Embed Size (px)
Citation preview

Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

A la memòria del meu company, Marc Rafecas.
- Aquest és també el teu projecte. -

Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Índex General
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex de l’Índex General
Índex de l’Índex General
Índex de la Memòria de Descriptiva 1
Índex de la Memòria de Càlcul 6
Índex dels Plànols 8
Índex del Pressupost 9
Índex del Plec de Condicions 10
Índex d’Annexes 11

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex General
Índex de la Memòria de Descriptiva
0 Objectiu 1
1 Presentació 21.1 Introducció 21.2 Regulació de l’Energia Elèctrica 2
1.2.1 Regulació de la Freqüència 31.2.2 Regulació de la Tensió 6
1.2.2.1 Grups d’Excitació 71.2.2.2 Sistemes d’Autoexcitació 8
1.2.3 El Grup Generador Utilitzat 9
2 Estudi i Disseny d’un Sistema Regulador per a un Grup Motor-Alternador Trifàsic 102.1 Introducció 102.2 Estudi del Grup per la Regulació de la Velocitat del Motor 10
2.2.1 Introducció 102.2.2 El Motor Asíncron 10
2.2.2.1 Introducció 102.2.2.2 Principi de Funcionament 112.2.2.3 El Circuit Equivalent 132.2.2.4 La Característica Mecánica del Motor Asíncron 132.2.2.5 Règims de Funcionament del Motor 162.2.2.6 Estabilitat en el Funcionament d’Un Motor Asíncron 18
2.2.3 Característica Mecánica de l’Alternador 202.2.3.1 Introducció 202.2.3.2 Par Resistent en Buï Fictici 202.2.3.3 Par Resistent en Càrrega 21
2.2.3.3.1 Aparició d’Una Força Tangencial 212.2.3.3.2 Equilibri en el Balanç de Potències 23
2.2.4 Regulació de la Velocitat 252.2.4.1 Introducció 252.2.4.2 Variacions del Par Intern del Motor 25
2.2.4.2.1 Característica Mecánica del Motor per Variació de Freqüència 262.2.4.3 Solució Adaptada 27
2.2.4.3.1 Introducció 272.2.4.3.2 Descripció del Sistema de Regulació de la Velocitat 27
2.3 Estudi del Grup per la Regulació de la Tensió 292.3.1 Introducció 292.3.2 La Màquina Síncrona: l’Alternador 29
2.3.2.1 Introducció 292.3.2.2 Principi de Funcionament 292.3.2.3 Règims de Funcionament 31

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Índex General
2.3.2.3.1 Règim en Buït 322.3.2.3.2 Règim en Càrrega 33
2.3.2.4 Diagrama Fasorial i Circuit Equivalent de l’Alternador 332.3.2.4.1 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Rotor
Cilíndric 342.3.2.4.2 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Pols
Salents 352.3.2.5 Balanç de Potències 36
2.3.2.5.1 Balanç de Potències per un Alternador de Rotor Cilíndric 372.3.2.5.2 Balanç de Potències per un Alternador de Pols Salents 38
2.3.3 Estudi de la Regulació de la Tensió de l’Alternador en el Règim Dinàmicdel Sistema 39
2.3.3.1 Introducció 392.3.3.2 L’Aternador dins el Sistema No Regulat 39
2.3.3.2.1 Variacions de Càrrega 392.3.3.2.2 Variacions de Velocitat 41
2.3.3.3 Regulació de la Tensió 412.3.3.3.1 L’Efecte Regulador de la Tensió 412.3.3.3.2 Principi Bàsic d’Un Sistema de Regulació 422.3.3.3.3 Sistema de Regulació per la Màquina Síncrona 442.3.3.3.4 Solució Adaptada 45
2.3.3.3.4.1 Introducció 452.3.3.3.4.2 El Convertidor CC-CC 45
2.3.3.3.4.2.1 Presentació 452.3.3.3.4.2.2 Descripció Básica de la Font de Tensió Conmutada
- Topologia Buck - 472.3.3.3.4.2.3 Funcionament 48
2.3.3.3.4.3 El Controlador 51
3 Estudi i Disseny del Sistema de Regulació 533.1 Introducció 533.2 El Regulador de Freqüència 53
3.2.1 Introducció 533.2.2 El Variador de Freqüència 53
3.2.2.1 Introducció 533.2.2.2 Escollir un Variador de Freqüència 543.2.2.3 El Variador de Freqüència Micromaster 55
3.2.2.3.1 Introducció 553.2.2.3.2 Presentació 553.2.2.3.3 Característiques 563.2.2.3.4 Ús del Variador 573.2.2.3.5 Descripció Tècnica 57
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Índex General
3.2.2.3.5.1 L'Esquema General 573.2.2.3.5.2 El Panell Frontal 593.2.2.3.5.3 Els Terminals de Control 60
3.2.2.3.6 Funcionament Bàsic 613.2.2.3.7 El Control Analògic 633.2.2.3.8 Arranc del Motor 643.2.2.3.9 Parada del Motor 64
3.2.2.4 El Circuit de Control 653.2.2.4.1 Descripció 65
3.2.2.5 Microcontrolador i Programa 653.2.2.5.1 Introducció 653.2.2.5.2 El Microcontrolador PIC16C84 66
3.2.2.5.2.1 Generalitats dels PIC's 16CXX 663.2.2.5.2.2 Les Famílies PIC 16CXX 663.2.2.5.2.3 Elecció del PIC16C84 683.2.2.5.2.4 El PIC16C84 68
3.2.2.5.3 El Programa 693.2.2.5.3.1 Objectiu 693.2.2.5.3.2 Descripció 693.2.2.5.3.3 El Programa 703.2.2.5.3.4 El Diagrama de Flux 723.2.2.5.3.5 Les Configuracions 74
3.2.2.6 La Conversió Digital - Analògic 743.2.2.6.1 El Circuit Conversor 743.2.2.6.2 El DAC0808 75
3.2.2.6.2.1 Descripció 753.2.2.6.2.2 Característiques del DAC0808 76
3.2.2.7 Driver del PIC 763.3 El Regulador de Tensió 77
3.3.1 Introducció 773.3.2 Estudi i Disseny del Convertidor Buck 77
3.3.2.1 Introducció 773.3.2.2 El Cicle de Treball 783.3.2.3 Els Diferents Modes de Conducció 783.3.2.4 Les Tensions d’Entrada, Sortida i de la Bobina 803.3.2.5 La Corrent en la Bobina 813.3.2.6 La Corrent en el Transistor i en el Díode 823.3.2.7 L’Arrissat del Condensador 83
3.3.3 Estudi i Disseny del Controlador 843.3.3.1 Introducció 843.3.3.2 Funcionament del Controlador 853.3.3.3 L' Amplificador d’Error 86

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Índex General
3.3.3.4 El Modulador d’Impulsos: El PWM 893.3.3.4.1 El Comparador 903.3.3.4.2 Oscil·lador Rampa 91
3.3.3.4.2.1 El Timer LM555 923.3.3.4.2.1.1 Descripció dels C.I. 555 923.3.3.4.2.1.2 Característiques 923.3.3.4.2.1.3 Diagrama de Blocs 93
3.3.3.4.2.2 Circuit de la Senyal Rampa 933.3.3.5 Driver i Conmutador 943.3.3.6 Altres Solucions al Controlador 96
3.3.3.6.1 Introducció 963.3.3.6.2 Controlador amb el C.I. LM78S40 96
3.3.3.6.2.1 Descripció 963.3.3.6.2.2 Teòria de Funcionament 98
3.3.3.6.3 Controlador amb el C.I. LH1605 983.3.3.6.3.1 Descripció 983.3.3.6.3.2 Teoria de Funcionament 99
3.3.3.6.4 Oscil·lador Rampa amb Amplificadors Operacionals 1003.3.4 Semiconductors de Potència 103
3.3.4.1 El Transistor de Potència 1033.3.4.1.1 El Transistor Bipolar 1033.3.4.1.2 El Transistor Darlington 1053.3.4.1.3 El Transistor Bipolar de Porta Aïllada IGBT 106
3.3.4.2 El Díode de Potència 1073.4 El Sistema d’Autoalimentació i les Senyals de Control 109
3.4.1 Introducció 1093.4.2 El Sistema d’Autoalimentació 110
3.4.2.1 Font d’Alimentació del Convertidor Buck: Font de Tensió ContínuaEstabilitzada 110
3.4.2.2 Font d’Alimentació dels Components Electrònics 1113.4.2.2.1 Disseny del Circuit d'Entrada 1123.4.2.2.2 Disseny del Circuit de Sortida 113
3.4.3 Les Senyals de Control 1133.4.3.1 Senyal del Controlador del Convertidor Buck 1133.4.3.2 Senyal pel Controlador de Freqüència 113
4 Proteccions del Sistema 1154.1 Introducció 1154.2 Protecció en l’instal·lació del Grup Generador 115
4.2.1 Introducció 1154.2.2 Tipus de Proteccions 1164.2.3 Altres Tipus de Proteccions 116

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Índex General
4.3 El Radiador : Dissipador de Calor pel Conmutador 1174.4 Xarxes de Protecció per Dispositius de Electrònics Sotmesos a Rames
Inductives119
4.4.1 Introducció 1194.4.2 Definició de les Xarxes Clamp i Snubber 1204.4.3 Tipus de Xarxes Clamp i Snubber 120
4.5 Altres Proteccions i Senyalitzacions pels Circuits del Sistema 121
Referències 123

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
6 Índex General
Índex de la Memòria de Càlcul
0 Íntroducció 1
Les Sessions al Laboratori de Màquines Elèctriques 21.1 Introducció 2
Mesura de la Resistència de l’Inductor 21.2.1 Objecte de l'assaig 21.2.2 Representacions Esquemàtiques 2
1.2
1.2.3 Notes 3Mesures del Sistema a Diferentes Càrregues 31.3.1 Objecte de l'Assaig 31.3.2 Esquema Elèctric 41.3.3 Taula de Valors 4
1.3
1.3.4 Notes 5
1
1.4 Resultats Obtinguts 5
Regulador de Freqüència 72.1 Driver del PIC 7
El Microcontrolador: Configuració del Programa 82.2.1 El Programa 82.2.2 Configuració de la Freqüència de Rellotge 92.2.3 Configuració dels Retards en les Rutes 192.2.4 Configuració dels Seguidors 28
2.2
2.2.5 Exemple de Configuració del Programa 30El Conversor Digital - Analògic 322.3.1 El Circuit 322.3.2 Interconnexió PIC – DAC 322.3.3 Localització d’Averies en el Conversor DAC0808 34
2.3
2.3.4 Identificació de Cada Error en la Pràctica 382.4 Configuració del Variador de Freqüència amb Control Analògic 39
2
Regulador de Tensió 413.1 Convertidor CC-CC - Topología Buck - 41
3.1.1 Càlcul de la Càrrega 413.1.2 Càlcul de la Tensió d’Entrada 433.1.3 Els Valors de Conmutació: Duty Cicle ( D ) 433.1.4 La Bobina (L) 45
3.1.4.1 Càlcul de la Bobina 453.1.4.2 Elecció del Tipus de Material, Geometria i Tamany del Nucli
Magnètic 47
3
3.1.5 El Condensador 48
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
7 Índex General
3.2 El Controlador 503.2.1 Circuit Amplificador d’Error 503.2.2 El Comparador - El PWM 523.2.3 Generador de la Senyal Rampa 54
3.3 Semiconductors de Potència: Driver, Conmutador i Díode 583.3.1 Transistors de Potència 583.3.2 El Díode de Potència 61
4 Disseny de les Fonts i Senyals pel Sistema 624.1 Font d’Alimentació de Tensió Contínua Estabilitzada per a l’Entrada del
Convertidor Buck 624.2 Font d'alimentació per als Components Electrònics 72
4.2.1 El Carregador de Bateries i Bateria 724.2.2 Disseny del Circuit Driver d'Entrada al Càrregador de Batèries 724.2.3 Disseny del Circuit Regulador 75
4.3 Senyal d'Entrada al Controlador del Buck 754.4 Senyal d’Entrada al Controlador de Freqüència 784.5 El Transformador 80
5 Elements i Circuits de Protecció 815.1 Relès de Protecció 815.2 Disseny d’un Radiador 82
5.2.1 Exemple de Disseny 865.3 Disseny de les Reds Snubber 90
5.3.1 Introducció 905.3.2 Disseny General d’Una Red Snubber 905.3.3 Disseny d’Una Red Snubber pel Díode de Potència 91
5.4 Altres Elements de Protecció 92

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
8 Índex General
Índex dels Plànols
Plànol 1 : Diagrama de Blocs
Plànol 2 : Circuit Adaptador
Plànol 3 : Circuit Regulador de Freqüència
Plànol 4 : Circuit Regulador de Tensió
Plànol 5 : Esquema de la Placa de l’Adaptador
Plànol 6 : Esquema de la Placa del Regulador de Freqüència
Plànol 7 : Esquema de la Placa del Regulador de Tensió

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
9 Índex General
Índex del Pressupost
Pressupost de les Plaques1 1
1.1 Placa de l’Adaptador 11.2 Placa del Regulador de Freqüència 21.3 Placa del Regulador de Tensió 2
2 Pressupost Software 3
3 Pressupost dels Components del Sistema 3
4 Pressupost Alimentació, Cables i Connectors 3
5 Resum de Pressupost 4

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
10 Índex General
Índex del Plec de Condicions
Instal·lacions Generadores de Baixa Tensió 1
1 Objecte i Camp d'Aplicació 12 Classificació 13 Condicions Generals 14 Condicions per la Connexió 2
4.1 Instal·lacions Generadores Aïllades 24.2 Instal·lacions Generadores Asistides 24.3 Instal·lacions Generadores Interconnectades 3
4.3.1 Potències Màximes de les Centrals Interconectades en Baixa Tensió 34.3.2 Condicions Específiques per l'Arranc i Acoplament de la Instal·lació
Generadora a la Red de Distribució Pública 44.3.2.1 Generadors Asíncrons 44.3.2.2 Generadors Síncrons 4
4.3.3 Equips de Maniobra i Mesura a Disposar en el Punt d'Interconexió 54.3.4 Control de l'Energia Reactiva 5
5 Cables de Connexió 66 Forma de l'Ona 67 Proteccions 68 Instal·lacions 7
8.1 Generalitats 78.2 Característiques de la Posta a Terra segons el Funcionament de la
Instal·lació Generadora Respecte a la Red de Distribució Pública 78.2.1 Instal·lacions Generadores Aïllades Connectades a Instal·lacions
Receptores que són Alimentades de Forma Exclussiva per dits Grups 78.2.2 Instal·lacions Generadores Asistides Connectades a instal·lacions
Receptores que poden ser Alimentades, de forma Independent, perllurs Grups o per la Red de Distribució Pública 8
8.2.3 Instal·lacions Generadores Interconectades, Connectades aInstal·lacions Receptores que poden ser Alimentades, de formaSimultania o Independent, per llurs Grups o per la Red de DistribucióPública 8
9 Posta en Marxa 910 Altres Disposicions 9
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
11 Índex General
Índex d’Annexes
1 Complementació sobre l’Estudi d’un Grup Generador 11.1 Constitució dels Motors Asíncrons 11.2 Circuit Equivalent d’una Màquina Asíncrona 21.3 La Característica Mecànica de la Màquina Accionada 71.4 Constitució dels Màquines Síncrones 10
2 Informació Complementària del Convertidor de Frequència Micromaster Vector 12
3 El PIC16C84 133.1 Introducció 133.2 Les seves Senyals Disponibles i Patillatge 133.3 L'Arquitectura Interna 143.4 Els Registres Interns 17
3.4.1 El Registre INDF 193.4.2 El Registre RTCC 193.4.3 El Registre PCL 193.4.4 El Registre STATUS o Registre d'Estat 203.4.5 El Registre FSR o Registre de Sel·lecció de Registre 213.4.6 Els Registres PORTA I PORTB 213.4.7 El Registre EEDATA i EEADR 213.4.8 El Registre PCLATH 213.4.9 El Registre INTCON 22
3.4.10 Els Registres 'TRISA' i 'TRISB' 233.4.11 Els Registres EECON1 i EECON2 233.4.12 Els Registres Restants 23
3.5 Els Ports Paral·lels 233.5.1 El Port A 243.5.1 El Port B 25
3.6 El Temporitzador 273.7 El Temporitzador Warchdog 293.8 La Memòria EEPROM de Dades 313.9 Reset i Interrupcions 32
3.9.1 Les Diferents Fonts d'Interrupcions 343.10 El Joc d’Instruccions 363.11 Programar un PIC16C84 36
4 Documentació Tècnica del Components Electrònics 37
5 Catàlegs 38
Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Memòria Descriptiva
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex de la Memòria Descriptiva
Índex de la Memòria de Descriptiva
0 Objectiu 1
1 Presentació 21.1 Introducció 21.2 Regulació de l’Energia Elèctrica 2
1.2.1 Regulació de la Freqüència 31.2.2 Regulació de la Tensió 6
1.2.2.1 Grups d’Excitació 71.2.2.2 Sistemes d’Autoexcitació 8
1.2.3 El Grup Generador Utilitzat 9
2 Estudi i Disseny d’un Sistema Regulador per a un Grup Motor-Alternador Trifàsic 102.1 Introducció 102.2 Estudi del Grup per la Regulació de la Velocitat del Motor 10
2.2.1 Introducció 102.2.2 El Motor Asíncron 10
2.2.2.1 Introducció 102.2.2.2 Principi de Funcionament 112.2.2.3 El Circuit Equivalent 132.2.2.4 La Característica Mecánica del Motor Asíncron 132.2.2.5 Règims de Funcionament del Motor 162.2.2.6 Estabilitat en el Funcionament d’Un Motor Asíncron 18
2.2.3 Característica Mecánica de l’Alternador 202.2.3.1 Introducció 202.2.3.2 Par Resistent en Buï Fictici 202.2.3.3 Par Resistent en Càrrega 21
2.2.3.3.1 Aparició d’Una Força Tangencial 212.2.3.3.2 Equilibri en el Balanç de Potències 23
2.2.4 Regulació de la Velocitat 252.2.4.1 Introducció 252.2.4.2 Variacions del Par Intern del Motor 25
2.2.4.2.1 Característica Mecánica del Motor per Variació de Freqüència 262.2.4.3 Solució Adaptada 27
2.2.4.3.1 Introducció 272.2.4.3.2 Descripció del Sistema de Regulació de la Velocitat 27
2.3 Estudi del Grup per la Regulació de la Tensió 292.3.1 Introducció 292.3.2 La Màquina Síncrona: l’Alternador 29
2.3.2.1 Introducció 292.3.2.2 Principi de Funcionament 292.3.2.3 Règims de Funcionament 31

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Índex de la Memòria Descriptiva
2.3.2.3.1 Règim en Buït 322.3.2.3.2 Règim en Càrrega 33
2.3.2.4 Diagrama Fasorial i Circuit Equivalent de l’Alternador 332.3.2.4.1 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Rotor
Cilíndric 342.3.2.4.2 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Pols
Salents 352.3.2.5 Balanç de Potències 36
2.3.2.5.1 Balanç de Potències per un Alternador de Rotor Cilíndric 372.3.2.5.2 Balanç de Potències per un Alternador de Pols Salents 38
2.3.3 Estudi de la Regulació de la Tensió de l’Alternador en el Règim Dinàmicdel Sistema 39
2.3.3.1 Introducció 392.3.3.2 L’Aternador dins el Sistema No Regulat 39
2.3.3.2.1 Variacions de Càrrega 392.3.3.2.2 Variacions de Velocitat 41
2.3.3.3 Regulació de la Tensió 412.3.3.3.1 L’Efecte Regulador de la Tensió 412.3.3.3.2 Principi Bàsic d’Un Sistema de Regulació 422.3.3.3.3 Sistema de Regulació per la Màquina Síncrona 442.3.3.3.4 Solució Adaptada 45
2.3.3.3.4.1 Introducció 452.3.3.3.4.2 El Convertidor CC-CC 45
2.3.3.3.4.2.1 Presentació 452.3.3.3.4.2.2 Descripció Básica de la Font de Tensió Conmutada
- Topologia Buck - 472.3.3.3.4.2.3 Funcionament 48
2.3.3.3.4.3 El Controlador 51
3 Estudi i Disseny del Sistema de Regulació 533.1 Introducció 533.2 El Regulador de Freqüència 53
3.2.1 Introducció 533.2.2 El Variador de Freqüència 53
3.2.2.1 Introducció 533.2.2.2 Escollir un Variador de Freqüència 543.2.2.3 El Variador de Freqüència Micromaster 55
3.2.2.3.1 Introducció 553.2.2.3.2 Presentació 553.2.2.3.3 Característiques 563.2.2.3.4 Ús del Variador 573.2.2.3.5 Descripció Tècnica 57
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Índex de la Memòria Descriptiva
3.2.2.3.5.1 L'Esquema General 573.2.2.3.5.2 El Panell Frontal 593.2.2.3.5.3 Els Terminals de Control 60
3.2.2.3.6 Funcionament Bàsic 613.2.2.3.7 El Control Analògic 633.2.2.3.8 Arranc del Motor 643.2.2.3.9 Parada del Motor 64
3.2.2.4 El Circuit de Control 653.2.2.4.1 Descripció 65
3.2.2.5 Microcontrolador i Programa 653.2.2.5.1 Introducció 653.2.2.5.2 El Microcontrolador PIC16C84 66
3.2.2.5.2.1 Generalitats dels PIC's 16CXX 663.2.2.5.2.2 Les Famílies PIC 16CXX 663.2.2.5.2.3 Elecció del PIC16C84 683.2.2.5.2.4 El PIC16C84 68
3.2.2.5.3 El Programa 693.2.2.5.3.1 Objectiu 693.2.2.5.3.2 Descripció 693.2.2.5.3.3 El Programa 703.2.2.5.3.4 El Diagrama de Flux 723.2.2.5.3.5 Les Configuracions 74
3.2.2.6 La Conversió Digital - Analògic 743.2.2.6.1 El Circuit Conversor 743.2.2.6.2 El DAC0808 75
3.2.2.6.2.1 Descripció 753.2.2.6.2.2 Característiques del DAC0808 76
3.2.2.7 Driver del PIC 763.3 El Regulador de Tensió 77
3.3.1 Introducció 773.3.2 Estudi i Disseny del Convertidor Buck 77
3.3.2.1 Introducció 773.3.2.2 El Cicle de Treball 783.3.2.3 Els Diferents Modes de Conducció 783.3.2.4 Les Tensions d’Entrada, Sortida i de la Bobina 803.3.2.5 La Corrent en la Bobina 813.3.2.6 La Corrent en el Transistor i en el Díode 823.3.2.7 L’Arrissat del Condensador 83
3.3.3 Estudi i Disseny del Controlador 843.3.3.1 Introducció 843.3.3.2 Funcionament del Controlador 853.3.3.3 L' Amplificador d’Error 86

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Índex de la Memòria Descriptiva
3.3.3.4 El Modulador d’Impulsos: El PWM 893.3.3.4.1 El Comparador 903.3.3.4.2 Oscil·lador Rampa 91
3.3.3.4.2.1 El Timer LM555 923.3.3.4.2.1.1 Descripció dels C.I. 555 923.3.3.4.2.1.2 Característiques 923.3.3.4.2.1.3 Diagrama de Blocs 93
3.3.3.4.2.2 Circuit de la Senyal Rampa 933.3.3.5 Driver i Conmutador 943.3.3.6 Altres Solucions al Controlador 96
3.3.3.6.1 Introducció 963.3.3.6.2 Controlador amb el C.I. LM78S40 96
3.3.3.6.2.1 Descripció 963.3.3.6.2.2 Teòria de Funcionament 98
3.3.3.6.3 Controlador amb el C.I. LH1605 983.3.3.6.3.1 Descripció 983.3.3.6.3.2 Teoria de Funcionament 99
3.3.3.6.4 Oscil·lador Rampa amb Amplificadors Operacionals 1003.3.4 Semiconductors de Potència 103
3.3.4.1 El Transistor de Potència 1033.3.4.1.1 El Transistor Bipolar 1033.3.4.1.2 El Transistor Darlington 1053.3.4.1.3 El Transistor Bipolar de Porta Aïllada IGBT 106
3.3.4.2 El Díode de Potència 1073.4 El Sistema d’Autoalimentació i les Senyals de Control 109
3.4.1 Introducció 1093.4.2 El Sistema d’Autoalimentació 110
3.4.2.1 Font d’Alimentació del Convertidor Buck: Font de Tensió ContínuaEstabilitzada 110
3.4.2.2 Font d’Alimentació dels Components Electrònics 1113.4.2.2.1 Disseny del Circuit d'Entrada 1123.4.2.2.2 Disseny del Circuit de Sortida 113
3.4.3 Les Senyals de Control 1133.4.3.1 Senyal del Controlador del Convertidor Buck 1133.4.3.2 Senyal pel Controlador de Freqüència 113
4 Proteccions del Sistema 1154.1 Introducció 1154.2 Protecció en l’instal·lació del Grup Generador 115
4.2.1 Introducció 1154.2.2 Tipus de Proteccions 1164.2.3 Altres Tipus de Proteccions 116

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Índex de la Memòria Descriptiva
4.3 El Radiador : Dissipador de Calor pel Conmutador 1174.4 Xarxes de Protecció per Dispositius de Electrònics Sotmesos a Rames
Inductives119
4.4.1 Introducció 1194.4.2 Definició de les Xarxes Clamp i Snubber 1204.4.3 Tipus de Xarxes Clamp i Snubber 120
4.5 Altres Proteccions i Senyalitzacions pels Circuits del Sistema 121
Referències 123

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Memòria Descriptiva
0 Objectiu
Aquest projecte és un estudi teòric sobre la regulació d'un alternador; a partir de l’estudi idisseny d'un regulador per a un grup motor-alternador trifàsics. El projecte té la finalitat dedotar al lector d’una sèrie de coneixements teòrics i de disseny per la realització d'un sistemaregulador particular per a un grup motor-alternador dels que es disposen al laboratori deMaquines Elèctriques de l'E.T.S.E.
Tot i que, el motor no és una turbina dins un sistema real d'una central, el concepte reguladorque es vol estudiar existeix, i des de l'universitat, es pot experimentar.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Memòria Descriptiva
1 Presentació
1.1 Introducció
Qualsevol tipus de central amb la finalitat principal de generar energia elèctrica està compostaper maquines motrius i generadors d'energia elèctrica; el comput d'aquest conjunt l'anomenemgrup.
El correcte funcionament d'un grup es basa en generar l'energia elèctrica per a una tensió i unafreqüència constants. Les diferents quantitats de càrrega que el grup alimenta provoquenvariacions d'aquesta tensió i freqüència generada. És per això, que tot grup ha de ser regulatper mantenir aquests valors de treball constants.
1.2 Regulació de l’Energia Elèctrica
Un sistema de generació d'energia elèctrica es basa en un grup format per una turbina i ungenerador; la turbina, aportant energia mecànica rotativa, i el generador, creant un sistema decamps magnètics excitadors a un circuit de bobines que originen unes forces electromotrius,comporten la generació d'una tensió alterna. Tant la energia mecànica com els campsmagnètics excitadors han de ser regulats per uns valors de tensió i freqüència determinats.Així doncs, entenem que el sistema general de regulació es basa en dos sistemes reguladorsque reaccionen conjuntament per a cada moment de desequilibri de les condicions de treballdel sistema.
D'aquesta manera, podem deduir i nombrar de que consta el sistema regulador d'un grupgenerador d'energia elèctrica:
- Regulació de la freqüència: regulació de la velocitat rotativa del grup generada per lamàquina motriu ( la turbina, en el cas d’una central ).
- Regulació de la tensió: regulació del sistema excitador de la màquina generadora.
Tal com s'estudiarà més endavant, la generació de la senyal senoidal conjunta els paràmetresde tensió i freqüència ( expressió de la f.e.m., apartat 2.3.2.2 ), i d'aquí, deriva la reacció mútuadels dos reguladors que hem mencionat anteriorment. És a dir, el concepte de regulació d'ungrup generador consta en trobar un punt d'equilibri dins els requisits de funcionament regits,entre dos reguladors diferents dels quals els seus paràmetres es troben físicament lligats.
A continuació, anem a veure els dos sistemes de regulació per separat.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Memòria Descriptiva
1.2.1 Regulació de la Freqüència
És la part que manté la velocitat constant de la turbina, amb el fi de no variar la freqüència dered, regulant la potència activa del grup. Parlem de potència activa i no de tensió generada perestudiar aquest sistema de regulació desvinculant-se del sistema regulador de tensió.
Les característiques fundamentals de la regulació està basada en la curva de estaticitat, curvaque relaciona la velocitat del grup i la potència activa. Es diu que la regulació és estàtica quanla velocitat disminueix al augmentar la potència, i és astàtica quan la velocitat es conservaconstant per a qualsevol potència. El sistema de regulació estàtic permet una regulació estable,perquè reacciona ràpidament al temps que es presenta l'efecte perturbador.
El següent gràfic observem que, per a un grup de característiques estàtiques, la velocitat de laturbina disminueix al augmentar la potència activa.
Figura 1.1. Curves de treball estàtica i astàtica per a un generador de velocitat
on S és estatisme:
O n
O n
f - fS =
f + f2
(1.1)
la funció bàsica de l'estatisme, es permetre la repartició proporcional de la càrrega total de lared entre els grups que el serveixen, aquesta s'efectúa segons la llei, que ben determinada,defineix en tot moment la relació entre la velocitat o freqüència i la potència activa de lamàquina.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Memòria Descriptiva
On
n
S×ff = f - ×P
P (1.2)
d'on:
S → estatisme.f → freqüència per una determinada potència.Pn → potència nominal.P → potència qualsevol.fO → freqüència a una potència igual a zero ( en buït ).
Quan una màquina està troba sense càrrega o desconnectada de la Red, o fòra del paral·lel siestava interconectada en una red eléctrica; mitjançant el variador de velocitat ( VV ) i d'acordamb l'estaticisme, es varia la velocitat entre la freqüència fmin i fmax. Això s'observa en elsegüent gràfic, on es mostra les posicions del variador de velocitat ( supossem entre 0 i 10 ), ide la velocitat de la freqüència del grup. Veiem gràfic:
Figura 1.2. Curves de treball d’un generador de velocitat segons la posició variador de velocitat
d’on:
fmin → freqüència en buït amb el canvi de velocitat en posició zero, velocitat mínima.fmax → freqüència en buït amb el canvi de velocitat en posició 10, velocitat màxima.f50 → freqüència en buït a 50 Hz.
L'objectiu del regulador és que per a qualsevol variació de velocitat el regulador ha de retornara la posició de l'equilibri, és a dir, la senyal de desviació ha de ser zero.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Memòria Descriptiva
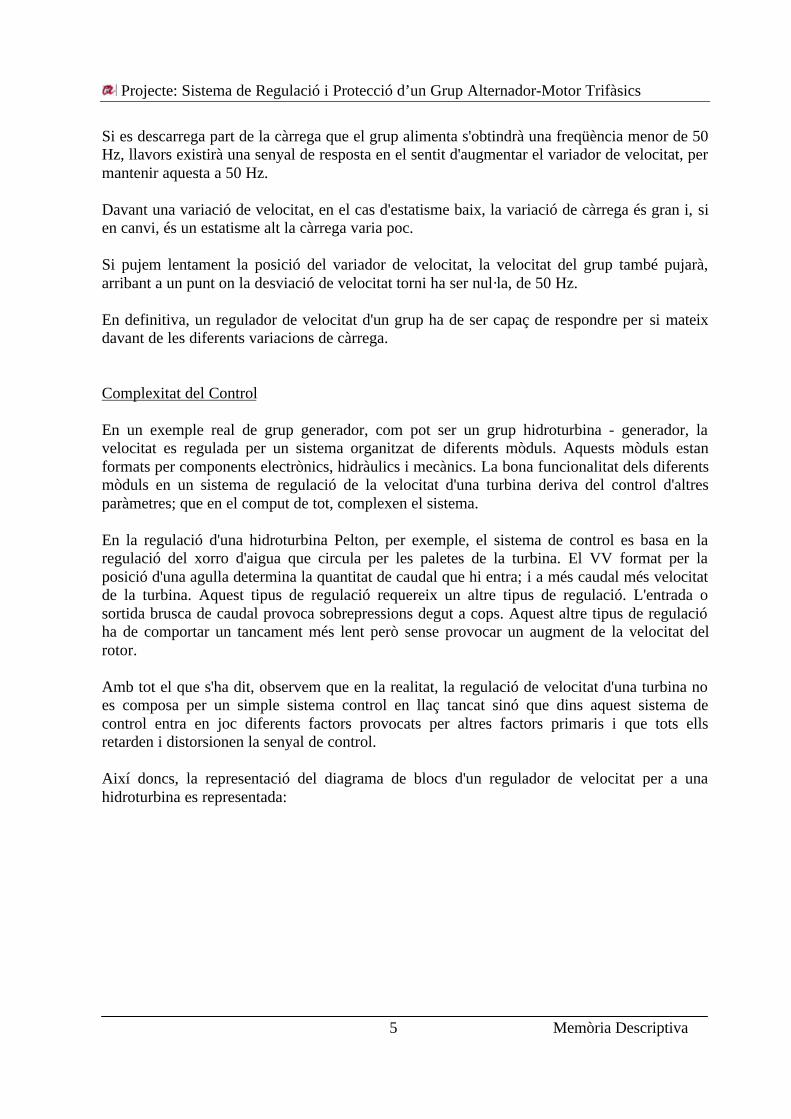
Si es descarrega part de la càrrega que el grup alimenta s'obtindrà una freqüència menor de 50Hz, llavors existirà una senyal de resposta en el sentit d'augmentar el variador de velocitat, permantenir aquesta a 50 Hz.
Davant una variació de velocitat, en el cas d'estatisme baix, la variació de càrrega és gran i, sien canvi, és un estatisme alt la càrrega varia poc.
Si pujem lentament la posició del variador de velocitat, la velocitat del grup també pujarà,arribant a un punt on la desviació de velocitat torni ha ser nul·la, de 50 Hz.
En definitiva, un regulador de velocitat d'un grup ha de ser capaç de respondre per si mateixdavant de les diferents variacions de càrrega.
Complexitat del Control
En un exemple real de grup generador, com pot ser un grup hidroturbina - generador, lavelocitat es regulada per un sistema organitzat de diferents mòduls. Aquests mòduls estanformats per components electrònics, hidràulics i mecànics. La bona funcionalitat dels diferentsmòduls en un sistema de regulació de la velocitat d'una turbina deriva del control d'altresparàmetres; que en el comput de tot, complexen el sistema.
En la regulació d'una hidroturbina Pelton, per exemple, el sistema de control es basa en laregulació del xorro d'aigua que circula per les paletes de la turbina. El VV format per laposició d'una agulla determina la quantitat de caudal que hi entra; i a més caudal més velocitatde la turbina. Aquest tipus de regulació requereix un altre tipus de regulació. L'entrada osortida brusca de caudal provoca sobrepressions degut a cops. Aquest altre tipus de regulacióha de comportar un tancament més lent però sense provocar un augment de la velocitat delrotor.
Amb tot el que s'ha dit, observem que en la realitat, la regulació de velocitat d'una turbina noes composa per un simple sistema control en llaç tancat sinó que dins aquest sistema decontrol entra en joc diferents factors provocats per altres factors primaris i que tots ellsretarden i distorsionen la senyal de control.
Així doncs, la representació del diagrama de blocs d'un regulador de velocitat per a unahidroturbina es representada:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
6 Memòria Descriptiva
Figura 1.3. Esquema en blocs d’un sistema de regulació de velocitat per a una hidroturbina
El sistema es defineix quan davant una variació de càrrega es produeix una variació defreqüència; això és, que a una descàrrega brusca la freqüència augmentarà de valor, per ser elpar del motor major que el par resistent. En la etapa de control de la variació de la senyaloriginarà una senyal en sentit de tancament movent-se el servomotor de comandament en igualsentit i apareixeràn les senyals antagonistes de la realimentació transitòria i permanent,conforme es va estabilitzant la freqüència de la red, totes les senyals tendeixen a desaparèixerfins arribar a un nou punt d'equilibri. Degut a la variació de la càrrega de l'estat anterior alactual, la correspondencia entre el canvi de velocitat i l'estatisme s'ha trencat; per obtenirnovament els 50 Hz és necessari actuar novament sobre el conmutador del variador develocitat en el sentit de portar la freqüència al valor nominal aconseguint que la senyal dedesviació sigui zero.
1.2.2 Regulació de la Tensió
Els generadors d'energia elèctrica, més concretament, els altenadors en que treballem sónalimentats per corrent contínua per crear els camps magnètics inductors comentatsanteriorment. El sistema d'alimentació de la corrent contínua es anomenat 'sistema d'excitació'.
Existeixen diferents modes de sistemes d'excitació de grups generadors que comporten adiferents modes de regulació de la tensió: els sistemes d'excitació creats per grups d'excitació i

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
7 Memòria Descriptiva
els sistemes d'autoexcitació.
1.2.2.1 Grups d’Excitació
Els grups d'excitació és el sistema d'excitació de grups generadors per aclopament ambturbines de gas, vapor i hidroturbines; és a dir, es localitzen en les grans centrals.
Tradicionalment, aquests sistemes d'excitació consten d'una dínamo excitatriu del tipus 'Shunt'montada en l'eix del grup i llur sortida s'aplica al rotor de l'alternador per mitjà d'uns anellsdeslizants amb les seves respectives escombretes. L'excitatriu és un generador de CCconvencional, en el que a vegades es substitueix tota o part de la seva excitació per unaexcitatriu pilot amb l'objectiu de millorar la rapidessa de resposta.
En el següent esquema es dòna una versió d'aquest sistema on poden apreciar-se cada un delselements.
Figura 1.4. Esquema elèctric d’un sistema d’excitació amb dínamo excitatriu
Les màquines síncrones més petites no solen tenir excitatriu pilot i l'excitatriu principaltreballa en forma 'Shunt' alimentat directament de l'inductor o camp de l'alternador.
Degut a les dificutats de conmutació en les dínamos quan aquestes giren a grans velocitats i,en general, per evitar la presència del colector de delgues, s'han desarrollat des de fa anysexcitatrius de corrent alterna que amb l'ajut de rectificadors de silici alimentant en correntcontínua els pols de l'alternador. El camp d'aquestes excitatrius prové generalment d'un altreexcitatriu de corrent alterna amb imans permanents de la qual la seva sortida s'ha rectificatpreviament com s'indica en el següent esquema:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
8 Memòria Descriptiva
Figura 1.5. Esquema elèctric d’un sistema d’excitació electrònic
Generalment les excitatrius pilots produeixen una corrent alterna d'una freqüència aproximadaals 400 Hz, mentres que la excitatriu principal és de 50 Hz.
Modernament, s'utilitza un sistema d'excitació sense escobetes, l'esquema és similar al'anterior però en el qual la excitatriu principal té una disposició inversa a la que es presenta.En aquest cas el devanat trifàsic de la excitatriu està col·locat en el rotor i el seu devanatinductor en l'estàtor. La sortida de corrent alterna de la excitatriu es converteix en correntcontínua per mitjà de rectificadors montats en l'eix i que alimenten directament al rotor del'alternador sense necessitat d'anells ni escobetes ( rectificadors giratoris ).
La regulació de la tensió dels alternadors es realitzava per mitjà de reostatos intercalats en elcircuit de camp de la excitatriu principal, que eren maniobrats a mà; més tard es contruïrenreguladors automàtics ( tipus "Tirrill" ) que modificaven directament la resistència del circuitd'excitació. També s'utilitzaven màquines especials per la regulació de tensió com lesamplidines i rototrols, que eren esencialment les màquines rotatives de corrent contínuaamplificadores, que disponíen d'un nombre d'escobetes doble que els dels dínamosconvencionals.
1.2.2.2 Sistemes d’Autoexcitació
Avui en dia, la regulació de la tensió és electrònica i es realitza per mitjà de tiristors orectificadors controlats de silici que permeten obtenir una corrent contínua d'amplitud variablesense que exiteixin pèrdues apreciables, a base d'actuar sobre un electrode auxiliar denominat'porta' ( gate ). En els alternadors moderns empleats en els grups electrògens pelsubministrament de l'energia elèctrica a instal·lacions aïllades, es recorre a l'autoexcitació del'alternador, que consisteix en obtenir la corrent contínua necessària pels pols de la pròpiasortida del generador dels quals rectifica. El 'cebat' de les màquines es realitza gràcies almagnetisme remanent existent en els pols de la màquina generadora.
Per lo tant, els generadors disponen de sistemes realimentats que permeten estabilitzar la

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
9 Memòria Descriptiva
tensió de sortida de la màquina, encara que aquesta treballi amb càrregues variables, lo quedòna una gran autonomía i seguretat al seu servei.
1.2.3 El Grup Generador Utilitzat
El grup que pretenem regular es composa per:
- 1 motor asíncron trifàsic ( Veure Annexe 1.1 : 'Constitució del Motors Asíncrons' ).
- 1 alternador trifàsic amb circuit d’excitació independent ( Veure Annexe 1.4 : 'Constituciódel Màquines Síncrones' ).
Els requisits que s'han de complir perquè ambdues màquines treballin com a grup són:
- El motor asíncron ( motor d'arrossegament ) ha de proporcionar, en condicions normals defuncionament, un par intern capaç d'arrossegar el par resistent que ofereix el funcionament dela màquina síncrona.
- La velocitat de rotor que exigeix el funcionament de la màquina síncrona ha d'estar dins elsvalors de treball del motor. Preferentment, en la seva velocitat nominal.
***
Aquest sistema generador comporta un sistema de control molt diferent als corresponents alsistema turbina-generador, pel que fa en la regulació de la velocitat. Ja que la substitució de laturbina per un motor elèctric asíncron en que presentava un sistema de control molt complexformat per servomecanismes controlats electrònicament que aconseguien regular en el computde tot la velocitat, ara queden suprimits o substituïts per uns altres. Ara es tracta d'un motorelèctric que manipulant els seus valors de subministrament: tensió i freqüència de red ( 220Vfase - neutre, i 50Hz ) ha de comportar un nou sistema de regulació de la velocitat.
Pel que fa a la regulació de tensió, el seu control es basa en un sistema de control electrònicautoalimentat com els que s'en parla a l'apartat 1.2.2.3.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
10 Memòria Descriptiva
2 Estudi i Disseny d’un Sistema Regulador per a un GrupMotor-Alternador Trifàsic
2.1 Introducció
Aquest és un tema molt important per entendre el funcionament de tot el sistema: són elsfonaments teòrics que comprenen el disseny del sistema establert.
Partint del funcionament del grup en llaç obert ( sense cap tipus de control ) observem elsvectors i les magnituds físiques que alteren el règim de funcionalitat dessitjat pel grup. Desd'aquest 'punt de vista' s'entenen totes les manipulacions físiques que s'hauràn d'imposar perobtenir uns valors de treball constants. I d'aquí, l'elecció estudiada dels sistemes de control quees s’estudien en el tema següent ( tema 3 ).
Els fonaments teòrics que tractem tot seguit es divideixen en dos segons la meta de laregulació a que volem arribar: tensió i freqüència de la senyal.
2.2 Estudi del Grup per la Regulació de la Velocitat del Motor
2.2.1 Introducció
L'estudi tècnic del funcionament de la màquina asíncrona i de la característica mecànica a quees comportarà l’alternador portaràn a desarrollar el disseny del sistema regulador de lavelocitat del motor i el seu comportament.
2.2.2 El Motor Asíncron
2.2.2.1 Introducció
Tot seguit, parlarem dels motors asíncrons; però no anirem més lluny del que necessitem saberper entendre el funcionament del projecte de regulació realitzat. Sí, és del tot necessaricomençar per entendre el principi de funcionament de les màquines asíncrones, així comtambé els seus règims de treball i nivells d'estabilitat com a motors. Relacionat amb elprojecte, té especial importància l'estudi de les curves parell-velocitat, així com també l'estudidel parell resistent de la màquina que acciona, perquè determinaràn el plantejament i elcomportament del grup regulat; i poder establir d'aquesta manera el disseny d'un sistema deregulació.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
11 Memòria Descriptiva
2.2.2.2 Principi de Funcionament
Com ja sabem el devanat de l'estàtor està constituït per 3 arrollaments desfasats 120º en l'espai( veure Annexe 1.1: Constitució de les Màquines Asíncrones ). En cada regió d'aquest espai essituen 2p número de pols. Al introduïr per ells corrents d'una red trifàsica de freqüència (f1) ,es produeix una ona rotativa de força magnetomotriu distribuïda sinusoidalment per laperifèria de l'entreferro, que produeix un flux giratori en la que la velocitat ve expressada per:
( )11
60 x fn = r.p.m.
P (2.1)
que rep el nom de velocitat de sincronisme (n1). Aquest flux giratori induirà forceselectromotrius en els conductors del rotor i si està el seu circuit tancat, apareixeràn correntsque reaccionaràn amb el flux del estàtor. D'acord amb la Llei de Faraday, la forçaelectromotriu induïda en un conductor de longitud 'L' que es mou a la velocitat 'V' dins d'uncamp magnètic (B) té un valor:
e = (V×B)×dl= (V×B)×L∫ (2.2)
Abreviadament: ce =B×L×v
Per determinar el seu sentit, ha de ser considerar-se que el rotor gira en sentit contrari al campper tenir en compte el moviment relatiu mutu entre ambdós sistemes. El sentit de la força queapareixerà en els conductors del rotor s'obté aplicant la coneguda llei vectorial (Llei deLaplace):
F= i×(L×B) (2.3)
Abreviadament: CF = B×l×i
L'aparició d'aquesta força centrífuga (FC) comporta l'aparició d'un parell intern (Mi) de lamàquina:
i CM = F ×r (2.4)
on 'r' és la distància del centre al lloc on es sotmesa la força centrífuga. Com veiemrepresentat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
12 Memòria Descriptiva
Figura 2.1. Representació del funcionament d’un motor asíncron
Aquest parell intern (Mi) de la màquina arrossega una càrrega de força de fregament 'Fr' i unparell resistent 'Mr'. Si Mr<Mi apareix el moviment giratori de la màquina asíncrona a velocitat'n'. Aquesta velocitat ha de ser inferior a la velocitat de sincronisme (n1). Si aquesta velocitatgiratòria del motor (n) s'aproxima a la velocitat de sincronisme (n1) del camp, la forçaelectromotriu induïda en els conductors del rotor resulta menor; i en conseqüència, resultentambé reduïdes les corrents en el mateix; això provoca una disminució del parell intern oparell electromagnètic del motor. Si com a cas límit, el rotor gires a la velocitat de sincronisme‘n1’, no haurià llavors moviment del camp giratori respecte del rotor, desapareixent així laforça electromotriu induïda (eC); i, en conseqüència, això anul·laria la corrent i el parell.
D'aquesta forma la velocitat de sincronisme ‘n1’ constitueix el límit teòric al que pot girar elrotor. El motor ha de girar a una velocitat inferior a la de sincronisme per funcionar com a tal(n<n1), és a dir, la seva velocitat de règim és asíncron. Es coneix amb el nom de lliscament alqüòcient:
1
1
n -ns =
n (2.5)
Aquest valor està comprès en els motors industrials entre el 3 i el 8 per cent a plena càrrega.Generalment treballen amb un lliscament del 5 %.
Al parlar de lliscament 's' hem també de fer menció de la velocitat de lliscament (nS) queresulta:
S 1n = n - n (2.6)
Al augmentar la càrrega mecànica del motor, el parell resistent es fa més gran que el parellintern i el lliscament augmenta; això provoca un augment de les corrents del rotor, gràcies laqual augmenta també el parell motor i s'estableix l'equilibri dinàmic dels moments resistent imotor. Les freqüències de les corrents del rotor, estan relacionades amb la freqüència delestàtor per mitjà de la següent expressió:
S 1f = s f× (2.7)
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
13 Memòria Descriptiva
En el cas de que el rotor estigués parat, es cumpleix: n=0; és a dir, s=1, lo que indica que enaquestes circumstàncies, les freqüències de l'estàtor i del rotor coincideixen, és a dir: fS=f1.
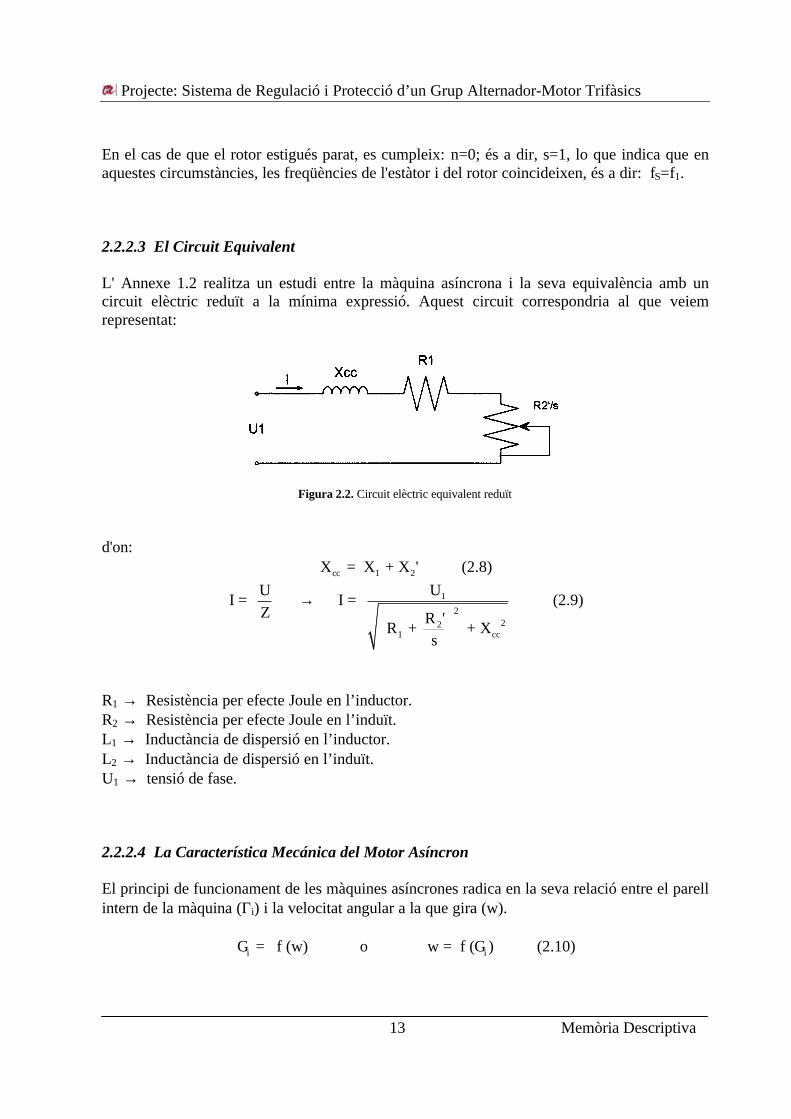
2.2.2.3 El Circuit Equivalent
L' Annexe 1.2 realitza un estudi entre la màquina asíncrona i la seva equivalència amb uncircuit elèctric reduït a la mínima expressió. Aquest circuit correspondria al que veiemrepresentat:
Figura 2.2. Circuit elèctric equivalent reduït
d'on:cc 1 2X = X + X ' (2.8)
1
222
1 cc
UUI = I =
Z R 'R + + X
s
→
(2.9)
R1 → Resistència per efecte Joule en l’inductor.R2 → Resistència per efecte Joule en l’induït.L1 → Inductància de dispersió en l’inductor.L2 → Inductància de dispersió en l’induït.U1 → tensió de fase.
2.2.2.4 La Característica Mecánica del Motor Asíncron
El principi de funcionament de les màquines asíncrones radica en la seva relació entre el parellintern de la màquina (Γi) i la velocitat angular a la que gira (w).
i iG = f (w) o w = f (G ) (2.10)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
14 Memòria Descriptiva
Segons aquesta relació la màquina pot estar en diferents règims de funcionament: de frenada,de motor i de generador. Tal relació l'anomenem característica interna de la màquina. Peracabar trobant la seva característica interna, partim del lligam de tals paràmetres amb larelació:
ii i 1 i
1
PP = w =
wΓ × → Γ (2.11)
Ara, les nostres intencions són les de trobar els valors parametricals d’aquesta relació.
La relació Pi-w en la màquina asíncrona és equivalent a la relació d'aquests altres paràmetres:
aii
1
PP = =
w wΓ (2.12)
d’on:
Pa → potència a l'entreferro de la màquina.w → velocitat angular del rotor.
Ambdues relacions són equivalents al valor del parell intern del motor (Γi). Sintetitzant larelació del parell intern segons l'esquema on podem observar quina és la potència del’entreferro de la màquina:
Figura 2.3. Circuit elèctric equivalent
22a 2
R 'P = 3 I '
s× × (2.13)
extreurem que:22
22a 2 2
i1 1 1
R '3 I 'P 3 R ' I 's = = =
w w w s
× × × ×Γ
× (2.14)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
15 Memòria Descriptiva
Com de l'apartat anterior, vàrem considerar que I2 » I1 per a una màxima reducció del circuitequivalent, vam poder determinar la següent expressió de I:
1
222
1 cc
UI =
R 'R + + X
s
(2.15)
una interrelació d’ambdues expressions ens permetrà establir una exhaustiva expressió delparell intern de la màquina:
22 1
i2 221
1 cc
3 R ' U =
R 'w s (R + ) + Xs
×Γ ×
× (2.16)
Com s'observa de l'expressió anterior, el valor del parell intern de la màquina deriva del valorde lliscament (s) a que està funcionant la màquina.
Una gràfica Γ-s resultaria:
Figura 2.4. Gràfic de la característica mecànica d’una màquina asíncrona
Com s'ha explicat en l'apartat del principi de funcionament de la màquina, el valor dellliscament 's' determina el règim de funcionament a que es troba treballant la màquina; aixíque:
- si s < 0 → la màquina està en règim de frenada; s'està parant.- si 0 < s < 1 → la màquina treballa com a motor.- si s > 1 → la màquina treballa com a generador.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
16 Memòria Descriptiva
Ara bé, com també es recorda de l'apartat 2.2.2.2, el lliscament 's' deriva de l'expressió:
1 1
1 1
n -n w -ws = =
n w (2.17)
la qual cosa fa que la gràfica anterior Γ-s pugui ser representada per la velocitat angular delrotor Γ-w, de la següent manera:
Figura 2.5. Gràfic de la característica mecànica de la màquina asíncrona en règim motor
En el sistema, la màquina asíncrona treballa com a motor, per lo que a partir d'ara nomésestudiàrem el comportament de la màquina pels valors de lliscament 's' compressos entre el 0 iel 1.
2.2.2.5 Règims de Funcionament del Motor
El funcionament d'un motor és el règim pel qual el parell intern de la màquina buscaarrossegar satisfactòriament o no un parell resistent. Les diferents curves de parell resistentexistents es poden veure a l'annexe 2.4. En el funcionament mecànic d'un motor elèctric, espoden distingir tres règims de funcionament diferents:
a) Règim de posta en marxa.b) Règim d'arranc.c) Règim de marxa normal o règim permanent.
En el règim de posta en marxa, i des del moment en que s'aplica la tensió en borns de lamàquina, s'enfronten dos parells:
a) el parell resistent en buït Mro, constituït pel fregament en els coixinets i en els elements detransmissió de la màquina accionada pel motor.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
17 Memòria Descriptiva
b) el parell motor en buït Mmo que és el par en repòs, representat per l'ordenada en l'origen deles característica mecànica del motor.
Evidentment, per a que el grup es posi en marxa, és necessari que es cumpleixi la condició:
Mmo > Mro (2.18)
El règim d'arranc és el període de posta en velocitat del motor, és a dir, l'interval comprèsentre una velocitat nul·la i la velocitat nominal del motor. Durant aquest interval, el motor hade proporcionar el màxim parell motor, ja que es té les següents condicions:
1- El parell de resistències passives ( fregaments, esforços en les transmissions, ... ) té elmateix valor que en repòs.2- El parell resistent de la màquina accionada o par útil, creix quasi sempre amb la velocitatdel motor.3- El motor ha de vèncer a més el parell d'inèrcia o parell dinàmic de tota la part que gira, és adir:
dwM = Ji dt
× (2.19)
On 'J' és el moment d'inèrcia de les masses giratòries. És a dir, que, durant el període d'arrances té:
Parell motor = Parell passiu + Parell resistent útil + Parell d'inèrcia (2.20)
La velocitat del motor va accelerant durant el període d'arranc, fins que arriba al seu valornominal, i en aquest moment es manté constant, i es té que
dw = 0
dt (2.21)
I, per conseqüent: Mi = 0.
El règim de marxa normal o règim permanent s'arriba quan la velocitat del motor no sufreixvariacions, i com s'ha dit anteriorment, s'anul·la el parell d'inèrcia, és a dir, que durant la postaen marxa normal es cumpleix la condició:
Parell motor = Parell passiu + Parell resistent útil (2.22)
A la suma del parell passiu i el parell resistent útil se'l pot anomenar parell resistent; per lo tantes té que:
Mr = Parell passiu + Parell resistent útil (2.23)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
18 Memòria Descriptiva
Si anomenem Mm al parell motor, en el règim de marxa normal es cumplirà la següentcondició: Mm = Mr . Per lo tant, el punt de funcionament P del motor estarà situat en laintersecció de les característiques mecàniques del motor i de la màquina accionada, és a dir, enla intersecció de les curves:
m
r
M = f (w)
M = f (w)
(2.24)
Figura 2.6. Gràfic del punt de treball del motor asíncron
Aquest punt de funcionament P dòna la velocitat del grup en règim de marxa normal.
La marxa de règim normal pot quedar-se modificada si es desplaça una de les característiquesrepresentades en el gràfic anterior. És a dir, actuant:
a) sobre un element de regulació del motor.b) sobre el valor de la càrrega que acciona.
Això és el que ens passarà mútuament en el sistema. Aquests règims variables defuncionament són estudiats més endavant.
2.2.2.6 Estabilitat en el Funcionament d’Un Motor Asíncron
Es diu que un motor elèctric asíncron funciona en règim estable, quan qualsevol variació d'unade les seves variables que fixen el seu règim, provoca una reacció correctora que tendeix areestablir el règim inicial.
Tenint en compte que en el règim de marxa normal es té:
Mm = Mr (2.25)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
19 Memòria Descriptiva
és a dir,Mm - Mr = 0 (2.26)
un motor elèctric tindrà un funcionament estable, quan es cumpleixen les següents condicions:
a) que la decelaració correspongui a:
Mm - Mr > 0 (2.27)
b) que una acceleració correspongui a:
Mm - Mr < 0 (2.28)
ja que en cada un d'aquests casos, existeix una reacció que actua en el sentit de tornar a lavelocitat primitiva, és a dir, a la condició
Mm - Mr = 0 (2.29)
Com les característiques mecàniques de les màquines accionades solen ser creixents, es pot dirque un motor elèctric té un règim de marxa normal probablement estable, quan a unadecelaració correspon un augment del seu parell motor: gràficament, quan la sevacaracterística mecànica sigui decreixent.
Es denomina grau d'estabilitat d'un motor elèctric, a la relació:
mdMdw
(2.30)
i el coeficient d'estabilitat d'un motor elèctric, està expressat per la relació
Parell motor màximParell motor normal
(2.31)
En règim inestable, poden succeïr:
a) el motor s'embalarà fins un nou punt de funcionament estable, o nou punt d'intersecció deles característiques de parell motor i parell resistent, a una velocitat generalment perillosa desdel punt de vista mecànic.
b) el motor es pararà, és a dir quedarà sotmès a una deceleració que el portarà fins a l'estat derepòs.
De tot lo dit, pot deduir-se que, en règims estables, els motors elèctrics asíncrons podenrespondre a qualsevol demanda de potència i que l'única limitació la constitueix la corrent de
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
20 Memòria Descriptiva
càrrega, ja que si aquesta augmenta, el calentament dels conductors per efecte Joule pot arribara valors límit perillossos.
2.2.3 Característica Mecánica de l’Alternador
2.2.3.1 Introducció
En l'annexe 2.3 es poden observar les diferentes corbes de parells resistents que un motorarrastra. En aquest apartat estudiarem la corba 2 ( de l'annexe ) corresponent al parell resistenten l'accionament d'un generador d'excitador independent com és el nostre cas.
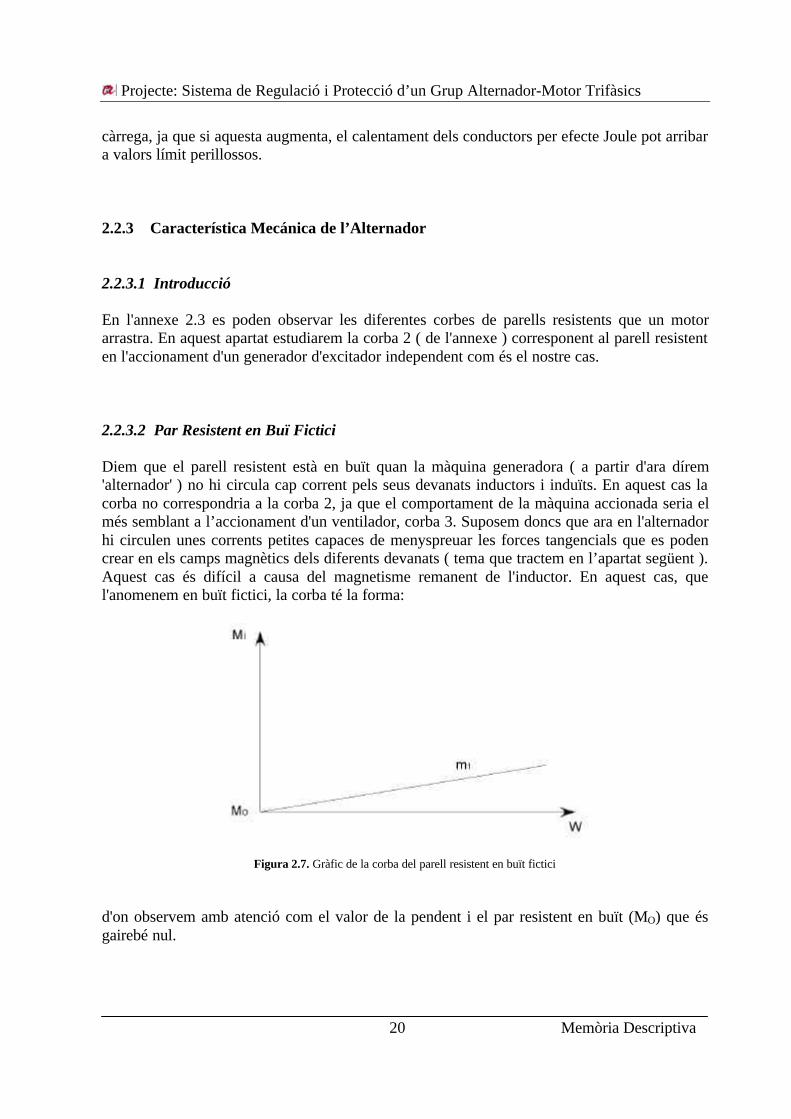
2.2.3.2 Par Resistent en Buï Fictici
Diem que el parell resistent està en buït quan la màquina generadora ( a partir d'ara dírem'alternador' ) no hi circula cap corrent pels seus devanats inductors i induïts. En aquest cas lacorba no correspondria a la corba 2, ja que el comportament de la màquina accionada seria elmés semblant a l’accionament d'un ventilador, corba 3. Suposem doncs que ara en l'alternadorhi circulen unes corrents petites capaces de menyspreuar les forces tangencials que es podencrear en els camps magnètics dels diferents devanats ( tema que tractem en l’apartat següent ).Aquest cas és difícil a causa del magnetisme remanent de l'inductor. En aquest cas, quel'anomenem en buït fictici, la corba té la forma:
Figura 2.7. Gràfic de la corba del parell resistent en buït fictici
d'on observem amb atenció com el valor de la pendent i el par resistent en buït (MO) que ésgairebé nul.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
21 Memòria Descriptiva
2.2.3.3 Par Resistent en Càrrega
Partint de l'estat de l'apartat anterior, i de fer girar el rotor de la màquina a una freqüència de50Hz, subministrem ara un valor de corrent nominal en els devanats inductors que induirànuns valors de corrent en l'estàtor i una f.e.m. nominals. El nou règim de treball comportarà quela corba quedi modificada tal com observem:
Figura 2.8. Gràfic de la corba del parell resistent en condicions de treball
En ella, observem canvis en la pendent i en el valor del parell resistent en buït (MO). Aquestscanvis en la corba són deguts a l'aparició d'una força tangencial en el rotor i a un equilibri en elbalanç de potències de la màquina síncrona.
2.2.3.3.1 Aparició d’Una Força Tangencial
En el 'Principi de Funcionament' ( apartat 2.2.2.2 ) hem vist com el motor asíncron origina unaforça centrífuga (FC) que provoca un moviment giratori a la càrrega ( indeterminada ) quearrastra. Ara veurem com la circulació de corrents en els devanats comporta l'aparició d'unaforça tangencial (Ft) contrària a la FC i provoca així un augment de la corba del parell resistent.
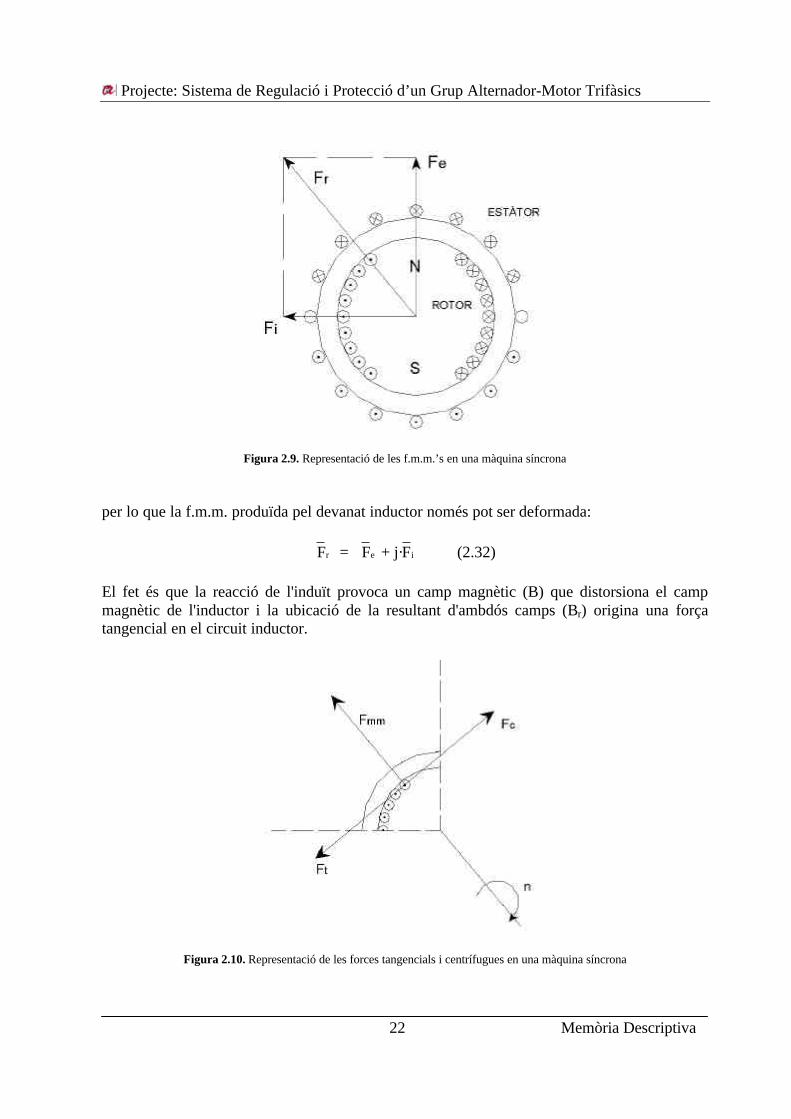
La força tangencial que aparèix és causa del que anomenem 'Reacció de l'Induït' en lesmàquines síncrones. La reacció de l'induït de les màquines síncrones és l'efecte que provoca laf.m.m. del circuit induït sobre la f.m.m. del circuit inductor quan es modicat el flux del'entreferro de la màquina. En ell es té influència tant la magnitud com la fase de la corrent del'estàtor. Quan es tracta d'alternadors trifàsics, les corrents de l'induït al circular per devanatsdesfasats 120º en l'espai produeixen una f.m.m. de reacció que gira en l'espai a la velocitat desincronisme, és a dir, a la mateixa velocitat que el rotor. Aquesta f.m.m. influeix sobre laf.m.m. produïda pel devanat inductor i pot deformar, reduïr o ampliar el camp d'excitació de lamàquina, depenent de la fase de les corrents que recorren l'induït. En nostre cas, en quel'alternador alimenta únicament càrregues resistives,
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
22 Memòria Descriptiva
Figura 2.9. Representació de les f.m.m.’s en una màquina síncrona
per lo que la f.m.m. produïda pel devanat inductor només pot ser deformada:
r e iF = F + j·F (2.32)
El fet és que la reacció de l'induït provoca un camp magnètic (B) que distorsiona el campmagnètic de l'inductor i la ubicació de la resultant d'ambdós camps (Br) origina una forçatangencial en el circuit inductor.
Figura 2.10. Representació de les forces tangencials i centrífugues en una màquina síncrona

