Embed Size (px)
Citation preview
JU Univerzitet u Tuzli Fakultet elektrotehnikeFakultet elektrotehnikePostdiplomski studij, 2013.Modul: Automatika i RobotikaP d t R b tik M h t ik i A t ti ij 2013Predmet: Robotika, Mehatronika i Automatizacija, 2013.
Senzori u mobilnoj roboticiSenzori u mobilnoj robotici
Predavač:
Vanr. Prof. dr. Lejla Banjanović-Mehmedović
Copyright: Lejla Banjanovic-Mehmedovic
Tipovi senzora, koji se često koriste u mobilnoj Tipovi senzora, koji se često koriste u mobilnoj b i ib i iroboticirobotici
P i ij ki i ( j š j k j Propriocepcijski senzori (mjere unutrašnje kretanje mehanizma MR):◦ Odometrijski (enkoderi akcelometri)◦ Odometrijski (enkoderi, akcelometri)◦ Orjentacioni (kompasi, žiroskopi)
Exteroceptivni senzori (mjere pojave vezane za Exteroceptivni senzori (mjere pojave vezane za okolni prostor MR):◦ Ultrazvučni senzori udaljenosti, laserski senzori udaljenosti, j j
radari, IR senzori, kamere
Propriocepcijski senzoriPropriocepcijski senzori
Copyright: Lejla Banjanovic-Mehmedovic
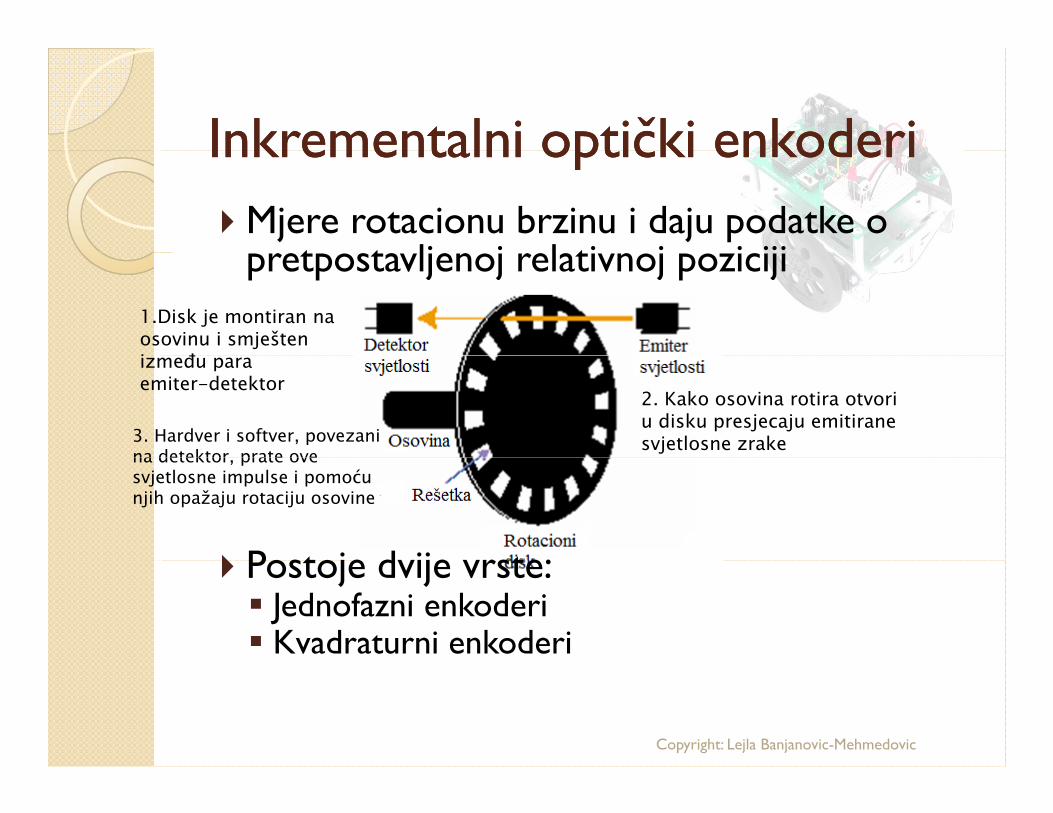
Inkrementalni optički enkoderiInkrementalni optički enkoderiInkrementalni optički enkoderiInkrementalni optički enkoderi Mjere rotacionu brzinu i daju podatke o
