Embed Size (px)
Citation preview

Sistem Kendali Daya Aktif Untuk Inverter Satu Fase
Yang Terintegrasi Dengan Jaringan Distribusi 220 Vrms
F. Danang Wijaya1,
Yohan Fajar Sidik2, Eka Firmansyah
3
1 Dosen Jurusan Teknik Elektro dan Teknologi Informasi, FT UGM
2 Mahasiswa Jurusan Teknik Elektro dan Teknologi Informasi, FT UGM
3Dosen Jurusan Teknik Elektro dan Teknologi Informasi, FT UGM
Jurusan Teknik Elektro dan Teknologi Informasi Fakultas Teknik Universitas Gadjah Mada
Jl. Grafika 2 Yogyakarta 55281
Email :
Abstract, Distributed generation (DG) are under increasing
concern for fulfill future electricity needs. One type of DG is
solar power plants (PLTS). The problems that arise in trying
to integrate PLTS into the power grid is how to control the
power flow to the grid. This research aims to simulate the
active power control system for single-phase inverter. This
control system can adjust the power generated by the inverter
to be given to the local load. If there is excess of power supply,
the power is supplied to the grid. The proposed control system
is based on dq transformation. Angular frequency as a
reference for dq transformation algorithm derived from
phase locked loop (PLL)-based transport delay T / 4. Control
actions carried out by the current control proportional
integrator (PI). Control system is assessed through the ability
to send the parameters of active power and total harmonic
distortion index (THD) inverter current is low. The
simulation results show that the inverter can be controlled to
provide active power to the local load. However, it was found
that the non-linear conditions on the grid can reduce the
quality of the inverter currents.
Keywords: distributed generation, singlephase inverter,
power flow, current control, proportional integrator
(PI), phase locked loop (PLL)
I. PENDAHULUAN
Sebagian besar energi listrik diperoleh melalui
konversi bahan fosil sebagai sumber energi primernya.
Kebutuhan energi listrik tersebut semakin meningkat
dengan bertambahnya waktu dan jumlah penduduk.
Sementara itu, bahan fosil semakin menipis karena
merupakan energi yang tidak dapat diperbaharui. Hal ini
dapat mengakibatkan krisis energi di masa mendatang.
Salah satu solusi untuk mengatasi ini adalah dengan
penerapan distributed generation (DG) [1]. DG ini
memanfaatkan energi terbarukan yang ramah lingkungan
seperti sel surya (PLT Surya) dan angin (PLT Bayu).
Pada umumnya DG mengkonversi energi primer
dalam menjadi listrik dalam bentuk sumber dc, sehingga
perlu dikonversi menjadi tegangan ac agar dapat
dipergunakan untuk menyuplai beban ac lokal. Konversi
dari dc ke ac ini memanfaatkan inverter.
DG dapat diintegrasikan dengan grid. Integrasi ini
bertujuan agar kelebihan daya DG dapat dikirimkan ke
grid [2]. Mekanisme ini dapat terjadi dengan
menerapkan sistem kendali daya aktif pada inverter.
Sistem kendali ini dapat berupa sistem kendali daya
aktif berbasis transformasi dq. Frekuensi sudut sebagai
referensi untuk transformasi-dq diperoleh dari algoritma
phase locked loop (PLL) berbasis transport delay T/4 [3].
Aksi kendali dilakukan dengan kendali arus proportional
integrator (PI).
Dalam Penelitian ini, kinerja sistem kendali untuk
inverter satu fase yang terintegrasi dengan grid akan
dinilai dengan bantuan model matematika. Parameter
yang diamati adalah kemampuan inverter menyuplai
daya aktif, operasi dalam kondisi tunak dan dinamik
untuk mengevaluasi besar rise time dan steady state
error, dan kualitas arus inverter yang dinyatakan dengan
indeks total harmonic distortion (THD).
II. INVERTER TERHUBUNG KE GRID
Gbr. 1 menunjukkan aliran daya pada sistem inverter
yang terintegrasi dengan grid. Inverter ini berfungsi
untuk menyuplai beban lokal. Bila terjadi kelebihan atau
kekurangan suplai, daya diambil atau dikirim dari dan ke
grid. Ekuivalen dengan hukum kirchoff arus, persamaan
daya yang mengalir pada titik point of common coupling
(PCC) ditunjukkan pada persamaan (1) dan (2) [4].