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
23 Memòria Descriptiva
Aplicant la llei de la mà esquerra determinem que el sentit de la força tangencial. Aquesta ésde sentit contrari al sentit de la força centrífuga per lo que provoca un parell resistent almoviment giratori del rotor.
tM = B l i r× × × (2.33)
Com hem vist, l'origen de la aparició d'aquesta força tangencial radica en el camp magnèticinductor creat i en que la màquina treballa sota algun valor de càrrega ( no es troba en buït ),independentment del parell giratòri que aporta el motor d'arrossegament. Per lo tant, aquestaforça altera només a lo corresponent al valor de parell en buït (MO).
2.2.3.3.2 Equilibri en el Balanç de Potències
Correspont al fet en que la pendent de la corba del parell resistent augmenta en el seu pas delbuït ( fictici ) cap al valor de càrrega nominal.
L'augment del valor de la càrrega comporta a significar que necessita el subministrament demés potència per mantenir els seus valors de treball nominals. L'inductor encarregat de regularla tensió de sortida fa augmentar la f.e.m. de l'induït, i així, la potència activa de la màquina.
Expressió de la potència d'un alternador de rotor cilíndric:
OACT
S
U×EP = m× ×sen?
X (2.34)
Expressió de la potència d'un alternador de pols salents:
2d qO
ACTd d q
X - XU×E m×UP = m× ×sen? + × sen2?
X 2 X X
× ×
(2.35)
d'on:
- m → el nombre de fases.- U → la tensió de l'alternador.- EO → f.e.m. en buït.- XS → reactancia síncrona ( veure apartat 2.3.3.2.1 ).- Xd i Xq → reactàncies en quadratura.- θ → desfasament entre la tensió i la f.e.m. de l'alternador.
Nota: l'origen d'aquestes expressions s'explica en l’apartat 2.3.2.5.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
24 Memòria Descriptiva
Quan el grup treballa en règim estable, aquesta potència activa s'iguala amb la potènciamecànica (Pi) de la màquina:
i ACTP = P (2.36)
llavors,
Oi i
S
U×EM = m× ×sen?
X×Ω (2.37)
Aquesta potència mecànica s'esdevé de l'arrossegament del motor asíncron; per lo qual, larelació d'ambdues potència és causat pel balanç d'equilibri en que la Pact necessita i la potènciamecànica subministra.
Figura 2.11. Gràfic del punt de treball del motor en buït fictici
Quan augmenta la càrrega l'alternador demana més potència activa. Si el motor no li cedeixmés, comportarà una caiguda de tensió en la màquina i en el balanç d'equilibri de potències,dins el règim estable del motor ( veure apartat 2.2.2.5 ), el motor respon amb una disminucióde la velocitat. Per últim comportarà l'augment del seu parell segons les curves de parell-velocitat del motor.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
25 Memòria Descriptiva
Figura 2.12. Gràfic del punt de treball del motor en condicions nominals
Això no vol dir que per la relació:
i i iP = M × Ω (2.38)
el motor continui cedint la mateixa potència que l'estat inicial ja que en aquest nou punt defuncionament el lliscament 's' ha augmentat ( veure apartat 2.2.2.2 ). Però, en definitiva, el nouequilibri de treball ha comportat un augment de la pendent de la corba del par resistent de lamàquina.
2.2.4 Regulació de la Velocitat
2.2.4.1 Introducció
El grup treballa per a uns valors constants sota uns valors de càrrega variables. Com acabemde veure en els apartats anteriors de la regulació de la velocitat, el motor ha de cedir en cadamoment la potència mecànica que l'alternador li demana per mantenir la freqüència constant.La tensió alterna de red ( 220V i 50Hz ) alimenta el motor d'arrossegament amb lo que seràper variació de la tensió alterna o freqüència o ambdues, amb el que aconseguim tal regulació.
2.2.4.2 Variacions del Par Intern del Motor
Existeixen diferents mètodes de variar el parell intern del motor asíncron. Aquestes són:
- Variació de la tensió alterna de la font d'alimentació.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
26 Memòria Descriptiva
- Variació de la frequència de la mateixa tensió.- Caiguda del lliscament 's' per augment de la resistència en el rotor del motor.- I per variació del nombre de pols de la màquina.
De tots aquests mètodes, estudiem, a continuació, la característica mecànica del motor pervariació de freqüència, que com compendrem més endavant serà el mètode de la solucióadaptada per la regulació de la velocitat.
Tot seguit anem ha fer un estudi de la característica mecànica del motor per variacions de latensió alterna i la freqüència que l'alimenta.
2.2.4.2.1 Característica Mecánica del Motor per Variació de Freqüència
En el sistema, la corba parell - velocitat angular, deduïda anteriorment, rep modificacions sivaria la freqüència de síncronisme, provocada pel control en el convertidor de freqüència quel'alimenta.
El convertidor de freqüència ha de ser capaç, fins que les seves característiques tècniques lidictin, de presentar una gran rigidesa, perquè el motor tingui suficient capacitat desobrecàrrega. El què es pretén dir és que aquest pugui subministrar suficient força magnetotriuen l'estàtor per obtenir un parell intern suficient per a uns màxims valors de sobrecàrrega. Aixòes pot aconseguir fent funcionar el motor a flux magnètic constant. Com que per a un motorasíncron, es pot admitir aproximadament, la proporcionalitat:
1 1U f≈ ⋅Φ (2.39)
Per conservar la constància del flux magnètic i, d'acord amb l'expressió anterior, ha derealitzar-se la regulació amb la relació invariable:
1
1
U = Cte
f (2.40)
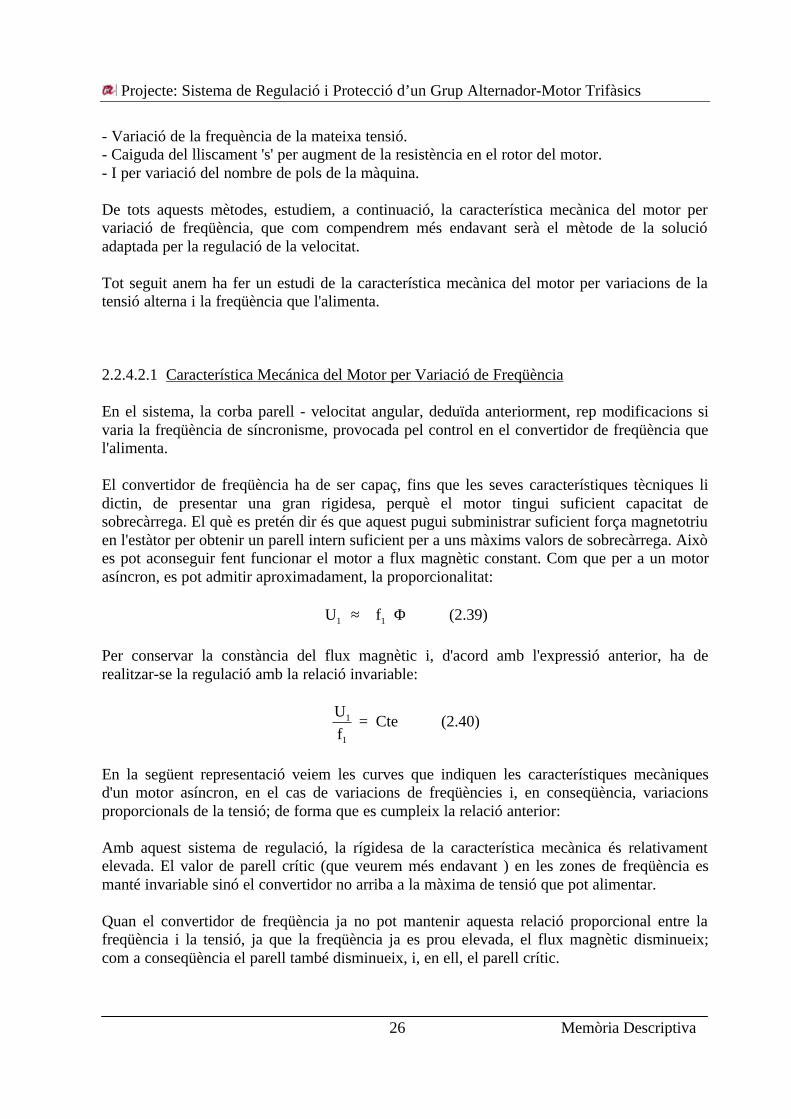
En la següent representació veiem les curves que indiquen les característiques mecàniquesd'un motor asíncron, en el cas de variacions de freqüències i, en conseqüència, variacionsproporcionals de la tensió; de forma que es cumpleix la relació anterior:
Amb aquest sistema de regulació, la rígidesa de la característica mecànica és relativamentelevada. El valor de parell crític (que veurem més endavant ) en les zones de freqüència esmanté invariable sinó el convertidor no arriba a la màxima de tensió que pot alimentar.
Quan el convertidor de freqüència ja no pot mantenir aquesta relació proporcional entre lafreqüència i la tensió, ja que la freqüència ja es prou elevada, el flux magnètic disminueix;com a conseqüència el parell també disminueix, i, en ell, el parell crític.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
27 Memòria Descriptiva
2f
C 2 2O 1 1 CC
U3M =
2 W R R +X×
× ± (2.41)
Les curves parell - velocitat angular a diferents freqüències, quan no podem mantenir el fluxmagnètic constant, descriuen les següents formes:
Figura 2.13. Curves del par – velocitat d’un motor asíncron a diferentes freqüències
Cal dir, tot i que no es dòna el cas en el sistema, que per freqüències més petites que les quenecessitem, no es podria tampoc mantenir la relació de la freqüència i la tensió; com aconseqüència del creixement relatiu de la caiguda de tensió en l'estàtor, que provoca unanotable disminució del flux magnètic i, per conseqüent, una disminució del parell crític.
2.2.4.3 Solució Adaptada
2.2.4.3.1 Introducció
La disponibilitat de variadors de freqüència en el Laboratori de Maquines Elèctriquesevidència que la opció de la regulació de la velocitat del grup per variació de la freqüència desincronisme del motor sigui la opció adaptada, i una de les dos solucions per al sistema deregulació del grup.
2.2.4.3.2 Descripció del Sistema de Regulació de la Velocitat
Amb el que hem dit en l'apartat anterior, la regulació de la velocitat l’obtenim per laprogramació d'un variador de freqüència. El programa instruirà al variador per a que

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
28 Memòria Descriptiva
converteixi la freqüència de red ( de 50Hz ) a la freqüència que necessitem a partir d'unasenyal analògica que li arriba.
Aquesta senyal indicarà, com és lògic, la velocitat a que gira el rotor del grup, que a la vegadaés la freqüència de la tensió induïda per l'alternador. Serà a partir d'aquesta senyal defreqüència en que la convertirem en una senyal analògica entre 0 a 10V. Aquests límits detensió són els que restringeixen els paràmetres de funcionament del variador de freqüència.D'aquesta manera es realitza un control en llaç tancat, és a dir, sota una variació de la velocitatnominal el sistema respon automàticament cap a la seva regulació.
El disseny del transductor de la senyal consisteix en la programació d'un microcontrolador.Aquest ha de ser programat per determinar el valor de la freqüència que li arriba a una senyaldigital de 8 bits. És, per tant lògic poder dir, que la ressolució a que treballarà aquest reguladorde velocitat serà de 256 valors entre la freqüència que alimenta el motor en buït i el valor de lasobrecàrrega a que el volem limitar. És a dir, entre el 0% i el 110%, el regulador de velocitatbuscarà entre 256 valors el seu valor de treball.
Figura 2.14. Gràfic dels punts de treball a que treballarà el motor controlat pel al sistema de regulació establert
En el següent gràfic, podem observar quin serà el marge de treball ( de parells ) que treballaràel motor asíncron regulat.
Aquesta solució de control de la velocitat del motor asíncron es complementa amb els driversque es enllaçaràn l'alternador amb el microcontrolador, i aquest amb el variador de freqüència.I com lògic, en aquest darrer driver a dissenyar haurem de necessitar d'un conversor digital –analògic.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
29 Memòria Descriptiva
2.3 Estudi del Grup per la Regulació de la Tensió
2.3.1 Introducció
A partir de l'estudi de la màquina síncrona ( com alternador ) comportarà entendre lespossibles solucions que es poden adoptar per a la regulació de la tensió generada, si abanspreviament entenem el concepte bàsic de la regulació de tensió. Després, de forma mésextensa, estudiarem la solució que s'ha adoptat.
2.3.2 La Màquina Síncrona: l’Alternador
2.3.2.1 Introducció
Com a l'estudi del motor, l'estudi de l'alternador inclou, després d'explicar el seu principi defuncionament, tot allò que el vincula amb el seu sistema de regulació de la tensió generada.
2.3.2.2 Principi de Funcionament
Les màquines síncrones són convertidors electromecànics rotatius capaços de transformarenergía mecànica en elèctricitat o viceversa, sota la forma de corrents alternes, amb lacondició de que en ambdós casos la velocitat de gir sigui constant i igual a:
-111
60 fn = n = min
p× (2.42)
d'on:
- n → és la velocitat del rotor.- n1 → és la velocitat del camp.- f1 → és la freqüència.- p → és el nombre parell de pols.
Les màquines elèctriques es denominen alternadors o motors, segons transformin energiamecànica en elèctrica ( alternador - generador ) o energia elèctrica en mecànica ( motorsíncron ). Una mateixa màquina síncrona pot funcionar de forma reversible, segons quin siguiel seu sentit de la conversió d'energia.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
30 Memòria Descriptiva
Figura 2.15. Representació de les conversions d’energia en una màquina síncrona
Quan parlem de màquines síncrones convencionals estem parlant de màquines que treballenamb una freqüència de 50 Hz. i que tenen:
- un circuit inductor ( excitador ) alimentat per corrent continua de B.T.- i un circuit induït alimentat per corrent alterna.
Les màquines síncrones funcionen com a màquines rotatives ( n ≠ 0 ), i d'acord amb lo ditanteriorment es caracterítzen per tenir:
1 2 L 2
n pf = 0 ; f = ; f = f
60×
(2.43)
on fL és la freqüència de càrrega.
És a dir, consisteix en un inductor alimentat per c.c. ( f1 = 0 ), que es denomina també devanatd'excitació o camp, i que sol col·locar-se al rotor alimentat per medi de dos anells. Veiemrepresentació:
Figura 2.16. Representació esquemàtica d’una màquina síncrona

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
31 Memòria Descriptiva
L'induït normalnet és trifàsic i sol col·locar-se en l'estàtor ( algunes vegades, en màquines depetita potència <10 kW s'utilitza en freqüència la posició inversa, és a dir, es situa l'inductoren l'estàtor i l'inductor en el rotor, existint llavors tres anells en el rotor ).
El principi de funcionament de les màquines síncrones és diferent segons aquesta actuí com agenerador, o bé, com a motor.
a ) Com a Generador ( alternador ): quan funciona com a generador ( alternador ),s'introdueix energía mecànica per l'eix, i al aplicar c.c. al inductor, s'obté en l'induït una f.e.m.de freqüència:
e = 4'44×? N f F× × × (2.44)
que s'aplica en la càrrega. La c.c. necessària per alimentar l'inductor s'obté d'un circuitexcitador, o bé, segons com sigui el sistema general a tractar, d'una dínamo excitatriu, que estàacoplada al mateix eix de la màquina.
Com hem pogut observar anteriorment, la freqüència de la càrrega ‘fL‘ que concideix amb lafreqüència de l'induït ( fL = f2 ) és directament proporcional a la velocitat de gir del rotor. Vetaqui, la importància que té que la turbina o motor primàri que l'arrastra treballi a velocitatconstant, i pugui aquest fer el servei de generador de tensió a freqüència contant, o també seracoplat paral·lelament amb altres alternadors.
b) Com a Motor: no treballem la màquina síncrona com a motor. Però per tindre algunareferència direm que funcionen com a motor introduïnt una corrent alterna de freqüència f2 perl'induït, tenint en compte que f1 = 0, apareix un parell rotor que fa girar el rotor a velocitat:
260×fn =
p (2.45)
on observem que la velocitat és funció directa de la freqüència ( velocitat de sincronisme ).L'inconvenient que té la màquina treballant com a motor és que gira a una velocitat fixa, ambel conseqüent problema d'arranc i pèrdua de sincronisme quan es produeixen parells de frenatbruscos. Tenen la seva utilitat en rellotges elèctrics, alguns servomecanismes, i en motors degran de potència, en el bombeig d'aigua en les Centrals Hidràuliques.
2.3.2.3 Règims de Funcionament
Tot seguit analitzem els règims de funcionament de la màquina en buït i en càrrega.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
32 Memòria Descriptiva
2.3.2.3.1 Règim en Buït
És el règim en que fem treballar la màquina quan el seu circuit d'induït es troba en buït ( sensecàrrega ). La força electromotriu en buït generada esta expressada per l’eqüació:
O 1 1 OE = 4'44×? N f F× × × (2.46)
Si treballem aquest règim a f1 = cte ( n = cte ), tindrem:
O OE = K'×F (2.47)
Per una altra part, com el flux inductor és proporcional a la corrent d'excitació, és a dir,
e exex e ex e ex
N II = H I = K''' H = K'''' I
×→ ⇒ × ⇒ Φ ×
l (2.48)
la força electromotriu en buït també és proporcional a la corrent d'excitació:
O exE = K×I (2.49)
La característica en buït: EO = f(Iex) a n = cte, és representada per aquest tipus de corba:
Figura 2.17. Corba de la característica f.e.m. – excitació de la màquina síncrona en buït
La corba no comença en l'origen, si no algo més amunt, és a dir, a un cert valor de forçaelectromotriu degut al magnetisme remanent de la màquina. En aquesta corba es distingeixen3 parts:
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
33 Memòria Descriptiva
1 - Una quasi rectilínia, d'inclinació molt pronunciada, que correspon a l'estat de dèbilsaturació de les parts del ferro que constitueixen el circuit magnètic de la màquina; en ella, laforça electromotriu augmenta proporcionalment a la corrent d'excitació.
2 - Una altra part molt corbada, la que indica que va a saturar-se poc a poc el ferroaugmentant-se més rapidament la corrent d'excitació que la tensió.
3 - Finalment, una altra part també rectilínia però aproximadament horitzontal, que corresponal estat fortament saturat del circuit magnètic, de forma que el flux magnètic tendeix a unvalor constant; en aquesta zona, solament és possible obtenir un apreciable augment de laforça electromotriu mitjançant un considerable augment de la corrent.
2.3.2.3.2 Règim en Càrrega
Si estant funcionant un alternador en buït, amb una determinada corrent d'excitació, es tanca elcircuit de l'induït connectant una impedància de càrrega als seus terminals, que en el nostre casnomés serà resistiva, s'obté una tensió U en borns de la màquina, inferior al valor querepresentava en buït EO. Dos són les causes de tal caiguda de tensió:
1 - Reducció de la f.e.m. a efecte de la reacció de l'induït: només per a màquines no saturades.
2 - Caiguda de tensió per pèrdues internes de la màquina.
La primera de les causes és producte del fenòmen descrit en l'apartat 2.2.3.3.1. L’apariciód'una nova força magnetomotriu 'Fi', degut al pas de corrents en l'induït, desfasada respecte laFe comporta una f.m.m. resultant menor i desviada per un angle ‘α’ respecte la mateixa Fe,única en règim de buït. Causa d'això, la f.e.m. generada es diminuïda ( per a màquines nosaturades ) i desfasada pel mateix angle α.
La segona causa comporta que la f.e.m. resultant no sigui la mateixa en la tensió en borns del'alternador. El pas de corrent de l'induït també comporta que es manifestint les pèrdues perefecte joule i les pèrdues per fluxos de dispersió.
sEfecte Joule Fluxos de Dispersió
Pèrdues en Càrrega = R×I + jX ×I (2.50)
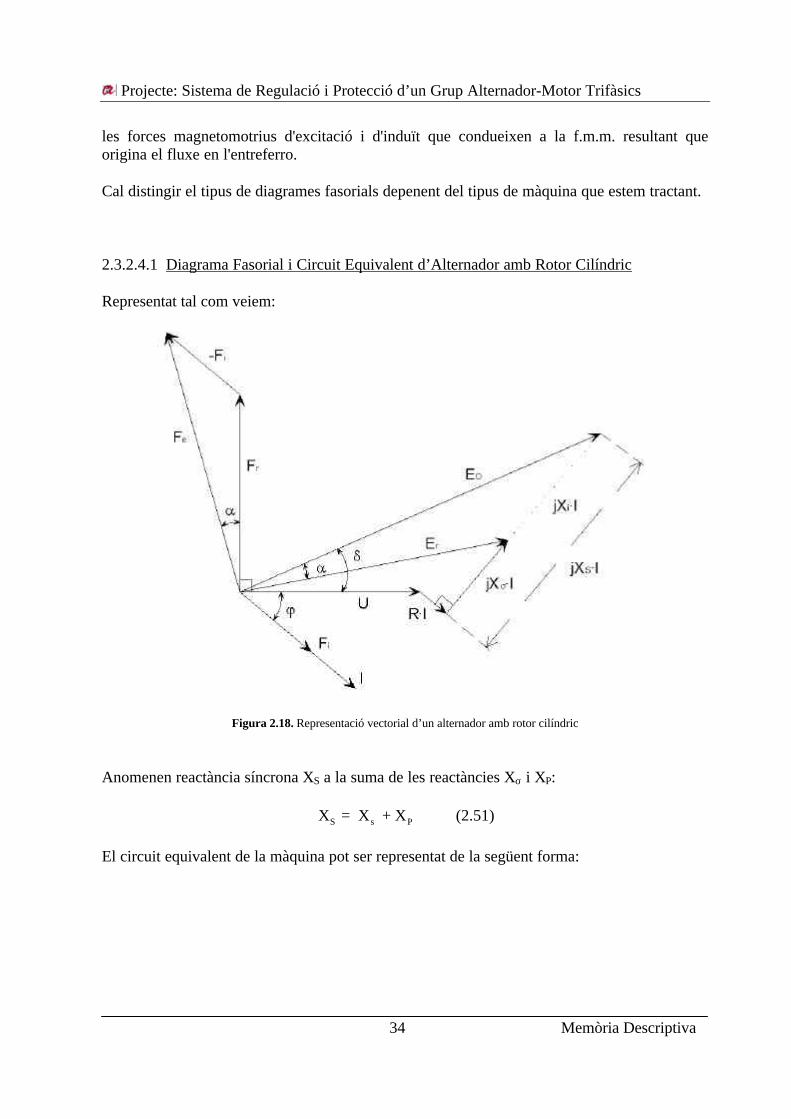
2.3.2.4 Diagrama Fasorial i Circuit Equivalent de l’Alternador
Amb tot el que s'ha explicat, ara podem realitzar el diagrama fasorial de l'alternador quedetermina de forma gràfica la relació existent entre la f.e.m. i la tensió generada en elsdiversos règims de funcionament de la màquina, estudiant al mateix temps la interacció entre
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
34 Memòria Descriptiva
les forces magnetomotrius d'excitació i d'induït que condueixen a la f.m.m. resultant queorigina el fluxe en l'entreferro.
Cal distingir el tipus de diagrames fasorials depenent del tipus de màquina que estem tractant.
2.3.2.4.1 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Rotor Cilíndric
Representat tal com veiem:
Figura 2.18. Representació vectorial d’un alternador amb rotor cilíndric
Anomenen reactància síncrona XS a la suma de les reactàncies Xσ i XP:
S s PX = X + X (2.51)
El circuit equivalent de la màquina pot ser representat de la següent forma:
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
35 Memòria Descriptiva
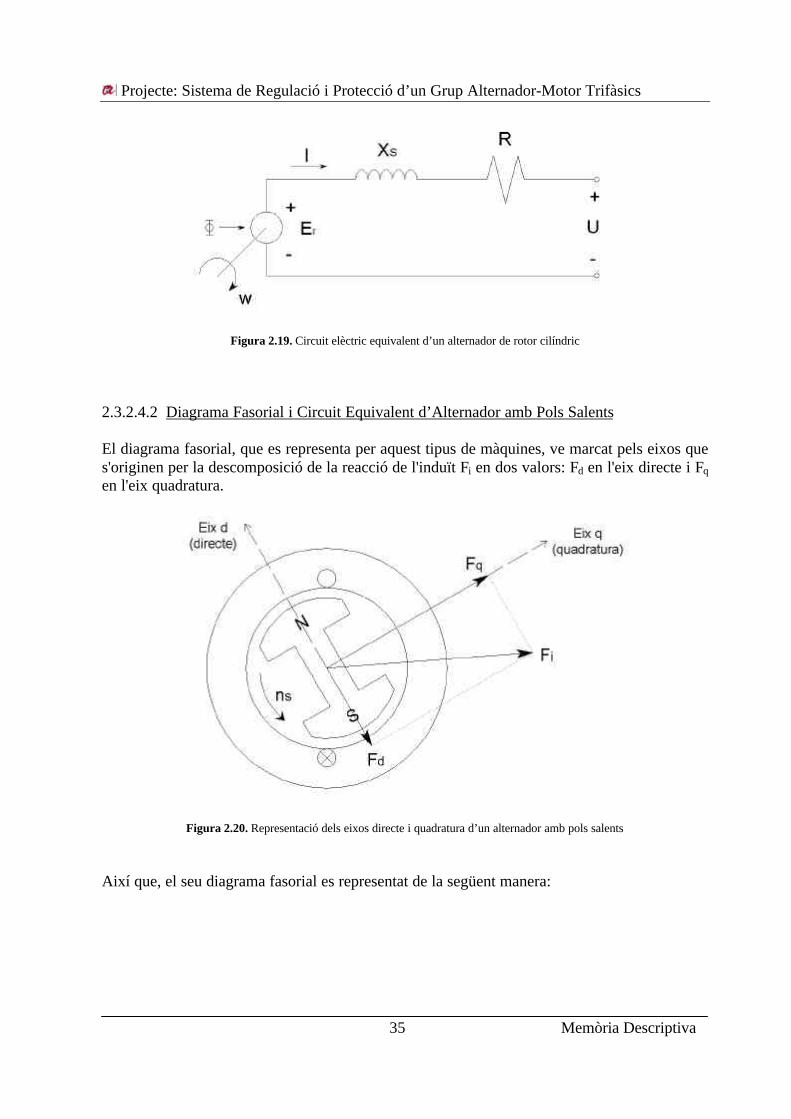
Figura 2.19. Circuit elèctric equivalent d’un alternador de rotor cilíndric
2.3.2.4.2 Diagrama Fasorial i Circuit Equivalent d’Alternador amb Pols Salents
El diagrama fasorial, que es representa per aquest tipus de màquines, ve marcat pels eixos ques'originen per la descomposició de la reacció de l'induït Fi en dos valors: Fd en l'eix directe i Fq
en l'eix quadratura.
Figura 2.20. Representació dels eixos directe i quadratura d’un alternador amb pols salents
Així que, el seu diagrama fasorial es representat de la següent manera:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
36 Memòria Descriptiva
Figura 2.21. Representació vectorial d’un alternador amb pols salents
I el circuit equivalent de la màquina es representat:
Figura 2.22. Circuit elèctric equivalent d’un alternador de rotor cilíndric
2.3.2.5 Balanç de Potències
Al igual que passa amb els diagrames fasorials, el balanç de potències d'ambdues menes demàquines serà diferent.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
37 Memòria Descriptiva
2.3.2.5.1 Balanç de Potències per un Alternador de Rotor Cilíndric
Partint de l'expressió bàsica de la potència activa:
ACTP = m×U×I×cos ϕ (2.52)
Aquesta serà substituida per valors propis de la màquina síncrona.
Com s'observa en el seu circuit equivalent, la l'expressió de la f.e.m. en buït és:
O SE = U + j·I X× (2.53)
amb el que ens permetrà substituïr la I a partir dels següents passos:
O 0 S2
E = U + X ×I θ πϕ−
(2.54)
O 0 O
- - S S2 2
S2
E - U E UI = = -
X XX
θϕ π π
θ
π
− (2.55)
O O
S S S
0
E EUI cos = I cos(- ) = cos ? - cos = sen?
X 2 X 2 Xπ π
ϕ ϕ × × × − × − × 14243
(2.56)
La potència queda expressada de la següent manera:
OACT
S
U EP = m sen?
X×
× × (2.57)
En el seu balanç de potències amb la potència mecànica cedida:
i i 1 ii
i i 1
P = M P M =
P = E I
× Ω ⇒× Ω
(2.58)
obtenim l'expressió del parell intern de la màquina:
O
S Oi
1 1 S
U Em sen?
X m U E sen?M = =
X
×× ×
× × ×Ω Ω ×
(2.59)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
38 Memòria Descriptiva
Si ens fixem amb l'expressió, el valor del parell intern ve determinat per l'angle de desfase θentre la tensió U i la f.e.m. en buït, i com per l’angle θ = π/2 obtindríem el parell màxim de lamàquina.
2.3.2.5.2 Balanç de Potències per un Alternador de Pols Salents
Partint del seu diagrama fasorial, i d'unes pèrdues de Joule nul·les ( PJ = 0 ), la potència activaper aquest tipus de màquines s'expressa:
ACT d d q qP = m×U ×I + m×U ×I (2.60)
d'on els valors de Ud, Uq, Id i Iq han de ser substituïts per valors parametricals de la màquina.
d- U = U sen?× (2.61)
q- U = U cos?× (2.62)
OO d d d
d
E - U cos?- E = U cos? + X I I =
X×
× × → (2.63)
q q qq
U sen?- U sen? + X I I =
X×
× × → (2.64)
llavors,
( ) ( )OACT
d q
E -U cos? U sen?P = m U×sen? + m U×cos? =
X X
× ×× × × ×
( ) ( )O
d q
E -U cos? U sen? = m U×sen? + m U×cos? =
X X
× ×× × × ×
2O
d q d
U E m U 1 1 = m sen? + ×sen2?
X 2 X X
× ×× × × −
(2.65)
finalment, expressem la potència activa:
2d qO
ACTd d q
X -XE U m U P = m sen? + ×sen2?
X 2 X X
× ×× × × ×
(2.66)
Amb la potència activa, el seu balanç de potències ens porta també la seva expressió de parintern de la màquina:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
39 Memòria Descriptiva
i i 1 ACTi ACT
i ACT 1
P = M P M = = K P
P = P
× Ω ⇒ × Ω
(2.67)
Amb U = Xq = Xd = EO = cte., podem representar la corba Mi = f(θ):
Figura 2.23. Corba de la característica parell – θ de l’alternador
2.3.3 Estudi de la Regulació de la Tensió de l’Alternador en el Règim Dinàmic delSistema
2.3.3.1 Introducció
Aquest és un tema que estudia el comportament de l'alternador regulat com a resposta al règimdinàmic del sistema.
2.3.3.2 L’Aternador dins el Sistema No Regulat
En aquest apartat, veurem el canvis de treball a que es troba sotmés l'alternador quan treballaper un sistema dinàmic. És a dir, quan es sotmés a variacions de la càrrega que l'alimenta i avariacions de la velocitat de sincronisme del motor.
2.3.3.2.1 Variacions de Càrrega
Suposem en un principi que la màquina síncrona es mou a velocitat estrictament constant, perlo tant en l'expressió de la f.e.m. la freqüència 'f' és un paràmetre fix. Al augmentar la càrrega,
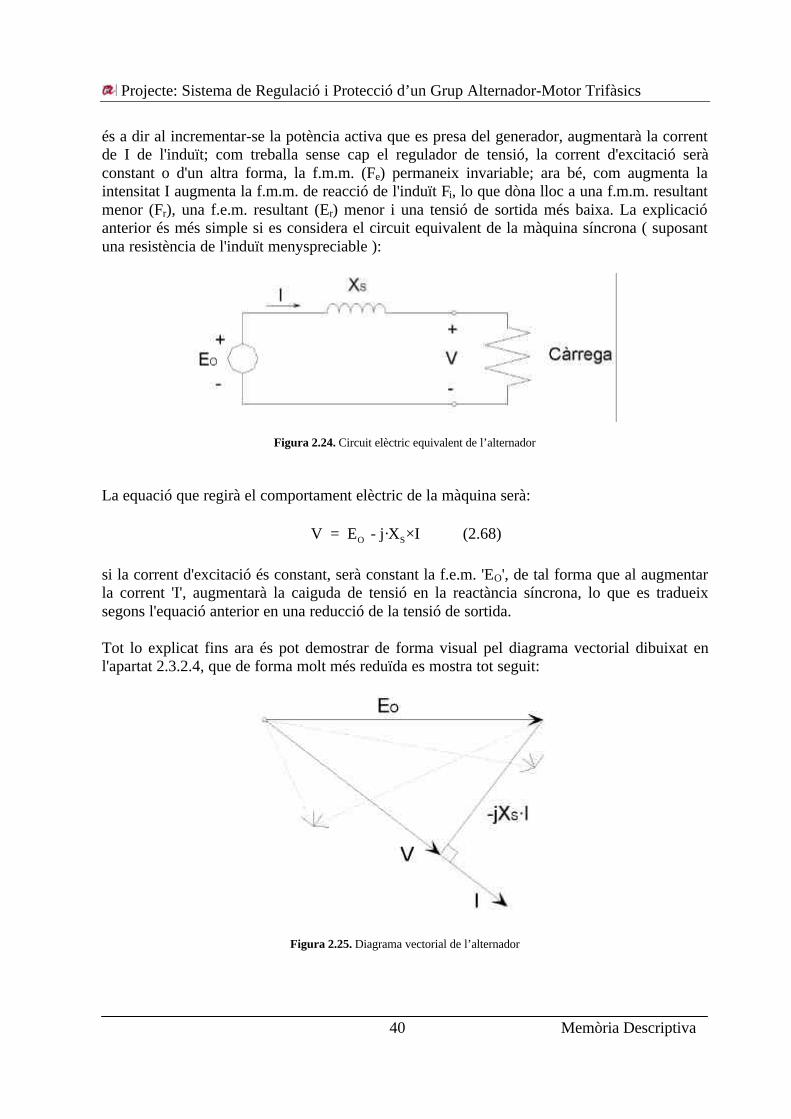
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
40 Memòria Descriptiva
és a dir al incrementar-se la potència activa que es presa del generador, augmentarà la correntde I de l'induït; com treballa sense cap el regulador de tensió, la corrent d'excitació seràconstant o d'un altra forma, la f.m.m. (Fe) permaneix invariable; ara bé, com augmenta laintensitat I augmenta la f.m.m. de reacció de l'induït Fi, lo que dòna lloc a una f.m.m. resultantmenor (Fr), una f.e.m. resultant (Er) menor i una tensió de sortida més baixa. La explicacióanterior és més simple si es considera el circuit equivalent de la màquina síncrona ( suposantuna resistència de l'induït menyspreciable ):
Figura 2.24. Circuit elèctric equivalent de l’alternador
La equació que regirà el comportament elèctric de la màquina serà:
O SV = E - j·X ×I (2.68)
si la corrent d'excitació és constant, serà constant la f.e.m. 'EO', de tal forma que al augmentarla corrent 'I', augmentarà la caiguda de tensió en la reactància síncrona, lo que es tradueixsegons l'equació anterior en una reducció de la tensió de sortida.
Tot lo explicat fins ara és pot demostrar de forma visual pel diagrama vectorial dibuixat enl'apartat 2.3.2.4, que de forma molt més reduïda es mostra tot seguit:
Figura 2.25. Diagrama vectorial de l’alternador

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
41 Memòria Descriptiva
Observant el següent gràfic:
Figura 2.26. Corba de la característica tensió – corrent de l’alternador
Veiem dibuixada la característica externa de la màquina d'on podem observar la variació de latensió de sortida conforme es modifica la corrent de l'induït ( per excitació constant ).
2.3.3.2.2 Variacions de Velocitat
En aquest apartat considerem la freqüència no controlada, o, si més no, controlada però no losuficientment per considerar-la fixe. La causa de les variacions de velocitat vènen provocadesper les variacions de la càrrega, que alteren les condicions de treball de la màquina. Les sevescauses són explicades a l'apartat 2.2.3.3.
Si d’aquest fenòmen observem l'expressió de la f.e.m. generada per una màquina síncrona:
1 1E = 4'44×? N f F× × × (2.69)
i que, com sabem, que la freqüència depèn enterament de la velocitat del motor asíncron quemou la màquina síncrona, es dedueix com les baixades de velocitat provoquen caigudes detensió, i viceversa.
2.3.3.3 Regulació de la Tensió
2.3.3.3.1 L’Efecte Regulador de la Tensió
Sota els efectes de les variacions de la càrrega i de la velocitat del motor, comentats

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
42 Memòria Descriptiva
anteriorment, interesa que la tensió subministrada a la càrrega es mantingui constant. Com laf.e.m. EO és proporcional al flux inductor, haurà de variar-se l’excitació per canviar el flux iaixí adaptar la nova f.e.m. per a que es reestabilitzi la tensió al valor nominal prefixat.
Aquesta acció es realitza amb un sistema regulador de tensió controlat, i d’això tractem en elssegüents apartats.
2.3.3.3.2 Principi Bàsic d’Un Sistema de Regulació
Si a la sortida d'una cadena de mando s'observa, per medi d'una medició, el resultat de mando (magnitud del mando ) i si, a conseqüència d'això, es compara el valor obtingut amb el valorteòric i s'intervé en la cadena de mando de forma que el valor obtingut s'ajusta el màximpossible al valor teòric, s'obté un sistema de regulació. Lo que caracteritza a un sistema és quees produeix i es manté continuament al valor preajustat d'una magnitud ( valor de cosigna ),per la intervenció a base de la medició de dita magnitud. D'aquesta forma, s'obté un sistema debucle tancat, ja que la correcció del valor obtingut respecte al valor teòric, s'efectua enl'entrada del sector mandat que, en aquest cas, és denomina sector regulat.
El valor 'x' previament fixat de la magnitud a regular, es denomina valor teòric o de consigna.Moltes vegades és constant però freqüentment també és variable, amb intervenció a unprograma prèviament fixat; en aquest últim cas segueix al valor d'una magnitud de guía 'w'.
La regulació resulta necessària quan intervenen magnituds perturvadores que originen unadivergència de la magnitud a regular, respecte al valor teòric. Quan es produeix aquestadivergència a regular, s'introdueix en la instal·lació regulada una variació, és a dir, es varia unamagnitud d'ajust i, que fa que la magnitud a regular 'x' torni a coincidir amb el valo teòric.
Aquests conceptes són aclarats pel cas més senzill que es pot comentar.
Figura 2.27. Esquema elèctric d’un sistema de regulació simple

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
43 Memòria Descriptiva
Es suposa un generador de corrent contínua, del que la tensió que genera en borns ha demantenir-se establilitzada. Per conseqüent, en aquest cas, la magnitud a regular és la tensió delgenerador UG. Com a magnituds perturbadores intervenen la velocitat 'n' i la corrent de càrregadel generador IG. El generador constitueix el sector regulat, és a dir, la part de la instal·lacióque ha de regular-se. El regulador comprèn la magnitud a regular UG i la compàra amb el valorteòric US, constituïda per una tensió constant. La divergència a regular ordena un dispositiuamplificador 2 ( un amplificador transistoritzat, per exemple ). En la seva sortidal'amplificador subministra la tensió d'excitació UE del generador, que actua com a magnitudd'ajust.
Quan el generador està recorregut per una corrent de càrrega IG, baixa la seva tensió en bornsUG. El regulador reacciona de forma que s'eleva la tensió d'excitació UE i, d'aquesta forma,fent pujar novament la tensió en borns UG fins el valor preestablert.
El següent esquema mostra en diagrana de blocs la instal·lació anterior que, a més, resultavàlida per a qualsevol sistema de regulació.
Figura 2.28. Diagrama de blocs d’un sistema realimentat
De l'exemple citat i de l'anàlisi de l'esquema anterior es poden deduir les característiques quedefineixen el sistema de regulació:
1. Els elements d'un sistema de regulació constitueixen un bucle tancat actiu, és a dir, uncircuit de regulació. La magnitud a regular actua sobre el regulador, aquest genera unamagnitud d'ajust que acciona sobre el sector regulat i així torna a influir en la magnitud aregular.
2. Els elements que costitueixen el circuit de regulació actuen en una sola direcció.
3. Els elements que costitueixen el circuit de regulació, s'inverteix el sentit de l'acció ( perexemple, quan baixa la magnitud a regular UG, puja la magnitud d'ajust UE ). Aquest fenòmense'l denomina retroacció o realimentació negativa ( o 'feedback' en inglès ).
4. El sector regulat és aquella part de la instal·lació, on la seva sortida hi apareix la magnitud aregular 'x' i on la seva entrada actua la magnitud d'ajust 'y'. Sobre el sector regulat actuen amés les magnituds perturbadores z1, z2, ..... zi, que influeixen en la magnitud a regular.Aquesta influència queda eliminada per variació de la magnitud d'ajust.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
44 Memòria Descriptiva
5. El regulador capta en la seva entrada la magnitud a regular 'x', la compara amb el valorteòric 'xs' i produeix la divergència a regular. A base d'aquesta comparació, el reguladorsubministra en la seva sortida la magnitud d'ajust 'y'.
Aquestes característiques es troben en qualsevol sistema de regulació. Són totalmentindependents de la naturalesa física de la magnitud a regular ( velocitat, tensió, pressió,temperatura, ... ) i de la magnitud d'ajust, així com de la constitució tècnica del sector regulat idel regulador.
2.3.3.3.3 Sistema de Regulació per la Màquina Síncrona
La regulació del nostre sistema és molt més complexa del que s'ha vist en l'exemple deregulació bàsica d'on veiem una regulació de la tensió per una simple divisió de tensionscontínues en que obteníem una senyal que únicament havia de passar per un controlador ‘P’per convertir-se en una senyal d'ecitació i obtindre així els seu valor adeqüat en la regulació.
Ara un sistema bàsic de regulació com l’anterior queda enrere davant les exigències queimposen la nostra màquina generadora a regular. La característica principal en que éscomplexa notòriament la màquina síncrona són les diferents tensions que entren i surten delregulador en qüestió.
Figura 2.29. Esquema elèctric del sistema regulador de l’alternador
Ara, en el sistema de regulació de tensió hi entra una senyal alterna procedent de la sortida del'alternador, mentre que surt una tensió contínua per l'excitació d'aquest.
La rectificació de la senyal alterna pot provocar un aparent paral·lelisme amb el cas anterior,però això no passa així. La senyal de sortida del regulador ha de ser la mateixa tensió queexcita l'inductor; a més, les característiques de funcionament de les màquines síncrones diuen

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
45 Memòria Descriptiva
que aquesta tensió és continua per lo que té una freqüència nul·la. Amb això, la variació delsvalors de sortida no hi podrà influir la tensió, que s’haurà de mantenir constant. Així doncs,procedent de la senyal de sortida de l'alternador ha de sortir una altra senyal que reduïda hasenyalitzar les variacions de la tensió de sortida ( l'error ).
Per acabar amb les restrincions que s'impossen pel disseny del regulador de tensió adequat,també hem de dir que el nostre regulador ha de tindre uns valors en els seus components quelimitin tensions o corrents que posin el perill el funcionament del regulador i de la mateixamàquina.
***
Dit tot això, el nostre sistema regulador de tensió adoptat serà una font de tensió conmutada.Una font controlada de tensió que té l'encàrreg de subministrar en cada moment la tensiód’excitació justa pel funcionament dinàmic de la màquina.
Sobre els diferents models que es podrien dissenyar hi han: els ponts rectificadors controlats isemicontrolats o els trocejadors o 'choppers', entre altres. Tots ells deriven d'una senyald'entrada i una de sortida governats per una senyal de dispar ( o de control ). Els circuitsconmutats de control que no compleixin amb els exigències d'entrada i sortida pel sistema deregulació de tensió, poden ser complementats per altres circuits adicionals. Així per exemple,el trocejador que parteix per una tensió d'entrada contínua haurà de complementar-se amb uncircuit conversor ac-cc en la seva entrada. O per l'altra banda, els rectificadors controlats hande convertir en contínua la tensió alterna rectificada que deixen 'passar'.
2.3.3.3.4 Solució Adaptada
2.3.3.3.4.1 Introducció
De les diferents solucions que es podien haver adoptat, ens decantem per la solució que en unprincipi ha de ser la més econòmica per tenir menor nombre de transistors de potència: elcircuit d'arquitectura 'chopper'. Són fonts controlades de contínua a contínua molt utilitzats enl'electrònica de potència.
2.3.3.3.4.2 El Convertidor CC-CC
2.3.3.3.4.2.1 Presentació
De convertidors controlats de contínua a contínua, coneguts com a fonts cc-cc conmutades o‘choppers’, n'hi han de diferentes menes. Segons la funcionalitat en que se'ls aplica, aquestspoden ser reductors (step-down), elevadors (step-up) o reductors-elevadors (up-down).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
46 Memòria Descriptiva
Totes tres classes estàn compostes pels mateixos components electrònics principals; però, ésen la dispossició d'aquests per la qual es diferencien en la seva forma de treballar. El primertipus de convertidor, convertidor reductor, rep aquest nom perquè la topologia de que escomposa fa que la conmutació controlada comporti una reducció de la tensió de sortidarespecte a la d'entrada. El segon, convertidor elevador, com el seu nom indica, comporta el cascontrari que l'anterior, en que la dispossició dels seus components provoquen una tensió desortida superior a la d'entrada. El tercer, té la peculiaritat de, en funció del seu valor deconmutació dins al seu període de treball, que aquest pugui treballar com a reductor o com aelevador.
El fet que uns siguin reductors i altres elevadors depèn de les tensions d'entrada i sortida. Arabé, tots els diferents convertidors guarden la mateixa relació entre la potència subministrada ila potència consumida:
PS = PO (2.70)
Com en aquests punts del circuit els valors són contínuüs, l'anterior expressió valdrà asignificar:
VS×IS = VO×IO (2.71)
Si recordem ara l'objectiu d'aquesta part de sistema que era la regulació de tensió d'unalternador a partir de la seva corrent d'excitació, deduïrem que el valor que hem de tenir enconsideració és la intensitat de sortida 'IO' i deduïrem també, que respecte a l'expressióanterior, el conversor que utilitzàrem serà del tipus reductor.
La finalitat principal del conversor, com tots aquests tipus de conversors que hi han, és la demantenir una tensió de sortida constant per diferents variacions de valors de càrrega i detensions d'entrada. Ara, aquesta finalitat queda alterada a partir del control ( en llaç tancat )que se li aplica; i el seu nou objectiu principal és la de proporcionar la corrent contínuaadequada pel subministrament en el circuit excitador d'un alternador que treballa en valorsnominals per a diferentes càrregues resistives.
Respecte a la que podia ser la seva alternativa, una font d’alimentació del tipus de regulació ensèrie, les fonts de tensió conmutades tenen un més alt rendiment ( arribant a superar el 90% )lo que fa més apta per la regulació de grans potències com és el nostre cas. En la seva contra,aquestes fonts requereixen una electrònica més complexa.
Tot seguit, descriurem detalladament com són aquests convertidors reductors, com funcionen,la seva estabilitat en el treball, i tot lo necessari per conèixe'ls fins el punt d'entendre el seusignificat dins el sistema i tot lo corresponent al seu muntatge.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
47 Memòria Descriptiva
2.3.3.3.4.2.2 Descripció Básica de la Font de Tensió Conmutada - Topologia Buck -
Correspont a la part de l’electrònica de potència del conjunt del regulador de tensió. La font detensió conmutada de topología reductora, com hem dit abans, és coneguda també com atopologia buck. És també per això, que aquests tipus de convertidors es poden trobardocumentats com a 'convertidor buck'.
El principi bàsic de funcionament d'aquests convertidors és la de transferir paquets d'energiade l'entrada a la sortida amb la condició que la tensió mitjà de la sortida es mantingui constant.Amb la particularitat respecte les altres fonts conmutades de reduïr la tensió de sortidarespecte la d'entrada (VS>VO); i de forma recíproca, augmentar la corrent de sortida respecte lad'entrada (IS<IO).
L’esquema bàsic d’un convertidor Buck és el següent:
Figura 2.30. Circuit elèctric del convertidor buck
Com es pot observar, el subministrament de la potència d'entrada ( PS = potènciasubministrada ) està freqüencialment interrumpuda per un transistor actuant com uninterruptor controlat; aquesta part del circuit és coneguda com a bloc de conmutació. Això fa,que a cada periode de treball (T), la conmutació comporti a la resta del circuit dos temps detreball diferent: el temps en quan l'interruptor es troba tancat (Ton) i en quan es troba obert(Toff), derivant d'aquesta manera, a dos modes de conducció diferents.
El marge de freqüències, en que pot treballar el convertidor cc/cc de forma estable, sol estarentre 10KHz i 1MHz. El fet que siguin freqüències tant elevades es basa per reduïr el rizat dela càrrega. Però, si aquesta no interpossa exigències de qualitat tant estrictes podríem trobarconvertidors treballant a freqüències molt més baixes.
L'altra part del circuit conversor està composta per una bobina (L), un condensador (C) i undiode (D) i té la missió de cumplir com un filtre pas-baix, és a dir, la de tornar el caràcter

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
48 Memòria Descriptiva
continu a la senyal conmutada present en la seva entrada. La dispossició de tots aquestscomponents no permeten un augment de la tensió d'entrada (VS), recordem que es tracta d'uncircuit reductor, però dins dels seus papers hi trobem que tenen una feina específica.
La bobina (L) es troba en sèrie amb la sortida provoca que la seva inductància es comporticom una font d'intensitat.
El condensador (C) es troba en paral·lel amb la sortida i té l'objectiu de retenir la tensiócontínua constant, a més d'actuar com a filtre de tensions i corrents alternes que la bobinagenera.
El paper del diode és, com tots els convertidors que existeixen, la de mantenir en llaç tancat elcircuit per a la conducció permanent de la tensió i corrent de sortida. En quan aquest es trobatancat (Doff) o obert (Don) també es diferenciaràn els diferents modes de conducció.
2.3.3.3.4.2.3 Funcionament
En l'instant inicial ( t = 0 ), estant el condensador descarregat, la base del transistor es atacadamitjançant el flanc de pujada de la senyal entregada pel generador, amb una amplitud losuficientment elevada com per portar al conmutador a la zona de saturació. En aquestescondicions ( Vce = 0V, teòricament ), tota la tensió d'entrada està aplicada directament en elsborns del diode (D), polaritzat inversament.
Figura 2.31. Circuit elèctric del convertidor buck en Ton
La bobina que tendeix a mantenir les condicions inicials de corrent pel circuit, oposa entre elsseus extrems una diferència de potencial igual a la tensió d'alimentació (VS). L'increment deltemps permet que per la bobina circuli una corrent (IL) que es divideix a través de la càrrega(IRL) i a través del condensador (IC). La tensió de sortida augmenta a mesura que augmenta ladiferència de potencial en les bornes del condensador, establint-se a partir d'aquest moment unrègim transitori.
En arribar el nivell baix de la senyal d'atac, es produeix la conmutació del transistor fins a la

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
49 Memòria Descriptiva
zona de tall, comportant-se idealment, durant aquest interval, com un circuit obert i aïllantd'aquesta manera el filtre de la senyal d'entrada. En aquest moment, la bobina que tendeixnovament a mantenir les condicions de corrent pel circuit, llibera l'energia emmagatzemadadurant el període de conducció, fent circular una corrent (IL
') que polaritza directament en eldiode (D), i en el qual es comporta com un curtcircuit.
Figura 2.32. Circuit elèctric del convertidor buck en Toff
Durant el règim transitori, el condensador tendeix a que la seva tensió en borns s'iguali a latensió d'entrada (VS), per la qual, la corrent que circula a través seu tendirà a disminuïr. Labobina que tendeix a que per ella circuli corrent màxima ( limitada per la resistènciainstantànea del circuit per a cada període ), s'oposa als canvis de corrent disminuïnt la sevadiferència de potencial en borns.
Al finalitzar el règim transitori, de la qual la seva duració depèn de les característiques i delsvalors dels components que formen el convertidor, s'estableix un règim permanent, en que labobina i el condensador arriben a uns nivells mitjos, tant de tensió com de corrent, a les quedenominem VO i IO.
Com pot comprovar-se en aquest circuit, l'energia es transferida durant els períodes desaturació del transistor directament des de l'entrada fins a la sortida a través de la bobina.Aquest fet, és el que dòna lloc al nom d'aquest tipus de convertidor.
Relació del convertidor amb la freqüència
Al funcionar el circuit en règim d'impulsos, no és possible parlar dels components reactius defiltre ( L i C ) en termes d'impedància, ja que w = 2·π·f, únicament està definida per a senyalsde tipus sinus i cosinus. De qualsevol forma, tant la bobina com el condensador presenten unadeterminada oposició al pas de la corrent. Aquesta oposició l'anomenàrem inercia al canvi osimplement inercia. El valor d'aquesta depèn de la senyal aplicada.
Si tenim, per exemple, l'expressió de tensió en una bobina:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
50 Memòria Descriptiva
L
? iV = - L×
? t (2.72)
és fàcil, llavors , compendre que un augment de la freqüència ( disminució de t ) produirà en labobina un augment de la seva tensió, presentant per tant una major oposició al pas de lacorrent.
Quant major sigui el valor de la freqüència de conmutació, major serà la inercia que presenti labobina, per tant, el condensador que tendeix a descarregar-se a través de la seva resitènciainstantànea en paral·lel, trobarà un camí de descàrrega més fàcil a través de la resistència decàrrega, tenint a entregar en ella la major la part de la energia acumulada durant el període desaturació.
Si la resistència de càrrega no existis ( sortida en circuit obert ), el condensador seguiriadescarregant-se a través de la resistència instantànea que presenten la resta dels componentsdel circuit, comportant un rissat en buït.
De la mateixa forma, la inercia al canvi que presenta el condensador disminueixproporcionalment amb l'augment de la freqüència, veiem expressió:
C
? vi = C×
? t (2.73)
Per a freqüències relativament elevades, el condensador presentarà una inercia losuficientment baixa com per proporcionar a la bobina un camí fàcil de descàrrega,emmagatzemant l'energia alliberada per aquesta i tenint, per tant, a mantenir constant la tensióde sortida durant el període de tall del transistor.
El tamany físic dels components que formen el filtre també està directament relacionat amb lafreqüència. Així que, per exemple, segons la següent expressió:
iC =
V F× (2.74)
el valor del condensador necessari per aquesta aplicació disminueix proporcionalment ambl'augment de la freqüència. De forma anàloga, és possible demostrar que el valor de la bobinanecessària, és menor quant menor sigui la freqüència de treball.
Per una altra part, el rissat de la senyal de sortida disminueix proporcionalment amb l'augmentde la freqüència. Interessa, per tant, que la freqüència que la freqüència de conmutació sigui lomés elevada possible dins de certs marges.
A mesura que augmenta la freqüència, també apareixen fenòmens indessitjables; entre altres,sorolls elèctrics i, capacitats i inductàncies paràsites, que al crear-se en els terminals delscomponents i entre les pistes de coure del circuit impres, modifiquen el funcionament de la

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
51 Memòria Descriptiva
font i compliquen els seus càlculs i el disseny de la mateixa. Per tant, el valor de la freqüènciade conmutació ha de ser un valor de compromís. Recordem, com hem dit al principi, quegeneralment el valor d'aquestes freqüències estan compressos entre els 10 KHz i l'1 MHz.
2.3.3.3.4.3 El Controlador
El controlador és l'encarregat de regular els temps de conducció i de bloqueix el conmutador,perquè el convertidor cedeixi la corrent contínua necessària pel qual ha estat dissenyat. Elcontrolador també es denomina llaç tancat de control, o simplement llaç de control. Perquè, apesar, que en el disseny del nostre controlador la senyal de mostra no procedeix directamentde la sortida del convertidor de potència, la transductància de tot el sistema sí que fa que tot ellsigui un sistema en llaç tancat.
El següent diagrama de blocs que representa el controlador amb cadascuna de les parts quetractarem més endavant:
Figura 2.33. Esquema de blocs del controlador del convertidor buck
Tot comença quan apareix una variació de la tensió de sortida del sistema, que en l'entrada delcontrolador anomenem senyal de mostra, i percebuda a partir d'una ampliació de l'error en sercomparada per una tensió de referència, una tensió contínua que l'usuari fixarà per obtenir elnivell de regulació dessitjat.
Aquest error ampliat a d'entrar al modulador per obtenir la senyal de conmutació i aconseguiraixí la regulació i l'equilibri del sistema. Així doncs, el modulador és l'element encarregat deregular el cicle de treball de la senyal de conmutació, en funció de les senyals rebudes des delselements de mostra i de referència. Així que, davant possibles variacions de la senyald'entrada, el sistema ha de reaccionar per compensar-la. Per exemple, en el cas de que la tensiód'entrada disminueixi, el circuit de control augmentarà el cicle de treball de la senyal de dispardel conmutador a fi de mantenir constant la tensió de sortida. Per altra part, si la càrrega variade valor, el control actuarà de forma similar a lo explicat respecte de la entrada. Naturalment,

