Embed Size (px)
Citation preview

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 1
INTRODUCCIÓN A LA AUTOMATIZACIÓN
1. AUTOMATISMOS
Los automatismos son realizados para aportar soluciones a los problemas de naturaleza
técnica, económica o humana.
1.1 Objetivos de un automatismo
- Eliminar las tareas humanas peligrosas, indeseables o repetitivas, al lograr que las
ejecuten las máquinas.
- Mejorar la productividad al adaptar la máquina a los criterios de producción, de
rendimiento o de calidad.
- Pilotar una producción variable, al facilitar el cambio de una producción a otra.
- Reforzar la seguridad, al vigilar y controlar las instalaciones y máquinas.
Fig. 1 Estructura de un automatismo

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 2
1.2 Estructura de un automatismo.
En todo sistema automatizado se distinguen dos partes, la máquina o instalación, y la
parte de mando constituida por el aparellaje del automatismo. Esta parte es asegurada
por los componentes de automatismos, respondiendo a cuatro funciones básicas: La
adquisición de datos, el tratamiento de datos, el mando de potencia y el diálogo hombre
máquina.
1.3 Adquisición de datos
Es la realizada por los captadores o detectores que informan a la unidad de tratamiento
del estado del sistema (variables de entrada).
La elección de los aparatos es función de las condiciones de utilización:
- Interruptores de posición accionados mecánicamente;
- Interruptores de nivel accionados por flotadores;
- Selector de posición para seguir el desplazamiento de un móvil;
- Manóstato para detectar la presencia o regular una presión;
- Detectores de proximidad inductivos o capacitivos estáticos cuando la detección
debe ser efectuada sin contacto con el móvil a controlar, o cuando la cadencia es
muy elevada, o en ambientes particulares;
- Células fotoeléctricas para detectar a distancias importantes;
- Detectores de velocidad para controlar las velocidades de desplazamiento o de
rotación, etc.
La evolución de los automatismos ha llevado a la creación de nuevos periféricos como los
conmutadores rotativos o de ruedas codificadoras que permiten visualizar las distancias,
los pesos, o cualquier otra información numérica.
1.3.1 Sensores
Los sensores son los elementos que utiliza el sistema para conocer el estado de ciertos
parámetros (la temperatura ambiente, la existencia de un escape de agua, etc.)

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 3
1.3.1.1 Tipos
Sensores de proximidad inductivos. Se utilizan principalmente en aplicaciones
industriales. Detectan cualquier objeto metálico sin necesidad de contacto: control
de presencia o de ausencia, detección de paso, de atasco, de posicionamiento, de
codificación y de contaje. Los sensores de proximidad inductivos aportan
numerosas ventajas:
- Compatibilidad con los automatismos electrónicos gracias a la posibilidad de
cadencias elevada.
- Durabilidad independiente del numero de ciclos de maniobra (ninguna pieza móvil
y, por tanto, sin desgaste mecánico, contactos de salida estáticos)
- Adaptación a ambientes húmedos, corrosivos y con atascos
- Detección de objetos frágiles, recién pintados, etc.
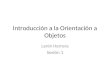
Fig. 2 Detectores de proximidad inductivos
Sensores capacitivos. Los detectores capacitivos son adecuados para detectar
objetos o productos no metálicos de cualquier tipo (papel, vidrio, plástico, líquido,
etc.) Un detector de posición capacitivo se compone de un oscilador cuyos
condensadores forman la cara sensible. Cuando se sitúa en este campo un
material conductor o aislante de permitividad (1) superior a 1, se modifica la
capacidad de conexión y se bloquean las oscilaciones. Estos detectores disponen
de un potenciómetro de regulación de sensibilidad.
Detectores fotoeléctricos. Los detectores fotoeléctricos permiten detectar todo
tipo de objetos (opacos, transparentes, reflectantes, etc.) en gran variedad de
aplicaciones industriales y terciarias. Disponen de Cinco sistemas básicos:

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 4
- Barrera
- Réflex
- Réflex polarizado
- Proximidad
- Proximidad con borrado del plano posterior
Pueden ser:
- aparatos compactos,
- en miniatura
- de cabeza óptica separada
- de fibra óptica
Modelos con caja de resina sintética, ofrecen una solución óptima para el tipo de objeto
que se detecta, el espacio disponible y las condiciones ambientales.
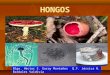
Fig. 3 Detectores fotoeléctricos
Fig. 4 Detectores fotoeléctricos