(1)
(2)
Persamaan (2) menunjukkan bahwa daya reaktif
beban seluruhnya disuplai oleh grid. Hal ini karena
inverter bekerja pada unity power factor.
ISSN: 2085-6350 Yogyakarta, 12 Juli 2012 CITEE 2012
96 JTETI, UGM - IEEE Comp. Soc. Ind. Chapter
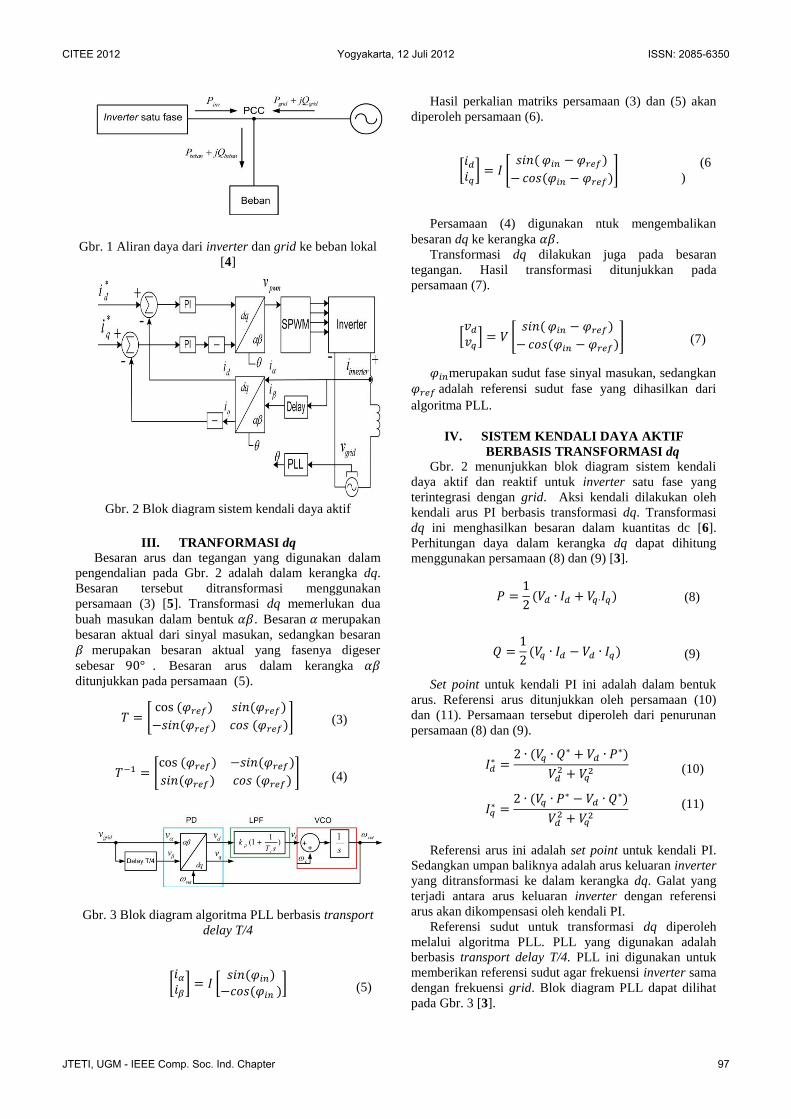
Gbr. 1 Aliran daya dari inverter dan grid ke beban lokal
[4]
Gbr. 2 Blok diagram sistem kendali daya aktif
III. TRANFORMASI dq
Besaran arus dan tegangan yang digunakan dalam
pengendalian pada Gbr. 2 adalah dalam kerangka dq.
Besaran tersebut ditransformasi menggunakan
persamaan (3) [5]. Transformasi dq memerlukan dua
buah masukan dalam bentuk . Besaran merupakan
besaran aktual dari sinyal masukan, sedangkan besaran
merupakan besaran aktual yang fasenya digeser
sebesar . Besaran arus dalam kerangka
ditunjukkan pada persamaan (5).
(3)
(4)
Gbr. 3 Blok diagram algoritma PLL berbasis transport
delay T/4
(5)
Hasil perkalian matriks persamaan (3) dan (5) akan
diperoleh persamaan (6).
(6
)
Persamaan (4) digunakan ntuk mengembalikan
besaran dq ke kerangka .