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
52 Memòria Descriptiva
la variació del cicle de treball o marge de control té sempre uns límits que depenen, engeneral, de les tensions d'entrada i de sortida, de la freqüència de conmutació i de la rapidessaamb que el sistema ha de retornar a les seves condicions d'equilibri.
El pas del modulador al conmutador no es realitza de forma directa ja que s'han de adequar elsvalors de la senyal modulada a valors de treball del conmutador del convertidor. Aquestaúltima part del controlador l'anomenem 'driver'.
Dins el controlador, més concretament en el circuit del modulador, s'origina la freqüència fixaa que treballarà el regulador i que, com recordem, tanta importància tenia amb el disseny delscomponents que formen el convertidor de potència.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
53 Memòria Descriptiva
3 Estudi i Disseny del Sistema de Regulació
3.1 Introducció
En el darrer apartat hem pogut conèixer com s'esdevé la regulació del grup a partir del seuprincipi de funcionament. Ara, descoberts els aspectes físics que comporten la regulació delgrup i descrita quina és la solució adaptada, en aquest tema realitzem un estudi delcomportament i disseny dels components i circuits d'aquest sistema de regulació escollit.
Tot i estan descrits els diferents sistemes de regulació, de tensió i freqüència, en aquest tematambé s'estudia la senyal de sortida del generador com a senyal d'entrada als controladors icom a font d'alimentació dels components electrònics i del propi convertidor buck.
3.2 El Regulador de Freqüència
3.2.1 Introducció
Es basava en donar una senyal analògica entre 0 i 10 volts en el control d'un variador defreqüència, perquè aquest subministri l'interval de freqüències a que treballarà el motorasíncron per mantenir la velocitat del rotor constant per quan aquest sufreixi canvis en el parresistent. La senyal analògica té que indicar en aquest interval la velocitat del rotor en que estroba. Aquesta tasca es concebuda a un microcontrolador del qual li arribarà la senyal desortida de l'alternador on la seva freqüència coincideix amb la freqüència a que gira el rotor. Elprograma dissenyat al microcontrolador determina la freqüència i la l’escriu en forma d'unasenyal digital de sortida. Un conversor DAC s'encarrega de fer l'ultim pas per fer d’aquestauna senyal analògica pel control del variador de freqüència; i així realitzar el llaç tancat.
Tot seguit estudiem els components electrònics d'aquest sistema de regulació de la velocitat,així com els circuits i el programa dissenyat a partir de la seva senyal d’entrada.
3.2.2 El Variador de Freqüència
3.2.2.1 Introducció
En aquest apartat estudiem com eligim el variador a utilitzar pels diferents factors que esdistingeixen. A continuació, del model utilitzat estudiarem el seu funcionament i les sevescaracterístiques dins el mode en que es usat.
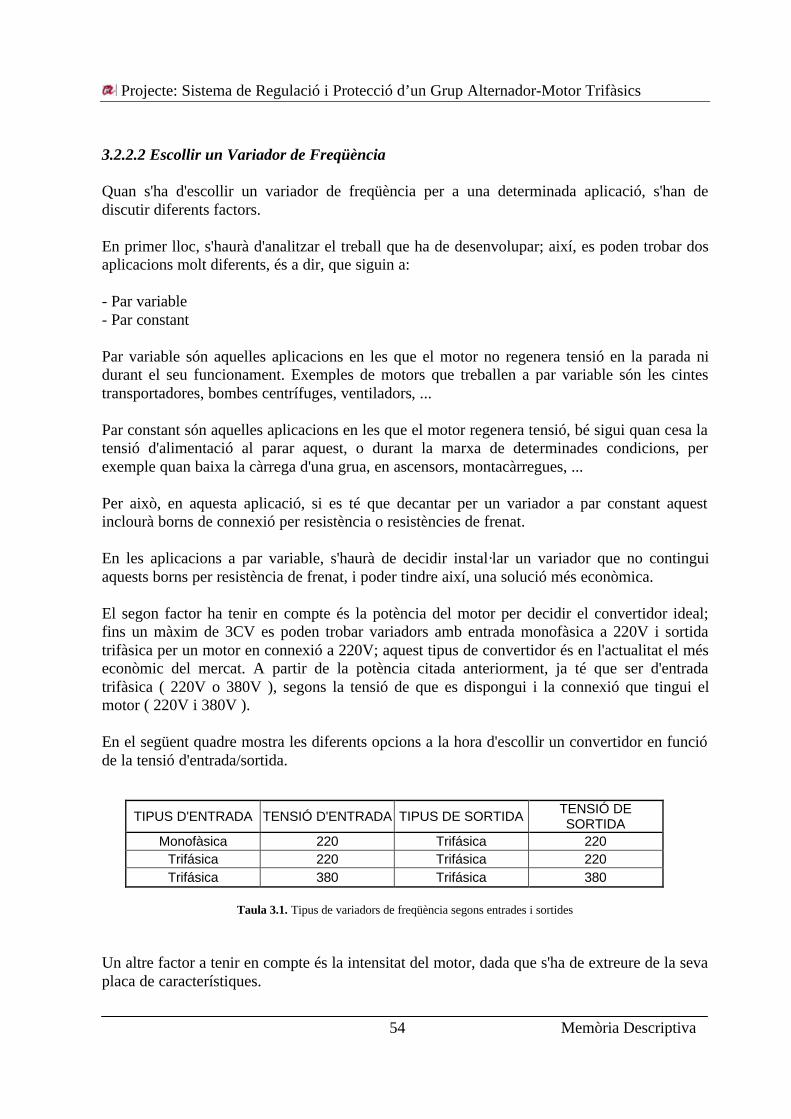
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
54 Memòria Descriptiva
3.2.2.2 Escollir un Variador de Freqüència
Quan s'ha d'escollir un variador de freqüència per a una determinada aplicació, s'han dediscutir diferents factors.
En primer lloc, s'haurà d'analitzar el treball que ha de desenvolupar; així, es poden trobar dosaplicacions molt diferents, és a dir, que siguin a:
- Par variable- Par constant
Par variable són aquelles aplicacions en les que el motor no regenera tensió en la parada nidurant el seu funcionament. Exemples de motors que treballen a par variable són les cintestransportadores, bombes centrífuges, ventiladors, ...
Par constant són aquelles aplicacions en les que el motor regenera tensió, bé sigui quan cesa latensió d'alimentació al parar aquest, o durant la marxa de determinades condicions, perexemple quan baixa la càrrega d'una grua, en ascensors, montacàrregues, ...
Per això, en aquesta aplicació, si es té que decantar per un variador a par constant aquestinclourà borns de connexió per resistència o resistències de frenat.
En les aplicacions a par variable, s'haurà de decidir instal·lar un variador que no continguiaquests borns per resistència de frenat, i poder tindre així, una solució més econòmica.
El segon factor ha tenir en compte és la potència del motor per decidir el convertidor ideal;fins un màxim de 3CV es poden trobar variadors amb entrada monofàsica a 220V i sortidatrifàsica per un motor en connexió a 220V; aquest tipus de convertidor és en l'actualitat el méseconòmic del mercat. A partir de la potència citada anteriorment, ja té que ser d'entradatrifàsica ( 220V o 380V ), segons la tensió de que es dispongui i la connexió que tingui elmotor ( 220V i 380V ).
En el següent quadre mostra les diferents opcions a la hora d'escollir un convertidor en funcióde la tensió d'entrada/sortida.
TIPUS D'ENTRADA TENSIÓ D'ENTRADA TIPUS DE SORTIDA TENSIÓ DESORTIDA
Monofàsica 220 Trifásica 220Trifásica 220 Trifásica 220Trifásica 380 Trifásica 380
Taula 3.1. Tipus de variadors de freqüència segons entrades i sortides
Un altre factor a tenir en compte és la intensitat del motor, dada que s'ha de extreure de la sevaplaca de característiques.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
55 Memòria Descriptiva
El variador ha de ser capaç de subministrar la intensitat nominal del motor; per això s'had'escollir un variador que proporcioni una intensitat lleugerament superior a la indicada en laplaca de característiques.
El Variador a Escollir
Sota els diferents factors que hem estudiat, el nostre variador ha de ser un variador de parvariable ja que no insteressa i no ens fa cap servei el fet de mantenir la constància en el par,amb lo qual aquesta elecció cap aquest tipus comporta una rebaixa econòmica.
La potència del motor a alimentar és de 3kW, el nostre variador ha de treballar sota aquestespotències.
La connexió ha de ser per a una entrada monofàsica de 220V i una sortida trifàsica de 220Vcom no pot ser de cap altra manera ( veure taula de dalt ).
La intensitat màxima nominal de corrent del motor ( depén de la seva connexió ) és de 6'3A, elvariador a de treballar a intensitats nominals lleugerament superiors a aquest valor.
3.2.2.3 El Variador de Freqüència Micromaster
3.2.2.3.1 Introducció
El contingut d’aquest tema més el capítol 2 dels Annexes, on aparèixen tots els paràmetres deconfiguració del variador, ens permetran conèixer el funcionament d’aquest pel seu ús.
3.2.2.3.2 Presentació
Al Laboratori de Màquines Elèctriques de l'ETSE de la URV es disposa de variadors defreqüència MICROMASTER Vector (MMV) de la marca SIEMENS. Aquests més elsMIDIMASTER Vector (MDV) constitueixen una amplia gamma estàndard de convertidors defreqüència apropiats per la seva gran presició pel control de velocitat de motors trifàsics.
D'aquests equips existeixen diferents models que van des del MICROMASTER Vectorcompacte de 110 W fins el MIDIMASTER Vector de 75 kW. Aquests models de variadorstenen diferents tipus de control ( analògic, digital, ... ) però es caracterítzen, exclusivament,per tenir un tipus de control sense sensors.
L'elecció del MICROMASTER no s'ha esdevingut per aquest tret característic, ja que noutilitzàrem aquest tipus de control. Sí, en canvi, ha estat elegit, entre altres coses, per ser

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
56 Memòria Descriptiva
variadors capaços d'accionar motors de potència que contempla el contingut del projecte; i perdisposar d'un control analògic o si no fòra possible un control digital.
A més d'aquests trets tècnics, aquests convertidors són convenients perquè tenen una granfacilitat en l'instal·lació, la pogramació i la posta de marxa.
3.2.2.3.3 Característiques
Les característiques fonamentals del variador de freqüència MICROMASTER són:
- Transistors de potència de l'inversor: IGBT.
- Mètode de Conmutació: PWM.
- Mètode de Control: US/f.
- Funcionament en llaç obert.
- Possibilitat de regulació PI en llaç tancat.
- Accionament de motors de potències entre 120 W i 75 kW.
- Freqüències de sortida: 0 - 380 Hz.
- Parell de posta en marxa elevat.
- Elevada presició per regular la velocitat.
- Capacitat de control remot mitjançant enllaç en sèrie RS485.
- Paràmetres predefinits pel fabricant.
- Control de la freqüència de sortida per 5 procediments diferents:
1) Consigna de freqüència mitjançant el teclat numèric. 2) Consigna analògica ( entrada de tensió o de corrent ). 3) Potenciòmetre extern. 4) 8 freqüències fixes mitjançant entrades binàries. 5) Interface sèrie.
- Frenat "compound".
- 1 sortida relé programable:
- 110 Vac / 0'3 A.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
57 Memòria Descriptiva
- 30 Vdc / 1 A.
- 3 entrades digitals parametritzades.
- 1 entrada analògica.
3.2.2.3.4 Ús del Variador
Quan s'utilitza un equip MICROMASTER Vector com el que disposem, el primer que s'ha defer és llegir detingudament totes les instruccions de seguretat i advertències per evitar faltesque puguin deteriorar l'equip, i o, de forma més greu, posar en perill l'integritat de l'usuari.
Un cop l'usuari és conèixedor de totes les instruccions de seguretat, realitzarà totes lesconnexions en el circuit de control pel qual es configurat. Posteriorment, afustarà unsinterruptors sel·lectors, anomenats DIP ( veure apartat 3.2.2.3.7 ), per determinar el tipus decontrol que utilitza. Ara el variador ja pot ser connectat a la red.
Finalment, a l'usuari tant sols li falta programar el variador de freqüència a merce delsparàmetres en que vol treballar mitjançant el panell frontal. Tot el conjunt de paràmetres queajusten les condicions de treball estaràn contingudes al manual del fabricant.
3.2.2.3.5 Descripció Tècnica
Tot seguit veurem l’esquema general, el panell frontal i l’esquema de control d’aquest tipus devariador de freqüència.
3.2.2.3.5.1 L'Esquema General
L'esquema general del variador de freqüència MICROMASTER és el veiem representat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
58 Memòria Descriptiva
Figura 3.1. Esquema General del variador Micromaster
Les parts més significatives són:
- Alimentació monofàsica a 220 Vac.- Rectificador.- Bus de contínua amb sortida.- Inversor trifàsic amb sortida per l'alimentació del motor d'inducció.- Entrada analògica / Potenciòmetre, per la regulació de velocitat externa del motor.- Entrades digitals programables.- Font d'alimentació del transductor PI.- Relé de sortida.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
59 Memòria Descriptiva
3.2.2.3.5.2 El Panell Frontal
El panell frontal està format per un teclat i un display. Les finalitats d'aquest panell són:
- Parametritzar correctament el variador en funció edl tipus de motor, del tipus de càrrega i deles condicions de treball del conjunt.- Modificació d'alguns paràmetres durant el funcionament.- I visualització de les condicions de treball.
La següent representació descriu la forma i la distribució els botons del panell frontal.
Figura 3.2. Esquema del panell frontal del variador Micromaster
Les funcions dels diferents botons són:
- Botó de marxa impulsos: si es pitja aquest botó estant el convertidor parat, arrancarà ifuncionarà a la freqüència per marxa per impulsos predeterminada. El convertidor es pararà aldeixar anar el botó. Si es pitja aquest botó estant el convertidor funcionant, no tindrà efecte.
- Botó de marxa: pitja aquest botó per arrancar el convertidor.
- Botó de parada: pitja aquest botó per parar el convertidor. Pitja una vegada per activar unOFF1. Pitja dos vegades ( o mantigues pitjat ) per activar un OFF2 amb amb l'objected'interrumpir immediatament la tensió des del motor, permeten que aquest es pari sensedecelarar-se.
- Pantalla de LED: Mostra la freqüència ( predeterminada ), els valors o númeroscorresponents a paràmetres ( quan es pitja P ) o els codis d'averia.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
60 Memòria Descriptiva
- Botó de sentit directe / invertit: Pitja aquest botó per canviar el sentit de gir del motor. Elsentit invers s'indica mitjançant un signe menys ( valors<100 ) o mitjançant un punt decimalintermitent ( valors>100 ).
- A dalt / augment de freqüència: Pitja aquest botó per l'augment de freqüència. S'utilitza percanviar valors o números corresponents a paràmetres a un ajust superior durant el procedimentde configuració de paràmetres.
- A baix / reducció de freqüència: Pitja aquest botó per la reducció de freqüència. S'utilitza percanviar valors o números corresponents a paràmetres a un ajust inferior durant el procedimentde configuració de paràmetres.
- Botó de configuració de paràmetres: Pitja aquest botó per tenir accés als paràmetres.Presionar i mantenir per accedir a una ressolució de paràmetres major.
3.2.2.3.5.3 Els Terminals de Control
La següent representació mostra els terminals de control del variador de freqüència:
Figura 3.3. Esquema del control del variador Micromaster
Teminal 1 i 2.- Són els terminals on es connecta la font d'alimentació continua que alimentatot lo corresponent al control del variador de freqüència. La connexió és de 10 - 0 volts, amb

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
61 Memòria Descriptiva
una entrada màxima de corrent de 10 mA.
Terminal 3 i 4.- Corresponents als terminals de la 1ª entrada analògica. Aquesta entradaanalògica es pot configurar per diferents valors de tensió i intensitat. De 0 o 2 - 10 volts, ambuna impedància d'entrada de 70k ohms; O de 0 o 4 - 20 mA, amb una resistència d'entrada de300 ohms.
Terminals del 5 al 8.- Són els terminals que corresponen a les entrades digitals. El seu margede tensió d'entrada està entre 7'5 i 33 volts; i no pot entrar més que 5 mA de corrent.
Terminal 9.- És el terminal de la font d'alimentació pel transductor del retroalimentació PID.La seva tensió és de 15 volts, per lo que pot esta curtcircuitat amb la font continua de lessenyals digitals d'entrada, si aquests estan alimentats a 15 volts. La corrent màxima d'entradaés de 50 mA.
Terminals 10 i 11.- Són els terminals corresponents a la 2ª entrada analògica. Aquesta pot serconfigurada per tensió ( 0 - 10 Volts ) o pel corrent ( 0 - 20 mA ).
Terminals 12 i 13.- Són terminals que corresponen a una sortida analògica del CPU delvariador. La seva sortida té uns valors de marges de 4 - 0 V, una corrent de 20 mA i unaimpedancia de sortida de 500 Ohms.
Terminals 14 i 15.- En paral·lel són connectats amb un sensor de temperatura PTC, que actuacom a protecció del motor contra els sobrecalentaments. És a dir, el PTC fa baixar la potènciadel motor quan aquest treballa a més baixa velocitat.
Terminals 18 al 22.- Són terminals de sortida per a relès de protecció a sobretensions.
Terminals 23 al 26.- Són terminals per a una connexió RS485, segons el protocol USS.Aquests terminals no es poden fer servir si hi han intencions d'utilitzar l'altre connexió RS485del panell frontal
3.2.2.3.6 Funcionament Bàsic
El variador, alimentat per una red monofàsica ( també pot ser trifàsica ), converteix aquestatensió que li arriba en tensió contínua.
L'esquema elèctric de funcionament és el que veiem representat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
62 Memòria Descriptiva
Figura 3.4. Esquema elèctric del variador Micromaster
Lo primer que fa el variador es rectificar i filtrar la tensió alterna que li arriba de la fontd'alimentació. Llavors, d'aquesta tensió contínua que adquereix, el variador la transforma enuna red trifàsica d'ones quadrades mitjançant un sistema d'interruptors conmutats per uncontrol de la CPU propi del variador i del qual ha estat programat per l'usuari.
Figura 3.5. Arquitectura interna del variador Micromaster
La CPU treballarà d'acord amb lo que ha estat configurada o programada. El seu control esbasa en dos vessants:
1- Un control a partir d'una senyal de tensió analògica o digital que determina un interval defreqüències a que haurà de treballar el variador.
2- I un control a partir de variacions en la seva font d'alimentació.
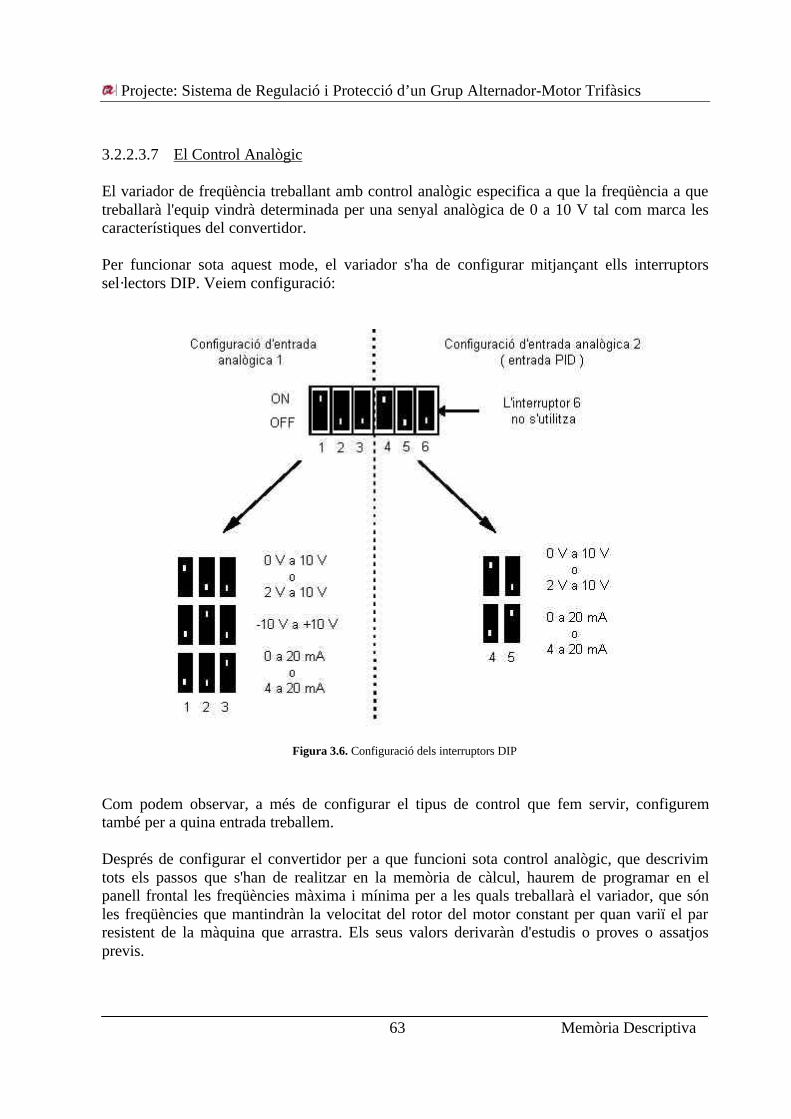
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
63 Memòria Descriptiva
3.2.2.3.7 El Control Analògic
El variador de freqüència treballant amb control analògic especifica a que la freqüència a quetreballarà l'equip vindrà determinada per una senyal analògica de 0 a 10 V tal com marca lescaracterístiques del convertidor.
Per funcionar sota aquest mode, el variador s'ha de configurar mitjançant ells interruptorssel·lectors DIP. Veiem configuració:
Figura 3.6. Configuració dels interruptors DIP
Com podem observar, a més de configurar el tipus de control que fem servir, configuremtambé per a quina entrada treballem.
Després de configurar el convertidor per a que funcioni sota control analògic, que descrivimtots els passos que s'han de realitzar en la memòria de càlcul, haurem de programar en elpanell frontal les freqüències màxima i mínima per a les quals treballarà el variador, que sónles freqüències que mantindràn la velocitat del rotor del motor constant per quan variï el parresistent de la màquina que arrastra. Els seus valors derivaràn d'estudis o proves o assatjosprevis.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
64 Memòria Descriptiva
3.2.2.3.8 Arranc del Motor
Per l'arranc del motor, el variador de freqüència només pot augmentar de forma progressiva elpar intern de la màquina mitjançant el valor de la freqüència. Des del moment en que es posaen marxa ( freqüència zero ) fins arribar al valor de freqüència de treball, el temps transcorre araó:
treballarranc
ft = 10 seg.
50 Hz× (3.1)
En el nostre cas, la freqüència de treball correspondrà al valor de la freqüència mínima dinsl'interval de freqüències del control, ja que l'arranc del motor es realitza amb l'aternador enbuït.
Externament al variador de freqüència, l'arranc del motor també estarà regit pel valor de latensió d'alimentació que mitjançant un potenciòmetre de potència pot ser incrementatprogressivament fins al seu valor nominal. D'aquesta manera evitem problemes en l'instantzero de l'arranc, perquè amb una freqüència nula i una tensió d'entrada nominal provocaríemcorrents d'arranc perillossos per la màquina.
3.2.2.3.9 Parada del Motor
Des del variador de freqüència hi han diferents modes de fer parar el motor. Aquestes són:
- La cancelació del comandament de marxa o pulsació del botó de parada (O) situat en elpanell frontal, fa que el convertidor es desceleri al règim de desceleració sel·leccionat (paràmetre P003 ).
- L'activació de OFF2 farà que el motor giri per inercia fins detindre's ( paràmetres P051 aP055 o P356 a valor 4 ).
- L'activació de OFF3 farà que es produeixi el frenat ràpid del motor ( paràmetres P051 a P055o P356 a valor 4 ).
- El frenat per injecció de CC fins el 250% farà que es produeixi una parada ràpida nocontrolada en el temps ( paràmetre P073 ).
- Mitjançant frenat per resistències externes en el MMV ( paràmetre P075).
- Frenat compost ( paràmetre P066 ).
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
65 Memòria Descriptiva
3.2.2.4 El Circuit de Control
3.2.2.4.1 Descripció
Com ja s'ha comentat anteriorment en altres apartats, el circuit de control del sistemaregulador de freqüència ha d'encarregar-se de transmetre una senyal analògica de 0 a 10 voltspel variador de freqüència a partir de la freqüència que detecti en la sortida de l'alternador. Ésa dir, li ha de arribar una senyal reduïda de la sortida de l'alternador de la qual la sevafreqüència ha de ser mesurada per determinar la senyal analògica correcte pel bon ús delvariador de freqüència com regulador de la velocitat.
L'encarregat de portar a terme aquesta operació és un microcontrolador programat per a taltreball. El microcontrolador escollit tindrà unes característiques tècniques que s'ajustaràn altreball que es encomanat. Això sí, la seva senyal sortida serà una senyal digital de 8 bits, amblo qual haurem de convertir-la amb una senyal analògica de 0 a 10 volts mitjançant un circuitde conversió mitjançant un DAC.
A més d'ajustar la senyal per a la entrada del variador de freqüència hem de constituir driverspels altres ponts d'interconnexió dels components si és necessari. Així per exemple, l'entradapel microcontrolador no pot entrar una senyal senoidal i serà convertida en una senyal de 0 i 1segons la polaritat de la tensió en el moment.
3.2.2.5 Microcontrolador i Programa
3.2.2.5.1 Introducció
Tot seguit veurem que el tipus de microcontrolador escollit pel circuit de control del reguladorde freqüència és un PIC16C86 de la família dels 16CXX de Microxip. Veurem quines són lesseves generalitats, característiques tècniques i elèctriques, instructives, ... que té i compendremaixí el perquè de la seva elecció. Degut a la seva extensió, gran part de l'informació delmicrocontrolador com la seva estructura interna, els seus registres interns o el seu conjuntd'instruccions en llenguatge ensamblador són continguts en el capítol 3 dels Annexes.
Descriurem el programa introduït al microcontrolador tot servint-nos d'un diagrama de flux delprograma.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
66 Memòria Descriptiva
3.2.2.5.2 El Microcontrolador PIC16C84
3.2.2.5.2.1 Generalitats dels PIC's 16CXX
Quan van aparèixer els PIC16CXX's, creats per l'empresa nord-americana Arizona Microchip,van revolucionar el mercat dels microcontroladors.
Van ser revolucionaris tecnològicament per ser microcontroladors amb tecnologia RISC ambuna arquitectura interna del tipus Harvard; mentre que en la majoria de microcontroladorsutilitzaven una arquitectura interna anomenada Von Neumann.
La arquitectura interna Von Neumann utilitza una memòria de programa que contéinstruccions i dades que es mesclen, i només utilitza un bus on s'han d'associar els codisd'instruccions i de dades. En contra d'aquesta arquitectura Von Neumann, en la arquitecturainterna Harvard les instruccions i les dades estan clarament diferenciats, i, utilitza bussosdiferents per lo que són més ràpids que els anteriors.
Com hem dit abans, els PIC's tenen tecnologia RISC. Aquesta tecnologia RISC disposa d'unaestructura pipeline que permet ejecutar com a mínim una instrucció mentre està buscant lasegüent. El principi pipeline pot proveïr de diferents nivells segons les prestacions delsmicrocontroladors RISC. Com es pot suposar, el principi pipeline permet també elevar lavelocitat d'execució d'instruccions en relació als microcontroladors clàssics.
Aquestes característiques tecnològiques que tenen els PIC's no complexen el nivell deprogramació respecte els altres microcontroladors; doncs, el joc d'instruccions per programar-los no contenen més que 33 o 35 simples instruccions bàsiques en llenguatge d'ensamblador.A pesar del nombre reduït de d'instruccions d'instruccions que tenen no ofereixen menornombre de prestacions que els microcontroladors convencionals.
3.2.2.5.2.2 Les Famílies PIC 16CXX
Existeixen dos grans famílies de circuits PIC 16CXX, i cadascuna disposa de varis membres.En la següent taula es presenten aquestes dos famílies de forma resumida, en la que ens permetfer-nos una idea respecte els recurssos interns.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
67 Memòria Descriptiva
RELL. MEMÒRIA PERIFÈRICS CARÁCTERÍSTIQUES
ME
MÒ
RIA
DE
PR
OG
RA
MA
FR
EQ
ÜÈ
NC
IA M
ÀX
IMA
( M
HZ
)
EP
RO
M
RO
M
EE
PR
OM
ME
MÒ
RIA
DE
DA
DE
S (
BY
TE
S)
ME
MÒ
RIA
EE
PR
OM
DE
DA
DE
S (
BY
TE
S)
TE
MP
OR
ITZ
AD
OR
(S)
CA
PT
UR
A/C
OM
PA
RA
CIÓ
/PW
M
PO
RT
(S)
SÈ
RIE
(S
PI/I
2 C
,SC
I)
PO
RT
ES
CLA
U P
AR
AL·
LEL
CO
NV
ER
TID
OR
A/D
( 8
BIT
S )
INT
ER
RU
PC
ION
S E
XT
ER
NE
S
FO
NT
S D
'INT
ER
RU
PC
ION
S
EN
TR
AD
ES
/SO
RT
IDE
S
TE
NS
IÓ D
'ALI
ME
NT
AC
IÓ (
VO
LTS
)
NÚ
ME
RO
D'IN
ST
RU
CC
ION
S
EN
CA
PS
ULA
TS
PIC16C64 20 2K - 128 - - TMRO-1-2 SPI/I2C 1 SÍ - SÍ 8 33 2,5-6,0 35 40-pin DIP, 44-pin PLCC, 44-pin QFP
PIC16C71 16 2K - 36 - - TMRO - - - 4ch SÍ 4 13 3,0-6,0 35 18-pin DIP, 18-pin SOIC, 44-pin QFP
PIC16C74 20 2K - 192 1K - TMRO-1-2 SPI/I2C,SCI 2 SÍ 8ch SÍ 12 33 2,0-6,0 35 40-pin DIP, 44-pin PLCC, 44-pin QFP
1º F
AM
ILIA
PIC16C84 10 - - 36 - - TMRO - - - - SÍ 4 13 2,0-6,0 35 18-pin DIP, 18-pin SOIC, 20-pin SSOP
PIC16C54 20 512 - 25 - - RTCC - - - - - 0 12 2,5-6,25 33 18-pin DIP, 18-pin SOIC, 20-pin SSOP
PIC16C54A 20 512 - 25 - - RTCC - - - - - 0 12 2,5-6,25 33 18-pin DIP, 18-pin SOIC, 20-pin QFP
PIC16CR54 20 - 512 25 - - RTCC - - - - - 0 12 2,5-6,25 33 18-pin DIP, 18-pin SOIC, 20-pin SSOP
PIC16C55 20 1K - 25 - - RTCC - - - - - 0 20 2,5-6,25 33 28-pin DIP, 28-pin SOIC, 28-pin SSOP
PIC16C58 20 1K - 25 - - RTCC - - - - - 0 12 2,5-6,25 33 28-pin DIP, 28-pin SOIC, 28-pin SSOP
PIC16C57 20 2K - 72 - - RTCC - - - - - 0 20 2,5-6,25 33 28-pin DIP, 28-pin SOIC, 28-pin SSOP
PIC16CR57A 20 - 2K 72 - - RTCC - - - - - 0 20 2,5-6,25 33 28-pin DIP, 28-pin SOIC, 28-pin SSOP
2º F
AM
ÍLIA
PIC16C58A 20 2K - 72 - - RTCC - - - - - 0 12 2,5-6,25 33 18-pin DIP, 18-pin SOIC, 20-pin SSOP
Taula 3.2. Famílies del PIC16CXX
Gràcies a la tecnologia RISC, vista a l'apartat anterior, no fa que el microcontrolador 16C54amb 512 bytes, per exemple, sigui tant inferior en prestacions que altres microcontroladors,per lo que encara tenen un gran pes en el mercat electrònic.
La família més coneguda és sens dubte la família 16C5X, ja que és la més antiga i es troba enmolts circuits d'innumerables aplicacions econòmiques, on reemplacen a molts circuits lògicsconvencionals.
Aquests circuits són esencialment de cinc tipus diferents, amb variants que afecten la velocitatde rellotge utilitzable i al tipus de ROM interna de programa. Tots els circuits 16C5Xcomparteixen la mateixa arquitectura interna i disposen dels mateixos recursos, amb tamanysvariables en lo que respecta a les memòries RAM i ROM i les línies d'entrada i sortida enparal·lel.
A la segona família, Microchip la qualifica com la família mid-range, lo que es tradueix comrang intermedi. Evidentment, aquests circuits recullen els mateixos conceptes que la família
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
68 Memòria Descriptiva
16C5X. Utilitzen la mateixa arquitectura i el mateix joc d'instruccions, però, a diferència dels16C5X, disponen de més recursos interns, com per exemple, els ports sèrie o inclòs elconvertidor analògic/digital.
3.2.2.5.2.3 Elecció del PIC16C84
Dels diferents microcontroladors que existeixen, i més concretament dels diferents tipus dePIC's que hi han, el PIC utilitzat en el control és un PIC16C84. Aquest disposa d'unes moltòptimes i avançades característiques tècniques i elèctriques, per ser de la família delsPIC16CXX; però aquest és concretament l'escollit per disposar d'una més simple estructurainterna ja que només fàrem ús dels registres interns més generals. Per lo tant, l'elecció delPIC16C84 resulta ser el més econòmic.
3.2.2.5.2.4 El PIC16C84
En el capítol 3 dels Annexes tenim tota la informació sobre el PIC16C84: senyals d'entrada isortida, patillatge, arquitectura interna, registres interns, temporitzadors, memòria, .... i el jocde 33 intruccions a ques es pot programar en llenguatge ensamblador.
En tot cas, de forma resumida expossem les caractístiques tècniques i elèctriques generals delPIC16C84, que són:
- Memòria del programa de 1K, paraules de 14 bits, tecnologia EEPROM.
- Memòria de dades RAM de 36 bytes.
- Memòria de dades EEPROM de 64 bytes.
- Disposició d'una pila de 8 nivells per permetre trucades a subrutines nidificades.
- Té quatre tipus diferents d'interruptors.
- Un joc reduït i senzill de 35 instruccions.
- L'encapsul·lat és de plàstic DIP amb 18 patilles.
- Permet un rang de freqüències de treball fins a 10MHz.
- Disposa de temporitzador (TMR0), i de gós guardià (WDT).
- Té 13 línies de E/S digitals dividides en dos portes ( porta A de 5 línies i porta B de 8 línies ).
- Corrent màxima absorbida per porta: 80 mA en la porta A i 150 mA en la porta B.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
69 Memòria Descriptiva
- Corrent màxima subministrada per porta: 50 mA en la porta A i 100 mA en la porta B.
- Corrent màxima absorbida per línia: 25 mA.
- Corrent màxima subministrada per línia: 20 mA.
- Voltatge d'alimentació (Vdd) ha d'estar entre 2 i 6 V en DC.
- Voltatge de grabació de programa (Vpp) ha d'estar entre 12 y 14 V en DC.
3.2.2.5.3 El Programa
3.2.2.5.3.1 Objectiu
L'objectiu del programa és localitzar la freqüència de la senyal de sortida de l'alternador dinsun marge: fmax ÷ fmín; i extreure'n la seva senyal digital que serà de 8 bits. És a dir, si elcontrol treballa per a una regulació de freqüència de 50 Hz i el sistema requereix uns margesde freqüència de 40 i 60 Hz per ser ajustada novament a 50 Hz, el programa localitzarà lafreqüència entre 256 valors del marge anterior i extreure així una senyal digital que determinael valor del control analògic del variador de freqüència.
Per exemple, si el programa treballa pel marge de freqüències descrit anteriorment, i localitzala freqüència 55:
( ) ( )60 40 55 40 =
256− −
Χ (3.2)
d’on X = 192, i li correspondria una senyal de sortida de: 11000000.
3.2.2.5.3.2 Descripció
Per mesurar les freqüències, utilitzem el mètode de comptar els zeros. Per això, la senyalsenoidal de l'alternador ha de ser transformada a valors on-off, és a dir, quan la senyal es trobien valors negatius aquests passen a ser zeros (off) en l'entrada al PIC, i quan siguin positiuspassen a ser una tensió de 5V (on). Veure l’apartat 3.2.3.4.1.
Per trobar el valor de freqüència, abans haurà de trobar-se dins els seu marge de freqüències aque treballa. Si prenem com a referència l'exemple anterior, la primera freqüència que trobaràserà la màxima, 60 Hz, per tenir menor nombre de zeros que la mínima. Per arribar a aquestafreqüència es necessitaràn un o més comptadors, que anomenàrem seguidors en el programa,per distingir-se del comptador que opera dins el marge. En cas de fer servir més d'un seguidor,

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
70 Memòria Descriptiva
tots excepte l'últim tindràn sempre una extensió de 256 execucions del programa, és a dir, unadurada fins el binari 11111111, i són distingits com a seguidors A. De fet, de seguidors Anomés hi ha un però aquest es va repetint fins un nombre configurat. El seguidor B només n'hiun també però es fa servir tant sols una vegada, ja que es el que troba el valor de l'inici delcomptador ( freqüència màxima, com hem dit abans ).
El fet de necessitar només un seguidor, cas molt poc probable dins els valors que treballem, espodrà inactivar el seguidor A i començar a comptar amb el seguidor B.
El fet de necessitar un o més seguidors ve determinat pels valors de marge de freqüències.Així doncs, per cada cop que es vulgui canviar el seu marge de freqüències, també haurem demodificar la configuració del programa ( veure Memòria de Càlcul, capítol 2 ).
Com observem, el programa ha de declarar diferents configuracions per al bon funcionamentdins el sistema de regulació.
3.2.2.5.3.3 El Programa
Tot seguit veiem el programa, en llenguatge ‘ensamblador’, utilitzat pel control de freqüènciaper microcontrolador:
;-----------------------------------------------------------------; PROGRAMA;-----------------------------------------------------------------
LIST P=16C84, F=INHX8M ; el·lecció del model del PICRADIX HEX ; sistema d'enumeració hexadecimalINCLUDE "16C84.inc" ; s'inclou la definició de regis- ; tres pel PIC
;-----------------------------------------------------------------; Rutina del compilador;-----------------------------------------------------------------
org 0 ; rutina de resetgoto start ; salta a startorg 4 ; rutina de interrupcion
;-----------------------------------------------------------------; Declaració de variables;-----------------------------------------------------------------
ESTAT_COMPT EQU 0x10FREQUENCIA EQU 0x11VALOR_FREQ EQU 0x12FREQ_MAX_A EQU 0x13FREQ_MAX_B EQU 0x14N_SEGUIDOR EQU 0x15
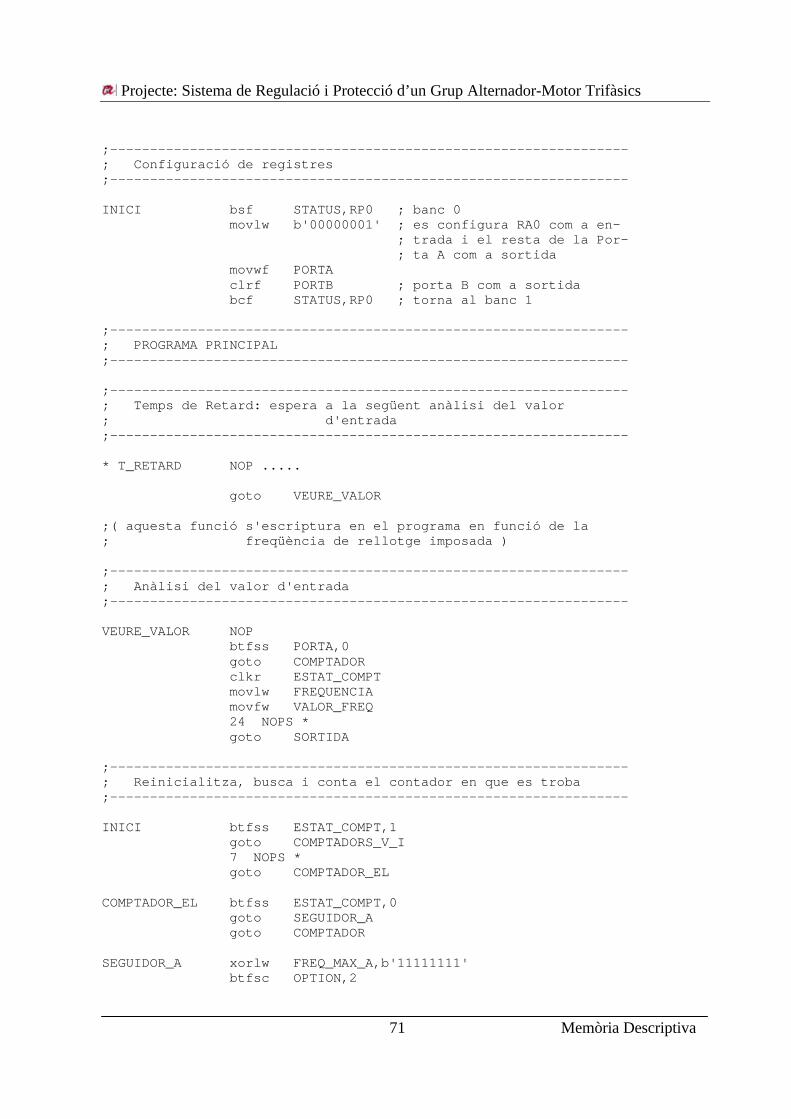
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
71 Memòria Descriptiva
;-----------------------------------------------------------------; Configuració de registres;-----------------------------------------------------------------
INICI bsf STATUS,RP0 ; banc 0 movlw b'00000001' ; es configura RA0 com a en- ; trada i el resta de la Por- ; ta A com a sortida movwf PORTA clrf PORTB ; porta B com a sortida bcf STATUS,RP0 ; torna al banc 1
;-----------------------------------------------------------------; PROGRAMA PRINCIPAL;-----------------------------------------------------------------
;-----------------------------------------------------------------; Temps de Retard: espera a la següent anàlisi del valor; d'entrada;-----------------------------------------------------------------
* T_RETARD NOP .....
goto VEURE_VALOR
;( aquesta funció s'escriptura en el programa en funció de la; freqüència de rellotge imposada )
;-----------------------------------------------------------------; Anàlisi del valor d'entrada;-----------------------------------------------------------------
VEURE_VALOR NOP btfss PORTA,0 goto COMPTADOR clkr ESTAT_COMPT movlw FREQUENCIA movfw VALOR_FREQ 24 NOPS * goto SORTIDA
;-----------------------------------------------------------------; Reinicialitza, busca i conta el contador en que es troba;-----------------------------------------------------------------
INICI btfss ESTAT_COMPT,1 goto COMPTADORS_V_I 7 NOPS * goto COMPTADOR_EL
COMPTADOR_EL btfss ESTAT_COMPT,0 goto SEGUIDOR_A goto COMPTADOR
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' btfsc OPTION,2
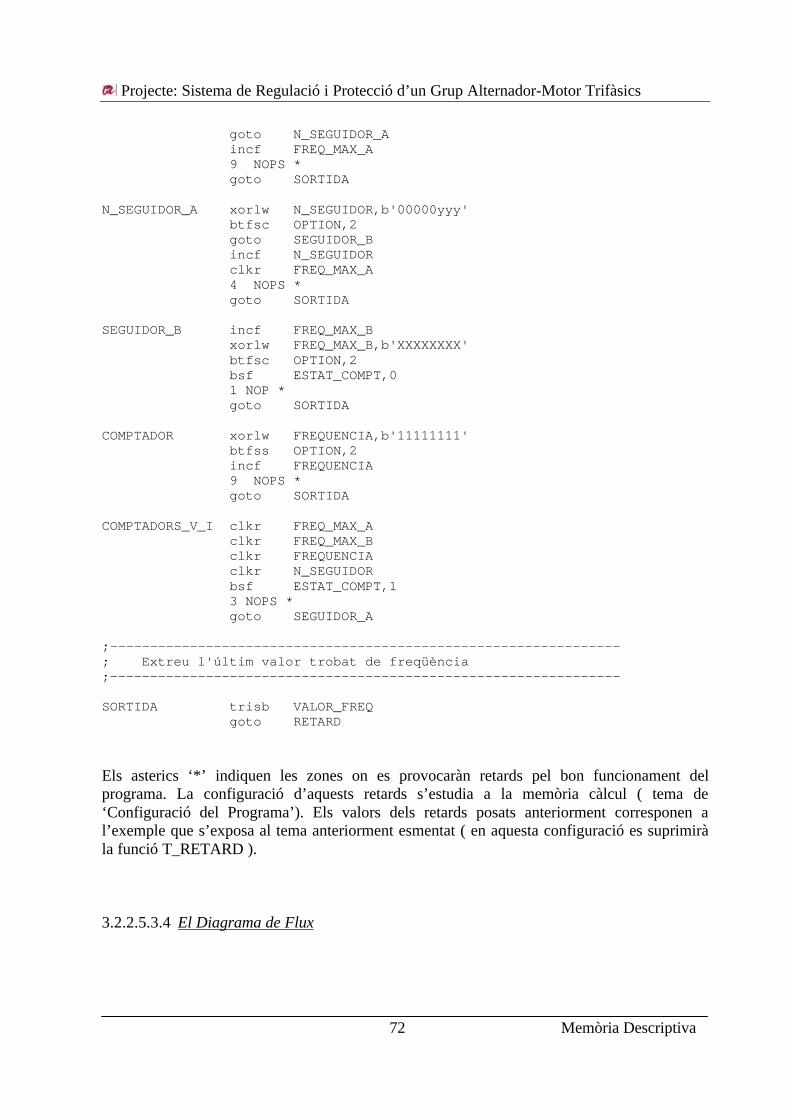
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
72 Memòria Descriptiva
goto N_SEGUIDOR_A incf FREQ_MAX_A 9 NOPS * goto SORTIDA
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' btfsc OPTION,2 goto SEGUIDOR_B incf N_SEGUIDOR clkr FREQ_MAX_A 4 NOPS * goto SORTIDA
SEGUIDOR_B incf FREQ_MAX_B xorlw FREQ_MAX_B,b'XXXXXXXX' btfsc OPTION,2 bsf ESTAT_COMPT,0 1 NOP * goto SORTIDA
COMPTADOR xorlw FREQUENCIA,b'11111111' btfss OPTION,2 incf FREQUENCIA 9 NOPS * goto SORTIDA
COMPTADORS_V_I clkr FREQ_MAX_A clkr FREQ_MAX_B clkr FREQUENCIA clkr N_SEGUIDOR bsf ESTAT_COMPT,1 3 NOPS * goto SEGUIDOR_A
;----------------------------------------------------------------; Extreu l'últim valor trobat de freqüència;----------------------------------------------------------------
SORTIDA trisb VALOR_FREQ goto RETARD
Els asterics ‘*’ indiquen les zones on es provocaràn retards pel bon funcionament delprograma. La configuració d’aquests retards s’estudia a la memòria càlcul ( tema de‘Configuració del Programa’). Els valors dels retards posats anteriorment corresponen al’exemple que s’exposa al tema anteriorment esmentat ( en aquesta configuració es suprimiràla funció T_RETARD ).
3.2.2.5.3.4 El Diagrama de Flux

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
73 Memòria Descriptiva
Figura 3.7. Diagrama de flux del programa
INICI
ENTRADA 1?
DESIGNARL’ÚLTIMA
FREQÜÈNCIATROBADA
INICI DEBÚSQUEDA?
REINICIALITZASEGUIDORS ICOMPTADOR
ESTEM ALCOMPTADOR?
COMPT +1
HA ACABAT EL1º SEGUIDOR?
SEG2 +1
HA ACABAT EL2er SEGUIDOR?
ESTAT EN COMPTADOR
SORTIDA
SEG1
SI
SI
SI
SI
SI
NO
NO
NO
NO
NO
ERAL’ÚLTIM?
Nº SEGUIDOR+1
NO
SI

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
74 Memòria Descriptiva
3.2.2.5.3.5 Les Configuracions
Els valors que s'han de configurar són:
- El nombre de seguidors A:- El registre del seguidor B.- Els retards de les rutes ( els NOPS ).- La circuiteria rellotge *.
En la memòria de càlcul s'estudia com es determinen les diferents configuracions.
* La circuiteria de rellotge no es configura, es dissenya des del començament amb unafreqüència de rellotge elevada, derivada pel marge de freqüències més petit a que podríemtreballar. El fet de quedar-se curts en aquesta freqüència comportaria canviïs en el hardware,per lo tant, ho hem de tenir en compte.
3.2.2.6 La Conversió Digital - Analògic
3.2.2.6.1 El Circuit Conversor
És un dels circuits més típics amb un circuit integrat DAC. El seu esquema és el que veiemrepresentat:
Figura 3.8. Circuit conversor D-A
Es tracta de la interconnexió d'un DAC0808 i un amplificador operacional que té un valor desortida:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
75 Memòria Descriptiva
OA1 A2 A8
V = 10V + + ..... + 2 4 256
×
(3.3)
L'entrada +VREF estableix la tensió de sortida analògica. En el nostre cas, la tensió dereferència és de 10 V i dòna lloc a una tensió de sortida màxima de 10V.
3.2.2.6.2 El DAC0808
3.2.2.6.2.1 Descripció
El DAC0808 és un conversor digital – continu del tipus escalera R/2R. L'esquema següentmostra el seu diagrama de blocs.
Figura 3.9. Diagrama del DAC0808 i patillatge
Figura 3.10. Patillatge del DAC

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
76 Memòria Descriptiva
Aquest dispositiu opera amb una tensió d'alimentació continua Vcc en el rang comprès entre+4'5 V i 5'5 V i una tensió VEE en el rang de -4'5 V a -16'5 V. La ressolució és de 8 bits, ambun temps d'assentament de sortida de 150 ns. El temps d'assentament és el temps que la sortidaanalògica tarda en estabilitzar-se després d'haver-se aplicat l'entrada digital. El DAC0808 potconnectar-se directament a dispossitius TTL o CMOS i la seva precisió és de 0'19%.
3.2.2.6.2.2 Característiques del DAC0808
Les prestacions bàsiques d'un DAC inclueixen la ressolució, pressició linialitat, monotonicitati temps d'establiment, cadascuna de les quals anem a veure a continuació.
- Ressolució. La ressolució del DAC és el recíproc del nombre d'escalons discrets a la sortida.Així que depèn dels n bits de l'entrada. El nombre total d'escalons discrets és igual a 2n -1, onn és el nombre de bits. La ressolució també pot expressar-se com el nombre de bits que esconverteixen.
- Pressició. La pressició és una comparació entre la sortida real d'un DAC i la sortida esperada.S'expressa com un porcentatge de la tensió de sortida a fons d'escala o màxima. Idealment, unabona pressició d'un DAC és +-1/2 del bit menys significatiu.
- Linialitat. Un error lineal és una desviació de la sortida ideal ( una línia recta ) del DAC. Uncas especial és l'error d'offset, que és la tensió de sortida quan els bits d'entrada són tots cero.
- Monotonocitat. Un DAC és monotónic si no produeix escalons invertits quan se li aplicaseqüèncialment el seu rang complet de bits d'entrada.
- Temps d'Assentament. Normalment, el temps d'assentament es defineix com el temps quetarda un DAC en quedar dins de +-1/2 LSB del valor final, quan es produeix un canvi en elcodi d'entrada.
3.2.2.7 Driver del PIC
El circuit del driver per a l'entrada al PIC és el que es mostra representat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
77 Memòria Descriptiva
Figura 3.11. Circuit Driver del PIC
Es basa en un circuit comparador del circuit integrat LM393 que, alimentat per Vdd = +5V iVss = 0V, comporta una sortida de 5 i 0 volts.
3.3 El Regulador de Tensió
3.3.1 Introducció
Com es descriu en l’apartat 2.3.3.3.4, la solució adaptada per la regulació de tensió es basavaen un convertidor cc-cc de topología buck ( topologia reductora ) que treballava com una fontde corrent contínua controlada a partir de la senyal de sortida del grup ( tensió generada ).
Del regulador de tensió, es distingeixen dos parts ben diferenciades: la part d'electrònica depotència, corresponent a la part del convertidor o chopper, i la part del controlador. Tot seguit,s'estudia i es dissenya, sense abstenir-se a altres solucions, les dues parts del regulador detensió.
3.3.2 Estudi i Disseny del Convertidor Buck
3.3.2.1 Introducció
Per l'estudi dels següents apartats del convertidor buck, és convenient recordar abans,l'esquema bàsic del convertidor.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
78 Memòria Descriptiva
Figura 3.12. Esquema bàsic del convertidor buck
En aquest estudi veurem els cicle de treball del convertidor, és a dir, els diferents temps de laconmutació del transistor, les seves gràfiques de tensió i corrent, i el disseny dels componentselectrònics de potència: el díode i el transistor.
La fiabilitat de l'estudi del circuit, en els diferents modes de conducció ( Ton i Toff ), és òptimamentre considerem que el condensador (C) té una capacitat lo suficientment gran per supossarque la tensió de sortida 'VO' es manté en tot moment constant.
3.3.2.2 El Cicle de Treball
En l'estudi o anàlisi dels diferents modes de conducció denominem "valor de la conmutància"o "cicle de treball" (D) a la relació existent entre el temps en que el transistor conmuta (ton) i elperíode 'T' de funcionament en que treballa el convertidor.
ontD =
T (3.4)
Per obtenir aquesta relació és necessari tenir en compte que la potència consumida pelselements reactius ( L i C ) és nul·la ( l'energia emmagatzemada per la bobina durant elsperíodes de saturació del transistor es entregada en la seva totalitat durant el temps en queaquest permaneix tallat ), i que el seu cicle de treball es calcula quan el circuit ha arribat alrègim permanent.
3.3.2.3 Els Diferents Modes de Conducció
Coneixent el terme de cicle de treball, aquest serà útil per l'anàlisi dels diferents modes de

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
79 Memòria Descriptiva
conducció.
- Mode 1: 0 < t < D·T → durant el període de saturació del transistor ( Ton i Doff ).
Figura 3.13. Circuit del convertidor buck en Ton
L' equació de la malla del circuit equivalent és:
S L O L S O0 = - V + V + V V = V - V⇒ (3.5)
i tenint en compte l'expressió de la tensió en la bobina:
LL
diV = L
dt× (3.6)
trobem l'expressió de la corrent en el temps de la conmutació (ton):
S OL 1
V - Vi = I + ×t
L (3.7)
- Mode 2: D·T < t < T → durant el període de tall del transistor ( toff i Don ).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
80 Memòria Descriptiva
Figura 3.14. Circuit del convertidor buck en Toff
Ara, l'equació de la malla passa a ser:
L S L O0 = - V + V V = V→ (3.8)
Amb el que la expressió de la corrent en el temps de la no-conmutació (toff) és:
OL 2
Vi = I - ×(t - D·T)
L (3.9)
3.3.2.4 Les Tensions d’Entrada, Sortida i de la Bobina
Si observem el circuit bàsic del convertidor buck, veurem que la disposició de la fontd'alimentació, la bobina i la càrrega, es troben, totes elles, en sèrie. Això fa, que totes trestensions conjuntes faciliti l'entendiment del seu anàlisi.
La tensió de la font d'alimentació és com sabem VS, però per l'efecte de la conmutació aquestano correspon a la tensió subministrada pel circuit. Sí, en canvi, aquesta tensió pot serrepresentada per la tensió aplicada al diode ( vd ) quan aquest es troba polaritzat inversament(Doff). Si aquesta senyal rectangular 'vd', en la que la seva amplitud depèn del cicle de treball,
d S S
D·Tv = V = V ·D
T× (3.10)
li calculèssim la seva tensió mitja, el seu valor coincidirà amb el valor de tensió de sortida(VO).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
81 Memòria Descriptiva
Figura 3.15. Gràfica de la tensió en el díode
En el temps del cicle de treball, la tensió en la bobina, provoca la caiguda de tensió entre latensió de la font d'alimentació i la tensió de sortida:
L S OV = V - V (3.11)
Quan el temps del període es troba fòra del cicle de treball (toff), la tensió en borns de la bobinali es aplicada tota la tensió continua de la sortida, provocant-li així un canvi de signe en elspols.
Figura 3.16. Gràfica de la tensió en el bobina
La tensió pic a pic de la senyal de la tensió en la bobina VL és equivalent a l'amplitud de latensió d'entrada (VS).
3.3.2.5 La Corrent en la Bobina
La senyal de la corrent de la bobina té la següent forma:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
82 Memòria Descriptiva
Figura 3.17. Gràfica de la corrent en el bobina
Els dos règims de funcionament del circuit comporta que la bobina actuí com una font decorrent:
- quan el circuit es troba dins el cicle de treball ( 0 < t < D·T ) la corrent creix a raó d'unapendent 'm1'.
S O1
V - Vm =
L (3.12)
- quan el circuit es troba fòra del cicle de treball ( D·T < t < T ) aquesta es descàrrega a raód'una pendent 'm2'.
O2
Vm =
L (3.13)
Tenint en compte que l'energia en la bobina vé donada per:
21W = ×L×i
2 (3.14)
I que el balanç d'energies durant un cicle ha de ser nul, es conclou que els increments decorrent per la bobina durant els períodes de tall i saturació de l'element conmutador sónidèntics:
on offi = i∆ ∆ (3.15)
D'aqui s'entén que la senyal de la corrent que passa per la bobina tingui una forma de senyaltriangulada.
3.3.2.6 La Corrent en el Transistor i en el Díode
Les senyals de corrent en el transistor i en el díode són el ressultat de la descomposició de la

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
83 Memòria Descriptiva
senyal de la corrent de la bobina.
Figura 3.18. Gràfica de la corrent en el transistor
Figura 3.19. Gràfica de la corrent en el díode
Com es dedueix, els temps en que es descompossen les senyals vé determinada pel temps quedura la conmutació.
3.3.2.7 L’Arrissat del Condensador
El condensador a més de tenir la capacitat suficient per carregar i mantenir la tensió continuade sortida constant, ha de ser capaç de filtrar el rissat de la tensió en la sortida.
Figura 3.20. Gràfica de la tensió en el condensador

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
84 Memòria Descriptiva
Així doncs, en règim estacionari, la tensió i la corrent mitjanes en el condensador són zero. Lasenyal de la corrent mostra com el condensador es carrega i es descarrega per l'excés i la faltaen la corrent ‘IL’ respecte la senyal de corrent contínua.
Figura 3.21. Gràfica de la corrent en el condensador
Així que, deduïm en la senyal de la corrent del condensador, que l'àrea que delimita la funcióentre t2 i t1 ha de ser la mateixa entre t3 i t2. Integrant la funció entre t2 i t1 tíndrem la variacióde la tensió en el condensador que coincideix amb la tensió de rissat buscada ( si supossemdespreciable la resistència interna del condensador ). L'increment positiu de tensió en l'intervalt2 - t1 coincidirà amb l'increment negativa en l'interval t3 - t2.
3.3.3 Estudi i Disseny del Controlador
3.3.3.1 Introducció
En aquest tema, estudiem el funcionament del controlador escollit pel sistema de regulació detensió; i realitzem, tot seguit, un estudi de cada un dels diferents circuits que el formen part.L'estudi d'aquest circuits comença a partir de la senyal contínua que li arriba de la senyal desortida del generador, i acaba en la senyal de dispar ajustada per la porta del conmutador.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
85 Memòria Descriptiva
Figura 3.22. Diagrama de blocs del controlador
També realitzàrem una visió general d'altres circuits controladors com a solucions que espodien haver adoptat.
3.3.3.2 Funcionament del Controlador
Com es diu en l'apartat 2.3.3.3.4.3 en que desciviem el controlador, el modulador PWMcompara dos senyals ( rampa i error ) dins un interval de valors Vmin÷Vmax dissenyat. Elfuncionament del controlador deriva d'aquest interval de valors.
Des de Vmin fins a Vmax, la senyal d'error ha d'indicar en quin estat nominal es troba elfuncionament de la màquina, és a dir, a quin tant per cent de la càrrega alimenta l'alternador,que es compendrà entre el 0 i el 110% del seu valor nominal. Veiem gràfic:
Figura 3.23. Gràfic de la zona de funcionament en equilibri del controlador
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
86 Memòria Descriptiva
La senyal d'error es situarà en el punt en que es troba funcionant la màquina, a partir de lainformació que li dòna la senyal de mostra. Com observem del gràfic, el marge dels tants percent de càrrega en equilibri no ocuparàn la totalitat de l'interval de valors del modulador ( Vmin
÷ Vmax ), això es degut a la quantitat d'excitació que necessitarà la màquina en buït quecomportarà un cert valor del cicle de treball.
Si recordem el que es deia en l'apartat 2.3.3.2.1 on un augment de la càrrega comportava unacaiguda de la tensió generada i viceversa, entenem perquè la senyal de mostra es conecta al'entrada inversora (Vid-) del circuit amplificador d'error. A més, el disseny d'aquest circuit verenyit per un valor de referència conectat a l'entrada no inversora que ens permetrà ajustar elvalor en que treballa el regulador. En termes generals, ajustàrem el potenciòmetre per 380Vper quan aquest treballi en condicions nominals, i segons el disseny establert en el circuitaquest punt de treball es romandrà pròxim a l'espai ocupat per la línia horitzontal que indica el100% de la càrrega del gràfic anterior, fet que significarà que la regulació treballarà en uneslínies dins l'espai que treballa el PWM que representaràn el 0 i 110 per cent de la càrrega. Dittot això, ens adonàrem de la gran importància que té el circuit amplificador d'error en elcontrolador.
Per explicar l'efecte regulador del controlador, ens imaginem que la màquina es trobatreballant en condicions normals (380V) a un 100% de la càrrega, i que, de sobte, apareix unabaixada del 20% de la càrrega. L'augment de tensió que origina comportarà una baixada de lasenyal de mostra i per efecte una baixada de la senyal d'error, que comportarà un cicle detreball del convertidor buck més curt. L'excitació de la màquina baixa i en ella torna baixar latensió generada. Sota la força inicial que feia baixar la senyal per l'augment de tensió ara lasenyal rep una força que la fa pujar degut a la nova tensió generada, més petita que l'anteriorper reducció del cicle de treball. Enfront a aquestes forces oposades el controlador troba unpunt d'equilibri que es situarà aprop de la línia del 80% del gràfic anterior i que en aquest puntsubministrarà també una tensió de sortida 380V, donant com resposta general l'efecteregulador de tensió.
3.3.3.3 L'Amplificador d’Error
La funció bàsica de l'amplificador d'error consisteix en evaluar les possibles desviacions de latensió de mostra, de forma que actuant sobre el modulador d'amplitud d'implusos (PWM), lasortida retorni, a través de l'element conmutador, al seu valor de règim.
Aquest bloc està basat en un controlador d'acció proporcional ‘P’, el circuit més simpled'amplificador d'error ( veure subapartat posterior ). Aquest circuit és el següent:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
87 Memòria Descriptiva
Figura 3.24. Circuit de l’amplificador d’error
Com pot obsevar-se, les entrades del circuit estan aplicades mitjançant dos senyals: la senyalde mostra 'Vm' ( procedent, com ja sabem, de la tensió de sortida del sistema ) formada per unacomponent contínua a la que se li superposa la senyal variable corresponent a la senyal derissat a regular, i la senyal de referència (Vref), corresponent a una senyal continua pura.D'aquesta forma, la sortida del circuit s'obté com la suma dels efectes produïts per per a cadacomponent.
Enfront a la component contínua de la senyal de mostra, el circuit es comporta com uncomparador. Així, si el valor de la senyal de mostra és menor que la corresponent a la senyalde referència, el circuit tendirà a conmutar a la saturació possitiva. Anàlogament, el circuittendirà a conmutar a la saturació negativa quan el valor de la senyal de referència sigui mésgran que el nivell de contínua de la senyal de mostra.
Figura 3.25. Gràfic representatiu de la senyal d’error

