Embed Size (px)
Citation preview

1
POLITECNICO DI MILANO Scuola di Ingegneria Industriale e dell'Informazione
Corso di Laurea Magistrale in Ingegneria Biomedica
MODELLO MUSCOLO-SCHELETRICO DINAMICO PER LA
SIMULAZIONE DEL MOVIMENTO DELLA CAVIGLIA
FISIOLOGICA E PROTESIZZATA
Relatore: Prof. Carlo A. FRIGO
Correlatori: Prof. Alberto LEARDINI
Dr. Ing. Esteban E. PAVAN
Tesi di Laurea Magistrale di:
Valentina Ventura Matr.799340
Anno Accademico 2013 -2014

2
"Chi supera la crisi supera se stesso senza essere superato"
Albert Einstein
A te, nonno, che andandotene mi hai donato un po' della tua forza.
Ti sento accanto a me.
3
Indice
Sommario ......................................................................................................................................................................................................................... 5
Abstract ......................................................................................................................................................................................................................... 12
Introduzione................................................................................................................................................................................................................ 18
Capitolo 1-Anatomia e Biomeccanica della caviglia ............................................................................................................................. 21
1.1 Piede e caviglia ............................................................................................................................................................................................. 21
1.2 Analisi cinematica della caviglia ......................................................................................................................................................... 26
1.3 I legamenti delle articolazioni della caviglia ................................................................................................................................. 31
1.4 Componenti muscolari e tendinee del complesso gamba-piede ...................................................................................... 38
1.5 La volta plantare .......................................................................................................................................................................................... 42
Capitolo 2-Biomeccanica del complesso gamba-piede e stato dell'arte .................................................................................... 47
2.1 Biomeccanica del complesso gamba-piede .................................................................................................................................. 47
2.2 Analisi della postura .................................................................................................................................................................................. 61
2.3 Analisi della distribuzione delle pressioni plantari .................................................................................................................. 62
2.4 Cinematica e dinamica del cammino ................................................................................................................................................ 64
2.5 Protesi di caviglia ........................................................................................................................................................................................ 68
Capitolo 3- Materiali e Metodi .......................................................................................................................................................................... 75
3.1 Descrizione del modello ......................................................................................................................................................................... 75
3.2 Scelta delle caratteristiche meccaniche dei legamenti .......................................................................................................... 83
3.3 Modellizzazione dei muscoli ................................................................................................................................................................. 88
3.4 Raggiungimento di una posizione fisiologica ............................................................................................................................... 91
3.5 Verifica delle funzioni muscolari ........................................................................................................................................................ 94
3.6 Modellizzazione della protesi ........................................................................................................................................................... 100
Capitolo 4- Risultati ............................................................................................................................................................................................. 110
4.1 Validazione del modello:verifica delle funzioni muscolari ................................................................................................. 110
4.1.2 Attivazione dei muscoli flessori ................................................................................................................................................... 115
4.1.3 Attivazione dei muscoli tibiali ....................................................................................................................................................... 117
4.1.4 Attivazione del muscolo peroneo breve ................................................................................................................................. 120
4.1.5 Attivazione del muscolo tibiale anteriore............................................................................................................................... 122
4.1.6 Attivazione del muscolo peroneo anteriore.......................................................................................................................... 126
4.2 Movimenti di flessione dorsale e plantare e di prono-supinazione .............................................................................. 130
4
4.2.1 Flessione plantare: piede in appoggio e piede in sospensione ................................................................................... 131
4.2.2 Supinazione : piede in appoggio e piede in sospensione................................................................................................ 142
4.2.3 Pronazione: piede in appoggio e piede in sospensione ................................................................................................... 153
4.2.4 Dorsiflessione: piede in appoggio e piede in sospensione ............................................................................................ 164
Capitolo 5 - Discussione dei risultati e conclusioni............................................................................................................................. 177
5.1 Considerazioni generali ....................................................................................................................................................................... 177
5.2 Discussione risultati dell'attivazione muscolare per la validazione del modello ................................................... 177
5.3 Discussione dei risultati dei movimenti di flessione plantare-dorsale e di prono-supinazione .................... 180
5.4 Conclusioni e sviluppi futuri .............................................................................................................................................................. 192
Bibliografia ................................................................................................................................................................................................................ 194
5
SOMMARIO
Il presente lavoro di tesi è consistito nello sviluppo di un modello muscolo-scheletrico
del complesso gamba-piede che consente di analizzare i movimenti fisiologici delle
articolazioni della caviglia. Permette inoltre di confrontare le variazioni in termini di
forze sviluppate dai legamenti, di forze muscolari e di forze di contatto tra tibia e
astragalo, valutate prima e dopo l'inserimento di una protesi comunemente utilizzata
per la sostituzione protesica totale dell’articolazione tibio-tarsica.
La ricerca e la progettazione di protesi di caviglia si sono sviluppate in maniera
consistente solo recentemente, in quanto i risultati ottenuti dopo l'impianto protesico
per le articolazioni di anca e ginocchio hanno spinto ricercatori ed aziende ad uno
sviluppo positivo anche per l'articolazione della caviglia.
Questa articolazione, però, presenta una principale differenza rispetto alle altre ovvero
gli sforzi che agiscono sulla stessa sono più elevate in quanto l'area di contatto
dell'articolazione è più piccola e molto congruente [2] e questo ne ha reso difficile la
progettazione.
Le prime protesi cercavano di replicare l'anatomia ed erano generalmente a due
componenti; queste non hanno dato risultati soddisfacenti in quanto le componenti
protesiche sono necessariamente non conformi e portano ad alte pressioni locali e
usura; inoltre, nelle protesi di prima generazione si potrebbe verificare sovraccarico di
alcuni legamenti che non sono in grado di sopportare sollecitazioni elevate non poiché
le componenti non riescono a replicare esattamente la superficie tibiale e talare
anatomiche.
Un miglioramento è stato ottenuto con l'introduzione dell'inserto mobile in polietilene
che scorre tra le due superfici metalliche, la tibiale e la talare, seguendone il
movimento, mantenendo la congruenza totale, e permettendo così di avere sforzi più
bassi al contatto.
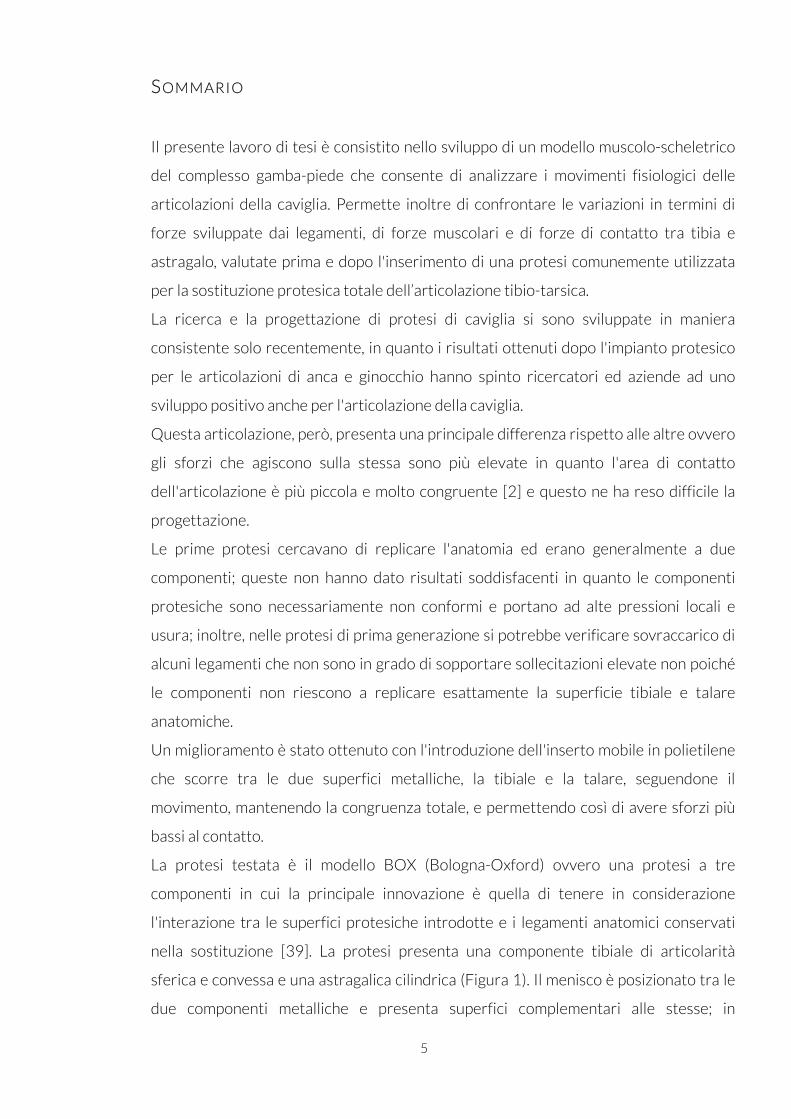
La protesi testata è il modello BOX (Bologna-Oxford) ovvero una protesi a tre
componenti in cui la principale innovazione è quella di tenere in considerazione
l'interazione tra le superfici protesiche introdotte e i legamenti anatomici conservati
nella sostituzione [39]. La protesi presenta una componente tibiale di articolarità
sferica e convessa e una astragalica cilindrica (Figura 1). Il menisco è posizionato tra le
due componenti metalliche e presenta superfici complementari alle stesse; in
particolare, sulla componente talare è presente un solco che permette all'insert
avere una completa congruenza tra le superfici e di muoversi sia rispetto alla
componente tibiale sia rispetto alla componente talare
dislocazione laterale
sulla protesi, ma solo da
che non ne consentono la fuoriuscita. E' quindi di fondamentale importanza che il
bilanciamento dei legamenti sia corretto
Figura
Per questo, nello sviluppo del modello stesso, si è posta particolare attenzione alla
modellazione dei legamenti.
L'impianto risulta anche meno spesso
comportando così anche una
alla possibile dislocazione dell'inserto in polietilene
superfici, per la prima volta compatibili con i legamenti ch
tutta l’escursione di flessione
Il software utilizzato per lo scopo è il programma SimWise 4D che permette di
effettuare simulazioni virtuali realizzando o importando modelli 3D e associando a
questi dimensioni, posizione spaziale e caratteristiche inerziali. Per ottenere le
geometrie 3D delle ossa, si è partiti da immagini di risonanza magnetica che sono
state poi processate con un software
mesh superficiali di triangolari con un numero di nodi più o meno elevato in modo da
trovare un giusto comp
superficie e la potenza del software utilizzato nel gestire i contatti.
Una volta importate le geometrie delle ossa, il piede è risultato in
plantare e supinazione
6
particolare, sulla componente talare è presente un solco che permette all'insert
avere una completa congruenza tra le superfici e di muoversi sia rispetto alla
componente tibiale sia rispetto alla componente talare limitando anche il rischio di
dislocazione laterale. Il menisco non risulta vincolato da nessuna struttura presente
ulla protesi, ma solo dall’apparato legamentoso dell'articolazione e dalle forze esterne,
che non ne consentono la fuoriuscita. E' quindi di fondamentale importanza che il
bilanciamento dei legamenti sia corretto dopo la sostituzione protesica
Figura 1 - La protesi di caviglia BOX Ankle; vista antero
Per questo, nello sviluppo del modello stesso, si è posta particolare attenzione alla
azione dei legamenti.
anche meno spesso rispetto a quelli a due
comportando così anche una quindi viene minimore resezione ossea
alla possibile dislocazione dell'inserto in polietilene sono limitati dal disegno delle
superfici, per la prima volta compatibili con i legamenti che le tengono a contatto per
tutta l’escursione di flessione.
Il software utilizzato per lo scopo è il programma SimWise 4D che permette di
effettuare simulazioni virtuali realizzando o importando modelli 3D e associando a
questi dimensioni, posizione spaziale e caratteristiche inerziali. Per ottenere le
delle ossa, si è partiti da immagini di risonanza magnetica che sono
state poi processate con un software standard (AMIRA, MSC) in modo da ottenere
triangolari con un numero di nodi più o meno elevato in modo da
trovare un giusto compromesso tra la fedeltà di replicazione
superficie e la potenza del software utilizzato nel gestire i contatti.
Una volta importate le geometrie delle ossa, il piede è risultato in
e supinazione, come visibile in Figura 2.
particolare, sulla componente talare è presente un solco che permette all'inserto di
avere una completa congruenza tra le superfici e di muoversi sia rispetto alla
limitando anche il rischio di
. Il menisco non risulta vincolato da nessuna struttura presente
dell'articolazione e dalle forze esterne,
che non ne consentono la fuoriuscita. E' quindi di fondamentale importanza che il
dopo la sostituzione protesica.
-laterale
Per questo, nello sviluppo del modello stesso, si è posta particolare attenzione alla
a due o tre componenti,
resezione ossea; i problemi legati
sono limitati dal disegno delle
e le tengono a contatto per
Il software utilizzato per lo scopo è il programma SimWise 4D che permette di
effettuare simulazioni virtuali realizzando o importando modelli 3D e associando a
questi dimensioni, posizione spaziale e caratteristiche inerziali. Per ottenere le
delle ossa, si è partiti da immagini di risonanza magnetica che sono
(AMIRA, MSC) in modo da ottenere
triangolari con un numero di nodi più o meno elevato in modo da
romesso tra la fedeltà di replicazione anatomica della
superficie e la potenza del software utilizzato nel gestire i contatti.
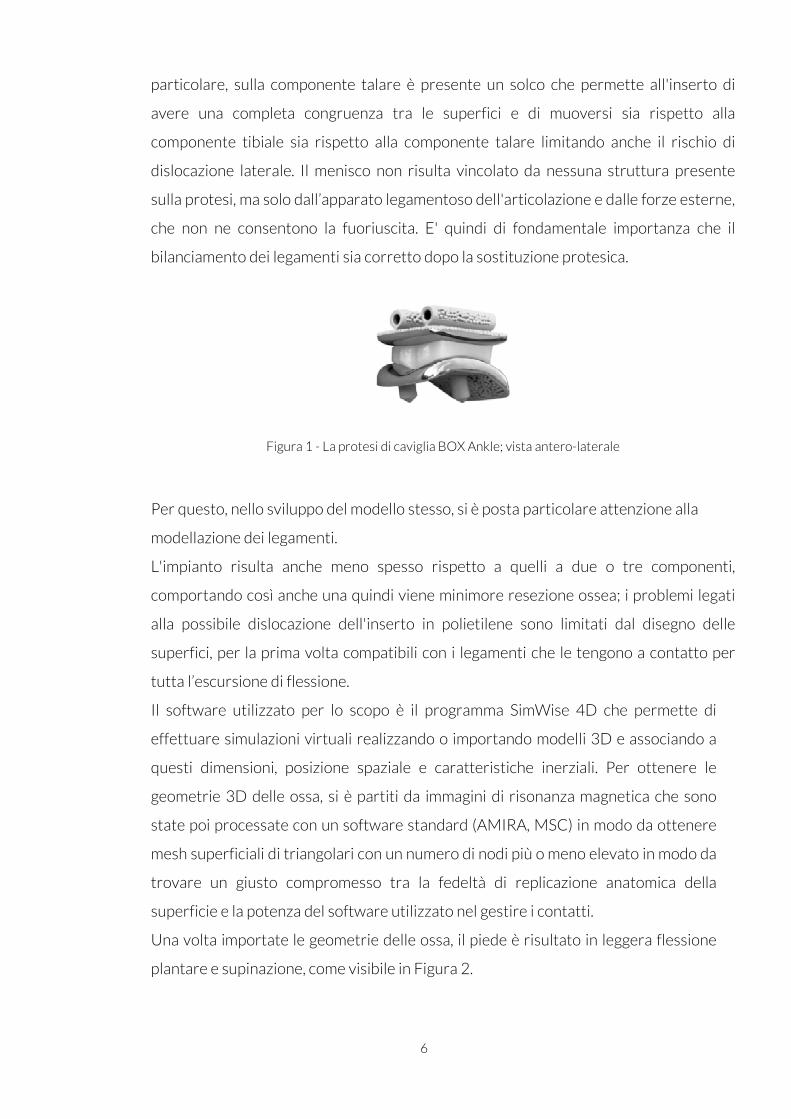
Una volta importate le geometrie delle ossa, il piede è risultato in leggera flessione
7
Figura 2- Posizione iniziale del modello, piede e gamba destra
Si è partiti da una situazione in cui tutte le ossa avevano la possibilità di collidere, ma
questo implicava tempi di simulazione molto lunghi. Per questo si sono effettuate
delle semplificazioni eliminando la condizione di contatto tra alcune ossa e
considerando l'avampiede come una singola struttura rigida.
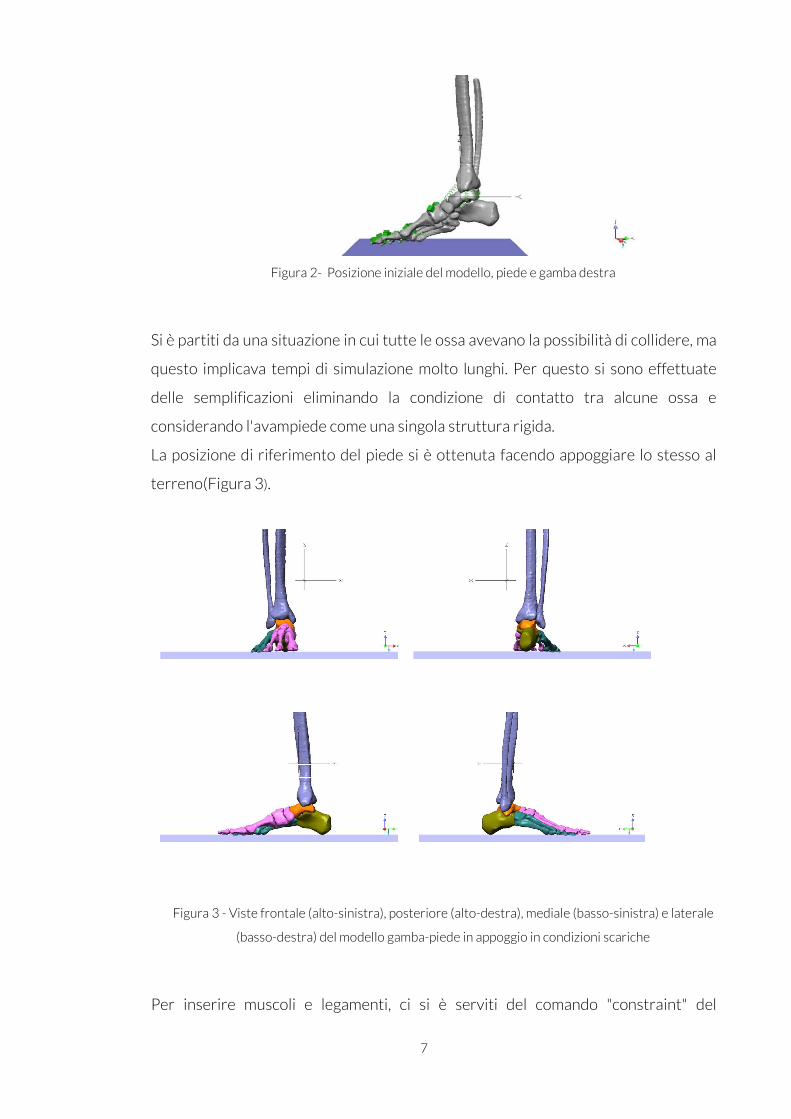
La posizione di riferimento del piede si è ottenuta facendo appoggiare lo stesso al
terreno(Figura 3).
Figura 3 - Viste frontale (alto-sinistra), posteriore (alto-destra), mediale (basso-sinistra) e laterale
(basso-destra) del modello gamba-piede in appoggio in condizioni scariche
Per inserire muscoli e legamenti, ci si è serviti del comando "constraint" del
8
programma che permette di definire un vincolo tra due corpi dopo aver individuato
due punti, o coords, su di essi. Si sono utilizzati attuatori lineari per rappresentare i
muscoli e molle con caratteristica non lineare per rappresentare i legamenti.
Per implementare la costante elastica per le molle, ci si è riferiti a diversi lavori di
letteratura [11, 13] che hanno permesso di definire una curva forza-allungamento non
lineare del tipo della curva forza-deformazione visibile in Figura 4.
Figura 4 -Forza-deformazione dei legamenti definita nel programma
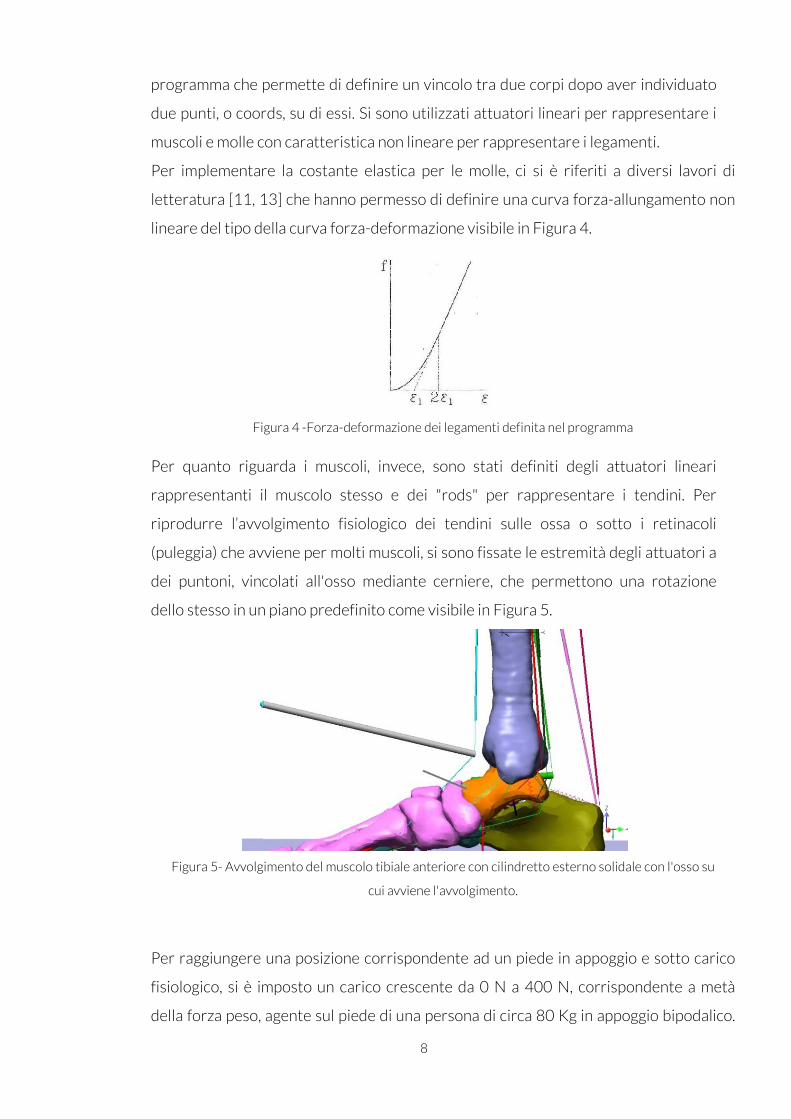
Per quanto riguarda i muscoli, invece, sono stati definiti degli attuatori lineari
rappresentanti il muscolo stesso e dei "rods" per rappresentare i tendini. Per
riprodurre l’avvolgimento fisiologico dei tendini sulle ossa o sotto i retinacoli
(puleggia) che avviene per molti muscoli, si sono fissate le estremità degli attuatori a
dei puntoni, vincolati all'osso mediante cerniere, che permettono una rotazione
dello stesso in un piano predefinito come visibile in Figura 5.
Figura 5- Avvolgimento del muscolo tibiale anteriore con cilindretto esterno solidale con l'osso su
cui avviene l'avvolgimento.
Per raggiungere una posizione corrispondente ad un piede in appoggio e sotto carico
fisiologico, si è imposto un carico crescente da 0 N a 400 N, corrispondente a metà
della forza peso, agente sul piede di una persona di circa 80 Kg in appoggio bipodalico.
9
Applicando il carico, si è ottenuta una variazione di lunghezza dei legamenti, a seconda
della loro posizione, che garantisce un pretensionamento degli stessi.
Per la validazione del modello, si sono effettuate delle simulazioni con il piede in
sospensione e con il piede in appoggio (sotto carico) attraverso l'attivazione degli
attuatori rappresentanti i vari muscoli, raggruppati a seconda della funzione
teoricamente svolta.
I valori di attivazione muscolare, sia forza che velocità di accorciamento, sono stati
decisi dopo diverse prove, scegliendo valori che permettessero di ottenere un
movimento fluido e controllato.
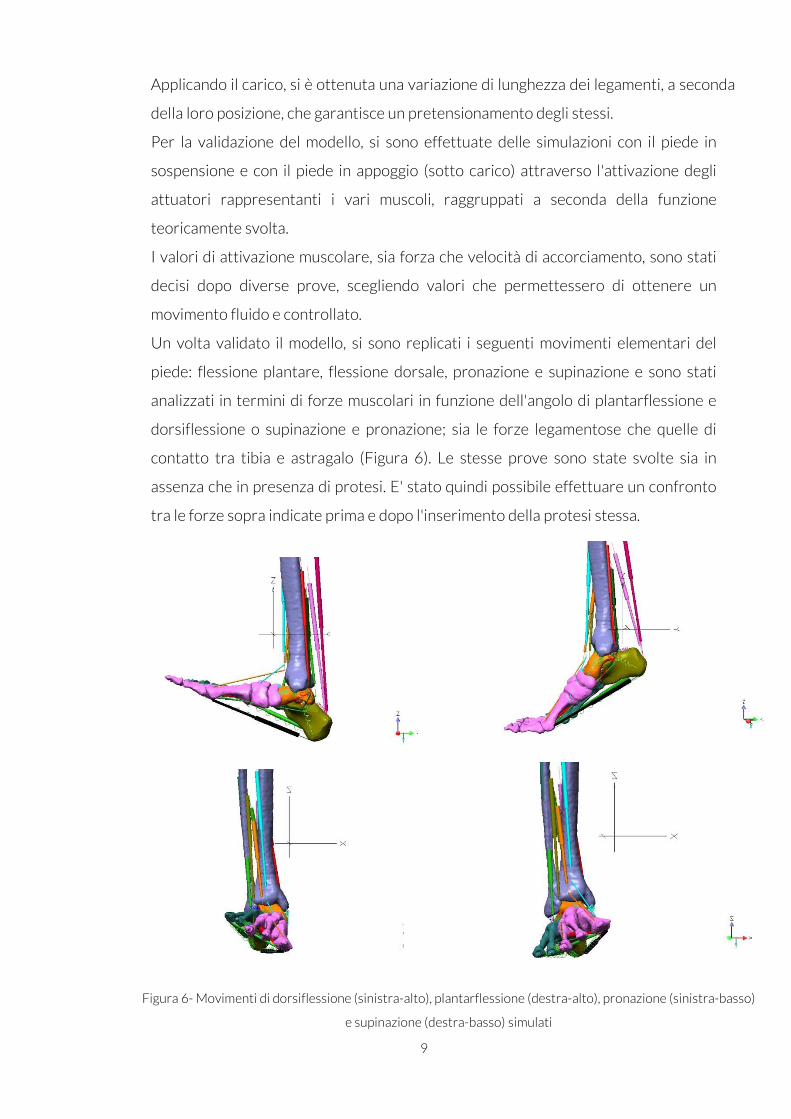
Un volta validato il modello, si sono replicati i seguenti movimenti elementari del
piede: flessione plantare, flessione dorsale, pronazione e supinazione e sono stati
analizzati in termini di forze muscolari in funzione dell'angolo di plantarflessione e
dorsiflessione o supinazione e pronazione; sia le forze legamentose che quelle di
contatto tra tibia e astragalo (Figura 6). Le stesse prove sono state svolte sia in
assenza che in presenza di protesi. E' stato quindi possibile effettuare un confronto
tra le forze sopra indicate prima e dopo l'inserimento della protesi stessa.
Figura 6- Movimenti di dorsiflessione (sinistra-alto), plantarflessione (destra-alto), pronazione (sinistra-basso)
e supinazione (destra-basso) simulati

10
Prima di inserire la protesi nel modello, si è analizzata la cinematica dello stesso in
condizioni naturali.
Siccome le componenti protesiche presentano geometrie note, è stato possibile
inserire dei vincoli, uno sferico e uno a cerniera, che governano, rispettivamente, il
movimento del menisco rispetto alle due componenti e il movimento della
componente talare rispetto al menisco. Questi vincoli sono stati inseriti nel centro
geometrico delle componenti individuati come i centri di due sfere che meglio
approssimano nel piano sagittale le componenti (Figura 7).
Figura 7- Sfere che meglio approssimano le componenti protesiche, tibiale a sinistra, astragalica a
destra.
Durante le prime simulazioni con la protesi allineata, è emerso che il menisco
fuoriusciva in direzione posteriore dopo pochi gradi di plantarflessione. Si sono
eseguite quindi le stesse simulazioni ruotando la componente tibiale intorno al vincolo
che governa il movimento del menisco. In particolare la componente tibiale è stata
ruotata di 3, 5 e 7 gradi rispetto alla posizione iniziale. La rotazione è avvenuta solo in
modo da ridurre il valore della flessione dorsale iniziale in quanto l'obiettivo è di
valutare come questo incida sulla fuoriuscita del menisco durante i movimenti
consentiti.
Dai risultati è emerso che il modello risponde in modo adeguato all'attivazione
muscolare e che l'attivazione di un attuatore non comporta solo un movimento in un
piano, ma un movimento combinato di plantarflessione o dorsiflessione con uno di
pronazione o supinazione, come ci si aspetta dalla letteratura.
La scelta di effettuare l'attivazione muscolare in appoggio e in sospensione è stata
necessaria per poter valutare il suo effetto sui legamenti, sia in condizioni di carico (in
appoggio) che di scarico (in sospensione).
11
Si è osservato che è presente una diversa sollecitazione dei legamenti a seconda del
movimento imposto, legata alla posizione che essi assumono rispetto al centro di
rotazione dell'articolazione protesizzata: in particolare quelli che passano per il
centro di rotazione risultano poco o per nulla sollecitati mentre quelli anteriori o
posteriori al CIR (Centro di Istantanea Rotazione) risultano più sollecitati.
Durante le simulazioni con la protesi inserita nel modello si è potuto osservare che il
menisco si sposta in direzione anteriore durante il movimento di dorsiflessione,
posteriore durante quello di plantarflessione come osservato da Leardini et Al. [43].
In conclusione, si è sviluppato un modello che permette di effettuare i movimenti
analizzati e di valutare alcuni parametri ai fini di poter confrontare in termini
quantitativi e qualitativi le variazioni dovute all'inserimento della protesi. La rotazione
della componente tibiale che presenta risultati migliori è quello di cinque gradi in
quanto permette di mantenere in sede il menisco, sia in appoggio che in sospensione,
per gradi di flessione plantare e dorsale ritenuti sufficientemente ampi.
Un possibile sviluppo del modello potrebbe essere quello di definire in modo diverso la
costante elastica dei legamenti, come indicato in alcuni lavori in letteratura. Inoltre,
sarebbe interessante provare a svincolare le ossa dell'avampiede che abbiamo
considerato come corpo rigido nel presente lavoro.
Da ultimo, un ulteriore sviluppo futuro potrebbe essere l'inserimento del modello in un
lavoro di analisi del cammino al fine di valutare la dinamica della protesi durante alcuni
gesti significativi (cammino,corsa,salto).
12
ABSTR ACT
This work consisted in the development of a musculoskeletal model of the ankle joint
complex in order to analyze the physiological motion of its joints, in particular of the
tibio-talar. It also made it possible to compare the variations in terms of ligament,
muscle and contact forces between tibia and talus, assessed before and after the
implantation of a total ankle prosthesis.
The research and design of ankle replacement shave developed recently, because of
the results obtained after the success of total hip and knee joint replacements, which
suggested possible positive developments also for the ankle joint.
This joint has a major difference from the others, i.e. the stresses that act on the same
are greater because the contact area of the joint is smaller and very congruent, which
made the design even more difficult [2].
Initial prosthesis designs tried to replicate the anatomy and generally had two
components. They failed to give satisfactory results because the prosthetic
components were necessarily not conform and lead to high local pressures and wear;
furthermore, in the first-generation prosthesis might occur overload of some ligaments
that were not able to withstand very high loads because the components not managed
exactly to replicate the anatomic surface of tibia and talus.
An improvement to such problems was obtained with the introduction of the mobile
bearing that slides between the tibia and talus surfaces following natural joint motion.
It maintains congruence and makes it possible to reduce stress on the joint.
The implantation became smaller compared to the one with two components and
therefore the bone resection was minimized, but there were problems linked to
possible dislocation of the mobile bearing.
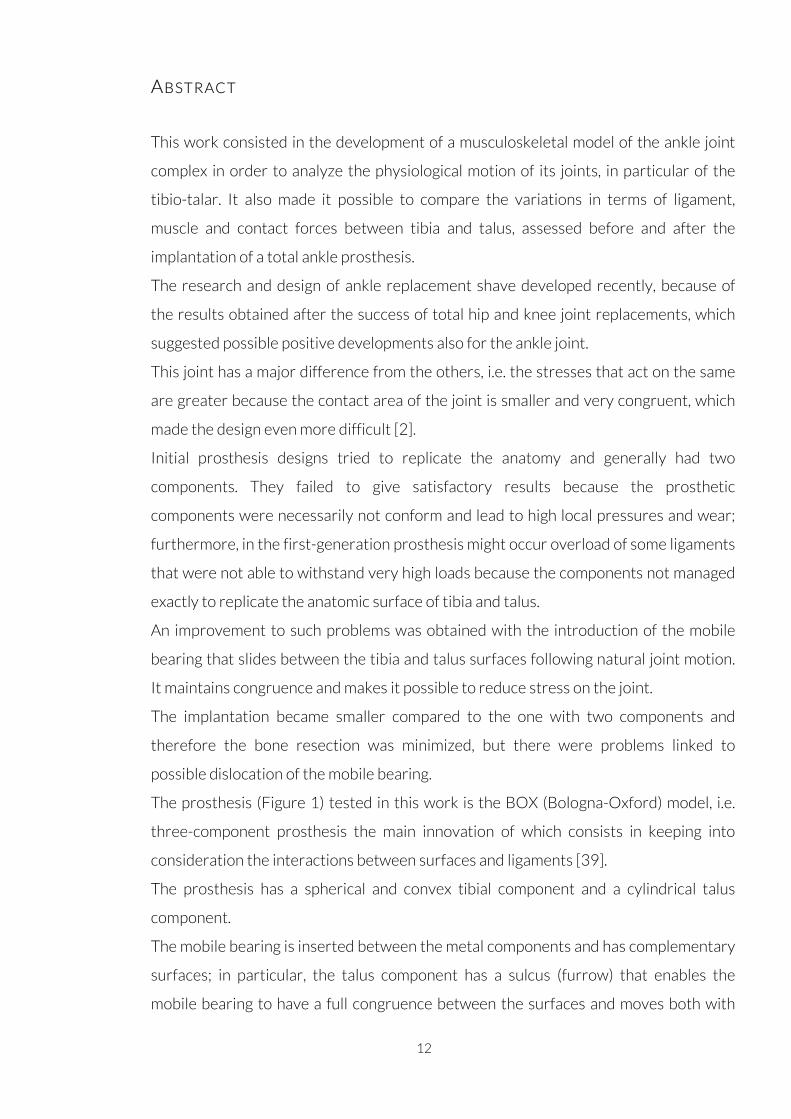
The prosthesis (Figure 1) tested in this work is the BOX (Bologna-Oxford) model, i.e.
three-component prosthesis the main innovation of which consists in keeping into
consideration the interactions between surfaces and ligaments [39].
The prosthesis has a spherical and convex tibial component and a cylindrical talus
component.
The mobile bearing is inserted between the metal components and has complementary
surfaces; in particular, the talus component has a sulcus (furrow) that enables the
mobile bearing to have a full congruence between the surfaces and moves both with
respect to tibial component and to the talus component. The mobile bearing is not
restricted by any prosthetic structure, but only by the joint ligam
forces which prevent it from dislocating. It is extremely important for the balancing of
ligaments to be correct.
For this reason, great attention was given to the modelization of the ligaments in
developing the model.
The software used for this purpose was SimWise 4D that made it possible to perform
virtual simulations by creating or importing 3D models and associating thereto the
dimensions, the position and the inertial characteristics. Magnetic re
were the starting point to obtain the 3D geometry of the bones. They were later
processed with a software (AMIRA, MSC) in order to obtain a triangular superficial
mesh with a number of nodes that could vary so as to obtain a compromise betwe
the faithful replication of the surface and the ability of the software program to process
the contacts.
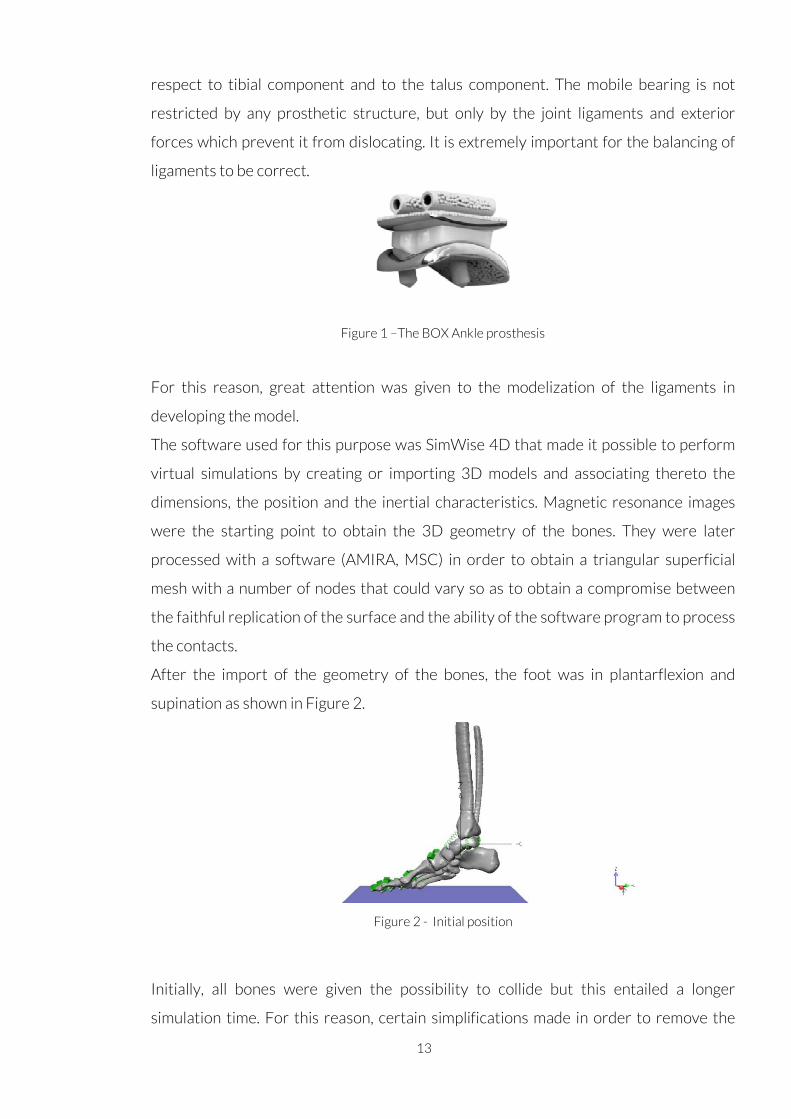
After the import of the geometry of the bones, the foot was in plantarflexion and
supination as shown in Figure 2.
Initially, all bones were given the possibility to collide but this entailed a longer
simulation time. For this reason, certain simplifications made in order to remove the
13
respect to tibial component and to the talus component. The mobile bearing is not
restricted by any prosthetic structure, but only by the joint ligam
forces which prevent it from dislocating. It is extremely important for the balancing of
ligaments to be correct.
Figure 1 –The BOX Ankle prosthesis
For this reason, great attention was given to the modelization of the ligaments in
eloping the model.
The software used for this purpose was SimWise 4D that made it possible to perform
virtual simulations by creating or importing 3D models and associating thereto the
dimensions, the position and the inertial characteristics. Magnetic re
were the starting point to obtain the 3D geometry of the bones. They were later
processed with a software (AMIRA, MSC) in order to obtain a triangular superficial
mesh with a number of nodes that could vary so as to obtain a compromise betwe
the faithful replication of the surface and the ability of the software program to process
After the import of the geometry of the bones, the foot was in plantarflexion and
supination as shown in Figure 2.
Figure 2 - Initial position
Initially, all bones were given the possibility to collide but this entailed a longer
simulation time. For this reason, certain simplifications made in order to remove the
respect to tibial component and to the talus component. The mobile bearing is not
restricted by any prosthetic structure, but only by the joint ligaments and exterior
forces which prevent it from dislocating. It is extremely important for the balancing of
For this reason, great attention was given to the modelization of the ligaments in
The software used for this purpose was SimWise 4D that made it possible to perform
virtual simulations by creating or importing 3D models and associating thereto the
dimensions, the position and the inertial characteristics. Magnetic resonance images
were the starting point to obtain the 3D geometry of the bones. They were later
processed with a software (AMIRA, MSC) in order to obtain a triangular superficial
mesh with a number of nodes that could vary so as to obtain a compromise between
the faithful replication of the surface and the ability of the software program to process
After the import of the geometry of the bones, the foot was in plantarflexion and
Initially, all bones were given the possibility to collide but this entailed a longer
simulation time. For this reason, certain simplifications made in order to remove the
14
contacts between some bones and the forefoot was considered as a rigid structure.
The reference position of the foot was obtained by making it touch the ground. The
reference position is visible in Figure 3.
Figure 3 - Views of the ankle joint complex in a closed chain environment (i.e. touching the ground)
without load
To insert muscles and ligaments, the program command "constraints" was used. This
made it possible to define a range between two points, referred to as coords.
A linear actuator was used to model the muscles, and springs with nonlinear elastic
constant to model the ligaments.
To define the elastic constant, reference was made to various articles [11, 13] that
define the non linear strength-elongation curve with the same trend of the strength-
strain curve as shown below in Figure 4.
Figure 4 - Graph strength-strain for ligaments
15
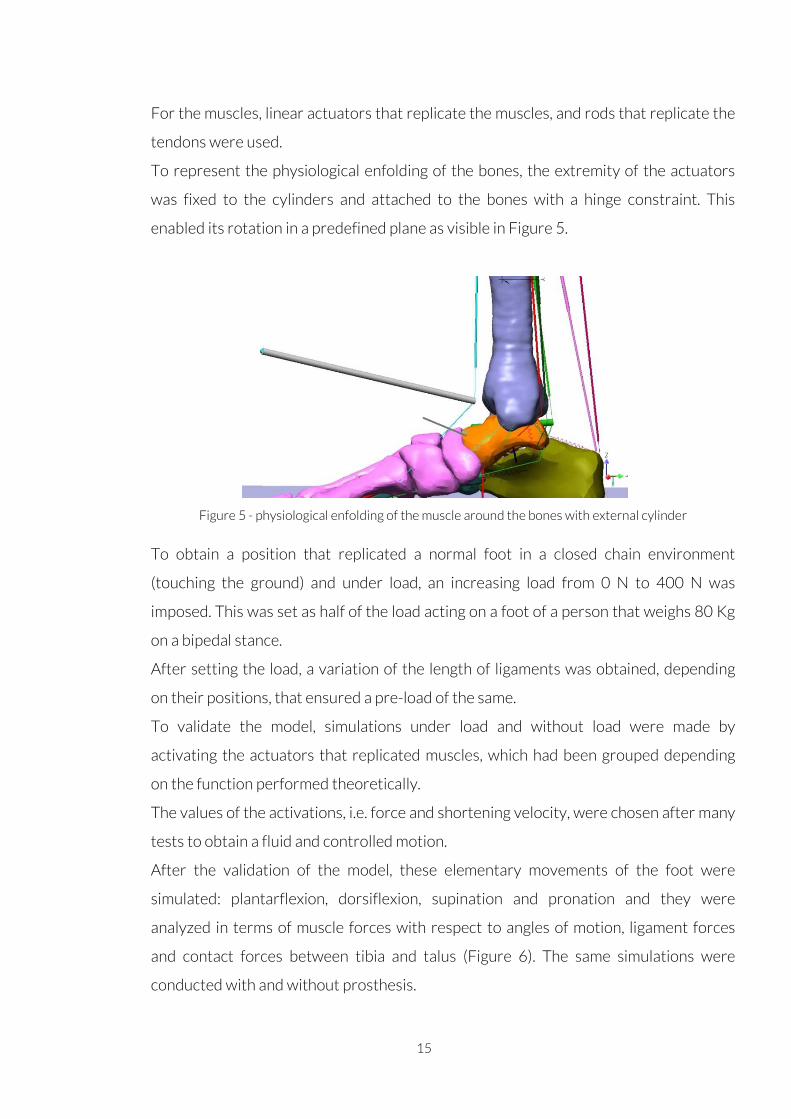
For the muscles, linear actuators that replicate the muscles, and rods that replicate the
tendons were used.
To represent the physiological enfolding of the bones, the extremity of the actuators
was fixed to the cylinders and attached to the bones with a hinge constraint. This
enabled its rotation in a predefined plane as visible in Figure 5.
Figure 5 - physiological enfolding of the muscle around the bones with external cylinder
To obtain a position that replicated a normal foot in a closed chain environment
(touching the ground) and under load, an increasing load from 0 N to 400 N was
imposed. This was set as half of the load acting on a foot of a person that weighs 80 Kg
on a bipedal stance.
After setting the load, a variation of the length of ligaments was obtained, depending
on their positions, that ensured a pre-load of the same.
To validate the model, simulations under load and without load were made by
activating the actuators that replicated muscles, which had been grouped depending
on the function performed theoretically.
The values of the activations, i.e. force and shortening velocity, were chosen after many
tests to obtain a fluid and controlled motion.
After the validation of the model, these elementary movements of the foot were
simulated: plantarflexion, dorsiflexion, supination and pronation and they were
analyzed in terms of muscle forces with respect to angles of motion, ligament forces
and contact forces between tibia and talus (Figure 6). The same simulations were
conducted with and without prosthesis.
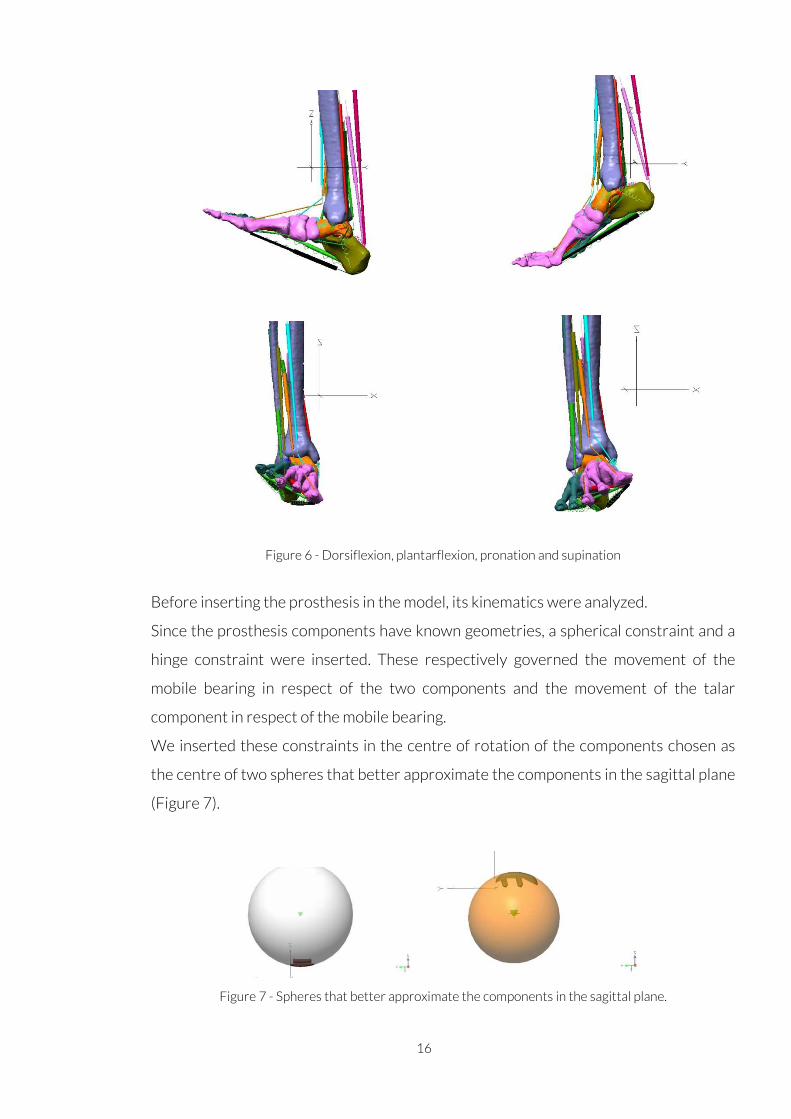
16
Figure 6 - Dorsiflexion, plantarflexion, pronation and supination
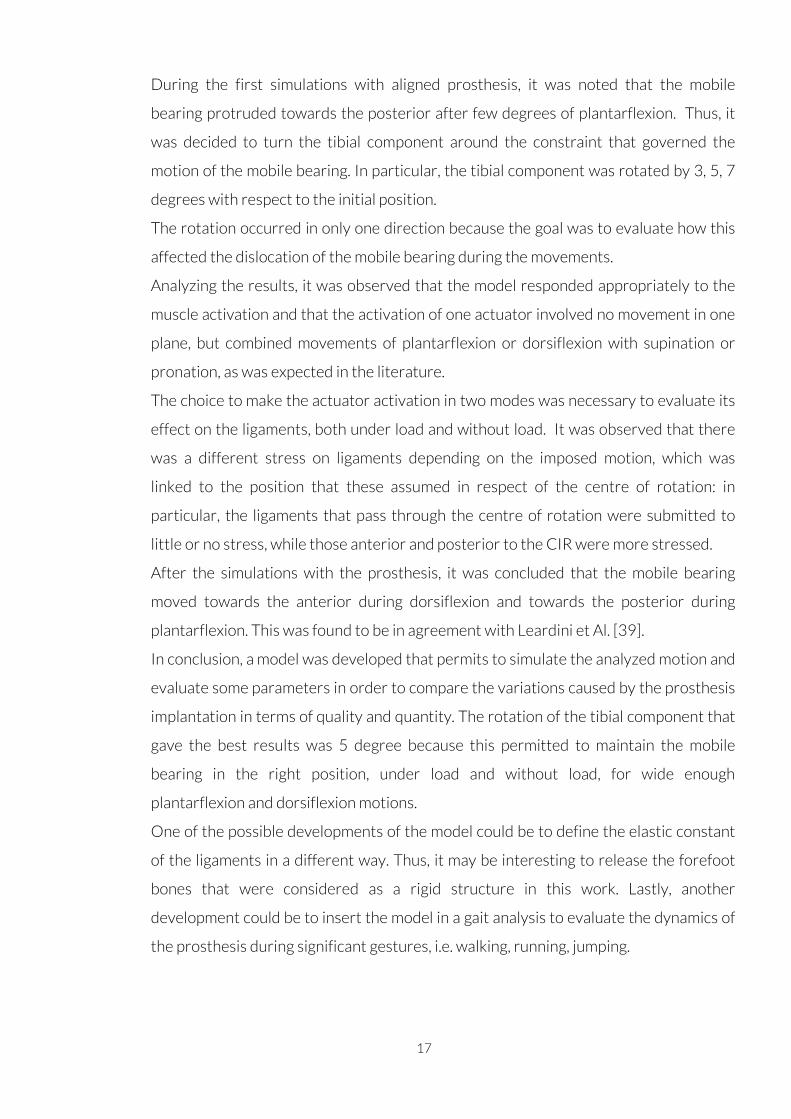
Before inserting the prosthesis in the model, its kinematics were analyzed.
Since the prosthesis components have known geometries, a spherical constraint and a
hinge constraint were inserted. These respectively governed the movement of the
mobile bearing in respect of the two components and the movement of the talar
component in respect of the mobile bearing.
We inserted these constraints in the centre of rotation of the components chosen as
the centre of two spheres that better approximate the components in the sagittal plane
(Figure 7).
Figure 7 - Spheres that better approximate the components in the sagittal plane.
17
During the first simulations with aligned prosthesis, it was noted that the mobile
bearing protruded towards the posterior after few degrees of plantarflexion. Thus, it
was decided to turn the tibial component around the constraint that governed the
motion of the mobile bearing. In particular, the tibial component was rotated by 3, 5, 7
degrees with respect to the initial position.
The rotation occurred in only one direction because the goal was to evaluate how this
affected the dislocation of the mobile bearing during the movements.
Analyzing the results, it was observed that the model responded appropriately to the
muscle activation and that the activation of one actuator involved no movement in one
plane, but combined movements of plantarflexion or dorsiflexion with supination or
pronation, as was expected in the literature.
The choice to make the actuator activation in two modes was necessary to evaluate its
effect on the ligaments, both under load and without load. It was observed that there
was a different stress on ligaments depending on the imposed motion, which was
linked to the position that these assumed in respect of the centre of rotation: in
particular, the ligaments that pass through the centre of rotation were submitted to
little or no stress, while those anterior and posterior to the CIR were more stressed.
After the simulations with the prosthesis, it was concluded that the mobile bearing
moved towards the anterior during dorsiflexion and towards the posterior during
plantarflexion. This was found to be in agreement with Leardini et Al. [39].
In conclusion, a model was developed that permits to simulate the analyzed motion and
evaluate some parameters in order to compare the variations caused by the prosthesis
implantation in terms of quality and quantity. The rotation of the tibial component that
gave the best results was 5 degree because this permitted to maintain the mobile
bearing in the right position, under load and without load, for wide enough
plantarflexion and dorsiflexion motions.
One of the possible developments of the model could be to define the elastic constant
of the ligaments in a different way. Thus, it may be interesting to release the forefoot
bones that were considered as a rigid structure in this work. Lastly, another
development could be to insert the model in a gait analysis to evaluate the dynamics of
the prosthesis during significant gestures, i.e. walking, running, jumping.
18
I N T R O D U Z I O N E
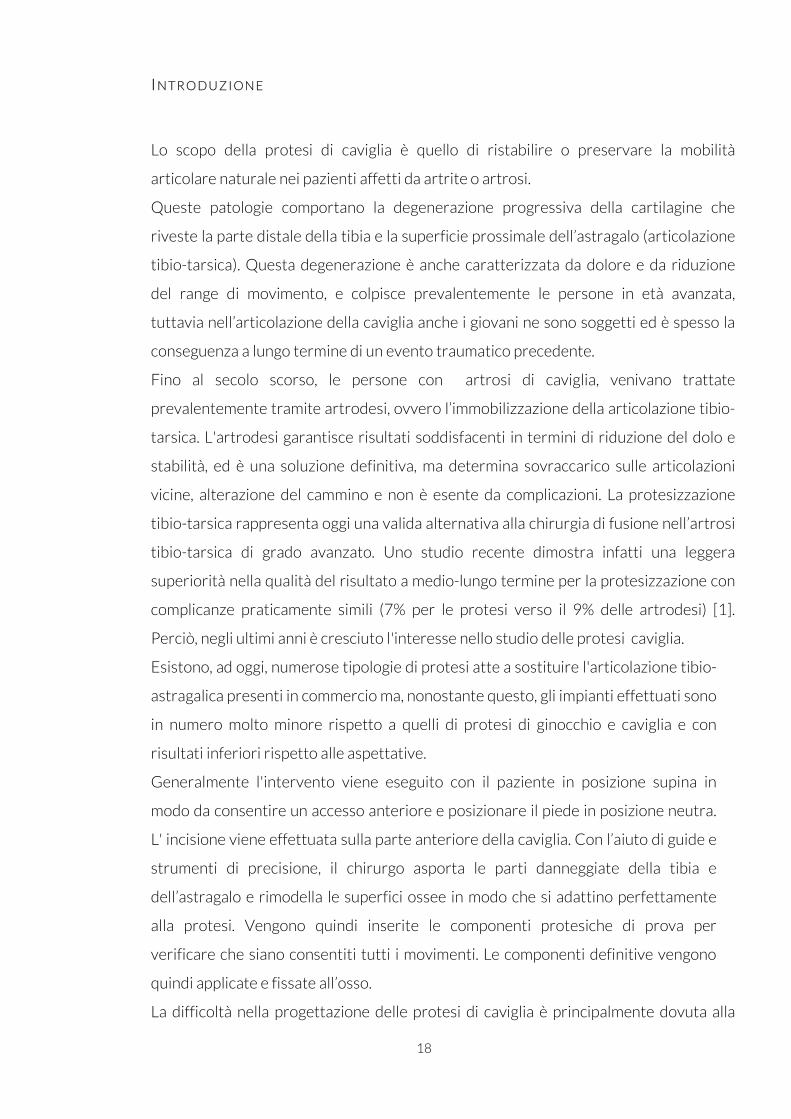
Lo scopo della protesi di caviglia è quello di ristabilire o preservare la mobilità
articolare naturale nei pazienti affetti da artrite o artrosi.
Queste patologie comportano la degenerazione progressiva della cartilagine che
riveste la parte distale della tibia e la superficie prossimale dell’astragalo (articolazione
tibio-tarsica). Questa degenerazione è anche caratterizzata da dolore e da riduzione
del range di movimento, e colpisce prevalentemente le persone in età avanzata,
tuttavia nell’articolazione della caviglia anche i giovani ne sono soggetti ed è spesso la
conseguenza a lungo termine di un evento traumatico precedente.
Fino al secolo scorso, le persone con artrosi di caviglia, venivano trattate
prevalentemente tramite artrodesi, ovvero l’immobilizzazione della articolazione tibio-
tarsica. L'artrodesi garantisce risultati soddisfacenti in termini di riduzione del dolo e
stabilità, ed è una soluzione definitiva, ma determina sovraccarico sulle articolazioni
vicine, alterazione del cammino e non è esente da complicazioni. La protesizzazione
tibio-tarsica rappresenta oggi una valida alternativa alla chirurgia di fusione nell’artrosi
tibio-tarsica di grado avanzato. Uno studio recente dimostra infatti una leggera
superiorità nella qualità del risultato a medio-lungo termine per la protesizzazione con
complicanze praticamente simili (7% per le protesi verso il 9% delle artrodesi) [1].
Perciò, negli ultimi anni è cresciuto l'interesse nello studio delle protesi caviglia.
Esistono, ad oggi, numerose tipologie di protesi atte a sostituire l'articolazione tibio-
astragalica presenti in commercio ma, nonostante questo, gli impianti effettuati sono
in numero molto minore rispetto a quelli di protesi di ginocchio e caviglia e con
risultati inferiori rispetto alle aspettative.
Generalmente l'intervento viene eseguito con il paziente in posizione supina in
modo da consentire un accesso anteriore e posizionare il piede in posizione neutra.
L' incisione viene effettuata sulla parte anteriore della caviglia. Con l’aiuto di guide e
strumenti di precisione, il chirurgo asporta le parti danneggiate della tibia e
dell’astragalo e rimodella le superfici ossee in modo che si adattino perfettamente
alla protesi. Vengono quindi inserite le componenti protesiche di prova per
verificare che siano consentiti tutti i movimenti. Le componenti definitive vengono
quindi applicate e fissate all’osso.
La difficoltà nella progettazione delle protesi di caviglia è principalmente dovuta alla
19
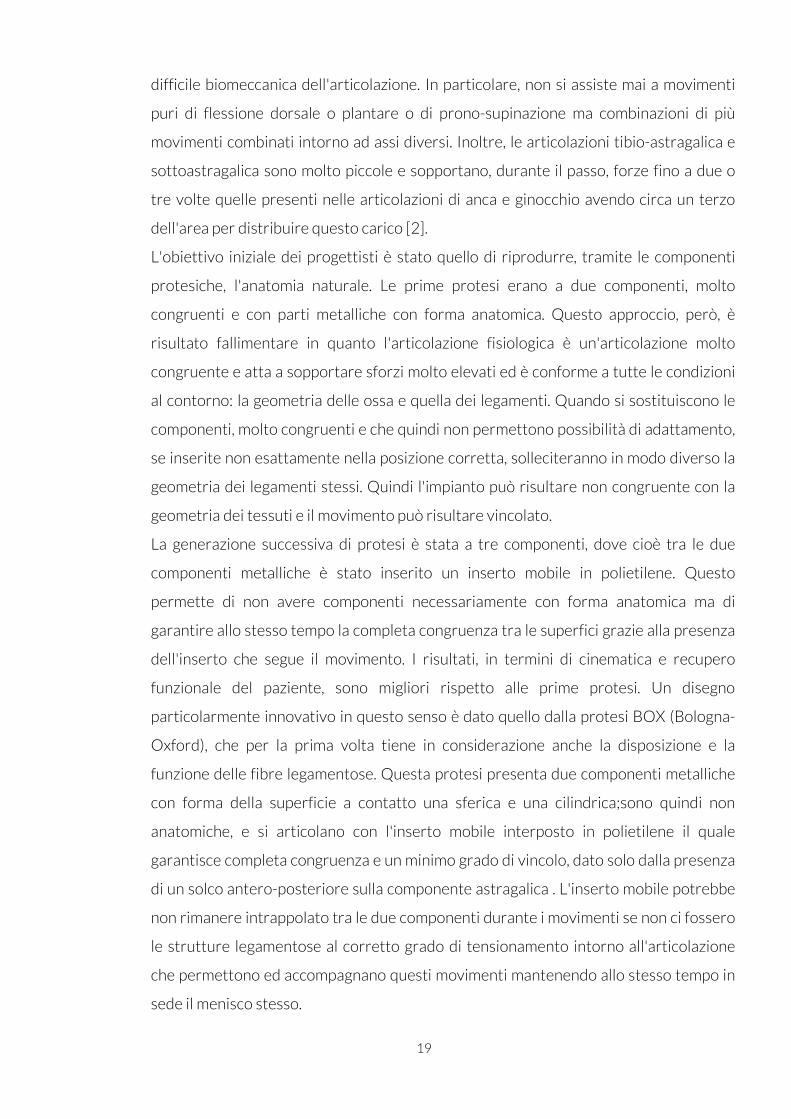
difficile biomeccanica dell'articolazione. In particolare, non si assiste mai a movimenti
puri di flessione dorsale o plantare o di prono-supinazione ma combinazioni di più
movimenti combinati intorno ad assi diversi. Inoltre, le articolazioni tibio-astragalica e
sottoastragalica sono molto piccole e sopportano, durante il passo, forze fino a due o
tre volte quelle presenti nelle articolazioni di anca e ginocchio avendo circa un terzo
dell'area per distribuire questo carico [2].
L'obiettivo iniziale dei progettisti è stato quello di riprodurre, tramite le componenti
protesiche, l'anatomia naturale. Le prime protesi erano a due componenti, molto
congruenti e con parti metalliche con forma anatomica. Questo approccio, però, è
risultato fallimentare in quanto l'articolazione fisiologica è un'articolazione molto
congruente e atta a sopportare sforzi molto elevati ed è conforme a tutte le condizioni
al contorno: la geometria delle ossa e quella dei legamenti. Quando si sostituiscono le
componenti, molto congruenti e che quindi non permettono possibilità di adattamento,
se inserite non esattamente nella posizione corretta, solleciteranno in modo diverso la
geometria dei legamenti stessi. Quindi l'impianto può risultare non congruente con la
geometria dei tessuti e il movimento può risultare vincolato.
La generazione successiva di protesi è stata a tre componenti, dove cioè tra le due
componenti metalliche è stato inserito un inserto mobile in polietilene. Questo
permette di non avere componenti necessariamente con forma anatomica ma di
garantire allo stesso tempo la completa congruenza tra le superfici grazie alla presenza
dell'inserto che segue il movimento. I risultati, in termini di cinematica e recupero
funzionale del paziente, sono migliori rispetto alle prime protesi. Un disegno
particolarmente innovativo in questo senso è dato quello dalla protesi BOX (Bologna-
Oxford), che per la prima volta tiene in considerazione anche la disposizione e la
funzione delle fibre legamentose. Questa protesi presenta due componenti metalliche
con forma della superficie a contatto una sferica e una cilindrica;sono quindi non
anatomiche, e si articolano con l'inserto mobile interposto in polietilene il quale
garantisce completa congruenza e un minimo grado di vincolo, dato solo dalla presenza
di un solco antero-posteriore sulla componente astragalica . L'inserto mobile potrebbe
non rimanere intrappolato tra le due componenti durante i movimenti se non ci fossero
le strutture legamentose al corretto grado di tensionamento intorno all'articolazione
che permettono ed accompagnano questi movimenti mantenendo allo stesso tempo in
sede il menisco stesso.
20
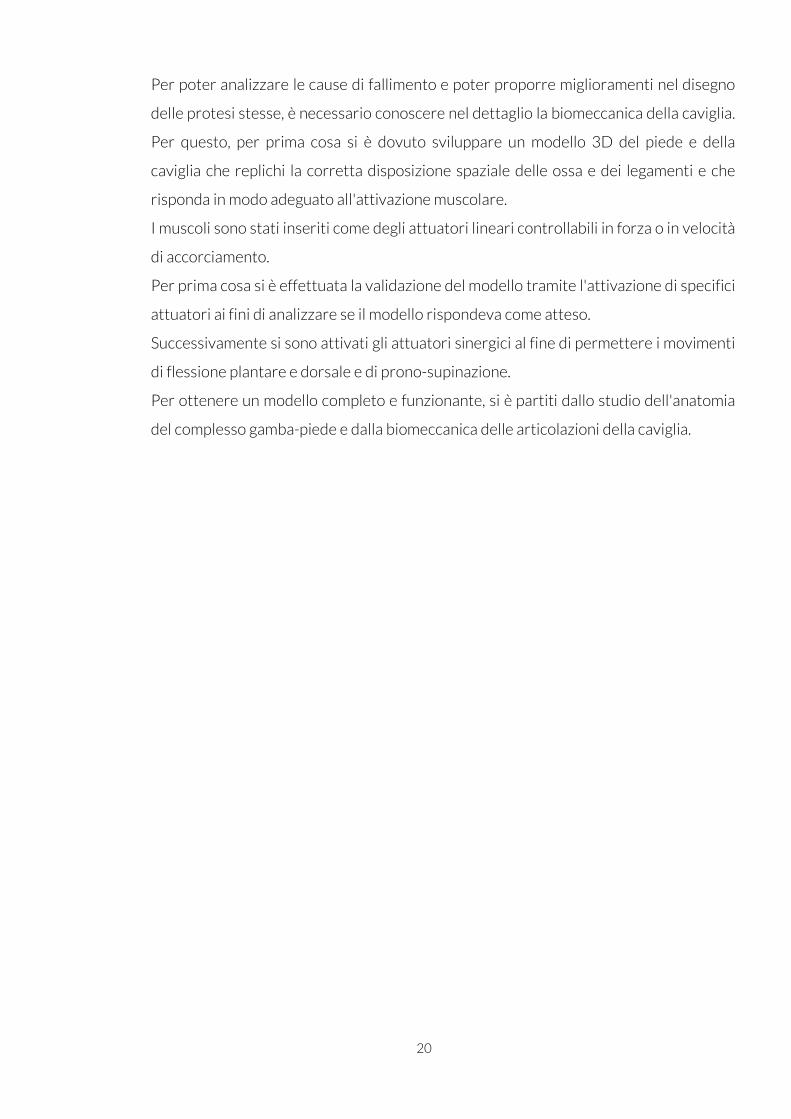
Per poter analizzare le cause di fallimento e poter proporre miglioramenti nel disegno
delle protesi stesse, è necessario conoscere nel dettaglio la biomeccanica della caviglia.
Per questo, per prima cosa si è dovuto sviluppare un modello 3D del piede e della
caviglia che replichi la corretta disposizione spaziale delle ossa e dei legamenti e che
risponda in modo adeguato all'attivazione muscolare.
I muscoli sono stati inseriti come degli attuatori lineari controllabili in forza o in velocità
di accorciamento.
Per prima cosa si è effettuata la validazione del modello tramite l'attivazione di specifici
attuatori ai fini di analizzare se il modello rispondeva come atteso.
Successivamente si sono attivati gli attuatori sinergici al fine di permettere i movimenti
di flessione plantare e dorsale e di prono-supinazione.
Per ottenere un modello completo e funzionante, si è partiti dallo studio dell'anatomia
del complesso gamba-piede e dalla biomeccanica delle articolazioni della caviglia.
21
CAPITOL O 1-ANATOMIA E BI OMECCANICA D ELL A CAVIGLI A
In questo capitolo viene fornita una panoramica completa delle articolazioni
presenti, dei legamenti e dei muscoli per poi discutere successivamente le
assunzioni fatte nel lavoro di tesi. Ha quindi lo scopo di introdurre concetti che
verranno poi ripresi nel terzo capitolo ai fini della descrizione del modello sviluppato.
1.1 P I E D E E C A V I G LI A
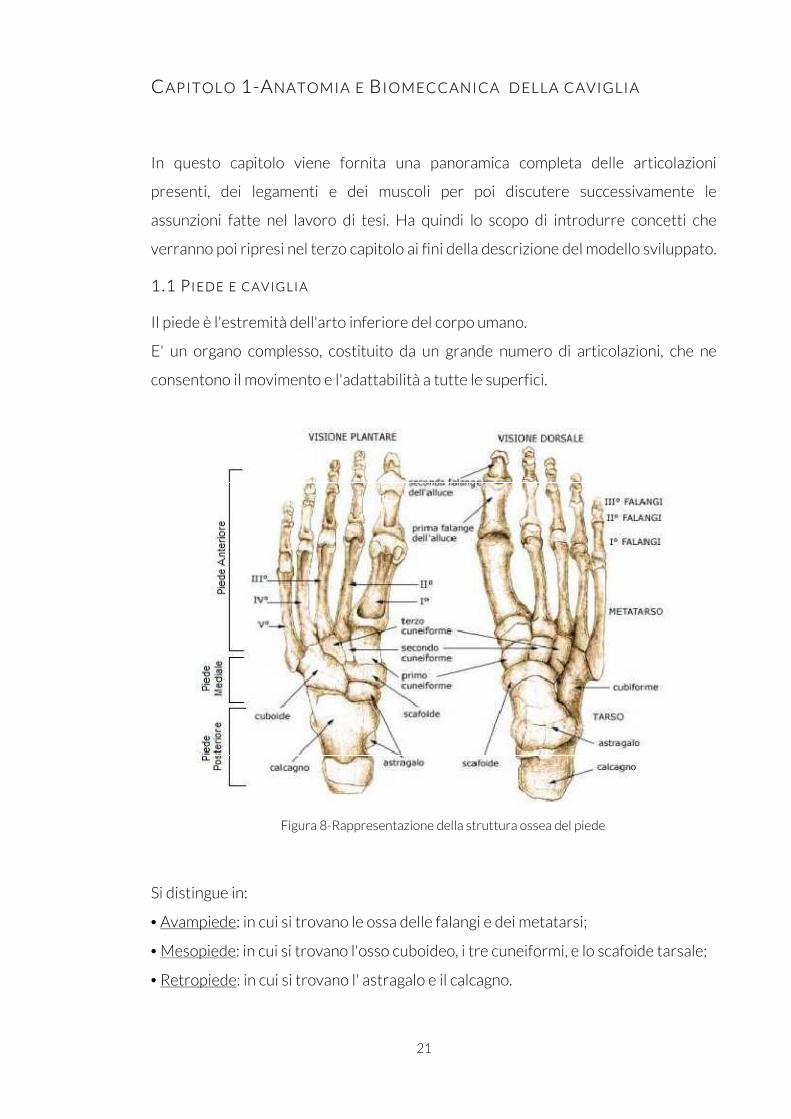
Il piede è l'estremità dell'arto inferiore del corpo umano.
E' un organo complesso, costituito da un grande numero di articolazioni, che ne
consentono il movimento e l'adattabilità a tutte le superfici.
Figura 8-Rappresentazione della struttura ossea del piede
Si distingue in:
• Avampiede: in cui si trovano le ossa delle falangi e dei metatarsi;
• Mesopiede: in cui si trovano l'osso cuboideo, i tre cuneiformi, e lo scafoide tarsale;
• Retropiede: in cui si trovano l' astragalo e il calcagno.
22
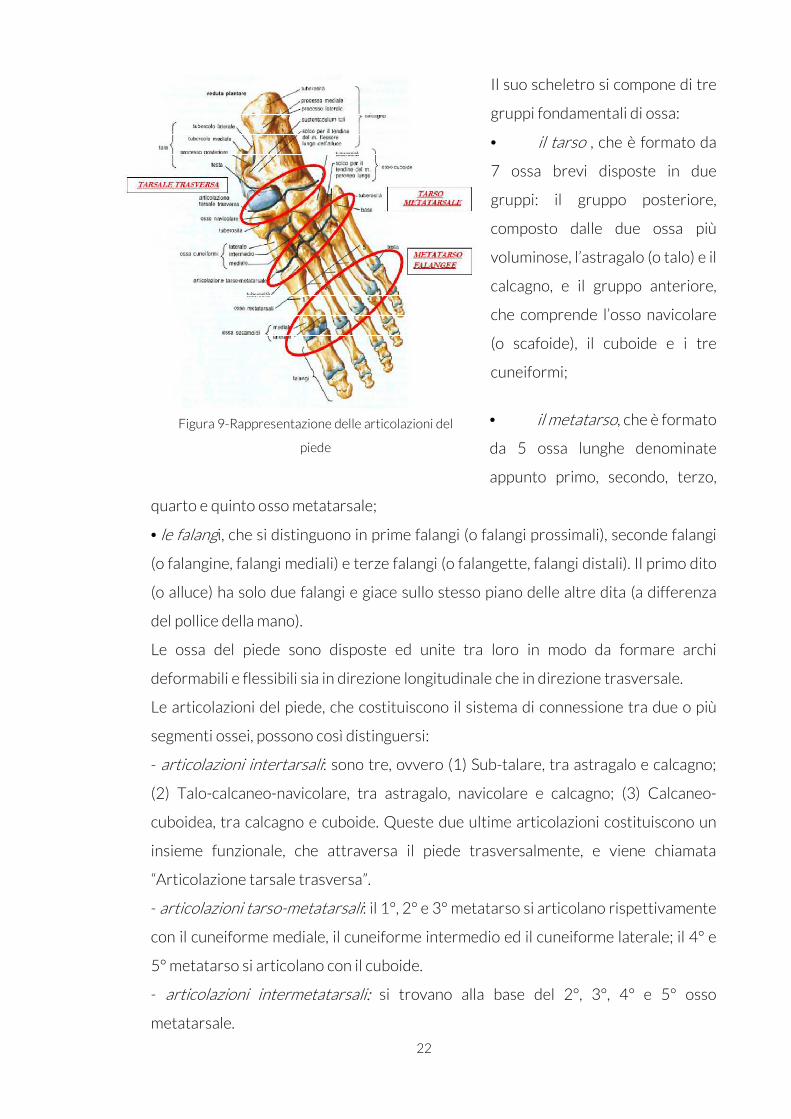
Il suo scheletro si compone di tre
gruppi fondamentali di ossa:
• il tarso , che è formato da
7 ossa brevi disposte in due
gruppi: il gruppo posteriore,
composto dalle due ossa più
voluminose, l’astragalo (o talo) e il
calcagno, e il gruppo anteriore,
che comprende l’osso navicolare
(o scafoide), il cuboide e i tre
cuneiformi;
• il metatarso, che è formato
da 5 ossa lunghe denominate
appunto primo, secondo, terzo,
quarto e quinto osso metatarsale;
• le falangi, che si distinguono in prime falangi (o falangi prossimali), seconde falangi
(o falangine, falangi mediali) e terze falangi (o falangette, falangi distali). Il primo dito
(o alluce) ha solo due falangi e giace sullo stesso piano delle altre dita (a differenza
del pollice della mano).
Le ossa del piede sono disposte ed unite tra loro in modo da formare archi
deformabili e flessibili sia in direzione longitudinale che in direzione trasversale.
Le articolazioni del piede, che costituiscono il sistema di connessione tra due o più
segmenti ossei, possono così distinguersi:
- articolazioni intertarsali: sono tre, ovvero (1) Sub-talare, tra astragalo e calcagno;
(2) Talo-calcaneo-navicolare, tra astragalo, navicolare e calcagno; (3) Calcaneo-
cuboidea, tra calcagno e cuboide. Queste due ultime articolazioni costituiscono un
insieme funzionale, che attraversa il piede trasversalmente, e viene chiamata
“Articolazione tarsale trasversa”.
- articolazioni tarso-metatarsali: il 1°, 2° e 3° metatarso si articolano rispettivamente
con il cuneiforme mediale, il cuneiforme intermedio ed il cuneiforme laterale; il 4° e
5° metatarso si articolano con il cuboide.
- articolazioni intermetatarsali: si trovano alla base del 2°, 3°, 4° e 5° osso
metatarsale.
Figura 9-Rappresentazione delle articolazioni del
piede
23
- articolazioni metatarso-falangee: collegano le 5 ossa metatarsali con le falangi
prossimali.
- articolazioni interfalangee: sono due per ogni dito, tranne che per l'alluce che ne ha
una.
I piedi sono una struttura anatomica fondamentale, perché su di essi agiscono tutti i
carichi generati dal movimento corporeo, sia nell'attività sportiva che nella vita di
tutti i giorni. Sono strutturati per sostenere il peso del nostro corpo e sono l'unica
parte a contatto con il terreno quando si sta in piedi o durante qualsiasi tipo di
spostamento.
Le loro funzioni sono molteplici:
- agiscono come ammortizzatori, e scaricano tutto il peso del nostro corpo a terra;
- aiutano nel mantenimento della postura durante il passo;
- forniscono la propulsione, lo slancio e la flessibilità per camminare, saltare e
correre.
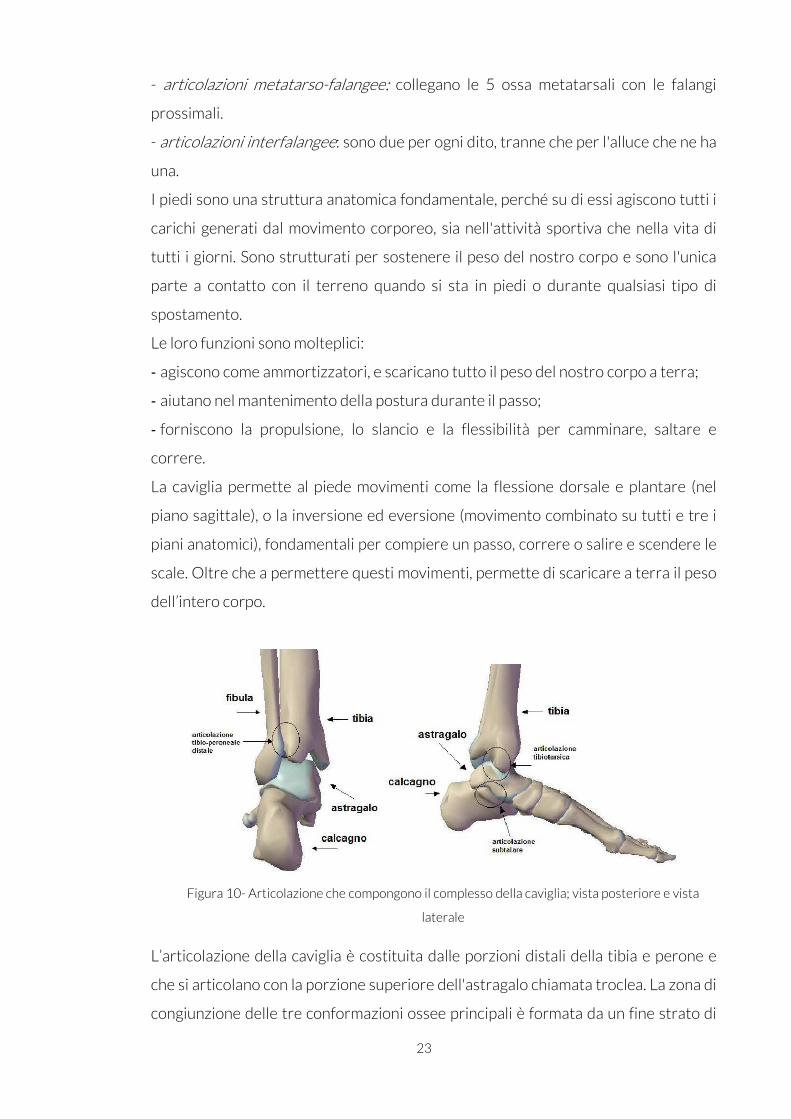
La caviglia permette al piede movimenti come la flessione dorsale e plantare (nel
piano sagittale), o la inversione ed eversione (movimento combinato su tutti e tre i
piani anatomici), fondamentali per compiere un passo, correre o salire e scendere le
scale. Oltre che a permettere questi movimenti, permette di scaricare a terra il peso
dell’intero corpo.
Figura 10- Articolazione che compongono il complesso della caviglia; vista posteriore e vista
laterale
L’articolazione della caviglia è costituita dalle porzioni distali della tibia e perone e
che si articolano con la porzione superiore dell'astragalo chiamata troclea. La zona di
congiunzione delle tre conformazioni ossee principali è formata da un fine strato di
24
cartilagine, spesso mediamente 1.6 mm il quale permette alle ossa di scorrere tra
loro quasi senza attrito durante il movimento [3].
Le articolazioni della caviglia, possono così distinguersi:
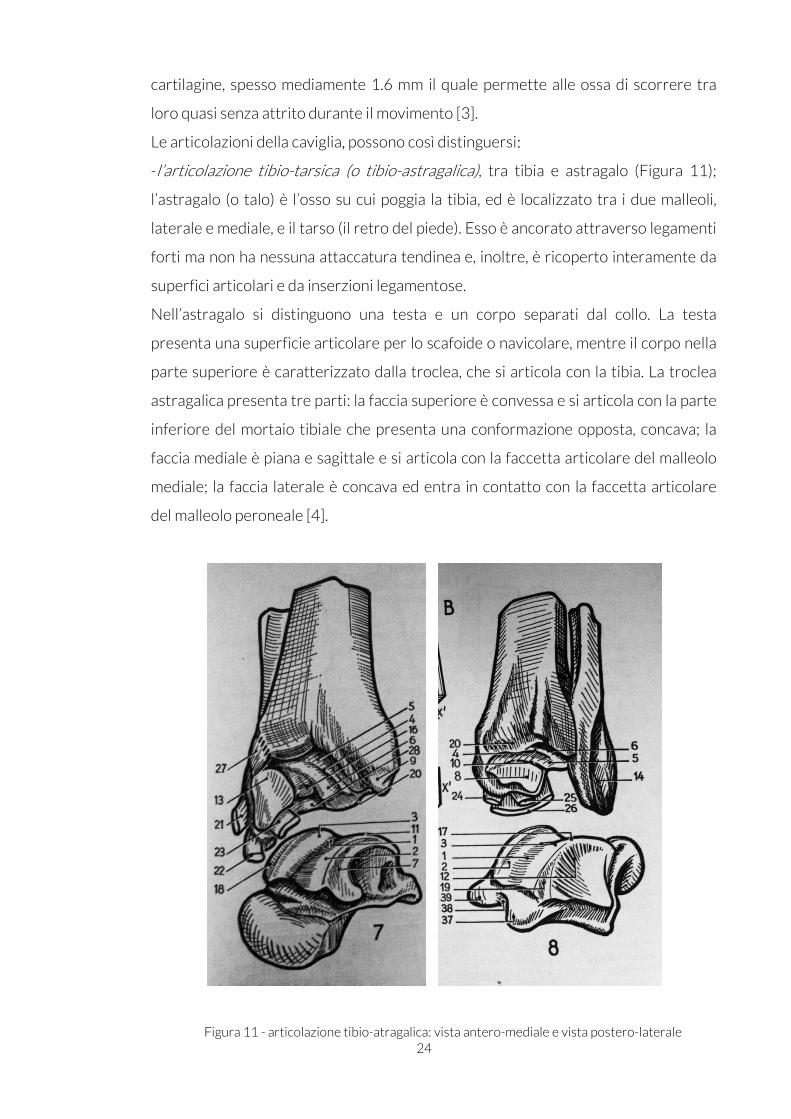
-l’articolazione tibio-tarsica (o tibio-astragalica), tra tibia e astragalo (Figura 11);
l’astragalo (o talo) è l’osso su cui poggia la tibia, ed è localizzato tra i due malleoli,
laterale e mediale, e il tarso (il retro del piede). Esso è ancorato attraverso legamenti
forti ma non ha nessuna attaccatura tendinea e, inoltre, è ricoperto interamente da
superfici articolari e da inserzioni legamentose.
Nell’astragalo si distinguono una testa e un corpo separati dal collo. La testa
presenta una superficie articolare per lo scafoide o navicolare, mentre il corpo nella
parte superiore è caratterizzato dalla troclea, che si articola con la tibia. La troclea
astragalica presenta tre parti: la faccia superiore è convessa e si articola con la parte
inferiore del mortaio tibiale che presenta una conformazione opposta, concava; la
faccia mediale è piana e sagittale e si articola con la faccetta articolare del malleolo
mediale; la faccia laterale è concava ed entra in contatto con la faccetta articolare
del malleolo peroneale [4].
Figura 11 - articolazione tibio-atragalica: vista antero-mediale e vista postero-laterale
25
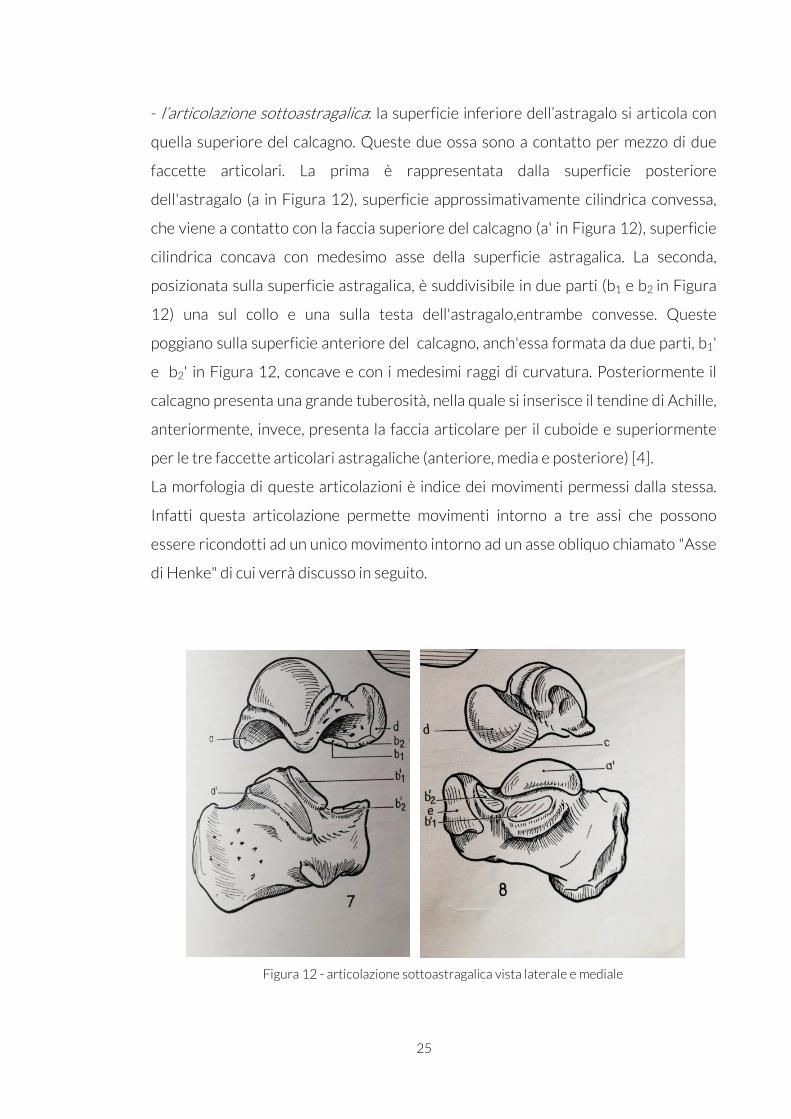
- l’articolazione sottoastragalica: la superficie inferiore dell’astragalo si articola con
quella superiore del calcagno. Queste due ossa sono a contatto per mezzo di due
faccette articolari. La prima è rappresentata dalla superficie posteriore
dell'astragalo (a in Figura 12), superficie approssimativamente cilindrica convessa,
che viene a contatto con la faccia superiore del calcagno (a' in Figura 12), superficie
cilindrica concava con medesimo asse della superficie astragalica. La seconda,
posizionata sulla superficie astragalica, è suddivisibile in due parti (b1 e b2 in Figura
12) una sul collo e una sulla testa dell'astragalo,entrambe convesse. Queste
poggiano sulla superficie anteriore del calcagno, anch'essa formata da due parti, b1'
e b2' in Figura 12, concave e con i medesimi raggi di curvatura. Posteriormente il
calcagno presenta una grande tuberosità, nella quale si inserisce il tendine di Achille,
anteriormente, invece, presenta la faccia articolare per il cuboide e superiormente
per le tre faccette articolari astragaliche (anteriore, media e posteriore) [4].
La morfologia di queste articolazioni è indice dei movimenti permessi dalla stessa.
Infatti questa articolazione permette movimenti intorno a tre assi che possono
essere ricondotti ad un unico movimento intorno ad un asse obliquo chiamato "Asse
di Henke" di cui verrà discusso in seguito.
Figura 12 - articolazione sottoastragalica vista laterale e mediale
26
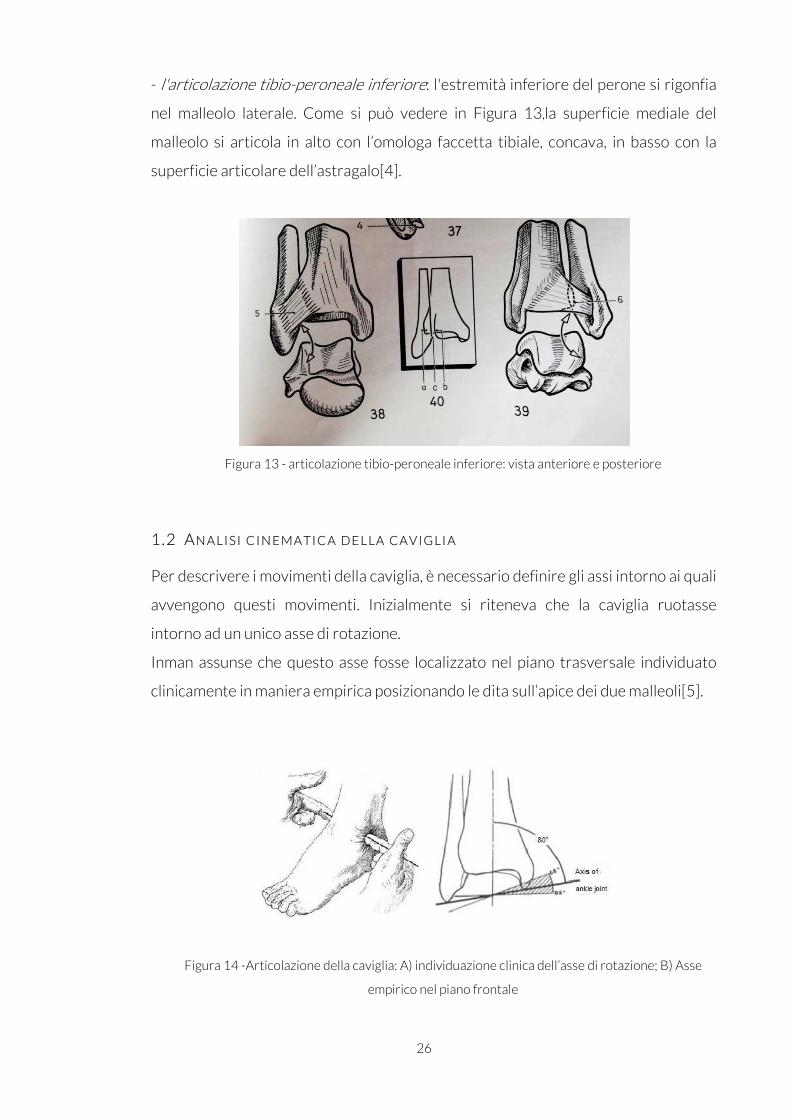
- l'articolazione tibio-peroneale inferiore: l'estremità inferiore del perone si rigonfia
nel malleolo laterale. Come si può vedere in Figura 13,la superficie mediale del
malleolo si articola in alto con l’omologa faccetta tibiale, concava, in basso con la
superficie articolare dell’astragalo[4].
Figura 13 - articolazione tibio-peroneale inferiore: vista anteriore e posteriore
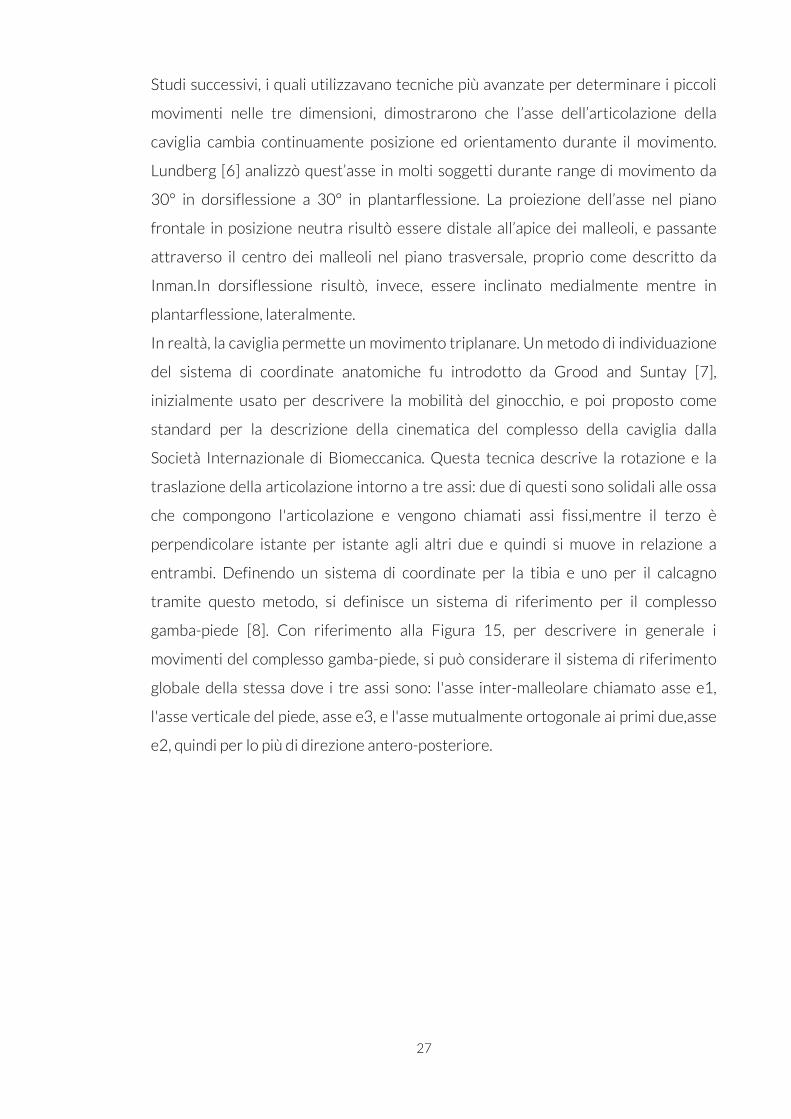
1 .2 AN A LI S I C I N E M A T I C A D E L LA C A V I G LI A
Per descrivere i movimenti della caviglia, è necessario definire gli assi intorno ai quali
avvengono questi movimenti. Inizialmente si riteneva che la caviglia ruotasse
intorno ad un unico asse di rotazione.
