Embed Size (px)
Citation preview
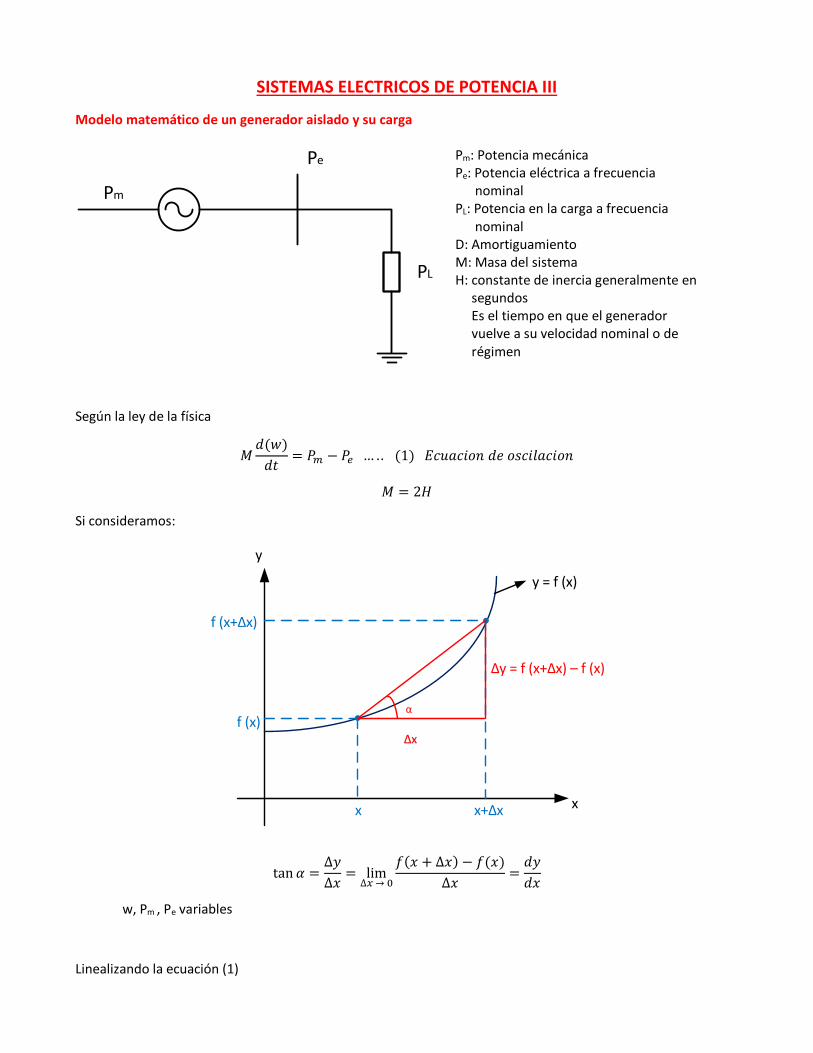
SISTEMAS ELECTRICOS DE POTENCIA III
Modelo matemático de un generador aislado y su carga
Pm
Pe
PL
Según la ley de la física
𝑀𝑑(𝑤)
𝑑𝑡= 𝑃𝑚 − 𝑃𝑒 … . . (1) 𝐸𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑑𝑒 𝑜𝑠𝑐𝑖𝑙𝑎𝑐𝑖𝑜𝑛
𝑀 = 2𝐻
Si consideramos:
f (x+Δx)
f (x)
x x+Δx x
y
y = f (x)
Δy = f (x+Δx) – f (x)
α
tan 𝛼 =∆𝑦
∆𝑥= lim
∆𝑥 → 0
𝑓(𝑥 + ∆𝑥) − 𝑓(𝑥)
∆𝑥=
𝑑𝑦
𝑑𝑥
w, Pm , Pe variables
Linealizando la ecuación (1)
Δx
Pm: Potencia mecánica Pe: Potencia eléctrica a frecuencia nominal PL: Potencia en la carga a frecuencia nominal D: Amortiguamiento M: Masa del sistema H: constante de inercia generalmente en segundos Es el tiempo en que el generador vuelve a su velocidad nominal o de régimen
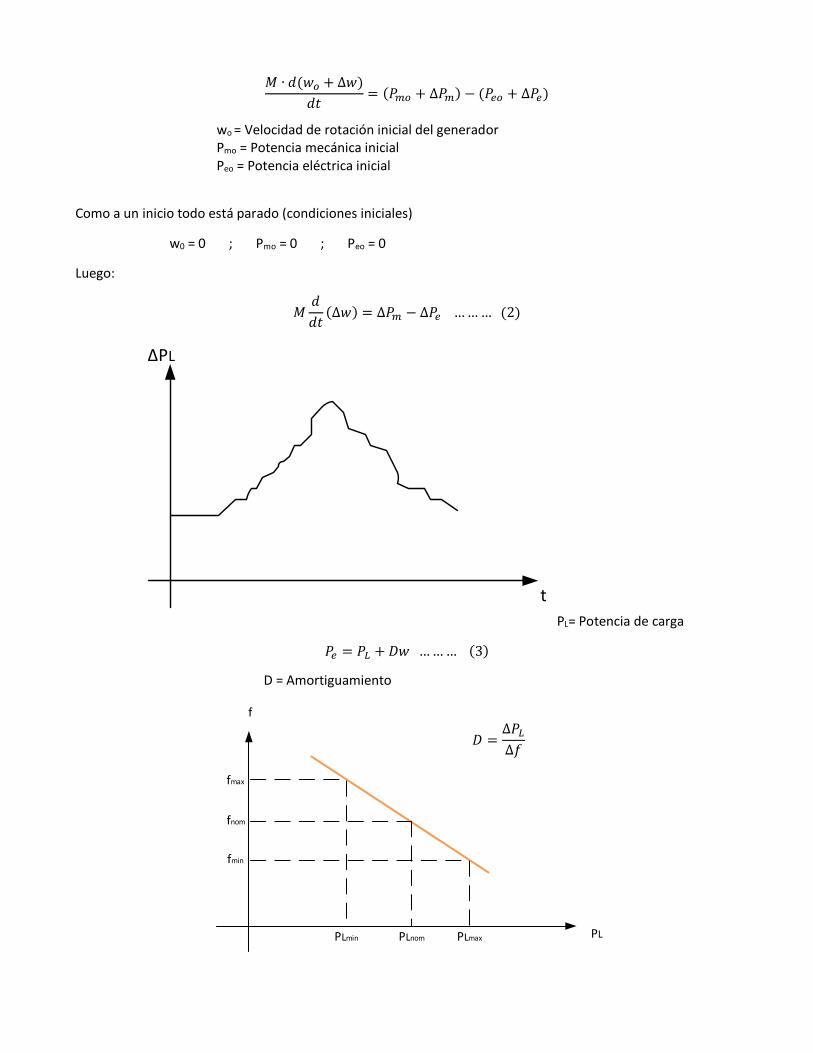
𝑀 ∙ 𝑑(𝑤𝑜 + ∆𝑤)
𝑑𝑡= (𝑃𝑚𝑜 + ∆𝑃𝑚) − (𝑃𝑒𝑜 + ∆𝑃𝑒)
wo = Velocidad de rotación inicial del generador Pmo = Potencia mecánica inicial Peo = Potencia eléctrica inicial
Como a un inicio todo está parado (condiciones iniciales)
w0 = 0 ; Pmo = 0 ; Peo = 0
Luego:
𝑀𝑑
𝑑𝑡(∆𝑤) = ∆𝑃𝑚 − ∆𝑃𝑒 … … … (2)
t
ΔPL
PL= Potencia de carga
𝑃𝑒 = 𝑃𝐿 + 𝐷𝑤 … … … (3)
D = Amortiguamiento
f
PL
fmax
fnom
fmin
PLmin PLnom PLmax
𝐷 =∆𝑃𝐿
∆𝑓
Es un sistema bien equilibrado D = 0,0 %
Si varia la carga no tendría que variar la frecuencia
Linealizando la ecuación (3)
∆𝑃𝑒 = ∆𝑃𝐿 + 𝐷∆𝑤
Reemplazando en la ecuación (2)
𝑀𝑑
𝑑𝑡(∆𝑤) = ∆𝑃𝑚 − (∆𝑃𝐿 + 𝐷∆𝑤)
𝑀𝑑
𝑑𝑡(∆𝑤) = ∆𝑃𝑚 − ∆𝑃𝐿 − 𝐷∆𝑤 … … … (4)
Sacando la transformada de La Place:
L {𝑑
𝑑𝑡 𝑓(𝑡)} = 𝑠𝐹(𝑠) − 𝐶. 𝐼.
L {∫ 𝑓(𝑡) 𝑑𝑡𝑡
0
} =𝐹(𝑠)
𝑠
Aplicando la transformada de La place a Ec. (4)
𝑀𝑠 ∆𝑤(𝑠) = ∆𝑃𝑚(𝑠) − ∆𝑃𝐿(𝑠) − 𝐷∆𝑤(𝑠) … … … (4`)
𝑀𝑠 ∆𝑤(𝑠) + 𝐷∆𝑤(𝑠) = ∆𝑃𝑚(𝑠) − ∆𝑃𝐿(𝑠)
∆𝑤(𝑠) = (1
𝑀𝑠 + 𝐷) (∆𝑃𝑚(𝑠) − ∆𝑃𝐿(𝑠)) … … … (4``)
1Ms+D
ΔPL (s)
ΔPm (s)
Generador + Carga
Δw(s) = 2π ΔF(s)
Variación de la frecuencia
ΔF(s)
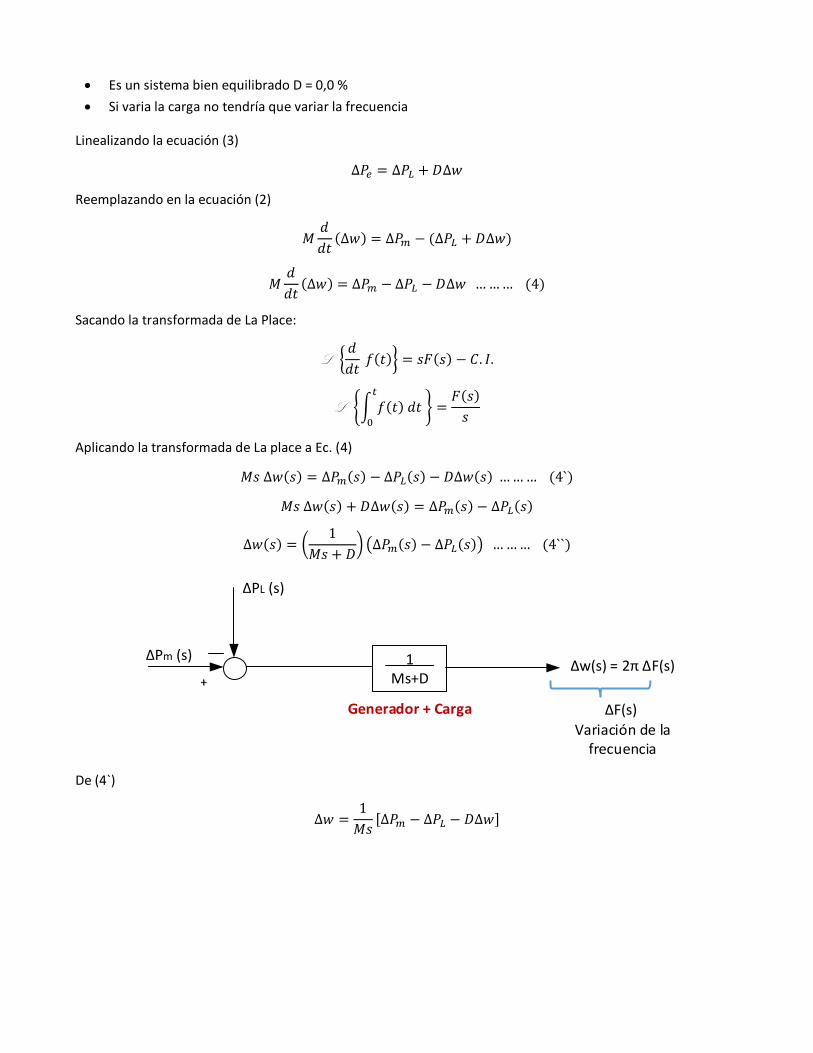
De (4`)
∆𝑤 =1
𝑀𝑠[∆𝑃𝑚 − ∆𝑃𝐿 − 𝐷∆𝑤]
+
1Ms
ΔPL (s)
ΔPm (s)Δw
D
H(s)
KSalEnt +
G(s)
K: Ganancia G(s): Planta de generación H(s): Retroalimentación
𝑆𝑎𝑙𝑖𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝐾 ∙ 𝐺(𝑠)
1 + 𝐾 ∙ 𝐺(𝑠)𝐻(𝑠)
∆𝑤
(∆𝑃𝑚 − ∆𝑃𝐿)=
1𝑀𝑠
1 +𝐷
𝑀𝑠
=
1𝑀𝑠
𝑀𝑠 + 𝐷𝑀𝑠
=1
𝑀𝑠 + 𝐷
∆𝑤 = [1
𝑀𝑠 + 𝐷] (∆𝑃𝑚 − ∆𝑃𝐿)
El siguiente paso es en la modelación es diseñar la turbina que prodúcela Pm
1Ms+D
ΔPL (s)
ΔPm (s)Δw
Central Hidráulica o Térmica
Regulador de
velocidad
Transductor
La temperatura es inversamente proporcional a la presión
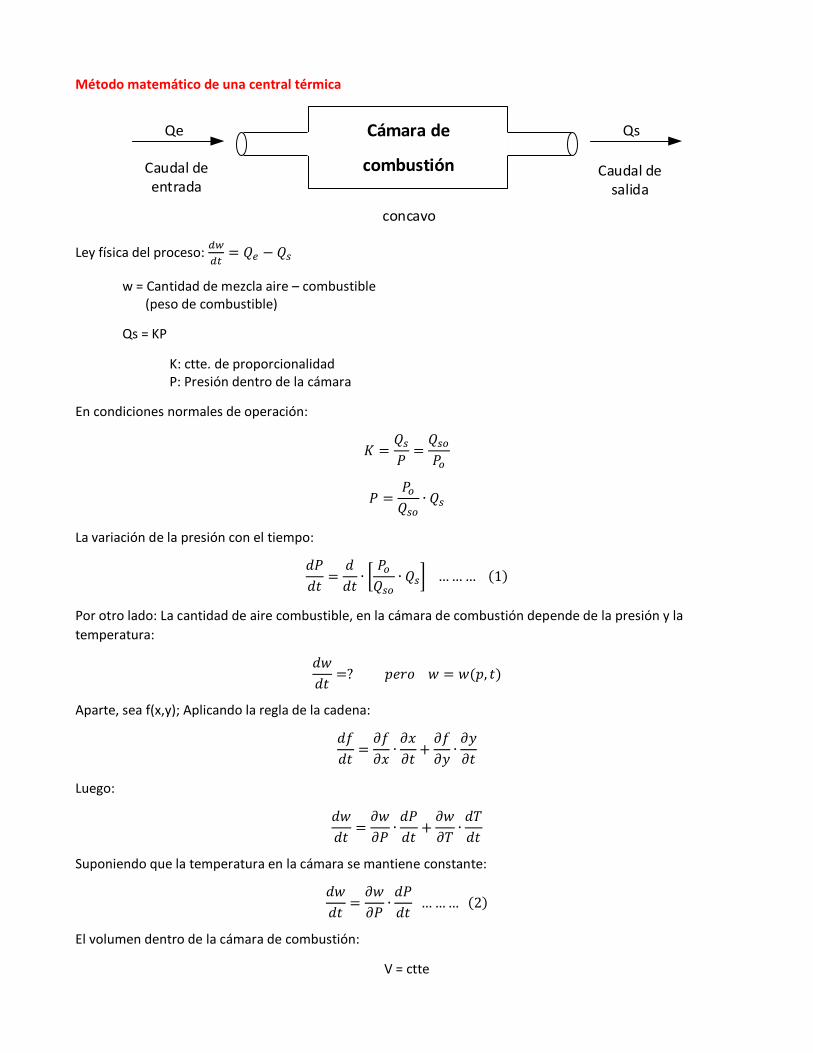
Método matemático de una central térmica
Cámara de
combustión Caudal de entrada
concavo
Qe Qs
Caudal de salida
Ley física del proceso: 𝑑𝑤
𝑑𝑡= 𝑄𝑒 − 𝑄𝑠
w = Cantidad de mezcla aire – combustible (peso de combustible)
Qs = KP
K: ctte. de proporcionalidad P: Presión dentro de la cámara
En condiciones normales de operación:
𝐾 =𝑄𝑠
𝑃=
𝑄𝑠𝑜
𝑃𝑜
𝑃 =𝑃𝑜
𝑄𝑠𝑜∙ 𝑄𝑠
La variación de la presión con el tiempo:
𝑑𝑃
𝑑𝑡=
𝑑
𝑑𝑡∙ [
𝑃𝑜
𝑄𝑠𝑜∙ 𝑄𝑠] … … … (1)
Por otro lado: La cantidad de aire combustible, en la cámara de combustión depende de la presión y la
temperatura:
𝑑𝑤
𝑑𝑡=? 𝑝𝑒𝑟𝑜 𝑤 = 𝑤(𝑝, 𝑡)
Aparte, sea f(x,y); Aplicando la regla de la cadena:
𝑑𝑓
𝑑𝑡=
𝜕𝑓
𝜕𝑥∙
𝜕𝑥
𝜕𝑡+
𝜕𝑓
𝜕𝑦∙
𝜕𝑦
𝜕𝑡
Luego:
𝑑𝑤
𝑑𝑡=
𝜕𝑤
𝜕𝑃∙
𝑑𝑃
𝑑𝑡+
𝜕𝑤
𝜕𝑇∙
𝑑𝑇
𝑑𝑡
Suponiendo que la temperatura en la cámara se mantiene constante:
𝑑𝑤
𝑑𝑡=
𝜕𝑤
𝜕𝑃∙
𝑑𝑃
𝑑𝑡 … … … (2)
El volumen dentro de la cámara de combustión:
V = ctte
𝑉 = 𝑣 ∙ 𝑤
v: Volumen especifico
w: Masa de aire – combustible
𝑤 =𝑉
𝑣
𝑑𝑤
𝑑𝑡=
𝑑
𝑑𝑃(
𝑉
𝑣) = 𝑉 ∙
𝑑
𝑑𝑃∙ (
1
𝑣) … … … (3)
Reemplazando (3) en (2):
𝑑𝑤
𝑑𝑡= 𝑉 ∙
𝜕
𝜕𝑃∙ (
1
𝑣) ∙
𝑑𝑃
𝑑𝑡
Considerando (1):
𝑑𝑤
𝑑𝑡= 𝑉 ∙
𝜕
𝜕𝑃∙ (
1
𝑣) ∙
𝑃𝑜
𝑄𝑠𝑜∙
𝑑
𝑑𝑡∙ 𝑄𝑠
Pero:
𝑑𝑤
𝑑𝑡= 𝑄𝑒 − 𝑄𝑠
𝑄𝑒 − 𝑄𝑠 = 𝑇𝑐 ∙𝑑
𝑑𝑡∙ 𝑄𝑠
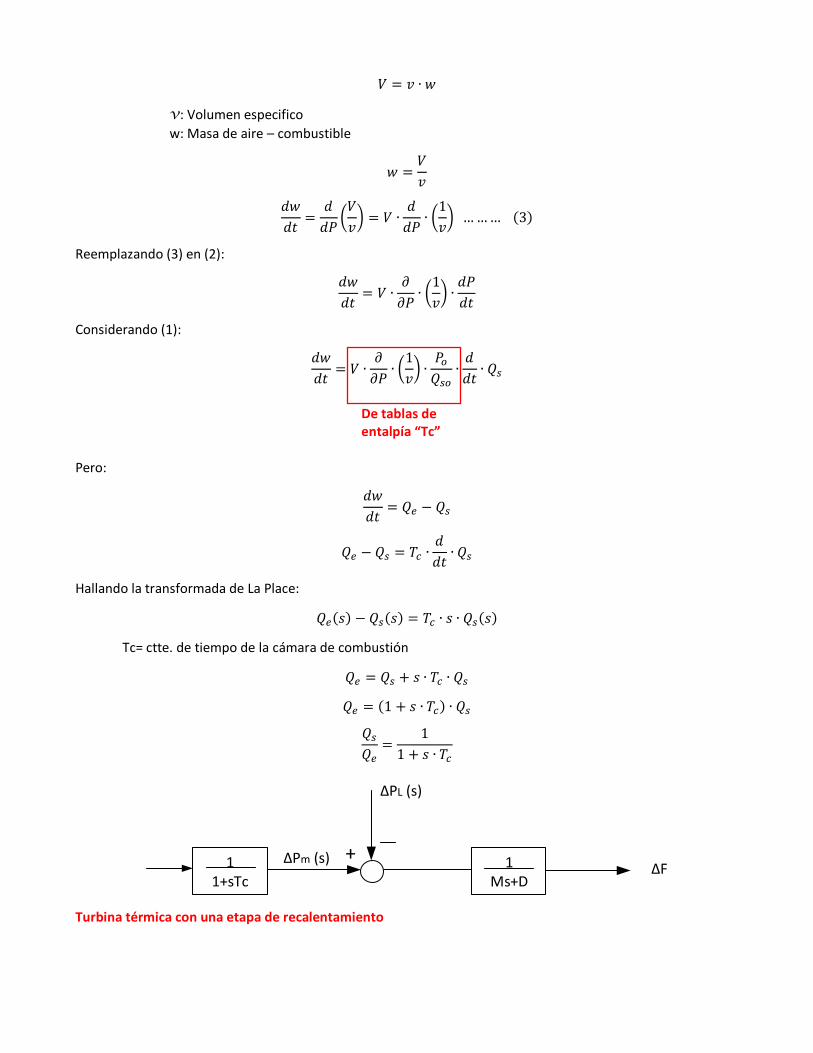
Hallando la transformada de La Place:
𝑄𝑒(𝑠) − 𝑄𝑠(𝑠) = 𝑇𝑐 ∙ 𝑠 ∙ 𝑄𝑠(𝑠)
Tc= ctte. de tiempo de la cámara de combustión
𝑄𝑒 = 𝑄𝑠 + 𝑠 ∙ 𝑇𝑐 ∙ 𝑄𝑠
𝑄𝑒 = (1 + 𝑠 ∙ 𝑇𝑐) ∙ 𝑄𝑠
𝑄𝑠
𝑄𝑒=
1
1 + 𝑠 ∙ 𝑇𝑐
1Ms+D
ΔPL (s)
ΔPm (s)ΔF1
1+sTc
+
Turbina térmica con una etapa de recalentamiento
De tablas de entalpía “Tc”
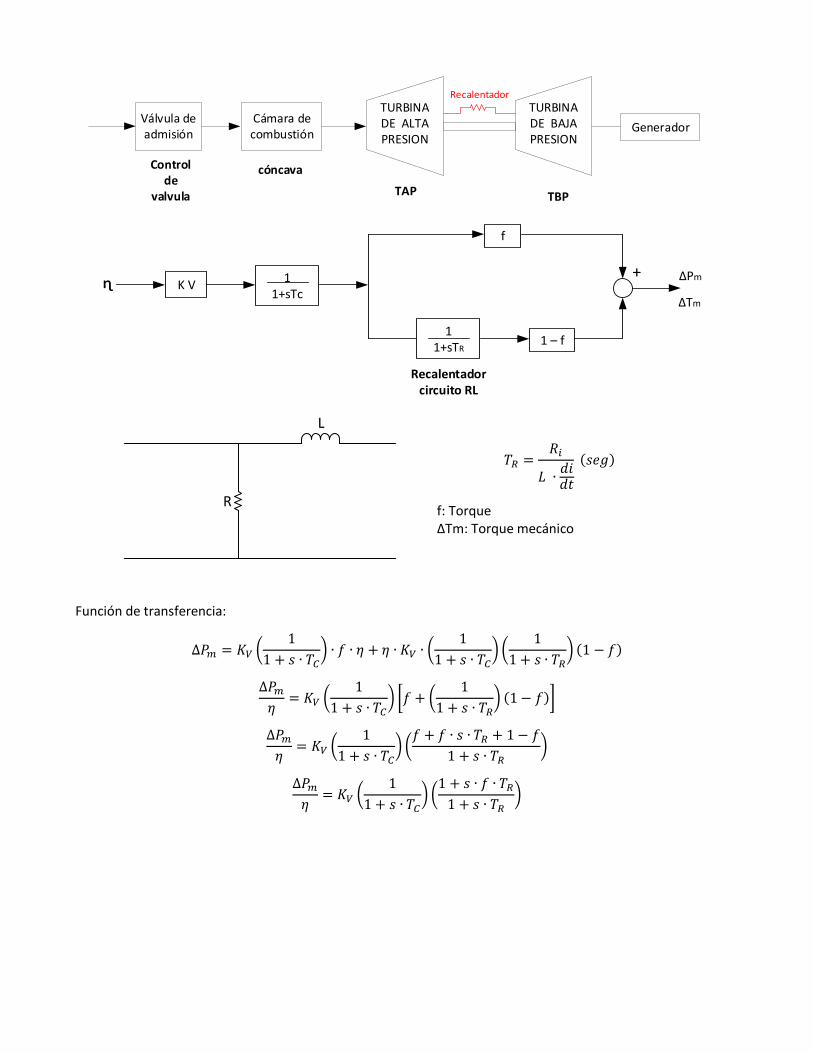
Cámara de combustión
Válvula de admisión
TURBINA DE ALTA PRESION
Recalentador
TURBINA DE BAJA PRESION
Generador
Control de
valvula
cóncava
TAP TBP
K V1
1+sTc
f
11+sTR
1 – f
ΔPm
ΔTm
+ᶯ
Recalentador circuito RL
R
L
Función de transferencia:
∆𝑃𝑚 = 𝐾𝑉 (1
1 + 𝑠 ∙ 𝑇𝐶) ∙ 𝑓 ∙ 𝜂 + 𝜂 ∙ 𝐾𝑉 ∙ (
1
1 + 𝑠 ∙ 𝑇𝐶) (
1
1 + 𝑠 ∙ 𝑇𝑅) (1 − 𝑓)
∆𝑃𝑚
𝜂= 𝐾𝑉 (
1
1 + 𝑠 ∙ 𝑇𝐶) [𝑓 + (
1
1 + 𝑠 ∙ 𝑇𝑅) (1 − 𝑓)]
∆𝑃𝑚
𝜂= 𝐾𝑉 (
1
1 + 𝑠 ∙ 𝑇𝐶) (
𝑓 + 𝑓 ∙ 𝑠 ∙ 𝑇𝑅 + 1 − 𝑓
1 + 𝑠 ∙ 𝑇𝑅)
∆𝑃𝑚
𝜂= 𝐾𝑉 (
1
1 + 𝑠 ∙ 𝑇𝐶) (
1 + 𝑠 ∙ 𝑓 ∙ 𝑇𝑅
1 + 𝑠 ∙ 𝑇𝑅)
𝑇𝑅 =𝑅𝑖
𝐿 ∙𝑑𝑖𝑑𝑡
(𝑠𝑒𝑔)
f: Torque ΔTm: Torque mecánico
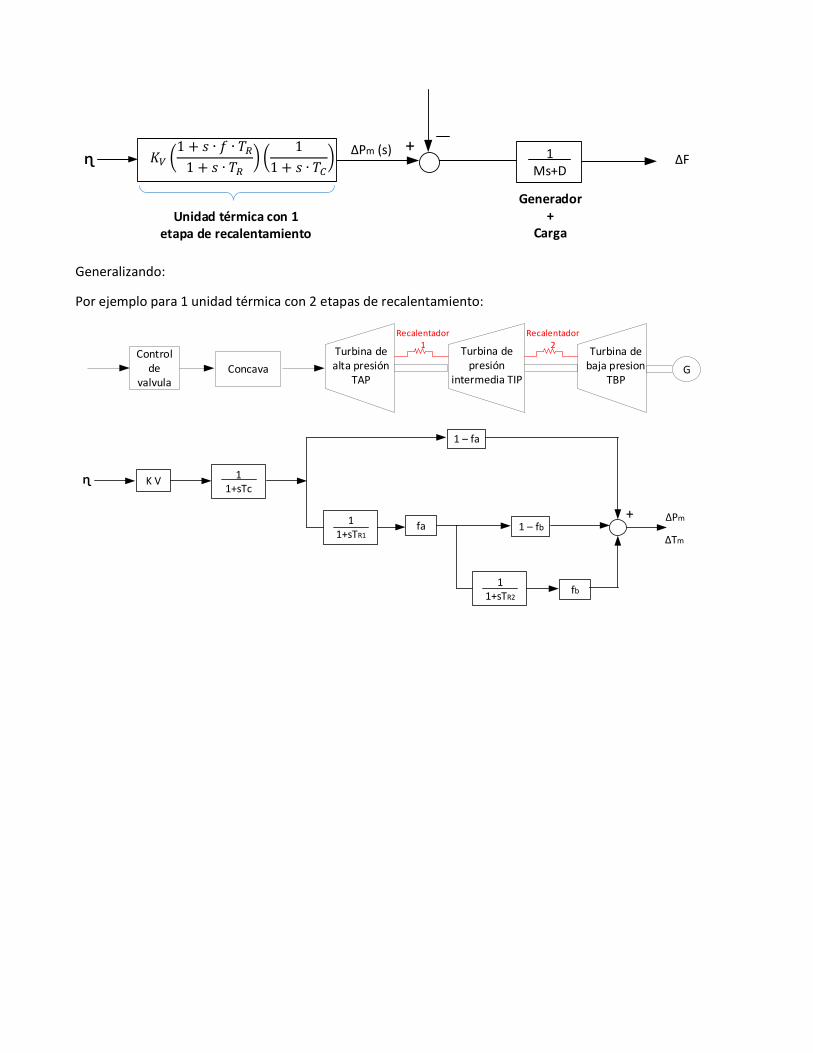
1Ms+D
ΔPm (s)ΔF
+ᶯ
Unidad térmica con 1 etapa de recalentamiento
Generador +
Carga
Generalizando:
Por ejemplo para 1 unidad térmica con 2 etapas de recalentamiento:
Concava
Control de
valvula
Turbina de alta presión
TAP
Recalentador1
Recalentador2
Turbina de baja presion
TBP
Turbina de presión
intermedia TIPG
K V1
1+sTc
1 – fa
11+sTR1
faΔPm
ΔTm
+
ᶯ
1 – fb
11+sTR2
fb
𝐾𝑉 (1 + 𝑠 ∙ 𝑓 ∙ 𝑇𝑅
1 + 𝑠 ∙ 𝑇𝑅) (
1
1 + 𝑠 ∙ 𝑇𝐶)
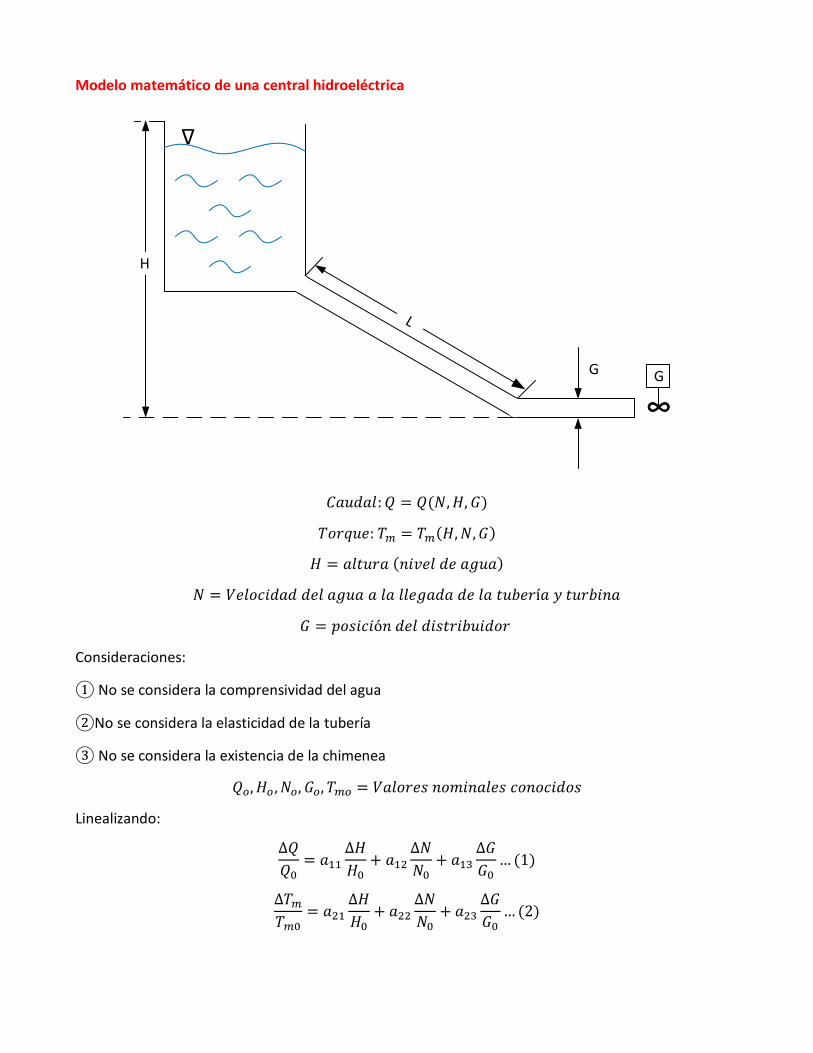
Modelo matemático de una central hidroeléctrica
G
H
∞G
Δ
𝐶𝑎𝑢𝑑𝑎𝑙: 𝑄 = 𝑄(𝑁, 𝐻, 𝐺)
𝑇𝑜𝑟𝑞𝑢𝑒: 𝑇𝑚 = 𝑇𝑚(𝐻, 𝑁, 𝐺)
𝐻 = 𝑎𝑙𝑡𝑢𝑟𝑎 (𝑛𝑖𝑣𝑒𝑙 𝑑𝑒 𝑎𝑔𝑢𝑎)
𝑁 = 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒𝑙 𝑎𝑔𝑢𝑎 𝑎 𝑙𝑎 𝑙𝑙𝑒𝑔𝑎𝑑𝑎 𝑑𝑒 𝑙𝑎 𝑡𝑢𝑏𝑒𝑟í𝑎 𝑦 𝑡𝑢𝑟𝑏𝑖𝑛𝑎
𝐺 = 𝑝𝑜𝑠𝑖𝑐𝑖ó𝑛 𝑑𝑒𝑙 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑖𝑑𝑜𝑟
Consideraciones:
① No se considera la comprensividad del agua
②No se considera la elasticidad de la tubería
③ No se considera la existencia de la chimenea
𝑄𝑜, 𝐻𝑜 , 𝑁𝑜, 𝐺𝑜, 𝑇𝑚𝑜 = 𝑉𝑎𝑙𝑜𝑟𝑒𝑠 𝑛𝑜𝑚𝑖𝑛𝑎𝑙𝑒𝑠 𝑐𝑜𝑛𝑜𝑐𝑖𝑑𝑜𝑠
Linealizando:
∆𝑄
𝑄0= 𝑎11
∆𝐻
𝐻0+ 𝑎12
∆𝑁
𝑁0+ 𝑎13
∆𝐺
𝐺0… (1)
∆𝑇𝑚
𝑇𝑚0= 𝑎21
∆𝐻
𝐻0+ 𝑎22
∆𝑁
𝑁0+ 𝑎23
∆𝐺
𝐺0… (2)
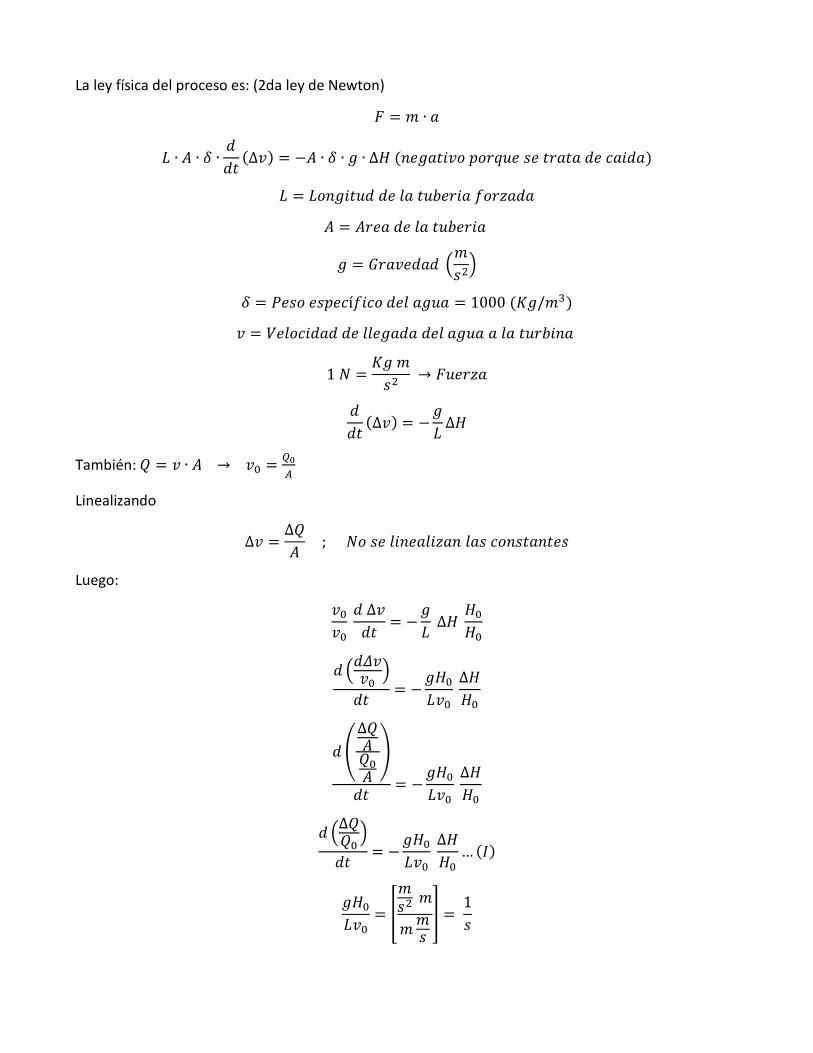
La ley física del proceso es: (2da ley de Newton)
𝐹 = 𝑚 ∙ 𝑎
𝐿 ∙ 𝐴 ∙ 𝛿 ∙𝑑
𝑑𝑡(∆𝑣) = −𝐴 ∙ 𝛿 ∙ 𝑔 ∙ ∆𝐻 (𝑛𝑒𝑔𝑎𝑡𝑖𝑣𝑜 𝑝𝑜𝑟𝑞𝑢𝑒 𝑠𝑒 𝑡𝑟𝑎𝑡𝑎 𝑑𝑒 𝑐𝑎𝑖𝑑𝑎)
𝐿 = 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑑𝑒 𝑙𝑎 𝑡𝑢𝑏𝑒𝑟𝑖𝑎 𝑓𝑜𝑟𝑧𝑎𝑑𝑎
𝐴 = 𝐴𝑟𝑒𝑎 𝑑𝑒 𝑙𝑎 𝑡𝑢𝑏𝑒𝑟𝑖𝑎
𝑔 = 𝐺𝑟𝑎𝑣𝑒𝑑𝑎𝑑 (𝑚
𝑠2)
𝛿 = 𝑃𝑒𝑠𝑜 𝑒𝑠𝑝𝑒𝑐í𝑓𝑖𝑐𝑜 𝑑𝑒𝑙 𝑎𝑔𝑢𝑎 = 1000 (𝐾𝑔/𝑚3)
𝑣 = 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑙𝑙𝑒𝑔𝑎𝑑𝑎 𝑑𝑒𝑙 𝑎𝑔𝑢𝑎 𝑎 𝑙𝑎 𝑡𝑢𝑟𝑏𝑖𝑛𝑎
1 𝑁 =𝐾𝑔 𝑚
𝑠2 → 𝐹𝑢𝑒𝑟𝑧𝑎
𝑑
𝑑𝑡(∆𝑣) = −
𝑔
𝐿∆𝐻
También: 𝑄 = 𝑣 ∙ 𝐴 → 𝑣0 =𝑄0
𝐴
Linealizando
∆𝑣 =∆𝑄
𝐴 ; 𝑁𝑜 𝑠𝑒 𝑙𝑖𝑛𝑒𝑎𝑙𝑖𝑧𝑎𝑛 𝑙𝑎𝑠 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒𝑠
Luego:
𝑣0
𝑣0 𝑑 ∆𝑣
𝑑𝑡= −
𝑔
𝐿 ∆𝐻
𝐻0
𝐻0
𝑑 (𝑑𝛥𝑣𝑣0
)
𝑑𝑡= −
𝑔𝐻0
𝐿𝑣0 ∆𝐻
𝐻0
𝑑 (
∆𝑄𝐴𝑄0𝐴
)
𝑑𝑡= −
𝑔𝐻0
𝐿𝑣0 ∆𝐻
𝐻0
𝑑 (∆𝑄𝑄0
)
𝑑𝑡= −
𝑔𝐻0
𝐿𝑣0 ∆𝐻
𝐻0… (𝐼)
𝑔𝐻0
𝐿𝑣0= [
𝑚𝑠2 𝑚
𝑚𝑚𝑠
] = 1
𝑠

