Embed Size (px)
Citation preview
Sinais e SistemasUnidade 5 –
Representação em domínio da
frequência para sinais contínuos:Transformada de Laplace
Prof. Cassiano Rech, Dr. [email protected]
Prof. Rafael Concatto Beltrame, Me. [email protected]
1/5
2Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
•
Introdução•
Definição da Transformada de Laplace
•
Solução de equações diferenciais linearese invariante no tempo
•
Função de Transferência•
Conceito de pólos e zeros
•
Estabilidade de sistemas
•
Sistemas com atraso de transporte•
Análise da resposta transitória
•
Análise da resposta em regime permanente
•
Resposta em frequência e Diagrama de Bode
Conteúdo da unidade
Aulas
01 e 02
Aula 03
Aula 04
Aulas
05 e
06
1/5
3Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Aula 04
•
Sistemas com atraso de transporte–
Definição do atraso de transporte
–
Exemplo de sistemas com atraso de transporte–
Aproximação de Padé
•
Análise da resposta transitória–
Sistemas de primeira ordem
–
Sistemas de segunda ordem–
Resposta ao impulso, degrau e rampa
•
Análise da resposta em regime permanente
1/5
4Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
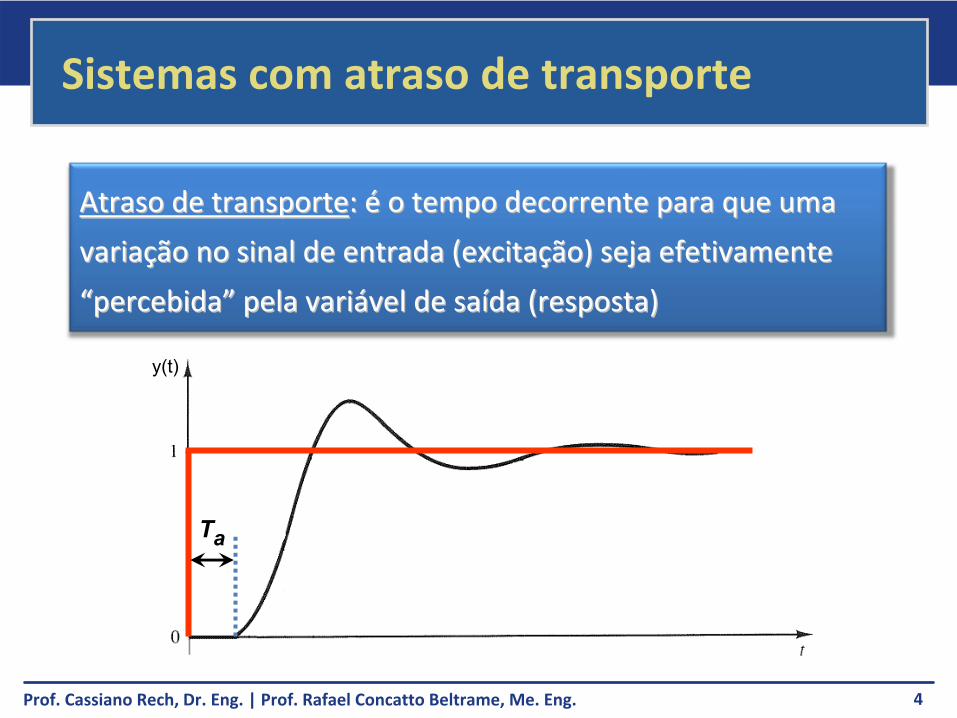
Sistemas com atraso de transporte
Atraso de transporteAtraso de transporte: : éé
o tempo decorrente para que uma o tempo decorrente para que uma variavariaçção no sinal de entrada (excitaão no sinal de entrada (excitaçção) seja efetivamente ão) seja efetivamente ““percebidapercebida””
pela varipela variáável de savel de saíída (resposta)da (resposta)
y(t)
Ta
1/5
5Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
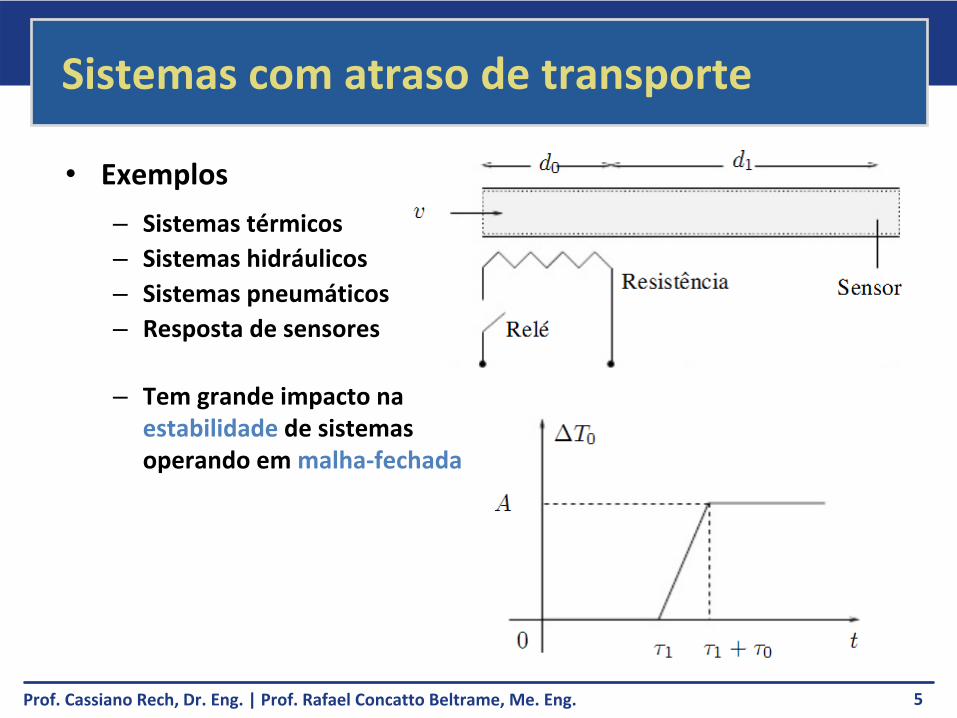
Sistemas com atraso de transporte
•
Exemplos–
Sistemas térmicos
–
Sistemas hidráulicos–
Sistemas pneumáticos
–
Resposta de sensores
–
Tem grande impacto naestabilidade
de sistemas
