Embed Size (px)
Citation preview
ESCUELA POLITECNICA NACIONAL
FACULTAD DE INGENIERIA MECANICA
CONTROL AUTOMATICO
SERVOMECANISMOS ELECTROHIDRAULICOS
Introducción
Un servomecanismo es un sistema formado de partes mecánicas y electrónicas.
Puede estar formado también de partes neumáticas, hidráulicas y controladas con
precisión. Ejemplos: brazo robot, mecanismo de frenos automotor, etc.
Ya desde la segunda mitad del siglo XIX los ingenieros inventaron máquinas
capaces de regular su actividad por sí mismas; llamamos servomecanismos a estas
máquinas. Se trata de dispositivos capaces de captar información del medio y de
modificar sus estados en función de las circunstancias y regular su actividad de cara
a la consecución de una meta.
Los servomecanismos tienen internamente una serie de componentes que en
conjunto caracterizan su funcionamiento. Estos son: circuito de control,
potenciómetro interno y el tope mecánico en el eje de salida. Según se modifiquen,
se pueden obtener diferentes comportamientos. A continuación se enumeran dichos
componentes y las características que se añaden o se eliminan:
1. Con Control: El circuito de control se encarga de recibir la modulación tipo
pulsos y ordenar al motor situarse en una posición relacionada con la anchura del
pulso recibido. Para ello es necesario que esté el potenciómetro. Si éste no se
encuentra, el circuito de control sólo puede mover el eje del motor hacia la izquierda
o hacia la derecha. Esta característica se puede emplear para evitar usar etapas de
potencia para mover el motor, el inconveniente es que se manejan señales de
control más complicadas.
1
2. Sin control: Al quitar el circuito de control se tendrá que usar un circuito de
potencia externo, pero ahora la señal de control será más sencilla, no será
obligatorio generar modulación. Otros inconvenientes se encuentran a la hora de
cerrar el bucle. Para ello es necesario utilizar el potenciómetro pero el valor de éste
hay que procesarlo con un circuito exterior.
3. Con potenciómetro: Establece un tipo de tope mecánico. Con él se pueden
realizar bucles cerrados de control. Cuando se tiene el circuito de control el bucle se
cerrar á internamente. Esto es muy útil en aeromodelismo, ya que, por control
remoto indicamos la posición que debe tomar el eje y el propio servomotor se
encarga de buscarla y posicionar su eje en ella. De esa forma, no hay que transmitir
datos desde el avión hasta el mando de control remoto. Si no hay circuito de control
el bucle se tendrá que cerrar externamente.
4. Sin potenciómetro: Se elimina el primer tope mecánico y la posibilidad de
cerrar el bucle. Si se mantiene el circuito de control se puede realizar un control
izquierda derecha en bucle abierto por medio de los pulsos, evitando poner un
circuito de potencia externo.
5. Con topes mecánicos: Sólo se tienen giros limitados, su aplicación es muy útil
en brazos robots, pinzas, manipuladores, mecanismos ON/OFF, aeromodelismo,
etc.
6. Sin topes mecánicos: Se eliminará el tope del rodamiento y el potenciómetro,
por lo tanto se pierde la posibilidad de cerrar el bucle internamente.
Generalidades
Un servomecanismo es un sistema de control por realimentación en los cuales la
variable controlada es una posición mecánica que constituye un servosistema, esto
es, todo sistema encargado de transmitir una orden o información de un punto a
otro, comparando los resultados obtenidos en el extremo receptor con los que se
deseaba obtener y deduciendo de esta comparación una señal correctora que
introducida automáticamente en el sistema modifique los resultados para conseguir
el valor deseado. Entonces la variable controlada ya no tiene por qué ser una
posición mecánica, pudiendo tratarse de cualquier otra magnitud física.
Partes de un servomecanismo
2
Las partes de un servomecanismo son las siguientes:
a) Comparador: Recibe la señal de entrada y una medida de la señal de salida,
comparando ambas para obtener una orden correctora.
b) Elementos de control: Son los encargados de transformar e incluso amplificar la
orden correctora para disponerla en condiciones de actuar sobre la parte siguiente.
c) Sistema controlador: Recibe la orden correctora previamente preparada para
ponerse en acción y llevar la señal de salida o variable controlada al valor prescrito.
d) Elementos de medida de la señal de salida: Toman la señal de salida, o más
generalmente una parte de ella, y la transforman haciendo posible su comparación
con la de entrada.
Funcionamiento de un servomecanismo
Las propiedades esenciales que debe reunir un servomecanismo en su
funcionamiento son: sensibilidad a la excitación, precisión y estabilidad. El
funcionamiento puede realizarse en régimen permanente y en régimen transitorio,
pues el sistema controlado siempre es de tipo dinámico. Si la carga es mecánica, la
variable controlada será una posición, una velocidad o una aceleración. Si no es
mecánica, la variable será de otro tipo, pero a los efectos de estudio siempre se
podrá reducir a uno de los anteriores.
El comportamiento se medirá en función de la precisión lograda. En régimen
transitorio, un funcionamiento incorrecto del sistema lleva consigo que nunca se
llegue al régimen permanente, quedando el sistema en condiciones de inestabilidad.
El régimen transitorio puede definirse como el paso de un régimen permanente a
otro diferente. Este paso queda determinado si se conocen las tres variables
siguientes: velocidad de respuesta o tiempo de tránsito, valor máximo de la
oscilación transitoria y frecuencia de dicha oscilación.
3
En el diseño de un servomecanismo o bien en el análisis del funcionamiento de uno
ya existente, es esencial considerar los tres aspectos siguientes: estabilidad,
comportamiento en régimen permanente y comportamiento en régimen transitorio.
Componentes de un servomecanismo
Un servomecanismo puede estar formado por uno o varios elementos que en
conjunto realicen la función correspondiente. Estos componentes pueden ser
eléctricos, mecánicos, electromecánicos, hidráulicos y neumáticos, clasificación que
se basa en los conceptos físicos esenciales que rigen su funcionamiento; pero
atendiendo a su misión en el diagrama-bloque, los componentes de un
servomecanismo pueden clasificarse en detectores de error, amplificadores y
generadores y motores.
Figura 1. Diagrama de bloques de un servomecanismo
1) Detectores de error.- Son los elementos que constituyen el comparador. Su
misión es obtener la señal correctora a partir de la comparación entre las señales de
entrada y salida. Los dispositivos que se utilizan con tal fin pueden ser: máquinas
síncronas, potenciómetros, células fotoeléctricas, circuitos electrónicos,
termómetros, manómetros, etc.