Inman assunse che questo asse fosse localizzato nel piano trasversale individuato
clinicamente in maniera empirica posizionando le dita sull’apice dei due malleoli[5].
Figura 14 -Articolazione della caviglia: A) individuazione clinica dell’asse di rotazione; B) Asse
empirico nel piano frontale
27
Studi successivi, i quali utilizzavano tecniche più avanzate per determinare i piccoli
movimenti nelle tre dimensioni, dimostrarono che l’asse dell’articolazione della
caviglia cambia continuamente posizione ed orientamento durante il movimento.
Lundberg [6] analizzò quest’asse in molti soggetti durante range di movimento da
30° in dorsiflessione a 30° in plantarflessione. La proiezione dell’asse nel piano
frontale in posizione neutra risultò essere distale all’apice dei malleoli, e passante
attraverso il centro dei malleoli nel piano trasversale, proprio come descritto da
Inman.In dorsiflessione risultò, invece, essere inclinato medialmente mentre in
plantarflessione, lateralmente.
In realtà, la caviglia permette un movimento triplanare. Un metodo di individuazione
del sistema di coordinate anatomiche fu introdotto da Grood and Suntay [7],
inizialmente usato per descrivere la mobilità del ginocchio, e poi proposto come
standard per la descrizione della cinematica del complesso della caviglia dalla
Società Internazionale di Biomeccanica. Questa tecnica descrive la rotazione e la
traslazione della articolazione intorno a tre assi: due di questi sono solidali alle ossa
che compongono l'articolazione e vengono chiamati assi fissi,mentre il terzo è
perpendicolare istante per istante agli altri due e quindi si muove in relazione a
entrambi. Definendo un sistema di coordinate per la tibia e uno per il calcagno
tramite questo metodo, si definisce un sistema di riferimento per il complesso
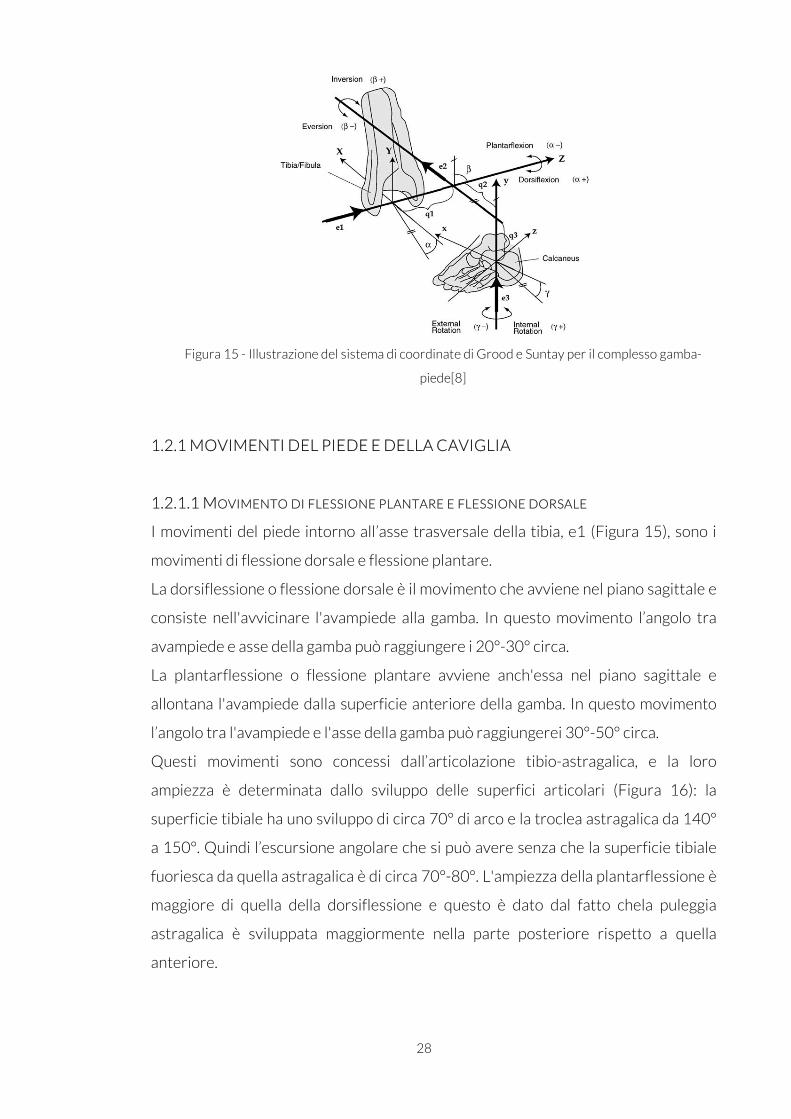
gamba-piede [8]. Con riferimento alla Figura 15, per descrivere in generale i
movimenti del complesso gamba-piede, si può considerare il sistema di riferimento
globale della stessa dove i tre assi sono: l'asse inter-malleolare chiamato asse e1,
l'asse verticale del piede, asse e3, e l'asse mutualmente ortogonale ai primi due,asse
e2, quindi per lo più di direzione antero-posteriore.
28
Figura 15 - Illustrazione del sistema di coordinate di Grood e Suntay per il complesso gamba-
piede[8]
1.2.1 MOVIMENTI DEL PIEDE E DELLA CAVIGLIA
1.2.1.1 MOVIMENTO DI FLESSIONE PLANTARE E FLESSIONE DORSALE
I movimenti del piede intorno all’asse trasversale della tibia, e1 (Figura 15), sono i
movimenti di flessione dorsale e flessione plantare.
La dorsiflessione o flessione dorsale è il movimento che avviene nel piano sagittale e
consiste nell'avvicinare l'avampiede alla gamba. In questo movimento l’angolo tra
avampiede e asse della gamba può raggiungere i 20°-30° circa.
La plantarflessione o flessione plantare avviene anch'essa nel piano sagittale e
allontana l'avampiede dalla superficie anteriore della gamba. In questo movimento
l’angolo tra l'avampiede e l'asse della gamba può raggiungerei 30°-50° circa.
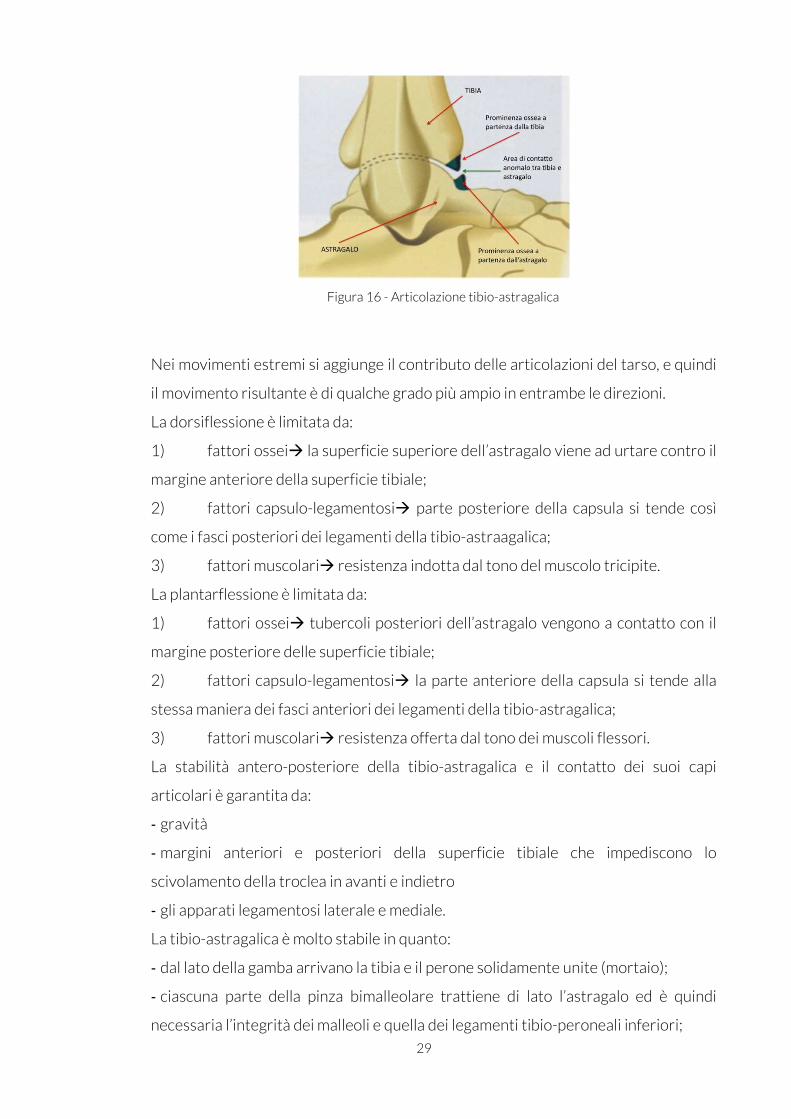
Questi movimenti sono concessi dall’articolazione tibio-astragalica, e la loro
ampiezza è determinata dallo sviluppo delle superfici articolari (Figura 16): la
superficie tibiale ha uno sviluppo di circa 70° di arco e la troclea astragalica da 140°
a 150°. Quindi l’escursione angolare che si può avere senza che la superficie tibiale
fuoriesca da quella astragalica è di circa 70°-80°. L'ampiezza della plantarflessione è
maggiore di quella della dorsiflessione e questo è dato dal fatto chela puleggia
astragalica è sviluppata maggiormente nella parte posteriore rispetto a quella
anteriore.
29
Figura 16 - Articolazione tibio-astragalica
Nei movimenti estremi si aggiunge il contributo delle articolazioni del tarso, e quindi
il movimento risultante è di qualche grado più ampio in entrambe le direzioni.
La dorsiflessione è limitata da:
1) fattori ossei� la superficie superiore dell’astragalo viene ad urtare contro il
margine anteriore della superficie tibiale;
2) fattori capsulo-legamentosi� parte posteriore della capsula si tende così
come i fasci posteriori dei legamenti della tibio-astraagalica;
3) fattori muscolari� resistenza indotta dal tono del muscolo tricipite.
La plantarflessione è limitata da:
1) fattori ossei� tubercoli posteriori dell’astragalo vengono a contatto con il
margine posteriore delle superficie tibiale;
2) fattori capsulo-legamentosi� la parte anteriore della capsula si tende alla
stessa maniera dei fasci anteriori dei legamenti della tibio-astragalica;
3) fattori muscolari� resistenza offerta dal tono dei muscoli flessori.
La stabilità antero-posteriore della tibio-astragalica e il contatto dei suoi capi
articolari è garantita da:
- gravità
- margini anteriori e posteriori della superficie tibiale che impediscono lo
scivolamento della troclea in avanti e indietro
- gli apparati legamentosi laterale e mediale.
La tibio-astragalica è molto stabile in quanto:
- dal lato della gamba arrivano la tibia e il perone solidamente unite (mortaio);
- ciascuna parte della pinza bimalleolare trattiene di lato l’astragalo ed è quindi
necessaria l’integrità dei malleoli e quella dei legamenti tibio-peroneali inferiori;
30
- gli apparati legamentosi laterale e mediale impediscono ogni movimento
dell’astragalo intorno al suo asse longitudinale.
Parlando di range di movimento, bisogna fare distinzione tra quello massimo e
quello funzionale, ovvero i gradi massimi che il complesso della caviglia può
compiere e quelli che compie normalmente durante, ad esempio, la camminata e la
corsa [9].
1.2.1.2 Movimento di pronazione e supinazione
Il movimento di supinazione consiste nell’orientare la pianta verso l’interno; il
movimento di pronazione consiste nell’orientare la pianta verso l’esterno.
L’ampiezza della supinazione è di circa 50° ed è maggiore di quella della pronazione.
1.2.1.3 Movimento combinato di inversione ed eversione
I movimenti del piede intorno all'asse e2 (Figura 15) sono i movimenti di inversione
ed eversione.
I movimenti descritti non esistono allo stato puro ma le articolazioni della caviglia
sono costituite in modo tale che un movimento in uno dei piani si accompagna
obbligatoriamente ad un movimento negli altri due piani. Il movimento di inversione
è l'azione combinata di adduzione(movimento che porta il piede più vicino alla linea
mediana del corpo), supinazione e flessione plantare; mentre quello di eversione è
l’azione combinata di abduzione(movimento che porta il piede lontano alla linea
mediana del corpo) accompagnata da pronazione e flessione dorsale.
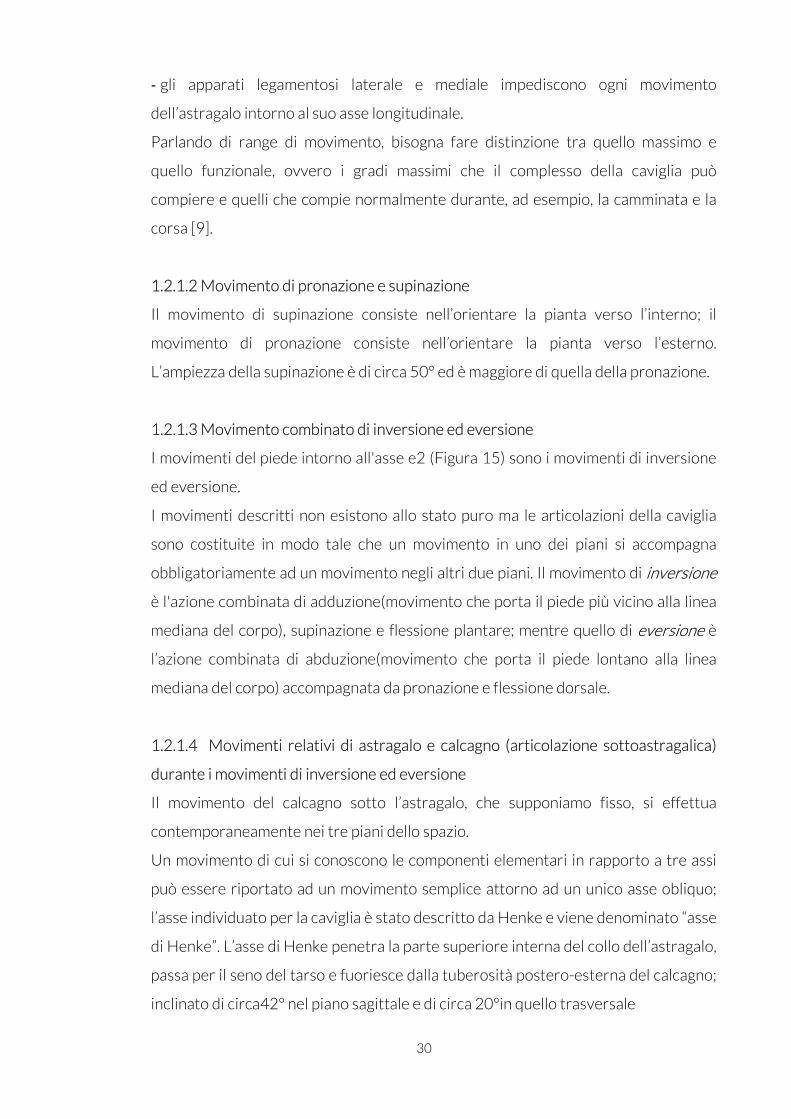
1.2.1.4 Movimenti relativi di astragalo e calcagno (articolazione sottoastragalica)
durante i movimenti di inversione ed eversione
Il movimento del calcagno sotto l’astragalo, che supponiamo fisso, si effettua
contemporaneamente nei tre piani dello spazio.
Un movimento di cui si conoscono le componenti elementari in rapporto a tre assi
può essere riportato ad un movimento semplice attorno ad un unico asse obliquo;
l’asse individuato per la caviglia è stato descritto da Henke e viene denominato “asse
di Henke”. L’asse di Henke penetra la parte superiore interna del collo dell’astragalo,
passa per il seno del tarso e fuoriesce dalla tuberosità postero-esterna del calcagno;
inclinato di circa42° nel piano sagittale e di circa 20°in quello trasversale
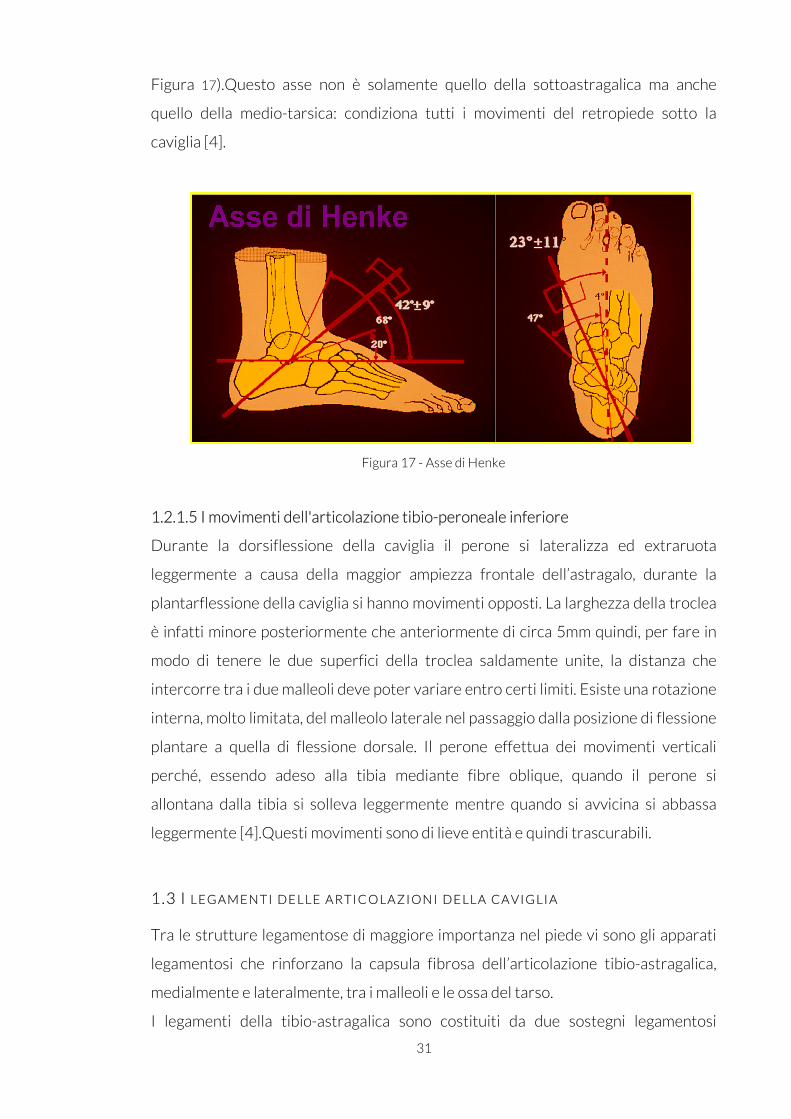
Figura 17).Questo asse non è solamente quello della sottoastragalica ma anche
quello della medio-
caviglia [4].
1.2.1.5 I movimenti dell'articolazione tibio
Durante la dorsiflessione della caviglia il perone si
leggermente a causa della maggior ampiezza frontale dell’astragalo
plantarflessione della caviglia si hanno movimenti opposti.
è infatti minore posteriormente che anteriormente di
modo di tenere le
intercorre tra i due malleoli deve poter variare entro certi limiti.
interna, molto limitata, del malleolo
plantare a quella di flessione dorsale. Il perone effettua dei movimenti verticali
perché, essendo adeso alla tibia mediante fibre oblique, quando il perone si
allontana dalla tibia si solleva leggermente mentre quando si avvicina si abbassa
leggermente [4].Questi movim
1.3 I L E G A M E N T I D E L LE A R T I
Tra le strutture legamentose di maggiore
legamentosi che rinforzano la capsula fibrosa dell’articolazione
medialmente e lateralmente
I legamenti della tibio
31
Questo asse non è solamente quello della sottoastragalica ma anche
-tarsica: condiziona tutti i movimenti del retropiede sotto la
Figura 17 - Asse di Henke
1.2.1.5 I movimenti dell'articolazione tibio-peroneale inferiore
Durante la dorsiflessione della caviglia il perone si lateralizza ed extraruota
a causa della maggior ampiezza frontale dell’astragalo
plantarflessione della caviglia si hanno movimenti opposti. La larghezza della troclea
minore posteriormente che anteriormente di circa 5mm quindi, per fare in
modo di tenere le due superfici della troclea saldamente unite, la distanza che
intercorre tra i due malleoli deve poter variare entro certi limiti.
interna, molto limitata, del malleolo laterale nel passaggio dalla posizione di flessione
lla di flessione dorsale. Il perone effettua dei movimenti verticali
perché, essendo adeso alla tibia mediante fibre oblique, quando il perone si
allontana dalla tibia si solleva leggermente mentre quando si avvicina si abbassa
Questi movimenti sono di lieve entità e quindi trascurabili.
L E G A M E N T I D E L LE A R T I C O LA Z I O N I D E LL A C A V I G LI A
Tra le strutture legamentose di maggiore importanza nel piede vi sono gli
legamentosi che rinforzano la capsula fibrosa dell’articolazione
medialmente e lateralmente, tra i malleoli e le ossa del tarso.
tibio-astragalica sono costituiti da due sostegni legamentosi
Questo asse non è solamente quello della sottoastragalica ma anche
tarsica: condiziona tutti i movimenti del retropiede sotto la
lateralizza ed extraruota
a causa della maggior ampiezza frontale dell’astragalo, durante la
La larghezza della troclea
5mm quindi, per fare in
due superfici della troclea saldamente unite, la distanza che
intercorre tra i due malleoli deve poter variare entro certi limiti. Esiste una rotazione
passaggio dalla posizione di flessione
lla di flessione dorsale. Il perone effettua dei movimenti verticali
perché, essendo adeso alla tibia mediante fibre oblique, quando il perone si
allontana dalla tibia si solleva leggermente mentre quando si avvicina si abbassa
enti sono di lieve entità e quindi trascurabili.
importanza nel piede vi sono gli apparati
legamentosi che rinforzano la capsula fibrosa dell’articolazione tibio-astragalica,
sono costituiti da due sostegni legamentosi
32
principali, l’apparato legamentoso mediale e quello laterale; vi sono poi due sistemi
accessori: i legamenti anteriori e i legamenti posteriori.
I legamenti collaterali formano, idealmente, da ciascun lato dell’articolazione, un
ventaglio il cui apice è posto sul malleolo corrispondente in vicinanza dell’asse
trasversale e la cui parte periferica è fissata sulle due ossa posteriori del tarso.
Il legamento collaterale esterno (Figura 18) è costituito a sua volta da tre fasci, due
destinati all’astragalo e uno al calcagno:
-peroneo-astragalico anteriore(ATFL) :dal margine anteriore del malleolo si dirige
obliquamente in basso ed in avanti per terminare sull’astragalo. In letteratura sono
state fornite numerose descrizioni dell’anatomia di questo legamento, variabili sotto
l’aspetto della quantità di fasci caratterizzanti il legamento: si parte da una singola
fascia fino a tre. La sua larghezza complessiva è di6-10 mm e non sembra variare
notevolmente a prescindere dal numero di bande presenti, il che suggerisce che le
variazioni osservate non modificano la funzione del legamento.
-peroneo-calcaneare (CFL): dall’apice del malleolo laterale si dirige in basso ed
indietro e termina sulla faccia esterna del calcagno. E' il più forte dei legamenti che
compongono il legamento collaterale laterale e forma la sua parte centrale. Nella sua
sezione trasversale, il legamento è arrotondato e ha un diametro di circa 6-8 mm,
mentre la sua lunghezza è di circa 20 mm.
-peroneo-astragalico posteriore(PTFL): prende origine sulla faccia interna del
malleolo dietro la faccetta articolare; si dirige orizzontalmente indietro per fissarsi
sull'estremità postero-esterna dell’astragalo. E’ prolungato da un piccolo legamento:
l’astragalo-calcaneare posteriore.
A causa dell’aspetto multifascicolare di questo legamento, la sua inserzione non
avviene in una zona specifica.
33
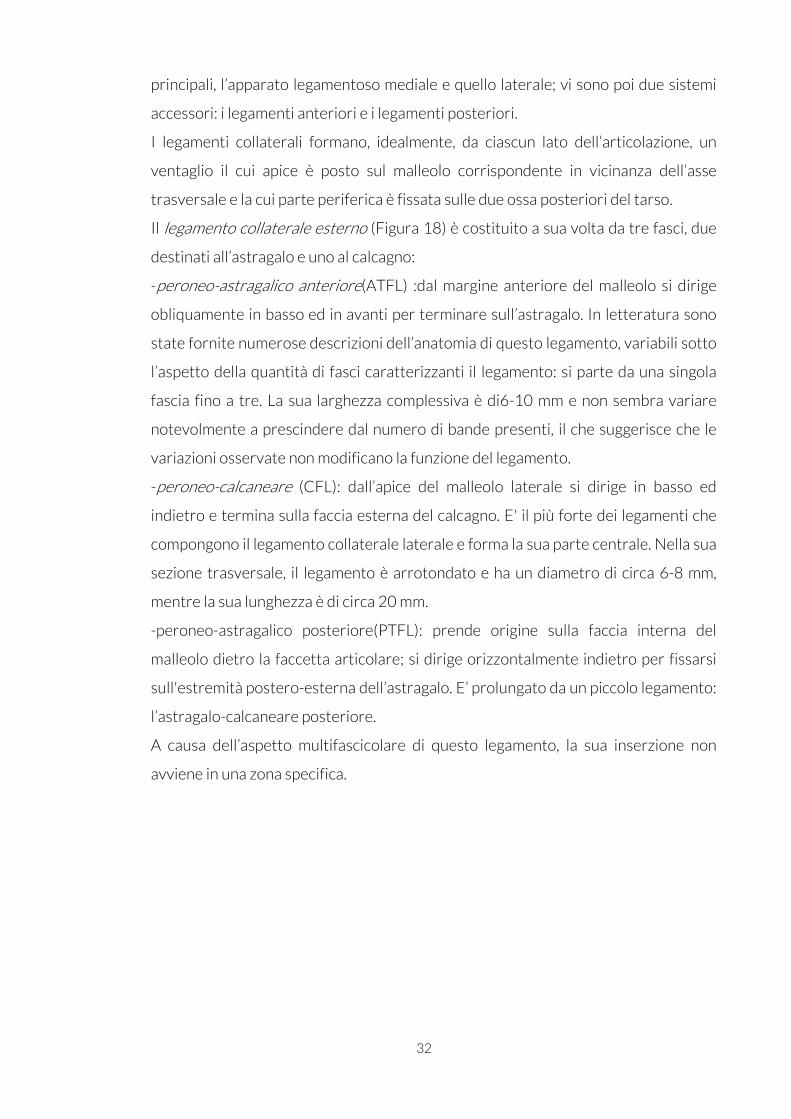
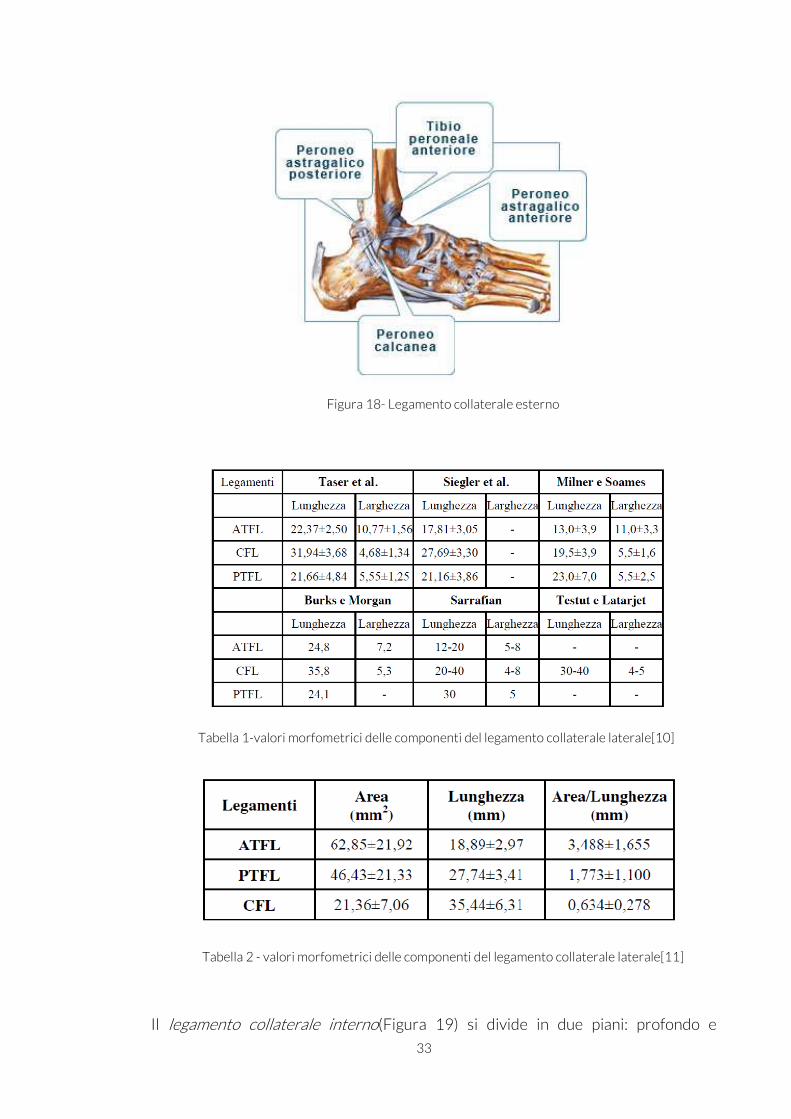
Figura 18- Legamento collaterale esterno
Tabella 1-valori morfometrici delle componenti del legamento collaterale laterale[10]
Tabella 2 - valori morfometrici delle componenti del legamento collaterale laterale[11]
Il legamento collaterale interno(Figura 19) si divide in due piani: profondo e
34
superficiale.
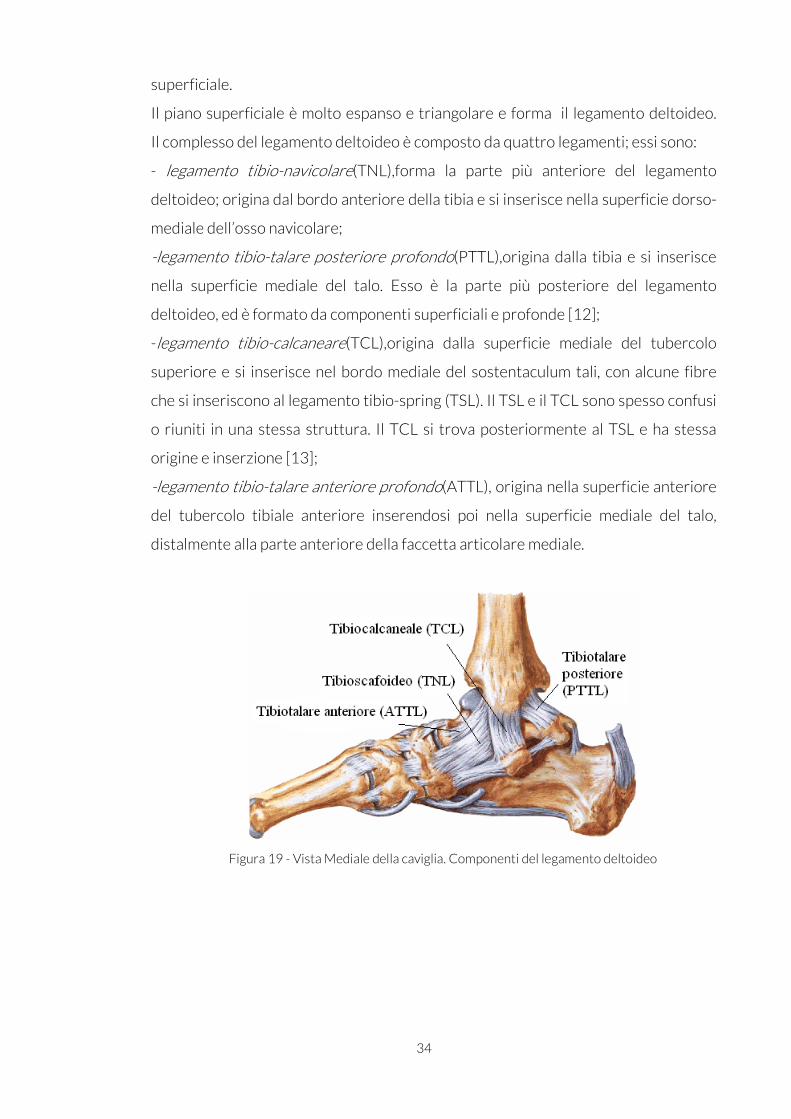
Il piano superficiale è molto espanso e triangolare e forma il legamento deltoideo.
Il complesso del legamento deltoideo è composto da quattro legamenti; essi sono:
- legamento tibio-navicolare(TNL),forma la parte più anteriore del legamento
deltoideo; origina dal bordo anteriore della tibia e si inserisce nella superficie dorso-
mediale dell’osso navicolare;
-legamento tibio-talare posteriore profondo(PTTL),origina dalla tibia e si inserisce
nella superficie mediale del talo. Esso è la parte più posteriore del legamento
deltoideo, ed è formato da componenti superficiali e profonde [12];
-legamento tibio-calcaneare(TCL),origina dalla superficie mediale del tubercolo
superiore e si inserisce nel bordo mediale del sostentaculum tali, con alcune fibre
che si inseriscono al legamento tibio-spring (TSL). Il TSL e il TCL sono spesso confusi
o riuniti in una stessa struttura. Il TCL si trova posteriormente al TSL e ha stessa
origine e inserzione [13];
-legamento tibio-talare anteriore profondo(ATTL), origina nella superficie anteriore
del tubercolo tibiale anteriore inserendosi poi nella superficie mediale del talo,
distalmente alla parte anteriore della faccetta articolare mediale.
Figura 19 - Vista Mediale della caviglia. Componenti del legamento deltoideo
35
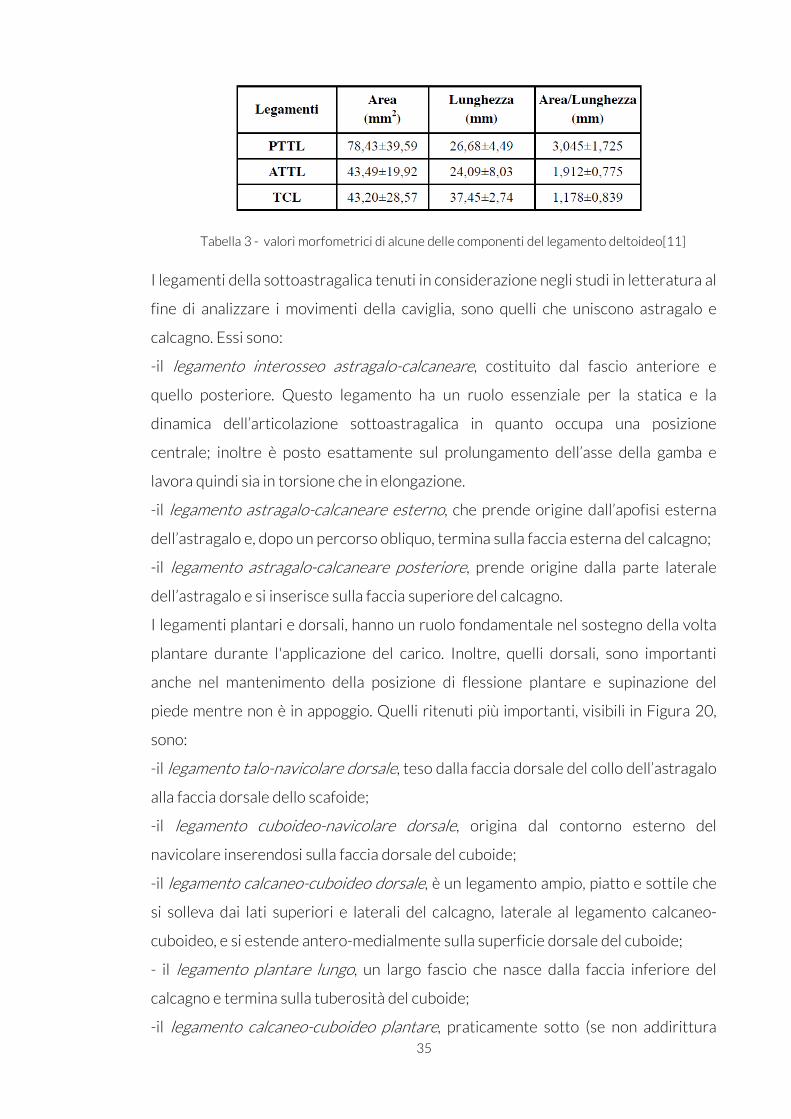
Tabella 3 - valori morfometrici di alcune delle componenti del legamento deltoideo[11]
I legamenti della sottoastragalica tenuti in considerazione negli studi in letteratura al
fine di analizzare i movimenti della caviglia, sono quelli che uniscono astragalo e
calcagno. Essi sono:
-il legamento interosseo astragalo-calcaneare, costituito dal fascio anteriore e
quello posteriore. Questo legamento ha un ruolo essenziale per la statica e la
dinamica dell’articolazione sottoastragalica in quanto occupa una posizione
centrale; inoltre è posto esattamente sul prolungamento dell’asse della gamba e
lavora quindi sia in torsione che in elongazione.
-il legamento astragalo-calcaneare esterno, che prende origine dall’apofisi esterna
dell’astragalo e, dopo un percorso obliquo, termina sulla faccia esterna del calcagno;
-il legamento astragalo-calcaneare posteriore, prende origine dalla parte laterale
dell’astragalo e si inserisce sulla faccia superiore del calcagno.
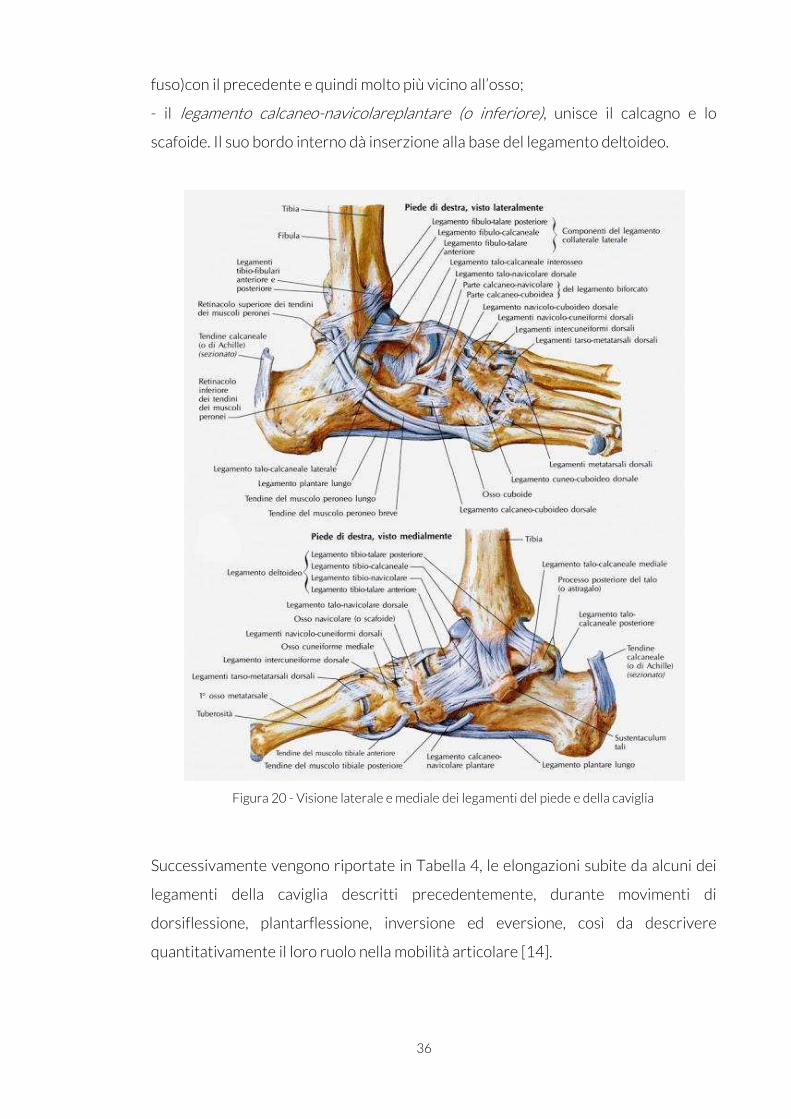
I legamenti plantari e dorsali, hanno un ruolo fondamentale nel sostegno della volta
plantare durante l'applicazione del carico. Inoltre, quelli dorsali, sono importanti
anche nel mantenimento della posizione di flessione plantare e supinazione del
piede mentre non è in appoggio. Quelli ritenuti più importanti, visibili in Figura 20,
sono:
-il legamento talo-navicolare dorsale, teso dalla faccia dorsale del collo dell’astragalo
alla faccia dorsale dello scafoide;
-il legamento cuboideo-navicolare dorsale, origina dal contorno esterno del
navicolare inserendosi sulla faccia dorsale del cuboide;
-il legamento calcaneo-cuboideo dorsale, è un legamento ampio, piatto e sottile che
si solleva dai lati superiori e laterali del calcagno, laterale al legamento calcaneo-
cuboideo, e si estende antero-medialmente sulla superficie dorsale del cuboide;
- il legamento plantare lungo, un largo fascio che nasce dalla faccia inferiore del
calcagno e termina sulla tuberosità del cuboide;
-il legamento calcaneo-cuboideo plantare, praticamente sotto (se non addirittura
36
fuso)con il precedente e quindi molto più vicino all’osso;
- il legamento calcaneo-navicolareplantare (o inferiore), unisce il calcagno e lo
scafoide. Il suo bordo interno dà inserzione alla base del legamento deltoideo.
Figura 20 - Visione laterale e mediale dei legamenti del piede e della caviglia
Successivamente vengono riportate in Tabella 4, le elongazioni subite da alcuni dei
legamenti della caviglia descritti precedentemente, durante movimenti di
dorsiflessione, plantarflessione, inversione ed eversione, così da descrivere
quantitativamente il loro ruolo nella mobilità articolare [14].
37
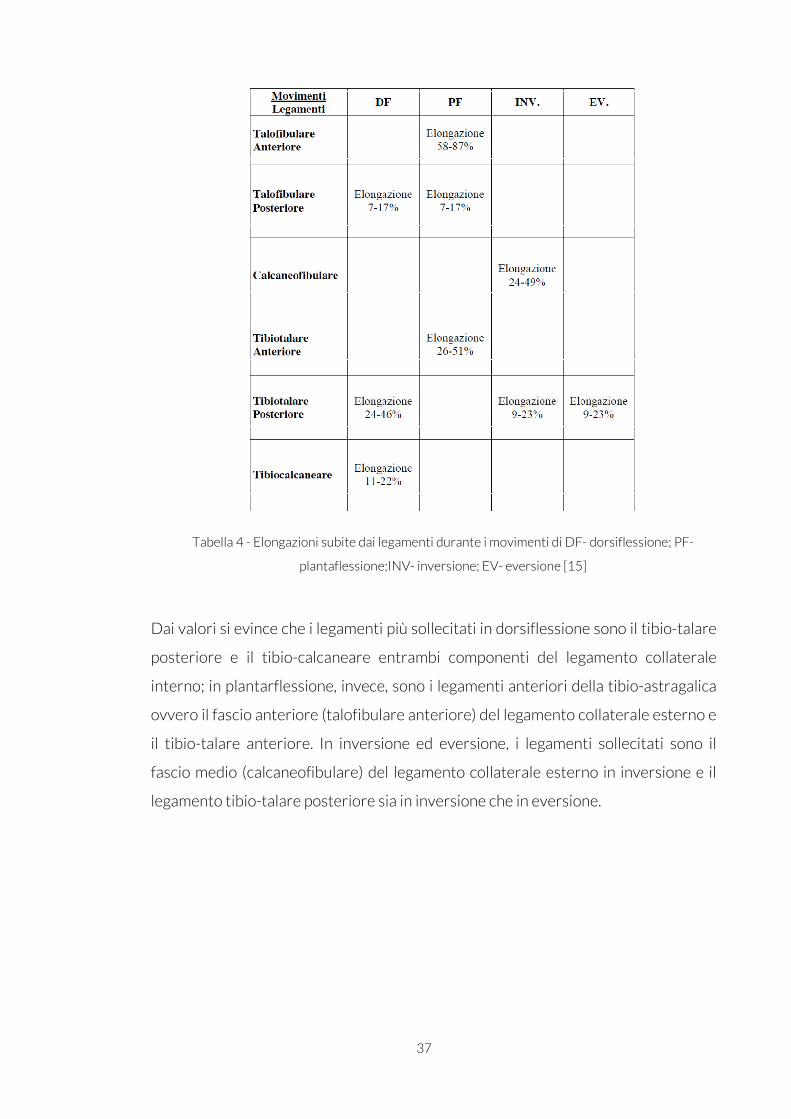
Tabella 4 - Elongazioni subite dai legamenti durante i movimenti di DF- dorsiflessione; PF-
plantaflessione;INV- inversione; EV- eversione [15]
Dai valori si evince che i legamenti più sollecitati in dorsiflessione sono il tibio-talare
posteriore e il tibio-calcaneare entrambi componenti del legamento collaterale
interno; in plantarflessione, invece, sono i legamenti anteriori della tibio-astragalica
ovvero il fascio anteriore (talofibulare anteriore) del legamento collaterale esterno e
il tibio-talare anteriore. In inversione ed eversione, i legamenti sollecitati sono il
fascio medio (calcaneofibulare) del legamento collaterale esterno in inversione e il
legamento tibio-talare posteriore sia in inversione che in eversione.
38
1.4 C O M P O N E N T I M U S C O L A R I E T E N D I N E E D E L C O M P L E S S O G A M B A- P I E D E
I muscoli del complesso gamba-piede, permettono di effettuare i movimenti della
caviglia descritti nel paragrafo 1.2.1.
A causa della morfologia delle articolazioni della caviglia, ogni movimento effettuato
in un piano implica necessariamente un movimento negli altri piani, come già
accennato. In questo paragrafo, si raggruppano i muscoli, inseriti nel modello, in base
alla loro funzione di flessori dorsali o plantari, abduttori-pronatori o adduttori-
supinatori. L'abduzione e l'adduzione sono movimenti impediti a livello della caviglia
ma si intendono associati ai movimenti di prono-supinazione intorno all'asse di
Henke e sono la conseguenza della rotazione interna-esterna della gamba (a
ginocchio flesso) o di tutto l’arto inferiore per mezzo dell’anca (a ginocchio esteso. In
particolare, l'abduzione è il movimento che porta il piede lontano dalla linea mediana
del corpo mentre l'adduzione è quello che porta il piede più vicino alla linea mediana
del corpo.
Il nome dei muscoli del complesso della caviglia, deriva dal nome dei muscoli
presenti nella mano dove la flessione e l'estensione sono invertite rispetto agli stessi
movimenti a livello del piede. Nel seguente paragrafo sembra sia presente
un'incongruenza tra il movimento effettuato e il nome dei muscolo che lo permette.
Per questo bisogna specificare che di seguito i muscoli chiamati estensori, sono
quelli che agiscono come flessori dorsali e i muscoli chiamati flessori, come flessori
plantari.
39
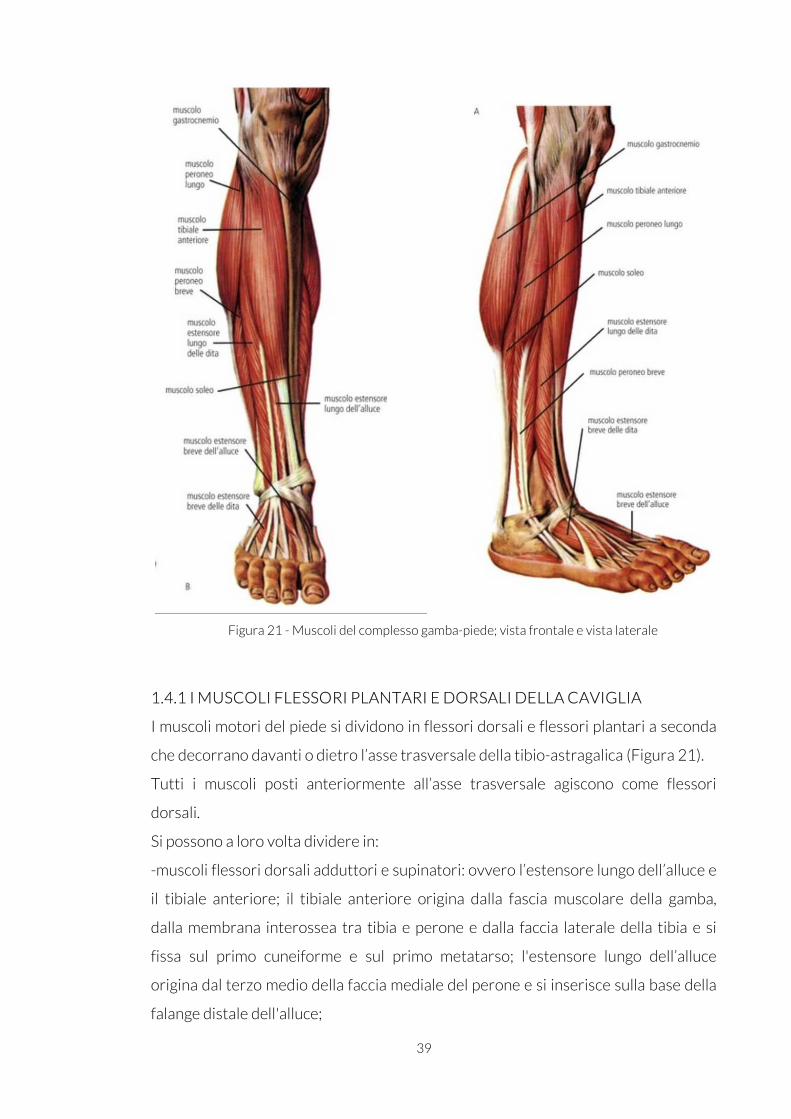
Figura 21 - Muscoli del complesso gamba-piede; vista frontale e vista laterale
1.4.1 I MUSCOLI FLESSORI PLANTARI E DORSALI DELLA CAVIGLIA
I muscoli motori del piede si dividono in flessori dorsali e flessori plantari a seconda
che decorrano davanti o dietro l’asse trasversale della tibio-astragalica (Figura 21).
Tutti i muscoli posti anteriormente all’asse trasversale agiscono come flessori
dorsali.
Si possono a loro volta dividere in:
-muscoli flessori dorsali adduttori e supinatori: ovvero l’estensore lungo dell’alluce e
il tibiale anteriore; il tibiale anteriore origina dalla fascia muscolare della gamba,
dalla membrana interossea tra tibia e perone e dalla faccia laterale della tibia e si
fissa sul primo cuneiforme e sul primo metatarso; l'estensore lungo dell’alluce
origina dal terzo medio della faccia mediale del perone e si inserisce sulla base della
falange distale dell'alluce;
40
-muscoli flessori dorsali abduttori e pronatori ovvero l’estensore comune delle dita e
il peroneo anteriore. L'estensore comune delle dita origina dal condilo laterale della
tibia, dai 3/4 prossimale della superficie anteriore del perone, dalla parte prossimale
della membrana interossea e si inserisce tramite quattro tendini, dal secondo al
quinto dito; il peroneo anteriore origina dalla faccia mediale del perone e dalla
membrana interossea e si inserisce sulla base del quinto metatarso.
Per ottenere una flessione pura della caviglia senza componenti di adduzione-
supinazione o di abduzione-pronazione, è necessario che questi due gruppi
muscolari si contraggano sinergicamente; si dice quindi che sono antagonisti-
sinergici.
Tutti i muscoli posti posteriormente all’asse trasversale agiscono come flessori
plantari (Figura 21).
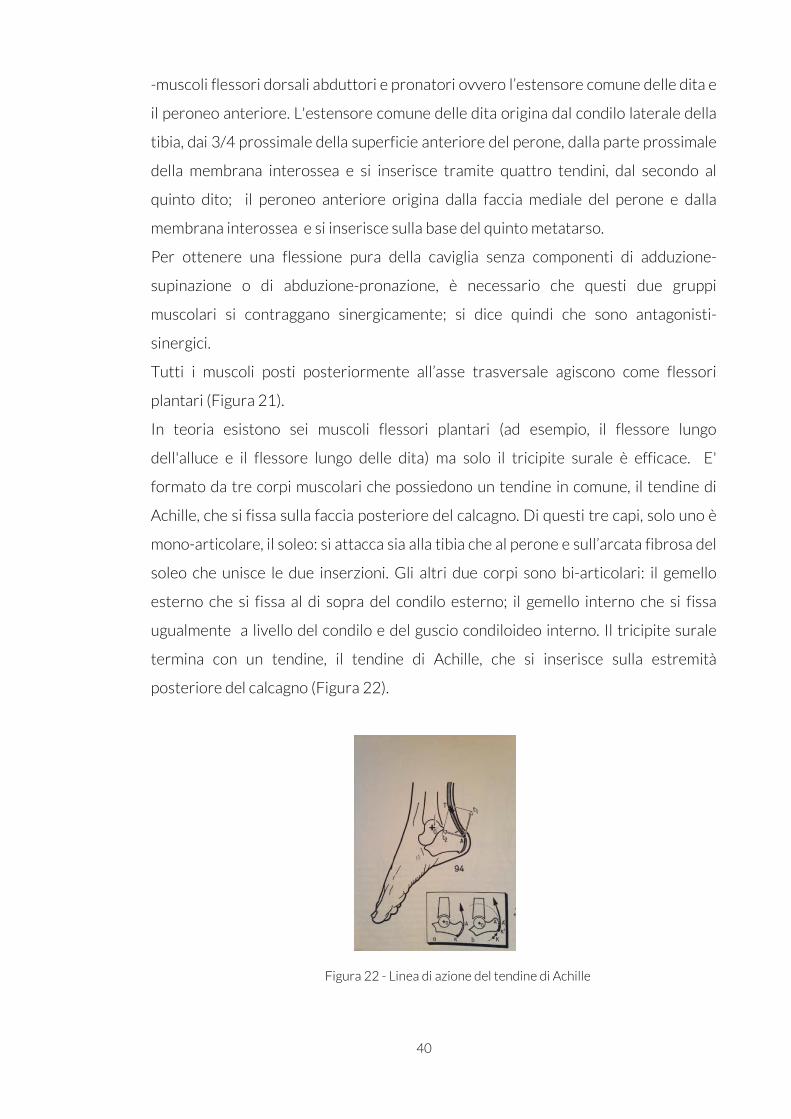
In teoria esistono sei muscoli flessori plantari (ad esempio, il flessore lungo
dell'alluce e il flessore lungo delle dita) ma solo il tricipite surale è efficace. E'
formato da tre corpi muscolari che possiedono un tendine in comune, il tendine di
Achille, che si fissa sulla faccia posteriore del calcagno. Di questi tre capi, solo uno è
mono-articolare, il soleo: si attacca sia alla tibia che al perone e sull’arcata fibrosa del
soleo che unisce le due inserzioni. Gli altri due corpi sono bi-articolari: il gemello
esterno che si fissa al di sopra del condilo esterno; il gemello interno che si fissa
ugualmente a livello del condilo e del guscio condiloideo interno. Il tricipite surale
termina con un tendine, il tendine di Achille, che si inserisce sulla estremità
posteriore del calcagno (Figura 22).
Figura 22 - Linea di azione del tendine di Achille
41
1.4.2 MUSCOLI ABDUTTORI-PRONATORI
I muscoli peronei funzionano contemporaneamente come flessori plantari, abduttori
e pronatori (Figura 21).Essi sono:
-peroneo breve laterale: ha origine dal 3° medio della faccia laterale del perone e dai
circostanti setti intermuscolari. I fasci muscolari continuano in un tendine che va a
fissarsi alla parte dorsale della base del 5° osso metatarsale. Essenzialmente è
abduttore del piede; partecipa alla pronazione aiutato dal peroneo anteriore e
dall’estensore comune delle dita. Il movimento di abduzione-pronazione puro risulta
dall’azione sinergica-antagonista dei peronei laterali e del peroneo anteriore e
dell’estensore comune delle dita;
-peroneo lungo laterale: ha origine dalla porzione antero-laterale della testa del
perone, dal terzo superiore della faccia e del margine laterale dello stesso osso. I
fasci muscolari continuano in un lungo tendine d'inserzione che va a terminare sulla
tuberosità del 1° osso metatarsale, sul 1° osso cuneiforme e sulla base del 2° osso
metatarsale. Assume un ruolo fondamentale nei movimenti del piede e nella statica e
nella dinamica della volta plantare: è abduttore e flessore plantare sia direttamente,
cioè abbassa la testa del primo metatarso, sia indirettamente, attirando il primo
metatarso in fuori avvicinando i metatarsi interni agli esterni; in questo modo
permette alla forza del tricipite di ripartirsi su tutti i raggi della pianta del piede.
Inoltre è anche pronatore poiché abbassa la testa del primo metatarso quando il
piede non è appoggiato al suolo.
1.4.5 MUSCOLI ADDUTTORI-SUPINATORI
I tre muscoli retro-malleolari mediali sono contemporaneamente flessori plantari,
adduttori e supinatori (Figura 21).
Essi sono:
-tibiale posteriore: origina dalla superficie della Tibia al di sotto del muscolo soleo e
della membrana interossea, e dalla faccia mediale del perone; si inserisce sul
navicolare e incrocia la tibio-astragalica, la sottoastragalica e la mediotarsica agendo
contemporaneamente su queste tre articolazioni:
1) attira il navicolare in direzione mediale (forte adduttore e direttamente
antagonista del peroneo breve che attira il tarso anteriore in fuori);
2) è supinatore per mezzo delle espansioni sulle ossa del tarso e del metatarso;
42
3) flessore plantare sia della tibio-astragalica che della medio-tarsica, a causa
dell'abbassamento del navicolare.
In queste azioni di flessione plantare e adduzione, il tibiale posteriore è aiutato dal
flessore lungo dell’alluce e dal flessore comune che sono flessori plantari della
caviglia e contemporaneamente adduttori e supinatori.
-tibiale anteriore: origine ed inserzione sono già state indicate precedentemente in
questo paragrafo. La sua azione è principalmente di flessione dorsale. Inoltre, data la
disposizione del tendine sul bordo mediale del piede (I° metatarso) agisce anche da
supinatore e parzialmente da adduttore; agisce sollevando tutti gli elementi dell’arco
interno:
1. solleva la base del primo metatarso sul primo cuneiforme;
2. solleva il cuneiforme sul navicolare e questo sull’astragalo
3. è l’antagonista diretto del peroneo lungo;
4. è flessore dorsale della caviglia e la sua contrazione sinergica-antagonista
con il tibiale posteriore porta ad una adduzione-supinazione pura senza flessione né
dorsale né plantare.
-estensore lungo dell’alluce: origine ed inserzione sono già state indicate
precedentemente in questo paragrafo. La sua azione è quella di adduttore-
supinatore ma è più debole del tibiale anteriore.
1.5 LA V O L T A P LA N T A R E
In seguito verranno descritte le funzioni della volta plantare e le strutture presenti che
contribuiscono al mantenimento della stessa, perché grazie alla sua curvatura e al suo
grado di deformabilità, l'appoggio del piede al terreno si modifica comportando una
serie di modifiche nella postura e nel cammino. In particolare, una panoramica sulle
strutture muscolari e tendinee che agiscono come stabilizzatori delle tre arcate
presenti (mediale, laterale e anteriore) è utile per un corretto posizionamento delle
strutture stesse nel momento della modellizzazione del complesso gamba-piede.
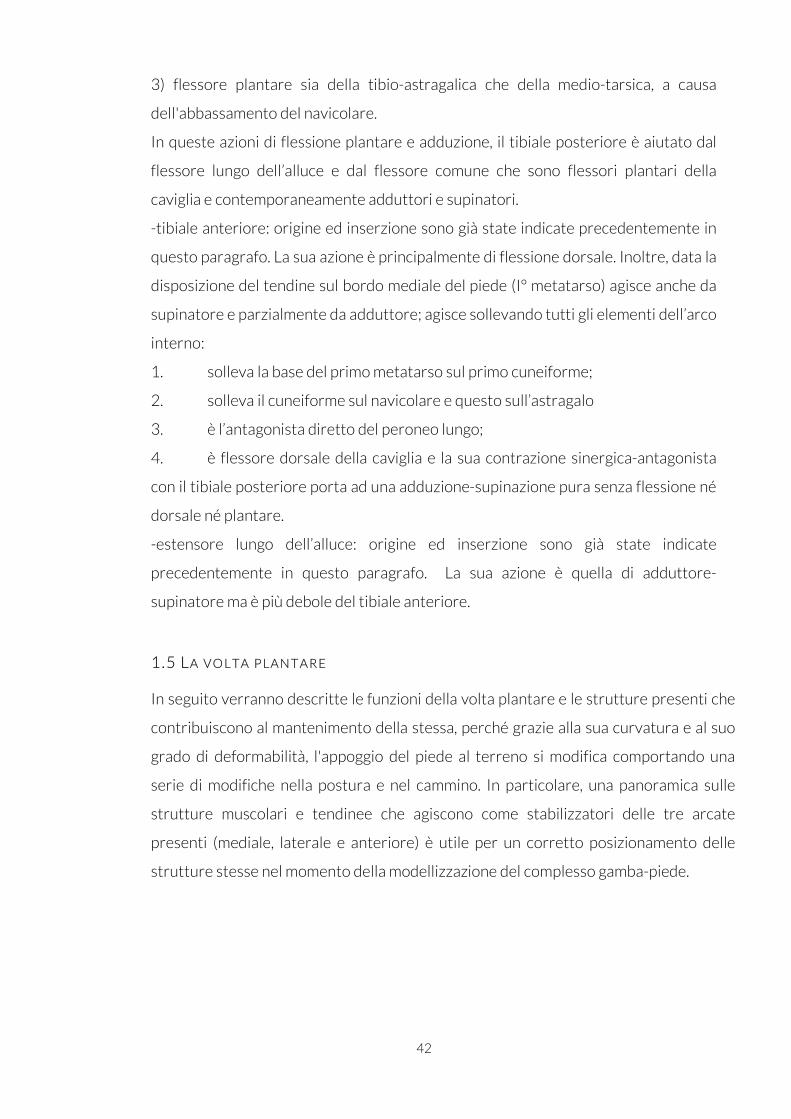
La volta plantare può adattarsi a tutte le asperità del terreno e trasmettere al suolo le
sollecitazioni ed il peso del corpo nelle migliori condizioni
elasticità che permette di variare la sua curvatura.
L'architettura della pianta del piede può essere definita come una volta sostenuta da
tre archi. Con riferimento alla
dai punti di appoggio che definiscono una struttura simile a un triangolo.
sono: testa del primo metatarso, testa del quinto metatarso, tuberosità posterio
calcagno. Tra i due punti di appoggio anteriori è teso l'arco anteriore, tra
è situato l'arco esterno, e tra
tre).L'apice della volta
ortostatica, si applica
verticale passante per i
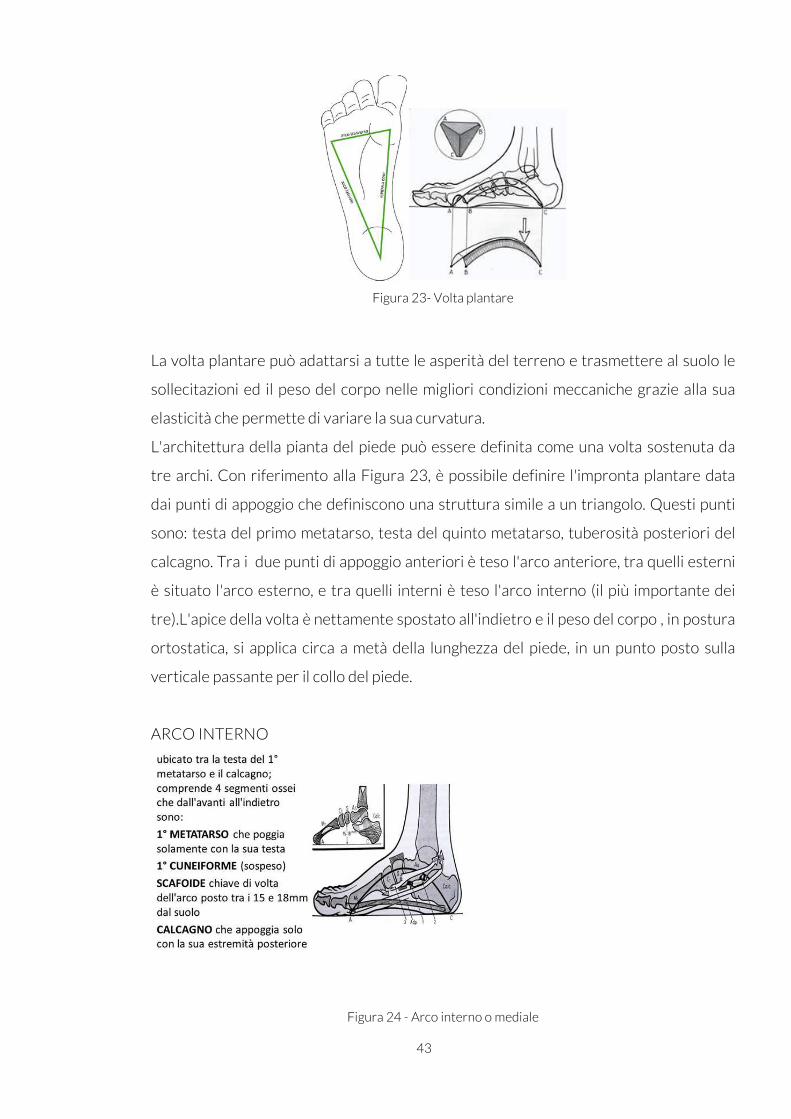
ARCO INTERNO
43
Figura 23- Volta plantare
La volta plantare può adattarsi a tutte le asperità del terreno e trasmettere al suolo le
sollecitazioni ed il peso del corpo nelle migliori condizioni meccaniche
elasticità che permette di variare la sua curvatura.
L'architettura della pianta del piede può essere definita come una volta sostenuta da
tre archi. Con riferimento alla Figura 23, è possibile definire l'impronta plantare data
dai punti di appoggio che definiscono una struttura simile a un triangolo.
sono: testa del primo metatarso, testa del quinto metatarso, tuberosità posterio
calcagno. Tra i due punti di appoggio anteriori è teso l'arco anteriore, tra
è situato l'arco esterno, e tra quelli interni è teso l'arco interno (il più importante dei
L'apice della volta è nettamente spostato all'indietro e il peso del corpo
si applica circa a metà della lunghezza del piede,
verticale passante per il collo del piede.
Figura 24 - Arco interno o mediale
La volta plantare può adattarsi a tutte le asperità del terreno e trasmettere al suolo le
meccaniche grazie alla sua
L'architettura della pianta del piede può essere definita come una volta sostenuta da
, è possibile definire l'impronta plantare data
dai punti di appoggio che definiscono una struttura simile a un triangolo. Questi punti
sono: testa del primo metatarso, testa del quinto metatarso, tuberosità posteriori del
calcagno. Tra i due punti di appoggio anteriori è teso l'arco anteriore, tra quelli esterni
è teso l'arco interno (il più importante dei
peso del corpo , in postura
circa a metà della lunghezza del piede, in un punto posto sulla
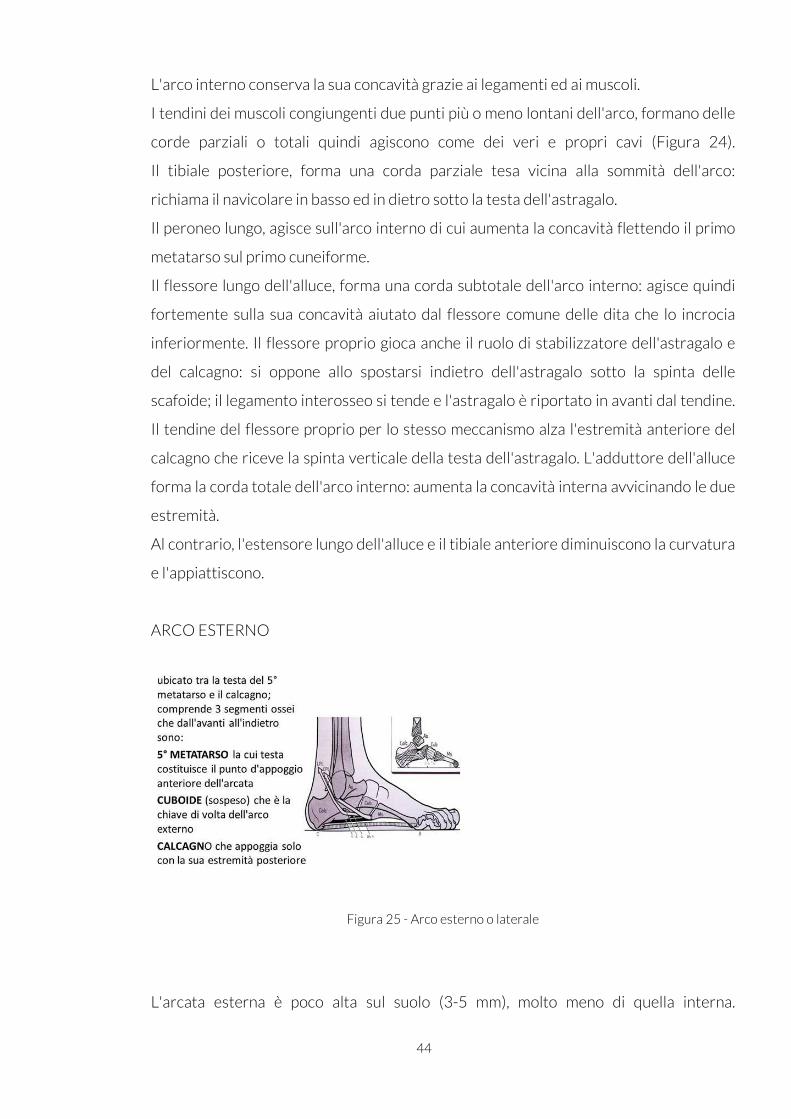
44
L'arco interno conserva la sua concavità grazie ai legamenti ed ai muscoli.
I tendini dei muscoli congiungenti due punti più o meno lontani dell'arco, formano delle
corde parziali o totali quindi agiscono come dei veri e propri cavi (Figura 24).
Il tibiale posteriore, forma una corda parziale tesa vicina alla sommità dell'arco:
richiama il navicolare in basso ed in dietro sotto la testa dell'astragalo.
Il peroneo lungo, agisce sull'arco interno di cui aumenta la concavità flettendo il primo
metatarso sul primo cuneiforme.
Il flessore lungo dell'alluce, forma una corda subtotale dell'arco interno: agisce quindi
fortemente sulla sua concavità aiutato dal flessore comune delle dita che lo incrocia
inferiormente. Il flessore proprio gioca anche il ruolo di stabilizzatore dell'astragalo e
del calcagno: si oppone allo spostarsi indietro dell'astragalo sotto la spinta delle
scafoide; il legamento interosseo si tende e l'astragalo è riportato in avanti dal tendine.
Il tendine del flessore proprio per lo stesso meccanismo alza l'estremità anteriore del
calcagno che riceve la spinta verticale della testa dell'astragalo. L'adduttore dell'alluce
forma la corda totale dell'arco interno: aumenta la concavità interna avvicinando le due
estremità.
Al contrario, l'estensore lungo dell'alluce e il tibiale anteriore diminuiscono la curvatura
e l'appiattiscono.
ARCO ESTERNO
Figura 25 - Arco esterno o laterale
L'arcata esterna è poco alta sul suolo (3-5 mm), molto meno di quella interna.
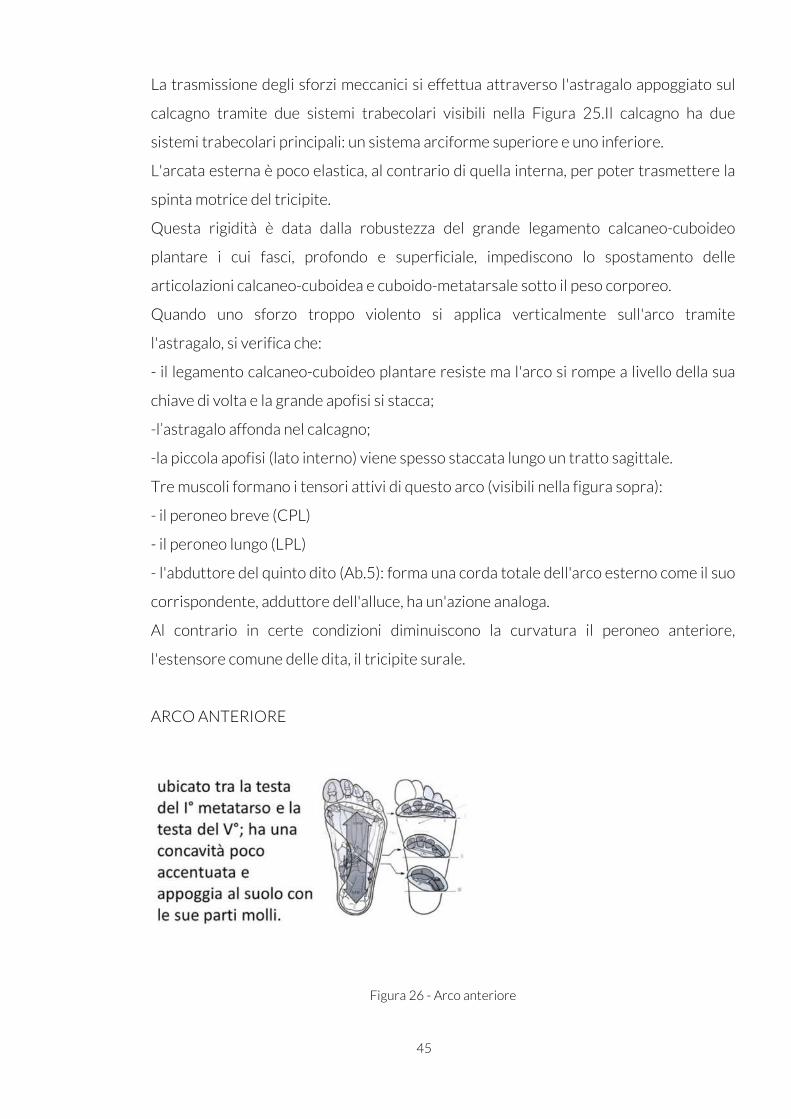
45
La trasmissione degli sforzi meccanici si effettua attraverso l'astragalo appoggiato sul
calcagno tramite due sistemi trabecolari visibili nella Figura 25.Il calcagno ha due
sistemi trabecolari principali: un sistema arciforme superiore e uno inferiore.
L'arcata esterna è poco elastica, al contrario di quella interna, per poter trasmettere la
spinta motrice del tricipite.
Questa rigidità è data dalla robustezza del grande legamento calcaneo-cuboideo
plantare i cui fasci, profondo e superficiale, impediscono lo spostamento delle
articolazioni calcaneo-cuboidea e cuboido-metatarsale sotto il peso corporeo.
Quando uno sforzo troppo violento si applica verticalmente sull'arco tramite
l'astragalo, si verifica che:
- il legamento calcaneo-cuboideo plantare resiste ma l'arco si rompe a livello della sua
chiave di volta e la grande apofisi si stacca;
-l’astragalo affonda nel calcagno;
-la piccola apofisi (lato interno) viene spesso staccata lungo un tratto sagittale.
Tre muscoli formano i tensori attivi di questo arco (visibili nella figura sopra):
- il peroneo breve (CPL)
- il peroneo lungo (LPL)
- l'abduttore del quinto dito (Ab.5): forma una corda totale dell'arco esterno come il suo
corrispondente, adduttore dell'alluce, ha un'azione analoga.
Al contrario in certe condizioni diminuiscono la curvatura il peroneo anteriore,
l'estensore comune delle dita, il tricipite surale.
ARCO ANTERIORE
Figura 26 - Arco anteriore
46
L'arco anteriore passa per la testa di tutti i metatarsi: la seconda testa, la più elevata,
forma la chiave di volta.
La concavità di questa arcata è poco accentuata e appoggia al suolo con l'interposizione
delle parti molli.
L'arcata è sostenuta dai legamenti intermetatarsali senza grande efficacia e da un solo
muscolo: il fascio trasverso dell'abduttore dell'alluce(Ab. p.). E' un muscolo
relativamente poco potente e facilmente smorzato.
L'arco anteriore è il punto di arrivo dei cinque raggi del metatarso.
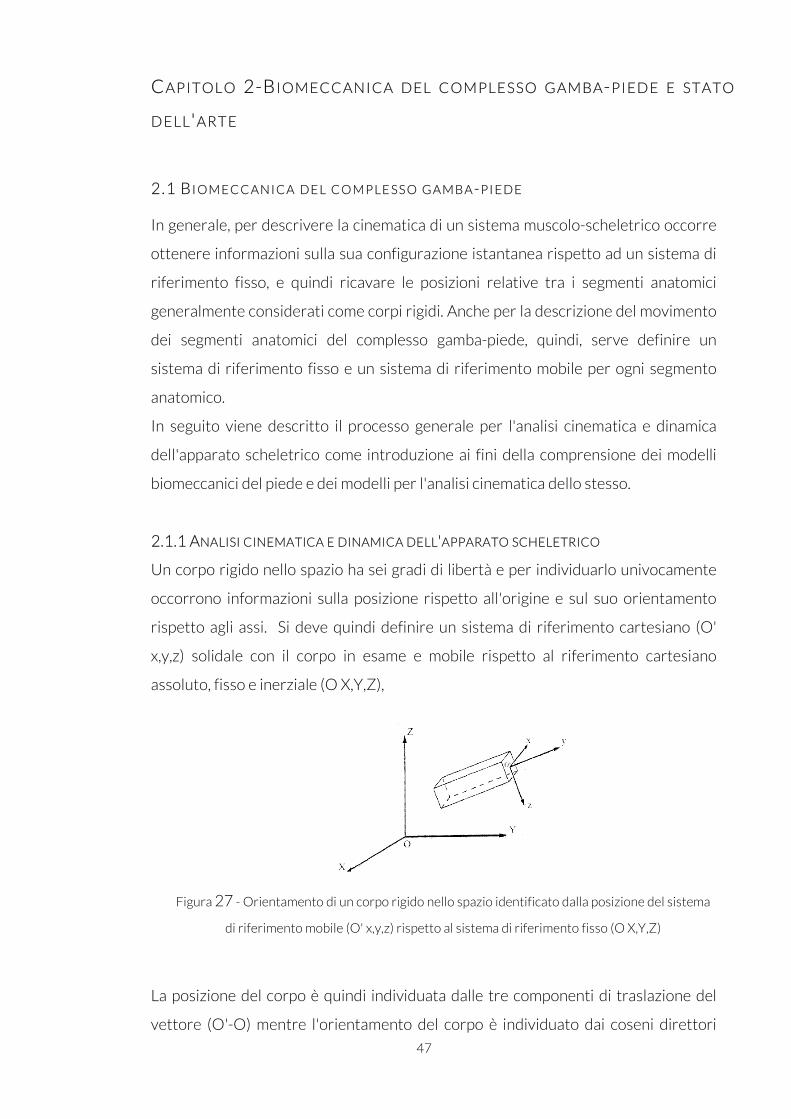
47
CAPITOL O 2-BIOMECC ANICA DEL C OMPLESSO G AMBA-PIED E E STATO
D ELL 'ART E
2 .1 B I O M E C C A N I C A D E L C O M P LE S S O G A M B A -P I E D E
In generale, per descrivere la cinematica di un sistema muscolo-scheletrico occorre
ottenere informazioni sulla sua configurazione istantanea rispetto ad un sistema di
riferimento fisso, e quindi ricavare le posizioni relative tra i segmenti anatomici
generalmente considerati come corpi rigidi. Anche per la descrizione del movimento
dei segmenti anatomici del complesso gamba-piede, quindi, serve definire un
sistema di riferimento fisso e un sistema di riferimento mobile per ogni segmento
anatomico.
In seguito viene descritto il processo generale per l'analisi cinematica e dinamica
dell'apparato scheletrico come introduzione ai fini della comprensione dei modelli
biomeccanici del piede e dei modelli per l'analisi cinematica dello stesso.
2.1.1 ANALISI CINEMATICA E DINAMICA DELL'APPARATO SCHELETRICO
Un corpo rigido nello spazio ha sei gradi di libertà e per individuarlo univocamente
occorrono informazioni sulla posizione rispetto all'origine e sul suo orientamento
rispetto agli assi. Si deve quindi definire un sistema di riferimento cartesiano (O'
x,y,z) solidale con il corpo in esame e mobile rispetto al riferimento cartesiano
assoluto, fisso e inerziale (O X,Y,Z),
Figura 27 - Orientamento di un corpo rigido nello spazio identificato dalla posizione del sistema
di riferimento mobile (O' x,y,z) rispetto al sistema di riferimento fisso (O X,Y,Z)
La posizione del corpo è quindi individuata dalle tre componenti di traslazione del
vettore (O'-O) mentre l'orientamento del corpo è individuato dai coseni direttori
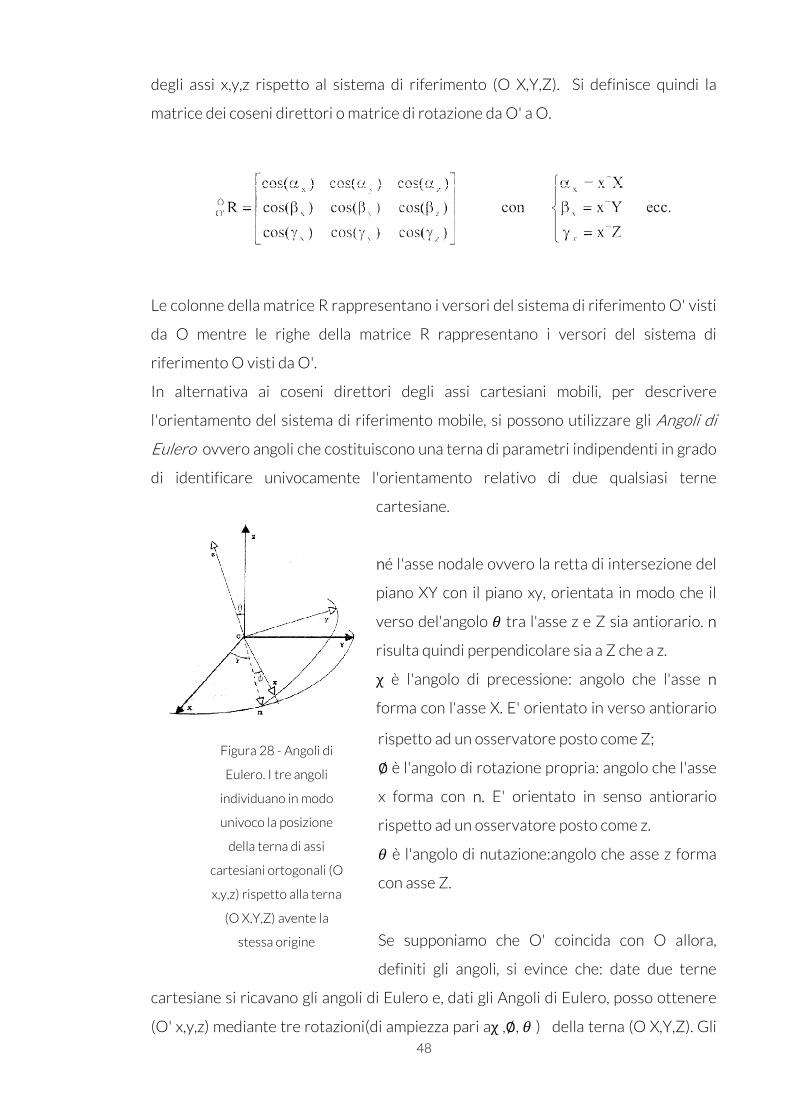
48
degli assi x,y,z rispetto al sistema di riferimento (O X,Y,Z). Si definisce quindi la
matrice dei coseni direttori o matrice di rotazione da O' a O.
Le colonne della matrice R rappresentano i versori del sistema di riferimento O' visti
da O mentre le righe della matrice R rappresentano i versori del sistema di
riferimento O visti da O'.
In alternativa ai coseni direttori degli assi cartesiani mobili, per descrivere
l'orientamento del sistema di riferimento mobile, si possono utilizzare gli Angoli di
Eulero ovvero angoli che costituiscono una terna di parametri indipendenti in grado
di identificare univocamente l'orientamento relativo di due qualsiasi terne
cartesiane.
né l'asse nodale ovvero la retta di intersezione del
piano XY con il piano xy, orientata in modo che il
verso del'angolo � tra l'asse z e Z sia antiorario. n
risulta quindi perpendicolare sia a Z che a z.
χ è l'angolo di precessione: angolo che l'asse n
forma con l'asse X. E' orientato in verso antiorario
rispetto ad un osservatore posto come Z;
∅ è l'angolo di rotazione propria: angolo che l'asse
x forma con n. E' orientato in senso antiorario
rispetto ad un osservatore posto come z.
� è l'angolo di nutazione:angolo che asse z forma
con asse Z.
Se supponiamo che O' coincida con O allora,
definiti gli angoli, si evince che: date due terne
cartesiane si ricavano gli angoli di Eulero e, dati gli Angoli di Eulero, posso ottenere
(O' x,y,z) mediante tre rotazioni(di ampiezza pari aχ ,∅, � ) della terna (O X,Y,Z). Gli
Figura 28 - Angoli di
Eulero. I tre angoli
individuano in modo
univoco la posizione
della terna di assi
cartesiani ortogonali (O
x,y,z) rispetto alla terna
(O X,Y,Z) avente la
stessa origine
49
angoli di Eulero e i coseni direttori sono in relazione tra di loro.
Dato che vengono esaminati corpi in movimento, allora sia il vettore traslazione (O'-
O) che la matrice di rotazione avranno componenti dipendenti dal tempo. Si
definisce quindi la matrice di rototraslazione da O a O' è definita nel modo seguente:
Per ottenere invece la trasformazione da O' ad O', si deve invertire la matrice. E'
possibile, attraverso lo stesso metodo, definire anche l'orientamento relativo dei
due corpi attraverso la matrice di traslazione relativa; la matrice così definita, però,
non fornisce informazioni sul significato biomeccanico del movimento ovvero gli
angoli considerati non sono angoli che possono essere utilizzati per descrivere un
movimento fisiologico.
Per questo si utilizza un altro approccio: si parte da una situazione iniziale in cui gli
assi del sistema di riferimento coincidono e con una sequenza di tre rotazioni
indipendenti si arriva alla posizione finale specificata dalla matrice di rotazione data.
Ovvero fattorizzo la matrice di rotazione R come prodotto di tre matrici ognuna
delle quali rappresenta una rotazione del sistema di riferimento mobile intorno ad
un asse fissato arbitrariamente:
Anche in questo caso questa matrice definisce la rotazione da O' ad O'; per ottenere
la trasformazione inversa è sufficiente invertire la matrice.
Se gli assi attorno a cui avvengono le rotazioni formano una terna cartesiana
ortogonale allora gli angoli di rotazione ∅�, ∅� , ∅�vengono chiamati Angoli di
Cardano, angoli in accordo con la definizione degli Angoli di Eulero.Conoscendo gli
angoli attorno ai quali avvengono le rotazioni,l'ordine con il quale sono applicate e la
matrice di rotazione risultante, si può ricavare l'entità delle rotazioni tramite gli
Angoli di Cardano.

50
Se scelti in modo opportuno gli assi attorno ai quali avvengono le rotazioni,si può
attribuire un significato funzionale all'ampiezza degli angoli. L'utilizzo in
biomeccanica degli Angoli di Cardano, permette di descrivere la configurazione
articolare in un determinato istante.
Definite le componenti anatomiche del movimento dell'apparato scheletrico: flesso-
estensione (moto nel piano sagittale), adduzione-abduzione (moto di un segmento
che si avvicina o si allontana dal piano sagittale), rotazione interna-esterna (moto
attorno all'asse longitudinale del segmento), per ogni segmento si definiscono tre
assi solidali con esso intorno ai quali avvengono i movimenti appena descritti. In
particolare: l'asse di flesso-estensione si sviluppa lungo la direzione medio-laterale
del segmento prossimale, quello di rotazione interna-esternain direzione
longitudinale del segmento distale, mentre il terzo asse, di adduzione-abduzione è
perpendicolare agli altri due. I tre assi così descritti costituiscono il Joint Cordinate
System (JCS) introdotto da Grood e Suntay (1983) per l'articolazione del ginocchio
e modificato successivamente per poter essere applicato al caso generale. Il JSC è
ampiamente utilizzato in biomeccanica perché fornisce una rappresentazione
dell'orientamento articolare nell'istante considerato analoga a quella utilizzata nella
pratica clinica, cosa che non succede con gli Angoli di Cardano.
2.1.2 MODELLI CINEMATICI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
I primi modelli sviluppati, modellizzano l'articolazione della caviglia come un giunto
sferico [16] ovvero un vincolo con 3 gradi di libertà. In questo modo, tutti i punti del
piede si muovono su sfere concentriche attorno al centro di rotazione della caviglia;
sono, quindi, permesse le rotazioni intorno a tre assi che si intersecano. Queste
rotazioni, espresse in termini di angoli di Eulero, non corrispondono però ai
movimenti fisiologici di plantarflessione-dorsiflessione o inversione-eversione.
Engsberg e Andrews [17], hanno modellizzato le articolazioni della caviglia come un
giunto con sei gradi di libertà. Con questo approccio, si prendono in considerazione
tutti i movimenti effettuati da entrambe le articolazioni (tibio-astragalica e
sottoastragalica) ma vengono fornite poche informazioni dal punto di vista clinico in
quanto non si hanno indicazioni sulla singola articolazione e i risultati sono difficili da
interpretare.
Procter e Paul [18], hanno modellizzato la caviglia come un'articolazione con due
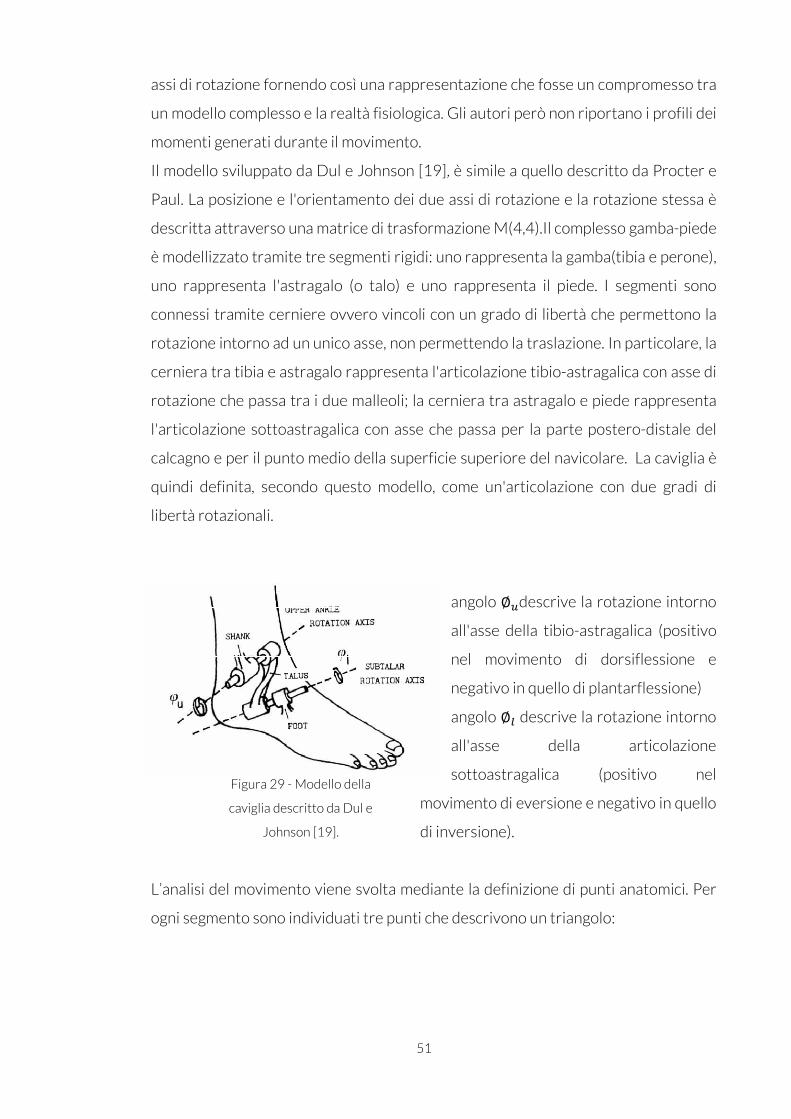
51
assi di rotazione fornendo così una rappresentazione che fosse un compromesso tra
un modello complesso e la realtà fisiologica. Gli autori però non riportano i profili dei
momenti generati durante il movimento.
Il modello sviluppato da Dul e Johnson [19], è simile a quello descritto da Procter e
Paul. La posizione e l'orientamento dei due assi di rotazione e la rotazione stessa è
descritta attraverso una matrice di trasformazione M(4,4).Il complesso gamba-piede
è modellizzato tramite tre segmenti rigidi: uno rappresenta la gamba(tibia e perone),
uno rappresenta l'astragalo (o talo) e uno rappresenta il piede. I segmenti sono
connessi tramite cerniere ovvero vincoli con un grado di libertà che permettono la
rotazione intorno ad un unico asse, non permettendo la traslazione. In particolare, la
cerniera tra tibia e astragalo rappresenta l'articolazione tibio-astragalica con asse di
rotazione che passa tra i due malleoli; la cerniera tra astragalo e piede rappresenta
l'articolazione sottoastragalica con asse che passa per la parte postero-distale del
calcagno e per il punto medio della superficie superiore del navicolare. La caviglia è
quindi definita, secondo questo modello, come un'articolazione con due gradi di
libertà rotazionali.
angolo ∅�descrive la rotazione intorno
all'asse della tibio-astragalica (positivo
nel movimento di dorsiflessione e
negativo in quello di plantarflessione)
angolo ∅ descrive la rotazione intorno
all'asse della articolazione
sottoastragalica (positivo nel
movimento di eversione e negativo in quello
di inversione).
L’analisi del movimento viene svolta mediante la definizione di punti anatomici. Per
ogni segmento sono individuati tre punti che descrivono un triangolo:
Figura 29 - Modello della
caviglia descritto da Dul e
Johnson [19].