operando em malha‐fechada
1/5
6Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
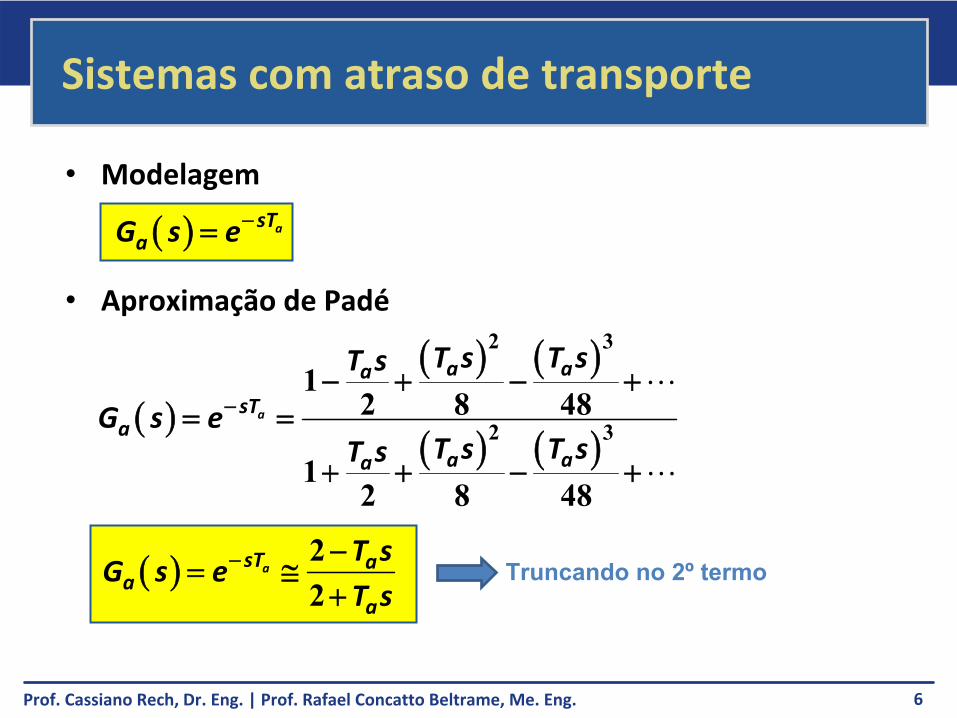
Sistemas com atraso de transporte
•
Modelagem
•
Aproximação de Padé
asTaG s e
2 3
2 3
12 8 48
12 8 48
a
a aasT
aa aa
T s T sT s
G s eT s T sT s
22
asT aa
a
T sG s e
T s
Truncando no 2º
termo
1/5
7Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
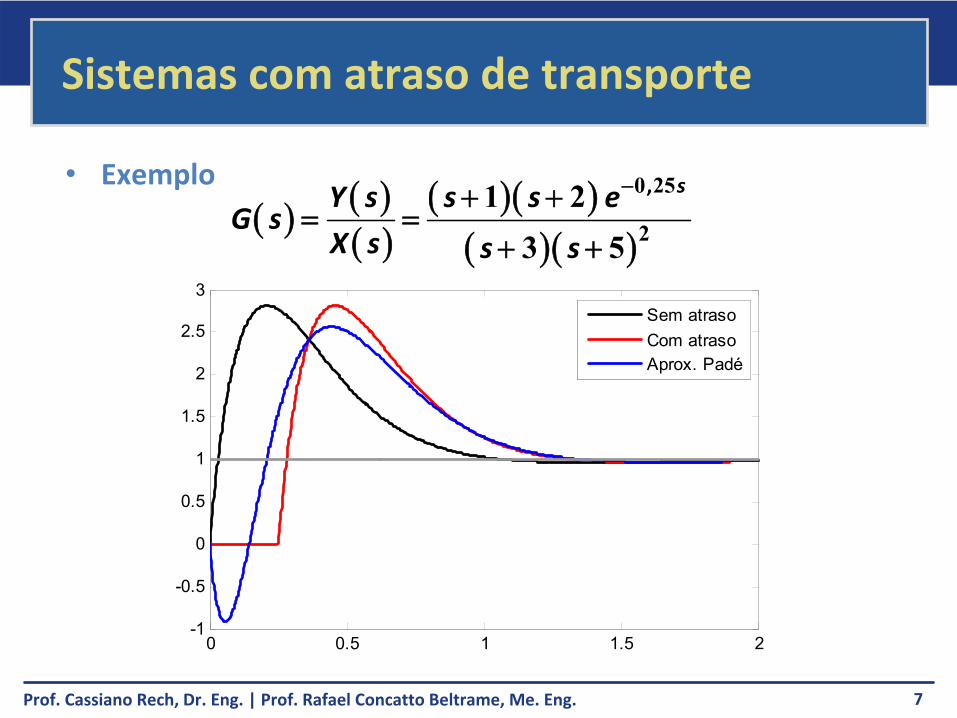
Sistemas com atraso de transporte
•
Exemplo
0 0.5 1 1.5 2-1
-0.5
0
0.5
1
1.5
2
2.5
3
Sem atrasoCom atrasoAprox. Padé
0 25
21 23 5
, sY s s s eG s
X s s s

1/5
8Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Análise da resposta transitória
•
Objetivo–
Comparar o desempenho
de diferentes sistemas com base em sinais
padrão de teste aplicados na entrada•
Função degrau
•
Função rampa•
Função impulso
•
Função senoidal
•
Resposta transitória–
Função do tempo que vai do estado inicial até
o final
•