2) Amplificadores.- Forman los elementos de control, destinados a elevar el nivel
de la señal correctora y modificarla de forma que resulte una nueva señal de
4
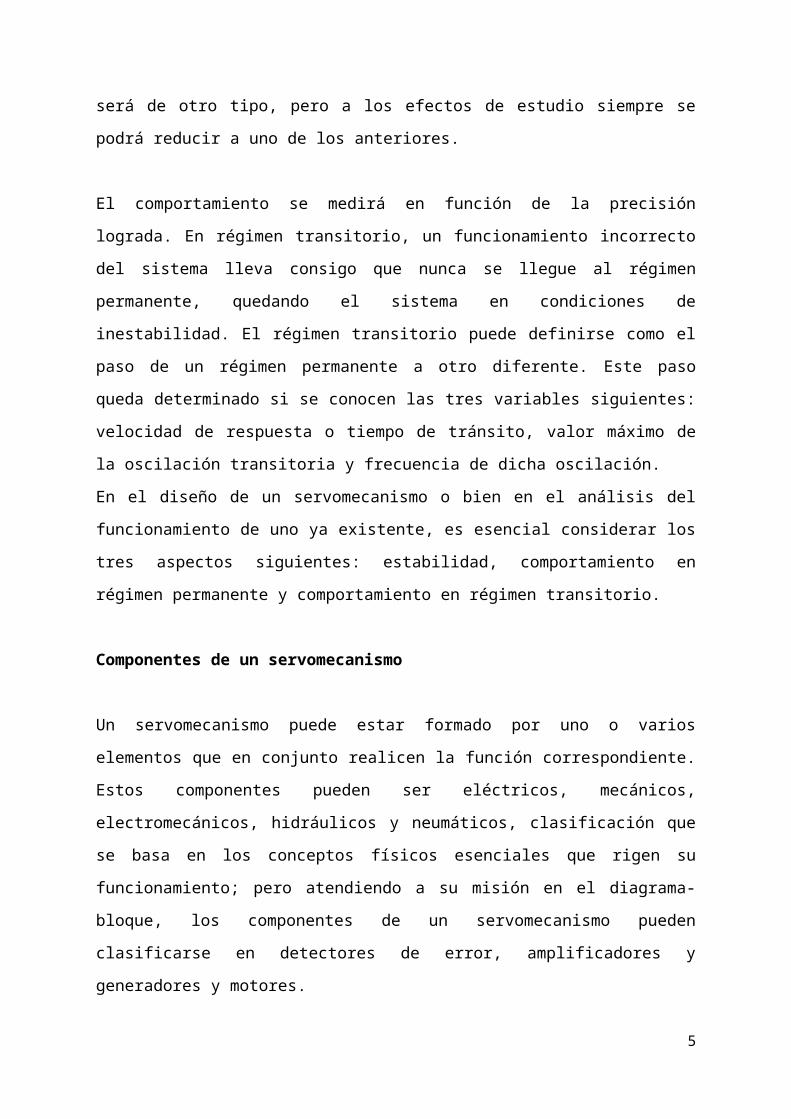
magnitud física y nivel adecuados para gobernar el sistema controlado. Con tal fin
se utilizan elementos mecánicos (mecánicos puros, neumáticos o hidráulicos) y
eléctricos (electrónicos, magnéticos y dinámicos).
3) Generadores y motores. Pueden formar parte de los elementos de control o del
sistema controlado. Son, en definitiva, los que gobiernan la señal de salida. Pueden
ser eléctricos y mecánicos (hidráulicos, neumáticos, etc.). Lo más frecuente es
utilizar motores de excitación constante gobernados por la corriente que recorre la
armadura o bien de excitación variable que reciben en sus inductores la señal
procedente del amplificador.
Servomecanismos Electrohidráulicos
Los servomecanismos electrohidráulicos son capaces de tener un mayor
rendimiento que cualquier otro tipo de servo. Elevada inercia y carga de torque
puede ser manejada con gran precisión y con una rápida respuesta. La parte de
potencia de estos servos consiste de una servo-válvula electrohidráulica, actuador
hidráulico y una fuente de poder hidráulica. La parte de error del lazo del servo
consiste de transductores de realimentación el cual mide la cantidad controlada, y
amplificadores electrónicos, discriminadores, y redes de compensación apropiados
para proporcionar la señal a la servo-válvula para cerrar el lazo. Los servos
electrohidráulicos derivan su flexibilidad de la parte electrónica y su habilidad de
manejo de potencia de la parte hidráulica.
La parte electrónica del lazo añade flexibilidad al servo electrohidráulico en muchos
aspectos. La amplia variedad de transductores eléctricos permite el control de
muchos parámetros. La versatilidad de los amplificadores eléctricos permite
cambios de ganancia y permite el uso de redes de compensación para corregir un
insatisfactorio lazo de ganancia del servo. Dichas redes consisten de resistores y
capacitores los cuales son más simples y más susceptibles a variaciones de
parámetros comparados con redes mecánicas y/o hidráulicas equivalentes. Estas
redes correctivas manipulan el lazo de ganancia y permiten diseñar una opción de
5
baja frecuencia (esencialmente estática) y características de rendimiento como error
de estado estable y estabilidad debido a cargas estáticas.
Resistencias añadidas y amplificadores diferenciales permiten que otros parámetros
sean realimentados en lazos secundarios para alterar características dinámicas de
elementos particulares en todo el lazo. Una variación de los transductores de
realimentación, facilidad de corrección de señal, y adición de lazos menores hacen
de los servos electrohidráulicos muy versátiles y la mejor opción para muchas
aplicaciones.
Los dispositivos de medida de retroalimentación teniendo salidas eléctrica pueden
ser obtenidos para censar casi cualquier magnitud física como posición, velocidad,
aceleración, fuerza, presión, temperatura, humedad, ligeras intensidades, etc., y los
servos electrohidráulicos pueden ser diseñados para controlar cualquiera de estas
magnitudes. La posición es probablemente la magnitud que más a menudo es
controlada, y típicamente los dispositivos para censar la posición son síncronos,
recolectores de reluctancia variable, y potenciómetros.
Tacómetros y acelerómetros son usados para obtener velocidad y aceleración como
señales eléctricas. Señales eléctricas proporcionales a la fuerza o presión pueden
ser obtenidas desde muchos tipos de sensores comerciales. La forma de onda de la
salida eléctrica depende de un transductor particular. Algunos dispositivos tienen
una salida eléctrica la cual varia continuamente con la magnitud que está siendo
medida. Este tipo de salida es usualmente referida como d–c, pero el nombre no es
particularmente apropiado porque la forma de onda de salida puede tener cualquier
forma.
Un segundo tipo de salida utiliza la señal para amplitud modulada con frecuencia de
60 o 400 cps o a veces superior. Debido a que esta frecuencia se da solo para
señales de entrada d-c, el resultado se llama supresor de modulación. Este tipo de
salida, típico de transductores síncronos y otros transductores comunes, requiere un
discriminador para recobrar la consistencia de un tren de pulsos cuyas amplitudes
son moduladas de forma proporcional a la magnitud que es medida. Por lo tanto, la
magnitud medida es muestreado en intervalos discretos. Este tipo de forma de onda
es encontrada en sistemas que tienen entradas digitales. Sistemas que usan estos
6
tres tipos de señales electicas son referidos como datos d-c, datos a-c, y datos
muestreados, respectivamente.
Los servos electrohidráulicos son usualmente clasificados por el nombre de la
magnitud controlada. Otras características de diseño como el tipo de información en
la sección electrónica, tipo des series de compensación. Magnitudes realimentadas
in lazo menor, potencia, etc., son también usados a menudo para propósitos
descriptivos.
Selección de suministro de presión y elementos de potencia
En esta sección se estudiara los factores envueltos en la selección de sistemas de
suministro de presión y determinar el tamaño de servo válvulas y de actuadores
hidráulicos para servos.
Selección de suministro de presión
Uno de los primeros pasos en el diseño de un sistema de control hidráulico
operando con un suministro constante de presión y flujo. Cuando se aumenta el
suministro de presión, menor flujo es requerido para alcanzar una potencia dada.
Como resultado todo el peso disminuye. Sin embargo, consideraciones más
exigentes dictan un incremento en el peso. Una respuesta más rápida es a menudo
posible debido a un volumen menor de aceite, pero éstas no son consideraciones
importantes porque un sistema de baja presión se puede diseñar con respuesta
comparable.
Varios factores sugieren presiones más bajas del suministro. Las salidas aumentan
con la presión del suministro y resulta en temperaturas del aceite más altas.
Consecuentemente, las tolerancias se deben apretar y el coste del sistema es
superior. El ruido desagradable también aumenta con la presión. La vida de los
componentes, especialmente la de los motores rotatorios con cojinetes de bolas
antifricción, disminuye substancialmente debido a cargas más altas en los cojinetes.