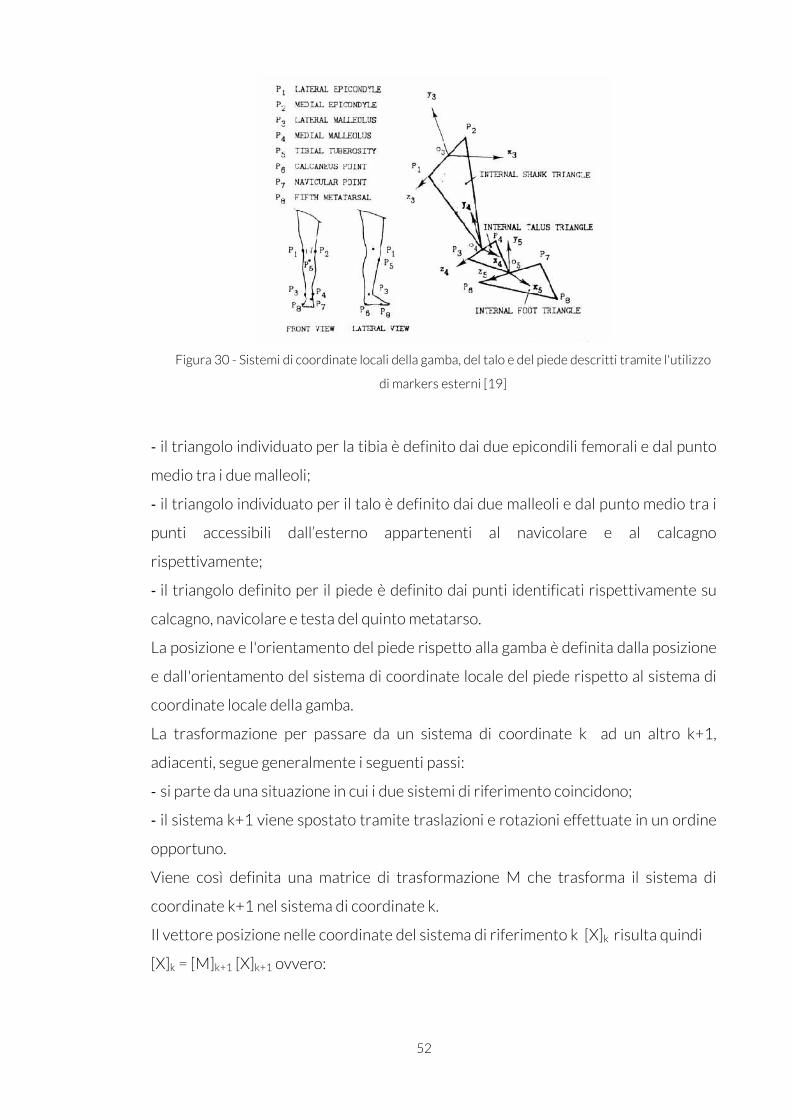
52
Figura 30 - Sistemi di coordinate locali della gamba, del talo e del piede descritti tramite l'utilizzo
di markers esterni [19]
- il triangolo individuato per la tibia è definito dai due epicondili femorali e dal punto
medio tra i due malleoli;
- il triangolo individuato per il talo è definito dai due malleoli e dal punto medio tra i
punti accessibili dall’esterno appartenenti al navicolare e al calcagno
rispettivamente;
- il triangolo definito per il piede è definito dai punti identificati rispettivamente su
calcagno, navicolare e testa del quinto metatarso.
La posizione e l'orientamento del piede rispetto alla gamba è definita dalla posizione
e dall'orientamento del sistema di coordinate locale del piede rispetto al sistema di
coordinate locale della gamba.
La trasformazione per passare da un sistema di coordinate k ad un altro k+1,
adiacenti, segue generalmente i seguenti passi:
- si parte da una situazione in cui i due sistemi di riferimento coincidono;
- il sistema k+1 viene spostato tramite traslazioni e rotazioni effettuate in un ordine
opportuno.
Viene così definita una matrice di trasformazione M che trasforma il sistema di
coordinate k+1 nel sistema di coordinate k.
Il vettore posizione nelle coordinate del sistema di riferimento k [X]k risulta quindi
[X]k = [M]k+1 [X]k+1 ovvero:
53
La matrice di trasformazione 4x4 contiene i parametri di traslazione Ak, Bk, Ck del
sistema di riferimento k+1 rispetto al sistema k, e i coseni direttori degli angoli
α�, β�, γ� che sono rispettivamente gli angoli di rotazione del sistema k+1 rispetto
agli assi x, y, z in sequenza (nella matrice, le lettere c ed s sono abbreviazioni di
coseno e seno). Di tutti questi parametri, Ak, Bk, Ck e α�, β� sono parametri
geometrici che descrivono la struttura del sistema, il parametro , γ� , indicato nella
matrice con ∅� , rappresenta l’angolo di rotazione del segmento distale rispetto al
prossimale, attorno all’asse zk definito dai suddetti parametri geometrici. Come tale
∅�è variabile e descrive il movimento relativo del sistema k+1 rispetto al sistema k
(Figura 30).
Tramite la matrice inversa si può passare dal vettore posizione definito nel sistema
di riferimento k a quello definito nel sistema di riferimento k+1.
Tenendo in considerazione questo ragionamento, si può passare dalla definizione di
un vettore in un sistema di coordinate ad un altro, se adiacenti.
La matrice di rotazione che descrive il movimento dell'articolazione della caviglia
intorno a due assi è quindi il prodotto tra due matrici: una che descrive il movimento
tra tibia e astragalo, l'altra che descrive il movimento tra astragalo e piede. Le due
matrici sono ottenute indipendentemente l'una dall'altra e poi moltiplicate.
In questo modo ho informazioni sulle due articolazioni, separatamente. L'astragalo è
una struttura interna quindi per ottenere le due matrici separatamente viene
utilizzato il "redundant distance method" descritto da Dul [20]. Questo metodo
utilizza i punti per la definizione degli assi di rotazione dell'astragalo (asse della tibio-
astragalica e della sottoastragalica) definiti tramite punti visibili esternamente ed è
basato sulla risoluzione di un problema ai minimi quadrati per determinare le
variabili di trasformazione della matrice.
Il modello di Dul, quindi, descrive il movimento del piede rispetto alla gamba
attraverso una matrice di rotazione M(4,4) che descrive quantitativamente le
relative posizioni del sistema di coordinate locali per il piede rispetto al sistema di
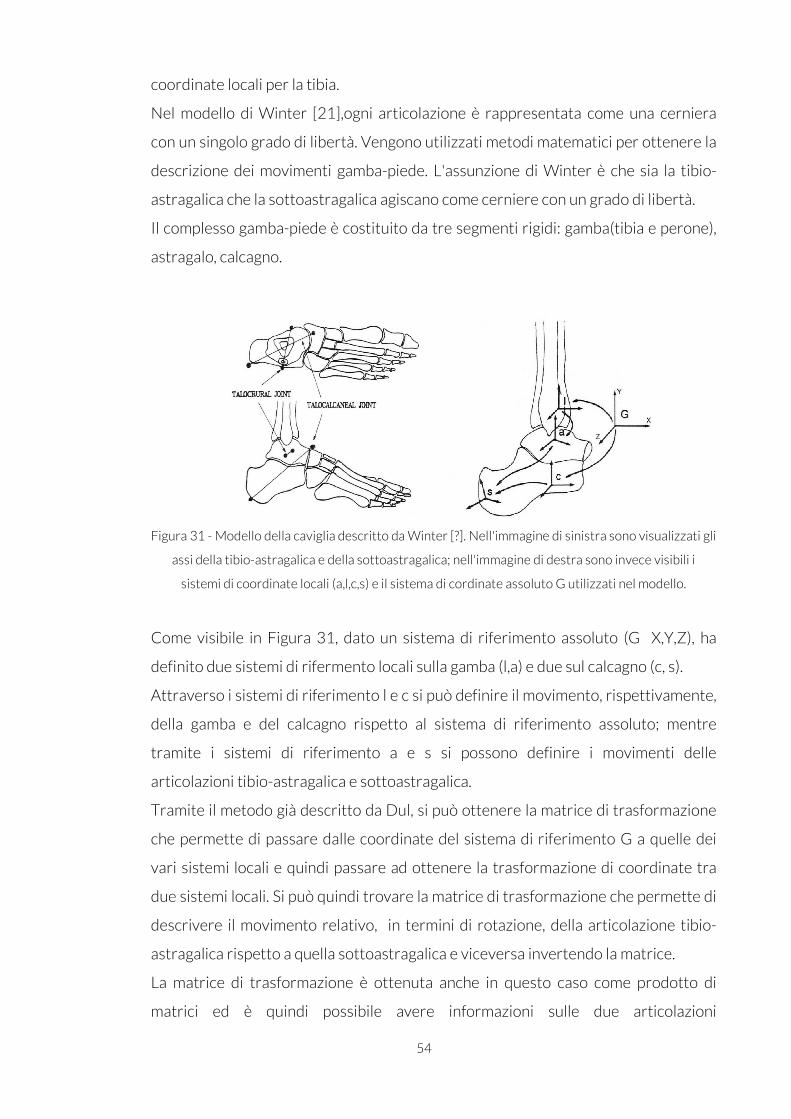
54
coordinate locali per la tibia.
Nel modello di Winter [21],ogni articolazione è rappresentata come una cerniera
con un singolo grado di libertà. Vengono utilizzati metodi matematici per ottenere la
descrizione dei movimenti gamba-piede. L'assunzione di Winter è che sia la tibio-
astragalica che la sottoastragalica agiscano come cerniere con un grado di libertà.
Il complesso gamba-piede è costituito da tre segmenti rigidi: gamba(tibia e perone),
astragalo, calcagno.
Figura 31 - Modello della caviglia descritto da Winter [?]. Nell'immagine di sinistra sono visualizzati gli
assi della tibio-astragalica e della sottoastragalica; nell'immagine di destra sono invece visibili i
sistemi di coordinate locali (a,l,c,s) e il sistema di cordinate assoluto G utilizzati nel modello.
Come visibile in Figura 31, dato un sistema di riferimento assoluto (G X,Y,Z), ha
definito due sistemi di rifermento locali sulla gamba (l,a) e due sul calcagno (c, s).
Attraverso i sistemi di riferimento l e c si può definire il movimento, rispettivamente,
della gamba e del calcagno rispetto al sistema di riferimento assoluto; mentre
tramite i sistemi di riferimento a e s si possono definire i movimenti delle
articolazioni tibio-astragalica e sottoastragalica.
Tramite il metodo già descritto da Dul, si può ottenere la matrice di trasformazione
che permette di passare dalle coordinate del sistema di riferimento G a quelle dei
vari sistemi locali e quindi passare ad ottenere la trasformazione di coordinate tra
due sistemi locali. Si può quindi trovare la matrice di trasformazione che permette di
descrivere il movimento relativo, in termini di rotazione, della articolazione tibio-
astragalica rispetto a quella sottoastragalica e viceversa invertendo la matrice.
La matrice di trasformazione è ottenuta anche in questo caso come prodotto di
matrici ed è quindi possibile avere informazioni sulle due articolazioni
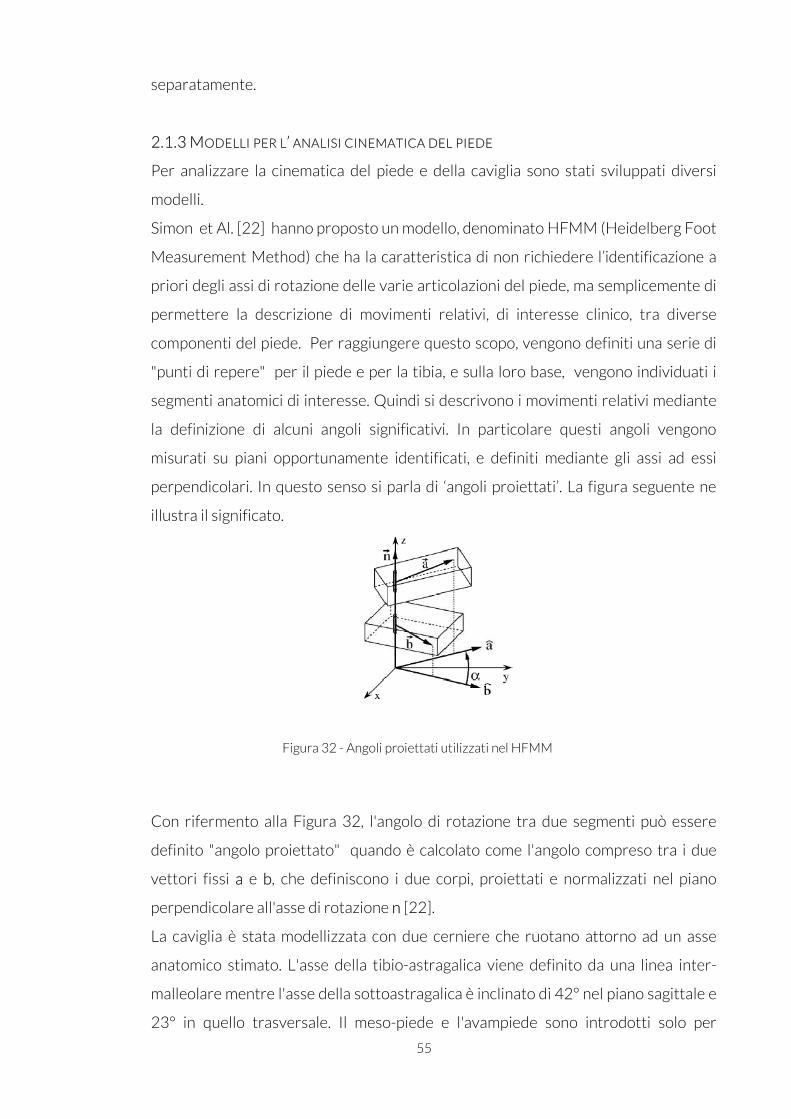
55
separatamente.
2.1.3 MODELLI PER L’ ANALISI CINEMATICA DEL PIEDE
Per analizzare la cinematica del piede e della caviglia sono stati sviluppati diversi
modelli.
Simon et Al. [22] hanno proposto un modello, denominato HFMM (Heidelberg Foot
Measurement Method) che ha la caratteristica di non richiedere l’identificazione a
priori degli assi di rotazione delle varie articolazioni del piede, ma semplicemente di
permettere la descrizione di movimenti relativi, di interesse clinico, tra diverse
componenti del piede. Per raggiungere questo scopo, vengono definiti una serie di
"punti di repere" per il piede e per la tibia, e sulla loro base, vengono individuati i
segmenti anatomici di interesse. Quindi si descrivono i movimenti relativi mediante
la definizione di alcuni angoli significativi. In particolare questi angoli vengono
misurati su piani opportunamente identificati, e definiti mediante gli assi ad essi
perpendicolari. In questo senso si parla di ‘angoli proiettati’. La figura seguente ne
illustra il significato.
Con rifermento alla Figura 32, l'angolo di rotazione tra due segmenti può essere
definito "angolo proiettato" quando è calcolato come l'angolo compreso tra i due
vettori fissi a e b, che definiscono i due corpi, proiettati e normalizzati nel piano
perpendicolare all'asse di rotazione n [22].
La caviglia è stata modellizzata con due cerniere che ruotano attorno ad un asse
anatomico stimato. L'asse della tibio-astragalica viene definito da una linea inter-
malleolare mentre l'asse della sottoastragalica è inclinato di 42° nel piano sagittale e
23° in quello trasversale. Il meso-piede e l'avampiede sono introdotti solo per
Figura 32 - Angoli proiettati utilizzati nel HFMM
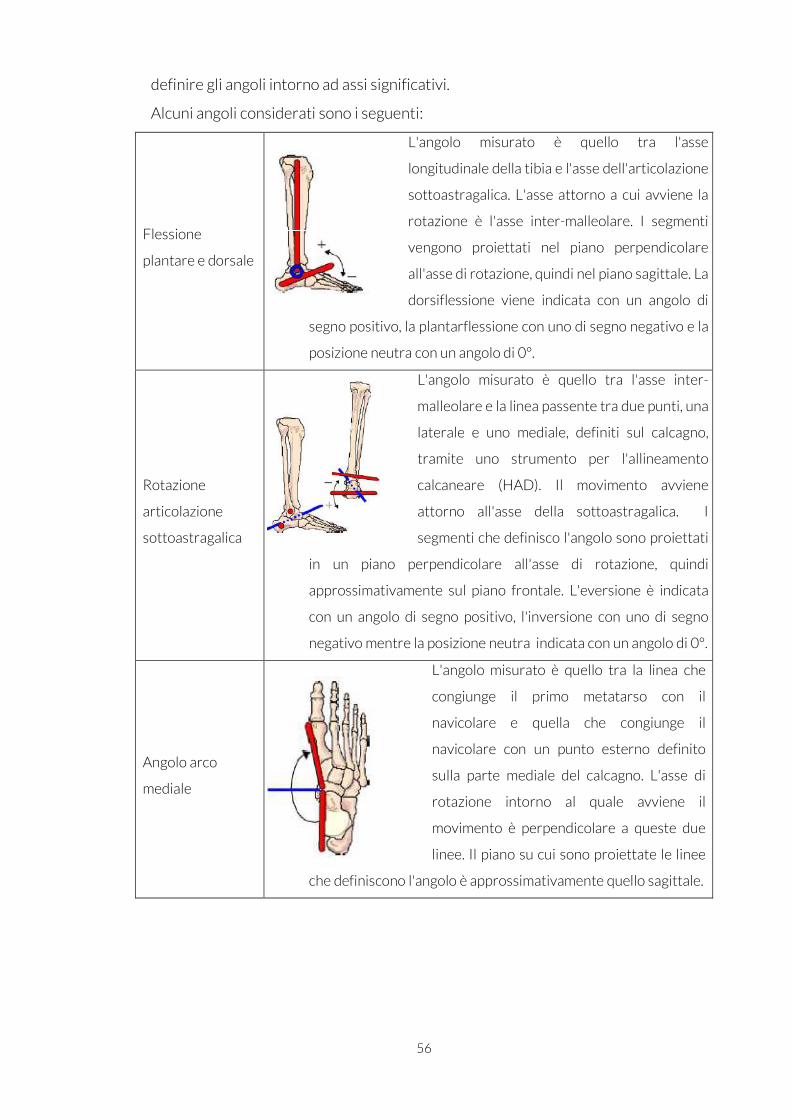
56
definire gli angoli intorno ad assi significativi.
Alcuni angoli considerati sono i seguenti:
Flessione
plantare e dorsale
L'angolo misurato è quello tra l'asse
longitudinale della tibia e l'asse dell'articolazione
sottoastragalica. L'asse attorno a cui avviene la
rotazione è l'asse inter-malleolare. I segmenti
vengono proiettati nel piano perpendicolare
all'asse di rotazione, quindi nel piano sagittale. La
dorsiflessione viene indicata con un angolo di
segno positivo, la plantarflessione con uno di segno negativo e la
posizione neutra con un angolo di 0°.
Rotazione
articolazione
sottoastragalica
L'angolo misurato è quello tra l'asse inter-
malleolare e la linea passente tra due punti, una
laterale e uno mediale, definiti sul calcagno,
tramite uno strumento per l'allineamento
calcaneare (HAD). Il movimento avviene
attorno all'asse della sottoastragalica. I
segmenti che definisco l'angolo sono proiettati
in un piano perpendicolare all'asse di rotazione, quindi
approssimativamente sul piano frontale. L'eversione è indicata
con un angolo di segno positivo, l'inversione con uno di segno
negativo mentre la posizione neutra indicata con un angolo di 0°.
Angolo arco
mediale
L'angolo misurato è quello tra la linea che
congiunge il primo metatarso con il
navicolare e quella che congiunge il
navicolare con un punto esterno definito
sulla parte mediale del calcagno. L'asse di
rotazione intorno al quale avviene il
movimento è perpendicolare a queste due
linee. Il piano su cui sono proiettate le linee
che definiscono l'angolo è approssimativamente quello sagittale.
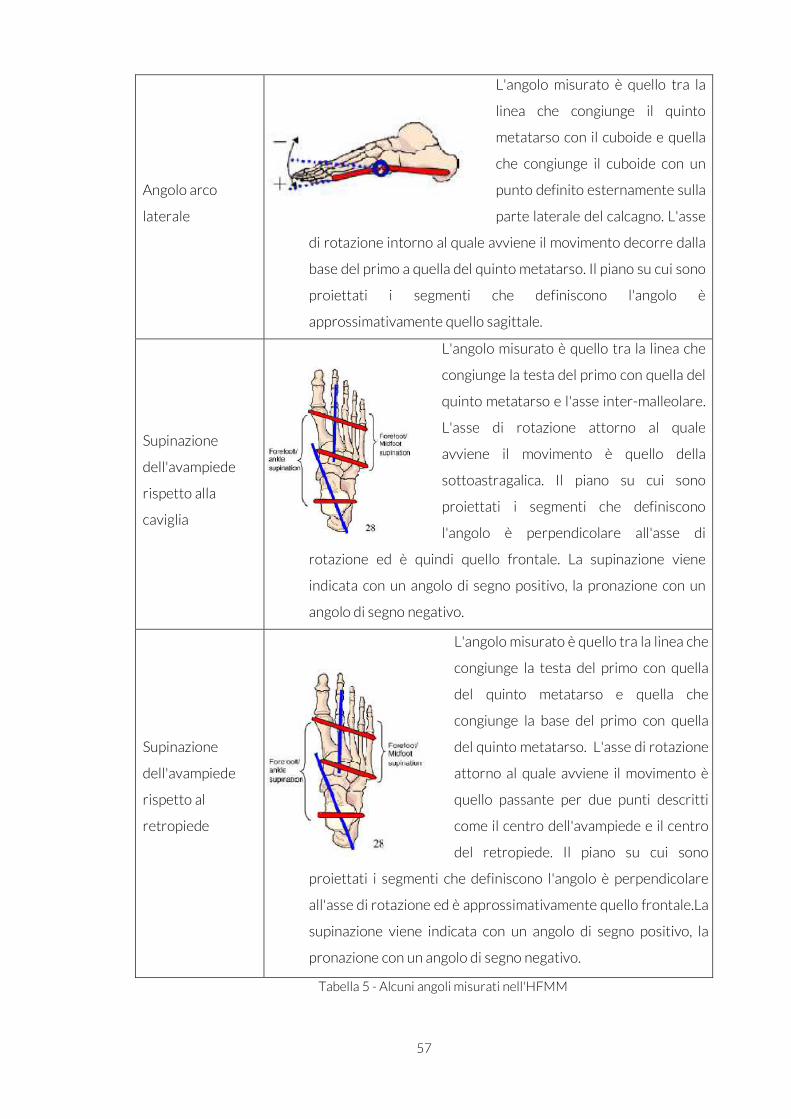
57
Angolo arco
laterale
L'angolo misurato è quello tra la
linea che congiunge il quinto
metatarso con il cuboide e quella
che congiunge il cuboide con un
punto definito esternamente sulla
parte laterale del calcagno. L'asse
di rotazione intorno al quale avviene il movimento decorre dalla
base del primo a quella del quinto metatarso. Il piano su cui sono
proiettati i segmenti che definiscono l'angolo è
approssimativamente quello sagittale.
Supinazione
dell'avampiede
rispetto alla
caviglia
L'angolo misurato è quello tra la linea che
congiunge la testa del primo con quella del
quinto metatarso e l'asse inter-malleolare.
L'asse di rotazione attorno al quale
avviene il movimento è quello della
sottoastragalica. Il piano su cui sono
proiettati i segmenti che definiscono
l'angolo è perpendicolare all'asse di
rotazione ed è quindi quello frontale. La supinazione viene
indicata con un angolo di segno positivo, la pronazione con un
angolo di segno negativo.
Supinazione
dell'avampiede
rispetto al
retropiede
L'angolo misurato è quello tra la linea che
congiunge la testa del primo con quella
del quinto metatarso e quella che
congiunge la base del primo con quella
del quinto metatarso. L'asse di rotazione
attorno al quale avviene il movimento è
quello passante per due punti descritti
come il centro dell'avampiede e il centro
del retropiede. Il piano su cui sono
proiettati i segmenti che definiscono l'angolo è perpendicolare
all'asse di rotazione ed è approssimativamente quello frontale.La
supinazione viene indicata con un angolo di segno positivo, la
pronazione con un angolo di segno negativo.
Tabella 5 - Alcuni angoli misurati nell'HFMM
58
Ci sono due vantaggi nell'utilizzo di questo metodo: in primo luogo, utilizzando dei
giunti a cerniera con un grado di libertà, il movimento può essere ridotto a una
rotazione attorno ad un solo asse e in secondo luogo è possibile definire angoli di
rotazione senza una definizione rigorosa di corpo rigido. Sono, infatti, necessari tre
punti per definire un corpo rigido, mentre, in questo caso, alcuni movimenti (come la
supinazione dell'avampiede) sono definiti attraverso la definizione di due soli punti.
Questo rappresenta un notevole vantaggio considerando il gran numero di segmenti
anatomici e articolazioni. Lo svantaggio principale è l'utilizzo di angoli proiettati e
quindi le valutazioni effettuate non sono tridimensionali.
Il modello è stato testato su dieci soggetti adulti [22]. In Figura 33, sono riportati
alcuni dei parametri analizzati normalizzati su un ciclo del passo. Il ciclo del passo
viene definito come l'intervallo tra due successivi contatti del piede al terreno e ne
verrà discusso nel paragrafo 2.4. In generale, è diviso in fase di appoggio, fase di
pendolamento e fase di doppio appoggio. Analizzando i risultati si evidenzia che, al
momento dell'inizio del contatto la caviglia è in leggera dorsiflessione, ed esegue
immediatamente una leggera plantarflessione (evidenziata nel grafico con un
minimo) a cui segue una dorsiflessione che raggiunge un valore di circa 15°. Al
momento del distacco del piede dal terreno (60% della durata del ciclo del passo),
l'angolo torna alla posizione neutra (indicata con un angolo di 0°) e si osserva un
nuovo inizio del ciclo del passo con una leggera dorsiflessione(grafico A). I risultati
ottenuti sono in accordo con quelli osservati con una analisi del cammino. Per
quanto riguarda l'angolo dell'arcata mediale e laterale, si osserva, in accordo con
quanto osservato in ambito clinico, che le variazioni angolari dell'arcata laterale
sono meno ampie rispetto a quelle dell'arcata mediale ma seguono lo stesso
andamento.
La rotazione dell'articolazione sottoastragalica visibile nel grafico E, indica che il
calcagno passa da una posizione di eversione durante la fase di sopportazione del
carico (0-10% della durata del ciclo del passo) fino ad una posizione di inversione
nella fase di volo. L'avampiede rimane supinato sia rispetto alla caviglia che al
retropiede durante tutta la fase di appoggio (grafici G e H).
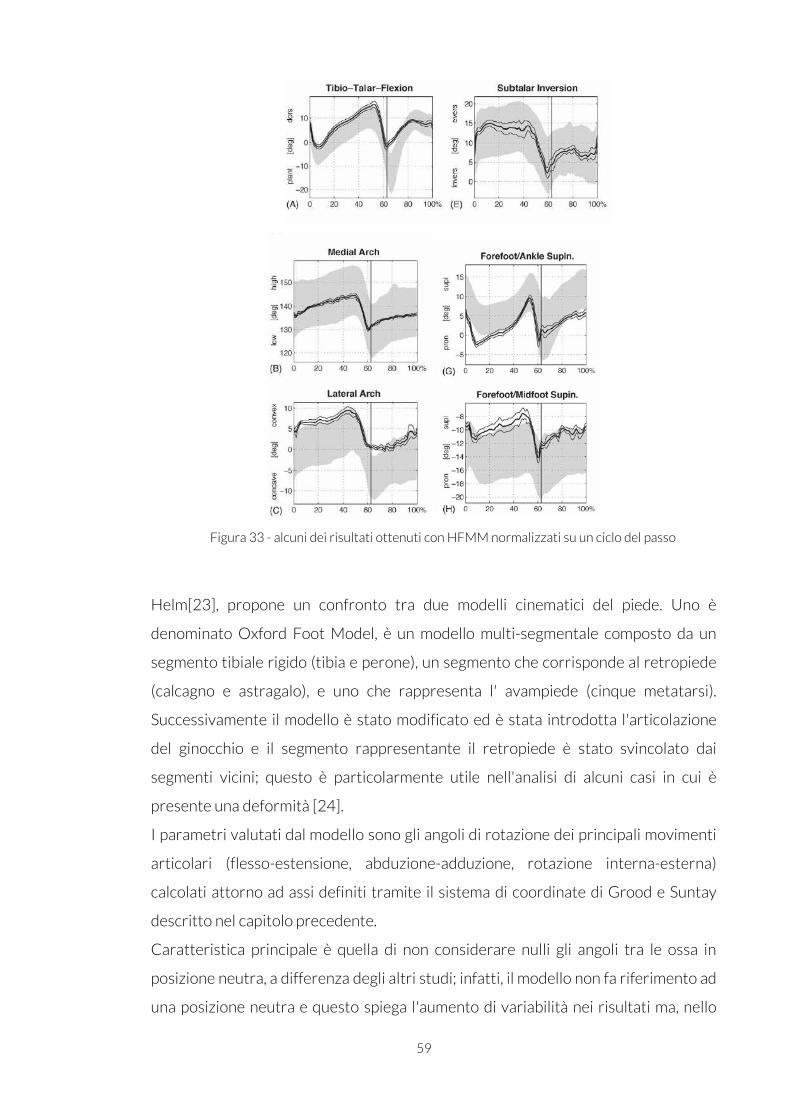
59
Figura 33 - alcuni dei risultati ottenuti con HFMM normalizzati su un ciclo del passo
Helm[23], propone un confronto tra due modelli cinematici del piede. Uno è
denominato Oxford Foot Model, è un modello multi-segmentale composto da un
segmento tibiale rigido (tibia e perone), un segmento che corrisponde al retropiede
(calcagno e astragalo), e uno che rappresenta l' avampiede (cinque metatarsi).
Successivamente il modello è stato modificato ed è stata introdotta l'articolazione
del ginocchio e il segmento rappresentante il retropiede è stato svincolato dai
segmenti vicini; questo è particolarmente utile nell'analisi di alcuni casi in cui è
presente una deformità [24].
I parametri valutati dal modello sono gli angoli di rotazione dei principali movimenti
articolari (flesso-estensione, abduzione-adduzione, rotazione interna-esterna)
calcolati attorno ad assi definiti tramite il sistema di coordinate di Grood e Suntay
descritto nel capitolo precedente.
Caratteristica principale è quella di non considerare nulli gli angoli tra le ossa in
posizione neutra, a differenza degli altri studi; infatti, il modello non fa riferimento ad
una posizione neutra e questo spiega l'aumento di variabilità nei risultati ma, nello
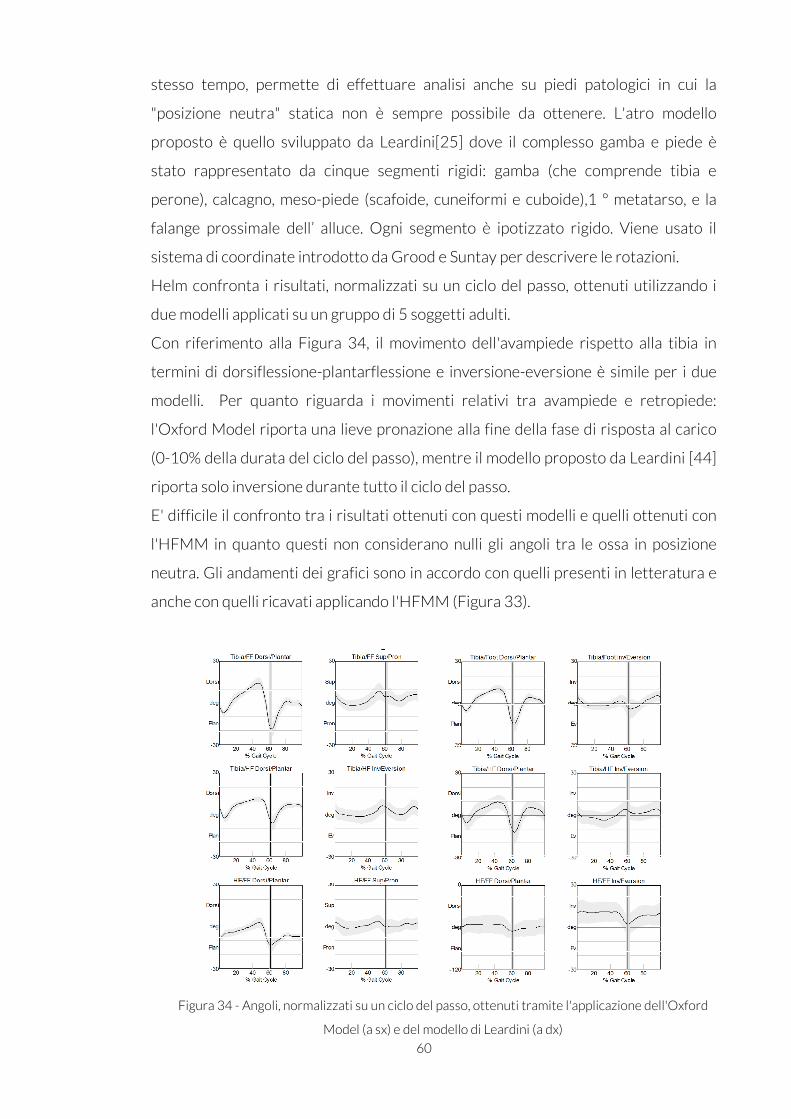
60
stesso tempo, permette di effettuare analisi anche su piedi patologici in cui la
"posizione neutra" statica non è sempre possibile da ottenere. L'atro modello
proposto è quello sviluppato da Leardini[25] dove il complesso gamba e piede è
stato rappresentato da cinque segmenti rigidi: gamba (che comprende tibia e
perone), calcagno, meso-piede (scafoide, cuneiformi e cuboide),1 ° metatarso, e la
falange prossimale dell’ alluce. Ogni segmento è ipotizzato rigido. Viene usato il
sistema di coordinate introdotto da Grood e Suntay per descrivere le rotazioni.
Helm confronta i risultati, normalizzati su un ciclo del passo, ottenuti utilizzando i
due modelli applicati su un gruppo di 5 soggetti adulti.
Con riferimento alla Figura 34, il movimento dell'avampiede rispetto alla tibia in
termini di dorsiflessione-plantarflessione e inversione-eversione è simile per i due
modelli. Per quanto riguarda i movimenti relativi tra avampiede e retropiede:
l'Oxford Model riporta una lieve pronazione alla fine della fase di risposta al carico
(0-10% della durata del ciclo del passo), mentre il modello proposto da Leardini [44]
riporta solo inversione durante tutto il ciclo del passo.
E' difficile il confronto tra i risultati ottenuti con questi modelli e quelli ottenuti con
l'HFMM in quanto questi non considerano nulli gli angoli tra le ossa in posizione
neutra. Gli andamenti dei grafici sono in accordo con quelli presenti in letteratura e
anche con quelli ricavati applicando l'HFMM (Figura 33).
Figura 34 - Angoli, normalizzati su un ciclo del passo, ottenuti tramite l'applicazione dell'Oxford
Model (a sx) e del modello di Leardini (a dx)
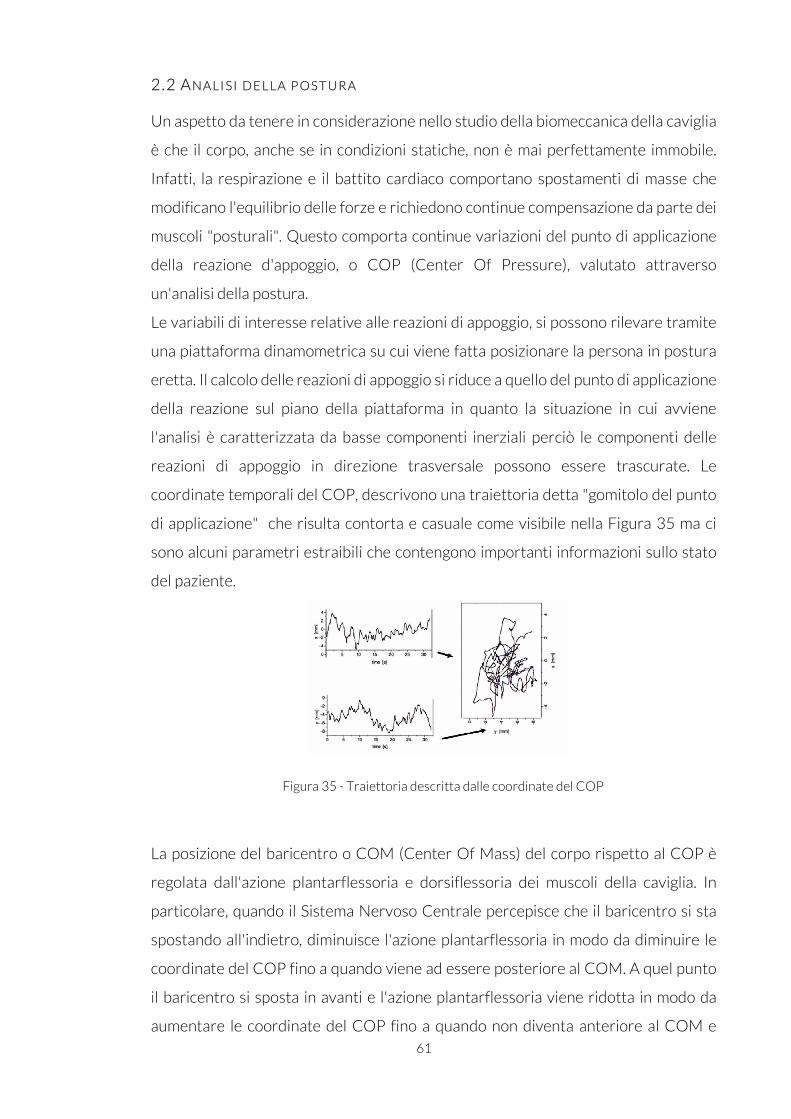
61
2.2 AN A LI S I D E L LA P O S T U R A
Un aspetto da tenere in considerazione nello studio della biomeccanica della caviglia
è che il corpo, anche se in condizioni statiche, non è mai perfettamente immobile.
Infatti, la respirazione e il battito cardiaco comportano spostamenti di masse che
modificano l'equilibrio delle forze e richiedono continue compensazione da parte dei
muscoli "posturali". Questo comporta continue variazioni del punto di applicazione
della reazione d'appoggio, o COP (Center Of Pressure), valutato attraverso
un'analisi della postura.
Le variabili di interesse relative alle reazioni di appoggio, si possono rilevare tramite
una piattaforma dinamometrica su cui viene fatta posizionare la persona in postura
eretta. Il calcolo delle reazioni di appoggio si riduce a quello del punto di applicazione
della reazione sul piano della piattaforma in quanto la situazione in cui avviene
l'analisi è caratterizzata da basse componenti inerziali perciò le componenti delle
reazioni di appoggio in direzione trasversale possono essere trascurate. Le
coordinate temporali del COP, descrivono una traiettoria detta "gomitolo del punto
di applicazione" che risulta contorta e casuale come visibile nella Figura 35 ma ci
sono alcuni parametri estraibili che contengono importanti informazioni sullo stato
del paziente.
Figura 35 - Traiettoria descritta dalle coordinate del COP
La posizione del baricentro o COM (Center Of Mass) del corpo rispetto al COP è
regolata dall'azione plantarflessoria e dorsiflessoria dei muscoli della caviglia. In
particolare, quando il Sistema Nervoso Centrale percepisce che il baricentro si sta
spostando all'indietro, diminuisce l'azione plantarflessoria in modo da diminuire le
coordinate del COP fino a quando viene ad essere posteriore al COM. A quel punto
il baricentro si sposta in avanti e l'azione plantarflessoria viene ridotta in modo da
aumentare le coordinate del COP fino a quando non diventa anteriore al COM e
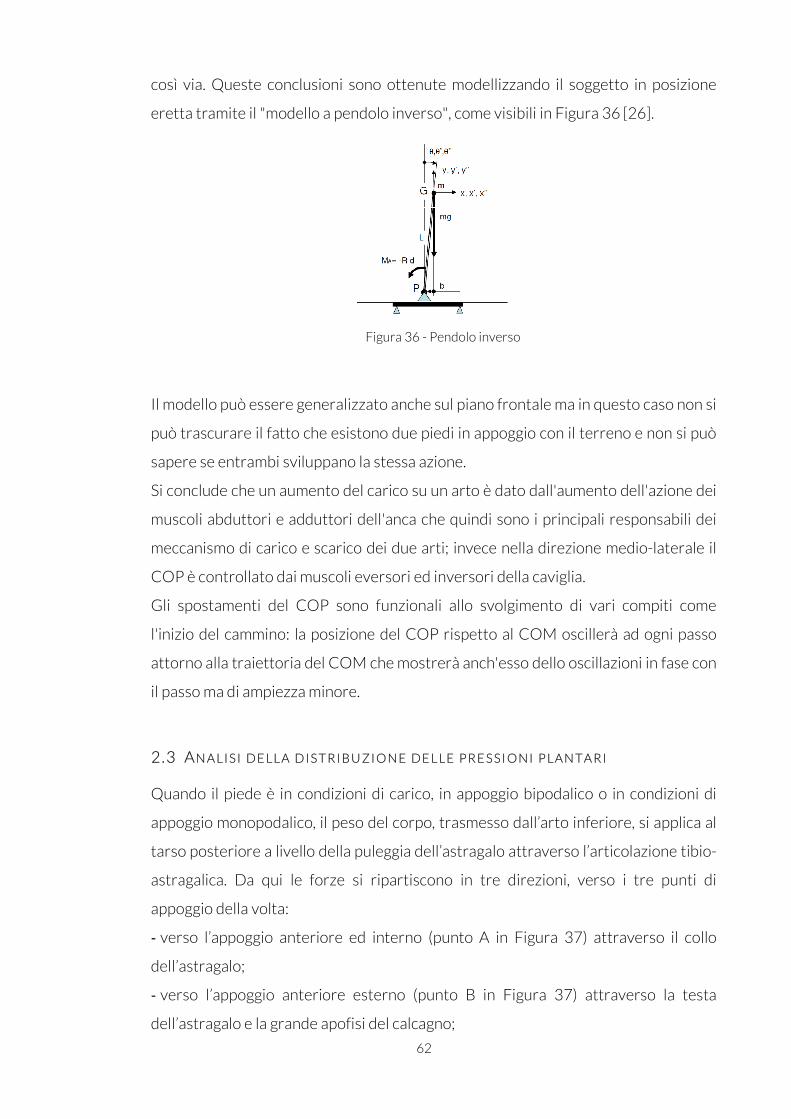
62
così via. Queste conclusioni sono ottenute modellizzando il soggetto in posizione
eretta tramite il "modello a pendolo inverso", come visibili in Figura 36 [26].
Figura 36 - Pendolo inverso
Il modello può essere generalizzato anche sul piano frontale ma in questo caso non si
può trascurare il fatto che esistono due piedi in appoggio con il terreno e non si può
sapere se entrambi sviluppano la stessa azione.
Si conclude che un aumento del carico su un arto è dato dall'aumento dell'azione dei
muscoli abduttori e adduttori dell'anca che quindi sono i principali responsabili dei
meccanismo di carico e scarico dei due arti; invece nella direzione medio-laterale il
COP è controllato dai muscoli eversori ed inversori della caviglia.
Gli spostamenti del COP sono funzionali allo svolgimento di vari compiti come
l'inizio del cammino: la posizione del COP rispetto al COM oscillerà ad ogni passo
attorno alla traiettoria del COM che mostrerà anch'esso dello oscillazioni in fase con
il passo ma di ampiezza minore.
2.3 AN A LI S I D E LL A D I S T R I B U Z I O N E D E L LE P R E S S I O N I P LA N T A R I
Quando il piede è in condizioni di carico, in appoggio bipodalico o in condizioni di
appoggio monopodalico, il peso del corpo, trasmesso dall’arto inferiore, si applica al
tarso posteriore a livello della puleggia dell’astragalo attraverso l’articolazione tibio-
astragalica. Da qui le forze si ripartiscono in tre direzioni, verso i tre punti di
appoggio della volta:
- verso l’appoggio anteriore ed interno (punto A in Figura 37) attraverso il collo
dell’astragalo;
- verso l’appoggio anteriore esterno (punto B in Figura 37) attraverso la testa
dell’astragalo e la grande apofisi del calcagno;
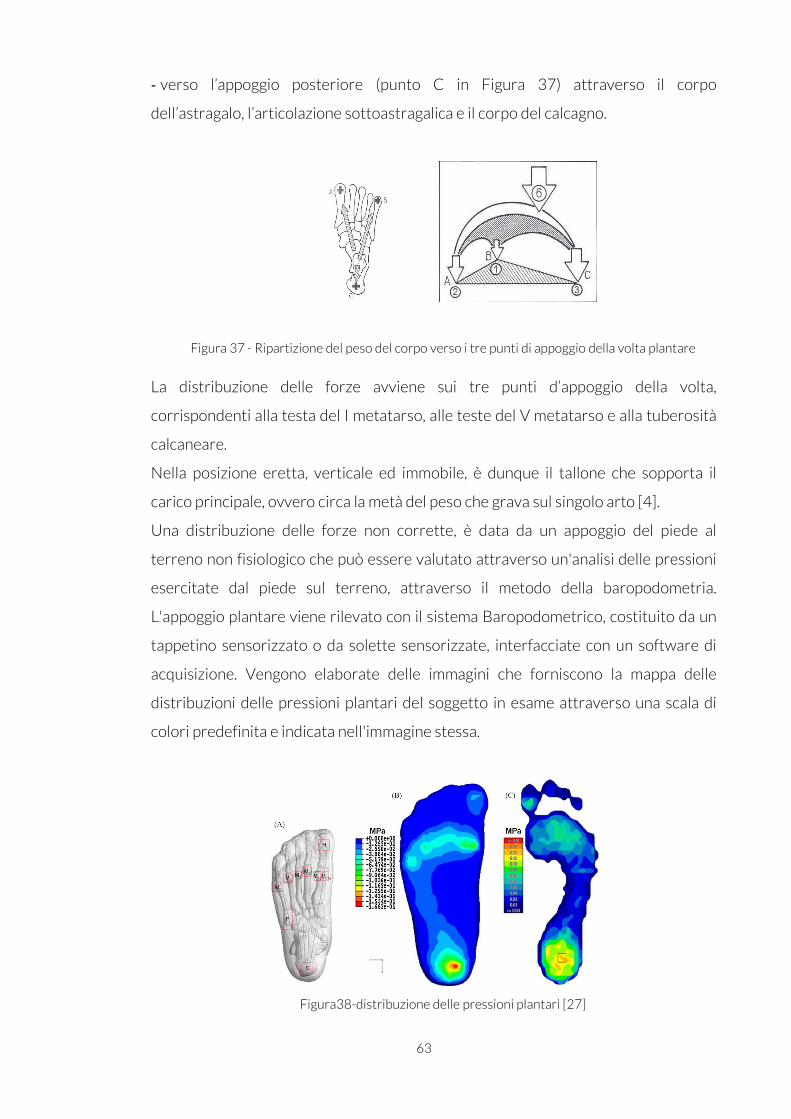
63
- verso l’appoggio posteriore (punto C in Figura 37) attraverso il corpo
dell’astragalo, l’articolazione sottoastragalica e il corpo del calcagno.
Figura 37 - Ripartizione del peso del corpo verso i tre punti di appoggio della volta plantare
La distribuzione delle forze avviene sui tre punti d’appoggio della volta,
corrispondenti alla testa del I metatarso, alle teste del V metatarso e alla tuberosità
calcaneare.
Nella posizione eretta, verticale ed immobile, è dunque il tallone che sopporta il
carico principale, ovvero circa la metà del peso che grava sul singolo arto [4].
Una distribuzione delle forze non corrette, è data da un appoggio del piede al
terreno non fisiologico che può essere valutato attraverso un'analisi delle pressioni
esercitate dal piede sul terreno, attraverso il metodo della baropodometria.
L'appoggio plantare viene rilevato con il sistema Baropodometrico, costituito da un
tappetino sensorizzato o da solette sensorizzate, interfacciate con un software di
acquisizione. Vengono elaborate delle immagini che forniscono la mappa delle
distribuzioni delle pressioni plantari del soggetto in esame attraverso una scala di
colori predefinita e indicata nell'immagine stessa.
Figura38-distribuzione delle pressioni plantari [27]
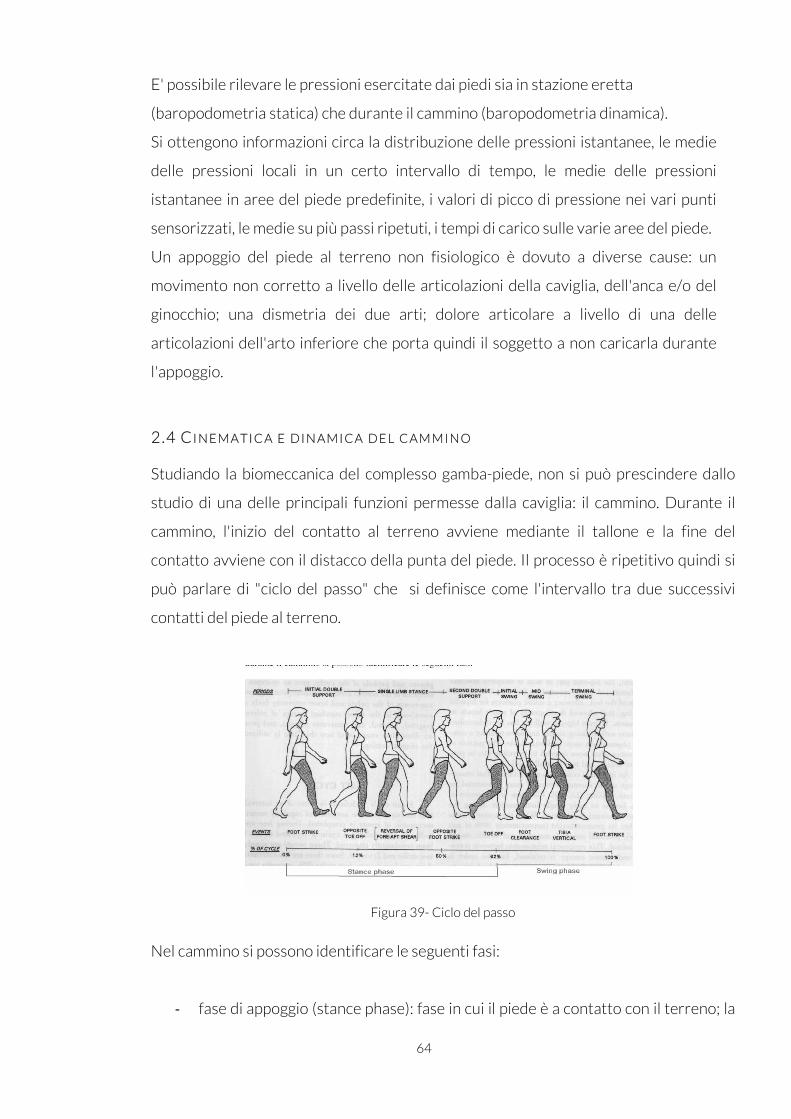
64
E' possibile rilevare le pressioni esercitate dai piedi sia in stazione eretta
(baropodometria statica) che durante il cammino (baropodometria dinamica).
Si ottengono informazioni circa la distribuzione delle pressioni istantanee, le medie
delle pressioni locali in un certo intervallo di tempo, le medie delle pressioni
istantanee in aree del piede predefinite, i valori di picco di pressione nei vari punti
sensorizzati, le medie su più passi ripetuti, i tempi di carico sulle varie aree del piede.
Un appoggio del piede al terreno non fisiologico è dovuto a diverse cause: un
movimento non corretto a livello delle articolazioni della caviglia, dell'anca e/o del
ginocchio; una dismetria dei due arti; dolore articolare a livello di una delle
articolazioni dell'arto inferiore che porta quindi il soggetto a non caricarla durante
l'appoggio.
2 .4 C I N E M A T I C A E D I N A M I C A D E L C A M M I N O
Studiando la biomeccanica del complesso gamba-piede, non si può prescindere dallo
studio di una delle principali funzioni permesse dalla caviglia: il cammino. Durante il
cammino, l'inizio del contatto al terreno avviene mediante il tallone e la fine del
contatto avviene con il distacco della punta del piede. Il processo è ripetitivo quindi si
può parlare di "ciclo del passo" che si definisce come l'intervallo tra due successivi
contatti del piede al terreno.
Figura 39- Ciclo del passo
Nel cammino si possono identificare le seguenti fasi:
- fase di appoggio (stance phase): fase in cui il piede è a contatto con il terreno; la
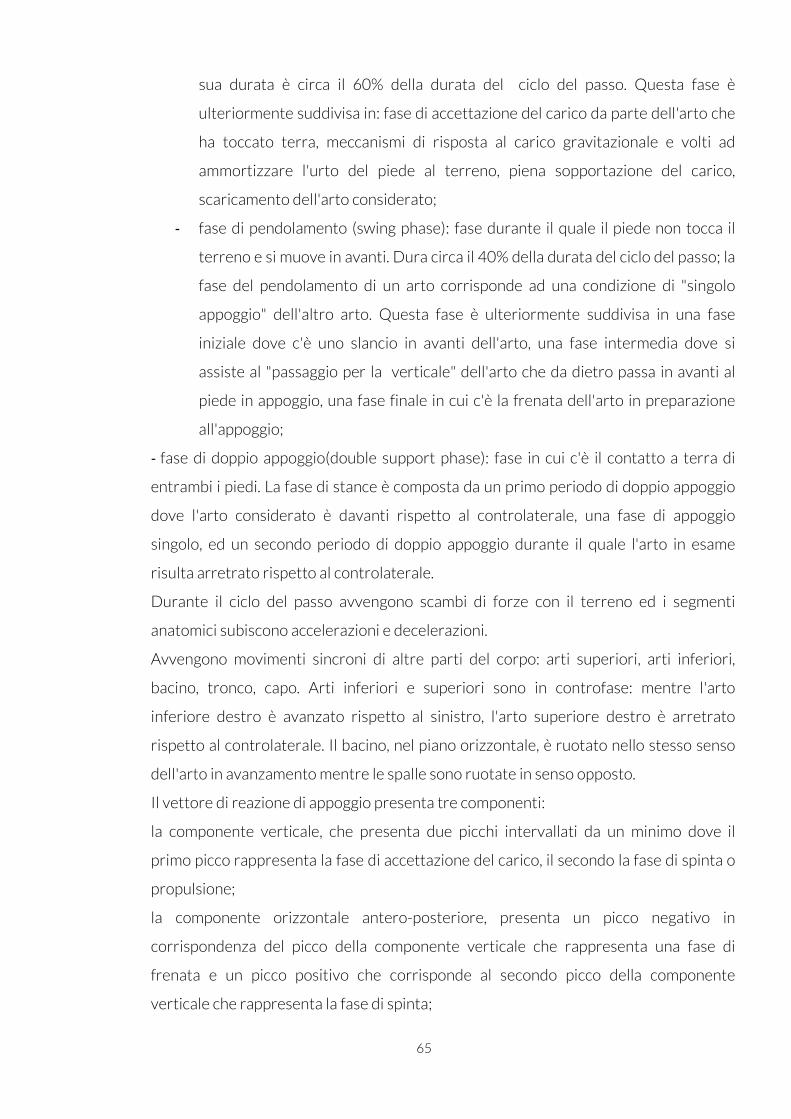
65
sua durata è circa il 60% della durata del ciclo del passo. Questa fase è
ulteriormente suddivisa in: fase di accettazione del carico da parte dell'arto che
ha toccato terra, meccanismi di risposta al carico gravitazionale e volti ad
ammortizzare l'urto del piede al terreno, piena sopportazione del carico,
scaricamento dell'arto considerato;
- fase di pendolamento (swing phase): fase durante il quale il piede non tocca il
terreno e si muove in avanti. Dura circa il 40% della durata del ciclo del passo; la
fase del pendolamento di un arto corrisponde ad una condizione di "singolo
appoggio" dell'altro arto. Questa fase è ulteriormente suddivisa in una fase
iniziale dove c'è uno slancio in avanti dell'arto, una fase intermedia dove si
assiste al "passaggio per la verticale" dell'arto che da dietro passa in avanti al
piede in appoggio, una fase finale in cui c'è la frenata dell'arto in preparazione
all'appoggio;
- fase di doppio appoggio(double support phase): fase in cui c'è il contatto a terra di
entrambi i piedi. La fase di stance è composta da un primo periodo di doppio appoggio
dove l'arto considerato è davanti rispetto al controlaterale, una fase di appoggio
singolo, ed un secondo periodo di doppio appoggio durante il quale l'arto in esame
risulta arretrato rispetto al controlaterale.
Durante il ciclo del passo avvengono scambi di forze con il terreno ed i segmenti
anatomici subiscono accelerazioni e decelerazioni.
Avvengono movimenti sincroni di altre parti del corpo: arti superiori, arti inferiori,
bacino, tronco, capo. Arti inferiori e superiori sono in controfase: mentre l'arto
inferiore destro è avanzato rispetto al sinistro, l'arto superiore destro è arretrato
rispetto al controlaterale. Il bacino, nel piano orizzontale, è ruotato nello stesso senso
dell'arto in avanzamento mentre le spalle sono ruotate in senso opposto.
Il vettore di reazione di appoggio presenta tre componenti:
la componente verticale, che presenta due picchi intervallati da un minimo dove il
primo picco rappresenta la fase di accettazione del carico, il secondo la fase di spinta o
propulsione;
la componente orizzontale antero-posteriore, presenta un picco negativo in
corrispondenza del picco della componente verticale che rappresenta una fase di
frenata e un picco positivo che corrisponde al secondo picco della componente
verticale che rappresenta la fase di spinta;
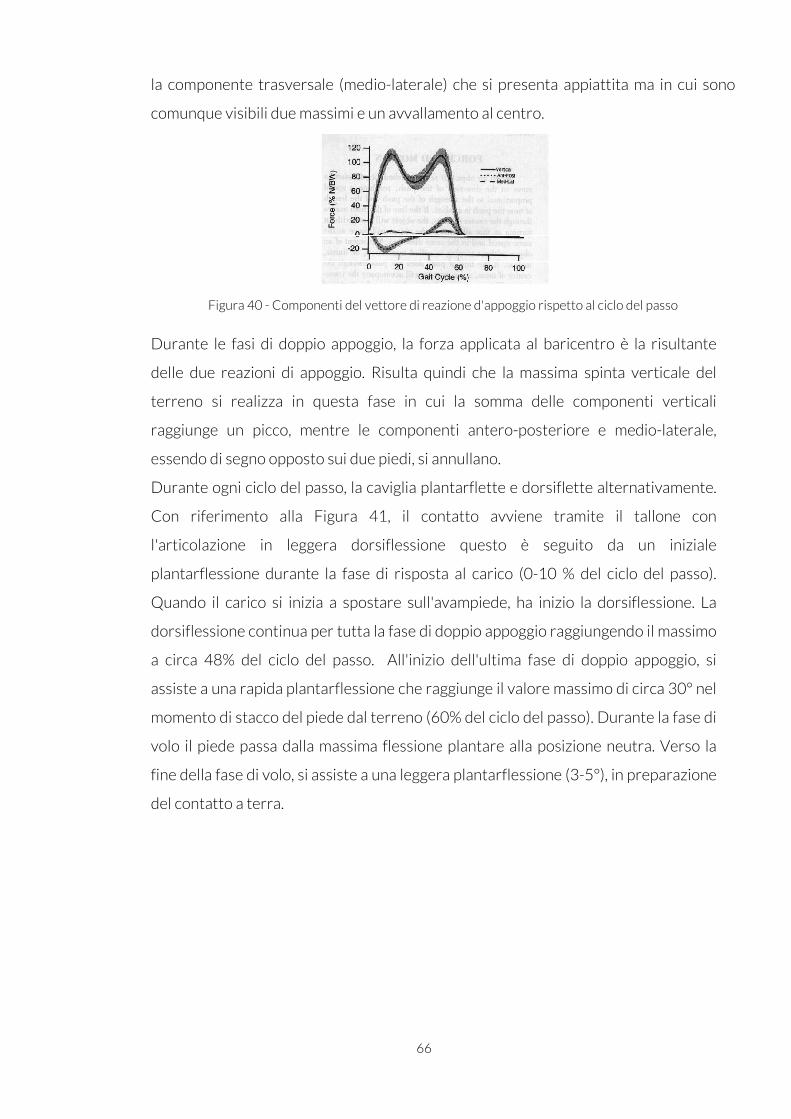
66
la componente trasversale (medio-laterale) che si presenta appiattita ma in cui sono
comunque visibili due massimi e un avvallamento al centro.
Figura 40 - Componenti del vettore di reazione d'appoggio rispetto al ciclo del passo
Durante le fasi di doppio appoggio, la forza applicata al baricentro è la risultante
delle due reazioni di appoggio. Risulta quindi che la massima spinta verticale del
terreno si realizza in questa fase in cui la somma delle componenti verticali
raggiunge un picco, mentre le componenti antero-posteriore e medio-laterale,
essendo di segno opposto sui due piedi, si annullano.
Durante ogni ciclo del passo, la caviglia plantarflette e dorsiflette alternativamente.
Con riferimento alla Figura 41, il contatto avviene tramite il tallone con
l'articolazione in leggera dorsiflessione questo è seguito da un iniziale
plantarflessione durante la fase di risposta al carico (0-10 % del ciclo del passo).
Quando il carico si inizia a spostare sull'avampiede, ha inizio la dorsiflessione. La
dorsiflessione continua per tutta la fase di doppio appoggio raggiungendo il massimo
a circa 48% del ciclo del passo. All'inizio dell'ultima fase di doppio appoggio, si
assiste a una rapida plantarflessione che raggiunge il valore massimo di circa 30° nel
momento di stacco del piede dal terreno (60% del ciclo del passo). Durante la fase di
volo il piede passa dalla massima flessione plantare alla posizione neutra. Verso la
fine della fase di volo, si assiste a una leggera plantarflessione (3-5°), in preparazione
del contatto a terra.
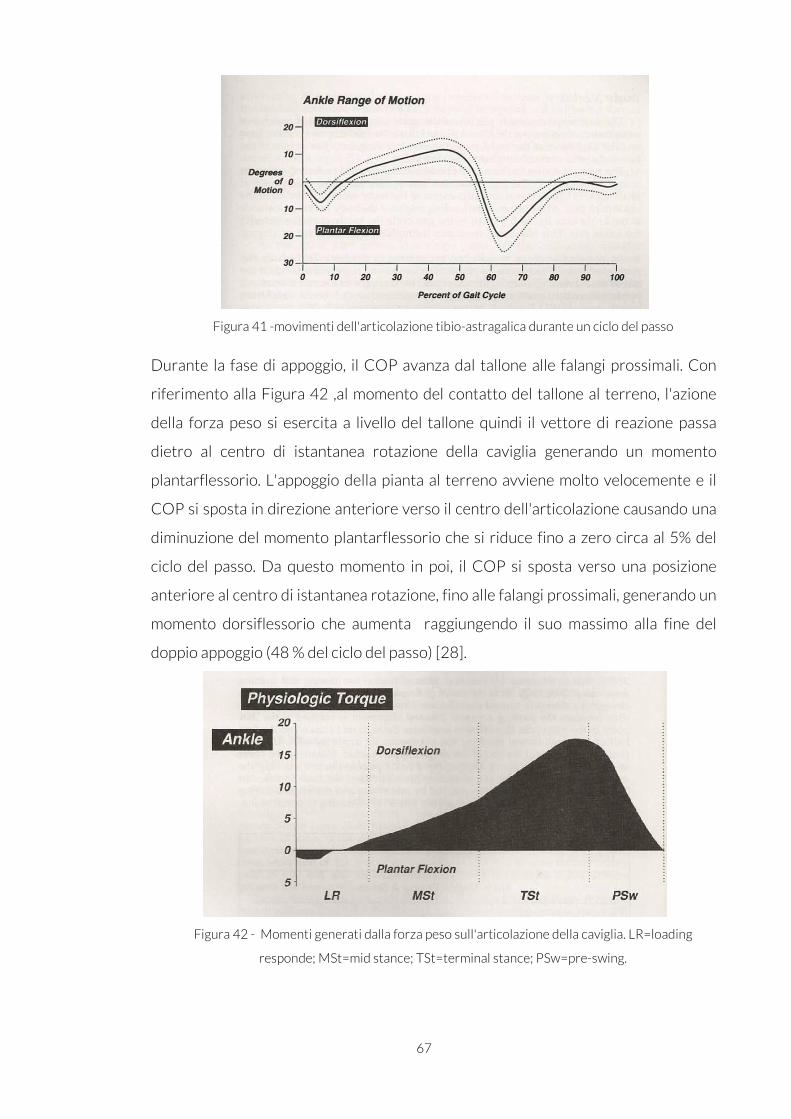
67
Figura 41 -movimenti dell'articolazione tibio-astragalica durante un ciclo del passo
Durante la fase di appoggio, il COP avanza dal tallone alle falangi prossimali. Con
riferimento alla Figura 42 ,al momento del contatto del tallone al terreno, l'azione
della forza peso si esercita a livello del tallone quindi il vettore di reazione passa
dietro al centro di istantanea rotazione della caviglia generando un momento
plantarflessorio. L'appoggio della pianta al terreno avviene molto velocemente e il
COP si sposta in direzione anteriore verso il centro dell'articolazione causando una
diminuzione del momento plantarflessorio che si riduce fino a zero circa al 5% del
ciclo del passo. Da questo momento in poi, il COP si sposta verso una posizione
anteriore al centro di istantanea rotazione, fino alle falangi prossimali, generando un
momento dorsiflessorio che aumenta raggiungendo il suo massimo alla fine del
doppio appoggio (48 % del ciclo del passo) [28].
Figura 42 - Momenti generati dalla forza peso sull'articolazione della caviglia. LR=loading
responde; MSt=mid stance; TSt=terminal stance; PSw=pre-swing.
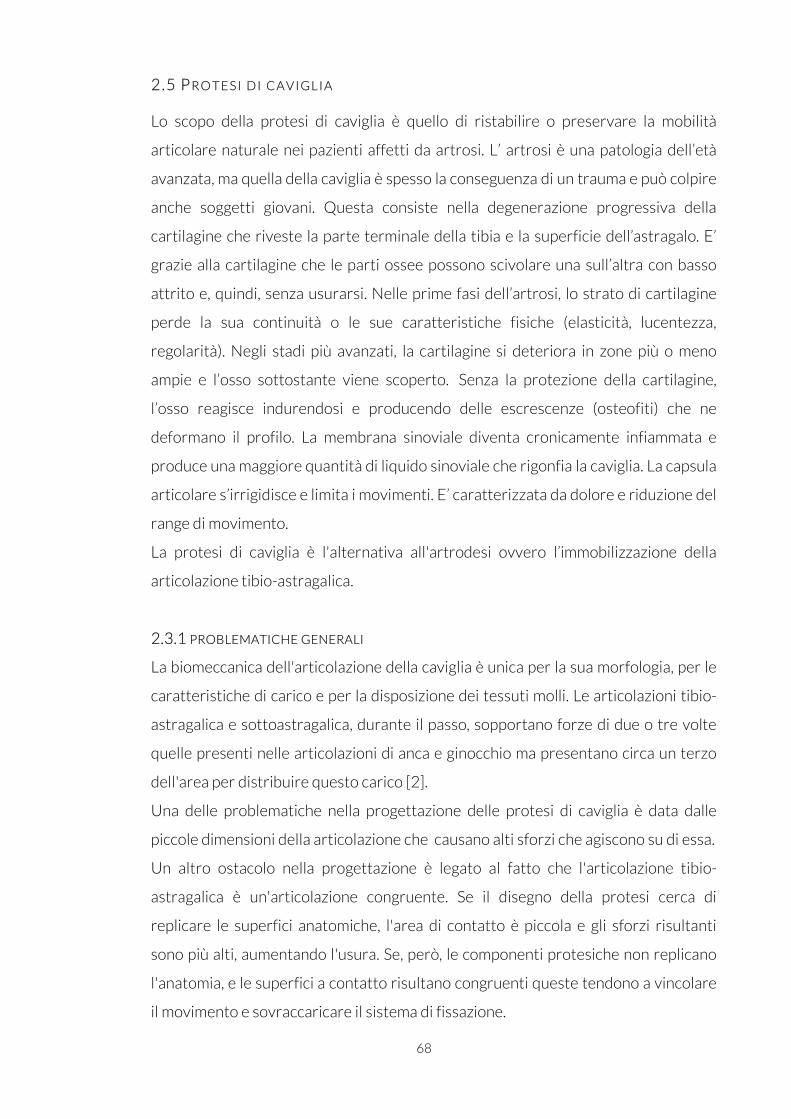
68
2.5 P R O T E S I D I C A V I G L I A
Lo scopo della protesi di caviglia è quello di ristabilire o preservare la mobilità
articolare naturale nei pazienti affetti da artrosi. L’ artrosi è una patologia dell’età
avanzata, ma quella della caviglia è spesso la conseguenza di un trauma e può colpire
anche soggetti giovani. Questa consiste nella degenerazione progressiva della
cartilagine che riveste la parte terminale della tibia e la superficie dell’astragalo. E’
grazie alla cartilagine che le parti ossee possono scivolare una sull’altra con basso
attrito e, quindi, senza usurarsi. Nelle prime fasi dell’artrosi, lo strato di cartilagine
perde la sua continuità o le sue caratteristiche fisiche (elasticità, lucentezza,
regolarità). Negli stadi più avanzati, la cartilagine si deteriora in zone più o meno
ampie e l’osso sottostante viene scoperto. Senza la protezione della cartilagine,
l’osso reagisce indurendosi e producendo delle escrescenze (osteofiti) che ne
deformano il profilo. La membrana sinoviale diventa cronicamente infiammata e
produce una maggiore quantità di liquido sinoviale che rigonfia la caviglia. La capsula
articolare s’irrigidisce e limita i movimenti. E’ caratterizzata da dolore e riduzione del
range di movimento.
La protesi di caviglia è l'alternativa all'artrodesi ovvero l’immobilizzazione della
articolazione tibio-astragalica.
2.3.1 PROBLEMATICHE GENERALI
La biomeccanica dell'articolazione della caviglia è unica per la sua morfologia, per le
caratteristiche di carico e per la disposizione dei tessuti molli. Le articolazioni tibio-
astragalica e sottoastragalica, durante il passo, sopportano forze di due o tre volte
quelle presenti nelle articolazioni di anca e ginocchio ma presentano circa un terzo
dell'area per distribuire questo carico [2].
Una delle problematiche nella progettazione delle protesi di caviglia è data dalle
piccole dimensioni della articolazione che causano alti sforzi che agiscono su di essa.
Un altro ostacolo nella progettazione è legato al fatto che l'articolazione tibio-
astragalica è un'articolazione congruente. Se il disegno della protesi cerca di
replicare le superfici anatomiche, l'area di contatto è piccola e gli sforzi risultanti
sono più alti, aumentando l'usura. Se, però, le componenti protesiche non replicano
l'anatomia, e le superfici a contatto risultano congruenti queste tendono a vincolare
il movimento e sovraccaricare il sistema di fissazione.
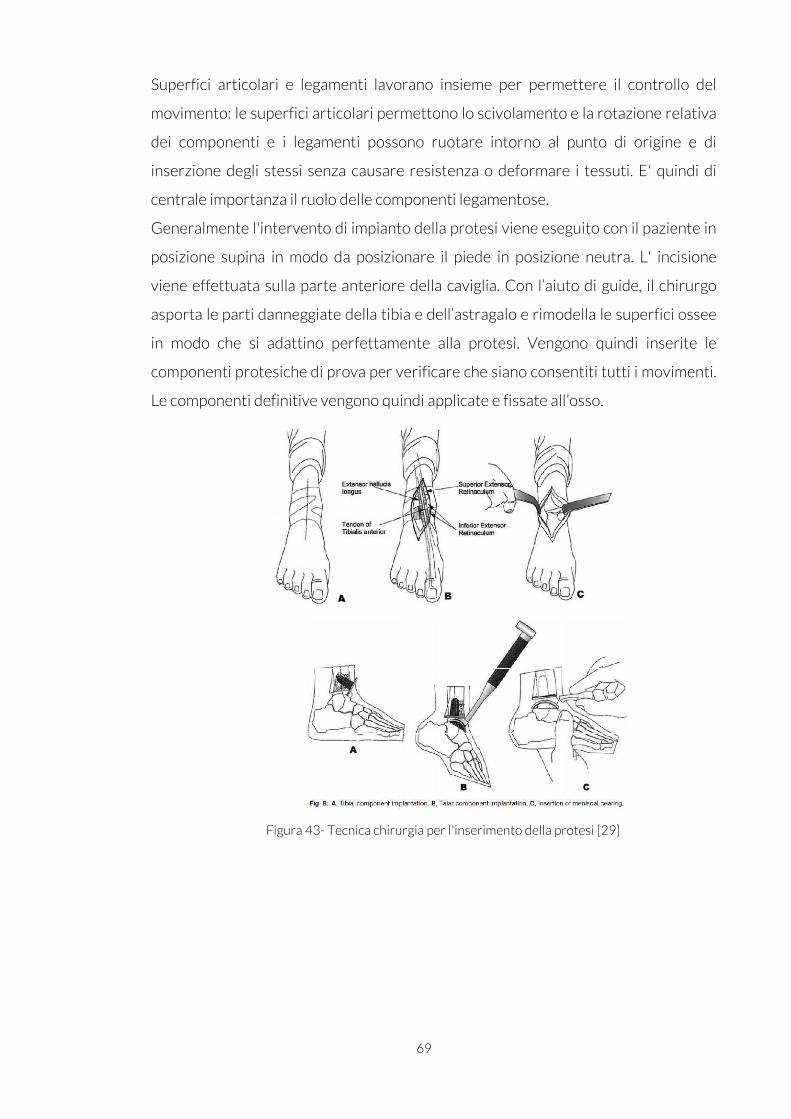
69
Superfici articolari e legamenti lavorano insieme per permettere il controllo del
movimento: le superfici articolari permettono lo scivolamento e la rotazione relativa
dei componenti e i legamenti possono ruotare intorno al punto di origine e di
inserzione degli stessi senza causare resistenza o deformare i tessuti. E' quindi di
centrale importanza il ruolo delle componenti legamentose.
Generalmente l'intervento di impianto della protesi viene eseguito con il paziente in
posizione supina in modo da posizionare il piede in posizione neutra. L' incisione
viene effettuata sulla parte anteriore della caviglia. Con l’aiuto di guide, il chirurgo
asporta le parti danneggiate della tibia e dell’astragalo e rimodella le superfici ossee
in modo che si adattino perfettamente alla protesi. Vengono quindi inserite le
componenti protesiche di prova per verificare che siano consentiti tutti i movimenti.
Le componenti definitive vengono quindi applicate e fissate all’osso.
Figura 43- Tecnica chirurgia per l'inserimento della protesi [29]
70
2.3.2 DISPOSITIVI PROTESICI
Le protesi di caviglia sono formate da una componente tibiale e una componente
talare,entrambe metalliche, che ricoprono, rispettivamente, la tibia e l'astragalo. A
volte è presente un inserto mobile in polietilene tra le due componenti.
Le tipologie di protesi di caviglia possono essere classificate in base ai seguenti
criteri [30]:
- metodi di fissazione (con o senza cemento);
- numero di componenti di cui è composta la protesi (due o tre componenti);
- vincolo meccanico presente;
- congruenza tra le superfici, ovvero la relazione presente tra le componenti
dell'impianto e come queste interagiscono;
- forma delle componenti (anatomica o non anatomica) ovvero la capacità
dell'impianto di essere conforme all'anatomia del sito in cui viene inserito;
- tipologia di inserto (fisso o mobile), questo è direttamente collegato alla forma
delle componenti protesiche in quanto agiscono insieme nel permettere alcuni
movimenti.
L'utilizzo del cemento come mezzo di fissazione presenta vantaggi e svantaggi. Se da
una parte permette di uniformare l'interfaccia tra protesi e osso, di smorzare i
carichi agenti sull'osso (il modulo elastico del cemento è minore di quello del
materiale metallico con cui è costruita la protesi) e consente una stabilità primaria
maggiore, dall'altra il problema nell'utilizzo del cemento è l’osteolisi precoce dovuta
al deterioramento dell’interfaccia protesi-osso: lo strato di cemento invecchia e
resiste meno agli sforzi fino ad arrivare a rottura portando alla formazione di detriti
che si interpongono nell'articolazione causando usura da terzo corpo.
Le nuove tipologie di protesi prevedono quindi rivestimenti osteoattivi (come
rivestimenti di idrossiapatite o porosi) che favoriscono la crescita ossea e
consentono maggior stabilità secondaria all'impianto. Con il tempo il rivestimento si
riassorbe lasciando le componenti fisse perché inglobate dall'osso stesso [31].
Le protesi a due componenti presentano una componente tibiale e una astragalica
con l'inserto in polietilene fissato alla componente tibiale. Queste protesi non
ricoprono solo la superficie inferiore della tibia e superiore del talo ma anche i
recessi mediali e laterali della articolazione, cioè l’interfaccia coni due malleoli. In
sede di intervento è richiesta a volte una fusione della sindesmosi tibio-peroneale
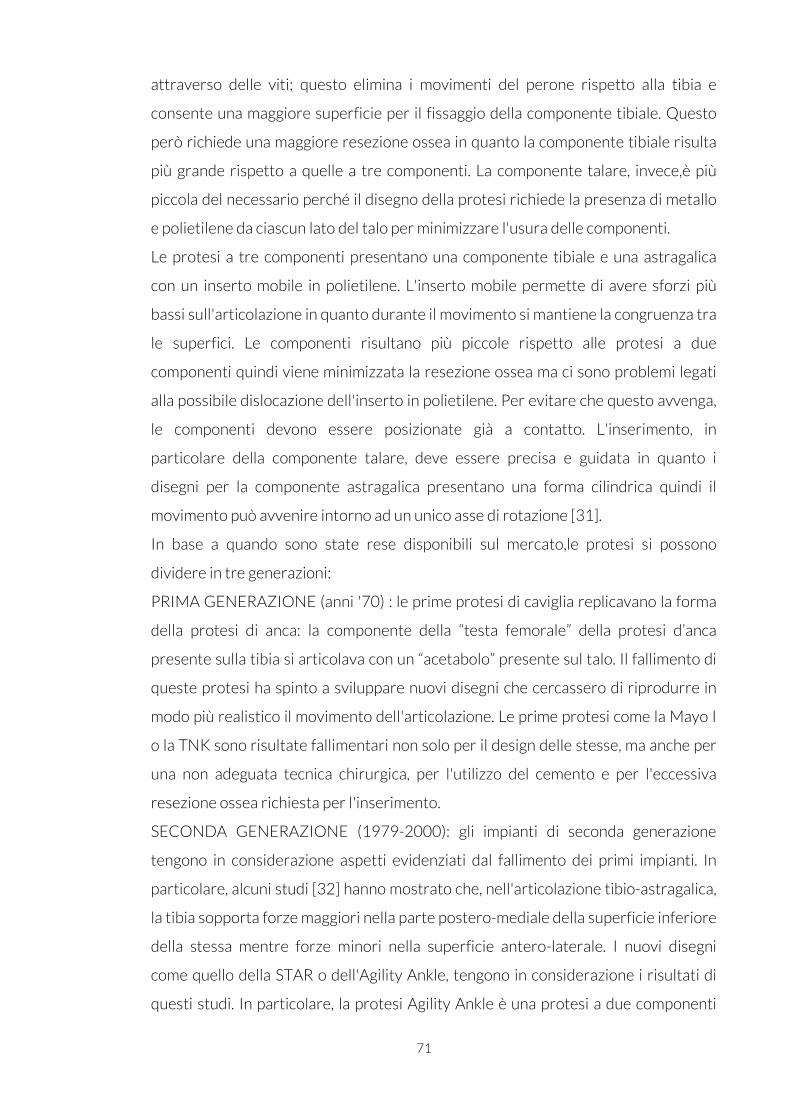
71
attraverso delle viti; questo elimina i movimenti del perone rispetto alla tibia e
consente una maggiore superficie per il fissaggio della componente tibiale. Questo
però richiede una maggiore resezione ossea in quanto la componente tibiale risulta
più grande rispetto a quelle a tre componenti. La componente talare, invece,è più
piccola del necessario perché il disegno della protesi richiede la presenza di metallo
e polietilene da ciascun lato del talo per minimizzare l'usura delle componenti.
Le protesi a tre componenti presentano una componente tibiale e una astragalica
con un inserto mobile in polietilene. L'inserto mobile permette di avere sforzi più
bassi sull'articolazione in quanto durante il movimento si mantiene la congruenza tra
le superfici. Le componenti risultano più piccole rispetto alle protesi a due
componenti quindi viene minimizzata la resezione ossea ma ci sono problemi legati
alla possibile dislocazione dell'inserto in polietilene. Per evitare che questo avvenga,
le componenti devono essere posizionate già a contatto. L'inserimento, in
particolare della componente talare, deve essere precisa e guidata in quanto i
disegni per la componente astragalica presentano una forma cilindrica quindi il
movimento può avvenire intorno ad un unico asse di rotazione [31].
In base a quando sono state rese disponibili sul mercato,le protesi si possono
dividere in tre generazioni:
PRIMA GENERAZIONE (anni '70) : le prime protesi di caviglia replicavano la forma
della protesi di anca: la componente della “testa femorale” della protesi d’anca
presente sulla tibia si articolava con un “acetabolo” presente sul talo. Il fallimento di
queste protesi ha spinto a sviluppare nuovi disegni che cercassero di riprodurre in
modo più realistico il movimento dell'articolazione. Le prime protesi come la Mayo I
o la TNK sono risultate fallimentari non solo per il design delle stesse, ma anche per
una non adeguata tecnica chirurgica, per l'utilizzo del cemento e per l'eccessiva
resezione ossea richiesta per l'inserimento.
SECONDA GENERAZIONE (1979-2000): gli impianti di seconda generazione
tengono in considerazione aspetti evidenziati dal fallimento dei primi impianti. In
particolare, alcuni studi [32] hanno mostrato che, nell'articolazione tibio-astragalica,
la tibia sopporta forze maggiori nella parte postero-mediale della superficie inferiore
della stessa mentre forze minori nella superficie antero-laterale. I nuovi disegni
come quello della STAR o dell'Agility Ankle, tengono in considerazione i risultati di
questi studi. In particolare, la protesi Agility Ankle è una protesi a due componenti
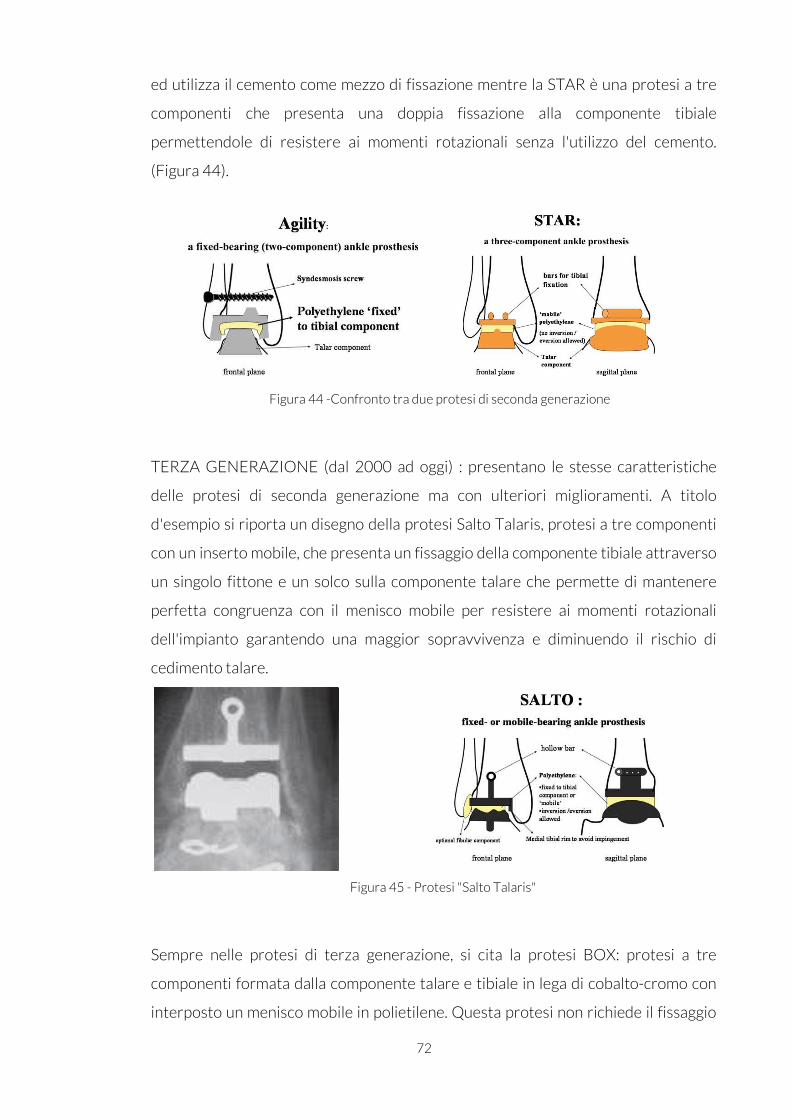
72
ed utilizza il cemento come mezzo di fissazione mentre la STAR è una protesi a tre
componenti che presenta una doppia fissazione alla componente tibiale
permettendole di resistere ai momenti rotazionali senza l'utilizzo del cemento.
(Figura 44).
TERZA GENERAZIONE (dal 2000 ad oggi) : presentano le stesse caratteristiche
delle protesi di seconda generazione ma con ulteriori miglioramenti. A titolo
d'esempio si riporta un disegno della protesi Salto Talaris, protesi a tre componenti
con un inserto mobile, che presenta un fissaggio della componente tibiale attraverso
un singolo fittone e un solco sulla componente talare che permette di mantenere
perfetta congruenza con il menisco mobile per resistere ai momenti rotazionali
dell'impianto garantendo una maggior sopravvivenza e diminuendo il rischio di
cedimento talare.
Figura 45 - Protesi "Salto Talaris"
Sempre nelle protesi di terza generazione, si cita la protesi BOX: protesi a tre
componenti formata dalla componente talare e tibiale in lega di cobalto-cromo con
interposto un menisco mobile in polietilene. Questa protesi non richiede il fissaggio
Figura 44 -Confronto tra due protesi di seconda generazione
73
tramite cemento. La componente tibiale presenta una superficie sferica convessa
che corrisponde alla superficie sferica concava del menisco mobile con uguale raggio
di curvatura. La caratteristica principale di questa nuova protesi è della interazione
tra superfici e legamenti: essa infatti permette alle fibre dei legamenti calcaneo-
fibulare e tibio-calcaneare di rimanere isometriche per tutto il range di movimento
passivo di dorsi-plantar-flessione.
E’ presente un solco nella componente talare per guidare il movimento del menisco
mobile nel piano sagittale e limitarne lo scivolamento e la possibile dislocazione
medio-laterale.
2.3.3 CAUSE DI FALLIMENTO DEI DISPOSITIVI PROTESICI
Per ottenere protesi più durature e soddisfacenti, è opportuno tenere in
considerazione i motivi di fallimento delle protesi e migliorare tutti gli aspetti più
carenti.
Le cause del fallimento si pensa siano dovute a delle complicazioni che possono
essere classificate come: errate valutazioni preoperatorie, non corretta esecuzione
dell’intervento, non ottimizzata progettazione e disegno della protesi, strumentario
per l'inserimento della protesi poco preciso e tutte le varie complicazioni post
operatorie[33].
Le complicazioni post impianto della protesi possono essere:
-INFEZIONE: se si presenta una deiscenza della ferita, questa deve essere curata
con continue medicazioni e antibiotici per via orale. La deiscenza della ferita può non
causare un problema per la protesi stessa; a volte però è collegata a un infezione
dell’articolazione. In questo caso è in alcune situazioni necessario rimuovere la
protesi e sostituirla con uno spaziatore di cemento che rilascia antibiotico nel sito
stesso. E’ necessario, durante la rimozione della protesi, lasciare sufficiente osso per
una successiva protesi futura o per un intervento di artrodesi;
-Osteolisi: un disallineamento di un arto o una posizione scorretta delle componenti
protesiche causano un consumo dell’inserto in polietilene e osteolisi; non è ancora
chiaro se possa essere prevenuta tramite una diagnosi preoperatoria. Spesso
l’osteolisi è associata a una migrazione dell’impianto. L'osteolisi è imputata anche
all'utilizzo del cemento.
Il cedimento della componente talare continua a rimanere la più comune causa di
74
fallimento.
-Diminuzione della densità ossea: per trattare la mancanza di osso, possono essere
usati diversi metodi come autograft, allograft, sostituzione con osso sintetico,
cemento.
-Disallineamenti del piede: disallineamenti già presenti prima dell'operazione
(deformità varo-valgo del piede) caricano eccessivamente le componenti; vengono
quindi corrette in sede operatoria;
-Malposizionamento della protesi: un posizionamento della componente talare non
allineata con quella tibiale provoca sforzi eccessivi nella parte mediale o laterale
dell'articolazione con conseguente cedimento dell'astragalo stesso o rottura dei
malleoli.
In caso di fallimento della protesi si attua una revisione ovvero rimozione o
sostituzione di uno o più componenti protesici.

75
CAPITOL O 3- MAT ERIALI E MET ODI
3 .1 DE S C R I Z I O N E D E L M O D E L LO
Il lavoro realizzato consiste in una modellizzazione 3D della caviglia e del piede che
consenta di replicare tutti i movimenti dell'articolazione fisiologica. Il fine è quello di
effettuare un confronto in termini di movimento,di forze muscolari e di forze
legamentose prima e dopo l'inserimento della protesi. Si è analizzata la cinematica
della protesi stessa e il range di movimento permesso. Si è inoltre scelto di simulare
disallineamenti delle componenti protesiche per poter dare informazioni di
carattere clinico per l'inserimento in fase di intervento.
3.1.1 CARATTERISTICHE DESIDERATE E SOFTWARE UTILIZZATO
Il software utilizzato per lo scopo è il programma SimWise 4D che permette di
effettuare simulazioni virtuali realizzando o importando modelli in 3De associando a
questi le dimensioni, la posizione spaziale e le caratteristiche inerziali. E' possibile,
inoltre, vincolare gli oggetti 3D tra di loro tramite il comando "constraint"con vincoli
rigidi o cerniere oppure inserire elementi smorzatori come molle o attuatori. Per la
realizzazione di questi, è necessario specificare due punti (coords) utili per la
collocazione del vincolo. Se due oggetti sono in contatto, è possibile scegliere se
permettere la compenetrazione o imporre una collisione. Attraverso il comando
"InsertMeter", si possono misurare variabili associate ad un determinato oggetto e
visualizzarne l'andamento in dipendenza dal tempo. Utilizzando il comando "Insert
Control Slider" è invece possibile far variare le variabili di interesse (ad esempio
l'angolo di rotazione) semplicemente facendo variare il cursore che compare sullo
schermo. Altro potente strumento di questo software è la possibilità di pre-
impostare il movimento di un corpo oppure definire l'andamento della variabile di
interesse importando un grafico che ne descriva l'andamento.
3.1.2 MODELLI SOLIDI VIRTUALI DELLE OSSA
Per ottenere le geometrie 3D delle ossa, si è partiti da immagini di risonanza
magnetica pesate T1. In uno studio precedente [34], le immagini sono state raccolte
su un soggetto maschio, di 37 anni , di 68 Kg e di 1,70 m di altezza, con una distanza
tra le immagini nella direzione assiale di 1 mm. Nelle immagini sono stati riconosciuti
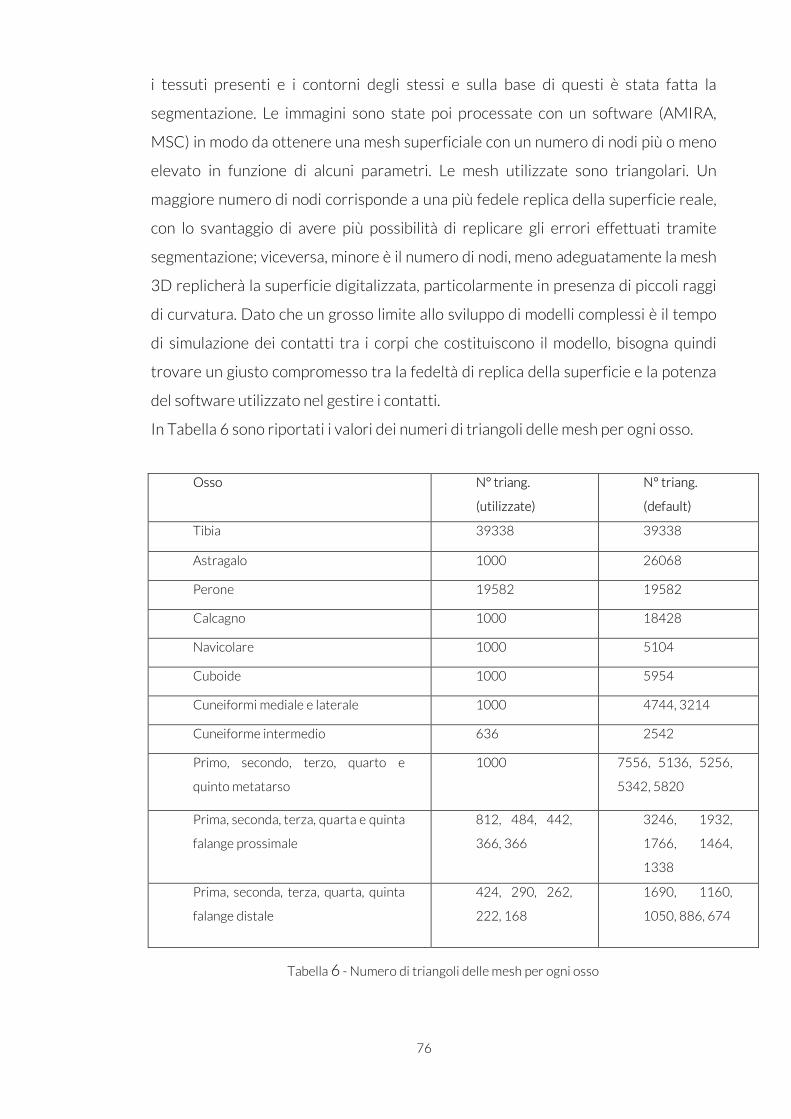
76
i tessuti presenti e i contorni degli stessi e sulla base di questi è stata fatta la
segmentazione. Le immagini sono state poi processate con un software (AMIRA,
MSC) in modo da ottenere una mesh superficiale con un numero di nodi più o meno
elevato in funzione di alcuni parametri. Le mesh utilizzate sono triangolari. Un
maggiore numero di nodi corrisponde a una più fedele replica della superficie reale,
con lo svantaggio di avere più possibilità di replicare gli errori effettuati tramite
segmentazione; viceversa, minore è il numero di nodi, meno adeguatamente la mesh
3D replicherà la superficie digitalizzata, particolarmente in presenza di piccoli raggi
di curvatura. Dato che un grosso limite allo sviluppo di modelli complessi è il tempo
di simulazione dei contatti tra i corpi che costituiscono il modello, bisogna quindi
trovare un giusto compromesso tra la fedeltà di replica della superficie e la potenza
del software utilizzato nel gestire i contatti.
In Tabella 6 sono riportati i valori dei numeri di triangoli delle mesh per ogni osso.
Tabella 6 - Numero di triangoli delle mesh per ogni osso
Osso N° triang.
(utilizzate)
N° triang.
