordonner en :
p = p1u = u1p = p2q = q2r = r2q = 0r = 0v = 0w = 0u = 0v = 0w = 0
Son expression matricielle sera alors :
1 0 0 0 0 00 0 0 1 0 01 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 0 1 00 0 0 0 0 10 0 0 1 00 00 0 0 0 1 00 0 0 0 0 1
pqruvw
=
pupqr
1
1
2
2
20000000
p 26 p 27p 26 p 27
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
On voit alors que l'on peut extraire de ce système un sous système constitué des 7 (c'est à dire : (6n – CC)) équations caractéristiques, soit :
0 1 0 0 0 00 0 1 0 0 00 0 0 0 1 00 0 0 0 0 10 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1
ppqruvw
=
0000000
Lamatrice[Ahc]ainsiforméeestderangrcq = 5. Le degré de liberté de la liaison L12 est donc nc12 = 6 – 5 = 1. On
trouve facilement que p ≠ 0, soit : VB
12 A, 1
=p 00 00 0
et qu'il s'agit donc d'une liaison pivot d'axe A x, 1( ) .
On remarque que pour les 7 équations caractéristiques le rang rcq vaut 5 et que le groupe de liaisons initial est donc hyperstatique d'ordre 2.
Si on reprend la solution envisagée précédemment et définie par le schéma de la figure 55, on a alors les torseurs cinématiques relatifs aux deux liaisons en parallèle qui
sont : VB
1 B, 1
=p uqr
1 1
1
1
00
et V
B2
A, 1
=pqr
2
2
2
000
.
L'expression de VB
12 A, 1
au point B, en posant BA l x = 1 , est :
V
B12
B, 1
=p uq v - rr w q
ll..+
.
On obtient dans ce cas un système de 12 équations comportant CC = 7 composantes cinématiques connues, c'est à dire non nulles. Le système est le suivant :
p = p1q = q1r = r1u = u1v – l.r = 0w + l.q = 0p = p2q = q2r = r2u = 0v = 0w = 0
que l'on peut ordonner en :
p = p1q = q1r = r1u = u1p = p2q = q2r = r2v – l.r = 0w + l.q = 0u = 0v = 0w = 0
Son expression matricielle est alors :
1 0 0 0 0 00 1 0 0 0 00 0 1 0 0 00 0 0 1 0 01 0 0 0 0 00 1 0 0 0 00 0 1 0 1 00 0 0 0 00 0 1 0 10 0
−+
ll
00 0 1 00 0 0 0 0 00 0 0 0 0 1
pqruvw
=
pqrupqr
1
1
1
1
2
2
200000
,dont on peut extraire le sous
système constitué des 5 (c'est à dire : (6n – CC)) équations caractéristiques, soit :
0 0 0 1 00 0 0 0 10 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1
−+
ll
pqruvw
=
00000
. La matrice [Ahc] ainsi
formée est de rang rcq = 5. Le degré de liberté de la liaison L12 est donc
nc12 = 6 – 5 = 1. On trouve facilement que p ≠ 0, soit VB
12 A, 1
=p 00 00 0
et qu'il s'agit donc d'une liaison pivot d'axe A x, 1( ) .
Mais dans ce cas le groupe de liaisons initial est isostatique car le système comporte 5 équations caractéristiques pour un rang rcq qui vaut toujours 5.
15.3 - Liaisons en série.
15.3.1 - Position du problème.
Il s'agit de remplacer plusieurs liaisons en série entre deux solides par une seule liaison suivant la représentation graphique donnée figure 56.
On dira que la liaison Lij est équivalente aux n liaisons simples Lk pour k = 1, ... , n.
15.3.2 - Recherche d'une liaison statiquement équivalente.
On peut alors représenter le problème sous la forme donnée figure 57.
Le torseur Fe‑n représente les actions mécaniques extérieures exercées sur le solides n.
Hypothèse : On suppose qu'aucun autre solide (de 0 à n‑1) n'est soumis à une action mécanique extérieure.