Estas consideraciones han resultado en el uso de 500 a 2000 psi para sistemas
industriales y 3000 a 4000 psi sistemas de aeronáuticos debido al beneficio de la
reducción de peso. En general, menores presiones de suministro son siempre
7
deseables cuando la opción permite porque estas son mas conducibles a lo largo de
los componentes, produce menores salidas las cuales minimizan perdidas de
potencia y necesitan menor mantenimiento.
Por supuesto, la última opción de suministro debe ser hecha en conjunto con el
actuador hidráulico para obtener las cargas esperadas en el rango de presión de los
componentes envueltos.
Transferencia máxima de potencia para carga con una servo válvula
Esto será de utilidad para determinar las condiciones para la máxima transferencia
de potencia a la carga con una servo válvula controlada por un actuador. Por
simplicidad se asume una valvula de centro critico para la cual el flujo con un
desplazamiento positivo del carrete se ha demostrado ser:
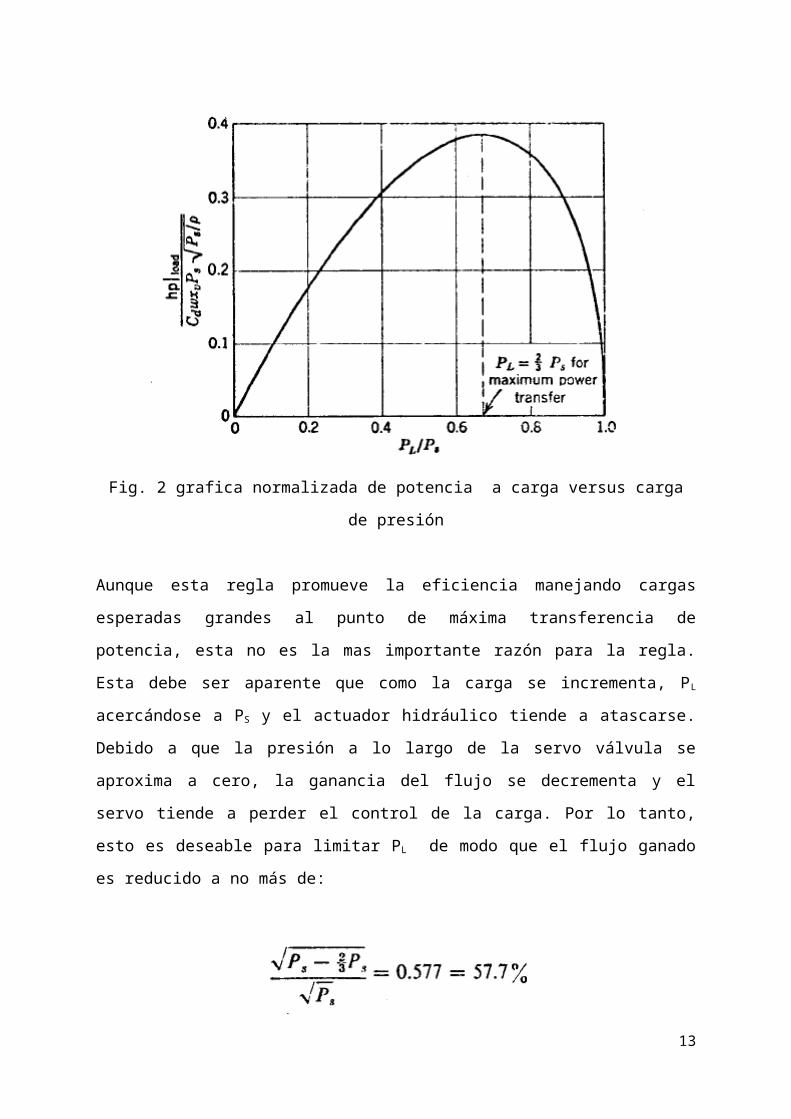
La potencia en HP suministrada a la carga es entonces:
La cual se encuentra graficada en la figura 2. La carga en HP es cero cuando PL =
PS porque sigue habiendo no queda ningún vestigio de presión a través de los
orificios de la servo válvula para producir un flujo que cause el movimiento del
actuador; el actuador se atasca. Cuando PL = 0 no se requiere ninguna potencia en
HP para la carga. La máxima potencia en HP ocurre entre los extremos y es
encontrado por la forma d hP /loaddPL
= 0 simplificando lo dado resulta en:
De esta forma, la máxima potencia es transferida a la carga cuando la presión a
través de la carga es dos tercios de la presión de suministro. Sin embargo, debido a
que PL es usualmente cambiante durante la operación del servo, esta será 2/3 PS
durante un pequeño intervalo de tiempo de funcionamiento del servo. Por lo tanto la
8
potencia es usualmente transferida a la carga de una manera menos óptima.
Entonces esta relación no es muy usada en diseños a menos que la carga sea
relativamente constante durante todo el ciclo.
Sin embargo, como regla general los elementos de potencia son dimensionados
como PL no excede 2/3 PS para la máxima carga normalmente esperada.
Fig. 2 grafica normalizada de potencia a carga versus carga de presión
Aunque esta regla promueve la eficiencia manejando cargas esperadas grandes al
punto de máxima transferencia de potencia, esta no es la mas importante razón
para la regla. Esta debe ser aparente que como la carga se incrementa, PL
acercándose a PS y el actuador hidráulico tiende a atascarse. Debido a que la
presión a lo largo de la servo válvula se aproxima a cero, la ganancia del flujo se
decrementa y el servo tiende a perder el control de la carga. Por lo tanto, esto es
deseable para limitar PL de modo que el flujo ganado es reducido a no más de:
9
de la carga de flujo no ganada. Debido a que los servos son usualmente diseñados
para proveer control suficiente si el lazo de ganancia se inclina para la mitad para
permitir márgenes por cambio de ganancia en componentes debido a tolerancias,
deterioro por envejecimiento temperatura, cargas, etc., entonces la regla del 2/3 PS
parecería ser educado y debe ser utilizado con precaución.
Aunque sea absolutamente posible que las altas tasas de la aceleración durante
cambios rápidos pueden causar PL para acceder 2/3 PS como condiciones son
usualmente de corta duración y no necesitan ser tomadas en cuenta.