Resposta estacionária (regime permanente)–
Maneira como o sinal de saída do sistema se comporta quanto t
tende
ao infinito
1/5
9Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 1ª
ordem
•
Seja o sistema de 1º
ordem definido a seguir, com T constante
•
Sua resposta ao degrau unitário é dada por
•
Logo, a resposta temporal é dada por
Resposta ao degrau unitário
11
Y sG s
X s Ts
1 111
Y s G s X s G s L tTs s
1 1 0, para tTy t L Y s e t
1/5
10Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 1ª
ordem
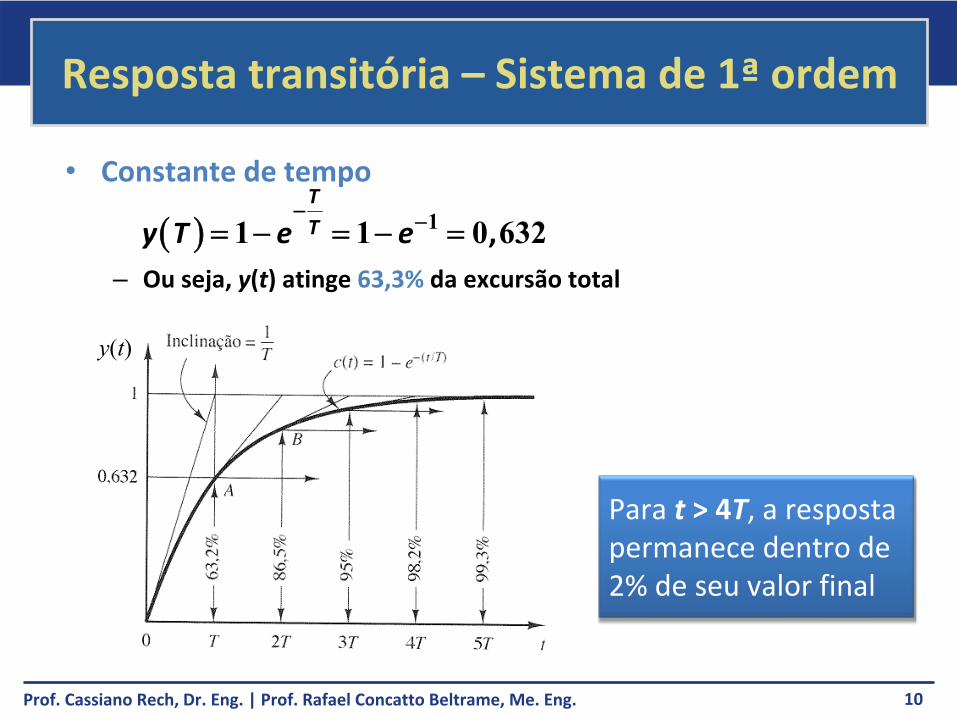
•
Constante de tempo
–
Ou seja, y(t) atinge 63,3%
da excursão total
11 1 0 632,TTy T e e
y(t)
Para t
> 4T, a resposta permanece dentro de 2% de seu valor final
1/5
11Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 1ª
ordem
•
Seja o sistema de 1º
ordem definido a seguir, com T constante
•
Sua resposta à
rampa unitária é dada por
•
Logo, a resposta temporal é dada por