(default)
Tibia 39338 39338
Astragalo 1000 26068
Perone 19582 19582
Calcagno 1000 18428
Navicolare 1000 5104
Cuboide 1000 5954
Cuneiformi mediale e laterale 1000 4744, 3214
Cuneiforme intermedio 636 2542
Primo, secondo, terzo, quarto e
quinto metatarso
1000 7556, 5136, 5256,
5342, 5820
Prima, seconda, terza, quarta e quinta
falange prossimale
812, 484, 442,
366, 366
3246, 1932,
1766, 1464,
1338
Prima, seconda, terza, quarta, quinta
falange distale
424, 290, 262,
222, 168
1690, 1160,
1050, 886, 674
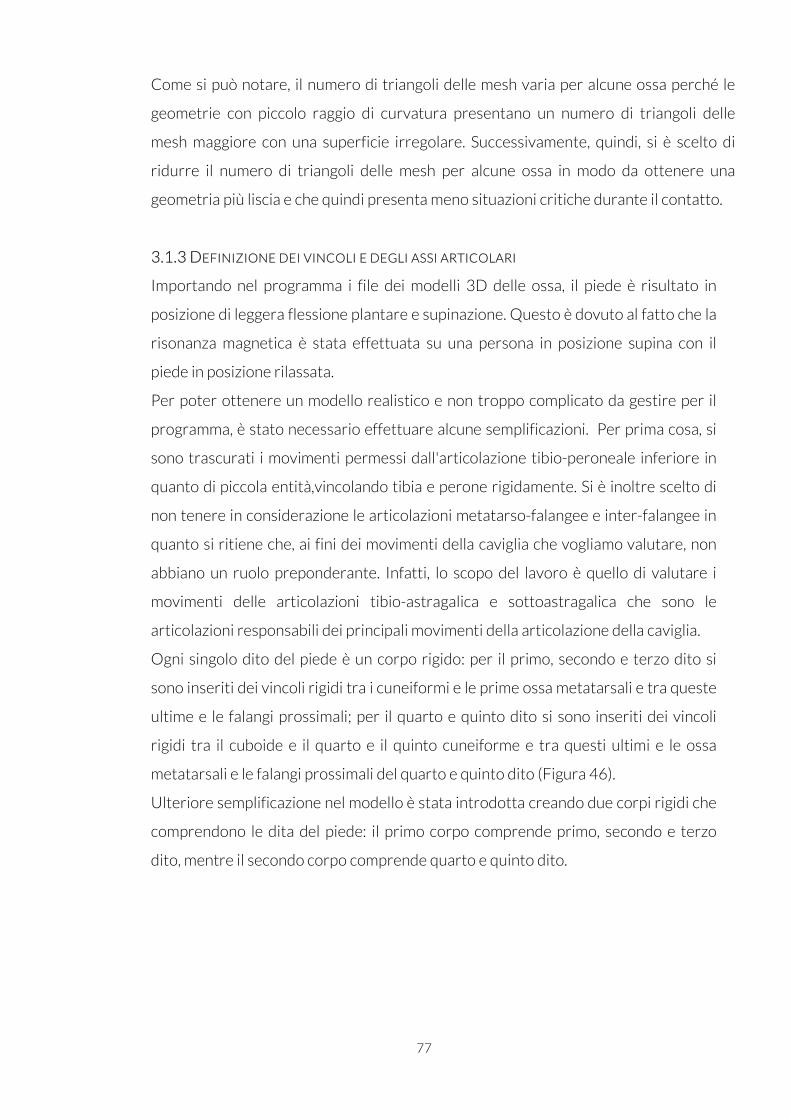
77
Come si può notare, il numero di triangoli delle mesh varia per alcune ossa perché le
geometrie con piccolo raggio di curvatura presentano un numero di triangoli delle
mesh maggiore con una superficie irregolare. Successivamente, quindi, si è scelto di
ridurre il numero di triangoli delle mesh per alcune ossa in modo da ottenere una
geometria più liscia e che quindi presenta meno situazioni critiche durante il contatto.
3.1.3 DEFINIZIONE DEI VINCOLI E DEGLI ASSI ARTICOLARI
Importando nel programma i file dei modelli 3D delle ossa, il piede è risultato in
posizione di leggera flessione plantare e supinazione. Questo è dovuto al fatto che la
risonanza magnetica è stata effettuata su una persona in posizione supina con il
piede in posizione rilassata.
Per poter ottenere un modello realistico e non troppo complicato da gestire per il
programma, è stato necessario effettuare alcune semplificazioni. Per prima cosa, si
sono trascurati i movimenti permessi dall'articolazione tibio-peroneale inferiore in
quanto di piccola entità,vincolando tibia e perone rigidamente. Si è inoltre scelto di
non tenere in considerazione le articolazioni metatarso-falangee e inter-falangee in
quanto si ritiene che, ai fini dei movimenti della caviglia che vogliamo valutare, non
abbiano un ruolo preponderante. Infatti, lo scopo del lavoro è quello di valutare i
movimenti delle articolazioni tibio-astragalica e sottoastragalica che sono le
articolazioni responsabili dei principali movimenti della articolazione della caviglia.
Ogni singolo dito del piede è un corpo rigido: per il primo, secondo e terzo dito si
sono inseriti dei vincoli rigidi tra i cuneiformi e le prime ossa metatarsali e tra queste
ultime e le falangi prossimali; per il quarto e quinto dito si sono inseriti dei vincoli
rigidi tra il cuboide e il quarto e il quinto cuneiforme e tra questi ultimi e le ossa
metatarsali e le falangi prossimali del quarto e quinto dito (Figura 46).
Ulteriore semplificazione nel modello è stata introdotta creando due corpi rigidi che
comprendono le dita del piede: il primo corpo comprende primo, secondo e terzo
dito, mentre il secondo corpo comprende quarto e quinto dito.
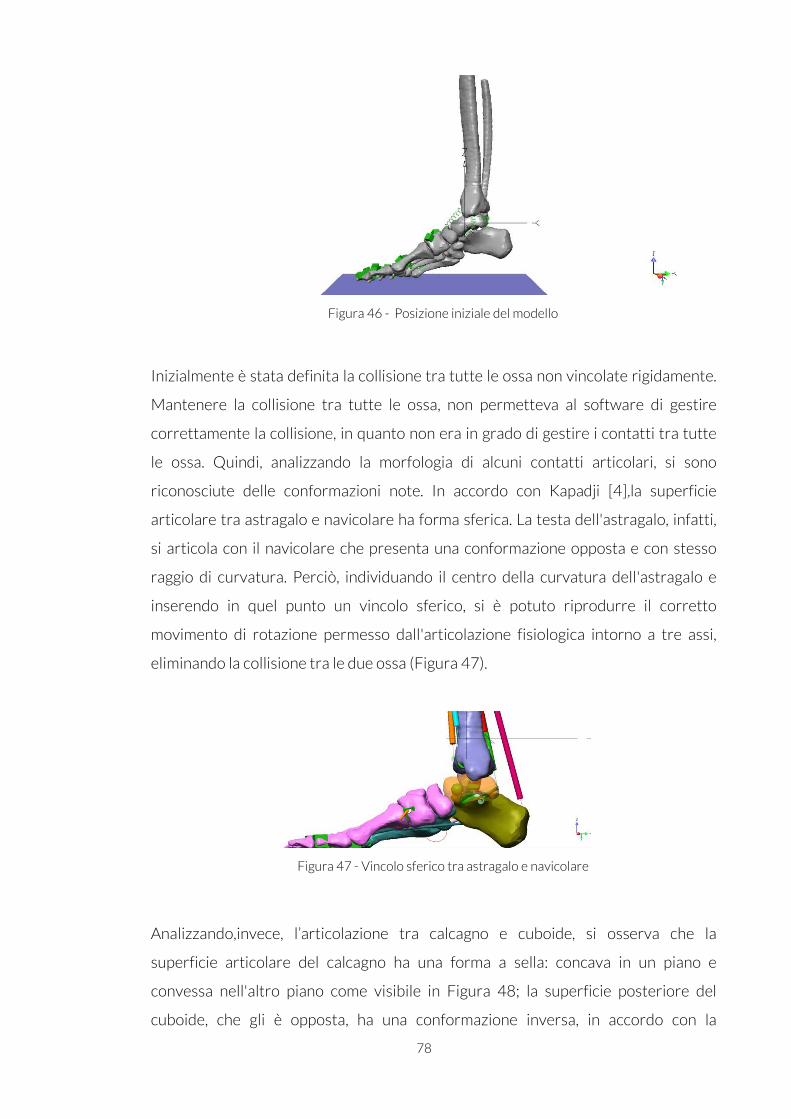
78
Figura 46 - Posizione iniziale del modello
Inizialmente è stata definita la collisione tra tutte le ossa non vincolate rigidamente.
Mantenere la collisione tra tutte le ossa, non permetteva al software di gestire
correttamente la collisione, in quanto non era in grado di gestire i contatti tra tutte
le ossa. Quindi, analizzando la morfologia di alcuni contatti articolari, si sono
riconosciute delle conformazioni note. In accordo con Kapadji [4],la superficie
articolare tra astragalo e navicolare ha forma sferica. La testa dell'astragalo, infatti,
si articola con il navicolare che presenta una conformazione opposta e con stesso
raggio di curvatura. Perciò, individuando il centro della curvatura dell'astragalo e
inserendo in quel punto un vincolo sferico, si è potuto riprodurre il corretto
movimento di rotazione permesso dall'articolazione fisiologica intorno a tre assi,
eliminando la collisione tra le due ossa (Figura 47).
Figura 47 - Vincolo sferico tra astragalo e navicolare
Analizzando,invece, l’articolazione tra calcagno e cuboide, si osserva che la
superficie articolare del calcagno ha una forma a sella: concava in un piano e
convessa nell'altro piano come visibile in Figura 48; la superficie posteriore del
cuboide, che gli è opposta, ha una conformazione inversa, in accordo con la
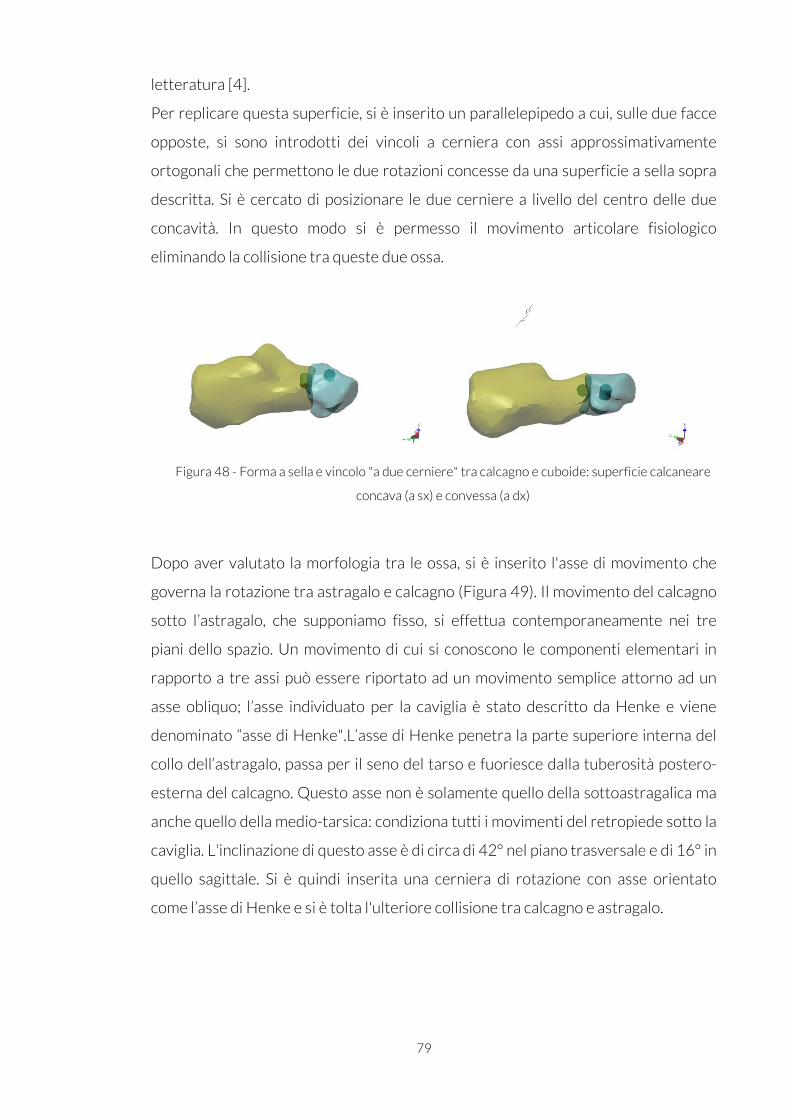
79
letteratura [4].
Per replicare questa superficie, si è inserito un parallelepipedo a cui, sulle due facce
opposte, si sono introdotti dei vincoli a cerniera con assi approssimativamente
ortogonali che permettono le due rotazioni concesse da una superficie a sella sopra
descritta. Si è cercato di posizionare le due cerniere a livello del centro delle due
concavità. In questo modo si è permesso il movimento articolare fisiologico
eliminando la collisione tra queste due ossa.
Figura 48 - Forma a sella e vincolo "a due cerniere" tra calcagno e cuboide: superficie calcaneare
concava (a sx) e convessa (a dx)
Dopo aver valutato la morfologia tra le ossa, si è inserito l'asse di movimento che
governa la rotazione tra astragalo e calcagno (Figura 49). Il movimento del calcagno
sotto l’astragalo, che supponiamo fisso, si effettua contemporaneamente nei tre
piani dello spazio. Un movimento di cui si conoscono le componenti elementari in
rapporto a tre assi può essere riportato ad un movimento semplice attorno ad un
asse obliquo; l’asse individuato per la caviglia è stato descritto da Henke e viene
denominato “asse di Henke".L’asse di Henke penetra la parte superiore interna del
collo dell’astragalo, passa per il seno del tarso e fuoriesce dalla tuberosità postero-
esterna del calcagno. Questo asse non è solamente quello della sottoastragalica ma
anche quello della medio-tarsica: condiziona tutti i movimenti del retropiede sotto la
caviglia. L'inclinazione di questo asse è di circa di 42° nel piano trasversale e di 16° in
quello sagittale. Si è quindi inserita una cerniera di rotazione con asse orientato
come l’asse di Henke e si è tolta l'ulteriore collisione tra calcagno e astragalo.
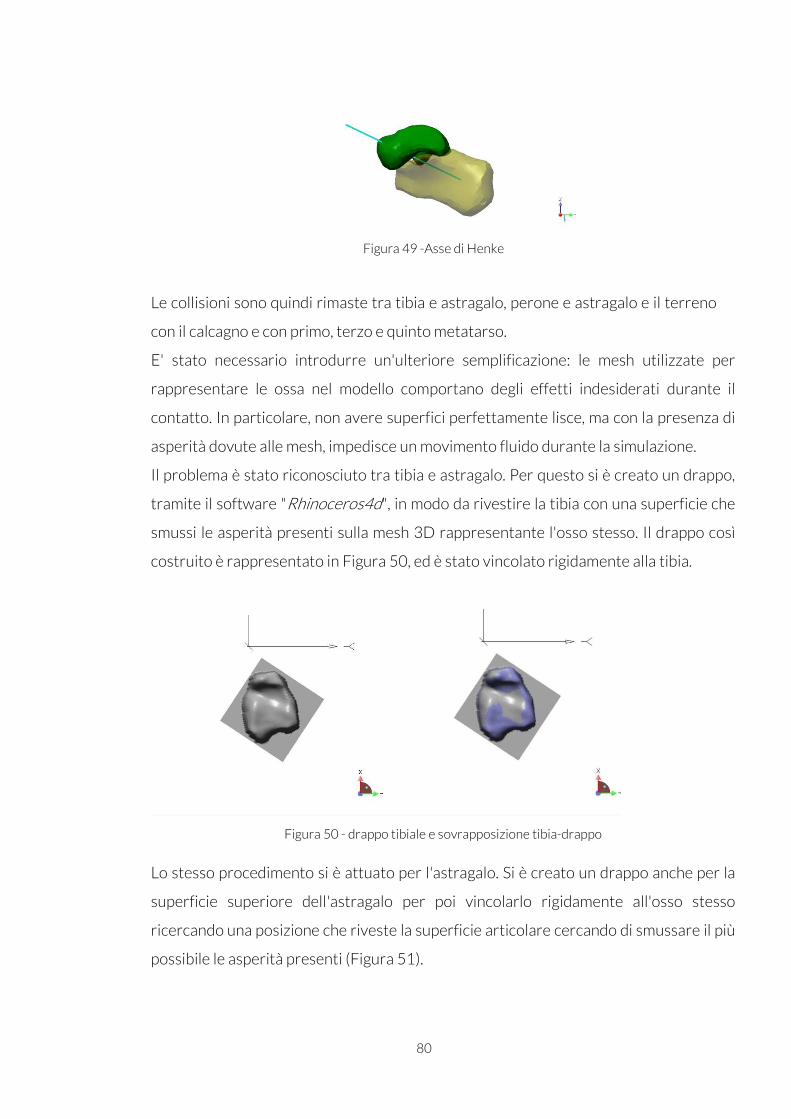
80
Figura 49 -Asse di Henke
Le collisioni sono quindi rimaste tra tibia e astragalo, perone e astragalo e il terreno
con il calcagno e con primo, terzo e quinto metatarso.
E' stato necessario introdurre un'ulteriore semplificazione: le mesh utilizzate per
rappresentare le ossa nel modello comportano degli effetti indesiderati durante il
contatto. In particolare, non avere superfici perfettamente lisce, ma con la presenza di
asperità dovute alle mesh, impedisce un movimento fluido durante la simulazione.
Il problema è stato riconosciuto tra tibia e astragalo. Per questo si è creato un drappo,
tramite il software "Rhinoceros4d", in modo da rivestire la tibia con una superficie che
smussi le asperità presenti sulla mesh 3D rappresentante l'osso stesso. Il drappo così
costruito è rappresentato in Figura 50, ed è stato vincolato rigidamente alla tibia.
Figura 50 - drappo tibiale e sovrapposizione tibia-drappo
Lo stesso procedimento si è attuato per l'astragalo. Si è creato un drappo anche per la
superficie superiore dell'astragalo per poi vincolarlo rigidamente all'osso stesso
ricercando una posizione che riveste la superficie articolare cercando di smussare il più
possibile le asperità presenti (Figura 51).
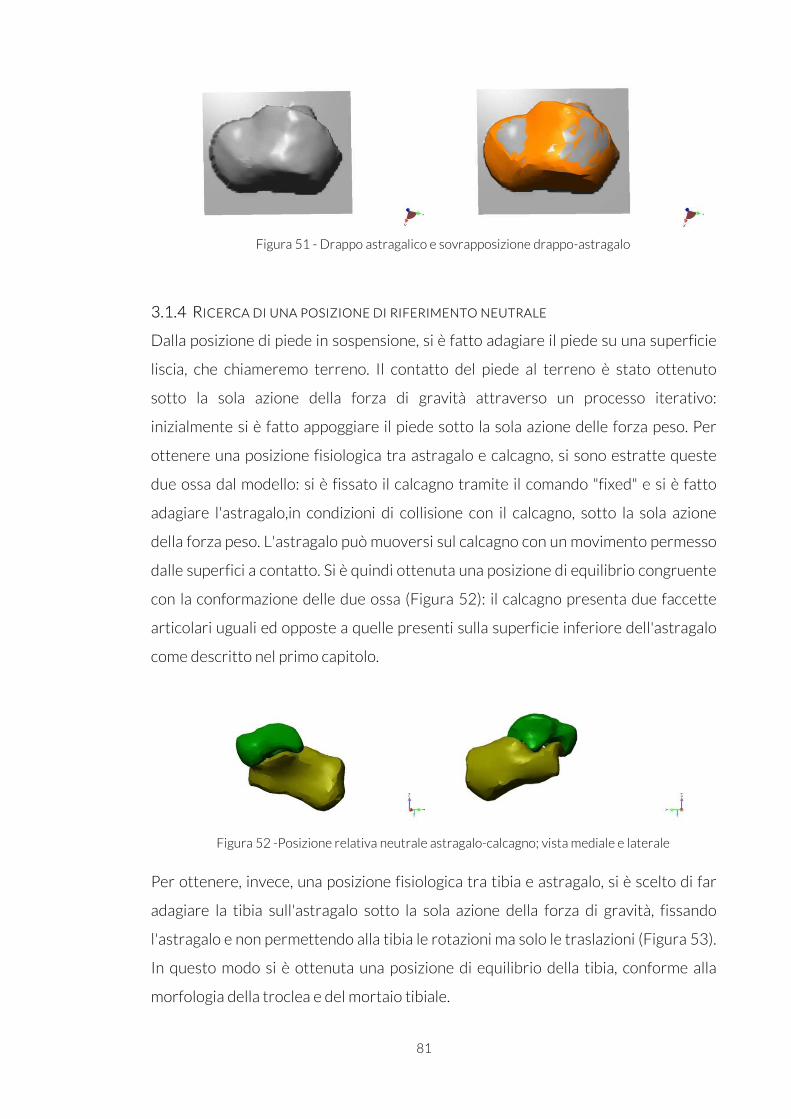
81
Figura 51 - Drappo astragalico e sovrapposizione drappo-astragalo
3.1.4 RICERCA DI UNA POSIZIONE DI RIFERIMENTO NEUTRALE
Dalla posizione di piede in sospensione, si è fatto adagiare il piede su una superficie
liscia, che chiameremo terreno. Il contatto del piede al terreno è stato ottenuto
sotto la sola azione della forza di gravità attraverso un processo iterativo:
inizialmente si è fatto appoggiare il piede sotto la sola azione delle forza peso. Per
ottenere una posizione fisiologica tra astragalo e calcagno, si sono estratte queste
due ossa dal modello: si è fissato il calcagno tramite il comando "fixed" e si è fatto
adagiare l'astragalo,in condizioni di collisione con il calcagno, sotto la sola azione
della forza peso. L'astragalo può muoversi sul calcagno con un movimento permesso
dalle superfici a contatto. Si è quindi ottenuta una posizione di equilibrio congruente
con la conformazione delle due ossa (Figura 52): il calcagno presenta due faccette
articolari uguali ed opposte a quelle presenti sulla superficie inferiore dell'astragalo
come descritto nel primo capitolo.
Figura 52 -Posizione relativa neutrale astragalo-calcagno; vista mediale e laterale
Per ottenere, invece, una posizione fisiologica tra tibia e astragalo, si è scelto di far
adagiare la tibia sull'astragalo sotto la sola azione della forza di gravità, fissando
l'astragalo e non permettendo alla tibia le rotazioni ma solo le traslazioni (Figura 53).
In questo modo si è ottenuta una posizione di equilibrio della tibia, conforme alla
morfologia della troclea e del mortaio tibiale.
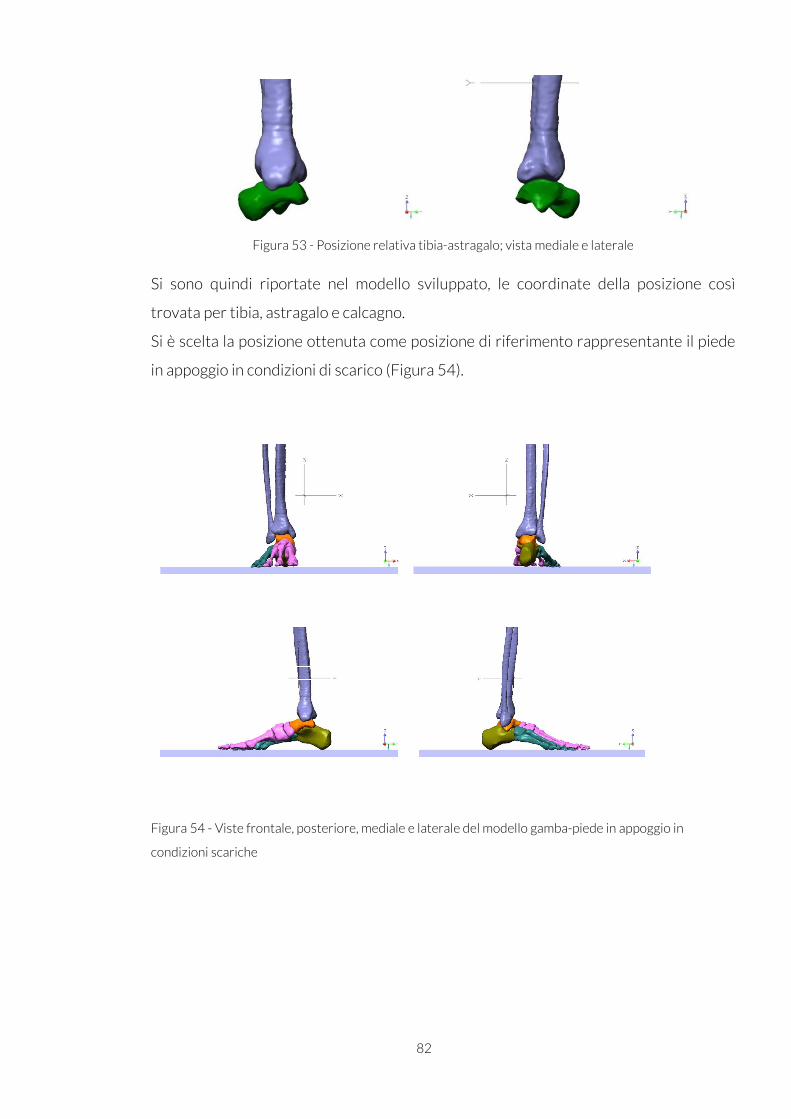
82
Figura 53 - Posizione relativa tibia-astragalo; vista mediale e laterale
Si sono quindi riportate nel modello sviluppato, le coordinate della posizione così
trovata per tibia, astragalo e calcagno.
Si è scelta la posizione ottenuta come posizione di riferimento rappresentante il piede
in appoggio in condizioni di scarico (Figura 54).
Figura 54 - Viste frontale, posteriore, mediale e laterale del modello gamba-piede in appoggio in
condizioni scariche
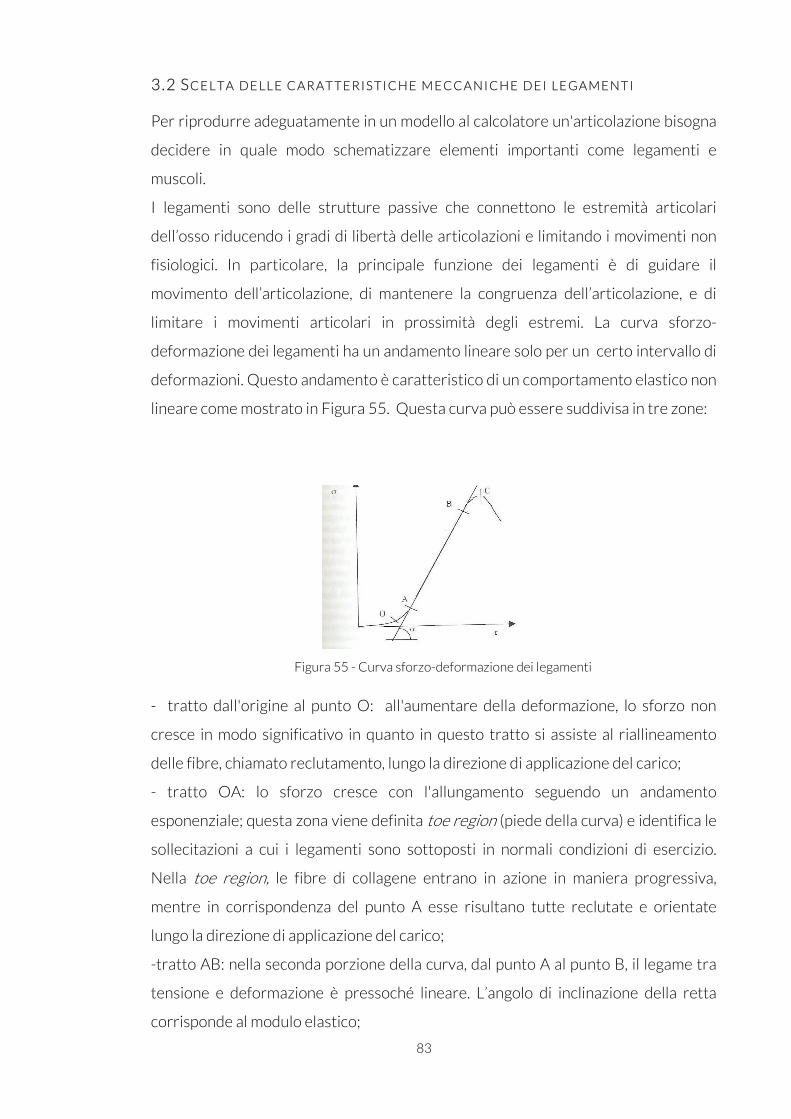
83
3.2 SC E L T A D E LL E C A R A T T E R I S T I C H E M E C C A N I C H E D E I LE G A M E N T I
Per riprodurre adeguatamente in un modello al calcolatore un'articolazione bisogna
decidere in quale modo schematizzare elementi importanti come legamenti e
muscoli.
I legamenti sono delle strutture passive che connettono le estremità articolari
dell’osso riducendo i gradi di libertà delle articolazioni e limitando i movimenti non
fisiologici. In particolare, la principale funzione dei legamenti è di guidare il
movimento dell’articolazione, di mantenere la congruenza dell’articolazione, e di
limitare i movimenti articolari in prossimità degli estremi. La curva sforzo-
deformazione dei legamenti ha un andamento lineare solo per un certo intervallo di
deformazioni. Questo andamento è caratteristico di un comportamento elastico non
lineare come mostrato in Figura 55. Questa curva può essere suddivisa in tre zone:
Figura 55 - Curva sforzo-deformazione dei legamenti
- tratto dall'origine al punto O: all'aumentare della deformazione, lo sforzo non
cresce in modo significativo in quanto in questo tratto si assiste al riallineamento
delle fibre, chiamato reclutamento, lungo la direzione di applicazione del carico;
- tratto OA: lo sforzo cresce con l'allungamento seguendo un andamento
esponenziale; questa zona viene definita toe region (piede della curva) e identifica le
sollecitazioni a cui i legamenti sono sottoposti in normali condizioni di esercizio.
Nella toe region, le fibre di collagene entrano in azione in maniera progressiva,
mentre in corrispondenza del punto A esse risultano tutte reclutate e orientate
lungo la direzione di applicazione del carico;
-tratto AB: nella seconda porzione della curva, dal punto A al punto B, il legame tra
tensione e deformazione è pressoché lineare. L’angolo di inclinazione della retta
corrisponde al modulo elastico;
84
-tratto BC: si osserva un comportamento non lineare dello sforzo all’aumentare
della deformazione. In questa fase diminuisce la capacità del tessuto di sostenere
incrementi di tensione, fino a giungere alla rottura (punto C).
I legamenti che si sono tenuti in considerazione sono quelli indicati nel primo
capitolo in accordo con il lavoro di Siegler e Al.[13].
Il posizionamento nel modello è avvenuto prendendo in considerazione la posizione
anatomica degli stessi, riportata anch'essa nel primo capitolo.
Siccome le dita del piede sono state considerate come due corpi rigidi, si è scelto di
inserire solo tre legamenti rappresentativi dell'aponeurosi del piede:
aponeurosi 1 che decorre dal calcagno al primo dito;
aponeurosi 2 che decorre dal calcagno al terzo dito;
aponeurosi 3 che decorre dal calcagno al quinto dito.
I legamenti sono stati rappresentati come delle molle a caratteristica non lineare.
Nel programma è possibile scegliere l'elemento "Spring/Damper" all'interno del
menù "constraint" e definire quindi una molla come vincolo tra due punti. Questo
tipo di vincolo prevede la presenza di una molla in parallelo con uno smorzatore
viscoso.
L’elemento "Spring/Damper" richiede anche di definire la Natural Length,
corrispondente alla lunghezza di riposo della molla (a carico nullo). Durante la
simulazione il sistema fornisce il valore della Current Length, cioè la lunghezza della
molla in quel preciso istante temporale (dipendente dal carico); entrambi i valori
dipenderanno dalla distanza tra i punti scelti per impostare il vincolo. La Natural
Length è stata impostata uguale al valore della Current Length. Modificando la
Current Length, i legamenti risultano pretensionati.
Inizialmente si è scelto di pretensionare i legamenti con un valore uguale per tutti,
corrispondente al 5% della lunghezza di riposo della molla, in modo da potersi
ritenere già nella parte lineare della curva sforzo-deformazione sopra descritta e
quindi attribuire ai legamenti un comportamento elastico-lineare.
Per decidere il valore della costante elastica, si sono cercati valori in letteratura.
Provando a dare un valore costante e uguale per tutti i legamenti, mail piede
risultava molto rigido.
Si è concluso che i valori considerati erano troppo elevati e che i valori di costante
elastica devono essere diversi per ogni legamento, a seconda della funzione svolta.
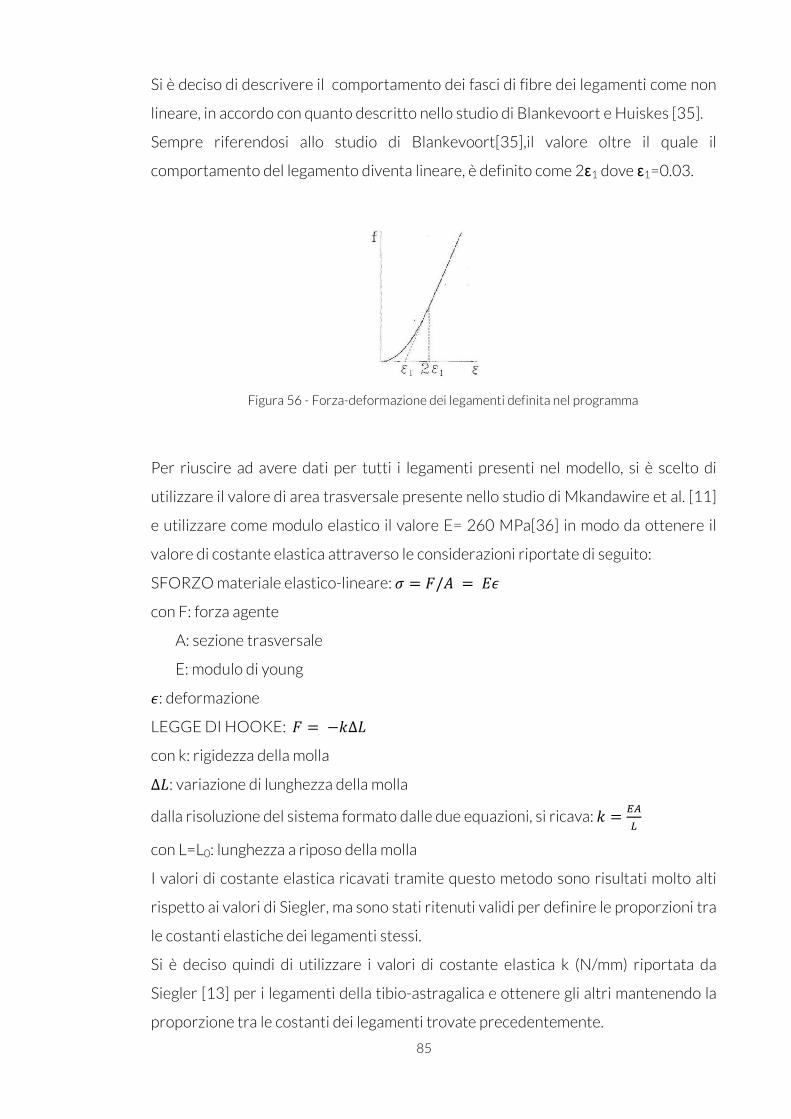
85
Si è deciso di descrivere il comportamento dei fasci di fibre dei legamenti come non
lineare, in accordo con quanto descritto nello studio di Blankevoort e Huiskes [35].
Sempre riferendosi allo studio di Blankevoort[35],il valore oltre il quale il
comportamento del legamento diventa lineare, è definito come 2ε1 dove ε1=0.03.
Figura 56 - Forza-deformazione dei legamenti definita nel programma
Per riuscire ad avere dati per tutti i legamenti presenti nel modello, si è scelto di
utilizzare il valore di area trasversale presente nello studio di Mkandawire et al. [11]
e utilizzare come modulo elastico il valore E= 260 MPa[36] in modo da ottenere il
valore di costante elastica attraverso le considerazioni riportate di seguito:
SFORZO materiale elastico-lineare: � = �/� = ��
con F: forza agente
A: sezione trasversale
E: modulo di young
�: deformazione
LEGGE DI HOOKE: � = −�∆�
con k: rigidezza della molla
∆�: variazione di lunghezza della molla
dalla risoluzione del sistema formato dalle due equazioni, si ricava: � =��
�
con L=L0: lunghezza a riposo della molla
I valori di costante elastica ricavati tramite questo metodo sono risultati molto alti
rispetto ai valori di Siegler, ma sono stati ritenuti validi per definire le proporzioni tra
le costanti elastiche dei legamenti stessi.
Si è deciso quindi di utilizzare i valori di costante elastica k (N/mm) riportata da
Siegler [13] per i legamenti della tibio-astragalica e ottenere gli altri mantenendo la
proporzione tra le costanti dei legamenti trovate precedentemente.
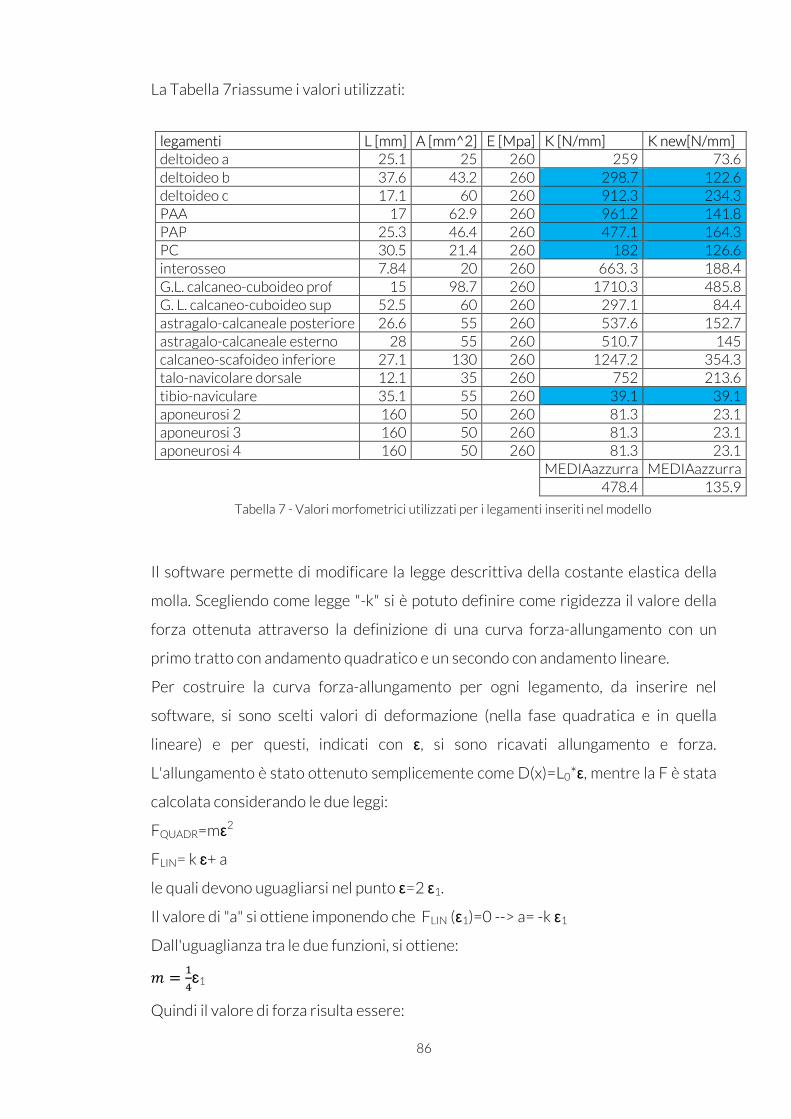
86
La Tabella 7riassume i valori utilizzati:
Tabella 7 - Valori morfometrici utilizzati per i legamenti inseriti nel modello
Il software permette di modificare la legge descrittiva della costante elastica della
molla. Scegliendo come legge "-k" si è potuto definire come rigidezza il valore della
forza ottenuta attraverso la definizione di una curva forza-allungamento con un
primo tratto con andamento quadratico e un secondo con andamento lineare.
Per costruire la curva forza-allungamento per ogni legamento, da inserire nel
software, si sono scelti valori di deformazione (nella fase quadratica e in quella
lineare) e per questi, indicati con ε, si sono ricavati allungamento e forza.
L'allungamento è stato ottenuto semplicemente come D(x)=L0*ε, mentre la F è stata
calcolata considerando le due leggi:
FQUADR=mε2
FLIN= k ɛ+ a
le quali devono uguagliarsi nel punto ε=2 ε1.
Il valore di "a" si ottiene imponendo che FLIN (ε1)=0 --> a= -k ε1
Dall'uguaglianza tra le due funzioni, si ottiene:
� =�
�ɛ1
Quindi il valore di forza risulta essere:
legamenti L [mm] A [mm^2] E [Mpa] K [N/mm] K new[N/mm]
deltoideo a 25.1 25 260 259 73.6
deltoideo b 37.6 43.2 260 298.7 122.6
deltoideo c 17.1 60 260 912.3 234.3
PAA 17 62.9 260 961.2 141.8
PAP 25.3 46.4 260 477.1 164.3
PC 30.5 21.4 260 182 126.6
interosseo 7.84 20 260 663. 3 188.4
G.L. calcaneo-cuboideo prof 15 98.7 260 1710.3 485.8
G. L. calcaneo-cuboideo sup 52.5 60 260 297.1 84.4
astragalo-calcaneale posteriore 26.6 55 260 537.6 152.7
astragalo-calcaneale esterno 28 55 260 510.7 145
calcaneo-scafoideo inferiore 27.1 130 260 1247.2 354.3
talo-navicolare dorsale 12.1 35 260 752 213.6
tibio-naviculare 35.1 55 260 39.1 39.1
aponeurosi 2 160 50 260 81.3 23.1
aponeurosi 3 160 50 260 81.3 23.1
aponeurosi 4 160 50 260 81.3 23.1
MEDIAazzurra MEDIAazzurra
478.4 135.9
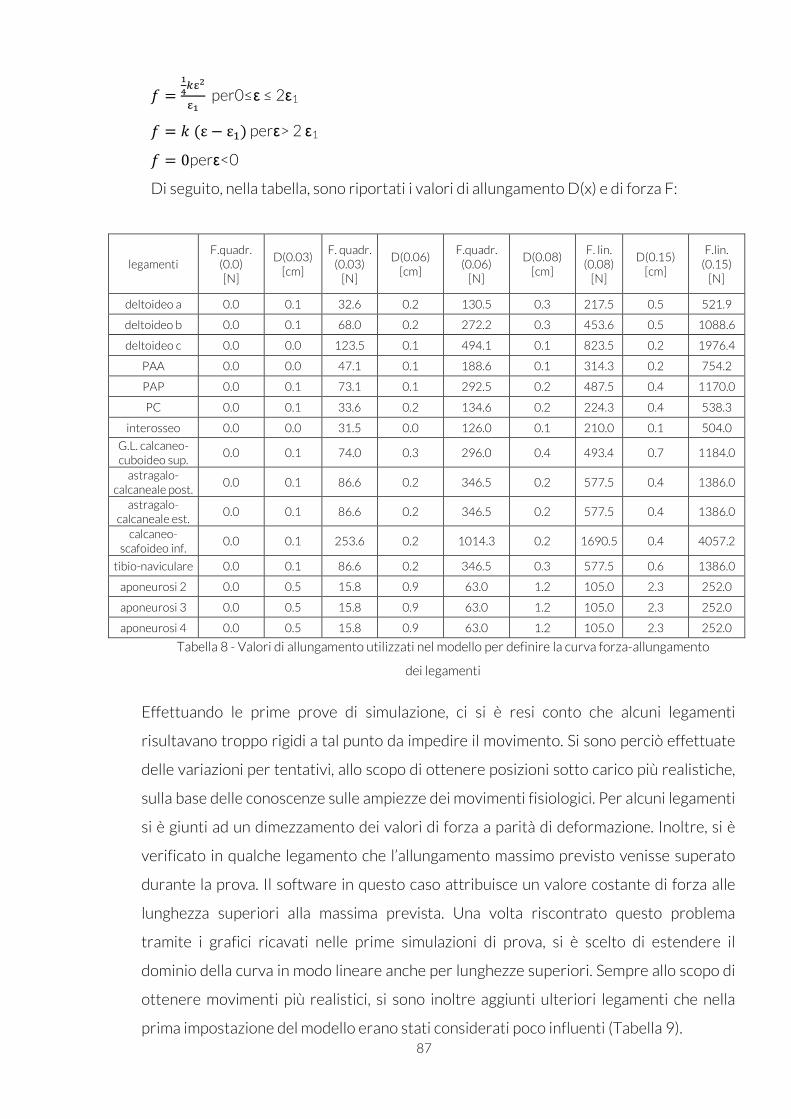
87
=!
"�#$
#!per0≤ε ≤ 2ε1
= �(ε − ε�) perε> 2 ε1
= 0perε<0
Di seguito, nella tabella, sono riportati i valori di allungamento D(x) e di forza F:
Tabella 8 - Valori di allungamento utilizzati nel modello per definire la curva forza-allungamento
dei legamenti
Effettuando le prime prove di simulazione, ci si è resi conto che alcuni legamenti
risultavano troppo rigidi a tal punto da impedire il movimento. Si sono perciò effettuate
delle variazioni per tentativi, allo scopo di ottenere posizioni sotto carico più realistiche,
sulla base delle conoscenze sulle ampiezze dei movimenti fisiologici. Per alcuni legamenti
si è giunti ad un dimezzamento dei valori di forza a parità di deformazione. Inoltre, si è
verificato in qualche legamento che l’allungamento massimo previsto venisse superato
durante la prova. Il software in questo caso attribuisce un valore costante di forza alle
lunghezza superiori alla massima prevista. Una volta riscontrato questo problema
tramite i grafici ricavati nelle prime simulazioni di prova, si è scelto di estendere il
dominio della curva in modo lineare anche per lunghezze superiori. Sempre allo scopo di
ottenere movimenti più realistici, si sono inoltre aggiunti ulteriori legamenti che nella
prima impostazione del modello erano stati considerati poco influenti (Tabella 9).
legamenti
F.quadr.
(0.0)
[N]
D(0.03)
[cm]
F. quadr.
(0.03)
[N]
D(0.06)
[cm]
F.quadr.
(0.06)
[N]
D(0.08)
[cm]
F. lin.
(0.08)
[N]
D(0.15)
[cm]
F.lin.
(0.15)
[N]
deltoideo a 0.0 0.1 32.6 0.2 130.5 0.3 217.5 0.5 521.9
deltoideo b 0.0 0.1 68.0 0.2 272.2 0.3 453.6 0.5 1088.6
deltoideo c 0.0 0.0 123.5 0.1 494.1 0.1 823.5 0.2 1976.4
PAA 0.0 0.0 47.1 0.1 188.6 0.1 314.3 0.2 754.2
PAP 0.0 0.1 73.1 0.1 292.5 0.2 487.5 0.4 1170.0
PC 0.0 0.1 33.6 0.2 134.6 0.2 224.3 0.4 538.3
interosseo 0.0 0.0 31.5 0.0 126.0 0.1 210.0 0.1 504.0
G.L. calcaneo-
cuboideo sup. 0.0 0.1 74.0 0.3 296.0 0.4 493.4 0.7 1184.0
astragalo-
calcaneale post. 0.0 0.1 86.6 0.2 346.5 0.2 577.5 0.4 1386.0
astragalo-
calcaneale est. 0.0 0.1 86.6 0.2 346.5 0.2 577.5 0.4 1386.0
calcaneo-
scafoideo inf. 0.0 0.1 253.6 0.2 1014.3 0.2 1690.5 0.4 4057.2
tibio-naviculare 0.0 0.1 86.6 0.2 346.5 0.3 577.5 0.6 1386.0
aponeurosi 2 0.0 0.5 15.8 0.9 63.0 1.2 105.0 2.3 252.0
aponeurosi 3 0.0 0.5 15.8 0.9 63.0 1.2 105.0 2.3 252.0
aponeurosi 4 0.0 0.5 15.8 0.9 63.0 1.2 105.0 2.3 252.0
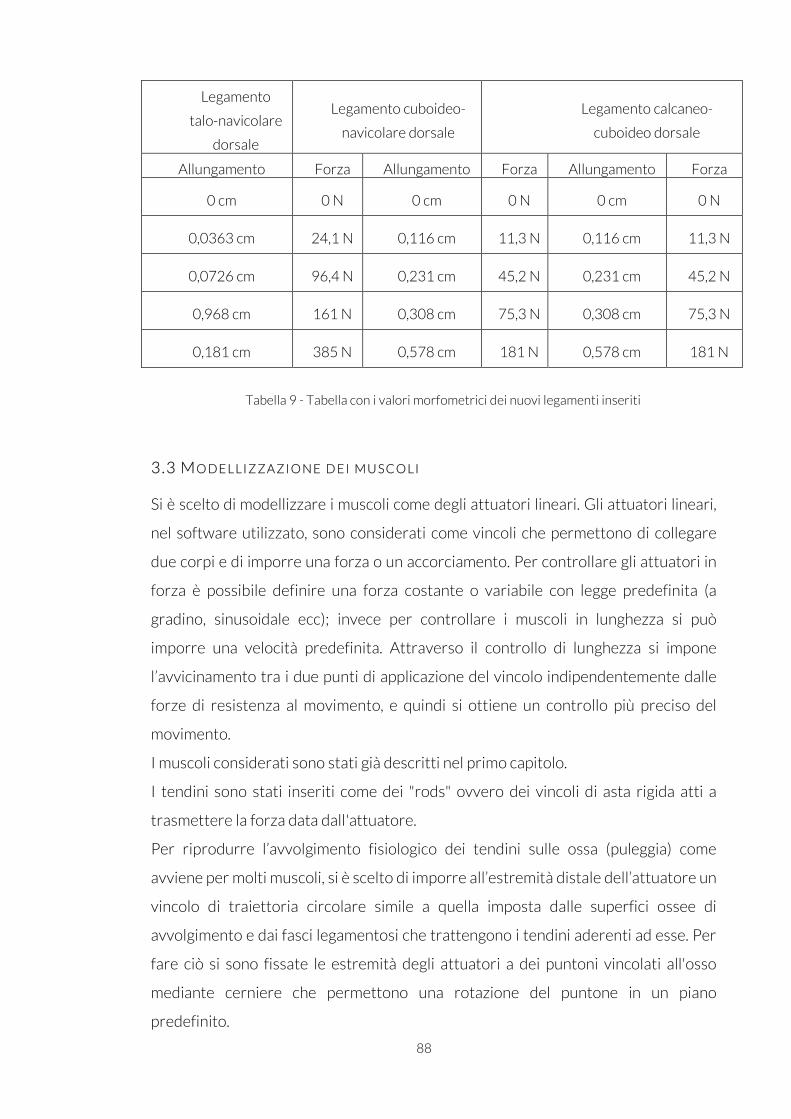
88
Tabella 9 - Tabella con i valori morfometrici dei nuovi legamenti inseriti
3 .3 MO D E L LI Z Z A Z I O N E D E I M U S C O LI
Si è scelto di modellizzare i muscoli come degli attuatori lineari. Gli attuatori lineari,
nel software utilizzato, sono considerati come vincoli che permettono di collegare
due corpi e di imporre una forza o un accorciamento. Per controllare gli attuatori in
forza è possibile definire una forza costante o variabile con legge predefinita (a
gradino, sinusoidale ecc); invece per controllare i muscoli in lunghezza si può
imporre una velocità predefinita. Attraverso il controllo di lunghezza si impone
l’avvicinamento tra i due punti di applicazione del vincolo indipendentemente dalle
forze di resistenza al movimento, e quindi si ottiene un controllo più preciso del
movimento.
I muscoli considerati sono stati già descritti nel primo capitolo.
I tendini sono stati inseriti come dei "rods" ovvero dei vincoli di asta rigida atti a
trasmettere la forza data dall'attuatore.
Per riprodurre l’avvolgimento fisiologico dei tendini sulle ossa (puleggia) come
avviene per molti muscoli, si è scelto di imporre all’estremità distale dell’attuatore un
vincolo di traiettoria circolare simile a quella imposta dalle superfici ossee di
avvolgimento e dai fasci legamentosi che trattengono i tendini aderenti ad esse. Per
fare ciò si sono fissate le estremità degli attuatori a dei puntoni vincolati all'osso
mediante cerniere che permettono una rotazione del puntone in un piano
predefinito.
Legamento
talo-navicolare
dorsale
Legamento cuboideo-
navicolare dorsale
Legamento calcaneo-
cuboideo dorsale
Allungamento Forza Allungamento Forza Allungamento Forza
0 cm 0 N 0 cm 0 N 0 cm 0 N
0,0363 cm 24,1 N 0,116 cm 11,3 N 0,116 cm 11,3 N
0,0726 cm 96,4 N 0,231 cm 45,2 N 0,231 cm 45,2 N
0,968 cm 161 N 0,308 cm 75,3 N 0,308 cm 75,3 N
0,181 cm 385 N 0,578 cm 181 N 0,578 cm 181 N
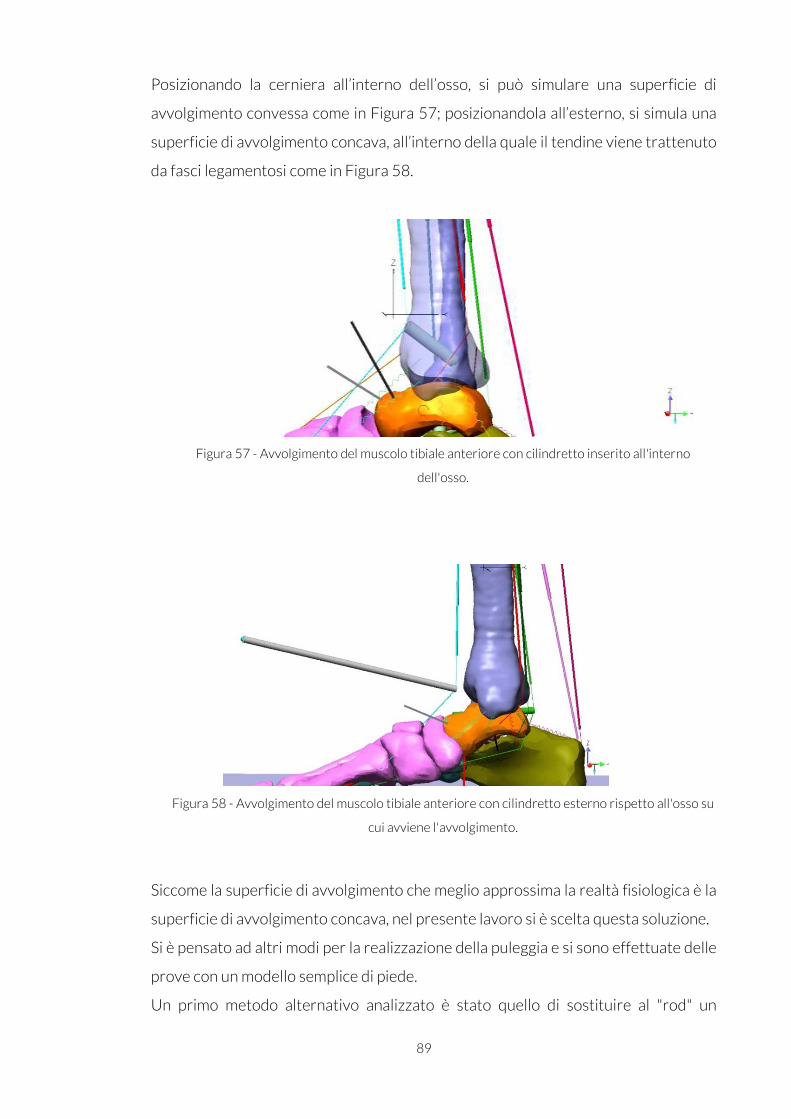
Posizionando la cerniera all’interno dell’osso, si può simulare una superficie di
avvolgimento convessa
superficie di avvolgimento concava, all’interno della quale il tendine viene trattenuto
da fasci legamentosi
Figura 57 - Avvolgimento del muscolo tibiale anteriore con cilindretto inserito all'interno
Figura 58 - Avvolgimento del muscolo tibiale anteriore con cilindretto esterno rispetto all'osso su
Siccome la superficie di avvolgimento che meglio approssima la realtà fisiologica è la
superficie di avvolgimento concava, nel presente
Si è pensato ad altri modi
prove con un modello semplice
Un primo metodo alternativo analizzato è stato quello di sostituire al "rod" un
89
Posizionando la cerniera all’interno dell’osso, si può simulare una superficie di
avvolgimento convessa come in Figura 57; posizionandola all’esterno, si simula una
superficie di avvolgimento concava, all’interno della quale il tendine viene trattenuto
da fasci legamentosi come in Figura 58.
Avvolgimento del muscolo tibiale anteriore con cilindretto inserito all'interno
dell'osso.
Avvolgimento del muscolo tibiale anteriore con cilindretto esterno rispetto all'osso su
cui avviene l'avvolgimento.
Siccome la superficie di avvolgimento che meglio approssima la realtà fisiologica è la
superficie di avvolgimento concava, nel presente lavoro si è scelta questa soluzione.
Si è pensato ad altri modi per la realizzazione della puleggia e si sono effettuate delle
rove con un modello semplice di piede.
Un primo metodo alternativo analizzato è stato quello di sostituire al "rod" un
Posizionando la cerniera all’interno dell’osso, si può simulare una superficie di
; posizionandola all’esterno, si simula una
superficie di avvolgimento concava, all’interno della quale il tendine viene trattenuto
Avvolgimento del muscolo tibiale anteriore con cilindretto inserito all'interno
Avvolgimento del muscolo tibiale anteriore con cilindretto esterno rispetto all'osso su
Siccome la superficie di avvolgimento che meglio approssima la realtà fisiologica è la
lavoro si è scelta questa soluzione.
della puleggia e si sono effettuate delle
Un primo metodo alternativo analizzato è stato quello di sostituire al "rod" un
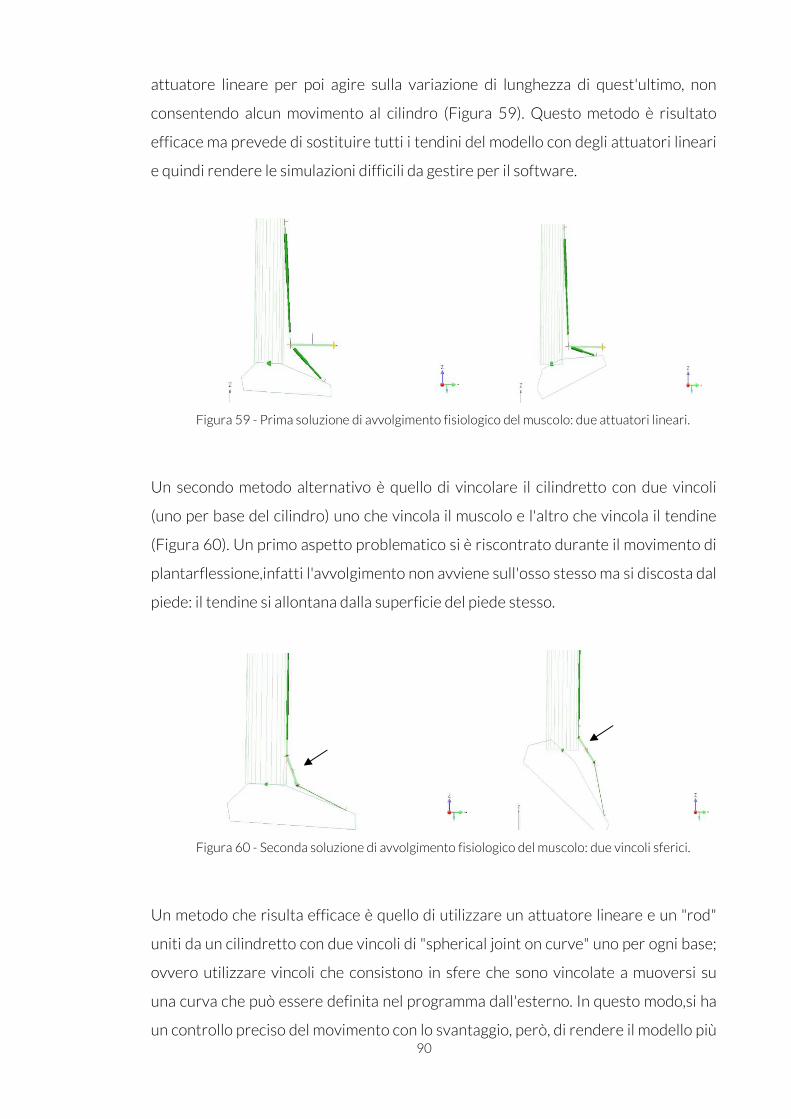
90
attuatore lineare per poi agire sulla variazione di lunghezza di quest'ultimo, non
consentendo alcun movimento al cilindro (Figura 59). Questo metodo è risultato
efficace ma prevede di sostituire tutti i tendini del modello con degli attuatori lineari
e quindi rendere le simulazioni difficili da gestire per il software.
Figura 59 - Prima soluzione di avvolgimento fisiologico del muscolo: due attuatori lineari.
Un secondo metodo alternativo è quello di vincolare il cilindretto con due vincoli
(uno per base del cilindro) uno che vincola il muscolo e l'altro che vincola il tendine
(Figura 60). Un primo aspetto problematico si è riscontrato durante il movimento di
plantarflessione,infatti l'avvolgimento non avviene sull'osso stesso ma si discosta dal
piede: il tendine si allontana dalla superficie del piede stesso.
Figura 60 - Seconda soluzione di avvolgimento fisiologico del muscolo: due vincoli sferici.
Un metodo che risulta efficace è quello di utilizzare un attuatore lineare e un "rod"
uniti da un cilindretto con due vincoli di "spherical joint on curve" uno per ogni base;
ovvero utilizzare vincoli che consistono in sfere che sono vincolate a muoversi su
una curva che può essere definita nel programma dall'esterno. In questo modo,si ha
un controllo preciso del movimento con lo svantaggio, però, di rendere il modello più
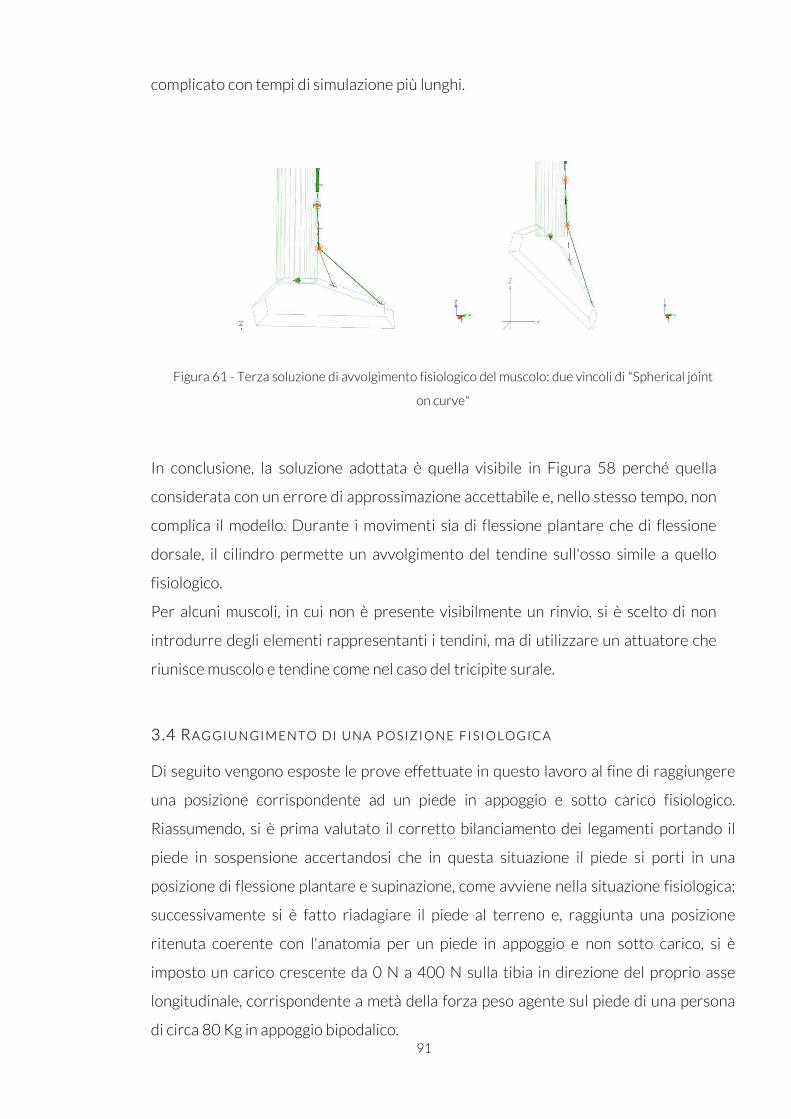
91
complicato con tempi di simulazione più lunghi.
Figura 61 - Terza soluzione di avvolgimento fisiologico del muscolo: due vincoli di "Spherical joint
on curve"
In conclusione, la soluzione adottata è quella visibile in Figura 58 perché quella
considerata con un errore di approssimazione accettabile e, nello stesso tempo, non
complica il modello. Durante i movimenti sia di flessione plantare che di flessione
dorsale, il cilindro permette un avvolgimento del tendine sull'osso simile a quello
fisiologico.
Per alcuni muscoli, in cui non è presente visibilmente un rinvio, si è scelto di non
introdurre degli elementi rappresentanti i tendini, ma di utilizzare un attuatore che
riunisce muscolo e tendine come nel caso del tricipite surale.
3 .4 RA G G I U N G I M E N T O D I U N A P O S I Z I O N E F I S I O L O G I C A
Di seguito vengono esposte le prove effettuate in questo lavoro al fine di raggiungere
una posizione corrispondente ad un piede in appoggio e sotto carico fisiologico.
Riassumendo, si è prima valutato il corretto bilanciamento dei legamenti portando il
piede in sospensione accertandosi che in questa situazione il piede si porti in una
posizione di flessione plantare e supinazione, come avviene nella situazione fisiologica;
successivamente si è fatto riadagiare il piede al terreno e, raggiunta una posizione
ritenuta coerente con l'anatomia per un piede in appoggio e non sotto carico, si è
imposto un carico crescente da 0 N a 400 N sulla tibia in direzione del proprio asse
longitudinale, corrispondente a metà della forza peso agente sul piede di una persona
di circa 80 Kg in appoggio bipodalico.
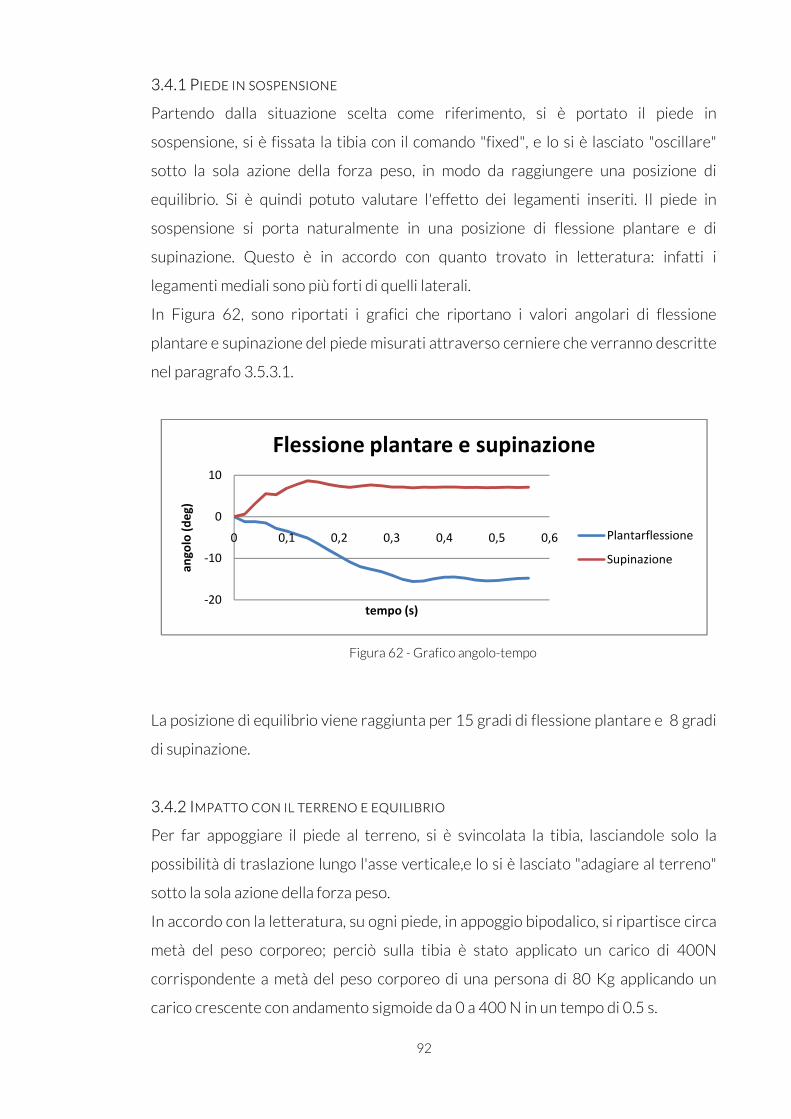
92
3.4.1 PIEDE IN SOSPENSIONE
Partendo dalla situazione scelta come riferimento, si è portato il piede in
sospensione, si è fissata la tibia con il comando "fixed", e lo si è lasciato "oscillare"
sotto la sola azione della forza peso, in modo da raggiungere una posizione di
equilibrio. Si è quindi potuto valutare l'effetto dei legamenti inseriti. Il piede in
sospensione si porta naturalmente in una posizione di flessione plantare e di
supinazione. Questo è in accordo con quanto trovato in letteratura: infatti i
legamenti mediali sono più forti di quelli laterali.
In Figura 62, sono riportati i grafici che riportano i valori angolari di flessione
plantare e supinazione del piede misurati attraverso cerniere che verranno descritte
nel paragrafo 3.5.3.1.
Figura 62 - Grafico angolo-tempo
La posizione di equilibrio viene raggiunta per 15 gradi di flessione plantare e 8 gradi
di supinazione.
3.4.2 IMPATTO CON IL TERRENO E EQUILIBRIO
Per far appoggiare il piede al terreno, si è svincolata la tibia, lasciandole solo la
possibilità di traslazione lungo l'asse verticale,e lo si è lasciato "adagiare al terreno"
sotto la sola azione della forza peso.
In accordo con la letteratura, su ogni piede, in appoggio bipodalico, si ripartisce circa
metà del peso corporeo; perciò sulla tibia è stato applicato un carico di 400N
corrispondente a metà del peso corporeo di una persona di 80 Kg applicando un
carico crescente con andamento sigmoide da 0 a 400 N in un tempo di 0.5 s.
-20
-10
0
10
0 0,1 0,2 0,3 0,4 0,5 0,6
an
go
lo (
de
g)
tempo (s)
Flessione plantare e supinazione
Plantarflessione
Supinazione
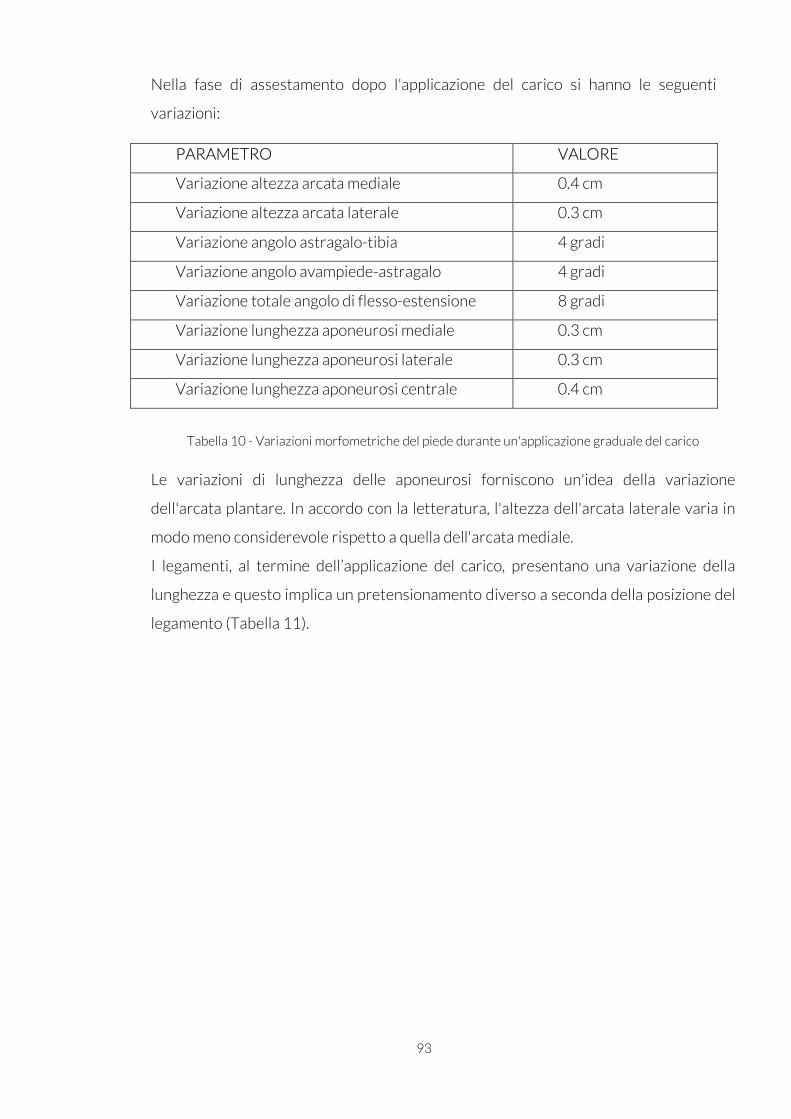
93
Nella fase di assestamento dopo l'applicazione del carico si hanno le seguenti
variazioni:
Tabella 10 - Variazioni morfometriche del piede durante un'applicazione graduale del carico
Le variazioni di lunghezza delle aponeurosi forniscono un'idea della variazione
dell'arcata plantare. In accordo con la letteratura, l'altezza dell'arcata laterale varia in
modo meno considerevole rispetto a quella dell'arcata mediale.
I legamenti, al termine dell’applicazione del carico, presentano una variazione della
lunghezza e questo implica un pretensionamento diverso a seconda della posizione del
legamento (Tabella 11).
PARAMETRO VALORE
Variazione altezza arcata mediale 0.4 cm
Variazione altezza arcata laterale 0.3 cm
Variazione angolo astragalo-tibia 4 gradi
Variazione angolo avampiede-astragalo 4 gradi
Variazione totale angolo di flesso-estensione 8 gradi
Variazione lunghezza aponeurosi mediale 0.3 cm
Variazione lunghezza aponeurosi laterale 0.3 cm
Variazione lunghezza aponeurosi centrale 0.4 cm
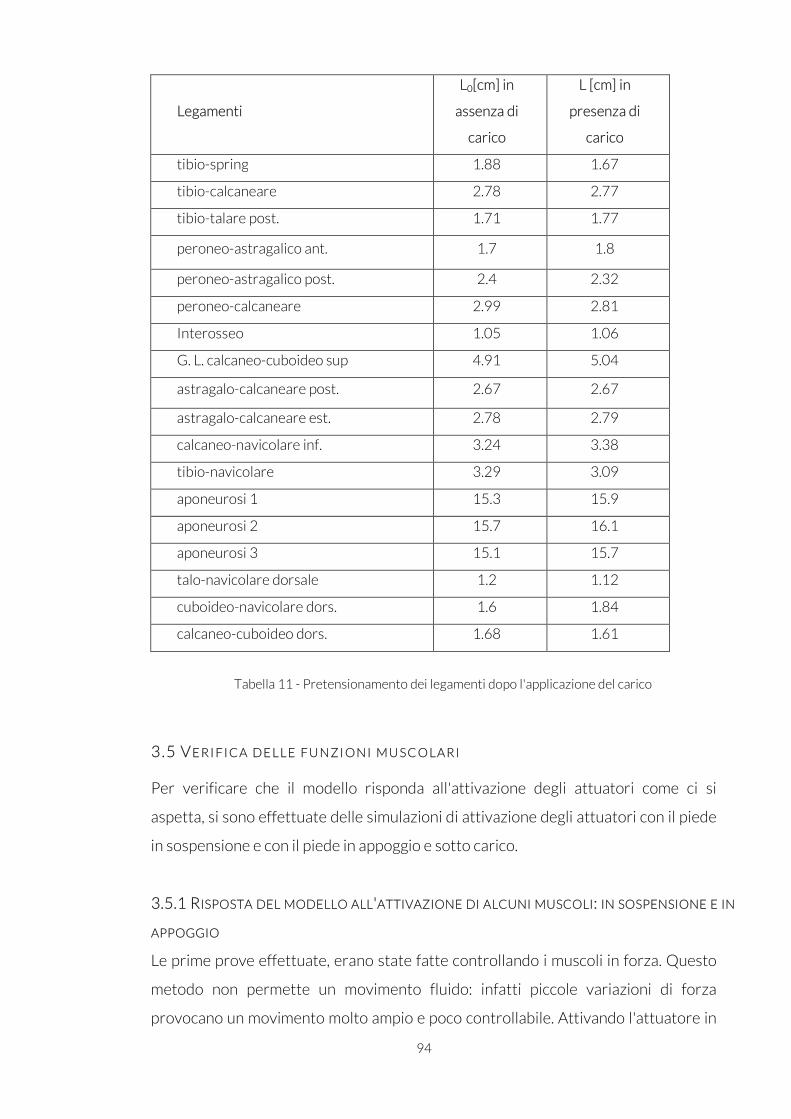
94
Legamenti
L0[cm] in
assenza di
carico
L [cm] in
presenza di
carico
tibio-spring 1.88 1.67
tibio-calcaneare 2.78 2.77
tibio-talare post. 1.71 1.77
peroneo-astragalico ant. 1.7 1.8
peroneo-astragalico post. 2.4 2.32
peroneo-calcaneare 2.99 2.81
Interosseo 1.05 1.06
G. L. calcaneo-cuboideo sup 4.91 5.04
astragalo-calcaneare post. 2.67 2.67
astragalo-calcaneare est. 2.78 2.79
calcaneo-navicolare inf. 3.24 3.38
tibio-navicolare 3.29 3.09
aponeurosi 1 15.3 15.9
aponeurosi 2 15.7 16.1
aponeurosi 3 15.1 15.7
talo-navicolare dorsale 1.2 1.12
cuboideo-navicolare dors. 1.6 1.84
calcaneo-cuboideo dors. 1.68 1.61
Tabella 11 - Pretensionamento dei legamenti dopo l'applicazione del carico
3 .5 VE R I F I C A D E L LE F U N Z I O N I M U S C O LA R I
Per verificare che il modello risponda all'attivazione degli attuatori come ci si
aspetta, si sono effettuate delle simulazioni di attivazione degli attuatori con il piede
in sospensione e con il piede in appoggio e sotto carico.
3.5.1 RISPOSTA DEL MODELLO ALL'ATTIVAZIONE DI ALCUNI MUSCOLI: IN SOSPENSIONE E IN
APPOGGIO
Le prime prove effettuate, erano state fatte controllando i muscoli in forza. Questo
metodo non permette un movimento fluido: infatti piccole variazioni di forza
provocano un movimento molto ampio e poco controllabile. Attivando l'attuatore in
95
velocità, invece, si impone l'accorciamento dello stesso, con un controllo più fine del
movimento. Se però si attivano due muscoli che agiscono sullo stesso grado di
libertà controllandoli entrambi in velocità, il sistema diventa iperstatico e solo uno
dei due attuatori governa il movimento mentre l'altro si accorcia con legge che
dipende da criteri non noti predefiniti dal software. Se invece i due attuatori, pur
essendo sinergici per un certo grado di libertà, possiedono anche funzioni
significativamente diverse, che si estrinsecano su diversi gradi di libertà, il controllo
in lunghezza può avvenire, ed avrà come risultato un movimento che dipende dal
rapporto di velocità tra i due attuatori.
Prima di effettuare i movimenti elementari della caviglia e del piede, si è scelto di
attivare alcuni attuatori per verificare che il modello risponda come voluto,sia con il
piede in sospensione che con il piede in appoggio e sotto carico.
In particolare, con il piede in sospensione si sono attivati i due muscoli
tibiali(anteriore e posteriore) per ottenere una supinazione pura; il muscolo peroneo
breve per ottenere un movimento di pronazione; i muscoli flessori (flessore lungo
delle dita e dell'alluce), per valutare l'azione dei flessori plantari della caviglia.
Con il piede in appoggio, si sono concessi alla tibia solo movimenti di traslazione in
tutti e tre i piani impedendone la rotazione, e si è valutata l'azione dei muscoli
flessori dorsali come il tibiale anteriore e il peroneo anteriore e quella del muscolo
flessore plantare gastrocnemio.
In Tabella 12, vengono riportatati i muscoli attivati con la relativa velocità di
accorciamento e l'azione svolta teoricamente.
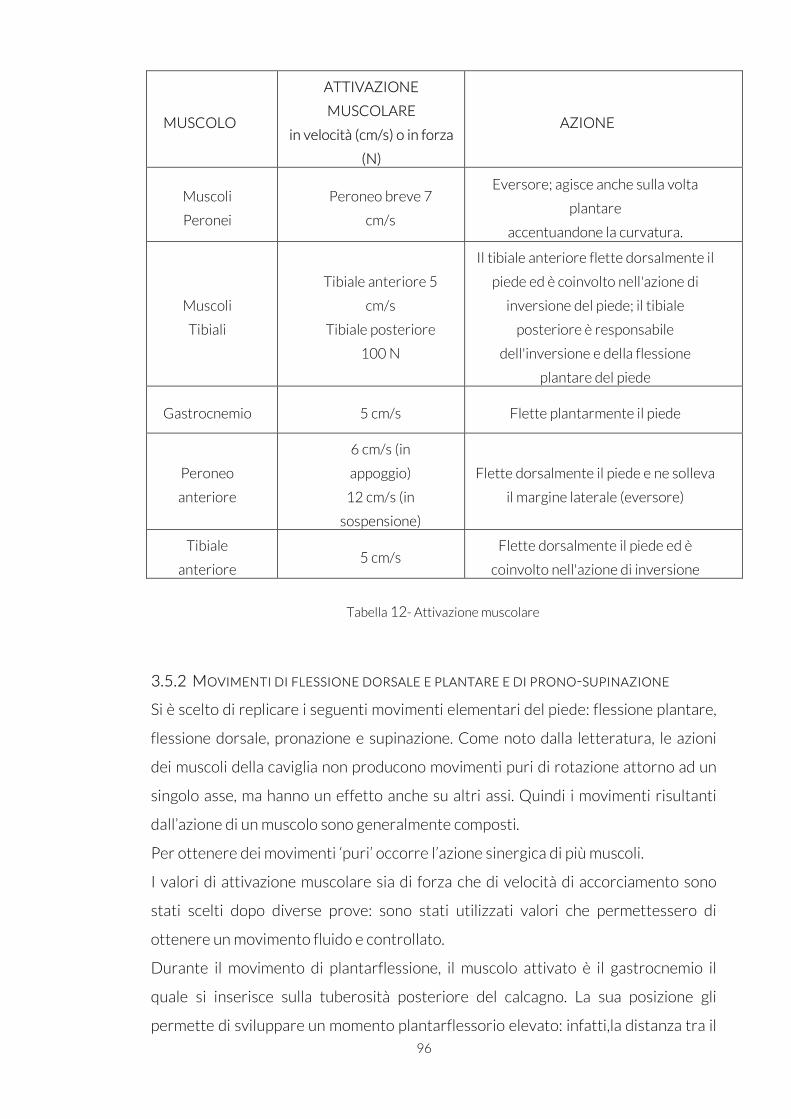
96
Tabella 12- Attivazione muscolare
3.5.2 MOVIMENTI DI FLESSIONE DORSALE E PLANTARE E DI PRONO-SUPINAZIONE
Si è scelto di replicare i seguenti movimenti elementari del piede: flessione plantare,
flessione dorsale, pronazione e supinazione. Come noto dalla letteratura, le azioni
dei muscoli della caviglia non producono movimenti puri di rotazione attorno ad un
singolo asse, ma hanno un effetto anche su altri assi. Quindi i movimenti risultanti
dall’azione di un muscolo sono generalmente composti.
Per ottenere dei movimenti ‘puri’ occorre l’azione sinergica di più muscoli.
I valori di attivazione muscolare sia di forza che di velocità di accorciamento sono
stati scelti dopo diverse prove: sono stati utilizzati valori che permettessero di
ottenere un movimento fluido e controllato.
Durante il movimento di plantarflessione, il muscolo attivato è il gastrocnemio il
quale si inserisce sulla tuberosità posteriore del calcagno. La sua posizione gli
permette di sviluppare un momento plantarflessorio elevato: infatti,la distanza tra il
MUSCOLO
ATTIVAZIONE
MUSCOLARE
in velocità (cm/s) o in forza
(N)
AZIONE
Muscoli
Peronei
Peroneo breve 7
cm/s
Eversore; agisce anche sulla volta
plantare
accentuandone la curvatura.
Muscoli
Tibiali
Tibiale anteriore 5
cm/s
Tibiale posteriore
100 N
Il tibiale anteriore flette dorsalmente il
piede ed è coinvolto nell'azione di
inversione del piede; il tibiale
posteriore è responsabile
dell'inversione e della flessione
plantare del piede
Gastrocnemio 5 cm/s Flette plantarmente il piede
Peroneo
anteriore
6 cm/s (in
appoggio)
12 cm/s (in
sospensione)
Flette dorsalmente il piede e ne solleva
il margine laterale (eversore)
Tibiale
anteriore 5 cm/s
Flette dorsalmente il piede ed è
coinvolto nell'azione di inversione
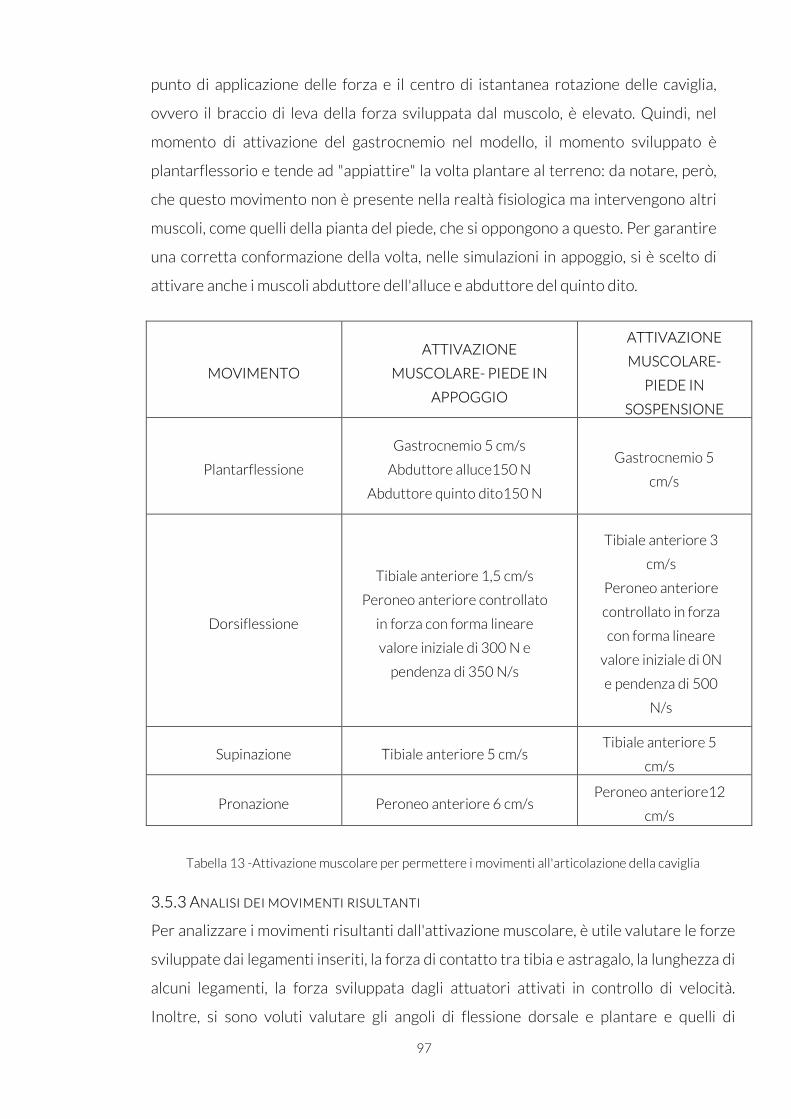
97
punto di applicazione delle forza e il centro di istantanea rotazione delle caviglia,
ovvero il braccio di leva della forza sviluppata dal muscolo, è elevato. Quindi, nel
momento di attivazione del gastrocnemio nel modello, il momento sviluppato è
plantarflessorio e tende ad "appiattire" la volta plantare al terreno: da notare, però,
che questo movimento non è presente nella realtà fisiologica ma intervengono altri
muscoli, come quelli della pianta del piede, che si oppongono a questo. Per garantire
una corretta conformazione della volta, nelle simulazioni in appoggio, si è scelto di
attivare anche i muscoli abduttore dell'alluce e abduttore del quinto dito.
Tabella 13 -Attivazione muscolare per permettere i movimenti all'articolazione della caviglia
3.5.3 ANALISI DEI MOVIMENTI RISULTANTI
Per analizzare i movimenti risultanti dall'attivazione muscolare, è utile valutare le forze
sviluppate dai legamenti inseriti, la forza di contatto tra tibia e astragalo, la lunghezza di
alcuni legamenti, la forza sviluppata dagli attuatori attivati in controllo di velocità.
Inoltre, si sono voluti valutare gli angoli di flessione dorsale e plantare e quelli di
MOVIMENTO
ATTIVAZIONE
MUSCOLARE- PIEDE IN
APPOGGIO
ATTIVAZIONE
MUSCOLARE-
PIEDE IN
SOSPENSIONE
Plantarflessione
Gastrocnemio 5 cm/s
Abduttore alluce150 N
Abduttore quinto dito150 N
Gastrocnemio 5
cm/s
Dorsiflessione
Tibiale anteriore 1,5 cm/s
Peroneo anteriore controllato
in forza con forma lineare
valore iniziale di 300 N e
pendenza di 350 N/s
Tibiale anteriore 3
cm/s
Peroneo anteriore
controllato in forza
con forma lineare
valore iniziale di 0N
e pendenza di 500
N/s
Supinazione Tibiale anteriore 5 cm/s Tibiale anteriore 5
cm/s
Pronazione Peroneo anteriore 6 cm/s Peroneo anteriore12
cm/s
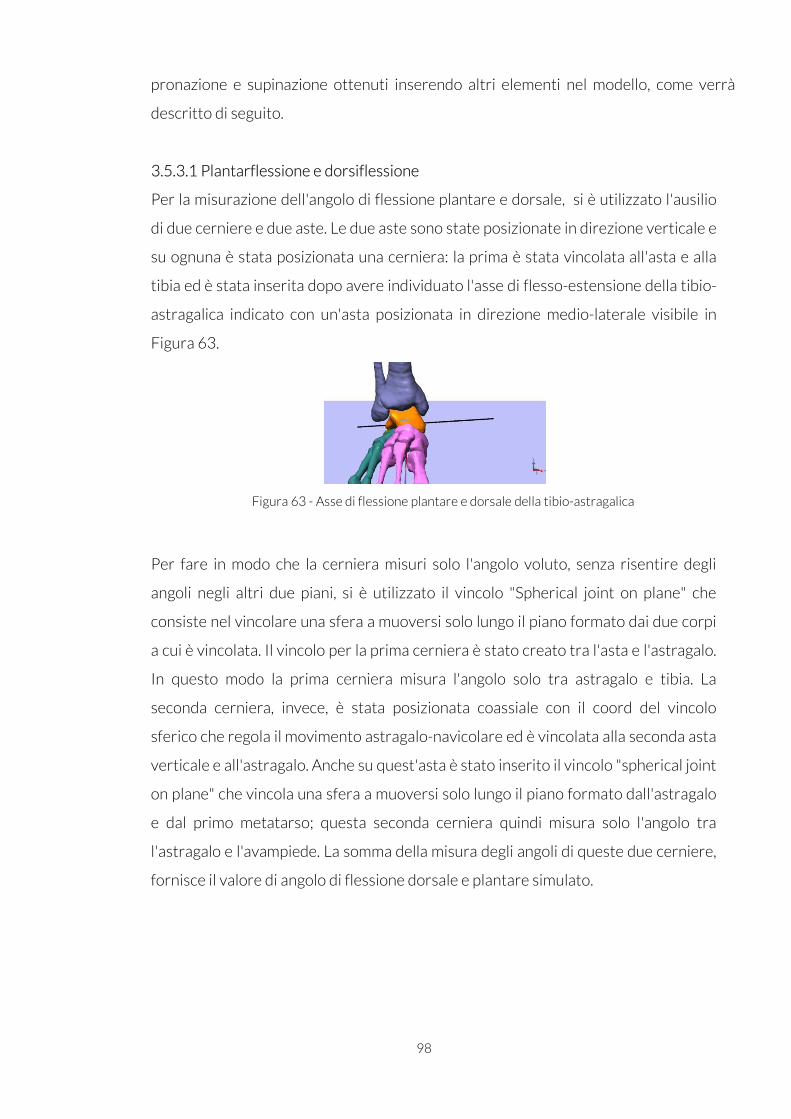
98
pronazione e supinazione ottenuti inserendo altri elementi nel modello, come verrà
descritto di seguito.
3.5.3.1 Plantarflessione e dorsiflessione
Per la misurazione dell'angolo di flessione plantare e dorsale, si è utilizzato l'ausilio
di due cerniere e due aste. Le due aste sono state posizionate in direzione verticale e
su ognuna è stata posizionata una cerniera: la prima è stata vincolata all'asta e alla
tibia ed è stata inserita dopo avere individuato l'asse di flesso-estensione della tibio-
astragalica indicato con un'asta posizionata in direzione medio-laterale visibile in
Figura 63.
Figura 63 - Asse di flessione plantare e dorsale della tibio-astragalica
Per fare in modo che la cerniera misuri solo l'angolo voluto, senza risentire degli
angoli negli altri due piani, si è utilizzato il vincolo "Spherical joint on plane" che
consiste nel vincolare una sfera a muoversi solo lungo il piano formato dai due corpi
a cui è vincolata. Il vincolo per la prima cerniera è stato creato tra l'asta e l'astragalo.
In questo modo la prima cerniera misura l'angolo solo tra astragalo e tibia. La
seconda cerniera, invece, è stata posizionata coassiale con il coord del vincolo
sferico che regola il movimento astragalo-navicolare ed è vincolata alla seconda asta
verticale e all'astragalo. Anche su quest'asta è stato inserito il vincolo "spherical joint
on plane" che vincola una sfera a muoversi solo lungo il piano formato dall'astragalo
e dal primo metatarso; questa seconda cerniera quindi misura solo l'angolo tra
l'astragalo e l'avampiede. La somma della misura degli angoli di queste due cerniere,
fornisce il valore di angolo di flessione dorsale e plantare simulato.
