Embed Size (px)
Citation preview

SISTEMA DE MEDIDAS DE FORCA PARA MANCAIS MAGNETICOS
SUPERCONDUTORES
Guilherme Theophilo Telles
Projeto de Graduacao apresentado ao Corpo
Docente do Departamento de Engenharia
Eletrica da Escola Politecnica da Universidade
Federal do Rio de Janeiro, como parte dos
requisitos necessarios a obtencao do tıtulo de
Engenheiro Eletricista.
Orientadores: Rubens de Andrade Jr.
Felipe Sass
Rio de Janeiro
Marco de 2015

SISTEMA DE MEDIDAS DE FORCA PARA MANCAIS MAGNETICOS
SUPERCONDUTORES
Guilherme Theophilo Telles
PROJETO DE GRADUACAO SUBMETIDO AO CORPO DOCENTE
DO DEPARTAMENTO DE ENGENHARIA ELETRICA DA ESCOLA
POLITECNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSARIOS PARA A OBTENCAO DO
GRAU DE ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Rubens de Andrade Jr., D.Sc
Prof. Felipe Sass, M.Sc
Prof. Elkin Ferney Rodriguez Velandia, D.Sc
Prof. Flavio Goulart dos Reis Martins, M.Sc.
RIO DE JANEIRO, RJ – BRASIL
MARCO DE 2015

Telles, Guilherme Theophilo
Sistema de Medidas de Forca para Mancais Magneticos
Supercondutores / Guilherme Theophilo Telles. – Rio de
Janeiro: UFRJ/Escola Politecnica, 2015.
XIV, 43 p.: il.; 29, 7cm.
Orientadores: Rubens de Andrade Jr.
Felipe Sass
Projeto de Graduacao – UFRJ/Escola Politecnica/
Departamento de Engenharia Eletrica, 2015.
Referencias Bibliograficas: p. 42 – 43.
1. supercondutor. 2. sistema de medidas. 3. mancal
magnetico. 4. maglev. 5. forca de levitacao. I.
de Andrade Jr., Rubens et al. II. Universidade Federal
do Rio de Janeiro, Escola Politecnica, Departamento de
Engenharia Eletrica. III. Sistema de Medidas de Forca
para Mancais Magneticos Supercondutores.
iii

Agradecimentos
Agradeco primeiramente a famılia, pois me fizeram como sou. A meus pais, An-
drea e Joao Miguel, e meus avos, Maria Angela, Fernando e Detta, sou eternamente
grato por sua preocupacao e carinho. Mesmo estando distantes, sinto seu olhar sobre
mim em tudo que faco e seu orgulho e uma grande motivacao para meus atos. A
meus demais parentes, que de uma forma ou de outra me apoiaram ao longo dessa
estrada, muito obrigado.
Em segundo, volto minha gratidao aos mestres pois me deram olhos para enxer-
gar o caminho e pernas para o trilhar. Gracas a voces, pude atingir muitos dos meus
objetivos e formular outros ainda no meio do caminho. O futuro que me espera e
tao seu quanto meu e para sempre carregarei seu nome em minhas conquistas.
A UFRJ e seus notaveis corpo docente e quadro de funcionarios devo tudo que
aprendi nesses cinco anos em que me receberam. Ostento o nome desta instituicao
com orgulho e sei que fui afortunado por poder desfrutar da competencia de seus
profissionais. Aos coordenadores do Departamento de Engenharia Eletrica, profes-
sores Sergio e Tatiana, assim como a secretaria do departamento, Sra. Katia, e ao
meu orientador academico, Prof. Rolim, obrigado pela constante disposicao e boa
vontade.
Ao LASUP e sua equipe agradeco pela oportunidade de ter trabalhado num am-
biente tao agradavel e em projetos tao intrigantes. As memorias de companherismo
e aprendizado sao insubstituıveis. Agradeco em particular aos professores Rubens e
Felipe, por sua orientacao, mas sem ofuscar a gratidao que devo a todos os outros
por tudo que me acrescentaram.
iv
A meus amigos, meu mais profundo e sincero obrigado. Enquanto meus mestres
me empurraram para frente, voces me mantiveram de pe. Foi sua amizade e sua
forca que me reergueram no meu momento mais sombrio e pra sempre serao uma
das maiores pecas no meu quebra-cabeca. Os lacos criados nestes predios nao sao
facilmente postos de lado, e sei que ainda dividiremos muitas lagrimas e muitas
risadas. O espaco foi criado, amigos. Aproveitem.
Finalmente mas nao menos importante, agradeco a minha namorada, Juliana
Brauns. Seu amor e o fogo que me move de dia e que me aquece a noite. Por me
fazer feliz todos os dias, obrigado.
”Herewith, maybe, thou shalt
rekindle hearts to the valour of
old in a world that grows chill”
- J. R. R. Tolkien
v

Resumo do Projeto de Graduacao apresentado a Escola Politecnica/UFRJ como
parte dos requisitos necessarios para a obtencao do grau de Engenheiro Eletricista
SISTEMA DE MEDIDAS DE FORCA PARA MANCAIS MAGNETICOS
SUPERCONDUTORES
Guilherme Theophilo Telles
Marco/2015
Orientadores: Rubens de Andrade Jr.
Felipe Sass
Departamento: Engenharia Eletrica
Este trabalho consiste no desenvolvimento de um sistema de medidas de forca
e posicao relativa entre ımas e amostras supercondutoras, com capacidade de exe-
cutar deslocamentos e medir forcas em duas dimensoes. Sua motivacao e promover
melhor compreensao acerca do funcionamento de supercondutores em aplicacoes de
levitacao magnetica, a fim de melhorar a tecnologia de levitacao do veıculo Maglev
Cobra, desenvolvido pelo LASUP da UFRJ. Foi empregado o software LabVIEW
para aquisicao e armazenamento dos dados e envio dos comandos de movimento. Foi
possıvel a realizacao de ensaios com amostras supercondutoras variadas, permitindo
sua caracterizacao.
vi

Abstract of Graduation Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Electrical Engineer
SYSTEM OF FORCE MEASUREMENT FOR SUPERCONDUCTIVE
MAGNETIC BEARINGS
Guilherme Theophilo Telles
March/2015
Advisors: Rubens de Andrade Jr.
Felipe Sass
Department: Electrical Engineering
This project is to develop a system of force and relative position measures be-
tween magnets and superconducting samples with measurement and displacement
capability in two dimensions. Its motivation is to promote better understanding of
superconducting operation in magnetic levitation applications in order to improve
the Maglev Cobra vehicle levitation technology, developed by LASUP UFRJ. Lab-
VIEW software was used for the data acquisition and storage and sending movement
commands. It was possible to perform several tests with different superconducting
samples, allowing their characterization.
vii

Sumario
Lista de Figuras x
Lista de Tabelas xii
Lista de Abreviaturas xiii
Lista de Sımbolos xiv
1 Introducao 1
1.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Organizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Supercondutividade 4
2.1 A Descoberta da Supercondutividade . . . . . . . . . . . . . . . . . . 4
2.2 Efeito Meissner e o Diamagnetismo . . . . . . . . . . . . . . . . . . . 5
2.3 Tipos de Supercondutores . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Mancais Magneticos Supercondutores . . . . . . . . . . . . . . . . . . 9
3 Metodologia e Equipamentos 11
3.1 Estrutura Fısica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2 Interface Analogico-Digital . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Programacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3.1 Estrutura Geral do Programa . . . . . . . . . . . . . . . . . . 18
3.3.2 Funcoes de Configuracao e de Parada . . . . . . . . . . . . . . 20
viii

3.3.3 Funcoes de Ensaio . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Resultados 33
4.1 Ensaio de Zero Field Cooling (ZFC) . . . . . . . . . . . . . . . . . . . 33
4.2 Ensaio de Field Cooling (FC) . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Ensaio de FC Lateral . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.4 Ensaios Dinamicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Conclusoes e Trabalhos Futuros 40
Referencias Bibliograficas 42
ix

Lista de Figuras
2.1 Regiao em que um material apresenta propriedades supercondutoras . 5
2.2 Efeito Meissner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Tipos de Supercondutores e suas diferencas . . . . . . . . . . . . . . . 7
3.1 Esquema da Bancada Original . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Esquema e foto da bancada completa . . . . . . . . . . . . . . . . . . 14
3.3 Estrutura movel de deslocamento horizontal . . . . . . . . . . . . . . 14
3.4 Motor de passo e sua fonte . . . . . . . . . . . . . . . . . . . . . . . . 15
3.5 Celula de Carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.6 Sensor de Posicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.7 Hub (a) e driver do motor de passo (b) . . . . . . . . . . . . . . . . . 17
3.8 Esquematico de interface de controle e aquisicao . . . . . . . . . . . . 18
3.9 Estrutura Geral do Programa . . . . . . . . . . . . . . . . . . . . . . 19
3.10 Interface das funcoes de configuracao - aba 1 . . . . . . . . . . . . . . 21
3.11 Interface das funcoes de configuracao - aba 2 . . . . . . . . . . . . . . 21
3.12 Funcao de Ensaio de ZFC . . . . . . . . . . . . . . . . . . . . . . . . 23
3.13 Interface da funcao de ZFC . . . . . . . . . . . . . . . . . . . . . . . 23
3.14 Funcao de Ensaio de Field Cooling . . . . . . . . . . . . . . . . . . . 24
3.15 Interface da funcao de Field Cooling . . . . . . . . . . . . . . . . . . 25
3.16 Funcao de Ensaio de FC Lateral . . . . . . . . . . . . . . . . . . . . . 26
3.17 Interface da funcao de FC Lateral . . . . . . . . . . . . . . . . . . . . 27
3.18 Funcao de Ensaio de Forca Constante . . . . . . . . . . . . . . . . . . 28
3.19 Interface da funcao de Forca Constante . . . . . . . . . . . . . . . . . 28
x
3.20 Funcao de Ensaio Dinamico de Unilateral . . . . . . . . . . . . . . . . 30
3.21 Funcao de Ensaio Dinamico de Bilateral . . . . . . . . . . . . . . . . 31
3.22 Interface da funcao de Ensaio Dinamico Unilateral . . . . . . . . . . . 32
3.23 Interface da funcao de Ensaio Dinamico Bilateral . . . . . . . . . . . 32
4.1 Resultados do ensaio de ZFC . . . . . . . . . . . . . . . . . . . . . . 34
4.2 Resultados do ensaio de FC . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Resultados do ensaio de FC Lateral . . . . . . . . . . . . . . . . . . . 36
4.4 Resultados do ensaio dinamico unilateral . . . . . . . . . . . . . . . . 38
4.5 Resultados do ensaio dinamico bilateral . . . . . . . . . . . . . . . . . 38
xi

Lista de Tabelas
2.1 Lista de materiais supercondutores . . . . . . . . . . . . . . . . . . . 8
3.1 Equipamentos que compoem a bancada final . . . . . . . . . . . . . . 13
3.2 Funcoes de Configuracao e de Parada . . . . . . . . . . . . . . . . . . 20
xii
Lista de Abreviaturas
FC Resfriamento do supercondutor na presenca de campo
magnetico (Field Cooling), p. 22
HTS Supercondutores de Alta Temperatura Crıtica (High Tempera-
ture Superconductors), p. 8
LASUP Laboratorio de Aplicacoes de Supercondutores, p. 1
MagLev Veıculo de Levitacao Magnetica, p. 1
SMES Armazenador de Energia Magnetica com Supercondutores (Su-
perconducting Magnetic Energy Storage), p. 9
Teoria BCS Teoria da supercondutividade proposta por Bardeen, Cooper e
Schrieffer, p. 7
UFRJ Universidade Federal do Rio de Janeiro, p. 1
ZFC Resfriamento do supercondutor em ausencia de campo
magnetico (Zero-Field Cooling), p. 22
xiii

