Embed Size (px)
Citation preview

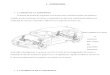
David Guadiana MartinezConsiderando el sistema de suspensión de un cuarto de automóvil de la figura 1 los modelos matemáticos son los siguientes:
Pasiva:
ms zs+cs ( zs− zu )+ks ( zs−zu )=0 (1)
mu zu+cs ( zs− zu )−k s ( zs−zu )+k t ( zu−zr )=0 (2)
Activa:
ms zs+k s ( z s−zu )=F A (3)
mu zu−ks ( zs−zu )+k t ( zu−zr )=−F A (4)
Figura 1: Dibujo esquemático: (a) Suspensión pasiva y (b) Suspensión activa.
a) Represente en variables de estado el modelo matemático del sistema de suspensión pasiva dado por las ecs. (1) y (2), definiendox1=zs , x2= z s , x3=zu , x4= zu. Como también, represente en variables de estado el modelo matemático del sistema de suspensión activa dado por las ecs. (3) y (4). Realice una simulación del sistema de suspensión pasiva considerando un perfíl de terreno como el que se muestra en la figura 2.

David Guadiana MartinezFigura 2: Perfil del terreno típico.
Representación en variables de estado (suspensión pasiva).
x1=zs , x2= z s , x3=zu , x4= zu x1= zs , x2= z s , x3= zu , x4= zu x1= zs=x2
x2= zs=−csms
(x2−x4 )−k sms
(x1−x3 )
x3= zu=x4
x4= zu=csmu
(x2−x 4 )+ksmu
(x1−x3 )−k tmu
(x3−zr )
Finalmente se representan las variables de estado en forma matricial:
[ x1x2x3x4
]=[0 10 0
−k sms
−csms
k sms
c sms
0 00 1ksmu
csmu
−k smu
−csmu
][ x1x2x3x4]+[000k tmu
] zrRepresentación en variables de estado (suspensión activa).
x1=zs , x2= z s , x3=zu , x4= zu x1= zs , x2= z s , x3= zu , x4= zu x1= zs=x2
x2= zs=F Ams
+k sms
(x1−x3 )
x3= zu=x4
x4= zu=−F Amu
+ksmu
(x1−x3 )−k tmu
(x3−zr )
Finalmente se representan las variables de estado en forma matricial:
[ x1x2x3x4
]=[0 10 0
−k sms
0k sm s
0
0 00 1ksmu
0−ks+k tmu
0] [ x1x2x3x 4]+[01ms0
−1mu
]u+[000k tmu
]zrAhora es necesario mostrar una simulación del sistema de suspensión pasiva en simulink como se ve en la figura 3 y mostrar sus graficas con los siguientes valores:
ms=282 [kg ] ,mu=45 [kg ] , ks=17900 [N /m ] , cs=1000 [N∗s /m ]

David Guadiana Martinez
Figura 3: Diagrama de bloques de un sistema de suspensión pasiva de un cuarto de automóvil
Los resultados se presentan a continuación:
Figura 4: Aceleración del cuerpo del automóvil.

David Guadiana Martinez
Figura 5: Posición del cuerpo del carro.
Figura 6: Deflexión de la suspensión.

David Guadiana Martinez
Figura 7: Deflexión del neumático.
Figura 8: Posición del neumático.
b) Diseñe un controlador por retroalimentación del estado para el sistema de suspensión activa y compare los resultados obtenidos con los resultados del sistema de suspensión pasiva. Obtenga seis graficas comparativas, de las siguientes variables:
Aceleración del cuerpo del auto Desplazamiento vertical del cuerpo del auto Deflexión de la suspensión Deflexión del neumático Desplazamiento vertical del neumático

David Guadiana Martinez Fuerza del actuador
Para diseñar el controlador lo primero que se debe de hacer es ver si el sistema es comprobable para ello se declara la siguiente matriz
ck=[B A*B (A^2)*B (A^3)*B]
Siendo:
A=[0 10 0
−ksms
0ksms
0
0 00 1ksmu
0−k s+k tmu
0 ]B=[
01ms0
−1mu
]Entonces se debe obtener el determinante de la matriz ck con ayuda de matlab:
det(ck)
ans = 0.0843
Al ver que el resultado de la determinante es diferente de cero concluimos que el sistema es controlable. En consecuencia procedemos a conocer los polos del sistema dinámico:
eig(A)
ans =
0.0000 +63.9396i
0.0000 -63.9396i
-0.0000 + 7.5632i
-0.0000 - 7.5632i
A la hora de calcular la matriz de ganancias K será necesario proporcionar un valor de polos de un valor minio al doble de los del sistema, la matriz de ganancias se obtiene de la siguiente manera:
K=acker(A,B,[-30 -30 -30 -30])
Esta matriz es usada en los bloques de simulink del sistema de suspensión activa con controlador por realimentación del estado mostrado en la figura 9.

David Guadiana Martinez
Figura 9: Diagrama de bloques del sistema de suspensión activa con controlador por realimentación del estado.
Los resultados de la simulación se presentan a continuación:
Figura 10: aceleración del cuerpo del automóvil.

David Guadiana Martinez
Figura 11: Posición del cuerpo del automóvil.
Figura 12: Deflexión de la suspensión.

David Guadiana Martinez
Figura 13: Deflexión del neumático.
Figura 14: Posición del neumático.

David Guadiana Martinez
Figura 15: Fuerza del actuador.
c) Disenie un observador de estado de orden completo para el sistema de suspensión activa, considerando como salida zs o zu. Revise si el sistema es de estado completamente observable con la salida elegida. El sistema debe ser observable ya sea con zs o con zu. Posteriormente, pruebe en simulación el desempenio del observador. Finalmente, para efectos de la simulación del control via observador, considere las variables zs y zu de la ecuación de estado, y del observador solo tome las variables estimadas ~zs y ~zu .
Para poder realizar el observador de estado es requisito identificar que este sea completamente observable, para ello se usa:
c=[1 0 0 0]ok=[c' A'*c' (A'^2)*c' (A'^3)*c']
La determinante de la matriz ok debe de ser diferente de cero para concluir que el sistema es observable con la variable elegida.

David Guadiana Martinez
det(ok)ans = 4.0291e+003
Al obtenerla nos damos cuenta que el sistema es completamente observable.Ahora se tienen que obtener la matriz de ganancias L, se omite el cálculo de los polos del sistema ya que se han calculado anteriormente.
L=acker(A',c',[-5 -5 -5 -5] ) L = 1.0e+005 *[0.0002 -0.0400 -0.0128 2.5327]
La simulación se realizara en simulink como se ven la figura 16, el valor de la matriz L debe ser introducido como transpuesta, el resultado del valor de zs y zs estimada son mostrados en la figura 17 y en la figura 18 respectivamente
Figura 16: Diagrama de bloques del observador de estado.

David Guadiana Martinez
Figura 17: Posición real del cuerpo del automóvil.
Figura 18: Posición Estimada del cuerpo del automóvil.