Transformasi dq dilakukan juga pada besaran
tegangan. Hasil transformasi ditunjukkan pada
persamaan (7).
(7)
merupakan sudut fase sinyal masukan, sedangkan
adalah referensi sudut fase yang dihasilkan dari
algoritma PLL.
IV. SISTEM KENDALI DAYA AKTIF
BERBASIS TRANSFORMASI dq
Gbr. 2 menunjukkan blok diagram sistem kendali
daya aktif dan reaktif untuk inverter satu fase yang
terintegrasi dengan grid. Aksi kendali dilakukan oleh
kendali arus PI berbasis transformasi dq. Transformasi
dq ini menghasilkan besaran dalam kuantitas dc [6].
Perhitungan daya dalam kerangka dq dapat dihitung
menggunakan persamaan (8) dan (9) [3].
(8)
(9)
Set point untuk kendali PI ini adalah dalam bentuk
arus. Referensi arus ditunjukkan oleh persamaan (10)
dan (11). Persamaan tersebut diperoleh dari penurunan
persamaan (8) dan (9).
(10)
(11)
Referensi arus ini adalah set point untuk kendali PI.
Sedangkan umpan baliknya adalah arus keluaran inverter
yang ditransformasi ke dalam kerangka dq. Galat yang
terjadi antara arus keluaran inverter dengan referensi
arus akan dikompensasi oleh kendali PI.
Referensi sudut untuk transformasi dq diperoleh
melalui algoritma PLL. PLL yang digunakan adalah
berbasis transport delay T/4. PLL ini digunakan untuk
memberikan referensi sudut agar frekuensi inverter sama
dengan frekuensi grid. Blok diagram PLL dapat dilihat
pada Gbr. 3 [3].
CITEE 2012 Yogyakarta, 12 Juli 2012 ISSN: 2085-6350
JTETI, UGM - IEEE Comp. Soc. Ind. Chapter 97
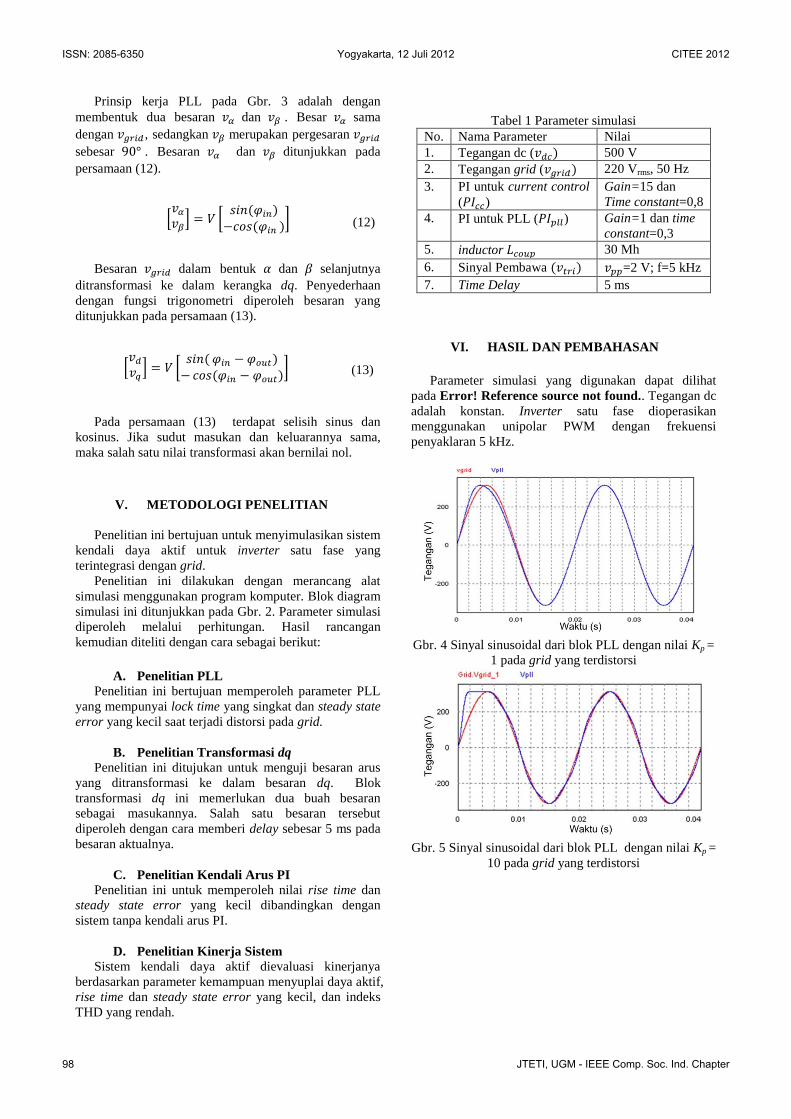
Prinsip kerja PLL pada Gbr. 3 adalah dengan
membentuk dua besaran dan . Besar sama
dengan , sedangkan merupakan pergesaran
sebesar . Besaran dan ditunjukkan pada
persamaan (12).