t t lj j l ti j i iji1.Disk je montiran na osovinu i smješten i đ
pretpostavljenoj relativnoj poziciji
između para emiter-detektor
2. Kako osovina rotira otvori u disku presjecaju emitirane svjetlosne zrake3. Hardver i softver, povezani
na detektor prate ovena detektor, prate ove svjetlosne impulse i pomoću njih opažaju rotaciju osovine
Postoje dvije vrste: Postoje dvije vrste: Jednofazni enkoderi Kvadraturni enkoderi
Copyright: Lejla Banjanovic-Mehmedovic
Inkrementalni optički enkoderiInkrementalni optički enkoderiInkrementalni optički enkoderiInkrementalni optički enkoderi
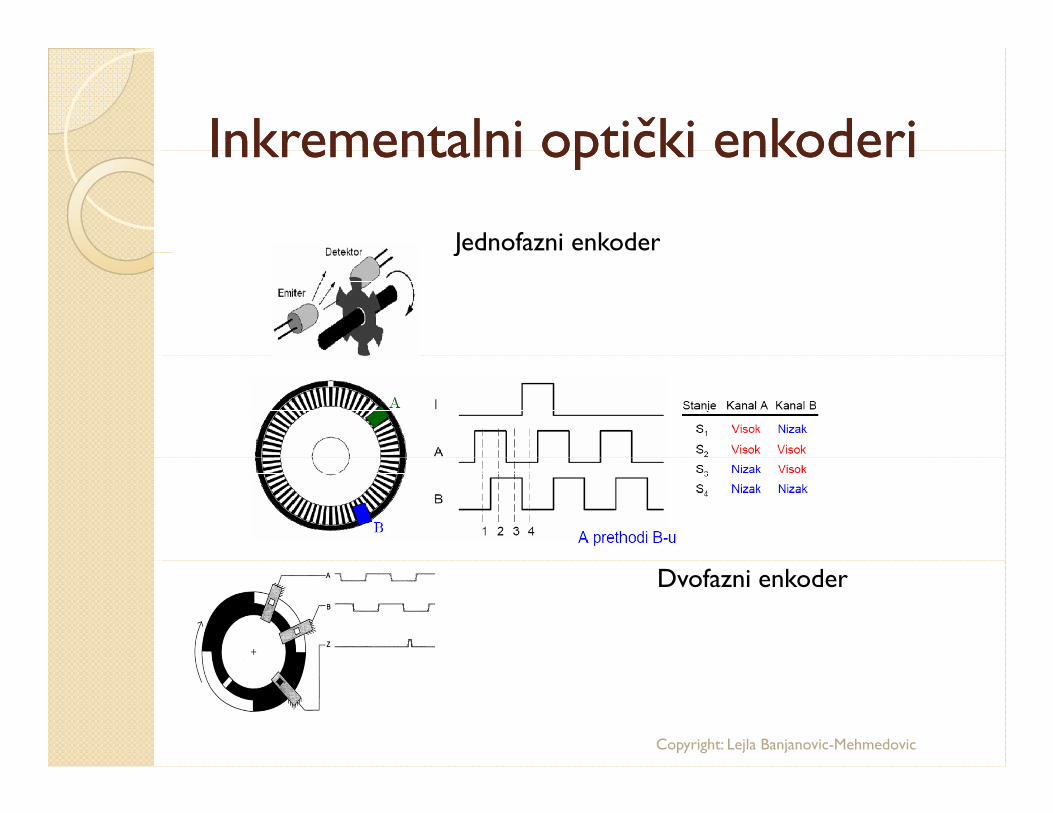
Jednofazni enkoderJ
Dvofazni enkoder
Copyright: Lejla Banjanovic-Mehmedovic
Inkrementalni optički enkoderiInkrementalni optički enkoderi Jednofazni enkoderi
Inkrementalni optički enkoderiInkrementalni optički enkoderi
Jeftini i jednostavni za korištenje-Ne mogu odrediti smijer rotacije; Dolazi do
š k i bl bil i i li grešaka i problema stabilnosti pri malim brzinama zbog pogreške kvantizacije
K d k d Kvadraturni enkoderiMogu odrediti smijer rotacije; Imaju 4x veću
rezoluciju nego jednofaznirezoluciju nego jednofazni-Informacije o relativnim položajima su