Lista de Sımbolos
B Densidade de Campo Magnetico, p. 7
CA Corrente Alternada, p. 13
CC Corrente Contınua, p. 13
F Forca, p. 7
Hc Intensidade de Campo Magnetico Crıtica, p. 5
J Densidade de Corrente Eletrica, p. 7
Jc Densidade de Corrente Crıtica, p. 5
Tc Temperatura Crıtica, p. 5
xiv
Capıtulo 1
Introducao
Neste capıtulo serao descritos os principais objetivos e motivacoes por tras do
projeto, assim como a organizacao dos capıtulos subsequentes deste trabalho.
1.1 Objetivos
Este trabalho tem como objetivo o desenvolvimento de um sistema capaz de re-
alizar ensaios de forca e posicao entre ımas e amostras supercondutoras, a fim de
estudar o comportamento de supercondutores em levitacao magnetica, com capaci-
dade de deslocamento e medicao em duas dimensoes.
O sistema desenvolvido sera utilizado com diversas amostras supercondutoras,
de forma a fornecer resultados visando tanto a caracterizacao das amostras e veri-
ficacao de sua qualidade quanto uma comparacao entre tipos diferentes de arranjos
supercondutores.
Este trabalho faz parte de uma serie de iniciativas do Laboratorio de Aplicacoes
de Supercondutores da UFRJ (LASUP), cujo objetivo e o aperfeicoamento do man-
cal magnetico utilizado no veıculo Maglev Cobra [1].
1
1.2 Motivacao
Supercondutores sao materiais cuja resistividade e nula em baixas temperatu-
ras, o que possibilita sua utilizacao em diversas aplicacoes em sistemas eletricos.
Com o passar do tempo, suas caracterısticas foram descobertas e o processo de sua
fabricacao aprimorado de forma a melhorar significativamente sua qualidade.
O LASUP estuda uma ampla variedade de tecnologias em que os materiais su-
percondutores podem ser utilizados, tendo como uma de suas principais metas a
construcao de um veıculo de levitacao magnetica supercondutora: o MagLev Cobra,
que faz uso de supercondutores para sua levitacao. No contexto atual, em que a pre-
ocupacao com o meio ambiente toma proporcoes cada vez maiores e a necessidade de
alternativas compactas e eficientes para sistemas de transporte publico ou massivo
em cidades torna-se prioritaria, o MagLev Cobra, um trem de levitacao magnetica,
apresenta diversas vantagens com relacao aos trens urbanos utilizados atualmente
no Brasil: nao emite poluentes, demanda menos energia e percorre curvas mais
acentuadas e inclinacoes mais ıngremes.
O MagLev Cobra levita por meio da interacao entre um trilho de ımas sobre o
qual se locomove e blocos supercondutores dispostos em criostatos, localizados por
sua vez na parte inferior do veıculo. Os criostatos sao abastecidos com nitrogenio
lıquido, de forma que os supercondutores permanecam na temperatura de 77 K, a
fim de manter seu estado supercondutor. Para otimizar a utilizacao dos supercon-
dutores e necessario minimizar a quandidade de material supercondutor, enquanto
se maximiza a forca de levitacao e a estabilidade lateral.
O sistema desenvolvido neste trabalho foi idealizado de forma a estudar a in-
teracao de supercondutores com ımas em condicoes distintas, inclusive em confi-
guracoes semelhantes as do veıculo em funcionamento. Desta forma, espera-se que
se possa estudar o comportamento de mancais magneticos e encontrar solucoes para
seu aprimoramento.
2
1.3 Organizacao
Neste capıtulo foram apresentados os objetivos e a motivacao por tras deste pro-
jeto. O capıtulo 2 descreve os pontos basicos da teoria de supercondutores, assim
como uma linha do tempo acerca das descobertas desses materiais. O capıtulo 3
apresenta os equipamentos e a metodologia utilizada, com enfoque na logica utili-
zada para a programacao do sistema. Em seguida, o capıtulo 4 apresenta alguns
resultados obtidos por meio do sistema desenvolvido. O capıtulo 5 contem as con-
clusoes a que se pode chegar com os resultados obtidos e algumas sugestoes acerca de
trabalhos futuros relacionados. As referencias bibliograficas podem ser encontradas
no ultimo capıtulo.
3

Capıtulo 2
Supercondutividade
Neste capıtulo serao vistos os principais pontos da teoria de supercondutores e
da historia da pesquisa da supercondutividade, com enfoque nas caracterısticas mais
relevantes para a aplicacao em mancais magneticos.
2.1 A Descoberta da Supercondutividade
A supercondutividade consiste na resistividade eletrica nula demonstrada por
alguns materiais quando submetidos a condicoes apropriadas de temperatura, den-
sidade de corrente e intensidade de campo magnetico.
O fenomeno foi descoberto por Heike Kamerlingh Onnes, em 1911, enquanto
buscava compreender o comportamento de metais em temperaturas extremamente
baixas. Utilizando-se de Helio lıquido para refrigeracao do material[2], Onnes espe-
rava que a resistividade eletrica de suas amostras se correlacionasse linearmente com
a temperatura a medida que se aproximassem do zero absoluto, atingindo valor nulo
em 0 K para amostras puras[3] e um valor residual de resistividade para amostras
impuras. Durante os testes com Mercurio impuro, no entanto, Onnes observou que
sua resistividade eletrica manteve-se como esperado apenas para valores de tempera-
tura maiores do que 4,2 K, caindo abruptamente para zero neste ponto[4, 5]. Onnes
batizou entao o fenomeno, atribuindo-lhe o nome pelo qual e conhecido ate hoje.
Em 1913, ao encontrar as mesmas propriedades no chumbo, Onnes definiu como
4
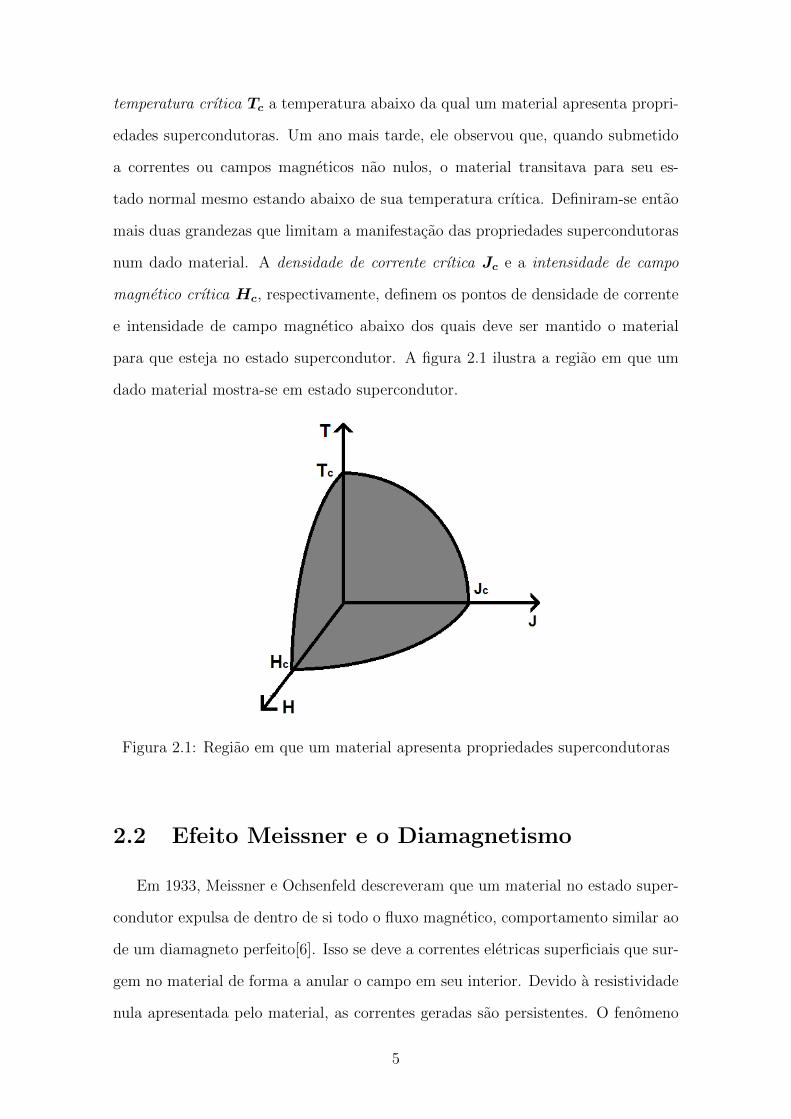
temperatura crıtica Tc a temperatura abaixo da qual um material apresenta propri-
edades supercondutoras. Um ano mais tarde, ele observou que, quando submetido
a correntes ou campos magneticos nao nulos, o material transitava para seu es-
tado normal mesmo estando abaixo de sua temperatura crıtica. Definiram-se entao
mais duas grandezas que limitam a manifestacao das propriedades supercondutoras
num dado material. A densidade de corrente crıtica Jc e a intensidade de campo
magnetico crıtica Hc, respectivamente, definem os pontos de densidade de corrente
e intensidade de campo magnetico abaixo dos quais deve ser mantido o material
para que esteja no estado supercondutor. A figura 2.1 ilustra a regiao em que um
dado material mostra-se em estado supercondutor.
Figura 2.1: Regiao em que um material apresenta propriedades supercondutoras
2.2 Efeito Meissner e o Diamagnetismo
Em 1933, Meissner e Ochsenfeld descreveram que um material no estado super-
condutor expulsa de dentro de si todo o fluxo magnetico, comportamento similar ao
de um diamagneto perfeito[6]. Isso se deve a correntes eletricas superficiais que sur-
gem no material de forma a anular o campo em seu interior. Devido a resistividade
nula apresentada pelo material, as correntes geradas sao persistentes. O fenomeno
5
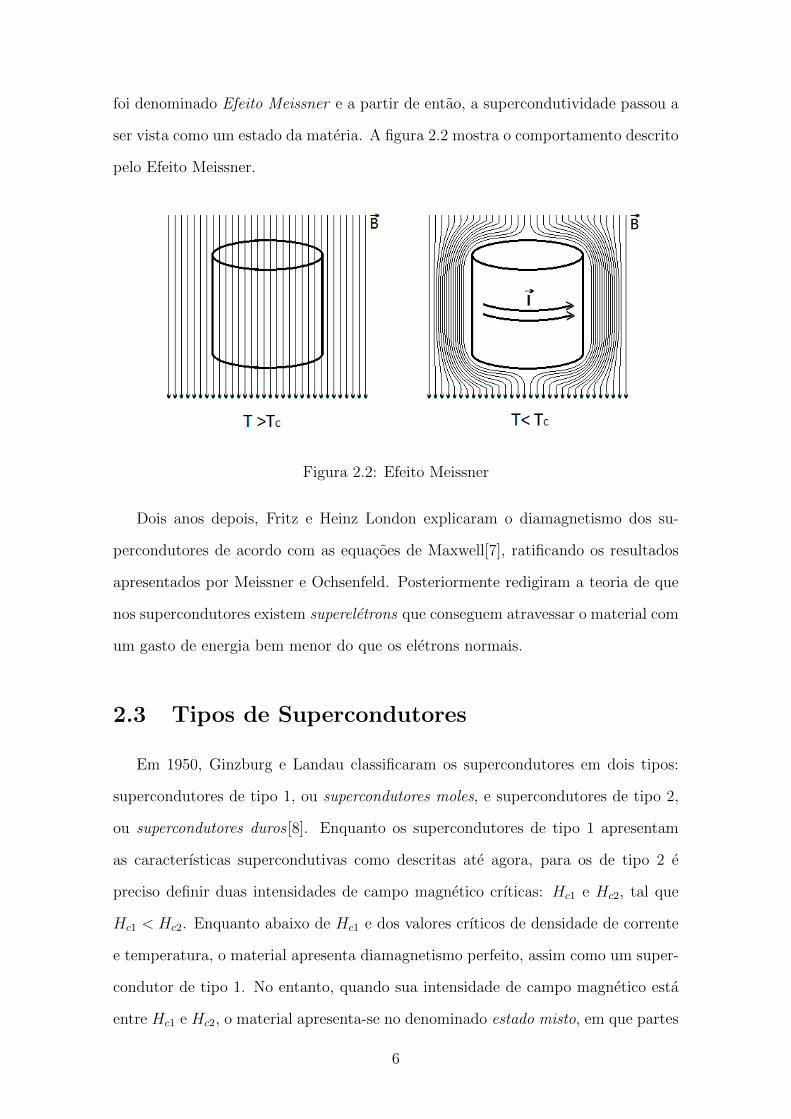
foi denominado Efeito Meissner e a partir de entao, a supercondutividade passou a
ser vista como um estado da materia. A figura 2.2 mostra o comportamento descrito
pelo Efeito Meissner.
Figura 2.2: Efeito Meissner
Dois anos depois, Fritz e Heinz London explicaram o diamagnetismo dos su-
percondutores de acordo com as equacoes de Maxwell[7], ratificando os resultados
apresentados por Meissner e Ochsenfeld. Posteriormente redigiram a teoria de que
nos supercondutores existem supereletrons que conseguem atravessar o material com
um gasto de energia bem menor do que os eletrons normais.
2.3 Tipos de Supercondutores
Em 1950, Ginzburg e Landau classificaram os supercondutores em dois tipos:
supercondutores de tipo 1, ou supercondutores moles, e supercondutores de tipo 2,
ou supercondutores duros [8]. Enquanto os supercondutores de tipo 1 apresentam
as caracterısticas supercondutivas como descritas ate agora, para os de tipo 2 e
preciso definir duas intensidades de campo magnetico crıticas: Hc1 e Hc2, tal que
Hc1 < Hc2. Enquanto abaixo de Hc1 e dos valores crıticos de densidade de corrente
e temperatura, o material apresenta diamagnetismo perfeito, assim como um super-
condutor de tipo 1. No entanto, quando sua intensidade de campo magnetico esta
entre Hc1 e Hc2, o material apresenta-se no denominado estado misto, em que partes
6
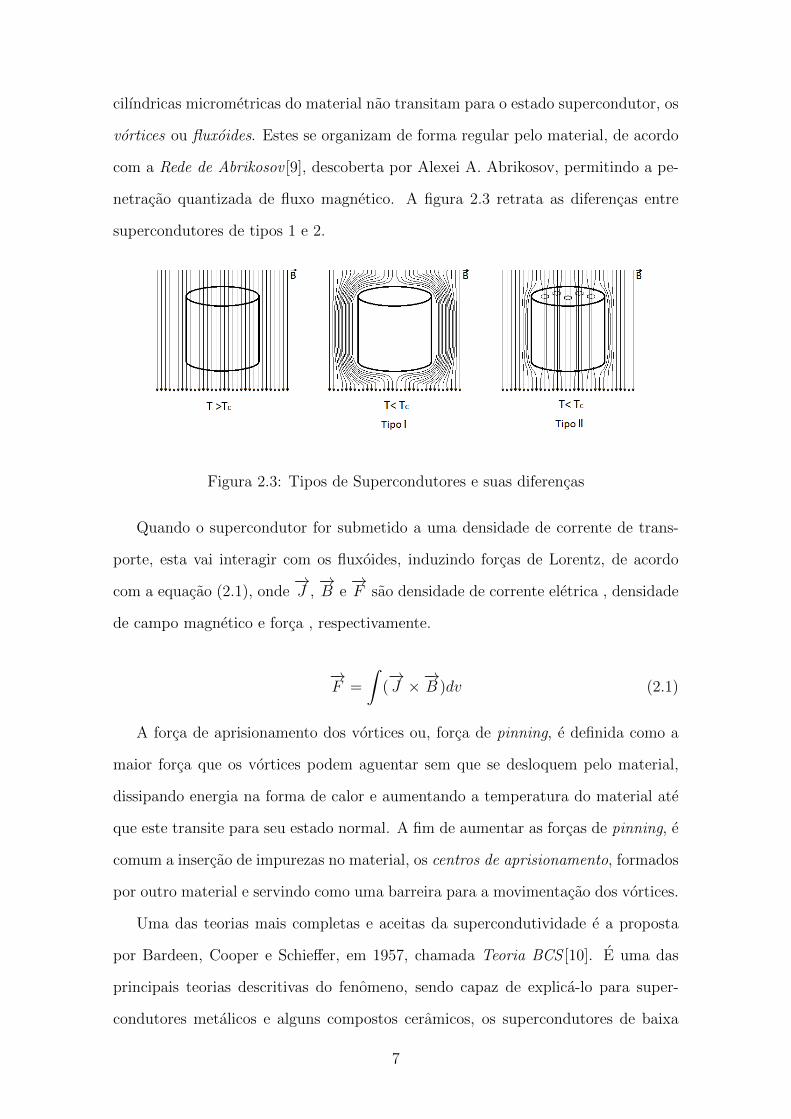
cilındricas micrometricas do material nao transitam para o estado supercondutor, os
vortices ou fluxoides. Estes se organizam de forma regular pelo material, de acordo
com a Rede de Abrikosov [9], descoberta por Alexei A. Abrikosov, permitindo a pe-
netracao quantizada de fluxo magnetico. A figura 2.3 retrata as diferencas entre
supercondutores de tipos 1 e 2.
Figura 2.3: Tipos de Supercondutores e suas diferencas
Quando o supercondutor for submetido a uma densidade de corrente de trans-
porte, esta vai interagir com os fluxoides, induzindo forcas de Lorentz, de acordo
com a equacao (2.1), onde−→J ,−→B e−→F sao densidade de corrente eletrica , densidade
de campo magnetico e forca , respectivamente.
−→F =
∫(−→J ×
−→B )dv (2.1)
A forca de aprisionamento dos vortices ou, forca de pinning, e definida como a
maior forca que os vortices podem aguentar sem que se desloquem pelo material,
dissipando energia na forma de calor e aumentando a temperatura do material ate
que este transite para seu estado normal. A fim de aumentar as forcas de pinning, e
comum a insercao de impurezas no material, os centros de aprisionamento, formados
por outro material e servindo como uma barreira para a movimentacao dos vortices.
Uma das teorias mais completas e aceitas da supercondutividade e a proposta
por Bardeen, Cooper e Schieffer, em 1957, chamada Teoria BCS [10]. E uma das
principais teorias descritivas do fenomeno, sendo capaz de explica-lo para super-
condutores metalicos e alguns compostos ceramicos, os supercondutores de baixa
7