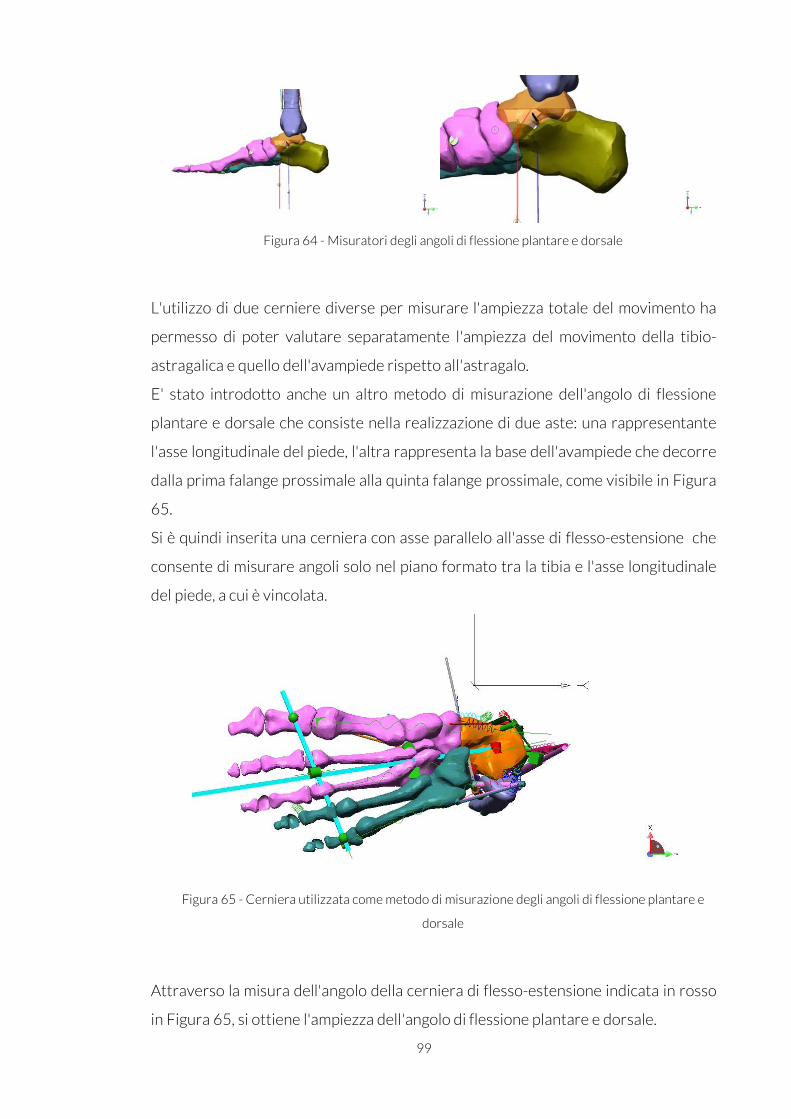
99
Figura 64 - Misuratori degli angoli di flessione plantare e dorsale
L'utilizzo di due cerniere diverse per misurare l'ampiezza totale del movimento ha
permesso di poter valutare separatamente l'ampiezza del movimento della tibio-
astragalica e quello dell'avampiede rispetto all'astragalo.
E' stato introdotto anche un altro metodo di misurazione dell'angolo di flessione
plantare e dorsale che consiste nella realizzazione di due aste: una rappresentante
l'asse longitudinale del piede, l'altra rappresenta la base dell'avampiede che decorre
dalla prima falange prossimale alla quinta falange prossimale, come visibile in Figura
65.
Si è quindi inserita una cerniera con asse parallelo all'asse di flesso-estensione che
consente di misurare angoli solo nel piano formato tra la tibia e l'asse longitudinale
del piede, a cui è vincolata.
Figura 65 - Cerniera utilizzata come metodo di misurazione degli angoli di flessione plantare e
dorsale
Attraverso la misura dell'angolo della cerniera di flesso-estensione indicata in rosso
in Figura 65, si ottiene l'ampiezza dell'angolo di flessione plantare e dorsale.
La convenzione scelta è stata quella di considerare positivi gli angoli di flessione
dorsale e negativi quelli di flessione
3.5.3.2 Supinazione e pronazione
Per misurare gli angoli di pronazione e supinazione, si è utilizzato il motore vincolato
rigidamente all'asse individuato come asse di movimento della sottoastragalica.
Utilizzando gli angoli misurati dal presente motore (motor
movimento), però, si ha una indicazione dei gradi di rotazione solo dell'astragalo
rispetto al calcagno, ovvero della prono
Per conoscere l'ampiezza della prono
stessa struttura a due aste descritta precedentemente. La cerniera utilizzata per la
misura dell'angolo di interesse è un vincolo di "cerniera su piano" con asse parallelo
all'asse longitudinale del piede che consente di misurare angoli solo nel piano
formato tra l'asse longitudinale stesso e l'asse che decorre tra primo e quinto dito, a
cui è vincolata (Figura
Quest'ultima è vincolata alla prima e alla quinta falange prossimale tramite due
vincoli sferici in modo da non vincolare i movimenti relativi tra le dita del piede.
La convenzione scelta
negativi quelli di pronazione.
3.6 MO D E L LI Z Z A Z I O N E D E L L A
3.6.1 DESCRIZIONE GEOMETRIC
La protesi testata nel modello è la protesi BOX
a tre componenti con due componenti metalliche
e una talare, e un inserto mo
100
La convenzione scelta è stata quella di considerare positivi gli angoli di flessione
e negativi quelli di flessione plantare.
.2 Supinazione e pronazione
Per misurare gli angoli di pronazione e supinazione, si è utilizzato il motore vincolato
rigidamente all'asse individuato come asse di movimento della sottoastragalica.
Utilizzando gli angoli misurati dal presente motore (motore che non impone nessun
movimento), però, si ha una indicazione dei gradi di rotazione solo dell'astragalo
rispetto al calcagno, ovvero della prono-supinazione del retropiede.
Per conoscere l'ampiezza della prono-supinazione dell'avampiede, si è utilizzata
stessa struttura a due aste descritta precedentemente. La cerniera utilizzata per la
misura dell'angolo di interesse è un vincolo di "cerniera su piano" con asse parallelo
all'asse longitudinale del piede che consente di misurare angoli solo nel piano
formato tra l'asse longitudinale stesso e l'asse che decorre tra primo e quinto dito, a
Figura 65).
Quest'ultima è vincolata alla prima e alla quinta falange prossimale tramite due
vincoli sferici in modo da non vincolare i movimenti relativi tra le dita del piede.
La convenzione scelta è stata quella di considerare positivi gli angoli di supinazione e
negativi quelli di pronazione.
O D E L LI Z Z A Z I O N E D E L L A P R O T E S I
ESCRIZIONE GEOMETRICA E CINEMATICA DELLA PROTESI BOX
La protesi testata nel modello è la protesi BOX(Bologna, Oxford)
a tre componenti con due componenti metalliche in lega di cobalto
e un inserto mobile in polietilene (Figura 66).
Figura 66 - Protesi BOX
La convenzione scelta è stata quella di considerare positivi gli angoli di flessione
Per misurare gli angoli di pronazione e supinazione, si è utilizzato il motore vincolato
rigidamente all'asse individuato come asse di movimento della sottoastragalica.
e che non impone nessun
movimento), però, si ha una indicazione dei gradi di rotazione solo dell'astragalo
supinazione del retropiede.
supinazione dell'avampiede, si è utilizzata la
stessa struttura a due aste descritta precedentemente. La cerniera utilizzata per la
misura dell'angolo di interesse è un vincolo di "cerniera su piano" con asse parallelo
all'asse longitudinale del piede che consente di misurare angoli solo nel piano
formato tra l'asse longitudinale stesso e l'asse che decorre tra primo e quinto dito, a
Quest'ultima è vincolata alla prima e alla quinta falange prossimale tramite due
vincoli sferici in modo da non vincolare i movimenti relativi tra le dita del piede.
è stata quella di considerare positivi gli angoli di supinazione e
PROTESI BOX
(Bologna, Oxford) ovvero una protesi
di cobalto-cromo,una tibiale

101
La protesi presenta come forme delle sue superfici articolanti,una componente
tibiale sferica convessa, ed una astragalica cilindrica (Figura 67). Il menisco è
posizionato tra le due componenti metalliche e presenta superfici complementari
alle stesse; in particolare sulla componente talare è presente un solco che corre
antero-posteriormente, che permette al menisco di avere una completa congruenza
tra le superfici, e di muoversi rispetto sia alla componente tibiale sia rispetto alla
componente talare.
Figura 67 - Diagramma nel piano sagittale delle due componenti tibiale e talare della protesi BOX.
Posizione relativa dei loro centri geometrici delle componenti protesiche e del centro istantaneo
di rotazione (cerchietto in bianco, nel punto di incrocio dei due legamenti isometrici); sono
mostrate le posizioni articolari in posizione di flessione dorsale (destra), neutra (centro), e
flessione plantare (sinistra).
L’elemento fortemente innovativo di questa protesi è di presentare una geometria
delle superfici articolari che tiene in considerazione la disposizione e le
caratteristiche dei legamenti della articolazione della caviglia. Lo studio della
articolazione della caviglia in condizioni moto passivo, permette di chiarire il ruolo
sinergico delle superfici articolari e dei legamenti durante il movimento
dell'articolazione. In particolare, Leardini et Al. [37, 38] hanno dimostrato che chele
fibre legamentose dei due legamenti peroneo-calcaneare e tibio-calcaneare, si
mantengono con buona approssimazione isometriche durante tutto il range di
movimento passivo dalla massima flessione plantare alla massima flessione dorsale.
Questo comporta che le superfici articolari vengano mantenute sempre a contatto e
i legamenti ruotino intorno al loro punto di origine e di inserzione senza variare la
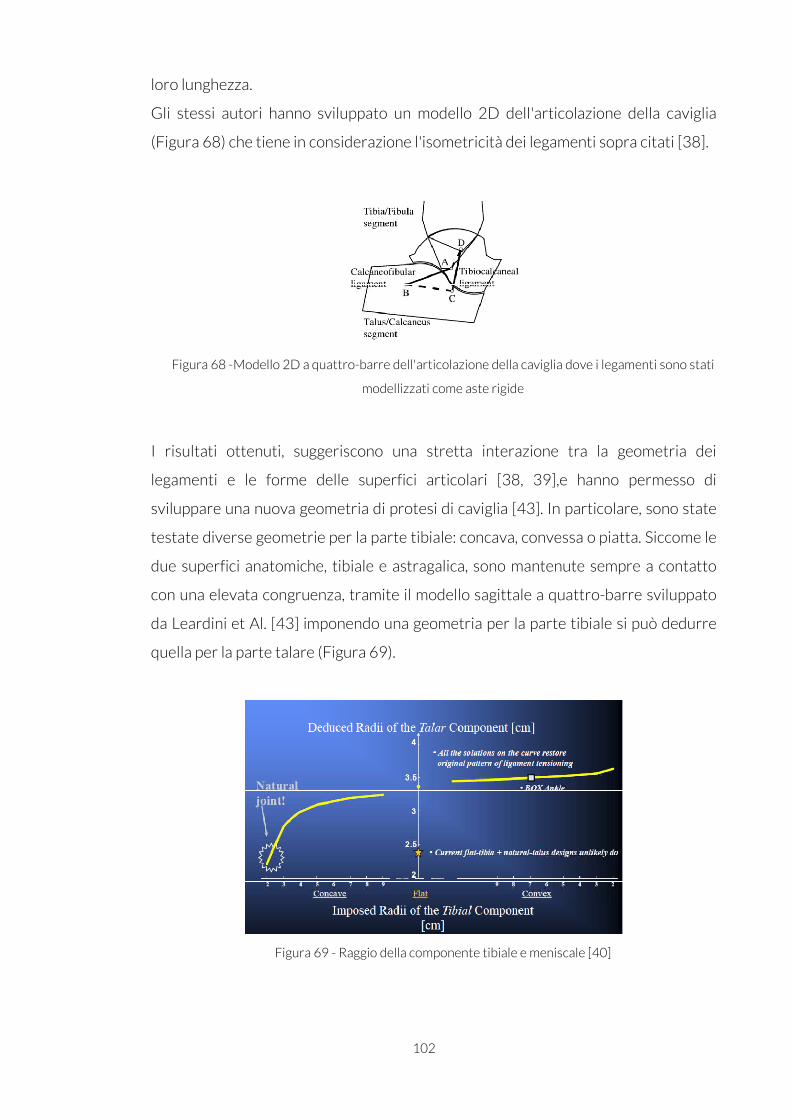
102
loro lunghezza.
Gli stessi autori hanno sviluppato un modello 2D dell'articolazione della caviglia
(Figura 68) che tiene in considerazione l'isometricità dei legamenti sopra citati [38].
Figura 68 -Modello 2D a quattro-barre dell'articolazione della caviglia dove i legamenti sono stati
modellizzati come aste rigide
I risultati ottenuti, suggeriscono una stretta interazione tra la geometria dei
legamenti e le forme delle superfici articolari [38, 39],e hanno permesso di
sviluppare una nuova geometria di protesi di caviglia [43]. In particolare, sono state
testate diverse geometrie per la parte tibiale: concava, convessa o piatta. Siccome le
due superfici anatomiche, tibiale e astragalica, sono mantenute sempre a contatto
con una elevata congruenza, tramite il modello sagittale a quattro-barre sviluppato
da Leardini et Al. [43] imponendo una geometria per la parte tibiale si può dedurre
quella per la parte talare (Figura 69).
Figura 69 - Raggio della componente tibiale e meniscale [40]
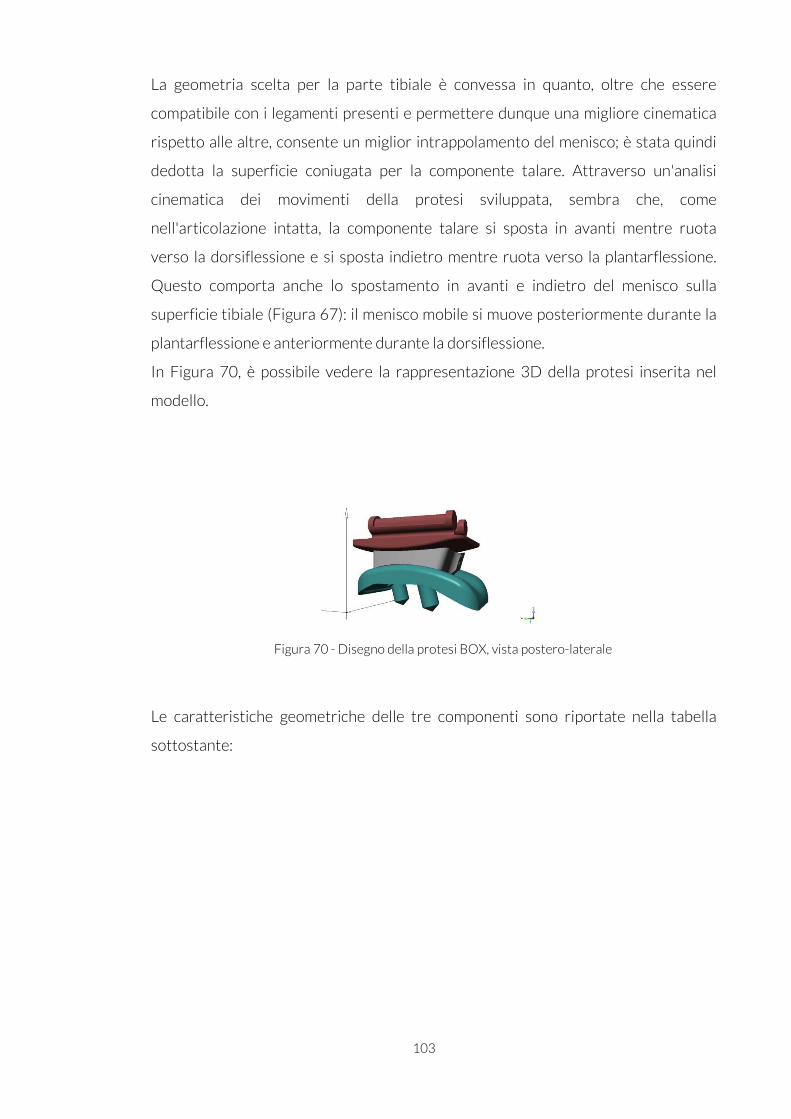
103
La geometria scelta per la parte tibiale è convessa in quanto, oltre che essere
compatibile con i legamenti presenti e permettere dunque una migliore cinematica
rispetto alle altre, consente un miglior intrappolamento del menisco; è stata quindi
dedotta la superficie coniugata per la componente talare. Attraverso un'analisi
cinematica dei movimenti della protesi sviluppata, sembra che, come
nell'articolazione intatta, la componente talare si sposta in avanti mentre ruota
verso la dorsiflessione e si sposta indietro mentre ruota verso la plantarflessione.
Questo comporta anche lo spostamento in avanti e indietro del menisco sulla
superficie tibiale (Figura 67): il menisco mobile si muove posteriormente durante la
plantarflessione e anteriormente durante la dorsiflessione.
In Figura 70, è possibile vedere la rappresentazione 3D della protesi inserita nel
modello.
Figura 70 - Disegno della protesi BOX, vista postero-laterale
Le caratteristiche geometriche delle tre componenti sono riportate nella tabella
sottostante:
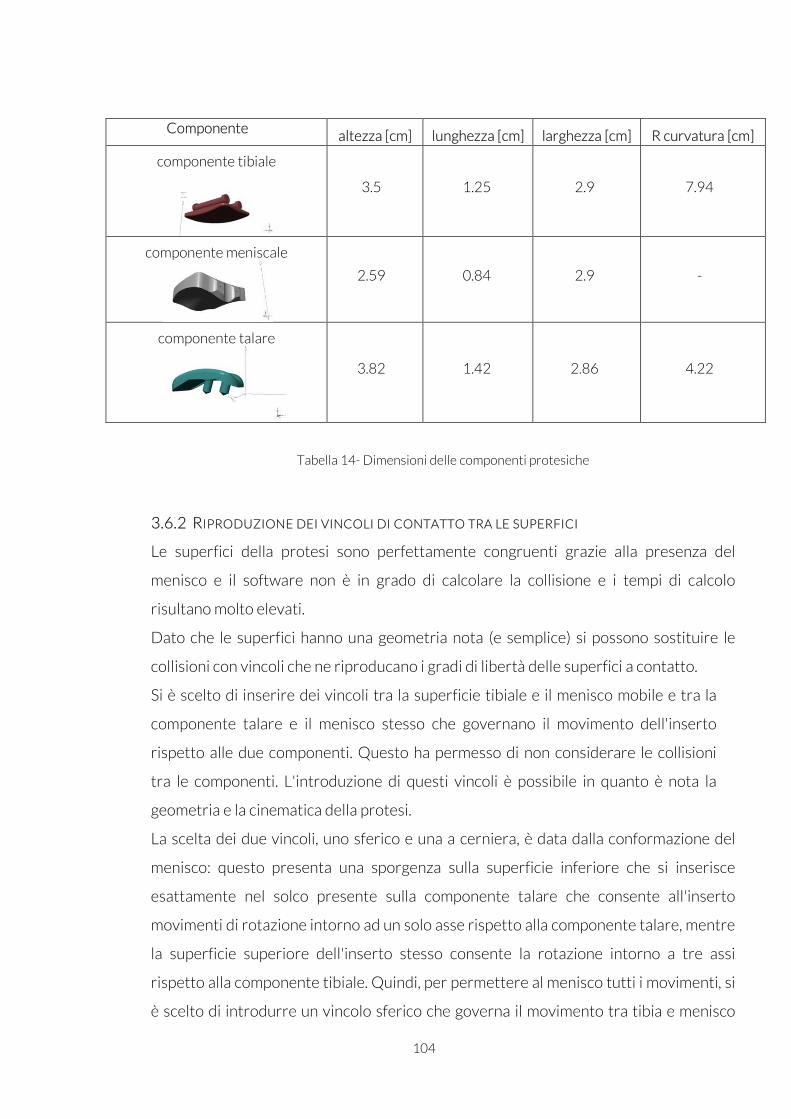
104
Tabella 14- Dimensioni delle componenti protesiche
3.6.2 RIPRODUZIONE DEI VINCOLI DI CONTATTO TRA LE SUPERFICI
Le superfici della protesi sono perfettamente congruenti grazie alla presenza del
menisco e il software non è in grado di calcolare la collisione e i tempi di calcolo
risultano molto elevati.
Dato che le superfici hanno una geometria nota (e semplice) si possono sostituire le
collisioni con vincoli che ne riproducano i gradi di libertà delle superfici a contatto.
Si è scelto di inserire dei vincoli tra la superficie tibiale e il menisco mobile e tra la
componente talare e il menisco stesso che governano il movimento dell'inserto
rispetto alle due componenti. Questo ha permesso di non considerare le collisioni
tra le componenti. L'introduzione di questi vincoli è possibile in quanto è nota la
geometria e la cinematica della protesi.
La scelta dei due vincoli, uno sferico e una a cerniera, è data dalla conformazione del
menisco: questo presenta una sporgenza sulla superficie inferiore che si inserisce
esattamente nel solco presente sulla componente talare che consente all'inserto
movimenti di rotazione intorno ad un solo asse rispetto alla componente talare, mentre
la superficie superiore dell'inserto stesso consente la rotazione intorno a tre assi
rispetto alla componente tibiale. Quindi, per permettere al menisco tutti i movimenti, si
è scelto di introdurre un vincolo sferico che governa il movimento tra tibia e menisco
Componente altezza [cm] lunghezza [cm] larghezza [cm] R curvatura [cm]
componente tibiale
3.5 1.25 2.9 7.94
componente meniscale
2.59 0.84 2.9 -
componente talare
3.82 1.42 2.86 4.22
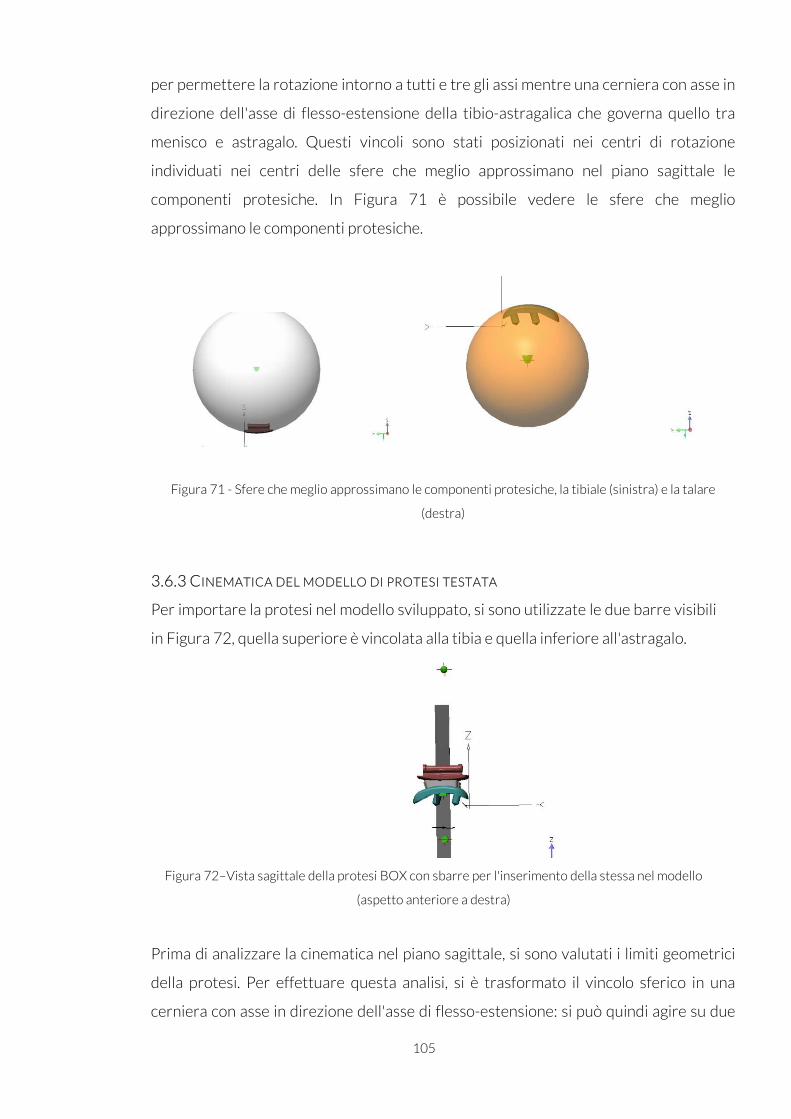
105
per permettere la rotazione intorno a tutti e tre gli assi mentre una cerniera con asse in
direzione dell'asse di flesso-estensione della tibio-astragalica che governa quello tra
menisco e astragalo. Questi vincoli sono stati posizionati nei centri di rotazione
individuati nei centri delle sfere che meglio approssimano nel piano sagittale le
componenti protesiche. In Figura 71 è possibile vedere le sfere che meglio
approssimano le componenti protesiche.
Figura 71 - Sfere che meglio approssimano le componenti protesiche, la tibiale (sinistra) e la talare
(destra)
3.6.3 CINEMATICA DEL MODELLO DI PROTESI TESTATA
Per importare la protesi nel modello sviluppato, si sono utilizzate le due barre visibili
in Figura 72, quella superiore è vincolata alla tibia e quella inferiore all'astragalo.
Figura 72–Vista sagittale della protesi BOX con sbarre per l'inserimento della stessa nel modello
(aspetto anteriore a destra)
Prima di analizzare la cinematica nel piano sagittale, si sono valutati i limiti geometrici
della protesi. Per effettuare questa analisi, si è trasformato il vincolo sferico in una
cerniera con asse in direzione dell'asse di flesso-estensione: si può quindi agire su due
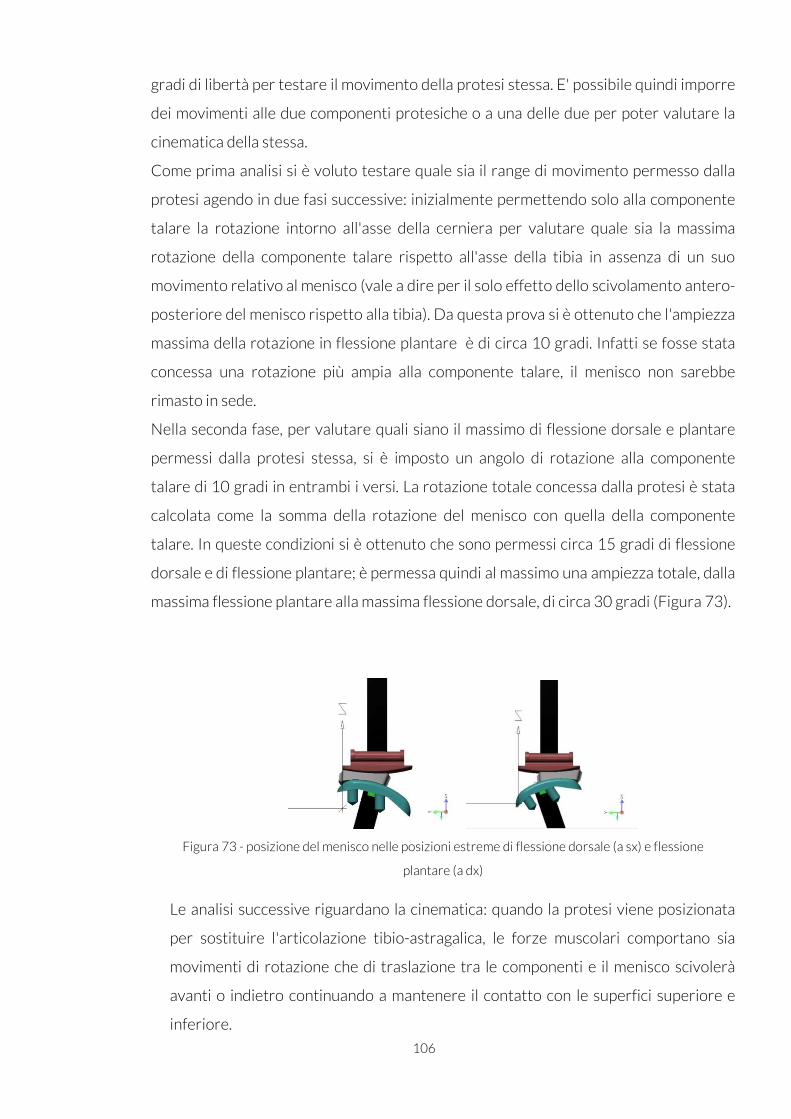
106
gradi di libertà per testare il movimento della protesi stessa. E' possibile quindi imporre
dei movimenti alle due componenti protesiche o a una delle due per poter valutare la
cinematica della stessa.
Come prima analisi si è voluto testare quale sia il range di movimento permesso dalla
protesi agendo in due fasi successive: inizialmente permettendo solo alla componente
talare la rotazione intorno all'asse della cerniera per valutare quale sia la massima
rotazione della componente talare rispetto all'asse della tibia in assenza di un suo
movimento relativo al menisco (vale a dire per il solo effetto dello scivolamento antero-
posteriore del menisco rispetto alla tibia). Da questa prova si è ottenuto che l'ampiezza
massima della rotazione in flessione plantare è di circa 10 gradi. Infatti se fosse stata
concessa una rotazione più ampia alla componente talare, il menisco non sarebbe
rimasto in sede.
Nella seconda fase, per valutare quali siano il massimo di flessione dorsale e plantare
permessi dalla protesi stessa, si è imposto un angolo di rotazione alla componente
talare di 10 gradi in entrambi i versi. La rotazione totale concessa dalla protesi è stata
calcolata come la somma della rotazione del menisco con quella della componente
talare. In queste condizioni si è ottenuto che sono permessi circa 15 gradi di flessione
dorsale e di flessione plantare; è permessa quindi al massimo una ampiezza totale, dalla
massima flessione plantare alla massima flessione dorsale, di circa 30 gradi (Figura 73).
Figura 73 - posizione del menisco nelle posizioni estreme di flessione dorsale (a sx) e flessione
plantare (a dx)
Le analisi successive riguardano la cinematica: quando la protesi viene posizionata
per sostituire l'articolazione tibio-astragalica, le forze muscolari comportano sia
movimenti di rotazione che di traslazione tra le componenti e il menisco scivolerà
avanti o indietro continuando a mantenere il contatto con le superfici superiore e
inferiore.
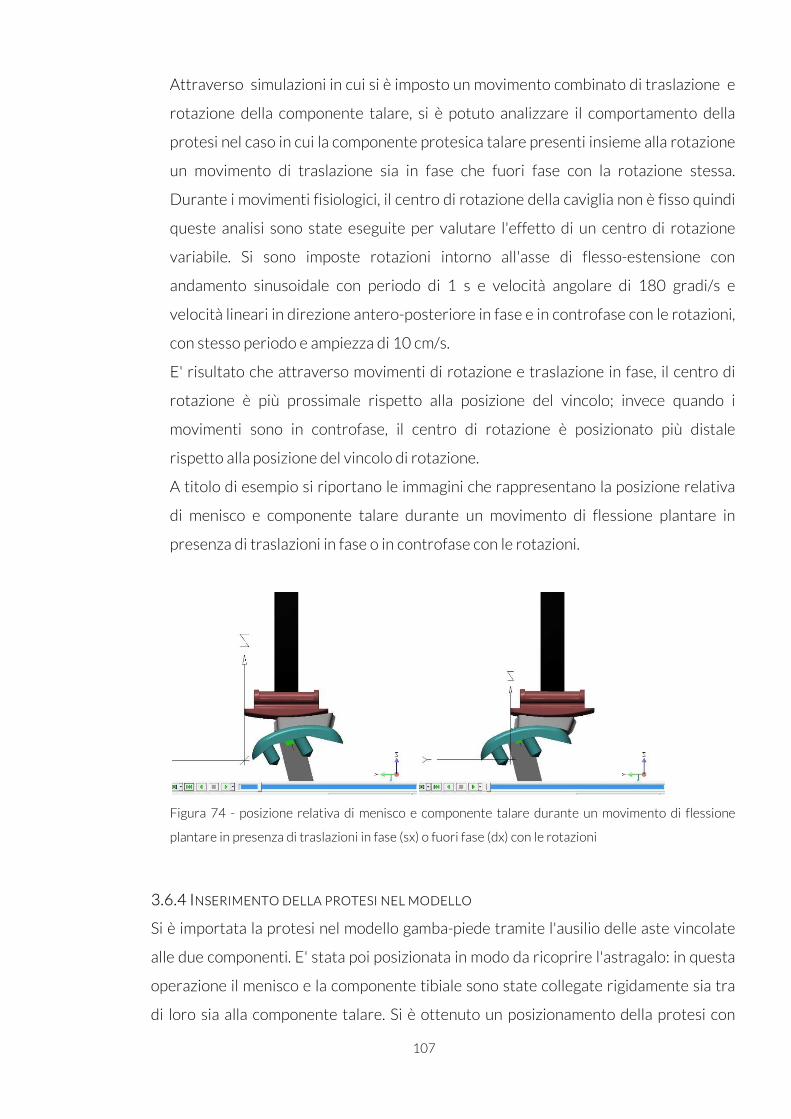
107
Attraverso simulazioni in cui si è imposto un movimento combinato di traslazione e
rotazione della componente talare, si è potuto analizzare il comportamento della
protesi nel caso in cui la componente protesica talare presenti insieme alla rotazione
un movimento di traslazione sia in fase che fuori fase con la rotazione stessa.
Durante i movimenti fisiologici, il centro di rotazione della caviglia non è fisso quindi
queste analisi sono state eseguite per valutare l'effetto di un centro di rotazione
variabile. Si sono imposte rotazioni intorno all'asse di flesso-estensione con
andamento sinusoidale con periodo di 1 s e velocità angolare di 180 gradi/s e
velocità lineari in direzione antero-posteriore in fase e in controfase con le rotazioni,
con stesso periodo e ampiezza di 10 cm/s.
E' risultato che attraverso movimenti di rotazione e traslazione in fase, il centro di
rotazione è più prossimale rispetto alla posizione del vincolo; invece quando i
movimenti sono in controfase, il centro di rotazione è posizionato più distale
rispetto alla posizione del vincolo di rotazione.
A titolo di esempio si riportano le immagini che rappresentano la posizione relativa
di menisco e componente talare durante un movimento di flessione plantare in
presenza di traslazioni in fase o in controfase con le rotazioni.
Figura 74 - posizione relativa di menisco e componente talare durante un movimento di flessione
plantare in presenza di traslazioni in fase (sx) o fuori fase (dx) con le rotazioni
3.6.4 INSERIMENTO DELLA PROTESI NEL MODELLO
Si è importata la protesi nel modello gamba-piede tramite l'ausilio delle aste vincolate
alle due componenti. E' stata poi posizionata in modo da ricoprire l'astragalo: in questa
operazione il menisco e la componente tibiale sono state collegate rigidamente sia tra
di loro sia alla componente talare. Si è ottenuto un posizionamento della protesi con
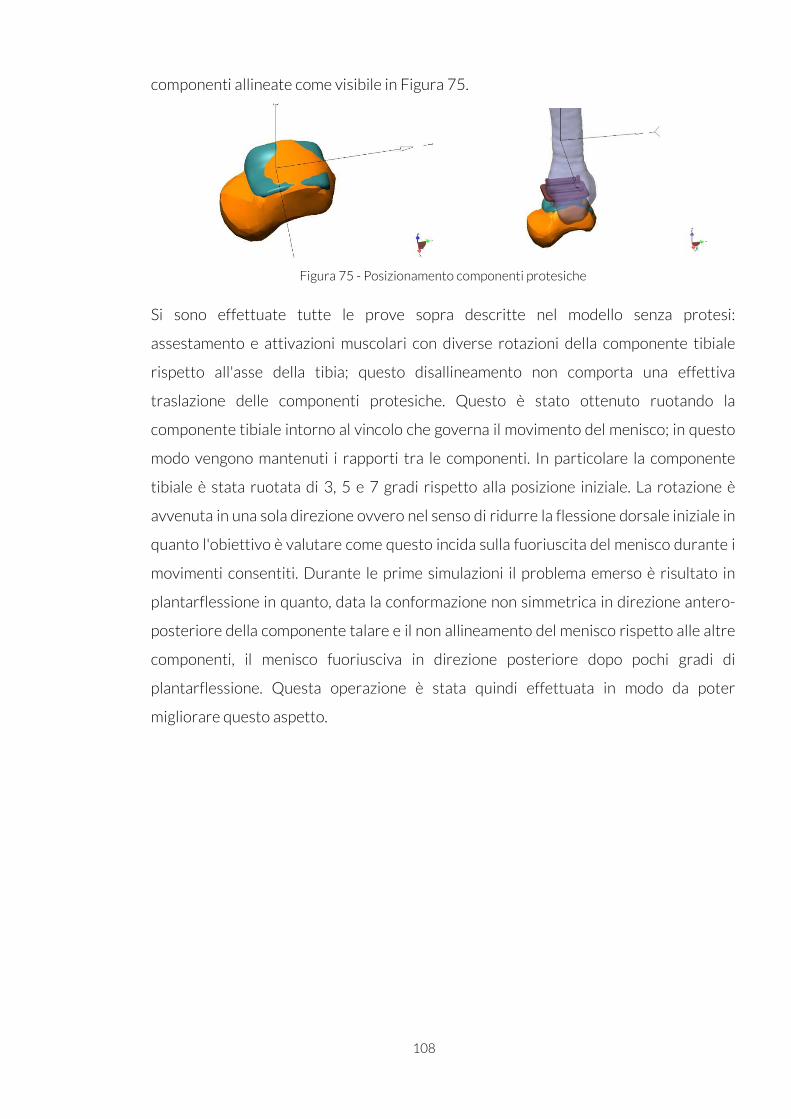
108
componenti allineate come visibile in Figura 75.
Figura 75 - Posizionamento componenti protesiche
Si sono effettuate tutte le prove sopra descritte nel modello senza protesi:
assestamento e attivazioni muscolari con diverse rotazioni della componente tibiale
rispetto all'asse della tibia; questo disallineamento non comporta una effettiva
traslazione delle componenti protesiche. Questo è stato ottenuto ruotando la
componente tibiale intorno al vincolo che governa il movimento del menisco; in questo
modo vengono mantenuti i rapporti tra le componenti. In particolare la componente
tibiale è stata ruotata di 3, 5 e 7 gradi rispetto alla posizione iniziale. La rotazione è
avvenuta in una sola direzione ovvero nel senso di ridurre la flessione dorsale iniziale in
quanto l'obiettivo è valutare come questo incida sulla fuoriuscita del menisco durante i
movimenti consentiti. Durante le prime simulazioni il problema emerso è risultato in
plantarflessione in quanto, data la conformazione non simmetrica in direzione antero-
posteriore della componente talare e il non allineamento del menisco rispetto alle altre
componenti, il menisco fuoriusciva in direzione posteriore dopo pochi gradi di
plantarflessione. Questa operazione è stata quindi effettuata in modo da poter
migliorare questo aspetto.
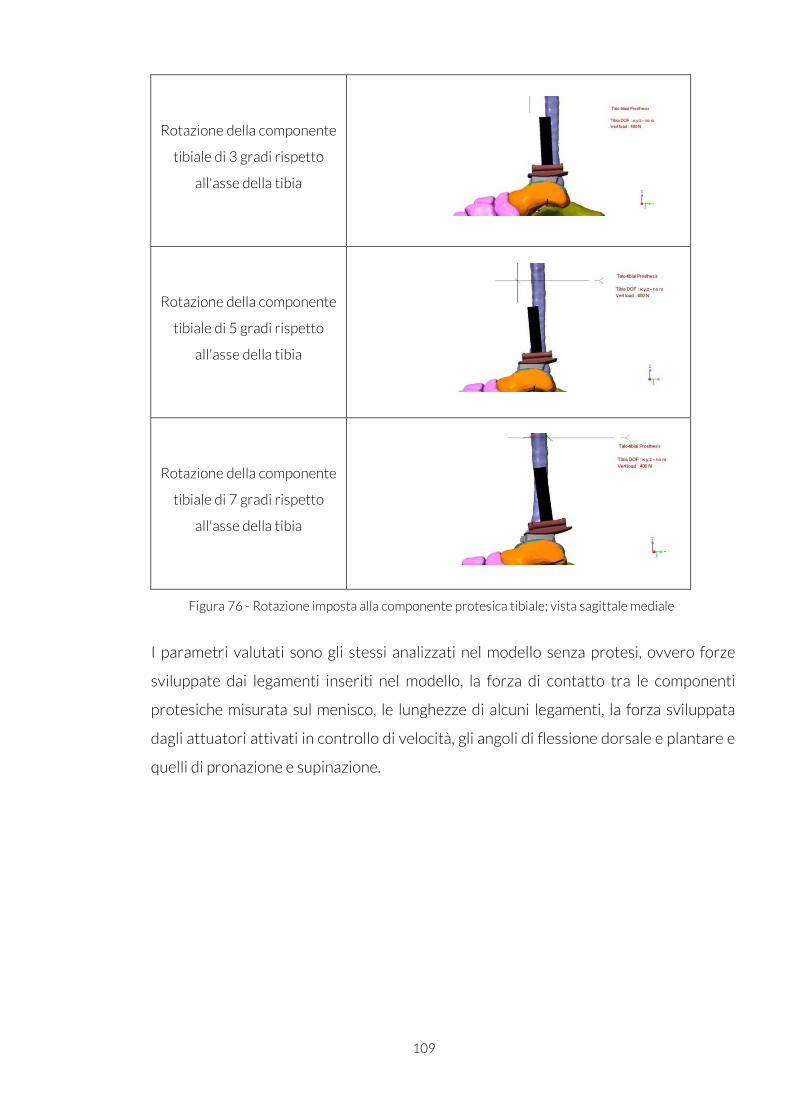
109
Rotazione della componente
tibiale di 3 gradi rispetto
all'asse della tibia
Rotazione della componente
tibiale di 5 gradi rispetto
all'asse della tibia
Rotazione della componente
tibiale di 7 gradi rispetto
all'asse della tibia
Figura 76 - Rotazione imposta alla componente protesica tibiale; vista sagittale mediale
I parametri valutati sono gli stessi analizzati nel modello senza protesi, ovvero forze
sviluppate dai legamenti inseriti nel modello, la forza di contatto tra le componenti
protesiche misurata sul menisco, le lunghezze di alcuni legamenti, la forza sviluppata
dagli attuatori attivati in controllo di velocità, gli angoli di flessione dorsale e plantare e
quelli di pronazione e supinazione.
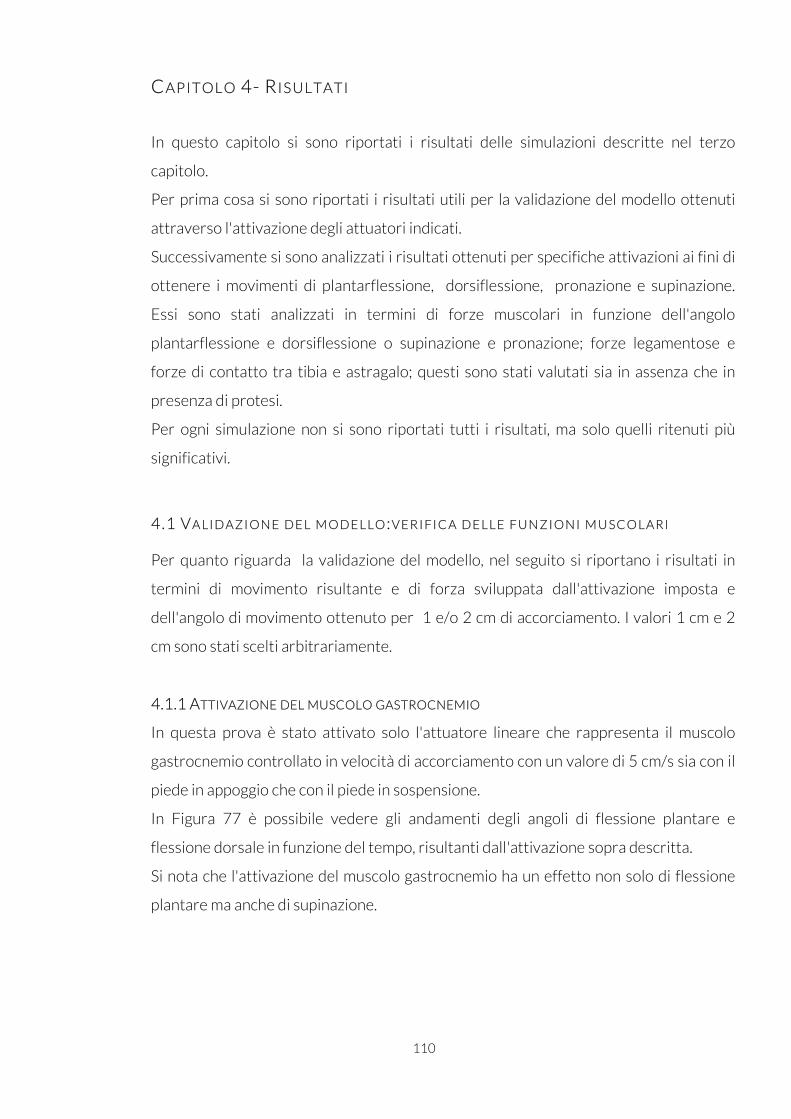
110
CAPITOL O 4- RIS ULTATI
In questo capitolo si sono riportati i risultati delle simulazioni descritte nel terzo
capitolo.
Per prima cosa si sono riportati i risultati utili per la validazione del modello ottenuti
attraverso l'attivazione degli attuatori indicati.
Successivamente si sono analizzati i risultati ottenuti per specifiche attivazioni ai fini di
ottenere i movimenti di plantarflessione, dorsiflessione, pronazione e supinazione.
Essi sono stati analizzati in termini di forze muscolari in funzione dell'angolo
plantarflessione e dorsiflessione o supinazione e pronazione; forze legamentose e
forze di contatto tra tibia e astragalo; questi sono stati valutati sia in assenza che in
presenza di protesi.
Per ogni simulazione non si sono riportati tutti i risultati, ma solo quelli ritenuti più
significativi.
4 .1 VA LI D A Z I O N E D E L M O D E L LO :V E R I F I C A D E L LE F U N Z I O N I M U S C O L A R I
Per quanto riguarda la validazione del modello, nel seguito si riportano i risultati in
termini di movimento risultante e di forza sviluppata dall'attivazione imposta e
dell'angolo di movimento ottenuto per 1 e/o 2 cm di accorciamento. I valori 1 cm e 2
cm sono stati scelti arbitrariamente.
4.1.1 ATTIVAZIONE DEL MUSCOLO GASTROCNEMIO
In questa prova è stato attivato solo l'attuatore lineare che rappresenta il muscolo
gastrocnemio controllato in velocità di accorciamento con un valore di 5 cm/s sia con il
piede in appoggio che con il piede in sospensione.
In Figura 77 è possibile vedere gli andamenti degli angoli di flessione plantare e
flessione dorsale in funzione del tempo, risultanti dall'attivazione sopra descritta.
Si nota che l'attivazione del muscolo gastrocnemio ha un effetto non solo di flessione
plantare ma anche di supinazione.
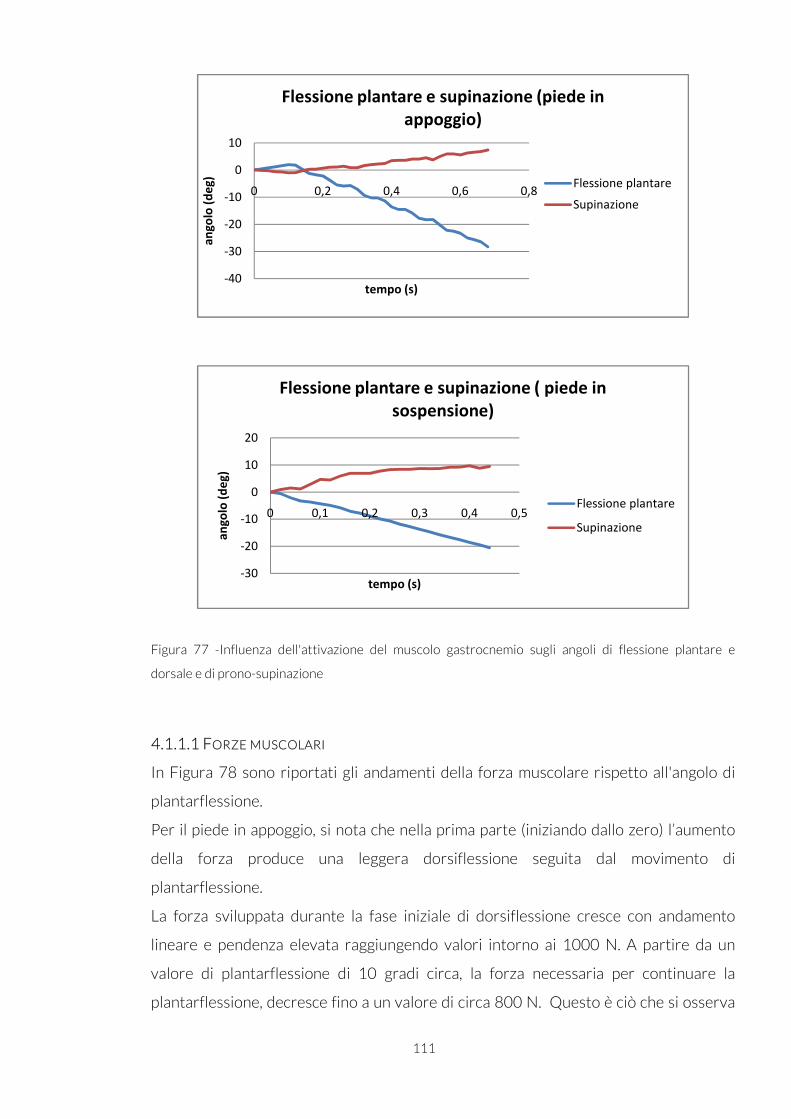
111
Figura 77 -Influenza dell'attivazione del muscolo gastrocnemio sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.1.1.1 FORZE MUSCOLARI
In Figura 78 sono riportati gli andamenti della forza muscolare rispetto all'angolo di
plantarflessione.
Per il piede in appoggio, si nota che nella prima parte (iniziando dallo zero) l’aumento
della forza produce una leggera dorsiflessione seguita dal movimento di
plantarflessione.
La forza sviluppata durante la fase iniziale di dorsiflessione cresce con andamento
lineare e pendenza elevata raggiungendo valori intorno ai 1000 N. A partire da un
valore di plantarflessione di 10 gradi circa, la forza necessaria per continuare la
plantarflessione, decresce fino a un valore di circa 800 N. Questo è ciò che si osserva
-40
-30
-20
-10
0
10
0 0,2 0,4 0,6 0,8
an
go
lo (
de
g)
tempo (s)
Flessione plantare e supinazione (piede in
appoggio)
Flessione plantare
Supinazione
-30
-20
-10
0
10
20
0 0,1 0,2 0,3 0,4 0,5
an
go
lo (
de
g)
tempo (s)
Flessione plantare e supinazione ( piede in
sospensione)
Flessione plantare
Supinazione
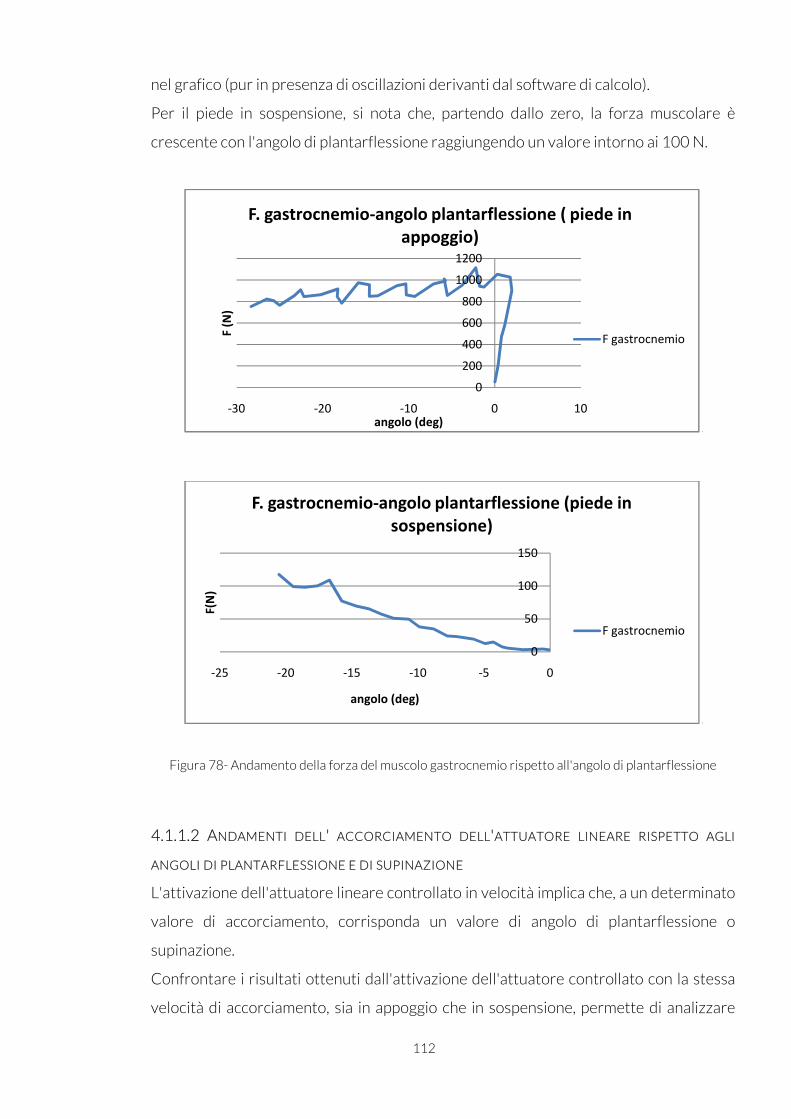
112
nel grafico (pur in presenza di oscillazioni derivanti dal software di calcolo).
Per il piede in sospensione, si nota che, partendo dallo zero, la forza muscolare è
crescente con l'angolo di plantarflessione raggiungendo un valore intorno ai 100 N.
.
.
Figura 78- Andamento della forza del muscolo gastrocnemio rispetto all'angolo di plantarflessione
4.1.1.2 ANDAMENTI DELL' ACCORCIAMENTO DELL'ATTUATORE LINEARE RISPETTO AGLI
ANGOLI DI PLANTARFLESSIONE E DI SUPINAZIONE
L'attivazione dell'attuatore lineare controllato in velocità implica che, a un determinato
valore di accorciamento, corrisponda un valore di angolo di plantarflessione o
supinazione.
Confrontare i risultati ottenuti dall'attivazione dell'attuatore controllato con la stessa
velocità di accorciamento, sia in appoggio che in sospensione, permette di analizzare
0
200
400
600
800
1000
1200
-30 -20 -10 0 10
F (
N)
angolo (deg)
F. gastrocnemio-angolo plantarflessione ( piede in
appoggio)
F gastrocnemio
0
50
100
150
-25 -20 -15 -10 -5 0
F(N
)
angolo (deg)
F. gastrocnemio-angolo plantarflessione (piede in
sospensione)
F gastrocnemio
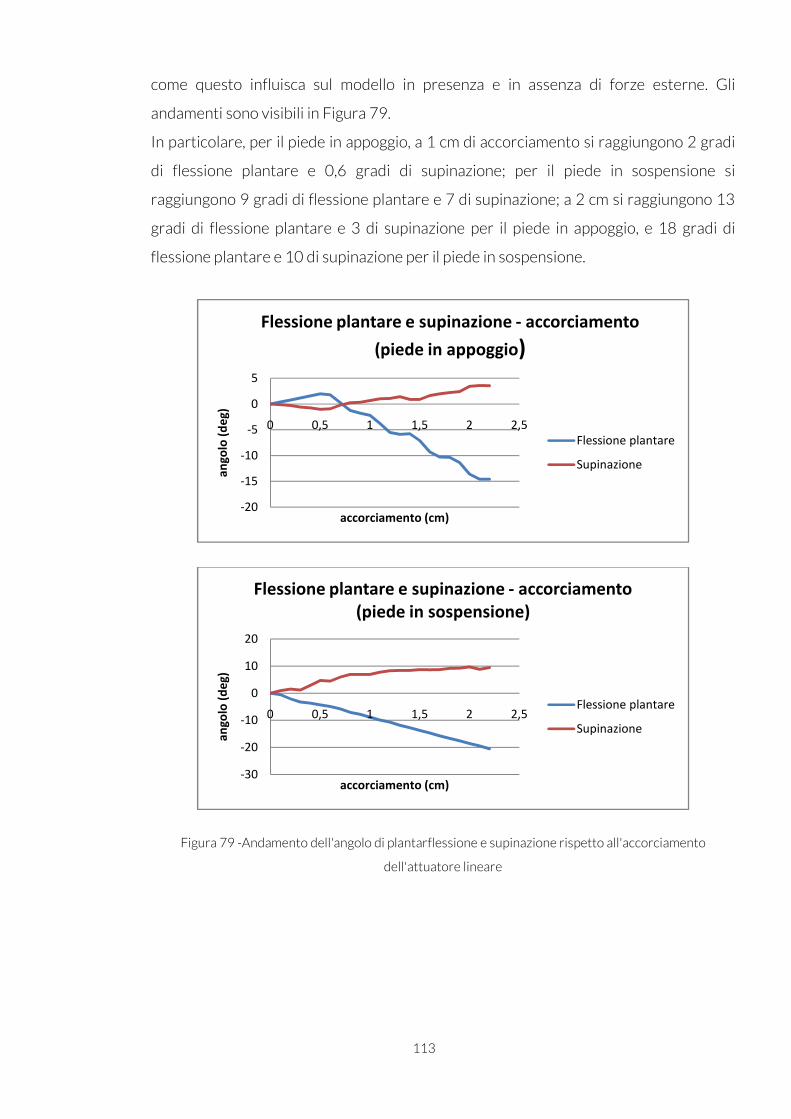
113
come questo influisca sul modello in presenza e in assenza di forze esterne. Gli
andamenti sono visibili in Figura 79.
In particolare, per il piede in appoggio, a 1 cm di accorciamento si raggiungono 2 gradi
di flessione plantare e 0,6 gradi di supinazione; per il piede in sospensione si
raggiungono 9 gradi di flessione plantare e 7 di supinazione; a 2 cm si raggiungono 13
gradi di flessione plantare e 3 di supinazione per il piede in appoggio, e 18 gradi di
flessione plantare e 10 di supinazione per il piede in sospensione.
Figura 79 -Andamento dell'angolo di plantarflessione e supinazione rispetto all'accorciamento
dell'attuatore lineare
-20
-15
-10
-5
0
5
0 0,5 1 1,5 2 2,5
an
go
lo (
de
g)
accorciamento (cm)
Flessione plantare e supinazione - accorciamento
(piede in appoggio)
Flessione plantare
Supinazione
-30
-20
-10
0
10
20
0 0,5 1 1,5 2 2,5
an
go
lo (
de
g)
accorciamento (cm)
Flessione plantare e supinazione - accorciamento
(piede in sospensione)
Flessione plantare
Supinazione
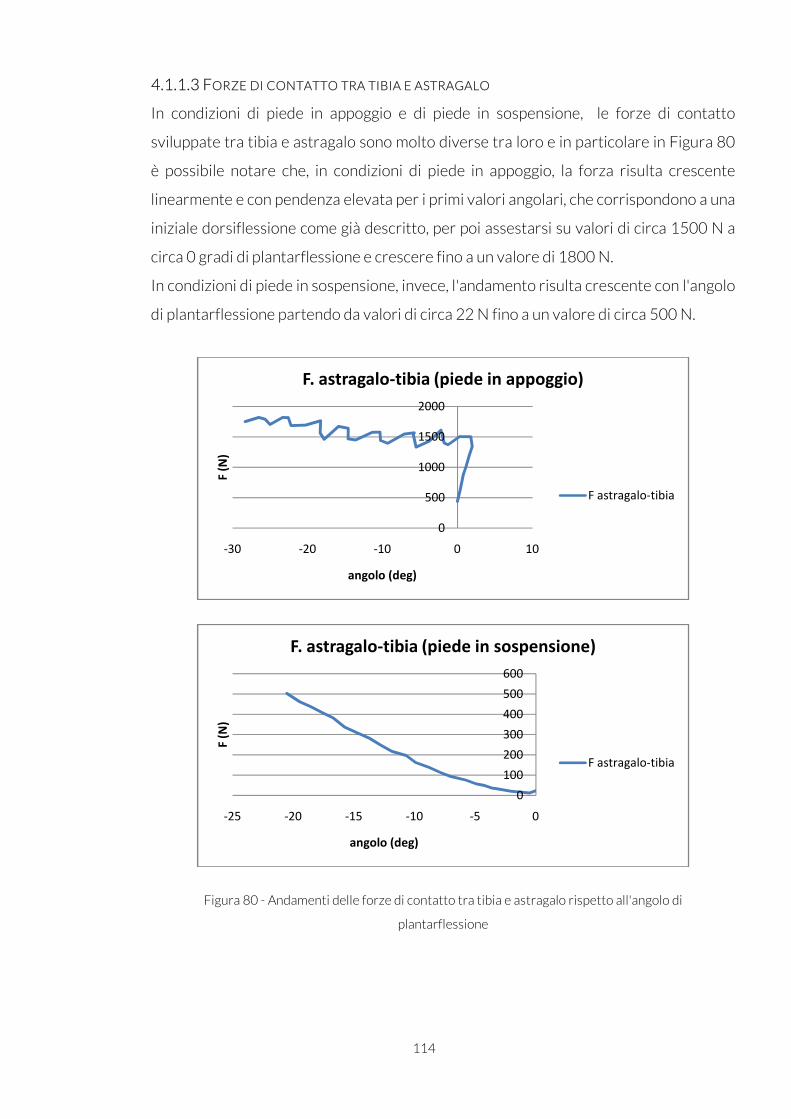
114
4.1.1.3 FORZE DI CONTATTO TRA TIBIA E ASTRAGALO
In condizioni di piede in appoggio e di piede in sospensione, le forze di contatto
sviluppate tra tibia e astragalo sono molto diverse tra loro e in particolare in Figura 80
è possibile notare che, in condizioni di piede in appoggio, la forza risulta crescente
linearmente e con pendenza elevata per i primi valori angolari, che corrispondono a una
iniziale dorsiflessione come già descritto, per poi assestarsi su valori di circa 1500 N a
circa 0 gradi di plantarflessione e crescere fino a un valore di 1800 N.
In condizioni di piede in sospensione, invece, l'andamento risulta crescente con l'angolo
di plantarflessione partendo da valori di circa 22 N fino a un valore di circa 500 N.
Figura 80 - Andamenti delle forze di contatto tra tibia e astragalo rispetto all'angolo di
plantarflessione
0
500
1000
1500
2000
-30 -20 -10 0 10
F (
N)
angolo (deg)
F. astragalo-tibia (piede in appoggio)
F astragalo-tibia
0
100
200
300
400
500
600
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
F. astragalo-tibia (piede in sospensione)
F astragalo-tibia
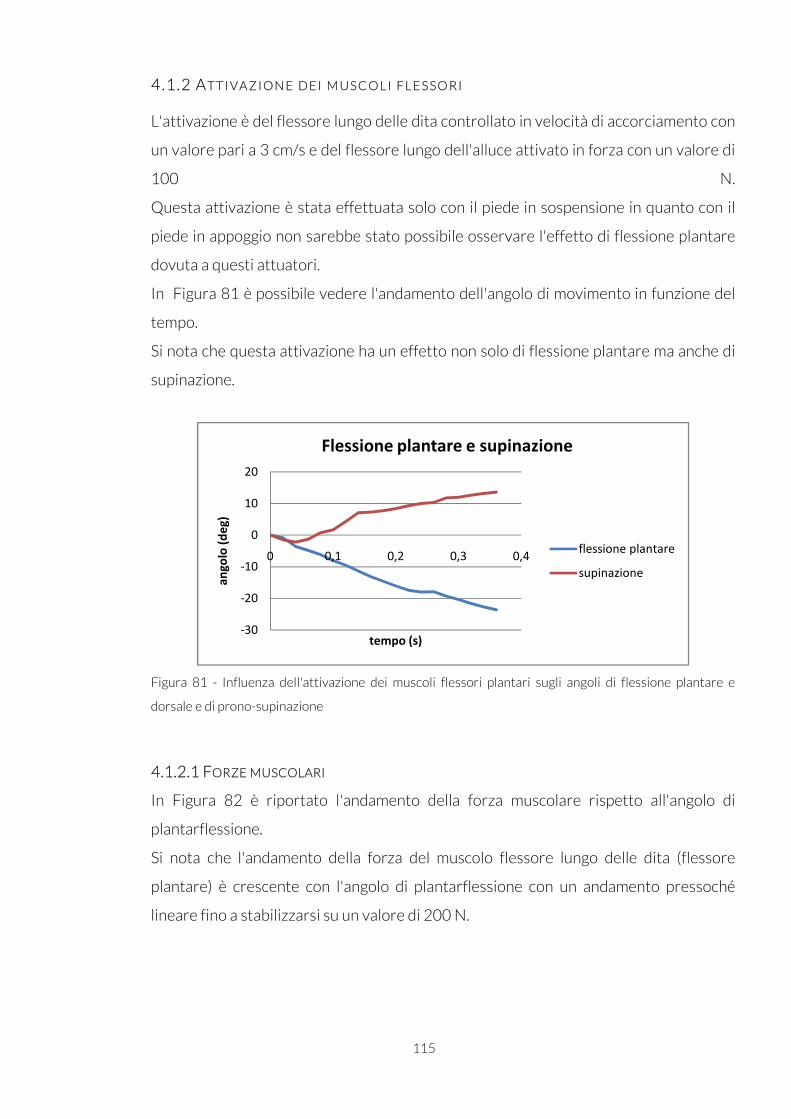
115
4.1.2 AT T I V A Z I O N E D E I M U S C O LI F LE S S O R I
L'attivazione è del flessore lungo delle dita controllato in velocità di accorciamento con
un valore pari a 3 cm/s e del flessore lungo dell'alluce attivato in forza con un valore di
100 N.
Questa attivazione è stata effettuata solo con il piede in sospensione in quanto con il
piede in appoggio non sarebbe stato possibile osservare l'effetto di flessione plantare
dovuta a questi attuatori.
In Figura 81 è possibile vedere l'andamento dell'angolo di movimento in funzione del
tempo.
Si nota che questa attivazione ha un effetto non solo di flessione plantare ma anche di
supinazione.
Figura 81 - Influenza dell'attivazione dei muscoli flessori plantari sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.1.2.1 FORZE MUSCOLARI
In Figura 82 è riportato l'andamento della forza muscolare rispetto all'angolo di
plantarflessione.
Si nota che l'andamento della forza del muscolo flessore lungo delle dita (flessore
plantare) è crescente con l'angolo di plantarflessione con un andamento pressoché
lineare fino a stabilizzarsi su un valore di 200 N.
-30
-20
-10
0
10
20
0 0,1 0,2 0,3 0,4
an
go
lo (
de
g)
tempo (s)
Flessione plantare e supinazione
flessione plantare
supinazione
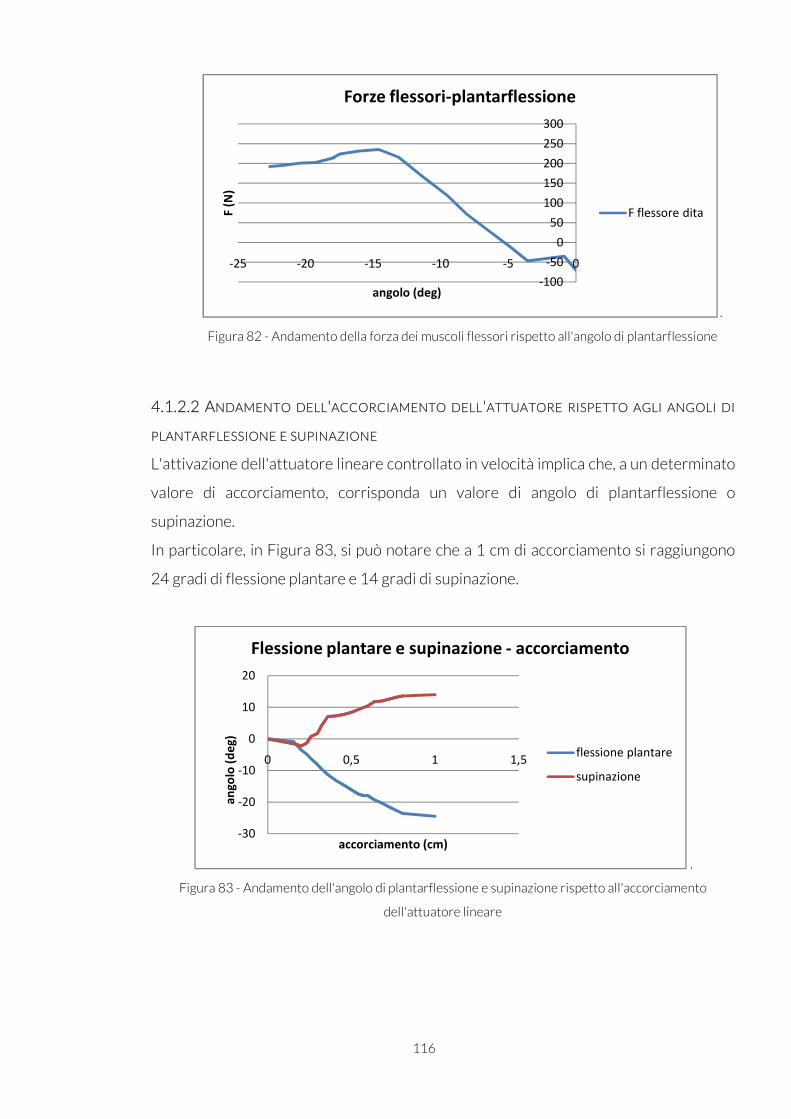
116
.
Figura 82 - Andamento della forza dei muscoli flessori rispetto all'angolo di plantarflessione
4.1.2.2 ANDAMENTO DELL'ACCORCIAMENTO DELL'ATTUATORE RISPETTO AGLI ANGOLI DI
PLANTARFLESSIONE E SUPINAZIONE
L'attivazione dell'attuatore lineare controllato in velocità implica che, a un determinato
valore di accorciamento, corrisponda un valore di angolo di plantarflessione o
supinazione.
In particolare, in Figura 83, si può notare che a 1 cm di accorciamento si raggiungono
24 gradi di flessione plantare e 14 gradi di supinazione.
.
Figura 83 - Andamento dell'angolo di plantarflessione e supinazione rispetto all'accorciamento
dell'attuatore lineare
-100
-50
0
50
100
150
200
250
300
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze flessori-plantarflessione
F flessore dita
-30
-20
-10
0
10
20
0 0,5 1 1,5
an
go
lo (
de
g)
accorciamento (cm)
Flessione plantare e supinazione - accorciamento
flessione plantare
supinazione
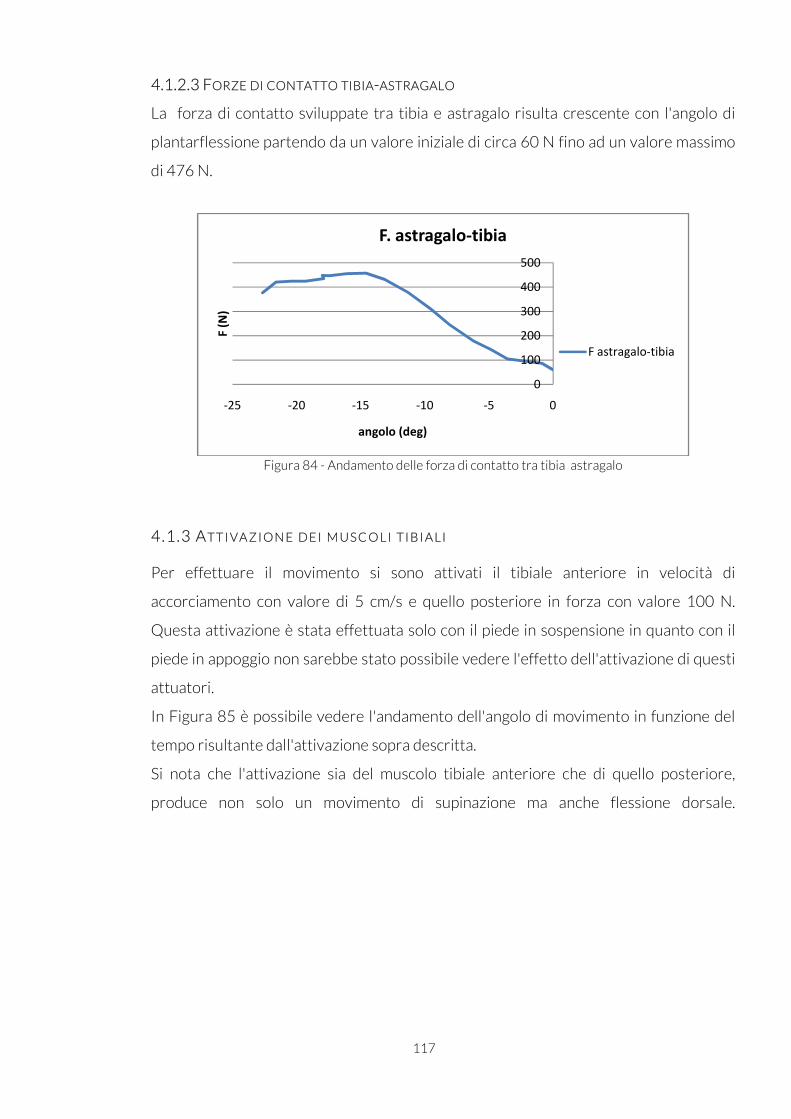
117
4.1.2.3 FORZE DI CONTATTO TIBIA-ASTRAGALO
La forza di contatto sviluppate tra tibia e astragalo risulta crescente con l'angolo di
plantarflessione partendo da un valore iniziale di circa 60 N fino ad un valore massimo
di 476 N.
Figura 84 - Andamento delle forza di contatto tra tibia astragalo
4.1.3 AT T I V A Z I O N E D E I M U S C O LI T I B I A LI
Per effettuare il movimento si sono attivati il tibiale anteriore in velocità di
accorciamento con valore di 5 cm/s e quello posteriore in forza con valore 100 N.
Questa attivazione è stata effettuata solo con il piede in sospensione in quanto con il
piede in appoggio non sarebbe stato possibile vedere l'effetto dell'attivazione di questi
attuatori.
In Figura 85 è possibile vedere l'andamento dell'angolo di movimento in funzione del
tempo risultante dall'attivazione sopra descritta.
Si nota che l'attivazione sia del muscolo tibiale anteriore che di quello posteriore,
produce non solo un movimento di supinazione ma anche flessione dorsale.
0
100
200
300
400
500
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
F. astragalo-tibia
F astragalo-tibia
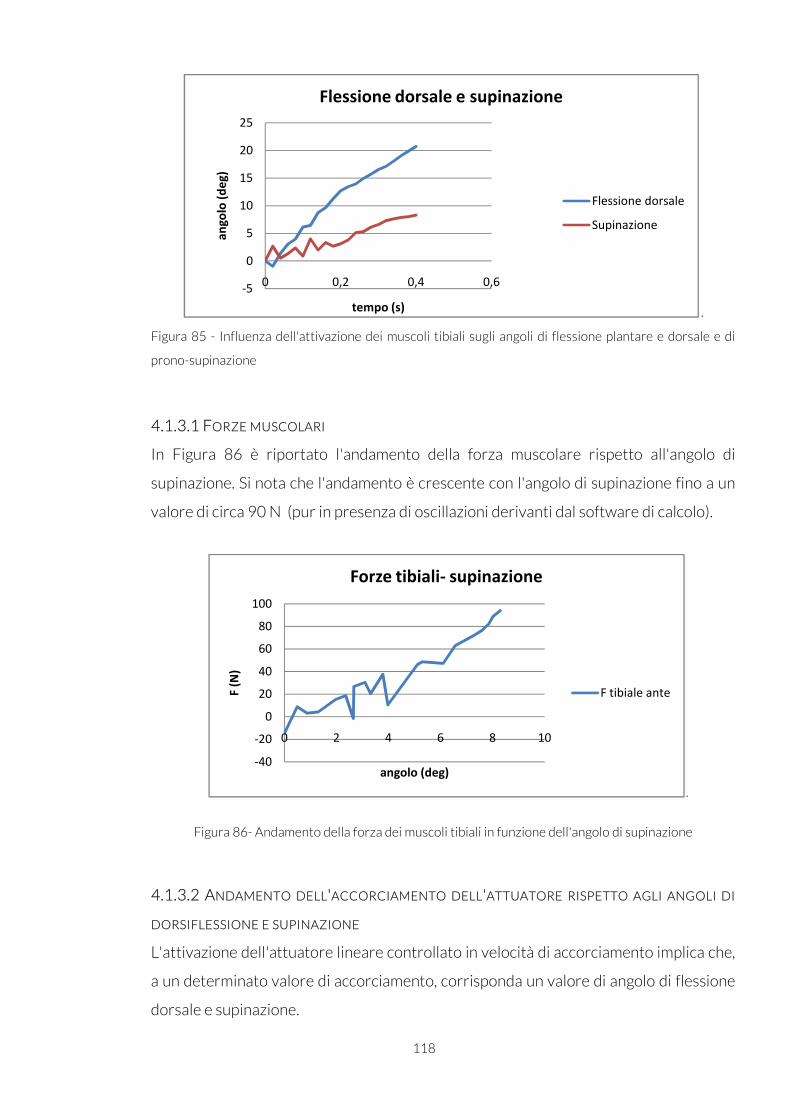
118
.
Figura 85 - Influenza dell'attivazione dei muscoli tibiali sugli angoli di flessione plantare e dorsale e di
prono-supinazione
4.1.3.1 FORZE MUSCOLARI
In Figura 86 è riportato l'andamento della forza muscolare rispetto all'angolo di
supinazione. Si nota che l'andamento è crescente con l'angolo di supinazione fino a un
valore di circa 90 N (pur in presenza di oscillazioni derivanti dal software di calcolo).
.
Figura 86- Andamento della forza dei muscoli tibiali in funzione dell'angolo di supinazione
4.1.3.2 ANDAMENTO DELL'ACCORCIAMENTO DELL'ATTUATORE RISPETTO AGLI ANGOLI DI
DORSIFLESSIONE E SUPINAZIONE
L'attivazione dell'attuatore lineare controllato in velocità di accorciamento implica che,
a un determinato valore di accorciamento, corrisponda un valore di angolo di flessione
dorsale e supinazione.
-5
0
5
10
15
20
25
0 0,2 0,4 0,6
an
go
lo (
de
g)
tempo (s)
Flessione dorsale e supinazione
Flessione dorsale
Supinazione
-40
-20
0
20
40
60
80
100
0 2 4 6 8 10
F (
N)
angolo (deg)
Forze tibiali- supinazione
F tibiale ante
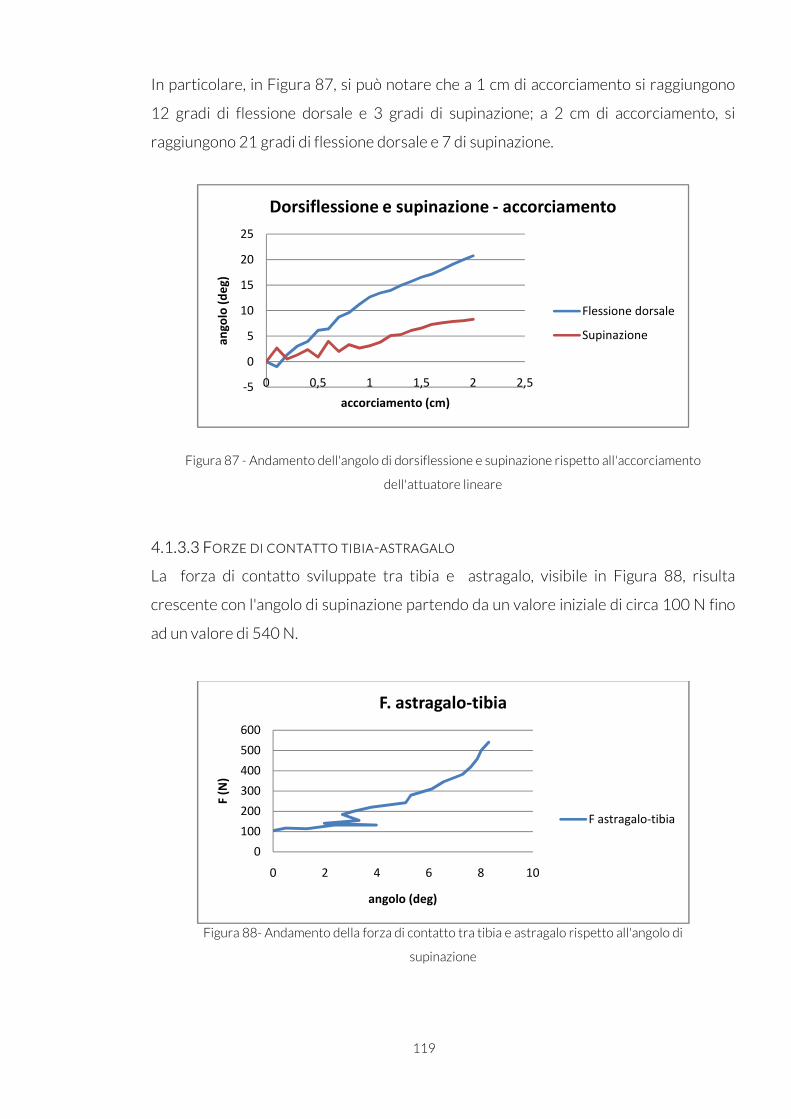
119
In particolare, in Figura 87, si può notare che a 1 cm di accorciamento si raggiungono
12 gradi di flessione dorsale e 3 gradi di supinazione; a 2 cm di accorciamento, si
raggiungono 21 gradi di flessione dorsale e 7 di supinazione.
Figura 87 - Andamento dell'angolo di dorsiflessione e supinazione rispetto all'accorciamento
dell'attuatore lineare
4.1.3.3 FORZE DI CONTATTO TIBIA-ASTRAGALO
La forza di contatto sviluppate tra tibia e astragalo, visibile in Figura 88, risulta
crescente con l'angolo di supinazione partendo da un valore iniziale di circa 100 N fino
ad un valore di 540 N.
Figura 88- Andamento della forza di contatto tra tibia e astragalo rispetto all'angolo di
supinazione
-5
0
5
10
15
20
25
0 0,5 1 1,5 2 2,5
an
go
lo (
de
g)
accorciamento (cm)
Dorsiflessione e supinazione - accorciamento
Flessione dorsale
Supinazione
0
100
200
300
400
500
600
0 2 4 6 8 10
F (
N)
angolo (deg)
F. astragalo-tibia
F astragalo-tibia
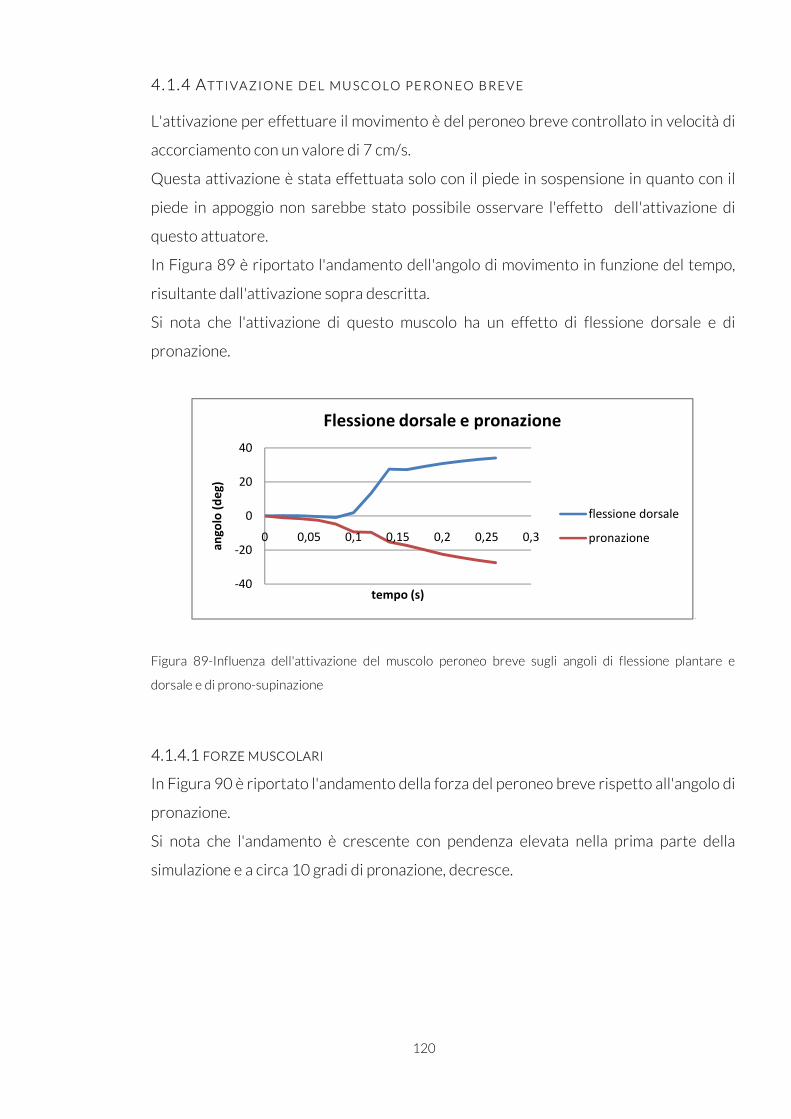
120
4.1.4 AT T I V A Z I O N E D E L M U S C O LO P E R O N E O B R E V E
L'attivazione per effettuare il movimento è del peroneo breve controllato in velocità di
accorciamento con un valore di 7 cm/s.
Questa attivazione è stata effettuata solo con il piede in sospensione in quanto con il
piede in appoggio non sarebbe stato possibile osservare l'effetto dell'attivazione di
questo attuatore.
In Figura 89 è riportato l'andamento dell'angolo di movimento in funzione del tempo,
risultante dall'attivazione sopra descritta.
Si nota che l'attivazione di questo muscolo ha un effetto di flessione dorsale e di
pronazione.
.
Figura 89-Influenza dell'attivazione del muscolo peroneo breve sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.1.4.1 FORZE MUSCOLARI
In Figura 90 è riportato l'andamento della forza del peroneo breve rispetto all'angolo di
pronazione.
Si nota che l'andamento è crescente con pendenza elevata nella prima parte della
simulazione e a circa 10 gradi di pronazione, decresce.
-40
-20
0
20
40
0 0,05 0,1 0,15 0,2 0,25 0,3
an
go
lo (
de
g)
tempo (s)
Flessione dorsale e pronazione
flessione dorsale
pronazione
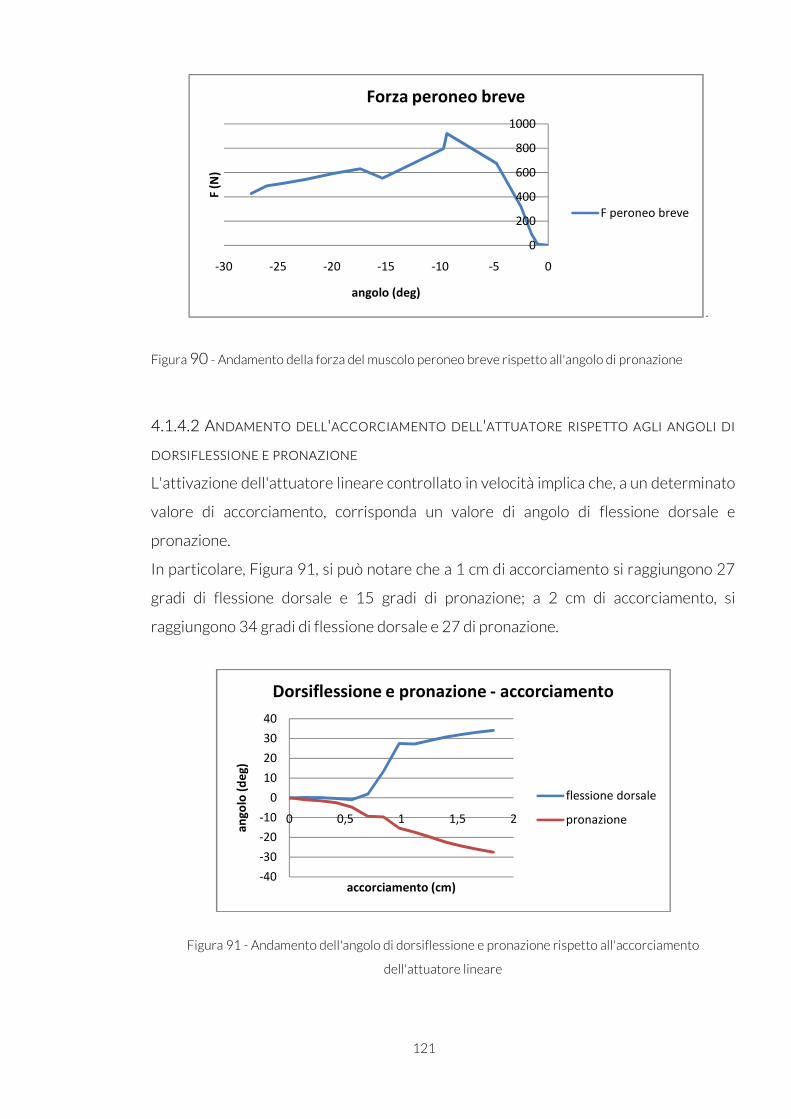
121
.
Figura 90 - Andamento della forza del muscolo peroneo breve rispetto all'angolo di pronazione
4.1.4.2 ANDAMENTO DELL'ACCORCIAMENTO DELL'ATTUATORE RISPETTO AGLI ANGOLI DI
DORSIFLESSIONE E PRONAZIONE
L'attivazione dell'attuatore lineare controllato in velocità implica che, a un determinato
valore di accorciamento, corrisponda un valore di angolo di flessione dorsale e
pronazione.
In particolare, Figura 91, si può notare che a 1 cm di accorciamento si raggiungono 27
gradi di flessione dorsale e 15 gradi di pronazione; a 2 cm di accorciamento, si
raggiungono 34 gradi di flessione dorsale e 27 di pronazione.
Figura 91 - Andamento dell'angolo di dorsiflessione e pronazione rispetto all'accorciamento
dell'attuatore lineare
0
200
400
600
800
1000
-30 -25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forza peroneo breve
F peroneo breve
-40
-30
-20
-10
0
10
20
30
40
0 0,5 1 1,5 2
an
go
lo (
de
g)
accorciamento (cm)
Dorsiflessione e pronazione - accorciamento
flessione dorsale
pronazione
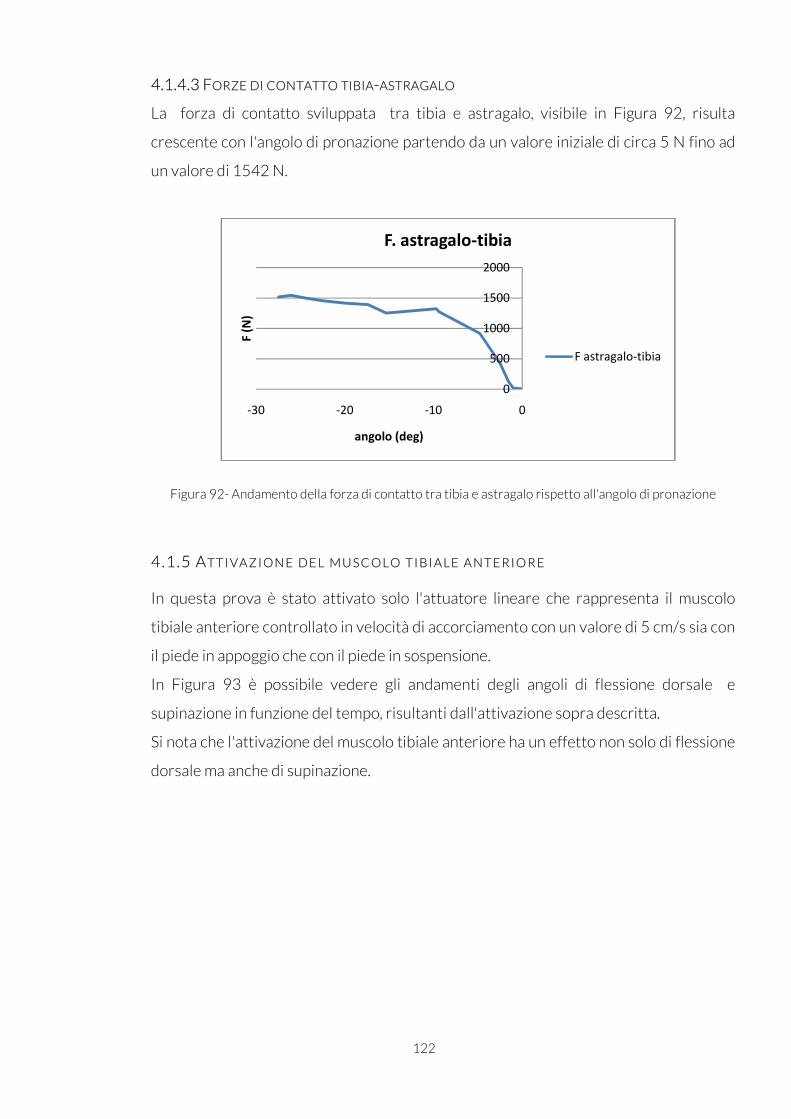
122
4.1.4.3 FORZE DI CONTATTO TIBIA-ASTRAGALO
La forza di contatto sviluppata tra tibia e astragalo, visibile in Figura 92, risulta
crescente con l'angolo di pronazione partendo da un valore iniziale di circa 5 N fino ad
un valore di 1542 N.
Figura 92- Andamento della forza di contatto tra tibia e astragalo rispetto all'angolo di pronazione
4 .1.5 AT T I V A Z I O N E D E L M U S C O LO T I B I A LE A N T E R I O R E
In questa prova è stato attivato solo l'attuatore lineare che rappresenta il muscolo
tibiale anteriore controllato in velocità di accorciamento con un valore di 5 cm/s sia con
il piede in appoggio che con il piede in sospensione.
In Figura 93 è possibile vedere gli andamenti degli angoli di flessione dorsale e
supinazione in funzione del tempo, risultanti dall'attivazione sopra descritta.
Si nota che l'attivazione del muscolo tibiale anteriore ha un effetto non solo di flessione
dorsale ma anche di supinazione.
0
500
1000
1500
2000
-30 -20 -10 0
F (
N)
angolo (deg)
F. astragalo-tibia
F astragalo-tibia
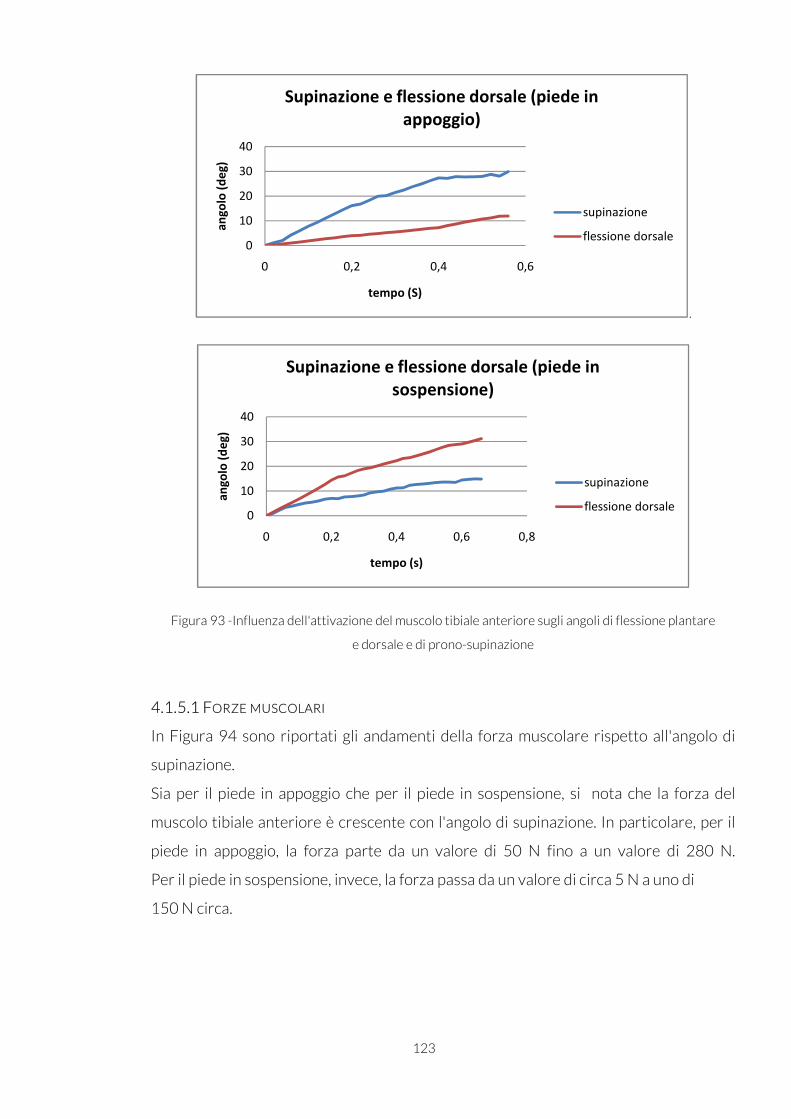
123
.