(12)
Besaran dalam bentuk dan selanjutnya
ditransformasi ke dalam kerangka dq. Penyederhaan
dengan fungsi trigonometri diperoleh besaran yang
ditunjukkan pada persamaan (13).
(13)
Pada persamaan (13) terdapat selisih sinus dan
kosinus. Jika sudut masukan dan keluarannya sama,
maka salah satu nilai transformasi akan bernilai nol.
V. METODOLOGI PENELITIAN
Penelitian ini bertujuan untuk menyimulasikan sistem
kendali daya aktif untuk inverter satu fase yang
terintegrasi dengan grid.
Penelitian ini dilakukan dengan merancang alat
simulasi menggunakan program komputer. Blok diagram
simulasi ini ditunjukkan pada Gbr. 2. Parameter simulasi
diperoleh melalui perhitungan. Hasil rancangan
kemudian diteliti dengan cara sebagai berikut:
A. Penelitian PLL
Penelitian ini bertujuan memperoleh parameter PLL
yang mempunyai lock time yang singkat dan steady state
error yang kecil saat terjadi distorsi pada grid.
B. Penelitian Transformasi dq
Penelitian ini ditujukan untuk menguji besaran arus
yang ditransformasi ke dalam besaran dq. Blok
transformasi dq ini memerlukan dua buah besaran
sebagai masukannya. Salah satu besaran tersebut
diperoleh dengan cara memberi delay sebesar 5 ms pada
besaran aktualnya.
C. Penelitian Kendali Arus PI
Penelitian ini untuk memperoleh nilai rise time dan
steady state error yang kecil dibandingkan dengan
sistem tanpa kendali arus PI.
D. Penelitian Kinerja Sistem
Sistem kendali daya aktif dievaluasi kinerjanya
berdasarkan parameter kemampuan menyuplai daya aktif,
rise time dan steady state error yang kecil, dan indeks
THD yang rendah.
Tabel 1 Parameter simulasi
No. Nama Parameter Nilai
1. Tegangan dc ( 500 V
2. Tegangan grid ( 220 Vrms, 50 Hz
3. PI untuk current control
( )
Gain=15 dan
Time constant=0,8
4. PI untuk PLL ( ) Gain=1 dan time
constant=0,3
5. inductor 30 Mh
6. Sinyal Pembawa =2 V; f=5 kHz
7. Time Delay 5 ms
VI. HASIL DAN PEMBAHASAN
Parameter simulasi yang digunakan dapat dilihat
pada Error! Reference source not found.. Tegangan dc
adalah konstan. Inverter satu fase dioperasikan
menggunakan unipolar PWM dengan frekuensi
penyaklaran 5 kHz.