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 5
Fig. 5 Composición de un detector fotoeléctrico
Fig. 6 Detectores fotoeléctricos en miniatura
1.4 Tratamiento de datos.
El conjunto de informaciones tomadas por los captadores es transmitido a la unidad de
tratamiento que elabora las órdenes de acción, según un procedimiento bien definido. En
función de la naturaleza del automatismo, el ciclo de funcionamiento puede ser
combinatorio o secuencial.
- Ciclo combinatorio. El ciclo de funcionamiento se realiza únicamente por la
combinación de los valores primarios. El mando de las salidas está directamente ligado a
las informaciones existentes en un instante dado. Las acciones anteriores no son
memorizadas.
- Ciclo secuencial. Es definido teniendo en cuenta las variables primarias y secundarias.
El mando de las salidas no solo depende de las informaciones presentes, sino también de
las acciones pasadas. Este ciclo necesita obligatoriamente memorias.

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 6
Según la importancia y complejidad del automatismo, el tratamiento de datos se efectúa
mediante relés de automatismos, contactores auxiliares, células lógicas y secuenciadores
(normalmente neumáticos), microsistemas o con ayuda de un autómata programable
(PLC).
1.4.1 Lógica cableada
La lógica cableada es una técnica de realización de equipos de automatismo en la que el
tratamiento de datos se efectúa por medio de contactores auxiliares o relés de
automatismo. Estos aparatos también cumplen otras funciones, entre las que cabe
mencionar:
– la selección de los circuitos,
–la desmultiplicación de los contactos auxiliares de los contactores, interruptores de
posición...,
– de interface para amplificar señales de control demasiado débiles para suministrar
energía a los aparatos de elevado consumo,
– etc.
Los contactores auxiliares y los relés de automatismo también suelen utilizarse de manera
conjunta con autómatas programables. En este caso, los contactos auxiliares deben
garantizar la fiabilidad de la conmutación de corrientes débiles, pocas decenas de mA, en
ambientes frecuentemente agresivos (polvo, humedad...). El funcionamiento de los
equipos de lógica cableada se define mediante el esquema de cableado.
1.4.2 Lógica programable
La lógica programable permite utilizar unidades electrónicas para el tratamiento de datos.
El funcionamiento de este tipo de equipos no está definido por un esquema, como en el
caso de la lógica cableada, sino por un programa cargado en la memoria de la unidad de
tratamiento.

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 7
Fig. 7 Contactores auxiliares y dispositivos aditivos
Los autómatas programables son los componentes básicos de los equipos electrónicos de
automatismo.
Hicieron su aparición en los Estados Unidos en 1969 como respuesta a la demanda de los
fabricantes de automóviles. Deseaban automatizar sus fábricas con un material capaz de
adaptarse a los cambios de fabricación, más sencillo y económico que los sistemas
cableados que se empleaban masivamente hasta entonces.
En la actualidad, existen numerosos modelos de autómatas programables: desde los
nanos autómatas, que se adaptan a las máquinas e instalaciones simples con un número
reducido de puertos de entrada/salida, hasta los autómatas multifunción, capaces de
gestionar varios millares de puertos de entrada/salida y dedicados al pilotaje de procesos
complejos.

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 8
Fig. 8 Autómata programable (PLC)
1.5 Mando de potencia.
Las señales disponibles a la salida de la unidad de tratamiento (variables de salida) son
aplicadas a los circuitos de mando de órganos amplificadores (bobinas de relés, de
contactores, distribuidores, etc.) cuyos circuitos de potencia alimentan los activadores
(motores, cilindros etc.). Estos amplificadores son elegidos en función de la tecnología
requerida, de la potencia de los activadores y de las condiciones de funcionamiento. Los
contactores, arrancadores, variadores de velocidad, distribuidores neumáticos, son los
más utilizados.
El control de potencia es una de las cuatro funciones que conforman la estructura de un
automatismo. Su función básica consiste en establecer o interrumpir la alimentación de
los receptores siguiendo las órdenes de la unidad de proceso de datos. Dichas órdenes
se elaboran a partir de la información procedente de los captadores (función de
adquisición de datos) y de los órganos de mando (función de diálogo hombre-máquina).
Entre los receptores más utilizados para el accionamiento de máquinas se encuentran los
motores eléctricos asíncronos de jaula. Los equipos de control de potencia destinados a
controlarlos, normalmente llamados arrancadores, realizan las funciones de
seccionamiento, protección y conmutación. Se pueden clasificar en tres familias:
Arrancadores “todo o nada”: el motor suele arrancar con sus características
propias y el régimen de velocidad establecido es constante