Si invertimos:
𝐿𝑣0
𝑔𝐻0= (𝑠) = 𝑇𝑤
𝑇𝑤 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑡𝑖𝑒𝑚𝑝𝑜 𝑑𝑒 𝑝𝑎𝑟𝑡𝑖𝑑𝑎 𝑑𝑒 𝑎𝑔𝑢𝑎
Reemplazando en (I):
𝑑 (∆𝑄𝑄0
)
𝑑𝑡=
−1
𝑇𝑤 ∆𝐻
𝐻0… (3)
Derivando en función a (1):
𝑑
𝑑𝑡(
∆𝑄
𝑄0) = 𝑎11
𝑑
𝑑𝑡(
∆𝐻
𝐻0) + 𝑎12
𝑑
𝑑𝑡(
∆𝑁
𝑁0) + 𝑎13
𝑑
𝑑𝑡(
∆𝐺
𝐺0)
Igualando con (3):
−1
𝑇𝑤 ∆𝐻
𝐻0= 𝑎11
𝑑
𝑑𝑡(
∆𝐻
𝐻0) + 𝑎12
𝑑
𝑑𝑡(
∆𝑁
𝑁0) + 𝑎13
𝑑
𝑑𝑡(
∆𝐺
𝐺0)
Aplicando la transformada de LaPlace:
−1
𝑇𝑤 ∆𝐻
𝐻0
(𝑠) = 𝑎11 𝑠 ∆𝐻
𝐻0
(𝑠) + 𝑎12 𝑠 ∆𝑁
𝑁0
(𝑠) + 𝑎13 𝑠 ∆𝐺
𝐺0
(𝑠)
− (1
𝑇𝑤+ 𝑎11 𝑠)
∆𝐻(𝑠)
𝐻0= 𝑎12 𝑠
∆𝑁
𝑁0
(𝑠) + 𝑎13 𝑠 ∆𝐺
𝐺0
(𝑠)
− (1 + 𝑎11 𝑇𝑤 𝑠
𝑇𝑤)
∆𝐻(𝑠)
𝐻0= 𝑎12 𝑠
∆𝑁
𝑁0
(𝑠) + 𝑎13 𝑠 ∆𝐺
𝐺0
(𝑠)
∆𝐻(𝑠)
𝐻0= (−
𝑇𝑤
1 + 𝑎11 𝑇𝑤 𝑠) (𝑎12 𝑠
∆𝑁
𝑁0
(𝑠) + 𝑎13 𝑠 ∆𝐺
𝐺0
(𝑠)) … (4)
Aplicando la transformada de LaPlace a la ecuación (2):
𝑇𝑚
𝑇𝑚0
(𝑠) = 𝑎21
∆𝐻
𝐻0
(𝑠) + 𝑎22
∆𝑁
𝑁0
(𝑠) + 𝑎23
∆𝐺
𝐺0
(𝑠) … (5)
Reemplazando (4) en (5):
𝑇𝑚
𝑇𝑚0
(𝑠) = 𝑎21 [−𝑇𝑤 𝑎12 𝑠
1 + 𝑎11 𝑇1𝑁 𝑠 ∆𝑁
𝑁0
(𝑠) + (−𝑇𝑤 𝑎13 𝑠
1 + 𝑎11 𝑇1𝑁 𝑠 ∆𝐺
𝐺0
(𝑠))] + 𝑎22 ∆𝑁
𝑁0
(𝑠) + 𝑎23
∆𝐺
𝐺0
(𝑠)
𝐹𝑎𝑐𝑡𝑜𝑟𝑖𝑧𝑎𝑛𝑑𝑜: ∆𝑇𝑚
𝑇𝑚0= [𝑎22 −
𝑎21 𝑎12 𝑇𝑤 𝑠
1 + 𝑎11 𝑠 𝑇𝑤]
∆𝑁
𝑁0
(𝑠) + [𝑎23 −𝑎21 𝑎13 𝑇𝑤 𝑠
1 + 𝑎11 𝑠 𝑇𝑤]
∆𝐺
𝐺0
(𝑠)

Despreciando la variación de la velocidad de la turbina:
∆𝑇𝑚
𝑇𝑚0
(𝑠) = [𝑎23 −𝑎21 𝑎13 𝑇𝑤 𝑠
1 + 𝑎11 𝑇𝑤 𝑠]
∆𝐺
𝐺0(𝑠)
∆𝑇𝑚
𝑇𝑚0
(𝑠) = 𝑎23 [1 −
𝑎13 𝑎21
𝑎23 𝑇𝑤 𝑠
1 + 𝑎11 𝑇𝑤 𝑠]
∆𝐺
𝐺0
Valores referenciales obtenidos de catálogos
𝑎11 = 0,58
𝑎21 = 1,40
𝑎13 = 1,1
𝑎23 = 1,50
Reemplazando valores:
∆𝑇𝑚
𝑇𝑚0= 𝑎23 [
1 + 𝑎11 𝑇𝑤 𝑠 −𝑎13 𝑎21
𝑎23𝑇𝑤 𝑠
1 + 𝑎11 𝑇𝑤 𝑠]
∆𝐺
𝐺0
∆𝑇𝑚
𝑇𝑚0= 1,5 [
1 + 0,58 𝑇𝑤 𝑠 −1,11,5 1,4 𝑇𝑤 𝑠
1 + 0,58 𝑇𝑤 𝑠]
∆𝐺
𝐺0
∆𝑇𝑚
𝑇𝑚0= 1,5 [
1 − 0,45 𝑇𝑤 𝑠
1 + 0,58 𝑇𝑤 𝑠]
∆𝐺
𝐺0… (𝐼𝐼)
Este es el modelo provisional de la central hidráulica.
1) 𝑄 ∝ 𝐺√𝐻
2) 𝑇𝑚 ∝ 𝐻𝑄
∆𝑓 =𝜕𝑓
𝜕𝑥|
𝑝 ∙ ∆𝑥 +
𝜕𝑓
𝜕𝑦|
𝑝
∙ ∆𝑦
𝑝: 𝑝𝑢𝑛𝑡𝑜 𝑑𝑒 𝑜𝑝𝑒𝑟𝑎𝑐𝑖ó𝑛
De 1):
𝑄 = 𝐾1 𝐺 √𝐻
𝑄0 = 𝐾1 𝐺0 √𝐻0
𝐾: 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑝𝑟𝑜𝑝𝑜𝑟𝑐𝑖𝑜𝑛𝑎𝑙𝑖𝑑𝑎𝑑
∆𝑄 =𝜕𝑄
𝜕𝐺|
𝐺0𝐻0
∙ ∆𝐺 +𝜕𝑄
𝜕𝐻|
𝐺0𝐻0
∙ ∆𝐻
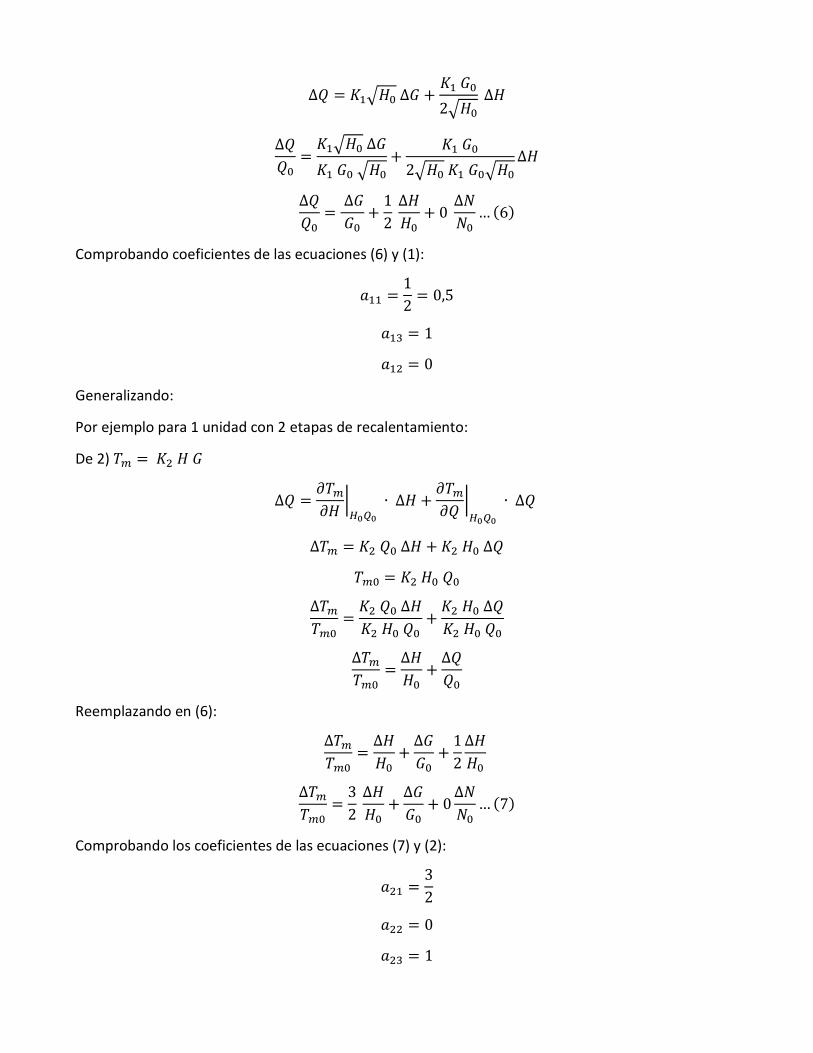
∆𝑄 = 𝐾1√𝐻0 ∆𝐺 +𝐾1 𝐺0
2√𝐻0
∆𝐻
∆𝑄
𝑄0=
𝐾1√𝐻0 ∆𝐺
𝐾1 𝐺0 √𝐻0
+𝐾1 𝐺0
2√𝐻0 𝐾1 𝐺0√𝐻0
∆𝐻
∆𝑄
𝑄0=
∆𝐺
𝐺0+
1
2 ∆𝐻
𝐻0+ 0
∆𝑁
𝑁0… (6)
Comprobando coeficientes de las ecuaciones (6) y (1):
𝑎11 =1
2= 0,5
𝑎13 = 1
𝑎12 = 0
Generalizando:
Por ejemplo para 1 unidad con 2 etapas de recalentamiento:
De 2) 𝑇𝑚 = 𝐾2 𝐻 𝐺
∆𝑄 =𝜕𝑇𝑚
𝜕𝐻|
𝐻0𝑄0
∙ ∆𝐻 +𝜕𝑇𝑚
𝜕𝑄|
𝐻0𝑄0
∙ ∆𝑄
∆𝑇𝑚 = 𝐾2 𝑄0 ∆𝐻 + 𝐾2 𝐻0 ∆𝑄
𝑇𝑚0 = 𝐾2 𝐻0 𝑄0
∆𝑇𝑚
𝑇𝑚0=
𝐾2 𝑄0 ∆𝐻
𝐾2 𝐻0 𝑄0+
𝐾2 𝐻0 ∆𝑄
𝐾2 𝐻0 𝑄0
∆𝑇𝑚
𝑇𝑚0=
∆𝐻
𝐻0+
∆𝑄
𝑄0
Reemplazando en (6):
∆𝑇𝑚
𝑇𝑚0=
∆𝐻
𝐻0+
∆𝐺
𝐺0+
1
2
∆𝐻
𝐻0
∆𝑇𝑚
𝑇𝑚0=
3
2 ∆𝐻
𝐻0+
∆𝐺
𝐺0+ 0
∆𝑁
𝑁0… (7)
Comprobando los coeficientes de las ecuaciones (7) y (2):
𝑎21 =3
2
𝑎22 = 0
𝑎23 = 1

Reemplazando estos valores en (II):
∆𝑇𝑚
𝑇𝑚0= 1 [
1 + 0,5 𝑇𝑤 𝑠 − 1 ∗ 1,5
1 𝑇𝑤 𝑠
1 + 0,5 𝑇𝑤 𝑠]
∆𝐺
𝐺0
∆𝑇𝑚
𝑇𝑚0= 1 (
1 − 𝑇𝑤 𝑠
1 + 0,5 𝑇𝑤 𝑠)
∆𝐺
𝐺0
∆𝑇𝑚
𝑇𝑚0= (
1 − 𝑠 𝑇𝑤
1 + 0,5 𝑠 𝑇𝑤)
∆𝐺
𝐺0… 𝑀𝑜𝑑𝑒𝑙𝑜 𝑝𝑎𝑟𝑎 𝑐𝑒𝑛𝑡𝑟𝑎𝑙 ℎ𝑖𝑑𝑟á𝑢𝑙𝑖𝑐𝑎
1Ms+D
ΔPL (s)
ΔF+
Reg. Vel.
1Ms+D
1 – sTw
1+sTw
2
ΔG ΔPm
- ΔPL
ΔF
∆𝑃𝑚
∆𝐺=
1 − 𝑠𝑇𝑤
1 + 𝑠𝑇𝑤
2
Sabemos que:
𝐺(𝑠) = { ͟⎾ } = −∆𝑔
𝑠 Escalon
Entonces:
∆𝑃𝑚(𝑠) = (1 − 𝑠𝑇𝑤
1 + 𝑠𝑇𝑤
2
) ∙∆𝑔
𝑠
Pero:
L -1 {
1
𝑠+𝑎} = 𝑒−𝑎𝑡
1 − 𝑠 ∙ 𝑇𝑤
1 +12
∙ 𝑠 ∙ 𝑇𝑤
∆𝐺
𝐺𝑜