izgubljene u slučaju prekida snageizgubljene u slučaju prekida snage
Copyright: Lejla Banjanovic-Mehmedovic
Apsolutni optički enkoderiApsolutni optički enkoderi
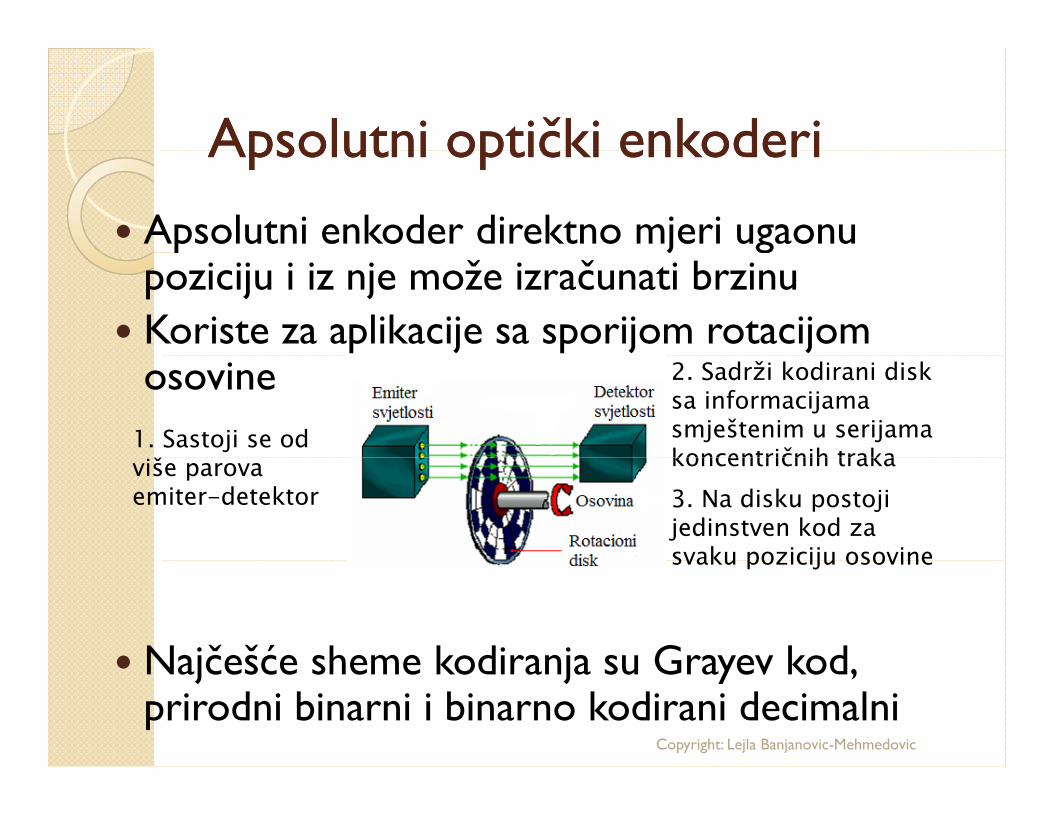
Apsolutni enkoder direktno mjeri ugaonu
Apsolutni optički enkoderiApsolutni optički enkoderi
p j gpoziciju i iz nje može izračunati brzinu
Koriste za aplikacije sa sporijom rotacijom osovine
1. Sastoji se od š
2. Sadrži kodirani disk sa informacijama smještenim u serijama koncentričnih trakaviše parova
emiter-detektorkoncentričnih traka3. Na disku postoji jedinstven kod za svaku poziciju osovine
Najčešće sheme kodiranja su Grayev kod
svaku poziciju osovine
Najčešće sheme kodiranja su Grayev kod, prirodni binarni i binarno kodirani decimalni
Copyright: Lejla Banjanovic-Mehmedovic
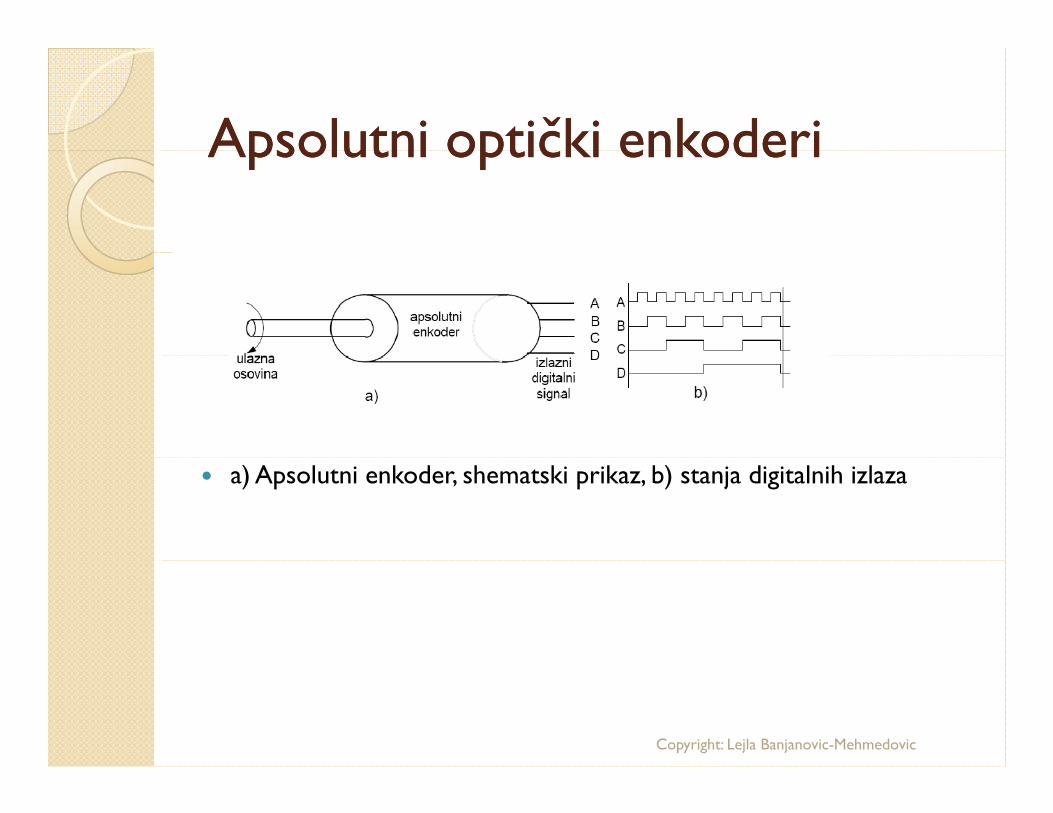
Apsolutni optički enkoderiApsolutni optički enkoderiApsolutni optički enkoderiApsolutni optički enkoderi
a) Apsolutni enkoder, shematski prikaz, b) stanja digitalnih izlaza
Copyright: Lejla Banjanovic-Mehmedovic

Primjer korištenja enkoderaPrimjer korištenja enkoderaPrimjer korištenja enkoderaPrimjer korištenja enkodera
a) Disk koji koristi Grayev kod, b) Disk koji koristi binarno kodiranje