Figura 93 -Influenza dell'attivazione del muscolo tibiale anteriore sugli angoli di flessione plantare
e dorsale e di prono-supinazione
4.1.5.1 FORZE MUSCOLARI
In Figura 94 sono riportati gli andamenti della forza muscolare rispetto all'angolo di
supinazione.
Sia per il piede in appoggio che per il piede in sospensione, si nota che la forza del
muscolo tibiale anteriore è crescente con l'angolo di supinazione. In particolare, per il
piede in appoggio, la forza parte da un valore di 50 N fino a un valore di 280 N.
Per il piede in sospensione, invece, la forza passa da un valore di circa 5 N a uno di
150 N circa.
0
10
20
30
40
0 0,2 0,4 0,6
an
go
lo (
de
g)
tempo (S)
Supinazione e flessione dorsale (piede in
appoggio)
supinazione
flessione dorsale
0
10
20
30
40
0 0,2 0,4 0,6 0,8
an
go
lo (
de
g)
tempo (s)
Supinazione e flessione dorsale (piede in
sospensione)
supinazione
flessione dorsale
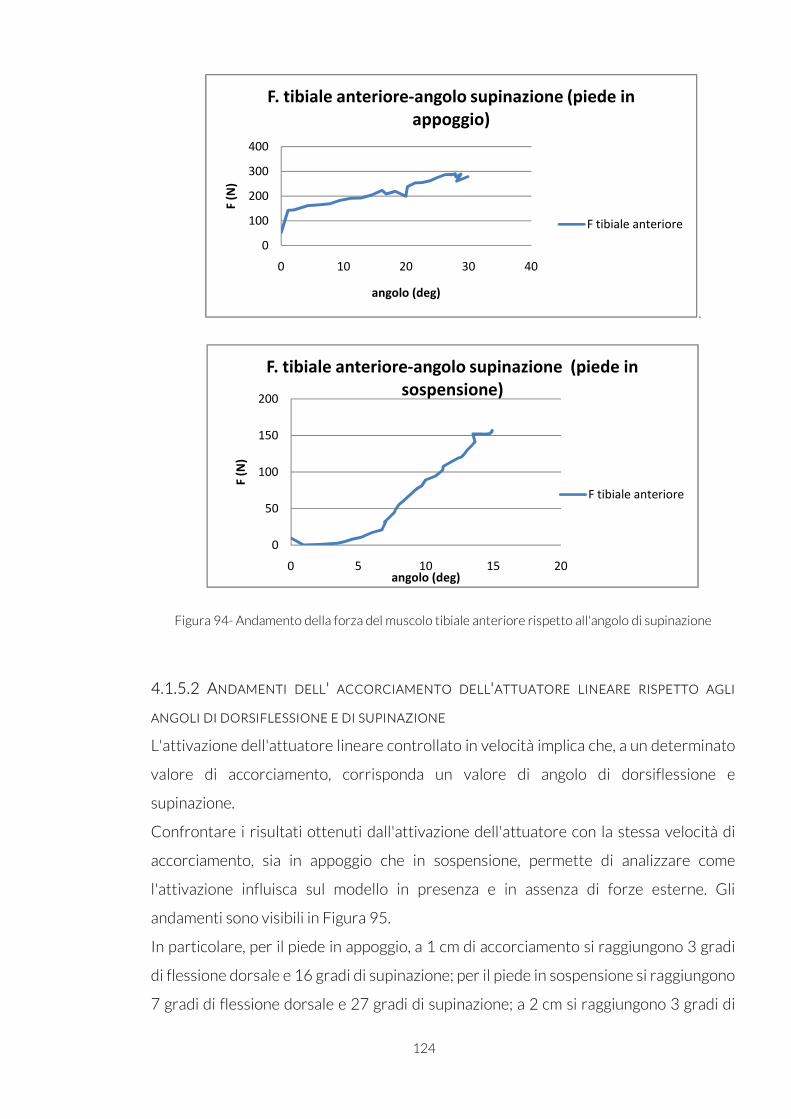
124
.
Figura 94- Andamento della forza del muscolo tibiale anteriore rispetto all'angolo di supinazione
4.1.5.2 ANDAMENTI DELL' ACCORCIAMENTO DELL'ATTUATORE LINEARE RISPETTO AGLI
ANGOLI DI DORSIFLESSIONE E DI SUPINAZIONE
L'attivazione dell'attuatore lineare controllato in velocità implica che, a un determinato
valore di accorciamento, corrisponda un valore di angolo di dorsiflessione e
supinazione.
Confrontare i risultati ottenuti dall'attivazione dell'attuatore con la stessa velocità di
accorciamento, sia in appoggio che in sospensione, permette di analizzare come
l'attivazione influisca sul modello in presenza e in assenza di forze esterne. Gli
andamenti sono visibili in Figura 95.
In particolare, per il piede in appoggio, a 1 cm di accorciamento si raggiungono 3 gradi
di flessione dorsale e 16 gradi di supinazione; per il piede in sospensione si raggiungono
7 gradi di flessione dorsale e 27 gradi di supinazione; a 2 cm si raggiungono 3 gradi di
0
100
200
300
400
0 10 20 30 40
F (
N)
angolo (deg)
F. tibiale anteriore-angolo supinazione (piede in
appoggio)
F tibiale anteriore
0
50
100
150
200
0 5 10 15 20
F (
N)
angolo (deg)
F. tibiale anteriore-angolo supinazione (piede in
sospensione)
F tibiale anteriore
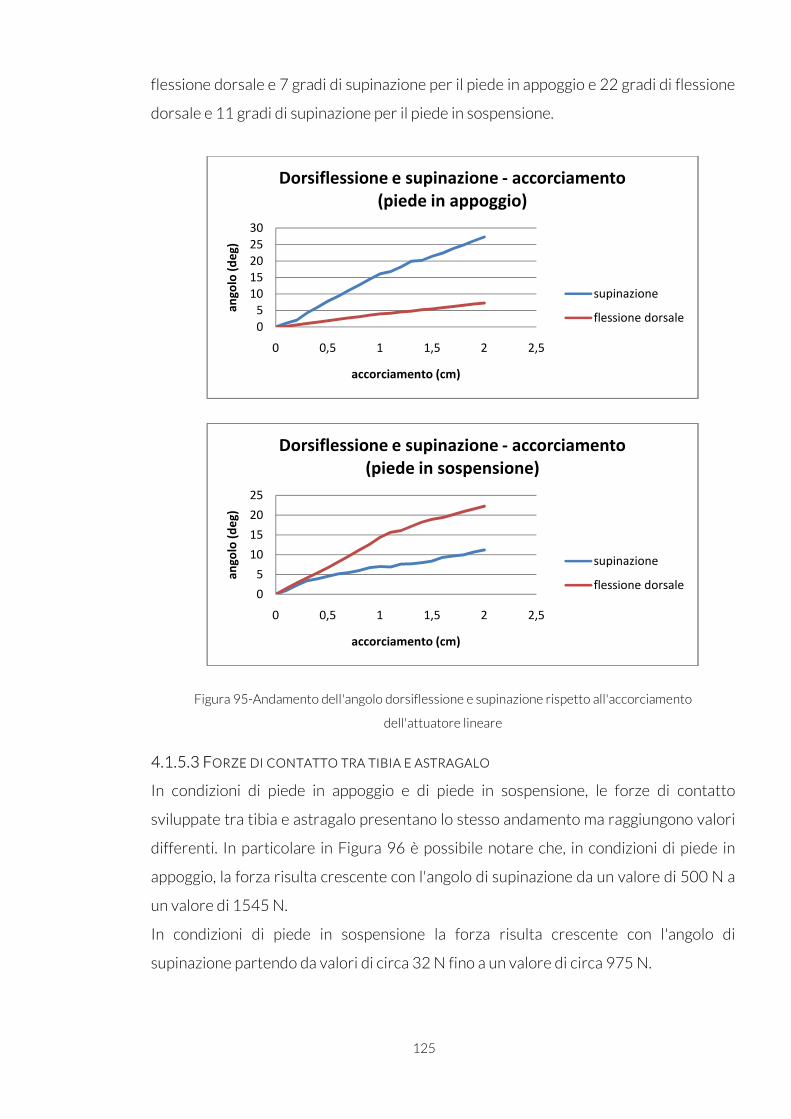
125
flessione dorsale e 7 gradi di supinazione per il piede in appoggio e 22 gradi di flessione
dorsale e 11 gradi di supinazione per il piede in sospensione.
Figura 95-Andamento dell'angolo dorsiflessione e supinazione rispetto all'accorciamento
dell'attuatore lineare
4.1.5.3 FORZE DI CONTATTO TRA TIBIA E ASTRAGALO
In condizioni di piede in appoggio e di piede in sospensione, le forze di contatto
sviluppate tra tibia e astragalo presentano lo stesso andamento ma raggiungono valori
differenti. In particolare in Figura 96 è possibile notare che, in condizioni di piede in
appoggio, la forza risulta crescente con l'angolo di supinazione da un valore di 500 N a
un valore di 1545 N.
In condizioni di piede in sospensione la forza risulta crescente con l'angolo di
supinazione partendo da valori di circa 32 N fino a un valore di circa 975 N.
0
5
10
15
20
25
30
0 0,5 1 1,5 2 2,5
an
go
lo (
de
g)
accorciamento (cm)
Dorsiflessione e supinazione - accorciamento
(piede in appoggio)
supinazione
flessione dorsale
0
5
10
15
20
25
0 0,5 1 1,5 2 2,5
an
go
lo (
de
g)
accorciamento (cm)
Dorsiflessione e supinazione - accorciamento
(piede in sospensione)
supinazione
flessione dorsale
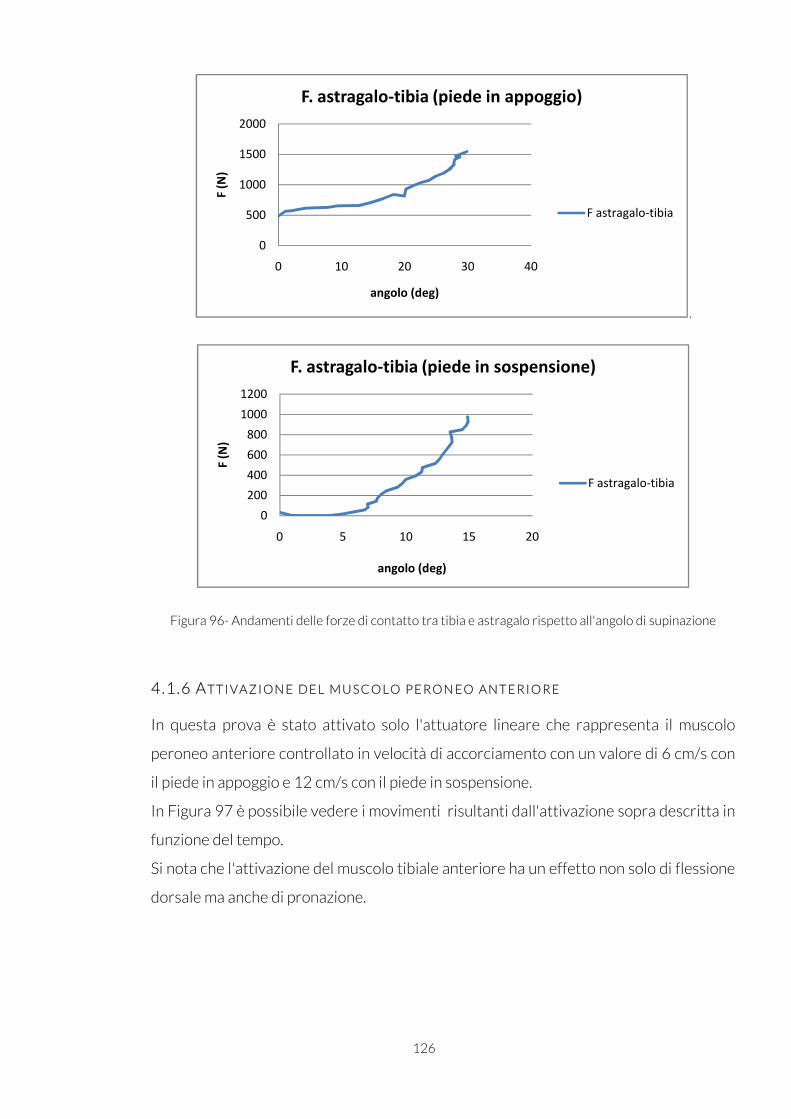
126
.
Figura 96- Andamenti delle forze di contatto tra tibia e astragalo rispetto all'angolo di supinazione
4 .1.6 AT T I V A Z I O N E D E L M U S C O LO P E R O N E O A N T E R I O R E
In questa prova è stato attivato solo l'attuatore lineare che rappresenta il muscolo
peroneo anteriore controllato in velocità di accorciamento con un valore di 6 cm/s con
il piede in appoggio e 12 cm/s con il piede in sospensione.
In Figura 97 è possibile vedere i movimenti risultanti dall'attivazione sopra descritta in
funzione del tempo.
Si nota che l'attivazione del muscolo tibiale anteriore ha un effetto non solo di flessione
dorsale ma anche di pronazione.
0
500
1000
1500
2000
0 10 20 30 40
F (
N)
angolo (deg)
F. astragalo-tibia (piede in appoggio)
F astragalo-tibia
0
200
400
600
800
1000
1200
0 5 10 15 20
F (
N)
angolo (deg)
F. astragalo-tibia (piede in sospensione)
F astragalo-tibia
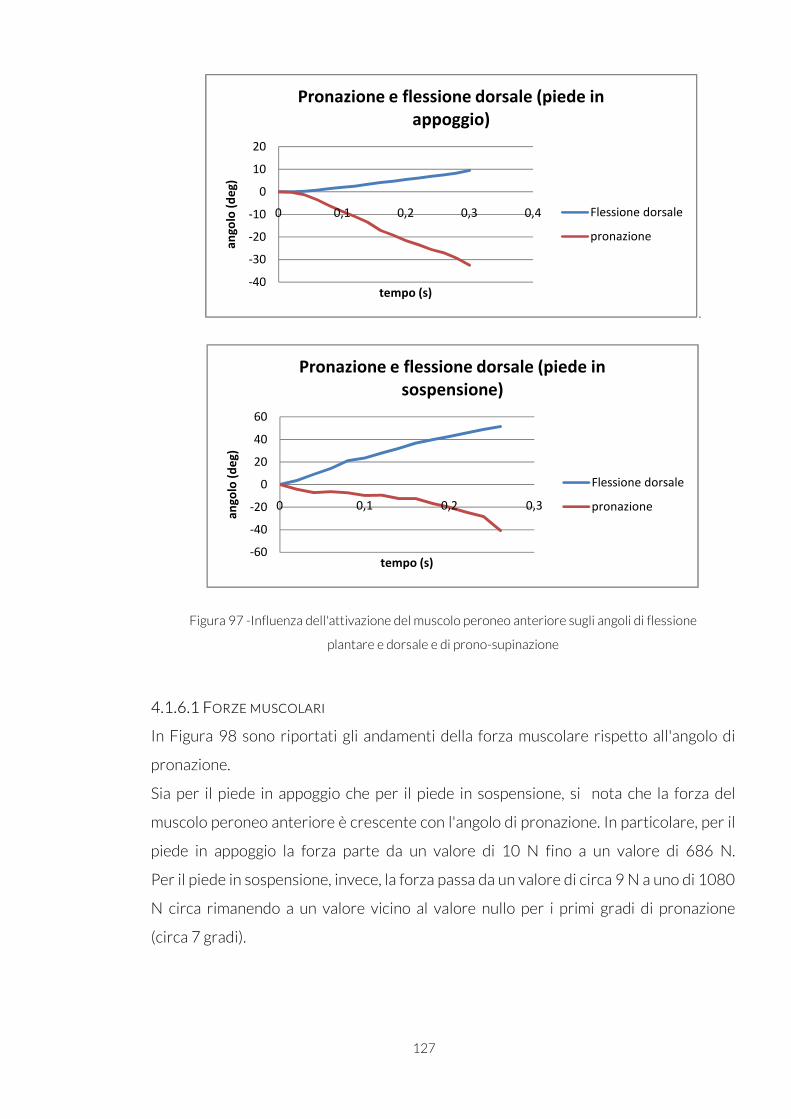
127
.
Figura 97 -Influenza dell'attivazione del muscolo peroneo anteriore sugli angoli di flessione
plantare e dorsale e di prono-supinazione
4.1.6.1 FORZE MUSCOLARI
In Figura 98 sono riportati gli andamenti della forza muscolare rispetto all'angolo di
pronazione.
Sia per il piede in appoggio che per il piede in sospensione, si nota che la forza del
muscolo peroneo anteriore è crescente con l'angolo di pronazione. In particolare, per il
piede in appoggio la forza parte da un valore di 10 N fino a un valore di 686 N.
Per il piede in sospensione, invece, la forza passa da un valore di circa 9 N a uno di 1080
N circa rimanendo a un valore vicino al valore nullo per i primi gradi di pronazione
(circa 7 gradi).
-40
-30
-20
-10
0
10
20
0 0,1 0,2 0,3 0,4
an
go
lo (
de
g)
tempo (s)
Pronazione e flessione dorsale (piede in
appoggio)
Flessione dorsale
pronazione
-60
-40
-20
0
20
40
60
0 0,1 0,2 0,3
an
go
lo (
de
g)
tempo (s)
Pronazione e flessione dorsale (piede in
sospensione)
Flessione dorsale
pronazione
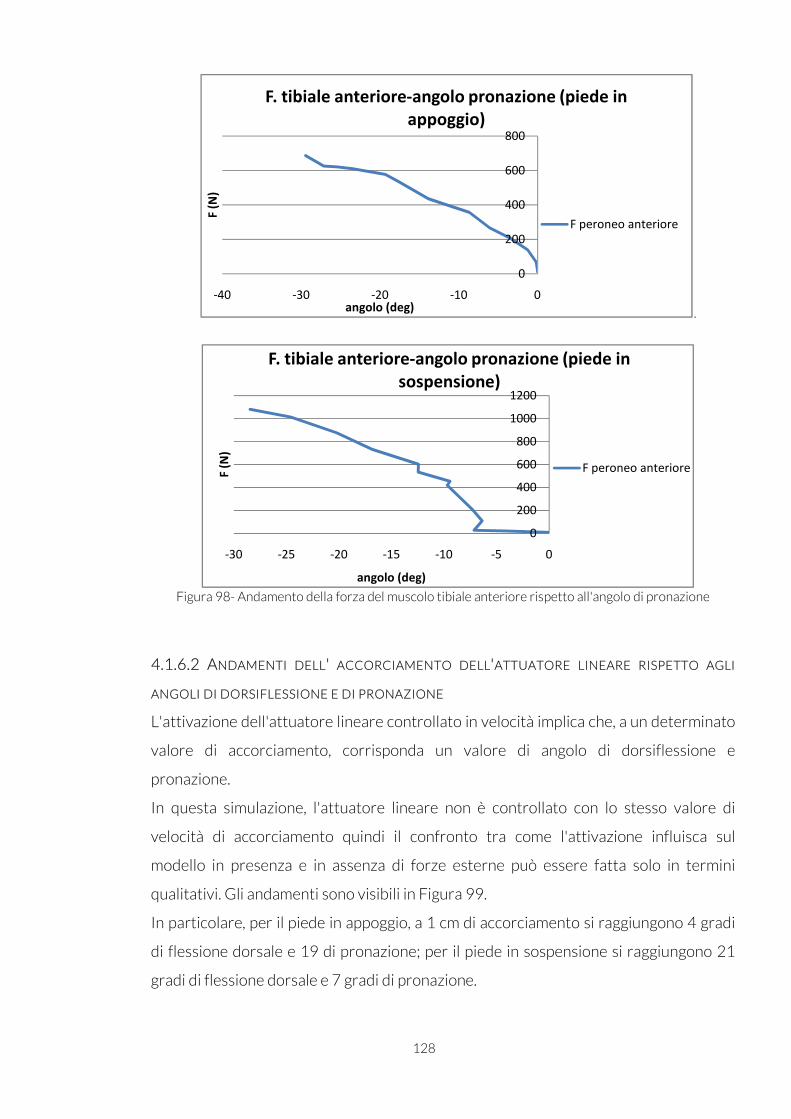
128
.
Figura 98- Andamento della forza del muscolo tibiale anteriore rispetto all'angolo di pronazione
4.1.6.2 ANDAMENTI DELL' ACCORCIAMENTO DELL'ATTUATORE LINEARE RISPETTO AGLI
ANGOLI DI DORSIFLESSIONE E DI PRONAZIONE
L'attivazione dell'attuatore lineare controllato in velocità implica che, a un determinato
valore di accorciamento, corrisponda un valore di angolo di dorsiflessione e
pronazione.
In questa simulazione, l'attuatore lineare non è controllato con lo stesso valore di
velocità di accorciamento quindi il confronto tra come l'attivazione influisca sul
modello in presenza e in assenza di forze esterne può essere fatta solo in termini
qualitativi. Gli andamenti sono visibili in Figura 99.
In particolare, per il piede in appoggio, a 1 cm di accorciamento si raggiungono 4 gradi
di flessione dorsale e 19 di pronazione; per il piede in sospensione si raggiungono 21
gradi di flessione dorsale e 7 gradi di pronazione.
0
200
400
600
800
-40 -30 -20 -10 0
F (
N)
angolo (deg)
F. tibiale anteriore-angolo pronazione (piede in
appoggio)
F peroneo anteriore
0
200
400
600
800
1000
1200
-30 -25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
F. tibiale anteriore-angolo pronazione (piede in
sospensione)
F peroneo anteriore
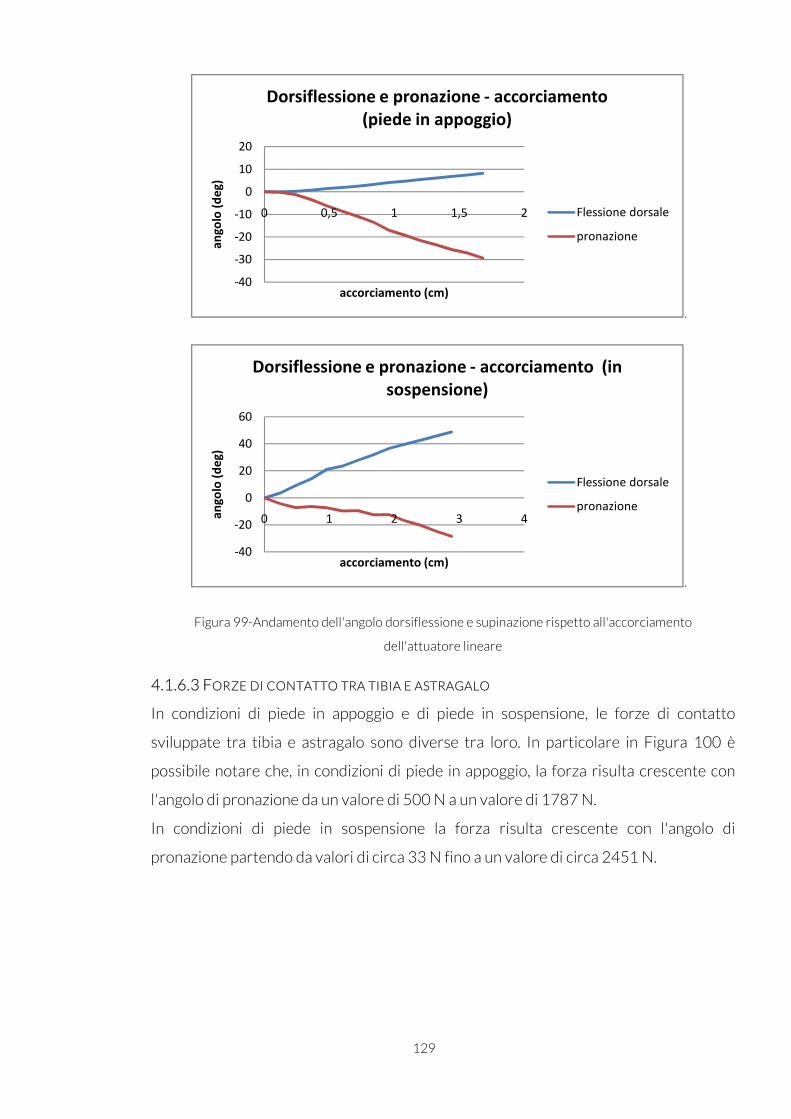
129
.
.
Figura 99-Andamento dell'angolo dorsiflessione e supinazione rispetto all'accorciamento
dell'attuatore lineare
4.1.6.3 FORZE DI CONTATTO TRA TIBIA E ASTRAGALO
In condizioni di piede in appoggio e di piede in sospensione, le forze di contatto
sviluppate tra tibia e astragalo sono diverse tra loro. In particolare in Figura 100 è
possibile notare che, in condizioni di piede in appoggio, la forza risulta crescente con
l'angolo di pronazione da un valore di 500 N a un valore di 1787 N.
In condizioni di piede in sospensione la forza risulta crescente con l'angolo di
pronazione partendo da valori di circa 33 N fino a un valore di circa 2451 N.
-40
-30
-20
-10
0
10
20
0 0,5 1 1,5 2a
ng
olo
(d
eg
)
accorciamento (cm)
Dorsiflessione e pronazione - accorciamento
(piede in appoggio)
Flessione dorsale
pronazione
-40
-20
0
20
40
60
0 1 2 3 4an
go
lo (
de
g)
accorciamento (cm)
Dorsiflessione e pronazione - accorciamento (in
sospensione)
Flessione dorsale
pronazione
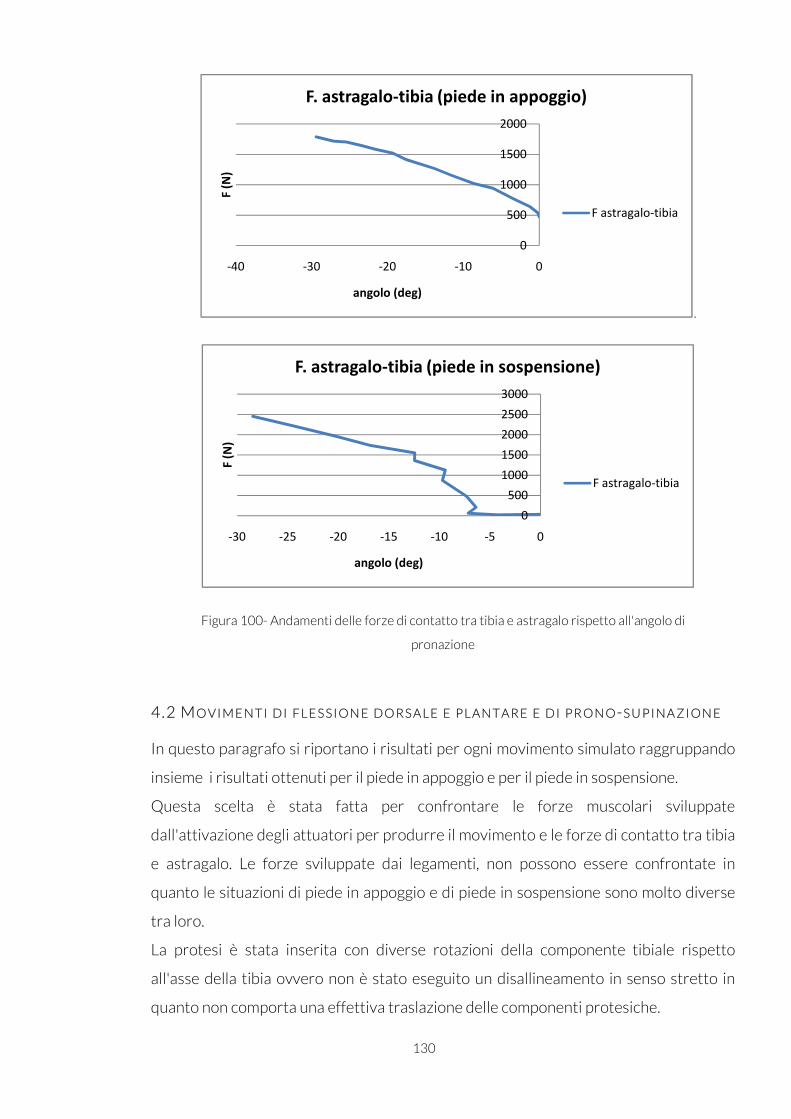
130
.
Figura 100- Andamenti delle forze di contatto tra tibia e astragalo rispetto all'angolo di
pronazione
4 .2 MO V I M E N T I D I F LE S S I O N E D O R S A LE E P L A N T A R E E D I P R O N O-S U P I N A Z I O N E
In questo paragrafo si riportano i risultati per ogni movimento simulato raggruppando
insieme i risultati ottenuti per il piede in appoggio e per il piede in sospensione.
Questa scelta è stata fatta per confrontare le forze muscolari sviluppate
dall'attivazione degli attuatori per produrre il movimento e le forze di contatto tra tibia
e astragalo. Le forze sviluppate dai legamenti, non possono essere confrontate in
quanto le situazioni di piede in appoggio e di piede in sospensione sono molto diverse
tra loro.
La protesi è stata inserita con diverse rotazioni della componente tibiale rispetto
all'asse della tibia ovvero non è stato eseguito un disallineamento in senso stretto in
quanto non comporta una effettiva traslazione delle componenti protesiche.
0
500
1000
1500
2000
-40 -30 -20 -10 0
F (
N)
angolo (deg)
F. astragalo-tibia (piede in appoggio)
F astragalo-tibia
0
500
1000
1500
2000
2500
3000
-30 -25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
F. astragalo-tibia (piede in sospensione)
F astragalo-tibia
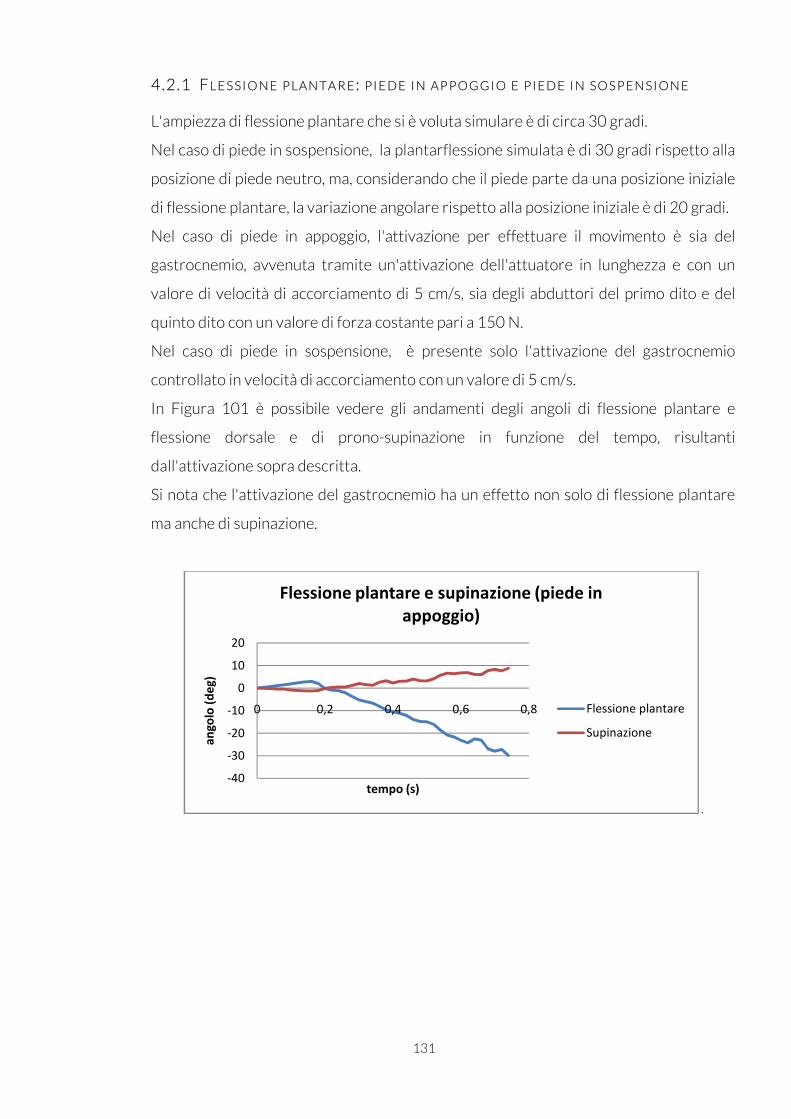
131
4.2.1 F LE S S I O N E P LA N T A R E : P I E D E I N A P P O G G I O E P I E D E I N S O S P E N S I O N E
L'ampiezza di flessione plantare che si è voluta simulare è di circa 30 gradi.
Nel caso di piede in sospensione, la plantarflessione simulata è di 30 gradi rispetto alla
posizione di piede neutro, ma, considerando che il piede parte da una posizione iniziale
di flessione plantare, la variazione angolare rispetto alla posizione iniziale è di 20 gradi.
Nel caso di piede in appoggio, l'attivazione per effettuare il movimento è sia del
gastrocnemio, avvenuta tramite un'attivazione dell'attuatore in lunghezza e con un
valore di velocità di accorciamento di 5 cm/s, sia degli abduttori del primo dito e del
quinto dito con un valore di forza costante pari a 150 N.
Nel caso di piede in sospensione, è presente solo l'attivazione del gastrocnemio
controllato in velocità di accorciamento con un valore di 5 cm/s.
In Figura 101 è possibile vedere gli andamenti degli angoli di flessione plantare e
flessione dorsale e di prono-supinazione in funzione del tempo, risultanti
dall'attivazione sopra descritta.
Si nota che l'attivazione del gastrocnemio ha un effetto non solo di flessione plantare
ma anche di supinazione.
.
-40
-30
-20
-10
0
10
20
0 0,2 0,4 0,6 0,8
an
go
lo (
de
g)
tempo (s)
Flessione plantare e supinazione (piede in
appoggio)
Flessione plantare
Supinazione
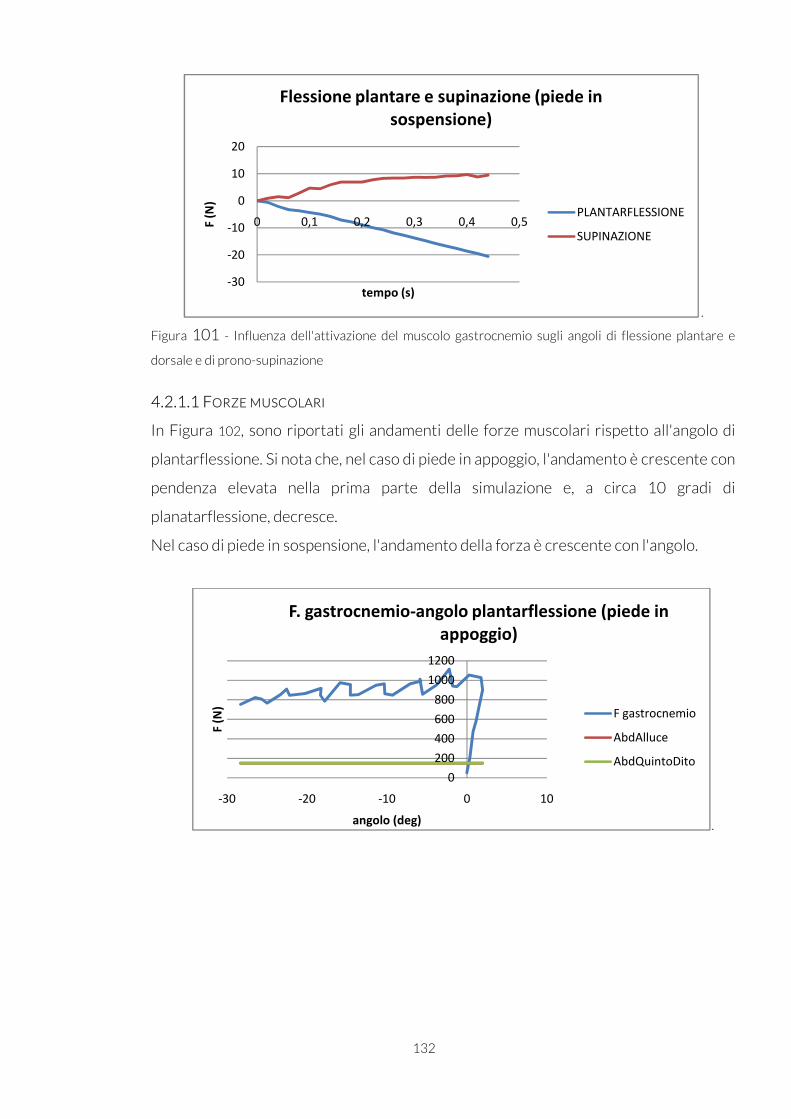
132
.
Figura 101 - Influenza dell'attivazione del muscolo gastrocnemio sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.2.1.1 FORZE MUSCOLARI
In Figura 102, sono riportati gli andamenti delle forze muscolari rispetto all'angolo di
plantarflessione. Si nota che, nel caso di piede in appoggio, l'andamento è crescente con
pendenza elevata nella prima parte della simulazione e, a circa 10 gradi di
planatarflessione, decresce.
Nel caso di piede in sospensione, l'andamento della forza è crescente con l'angolo.
.
-30
-20
-10
0
10
20
0 0,1 0,2 0,3 0,4 0,5F (
N)
tempo (s)
Flessione plantare e supinazione (piede in
sospensione)
PLANTARFLESSIONE
SUPINAZIONE
0
200
400
600
800
1000
1200
-30 -20 -10 0 10
F (
N)
angolo (deg)
F. gastrocnemio-angolo plantarflessione (piede in
appoggio)
F gastrocnemio
AbdAlluce
AbdQuintoDito
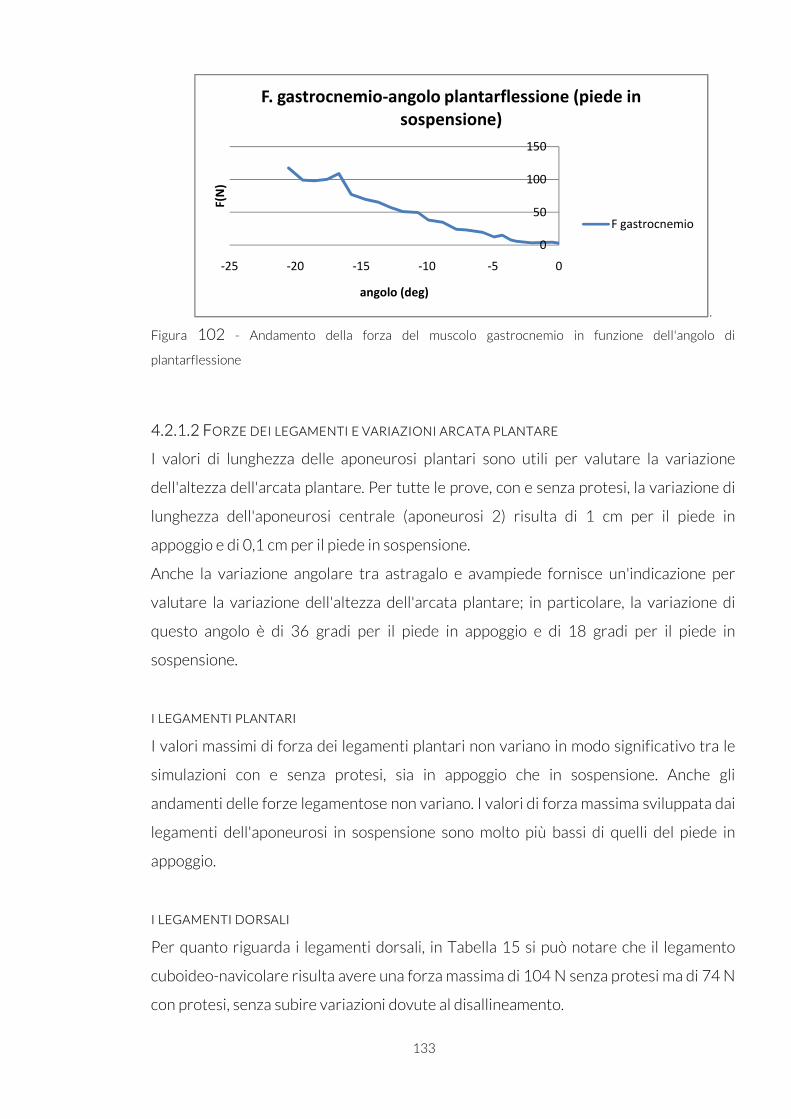
133
.
Figura 102 - Andamento della forza del muscolo gastrocnemio in funzione dell'angolo di
plantarflessione
4.2.1.2 FORZE DEI LEGAMENTI E VARIAZIONI ARCATA PLANTARE
I valori di lunghezza delle aponeurosi plantari sono utili per valutare la variazione
dell'altezza dell'arcata plantare. Per tutte le prove, con e senza protesi, la variazione di
lunghezza dell'aponeurosi centrale (aponeurosi 2) risulta di 1 cm per il piede in
appoggio e di 0,1 cm per il piede in sospensione.
Anche la variazione angolare tra astragalo e avampiede fornisce un'indicazione per
valutare la variazione dell'altezza dell'arcata plantare; in particolare, la variazione di
questo angolo è di 36 gradi per il piede in appoggio e di 18 gradi per il piede in
sospensione.
I LEGAMENTI PLANTARI
I valori massimi di forza dei legamenti plantari non variano in modo significativo tra le
simulazioni con e senza protesi, sia in appoggio che in sospensione. Anche gli
andamenti delle forze legamentose non variano. I valori di forza massima sviluppata dai
legamenti dell'aponeurosi in sospensione sono molto più bassi di quelli del piede in
appoggio.
I LEGAMENTI DORSALI
Per quanto riguarda i legamenti dorsali, in Tabella 15 si può notare che il legamento
cuboideo-navicolare risulta avere una forza massima di 104 N senza protesi ma di 74 N
con protesi, senza subire variazioni dovute al disallineamento.
0
50
100
150
-25 -20 -15 -10 -5 0
F(N
)
angolo (deg)
F. gastrocnemio-angolo plantarflessione (piede in
sospensione)
F gastrocnemio
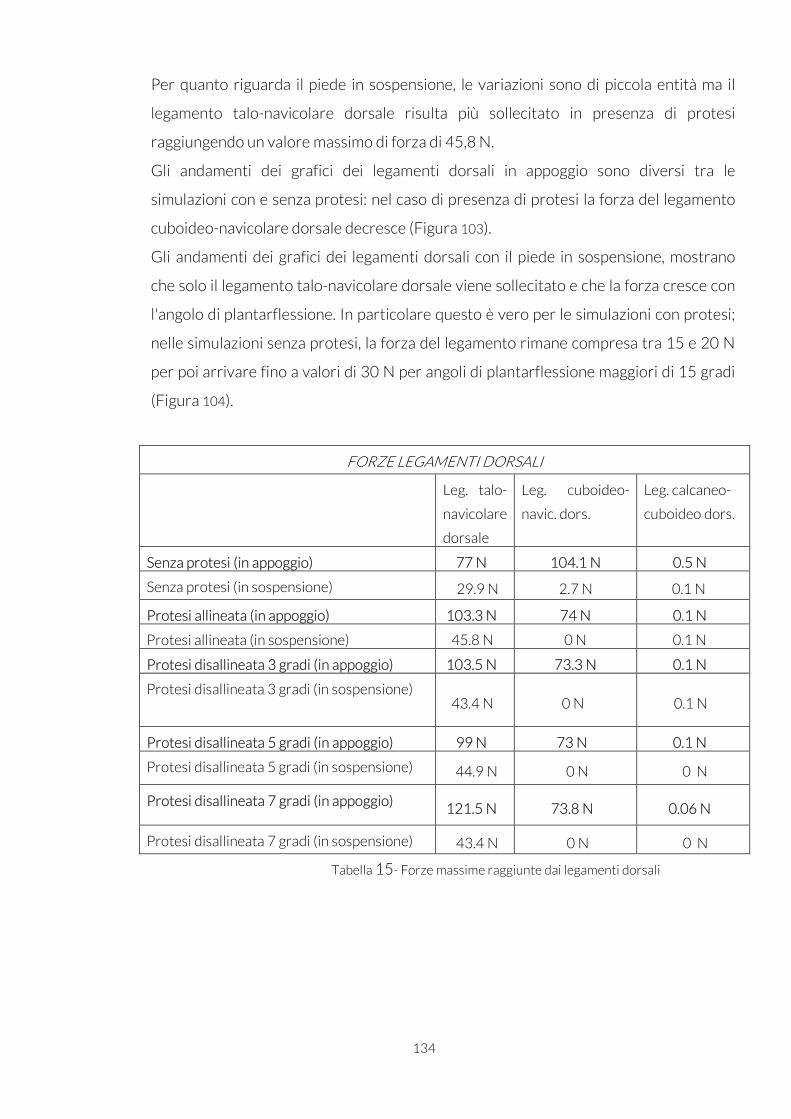
134
Per quanto riguarda il piede in sospensione, le variazioni sono di piccola entità ma il
legamento talo-navicolare dorsale risulta più sollecitato in presenza di protesi
raggiungendo un valore massimo di forza di 45,8 N.
Gli andamenti dei grafici dei legamenti dorsali in appoggio sono diversi tra le
simulazioni con e senza protesi: nel caso di presenza di protesi la forza del legamento
cuboideo-navicolare dorsale decresce (Figura 103).
Gli andamenti dei grafici dei legamenti dorsali con il piede in sospensione, mostrano
che solo il legamento talo-navicolare dorsale viene sollecitato e che la forza cresce con
l'angolo di plantarflessione. In particolare questo è vero per le simulazioni con protesi;
nelle simulazioni senza protesi, la forza del legamento rimane compresa tra 15 e 20 N
per poi arrivare fino a valori di 30 N per angoli di plantarflessione maggiori di 15 gradi
(Figura 104).
Tabella 15- Forze massime raggiunte dai legamenti dorsali
FORZE LEGAMENTI DORSALI
Leg. talo-
navicolare
dorsale
Leg. cuboideo-
navic. dors.
Leg. calcaneo-
cuboideo dors.
Senza protesi (in appoggio) 77 N 104.1 N 0.5 N
Senza protesi (in sospensione) 29.9 N 2.7 N 0.1 N
Protesi allineata (in appoggio) 103.3 N 74 N 0.1 N
Protesi allineata (in sospensione) 45.8 N 0 N 0.1 N
Protesi disallineata 3 gradi (in appoggio) 103.5 N 73.3 N 0.1 N
Protesi disallineata 3 gradi (in sospensione) 43.4 N 0 N 0.1 N
Protesi disallineata 5 gradi (in appoggio) 99 N 73 N 0.1 N
Protesi disallineata 5 gradi (in sospensione) 44.9 N 0 N 0 N
Protesi disallineata 7 gradi (in appoggio) 121.5 N 73.8 N 0.06 N
Protesi disallineata 7 gradi (in sospensione) 43.4 N 0 N 0 N
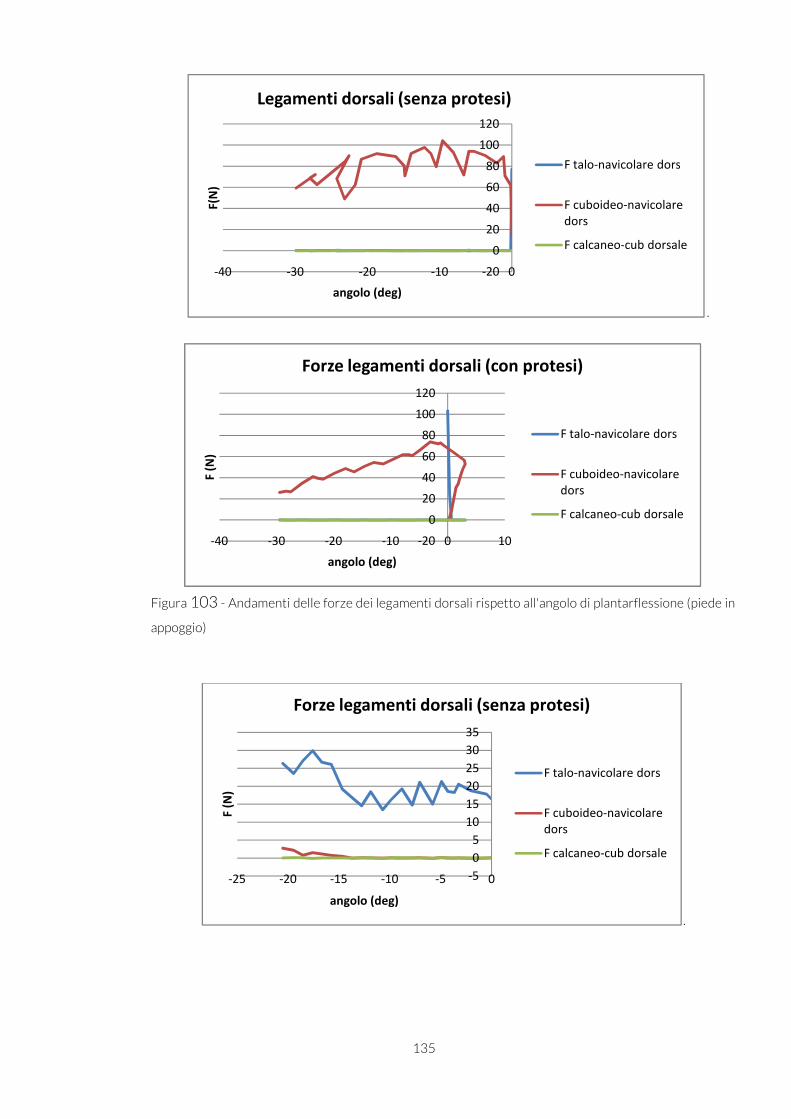
135
.
Figura 103 - Andamenti delle forze dei legamenti dorsali rispetto all'angolo di plantarflessione (piede in
appoggio)
.
-20
0
20
40
60
80
100
120
-40 -30 -20 -10 0
F(N
)
angolo (deg)
Legamenti dorsali (senza protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
-20
0
20
40
60
80
100
120
-40 -30 -20 -10 0 10
F (
N)
angolo (deg)
Forze legamenti dorsali (con protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
-5
0
5
10
15
20
25
30
35
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze legamenti dorsali (senza protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale

136
.
Figura 104 -Andamenti delle forze dei legamenti dorsali rispetto all'angolo di plantarflessione (piede in
sospensione)
I LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
I legamenti laterali della tibio-astragalica risultano sollecitati in modo diverso in
presenza o in assenza di protesi, sia con il piede in appoggio che in sospensione.
In particolare, per il piede in appoggio: i legamenti risultano più sollecitati in presenza di
protesi tranne il legamento peroneo-astragalico anteriore che invece risulta meno
sollecitato in presenza di protesi, come indicato in Tabella 16.
Per il piede in sospensione, i legamenti peroneo-astragalico anteriore e peroneo-
calcaneare risultano meno sollecitati in presenza di protesi e raggiungono forze
massime minori con il disallineamento, come visibile in Tabella 16.
Gli andamenti delle forze dei legamenti per il piede in appoggio sono diversi con e
senza protesi: nel caso senza protesi, i legamenti peroneo-calcaneare e peroneo-
astragalico posteriore non sono sollecitati mentre il grande legamento calcaneo-
cuboideo ha una forza decrescente con l'angolo di plantarflessione e il legamento
peroneo astragalico anteriore ha una forza crescente con l'angolo di plantarflessione;
nel caso con protesi, il grande legamento calcaneo-cuboideo presenta lo stesso
andamento ma gli altri legamenti risultano meno sollecitati (Figura 105).
Per quanto riguarda gli andamenti delle forze dei legamenti in condizione di piede in
sospensione, i grafici non vengono riportati perché non sono significativi. La forza dei
legamenti risulta crescente con l'angolo di plantarflessione sia con che senza protesi.
-10
0
10
20
30
40
50
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze legamenti dorsali (con protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
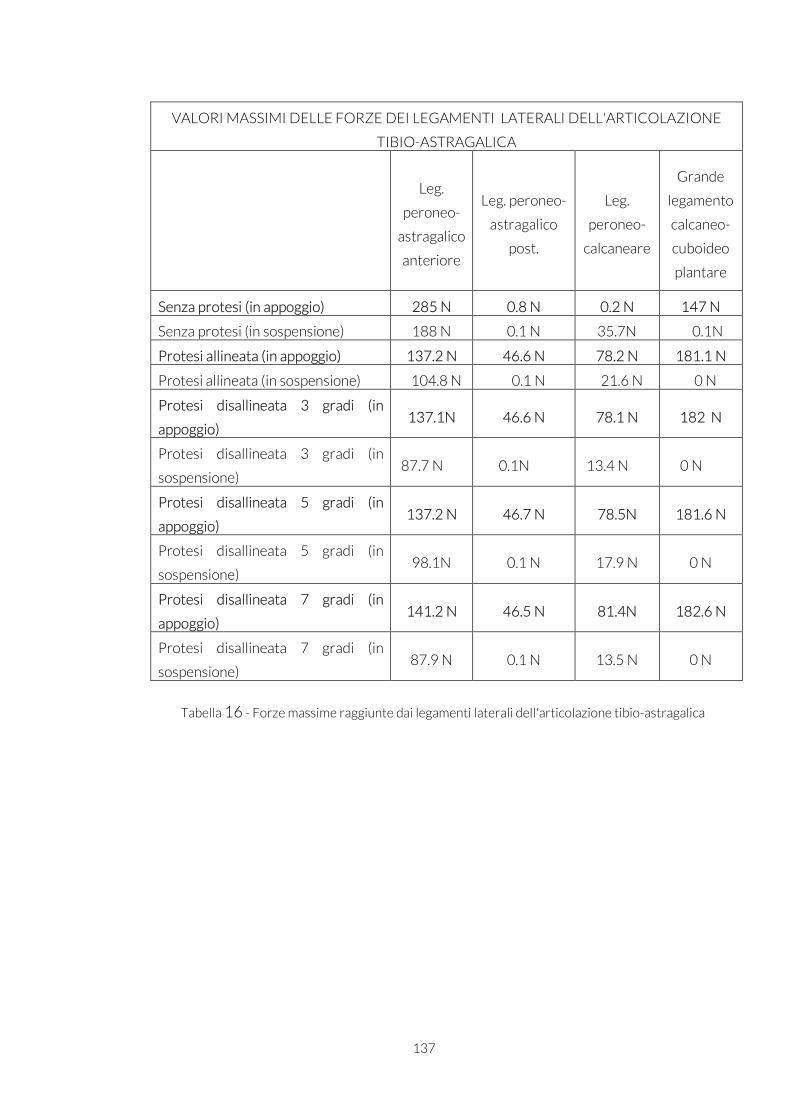
137
Tabella 16 - Forze massime raggiunte dai legamenti laterali dell'articolazione tibio-astragalica
VALORI MASSIMI DELLE FORZE DEI LEGAMENTI LATERALI DELL'ARTICOLAZIONE
TIBIO-ASTRAGALICA
Leg.
peroneo-
astragalico
anteriore
Leg. peroneo-
astragalico
post.
Leg.
peroneo-
calcaneare
Grande
legamento
calcaneo-
cuboideo
plantare
Senza protesi (in appoggio) 285 N 0.8 N 0.2 N 147 N
Senza protesi (in sospensione) 188 N 0.1 N 35.7N 0.1N
Protesi allineata (in appoggio) 137.2 N 46.6 N 78.2 N 181.1 N
Protesi allineata (in sospensione) 104.8 N 0.1 N 21.6 N 0 N
Protesi disallineata 3 gradi (in
appoggio) 137.1N 46.6 N 78.1 N 182 N
Protesi disallineata 3 gradi (in
sospensione) 87.7 N 0.1N 13.4 N 0 N
Protesi disallineata 5 gradi (in
appoggio) 137.2 N 46.7 N 78.5N 181.6 N
Protesi disallineata 5 gradi (in
sospensione) 98.1N 0.1 N 17.9 N 0 N
Protesi disallineata 7 gradi (in
appoggio) 141.2 N 46.5 N 81.4N 182.6 N
Protesi disallineata 7 gradi (in
sospensione) 87.9 N 0.1 N 13.5 N 0 N
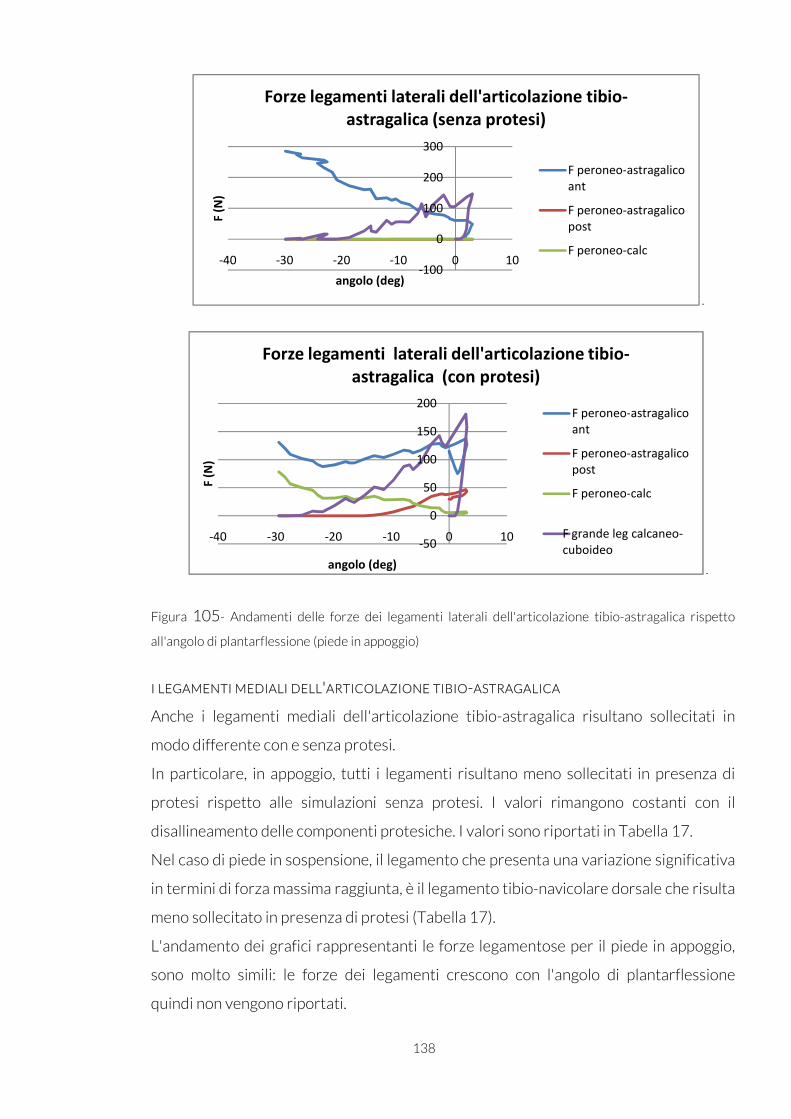
138
.
.
Figura 105- Andamenti delle forze dei legamenti laterali dell'articolazione tibio-astragalica rispetto
all'angolo di plantarflessione (piede in appoggio)
I LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Anche i legamenti mediali dell'articolazione tibio-astragalica risultano sollecitati in
modo differente con e senza protesi.
In particolare, in appoggio, tutti i legamenti risultano meno sollecitati in presenza di
protesi rispetto alle simulazioni senza protesi. I valori rimangono costanti con il
disallineamento delle componenti protesiche. I valori sono riportati in Tabella 17.
Nel caso di piede in sospensione, il legamento che presenta una variazione significativa
in termini di forza massima raggiunta, è il legamento tibio-navicolare dorsale che risulta
meno sollecitato in presenza di protesi (Tabella 17).
L'andamento dei grafici rappresentanti le forze legamentose per il piede in appoggio,
sono molto simili: le forze dei legamenti crescono con l'angolo di plantarflessione
quindi non vengono riportati.
-100
0
100
200
300
-40 -30 -20 -10 0 10
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (senza protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
-50
0
50
100
150
200
-40 -30 -20 -10 0 10
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (con protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg calcaneo-
cuboideo
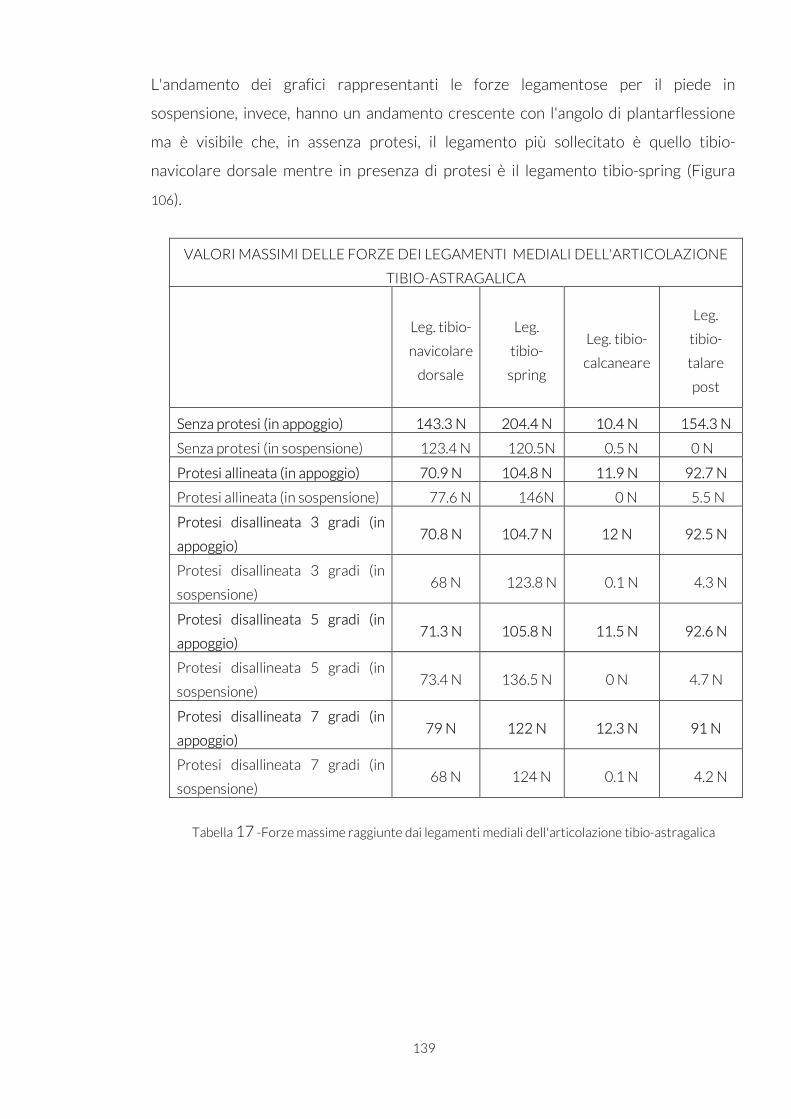
139
L'andamento dei grafici rappresentanti le forze legamentose per il piede in
sospensione, invece, hanno un andamento crescente con l'angolo di plantarflessione
ma è visibile che, in assenza protesi, il legamento più sollecitato è quello tibio-
navicolare dorsale mentre in presenza di protesi è il legamento tibio-spring (Figura
106).
Tabella 17 -Forze massime raggiunte dai legamenti mediali dell'articolazione tibio-astragalica
VALORI MASSIMI DELLE FORZE DEI LEGAMENTI MEDIALI DELL'ARTICOLAZIONE
TIBIO-ASTRAGALICA
Leg. tibio-
navicolare
dorsale
Leg.
tibio-
spring
Leg. tibio-
calcaneare
Leg.
tibio-
talare
post
Senza protesi (in appoggio) 143.3 N 204.4 N 10.4 N 154.3 N
Senza protesi (in sospensione) 123.4 N 120.5N 0.5 N 0 N
Protesi allineata (in appoggio) 70.9 N 104.8 N 11.9 N 92.7 N
Protesi allineata (in sospensione) 77.6 N 146N 0 N 5.5 N
Protesi disallineata 3 gradi (in
appoggio) 70.8 N 104.7 N 12 N 92.5 N
Protesi disallineata 3 gradi (in
sospensione) 68 N 123.8 N 0.1 N 4.3 N
Protesi disallineata 5 gradi (in
appoggio) 71.3 N 105.8 N 11.5 N 92.6 N
Protesi disallineata 5 gradi (in
sospensione) 73.4 N 136.5 N 0 N 4.7 N
Protesi disallineata 7 gradi (in
appoggio) 79 N 122 N 12.3 N 91 N
Protesi disallineata 7 gradi (in
sospensione) 68 N 124 N 0.1 N 4.2 N
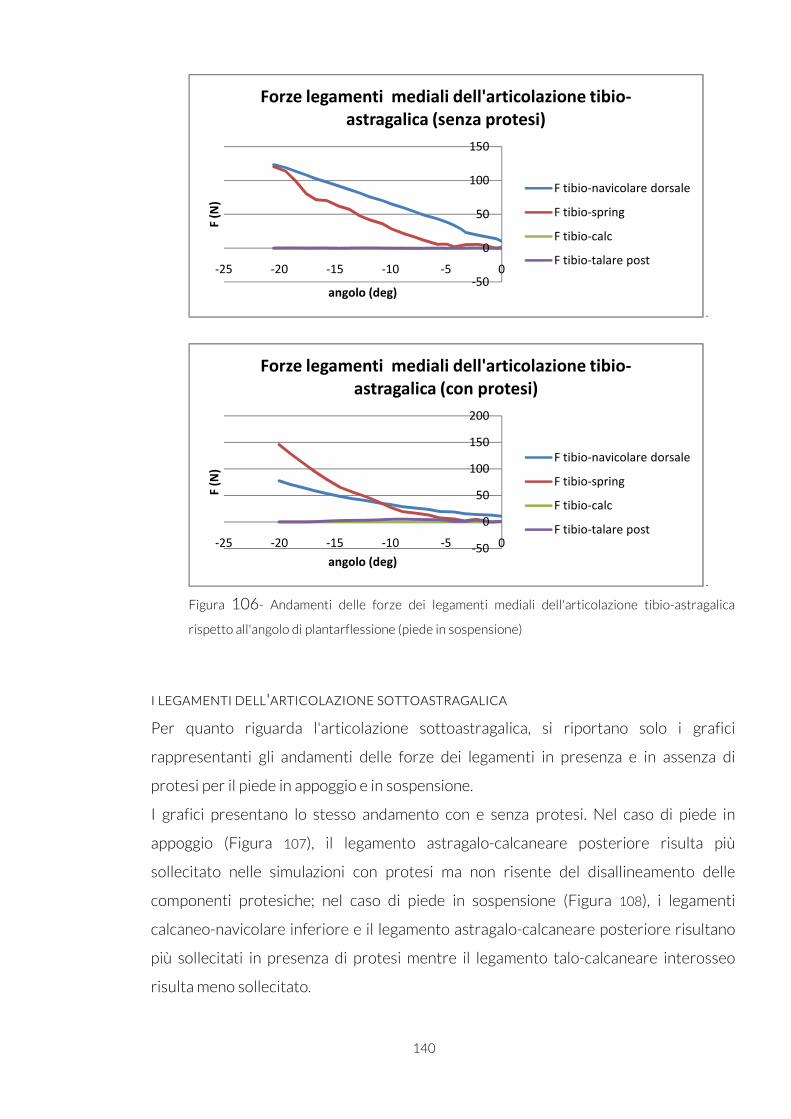
140
.
.
Figura 106- Andamenti delle forze dei legamenti mediali dell'articolazione tibio-astragalica
rispetto all'angolo di plantarflessione (piede in sospensione)
I LEGAMENTI DELL'ARTICOLAZIONE SOTTOASTRAGALICA
Per quanto riguarda l'articolazione sottoastragalica, si riportano solo i grafici
rappresentanti gli andamenti delle forze dei legamenti in presenza e in assenza di
protesi per il piede in appoggio e in sospensione.
I grafici presentano lo stesso andamento con e senza protesi. Nel caso di piede in
appoggio (Figura 107), il legamento astragalo-calcaneare posteriore risulta più
sollecitato nelle simulazioni con protesi ma non risente del disallineamento delle
componenti protesiche; nel caso di piede in sospensione (Figura 108), i legamenti
calcaneo-navicolare inferiore e il legamento astragalo-calcaneare posteriore risultano
più sollecitati in presenza di protesi mentre il legamento talo-calcaneare interosseo
risulta meno sollecitato.
-50
0
50
100
150
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze legamenti mediali dell'articolazione tibio-
astragalica (senza protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
-50
0
50
100
150
200
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze legamenti mediali dell'articolazione tibio-
astragalica (con protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
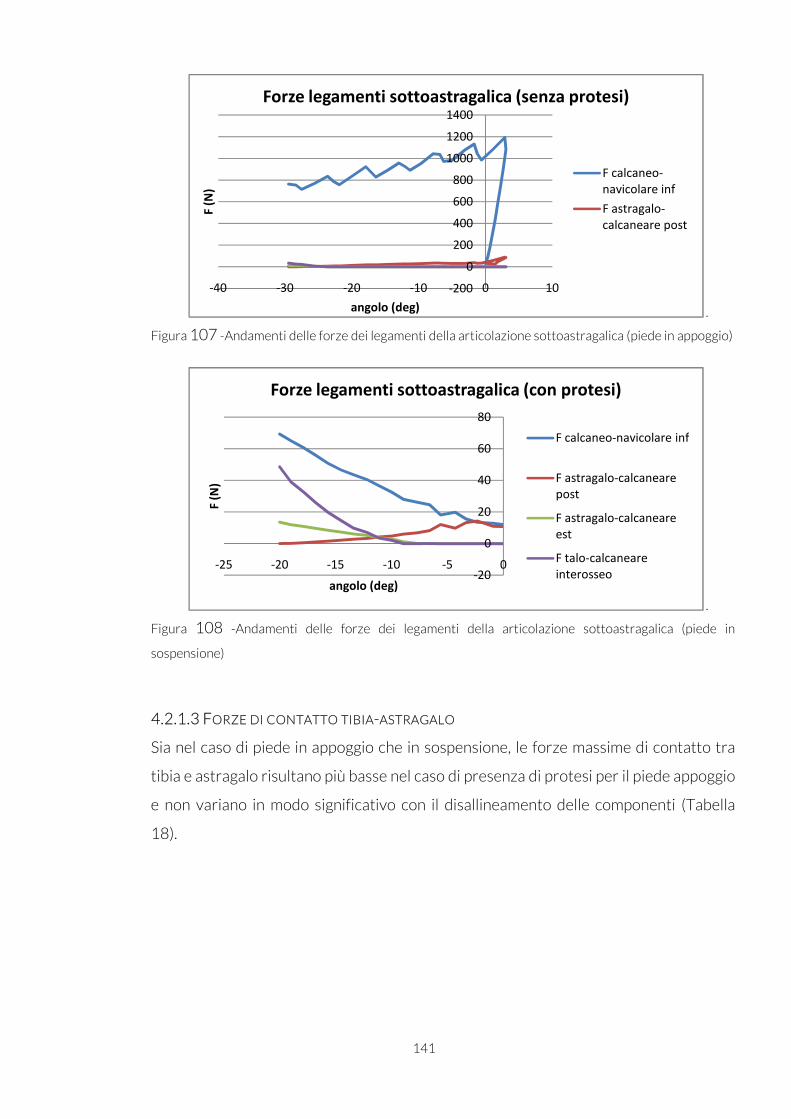
141
.
Figura 107 -Andamenti delle forze dei legamenti della articolazione sottoastragalica (piede in appoggio)
.
Figura 108 -Andamenti delle forze dei legamenti della articolazione sottoastragalica (piede in
sospensione)
4.2.1.3 FORZE DI CONTATTO TIBIA-ASTRAGALO
Sia nel caso di piede in appoggio che in sospensione, le forze massime di contatto tra
tibia e astragalo risultano più basse nel caso di presenza di protesi per il piede appoggio
e non variano in modo significativo con il disallineamento delle componenti (Tabella
18).
-200
0
200
400
600
800
1000
1200
1400
-40 -30 -20 -10 0 10
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (senza protesi)
F calcaneo-
navicolare inf
F astragalo-
calcaneare post
-20
0
20
40
60
80
-25 -20 -15 -10 -5 0
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (con protesi)
F calcaneo-navicolare inf
F astragalo-calcaneare
post
F astragalo-calcaneare
est
F talo-calcaneare
interosseo
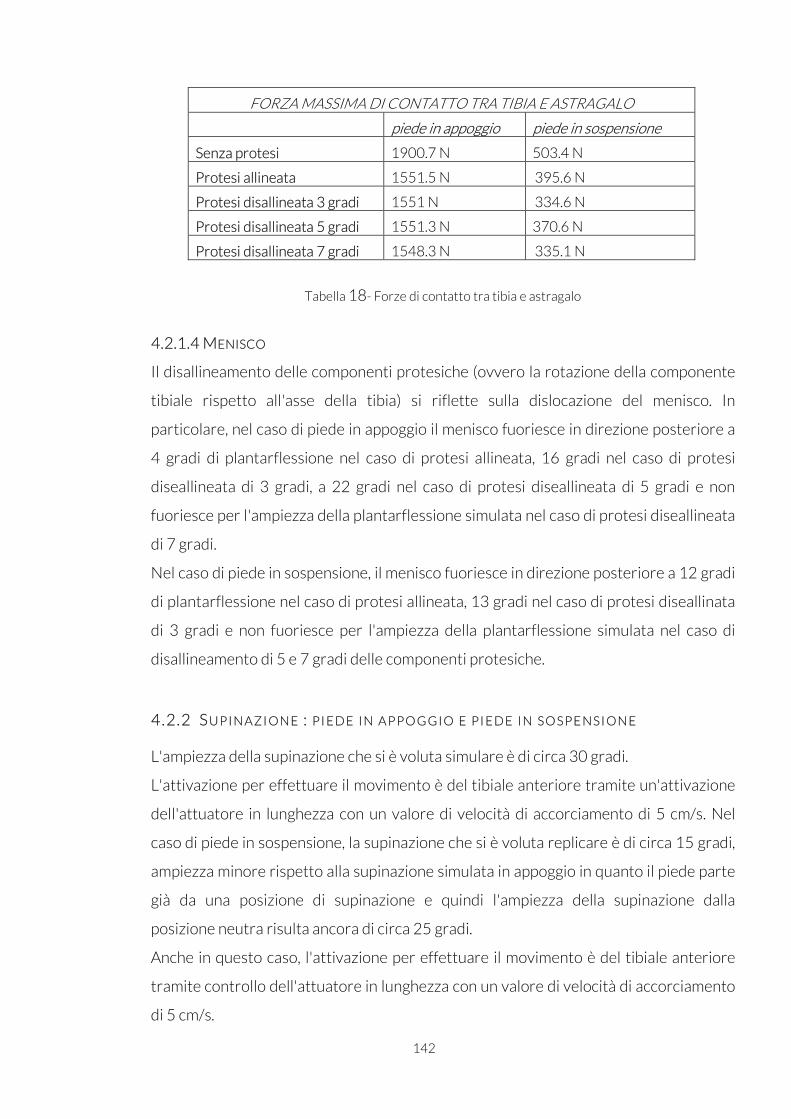
142
Tabella 18- Forze di contatto tra tibia e astragalo
4.2.1.4 MENISCO
Il disallineamento delle componenti protesiche (ovvero la rotazione della componente
tibiale rispetto all'asse della tibia) si riflette sulla dislocazione del menisco. In
particolare, nel caso di piede in appoggio il menisco fuoriesce in direzione posteriore a
4 gradi di plantarflessione nel caso di protesi allineata, 16 gradi nel caso di protesi
diseallineata di 3 gradi, a 22 gradi nel caso di protesi diseallineata di 5 gradi e non
fuoriesce per l'ampiezza della plantarflessione simulata nel caso di protesi diseallineata
di 7 gradi.
Nel caso di piede in sospensione, il menisco fuoriesce in direzione posteriore a 12 gradi
di plantarflessione nel caso di protesi allineata, 13 gradi nel caso di protesi diseallinata
di 3 gradi e non fuoriesce per l'ampiezza della plantarflessione simulata nel caso di
disallineamento di 5 e 7 gradi delle componenti protesiche.
4.2.2 S U P I N A Z I O N E : P I E D E I N A P P O G G I O E P I E D E I N S O S P E N S I O N E
L'ampiezza della supinazione che si è voluta simulare è di circa 30 gradi.
L'attivazione per effettuare il movimento è del tibiale anteriore tramite un'attivazione
dell'attuatore in lunghezza con un valore di velocità di accorciamento di 5 cm/s. Nel
caso di piede in sospensione, la supinazione che si è voluta replicare è di circa 15 gradi,
ampiezza minore rispetto alla supinazione simulata in appoggio in quanto il piede parte
già da una posizione di supinazione e quindi l'ampiezza della supinazione dalla
posizione neutra risulta ancora di circa 25 gradi.
Anche in questo caso, l'attivazione per effettuare il movimento è del tibiale anteriore
tramite controllo dell'attuatore in lunghezza con un valore di velocità di accorciamento
di 5 cm/s.
FORZA MASSIMA DI CONTATTO TRA TIBIA E ASTRAGALO
piede in appoggio piede in sospensione
Senza protesi 1900.7 N 503.4 N
Protesi allineata 1551.5 N 395.6 N
Protesi disallineata 3 gradi 1551 N 334.6 N
Protesi disallineata 5 gradi 1551.3 N 370.6 N
Protesi disallineata 7 gradi 1548.3 N 335.1 N
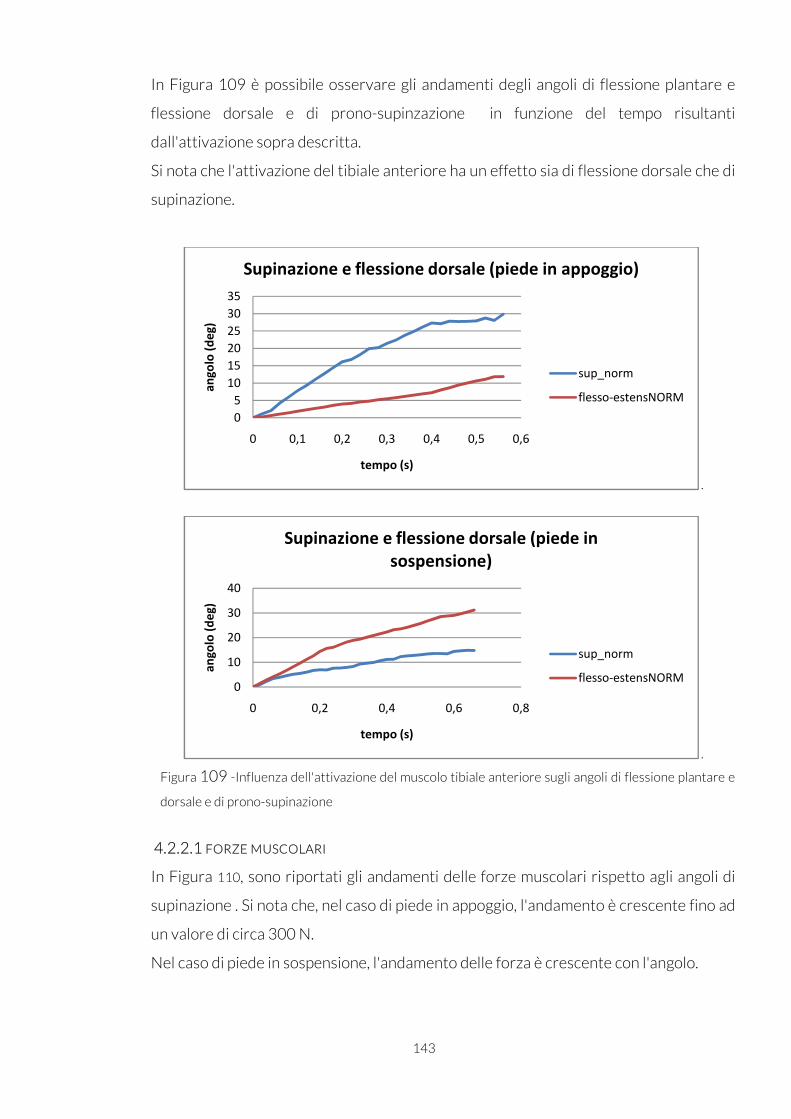
143
In Figura 109 è possibile osservare gli andamenti degli angoli di flessione plantare e
flessione dorsale e di prono-supinzazione in funzione del tempo risultanti
dall'attivazione sopra descritta.
Si nota che l'attivazione del tibiale anteriore ha un effetto sia di flessione dorsale che di
supinazione.
.
.
Figura 109 -Influenza dell'attivazione del muscolo tibiale anteriore sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.2.2.1 FORZE MUSCOLARI
In Figura 110, sono riportati gli andamenti delle forze muscolari rispetto agli angoli di
supinazione . Si nota che, nel caso di piede in appoggio, l'andamento è crescente fino ad
un valore di circa 300 N.
Nel caso di piede in sospensione, l'andamento delle forza è crescente con l'angolo.
0
5
10
15
20
25
30
35
0 0,1 0,2 0,3 0,4 0,5 0,6
an
go
lo (
de
g)
tempo (s)
Supinazione e flessione dorsale (piede in appoggio)
sup_norm
flesso-estensNORM
0
10
20
30
40
0 0,2 0,4 0,6 0,8
an
go
lo (
de
g)
tempo (s)
Supinazione e flessione dorsale (piede in
sospensione)
sup_norm
flesso-estensNORM
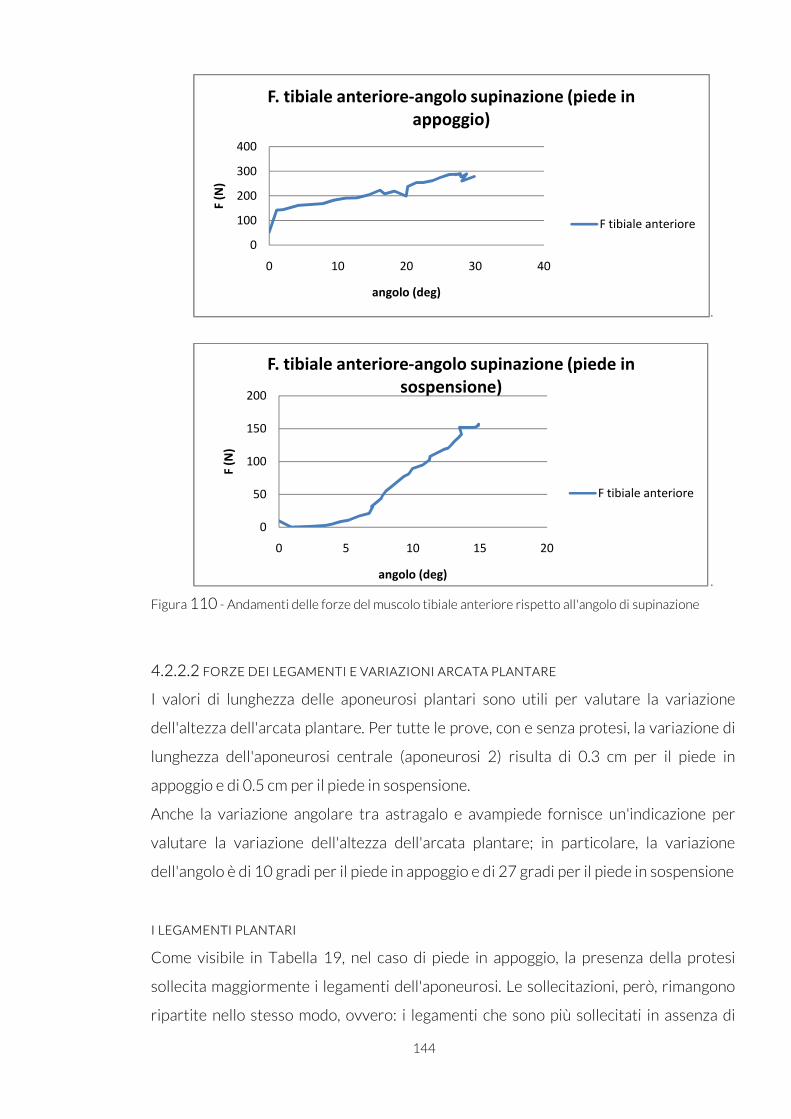
144
.
.
Figura 110 - Andamenti delle forze del muscolo tibiale anteriore rispetto all'angolo di supinazione
4.2.2.2 FORZE DEI LEGAMENTI E VARIAZIONI ARCATA PLANTARE
I valori di lunghezza delle aponeurosi plantari sono utili per valutare la variazione
dell'altezza dell'arcata plantare. Per tutte le prove, con e senza protesi, la variazione di
lunghezza dell'aponeurosi centrale (aponeurosi 2) risulta di 0.3 cm per il piede in
appoggio e di 0.5 cm per il piede in sospensione.
Anche la variazione angolare tra astragalo e avampiede fornisce un'indicazione per
valutare la variazione dell'altezza dell'arcata plantare; in particolare, la variazione
dell'angolo è di 10 gradi per il piede in appoggio e di 27 gradi per il piede in sospensione
I LEGAMENTI PLANTARI
Come visibile in Tabella 19, nel caso di piede in appoggio, la presenza della protesi
sollecita maggiormente i legamenti dell'aponeurosi. Le sollecitazioni, però, rimangono
ripartite nello stesso modo, ovvero: i legamenti che sono più sollecitati in assenza di
0
100
200
300
400
0 10 20 30 40
F (
N)
angolo (deg)
F. tibiale anteriore-angolo supinazione (piede in
appoggio)
F tibiale anteriore
0
50
100
150
200
0 5 10 15 20
F (
N)
angolo (deg)
F. tibiale anteriore-angolo supinazione (piede in
sospensione)
F tibiale anteriore
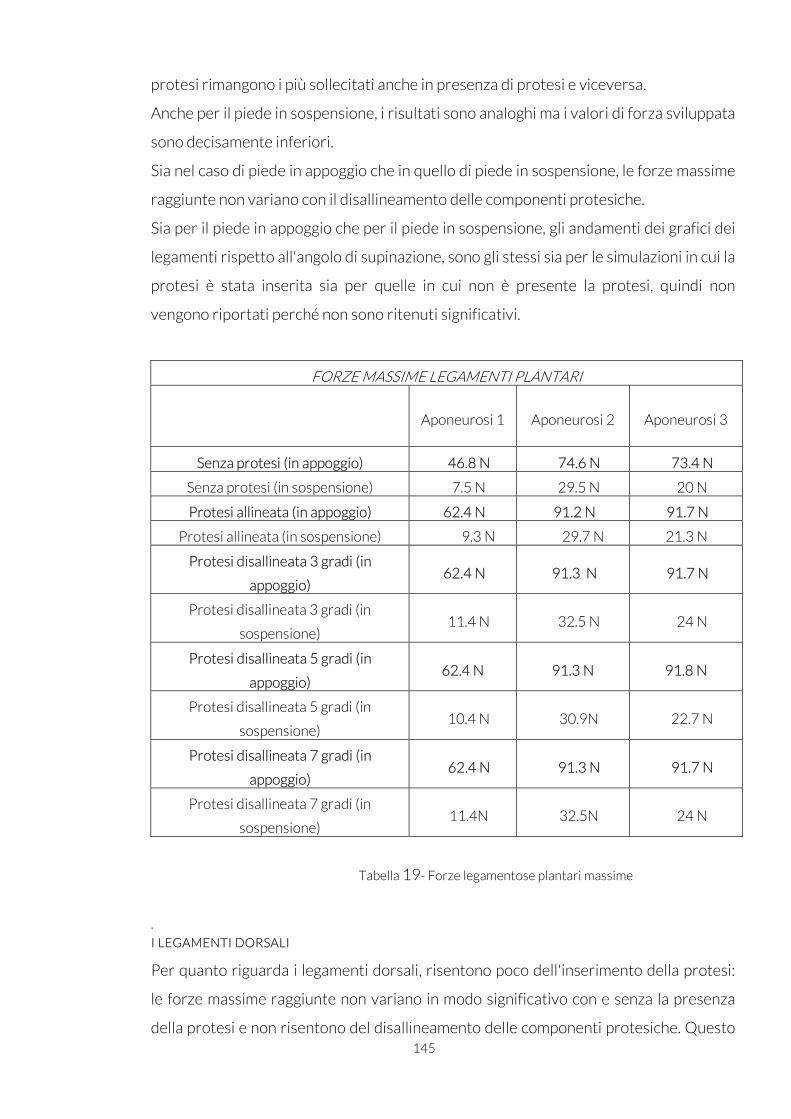
145
protesi rimangono i più sollecitati anche in presenza di protesi e viceversa.
Anche per il piede in sospensione, i risultati sono analoghi ma i valori di forza sviluppata
sono decisamente inferiori.
Sia nel caso di piede in appoggio che in quello di piede in sospensione, le forze massime
raggiunte non variano con il disallineamento delle componenti protesiche.
Sia per il piede in appoggio che per il piede in sospensione, gli andamenti dei grafici dei
legamenti rispetto all'angolo di supinazione, sono gli stessi sia per le simulazioni in cui la
protesi è stata inserita sia per quelle in cui non è presente la protesi, quindi non
vengono riportati perché non sono ritenuti significativi.
Tabella 19- Forze legamentose plantari massime
.
I LEGAMENTI DORSALI
Per quanto riguarda i legamenti dorsali, risentono poco dell'inserimento della protesi:
le forze massime raggiunte non variano in modo significativo con e senza la presenza
della protesi e non risentono del disallineamento delle componenti protesiche. Questo
FORZE MASSIME LEGAMENTI PLANTARI
Aponeurosi 1 Aponeurosi 2 Aponeurosi 3
Senza protesi (in appoggio) 46.8 N 74.6 N 73.4 N
Senza protesi (in sospensione) 7.5 N 29.5 N 20 N
Protesi allineata (in appoggio) 62.4 N 91.2 N 91.7 N
Protesi allineata (in sospensione) 9.3 N 29.7 N 21.3 N
Protesi disallineata 3 gradi (in
appoggio) 62.4 N 91.3 N 91.7 N
Protesi disallineata 3 gradi (in
sospensione) 11.4 N 32.5 N 24 N
Protesi disallineata 5 gradi (in
appoggio) 62.4 N 91.3 N 91.8 N
Protesi disallineata 5 gradi (in
sospensione) 10.4 N 30.9N 22.7 N
Protesi disallineata 7 gradi (in
appoggio) 62.4 N 91.3 N 91.7 N
Protesi disallineata 7 gradi (in
sospensione) 11.4N 32.5N 24 N
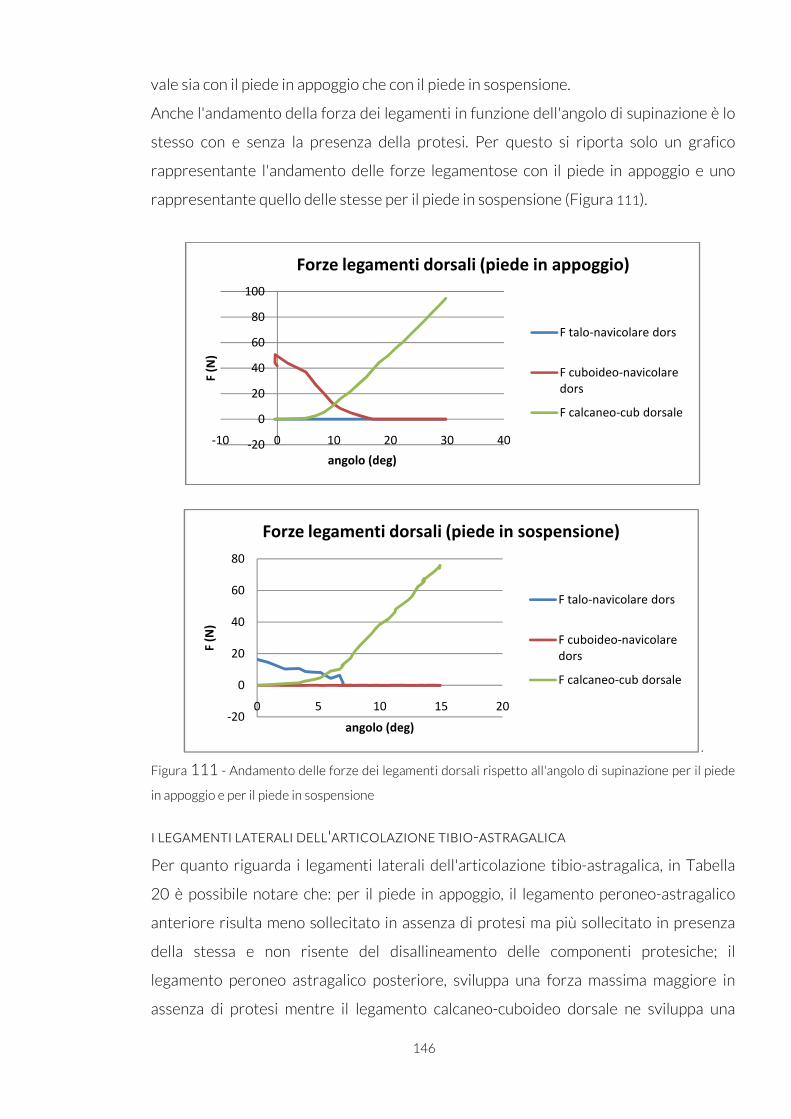
146
vale sia con il piede in appoggio che con il piede in sospensione.
Anche l'andamento della forza dei legamenti in funzione dell'angolo di supinazione è lo
stesso con e senza la presenza della protesi. Per questo si riporta solo un grafico
rappresentante l'andamento delle forze legamentose con il piede in appoggio e uno
rappresentante quello delle stesse per il piede in sospensione (Figura 111).
.
Figura 111 - Andamento delle forze dei legamenti dorsali rispetto all'angolo di supinazione per il piede
in appoggio e per il piede in sospensione
I LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Per quanto riguarda i legamenti laterali dell'articolazione tibio-astragalica, in Tabella
20 è possibile notare che: per il piede in appoggio, il legamento peroneo-astragalico
anteriore risulta meno sollecitato in assenza di protesi ma più sollecitato in presenza
della stessa e non risente del disallineamento delle componenti protesiche; il
legamento peroneo astragalico posteriore, sviluppa una forza massima maggiore in
assenza di protesi mentre il legamento calcaneo-cuboideo dorsale ne sviluppa una
-20
0
20
40
60
80
100
-10 0 10 20 30 40
F (
N)
angolo (deg)
Forze legamenti dorsali (piede in appoggio)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
-20
0
20
40
60
80
0 5 10 15 20
F (
N)
angolo (deg)
Forze legamenti dorsali (piede in sospensione)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
147
maggiore in presenza di protesi stessa e entrambi non risentono del disallineamento
delle componenti protesiche.