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
88 Memòria Descriptiva
Observem que en t=0 ( IR2=0 ), la sortida de l'amplificador d'error experimenta un valor inicialigual al de la tensió de referència, sent independent de la magnitud contínua de la senyal demostra. Per una altra part, enfront a les variacions corresponents al rissat de la senyal demostra (Vm), el circuit ha de comportar-se, a la freqüència de conmutació, com unamplificador inversor, de la qual la senyal de sortida pren el valor:
( )2O REF m REF
1
RV = V - V + V
R× (3.16)
La presència d’un potenciòmetre en sèrie a la font de tensió contínua de la senyal de referènciafa que tinguem la possibiltat d'ajustar el nivell de regulació que dessitgem pel controlador.Aquest és un motiu prou contundent per no faltar la presència d'un potenciòmetre en aquestaubicació en el disseny del circuit controlador.
L'Amplificador com a Controlador PID
En molts casos, el circuit de l'amplificador d'error té un disseny més robust que alcorresponent a un simple controlador 'P'. Aquest pot ser PD, PI o PID.
- PI ( proporcional integratiu ): aquest controlador augmenta el guany i millora el temps deresposta de la senyal; és a dir, el fa més ràpid. Té l'inconvenient que, al moment, tambéaugmenta el valor d'amortiguament i així la seva inestabilitat.
- PD ( proporcional derivatiu ): té l'objectiu de reduïr el seu temps de resposta quan la senyales troba fòra dels marges d'estabilitat de fase establerts.
- PID ( proporcional derivatiu i integratiu ): en termes analítics d'electrònica de control, el PDaporta un 'zero' en el sistema, mentre que el 'PI' aporta un 'pol'. El controlador PID comportauna funció de transferència de pols i zeros pel disseny adequat de la senyal de control des deles dues vessants.
En termes generals, el que pretén un controlador PI-D és adequar la senyal d'error a uns valorsde qualitat exigits en el circuit de control.
Ara bé, el disseny d'aquests controladors són exclussius per models de control de petita senyal.Correspon al cas més habitual de controlador 'PI'; que, per circuits de freqüència elevada lasenyal d'error a controlar ha de contenir-se dins uns marges acceptables d'estabilitat. Eldisseny d'aquest tipus de controlador l'anomenem 'model de la petita senyal'.
En l'estudi del controlador pel nostre sistema, entenem que el model a seguir no correspon aun model de petita senyal pel següents motius rellevants:
- Les variacions de la càrrega en l'alternador són els derivatius dels canvis de la senyal d'error.
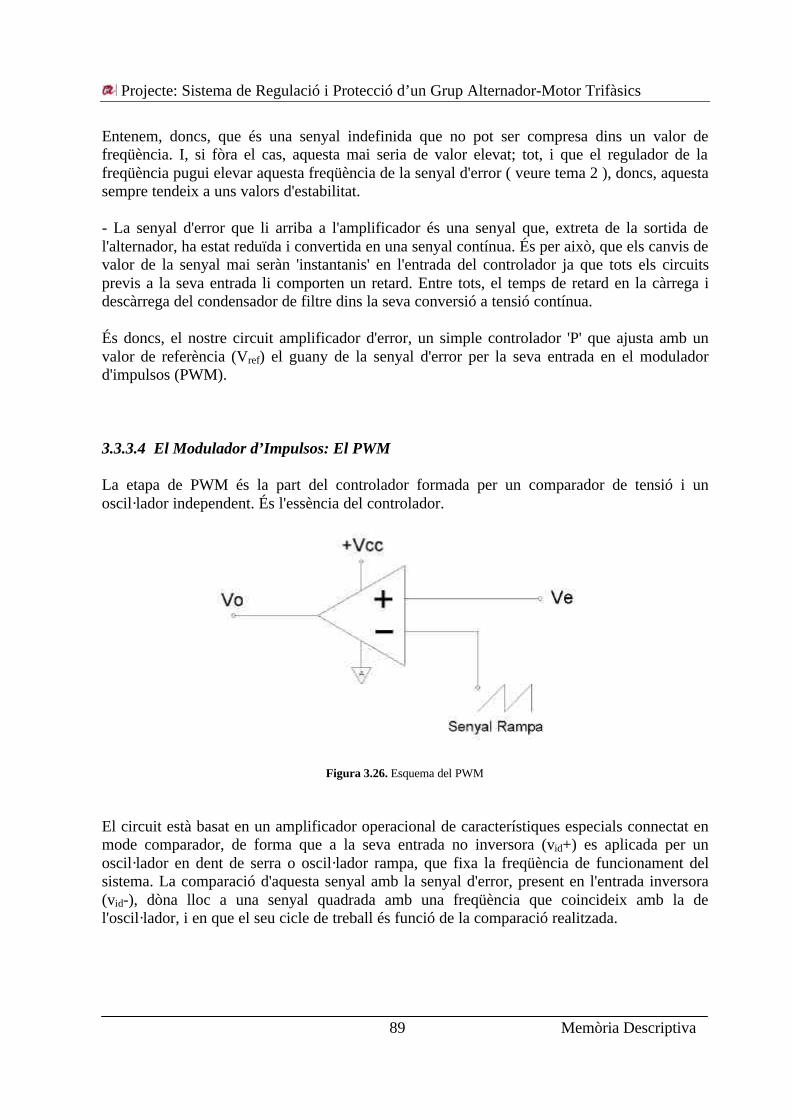
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
89 Memòria Descriptiva
Entenem, doncs, que és una senyal indefinida que no pot ser compresa dins un valor defreqüència. I, si fòra el cas, aquesta mai seria de valor elevat; tot, i que el regulador de lafreqüència pugui elevar aquesta freqüència de la senyal d'error ( veure tema 2 ), doncs, aquestasempre tendeix a uns valors d'estabilitat.
- La senyal d'error que li arriba a l'amplificador és una senyal que, extreta de la sortida del'alternador, ha estat reduïda i convertida en una senyal contínua. És per això, que els canvis devalor de la senyal mai seràn 'instantanis' en l'entrada del controlador ja que tots els circuitsprevis a la seva entrada li comporten un retard. Entre tots, el temps de retard en la càrrega idescàrrega del condensador de filtre dins la seva conversió a tensió contínua.
És doncs, el nostre circuit amplificador d'error, un simple controlador 'P' que ajusta amb unvalor de referència (Vref) el guany de la senyal d'error per la seva entrada en el moduladord'impulsos (PWM).
3.3.3.4 El Modulador d’Impulsos: El PWM
La etapa de PWM és la part del controlador formada per un comparador de tensió i unoscil·lador independent. És l'essència del controlador.
Figura 3.26. Esquema del PWM
El circuit està basat en un amplificador operacional de característiques especials connectat enmode comparador, de forma que a la seva entrada no inversora (vid+) es aplicada per unoscil·lador en dent de serra o oscil·lador rampa, que fixa la freqüència de funcionament delsistema. La comparació d'aquesta senyal amb la senyal d'error, present en l'entrada inversora(vid-), dòna lloc a una senyal quadrada amb una freqüència que coincideix amb la del'oscil·lador, i en que el seu cicle de treball és funció de la comparació realitzada.
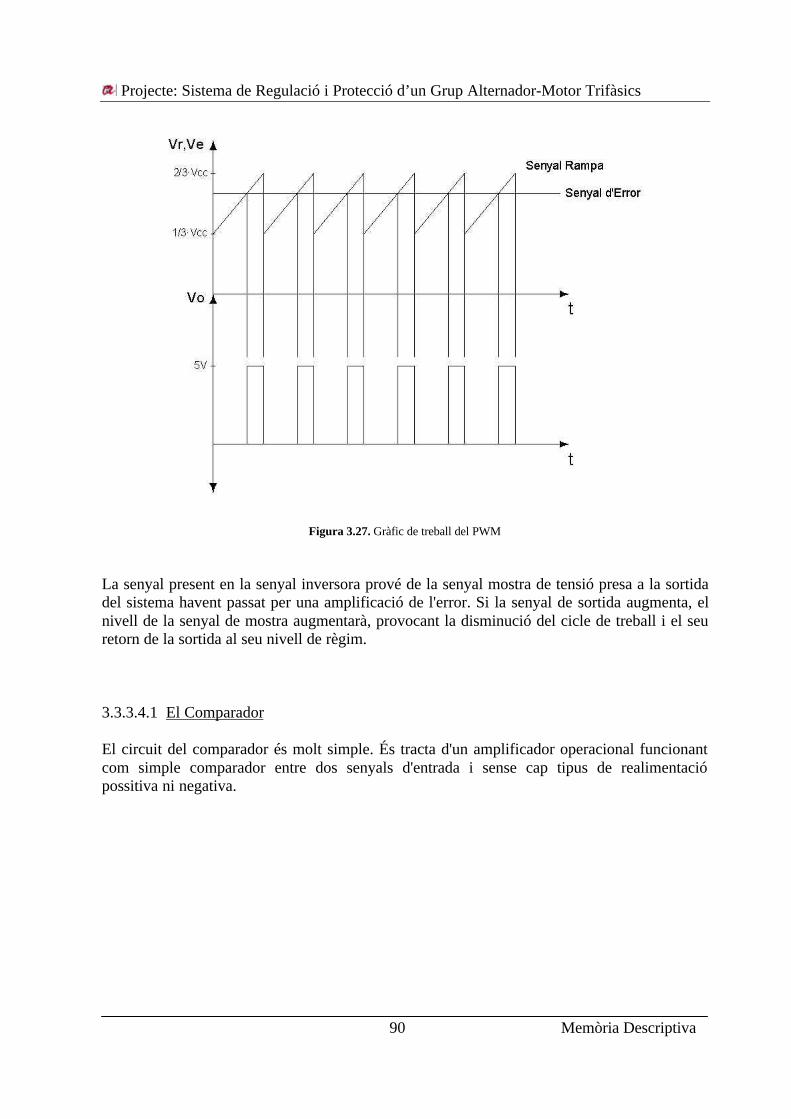
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
90 Memòria Descriptiva
Figura 3.27. Gràfic de treball del PWM
La senyal present en la senyal inversora prové de la senyal mostra de tensió presa a la sortidadel sistema havent passat per una amplificació de l'error. Si la senyal de sortida augmenta, elnivell de la senyal de mostra augmentarà, provocant la disminució del cicle de treball i el seuretorn de la sortida al seu nivell de règim.
3.3.3.4.1 El Comparador
El circuit del comparador és molt simple. És tracta d'un amplificador operacional funcionantcom simple comparador entre dos senyals d'entrada i sense cap tipus de realimentaciópossitiva ni negativa.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
91 Memòria Descriptiva
Figura 3.28. Circuit comparador
L'amplitud de la senyal quadrada en la sortida ve marcada pel diferencial de tensió en els pinsd'alimentació de l'amplificador operacional: Vdd i Vss. En el nostre cas, la tensió negativa estroba connectada a terra; amb la qual cosa, farà que marqui 0 volts en la sortida delcomparador quan en l'entrada la senyal de mostra o d'error ( connectada a l'entrada inversora )superi a la senyal de rampa ( connectada a l'entrada no inversora ). En el cas contrari, la sortidadel comparador serà de +Vdd volts.
La ubicació d'una resistència R entre la sortida de l'amplificador i la tensió que l'alimentacomporta el pas permanent de corrent dins amplificador tant aquest estigui a cero o a +Vdd detensió en la sortida. El valor de R ha de ser calculat, i sol ser alta. El pas permanent de correnten l'amplificador dòna millor qualitat a la sortida del comparador.
3.3.3.4.2 Oscil·lador Rampa
Hi han diferents circuits capaços de generar la senyal rampa que dessitgem. La opció escollidaes basa en un circuit amb un c.i. timer LM555, ja que aquest tipus de circuit integrat poden serconnectats en modes de diferents multivibradors, i entre els quals, en mode de senyal rampa.Les seves característiques tècniques i elèctriques del c.i. les vorem tot seguit.
Més endavant, apartat 3.3.3.6.4, veurem una altra solució de senyal rampa basada enamplificadors operacionals.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
92 Memòria Descriptiva
3.3.3.4.2.1 El Timer LM555
3.3.3.4.2.1.1 Descripció dels C.I. 555
El circuit integrat (c.i.) LM555 és un c.i. de la família dels timers 555. Els 555 són moltconeguts i ampliament utilitzats en el món de la electrònica, ja que la seva versatilitat els fanútils en un gran nombre d'aplicacions.
Dins dels sistemes d'alimentació conmutats, el circuit per a la modulació de l'amplitudd'impulsos pot estar basat, en certes ocasions, en l'ús d'aquests circuits integrats. No obstant,encara que els fabricants inclouen en els seus catàlegs sistemes conmutats d'aquests tipus, laseva utilització no està extensa, ja que la seva resposta depen de la constant de temps decàrrega i de descàrrega d'un condensador. Per una altra part, la simplicitat d'aquest mètode,unit al seu baix cost, permeten realitzar assatjos de laboratori, que en ocasions, resultenaltament pedagògics.
En general, les aplicacions més importants d'aquest integrat són les següents: temporització deprecisió, generador d'impulsos, temporitzadors seqüèncials, generadors de temps de retard,modulació d'ample d'impulsos (PWM), modulació per posició d'impulsos, generadors linialsde rampa, ...
3.3.3.4.2.1.2 Característiques
Poden resumir-se de la següent forma:
- Marge de temps de temporització: des de microsegons fins a hores.- Cicle de treball ajustable.- Potència màxima de sortida 600 mW, per una corrent màxima de sortida de 225 mA.- Tensions d'alimentació compresses entre 5 i 18 V, segons el tipus i fabricant.- Amb Vcc = 5 V; la sortida és compatible amb T.T.L.- Estabilitat enfront a variacions de temperatura = 0'005% ºC.- Càrrega directament connectable entre la sortida i Vcc o sortida i massa.
En l'actualitat, és disposa d'aquest circuit fabricat en tecnologies bipolar i CMOS, oferintaquesta última la avantatge d'un menor consum i una major velocitat de resposta. Aquestintegrat es subministra normalment en càpsula dual in line de vuit pins (DIP-8), no obstant, elcircuit també està disponible en càpsula dual in line de 14 pins i càpsula metàl·lica TO-99 devuit patilles.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
93 Memòria Descriptiva
3.3.3.4.2.1.3 Diagrama de Blocs
Els diagrames de blocs corresponents a la tecnologia és el que veiem representat:
Figura 3.29. Esquema intern i patillatge del LM555
La tecnologia bipolar s'obté per substitució del transistor CMOS; en tot lo altre es manté igual.
Com podem observar, el 555 està format per dos amplificadors operacionals d'entrada,connectats en mode comparador. Les seves entrades accessibles reben els noms de threshold (umbral ), control voltage ( tensió de control ) i trigger ( dispar ), respectivament. La sortidad'ambdós aplicadors estan connectats a les entrades d'un multivibrador bi-estable ( R-S ), de laqual la seva sortida de reset ( posta a zero ) és accessible des de l'exterior. La sortida directadel biestable, està connectat a un buffer de sortida i al drenador d'un mosfet ( o colector d'enbipolar, dependent de la tecnologia ). En ambdós cassos, la sortida accessible d'aquesttransistor rep el nom de discharge ( descàrrega ).
3.3.3.4.2.2 Circuit de la Senyal Rampa
Si s'uneixen les entrades de dispar (pin 2) i umbral (pin 6), el circuit es disparà a sí mateix,comportant-se com un generador d'ones quadrades. Aquest és un circuit típic en lesaplicacions dels circuits integrats 555. Ara bé, si també s'uneix també la sortida de descarrega(pin 7) aconseguim una senyal rampa en la rama que els uneix, per efecte que provoca lapendent en carregar-se el condensador C2.
El següent circuit representa aquest tipus d'aplicació:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
94 Memòria Descriptiva
Figura 3.30. Circuit de la senyal rampa
Si observem com era el circuit interior del 555, ens adonarem que la dent de serra es situaràentre 1/3 i 2/3 de la tensió contínua que l'alimenta: 1/3·Vcc ÷ 2/3·Vcc.
El transistor Q està configurat com una font de corrent constant de manera que la corrent quecedeixi serà constant i, en conseqüència, també ho serà el període d'oscil·lador. Com es potapreciar, existeix una dependència de la freqüència d'oscil·lador amb la tensió d'alimentació.Però això, no té major transcendència doncs el funcionament de la font és relativamentinsensible a les variacions en freqüència de conmutació. Això s'haurà d'observar en la pràctica,actuant directament sobre el potenciòmetre (P). També el valor de la freqüència vindràdeterminat pel valor del condensador (C) evidentment.
3.3.3.5 Driver i Conmutador
Tot i que el transistor i el díode corresponguin a la part de potència, com a elements deconmutació, el seu funcionament es estudiat aquest apartat com a sistema d’interrelació de lesdues parts del sistema regulador.
***
El driver és el circuit encarregat d'adequar la senyal procedent del modulador d'amplitudd'impulsos (PWM), de forma que la senyal en el driver quedi modificada perquè pugui seraplicada de forma efectiva a l'element conmutador; del qual el seu valor ja es coneix. D'aquíentenem que driver valgui a dir "conductor" en català.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
95 Memòria Descriptiva
El driver pot obtenir-se mitjançant la combinació adequada de components discrets. Existeixendiferents menes de circuit que funcionen com a drivers. El nostre exemple, correspon a uncircuit senzill del qual el seu anàlisi s'explica a continuació.
Figura 3.31. Circuit driver i conmutador ‘darlington’
Com pot observar-se, el circuit està format pel diode de potència (D), un conjunt Darlington,integrat pels transistors Q1 i Q2, que asseguren un alt guany en corrent i un tercer transistor decomandament Q3, sobre el que actua directament la senyal de sortida del modulador d'ampled'impulsos. El funcionament d'aquest circuit, dissenyat per a convertidors reductors, potressumir-se de la següent forma:
En l'instant inicial, supossant una tensió de sortida igual a zero, el nivell de tensió en la base deQ3 ha de tenir el valor suficient per permetre que la corrent que flueix fins el transistor portiaquest a la zona de conducció. En aquest instant, els transistors Q2 i Q1, polaritzats a través dela resistències R1, R2 i R3, entren en saturació, polaritzant en inversa el diode D1 i permetenque circuli corrent a través de la bobina del filtre. Com a conseqüència d'això, la tensió desortida augmenta i el llaç de control, a través del PWM, introdueix un flanc de baixada en labase de Q3, tallant-lo. Aquest nou estat del transistor impedeix que circuli corrent a través deles resistències i produeix el tall instantani de Q2 i Q1, quedant-se, per tant, el convertidor aïllatde la font primària d'entrada (VE). Durant aquest interval, D1 queda polaritzat directament ipermet, al tancar el circuit, recuperar part de l'energia emmagatzemada en la bobina. El règimpermanent s'arriba a aconseguir després d'uns quants cicles de conmutació, dependent delvalor dels components del filtre.
En el disseny de circuits driver, implementats mitjançant components discrets, és necessaritenir en compte factors tals com el guany en corrent (β), VCEsat i els valors màxims admissibles

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
96 Memòria Descriptiva
de corrent (ICmax) de cada transistor. En el cas d'optar per la utilització d'un circuit integrat decontrol, tots els components del driver, excepte si s'utilitza un transistor exterior, estanintegrats en el xip de llur circuit integrat.
3.3.3.6 Altres Solucions al Controlador
3.3.3.6.1 Introducció
En el mercat electrònic hi han circuits integrats que configuren el model de controladorestudiat. Aquests són, per exemple, els c.i. LM78S40 i LH1605 que, tot seguit, s'estudiaran,així com també el c.i. 555 pot ser utilitzat com a model de controlador, que també seràestudiat.
Al marge dels diferents models de controladors que es tracten, estudiem també l'oscil·ladorrampa amb amplificadors operacionals com alternativa a l'ús del c.i. LM555.
3.3.3.6.2 Controlador amb el C.I. LM78S40
3.3.3.6.2.1 Descripció
Aquest circuit integrat, protegit externament mitjançant una càpsula de plàstic DIP de 16patilles,
Figura 3.32. Patillatge del LM78S40
forma un subsistema constituït pels blocs necessaris per implementar reguladors deconmutació. Amb objecte d'aconseguir la màxima flexibilitat amb el mínim nombre decomponents externs, el circuit integrat està dissenyat de forma que els diferents blocs no estan

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
97 Memòria Descriptiva
interconnectats, augmentant-se, per tant les possibilitats de disseny.
És així, com les possibilitats de disseny d'aquest circuit integrat fan que pugui ser aplicat pelsdiferents tipus de convertidors cc-cc: reductors, elevadors i elevadors-reductors, entre altrestipus de circuits.
Independentment del tipus de topologia aplicada, sempre es parteix del primer bloc funcional,per obtenir les diferents configuracions. Per altra part, és possible afegir circuiteria adicional,com els diferents modes d'arranc, proteccions contra contra sobrecorrent, etc. Aquestsdispossitius adicionals no formen part de l'integrat i són específics de cada tipus de regulador.
En la següent representació mostra el diagrama funcional per blocs, amb l'assignació de lespatilles:
Figura 3.33. Esquema de blocs del LM78S40
Els blocs que formen part de l'integrat són els següents:
- Tensió de referència compensada en temperatura. Vref = 1'25 V.- Oscil·lador controlat per corrent. Marge de freqüència de 100 Hz a 100 kHz.- Limitació de corrent compensada en temperatura ( sense Ipk ).- Circuiteria lògica de conmutació. Sincronitzat en reset per flanc de baixada (down slope).- Conmutació de sortida: Imax 1 A darlington. Ampliable externament. Tensió de saturacióaproximada (Vsat) 1'2 V.- Comparador d'alt guany apte per a funcionar com PWM.- Diode volant. Imax: 1 A. Tensió directa (Vf) de 1'2 V ( aconsellable substituir per diodeshottky ).- Amplificador operacional amb realimentació asimètrica. Guany de tensió 250. Sortidacurtcircuitable. Slew rate 0'6 V/µs.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
98 Memòria Descriptiva
3.3.3.6.2.2 Teòria de Funcionament
L'oscil·lador intern genera la senyal de porta que controla l'estat on-off del transistorconmutador. La freqüència de sortida d'aquest oscil·lador es fixa mitjançant la connexió d'uncondensador exterior (CT). Per una part, el cicle de treball de l'oscil·lador està fixatinternament pel valor de 6/7 i pot ser modificat pel dispositiu de mesura de corrent de pic (Ipk).Aquest, medeix la corrent a través del transistor conmutador mitjançant una resistència externade baix valor Rsc i pot modificar l'interval ON del conmutador. La tensió nominal d'activacióés de 0'3V. La tensió de referència (1'25V) subministra una tensió estable de referència ambrespecte a la tensió de mostra, segons la configuració.
El comparador pot inhibir, mitjançant el seu basculament, la senyal de dispar subministrat perl'oscil·lador, tallant el transistor de conmutació quan la sortida és massa alta. En efecte, elcircuit efectua dos controls:
1- detecció de la sobrecorrent; la correcció s'efectua per disminució de l'interval ON.
2- detecció de sobretensió; en aquest cas, la correcció s'efectua pel tall del transistor deconmutació.
Aquest comparador pot funcionar com PWM si la senyal de rampa, generada per l'oscil·lador,es compara amb la senyal d'error obtinguda mitjançant la conexió de l'amplificadoroperacional disponible ( llaç de realimentació mostrant la tensió de sortida, és a dir, controldirecte del cicle de treball ).
El 78S40 pot operar al marge de tensions d'entrada de 2'5 V fins a 40 V, soportant fins a 1'5 Ade pic. Per obtenir corrents i tensions superiors a les especificades han d'afegir-se,externament, un transistor i un diode.
3.3.3.6.3 Controlador amb el C.I. LH1605
3.3.3.6.3.1 Descripció
El CI LH1605 és el primer d'una família de reguladors de conmutació d'alt rendimentdissenyats per simplifiicar la conversió de potència, al mateix moment que es minimitzen lespèrdues.
Pot entregar com a corrent de sortida de forma contínua fins 5A i operar amb un ampli margede tensions d'entrada i de sortida. En el seva connexió clàssica com regulador de tensió step-down, únicament requereix de quatre elements de connexió externa: una resistència, doscondensadors i un inductor o bobina (coil). El dispossitiu està protegit externament mitjançantuna càpsula T03, estàndard de 8 pins, que conté una patilla de tensió de referència percompensació de temperatura, un amplificador d'error, un modulador d'ample d'impuls (PWM)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
99 Memòria Descriptiva
de freqüència programable i un diode volant de conmutació d'alta corrent.
Figura 3.34. Patillatge del LH1605
3.3.3.6.3.2 Teoria de Funcionament
El modulador d'ample d'impulsos de l'integrat LH1605 esta integrat pel següent diagrama deblocs:
Figura 3.35. Esquema de blocs del LH1605
Opera a la freqüència determinada pel valor d'un condensador connectat externament (Ct), quevaria el cicle de conmutació de dos transistors en configuració Darlington, d'acord amb la

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
100 Memòria Descriptiva
realimentació aplicada en la patilla 3.
Per obtenir una precissa, la diferència entre la tensió de mostra i la tensió de referència internaés amplificada, originant-se una tensió d'error que varia a raó inversa amb la senyal derealimentació. Aquesta tensió d'error és comparada amb una senyal periòdica en rampa,obtinguda a través de Ct per una corrent constant que subministra l'oscil·lador intern. Lasortida del comparador és alta fins que la rampa excedeix la tensió d'error.
La sortida del comparador es combina lògicament amb el pols de borrat creat per l'oscil·ladordurant la descàrrega de Ct, lo que produeix una senyal de comandament de conmutaciófreqüència constant, on els seus flancs de pujada coincideixen amb els de baixada de borrat.S'observa com el pols de borrat del oscil·lador és més curt que el temps de retard combinat dela senyal de comandament del buffer i el de conmutació del transistor. El LH1605 potfuncionar al 100% de duració del cicle, amb una tensió de realimentació suficientment petitaen la patilla 3.
3.3.3.6.4 Oscil·lador Rampa amb Amplificadors Operacionals
Aquest circuit bàsic de senyal rampa és el que veiem representat:
Figura 3.36. Circuit oscil·lador rampa amb amplificadors operacionals
La part del circuit corresponent a la sortida VO':

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
101 Memòria Descriptiva
Figura 3.37. Circuit de senyal d’ona quadrada
Es tracta d'un multivibrador estable ( observem la seva realimentació positiva), que genera a laseva sortida una senyal quadrada.
Figura 3.38. Gràfic d’ona quadrada
Observem que l'amplitud d'aquesta senyal és la corresponent al diferencial de la tensió del'alimentació de l'amplificador operacional.
La segona part del circuit serà corresponent a la següent representació:
Figura 3.39. Circuit integrador

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
102 Memòria Descriptiva
Aquesta part del circuit comporta una integració de la senyal quadrada VO'; amb la qual cosa,aquesta senyal Vo' passa a ser una senyal triangular.
Figura 3.40. Gràfic de la senyal triangular
De període:
31 1 2
3 1 1 2
R4×R ×C ×RT = f =
R 4×R ×C ×R⇒ (3.17)
La sortida de l'integrador està connectada a l'entrada del multivibrador; aquest tipus derealimentació comporta la transmissió de forma permanent i en llaç tancat, sense la necessitatde cap senyal exterior, de senyals per la transició d'estats. Així com, quan la senyal triangulararriba a un punt màxim de canvi d'estat del multivibrador aquest canvia d'estat i provoca elcanvi de pendent en l'altre.
L'efecte rampa o dent dentada s'aconsegueix per la presència d'una tensió negativa '-VR' enl'entrada no inversora de l'amplificador operacional del circuit integrador.
Figura 3.41. Gràfic de la senyal rampa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
103 Memòria Descriptiva
Les pendents 'm1' i 'm2' venen determinades pel valor de la tensió negativa (VR):
CC R CC R1 2
V - v -V - vm = i m =
R×C R×C (3.18)
És important observar com l'augment d'una pendent, per la alteració de -VR, provoca unareducció en l'altre. Això comporta que el valor de -VR no altera el temps del període (T)dissenyat en el circuit.
La ubicació en sèrie d'un potènciometre amb la tensió negativa permetrà jugar amb els valorsd'aquestes pendents.
3.3.4 Semiconductors de Potència
3.3.4.1 El Transistor de Potència
L'avanç en la tecnològia de la fabricació de components discrets de conmutació ha fet millorarmolt les característiques i resposta d'aquests dispositius. Sota aquest aspecte, els transistors,tant bipolars com unipolars, o inclús combinacions d'aquests, ocupen en aquest moment unlloc important com interruptors de potència, substituïnt a components específics, com eltiristor, ja que permeten treballar a freqüències de conmutació molt elevades.
Els diferents tipus de transistors que es poden en aplicacions de conmutació per a granpotència són:
- Transistors de potència bipolars.- Transistor Darlington- Transistor unipolars: FET, VMOS, ...- Transistors híbrids: - Bimos. - Transistor de porta aïllada (IGT). - Transistor d'inducció estàtica (SIT). - Dispositius inteligents de potència.
De tots ells, estudiàrem el transistor de potència bipolar i el transistor darlington per ser elstransistors escollits en el disseny del convertidor buck.
3.3.4.1.1 El Transistor Bipolar
El principi bàsic de funcionament del transistor bipolar és que la corrent principal o corrent delcolector, ja sigui NPN o PNP, es controla mitjançant la corrent base del mateix transistor.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
104 Memòria Descriptiva
Figura 3.42. Representació d’un transistor bipolar com a interruptor
En aplicacions de potència, aquests elements treballen generalment en règim de conmutació,controlant una potència elevada, a partir de les senyals de baix nivell introduïdes en la sevabase.
La desavantatge que presenta la utilització d'aquests components com interruptors, és la sevaincapacitat de soportar valors elevats de tensió inversa, ja que condueixen en un únic sentit,per aixó és necessari recòrrer a circuits adicionals de protecció que impedeixen l'acciódestructiva d'aquestes tensions.
En la següent representació es mostra un circuit típic que permet realitzar el test deconmutació ( normalment, aquest circuit test sol sortir en els catàlegs subministrats pelsfabricants ).
Figura 3.43. Representació dels temps de conmutació d’un transistor
VCC
IC
IB1
IB2
0

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
105 Memòria Descriptiva
El circuit inclou la ona de sortida, obtinguda a partir d'una sental de ona quadrada d'entrada (observem que per augmentar la velocitat de conmutació, el final del pols té una polaritatnegativa ) i els paràmetres que caracterítzen al transistor de conmutació.
Aquests són els següents:
- td ⇒ Temps de retard ( delay time ).- tr ⇒ Temps de pujada ( rise time ).- ts ⇒ Temps d'emmagatzament ( storage time ).- tr ⇒ Temps de caiguda ( fall time ).
Evidentment, és necessari efectuar l'elecció del transistor, tenint en compte a més les següentscaracterístiques:
- VCEmax i ICmax ⇒ Tensió i intensitat màxima de colector.- hFE o β ⇒ Guany estàtic de corrent.
Aquest paràmetre arriba a tenir especial importància en el dimensionat del circuit de contro (driver ). A mesura que augmenta la potència nominal del transistor, hFE disminueix, arribantfins i tot a estar per sota de 10.
3.3.4.1.2 El Transistor Darlington
Aquest dispositiu està format bàsicament per dos transistors bipolars. Veiem representació delcircuit:
Figura 3.44. Representació d’un transistor darlington
El primer d'ells controla al segon, de forma que es garantitza una elevada β del conjunt i, pertant, un augment considerable de la potència de conmutació. Gran part dels elements deconmutació en els reguladors actuals utilitzen aquesta configuració. Donada la tendènciaactual, el par Darlington sol subministrar-se en forma de mòdul incluïnt els elements deprotecció necessaris. Aquesta solució constitueix una avantatge adicional, doncs redueix el
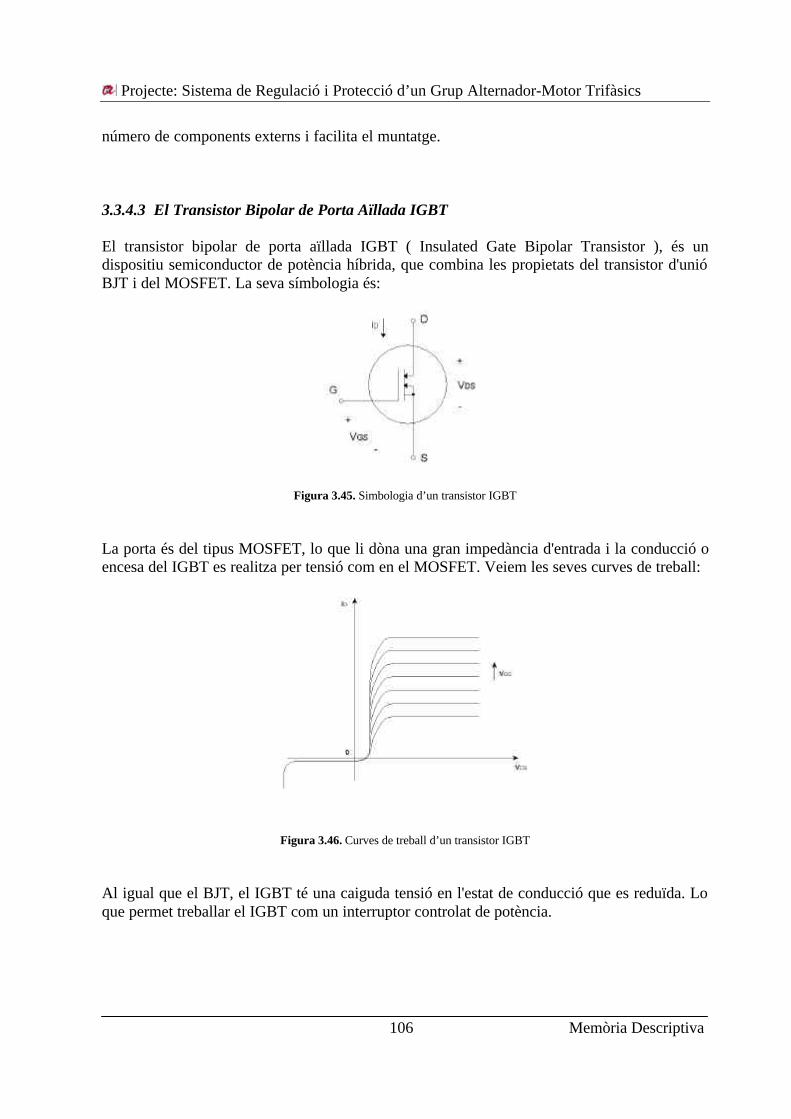
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
106 Memòria Descriptiva
número de components externs i facilita el muntatge.
3.3.4.3 El Transistor Bipolar de Porta Aïllada IGBT
El transistor bipolar de porta aïllada IGBT ( Insulated Gate Bipolar Transistor ), és undispositiu semiconductor de potència híbrida, que combina les propietats del transistor d'unióBJT i del MOSFET. La seva símbologia és:
Figura 3.45. Simbologia d’un transistor IGBT
La porta és del tipus MOSFET, lo que li dòna una gran impedància d'entrada i la conducció oencesa del IGBT es realitza per tensió com en el MOSFET. Veiem les seves curves de treball:
Figura 3.46. Curves de treball d’un transistor IGBT
Al igual que el BJT, el IGBT té una caiguda tensió en l'estat de conducció que es reduïda. Loque permet treballar el IGBT com un interruptor controlat de potència.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
107 Memòria Descriptiva
Figura 3.47. Representació de la conmutació d’un transistor IGTB
La velocitat de conmutació és significantment més petita que el MOSFET i de l'ordre del BJT.Existeixen en el mercat IGBT de 2000V, 3000A i que són molt superiors als transistors d'unióBJT.
3.3.4.2 El Díode de Potència
El díode semiconductor és un dispositiu electrònic compost per una unió PN conectada a dosterminals ( ànode i càtode ).
Figura 3.48. Simbologies d’un díode
Quan l'ànode es polaritza positivament respecte el càtode, permet el pàs de corrent, oposant-seuna baixa diferència de potencial entre els seus terminals ( polarització directa ). Quan el díodees polaritza en inversa ( ànode negatiu respecte a càtode ), aquest ofereix una alta resistència alpas de la corrent, augmentant la tensió entre els seus borns.
P NA
A
A
K
K
K

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
108 Memòria Descriptiva
Figura 3.49. Curva de treball d’un díode
on:
- VV ⇒ Tensió umbral o de difusió.- IF ⇒ Corrent directe o de conducció.- IR ⇒ Corrent inversa de saturació.- rd ⇒ Resistència dinàmica de saturació:
Fd
F
? vr =
? i (3.19)
En els díodes de silici, la caiguda de tensió en conducció és de l'ordre de 1 volt a la correntnominal del diode, mentres que en la polarització inversa, la corrent IS, dependent de latemperatura, és de l'ordre de cent mil vegades menor que Id.
En les fonts d'alimentació conmutades com la nostra, és necessari dispondre de díodes que nonomés siguin capaços de conduir decenes d'ampers i de bloquejar tensions d'uns quantscentenars de volts, sino que, a més, la seva resposta ha de realitzar-se dins uns límits de tempsmolt petits ( de l'ordre de nanosegons ), és a dir, el temps de conmutació ha de sersuficientment petit, per a que aquest no sigui significatiu en el període de conmutació.
La velocitat de resposta d'un dispositiu d'aquestes característiques pot ser estimada en funcióde diversos paràmetres. Un d'ells, potser el més important, és el temps de recuperació inversa(trr), definit com el temps que transcorre des del moment en que la corrent passa a ser inversa,fins que descendeixi al 10% del seu valor de pic. En el moment en que el díode es polaritzadirectament, no existeixen portadors majoritaris presents en la unió, per tant, la caiguda detensió directa pot ser inicialment elevada. Al tenir lloc una modulació de conductivitat pergeneració de càrrega, aquesta caiguda de tensió disminueix ràpidament a un valor estable. Elseu valor de pic és conegut com una tensió de recuperació directa (Vfr), mentres que el seutemps transcorregut des de que aquesta tensió arriba al 10% del seu valor estable fins al 100%
VF(V)
IF(mA)
VR(V) IR
VY
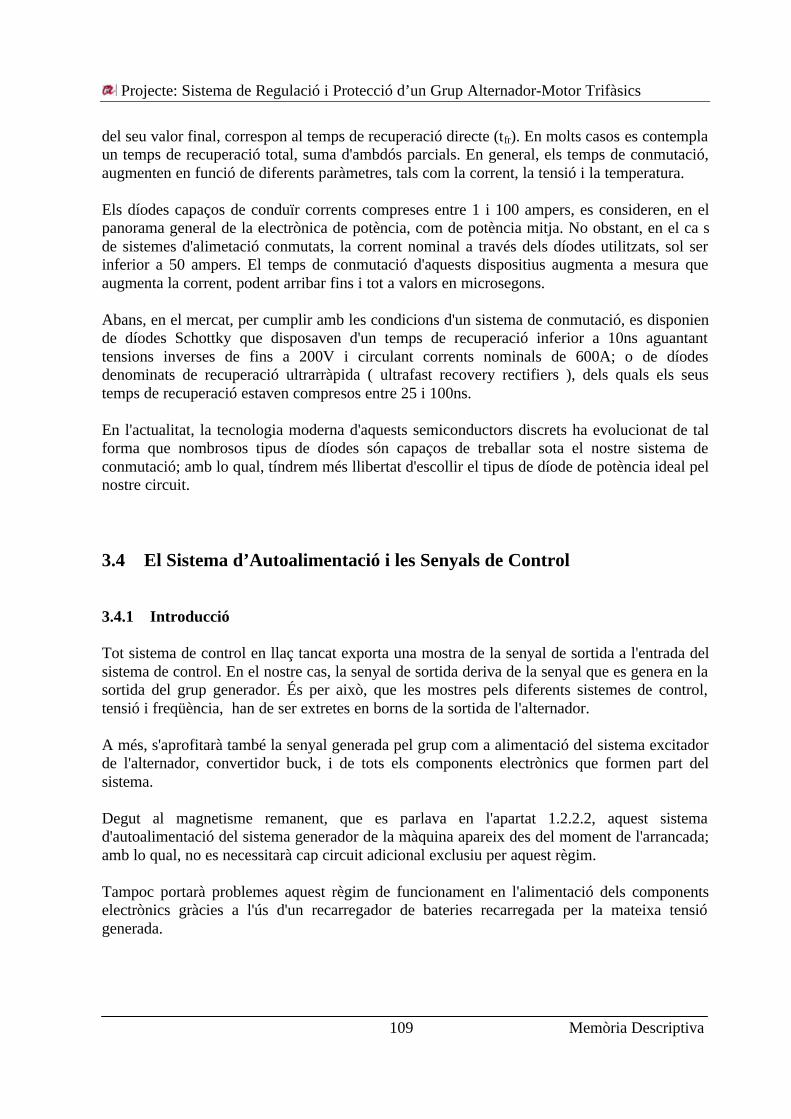
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
109 Memòria Descriptiva
del seu valor final, correspon al temps de recuperació directe (tfr). En molts casos es contemplaun temps de recuperació total, suma d'ambdós parcials. En general, els temps de conmutació,augmenten en funció de diferents paràmetres, tals com la corrent, la tensió i la temperatura.
Els díodes capaços de conduïr corrents compreses entre 1 i 100 ampers, es consideren, en elpanorama general de la electrònica de potència, com de potència mitja. No obstant, en el ca sde sistemes d'alimetació conmutats, la corrent nominal a través dels díodes utilitzats, sol serinferior a 50 ampers. El temps de conmutació d'aquests dispositius augmenta a mesura queaugmenta la corrent, podent arribar fins i tot a valors en microsegons.
Abans, en el mercat, per cumplir amb les condicions d'un sistema de conmutació, es disponiende díodes Schottky que disposaven d'un temps de recuperació inferior a 10ns aguantanttensions inverses de fins a 200V i circulant corrents nominals de 600A; o de díodesdenominats de recuperació ultrarràpida ( ultrafast recovery rectifiers ), dels quals els seustemps de recuperació estaven compresos entre 25 i 100ns.
En l'actualitat, la tecnologia moderna d'aquests semiconductors discrets ha evolucionat de talforma que nombrosos tipus de díodes són capaços de treballar sota el nostre sistema deconmutació; amb lo qual, tíndrem més llibertat d'escollir el tipus de díode de potència ideal pelnostre circuit.
3.4 El Sistema d’Autoalimentació i les Senyals de Control
3.4.1 Introducció
Tot sistema de control en llaç tancat exporta una mostra de la senyal de sortida a l'entrada delsistema de control. En el nostre cas, la senyal de sortida deriva de la senyal que es genera en lasortida del grup generador. És per això, que les mostres pels diferents sistemes de control,tensió i freqüència, han de ser extretes en borns de la sortida de l'alternador.
A més, s'aprofitarà també la senyal generada pel grup com a alimentació del sistema excitadorde l'alternador, convertidor buck, i de tots els components electrònics que formen part delsistema.
Degut al magnetisme remanent, que es parlava en l'apartat 1.2.2.2, aquest sistemad'autoalimentació del sistema generador de la màquina apareix des del moment de l'arrancada;amb lo qual, no es necessitarà cap circuit adicional exclusiu per aquest règim.
Tampoc portarà problemes aquest règim de funcionament en l'alimentació dels componentselectrònics gràcies a l'ús d'un recarregador de bateries recarregada per la mateixa tensiógenerada.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
110 Memòria Descriptiva
3.4.2 El Sistema d’Autoalimentació
3.4.2.1 Font d’Alimentació del Convertidor Buck: Font de Tensió Contínua Estabilitzada
Una font d'alimentació convencional és un sistema on tots els seus elements electrònics decontrol treballen sempre en zona activa, lluny, per tant, de les zones de tall i saturació. El sevafinalitat es basa en el subministrament permanent de la energia elèctrica contínua adequada alcircuit, instrument o aparell a que es demandada.
La nostre font d'alimentació no s'amaga de la definició de la font d'alimentació convencional;per lo que, la seva estructura principal és comuna a aquestes:
Figura 3.50. Representació d’una font d’alimentació contínua
Partint de la seva font primària de tensió alterna, la primera etapa de la font es la reducciód'aquesta a uns valors pròxims i lleugerament superiors als que són demandats. Aquesta és laetapa que exercirà un transformador en la majoria de vegades que la diferència de les tensionssigui elevada. Qualsevol altra solució com la caiguda de tensió per resistències són solucionsmolt més dolentes encara que siguin efectives.
Les dos etapes següents corresponen a la part en que la tensió alterna es transforma en tensiócontínua; són les etapes de rectificació i de filtre.
L'etapa de rectificació està composta per díodes que actuant com a rectificadors converteixenla tensió alterna de la sortida del transformador en una tensió contínua polsada. Hi handiferents circuits rectificadors segons si rectifiquen a 'mitja ona' o a 'ona completa'. L'elecciód'un o altre circuit ve marcat per la necessitat de la tensió contínua que volguem obtenir.
L'etapa de filtre estarà composta per condensadors o per combinacions d'aquests amb bobines( L-C ) o resistències ( R-C ) segons el tipus de filtrat que dessitgem. La red de filtre faràdisminuïr el risat de la tensió fins uns valors dissenyats, transformar-la aquesta en tensiócontínua.
La particularitat de la nostra font d'alimentació enfront a les fonts d'alimentació convencionalsés que es tracta d'una font de tensió estabilitzada.
Reben el nom de 'font de tensió estabilitzada' tots aquells sistemes d'alimentació que
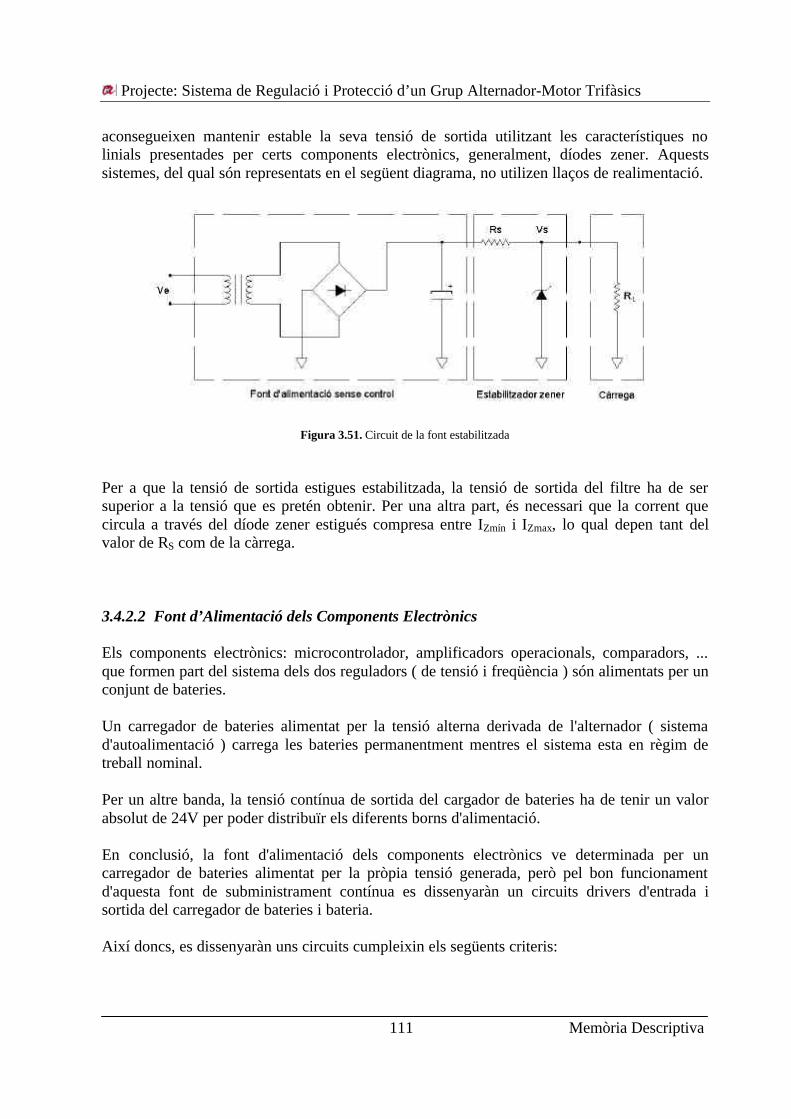
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
111 Memòria Descriptiva
aconsegueixen mantenir estable la seva tensió de sortida utilitzant les característiques nolinials presentades per certs components electrònics, generalment, díodes zener. Aquestssistemes, del qual són representats en el següent diagrama, no utilizen llaços de realimentació.
Figura 3.51. Circuit de la font estabilitzada
Per a que la tensió de sortida estigues estabilitzada, la tensió de sortida del filtre ha de sersuperior a la tensió que es pretén obtenir. Per una altra part, és necessari que la corrent quecircula a través del díode zener estigués compresa entre IZmín i IZmax, lo qual depen tant delvalor de RS com de la càrrega.
3.4.2.2 Font d’Alimentació dels Components Electrònics
Els components electrònics: microcontrolador, amplificadors operacionals, comparadors, ...que formen part del sistema dels dos reguladors ( de tensió i freqüència ) són alimentats per unconjunt de bateries.
Un carregador de bateries alimentat per la tensió alterna derivada de l'alternador ( sistemad'autoalimentació ) carrega les bateries permanentment mentres el sistema esta en règim detreball nominal.
Per un altre banda, la tensió contínua de sortida del cargador de bateries ha de tenir un valorabsolut de 24V per poder distribuïr els diferents borns d'alimentació.
En conclusió, la font d'alimentació dels components electrònics ve determinada per uncarregador de bateries alimentat per la pròpia tensió generada, però pel bon funcionamentd'aquesta font de subministrament contínua es dissenyaràn un circuits drivers d'entrada isortida del carregador de bateries i bateria.
Així doncs, es dissenyaràn uns circuits cumpleixin els següents criteris:
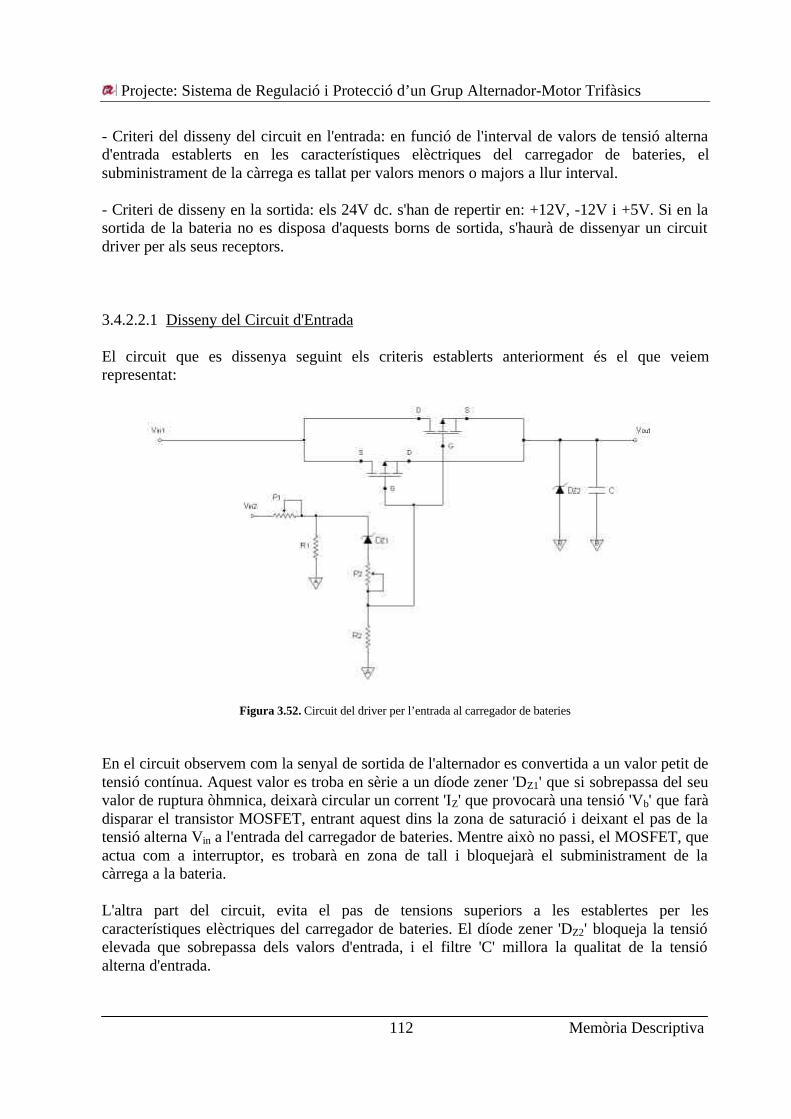
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
112 Memòria Descriptiva
- Criteri del disseny del circuit en l'entrada: en funció de l'interval de valors de tensió alternad'entrada establerts en les característiques elèctriques del carregador de bateries, elsubministrament de la càrrega es tallat per valors menors o majors a llur interval.
- Criteri de disseny en la sortida: els 24V dc. s'han de repertir en: +12V, -12V i +5V. Si en lasortida de la bateria no es disposa d'aquests borns de sortida, s'haurà de dissenyar un circuitdriver per als seus receptors.
3.4.2.2.1 Disseny del Circuit d'Entrada
El circuit que es dissenya seguint els criteris establerts anteriorment és el que veiemrepresentat:
Figura 3.52. Circuit del driver per l’entrada al carregador de bateries
En el circuit observem com la senyal de sortida de l'alternador es convertida a un valor petit detensió contínua. Aquest valor es troba en sèrie a un díode zener 'DZ1' que si sobrepassa del seuvalor de ruptura òhmnica, deixarà circular un corrent 'IZ' que provocarà una tensió 'Vb' que faràdisparar el transistor MOSFET, entrant aquest dins la zona de saturació i deixant el pas de latensió alterna Vin a l'entrada del carregador de bateries. Mentre això no passi, el MOSFET, queactua com a interruptor, es trobarà en zona de tall i bloquejarà el subministrament de lacàrrega a la bateria.
L'altra part del circuit, evita el pas de tensions superiors a les establertes per lescaracterístiques elèctriques del carregador de bateries. El díode zener 'DZ2' bloqueja la tensióelevada que sobrepassa dels valors d'entrada, i el filtre 'C' millora la qualitat de la tensióalterna d'entrada.
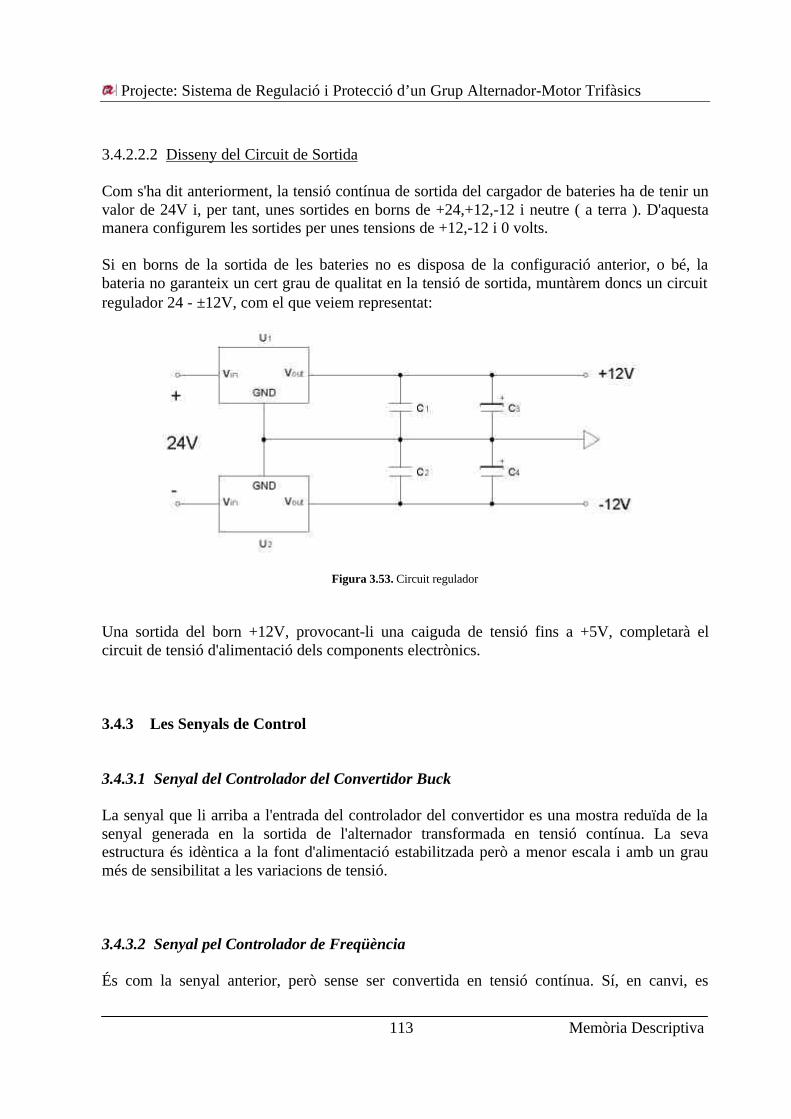
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
113 Memòria Descriptiva
3.4.2.2.2 Disseny del Circuit de Sortida
Com s'ha dit anteriorment, la tensió contínua de sortida del cargador de bateries ha de tenir unvalor de 24V i, per tant, unes sortides en borns de +24,+12,-12 i neutre ( a terra ). D'aquestamanera configurem les sortides per unes tensions de +12,-12 i 0 volts.
Si en borns de la sortida de les bateries no es disposa de la configuració anterior, o bé, labateria no garanteix un cert grau de qualitat en la tensió de sortida, muntàrem doncs un circuitregulador 24 - ±12V, com el que veiem representat:
Figura 3.53. Circuit regulador
Una sortida del born +12V, provocant-li una caiguda de tensió fins a +5V, completarà elcircuit de tensió d'alimentació dels components electrònics.
3.4.3 Les Senyals de Control
3.4.3.1 Senyal del Controlador del Convertidor Buck
La senyal que li arriba a l'entrada del controlador del convertidor es una mostra reduïda de lasenyal generada en la sortida de l'alternador transformada en tensió contínua. La sevaestructura és idèntica a la font d'alimentació estabilitzada però a menor escala i amb un graumés de sensibilitat a les variacions de tensió.
3.4.3.2 Senyal pel Controlador de Freqüència
És com la senyal anterior, però sense ser convertida en tensió contínua. Sí, en canvi, es

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
114 Memòria Descriptiva
transformada en una senyal quadrada per part del driver del PIC ( ja estudiat ).
Com l'objectiu del microcontrolador és la de comptar el temps de mig període de la senyald’entrada ( temps en 'zero' ), és important, llavors, que la senyal senoidal que li arriba siguid'òptima qualitat. És per això, que a més de ser reduïda a valors adequats al driver del PIC, latensió ha de ser sotmesa a una red de pas-baix per suprimir els armonics que no són el de 1ºordre.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
115 Memòria Descriptiva
4 Proteccions del Sistema
4.1 Introducció
En aquest capítol es tracta sobre tot lo relacionat amb dispositius, elements, circuits o aparellsde protecció de tot el sistema de control i de la instal·lació del grup generador als receptors.
Les proteccions per a la instal·lació no només han d'evitar el deteriorament dels receptors peruna subministració dels valors no dessitjada; sinó que aquests ja han d'actuar quan aquestsvalors es troben fòra d'uns requisits de qualitat.
Pel que fa a les proteccions als circuits del sistema de regulació; aquests, complementen icomplexen l'arquitectura bàsica dels seus circuits electrònics. I, a més de protegir, tenenl'objectiu de senyalitzar i millorar la resposta de treball d'algun dispositiu sotmès a uns valorsconflictius.
4.2 Protecció en l’instal·lació del Grup Generador
4.2.1 Introducció
En les intal·lacions elèctriques, les sobreintensitats són la causa de molts accidents elèctrics.Tenen el seu origen en causes molt diverses, com poden ser la conexió d'un nombre elevat dereceptors, mal dimensionament de les línees de la instal·lació, defectuós funcionament delsreceptors o altres aparells de maniobra, defectes de contacte, curtcircuits i altres.
Les sobreintensitats generen caigudes de tensió, calentament als seus conductors, defectuósfuncionament dels seus receptors, incendis i altres accidents de conseqüències diverses.
Hem de protegir les instal·lacions en la seva totalitat contra les sobreintensitats a partir d'uncorrecte càlcul de les seves línees, dimensionat dels aparells de maniobra i control, prevenintde no sobrecarregar les línies en servei, evitant en tot defecte de funcionament dels receptors iels curtcircuits accidentals.
Però, a més de protegir l'instal·lació de sobrecorrents, hem de garantir la qualitat de la tensiógenerada.
Amb aquests dos protocols el sistema, el sistema generador sempre treballarà sota uns valorsde qualitat, i, qualsevol fuga d'aquests valors en l'instal·lació o en els receptors, el conjuntdeixa de ser subministrat.
***
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
116 Memòria Descriptiva
El nostre sistema reduït de centraleta elèctrica amb la seva respectiva instal·lació no és absentde disposar del seu sistema de proteccions.
4.2.2 Tipus de Proteccions
Tot seguit anem a veure les diferents elements de protecció indispensables que utilitzem en lanostra instal·lació de baixa tensió. Aquests són:
- Relè de sobrecorrent: també anomenat relè magnetotèrmic. Té la funcionalitat de protegirl'instal·lació i els receptors contra tensions elevades. El dispar s'ajustarà a les condicions detreball que li apliquem.
- Relè de màxima tensió: aparell elèctric que protegeix l'instal·lació i receptors contra tensionsque superen al reglatge del qual ha estat dissenyat.
- Relè de mínima tensió: aparell elèctric que protegeix l'instal·lació i receptors contra tensionsque són inferiors al reglatge del qual ha estat dissenyat.
- Relè de freqüència: es tracta d'un relè programable per a que treballi dins un interval devalors de freqüència. És doncs, a diferència dels altres relès, un relè que dispara si la qualitatde la ona senoidal surt fòra d'uns valors de freqüència configurats.
Com es pot apreciar de les definicions, els relès de sobretensió, subtensió i de freqüència notreballaràn en règims d'arranc i parada del sistema. De fet, en règim de parada poden treballarperò el seu ús es substituït per un interruptor.
4.2.3 Altres Tipus de Proteccions
Aquests diferents relès de proteccions són suficients per evitar el deteriorament de l'instal·laciói receptors en un mal funcionament del nostre sistema. En tot cas, hi han altres elements deproteccions que poden complementar, substituïr o sobredimensionar el nostre sistema deproteccions. Aquests són:
- Interruptor: és una aparell mecànic d'accionament manual que permet obrir o tancar circuitsen càrrega, sent capaç de tallar l'arc que el forma al obrir el circuit.
- Fusible: Protegeix als circuits i receptors contra les corrents molt elevades o de curtcircuit.
- Interruptor diferencial: protegeix als circuits contra les corrents de fuga; tenint una clarafunció de protecció, especialment de les persones quan es tracta de contactes indirectes.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
117 Memòria Descriptiva
- Interruptor disjuntor: es tracta d'un interruptor de protecció, que normalment esta tancat.Aquest es dispara quan l'acusa una intensitat superior a la del seu reglatge. És, per tant, unelement de protecció contra sobreintensitats i un substitut del fusible.
- Contactor protector: format per un contactor tripolar i un relè magnetotèrmic i governat percircuits de potència, protegeix als receptors contra les sobreintensitats per corrents mitges ielevades.
I de funcionalitat molt diferent a la argumentada fins ara, ens podem trobar:
- Relè contra la falta de fase: desconnecten o avisen quan en la red falta una fase per lacircumstància que fòra.
- Relè temporitzador: desconnecten o transmeten una senyal, quan ha transcorregut un tempsde reglatge.
4.3 El Radiador : Dissipador de Calor pel Conmutador
Encara que l'element conmutador i els seus components associats treballen en règim deconmutació, sempre s'experimenta en ells una dissipació de potència durant els intervals depujada i baixada de la senyal. Aquesta dissipació es fa especialment important en l'elementconmutador, ja que és aquest el que ha de governar pràcticament la totalitat de la potència desortida del sistema. Conseqüència d'això, el calentament dels semiconductors en condicionsnormals de funcionament, altera les característiques del regulador, de tal forma que si el calorgenerat no es dissipat, els components afectats es deterioren, generalment, de formairreversible. Per això, és necessari dotar aquests components d'un medi efectiu que permetimantenir la temperatura de funcionament dels mateixos dins les especificacions recomenadespel fabricant.
La potència tèrmica de l'element conmutador consisteix quasi sempre en afegir solidariamental cós del component una peça, generalment metàl·lica, amb unes característiques deconducció i radiació tèrmica que permeten mantenir de forma efectiva, la temperatura defuncionament dins els límits de seguretat marcats pels fabricants. Aquests elements reben elnom de radiadors o de dissipadors de calor.
El disseny del conjunt de dissipació es realitza a partir de l'equació tèrmica del component, elqual s'estableix mitjançant un circuit de flux de calor en el que intervenen les diversestemperatures dels elements del conjunt i les seves propietats en quant a evaquació o retenció,denominades resistències tèrmiques.
En general, els càlculs de les lleis de conducció de calor poden compendre's fàcilment, ja quepresenten una gran analogia amb la Llei d'Ohm. Un circuit tèrmic, on la component 'A'transmet calor fins el radiador 'B' demostra l'equivalència eléctrica amb la Llei d'ohm, alcircular una corrent 'I' entre dos punts 'A' i 'B' connectats a través duna resistència 'R'.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
118 Memòria Descriptiva
D'aquesta forma, l'equació tèrmica pot expressar-se mitjantçant l'equació:
A B AB dT - T = R P× (5.1)
o bé:
A B j a ja ja dT - T = T - T = T = R P× (5.2)
d'on:
- Tj → temperatura de la unió del semiconductor en ºC.- Ta → temperatura ambient en ºC.- Pd → potència dissipada pel dispossitiu en watts (W).- Rja → resistència tèrmica unió-ambient en ºC/W.
En la que Rja pot expressar-se com la suma de les resistències tèrmiques existents entreambient i unió:
ja jc cr raR = T + R + R (5.3)
d'on:
- Rjc → resistència tèrmica unió-càpsula (ºC/W).- Rcr → resistència tèrmica càpsula-radiador (ºC/W).- Rra → resistència tèrmica radiador-ambient (ºC/W).
L'equivalent d'un circuit tèrmic pot comparar-se, per tant, a un circuit elèctric, format per ungenerador capaç d'entregar la potència necessària que serà consumida proporcionalment percada una de les resistències.
El valor de la resistència tèrmica Rjc depèn del component i del seu encapsulat. 'Rsa' és pròpiadel radiador i 'Rcs' depèn del tipus de substància interposada entre la càpsula i el radiador. Totsaquests valors generalment estàn relacionants en els catàlegs dels fabricants.
Generalment, l'elecció del radiador es realitza en funció de les condicions de funcionament ide les característiques del component al que s'ha de protegir termicament. Per això, latemperatura ambient màxima, així com la temperatura d'unió, potència dissipada i valor de laresistència tèrmica Rjc, dades generalment conegudes, permeten calcular mitjançant lesequacions (1) i (3), el valor de Rra. A partir d'aquest punt, s'ha d'elegir el radiador comercial onles característiques d'aquest s'adiuen més als càlculs realitzats, o bé, si el disseny i/ol'economia ho requereixen, efectuar el disseny i la construcció del mateix.
Les condicions de funcionament dels radiadors, en quant a la ventilació, és generalment de dos