∆𝑃𝑚(𝑠) =−𝑇𝑤 (𝑠 −
1𝑇𝑤
)
+𝑇𝑤
2 (𝑠 +2
𝑇𝑤)
∗∆𝑔
𝑠
∆𝑃𝑚(𝑠) =𝑠 −
1𝑇𝑤
𝑠 +2
𝑇𝑤
∙(−2∆𝑔)
𝑠=
𝐴
𝑠 +2
𝑇𝑤
+𝐵
𝑠=
𝐴𝑠 + 𝐵 (𝑠 +2
𝑇𝑤)
𝑠 (𝑠 +2
𝑇𝑤)
∆𝑃𝑚(𝑠) = −2∆𝑔 𝑠 +2
𝑇𝑤∆𝑔 = 𝐴𝑠 + 𝐵𝑠 +
2
𝑇𝑤𝐵
Comparando coeficientes
𝐴 + 𝐵 = −2∆𝑔 … (1)
2𝐵
𝑇𝑤=
2
𝑇𝑤∆𝑔 → 𝐵 = ∆𝑔 … (2)
𝐴 + ∆𝑔 = −2∆𝑔 → 𝐴 = −3∆𝑔
Entonces:
∆𝑃𝑚(𝑠) =−3∆𝑔
𝑠 +2
𝑇𝑤
+∆𝑔
𝑠… (3)
Otra forma de hallar A y B
∆𝑃𝑚(𝑠) =(−2∆𝑔) (𝑠 −
1𝑇𝑤
)
(𝑠 +2
𝑇𝑤) 𝑠
=𝐴
𝑠 +2
𝑇𝑤
+𝐵
𝑠
Para A:
𝑠 +2
𝑇𝑤= 0 → 𝑠 = −
2
𝑇𝑤
Reemplazamos donde no se haga indeterminación:
𝐴 =−2∆𝑔 (−
2𝑇𝑤
−1
𝑇𝑤)
−2
𝑇𝑤
=−2∆𝑔 (−
3𝑇𝑤
)
−2
𝑇𝑤
= −3∆𝑔
Para B:
𝑠 = 0
Reemplazamos de tal forma de que no haya indeterminación
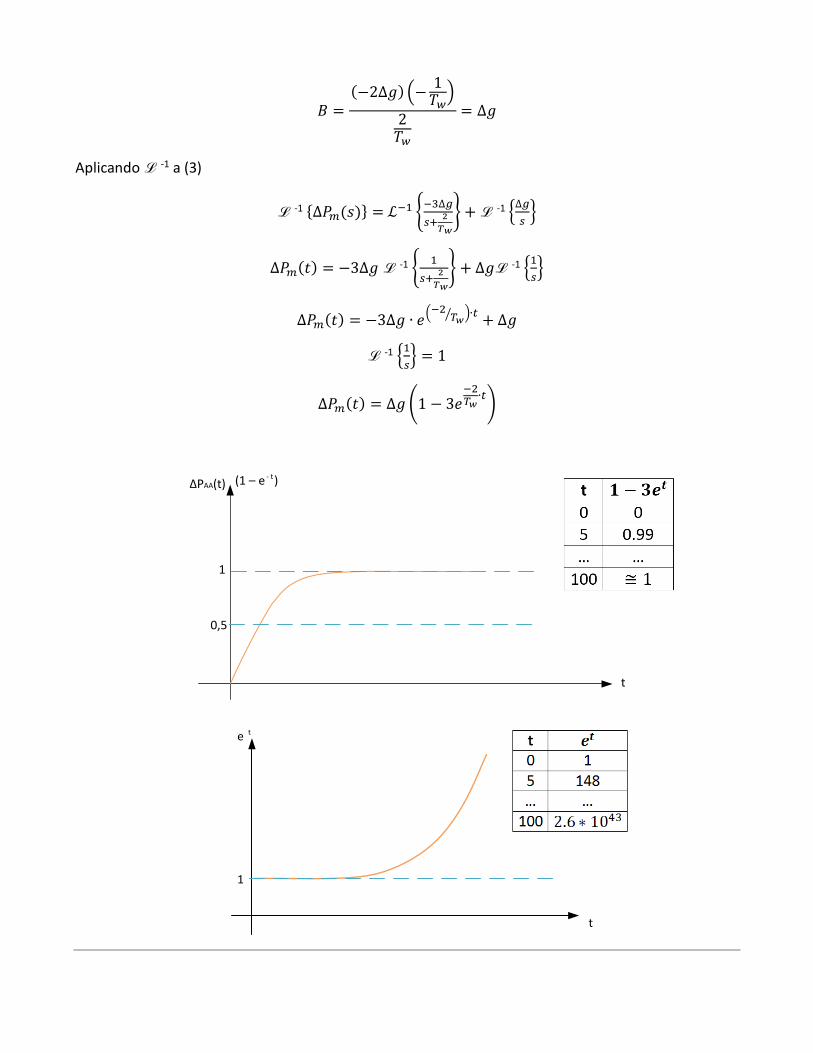
𝐵 =(−2∆𝑔) (−
1𝑇𝑤
)
2𝑇𝑤
= ∆𝑔
Aplicando L -1 a (3)
L -1 {∆𝑃𝑚(𝑠)} = ℒ−1 {
−3∆𝑔
𝑠+2
𝑇𝑤
} + L -1 {
∆𝑔
𝑠}
∆𝑃𝑚(𝑡) = −3∆𝑔 L -1 {
1
𝑠+2
𝑇𝑤
} + ∆𝑔L -1 {
1
𝑠}
∆𝑃𝑚(𝑡) = −3∆𝑔 ∙ 𝑒(−2
𝑇𝑤⁄ )∙𝑡
+ ∆𝑔
L -1 {
1
𝑠} = 1
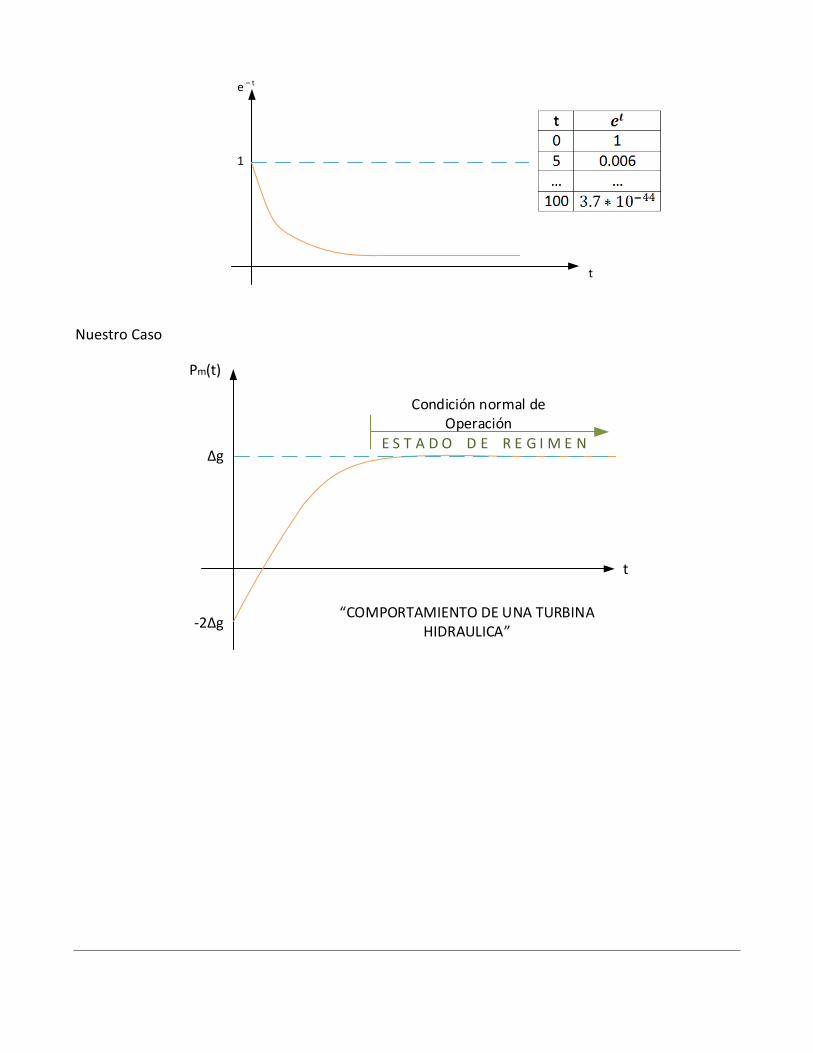
∆𝑃𝑚(𝑡) = ∆𝑔 (1 − 3𝑒−2𝑇𝑤
∙𝑡)
t
ΔPAA(t) (1 – e )- t
1
0,5
t
e t
1
t
e – t
1
Nuestro Caso
t
Pm(t)
Δg
-2Δg
E S T A D O D E R E G I M E N
Condición normal de Operación
“COMPORTAMIENTO DE UNA TURBINA HIDRAULICA”
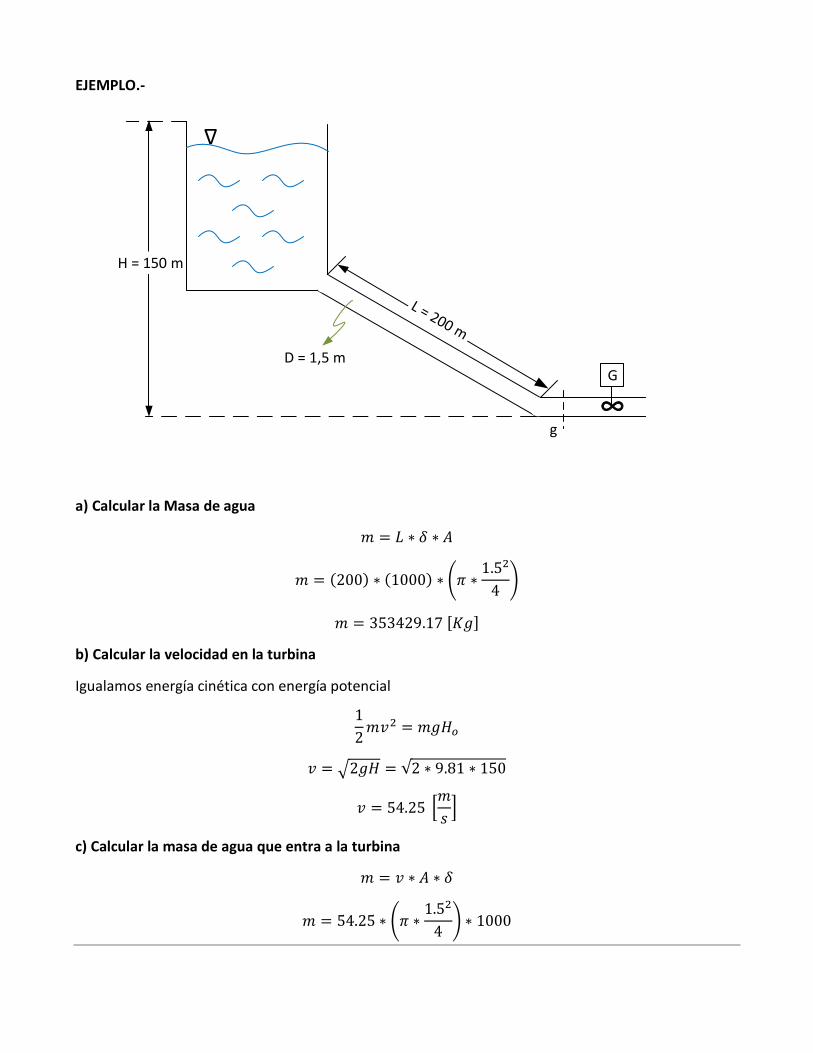
EJEMPLO.-
g
H = 150 m
∞G
Δ
D = 1,5 m
a) Calcular la Masa de agua
𝑚 = 𝐿 ∗ 𝛿 ∗ 𝐴
𝑚 = (200) ∗ (1000) ∗ (𝜋 ∗1.52
4)
𝑚 = 353429.17 [𝐾𝑔]
b) Calcular la velocidad en la turbina
Igualamos energía cinética con energía potencial
1
2𝑚𝑣2 = 𝑚𝑔𝐻𝑜
𝑣 = √2𝑔𝐻 = √2 ∗ 9.81 ∗ 150
𝑣 = 54.25 [𝑚
𝑠]
c) Calcular la masa de agua que entra a la turbina
𝑚 = 𝑣 ∗ 𝐴 ∗ 𝛿
𝑚 = 54.25 ∗ (𝜋 ∗1.52
4) ∗ 1000
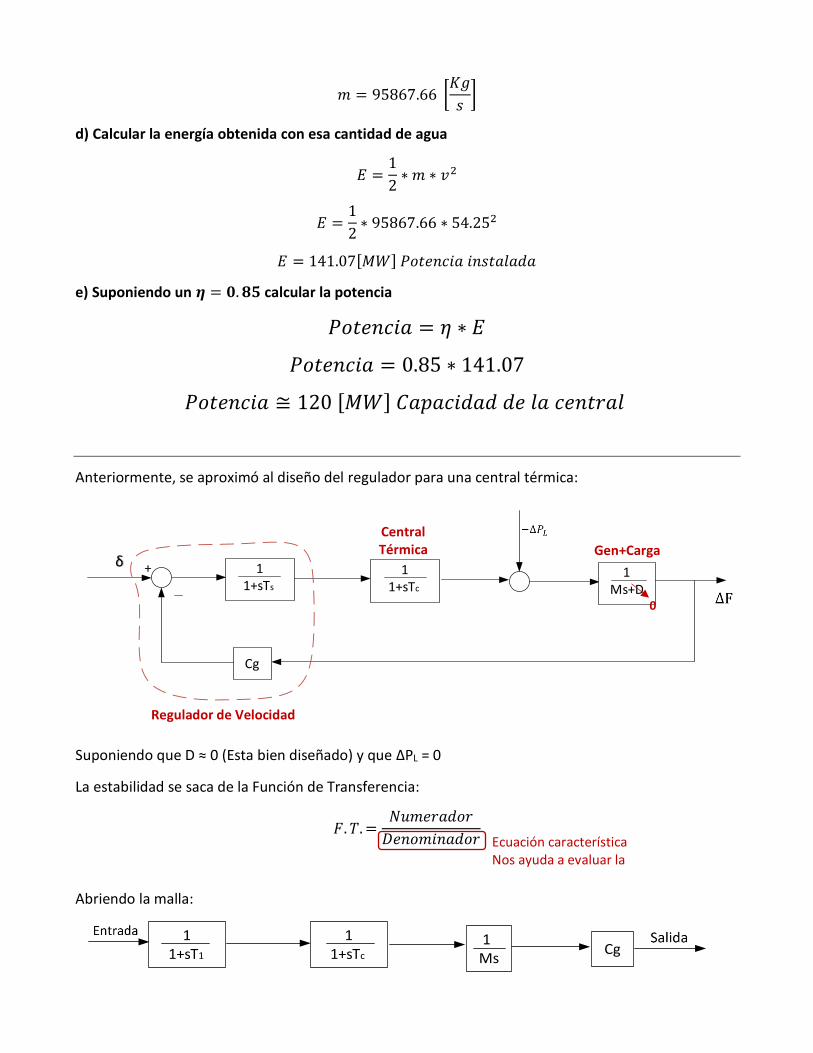
𝑚 = 95867.66 [𝐾𝑔
𝑠]
d) Calcular la energía obtenida con esa cantidad de agua
𝐸 =1
2∗ 𝑚 ∗ 𝑣2
𝐸 =1
2∗ 95867.66 ∗ 54.252
𝐸 = 141.07[𝑀𝑊] 𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑖𝑛𝑠𝑡𝑎𝑙𝑎𝑑𝑎
e) Suponiendo un 𝜼 = 𝟎. 𝟖𝟓 calcular la potencia
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 = 𝜂 ∗ 𝐸
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 = 0.85 ∗ 141.07
𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 ≅ 120 [𝑀𝑊] 𝐶𝑎𝑝𝑎𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑙𝑎 𝑐𝑒𝑛𝑡𝑟𝑎𝑙
Anteriormente, se aproximó al diseño del regulador para una central térmica:
1 1+sTs
Cg
+ 1 1+sTc
1 Ms+D
Suponiendo que D ≈ 0 (Esta bien diseñado) y que ΔPL = 0
La estabilidad se saca de la Función de Transferencia:
𝐹. 𝑇. =𝑁𝑢𝑚𝑒𝑟𝑎𝑑𝑜𝑟
𝐷𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑑𝑜𝑟
Abriendo la malla:
1 1+sT1 Cg
1 1+sTc
1 Ms
Regulador de Velocidad
Central Térmica
Gen+Carga
0
Ecuación característica Nos ayuda a evaluar la estabilidad
δ
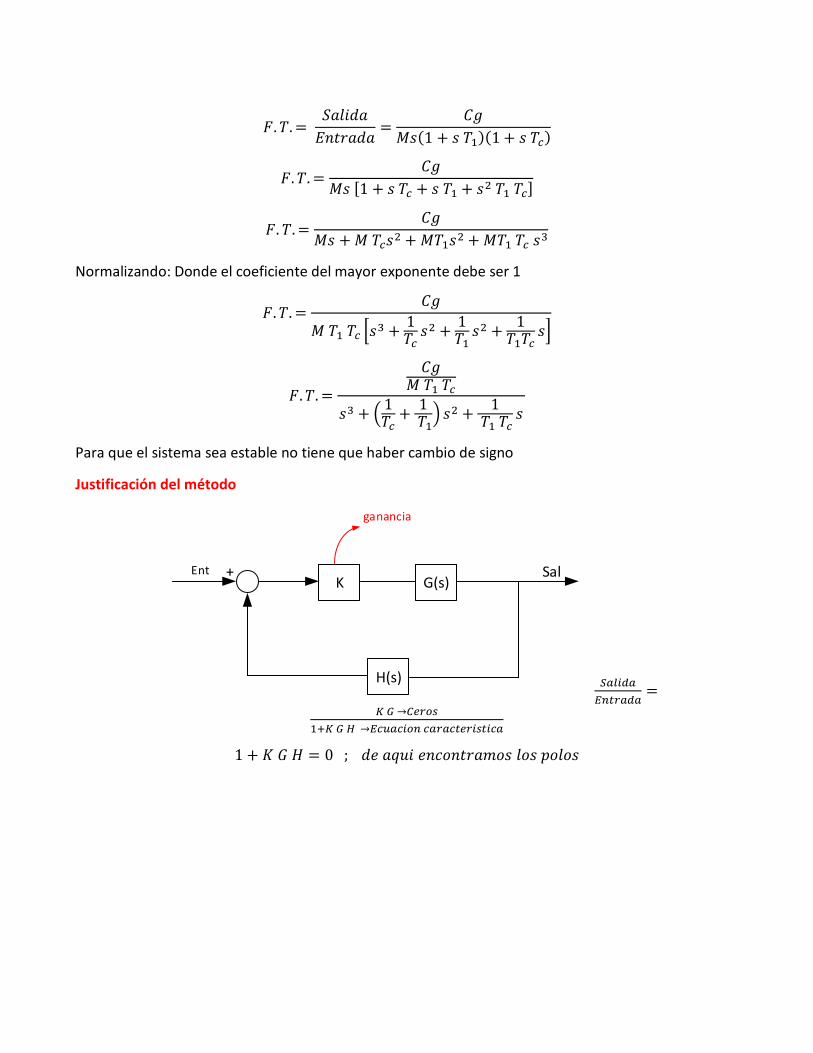
𝐹. 𝑇. = 𝑆𝑎𝑙𝑖𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝐶𝑔
𝑀𝑠(1 + 𝑠 𝑇1)(1 + 𝑠 𝑇𝑐)
𝐹. 𝑇. =𝐶𝑔
𝑀𝑠 [1 + 𝑠 𝑇𝑐 + 𝑠 𝑇1 + 𝑠2 𝑇1 𝑇𝑐]
𝐹. 𝑇. =𝐶𝑔
𝑀𝑠 + 𝑀 𝑇𝑐𝑠2 + 𝑀𝑇1𝑠2 + 𝑀𝑇1 𝑇𝑐 𝑠3
Normalizando: Donde el coeficiente del mayor exponente debe ser 1
𝐹. 𝑇. =𝐶𝑔
𝑀 𝑇1 𝑇𝑐 [𝑠3 +1𝑇𝑐
𝑠2 +1𝑇1
𝑠2 +1
𝑇1𝑇𝑐𝑠]
𝐹. 𝑇. =
𝐶𝑔𝑀 𝑇1 𝑇𝑐
𝑠3 + (1𝑇𝑐
+1
𝑇1) 𝑠2 +
1 𝑇1 𝑇𝑐
𝑠
Para que el sistema sea estable no tiene que haber cambio de signo
Justificación del método
H(s)
KSalEnt +
G(s)
ganancia
𝑆𝑎𝑙𝑖𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝐾 𝐺 →𝐶𝑒𝑟𝑜𝑠
1+𝐾 𝐺 𝐻 →𝐸𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑐𝑎𝑟𝑎𝑐𝑡𝑒𝑟𝑖𝑠𝑡𝑖𝑐𝑎
1 + 𝐾 𝐺 𝐻 = 0 ; 𝑑𝑒 𝑎𝑞𝑢𝑖 𝑒𝑛𝑐𝑜𝑛𝑡𝑟𝑎𝑚𝑜𝑠 𝑙𝑜𝑠 𝑝𝑜𝑙𝑜𝑠
X XX
XX X
0
0
XXX
Estable
Inestable
0
𝑃𝑜𝑙𝑜𝑠 = −𝑎 ± 𝑖𝑏
0
0Estable Inestable
X XXX
X XXX
Puntocritico
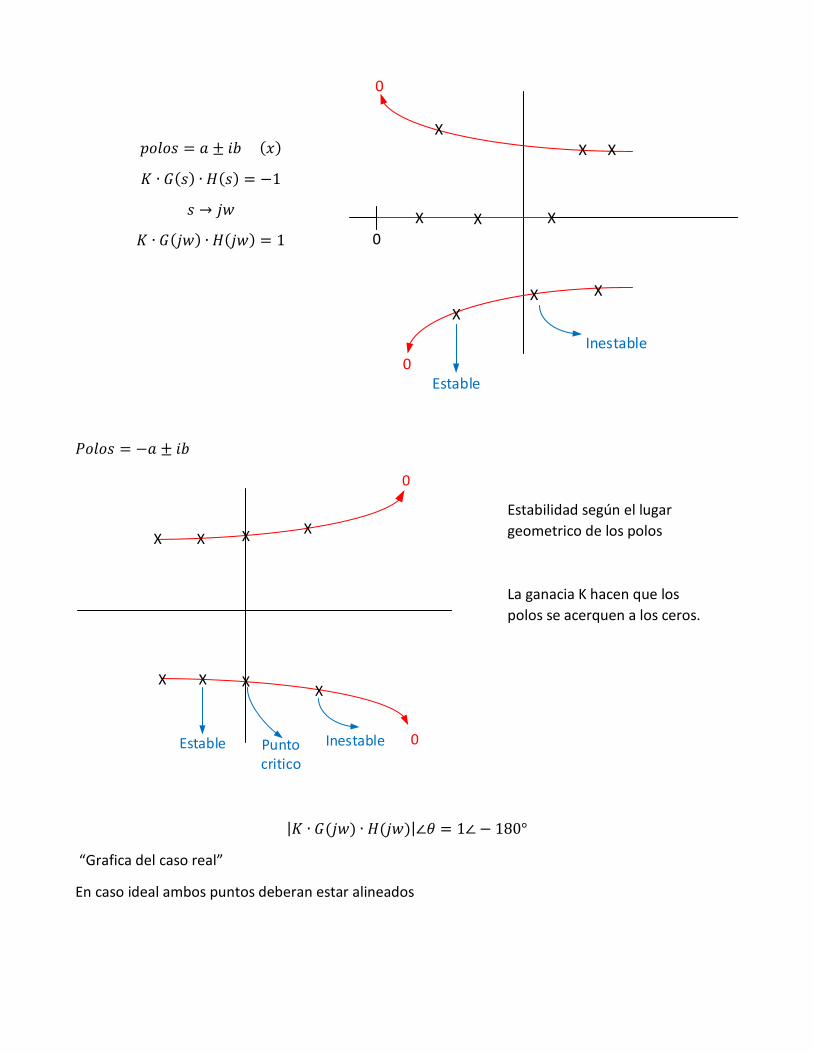
|𝐾 ∙ 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)|∠𝜃 = 1∠ − 180°
“Grafica del caso real”
En caso ideal ambos puntos deberan estar alineados
𝑝𝑜𝑙𝑜𝑠 = 𝑎 ± 𝑖𝑏 (𝑥)
𝐾 ∙ 𝐺(𝑠) ∙ 𝐻(𝑠) = −1
𝑠 → 𝑗𝑤
𝐾 ∙ 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤) = 1
Estabilidad según el lugar
geometrico de los polos
La ganacia K hacen que los
polos se acerquen a los ceros.
Mganancia
t
db
t
˂
Mfase
Modulo=1
-180º
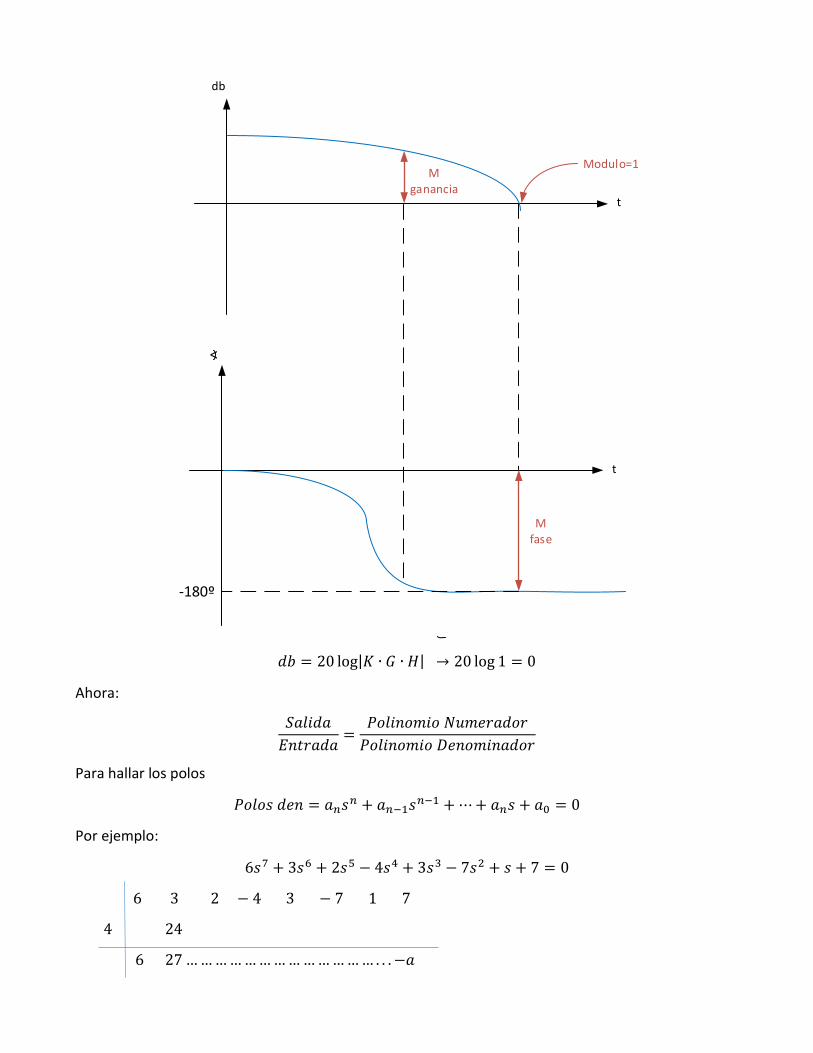
𝑑𝑏 = 20 log|𝐾 ∙ 𝐺 ∙ 𝐻| → 20 log 1 = 0
Ahora:
𝑆𝑎𝑙𝑖𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝑃𝑜𝑙𝑖𝑛𝑜𝑚𝑖𝑜 𝑁𝑢𝑚𝑒𝑟𝑎𝑑𝑜𝑟
𝑃𝑜𝑙𝑖𝑛𝑜𝑚𝑖𝑜 𝐷𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑑𝑜𝑟
Para hallar los polos
𝑃𝑜𝑙𝑜𝑠 𝑑𝑒𝑛 = 𝑎𝑛𝑠𝑛 + 𝑎𝑛−1𝑠𝑛−1 + ⋯ + 𝑎𝑛𝑠 + 𝑎0 = 0
Por ejemplo:
6𝑠7 + 3𝑠6 + 2𝑠5 − 4𝑠4 + 3𝑠3 − 7𝑠2 + 𝑠 + 7 = 0
6 3 2 − 4 3 − 7 1 7
4 24
6 27 … … … … … … … … … … … … … . . . −𝑎
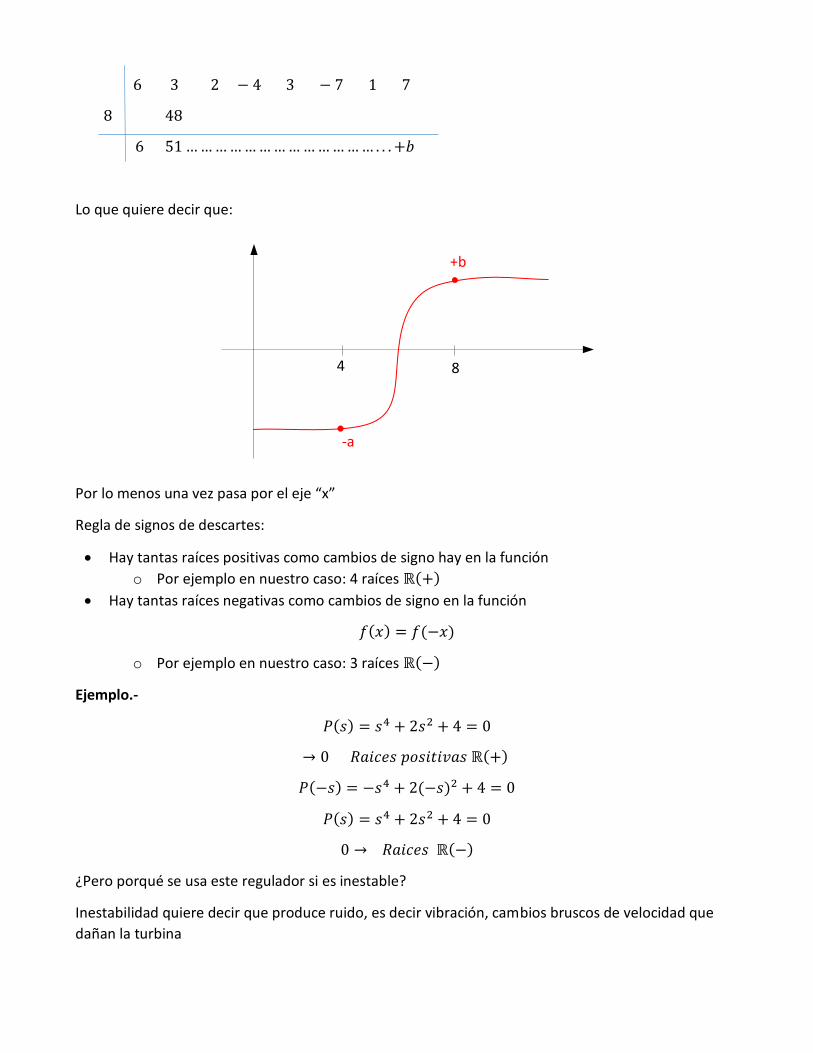
6 3 2 − 4 3 − 7 1 7
8 48
6 51 … … … … … … … … … … … … … . . . +𝑏
Lo que quiere decir que:
+b
-a
4 8
Por lo menos una vez pasa por el eje “x”
Regla de signos de descartes:
Hay tantas raíces positivas como cambios de signo hay en la función
o Por ejemplo en nuestro caso: 4 raíces ℝ(+)
Hay tantas raíces negativas como cambios de signo en la función
𝑓(𝑥) = 𝑓(−𝑥)
o Por ejemplo en nuestro caso: 3 raíces ℝ(−)
Ejemplo.-
𝑃(𝑠) = 𝑠4 + 2𝑠2 + 4 = 0
→ 0 𝑅𝑎𝑖𝑐𝑒𝑠 𝑝𝑜𝑠𝑖𝑡𝑖𝑣𝑎𝑠 ℝ(+)
𝑃(−𝑠) = −𝑠4 + 2(−𝑠)2 + 4 = 0
𝑃(𝑠) = 𝑠4 + 2𝑠2 + 4 = 0
0 → 𝑅𝑎𝑖𝑐𝑒𝑠 ℝ(−)
¿Pero porqué se usa este regulador si es inestable?
Inestabilidad quiere decir que produce ruido, es decir vibración, cambios bruscos de velocidad que
dañan la turbina
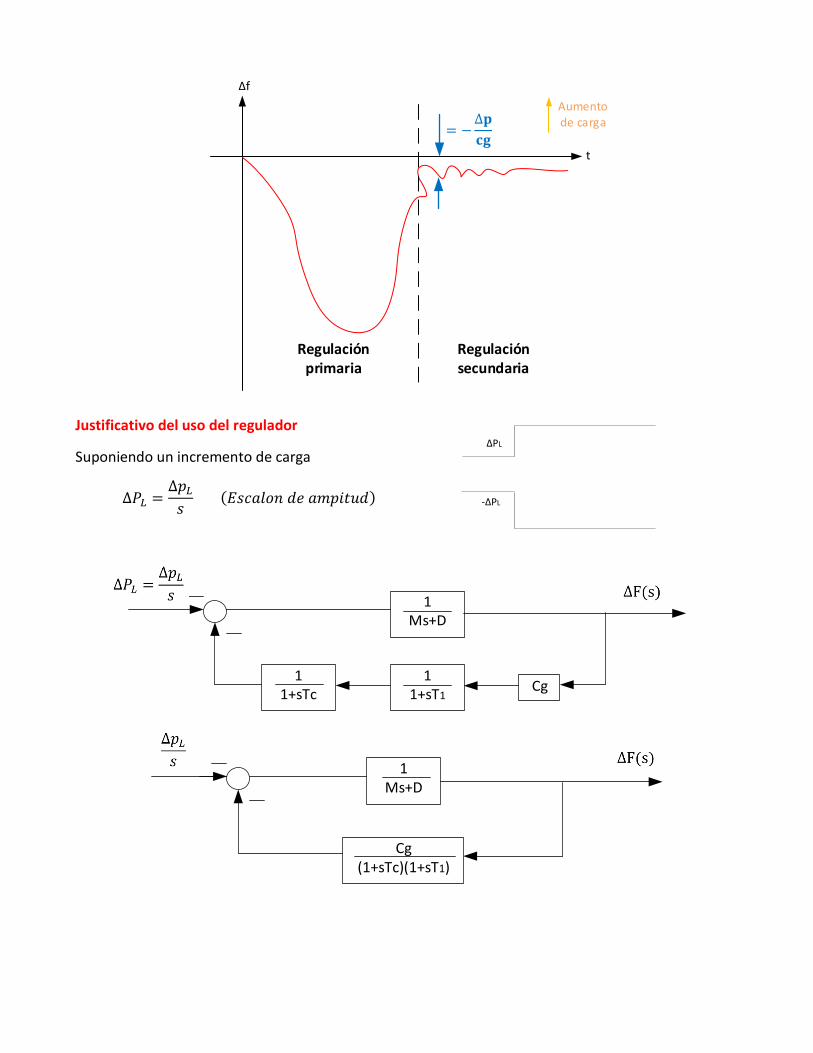
Regulación secundaria
Regulación primaria
t
Δf
Aumentode carga
Justificativo del uso del regulador
Suponiendo un incremento de carga
∆𝑃𝐿 =∆𝑝𝐿
𝑠 (𝐸𝑠𝑐𝑎𝑙𝑜𝑛 𝑑𝑒 𝑎𝑚𝑝𝑖𝑡𝑢𝑑)
1Ms+D
11+sTc
11+sT1
Cg
1Ms+D
Cg(1+sTc)(1+sT1)
ΔPL
-ΔPL
= −∆𝐩
𝐜𝐠
∆𝐹(𝑠)
−∆𝑝𝐿
𝑠
=
1𝑀𝑠 + 𝐷
1 +𝐶𝑔
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
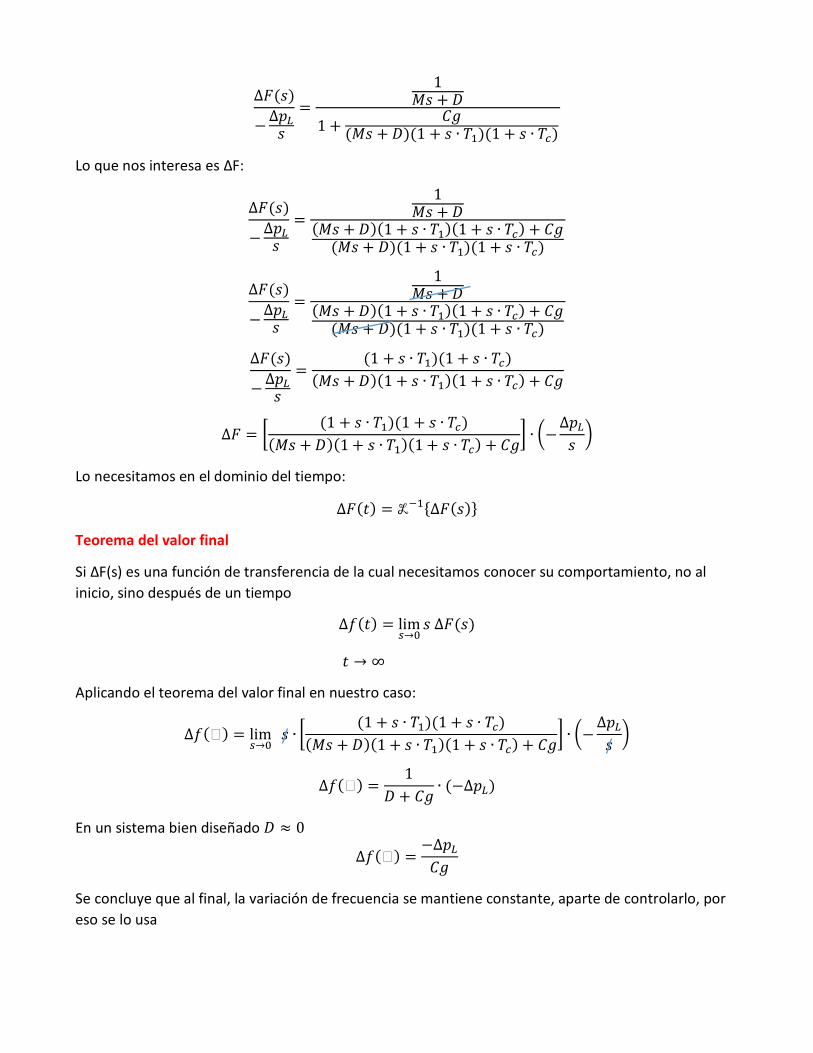
Lo que nos interesa es ΔF:
∆𝐹(𝑠)
−∆𝑝𝐿
𝑠
=
1𝑀𝑠 + 𝐷
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐) + 𝐶𝑔(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
∆𝐹(𝑠)
−∆𝑝𝐿
𝑠
=
1𝑀𝑠 + 𝐷
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐) + 𝐶𝑔(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
∆𝐹(𝑠)
−∆𝑝𝐿
𝑠
=(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐) + 𝐶𝑔
∆𝐹 = [(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐) + 𝐶𝑔] ∙ (−
∆𝑝𝐿
𝑠)
Lo necesitamos en el dominio del tiempo:
∆𝐹(𝑡) = L−1{∆𝐹(𝑠)}
Teorema del valor final
Si ΔF(s) es una función de transferencia de la cual necesitamos conocer su comportamiento, no al
inicio, sino después de un tiempo
∆𝑓(𝑡) = lim𝑠→0
𝑠 ∆𝐹(𝑠)
𝑡 → ∞
Aplicando el teorema del valor final en nuestro caso:
∆𝑓(ꝏ) = lim𝑠→0
𝑠 ∙ [(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐)
(𝑀𝑠 + 𝐷)(1 + 𝑠 ∙ 𝑇1)(1 + 𝑠 ∙ 𝑇𝑐) + 𝐶𝑔] ∙ (−
∆𝑝𝐿
𝑠)
∆𝑓(ꝏ) =1
𝐷 + 𝐶𝑔∙ (−∆𝑝𝐿)
En un sistema bien diseñado 𝐷 ≈ 0
∆𝑓(ꝏ) =−∆𝑝𝐿
𝐶𝑔
Se concluye que al final, la variación de frecuencia se mantiene constante, aparte de controlarlo, por
eso se lo usa
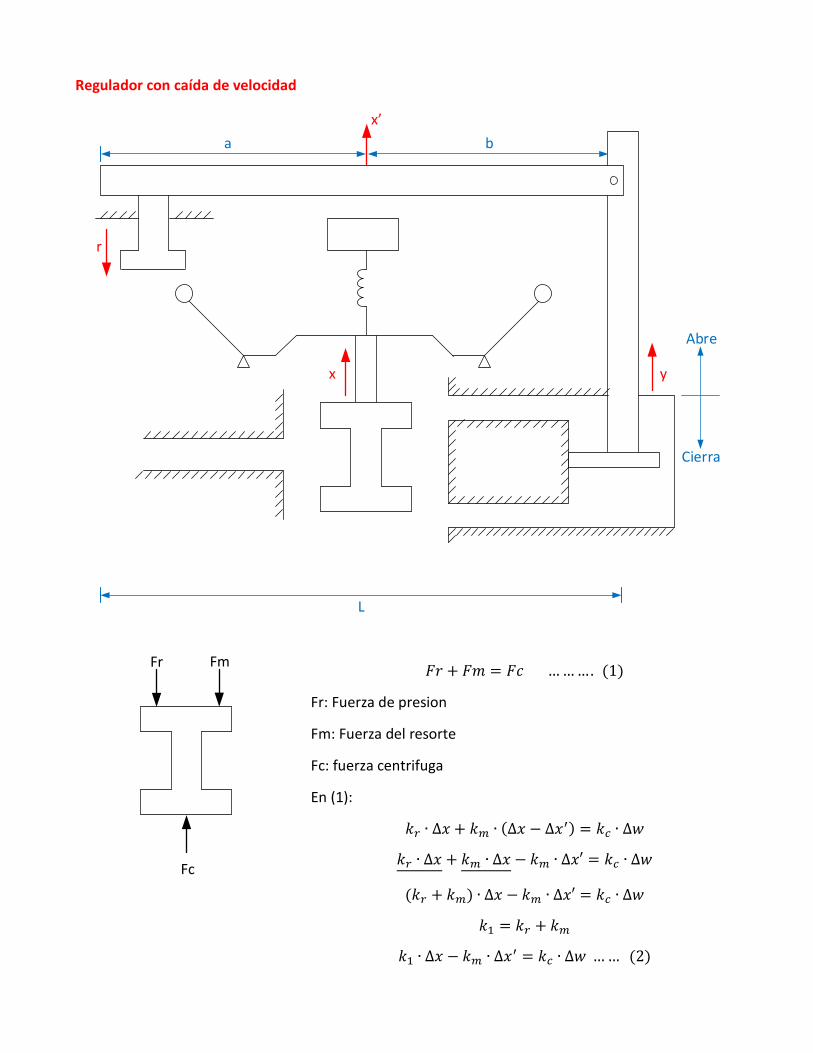
Regulador con caída de velocidad
r
x y
x
a b
L
Abre
Cierra
𝐹𝑟 + 𝐹𝑚 = 𝐹𝑐 … … …. (1)
Fr: Fuerza de presion
Fm: Fuerza del resorte
Fc: fuerza centrifuga
En (1):
𝑘𝑟 ∙ ∆𝑥 + 𝑘𝑚 ∙ (∆𝑥 − ∆𝑥′) = 𝑘𝑐 ∙ ∆𝑤
𝑘𝑟 ∙ ∆𝑥 + 𝑘𝑚 ∙ ∆𝑥 − 𝑘𝑚 ∙ ∆𝑥′ = 𝑘𝑐 ∙ ∆𝑤
(𝑘𝑟 + 𝑘𝑚) ∙ ∆𝑥 − 𝑘𝑚 ∙ ∆𝑥′ = 𝑘𝑐 ∙ ∆𝑤
𝑘1 = 𝑘𝑟 + 𝑘𝑚
𝑘1 ∙ ∆𝑥 − 𝑘𝑚 ∙ ∆𝑥′ = 𝑘𝑐 ∙ ∆𝑤 … … (2)
Fr Fm
Fc
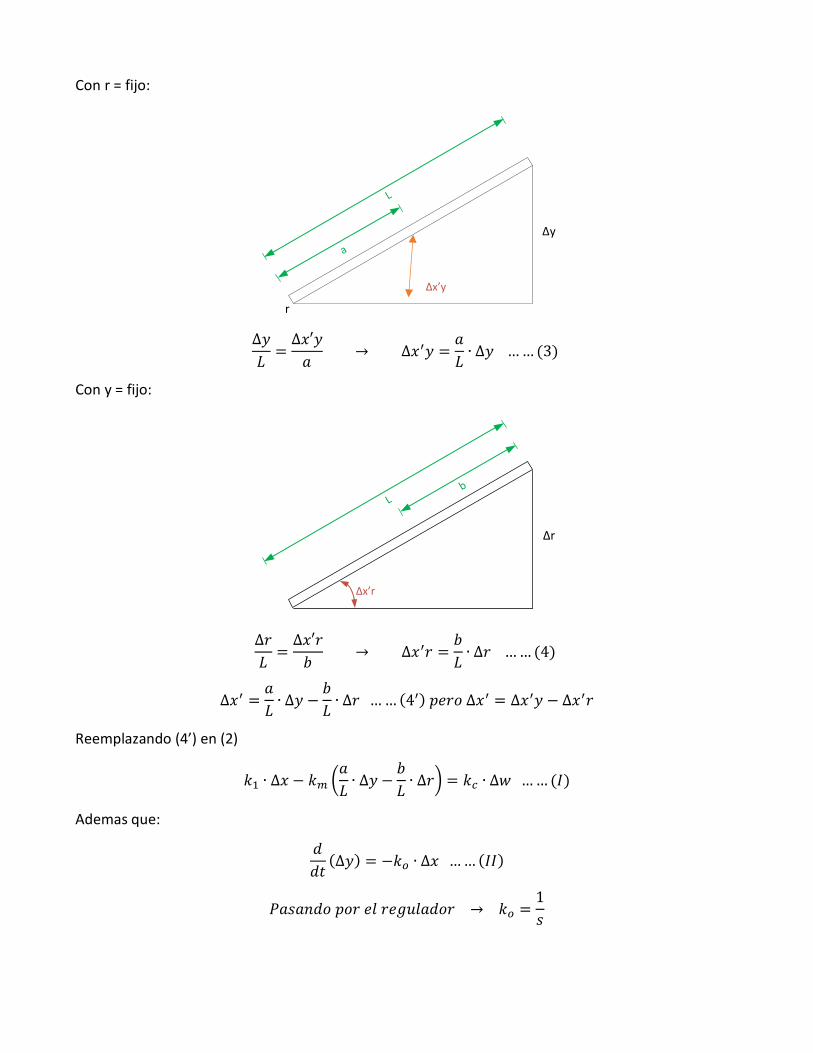
Con r = fijo:
Δx y
Δy
r
∆𝑦
𝐿=
∆𝑥′𝑦
𝑎 → ∆𝑥′𝑦 =
𝑎
𝐿∙ ∆𝑦 … … (3)
Con y = fijo:
Δx r
Δr
∆𝑟
𝐿=
∆𝑥′𝑟
𝑏 → ∆𝑥′𝑟 =
𝑏
𝐿∙ ∆𝑟 … … (4)
∆𝑥′ =𝑎
𝐿∙ ∆𝑦 −
𝑏
𝐿∙ ∆𝑟 … … (4′) 𝑝𝑒𝑟𝑜 ∆𝑥′ = ∆𝑥′𝑦 − ∆𝑥′𝑟
Reemplazando (4’) en (2)
𝑘1 ∙ ∆𝑥 − 𝑘𝑚 (𝑎
𝐿∙ ∆𝑦 −
𝑏
𝐿∙ ∆𝑟) = 𝑘𝑐 ∙ ∆𝑤 … … (𝐼)
Ademas que:
𝑑
𝑑𝑡(∆𝑦) = −𝑘𝑜 ∙ ∆𝑥 … … (𝐼𝐼)
𝑃𝑎𝑠𝑎𝑛𝑑𝑜 𝑝𝑜𝑟 𝑒𝑙 𝑟𝑒𝑔𝑢𝑙𝑎𝑑𝑜𝑟 → 𝑘𝑜 =1
𝑠