Per il piede in sospensione, si osservano variazioni significative nella forza massima
solo per il legamento peroneo-astragalico posteriore che raggiunge valori più elevati in
assenza di protesi; in particolare, la forza massima raggiunta da questo legamento
sembra risentire del disallineamento delle componenti, anche se le variazioni sono di
piccola entità.
Per il piede in appoggio, gli andamenti delle forze di questi legamenti in funzione
dell'angolo di supinazione sono riportati in Figura 112 dove è possibile notare che il
legamento peroneo-astragalico anteriore risulta non sollecitato sia in presenza che in
assenza della protesi stessa; per tutti gli altri legamenti, la forza è crescente con
l'angolo di supinazione ma è possibile notare che, nel caso di assenza di protesi, le forze
sviluppate dal peroneo-astragalico posteriore e dal peroneo-calcaneare rimangono
nulle fino a circa 15-20 gradi di supinazione e poi iniziano a crescere con pendenze
diverse; la forza del legamento peroneo-calcaneare ha pendenza più elevata rispetto al
legamento peroneo-astragalico posteriore.
Nel caso di presenza di protesi, la forza sviluppata da questi due legamenti rimane
costante ma non nulla (circa 30 N) per poi crescere per valori superiori a 15-20 gradi.
L'andamento delle forze degli stessi legamenti per il piede in sospensione, è uguale sia
nel caso di presenza di protesi che in assenza della stessa quindi non vengono riportate.
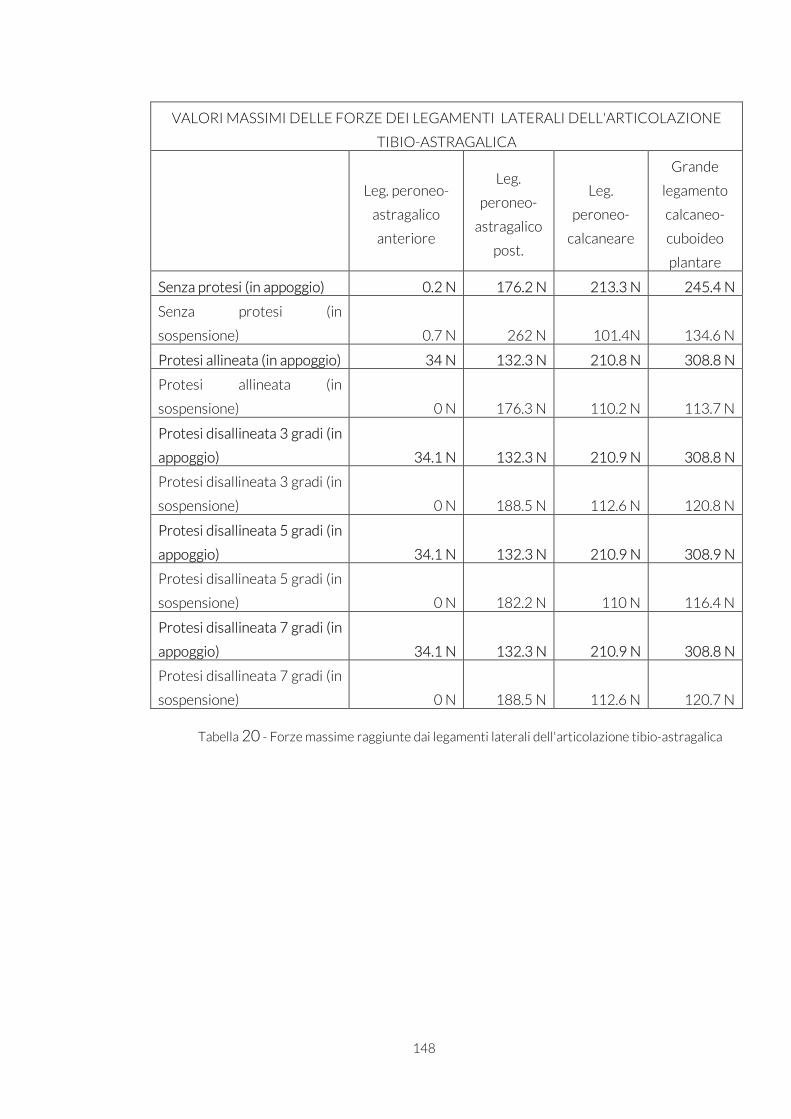
148
Tabella 20 - Forze massime raggiunte dai legamenti laterali dell'articolazione tibio-astragalica
VALORI MASSIMI DELLE FORZE DEI LEGAMENTI LATERALI DELL'ARTICOLAZIONE
TIBIO-ASTRAGALICA
Leg. peroneo-
astragalico
anteriore
Leg.
peroneo-
astragalico
post.
Leg.
peroneo-
calcaneare
Grande
legamento
calcaneo-
cuboideo
plantare
Senza protesi (in appoggio) 0.2 N 176.2 N 213.3 N 245.4 N
Senza protesi (in
sospensione) 0.7 N 262 N 101.4N 134.6 N
Protesi allineata (in appoggio) 34 N 132.3 N 210.8 N 308.8 N
Protesi allineata (in
sospensione) 0 N 176.3 N 110.2 N 113.7 N
Protesi disallineata 3 gradi (in
appoggio) 34.1 N 132.3 N 210.9 N 308.8 N
Protesi disallineata 3 gradi (in
sospensione) 0 N 188.5 N 112.6 N 120.8 N
Protesi disallineata 5 gradi (in
appoggio) 34.1 N 132.3 N 210.9 N 308.9 N
Protesi disallineata 5 gradi (in
sospensione) 0 N 182.2 N 110 N 116.4 N
Protesi disallineata 7 gradi (in
appoggio) 34.1 N 132.3 N 210.9 N 308.8 N
Protesi disallineata 7 gradi (in
sospensione) 0 N 188.5 N 112.6 N 120.7 N
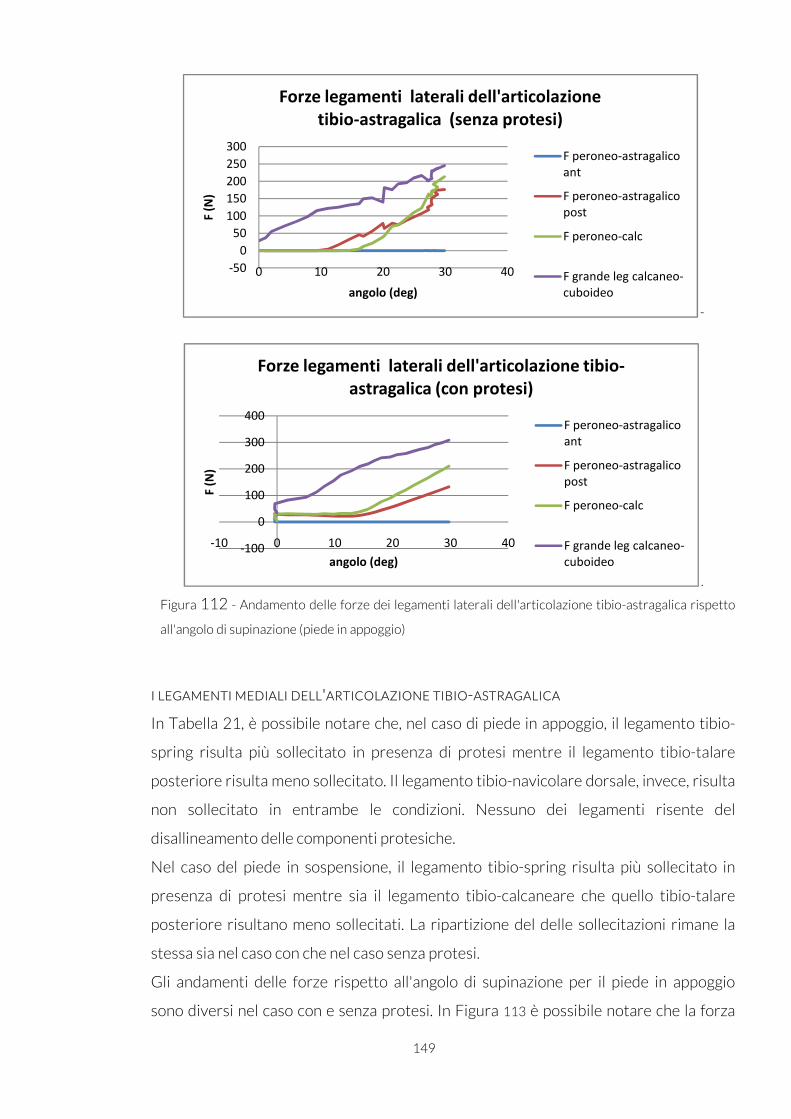
149
-
.
Figura 112 - Andamento delle forze dei legamenti laterali dell'articolazione tibio-astragalica rispetto
all'angolo di supinazione (piede in appoggio)
I LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
In Tabella 21, è possibile notare che, nel caso di piede in appoggio, il legamento tibio-
spring risulta più sollecitato in presenza di protesi mentre il legamento tibio-talare
posteriore risulta meno sollecitato. Il legamento tibio-navicolare dorsale, invece, risulta
non sollecitato in entrambe le condizioni. Nessuno dei legamenti risente del
disallineamento delle componenti protesiche.
Nel caso del piede in sospensione, il legamento tibio-spring risulta più sollecitato in
presenza di protesi mentre sia il legamento tibio-calcaneare che quello tibio-talare
posteriore risultano meno sollecitati. La ripartizione del delle sollecitazioni rimane la
stessa sia nel caso con che nel caso senza protesi.
Gli andamenti delle forze rispetto all'angolo di supinazione per il piede in appoggio
sono diversi nel caso con e senza protesi. In Figura 113 è possibile notare che la forza
-50
0
50
100
150
200
250
300
0 10 20 30 40
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione
tibio-astragalica (senza protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg calcaneo-
cuboideo
-100
0
100
200
300
400
-10 0 10 20 30 40
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (con protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg calcaneo-
cuboideo
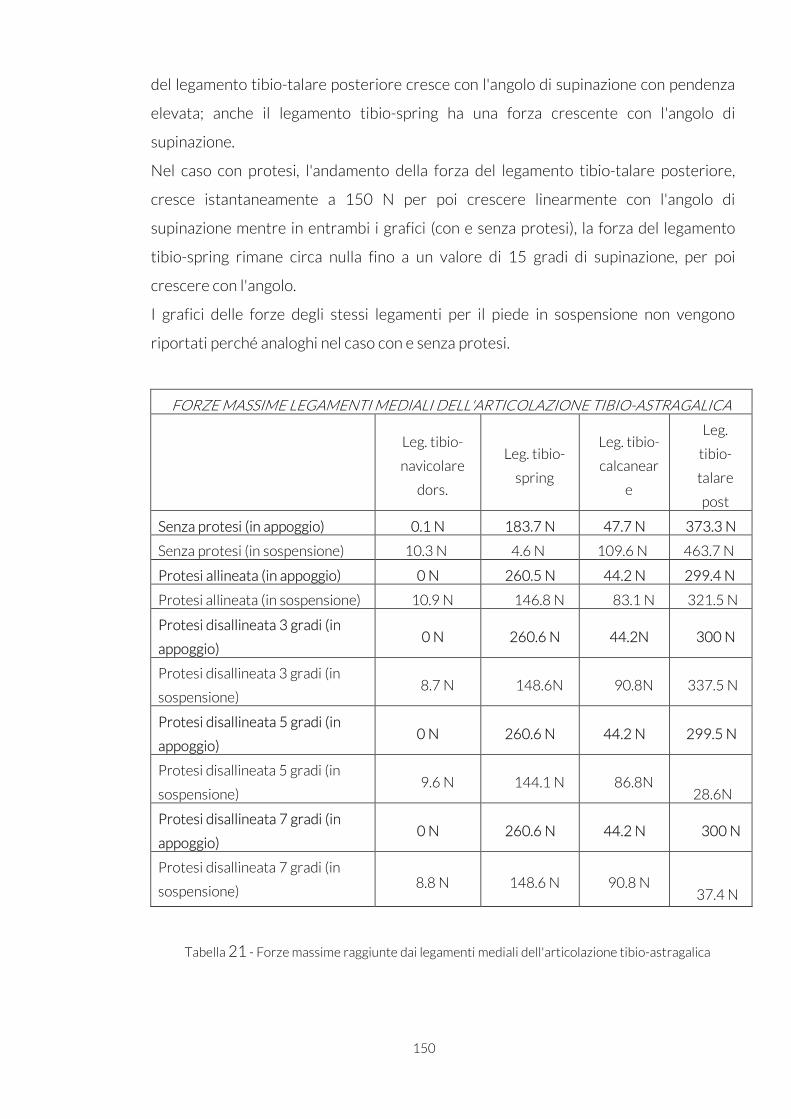
150
del legamento tibio-talare posteriore cresce con l'angolo di supinazione con pendenza
elevata; anche il legamento tibio-spring ha una forza crescente con l'angolo di
supinazione.
Nel caso con protesi, l'andamento della forza del legamento tibio-talare posteriore,
cresce istantaneamente a 150 N per poi crescere linearmente con l'angolo di
supinazione mentre in entrambi i grafici (con e senza protesi), la forza del legamento
tibio-spring rimane circa nulla fino a un valore di 15 gradi di supinazione, per poi
crescere con l'angolo.
I grafici delle forze degli stessi legamenti per il piede in sospensione non vengono
riportati perché analoghi nel caso con e senza protesi.
Tabella 21 - Forze massime raggiunte dai legamenti mediali dell'articolazione tibio-astragalica
FORZE MASSIME LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Leg. tibio-
navicolare
dors.
Leg. tibio-
spring
Leg. tibio-
calcanear
e
Leg.
tibio-
talare
post
Senza protesi (in appoggio) 0.1 N 183.7 N 47.7 N 373.3 N
Senza protesi (in sospensione) 10.3 N 4.6 N 109.6 N 463.7 N
Protesi allineata (in appoggio) 0 N 260.5 N 44.2 N 299.4 N
Protesi allineata (in sospensione) 10.9 N 146.8 N 83.1 N 321.5 N
Protesi disallineata 3 gradi (in
appoggio) 0 N 260.6 N 44.2N 300 N
Protesi disallineata 3 gradi (in
sospensione) 8.7 N 148.6N 90.8N 337.5 N
Protesi disallineata 5 gradi (in
appoggio) 0 N 260.6 N 44.2 N 299.5 N
Protesi disallineata 5 gradi (in
sospensione) 9.6 N 144.1 N 86.8N
28.6N
Protesi disallineata 7 gradi (in
appoggio) 0 N 260.6 N 44.2 N 300 N
Protesi disallineata 7 gradi (in
sospensione) 8.8 N 148.6 N 90.8 N
37.4 N
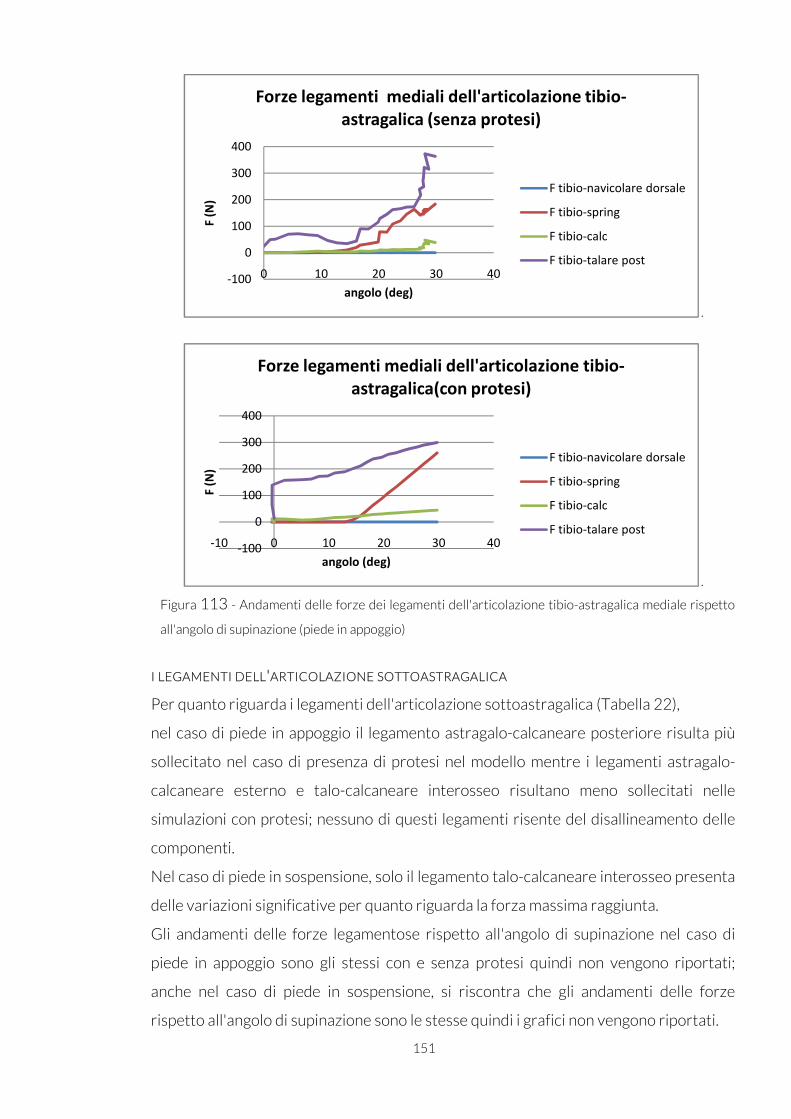
151
.
.
Figura 113 - Andamenti delle forze dei legamenti dell'articolazione tibio-astragalica mediale rispetto
all'angolo di supinazione (piede in appoggio)
I LEGAMENTI DELL'ARTICOLAZIONE SOTTOASTRAGALICA
Per quanto riguarda i legamenti dell'articolazione sottoastragalica (Tabella 22),
nel caso di piede in appoggio il legamento astragalo-calcaneare posteriore risulta più
sollecitato nel caso di presenza di protesi nel modello mentre i legamenti astragalo-
calcaneare esterno e talo-calcaneare interosseo risultano meno sollecitati nelle
simulazioni con protesi; nessuno di questi legamenti risente del disallineamento delle
componenti.
Nel caso di piede in sospensione, solo il legamento talo-calcaneare interosseo presenta
delle variazioni significative per quanto riguarda la forza massima raggiunta.
Gli andamenti delle forze legamentose rispetto all'angolo di supinazione nel caso di
piede in appoggio sono gli stessi con e senza protesi quindi non vengono riportati;
anche nel caso di piede in sospensione, si riscontra che gli andamenti delle forze
rispetto all'angolo di supinazione sono le stesse quindi i grafici non vengono riportati.
-100
0
100
200
300
400
0 10 20 30 40
F (
N)
angolo (deg)
Forze legamenti mediali dell'articolazione tibio-
astragalica (senza protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
-100
0
100
200
300
400
-10 0 10 20 30 40
F (
N)
angolo (deg)
Forze legamenti mediali dell'articolazione tibio-
astragalica(con protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
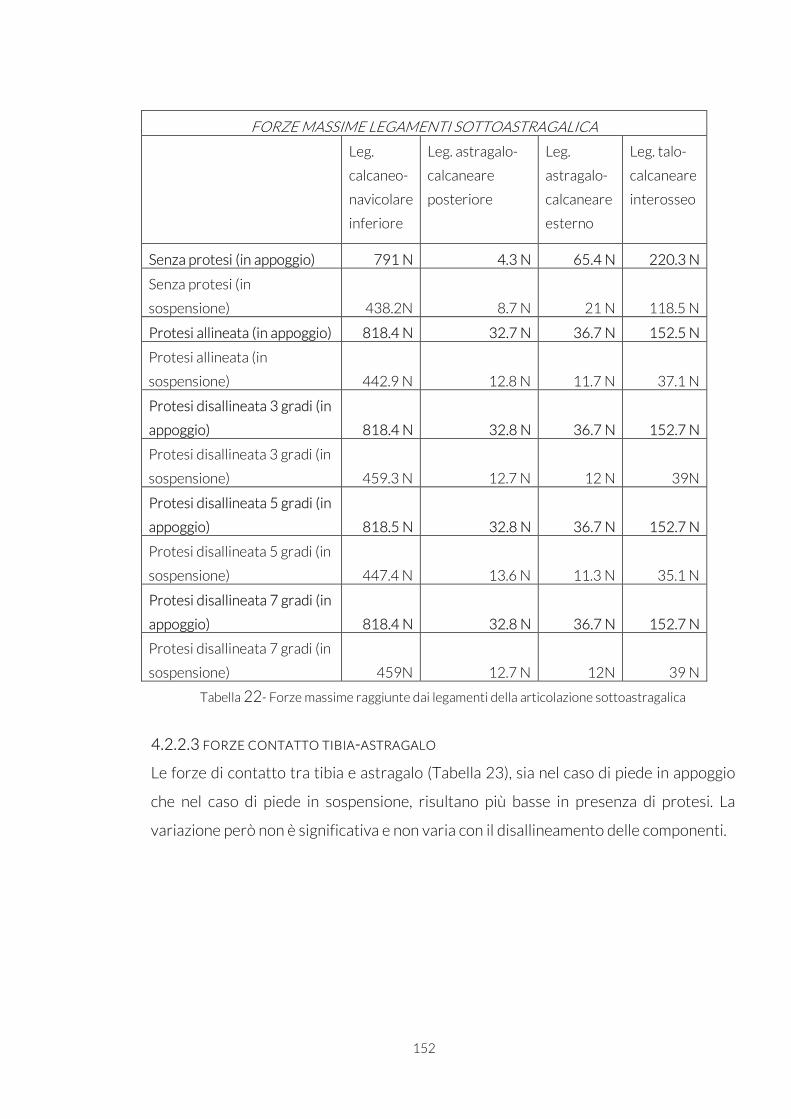
152
Tabella 22- Forze massime raggiunte dai legamenti della articolazione sottoastragalica
4.2.2.3 FORZE CONTATTO TIBIA-ASTRAGALO
Le forze di contatto tra tibia e astragalo (Tabella 23), sia nel caso di piede in appoggio
che nel caso di piede in sospensione, risultano più basse in presenza di protesi. La
variazione però non è significativa e non varia con il disallineamento delle componenti.
FORZE MASSIME LEGAMENTI SOTTOASTRAGALICA
Leg.
calcaneo-
navicolare
inferiore
Leg. astragalo-
calcaneare
posteriore
Leg.
astragalo-
calcaneare
esterno
Leg. talo-
calcaneare
interosseo
Senza protesi (in appoggio) 791 N 4.3 N 65.4 N 220.3 N
Senza protesi (in
sospensione) 438.2N 8.7 N 21 N 118.5 N
Protesi allineata (in appoggio) 818.4 N 32.7 N 36.7 N 152.5 N
Protesi allineata (in
sospensione) 442.9 N 12.8 N 11.7 N 37.1 N
Protesi disallineata 3 gradi (in
appoggio) 818.4 N 32.8 N 36.7 N 152.7 N
Protesi disallineata 3 gradi (in
sospensione) 459.3 N 12.7 N 12 N 39N
Protesi disallineata 5 gradi (in
appoggio) 818.5 N 32.8 N 36.7 N 152.7 N
Protesi disallineata 5 gradi (in
sospensione) 447.4 N 13.6 N 11.3 N 35.1 N
Protesi disallineata 7 gradi (in
appoggio) 818.4 N 32.8 N 36.7 N 152.7 N
Protesi disallineata 7 gradi (in
sospensione) 459N 12.7 N 12N 39 N
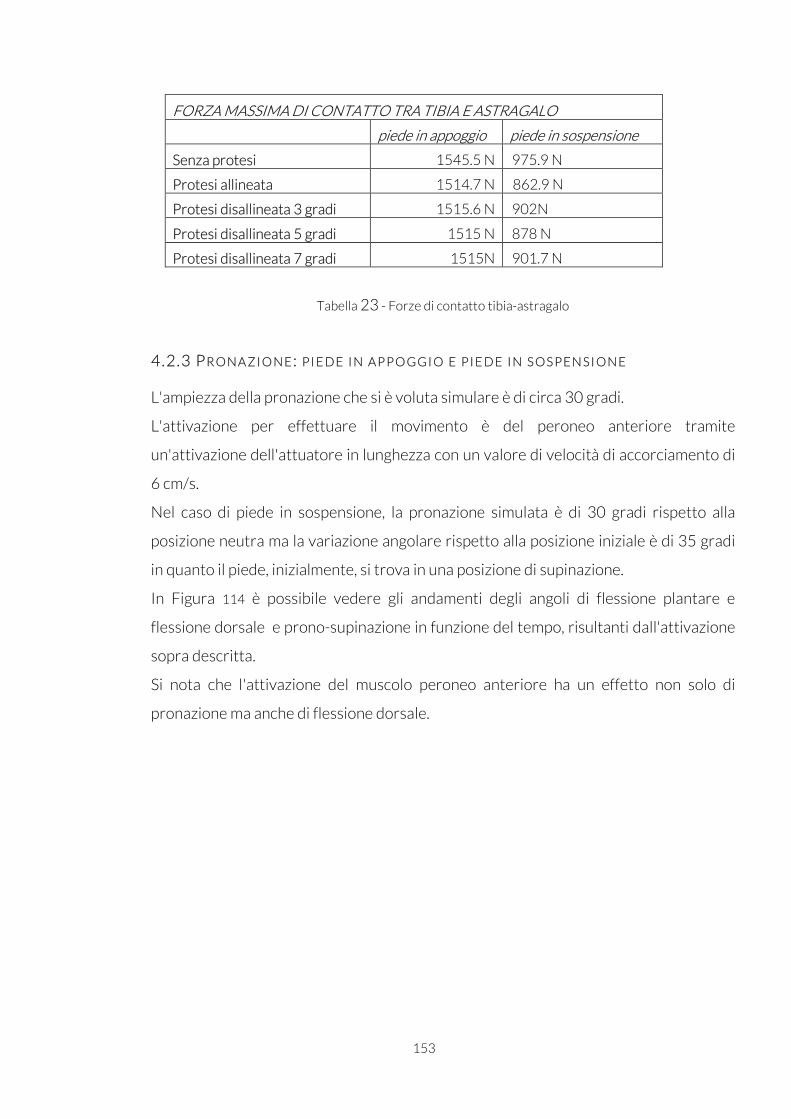
153
Tabella 23 - Forze di contatto tibia-astragalo
4 .2.3 PR O N A Z I O N E : P I E D E I N A P P O G G I O E P I E D E I N S O S P E N S I O N E
L'ampiezza della pronazione che si è voluta simulare è di circa 30 gradi.
L'attivazione per effettuare il movimento è del peroneo anteriore tramite
un'attivazione dell'attuatore in lunghezza con un valore di velocità di accorciamento di
6 cm/s.
Nel caso di piede in sospensione, la pronazione simulata è di 30 gradi rispetto alla
posizione neutra ma la variazione angolare rispetto alla posizione iniziale è di 35 gradi
in quanto il piede, inizialmente, si trova in una posizione di supinazione.
In Figura 114 è possibile vedere gli andamenti degli angoli di flessione plantare e
flessione dorsale e prono-supinazione in funzione del tempo, risultanti dall'attivazione
sopra descritta.
Si nota che l'attivazione del muscolo peroneo anteriore ha un effetto non solo di
pronazione ma anche di flessione dorsale.
FORZA MASSIMA DI CONTATTO TRA TIBIA E ASTRAGALO
piede in appoggio piede in sospensione
Senza protesi 1545.5 N 975.9 N
Protesi allineata 1514.7 N 862.9 N
Protesi disallineata 3 gradi 1515.6 N 902N
Protesi disallineata 5 gradi 1515 N 878 N
Protesi disallineata 7 gradi 1515N 901.7 N
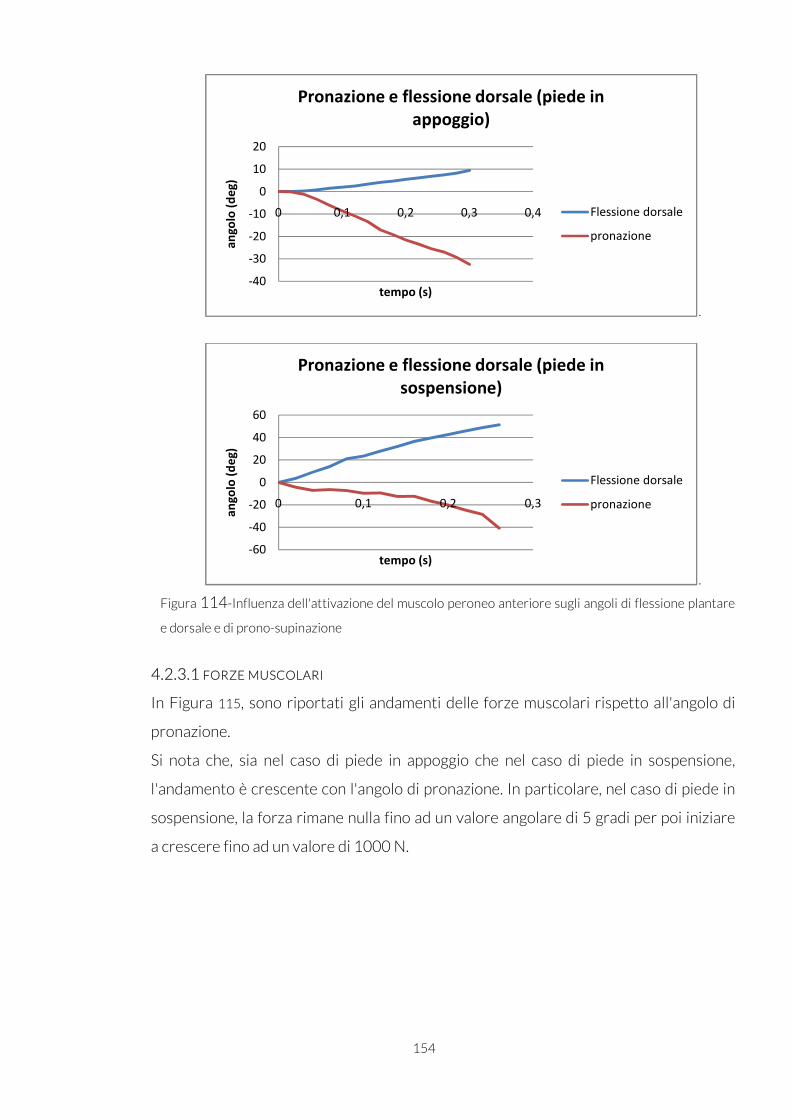
154
.
.
Figura 114-Influenza dell'attivazione del muscolo peroneo anteriore sugli angoli di flessione plantare
e dorsale e di prono-supinazione
4.2.3.1 FORZE MUSCOLARI
In Figura 115, sono riportati gli andamenti delle forze muscolari rispetto all'angolo di
pronazione.
Si nota che, sia nel caso di piede in appoggio che nel caso di piede in sospensione,
l'andamento è crescente con l'angolo di pronazione. In particolare, nel caso di piede in
sospensione, la forza rimane nulla fino ad un valore angolare di 5 gradi per poi iniziare
a crescere fino ad un valore di 1000 N.
-40
-30
-20
-10
0
10
20
0 0,1 0,2 0,3 0,4
an
go
lo (
de
g)
tempo (s)
Pronazione e flessione dorsale (piede in
appoggio)
Flessione dorsale
pronazione
-60
-40
-20
0
20
40
60
0 0,1 0,2 0,3
an
go
lo (
de
g)
tempo (s)
Pronazione e flessione dorsale (piede in
sospensione)
Flessione dorsale
pronazione
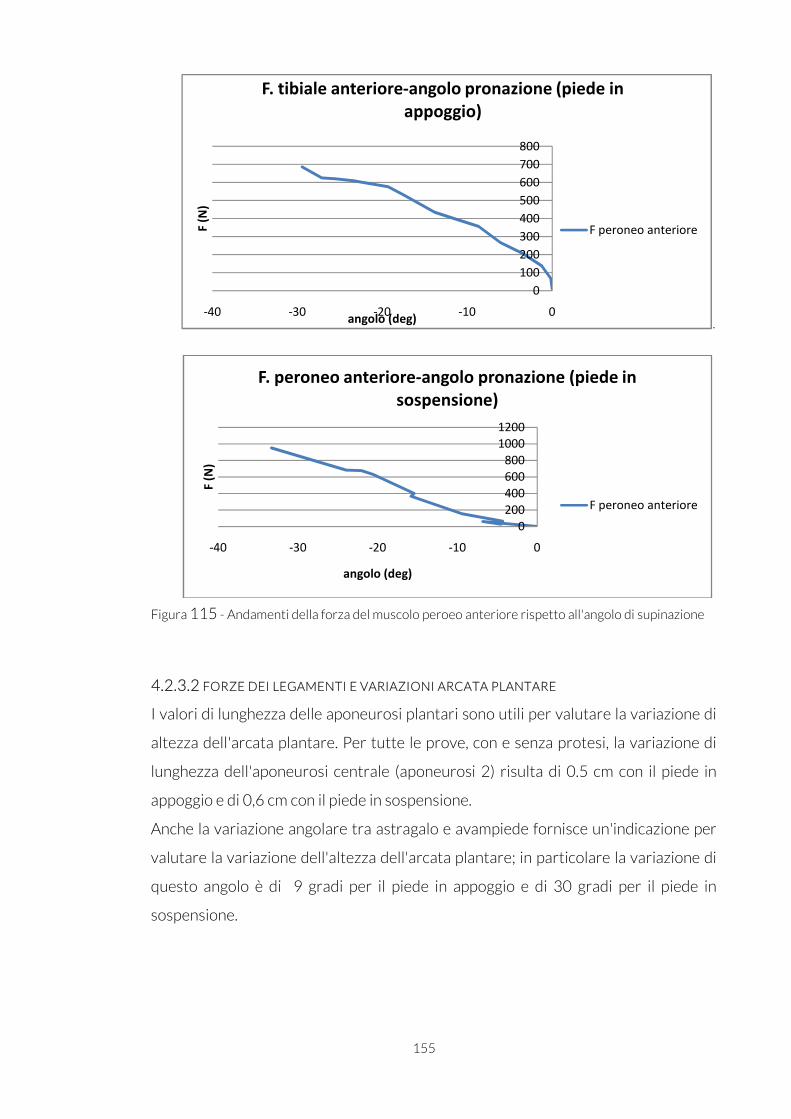
155
.
Figura 115 - Andamenti della forza del muscolo peroeo anteriore rispetto all'angolo di supinazione
4.2.3.2 FORZE DEI LEGAMENTI E VARIAZIONI ARCATA PLANTARE
I valori di lunghezza delle aponeurosi plantari sono utili per valutare la variazione di
altezza dell'arcata plantare. Per tutte le prove, con e senza protesi, la variazione di
lunghezza dell'aponeurosi centrale (aponeurosi 2) risulta di 0.5 cm con il piede in
appoggio e di 0,6 cm con il piede in sospensione.
Anche la variazione angolare tra astragalo e avampiede fornisce un'indicazione per
valutare la variazione dell'altezza dell'arcata plantare; in particolare la variazione di
questo angolo è di 9 gradi per il piede in appoggio e di 30 gradi per il piede in
sospensione.
0
100
200
300
400
500
600
700
800
-40 -30 -20 -10 0
F (
N)
angolo (deg)
F. tibiale anteriore-angolo pronazione (piede in
appoggio)
F peroneo anteriore
0
200
400
600
800
1000
1200
-40 -30 -20 -10 0
F (
N)
angolo (deg)
F. peroneo anteriore-angolo pronazione (piede in
sospensione)
F peroneo anteriore
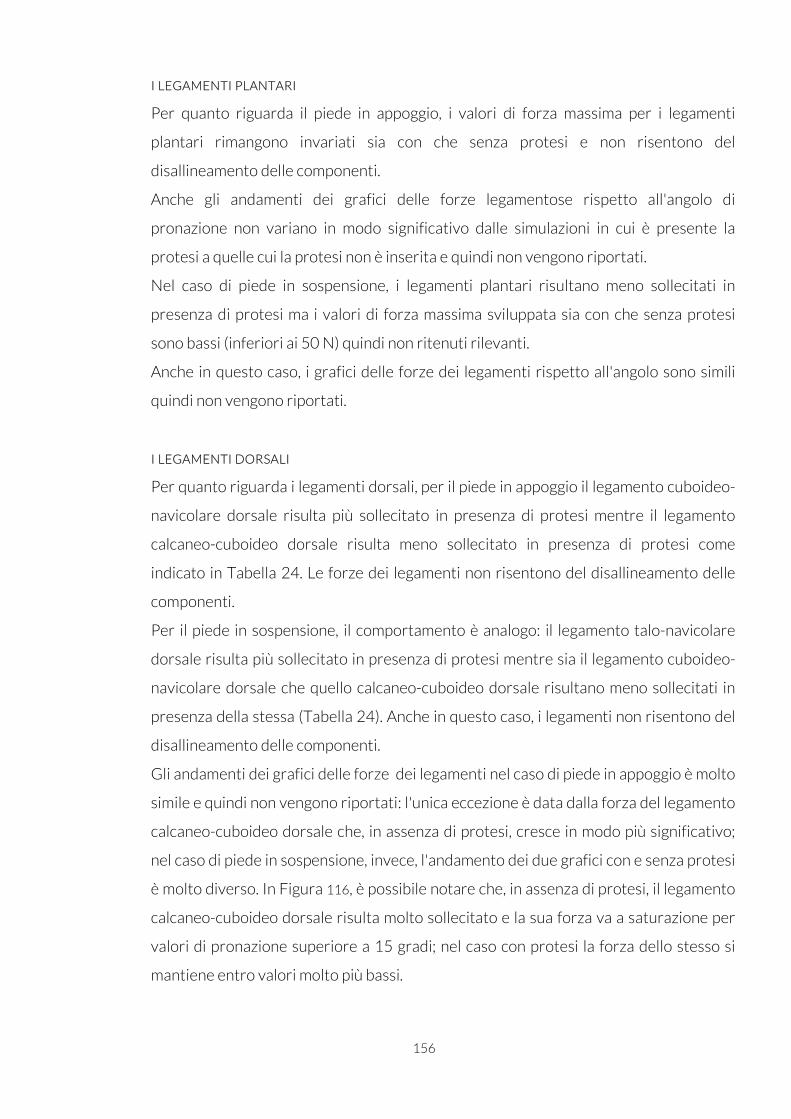
156
I LEGAMENTI PLANTARI
Per quanto riguarda il piede in appoggio, i valori di forza massima per i legamenti
plantari rimangono invariati sia con che senza protesi e non risentono del
disallineamento delle componenti.
Anche gli andamenti dei grafici delle forze legamentose rispetto all'angolo di
pronazione non variano in modo significativo dalle simulazioni in cui è presente la
protesi a quelle cui la protesi non è inserita e quindi non vengono riportati.
Nel caso di piede in sospensione, i legamenti plantari risultano meno sollecitati in
presenza di protesi ma i valori di forza massima sviluppata sia con che senza protesi
sono bassi (inferiori ai 50 N) quindi non ritenuti rilevanti.
Anche in questo caso, i grafici delle forze dei legamenti rispetto all'angolo sono simili
quindi non vengono riportati.
I LEGAMENTI DORSALI
Per quanto riguarda i legamenti dorsali, per il piede in appoggio il legamento cuboideo-
navicolare dorsale risulta più sollecitato in presenza di protesi mentre il legamento
calcaneo-cuboideo dorsale risulta meno sollecitato in presenza di protesi come
indicato in Tabella 24. Le forze dei legamenti non risentono del disallineamento delle
componenti.
Per il piede in sospensione, il comportamento è analogo: il legamento talo-navicolare
dorsale risulta più sollecitato in presenza di protesi mentre sia il legamento cuboideo-
navicolare dorsale che quello calcaneo-cuboideo dorsale risultano meno sollecitati in
presenza della stessa (Tabella 24). Anche in questo caso, i legamenti non risentono del
disallineamento delle componenti.
Gli andamenti dei grafici delle forze dei legamenti nel caso di piede in appoggio è molto
simile e quindi non vengono riportati: l'unica eccezione è data dalla forza del legamento
calcaneo-cuboideo dorsale che, in assenza di protesi, cresce in modo più significativo;
nel caso di piede in sospensione, invece, l'andamento dei due grafici con e senza protesi
è molto diverso. In Figura 116, è possibile notare che, in assenza di protesi, il legamento
calcaneo-cuboideo dorsale risulta molto sollecitato e la sua forza va a saturazione per
valori di pronazione superiore a 15 gradi; nel caso con protesi la forza dello stesso si
mantiene entro valori molto più bassi.
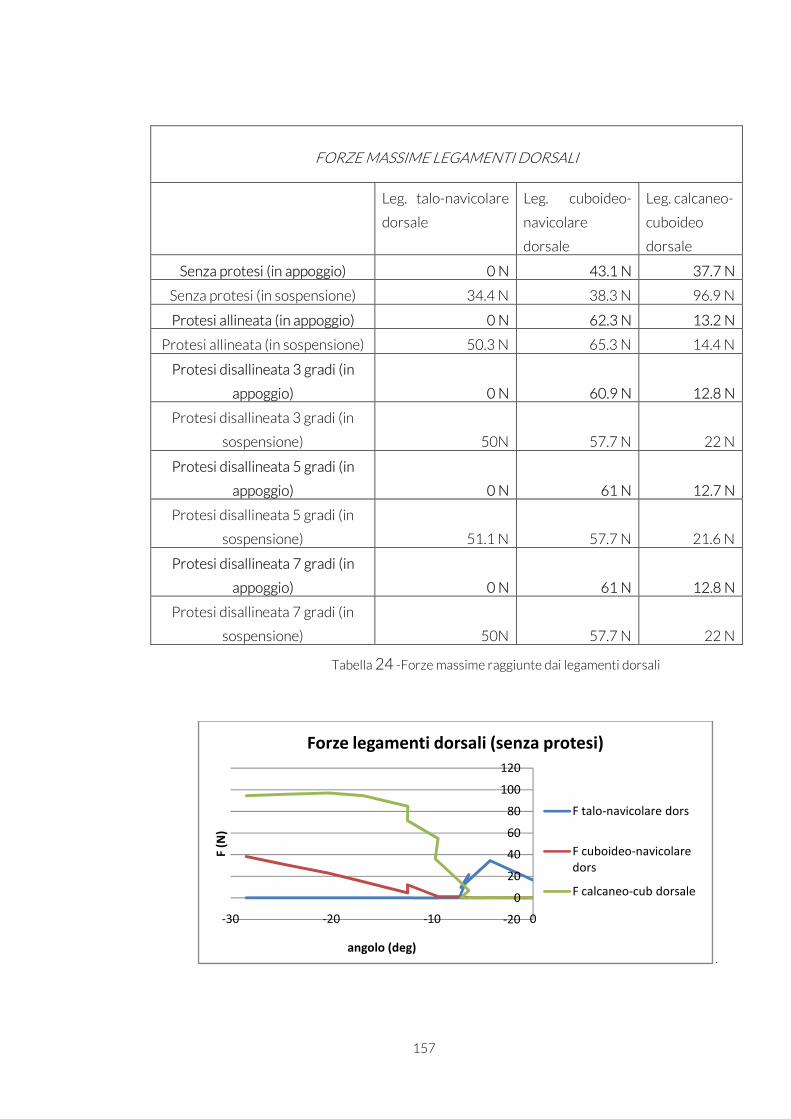
157
Tabella 24 -Forze massime raggiunte dai legamenti dorsali
.
-20
0
20
40
60
80
100
120
-30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti dorsali (senza protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
FORZE MASSIME LEGAMENTI DORSALI
Leg. talo-navicolare
dorsale
Leg. cuboideo-
navicolare
dorsale
Leg. calcaneo-
cuboideo
dorsale
Senza protesi (in appoggio) 0 N 43.1 N 37.7 N
Senza protesi (in sospensione) 34.4 N 38.3 N 96.9 N
Protesi allineata (in appoggio) 0 N 62.3 N 13.2 N
Protesi allineata (in sospensione) 50.3 N 65.3 N 14.4 N
Protesi disallineata 3 gradi (in
appoggio) 0 N 60.9 N 12.8 N
Protesi disallineata 3 gradi (in
sospensione) 50N 57.7 N 22 N
Protesi disallineata 5 gradi (in
appoggio) 0 N 61 N 12.7 N
Protesi disallineata 5 gradi (in
sospensione) 51.1 N 57.7 N 21.6 N
Protesi disallineata 7 gradi (in
appoggio) 0 N 61 N 12.8 N
Protesi disallineata 7 gradi (in
sospensione) 50N 57.7 N 22 N
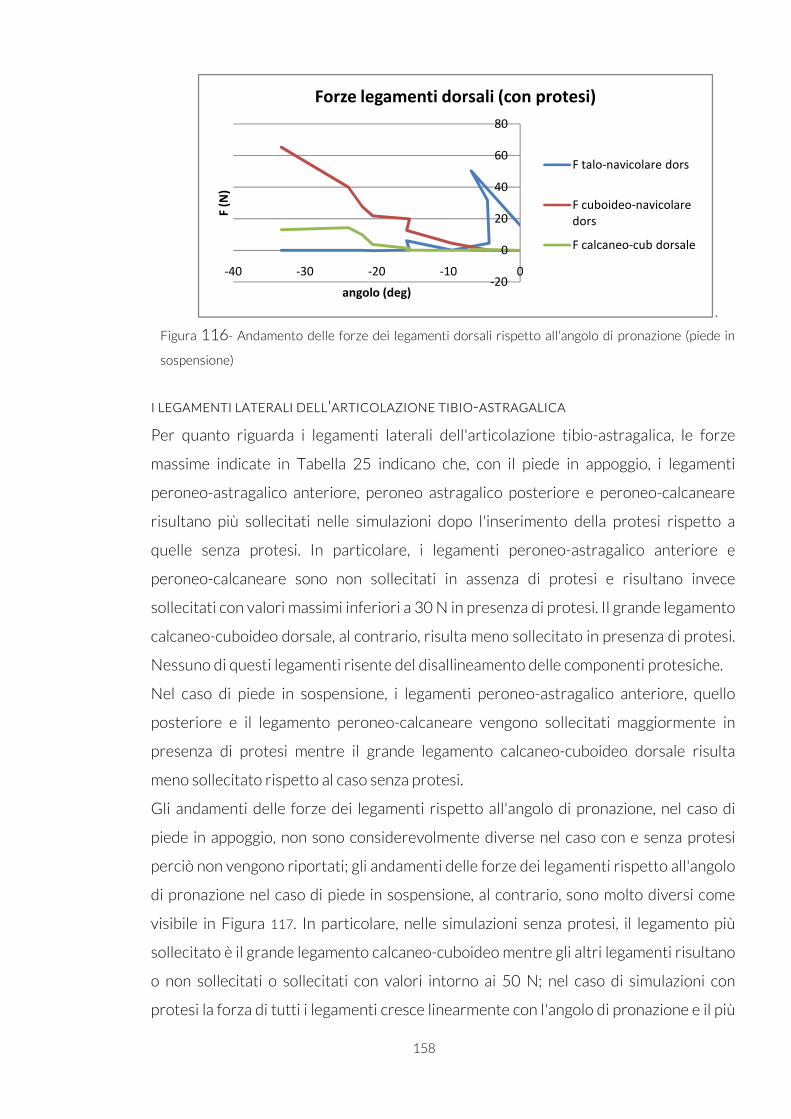
158
.
Figura 116- Andamento delle forze dei legamenti dorsali rispetto all'angolo di pronazione (piede in
sospensione)
I LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Per quanto riguarda i legamenti laterali dell'articolazione tibio-astragalica, le forze
massime indicate in Tabella 25 indicano che, con il piede in appoggio, i legamenti
peroneo-astragalico anteriore, peroneo astragalico posteriore e peroneo-calcaneare
risultano più sollecitati nelle simulazioni dopo l'inserimento della protesi rispetto a
quelle senza protesi. In particolare, i legamenti peroneo-astragalico anteriore e
peroneo-calcaneare sono non sollecitati in assenza di protesi e risultano invece
sollecitati con valori massimi inferiori a 30 N in presenza di protesi. Il grande legamento
calcaneo-cuboideo dorsale, al contrario, risulta meno sollecitato in presenza di protesi.
Nessuno di questi legamenti risente del disallineamento delle componenti protesiche.
Nel caso di piede in sospensione, i legamenti peroneo-astragalico anteriore, quello
posteriore e il legamento peroneo-calcaneare vengono sollecitati maggiormente in
presenza di protesi mentre il grande legamento calcaneo-cuboideo dorsale risulta
meno sollecitato rispetto al caso senza protesi.
Gli andamenti delle forze dei legamenti rispetto all'angolo di pronazione, nel caso di
piede in appoggio, non sono considerevolmente diverse nel caso con e senza protesi
perciò non vengono riportati; gli andamenti delle forze dei legamenti rispetto all'angolo
di pronazione nel caso di piede in sospensione, al contrario, sono molto diversi come
visibile in Figura 117. In particolare, nelle simulazioni senza protesi, il legamento più
sollecitato è il grande legamento calcaneo-cuboideo mentre gli altri legamenti risultano
o non sollecitati o sollecitati con valori intorno ai 50 N; nel caso di simulazioni con
protesi la forza di tutti i legamenti cresce linearmente con l'angolo di pronazione e il più
-20
0
20
40
60
80
-40 -30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti dorsali (con protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
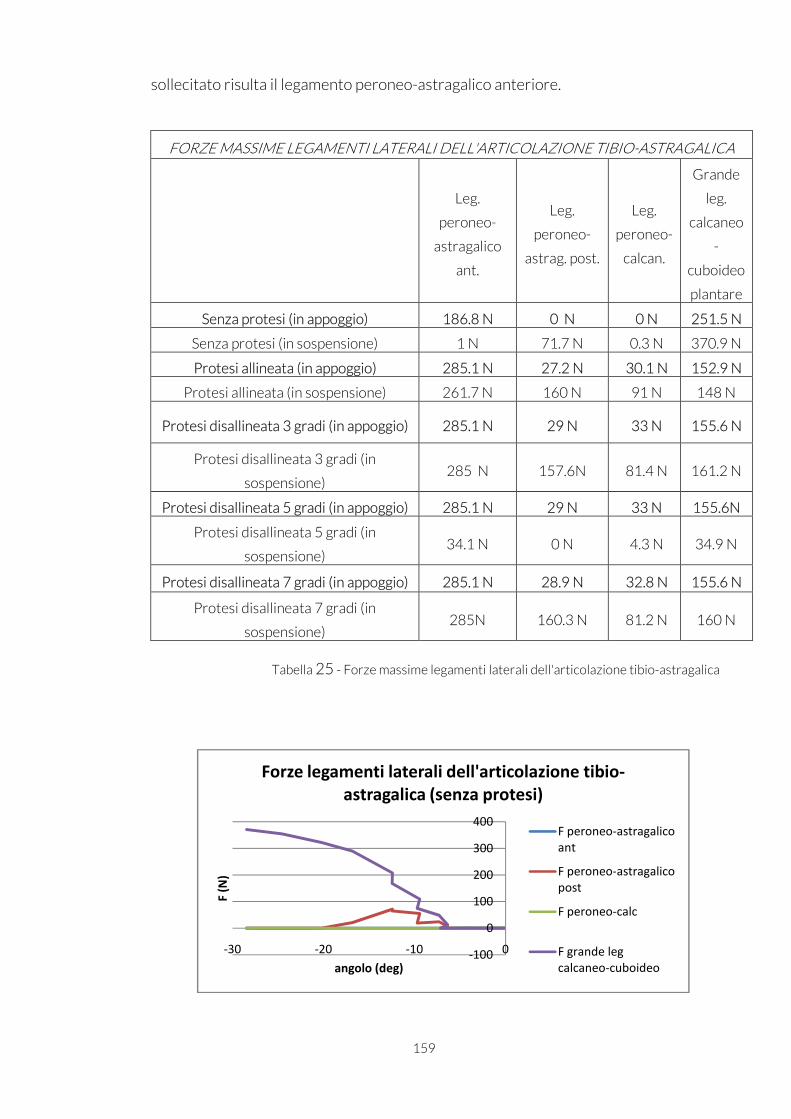
159
sollecitato risulta il legamento peroneo-astragalico anteriore.
Tabella 25 - Forze massime legamenti laterali dell'articolazione tibio-astragalica
-100
0
100
200
300
400
-30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (senza protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg
calcaneo-cuboideo
FORZE MASSIME LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Leg.
peroneo-
astragalico
ant.
Leg.
peroneo-
astrag. post.
Leg.
peroneo-
calcan.
Grande
leg.
calcaneo
-
cuboideo
plantare
Senza protesi (in appoggio) 186.8 N 0 N 0 N 251.5 N
Senza protesi (in sospensione) 1 N 71.7 N 0.3 N 370.9 N
Protesi allineata (in appoggio) 285.1 N 27.2 N 30.1 N 152.9 N
Protesi allineata (in sospensione) 261.7 N 160 N 91 N 148 N
Protesi disallineata 3 gradi (in appoggio) 285.1 N 29 N 33 N 155.6 N
Protesi disallineata 3 gradi (in
sospensione) 285 N 157.6N 81.4 N 161.2 N
Protesi disallineata 5 gradi (in appoggio) 285.1 N 29 N 33 N 155.6N
Protesi disallineata 5 gradi (in
sospensione) 34.1 N 0 N 4.3 N 34.9 N
Protesi disallineata 7 gradi (in appoggio) 285.1 N 28.9 N 32.8 N 155.6 N
Protesi disallineata 7 gradi (in
sospensione) 285N 160.3 N 81.2 N 160 N
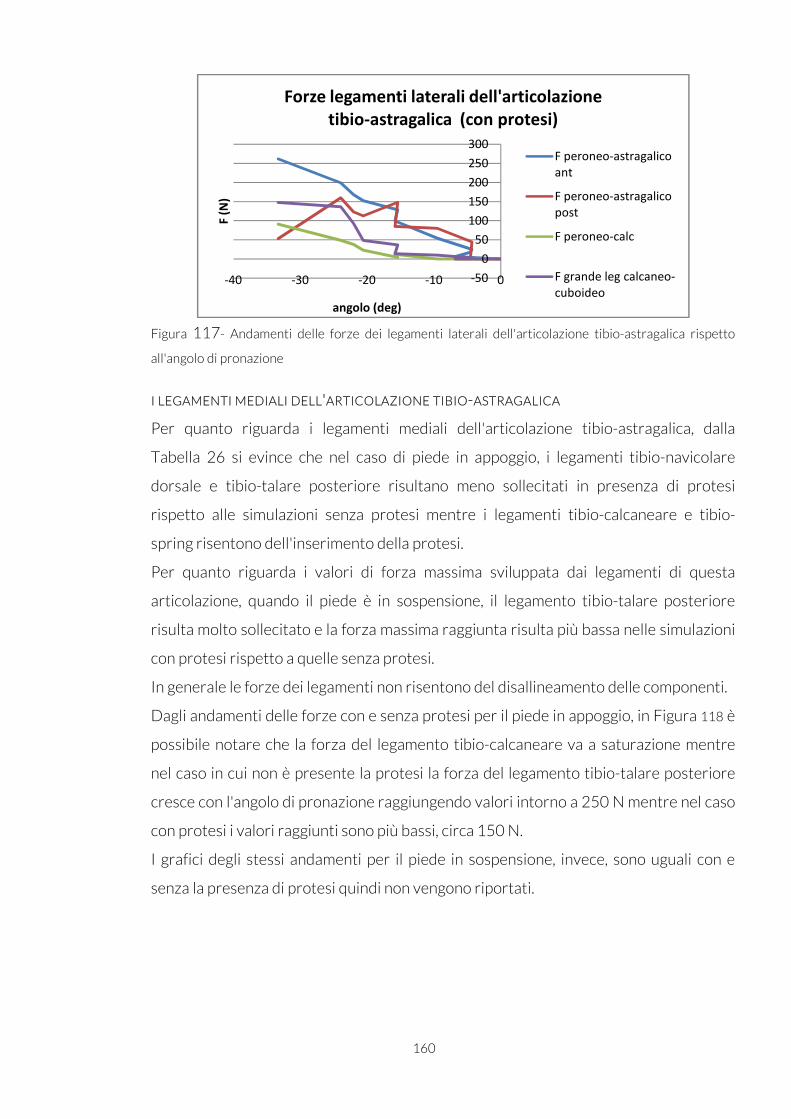
160
Figura 117- Andamenti delle forze dei legamenti laterali dell'articolazione tibio-astragalica rispetto
all'angolo di pronazione
I LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Per quanto riguarda i legamenti mediali dell'articolazione tibio-astragalica, dalla
Tabella 26 si evince che nel caso di piede in appoggio, i legamenti tibio-navicolare
dorsale e tibio-talare posteriore risultano meno sollecitati in presenza di protesi
rispetto alle simulazioni senza protesi mentre i legamenti tibio-calcaneare e tibio-
spring risentono dell'inserimento della protesi.
Per quanto riguarda i valori di forza massima sviluppata dai legamenti di questa
articolazione, quando il piede è in sospensione, il legamento tibio-talare posteriore
risulta molto sollecitato e la forza massima raggiunta risulta più bassa nelle simulazioni
con protesi rispetto a quelle senza protesi.
In generale le forze dei legamenti non risentono del disallineamento delle componenti.
Dagli andamenti delle forze con e senza protesi per il piede in appoggio, in Figura 118 è
possibile notare che la forza del legamento tibio-calcaneare va a saturazione mentre
nel caso in cui non è presente la protesi la forza del legamento tibio-talare posteriore
cresce con l'angolo di pronazione raggiungendo valori intorno a 250 N mentre nel caso
con protesi i valori raggiunti sono più bassi, circa 150 N.
I grafici degli stessi andamenti per il piede in sospensione, invece, sono uguali con e
senza la presenza di protesi quindi non vengono riportati.
-50
0
50
100
150
200
250
300
-40 -30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione
tibio-astragalica (con protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg calcaneo-
cuboideo
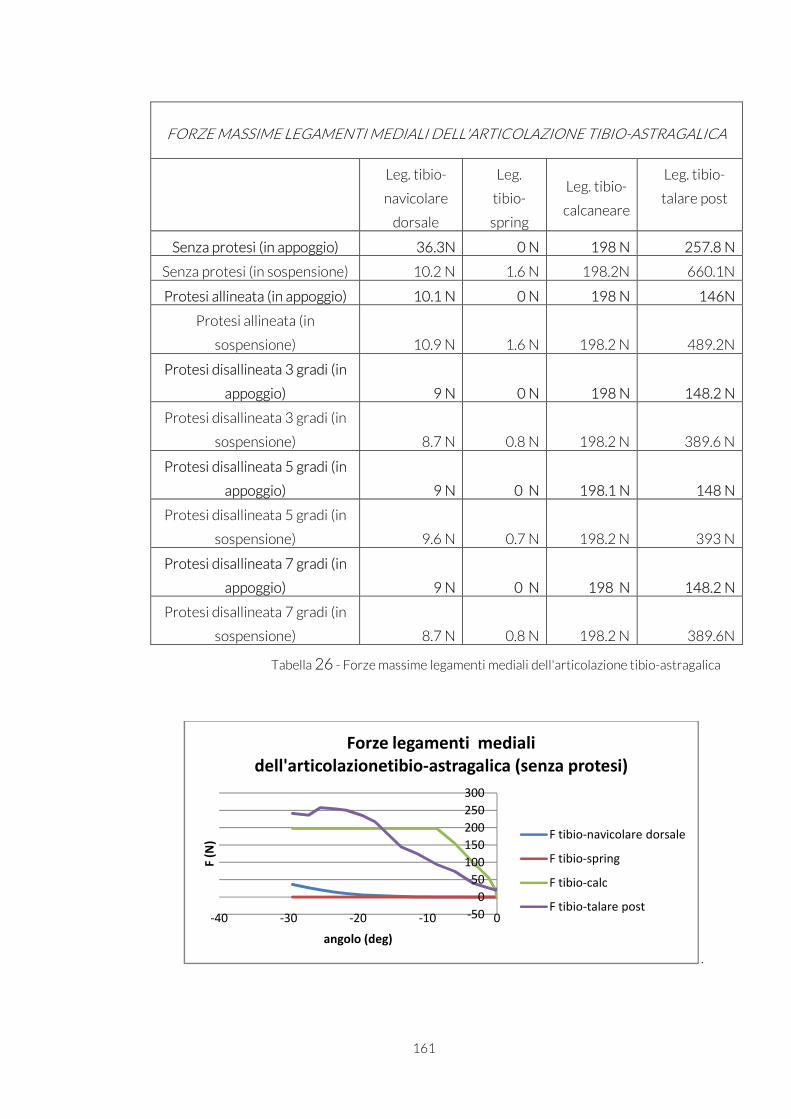
161
Tabella 26 - Forze massime legamenti mediali dell'articolazione tibio-astragalica
.
-50
0
50
100
150
200
250
300
-40 -30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti mediali
dell'articolazionetibio-astragalica (senza protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
FORZE MASSIME LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Leg. tibio-
navicolare
dorsale
Leg.
tibio-
spring
Leg. tibio-
calcaneare
Leg. tibio-
talare post
Senza protesi (in appoggio) 36.3N 0 N 198 N 257.8 N
Senza protesi (in sospensione) 10.2 N 1.6 N 198.2N 660.1N
Protesi allineata (in appoggio) 10.1 N 0 N 198 N 146N
Protesi allineata (in
sospensione) 10.9 N 1.6 N 198.2 N 489.2N
Protesi disallineata 3 gradi (in
appoggio) 9 N 0 N 198 N 148.2 N
Protesi disallineata 3 gradi (in
sospensione) 8.7 N 0.8 N 198.2 N 389.6 N
Protesi disallineata 5 gradi (in
appoggio) 9 N 0 N 198.1 N 148 N
Protesi disallineata 5 gradi (in
sospensione) 9.6 N 0.7 N 198.2 N 393 N
Protesi disallineata 7 gradi (in
appoggio) 9 N 0 N 198 N 148.2 N
Protesi disallineata 7 gradi (in
sospensione) 8.7 N 0.8 N 198.2 N 389.6N
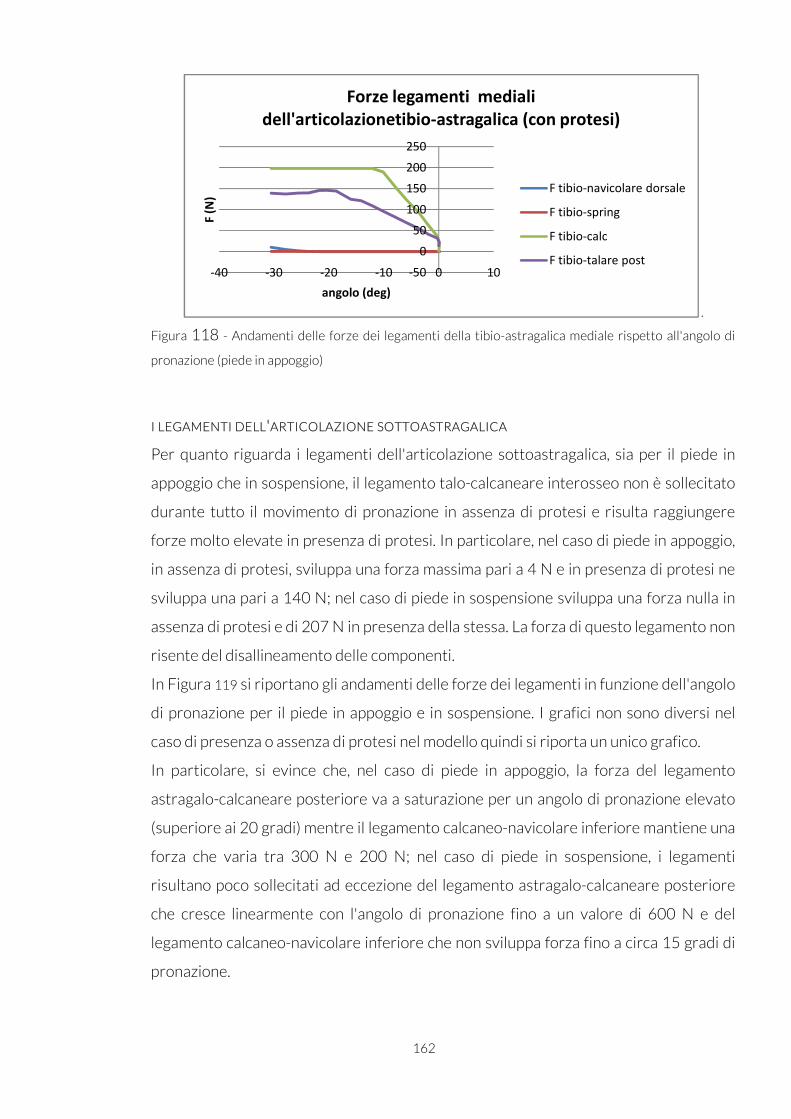
162
.
Figura 118 - Andamenti delle forze dei legamenti della tibio-astragalica mediale rispetto all'angolo di
pronazione (piede in appoggio)
I LEGAMENTI DELL'ARTICOLAZIONE SOTTOASTRAGALICA
Per quanto riguarda i legamenti dell'articolazione sottoastragalica, sia per il piede in
appoggio che in sospensione, il legamento talo-calcaneare interosseo non è sollecitato
durante tutto il movimento di pronazione in assenza di protesi e risulta raggiungere
forze molto elevate in presenza di protesi. In particolare, nel caso di piede in appoggio,
in assenza di protesi, sviluppa una forza massima pari a 4 N e in presenza di protesi ne
sviluppa una pari a 140 N; nel caso di piede in sospensione sviluppa una forza nulla in
assenza di protesi e di 207 N in presenza della stessa. La forza di questo legamento non
risente del disallineamento delle componenti.
In Figura 119 si riportano gli andamenti delle forze dei legamenti in funzione dell'angolo
di pronazione per il piede in appoggio e in sospensione. I grafici non sono diversi nel
caso di presenza o assenza di protesi nel modello quindi si riporta un unico grafico.
In particolare, si evince che, nel caso di piede in appoggio, la forza del legamento
astragalo-calcaneare posteriore va a saturazione per un angolo di pronazione elevato
(superiore ai 20 gradi) mentre il legamento calcaneo-navicolare inferiore mantiene una
forza che varia tra 300 N e 200 N; nel caso di piede in sospensione, i legamenti
risultano poco sollecitati ad eccezione del legamento astragalo-calcaneare posteriore
che cresce linearmente con l'angolo di pronazione fino a un valore di 600 N e del
legamento calcaneo-navicolare inferiore che non sviluppa forza fino a circa 15 gradi di
pronazione.
-50
0
50
100
150
200
250
-40 -30 -20 -10 0 10
F (
N)
angolo (deg)
Forze legamenti mediali
dell'articolazionetibio-astragalica (con protesi)
F tibio-navicolare dorsale
F tibio-spring
F tibio-calc
F tibio-talare post
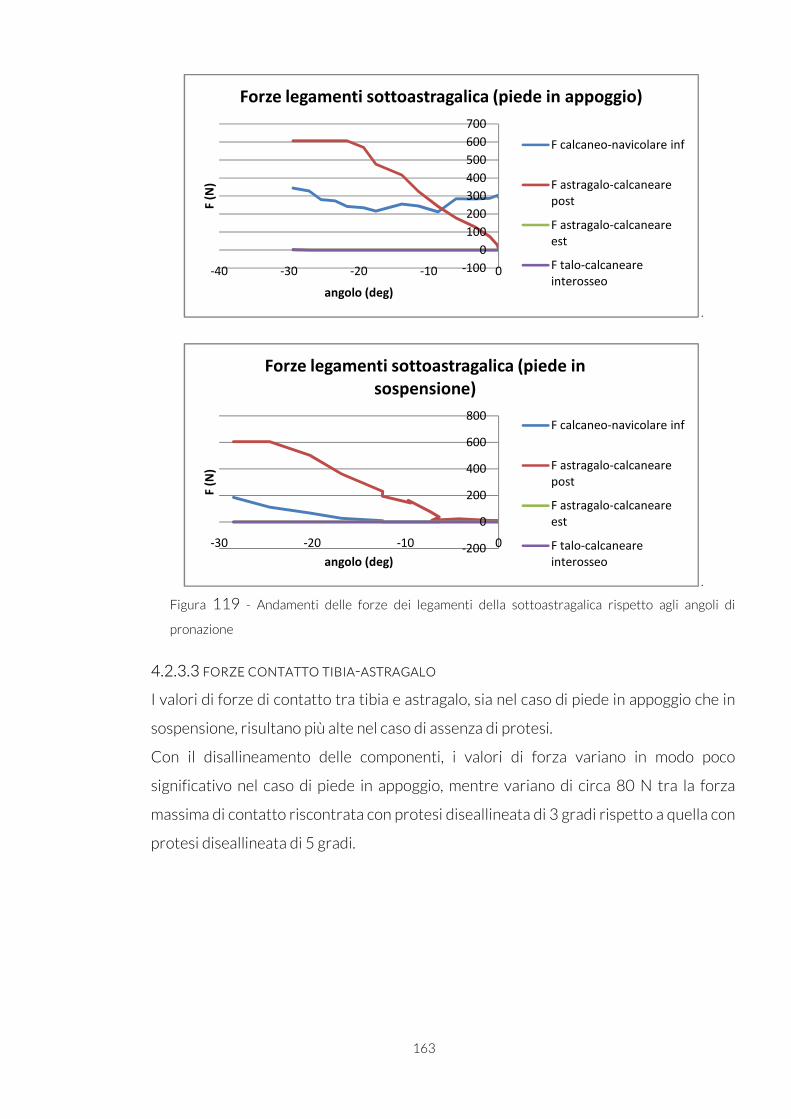
163
.
.
Figura 119 - Andamenti delle forze dei legamenti della sottoastragalica rispetto agli angoli di
pronazione
4.2.3.3 FORZE CONTATTO TIBIA-ASTRAGALO
I valori di forze di contatto tra tibia e astragalo, sia nel caso di piede in appoggio che in
sospensione, risultano più alte nel caso di assenza di protesi.
Con il disallineamento delle componenti, i valori di forza variano in modo poco
significativo nel caso di piede in appoggio, mentre variano di circa 80 N tra la forza
massima di contatto riscontrata con protesi diseallineata di 3 gradi rispetto a quella con
protesi diseallineata di 5 gradi.
-100
0
100
200
300
400
500
600
700
-40 -30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (piede in appoggio)
F calcaneo-navicolare inf
F astragalo-calcaneare
post
F astragalo-calcaneare
est
F talo-calcaneare
interosseo
-200
0
200
400
600
800
-30 -20 -10 0
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (piede in
sospensione)
F calcaneo-navicolare inf
F astragalo-calcaneare
post
F astragalo-calcaneare
est
F talo-calcaneare
interosseo
164
Tabella 27 - Forze di contatto tibia-astragalo
4 .2.4 D O R S I F LE S S I O N E : P I E D E I N A P P O G G I O E P I E D E I N S O S P E N S I O N E
L'ampiezza della flessione dorsale che si è voluta simulare è di circa 25 gradi.
L'attivazione per effettuare il movimento è del tibiale anteriore in lunghezza con un
valore di velocità di accorciamento 1,5 cm/s partendo da un valore iniziale di 200 N e
del peroneo anteriore in controllo di forza con una velocità crescente con legge lineare
di pendenza 350 N/s partendo da un valore iniziale di 300 N.
Nel caso di piede in sospensione, la dorsiflessione simulata è di circa 25 gradi rispetto
alla posizione neutra, ma, considerando che il piede parte da una posizione di flessione
plantare, la variazione angolare rispetto alla posizione iniziale risulta di 35 gradi circa.
In questo caso, l'attivazione per effettuare il movimento è del tibiale anteriore
controllato in velocità di accorciamento con un valore di 3 cm/s e del peroneo anteriore
controllato in forza con legge lineare di pendenza 500 N.
In Figura 120 è possibile vedere gli andamenti degli angoli di flessione plantare e
flessione dorsale in funzione del tempo, risultanti dall'attivazione sopra descritta.
Si nota che l'attivazione di questi muscoli ha un effetto non solo di flessione dorsale ma
anche di pronazione.
FORZA MASSIMA DI CONTATTO TRA TIBIA E ASTRAGALO
piede in appoggio piede in sospensione
Senza protesi 1788 N 2451.4 N
Protesi allineata 1665.2 N 1857.3 N
Protesi disallineata 3 gradi 1654.8 N 1580.7 N
Protesi disallineata 5 gradi 1655.1 N 1502.1 N
Protesi disallineata 7 gradi 1655.2 N 1504.6N
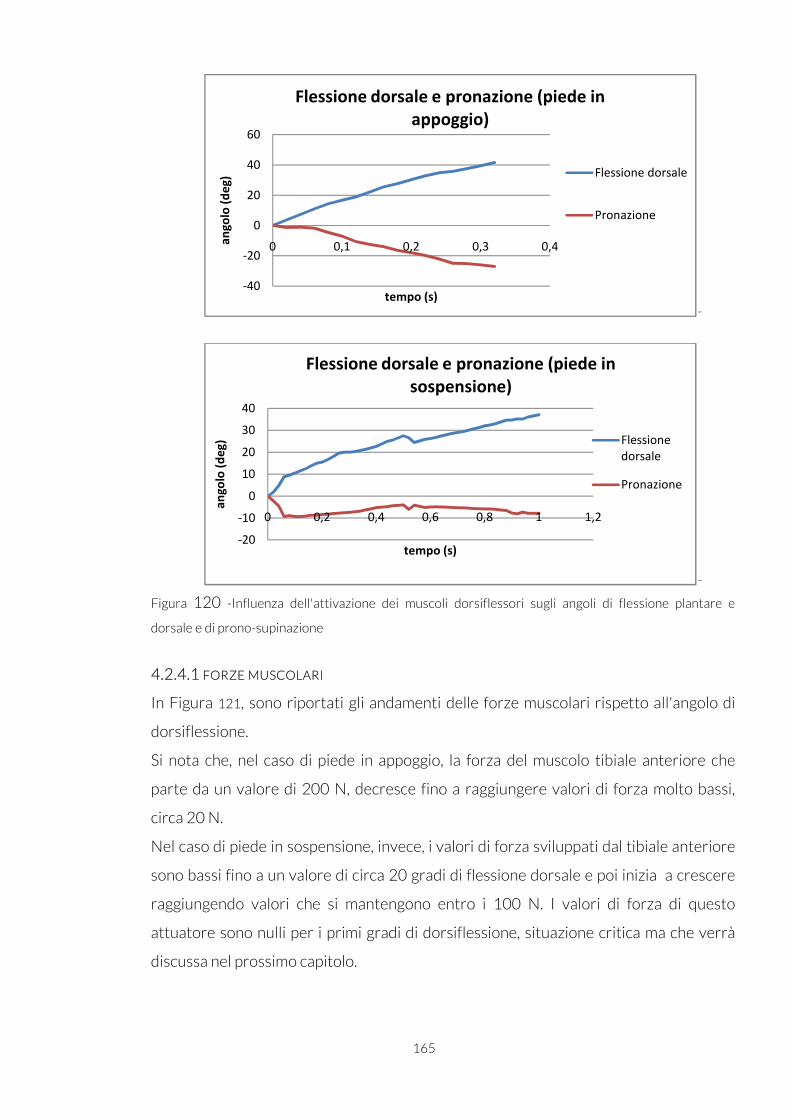
165
-
-
Figura 120 -Influenza dell'attivazione dei muscoli dorsiflessori sugli angoli di flessione plantare e
dorsale e di prono-supinazione
4.2.4.1 FORZE MUSCOLARI
In Figura 121, sono riportati gli andamenti delle forze muscolari rispetto all'angolo di
dorsiflessione.
Si nota che, nel caso di piede in appoggio, la forza del muscolo tibiale anteriore che
parte da un valore di 200 N, decresce fino a raggiungere valori di forza molto bassi,
circa 20 N.
Nel caso di piede in sospensione, invece, i valori di forza sviluppati dal tibiale anteriore
sono bassi fino a un valore di circa 20 gradi di flessione dorsale e poi inizia a crescere
raggiungendo valori che si mantengono entro i 100 N. I valori di forza di questo
attuatore sono nulli per i primi gradi di dorsiflessione, situazione critica ma che verrà
discussa nel prossimo capitolo.
-40
-20
0
20
40
60
0 0,1 0,2 0,3 0,4
an
go
lo (
de
g)
tempo (s)
Flessione dorsale e pronazione (piede in
appoggio)
Flessione dorsale
Pronazione
-20
-10
0
10
20
30
40
0 0,2 0,4 0,6 0,8 1 1,2
an
go
lo (
de
g)
tempo (s)
Flessione dorsale e pronazione (piede in
sospensione)
Flessione
dorsale
Pronazione
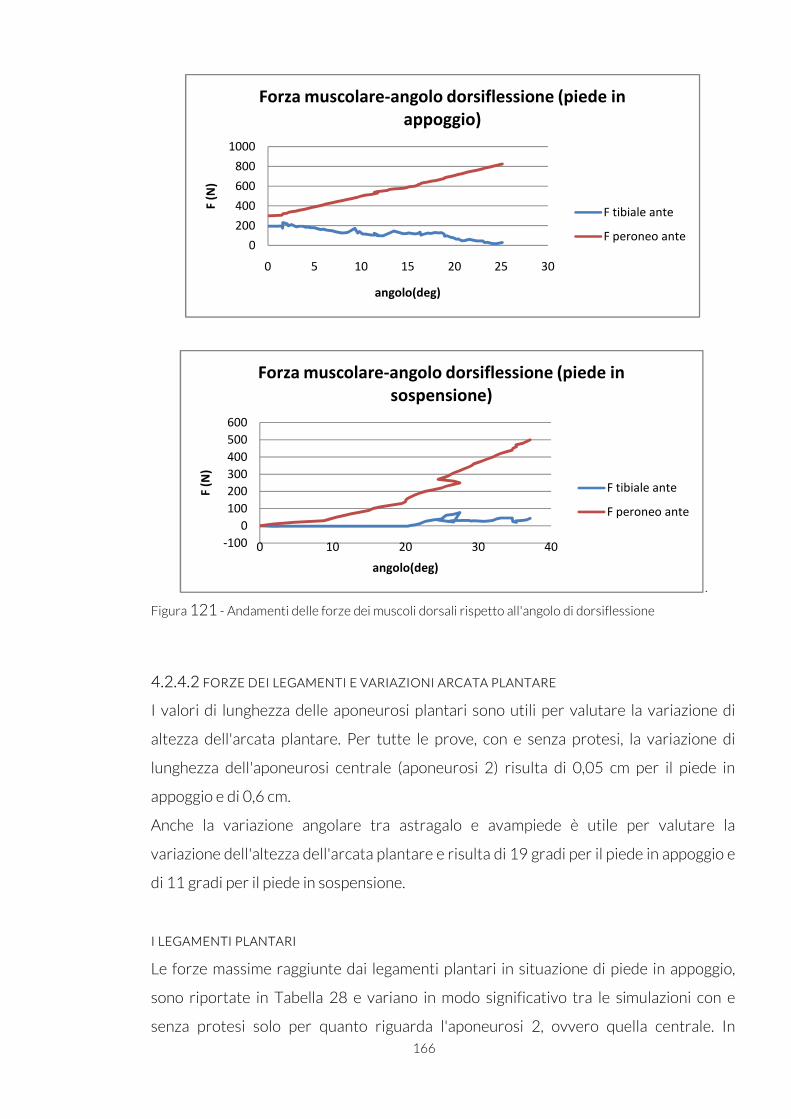
166
.
Figura 121 - Andamenti delle forze dei muscoli dorsali rispetto all'angolo di dorsiflessione
4.2.4.2 FORZE DEI LEGAMENTI E VARIAZIONI ARCATA PLANTARE
I valori di lunghezza delle aponeurosi plantari sono utili per valutare la variazione di
altezza dell'arcata plantare. Per tutte le prove, con e senza protesi, la variazione di
lunghezza dell'aponeurosi centrale (aponeurosi 2) risulta di 0,05 cm per il piede in
appoggio e di 0,6 cm.
Anche la variazione angolare tra astragalo e avampiede è utile per valutare la
variazione dell'altezza dell'arcata plantare e risulta di 19 gradi per il piede in appoggio e
di 11 gradi per il piede in sospensione.
I LEGAMENTI PLANTARI
Le forze massime raggiunte dai legamenti plantari in situazione di piede in appoggio,
sono riportate in Tabella 28 e variano in modo significativo tra le simulazioni con e
senza protesi solo per quanto riguarda l'aponeurosi 2, ovvero quella centrale. In
0
200
400
600
800
1000
0 5 10 15 20 25 30
F (
N)
angolo(deg)
Forza muscolare-angolo dorsiflessione (piede in
appoggio)
F tibiale ante
F peroneo ante
-100
0
100
200
300
400
500
600
0 10 20 30 40
F (
N)
angolo(deg)
Forza muscolare-angolo dorsiflessione (piede in
sospensione)
F tibiale ante
F peroneo ante
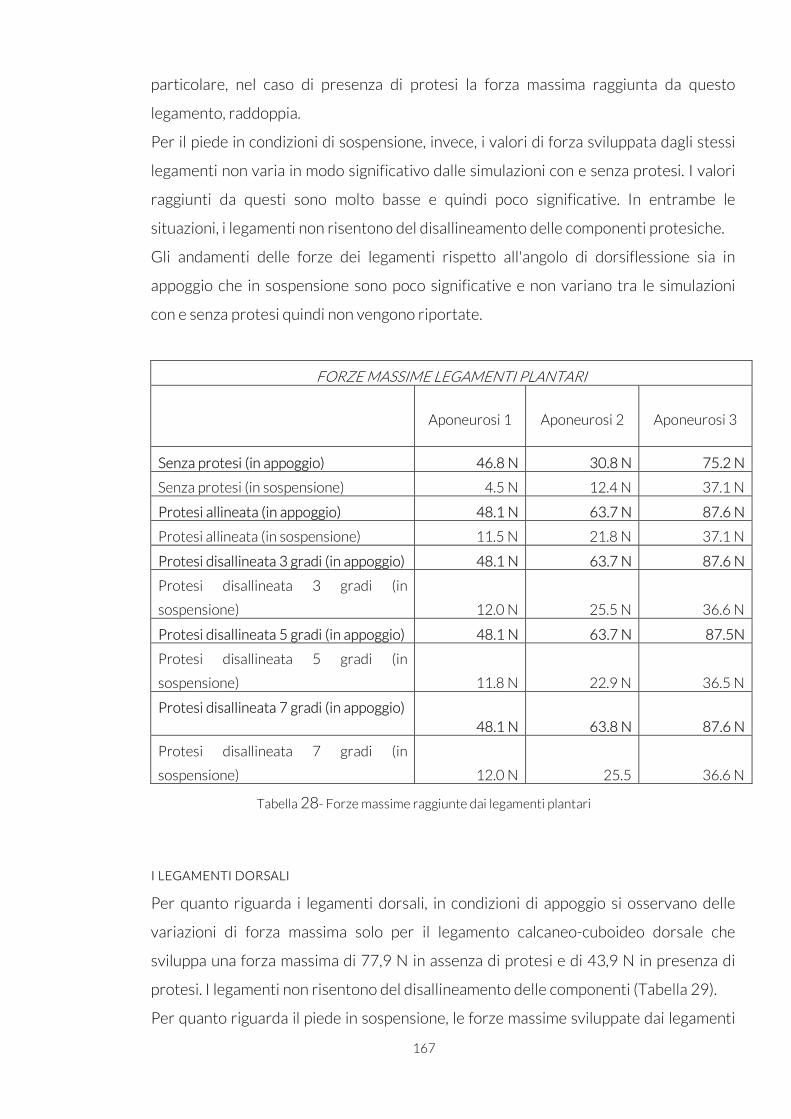
167
particolare, nel caso di presenza di protesi la forza massima raggiunta da questo
legamento, raddoppia.
Per il piede in condizioni di sospensione, invece, i valori di forza sviluppata dagli stessi
legamenti non varia in modo significativo dalle simulazioni con e senza protesi. I valori
raggiunti da questi sono molto basse e quindi poco significative. In entrambe le
situazioni, i legamenti non risentono del disallineamento delle componenti protesiche.
Gli andamenti delle forze dei legamenti rispetto all'angolo di dorsiflessione sia in
appoggio che in sospensione sono poco significative e non variano tra le simulazioni
con e senza protesi quindi non vengono riportate.
Tabella 28- Forze massime raggiunte dai legamenti plantari
I LEGAMENTI DORSALI
Per quanto riguarda i legamenti dorsali, in condizioni di appoggio si osservano delle
variazioni di forza massima solo per il legamento calcaneo-cuboideo dorsale che
sviluppa una forza massima di 77,9 N in assenza di protesi e di 43,9 N in presenza di
protesi. I legamenti non risentono del disallineamento delle componenti (Tabella 29).
Per quanto riguarda il piede in sospensione, le forze massime sviluppate dai legamenti
FORZE MASSIME LEGAMENTI PLANTARI
Aponeurosi 1 Aponeurosi 2 Aponeurosi 3
Senza protesi (in appoggio) 46.8 N 30.8 N 75.2 N
Senza protesi (in sospensione) 4.5 N 12.4 N 37.1 N
Protesi allineata (in appoggio) 48.1 N 63.7 N 87.6 N
Protesi allineata (in sospensione) 11.5 N 21.8 N 37.1 N
Protesi disallineata 3 gradi (in appoggio) 48.1 N 63.7 N 87.6 N
Protesi disallineata 3 gradi (in
sospensione) 12.0 N 25.5 N 36.6 N
Protesi disallineata 5 gradi (in appoggio) 48.1 N 63.7 N 87.5N
Protesi disallineata 5 gradi (in
sospensione) 11.8 N 22.9 N 36.5 N
Protesi disallineata 7 gradi (in appoggio)
48.1 N 63.8 N 87.6 N
Protesi disallineata 7 gradi (in
sospensione) 12.0 N 25.5 36.6 N
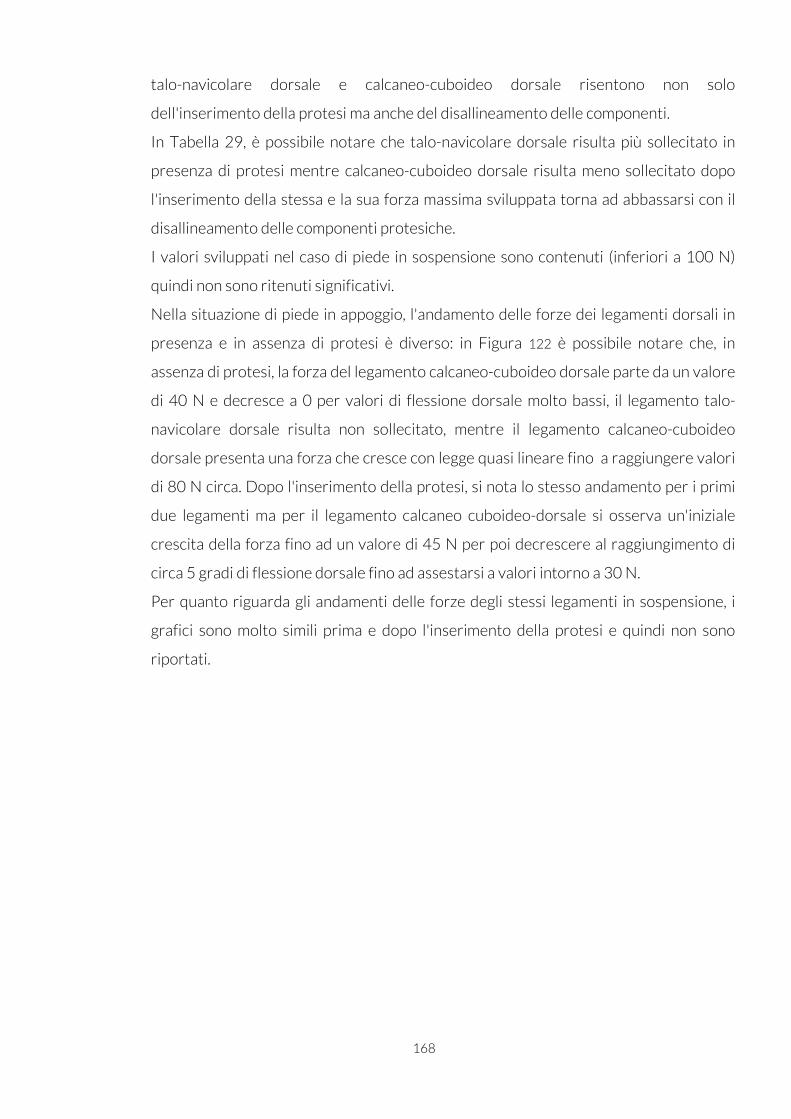
168
talo-navicolare dorsale e calcaneo-cuboideo dorsale risentono non solo
dell'inserimento della protesi ma anche del disallineamento delle componenti.
In Tabella 29, è possibile notare che talo-navicolare dorsale risulta più sollecitato in
presenza di protesi mentre calcaneo-cuboideo dorsale risulta meno sollecitato dopo
l'inserimento della stessa e la sua forza massima sviluppata torna ad abbassarsi con il
disallineamento delle componenti protesiche.
I valori sviluppati nel caso di piede in sospensione sono contenuti (inferiori a 100 N)
quindi non sono ritenuti significativi.
Nella situazione di piede in appoggio, l'andamento delle forze dei legamenti dorsali in
presenza e in assenza di protesi è diverso: in Figura 122 è possibile notare che, in
assenza di protesi, la forza del legamento calcaneo-cuboideo dorsale parte da un valore
di 40 N e decresce a 0 per valori di flessione dorsale molto bassi, il legamento talo-
navicolare dorsale risulta non sollecitato, mentre il legamento calcaneo-cuboideo
dorsale presenta una forza che cresce con legge quasi lineare fino a raggiungere valori
di 80 N circa. Dopo l'inserimento della protesi, si nota lo stesso andamento per i primi
due legamenti ma per il legamento calcaneo cuboideo-dorsale si osserva un'iniziale
crescita della forza fino ad un valore di 45 N per poi decrescere al raggiungimento di
circa 5 gradi di flessione dorsale fino ad assestarsi a valori intorno a 30 N.
Per quanto riguarda gli andamenti delle forze degli stessi legamenti in sospensione, i
grafici sono molto simili prima e dopo l'inserimento della protesi e quindi non sono
riportati.
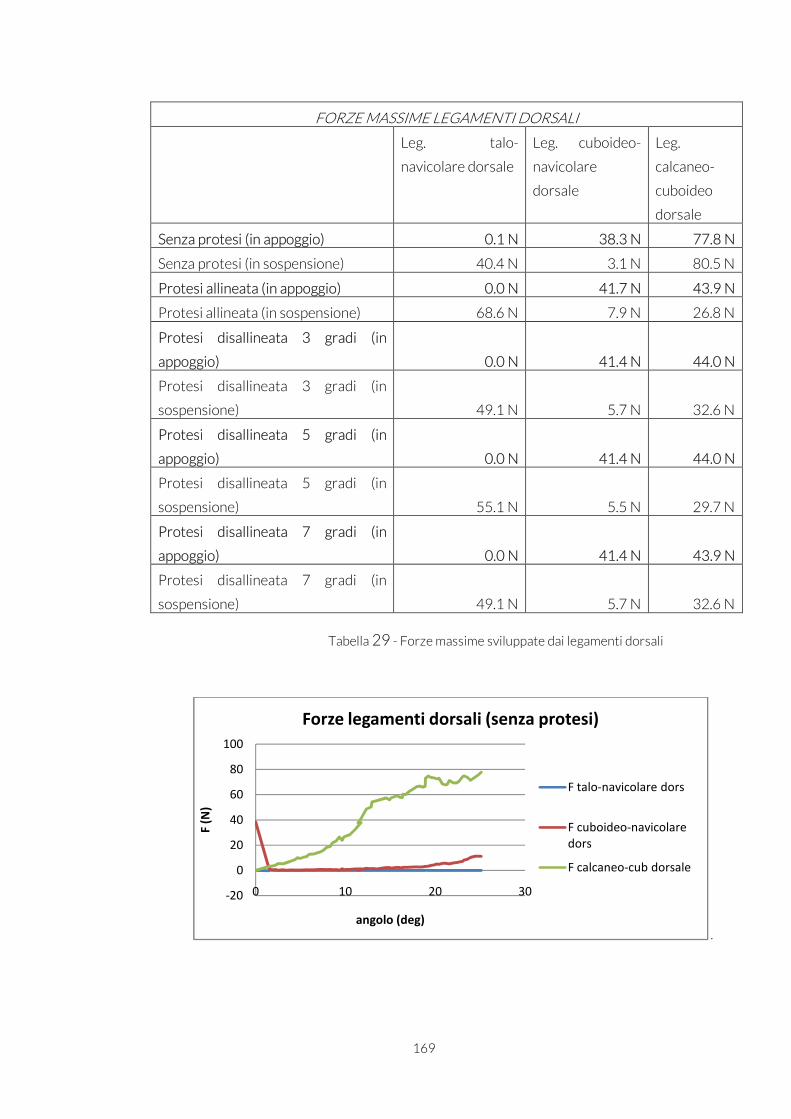
169
Tabella 29 - Forze massime sviluppate dai legamenti dorsali
.
-20
0
20
40
60
80
100
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti dorsali (senza protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
FORZE MASSIME LEGAMENTI DORSALI
Leg. talo-
navicolare dorsale
Leg. cuboideo-
navicolare
dorsale
Leg.
calcaneo-
cuboideo
dorsale
Senza protesi (in appoggio) 0.1 N 38.3 N 77.8 N
Senza protesi (in sospensione) 40.4 N 3.1 N 80.5 N
Protesi allineata (in appoggio) 0.0 N 41.7 N 43.9 N
Protesi allineata (in sospensione) 68.6 N 7.9 N 26.8 N
Protesi disallineata 3 gradi (in
appoggio) 0.0 N 41.4 N 44.0 N
Protesi disallineata 3 gradi (in
sospensione) 49.1 N 5.7 N 32.6 N
Protesi disallineata 5 gradi (in
appoggio) 0.0 N 41.4 N 44.0 N
Protesi disallineata 5 gradi (in
sospensione) 55.1 N 5.5 N 29.7 N
Protesi disallineata 7 gradi (in
appoggio) 0.0 N 41.4 N 43.9 N
Protesi disallineata 7 gradi (in
sospensione) 49.1 N 5.7 N 32.6 N
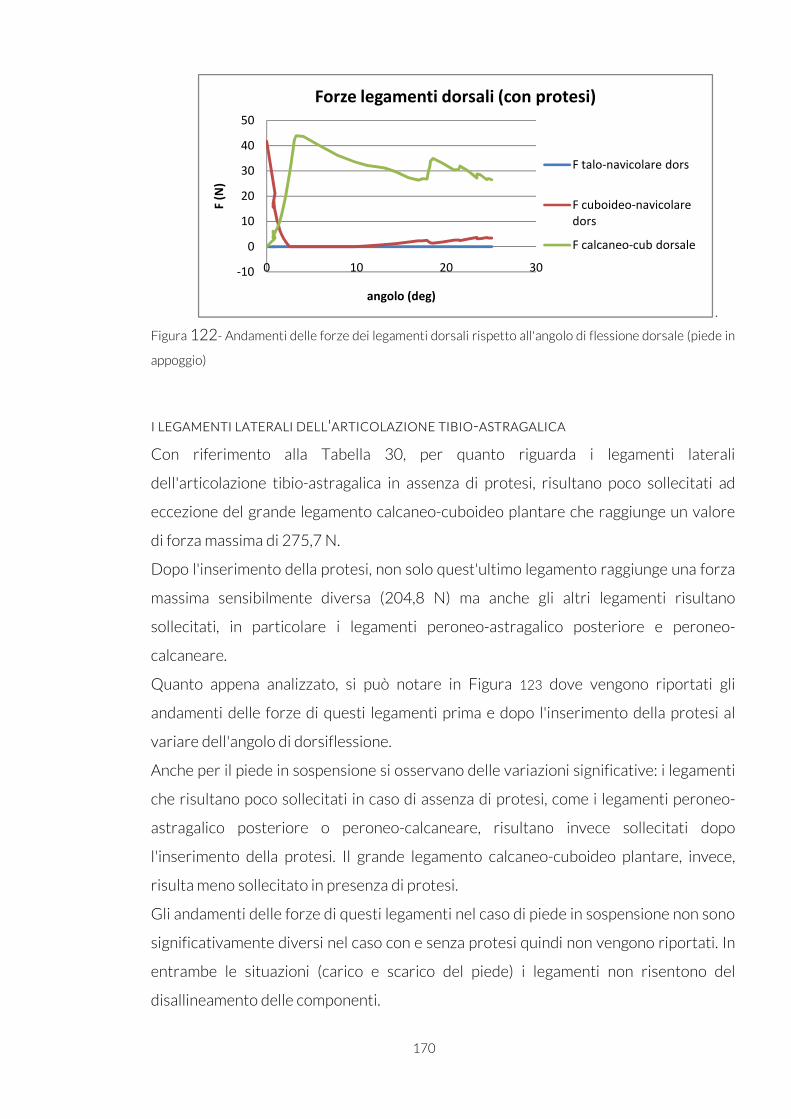
170
.