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
119 Memòria Descriptiva
tipus:
- Ventilació forçada o refrigeració per aire circulant.
- Ventilació normal o refrigeració per convecció.
En el primer cas, el disseny s'efectua normalment de forma empírica, degut a les dificultatsque es plantegen en la medició exacta del flux de l'aire. Per una altra part, els dissipadorsrefrigeradors per convecció natural, han de sobredimensionar-se al efectuar el disseny, perpoder precedir amb seguretat les seves característiques, essent aconsellable col·locar aquestscomponents en una zona de circulació natural de l'aire. Tot i això, qualsevol disseny ha de serprèviament assajat.
4.4 Xarxes de Protecció per Dispositius de Electrònics Sotmesos a RamesInductives
4.4.1 Introducció
En el circuit del convertidor buck del regulador de tensió, la càrrega pel transistor deconmutació i el díode de rectificació és en la major part de les vegades inductiva durant elsintervals de conmutació ( Ton i Toff ). La importància de l'inductància en els convertidors cc-cctranscorre per la presència de transformadors en el circuit. En el nostre cas, la inductància dela bobina 'L' sumada a la de la càrrega de sortida 'Li' comporten que el nostre circuit no siguiabsent d'aquest estudi.
Així doncs, en el cas del transistor de conmutació, quan aquest es curtcircuita, la corrent que elrecorre creix linialment, degut els valors inductius connectats en sèrie amb el transistor i lafont de tensió contínua 'VS', i d'aquesta manera tota la tensió de la font primària es troba aextrems de la bobina 'L'. El transistor passa a saturar-se sense problemes de sobretensió, peròquan s'obre, la corrent disminueix ràpidamen, donant lloc a una força contraelectromotriu en'L' d'un valor tal que sumada al valor de VCC, pot destruir el transistor. Per una altra part, deguta l'inductància, es produeix un desfase entre la corrent i la tensió, de manera que aquest canvino es produeix simultàniament, coexistint durant un cert temps tensió i corrent pel transistor,dissipant aquest certa potència que afecta negativament al rendiment del circuit.
En el cas del díode rectificador, el problema és similar. El díode es curtcircuita fàcilment i lacorrent circula fins la sortida a través de l'inductor de filtre. Quan el díode s'obre, l'inductànciai la capacitat de l'unió del díode (Cj) formen un circuit ressonant. Aquest fenòmen dòna lloc al'aparició d'un sobreimpuls de tensió inversa en Cj, capaç de destruir el dispositiu.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
120 Memòria Descriptiva
4.4.2 Definició de les Xarxes Clamp i Snubber
En tots els circuits de protecció es denominen 'xarxes clamp' a aquelles en les que els díodesactuen retornant a la línia part de l'energia de la bobines i els díodes zener mantenen una tensiódeterminada permetent el pas de la corrent. Per una altra part, les 'xarxes snubber', actuen,fundamentalment, amortiguant la corrent previament derivada. En contraposició amb lesxarxes clamp, els circuits snubber són reds dissipatives.
4.4.3 Tipus de Xarxes Clamp i Snubber
Tot seguit, es mostren cinc diferentes xarxes clamps, snubber o combinació d'ambdós.
1º- Circuit:
Figura 5.1. Xarxa Clamp
Es tracta d'una xarxa clamp que deriva la corrent de la bobina durant el temps en Toff, ja que eldíode D queda polaritzat directament i el díode zener manté la seva tensió de referènciapermeten el pas de la corrent.
2º- Circuit:
Figura 5.2. Xarxa Snubber-Clamp
Es tracta d'una xarxa snubber-clamp que permet el pas de corrent a través del díodeamortiguant en part la corrent mitjançant la xarxa R-C.
3º- Circuit:
Figura 5.3. Xarxa Clamp

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
121 Memòria Descriptiva
És una red clamp que protegeix el component electrònic d'un sobreimpuls de tensió inversa,mitjançant la fixació de la tensió entre els seus terminals.
4º- Circuit:
Figura 5.3. Xarxa Snubber
És una xarxa snubber que amortigua el pas del sobreimpuls de corrent en ambdues direccions.La seva acció és la de filtre pas-baix.
4.5 Altres Proteccions i Senyalitzacions pels Circuits del Sistema
Hi han un conjunt de components elèctrics i/o aparells capaços de protegir els circuitselectrònics que componen el sistema. Hi han d'altres, que sense l'afany de protegir són capaçosd'indicar en quin estat es troba el circuit.
Així doncs, anem a veure les diferents proteccions o senyalitzadors que podrén complementarl'arquitectura dels nostres circuits.
- Fusible: incorporat a la plaqueta i situat en les entrades dels circuits té l'objectiu de protegirel circuit de l'entrada inesperada de sobreintensitats.
- Varistors: té la finalitat de protegir els circuits de les sobretensions transitòries de senyalsalternes i contínues. És caracterítza per consumir la potència no dessitjada provocada per lasobretensió. Com podem deduïr, aquest també es situarà en les entrades del circuit.
- Díode zener: corresponent a un circuit de red clamp, estudiada anteriorment, provoca elbloqueig d'una sobretensió superior a una tensió prefixada. La configuració bàsica de la fontd'alimentació de tensió contínua estabilitzadora incorpora un díode zener amb aquesta finalitat.
Observem com els dos últims components: varistor i díode zener, protegeixen el circuit detensions no dessitjades; però a diferència de lo vist fins ara en tema de proteccions asobretensions, aquests no tallen el circuit sinó que només bloquejen el pas d'aquestes tensionsfins a retornar a valors normals de treball. D'aquí, la seva gran importància dins els circuitselectrònics de control.
- Relè diferencial: el seu objectiu és la de protegir als circuits contra les corrents de fuga.
***

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
122 Memòria Descriptiva
L'interés de conèixer en quin estat es troba alguna part concreta del circuit ens comporta l'usde díodes il·luminosos, anomenats “LED's”.
Aquests tenen la finalitat exclussiva de senyalitzar el pas de corrent en una rama del circuit iindicar, així, si arriba tensió en un terminal determinat.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
123 Memòria Descriptiva
Referències
[1] Llibre: F.F. Mazda, Electrònica de Potència, Ed. Paraninfo, 1995.
[2] Llibre: Irving M.Gottlieb, Power Suplies,Switching Regulators,Inverters and Converters, McGraw-Hill, 1994.
[3] Llibre: James T.Humprhies / Leslie P.Sheets, Electrònica Industrial, Ed. Paraninfo, 1996.
[4] Llibre: K. Kit Sum, Switch Mode Power Conversion, Dekker, 1984.
[5] Llibre: Mohan / Undeland / Robbins, Power Electronics, Wiley, 1995.
[6] Llibre: Esteban del Castillo, Electrónica Industrial - Colección Prácticas de Laboratorio -, URV, 1993.
[7] Llibre: Bimal K. Bose, Modern Power Electronics and AC Drives, Pretince Hall, 2001.
[8] Llibre: J. Luis Muñoz Saéz / S. Hernández González, Sistemas de Alimentación Conmutados, Ed. Paraninfo, 1996.
[9] Llibre: Lluís Prat Viñas / Ramón Bragós Bardia / Juan Antonio Chávez Dominguez / Mireya Ferández Chimeno / VicenteJiménez Serres / Jordi Madrenas Boadas / Eduardo Navarro González / Jordi Salazar Soler, Circuitos y DispositivosElectrónicos, UPC, 1994.
[10] Llibre: Luís Martinez Solomero / Alberto Poveda López / Luís García de Vicuña / Francesc Guinjoan Gispert , AntonioF. Sánchez García / Francesc J. Sánchez Robert, Funcions Electròniques, UPC, 1993.
[11] Llibre: Thomas L.Floyd, Fundamentos de Sistemas Digitales, Pretince Hall, 2002.
[12] Llibre: José Maria Merino Azcárraga, Convertidores de Frecuencia para Motores de Corriente Alterna, 1998.
[13] Llibre: Manuel Álvarez Pulido, Convertidores de Frecuencia, Controladores de Motores y SSR, Marcombo, 2000.
[14] Llibre: Ion Boldea / S.A. Nasac, Electric Drives, CRC, 1998.
[15] Llibre: Kaushick Rajashekara / Atsuo Kawamura / Kauki Matsuse, Sensoreless Control of AC Motor Drives, IEEEPRESS, 1996.
[16] Llibre: Chee-mun, Dynamic Simulation of Electric Machinery, Pretince Hall, 1998.
[17] Llibre: D.W. Novotny and T.A. Lipo, Vector Control and Dynamics of AC Drives, Oxford Science, 1998.
[18] Llibre: Jesus Fraile Mora, Màquines Elèctriques, Colección Escuelas, 2002.
[19] Llibre: D. Enrique Oños Prados, D. José Ramírez Vázquez, D. Francisco Ruiz Vasallo, Maniobra, Mando y ControlEléctricos, CEAC, 1992.
[20] Llibre: Departament d'Indústria, Comerç i Turisme, Instal·lacions Receptores d'Energia Elèctrica en Baixa Tensió,Marcombo S.A., 1999.
[21] Llibre: Oriol Boix Aragònes / Joan Rull Duran, Instal·lacions Elèctriques, UPC, 1993.
[22] Pàgina Web HTTP://www.ing.unlp.ar. [Circuits Elèctrics] 23-2-03
[23] Pàgina Web HTTP://www.infopower.es. [Generadors] 12-3-03
[24] Pàgina Web HTTP://www.joseclaudio.eng.br. [Motors y generadors] 20-3-03
[25] Pàgina Web HTTP://es.geocities.com/allcircuits. [Circuits de potència] 20-3-03

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
124 Memòria Descriptiva
[26] Pàgina Web HTTP://www.upv.es.gedee. [Regulación en sistemas de distribución] 2-4-03
[27] Pàgina Web HTTP://2.ing.puc.cl. [Regulació de generadors] 5-4-03
[28] Pàgina Web HTTP://www.iee-unsj.org. [Estabilitat en generadors] 6-5-03
[29] Pàgina Web HTTP://www.sener.es/campos-actividad. [Sistemes de control] 1-6-03
[30] Pàgina Web HTTP://www.proton.ucting.udg.mx. [Semiconductors] 24-6-03
[31] Pàgina Web HTTP://www.uco.es/dptos/electro. [Electrònica] 2-7-03
[32] Pàgina Web HTTP://www.radsur.com/semiconductores. [Semiconductors] 5-7-03
Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Memòria de Càlcul
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex de la Memòria de Càlcul
Índex de la Memòria de Càlcul
0 Íntroducció 1
Les Sessions al Laboratori de Màquines Elèctriques 21.1 Introducció 2
Mesura de la Resistència de l’Inductor 21.2.1 Objecte de l'assaig 21.2.2 Representacions Esquemàtiques 2
1.2
1.2.3 Notes 3Mesures del Sistema a Diferentes Càrregues 31.3.1 Objecte de l'Assaig 31.3.2 Esquema Elèctric 41.3.3 Taula de Valors 4
1.3
1.3.4 Notes 5
1
1.4 Resultats Obtinguts 5
Regulador de Freqüència 72.1 Driver del PIC 7
El Microcontrolador: Configuració del Programa 82.2.1 El Programa 82.2.2 Configuració de la Freqüència de Rellotge 92.2.3 Configuració dels Retards en les Rutes 192.2.4 Configuració dels Seguidors 28
2.2
2.2.5 Exemple de Configuració del Programa 30El Conversor Digital - Analògic 322.3.1 El Circuit 322.3.2 Interconnexió PIC – DAC 322.3.3 Localització d’Averies en el Conversor DAC0808 34
2.3
2.3.4 Identificació de Cada Error en la Pràctica 382.4 Configuració del Variador de Freqüència amb Control Analògic 39
2
Regulador de Tensió 413.1 Convertidor CC-CC - Topología Buck - 41
3.1.1 Càlcul de la Càrrega 413.1.2 Càlcul de la Tensió d’Entrada 433.1.3 Els Valors de Conmutació: Duty Cicle ( D ) 433.1.4 La Bobina (L) 45
3.1.4.1 Càlcul de la Bobina 453.1.4.2 Elecció del Tipus de Material, Geometria i Tamany del Nucli
Magnètic 47
3
3.1.5 El Condensador 48

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Índex de la Memòria de Càlcul
3.2 El Controlador 503.2.1 Circuit Amplificador d’Error 503.2.2 El Comparador - El PWM 523.2.3 Generador de la Senyal Rampa 54
3.3 Semiconductors de Potència: Driver, Conmutador i Díode 583.3.1 Transistors de Potència 583.3.2 El Díode de Potència 61
4 Disseny de les Fonts i Senyals pel Sistema 624.1 Font d’Alimentació de Tensió Contínua Estabilitzada per a l’Entrada del
Convertidor Buck 624.2 Font d'alimentació per als Components Electrònics 72
4.2.1 El Carregador de Bateries i Bateria 724.2.2 Disseny del Circuit Driver d'Entrada al Càrregador de Batèries 724.2.3 Disseny del Circuit Regulador 75
4.3 Senyal d'Entrada al Controlador del Buck 754.4 Senyal d’Entrada al Controlador de Freqüència 784.5 El Transformador 80
5 Elements i Circuits de Protecció 815.1 Relès de Protecció 815.2 Disseny d’un Radiador 82
5.2.1 Exemple de Disseny 865.3 Disseny de les Xarxes Snubber 90
5.3.1 Introducció 905.3.2 Disseny General d’Una Xarxa Snubber 905.3.3 Disseny d’Una Xarxa Snubber pel Díode de Potència 91
5.4 Altres Elements de Protecció 92

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Memòria de Càlcul
0 Introducció
En la memòria de càlcul es coneixeran tots els càlculs que es necessiten pel disseny delscircuits i components del sistema de regulació descrits en la ‘Memòria Descriptiva’.
Pel disseny del càlcul ens hem servit de valors de mostra que ajudaran al lector a lacomprensió sobre el dimensionament del sistema i l'elecció de cada un dels components.
Els valors servits com a exemple al càlcul deriven dels valors característics d'un grup motor-alternador trifàsic determinat. Les plaques caracterítiques de les respectives màquines són:
AEG DE LORENZODL 2066ª 3 G
220/380 V. A/Y 6.35/3.6 A. A/Y2.4 kVA cos 0.8
1500 r.p.m. 50 Hz190 V. 0.66 A.
F. IP44 SYNCHRONOUS
Taula 0.1. Placa característica de l’alternador
MOTOR JAULAARDILLA Typ Dd 140 / 100 - 4
D – Mot Nr 6737480Y 380 / 660 V 6’3 / 3’65 A
3 KW cos 0’861450 U / min 50 Hz
Kol kl - EVDE 0530
Taula 0.2. Placa característica del motor asíncron

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Memòria de Càlcul
1 Sessions de Mesura
1.1 Introducció
Es realitzaran unes sessions de mesures per cada grup generador que es dessitgi implantar unsistema regulador; tot i que, les característiques de dues màquines de dos grups generadorsdiferents siguin iguals.
Es realitzaran un total de dos sessions, aquestes són:
1- Mesura de la resistència de l'inductor de l'alternador.
2- Mesures del sistema a diferents càrregues.
1.2 Mesura de la Resistència de l’Inductor
1.2.1 Objecte de l'assaig
Com el seu nom ho diu, l'objectiu de la primera sessió és la mesura de la resistència del circuitexcitador de l'alternador. Per això, excitem l'inductor fins el pas de corrent nominal o finsarribant a la tensió nominal. I mitjançant la Llei d'Ohm, calculem la resistència:
[ ]VR = O
I (1.1)
Un segon mètode seria el càlcul del valor òhmmic del circuit inductor per ús d'un ohmnímetre.
1.2.2 Representacions Esquemàtiques

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Memòria de Càlcul
Figura 1.1. Representació esquemàtica de la mesura de la resistència de l’inductor
1.2.3 Notes
- La resistència de l'inductor no correspon a la resistència en una bobina, sinó el de tot elcircuit inductor en que està constituït el generador.
- En la mesura, l'induït sempre es trobarà en circuit obert.
1.3 Mesures del Sistema a Diferentes Càrregues
1.3.1 Objecte de l'Assaig
En aquesta sessió realitzem dos assajos pel grup motor-alternador trifàsic. L’un treballant encondicions nominals de tensió i freqüència ( 380 V i 50 Hz ) i l’altre per una excitació ifreqüència constants; ambdues per a diferents tants per cent de càrregues.
Per alimentar el motor asíncron utilitzem el variador de freqüència Micromaster Vector per aun control analògic en que mitjançant un potenciòmetre ajustem la freqüència de sortida delvariador per aconseguir una velocitat de 1500 min-1 en el motor ( 50 Hz en l'alternador ). Lafreqüència del variador haurà de visualitzar-se pel panell frontal.
1º Assaig
En l'alternador, el circuit inductor està connectat a una font de tensió contínua, i mitjançant unreostator ajustàrem la seva corrent d'excitació.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Memòria de Càlcul
En l'assaig es pretén aconseguir dos objectius:
1- Determinar el marge de freqüències en que treballarà el variador de freqüència.
2- Determinar les corrents d'excitació de l'alternador per a les diferents càrregues. Però,principalment, ens interessarà els valors de la corrent en buït i en el 100 i 110 per cent de lacàrrega.
2º Assaig
En aquest segon assaig, observarem com augmenta perillosament la tensió a mesura quebaixem el 100% de la càrrega. L’objectiu d’aquest assaig és determinar quin tant per centmàxim de la càrrega podem desconectar instantàniament.
1.3.2 Esquema Elèctric
Figura 1.2. Representació esquemàtica de la sessió 2
1.3.3 Taula de Valors
La taula de valors que es pretén obtenir en el primer assaig és la mostrada:
Vred Freqüència min-1 Vsortida Hz A1 A2 A3 Aex % Càrrega220 - 1500 380 50 - - - - 0 ÷110%
Taula 1.1. Taula de valors per una tensió de sortida constant

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Memòria de Càlcul
i en el segon assaig:
Vred Freqüència min-1 Vsortida Hz A1 A2 A3 Aex % Càrrega220 - 1500 - 50 - - - 0’66 0 ÷110%
Taula 1.2. Taula de valors per una excitació constant
Ambdues per a diferents tants per cent de càrrega: del 0 al 110% a salts del 10%.
1.3.4 Notes
- Per fer treballar el variador de freqüència Micromaster Vector amb control analògic anem al’apartat ‘Configuració del Variador de Freqüència amb Control Analògic’ del capítol 2.
1.4 Resultats Obtinguts
Els resultats obtinguts en les Mesures del grup motor - alternador III han estat els següents:
Mesura de la Resistència de l'Induït (Ri).
En aplicació al mètode V-I, hem obtingut un marge de ressutats diferents entre 135 i 145Ω.
Mesures del Sistema a diferentes càrregues
Les taula de valors esdevingudes en els diferents assajos de la sessió ens ha aportat elssegüents resultats:
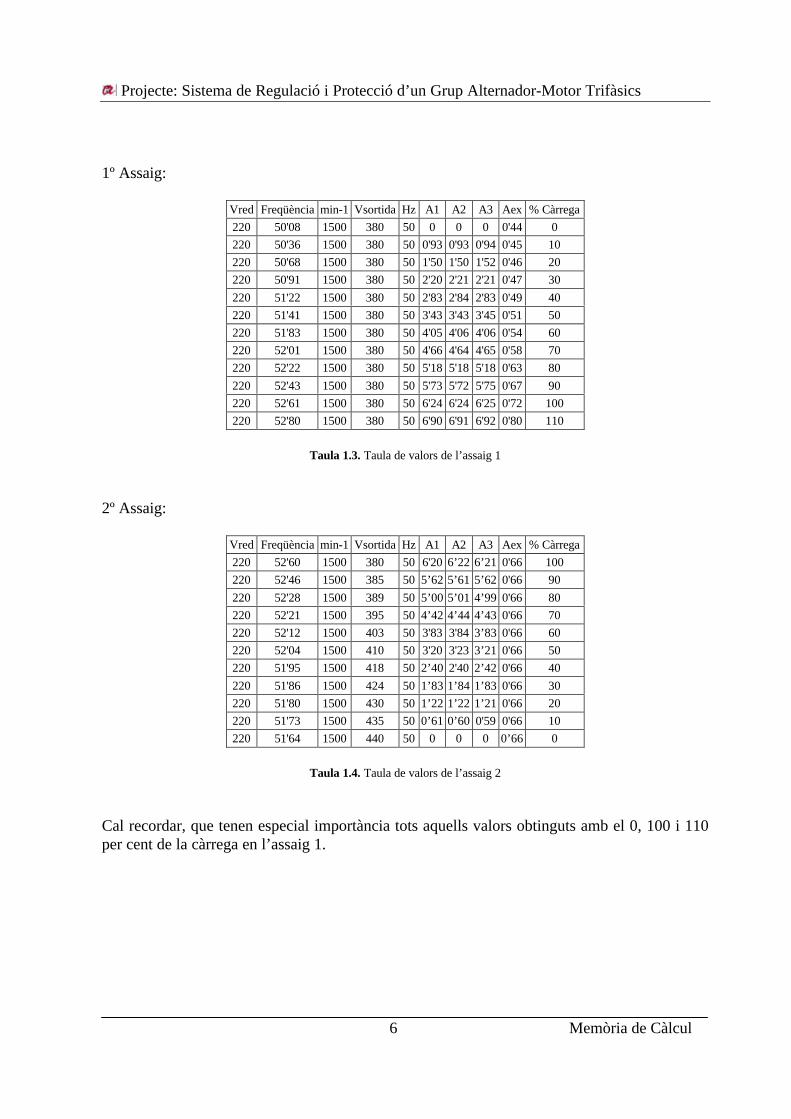
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
6 Memòria de Càlcul
1º Assaig:
Vred Freqüència min-1 Vsortida Hz A1 A2 A3 Aex % Càrrega220 50'08 1500 380 50 0 0 0 0'44 0220 50'36 1500 380 50 0'93 0'93 0'94 0'45 10220 50'68 1500 380 50 1'50 1'50 1'52 0'46 20220 50'91 1500 380 50 2'20 2'21 2'21 0'47 30220 51'22 1500 380 50 2'83 2'84 2'83 0'49 40220 51'41 1500 380 50 3'43 3'43 3'45 0'51 50220 51'83 1500 380 50 4'05 4'06 4'06 0'54 60220 52'01 1500 380 50 4'66 4'64 4'65 0'58 70220 52'22 1500 380 50 5'18 5'18 5'18 0'63 80220 52'43 1500 380 50 5'73 5'72 5'75 0'67 90220 52'61 1500 380 50 6'24 6'24 6'25 0'72 100220 52'80 1500 380 50 6'90 6'91 6'92 0'80 110
Taula 1.3. Taula de valors de l’assaig 1
2º Assaig:
Vred Freqüència min-1 Vsortida Hz A1 A2 A3 Aex % Càrrega220 52'60 1500 380 50 6'20 6’22 6’21 0'66 100220 52'46 1500 385 50 5’62 5’61 5’62 0'66 90220 52'28 1500 389 50 5’00 5’01 4’99 0'66 80220 52'21 1500 395 50 4’42 4’44 4’43 0'66 70220 52'12 1500 403 50 3'83 3'84 3’83 0'66 60220 52'04 1500 410 50 3'20 3'23 3’21 0'66 50220 51'95 1500 418 50 2’40 2'40 2’42 0'66 40220 51'86 1500 424 50 1’83 1’84 1’83 0'66 30220 51'80 1500 430 50 1’22 1’22 1’21 0'66 20220 51'73 1500 435 50 0’61 0’60 0'59 0'66 10220 51'64 1500 440 50 0 0 0 0’66 0
Taula 1.4. Taula de valors de l’assaig 2
Cal recordar, que tenen especial importància tots aquells valors obtinguts amb el 0, 100 i 110per cent de la càrrega en l’assaig 1.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
7 Memòria de Càlcul
2 Regulador de Freqüència
2.1 Driver del PIC
El circuit del driver per a l'entrada al PIC és el que es mostra representat:
Figura 2.1. Circuit del Driver del PIC
Es basa en un circuit comparador del circuit integrat LM393 que, alimentat per Vdd = +5V iVss = 0V, comporta una sortida de 5 i 0 volts.
La seva senyal és adequada en el circuit Adaptador de Fonts i Senyals, en que imposibilital’entrada en aquest circuit de tensions superiors als 5V.
La interconnexió de la resistència de 3K ohms és propia d’un circuit comparador amb elscircuits integrats LM393. Aquesta millora la resposta del circuit.
***
Resum dels valors del components comercials pel circuit driver del PIC:
COMPONENT COMERCIAL
Comparador LM393
R3 MCF 3K ; 0’25W
Taula 2.1. Llistat de components pel circuit driver del PIC

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
8 Memòria de Càlcul
2.2 El Microcontrolador: Configuració del Programa
2.2.1 El Programa
Tot seguit anem a veure l’arquitectura del programa en la forma més simple; és a dir, tot el jocd'instruccions dissenyat per obeïr el diagrama de flux del programa deixant de banda tot locorresponent al joc de declaracions de variables i configuracions de registre.
VEURE_VALOR btfss PORTA,1 goto COMPTADOR clkr ESTAT_COMPT movlw FREQUENCIA movfw VALOR_FREQ goto SORTIDA
COMPTADOR btfss ESTAT_COMPT,1 goto COMPTADORS_V_I goto COMPTADOR_EL
COMPTADOR_EL btfss ESTAT_COMPT,0 goto SEGUIDOR_A goto COMPTADOR
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' btfsc OPTION,2 goto N_SEGUIDOR_A incf FREQ_MAX_A goto SORTIDA
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' * btfsc OPTION,2 goto SEGUIDOR_B incf N_SEGUIDOR clkr FREQ_MAX_A goto SORTIDA
SEGUIDOR_B incf FREQ_MAX_B xorlw FREQ_MAX_B,b'XXXXXXXX' * btfsc OPTION,2 bsf ESTAT_COMPT,0 goto SORTIDA
COMPTADOR xorlw FREQUENCIA,b'11111111' btfss OPTION,2 incf FREQUENCIA goto SORTIDA
COMPTADORS_V_I clkr FREQ_MAX_A clkr FREQ_MAX_B clkr FREQUENCIA clkr N_SEGUIDOR

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
9 Memòria de Càlcul
bsf ESTAT_COMPT,1 goto SEGUIDOR_A
SORTIDA trisb VALOR_FREQ goto VEURE_VALOR
(* Aquests valors binari es configuren més endavant )
A partir d'ara es realitzaràn tot un conjunt de configuracions en el software que faràn viable lafuncionalitat del programa dins el sistema. I així, poder fer totes les declaracions de variables iconfiguracions de registres interns.
2.2.2 Configuració de la Freqüència de Rellotge
Tot comença a partir de quines freqüències ha de regular el variador ( les quals els seus valorssón extrets en la segona part de la 2ª sessió de laboratori ). Si el controlador treballes per adiferents sistemes seria convenient configurar la freqüència del rellotge pel sistema on elmarge de freqüències fós el més reduït.
Supossem el cas que dissenyem el programa per a unes freqüències d'entrada de 30 i 60 Hz.
El pas que anem a realitzar és el de passar les freqüències a períodes per treballar amb els seustemps de durada.
maxmin
1 1T = = = 0'033 seg.
f 30 (2.1)
minmax
1 1T = = = 0'016 seg.
f 60 (2.2)
Cal tenir present l'inversió de significat entre freqüències i períodes: ara la freqüència màximaté el significat de període mínim, i viceversa.
Com el programa pretén treure una senyal digital de 256 bits entre aquests temps:
Figura 2.2. Interval dels diferents valors de sortides en un marge de freqüències
.... .... ..... ....
Tmax0’033 seg.
Tmin0’016 seg.
0 1 2 3 252 253 254 255

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
10 Memòria de Càlcul
amb lo qual, podem saber el temps de durada del programa (Tprogama):
programa
? T (0'033 - 0'016)T = = = 65'1 µs
256 256 (2.3)
Llavors, la freqüència de programa és: programa1
f = = 15'3 KHz.65'1µ
(2.4)
El següent pas és conèixer la freqüència de treball del PIC: la freqüència rellotge.
Com el nº de cicles en el programa pel temps de rellotge és igual al temps de durada delprograma, podrem establir la següent relació:
rellotge programarellotge programa
1 1nº cicles T = T nº cicles =
f f× → × (2.5)
Per determinar el nº de cicles en el programa, hem de trobar quin és el camí més llarg en ciclesque pot anar instruïnt el programa. És necessari per això conèixer el nombre de cicles per acada instrucció. El diagrama de flux pot ajudar a deduïr quina serà la ruta amb més nombre decicles, però atenció, perquè no és del tot fiable. Sí és convenient, el compte de tots els ciclesper a cada una de les diferents rutes, ja que més endavant aquesta feina serà necessària.
Si veiem el nº de condicionants en el diagrama de flux, sabrem quantes rutes hi ha:
nº rutes = 2 nº condicionants = 2 5 = 10 rutes× × (2.6)
Ara anem a comptar el nombre de cicles per a cada una de les 10 rutes:
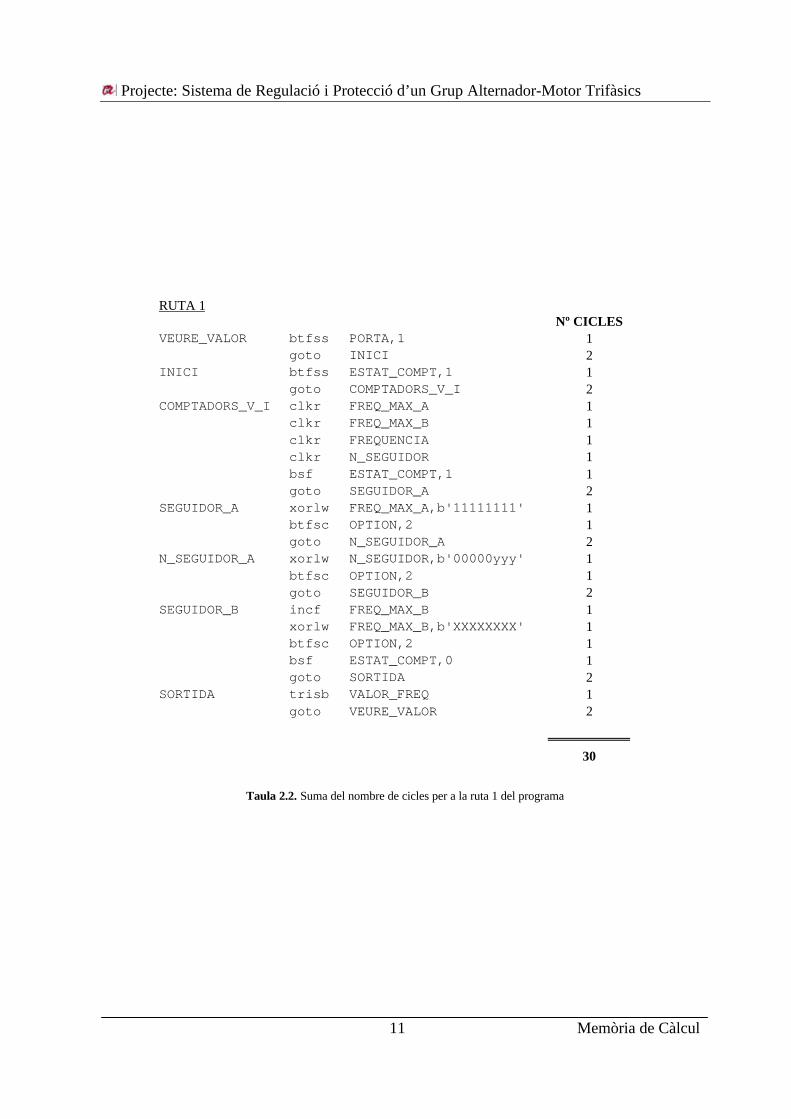
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
11 Memòria de Càlcul
RUTA 1Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 1goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 1bsf ESTAT_COMPT,0 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
30
Taula 2.2. Suma del nombre de cicles per a la ruta 1 del programa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
12 Memòria de Càlcul
RUTA 2Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 1goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 2goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
30
Taula 2.3. Suma del nombre de cicles per a la ruta 2 del programa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
13 Memòria de Càlcul
RUTA 3Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COPMTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2incf N_SEGUIDOR 1clkr FREQ_MAX_A 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
27
Taula 2.4. Suma del nombre de cicles per a la ruta 3 del programa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
14 Memòria de Càlcul
RUTA 4Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 2incf FREQ_MAX_A 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
22
Taula 2.5. Suma del nombre de cicles per a la ruta 4 del programa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
15 Memòria de Càlcul
Taula 2.6. Suma del nombre de cicles per a la ruta 5 del programa
RUTA 5Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 1bsf ESTAT_COMPT,0 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
27

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
16 Memòria de Càlcul
Taula 2.7. Suma del nombre de cicles per a la ruta 6 del programa
RUTA 6Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 2goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
27
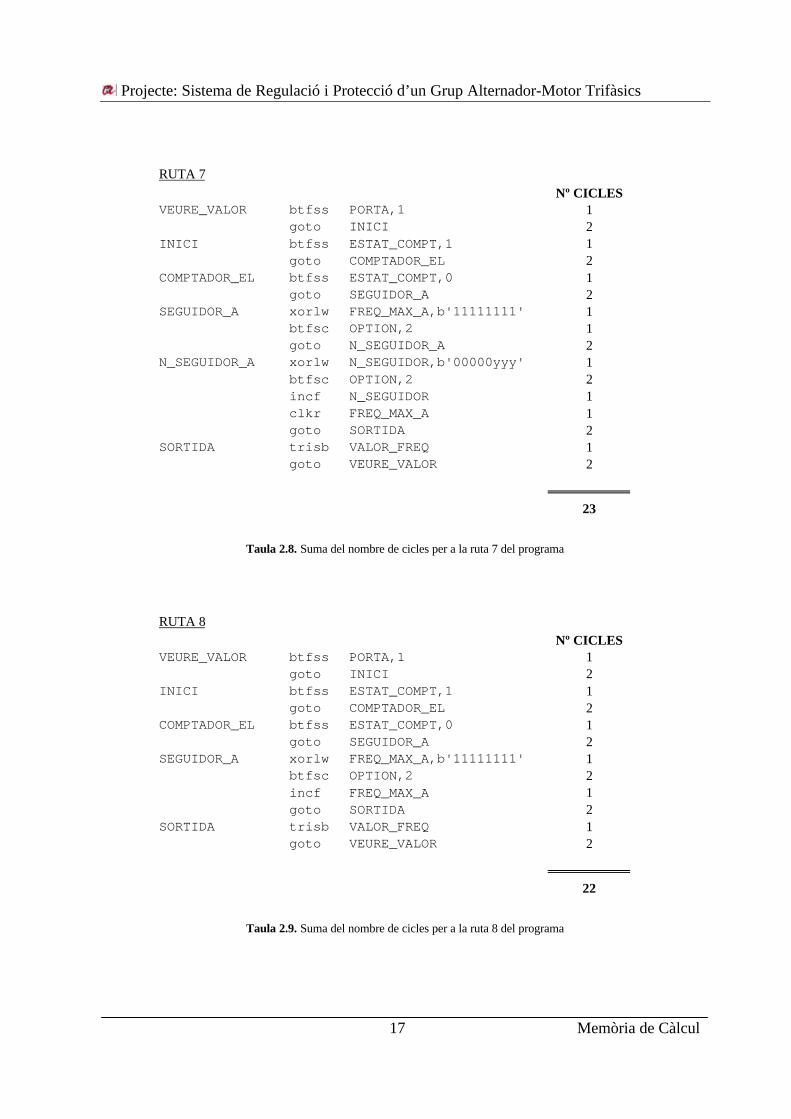
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
17 Memòria de Càlcul
RUTA 7Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2incf N_SEGUIDOR 1clkr FREQ_MAX_A 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
23
Taula 2.8. Suma del nombre de cicles per a la ruta 7 del programa
RUTA 8Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 2incf FREQ_MAX_A 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
22
Taula 2.9. Suma del nombre de cicles per a la ruta 8 del programa

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
18 Memòria de Càlcul
RUTA 9Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 2goto COMPTADOR 2
COMPTADOR xorlw FREQUENCIA,b'11111111' 1btfss OPTION,2 1incf FREQUENCIA 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
18
Taula 2.10. Suma del nombre de cicles per a la ruta 9 del programa
Taula 2.11. Suma del nombre de cicles per a la ruta 10 del programa
Hem pogut veure que en la 1ª i 2ª ruta tenen el nombre màxim de cicles: 30 cicles. Amb loqual:
RUTA 10Nº CICLES
VEURE_VALOR btfss PORTA,1 2clkr ESTAT_COMPT 1movlw FREQUENCIA 1movfw VALOR_FREQ 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
10

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
19 Memòria de Càlcul
rellotgerellotge
1 130 x = f = 460'8 kHz
f 15'36k→ (2.7)
En la circuiteria de rellotge, l'haurem de dissenyar per a freqüències més altes a 460'8 kHz perno quedar-nos curts; amb la conseqüència de fer augmentar el nombre de cicles a partird'instruccions NOP en una funció que anomenàrem T_RETARD ( temps de retard ).
Recordem que per dissenyar la circuiteria rellotge, dispossem d'un predivisor en el registreOPTION ( veure apartat 3.6 de l’annexe ).
Per a una circuiteria de rellotge R-C, d’on:
- Rext = 3 KΩ;- Cext = 300 pF,
la freqüència rellotge seria de 538 kHz ( veure taules en la documentació técnica del capítol 3,El PIC16C84, d’annexes contiguda en el cd d’acompanyament ). Llavors,
rellotge
1T = = 1'86 µs
538 (2.8)
el número d'intruccions total seria:
65'1µnº instruccions = = 35 instruccions
1'86µ (2.9)
Amb lo qual, haurem de provocar 5 cicles de retard després dels 30 cicles d'instruccions delprograma. La funció T_RETARD serà:
SORTIDA trisb VALOR_FREQ goto T_RETARD
T_RETARD NOP 1 cicle NOP + 1 cicle NOP + 1 cicle goto VEURE_VALOR + 2 cicles = 5 cicles en total.
2.2.3 Configuració dels Retards en les Rutes
Aquesta configuració és invariable per a qualsevol interval de freqüències a que estiguemtreballant. I atenció, provoca canvis en valors de freqüència trobats anteriorment, com vorem.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
20 Memòria de Càlcul
La funcionalitat del programa en el sistema deriva en que el temps de durada del programasigui igual per a totes les diferents rutes instructives que es puguin seguir. Així doncs, en totesaquelles rutes que no arribin a 30 cicles haurem de provocar retards mitjançant instruccionsNOP allà on es desmarquin de les rutes més llargues. En molts casos, una ubicació és comunaper altres rutes i comporta un augment del nombre de cicles per aconseguir l’igualtat. Aquestfet és molt important perquè modifica els valors de freqüència anteriors com hem dit abans.
És convenient començar configurar els NOPS per les rutes més llargues i anar descendintposteriorment.
La configuració de NOPS en el programa comporta les següents rutes:
RUTA 1Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 13 NOPS 3goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 1goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 1bsf ESTAT_COMPT,0 11 NOP 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.12. Configuració dels NOPS en la ruta 1 per un nombre determinat de cicles

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
21 Memòria de Càlcul
RUTA 2Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 13 NOPS 3goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 1goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 21 NOP 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.13. Configuració dels NOPS en la ruta 2 per un nombre determinat de cicles
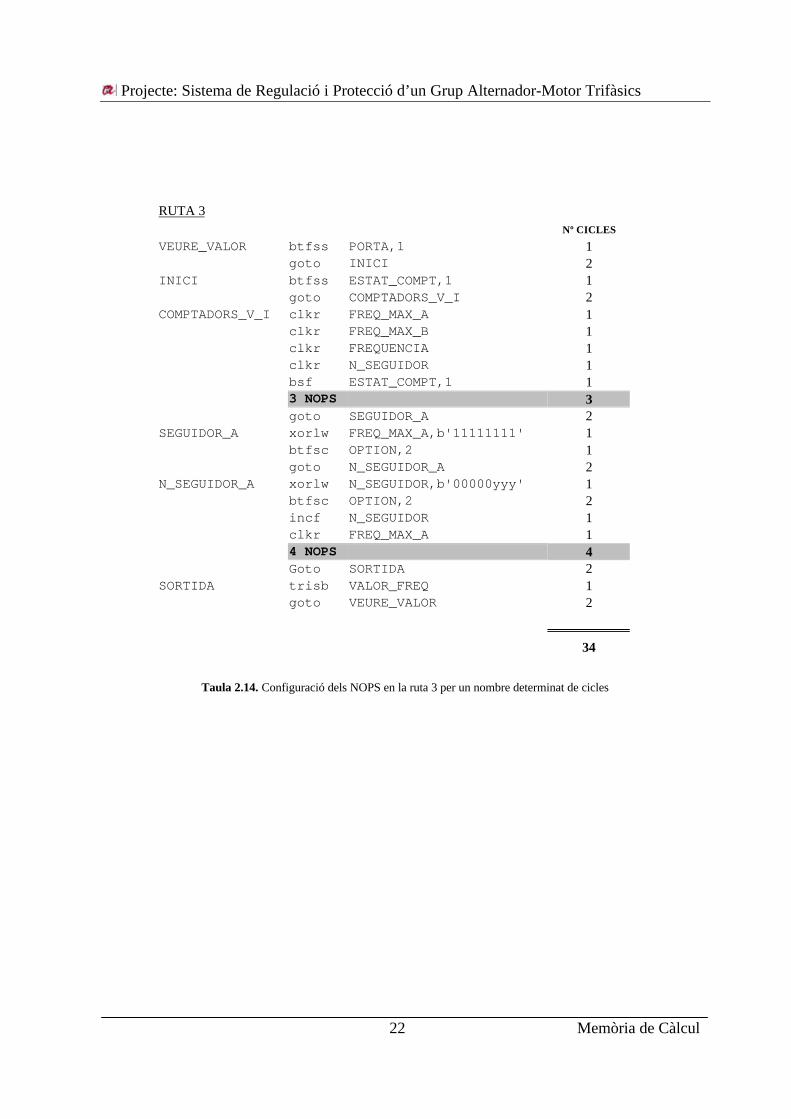
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
22 Memòria de Càlcul
RUTA 3Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 13 NOPS 3goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2incf N_SEGUIDOR 1clkr FREQ_MAX_A 14 NOPS 4Goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.14. Configuració dels NOPS en la ruta 3 per un nombre determinat de cicles

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
23 Memòria de Càlcul
Taula 2.15. Configuració dels NOPS en la ruta 4 per un nombre determinat de cicles
RUTA 4Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 1goto COMPTADORS_V_I 2
COMPTADORS_V_I clkr FREQ_MAX_A 1clkr FREQ_MAX_B 1clkr FREQUENCIA 1clkr N_SEGUIDOR 1bsf ESTAT_COMPT,1 13 NOPS 3goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 2incf FREQ_MAX_A 19 NOPS 9goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
24 Memòria de Càlcul
RUTA 5Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 17 NOPS 7goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 1bsf ESTAT_COMPT,0 1goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.16. Configuració dels NOPS en la ruta 5 per un nombre determinat de cicles

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
25 Memòria de Càlcul
RUTA 6Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 17 NOPS 7goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2goto SEGUIDOR_B 2
SEGUIDOR_B incf FREQ_MAX_B 1xorlw FREQ_MAX_B,b'XXXXXXXX' 1btfsc OPTION,2 2goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.17. Configuració dels NOPS en la ruta 6 per un nombre determinat de cicles

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
26 Memòria de Càlcul
RUTA 7Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 17 NOPS 7goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 1goto N_SEGUIDOR_A 2
N_SEGUIDOR_A xorlw N_SEGUIDOR,b'00000yyy' 1btfsc OPTION,2 2incf N_SEGUIDOR 1clkr FREQ_MAX_A 14 NOPS 4goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.18. Configuració dels NOPS en la ruta 7 per un nombre determinat de cicles
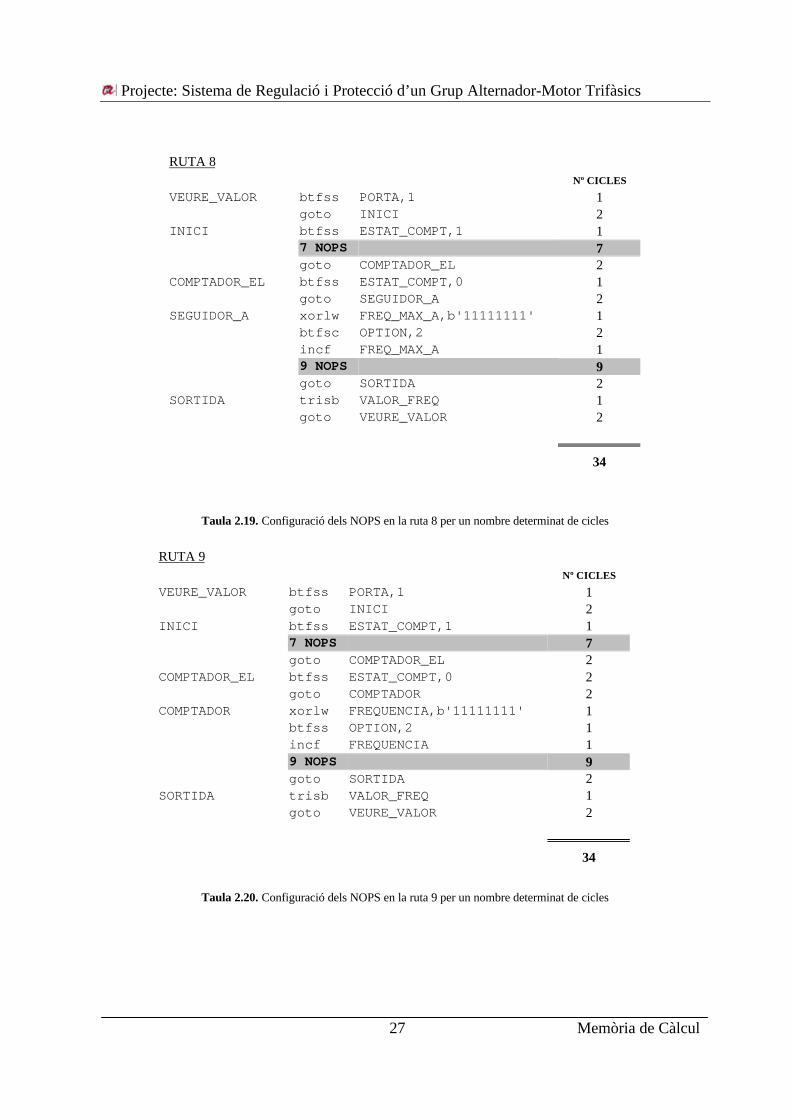
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
27 Memòria de Càlcul
Taula 2.19. Configuració dels NOPS en la ruta 8 per un nombre determinat de cicles
RUTA 9Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 17 NOPS 7goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 2goto COMPTADOR 2
COMPTADOR xorlw FREQUENCIA,b'11111111' 1btfss OPTION,2 1incf FREQUENCIA 19 NOPS 9goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.20. Configuració dels NOPS en la ruta 9 per un nombre determinat de cicles
RUTA 8Nº CICLES
VEURE_VALOR btfss PORTA,1 1goto INICI 2
INICI btfss ESTAT_COMPT,1 17 NOPS 7goto COMPTADOR_EL 2
COMPTADOR_EL btfss ESTAT_COMPT,0 1goto SEGUIDOR_A 2
SEGUIDOR_A xorlw FREQ_MAX_A,b'11111111' 1btfsc OPTION,2 2incf FREQ_MAX_A 19 NOPS 9goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
28 Memòria de Càlcul
RUTA 10Nº CICLES
VEURE_VALOR btfss PORTA,1 2clkr ESTAT_COMPT 1movlw FREQUENCIA 1movfw VALOR_FREQ 124 NOPS 24goto SORTIDA 2
SORTIDA trisb VALOR_FREQ 1goto VEURE_VALOR 2
34
Taula 2.21. Configuració dels NOPS en la ruta 10 per un nombre determinat de cicles
Ara ja hem aconseguit un programa on el seu temps de durada és constant sigui quina sigui laseva ruta.
Com ens temíem, aquesta configuració ha modificat el nombre de cicles del programa que erade 30 cicles a 34 cicles. Per sort, la freqüència rellotge no queda alterada ja que treballava pera 35 cicles, però sí, queda anul·lada la funció F_RETARD per aquests valors ja que el mínimde cicles de retard que pot provocar és de 2 cicles. Fet que comporta trobar una altra solució.
La solució es troba en la ubicació d’un NOP en un tram comú a totes les rutes. Aquest es trobaa l’origen del programa o el final.
- Origen: VEURE_VALOR NOP btfss PORTA,1 goto COMPTADOR ( ...... )
- Final: SORTIDA trisb VALOR_FREQ NOP goto VEURE_VALOR
2.2.4 Configuració dels Seguidors
Si el comptador comptés el primer zero que rebèssim de la senyal d'entrada, el registreFREQUENCIA 00000000 de la freqüència màxima en que s'hagués inicialitzat el comptadorcoincidiria amb el de la freqüència del programa: fprograma = 15'36 kHz. L'objectiu dels

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
29 Memòria de Càlcul
seguidors és registrar el nombre de vegades que s’excutarà el programa ( operacions ) abansd'arribar a l'inici del comptador ( a la freqüència màxima ).
Figura 2.3. Representació dels temps d’inici i final del comptador
Així doncs,
programa minprograma max
1 1nº operacions x T = T nº operacions x =
f f→ (2.10)
15'36Knº operacions = = 256 operacions
60 (2.11)
Dóna el cas que per a una fmax=60Hz necessitem un seguidor configurat en 11111111.
Observem els casos on fmax sigui 55Hz i 65 Hz ( sense tenir en compte l'interval a quetreballarien ).
- Per a 55Hz:
15'36Knº operacions = = 279 > 256
55 (2.12)
279 - 256 = 23 b'00010111'→ (2.13)
En aquests cas, utilitzem els dos seguidors: un SEGUIDOR_A i el SEGUIDOR_B que
INICI||
fprograma
FI||
fminfmin =fmax
compta la mateixafrequència fins el final
interval del comptador
temps en entrada 0

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
30 Memòria de Càlcul
finalitzarà quan arribi a 00010111.
- Per a 65Hz:
15'36Knº operacions = = 236 < 256
65 (2.14)
236 b'11101100'→ (2.15)
En aquest últim cas, utilitzem un únic seguidor, SEGUIDOR_B, amb una extensió de11101100 d'operacions abans d'arribar al comptador.
Quan utilitzem un sol seguidor, utilitzàrem el SEGUIDOR_B perquè és el que passadirectament al comptador quan ha finalitzat. Per anul·lar el seguidor_A es substitueixl'instrucció:
xorlw FREQ_MAX_A,b'11111111'
per l'instrucció: xorlw FREQ_MAX_A,b'00000000'
Aquesta opció impossibilita l'instrucció:
xorlw FREQ_MAX_B,b'00000000'
per l'increment anterior; però com mai succedirà un Z=1 per aquesta instrucció, seria irreal enel sistema, aquest salt no tindrà importància.
Per posar el nombre de seguidors A que necessitem, hem de posar aquest nombre en binari enel registre: b'00000yyy'de l'instrucció:
xorlw N_SEGUIDOR,b'00000yyy'
en el cas de posar un sol seguidor A, posarem b'00000001'.
2.2.5 Exemple de Configuració del Programa
Amb tot el que s'ha explicat fins ara, anem a posar un exemple de configuració del programaper a un interval de freqüències de 45-55 Hz. Els passos són els següents:
- fprograma:
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
31 Memòria de Càlcul
maxmin
1 1T = = = 0'022 seg.
f 45 (2.16)
minmax
1 1T = = = 0'018 seg.
f 55 (2.17)
llavors,
programa programa? T (0'022 - 0'018) 1
T = = = 15'8 µs f = = 63'36 KHz256 256 15'8µ
→ (2.18)
- frellotge:
rellotge programaf = nº cicles f = 34 63'36K = 2'15 MHz× × (2.19)
Suposem que en el circuit rellotge R-C:
- Rext = 20 KΩ;- Cext = 20 pF,
aconseguim una frellotge de 2’3 MHz. ⇒ Trellotge = 0’43µs.
- Funció T_RETARD ( temps de retard ):
15'8µnº instruccions = 36 instruccions
0'43µ≈ (2.20)
Per lo tant, hem de provocar un total de ' 36 – 34 = 2 ' cicles en retard:
T_RETARD goto VEURE_VALOR 2 cicles
- Nº seguidors:
63'36Knº operacions = = 1152 operacions
55 (2.21)
1152 = 4'5 nº seguidors A = 4
256→ (2.22)
Utilitzem 4 seguidors A: b'00000yyy' → b'00000100’
1152 - 4 256 = 1152 - 1024 = 128× (2.23)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
32 Memòria de Càlcul
El seguidor B acaba quan arriba a b'xxxxxxxx' → b’10000000’.
2.3 El Conversor Digital - Analògic
2.3.1 El Circuit
El circuit de conversió digital a contínua és el que veiem representat:
Figura 2.4. Circuit conversor DAC
Es tracta d'una aplicació típica del circuit integrat DAC0808 amb tots els valorspredeterminats per a una sortida analògica de 0 a 10 volts.
2.3.2 Interconnexió PIC – DAC
Hem de comprovar si les característiques de les senyals de sortida del microcontrolador sónadequades per les entrades del DAC.
- Les Tensions:
Com VOLmax = 0'6V del PIC és menor a VILmax = 0'8V del DAC, no haurà cap valor ‘baix’de sortida del PIC que no sigui ‘baix’ (VIL) en l'entrada del DAC.
Com VIHmin = 2V del DAC és menor a la VIHmin = 0’48·Vdd = 2’4V del PIC, no haurà un

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
33 Memòria de Càlcul
valor de sortida ‘alt’ (VH) del PIC que no sigui ‘alt’ en el DAC.
- Les Corrents:
Si ens fixem en la següent taula:
VALORS DE SORTIDA DEL PIC VALORS D'ENTRADA AL DACIOVO IO VI mín típica màxima
VOL = 0'6 V 8'5 mA VIH = 5 V - 0 0'040 mAVOH = 4'3 V - 3 mA VIL = 0'8 V - - 0'003 mA - 0'8 mA
Taula 2.22. Taula de carácterístiques elèctriques entre el PIC i el DAC
Les corrents de sortida del microcontrolador no s’adiuen a les corrents d’entrada al DAC: sónunes 10 vegades superiors. Sí en canvi, podem observar que tant VIH o VIL del DAC podentreballar per una corrent d’entrada nula. La solució, doncs, radica en provocar una caiguda decorrent absoluta per a la entrada del DAC. Tal solució comporta la interconnexió d’unaresistència a cada bit amb la massa.
Figura 2.5. Interconnexió PIC-DAC
El valor de la resistència deriva del valor mínim resistiu que es pot despendre dels valors detaula anterior. Aquests són:
OL
OL,max
V 0'6 VR = = = 0'07 K = 70 68 valor comercial
I 8'5 mAΩ Ω ⇒ Ω → (22.24)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
34 Memòria de Càlcul
***
Resum dels valors del components comercials pel circuit driver del PIC:
COMPONENTS COMERCIALS C.I. DAC DAC0808 Amplificador Operacional LF351 C1 MKT 0'1µF R1 ÷ R8 MCF 68 ; 0’25W R9, R11 MCF 5M ; 0’25W R10 MCF 5K ; 0’25W
Taula 2.1. Llistat de components pel circuit conversor DAC
2.3.3 Localització d’Averies en el Conversor DAC0808
Les proves bàsiques dels convertidors DAC inclouen la comprovació de les sevescaracterístiques de funcionament, tals com la monotonicitat, offset, linialitat i guany, així comla comprovació de la existència de codis incorrectes o ausents.
El concepte de comprovació d'averies en un DAC és el que s'ilustra en el següent esquema.
Figura 2.6. Montatge per comprovació d’averies
En aquest mètode bàsic, s'aplica a les entrades digitals una seqüència de codis binaris,mitjançant un generador de seqüència binària de prova i s'observa la sortida resultant per unoscil·loscopi.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
35 Memòria de Càlcul
La seqüència de codis binaris abarca tot el rang complet de valors de 0 a 2n-1 en ordreascendent, sent n el nombre de bits. El nostre cas és d'un codi binari de 8 bits per lo que elrang complet de valors és de 0 a 255.
La sortida ideal és, com s'indica en l'esquema anterior, una escalera recta. Quant major és elnúmero de bits del codi binari, millor és la ressolució. És a dir, quants més esglaons discrets hihagin, més s'aproxima la sortida a una rampa linial.
Tot seguit, anem a exposar com s'identifiquen els diferents errors de conversió digital -analògica que ens poden trobar.
Error de no monotonicitat
Els escalons en sentit invers indiquen un funcionament no monotònic, que és una forma de nolinialitat. Aquest error apareix en el cas que algun bit ( que no és el 00000000 ) és interpretatcom un 0 contant. És a dir, un curtcircuit qua fa que la línia d'entrada del bit permaneixi anivell a baix.
Figura 2.7. Gràfica de sortida del DAC amb error de no monotonocitat
L'anterior representació podem observar que el bit 21 es troba a nivell baix, per lo que cadanombre digital on aquest bit hagi de ser interpretat com a nivell alt, la senyal perdrà lalinialitat.
No linialitat diferencial
L'error de no linialitat diferèncial apareix quan l'amplitud de l'esglaó és menor de la que hauria
0 1 2 ............................ 255Entrada binaria
(expressat en decimal)
Sortida Analògica ideal
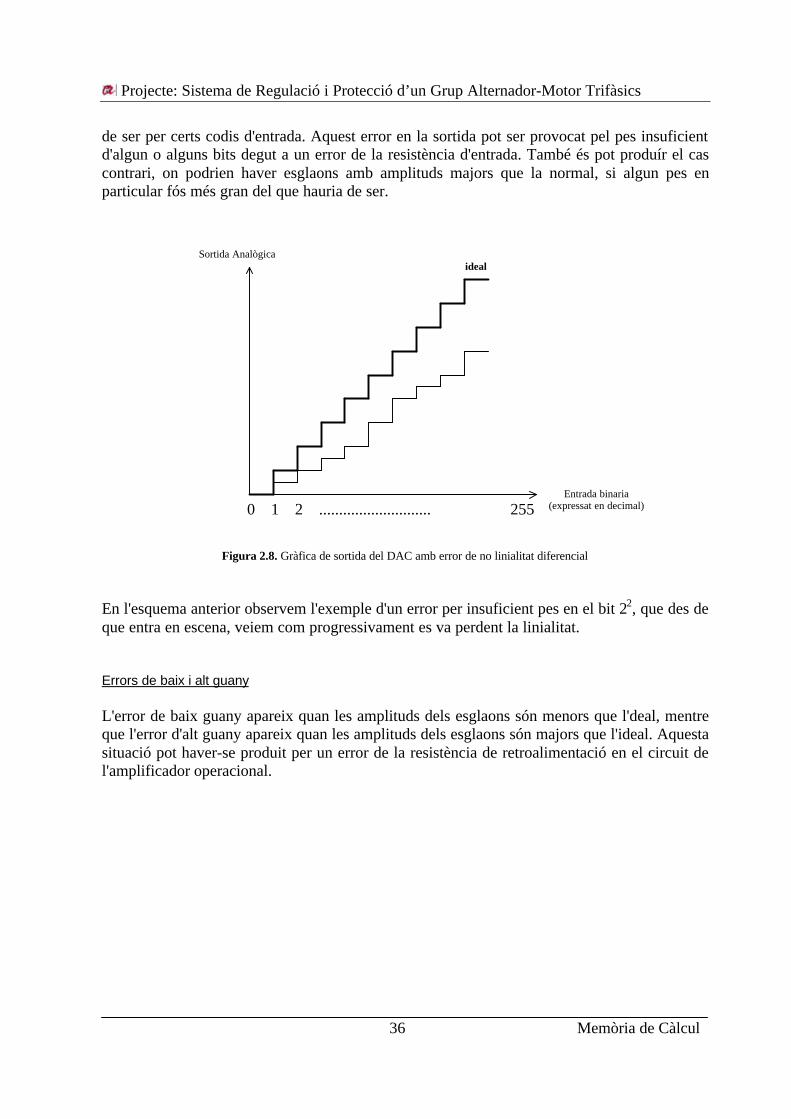
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
36 Memòria de Càlcul
de ser per certs codis d'entrada. Aquest error en la sortida pot ser provocat pel pes insuficientd'algun o alguns bits degut a un error de la resistència d'entrada. També és pot produír el cascontrari, on podrien haver esglaons amb amplituds majors que la normal, si algun pes enparticular fós més gran del que hauria de ser.
Figura 2.8. Gràfica de sortida del DAC amb error de no linialitat diferencial
En l'esquema anterior observem l'exemple d'un error per insuficient pes en el bit 22, que des deque entra en escena, veiem com progressivament es va perdent la linialitat.
Errors de baix i alt guany
L'error de baix guany apareix quan les amplituds dels esglaons són menors que l'deal, mentreque l'error d'alt guany apareix quan les amplituds dels esglaons són majors que l'ideal. Aquestasituació pot haver-se produit per un error de la resistència de retroalimentació en el circuit del'amplificador operacional.
0 1 2 ............................ 255Entrada binaria
(expressat en decimal)
Sortida Analògica ideal