Copyright: Lejla Banjanovic-Mehmedovic
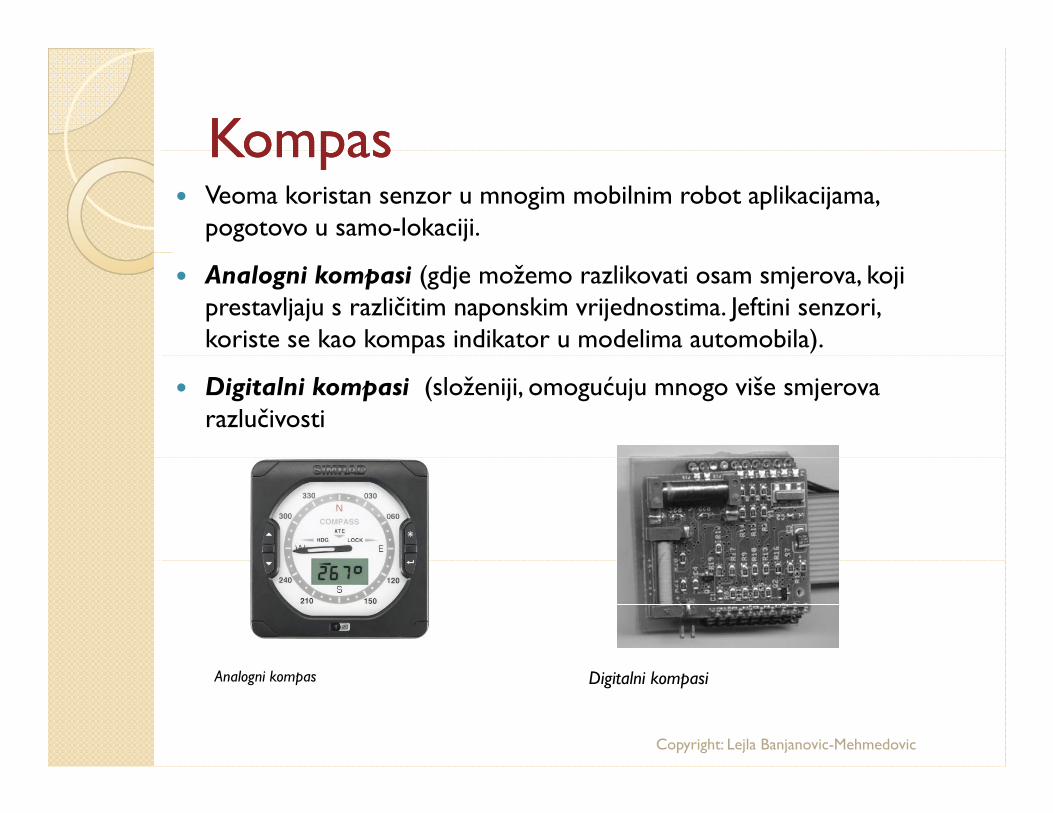
KompasKompasKompasKompas Veoma koristan senzor u mnogim mobilnim robot aplikacijama,
pogotovo u samo-lokaciji.
Analogni kompasi (gdje možemo razlikovati osam smjerova, koji prestavljaju s različitim naponskim vrijednostima. Jeftini senzori, koriste se kao kompas indikator u modelima automobila).
Digitalni kompasi (složeniji, omogućuju mnogo više smjerova razlučivosti
Analogni kompas Digitalni kompasi
Copyright: Lejla Banjanovic-Mehmedovic
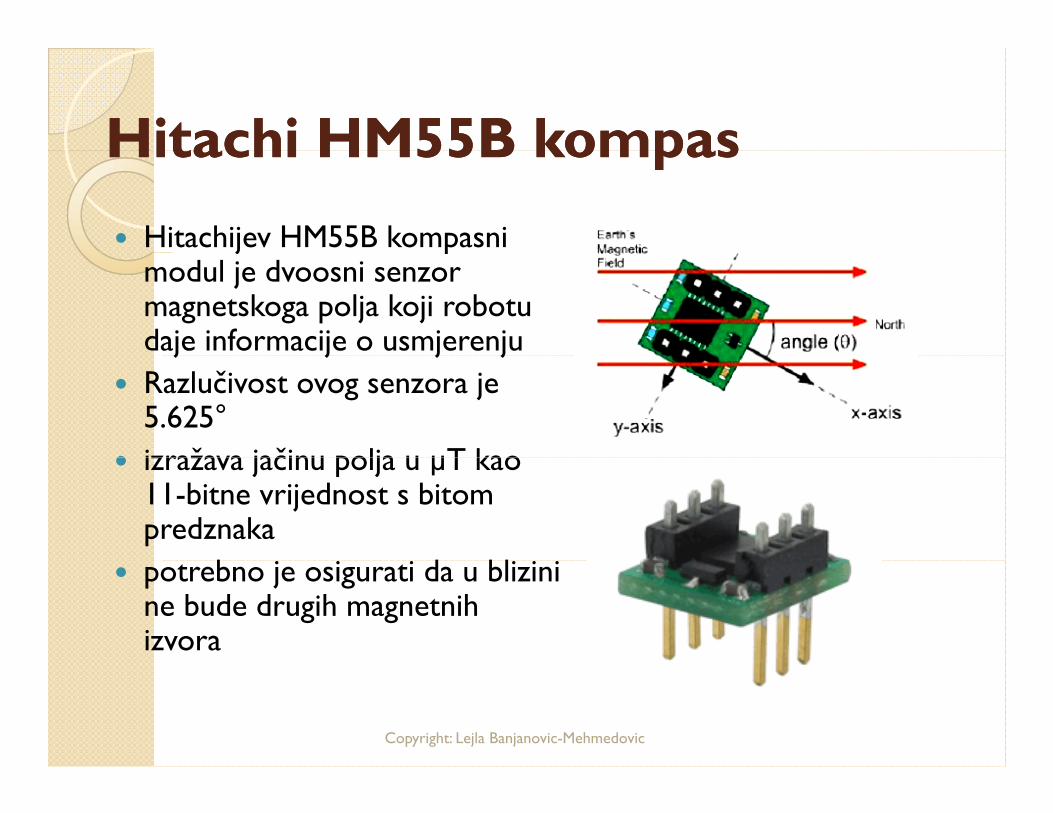
Hitachi HM55B kompasHitachi HM55B kompasHitachi HM55B kompasHitachi HM55B kompas
Hitachijev HM55B kompasni j pmodul je dvoosni senzor magnetskoga polja koji robotu daje informacije o usmjerenjuj j j j
Razlučivost ovog senzora je 5.625°
izražava jačinu polja u µT kao izražava jačinu polja u µT kao 11-bitne vrijednost s bitom predznaka
b d bl potrebno je osigurati da u blizini ne bude drugih magnetnih izvora
Copyright: Lejla Banjanovic-Mehmedovic
Eksterocepcijski senzoriEksterocepcijski senzori
Copyright: Lejla Banjanovic-Mehmedovic
Ultrasonični senzoriUltrasonični senzoriUltrasonični senzoriUltrasonični senzori Ultrazvučni senzor se često naziva sonar.