temperatura crıtica. No que diz respeito, contudo, aos de alta temperatura crıtica,
a teoria mostra-se ineficiente.
O modelo do estado crıtico[11], proposto em 1962 por Bean preve que a cor-
rente superficial que circula pelo supercondutor varia das bordas para o interior do
material de acordo com o campo magnetico a que este e exposto.
Finalmente, em 1986, foram descobertos os supercondutores com alta tempe-
ratura crıtica, ou High Temperature Superconductors (HTS), com a pesquisa de
Bednorz e Muller. Com temperatura crıtica na ordem de 100 K, os HTS permitem
a utilizacao de Nitrogenio lıquido para refrigeracao, um material muito mais abun-
dante e barato do que Helio lıquido, o que facilitou e incentivou as pesquisas na area.
A tabela 2.1 apresenta alguns materiais supercondutores e suas caracterısticas.
Tabela 2.1: Materiais supercondutores (retirado de[12])
Material Tc (K) Ano
Hg 4,2 1911
Pb 7,2 1913
Nb 9,2 1930
NbN0,96 15,2 1950
Nb3Sn 18,1 1954
Nb3 (Al0,75Ge0,25) 20-21 1966
Nb3Ga 20,3 1971
Nb3Ge 23,2 1973
BaxLa5−xCu5Oy 30-35 1986
(La0,8Ba0,11)Cu4−δ (1GPa) 52 1986
Y Ba2Cu3O7−δ 92 1987
Bi2Sr2Ca2Cu3O10 110 1988
T l2Ba2Ca2Cu3O10 125 1988
T l2Ba2Ca2Cu3O10 (7GPa) 131 1993
HgBa2Ca2Cu3O8+δ 133 1993
HgBa2Ca2Cu3O8+δ (25GPa) 155 1993
Hg0,8Pb0,2Ba2Ca2Cu3Ox 133 1994
HbBa2Ca2Cu3O8+δ (30GPa) 164 1994
Hg0,8T l0,2Ba2Ca2Cu3O8,33 (30GPa) 138 1995
MgB2 39 2001
Vale o destaque para a liga Y Ba2Cu3O7−δ, um oxido de Itrio, Bario e Cobre,
8

de que as amostras utilizadas neste trabalho sao feitas. Sua principal vantagem
com relacao a outros tipos de supercondutores e a possibilidade de ser utilizado, na
temperatura do nitrogenio lıquido, em aplicacoes praticas que demandem campos
magneticos de ate 7 T.
2.4 Mancais Magneticos Supercondutores
Entre as principais aplicacoes dos supercondutores, podem-se citar mancais
magneticos supercondutores [13], veıculos Maglev[1], limitadores de corrente [14],
eletromagnetos com alto valor de campo magnetico [15], maquinas de ressonancia
magnetica, aceleradores de partıculas, dispositivos de armazenamento de energia
eletrica como Flywheels [16] e SMES (Superconducting Magnetic Energy Storage
System) [17], maquinas eletricas [18] e linhas de transmissao [19].
Dentre tais aplicacoes e considerando-se o ambito deste trabalho, vale destacar
os mancais magneticos supercondutores. Mancais sao estruturas cujo objetivo e
minimizar as perdas por contato mecanico entre duas partes de uma mesma maquina
que apresentam movimento relativo entre si. Os mancais magneticos fazem uso das
propriedades magneticas de ımas permanentes ou eletroımas para a reducao de atrito
em aplicacoes de alto desempenho.
No caso especıfico de mancais magneticos supercondutores, e a interacao entre
um ıma permanente e um supercondutor do tipo II que garante a alta eficiencia
do processo de levitacao [20]. Devido a estabilidade fornecida ao sistema gracas
as forcas restauradoras passivas que surgem no supercondutor, este tipo de mancal
dispensa o uso de sistemas de controle, ao contrario dos mancais eletromagneticos
[21].
A possibilidade de utilizacao de supercondutores do tipo II, neste tipo de
aplicacao, se deve ao aprisionamento de campo nos vortices e ao diamagnetismo apre-
sentado pelo material. Ao transitar para o estado supercondutor, os vortices tendem
a manter o campo a que o material estava exposto, de forma que qualquer alteracao
no posicionamento do supercondutor provoca uma variacao no campo magnetico
9
aprisionado, o que, por sua vez, causa a circulacao de correntes em oposicao a essa
variacao de fluxo, de acordo com a Lei de Lenz. A interacao das correntes geradas
com o campo magnetico aprisionado implica o surgimento de uma forca restaura-
dora que faz com que a posicao relativa entre o ıma e o supercondutor tenda a ser
igual a do momento de refrigeracao do material.
Neste trabalho, foi implementado um sistema capaz de submeter mancais
magneticos supercondutores a variados tipos de ensaios, cujos principais parametros
foram o posicionamento relativo entre ıma e supercondutor e a forca de interacao
entre eles, de forma a promover maior compreensao acerca de seu funcionamento
quando submetidos a condicoes similares as de suas aplicacoes reais.
10