Gbr. 4 Sinyal sinusoidal dari blok PLL dengan nilai Kp =
1 pada grid yang terdistorsi
Gbr. 5 Sinyal sinusoidal dari blok PLL dengan nilai Kp =
10 pada grid yang terdistorsi
ISSN: 2085-6350 Yogyakarta, 12 Juli 2012 CITEE 2012
98 JTETI, UGM - IEEE Comp. Soc. Ind. Chapter
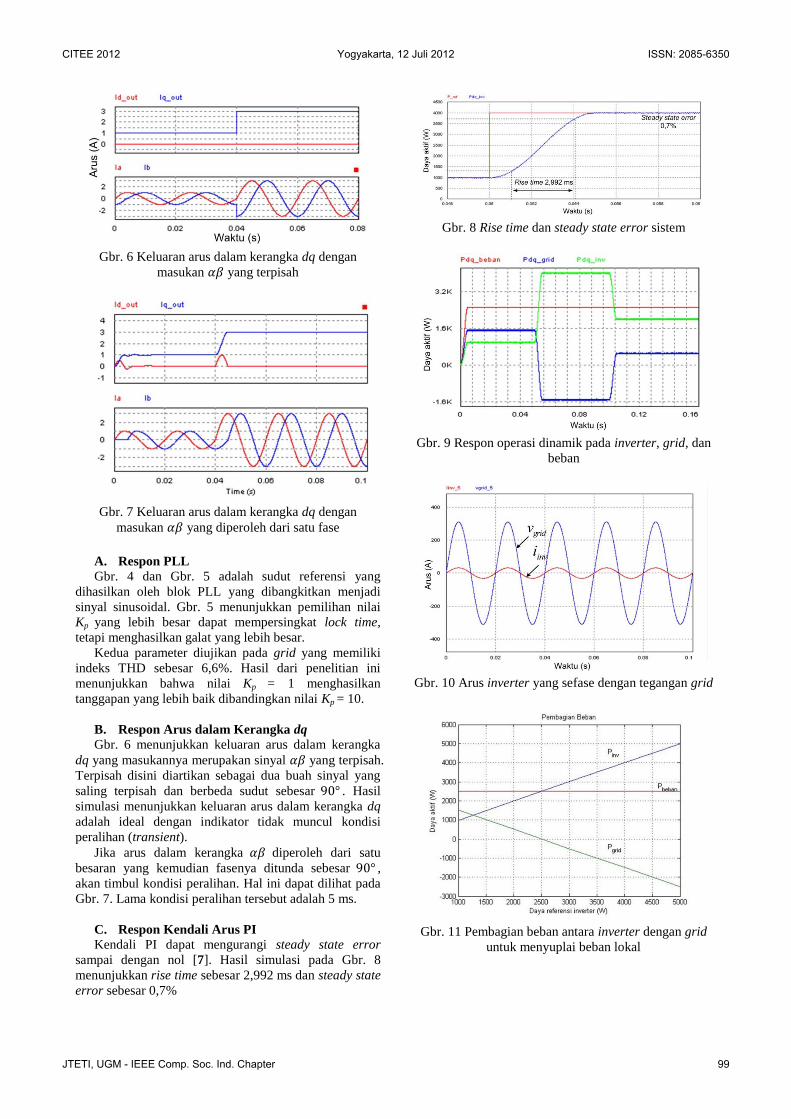
Gbr. 6 Keluaran arus dalam kerangka dq dengan
masukan yang terpisah
Gbr. 7 Keluaran arus dalam kerangka dq dengan
masukan yang diperoleh dari satu fase
A. Respon PLL
Gbr. 4 dan Gbr. 5 adalah sudut referensi yang
dihasilkan oleh blok PLL yang dibangkitkan menjadi
sinyal sinusoidal. Gbr. 5 menunjukkan pemilihan nilai
Kp yang lebih besar dapat mempersingkat lock time,
tetapi menghasilkan galat yang lebih besar.
Kedua parameter diujikan pada grid yang memiliki
indeks THD sebesar 6,6%. Hasil dari penelitian ini
menunjukkan bahwa nilai Kp = 1 menghasilkan
tanggapan yang lebih baik dibandingkan nilai Kp = 10.
B. Respon Arus dalam Kerangka dq
Gbr. 6 menunjukkan keluaran arus dalam kerangka
dq yang masukannya merupakan sinyal yang terpisah.
Terpisah disini diartikan sebagai dua buah sinyal yang
saling terpisah dan berbeda sudut sebesar . Hasil
simulasi menunjukkan keluaran arus dalam kerangka dq
adalah ideal dengan indikator tidak muncul kondisi
peralihan (transient).
Jika arus dalam kerangka diperoleh dari satu
besaran yang kemudian fasenya ditunda sebesar ,
akan timbul kondisi peralihan. Hal ini dapat dilihat pada
Gbr. 7. Lama kondisi peralihan tersebut adalah 5 ms.