Llevando a P.U.:
𝜉 =∆𝑥
𝑥𝐵 ; 𝛿 =
∆𝑟
𝑟𝐵 ; 𝐿 =
∆𝑤
𝑤𝐵 ; 𝜂 =
∆𝑦
𝑦𝐵
Reemplazando en (I)
𝑘1 ∙ 𝑥𝐵 ∙ 𝜉 − 𝑘𝑚 ∙𝑎
𝐿∙ 𝑦𝐵 ∙ 𝜂 + 𝑘𝑚 ∙
𝑏
𝐿∙ 𝑟𝐵 ∙ 𝛿 = 𝑘𝑐 ∙ 𝑤𝐵 ∙ L
En (II):
𝑑
𝑑𝑡(𝑦𝐵 ∙ 𝜂) = −𝑘𝑜 ∙ 𝑥𝐵 ∙ 𝜉
Aplicando L a ambas ecuaciones
𝑘1 ∙ 𝑥𝐵 ∙ 𝜉(𝑠) − 𝑘𝑚 ∙𝑎
𝐿∙ 𝑦𝐵 ∙ 𝜂(𝑠) + 𝑘𝑚 ∙
𝑏
𝐿∙ 𝑟𝐵 ∙ 𝛿(𝑠) = 𝑘𝑐 ∙ 𝑤𝐵 ∙ L(𝑠) … … (∗)
𝑦𝐵 ∙ 𝑠 ∙ 𝜂(𝑠) = −𝑘𝑜 ∙ 𝑥𝐵 ∙ 𝜉(𝑠) … … (∗∗)
De (**) despejamos 𝜼(s) porque esta relacionada con la salida:
𝜂(𝑠) =−𝑘𝑜 ∙ 𝑥𝐵 ∙ 𝜉(𝑠)
𝑦𝐵 ∙ 𝑠
𝜂 =𝑘𝑜
𝑠∙
𝑥𝐵
𝑦𝐵∙ (−𝜉) … … (𝛼)
Ordenando (*)
𝑘𝑚 ∙𝑏
𝐿∙ 𝑟𝐵 ∙ 𝛿 − 𝑘𝑚 ∙
𝑎
𝐿∙ 𝑦𝐵 ∙ 𝜂 − 𝑘𝑐 ∙ 𝑤𝐵 ∙ L = −𝑘1 ∙ 𝑥𝐵 ∙ 𝜉
−𝜉 =𝑘𝑚
𝑘1∙
𝑟𝐵
𝑥𝐵∙
𝑏
𝐿∙ 𝜌 −
𝑘𝑚
𝑘1∙
𝑦𝐵
𝑥𝐵∙
𝑎
𝐿∙ 𝜂 −
𝑘𝑐
𝑘1∙
𝑤𝐵
𝑥𝐵∙ L
−𝜉 =𝑘𝑚
𝑘1∙
𝑟𝐵
𝑥𝐵∙
𝑏
𝐿∙ [𝜌 −
𝑦𝐵
𝑟𝐵∙
𝑎
𝑏∙ 𝜂 −
𝑘𝑐
𝑘𝑚∙
𝑤𝐵
𝑟𝐵∙
𝐿
𝑏∙L]
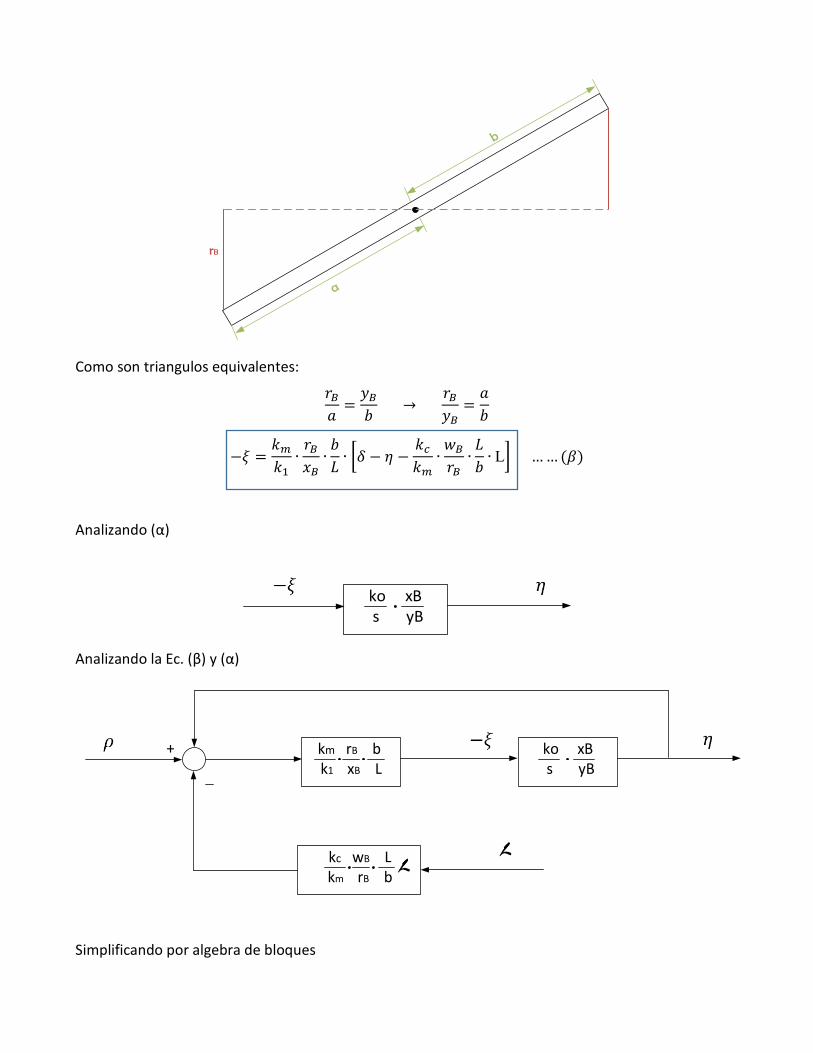
rB
Como son triangulos equivalentes:
𝑟𝐵
𝑎=
𝑦𝐵
𝑏 →
𝑟𝐵
𝑦𝐵=
𝑎
𝑏
−𝜉 =𝑘𝑚
𝑘1∙
𝑟𝐵
𝑥𝐵∙
𝑏
𝐿∙ [𝛿 − 𝜂 −
𝑘𝑐
𝑘𝑚∙
𝑤𝐵
𝑟𝐵∙
𝐿
𝑏∙ L] … … (𝛽)
Analizando (α)
ko xB s yB
Analizando la Ec. (β) y (α)
km rB b k1 xB L
ko xB s yB
kc wB L km rB b
+
Simplificando por algebra de bloques

km rB xB b ko k1 xB yB L s
1 R
+
𝑘𝑐
𝑘𝑚∙
𝑤𝐵
𝑟𝐵∙
𝐿
𝑏= [
𝐻𝑧
𝑚∙
𝑚
𝑚] = [
𝐻𝑧
𝑚]
Donde:
R = Regulacion permanente (m/Hz) {Estatismo Permanente}
𝑘𝑚
𝑘1∙
𝑟𝐵
𝑦𝐵∙
𝑏
𝐿∙ 𝑘𝑜 = [
𝑚
𝑚∙
𝑚
𝑚∙
1
𝑠]
Donde:
T1 = cte. De tiempo
1 sT1
1 R
+
Bloque Transductor
𝐹𝑇1 =
1𝑠 ∙ 𝑇1
1 +1
𝑠 ∙ 𝑇1
=1
1 + 𝑠 ∙ 𝑇1
1 1+sT1
1 R
+
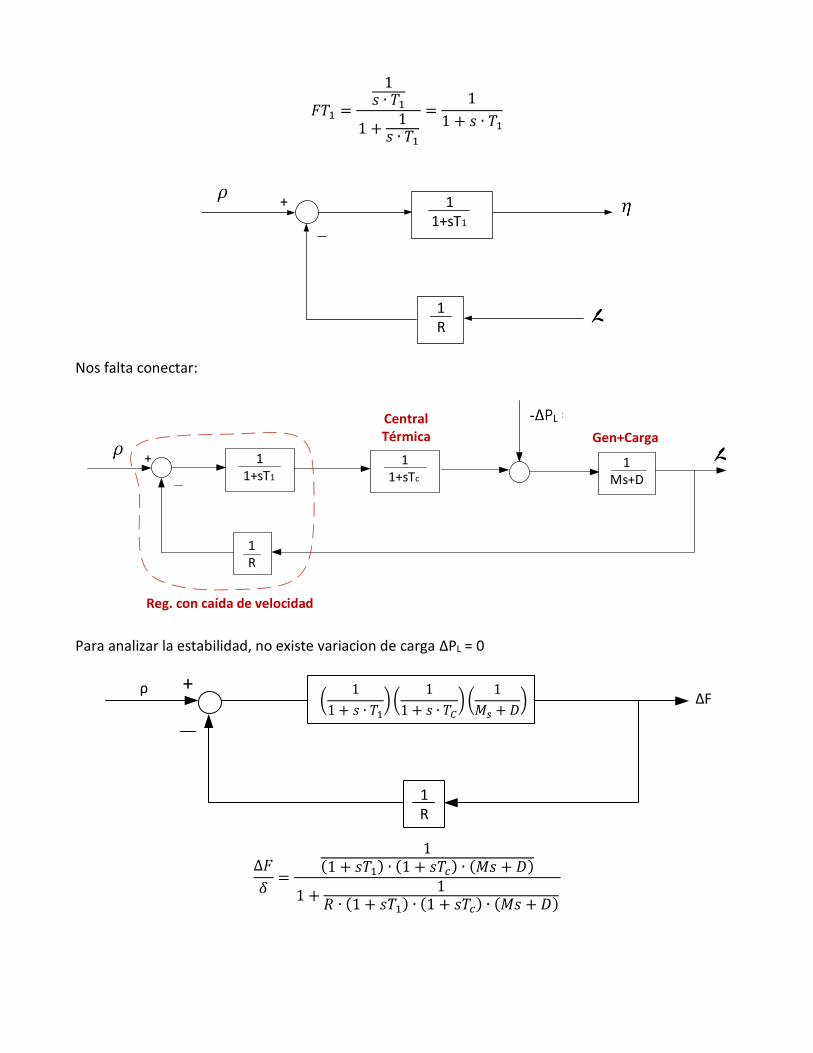
Nos falta conectar:
1 1+sT1
1 R
+ 1 1+sTc
1 Ms+D
Para analizar la estabilidad, no existe variacion de carga ΔPL = 0
ρ ΔF
+
1R
∆𝐹
𝛿=
1(1 + 𝑠𝑇1) ∙ (1 + 𝑠𝑇𝑐) ∙ (𝑀𝑠 + 𝐷)
1 +1
𝑅 ∙ (1 + 𝑠𝑇1) ∙ (1 + 𝑠𝑇𝑐) ∙ (𝑀𝑠 + 𝐷)
Reg. con caída de velocidad
Central Térmica
Gen+Carga
(1
1 + 𝑠 ∙ 𝑇1) (
1
1 + 𝑠 ∙ 𝑇𝐶) (
1
𝑀𝑠 + 𝐷)
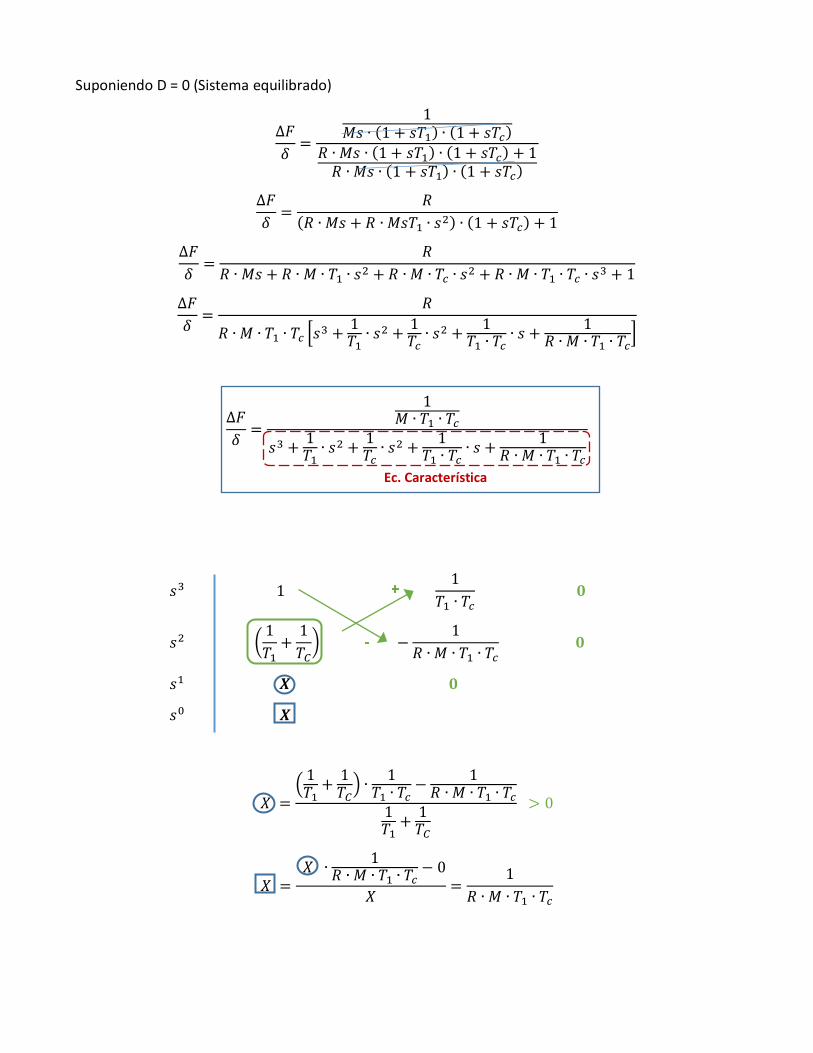
Suponiendo D = 0 (Sistema equilibrado)
∆𝐹
𝛿=
1𝑀𝑠 ∙ (1 + 𝑠𝑇1) ∙ (1 + 𝑠𝑇𝑐)
𝑅 ∙ 𝑀𝑠 ∙ (1 + 𝑠𝑇1) ∙ (1 + 𝑠𝑇𝑐) + 1𝑅 ∙ 𝑀𝑠 ∙ (1 + 𝑠𝑇1) ∙ (1 + 𝑠𝑇𝑐)
∆𝐹
𝛿=
𝑅
(𝑅 ∙ 𝑀𝑠 + 𝑅 ∙ 𝑀𝑠𝑇1 ∙ 𝑠2) ∙ (1 + 𝑠𝑇𝑐) + 1
∆𝐹
𝛿=
𝑅
𝑅 ∙ 𝑀𝑠 + 𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑠2 + 𝑅 ∙ 𝑀 ∙ 𝑇𝑐 ∙ 𝑠2 + 𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐 ∙ 𝑠3 + 1
∆𝐹
𝛿=
𝑅
𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐 [𝑠3 +1𝑇1
∙ 𝑠2 +1𝑇𝑐
∙ 𝑠2 +1
𝑇1 ∙ 𝑇𝑐∙ 𝑠 +
1𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
]
∆𝐹
𝛿=
1𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
𝑠3 +1𝑇1
∙ 𝑠2 +1𝑇𝑐
∙ 𝑠2 +1
𝑇1 ∙ 𝑇𝑐∙ 𝑠 +
1𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
𝑠3 1 1
𝑇1 ∙ 𝑇𝑐 𝟎
𝑠2 (1
𝑇1+
1
𝑇𝐶) −
1
𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐 𝟎
𝑠1 𝑿 𝟎
𝑠0 𝑿
𝑋 =(
1𝑇1
+1𝑇𝐶
) ∙1
𝑇1 ∙ 𝑇𝑐−
1𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
1𝑇1
+1𝑇𝐶
> 0
𝑋 = 𝑋 ∙
1𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
− 0
𝑋=
1
𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐
Ec. Característica
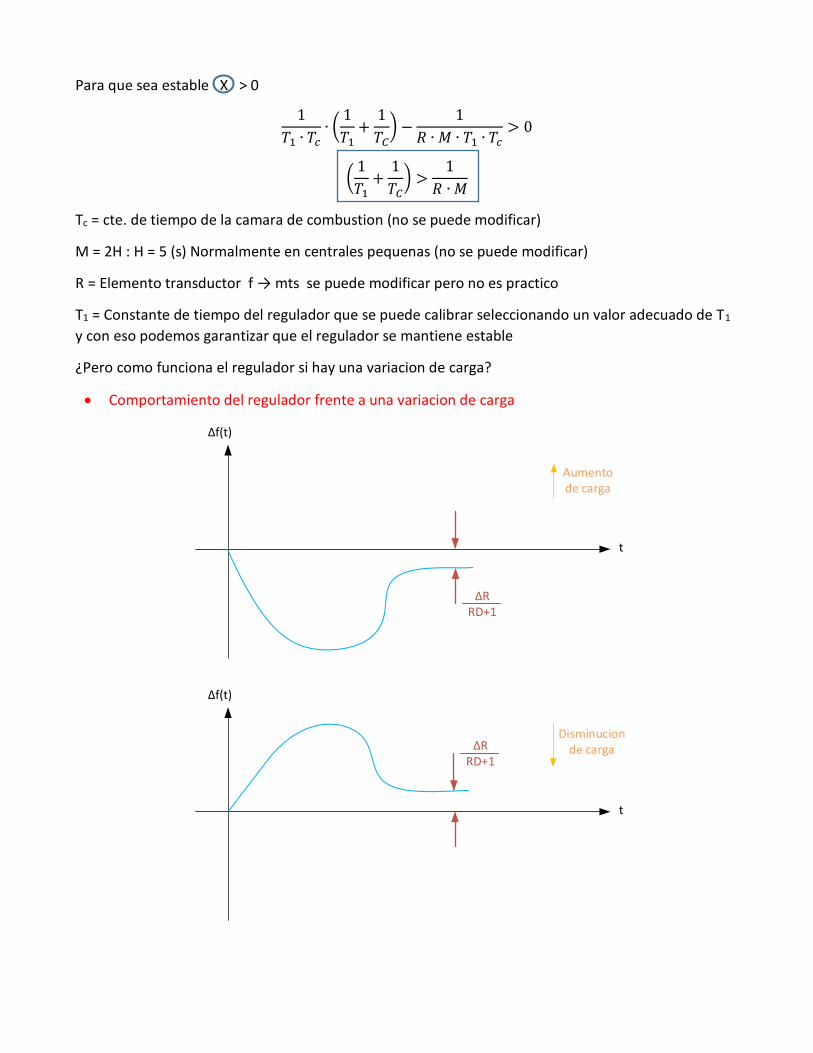
Para que sea estable X > 0
1
𝑇1 ∙ 𝑇𝑐∙ (
1
𝑇1+
1
𝑇𝐶) −
1
𝑅 ∙ 𝑀 ∙ 𝑇1 ∙ 𝑇𝑐> 0
(1
𝑇1+
1
𝑇𝐶) >
1
𝑅 ∙ 𝑀
Tc = cte. de tiempo de la camara de combustion (no se puede modificar)
M = 2H : H = 5 (s) Normalmente en centrales pequenas (no se puede modificar)
R = Elemento transductor f → mts se puede modificar pero no es practico
T1 = Constante de tiempo del regulador que se puede calibrar seleccionando un valor adecuado de T1
y con eso podemos garantizar que el regulador se mantiene estable
¿Pero como funciona el regulador si hay una variacion de carga?
Comportamiento del regulador frente a una variacion de carga
ΔRRD+1
Aumentode carga
t
Δf(t)
ΔRRD+1
Disminucionde carga
t
Δf(t)
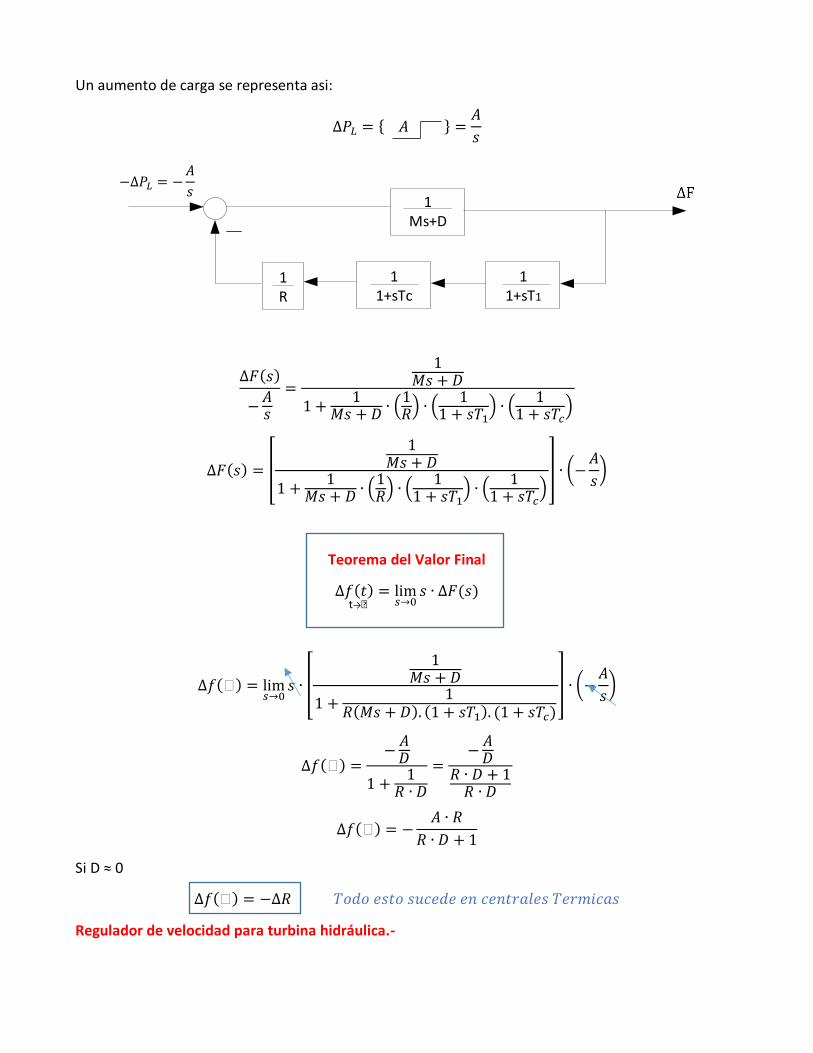
Un aumento de carga se representa asi:
∆𝑃𝐿 = { 𝐴 } =𝐴
𝑠
1Ms+D
11+sTc
11+sT1
1R
∆𝐹(𝑠)
−𝐴𝑠
=
1𝑀𝑠 + 𝐷
1 +1
𝑀𝑠 + 𝐷 ∙ (1𝑅) ∙ (
11 + 𝑠𝑇1
) ∙ (1
1 + 𝑠𝑇𝑐)
∆𝐹(𝑠) = [
1𝑀𝑠 + 𝐷
1 +1
𝑀𝑠 + 𝐷 ∙ (1𝑅) ∙ (
11 + 𝑠𝑇1
) ∙ (1
1 + 𝑠𝑇𝑐)
] ∙ (−𝐴
𝑠)
Teorema del Valor Final
∆𝑓(𝑡) = lim𝑠→0
𝑠 ∙ ∆𝐹(𝑠)
∆𝑓(ꝏ) = lim𝑠→0
𝑠 ∙ [
1𝑀𝑠 + 𝐷
1 +1
𝑅(𝑀𝑠 + 𝐷). (1 + 𝑠𝑇1). (1 + 𝑠𝑇𝑐)
] ∙ (−𝐴
𝑠)
∆𝑓(ꝏ) =−
𝐴𝐷
1 +1
𝑅 ∙ 𝐷
=−
𝐴𝐷
𝑅 ∙ 𝐷 + 1𝑅 ∙ 𝐷
∆𝑓(ꝏ) = −𝐴 ∙ 𝑅
𝑅 ∙ 𝐷 + 1
Si D ≈ 0
∆𝑓(ꝏ) = −∆𝑅 𝑇𝑜𝑑𝑜 𝑒𝑠𝑡𝑜 𝑠𝑢𝑐𝑒𝑑𝑒 𝑒𝑛 𝑐𝑒𝑛𝑡𝑟𝑎𝑙𝑒𝑠 𝑇𝑒𝑟𝑚𝑖𝑐𝑎𝑠
Regulador de velocidad para turbina hidráulica.-
t→ꝏ
−∆𝑃𝐿 = −𝐴
𝑠
Δr
Δx
Δy
Aceite a presión
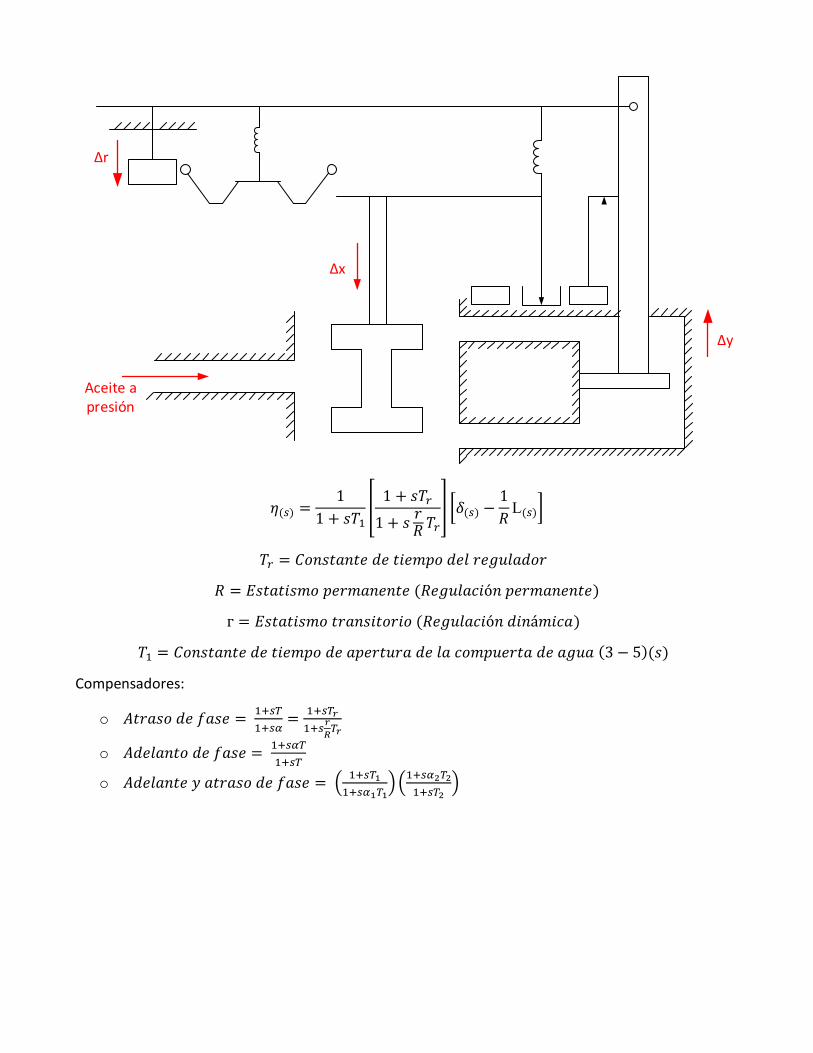
𝜂(𝑠) =1
1 + 𝑠𝑇1[
1 + 𝑠𝑇𝑟
1 + 𝑠𝑟𝑅 𝑇𝑟
] [𝛿(𝑠) −1
𝑅L(𝑠)]
𝑇𝑟 = 𝐶𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑡𝑖𝑒𝑚𝑝𝑜 𝑑𝑒𝑙 𝑟𝑒𝑔𝑢𝑙𝑎𝑑𝑜𝑟
𝑅 = 𝐸𝑠𝑡𝑎𝑡𝑖𝑠𝑚𝑜 𝑝𝑒𝑟𝑚𝑎𝑛𝑒𝑛𝑡𝑒 (𝑅𝑒𝑔𝑢𝑙𝑎𝑐𝑖ó𝑛 𝑝𝑒𝑟𝑚𝑎𝑛𝑒𝑛𝑡𝑒)
ᴦ = 𝐸𝑠𝑡𝑎𝑡𝑖𝑠𝑚𝑜 𝑡𝑟𝑎𝑛𝑠𝑖𝑡𝑜𝑟𝑖𝑜 (𝑅𝑒𝑔𝑢𝑙𝑎𝑐𝑖ó𝑛 𝑑𝑖𝑛á𝑚𝑖𝑐𝑎)
𝑇1 = 𝐶𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑡𝑖𝑒𝑚𝑝𝑜 𝑑𝑒 𝑎𝑝𝑒𝑟𝑡𝑢𝑟𝑎 𝑑𝑒 𝑙𝑎 𝑐𝑜𝑚𝑝𝑢𝑒𝑟𝑡𝑎 𝑑𝑒 𝑎𝑔𝑢𝑎 (3 − 5)(𝑠)
Compensadores:
o 𝐴𝑡𝑟𝑎𝑠𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒 = 1+𝑠𝑇
1+𝑠𝛼=
1+𝑠𝑇𝑟
1+𝑠𝑟
𝑅𝑇𝑟
o 𝐴𝑑𝑒𝑙𝑎𝑛𝑡𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒 = 1+𝑠𝛼𝑇
1+𝑠𝑇
o 𝐴𝑑𝑒𝑙𝑎𝑛𝑡𝑒 𝑦 𝑎𝑡𝑟𝑎𝑠𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒 = (1+𝑠𝑇1
1+𝑠𝛼1𝑇1) (
1+𝑠𝛼2𝑇2
1+𝑠𝑇2)
1+sTr 1+s r Tr
1 R
+ 1 1+sT1
1 Ms+D R
1-sTw 1+s Tw 2
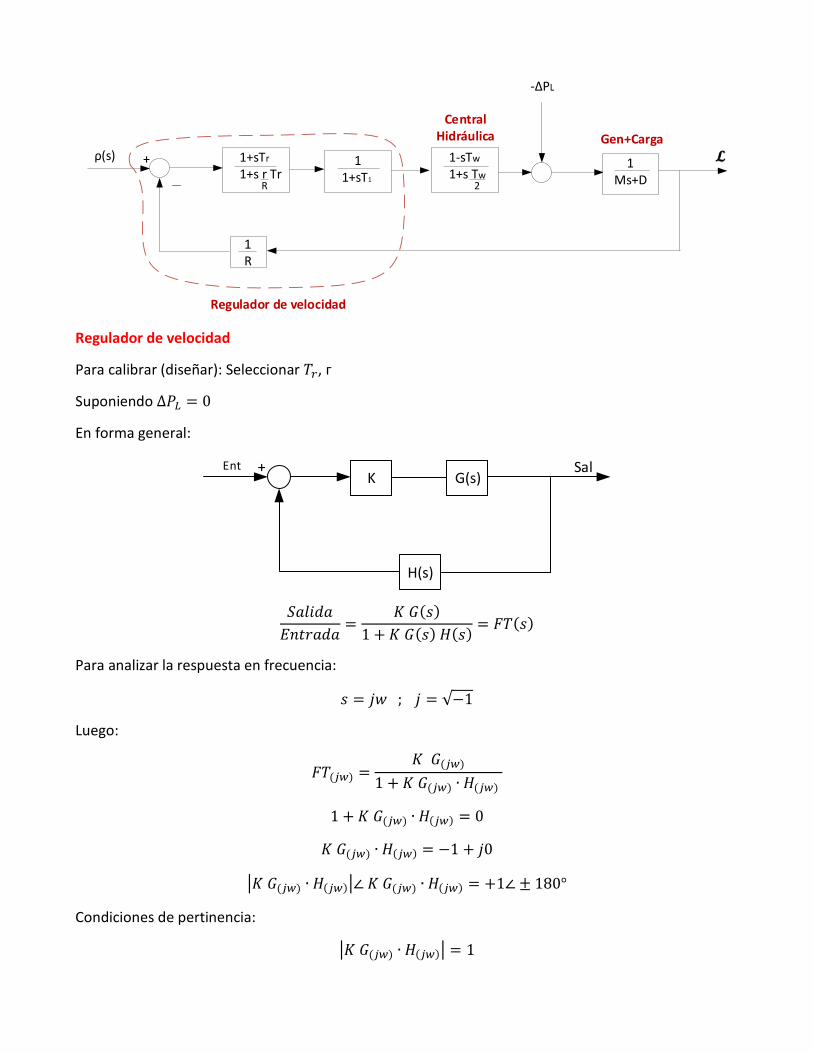
Regulador de velocidad
Central Hidráulica Gen+Carga
ρ(s)
-ΔPL
Regulador de velocidad
Para calibrar (diseñar): Seleccionar 𝑇𝑟, ᴦ
Suponiendo ∆𝑃𝐿 = 0
En forma general:
H(s)
KSalEnt +
G(s)
𝑆𝑎𝑙𝑖𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝐾 𝐺(𝑠)
1 + 𝐾 𝐺(𝑠) 𝐻(𝑠)= 𝐹𝑇(𝑠)
Para analizar la respuesta en frecuencia:
𝑠 = 𝑗𝑤 ; 𝑗 = √−1
Luego:
𝐹𝑇(𝑗𝑤) =𝐾 𝐺(𝑗𝑤)
1 + 𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)
1 + 𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤) = 0
𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤) = −1 + 𝑗0
|𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)|∠ 𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤) = +1∠ ± 180°
Condiciones de pertinencia:
|𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)| = 1
𝓛
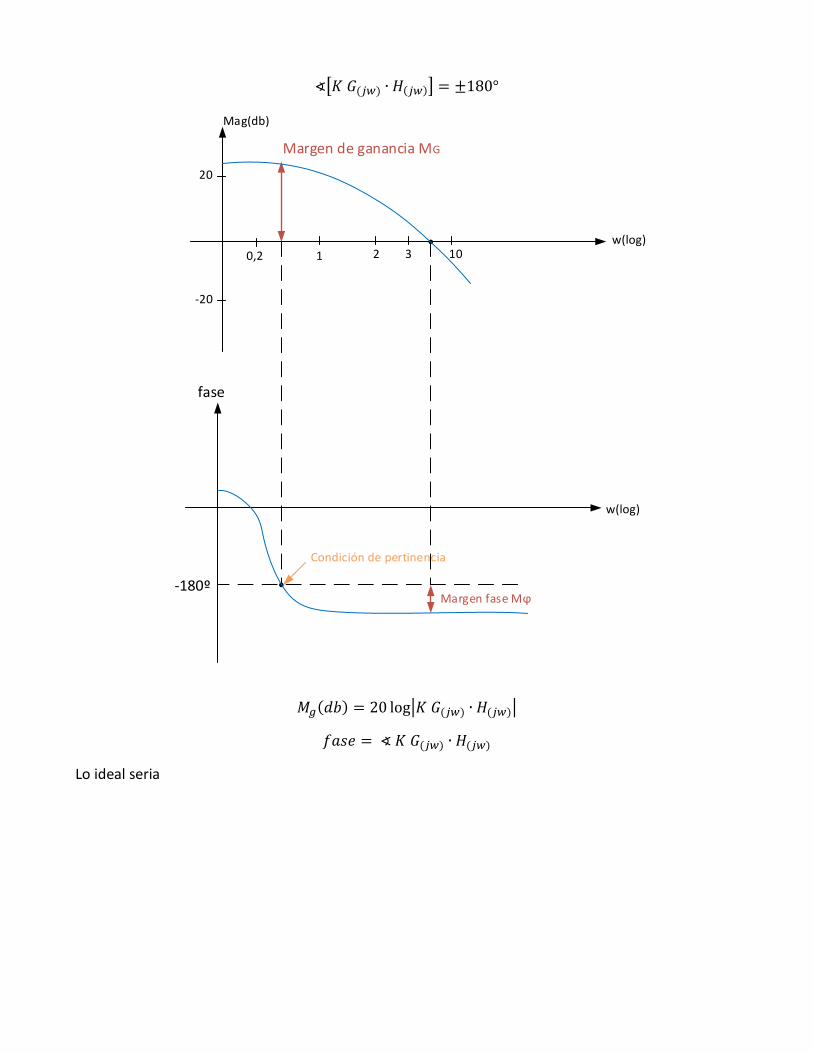
∢[𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)] = ±180°
Margen de ganancia MG
w(log)
Mag(db)
fase
Margen fase Mϕ -180º
20
-20
0,2 1 2 3 10
w(log)
Condición de pertinencia
𝑀𝑔(𝑑𝑏) = 20 log|𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)|
𝑓𝑎𝑠𝑒 = ∢ 𝐾 𝐺(𝑗𝑤) ∙ 𝐻(𝑗𝑤)
Lo ideal seria
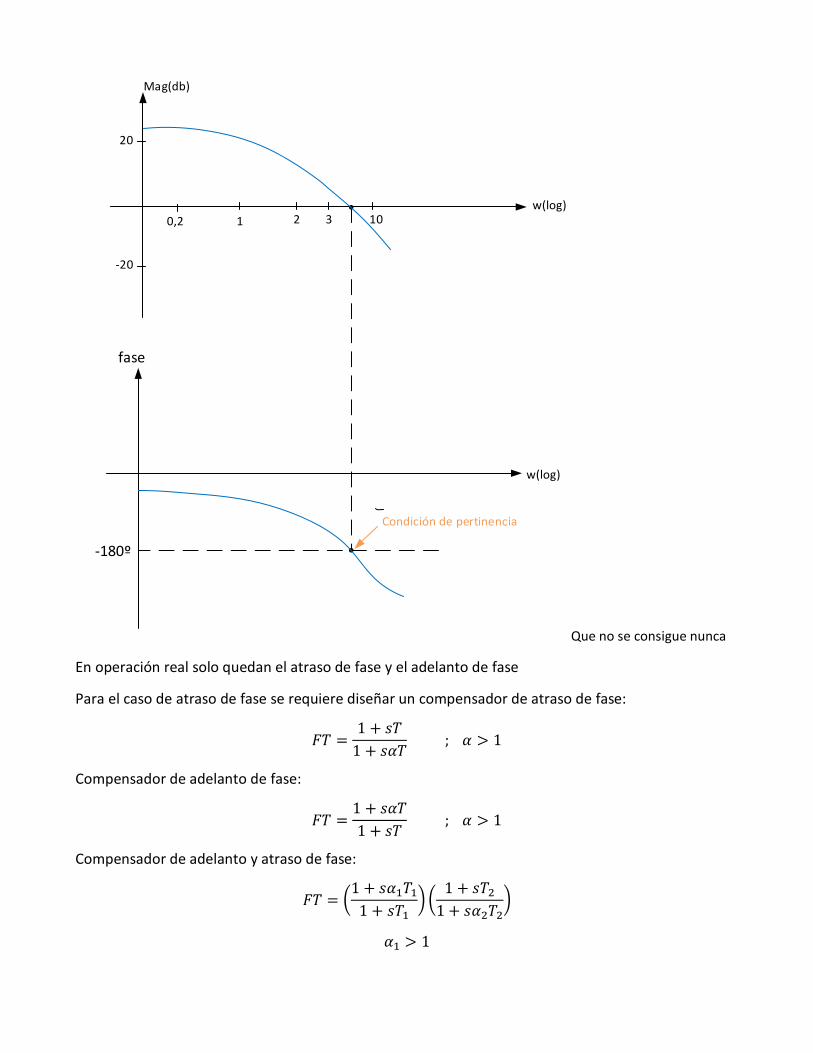
w(log)
Mag(db)
fase
-180º
20
-20
0,2 1 2 3 10
w(log)
Condición de pertinencia
Que no se consigue nunca
En operación real solo quedan el atraso de fase y el adelanto de fase
Para el caso de atraso de fase se requiere diseñar un compensador de atraso de fase:
𝐹𝑇 =1 + 𝑠𝑇
1 + 𝑠𝛼𝑇 ; 𝛼 > 1
Compensador de adelanto de fase:
𝐹𝑇 =1 + 𝑠𝛼𝑇
1 + 𝑠𝑇 ; 𝛼 > 1
Compensador de adelanto y atraso de fase:
𝐹𝑇 = (1 + 𝑠𝛼1𝑇1
1 + 𝑠𝑇1) (
1 + 𝑠𝑇2
1 + 𝑠𝛼2𝑇2)
𝛼1 > 1