Figura 122- Andamenti delle forze dei legamenti dorsali rispetto all'angolo di flessione dorsale (piede in
appoggio)
I LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Con riferimento alla Tabella 30, per quanto riguarda i legamenti laterali
dell'articolazione tibio-astragalica in assenza di protesi, risultano poco sollecitati ad
eccezione del grande legamento calcaneo-cuboideo plantare che raggiunge un valore
di forza massima di 275,7 N.
Dopo l'inserimento della protesi, non solo quest'ultimo legamento raggiunge una forza
massima sensibilmente diversa (204,8 N) ma anche gli altri legamenti risultano
sollecitati, in particolare i legamenti peroneo-astragalico posteriore e peroneo-
calcaneare.
Quanto appena analizzato, si può notare in Figura 123 dove vengono riportati gli
andamenti delle forze di questi legamenti prima e dopo l'inserimento della protesi al
variare dell'angolo di dorsiflessione.
Anche per il piede in sospensione si osservano delle variazioni significative: i legamenti
che risultano poco sollecitati in caso di assenza di protesi, come i legamenti peroneo-
astragalico posteriore o peroneo-calcaneare, risultano invece sollecitati dopo
l'inserimento della protesi. Il grande legamento calcaneo-cuboideo plantare, invece,
risulta meno sollecitato in presenza di protesi.
Gli andamenti delle forze di questi legamenti nel caso di piede in sospensione non sono
significativamente diversi nel caso con e senza protesi quindi non vengono riportati. In
entrambe le situazioni (carico e scarico del piede) i legamenti non risentono del
disallineamento delle componenti.
-10
0
10
20
30
40
50
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti dorsali (con protesi)
F talo-navicolare dors
F cuboideo-navicolare
dors
F calcaneo-cub dorsale
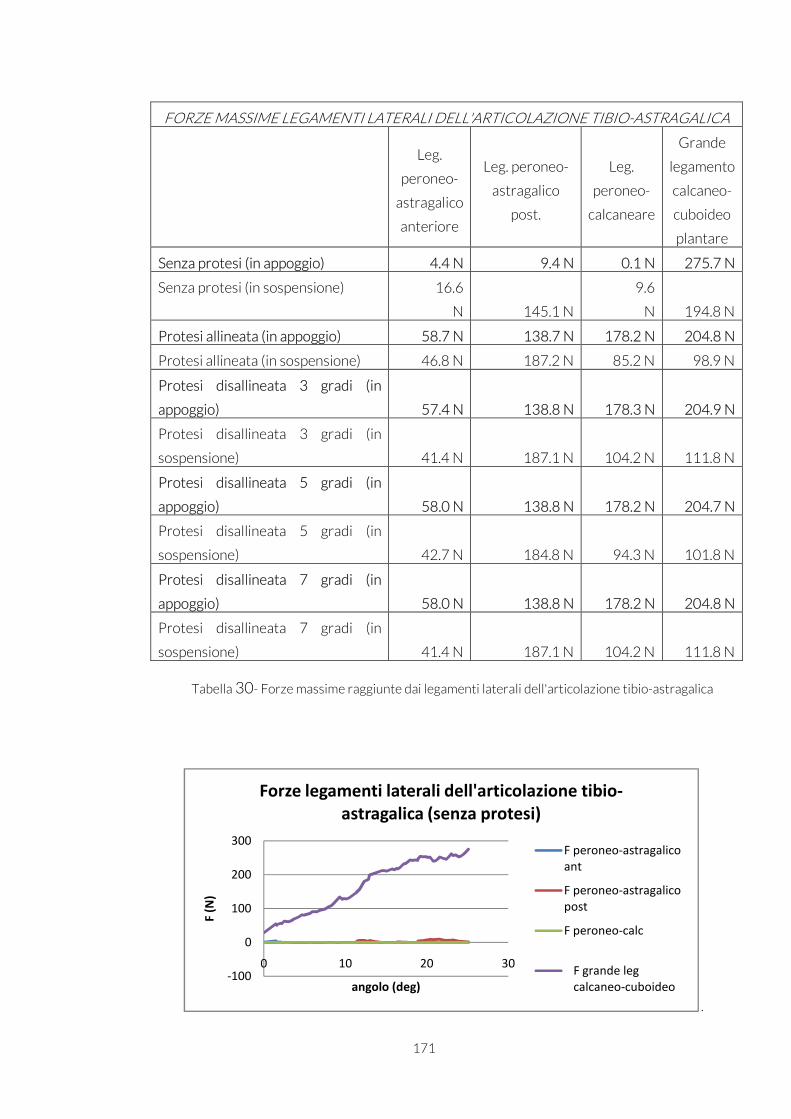
171
Tabella 30- Forze massime raggiunte dai legamenti laterali dell'articolazione tibio-astragalica
.
-100
0
100
200
300
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (senza protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg
calcaneo-cuboideo
FORZE MASSIME LEGAMENTI LATERALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Leg.
peroneo-
astragalico
anteriore
Leg. peroneo-
astragalico
post.
Leg.
peroneo-
calcaneare
Grande
legamento
calcaneo-
cuboideo
plantare
Senza protesi (in appoggio) 4.4 N 9.4 N 0.1 N 275.7 N
Senza protesi (in sospensione) 16.6
N 145.1 N
9.6
N 194.8 N
Protesi allineata (in appoggio) 58.7 N 138.7 N 178.2 N 204.8 N
Protesi allineata (in sospensione) 46.8 N 187.2 N 85.2 N 98.9 N
Protesi disallineata 3 gradi (in
appoggio) 57.4 N 138.8 N 178.3 N 204.9 N
Protesi disallineata 3 gradi (in
sospensione) 41.4 N 187.1 N 104.2 N 111.8 N
Protesi disallineata 5 gradi (in
appoggio) 58.0 N 138.8 N 178.2 N 204.7 N
Protesi disallineata 5 gradi (in
sospensione) 42.7 N 184.8 N 94.3 N 101.8 N
Protesi disallineata 7 gradi (in
appoggio) 58.0 N 138.8 N 178.2 N 204.8 N
Protesi disallineata 7 gradi (in
sospensione) 41.4 N 187.1 N 104.2 N 111.8 N
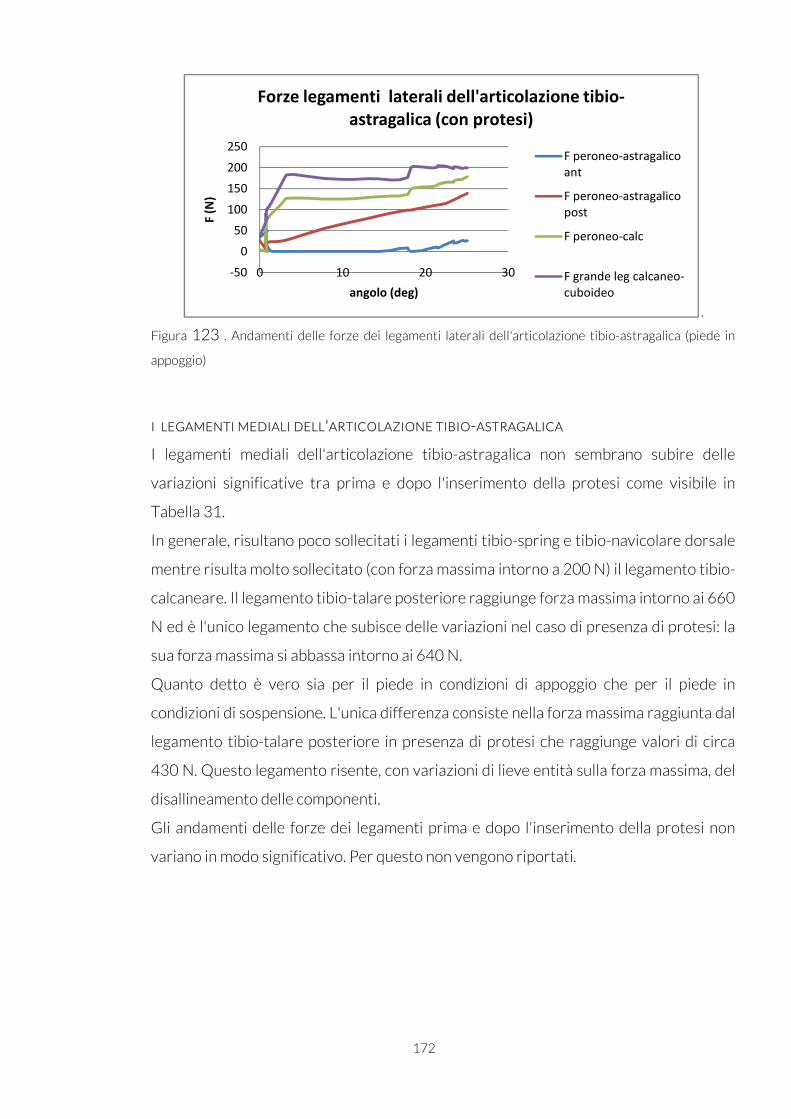
172
.
Figura 123 . Andamenti delle forze dei legamenti laterali dell'articolazione tibio-astragalica (piede in
appoggio)
I LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
I legamenti mediali dell'articolazione tibio-astragalica non sembrano subire delle
variazioni significative tra prima e dopo l'inserimento della protesi come visibile in
Tabella 31.
In generale, risultano poco sollecitati i legamenti tibio-spring e tibio-navicolare dorsale
mentre risulta molto sollecitato (con forza massima intorno a 200 N) il legamento tibio-
calcaneare. Il legamento tibio-talare posteriore raggiunge forza massima intorno ai 660
N ed è l'unico legamento che subisce delle variazioni nel caso di presenza di protesi: la
sua forza massima si abbassa intorno ai 640 N.
Quanto detto è vero sia per il piede in condizioni di appoggio che per il piede in
condizioni di sospensione. L'unica differenza consiste nella forza massima raggiunta dal
legamento tibio-talare posteriore in presenza di protesi che raggiunge valori di circa
430 N. Questo legamento risente, con variazioni di lieve entità sulla forza massima, del
disallineamento delle componenti.
Gli andamenti delle forze dei legamenti prima e dopo l'inserimento della protesi non
variano in modo significativo. Per questo non vengono riportati.
-50
0
50
100
150
200
250
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti laterali dell'articolazione tibio-
astragalica (con protesi)
F peroneo-astragalico
ant
F peroneo-astragalico
post
F peroneo-calc
F grande leg calcaneo-
cuboideo
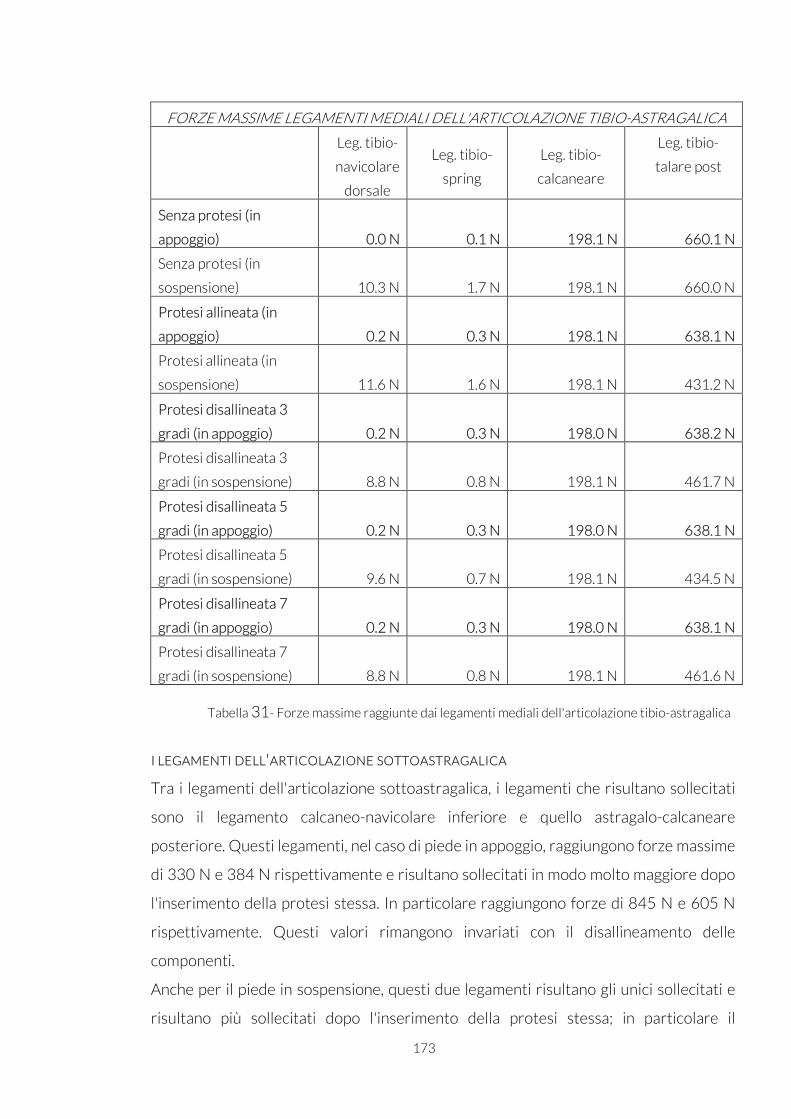
173
Tabella 31- Forze massime raggiunte dai legamenti mediali dell'articolazione tibio-astragalica
I LEGAMENTI DELL'ARTICOLAZIONE SOTTOASTRAGALICA
Tra i legamenti dell'articolazione sottoastragalica, i legamenti che risultano sollecitati
sono il legamento calcaneo-navicolare inferiore e quello astragalo-calcaneare
posteriore. Questi legamenti, nel caso di piede in appoggio, raggiungono forze massime
di 330 N e 384 N rispettivamente e risultano sollecitati in modo molto maggiore dopo
l'inserimento della protesi stessa. In particolare raggiungono forze di 845 N e 605 N
rispettivamente. Questi valori rimangono invariati con il disallineamento delle
componenti.
Anche per il piede in sospensione, questi due legamenti risultano gli unici sollecitati e
risultano più sollecitati dopo l'inserimento della protesi stessa; in particolare il
FORZE MASSIME LEGAMENTI MEDIALI DELL'ARTICOLAZIONE TIBIO-ASTRAGALICA
Leg. tibio-
navicolare
dorsale
Leg. tibio-
spring
Leg. tibio-
calcaneare
Leg. tibio-
talare post
Senza protesi (in
appoggio) 0.0 N 0.1 N 198.1 N 660.1 N
Senza protesi (in
sospensione) 10.3 N 1.7 N 198.1 N 660.0 N
Protesi allineata (in
appoggio) 0.2 N 0.3 N 198.1 N 638.1 N
Protesi allineata (in
sospensione) 11.6 N 1.6 N 198.1 N 431.2 N
Protesi disallineata 3
gradi (in appoggio) 0.2 N 0.3 N 198.0 N 638.2 N
Protesi disallineata 3
gradi (in sospensione) 8.8 N 0.8 N 198.1 N 461.7 N
Protesi disallineata 5
gradi (in appoggio) 0.2 N 0.3 N 198.0 N 638.1 N
Protesi disallineata 5
gradi (in sospensione) 9.6 N 0.7 N 198.1 N 434.5 N
Protesi disallineata 7
gradi (in appoggio) 0.2 N 0.3 N 198.0 N 638.1 N
Protesi disallineata 7
gradi (in sospensione) 8.8 N 0.8 N 198.1 N 461.6 N
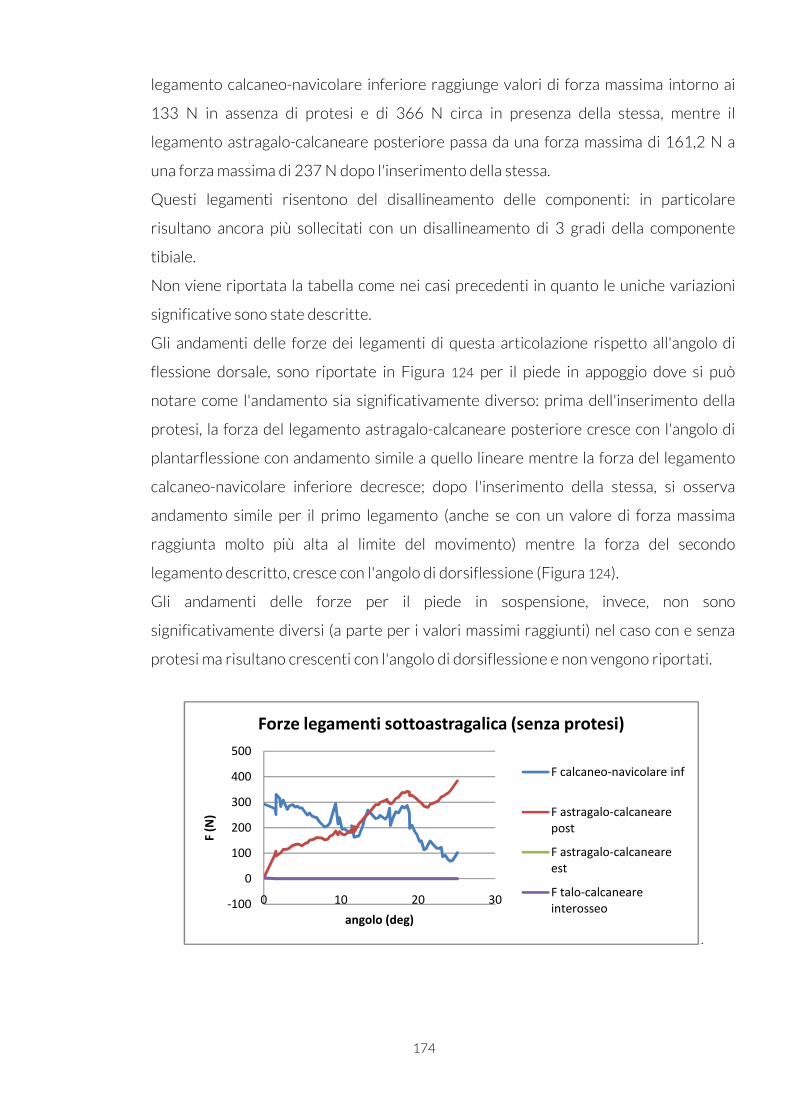
174
legamento calcaneo-navicolare inferiore raggiunge valori di forza massima intorno ai
133 N in assenza di protesi e di 366 N circa in presenza della stessa, mentre il
legamento astragalo-calcaneare posteriore passa da una forza massima di 161,2 N a
una forza massima di 237 N dopo l'inserimento della stessa.
Questi legamenti risentono del disallineamento delle componenti: in particolare
risultano ancora più sollecitati con un disallineamento di 3 gradi della componente
tibiale.
Non viene riportata la tabella come nei casi precedenti in quanto le uniche variazioni
significative sono state descritte.
Gli andamenti delle forze dei legamenti di questa articolazione rispetto all'angolo di
flessione dorsale, sono riportate in Figura 124 per il piede in appoggio dove si può
notare come l'andamento sia significativamente diverso: prima dell'inserimento della
protesi, la forza del legamento astragalo-calcaneare posteriore cresce con l'angolo di
plantarflessione con andamento simile a quello lineare mentre la forza del legamento
calcaneo-navicolare inferiore decresce; dopo l'inserimento della stessa, si osserva
andamento simile per il primo legamento (anche se con un valore di forza massima
raggiunta molto più alta al limite del movimento) mentre la forza del secondo
legamento descritto, cresce con l'angolo di dorsiflessione (Figura 124).
Gli andamenti delle forze per il piede in sospensione, invece, non sono
significativamente diversi (a parte per i valori massimi raggiunti) nel caso con e senza
protesi ma risultano crescenti con l'angolo di dorsiflessione e non vengono riportati.
.
-100
0
100
200
300
400
500
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (senza protesi)
F calcaneo-navicolare inf
F astragalo-calcaneare
post
F astragalo-calcaneare
est
F talo-calcaneare
interosseo
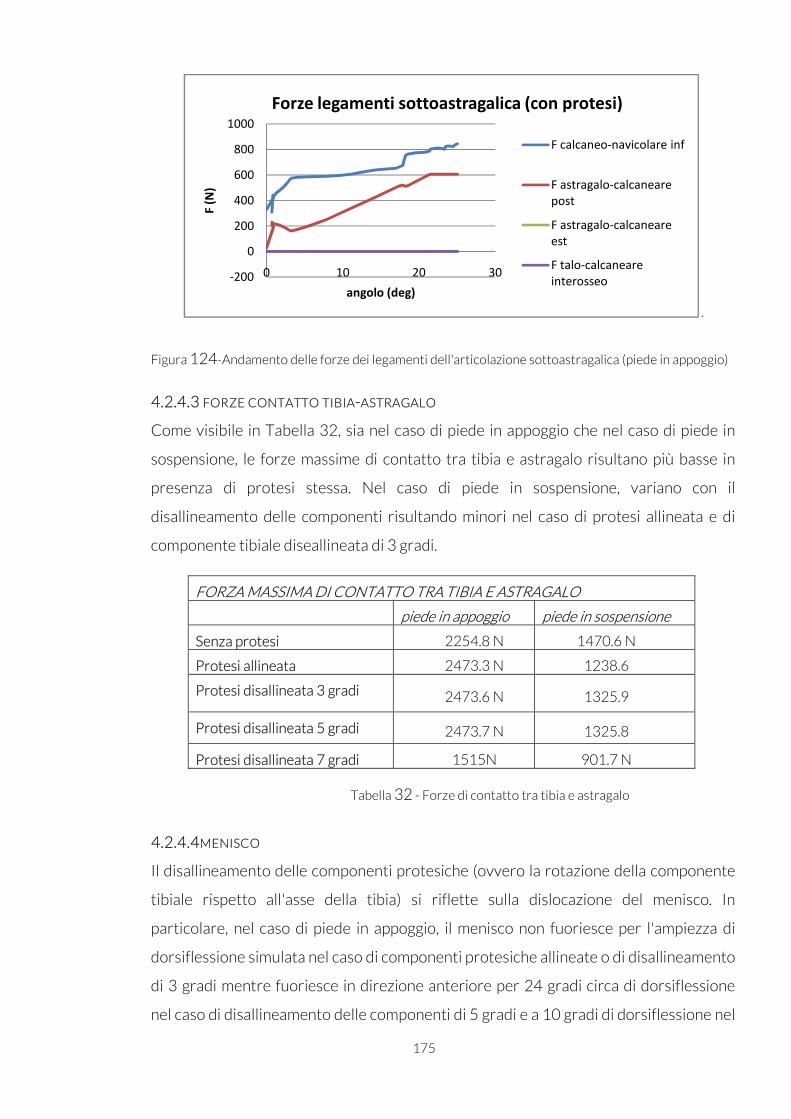
175
.
Figura 124-Andamento delle forze dei legamenti dell'articolazione sottoastragalica (piede in appoggio)
4.2.4.3 FORZE CONTATTO TIBIA-ASTRAGALO
Come visibile in Tabella 32, sia nel caso di piede in appoggio che nel caso di piede in
sospensione, le forze massime di contatto tra tibia e astragalo risultano più basse in
presenza di protesi stessa. Nel caso di piede in sospensione, variano con il
disallineamento delle componenti risultando minori nel caso di protesi allineata e di
componente tibiale diseallineata di 3 gradi.
Tabella 32 - Forze di contatto tra tibia e astragalo
4.2.4.4MENISCO
Il disallineamento delle componenti protesiche (ovvero la rotazione della componente
tibiale rispetto all'asse della tibia) si riflette sulla dislocazione del menisco. In
particolare, nel caso di piede in appoggio, il menisco non fuoriesce per l'ampiezza di
dorsiflessione simulata nel caso di componenti protesiche allineate o di disallineamento
di 3 gradi mentre fuoriesce in direzione anteriore per 24 gradi circa di dorsiflessione
nel caso di disallineamento delle componenti di 5 gradi e a 10 gradi di dorsiflessione nel
-200
0
200
400
600
800
1000
0 10 20 30
F (
N)
angolo (deg)
Forze legamenti sottoastragalica (con protesi)
F calcaneo-navicolare inf
F astragalo-calcaneare
post
F astragalo-calcaneare
est
F talo-calcaneare
interosseo
FORZA MASSIMA DI CONTATTO TRA TIBIA E ASTRAGALO
piede in appoggio piede in sospensione
Senza protesi 2254.8 N 1470.6 N
Protesi allineata 2473.3 N 1238.6
Protesi disallineata 3 gradi 2473.6 N 1325.9
Protesi disallineata 5 gradi 2473.7 N 1325.8
Protesi disallineata 7 gradi 1515N 901.7 N

176
caso di disallineamento delle componenti di 7 gradi. Nel caso di piede in sospensione, il
menisco non fuoriesce per l'ampiezza di dorsiflessione simulata nel caso di componenti
protesiche allineate o con disallineamento di 3 gradi mentre fuoriesce in direzione
anteriore per 24 gradi di dorsiflessione nel caso di disallineamento di 5 gradi e per 12
gradi di plantarflessione nel caso di disallineamento di 7 gradi.
177
CAPITOL O 5 - DISCUSSION E DEI RI SULTATI E CONCL USIONI
5 .1 C O N S I D E R A Z I O N I G E N E R A LI
Nei risultati riportati nel quarto capitolo, ci si è focalizzati sulle forze sviluppate
dall'attivazione degli attuatori, sulle forze massime sviluppate dai legamenti e sulle
forze di contatto tra tibia e astragalo.
I valori di forza minima sviluppata dai legamenti, non sono stati presi in considerazione
in quanto il pretensionamento è diverso per ognuno di questi e quindi ogni legamento
presenta una forza minima che dipende dalla lunghezza iniziale.
Gli andamenti delle forze dei legamenti rispetto agli angoli di plantarflessione,
dorsiflessione, pronazione o supinazione non sono stati riportati in tutti i casi analizzati
in quanto non è sempre presente una variazione dell'andamento delle forze
legamentose con e senza la presenza di protesi oppure, in alcuni casi, le variazioni sono
minime e ritenute non significative, ovvero indipendenti dalla simulazione stessa e non
importanti per lo scopo della tesi.
In tutte le prove è possibile notare che l'attivazione di un muscolo non produce un
movimento puro ma sempre un movimento triplanare in cui la flessione plantare o
dorsale si accompagna alla pronazione o supinazione e viceversa, in accordo con
quanto descritto in letteratura.
5 .2 D I S C U S S I O N E R I S U LT A T I D E L L 'A T T I V A Z I O N E M U S C O L A R E P E R LA
V A LI D A Z I O N E D E L M O D E LL O
L'obbiettivo delle simulazioni effettuate per la validazione del lavoro è quello di
valutare come il modello risponda all'attivazione di specifici attuatori rappresentanti
determinati muscoli.
Gli attuatori che si è scelto di attivare sono stati scelti in base al raggruppamento
indotto dalla funzione svolta, effettuato nella sezione riguardante i muscoli riportata
nel primo capitolo.
L'azione degli attuatori è risultata concorde con quanto trovato in letteratura: si
osservano movimenti di plantarflessione accompagnati da supinazione, ovvero
movimenti di inversione, data dai muscoli flessori: gastrocnemio, flessore dell'alluce e
flessore lungo delle dita; di flessione dorsale accompagnati da pronazione, ovvero
178
movimenti di eversione, dati dai muscoli peronei (peroneo breve e peroneo anteriore).
Inoltre si osservano movimenti di flessione dorsale accompagnati da supinazione dati
dall'attivazione del muscolo tibiale anteriore, come ci si aspetta da un muscolo
principalmente dorsiflessore; esso contribuisce anche alla supinazione a causa della
sua inserzione tendinea sulla parte mediale del piede.
Lo stesso movimento viene osservato anche a seguito dell'attivazione dei muscoli tibiali
(anteriore e posteriore): i due muscoli sono antagonisti quindi questa attivazione
dovrebbe produrre una supinazione pura ma se il bilanciamento tra l'attivazione dei
due muscoli non è corretta, il movimento rimane combinato di dorsiflessione e
supinazione. Ottenere un'attivazione che consenta di avere un movimento puro di
supinazione non è possibile in mancanza di dati ottenuti da prove sperimentali.
L'andamento delle forze sviluppate dall'attuatore attivato in velocità di accorciamento
(ovvero l'attuatore che governa il movimento) rispetto all'angolo di movimento della
principale funzione svolta, è significativo nel caso di piede in sospensione perché
rappresenta la risposta dei legamenti al movimento imposto: in particolare, nel caso di
piede in sospensione, non sono presenti forze esterne, a meno della forza di gravità,
quindi l'andamento del grafico è imputabile alle forze sviluppate dai legamenti e, come
ci si aspetta, è crescente con l'angolo.
I valori di forza raggiunti nei vari casi non sono particolarmente significativi in quanto
dipendono dal valore di angolo di plantarfessione, dorsiflessione, pronazione o
supinazione raggiunto ma è interessante notare che, in tutte le simulazioni effettuate in
questo contesto, sono valori più bassi dei valori sviluppati nel caso di piede in appoggio.
Nel caso delle forze muscolari sviluppate per il piede in appoggio, è interessante notare
l'andamento in Figura 78 dovuto all'attivazione del gastrocnemio: l’aumento della
forza produce una leggera dorsiflessione dovuta al fatto che, spostandosi la reazione
d’appoggio dalla posizione iniziale (approssimativamente sotto la caviglia, dato che il
momento è nullo) alla punta del piede (effetto prodotto dalla contrazione del muscolo),
il suo momento rispetto al centro della caviglia aumenta, e quindi i legamenti che
sostengono l‘arcata plantare vengono allungati. Come risultato, l’avampiede va in
dorsiflessione rispetto alla tibia di circa 10 gradi. Successivamente, mentre il tallone si
solleva da terra, la caviglia progressivamente avanza mentre la punta del piede è fissa al
terreno. Ciò porta ad una progressiva diminuzione del momento generato dalla
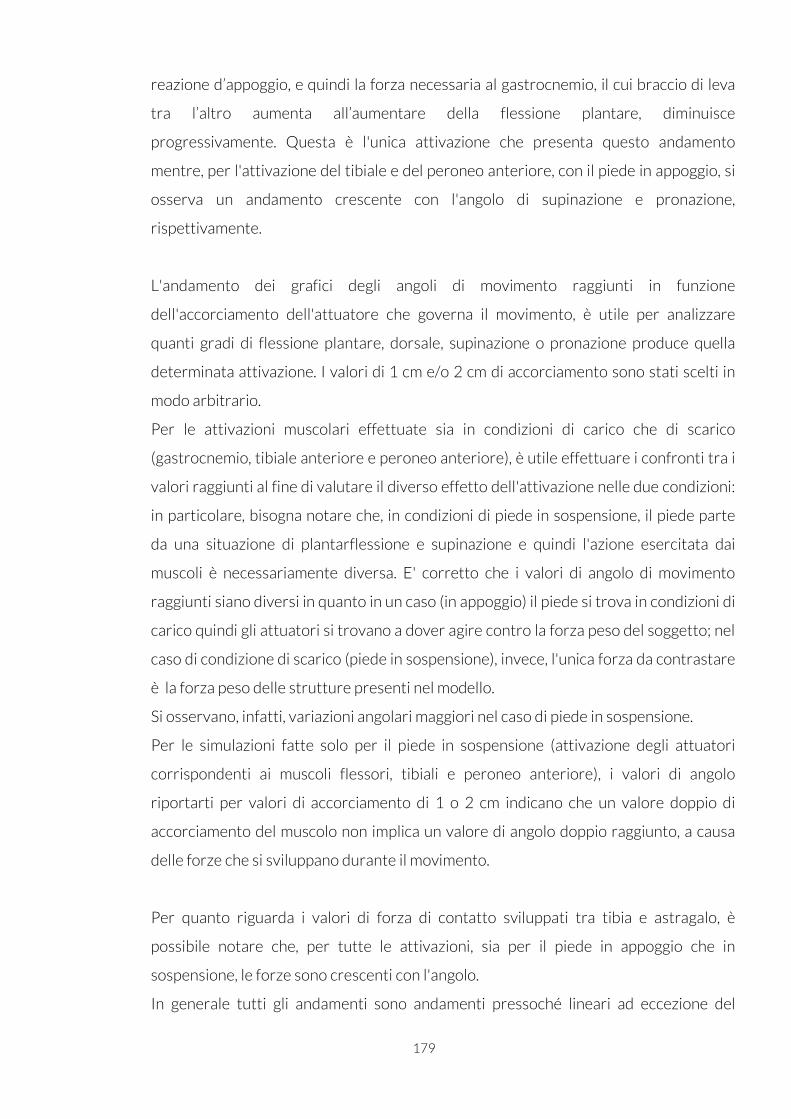
179
reazione d’appoggio, e quindi la forza necessaria al gastrocnemio, il cui braccio di leva
tra l’altro aumenta all’aumentare della flessione plantare, diminuisce
progressivamente. Questa è l'unica attivazione che presenta questo andamento
mentre, per l'attivazione del tibiale e del peroneo anteriore, con il piede in appoggio, si
osserva un andamento crescente con l'angolo di supinazione e pronazione,
rispettivamente.
L'andamento dei grafici degli angoli di movimento raggiunti in funzione
dell'accorciamento dell'attuatore che governa il movimento, è utile per analizzare
quanti gradi di flessione plantare, dorsale, supinazione o pronazione produce quella
determinata attivazione. I valori di 1 cm e/o 2 cm di accorciamento sono stati scelti in
modo arbitrario.
Per le attivazioni muscolari effettuate sia in condizioni di carico che di scarico
(gastrocnemio, tibiale anteriore e peroneo anteriore), è utile effettuare i confronti tra i
valori raggiunti al fine di valutare il diverso effetto dell'attivazione nelle due condizioni:
in particolare, bisogna notare che, in condizioni di piede in sospensione, il piede parte
da una situazione di plantarflessione e supinazione e quindi l'azione esercitata dai
muscoli è necessariamente diversa. E' corretto che i valori di angolo di movimento
raggiunti siano diversi in quanto in un caso (in appoggio) il piede si trova in condizioni di
carico quindi gli attuatori si trovano a dover agire contro la forza peso del soggetto; nel
caso di condizione di scarico (piede in sospensione), invece, l'unica forza da contrastare
è la forza peso delle strutture presenti nel modello.
Si osservano, infatti, variazioni angolari maggiori nel caso di piede in sospensione.
Per le simulazioni fatte solo per il piede in sospensione (attivazione degli attuatori
corrispondenti ai muscoli flessori, tibiali e peroneo anteriore), i valori di angolo
riportarti per valori di accorciamento di 1 o 2 cm indicano che un valore doppio di
accorciamento del muscolo non implica un valore di angolo doppio raggiunto, a causa
delle forze che si sviluppano durante il movimento.
Per quanto riguarda i valori di forza di contatto sviluppati tra tibia e astragalo, è
possibile notare che, per tutte le attivazioni, sia per il piede in appoggio che in
sospensione, le forze sono crescenti con l'angolo.
In generale tutti gli andamenti sono andamenti pressoché lineari ad eccezione del
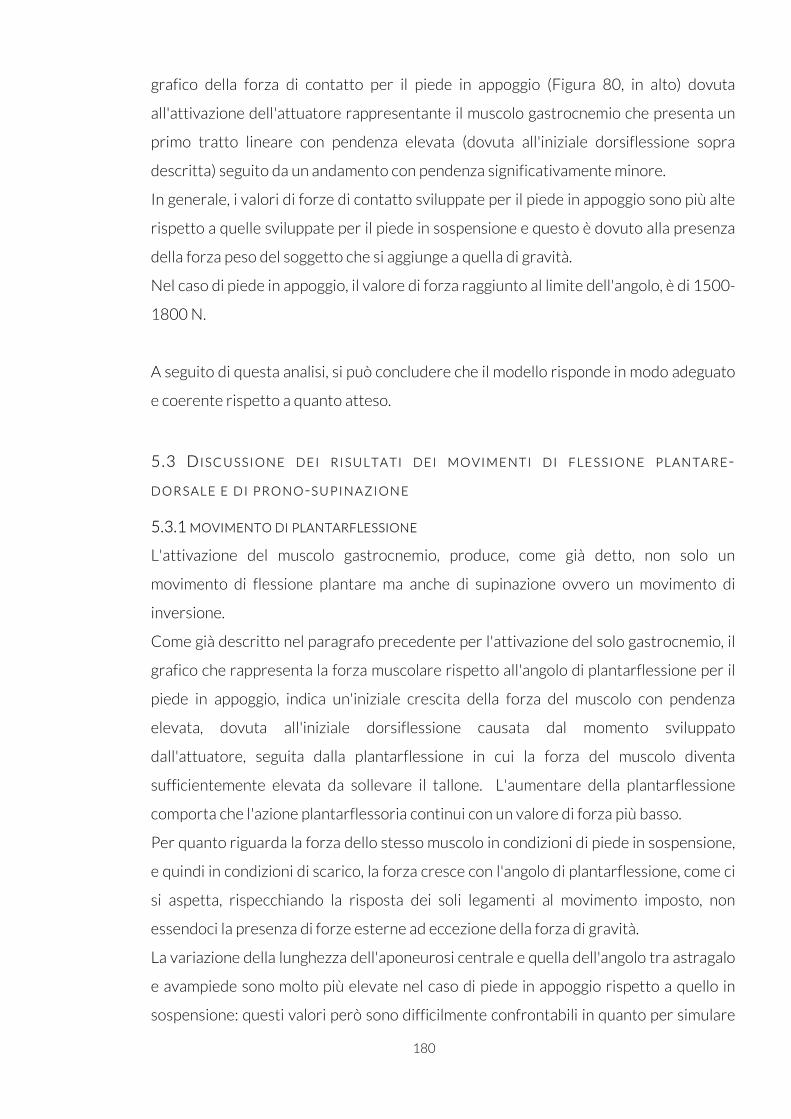
180
grafico della forza di contatto per il piede in appoggio (Figura 80, in alto) dovuta
all'attivazione dell'attuatore rappresentante il muscolo gastrocnemio che presenta un
primo tratto lineare con pendenza elevata (dovuta all'iniziale dorsiflessione sopra
descritta) seguito da un andamento con pendenza significativamente minore.
In generale, i valori di forze di contatto sviluppate per il piede in appoggio sono più alte
rispetto a quelle sviluppate per il piede in sospensione e questo è dovuto alla presenza
della forza peso del soggetto che si aggiunge a quella di gravità.
Nel caso di piede in appoggio, il valore di forza raggiunto al limite dell'angolo, è di 1500-
1800 N.
A seguito di questa analisi, si può concludere che il modello risponde in modo adeguato
e coerente rispetto a quanto atteso.
5.3 D I S C U S S I O N E D E I R I S U L T A T I D E I M O V I M E N T I D I F LE S S I O N E P L A N T A R E-
D O R S A L E E D I P R O N O -S U P I N A Z I O N E
5.3.1 MOVIMENTO DI PLANTARFLESSIONE
L'attivazione del muscolo gastrocnemio, produce, come già detto, non solo un
movimento di flessione plantare ma anche di supinazione ovvero un movimento di
inversione.
Come già descritto nel paragrafo precedente per l'attivazione del solo gastrocnemio, il
grafico che rappresenta la forza muscolare rispetto all'angolo di plantarflessione per il
piede in appoggio, indica un'iniziale crescita della forza del muscolo con pendenza
elevata, dovuta all'iniziale dorsiflessione causata dal momento sviluppato
dall'attuatore, seguita dalla plantarflessione in cui la forza del muscolo diventa
sufficientemente elevata da sollevare il tallone. L'aumentare della plantarflessione
comporta che l'azione plantarflessoria continui con un valore di forza più basso.
Per quanto riguarda la forza dello stesso muscolo in condizioni di piede in sospensione,
e quindi in condizioni di scarico, la forza cresce con l'angolo di plantarflessione, come ci
si aspetta, rispecchiando la risposta dei soli legamenti al movimento imposto, non
essendoci la presenza di forze esterne ad eccezione della forza di gravità.
La variazione della lunghezza dell'aponeurosi centrale e quella dell'angolo tra astragalo
e avampiede sono molto più elevate nel caso di piede in appoggio rispetto a quello in
sospensione: questi valori però sono difficilmente confrontabili in quanto per simulare
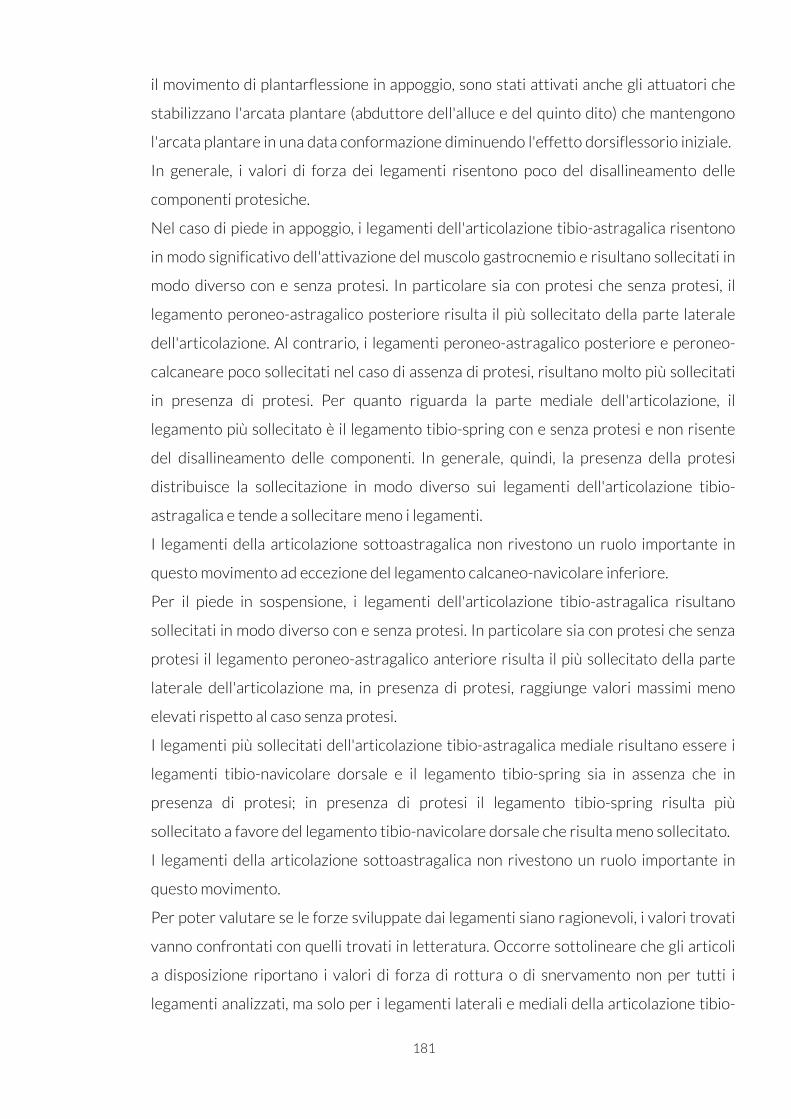
181
il movimento di plantarflessione in appoggio, sono stati attivati anche gli attuatori che
stabilizzano l'arcata plantare (abduttore dell'alluce e del quinto dito) che mantengono
l'arcata plantare in una data conformazione diminuendo l'effetto dorsiflessorio iniziale.
In generale, i valori di forza dei legamenti risentono poco del disallineamento delle
componenti protesiche.
Nel caso di piede in appoggio, i legamenti dell'articolazione tibio-astragalica risentono
in modo significativo dell'attivazione del muscolo gastrocnemio e risultano sollecitati in
modo diverso con e senza protesi. In particolare sia con protesi che senza protesi, il
legamento peroneo-astragalico posteriore risulta il più sollecitato della parte laterale
dell'articolazione. Al contrario, i legamenti peroneo-astragalico posteriore e peroneo-
calcaneare poco sollecitati nel caso di assenza di protesi, risultano molto più sollecitati
in presenza di protesi. Per quanto riguarda la parte mediale dell'articolazione, il
legamento più sollecitato è il legamento tibio-spring con e senza protesi e non risente
del disallineamento delle componenti. In generale, quindi, la presenza della protesi
distribuisce la sollecitazione in modo diverso sui legamenti dell'articolazione tibio-
astragalica e tende a sollecitare meno i legamenti.
I legamenti della articolazione sottoastragalica non rivestono un ruolo importante in
questo movimento ad eccezione del legamento calcaneo-navicolare inferiore.
Per il piede in sospensione, i legamenti dell'articolazione tibio-astragalica risultano
sollecitati in modo diverso con e senza protesi. In particolare sia con protesi che senza
protesi il legamento peroneo-astragalico anteriore risulta il più sollecitato della parte
laterale dell'articolazione ma, in presenza di protesi, raggiunge valori massimi meno
elevati rispetto al caso senza protesi.
I legamenti più sollecitati dell'articolazione tibio-astragalica mediale risultano essere i
legamenti tibio-navicolare dorsale e il legamento tibio-spring sia in assenza che in
presenza di protesi; in presenza di protesi il legamento tibio-spring risulta più
sollecitato a favore del legamento tibio-navicolare dorsale che risulta meno sollecitato.
I legamenti della articolazione sottoastragalica non rivestono un ruolo importante in
questo movimento.
Per poter valutare se le forze sviluppate dai legamenti siano ragionevoli, i valori trovati
vanno confrontati con quelli trovati in letteratura. Occorre sottolineare che gli articoli
a disposizione riportano i valori di forza di rottura o di snervamento non per tutti i
legamenti analizzati, ma solo per i legamenti laterali e mediali della articolazione tibio-
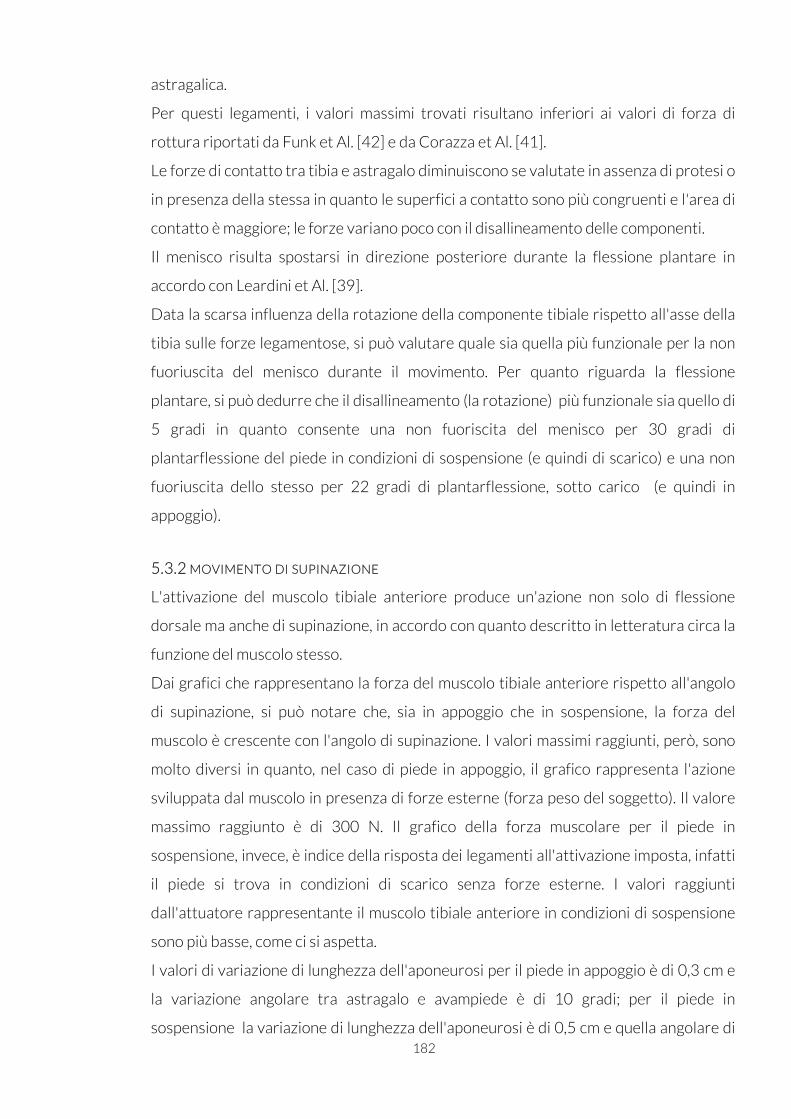
182
astragalica.
Per questi legamenti, i valori massimi trovati risultano inferiori ai valori di forza di
rottura riportati da Funk et Al. [42] e da Corazza et Al. [41].
Le forze di contatto tra tibia e astragalo diminuiscono se valutate in assenza di protesi o
in presenza della stessa in quanto le superfici a contatto sono più congruenti e l'area di
contatto è maggiore; le forze variano poco con il disallineamento delle componenti.
Il menisco risulta spostarsi in direzione posteriore durante la flessione plantare in
accordo con Leardini et Al. [39].
Data la scarsa influenza della rotazione della componente tibiale rispetto all'asse della
tibia sulle forze legamentose, si può valutare quale sia quella più funzionale per la non
fuoriuscita del menisco durante il movimento. Per quanto riguarda la flessione
plantare, si può dedurre che il disallineamento (la rotazione) più funzionale sia quello di
5 gradi in quanto consente una non fuoriscita del menisco per 30 gradi di
plantarflessione del piede in condizioni di sospensione (e quindi di scarico) e una non
fuoriuscita dello stesso per 22 gradi di plantarflessione, sotto carico (e quindi in
appoggio).
5.3.2 MOVIMENTO DI SUPINAZIONE
L'attivazione del muscolo tibiale anteriore produce un'azione non solo di flessione
dorsale ma anche di supinazione, in accordo con quanto descritto in letteratura circa la
funzione del muscolo stesso.
Dai grafici che rappresentano la forza del muscolo tibiale anteriore rispetto all'angolo
di supinazione, si può notare che, sia in appoggio che in sospensione, la forza del
muscolo è crescente con l'angolo di supinazione. I valori massimi raggiunti, però, sono
molto diversi in quanto, nel caso di piede in appoggio, il grafico rappresenta l'azione
sviluppata dal muscolo in presenza di forze esterne (forza peso del soggetto). Il valore
massimo raggiunto è di 300 N. Il grafico della forza muscolare per il piede in
sospensione, invece, è indice della risposta dei legamenti all'attivazione imposta, infatti
il piede si trova in condizioni di scarico senza forze esterne. I valori raggiunti
dall'attuatore rappresentante il muscolo tibiale anteriore in condizioni di sospensione
sono più basse, come ci si aspetta.
I valori di variazione di lunghezza dell'aponeurosi per il piede in appoggio è di 0,3 cm e
la variazione angolare tra astragalo e avampiede è di 10 gradi; per il piede in
sospensione la variazione di lunghezza dell'aponeurosi è di 0,5 cm e quella angolare di
183
27 gradi. Il piede in sospensione parte da una situazione di scarico, con un aponeurosi
accorciata, e quindi è permessa una maggiore variazione dell'arcata plantare.
Per il piede in appoggio, i legamenti plantari risultano sollecitati in modo diverso a
seconda della presenza o meno della protesi; in particolare la presenza delle protesi
sollecita maggiormente i legamenti nel caso di piede in appoggio ma le sollecitazioni
rimangono ripartite nello stesso modo: i legamenti più sollecitati in assenza di protesi
rimangono i più sollecitati anche dopo l'inserimento della stessa. I legamenti dorsali
risultano poco sollecitati durante questa attivazione muscolare raggiungendo valori
massimi di 100 N. Questo valore di forza è sviluppato dal legamento calcaneo-
cuboideo dorsale che, essendo in posizione laterale, risente del movimento di
supinazione imposto.
Per quanto riguarda l'articolazione tibio-astragalica sia mediale che laterale, risulta
essere quella che risente maggiormente di questa attivazione muscolare: in particolare,
una maggiore sollecitazione è presente sui legamenti presenti nella parte opposta
dell'articolazione rispetto alla parte dove avviene il movimento stesso, ovvero nella
parte laterale. Le sollecitazioni vengono ripartite in modo differente tra i legamenti nel
caso con e senza protesi. La diversa ripartizione della sollecitazione sui legamenti è
data dai diversi rapporti articolari che si instaurano dopo l'inserimento della protesi
stessa.
Nella parte mediale dell'articolazione si osserva un comportamento diverso: la
ripartizione delle sollecitazioni tra i legamenti avviene nello stesso modo sia in
presenza che in assenza di protesi ma i valori raggiunti nei due casi sono diversi.
A livello dell'articolazione sottoastragalica il legamento più sollecitato è il legamento
calcaneo-navicolare inferiore che sviluppa forze elevate sia in assenza che in presenza
di protesi; questo è intuitivo pensando al movimento generato dall'attivazione del
muscolo tibiale anteriore ovvero supinazione e flessione dorsale, entrambi movimenti
che agiscono sul legamento indicato.
Per il piede in sospensione, i legamenti plantari risultano sollecitati in modo diverso a
seconda della presenza o meno della protesi; in particolare la presenza delle protesi
sollecita maggiormente i legamenti ma le sollecitazioni rimangono ripartite nello stesso
modo: i legamenti più sollecitati in assenza di protesi rimangono i più sollecitati anche
dopo l'inserimento della stessa.
Tra i legamenti dorsali, quello più sollecitato risulta essere il legamento calcaneo-
184
cuboideo dorsale che, essendo in posizione laterale, risente del movimento di
supinazione imposto.
Per quanto riguarda l'articolazione tibio-astragalica sia mediale che laterale, la
ripartizione delle sollecitazioni non subisce variazioni significative.
Il legamento più sollecitato della parte laterale risulta essere il legamento peroneo-
astragalico posteriore sia in assenza che in presenza di protesi; per la parte mediale,
invece, l'unica variazione importante è data dalla forza massima sviluppata dal
legamento tibio-spring che passa da non essere sollecitato in assenza di protesi a
sviluppare una forza massima di 146,8 N in presenza della stessa. Il legamento più
sollecitato risulta essere il legamento tibio-talare posteriore sia in assenza che in
presenza di protesi.
A livello dell'articolazione sottoastragalica il legamento più sollecitato è il legamento
calcaneo-navicolare inferiore che sviluppa forze molto elevate sia in assenza che in
presenza di protesi; questo è intuitivo pensando al movimento generato
dall'attivazione del muscolo tibiale anteriore ovvero supinazione e flessione dorsale,
entrambi movimenti che agiscono sul legamento indicato.
Come già visto per il movimento di plantarflessione, i valori di forza sviluppata dai
legamenti risultano inferiori ai valori di forza di rottura riportata da Funk et Al. [42] e di
forza di snervamento riportati da Corazza et Al. [41] ad eccezione del legamento tibio-
talare posteriore la cui forza sviluppata risulta superiore alla forza di snervamento
trovata nel lavoro di Corazza et Al. [41]; il valore riportato nell'articolo, però, si riferisce
unicamente al fascio profondo del legamento, mentre quello ottenuto nel seguente
lavoro si riferisce alla forza sviluppata da una molla che modellizza fascio profondo e
superficiale del legamento stesso. Inoltre, bisogna tenere in considerazione che le forze
massime valutate in questo contesto sono per valori di angolo di movimento molto
elevato: valori più bassi sono sviluppati dallo stesso legamento per angoli di
supinazione inferiori.
Nel caso di piede in appoggio, le forze di contatto tra tibia e astragalo risultano più alte
nel caso di assenza di protesi e si abbassano con l'introduzione della protesi nel
modello. Questo è dovuto a una ripartizione della forza peso diversa nei due casi e a
rapporti articolari diversi nel caso di superfici articolari fisiologiche o protesiche;
inoltre le superfici delle protesi sono molto congruenti e non presentano asperità e
questo abbassa ulteriormente la forza sentita dalla componente astragalica rispetto a
185
quella sentita dall'astragalo.
Nel caso di piede in sospensione, si osserva lo stesso fenomeno anche se con valori di
forza più bassi.
Con il diseallinemanto, la forza di contatto subisce delle variazioni dovute alla
variazione dei rapporti articolari.
Le forze di contatto con il piede in sospensione sono più basse rispetto a quelle in
appoggio come ci si aspetta in quanto non è presente la forza peso che grava sulla tibia
aumentando il carico sentito sull'astragalo.
5.3.3 MOVIMENTO DI PRONAZIONE
L'attivazione del muscolo peroneo anteriore produce un movimento di flessione
dorsale e di pronazione ovvero di eversione, in accordo con la letteratura.
I grafici degli andamenti delle forze muscolari rispetto all'angolo di pronazione, sono
crescenti con l'angolo sia per il piede in appoggio che per il piede in sospensione.
Nel caso di piede in sospensione, il grafico è significativo in quanto è indice della
risposta dei legamenti al movimento imposto. Nel caso di piede in appoggio, invece, è
utile solo per concludere che le forze sviluppate da questa attivazione sono di circa 700
N al limite del movimento imposto.
Nel caso di piede in appoggio si osserva una minore variazione della lunghezza
dell'aponeurosi centrale e della variazione dell'angolo tra astragalo e avampiede, in
accordo con il fatto che in posizione di sospensione il piede si trova in una posizione di
scarico, con aponeurosi accorciate e quindi la variazione angolare permessa è
maggiore.
I legamenti plantari risultano poco sollecitati da questo movimento imposto e, in
particolare, non risentono del disallineamento delle componenti protesiche.
In condizioni di piede in appoggio, il legamento calcaneo-navicolare dorsale risulta più
sollecitato in presenza di protesi mentre il legamento calcaneo-cuboideo dorsale
risulta meno sollecitato; questo è indice di una variazione dei rapporti articolari data
dall'inserimento della protesi.
Per quanto riguarda i legamenti dell'articolazione tibio-astragalica, i legamenti non
risentono del disallineamento. In particolare ci sono alcuni legamenti che non risultano
sollecitati in assenza di protesi, come i legamenti peroneo-astragalico anteriore e
peroneo-calcaneare che risultano invece sollecitati dopo l'inserimento della protesi
stessa, anche se con valori di forza molto modesti; il legamento calcaneo-cuboideo
186
dorsale, al contrario, risulta sollecitato in assenza di protesi e meno in presenza di
protesi stessa, ma la distribuzione delle sollecitazioni nel caso in cui sia presente o
assente la protesi rimane la stessa.
Per quanto riguarda la parte mediale dell'articolazione, si nota che la forza del
legamento tibio-calcaneare va a saturazione per valori di pronazione superiori a 10
gradi. Questo è dovuto al fatto che durante il movimento di pronazione, movimento che
interessa la parte laterale del piede, i legamenti più sollecitati, più tesi, sono quelli della
parte controlaterale ovvero quelli dell'articolazione tibio-astragalica mediale in questo
caso. Quindi è possibile che alcuni legamenti vengano sollecitati in modo eccessivo,
soprattutto se il movimento ha un'ampiezza elevata. Tale andamento della forza è
visibile anche nei grafici delle forze dei legamenti dopo l'inserimento della protesi, ma i
valori raggiunti dal legamento tibio-talare posteriore risultano più bassi, ovvero i
legamenti, in presenza di protesi, risultano meno sollecitati.
I legamenti dell'articolazione sottoastragalica non risentono della presenza o assenza
di protesi e neanche del diseallinemanto delle componenti ad eccezione del legamento
talo-calcaneare interosseo che risulta non sollecitato nel caso di assenza di protesi e
raggiunge invece valori elevati nel caso di presenza di protesi.
In condizioni di piede in sospensione, la situazione risulta analoga: i legamenti plantari
vengono poco sollecitati durante tutto il movimento di pronazione e non risentono
della presenza della protesi né del disallineamento delle componenti.
I legamenti dorsali, invece, presentano diversa ridistribuzione dei carichi sui legamenti:
in assenza di protesi, la forza del legamento calcaneo-cuboideo dorsale va a
saturazione per valori di pronazione superiori a 15 gradi mentre nel caso di presenza di
protesi i valori di forza sviluppati dallo stesso vengono mantenuti molto più bassi
mentre risulta più sollecitato in presenza di protesi il legamento cuboideo-navicolare
dorsale. La saturazione presente per il legamento non viene ritenuta significativa in
quanto avviene per valori di pronazione considerati elevati. Inoltre, questo legamento è
uno dei legamenti che viene maggiormente sollecitato dal movimento di pronazione in
quanto si trova nella parte dorsale-laterale del piede.
Per quanto riguarda i legamenti laterali dell'articolazione tibio-astragalica, essi
risultano sollecitati in modo completamente diverso con e senza protesi: in presenza di
protesi la risposta al movimento è di tutti i legamenti con forza crescente rispetto
all'angolo di pronazione mentre nel caso di assenza di protesi risulta sollecitato solo il
187
grande legamento calcaneo-cuboideo; i legamenti mediali dell'articolazione, invece,
rispondono in modo simile con e senza protesi.
Forze maggiori sono sviluppate nella parte mediale dell'articolazione in quanto più
sollecitata dal movimento imposto.
I legamenti dell'articolazione sottoastragalica non risentono della presenza o assenza
di protesi e neanche del diseallinemanto.
I valori di forza sviluppata dai legamenti risultano inferiori ai valori di forza di rottura
riportata da Funk et Al. [42] e di forza di snervamento riportati da Corazza et Al. [41]
ad eccezione del legamento tibio-talare posteriore la cui forza sviluppata risulta
superiore alla forza di snervamento trovata nel lavoro di Corazza et Al. [41]; il valore
riportato nell'articolo, però, si riferisce unicamente al fascio profondo del legamento,
mentre quello ottenuto nel seguente lavoro si riferisce alla forza sviluppata da una
molla che modellizza fascio profondo e superficiale del legamento stesso. Inoltre,
bisogna tenere in considerazione che le forze massime valutate in questo contesto
sono per valori di angolo di movimento molto elevato: valori più bassi sono sviluppati
dallo stesso legamento per angoli di supinazione inferiori.
Nel caso di piede in appoggio, le forze di contatto tra tibia e astragalo risultano più alte
nel caso di assenza di protesi e si abbassano con l'introduzione della protesi nel
modello. Questo è dovuto a una ripartizione della forza peso diversa nei due casi e a
rapporti articolari diversi nel caso di superfici articolari fisiologiche o protesiche;
inoltre, le superfici delle protesi sono molto congruenti e non presentano asperità e
questo abbassa ulteriormente la forza sentita dalla componente astragalica rispetto a
quella sentita dall'astragalo.
Nel caso di piede in sospensione, si osserva lo stesso fenomeno. In particolare, con il
diseallinemanto, la forza di contatto subisce delle variazioni dovute alla variazione dei
rapporti articolari.
Si osservano valori di forze di contatto minori, sia per il piede in appoggio che per il
piede in sospensione, con disallineamento delle componenti.
5.3.4 MOVIMENTO DI DORSIFLESSIONE
L'attivazione dei muscoli dorsiflessori produce non solo un movimento di flessione
dorsale, ma anche di pronazione ovvero un movimento di eversione.
E' molto importante discutere l'andamento delle forze muscolari rispetto all'angolo di
188
dorsiflessione in quanto sia nel caso di piede in appoggio che nel caso di piede in
sospensione, si osserva un andamento inaspettato della forza del muscolo tibiale
anteriore che diminuisce all'aumentare dell'angolo di dorsiflessione; ciò è dovuto al
fatto che, all'aumento dell'ampiezza della dorsiflessione, il braccio di leva della forza
diminuisce quindi anche la forza necessaria per continuare il movimento.
Contrariamente a quanto avviene per il muscolo peroneo anteriore, la forza del
muscolo tibiale anteriore non cresce con l'angolo di dorsiflessione, ma per i primi gradi
di movimento si attesta attorno a un valore nullo. Il motivo risiede nell'attivazione
contemporanea di due attuatori che può portare a forzare uno dei due attuatori (in
questo caso il tibiale anteriore) ad allungarsi all'inizio del movimento, invece di
accorciarsi, come ci si aspetta. Superati i primi angoli di dorsiflessione, il muscolo
sviluppa forze positive e l'andamento della forza risulta crescente, anche se con valori
che si mantengono entro gli 80 N. La forza del muscolo peroneo anteriore, invece,
risulta crescente con andamento lineare.
Analizzando il comportamento dei legamenti per il piede in appoggio, è possibile notare
che i legamenti plantari non risultano particolarmente sollecitati da questo movimento
e non sviluppano forze elevate ad eccezione dell'aponeurosi 3. L'inserimento della
protesi nel modello ha effetto solo sull'aponeurosi centrale (aponeurosi 2), che
raggiunge un valore di forza massima doppio.
I legamenti dorsali, invece, presentano un andamento della forza sviluppata rispetto
all'angolo di dorsiflessione che varia considerevolmente in assenza o presenza di
protesi. Questo dimostra che la presenza di protesi modifica i rapporti articolari e
quindi sollecita in modo diverso i legamenti a seconda della posizione che essi
occupano rispetto al centro di istantanea rotazione della stessa. Il legamento tibio-
navicolare dorsale, ad esempio, rimane non sollecitato sia in presenza che in assenza
della protesi stessa.
Per quanto riguarda i legamenti dell'articolazione tibio-astragalica si osserva che
risultano maggiormente sollecitati i legamenti della parte laterale. In particolare per
questa parte dell'articolazione, cambia la ripartizione delle forze sviluppate sui
legamenti: in particolare, mentre in assenza di protesi solo il grande legamento
calcaneo-cuboideo plantare risulta sollecitato, dopo l'inserimento della protesi tutti i
legamenti sviluppano forze crescenti con l'angolo di flessione dorsale raggiungendo
valori di forza massima inferiore rispetto a quella del grande legamento calcano-
189
cuboideo plantare, che risulta essere il legamento più sollecitato.
La parte mediale dell'articolazione subisce variazioni meno significative dal punto di
vista delle forze massime raggiunte.
La saturazione del legamento tibio-calcaneare può essere spiegata dal fatto che nel
movimento descritto si ha una rotazione del calcagno che porta il legamento ad
allungarsi oltre l'allungamento descritto dalla legge impostata.
I legamenti dell'articolazione sottoastragalica presentano un comportamento
significativamente diverso prima e dopo l'inserimento della protesi. In particolare si
osserva che la forza del legamento astragalo-calcaneare posteriore cresce con l'angolo
di dorsiflessione mentre quella del legamento calcaneo-navicolare inferiore decresce;
dopo l'inserimento della protesi, crescono entrambe. Anche questo dimostra che la
protesi varia i rapporti articolari tra le componenti e sollecita in modo differente i
legamenti a seconda del loro posizionamento. Al limite della dorsiflessione, il
legamento tibio-talare posteriore presenta una forza che va a saturazione, ma questo
avviene per valori di flessione dorsale elevati quindi non risulta significativo.
I legamenti di questa articolazione risultano più sollecitati in presenza di protesi.
In generale i valori delle forze dei legamenti con il piede in appoggio non risente del
disallineamento delle componenti protesiche.
Nel caso di piede in sospensione, i valori di forza raggiunti dai legamenti plantari
risultano molto bassi e non variano in modo significativo con l'inserimento della protesi.
Anche i legamenti dorsali sviluppano forze poco elevate, ma le forze massime
sviluppate con e senza protesi risultano significativamente diverse. In particolare, il
legamento talo-navicolare dorsale risulta più sollecitato dopo l'inserimento della
protesi mentre quello calcaneo-cuboideo dorsale risulta meno sollecitato, a causa dei
rapporti articolari diversi che si riscontrano dopo l'inserimento della stessa. In questo
caso il disallineamento delle componenti sembra influire sulla forza massima sviluppata
da questi due legamenti: la forza del legamento talo-navicolare dorsale si abbassa con il
disallineamento delle componenti.
Per quanto riguarda l'articolazione tibio-astragalica, le variazioni significative si
osservano nel parte laterale dell'articolazione dove risulta quindi che legamenti non
sollecitati senza protesi risultano sollecitati con l'inserimento della stessa e viceversa.
Per quanto riguarda la parte mediale, sono presenti variazioni meno significative dal
punto di vista delle forze massime raggiunte: anche in questo caso, la saturazione del
190
legamento tibio-calcaneare può essere spiegata dal fatto che, nel movimento descritto,
si ha una rotazione del calcagno che porta il legamento ad allungarsi oltre il range di
allungamento descritto dalla legge impostata.
I legamenti dell'articolazione sottoastragalica, presentano una forza crescente con gli
angoli di dorsiflessione sia nel caso con che senza protesi e, in generale, risultano più
sollecitati nel caso di presenza di protesi. Non solo, risentono anche del
disallineamento delle componenti: in particolare, un disallineamento delle componenti
di 3 gradi sovraccarica maggiormente i legamenti.
La variazione dell'arcata plantare risulta molto maggiore nel caso di piede in
sospensione: la variazione angolare misurata non è significativamente diversa ma la
variazione della lunghezza dell'aponeurosi implica che in condizioni di scarico, la volta
plantare si appiattisce maggiormente. In posizione di sospensione il piede si trova in
una posizione di scarico, con aponeurosi accorciate e quindi la variazione angolare
permessa è maggiore.
I valori di forza sviluppata dai legamenti risultano inferiori ai valori di forza di rottura
riportata da Funk et Al. [42] e da Corazza et Al. [41] ad eccezione del legamento tibio-
talare posteriore la cui forza sviluppata risulta superiore alla forza di snervamento
trovata nel lavoro di Corazza et Al. [41]; il valore riportato nell'articolo, però, si riferisce
unicamente al fascio profondo del legamento, mentre quello ottenuto nel seguente
lavoro si riferisce alla forza sviluppata da una molla che modellizza fascio profondo e
superficiale del legamento stesso. Le forze massime valutate in questo contesto sono
per valori di angolo di movimento molto elevato: valori più bassi sono sviluppati dallo
stesso legamento per angoli di supinazione inferiori.
Le forze di contatto, come atteso, sono più basse nel caso di presenza di protesi sia per
il piede in appoggio che per quello in sospensione in quanto la protesi presenta
superfici più lisce e congruenti e quindi una migliore ripartizione del carico. Il
disallineamento incide sui valori di forza massima di contatto sviluppata solo per il
piede in sospensione dove i valori minimi vengono raggiunti per la protesi allineata o
diseallineata di 5 gradi. Le forze di contatto massime raggiunte per il piede in
sospensione sono più basse rispetto a quelle per il piede in appoggio, come ci si aspetta
in quanto il piede in sospensione si trova in una situazione di scarico.
Durante questo movimento descritto, il menisco si sposta in direzione anteriore in
accordo con quanto descritto da Leardini et Al. [39].
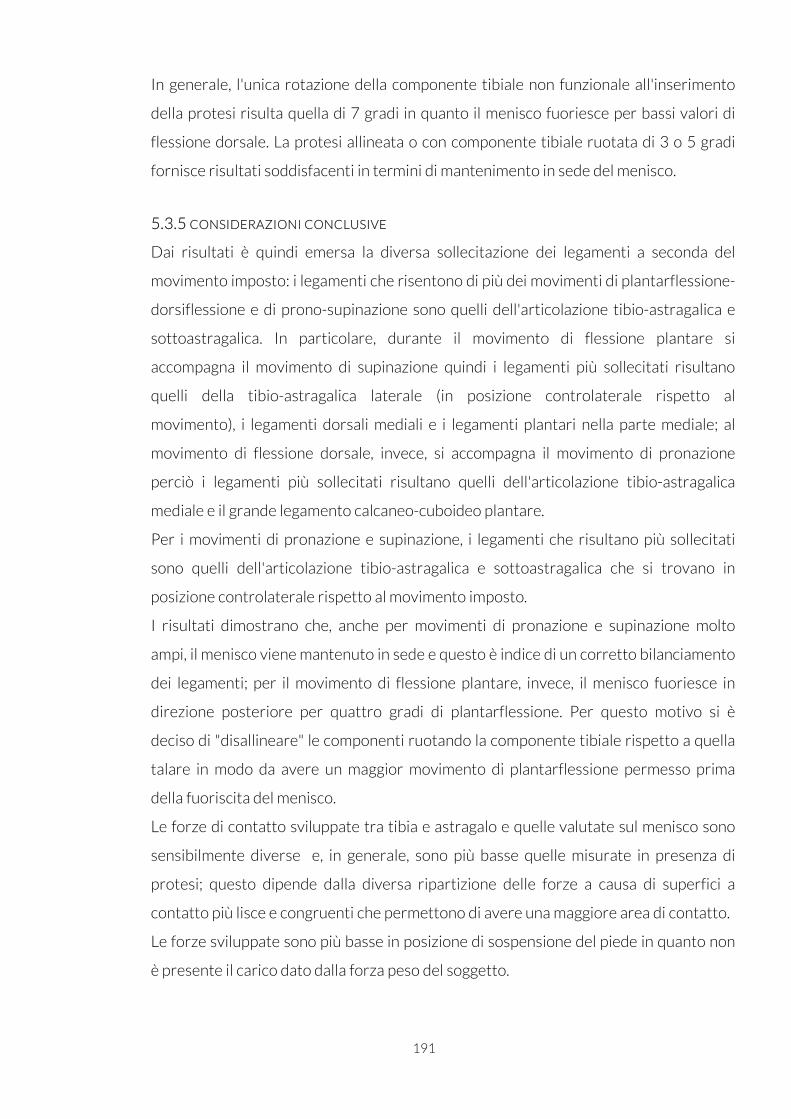
191
In generale, l'unica rotazione della componente tibiale non funzionale all'inserimento
della protesi risulta quella di 7 gradi in quanto il menisco fuoriesce per bassi valori di
flessione dorsale. La protesi allineata o con componente tibiale ruotata di 3 o 5 gradi
fornisce risultati soddisfacenti in termini di mantenimento in sede del menisco.
5.3.5 CONSIDERAZIONI CONCLUSIVE
Dai risultati è quindi emersa la diversa sollecitazione dei legamenti a seconda del
movimento imposto: i legamenti che risentono di più dei movimenti di plantarflessione-
dorsiflessione e di prono-supinazione sono quelli dell'articolazione tibio-astragalica e
sottoastragalica. In particolare, durante il movimento di flessione plantare si
accompagna il movimento di supinazione quindi i legamenti più sollecitati risultano
quelli della tibio-astragalica laterale (in posizione controlaterale rispetto al
movimento), i legamenti dorsali mediali e i legamenti plantari nella parte mediale; al
movimento di flessione dorsale, invece, si accompagna il movimento di pronazione
perciò i legamenti più sollecitati risultano quelli dell'articolazione tibio-astragalica
mediale e il grande legamento calcaneo-cuboideo plantare.
Per i movimenti di pronazione e supinazione, i legamenti che risultano più sollecitati
sono quelli dell'articolazione tibio-astragalica e sottoastragalica che si trovano in
posizione controlaterale rispetto al movimento imposto.
I risultati dimostrano che, anche per movimenti di pronazione e supinazione molto
ampi, il menisco viene mantenuto in sede e questo è indice di un corretto bilanciamento
dei legamenti; per il movimento di flessione plantare, invece, il menisco fuoriesce in
direzione posteriore per quattro gradi di plantarflessione. Per questo motivo si è
deciso di "disallineare" le componenti ruotando la componente tibiale rispetto a quella
talare in modo da avere un maggior movimento di plantarflessione permesso prima
della fuoriscita del menisco.
Le forze di contatto sviluppate tra tibia e astragalo e quelle valutate sul menisco sono
sensibilmente diverse e, in generale, sono più basse quelle misurate in presenza di
protesi; questo dipende dalla diversa ripartizione delle forze a causa di superfici a
contatto più lisce e congruenti che permettono di avere una maggiore area di contatto.
Le forze sviluppate sono più basse in posizione di sospensione del piede in quanto non
è presente il carico dato dalla forza peso del soggetto.
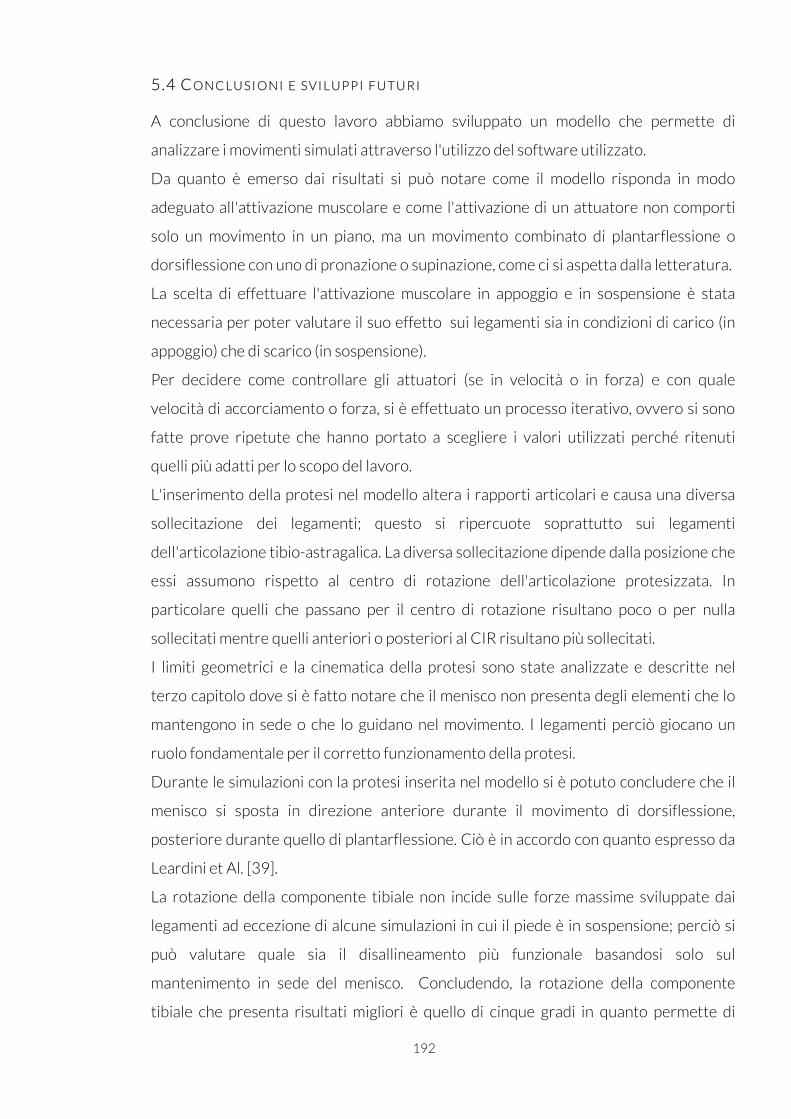
192
5.4 C O N C LU S I O N I E S V I L U P P I F U T U R I
A conclusione di questo lavoro abbiamo sviluppato un modello che permette di
analizzare i movimenti simulati attraverso l'utilizzo del software utilizzato.
Da quanto è emerso dai risultati si può notare come il modello risponda in modo
adeguato all'attivazione muscolare e come l'attivazione di un attuatore non comporti
solo un movimento in un piano, ma un movimento combinato di plantarflessione o
dorsiflessione con uno di pronazione o supinazione, come ci si aspetta dalla letteratura.
La scelta di effettuare l'attivazione muscolare in appoggio e in sospensione è stata
necessaria per poter valutare il suo effetto sui legamenti sia in condizioni di carico (in
appoggio) che di scarico (in sospensione).
Per decidere come controllare gli attuatori (se in velocità o in forza) e con quale
velocità di accorciamento o forza, si è effettuato un processo iterativo, ovvero si sono
fatte prove ripetute che hanno portato a scegliere i valori utilizzati perché ritenuti
quelli più adatti per lo scopo del lavoro.
L'inserimento della protesi nel modello altera i rapporti articolari e causa una diversa
sollecitazione dei legamenti; questo si ripercuote soprattutto sui legamenti
dell'articolazione tibio-astragalica. La diversa sollecitazione dipende dalla posizione che
essi assumono rispetto al centro di rotazione dell'articolazione protesizzata. In
particolare quelli che passano per il centro di rotazione risultano poco o per nulla
sollecitati mentre quelli anteriori o posteriori al CIR risultano più sollecitati.
I limiti geometrici e la cinematica della protesi sono state analizzate e descritte nel
terzo capitolo dove si è fatto notare che il menisco non presenta degli elementi che lo
mantengono in sede o che lo guidano nel movimento. I legamenti perciò giocano un
ruolo fondamentale per il corretto funzionamento della protesi.
Durante le simulazioni con la protesi inserita nel modello si è potuto concludere che il
menisco si sposta in direzione anteriore durante il movimento di dorsiflessione,
posteriore durante quello di plantarflessione. Ciò è in accordo con quanto espresso da
Leardini et Al. [39].
La rotazione della componente tibiale non incide sulle forze massime sviluppate dai
legamenti ad eccezione di alcune simulazioni in cui il piede è in sospensione; perciò si
può valutare quale sia il disallineamento più funzionale basandosi solo sul
mantenimento in sede del menisco. Concludendo, la rotazione della componente
tibiale che presenta risultati migliori è quello di cinque gradi in quanto permette di
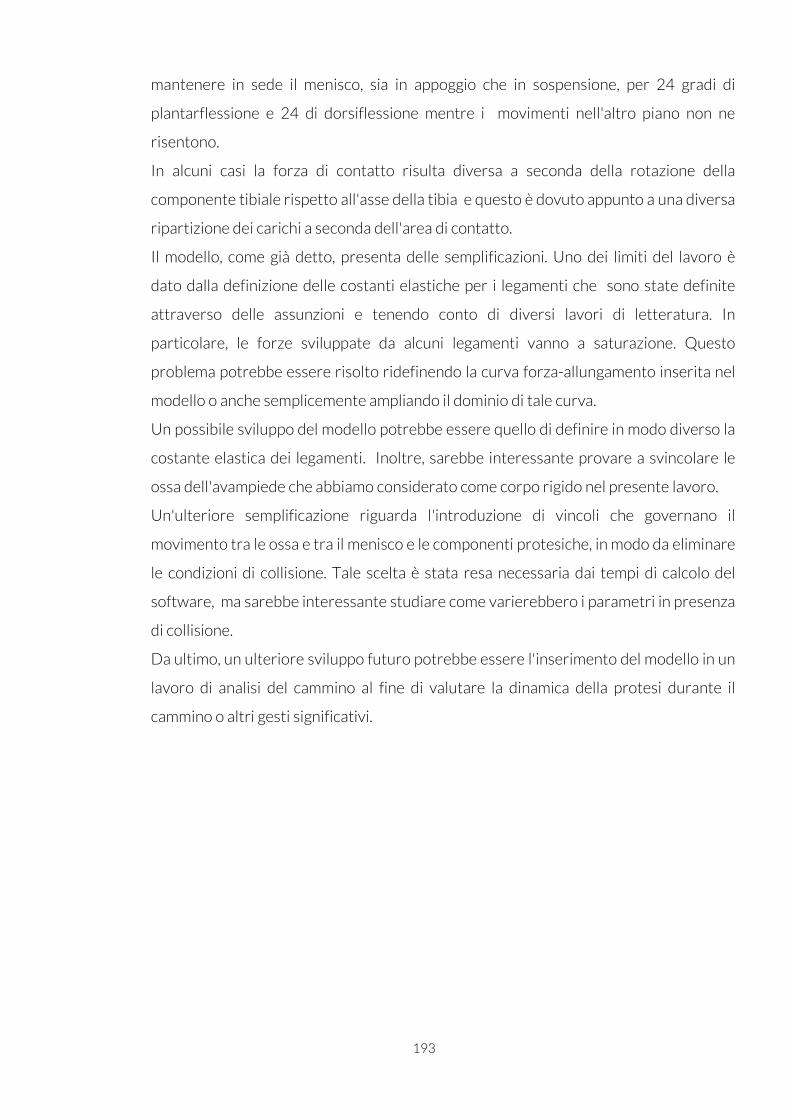
193
mantenere in sede il menisco, sia in appoggio che in sospensione, per 24 gradi di
plantarflessione e 24 di dorsiflessione mentre i movimenti nell'altro piano non ne
risentono.
In alcuni casi la forza di contatto risulta diversa a seconda della rotazione della
componente tibiale rispetto all'asse della tibia e questo è dovuto appunto a una diversa
ripartizione dei carichi a seconda dell'area di contatto.
Il modello, come già detto, presenta delle semplificazioni. Uno dei limiti del lavoro è
dato dalla definizione delle costanti elastiche per i legamenti che sono state definite
attraverso delle assunzioni e tenendo conto di diversi lavori di letteratura. In
particolare, le forze sviluppate da alcuni legamenti vanno a saturazione. Questo
problema potrebbe essere risolto ridefinendo la curva forza-allungamento inserita nel
modello o anche semplicemente ampliando il dominio di tale curva.
Un possibile sviluppo del modello potrebbe essere quello di definire in modo diverso la
costante elastica dei legamenti. Inoltre, sarebbe interessante provare a svincolare le
ossa dell'avampiede che abbiamo considerato come corpo rigido nel presente lavoro.
Un'ulteriore semplificazione riguarda l'introduzione di vincoli che governano il
movimento tra le ossa e tra il menisco e le componenti protesiche, in modo da eliminare
le condizioni di collisione. Tale scelta è stata resa necessaria dai tempi di calcolo del
software, ma sarebbe interessante studiare come varierebbero i parametri in presenza
di collisione.
Da ultimo, un ulteriore sviluppo futuro potrebbe essere l'inserimento del modello in un
lavoro di analisi del cammino al fine di valutare la dinamica della protesi durante il
cammino o altri gesti significativi.
194
BIBLI OGRAFIA
1) S. Fuchs, C. Sandmann, A. Skwara et al. "Quality of life 20 years after arthrodesis of
the ankle: A study of adjacent joints". J Bone Joint Surg (2003), vol. 85, pp. 994-8
2) B. D. Overley Jr, "Total Ankle Replacement: A Historical Perspective", Clinics in
Podiatric Medicine and Surgery (2012), vol. 29, pp. 547-570
3) D.E.T. Shepherd, B.B. Seedhom, “Thickness of human articular cartilage in joints of the
lower limb” Annals of the Rheumatic Diseases (1999), vol. 58, pp. 27–34
4) A.Kapandji, "Fisiologia articolare umana", Marrapese editore DEMI (1983), vol. II
5) V.T. Inman, “The Joints of the Ankle”, Baltimore: Williams & Wilkins (1976)
6) A. Lundberg et al., ”Kinematics of the Ankle/Foot Complex-Part1: Plantarflexion and
Dorsiflexion” , Foot & Ankle (1989), vol. 9, pp. 194-200
7) E.S. Grood, W.J. Suntay, “A joint coordinate system for the clinical description of
three- dimensional motions: application to the knee”, Journal of Biomechanical
Engineering (1983), vol. 105, pp. 136–144.
8) G. Wu, S. Siegler, P- Allar, C. Kirtley, A. Leardini, D. Rosenbaum, M. Whittle, D. D.
D’Lima, L. Cristofolini, H. Witte, O. Schmid, I. Stokes, "ISB recommendation on
definitions of joint coordinate system of various joints for the reporting of human
joint motion—part I: ankle, hip, and spine", Journal of Biomechanics (2002), vol. 35,
pp. 543–548
9) R. P. Kleipool, L. Blankevoort, “The relation between geometry and function of the
ankle joint complex: a biomechanical review ”, Knee Surg Sports Traumatol
Arthrosc.(2010), vol 18, pp. 618-627
10) T. Figen, S. Qaiser, A. E. Nabil, “Anatomy of lateral ankle ligaments and their
relationship to bony landmarks”, Surg. Radiol. Anat. (2006), vol. 28, pp. 391–397
195
11) C. Mkandawire, W.R. Ledoux, B.J. Sangeorzan, R.P. Ching, “Foot and ankle
morphometry”, Journal of Rehabilitation Research & Development (2005), vol. 42,
pp. 809–820
12) C.E. Milner, R.W. Soames, “The Medial collateral Ligaments of Human Ankle Joint:
Anatomical Variation”, Foot and Ankle Int. (1988)
13) S. Siegler, J. Block, C.D. Schneck, “The mechanical characteristics of the collateral
ligaments of the human ankle joint”, Foot Ankle (1988), vol. 8, pp. 234-242
14) A. Raumer, "Valutazione della biomeccanica e della cinematica dell’articolazione della
caviglia con particolare riguardo ai legamenti", Tesi di laurea in Ingegneria Biomedica
2009/2010, "Università degli Studi di Padova"
15) Z.-P. Luo H.B. Kitaoka, H.-C. Hsu, H. Kura,-N An, “Physiological Elongation of
Ligamentous Complex Surrounding the Hindfoot Joints: In Vitro Biomechanical
Study”, Foot and Ankle Int (1997), vol. 18, pp. 277-283
16) A. Seireg, R.J. Arvikar, "A mathematical model for evaluation of forces in lower
extremities of the musculo-skeletal system ", Journal of Biomechanics (1973), vol. 6,
pp. 313–322
17) J.R. Engsberg, J.G. Andrews, "Kinematic analysis of the talocalcaneal/talocrural joint
during running support", Medicine and Science in Sports and Exercise (1987), vol. 17,
pp. 55-56
18) P. Procter, J.P. Paul, "Ankle joint biomechanics" , J Biomech. (1982), vol. 15, pp. 627-
34
19) J. Dul, G.E. Johnson, "A kinematic model of the human ankle", Journal of biomedical
engineering (1985), vol. 7, pp. 137–143
196
20) J. Dul, G.E. Johnson, A.M. Strauss, "Estimation of the relative spatial position of body
segments using redundant distance measurements"
21) S. H. Scott, D. Winter, "Talocrural and talocalcaneal joint kinematics and kinetics
during the stance phase of walking", J Biomech. (1991), vol. 24, pp. 743-52.
22) J. Simon, L. Doederlein, A.S. McIntosh, D. Metaxiotis, H.G. Bock, S.I. Wolf, "The
Heidelberg foot measurement method: development, description and assessment",
Gait Posture (2006), vol. 23, pp. 411-24
23) A. Helm, "Multi-segment Foot Kinematics in Young Adults: A Preliminary Study
Comparing Two Biomechanical Gait Models", Grand Valley State University (2014)
24) J. Stebbins, M. Harrington, N. Thompson, A. Zavatsky, T. Theologis, "Repeatability of
a model for measuring multi-segment foot kinematics in children", Oxford Gait
Laboratory, Nuffield Orthopaedic Centre (2006), vol. 23, pp. 401–410
25) A. Leardini, M.G. Benedetti, F. Catani, L. Simoncini, S. Giannini, "An anatomically
based protocol for the description of foot segment kinematics during gait", Cinical
Biomechanics (1999), vol.14, pp. 528-536
26) W.H. Gage, D.A. Winter, J.S. Frank, A.L. Adkin, "Kinematic and kinetic validity of the
inverted pendulum model in quiet standing", Gait Posture (2004), vol. 19, pp. 124-32
27) W.-M. Chen, T. Lee, Peter V.-S. Lee, J. W. Lee, S.-J. Lee, "Effects of internal stress
concentrations in plantar soft-tissue - A preliminary three-dimensional finite element
analysis", Medical Engineering & Physics (2010), vol. 32, pp. 324–331
28) J. Perry, "Gait analysis: normal and pathological function", SLACK (1992)
29) F.F. Buechel Sr., F.F. Buechel Jr., M.J. Pappas, "Ten-Year Evaluation of Cementless
Buechel-Pappas Meniscal Bearing Total Ankle Replacement", Foot & Ankle
International (2003), vol. 24, pp. 462-472
197
30) V. Valderrabano, G.I. Pagenstert, A. M. Müller, J. Paul, H.B. Henninger, A. Barg,
"Mobile-and fixed-bearing total ankle prostheses", Foot and Ankle Clinics (2012), vol.
17, pp. 565–585
31) C.L. Sltzman, T.E. Mcliff, "Total ankle replacement revisited", Journal of Orthopaedic
& Sports Physical Therapy (2000), vol. 30, pp. 56-67
32) Hvid, O. Rasmussen, N.C. Jensen, S. Nielsen, "Trabecular bone strength profiles at the
ankle joint", Clinical Orthopaedics & Related Research (1985), Volume 199, pp. 306-
312
33) S.F. Conti, Y.S. Wong, "Complication of Total Ankle Replacement", Clinical
Orthopaedics & Related Research (2001), vol. 391, pp. 105-114
34) E. Pavan, C. Frigo, "Musculoskeletal models and bioimages can improve movement
analysis applications", Movement Biomechanics and Motor Control Lab (MBMC-
TBM Lab, Department of Bioengineering, Polytechnic of Milan, Milan, Italy)
35) L. Blankevoort, R. Huiskes.Ligament-Bone Interaction in a Three-Dimensional Model
of the Knee. Journal of Biomechanical Engineering. 1991, Vol. 113, 263-269
36) J.T.M. Cheung, M .Zhang, "Effects of plantar fascia stiffness on the biomechanical
responses of the ankle–foot complex", Clinical Biomechanics (2004), vol. 19, pp. 839-
846
37) A. Leardini, J.J. O'Connor, F. Catani, S. Giannini,"Kinematics of the human ankle
complex in passive flexion; a single degree of freedom system", Journal of
Biomechanics (1999), vol. 32, pp. 111-118
38) A. Leardini, J.J. O'Connor, F. Catani, S. Giannini, "A geometric model of the human
ankle joint", Journal of biomechanics (1999) , vol. 32, pp. 585–591
198
39) A. Leardini, "Geometry and mechanics of the human ankle complex and ankle
prosthesis design", Clinical Biomechanics (2001 ), vol. 16, pp. 706-709
40) A. Leardini, J.J. O’Connor, S. Giannini, "Biomechanics of the natural, arthritic, and
replaced human ankle joint", Journal of Foot and Ankle Research (2014), vol. 7
41) F. Corazza, J.J. O’Connor, A. Leardini, V. Parenti Castelli,"Ligament fibre recruitment
and forces for the anterior drawer test at the human ankle joint", Journal of
Biomechanics (2003), vol 36, pp. 363–372
42) J. R. Funk, G. W. Hall, J. R. Crandall, W. D. Pilkey, "Linear and quasi-linear viscoelastic
characterization of ankle ligaments", Journal of Biomechanical Engineering (2000),
vol 122, pp. 15-22
43) A. Leardini, F. Catani, S. Giannini, J. J. O'Connor, "Computer-assisted design of the
sagittal shapes of a ligament-compatible total ankle replacement", Med Biol Eng
Comput. (2001), vol. 39, pp. 168-75
44) A. Leardini, M.G. Benedetti, L. Berti, D. Bettinelli, R. Nativo, S. Giannini, "Rear-foot,
mid-foot and fore-foot motion during the stance phase of gait", Gait & Posture
(2007), vol. 25, pp. 453–462