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 9
Arrancadores basados en arrancadores electrónicos: la aceleración y la
deceleración están controladas y el régimen de velocidad establecido es constante
Arrancadores basados en variadores de velocidad electrónicos: el arranque y la
parada están controlados y la velocidad depende de una consigna.
1.5.1 El seccionamiento. Para manipular las instalaciones o las máquinas y sus
respectivos equipos eléctricos con total seguridad, es necesario disponer de medios que
permitan aislar eléctricamente los circuitos de potencia y de control de la red de
alimentación general. Esta función, llamada seccionamiento, corresponde a:
Aparatos específicos: seccionadores o interruptores seccionadores
Funciones de seccionamiento integradas en aparatos con funciones múltiples.
Fig. 9 Seccionador
Obsérvese que en los equipos con varios arrancadores no siempre es necesario añadir un
seccionador a cada arrancador. Sin embargo, conviene tener siempre dispuesto un
mando de aislamiento general que permita aislar todo el equipo.
1.5.2 La protección. Todos los receptores pueden sufrir accidentes:
De origen eléctrico:
– sobretensión, caída de tensión, desequilibrio o ausencia de fases que provocan un
aumento de la corriente absorbida,

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 10
– cortocircuitos cuya intensidad puede superar el poder de corte del contactor.
De origen mecánico:
– calado del rotor, sobrecarga momentánea o prolongada que provocan un aumento de
la corriente que absorbe el motor, haciendo que los bobinados se calienten
peligrosamente.
Con el fin de que dichos accidentes no dañen los componentes ni perturben la red de
alimentación, todos los arrancadores deben incluir obligatoriamente:
protección contra los cortocircuitos, para detectar y cortar lo antes posible las
corrientes anómalas superiores a 10 In,
protección contra las sobrecargas, para detectar los aumentos de corriente
hasta 10 In y cortar el arranque antes de que el recalentamiento del motor y de los
conductores dañe los aislantes.
Si es necesario, se pueden añadir protecciones complementarias como el control de fallos
de aislamiento, de inversión de fases, de temperatura de los bobinados, etc. La protección
corresponde a:
Aparatos específicos: seccionadores portafusiles, disyuntores, relés de
protección y relés de medida,
Funciones específicas integradas en los aparatos de
Fig. 10 Fusibles de protección

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 11
Fig. 11 Disyuntores magnéticos
Fig. 12 Relés térmicos
1.5.3 La conmutación. La conmutación consiste en establecer, cortar y, en el caso de la
variación de velocidad, ajustar el valor de la corriente absorbida por un motor. Según las
necesidades, esta función puede realizarse con aparatos:
Electromecánicos: contactores, contactores disyuntores y disyuntores motores,
Electrónicos: relés y contactores estáticos, arrancadores ralentizadores
progresivos, variadores y reguladores de velocidad.
Fig. 13 Contactores

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 12
1.6 Diálogo hombre máquina.
El diálogo hombre-máquina es el complemento indispensable de todo automatismo.
Permite al operador intervenir en el momento del arranque o en curso de ciclo, proceder a
una parada de emergencia y por medio del sistema de señalización, controlar
permanentemente el desarrollo de las operaciones.
Esta función de diálogo es asegurada por todos los auxiliares de mando de intervención
manual (pulsadores, cajas de pulsadores, conmutadores) así como por los pilotos de
señalización, y para las instalaciones más complejas, por los pupitres de mando, cuadros
sinópticos, teclas y teclados, micro terminales, etc.)
El diálogo hombre-máquina activa la circulación de dos flujos de datos que circulan en los
siguientes sentidos:
– Máquina a Hombre
– Hombre a Máquina
Ambos flujos son independientes y están ligados al mismo tiempo:
Independientes. Ya que pueden presentar distintos niveles de información. El
diseñador del automatismo define estos niveles en base a las necesidades del
proceso y a los deseos del usuario: por ejemplo, señales “Todo o Nada” del
operador hacia la máquina, mensajes alfanuméricos o sinópticos animados de la
máquina hacia el operador.
Ligados. Ya que la intervención del operador sobre un interfaz de control se
traduce, a nivel del automatismo, por una acción bien definida y por la emisión de
una información que depende de la buena ejecución de la acción. La intervención
del operador puede ser voluntaria (parada de producción, modificación de datos...)
o consecutiva a un mensaje emitido por la máquina ( fin de ciclo, alarma, …)

Configuración de Controladores Lógicos Programables. Introducción a la Automatización 2013-1
Preparo: Ing. Rafael Escorcia G. Página 13
Fig. 14 Circulación de la información
Fig. 15 Pulsadores y pilotos luminosos
Fig. 16 Diferentes órganos de dialogo