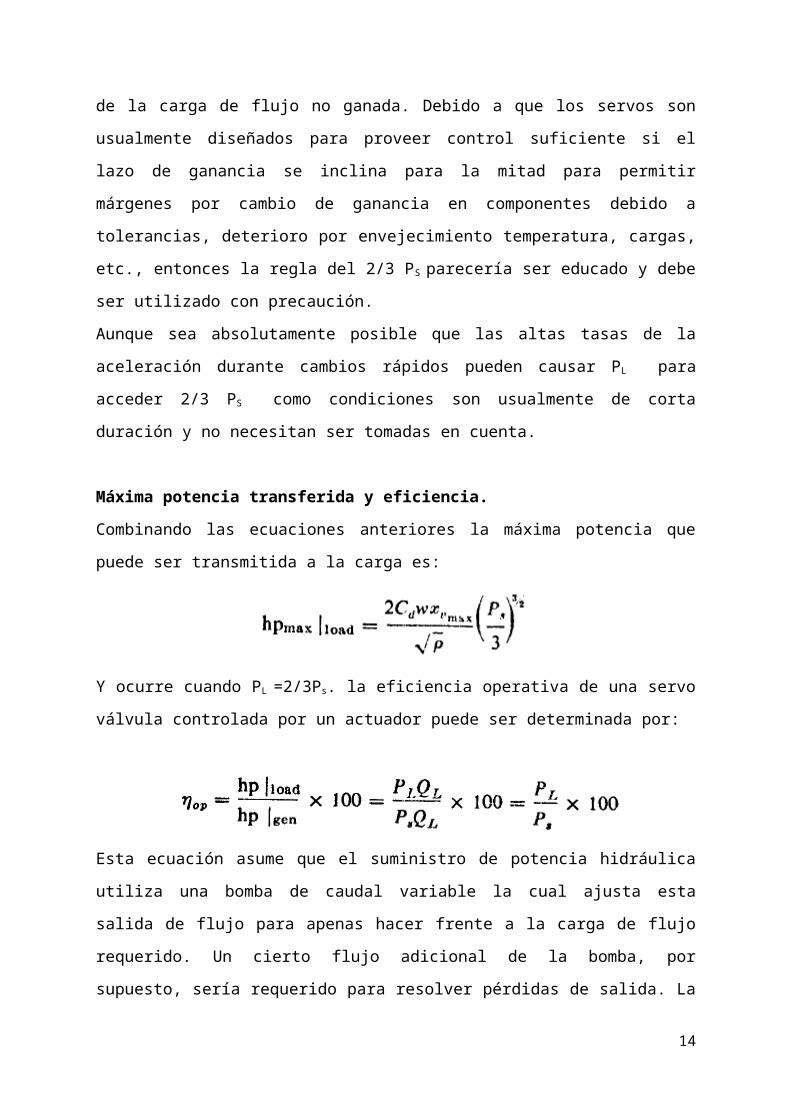
Máxima potencia transferida y eficiencia.
Combinando las ecuaciones anteriores la máxima potencia que puede ser
transmitida a la carga es:
Y ocurre cuando PL =2/3Ps. la eficiencia operativa de una servo válvula controlada
por un actuador puede ser determinada por:
Esta ecuación asume que el suministro de potencia hidráulica utiliza una bomba de
caudal variable la cual ajusta esta salida de flujo para apenas hacer frente a la carga
de flujo requerido. Un cierto flujo adicional de la bomba, por supuesto, sería
requerido para resolver pérdidas de salida. La eficiencia operativa es cero cuando
no hay carga y se incrementa el 100% con una carga de parada. Debido a que
PL/PS es normalmente limitada a 2/3, la máxima eficiencia operativa es 67% para
servo válvulas controladas por actuadores. La potencia generada a condición de no
carga (PL=0), la cual es disipada al aceite caliente a lo largo de todos los orificios de
la servo válvula, pueden variar ampliamente desde cero a PSQLmax, dependiendo del
fluido requerido para alcanzar la máxima velocidad (QLMAX).
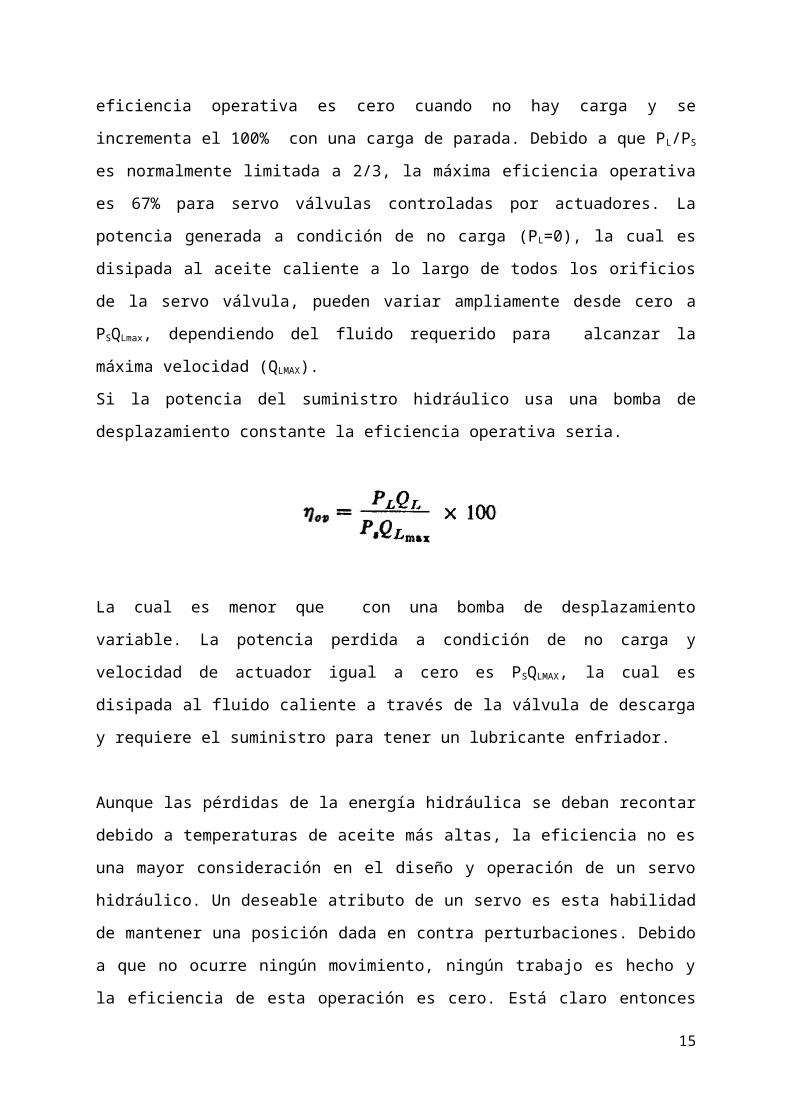
Si la potencia del suministro hidráulico usa una bomba de desplazamiento constante
la eficiencia operativa seria.
10
La cual es menor que con una bomba de desplazamiento variable. La potencia
perdida a condición de no carga y velocidad de actuador igual a cero es PSQLMAX, la
cual es disipada al fluido caliente a través de la válvula de descarga y requiere el
suministro para tener un lubricante enfriador.
Aunque las pérdidas de la energía hidráulica se deban recontar debido a
temperaturas de aceite más altas, la eficiencia no es una mayor consideración en el
diseño y operación de un servo hidráulico. Un deseable atributo de un servo es esta
habilidad de mantener una posición dada en contra perturbaciones. Debido a que no
ocurre ningún movimiento, ningún trabajo es hecho y la eficiencia de esta operación
es cero. Está claro entonces que los factores tales como exactitud, respuesta, y
conformidad son las consideraciones que compensan la eficiencia.
Generalmente, la potencia envuelta en procesos bajo control es mucho mayor que
la requerida para propósitos de control. Por lo tanto, las mejoras en la eficacia del
proceso bajo control conllevarían la reducción de costos totales.
Selección de actuadores hidráulicos
Dos consideraciones básicas gobiernan el tamaño (por ejemplo: área del pistón o
desplazamiento del motor) seleccionados por el dispositivo de potencia de salida de
un sistema hidráulico:
1. El tamaño debe ser tan lo suficientemente grande como para manejar cargas
estimadas durante un ciclo de trabajo. Este es a menudo el propósito primario
de un actuador y requiere de análisis de un ciclo de trabajo típico para
obtener los requerimientos de carga HP y la fuerza o torque.
2. La respuesta de lazo cerrado de un servo es limitada por la resonancia más
baja del lazo abierto. Debido a que ésta es generalmente la frecuencia
natural hidráulica de la carga del motor, esta debe ser lo suficiente mente
bastante grande para permitir una respuesta aceptable del servo. Por lo
11
tanto, el tamaño del actuador debe ser lo suficientemente grande de modo
que la frecuencia natural asociada sea adecuada.