Capıtulo 3
Metodologia e Equipamentos
Sera apresentada neste capıtulo a metodologia com que o projeto foi desenvol-
vido, com enfoque nos equipamentos utilizados para montagem da estrutura fısica
e na implementacao do programa utilizado para realizacao dos ensaios com super-
condutores.
3.1 Estrutura Fısica
Para estudar a interacao de ımas e amostras supercondutoras submetidas a forcas
externas, foi necessaria a elaboracao de um sistema capaz de exercer essas forcas
e ainda fornecer os dados de forca aplicada e posicao relativa a cada instante. O
foco do estudo consiste na aplicacao em levitacao sobre trilhos, que por sua vez sao
construidos de forma que o campo gerado e o mesmo ao longo do seu comprimento.
Devido a essa simetria na direcao de locomocao do veıculo, decidiu-se pela utilizacao
de somente dois eixos de deslocamento, visto que os resultados seriam os mesmos
para qualquer ponto no terceiro eixo.
Como ponto de partida para o projeto, foi utilizada uma bancada previamente
construıda, cujo esquema pode ser observado na figura 3.1, capaz de provocar des-
locamento relativo apenas na direcao vertical. A estrutura principal da bancada e
composta de uma mesa metalica com dois trilhos verticais localizados nas laterais,
ao longo dos quais se desloca a estrutura movel, cuja movimentacao e realizada
11
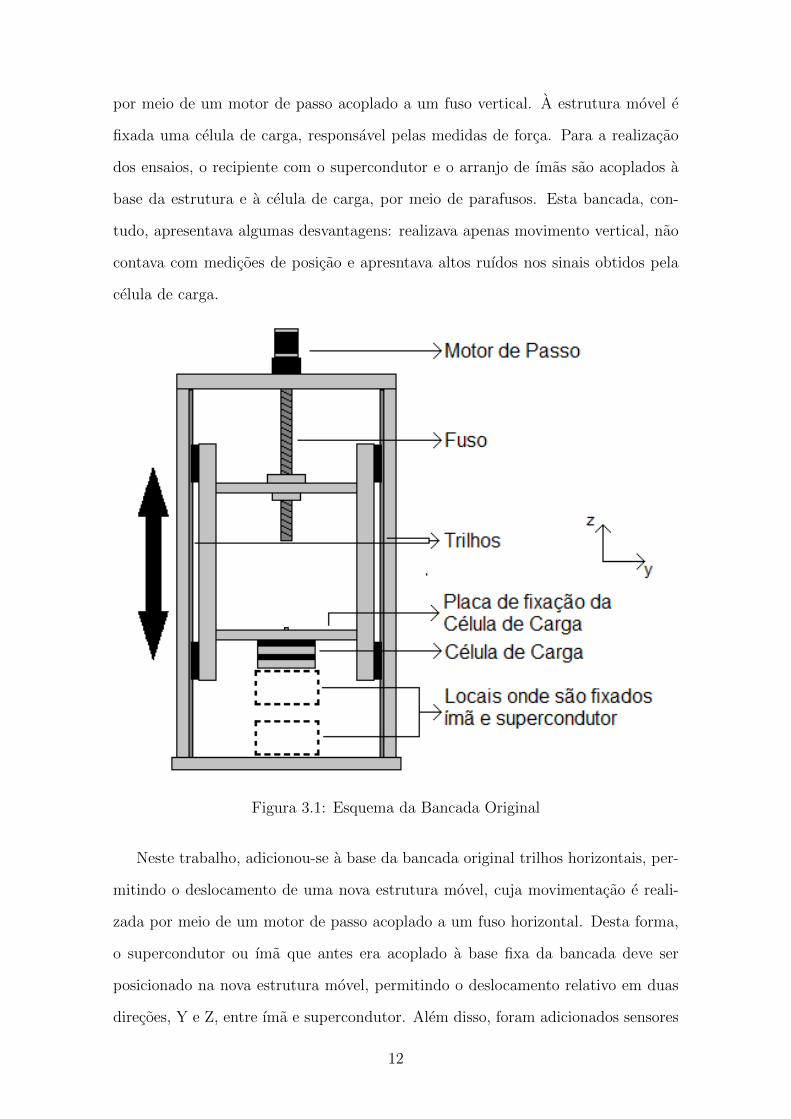
por meio de um motor de passo acoplado a um fuso vertical. A estrutura movel e
fixada uma celula de carga, responsavel pelas medidas de forca. Para a realizacao
dos ensaios, o recipiente com o supercondutor e o arranjo de ımas sao acoplados a
base da estrutura e a celula de carga, por meio de parafusos. Esta bancada, con-
tudo, apresentava algumas desvantagens: realizava apenas movimento vertical, nao
contava com medicoes de posicao e apresntava altos ruıdos nos sinais obtidos pela
celula de carga.
Figura 3.1: Esquema da Bancada Original
Neste trabalho, adicionou-se a base da bancada original trilhos horizontais, per-
mitindo o deslocamento de uma nova estrutura movel, cuja movimentacao e reali-
zada por meio de um motor de passo acoplado a um fuso horizontal. Desta forma,
o supercondutor ou ıma que antes era acoplado a base fixa da bancada deve ser
posicionado na nova estrutura movel, permitindo o deslocamento relativo em duas
direcoes, Y e Z, entre ıma e supercondutor. Alem disso, foram adicionados sensores
12
de posicao a fim de medir o deslocamento relativo, tanto vertical quanto horizontal,
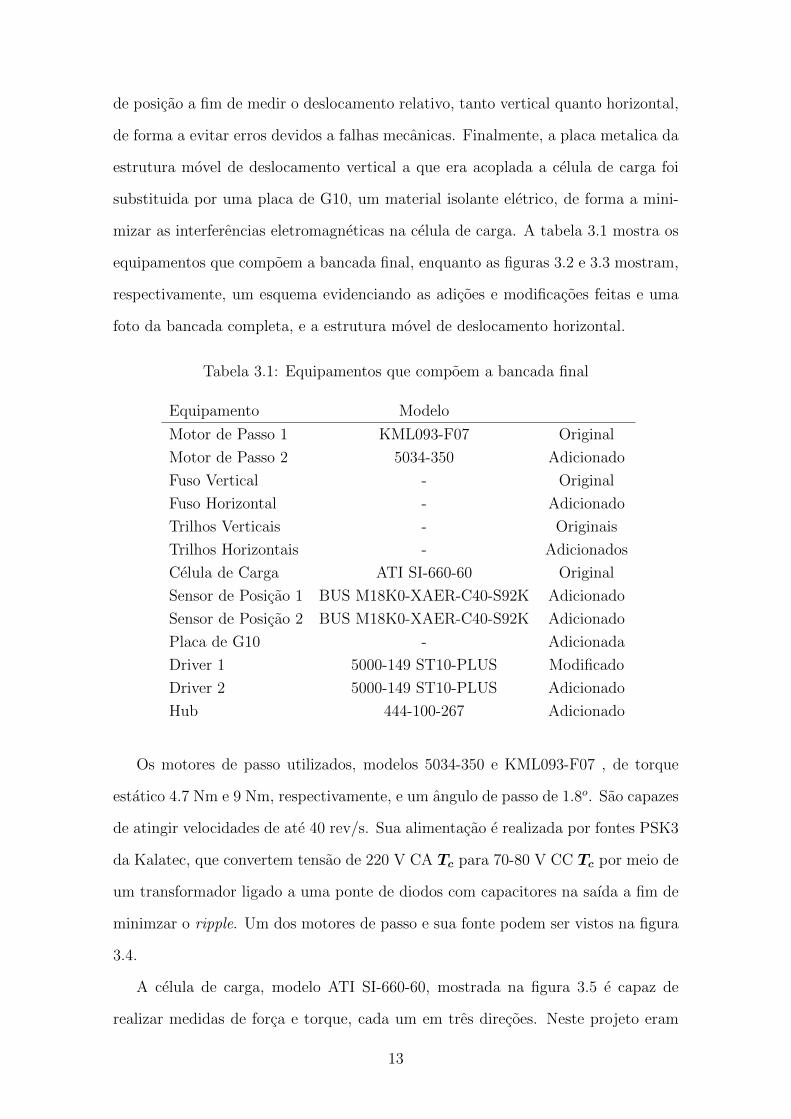
de forma a evitar erros devidos a falhas mecanicas. Finalmente, a placa metalica da
estrutura movel de deslocamento vertical a que era acoplada a celula de carga foi
substituida por uma placa de G10, um material isolante eletrico, de forma a mini-
mizar as interferencias eletromagneticas na celula de carga. A tabela 3.1 mostra os
equipamentos que compoem a bancada final, enquanto as figuras 3.2 e 3.3 mostram,
respectivamente, um esquema evidenciando as adicoes e modificacoes feitas e uma
foto da bancada completa, e a estrutura movel de deslocamento horizontal.
Tabela 3.1: Equipamentos que compoem a bancada final
Equipamento Modelo
Motor de Passo 1 KML093-F07 Original
Motor de Passo 2 5034-350 Adicionado
Fuso Vertical - Original
Fuso Horizontal - Adicionado
Trilhos Verticais - Originais
Trilhos Horizontais - Adicionados
Celula de Carga ATI SI-660-60 Original
Sensor de Posicao 1 BUS M18K0-XAER-C40-S92K Adicionado
Sensor de Posicao 2 BUS M18K0-XAER-C40-S92K Adicionado
Placa de G10 - Adicionada
Driver 1 5000-149 ST10-PLUS Modificado
Driver 2 5000-149 ST10-PLUS Adicionado
Hub 444-100-267 Adicionado
Os motores de passo utilizados, modelos 5034-350 e KML093-F07 , de torque
estatico 4.7 Nm e 9 Nm, respectivamente, e um angulo de passo de 1.8o. Sao capazes
de atingir velocidades de ate 40 rev/s. Sua alimentacao e realizada por fontes PSK3
da Kalatec, que convertem tensao de 220 V CA Tc para 70-80 V CC Tc por meio de
um transformador ligado a uma ponte de diodos com capacitores na saıda a fim de
minimzar o ripple. Um dos motores de passo e sua fonte podem ser vistos na figura
3.4.
A celula de carga, modelo ATI SI-660-60, mostrada na figura 3.5 e capaz de
realizar medidas de forca e torque, cada um em tres direcoes. Neste projeto eram
13

Figura 3.2: Esquema e foto da bancada completa
Figura 3.3: Estrutura movel de deslocamento horizontal
14

Figura 3.4: Motor de passo e sua fonte
interessantes apenas as medidas de forca, de forma que as medidas de torque, apesar
de medidas em alguns casos, nao sao levadas em consideracao durante a analise dos
resultados. Seu fundo de escala e resolucao para medicoes de forca vertical sao de
1980 N e 0.25 N, respectivamente, e para medicoes de forca horizontal, de 660 N e
0.125 N, respectivamente.
Figura 3.5: Celula de Carga
Os sensores de posicao sao sensores ultrassonicos, ambos de modelo BUS M18K0-
15

XAER-C40-S92K e apresentados na figura 3.6, possuem resolucao igual a 0.2 mm e
sao capazes de realizar medidas entre 30 e 400 mm.
Figura 3.6: Sensor de Posicao
3.2 Interface Analogico-Digital
Um computador e duas placas de aquisicao de dados sao utilizados para aquisicao
e armazenamento dos dados fornecidos pela celula de carga e pelos sensores de
posicao, assim como para envio dos comandos a serem executados pelos motores de
passo. Contudo, como meio de comunicacao entre o computador e os equipamentos
da bancada, alguns dispositivos fizeram-se necessarios.
Para controle dos motores de passo, faz-se uso de comunicacao serial, atraves da
porta serial do computador. Ligado a ela, um hub 444-100-267 divide os comandos
16

direcionados a cada um dos motores. Conectados ao hub, por sua vez, estao dois
drivers, ambos de modelo 5000-149 ST10-PLUS, cada um conectado a um motor,
responsaveis pela conversao dos comandos enviados para os sinais eletricos corres-
pondentes. A figura 3.7 mostra o driver ao lado de um dos motores de passo e o
hub utilizado.
Figura 3.7: Hub (a) e driver do motor de passo (b)
Para interpretar no computador os sinais gerados pela celula de carga, e utilizada
uma placa de aquisicao PCI-6259, responsavel pela conversao analogico-digital dos
mesmos. Uma outra placa de aquisicao, modelo PCI-6220, tambem e utilizada de
forma analoga com os sensores de posicao. Usam-se duas placas pois o cabo da
celula de carga impede o uso de muitas das conexoes da placa PCI-6259, de forma
que uma segunda placa mostrou-se necessaria. Um esquema de toda a interface
analogico-digital pode ser visto na figura 3.8.
17

Figura 3.8: Esquematico de interface de controle e aquisicao
3.3 Programacao
O programa desenvolvido para o sistema de medidas de forca e composto por seis
funcoes de ensaio, cinco funcoes de configuracao e duas funcoes de parada, que serao
descritas nesta secao, assim como a estrutura geral do programa e suas finalidades.
3.3.1 Estrutura Geral do Programa
A fim de enviar os comandos dos motores de passo de acordo com a logica
de movimento dos ensaios a serem executados, assim como receber e armazenar os
dados obtidos pela celula de carga e pelos sensores ultrassonicos, foi desenvolvido um
programa em LabVIEW. O LabVIEW e um software de projeto grafico de sistemas
da National Instruments, e foi escolhido devido a sua alta indicacao para aplicacoes
de medicoes e controle, alem de sua facil integracao com os equipamentos utilizados.
O programa foi desenvolvido de forma que fosse capaz de realizar os ensaios
desejados e configurar os equipamentos de forma facil e adequada, alem de salvar os
dados obtidos para posterior analise. A estrutura geral do programa pode ser vista
18