C. Respon Kendali Arus PI
Kendali PI dapat mengurangi steady state error
sampai dengan nol [7]. Hasil simulasi pada Gbr. 8
menunjukkan rise time sebesar 2,992 ms dan steady state
error sebesar 0,7%
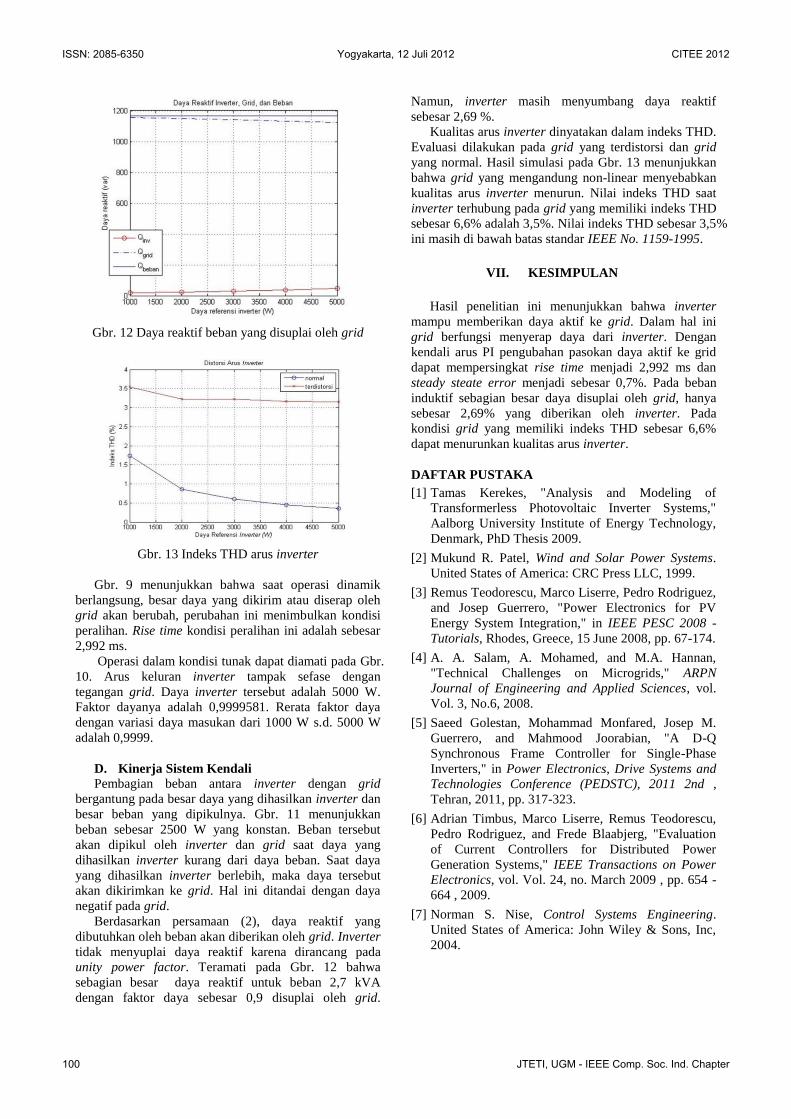
Gbr. 8 Rise time dan steady state error sistem
Gbr. 9 Respon operasi dinamik pada inverter, grid, dan
beban
Gbr. 10 Arus inverter yang sefase dengan tegangan grid
Gbr. 11 Pembagian beban antara inverter dengan grid
untuk menyuplai beban lokal
CITEE 2012 Yogyakarta, 12 Juli 2012 ISSN: 2085-6350
JTETI, UGM - IEEE Comp. Soc. Ind. Chapter 99
Gbr. 12 Daya reaktif beban yang disuplai oleh grid
Gbr. 13 Indeks THD arus inverter
Gbr. 9 menunjukkan bahwa saat operasi dinamik
berlangsung, besar daya yang dikirim atau diserap oleh
grid akan berubah, perubahan ini menimbulkan kondisi
peralihan. Rise time kondisi peralihan ini adalah sebesar
2,992 ms.
Operasi dalam kondisi tunak dapat diamati pada Gbr.
10. Arus keluran inverter tampak sefase dengan
tegangan grid. Daya inverter tersebut adalah 5000 W.
Faktor dayanya adalah 0,9999581. Rerata faktor daya
dengan variasi daya masukan dari 1000 W s.d. 5000 W
adalah 0,9999.