𝛼2 > 1
En nuestro caso tenemos que diseñar un regulador de “atraso de fase”
𝑅𝑒𝑔 =1 + 𝑠𝑇𝑟
1 + 𝑠𝑟𝑅 𝑇𝑟
=1 + 𝑠𝑇
1 + 𝑠𝛼𝑇
Comprobando:
𝑇 = 𝑇𝑟
𝛼 =𝑟
𝑅
Pasos para obtener el regulador de velocidad de una central hidráulica
P1: Realizar los diagramas de Bode para el sistema sin regulador (Sin compensador de atraso de fase).
Verificar el margen de fase. Si el margen de fase no atiende las especificaciones pasar al paso 2.
P2: Determinar la frecuencia donde se obtendría el margen de fase deseado en el cual la curva de la
magnitud debe volver a cero deciberios.
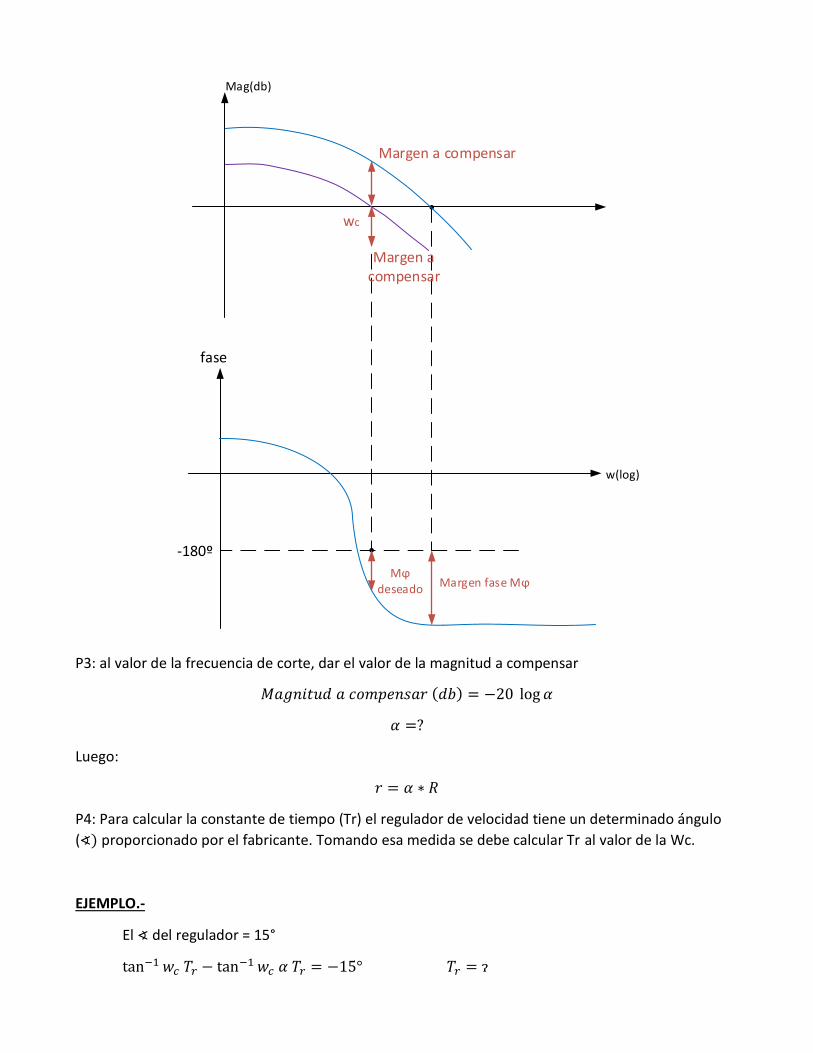
Margen a compensar
Mag(db)
fase
Margen fase Mϕ
-180º
w(log)
Mϕdeseado
Margen a compensar
wc
P3: al valor de la frecuencia de corte, dar el valor de la magnitud a compensar
𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑 𝑎 𝑐𝑜𝑚𝑝𝑒𝑛𝑠𝑎𝑟 (𝑑𝑏) = −20 log 𝛼
𝛼 =?
Luego:
𝑟 = 𝛼 ∗ 𝑅
P4: Para calcular la constante de tiempo (Tr) el regulador de velocidad tiene un determinado ángulo
(∢) proporcionado por el fabricante. Tomando esa medida se debe calcular Tr al valor de la Wc.
EJEMPLO.-
El ∢ del regulador = 15°
tan−1 𝑤𝑐 𝑇𝑟 − tan−1 𝑤𝑐 𝛼 𝑇𝑟 = −15° 𝑇𝑟 = ɂ
1+sTr 1+s r
1 R
+ 1 1+sT1
1 Ms+D R
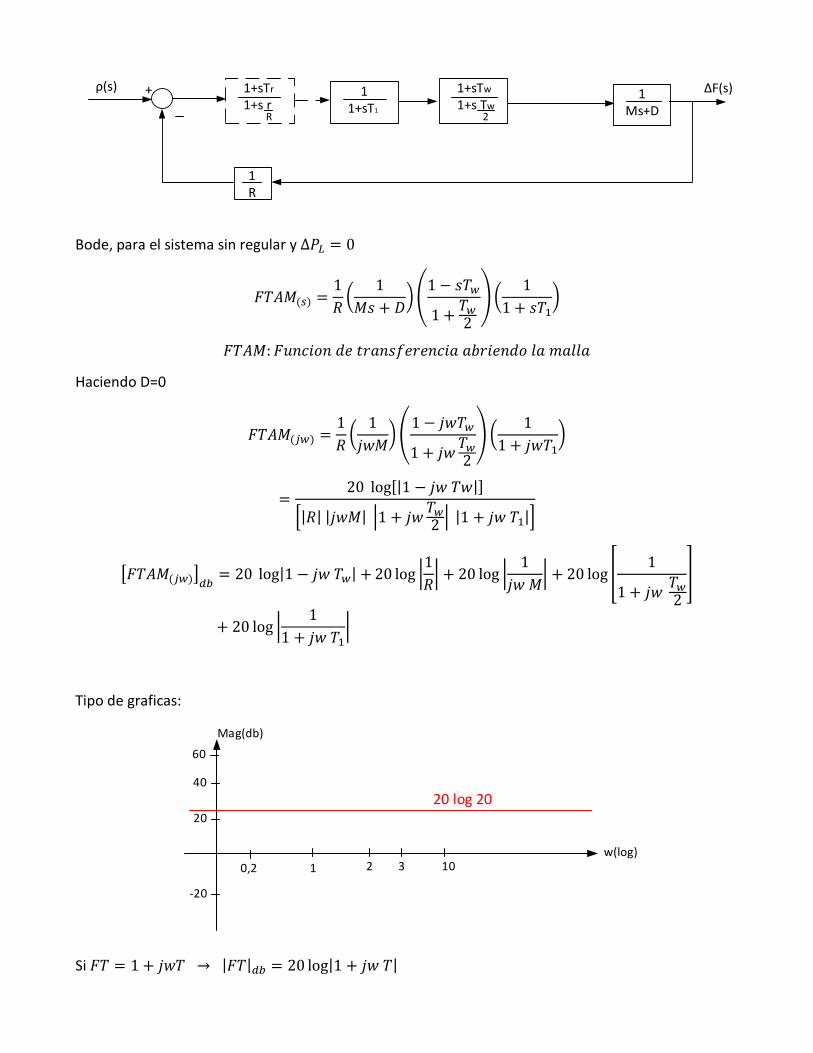
1+sTw 1+s Tw 2
ρ(s) ΔF(s)
Bode, para el sistema sin regular y ∆𝑃𝐿 = 0
𝐹𝑇𝐴𝑀(𝑠) =1
𝑅(
1
𝑀𝑠 + 𝐷) (
1 − 𝑠𝑇𝑤
1 +𝑇𝑤
2
) (1
1 + 𝑠𝑇1)
𝐹𝑇𝐴𝑀: 𝐹𝑢𝑛𝑐𝑖𝑜𝑛 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎 𝑎𝑏𝑟𝑖𝑒𝑛𝑑𝑜 𝑙𝑎 𝑚𝑎𝑙𝑙𝑎
Haciendo D=0
𝐹𝑇𝐴𝑀(𝑗𝑤) =1
𝑅(
1
𝑗𝑤𝑀) (
1 − 𝑗𝑤𝑇𝑤
1 + 𝑗𝑤𝑇𝑤
2
) (1
1 + 𝑗𝑤𝑇1)
=20 log[|1 − 𝑗𝑤 𝑇𝑤|]
[|𝑅| |𝑗𝑤𝑀| |1 + 𝑗𝑤𝑇𝑤
2| |1 + 𝑗𝑤 𝑇1|]
[𝐹𝑇𝐴𝑀(𝑗𝑤)]𝑑𝑏
= 20 log|1 − 𝑗𝑤 𝑇𝑤| + 20 log |1
𝑅| + 20 log |
1
𝑗𝑤 𝑀| + 20 log [
1
1 + 𝑗𝑤 𝑇𝑤
2
]
+ 20 log |1
1 + 𝑗𝑤 𝑇1|
Tipo de graficas:
w(log)
Mag(db)
20
-20
0,2 1 2 3 10
40
60
20 log 20
Si 𝐹𝑇 = 1 + 𝑗𝑤𝑇 → |𝐹𝑇|𝑑𝑏 = 20 log|1 + 𝑗𝑤 𝑇|

|𝐹𝑇|𝑑𝑏 = 20 log √12 + 𝑤2 𝑇2
Si 𝑤𝑡 ≪ 1 → 20 log √1 = 0
Si 𝑤𝑡 =1
𝑇 → 20 log √2 = 3 𝑑𝑏
Si 𝑤𝑡 =10
𝑇 → 20 log √101 = 20 𝑑𝑏
Si 𝑤𝑡 =100
𝑇 → 20 log √1001 = 40 𝑑𝑏
w(log)
Mag(db)
20
-20
40
60
2010
𝐹𝑇 =1
1 + 𝑗𝑤 𝑇
|𝐹𝑇|𝑑𝑏 = 20 log|1|
|𝑗𝑤 𝑇 + 1|
= 20 log 1 − 20 log|1 + 𝑗𝑤 𝑇|
|𝐹𝑇|𝑑𝑏 = −20 log|1 + 𝑗𝑤 𝑇| = 20 log|1|
|1 + 𝑗𝑤 𝑇|
Diseño del regulador mediante ZIEGLEN – NICHOLS
Se toma en torno a la ganancia de oscilación Kosc y periodo de oscilación 𝑃𝑜𝑠𝑐 =2𝜋
𝑤𝑜𝑠𝑐 ;
𝐾𝑜𝑠𝑐: 𝐺𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑜𝑠𝑐𝑖𝑙𝑎𝑐𝑖ó𝑛
Control de Tipo Parámetros
Proporcional 𝑃 → 𝐶(𝑠) = 𝐾𝑐 𝐾𝑐 = 0,5 ∗ 𝐾𝑜𝑠𝑐
Proporcional Integral
𝑃𝐼 → 𝐶(𝑠) = 𝐾𝑐 (1 +1
𝑆𝑇𝑖)
𝐾𝑐 = 0,45 ∗ 𝐾𝑜𝑠𝑐 𝑇𝑖 = 0,83 ∗ 𝑃𝑜𝑠𝑐
Proporcional Integral Derivativo
𝑃𝐼𝐷 → 𝐶(𝑠) = 𝐾𝑐 [1 +1
𝑠𝑇𝑐+ 𝑠𝑇𝑑]
𝐾𝑐 = 0,6 ∗ 𝐾𝑜𝑠𝑐 𝑇𝑖 = 0,5 ∗ 𝑃𝑜𝑠𝑐
𝑇𝑑 = 0,125 ∗ 𝑃𝑜𝑠𝑐
Proporcional Derivativo 𝑃𝐷 → 𝐶(𝑠) = 𝐾𝑐[1 + 𝑠𝑇𝑑]
𝐾𝑐 = 0,6 ∗ 𝐾𝑜𝑠𝑐 𝑇𝑑 = 0,125 ∗ 𝑃𝑜𝑠𝑐
𝐰 =𝟏
𝐓 𝐰 =
𝟏𝟎
𝐓

K+ 1
1+sT1 1
Ms
1-sTw 1+s Tw 2
ρ ΔF
-ΔPL
Suponiendo ∆𝑃𝐿 = 0 ; 𝐷 = 0 ; 𝑦 𝑜𝑡𝑟𝑜𝑠 …
∆𝐹
𝛿=
𝐾 (1
1 + 𝑠𝑇1) (
1 − 𝑠𝑇𝑤
1 + 𝑠𝑇𝑤2
) (1
𝑀𝑠)
1 + 𝐾 (1
1 + 𝑠𝑇1) (
1 − 𝑠𝑇𝑤
1 + 𝑠𝑇𝑤
2
) (1
𝑀𝑠)
∆𝐹
𝛿=
(𝐾
𝑀𝑠) (1
1 + 𝑠 𝑇1) (
1 − 𝑠 𝑇𝑤
1 + 𝑠𝑇𝑤2
)
𝑀𝑠(1 + 𝑠𝑇1) (1 + 𝑠𝑇𝑤2 ) + 𝐾(1 − 𝑠𝑇𝑤)
(𝑀𝑠)(1 + 𝑠𝑇1) (1 + 𝑠𝑇𝑤
2 )
∆𝐹
𝛿=
𝐾(1 − 𝑠𝑇𝑤 )
(𝑀𝑠 + 𝑀𝑇1𝑠2) (1 + 𝑠𝑇𝑤
2 ) + 𝐾 − 𝐾𝑇𝑤𝑠
∆𝐹
𝛿=
𝐾(1 − 𝑠𝑇𝑤 )
𝑀𝑠 + 𝑀𝑇1𝑠2 + 𝑀𝑇𝑤
2 𝑠2 + 𝑀𝑇1𝑇𝑤
2 𝑠3 + 𝐾 − 𝐾𝑇𝑤𝑠
∆𝐹
𝛿=
𝐾(1 − 𝑠𝑇𝑤 )
𝑀𝑇1𝑇𝑤
2[𝑠3 +
1𝑇1
𝑠2 − 𝐾2
𝑀𝑇1𝑠 +
2𝑇1𝑇𝑤
𝑠 +𝐾 2
𝑀𝑇1𝑇𝑤]
∆𝐹
𝛿=
𝐾
𝑀𝑇1𝑇𝑤2
(1 − 𝑠𝑇𝑤)
𝑠3 + (1𝑇1
+2
𝑇𝑤) 𝑠2 + (
2𝑇1𝑇𝑤
−2 𝐾𝑀𝑇1
) 𝑠 +2 𝐾
𝑀𝑇1𝑇𝑤
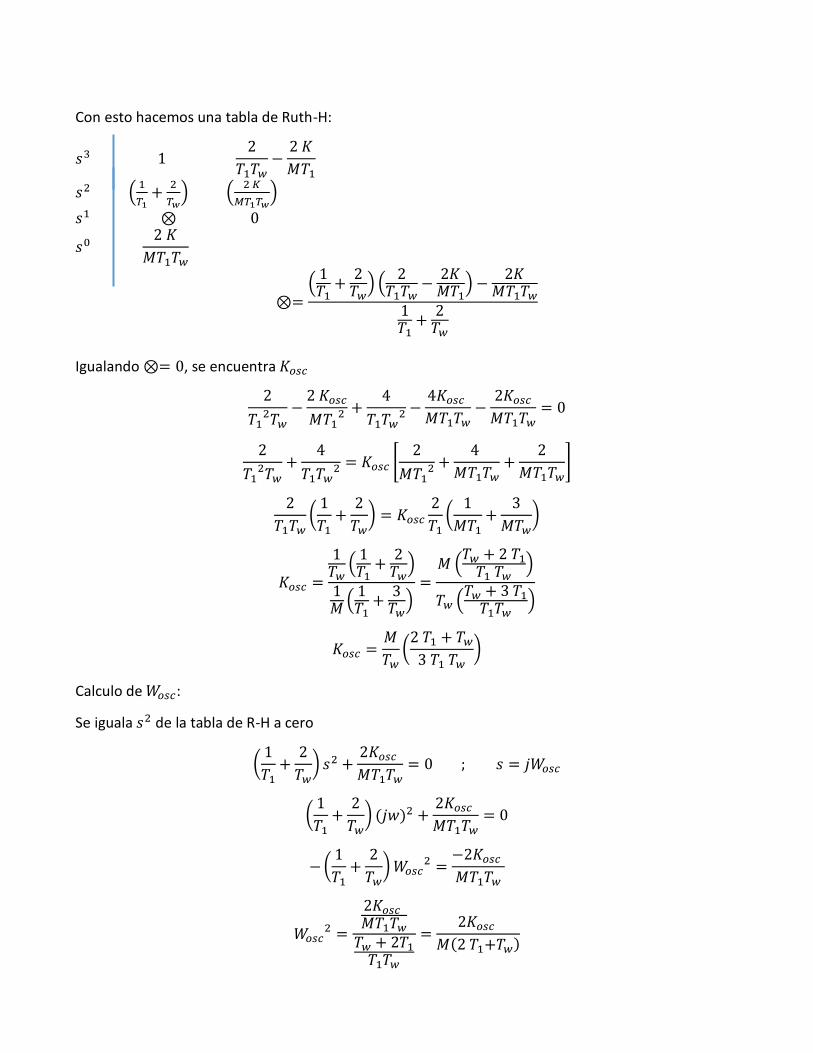
Con esto hacemos una tabla de Ruth-H:
𝑠3 1 2
𝑇1𝑇𝑤−
2 𝐾
𝑀𝑇1
𝑠2 (1
𝑇1+
2
𝑇𝑤) (
2 𝐾
𝑀𝑇1𝑇𝑤)
𝑠1 ⊗ 0
𝑠0 2 𝐾
𝑀𝑇1𝑇𝑤
⊗=(
1𝑇1
+2
𝑇𝑤) (
2𝑇1𝑇𝑤
−2𝐾
𝑀𝑇1) −
2𝐾𝑀𝑇1𝑇𝑤
1𝑇1
+2
𝑇𝑤
Igualando ⊗= 0, se encuentra 𝐾𝑜𝑠𝑐
2
𝑇12𝑇𝑤
−2 𝐾𝑜𝑠𝑐
𝑀𝑇12 +
4
𝑇1𝑇𝑤2 −
4𝐾𝑜𝑠𝑐
𝑀𝑇1𝑇𝑤−
2𝐾𝑜𝑠𝑐
𝑀𝑇1𝑇𝑤= 0
2
𝑇12𝑇𝑤
+4
𝑇1𝑇𝑤2 = 𝐾𝑜𝑠𝑐 [
2
𝑀𝑇12 +
4
𝑀𝑇1𝑇𝑤+
2
𝑀𝑇1𝑇𝑤]
2
𝑇1𝑇𝑤(
1
𝑇1+
2
𝑇𝑤) = 𝐾𝑜𝑠𝑐
2
𝑇1(
1
𝑀𝑇1+
3
𝑀𝑇𝑤)
𝐾𝑜𝑠𝑐 =
1𝑇𝑤
(1𝑇1
+2
𝑇𝑤)
1𝑀 (
1𝑇1
+3
𝑇𝑤)
=𝑀 (
𝑇𝑤 + 2 𝑇1
𝑇1 𝑇𝑤)
𝑇𝑤 (𝑇𝑤 + 3 𝑇1
𝑇1𝑇𝑤)
𝐾𝑜𝑠𝑐 =𝑀
𝑇𝑤(
2 𝑇1 + 𝑇𝑤
3 𝑇1 𝑇𝑤)
Calculo de 𝑊𝑜𝑠𝑐:
Se iguala 𝑠2 de la tabla de R-H a cero
(1
𝑇1+
2
𝑇𝑤) 𝑠2 +
2𝐾𝑜𝑠𝑐
𝑀𝑇1𝑇𝑤= 0 ; 𝑠 = 𝑗𝑊𝑜𝑠𝑐
(1
𝑇1+
2
𝑇𝑤) (𝑗𝑤)2 +
2𝐾𝑜𝑠𝑐
𝑀𝑇1𝑇𝑤= 0
− (1
𝑇1+
2
𝑇𝑤) 𝑊𝑜𝑠𝑐
2 =−2𝐾𝑜𝑠𝑐
𝑀𝑇1𝑇𝑤
𝑊𝑜𝑠𝑐2 =
2𝐾𝑜𝑠𝑐 𝑀𝑇1𝑇𝑤
𝑇𝑤 + 2𝑇1
𝑇1𝑇𝑤
=2𝐾𝑜𝑠𝑐
𝑀(2 𝑇1+𝑇𝑤)
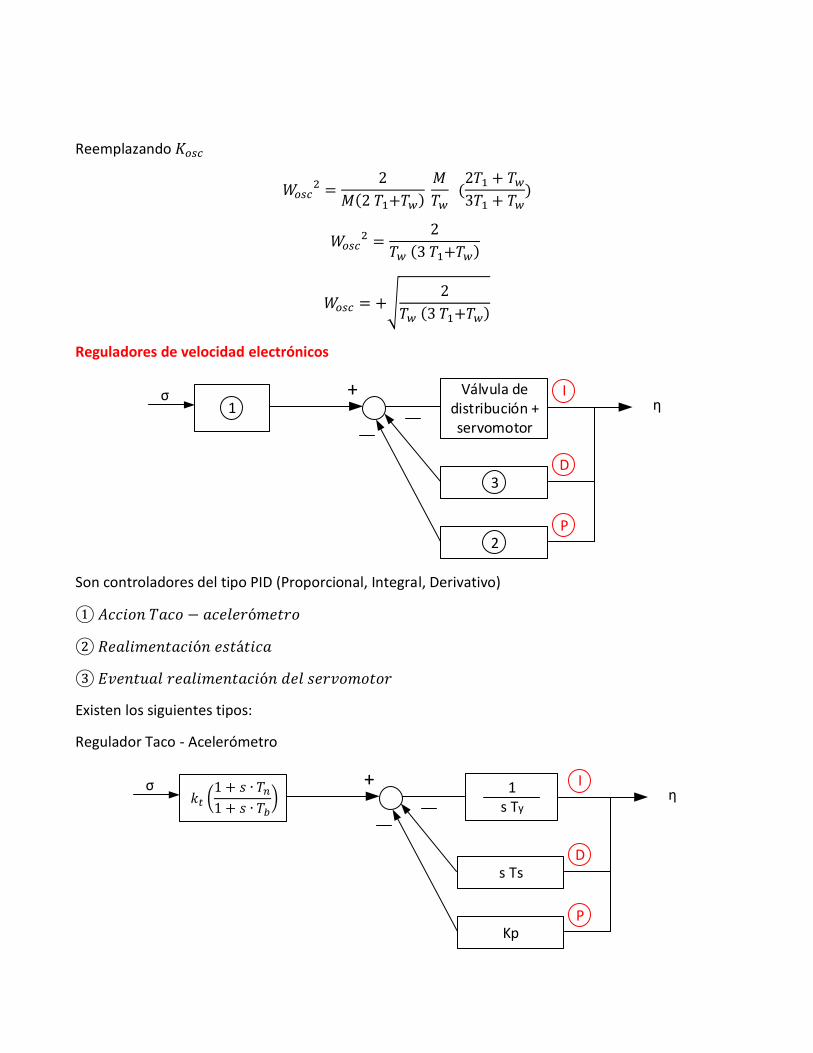
Reemplazando 𝐾𝑜𝑠𝑐
𝑊𝑜𝑠𝑐2 =
2
𝑀(2 𝑇1+𝑇𝑤) 𝑀
𝑇𝑤 (
2𝑇1 + 𝑇𝑤
3𝑇1 + 𝑇𝑤)
𝑊𝑜𝑠𝑐2 =
2
𝑇𝑤 (3 𝑇1+𝑇𝑤)
𝑊𝑜𝑠𝑐 = +√2
𝑇𝑤 (3 𝑇1+𝑇𝑤)
Reguladores de velocidad electrónicos
Válvula de distribución + servomotor
η 1+
3
2
σ I
D
P
Son controladores del tipo PID (Proporcional, Integral, Derivativo)
① 𝐴𝑐𝑐𝑖𝑜𝑛 𝑇𝑎𝑐𝑜 − 𝑎𝑐𝑒𝑙𝑒𝑟ó𝑚𝑒𝑡𝑟𝑜
② 𝑅𝑒𝑎𝑙𝑖𝑚𝑒𝑛𝑡𝑎𝑐𝑖ó𝑛 𝑒𝑠𝑡á𝑡𝑖𝑐𝑎
③ 𝐸𝑣𝑒𝑛𝑡𝑢𝑎𝑙 𝑟𝑒𝑎𝑙𝑖𝑚𝑒𝑛𝑡𝑎𝑐𝑖ó𝑛 𝑑𝑒𝑙 𝑠𝑒𝑟𝑣𝑜𝑚𝑜𝑡𝑜𝑟
Existen los siguientes tipos:
Regulador Taco - Acelerómetro
1s Ty
η +
s Ts
Kp
σ I
D
P
𝑘𝑡 (1 + 𝑠 ∙ 𝑇𝑛
1 + 𝑠 ∙ 𝑇𝑏)