na figura 3.9..
Figura 3.9: Estrutura Geral do Programa
A primeira parte do programa, executada automaticamente quando este e inici-
ado, e responsavel pela inicializacao das variaveis de interface com o usuario, con-
figuracao da comunicacao serial e configuracao dos drivers dos motores de passo, o
que engloba ajuste de velocidade, aceleracao, resolucao e corrente maxima. As con-
figuracoes feitas nesse momento consistem nos valores normalmente utilizado para
cada parametro: 3 mm/s, 500 mm/s², 20000 partes por rotacao e 5A , embora cada
um possa ser reconfigurado de acordo com a vontade do usuario antes do inıcio do
ensaio ou de sair do programa.
Em seguida, o programa entra em espera, aguardando uma acao do usuario.
Atraves da interface do programa, tres tipos de funcoes podem ser executadas: as
funcoes de configuracao, de ensaio e de parada. Uma vez que cada procedimento
chega ao fim, o programa volta para seu estado de espera.
19
3.3.2 Funcoes de Configuracao e de Parada
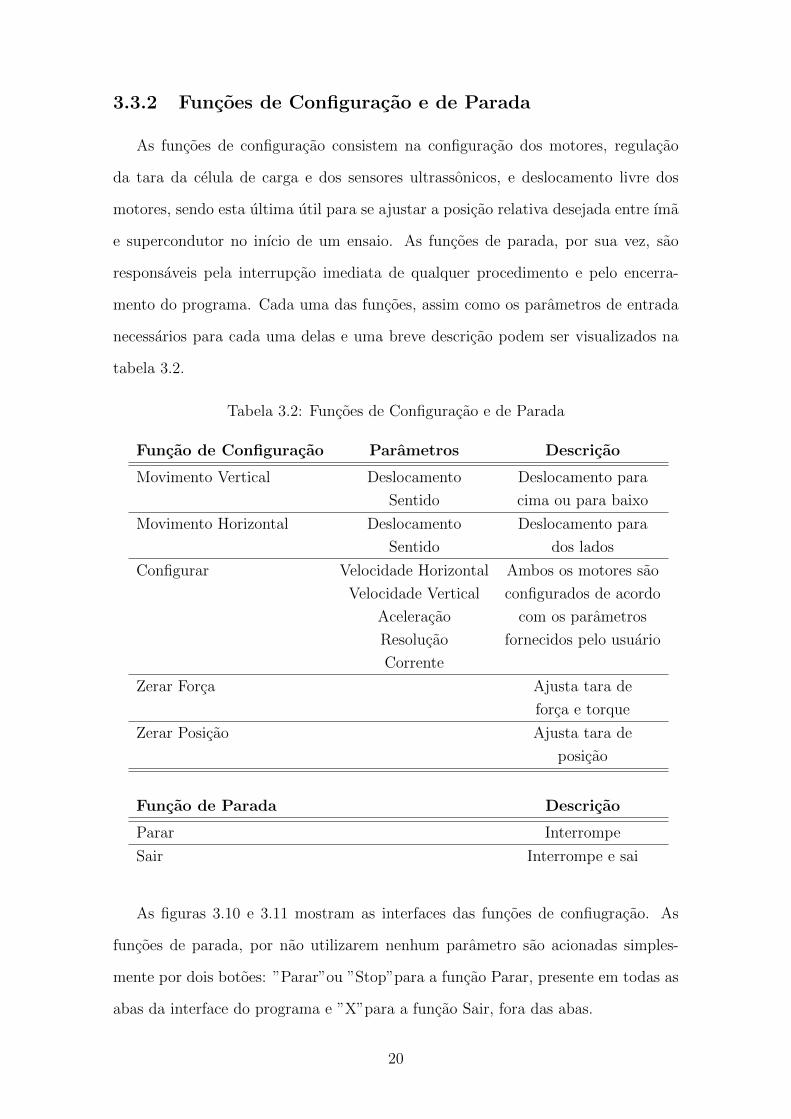
As funcoes de configuracao consistem na configuracao dos motores, regulacao
da tara da celula de carga e dos sensores ultrassonicos, e deslocamento livre dos
motores, sendo esta ultima util para se ajustar a posicao relativa desejada entre ıma
e supercondutor no inıcio de um ensaio. As funcoes de parada, por sua vez, sao
responsaveis pela interrupcao imediata de qualquer procedimento e pelo encerra-
mento do programa. Cada uma das funcoes, assim como os parametros de entrada
necessarios para cada uma delas e uma breve descricao podem ser visualizados na
tabela 3.2.
Tabela 3.2: Funcoes de Configuracao e de Parada
Funcao de Configuracao Parametros Descricao
Movimento Vertical Deslocamento Deslocamento para
Sentido cima ou para baixo
Movimento Horizontal Deslocamento Deslocamento para
Sentido dos lados
Configurar Velocidade Horizontal Ambos os motores sao
Velocidade Vertical configurados de acordo
Aceleracao com os parametros
Resolucao fornecidos pelo usuario
Corrente
Zerar Forca Ajusta tara de
forca e torque
Zerar Posicao Ajusta tara de
posicao
Funcao de Parada Descricao
Parar Interrompe
Sair Interrompe e sai
As figuras 3.10 e 3.11 mostram as interfaces das funcoes de confiugracao. As
funcoes de parada, por nao utilizarem nenhum parametro sao acionadas simples-
mente por dois botoes: ”Parar”ou ”Stop”para a funcao Parar, presente em todas as
abas da interface do programa e ”X”para a funcao Sair, fora das abas.
20
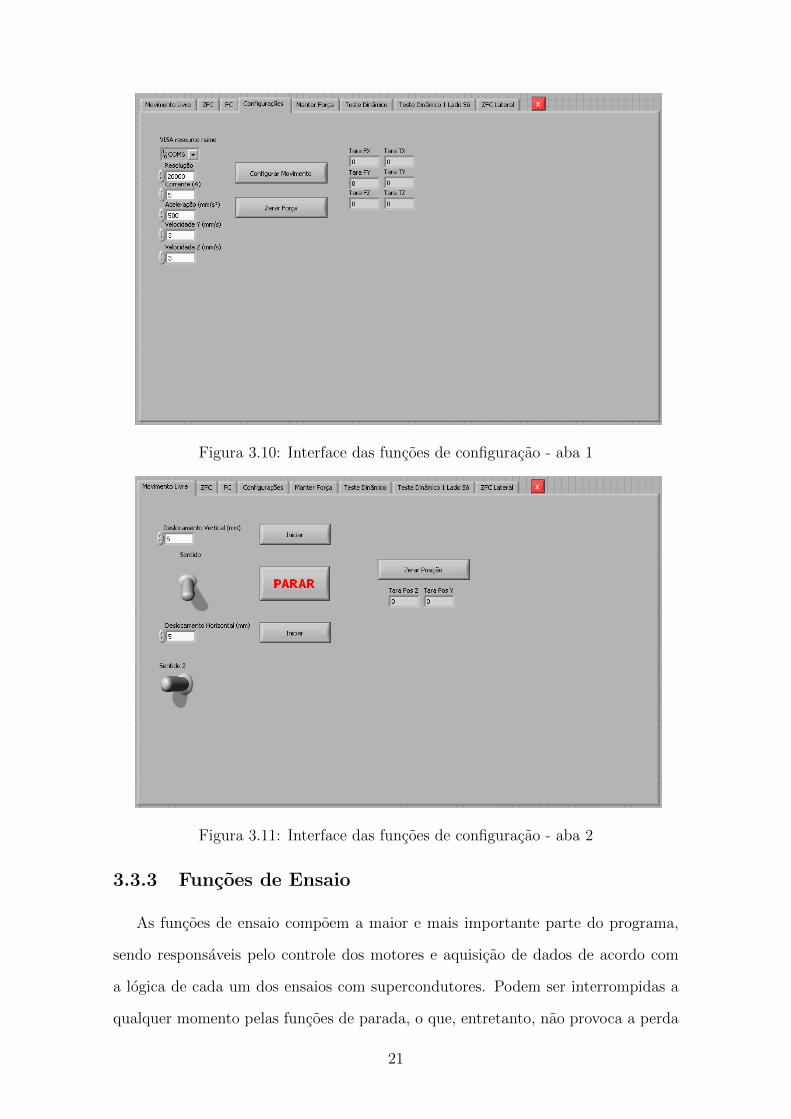
Figura 3.10: Interface das funcoes de configuracao - aba 1
Figura 3.11: Interface das funcoes de configuracao - aba 2
3.3.3 Funcoes de Ensaio
As funcoes de ensaio compoem a maior e mais importante parte do programa,
sendo responsaveis pelo controle dos motores e aquisicao de dados de acordo com
a logica de cada um dos ensaios com supercondutores. Podem ser interrompidas a
qualquer momento pelas funcoes de parada, o que, entretanto, nao provoca a perda
21

dos dados obtidos, uma vez que eles sao salvos a medida que sao coletados.
Sao seis os tipos de ensaios que foram desenvolvidos neste trabalho: Zero-Field
Cooling (ZFC), Field Cooling (FC), Field Cooling Lateral (FC Lateral), Forca Cons-
tante, Ensaio Dinamico Unilateral e Ensaio Dinamico Bilateral.
Nesta secao serao apresentados fluxogramas contendo a logica de cada funcao na
programacao do sistema. Os blocos em laranja sao referentes a movimento vertical,
os azuis, a movimento horizontal, e os verdes, a ambos.
Ensaio de Zero Field Cooling (ZFC)
A funcao de ZFC e a mais simples dentre as funcoes de ensaio e tem sua im-
portancia por poder fornecer a curva de onde pode-se extrair a forca de levitacao
maxima de um mancal supercondutor. Utilizando como parametros posicao inicial,
posicao mınima, passo e tempo de espera, sua rotina e composta de uma etapa de
configuracao, uma etapa principal e uma etapa de finalizacao.
Na etapa de configuracao sao inicializadas as comunicacoes serial e com a celula
de carga e e criado um documento de texto onde serao salvos os dados coletados de
forca e posicao.
Uma vez que todas as configuracoes foram feitas, da-se inıcio a etapa principal,
onde o ensaio propriamente dito acontece. A estrutura movel de deslocamento
vertical se move D milımetros para baixo e espera T microssegundos, onde D e
T sao o passo e o tempo de espera fornecidos irrestritamente pelo usuario. As
medidas de forca sao entao armazenadas com os dados de posicao correspondentes.
O processo se repete ate que seja atingida a posicao mınima, momento a partir do
qual o sentido de deslocamento e invertido e a estrutura passa a subir ate atingir
novamente a posicao inicial.
Quando a posicao inicial e novamente atingida, inicia-se a etapa de finalizacao,
onde as comunicacoes serial e com a celula de carga sao suspensas e o documento
de texto e finalizado. A logica da funcao de ZFC e sua interface podem ser vistas
na figuras 3.12 e 3.13.
22
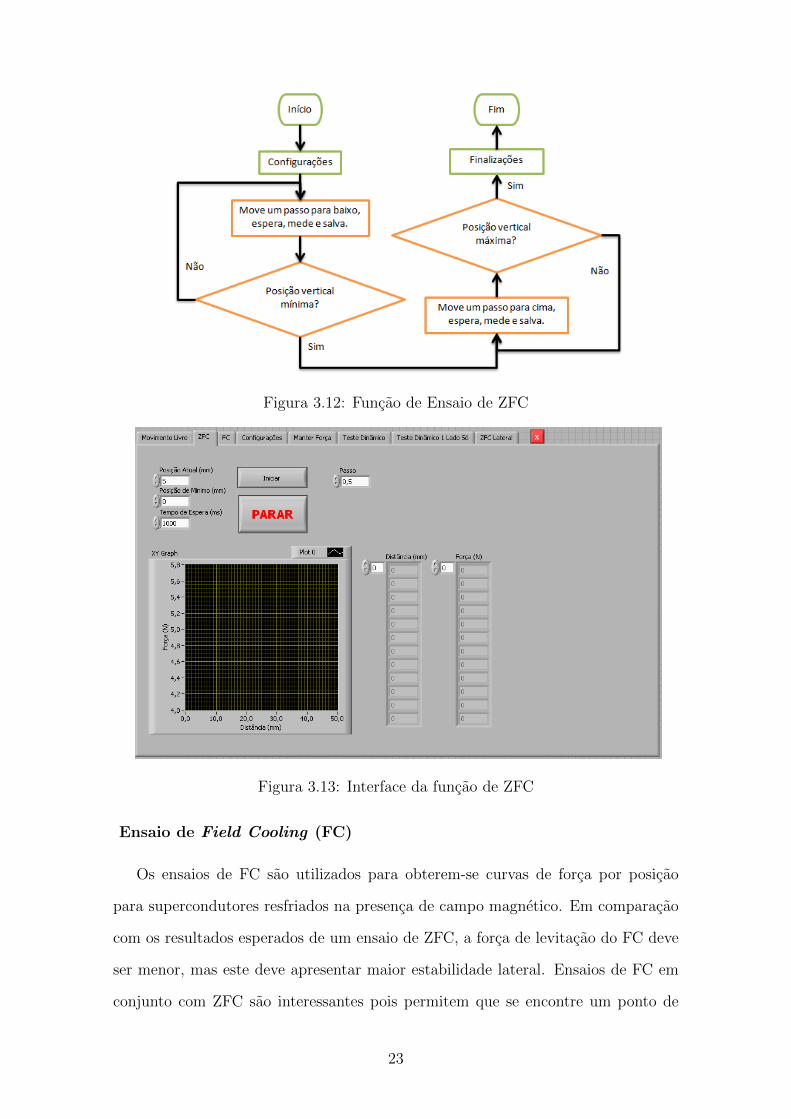
Figura 3.12: Funcao de Ensaio de ZFC
Figura 3.13: Interface da funcao de ZFC
Ensaio de Field Cooling (FC)
Os ensaios de FC sao utilizados para obterem-se curvas de forca por posicao
para supercondutores resfriados na presenca de campo magnetico. Em comparacao
com os resultados esperados de um ensaio de ZFC, a forca de levitacao do FC deve
ser menor, mas este deve apresentar maior estabilidade lateral. Ensaios de FC em
conjunto com ZFC sao interessantes pois permitem que se encontre um ponto de
23
operacao otimo, em que o mancal apresente forca de levitacao e estabilidade lateral
adequadas.
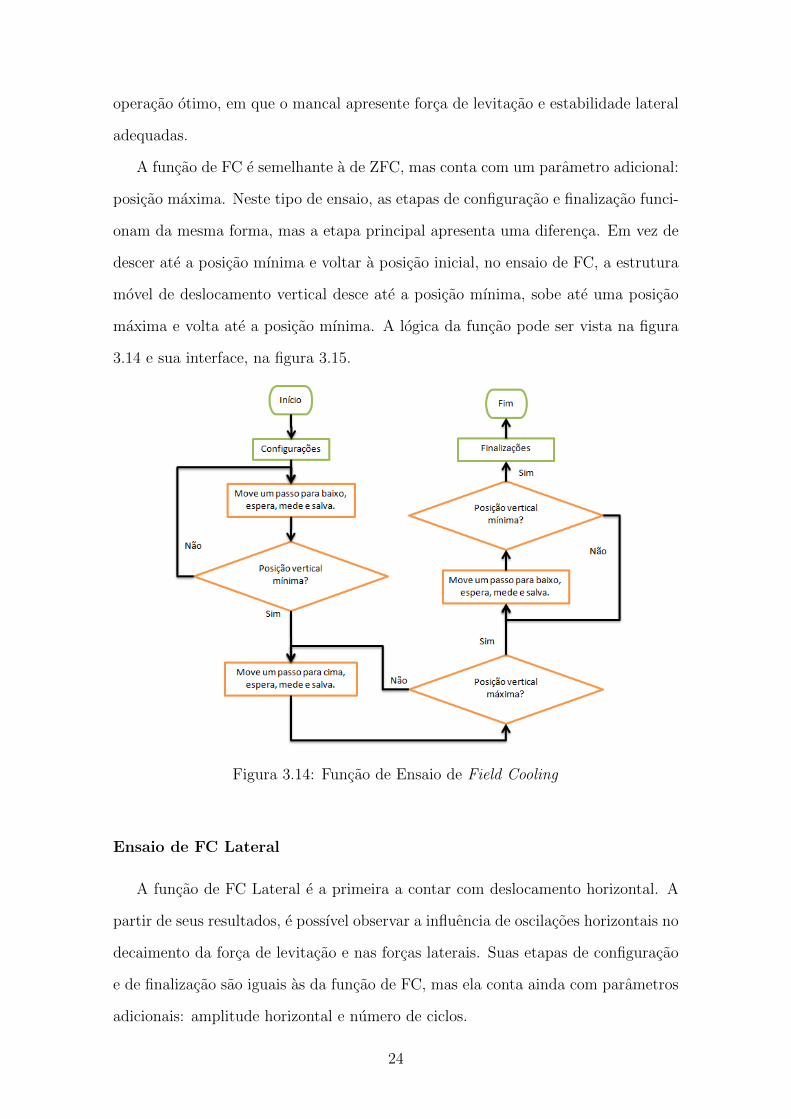
A funcao de FC e semelhante a de ZFC, mas conta com um parametro adicional:
posicao maxima. Neste tipo de ensaio, as etapas de configuracao e finalizacao funci-
onam da mesma forma, mas a etapa principal apresenta uma diferenca. Em vez de
descer ate a posicao mınima e voltar a posicao inicial, no ensaio de FC, a estrutura
movel de deslocamento vertical desce ate a posicao mınima, sobe ate uma posicao
maxima e volta ate a posicao mınima. A logica da funcao pode ser vista na figura
3.14 e sua interface, na figura 3.15.
Figura 3.14: Funcao de Ensaio de Field Cooling
Ensaio de FC Lateral
A funcao de FC Lateral e a primeira a contar com deslocamento horizontal. A
partir de seus resultados, e possıvel observar a influencia de oscilacoes horizontais no
decaimento da forca de levitacao e nas forcas laterais. Suas etapas de configuracao
e de finalizacao sao iguais as da funcao de FC, mas ela conta ainda com parametros
adicionais: amplitude horizontal e numero de ciclos.
24