Ambos factores son importantes y requieren atención. Un actuador que maneja la
carga pero es demasiado lento en su respuesta será igual de insatisfactorio que uno
que sea lo suficientemente grande como para manejar dicha carga. Sin embargo, es
también importante no sobredimensionar actuadores de modo que el flujo requerido
para máxima velocidad es reducido al mínimo. Por otro lado, el suministro de
energía hidráulica se llega a abultar con perdidas grandes s de potencia. Esta es la
desventaja básica para seleccionar actuadores de gran tamaño. En algunos casos
donde las cargas son extremadamente grandes, el tamaño del actuador es escogido
principalmente para manejar a la carga y las características de respuesta son
secundarias.
Como un ejemplo, suponer que el dispositivo de salida es un pistón. El área de
pistón requerida puede ser encontrada resolviendo la ecuación siguiente:
Análisis del más exigente ciclo de trabajo dará valores para la máxima aceleración y
velocidad la cual puede ser asumida para que ocurra simultáneamente como una
primera aproximación. Usando los valores de 2/3 PS para PL existe un adecuado
control en la ganancia de flujo y la potencia requerida para la máxima carga es
transferida de una manera óptima. Si las especificaciones dinámicas para el sistema
son exigentes, el error de posición de la válvula permitido pueda ser multiplicado por
la sensibilidad de la presión de la servo válvula para determinar un valor para PL. si
este valor es usado, la carga máxima podría ser manejada sin un error especifico.
Sin embargo, el área del pistón seria grande and requerirá de grandes flujos para
máxima velocidad pero será garantizada en casos extremos.
La frecuencia natural hidráulica para una combinación de servo válvula y pistón se
calcula como:
12
Y debe ser lo suficientemente grande para obtener una adecuada respuesta
dinámica. Teóricamente, un análisis de la mayor demanda en la señal de entrada y
la respuesta deseada dará el espectro de frecuencia significativa la cual servo debe
pasar y establecer el ancho de banda de frecuencia requerida. Como se indico
antes la frecuencia hidráulica natural requerida puede ser relacionada con el ancho
de banda necesitado. Sin embargo, como con otras especificaciones también,
valores aceptables de frecuencia natural usualmente envuelven desde experiencia
y/o funcionamiento pasado de aplicaciones anteriores del servo. Para servos
hidráulicos los cuales desarrollan funciones computacionales o los cuales tienen
cargas ligeras, el área es escogida principalmente para dar una frecuencia
hidráulica natural lo suficientemente grande.
Selección de la relación de transmisión de movimiento por engranes
La selección dl desplazamiento de un actuador rotatorio es hecha sobre bases
similares a los pistones. Sin embargo, son necesarias condiciones adicionales para
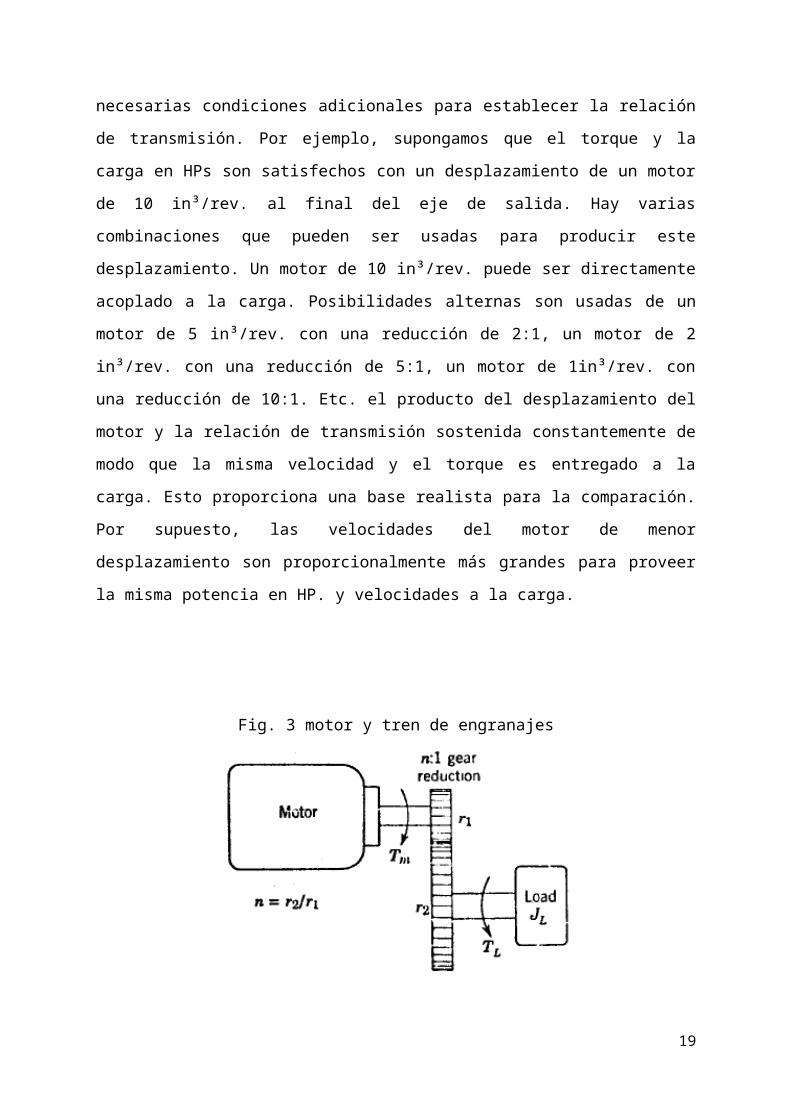
establecer la relación de transmisión. Por ejemplo, supongamos que el torque y la
carga en HPs son satisfechos con un desplazamiento de un motor de 10 in³/rev. al
final del eje de salida. Hay varias combinaciones que pueden ser usadas para
producir este desplazamiento. Un motor de 10 in³/rev. puede ser directamente
acoplado a la carga. Posibilidades alternas son usadas de un motor de 5 in³/rev. con
una reducción de 2:1, un motor de 2 in³/rev. con una reducción de 5:1, un motor de
1in³/rev. con una reducción de 10:1. Etc. el producto del desplazamiento del motor y
la relación de transmisión sostenida constantemente de modo que la misma
velocidad y el torque es entregado a la carga. Esto proporciona una base realista
para la comparación. Por supuesto, las velocidades del motor de menor
desplazamiento son proporcionalmente más grandes para proveer la misma
potencia en HP. y velocidades a la carga.
Fig. 3 motor y tren de engranajes
13
Sin embargo, la misma tasa de flujo para cada motor y combinación de engranes
alcanzara la misma velocidad de salida. Bajo esas circunstancias, que es torque
constante a la carga, cual combinación debe ser seleccionada?.
Varias consideraciones son posibles.
1. La razón más importante es que el torque para la tasa de inercia a la carga
es máximo. Entonces, la aceleración máxima de la carga es alcanzada con el
menor torque. Este hecho puede ser demostrado asumiendo un solo tren de
engranajes como el mostrado en la figura anterior y la ecuación del torque
para la carga es la siguiente:
Donde:
Se asume que JL, αL, y TL son condiciones de carga dadas.
