Embed Size (px)
Citation preview

Hur kan den realtidsdata som samlas in kombineras på bästa sätt?
Mobile Millennium Stockholm
David Gundlegård
Institutionen för Teknik och Naturvetenskap
Avdelningen för Kommunikations- och Transportsystem
Andreas Allström (LiU/Sweco), Mahmood Rahmani (KTH)
Transportforum 2012

Agenda
• Allmänt om projektet
• Forskningsplattform
• Tillgänglig data
• Estimering
• Kombinera data
• Kommande arbete
2

Partners
• Finansierat av Trafikverket• FUD-program TTS• STRESS (Storstäders Trängsel
och REStids System)• Samarbete mellan
• Linköpings Universitet• KTH• Sweco• University of California, Berkeley

Syfte
• Skapa nya modeller för filtrering av trafikdata och fusionering av data från olika källor
• Visualisera restider/hastigheter från dessa modeller i realtid
• Bygga en plattform för fortsatt forskning och utveckling inom området
• Validera befintliga och nya modeller• Identifiera vägsträckor där nya
datainsamlingsmetoder behövs

TomTomBaserad på GPS –data från TomToms premiumprodukter
Trelocity/DNBaserad på taxidata och MCS-data (?)
Mobile Millennium StockholmBaserad på taxidata och MCS-data
Trafiken.nuBaserad på MCS-data
Google trafficBaserad på data från användare av Google maps
Varför?

12
Forskningsplattform
Sensorer

Sensorer - radar
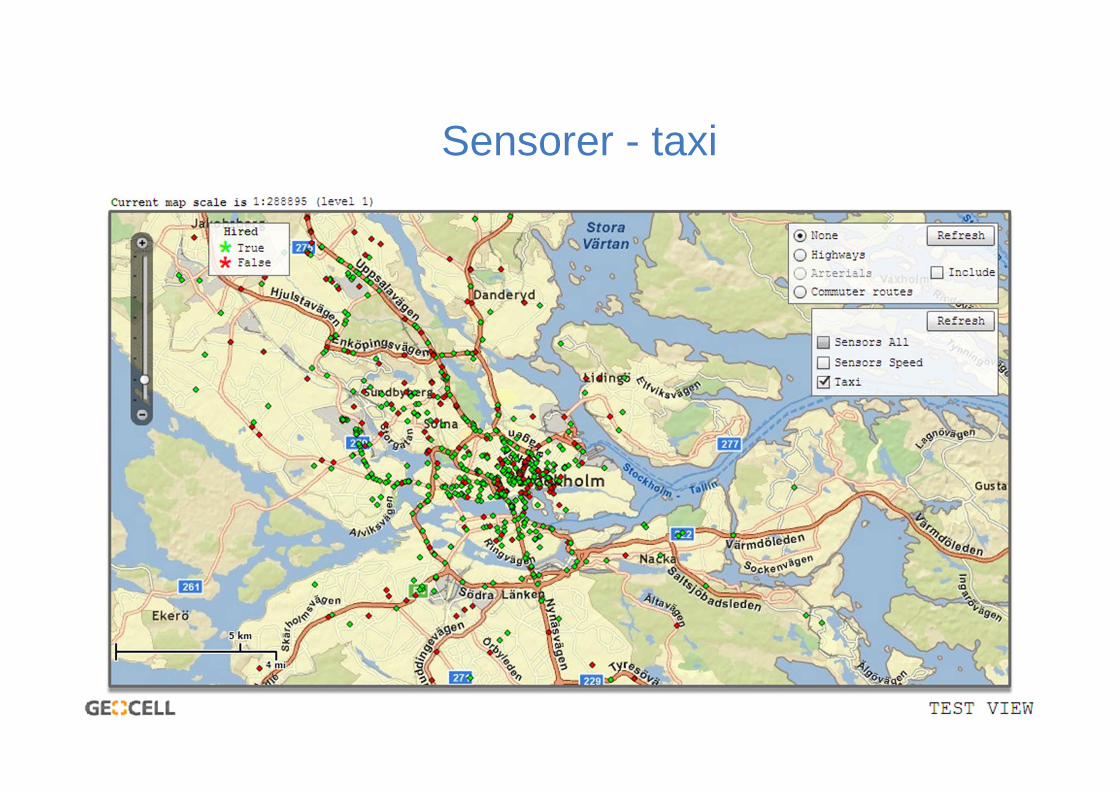
Sensorer - taxi

Sensorer - kameror

Sensorer - kommande
• Bluetooth
• FCD• Samarbeten
• Mobilapp
• Kameror (för realtidsestimering)
• Mobilnätsdata?
• Incidenter
17

Estimering - motorväg
• Baserad på kinematic wave theory (Lighthill-Whitham-Richards PDE)
• Använder en transformation av Cell Transmission Model• Propagerar hastighet istället för densitet
• Underlättar fusion med punkthastigheter från probes
• Ensemble Kalman Filtering (EnKF) används för att kombineramodellprediktion och mätningar

Rådata VS Modell

Estimering - Huvudvägnät
o Idag baserat på taxi-datao Ruttklassificering
o Hidden Markov Modelo Restidsfördelning länkar
o Baserad på länkparametrar, ex.vis. kölängd, cykeltid
o Korrelation mellan länkaro Modellera hur tillståndet propagerar i nätverketo Coupled Hidden Markov Model (CHMM)o Coupling = lokal korrelation mellan länkar
o Historisk databas
20

Estimering - Huvudvägnät
• Enklare Gaussisk modell körs live i nuläget• Kombinera mätningar och historisk databas (Bayesian estimation)
21

Fas 1 - Pendlarrutter

Fusionering av data
o Många olika typer av trafikdatatillgängligto Fler kommer!o Ingen enskild datakälla löser alla
problem o Kombinera heterogen data med
olika egenskapero Förbättra kvalitet och täckning för
estimering och prediktionero Minska antalet fasta sensorer

Fusionering av data
• Taxi + Radar
• Via Ensemble Kalman Filteringoch CTM-v som trafikmodell
• Mer generellt• Punktsensorer + restider samplade
dynamiskt i tid och rum

Tid(t)
Position (s)Naiv trajektor
Sann trajektor
Genomsnittlig hastighet från modell
Initial trajektor
(t1, s1)
(t2, s2) Förbättrad trajektor
Fusionera data
Fast sensor
Fast sensor

Kommande arbete
o Färdigställa och utvärdera fusionering av taxi + radar
o Validering av utvecklade modeller för motorväg och huvudvägnät
o Utöka täckningen på restidsestimering i realtid
o Fokus på predikteringsmodellero Utvärdera effekterna av att minska antalet
fasta sensorer i kombination med modell och alternativ data
o Utöka antalet sensorer för estimering, prediktering och validering