Figura 3.15: Interface da funcao de Field Cooling
Na etapa principal, assim como na funcao de FC, a estrutura movel de desloca-
mento vertical desce ate atingir uma posicao mınima, onde fica ate o fim do ensaio.
A estrutura movel de deslocamento horizontal passa entao a mover-se com o mesmo
passo e tempo de espera, oscilando para os lados dentro dos limites estabelecidos
pela amplitude horizontal um numero de vezes equivalente ao numero de ciclos for-
necido pelo usuario. As figuras 3.16 e 3.17 mostram a logica desta funcao e sua
interface.
Ensaio de Forca Constante
A funcao de Forca Constante, diferentemente das anteriores, conta com limites
de forca para estabelecer o deslocamento do ensaio. Sua finalidade e a verificacao
do decaimento da altura de levitacao ao longo do tempo quando o supercondutor
permanece submetido a uma mesma forca de interacao com o ıma, o que correspon-
deria a um veıculo de levitacao magnetica levitando mas parado sobre os trilhos.
Conta apenas com tres parametros: Forca de Controle, Limite de Altura e Tempo
de Ensaio.
Enquanto as etapas de configuracao e finalizacao seguem o mesmo padrao utili-
25

Figura 3.16: Funcao de Ensaio de FC Lateral
zado nas outras funcoes, a etapa principal desta funcao e configurada de acordo com
a forca medida: a estrutura movel de deslocamento vertical parte de sua posicao
inicial, deslocando-se para baixo. A cada 150 microssegundos, e comparado o valor
de forca vertical medido com o de controle. Caso o valor medido seja menor, a
estrutura anda um passo de 0.1 milımetro para baixo. Caso seja maior, a estrutura
fica parada. O processo se repete ate que a altura ou o tempo limite seja atin-
gido. Assume-se, em todos os momentos, que os valores de forca serao maiores a
medida em que o ıma e o supercondutor se aproximam. A logica da funcao pode ser
observada na figura 3.18, assim como a sua interface pode ser vista na figura 3.19
26
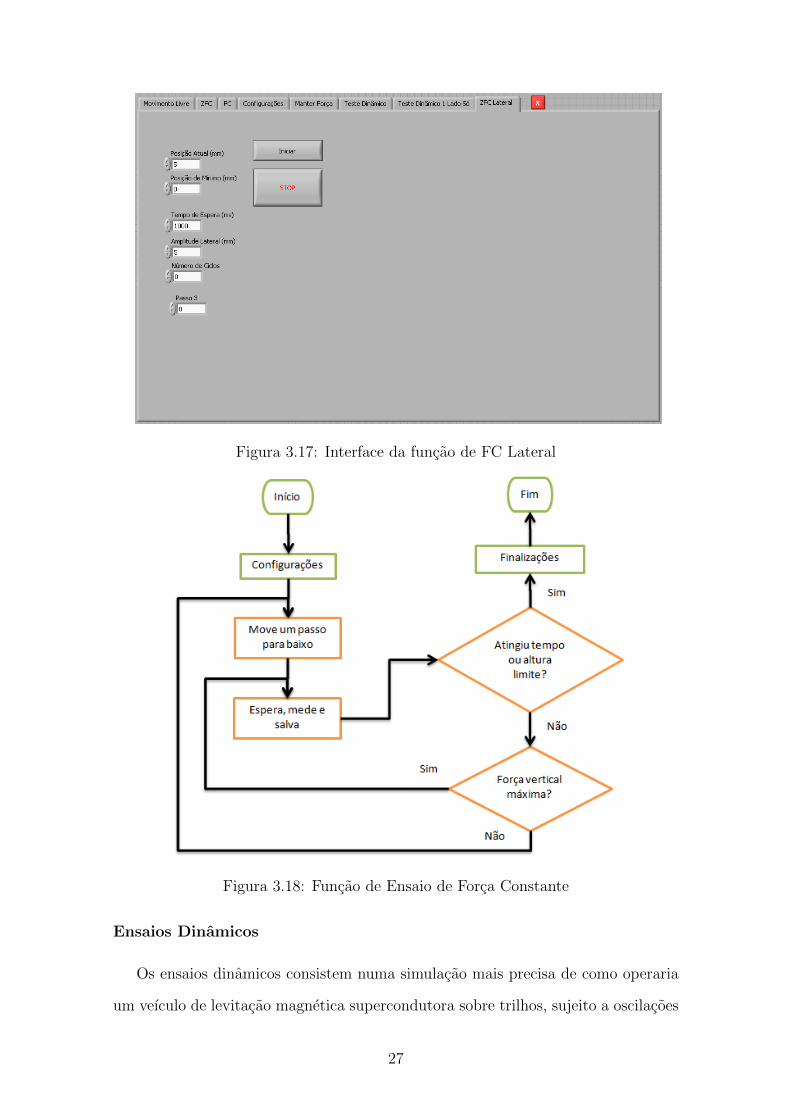
Figura 3.17: Interface da funcao de FC Lateral
Figura 3.18: Funcao de Ensaio de Forca Constante
Ensaios Dinamicos
Os ensaios dinamicos consistem numa simulacao mais precisa de como operaria
um veıculo de levitacao magnetica supercondutora sobre trilhos, sujeito a oscilacoes
27

Figura 3.19: Interface da funcao de Forca Constante
verticais e horizontais, devido a curvas, aclives e declives, e mesmo variacoes de peso
provenientes de embarque e desembarque de passageiros. Seus resultados permitem
verificar o quanto varia a posicao de operacao do veıculo nessa situacao.
As duas funcoes dinamicas sao as mais complexas dentre as funcoes de ensaio
e sao assim chamadas devido ao fato de toda a sua movimentacao ser realizada
de forma contınua, e nao em passos, como nas outras funcoes. Apesar de a mo-
vimentacao ser mais semelhante a de um veıculo de levitacao magnetica do que a
dos outros ensaios, o fato de ser contınua tambem provoca um aumento dos erros
associados aos valores medidos de forca e posicao. Isso se deve ao atraso proveni-
ente do tempo necessario para processamento dos dados e envio dos comandos por
parte do programa. As funcoes dinamicas utilizam como entrada Forca Maxima
Vertical, Forca Mınima Vertical, Forca Lateral Limite, Tempo de Ensaio, Intervalo
de Movimentacao Horizontal, Tempo de Espera no Limite e Limites de Posicao.
As etapas de configuracao e finalizacao das funcoes dinamicas sao iguais as das
outras funcoes de ensaio, e suas etapas principais distinguem-se tanto entre si quanto
com relacao as demais funcoes.
A etapa principal da Funcao Dinamica Bilateral inicia-se com o deslocamento
28
para baixo da estrutura movel de deslocamento vertical. As medicoes de forca,
torque e posicao sao tomadas continuamente. Quando a medida de forca corresponde
ao valor maximo de entrada, o sentido se inverte e o movimento passa a ser para
cima ate que se atinja o valor de forca mınima. A movimentacao vertical e cıclica
entre estes dois valores e nao se interrompe ate o fim do ensaio.
A cada intervalo de tempo correspondente ao valor fornecido pelo usuario de In-
tervalo de Movimentacao Horizontal, inicia-se um ciclo de movimentacao horizontal
sem interromper a movimentacao vertical. Neste ciclo, a estrutura movel de deslo-
camento horizontal movimenta-se primeiro para a direita, depois para a esquerda e
novamente para o meio, realizando medicoes continuamente. Os limites desse ciclo
sao determinados pela Forca Limite Horizontal, e uma vez que a estrutura atinja
esse limite de forca, ela permanece nele ao longo do Tempo de Espera no Limite,
realizando ajustes de posicao para que a medicao de forca horizontal permaneca
constante. Quando o ciclo e finalizado, retoma-se a movimentacao vertical.
Em paralelo com tudo isso, sao checados a cada instante o tempo decorrido de
ensaio e as posicoes vertical e horizontal. Se em algum instante esses valores coinci-
dem com os valores limites fornecidos pelo usuario, a etapa principal e finalizada e
a etapa de finalizacao se inicia.
A unica diferenca entre a Funcao Dinamica de Dois Lados e a Funcao Dinamica
Unilateral e o ciclo horizontal. Para a funcao unilateral, este ciclo resume-se a
estrutura horizontal movimentando-se apenas para um lado, aguardando o tempo
de espera e voltando para o centro. A logica das funcoes pode ser observada nas
figuras 3.20 e 3.21 e suas interfaces, nas figuras 3.22 e 3.23
Neste capıtulo foram apresentados os equipamentos utilizados e a metodologia
adotada para realizacao do projeto. A seguir, serao vistos exemplos dos resultados
obstidos dos ensaios que demonstrem o funcionamento do sistema de acordo com as
entradas do usuario.
29

Figura 3.20: Funcao de Ensaio Dinamico de Unilateral
30

Figura 3.21: Funcao de Ensaio Dinamico de Bilateral31
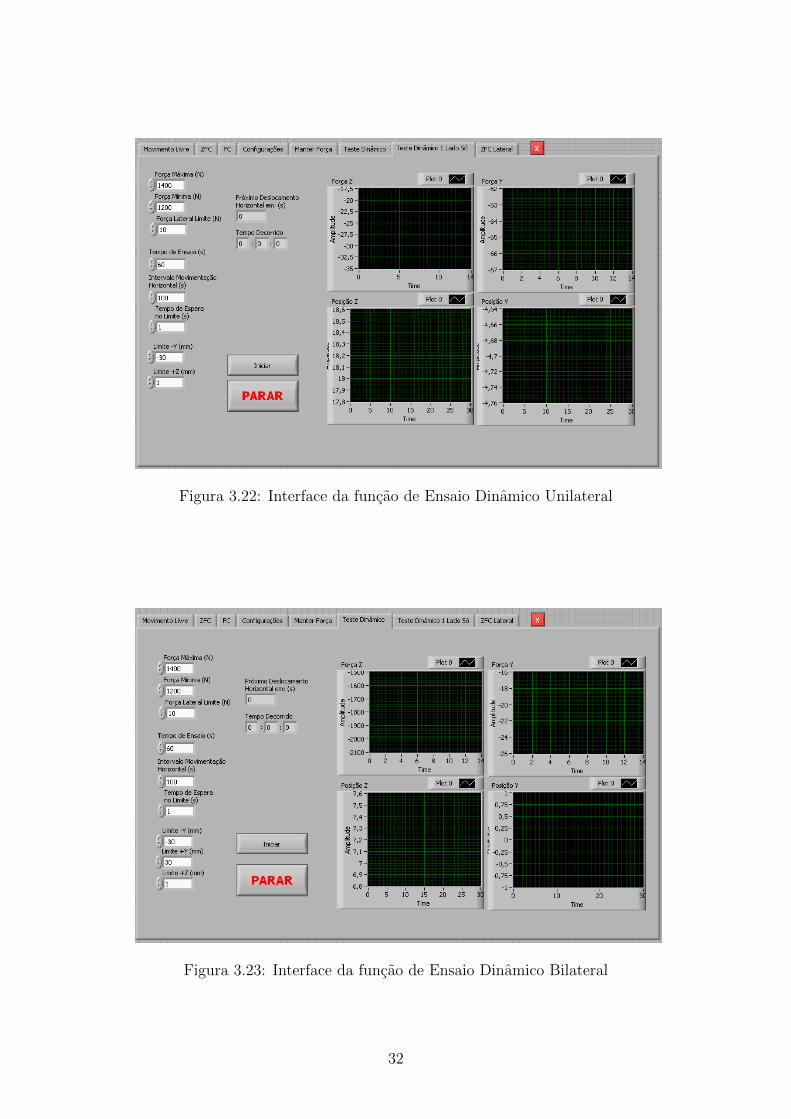
Figura 3.22: Interface da funcao de Ensaio Dinamico Unilateral
Figura 3.23: Interface da funcao de Ensaio Dinamico Bilateral
32