De catálogos solo sacamos rangos, por eso:
0 ≤ 𝑇𝑛 ≤ 15 𝑠𝑒𝑔
𝑇𝑏 ~ 0
𝜂
L=
𝐾𝑡 (1 + 𝑠𝑇𝑛
1 )1
𝑠𝑇𝑦
1 +𝑠𝑇𝑠
𝑠𝑇𝑦+
𝐾𝑝
𝑠𝑇𝑦
=
𝐾𝑡(1 + 𝑠𝑇𝑛)𝑠𝑇𝑦
𝑠𝑇𝑦 + 𝑠𝑇𝑠 + 𝐾𝑝
𝑠𝑇𝑦
𝜂
L=
𝐾𝑡(1 + 𝑠𝑇𝑛)
𝐾𝑝 + 𝑠(𝑇𝑦 + 𝑇𝑠)
Debemos acomodar esto a lo que habíamos obtenido con Bode
𝑅𝑒𝑔 =1
𝑅[
1 + 𝑠𝑇𝑟
1 + 𝑠𝑟𝑅 𝑇𝑟
]
Se diseña: 𝑟 , 𝑇𝑟. 𝐴𝑐𝑜𝑚𝑜𝑑𝑎𝑛𝑑𝑜:
𝜂
L=
𝐾𝑡(1 + 𝑠𝑇𝑛)
𝐾𝑝 [1 + 𝑠 (𝑇𝑦 + 𝑇𝑠
𝐾𝑝)]
=1
𝑅
1 + 𝑠𝑇𝑟
1 + 𝑠𝑟𝑅 𝑇𝑟
Comparando
1
𝑅=
𝐾𝑡
𝐾𝑝 𝑝𝑎𝑠𝑜 ② {𝐶𝑜𝑛𝑜𝑐𝑖𝑑𝑜 𝑅, 𝑠𝑒𝑙𝑒𝑐𝑐𝑖𝑜𝑛𝑎𝑟 𝑑𝑒 𝑐𝑎𝑡á𝑙𝑜𝑔𝑜 𝐾𝑡, 𝐾𝑝, 𝑡𝑎𝑙 𝑞𝑢𝑒:
𝐾𝑡
𝐾𝑝=
1
𝑅
Son datos: 𝑅, 𝑇𝑟, 𝑟, 𝑜𝑏𝑡𝑒𝑛𝑖𝑑𝑜𝑠 𝑝𝑜𝑟 𝐵𝑜𝑑𝑒 𝑦 𝑓𝑜𝑟𝑚𝑢𝑙𝑎𝑠 𝑎𝑝𝑟𝑜𝑥𝑖𝑚𝑎𝑑𝑎𝑠
𝑇𝑟 = 𝑇𝑛 𝑝𝑎𝑠𝑜 ①
𝑟
𝑅 𝑇𝑟 =
𝑇𝑦 + 𝑇𝑠
𝐾𝑝 𝑑𝑒𝑠𝑝𝑒𝑗𝑎𝑛𝑑𝑜 𝑟 =
𝑅
𝑇𝑟[𝑇𝑦 + 𝑇𝑠
𝐾𝑝] =
𝐾𝑝
𝐾𝑡𝑇𝑛[𝑇𝑦 + 𝑇𝑠
𝐾𝑝]
𝑟 =𝑇𝑦 + 𝑇𝑠
𝐾𝑡 𝑇𝑛
Del paso 2 se conoce 𝐾𝑡 del paso 1 se conoce 𝑇𝑛
Seleccionar de catálogos "𝑇𝑦" y "𝑇𝑠", este tipo de reguladores existen en Zongo, Guaracachi y otros
Normalmente se anula la acción derivativa “D”
Para convertirlo en un controlador proporcional integral, en la computadora (programa) debemos
declarar
𝐾𝑝 → 0 𝑦 𝑇𝑠 = 0
Luego:
𝜂
L=
𝐾𝑡(1 + 𝑠𝑇𝑛)
𝐾𝑝 + 𝑠(𝑇𝑦 + 𝑇𝑠)=
𝐾𝑡 + 𝑠𝐾𝑡 𝑇𝑛
𝑠𝑇𝑦
𝜂
L=
𝐾𝑡
𝑠𝑇𝑦+
𝑠 𝐾𝑡 𝑇𝑛
𝑠 𝑇𝑦 → 𝑜𝑟𝑑𝑒𝑛𝑎𝑛𝑑𝑜
𝜂
L=
𝐾𝑡 𝑇𝑛
𝑇𝑦+
𝐾𝑡
𝑠 𝑇𝑦
Donde:
𝐾𝑡 𝑇𝑛
𝑇𝑦∶ "𝑃"
𝐾𝑡
𝑠 𝑇𝑦∶ "𝐼"
Así el regulador se convierte en una acción proporcional integral
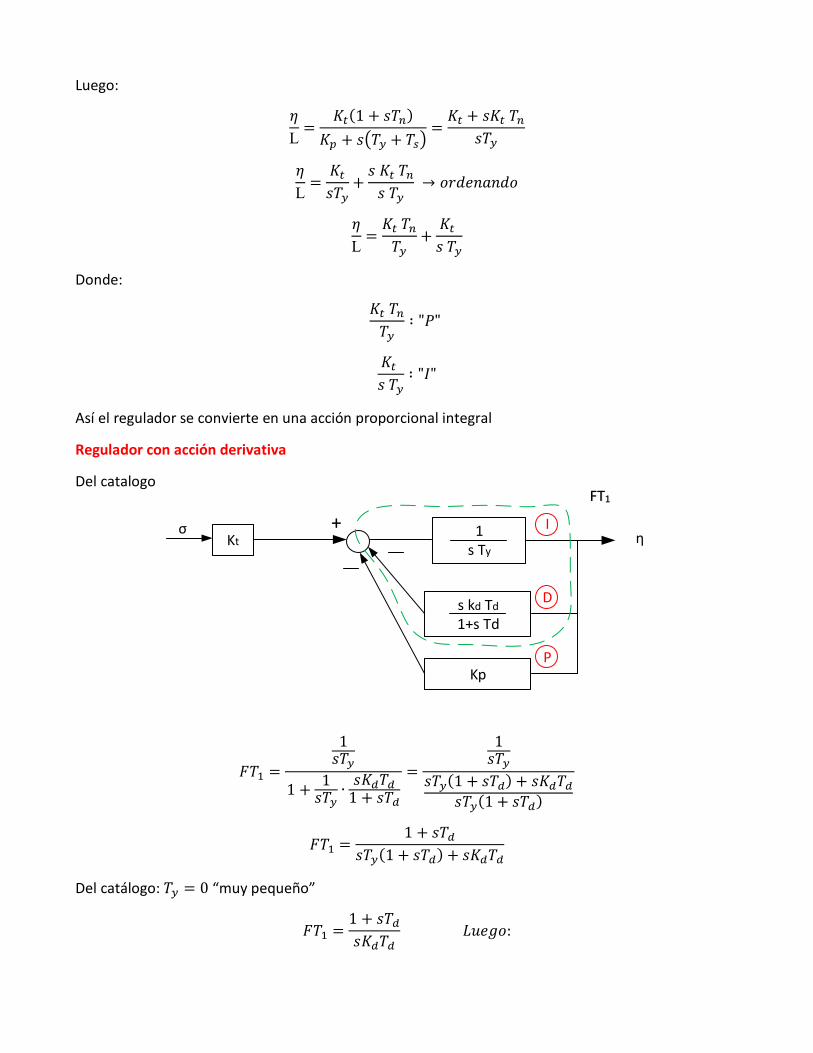
Regulador con acción derivativa
Del catalogo
1s Ty
η Kt
+
s kd Td
1+s Td
Kp
σ I
D
P
𝐹𝑇1 =
1𝑠𝑇𝑦
1 +1
𝑠𝑇𝑦∙
𝑠𝐾𝑑𝑇𝑑
1 + 𝑠𝑇𝑑
=
1𝑠𝑇𝑦
𝑠𝑇𝑦(1 + 𝑠𝑇𝑑) + 𝑠𝐾𝑑𝑇𝑑
𝑠𝑇𝑦(1 + 𝑠𝑇𝑑)
𝐹𝑇1 =1 + 𝑠𝑇𝑑
𝑠𝑇𝑦(1 + 𝑠𝑇𝑑) + 𝑠𝐾𝑑𝑇𝑑
Del catálogo: 𝑇𝑦 = 0 “muy pequeño”
𝐹𝑇1 =1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑 𝐿𝑢𝑒𝑔𝑜:
FT1
+ 1+s Td
1+s Kd Td
Kp
σ η Kt
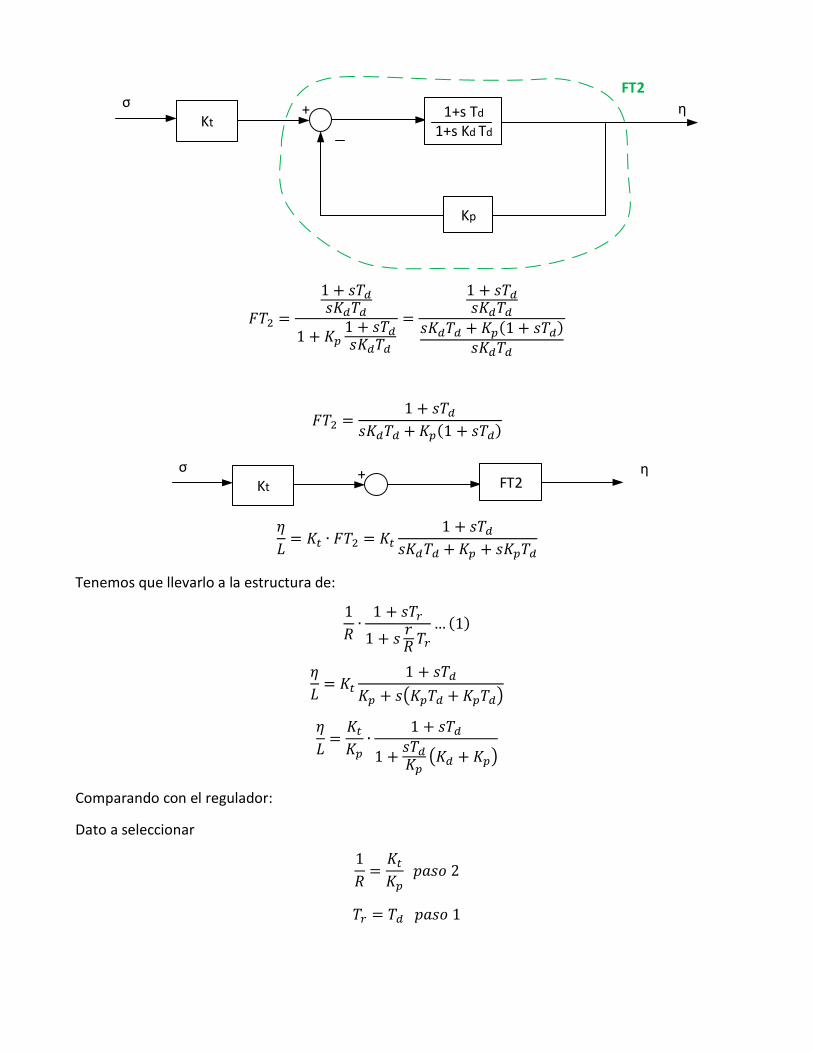
FT2
𝐹𝑇2 =
1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑
1 + 𝐾𝑝1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑
=
1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑
𝑠𝐾𝑑𝑇𝑑 + 𝐾𝑝(1 + 𝑠𝑇𝑑)
𝑠𝐾𝑑𝑇𝑑
𝐹𝑇2 =1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑 + 𝐾𝑝(1 + 𝑠𝑇𝑑)
+FT2
σ η Kt
𝜂
𝐿= 𝐾𝑡 ∙ 𝐹𝑇2 = 𝐾𝑡
1 + 𝑠𝑇𝑑
𝑠𝐾𝑑𝑇𝑑 + 𝐾𝑝 + 𝑠𝐾𝑝𝑇𝑑
Tenemos que llevarlo a la estructura de:
1
𝑅∙
1 + 𝑠𝑇𝑟
1 + 𝑠𝑟𝑅 𝑇𝑟
… (1)
𝜂
𝐿= 𝐾𝑡
1 + 𝑠𝑇𝑑
𝐾𝑝 + 𝑠(𝐾𝑝𝑇𝑑 + 𝐾𝑝𝑇𝑑)
𝜂
𝐿=
𝐾𝑡
𝐾𝑝∙
1 + 𝑠𝑇𝑑
1 +𝑠𝑇𝑑
𝐾𝑝(𝐾𝑑 + 𝐾𝑝)
Comparando con el regulador:
Dato a seleccionar
1
𝑅=
𝐾𝑡
𝐾𝑝 𝑝𝑎𝑠𝑜 2
𝑇𝑟 = 𝑇𝑑 𝑝𝑎𝑠𝑜 1

Como R es dato, seleccionar de catálogo 𝐾𝑡 y 𝐾𝑝 tal que: 𝐾𝑡
𝐾𝑝=
1
𝑅 𝑝𝑎𝑠𝑜 (2)
𝑟
𝑅𝑇𝑟 = 𝑇𝑑 (
𝐾𝑑
𝐾𝑝+ 1) 𝑝𝑎𝑠𝑜(3)
De (3) despejando “T” y considerando (2) y (1)
𝑟 =𝑅𝑇𝑑
𝑇𝑟(
𝐾𝑑
𝐾𝑝+ 1) =
𝐾𝑝
𝐾𝑡∙
𝑇𝑑
𝑇𝑟(
𝐾𝑑 + 𝐾𝑝
𝐾𝑝)
𝑟 =𝐾𝑑 + 𝐾𝑝
𝐾𝑡
𝑟: 𝑠𝑒 𝑐𝑜𝑛𝑜𝑐𝑒 𝑝𝑜𝑟 𝐵𝑜𝑑𝑒
𝐾𝑝 y 𝐾𝑡: 𝑠𝑒 𝑐𝑜𝑛𝑜𝑐𝑒𝑛 𝑑𝑒𝑙 𝑝𝑎𝑠𝑜 2
𝑆𝑒𝑙𝑒𝑐𝑐𝑖𝑜𝑛𝑎𝑟 𝐾𝑑
Y así, esta dimensionado el regulador
Para que sea un regulador (𝑃) (𝐼) declarar 𝐾𝑝 → 0
𝜂
𝐿=
𝐾𝑡 + 𝑠𝐾𝑡𝑇𝑑
𝑠𝐾𝑑𝑇𝑑=
𝐾𝑡
𝑠𝐾𝑑𝑇𝑑+
𝑠𝐾𝑡𝑇𝑑
𝑠𝐾𝑑𝑇𝑑
𝜂
𝐿=
𝐾𝑡
𝐾𝑑+
𝐾𝑡
𝑠𝐾𝑑𝑇𝑑
𝜂
𝐿= (𝑃) + (𝐼)
Resumen de lo visto hasta ahora (caso térmico simple):
1 1+s T1
1 R
+ 1 1+sTC
1 Ms+D
Regulador Gen+Carga
ρ(s)
-ΔPL
Central
G(s)
H(s)
ΔF

Caso térmico y 1 etapa de calentamiento
1 1+s T1
1 R
+ 1 – s f Tr
(1+sTr)(1+sTC)
1 Ms+D
ρ(s)
-ΔPL
G(s)
H(s)
Caso hidráulico
1 1+s T1
1 R
+ 1 Ms+D
ρ(s)
-ΔPL
G(s)
H(s)
1-sTw 1+s Tw 2
Central Hidráulica
1+sTr 1+s r Tr R
Regulador
En forma general
H(s)ΔF
-ΔPL
ρ +G(s)
1R
a) Con regulador bloqueado: (Régimen permanente), H(s) = 0
ΔF(s)ΔPL – G(s)
∆𝐹(𝑠)
∆𝑃𝐿(𝑠)= 𝐺(𝑠)
Si: 𝛥𝑃𝐿 =∆𝑝𝑙
𝑠
ΔF
ΔF
+
Δpl

∆𝐹(𝑠)
−∆𝑃𝐿(𝑠)= 𝐺(𝑠) 𝛥𝐹(𝑠) = 𝐺(𝑠)[∆𝑃𝐿(𝑠)]
Suponiendo una variación de carga de un escalón (aumento de carga)
∆𝐹(𝑠) = [1
𝑀𝑠 + 𝐷] [−
∆𝑃𝐿
𝑠]
Por teorema del valor final:
∆𝑓(𝑡)𝑡→∞ = lim𝑠→0
𝑠(∆𝐹(𝑠))
∆𝑓(𝑡)𝑡→∞ = lim𝑠→0
𝑠 (1
𝑀𝑠 + 𝐷) (−
∆𝑃𝐿
𝑠)
∆𝑓(∞) = −∆𝑃𝐿
𝐷 "𝐶𝑜𝑛 𝑎𝑢𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑐𝑎𝑟𝑔𝑎"
f
ΔPL
fmax
fnom
fmin
ΔPLmin ΔPLnom ΔPLmax
𝐷 =∆𝑓
∆𝑃𝐿= 0% … 𝐼𝑑𝑒𝑎𝑙
Disminución de carga:
∆𝑃𝐿 = −∆𝑃𝐿
𝑠
Luego:
∆𝑓(∞) =∆𝑝𝐿
𝐷… 𝑐𝑜𝑛 𝑑𝑖𝑠𝑚𝑖𝑛𝑢𝑐𝑖𝑜𝑛 𝑑𝑒 𝑐𝑎𝑟𝑔𝑎
b) Considerando la acción del regulador:
𝐷 =∆𝑓
∆𝑃𝐿= 0% → 𝐼𝐷𝐸𝐴𝐿
-Δpl