D. Kinerja Sistem Kendali
Pembagian beban antara inverter dengan grid
bergantung pada besar daya yang dihasilkan inverter dan
besar beban yang dipikulnya. Gbr. 11 menunjukkan
beban sebesar 2500 W yang konstan. Beban tersebut
akan dipikul oleh inverter dan grid saat daya yang
dihasilkan inverter kurang dari daya beban. Saat daya
yang dihasilkan inverter berlebih, maka daya tersebut
akan dikirimkan ke grid. Hal ini ditandai dengan daya
negatif pada grid.
Berdasarkan persamaan (2), daya reaktif yang
dibutuhkan oleh beban akan diberikan oleh grid. Inverter
tidak menyuplai daya reaktif karena dirancang pada
unity power factor. Teramati pada Gbr. 12 bahwa
sebagian besar daya reaktif untuk beban 2,7 kVA
dengan faktor daya sebesar 0,9 disuplai oleh grid.
Namun, inverter masih menyumbang daya reaktif
sebesar 2,69 %.
Kualitas arus inverter dinyatakan dalam indeks THD.
Evaluasi dilakukan pada grid yang terdistorsi dan grid
yang normal. Hasil simulasi pada Gbr. 13 menunjukkan
bahwa grid yang mengandung non-linear menyebabkan
kualitas arus inverter menurun. Nilai indeks THD saat
inverter terhubung pada grid yang memiliki indeks THD
sebesar 6,6% adalah 3,5%. Nilai indeks THD sebesar 3,5%
ini masih di bawah batas standar IEEE No. 1159-1995.
VII. KESIMPULAN
Hasil penelitian ini menunjukkan bahwa inverter
mampu memberikan daya aktif ke grid. Dalam hal ini
grid berfungsi menyerap daya dari inverter. Dengan
kendali arus PI pengubahan pasokan daya aktif ke grid
dapat mempersingkat rise time menjadi 2,992 ms dan
steady steate error menjadi sebesar 0,7%. Pada beban
induktif sebagian besar daya disuplai oleh grid, hanya
sebesar 2,69% yang diberikan oleh inverter. Pada
kondisi grid yang memiliki indeks THD sebesar 6,6%
dapat menurunkan kualitas arus inverter.
DAFTAR PUSTAKA
[1] Tamas Kerekes, "Analysis and Modeling of
Transformerless Photovoltaic Inverter Systems,"
Aalborg University Institute of Energy Technology,
Denmark, PhD Thesis 2009.
[2] Mukund R. Patel, Wind and Solar Power Systems.
United States of America: CRC Press LLC, 1999.
[3] Remus Teodorescu, Marco Liserre, Pedro Rodriguez,
and Josep Guerrero, "Power Electronics for PV
Energy System Integration," in IEEE PESC 2008 -
Tutorials, Rhodes, Greece, 15 June 2008, pp. 67-174.
[4] A. A. Salam, A. Mohamed, and M.A. Hannan,
"Technical Challenges on Microgrids," ARPN
Journal of Engineering and Applied Sciences, vol.
Vol. 3, No.6, 2008.
[5] Saeed Golestan, Mohammad Monfared, Josep M.
Guerrero, and Mahmood Joorabian, "A D-Q
Synchronous Frame Controller for Single-Phase
Inverters," in Power Electronics, Drive Systems and
Technologies Conference (PEDSTC), 2011 2nd ,
Tehran, 2011, pp. 317-323.
[6] Adrian Timbus, Marco Liserre, Remus Teodorescu,
Pedro Rodriguez, and Frede Blaabjerg, "Evaluation
of Current Controllers for Distributed Power
Generation Systems," IEEE Transactions on Power
Electronics, vol. Vol. 24, no. March 2009 , pp. 654 -
664 , 2009.
[7] Norman S. Nise, Control Systems Engineering.
United States of America: John Wiley & Sons, Inc,
2004.
ISSN: 2085-6350 Yogyakarta, 12 Juli 2012 CITEE 2012
100 JTETI, UGM - IEEE Comp. Soc. Ind. Chapter










![Panduan Referensi - download.brother.com · Lampu LED menyala tergantung pada status daya printer. Ketika printer dalam Mode Tidur, LED berkedip. 5. Daya Aktif/Nonaktif ... Otomatis]](https://img.pdfslide.tips/doc/110x75/5c859d7409d3f289588c4457/panduan-referensi-lampu-led-menyala-tergantung-pada-status-daya-printer-ketika.jpg)

