f i g 5 6
f i g 5 7
L1
0Lij
Lk
Ln
~0
n
n
1
k‑1k
n‑1
L1
0Lij
Lk
Ln
~0
n
n
1
k‑1k
n‑1
Fe‑n
Fe‑n
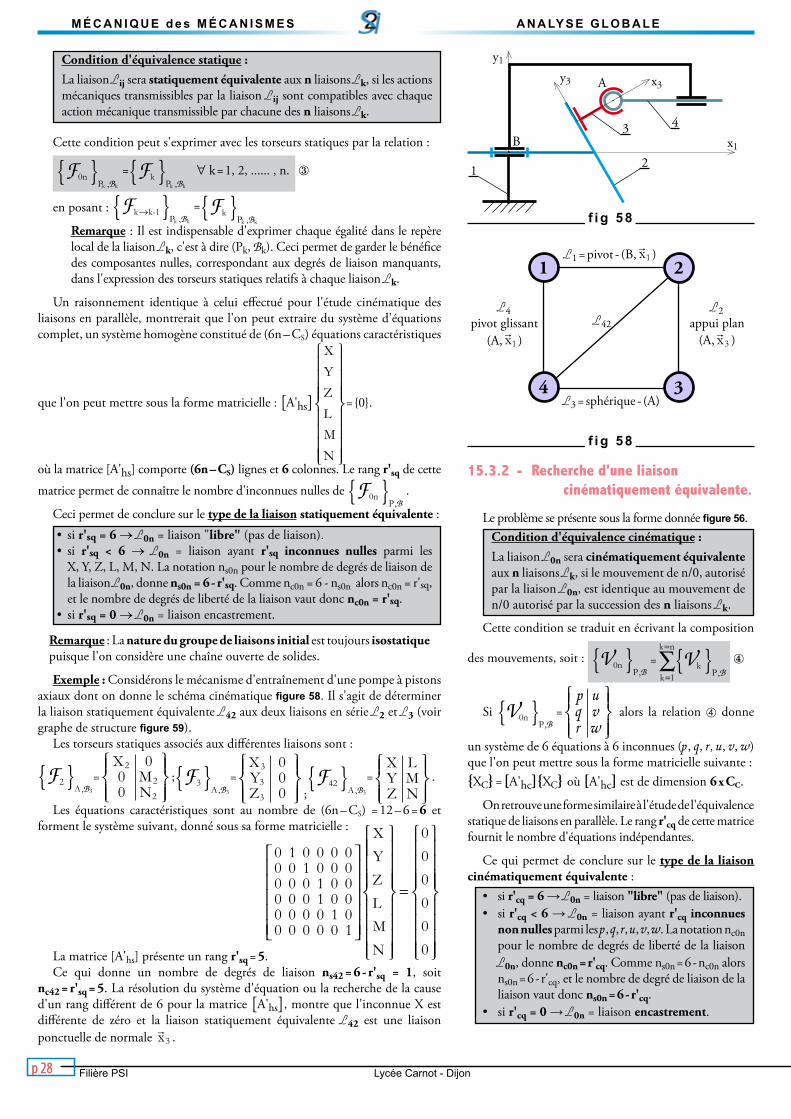
p 28
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
Filière PSI Lycée Carnot - Dijon p 28 p 29
f i g 5 8
1 2x1
y1
A
B
x3y3
3 4
Condition d'équivalence statique :La liaison Lij sera statiquement équivalente aux n liaisons Lk, si les actions mécaniques transmissibles par la liaison Lij sont compatibles avec chaque action mécanique transmissible par chacune des n liaisons Lk.
Cette condition peut s'exprimer avec les torseurs statiques par la relation :
FB
0n Pk k,
= FB
k Pk k,
k = 1, 2, ...... , n.
en posant : FB
k k-1→ Pk k,
= FB
k Pk k,
Remarque : Il est indispensable d'exprimer chaque égalité dans le repère local de la liaison Lk, c'est à dire (Pk, Bk). Ceci permet de garder le bénéfice des composantes nulles, correspondant aux degrés de liaison manquants, dans l'expression des torseurs statiques relatifs à chaque liaison Lk.
Un raisonnement identique à celui effectué pour l'étude cinématique des liaisons en parallèle, montrerait que l'on peut extraire du système d'équations complet, un système homogène constitué de (6n – CS) équations caractéristiques
que l'on peut mettre sous la forme matricielle : [A'hs]
XYZLMN
=0.
oùlamatrice[A'hs]comporte(6n – CS) lignes et 6 colonnes. Le rang r'sq de cette
matrice permet de connaître le nombre d'inconnues nulles de FB
0n P,
.
Ceci permet de conclure sur le type de la liaison statiquement équivalente :• sir'sq = 6 → L0n = liaison "libre" (pas de liaison).• si r'sq < 6 → L0n = liaison ayant r'sq inconnues nulles parmi les X,Y,Z,L,M,N.Lanotationns0n pour le nombre de degrés de liaison de la liaison L0n, donne ns0n = 6 ‑ r'sq. Comme nc0n = 6 ‑ ns0n alors nc0n = r'sq, et le nombre de degrés de liberté de la liaison vaut donc nc0n = r'sq.
• sir'sq = 0 → L0n = liaison encastrement.
Remarque : La nature du groupe de liaisons initial est toujours isostatique puisque l'on considère une chaîne ouverte de solides.