Princip rada ovih senzora se zasniva na refleksiji zvuka od objekta nakoji naiđe.
Princip rada sonara zasniva na vremenu putovanja signala odnjegovog emitovanja pa do odobijanja od objekta i vraćanja nazad.Na ovaj način mjerimo udaljenost objekta.
Prednosti zbog kojih se sonar vrlo često koristi jesu jednostavnost,mala masa, mala potrošnja, niske cijene i odlična svojstva priizbjegavanju prepreka.
Najveći nedostaci su velika širina zrake, mala brzina zvuka, gušenjesignala, velika minimalna udaljenost mjerenja, ograničena maksimalnag j j j gudaljenost, spekularne refleksije itd.
Copyright: Lejla Banjanovic-Mehmedovic
Ultrasonični senzoriUltrasonični senzoriUltrasonični senzoriUltrasonični senzori Sonari su aktivni senzori koji se sastoje od emitera i
detektora. Emiter proizvodi signal (zvuk) ultrazvučne frekvencije.
Signal putuje od izvora i kada naiđe na neku preprekudbije se Uk lik nema re reke si nal se neće ratitiodbije se. Ukoliko nema prepreke, signal se neće vratiti,
on slabi sa udaljenošću i na kraju nestaje. Ako se signalvrati, vrijeme koje je prošlo od emitovanja pa dovraćanja nazad se može iskoristiti za mjerenje udaljenostiobjekta.
Udaljenost objekta se mjeri pomoću sonara na sljedeći Udaljenost objekta se mjeri pomoću sonara na sljedećinacin: kada se emituje ultrazvučni signal, startuje setajmer i on se zaustavlja kada se signal vrati. Rezultujuće
ž b k d l dvrijeme se množi sa brzinom zvuka i dijeli sa dva.
Copyright: Lejla Banjanovic-Mehmedovic

Ultrasonični senzoriUltrasonični senzoriUltrasonični senzoriUltrasonični senzori Ultrazvučni senzor Paralax
PING))) može se rotirati PING))), može se rotirati. Domet: 2cm – 3m
Pi Ping senzor
Princip rada PING senzora
Copyright: Lejla Banjanovic-Mehmedovic
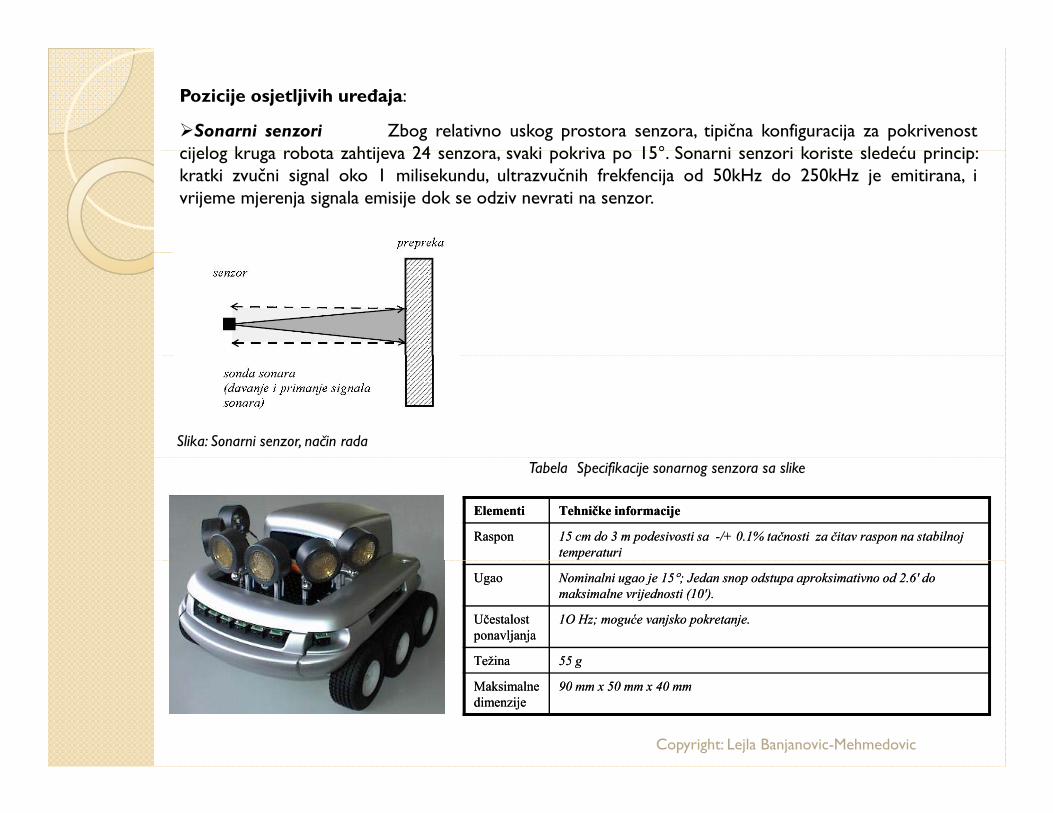
Pozicije osjetljivih uređaja:
Sonarni senzori Zbog relativno uskog prostora senzora, tipična konfiguracija za pokrivenostij l k b t htij 24 ki k i 15° S i i k i t l d ć i icijelog kruga robota zahtijeva 24 senzora, svaki pokriva po 15°. Sonarni senzori koriste sledeću princip:
kratki zvučni signal oko 1 milisekundu, ultrazvučnih frekfencija od 50kHz do 250kHz je emitirana, ivrijeme mjerenja signala emisije dok se odziv nevrati na senzor.