∆𝐹(𝑆)
−∆𝑃𝐿(𝑆)=
𝐺(𝑆)
1 +1𝑅 𝐻(𝑆)𝐺(𝑆)
Suponiendo un aumento de carga: ∆𝑃𝐿 =∆𝑃𝑙
𝑠
∆𝐹(𝑆) = [𝐺(𝑆)
1 +1𝑅 𝐻(𝑆)𝐺(𝑆)
] (−∆𝑃𝑙
𝑠)
Por teorema del valor final:
∆𝑓(𝑡) = lim 𝑠∆𝐹(𝑠)
∆𝑓(𝑡) = 𝑠 lim [𝐺(𝑆)
1 +1𝑅 𝐻(𝑆)𝐺(𝑆)
] (−∆𝑃𝑙
𝑠)
lim 𝐺(𝑆) = lim (1
𝑀𝑠 + 𝐷) =
1
𝐷
𝑙𝑖𝑚𝐻(𝑆) = 𝑙𝑖𝑚𝐻(𝑆) = 1 "𝑝𝑎𝑟𝑎 𝑙𝑜𝑠 𝑡𝑟𝑒𝑠 𝑐𝑎𝑠𝑜𝑠"
∆𝑓(∞) = (
1𝐷
1 +1𝑅 ∙
1𝐷
) (−∆𝑃𝑙) ∙𝐷
𝐷
∆𝑓(∞) = (−1
𝐷 +1𝑅
) (−∆𝑃𝑙) … 𝑐𝑜𝑛 𝑎𝑢𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑐𝑎𝑟𝑔𝑎
Suponiendo disminución de carga
∆𝑓(∞) = (1
𝐷 +1𝑅
) (∆𝑃𝑙) … 𝑐𝑜𝑛 𝑑𝑖𝑠𝑚𝑖𝑛𝑢𝑐𝑖ó𝑛 𝑑𝑒 𝑐𝑎𝑟𝑔𝑎
G(s)
1
𝑅 H(s)
−∆𝑃𝐿 ΔF
t →∞
t →∞ s →0
s →0
s →0 s →0
s →0 s →0
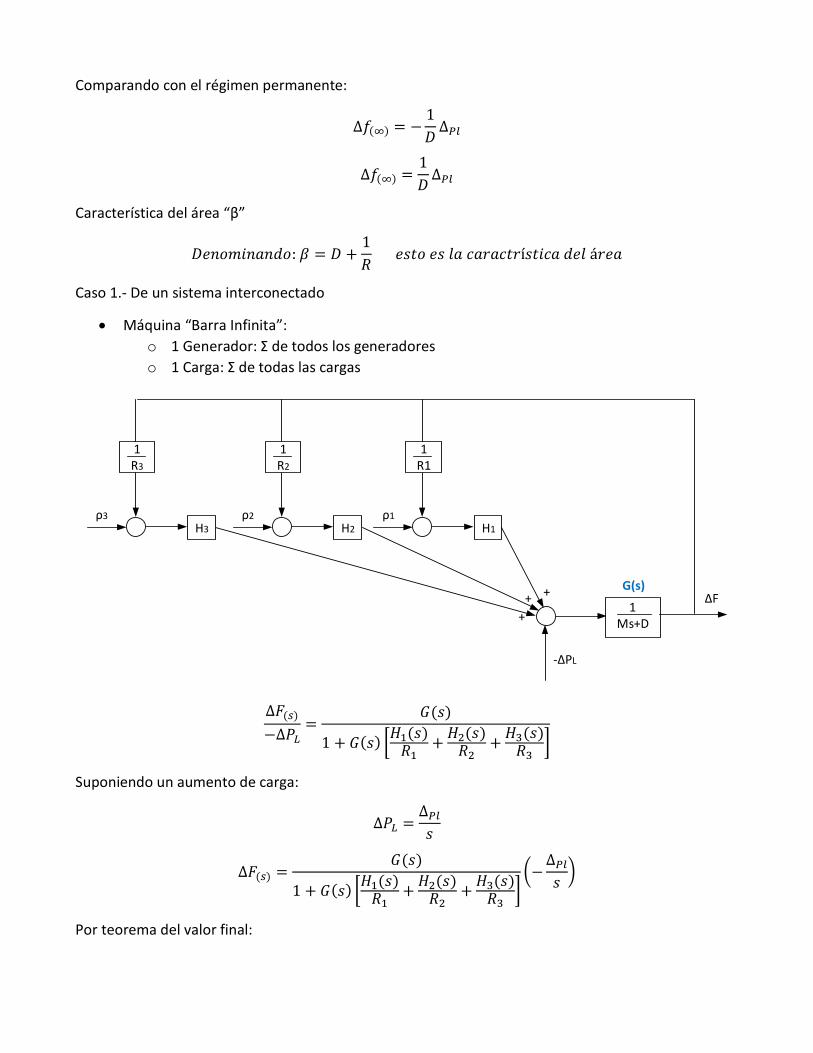
Comparando con el régimen permanente:
∆𝑓(∞) = −1
𝐷∆𝑃𝑙
∆𝑓(∞) =1
𝐷∆𝑃𝑙
Característica del área “β”
𝐷𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑛𝑑𝑜: 𝛽 = 𝐷 +1
𝑅 𝑒𝑠𝑡𝑜 𝑒𝑠 𝑙𝑎 𝑐𝑎𝑟𝑎𝑐𝑡𝑟í𝑠𝑡𝑖𝑐𝑎 𝑑𝑒𝑙 á𝑟𝑒𝑎
Caso 1.- De un sistema interconectado
Máquina “Barra Infinita”:
o 1 Generador: Σ de todos los generadores
o 1 Carga: Σ de todas las cargas
+ 1 Ms+D
ρ3
-ΔPL
G(s)
H3
1R3
+
ρ2
H2
1R2
+
ρ1
H1
1R1
ΔF
∆𝐹(𝑠)
−∆𝑃𝐿=
𝐺(𝑠)
1 + 𝐺(𝑠) [𝐻1(𝑠)
𝑅1+
𝐻2(𝑠)𝑅2
+𝐻3(𝑠)
𝑅3]
Suponiendo un aumento de carga:
∆𝑃𝐿 =∆𝑃𝑙
𝑠
∆𝐹(𝑠) =𝐺(𝑠)
1 + 𝐺(𝑠) [𝐻1(𝑠)
𝑅1+
𝐻2(𝑠)𝑅2
+𝐻3(𝑠)
𝑅3]
(−∆𝑃𝑙
𝑠)
Por teorema del valor final:
∆𝑓(∞) = lim𝑠→0
𝑠 [𝐺(𝑠)
1 + 𝐺(𝑠) [𝐻1(𝑠)
𝑅1+
𝐻2(𝑠)𝑅2
+𝐻3(𝑠)
𝑅3]] (−
∆𝑃𝑙
𝑠)
=
1𝐷
1 +1𝐷
[1
𝑅1+
1𝑅2
+1
𝑅3]
(−∆𝑃𝑙) ∙𝐷
𝐷
∆𝑓(∞) =1
𝐷 + [1
𝑅1+
1𝑅2
+1
𝑅3]
(−∆𝑃𝑙)
∆𝑓(∞) =1
𝐷 + [1
𝑅𝑒𝑞]
(−∆𝑃𝑙)
∆𝑓(∞) = (1
𝐷 +1
𝑅𝑒𝑞
) (−∆𝑃𝑙) … 𝑠𝑢𝑝𝑜𝑛𝑖𝑒𝑛𝑑𝑜 𝑢𝑛 𝑎𝑢𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 (∆𝑃𝐿)
∆𝑓(∞) = (1
𝐷 +1
𝑅𝑒𝑞
) (∆𝑃𝑙) … 𝑠𝑢𝑝𝑜𝑛𝑖𝑒𝑛𝑑𝑜 𝑢𝑛𝑎 𝑑𝑖𝑠𝑚𝑖𝑛𝑢𝑐𝑖𝑜𝑛 𝑑𝑒 (∆𝑃𝐿)
1M2s+D
1R2
Regulador 2+Turbina 2
1M1s+D
Regulador 1+Turbina 1
1R1
TS
AREA 1
ΔF1
ΔF2
-ΔPL2
-ΔPL1
ρ
ρ +
+
AREA 2
ΔPTLI-2
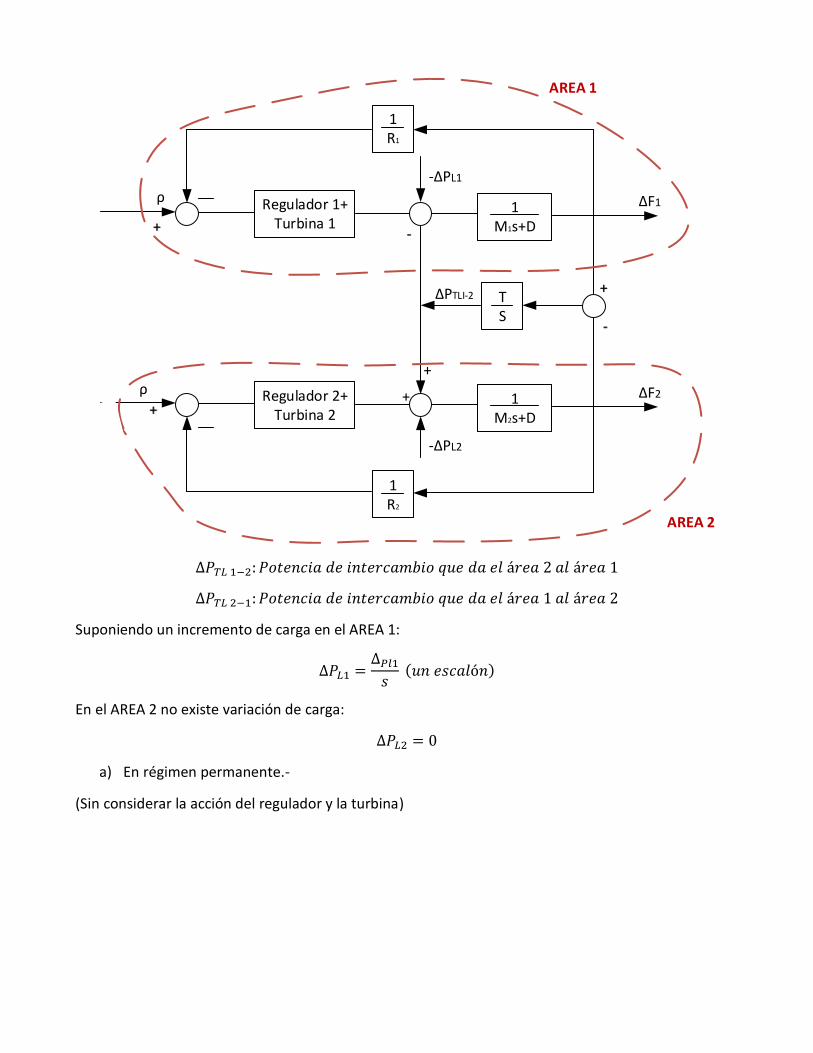
∆𝑃𝑇𝐿 1−2: 𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑑𝑒 𝑖𝑛𝑡𝑒𝑟𝑐𝑎𝑚𝑏𝑖𝑜 𝑞𝑢𝑒 𝑑𝑎 𝑒𝑙 á𝑟𝑒𝑎 2 𝑎𝑙 á𝑟𝑒𝑎 1
∆𝑃𝑇𝐿 2−1: 𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎 𝑑𝑒 𝑖𝑛𝑡𝑒𝑟𝑐𝑎𝑚𝑏𝑖𝑜 𝑞𝑢𝑒 𝑑𝑎 𝑒𝑙 á𝑟𝑒𝑎 1 𝑎𝑙 á𝑟𝑒𝑎 2
Suponiendo un incremento de carga en el AREA 1:
∆𝑃𝐿1 =∆𝑃𝑙1
𝑠 (𝑢𝑛 𝑒𝑠𝑐𝑎𝑙ó𝑛)
En el AREA 2 no existe variación de carga:
∆𝑃𝐿2 = 0
a) En régimen permanente.-
(Sin considerar la acción del regulador y la turbina)
+
+ -
+
-
1M2s+D2
1M1s+D1
TS
ΔF1
ΔF2
-ΔPL1
+
–
–
–
FT1
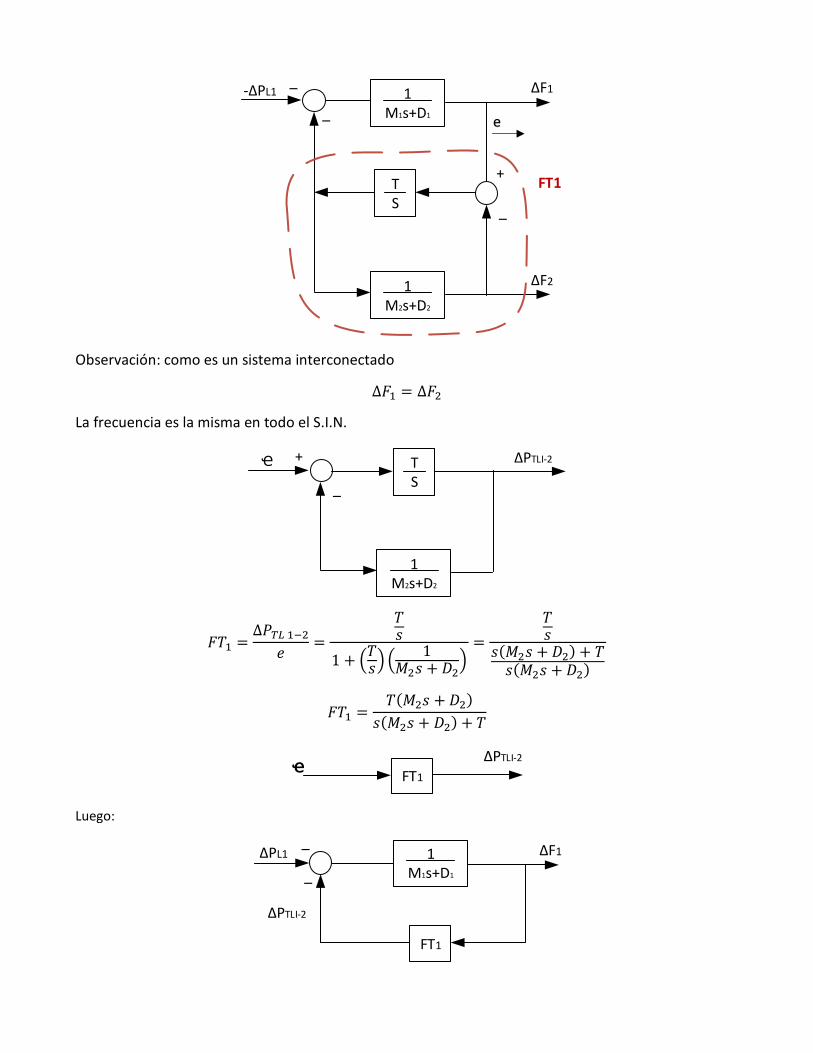
Observación: como es un sistema interconectado
∆𝐹1 = ∆𝐹2
La frecuencia es la misma en todo el S.I.N.
1M2s+D2
TS
Ҽ
–
+ ΔPTLI-2
𝐹𝑇1 =∆𝑃𝑇𝐿 1−2
𝑒=
𝑇𝑠
1 + (𝑇𝑠) (
1𝑀2𝑠 + 𝐷2
)=
𝑇𝑠
𝑠(𝑀2𝑠 + 𝐷2) + 𝑇𝑠(𝑀2𝑠 + 𝐷2)
𝐹𝑇1 =𝑇(𝑀2𝑠 + 𝐷2)
𝑠(𝑀2𝑠 + 𝐷2) + 𝑇
FT1Ҽ
ΔPTLI-2
Luego:
ΔF1ΔPL1 –
ΔPTLI-2
1M1s+D1
FT1
–
e
∆𝐹1
−∆𝑃𝐿1=
1𝑀1𝑠 + 𝐷1
1 +𝑇(𝑀2𝑠 + 𝐷2)
𝑠(𝑀2𝑠 + 𝐷2) + 𝑇∙
1𝑀1𝑠 + 𝐷1
∆𝐹1
−∆𝑃𝐿1=
1𝑀1𝑠 + 𝐷1
[𝑠(𝑀2𝑠 + 𝐷2) + 𝑇](𝑀1𝑠 + 𝐷1) + 𝑇(𝑀2𝑠 + 𝐷2)[𝑠(𝑀2𝑠 + 𝐷2) + 𝑇](𝑀1𝑠 + 𝐷1)
∆𝐹1
−∆𝑃𝐿1=
𝑠(𝑀2𝑠 + 𝐷2) + 𝑇
[𝑠(𝑀2𝑠 + 𝐷2) + 𝑇](𝑀1𝑠 + 𝐷1) + 𝑇(𝑀2𝑠 + 𝐷2) 𝑑𝑜𝑛𝑑𝑒: − ∆𝑃𝐿1 = −
∆𝑃𝑙1
𝑠
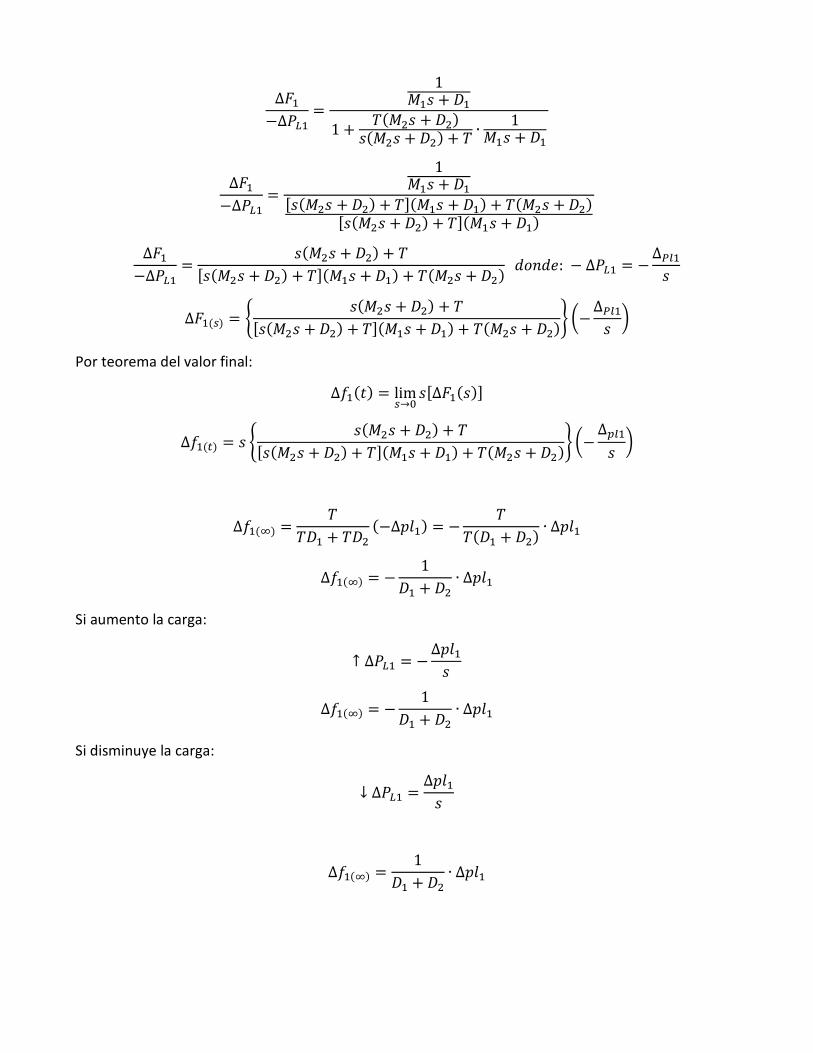
∆𝐹1(𝑠) = {𝑠(𝑀2𝑠 + 𝐷2) + 𝑇
[𝑠(𝑀2𝑠 + 𝐷2) + 𝑇](𝑀1𝑠 + 𝐷1) + 𝑇(𝑀2𝑠 + 𝐷2)} (−
∆𝑃𝑙1
𝑠)
Por teorema del valor final:
∆𝑓1(𝑡) = lim𝑠→0
𝑠[∆𝐹1(𝑠)]
∆𝑓1(𝑡) = 𝑠 {𝑠(𝑀2𝑠 + 𝐷2) + 𝑇
[𝑠(𝑀2𝑠 + 𝐷2) + 𝑇](𝑀1𝑠 + 𝐷1) + 𝑇(𝑀2𝑠 + 𝐷2)} (−
∆𝑝𝑙1
𝑠)
∆𝑓1(∞) =𝑇
𝑇𝐷1 + 𝑇𝐷2
(−∆𝑝𝑙1) = −𝑇
𝑇(𝐷1 + 𝐷2)∙ ∆𝑝𝑙1
∆𝑓1(∞) = −1
𝐷1 + 𝐷2∙ ∆𝑝𝑙1
Si aumento la carga:
↑ ∆𝑃𝐿1 = −∆𝑝𝑙1
𝑠
∆𝑓1(∞) = −1
𝐷1 + 𝐷2∙ ∆𝑝𝑙1
Si disminuye la carga:
↓ ∆𝑃𝐿1 =∆𝑝𝑙1
𝑠
∆𝑓1(∞) =1
𝐷1 + 𝐷2∙ ∆𝑝𝑙1
Y si varía la carga en el área 2 y no en el área 1:
∆𝑓2(∞) = −1
𝐷1 + 𝐷2∙ ∆𝑝𝑙2
Si aumento la carga:
↑ ∆𝑃𝐿2 = −∆𝑝𝑙2
𝑠
∆𝑓2(∞) = −1
𝐷1 + 𝐷2∙ ∆𝑝𝑙2
Si disminuye la carga:
↓ ∆𝑃𝐿2 =∆𝑝𝑙2
𝑠
∆𝑓2(∞) =1
𝐷1 + 𝐷2∙ ∆𝑝𝑙2
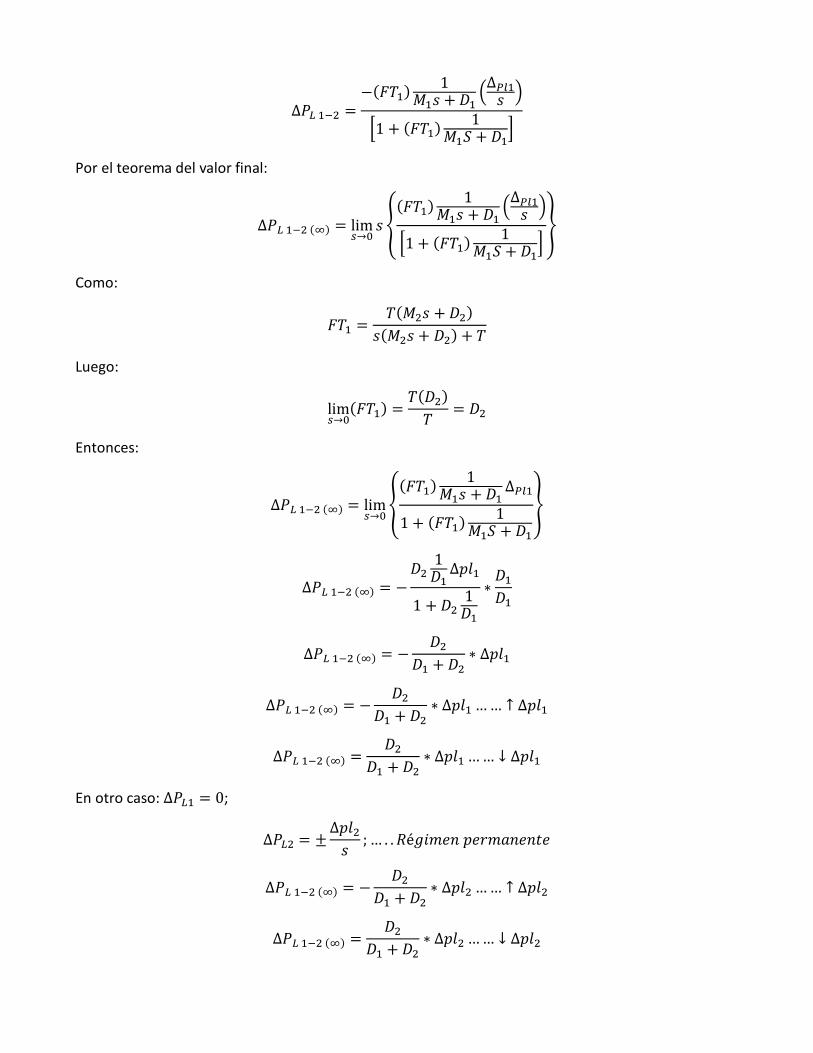
Volviendo al primer caso: calculamos la potencia de intercambio cuando ∆𝑃𝐿1 =∆𝑝𝑙1
𝑠 y ∆𝑃𝐿2 = 0 en
régimen permanente:
∆𝑃𝑇𝐿 1−2 = (𝐹𝑇1)(∆𝐹1) … (1)
∆𝐹1(𝑠) = (1
𝑀1𝑠 + 𝐷1) [−∆𝑃𝐿1(𝑠) − ∆𝑃𝑇 𝐿1−2(𝑠)] … (2)
ΔF1ΔPL1 –
ΔPTLI-2
1M1s+D1
FT1
–
Reemplazando (2) en (1)
∆𝑃𝐿 1−2 = (𝐹𝑇1) [1
𝑀1𝑠 + 𝐷1
(−∆𝑃𝐿1 − ∆𝑃𝑇𝐿 1−2)]
∆𝑃𝐿 1−2 = −(𝐹𝑇1)1
𝑀1𝑠 + 𝐷1∆𝑃𝐿1 − (𝐹𝑇1)
1
𝑀1𝑠 + 𝐷1∆𝑃𝑇𝐿 1−2
∆𝑃𝐿 1−2 [1 + (𝐹𝑇1)1
𝑀1𝑆 + 𝐷1] = −(𝐹𝑇1)
1
𝑀1𝑠 + 𝐷1(
∆𝑃𝑙1
𝑠)
∆𝑃𝐿 1−2 =−(𝐹𝑇1)
1𝑀1𝑠 + 𝐷1
(∆𝑃𝑙1
𝑠 )
[1 + (𝐹𝑇1)1
𝑀1𝑆 + 𝐷1]
Por el teorema del valor final:
∆𝑃𝐿 1−2 (∞) = lim𝑠→0
𝑠 {(𝐹𝑇1)
1𝑀1𝑠 + 𝐷1
(∆𝑃𝑙1
𝑠 )
[1 + (𝐹𝑇1)1
𝑀1𝑆 + 𝐷1]
}
Como:
𝐹𝑇1 =𝑇(𝑀2𝑠 + 𝐷2)
𝑠(𝑀2𝑠 + 𝐷2) + 𝑇
Luego:
lim𝑠→0
(𝐹𝑇1) =𝑇(𝐷2)
𝑇= 𝐷2
Entonces:
∆𝑃𝐿 1−2 (∞) = lim𝑠→0
{(𝐹𝑇1)
1𝑀1𝑠 + 𝐷1
∆𝑃𝑙1
1 + (𝐹𝑇1)1
𝑀1𝑆 + 𝐷1
}
∆𝑃𝐿 1−2 (∞) = −𝐷2
1𝐷1
∆𝑝𝑙1
1 + 𝐷21
𝐷1
∗𝐷1
𝐷1
∆𝑃𝐿 1−2 (∞) = −𝐷2
𝐷1 + 𝐷2∗ ∆𝑝𝑙1
∆𝑃𝐿 1−2 (∞) = −𝐷2
𝐷1 + 𝐷2∗ ∆𝑝𝑙1 … … ↑ ∆𝑝𝑙1
∆𝑃𝐿 1−2 (∞) =𝐷2
𝐷1 + 𝐷2∗ ∆𝑝𝑙1 … … ↓ ∆𝑝𝑙1
En otro caso: ∆𝑃𝐿1 = 0;
∆𝑃𝐿2 = ±∆𝑝𝑙2
𝑠; … . . 𝑅é𝑔𝑖𝑚𝑒𝑛 𝑝𝑒𝑟𝑚𝑎𝑛𝑒𝑛𝑡𝑒
∆𝑃𝐿 1−2 (∞) = −𝐷2
𝐷1 + 𝐷2∗ ∆𝑝𝑙2 … … ↑ ∆𝑝𝑙2
∆𝑃𝐿 1−2 (∞) =𝐷2
𝐷1 + 𝐷2∗ ∆𝑝𝑙2 … … ↓ ∆𝑝𝑙2
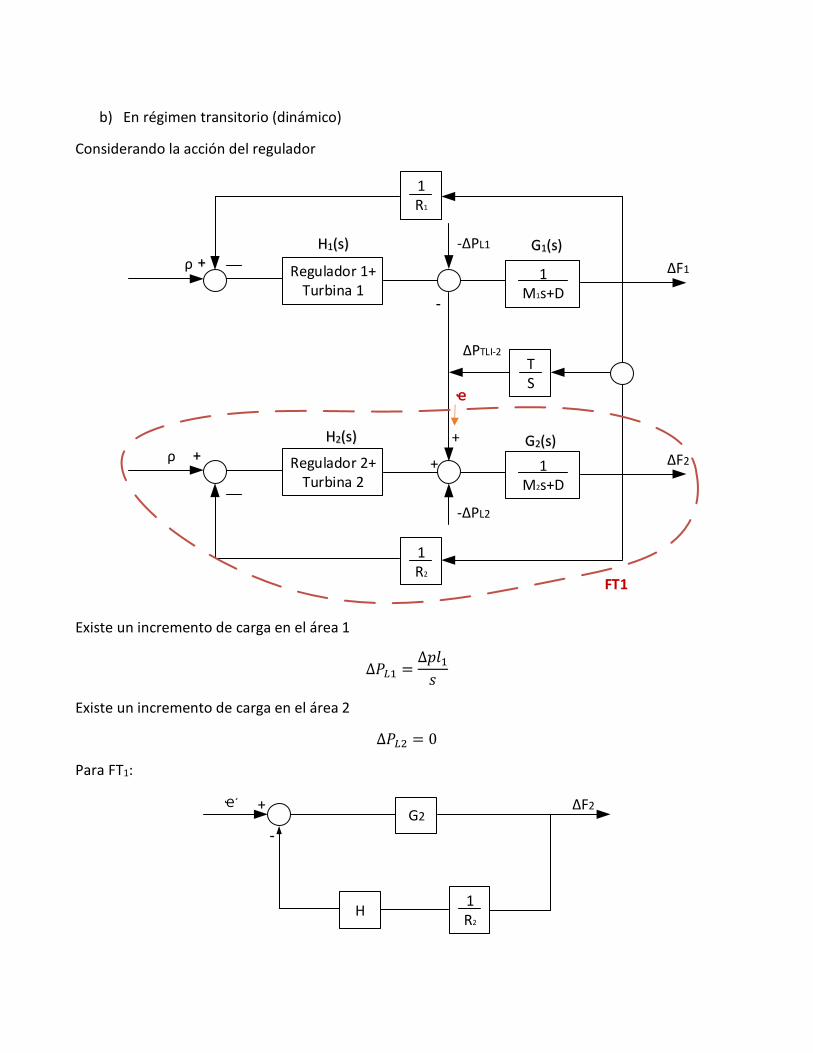
b) En régimen transitorio (dinámico)
Considerando la acción del regulador
1M2s+D
1R2
Regulador 2+Turbina 2
1M1s+D
Regulador 1+Turbina 1
1R1
TS
Ҽ
ΔF1
ΔF2
-ΔPL2
-ΔPL1
ρ
ρ +
+
FT1
ΔPTLI-2
Existe un incremento de carga en el área 1
∆𝑃𝐿1 =∆𝑝𝑙1
𝑠
Existe un incremento de carga en el área 2
∆𝑃𝐿2 = 0
Para FT1:
1R2
H
G2ΔF2Ҽ´ +
+
-
+
H1(s) G1(s)
H2(s) G2(s)
-
∆𝐹2
Ҽ=
𝐺2
1 + 𝐺2𝐻21
𝑅2
ΔF2Ҽ
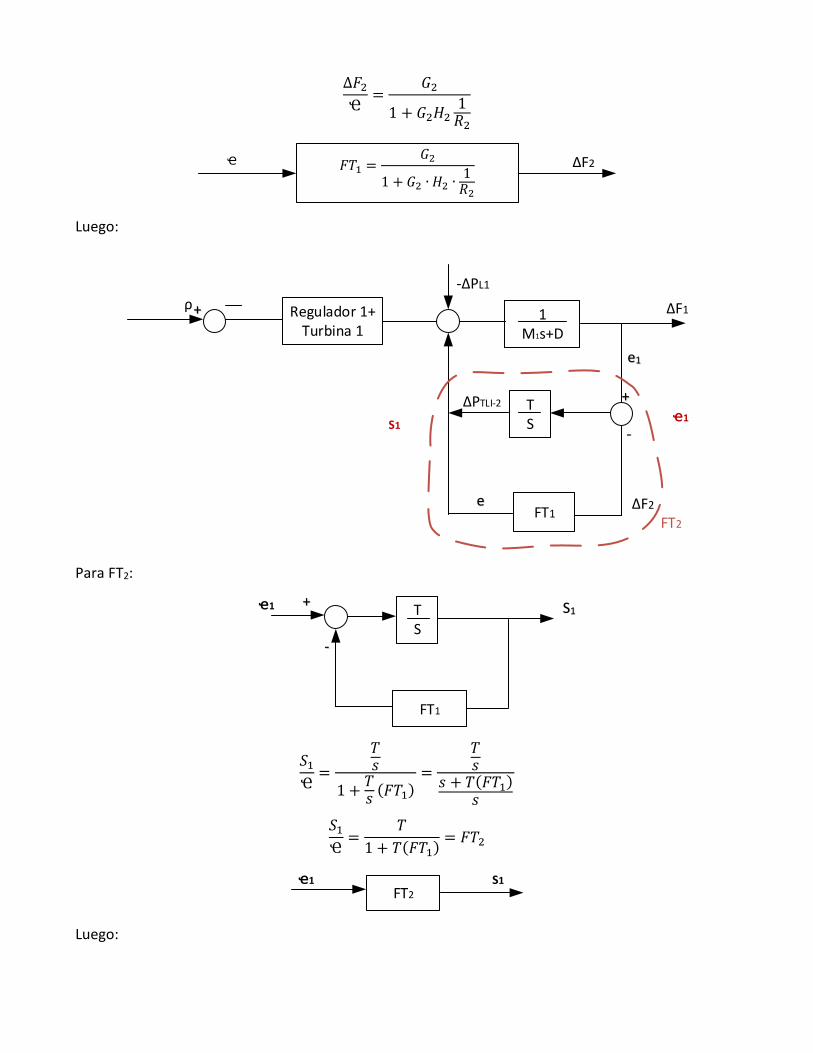
Luego:
FT1
1M1s+D
Regulador 1+Turbina 1
TS
ΔF1
ΔF2
-ΔPL1
ρ
ΔPTLI-2
FT2
Ҽ1 S1
Para FT2:
FT1
TS
Ҽ1
𝑆1
Ҽ=
𝑇𝑠
1 +𝑇𝑠
(𝐹𝑇1)=
𝑇𝑠
𝑠 + 𝑇(𝐹𝑇1)𝑠
𝑆1
Ҽ=
𝑇
1 + 𝑇(𝐹𝑇1)= 𝐹𝑇2
FT2
Ҽ1 S1
Luego:
𝐹𝑇1 =𝐺2
1 + 𝐺2 ∙ 𝐻2 ∙1
𝑅2
+
e1
+
-
e
S1 +
-
G1
Regulador 1+Turbina 1
1R1
FT2
ΔF1
-ΔPL1
ρ
Ҽ1 S1
FT3
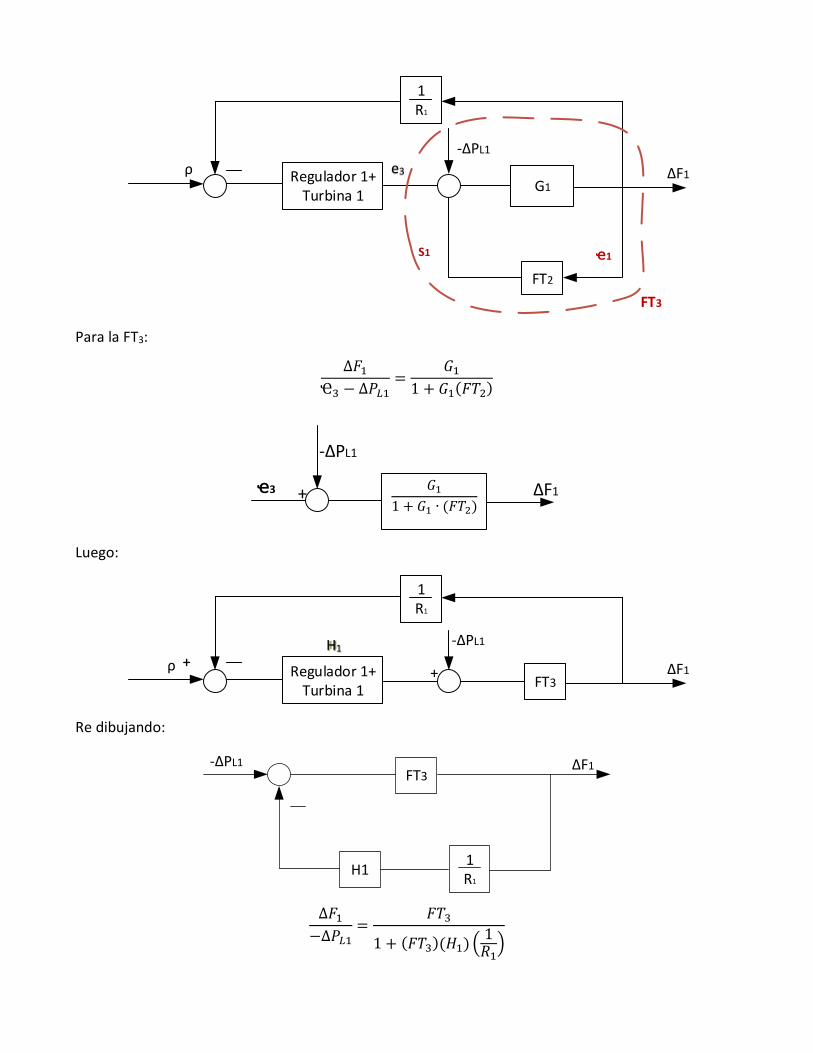
Para la FT3:
∆𝐹1
Ҽ3 − ∆𝑃𝐿1=
𝐺1
1 + 𝐺1(𝐹𝑇2)
ΔF1
-ΔPL1
+Ҽ3
Luego:
Regulador 1+Turbina 1
ΔF1
-ΔPL1
ρ +FT3
1R1
H
Re dibujando:
1R1
H1
FT3ΔF1-ΔPL1
∆𝐹1
−∆𝑃𝐿1=
𝐹𝑇3
1 + (𝐹𝑇3)(𝐻1) (1
𝑅1)
𝐺1
1 + 𝐺1 ∙ (𝐹𝑇2)
e3
+ H1
∆𝐹1(𝑠) = [𝐹𝑇3
1 + (𝐹𝑇3)(𝐻1) (1
𝑅1)
] (−∆𝑝𝑙1
𝑠)
Usando el teorema del valor final:
∆𝑓1(𝑡)𝑡→∞ = lim𝑠→0
𝑠 [𝐹𝑇3
1 + (𝐹𝑇3)(𝐻1) (1
𝑅1)
] (−∆𝑝𝑙1
𝑠) … . (𝛼)
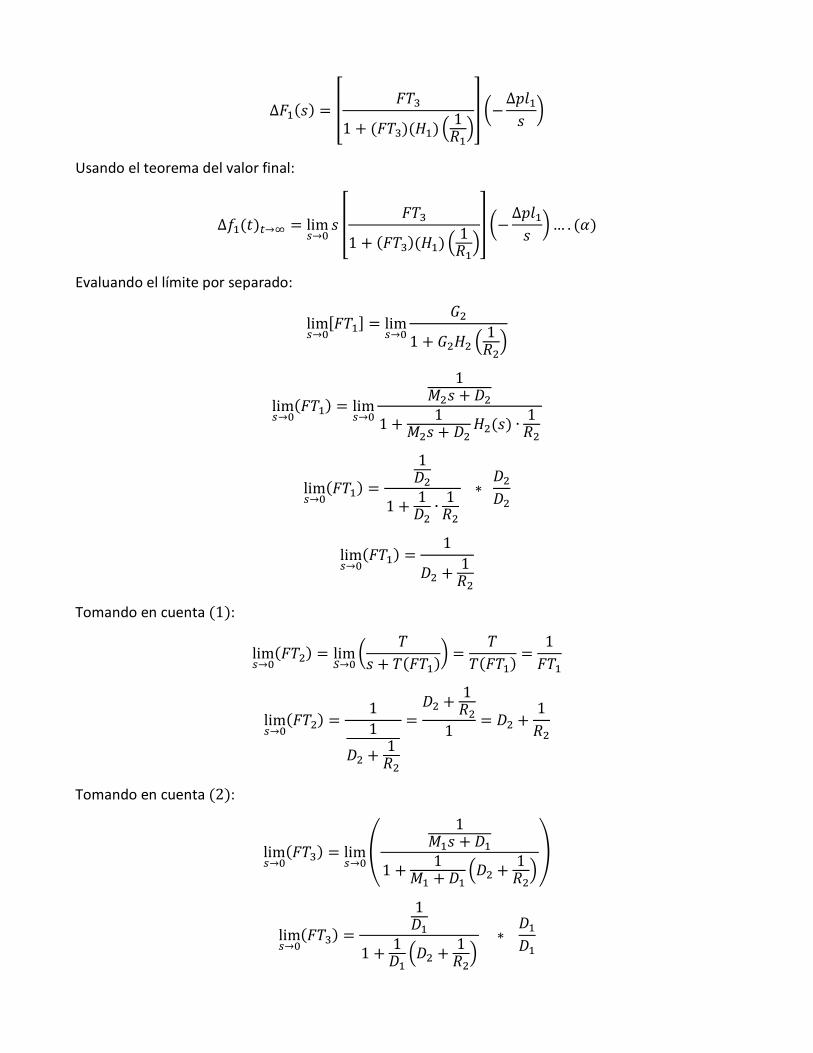
Evaluando el límite por separado:
lim𝑠→0
[𝐹𝑇1] = lim𝑠→0
𝐺2
1 + 𝐺2𝐻2 (1
𝑅2)
lim𝑠→0
(𝐹𝑇1) = lim𝑠→0
1𝑀2𝑠 + 𝐷2
1 +1
𝑀2𝑠 + 𝐷2𝐻2(𝑠) ∙
1𝑅2
lim𝑠→0
(𝐹𝑇1) =
1𝐷2
1 +1
𝐷2∙
1𝑅2
∗ 𝐷2
𝐷2
lim𝑠→0
(𝐹𝑇1) =1
𝐷2 +1
𝑅2
Tomando en cuenta (1):
lim𝑠→0
(𝐹𝑇2) = lim𝑆→0
(𝑇
𝑠 + 𝑇(𝐹𝑇1)) =
𝑇
𝑇(𝐹𝑇1)=
1
𝐹𝑇1
lim𝑠→0
(𝐹𝑇2) =1
1
𝐷2 +1
𝑅2
=𝐷2 +
1𝑅2
1= 𝐷2 +
1
𝑅2
Tomando en cuenta (2):
lim𝑠→0
(𝐹𝑇3) = lim𝑠→0
(
1𝑀1𝑠 + 𝐷1
1 +1
𝑀1 + 𝐷1(𝐷2 +
1𝑅2
))
lim𝑠→0
(𝐹𝑇3) =
1𝐷1
1 +1
𝐷1(𝐷2 +
1𝑅2
) ∗
𝐷1
𝐷1
lim𝑠→0
(𝐹𝑇3) =1
𝐷1+𝐷2 +1
𝑅2
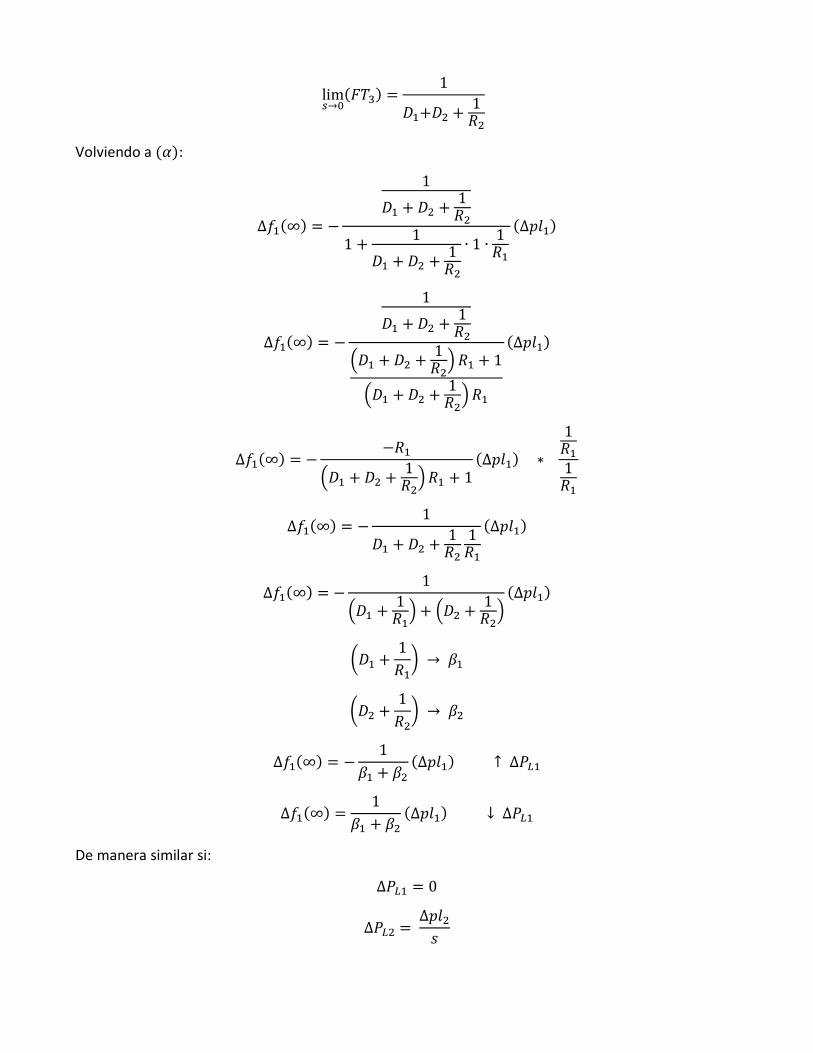
Volviendo a (𝛼):
∆𝑓1(∞) = −
1
𝐷1 + 𝐷2 +1
𝑅2
1 +1
𝐷1 + 𝐷2 +1
𝑅2
∙ 1 ∙1
𝑅1
(∆𝑝𝑙1)
∆𝑓1(∞) = −
1
𝐷1 + 𝐷2 +1
𝑅2
(𝐷1 + 𝐷2 +1
𝑅2) 𝑅1 + 1
(𝐷1 + 𝐷2 +1
𝑅2) 𝑅1
(∆𝑝𝑙1)
∆𝑓1(∞) = −−𝑅1
(𝐷1 + 𝐷2 +1
𝑅2) 𝑅1 + 1
(∆𝑝𝑙1) ∗
1𝑅1
1𝑅1
∆𝑓1(∞) = −1
𝐷1 + 𝐷2 +1
𝑅2
1𝑅1
(∆𝑝𝑙1)
∆𝑓1(∞) = −1
(𝐷1 +1
𝑅1) + (𝐷2 +
1𝑅2
)(∆𝑝𝑙1)
(𝐷1 +1
𝑅1) → 𝛽1
(𝐷2 +1
𝑅2) → 𝛽2
∆𝑓1(∞) = −1
𝛽1 + 𝛽2
(∆𝑝𝑙1) ↑ ∆𝑃𝐿1
∆𝑓1(∞) =1
𝛽1 + 𝛽2
(∆𝑝𝑙1) ↓ ∆𝑃𝐿1
De manera similar si:
∆𝑃𝐿1 = 0
∆𝑃𝐿2 = ∆𝑝𝑙2
𝑠
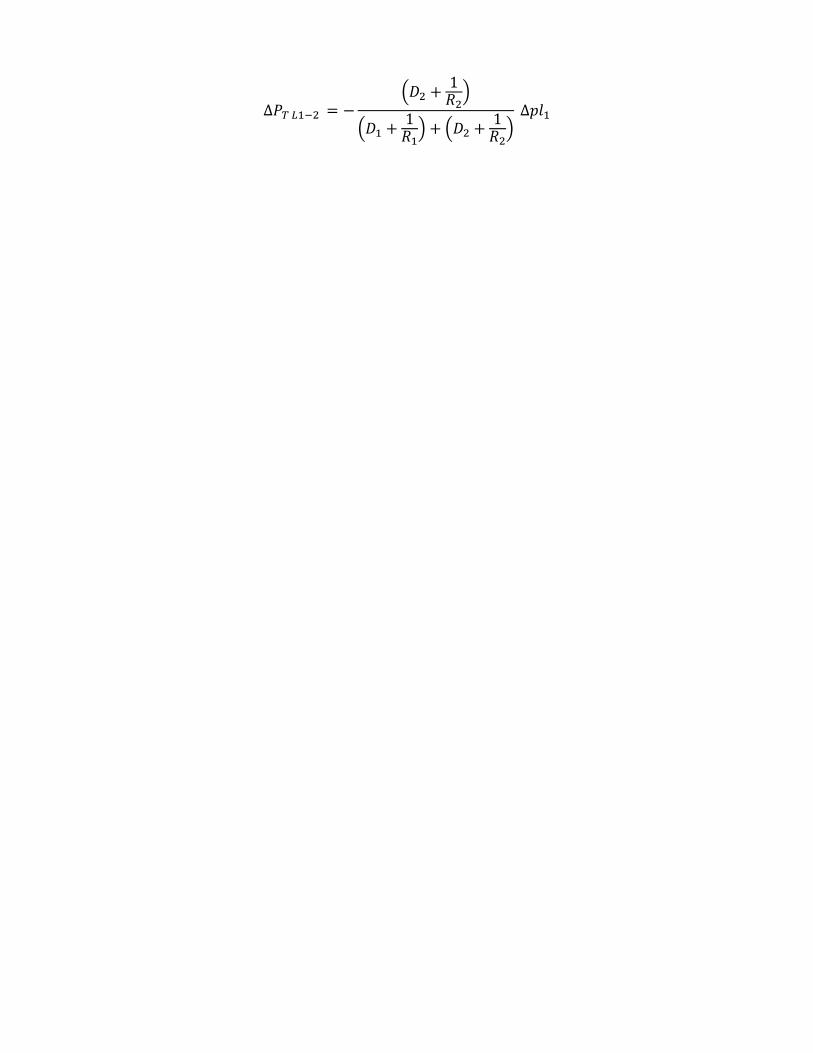
∆𝑃𝑇 𝐿1−2 = −(𝐷2 +
1𝑅2
)
(𝐷1 +1
𝑅1) + (𝐷2 +
1𝑅2
) ∆𝑝𝑙1