Resposta à rampa unitária
11
Y sG s
X s Ts
21 11
Y s G s X s G s L tTs s
1 0, para tTy t L Y s t T T e t
1/5
12Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 1ª
ordem
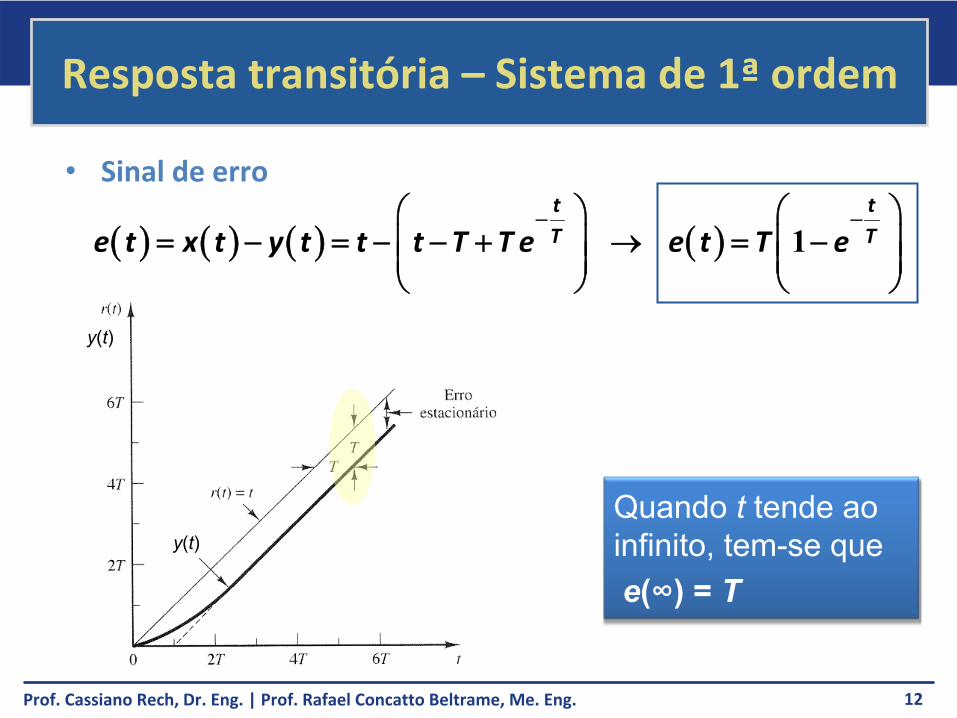
•
Sinal de erro
1t tT Te t x t y t t t T T e e t T e
Quando t
tende ao infinito, tem-se quee(∞) = T
y(t)
y(t)
1/5
13Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 1ª
ordem
•
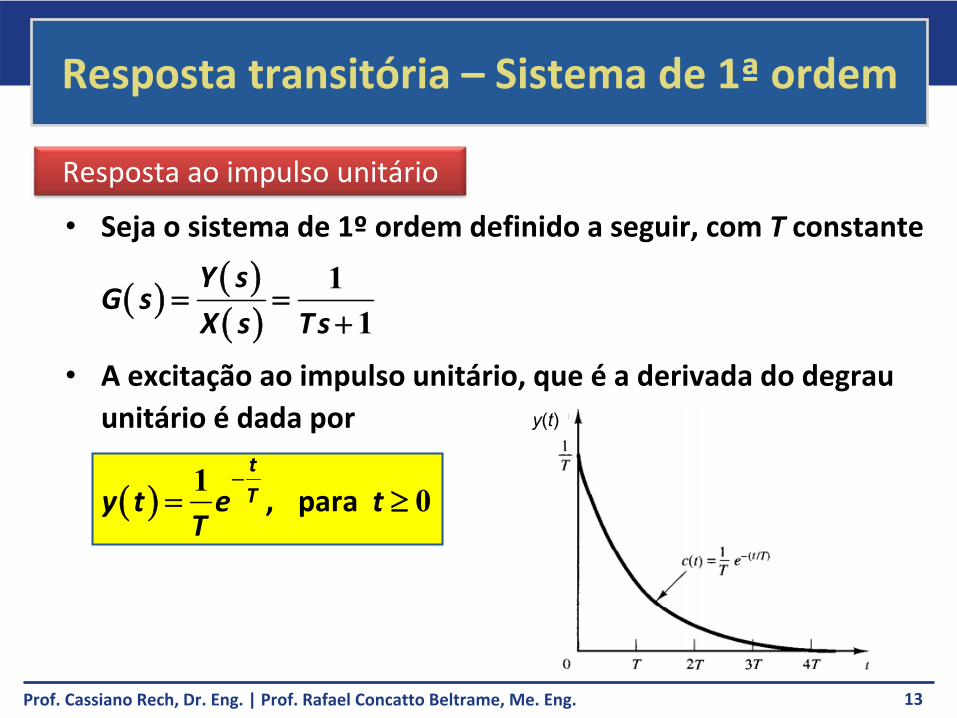
Seja o sistema de 1º
ordem definido a seguir, com T constante
•
A excitação ao impulso unitário, que é a derivada do degrau unitário é dada por
Resposta ao impulso unitário
11
Y sG s
X s Ts
1 0, para tTy t e t
T
y(t)
1/5
14Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
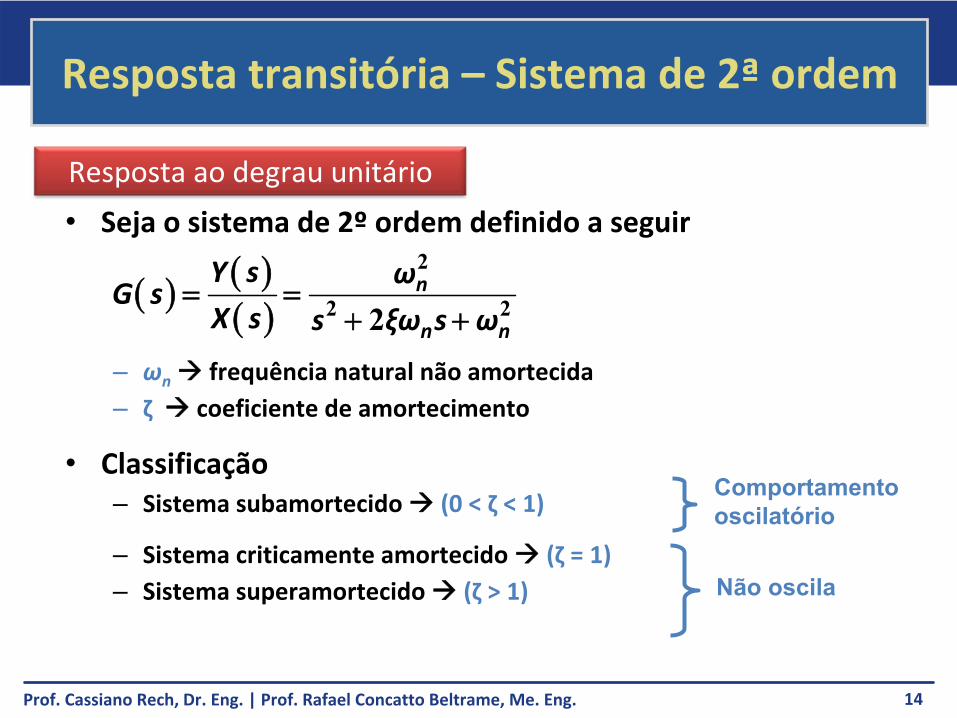
Seja o sistema de 2º
ordem definido a seguir
–
ωn
frequência natural não amortecida–
ζ
coeficiente de amortecimento
•
Classificação–
Sistema subamortecido
(0 < ζ
< 1)
–