Slika: Sonarni senzor, način rada
Tabela Specifikacije sonarnog senzora sa slike
ElementiElementi Tehničke informacijeTehničke informacije
Raspon Raspon 15 cm do 3 m podesivosti sa 15 cm do 3 m podesivosti sa --/+ 0.1% tačnosti za čitav raspon na stabilnoj /+ 0.1% tačnosti za čitav raspon na stabilnoj temperaturitemperaturi
Ugao Ugao Nominalni ugao je 15Nominalni ugao je 15; Jedan snop odstupa aproksimativno od 2.6' do ; Jedan snop odstupa aproksimativno od 2.6' do maksimalne vrijednosti (10').maksimalne vrijednosti (10').
Učestalost Učestalost ponavljanja ponavljanja
1O Hz; moguće vanjsko pokretanje.1O Hz; moguće vanjsko pokretanje.
TežinaTežina 55 g55 gTežina Težina 55 g55 g
Maksimalne Maksimalne dimenzije dimenzije
90 mm x 50 mm x 40 mm90 mm x 50 mm x 40 mm
Copyright: Lejla Banjanovic-Mehmedovic
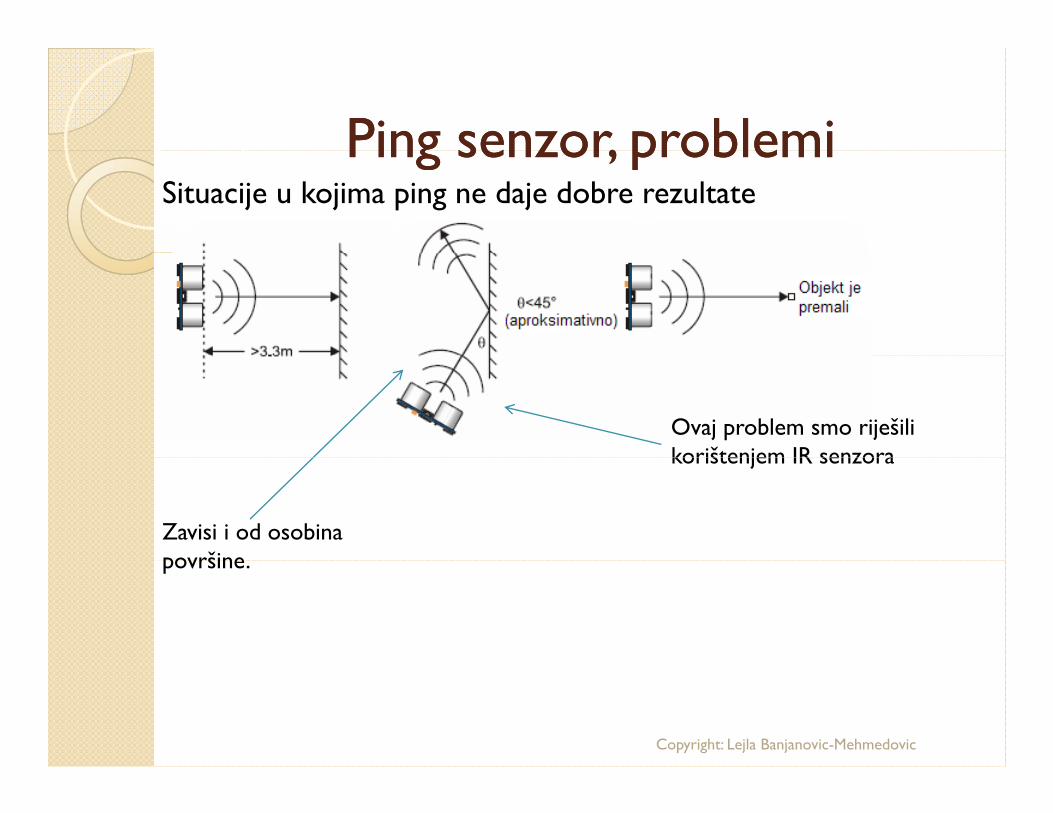
Ping senzor, problemiPing senzor, problemiPing senzor, problemiPing senzor, problemiSituacije u kojima ping ne daje dobre rezultate
Ovaj problem smo riješili korištenjem IR senzorakorištenjem IR senzora
Zavisi i od osobina površinepovršine.