Capıtulo 4
Resultados
O sistema desenvolvido foi utilizado em diversos ensaios fundamentais para a
caracterizacao das amostras supercondutoras e maior compreensao acerca de seu uso
em levitacao magnetica. Os resultados dos ensaios tambem podem ser observados
para verificar se o sistema se comportou de forma coerente.
Para cada tipo de ensaio, os resultados observados para diferentes amostras se-
guem um mesmo padrao, variando em valores, mas mantendo o mesmo formato.
Nesta secao, serao vistos exemplos desses resultados em que seja possıvel verificar o
funcionamento do sistema. Nos ensaios dinamicos foram usados criostatos de super-
condutores dispostos de forma identica aos utilizados no MagLev Cobra, enquanto
os outros ensaios foram feitos com blocos supercondutores unicos.
4.1 Ensaio de Zero Field Cooling (ZFC)
A figura 4.1 mostra os resultados de um dos ensaios de ZFC realizados por
meio do sistema desenvolvido. Nela e possıvel observar o formato normalmente
encontrado para a curva de Forca Vertical x Posicao Vertical deste ensaio. Os
ensaios de ZFC sao realizados sem a utilizacao dos sensores ultrassonicos, por terem
sido implementados antes da obtencao dos mesmos, de forma que todas as medidas
de posicao armazenadas sao calculadas pelo passo do motor.
Neste exemplo, o supercondutor e resfriado a uma distancia de 100 mm do ıma,
33

Figura 4.1: Resultados do ensaio de ZFC
aproximado ate 5 mm e afastado novamente ate 100mm, em passos de 1 mm. E
possıvel verificar o crescimento da forca de repulsao entre a amostra supercondutora
e o ıma utilizados a medida que se aproximam, e que essa mesma forca diminui
gradualmente conforme se afastam, ate atingir a distancia inicial, onde atinge valor
nulo novamente.
E notavel, contudo, o fato de que, no caminho de volta, a forca vertical chega
a mudar de sentido, o que representa uma forca de atracao entre as partes. Isso e
uma caracterıstica esperada deste tipo de curva e confere com os resultados obtidos
previamente[22].
Verificando os resultados obtidos e analisando os valores de posicao relativa atin-
gidos em cada ponto do ensaio, e possıvel confirmar que a logica do programa fun-
cionou da forma correta, contudo, como nao ha medidas de posicao reais, e possıvel
que tenham ocorridos erros por perda de passo dos motores.
34
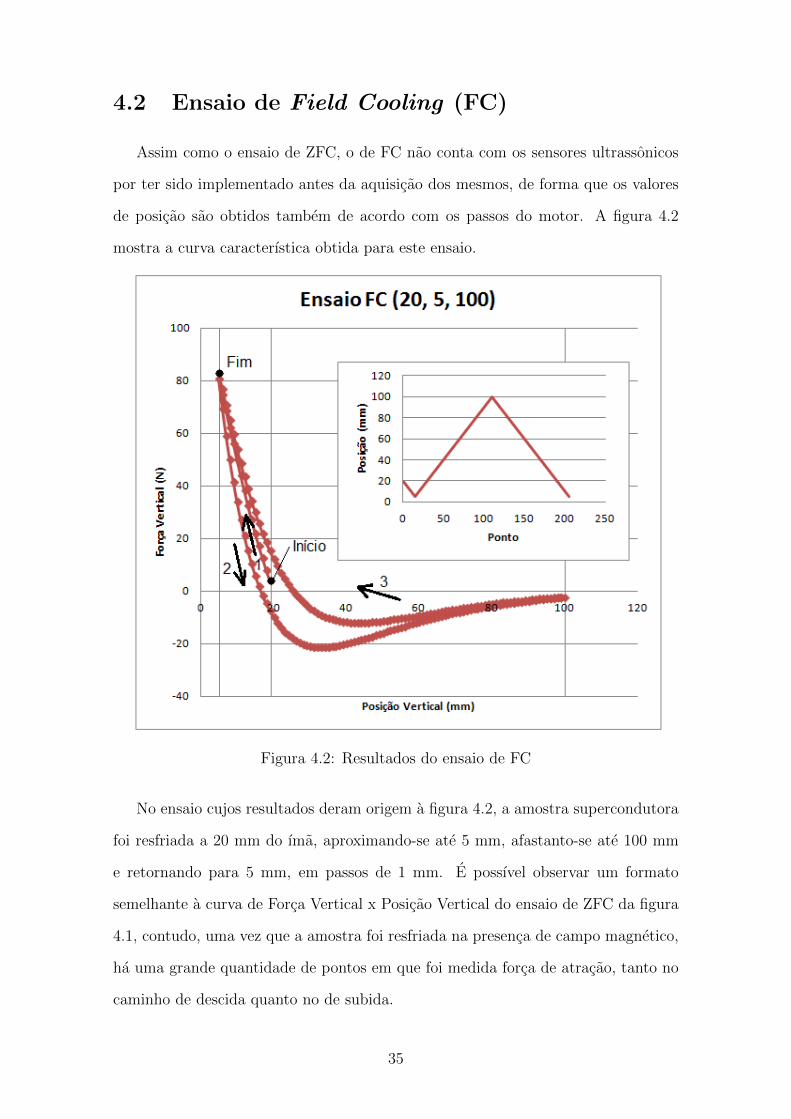
4.2 Ensaio de Field Cooling (FC)
Assim como o ensaio de ZFC, o de FC nao conta com os sensores ultrassonicos
por ter sido implementado antes da aquisicao dos mesmos, de forma que os valores
de posicao sao obtidos tambem de acordo com os passos do motor. A figura 4.2
mostra a curva caracterıstica obtida para este ensaio.
Figura 4.2: Resultados do ensaio de FC
No ensaio cujos resultados deram origem a figura 4.2, a amostra supercondutora
foi resfriada a 20 mm do ıma, aproximando-se ate 5 mm, afastanto-se ate 100 mm
e retornando para 5 mm, em passos de 1 mm. E possıvel observar um formato
semelhante a curva de Forca Vertical x Posicao Vertical do ensaio de ZFC da figura
4.1, contudo, uma vez que a amostra foi resfriada na presenca de campo magnetico,
ha uma grande quantidade de pontos em que foi medida forca de atracao, tanto no
caminho de descida quanto no de subida.
35
Mais uma vez, a partir dos resultados obtidos verificou-se que a logica do pro-
grama funcionou como esperado, mas o sistema ainda esta sujeito a erros por perda
de passo.
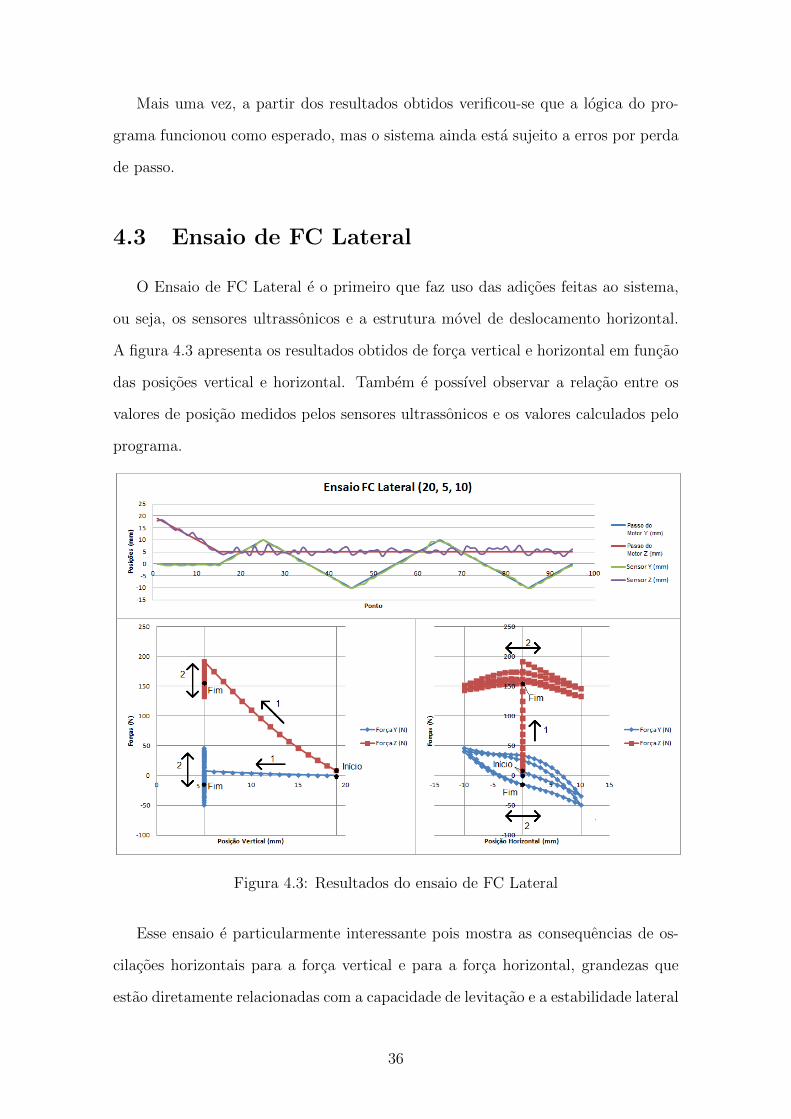
4.3 Ensaio de FC Lateral
O Ensaio de FC Lateral e o primeiro que faz uso das adicoes feitas ao sistema,
ou seja, os sensores ultrassonicos e a estrutura movel de deslocamento horizontal.
A figura 4.3 apresenta os resultados obtidos de forca vertical e horizontal em funcao
das posicoes vertical e horizontal. Tambem e possıvel observar a relacao entre os
valores de posicao medidos pelos sensores ultrassonicos e os valores calculados pelo
programa.
Figura 4.3: Resultados do ensaio de FC Lateral
Esse ensaio e particularmente interessante pois mostra as consequencias de os-
cilacoes horizontais para a forca vertical e para a forca horizontal, grandezas que
estao diretamente relacionadas com a capacidade de levitacao e a estabilidade lateral
36