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
37 Memòria de Càlcul
Figura 2.9. Gràfica de sortida del DAC amb error d’alt i baix guany
En l'esquema anterior observem que tant un error de baix guany o d'alt guany aquest errorapareix des de que el bit 20 es posa a nivell alt, llavors l'error es va sumant progressivamentper cada valor digital, per lo que l'error màxim és 255 vegades més gran que l'error en el valor1. Com es pot deduir per la seva diferència en el valor ideal és un error que s'ha d'evitar lomínim possible.
Error d’offset
L'error d'offset apareix quan l'entrada binaria és 0 en tots vuit bits i en canvi la tensió desortida no és cero; té un cert valor que l'anomenem valor d'offset. Aquest valor d'offset serà elmateix per a tots els esglaons de la conversió. Aquest situació pot ser que s'esdevingui a partird'un error en el amplificador operacional.
0 1 2 ............................ 255Entrada binaria
(expressat en decimal)
Sortida Analògica ideal
Alt guany
Baix guany
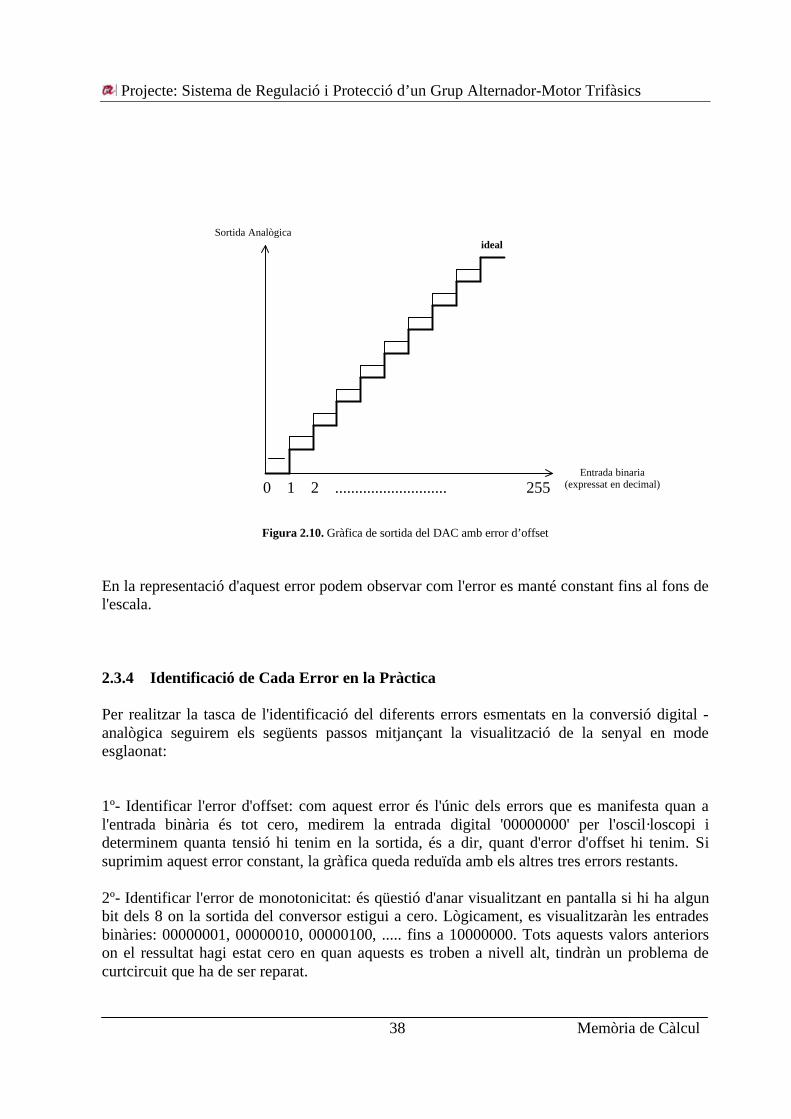
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
38 Memòria de Càlcul
Figura 2.10. Gràfica de sortida del DAC amb error d’offset
En la representació d'aquest error podem observar com l'error es manté constant fins al fons del'escala.
2.3.4 Identificació de Cada Error en la Pràctica
Per realitzar la tasca de l'identificació del diferents errors esmentats en la conversió digital -analògica seguirem els següents passos mitjançant la visualització de la senyal en modeesglaonat:
1º- Identificar l'error d'offset: com aquest error és l'únic dels errors que es manifesta quan al'entrada binària és tot cero, medirem la entrada digital '00000000' per l'oscil·loscopi ideterminem quanta tensió hi tenim en la sortida, és a dir, quant d'error d'offset hi tenim. Sisuprimim aquest error constant, la gràfica queda reduïda amb els altres tres errors restants.
2º- Identificar l'error de monotonicitat: és qüestió d'anar visualitzant en pantalla si hi ha algunbit dels 8 on la sortida del conversor estigui a cero. Lògicament, es visualitzaràn les entradesbinàries: 00000001, 00000010, 00000100, ..... fins a 10000000. Tots aquests valors anteriorson el ressultat hagi estat cero en quan aquests es troben a nivell alt, tindràn un problema decurtcircuit que ha de ser reparat.
0 1 2 ............................ 255Entrada binaria
(expressat en decimal)
Sortida Analògica ideal

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
39 Memòria de Càlcul
3º- Després d'haver localitzat els dos primers errors ( d'offset i de no monotonicitat ),observem si les amplituds dels esglaons de la senyal de sortida visualitzada són constants. Sino és constant, ja sabrem que en la conversió D/A hi han errors de no linialitat diferencial. Perlo que hi ha un fallo en la resistència d'entrada d'algun o alguns bits. Per identificar aquest/sbits medim, com el cas anterior, els valors de 00000001, 00000010, ...... fins a 10000000. Elsdiferents valors que ens poden donar val a significar el nombre d'errors que aporten error de nolinialitat diferencial. Aquest errors han de ser solucionats per un ajustament dels valors delsbits en l'entrada del conversor DAC.
4º- Identificació d'error d'alt o baix guany. Aquest error s'identifica per la mesura de qualsevolsenyal superior a '00000000', preferentment la senyal de sortida màxima. Si aquesta no arribaa la senyal de sortida de 10 volts per una senyal d'entrada '11111111' tindrà un error de baixguany. En cas contrari, tindrà un error de alt guany. El problema radica en la resistència derealimentació de l'amplificador operacional, per lo que, el problema pot ser solventat.
2.4 Configuració del Variador de Freqüència amb Control Analògic
Per obtenir una configuració bàsica d'arranc utilitzant control analògic en tensió de la velocitatde gir del motor, procedim de la següent manera:
1.- Conectem el born de control 9 al born 5 mitjançant un simple contacte deconnexió/desconnexió. D'aquesta manera, el motor queda configurat per girar en sentit horari (ajustament predeterminat ).
2.- Conectem un potenciòmetre de 4'7K al borns de control tal com es mostra en la figura iconectem la patilla 2 ( 0V ) a la patilla 4 i una senyal de 0 a -10V entre la patilla 2 ( 0V ) i lapatilla 3 ( AIN+).
Figura 2.11. Borns de control analògic del variador de freqüència

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
40 Memòria de Càlcul
3.- Ajustament dels interruptors selectors DIP 1,2 i 3 de configuració d'entrada analògica 1per entrada de tensió (V).
Figura 2.12. Configuració dels interruptors DIP per treballar amb control analògic
4.- Fixem totes les tapes al equip i, a continuació, apliquem l'alimentació de la red alconvertidor. Ajustament del paràmetre P009 a 002 o 003 per a que puguin ajustar-se tots elsparàmetres.
5.- Ajustament del paràmetre P006 a 001 per especificar consigna analògica.
6.- Ajustament del paràmetre P007 a 000 per especificar entrada digital ( és a dir, DIN1, born5, en aquest cas ) i desactivar els comandaments del panell frontal.
7.- Ajustament dels paràmetres P021 i P022 per especificar els ajustaments de la freqüènciamàxima i mínima de sortida. El marge de les freqüències ha de ser suficientment gran perarribar a subministrar el valor adeqüat a unes càrregues del 0 al 110%. Ara bé, un excésd’aquests interval provoca una disminució de la precissió de la velocitat a regular.
8.- Situem l'interruptor extern de connexió/desconnexió en la posició ON, podem girar elpotenciòmetre ( ajust de la tensió de control analògic ) i poder visualitzar freqüència ajustadaen el panell del convertidor de freqüència.
9.- Arranquem el motor amb el botó de marxa del panell frontal.
Per variar la velocitat del motor durant l’assaig fem girar el potenciòmetre.
10.- Per parar pitgem el botó de parada del panell frontal, que si no es configura un mode deparada abans ( veure apartat 2.2.3.9 del capítol 3 de la Memòria Descriptiva ), aquest perdefecte descelerarà i procedirà a parar-se seguint una corba definida en l’instrucció P003, queper defecte és de 10 segons per una freqüència de 50 Hz.
***
Fent el mateix que lo dit fins ara, però substituïnt el potenciòmetre en l’entrada dels borns de

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
41 Memòria de Càlcul
control per la senyal de sortida del nostre circuit de control dissenyat obtenim el variador defreqüència treballant pel nostre sistema de regulació de freqüència.
3 Regulador de Tensió
3.1 Convertidor CC-CC - Topologia Buck -
3.1.1 Càlcul de la Càrrega
Per arribar a trobar els valor de la càrrega de sortida del convertidor Buck, així com també laseva potència consumida en la sortida, realitzàrem els següents passos:
1.- Mesura de la resistència de l'inductor (Ri).
Aquesta mesura no correspondrà amb el valor total de la càrrega (RO), perquè hi posàrem unvalor resistiu en paral·lel (RP), com veurem més endavant. Per la mesura de la Ri hem d'haverrealitzat prèviament la mesura de la resistència de l’inductor de la primera sessió. Llavors:
iR = 135 145 ÷ Ω (3.1)
A efectes de la temperatura, el fet de repetir la mesura diferents vegades per a diferents valorsde tensió ( mètode de V-I ), ens porta a diferents valors de la resistència de l'inductor amb laqual cosa expressem dit valor com a interval entre dos valors.
En alguns càlculs, no seria convenient prendre un valor fix de la resistència de l'inductor (Ri),si la diferència entre els seus valors mesurats és elevada. Per lo que en fer els càlculs,pendríem com a valor l'interval Ri,max o Ri,min, l'elecció d'un o altre marge de la magnitudòhmmica ve determinat per quin dels dos valors es sobredimensiona el càlcul en qüestió. En elnostre cas, la resistència es fixada pel seu valor mig de 140Ω, perquè encara que en els càlculsjuguèssim amb els seus marges, els resultats que obtindríem no comportarien gaires canvis; isi es donès el cas, poden ser ajustats experimentalment mitjançant un potenciòmetre.
2.- Càlcul de la tensió continua (VO).
Encara que la intensitat nominal d'excitació de la màquina síncrona sigui de 0'66A ( tal i comindica la seva placa característica ), els càlculs s'establiràn a partir del seu valor d'intensitatd'excitació en sobrecàrrega per garantir que el valor de corrent màxim no sobrepassi el valordel 110% de la càrrega. Recordem, que aquest valor ha de ser extret en la segona sessió demesures. El valor de Iex en sobrecàrrega és de 0'8 Ampers.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
42 Memòria de Càlcul
O i exV = R I = 140 0'80 = 112 V× × (3.2)
3.- Determinar la RP.
La funcionalitat principal de posar una resistència en paral·lel a la Ri és la de descarregar la VO
acumulada en el condensador en cas de desconnectar el convertidor buck i no tenir connectadala càrrega Ri. Tal resistència que utilitzem ha de tindre dos requisits:
- En funcionament del Buck, ha de consumir poc: IP baix. És a dir, tenir un valor ohmic alt.
- Ha d'aguantar tota la potència (PO) en cas de desconnexió de Ri.
Pel cas en que estem treballant, establim el criteri que en la càrrega total del convertidor buckRO volem que hi passi una corrent màxima de 1A. Supossant que la corrent màxima que volemdeixar passar en la Ri és de 0'8A ( corresponent al 110% del valor en sobrecàrrega ). Per tant,per quan passin 0'8A de corrent en Ri, passaràn 0'2A de corrent en RP.
La qual cosa, el valor de RP tindrà un valor de:
OP
p
V 112R = = = 560
I 0'2Ω (3.3)
i una potencia total:
P O PP = V I = 112 0'2 = 22'4 W× × (3.4)
Pel disseny de RP utilitzem resistències de la sèrie SBCHE ( anomenats ‘caixes blanques’ )caracterítzats per aguantar potències d’aquesta magnitud. Per obtenir aquest valorinterconectem les en sèrie de valor: 330, 220 i 10 Ω. Com són resistències que ocupen molt,hem d’ajustar el seu disseny en raó a la potencia que consumen. Així doncs,
2 2P330 PP = R I = 330 0 '2 = 13'2 W× × (3.5)
2 2P220 PP = R I = 220 0 '2 = 8'8 W× × (3.6)
2 2P10 PP = R I = 10 0 '2 = 0'4 W× × (3.7)
En conclusió, les dues primeres resistències seran SBCHE de potència màxima 17 i 11 Wattsrespectivament, mentre que la de 10Ω serà una resistència de la sèrie AC03 de 2’5W.
4.- Coneixent ja la RP, coneixàrem lògicament la càrrega de sortida del convertidor Buck, laRO.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
43 Memòria de Càlcul
i pO
i p
R × R 140 560R = = = 112
R + R 140 + 560×
Ω (3.8)
5.- La potència màxima que consumeix la sortida del converidor Buck és de:
O O OP = V I = 112 1 = 112 W× × (3.9)
Ara ja tenim tot lo necessari pel disseny de la RO resultant:
COMPONENTS COMERCIALSComponent Valor Tipus
R1 330Ω; 17W SBCHER2 220Ω; 11W SBCHE
R3 10Ω; 2'5W AC03
Taula 3.1. Llistat de components per la sortida resistiva del convertidor
3.1.2 Càlcul de la Tensió d’Entrada
Les caigudes de tensió de la bobina i el transistor, situades en sèrie amb la càrrega de sortida,comporten que:
S OV = V + U∆ (3.10)
Aquesta caiguda de tensió sol estar entre 1 volt. Per lo tant, considerem que a l'entrada delconvertidor hi hàurem de tenir una tensió de:
SV = 112 + 1 = 113 V (3.11)
3.1.3 Els Valors de Conmutació: Duty Cicle ( D )
En aquest apartat anem a deduïr i calcular els valors del cicle de conmutació que es podendonar en el sistema quan aquest ja esta treballant en les seves condicions normals defuncionament. Els valors que busquem són els de durada de cicle màxim (DH) i el de duradade cicle mínim (DL).
Duty High

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
44 Memòria de Càlcul
El valor de DH que escollim pel disseny del buck és unitari. Això, val a dir, que elscomponents electrònics han estat dissenyats per treballar en condicions normals amb el correntmàxim que els hi pot circular. Aquest valor de DH = 1 resulta quan es troba circulant amb elcorrent màxim de sobrecàrrega, que en el nostre cas és de 0'8A corresponent al 110% desobrecàrrega o en el moment d’arranc de la màquina.
Duty Low
El valor mínim del Duty Cicle (DL) deriva del valor de la corrent d'excitació mínima quenecessita la màquina síncrona i que correspont a quan aquesta treballa en buït. Per conèixeraquest valor de corrent d'excitació, hem de extreure'l de la taula de valors realitzada en la 2ªsessió. Aquest valor és de Ii = 0'42A. La tensió mínima a que treballarà el convertidor és:
O,min i,min iV = I R = 0'42 140 = 58'8 V× × (3.12)
Com la relació entre la tensió d'entrada i de sortida del convertisor buck és:
OO S
S
VV = V D D =
V× → (3.13)
el valor del duty cicle mínim (DL) que treballarà el convertidor és:
L
58'8D = = 0'525
112 (3.14)
Així doncs, els diferents valors de conmutació, en ple funcionament de l'alternador, oscil·lenentre 0'525 i 1, segons el valor de la càrrega.
Els Diferents Valors de Tensió
Com podem observar en els darrers càlculs, l'interval de valors de la tensió de sortida es trobaentre 58'8 i 112 volts.
Els Diferents Valors de Corrents
La corrent mínima (IOmin) que hi circularà per la càrrega RO serà:
O,minO i,min
P
V 58'8I = I + = 0'42 + = 0'525 A
R 560 (3.15)
El valor de la corrent en la sortida oscil·la entre 1 i 0'525 A.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
45 Memòria de Càlcul
Com en un convertidor buck, la potència d'entrada (Pe) ha de ser teòricament igual que en lapotència de sortida ( PO ), és manté la següent relació:
e O S S O OP = P V ×I = V ×I→ (3.16)
així doncs, la corrent d'entrada mínima és:
OS O S O
S
VI = I × I = I D = 0'525 0'525 = 0'276 A
V→ × × (3.17)
I el valor de la corrent en l'entrada oscil·la entre 1 i 0'276 A.
3.1.4 La Bobina (L)
3.1.4.1 Càlcul de la Bobina
Recordem ara, com era la senyal de la tensió, per als diferents cicles de treball, en unconvertidor buck:
Figura 3.1. Gràfica de la tensió en la bobina (VL)
que corresponia a unes corrents que oscil·laven d'aquesta forma:
Figura 3.2.Gràfica de lacorrent en labobina (iL)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
46 Memòria de Càlcul
Segons en quin temps de treball es troba la corrent queda expressada per una de les dosexpressions:
S OON L 1
V - Vt i = I + ×t
L→ (3.18)
OOFF L 2
Vt i = I + ×(t - D·T)
L→ (3.19)
Entre elles, podem deduïr el seu rissat de corrent:
S OL 2 1
V - V? I = I - I = ×D·T
L (3.20)
Eliminant VS, l'expressió ∆IL queda:
OL
V ×(1-D)? I =
f×L (3.21)
o bé, eliminant VO, l'expressió ∆IL queda d'aquesta altra manera:
SL
V ×(1-D)×D? I =
f×L (3.22)
Segons això, podem expressar en forma dels paràmetres anteriors:
DT T
O L 1 L 20 DT
L L 1 21 1
1I = i m dt + i m dt
T? I ? I I +I1
= T× +T×I = I + = T 2 2 2
∫ ∫ (3.23)
el qual ens indica que:
L2 O O 1
? II - I = I - I =
2 (3.24)
Si es dissenya un convertidor buck pel qual la seva conducció sempre sigui continua:
1 O
? II > 0 I >
2→ (3.25)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
47 Memòria de Càlcul
O SO
V V ×D×(1 - D)×T = I >
R 2×L (3.26)
llavors despejant, ens trobem que en la elecció de la bobina L s'ha de complir el següent:
1L > ×R×T
2 (3.27)
Ara bé, com nosaltres treballem per a diferents valors de VO,
OL L S
OH H S
V = D V
V = D V
× ×
(3.28)
i no tenim una certa variació de càrrega; el criteri definitiu que sí haurem de seguir en el càlculde la inductancia perquè garanteixi una conducció continua és la següent:
OHL
R TL > ×(1 - D )
2×
(3.29)
Com podem observar, per una inductancia donada, la condició de conducció continuadependerà del valor mínim del cicle de treball (DL).
Pels valors que estem treballant, la bobina tindrà un valor de:
1145× ×(1 - 0'525)
50KL > = 688'75 µH.2
(3.30)
Considerem pel nostre disseny una bobina de 700µH.
El valor del període ve determinat per la freqüència que treballarà en conmutador i que esdissenyarà en el controlador. Aquesta, com podem observar, serà de 50kHZ.
3.1.4.2 Elecció del Tipus de Material, Geometria i Tamany del Nucli Magnètic
El nucli magnètic de la bobina ha de emmagatzemar l'energia proporcionada per l'inductor; pertant, el comportament d'aquest determina el material, el tamany i la forma del nucli a escollir.
Els materials magnètics són aquells que posseixen un camp magnètic propi, de forma quel'acció d'un petit camp produeix una imantació de valor elevat, que pot conservar-se en partdesprés de cedir l'acció del camp.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
48 Memòria de Càlcul
Les pèrdues més importants que es produeixen en el nucli magnètic són les pèrdues per efectede Foucault que es produeixen per les corrents de conducció resultants de la forçaelectromotriu, induïda per la variació del camp magnètic.
Generalment els materials més utilitzats són les ferrites, materials metàl·lics que es redueixena pols i es compacten posteriorment, de forma que la permeabilitat del material disminueix iaugmenta la resistència del nucli, disminuïnt d'aquesta forma les pèrdues de Foucault.
Actualment, quasi tots els fabricants disponen de diferents tipus de ferrites que dònen lloc adiferents tipus de materials, amb diferents característiques, que varien depenen del fabricant.
El tipus de material escollit per la bobina és del tipus toroidal.
L'elecció del tamany es realitza a través de les taules L×I2 que ens proporciona el fabricant,éssent L la inductancia dessitjada en la bobina i I la intensitat en contínua que ha de atravessar.
Per lo tant, en el nostre cas tenim que:
2 2 2L I = 700µ 1 = 700µ A× × ⋅ (3.31)
Amb lo qual, podem escollir qualsevol nucli en la que la seva recta intersecti amb el valor deL×I2 que desitgem.
Una vegada escollit el tipus de nucli, només ens falta establir el nombre de voltes necessàriesper aconseguir la inductància dessitjada, el qual l'obtenim de la següent expressió:
2 3LN = 10 L A× × (3.32)
Sent ‘N’ el nombre de voltes necessàries, ‘L’ la inductància desitjada i ‘AL’ una constant quedepen del tipus de material.
3.1.5 El Condensador
El condensador de filtre ha de mantenir la tensió de sortida constant, reduïnt el factor de rissatfins a uns valors tolerables en la sortida. La senyal de rissat que filtra es la que veiemrepresentada:
1v = × i ×dt + v (t = 0)C C CC
∫ (3.33)
I la expressem:
C C màxim C mínim? V = V - V (3.34)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
49 Memòria de Càlcul
Recordem com era el rissat de corrent que surt de la inductància (L):
S OON L 1
OOFF L 2
V - Vt i = I + × t
LV
t i = I + × (t - D·T) L
→ →
(3.35)
El condensador ha de filtrar el rissat de corrent que surt de la bobina: L C? i = ? i . Elcondensador es carrega amb el excès de IL per sobre del valor de IO. Com hem vistanteriorment que,
L2 O O 1
? II - I = I - I =
2 (3.36)
llavors les bases dels triàngles que formen IL amb Io tenen igual base; i com les àrees sóniguals resulta que:
Figura 3.3. Gràfic del rissat que filtrarà el condensador
L
O L
1 T ? I× ×? Q T2 2 2? V = = = ×? IC C 8×C
(3.37)
2O
O
T V? V = ×(1-D)
8×L C×
× (3.38)
2O
O
? V T = ×(1-D)
V 8×L C× (3.39)
o bé,S
O 2
V D×(1-D)? V =
8×C L f×
× × (3.40)
+ ∆Q
- ∆Q
T/2
T/2
IO

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
50 Memòria de Càlcul
D’aquesta última expressió, podem deduïr quin serà el valor de rissat màxim i per a quin ciclede treball correspon:
2O S
O
d(? V ) T ×V = 0 D = 0'5 ? V =
dD 32×C×L→ → (3.41)
El nostre cicle de treball mínim en règim de treball és de DL = 0’525, però degut a laproximitat d’ambdós valors, i per anar més sobrats, considerem DL = 0’5. Ara coneixent elvalor de DL podem realitzar el càlcul de la capacitat (C) que s'extreu per un factor de rissat
donat O
O
? VV
:
( )2L
O
O max
T × 1-DC >
? V8×L×
V
(3.42)
Pels valors que estem treballant, el condensador tindrà un valor de:
( )21× 1-0'5
50kC > 340 µF8×700µ×0'0001
≈ (3.43)
Escollim un condensador electrolític de la sèrie ALC10 de 470µF i de 400V de tensiócontínua.
3.2 El Controlador
3.2.1 Circuit Amplificador d’Error
El seu circuit és el que veiem representat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
51 Memòria de Càlcul
Figura 3.4. Circuit amplificador d’error
La senyal de sortida equival a l'expressió:
2 2O REF in
1 1
R RV = V 1+ - V
R R
× ×
(3.44)
o bé,
( )2O REF in REF
1
RV = V - V + V
R× (3.45)
El fet que la VREF s'ajusti per un potenciòmetre facilita el disseny del circuit.
El marge de valors pel qual treballarà l'amplificador ha de ser petit ja que aixi millora la sevaqualitat de resposta. Partint dels criteris que s'establien en la segona sessió de mesures ( capítol1 ) sobre els canvis de càrrega instantanis dissenyem l'amplificador per a que un canvi del 10%de la càrrega tingui una resposta lo més ràpida possible. Això val a dir que pel sistema noregulat, una sortida d'alternador de 370V o 390V correspongui una senyal Ve de 4V o 8V,respectivament.
inin
inin
V6 = V = 6'16V
380 390V6
= V = 5'84V 380 370
⇒ ⇒
(3.46)
És indiferent treballar per un o altre valor.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
52 Memòria de Càlcul
Si supossem que trobem el valor de VREF per la meitat del valor total del potenciòmetre ( VREF
= 6V ), llavors,
( )8 = K 6 - 5'84 + 6 K 13'5× ⇒ ≈ (3.47)
Mirant les taules característiques dels circuits integrats que interconnecten amb la rama de lesresistències R1 i R2 observem que la corrent que ah de circular és molt baixa. Imaginem-nosque per 6V i circula 0'1 miliamper ( valor que es troba dins els valors de treball dels C.I.'s ),llavors:
V 6VR = = = 600 K
I 0'01mΩ (3.48)
les resistències seràn:
1 2 1 1R + R = R + 13'5 R = 0'6M × (3.49)
1 2
0'6MR = = 41'4 K . R = 13'5 41'4K = 559 K .
14'5Ω → × Ω (3.50)
Els valors comercials de les resistències són de 47K (R1) i 470K,150K i 15K en sèrie per R2 (mantenint la proporcionalitat ). Totes elles de 0'25W de la sèrie MCF.
La presició que es perd en l'elecció dels components enfront els càlculs teòrics es recupera enun ajust amb el potenciòmetre.
***
Resum dels valors del components comercials pel circuit amplificador d'error:
COMPONENTS COMERCIALSAmplificador Operacional LM741
R1 ( sèrie MCF ) 47K ; 0'25W. R2,1 ( sèrie MCF ) 470K ; 0'25W. R2,2 ( sèrie MCF ) 150K ; 0'25W. R2,3 ( sèrie MCF ) 415K ; 0'25W.
Taula 2. Llistat de components pel circuit amplificador d’error
3.2.2 El Comparador - El PWM
Pel circuit del comparador PWM utilitzem l'amplificador operacional LM393 alimentat per12V ( accepta un interval màxim de 0 ÷ 36V o de -18 ÷ 18V ). El seu mode de connexió ésel de comparador bàsic representat en el seu full de característiques:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
53 Memòria de Càlcul
Figura 3.5. Circuit comparador -PWM
La seva tensió sortida es comprén pels mateixos valors dels quals es alimentat: 0 i +12V.
Una corrent en quan la sortida és 0, similar per quan la sortida és de 12V, ajuda a obtenir unamillor resposta de l'amplificador operacional. D’aquí s’entén la posició de la resistencia ‘R’.
Com la corrent és de 0’1mA ( veure apartat ‘Semiconductors de Potència’ ):
12VR = = 120 K .
0'1mAΩ (3.51)
P = V I = 12 0 '1m = 1'2 mW.× × (3.52)
Obtindrem una resistència comercial de 120 KΩ i 0’25 Watts de la sèrie MCF.
Recordem que com els valors d'entrada sempre són possitius i que el valor màxim corresponiaal de la senyal rampa de 8V: mai superaria la diferència de tensió en les entrades que és 11'8V( V+ -0'12V ), per lo que garantitza el bon funcionament de l'amplificador.
***
Resum dels valors del components comercials pel circuit comparador ‘PWM’:
COMPONENTS COMERCIALS Comparador LM393 R ( sèrie MCF ) 120K ; 0'25W.
Taula 3.3. Llistat de components pel circuit comparador PWM
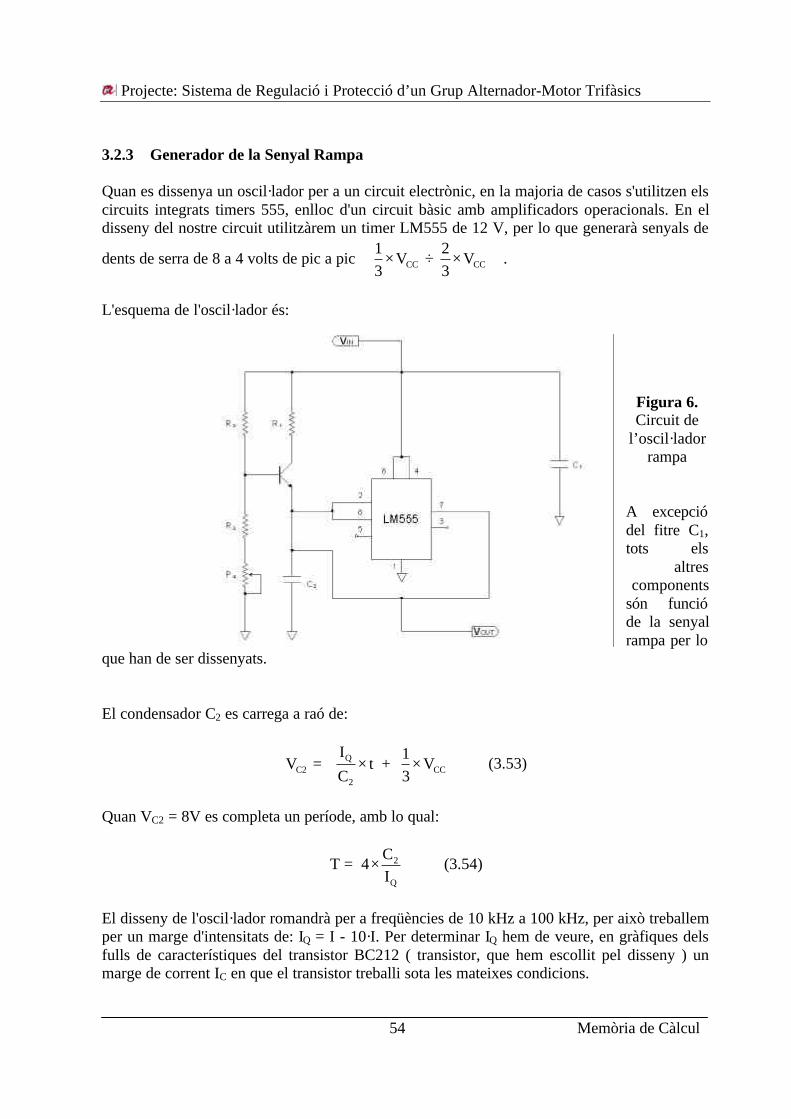
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
54 Memòria de Càlcul
3.2.3 Generador de la Senyal Rampa
Quan es dissenya un oscil·lador per a un circuit electrònic, en la majoria de casos s'utilitzen elscircuits integrats timers 555, enlloc d'un circuit bàsic amb amplificadors operacionals. En eldisseny del nostre circuit utilitzàrem un timer LM555 de 12 V, per lo que generarà senyals de
dents de serra de 8 a 4 volts de pic a pic CC CC1 2
V ÷ V 3 3
× ×
.
L'esquema de l'oscil·lador és:
Figura 6.Circuit de
l’oscil·ladorrampa
A excepciódel fitre C1,tots els
altrescomponents
són funcióde la senyalrampa per lo
que han de ser dissenyats.
El condensador C2 es carrega a raó de:
QC2 CC
2
I 1V = t + V
C 3× × (3.53)
Quan VC2 = 8V es completa un període, amb lo qual:
2
Q
CT = 4
I× (3.54)
El disseny de l'oscil·lador romandrà per a freqüències de 10 kHz a 100 kHz, per això treballemper un marge d'intensitats de: IQ = I - 10·I. Per determinar IQ hem de veure, en gràfiques delsfulls de característiques del transistor BC212 ( transistor, que hem escollit pel disseny ) unmarge de corrent IC en que el transistor treballi sota les mateixes condicions.
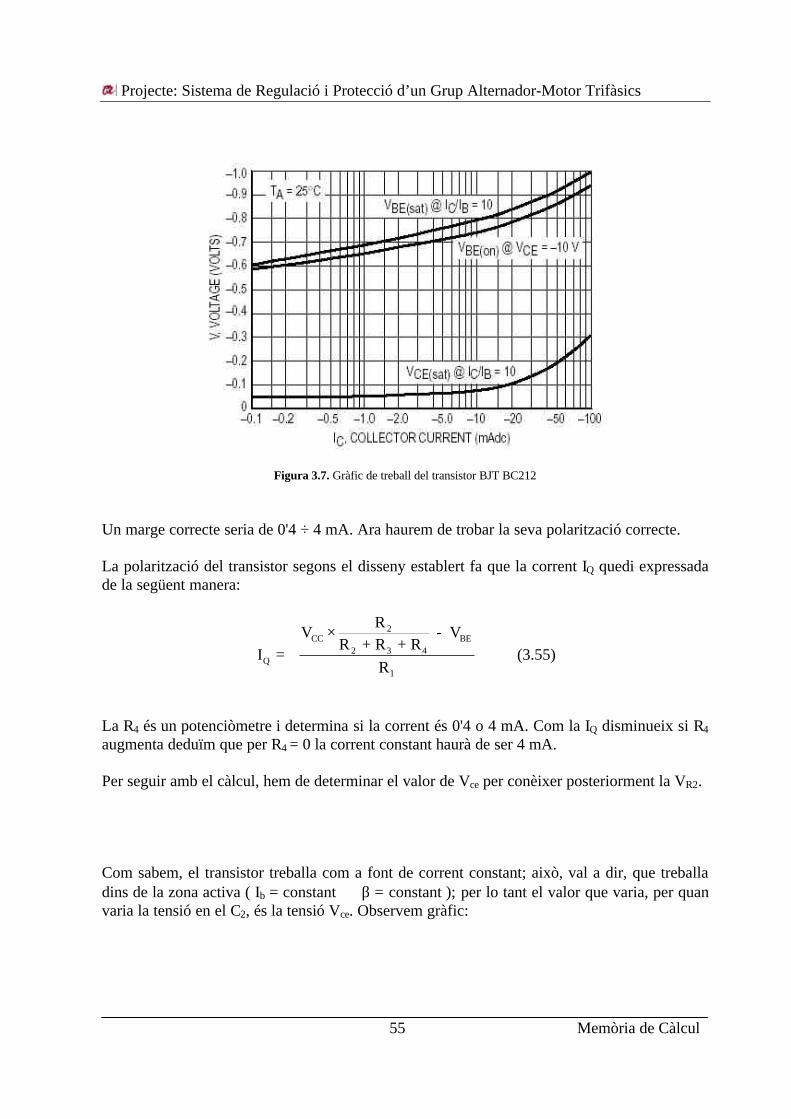
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
55 Memòria de Càlcul
Figura 3.7. Gràfic de treball del transistor BJT BC212
Un marge correcte seria de 0'4 ÷ 4 mA. Ara haurem de trobar la seva polarització correcte.
La polarització del transistor segons el disseny establert fa que la corrent IQ quedi expressadade la següent manera:
2CC BE
2 3 4Q
1
RV - V
R + R + RI =
R
× (3.55)
La R4 és un potenciòmetre i determina si la corrent és 0'4 o 4 mA. Com la IQ disminueix si R4
augmenta deduïm que per R4 = 0 la corrent constant haurà de ser 4 mA.
Per seguir amb el càlcul, hem de determinar el valor de Vce per conèixer posteriorment la VR2.
Com sabem, el transistor treballa com a font de corrent constant; això, val a dir, que treballadins de la zona activa ( Ib = constant ⇔ β = constant ); per lo tant el valor que varia, per quanvaria la tensió en el C2, és la tensió Vce. Observem gràfic:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
56 Memòria de Càlcul
Figura 3.8. Curves de treball d’un transistor bipolar
Quan la VC2 es troba al seu punt més alt (8V): la Vce serà mínima. Considerem llavors que estroba el mínim valor de Vce en la zona activa: Vce = 0'6V. Llavors:
R1 R112V = V + 0'6V + 8V V = 3'4 Volts→ (3.56)
Com IQ són 4 mA,
1
3'4R = = 0'85 K
4mΩ (3.57)
La resistència de valor més aproximat a un valor comercial és de 820 Ω i com:
R1 CER V V ( zona activa ) Acceptem la resistència !!!↓ ⇒ ↓ ⇒ ↑ →
El nou valor de la VR1 és: R1V = 4m 820 = 3'28 K× Ω (3.58)
Coneixent VR1 trobem la polarització VB mitjançant la malla que els uneix.
CC R1 EB BV = V + V + V (3.59)
Com es coneix Veb per les característiques del BC212, determinem VB:
B CC R1 EBV = V - V - V = 12 - 3'28 - 0'6 = 8'12 V (3.60)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
57 Memòria de Càlcul
Supossem que la corrent que passa per R3 és la mateixa que passa per R1: IR3 = IQ = 4 mA.Amb lo qual:
BB 3 Q 3
Q
V 8'12V = R ×I R = = = 2'03 KO
I 4m→ (3.61)
Escollim un valor R3, un pèl més elevat que el teòric, per garantitzar el pas a Ib. Per lo que,escollim una R3 de 2K2Ω.
Com que IB <<, podem supossar que per R2 i R3 hi pot circular una corrent gairebé similar:
I = IR2 = IR3 (3.62)
Calculem, llavors, R2:
CC B 2 2
12 - 8'12 3'88V - V = R I R = = = 0'97 K
4m 4m× → Ω (3.63)
La resistència que utilitzem serà R2 = 1K2Ω, un pel més gran que en el teòric com aconseqüència de l'augment de R3 en l'elecció de la resistència comercial.
Ara coneixem la polarització del transistor quan treballa per una corrent IQ = 4 mA. Per quantreballi amb IQ = 0'4 mA el potenciòmetre (R4) es trobarà el seu valor màxim, amb lo qual,trobem R4:
2CC BE
2 3 4 4Q
1
R 1K2V · - V 12 · - 0'6
R + R + R 1K2 + 2K2 + RI = 0'4 =
R 0'82K→ (3.64)
R4 ≈ 12 KΩ → utilitzàrem un potenciòmetre de 10 KΩ !!!!
Per últim trobem el valor de la capacitat del condensador per l'expressió:
Q
1 CT = = 4
f I× (3.65)
quan IQ= 4 mA i f = 100 KHz. → C= 10 nF.
Resum dels valors del components comercials pel circuit de la senyal dent de serra:
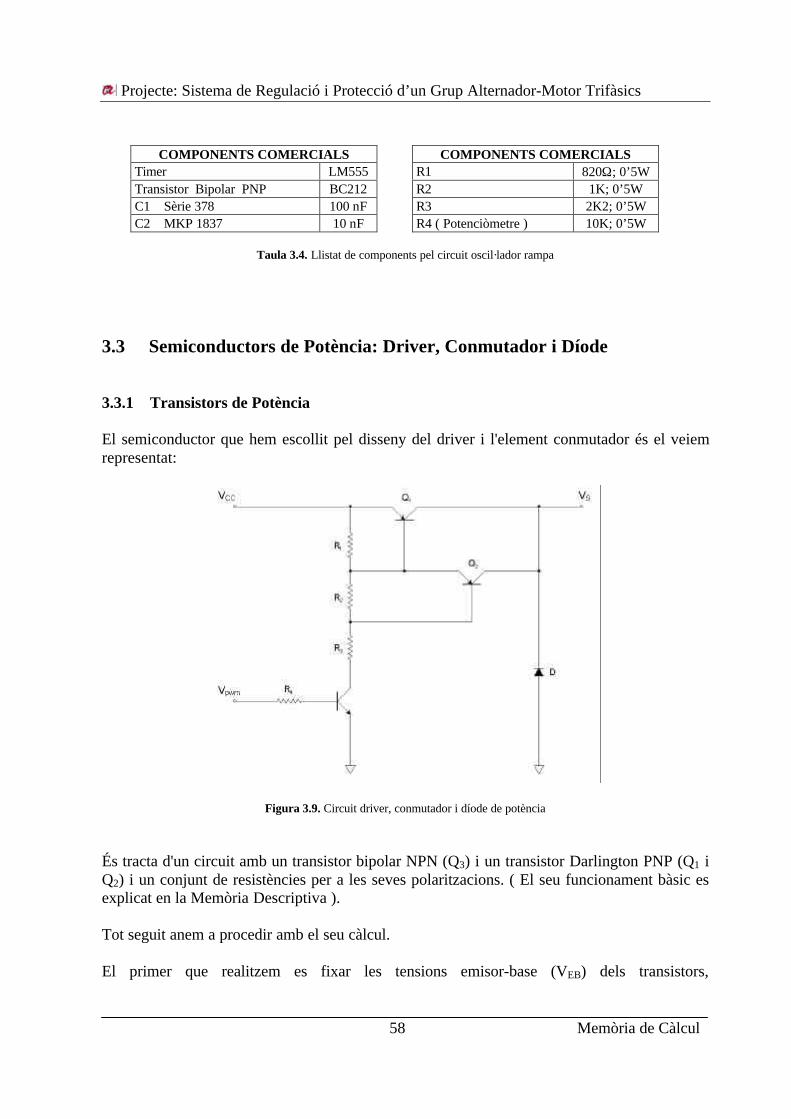
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
58 Memòria de Càlcul
COMPONENTS COMERCIALS COMPONENTS COMERCIALS Timer LM555 R1 820Ω; 0’5W Transistor Bipolar PNP BC212 R2 1K; 0’5W C1 Sèrie 378 100 nF R3 2K2; 0’5W C2 MKP 1837 10 nF R4 ( Potenciòmetre ) 10K; 0’5W
Taula 3.4. Llistat de components pel circuit oscil·lador rampa
3.3 Semiconductors de Potència: Driver, Conmutador i Díode
3.3.1 Transistors de Potència
El semiconductor que hem escollit pel disseny del driver i l'element conmutador és el veiemrepresentat:
Figura 3.9. Circuit driver, conmutador i díode de potència
És tracta d'un circuit amb un transistor bipolar NPN (Q3) i un transistor Darlington PNP (Q1 iQ2) i un conjunt de resistències per a les seves polaritzacions. ( El seu funcionament bàsic esexplicat en la Memòria Descriptiva ).
Tot seguit anem a procedir amb el seu càlcul.
El primer que realitzem es fixar les tensions emisor-base (VEB) dels transistors,

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
59 Memòria de Càlcul
d’aproximadament 1 volt ( aquest valor pot ser modificat segons els resultats que obtínguem ).Aquestes tensions tindràn presència en quan els seus respectius transistors treballin en zona desaturació.
En aquest estat de saturació, la tensió VCEsat del transistor Q3 és aproximadament de 0'2V, i pertant, la tensió en R3 serà de:
R3 CC EBQ1 EBQ2 CEQ3V = V - V - V - V = 113 - 1 - 1 - 0'2 = 110'8V (3.66)
Amb un cicle de treball màxim del 100% ( D = 1 ), en un règim de funcionament d'arranc delsistema per exemple, la tensió de la font és gairebé la mateixa que en la sortida:
S CC MAX CEsatQ1V = V D - V = 113 1 - 1 = 112V× × (3.67)
Al ser Q1 un transistor de potència, hem considerat una tensió VCEsat de 1 volt.
Per a una resistència d’induït de 140Ω, el valor mig de corrent que hi circularà per Q1 és:
SLm
L
V 112I = = = 1 A
R 112 (3.68)
( expressem ILm per ser també la corrent mitja que circula per la bobina ).
Fixant per a que el divisor de tensió circuli una corrent 1000 vegades inferior a la corrent ILm:1mA, a efectes de rendiment, encara que pot augmentar-se més si no és suficient, s'obtenen elsvalors de les resistències:
R11
R
V 1R = = = 1 KO
I 1m (3.69)
R22
R
V 1R = = = 1 KO
I 1m (3.70)
R33
R
V 110'8R = = = 110'8 KO
I 1m (3.71)
( )22R3P = R I = 110'8K 1m = 110'8 mW× × (3.72)
Els valors de R1 i R2 no solen ser iguals en tratar-se de transistors darlington per lo que variales seves tensions en borns. Aquests transistors ja les porten incorporades.
El valor resistiu de R3 en l’elecció de les resistències, per aconseguir aquest valor òhmnic, no

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
60 Memòria de Càlcul
ha de tendir a sobrepassar els 138'5KΩ, per garantir la saturació de Q1 i Q2.
L'elecció dels semiconductors deriva a que tinguin una freqüència de tall 20 vegades més, coma mínim, de la freqüència de conmutació per asegurar que no s'hi introdueixi alguna distorsió.És a dir,
T Tf = 20× 50K = 1 MHz T = 1µs→ (3.73)
Pel transistor bipolar NPN Q3 hem escollit el model BSW67A ja que:
- Té una TT = 900ns > 1µs.- Té una tensió de ruptura de 160V ( >112V ).- Té una potència de dissipació de fins a 0'8W i en el circuit només es dissipen 0'16W.
satQ3 satQ3 RP = V × I = 0'2 × 0'8 m = 0'16 W (3.74)
Per determinar la R4, hem de veure la VEB del transistor Q3 i fixar una corrent IB adequada:0'1mA per exemple; llavors:
EB4
B
12 - V 12 - 0'6R = = = 114 K
I 0'1mΩ (3.75)
El transistor darlington, format pels transistors bipolars Q1 i Q2, ha de ser capaç de no entraren zona de ruptura per una tensió VS=112V i tolerar el pas a una corrent màxima d'IC en elpunt pic-a-pic de la corrent que passa per la bobina quan, a més, tenim desconnectada lacàrrega excitadora de l'alternador i estem només amb la resistència en paral·lel Rp.
El transistor darlington PNP escollit és el BDT62C, és un transistor amb una β=1000, unafT>10MHz, una corrent màxima de 8A i una potència de dissipació màxima molt superior a lautilitzada. Com a inconvenient, la seva tensió de ruptura és de 120V, només 8 volts per sobrede la que treballem. Però recordem que dispossem d'un circuit limitador de tensió en la fontd'alimentació.
Una altra cosa a tenir en compte, és que el transistor no té llibertat de modulació, és a dir, jaincorpora les resistències R1 i R2 ( això ho podem veure més ràpidament amb el nombre depotes del transistor). Si el valor d'aquestes resistències internes distorsionen el funcionamentque volem aplicar al circuit, ho corretgírem en una modificació de R3.
***
Resum dels valors del components comercials pel driver i conmutador ‘darlington’ depotència:
COMPONENTS COMERCIALS Transistor darlington PNP BDT62C
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
61 Memòria de Càlcul
Transistor bipolar NPN BSW67A R3 MCF 120K ; 0'25W R4 MCF 120K ; 0'25W
Taula 3.5. Llistat de components pel circuit driver i conmutador darlington
3.3.2 El Díode de Potència
Tenint en consideració tots els càlculs que s'han anat fent, el díode de potència ha de:
- Aguantar una tensió de tall de 112V.
- Ha de deixar el pas a una corrent màxima de 2A.
- I tenir un trr mínim de 0’5µs per a una freqüència de 100KHz: 5% dels temps de tall enrecuperació.
El díode escollit és un BA157 ja que té una tensió de ruptura de 400V, una corrent màxima de150A i un trr de 200ns aproximadament.
Atenció! degut a que deixa passar una corrent inversa de 1A avanç d'entrar en ruptura (400V),hem de suposar que en condicions de treball normal deixa passar un petit valor de corrent. Sies major del que teníem considerat, podem solventar el problema per un reajustament deldisseny de la resistència RP. El circuit impres ha de disposar de borns d’interconexió per aaltres resistències de l’RP. D’aquesta manera seguim considerant en el disseny del buck unvalor de corrent màxim d’entrada d’1A.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
62 Memòria de Càlcul
4 Disseny de les Fonts i Senyals pel Sistema
4.1 Font d’Alimentació de Tensió Contínua Estabilitzada per a l’Entradadel Convertidor Buck
Recordem com era l'estructura d'una font d'alimentació estabilitzada representada en elsegüent figura:
Figura 4.1. Circuit bàsic de font d’alimentació estabilitzada
Dels càlculs extrets en el disseny del convertidor buck, la font d'alimentació estabilitzadatreballarà per a una entrada de 380V de tensió alterna i unes sortides:
- RL:
L O transistor bobina bobina transistorV 1V
R = R + R + R R 0 ; R = = =1 I 1A
→ ≈ Ω
(4.1)
L O transistor bobina R = R + R + R = 112 + 1 + 0 = 113 ⇒ Ω (4.2)
- VS:
S L LV = R I = 113 1A = 113 V× Ω × (4.3)
Tot seguit procedim amb el càlculs de cada part de la font i els seus components.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
63 Memòria de Càlcul
Transformador
El primer que dissenyem és la reducció de la tensió que comportarà el transformador.L'elecció del transformador es realitza en l'apartat 5 d’aquest capítol.
Com el propòsit del disseny és obtenir una tensió contínua determinada, haurem de treballar,llavors, amb els valors de pic:
P,1 EFV = 2 V = 2 380V = 537'40 V× × (4.4)
Degut al filtre a la sortida del pont rectificador, el valor de pic en el secundari deltransformador ha de ser pròxim al valor de VS que dessitgem. Si prenem com a relació deltransformador: rt = 4, llavors:
P,1 P,1t P,2
P,2 t
V V 537'40Vr = V = = = 134'35V > 113V
V r 4⇒ (4.5)
Per lo que considerem un valor òptim.
El Pont Rectificador
Es tracta d'un rectificador d'ona completa d'estructura 'pont rectificador' ( 4 díodes ); comveiem:
Figura 4.2. Circuit rectificador pont
Els disseny dels díodes es basa únicament a que els valors que treballem estiguin lluny de lazona de saturació ( valors per sobre de IF i VF ) i de la zona de ruptura (-VBR). Els díodesescollits són els 1.5KE400A amb càpsula DO-201AE.
Apunt: seguint l'esquema del circuit, el següent valor a calcular seria la capacitat del filtre.Encara que es podria ara realitzar el seu càlcul, és convenient esperar-se a trobar tot el valor

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
64 Memòria de Càlcul
ohmic del circuit per a la comprensió del seu càcul. El càlcul es realitza més endavant.
La Caiguda de Tensió
Es tracta de la caiguda de tensió que provoca que en VS obtinguem la tensió dessitjada. Estracta del càlcul de la RS i com compendrem més endavant s'avança al càlcul del filtre a posar.
Per conèixer la RS haurem de saber abans la quantitat de tensió contínua que convertida del'alterna, que la localitzem en la rama del filtre i que la nomenclatem 'VCC'. Per trobar aquestaquantitat de tensió establim un factor de rissat del 5% de la senyal.
Figura 4.3. Gràfic de la senyal convertida amb un rissat del 5%
Amb lo qual, es perd un 2'5% de la tensió de pic de la tensió alterna de la entrada alconvertidor ca-cc:
CC P,2 P,2
2'5V = V - V
100× (4.6)
CC
2'5V = 134'35 - 134'35 131 V
100× ≈ (4.7)
Per últim, considerem que per la RS hi circula una corrent de 1'2 ampers ( lleugeramentsuperior al valor d'entrada del convertidor buck, que és d' 1 amper ). Així doncs, podemrealizar el càlcul definitiu de la resistència RS:
U 131 - 113 18R = = = = 15
I 1'2 1'2∆
Ω (4.8)
La disposició i elecció de les resistències es concreten un cop determinat el díode zener.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
65 Memòria de Càlcul
El Díode Zener
El díode zener ha de treballar per una tensió de tall que permeti el bloqueix a una sobretensióque perjudiqui el funcionament del convertidor buck i que protegeixi els seus components, enconcret, el transistor darlington si es fa ús d'aquest en el disseny del conmutador. Suposem,llavors, que a la entrada del convertidor li ha d'arribar una tensió de 113V. i que impossibilitiel pas d'una tensió de 120V ( veure l’apartat ‘Semiconductors de Potència’ del capìtol 3 ). Aixídoncs, la tensió de bloqueix que treballarà el díode zener es compendrà dins aquest interval. Eldíode zener que escollim, perquè més s'aproxima a les exigències de treball que establim, ésun díode de la sèrie 1N5300B amb una tensió de bloqueix de 120V. Per garantir la seguretatdel conmutador, en cas de ser un darlington, haurem de provocar una petita caiguda de tensióals 120V, fet que veurem en el següent apartat.
El Conjunt de Resistències RS
El problema que es reflecteix en l'apartat anterior es solventa en compartir la caiguda de tensióRS entre dues bandes del díode zener.
Figura 4.4. Circuit estabilitzador amb caiguda de tensió
Així doncs:
- RS1: el valor de RS1 serà aproximat i mai inferior a:
S1
U 131 - 120 11R = = = = 9'17
I 1'2 1'2∆
Ω (4.9)
De potència:
P = V I = 11V 1'2A = 13'2 W× × (4.10)
La resistència que posarem serà una resistència de 4Ω7 ohms i 17 watts de la sèrie SBCHE15.Al ser un valor inferior al calculat, dòna més garanties de tenir una tensió de 120V en lasortida, valor que correspont al 113V de tensió en l’entrada al convertidor buck. Fins i tot, una

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
66 Memòria de Càlcul
opció a adoptar serie la absència de qualsevol resistencia RS en aquesta rama.
Sí, en canvi, és imprescindible la RS2.
- RS2: el valor de RS2 també serà aproximat i mai inferior a:
S2
U 120 - 113 7R = = = = 5'83
I 1'2 1'2∆
Ω (4.11)
De potència:
P = V I = 7V 1'2A = 8'4 W× × (4.12)
El valor resistiu de RS2 es compartit entre una resistència fixa i un potenciòmetre en sèrie, queens permetrà ajustar la tensió de sortida de la font.
Les resistències fixes elegides són:
- RS1 : una SBCHE15 de 10 ohms i 17 watts de potència.- RS2 : una W24 de 4'7 ohms i 11 watts de potència.
La potència màxima que consumirà el potenciòmetre serà de:
S2P = (7-1'2 4'7) I = 1'36V 1'2A = 1'632 W× × × (4.13)
Amb lo qual, utilitzem un potenciòmetre de la sèrie PE30 ceràmic de 10 ohms i 3 watts depotència màxima. Degut a que en el procés d'ajustament aquest pot sotmetre's a una potènciasuperior a la màxima ( de 3W ), protegirem el potenciòmetre gràcies a una red 'clamp' ( veureapartat 4 del capítol 5 ).
Circuit d’Ajustament de la Corrent de Sortida
Es tracta de provocar una caiguda de corrent ajustada per fer entrar al convertidor buck lacorrent que dessitgem. Es tracta, tant sols, d'una connexió en sèrie d'un valor resistiu fixe i unpotenciòmetre d'ajustament, situats a una rama en paral·lel de la sortida de la fontd'alimentació (113V.).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
67 Memòria de Càlcul
Figura 4.5. Rama per caiguda de corrent
En un principi el valor resistiu fixe ha de ser capaç de consumir una corrent màxima de 0'4A iaguantar una tensió contínua de 113V. Amb lo qual:
CA,fixe
113VR = = 282'5
0'4AΩ (4.14)
CA,fixeP = V I = 113 0'4 = 45'2 W× × (4.15)
Com les resistènies que fem servir no treballen a tanta potència, aquesta la repartirem a partird'una disposició en paral·lel de les resistències augmentant, com a conseqüència, els seusvalors ohmics:
fixe 4 resistències en paral·lel, de valor: 4 R = 1'130 → × Ω (4.16)
La solució que establim és una disposició de 4 resistències de la sèrie W24 de 1K5 ohms i 12watts. Com el valor ohmnic ha augmentat, la corrent màxima que deixa circular ja no és lamateixa:
CA,fixe
1K5R = = 375 .
4Ω (4.17)
SCA
CA,fixe
V 113VI = = = 0'30
R 375Ω
Ω (4.18)
Al ser una corrent superior a 0'2 ampers, consideràrem òptima la disposició d'aquestesresistències.
Amb el potenciòmetre considerem que deixa passar una corrent mínima de 0'1A. ( en unprincipi ),

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
68 Memòria de Càlcul
SCA
CA,min
V 113VR = = = 1130
I 0'1AΩ (4.19)
amb lo qual:
CA,potenciòmetreR = 1130 - 375 = 755 Ω (4.20)2 2
CA,potenciòmetreP = R I = 755 0'1 = 7'55 W× × (4.21)
Dels potenciòmetre de potència, els que més s'aproximen a aquest valor són elspotenciòmetres de 500Ω, per lo que hem de comprovar si tolerem tanta baixada del valor.
CAR = 375 + 500 = 875 Ω (4.22)
S
CA
V 113VI = = = 0'129 A. < 0'2 A. corrent que acceptem !!!
R 875⇒
Ω (4.23)
La potència màxima que haurà d'aguantar serà de:
2 2P = R I = 500 0'1 = 5 W× × (4.24)
Així doncs, el potenciòmetre que utilitzem és de 500 ohms i 8 watts de potència, de la sèrie860.
Càlcul de la Resistència Total
Considerem resistència total a tot el valor ohmnic que es despren des de la sortida del pontrectificador fins el convertidor buck, quan aquest es troba conmutat (Ton); i que quedarepresentat en aquest circuit:
Figura 4.6. Circuit resistiu equivalent
Amb el que podem procedir en el seu càlcul:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
69 Memòria de Càlcul
buckbuck,ACmax
AC,max
R = 113 113 875 R = = 100'08
R = 875 113 875
Ω ×ΩΩ +
(4.25)
total buck,ACmax SR = R + R = 100'08 + ( 10 + 5'83 ) = 115'91 Ω (4.26)
Nota: hem considerat que la resistència del díode zener estabilitzador era massa gran perquèhi circuli una corrent i, per tant, l'hem exclós d'aquest càlcul.
El fet d'haver trobat la resistència total ens ajudarà en el càlcul del filtre.
Càlcul de la Capacitat de Filtre
Amb el circuit de filtre hem d'obtenir la tensió, que surt del pont rectificador, en contínua ambun factor de rissat màxim del 5%.
Per començar, representem l'expressió d'aquesta senyal de sortida (VP,2) en sèrie de Fourier:
( )L DC n nn=1,2,3,..
v = V + a sen nwt + b cos nwt∞
× ×∑ (4.27)
d'on els coeficients de la sèrie es podràn calcular de la següent manera:
2O
DC m0
2 V1- V = V sen wt d(wt) =
2
π
π π×
× × ×∫ (4.28)
2
n m0
1- a = V sen wt sen nwt d(wt) = 0
π
π× × × ×∫ (4.29)
( ) ( )O
n m2,4,..0
4 V2 1- b = V sen nwt cos nwt d(wt) =
n 1 n+1n
π
π π
∞
=
× −× × × × ×
− ×∑∫ (4.30)
Resultant de la següent manera:
O O O OL
2 V 4 V 4×V 4×Vv = - cos2wt - ×cos4wt - ×cos4wt - ...
3 15p 35pπ π× ×
× (4.31)
De la expressió de la sèrie de Fourier ens interessarà més endavant les amplituds i freqüènciesdels armònics ( considerem només un rissat format pels 3 primers armònics de l'expressió ).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
70 Memòria de Càlcul
O O O2 2 4 4 6 6
4 V 4×V 4×Vb = f = 2·f ; b = f = 4·f ; b = f = 6·f
3 15p 35pπ×
(4.32)
Com el condensador ha de carregar-se per a un rissat de tres armònics
Figura 4.7. Gràfic representatiu de la càrrega de filtració d’un armònic
O
QV =
C∆
∆ (4.33)
considerem, llavors, la següent expressió:
T TT8 164
O
total 0 0 0
O
V 4 4 4 sin 2wt + sin 4wt + sin8wt
R 3 15 35V =
C
π π π
× × × × ∆
∫ ∫ ∫ (4.34)
Si procedim al càlcul de la 'C':
O
O total
V 4 T 4 T 4 TC = + +
V R 3 15 354 2 8 2 16 2π π π × × × × ∆ × × × ×
(4.35)
Ototal
O
T 4 4 4C = + +
V 12 2 120 2 560 2RV
π π π × ∆ × × × ×
(4.36)
Ototal
O
T 40 + 400 + 8C =
V 1200 2RV
π × ∆ × ×
(4.37)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
71 Memòria de Càlcul
trobem l'expressió de la capacitat del filtre:
Ototal
O
448C
Vf 1200 2 R
Vπ
≥∆
× × × × (4.38)
d'on:
O
O
V- factor de rissat del 0'5%.
V
- f freqüència mínima de treball ( la considerem de 45 Hz ).
∆→
→
Així doncs, trobem el seu valor:
448C = 322 µC
0'05 45 1200 2 115'91π≥
× × × × (4.39)
Com el valor capacitiu no pot ser menor a 322µF, la opció que obtem és la disposició enparal·lel de 2 condensadors electrolítics de la sèrie 159 de 220µ i 150µ Faradays amb una altatensió de ruptura ( 400V dc.) .
***
Resum de valors dels components comercials pel circuit de la font d'alimentació estabilizada:
COMPONENTS COMERCIALS - DÍODES-Components Sèrie Càpsula D1-D4 1.5KE400A DO-201AE Díode Zener 1N5300B 17 02
COMPONENTS COMERCIALS - RESISTÈNCIES-Components Resistència; Potència Sèrie RS1 10Ω ; 17W SBCHE15
RS2 4Ω7 ; 11W W24
PS2 10Ω ; 3W PE30
RCA1-RCA4 1K5 ; 12W W24
PCA 500Ω ; 8W 860
COMPONENTS COMERCIALS - FILTRE-
Components Capacitat; Vdcmax Sèrie C1 220µF ; 400V 159 C2 150µF ; 400V 159
Taula 4.1. Llistat de components pel circuit de la font d’alimentació estabilitzada

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
72 Memòria de Càlcul
4.2 Font d'alimentació per als Components Electrònics
4.2.1 El Carregador de Bateries i Bateria
Suposem que dissenyem aquesta font per un carregador de bateries de les següentscaracterístiques:
- Entrada de 110V ac ( 120 ÷ 100V ) i 3A de corrent màxima.
I una bateria de:
- Sortida contínua de 24V. No disposa de borns de sortida de +12V i -12V.
4.2.2 Disseny del Circuit Driver d'Entrada al Càrregador de Batèries
Circuit corresponent al representat:
Figura 4.8. Circuit driver d’entrada al carregador de bateries
La tensió contínua d'entrada Vin es compren entre 0 a 6V originaria de la tensió alternagenerada del sistema que s'extreu en un dels borns de sortida del transformador. Per aquestcircuit, la conversió ca-cc es despren en un born de sortida del circuit de la senyal d'entrada al