Copyright: Lejla Banjanovic-Mehmedovic

Infracrveni senzoriInfracrveni senzoriInfracrveni senzoriInfracrveni senzori Ugao pod kojim se reflektuju promjene se
mijenja u skladu s rastojanjem od objekta te se može koristiti kao mjera-rastojanja te se može koristiti kao mjera-rastojanja od objekta.
Talasna dužina se obično koristi od 980nm. Iako je nevidljiva za ljudko oko, može se j j jtransformisati u vidljivu svjetlost
Slika: Sharp PSD senzor i senzor diagram
Copyright: Lejla Banjanovic-Mehmedovic
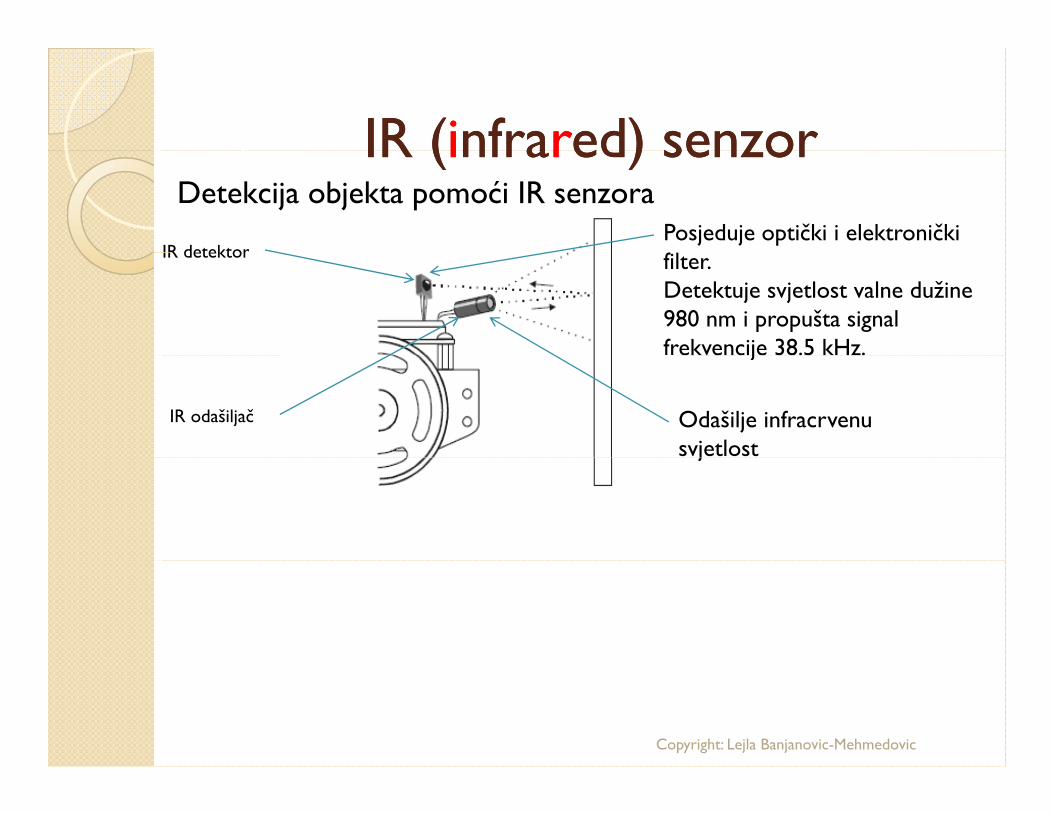
IR (IR (iinfranfrarred) senzored) senzorIR (IR (iinfranfrarred) senzored) senzorDetekcija objekta pomoći IR senzora
IR detektorPosjeduje optički i elektronički f lIR detektor filter.Detektuje svjetlost valne dužine 980 nm i propušta signal frekvencije 38.5 kHz.
IR odašiljač Odašilje infracrvenu svjetlost
j
j
Copyright: Lejla Banjanovic-Mehmedovic
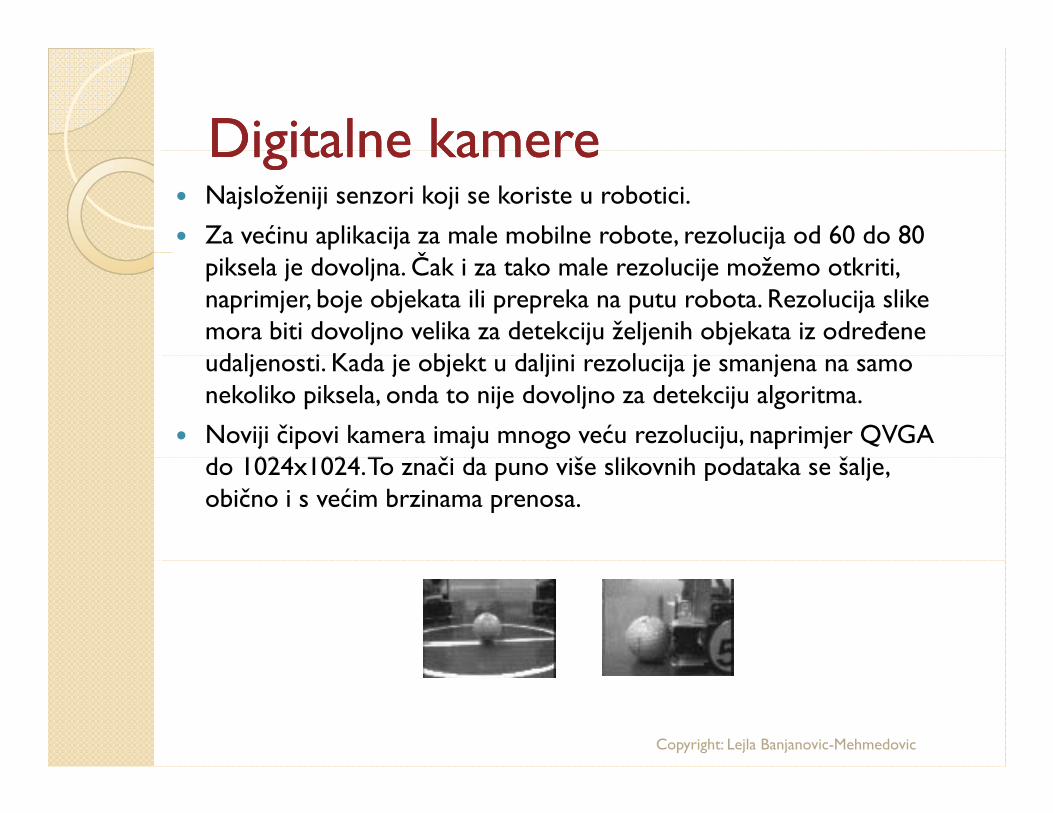
Digitalne kamereDigitalne kamereDigitalne kamereDigitalne kamere Najsloženiji senzori koji se koriste u robotici.