Exemple : Considérons le mécanisme d'entraînement d'une pompe à pistons axiaux dont on donne le schéma cinématique figure 58. Il s'agit de déterminer la liaison statiquement équivalente L42 aux deux liaisons en série L2 et L3 (voir graphe de structure figure 59).
Les torseurs statiques associés aux différentes liaisons sont :
FB
2 A, 3
=X
MN
2
2
2
000
; F
B3
A, 3
=XYZ
3
3
3
000
;F
B42
A, 3
=X LY MZ N
.
Les équations caractéristiques sont au nombre de (6n – CS) = 12 – 6 = 6 et forment le système suivant, donné sous sa forme matricielle :
0 1 0 0 0 00 0 1 0 0 00 0 0 1 0 00 0 0 1 0 00 0 0 0 1 00 0 0 0 0 1
XYZLMN
=
000000Lamatrice[A'hs]présenteunrangr'sq = 5.
Ce qui donne un nombre de degrés de liaison ns42 = 6 ‑ r'sq = 1, soit nc42 = r'sq = 5. La résolution du système d'équation ou la recherche de la cause d'un rang différent de 6 pour la matrice [A'hs],montrequel'inconnueXestdifférente de zéro et la liaison statiquement équivalente L42 est une liaison ponctuelle de normale
x3 .
15.3.2 - Recherche d'une liaison cinématiquement équivalente.
Le problème se présente sous la forme donnée figure 56.Condition d'équivalence cinématique :La liaison L0n sera cinématiquement équivalente aux n liaisons Lk, si le mouvement de n/0, autorisé par la liaison L0n, est identique au mouvement de n/0 autorisé par la succession des n liaisons Lk.
Cette condition se traduit en écrivant la composition
des mouvements, soit : VB
0n P,
= VB
k =
=
∑Pk
k n
,1
Si
VB
0n P,
=p uq vr w
alors la relation donne
un système de 6 équations à 6 inconnues (p, q, r, u, v, w) que l'on peut mettre sous la forme matricielle suivante : XC = [A'hc]XC où [A'hc] est de dimension 6 x CC.
On retrouve une forme similaire à l'étude de l'équivalence statique de liaisons en parallèle. Le rang r'cq de cette matrice fournit le nombre d'équations indépendantes.
Ce qui permet de conclure sur le type de la liaison cinématiquement équivalente :
• sir'cq = 6 → L0n = liaison "libre" (pas de liaison).• sir'cq < 6 → L0n = liaison ayant r'cq inconnues
non nulles parmi les p, q, r, u, v, w. La notation nc0n pour le nombre de degrés de liberté de la liaison L0n, donne nc0n = r'cq. Comme ns0n = 6 ‑ nc0n alors ns0n = 6 ‑ r'cq, et le nombre de degré de liaison de la liaison vaut donc ns0n = 6 ‑ r'cq.
• sir'cq = 0 → L0n = liaison encastrement.
f i g 5 8
1 2
4 3
L1 = pivot ‑ (B,x1 )
L3 = sphérique ‑ (A)
L42
L4pivot glissant
(A,x1 )
L2appui plan
(A,x3 )

p 28 p 29
M É C A N I Q U E d e s M É C A N I S M E S A N A LY S E G L O B A L E
version 2007 Lycée Carnot - Dijon Filière PSI
Exemple : Le mécanisme précédent donné figure 58 peut être traité par cette approche.
Les différents torseurs cinématiques associés aux liaisons sont :
VB
2 A, 3
=p
vw
2
2
2
000
, V
B3
A, 3
=pqr
3
3
3
000
et
VB
42 A, 3
=p uq vr w
.
La relation d'équivalence cinématique donne :
VB
42 A, 3
= VB
2 A, 3
+ VB
3 A, 3
On obtient alors un système d'équations qui, sous forme matricielle, s'écrit :
pqruvw
=
1 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0 0 0 0 00 1 0 0 0 00 0 1 0 0 0
pvwpqr
2
2
2
3
3
3
La matrice [A'hc] présente un rang r'cq = 5.
Ce qui donne un degré de liberté nc42 = r'cq = 5, soit ns42 = 6 ‑ r'cq = 1.
La résolution du système d'équation ou la recherche de la cause d'un rang différent de 6 pour la matrice [A'hc], montre que l'inconnue u est nulle.
La liaison cinématiquement équivalente L42 est donc une liaison ponctuelle de normale x3 .
Remarque : l'équation p = p2 + p3 , montre que les deux liaisons initialement en série présente 1 degré de mobilité en trop, qui se traduit par un degré de mobilité interne au mécanisme correspondant à une rotation possible du solide 3 autour de l'axe x3 .