El torque para la tasa de inercia a la carga es:
14
Esta función deber ser maximizada con respecto a la relación de transmisión. Sin
embargo, de esto depende encontrar el mínimo valor de la inercia reflejada del
motor debido a que motores pequeños usados con relaciones de transmisión
grandes tienen menor inercia. Empíricamente, la inercia del motor es proporcional al
1.5 de la potencia de desplazamiento. Por lo tanto, la inercia de un motor
directamente acoplado puede ser escrita:
donde k es una constante D es el desplazamiento. La inercia de motor con engranes
de desplazamiento DG seria:
Debido a que se asume que D=nDG, se puede formar una relación de estas inercia
para determinar la mayor. Entonces:
Un bosquejo de esta función muestra que la inercia reflejada del motor con
engranes es siempre mayor que la conducida directamente si n>1. Con esto, se
nota que la inercia del motor para una carga se incrementa más rápido debido a la
relación de transmisión que lo que se reduce debido a inercias de motores
pequeños. Como n es mayor que la unidad y la inercia mínima es deseable, se
puede concluir que la ecuación del torque es maximizada y mayores aceleraciones
son obtenidas tanto como una conexión directa sea posible.
Otros factores que favorecen la conexión directa son los siguientes:
2. Mínima reacción violenta desde que son eliminados los engranes. Las
reacciones violentas son las mas severas en los letargos de servos
compensadores de tipo 1 y servos de tipo 2 debido a su tendencia a ciclos
oscilatorios. Las reacciones violentas de los engranes aparecerán fuera del
15
lazo y no afectan la estabilidad si la retroalimentación es tomada desde el eje
del motor que desde el eje a la salida.
3. Alta sujeción es alcanzada eliminando la elasticidad del tren de engranajes.
4. Bajas velocidades de operación promueven la fiabilidad y larga vida pero
requiere motores con buen despeno a velocidades bajas, que es, mínimo
torque y velocidad ondeante
Selección de Servo válvulas
Las servo válvulas electrohidráulicas son usualmente dimensionadas por el flujo de
carga obtenible a carga máxima y con una presión de 1000 psi. Por lo tanto
tenemos los siguientes factores:
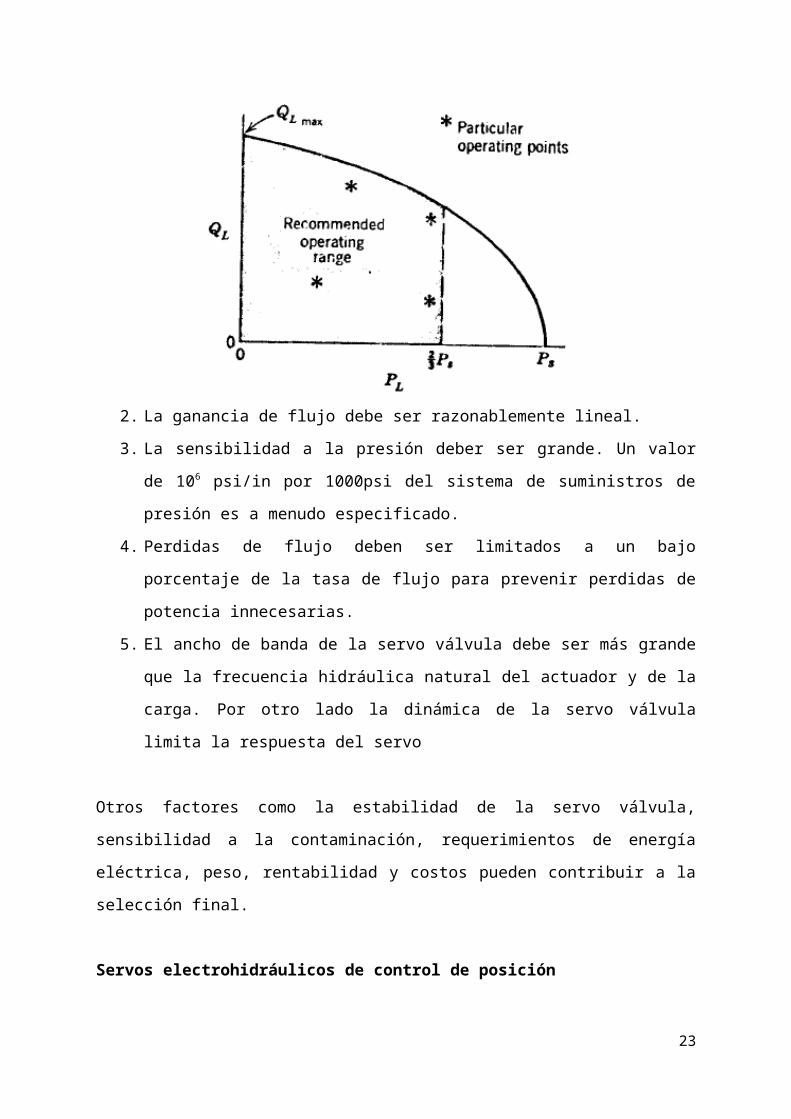
1. Como lo muestra la figura 4. La curva de la presión del flujo para máximo
golpeteo deben encontrarse todo el flujo de carga y la presión de la carga de
modo que PL< 2/3PS. esto asegura que el flujo adecuado y la potencia sean
entregados por el actuador hidráulico y es el factor básico en el
dimensionamiento de una servo válvula
Figura 4. Curva de presión del flujo
2. La ganancia de flujo debe ser razonablemente lineal.
3. La sensibilidad a la presión deber ser grande. Un valor de 106 psi/in por
1000psi del sistema de suministros de presión es a menudo especificado.
16
4. Perdidas de flujo deben ser limitados a un bajo porcentaje de la tasa de flujo
para prevenir perdidas de potencia innecesarias.
5. El ancho de banda de la servo válvula debe ser más grande que la frecuencia
hidráulica natural del actuador y de la carga. Por otro lado la dinámica de la
servo válvula limita la respuesta del servo
Otros factores como la estabilidad de la servo válvula, sensibilidad a la
contaminación, requerimientos de energía eléctrica, peso, rentabilidad y costos
pueden contribuir a la selección final.
Servos electrohidráulicos de control de posición
El tipo más común de servos electrohidráulicos son aquellos usados para controlar
la posición. Un análisis de dicho servo, omitiendo alguna forma de compensación
como lazos cortos o redes tardías, establecerán criterios significativos de
funcionamiento y sugiere un procedimiento de diseño. Un entendimiento de los
parámetros básicos y problemas asociados con este tipo de servos es
fundamentalmente para el diseño de otros servos electrohidráulicos asi como
también incluyendo los regímenes de compensación y estos son usados para
controlar otras magnitudes físicas.
Diagrama de bloques del lazo del servo
Un simple, servo electrohidráulico rotativo de control de posición sin compensación
es ilustrado en la figura 5. Un par de sincrónicos son usados para medir el error
entre la entrada (referencia) y salida (controlada) de la posición del eje. Estos
dispositivos dan una señal eléctrica de amplitud modulada a la salida la cual es
proporcional al error instantáneo.
La porción de señal de la salida es dada por:
Donde Ke es el voltaje de salida a máximo acople entre rotores y estatores y es una
constante la cual depende del voltaje de referencia y tasas de transformación entre
rotores y estatores de las unidades sincrónicas.