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
73 Memòria de Càlcul
controlador de tensió, i el seu disseny s'estudia en el seu respectiu apartat.
Anem a seguir, tot seguit, les diferents parts que componen aquest circuit pròpi.
Els Transistors MOSFET's
El primer que establim en el circuit és l'elecció dels transistors utilitzats. Aquests seràntransistors de potència capaços de suportar tensions altes i corrents més elevades que lesconsumides pel carregador de bateries.
El model MOSFET escollit és un TO-220, de VDS = 400V, ID = 5'5A i VGSmax = 4V.
Circuit de Control
Supossem que treballem per una VGS = 2V i elegim un díode zener 1N5333B de VZ = 3'3V i IZ
= 0'38A, llavors calculem el valor de R:
GS
Z
V 2R = = 5 5
I 0'38≈ Ω (4.40)
i la seva potència:
GSP = V I = 2 0'38 = 0'76 W× × (4.41)
Així que, el potenciòmetre P2 que utilitzàrem serà de 10Ω i capaç de suportar una potència de:
2 2P = R I = 10 0'38 = 1'44 W× × (4.42)
Com treballem per un díode de tall de 3'3V, hem de provocar una caiguda de tensió per tald'ajustar el circuit de tall pel valor d'entrada que no dessitgem. Així doncs,
110 100 = X = 5'45
6 X→ (4.43)
Els 5'45V seràn la mínima baixada de tensió pel qual el díode no arribarà a la tensió de tall, ies talla llavors el subministrament pel carregador de bateries. Per aquests valors:
U 5'45 - 3'3 1'15R = = = = 2'875
I 0'4 0'4∆
Ω (4.44)
Per lo que, el seu valor ohmic estarà comprés per un potenciòmetre de 10Ω, i de potència:
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
74 Memòria de Càlcul
2 2P = R I = 10 0'4 = 1'6 W× × (4.45)
La resistència R1 li circularà un 0'02mA, degut a l'augment establert en al càlcul anterior. Amblo qual, el seu valor és de:
Z1
V 3'3R = = = 165
0'02 0'02Ω (4.46)
Limitador de Tensió
El díode zener DZ2 ha de tenir una tensió VZ superior, o lleugerament inferior, al valor de picde la tensió alterna màxima que tolera el subministrament el carregador de bateries. És a dir:
PICV = 2 120 170 V× ≈ (4.47)
En aquest cas, el díode zener més pròxim ( i per sota ) d'aquest valor és un del tipus 1N5384Bde VZ = 160V. Amb lo qual, el submistrament es talla al poc de sobrepassar 113V de la tensióalterna.
Filtre de Qualitat
Per últim, a la sortida d'aquest circuit hi posem un filtre C de 150nF MKT per millorar laqualitat de la tensió a l'entrada del carregador de bateries, degut als armònics que han pogutser originats en temps de la conmutació dels interruptors MOSFET.
***
Resum de valors dels components comercials pel circuit driver per l’entrada al carregador debateries:
TAULA DE COMPONENTS 2 Transistors MOSFET TO-220 ; 400V ; VGS=4V Díode Zener 1 1N5333B ; VZ=3'3V Díode Zener 2 1N5384B ; VZ=160V C MKT 150nF R1 160Ω ; 0'5W MCF R2 5Ω6 ; 1W PR01 P1 10Ω ; 2W MCU Cermet P2 10Ω ; 2W MCU Cermet
Taula 4.2. Llistat de components pel circuit driver per l’entrada del carregador de bateries

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
75 Memòria de Càlcul
4.2.3 Disseny del Circuit Regulador
Es tracta d'un circuit convencional i el seu esquema és el que es mostra representat:
Figura 4.9. Circuit regulador de 24V
Taula dels Components:
TAULA DE COMPONENTS Regulador de Tensió 7812 Regulador de Tensió 7912 C1,C2 MKT 100nF ; 63V C3,C4 Electrolític 10µF ; 25V
Taula 4.3. Llistat de components pel circuit regulador de 24V
4.3 Senyal d'Entrada al Controlador del Buck
El seu circuit correspon al representat en el següent esquema:
Figura 4.10. Circuit de la senyal d’entrada al controlador buck

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
76 Memòria de Càlcul
Les diferents etapes que passarà la tensió de mostra a convertir-se en una senyal contínua sónles següents:
Reducció de la Tensió
La seva tensió d'entrada es presa de la sortida del transformador per la relació 380V/6V.
Rectificació
La ona serà rectificada per un circuit d'ona completa com el veiem representat en l'esquemaanterior. La tensió contínua obtinguda serà:
iO
2 VV = = 3'82 V
π×
(4.48)
Amb lo qual deduïm la necessitat de filtrar la senyal amb condensadors electrolítcs perconvertir més tensió en contínua.
Cal tenir present, que la tensió al ser rectificada hem augmentat el doble el seu valor defreqüència.
Filtre
Estarà compost per un condensador de electrolític (C1) i un condensador (C2). L’objectiu delsdos condensadors és la d'aconseguir el valor de tensió contínua dessitjat i obtenir una òptimaqualitat de la senyal contínua.
Pel càlcul de la capacitat del condensador C1 ens servim de la següent expressió:
O
T2×I 2×T×VQ 2V = = =
V C 2 C R
×∆∆
× × (4.49)
d'on obtenim la expressió que determina C:
O
2×TC =
V2 R
V∆
× × (4.50)
En l'apartat anterior s'explicava que aquesta senyal també era utilitzada pel control del driverdel carregador de bateries. Com en aquest circuit tenia una impedància aproximada de 10

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
77 Memòria de Càlcul
ohms fa que la impedància total de les seves rames interconnectades, d'impedàncies moltsuperiors, estigui al voltant d'aquest valor. Com aquest valor ohmnic és molt petit per aquestscàlculs, pren doble importància el circuit de la caiguda de tensió al final del circuit, perquè, laresistència en sèrie que veiem en l’esquema anterior, fa pujar el valor resistiu del circuit finsgairebé el seu valor. Amb això, els càlculs seràn més favorables. Si aquesta resistència és de1K i, si a més considerem un factor de rissat del 10%, llavors tenim:
2×0'01C = = 70'7 µF
2 1K 0'10× × (4.51)
El condensador electrolític que utilitzem serà de 100µF i 16V, de la sèrie TKA.
El condensador C2 ha de comportar-se com un filtre de pas baix a partir de freqüències de100Hz ( valor de freqüencia del primer armònic ). Per això, ha de tenir una impedància mésbaixa que 1K ohms per 100Hz de freqüència. Amb lo qual, considerem la següent relació:
C
1X = < R
C×W (4.52)
llavors,
1 1C > = = 1'6 µF
R×W 1K×2p×100 (4.53)
Utilitzem un condensador MKT de 2'2 µF.
Caiguda de Tensió
Per arribar als 6 volts dessitjats hem de provocar una caiguda de tensió per mitja d'un divisorde tensió. Com anteriorment hem establert un factor de rissat ( en el filtre ) del 10% en latensió contínua serà un 5% més petita que el valor de pic dels 6V d'alterna. Llavors:
V= 2×6 - 0'05× 2×6 8 V≈ (4.54)
Per la seguent relació de resistències sabrem per quins valors ha de treballar el potenciòmetre:
( )X 1K
= X = 3 K6V 8-6 V
⇒ Ω (4.55)
Per tant, utilitzem un potenciòmetre 3386 de 10K i 0'5W.
***

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
78 Memòria de Càlcul
Resum de valors dels components comercials pel circuit d’entrada al controlador delconvertidor buck:
COMPONENTS COMERCIALSComponents Sèrie Càpsula
4 Díodes Rectificadors 1N5298 DO-204AAComponents Valor
Condensador Electrolític TKA 100 F ; 16V Condensador MKT 2'2 F Potenciòmetre 3386 10K ; 0'5W R MCF 1K
Taula 4.4. Llistat de components pel circuit de la senyal d’entrada al controlador de tensió
4.4 Senyal d’Entrada al Controlador de Freqüència
El seu circuit que hem de dissenyar és el que es mostra representat:
Figura 4.11. Circuit per a l’entrada del regulador de freqüència
Reducció de la Tensió
Aprofitem els borns de sortida de 6V ac. del transformador. A més, li provoquem una caigudade tensió per un divisor de tensió, perquè la tensió que li arribi al circuit driver del PIC nosigui superior als 5V de tensió que alimenten l'A.O. del circuit driver. Les resistències queposem de 10K ohms, provocaràn una caiguda de tensió de 3V i consumiràn una potència de:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
79 Memòria de Càlcul
2 2V 3P = = = 0'9 W.
R 10 (4.56)
Escollim unes resistències MCF de 10K ohms i de 2W de potència màxima.
Limitador de Tensió
Per assegurar-nos que sempre tenim un valor de tensió no superior a 5V, utilitzem un díodezener de tensió:
ZV 3 2 = 4'24V ≤ × (4.57)
Escollim un díode zener 1N5336B de VZ = 4'3V.
Filtre de Qualitat
Per últim, dissenyem un filtre per a rissats, producte de l'histerèsi en l'entrada de l'A.O. que potcomportar errors en la sortida del controlador de freqüència. Com l'A.O. treballa en zona desaturació la seva impedància serà molt elevada lo que comporta un filtre de capacitat petita pera freqüències elevades. És convenient utilitzar un condensador del tipus MKT i de l'ordre delsnanofaradays i experimentar previament la filtració per visualització de la senyal mitjançantun oscil·loscopi.
***
Resum de valors dels components comercials pel circuit d’entrada al controlador defreqüència:
COMPONENTS COMERCIALSComponents Sèrie Càpsula
Díode Zener 1N5336B 17 02Components Resistència; Potència Sèrie
2×R 10K;2W MCF C 50nF MKT
Taula 4.5. Llistat de components pel circuit de la senyal d’entrada al controlador de freqüència

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
80 Memòria de Càlcul
4.5 El Transformador
Segons les fonts i les senyals estudiades anteriorment necessitem el subministrament de tensióalterna de:
- Vin > 113V.- 220V.- 110V.- 6V.
La solució adoptada és l'ús de dos transformadors d'aquestes característiques:
- Transformador de 380V de tensió d'entrada amb una relació de sortida de rt = 4 reductor.
- Transformador de sortida multiple: 220V, 110V i 6V.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
81 Memòria de Càlcul
5 Elements i Circuits de Protecció
5.1 Relès de Protecció
En aquest tema tractem sobre l'elecció dels diferents relès de protecció en la instal·lació delgenerador al conjunt de receptors. Com s'argumenta en el tema 5 de la Memòria Descriptiva,els relès de protecció que utilitzem són: relè de sobreintensitat, relè de de màxima i mínimatensió i de freqüència.
Els paràmetres que es tenen en compte en l'elecció dels diferents relès vindràn determinats, amés de valors de seguretat per evitar el magnituds perilloses en els receptors, per la qualitatque s'exigirà en el sistema generador. Cal considerar en aquest cas si el nostre grup generadortreballa com a font d'energia elèctrica independent o en paral·lel a un altre grup generador.
Elecció dels relès
L'elecció d'un relè ve determinada per les consideracions següents:
- Tensió nominal que suporta.- Tant % d'histèresi que tolera en la mesura.- Potència absorbida.- Corrent màxima que suporta.- Temps de desconnexió.- Marges de temperatura a que pot treballar.- Compliment de les normes elèctriques VDE 0435.- Compliment de les normes d'esforços mecànics DIN IEC 255-21.
Per als diferents relès de protecció supossem diferents consideracions de disseny:
- Relè de sobrecorrent: corrent de tall a que treballa.- Relè de màxima i mínima tensió: marge de tensions a que pot treballar.- Relè de freqüència: marge de freqüències a que pot treballar.
En els dos darrers relès de protecció hem d'escollir si volem, o no, que siguin relèsprogramables ( relès amb PLC ).
En l'annexe, es poden veure catàlegs de diferents marques comercials de: relès de protecció desobreintensitat, relès de màxima i mínima tensió i relès de freqüència.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
82 Memòria de Càlcul
5.2 Disseny d’Un Radiador
El radiador que dissenyem tot seguit queda restringit per una refrigeració de convecció, per loque, el seu disseny tendeix a sobredimensionar-se.
L'estratègia bàsica que permet dissenyar un radiador eficient, parteix del càlcul correcte de laresistència tèrmica Rra, ja que el seu valor és determinant en el disseny. Desgraciadament, elmètode exacte per efectuar el càlcul d'aquesta resistència excedeix els límits d'aquest estudi,no obstant, mitjançant el mètode oferit, s'obté un molt bona aproximació en el disseny, sempreque es mantinguin les següents condicions:
1- El radiador ha d'estar construït amb una pletina rectangular o circular, molt prima enrelació a les seves dimensions.
2- El radiador ha d'estar allunyat d'altres fonts de calor.
3- La relació llarg-ample de la pletina no ha d'excedir de 2:1.
4- No ha d'haver restriccions per la circulació de l'aire per convecció.
Mantenint les condicions anteriors, la resistència tèrmica Rra pot calcular-se, de formaaproximada, mitjançant l'equació:
( )raC C r T
1 1 ºCR = =
A×?× K ×h + ×H A ? h W ∈ × ×
(5.1)
d'on:
- A → Àrea de la superfície del radiador.- η → Factor d'efectivitat del radiador.- Kc → Factor de correcció.- hc → Coeficient de transferència de calor per convecció.- ∈ → Emisivitat.- Hr → Coeficient normalitzat de transferència de calor per radiació.
El coeficient de transferència de calor per convecció (hc), sobté a partir del gràfic:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
83 Memòria de Càlcul
Figura 5.1. Gràfic del coeficient de transferència de calor perconvecció a raó de l’increment de la temperatura en el dissipador
Aquest paràmetre, com es pot observar, depen de l'increment de la temperatura en eldissipador ( Tr - Ta ) i del factor de forma (L), cumplint-se així:
r a ra dT - T = R P× (5.2)
d'on Tr és la temperatura del radiador i Ta és la temperatura ambient.
El paràmetre L, depenent de la forma del radiador i de la posició del muntatge ( vertical ohoritzontal ), s'ofereix en la següent taula, junt amb el factor de correcció Kc.
Superfície Posició KL KC
Vertical Altura 1Rectangular Plana
Horitzontal (L*H)/(L+H) 1'35Circular Plana Vertical π/diametre 0'9
Taula 5.1. Determinació del factor de correcció KC segons la forma i el montatge del radiador
El factor normalitzat de transferència de calor per radiació (Hr), funció de la temperaturaambient (Ta), i de l'increment de temperatura, ( Tr-Ta ), pot obtenir-se a partir de la següentgràfic:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
84 Memòria de Càlcul
Figura 5.2. Gràfic del factor nomalitzat de transferència de calor per radiació a raó del’increment de la temperatura en el dissipador
El valor de ∈ , per diferents tipus de material, s'obté a partir de la taula:
Material Emisivitat (∈ ) Alumini anoditzat 0'80 Alodí sobre alumini 0'15 Alumini polit 0'05 Cobre polit 0'07 Cobre oxidat 0'70 Tira de cinta d'acer ondulat 0'66 Esmalt 0'85 Pintura a l'oli 0'95 Barniz 0'93
Taula 5.2. Determinació de l’emisivitat ∈ segons el tipus de material
Finalment, el coeficient η, s'obté a partir del següent nomograma:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
85 Memòria de Càlcul
Figura 5.3. Nomograma de factors interrelacionats pel disseny del radiador
Aquest s'utilitza de la següent forma:
- A partir dels anteriors gràfics ( figures 1 i 2 ) i de les taules 1 i 2, es calcula el valor de:
T C C rh = K h + H× ∈× (5.3)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
86 Memòria de Càlcul
i es localitza el punt calculat en el nomograma.
- A continuació es traça una línia des de hT a través de l'espesor elegit, fins tallar en α.
- A partir de la representació:
Figura 5.4. Determinació de D segons la forma del radiador
es determina D. Una vegada localitzat el valor, es traza una línia pels dos punts D i α finstallar amb la columna η.
- Si el radiador no és de la forma simétrica, i està, a més, col·locat verticalment, η ha demultiplicar-se per 0'7.
Si es dessitja obtenir amb exactitud, és necessari efectuar diferents assatjos per iteració,començant per un tamany que ressulti petit i anar degradant-lo fins obtenir el tamany i formadessitjats.
Tot seguit, anem a realitzar tots els passos pel disseny del radiador del conmutador.
5.2.1 Exemple de Disseny
Dissenyem un radiador pla de forma horitzontal, montat sobre el transistor darlingtonBDT62C ( conmutador del convertidor buck ) tractat en l'apartat ‘Semiconductors de Potencia’del capítol 3.
De les característiques del transistor s'obtenen les següents paràmetres:
- Màxima temperatura de la unió: 150 ºC.- Potència màxima dissipable: 90 W.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
87 Memòria de Càlcul
- Resistència tèrmica unió-ambient (Rja): 125ºC/W.- Resistència tèrmica unió-càpsula (Rjc): 12'5ºC/W.
Sens dubte, estem sobredimensionant el radiador ja que el transistor treballant com aconmutador mai consumirà potències tant elevades. Però, degut al seu baix cost i al grau deseguretat que garanteix pel circuit, el radiador pot ser sobredimensionat. En tot cas, 90W ésexcessiu ja que consumirà una potència de 2'4 W aproximadament ( 1'2A×1V=2'4W ).Dissenyem, llavors, el radiador per una potència de 5 W.
Per una temperatura de funcionament de la càpsula del transistor de 40ºC, quan aquest dissipila màxima potència (90W), s'obté un equivalent de resistència tèrmica càpsula-ambient de:
ca
40ºCR = = 8 ºC/W
5W (5.4)
Com la resistència tèrmica entre l'unió i càpsula és de 12'5ºC/W la diferència entre aquestesdos resistències tèrmiques ha d'assumir-la el radiador. Per tant, la resistència tèrmica delradiador ha de ser:
raR = 12'5ºC/W - 8ºC/W = 4'5 ºC/W (5.5)
Així que, les condicions pel disseny del radiador són:
- Radiador de Rra = 4'5 ºC/W.- Potència a dissipar: Pd = 5 W.- Màxima temperatura ambient: Ta = 50 ºC.- El material disponible és alumini anoditzat. Pletina de 1/8.
Tot seguit anem a realitzar els diferents passos que comportaràn el disseny del nostre radiador:
- En primer lloc, es realitza una estimació del tamany del radiador ( en polsades ); elegim,llavors, un radiador d'àrea:
A = 1'5" 1'5" = 1'25 polsades quadadres× (5.6)
- El factor KL s'obté a partir de la taula 1:
L
L H 1'5 1'5 1'25K = = = = 0'42 polsades
L+H 1'5+1'5 3× ×
(5.7)
- Ara obtenim l'increment de temperatura en el dissipador:
r a ra dT - T = R P = 11'06 5 = 55'3 ºC× × (5.8)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
88 Memòria de Càlcul
- A partir del valor de KL i de la figura 1, s'obté hc:
2-3Ch = 6'5 10 W polsada - ºC× (5.9)
- De la taula 1 s'obté: Kc = 1'35.
- A partir del valor en 'Tr-Ta', per una temperatura ambient de 50ºC s'obté de la figura 2:
2-2rH = 0'64 10 W polsada - ºC× (5.10)
- De la taula 2, s'obté per alumini anoditzat: ∈ = 0'8.
- Amb els valors obtinguts es calcula hT:
2-3 -2 -3T C C rh = K h + H = 1'35 6'5 10 + 0'8 0 '64 10 = 13'9 10 W polsada -ºC× ∈× × × × × × (5.11)
- Del nomograma de la figura 5, s'obté α = 0'17.
- De la figura 4:1'25
D = = 0'63π
(5.12)
- Traçant, en el nomograma una línia des de D fins a α i prolongant fins tallar en η, s'obté: 1(100%).
- I finalment, ja podem calcular resistència tèrmica del radiador:
ra 3T
1 1 ºC ºCR = = = 57'55 >> 4'5
A ? h 1'25 1 13'9 10 W W− × × × × ×
(5.13)
Dels càlculs obtinguts, deduïm que el tamany suposat de 1'5 polsades ha ressultat ser moltpetit, amb lo qual hem tornar a trobar el valor de Rra per unes dimensions de radiadorsuperiors.
Si suposessim unes dimensions de 5 x 4 polsades1 d'amplada del radiador els resultatsobtinguts serien òptims.
ra 3T
1 1 ºC ºCR = = = 4'04 4'5
A ? h 20 0'89 13'9 10 W W− ≈ × × × × ×
(5.14)
Fins i tot, per l'augment del valor de la potència imposada al principi del disseny del radiador,unes dimensions inferiors també serien correctes .
[1] Recordem que una polsada és l’equivalent a 2’54 cm.
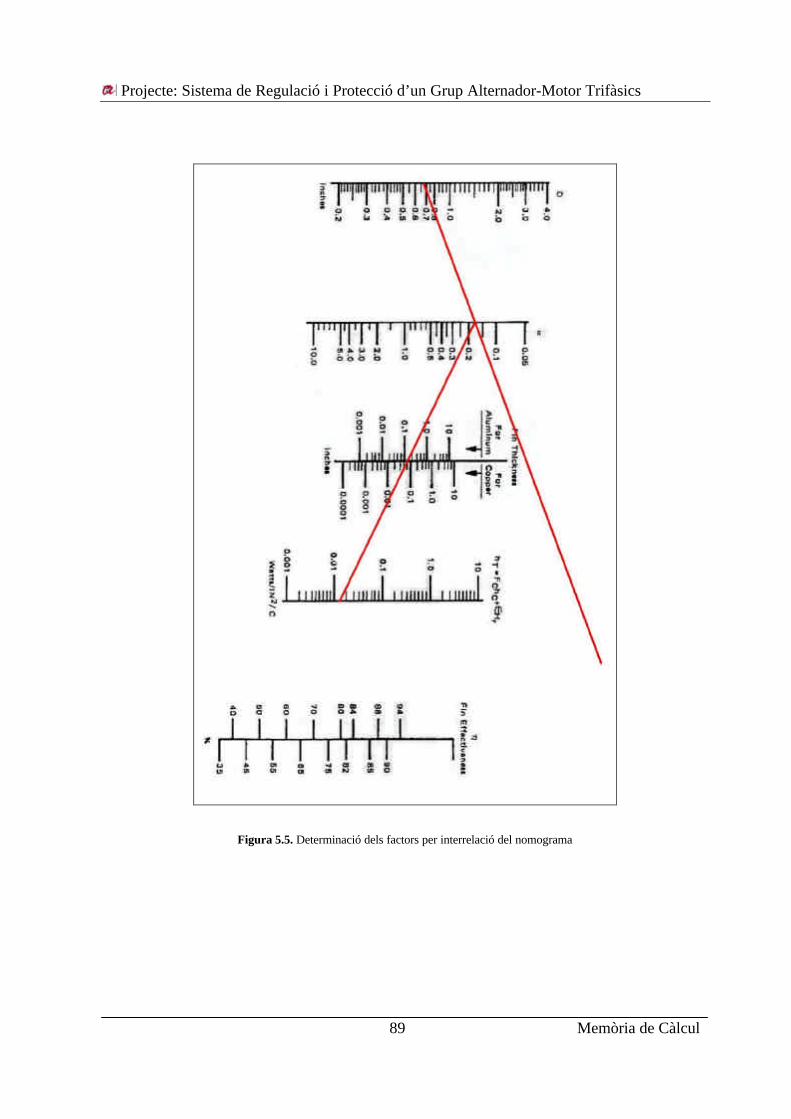
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
89 Memòria de Càlcul
Figura 5.5. Determinació dels factors per interrelació del nomograma

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
90 Memòria de Càlcul
5.3 Disseny de les Xarxes Snubber
5.3.1 Introducció
La tecnologia actual dels components electrònics, porten, en la majoria de casos, circuitsadicionals de protecció del component. En l'elecció dels components hem de procurar queaquests en continguin. Però si no fòra el cas, aquests s'haurien de dissenyar. Tot s'estudia eldisseny d'aquestes xarxes de protecció.
5.3.2 Disseny General d’Una Xarxa Snubber
El disseny de les reds snubber poden ser tractades com qualsevol xarxa passiva. Encara queexisteixen diferents criteris per definir el valor dels components, el seu càlcul pot abodar-semitjançant el mètode que es tracta tot seguit.
El valor del condensador s'obté a partir de l'equació fundamental de la càrrega:
rI tQC = =
V V×
(5.15)
d'on:
- I → és la corrent de pic de conmutació.- tr → és el temps de caiguda del transistor.- V → és la tensió de pic de conmutació ( aproximadament 2 vegades la tensió d'alimentació ).
En el càlcul de la resistència snubber intervé, lògicament, la constant del temps delcondensador. Tenint en compte que emmagatzema càrrega durant l'interval tON, aquest és eltemps utilitzat en el càlcul:
ONt = R C R =
Cτ × ⇒ (5.16)
La potència que ha de dissipar la resistència és:
22C
r
1W = C V
C V f2 P = W 2P = t
× × × × ⇒
(5.17)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
91 Memòria de Càlcul
d'on f és la freqüència de conmutació.
Per últim, el díode utilitzat en aquest tipus de xarxes és generalment un díode de conmutacióultrafast.
5.3.3 Disseny d’Una Xarxa Snubber pel Díode de Potència
El disseny d'una xarxa snubber pel díode de potència comporta uns passos diferents alsdescrits.
Pel circuit ressonant sèrie, la resistència s'obté a partir de l'expressió:
Ksnb
j
LR =
C (5.18)
d'on:
- LK → és el valor de la inductància en el circuit.- Cj → la capacitat de l'unió del díode.
Per lo que el seu valor serà de:
snb
700µR = = 7'63 M .
12nΩ (5.19)
El condensador Csnb s'utiliza per bloquejar la tensió inversa del díode. La seva capacitat ha deser superior, al menys 10 vegades major que la oferida per la capacitat paràsita del díode, aixòés:
snb jC = 10 C× (5.20)
Amb lo qual el seu valor serà de 120 pF.
Apunt: Amb objectiu d'accelerar el procés, pot adoptar-se el criteri de que la constant detemps de càrrega del condensador sigui el 10% de TONmin:
snb snb snb ONmin = R C = 0'1 t τ × × (5.21)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
92 Memòria de Càlcul
5.4 Altres Elements de Protecció
En el disseny del circuit ens hem trobat situacions que es indispensable o de molta utilitat laincorporació d'algun element de protecció o de senyalització descrits en la memòriadescriptiva.
- Xarxa Clamp. Composta per un díode zener aquesta ha de protegir el potenciòmetre PS2del circuit de la font estabilitzada. la manipulació d'aquesta pot comporta un consum més grandel que pot suportar (3W). Com la potència d'ajust és de 1'632W, dissenyem una xarxa clampper a que limiti el consum de potència per un valor entremig dels esmentats.
Així doncs, per un díode zener de tensió 2'4V:
S2P = 2'4V 1'2A = 2'88 W× (5.21)
impedeix que a la corrent màxima que en el circuit hi pot circular el potenciòmetre PS2 noarribi ha consumir 3W de potència.
→ Díode Zener BZX79C de VZ = 2'4V.
- Led de Senyalització. En el circuit driver per a l'entrada del carregador de bateries seriainteressant saber quan esta subministrant el carregador mitjançant un díode de senyalització.Si aquest no el porta incorporat interconnectarem un en el born de la tensió VGS de dispar delsMOSFET’s.
Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Plànols
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex dels Plànols
Índex dels Plànols
Plànol 1 : Diagrama de Blocs
Plànol 2 : Circuit Adaptador
Plànol 3 : Circuit Regulador de Freqüència
Plànol 4 : Circuit Regulador de Tensió
Plànol 5 : Esquema de la Placa de l’Adaptador
Plànol 6 : Esquema de la Placa del Regulador de Freqüència
Plànol 7 : Esquema de la Placa del Regulador de Tensió


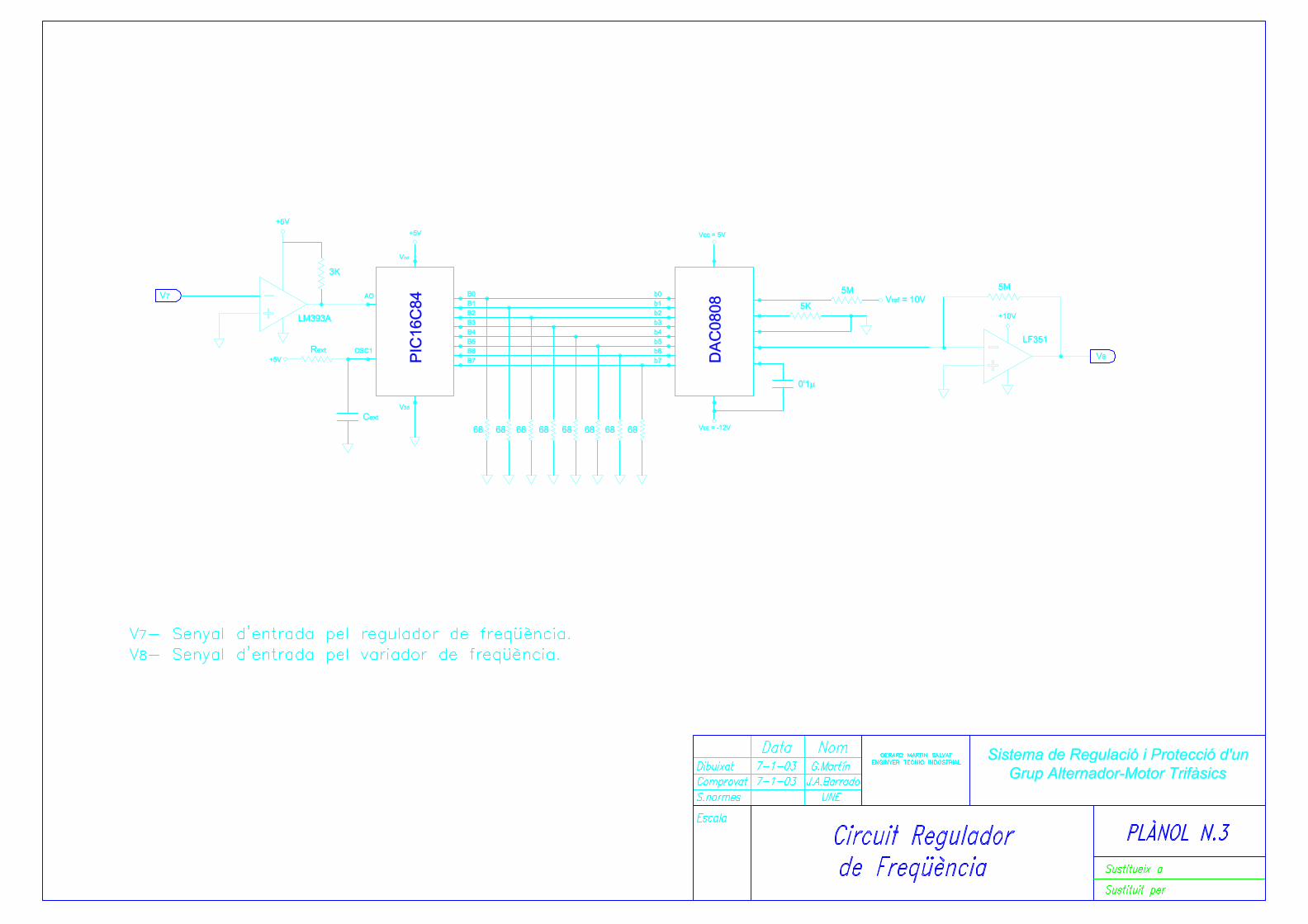


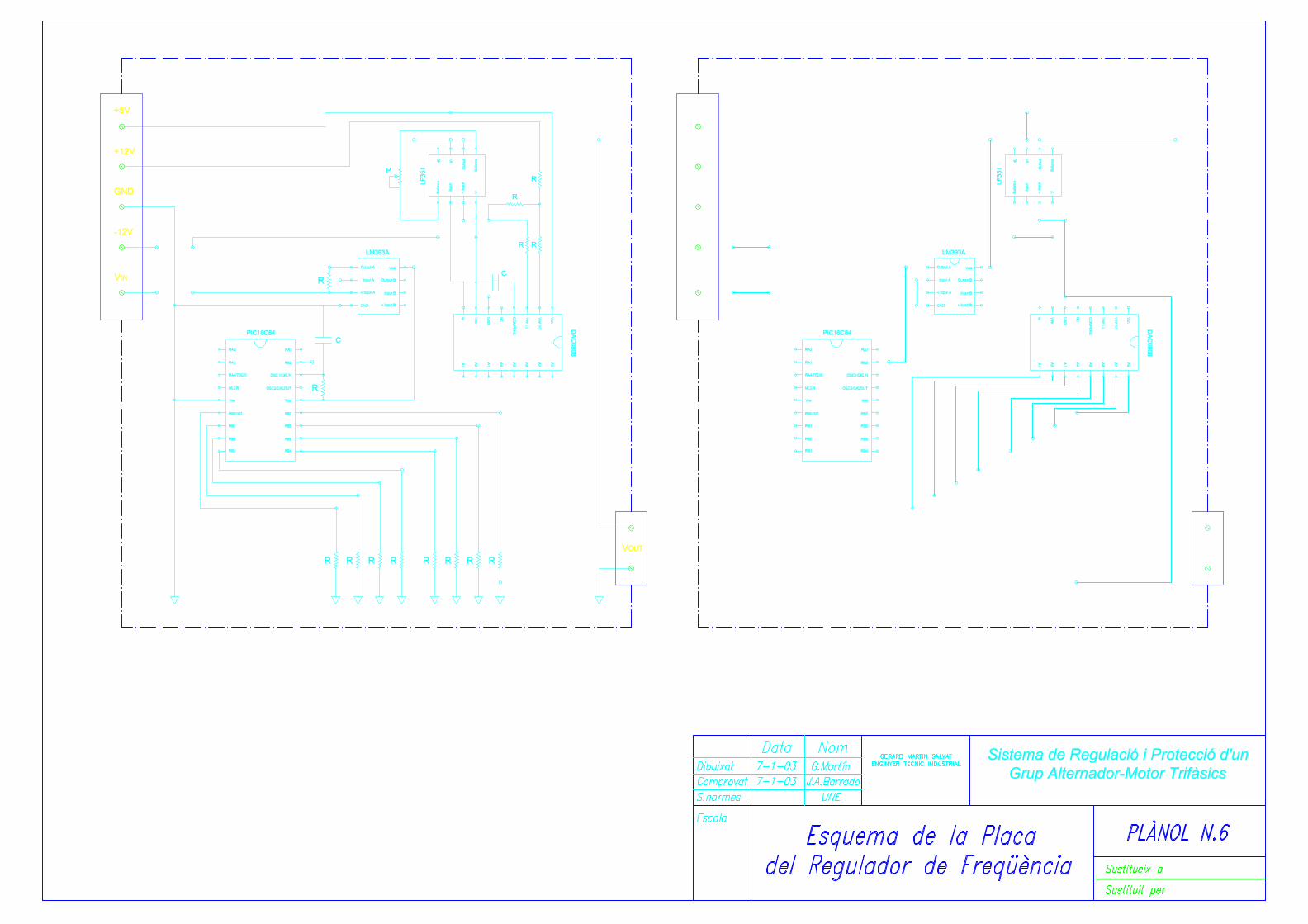


Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Pressupost
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex del Pressupost
Índex del Pressupost
Pressupost de les Plaques1 1
1.1 Placa de l’Adaptador 11.2 Placa del Regulador de Freqüència 21.3 Placa del Regulador de Tensió 2
2 Pressupost Software 3
3 Pressupost dels Components del Sistema 3
4 Pressupost Alimentació, Cables i Connectors 3
5 Resum de Pressupost 4
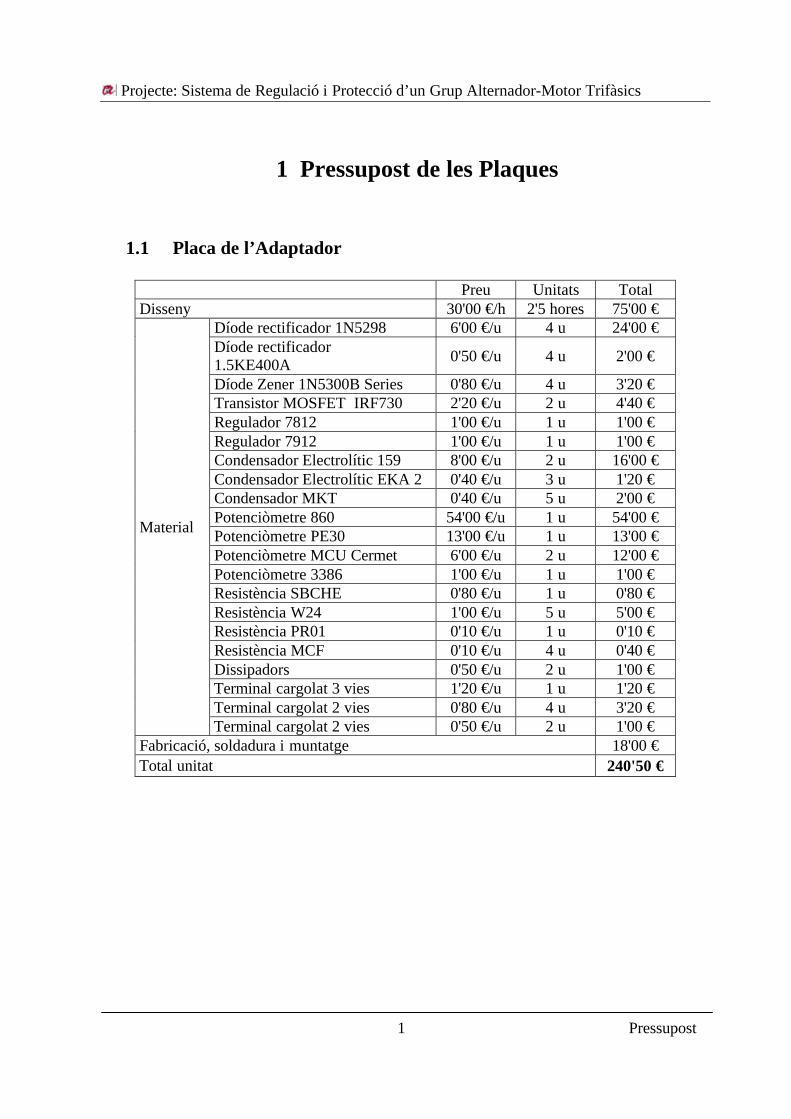
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Pressupost
1 Pressupost de les Plaques
1.1 Placa de l’Adaptador
Preu Unitats Total Disseny 30'00 €/h 2'5 hores 75'00 €
Díode rectificador 1N5298 6'00 €/u 4 u 24'00 € Díode rectificador 1.5KE400A 0'50 €/u 4 u 2'00 €
Díode Zener 1N5300B Series 0'80 €/u 4 u 3'20 € Transistor MOSFET IRF730 2'20 €/u 2 u 4'40 € Regulador 7812 1'00 €/u 1 u 1'00 € Regulador 7912 1'00 €/u 1 u 1'00 € Condensador Electrolític 159 8'00 €/u 2 u 16'00 € Condensador Electrolític EKA 2 0'40 €/u 3 u 1'20 € Condensador MKT 0'40 €/u 5 u 2'00 € Potenciòmetre 860 54'00 €/u 1 u 54'00 € Potenciòmetre PE30 13'00 €/u 1 u 13'00 € Potenciòmetre MCU Cermet 6'00 €/u 2 u 12'00 € Potenciòmetre 3386 1'00 €/u 1 u 1'00 € Resistència SBCHE 0'80 €/u 1 u 0'80 € Resistència W24 1'00 €/u 5 u 5'00 € Resistència PR01 0'10 €/u 1 u 0'10 € Resistència MCF 0'10 €/u 4 u 0'40 € Dissipadors 0'50 €/u 2 u 1'00 € Terminal cargolat 3 vies 1'20 €/u 1 u 1'20 € Terminal cargolat 2 vies 0'80 €/u 4 u 3'20 €
Material
Terminal cargolat 2 vies 0'50 €/u 2 u 1'00 € Fabricació, soldadura i muntatge 18'00 € Total unitat 240'50 €
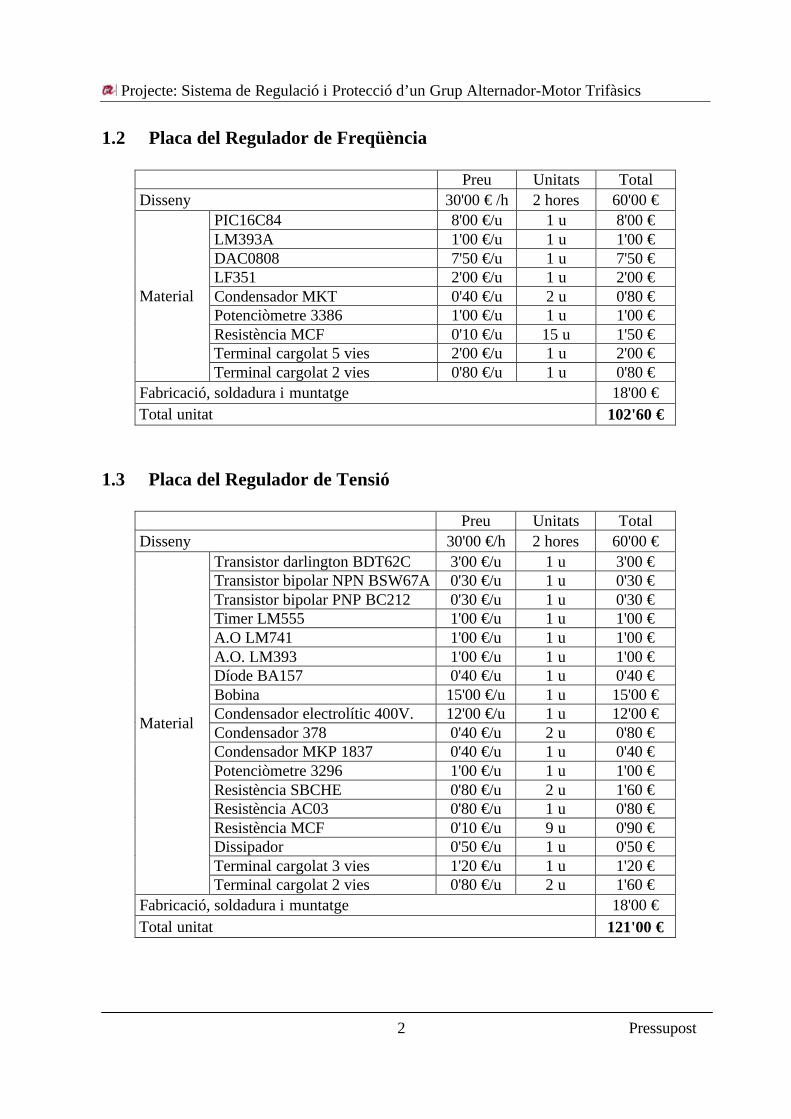
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Pressupost
1.2 Placa del Regulador de Freqüència
Preu Unitats Total Disseny 30'00 € /h 2 hores 60'00 €
PIC16C84 8'00 €/u 1 u 8'00 € LM393A 1'00 €/u 1 u 1'00 € DAC0808 7'50 €/u 1 u 7'50 € LF351 2'00 €/u 1 u 2'00 € Condensador MKT 0'40 €/u 2 u 0'80 € Potenciòmetre 3386 1'00 €/u 1 u 1'00 € Resistència MCF 0'10 €/u 15 u 1'50 € Terminal cargolat 5 vies 2'00 €/u 1 u 2'00 €
Material
Terminal cargolat 2 vies 0'80 €/u 1 u 0'80 € Fabricació, soldadura i muntatge 18'00 € Total unitat 102'60 €
1.3 Placa del Regulador de Tensió
Preu Unitats Total Disseny 30'00 €/h 2 hores 60'00 €
Transistor darlington BDT62C 3'00 €/u 1 u 3'00 € Transistor bipolar NPN BSW67A 0'30 €/u 1 u 0'30 € Transistor bipolar PNP BC212 0'30 €/u 1 u 0'30 € Timer LM555 1'00 €/u 1 u 1'00 € A.O LM741 1'00 €/u 1 u 1'00 € A.O. LM393 1'00 €/u 1 u 1'00 € Díode BA157 0'40 €/u 1 u 0'40 € Bobina 15'00 €/u 1 u 15'00 € Condensador electrolític 400V. 12'00 €/u 1 u 12'00 € Condensador 378 0'40 €/u 2 u 0'80 € Condensador MKP 1837 0'40 €/u 1 u 0'40 € Potenciòmetre 3296 1'00 €/u 1 u 1'00 € Resistència SBCHE 0'80 €/u 2 u 1'60 € Resistència AC03 0'80 €/u 1 u 0'80 € Resistència MCF 0'10 €/u 9 u 0'90 € Dissipador 0'50 €/u 1 u 0'50 € Terminal cargolat 3 vies 1'20 €/u 1 u 1'20 €
Material
Terminal cargolat 2 vies 0'80 €/u 2 u 1'60 € Fabricació, soldadura i muntatge 18'00 € Total unitat 121'00 €
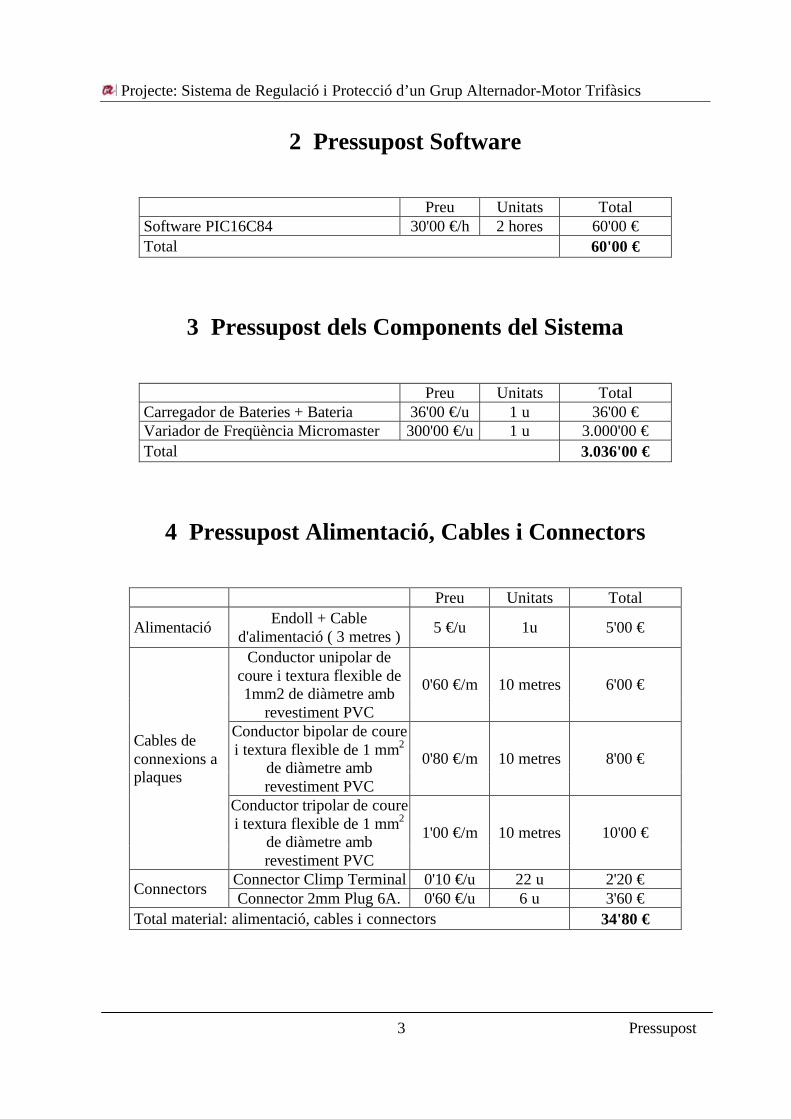
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Pressupost
2 Pressupost Software
Preu Unitats Total Software PIC16C84 30'00 €/h 2 hores 60'00 € Total 60'00 €
3 Pressupost dels Components del Sistema
Preu Unitats Total Carregador de Bateries + Bateria 36'00 €/u 1 u 36'00 € Variador de Freqüència Micromaster 300'00 €/u 1 u 3.000'00 € Total 3.036'00 €
4 Pressupost Alimentació, Cables i Connectors
Preu Unitats Total
Alimentació Endoll + Cabled'alimentació ( 3 metres ) 5 €/u 1u 5'00 €
Conductor unipolar decoure i textura flexible de1mm2 de diàmetre amb
revestiment PVC
0'60 €/m 10 metres 6'00 €
Conductor bipolar de courei textura flexible de 1 mm2
de diàmetre ambrevestiment PVC
0'80 €/m 10 metres 8'00 € Cables de connexions a plaques
Conductor tripolar de courei textura flexible de 1 mm2
de diàmetre ambrevestiment PVC
1'00 €/m 10 metres 10'00 €
Connector Climp Terminal 0'10 €/u 22 u 2'20 € Connectors Connector 2mm Plug 6A. 0'60 €/u 6 u 3'60 € Total material: alimentació, cables i connectors 34'80 €

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Pressupost
5 Resum de Pressupost
Preu Placa del circuit adaptador 240'50 € Placa del circuit regulador de freqüència 102'60 € Placa del circuit regulador de tensió 121'00 € Software 60'00 € Components del sistema 3.036'00 € Alimentació, cables i connectors 34'80 €
Total 3.594'90 €
El cost total de tot el sistema de regulació del grup generador és de TRES MIL CINC CENTSNORANTA-QUATRE EUROS amb CINQUANTA CÈNTIMS.

Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Plec de Condicions
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex del Plec de Condicions
Índex del Plec de Condicions
Instal·lacions Generadores de Baixa Tensió 1
1 Objecte i Camp d'Aplicació 12 Classificació 13 Condicions Generals 14 Condicions per la Connexió 2
4.1 Instal·lacions Generadores Aïllades 24.2 Instal·lacions Generadores Asistides 24.3 Instal·lacions Generadores Interconnectades 3
4.3.1 Potències Màximes de les Centrals Interconectades en Baixa Tensió 34.3.2 Condicions Específiques per l'Arranc i Acoplament de la Instal·lació
Generadora a la Red de Distribució Pública 44.3.2.1 Generadors Asíncrons 44.3.2.2 Generadors Síncrons 4
4.3.3 Equips de Maniobra i Mesura a Disposar en el Punt d'Interconexió 54.3.4 Control de l'Energia Reactiva 5
5 Cables de Connexió 66 Forma de l'Ona 67 Proteccions 68 Instal·lacions 7
8.1 Generalitats 78.2 Característiques de la Posta a Terra segons el Funcionament de la
Instal·lació Generadora Respecte a la Red de Distribució Pública 78.2.1 Instal·lacions Generadores Aïllades Connectades a Instal·lacions
Receptores que són Alimentades de Forma Exclussiva per dits Grups 78.2.2 Instal·lacions Generadores Asistides Connectades a instal·lacions
Receptores que poden ser Alimentades, de forma Independent, perllurs Grups o per la Red de Distribució Pública 8
8.2.3 Instal·lacions Generadores Interconectades, Connectades aInstal·lacions Receptores que poden ser Alimentades, de formaSimultania o Independent, per llurs Grups o per la Red de DistribucióPública 8
9 Posta en Marxa 910 Altres Disposicions 9

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Plec de Condicions
Instal·lacions Generadores de Baixa Tensió
1 Objecte i Camp d'Aplicació
La present instrucció s'aplica a les instal·lacions generadores, entenent com a tals, lesdestinades a transformar qualsevol tipus d'energia no elèctrica en energia elèctrica.
Als efectes d'aquesta instrucció s'entén per "Reds de Distribució Pública" a les reds elèctriquesque pertanyen o són explotades per empresses amb el fi principal de la distribució de l'energiaelèctrica per venta de tercers. Així mateix, s'entén per "Autogenerador" a l'empresa que,subsidiariament a les seves activitats principals, produeix, individualment o en comú, l'energiaelèctrica destinada en la seva totalitat o en part, a les seves necessitats pròpies.
2 Classificació
Les Instal·lacions generadores es classifiquen, atenent al seu funcionament respecte a la Redde Distribució Pública, en:
a) Instal·lacions generadores aïllades: aquelles en les que no pot existir connexió elèctricaalguna amb la Red de Distribució Pública.
b) Instal·lacions generadores asistides: aquelles en les que existeix un connexió amb la Red deDistribució Pública, però sense que els generadors puguin estar treballant en paral·lel amb ella.La font preferent de subministrament podrà ser tant els grups generadors com la Red deDistribució Pública, quedant l'altra font com a socors o de suport. Per impedir la connexiósimultània d'ambdues, s'hauràn d'instal·lar els corresponents sistemes de conmutació. Seràpossible, no obstant, la realització de maniobres de transferència de càrrega sense tall, sempreque es cumpleixin els requisits tècnics descrits en l'apartat 4.2.
c) Instal·lacions generadores interconnectades: aquelles que estan, normalment, treballant enparal·lel amb la Red de Distribució Pública.
3 Condicions Generals
Els generadors i les instal·lacions complementàries de les instal·lacions generadores, com elsdipòsits de combustibles, canalitzacions de líquids o gasos, etc ..., hauràn de cumplir, a més,les disposicions que estableixen els Reglaments i Directives específics que les són aplicables.
Quan les instal·lacions generadores estàn allotjades en edificis o establiments industrials, elsseus locals, que seràn d'ús exclussiu, compliràn amb les dispossicions reguladores ede

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Plec de Condicions
protecció contra incendis corresponents.
Els locals on estàn instal·lats els motors tèrmics, o qualsevol que sigui la seva potènciaprimària, hauràn d'estar suficientment ventilats.
Els conductors de sortida dels gasos de combustió seràn de material incombustible i evaquaràndirectament al exterior o a través d'un sistema d'aprofitament energètic.
4 Condicions per la Connexió
4.1 Instal·lacions Generadores Aïllades
La connexió als receptors, en les instal·lacions on no donar-se la possibilitat de l'acoplamentamb la Red de Distribució Pública o amb un altre generador, precisarà la instal·lació d'undispossitiu que permeti connectar i desconnectar la càrrega en els circuits de sortida delgenerador.
Quan existeixin més d'un generador i la seva connexió exigeixi la sincronització, s'haurà dedispossar d'un equip manual o automàtic per realitzar dita operació.
Els generadors portàtils hauràn d'incorporar les proteccions generals contra sobreintensitats icontactes indirectes necessaris per l'instal·lació que alimentin.
4.2 Instal·lacions Generadores Asistides
En la instal·lació interior la alimentació alternativa ( red o generador ) podrà fer-se en varispunts que aniràn previstos d'un sistema de conmutació per tots els conductors actius i elneutre, que impedeixen l'acoplament simultani d'ambdues fonts d'alimentació.
En el cas en el que està prevista realitzar maniobres de transferència de càrrega sense tall, laconnexió de la instal·lació generadora asistida amb la Red de Distribució Pública es farà en unpunt únic i hauràn de complir-se els següents requisits:
- Només podrà realitzar maniobres de transferència de càrrega sense tall els generadors depotència superiors a 100 kVA.
- En el moment de la interconnexió entre el generador i la Red de Distribució Pública, esdesconnectarà el neutre del generador de terra.
- El sistema de conmutació haurà d'instal·lar-se junt amb els aparells de mesura de la Red deDistribució Pública, amb accessibilitat per a l'empresa distribuidora.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Plec de Condicions
- Haurà d'incloure's un sistema de protecció que impossibiliti l'enviament de potència delgenerador a la red.
- Haurà d'incloure's sistemes de protecció per tensió del generador fòra dels límits, freqüènciafòra dels límits, sobrecàrrega i curtcircuit, enclavament per no poder energitzar la línia sensetensió i protecció per fòra de sincronisme.
- Dispondrà d'un equip de sincronització i no es podrà mantenir la interconnexió més de 5segons.
El conmutador portarà un contacte auxiliar que permeti conectar a una terra pròpia el neutre dela generació, en els casos que preveuen la transferència de càrrega sense tall.
Els elements de protecció i les seves connexions al conmutador seràn precintables o esgarantitzarà mitjançant el mètode alternatiu que no es poden modificar els paràmetres deconmutació inicials i l'empresa distribuidora d'energia elèctrica, haurà de poder accedir deforma permanent a dit element, en els casos en que es preveuen la transferència de càrregasense talls. El dispositiu de maniobra del conmutador serà accessible al autogenerador.
4.3 Instal·lacions Generadores Interconnectades
La potència màxima de les centrals interconectades a una Red de Distribució Pública, estaràcondicionada per les característiques d'aquesta: tensió de servei, potència de curtcircuit,capacitat de transport de línia, potència consumida en la red de baixa tensió, ...
4.3.1 Potències Màximes de les Centrals Interconectades e Baixa Tensió
Amb caràcter general la interconnexió de centrals generadores a les reds de baixa tensió de3x400/230V serà admissible quan la suma de les potències nominals de els generadors noexcedeix de 100 kVA, ni e la mitad de la capacitat de la sortida del centre de transformaciócorresponent a la línia de la Red de Distribució Pública a la que es connecta la central.
En reds trifàsiques a 3x220/127V, es podrà conectar centrals de potència total no superior a 60kVA ni de la mitad de la capacitat de la sortida del centre de transformació corresponent a lalínia de la Red de Distribució Pública a la que es connecta la central. En aquests casos tota lainstal·lació haurà d'estar preparada per un funcionament futur a 3x400/230 V.
En els generadors eòlics, per evitar fluctuacions en la red, la potència dels generadors no seràsuperior al 5% de la potència de curcircuit en el punt de conexió a la Red de DistribucióPública.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Plec de Condicions
4.3.2 Condicions Específiques per l'Arranc i Acoplament de la Instal·lació Generadora ala Red de Distribució Pública
4.3.2.1 Generadors Asíncrons
La caiguda de tensió que pot produir-se en la connexió dels generadors no serà superior al 3%de la tensió assignada de la red.
En el cas de generadors eòlics la freqüència de les connexions serà com a màxim de 3 perminut, sent el límit de la caiguda de tensió del 2% de la tensió assignada durant 1 segon.
Per limitar la intensitat en el moment de la connexió i les caigudes de tensió, als valorsanteriorment indicats, s'utilitzaràn dispositius adequats.
La connexió d'un generador asíncron a la red no es realitzarà fins que, accionats per la turbinao el motor, aquest hagi adquirit una velocitat entre 90 i el 100% de la velocitat de sincronisme.
4.3.2.2 Generadors Síncrons
L'utililtzació de generadors síncrons en instal·lacions que han de connectar-se a Reds deDistribució Pública, haurà de ser acordada amb l'empresa distribuidora d'energia elèctrica,atenent a la necessitat de funcionament independent de la red i a les condicions d'explotaciód'aquesta.
La central haurà de posseïr un equip de sincronització, automàtic i manual.
Podrà prescindir-se d'aquest equip si la connexió pogués efectuar-se com a generadorasíncron. En aquest cas les característiques d'arranc hauràn de complir lo indicat per aquesttipus de generadors.
La connexió de la central a la Red de Distribució Pública haurà de efectuar-se quan l'operacióde sincronització les diferències entre les magnituds elèctriques del generador i la red nosiguin superiors a les següents:
- Diferència de tensions: ±8%- Diferència de freqüència: ±0'1Hz %- Diferència de fase: ±10º
Els punts on no existirà equip de sincronisme i sigui possible la posta en paral·lel, entre elgenerador i la Red de Distribució Pública, dispondrà d'un enclavament que impedeixi la postaen paral·lel.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Plec de Condicions
4.3.3 Equips de Maniobra i Mesura a Disposar en el Punt d'Interconexió
En l'origen de l'instal·lació interior i en un punt únic i accessible de forma permanent a laempresa distribuidora d'energia elèctrica, s'instal·larà un interruptor automàtic sobre el queactuaràn un conjunt de proteccions. Aquests hauràn de garantitzar que les faltes internes del'instal·lació no perturbin el correcte funcionament de les reds a les que estan connectades i encas de defecte d'aquestes, hauràn de desconnectar l'interruptor de la interconnexió que nopodrà respondre fins que existeixi tensió estable en la Red de Distribució Pública.
Les proteccions i el connexionat de l'interruptor seràn precintables i el dispositiu de maniobraserà accessible al autogenerador.
L'interruptor d'acoplament portarà un contacte auxiliar que permeti desconnectar el neutre dela red de distribució pública i conectar a terra el neutre de la generació quan aquesta ha detreballar independentment d'aquella.
Quan es preveu l'entrega d'energia de la instal·lació generadora a la Red de DistribucióPública, es dispondrà, al final de la instal·lació d'enllaç, un equip de mesura que registri laenergia subministrar per l'autogenerador. Aquest equip de mesura podrà tenir elementscomuns amb l'equip que registri la energia aportada per le Red de Distribució Pública, sempreque els registres de la energia en ambdés sintits es contabilitzin de forma independent.
Els elements a disposar en l'equip de mesura seràn els que correspondràn al tipus dedescriminació horària que s'estableixi.
En les instal·lacions generadores amb generadors asíncrons es dispondrà sempre un contactorque registri la energia reactiva absorvida per aquest.
Quan ha de verificar-se al compliment de programes d'entrega d'energia tendràn que disposar-se els elements de mesura o registres necessaris.
4.3.4 Control de l'Energia Reactiva
En les instal·lacions amb generadors asíncrons, el factor de potència de la instal·lació no seràinferior a 0'86 a la potència nominal i per això, quan sigui necessari, s'instal·laràn les bateriesde condensadors precisses.
Les instal·lacions anteriors dispondràn de dispositius de protecció adequats que asseguren ladesconexió en un temps inferior a 1 segon quan es produeixi una interrupció en la Red deDistribució Pública.
L'empresa distribuidora d'energia elèctrica podrà eximir de la compensació del factor depotència en el cas de que pugui subministrar l'energia reactiva.
Els generadors síncrons hauràn de tenir una capacitat de generació d'energia reactiva suficient