Nuevo Caso
SISO: Simple Imput Simple Output
MIMO: Multiple Imput Multiple Output
Para múltiples entradas y múltiples salidas (MIMO)
La representación en variables de estado.-
�̇� = 𝐴𝑥 + 𝐵𝑢 … (𝐼)
𝑦 = 𝐶𝑥 + 𝐷𝑢 … (𝐼𝐼)
Donde:
𝑋: 𝑉𝑒𝑐𝑡𝑜𝑟 𝑑𝑒 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
𝑢: 𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠
𝑦: 𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑠𝑎𝑙𝑖𝑑𝑎𝑠
𝐴: 𝑀𝑎𝑡𝑟𝑖𝑧 𝑐𝑢𝑎𝑑𝑟𝑎𝑑𝑎 𝑞𝑢𝑒 𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑎 𝑎𝑙 𝑚𝑜𝑑𝑒𝑙𝑜 𝑚𝑎𝑡𝑒𝑚𝑎𝑡𝑖𝑐𝑜 𝑑𝑒𝑙 𝑠𝑖𝑠𝑡𝑒𝑚𝑎
𝐵: 𝑀𝑎𝑡𝑟𝑖𝑧 𝑞𝑢𝑒 𝑟𝑒𝑙𝑎𝑐𝑖𝑜𝑛𝑎 𝑙𝑎𝑠 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠 𝑐𝑜𝑛 𝑣𝑎𝑟𝑖𝑎𝑐𝑜𝑛 𝑑𝑒 𝑙𝑎𝑠 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
𝐶: 𝑀𝑎𝑡𝑟𝑖𝑧 𝑞𝑢𝑒 𝑟𝑒𝑙𝑎𝑐𝑖𝑜𝑛𝑎 𝑙𝑎𝑠 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠 𝑐𝑜𝑛 𝑙𝑎𝑠 𝑠𝑎𝑙𝑖𝑑𝑎𝑠
𝐷: 𝑂𝑐𝑎𝑠𝑖𝑜𝑛𝑎𝑙 𝑚𝑎𝑡𝑟𝑖𝑧 𝑞𝑢𝑒 𝑟𝑒𝑙𝑎𝑐𝑖𝑜𝑛𝑎 𝑙𝑎𝑠 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠 𝑦 𝑙𝑎𝑠 𝑠𝑎𝑙𝑖𝑑𝑎𝑠
�̇� = 𝑉𝑒𝑐𝑡𝑜𝑟 𝑞𝑢𝑒 𝑎𝑔𝑙𝑢𝑡𝑖𝑛𝑎 𝑎 𝑙𝑎𝑠 𝑑𝑒𝑟𝑖𝑣𝑎𝑑𝑎𝑠 𝑑𝑒 𝑙𝑎𝑠 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒𝑠 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Todo en el dominio del tiempo
Hallando las transformadas de LaPlace de (I) y (II)
𝑆𝑋(𝑠) = 𝐴𝑋(𝑠) + 𝐵𝑢(𝑠) … (𝐼)
𝑌(𝑠) = 𝐶𝑋(𝑠) + 𝐷𝑢(𝑠) … (𝐼𝐼)
De (I):
𝑆𝑋(𝑠) − 𝐴𝑋(𝑠) = 𝐵𝑢(𝑠)
(𝑆 𝐼 − 𝐴) 𝑋(𝑠) = 𝐵𝑢(𝑠) … 𝑚/𝑚 (𝑆𝐼 − 𝐴)−1
(𝑆𝐼 − 𝐴)−1(𝑆𝐼 − 𝐴)𝑋(𝑠) = (𝑆𝐼)−1 𝐵𝑢(𝑠)
𝑋(𝑠) = (𝑆𝐼 − 𝐴)−1𝐵𝑈(𝑠)
Reemplazando en (II):
𝑌(𝑠) = 𝐶(𝑆𝐼 − 𝐴)−1𝐵𝑈(𝑠) + 𝐷𝑈(𝑠)
𝑌(𝑠) = [𝐶(𝑆𝐼 − 𝐴)−1𝐵 + 𝐷]𝑈(𝑠)
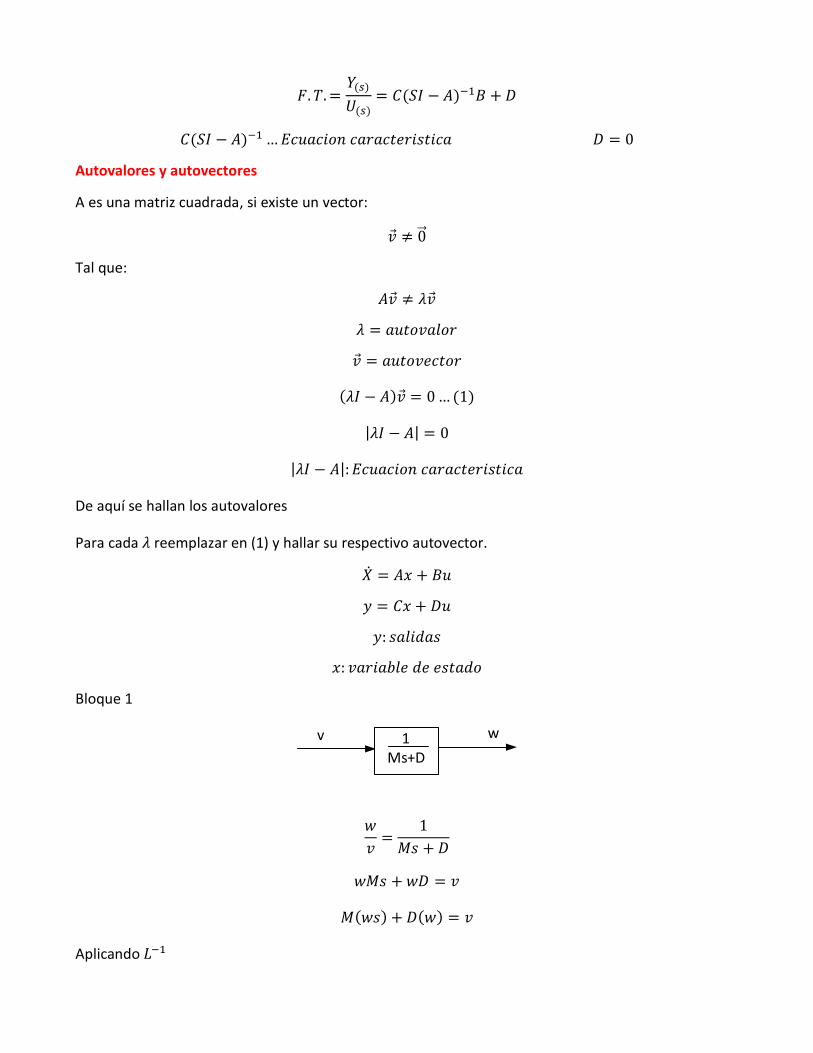
𝐹. 𝑇. =𝑌(𝑠)
𝑈(𝑠)= 𝐶(𝑆𝐼 − 𝐴)−1𝐵 + 𝐷
𝐶(𝑆𝐼 − 𝐴)−1 … 𝐸𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑐𝑎𝑟𝑎𝑐𝑡𝑒𝑟𝑖𝑠𝑡𝑖𝑐𝑎 𝐷 = 0
Autovalores y autovectores
A es una matriz cuadrada, si existe un vector:
�⃗� ≠ 0⃗⃗
Tal que:
𝐴�⃗� ≠ 𝜆�⃗�
𝜆 = 𝑎𝑢𝑡𝑜𝑣𝑎𝑙𝑜𝑟
�⃗� = 𝑎𝑢𝑡𝑜𝑣𝑒𝑐𝑡𝑜𝑟
(𝜆𝐼 − 𝐴)�⃗� = 0 … (1)
|𝜆𝐼 − 𝐴| = 0
|𝜆𝐼 − 𝐴|: 𝐸𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑐𝑎𝑟𝑎𝑐𝑡𝑒𝑟𝑖𝑠𝑡𝑖𝑐𝑎
De aquí se hallan los autovalores
Para cada 𝜆 reemplazar en (1) y hallar su respectivo autovector.
�̇� = 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷𝑢
𝑦: 𝑠𝑎𝑙𝑖𝑑𝑎𝑠
𝑥: 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Bloque 1
1 Ms+D
wv
𝑤
𝑣=
1
𝑀𝑠 + 𝐷
𝑤𝑀𝑠 + 𝑤𝐷 = 𝑣
𝑀(𝑤𝑠) + 𝐷(𝑤) = 𝑣
Aplicando 𝐿−1

𝑀𝑑𝑤
𝑑𝑡+ 𝐷𝑤 = 𝑣
𝑑𝑤
𝑑𝑡: 𝐷𝑜𝑛𝑑𝑒 ℎ𝑎𝑦 𝑙𝑎 𝑑𝑒𝑟𝑖𝑣𝑎𝑑𝑎, 𝑒𝑠𝑎 𝑒𝑠 𝑙𝑎 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Entonces:
𝑤 → 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
𝑋1 = 𝑤
𝑀𝑑𝑋1
𝑑𝑡+ 𝐷𝑋1 = 𝑣
𝑀�̇�1 + 𝐷𝑋1 = 𝑣
�̇�1 = −𝐷
𝑀𝑋1 +
1
𝑀𝑣 … (1 𝑝𝑟𝑜𝑣𝑖𝑠𝑖𝑜𝑛𝑎𝑙)
Provisional, porque las entradas verdaderas son 𝑇𝑚, 𝑈𝐸
Bloque 2.-
wo
s
δ w
𝛿
𝑤=
𝑤0
𝑠
𝑠𝛿 = 𝑤𝑜𝑤
¿Hay derivada? Sí: δ
𝑑
𝑑𝑡δ = 𝑤𝑜𝑤
δ = 𝑋2 … (𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜)
�̇�2 = 𝑤0𝑋1 … (2) 𝑒𝑐𝑢𝑎𝑐𝑖𝑜𝑛 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜 𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑖𝑣𝑎
Bloque 3.-
K3
1+s Tdo
Eq`θ

𝐸𝑞′ + 𝐸𝑞
′ 𝑠 𝑇𝑑0 = 𝐾3𝜃
𝐸𝑞′ + 𝑇𝑑0(𝑠𝐸𝑞
′ ) = 𝐾3𝜃
𝑋3 = 𝐸𝑞′ → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Hallando la transformada inversa de L−1
𝑋3 + 𝑇𝑑0𝑋3̇ = 𝐾3𝜃
𝑋3̇ =−1
𝑇𝑑0𝑋3 +
𝐾3
𝑇𝑑0𝜃
𝑋3̇ = −1
𝑇𝑑0𝑋3 +
𝐾3
𝑇𝑑0(𝐸𝑓 − 𝛹) … (3)𝑝𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒
Pero: 𝛹 = 𝛿 𝐾4
Bloque 4.-
KA
1+s TA
Efγ
𝐸𝑓 + 𝐸𝑓 𝑠 𝑇𝐴 = 𝛾 𝐾𝐴
𝐸𝑓 + 𝑇𝐴(𝑠 𝐸𝑓) = 𝛾 𝐾𝐴
𝑋4 = 𝐸𝑓 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
𝑋4 + 𝑇𝐴𝑋4̇ = 𝛾 𝐾𝐴
𝑋4̇ = −1
𝑇𝐴𝑋4 +
𝐾𝐴
𝑇𝐴𝛾
Pero:
𝛾 = 𝑈𝐸 − 𝛼 − 𝛽
𝛼 = 𝛿𝐾5 𝑦 𝑐𝑜𝑚𝑜: 𝛿 = 𝑋2
𝛽 = 𝐸𝑞′ 𝐾6 𝑦 𝑐𝑜𝑚𝑜: 𝐸𝑞
′ = 𝑋3
𝑋4̇ = −1
𝑇𝐴𝑋4 +
𝐾𝐴
𝑇𝐴𝑈𝐸 −
𝐾𝐴
𝑇𝐴𝐾5 𝛿 −
𝐾𝐴
𝑇𝐴𝐾6 𝐸𝑞
′
𝑋4̇ = −𝐾𝐴
𝑇𝐴𝐾5𝑋2 −
𝐾𝐴
𝑇𝐴𝐾6 𝑋3 −
1
𝑇𝐴𝑋4 +
𝐾𝐴
𝑇𝐴𝑈𝐸 … (4)𝐸𝑐. 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜 𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑖𝑣𝑎
Volviendo a (3):
𝛹 = 𝛿 𝐾4 𝑝𝑒𝑟𝑜 𝛿 = 𝑋2
𝐸𝑓 = 𝑋4
Luego:
𝑋3̇ = −𝐾3
𝑇𝑑0𝐾4𝑋2 −
1
𝑇𝑑0 𝑋3 +
𝐾3
𝑇𝑑0 𝑋4 … (3) 𝐸𝑐. 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜 𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑖𝑣𝑎
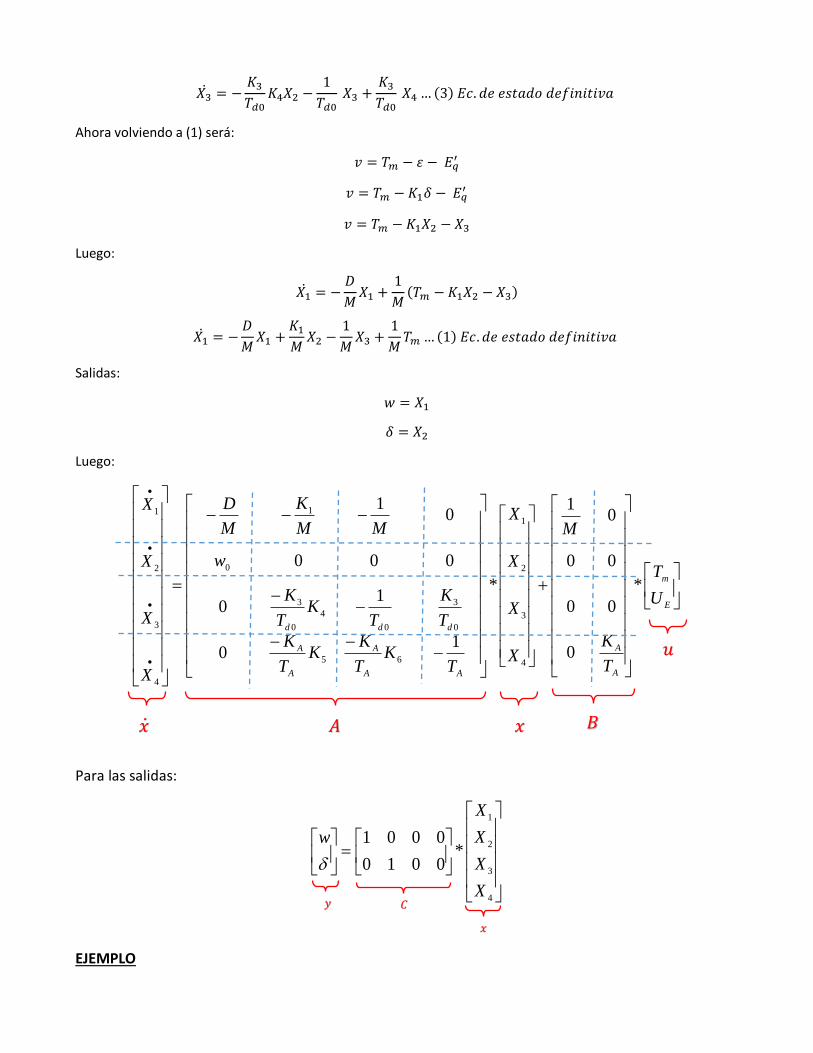
Ahora volviendo a (1) será:
𝑣 = 𝑇𝑚 − 휀 − 𝐸𝑞′
𝑣 = 𝑇𝑚 − 𝐾1𝛿 − 𝐸𝑞′
𝑣 = 𝑇𝑚 − 𝐾1𝑋2 − 𝑋3
Luego:
𝑋1̇ = −𝐷
𝑀𝑋1 +
1
𝑀(𝑇𝑚 − 𝐾1𝑋2 − 𝑋3)
𝑋1̇ = −𝐷
𝑀𝑋1 +
𝐾1
𝑀𝑋2 −
1
𝑀𝑋3 +
1
𝑀𝑇𝑚 … (1) 𝐸𝑐. 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜 𝑑𝑒𝑓𝑖𝑛𝑖𝑡𝑖𝑣𝑎
Salidas:
𝑤 = 𝑋1
𝛿 = 𝑋2
Luego:
E
m
A
A
AA
A
A
A
ddd
U
T
T
K
M
X
X
X
X
TK
T
KK
T
K
T
K
TK
T
K
w
MM
K
M
D
X
X
X
X
*
0
00
00
01
*
10
10
000
01
4
3
2
1
65
0
3
0
4
0
3
0
1
4
3
2
1
Para las salidas:
4
3
2
1
*0010
0001
X
X
X
X
w
EJEMPLO
�̇� 𝐴 𝑥 𝐵
𝑢
𝑦
𝑥
𝐶
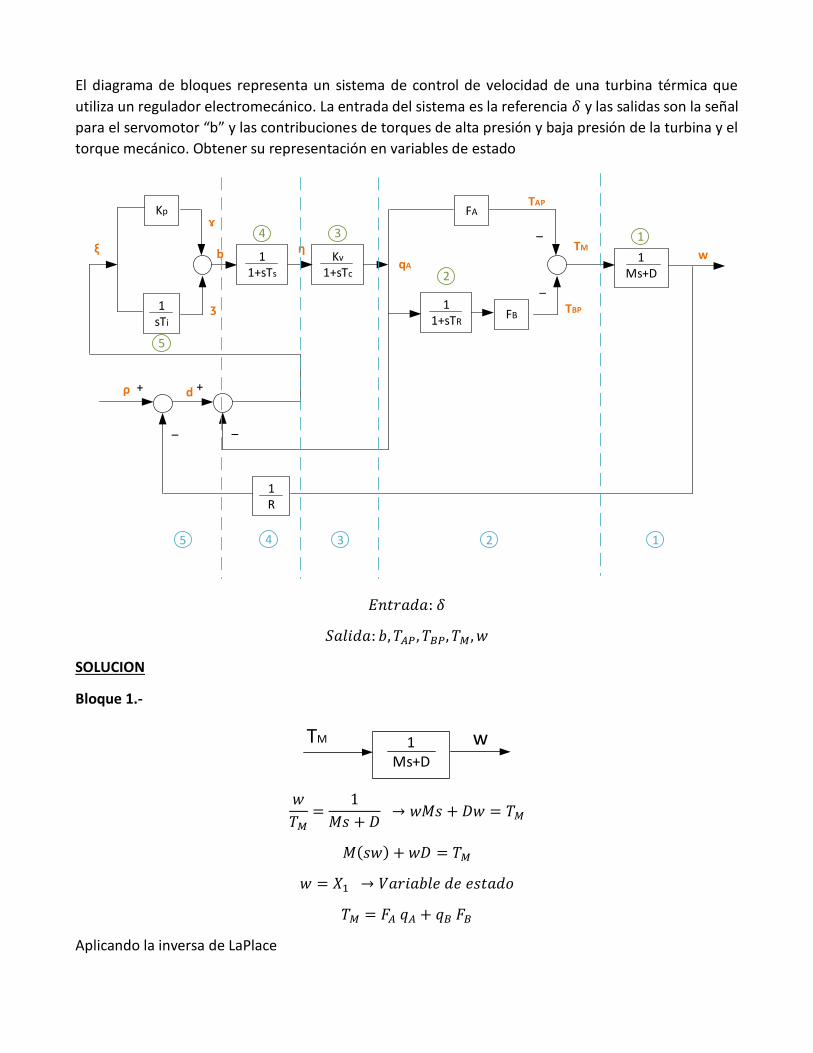
El diagrama de bloques representa un sistema de control de velocidad de una turbina térmica que
utiliza un regulador electromecánico. La entrada del sistema es la referencia 𝛿 y las salidas son la señal
para el servomotor “b” y las contribuciones de torques de alta presión y baja presión de la turbina y el
torque mecánico. Obtener su representación en variables de estado
1 Ms+D
1
TBP
–
–
FA
11+sTR FB
Kv
1+sTc 1
1+sTs
ʒ
ɤ Kp
1sTi
ρ +
–
+
–
1R
2
34
5
TAP
TMw
d
bξ qA
η
1235 4
𝐸𝑛𝑡𝑟𝑎𝑑𝑎: 𝛿
𝑆𝑎𝑙𝑖𝑑𝑎: 𝑏, 𝑇𝐴𝑃, 𝑇𝐵𝑃, 𝑇𝑀, 𝑤
SOLUCION
Bloque 1.-
1 Ms+D
TM w
𝑤
𝑇𝑀=
1
𝑀𝑠 + 𝐷 → 𝑤𝑀𝑠 + 𝐷𝑤 = 𝑇𝑀
𝑀(𝑠𝑤) + 𝑤𝐷 = 𝑇𝑀
𝑤 = 𝑋1 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
𝑇𝑀 = 𝐹𝐴 𝑞𝐴 + 𝑞𝐵 𝐹𝐵
Aplicando la inversa de LaPlace

𝑀(𝑠�̇�1) + 𝐷𝑋1 = 𝑇𝑀
�̇�1 = −𝐷
𝑀𝑋1 +
1
𝑀𝑇𝑀 𝑝𝑒𝑟𝑜 𝑇𝑀 = 𝑇𝐴𝑃 + 𝑇𝐵𝑃
�̇�1 = −𝐷
𝑀𝑋1 +
1
𝑀[𝐹𝐴 𝑞𝐴 + 𝑞𝐵 𝐹𝐵] … (1) 𝑝𝑒𝑛𝑑
�̇� = 𝐴𝑥 + 𝐵𝑢 ; 𝑥: 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 ; 𝑢: 𝑒𝑛𝑡𝑟𝑎𝑑𝑎
𝑦 = 𝐶𝑥 + 𝐷𝑢
Bloque 2.-
1 1+sTR
qA qB
𝑞𝐵
𝑞𝐴=
1
1 + 𝑠𝑇𝑅
𝑞𝐵 + 𝑞𝐵 𝑠𝑇𝑅 = 𝑞𝐴 → 𝑞𝐵 + 𝑇𝑅(𝑠 𝑞𝐵) = 𝑞𝐴
𝑞𝐵 = 𝑋2 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Aplicando la inversa de LaPlace
𝑋2 + 𝑇𝑅(�̇�2) = 𝑞𝐴
�̇�2 = −1
𝑇𝑅𝑋2 +
1
𝑇𝑅𝑞𝐴 … (2)𝑝𝑒𝑛𝑑
Bloque 3.-
Kv 1+sTC
qA
𝑞𝐴
𝜂=
𝑘𝑣
1 + 𝑠𝑇𝑐
𝑞𝐴 + 𝑞𝐴 𝑠𝑇𝑐 = 𝜂𝑘𝑣 → 𝑞𝐴 + 𝑇𝑐(𝑠𝑞𝐴) = 𝜂𝑘𝑣
𝑞𝐴 = 𝑋3 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Aplicando la inversa de LaPlace
𝑋3 + 𝑇𝑐�̇�3 = 𝜂𝑘𝑣
�̇�3 = −1
𝑇𝑐𝑋3 +
1
𝑇𝑐
(𝜂 𝑘𝑣) … (3)𝑝𝑒𝑛𝑑
Volviendo a (1) con 𝑋2 y 𝑋3

�̇�1 = −𝐷
𝑀𝑋1 +
𝐹𝐵
𝑀𝑋2 +
𝐹𝐴
𝑀𝑋3 … (1)𝑑𝑒𝑓𝑖𝑛𝑖𝑑𝑜
Volviendo a (2) con 𝑋3
�̇�2 = −1
𝑇𝑅𝑋2 +
1
𝑇𝑅𝑋3 … (2)𝑑𝑒𝑓𝑖𝑛𝑖𝑑𝑜
Bloque 4.-
1 1+s TS
b
𝜂
𝑏=
1
1 + 𝑠𝑇𝑠
𝜂 + 𝑠𝑇𝑠𝜂 = 𝑏 → 𝜂 + 𝑇𝑠(𝑠𝜂) = 𝑏
𝜂 = 𝑋4 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Aplicando la inversa de LaPlace
𝑋4 + 𝑇𝑠 �̇�4 = 𝑏
�̇�4 = −1
𝑇𝑠𝑋4 +
1
𝑇𝑠𝑏
𝑏 = 𝛾 + 𝔷 = 𝐾𝑝𝜉 + 𝔷
𝑏 = 𝐾𝑝(ʆ − 𝑞𝐴) + 𝔷
�̇�4 = −1
𝑇𝑠𝑋4 +
1
𝑇𝑠[𝐾𝑝 ʆ − 𝑋3𝐾𝑝 + 𝔷] … (4) 𝑝𝑒𝑛𝑑
Volviendo a (3) reemplazamos 𝜂 = 𝑋4
�̇�3 = −1
𝑇𝑐𝑋3 +
𝑘𝑣
𝑇𝑐𝑋4 … (3)𝑑𝑒𝑓𝑖𝑛
Bloque 5.-
1 s Ti
ξ
𝔷
𝜉=
1
𝑠𝑇𝑖 → 𝑇𝑖(𝑠𝔷) = 𝜉
𝔷 = 𝑋5 → 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜
Aplicando la inversa de LaPlace
𝑇𝑖(�̇�5) = 𝜉 → �̇�5 =1
𝑇𝑖𝜉
𝜉 = ʆ − 𝑞𝐴 = ʆ −1
𝑅𝑋1 − 𝑞𝐴
�̇�5 = −1
𝑇𝑖𝑅𝑋1 −
1
𝑇𝑖𝑋3 +
1
𝑇𝑖ʆ … (5) 𝑑𝑒𝑓𝑖𝑛
Volviendo a (4), reemplazando 𝔷 = 𝑋5
�̇�4 = −𝐾𝑃
𝑅𝑇𝑠𝑋1 −
𝐾𝑃
𝑇𝑠𝑋3 −
1
𝑇𝑠𝑋4 +
1
𝑇𝑠𝑋5 +
𝐾𝑃
𝑇𝑠 ʆ … (4)𝑑𝑒𝑓𝑖𝑛
Luego, ecuaciones de entrada:
*
1
0
0
0
*
001
01
110
01
00
0011
0
00
5
4
3
2
1
5
4
3
2
1
i
S
P
ii
SSS
P
S
P
C
v
C
RR
AB
T
T
K
X
X
X
X
X
TRT
TTT
K
RT
K
T
K
T
TT
M
F
M
F
M
D
X
X
X
X
X
Ecuación de salida: 𝑏, 𝑇𝐴𝑃, 𝑇𝐵𝑃, 𝑇𝑀, 𝑤
*
0
0
0
0
*
00001
000
0000
0000
100
5
4
3
2
1
P
AB
B
A
PP
M
BP
AP
K
X
X
X
X
X
FF
F
F
KR
K
w
T
T
T
b

𝑏 = 𝐾𝑃 𝛿 − 𝐾𝑃𝑋3 + 𝑋5
𝑏 = 𝐾𝑃 (𝛿 −1
𝑅 𝑤) − 𝐾𝑃𝑋3 + 𝑋5
𝑏 = −𝐾𝑃
𝑅𝑋1 − 𝐾𝑃𝑋3 + 𝑋5 + 𝐾𝑃𝛿
𝑇𝐴𝑃 = 𝐹𝐴 𝑞𝐴 = 𝐹𝐴 𝑋3





















![[ebook] Edicions UPC - Proteccion de Sistemas Electricos de Potencia - Spanish Español](https://img.pdfslide.tips/doc/110x75/55cf98a4550346d03398d703/ebook-edicions-upc-proteccion-de-sistemas-electricos-de-potencia-spanish.jpg)