Sistema criticamente amortecido (ζ
= 1)–
Sistema superamortecido (ζ
> 1)
Resposta ao degrau unitário
2
2 22n
n n
Y s ωG s
X s s ξω s ω
Comportamentooscilatório
Não
oscila
1/5
15Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
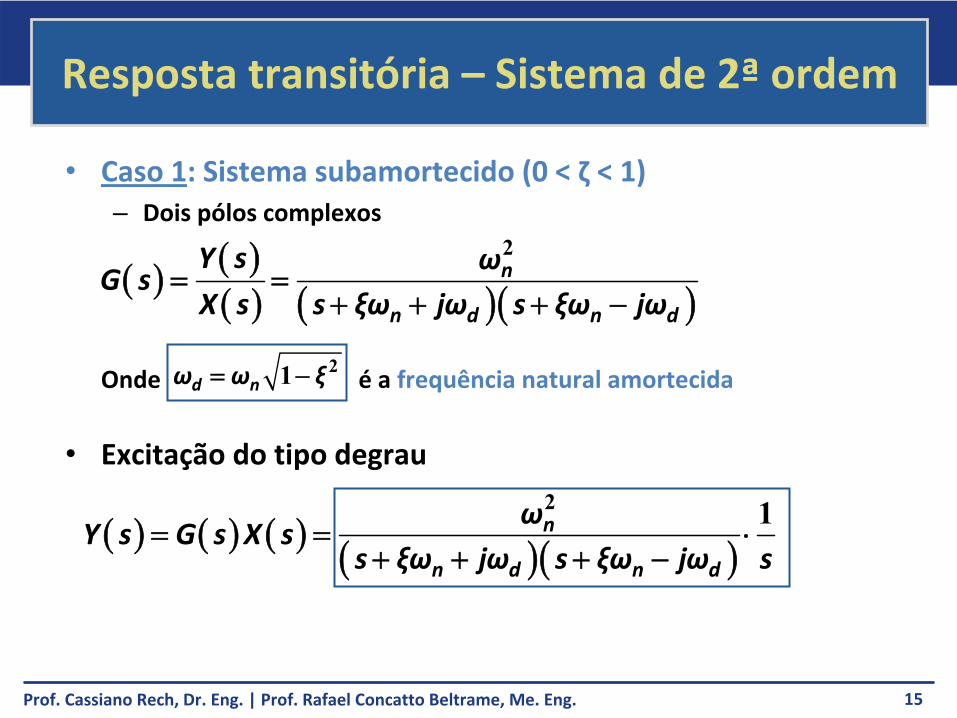
Caso 1: Sistema subamortecido
(0 < ζ
< 1)–
Dois pólos complexos
Onde é a frequência natural amortecida
•
Excitação do tipo degrau
2n
n d n d
Y s ωG s
X s s ξω jω s ξω jω
21d nω ω ξ
2 1n
n d n d
ωY s G s X s
s ξω jω s ξω jω s
1/5
16Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
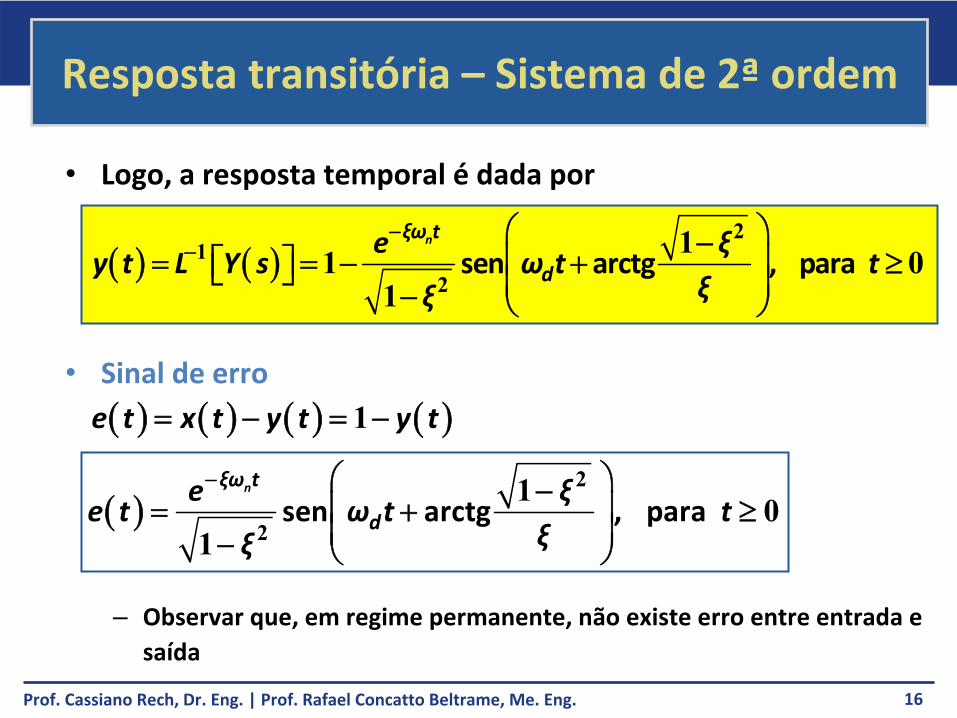
Logo, a resposta temporal é dada por
•
Sinal de erro
–
Observar que, em regime permanente, não existe erro entre entrada e saída
2
12
11 01
sen arctg , para nξω t
de ξ
y t L Y s ω t tξξ
1e t x t y t y t
2
2
1 01
sen arctg , para nξω t
de ξ
e t ω t tξξ
1/5
17Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