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
6 Plec de Condicions
per mantenir el factor de potència entre 0'8 i 1 en avanç o retard. Amb objecte de mantenirestable la energia reactiva subministrada s'instal·larà un control de la excitació que permetiregular la mateixa.
5 Cables de Connexió
Els cables de conexió hauràn d'estar dimensionats per una intensitat no inferior al 125% de lamàxima intensitat del generador i la caiguda de tensió entre el generador i el puntd'interconexió a la Red de Distribució Pública o a la instal·lació interior, no serà superior al1'5%, per l'intensitat nominal.
6 Forma de l'Ona
La tensió generada serà practicament senoidal, amb una taxa màxima d'armònics, en qualsevolcondició de funcionament de:
Armònics d'ordre par: 4/nArmònics d'ordre 3: 5Armònics d'ordre impar (≥5) 25/n
La taxa d'armònics és la relació, en %, entre el valor eficaz de l'armònic d'ordre 'n' i el valoreficaz del fundamental.
7 Proteccions
La màquina motriu i els generadors dispondràn de les proteccions específiques que el fabricantaconsella per reduïr els danys com a conseqüència de defectes interns o externs a ells.
Els circuits de sortida dels generadors es dotaràn de les proteccions establertes en lescorresponents ITC que les siguin aplicables.
En les instal·lacions de generació que poden estar interconnectades amb la Red de DistribucióPública, es dispondrà un conjunt de proteccions que actuin sobre l'interruptor d'interconnexió,situades en l'origen de la instal·lació interior. Aquestes correspondràn a un model homologat ihauràn d'estar degudament verificades i precintades per un laboratori reconegut.
Les proteccions mínimes a disposar seràn les seguents:
- De sobreintensitat, mitjançant reles directes magnetotèrmics o solució equivalent.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
7 Plec de Condicions
- De mínima tensió instantanis, conectats entre les tres fases i neutre i que actuaràn, en untemps inferior a 0'5 segons, a partir de que la tensió arribi al 85% de seu valor assignat.
- De sobretensió, conectat entre una fase i neutre, i de la qual la seva actuació ha de produir-seen un temps inferior a 0'5 segons, a partir de que la tensió arribi al 110% de seu valor assignat.
- De màxima i mínima freqüència, conectat entre fases, i de la qual la seva actuació ha deproduir-se quan la freqüència sigui inferior a 49 Hz o superior a 51 Hz durant més de 5períodes.
8 Instal·lacions de la Posta a Terra
8.1 Generalitats
Les centrals d'instal·lacions generadores hauràn d'estar previstes de sistemes de posta de terraque, en tot moment, assegurin que les tensions que es poden presentar en les massesmetàl·liques de la instal·lació no superin els valors establerts en la MIE-RAT 13 del'Reglament sobre Condicions Tècniques i Garanties de Seguretat en Centrals Elèctriques,Subestacions i Centres de Transformació.
Els sistemes de posta a terra de les centrals d'instal·lacions generadores hauràn de tenir lescondicions tècniques adequades per a que no es produeixin transferències de defectes a la Redde Distribución Pública ni a les instal·lacions privades, qualsevol que sigui el seufuncionament respecte a aquesta: aïllades, asistides o interconectades.
8.2 Característiques de la Posta a Terra segons el Funcionament de la Instal·lacióGeneradora Respecte a la Red de Distribució Pública
8.2.1 Instal·lacions Generadores Aïllades Connectades a Instal·lacions Receptores que sónAlimentades de forma Exclussiva per llurs Grups
La red de terres de la instal·lació conectada a la generació serà independent de qualsevol altrared a terres. Es considerarà que les reds de terra són independents quan el pas de la correntmàxima de defecte per una de elles, no provoca en l'atra diferències de tensió, respecte a laterra de referència, superiors a 50 V.
En les instal·lacions d'aquest tipus es realitzarà la posta a terra del neutre del generador i de lesmasses de la instal·lació conforme a un dels sistemes recollits en la ITC-BT 08.
Quan el generador no tingui el neutre accessible, es podrà posar a terra el sistema mitjançant
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
8 Plec de Condicions
un transformador trifàsic en estrella, utilitzable per altres funcions auxiliars.
En el cas de que treballin varis generadors en paral·lel, s'haurà de connectar a terra, en un solpunt, la unió dels neutres dels generadors.
8.2.2 Instal·lacions Generadores Asistides Connectades a Instal·lacions Receptores quepoden ser Alimentades, de forma Independent, per llurs Grups o per la Red de DistribucióPública
Quan la Red de Distribució Pública tingui el neutre posta a terra, l'esquema de posta a terraserà el TT i es conectaràn les masses de la instal·lació i receptors a una terra independent de ladel neutre de la Red de Distribució Pública.
En cas de impossibillitat tècnica de realitzar una terra independent pel neutre del generador, iprèvia autorització específica de l'Organ Competent de la Comunitat Autònoma, es podràutilitzar la mateixa terra pel neutre i les masses.
Per alimentar la instal·lació des de la generació pròpia en ls casos en que es preeutransferencia de càrrega sense tall, es dispondrà, en el conmutador d'iterconexió, un polauxiliar que quan passi a alimentar la instal·lació des de la generació pròpia conecti a terra elneutre de la generació.
8.2.3 Instal·lacions Generadores Interconectades Connectades a Instal·lacions Receptoresque poden ser Alimentades, de forma Simultània o Independent, per llurs Grups o per laRed de Distribució Pública
Quan la instal·lació receptora està acoplada a una Red de Distribució Pública que té el neutreposta a terra, l'esquema de posta a terra serà TT i es connectaràn les masses de la instal·lació ireceptors a una terra independent de la del neutre de la Red de Distribució Pública.
Quan la instal·lació receptora no està acoplada a la Red de Distribució Pública i s'alimenti deforma exclussiva des de la instal·lació generadora, existirà en l'interruptor automàticd'interconnexió, un pol auxiliar que desconnectarà el neutre de la Red de Distribució Pública iconnectarà a terra el neutre de la generació.
Per la protecció de les instal·lacions generadores s'establirà un dispositiu de detecció de lacorrent que circula per la connexió dels neutres dels generadors al neutre de la Red deDistribució Pública, que desconnectarà la instal·lació si es sobrepassa el 50% de la intensitatnominal.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
9 Plec de Condicions
9 Posta en Marxa
Per la posta en marxa de les instal·lacions generadores asistides o interconnectades, a més delstràmits i gestions que correspondra realitzar, d'acord amb la legistació vigent davant elsorganismes competents s'haurà de presentar l'oportu projecte a l'empresa distribuidorad'energia elèctrica d'aquelles parts que afecten a les condicions d'acoplament i seguretat delsubministrament elèctric. Aquesta podrà verificar, avanç de realitzar la posta en servei, que lesinstal·lacions d'interconnexió i altres elements que afecten a la regularitat del subministramentestàn realitzades d'acord amb els reglaments en vigor. En cas de desacord es comunicarà alsòrganismes competents de la administració, per la seva resolució.
Aquest tràmit davant l'empresa distribuidora d'energia elèctrica, no serà precís en instal·lacionsgeneradores aïllades.
10 Altres Disposicions
Totes les actuacions relacionades amb la fixació del punt de conexió, el projecte, la posta enmarxa i explotació de les instal·lacions generadores seguiràn els criteris que estableix lalegislació en vigor.
L'empresa distribuidora d'energia elèctrica podrà, quan detecti risc inmediatper les persones,animals i bens, desconnectar les instal·lacions generadores interconnectades, comunicant-loposteriorment, al Organisme Competent de la Administració.
Sistema de Regulació i Protecció d’un GrupAlternador – Motor Trifàsics
Annexes
AUTOR: Gerard Martín SalvatDIRECTOR: Josep Anton Barrado
DATA: Novembre / 2003.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Índex d’Annexes
Índex d’Annexes
1 Complementació sobre l’Estudi d’un Grup Generador 11.1 Constitució dels Motors Asíncrons 11.2 Circuit Equivalent d’una Màquina Asíncrona 21.3 La Característica Mecànica de la Màquina Accionada 71.4 Constitució dels Màquines Síncrones 10
2 Informació Complementària del Convertidor de Frequència Micromaster Vector 12
3 El PIC 16C84 133.1 Introducció 133.2 Les seves Senyals Disponibles i Patillatge 133.3 L'Arquitectura Interna 143.4 Els Registres Interns 17
3.4.1 El Registre INDF 193.4.2 El Registre RTCC 193.4.3 El Registre PCL 193.4.4 El Registre STATUS o Registre d'Estat 203.4.5 El Registre FSR o Registre de Sel·lecció de Registre 213.4.6 Els Registres PORTA I PORTB 213.4.7 El Registre EEDATA i EEADR 213.4.8 El Registre PCLATH 213.4.9 El Registre INTCON 22
3.4.10 Els Registres 'TRISA' i 'TRISB' 233.4.11 Els Registres EECON1 i EECON2 233.4.12 Els Registres Restants 23
3.5 Els Ports Paral·lels 233.5.1 El Port A 243.5.1 El Port B 25
3.6 El Temporitzador 273.7 El Temporitzador Warchdog 293.8 La Memòria EEPROM de Dades 313.9 Reset i Interrupcions 32
3.9.1 Les Diferents Fonts d'Interrupcions 343.10 El Joc d’Instruccions 363.11 Programar un PIC16C84 36
4 Documentació Tècnica del Components Electrònics 37
5 Catàlegs 38

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
1 Annexes
1 Complementació sobre l’Estudi d’un Grup Generador
1.1 Constitució dels Motors Asíncrons
El motor asíncron o d'inducció com qualsevol altre dispositiu de conversió electromecànica dela energia del tipus rotatiu, esta formada per un estator i un rotor. En el estator es col·locanormalment l'inductor, alimentat per una red mono o trifàsica ( trifàsica, generalment ). Elrotor és l'induït, i les corrents que hi circulen per ell aparèixen com a conseqüència de lainteracció amb el flux de l'estàtor. Dependent del tipus de rotor, aquestes màquines esclassifiquen:
a - Rotor en Gàbia d'Esquirol o en Curtcircuit.b - Rotor Devanat o amb Anells.
El rotor està constituït per un conjunt de xapes apilades, formant un cilindre, que té unesranures en la circumferència exterior d'on es col·loca el devanat.En el tipus en forma de gàbia d'esquirol es té una sèrie de conductors de cobre o d'aluminiposats en curtcircuit per dos anells laterals ( el seu nom deriva de la similitat geomètricarespecte una gàbia d'esquirol ). Veiem-ho:
Figura 1.1. Rotor de gàbia d’esquirol
En el cas de rotor devanat o amb anells, es té un arrollament trifàsic similar al situat al estàtor,en el que les tres fases es connecten per un costat en estrella i per l'altre s'envien a uns anellsaïllats entre sí com es mostra en la següent figura:
Figura 1.2. Rotor devanat o amb anells

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
2 Annexes
Aquesta disposició fa possible la introducció de resistències externes pels anells per limitar lescorrents d'arranc, millorar les característiques del par i controlar la velocitat.
L'estàtor està format per un apilament de xapes al silici, disponen d'unes ranures en la sevaperifèria interior en les que es situa un devanat trifàsic distribuït, alimentat per una corrent delmateix tipus, de tal forma que s'obté un flux giratori d'amplitud constant distribuïtsinusoidalment per l'entreferro. L'estàtor està rodejat per una carcassa, tal com ho veiem:
Figura 1.3. Estàtor d’un motor asíncron
1.2 Circuit Equivalent d’una Màquina Asíncrona
Per arribar a trobar les fòrmules o conjunt d'expressions que ens interessen per estarinterrelacionades amb el contexte del que correspon el projecte, hem de representar el motord'inducció com una representació del que realment és. Aquesta representació elèctrica rep elnom de 'circuit equivalent'; i, aclara molt l'entendiment de funcionament de la màquina.
La importància que s'esdevé en representar el circuit equivalent; és que els paràmetresd'aquests són accessibles al càlcul o a la mesura; i d'ells es poden derivar altres expressionsmés complexes com per exemple l'expressió del par intern de la màquina en funció de lavelocitat (w), molt vinculat a la part descriptiva del projecte.
Per poder trobar el circuit equivalent i entendre'l és necessari anar per passos. Però abans detot observem com queda simbolitzat de la forma més bàsica el motor:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
3 Annexes
Figura 1.4. Representació elèctrica d’un motor asíncron
d’on:
R1 → Resistència per efecte Joule en l’inductor.L1 → Inductància de dispersió en l’inductor.R2 → Resistència per efecte Joule en l’induït.L2 → Inductància de dispersió en l’induït.
El primer pas en la reducció en un circuit equivalent és en la reducció en repós de la màquina.
Quan el motor d'inducció està parat ( no gira ). Les seves característiques més determinantssón:
n = 0 ; s = 1 ; f1 = f2 (1.1)
Amb aquestes característiques el motor d'inducció actua com un transformador en curtcircuit.Observem quin circuit representa i com queda definit el rotor per quan el lliscament és unitari(s =1).
Figura 1.5. Circuit equivalent del motor asíncron en lliscament unitari
Quan el motor d'inducció és troba en moviment (n≠0) el lliscament deixa de ser unitari per serexpressat:
1
1
n -ns = 1
n≠ (1.2)

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
4 Annexes
per lo que canvien la f.e.m. i la reactància del rotor ( o induït ) per:
2S 2 2S 2E = s×E i X = s×X (1.3)
Per lo que la representació torna a ser:
Figura 1.6. Circuit equivalent del motor asíncron en funció del lliscament
Ara la intensitat que passa pels devanats de l'induït ' I2', que provoca la força de gir del rotor,és expressada per:
2S 2 2S 2 22 2 2 2 2
2S 2 2S 2 2 222
E = s E E s E E I = = =
X = s X X R + s R +
s
XX
× ×→× ×
I la nova representació és:
Figura 1.7. Circuit equivalent del motor asíncron per igualtat de la freqüència en l’induït i l’inductor
Pel pas al repòs de la resistència 'R2/s' a 'R2', anem a fer una operació fictícia afegint unaresitència 'Rc'.
2 22 2 2
R R 1R + Rc = Rc = - R Rc = R ( - 1 )
s s s→ → ×
Amb lo que el circuit equivalent en la reducció en repós queda finalment:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
5 Annexes
Figura 1.8. Circuit equivalent del motor asíncron amb els paràmetres reduïts en el circuit rotor
Ara ja tenim un circuit equivalent on tots els seus valors han estat reduïts als valors en repòs (E2, X2, R2 ).
El següent pas a realitzar és la reducció del secundari al primari, és a dir, reduïr les magnitudsd'un devanat a un altre. Aquesta reducció evita que apareixi la acció transformadora entre elscircuits primari i secundari.
El circuit que s'esdevé en la reducció en repòs del motor asíncron no uneix encara lesavantatges analítiques d'un circuit elèctric ja existeixen acoplaments magnètics. Com passaamb els transformadors per realitzar aquesta reducció es requereix a considerar un nousecundari on el número de espires és el mateix que en el primari: N2'=N1; i, d'aquesta maneraes modifiquen les magnituds secundàries als nous valors ( per la relació 'm' ). Veiem talsmagnituds reduïdes:
2 21 1 2t 2 2 2 t 2 2 t 2
2 t t
N E Ir = ; E = ; I ' = ; R ' = r ×R ; X ' = r ×X
N r r (1.4)
Ara el circuit pot ser representat amb les nous valors:
Figura 1.9. Circuit equivalent del motor asíncron amb igualtat del nombre d’espires ( i f.e.m. )
A vegades la relació de tensió i de tensió no és la mateix:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
6 Annexes
22 V 2 2
i
I E ' = m × E ; I ' =
m (1.5)
Tenint en compte els valors transformats del nou rotor i d'acord amb la igualtat:
2 2 1 2 1 1 1 1E ' = 4'44 ? ' f N ' = 4'44 ? f N = E× × × × Φ × × × × Φ
Es podràn unir els terminals A-A' del primari ( estàtor ) amb els corresponents a-a' delsecundari ( rotor ). L'esquema elèctric equivalent queda ara:
Figura 1.10. Circuit equivalent del motor asíncron units en els terminals dels circuits inductor i induït
Com es pot observar aquest circuit té una rama paral·lela per la que derivarà la corrent en buït(Io) composta per les corrents per pèrdues en l'efecte joule (IFe) i corrents per pèrdues al'entreferro (Iµ). La equació que relaciona les corrents del estàtor i el rotor, s'obtenen del'esquema anterior, aplicant la 1ª llei de Kirchoff en el node 'a', lo que dòna lloc a:
21 O 2 O
t
II = I + I ' = I +
r (1.6)
i les equacions elèctriques del primari i secundari corresponents seràn:
1 1 1 1 1 1V = E + R ×I + j×X ×I
2 2 2 C 2 2 2E ' = R '×I ' + R '×I ' + j×X '×I ' (1.7)
S'obté una gran avantatge analítica si la rama en buït es traslladada als terminals, lo que dònalloc al nou circuit equivalent aproximat:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
7 Annexes
Figura 1.11. Circuit equivalent del motor asíncron
El circuit equivalent pot ser reduït a la seva màxima expressió si considerem que:
Io <<< I1 ⇒ I1 = I2’ ( nomenclatem I ) (1.8)
Amb lo que definitavement el circuit queda expressat:
Figura 1.12. Circuit equivalent reduït del motor asíncron
on les valors elèctrics són representats per aquestes noves expressions:
cc 1 2
1
222
1 cc
X = X + X '
U UI = I =
Z R 'R + + X
s
→
(1.9)
1.3 La Característica Mecànica de la Màquina Accionada
Fins ara, hem vist, únicament, la característica mecànica del motor, però per arribar a entendreels seus punts de treball i la seva estabilitat, haurem de conèixer abans la curva de lacaraterística mecànica de la màquina que acciona. És a dir, la curva del par resistent en funcióde la velocitat angular del motor.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
8 Annexes
Les característiques mecàniques de les màquines accionades, varien segons el tipus demàquines. No obstant, es poden obtenir alguns resultats generals, utilitzant la següent fòrmulaexperimental per la característica mecànica de la màquina accionada:
x
r 0 rn ron
wM = M + (M - M )×
w
(1.10)
d'on:Mr → par resistent de la màquina accionada, a la velocitat w.Mro → par resistent en buït de la maquina accionada ( constituït pel rozament en elscoixinets i parts mòbils del màquina ).Mrn → par resistent de la màquina accionada, a la velocitat nominal wn.x → Coeficient que caracteritza la variació del par resistent en funcio de la velocitat.
La fòrmula anterior permet classificar les característiques mecàniques de les màquinesaccionades, com s'expressa a continuació. Veiem curves:
Figura 1.12. Curves dels diferents parells resistius que arrossega un motor
1. Característica mecànica independent de la velocitat: curva 1.
En aquest cas és té:
X = 0
i el par resistent 'Mr' no depen de la velocitat de gir del motor. Exemples d'aquest tipus demàquina accionada són aparells d'elevació, bombes de pistó, cintes transportadores ( quan lamassa del material transportat és constant ), .... Amb bastant aproximació, es poden classificaren aquest grup, les màquines en les que es compleix la condició:
Par resistent = Par resistent en buït
Γr
w 13
4
2

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
9 Annexes
ja que, en aquests casos, el par resistent en buït varia poc, dins els límits de les velocitats deservei.
2. Característica mecànica que creix linialment amb la velocitat: curva 2.
En aquest cas es cumpleix la condició:
X = 1
i el par resistent varia linialment amb la velocitat 'w' i augmenta amb aquest últim ( persimplificar es pot supossar que Mro = 0 ). Aquesta característica mecànica s'obté, per exemple,en cas d'accionament d'un generador d'excitació independent, quan aquest actúa sobre unaresistència exterior fixa.
3. Característica mecànica que creix parabòl·licament amb la velocitat: curva 3.
En aques cas, es té:
X ≈ 2
i el par resistent creix proporcionalment al quadrat de la velocitat del motor d'accionament.Entre les màquines d'aquest tipus es troben els ventiladors, els compresors, les bombescentrífugues, les hèlices de vaixells, .... Les màquines amb aquest tipus de característicamecànica es denominen també ' màquines de característica ventilador ' perquè els ventiladorssón les màquines més típiques en les que el par resistent depen del quadrat de la velocitat derotació.
4. Característica mecànica que decreix de forma no linial amb la velocitat: curva 4.
En aquest cas, es té:
X = -1
i el par resistent Mr varia en la raó inversa de la velocitat, mentres que la potència absorbidaper la màquina permaneix constant. Exemple d'aquest tipus de màquines són les màquines detall, així com, les cilindres llaminadors empleats enla indústria metal·lúrgica, etc ...
Naturalment, els quatre tipus de característiques mecàniques citats no comprenen tots elscassos possibles; no obstant, dònen una idea de les característiques mecàniques de certesmàquines que poden considerar-se típiques.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
10 Annexes
1.4 Constitució dels Màquines Síncrones
Les màquines síncrones, al igual que els altres tipus de màquines elèctriques estan constituïdesper dos devanats independents:
a - Un devanat inductor, construït en forma d'arrollament concentrat o bé distribuït en ranures,alimentat per corrent continua, que dòna lloc als pols de la màquina.
b - Un devanat induït distribuït formant un arrollament trifàsic recorregut per corrent alterna.
En les màquines síncrones petites, que no passen de 10 kVA de potència, el devanat inductores col·loca normalment al estàtor, en forma concentrada, sobre expansions magnètiquesdenominades 'pols magnètics', estant situat el induït en el rotor formant generalment tres fasesde les quals tenen sortida exterior per medi de tres anells com es mostra en la representació:
Figura 1.13. Màquina Síncrona amb l’induït en el rotor
En les màquines síncrones grans, que pel cas d'alternadors, poden arribar a 1000-1500 MVA lacol·locació dels devanbats és inversa a l'anterior, de tal forma que tots els pols queden situatsen el rotor i el devanat trifàsic en l'estàtor.
En aquesta situació la estructura del rotor es fabrica en dos versions diferents, ja sigui enforma de pols salents, o ja sigui en la forma de pols llissos o rotor cilíndric. Veiem ambduesrepresentacions:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
11 Annexes
Figura 1.14. Tipus constructius de les maquines síncrones
En el primer dels devanats dels pols són concentrats, mentres que pel rotor cilíndric, eldevanat es col·loca en els pols ( generalment 2 o 4 pols ) i està distribuït en ranures, cubrintuna part de la circumferència del rotor. La alimentació del devanat inductor es realitza permedi de dos anells col·locats en la part mòvil de la màquina per lo que s'introdueix una correntcontinua exterior ( circuit excitador ).

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
12 Annexes
2 Informació Complementària del Convertidor deFrequència Micromaster Vector
L’informació complementària del convertidor de freqüència Micromaster Vector es troba en eldocument ‘ Micromaster.pdf ’, contingut en:
D:/Projecte Fi de Carrera/Cap.7-Annexes/Capítol 2/
del Cd d’acompanyament.
L’informació annexe continguda en el document és:
- Instal·lació Mecànica del convertidor.- Instal·lació Elèctrica del convertidor.- Connexions de potència i del motor.- Proteccions contra sobrecàrregues del motor.- Paràmetres del sistema.- Codis d’averia i d’advertència.- Especificacions.- Comptabilitat electromagnètica (C.E.M.).- Aspectes Mediambientals.- Ajustaments de paràmetres de l’usuari.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
13 Annexes
3 El PIC16C84
3.1 Introducció
En aquest apartat tractem únicament sobre el microcontrolador encarregat de donar una senyaldigital per al variador de freqüència a partir de rebre la senyal de la tensió de sortida del'alternador, el PIC16C84.
Veurem quines són les seves senyals disponibles, així com també el seu patillatge; la sevaarquitectura interna, els seus registres interns, de forma més extessa aquells que són utilitzatsen el programa; els seus ports; el temporitzador; el temporitzador Watchdog; la memòriaEEPROM de dades; i el reset i interrupcions.
Per últim, veurem les característiques elèctriques que s'han de cumplir en el circuit per a uncorrecte funcionament del circuit.
3.2 Les seves Senyals Disponibles i Patillatge
El PIC16C84 es poden trobar en encapsulats DIL ( ceràmic o plàstic ) per a muntatgessuperficials o SOIC. La següent representació presenta, en encapsulat DIL, el patillatge delPIC.
Figura 3.1. Patillatge del PIC16C84
En aquesta representació podem observar que el PIC disposa de les següents senyals:
- VSS i VDD : els pins d'alimentació. El pin VSS és la massa general; mentre que VDD és

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
14 Annexes
l'alimentació possitiva. Aquesta última ha d'estar compresa entre 2 i 6 volts. Cal dir, que elcontingut de la RAM es manté quan el PIC està en 'sleep' si aquesta tensió no baixa dels 1'5volts.
- OSC1 i OSC2 : els pins de la senyal rellotge. Existeixen diferents models del PIC segonsquina és la seva circuiteria de rellotge. Aquestes es diferencien segons el sufix afegit que tenena la referència. Aquests poden ser:
- XT : per oscil·lador de quarz 'estàndard'.
- HS ( High Speed ) : també és una versió per oscil·lador de quarz, però capaç detreballar amb una freqüència màxima de 20 MHz.
- LP ( Low Power ) : altra versió de quarz capaç de treballar a baix consum. Aixòsí, la seva freqüència màxima no supera els 200 KHZ.
- RC : la seva circuiteria pertany a una cèl·lula RC. Pot treballar fins a unafreqüència màxima de 4 MHz però amb una estabilitat menor que la de lesversions de quarz.
- MCLR : la entrada de reset. Si la velocitat de creixement de la tensió d'alimentació VDD ésprou alta ( superior a 0'05 V/ms ) el pin MCLR es connecta en aquesta senyal VDD. Sinó éssuficient alta, el pin de reset necessitarà una circuiteria adicional per a un control de resetextern. ( Sigui quin sigui el cas que es dòna en el projecte això ho veurem en la Memòria deCàlcul ) .
- RA0 a RA3 : són els pins d'entrada i sortida de 0 a 3 del port A.
- RA4/RTCC : és el pin d'entrada i sortida 4 del port A. És comú també a l'entrada del rellotgeextern del temporitzador 0.
- RB0/INT : és l'entrada i sortida 0 del port B, comú amb l'entrada d'interrupció externa.
- RB1 a RB7 : són les entrades i sortides de 1 a 7 del port B. Els pins del 4 al 7 aguanten amés la funció d'interrució per canvi d'estat.
3.3 L'Arquitectura Interna
En el següent esquema es presenta l'arquitectura interna de tipus Harvard del PIC16C84.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
15 Annexes
Figura 3.2. Arquitectura Interna del PIC16C84
Lo primer que observem és que té una memòria de programa organitzada en 14 bits, lo quepermet codificar en una sola paraula la instrucció i l'operant o la seva direcció; d'aquestaforma, el codi que s'obté és molt compacte.
Les dades procedents d'aquesta memòria s'introdueixen en un descodificador d'instruccions,que actua a la vegada sobre el PC o comptador de programa, per les instruccions de salt perexemple, sobre el bloc de registres de propòsit general ( continguda en la memòria RAM delPIC ), i deixa passar les dades en destí al registre W o registre de treball. Aquest estàíntimament lligat a l'ALU ( Unitat Aritmètica - Lògica ), la qual rep, a través d'un bus de dadesespecífic, les dades procedents del bloc de registres, de les entrades o sortides, o dels registresde recursos interns.
Els registres estan organitzats sempre de la mateixa manera estant en les direccions més baixesels registres especials i els registres dels recursos, i 'per dalt' els registres de propòsit general.La organització de la memòria del programa es com es representa.:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
16 Annexes
Figura 3.3. Memòria de registres
El PC conté 13 bits, en el que es poden direccionar 8 Kbytes de memòria. Com en elPIC16C84 no hi ha més que un 1 Kbyte, el fet de direccionar més enllà d'aquest valor fa quees torni al principi, com si els bits de major pes s'ignoressin. Com veiem en la representacióanterior, el vector de reset s'almacena en la direcció 0000, mentre que el vector d'interrupcióestà en la direcció 0004. La memòria de programa d'usuari comença en la direcció 0005 is'extèn fins a 03FF.
Es pot observar també que el comptador de programa o PC està connectat a una pila de 8nivells. La pila és indispensable per a les operacions subrutines.
Els restants elements d'aquesta figura corresponen, per a un costat, al rellotge de temps real oRTCC amb un predivisor programable i, per un altre costat, a la sel·lecció de les sevesentrades així com el registre d'opció ( que ja veurem ) i al rellotge mestre del micro.
El funcionament de tot aquest conjunt complet es regeix pel rellotge. Com veiem en la següentrepresentació:

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
17 Annexes
Figura 3.4. Gràfics del funcionament del PIC en funció de l’oscil·lador rellotge
la senyal subministrada per aquest oscil·lador rellotge es divideix per quatre amb el fi degenerar internament quatre cicles diferents, de Q1 a Q4. Internament, en cada cicle Q1, el PCs'incrementa en una unitat mentre es busquen les instruccions en la memòria de programai, encada cicle Q4, es memoritza en el registre d'instrucció. El diagrama anterior posa clarament enevidència el fet en que una instrucció s'executa mentre que la següent està en el transcurs de labúsqueda.
3.4 Els Registres Interns
En el següent esquema es presenta la cartografia dels registres interns que conté la memòriadel PIC, col·locats en el bloc de registres de propòsit general.
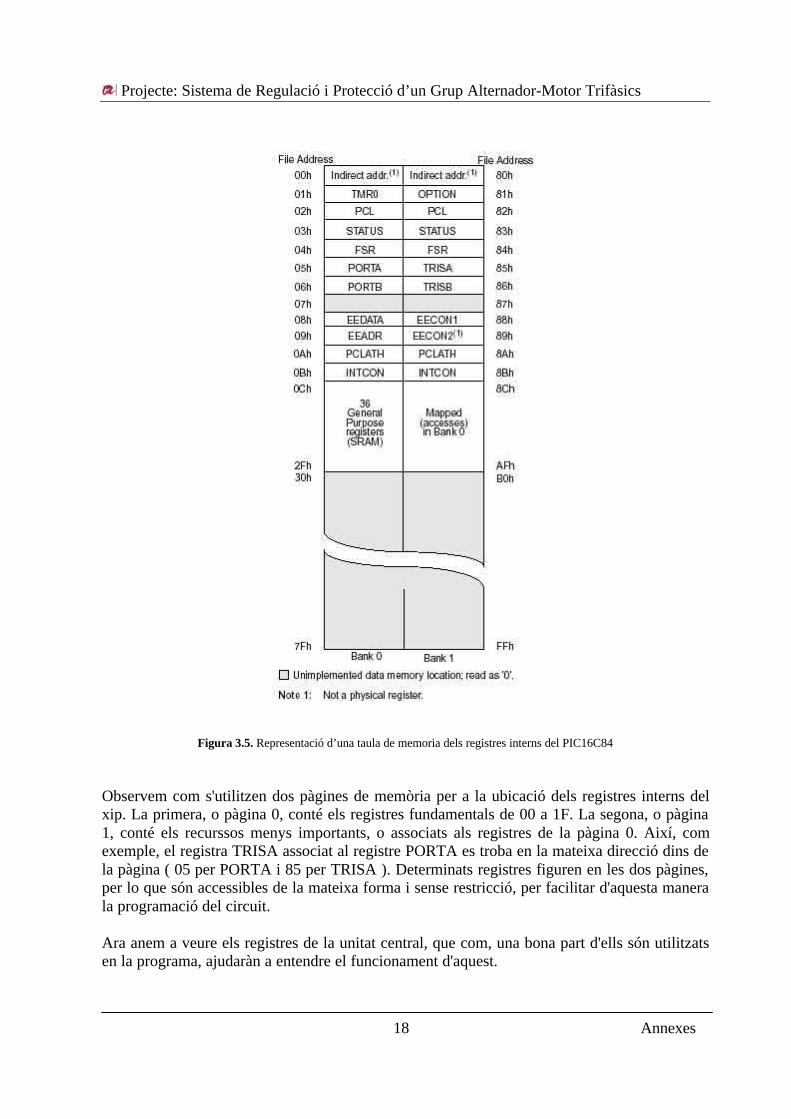
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
18 Annexes
Figura 3.5. Representació d’una taula de memoria dels registres interns del PIC16C84
Observem com s'utilitzen dos pàgines de memòria per a la ubicació dels registres interns delxip. La primera, o pàgina 0, conté els registres fundamentals de 00 a 1F. La segona, o pàgina1, conté els recurssos menys importants, o associats als registres de la pàgina 0. Així, comexemple, el registra TRISA associat al registre PORTA es troba en la mateixa direcció dins dela pàgina ( 05 per PORTA i 85 per TRISA ). Determinats registres figuren en les dos pàgines,per lo que són accessibles de la mateixa forma i sense restricció, per facilitar d'aquesta manerala programació del circuit.
Ara anem a veure els registres de la unitat central, que com, una bona part d'ells són utilitzatsen la programa, ajudaràn a entendre el funcionament d'aquest.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
19 Annexes
3.4.1 El Registre INDF ( Direcció 00 ) O Registre d'Indirecció
El primer registre o registre de direcció 00 és un pèl particular, en el sentit de què no téexistència física; per tant, no es pot accedir a ell. Si s'intenta llegir-lo, es trobarà 00, i sis'intenta escriure's en ell, es produirà un NOP, és a dir, és una instrucció que no fa res. Enrealitat, aquest registre serveix únicament per especificar la utilització del direccionamentindirecte.
3.4.2 El Registre RTCC ( Direcció 01 )
També anomenat registre TMR0. És el registre de rellotge o contador de temps real. Les sevessigles corresponen a Real Time Clock Counter. Com veurem més endavant, aquest registreestà en funció de l'oscil·lador intern o d'un rellotge extern, i del registre OPTION.
3.4.3 El Registre PCL ( Direcció 02 )
És el registre del contador del programa o PC; o més concretament els 8 bits de menor pes delPC, ja aquest és de 13 bits. Els altres 5 es troben en els cinc bits de major pes del registresPCLATH, situat en les posicions 0A i 8A. Com mostra la següent representació:
Figura 3.6. Esquema del registre PCL

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
20 Annexes
Si el PC és destí d'una instrucció, el contingut de PCLATH es té en compte automàticament.Per les instruccions GOTO i CALL, té lloc la mateixa operació, tenint en compte el fet de queel PC està codificat amb 11 bits en la pròpia instrucció.
Els vuit registres de pila no apareixen en la representació de l'organització dels registresinterns, ja que estan situats en el mateix espai de memòria que els altres. Són registres de 13bits capaços de contenir integrament al PC. La seva utilització és automàtica, ja que el PCs'introdueix en la pila durant l'execució d'una instrucció CALL o d'una interrupció, i s'extreude la pila durant l'execució del retorn corresponent. Aquests registres de pila han deconsiderar-se com un buffer de memòria circular; lo que significa que, si introdueix més de 8valors del PC, el novè valor pendrà la posició del primer, i així successivament.
A propòsit d'això, observem que ningún bit de registre indica que la pila està plena per lo ques'ha de tenir en compte de que no es desbordi, excepte si es vol realitzar operacions de retornespecials.
3.4.4 El Registre STATUS ( Direcció 03 ) o Registre d'Estat
Aquest registre conté un cert nombre de bits d'estat de la unitat central, però també té els bitsde sel·lecció de pàgina, que es denominen RP1 i RP0. Es pot llegir o escriure com qualsevolaltre registre. Alguns bits d'estat no es modifiquen després d'un intent d'escriptura. Cada bitd'aquest registre té el seu significat concret que és el que segueix:
Figura 3.7. Esquema del registre STATUS
- Bit 0 o bit C ( Carry ). Aquest és el bit d'acarreig per les operacions de suma i substracció. Esposa a 1 mitjançant les instruccions 'addwf' i 'subwf', si es genera un acarreig en el bit demajor pes. Aquest bit també s'utilitzen per a instruccions de rotació.
- Bit 1 o bit DC ( Digit Carry ). Aquest és un bit d'acarreig de digit, per a la aritmètica DCBper exemple. Es posa a 1 amb les instruccions 'addwf' i 'subwf', si es genera un acarreig del bit3 al grup superior de 4 bits.
- Bit 2 o bit Z ( Zero ). Aquest bit es posa a 1 si el ressultat de la operació aritmètica o lògicaexecutada és nul.
- Bit 3 o bit PD ( Power Down ). Aquest bit es posa a 1 durant la connexió a la alimentació delcircuit, o durant la execució d'una instrucció CLRWDT relativa al temporitzador watchdog. Es
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
21 Annexes
posa a 0 mitjançant una instrucció SLEEP.
- Bit 4 o bit TO ( Time Out ). Aquest bit es posa a 1 durant una connexió a l'alimentació odurant la execució d'una instrucció CLRWDT o SLEEP. Es posa a 0 quan el temporitzadorwatchdog es desborda.
- Bits 5 i 6 o bits RP0 i RP1. Com hem dit abans, aquests bits serveixen per sel·leccionar lespàgines de la memòria del programa.
00 = Pàgina 0 (00h - 7Fh)01 = Pàgina 1 (80h - FFh)10 = Pàgina 2 (100h - 17Fh)11 = Pàgina 3 (180h - 1FFh)
- Bit 7 o bit IRP. Aquest bit està previst per un futur direccionament de paginat indirecte; peròen l'actualitat no s'utilitza, per lo que s'ha de posar a 0.
3.4.5 El Registre FSR ( Direcció 04 ) o Registre de Sel·lecció de Registre
El contingut de FSR s'utilitza pel direccionament indirecte.Aquest registre conté 8 bits; noobstant, és precís saber que en el direccionament indirecte, pot construir-se una direcció de 9bits utilitzant el contingut d'aquest registre i el bit IRP del registre d'estat. Aquesta possibilitatno està explotada en el PIC16C84 i es recomana no utilitzar el bit IRP i que es programi 0 finsa futures extensions.
3.4.6 Els Registres PORTA I PORTB ( Direccions 05 i 06 )
Aquests registres corresponen respectivament als ports paral·lels A i B. El paper d'aquests dosregistres els veurem en l'apartat de 'Els Ports'.
3.4.7 El Registre EEDATA i EEADR ( Direccions 08 i 09 )
Aquests registres només serveixen com a registres de dades i de direccions per a la memòriaEEPROM. En l'apartat de ' La Memòria EEPROM de Dades' es parla de la funcionalitat decadascun.
3.4.8 El Registre PCLATH ( Direccions 0A i 8A )
El detall d'aquest registre s'ha pogut veure en el Registre PCL.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
22 Annexes
3.4.9 El Registre INTCON ( Direccions 0B i 8B )
Aquest registre serveix pel control global de les interrupcions i per indicar la procedènciad'algunes de elles, gràcies als bits d'estat. El PIC16C84 disposa de quatre potencials recurssosd'interrupció:
- Una font externa a través del pin RB0/INT.- Un desbordament del temporitzador 0.- Un canvi d'estat en els pins RB4 a RB7.- Un fi en la programació de la EEPROM de dades.
Cada bit del registre INTCON té el seu significat concret que és el que segueix:
Figura 3.8. Esquema del registre INTCON
- Bit 0 o bit RBIF ( RB Interrupt Flag ). Si es posa a 1, aquest bit indica un canvi d'estat en unade les líniies de RB4 a RB7 del port B.
- Bit 1 o bit INTF ( INTerrupt Flag ). Si es posa a 1, aquest bit indica una interrupcióprovocada per la línia RB0/INT del port B.
- Bit 2 o bit TOIF ( Timer 0 Interrupt Flag ). Si es posa a 1, aquest bit indica un desbordamentdel temporitzador 0.
- Bit 3 o bit RBIE ( RB Interrupt Enable ). Si es posa a 1, aquest bit autoritza les interrupcionsprovocades per un canvi d'estat de les línies RB4 a RB7 del port B.
- Bit 4 o bit INTE ( INTerrupt Enable ). Si es posa a 1, aquest bit autoritza les interrupcionsprovocades per la línia RB0/INT del port B.
- Bit 5 o bit TOIE ( Timer 0 Interrupt Enable ). Si està a 1, aquest bit autoritza lesinterrupcions degudes al desbordament del temporitzador 0.
- Bit 6 o bit EEIE ( EEPROM Interrupt Enable ). Si està a 1, autoritza les interrupcions queprocedeixen de la memòria EEPROM de dades.
- Bit 7 o bit GIE ( Global Interrupt Enable ). Si es posa a 1, aquest bit autoritza totes lesinterrupcions, que no estan emmascarades mitjançant els seus bits individuals d'activació. Siestà a 0, totes les interrupcions estan emmascarades, encara que els seus bits d'activacióindividual estan correctament activats.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
23 Annexes
Cada bit individual ( RBIF, INTF, ... ) ha de tornar a posar-se a 0 per software, en el programade tratament de la interrupció corresponent.
Quan arriba una interrupció, el PIC posa el bit GIE automàticament a 0, de forma que no esperturba el tratament de la interrupció en curs, degut a les altres interrpcions eventuals. Aquestbit es posa a 1 al acabar el programa d'interrpució, amb la execució de la instrucció RETFIE.
Els bits d'indicació d'interrupció permaneixen funcionals inclús quan les interrupcionscorresponents no s'han autoritzat.
3.4.10 Els Registres 'TRISA' i 'TRISB' ( Direccions 85 i 86 )
Com en els registres PORTA i PORTB, aquests registres corresponen respectivament als portsparal·lels A i B. El paper d'aquests dos registres també els veurem en l'apartat de 'Els Ports'.
3.4.11 Els Registres EECON1 i EECON2 ( Direccions 88 i 89 )
Són registres de control i funcionalitat de la memòria EEPROM de dades. El significat de cadabit es comentat en l'apartat de 'La Memòria EEPROM de Dades'.
3.4.12 Els Registres Restants
En funció del tamany de la memòria RAM del circuit, es pot disposar des de 24 fins a 72registres. Aquests es consideren registres de propòsit general, ja que es poden utilitzar senserestriccions especials.Cal recordar, que per a l'ús d'un d'aquests registres s'ha de determinar a quina pàgina es trobatal registre; recordem llavors que els bits 5 i 6 del registre FSR s'encarreguen d'aquesta funció.
3.5 Els Ports Paral·lels
El PIC16C84 disposa de dos ports paral·lels denominats port A i port B. Aquests ports espoden programar individualment com a entrades o com a sortides, i s'utilitzen gairebé de lamateixa forma.
Tenint en compte el fet que el circuit es proposen amb encapsulats de 18 pins, determinadeslínies d'aquests ports es comparteixen amb altres recurssos interns.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
24 Annexes
3.5.1 El Port A
El port A disposa d'un ample de 5 bits. Les línies RA0 a RA3 respeten el següent esquemaintern.
Figura 3.9. Esquema del circuit dels ports de les línies RA0-3
A la sortida de totes elles estan previstes d'un buffer de sortida CMOS. Com també es potobservar tant si actuen com a entrada o com a sortida, ambdues senyals passen per un latch.
La línia RA4 adopta una estructura un tant diferent, com mostra el seu esquema.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
25 Annexes
Figura 3.10. Esquema del circuit dels ports de la línia RA4
La sortida és en aquest cas del tipus drenador obert ( l'equivalent en MOS del clàssic colectorobert ) i la sortida està provista d'un trigger Schmitt. És comú amb l'entrada externa deltemporitzador 0 ( TMRO, i en alguns documents abreviada com a RTCC ).
El sentit de treball de totes les línies d'aquest port es controlen mitjançant el registre TRISA,en el que un bit a 0 activa la línia corresponent com a sortida, i un bit a 1 com a entrada.Evidentment, després d'un reset, tots els bits del registre TRISA queden a 1.
3.5.2 El Port B
El port B és un port bidireccional de 8 bits complet, en el que només una línia comparteix ambun altre recurs intern. Les línies RB0 a RB3 adopten el següent esquema.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
26 Annexes
Figura 3.11. Esquema del circuit dels ports de les línies RB0-3
Mentre que les línies RB4 a RB7 adopten aquesta altra estructura.
Figura 3.12. Esquema del circuit dels ports de les línies RB4-7

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
27 Annexes
La raó d'aquesta diferència radica en el fet que es possible programar la generació d'unainterrupció durant un canvi d'estat d'una de les línies de RB4 a RB7.
Si s'utilitza aquesta possibilitat, el simple fet de que alguna de les línies RB4 a RB7 canvid'estat generarà una interrupció. Només les línies programades com a entrades poden sermonotoritzades per aquest procediment.
Com s'ha vist dels esquemes anteriors, totes les línies del port B dispossen d'una resistència depull-up d'alt valor, connectada a l'alimentació. Aquesta resistència es pot activar o no gràciesal registre RBPU del registre OPTION. L'activació o no d'aquesta resistència de pull-up afectaa totes les línies del port B. A més, aquesta desactiva automàticament amb un reset, al igualque les línies que estan configurades com a sortida.
El sentit de treball de cada una de les línies d'aquest port es controlat pel registre TRISB, en elque un bit a 0 fa que la línia corresponent s'activi com a sortida, i un bit a 1 com a entrada.Evidentment, després d'un reset, tots els bits del registre TRISB es posen a 1.
3.6 El Temporitzador
A diferència d'altres famílies de PIC's 16CXX, el PIC PIC16C84 només té un temporitzador,però aquest té la novetat particular de generar una interrupció quan el temporitzador esdesborda de FF a 00. El seu mode de funcionament i de programació depenen del registreTMR0 en qüestió, i del registre OPTION que el configura. El següent esquema represental'esquema del temporitzador 0 o RTCC.
Figura 3.13. Esquema del circuit del temporitzador
Si es parteix del registre TMR0 o RTCC es constata que pot rebre la seva senyal directament odesprés del pas per un predivisor, sent feta la sel·lecció mitjançant el bit anomenat PSA.
Si es sel·leciona el predivisor, la seva taxa de divisor es programa per medi de tres bits: PS0,PS1 i PS2.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
28 Annexes
En tots els casos, la senyal utilitzada pot procedir d'una qualsevol de dos fonts possibles,depenen de l'estat del bit de sel·lecció RTS. O procedeix de l'oscil·lador rellotge després de ladivisió per 4, per lo que està a la freqüència del rellotge d'instrucció, o del pin T0CKI. Laporta OR EXCLUSSIU, controlada pel bit RTE, permet sel·leccionar si l'increment del registreTMR0 es produirà sobre el flanc de pujada o el de baixada.
Els bits RTE, RTS, PSA i PS0 a PS2 que s'utilitzen per configurar aquest temporitzador 0estan continguts en el registre OPTION. Cada bit d'aquest registre té el seu significatparticular, que és el que segueix:
Figura 3.14. Esquema del registre OPTION
- Bit 0, 1, 2 o bits PS0, PS1, PS2. Aquests bits serveixen per definir la taxa de dividió delpredivisor. Com es mostra en la següent taula:
PS2 PS1 PS0 Temporitzador 0 Watchdog0 0 0 2 10 0 1 4 20 1 0 8 40 1 1 16 81 0 0 32 161 0 1 64 321 1 0 128 641 1 1 256 128
Taula 3.1. Taula de la taxa del predivisor
Aquesta taxa difereix depenent de que el predivisor estigui assignat al temporitzador 0 o altemporitzador watchdog.
- Bit 3 o bit PSA ( PreScaler Assignment ). Si aquest bit està a 0, el predivisor està assignat altemporitzador 0. Si està a 1, està assignat al temporitzador watchdog.
- Bit 4 o bit RTE ( Timer 0 signal Edge ). Si aquest bit està a 0, el contingut del registre TMR0s'incrementarà en un flanc de pujada de la senyal aplicada al pin RA4/T0 CKI; si està a 1,s'incrementa amb el flanc de baixada.
- Bit 5 o bit RTS ( Timer 0 signal Source ). Si aquest bit està a 0, el temporitzador 0 utilitzaràel rellotge intern. Si està a 1, utilitzarà la senyal aplicada al pin RA4/T0 CKI.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
29 Annexes
El registre OPTION conté dos bits més que el temporitzador 0 no utilitza; aquests són els bits6 i 7, o bits INTEDG ( INTerrupt EDGe ) i bit RBPU ( RB Pull UP enable ). Aquests sóntractats en els apartats on són utilitzats.
Evidentment, el registre TMR0 s'incrementa a cada unitat en cada impuls de rellotgesel·leccionat mitjançant el registre OPTION. Quan arriba al valor FF, torna a 00 generant unainterrupció, si s'ha autoritzat, i continua el seu cicle indefinidament.
El registre TMR0 es pot llegir o escriure directament amb qualsevol instrucció, amb el fi deconèixer la seva posició actual, o per inicialitzar-lo en un estat determinat. És important saberque, després de qualsevol escriptura en aquest registre, és necessari un retard de dos ciclesd'instrucció per a que es retorni a l'incrementació. Aquest retard és independent de la fontrellotge sel·leccionada. Les instruccions concebudes són únicament les de l'escriptura i lectura-modificació-escriptura, tals com 'MOVF TMR0' o 'CLRF TMR0'. Per comprovar el pas per 0d'aquest registre sense interferir en el desarrollament regular del recompte, es recomenableutilitzar, per exemple, una instrucció 'MOVF TMR0,W', que no fa més que una lectura.
Tenint en compte la circuiteria de sincronització amb el rellotge intern del processador que eltemporitzador incorpora, aquest deixa de funcionar quan el processador es troba en modeSLEEP. Per això, no és possible utilitzar l'evolució d'aquest temporitzadori el seudesbordament, per generar una interrupció que faci que el PIC surti d'aquest mode.
Totes les instruccions que escriuen en TMR0 posen a 0 al predivisor, quan aquest està assignata aquest temporitzador.
3.7 El Temporitzador Warchdog
És un temporitzador intern del microconrtolador utilitzat com a alternativa al RTCC. Eltemporitzador watchdog del PIC16C84 està previst del seu propi escil·lador autònom amb lacèlul·la RC interna, per lo que no necessita cap component extern i continua funcionant inclúsquan el rellotge del PIC es para durant una instrucció SLEEP per exemple; vet aquí el seu nomde 'gosset guardià'.
El temporitzador watchdog es pot representar de la següent forma esquematica:
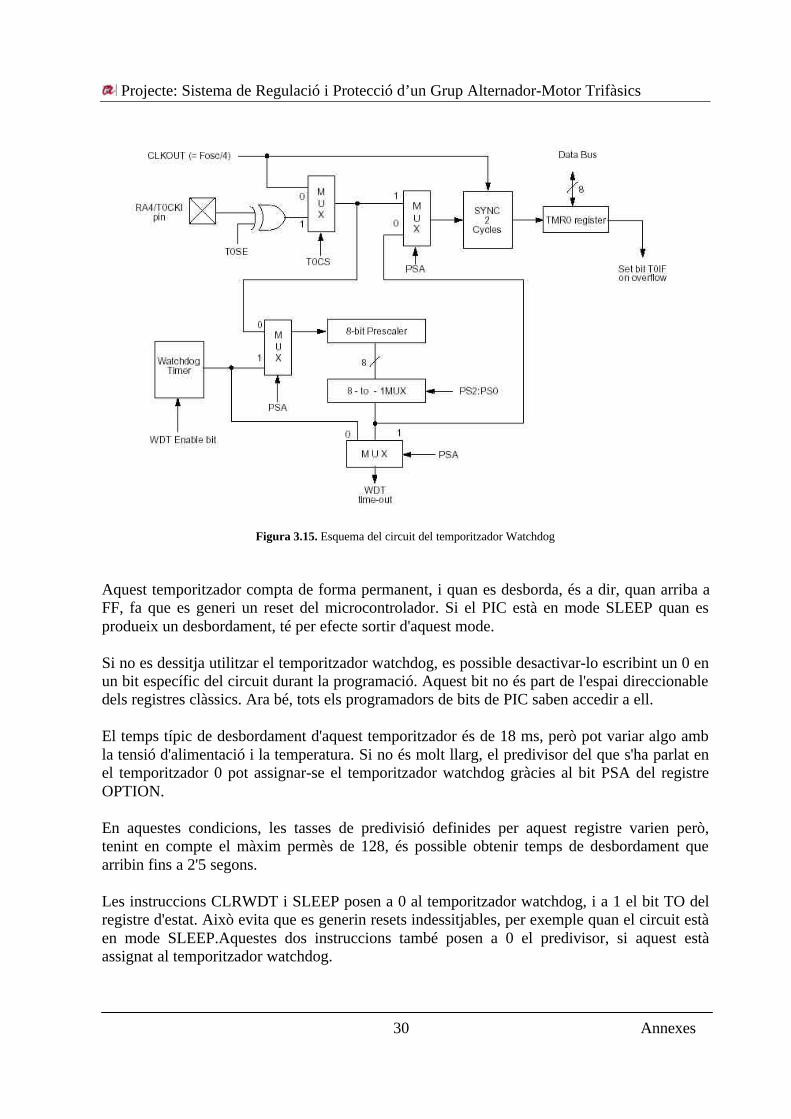
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
30 Annexes
Figura 3.15. Esquema del circuit del temporitzador Watchdog
Aquest temporitzador compta de forma permanent, i quan es desborda, és a dir, quan arriba aFF, fa que es generi un reset del microcontrolador. Si el PIC està en mode SLEEP quan esprodueix un desbordament, té per efecte sortir d'aquest mode.
Si no es dessitja utilitzar el temporitzador watchdog, es possible desactivar-lo escribint un 0 enun bit específic del circuit durant la programació. Aquest bit no és part de l'espai direccionabledels registres clàssics. Ara bé, tots els programadors de bits de PIC saben accedir a ell.
El temps típic de desbordament d'aquest temporitzador és de 18 ms, però pot variar algo ambla tensió d'alimentació i la temperatura. Si no és molt llarg, el predivisor del que s'ha parlat enel temporitzador 0 pot assignar-se el temporitzador watchdog gràcies al bit PSA del registreOPTION.
En aquestes condicions, les tasses de predivisió definides per aquest registre varien però,tenint en compte el màxim permès de 128, és possible obtenir temps de desbordament quearribin fins a 2'5 segons.
Les instruccions CLRWDT i SLEEP posen a 0 al temporitzador watchdog, i a 1 el bit TO delregistre d'estat. Això evita que es generin resets indessitjables, per exemple quan el circuit estàen mode SLEEP.Aquestes dos instruccions també posen a 0 el predivisor, si aquest estàassignat al temporitzador watchdog.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
31 Annexes
3.8 La Memòria EEPROM de Dades
El PIC16C84 conté una EEPROM de dades de 16 bytes. Aquesta memòria no forma partdireccionable "normal", tan sols és accessible per lectura i escriptura a través de dos registres:un registre EEDATA en la direcció 08 per les dades, i un registre EEADR en la direcció 09per les direccions. Dos registres de control, EECON1 en la direcció 88 i EECON2 en ladirecció 89, permeten definir el mode de funcionament d'aquesta memòria.
Aquesta memòria EEPROM no utilitza ningún recurs d'alimentació extern, i funciona en tot elrang d'alimentació autoritzat pel PIC16C84. La seva duració típica de programació és de 10ms. Es controla mitjançant un temporitzador intern, el qual es evita de realitzar qualsevolmesura de temps per software.
Si es dessitja escriure una direcció ja ocupada, automàticament es borra el contingut que haviai s'introdueix la nova dada. Per això, no està previst ningun comandament específic de borrat.
El principi d'utilització d'aquesta EEPROM en mode lectura és molt simple, i és segueix elspassos següents:
- Escriptura de la direcció que s'ha de llegir en el registre EEADR.
- Posada a 1 del bit RD del registre de control EECON1 ( ho veiem més endavant ).
- Lectura de la dada direccionat al registre EEDATA.
Tenint en compte la velocitat de funcionament d'aquesta memòria, la dada està disponible enEEDATA després de que el bit RD es posa a 1, per lo que és possible llegir-lo mitjançant lainstrucció que segueix inmediatament a la que es posa aquest bit a 1.
La escriptura en aquesta memòria, que cosisteix en realitat en una programació, ja que estemtreballant amb una memòria EEPROM, és algo més complicada per evidents raons deseguritat. Aquest s'ha de desarrollar de la forma següent:
- Escriptura de la direcció en la que que dessitja escriure en el registre EEADR.
- Escriptura de la dada en el registre EEDATA.
El significat del registre de control EECON1 conté un determinat nombre de bits de control,en la qual el seu significat és el que segueix:
Figura 3.16. Esquema del registre EECON1

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
32 Annexes
- Bit 0 o bit RD ( Read Data ). Aquest bit ha de posar-se a 1 per llegir una dada. El circuit elposa a 0 automàticament.
- Bit 1 o bit WR ( Write Data ). Aquest bit ha de posar-se a 1 per escriure una dada. El circuittambé el posa a 0 automàticament.
- Bit 2 o bit WREN ( WRite Enable ). Si aquest bit està a 0, impedeix qualsevol escriptura enla EEPROM. Ha de posar-se a 1 per autoritzar una escriptura.
- Bit 3 o bit WRERR ( WRite ERRor ). Aquest bit es posa a 1 si es produeix un error deescriptura després d'una parada prematura ( reset o acció del temporitzador watchdog, perexemple ). En aquestes condicions, els continguts de EEDATA i EEADR no varien, perpermitir una repetició correcta de l'operació.
- Bit 4 o bit EEIF ( EEPROM Interrupt Flag ). Aquest bit es posa a 1 quan s'acaba unaescriptura. Ha de posar-se a 0 per software.
El registre EECON2 no té existència física, per lo que és impossible llegir-lo. No serveix resmés que per a realitzar el procés de seguritat quan es realitza una operació d'escriptura.
3.9 Reset i Interrupcions
El reset del PIC16C84 pot ser provocat per diverses fonts:
- Una connecció a l'alimenació del circuit.
- Una acció sobre el pin MLCR mentre el circuit està en mode normal.
- Una acció sobre el pin MLCR mentre el circuit està en mode SLEEP.
- Un desbordament del temporitzador watchdog mentre el circuit està en mode normal.
- Un desbordament del temporitzador watchdog mentre el circuit està en mode SLEEP.
Els components del circuit i l'estat del registres afectats per un reset són diferents dependent dela situació que es produeixi. En primer lloc, és possible distingir per software l'origen del reset.Per això, és un suficient en llegir els bits TO i PD del registre d'estat vist al començament delcapítol. la següent taula mostra quals són les combinacions vàlides i els seus respectiussignificats.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
33 Annexes
Taula 3.2. Taula dels significats dels bits TO i PD
En tots els cassos, quan es surt del mode SLEEP mitjançant el temporitzador watchdog o perarribada d'una interrupció, el contador del programa PC es posa a 000. Per tant, la primerainstrucció executable del programa ha de trobar-se en aquesta direcció.
Quan es surt del mode SLEEP mitjançant el temporitzador watchdog, el PC s'incrementa enuna unitat per passar a la instrucció que segueix la instrucció SLEEP, igual que quan es surtd'aquest mode mitjançant una interrupció ( si el bit GIE del registre INTCON està a 1 ).
Les possibles fonts de reset afecten de forma diversa als continguts del diferents registres decontrol, d'estat o de dades. En la descripció de cada registre hem indicat l'estat dels bitsdesprés d'un reset d'alimentació. En la següent taula es troben aquestes indicacions, molt méscompletes, per a les diverses situacions de possibles resets.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
34 Annexes
Figura 3.3. Taula dels estats dels registres interns després d’un reset
És aconsellable, examinar aquesta taula abans de qualsevol utilització d'un registre desprésd'un reset, excepte en el cas de que es reinicialitsi cada registre, lo que és possible endeterminades aplicacions.
3.9.1 Les Diferents Fonts d'Interrupcions
El PIC16C84 disposa de quatre fonts d'interrupció diferents, que s'autoritzen o no mitjançantla posta a 1 dels corresponents bits del registre INTCON. Cada potencial font d'interrupciódisposa del seu propi flag, que funciona sempre, independentment de les interrupcionscorresponents hagin estat autoritzades.
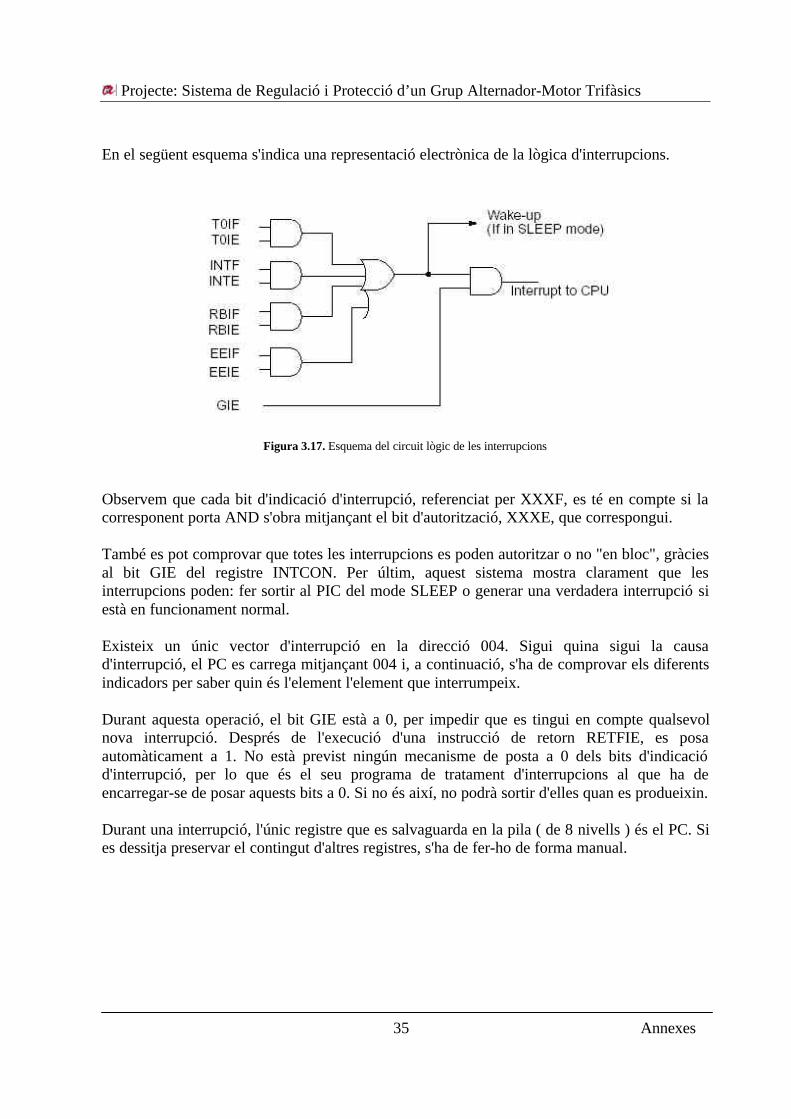
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
35 Annexes
En el següent esquema s'indica una representació electrònica de la lògica d'interrupcions.
Figura 3.17. Esquema del circuit lògic de les interrupcions
Observem que cada bit d'indicació d'interrupció, referenciat per XXXF, es té en compte si lacorresponent porta AND s'obra mitjançant el bit d'autorització, XXXE, que correspongui.
També es pot comprovar que totes les interrupcions es poden autoritzar o no "en bloc", gràciesal bit GIE del registre INTCON. Per últim, aquest sistema mostra clarament que lesinterrupcions poden: fer sortir al PIC del mode SLEEP o generar una verdadera interrupció siestà en funcionament normal.
Existeix un únic vector d'interrupció en la direcció 004. Sigui quina sigui la causad'interrupció, el PC es carrega mitjançant 004 i, a continuació, s'ha de comprovar els diferentsindicadors per saber quin és l'element l'element que interrumpeix.
Durant aquesta operació, el bit GIE està a 0, per impedir que es tingui en compte qualsevolnova interrupció. Després de l'execució d'una instrucció de retorn RETFIE, es posaautomàticament a 1. No està previst ningún mecanisme de posta a 0 dels bits d'indicaciód'interrupció, per lo que és el seu programa de tratament d'interrupcions al que ha deencarregar-se de posar aquests bits a 0. Si no és així, no podrà sortir d'elles quan es produeixin.
Durant una interrupció, l'únic registre que es salvaguarda en la pila ( de 8 nivells ) és el PC. Sies dessitja preservar el contingut d'altres registres, s'ha de fer-ho de forma manual.
Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
36 Annexes
3.10 El Joc d’Instruccions
En el Cd d'acompanyament, seguint la ruta:
D:/Projecte de Fi de Carrera/Cap.7-Annexes /Capítol 3
Hi trobem la documentació técnica del PIC16C84: arxiu PIC16C84.pdf. En aquest documenttècnic es descriuen tot el joc d’instruccions, en llenguatge ensamblador, a que pot serprogramat el microcontrolador PIC.
3.11 Programar un PIC16C84
Seguint la mateixa ruta anterior, hi trobem una subcarpeta: /Programar PIC. En ella hi trobemun arxiu, manual.pdf, que mostra tots els passos que s’han de fer la programació d’unmicrocontrolador PIC.

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
37 Annexes
4 Documentació Tècnica del Components Electrònics
La documentació tècnica dels components electrònics que formen part del sistema deregulació dissenyat en la 'Memòria de Càlcul' es troben continguts en la carpeta:
D:/Projecte de Fi de Carrera /Cap.7-Annexes/Capítol 4
del Cd d'acompanyament.
Els components electrònics del circuit regulador de freqüència s'inclouen dins la subcarpeta:/Regulador de Freqüència. Els components que hi podem trobar són:
- L'amplificador operacional LM393 en l'arxiu LM393.pdf .- El conversor digital - analògic DAC0808 en l'arxiu DAC0808.pdf .- L'amplificador operacional LF351 en l'arxiu LF351.pdf .
Els components electrònics del circuit regulador de tensió s'inclouen dins la subcarpeta:/Regulador de Tensió. Els components que hi podem trobar són:
- L'amplificador operacional LM741 en l'arxiu LM741.pdf .- L'amplificador operacional LM393 en l'arxiu LM393.pdf .- El circuit integrat timer LM555 en l'arxiu LM555.pdf .- El transistor bipolar BC212 en l'arxiu BC212.pdf .- El transistor bipolar BSW67A en l'arxiu BSW67A.pdf .- El transistor darlington BDT62C en l'arxiu BDT62C.pdf .
En aquesta mateixa subcarpeta també es troben els documents tècnics dels circuits integratsque es comenten en l'apartat del controlador del convertidor buck del capítol 3 de la 'MemòriaDescriptiva': LH1605 i LM78S40.
- LH1605 en l'arxiu LH1605.pdf .- LM78S40 en l'arxiu LM78S40.pdf .

Projecte: Sistema de Regulació i Protecció d’un Grup Alternador-Motor Trifàsics
38 Annexes
5 Catàlegs
En el Cd d'acompanyament dins la carpeta 'Catalegs' en la ruta:
D:/Projecte de Fi de Carrera/Cap.7-Annexes/Capítol 5
Hi trobem un quants catàlegs en format 'pdf' o 'html' sobre:
- Bobines.
- Bateries recargables.
- Transformadors
- Relès de protecció.