do supercondutor num dado campo magnetico, que por sua vez sao fatores muito
importantes para a levitacao magnetica em larga escala.
No ensaio em questao, a amostra foi resfriada a 20 mm do ıma, aproximando-
se para 5 mm e realizando duas oscilacoes horizontais entre -10 e +10 mm. E
possıvel notar algumas caracterısticas principais a partir da analise destes resultados:
enquanto a amostra se aproxima do ıma, o ensaio apresenta os mesmos resultados de
um FC normal, o que era de se esperar, mas uma vez que as oscilacoes horizontais
se iniciam, e possıvel perceber um decaimento gradual da forca de levitacao. Alem
disso, a forca horizontal segue uma curva ao redor da origem, tendendo a puxar a
amostra para o centro das oscilacoes horizontais a medida que se distancia.
Observando os dados de posicao calculados e medidos, e possıvel confirmar que
os valores de posicao atingidos sao os desejados. As medicoes de posicao por parte
dos sensores ultrassonicos se fazem importantes para confirmar que as estruturas
moveis estao de fato se movendo como desejado. Entretando, o alto erro associado
aos valores medidos, muitas vezes maior do que o passo do ensaio, compromete
os resultados. A grande variacao das medicoes de posicao vertical se deve ao fato
de o erro associado ser diretamente relacionado ao alcance para o qual o sensor e
configurado, de forma que as medidas de posicao vertical apresentam erro bem maior
do que as de posicao horizontal.
4.4 Ensaios Dinamicos
Os ensaios dinamicos sao os que melhor simulam as condicoes em que se encon-
traria um veıculo de levitacao magnetica, com oscilacoes recorrentes, tanto verticais
como horizontais. E possıvel visualizar os resultados de posicao e forca em funcao
do tempo na figura 4.4 para o ensaio de unilateral e na figura 4.5 para o ensaio
bilateral.
Para ambos os ensaios, os parametros utilizados foram 1600 e 2000 N de forca
vertical mınima e maxima, respectivamente, e 300 N de forca horizontal para cada
um dos lados, no caso do bilateral e para apenas um lado para o ensaio unilateral. O
37
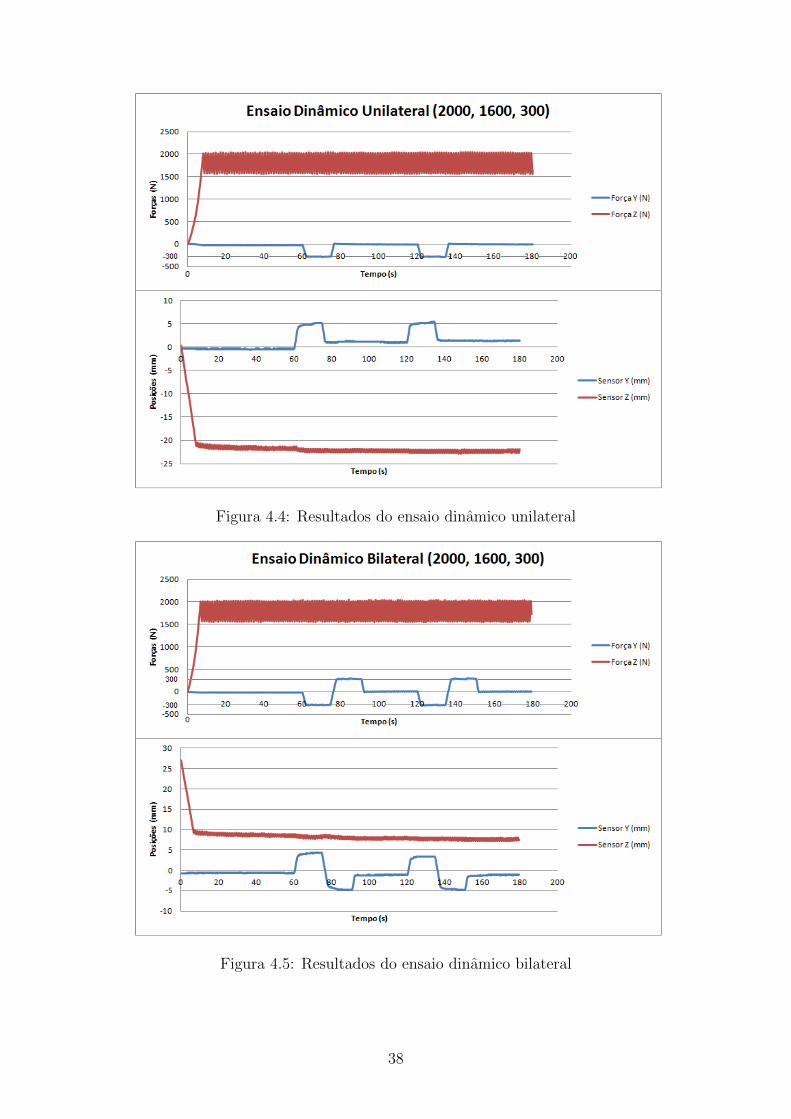
Figura 4.4: Resultados do ensaio dinamico unilateral
Figura 4.5: Resultados do ensaio dinamico bilateral
38
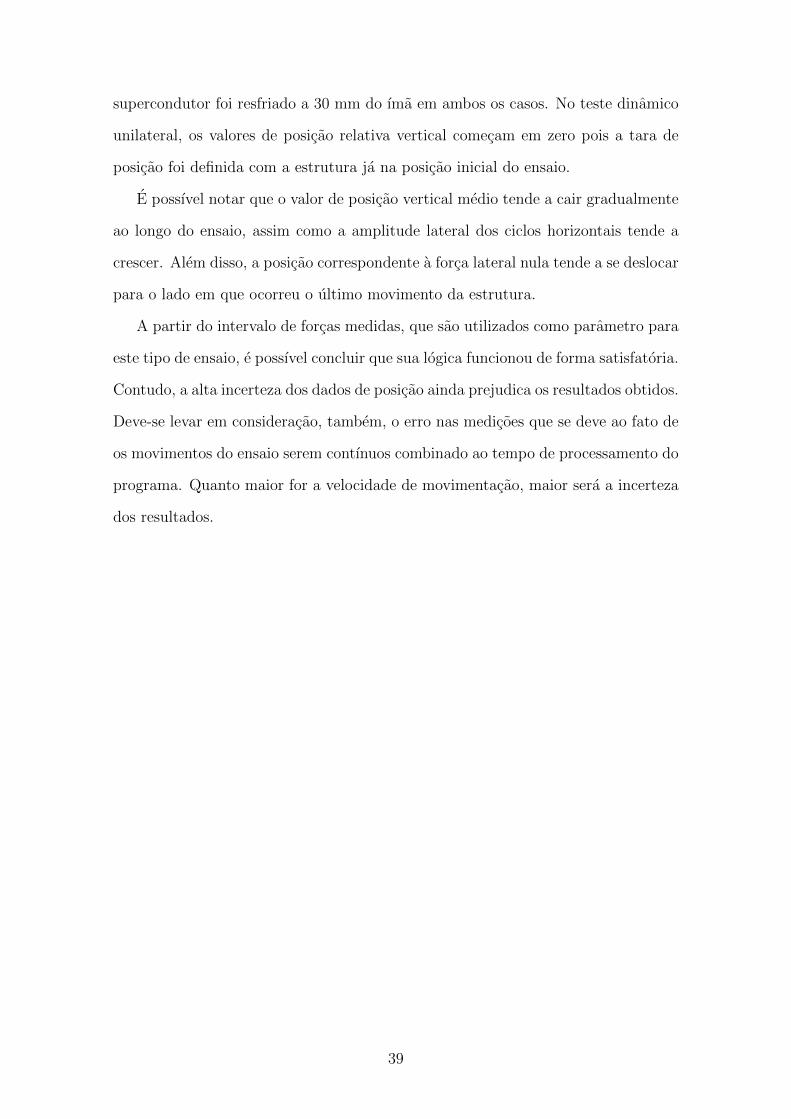
supercondutor foi resfriado a 30 mm do ıma em ambos os casos. No teste dinamico
unilateral, os valores de posicao relativa vertical comecam em zero pois a tara de
posicao foi definida com a estrutura ja na posicao inicial do ensaio.
E possıvel notar que o valor de posicao vertical medio tende a cair gradualmente
ao longo do ensaio, assim como a amplitude lateral dos ciclos horizontais tende a
crescer. Alem disso, a posicao correspondente a forca lateral nula tende a se deslocar
para o lado em que ocorreu o ultimo movimento da estrutura.
A partir do intervalo de forcas medidas, que sao utilizados como parametro para
este tipo de ensaio, e possıvel concluir que sua logica funcionou de forma satisfatoria.
Contudo, a alta incerteza dos dados de posicao ainda prejudica os resultados obtidos.
Deve-se levar em consideracao, tambem, o erro nas medicoes que se deve ao fato de
os movimentos do ensaio serem contınuos combinado ao tempo de processamento do
programa. Quanto maior for a velocidade de movimentacao, maior sera a incerteza
dos resultados.
39
Capıtulo 5
Conclusoes e Trabalhos Futuros
Neste trabalho, foi desenvolvido um sistema de medidas de forca e posicao rela-
tiva entre ımas e supercondutores, a fim de estudar suas caracterısticas e seu compor-
tamento quando utilizados em condicoes semelhantes as de operacao em aplicacoes
de levitacao magnetica.
Com esse sistema, foi possıvel a realizacao de diversos ensaios com alguns ti-
pos de supercondutores, contribuindo para o aprendizado acerca do funcionamento
desses materiais e o aprimoramento de tecnicas utilizadas em mancais magneticos.
Os resultados de alguns ensaios realizados foram utilizados como exemplo, neste
trabalho, para demonstrar o funcionamento do sistema desenvolvido.
Alem dos ensaios classicos em uma dimensao (ZFC e FC), foram implementadas
rotinas de ensaio em duas dimensoes, permitindo o deslocamento horizontal relativo
entre o ıma e o supercondutor. Esta adicao foi fundamental para a producao de
novos resultados, uma vez que os ensaios puramente verticais ja eram realizados
previamente. Alem disso, os novos ensaios que utilizam como parametro a forca
proveniente da interacao entre ıma e supercondutor em vez da posicao relativa pos-
sibilitaram um estudo acerca do decaimento tanto da forca de levitacao quanto da
estabilidade lateral do mancal quando em operacao prolongada ou submetido a os-
cilacoes.
Vale ressaltar, contudo, que o sistema ainda esta sujeito a erros de passo dos mo-
tores e a altas incertezas na medicao de posicao por parte dos sensores ultrassonicos.
40

Alem disso, a movimentacao contınua provoca erros mais altos nas medicoes por
conta do atraso devido ao tempo de processamento.
Sugerem-se como trabalhos futuros a melhoria do sistema por meio da substi-
tuicao dos sensores atuais por modelos mais precisos, aumentando a qualidade dos
dados medidos, e do refinamento da programacao dos ensaios dinamicos de forma
a diminuir os erros provenientes do tempo de processamento. A implementacao de
um novo eixo de deslocamento e indicada, pois permitiria movimentacao ao longo
de todas as tres dimensoes do espaco. Isso possibilitaria estudos acerca de mancais
supercondutores assimetricos nos tres eixos. Alem disso, um sistema capaz de incli-
nar o ıma com relacao ao supercondutor seria interessante, simulando os efeitos de
uma colisao lateral num veıculo que emprega esse tipo de levitacao. O emprego de
medidas de torque, assim como a utilizacao de um sensor para verificar o angulo de
inclinacao seriam bastante beneficos nesse caso. Tambem sugere-se que sejam reali-
zados os ensaios com diferentes arranjos de supercondutores, uma vez que busca-se
minimizar sua quantidade e maximizar sua forca de levitacao e estabilidade lateral, o
que pode ser alcancado por meio de testes eficazes aliados aos modelos de simulacao.
41
Referencias Bibliograficas
[1] SOTELO, G. G., DIAS, D. H. N., DE ANDRADE, R., et al. “Tests on a
superconductor linear magnetic bearing of a full-scale maglev vehicle”,
Applied Superconductivity, IEEE Transactions on, v. 21, n. 3, pp. 1464–
1468, 2011.
[2] ONNES, H. K. “The liquefaction of helium”, Koninklijke Nederlandse Akademie
van Weteschappen Proceedings Series B Physical Sciences, v. 11, pp. 168–
185, 1908.
[3] ROSE-INNES, A. C., RHODERICK, E. H. Introduction to Superconductivity.
1st ed. Oxford, London, Edingburg, New York, Toronto, Sydney, Paris,
Braunschweig, Pergamon Press, 1969.
[4] ONNES, H. K. “The Superconductivity of Mercury”, Comm. Phys. Lab. Univ.
Leiden, 1911.
[5] ONNES, H. K. “Report on the researches made in Leiden Cryogenic Laboratory
between the second and third International Congress of Refrigeration”,
Selected Reprints of Americam Association of Physics Teachers, v. 34,
n. b, pp. 55–70, 1913.
[6] MEISSNER, W., OCHSENFELD, R. “Ein neuer effekt bei eintritt der supra-
leitfahigkeit”, Die Naturwissenschaften, v. 21, pp. 787–788, 1933.
[7] LONDON, F., LONDON, H. “The electromagnetic equations of the su-
praconductor”, Proceedings of the Royal Society of London. Series A-
Mathematical and Physical Sciences, v. 149, n. 866, pp. 71–88, 1935.
[8] GINZBURG, V. L., LANDAU, L. D. “On the theory of superconductivity”,
JETP, pp. 1064–1082, 1950.
[9] ABRIKOSOV, A. A. “On the magnetic properties of superconductors of the
second group”, Soviet Physics (JETP), v. 5, n. 6, pp. 1174–1182, 1957.
[10] BARDEEN, J., COOPER, L. N., SCHRIEFFER, J. R. “Theory of Supercon-
ductivity”, Physical Reviw, v. 108, n. 5, pp. 1175–1204, Dezembro 1957.
42
[11] BEAN, C. P. “Magnetization of hard superconductors”, Physical Review Let-
ters, v. 8, n. 6, pp. 250, 1962.
[12] DOS REIS MARTINS, F. G. Caracterizacao de Fitas Supercondutoras 2G na
Presenca de Campos Magneticos. Universidade Federal do Rio de Janeiro,
Rio de Janeiro, RJ, Brasil, 2012. projeto de fim de curso em Engenharia
Eletrica.
[13] DIAS, D. H. N., SOTELO, G. G., DE ANDRADE JUNIOR, R., et al. Im-
plementacao de um Sistema de Medidas de Forca e Torque para Mancais
Magneticos Supercondutores Lineares. Bonito, MS, Brasil, 2010.
[14] BOENIG, H., PAICE, D. “Fault current limiter using a superconducting coil”,
Magnetics, IEEE Transactions on, v. 19, n. 3, pp. 1051–1053, 1983.
[15] YNTEMA, G. B. “Superconducting winding for electromagnet”, Physical Re-
view, v. 98, pp. 74–76, 1955.
[16] SUNG, T., HAN, S., HAN, Y., et al. “Designs and analyses of flywheel
energy storage systems using high-Tc superconductor bearings”, Cryo-
genics, v. 42, n. 6–7, pp. 357 – 362, 2002.
[17] CHEUNG, K. Y. C., CHEUNG, S. T. H., DE SILVA, R. G. N., et al. “Large-
scale energy storage systems”, Imperial College London, ISE2, pp. 2002–
2003, 2003.
[18] BUMBY, J. R. Superconducting rotating electrical machines, 1983.
[19] MAGUIRE, J., SCHMIDT, F., BRATT, S., et al. “Development and demons-
tration of a HTS power cable to operate in the Long Island Power Autho-
rity transmission grid”, Applied Superconductivity, IEEE Transactions on,
v. 17, n. 2, pp. 2034–2037, 2007.
[20] BRANDT, E. H. “Levitation in physics”, Science, v. 243, n. 4889, pp. 349–355,
1989.
[21] MOON, F. C., CHANG, P.-Z. Superconducting levitation: Applications to bea-
rings and magnetic transportation. New York, Wiley, 1994.
[22] SOTELO, G. G., DIAS, D. H. N., DE ANDRADE JR, R., et al. “Tests on a
Superconductor Linear Magnetic Bearing of a Full-Scale MagLev Vehicle”,
IEEE Transactions on Applied Superconductivity, 2010. Artigo aceito para
publicacao em edicoes futuras da revista.
43





