Za većinu aplikacija za male mobilne robote, rezolucija od 60 do 80 Čpiksela je dovoljna. Čak i za tako male rezolucije možemo otkriti,
naprimjer, boje objekata ili prepreka na putu robota. Rezolucija slike mora biti dovoljno velika za detekciju željenih objekata iz određene d lj i K d j bj k d lji i l ij j j udaljenosti. Kada je objekt u daljini rezolucija je smanjena na samo
nekoliko piksela, onda to nije dovoljno za detekciju algoritma.
Noviji čipovi kamera imaju mnogo veću rezoluciju, naprimjer QVGA d 1024 1024 T či d iš lik ih d k š lj do 1024x1024. To znači da puno više slikovnih podataka se šalje, obično i s većim brzinama prenosa.
Copyright: Lejla Banjanovic-Mehmedovic
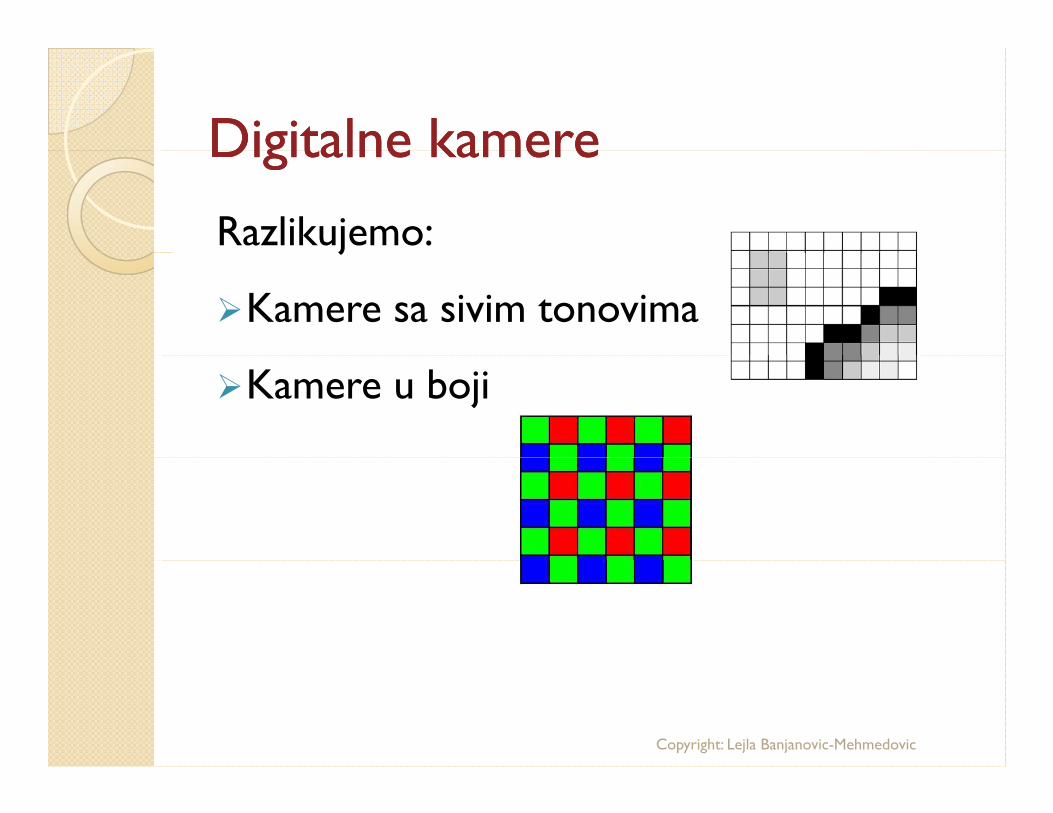
Digitalne kamereDigitalne kamereDigitalne kamereDigitalne kamere
Razlikujemo:j
Kamere sa sivim tonovima
Kamere u boji
Copyright: Lejla Banjanovic-Mehmedovic









![001 Tmkusuma2013 IT-012276 ROBOTIKA [Dasar-Dasar Robotika]](https://img.pdfslide.tips/doc/110x75/577cd0591a28ab9e789205c1/001-tmkusuma2013-it-012276-robotika-dasar-dasar-robotika.jpg)