Caso 2: Sistema criticamente amortecido
(ζ
= 1)–
Dois pólos reais e iguais
•
Excitação do tipo degrau
•
Logo, a resposta temporal é dada por
2
2n
n
Y s ωG s
X s s ω
2
21n
n
ωY s G s X s
ss ω
1 1 1 0, para nω tny t L Y s e ω t t
1/5
18Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
Caso 3: Sistema superamortecido
(ζ
> 1)–
Dois pólos reais, negativos e distintos
•
Excitação do tipo degrau
2
2 21 1n
n n n n
Y s ωG s
X s s ξω ω ξ s ξω ω ξ
2
2 2
1
1 1n
n n n n
ωY s G s X s
ss ξω ω ξ s ξω ω ξ
1/5
19Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
Logo, a resposta temporal é dada por
1 21
2 1 2
21
22
1 02 1
1
1
, para s t s t
n
n
n
ω e ey t L Y s t
s sξ
s ξ ξ ω
s ξ ξ ω
1/5
20Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
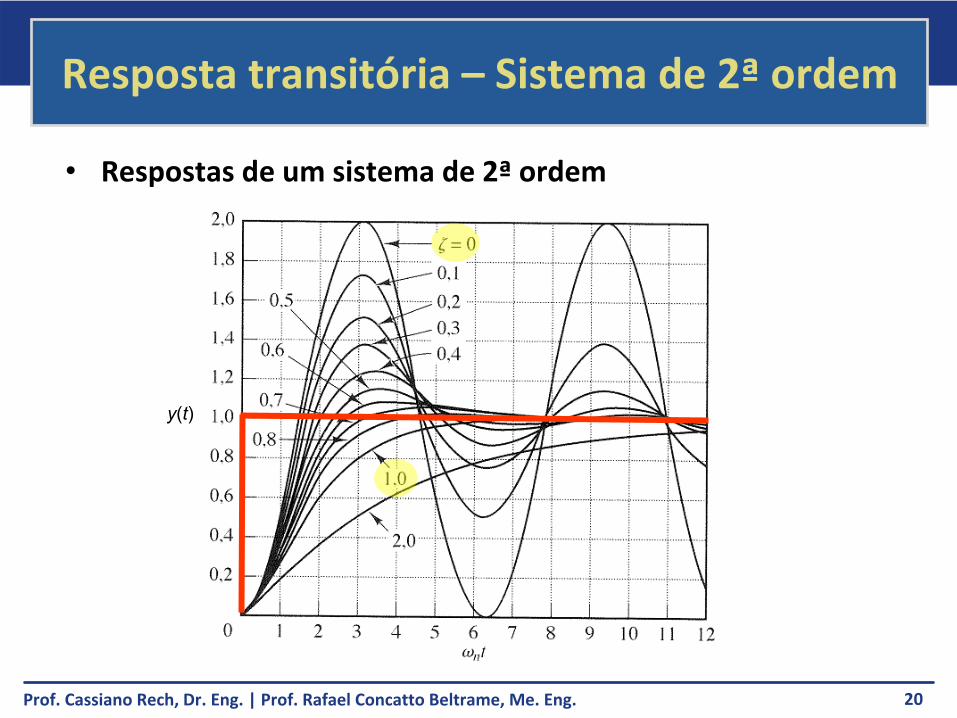
•
Respostas de um sistema de 2ª
ordem
y(t)
1/5
21Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
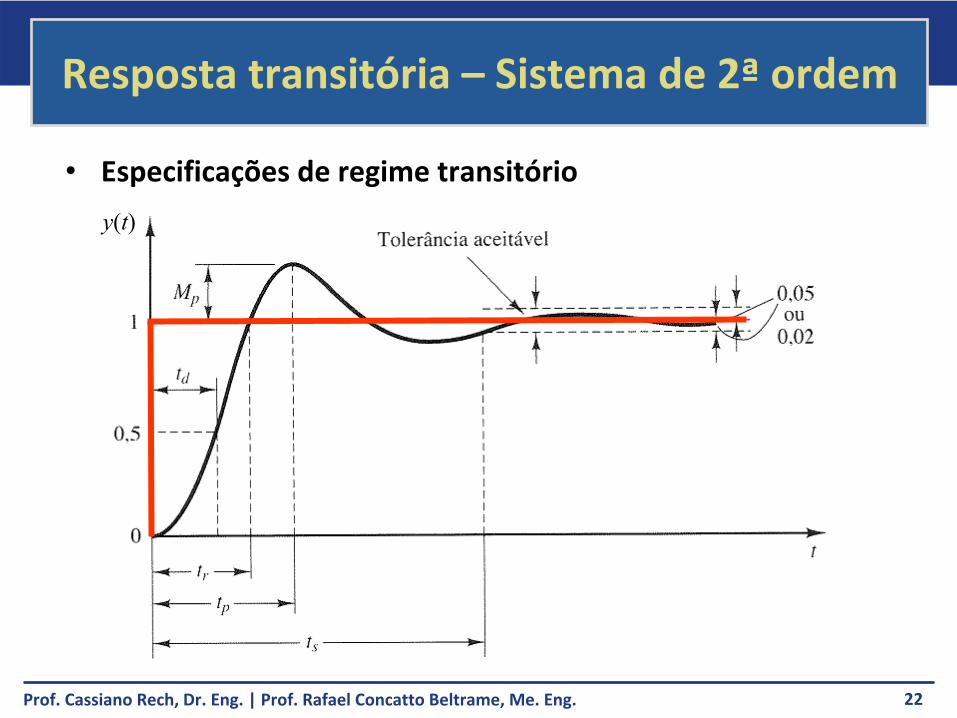
Especificações de regime transitório(Definidas no domínio do tempo)
–
Tempo de atraso, td
Tempo para y(t) atingir metade do valor final–
Tempo de subida, tr
Tempo para y(t) variar de 10% a 90% do valor final
–
Instante de pico, tp
Instante de tempo em que y(t) atinge o valor máximo
–
Máxima ultrapassagem percentual
–
Tempo de acomodação, ts
Tempo para y(t) situar‐se na faixa entre 2% ou 5% do valor final
100%pp
y t yM
y
1/5
22Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
Resposta transitória – Sistema de 2ª
ordem
•
Especificações de regime transitórioy(t)
1/5
23Prof. Cassiano Rech, Dr. Eng. | Prof. Rafael Concatto Beltrame, Me. Eng.
[1] OGATA, K. Engenharia de controle moderno. 3ª
ed. Rio de Janeiro: Prentice‐ Hall, 2000.
[2] CHAPARRO, L. F. Signals and systems using MATLAB. Oxford: Elsevier, 2011.
[3] FERREIRA, P. A. V. Princípios
de controle
e servomecanismos
(notas
de aula). Campinas: UNICAMP, 2006.
Bibliografia