17
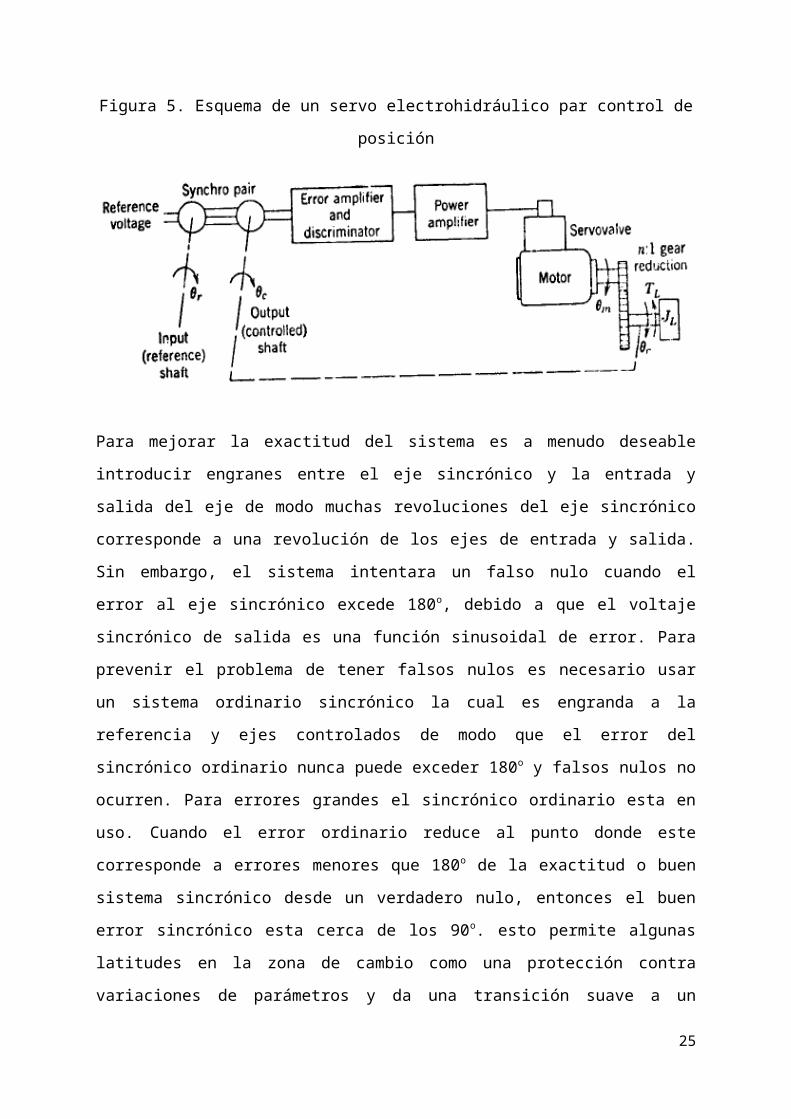
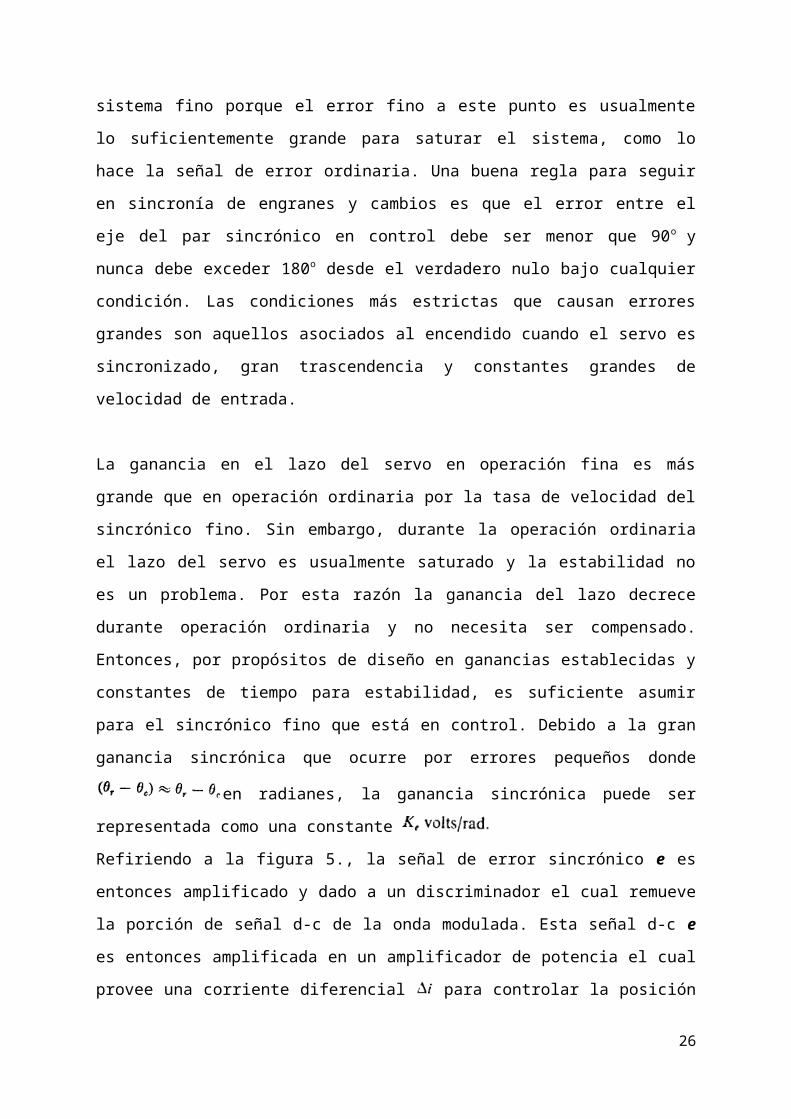
Figura 5. Esquema de un servo electrohidráulico par control de posición
Para mejorar la exactitud del sistema es a menudo deseable introducir engranes
entre el eje sincrónico y la entrada y salida del eje de modo muchas revoluciones del
eje sincrónico corresponde a una revolución de los ejes de entrada y salida. Sin
embargo, el sistema intentara un falso nulo cuando el error al eje sincrónico excede
180o, debido a que el voltaje sincrónico de salida es una función sinusoidal de error.
Para prevenir el problema de tener falsos nulos es necesario usar un sistema
ordinario sincrónico la cual es engranda a la referencia y ejes controlados de modo
que el error del sincrónico ordinario nunca puede exceder 180o y falsos nulos no
ocurren. Para errores grandes el sincrónico ordinario esta en uso. Cuando el error
ordinario reduce al punto donde este corresponde a errores menores que 180o de la
exactitud o buen sistema sincrónico desde un verdadero nulo, entonces el buen
error sincrónico esta cerca de los 90o. esto permite algunas latitudes en la zona de
cambio como una protección contra variaciones de parámetros y da una transición
suave a un sistema fino porque el error fino a este punto es usualmente lo
suficientemente grande para saturar el sistema, como lo hace la señal de error
ordinaria. Una buena regla para seguir en sincronía de engranes y cambios es que
el error entre el eje del par sincrónico en control debe ser menor que 90o y nunca
debe exceder 180o desde el verdadero nulo bajo cualquier condición. Las
condiciones más estrictas que causan errores grandes son aquellos asociados al
encendido cuando el servo es sincronizado, gran trascendencia y constantes
grandes de velocidad de entrada.
18
La ganancia en el lazo del servo en operación fina es más grande que en operación
ordinaria por la tasa de velocidad del sincrónico fino. Sin embargo, durante la
operación ordinaria el lazo del servo es usualmente saturado y la estabilidad no es
un problema. Por esta razón la ganancia del lazo decrece durante operación
ordinaria y no necesita ser compensado. Entonces, por propósitos de diseño en
ganancias establecidas y constantes de tiempo para estabilidad, es suficiente
asumir para el sincrónico fino que está en control. Debido a la gran ganancia
sincrónica que ocurre por errores pequeños donde en radianes, la
ganancia sincrónica puede ser representada como una constante
Refiriendo a la figura 5., la señal de error sincrónico e es entonces amplificado y
dado a un discriminador el cual remueve la porción de señal d-c de la onda
modulada. Esta señal d-c e es entonces amplificada en un amplificador de potencia
el cual provee una corriente diferencial para controlar la posición del vástago de
la servo válvula. En series de servos compensados, las redes de compensación son
insertadas entre el discriminador y el amplificador de potencia.
El diseño de amplificadores y discriminadores en la parte electrónica del lazo es
discutible. Debido a que estos componentes tienen dinámica negligente comparada
con los componentes hidromecánicos, ellos pueden ser descritos por su estado
estable de ganancia constante. Entonces la ganancia del error del amplificador y
discriminador son:
La función de transferencia desde la entrada de voltaje al el amplificador de potencia
hasta la posición del vástago de la servo válvula es de la forma:
Donde KS in./volt es la constante de ganancia de la servo válvula y amplificador. Los
retrasos a w1 y w2 rad/sec desde la constante de tiempo inductivo (L/R) del torque
del motor con armadura y desde la frecuencia cursante del lazo de posición del
vástago. La frecuencia natural wo es debido a la resonancia del torque del motor.
19
Los elementos remanentes en el lazo es la combinación válvula-motor. La función
de transferencia de la combinación particular pueden ser seleccionados según sus
detalles. Se asume una inercia de carga simple y dinámica no estructurada de modo
que los elementos de potencia sean descritos. Este caso es por lejos el más común
y más frecuentemente usado como un modelo en diseño de sistemas. Entonces:
Donde TL es el torque de carga a la salida del eje. La carga de inercia debe ser
apropiadamente reflejada en cálculos con la frecuencia hidráulica natural .
El motor y cargas de velocidad son relacionados por la relación de transmisión.
Entonces:
Esta descripción matemática de los elementos en el lazo puede ser usado para
formar el diagrama de bloques del servo. Estabilidad y otras funciones
características pueden ser calculadas desde el diagrama.
Análisis de estabilidad
La estabilidad es probablemente la función más importante de un servo y a menudo
requiere algún sacrificio en la velocidad de respuesta. El diseño del lazo dinámico es
usualmente centrado alrededor de los requerimientos por estabilidad. El diagrama
de bode es el método mas usado para el análisis de estabilidad en control hidráulico
debido a la tendencia a variar de los parámetros. Debido a los diagrams de bode
son segmentados rápidamente, la estabilidad puede ser investigada por un amplio
rango de variaciones de parámetros, y debe ser siempre hecho.
El diagrama de bode es una grafica de ganancia en lazo abierto el cual está dado
por:
20
donde es la constante de ganancia del lazo
abierto. La s libre en el denominador indica una integración de modo que este lazo
de servo es tipo 1 y tiene una posición de error cero. El error de estado estable para
la constante de velocidad de entrada es simplemente la velocidad de entrada
dividida para Kv.
21
Figura 6. Diagrama de bloques del servo electrohidráulico de control de posición
22
Este lazo de función de ganancia es muy complicado y una expresión simplificada la
cual aun retenga información esencial para la estabilidad es deseable. Debido a que
las servo válvulas tienen rápidas respuestas, la frecuencia hidráulica natural es
usualmente la mas lenta frecuencia de ruptura en el lazo y domina la función
dinámica. De modo que el lazo de ganancia puede ser aproximado a:
Figura 7. Diagrama de bode del lazo de control de posición
La figura 7 muestra el diagrama de bode de la ecuación anterior. Si la resonancia
del pico de la raíz cuadrática por encima de la unidad de ganancia, entonces el
sistema llega a ser inestable debido al punto critico del diagrama de Nyquist. Desde
23
la geometría del diagrama asintótico, note que la frecuencia cursante es
aproximadamente igual a la velocidad constante
El nivel de ganancia del diagrama asintótico es a la frecuencia . Este
nivel es amplificado por el factor , el cual es el factor de amplificación del
cuadrático a la resonancia. Entonces, el nivel de ganancia al pico de resonancia es
y debeb ser menor que la unidad por estabilidad. Por lo tanto, el criterio
de estabilidad es:
Este resultado es fundamental para el diseño de todo servo hidráulico y puede ser
de rigurosidad derivada por la formación de la ecuación característica
, y aplicando el criterio de estabilidad de Routh. Debido a las
moderadas tasas de humedad de 0.1 y 0.2 que son características de un sistema, la
constante de velocidad es limitada al 20% o 40% de la frecuencia hidráulica natural.
Este hecho provee una regla muy usada para propósitos de diseño. Debido a que
y son aproximadamente iguales, esta regla también da la frecuencia
permisible.
Del criterio de estabilidad se nota que una constante de velocidad grande requiere
una frecuencia hidráulica grande, y grandes tasas de humedad. Ambas magnitudes
son arregladas una vez que el elemento de potencia es seleccionado.
Respuesta a la referencia y torque de entrada.
Dos importantes características del lazo del servo son la respuesta del lazo cerrado
a la referencia de entrada, esto es y el acatamiento debido al torque de
entrada, esto es . La rigidez del lazo cerrado, la cual es la relación
y es a menudo preferida. Estas características se muestran en el
24
digrama de bloques de la figura 8. La cual se basa en una aproximación del lazo de
la función de ganancia.
La respuesta de lazo cerrado esta dada por:
El denominador de esta expresión es la ecuación característica del sistema la cual
es cubica. Debido a esta expresión cubica puede ser representada por un factor
lineal y cuadrático, y se puede escribir:
Donde es la frecuencia de ruptura del factor lineal es la frecuencia natural
del factor cuadrático, y es la tasa de amortiguamiento del factor cuadratico.
Figura 8. Diagrama simplificado de bloques
25
Normalmente estas magnitudes pueden ser encontradas solo si el cubo tiene
coeficientes numéricos y esto hace posible resolver el cubo y dibujar los resultados
en una curva normalizada como lo muestra la figura 9,10 y 11. Dando los
parámetros de lazo abierto como y , los parámetros de lazo cerrado
y pueden ser obtenidos desde estas planificaciones. Para bajos
valores de la siguiente aproximación más usadas en diseños
preliminares, pueden ser: .
Por lo tanto, la frecuencia de ruptura de lazo cerrado es semejante a la frecuencia
hidráulica natural y la frecuencia cursante. Sin embargo, valores exactos pueden ser
obtenidos siempre desde las soluciones cubicas.
Figura 9. Grafica normalizada de la ecuación cubica característica.
26
Grafica 10. Grafica normalizada de la frecuencia natural del factor cuadrático de la
ecuación cubica característica
Grafica 11. Grafica de tasa de amortiguamiento del factor cuadrático de la ecuación
cubica característica.
27
Referencias
Herbert E. Merritt; Hydraulic Control Systems; London 1967
http://es.wikipedia.org/wiki/Servomecanismo
http://www.iearobotics.com/personal/andres/proyectos/pucho/
documentacion/capitulo3.pdf
http://www.canalsocial.net/ger/ficha_GER.asp?id=6098&cat=fisica
http://www.google.com/imgres?imgurl=http://ciecfie.epn.edu.ec/CControlC
http://www.meche.net/MAE%20340/Lab/Lab%204/Moog.pdf
http://www.hydraulicspneumatics.com/200/FPE/SystemDesign/Article/True/
6463/SystemDesign
http://www.laship.ufsc.br/PDF/ApostilaPDF/SistHPContAutP1.pdf
http://focus.ti.com/lit/an/spraa76/spraa76.pdf
http://www.fluidpowerjournal.com/images/2009/FPJMA09/
FPJMA09_mathematical.pdf
28







![numeros-complexos [Modo de Compatibilidade]educatec.eng.br/engenharia/Controle e servomecanismos/Aulas/Numeros... · Divisão de números complexos : ... Converta os números seguintes](https://img.pdfslide.tips/doc/110x75/5c11407e09d3f294068bbbbb/numeros-complexos-modo-de-compatibilidade-e-servomecanismosaulasnumeros.jpg)





















